generaciÓn de un modelo digital de terreno de...
TRANSCRIPT
1
GENERACIÓN DE UN MODELO DIGITAL DE TERRENO DE ALTA
RESOLUCIÓN PARA LA ELABORACIÓN DE PRODUCTOS TRIDIMENSIONALES
COMO HERRAMIENTA EN LA TOMA DE DECISIONES SOBRE AFECTACIÓN DE
REDES DE SERVICIOS PÚBLICOS DEL PUNTO CRÍTICO AVENIDA PRIMERO DE
MAYO CON CARRERA 68 EN EL TRAZADO PRELIMINAR DE LA LÍNEA DEL
METRO EN BOGOTÁ
Autores:
Laura Natalia Mejía Guerrero Cód.: 20102025048
William Alejandro Jiménez Martínez Cód.: 20101025052
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE INGENIERÍA
INGENIERÍA CATASTRAL Y GEODESIA
Bogotá D.C
2017

2
GENERACIÓN DE UN MODELO DIGITAL DE TERRENO DE ALTA
RESOLUCIÓN PARA LA ELABORACIÓN DE PRODUCTOS TRIDIMENSIONALES
COMO HERRAMIENTA EN LA TOMA DE DECISIONES SOBRE AFECTACIÓN DE
REDES DE SERVICIOS PÚBLICOS DEL PUNTO CRÍTICO AVENIDA PRIMERO DE
MAYO CON CARRERA 68 EN EL TRAZADO PRELIMINAR DE LA LÍNEA DEL
METRO EN BOGOTÁ
Laura Natalia Mejía Guerrero Cód.: 20102025048
William Alejandro Jiménez Martínez Cód.: 20101025052
ANTEPROYECTO TRABAJO DE GRADO EN LA MODALIDAD DE PASANTÍA
PARA OPTAR AL TÍTULO DE INGENIERO CATASTRAL Y GEODESTA
Reglamentado por el acuerdo N 038 de 2015
Director Interno:
Profesora Erika Sofía Upegui Cardona
Ingeniera Catastral y Geodesta
PhD. en Geografía y Ordenamiento Territorial
Universidad Distrital Francisco José de Caldas
Director Externo:
Ingeniero Jhon Jairo Castro Afanador
Ingeniero Topográfico
Líder SIGUE
Empresa de Acueducto y Alcantarillado de Bogotá
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE INGENIERÍA
INGENIERÍA CATASTRAL Y GEODESIA
Bogotá D.C
2017
3
Contenido 1. INTRODUCCIÓN .......................................................................................................... 9
2. PLANTEAMIENTO DEL PROBLEMA ..................................................................... 11
3. OBJETIVOS ................................................................................................................. 12
3.1 Objetivo General .................................................................................................... 12
3.2 Objetivos Específicos ............................................................................................ 12
4. JUSTIFICACIÓN ......................................................................................................... 13
5. MARCO REFERENCIAL ........................................................................................... 15
5.1 Marco teórico ......................................................................................................... 15
5.1.1 Teledetección: ................................................................................................. 15
5.1.2 Sistemas de teledetección activa: ................................................................... 15
5.1.3 Sensor LiDAR: ............................................................................................... 15
5.1.4 Sensor LiDAR terrestre: ................................................................................. 16
5.1.5 Ortofoto: ......................................................................................................... 18
5.1.6 Modelo Digital de Elevación (MDE): ............................................................ 18
5.1.7 Modelo Digital de Terreno (MDT): ............................................................... 19
5.1.8 Sistema de clasificación ASPRS: ................................................................... 19
5.1.9 Métodos de interpolación: .............................................................................. 20
5.1.10 Tipos de almacenamiento para datos LiDAR: ................................................ 21
5.1.11 Estadística descriptiva de los datos: ............................................................... 22
4
5.1.12 Ground Filter: ................................................................................................. 23
5.1.13 Criterios Visuales de identificación en teledetección: .................................... 24
5.1.14 Rango o retorno Laser: ................................................................................... 24
5.1.15 Geodatabase: ................................................................................................... 25
5.1.16 Raíz del Error Cuadrático Medio: .................................................................. 25
5.2 Antecedentes .......................................................................................................... 27
5.3 Marco Geográfico .................................................................................................. 28
5.4 Insumos, descripción de datos y softwares utilizados ........................................... 30
5.4.1 Insumos: ......................................................................................................... 30
5.4.2 Descripción de los datos: ................................................................................ 35
5.4.3 Software utilizados: ........................................................................................ 36
6. METODOLOGÍA ......................................................................................................... 38
6.1 Reconocimiento visual ........................................................................................... 38
6.2 Clasificación de la nube de puntos ........................................................................ 38
6.3 Análisis descriptivo y estadístico de las clases ...................................................... 39
6.4 Generación de MDT y MDS .................................................................................. 39
6.5 Generación de Curvas de nivel .............................................................................. 40
6.6 Validación de exactitud ......................................................................................... 40
6.7 Modelamiento final ................................................................................................ 41
7. RESULTADOS Y ANÁLISIS ..................................................................................... 43

5
7.1 Clasificación nube de puntos (Filtrado) ................................................................. 43
7.2 Visualización de filtrado ........................................................................................ 48
7.2.1 Global Mapper (color por elevación): ............................................................ 48
7.2.2 MARS (color por elevación): ......................................................................... 53
7.3 Análisis de estadísticas .......................................................................................... 57
7.3.1 Terreno: .......................................................................................................... 57
7.3.2 Edificaciones: ................................................................................................. 59
7.3.3 Vegetación: ..................................................................................................... 61
7.4 Curvas de Nivel ..................................................................................................... 63
7.5 Modelos Digitales .................................................................................................. 64
7.5.1 Terreno: .......................................................................................................... 64
7.5.2 Edificaciones: ................................................................................................. 65
7.6 Validación de resultados ........................................................................................ 66
7.7 Modelo Final .......................................................................................................... 68
8. CONCLUSIONES ........................................................................................................ 70
9. ALCANCE DEL PROYECTO .................................................................................... 72
10. ANEXOS ................................................................................................................... 73
10.1 Anexo 1 .............................................................................................................. 73
10.2 Anexo 2 .............................................................................................................. 74
10.3 Anexo 3 .............................................................................................................. 75

6
11. BIBLIOGRAFÍA ....................................................................................................... 76
Índice de Ilustraciones
Ilustración 1: Tipos de escáner LiDAR terrestre, fuente (Shan & K. Thoth, 2008). ............ 18
Ilustración 2: Operación con método TOF, fuente (Shan & K. Thoth, 2008) ...................... 25
Ilustración 3: Afectación de la línea del metro en la Av. Primera de Mayo. Elaboración
propia. ................................................................................................................................... 29
Ilustración 4: Ubicación específica punto crítico Av. Primera de Mayo con carrera 68.
Elaboración propia. ............................................................................................................... 30
Ilustración 5: Ejemplo de ubicación de armado del LiDAR terrestre. ................................. 32
Ilustración 6. Ejemplo de distribución de puntos de control ................................................ 32
Ilustración 7: Datos LiDAR terrestre, extraído de ReCap. ................................................... 33
Ilustración 8: Error medio cuadrático, extraído de ReCap. .................................................. 33
Ilustración 9. GPS Base & Rover 5700 ................................................................................ 34
Ilustración 10. NIKON DTM 322. ....................................................................................... 34
Ilustración 11. LIDAR IMAGER 5010 ................................................................................ 35
Ilustración 12: Distribución de TILES. Nube de puntos sin filtrar, extraído de MARS. .... 35
Ilustración 13: Diagrama de Flujo de la metodología. ......................................................... 38
Ilustración 14: Ubicación pozos alcantarillado pluvial, elaboración propia ........................ 41
Ilustración 15: Vista general de los TILES; extraído de MARS. ......................................... 43
Ilustración 16: Convenciones de las clases de filtrado, extraído de MARS. ........................ 44
Ilustración 17: Proceso de filtrado, extraído de MARS. ...................................................... 45
Ilustración 18: Proceso final de filtrado, extraído de MARS. .............................................. 46
7
Ilustración 19: Resumen estadístico al final de la clasificación, extraído de ArcGIS. ......... 47
Ilustración 20: Escala de colores de elevación, extraído de Global Mapper. ....................... 48
Ilustración 21: Visualización de la cobertura suelo, extraído de Global Mapper................. 49
Ilustración 22: Visualización de la cobertura vegetal, extraída de Global Mapper. ............. 50
Ilustración 23: Visualización de la cobertura edificaciones, extraído de Global Mapper. ... 51
Ilustración 24: Visualización de la cobertura ruido, extraído de Global Mapper................. 52
Ilustración 25: Visualización de la cobertura terreno, extraído de MARS. .......................... 53
Ilustración 26: Visualización de la cobertura vegetación, extraído de MARS. .................... 54
Ilustración 27: Visualización de la cobertura edificaciones, extraído de MARS. ................ 55
Ilustración 28: Visualización de la cobertura ruido, extraído de MARS.............................. 56
Ilustración 29: Gráfico frecuencia vs marca de clase para el terreno, elaboración propia. .. 58
Ilustración 30: Gráfico frecuencia vs marca de clase para las edificaciones, elaboración
propia. ................................................................................................................................... 60
Ilustración 31: Gráfico frecuencia vs marca de clase para la vegetación, elaboración propia.
.............................................................................................................................................. 62
Ilustración 32: Generación curvas de nivel, extraído de Global Mapper. ............................ 63
Ilustración 33: Generación de MDT del terreno, extraído de ArcGIS y Global Mapper. .... 64
Ilustración 34: Generación de MDS de las edificaciones, extraído de ArcGIS y Global
Mapper .................................................................................................................................. 65
Ilustración 35: Fusión ortofoto - MDT, extraído de ArcGIS. ............................................... 68
Ilustración 36: Fusión ortofoto - MDT y shapes de IDECA, extraído de ArcGIS. .............. 68

8
Índice de Tablas
Tabla 1: Valores de clasificación LAS, ................................................................................ 19
Tabla 2: intervalos de exactitud, fuente ASPRS. ................................................................. 26
Tabla 3: Datos generales, fuente: elaboración propia. .......................................................... 36
Tabla 4: Estadísticas generales clase terreno, elaboración propia. ....................................... 57
Tabla 5: Frecuencia del Terreno, elaboración propia. .......................................................... 58
Tabla 6: Estadísticas generales clase edificaciones, elaboración propia. ............................. 59
Tabla 7: Frecuencias clase edificaciones, elaboración propia. ............................................. 60
Tabla 8: Estadísticas generales clase vegetación, elaboración propia. ................................. 61
Tabla 9: Frecuencias clase vegetación, elaboración propia. ................................................. 62
Tabla 10: Validación de elevación en pozos. Elaboración propia. ....................................... 66
Tabla 11: Comparación ECM por software .......................................................................... 67

9
1. INTRODUCCIÓN
La empresa de Acueducto y Alcantarillado de Bogotá mediante su gerencia de
tecnología; específicamente en el departamento de Dirección de la Información Técnica y
Geográfica (DITG) el cual se encarga de la creación de una base de datos geográfica,
completa, actualizada y confiable que suministre información para apoyar los diferentes
procesos de la empresa y mediante su subdirección Sistema de Información Geográfico
Unificado Empresarial (SIGUE), adelanta procesos de estudios sobre sus redes tanto de
acueducto como de alcantarillado en cuanto a la implicación que tiene el diseño propuesto
por la actual alcaldía para la implementación de la primera línea del metro en la ciudad de
Bogotá. Cabe resaltar que la empresa fija su interés principalmente en las redes de servicios
públicos ya que estos son su mayor activo, por tal motivo se busca que los estudios de la
información geográfica condensada que se realicen, permitan la toma decisiones
interdisciplinarias acertadas.
Atendiendo las necesidades y requerimientos de la empresa fue necesario la
implementación del sensor LiDAR (Light Detection and Ranging); para la definición de las
zonas críticas para el levantamiento de información con LiDAR terrestre se tomó como
criterio las intercepciones donde se afectan obras civiles como puentes vehiculares, canales,
construcciones, intercepciones viales, Box Coulvert, las cuales no permiten el
levantamiento de información con el sensor de LiDAR aéreo y se requiere de información
adicional para la toma de decisiones.
En total se definieron cinco zonas donde se realizó el levantamiento de información con
LiDAR terrestre:

10
1. Avenida Boyacá – Avenida Primero de Mayo
2. Avenida 68 – Avenida Primero de Mayo
3. Avenida Primero de Mayo – Carrera 53
4. Avenida Primero de Mayo – Carrera 39
5. Autopista Sur – Diagonal 16 Sur Canal Fucha
Con el apoyo de herramientas especializadas las cuales facilitan la interrelación de datos
adquiridos por diferentes sensores remotos, la entidad realizó actividades de procesamiento
de estos datos crudos los cuales identificó, filtró y organizó, presentándolos de manera
concisa y clasificada en formato LAS (Log ASCII Standard, extensión con la que se
generan los archivos de la nube de puntos LiDAR), el cuál será el insumo base para generar
un modelo digital de terreno ajustado a la realidad, que cumpla las normas técnicas
adoptadas por la empresa (norma NS-30) y que tenga como función final el apoyo asociado
a las implicaciones previamente descritas en el desarrollo urbanístico de la ciudad.
11
2. PLANTEAMIENTO DEL PROBLEMA
La movilidad en Bogotá ha presentado grandes problemas debido al aumento en la
densidad de población (Jolonch Palau, Javier; 2013), por tal motivo la alcaldía de la ciudad
ha propuesto la implementación de un nuevo sistema de trasporte masivo: el metro elevado;
esta solución a los problemas de movilidad en la ciudad conllevan a nuevas problemáticas
para diferentes entidades, por ejemplo la empresa de acueducto y alcantarillado de Bogotá
ya que con esta implementación se pueden presentar problemas en las redes de servicios
públicos domiciliarios, con lo cual se hace evidente la necesidad de hacer un estudio
detallado en el cuál aparte de identificar los puntos críticos, se proceda a estudiarlos a
profundidad, para de esta manera poder llegar a soluciones reales.
Por tal razón la empresa de acueducto necesita un soporte geográfico y con bases
académicas, para sustentar y aplicar los diseños para el traslado anticipado de redes “TAR”,
que sirvan para una aplicación exitosa de la línea trazada de metro y que no genere un
traumatismo en las redes existentes y proyectadas de la entidad.

12
3. OBJETIVOS
3.1 Objetivo General
Generación de modelos digitales de alta precisión utilizando datos obtenidos del sensor
LiDAR, para la toma de decisiones referente a la red de servicios públicos domiciliarios y
para el futuro estudio del traslado de redes anticipado en el diseño preliminar del trazado de
la línea del metro en Bogotá.
3.2 Objetivos Específicos
● Generar un modelo digital de terreno (MDT) y de elevación (MDE) de calidad, el
cual en su metodología cumpla con las normas y lineamientos establecidos para los
datos geográficos, así como los propuestos por la entidad, en cada una de sus fases:
captura, procesos y visualización.
● Realizar un correcto y preciso filtrado en la totalidad de la información entregada en
el tiempo asignado.
● Hacer una comparación de los distintos software que se pueden utilizar en el
tratamiento y procesamiento de la información.
● Validar de forma precisa los datos obtenidos, para de esta manera constatar la
calidad de los productos generados.
● Generar un modelo digital empalmado con una imagen raster, con la cual se puedan
apreciar los aspectos más importantes del modelamiento y sirva como insumo para
futuros estudios.
● Investigar de manera general los posibles alcances del proyecto, dentro del
departamento (DITG).

13
4. JUSTIFICACIÓN
Los centros urbanos modernos y en especial las ciudades capitales se encuentran en una
constante evolución, ya que en ellas se centran las actividades económicas, políticas y
sociales que son de vital importancia en el desarrollo de un país, consecuentemente los
estudios y proyectos deben desarrollarse de la manera más eficaz y eficiente para estar
acorde al crecimiento acelerado de dichas ciudades (Regot, Andres, & Amparo, 2011).
En el caso específico de nuestro país, por tener una distribución centralizada, Bogotá es
el pilar principal de su estructura socioeconómica, por tal razón la ciudad presenta un índice
demográfico bastante elevado el cual hace necesario la implementación de medios de
transporte masivos que ayuden a la reducción de tiempos y a una movilidad dinámica de las
personas dentro de la ciudad; por ende desde anteriores alcaldías se ha intentado la
implementación de una línea de metro que cubra los lugares con mayor índice demográfico
y que ayude a resolver los problemas de transporte en estas zonas.
La actual alcaldía ha propuesto un proyecto de metro elevado, con el cual se hace
indispensable realizar estudios de afectación en la ciudad a lo largo de su ruta propuesta; en
el caso puntual de la empresa de Acueducto y Alcantarillado de Bogotá es de suma
importancia tener en cuenta las intersecciones de esta línea con las redes de servicios ya
implementadas y que no pueden ser modificadas, así como de los cuerpos de agua que
también se vean afectados. Es por este motivo que se está implementando un proyecto
denominado METRO el cual tiene como objetivo luego de la identificación de los puntos
críticos, poder desarrollar un catastro de redes preciso y acertado en cuanto ubicación y
cantidad de tuberías tanto de acueducto como de alcantarillado, el cual ayude a la toma de
decisiones para la construcción acertada de la línea; para esto es indispensable contar con

14
un estudio totalmente detallado de cada uno de los puntos críticos establecidos, en el cual se
desarrollen las diferentes actividades ingenieriles mencionadas anteriormente como
fundamento del proyecto.
15
5. MARCO REFERENCIAL
5.1 Marco teórico
5.1.1 Teledetección:
La teledetección es una técnica a través de la cual se obtiene información de un objeto sin
tener contacto directo con él, esto es posible gracias a la relación sensor-cobertura, la cual
en el caso de los sensores multiespectrales se expresa a través de la llamada radiación
electromagnética. Esta relación se puede presentar de tres formas: Emisión, Reflexión y
Emisión-Reflexión, el flujo de energía que se produce por alguna de estas formas va a estar
en función de la transmisión de energía térmica (Comisión Nacional del Agua, 2005). Cabe
destacar que la teledetección no engloba solo los procesos que permiten obtener una
imagen desde el aire o el espacio, sino también su posterior tratamiento, en el contexto de
una determinada aplicación (Chuvieco, 1995).
5.1.2 Sistemas de teledetección activa:
En los Sistemas de Teledetección activos existe en la plataforma una fuente de emisión
energética (muy frecuentemente ondas de radar o láser), el sensor recoge el reflejo de esta
emisión energética, es decir, de las ondas que él mismo emite tras reflejarse en la superficie
terrestre u objetos que están a su alrededor en el caso de los sensores terrestres (Madeleine,
2014).
5.1.3 Sensor LiDAR:
El LiDAR (light detection and ranging) es un sistema basado en la emisión de pulsos de luz
láser desde una plataforma aérea o terrestre. La medición precisa de tiempo de retorno de
las posiciones del pulso al sensor permite calcular la distancia que separa a este de la
16
superficie terrestre y de los objetos que existen sobre ella (Mas & Martínez Romero, 2006).
La mayor parte de sistemas y aplicaciones LiDAR trabajan con un mismo formato, el
formato LAS, cuya especificación ha sido desarrollada por la American Society for
Photogrammetry & Remote Sensing (ASPRS), y que se ha convertido en un estándar de
facto para trabajar con datos LiDAR, para conocer las coordenadas de la nube de puntos se
necesita la posición del sensor y el ángulo del espejo en cada momento, para ello el sistema
se apoya en un sistema GPS (Global Positioning System) diferencial el cual es un sistema
que proporciona a los receptores de GPS correcciones de los datos recibidos de los satélites
GPS, con el fin de proporcionar una mayor precisión en la posición calculada; el resultado
es de miles de puntos por segundo (Madeleine, 2014).
5.1.4 Sensor LiDAR terrestre:
Son aquellos que miden las características topográficas que están presentes en el suelo en el
área alrededor la posición fija (estática) que ha sido ocupada por el instrumento. Lo hacen a
través de la medición simultánea del rango de inclinación mediante un rango de láser y los
dos valores asociados, ángulos por codificadores angulares en los planos horizontales y
verticales que pasan por el centro del instrumento, en la mayoría de los casos, antes del
proceso de escaneo los incrementos angulares en ambas direcciones, que comprenden el
acimut y las rotaciones verticales, puede ser configurado por el usuario (Shan & K. Thoth,
2008). Normalmente, los tamaños de pasos angulares se establecen en valores idénticos;
por lo tanto, el escáner proporciona un muestreo espacial igual en una coordenada polar
centrada en el instrumento
sistema. Estas medidas simultáneas de distancia y ángulo se llevan a cabo de manera

17
automatizada utilizando un patrón de escaneo predeterminado a menudo a una tasa de
medición de 1000 Hz o más.
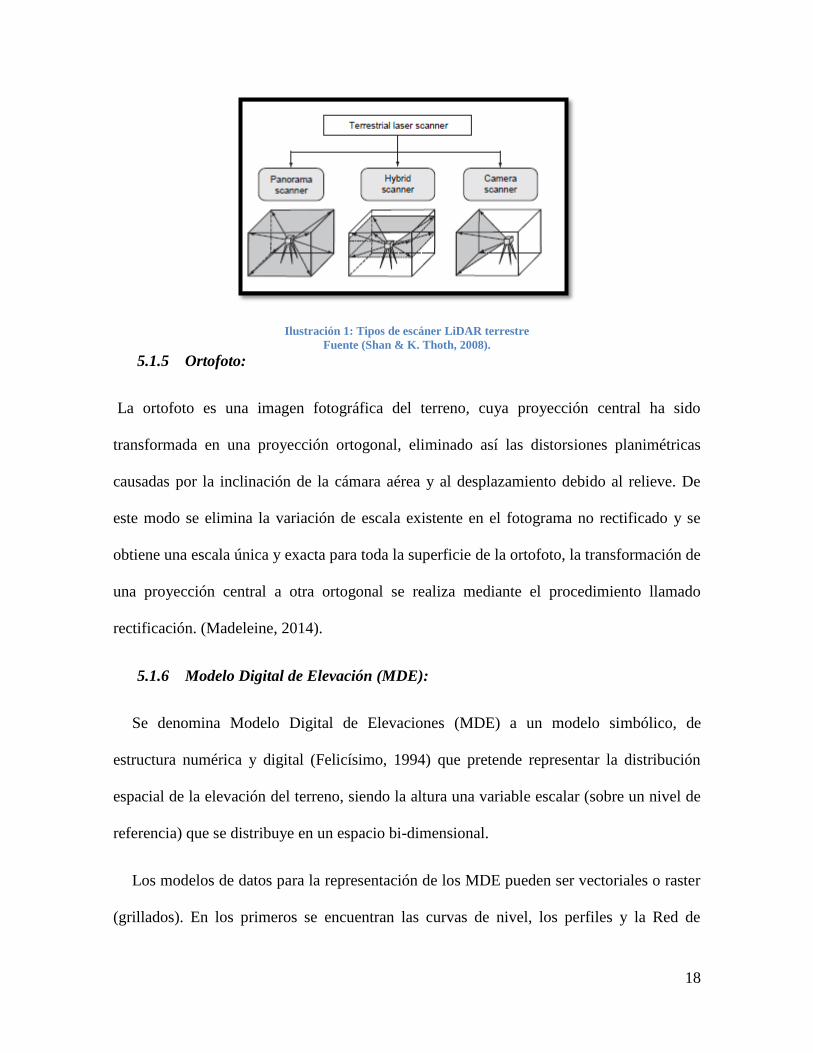
Existen tres tipos de láser terrestre (ilustración 1) estático o basado en tierra (i) escáneres de
tipo panorámico; (iii) escáneres híbridos; y (iii) tipo de cámara (Shan & K. Thoth, 2008).
1. Dentro de la primera de estas tres categorías, los escáneres de tipo panorámico llevan a
cabo la distancia y medidas angulares en un patrón sistemático que da un total de 360 °
cobertura angular dentro del plano horizontal que pasa a través del instrumento centro y
típicamente una cobertura mínima de 180 ° en el plano vertical que se encuentra a la
derecha ángulos al plano horizontal, dando cobertura hemisférica.
2. Los instrumentos que pertenecen a la segunda categoría de escáneres híbridos son
aquellos donde la acción de escaneo no está restringida alrededor de un eje de rotación,
generalmente el movimiento de exploración horizontal en la dirección de azimut producida
por una rotación del instrumento alrededor de su eje vertical. Sin embargo, el movimiento
de exploración angular vertical en elevación alrededor del eje horizontal del instrumento
está restringido o limitado, generalmente a 50 ° -60 °.
3. Los escáneres de cámara que componen la tercera categoría llevan a cabo su distancia y
medidas angulares en un rango angular mucho más limitado y dentro de un FOV bastante
específico
18
Ilustración 1: Tipos de escáner LiDAR terrestre
Fuente (Shan & K. Thoth, 2008).
5.1.5 Ortofoto:
La ortofoto es una imagen fotográfica del terreno, cuya proyección central ha sido
transformada en una proyección ortogonal, eliminado así las distorsiones planimétricas
causadas por la inclinación de la cámara aérea y al desplazamiento debido al relieve. De
este modo se elimina la variación de escala existente en el fotograma no rectificado y se
obtiene una escala única y exacta para toda la superficie de la ortofoto, la transformación de
una proyección central a otra ortogonal se realiza mediante el procedimiento llamado
rectificación. (Madeleine, 2014).
5.1.6 Modelo Digital de Elevación (MDE):
Se denomina Modelo Digital de Elevaciones (MDE) a un modelo simbólico, de
estructura numérica y digital (Felicísimo, 1994) que pretende representar la distribución
espacial de la elevación del terreno, siendo la altura una variable escalar (sobre un nivel de
referencia) que se distribuye en un espacio bi-dimensional.
Los modelos de datos para la representación de los MDE pueden ser vectoriales o raster
(grillados). En los primeros se encuentran las curvas de nivel, los perfiles y la Red de
19
Triángulos Irregulares (TIN, por su acrónico en inglés). En tanto que en los segundos, se
encuentran las matrices de celdas regulares, con cotas sobre una grilla de filas y columnas
equidistantes. No todos los MDE son igualmente útiles: se diferencian entre sí por la
resolución y por la exactitud, y diferentes aplicaciones plantearán diferentes requisitos
(Burgos & Salcedo, 2014).
5.1.7 Modelo Digital de Terreno (MDT):
Son una generación de modelos simbólicos que se definen como estructuras numéricas
de datos que representan la distribución espacial de variables cuantitativas y continuas. En
este sentido, los MDT son la herramienta idónea para el estudio y manejo de un buen
número de variables geológicas, biológicas y geográficas en cuya naturaleza domina una
componente cuantitativa o estadística (Felicísimo, 1994).
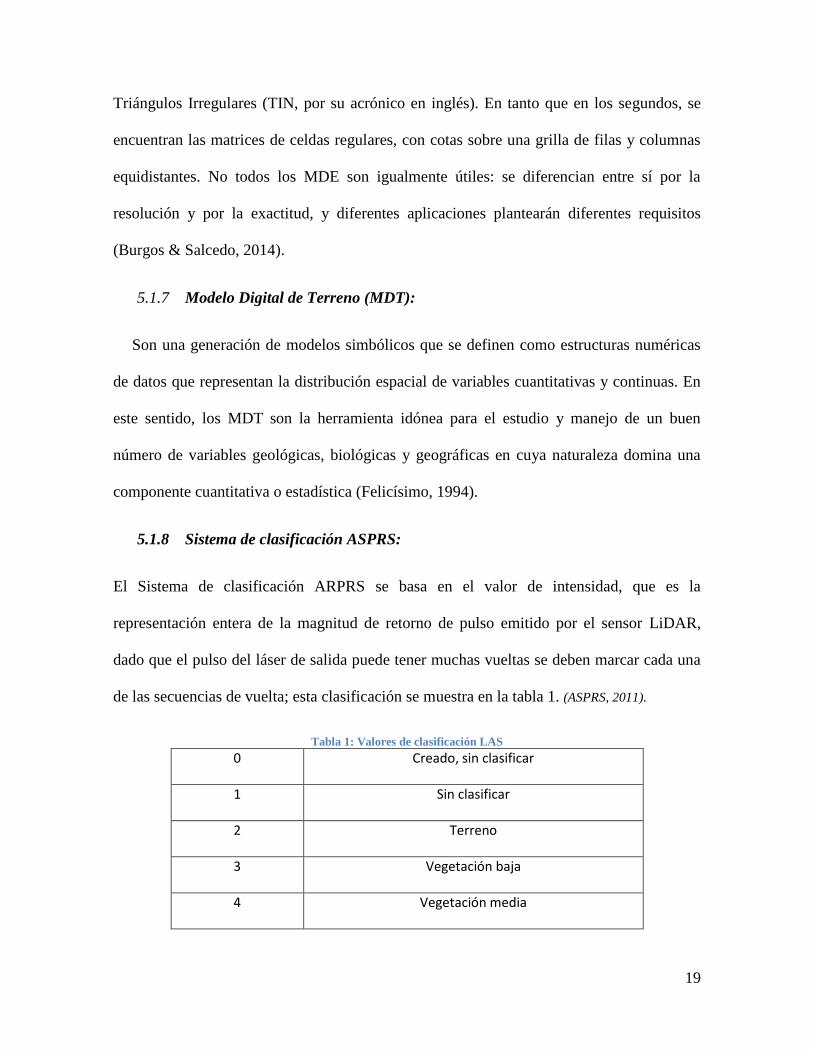
5.1.8 Sistema de clasificación ASPRS:
El Sistema de clasificación ARPRS se basa en el valor de intensidad, que es la
representación entera de la magnitud de retorno de pulso emitido por el sensor LiDAR,
dado que el pulso del láser de salida puede tener muchas vueltas se deben marcar cada una
de las secuencias de vuelta; esta clasificación se muestra en la tabla 1. (ASPRS, 2011).
Tabla 1: Valores de clasificación LAS
0 Creado, sin clasificar
1 Sin clasificar
2 Terreno
3 Vegetación baja
4 Vegetación media
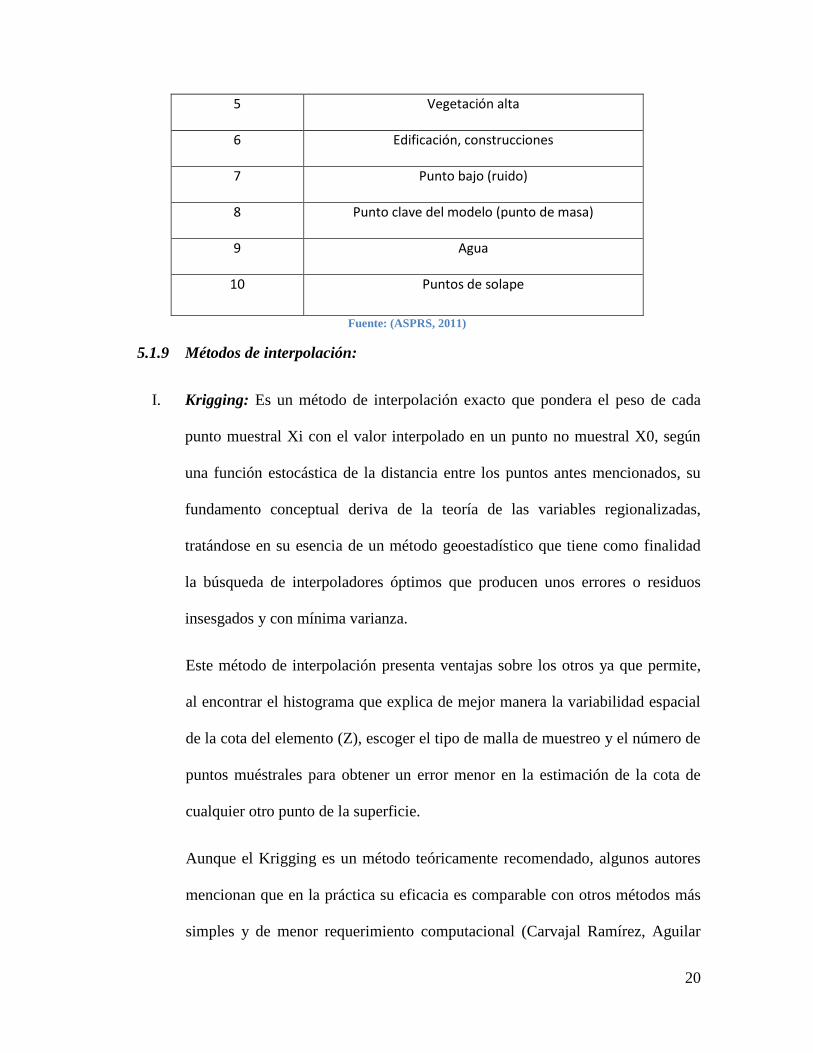
20
5 Vegetación alta
6 Edificación, construcciones
7 Punto bajo (ruido)
8 Punto clave del modelo (punto de masa)
9 Agua
10 Puntos de solape
Fuente: (ASPRS, 2011)
5.1.9 Métodos de interpolación:
I. Krigging: Es un método de interpolación exacto que pondera el peso de cada
punto muestral Xi con el valor interpolado en un punto no muestral X0, según
una función estocástica de la distancia entre los puntos antes mencionados, su
fundamento conceptual deriva de la teoría de las variables regionalizadas,
tratándose en su esencia de un método geoestadístico que tiene como finalidad
la búsqueda de interpoladores óptimos que producen unos errores o residuos
insesgados y con mínima varianza.
Este método de interpolación presenta ventajas sobre los otros ya que permite,
al encontrar el histograma que explica de mejor manera la variabilidad espacial
de la cota del elemento (Z), escoger el tipo de malla de muestreo y el número de
puntos muéstrales para obtener un error menor en la estimación de la cota de
cualquier otro punto de la superficie.
Aunque el Krigging es un método teóricamente recomendado, algunos autores
mencionan que en la práctica su eficacia es comparable con otros métodos más
simples y de menor requerimiento computacional (Carvajal Ramírez, Aguilar
21
Torres, Aguilar Torres, & Agüera, 2001).
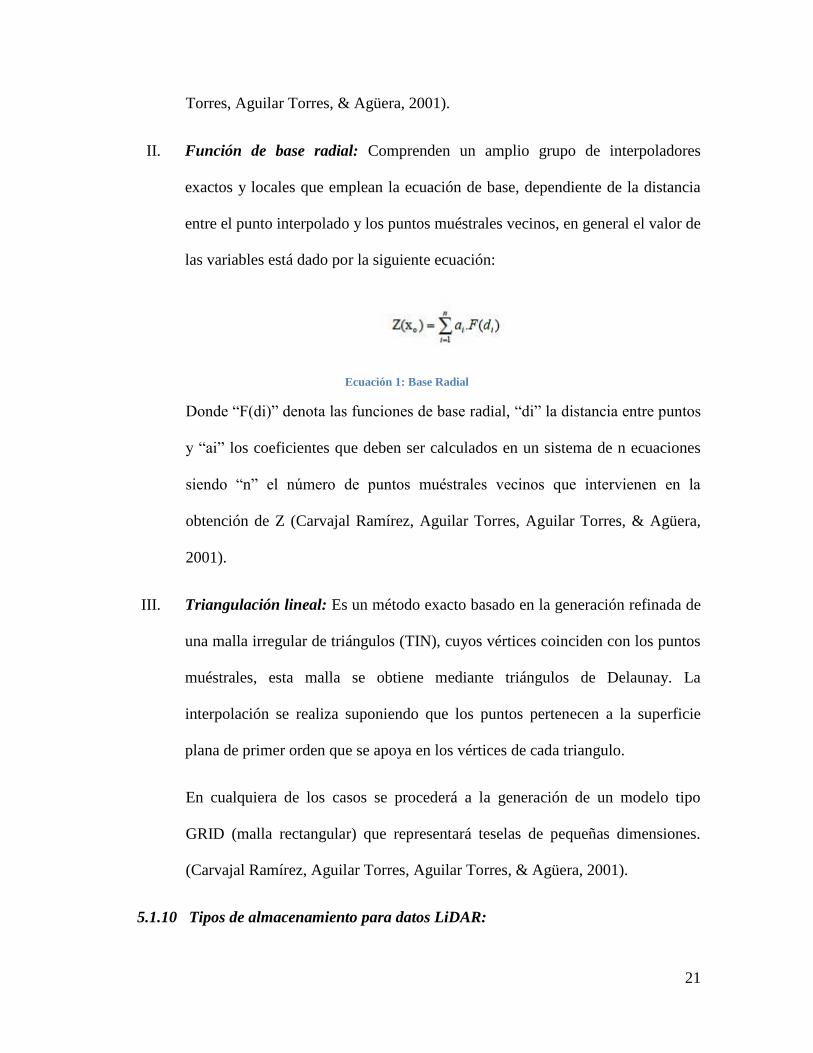
II. Función de base radial: Comprenden un amplio grupo de interpoladores
exactos y locales que emplean la ecuación de base, dependiente de la distancia
entre el punto interpolado y los puntos muéstrales vecinos, en general el valor de
las variables está dado por la siguiente ecuación:
Ecuación 1: Base Radial
Donde “F(di)” denota las funciones de base radial, “di” la distancia entre puntos
y “ai” los coeficientes que deben ser calculados en un sistema de n ecuaciones
siendo “n” el número de puntos muéstrales vecinos que intervienen en la
obtención de Z (Carvajal Ramírez, Aguilar Torres, Aguilar Torres, & Agüera,
2001).
III. Triangulación lineal: Es un método exacto basado en la generación refinada de
una malla irregular de triángulos (TIN), cuyos vértices coinciden con los puntos
muéstrales, esta malla se obtiene mediante triángulos de Delaunay. La
interpolación se realiza suponiendo que los puntos pertenecen a la superficie
plana de primer orden que se apoya en los vértices de cada triangulo.
En cualquiera de los casos se procederá a la generación de un modelo tipo
GRID (malla rectangular) que representará teselas de pequeñas dimensiones.
(Carvajal Ramírez, Aguilar Torres, Aguilar Torres, & Agüera, 2001).
5.1.10 Tipos de almacenamiento para datos LiDAR:
22
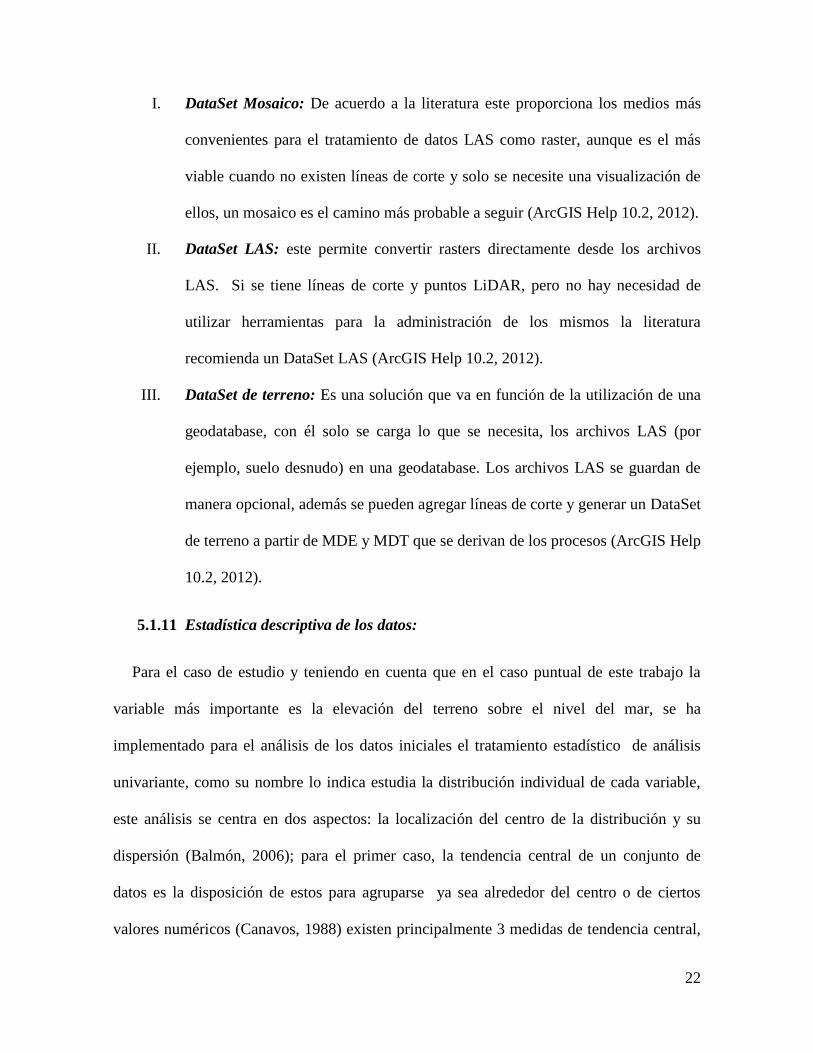
I. DataSet Mosaico: De acuerdo a la literatura este proporciona los medios más
convenientes para el tratamiento de datos LAS como raster, aunque es el más
viable cuando no existen líneas de corte y solo se necesite una visualización de
ellos, un mosaico es el camino más probable a seguir (ArcGIS Help 10.2, 2012).
II. DataSet LAS: este permite convertir rasters directamente desde los archivos
LAS. Si se tiene líneas de corte y puntos LiDAR, pero no hay necesidad de
utilizar herramientas para la administración de los mismos la literatura
recomienda un DataSet LAS (ArcGIS Help 10.2, 2012).
III. DataSet de terreno: Es una solución que va en función de la utilización de una
geodatabase, con él solo se carga lo que se necesita, los archivos LAS (por
ejemplo, suelo desnudo) en una geodatabase. Los archivos LAS se guardan de
manera opcional, además se pueden agregar líneas de corte y generar un DataSet
de terreno a partir de MDE y MDT que se derivan de los procesos (ArcGIS Help
10.2, 2012).
5.1.11 Estadística descriptiva de los datos:
Para el caso de estudio y teniendo en cuenta que en el caso puntual de este trabajo la
variable más importante es la elevación del terreno sobre el nivel del mar, se ha
implementado para el análisis de los datos iniciales el tratamiento estadístico de análisis
univariante, como su nombre lo indica estudia la distribución individual de cada variable,
este análisis se centra en dos aspectos: la localización del centro de la distribución y su
dispersión (Balmón, 2006); para el primer caso, la tendencia central de un conjunto de
datos es la disposición de estos para agruparse ya sea alrededor del centro o de ciertos
valores numéricos (Canavos, 1988) existen principalmente 3 medidas de tendencia central,
23
la media la cual es el promedio aritmético de las observaciones (J, 2002), la mediana es el
valor para el cual, cuando todas las observaciones se ordenan de manera creciente, la mitad
de estas es menor que este valor y la otra mitad mayor (Canavos, 1988) y por último la
moda que es el valor de la observación que ocurre con mayor frecuencia en el conjunto de
datos (Canavos, 1988), las medidas de tendencia central proporcionan información acerca
de un conjunto de datos pero no proporcionan ninguna idea de la variabilidad de los
mismos por tal razón el segundo caso se utilizan las medidas de dispersión, de las cuales
una de las más útiles es la varianza la cual es en esencia el promedio del cuadrado de las
distancias entre cada observación y la media del conjunto de observaciones (Canavos,
1988), los valores de varianza pueden sufrir cambios muy desproporcionados por valores
extremos en el conjunto de datos por tal razón, la raíz cuadrada positiva de la varianza
recibe el nombre de desviación estándar (Canavos, 1988), la varianza y la deviación
estándar no son medidas de variabilidad distintas ya que la última no puede determinarse
sin el conocimiento de la primera (J, 2002), a menudo se prefiere la desviación estándar
con respecto a la varianza, porque se expresa en las mismas unidades físicas de las
observaciones (Canavos, 1988).
5.1.12 Ground Filter:
Es un método de clasificación que genera un archivo de puntos pertenecientes solo a la
superficie del terreno, esto lo hace calculando una superficie asignándole igual peso a todos
los puntos LiDAR, esto da lugar a una superficie patrón o guía en donde se encuentran el
verdadero suelo y otras superficies dependiendo al zona de estudio, de esta manera los
puntos del terreno que estén más propensos a estar por debajo de esta superficie serán los
del terreno mientras que los puntos que estén por encima pertenecerán a otras coberturas,
24
mediante este proceso la mayoría de los puntos que pertenecen a otras clases serán
eliminados siempre y canto se realicen varían iteraciones del algoritmo (Vicente, 2015).
5.1.13 Criterios Visuales de identificación en teledetección:
Antes de empezar con el análisis de imágenes determinar qué objetos o características se
van a analizar dependiendo del tema de intereses de vital importancia. Para dichas
finalidades el estudio sistemático de las imágenes de sensores remotos incluye
características básicas de elementos que aparecen en las mismas. Las características
específicas dependen del campo de aplicación y el área o destinación del trabajo, la mayor
parte de las aplicaciones consideran las características básicas que se enuncian a
continuación: 1. Tono 2.Color 3. Textura 4. Forma 5. Tamaño 6. Patrón 7. Sombras 8.
Localización (Meléndez, 2006).
5.1.14 Rango o retorno Laser:
Todas las operaciones de barrido o escaneo LiDAR se basan en el uso de un haz de luz
láser, que puede medir distancias con un alto grado de precisión, la medición de la distancia
está hecha siempre en función de la magnitud precisa del tiempo (Shan & K. Thoth, 2008).
El método que aplica este concepto es:
-TOF (Time Of Flight, o tiempo de vuelo): implica la medición precisa de un corto pero
intenso pulso de radiación laser que viaja desde el sensor hasta un objeto y regresa al
emisor, de tal manera el instrumento mide el intervalo de tiempo preciso que ha
transcurrido entre que el pulso fue emitido por el emisor ubicado en el punto A y su retorno
luego de la reflexión con un objeto ubicado en el punto B, como se puede apreciar en la
ilustración 2.

25
Ilustración 2: Operación con método TOF
Fuente (Shan & K. Thoth, 2008)
Este rango esta dado como ya se dijo anteriormente en función del tiempo y de la velocidad
del haz de luz que es un valor conocido la ecuación que la describe es la siguiente
(ecuación 2):
𝑅 = 𝑣t/2
Ecuación 2: Rango, fuente (Shan & K. Thoth, 2008)
Donde R es la distancia o rango, v la velocidad de la radiación electromagnética y t es el
intervalo de tiempo medido.
5.1.15 Geodatabase:
Se trata de una base de datos que almacena toda la información relativa a un conjunto de
entidades geográficas o espaciales (geometría, topología, identificadores, datos temáticos),
las ventajas de este método de almacenamiento de entidades geográficas son, la posibilidad
de usar SQL, para hacer consultas y análisis sobre mapas vectoriales, adema de mayor
integración, en una sola herramienta, de todas las funciones para trabajar con información
vectorial (Sarría, 2013).
5.1.16 Raíz del Error Cuadrático Medio:

26
Es una medida de desempeño cuantitativa, que ayuda a evaluar el comportamiento de los
datos estimados o medidos con respecto a una medición patrón o real, se consideran los
cuadrados del error para evitar que las diferencias positivas se compensen con las negativas
(Canavos, 1988), para el caso puntual del desarrollo de este proyecto se aplicará la fórmula
del error medio cuadrático como se muestra en la ecuación 3:
Ecuación 3: Error medio cuadrático
Cuanto menor sea el valor que se obtenga menor será la diferencia entre el modelo y la
realidad.
Adicional a esto, se deben tener en cuenta los criterios de la ASPRS para los valores de
exactitud teniendo en cuenta los valores del ECM (tabla 2).
Tabla 2: intervalos de exactitud
Fuente ASPRS.

27
5.2 Antecedentes
La implementación de nuevos sensores y tecnologías para la obtención y procesamiento
de datos han desempeñado un papel muy importante en el desarrollo y automatización de
procesos para la extracción de información geográfica a diferentes escalas. Un ejemplo
tangible es la utilización de sensores LiDAR, para la generación de topografía y estudios
arquitectónicos dentro de las grandes ciudades (Regot, Andres, & Amparo, 2011), quienes
utilizando datos abiertos al público de la ciudad de Barcelona a escalas 1:1000 y 1:500
lograron realizar una integración con datos levantados con scanner LiDAR terrestre para la
definición de espacios urbanos llegando a tener precisiones del orden de los centímetros,
corroborados en campo con levantamientos topográficos tradicionales. En general las
metodologías para la generación de MDT’s y MDE’s, utilizan métodos de interpolación
como IDW (ponderación por distancia,) curvas de nivel o redes irregulares de triángulos
(TIN) comunes en la geomática, obteniendo resultados satisfactorios teniendo en cuenta los
parámetros dados por la ASPRS para el caso puntual de (Regot, Andres, & Amparo, 2011).
Además fueron validados por métodos estadísticos como el error medio cuadrático o la
rectificación y replanteo en campo, teniendo en cuenta el volumen de datos que manejan.
En años anteriores (Albacete & Garmendia, 2011) realizaron un modelo digital de terreno
en donde utilizan el interpolador geoestadístico Krigging, obteniendo un MDT congruente
con la realidad en cuanto a diferencias altimétricas respecto a valores levantados con GPS.
Otro estudio de gran validez en zonas urbanas lo adelantó (Campoy, 2015), quien generó
modelos en 3-D utilizando redes irregulares de triángulos (TIN), para analizar variables
inherentes a la hora de conducir un automóvil como distancias de visibilidad, parada o
cruce, que constituyen un parámetro esencial en el diseño geométrico de vías en la ciudad
28
de Valencia, España logrando la creación de rangos en los cuales se agrupan los ángulos de
las curvas de las vías y su relación directa con la visibilidad en las mismas.
Por último, cabe resaltar a un referente para la ciudad de Bogotá, el cual ha sido el
trabajo desarrollado por (Osorio, 2016) quien encuentra aplicaciones ambientales a partir de
los modelos de elevación generados a partir del interpolador Krigging y que arrojó errores
entre los 2 y 8 milímetros los cuales están dentro de los rangos establecidos por ASPRSS
para la exactitud, el modelo generó gran aporte para el estudio de algunas variables
causantes de la remoción en masa en zonas específicas de los cerros orientales de la ciudad.
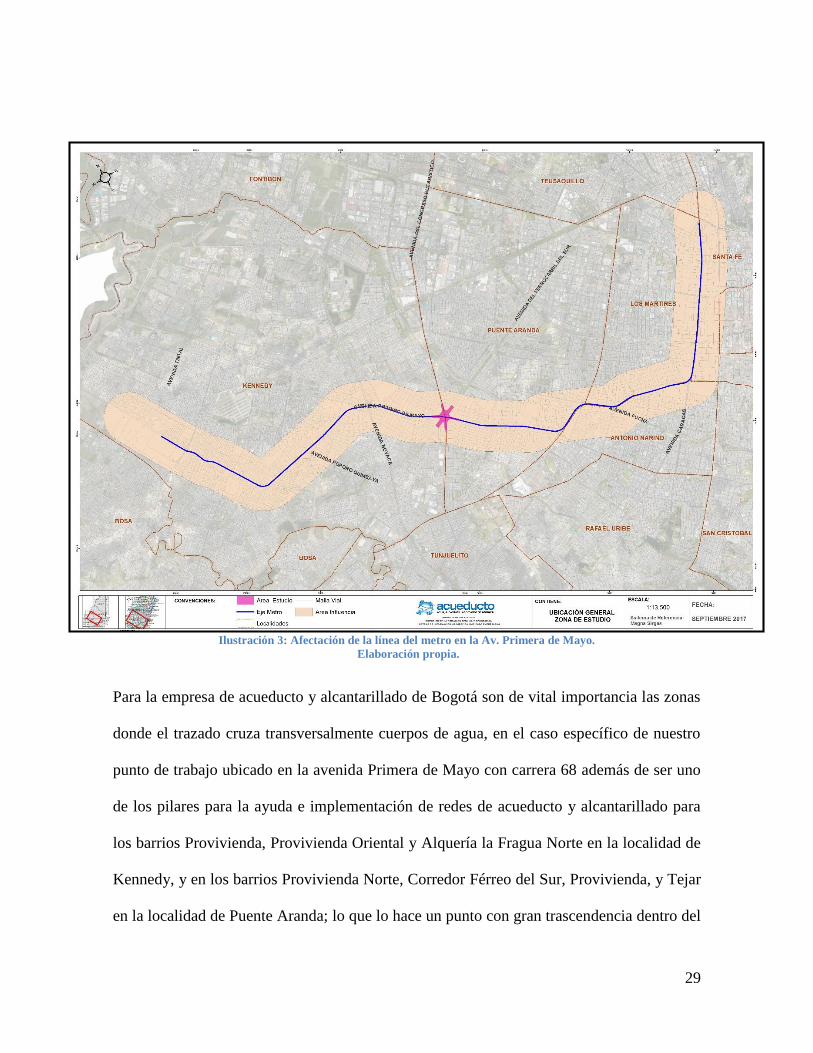
5.3 Marco Geográfico
Para la definición de la zona de estudio como ya se mencionó con anterioridad se tomó la
propuesta inicial del metro elevado para Bogotá, el cual tiene su mayor influencia sobre la
avenida Primera de Mayo, como se puede apreciar en la ilustración 3 la afectación de la
línea del metro tiene un gran impacto sobre las localidades de Kennedy, Antonio Nariño,
Los Mártires y Puente Aranda en la parte sur de la ciudad.
29
Ilustración 3: Afectación de la línea del metro en la Av. Primera de Mayo.
Elaboración propia.
Para la empresa de acueducto y alcantarillado de Bogotá son de vital importancia las zonas
donde el trazado cruza transversalmente cuerpos de agua, en el caso específico de nuestro
punto de trabajo ubicado en la avenida Primera de Mayo con carrera 68 además de ser uno
de los pilares para la ayuda e implementación de redes de acueducto y alcantarillado para
los barrios Provivienda, Provivienda Oriental y Alquería la Fragua Norte en la localidad de
Kennedy, y en los barrios Provivienda Norte, Corredor Férreo del Sur, Provivienda, y Tejar
en la localidad de Puente Aranda; lo que lo hace un punto con gran trascendencia dentro del

30
trazado propuesto, como se observa en la ilustración 4.
Ilustración 4: Ubicación específica punto crítico Av. Primera de Mayo con carrera 68.
Elaboración propia.
5.4 Insumos, descripción de datos y softwares utilizados
5.4.1 Insumos:
La toma y el procesamiento de datos muestrales como primer insumo para el estudio fue
realizado por la empresa INCIGE S.A.S, contratista encargado. Para hacer el levantamiento
del tramo se creó una red geodésica y de esta manera las redes de estaciones GNSS de
operación continua que se escogieron fueron: CORSS del IGAC y la ABCC de la Empresa
de Acueducto y Alcantarillado de Bogotá con las cuales se realizó dicha red, compuesta por
28 puntos cada km garantizando así puntos de referencia en todo el tramo.
31
Como segundo insumo se realizó un levantamiento topográfico puntual del sector a
trabajar, estos puntos fueron levantados con equipos GPS doble frecuencia con método de
levantamiento RTK el cual logró obtener precisiones del orden centimétrico.
Una vez realizado el levantamiento se procedió a la etapa de descarga y revisión de datos
GPS, en donde se descargaron los datos directamente al computador. La información fue
organizada por fecha y adicionalmente fueron generados los archivos RINEX de cada
posicionamiento y se corrigieron alturas instrumentales.
Como puntos base para el ajuste de la red, se descargaron los datos RINEX de las
estaciones BOGA y BOGT del IGAC y ABPW, ABPD Y ABCC de la EAB, sin embargo,
haciendo la revisión de toda esta información, se optó por trabajar solo con las estaciones
activas BOGA Y ABPW, debido a que solo estas 2 estaciones cumplían con la totalidad del
tiempo de rastreo durante los días de trabajo.
Una vez realizado el ajuste en red se obtiene como tercer insumo los datos LiDAR
capturados de manera terrestre, la captura de estos datos se realizó teniendo en cuenta los
siguientes aspectos:
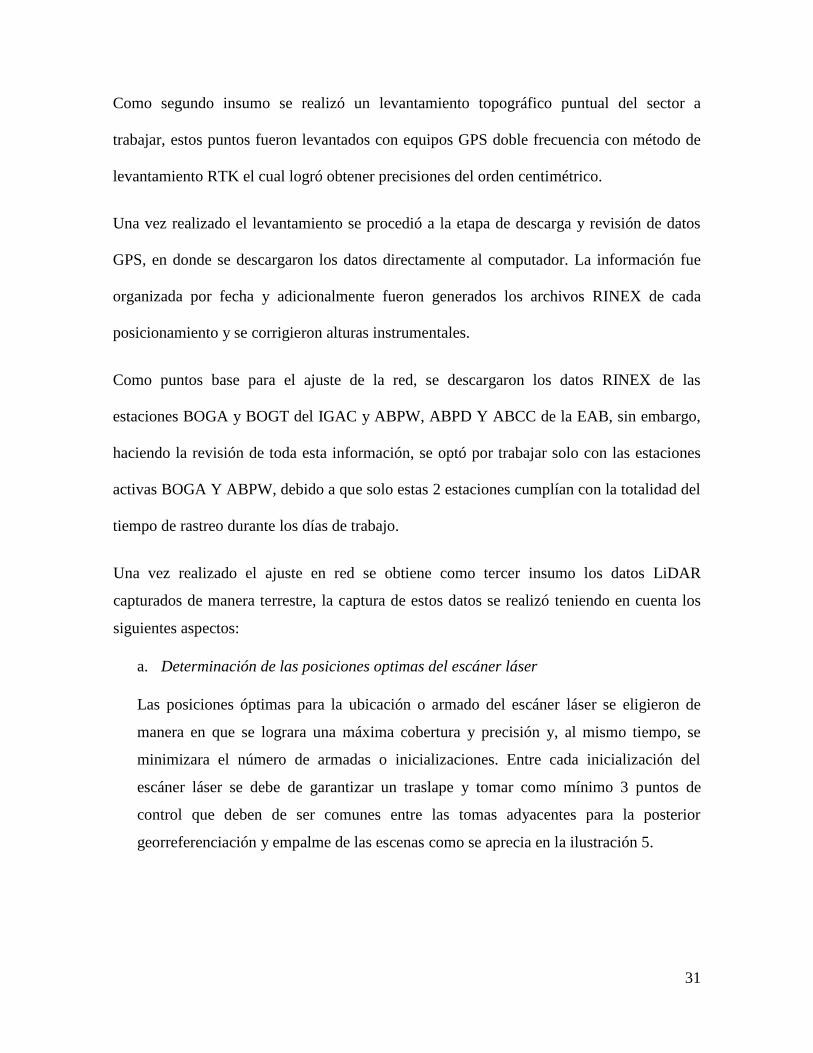
a. Determinación de las posiciones optimas del escáner láser
Las posiciones óptimas para la ubicación o armado del escáner láser se eligieron de
manera en que se lograra una máxima cobertura y precisión y, al mismo tiempo, se
minimizara el número de armadas o inicializaciones. Entre cada inicialización del
escáner láser se debe de garantizar un traslape y tomar como mínimo 3 puntos de
control que deben de ser comunes entre las tomas adyacentes para la posterior
georreferenciación y empalme de las escenas como se aprecia en la ilustración 5.
32
Ilustración 5: Ejemplo de ubicación de armado del LiDAR terrestre.
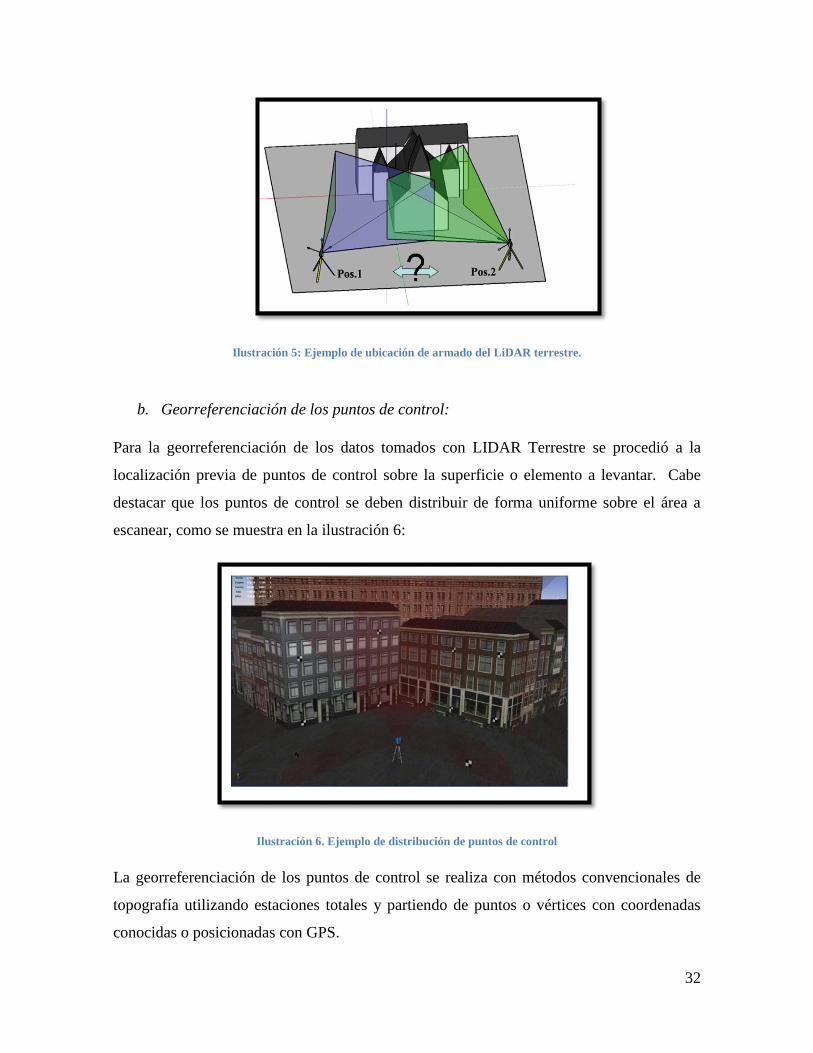
b. Georreferenciación de los puntos de control:
Para la georreferenciación de los datos tomados con LIDAR Terrestre se procedió a la
localización previa de puntos de control sobre la superficie o elemento a levantar. Cabe
destacar que los puntos de control se deben distribuir de forma uniforme sobre el área a
escanear, como se muestra en la ilustración 6:
Ilustración 6. Ejemplo de distribución de puntos de control
La georreferenciación de los puntos de control se realiza con métodos convencionales de
topografía utilizando estaciones totales y partiendo de puntos o vértices con coordenadas
conocidas o posicionadas con GPS.

33
c. Procesamiento y clasificación de los datos LIDAR:
Una vez fue tomada la información LIDAR en campo se procedió a realizar la descarga,
procesamiento y ajuste de la información de cada una de las escenas de los datos LIDAR.
Después de tener la nube de puntos ajustada se procedió con la clasificación de cada uno de
los elementos visibles (terreno natural, construcciones, postes, vías, puentes, andenes, etc.)
Como se puede observar en la vista general de los datos sin procesar (ilustración 7).
Ilustración 7: Datos LiDAR terrestre
Extraído de ReCap.
Ilustración 8: Error medio cuadrático
Extraído de ReCap.

34
En la ilustración 8 se puede evidenciar el error medio cuadrático de la sobreposición o
solape, como se puede observar todas están por encima dl 90% eso quiere decir que se
solaparon con éxito todas las escenas tomadas por el sensor.
d. Para la toma de datos LIDAR Terrestre se utilizaran los siguientes equipos
(ilustraciones 9, 10 y 11):
- Equipos GPS
Ilustración 9. GPS Base & Rover 5700
- Estación Total
Ilustración 10. NIKON DTM 322.
- Equipo LIDAR Terrestre Z+F IMAGER 5010

35
Ilustración 11. LIDAR IMAGER 5010
5.4.2 Descripción de los datos:
Los archivos obtenidos por el sensor son en formato .LAS, dichos archivos los procesó la
empresa, entregando como último insumo (ilustración 12) para una mayor comodidad y
mayor agilidad de procesamiento, la información en TILES los cuales se encargan de
dividir la información en partes iguales.
Ilustración 12: Distribución de TILES. Nube de puntos sin filtrar
Extraído de MARS.
36
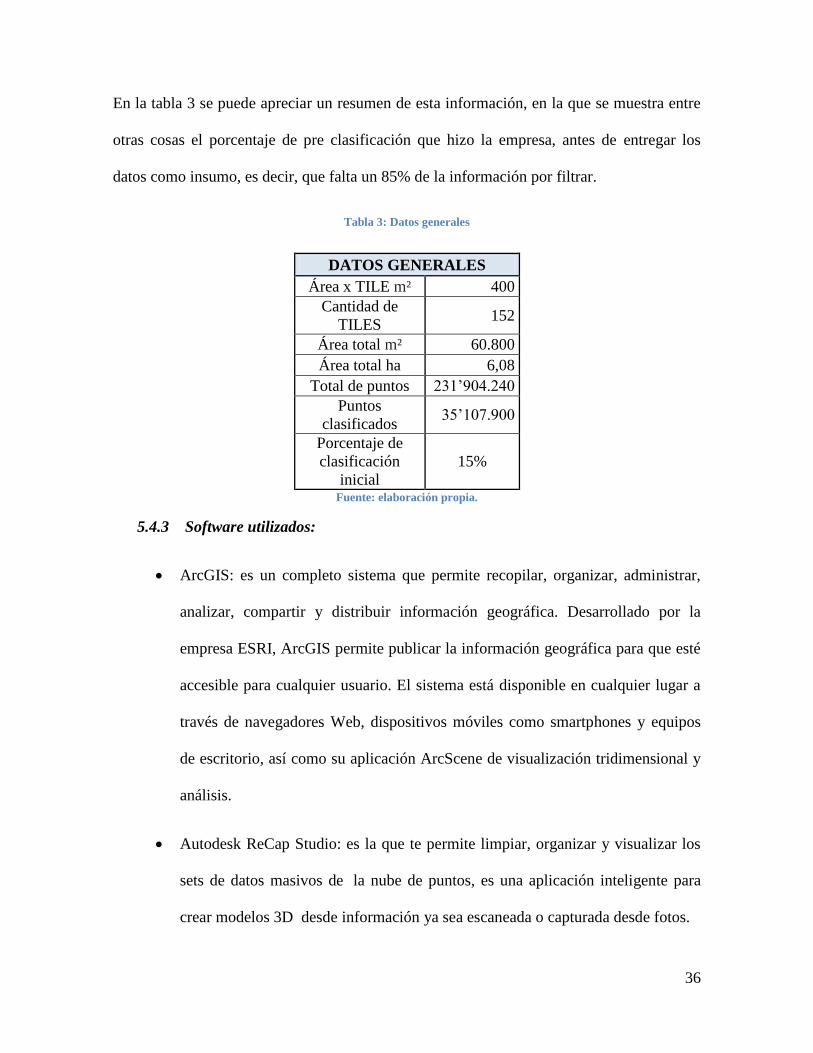
En la tabla 3 se puede apreciar un resumen de esta información, en la que se muestra entre
otras cosas el porcentaje de pre clasificación que hizo la empresa, antes de entregar los
datos como insumo, es decir, que falta un 85% de la información por filtrar.
Tabla 3: Datos generales
DATOS GENERALES
Área x TILE m² 400
Cantidad de
TILES 152
Área total m² 60.800
Área total ha 6,08
Total de puntos 231’904.240
Puntos
clasificados 35’107.900
Porcentaje de
clasificación
inicial
15%
Fuente: elaboración propia.
5.4.3 Software utilizados:
ArcGIS: es un completo sistema que permite recopilar, organizar, administrar,
analizar, compartir y distribuir información geográfica. Desarrollado por la
empresa ESRI, ArcGIS permite publicar la información geográfica para que esté
accesible para cualquier usuario. El sistema está disponible en cualquier lugar a
través de navegadores Web, dispositivos móviles como smartphones y equipos
de escritorio, así como su aplicación ArcScene de visualización tridimensional y
análisis.
Autodesk ReCap Studio: es la que te permite limpiar, organizar y visualizar los
sets de datos masivos de la nube de puntos, es una aplicación inteligente para
crear modelos 3D desde información ya sea escaneada o capturada desde fotos.
37
Global Mapper: es una potente aplicación que combina una gama completa de
herramientas de tratamiento de datos espaciales con acceso a una variedad sin
precedentes de formatos de datos. Global Mapper lee datos LiDAR en
formatos LAS y LASzip (archivos LAS comprimidos) directamente. Utiliza los
datos GPS de receptores compatibles, conectados a un computador móvil.
Con datos importados elevación Global Mapper puede generar vistas
perspectivas en 3D, sombreados personalizados, análisis de cuencas, cuencas
visuales y línea de vista, además de la generación de curvas de nivel
personalizadas.
MARS: Es un paquete de software Merrick Advanced Remote Sensing
(MARS®) es una aplicación de Windows completa, de producción autónoma,
diseñada para visualizar, gestionar, procesar y analizar datos de nubes de puntos
LiDAR. El paquete de software MARS® está diseñado para sistemas operativos
Windows de 64 bits y proporciona potentes funciones de filtrado, edición y
gestión de datos LiDAR.
38
6. METODOLOGÍA
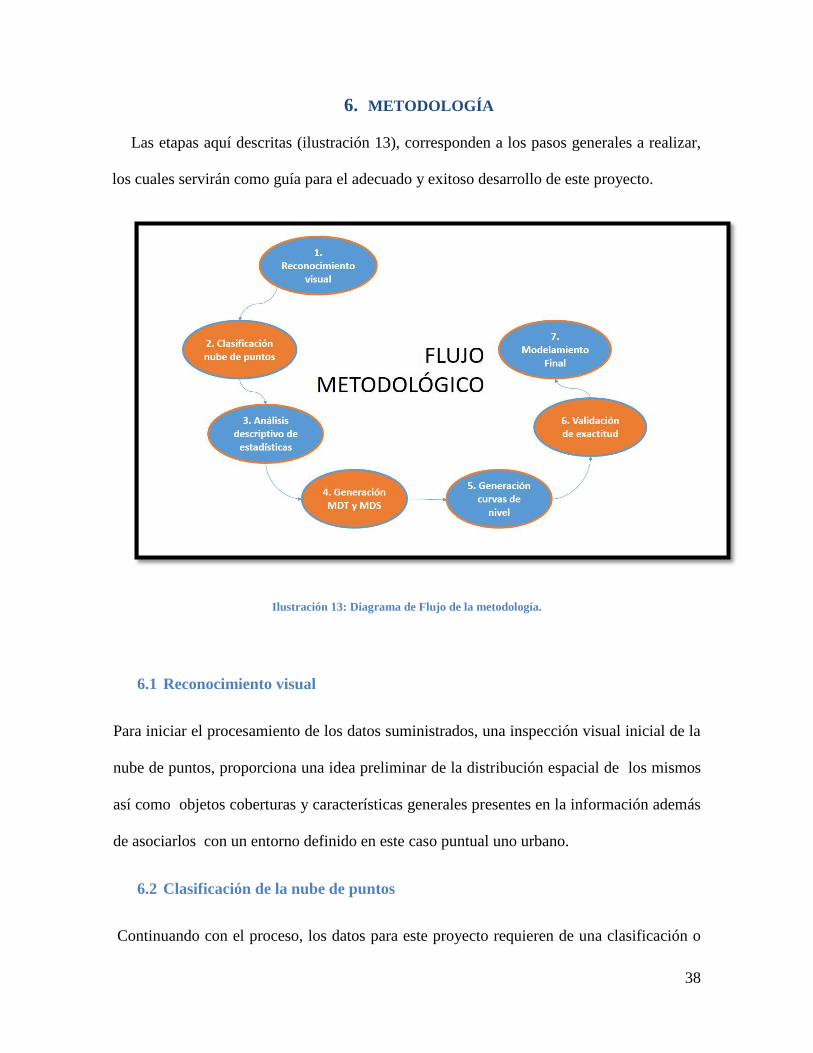
Las etapas aquí descritas (ilustración 13), corresponden a los pasos generales a realizar,
los cuales servirán como guía para el adecuado y exitoso desarrollo de este proyecto.
Ilustración 13: Diagrama de Flujo de la metodología.
6.1 Reconocimiento visual
Para iniciar el procesamiento de los datos suministrados, una inspección visual inicial de la
nube de puntos, proporciona una idea preliminar de la distribución espacial de los mismos
así como objetos coberturas y características generales presentes en la información además
de asociarlos con un entorno definido en este caso puntual uno urbano.
6.2 Clasificación de la nube de puntos
Continuando con el proceso, los datos para este proyecto requieren de una clasificación o

39
filtrado de coberturas de acuerdo al estándar implementado por la American Society for
Photogrammetry and Remote Sensing – ASPRS que permita visualizar, manipular y
ordenar de la mejor manera la información adquirida, para dicho fin el algoritmo
GroundFilter agiliza el proceso, al clasificar una gran cantidad de puntos de la superficie
topográfica del área de estudio, para el resto de clases es suficiente con los criterios para la
identificación y análisis visual de imágenes en teledetección.
6.3 Análisis descriptivo y estadístico de las clases
Posteriormente se procede a realizar un análisis descriptivo de cada una de las clases
generadas en el paso anterior, debido al gran volumen de información contenida en cada
una de las clases, se generan muestras representativas de cada una de ellas, las cuales se les
aplican procesos estadísticos como generación de medidas de tendencia central y de
variabilidad así como tablas de frecuencia e histogramas que faciliten la interpretación de la
nube de puntos tanto general como particular.
6.4 Generación de MDT y MDS
La generación de los modelos digitales de terreno y de superficie para este proyecto se ha
realizado de 2 maneras distintas, de forma que se puedan comparar 2 métodos diferentes
para la generación de los MDT y MDS.
El primer método a tener en cuenta es el TIN de múltiple resolución el cual se genera
mediante la herramienta lasDataSet almacenado en una geodatabase que además guardara
los modelos generados, esta implementación re realiza en el software ArcGIS, en este caso
de estudio se empleara el cálculo mediante el tamaño de ventana. El cual define la
resolución y la escala, para parámetro se definió un tamaño de ventana 1, lo anterior con el

40
fin de que cada 1 metro cuadrado se mire el valor más bajo de elevación para la creación de
las pirámides (triángulos), implementados por el método y evitar mucha simplificación o
generalización y lograr el detalle esperado.
Paralelamente la generación de los MDT y MDS se realiza con el uso del método de
Krigging, implementado en software Global Mapper, en este proceso además de tener el
parámetro del tamaño de la celda o ventana, se debe seleccionar que valor funciona como
referencia en la elevación de cada ventana, por lo cual un valor promedio es un valor
apropiado para el proyecto.
6.5 Generación de Curvas de nivel
Con el insumo generado en los MDT, se procede a generar uno de los resultados que más
puede ayudar en la interpretación de la distribución del terreno en la vida real, son las
curvas de contorno o de nivel, en este caso de estudio se genera 1 capa con intervalo de 50
centímetros que nos brindara un mayor detalle.
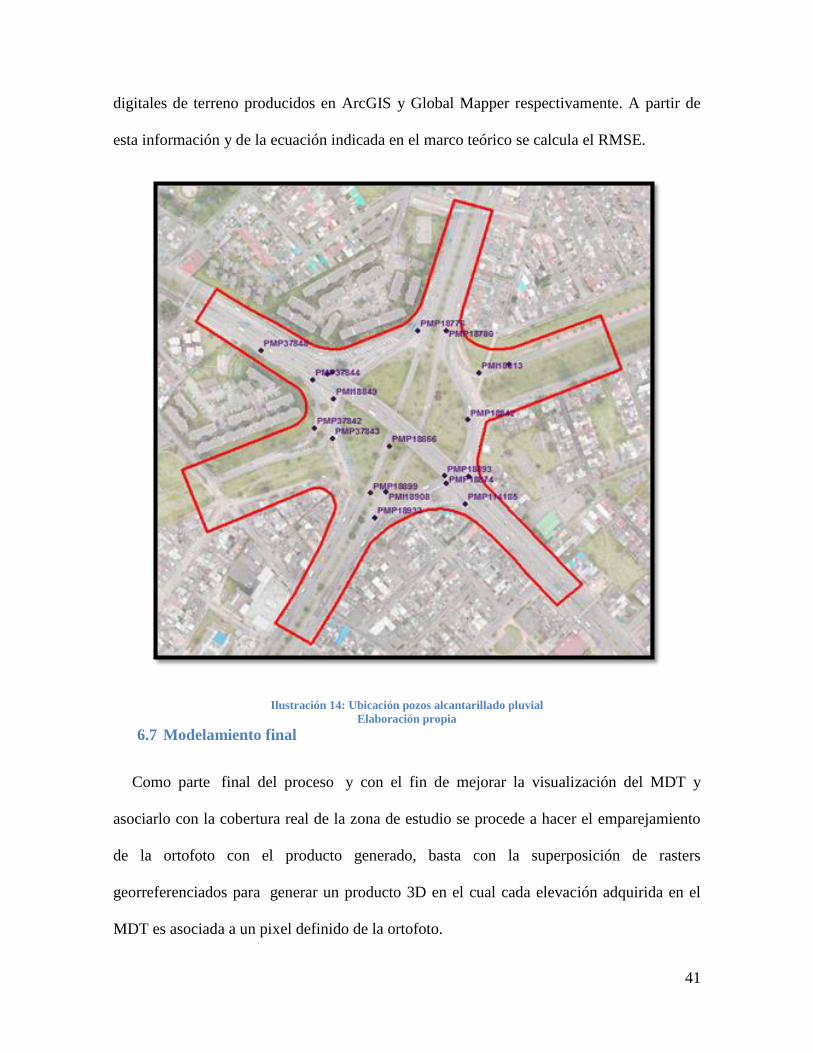
6.6 Validación de exactitud
Para realizar la validación se escogieron 25 pozos de la red de alcantarillado
pluvial localizados sobre el terreno de la zona de estudio (ilustración 14), para la selección
se tuvieron en cuenta que estuvieran distribuidos de la mejor manera posible sobre la zona
de estudio como se observa en el anexo y que representen igual de bien el nivel del suelo,
estos pozos tienen coordenadas conocidas, levantadas con anterioridad por la empresa de
acueducto mediante diferentes métodos como levantamientos GPS o con estación total,
luego se extraen los valores de elevación a una tabla Excel (resultados, tabla 10 ) en la que
se observan los valores reales obtenidos de los pozos y los valores de los dos modelos
41
digitales de terreno producidos en ArcGIS y Global Mapper respectivamente. A partir de
esta información y de la ecuación indicada en el marco teórico se calcula el RMSE.
Ilustración 14: Ubicación pozos alcantarillado pluvial
Elaboración propia
6.7 Modelamiento final
Como parte final del proceso y con el fin de mejorar la visualización del MDT y
asociarlo con la cobertura real de la zona de estudio se procede a hacer el emparejamiento
de la ortofoto con el producto generado, basta con la superposición de rasters
georreferenciados para generar un producto 3D en el cual cada elevación adquirida en el
MDT es asociada a un pixel definido de la ortofoto.
42
Para esto se le realizó un clip del aérea de estudio a la ortofoto entregada como uno de los
insumos, seguido a esto se generó un raster producto de la unión entre un TIN con los datos
de elevación, para luego cargar dichas coberturas (raster de elevación, ortofoto y curvas de
nivel) a ArcScene y generar así el modelo final. Es necesario tener en cuenta la proyección
que tiene cada producto ya que de no ser la misma se pueden caer en errores de
modelamiento.

43
7. RESULTADOS Y ANÁLISIS
7.1 Clasificación nube de puntos (Filtrado)
Se aprecia en la ilustración 15 la vista general de la distribución por TILES, con los
cuales se utilizaron para la eficaz distribución del trabajo a la hora del filtrado, de esta
manera se evita la pérdida de información en el proceso.
Ilustración 15: Vista general de los TILES
Extraído de MARS.

44
Dicho filtrado se divide por 4 clases principales, terreno (Ground) representado con el
color naranja, vegetación baja (Low Vegetation) representado de color verde, edificaciones
(Building) representado con el color azul y por último el ruido (Low Point Noise)
representado de fucsia, como se aprecia en la ilustración 16.
Ilustración 16: Convenciones de las clases de filtrado
Extraído de MARS.
Dicho procesamiento de filtrado al ser un 85% realizado de manera manual, tuvo todo un
proceso en tiempo; en la ilustración 17 se puede evidenciar el proceso de filtrado por
semanas, dicho proceso se vio afectado por la cantidad de puntos de acuerdo al TILE que se
estaba filtrando, es decir en lugares como el puente la densidad la densidad de puntos era
mayor y por ende el software necesitaba más tiempo de procesamiento.

45
SEMANA 1 SEMANA 3
SEMANA 5 SEMANA 7
SEMANA 9 SEMANA 12
Ilustración 17: Proceso de filtrado
Extraído de MARS.
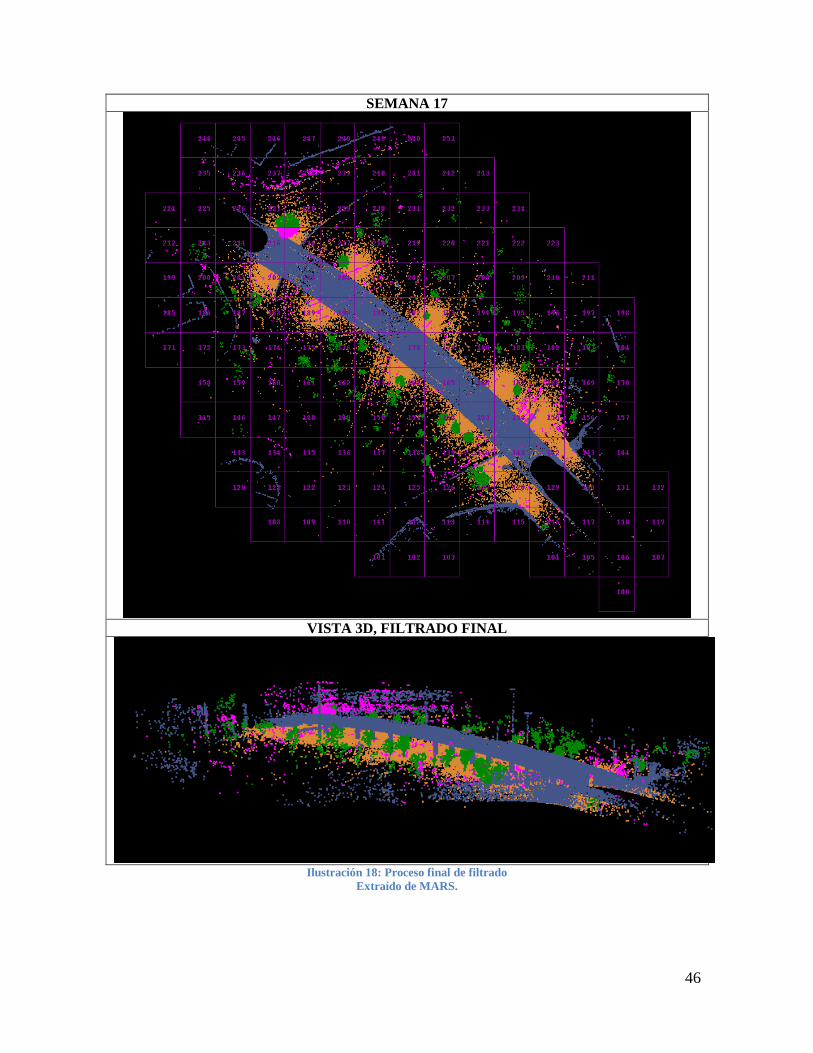
Después de 17 semanas se puede evidenciar en la ilustración 18 el producto final del
filtrado, y generar así una vista en 3D para darle más claridad a lo que se está viendo.
Diferenciando plenamente de esta manera los aspectos clasificados como: terreno,
vegetación, edificaciones y ruido.
46
SEMANA 17
VISTA 3D, FILTRADO FINAL
Ilustración 18: Proceso final de filtrado
Extraído de MARS.
47
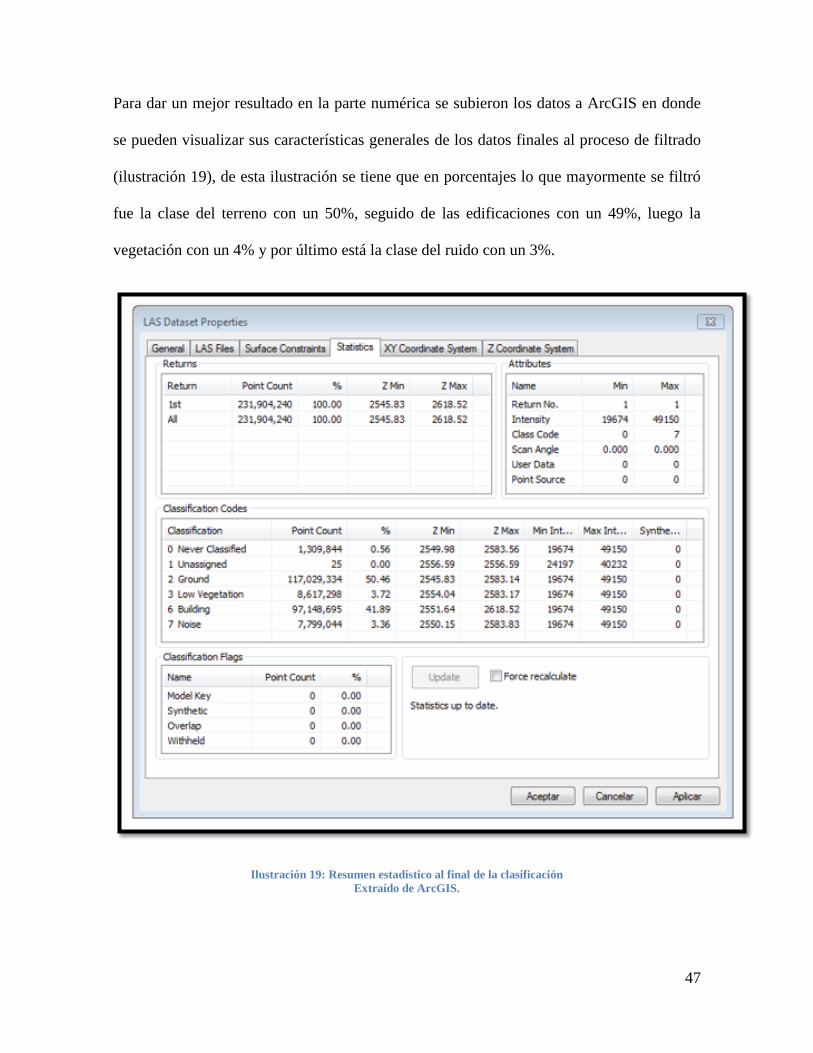
Para dar un mejor resultado en la parte numérica se subieron los datos a ArcGIS en donde
se pueden visualizar sus características generales de los datos finales al proceso de filtrado
(ilustración 19), de esta ilustración se tiene que en porcentajes lo que mayormente se filtró
fue la clase del terreno con un 50%, seguido de las edificaciones con un 49%, luego la
vegetación con un 4% y por último está la clase del ruido con un 3%.
Ilustración 19: Resumen estadístico al final de la clasificación
Extraído de ArcGIS.

48
7.2 Visualización de filtrado
7.2.1 Global Mapper (color por elevación):
La visualización de los puntos ya filtrados se puede realizar mediante el software Global
Mapper, en el cual se pueden categorizar la manera de ver los datos de acuerdo a su color
de cobertura, o de acuerdo a la escala de colores por elevación, por tal motivo para facilidad
de interpretación y análisis se escoge la visualización por elevación mostrando una vista en
2D y en 3D para cada una de las coberturas trabajadas.
En ambas coberturas el programa muestra la paleta de colores por la que se clasifican los
puntos según su altura (ilustración 20).
Ilustración 20: Escala de colores de elevación
Extraído de Global Mapper.
49
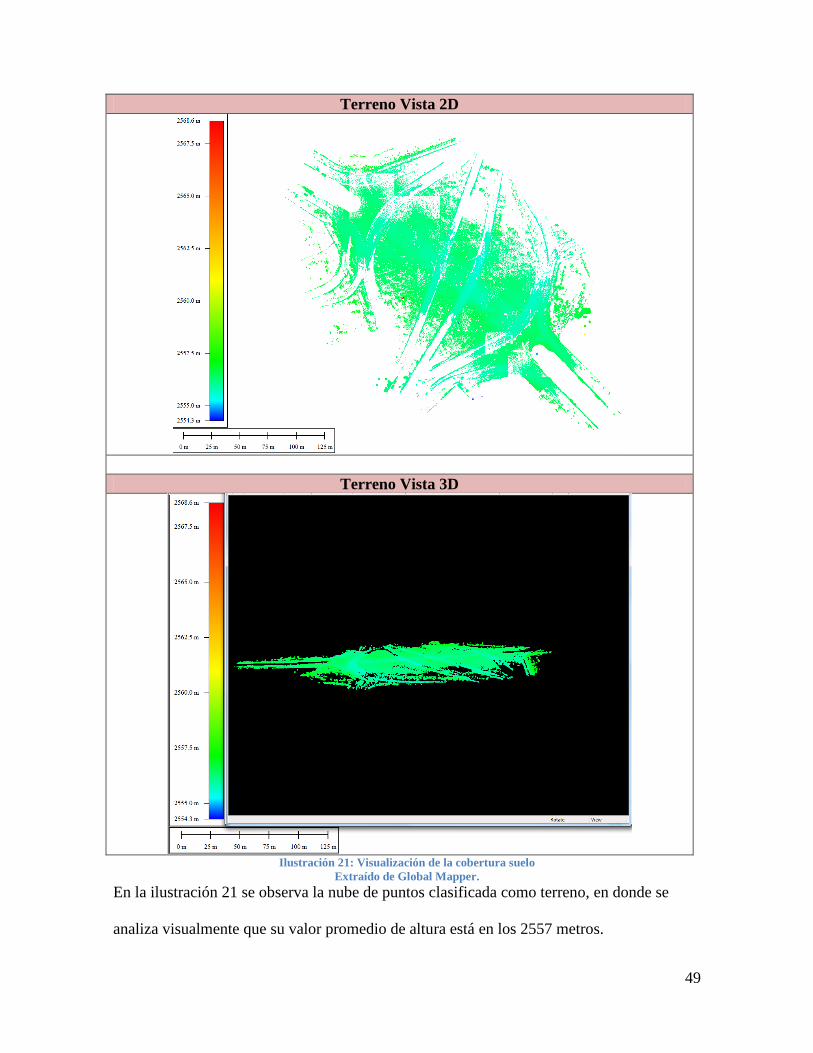
Terreno Vista 2D
Terreno Vista 3D
Ilustración 21: Visualización de la cobertura suelo
Extraído de Global Mapper.
En la ilustración 21 se observa la nube de puntos clasificada como terreno, en donde se
analiza visualmente que su valor promedio de altura está en los 2557 metros.
50
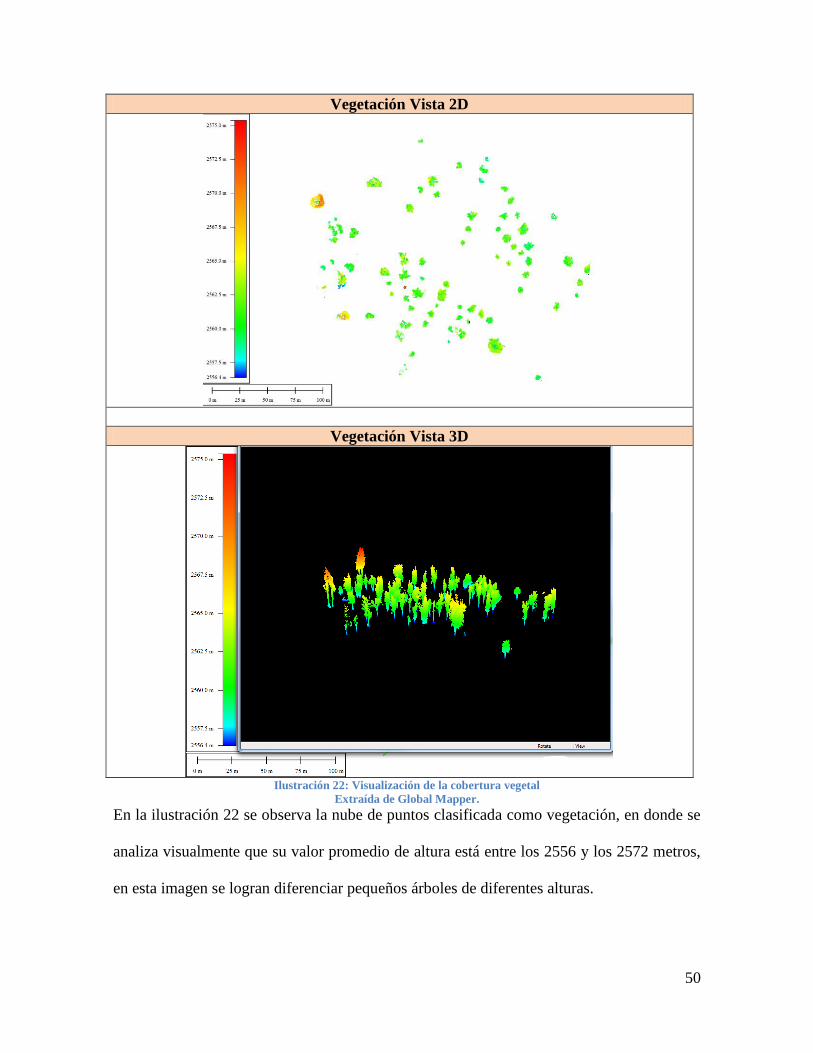
Vegetación Vista 2D
Vegetación Vista 3D
Ilustración 22: Visualización de la cobertura vegetal
Extraída de Global Mapper.
En la ilustración 22 se observa la nube de puntos clasificada como vegetación, en donde se
analiza visualmente que su valor promedio de altura está entre los 2556 y los 2572 metros,
en esta imagen se logran diferenciar pequeños árboles de diferentes alturas.
51
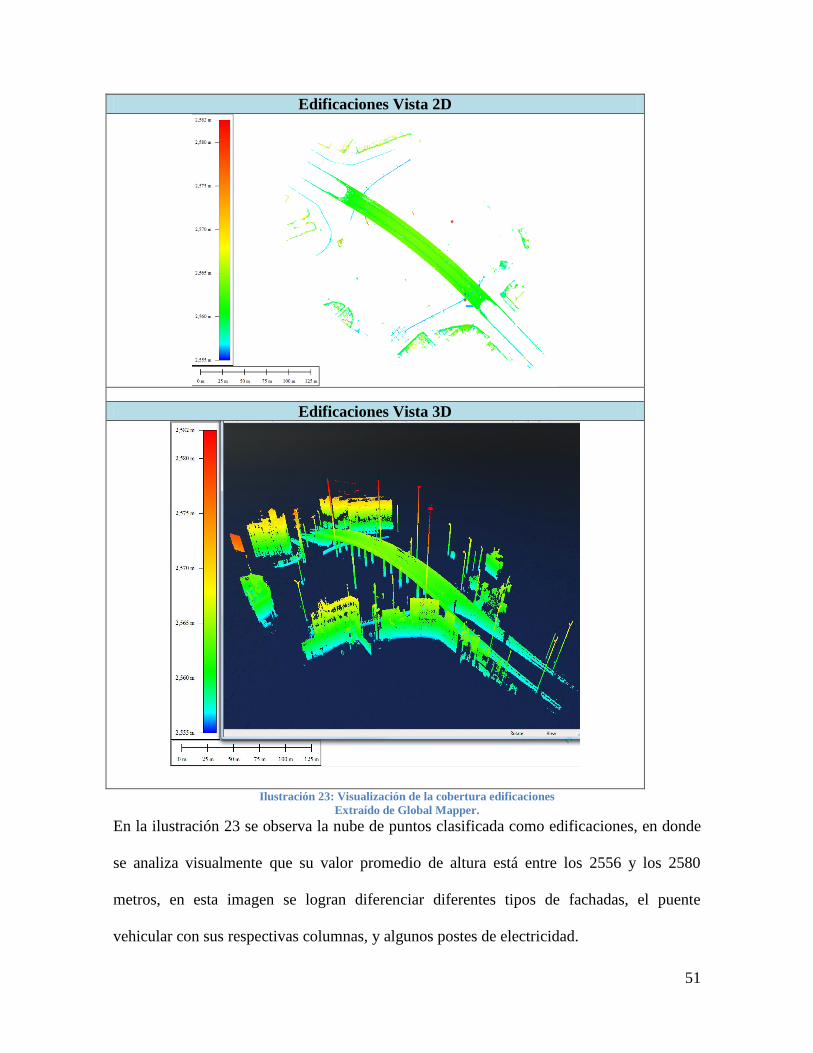
Edificaciones Vista 2D
Edificaciones Vista 3D
Ilustración 23: Visualización de la cobertura edificaciones
Extraído de Global Mapper.
En la ilustración 23 se observa la nube de puntos clasificada como edificaciones, en donde
se analiza visualmente que su valor promedio de altura está entre los 2556 y los 2580
metros, en esta imagen se logran diferenciar diferentes tipos de fachadas, el puente
vehicular con sus respectivas columnas, y algunos postes de electricidad.
52
Ruido Vista 2D
Ruido Vista 3D
Ilustración 24: Visualización de la cobertura ruido
Extraído de Global Mapper.
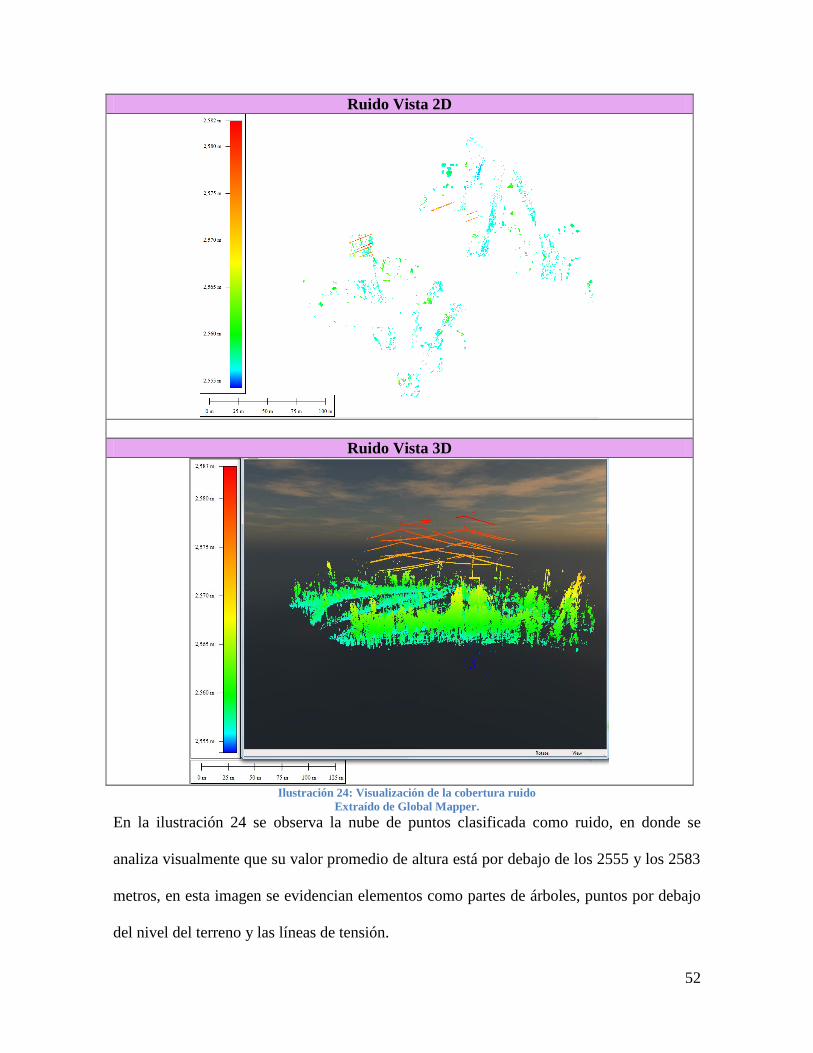
En la ilustración 24 se observa la nube de puntos clasificada como ruido, en donde se
analiza visualmente que su valor promedio de altura está por debajo de los 2555 y los 2583
metros, en esta imagen se evidencian elementos como partes de árboles, puntos por debajo
del nivel del terreno y las líneas de tensión.
53
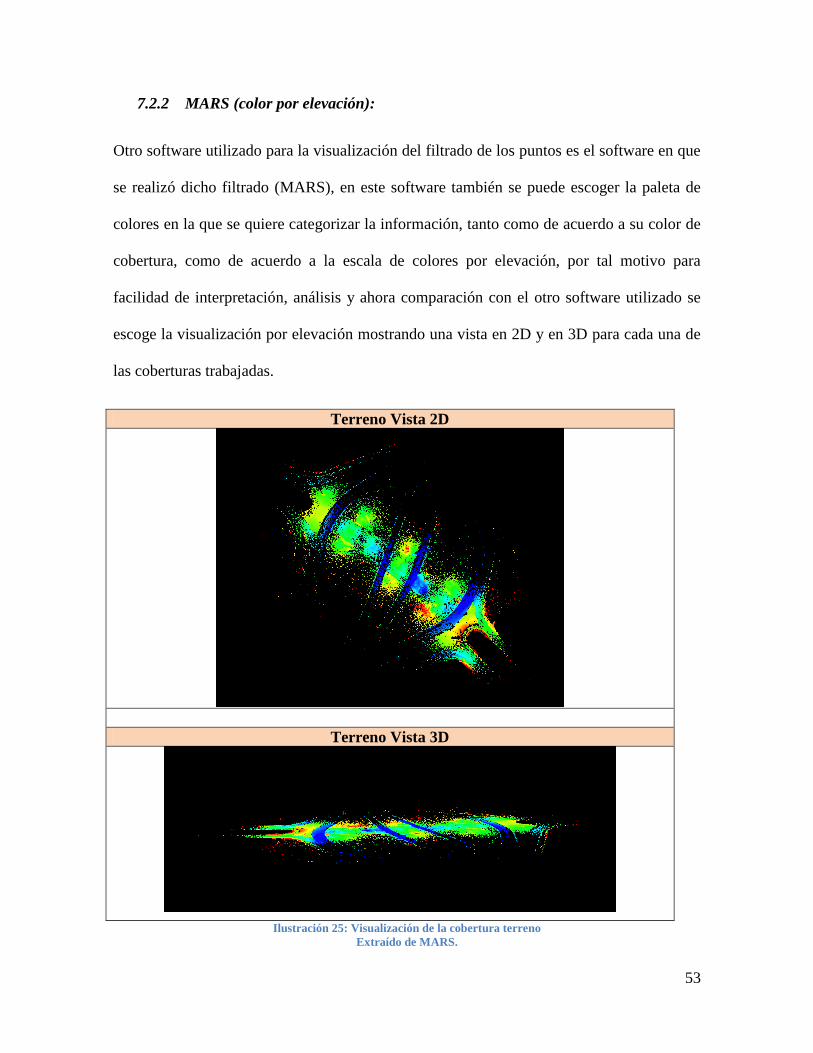
7.2.2 MARS (color por elevación):
Otro software utilizado para la visualización del filtrado de los puntos es el software en que
se realizó dicho filtrado (MARS), en este software también se puede escoger la paleta de
colores en la que se quiere categorizar la información, tanto como de acuerdo a su color de
cobertura, como de acuerdo a la escala de colores por elevación, por tal motivo para
facilidad de interpretación, análisis y ahora comparación con el otro software utilizado se
escoge la visualización por elevación mostrando una vista en 2D y en 3D para cada una de
las coberturas trabajadas.
Terreno Vista 2D
Terreno Vista 3D
Ilustración 25: Visualización de la cobertura terreno
Extraído de MARS.
54
Vegetación Vista 2D
Vegetación Vista 3D
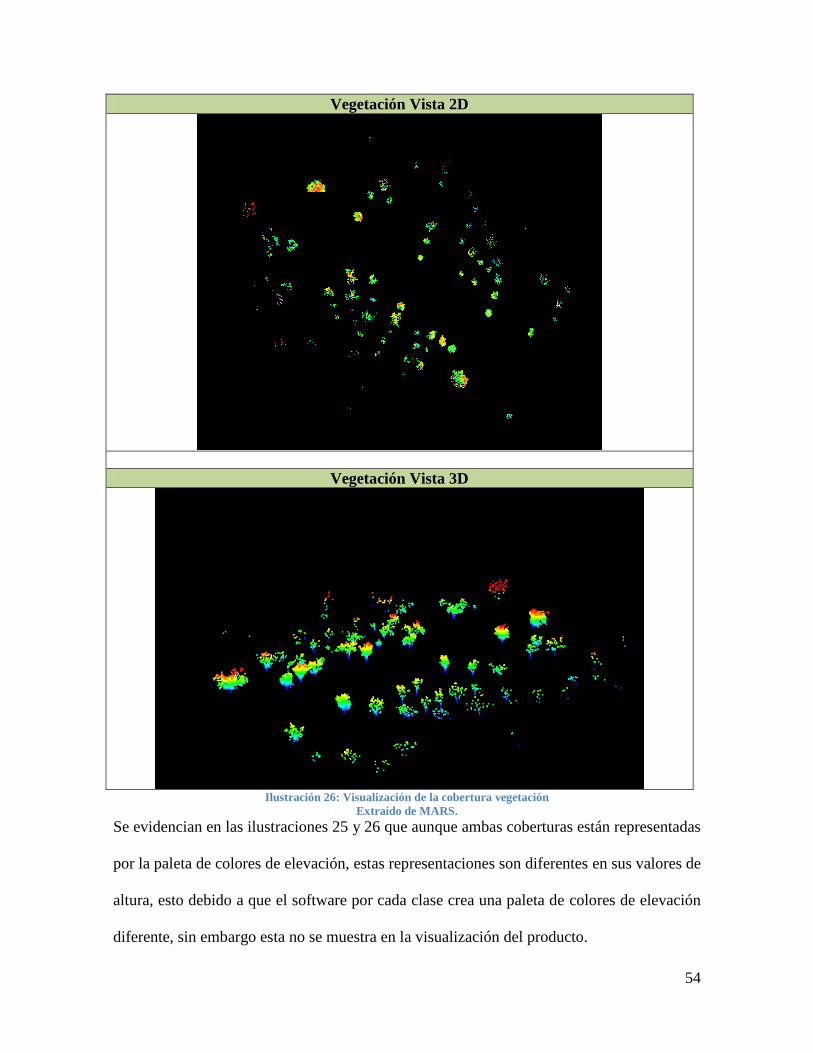
Ilustración 26: Visualización de la cobertura vegetación
Extraído de MARS.
Se evidencian en las ilustraciones 25 y 26 que aunque ambas coberturas están representadas
por la paleta de colores de elevación, estas representaciones son diferentes en sus valores de
altura, esto debido a que el software por cada clase crea una paleta de colores de elevación
diferente, sin embargo esta no se muestra en la visualización del producto.
55
Edificaciones Vista 2D
Edificaciones Vista 3D
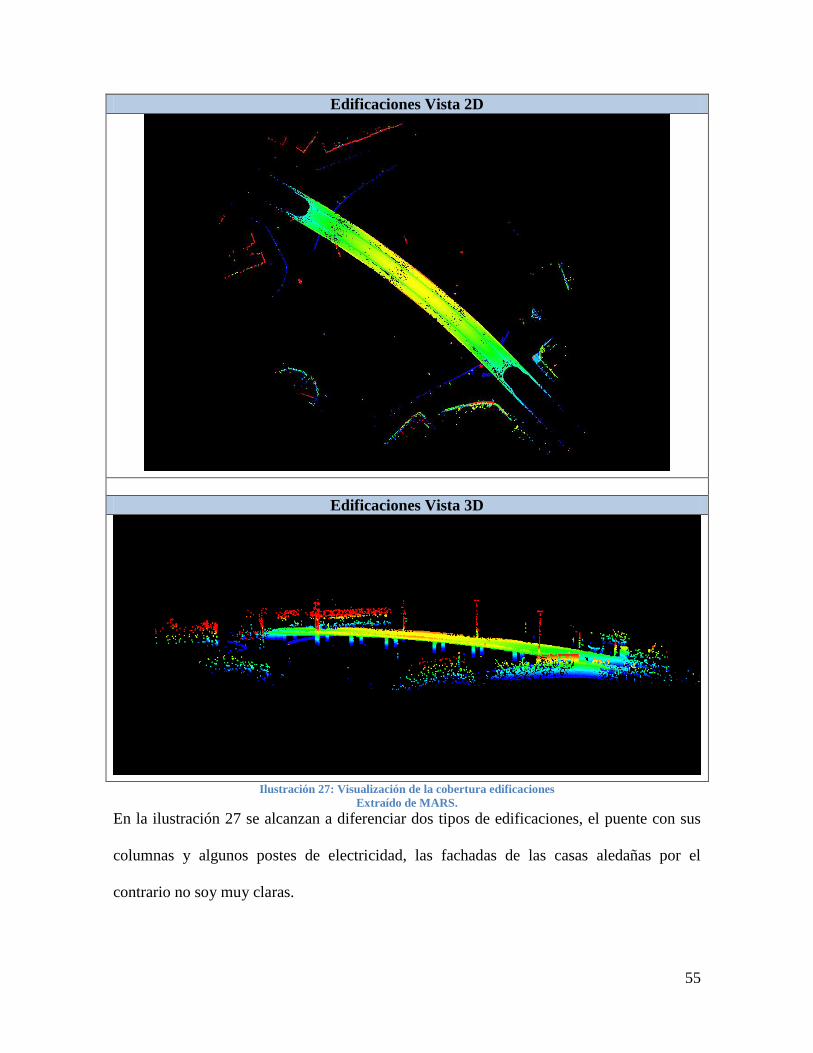
Ilustración 27: Visualización de la cobertura edificaciones
Extraído de MARS.
En la ilustración 27 se alcanzan a diferenciar dos tipos de edificaciones, el puente con sus
columnas y algunos postes de electricidad, las fachadas de las casas aledañas por el
contrario no soy muy claras.

56
Ruido Vista 2D
Ruido Vista 2D
Ilustración 28: Visualización de la cobertura ruido
Extraído de MARS.
En la cobertura del ruido (ilustración 28) tanto para su vista en 2D como en su vista en 3D
se puede concluir que aunque estos puntos representan lo que no se desea incluir en el
filtrado, no se logra identificar a que cobertura pudieron estar relacionados estos puntos.
57
7.3 Análisis de estadísticas
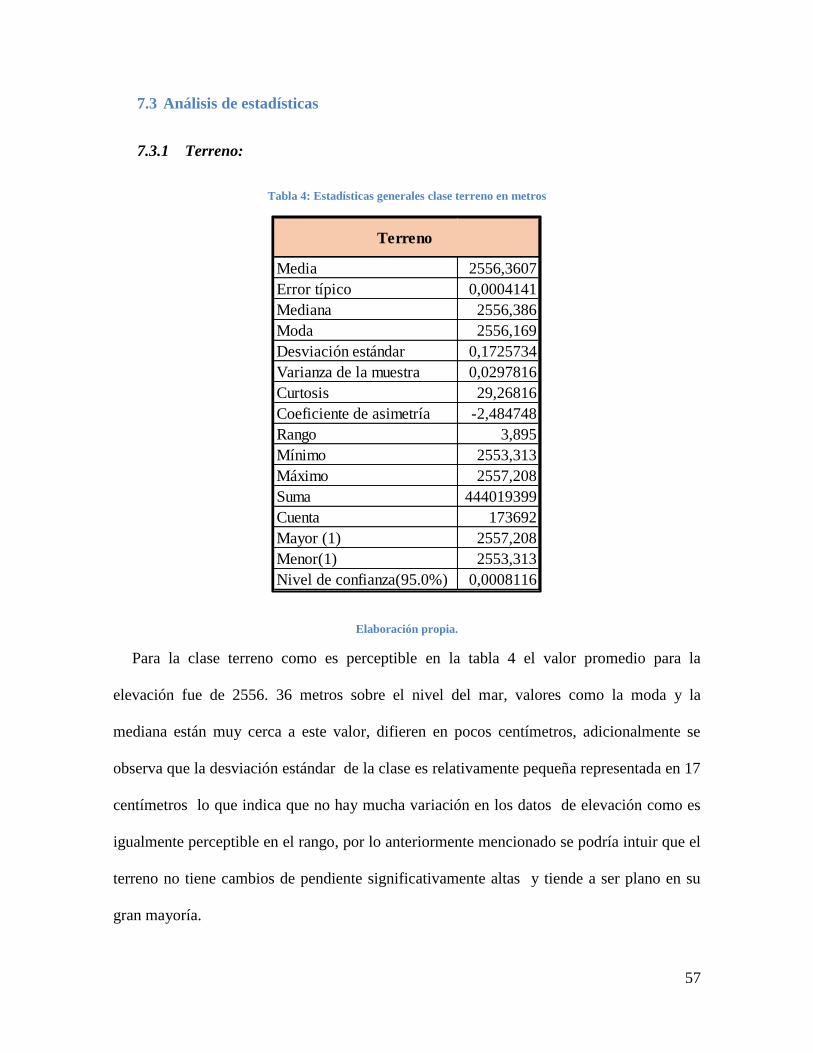
7.3.1 Terreno:
Tabla 4: Estadísticas generales clase terreno en metros
Elaboración propia.
Para la clase terreno como es perceptible en la tabla 4 el valor promedio para la
elevación fue de 2556. 36 metros sobre el nivel del mar, valores como la moda y la
mediana están muy cerca a este valor, difieren en pocos centímetros, adicionalmente se
observa que la desviación estándar de la clase es relativamente pequeña representada en 17
centímetros lo que indica que no hay mucha variación en los datos de elevación como es
igualmente perceptible en el rango, por lo anteriormente mencionado se podría intuir que el
terreno no tiene cambios de pendiente significativamente altas y tiende a ser plano en su
gran mayoría.
Media 2556,3607
Error típico 0,0004141
Mediana 2556,386
Moda 2556,169
Desviación estándar 0,1725734
Varianza de la muestra 0,0297816
Curtosis 29,26816
Coeficiente de asimetría -2,484748
Rango 3,895
Mínimo 2553,313
Máximo 2557,208
Suma 444019399
Cuenta 173692
Mayor (1) 2557,208
Menor(1) 2553,313
Nivel de confianza(95.0%) 0,0008116
Terreno
58
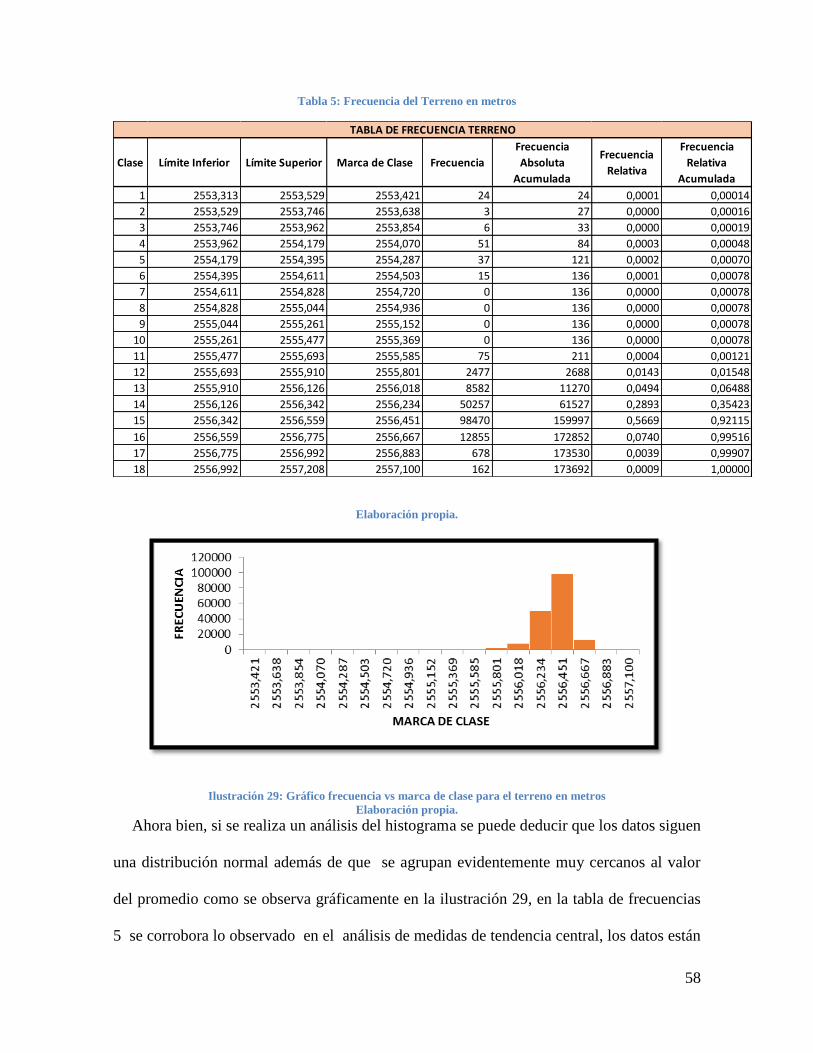
Tabla 5: Frecuencia del Terreno en metros
Elaboración propia.
Ilustración 29: Gráfico frecuencia vs marca de clase para el terreno en metros
Elaboración propia.
Ahora bien, si se realiza un análisis del histograma se puede deducir que los datos siguen
una distribución normal además de que se agrupan evidentemente muy cercanos al valor
del promedio como se observa gráficamente en la ilustración 29, en la tabla de frecuencias
5 se corrobora lo observado en el análisis de medidas de tendencia central, los datos están
Clase Límite Inferior Límite Superior Marca de Clase Frecuencia
Frecuencia
Absoluta
Acumulada
Frecuencia
Relativa
Frecuencia
Relativa
Acumulada
1 2553,313 2553,529 2553,421 24 24 0,0001 0,00014
2 2553,529 2553,746 2553,638 3 27 0,0000 0,00016
3 2553,746 2553,962 2553,854 6 33 0,0000 0,00019
4 2553,962 2554,179 2554,070 51 84 0,0003 0,00048
5 2554,179 2554,395 2554,287 37 121 0,0002 0,00070
6 2554,395 2554,611 2554,503 15 136 0,0001 0,00078
7 2554,611 2554,828 2554,720 0 136 0,0000 0,00078
8 2554,828 2555,044 2554,936 0 136 0,0000 0,00078
9 2555,044 2555,261 2555,152 0 136 0,0000 0,00078
10 2555,261 2555,477 2555,369 0 136 0,0000 0,00078
11 2555,477 2555,693 2555,585 75 211 0,0004 0,00121
12 2555,693 2555,910 2555,801 2477 2688 0,0143 0,01548
13 2555,910 2556,126 2556,018 8582 11270 0,0494 0,06488
14 2556,126 2556,342 2556,234 50257 61527 0,2893 0,35423
15 2556,342 2556,559 2556,451 98470 159997 0,5669 0,92115
16 2556,559 2556,775 2556,667 12855 172852 0,0740 0,99516
17 2556,775 2556,992 2556,883 678 173530 0,0039 0,99907
18 2556,992 2557,208 2557,100 162 173692 0,0009 1,00000
TABLA DE FRECUENCIA TERRENO
59
en su gran mayoría agrupados en la clase 15 la cual representa casi el 57% del total de los
datos de la muestra y son los que se ubican en el intervalo entre 2556.342 y 2556.559
metros donde evidentemente se encuentra la media de los datos.
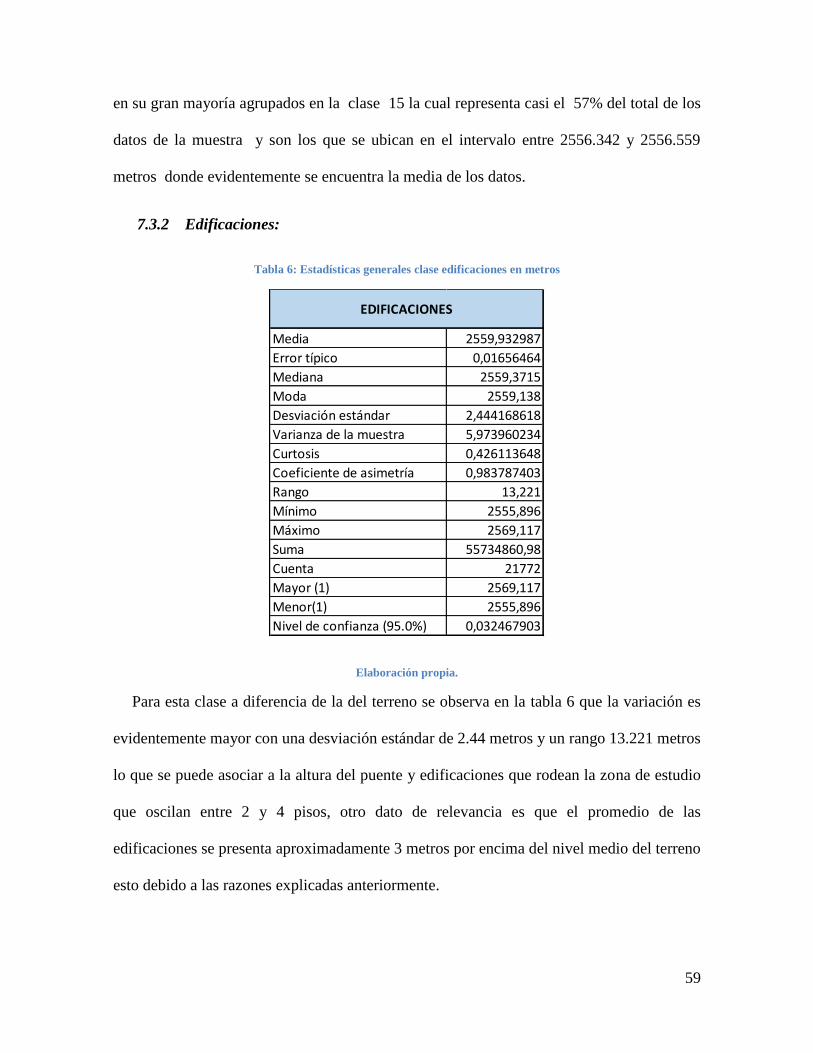
7.3.2 Edificaciones:
Tabla 6: Estadísticas generales clase edificaciones en metros
Elaboración propia.
Para esta clase a diferencia de la del terreno se observa en la tabla 6 que la variación es
evidentemente mayor con una desviación estándar de 2.44 metros y un rango 13.221 metros
lo que se puede asociar a la altura del puente y edificaciones que rodean la zona de estudio
que oscilan entre 2 y 4 pisos, otro dato de relevancia es que el promedio de las
edificaciones se presenta aproximadamente 3 metros por encima del nivel medio del terreno
esto debido a las razones explicadas anteriormente.
Media 2559,932987
Error típico 0,01656464
Mediana 2559,3715
Moda 2559,138
Desviación estándar 2,444168618
Varianza de la muestra 5,973960234
Curtosis 0,426113648
Coeficiente de asimetría 0,983787403
Rango 13,221
Mínimo 2555,896
Máximo 2569,117
Suma 55734860,98
Cuenta 21772
Mayor (1) 2569,117
Menor(1) 2555,896
Nivel de confianza (95.0%) 0,032467903
EDIFICACIONES
60
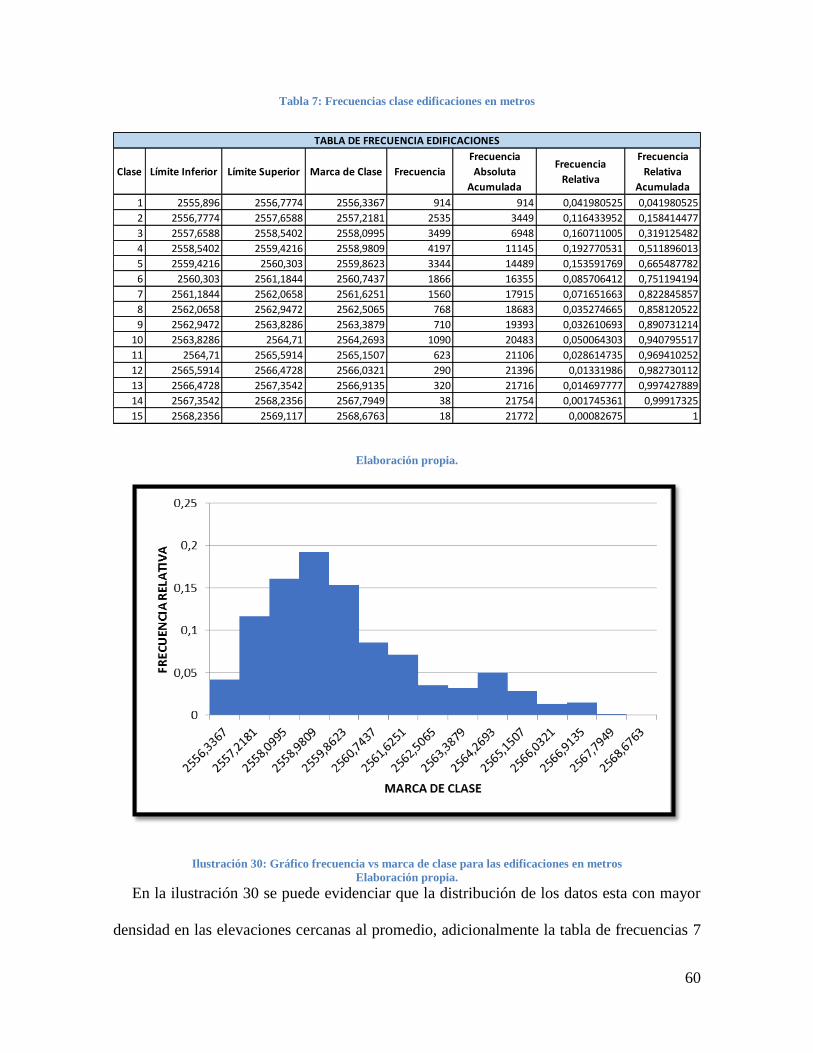
Tabla 7: Frecuencias clase edificaciones en metros
Elaboración propia.
Ilustración 30: Gráfico frecuencia vs marca de clase para las edificaciones en metros
Elaboración propia.
En la ilustración 30 se puede evidenciar que la distribución de los datos esta con mayor
densidad en las elevaciones cercanas al promedio, adicionalmente la tabla de frecuencias 7
Clase Límite Inferior Límite Superior Marca de Clase Frecuencia
Frecuencia
Absoluta
Acumulada
Frecuencia
Relativa
Frecuencia
Relativa
Acumulada
1 2555,896 2556,7774 2556,3367 914 914 0,041980525 0,041980525
2 2556,7774 2557,6588 2557,2181 2535 3449 0,116433952 0,158414477
3 2557,6588 2558,5402 2558,0995 3499 6948 0,160711005 0,319125482
4 2558,5402 2559,4216 2558,9809 4197 11145 0,192770531 0,511896013
5 2559,4216 2560,303 2559,8623 3344 14489 0,153591769 0,665487782
6 2560,303 2561,1844 2560,7437 1866 16355 0,085706412 0,751194194
7 2561,1844 2562,0658 2561,6251 1560 17915 0,071651663 0,822845857
8 2562,0658 2562,9472 2562,5065 768 18683 0,035274665 0,858120522
9 2562,9472 2563,8286 2563,3879 710 19393 0,032610693 0,890731214
10 2563,8286 2564,71 2564,2693 1090 20483 0,050064303 0,940795517
11 2564,71 2565,5914 2565,1507 623 21106 0,028614735 0,969410252
12 2565,5914 2566,4728 2566,0321 290 21396 0,01331986 0,982730112
13 2566,4728 2567,3542 2566,9135 320 21716 0,014697777 0,997427889
14 2567,3542 2568,2356 2567,7949 38 21754 0,001745361 0,99917325
15 2568,2356 2569,117 2568,6763 18 21772 0,00082675 1
TABLA DE FRECUENCIA EDIFICACIONES
61
indica que las clases de la 2 a la 5 representan aproximadamente el 60%, del total
acumulado por ello tienen un mayor peso en el comportamiento de los datos, esto se
asociaría a que en las vigas del puente se tiene una gran densidad de datos levantados y
evidentemente la parte de arriba del puente también aporta con una notable cantidad así
como las construcciones aledañas que no son demasiado altas.
7.3.3 Vegetación:
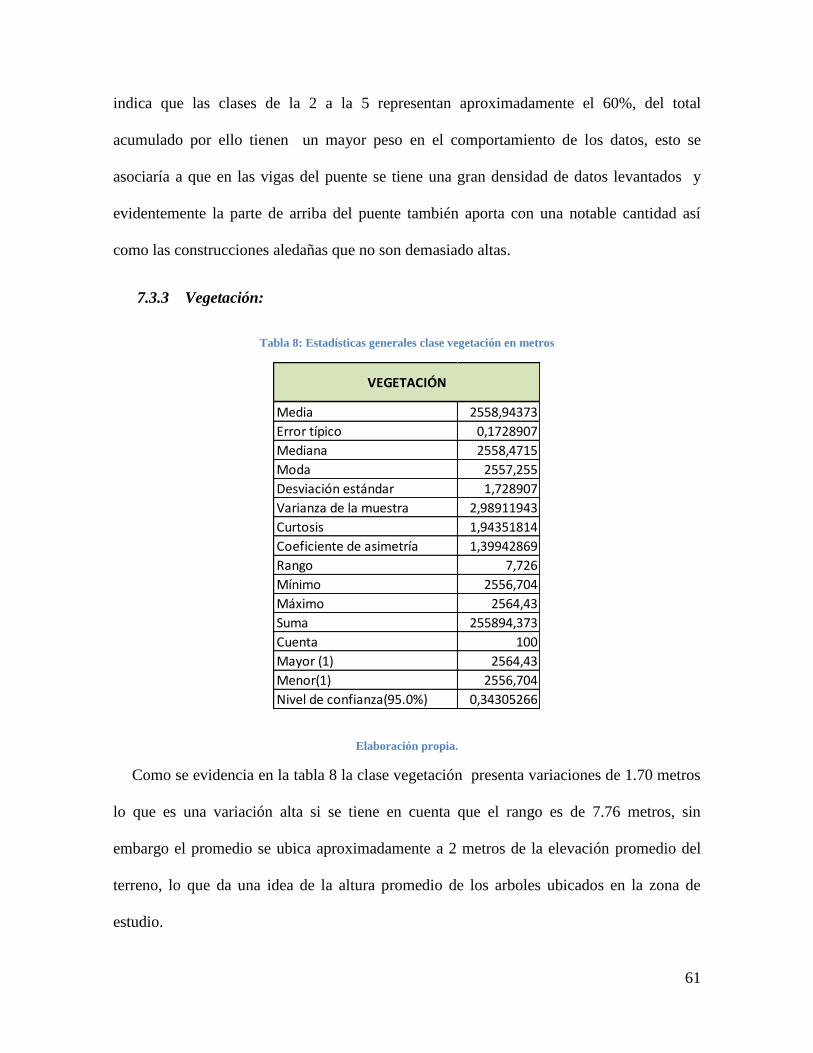
Tabla 8: Estadísticas generales clase vegetación en metros
Elaboración propia.
Como se evidencia en la tabla 8 la clase vegetación presenta variaciones de 1.70 metros
lo que es una variación alta si se tiene en cuenta que el rango es de 7.76 metros, sin
embargo el promedio se ubica aproximadamente a 2 metros de la elevación promedio del
terreno, lo que da una idea de la altura promedio de los arboles ubicados en la zona de
estudio.
Media 2558,94373
Error típico 0,1728907
Mediana 2558,4715
Moda 2557,255
Desviación estándar 1,728907
Varianza de la muestra 2,98911943
Curtosis 1,94351814
Coeficiente de asimetría 1,39942869
Rango 7,726
Mínimo 2556,704
Máximo 2564,43
Suma 255894,373
Cuenta 100
Mayor (1) 2564,43
Menor(1) 2556,704
Nivel de confianza(95.0%) 0,34305266
VEGETACIÓN
62
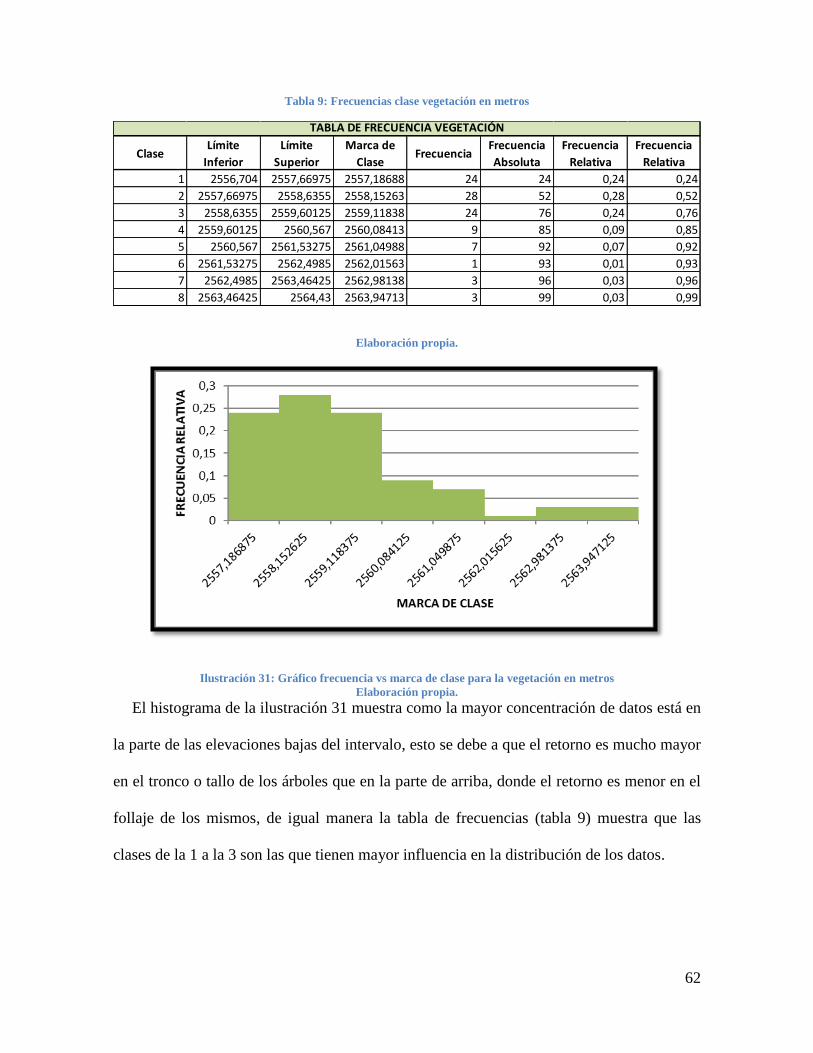
Tabla 9: Frecuencias clase vegetación en metros
Elaboración propia.
Ilustración 31: Gráfico frecuencia vs marca de clase para la vegetación en metros
Elaboración propia.
El histograma de la ilustración 31 muestra como la mayor concentración de datos está en
la parte de las elevaciones bajas del intervalo, esto se debe a que el retorno es mucho mayor
en el tronco o tallo de los árboles que en la parte de arriba, donde el retorno es menor en el
follaje de los mismos, de igual manera la tabla de frecuencias (tabla 9) muestra que las
clases de la 1 a la 3 son las que tienen mayor influencia en la distribución de los datos.
ClaseLímite
Inferior
Límite
Superior
Marca de
ClaseFrecuencia
Frecuencia
Absoluta
Frecuencia
Relativa
Frecuencia
Relativa
1 2556,704 2557,66975 2557,18688 24 24 0,24 0,24
2 2557,66975 2558,6355 2558,15263 28 52 0,28 0,52
3 2558,6355 2559,60125 2559,11838 24 76 0,24 0,76
4 2559,60125 2560,567 2560,08413 9 85 0,09 0,85
5 2560,567 2561,53275 2561,04988 7 92 0,07 0,92
6 2561,53275 2562,4985 2562,01563 1 93 0,01 0,93
7 2562,4985 2563,46425 2562,98138 3 96 0,03 0,96
8 2563,46425 2564,43 2563,94713 3 99 0,03 0,99
TABLA DE FRECUENCIA VEGETACIÓN
63
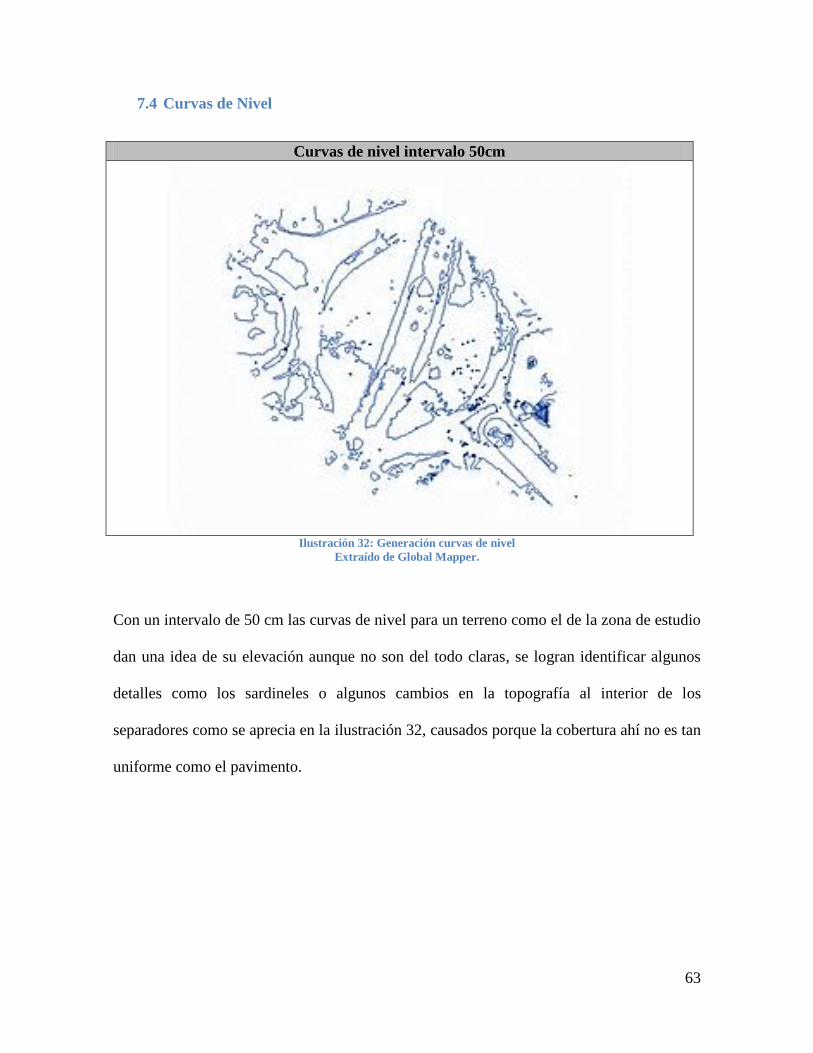
7.4 Curvas de Nivel
Curvas de nivel intervalo 50cm
Ilustración 32: Generación curvas de nivel
Extraído de Global Mapper.
Con un intervalo de 50 cm las curvas de nivel para un terreno como el de la zona de estudio
dan una idea de su elevación aunque no son del todo claras, se logran identificar algunos
detalles como los sardineles o algunos cambios en la topografía al interior de los
separadores como se aprecia en la ilustración 32, causados porque la cobertura ahí no es tan
uniforme como el pavimento.
64
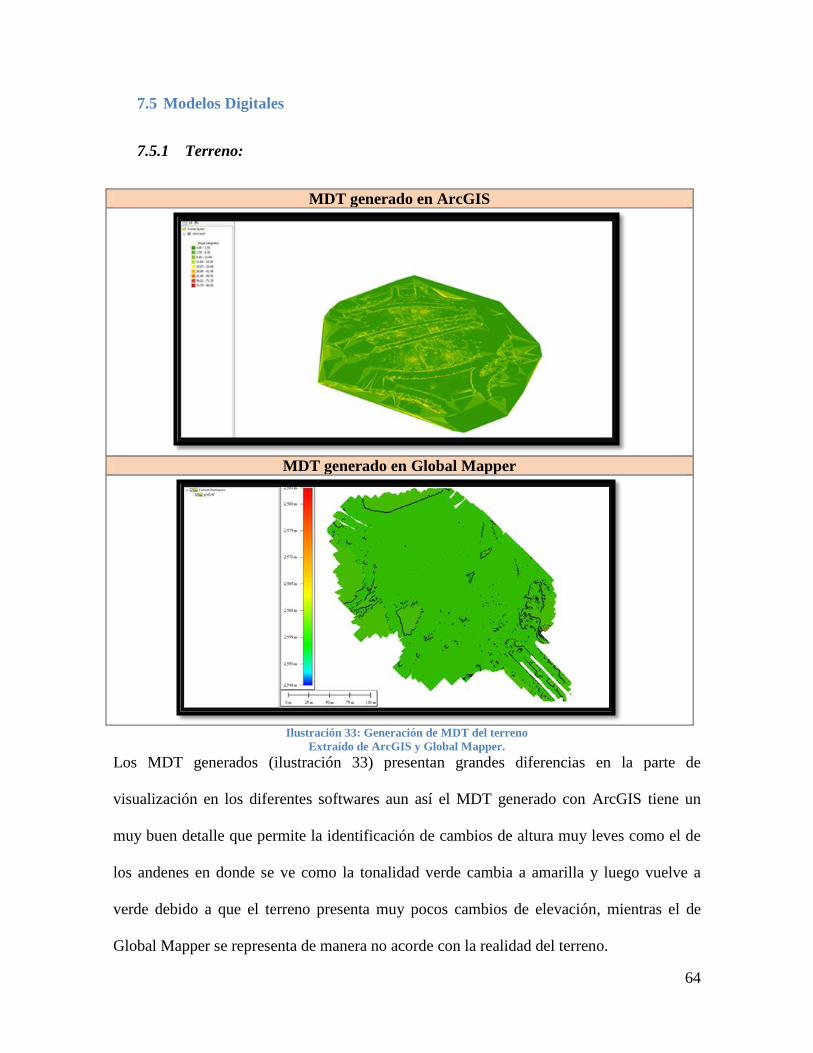
7.5 Modelos Digitales
7.5.1 Terreno:
MDT generado en ArcGIS
MDT generado en Global Mapper
Ilustración 33: Generación de MDT del terreno
Extraído de ArcGIS y Global Mapper.
Los MDT generados (ilustración 33) presentan grandes diferencias en la parte de
visualización en los diferentes softwares aun así el MDT generado con ArcGIS tiene un
muy buen detalle que permite la identificación de cambios de altura muy leves como el de
los andenes en donde se ve como la tonalidad verde cambia a amarilla y luego vuelve a
verde debido a que el terreno presenta muy pocos cambios de elevación, mientras el de
Global Mapper se representa de manera no acorde con la realidad del terreno.
65
7.5.2 Edificaciones:
MDS generado en ArcGIS
MDS generado en Global Mapper
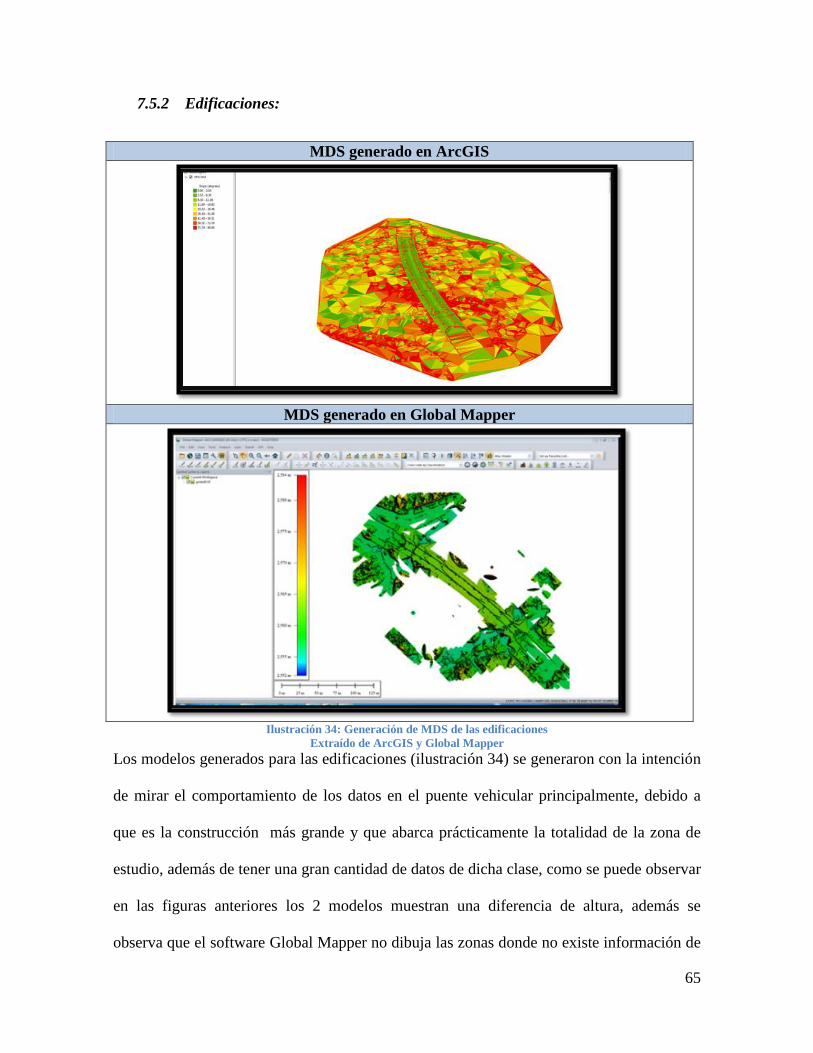
Ilustración 34: Generación de MDS de las edificaciones
Extraído de ArcGIS y Global Mapper
Los modelos generados para las edificaciones (ilustración 34) se generaron con la intención
de mirar el comportamiento de los datos en el puente vehicular principalmente, debido a
que es la construcción más grande y que abarca prácticamente la totalidad de la zona de
estudio, además de tener una gran cantidad de datos de dicha clase, como se puede observar
en las figuras anteriores los 2 modelos muestran una diferencia de altura, además se
observa que el software Global Mapper no dibuja las zonas donde no existe información de
66
la clase mientras ArcGIS muestra el terreno dándole al usuario la oportunidad de comparar
las diferentes elevaciones.
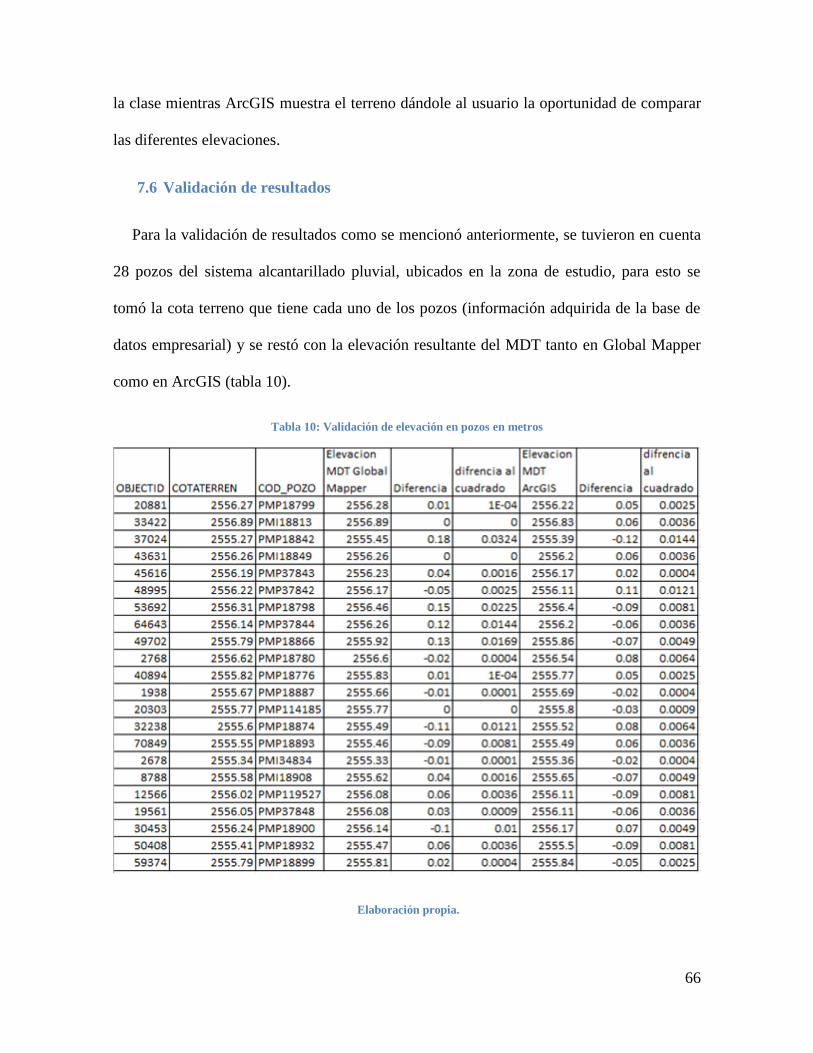
7.6 Validación de resultados
Para la validación de resultados como se mencionó anteriormente, se tuvieron en cuenta
28 pozos del sistema alcantarillado pluvial, ubicados en la zona de estudio, para esto se
tomó la cota terreno que tiene cada uno de los pozos (información adquirida de la base de
datos empresarial) y se restó con la elevación resultante del MDT tanto en Global Mapper
como en ArcGIS (tabla 10).
Tabla 10: Validación de elevación en pozos en metros
Elaboración propia.

67
Tabla 11: Comparación ECM por software
Elaboración propia.
Como es perceptible en la tabla 11, a pesar de que en la parte de representación visual hay
cambios sustantivos en los modelos, al hacer la evaluación de exactitud para los resultados
generados en los 2 softwares se evidencia que la diferencia es muy poca, escasamente
alcanza los 8 milímetros es decir casi imperceptible a la escala del trabajo, lo que da un
indicio de que la fase del filtrado y generación de modelos fue acertada, para corroborar
esto se hizo una comparación con los parámetros dados por la ASPRS y se evidenció que
está dentro del intervalo permitido que va hasta los 9.1 centímetros, es decir que el modelo
resultante se ajusta de manera acertada a la realidad.

68
7.7 Modelo Final
Ilustración 35: Fusión ortofoto – MDT
Extraído de ArcGIS.
Ilustración 36: Fusión ortofoto - MDT y shapes de IDECA
Extraído de ArcGIS.
69
La fusión entre el MDT y la ortofoto genera un producto (ilustración 35) que no solo
posee información valiosa de elevación también genera una interfaz agradable y a la vista y
que permite identificar con facilidad detalles en la zona de estudio como el puente vehicular
o los andenes y calzadas (shapes extraídos de IDECA: Infraestructura de Datos Espaciales
para el Distrito Capital) (ilustración 36), además de eso la visualización 3D ayuda mucho
aunque en la parte de las construcciones como casas y apartamentos la visualización no es
tan agradable ya que el sensor solo recibió retorno de los frentes lo que hace que la fusión
con la imagen raster no sea del todo acertada.
70
8. CONCLUSIONES
A pesar de que las herramientas presentadas por los software ayudan en gran medida al
desarrollo del proceso, fue evidente que el tratamiento de los datos LiDAR no se puede
realizar en un solo software, debido a que ninguno de los programas agrupa todas las
herramientas de la mejor manera para llegar desde los datos crudos hasta los productos
finales, por el contrario, cada programa tiene fortalezas en procesos puntuales del
tratamiento de datos y la interrelación entre ellos genera mejores resultados que cada
programa individual. En función de lo anterior se identificó que para la visualización de los
datos crudos el mejor software es ReCap, para el proceso de filtrado es MARS, para la
visualización del producto filtrado es Global Mapper, para el estudio estadístico, para la
generación de los modelos digitales y para el empalme final con la ortofoto es ArcGIS.
Durante el proceso de generación de los productos evidenciamos que cada actividad tiene
un gran peso para llegar a un resultado válido, de tal manera cada etapa del proyecto
requiere de un cuidado minucioso además de análisis y verificación particular en cada uno
de los resultados preliminares como por ejemplo las estadísticas de las clases
generadas durante el proceso de filtrado, o la generación de curvas de nivel asociadas al
MDT, esto tiene influencia directa en un mejor resultado total del proceso y presta un
apoyo para la adecuada interpretación del producto final.
Al tratarse de un scanner los levantamientos LiDAR terrestres suministran nubes densas de
puntos, dicha cantidad de información favorece la aplicación de interpoladores y algoritmos
de clasificación, a pesar de esto una validación de los productos evidencia que los MDT y
MDS son solo representaciones aproximadas de la realidad y al ser valores calculados
tienen un grado de desfase en el ajuste en especial para el cálculo de elevaciones, esta
71
variable se debe tener en cuenta al momento de utilizar aplicaciones o proyectos en donde
dichos modelos sirvan como insumo además de apoyarlos con otro tipo de información
como levantamientos de georadar o levantamientos en campo.
Para una mejor visualización del producto final, y empalme con imágenes, es necesario
depurar de una manera más detallada los datos, esto con el fin de que el modelo de
elevación se ajuste mucho mejor a la realidad y por ende el modelo digital como producto
final sea más específico en detalles importantes.
72
9. ALCANCE DEL PROYECTO
Es importante destacar que la empresa de acueducto y alcantarillado de Bogotá es
llamada de esa manera, ya que esta maneja como base fundamental la instalación y el
manejo de las redes y de todos los elementos del sistema de acueducto y del de
alcantarillado, el cual se subdivide en pluvial y en sanitario; es por esta razón que la
generación de la información representada en este trabajo servirá como insumo base para
dos procesos que actualmente se están implementando: la visualización de las redes con un
aplicativo de realidad aumentada y el inminente estudio del traslado anticipado de redes
(TAR)
Actualmente la empresa se encuentra adelantando el desarrollo en la implementación de
programas de realidad aumentada como AUG view o ArcGIS colector, esto con el fin de
poder visualizar de manera digital la modelación de todas las redes existentes; para esto, es
necesario contar con dos insumos, el primero es un excelente catastro actualizado de redes,
y el segundo es contar con modelos digitales de gran precisión, sobre los cuales se pueda
realizar el modelamiento de dichas redes.
Con un catastro de redes actualizado, un aplicativo funcional de realidad aumentada y
con un modelamiento 3D de las redes y del terreno, es posible hacer innumerables estudios,
dentro de los más importantes y relacionados con el objetivo de este trabajo es el del
traslado de redes anticipado con el objetivo de saber si con la implementación del metro
elevado hay necesidad de hacer cambios estructurales; por ende con una implementación
digital como la aquí mencionada se podría ahorrar insumos hoy por hoy gastados en
constante salidas a campo para la verificación de redes o simplemente para un estudio
visual del terreno a trabajar.

73
10. ANEXOS
Se muestran las salidas gráficas por casa uno de los sistemas que maneja la empresa,
acueducto (anexo 1), alcantarillado pluvial (anexo 2) y alcantarillado sanitario (anexo 3) en
donde se evidencia su ubicación, el diámetro de las redes y el tipo de material de las
mismas.
10.1 Anexo 1

74
10.2 Anexo 2
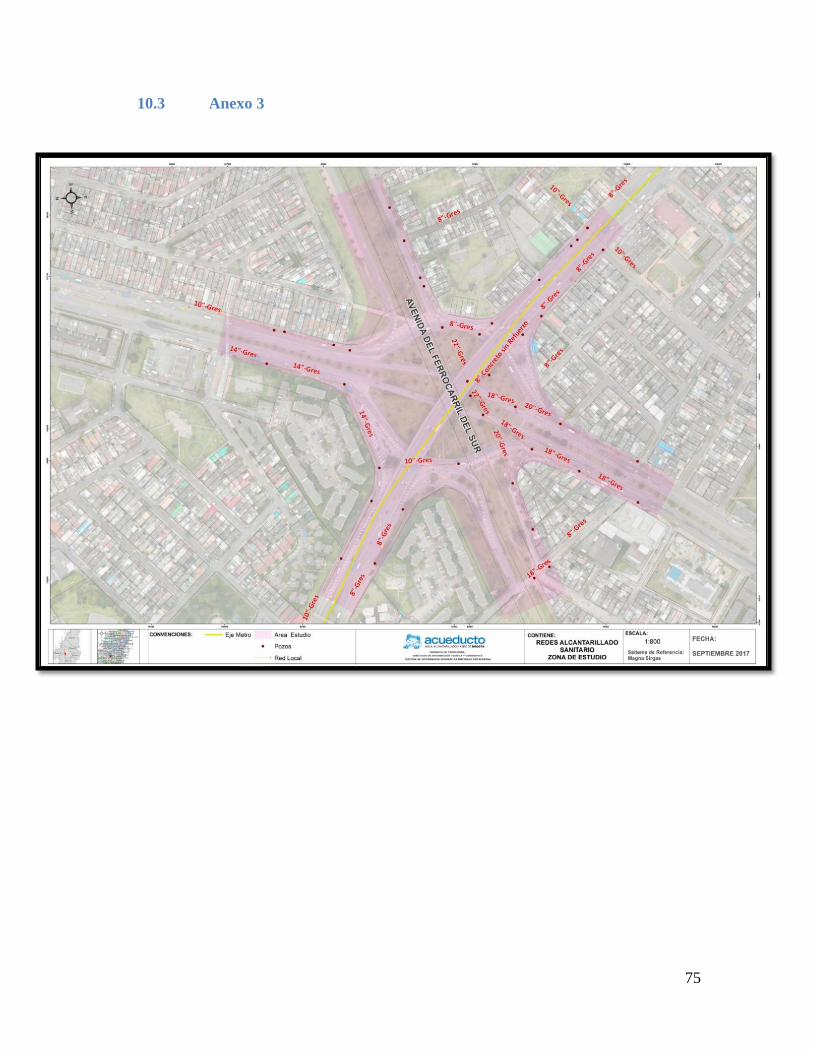
75
10.3 Anexo 3
76
11. BIBLIOGRAFÍA
Albacete, A., & Garmendia, L. (2011). Procesamiento de datos LiDAR en ArcGIS
Desktop 10. Universidad Complutense de Madrid.
ASPRS. (2011). Gis manuals Photogrammetry [rpceedings Remote sensing.
Milwaukee.
Balmón, M. A. (2006). Guía Práctica de Análisis de Datos. España: Junta de
Andalucía. Consejería de Innovación, Ciencia y Empresa. Instituto de Investigación
y Formación Agraria y Pesquera.
Brieseab, C., Mandlburgerab, G., Resslb, C., & Brockmannc, H. (2009). Automatic
break line determination for the generation of a DTM. 1-2.
Burgos, V., & Salcedo, A. P. (2014). Modelos digitales de elevación: Tendencias,
correcciones hidrológicas y nuevas fuentes de información. INA.
Campoy, J. (2015). Nueva metodología para la obtención de distancias de
visibilidad disponibles en carreteras existentes basado en datos LiDAR terrestre.
universidad politécnica de valencia.
Canavos, G. C. (1988). Probabilidad y Estadística Aplicaciones y Métodos. México:
Interamericana .
Carvajal Ramírez, F., Aguilar Torres, M. Á., Aguilar Torres, F. J., & Agüera, F.
(2001). Evaluación de diferentes técnicas de interpolación espacial para la
generación de modelos digitales de elevación del terreno agrícola. Mapping, 72-92.
Comisión Nacional del Agua. (Junio de 2005). Fundamentos de Teledetección
Espacial.

77
Chuvieco, E. (1995). Fundamentos de Teledetección Espacial. En E. Chuvieco,
Fundamentos de Teledetección Espacial (Segunda ed., pág. 27). Madrid, España:
Rialp, S.A.
Felicísimo, A. M. (1994). Modelos Digitales del Terreno Introducción y
aplicaciones en las ciencias ambientales. Oviedo: Pentalfa.
Haala, N., Kremerb, J., Hunterc, G., & Petera, M. (s.f.). Mobile LiDAR mapping for
3d point cloud collection in urban areas. Kreuztal, Germany.
J, A. R. (2002). Estadística Descriptiva, Probabilidad e Inferencia. Santiago de
Chile: Facultad de Ciencias Agrónomas, facultad de Chile.
López, R. d. (27 de 04 de 2010). La Teledetección como herramienta innovadora en
el ciclo integral del agua. Madrid, España.
Madeleine, B. (2014). Metodología para ejecución y control de calidad para
ortofotos, mediante combinación de sensor digital con LiDAR en zonas rurales.
Madrid.
Mas, F. M., & Martinez Romero, R. (2006).Aplicaciones de la teledetección láser
(LIDAR) en la caracterización y gestión del medio fluvial. CEDEX, 1.
Meléndez, E. G. (2006). Módulo VII: Sistemas de Información Geográfica y
Teledetección, análisis visual de imagenes. León .
Osorio, I. (2016). Estudio de la variable altimétrica (z) sobre un modelo digital de
elevación por medio de tecnología LiDAR terrestre. Universidad Distrital Francisco
José de Caldas.
Regot, J., Andres, M., & Amparo, N. (2011). Integración de MDT'S para
intervenciones urbanísticas. ETSAB, UPC.
Ruiz, C. P. (s.f.). Universidad de Jaén. Recuperado el 03 de Marzo de 2017, de
http://www.ujaen.es/huesped/pidoceps/tel/archivos/8.pdf

78
Sarría, F. A. (2013). Sistemas de Información Geográfica, temario de la asignatura.
Murcia: Universidad de Murcia.
Shan, J., & K. Thoth, C. (2008). Topographic Laser Ranging and Scanning. CRC
Press.
Vicente, J. F. (2015). Aplicación de datos LiDAR del sistema aéreo en la
actualización catastral urbana. Valencia, España.