fundamentos de la robótica
DESCRIPTION
Fundamentos basicos para el analisis de un sistema robótico.TRANSCRIPT

FUNDAMENTOS DE ROBOTICA CON EL SCORBOT-ER9
Actividad 1: Introducción a la Robótica
Cientos de miles de celdas de robótica están funcionando en todo el mundo, en una gran variedad de industrias. En esta actividad, definirá un robot industrial y explorará las muchas aplicaciones industriales en al que se usan robots.
Esta actividad incluye los siguientes temas:
▪ ¿Qué es un Robot?▪ Historia del Robot Industrial▪ Aplicaciones de Robots Industriales▪ Sistema Flexible de Manufactura (FMS)
Actividad 1: Introducción a la Robótica

En esta actividad usted logrará lo siguiente:
▪ Repasar la historia de los robots industriales.
▪ Examinar aplicaciones de robots industriales.
▪ Explorar avances realizados en los programas de simulación con robots
OBJETIVOS
Definición de un Robot Industrial
Algunos definen un robot como un hombre-hecho-máquina que puede desarrollar trabajo normalmente desarrollado por humanos y otros trabajos más. Otros definen un robot como una unidad de movimiento múltiple con uno ó más brazos y articulaciones que es capaz de desarrollar muchas tareas diferentes.
Como puede ver, existen muchas definiciones diferentes de un robot. La definición más ampliamente aceptada para un robot industrial fue dada por el Instituto de Robótica de Estados Unidos:
"Un robot es un manipulador re-programable, multifuncional diseñado para mover materiales, piezas, herramientas ó unidades especializadas, a través de movimientos programados variables para la realización de varias tareas".
¿Qué es un Robot?

Conceptos Claves de Robótica
Esta definición contiene varias palabras clave:
Re-programable: El robot debe ser capaz de ser programado usando el software de un controlador para desarrollar una amplia variedad de tareas.
Multifuncional: Los robots son versátiles, capaces de desarrollar diferentes tareas.
Manipulador: El robot debe tener un brazo mecánico.
Estos tres conceptos representan las bases de este módulo de formación. En las siguientes actividades aprenderá cómo trabaja un robot y cómo manipular un robot. Aprenderá cómo escribir programas de robótica y cómo programar un robot para desarrollar varias tareas.
¿Qué es un Robot?
Orígenes de la Palabra Robot
La primera referencia a la palabra robot se hizo por el cineasta checo Karel Capek en 1920 en su película Los robots universales de Rossum. Robot, derivado de la palabra checa usada para designar labor forzosa, fue usada para describir a los robots mecánicos semejantes a los hombres a los que un irresponsable científico dio sentimientos.
El término robótica se refiere al estudio y uso de robots, y fue acuñado y usado por primera vez por el científico y escritor ruso nacionalizado estadounidense Isaac Asimoven Runaround, una historia corta publicada en 1942.
¿Qué es un Robot?

Leyes de la Robótica de Asimov
Asimov también propuso tres "Leyes de la Robótica", a las que más tarde añadió la "ley cero".
Ley Cero: Un robot no debería herir a un ser humano.
Ley Uno: Un robot no debería herir a un ser humano, pero puede llegar a hacer daño si se viola una ley de orden mayor.
Ley Dos: Un robot debe obedecer las órdenes dadas por un ser humano, excepto cuando las órdenes creen un conflicto con una ley de orden mayor.
Ley Tres: Un robot debe auto-protegerse siempre que su protección no entre en conflicto con una ley de orden mayor.
¿Qué es un Robot?
Línea Cronológica
Las máquinas automáticas han sido usadas en la industria desde los tiempos de la revolución industrial. Mueva el curso del ratón sobre los años de la línea cronológica para descubrir los pasos en el desarrollo de la robótica industrial a lo largo de los siglos.
Historia del Robot Industrial
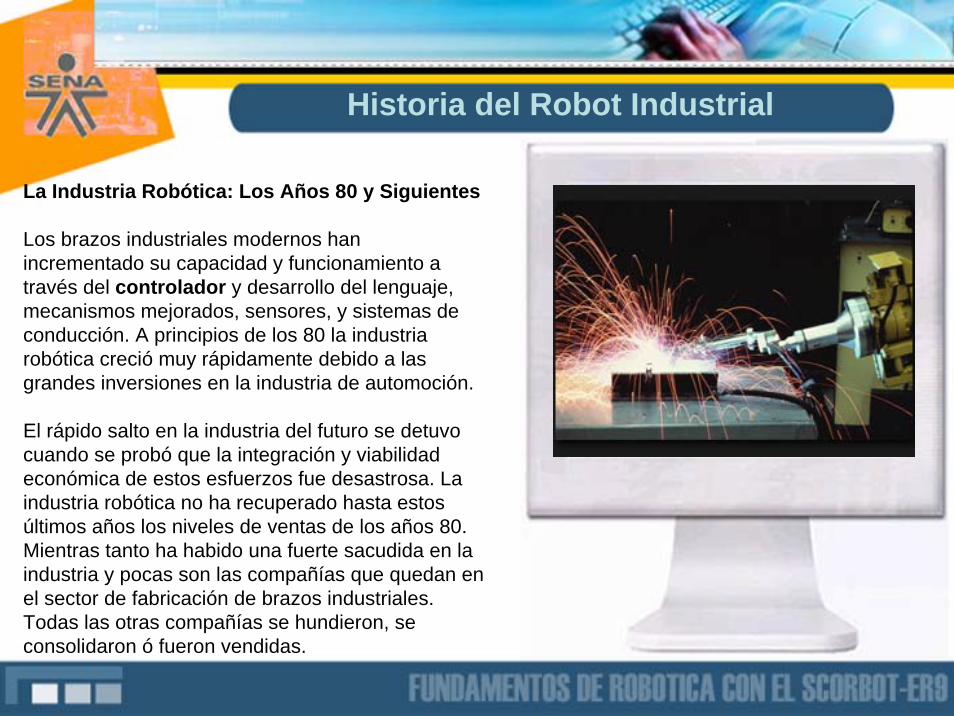
La Industria Robótica: Los Años 80 y Siguientes
Los brazos industriales modernos han incrementado su capacidad y funcionamiento a través del controlador y desarrollo del lenguaje, mecanismos mejorados, sensores, y sistemas de conducción. A principios de los 80 la industria robótica creció muy rápidamente debido a las grandes inversiones en la industria de automoción.
El rápido salto en la industria del futuro se detuvo cuando se probó que la integración y viabilidad económica de estos esfuerzos fue desastrosa. La industria robótica no ha recuperado hasta estos últimos años los niveles de ventas de los años 80. Mientras tanto ha habido una fuerte sacudida en la industria y pocas son las compañías que quedan en el sector de fabricación de brazos industriales. Todas las otras compañías se hundieron, se consolidaron ó fueron vendidas.
Historia del Robot Industrial

Uso de Aplicaciones de Robótica en la Industria
En 1995 más de 700.000 robots estaban trabajando en la industria. Más de 500.000 fueron usados en Japón, unos 120.000 en Europa y unos 60.000 en Estados Unidos.
El principal uso en el que el robot se aplica en la industria es en desarrollar tareas que suponen un riesgo para el ser humano, ó son desagradables ó difíciles de desempeñar por humanos. Por ejemplo, las actividades en entornos que ofrecen gran peligro para los humanos, como prospección de depósitos minerales bajo el agua, monitorización de tormentas tropicales ó exploración de volcanes activos, son ideales para los robots. De forma similar, los robots pueden explorar planetas lejanos.
En laboratorios médicos, los robots manejan materiales peligrosos como muestras de sangre ú orina. En otros casos, los robots se usan en tareas repetitivas de gran precisión, como ajuste de tornillos, en las que la actividad humana va perdiendo eficacia después de varias horas de trabajo. Los robots pueden desarrollar operaciones monótonas durante 24 horas al día sin fatiga.
Aplicaciones con Robots Industriales

Industria de Fabricación
La industria de fabricación, en particular, no podría haber crecido como lo ha hecho sin la tecnología robótica. En este módulo nos centraremos en el uso de robots en la industria. La lista siguiente incluye sólo algunas aplicaciones de los robots en la industria.
Manual:
▪ Paletizar y despaletizar
▪ Empaquetar y desempaquetar
▪ Alimentar piezas de trabajo sobre la línea de ensamblaje
Aplicaciones con Robots Industriales
Aplicaciones con Robots Industriales
Industria de Fabricación - Continuación
Ensamblar:
▪ Clavar
▪ Inserción y ajuste de tuercas y tornillos .▪ Taladrar.
▪ Amontonar
▪ Ensamblaje de tarjetas de circuitoimpreso

Industria de Fabricación - Continuación
▪ Soldadura.
▪ Sellado y Pintura:
▪ Sellado de piezas de automóviles
▪ Sellado de componentes electrónicos
▪ Aplicación de grasas y adhesivos .
▪ Pintar piezas de automóviles
Aplicaciones con Robots Industriales
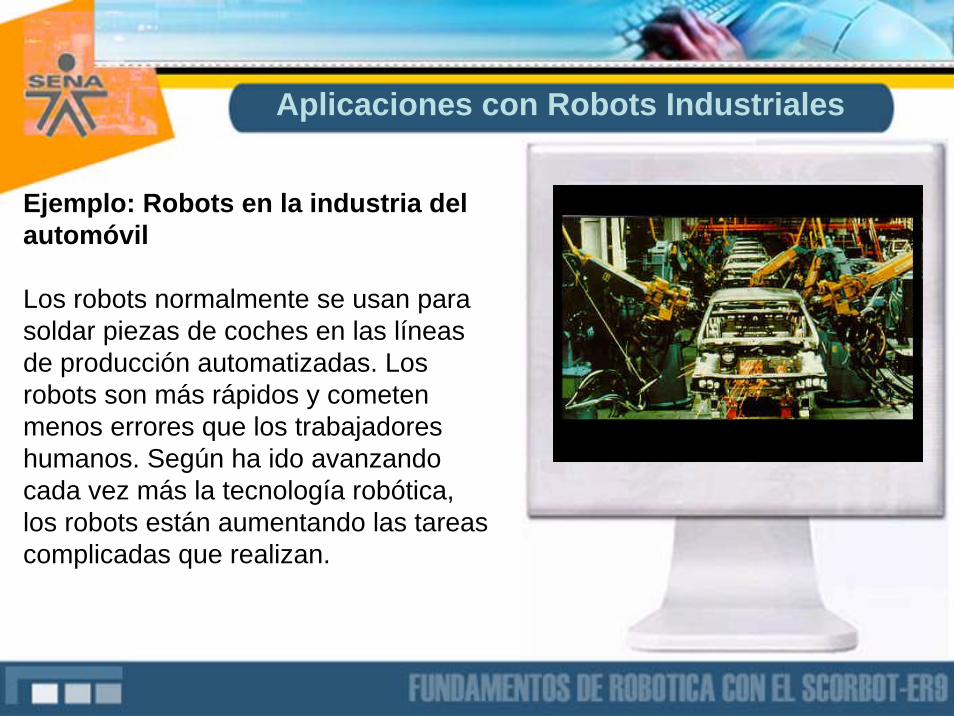
Ejemplo: Robots en la industria del automóvil
Los robots normalmente se usan para soldar piezas de coches en las líneas de producción automatizadas. Los robots son más rápidos y cometen menos errores que los trabajadores humanos. Según ha ido avanzando cada vez más la tecnología robótica, los robots están aumentando las tareas complicadas que realizan.
Aplicaciones con Robots Industriales
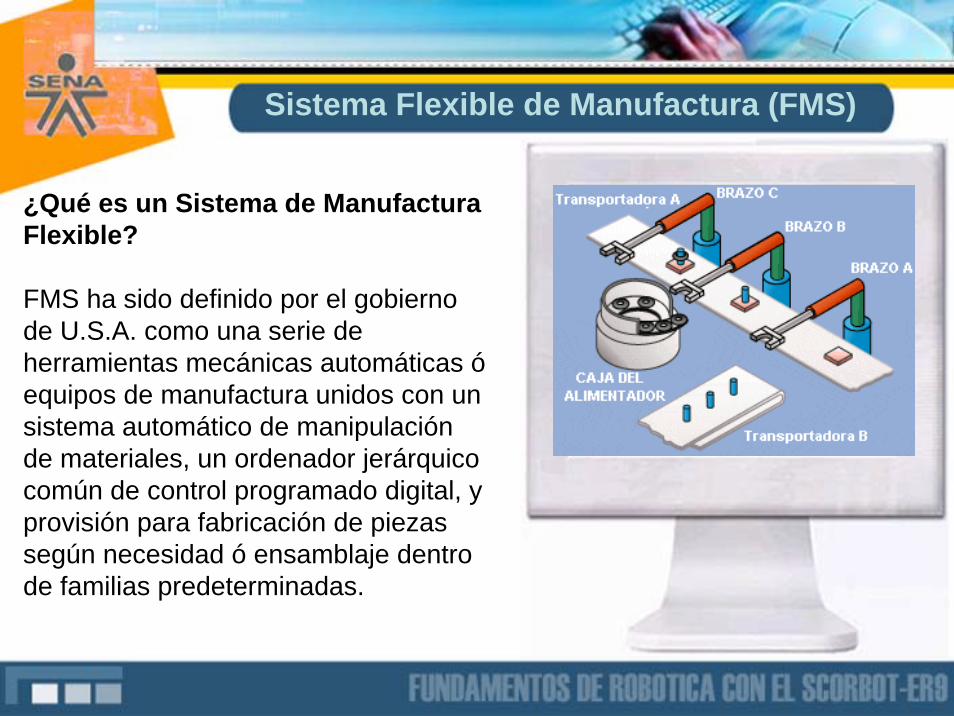
¿Qué es un Sistema de Manufactura Flexible?
FMS ha sido definido por el gobierno de U.S.A. como una serie de herramientas mecánicas automáticas óequipos de manufactura unidos con un sistema automático de manipulación de materiales, un ordenador jerárquico común de control programado digital, y provisión para fabricación de piezas según necesidad ó ensamblaje dentro de familias predeterminadas.
Sistema Flexible de Manufactura (FMS)
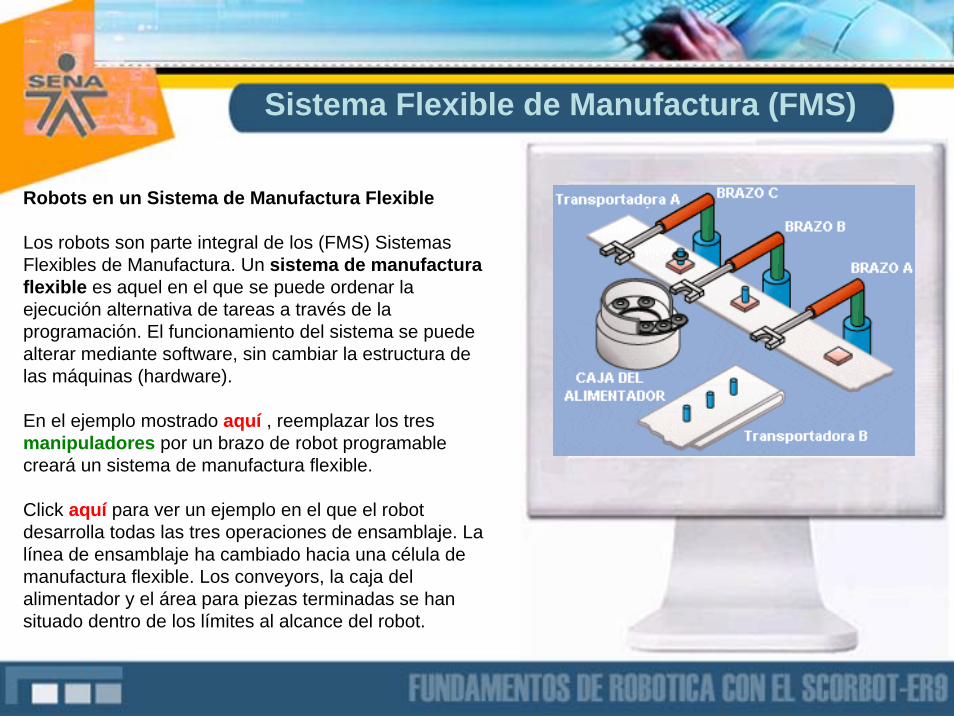
Robots en un Sistema de Manufactura Flexible
Los robots son parte integral de los (FMS) Sistemas Flexibles de Manufactura. Un sistema de manufactura flexible es aquel en el que se puede ordenar la ejecución alternativa de tareas a través de la programación. El funcionamiento del sistema se puede alterar mediante software, sin cambiar la estructura de las máquinas (hardware).
En el ejemplo mostrado aquí , reemplazar los tres manipuladores por un brazo de robot programable creará un sistema de manufactura flexible.
Click aquí para ver un ejemplo en el que el robot desarrolla todas las tres operaciones de ensamblaje. La línea de ensamblaje ha cambiado hacia una célula de manufactura flexible. Los conveyors, la caja del alimentador y el área para piezas terminadas se han situado dentro de los límites al alcance del robot.
Sistema Flexible de Manufactura (FMS)

Robots en un Sistema de Manufactura Flexible - Continuación
Este ejemplo explota la versatilidad del robot y reduce costes reemplazando tres brazos "rígidos" por uno "flexible". Sin embargo, esto también reduce el rata de producción, pues un brazo desarrolla las tres operaciones secuencialmente y los conveyorsdeben desplazarse lentamente a un tercio de su velocidad original para permitir que al robot le de tiempo de completar la tarea de ensamblaje.
Sistema Flexible de Manufactura (FMS)

FUNDAMENTOS DE ROBOTICA CON EL SCORBOT-ER9
Actividad 2: Como trabaja un Robot

En las actividades anteriores exploró los variados usos de los robots en la industria. En esta actividad, identificará los tipos de robots, y aprenderá cómo trabajan los robots, incluyendo los siguientes temas:
Componentes de los Sistemas Robóticos
Tipos de Articulaciones del Robot.
Tipos de Robots
Ejes de direccionamiento del manipulador
Sistema de control de Robótica
Lenguaje de Programación
Actividad 2: Como trabaja un Robot

En esta actividad usted logrará lo siguiente:
Identificar los componentes de un sistema de robótica.
Definir diferentes tipos de robots.
Examinar la estructura de un robot y la forma de moverse
OBJETIVOS
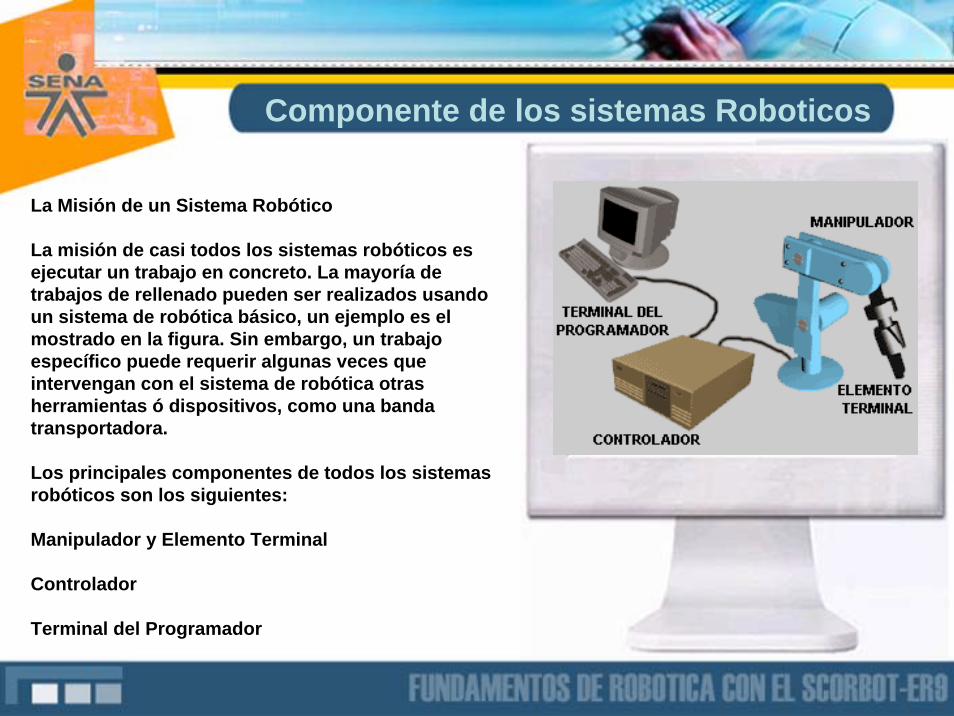
La Misión de un Sistema Robótico
La misión de casi todos los sistemas robóticos es ejecutar un trabajo en concreto. La mayoría de trabajos de rellenado pueden ser realizados usando un sistema de robótica básico, un ejemplo es el mostrado en la figura. Sin embargo, un trabajo específico puede requerir algunas veces que intervengan con el sistema de robótica otras herramientas ó dispositivos, como una banda transportadora.
Los principales componentes de todos los sistemas robóticos son los siguientes:
Manipulador y Elemento Terminal
Controlador
Terminal del Programador
Componente de los sistemas Roboticos

Manipulador y Elemento Terminal
El sistema robótico hace su trabajo usando un elemento terminal como una pinza . El elemento terminal está conectado al manipulador del robot. El manipulador, normalmente llamado brazo del robot óbrazo robótico, mueve el efecto terminal consigo dentro del entorno de trabajo (rango de trabajo).
Controlador
El controlador controla la alimentación suministrada a la unidad de direccionamiento del manipulador; así controla los movimientos del manipulador. Hidráulica, neumática ó sistemas de direccionamiento eléctricos se usan para alimentar el robot. El controlador también recibe y ordena al robot que ejecute comandos de programación desde la terminal del programador.
Componente de los sistemas Roboticos
Terminal del Programador
La Terminal del Programador está compuesta por un lenguaje/software de programación fácil de usar instalado en un ordenador. El lenguaje de programación se compila a lenguaje código máquina, enviado y ejecutado por el controlador. La misión del ordenador es permitir que los humanos programen el controlador, definiendo así las acciones del manipulador.
Actuadores y Sensores
Para desarrollar tareas específicas, los tres componentes básicos de los sistemas robóticos se integran con actuadores y sensores , según se necesite.
Actuadores, como una pistola de soldadura, se usan para ampliar las capacidades del robot para desarrollar tareas especiales.
Sensores, como sensor de temperatura, sensor de nivel ó un sistema de visión, permiten que el sistema monitorice, controle y responda a varias condiciones.
Componente de los sistemas Roboticos

¿Qué es una articulación?
Una articulación es un lugar ó una parte en la que se unen dos piezas ú objetos. Por ejemplo, su muñeca es la articulación que conecta su mano y su brazo.
Manipuladores de Robot están construidos por rígidos segmentos conectados por articulaciones que permiten que una unión se mueva relativa a la otra. Definir tipos de articulaciones que permitan diferentes tipos de movimiento relativo entre uniones. En esta actividad explorará dos tipos diferentes de articulaciones: prismáticas y de revolución.
Tipos de Articulaciones del Robot
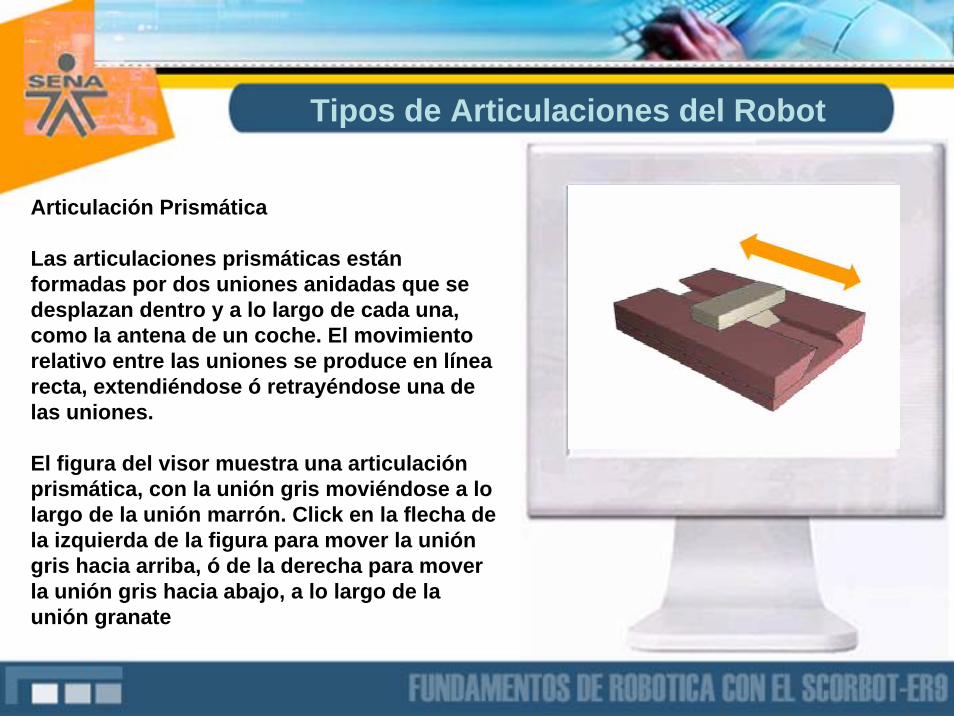
Articulación Prismática
Las articulaciones prismáticas están formadas por dos uniones anidadas que se desplazan dentro y a lo largo de cada una, como la antena de un coche. El movimiento relativo entre las uniones se produce en línea recta, extendiéndose ó retrayéndose una de las uniones.
El figura del visor muestra una articulación prismática, con la unión gris moviéndose a lo largo de la unión marrón. Click en la flecha de la izquierda de la figura para mover la unión gris hacia arriba, ó de la derecha para mover la unión gris hacia abajo, a lo largo de la unión granate
Tipos de Articulaciones del Robot
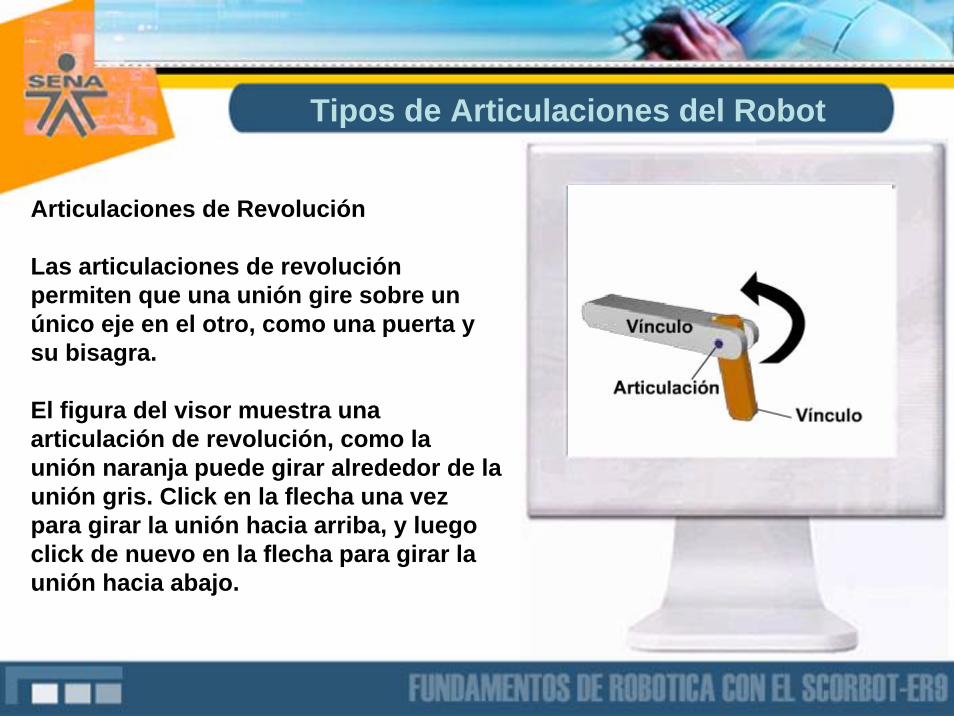
Articulaciones de Revolución
Las articulaciones de revolución permiten que una unión gire sobre un único eje en el otro, como una puerta y su bisagra.
El figura del visor muestra una articulación de revolución, como la unión naranja puede girar alrededor de la unión gris. Click en la flecha una vez para girar la unión hacia arriba, y luego click de nuevo en la flecha para girar la unión hacia abajo.
Tipos de Articulaciones del Robot
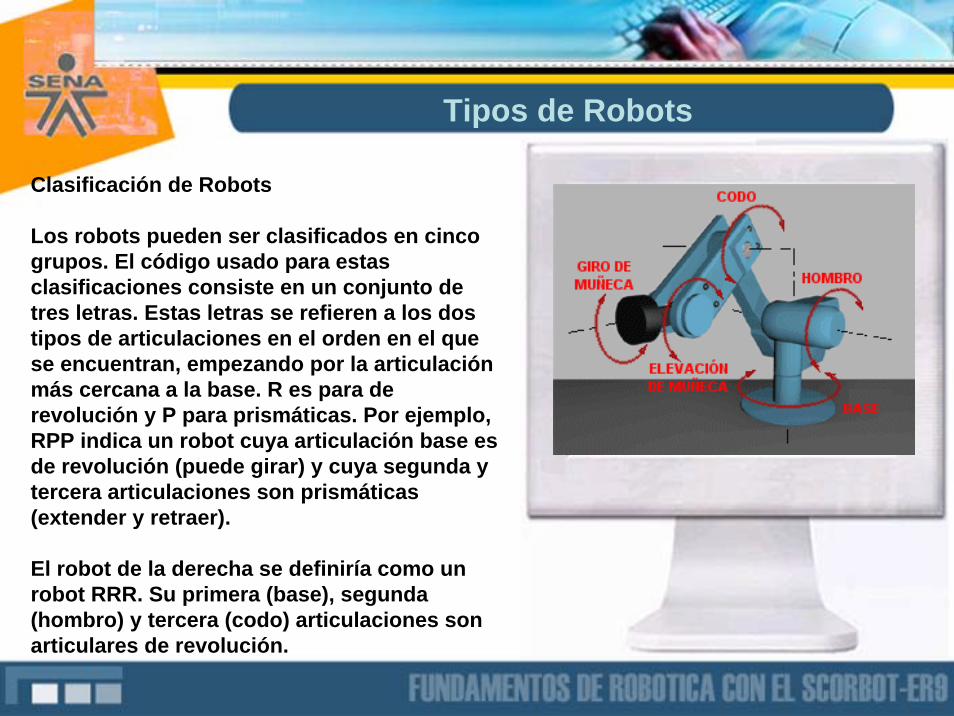
Clasificación de Robots
Los robots pueden ser clasificados en cinco grupos. El código usado para estas clasificaciones consiste en un conjunto de tres letras. Estas letras se refieren a los dos tipos de articulaciones en el orden en el que se encuentran, empezando por la articulación más cercana a la base. R es para de revolución y P para prismáticas. Por ejemplo, RPP indica un robot cuya articulación base es de revolución (puede girar) y cuya segunda y tercera articulaciones son prismáticas (extender y retraer).
El robot de la derecha se definiría como un robot RRR. Su primera (base), segunda (hombro) y tercera (codo) articulaciones son articulares de revolución.
Tipos de Robots

Robots Cartesianos
Las primeras tres articulaciones de un robot Cartesiano son articulaciones prismáticas lineales. Sin embargo los robots Cartesianos se denominan PPP.
Como se indicó en la figura de la derecha, los robots tipo Cartesiano pueden extenderse ó retraerse a lo largo del eje-Y en articulaciones prismáticas 1 y 2. El robot puede extenderse óretraerse a lo largo del eje Z en la articulación prismática 3.
El robot no puede moverse a lo largo del eje-X.
Tipos de Robots
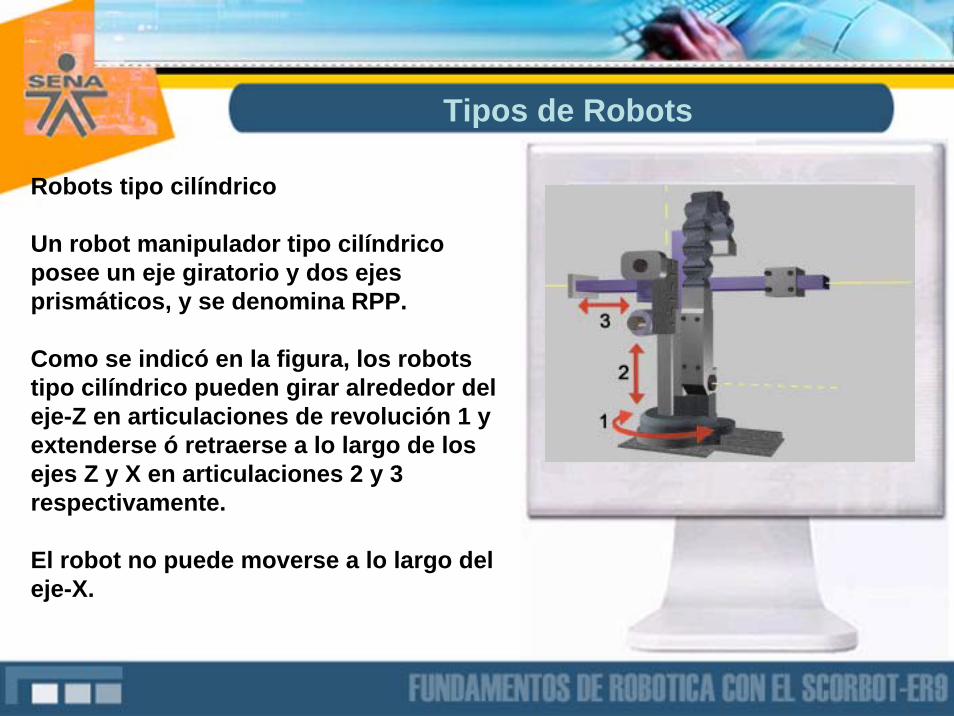
Robots tipo cilíndrico
Un robot manipulador tipo cilíndrico posee un eje giratorio y dos ejes prismáticos, y se denomina RPP.
Como se indicó en la figura, los robots tipo cilíndrico pueden girar alrededor del eje-Z en articulaciones de revolución 1 y extenderse ó retraerse a lo largo de los ejes Z y X en articulaciones 2 y 3 respectivamente.
El robot no puede moverse a lo largo del eje-X.
Tipos de Robots
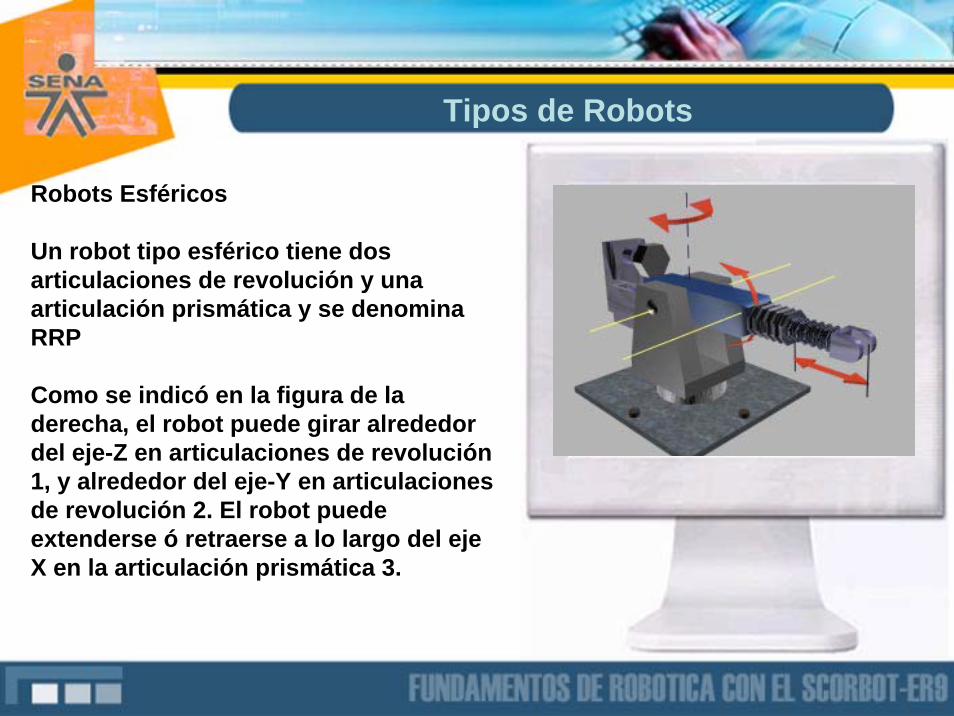
Robots Esféricos
Un robot tipo esférico tiene dos articulaciones de revolución y una articulación prismática y se denomina RRP
Como se indicó en la figura de la derecha, el robot puede girar alrededor del eje-Z en articulaciones de revolución 1, y alrededor del eje-Y en articulaciones de revolución 2. El robot puede extenderse ó retraerse a lo largo del eje X en la articulación prismática 3.
Tipos de Robots
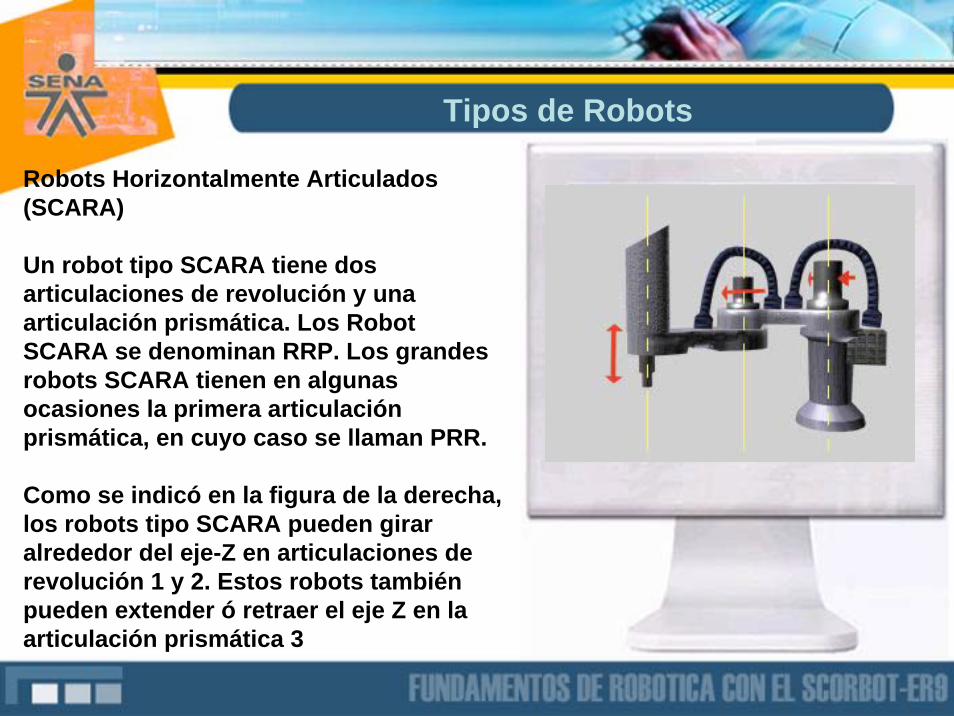
Robots Horizontalmente Articulados (SCARA)
Un robot tipo SCARA tiene dos articulaciones de revolución y una articulación prismática. Los Robot SCARA se denominan RRP. Los grandes robots SCARA tienen en algunas ocasiones la primera articulación prismática, en cuyo caso se llaman PRR.
Como se indicó en la figura de la derecha, los robots tipo SCARA pueden girar alrededor del eje-Z en articulaciones de revolución 1 y 2. Estos robots también pueden extender ó retraer el eje Z en la articulación prismática 3
Tipos de Robots
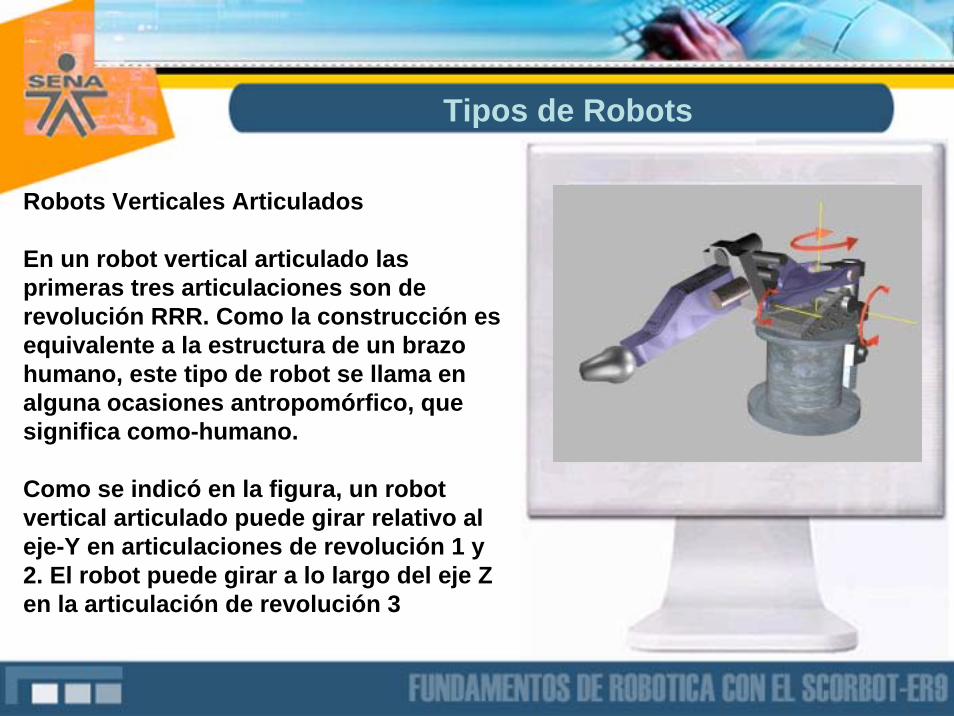
Robots Verticales Articulados
En un robot vertical articulado las primeras tres articulaciones son de revolución RRR. Como la construcción es equivalente a la estructura de un brazo humano, este tipo de robot se llama en alguna ocasiones antropomórfico, que significa como-humano.
Como se indicó en la figura, un robot vertical articulado puede girar relativo al eje-Y en articulaciones de revolución 1 y 2. El robot puede girar a lo largo del eje Z en la articulación de revolución 3
Tipos de Robots
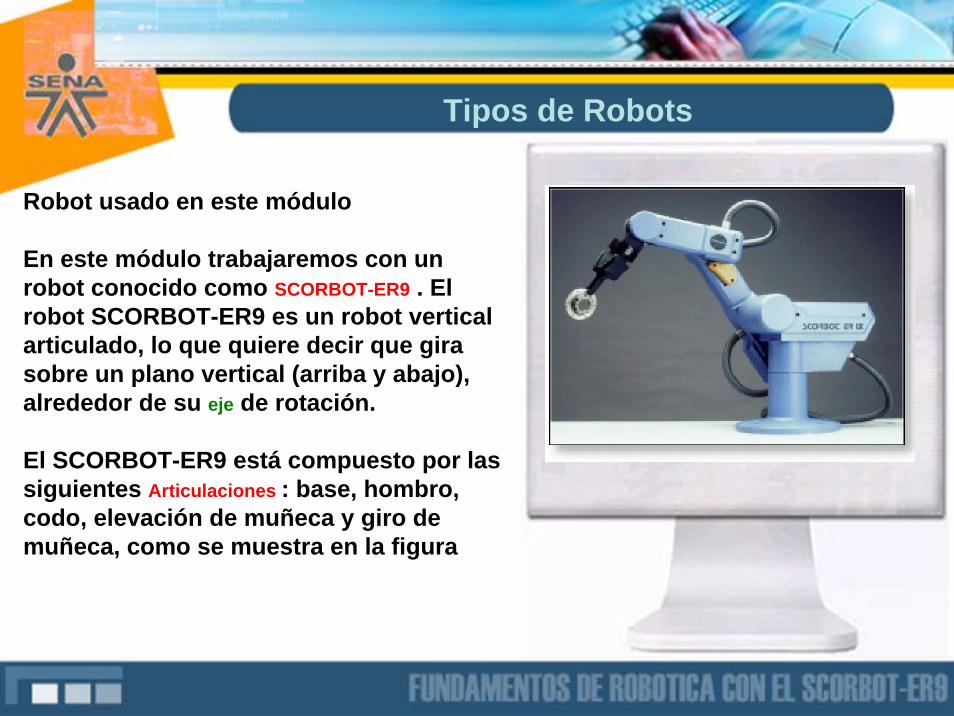
Robot usado en este módulo
En este módulo trabajaremos con un robot conocido como SCORBOT-ER9 . El robot SCORBOT-ER9 es un robot vertical articulado, lo que quiere decir que gira sobre un plano vertical (arriba y abajo), alrededor de su eje de rotación.
El SCORBOT-ER9 está compuesto por las siguientes Articulaciones : base, hombro, codo, elevación de muñeca y giro de muñeca, como se muestra en la figura
Tipos de Robots