ejecuciÓn de actividades en apoyo a la generaciÓn de...
TRANSCRIPT
EJECUCIÓN DE ACTIVIDADES EN APOYO A LA GENERACIÓN
DE CARTOGRAFÍA DIGITAL Y ORTOMOSAICOS
KELLY TATIANA RODRÍGUEZ RODRÍGUEZ
JUAN FELIPE ESPINEL CARRANZA
TECNOLOGÍA EN TOPOGRAFÍA
FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES
UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
2018
BOGOTÁ D.C
EJECUCIÓN DE ACTIVIDADES EN APOYO A LA GENERACIÓN
DE CARTOGRAFÍA DIGITAL Y ORTOMOSAICOS
KELLY TATIANA RODRÍGUEZ RODRÍGUEZ – 20151031022
JUAN FELIPE ESPINEL CARRANZA – 20151031026
Trabajo de grado presentado en la modalidad de pasantía para optar por
título de Tecnólogo en Topografía
DIRECTOR
MSC. ING CARLOS ALFREDO RODRÍGUEZ ROJAS
TECNOLOGÍA EN TOPOGRAFÍA
FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES
UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
2018
BOGOTÁ D.C
Informe Pasantía - Universidad Distrital Francisco José de Caldas
ACLARATORIA
ARTICULLO 117
"Las ideas emitidas por los autores son de su exclusiva responsabilidad y no expresan
necesariamente opiniones de la Universidad" (Artículo 117, Acuerdo 029 de 1998)
Informe Pasantía - Universidad Distrital Francisco José de Caldas
AGRADECIMIENTOS
Principalmente a nuestras familias que nos apoyaron y tuvieron la paciencia en cada uno de
los procesos universitarios.
Al Ing. Carlos Rodríguez por acompañarnos, dirigirnos y ayudarnos en el desarrollo
de esta pasantía, así como su acompañamiento en nuestra formación académica.
Agradecemos a la Universidad Distrital Francisco José de Caldas y a cada uno de los
docentes que hicieron parte de nuestro desarrollo profesional que aportaron sus
conocimientos en cada una de las áreas para nuestro desarrollo académico y personal.
Informe Pasantía - Universidad Distrital Francisco José de Caldas
JUSTIFICACIÓN
La realización de pasantía como modalidad de trabajo de grado permite adquirir un
acercamiento al campo laborar en donde asiente poner en práctica y fortalecer los
conocimientos adquiridos durante el proceso académico; además de, adquirir nuevas
habilidades para resolver problemas. Por lo anterior, el acercamiento al campo laboral es de
gran experiencia debido a que llevan al estudiante a desempeñar, mejorar y aprender labores
en las áreas de desarrollo, para este caso, con el fin de obtener el título de Tecnólogo en
Topografía.
Informe Pasantía - Universidad Distrital Francisco José de Caldas
RESUMEN
Los humedales de la región del Valle del Cauca se encuentran actualmente amenazados,
donde la generación de cartografía digital correspondiente de estos, busca caracterizar
espacialmente a cada uno de ellos con el fin de permitir a la Corporación Autónoma Regional
del Valle del Cauca realizar un monitoreo y control encaminado a soluciones del estado
actual de estos ecosistemas. A partir de las fotografías áreas capturadas por la comisión de
campo se busca generar los ortomosaicos respectivos a las zonas, que georreferenciados
permitan realizar la vectorización de cada objeto de interés exigido por CVC.
Es allí, donde el procesamiento de cartografía digital y ortomosaicos son factores
fundamentales que ayudan en la determinación de planes de manejo en pro a la restauración
y conservación de los ecosistemas, analizando y evaluando el desarrollo de los mismos,
mediante la toma y procesamiento de imágenes con RPAS (Sistema de Aeronaves Pilotadas
a Distancia) en humedales de la zona urbana de Santiago de Cali y del corredor del Rio
Cauca. (Corporación Autónoma Regional del Valle del Cauca, Analisis del Sector
Economico y de los Oferentes, 2017)
Palabras Clave: Corporación Autónoma Regional, Modelo Digital de Terreno, Modelo
Digital de Superficie, Ortomosaico, Cartografía Digital, Sistema de Coordenadas, Datum.
Informe Pasantía - Universidad Distrital Francisco José de Caldas
ABSTRACT
The wetlands of the Valle del Cauca region are currently under threat, where the generation
of digital cartography corresponding of these, seeks to spatially characterize each one of them
in order to allow the Regional Autonomous Corporation of Valle del Cauca to monitor and
control aimed at solutions of the current state of these ecosystems. From the photographs of
the areas captured by the field commission, it is sought to generate the respective
orthomosaics to the zones, which georeferenced allow the vectorization of each object of
interest demanded by CVC.
It is there, where the processing of digital cartography and orthomosaics are fundamental
factors that help in the determination of management plans for the restoration and
conservation of ecosystems, analyzing and evaluating the development of them, through
taking and processing images with RPAS (System of Remote Piloted Aircraft) in wetlands
of the urban area of Santiago de Cali and the corridor of the Cauca River.
(Corporación Autónoma Regional del Valle del Cauca, Analisis del Sector Economico y de
los Oferentes, 2017)
Keywords: Regional Autonomous Corporation, Digital Terrain Model, Digital Surface
Model, Ortomosaic, Digital Cartography, Coordinate System, Datum.
Informe Pasantía - Universidad Distrital Francisco José de Caldas
ÍNDICE DE CONTENIDO
1. INTRODUCCIÓN .......................................................................................................... 1
2. OBJETIVOS ................................................................................................................... 2
2.1 OBJETIVO GENERAL ........................................................................................... 2
2.2 OBJETIVOS ESPECIFICOS .................................................................................. 2
3. UBICACIÓN .................................................................................................................. 3
3.1 ÁREA DE ESTUDIO 1 – JAMUNDÍ (RURAL) .................................................... 3
3.2 ÁREA DE ESTUDIO 2 – SANTIAGO DE CALI (URBANO) ............................. 4
4. MARCO TEÓRICO ....................................................................................................... 5
4.1 HUMEDAL ............................................................................................................. 5
4.2 GPS – Sistema de Posicionamiento Global ............................................................. 5
4.3 POSTPROCESO ...................................................................................................... 6
4.4 DOP ......................................................................................................................... 6
4.5 HDOP ....................................................................................................................... 7
4.6 VDOP ....................................................................................................................... 7
4.7 EFEMÉRIDES ......................................................................................................... 7
4.8 SISTEMA DE REFERENCIA ................................................................................ 7
4.9 ÉPOCA DE REFERENCIA .................................................................................... 8
4.10 ELIPSOIDE .......................................................................................................... 8
4.11 GEOIDE ............................................................................................................... 9
4.12 ONDULACIÓN GEOIDAL ................................................................................ 9
4.13 ALTURA ELIPSOIDAL.................................................................................... 10
4.14 ALTURA ORTOMÉTRICA .............................................................................. 10
4.15 SISTEMA DE AERONAVES PILOTADAS A DISTANCIA - RPAS ............ 10
4.16 FOTOGRAMETRÍA .......................................................................................... 11
4.17 FOTOCONTROL............................................................................................... 11
4.18 EXACTITUD POSICIONAL ............................................................................ 11
4.19 RMS ................................................................................................................... 11
4.20 GEOETIQUETAR ............................................................................................. 11
4.21 NUBE DE PUNTOS .......................................................................................... 12
4.22 MODELO DIGITAL DE ELEVACIÓN – DEM .............................................. 12
4.23 MODELO DIGITAL DE TERRENO – DTM ................................................... 12
4.24 ORTOMOSAICO............................................................................................... 12
4.25 GEODATABASE .............................................................................................. 13
Pág.
Informe Pasantía - Universidad Distrital Francisco José de Caldas
4.26 VECTORIZACIÓN ........................................................................................... 13
4.27 CARTOGRAFÍA DIGITAL .............................................................................. 14
4.28 METADATOS ................................................................................................... 14
4.29 EXCEL ............................................................................................................... 14
4.30 MAGNA SIRGAS PRO 3.0 ............................................................................... 15
4.31 LEICA GEO OFFICE ........................................................................................ 16
4.32 TOPCON TOOLS .............................................................................................. 16
4.33 GOOGLE EARTH ............................................................................................. 17
4.34 AGISOFT PHOTOSCAN PROFESSIONAL .................................................... 18
4.35 GLOBAL MAPPER PRO .................................................................................. 18
4.36 MICROSTATION V8i ....................................................................................... 19
4.37 ARCGIS ............................................................................................................. 20
5. METODOLOGÍA ......................................................................................................... 21
5.1 ORGANIZACIÓN DE LA INFORMACIÓN ....................................................... 21
5.2 PUNTOS FOTO IDENTIFICABLES ................................................................... 21
5.3 POSTPROCESAMIENTO DE LOS DATOS TOMADOS EN CAMPO ............. 23
5.4 FOTOCONTROL .................................................................................................. 26
5.5 DEM – MODELO DIGITAL DE ELEVACIÓN .................................................. 27
5.6 DTM – MODELO DIGITAL DE TERRENO ...................................................... 28
5.7 GENERACIÓN FINAL DE ORTOMOSAICOS .................................................. 29
5.8 EXACTITUD POSICIONAL ................................................................................ 31
5.9 GEOETIQUETAR ................................................................................................. 32
5.10 VECTORIZACIÓN ........................................................................................... 33
5.11 CONTROL DE CALIDAD ................................................................................ 37
5.12 METADATOS ................................................................................................... 38
6. RESULTADOS ............................................................................................................ 41
6.1 JAMUNDÍ (RURAL) ............................................................................................ 41
6.1.1. REGIÓN DEL ORTOMOSAICO Y VECTORIZACIÓN ZONA
“TABLANCA” ............................................................................................................. 41
6.2 SANTIAGO DE CALI (URBANO) ...................................................................... 41
6.2.1. REGIÓN DEL ORTOMOSAICO Y VECTORIZACIÓN ZONA “EL
LIMONAR” .................................................................................................................. 41
6.2.2. REGÍON DEL ORTOMOSAICO Y VECTORIZACIÓN ZONA “LOS
CISNES” ....................................................................................................................... 42
Informe Pasantía - Universidad Distrital Francisco José de Caldas
6.2.3. REGIÓN DEL ORTOMOSAICO Y VECTORIZACIÓN ZONA “CALLE 9”
42
6.2.4. REGIÓN DEL ORTOMOSAICO Y VECTORIZACIÓN ZONA “EL
BATALLÓN” ............................................................................................................... 43
7. RECOMENDACIONES .............................................................................................. 44
8. CONCLUSIONES ........................................................................................................ 45
9. ASPECTOS DE LA PASANTÍA ................................................................................. 46
10. BIBLIOGRAFÍA .......................................................................................................... 48

Informe Pasantía - Universidad Distrital Francisco José de Caldas
ÍNDICE DE ILUSTRACIONES
Ilustración 1. Área de estudio 1 - Jamundí ............................................................................. 3
Ilustración 2. Área de estudio 2 - Santiago de Cali ................................................................ 4 Ilustración 3. DOP .................................................................................................................. 6 Ilustración 4. Elipsoide ........................................................................................................... 8 Ilustración 5. Geoide............................................................................................................... 9 Ilustración 6. Definición de Alturas ..................................................................................... 10
Ilustración 7. Excel ............................................................................................................... 14 Ilustración 8. Magna Sirgas Pro 3.0 ..................................................................................... 15 Ilustración 9. Leica Geo Office ............................................................................................ 16 Ilustración 10. Topcon Tools ................................................................................................ 16
Ilustración 11. Google Earth Pro .......................................................................................... 17 Ilustración 12. Agisoft Photoscan Professional .................................................................... 18 Ilustración 13. Global Mapper Pro ....................................................................................... 18
Ilustración 14. MicroStation V8i .......................................................................................... 19
Ilustración 15. ArcGIS .......................................................................................................... 20 Ilustración 16. Señalización de Punto Foto Identificable ..................................................... 21 Ilustración 17. Formato de puntos fotoidentificables ........................................................... 22
Ilustración 18. Ubicación de las bases posicionadas en una de las areas de estudio ............ 23 Ilustración 19. Ubicación de Estación Permanente de Rastreo Continuo CALI .................. 24
Ilustración 20. Parámetros Postproceso 1 ............................................................................. 24 Ilustración 21. Parámetros Postproceso 2 ............................................................................. 25 Ilustración 22. Parámetros Postproceso 3 ............................................................................. 25
Ilustración 23. Parámetros Postproceso 4 ............................................................................. 25
Ilustración 24. Ubicación de un punto fotoidentificable ...................................................... 26 Ilustración 25. Error en metros y error en pixel ................................................................... 27 Ilustración 26. Modelo Digital de Elevación ........................................................................ 28
Ilustración 27. Clasificación y Limpieza Nube de Puntos Densa – 1................................... 28 Ilustración 28. Nube de puntos densa clasificada ................................................................. 29
Ilustración 29. Edición de Ortomosaico ............................................................................... 30 Ilustración 30. Región de un ortomosaico con puntos de Fotocontrol ................................. 30
Ilustración 31. GeoTag ......................................................................................................... 32 Ilustración 32. Geoetiquetación de los Puntos Fotoidentificables ........................................ 32 Ilustración 33. Geodatabase adaptada al modelo del IGAC ................................................. 33 Ilustración 34. Vectorización 1 ............................................................................................. 35 Ilustración 35. Vectorización 2 ............................................................................................. 36
Ilustración 36. Vectorización 3 ............................................................................................. 36 Ilustración 37. Ejemplo Tabla de Atributos - 1 .................................................................... 36
Ilustración 38. Ejemplo Tabla de Atributos - 2 .................................................................... 37 Ilustración 39. Ejemplo - Inicio de Metadato para “Árbol” ................................................. 40 Ilustración 40. Región del Ortomosaico y Vectorización zona "Tablanca" ......................... 41 Ilustración 41. Región del Ortomosaico y Vectorización zona "El Limonar" ..................... 41 Ilustración 42. Región del Ortomosaico y Vectorización zona "Los Cisnes" ...................... 42
Ilustración 43. Región del Ortomosaico y Vectorización zona "Calle 9" ............................ 42 Ilustración 44. Región del Ortomosaico y Vectorización zona "El Batallón" ...................... 43
Pág.

Informe Pasantía - Universidad Distrital Francisco José de Caldas
ÍNDICE DE TABLAS
Tabla 1. Exactitud Posicional Puntos de Verificación ......................................................... 31
Tabla 2. Valores Estadísticos Exactitud Posicional.............................................................. 31 Tabla 3. Representación de los elementos requeridos por CVC en modelo IGAC .............. 34 Tabla 4. Simbología de cada elemento vectorizado ............................................................. 34 Tabla 5. Asignación de Reglas Control de Calidad .............................................................. 38 Tabla 6. Descripción de actividades desarrolladas ............................................................... 47
Pág.
Pág. 1
Informe Pasantía - Universidad Distrital Francisco José de Caldas
1. INTRODUCCIÓN
El desarrollo de la topografía a lo largo de los años, ha llevado consigo la aplicación de
nuevas tecnologías, en donde minimizar tiempos y obtener información en lugares de difícil
acceso se ha convertido en la mejor opción para realizar proyectos de tipo topográfico. El
sistema aéreo tripulado de forma remota RPAS (Remotely Piloted Aircraft System), permite
volar las naves aéreas no tripuladas por medio de una señal a distancia a través de control
remoto, por lo que se han convertido en una herramienta importante para la obtención de
imágenes, ya que permiten conseguir una cobertura mayor de las superficies. (Corredor,
2015)
La Corporación Autónoma Regional del Valle del Cauca determina como acciones
prioritarias conservar, restaurar y manejar los ecosistemas en bosques secos, humedales y
áreas protegidas, mediante planes de manejo donde los humedales y bosques secos son
ecosistemas amenazados. Mediante el artículo 459 del acuerdo 0373 de 2014 define el
programa de Recuperación Ambiental y Paisajística de Humedales, con el objetivo de
beneficiar el ecosistema y la comunidad. (Corporación Autónoma Regional del Valle del
Cauca, Estudios Previos de la Contratación, 2017)
Con la captura, procesamiento y análisis de la información aerofotogrametríca obtenida
mediante vehículos aéreos no tripulados VAN (UAV) permiten generar la cartografía digital
correspondiente a los humedales de estudio para lograr un adecuado plan de manejo y control
de la evolución de los humedales, así como sus áreas de protección antes y después de
implementar medidas en el fortalecimiento de información corporativa. (Corporación
Autónoma Regional del Valle del Cauca, Estudios Previos de la Contratación, 2017)
Pág. 2
Informe Pasantía - Universidad Distrital Francisco José de Caldas
2. OBJETIVOS
2.1 OBJETIVO GENERAL
Realizar actividades que impliquen generar la respectiva cartografía digital de las zonas de
estudio de acuerdo a la normatividad vigente y pliego de condiciones estimado en el proyecto.
2.2 OBJETIVOS ESPECIFICOS
Obtener las precisiones exigidas en el postprocesamiento de los puntos base con el
fin de asegurar confiabilidad en la georreferenciación de los ortomosaicos.
Contribuir en la generación de los ortomosaicos correspondientes a los sectores de
interés a partir de la información tomada por el personal de campo.
Fortalecer conocimientos y habilidades en el área de desempeño adquiriendo la
capacidad de ejecutar correctamente las labores asignadas en diferentes ámbitos.
Pág. 3
Informe Pasantía - Universidad Distrital Francisco José de Caldas
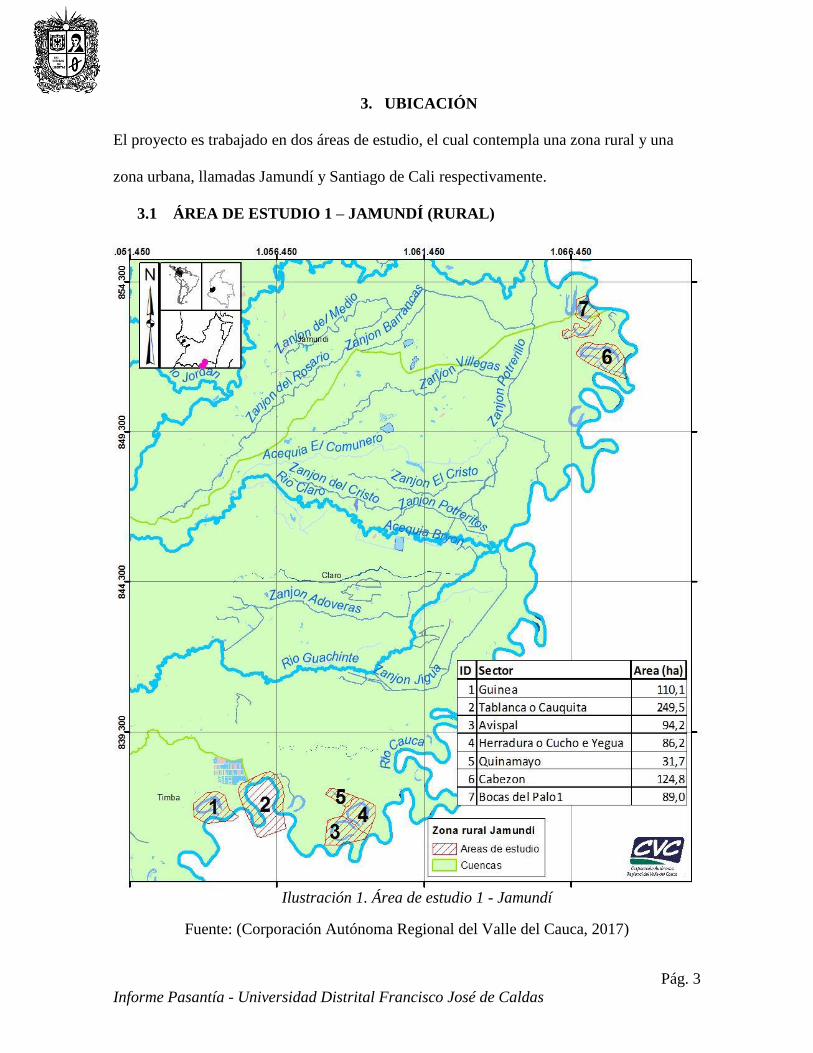
3. UBICACIÓN
El proyecto es trabajado en dos áreas de estudio, el cual contempla una zona rural y una
zona urbana, llamadas Jamundí y Santiago de Cali respectivamente.
3.1 ÁREA DE ESTUDIO 1 – JAMUNDÍ (RURAL)
Ilustración 1. Área de estudio 1 - Jamundí
Fuente: (Corporación Autónoma Regional del Valle del Cauca, 2017)
Pág. 4
Informe Pasantía - Universidad Distrital Francisco José de Caldas
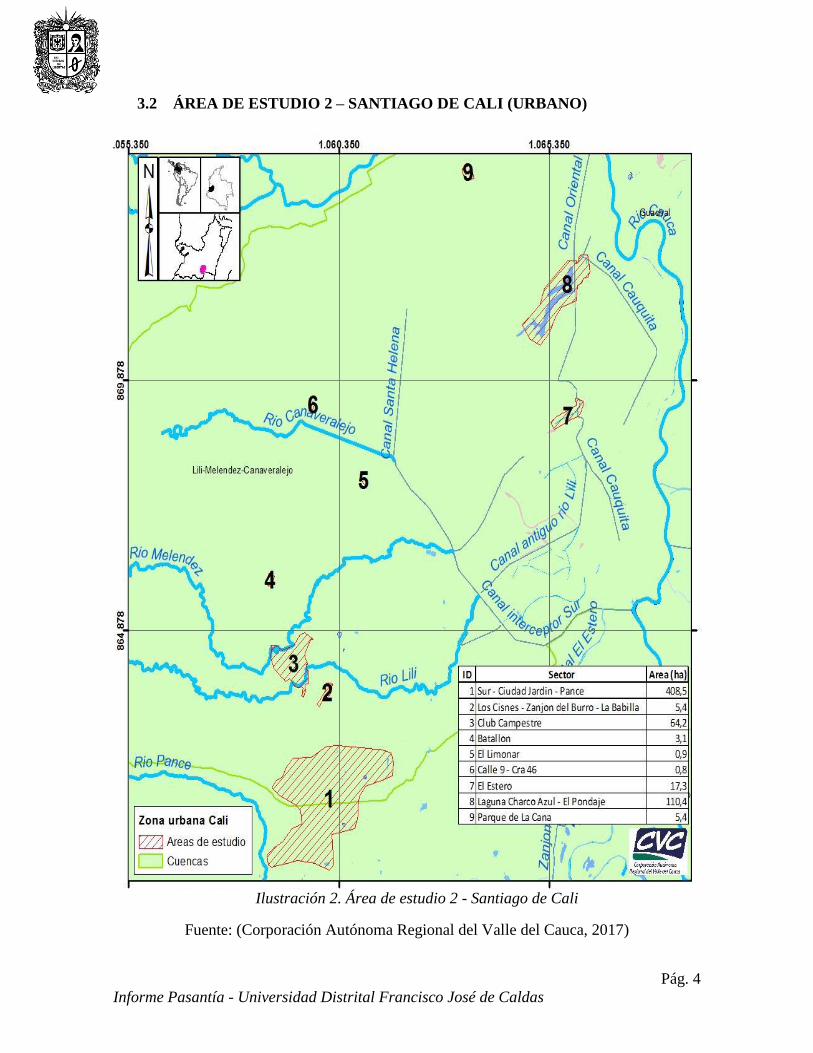
3.2 ÁREA DE ESTUDIO 2 – SANTIAGO DE CALI (URBANO)
Ilustración 2. Área de estudio 2 - Santiago de Cali
Fuente: (Corporación Autónoma Regional del Valle del Cauca, 2017)
Pág. 5
Informe Pasantía - Universidad Distrital Francisco José de Caldas
4. MARCO TEÓRICO
4.1 HUMEDAL
Según Ramsar Protección de Humedales define los humedales como una zona de extensión
de pantano o superficie cubierta de agua corriente o estacionaria, los cuales pueden ser
naturales o artificiales. Estas zonas de transición entre los sistemas acuáticos y terrestres
sirven como áreas de inundación y amortiguadores temporales o permanentes, donde todo
ello depende de la fauna y flora que se encuentre en el sitio. Estos se pueden encontrar
influenciados por otros cuerpos de agua como ríos, ciénagas y mareas, en el que son cunas
de biodiversidad biológica y fuentes de agua. (Ramsar, 2018)
4.2 GPS – Sistema de Posicionamiento Global
Este sistema tiene como objetivo determinar las coordenadas espaciales de cierto punto en la
superficie terrestre a cualquier hora, teniendo en cuenta el sistema de referencia mundial, ya
sea que se encuentre en movimiento o no, en donde mínimo el sistema debe contener
información de la distancia a cuatro satélites. Cabe denotar que las siglas de este sistema GPS
fueron adoptadas por el gobierno de los Estados Unidos al referirse de su constelación, ya
que fue una de las primeras en desarrollarse. Se denomina GPS a los instrumentos que
trabajan en base a los satélites artificiales, los cuales tiene una órbita definida moviéndose
alrededor de la tierra que gracias a las ondas de radio se calcula la pseudodistancia, lo que
provoca que se puedan determinar las coordenadas en donde se encuentra ubicado el equipo.
(Huerta, Mangiaterra, & Noguera., 2005)
Pág. 6
Informe Pasantía - Universidad Distrital Francisco José de Caldas
4.3 POSTPROCESO
La corrección de la distancia calculada entre el satélite y el equipo GPS para el cálculo de las
coordenadas del punto posicionado se debe de realizar por medio de un proceso el cual
consiste en realizar las correcciones correspondientes, en donde se tiene en cuenta una
estación base con coordenadas conocidas para que se pueda calcular una distancia verdadera
entre el receptor y cada satélite. (Huerta, Mangiaterra, & Noguera., 2005)
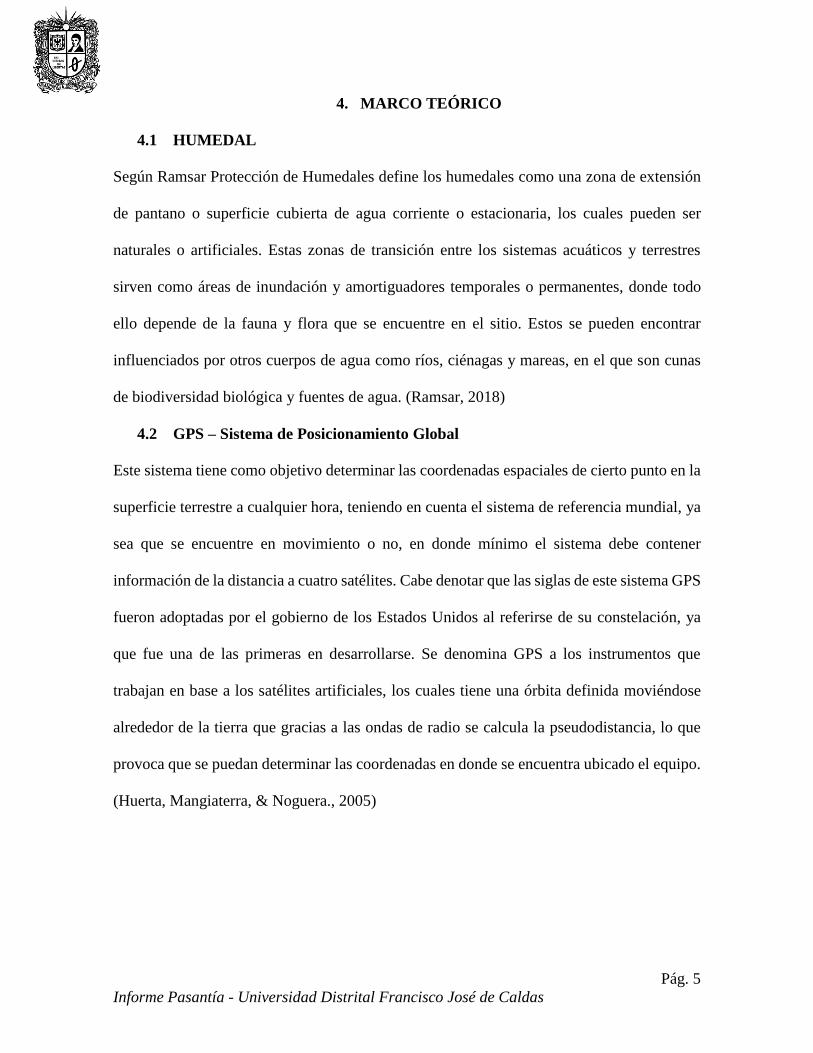
4.4 DOP
La disolución de la precisión DOP, se refiere a la consistencia geométrica del conjunto de
satélites que se encuentran en el campo de observación del receptor. Cuando los satélites
están muy cerca unos a otros la geometría satelital es débil lo que quiere decir que la posición
del receptor se define por la intersección de cada una de las esferas, lo que genera
incertidumbre afectando la exactitud de las medidas; mientras que, si la geometría es alta se
debe a que los satélites se encuentran angularmente muy distantes y el DOP es menor, esto
puede afectar la exactitud de las medidas. (Universidad de Alcalá, 2018)
Ilustración 3. DOP
Fuente: (Universidad de Alcalá, 2018)
Pág. 7
Informe Pasantía - Universidad Distrital Francisco José de Caldas
4.5 HDOP
La disolución horizontal de la precisión es una medida de la calidad geométrica de la
distribución satelital, por lo que este factor determina la precisión con respecto a la posición
horizontal (X, Y). (Universidad de Alcalá, 2018)
4.6 VDOP
La disolución vertical de la precisión suministra la información de la incertidumbre en la
posición vertical del punto. (Universidad de Alcalá, 2018)
4.7 EFEMÉRIDES
Este paquete de datos muestra elementos que define la trayectoria elipsoidal de cada satélite,
contiene información sobre el estado, sincronización de los tiempos o de retardos
atmosféricos. Existen diferentes tipos de efemérides que son: transmitidas, ultrarrápidas,
observadas, combinadas, rápidas y finales. (Peña, 2016)
4.8 SISTEMA DE REFERENCIA
Un sistema de referencia es el conjunto de convenciones y conceptos teóricos que asienten
definir ciertos parámetros los cuales permiten establecer la orientación, ubicación y escala de
los ejes coordenados (X, Y, Z), siendo este un modelo. El sistema de referencia se materializa
por medio de puntos reales sobre la superficie terrestre, denominándose como marcos de
referencia, por lo que si el origen del sistema se encuentra en el centro de masas de la tierra
se denomina como sistema geocéntrico o sistema de coordenadas geocéntrico, o bien sea se
pueden expresar en curvilíneas (Latitud y longitud), siendo necesario considerar un elipsoide
de referencia. (Instituto Geográfico AgustinCodazzi, 2004)
Pág. 8
Informe Pasantía - Universidad Distrital Francisco José de Caldas
4.9 ÉPOCA DE REFERENCIA
Las épocas de referencia de los sistemas de referencia se encuentran dadas por la variación
en el tiempo de las velocidades de la Tierra que permiten establecer cuál de las posiciones de
las estaciones son vigentes. En Colombia tras la primera campaña GPS – Sirgas se
establecieron las estaciones del país en conjunto con las de América del sur, cuyas
coordenadas quedaron referida al ITRF94 correspondiente a la época 1995.4, que contiene
precisiones de ±2mm a ±7mm, exactitud horizontal del ±2mm y vertical de ±6mm. (Instituto
Geográfico AgustinCodazzi, 2004)
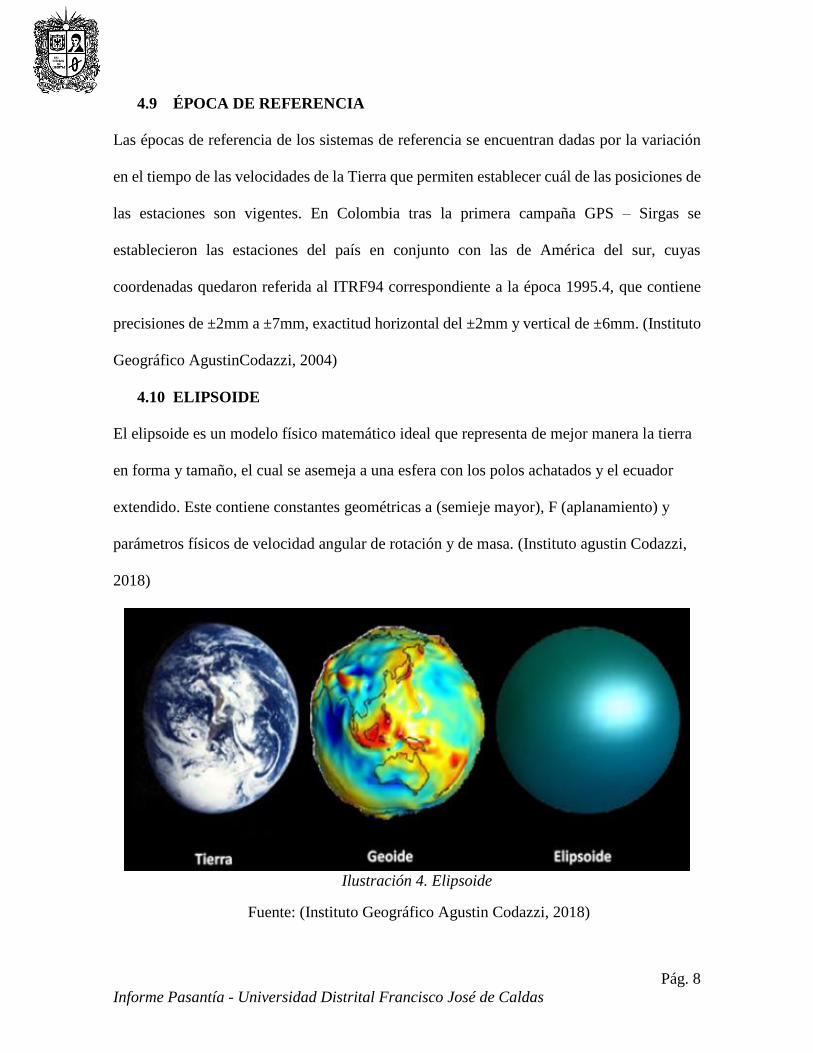
4.10 ELIPSOIDE
El elipsoide es un modelo físico matemático ideal que representa de mejor manera la tierra
en forma y tamaño, el cual se asemeja a una esfera con los polos achatados y el ecuador
extendido. Este contiene constantes geométricas a (semieje mayor), F (aplanamiento) y
parámetros físicos de velocidad angular de rotación y de masa. (Instituto agustin Codazzi,
2018)
Ilustración 4. Elipsoide
Fuente: (Instituto Geográfico Agustin Codazzi, 2018)
Pág. 9
Informe Pasantía - Universidad Distrital Francisco José de Caldas
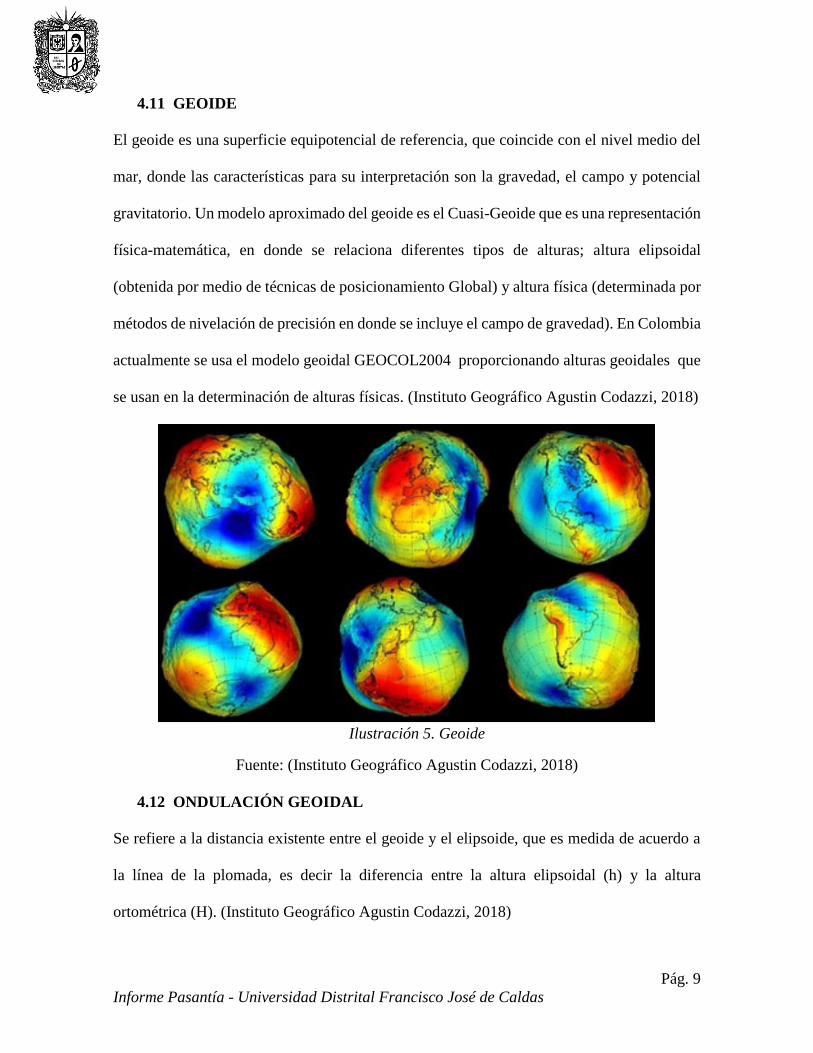
4.11 GEOIDE
El geoide es una superficie equipotencial de referencia, que coincide con el nivel medio del
mar, donde las características para su interpretación son la gravedad, el campo y potencial
gravitatorio. Un modelo aproximado del geoide es el Cuasi-Geoide que es una representación
física-matemática, en donde se relaciona diferentes tipos de alturas; altura elipsoidal
(obtenida por medio de técnicas de posicionamiento Global) y altura física (determinada por
métodos de nivelación de precisión en donde se incluye el campo de gravedad). En Colombia
actualmente se usa el modelo geoidal GEOCOL2004 proporcionando alturas geoidales que
se usan en la determinación de alturas físicas. (Instituto Geográfico Agustin Codazzi, 2018)
Ilustración 5. Geoide
Fuente: (Instituto Geográfico Agustin Codazzi, 2018)
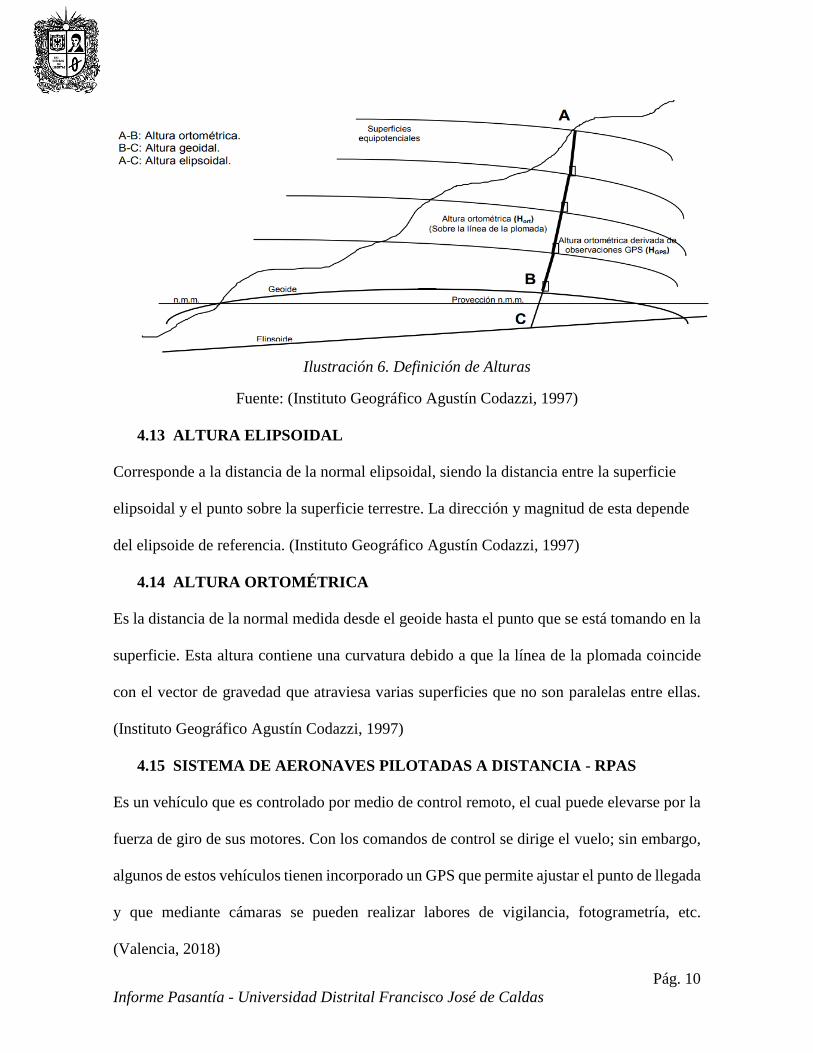
4.12 ONDULACIÓN GEOIDAL
Se refiere a la distancia existente entre el geoide y el elipsoide, que es medida de acuerdo a
la línea de la plomada, es decir la diferencia entre la altura elipsoidal (h) y la altura
ortométrica (H). (Instituto Geográfico Agustin Codazzi, 2018)
Pág. 10
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Ilustración 6. Definición de Alturas
Fuente: (Instituto Geográfico Agustín Codazzi, 1997)
4.13 ALTURA ELIPSOIDAL
Corresponde a la distancia de la normal elipsoidal, siendo la distancia entre la superficie
elipsoidal y el punto sobre la superficie terrestre. La dirección y magnitud de esta depende
del elipsoide de referencia. (Instituto Geográfico Agustín Codazzi, 1997)
4.14 ALTURA ORTOMÉTRICA
Es la distancia de la normal medida desde el geoide hasta el punto que se está tomando en la
superficie. Esta altura contiene una curvatura debido a que la línea de la plomada coincide
con el vector de gravedad que atraviesa varias superficies que no son paralelas entre ellas.
(Instituto Geográfico Agustín Codazzi, 1997)
4.15 SISTEMA DE AERONAVES PILOTADAS A DISTANCIA - RPAS
Es un vehículo que es controlado por medio de control remoto, el cual puede elevarse por la
fuerza de giro de sus motores. Con los comandos de control se dirige el vuelo; sin embargo,
algunos de estos vehículos tienen incorporado un GPS que permite ajustar el punto de llegada
y que mediante cámaras se pueden realizar labores de vigilancia, fotogrametría, etc.
(Valencia, 2018)
Pág. 11
Informe Pasantía - Universidad Distrital Francisco José de Caldas
4.16 FOTOGRAMETRÍA
Es la ciencia que tiene como objetivo conocer las dimensiones y la posición de los objetos
en el espacio por medio de medidas realizadas a través de la intersección de dos fotografías
o simplemente una. A partir de las fotografías se puede obtener información bidimensional,
pero en la generación del traslape se puede obtener información tridimensional, esta técnica
es básica para la elaboración de cartografía. La fotogrametría puede ser terrestre o aérea.
(Instituto Geográfico Agustin Codazzi, 2018)
4.17 FOTOCONTROL
Es la determinación de coordenadas horizontales y verticales, a partir de mediciones
satelitales obtenidas por medio de técnicas de posicionamiento global de puntos en el terreno,
que son identificables en las fotografías aéreas, a fin de fijar la posición real del mosaico
espacial ortogonal del terreno. (Pérez, 2015)
4.18 EXACTITUD POSICIONAL
La exactitud posicional significa la cercanía de la posición de un objeto con respecto a la
posición real o considerada como verdadera con respecto a un sistema de referencia. (IDECA,
2018)
4.19 RMS
Se refiere al error medio cuadrático, el cual muestra la dispersión de las posiciones calculadas
de acuerdo a una posición ajustada. (Peña, 2016)
4.20 GEOETIQUETAR
Es un método de almacenamiento de datos complementarios que se le otorgan a una imagen
con el fin de mostrar el lugar en donde fue capturada, mediante etiquetas de coordenadas
GPS, que permiten clasificar las imágenes por medio de mapas digitales y así de manera más
Pág. 12
Informe Pasantía - Universidad Distrital Francisco José de Caldas
fácil saber en dónde fueron adquiridas las imágenes sin la necesidad de estar presente.
(Guerrero, 2011)
4.21 NUBE DE PUNTOS
Una nube de puntos es un gran conjunto de vértices, los cuales contienen coordenadas
horizontales y verticales que representan la superficie externa de un objeto adquirida
mediante diferentes procesos ya sea topográficos, geodésicos, fotogramétricos o por medio
de escáneres. Estas nubes se pueden clasificar, así mismo convertirse en mallas de
triangulación irregular reconstruyendo modelos de superficie. (AUTOCAD, 2018)
4.22 MODELO DIGITAL DE ELEVACIÓN – DEM
Es una estructura de valores numéricos con datos que permiten una distribución espacial
donde contiene como atributo la elevación (Z) con respecto al nivel medio del mar
correspondiente a la superficie del terreno y los valores horizontales X y Y correspondiente
a la posición. Esta representación visual caracteriza las formas de relieve y los elementos
presentes en él. (Instituto Nacional de Estadistica y Geografía, 2018)
4.23 MODELO DIGITAL DE TERRENO – DTM
DTM es el conjunto de capas, que representa las características de la superficie terrestre, el
cual se deriva de un modelo digital de elevaciones. En este modelo de terreno no se tienen
en cuenta las alturas de los objetos externos, tal como construcciones, vegetación, etc, solo
es representada la superficie del suelo al desnudo. (Felicísimo, 1994)
4.24 ORTOMOSAICO
Cuando en un mosaico se es corregido todos los errores de nitidez, falta de información, etc,
que son generados por el relieve del terreno y los objetos se denomina ortomosaico, entonces,
un ortomosaico es el conjunto de imágenes que tomados desde uno o varios planes de vuelo
Pág. 13
Informe Pasantía - Universidad Distrital Francisco José de Caldas
con el fin de generar una zona de traslape que permita unir las fotografías para obtener una
mayor escena ser unidas para que se tenga una mayor escena. (Escalante, 2016)
Además, un ortomosaico permite generar cartografía digital a escala, representando la
realidad del terreno lo más exacto posible en un mapa teniendo en cuenta la proyección
adecuada para ello, que no es más que una red de paralelos y meridianos sobre los cuales
puede ser representado un mapa o plano. Este tipo de cartografía requiere entonces de
tecnología avanzada y de softwares especializados con el fin de digitalizar con gran precisión
y exactitud la superficie por medio de vectores, lo que permite representar la posición, forma
y tamaño de los objetos presentados en el terreno. (Instituto Geografico Agustin Codazzi,
2007)
4.25 GEODATABASE
En el software ArcGIS una geodatabase es el lugar de almacenamiento de la información y
las capas, en donde se administran y se editan los datos. Este tipio de ordenaciones cuenta
con un modelo de información integral en donde almacenan cierta clase de entidades,
atributos, datasets, entre otros. Esta estructura nativa de ArcGIS almacena físicamente la
información geográfica con un modelo de transacción para administrar un flujo de datos, en
donde estas geodatabases pueden ser de varios tamaños y tener un numero variado de
usuarios. (ArcMap 10.6, 2018)
4.26 VECTORIZACIÓN
Es una serie de procedimientos en donde se lleva una información ráster (imagen) a una
información de tipo vectorial. Para que el desarrollo eficiente de la vectorización sea
eficiente, es necesario realizar la eliminación de ruido en las imágenes con el fin de rellenar
agujeros que mejoren los datos. (ArcMap 10.4, 2018)
Pág. 14
Informe Pasantía - Universidad Distrital Francisco José de Caldas
4.27 CARTOGRAFÍA DIGITAL
La cartografía digital es la representación gráfica de elementos espaciales, entrada y salida
de datos geográficos por medio de software, que mediante la adquisición de datos numéricos
se puede elaborar planos o mapas. (Instituto agustin Codazzi, 2018)
4.28 METADATOS
Es un conjunto de atributos o elementos que describen un objeto determinado, que sirven de
identificador de materiales digitales y suministrar información sobre los datos producidos,
los cuales se dan con la necesidad de almacenar la información de forma digital. Los
metadatos permiten a las personas ubicar y entender los datos, estos archivos de información
recogen características, representándolas y dando a entender el porqué del recurso.
(Benjumea, 2018)
4.29 EXCEL
Ilustración 7. Excel
Fuente: (Tutoriales en PDF, S.F.)
Es un software de la casa Microsoft Office que consiste en hojas de cálculo donde se pueden
realizar procesos y funciones matemáticas, estadísticas, financieras, contables, etc., desde las
funciones más sencillas hasta las más complejas según su propio lenguaje de programación.

Pág. 15
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Estas hojas de cálculo están compuestas por celdas definidas por un numero de fila y una
letra (s) de columna, donde se realizan dichas operaciones en diferentes formatos de
visibilidad (numero, financiero, moneda, contabilidad, personalizado, texto etc.).
(Departamento de Formación, S.F.)
4.30 MAGNA SIRGAS PRO 3.0
Ilustración 8. Magna Sirgas Pro 3.0
Aplicativo creado por la Subdirección de Geografía y Cartografía del Instituto Geográfico
Agustín Codazzi IGAC, el cual tiene como propósito ser una herramienta para los usuarios
en cálculos respectivos para todo lo que comprende el manejo de coordenadas
tridimensionales en la zona del territorio nacional según su definición. (Subdirección de
Geografía y Cartografía, 2010)
Lo anterior comprende la conversión y transformación de coordenadas desde el mismo
sistema o desde diferentes sistemas de coordenadas según sea el datum (MAGNA-SIRGAS;
Observatorio Astronómico de Bogotá), obtención de ondulaciones geoidales
(GEOCOL2004), cálculo de velocidades, acimutes, coordenadas entre puntos, etc. (Martínez,
2007)

Pág. 16
Informe Pasantía - Universidad Distrital Francisco José de Caldas
4.31 LEICA GEO OFFICE
Ilustración 9. Leica Geo Office
Fuente: (Identi, 2017)
Este software utilizado en el campo de la topografía y procesamiento de datos GNSS, ofrece
todo lo necesario para la visualización, gestión, proceso, cálculos, importación y exportación
de datos GPS, TPS, etc.; además de, contar con la lectura de archivos tipo RINEX. (Leica
Geosystems, 2018)
4.32 TOPCON TOOLS
Ilustración 10. Topcon Tools
Fuente: (Wikipedia, 2017)
Pág. 17
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Este software ofrece una solución al postprocesamiento de datos GNSS con una interfaz
sencilla que facilita su operación y visualización de todas las características y herramientas
en pantalla para ajuste de redes geodésicas o simples observaciones GPS, así como,
postproceso de datos tipo RINEX, GPS+Topcon, importación de datos de receptores, vista
tabular de los datos, configuración personalizable de los proyectos, configuración de
reportes, soporte de efemérides precisas, configuración de procesamiento, entre otras
herramientas. (Geosistemas, S.F.)
4.33 GOOGLE EARTH
Ilustración 11. Google Earth Pro
Fuente: (MacUpdate, 2018)
Es un software con el fin de ofrecer datos SIG, que permite al usuario ver imágenes
satelitales, mapas, imágenes de relieve y edificios 3D, explorando un detallado contenido
geográfico complementado con herramientas como medición de distancias y áreas,
cuadriculas, ubicación de puntos y definición de las coordenadas de estos en datum WGS84,
creación de polígonos, perfiles, rutas, entre otras más herramientas. (Google, 2018)
Pág. 18
Informe Pasantía - Universidad Distrital Francisco José de Caldas
4.34 AGISOFT PHOTOSCAN PROFESSIONAL
Ilustración 12. Agisoft Photoscan Professional
Fuente: (MAC TORRENTS, 2017)
Es un software el cual está diseñado para el procesamiento de imágenes digitales, el cual
mediante técnicas de fotogrametría digital permite generar una reconstrucción 3D del
entorno, por medio de una nube de puntos que asientan generar modelos digitales de
elevación, modelos digitales de terreno con detalle y ortomosaicos georreferenciados de alta
resolución, siendo un programa adecuado para la documentación fotogramétrica por sus
aplicaciones SIG. (Agisoft, 2014)
4.35 GLOBAL MAPPER PRO
Ilustración 13. Global Mapper Pro
Fuente: (Creative Tools, 2018)
Pág. 19
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Es un software desarrollado para fines en el ámbito de los SIG, que ofrece herramientas para
el procesamiento de datos espaciales SIG, permitiendo interactuar con imágenes, mapas
topográficos, DEM (Modelo Digital de Elevación) y DSM (Modelo Digital de Superficie).
Además, visualiza, convierte y analiza cualquier tipo de datos geoespaciales en 2D y en 3D,
con una interfaz versátil que ofrece fácil manejo tanto para los profesionales del SIG como
para las personas que empiezan sus primeros pasos con este software. (GEOSOLUCIONES,
S.F.)
4.36 MICROSTATION V8i
Ilustración 14. MicroStation V8i
Fuente: (Ace Industrial Academy, S.F.)
Con este software se puede modelar, documentar y visualizar proyectos de cualquier tamaño
y complejidad, ofreciendo un diseño y construcción con gran versatilidad y precisión para
modelos ricos en información 2D y 3D de todos los tipos de proyectos en cada disciplina de
proyectos de infraestructura. (Bentley, S.F.)
Pág. 20
Informe Pasantía - Universidad Distrital Francisco José de Caldas
4.37 ARCGIS
Ilustración 15. ArcGIS
Fuente: (Taringa, S.F.)
Es un producto de la casa ESRI, el cual hace referencia al conjunto de software en el campo
de los SIG (Sistemas de Información Geográfica), los cuales son:
o ArcGIS Desktop: Conjunto de aplicaciones SIG avanzadas como ArcMap,
ArcCatalog y ArcToolbox.
o ArcSDE™ Gateway: Interfaz para administrar la “geodatabase” (base de
datos geográfica) en un medio de administración de bases de datos (DBMS).
o ArcIMS: SIG orientado al campo del internet para distribuir datos y servicios.
(ESRI, S.F.)
Pág. 21
Informe Pasantía - Universidad Distrital Francisco José de Caldas
5. METODOLOGÍA
5.1 ORGANIZACIÓN DE LA INFORMACIÓN
Una vez obtenida la información de campo, se procede a organizarla según el lugar, la
finalidad y tipo de archivo en carpetas que permitan la manipulación de los datos con más
facilidad y orden.
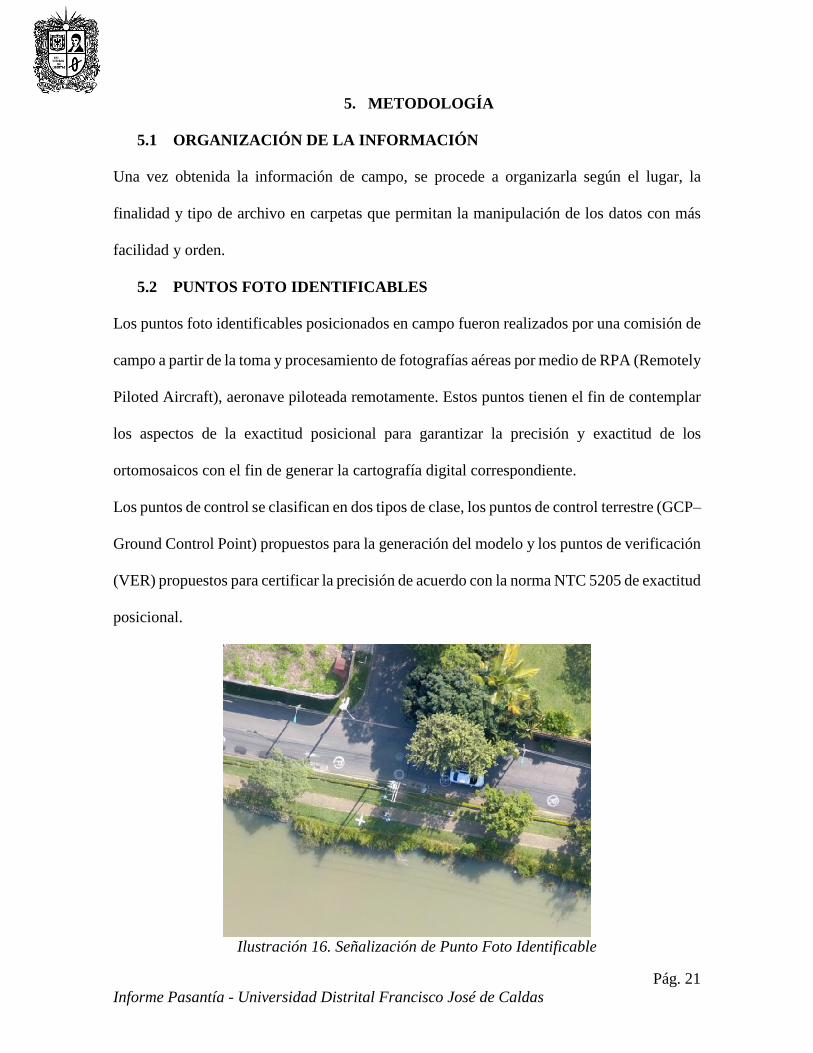
5.2 PUNTOS FOTO IDENTIFICABLES
Los puntos foto identificables posicionados en campo fueron realizados por una comisión de
campo a partir de la toma y procesamiento de fotografías aéreas por medio de RPA (Remotely
Piloted Aircraft), aeronave piloteada remotamente. Estos puntos tienen el fin de contemplar
los aspectos de la exactitud posicional para garantizar la precisión y exactitud de los
ortomosaicos con el fin de generar la cartografía digital correspondiente.
Los puntos de control se clasifican en dos tipos de clase, los puntos de control terrestre (GCP–
Ground Control Point) propuestos para la generación del modelo y los puntos de verificación
(VER) propuestos para certificar la precisión de acuerdo con la norma NTC 5205 de exactitud
posicional.
Ilustración 16. Señalización de Punto Foto Identificable
Pág. 22
Informe Pasantía - Universidad Distrital Francisco José de Caldas
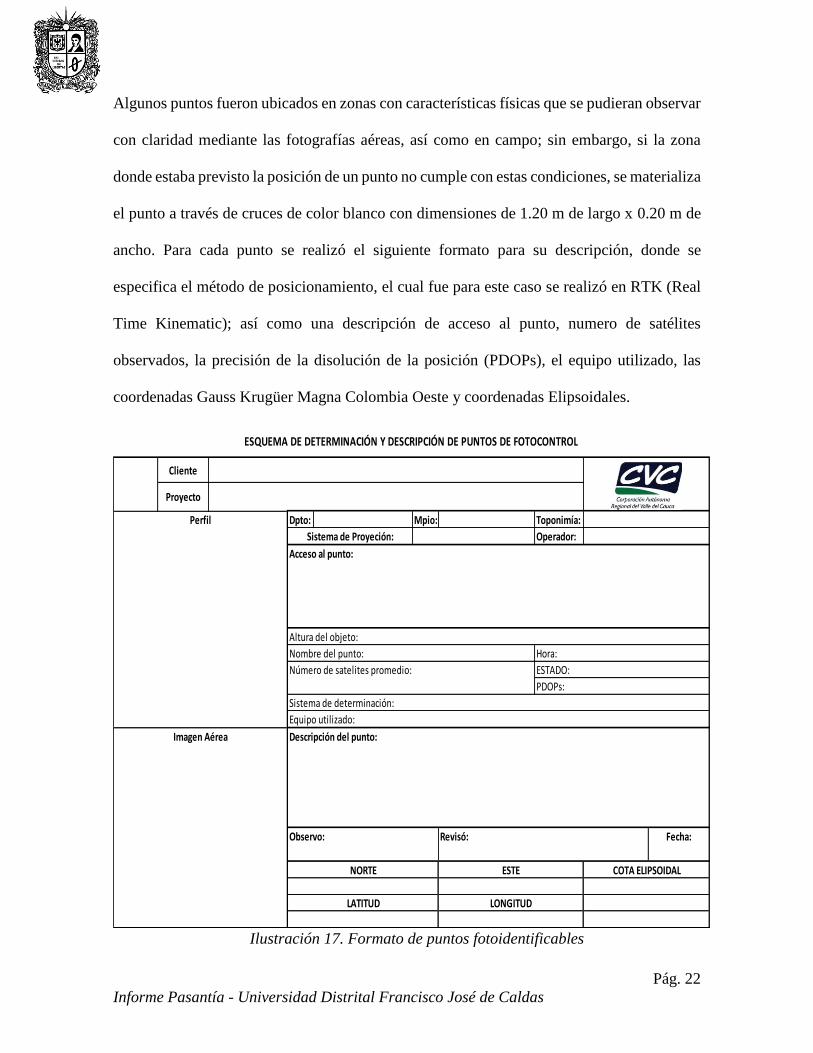
Algunos puntos fueron ubicados en zonas con características físicas que se pudieran observar
con claridad mediante las fotografías aéreas, así como en campo; sin embargo, si la zona
donde estaba previsto la posición de un punto no cumple con estas condiciones, se materializa
el punto a través de cruces de color blanco con dimensiones de 1.20 m de largo x 0.20 m de
ancho. Para cada punto se realizó el siguiente formato para su descripción, donde se
especifica el método de posicionamiento, el cual fue para este caso se realizó en RTK (Real
Time Kinematic); así como una descripción de acceso al punto, numero de satélites
observados, la precisión de la disolución de la posición (PDOPs), el equipo utilizado, las
coordenadas Gauss Krugüer Magna Colombia Oeste y coordenadas Elipsoidales.
Ilustración 17. Formato de puntos fotoidentificables
Cliente
Proyecto
Dpto: Mpio: Toponimía:
Operador:
Imagen Aérea
Sistema de Proyeción:
Perfil
Observo: Revisó: Fecha:
Nombre del punto: Hora:
COTA ELIPSOIDAL
Altura del objeto:
PDOPs:
ESTADO: Número de satelites promedio:
LATITUD LONGITUD
Sistema de determinación:
Equipo utilizado:
Descripción del punto:
NORTE ESTE
ESQUEMA DE DETERMINACIÓN Y DESCRIPCIÓN DE PUNTOS DE FOTOCONTROL
Acceso al punto:
Pág. 23
Informe Pasantía - Universidad Distrital Francisco José de Caldas
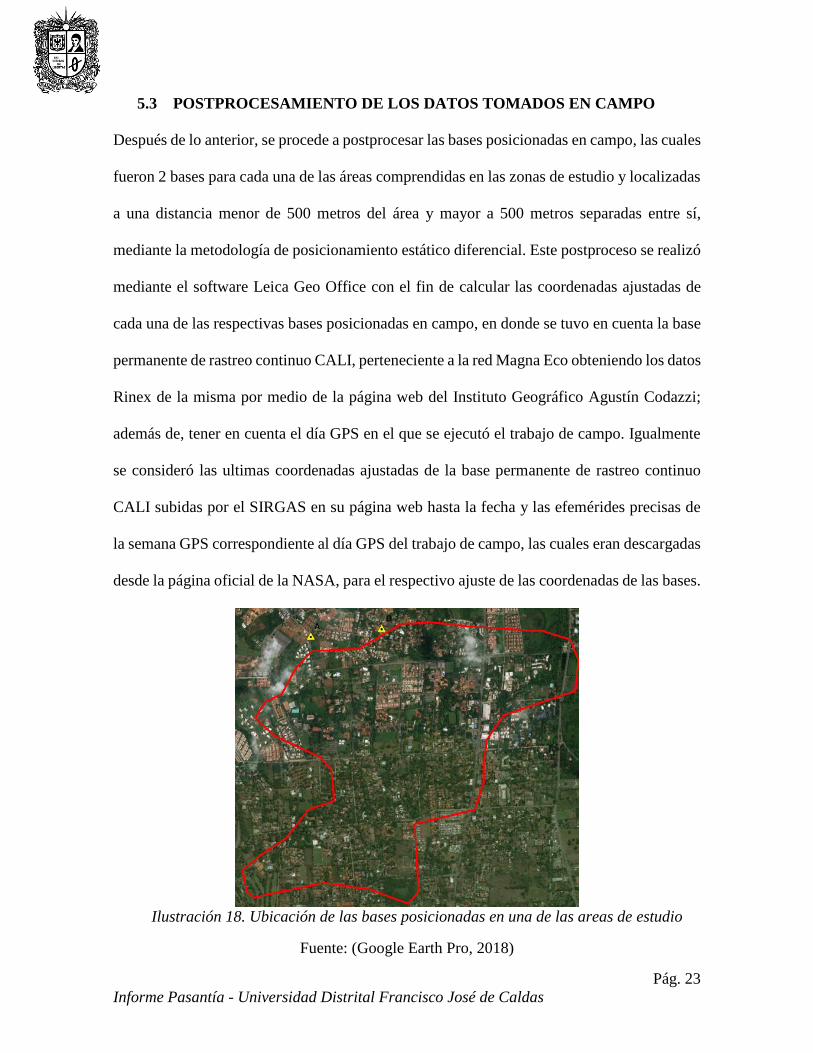
5.3 POSTPROCESAMIENTO DE LOS DATOS TOMADOS EN CAMPO
Después de lo anterior, se procede a postprocesar las bases posicionadas en campo, las cuales
fueron 2 bases para cada una de las áreas comprendidas en las zonas de estudio y localizadas
a una distancia menor de 500 metros del área y mayor a 500 metros separadas entre sí,
mediante la metodología de posicionamiento estático diferencial. Este postproceso se realizó
mediante el software Leica Geo Office con el fin de calcular las coordenadas ajustadas de
cada una de las respectivas bases posicionadas en campo, en donde se tuvo en cuenta la base
permanente de rastreo continuo CALI, perteneciente a la red Magna Eco obteniendo los datos
Rinex de la misma por medio de la página web del Instituto Geográfico Agustín Codazzi;
además de, tener en cuenta el día GPS en el que se ejecutó el trabajo de campo. Igualmente
se consideró las ultimas coordenadas ajustadas de la base permanente de rastreo continuo
CALI subidas por el SIRGAS en su página web hasta la fecha y las efemérides precisas de
la semana GPS correspondiente al día GPS del trabajo de campo, las cuales eran descargadas
desde la página oficial de la NASA, para el respectivo ajuste de las coordenadas de las bases.
Ilustración 18. Ubicación de las bases posicionadas en una de las areas de estudio
Fuente: (Google Earth Pro, 2018)
Pág. 24
Informe Pasantía - Universidad Distrital Francisco José de Caldas
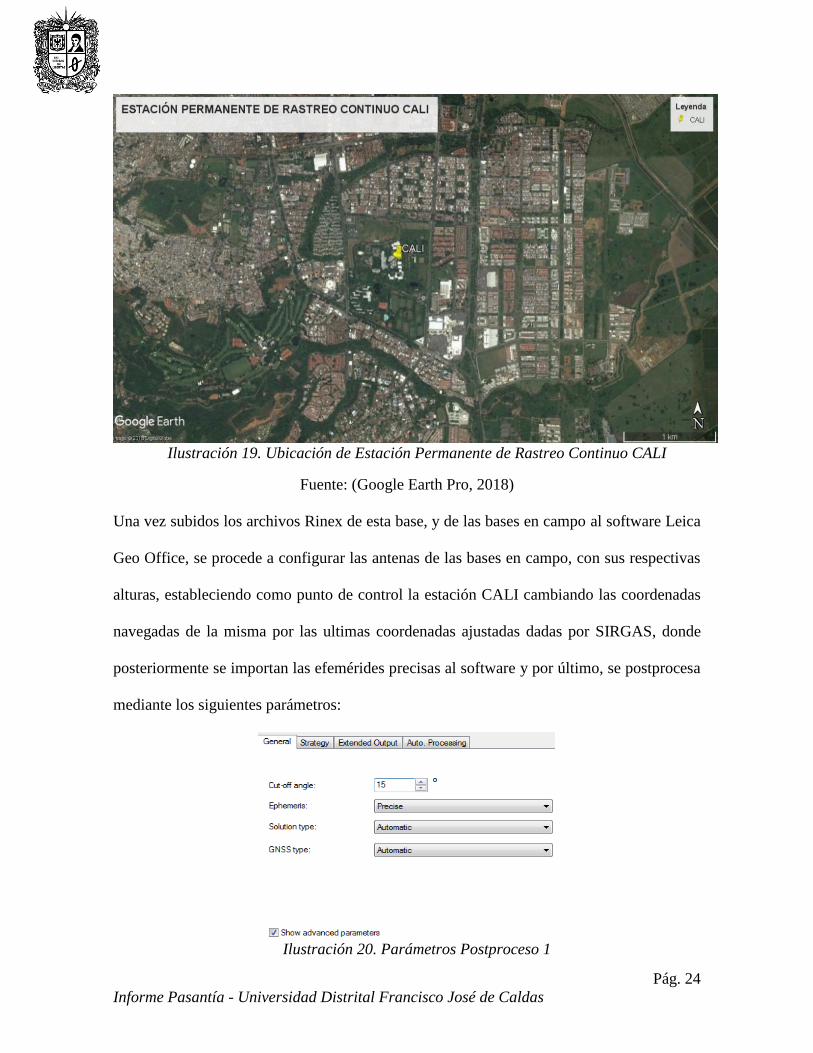
Ilustración 19. Ubicación de Estación Permanente de Rastreo Continuo CALI
Fuente: (Google Earth Pro, 2018)
Una vez subidos los archivos Rinex de esta base, y de las bases en campo al software Leica
Geo Office, se procede a configurar las antenas de las bases en campo, con sus respectivas
alturas, estableciendo como punto de control la estación CALI cambiando las coordenadas
navegadas de la misma por las ultimas coordenadas ajustadas dadas por SIRGAS, donde
posteriormente se importan las efemérides precisas al software y por último, se postprocesa
mediante los siguientes parámetros:
Ilustración 20. Parámetros Postproceso 1
Pág. 25
Informe Pasantía - Universidad Distrital Francisco José de Caldas
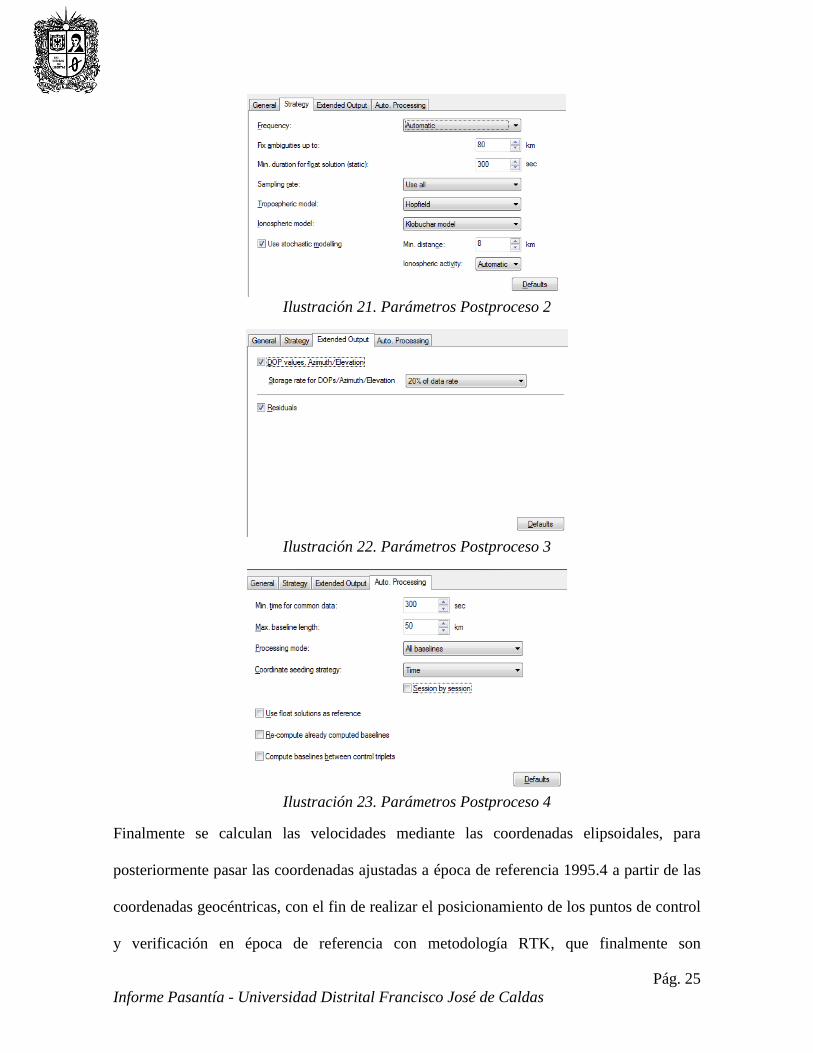
Ilustración 21. Parámetros Postproceso 2
Ilustración 22. Parámetros Postproceso 3
Ilustración 23. Parámetros Postproceso 4
Finalmente se calculan las velocidades mediante las coordenadas elipsoidales, para
posteriormente pasar las coordenadas ajustadas a época de referencia 1995.4 a partir de las
coordenadas geocéntricas, con el fin de realizar el posicionamiento de los puntos de control
y verificación en época de referencia con metodología RTK, que finalmente son
Pág. 26
Informe Pasantía - Universidad Distrital Francisco José de Caldas
transformadas a cada uno de los siguientes sistemas de coordenadas teniendo en cuenta el
elipsoide WGS84, geoide GeoCOL2004 y datum Magna:
Coordenadas Elipsoidales
Coordenadas Planas Gauss Krugüer (Origen Oeste)
Coordenadas Planas Cartesianas Locales (Con origen cartesiano de destino “VALLE
DEL CAUCA-CALI-2009”
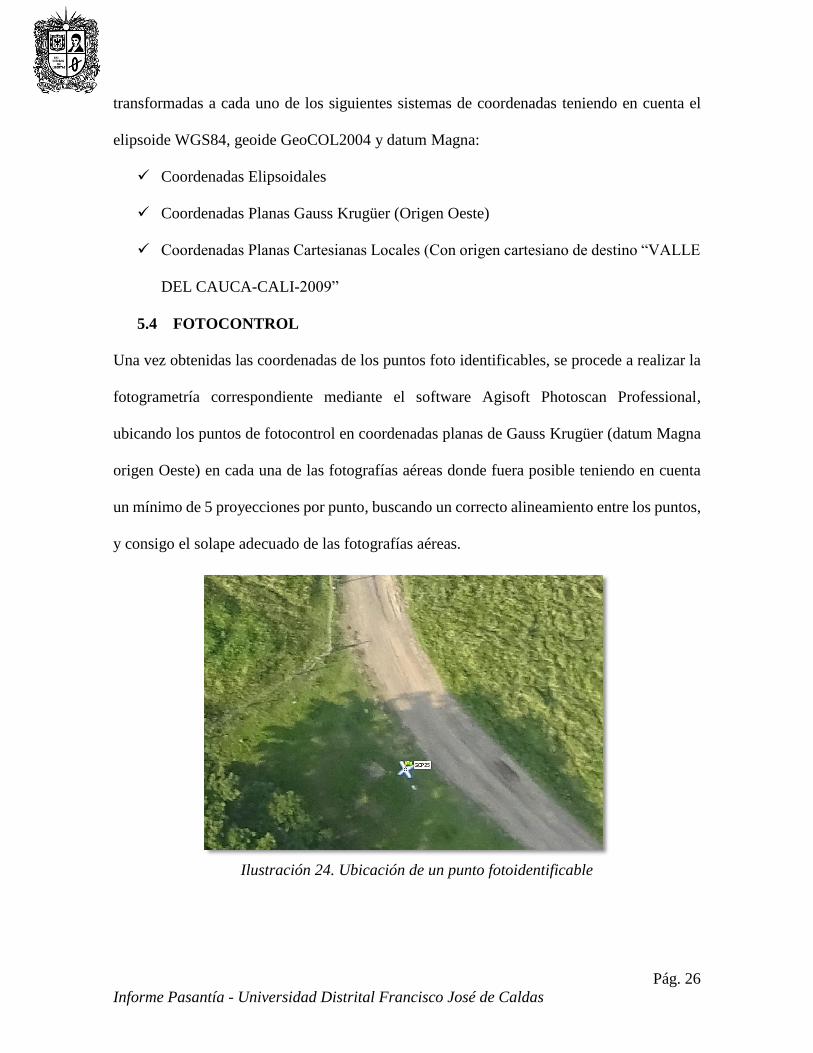
5.4 FOTOCONTROL
Una vez obtenidas las coordenadas de los puntos foto identificables, se procede a realizar la
fotogrametría correspondiente mediante el software Agisoft Photoscan Professional,
ubicando los puntos de fotocontrol en coordenadas planas de Gauss Krugüer (datum Magna
origen Oeste) en cada una de las fotografías aéreas donde fuera posible teniendo en cuenta
un mínimo de 5 proyecciones por punto, buscando un correcto alineamiento entre los puntos,
y consigo el solape adecuado de las fotografías aéreas.
Ilustración 24. Ubicación de un punto fotoidentificable
Pág. 27
Informe Pasantía - Universidad Distrital Francisco José de Caldas
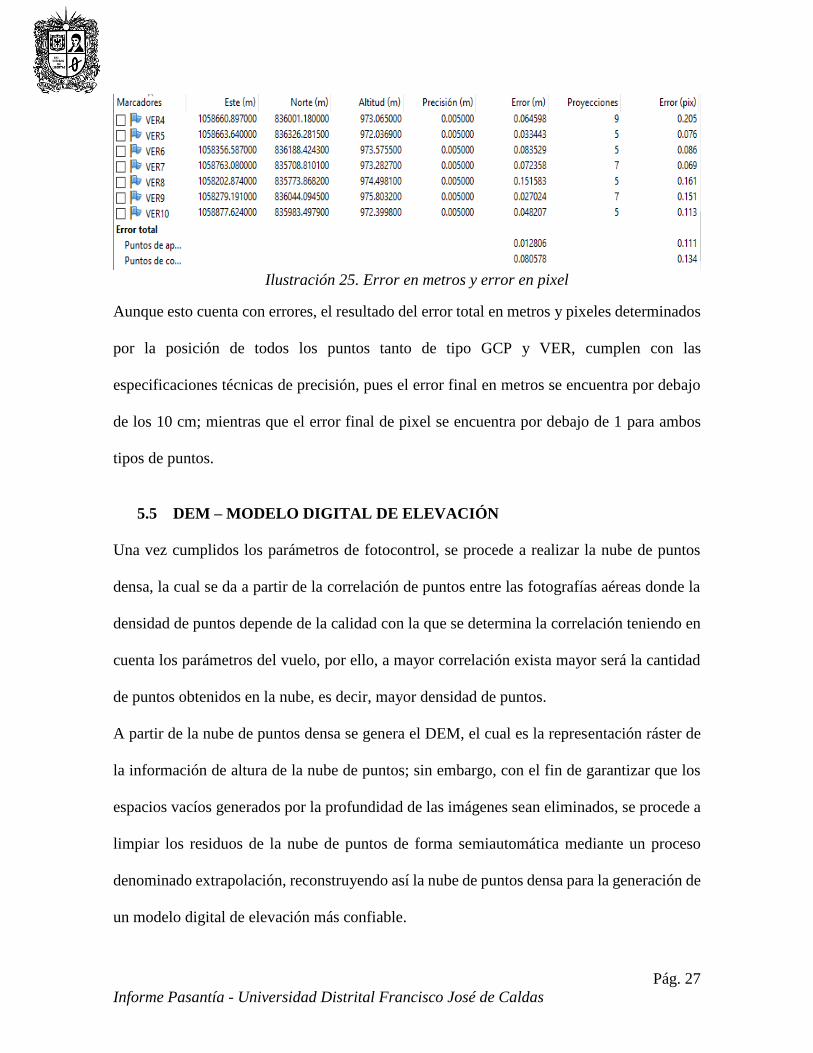
Ilustración 25. Error en metros y error en pixel
Aunque esto cuenta con errores, el resultado del error total en metros y pixeles determinados
por la posición de todos los puntos tanto de tipo GCP y VER, cumplen con las
especificaciones técnicas de precisión, pues el error final en metros se encuentra por debajo
de los 10 cm; mientras que el error final de pixel se encuentra por debajo de 1 para ambos
tipos de puntos.
5.5 DEM – MODELO DIGITAL DE ELEVACIÓN
Una vez cumplidos los parámetros de fotocontrol, se procede a realizar la nube de puntos
densa, la cual se da a partir de la correlación de puntos entre las fotografías aéreas donde la
densidad de puntos depende de la calidad con la que se determina la correlación teniendo en
cuenta los parámetros del vuelo, por ello, a mayor correlación exista mayor será la cantidad
de puntos obtenidos en la nube, es decir, mayor densidad de puntos.
A partir de la nube de puntos densa se genera el DEM, el cual es la representación ráster de
la información de altura de la nube de puntos; sin embargo, con el fin de garantizar que los
espacios vacíos generados por la profundidad de las imágenes sean eliminados, se procede a
limpiar los residuos de la nube de puntos de forma semiautomática mediante un proceso
denominado extrapolación, reconstruyendo así la nube de puntos densa para la generación de
un modelo digital de elevación más confiable.
Pág. 28
Informe Pasantía - Universidad Distrital Francisco José de Caldas
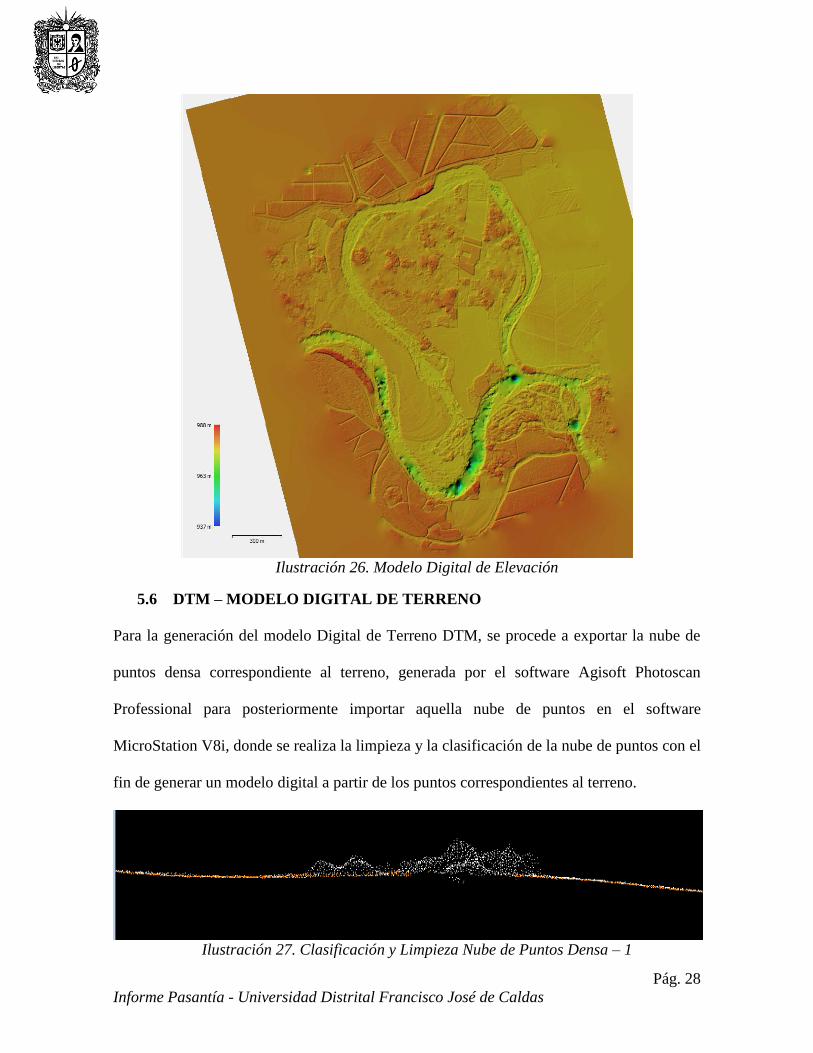
Ilustración 26. Modelo Digital de Elevación
5.6 DTM – MODELO DIGITAL DE TERRENO
Para la generación del modelo Digital de Terreno DTM, se procede a exportar la nube de
puntos densa correspondiente al terreno, generada por el software Agisoft Photoscan
Professional para posteriormente importar aquella nube de puntos en el software
MicroStation V8i, donde se realiza la limpieza y la clasificación de la nube de puntos con el
fin de generar un modelo digital a partir de los puntos correspondientes al terreno.
Ilustración 27. Clasificación y Limpieza Nube de Puntos Densa – 1
Pág. 29
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Ilustración 28. Nube de puntos densa clasificada
5.7 GENERACIÓN FINAL DE ORTOMOSAICOS
Una vez reconstruida la nube de puntos densa y elaborado el modelo digital de elevación
DEM, se procede a generar el ortomosaico mediante el software Agisoft Photoscan
Professional, el cual permite editar manualmente el mismo teniendo en cuenta zonas en las
que no se visualicen correctamente los objetos con nitidez o donde simplemente se pueda
aumentar la misma en la visualización de zonas donde aún sea evidentes los objetos,
corrigiendo y mejorando el ortomosaico correspondientemente, manteniendo la geometría y
uniformidad de los objetos allí encontrados, con el fin facilitar la vectorización para evitar
errores y mejorar la exactitud en la ejecución de la misma.

Pág. 30
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Ilustración 29. Edición de Ortomosaico
Ilustración 30. Región de un ortomosaico con puntos de Fotocontrol
Pág. 31
Informe Pasantía - Universidad Distrital Francisco José de Caldas
5.8 EXACTITUD POSICIONAL
Consiste en realizar un proceso estadístico que permita determinar las diferencias entre las
proyecciones de las coordenadas de los puntos ubicados en el ortomosaico y las coordenadas
realizadas con RTK, con el fin de analizar la exactitud posicional definida por los puntos de
verificación, determinando la dispersión de las posiciones de estos puntos, de acuerdo con la
posición de los mismos tomados en campo.
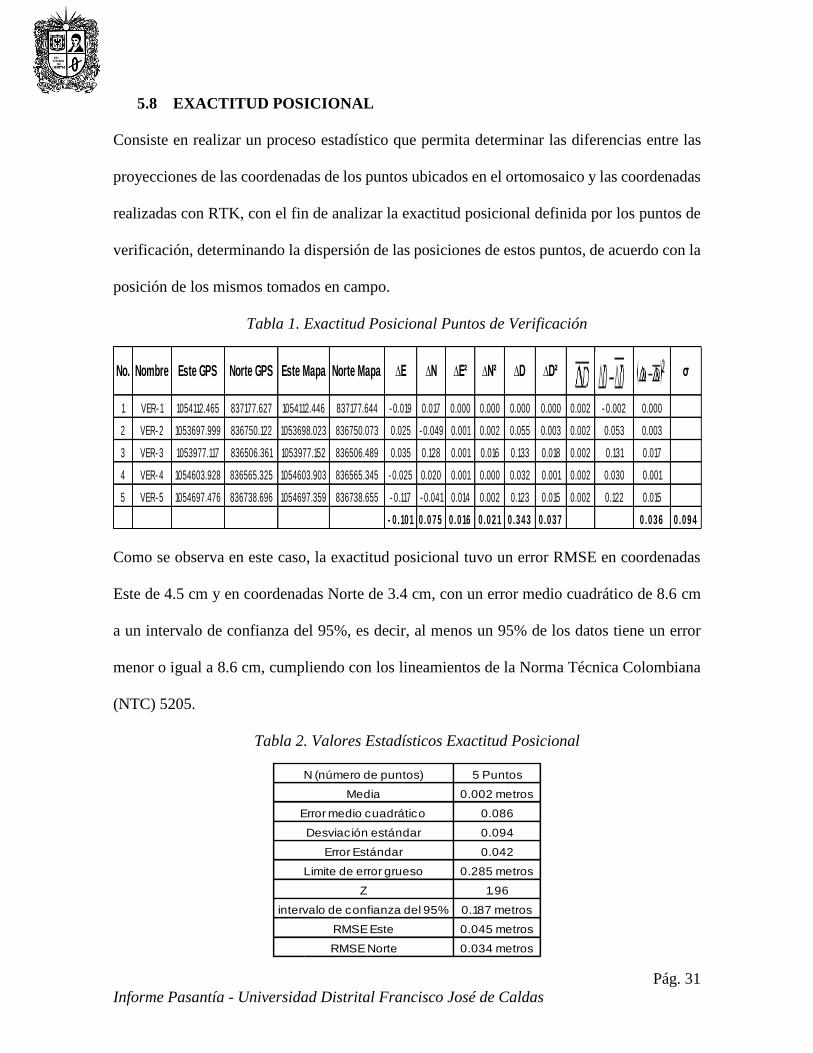
Tabla 1. Exactitud Posicional Puntos de Verificación
Como se observa en este caso, la exactitud posicional tuvo un error RMSE en coordenadas
Este de 4.5 cm y en coordenadas Norte de 3.4 cm, con un error medio cuadrático de 8.6 cm
a un intervalo de confianza del 95%, es decir, al menos un 95% de los datos tiene un error
menor o igual a 8.6 cm, cumpliendo con los lineamientos de la Norma Técnica Colombiana
(NTC) 5205.
Tabla 2. Valores Estadísticos Exactitud Posicional
No. Nombre Este GPS Norte GPS Este Mapa Norte Mapa ∆E ∆N ∆E² ∆N² ∆D ∆D² σ
1 VER- 1 1054112.465 837177.627 1054112.446 837177.644 - 0.019 0.017 0.000 0.000 0.000 0.000 0.002 - 0.002 0.000
2 VER- 2 1053697.999 836750.122 1053698.023 836750.073 0.025 - 0.049 0.001 0.002 0.055 0.003 0.002 0.053 0.003
3 VER- 3 1053977.117 836506.361 1053977.152 836506.489 0.035 0.128 0.001 0.016 0.133 0.018 0.002 0.131 0.017
4 VER- 4 1054603.928 836565.325 1054603.903 836565.345 - 0.025 0.020 0.001 0.000 0.032 0.001 0.002 0.030 0.001
5 VER- 5 1054697.476 836738.696 1054697.359 836738.655 - 0.117 - 0.041 0.014 0.002 0.123 0.015 0.002 0.122 0.015
- 0 .101 0 .075 0 .016 0 .021 0 .343 0 .037 0 .036 0 .094
5 Puntos
0.002 metros
0.086
0.094
0.042
0.285 metros
1.96
0.187 metros
0.045 metros
0.034 metros
Z
intervalo de confianza del 95%
RMSE Este
RMSE Norte
N (número de puntos)
Media
Error medio cuadrático
Desviación estándar
Error Estándar
Limite de error grueso
Pág. 32
Informe Pasantía - Universidad Distrital Francisco José de Caldas
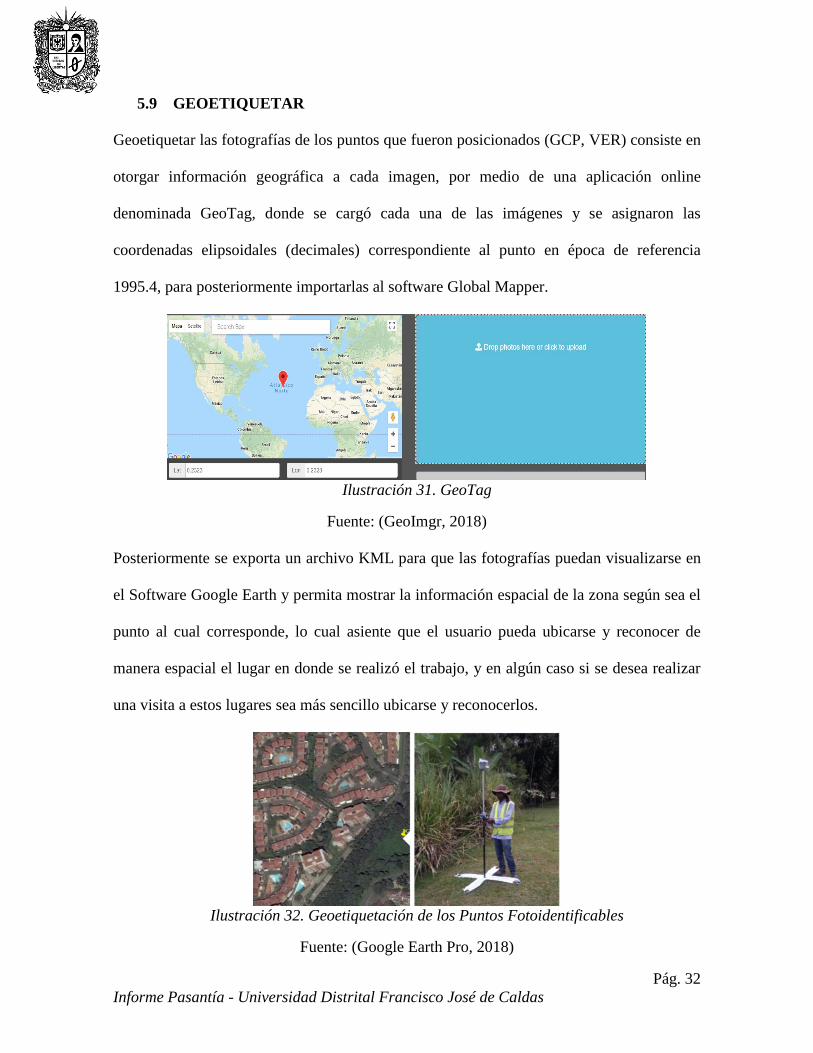
5.9 GEOETIQUETAR
Geoetiquetar las fotografías de los puntos que fueron posicionados (GCP, VER) consiste en
otorgar información geográfica a cada imagen, por medio de una aplicación online
denominada GeoTag, donde se cargó cada una de las imágenes y se asignaron las
coordenadas elipsoidales (decimales) correspondiente al punto en época de referencia
1995.4, para posteriormente importarlas al software Global Mapper.
Ilustración 31. GeoTag
Fuente: (GeoImgr, 2018)
Posteriormente se exporta un archivo KML para que las fotografías puedan visualizarse en
el Software Google Earth y permita mostrar la información espacial de la zona según sea el
punto al cual corresponde, lo cual asiente que el usuario pueda ubicarse y reconocer de
manera espacial el lugar en donde se realizó el trabajo, y en algún caso si se desea realizar
una visita a estos lugares sea más sencillo ubicarse y reconocerlos.
Ilustración 32. Geoetiquetación de los Puntos Fotoidentificables
Fuente: (Google Earth Pro, 2018)
Pág. 33
Informe Pasantía - Universidad Distrital Francisco José de Caldas
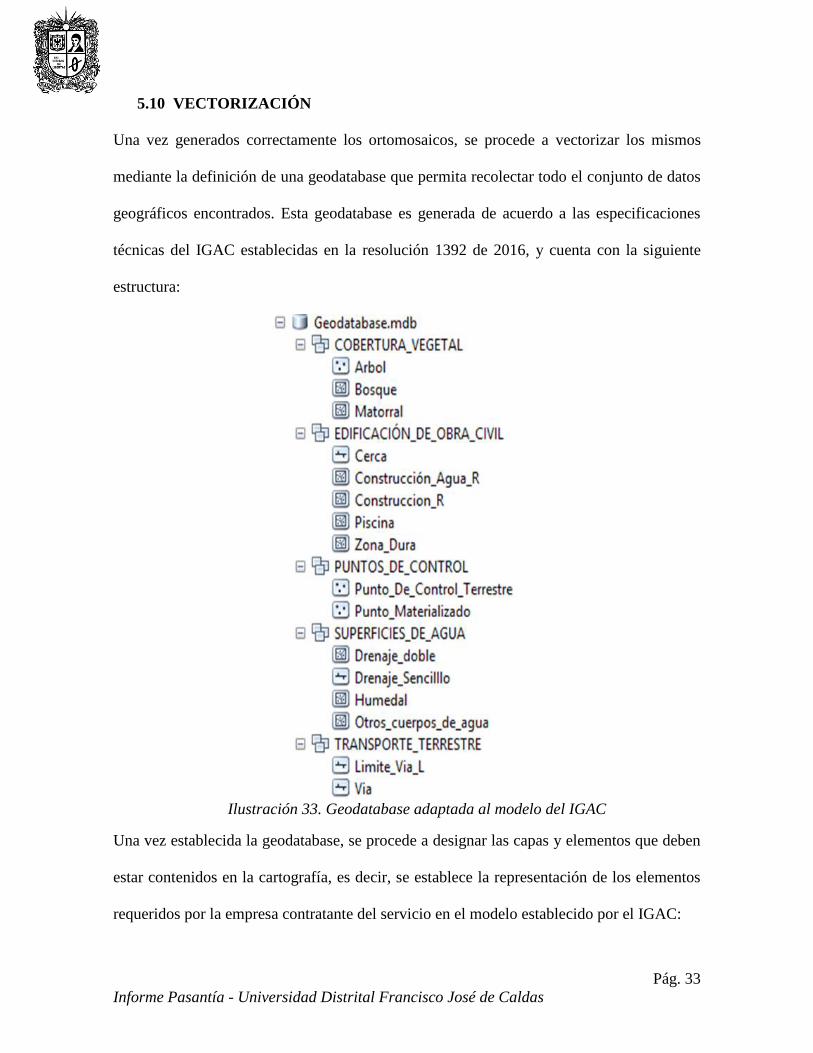
5.10 VECTORIZACIÓN
Una vez generados correctamente los ortomosaicos, se procede a vectorizar los mismos
mediante la definición de una geodatabase que permita recolectar todo el conjunto de datos
geográficos encontrados. Esta geodatabase es generada de acuerdo a las especificaciones
técnicas del IGAC establecidas en la resolución 1392 de 2016, y cuenta con la siguiente
estructura:
Ilustración 33. Geodatabase adaptada al modelo del IGAC
Una vez establecida la geodatabase, se procede a designar las capas y elementos que deben
estar contenidos en la cartografía, es decir, se establece la representación de los elementos
requeridos por la empresa contratante del servicio en el modelo establecido por el IGAC:
Pág. 34
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Tabla 3. Representación de los elementos requeridos por CVC en modelo IGAC
Elementos requeridos por CVC
Representación en modelo IGAC
Conjunto de Datos Clases de Datos
1. Edificios Edificación_Obra_Civil Construcción_ R
2. Cercas Edificación_Obra_Civil Cerca
3. Diques Edificación_Obra_Civil Construcción_Agua_R
4. Cuerpos de agua Superficies_de_Agua Drenaje_Doble-Sencillo y Humedal
5.Caminos Transporte_Terrestre Vía
6.Vías Transporte_Terrestre Vía
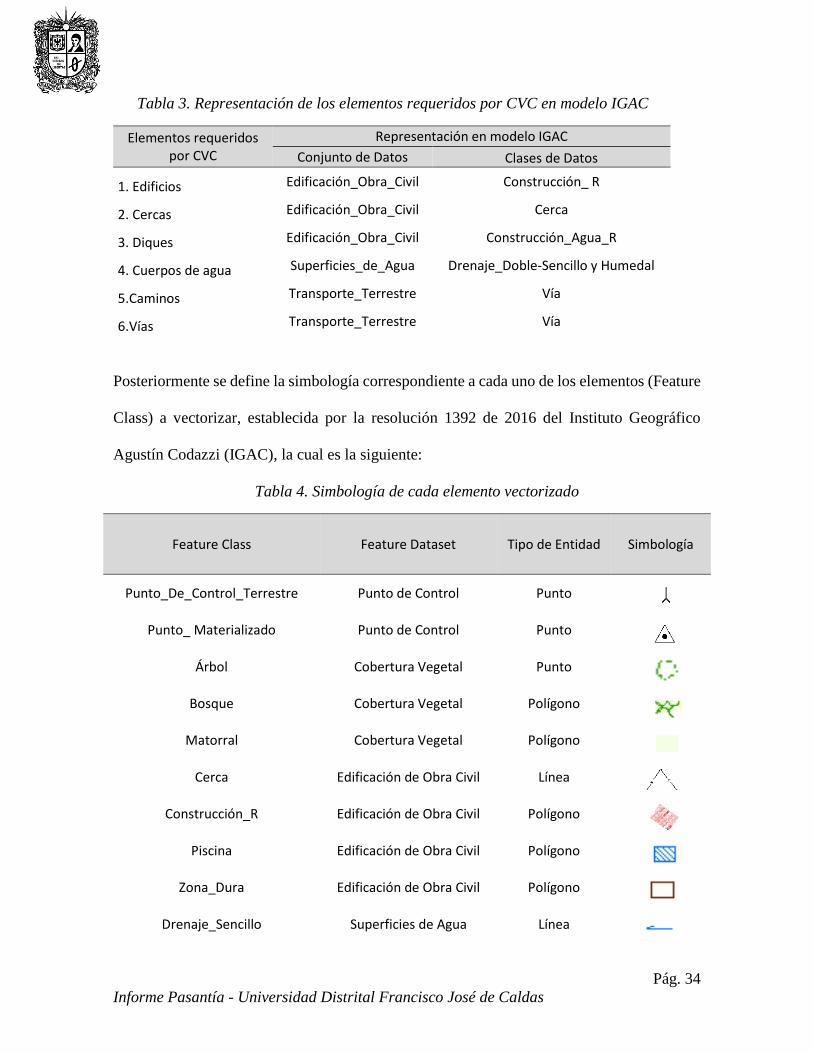
Posteriormente se define la simbología correspondiente a cada uno de los elementos (Feature
Class) a vectorizar, establecida por la resolución 1392 de 2016 del Instituto Geográfico
Agustín Codazzi (IGAC), la cual es la siguiente:
Tabla 4. Simbología de cada elemento vectorizado
Feature Class Feature Dataset Tipo de Entidad Simbología
Punto_De_Control_Terrestre Punto de Control Punto
Punto_ Materializado Punto de Control Punto
Árbol Cobertura Vegetal Punto
Bosque Cobertura Vegetal Polígono
Matorral Cobertura Vegetal Polígono
Cerca Edificación de Obra Civil Línea
Construcción_R Edificación de Obra Civil Polígono
Piscina Edificación de Obra Civil Polígono
Zona_Dura Edificación de Obra Civil Polígono
Drenaje_Sencillo Superficies de Agua Línea
Feature class Feature data set Tipo de entidad Simbología
Punto_De_Control:Terrestre PUNTO DE CONTROL Punto
Punto_Materializado PUNTO DE CONTROL Punto
Arbol COBERTURA VEGETAL Punto
Bosque COBERTURA VEGETAL Poligono
Matorral COBERTURA VEGETAL Poligono
Zona_Verde COBERTURA VEGETAL Poligono
Cerca EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_L EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_P EDIFICIO EN OBRA CIVIL Punto
Construccion_Agua_R EDIFICIO EN OBRA CIVIL Poligono
Construccion_P EDIFICIO EN OBRA CIVIL Punto
Construccion_R EDIFICIO EN OBRA CIVIL Poligono
Limite_Manzana_R EDIFICIO EN OBRA CIVIL Poligono
Linea_Demarcación EDIFICIO EN OBRA CIVIL Linea
Lote_L EDIFICIO EN OBRA CIVIL Linea
Lote_R EDIFICIO EN OBRA CIVIL Poligono
Muro EDIFICIO EN OBRA CIVIL Linea
Feature class Feature data set Tipo de entidad Simbología
Punto_De_Control:Terrestre PUNTO DE CONTROL Punto
Punto_Materializado PUNTO DE CONTROL Punto
Arbol COBERTURA VEGETAL Punto
Bosque COBERTURA VEGETAL Poligono
Matorral COBERTURA VEGETAL Poligono
Zona_Verde COBERTURA VEGETAL Poligono
Cerca EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_L EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_P EDIFICIO EN OBRA CIVIL Punto
Construccion_Agua_R EDIFICIO EN OBRA CIVIL Poligono
Construccion_P EDIFICIO EN OBRA CIVIL Punto
Construccion_R EDIFICIO EN OBRA CIVIL Poligono
Limite_Manzana_R EDIFICIO EN OBRA CIVIL Poligono
Linea_Demarcación EDIFICIO EN OBRA CIVIL Linea
Lote_L EDIFICIO EN OBRA CIVIL Linea
Lote_R EDIFICIO EN OBRA CIVIL Poligono
Muro EDIFICIO EN OBRA CIVIL Linea
Feature class Feature data set Tipo de entidad Simbología
Punto_De_Control:Terrestre PUNTO DE CONTROL Punto
Punto_Materializado PUNTO DE CONTROL Punto
Arbol COBERTURA VEGETAL Punto
Bosque COBERTURA VEGETAL Poligono
Matorral COBERTURA VEGETAL Poligono
Zona_Verde COBERTURA VEGETAL Poligono
Cerca EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_L EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_P EDIFICIO EN OBRA CIVIL Punto
Construccion_Agua_R EDIFICIO EN OBRA CIVIL Poligono
Construccion_P EDIFICIO EN OBRA CIVIL Punto
Construccion_R EDIFICIO EN OBRA CIVIL Poligono
Limite_Manzana_R EDIFICIO EN OBRA CIVIL Poligono
Linea_Demarcación EDIFICIO EN OBRA CIVIL Linea
Lote_L EDIFICIO EN OBRA CIVIL Linea
Lote_R EDIFICIO EN OBRA CIVIL Poligono
Muro EDIFICIO EN OBRA CIVIL Linea
Feature class Feature data set Tipo de entidad Simbología
Punto_De_Control:Terrestre PUNTO DE CONTROL Punto
Punto_Materializado PUNTO DE CONTROL Punto
Arbol COBERTURA VEGETAL Punto
Bosque COBERTURA VEGETAL Poligono
Matorral COBERTURA VEGETAL Poligono
Zona_Verde COBERTURA VEGETAL Poligono
Cerca EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_L EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_P EDIFICIO EN OBRA CIVIL Punto
Construccion_Agua_R EDIFICIO EN OBRA CIVIL Poligono
Construccion_P EDIFICIO EN OBRA CIVIL Punto
Construccion_R EDIFICIO EN OBRA CIVIL Poligono
Limite_Manzana_R EDIFICIO EN OBRA CIVIL Poligono
Linea_Demarcación EDIFICIO EN OBRA CIVIL Linea
Lote_L EDIFICIO EN OBRA CIVIL Linea
Lote_R EDIFICIO EN OBRA CIVIL Poligono
Muro EDIFICIO EN OBRA CIVIL Linea
Feature class Feature data set Tipo de entidad Simbología
Punto_De_Control:Terrestre PUNTO DE CONTROL Punto
Punto_Materializado PUNTO DE CONTROL Punto
Arbol COBERTURA VEGETAL Punto
Bosque COBERTURA VEGETAL Poligono
Matorral COBERTURA VEGETAL Poligono
Zona_Verde COBERTURA VEGETAL Poligono
Cerca EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_L EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_P EDIFICIO EN OBRA CIVIL Punto
Construccion_Agua_R EDIFICIO EN OBRA CIVIL Poligono
Construccion_P EDIFICIO EN OBRA CIVIL Punto
Construccion_R EDIFICIO EN OBRA CIVIL Poligono
Limite_Manzana_R EDIFICIO EN OBRA CIVIL Poligono
Linea_Demarcación EDIFICIO EN OBRA CIVIL Linea
Lote_L EDIFICIO EN OBRA CIVIL Linea
Lote_R EDIFICIO EN OBRA CIVIL Poligono
Muro EDIFICIO EN OBRA CIVIL Linea
Feature class Feature data set Tipo de entidad Simbología
Punto_De_Control:Terrestre PUNTO DE CONTROL Punto
Punto_Materializado PUNTO DE CONTROL Punto
Arbol COBERTURA VEGETAL Punto
Bosque COBERTURA VEGETAL Poligono
Matorral COBERTURA VEGETAL Poligono
Zona_Verde COBERTURA VEGETAL Poligono
Cerca EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_L EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_P EDIFICIO EN OBRA CIVIL Punto
Construccion_Agua_R EDIFICIO EN OBRA CIVIL Poligono
Construccion_P EDIFICIO EN OBRA CIVIL Punto
Construccion_R EDIFICIO EN OBRA CIVIL Poligono
Limite_Manzana_R EDIFICIO EN OBRA CIVIL Poligono
Linea_Demarcación EDIFICIO EN OBRA CIVIL Linea
Lote_L EDIFICIO EN OBRA CIVIL Linea
Lote_R EDIFICIO EN OBRA CIVIL Poligono
Muro EDIFICIO EN OBRA CIVIL Linea
Feature class Feature data set Tipo de entidad Simbología
Punto_De_Control:Terrestre PUNTO DE CONTROL Punto
Punto_Materializado PUNTO DE CONTROL Punto
Arbol COBERTURA VEGETAL Punto
Bosque COBERTURA VEGETAL Poligono
Matorral COBERTURA VEGETAL Poligono
Zona_Verde COBERTURA VEGETAL Poligono
Cerca EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_L EDIFICIO EN OBRA CIVIL Linea
Construccion_Agua_P EDIFICIO EN OBRA CIVIL Punto
Construccion_Agua_R EDIFICIO EN OBRA CIVIL Poligono
Construccion_P EDIFICIO EN OBRA CIVIL Punto
Construccion_R EDIFICIO EN OBRA CIVIL Poligono
Limite_Manzana_R EDIFICIO EN OBRA CIVIL Poligono
Linea_Demarcación EDIFICIO EN OBRA CIVIL Linea
Lote_L EDIFICIO EN OBRA CIVIL Linea
Lote_R EDIFICIO EN OBRA CIVIL Poligono
Muro EDIFICIO EN OBRA CIVIL Linea
Feature class Feature data set Tipo de entidad Simbología
Paramento EDIFICIO EN OBRA CIVIL Poligono
Parque_R EDIFICIO EN OBRA CIVIL Poligono
Piscina EDIFICIO EN OBRA CIVIL Poligono
Tapa_Camara EDIFICIO EN OBRA CIVIL Punto
Zona_dura EDIFICIO EN OBRA CIVIL Poligono
Antena INS CONSTRUCCION TRANSPORTE Punto
Poste INS CONSTRUCCION TRANSPORTE Punto
Puente L INS CONSTRUCCION TRANSPORTE Linea
Red_alta_tensión INS CONSTRUCCION TRANSPORTE Linea
Terminal_R INS CONSTRUCCION TRANSPORTE Poligono
Torre INS CONSTRUCCION TRANSPORTE Punto
Baco_Arena SUPERFICIE DE AGUA Poligono
Cienaga SUPERFICIE DE AGUA Poligono
Drenaje_Doble SUPERFICIE DE AGUA Poligono
Drenaje_Sencillo SUPERFICIE DE AGUA Linea
Isla SUPERFICIE DE AGUA Poligono
Humedal SUPERFICIE DE AGUA Poligono
Feature class Feature data set Tipo de entidad Simbología
Paramento EDIFICIO EN OBRA CIVIL Poligono
Parque_R EDIFICIO EN OBRA CIVIL Poligono
Piscina EDIFICIO EN OBRA CIVIL Poligono
Tapa_Camara EDIFICIO EN OBRA CIVIL Punto
Zona_dura EDIFICIO EN OBRA CIVIL Poligono
Antena INS CONSTRUCCION TRANSPORTE Punto
Poste INS CONSTRUCCION TRANSPORTE Punto
Puente L INS CONSTRUCCION TRANSPORTE Linea
Red_alta_tensión INS CONSTRUCCION TRANSPORTE Linea
Terminal_R INS CONSTRUCCION TRANSPORTE Poligono
Torre INS CONSTRUCCION TRANSPORTE Punto
Baco_Arena SUPERFICIE DE AGUA Poligono
Cienaga SUPERFICIE DE AGUA Poligono
Drenaje_Doble SUPERFICIE DE AGUA Poligono
Drenaje_Sencillo SUPERFICIE DE AGUA Linea
Isla SUPERFICIE DE AGUA Poligono
Humedal SUPERFICIE DE AGUA Poligono
Feature class Feature data set Tipo de entidad Simbología
Paramento EDIFICIO EN OBRA CIVIL Poligono
Parque_R EDIFICIO EN OBRA CIVIL Poligono
Piscina EDIFICIO EN OBRA CIVIL Poligono
Tapa_Camara EDIFICIO EN OBRA CIVIL Punto
Zona_dura EDIFICIO EN OBRA CIVIL Poligono
Antena INS CONSTRUCCION TRANSPORTE Punto
Poste INS CONSTRUCCION TRANSPORTE Punto
Puente L INS CONSTRUCCION TRANSPORTE Linea
Red_alta_tensión INS CONSTRUCCION TRANSPORTE Linea
Terminal_R INS CONSTRUCCION TRANSPORTE Poligono
Torre INS CONSTRUCCION TRANSPORTE Punto
Baco_Arena SUPERFICIE DE AGUA Poligono
Cienaga SUPERFICIE DE AGUA Poligono
Drenaje_Doble SUPERFICIE DE AGUA Poligono
Drenaje_Sencillo SUPERFICIE DE AGUA Linea
Isla SUPERFICIE DE AGUA Poligono
Humedal SUPERFICIE DE AGUA Poligono
Pág. 35
Informe Pasantía - Universidad Distrital Francisco José de Caldas
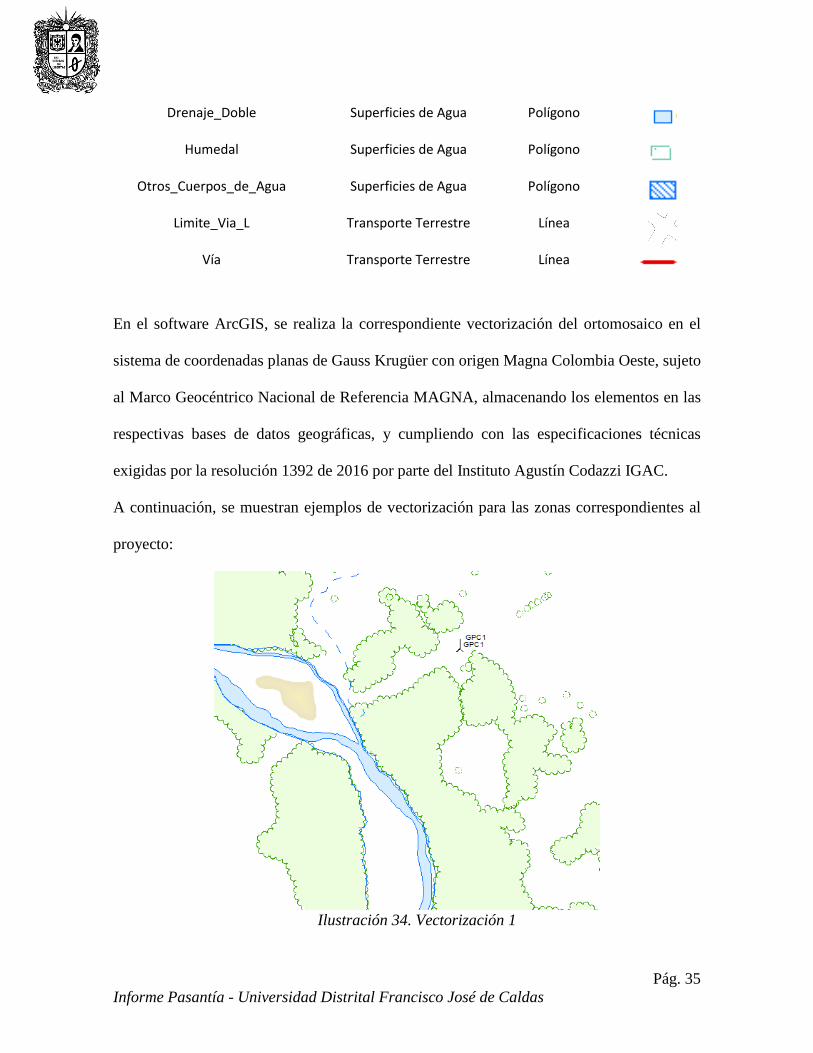
Drenaje_Doble Superficies de Agua Polígono
Humedal Superficies de Agua Polígono
Otros_Cuerpos_de_Agua Superficies de Agua Polígono
Limite_Via_L Transporte Terrestre Línea
Vía Transporte Terrestre Línea
En el software ArcGIS, se realiza la correspondiente vectorización del ortomosaico en el
sistema de coordenadas planas de Gauss Krugüer con origen Magna Colombia Oeste, sujeto
al Marco Geocéntrico Nacional de Referencia MAGNA, almacenando los elementos en las
respectivas bases de datos geográficas, y cumpliendo con las especificaciones técnicas
exigidas por la resolución 1392 de 2016 por parte del Instituto Agustín Codazzi IGAC.
A continuación, se muestran ejemplos de vectorización para las zonas correspondientes al
proyecto:
Ilustración 34. Vectorización 1
Feature class Feature data set Tipo de entidad Simbología
Paramento EDIFICIO EN OBRA CIVIL Poligono
Parque_R EDIFICIO EN OBRA CIVIL Poligono
Piscina EDIFICIO EN OBRA CIVIL Poligono
Tapa_Camara EDIFICIO EN OBRA CIVIL Punto
Zona_dura EDIFICIO EN OBRA CIVIL Poligono
Antena INS CONSTRUCCION TRANSPORTE Punto
Poste INS CONSTRUCCION TRANSPORTE Punto
Puente L INS CONSTRUCCION TRANSPORTE Linea
Red_alta_tensión INS CONSTRUCCION TRANSPORTE Linea
Terminal_R INS CONSTRUCCION TRANSPORTE Poligono
Torre INS CONSTRUCCION TRANSPORTE Punto
Baco_Arena SUPERFICIE DE AGUA Poligono
Cienaga SUPERFICIE DE AGUA Poligono
Drenaje_Doble SUPERFICIE DE AGUA Poligono
Drenaje_Sencillo SUPERFICIE DE AGUA Linea
Isla SUPERFICIE DE AGUA Poligono
Humedal SUPERFICIE DE AGUA Poligono
Feature class Feature data set Tipo de entidad Simbología
Paramento EDIFICIO EN OBRA CIVIL Poligono
Parque_R EDIFICIO EN OBRA CIVIL Poligono
Piscina EDIFICIO EN OBRA CIVIL Poligono
Tapa_Camara EDIFICIO EN OBRA CIVIL Punto
Zona_dura EDIFICIO EN OBRA CIVIL Poligono
Antena INS CONSTRUCCION TRANSPORTE Punto
Poste INS CONSTRUCCION TRANSPORTE Punto
Puente L INS CONSTRUCCION TRANSPORTE Linea
Red_alta_tensión INS CONSTRUCCION TRANSPORTE Linea
Terminal_R INS CONSTRUCCION TRANSPORTE Poligono
Torre INS CONSTRUCCION TRANSPORTE Punto
Baco_Arena SUPERFICIE DE AGUA Poligono
Cienaga SUPERFICIE DE AGUA Poligono
Drenaje_Doble SUPERFICIE DE AGUA Poligono
Drenaje_Sencillo SUPERFICIE DE AGUA Linea
Isla SUPERFICIE DE AGUA Poligono
Humedal SUPERFICIE DE AGUA Poligono
Feature class Feature data set Tipo de entidad Simbología
Jaguey_P SUPERFICIE DE AGUA Punto
Jaguey_R SUPERFICIE DE AGUA Poligono
Pantano SUPERFICIE DE AGUA Poligono
Otros cuerpos de agua SUPERFICIE DE AGUA Poligono
Aeropuerto_R TRANSPORTE AEREO Poligono
Pisto_Aterrizaje_R TRANSPORTE AEREO Poligono
Cicloruta TRANSPORTE TERRESTRE Linea
Limite_Vial_L TRANSPORTE TERRESTRE Linea
Limite_Vial_R TRANSPORTE TERRESTRE Poligono
Separador_vial_L TRANSPORTE TERRESTRE Linea
Separador_vial_R TRANSPORTE TERRESTRE Poligono
Vía TRANSPORTE TERRESTRE Linea
Feature class Feature data set Tipo de entidad Simbología
Jaguey_P SUPERFICIE DE AGUA Punto
Jaguey_R SUPERFICIE DE AGUA Poligono
Pantano SUPERFICIE DE AGUA Poligono
Otros cuerpos de agua SUPERFICIE DE AGUA Poligono
Aeropuerto_R TRANSPORTE AEREO Poligono
Pisto_Aterrizaje_R TRANSPORTE AEREO Poligono
Cicloruta TRANSPORTE TERRESTRE Linea
Limite_Vial_L TRANSPORTE TERRESTRE Linea
Limite_Vial_R TRANSPORTE TERRESTRE Poligono
Separador_vial_L TRANSPORTE TERRESTRE Linea
Separador_vial_R TRANSPORTE TERRESTRE Poligono
Vía TRANSPORTE TERRESTRE Linea
Feature class Feature data set Tipo de entidad Simbología
Jaguey_P SUPERFICIE DE AGUA Punto
Jaguey_R SUPERFICIE DE AGUA Poligono
Pantano SUPERFICIE DE AGUA Poligono
Otros cuerpos de agua SUPERFICIE DE AGUA Poligono
Aeropuerto_R TRANSPORTE AEREO Poligono
Pisto_Aterrizaje_R TRANSPORTE AEREO Poligono
Cicloruta TRANSPORTE TERRESTRE Linea
Limite_Vial_L TRANSPORTE TERRESTRE Linea
Limite_Vial_R TRANSPORTE TERRESTRE Poligono
Separador_vial_L TRANSPORTE TERRESTRE Linea
Separador_vial_R TRANSPORTE TERRESTRE Poligono
Vía TRANSPORTE TERRESTRE Linea
Pág. 36
Informe Pasantía - Universidad Distrital Francisco José de Caldas
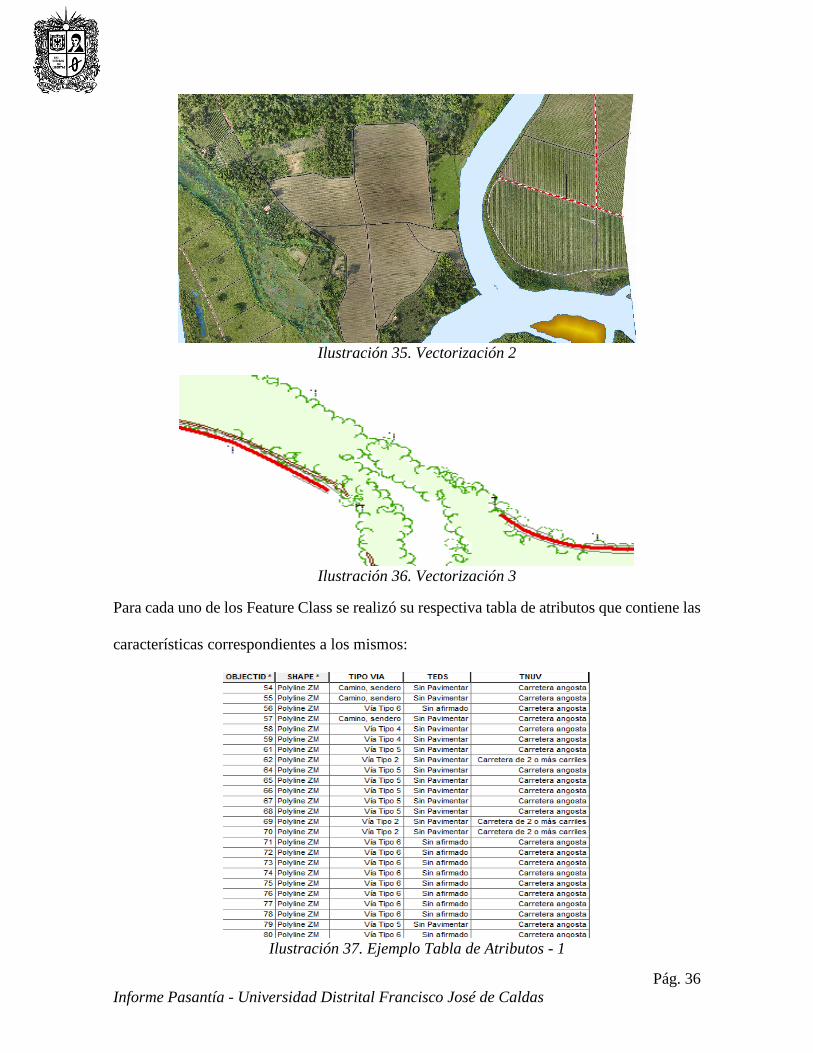
Ilustración 35. Vectorización 2
Ilustración 36. Vectorización 3
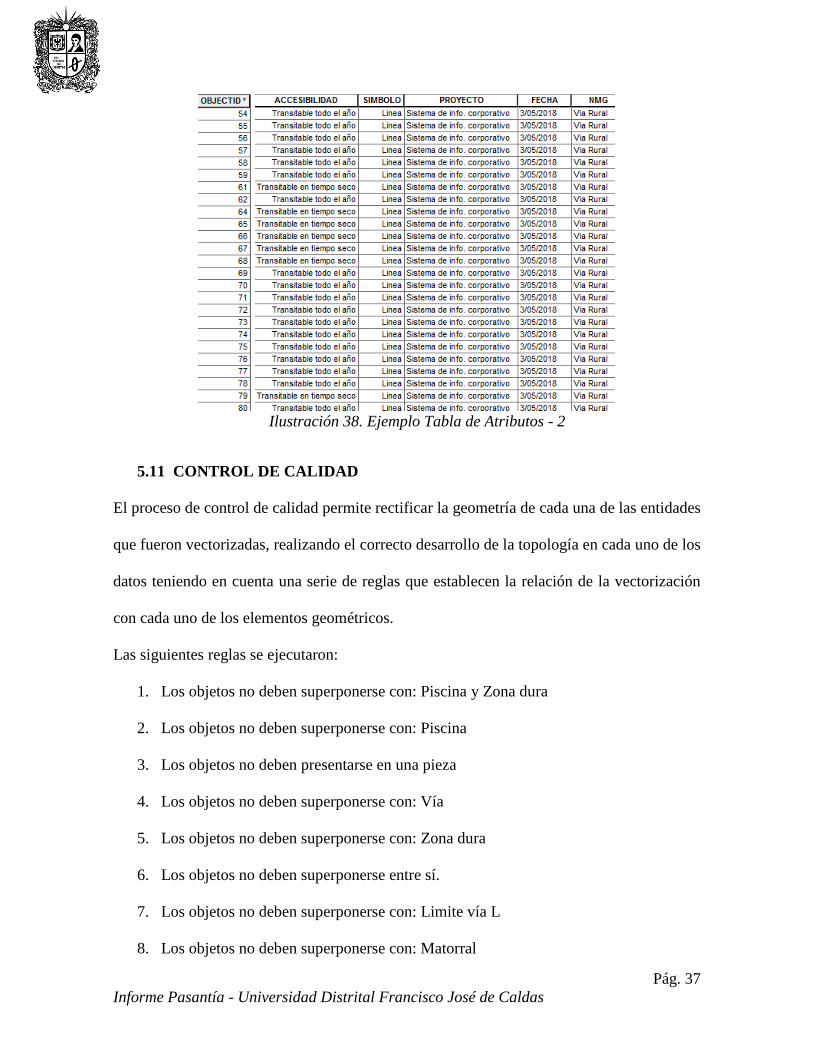
Para cada uno de los Feature Class se realizó su respectiva tabla de atributos que contiene las
características correspondientes a los mismos:
Ilustración 37. Ejemplo Tabla de Atributos - 1
Pág. 37
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Ilustración 38. Ejemplo Tabla de Atributos - 2
5.11 CONTROL DE CALIDAD
El proceso de control de calidad permite rectificar la geometría de cada una de las entidades
que fueron vectorizadas, realizando el correcto desarrollo de la topología en cada uno de los
datos teniendo en cuenta una serie de reglas que establecen la relación de la vectorización
con cada uno de los elementos geométricos.
Las siguientes reglas se ejecutaron:
1. Los objetos no deben superponerse con: Piscina y Zona dura
2. Los objetos no deben superponerse con: Piscina
3. Los objetos no deben presentarse en una pieza
4. Los objetos no deben superponerse con: Vía
5. Los objetos no deben superponerse con: Zona dura
6. Los objetos no deben superponerse entre sí.
7. Los objetos no deben superponerse con: Limite vía L
8. Los objetos no deben superponerse con: Matorral
Pág. 38
Informe Pasantía - Universidad Distrital Francisco José de Caldas
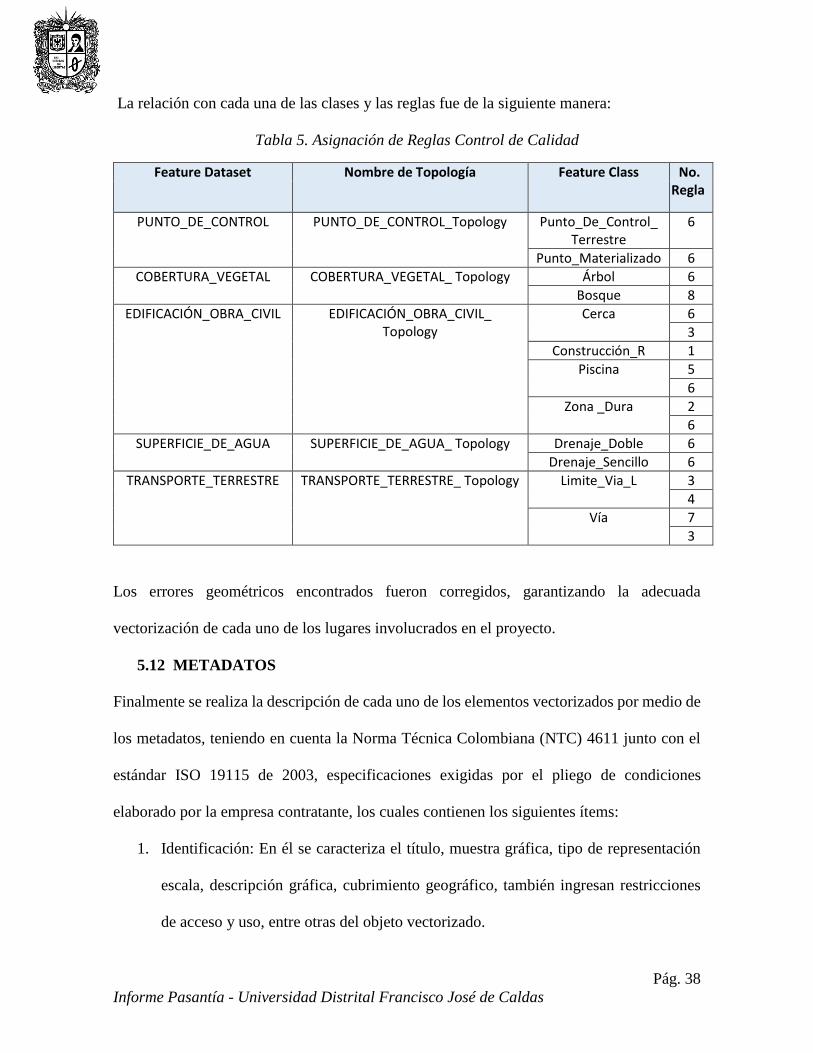
La relación con cada una de las clases y las reglas fue de la siguiente manera:
Tabla 5. Asignación de Reglas Control de Calidad
Feature Dataset Nombre de Topología Feature Class No. Regla
PUNTO_DE_CONTROL PUNTO_DE_CONTROL_Topology Punto_De_Control_ Terrestre
6
Punto_Materializado 6
COBERTURA_VEGETAL COBERTURA_VEGETAL_ Topology Árbol 6
Bosque 8
EDIFICACIÓN_OBRA_CIVIL EDIFICACIÓN_OBRA_CIVIL_ Topology
Cerca 6
3
Construcción_R 1
Piscina 5
6
Zona _Dura 2
6
SUPERFICIE_DE_AGUA SUPERFICIE_DE_AGUA_ Topology Drenaje_Doble 6
Drenaje_Sencillo 6
TRANSPORTE_TERRESTRE TRANSPORTE_TERRESTRE_ Topology Limite_Via_L 3
4
Vía 7
3
Los errores geométricos encontrados fueron corregidos, garantizando la adecuada
vectorización de cada uno de los lugares involucrados en el proyecto.
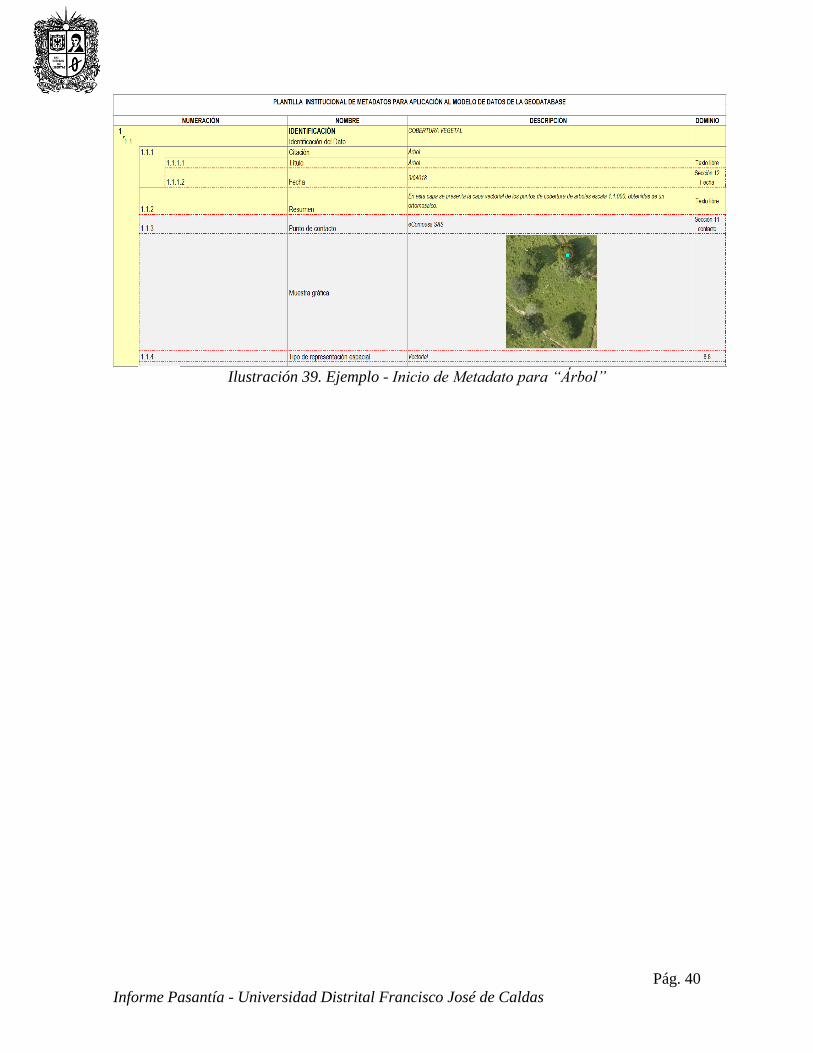
5.12 METADATOS
Finalmente se realiza la descripción de cada uno de los elementos vectorizados por medio de
los metadatos, teniendo en cuenta la Norma Técnica Colombiana (NTC) 4611 junto con el
estándar ISO 19115 de 2003, especificaciones exigidas por el pliego de condiciones
elaborado por la empresa contratante, los cuales contienen los siguientes ítems:
1. Identificación: En él se caracteriza el título, muestra gráfica, tipo de representación
escala, descripción gráfica, cubrimiento geográfico, también ingresan restricciones
de acceso y uso, entre otras del objeto vectorizado.
Pág. 39
Informe Pasantía - Universidad Distrital Francisco José de Caldas
2. Calidad de datos: Se ingresa la descripción del nivel, es decir de la capa, atributos,
conjunto de datos, historia de cómo se generó la vectorización de esté, fuentes de
información (para este caso fue por medio de Vehículo no tripulado DRON), y el
proceso de vectorización.
3. Representación espacial: Describe el número de objetos vectorizados, tipo de objeto,
nivel topológico y la representación vectorial.
4. Referencia Espacial: En este campo se especifica la referencia espacial realizada por
medio de sistema de referencia MAGNA con datum GRS80, se especifica la
proyección cartográfica, coordenadas elipsoidales y planas Gauss Krugüer, también
se identifica el responsable del sistema de referencia (IGAC para Colombia).
5. Referencia del metadato: se ingresa la ruta de acceso al archivo que contiene la
información de la capa, el nombre estándar del metadato y la versión del mismo.
6. Catálogo de símbolos: se ingresa la citación cuando se ha tomado la simbología de
otro trabajo.
7. Distribución: se describe el tipo de formato en el que se entrega la información,
nombre de Geodatabase, opción de transferencia de la información y los datos de
contacto del responsable de la vectorización.
8. Citación: Se describe la información del responsable y la forma de representación
9. Contactos: se describen los datos de la organización o personas que están asociadas
a la generación de la información de contacto.
10. Información de la fecha: se ingresa la fecha de creación de la información del objeto
vectorizado.
Pág. 40
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Ilustración 39. Ejemplo - Inicio de Metadato para “Árbol”
Pág. 41
Informe Pasantía - Universidad Distrital Francisco José de Caldas
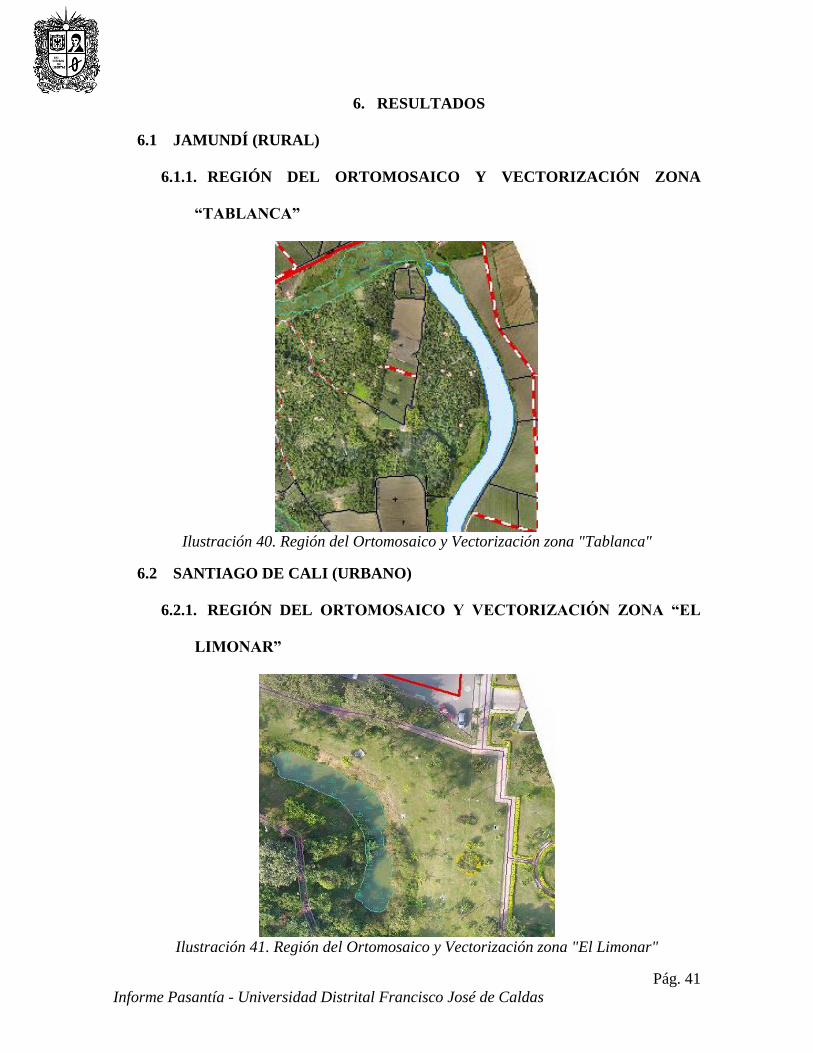
6. RESULTADOS
6.1 JAMUNDÍ (RURAL)
6.1.1. REGIÓN DEL ORTOMOSAICO Y VECTORIZACIÓN ZONA
“TABLANCA”
Ilustración 40. Región del Ortomosaico y Vectorización zona "Tablanca"
6.2 SANTIAGO DE CALI (URBANO)
6.2.1. REGIÓN DEL ORTOMOSAICO Y VECTORIZACIÓN ZONA “EL
LIMONAR”
Ilustración 41. Región del Ortomosaico y Vectorización zona "El Limonar"
Pág. 42
Informe Pasantía - Universidad Distrital Francisco José de Caldas
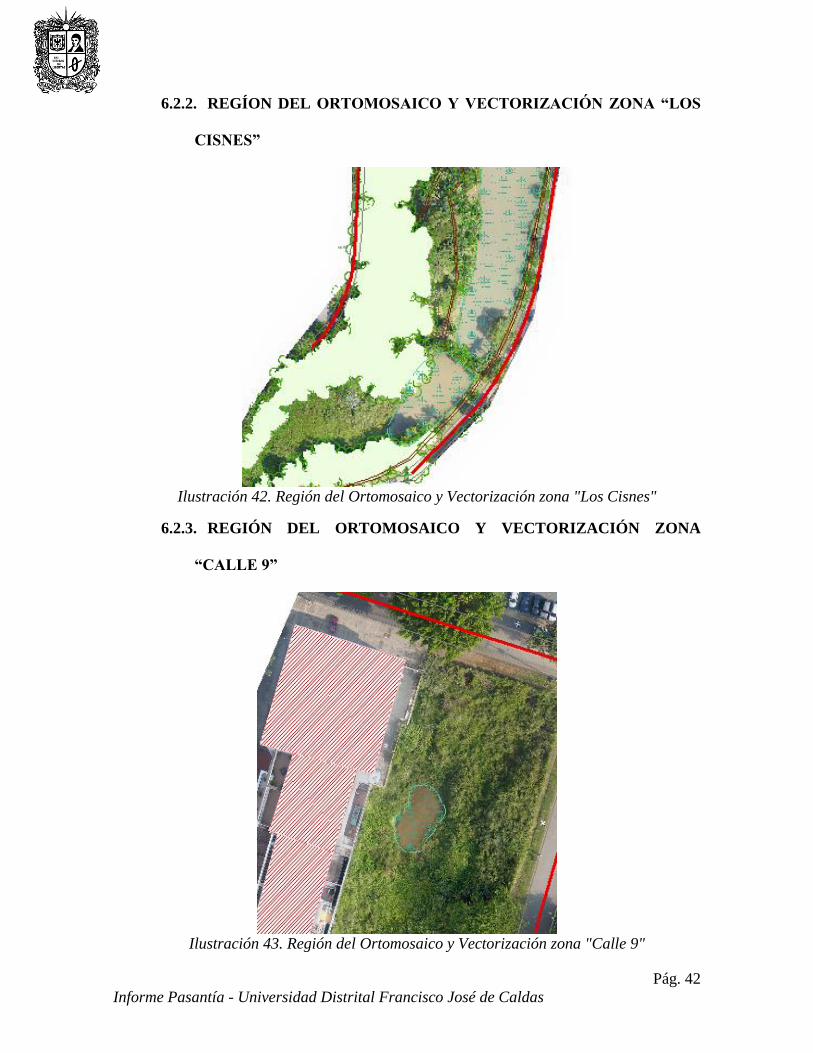
6.2.2. REGÍON DEL ORTOMOSAICO Y VECTORIZACIÓN ZONA “LOS
CISNES”
Ilustración 42. Región del Ortomosaico y Vectorización zona "Los Cisnes"
6.2.3. REGIÓN DEL ORTOMOSAICO Y VECTORIZACIÓN ZONA
“CALLE 9”
Ilustración 43. Región del Ortomosaico y Vectorización zona "Calle 9"
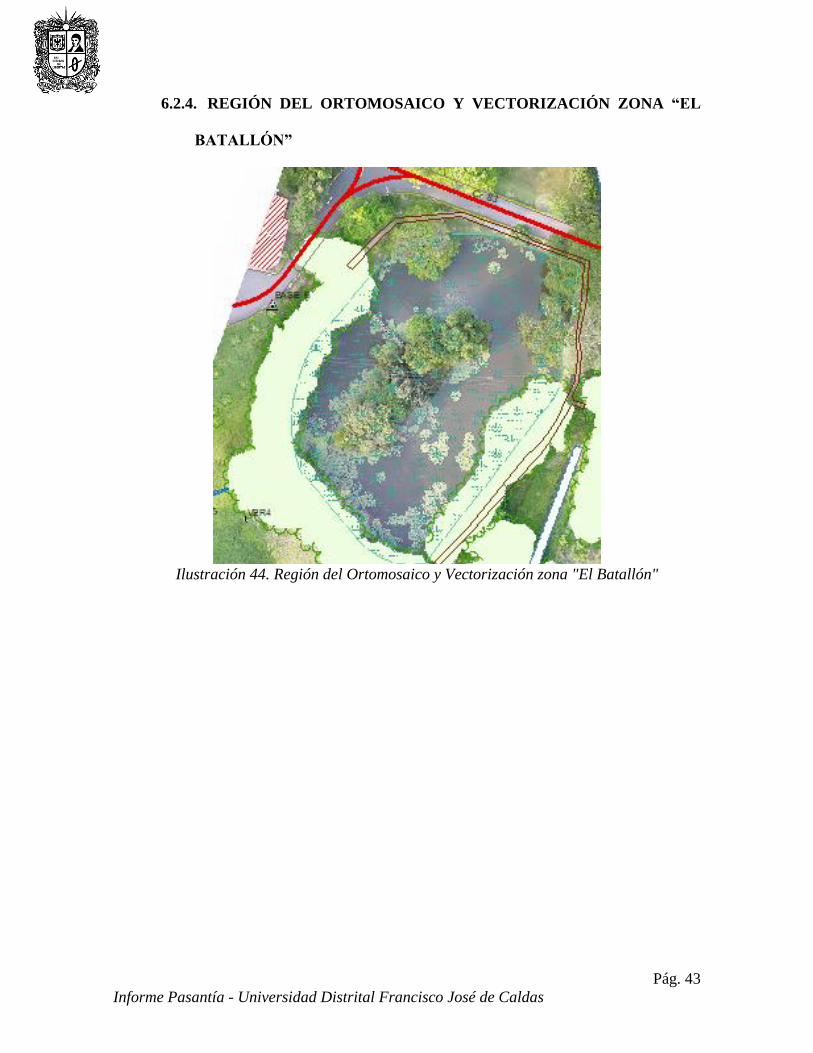
Pág. 43
Informe Pasantía - Universidad Distrital Francisco José de Caldas
6.2.4. REGIÓN DEL ORTOMOSAICO Y VECTORIZACIÓN ZONA “EL
BATALLÓN”
Ilustración 44. Región del Ortomosaico y Vectorización zona "El Batallón"
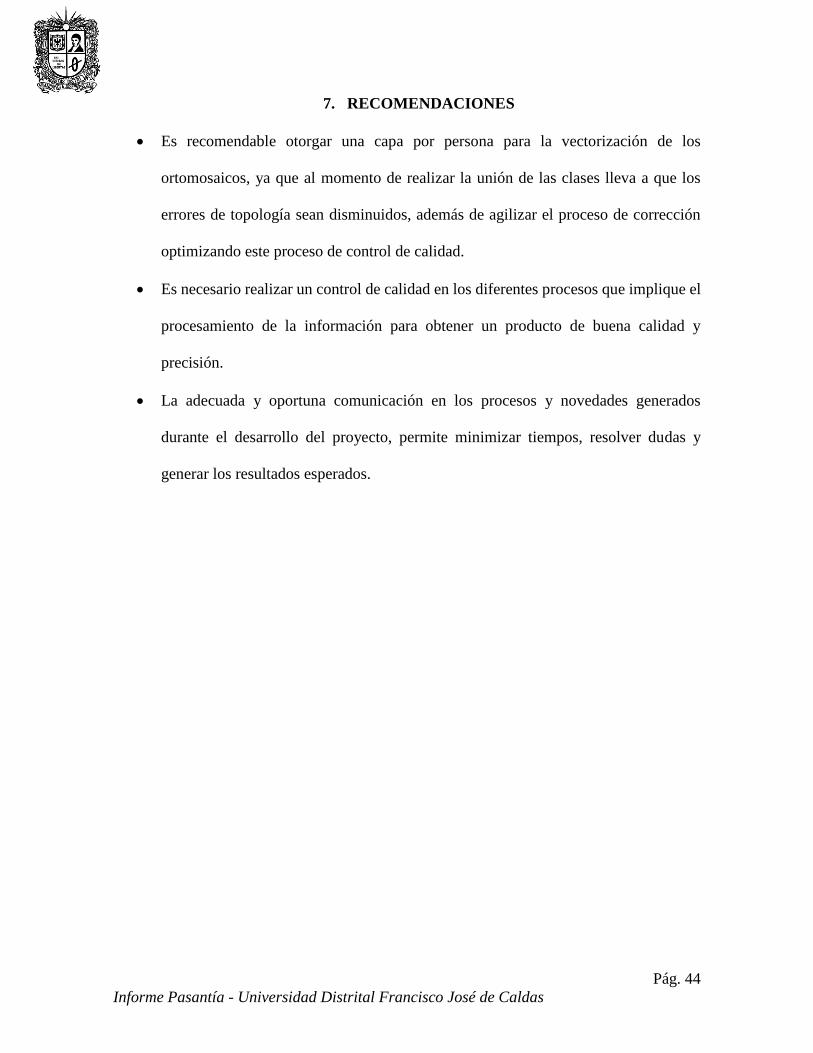
Pág. 44
Informe Pasantía - Universidad Distrital Francisco José de Caldas
7. RECOMENDACIONES
Es recomendable otorgar una capa por persona para la vectorización de los
ortomosaicos, ya que al momento de realizar la unión de las clases lleva a que los
errores de topología sean disminuidos, además de agilizar el proceso de corrección
optimizando este proceso de control de calidad.
Es necesario realizar un control de calidad en los diferentes procesos que implique el
procesamiento de la información para obtener un producto de buena calidad y
precisión.
La adecuada y oportuna comunicación en los procesos y novedades generados
durante el desarrollo del proyecto, permite minimizar tiempos, resolver dudas y
generar los resultados esperados.
Pág. 45
Informe Pasantía - Universidad Distrital Francisco José de Caldas
8. CONCLUSIONES
No cabe duda que los drones han tenido gran influencia en el campo de la topografía
debido a su menor costo y mayor rendimiento para ciertos tipos de trabajo realizados
con topografía convencional; sin embargo, no reemplaza a esta debido al alcance de
datos al que se limita el uso de drones, por ello, es necesario combinar la topografía
convencional con el uso de drones para ofrecer resultados a la vanguardia de la
actualidad, además de tener un conjunto de datos mucho más robusto con ayuda del
correcto manejo de los programas SIG (Sistemas de Información Geográfica), que
permiten generar ortomosaicos, modelos digitales de elevación, modelos digitales de
terreno, nubes de puntos, curvas de nivel, modelo 3D, cartografía digital,
cubicaciones, levantamientos, etc.
Para este tipo de proyectos donde interactúan varias personas, es importante la
comunicación y el orden para lograr un adecuado trabajo en equipo y consigo
minimizar en lo posible errores humanos en los procedimientos a realizar.
La participación en la pasantía permitió fortalecer habilidades y conocimientos, que
a futuro ofrecen mayor facilidad en la ejecución de procesos que se vinculen con los
realizados en este proyecto.
Pág. 46
Informe Pasantía - Universidad Distrital Francisco José de Caldas
9. ASPECTOS DE LA PASANTÍA
La pasantía se desarrolló durante 192 horas de las cuales se realizaban 8 horas por día, en
donde en el transcurso de la misma se efectuó aproximadamente 50 horas en la generación
final de ortomosaicos y 70 horas aproximadamente en el proceso de vectorización; mientras
que las 72 horas restantes fueron desarrolladas en la ejecución de actividades restantes.
De acuerdo a lo anterior se describen las labores especificas que contribuyeron al desarrollo
de estas actividades y el porcentaje que se atribuye a cada una de ellas:

Pág. 47
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Tabla 6. Descripción de actividades desarrolladas
Actividad Tiempo en
horas aprox.
Tiempo en
%Labores Descripción
4 2.1% Organización de información Estructurar y ordenar los archivos según tipo de finalidad
8 4.2% Prosprocesamiento de bases
Determinar las coordenadas ajustadas en época de
referencia correspondientes a las bases posicionadas por
el personal de campo
25 13.0% Formatos de posicionamientoRealizar los formatos de determinación y descripción para
cada uno de los puntos de control terrestre y verificación
6 3.1% GeoetiquetaciónOtorgar coordenadas geográficas a cada una de las
fotografías de perfil según corresponda el punto
25 13.0% Fotocontrol
Georreferenciar las fotografías aéreas por medio de los
puntos de control terrestre y verificación con un mínimo
de 5 proyecciones por punto, error en distancia por debajo
de los 10 cm y error en pixel por debajo de 1.
4 2.1% Generación del modelo digital de elevación
Generar el modelo digital de elevación por medio de la
nube de puntos densa junto con el proceso de
extrapolación
20 10.4% Generación del modelo digital de terrenoRealizar la clasificación de puntos correspondientes al
terreno a partir de la nube de puntos densa
36 18.8% Edición de ortomosaico
Mejorar visualmente el ortomosaico sin afectar la
geometría y características de los objetos a partir de las
diferentes fotografías aéreas
46 24.0% Vectorizacón
Vectorizar las capas de interés según especificaciones
técnicas del IGAC establecidas en la resolución 1392 de
2016
10 5.2% Control de calidad
Verificar que las capas vectorizadas no se encuentren
superpuestas, intersectadas o discontinuas según sea el
caso
Posteriores 8 4.2% Metadatos Realizar un inventario y descripcion de los datos según la
Norma Técnica Colombiana 4611.
Total 192 100.0%
Generación de
Ortomosaicos
Preliminares
Generación de Cartografia
Digital
Pág. 48
Informe Pasantía - Universidad Distrital Francisco José de Caldas
10. BIBLIOGRAFÍA
Ace Industrial Academy. (S.F.). Ace Industrial Academy. Obtenido de Ace Industrial
Academy: https://www.aia.edu.sg/training/bentley/microstation-training
Agisoft. (2014). GEOBIT. Obtenido de GEOBIT: https://www.agisoft.es/products/agisoft-
photoscan/
ArcMap 10.4. (19 de Abril de 2018). ArcGis Desktop. Obtenido de ArcGis Desktop:
https://desktop.arcgis.com/es/arcmap/10.4/extensions/arcscan/about-batch-
vectorization.htm
ArcMap 10.6. (28 de 04 de 2018). ArcGis. Obtenido de ArcGis:
http://desktop.arcgis.com/es/arcmap/latest/manage-data/geodatabases/what-is-a-
geodatabase.htm
AUTOCAD. (23 de Abril de 2018). Autodestk. Obtenido de Autodestk:
https://knowledge.autodesk.com/es/support/autocad/learn-
explore/caas/CloudHelp/cloudhelp/2017/ESP/AutoCAD-Core/files/GUID-
C0C610D0-9784-4E87-A857-F17F1F7FEEBE-htm.html
Benjumea, M. M. (19 de AbriL de 2018). Los metadatos. Bogotá, Colombia.
Bentley. (S.F.). Bentley. Obtenido de Bentley:
https://www.bentley.com/en/products/brands/microstation
Corporación Autónoma Regional del Valle del Cauca. (2017). Analisis del Sector
Economico y de los Oferentes. Cali: CVC.
Corporación Autónoma Regional del Valle del Cauca. (2017). Estudios Previos de la
Contratación. Cali: CVC.
Corporación Autónoma Regional del Valle del Cauca. (2017). Pliego de Condiciones.
Santiago de Cali: CVC.
Corporación Autonoma Regional del Valle del Cauca. (2018). CVC. Obtenido de CVC:
https://www.cvc.gov.co/asi-es-cvc/history
Corredor, G. (2015). Implementación de modelos de elevación obtenidos mediante
topografía convencional y topografía con drones para el diseño geométrico de una
vía en rehabilitación sector Tuluá - Río Frio. Bogotá D.C: S.F.
Creative Tools. (2018). Creative Tools. Obtenido de Creative Tools:
https://www.creativetools.se/software/3d-software/blue-marble-global-mapper
Departamento de Formación. (S.F.). Curso Ofimática Básica: Microsoft Excel. Oviedo:
Calle La Lila.
Escalante, J. (2016). Ortomosaicos y modelos digitales de elevación generados a partir de
imagenes tomadas con sistemas UAV. Tecnura, 119-140.
ESRI. (S.F.). ¿Qué es ArcGIS? New York: SIG de ESRI.
Felicísimo, A. (1994). Modelos digitales del terreno. Introducción y aplicaciones en
ciencias ambientales. En A. Felicísimo.
GeoImgr. (2018). GeoImgr. Obtenido de GeoImgr: https://www.geoimgr.com/
Geosistemas. (S.F.). Geosistemas SRL. Obtenido de Geosistemas SRL:
https://www.viarural.com.ar/viarural.com.ar/insumosagropecuarios/agricolas/agricu
ltura-de-precision/geosistemas/topcon-tools.htm
GEOSOLUCIONES. (S.F.). Global Mapper. Santiago de Chile: GeoSoluciones.
Google. (2018). Google. Obtenido de Google:
https://www.google.com/intl/es/earth/download/gep/agree.html
Pág. 49
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Google Earth Pro. (2018). Image © 2018 DigitalGlobe. Google.
Guerrero, P. (26 de Octubre de 2011). Geografia. Obtenido de Geografia:
https://geografia.laguia2000.com/general/geoetiquetado
Huerta, E., Mangiaterra, A., & Noguera., G. (2005). GPS Posicionamiento Satelital.
Rosario: UNR EDITORA.
IDECA. (24 de Abril de 2018). IDECA. Obtenido de IDECA:
https://www.ideca.gov.co/es/glosario?page=1
Identi. (2017). Identi. Obtenido de Identi: http://www.identi.li/index.php?topic=458171
Instituto agustin Codazzi. (19 de ABRIL de 2018). IGAC. Obtenido de IGAC:
http://geoservice.igac.gov.co/contenidos_telecentro/cartografia_basica/cursos/sem_
1/uni1/index.php?id=38
Instituto Geográfico Agustín Codazzi. (Mayo de 1997). GUÍA METODOLÓGICA PARA
LA OBTENCIÓN DE ALTURAS SOBRE EL MEDIO DEL MAR UTILIZANDO
EL SISTEMA GPS. Bogotá D.C, Colombia: IGAC.
Instituto Geografico Agustin Codazzi. (2007). Mejora de los Sistemas de Carwtografia del
Territorio Colombiano. Departamento de la Guajira.
Instituto Geográfico Agustin Codazzi. (28 de 04 de 2018). IGAC. Obtenido de IGAC:
https://www.igac.gov.co/es/contenido/tramites-y-servicios/modelo-geoidal-de-
colombia
Instituto Geográfico AgustinCodazzi. (Mayo de 2004). Tipo de coordenadas manejados en
Colombia. Bogotá D.C, Colombia.
Instituto Nacional de Estadistica y Geografía. (21 de Abril de 2018). INEGI. Obtenido de
INEGI:
http://www.inegi.org.mx/geo/contenidos/datosrelieve/continental/queesmde.aspx
Leica Geosystems. (2018). HEXAGON GEOSYSTEMS. Obtenido de HEXAGON
GEOSYSTEMS: https://leica-geosystems.com/products/total-
stations/software/leica-geo-office
MAC TORRENTS. (2017). MAC TORRENTS. Obtenido de MAC TORRENTS:
http://mac-torrents.com/photoscan-pro-1-3-1/
MacUpdate. (2018). MacUpdate. Obtenido de MacUpdate:
https://www.macupdate.com/app/mac/55148/google-earth-pro
Martínez, W. (2007). Implementación de SIRGAS en el ámbito nacional: Caso colombiano
MAGNA-SIRGAS. Bogotá D.C.: Instituto Geográfico Agustín Codazzi.
Peña, G. P. (2016). Comparativa de diferentes tipos de efemerides gnss en calculo de
grandes lineas base con magnet office. Madrid.
Pérez, E. M. (2015). Fotogrametría y Cartografía Digital. En E. M. Pérez, Efraín Menjívar
Pérez (pág. 17). Costa Rica: Registro Nacional.
Ramsar. (20 de 04 de 2018). Humedales de México. Obtenido de Humedales de México:
http://ramsar.conanp.gob.mx/la_conanp_y_los_humedales.php
Subdirección de Geografía y Cartografía. (2010). Manual De Usuario Magna Sirgas Pro 3
Beta. Bogotá D.C: Instituto Geográfico Agustín Codazzi.
Taringa. (S.F.). Taringa. Obtenido de Taringa: https://www.taringa.net/posts/ciencia-
educacion/17365011/Error-abre-ArcCatalog-no-abre-ArcMAP.html
Tutoriales en PDF. (S.F.). Tutoriales en PDF. Obtenido de Tutoriales en PDF:
http://tutorialesenpdf.com/microsoft-excel/
Universidad de Alcalá. (Abril de 2018). Sistemas de Navegación;Teoría de la Señal y las
Comunicaciones. España.
Pág. 50
Informe Pasantía - Universidad Distrital Francisco José de Caldas
Valencia, U. I. (22 de abril de 2018). Viu. Obtenido de Viu:
https://www.universidadviu.es/que-es-un-dron-y-como-funciona/
Wikipedia. (2017). Wikipedia. Obtenido de Wikipedia:
https://commons.wikimedia.org/wiki/File:Topcon_company_logo.svg