funciones vectoriales de variable vectorial...aplicaciones de la ingeniería, involucran funciones...
TRANSCRIPT
1
CAPÍTULO 1
FUNCIONES MULTIVARIABLE
1.1 Introducción
Aunque los primeros estudios del cálculo involucran principalmente funciones que toman
como entrada un número real y entregan como salida otro número del mismo tipo, la
aplastante mayoría de las propiedades del espacio, de fenómenos de la naturaleza, o de las
aplicaciones de la ingeniería, involucran funciones que toman o entregan más de una variable.
Por ejemplo, para algo tan simple como calcular el contenido volumétrico de un recipiente
cilíndrico, se requiere saber el radio de la base y la altura. Con esas dos cantidades, (𝑟, ℎ), se
puede determinar su volumen 𝑉. Otra disciplina, la cinemática básica, permite calcular las
coordenadas de la posición (𝑥, 𝑦) de un móvil en tiro parabólico, dado cualquier valor del
tiempo 𝑡 que esté incluido en el lapso comprendido entre el instante de lanzamiento y el
instante de caída. En el campo de la dinámica, es sabido que un objeto (como un planeta)
sometido a un campo de fuerzas centrales (como el campo gravitacional de una estrella), hace
que el objeto experimente una fuerza en función de su posición. En otras palabras, para cada
posición (𝑥, 𝑦, 𝑧) del planeta, se puede calcular la fuerza 𝐹 = (𝐹𝑥, 𝐹𝑦 , 𝐹𝑧) que experimenta.
Aunque en la práctica sea prácticamente imposible definir con una expresión matemática
predefinida un segmento de vídeo tomado en la vida real, de forma algo laxa se puede
considerar que el valor de color que produce la pantalla es una función multivariable. Un
segmento de vídeo consta de una secuencia de cuadros o imágenes que se pasan
secuencialmente con una frecuencia superior a 16 cuadros por segundo, para crear la ilusión
de movimiento. Cada cuadro 𝑘 consta de una matriz de píxeles especificados por la
coordenada (𝑥, 𝑦) dentro del cuadro. Para cada píxel de imagen en cada cuadro del segmento
de vídeo, el color está especificado por una terna de números 𝑅, 𝐺, 𝐵 (del inglés Red, Green,
Blue) que indica la correspondiente mezcla de colores Rojo, Verde y Azul. Entonces, se
puede considerar un archivo de vídeo digital como una función que para cada cuadro 𝑘, y
para cada píxel con posición (𝑥, 𝑦) en el cuadro, entrega el color 𝐶 = (𝑅, 𝐺, 𝐵) =

2
(𝑅(𝑘, 𝑥, 𝑦), 𝐺(𝑘, 𝑥, 𝑦), 𝐵(𝑘, 𝑥, 𝑦)), una terna de valores con las componentes de rojo, verde
y azul del color que va a ser visualizado en el monitor para cada punto, en cada instante del
vídeo.
Las operaciones que procesan variables con múltiples componentes son ejemplos de lo que
se conoce como funciones multivariable y son el insumo básico del Cálculo Multivariable,
el cual se define como el estudio de propiedades locales y globales de conjuntos de puntos
definidos en 𝐑𝑛 por medio de funciones multivariable. Por “local” se debe entender “en la
cercanía de un punto”, mientras que “global” se debe tomar como una propiedad asociada a
la totalidad o globalidad de los puntos del conjunto.
Entre las propiedades locales que se estudiarán se incluyen: límite, continuidad,
derivabilidad, diferenciabilidad, curvatura, extremos locales; entre las propiedades globales
se incluyen algunas geométricas como longitudes, áreas, volúmenes, centroides, y algunas
físicas como trabajo ejercido a lo largo de una trayectoria, caudal, masa, momento de inercia
rotacional, centro de masa, y otras propiedades definidas a partir de integrales.
Pasaremos a dar rigor a la definición de este tipo de funciones a continuación.
1.2 Funciones multivariable
Una función, aplicación, o mapeo �⃑� multivariable es una regla que a cada elemento 𝑥 en
un conjunto 𝐴 incluido en 𝐑𝑛 , asigna un único elemento 𝑦 = 𝑓 (𝑥 ) en un conjunto 𝐵
incluido en 𝐑𝑚. Al conjunto 𝐴 se le llama dominio de la función1 y al conjunto 𝐵 se le llama
codominio de la función2.
Lo anterior se representa así:
𝑓 : 𝐴 → 𝐵
𝑥 ↦ 𝑓 (𝑥 )
Es necesario precisar ahora algunas denominaciones.
1 Otros nombres para el dominio son “conjunto de definición” y “conjunto de partida”. 2 El codominio de la función también se conoce como “contradominio”, “conjunto final” o “conjunto de
llegada”.
3
Al vector 𝑥 = (𝑥1, 𝑥2, … , 𝑥𝑗 , … , 𝑥𝑛), con 𝑗 ∈ {1,2, … , 𝑛}, se le denomina argumento
de la función, vector de entrada, o variable independiente. En ocasiones se puede
representar como vector columna.
Al vector 𝑓 (𝑥 ) = 𝑦 = (𝑓1(𝑥 ), 𝑓2(𝑥 ), … , 𝑓𝑖(𝑥 ),… , 𝑓𝑚(𝑥 )), con 𝑖 ∈ {1,2, … ,𝑚}, se le
denomina imagen del argumento 𝑥 , vector de salida ( ante el vector de entrada 𝑥 ), o
variable dependiente (en función de la variable 𝑥 ).
A veces, la definición de una función depende de ciertas cantidades fijas, diferentes
a las entradas y las salidas, y que su modificación significaría un cambio en el
fenómeno bajo estudio; dichas cantidades se llaman parámetros de la función, que
no se deben confundir con los parámetros de una curva o una superficie según se
estudian en geometría analítica.
Ejemplo 1.1. Ley de la Gravitación Universal de Newton.
A fines del siglo XVII, Isaac Newton postuló su ley de Gravitación Universal. Ella
establece que dos cuerpos con masas 𝑀 y 𝑚 separados por una distancia 𝑑, con tamaños
despreciables comparados con su separación, experimentan una fuerza de atracción entre
ellos directamente proporcional al producto de sus masas, e inversamente proporcional al
cuadrado de la distancia que los separa.
Expresar como función multivariable la fuerza 𝐹 = (𝐹𝑥, 𝐹𝑦) que ejerce el Sol sobre la
Tierra, con masa 𝑚𝑇, localizada en la posición 𝑟 = (𝑥, 𝑦), si se considera que el Sol, de
masa 𝑀𝑆 es mucho más masivo que la tierra y está situado en el origen.
Solución:
La situación física se describe en la figura (1.1).
4
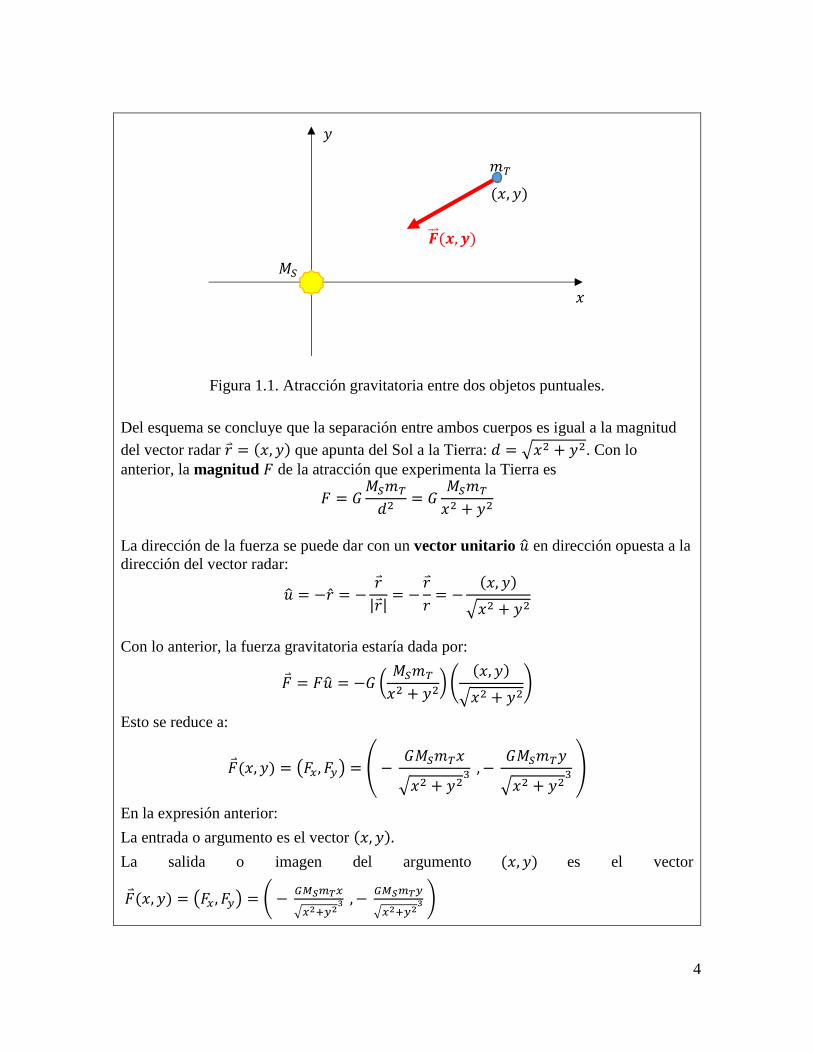
Figura 1.1. Atracción gravitatoria entre dos objetos puntuales.
Del esquema se concluye que la separación entre ambos cuerpos es igual a la magnitud
del vector radar 𝑟 = (𝑥, 𝑦) que apunta del Sol a la Tierra: 𝑑 = √𝑥2 + 𝑦2. Con lo
anterior, la magnitud 𝐹 de la atracción que experimenta la Tierra es
𝐹 = 𝐺𝑀𝑆𝑚𝑇
𝑑2= 𝐺
𝑀𝑆𝑚𝑇
𝑥2 + 𝑦2
La dirección de la fuerza se puede dar con un vector unitario �̂� en dirección opuesta a la
dirección del vector radar:
�̂� = −�̂� = −𝑟
|𝑟 |= −
𝑟
𝑟= −
(𝑥, 𝑦)
√𝑥2 + 𝑦2
Con lo anterior, la fuerza gravitatoria estaría dada por:
𝐹 = 𝐹�̂� = −𝐺 (𝑀𝑆𝑚𝑇
𝑥2 + 𝑦2) (
(𝑥, 𝑦)
√𝑥2 + 𝑦2)
Esto se reduce a:
𝐹 (𝑥, 𝑦) = (𝐹𝑥, 𝐹𝑦) = ( − 𝐺𝑀𝑆𝑚𝑇𝑥
√𝑥2 + 𝑦23 , −
𝐺𝑀𝑆𝑚𝑇𝑦
√𝑥2 + 𝑦23 )
En la expresión anterior:
La entrada o argumento es el vector (𝑥, 𝑦).
La salida o imagen del argumento (𝑥, 𝑦) es el vector
𝐹 (𝑥, 𝑦) = (𝐹𝑥 , 𝐹𝑦) = ( − 𝐺𝑀𝑆𝑚𝑇𝑥
√𝑥2+𝑦23 , −
𝐺𝑀𝑆𝑚𝑇𝑦
√𝑥2+𝑦23 )
𝑥
𝑦
𝑚𝑇
(𝑥, 𝑦)
�⃑⃑� (𝒙, 𝒚)
𝑀𝑆
5
Las cantidades 𝐺,𝑀𝑆 y 𝑚𝑇 son parámetros de la función. No son variables, pero podrían
cambiarse para representar otros fenómenos. Por ejemplo, si la masa de la tierra 𝑚𝑇 se
cambiara por la masa joviana 𝑚𝐽 , entonces, la expresión representaría la atracción
experimentada por Júpiter debido a la atracción solar.
La elección del dominio y del codominio incluye siempre algún grado de arbitrariedad
(dependiendo de requerimientos adicionales sobre la función), aunque hay sendas
condiciones que deben cumplir ambos conjuntos:
Necesariamente, toda entrada en el dominio debe tener bien definida su imagen
respectiva.
Necesariamente, toda imagen entregada por la función debe estar incluida en el
codominio.
Aunque la expresión matemática que defina la regla de operación de una función pueda estar
definida para un conjunto muy amplio, a veces las condiciones de la realidad, o imposiciones
matemáticas adicionales pueden restringir la elección del dominio o del codominio más allá
de lo que permita la definición matemática de la regla de operación de la función.
Ejemplo 1.2.
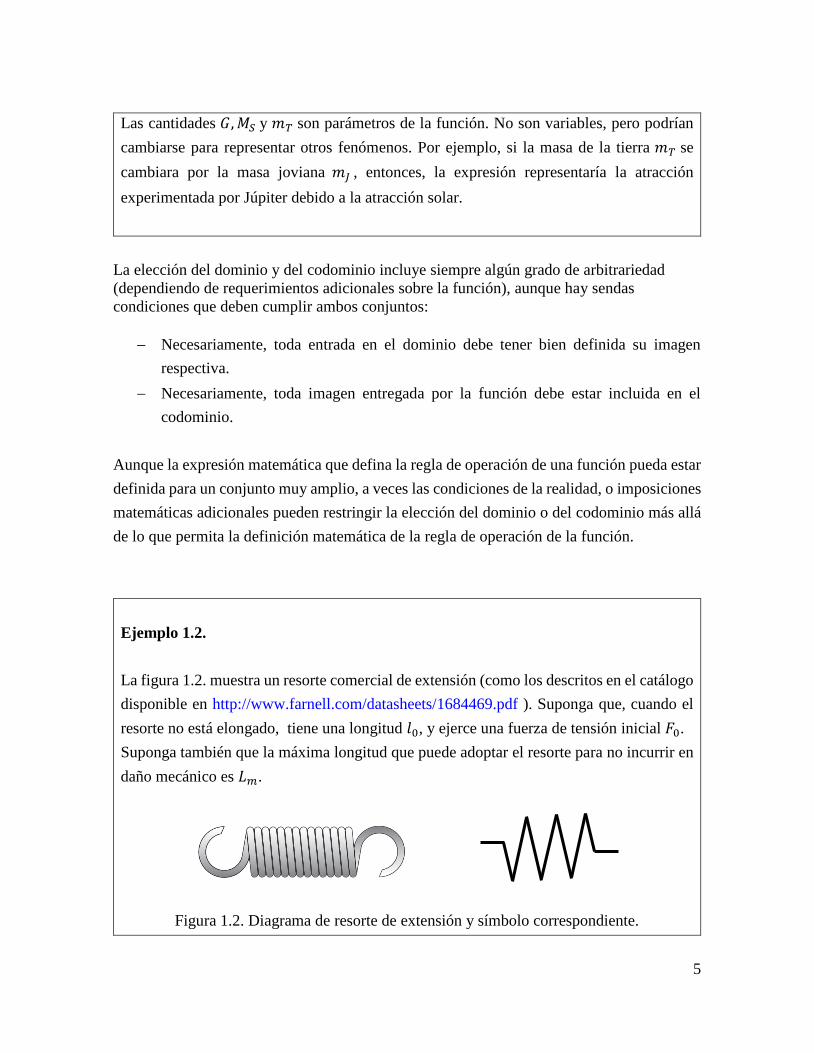
La figura 1.2. muestra un resorte comercial de extensión (como los descritos en el catálogo
disponible en http://www.farnell.com/datasheets/1684469.pdf ). Suponga que, cuando el
resorte no está elongado, tiene una longitud 𝑙0, y ejerce una fuerza de tensión inicial 𝐹0.
Suponga también que la máxima longitud que puede adoptar el resorte para no incurrir en
daño mecánico es 𝐿𝑚.
Figura 1.2. Diagrama de resorte de extensión y símbolo correspondiente.
6
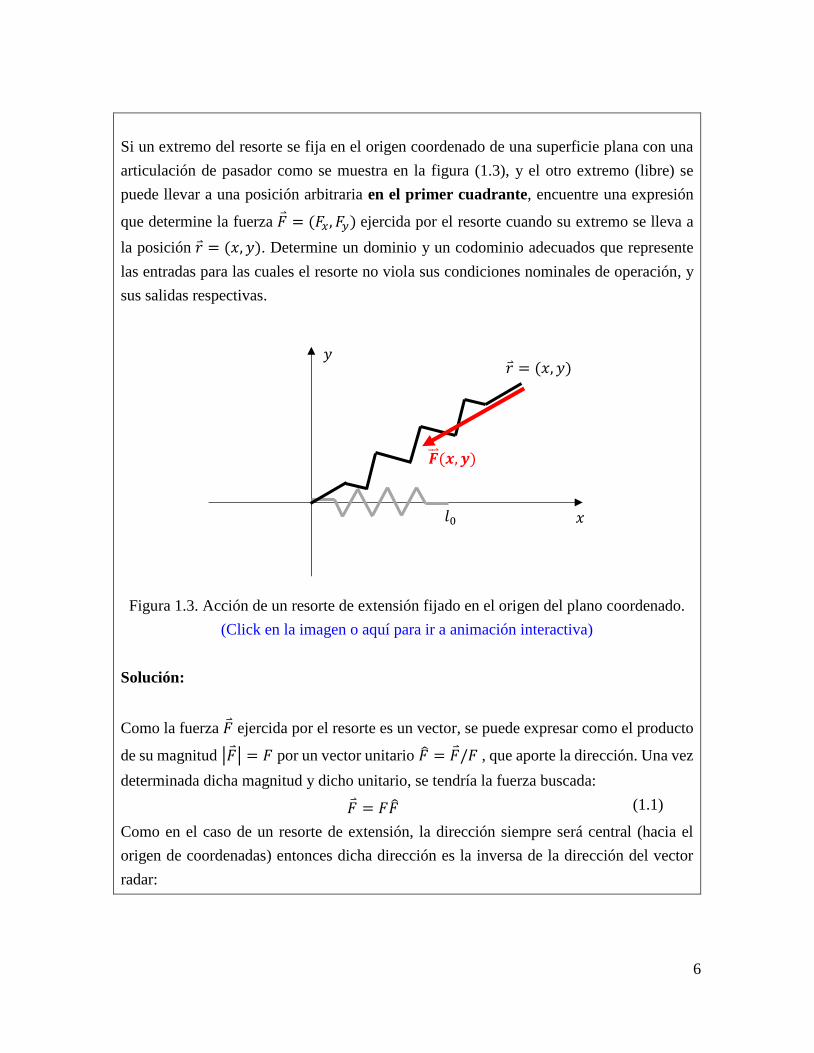
Si un extremo del resorte se fija en el origen coordenado de una superficie plana con una
articulación de pasador como se muestra en la figura (1.3), y el otro extremo (libre) se
puede llevar a una posición arbitraria en el primer cuadrante, encuentre una expresión
que determine la fuerza 𝐹 = (𝐹𝑥, 𝐹𝑦) ejercida por el resorte cuando su extremo se lleva a
la posición 𝑟 = (𝑥, 𝑦). Determine un dominio y un codominio adecuados que represente
las entradas para las cuales el resorte no viola sus condiciones nominales de operación, y
sus salidas respectivas.
Figura 1.3. Acción de un resorte de extensión fijado en el origen del plano coordenado.
(Click en la imagen o aquí para ir a animación interactiva)
Solución:
Como la fuerza 𝐹 ejercida por el resorte es un vector, se puede expresar como el producto
de su magnitud |𝐹 | = 𝐹 por un vector unitario �̂� = 𝐹 /𝐹 , que aporte la dirección. Una vez
determinada dicha magnitud y dicho unitario, se tendría la fuerza buscada:
𝐹 = 𝐹�̂� (1.1)
Como en el caso de un resorte de extensión, la dirección siempre será central (hacia el
origen de coordenadas) entonces dicha dirección es la inversa de la dirección del vector
radar:
𝑥
𝑦
𝑙0
𝑟 = (𝑥, 𝑦)
�⃑⃑� (𝒙, 𝒚)

7
�̂� = −�̂� = −𝑟
|𝑟 |= −
𝑟
𝑟= −
(𝑥, 𝑦)
√𝑥2 + 𝑦2
(1.2)
Queda por encontrar únicamente la magnitud de la fuerza ejercida por el resorte. Para tal
fin, se recuerda la ley empírica de Hooke que establece que la razón entre los incrementos
Δ𝐹 de fuerza de tensión del resorte, y los incrementos Δ𝑙 de longitud que los causan, es
aproximadamente una constante, llamada constante de elasticidad o constante elástica del
resorte:
Δ𝐹
Δ𝑙 = 𝑘
(1.3)
Si se toma como condición de partida la elongación nula con fuerza base 𝐹0, se tiene lo
siguiente:
(𝐹 − 𝐹0)
(𝑙 − 𝑙0) = 𝑘
(1.4)
En (1.4) es fácil encontrar la longitud total del resorte cuando su extremo se lleva al punto
𝑟 = (𝑥, 𝑦). Sería la longitud del vector radar:
𝑙 = √𝑥2 + 𝑦2 (1.5)
Reemplazando (1.5) en (1.4) y resolviendo para 𝐹 se obtiene la magnitud de la fuerza
buscada:
𝐹 = 𝐹0 + 𝑘 (√𝑥2 + 𝑦2 − 𝑙0). (1.6)
Reemplazando (1.6) y (1.2) en (1.1) se encuentra la respuesta buscada
𝐹 = −(𝐹0 + 𝑘 (√𝑥2 + 𝑦2 − 𝑙0))(𝑥, 𝑦)
√𝑥2 + 𝑦2.
(1.7)
Realizando la multiplicación entre el escalar y el vector, se obtiene la expresión,
componente por componente:
𝐹 (𝑥, 𝑦) = (−𝑥 (𝐹0 + 𝑘(√𝑥2 + 𝑦2 − 𝑙0))
√𝑥2 + 𝑦2, −
𝑦 (𝐹0 + 𝑘(√𝑥2 + 𝑦2 − 𝑙0))
√𝑥2 + 𝑦2).
(1.8)

8
Para ilustrar el nivel de arbitrariedad que tiene la definición del dominio y el codominio de
una función, basta notar que la expresión anterior sólo queda sin definir cuando la entrada
es el vector nulo. Esto podría movernos a definir el dominio de 𝐹 como
𝐴 = {(𝑥, 𝑦) ∈ 𝐑2: (𝑥, 𝑦) ≠ (0,0)}. (1.9)
Similarmente, como cualquier vector de salida que entregue esa función queda en 𝐑2, se
puede definir el codominio como
𝐵 = 𝐑2. (1.10)
No obstante, el dominio y el codominio definidos en (1.9) y (1.10) no son los más realistas
desde el punto de vista de la aplicación: en la realidad, como el resorte no es susceptible
de ser comprimido sin que se deforme plásticamente, el extremo libre no puede quedar a
menor distancia que 𝑙0, medida desde el origen. Además, para que no haya deformación
permanente del resorte por fluencia, el extremo libre no se puede estirar más allá de la
longitud 𝐿𝑀. Por último, dado que la posición del extremo libre no puede salir del primer
cuadrante, entonces ambas variables de entrada, 𝑥 y 𝑦 deberían ser positivas. Esto nos
mueve a definir de forma más razonable el dominio de la función así:
𝐴 = {(𝑥, 𝑦) ∈ 𝐑2: 𝑥 ≥ 0 ∧ 𝑦 ≥ 0 ∧ 𝑙0 ≤ √𝑥2 + 𝑦2 ≤ 𝐿𝑀} (1.11)
De forma análoga, podemos considerar las restricciones en las salidas para definir un
codominio razonable: Como la fuerza ejercida por el resorte va en sentido opuesto al radar
(𝑥, 𝑦) del extremo libre, y el radar queda en el primer cuadrante, entonces la fuerza estará
en el tercer cuadrante. Más aún, como el resorte tiene una precarga por fabricación, la
magnitud de la fuerza que ejerza será necesariamente mayor a 𝐹0 y por lo tanto, podemos
definir el codominio de la función así:
𝐵 = {(𝐹𝑥 , 𝐹𝑦) ∈ 𝐑2: 𝐹𝑥 ≤ 0 ∧ 𝐹𝑦 ≤ 0 ∧ √𝐹𝑥2 + 𝐹𝑦2 ≥ 𝐹0}. (1.12)

9
Repare en lo siguiente: aunque no hay el menor problema matemático en usar la función
con el dominio y el codominio de las ecuaciones (1.9) y (1.10), resulta absurdo decir que
se tomará un resorte de 20 gramos de peso, se le va a estirar 20 años-luz y que el resorte
responderá ejerciendo una fuerza del orden de 100 billones (hispanos) de toneladas
métricas. Por eso es mejor definir de forma más precisa el dominio y el codominio como
en (1.11) y (1.12), los cuales representan realmente el dominio de entradas que puede
aceptar el resorte, y las fuerzas reales de salida que puede ejercer.
En algunas ocasiones se tiene una expresión matemática que puede servir para definir una
función, pero no se da un dominio especificado. En ese caso, se puede definir una función si
se determina el máximo conjunto en el cual dicha expresión matemática esté bien definida;
a este conjunto máximo se le llama dominio natural de la expresión, que representaremos
como 𝐷𝑜𝑚𝑁(𝑓 ).
Ejemplo 1.3.
Encontrar el dominio natural de la expresión matemática siguiente y defina con ella una
función:
𝑓 (𝑥, 𝑦, 𝑧) = (√𝑥 + ln(1 − 𝑧2) , √4 − 𝑥2 − 𝑦2)
Solución
Se puede definir una función en el máximo conjunto de entradas en 𝐑3 donde esté bien
definida dicha expresión. Para eso, tienen que existir las dos componentes del vector de
salida, y eso implica que 𝑥 ≥ 0 , para que exista √𝑥 ; 1 − 𝑧2 > 0 para que exista
ln(1 − 𝑧2) , y 4 − 𝑥2 − 𝑦2 ≥ 0 para que exista √4 − 𝑥2 − 𝑦2 . Simplificando esas
expresiones, se obtiene:
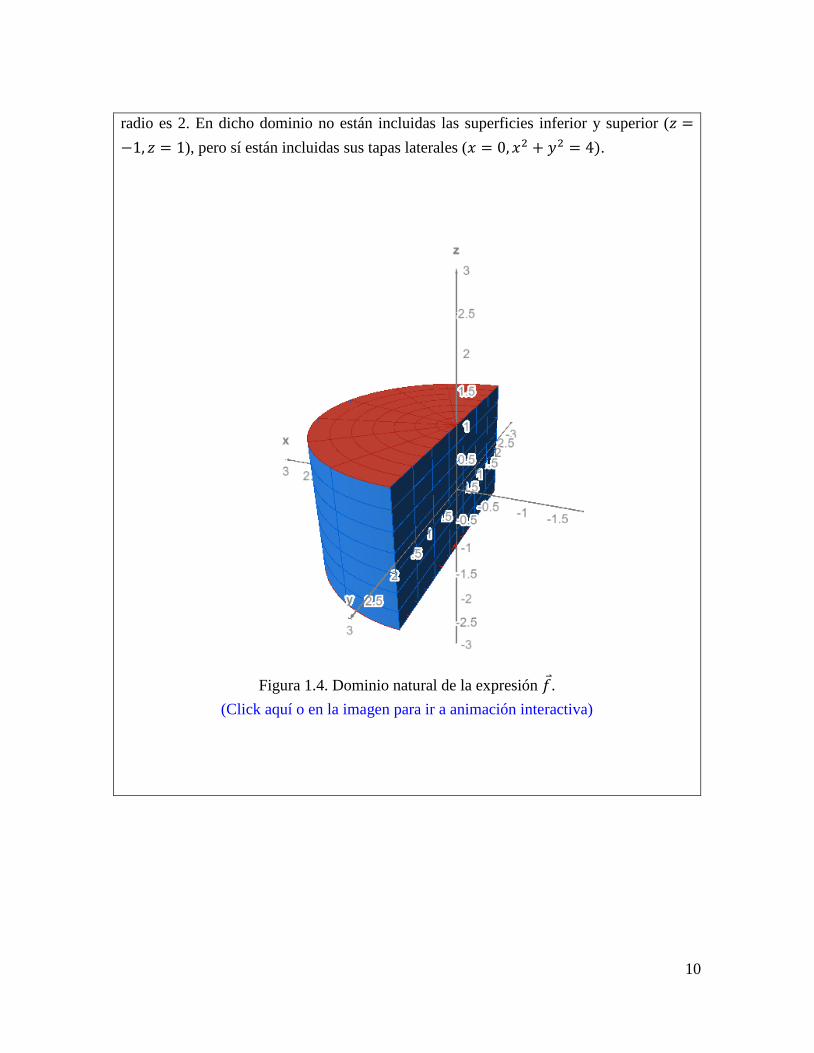
𝐴 = 𝐷𝑜𝑚𝑁(𝑓 ) = {(𝑥, 𝑦, 𝑧) ∈ 𝐑3: 𝑥 ≥ 0 ∧ −1 < 𝑧 < 1 ∧ 𝑥2 + 𝑦2 ≤ 22}
Se entiende entonces que el dominio natural de la expresión 𝑓 es medio tronco de cilindro
circunferencial recto, de dos unidades de altura, centrado en el origen, con eje 𝑧, y cuyo
10
radio es 2. En dicho dominio no están incluidas las superficies inferior y superior (𝑧 =
−1, 𝑧 = 1), pero sí están incluidas sus tapas laterales (𝑥 = 0, 𝑥2 + 𝑦2 = 4).
Figura 1.4. Dominio natural de la expresión 𝑓 .
(Click aquí o en la imagen para ir a animación interactiva)

11
1.3 Tipos de funciones multivariable
Dependiendo de la dimensión geométrica de los espacios que contengan al dominio 𝐴 ∈ 𝐑𝑛
y al codominio 𝐵 ∈ 𝐑𝑚, una función multivariable se clasifica en los siguientes tipos.
Funciones reales de variable real: cuando 𝑛 = 𝑚 = 1. Son el objeto de estudio de
los cursos previos de cálculo diferencial e integral. Por ejemplo,
𝑦 = 𝑓(𝑡) = 𝐴 cos (2𝜋𝑡
𝜏+ 𝜙)
que define la posición de una partícula sujeta a movimiento armónico simple con
período 𝜏, ángulo de fase 𝜙, y amplitud 𝐴.
Funciones vectoriales de variable real: cuando 𝑛 = 1 y 𝑚 ≥ 2. Por ejemplo, la
función que define la trayectoria de un objeto en tiro parabólico, de la forma
𝑟 = (𝑥, 𝑦) = 𝑔 (𝑡) = (𝑥0 + 𝑣0𝑥𝑡, 𝑦0 + 𝑣0𝑦𝑡 −𝑔𝑡2
2) ;
aquí, para cada instante de entrada 𝑡, la función 𝑔 entrega un único vector de salida
𝑟 = (𝑥, 𝑦) en 𝐑2.
Funciones reales de variable vectorial (o campos escalares): cuando 𝑚 = 1 y
𝑛 ≥ 2. Por ejemplo, la función que define la tensión o potencial eléctrico3 (energía
potencial eléctrica por unidad de carga) alrededor de una partícula con carga eléctrica
𝑄, en función de la posición alrededor de la partícula cargada:
𝑉(𝑥, 𝑦, 𝑧) =𝑄
4𝜋𝜖0√𝑥2 + 𝑦2 + 𝑧2;
aquí, para cada vector posición 𝑟 = (𝑥, 𝑦, 𝑧) de entrada a la función, ésta entrega
como salida el potencial eléctrico 𝑉 en dicho punto.
Campos vectoriales: cuando 𝑛 = 𝑚 ≥ 2. Los dos primeros ejemplos ya tratados en
detalle, del campo gravitacional, y de la fuerza ejercida por un resorte, se pueden
considerar como tales, entre muchos otros, como el campo eléctrico, el campo
magnético, el campo de velocidades de un fluido, etc.
Funciones vectoriales de variable vectorial: este nombre general se reserva cuando
las entradas y salidas son vectores, no necesariamente de la misma dimensión. Los
campos vectoriales son un caso particular de estas.
3 A la tensión eléctrica o potencial eléctrico, se le conoce en la jerga técnica eléctrica como “voltaje”.

12
1.4 Notación
La notación que se utilizará para representar las funciones multivariable heredará en general
la notación de las cantidades que entreguen como salida. Si la salida es escalar, la función se
denotará con la misma simbología para escalares; si es vectorial, se denotará con los mismos
símbolos para vectores. Aunque el estándar tipográfico para representar vectores es el texto
en negrita, mientras que los escalares se representan con tipografía normal, la experiencia
pedagógica sugiere mantener tipográficamente la misma representación que se da a los
vectores cuando se les representa de forma manuscrita; esto es, usar una flecha ( ⃗ ) o un
arpón ( ) que impliquen la idea de vector. Cuando el vector sea unitario, en lugar de arpón
o flecha, se usará el acento circunflejo ( ̂ ). Además, las funciones escalares componentes
heredarán el nombre de la función vectorial que ellas conforman, diferenciándolas con
subíndices. Así, una función vectorial de variable vectorial que se vaya a denotar con una
letra, por ejemplo 𝑓 , tendrá como funciones componentes 𝑓1, 𝑓2, … , 𝑓𝑚.
Toda función vectorial se puede escribir como una combinación lineal de los elementos de
la base canónica {�̂�1, �̂�2, … , �̂�𝑚} ⊂ 𝐑𝑚 cuyos soportes son los campos escalares
componentes:
𝑓 (𝑥 ) = (𝑓1(𝑥 ), 𝑓2(𝑥 ),… , 𝑓𝑚(𝑥 )) =
= (𝑓1(𝑥 ), 0, … ,0) + (0, 𝑓2(𝑥 ),… ,0) + ⋯+ (0,0, … , 𝑓𝑚(𝑥 )) =
= 𝑓1(𝑥 )(1,0, … ,0) + 𝑓2(𝑥 )(0,1, … ,0) + ⋯+ 𝑓𝑚(𝑥 )(0,0, … ,1) =
= 𝑓1(𝑥 )�̂�1 + 𝑓2(𝑥 )�̂�2 + ⋯+ 𝑓𝑚(𝑥 )�̂�𝑚 =
= ∑𝑓𝑖(𝑥 )
𝑚
𝑖=1
�̂�𝑖
Las funciones vectoriales también pueden escribirse en forma matricial como se muestra a
continuación:
𝑓 (𝑥 ) = [
𝑓1(𝑥 )
𝑓2(𝑥 )⋮
𝑓𝑚(𝑥 )
] ;
esta representación es particularmente útil cuando se trabajan las derivadas de forma
matricial, como se verá más adelante.

13
1.5 Álgebra de funciones de multivariable
Para funciones con el mismo dominio, la igualdad de funciones multivariable implica la
igualdad de las imágenes para cada argumento o entrada en el dominio. Además, las
operaciones algebraicas básicas entre funciones multivariable heredan la operatividad de las
respectivas operaciones elementales con escalares y vectores que se tratan en cursos previos,
teniendo en cuenta que los resultados terminan siendo funciones de las variables involucradas
y no olvidando las restricciones matemáticas respectivas (como las asociadas a la división o
a las raíces pares de números negativos).
Por ejemplo, si se tienen funciones definidas en 𝐑3 así:
𝑓 : 𝐑3 → 𝐑3
(𝑥, 𝑦, 𝑧) ↦ 𝑓 (𝑥, 𝑦, 𝑧) = (𝑧2, 𝑥, 4𝑦)
𝑔 : 𝐑3 → 𝐑3
(𝑥, 𝑦, 𝑧) ↦ 𝑔 (𝑥, 𝑦, 𝑧) = (0, 𝑥 − 𝑦, 𝑥𝑦)
ℎ: 𝐑3 → 𝐑(𝑥, 𝑦, 𝑧) ↦ ℎ(𝑥, 𝑦, 𝑧) = 𝑥 − 𝑦
entonces,
𝑓 ⋅ 𝑔 : 𝐑3 → 𝐑
(𝑥, 𝑦, 𝑧) ↦ (𝑓 ⋅ 𝑔 )(𝑥, 𝑦, 𝑧) : = 𝑓 (𝑥, 𝑦, 𝑧) ⋅ 𝑔 (𝑥, 𝑦, 𝑧) = (𝑧2, 𝑥, 4𝑦) ⋅ (0, 𝑥 − 𝑦, 𝑥𝑦)
= 𝑥2 − 𝑥𝑦 + 4𝑥𝑦2
𝑓 × 𝑔 : 𝐑3 → 𝐑3
(𝑥, 𝑦, 𝑧) ↦ (𝑓 × 𝑔 )(𝑥, 𝑦, 𝑧) : = 𝑓 (𝑥, 𝑦, 𝑧) × 𝑔 (𝑥, 𝑦, 𝑧) = (𝑧2, 𝑥, 4𝑦) × (0, 𝑥 − 𝑦, 𝑥𝑦)
= (𝑥2𝑦 − 4𝑥𝑦 + 4𝑦2, −𝑥𝑦𝑧2, 𝑥𝑧2 − 𝑦𝑧2)
ℎ𝑔 : 𝐑3 → 𝐑3
(𝑥, 𝑦, 𝑧) ↦ (ℎ𝑔 )(𝑥, 𝑦, 𝑧) ≔ ℎ(𝑥, 𝑦, 𝑧)𝑔 (𝑥, 𝑦, 𝑧) = (𝑥 − 𝑦)(0, 𝑥 − 𝑦, 𝑥𝑦)
= (0, (𝑥 − 𝑦)2, 𝑥2𝑦 − 𝑥𝑦2)
Otras operaciones más complejas como la composición y la inversión, se dejarán para
secciones posteriores, relacionadas con teoremas de derivación.

14
1.6 Conjuntos de puntos asociados a una función
Las funciones multivariable tienen asociados tres tipos de conjuntos. Uno de ellos en su
dominio; otro en su codominio y otro en el producto cartesiano de ambos. Cada uno de esos
tipos de conjuntos se define a continuación.
Conjuntos de nivel: Un conjunto de nivel �⃑� de una función
𝑓 : 𝐴 ⊆ 𝐑𝑛 → 𝐵 ⊆ 𝐑𝑚
𝑥 ↦ 𝑦 = 𝑓 (𝑥 )
es el subconjunto de entradas en el dominio 𝐴 cuyas salidas son un mismo vector �⃑� constante
en el codominio 𝐵. En este texto se simboliza y define así:
𝑁𝑖𝑣 �⃑� (𝑓 ) = {𝑥 ∈ 𝐴: 𝑓 (𝑥 ) = �⃑� ∈ 𝐵}
Usualmente los conjuntos de nivel tienen significado geométrico cuando 𝑛 > 𝑚; si 𝑚 > 𝑛,
lo más frecuente es que sean vacíos porque se generan contradicciones matemáticas. Cuando
𝑛 = 𝑚 los conjuntos de nivel suelen constar de puntos aislados que no tienen mayor utilidad
práctica.
Conjunto imagen: El conjunto imagen de una función
𝑓 : 𝐴 ⊆ 𝐑𝑛 → 𝐵 ⊆ 𝐑𝑚
�⃑� ↦ 𝑥 = 𝑓 (�⃑� )
Es el subconjunto de vectores en el codominio que son salida efectiva de la función ante
entradas en el dominio. Se simboliza y se define así:
𝐼𝑚(𝑓 ) = {𝑥 ∈ 𝐵: 𝑥 = 𝑓 (�⃑� ) ∧ �⃑� ∈ 𝐴}
Aunque toda función tiene conjunto imagen, típicamente se usa para definir conjuntos de
puntos de forma paramétrica solamente cuando 𝑛 < 𝑚.
Gráfico: El conjunto gráfico de una función
𝑓 : 𝐴 ⊆ 𝐑𝑛 → 𝐵 ⊆ 𝐑𝑚
𝑥 ↦ 𝑦 = 𝑓 (𝑥 ),
es el subconjunto del producto cartesiano del dominio y el codominio de la función,
conformado por parejas ordenadas que constan entradas y sus salidas respectivas. Se
simboliza y se define así:

15
𝐺𝑟𝑎𝑓(𝑓 ) = {(𝑥 , 𝑦 ) ∈ 𝐴 × 𝐵: 𝑦 = 𝑓 (𝑥 ) ∧ 𝑥 ∈ 𝐴}
En la práctica, si 𝑥 = (𝑥1, 𝑥2, … 𝑥𝑛) y 𝑦 = (𝑦1, 𝑦2, … 𝑦𝑚), el vector (𝑥 , 𝑦 ) se escribe así:
(𝑥1, 𝑥2, … 𝑥𝑛, 𝑦1, 𝑦2, … 𝑦𝑚), sin paréntesis internos, o sea, como un elemento de 𝐑𝑛+𝑚.
Hay que enfatizar que el gráfico de una función no es un dibujo; es un conjunto de puntos
que a veces se puede dibujar o graficar computacionalmente y otras veces no.
Ejemplo 1.3
Dada la función
𝑓: 𝐑2 → 𝐑
𝑥 = (𝑥, 𝑦) ↦ 𝑧 = 𝑓(𝑥, 𝑦) = 𝑥2 − 𝑦2,
encontrar:
a) 𝑁𝑖𝑣4(𝑓)
b) 𝑁𝑖𝑣0(𝑓)
c) 𝑁𝑖𝑣−2(𝑓)
d) 𝐼𝑚(𝑓)
e) 𝐺𝑟𝑎𝑓(𝑓)
Solución:
a) 𝑁𝑖𝑣4(𝑓) son los puntos del conjunto de entrada, tales que su salida respectiva sea
igual a 4. Esto implica 𝑓(𝑥, 𝑦) = 𝑥2 − 𝑦2 = 4 que representa a una hipérbola con
eje focal horizontal, que en su forma canónica es:
𝑁𝑖𝑣4(𝑓) = {(𝑥, 𝑦) ∈ 𝐑2:𝑥2
22−
𝑦2
22= 1}
16
(Click aquí o en la imagen para ir a gráfica interactiva)
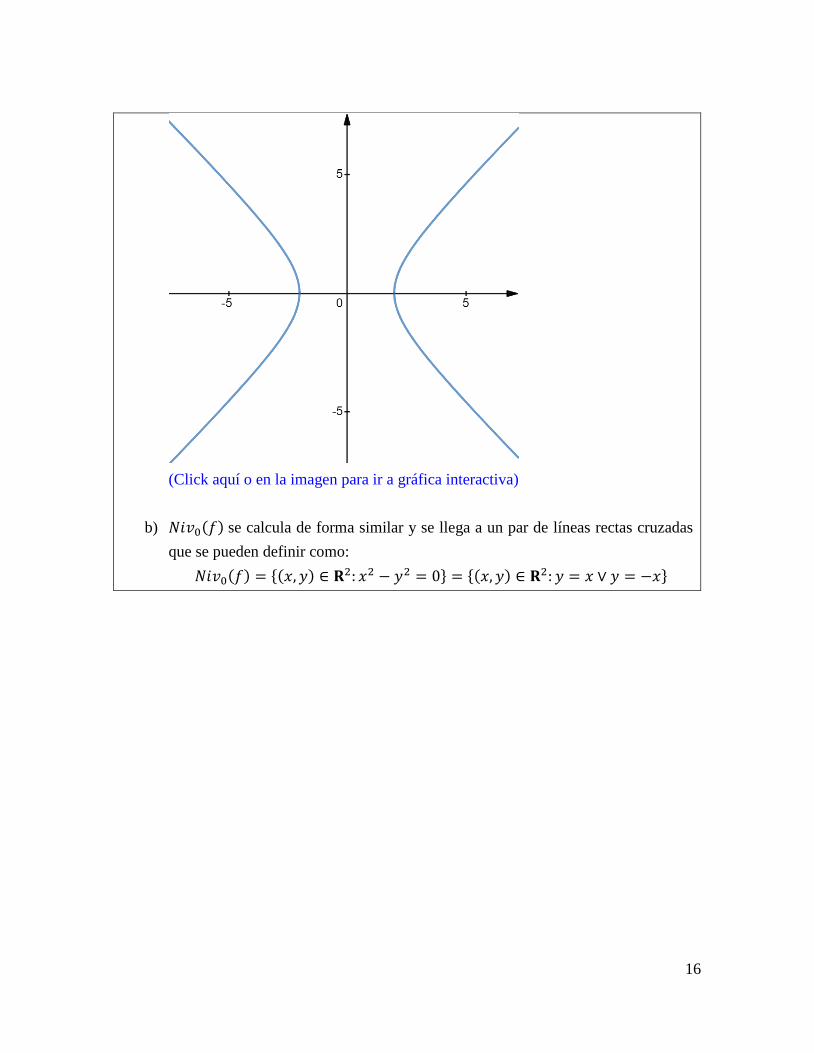
b) 𝑁𝑖𝑣0(𝑓) se calcula de forma similar y se llega a un par de líneas rectas cruzadas
que se pueden definir como:
𝑁𝑖𝑣0(𝑓) = {(𝑥, 𝑦) ∈ 𝐑2: 𝑥2 − 𝑦2 = 0} = {(𝑥, 𝑦) ∈ 𝐑2: 𝑦 = 𝑥 ∨ 𝑦 = −𝑥}
17
(Click aquí o en la imagen para ir a gráfica interactiva)
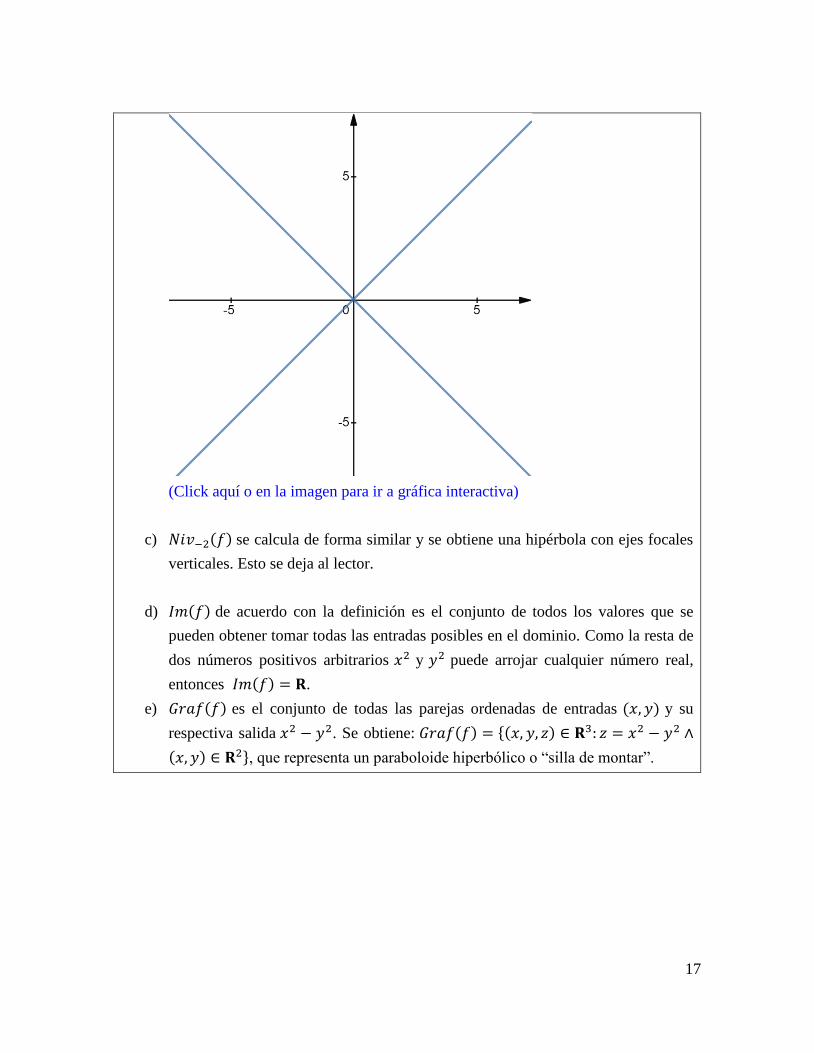
c) 𝑁𝑖𝑣−2(𝑓) se calcula de forma similar y se obtiene una hipérbola con ejes focales
verticales. Esto se deja al lector.
d) 𝐼𝑚(𝑓) de acuerdo con la definición es el conjunto de todos los valores que se
pueden obtener tomar todas las entradas posibles en el dominio. Como la resta de
dos números positivos arbitrarios 𝑥2 y 𝑦2 puede arrojar cualquier número real,
entonces 𝐼𝑚(𝑓) = 𝐑.
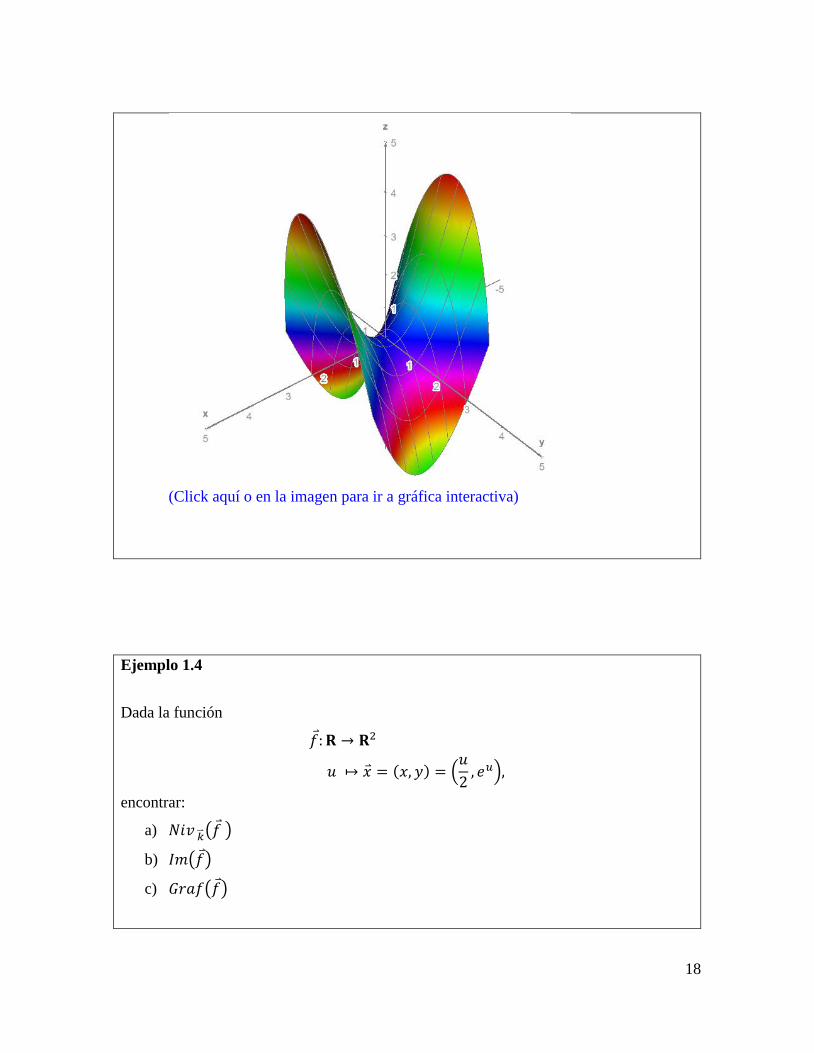
e) 𝐺𝑟𝑎𝑓(𝑓) es el conjunto de todas las parejas ordenadas de entradas (𝑥, 𝑦) y su
respectiva salida 𝑥2 − 𝑦2. Se obtiene: 𝐺𝑟𝑎𝑓(𝑓) = {(𝑥, 𝑦, 𝑧) ∈ 𝐑3: 𝑧 = 𝑥2 − 𝑦2 ∧
(𝑥, 𝑦) ∈ 𝐑2}, que representa un paraboloide hiperbólico o “silla de montar”.
18
(Click aquí o en la imagen para ir a gráfica interactiva)
Ejemplo 1.4
Dada la función
𝑓 : 𝐑 → 𝐑2
𝑢 ↦ 𝑥 = (𝑥, 𝑦) = (𝑢
2, 𝑒𝑢),
encontrar:
a) 𝑁𝑖𝑣 �⃑� (𝑓 )
b) 𝐼𝑚(𝑓 )
c) 𝐺𝑟𝑎𝑓(𝑓 )
19
Solución:
a) Si se aplica la definición para 𝑁𝑖𝑣𝑘(𝑓 ) en general, se tendría que encontrar el valor
de entrada 𝑢 que lograra que 𝑓 (𝑢) = (𝑢
2, 𝑒𝑢) = �⃑� = (𝑘1, 𝑘2) arbitrario en 𝑹2 .
Esto implica resolver dos ecuaciones (no lineales) en una sola incógnita,:
𝑢
2= 𝑘1 ∧ 𝑒𝑢 = 𝑘2
que, en la mayoría aplastante de los casos carece de solución porque 𝑘1 𝑘2 son
arbitrarios y por tal razón, carece de interés práctico (¿en qué caso podría estar
definido un conjunto de nivel de este tipo?).
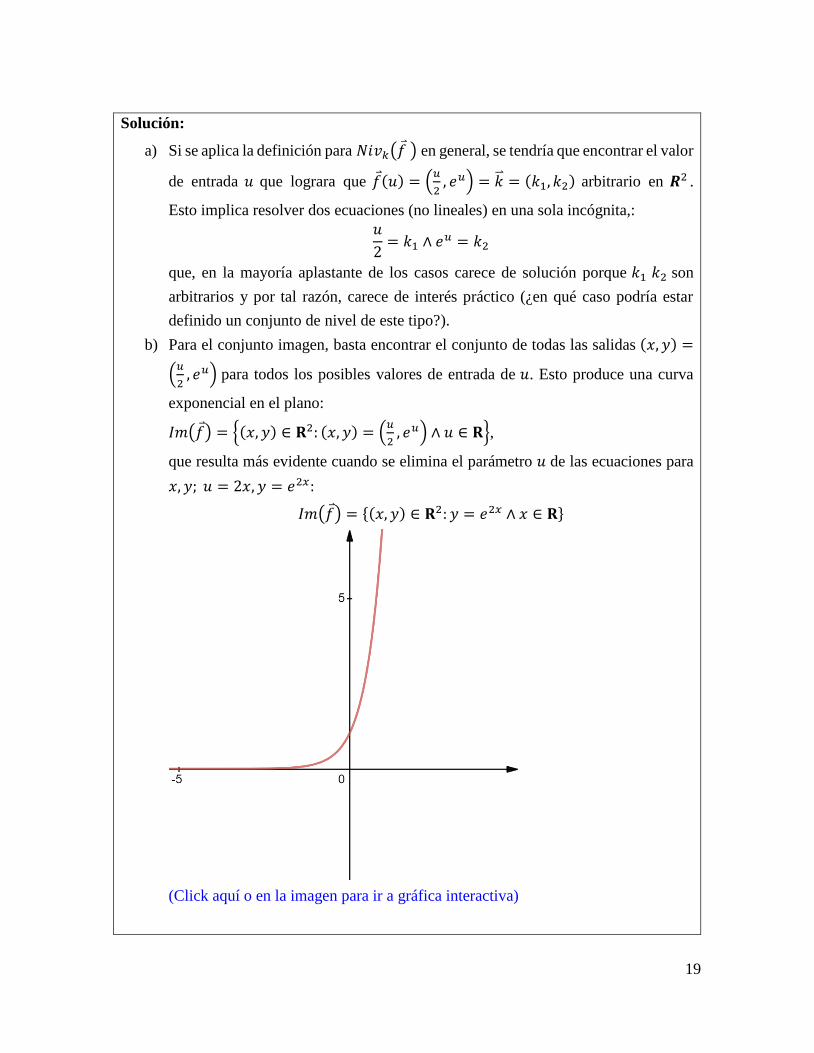
b) Para el conjunto imagen, basta encontrar el conjunto de todas las salidas (𝑥, 𝑦) =
(𝑢
2, 𝑒𝑢) para todos los posibles valores de entrada de 𝑢. Esto produce una curva
exponencial en el plano:
𝐼𝑚(𝑓 ) = {(𝑥, 𝑦) ∈ 𝐑2: (𝑥, 𝑦) = (𝑢
2, 𝑒𝑢) ∧ 𝑢 ∈ 𝐑},
que resulta más evidente cuando se elimina el parámetro 𝑢 de las ecuaciones para
𝑥, 𝑦; 𝑢 = 2𝑥, 𝑦 = 𝑒2𝑥:
𝐼𝑚(𝑓 ) = {(𝑥, 𝑦) ∈ 𝐑2: 𝑦 = 𝑒2𝑥 ∧ 𝑥 ∈ 𝐑}
(Click aquí o en la imagen para ir a gráfica interactiva)
20
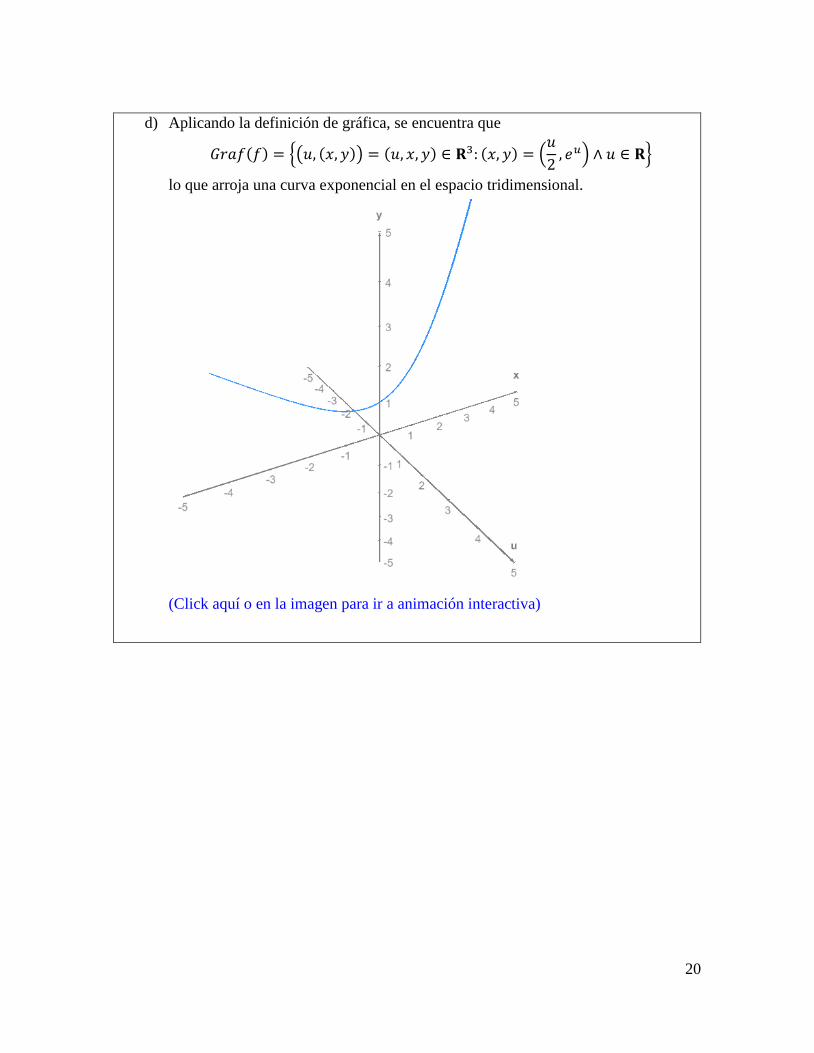
d) Aplicando la definición de gráfica, se encuentra que
𝐺𝑟𝑎𝑓(𝑓) = {(𝑢, (𝑥, 𝑦)) = (𝑢, 𝑥, 𝑦) ∈ 𝐑3: (𝑥, 𝑦) = (𝑢
2, 𝑒𝑢) ∧ 𝑢 ∈ 𝐑}
lo que arroja una curva exponencial en el espacio tridimensional.
(Click aquí o en la imagen para ir a animación interactiva)
21
1.7 Definición de conjuntos de puntos por medio de funciones
Así como una función tiene asociados tres tipos de conjuntos de puntos (gráfico, imagen y
conjuntos de nivel), un conjunto de puntos 𝑆 ⊂ 𝐑𝑛 puede ser definido de tres formas
distintas: como un conjunto de nivel de una función, como la imagen de otra función, o como
la gráfica de otra función más. De cierta forma, este es el problema opuesto al de la sección
anterior.
Definición implícita de un conjunto de puntos
Se dice que el conjunto 𝑆 ⊂ 𝐑𝑛 está definido implícitamente por una función 𝑓 si 𝑆
es un conjunto de nivel de 𝑓 . Así, definir implícitamente a un conjunto 𝑆 consiste
en hallar una función de forma tal que uno de sus conjuntos de nivel sea 𝑆.
Definición paramétrica de un conjunto de puntos
Se dice que el conjunto 𝑆 ⊂ 𝐑𝑛 está definido paramétricamente por una función 𝑔
si 𝑆 es el conjunto imagen de 𝑔 . En este caso, también se dice que 𝑔 es una
parametrización de 𝑆. Así, definir paramétricamente a un conjunto 𝑆 consiste en
hallar una función de forma tal que su conjunto imagen sea 𝑆.
Definición explícita de un conjunto de puntos
Se dice que el conjunto 𝑆 ⊂ 𝐑𝑛 está definido explícitamente por una función ℎ⃑ si 𝑆
es la gráfica de ℎ⃑ . Así, definir explícitamente a un conjunto 𝑆 consiste en hallar una
función de tal forma que su gráfica sea 𝑆.
El proceso de definir un conjunto dado por medio de funciones implica una labor fuerte de
análisis, para la cual se deben tener claros los métodos de parametrización y eliminación de
variables que se ven en geometría analítica, y los procesos algebraicos necesarios para
encontrar algunas variables en términos de otras. Aunque usualmente se debe tener una forma
de definición para poder pasar a cualquiera de las otras dos, muchas veces el conjunto a
definir puede presentarse de forma visual o verbal, y esto implica tener la capacidad de
encontrar las tres definiciones a partir de un proceso mental de modelización.
22
Teniendo bien en claro cómo se definen líneas, y superficies en espacios de dimensiones
arbitrarias por medio de parametrizaciones, se puede pasar a obtener los otros tipos de
definición. Recordemos lo siguiente:
El conjunto imagen de una función 𝑓 : 𝐴 ⊂ 𝐑1 → 𝐑𝑛
𝑢 ↦ 𝑥 es una línea en 𝐑𝑛.
El conjunto imagen de una función 𝑓 : 𝐴 ⊂ 𝐑2 → 𝐑𝑛
(𝑢1, 𝑢2) ↦ 𝑥 es una superficie en 𝐑𝑛.
El conjunto imagen de una función 𝑓 : 𝐴 ⊂ 𝐑3 → 𝐑𝑛
(𝑢1, 𝑢2, 𝑢3) ↦ 𝑥 es un volumen en 𝐑𝑛.
Aunque se podría seguir aumentando la dimensionalidad del conjunto, en un curso de cálculo
vectorial de pregrado para ingeniería no se necesita más. El siguiente esquema indica los
procesos necesarios para pasar de una representación a otra.
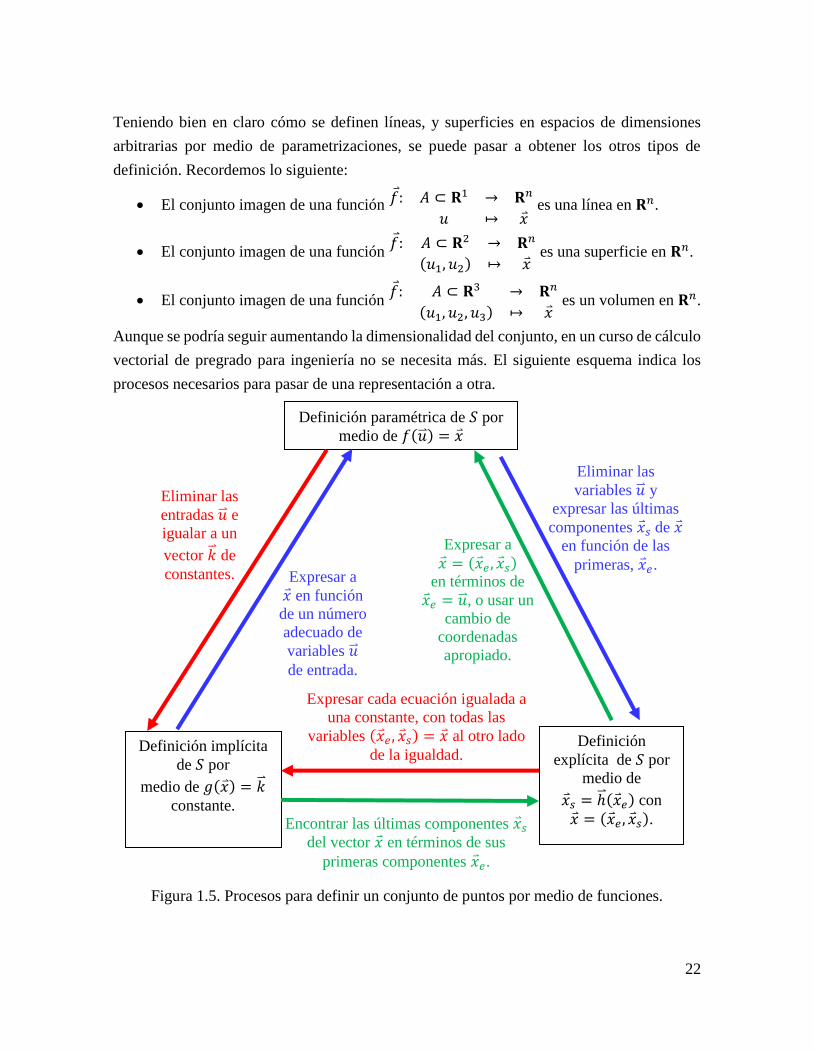
Figura 1.5. Procesos para definir un conjunto de puntos por medio de funciones.
Definición paramétrica de 𝑆 por
medio de 𝑓(�⃑� ) = 𝑥
Definición implícita
de 𝑆 por
medio de 𝑔(𝑥 ) = �⃑� constante.
Eliminar las
entradas �⃑� e
igualar a un
vector �⃑� de
constantes. Expresar a
𝑥 en función
de un número
adecuado de
variables �⃑� de entrada.
Definición
explícita de 𝑆 por
medio de
𝑥 𝑠 = ℎ⃑ (𝑥 𝑒) con
𝑥 = (𝑥 𝑒 , 𝑥 𝑠). Encontrar las últimas componentes 𝑥 𝑠
del vector 𝑥 en términos de sus
primeras componentes 𝑥 𝑒.
Expresar cada ecuación igualada a
una constante, con todas las
variables (𝑥 𝑒 , 𝑥 𝑠) = 𝑥 al otro lado
de la igualdad.
Expresar a
𝑥 = (𝑥 𝑒 , 𝑥 𝑠) en términos de
𝑥 𝑒 = �⃑� , o usar un
cambio de
coordenadas
apropiado.
Eliminar las
variables �⃑� y
expresar las últimas
componentes 𝑥 𝑠 de 𝑥
en función de las
primeras, 𝑥 𝑒.
23
Los siguientes ejemplos aclararán las ideas presentadas en el diagrama anterior.
Ejemplo 1.5.
Créditos:
European Southern Observatory/Christoph Malin
http://www.eso.org/public/images/ann12092a/
https://creativecommons.org/licenses/by/4.0/deed.en
Los reflectores parabólicos (paraboloides de revolución) son dispositivos pasivos
concentradores de energía que se usan en numerables aplicaciones, como antenas de
telecomunicaciones, radiotelescopios, espejos de telescopios, hornos solares, etc. Defina
implícitamente (como conjunto de nivel), explícitamente (como gráfica), y
paramétricamente (como imagen), a un paraboloide de revolución 𝑆 con eje 𝑧, distancia
focal 𝑃, y vértice en el origen, que abre en sentido de 𝑧+.
Solución:
Partiendo de la ecuación de una parábola canónica en el plano 𝑥𝑧 dada por:
𝑥2 = 4𝑃𝑧, se puede cambiar 𝑥 por √𝑥2 + 𝑦2, para obtener la correspondiente figura de
revolución alrededor del eje 𝑧. La ecuación del paraboloide sería entonces:
24
√𝑥2 + 𝑦22= 𝑥2 + 𝑦2 = 4𝑃𝑧
Así:
a) Para obtener una función 𝑔 que sirva para definir explícitamente al paraboloide 𝑆,
de las ecuaciones disponibles se encuentran las últimas componentes del vector
(𝑥, 𝑦, 𝑧) de puntos del paraboloide, en términos de las primeras componentes.
Como en este caso solamente hay una ecuación, entonces sólo se puede encontrar
una última componente (𝑧) del vector de puntos (𝑥, 𝑦, 𝑧) , en términos de las
primeras componentes (𝑥, 𝑦) del vector, así:
𝑧 =𝑥2 + 𝑦2
4𝑃
Queda entonces:
𝑔: 𝐑2 → 𝐑
(𝑥, 𝑦) ↦ 𝑧 = 𝑔(𝑥, 𝑦) =𝑥2 + 𝑦2
4𝑃
Entonces se puede definir explícitamente el paraboloide como la gráfica de la
función 𝑔 de la siguiente manera:
𝑆 = {(𝑥, 𝑦, 𝑧) ∈ 𝐑3: 𝑧 = 𝑔(𝑥, 𝑦) =𝑥2 + 𝑦2
4𝑃}

25
(Click aquí o en la imagen para ir a animación interactiva)
b) Para obtener una función 𝑓 que sirva para definir implícitamente al paraboloide 𝑆,
basta manipular la igualdad para que uno de sus lados quede igualado a una
constante; por ejemplo:
𝑥2 + 𝑦2 − 4𝑃𝑧 = 0.
Entonces, el paraboloide quedaría definido implícitamente con un conjunto de
nivel 𝑘 = 0 (constante) de la función
𝑓: 𝐑3 → 𝐑
(𝑥, 𝑦, 𝑧) ↦ 𝑓(𝑥, 𝑦, 𝑧) = 𝑥2 + 𝑦2 − 4𝑃𝑧
de esta forma:
𝑆 = {(𝑥, 𝑦, 𝑧) ∈ 𝐑3: 𝑓(𝑥, 𝑦, 𝑧) = 𝑥2 + 𝑦2 − 4𝑃𝑧 = 0}
c) Para definir paramétricamente a 𝑆, hay que hallar una función ℎ⃑ que entregue los
puntos (𝑥, 𝑦, 𝑧) de 𝑆 en términos de un número adecuado de entradas (para una
superficie). Para esto, basta recordar que una superficie está definida por dos
parámetros, y por tanto, basta definir los puntos (𝑥, 𝑦, 𝑧) de 𝑆 en términos de dos

26
entradas (𝑢1, 𝑢2). Dado que 𝑧 depende de 𝑥 y 𝑦 en la definición explícita, se puede
usar la parametrización trivial:
𝑥 = 𝑢1
𝑦 = 𝑢2
𝑧 =𝑢1
2 + 𝑢22
4𝑃
De ahí se obtiene la función
ℎ⃑ : 𝐑2 → 𝐑3
(𝑢1, 𝑢2) ↦ 𝑟 = (𝑥, 𝑦, 𝑧) = ℎ⃑ (𝑢1, 𝑢2) = (𝑢1, 𝑢2,𝑢1
2 + 𝑢22
4𝑃) .
Con esta función, se puede definir paramétricamente al paraboloide 𝑆 como el
conjunto imagen de la función ℎ⃑ de la siguiente manera:
𝑆 = {(𝑥, 𝑦, 𝑧) ∈ 𝐑3: (𝑥, 𝑦, 𝑧) = ℎ⃑ (𝑢1, 𝑢2) = (𝑢1, 𝑢2,𝑢1
2 + 𝑢22
4𝑃)}.
Una definición paramétrica alternativa:
Se puede aprovechar la simetría de revolución de la superficie 𝑆 y usar coordenadas
angulares para parametrizarla de otra forma alternativa. Por ejemplo, coordenadas
cilíndricas. En este caso, se debe recordar que en coordenadas cilíndricas:
[𝑥𝑦𝑧] = [
𝜌 cos𝜙𝜌 sin 𝜙
𝑧] , [
𝜌𝜙𝑧] =
[ √𝑥2 + 𝑦2
cos−1𝑥
√𝑥2 + 𝑦2
𝑧 ]
.
Entonces con 𝜌 = √𝑥2 + 𝑦2 la ecuación del paraboloide
𝑧 =𝑥2+𝑦2
4𝑃 se puede transformar en 𝑧 =
𝜌2
4𝑃 , y con la transformación a coordenadas
cilíndricas, la función que define paramétricamente a 𝑆 estaría dada por:
�⃑� : 𝐑2 → 𝐑3
(𝜌, 𝜙) ↦ 𝑟 = (𝑥, 𝑦, 𝑧) = �⃑� (𝜌, 𝜙) = (𝜌 cos𝜙 , 𝜌 sin𝜙 ,𝜌2
4𝑃 )
.
La definición paramétrica del conjunto 𝑆 con esta nueva función sería:
𝑆 = {(𝑥, 𝑦, 𝑧) ∈ 𝐑3: (𝑥, 𝑦, 𝑧) = ℎ⃑ (𝑢1, 𝑢2) = �⃑� (𝜌, 𝜙) = (𝜌 cos𝜙 , 𝜌 sin𝜙 ,𝜌2
4𝑃 )} ,
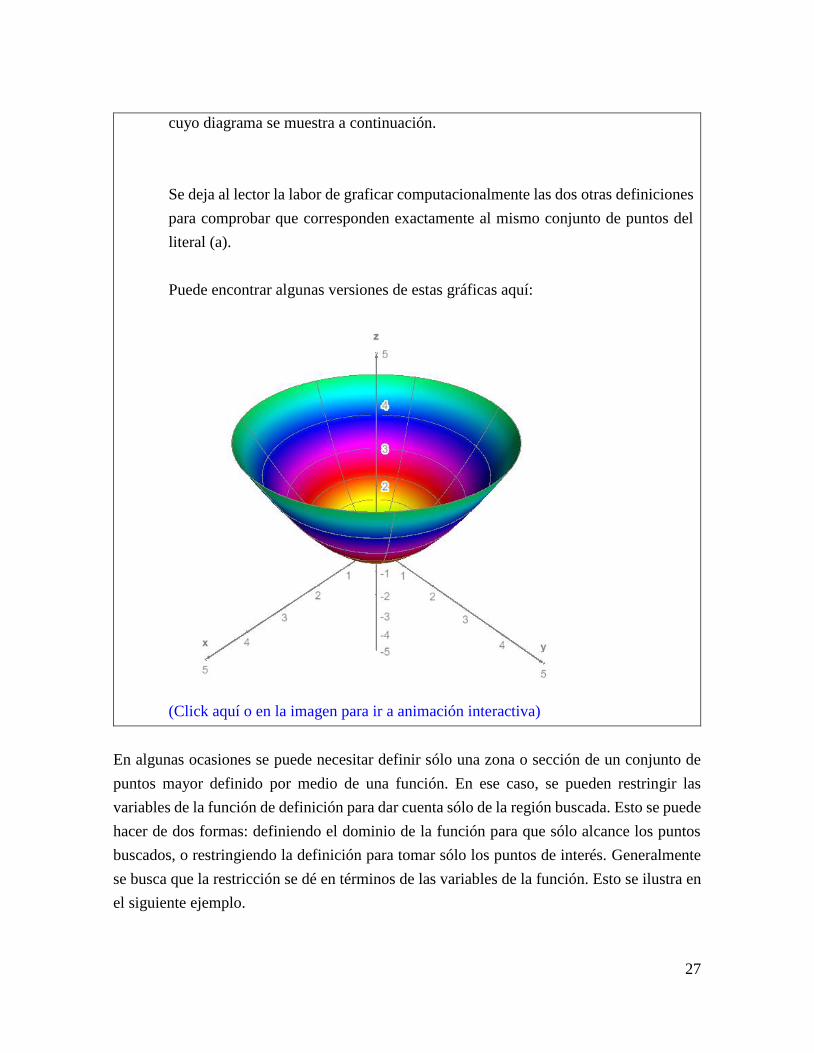
27
cuyo diagrama se muestra a continuación.
Se deja al lector la labor de graficar computacionalmente las dos otras definiciones
para comprobar que corresponden exactamente al mismo conjunto de puntos del
literal (a).
Puede encontrar algunas versiones de estas gráficas aquí:
(Click aquí o en la imagen para ir a animación interactiva)
En algunas ocasiones se puede necesitar definir sólo una zona o sección de un conjunto de
puntos mayor definido por medio de una función. En ese caso, se pueden restringir las
variables de la función de definición para dar cuenta sólo de la región buscada. Esto se puede
hacer de dos formas: definiendo el dominio de la función para que sólo alcance los puntos
buscados, o restringiendo la definición para tomar sólo los puntos de interés. Generalmente
se busca que la restricción se dé en términos de las variables de la función. Esto se ilustra en
el siguiente ejemplo.
28
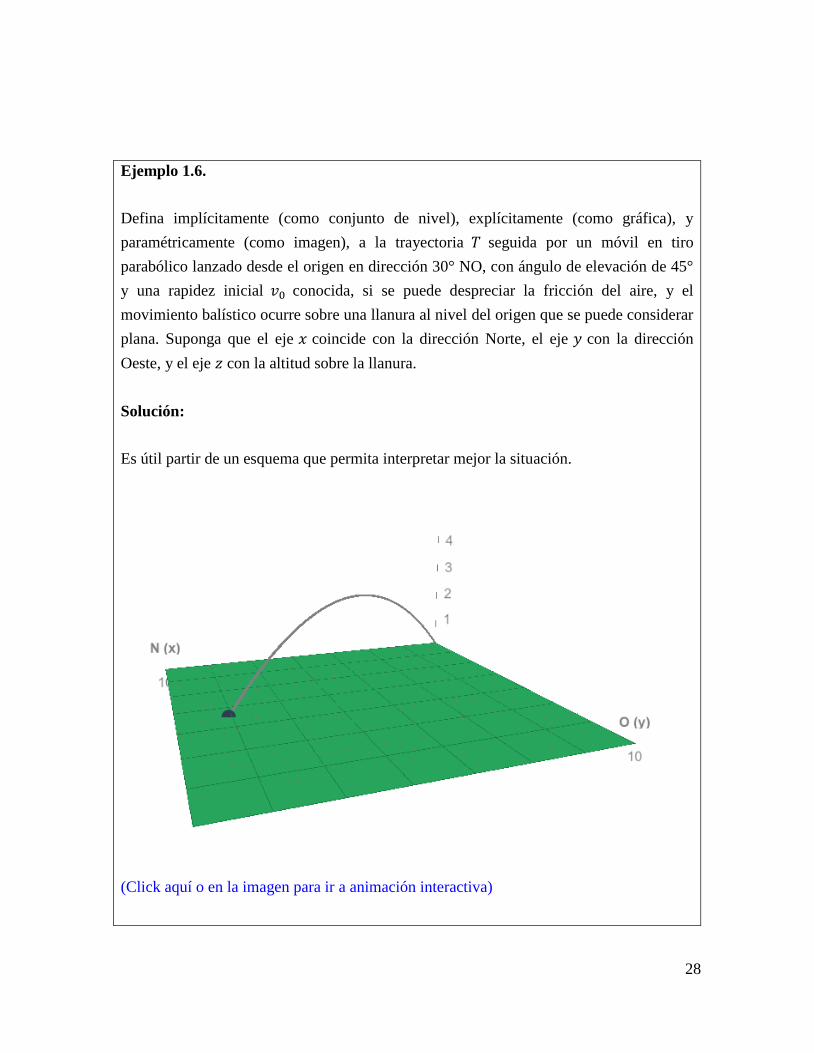
Ejemplo 1.6.
Defina implícitamente (como conjunto de nivel), explícitamente (como gráfica), y
paramétricamente (como imagen), a la trayectoria 𝑇 seguida por un móvil en tiro
parabólico lanzado desde el origen en dirección 30° NO, con ángulo de elevación de 45°
y una rapidez inicial 𝑣0 conocida, si se puede despreciar la fricción del aire, y el
movimiento balístico ocurre sobre una llanura al nivel del origen que se puede considerar
plana. Suponga que el eje 𝑥 coincide con la dirección Norte, el eje 𝑦 con la dirección
Oeste, y el eje 𝑧 con la altitud sobre la llanura.
Solución:
Es útil partir de un esquema que permita interpretar mejor la situación.
(Click aquí o en la imagen para ir a animación interactiva)

29
Es muy fácil hacer lo pedido partiendo de los conceptos física básica. En el tema de
cinemática en el espacio se encuentra que, para el movimiento uniformemente acelerado,
el vector de posición 𝑥 = (𝑥, 𝑦, 𝑧) de la partícula se puede encontrar para cada instante 𝑡
requerido a partir de la ecuación vectorial
𝑥 = 𝑥 0 + 𝑣 0𝑡 +𝑎 𝑡2
2.
En ella, 𝑥 0 es el vector de posición inicial (en 𝑡 = 0), que en nuestro caso es (0,0,0); 𝑎 es
el vector (constante) de aceleración a lo largo de la duración del movimiento, que en
nuestro caso es debido a la gravedad y está dado por 𝑎 = (0,0, −𝑔), entendiendo por 𝑔 ≈
9.8 m/s2. Por último, el vector de velocidad 𝑣 0 se puede encontrar descomponiéndolo en
términos de su rapidez y sus ángulos respecto a los ejes coordenados, según la convención
de colores en la imagen siguiente, así:
(Click aquí o en la imagen para ir a animación interactiva)
Queda:
𝑣 0 = (𝑣0 cos 𝜃 cos𝜙 , 𝑣0 cos 𝜃 sin𝜙 , 𝑣0 sin 𝜃)
Con todo lo anterior, la posición se puede encontrar en función del tiempo así:
𝑥 = (𝑥, 𝑦, 𝑧) = (0,0,0) + (𝑣0 cos 𝜃 cos𝜙 , 𝑣0 cos 𝜃 sin𝜙 , 𝑣0 sin 𝜃)𝑡 + (0,0, −𝑔)𝑡2
2

30
Al simplificar, reemplazando los valores de las funciones trigonométricas se obtiene:
𝑥 = (𝑥, 𝑦, 𝑧) = (𝑣0
√2
2
√3
2𝑡, 𝑣0
√2
2
1
2𝑡, 𝑣0
√2
2𝑡 −
𝑔
2𝑡2),
que claramente es una función del siguiente tipo:
𝑓 ∶ 𝐑 → 𝐑3
𝑡 ↦ 𝑓 (𝑡) = (𝑣0
√6
4𝑡, 𝑣0
√2
4𝑡, 𝑣0
√2
2𝑡 −
𝑔
2𝑡2)
.
En este caso, el conjunto 𝐼𝑚(𝑓 ) es el conjunto de puntos de la parábola que sigue el móvil,
por lo que se puede decir que dicha trayectoria parabólica está definida paramétricamente
por 𝑓 . Pero hay una complicación: la trayectoria del móvil no es infinita y por tanto, la
definición paramétrica de la trayectoria debe considerar las restricciones necesarias para
tomar sólo el conjunto de puntos de interés. Para esto, se puede redefinir el dominio de la
función, para que sólo permita los valores de la entrada 𝑡 que toma el vuelo desde su
comienzo hasta que vuelve a tocar el suelo. Note que esto sólo ocurre mientras 𝑧 ≥ 0, o
sea, mientras 𝑣0 √2
2𝑡 −
𝑔
2𝑡2 ≥ 0, lo que implica 𝑣0√2𝑡 ≥ 𝑔𝑡2. De aquí se concluye que el
dominio válido de la función debe ser el intervalo [0,𝑣0√2
𝑔].
Entonces, la definición paramétrica de la trayectoria 𝑇 con la función
𝑓 ∶ [0,𝑣0√2
𝑔] → 𝐑3
𝑡 ↦ 𝑓 (𝑡) = (𝑣0
√6
4𝑡, 𝑣0
√2
4𝑡, 𝑣0
√2
2𝑡 −
𝑔
2𝑡2) ,
sería:
𝑇 = 𝐼𝑚(𝑓 ) =
{𝑥 = (𝑥, 𝑦, 𝑧) ∈ 𝐑3: 𝑥 = 𝑓 (𝑡) = ( 𝑣0√6 𝑡
4, 𝑣0√2 𝑡
4, 𝑣0√2 𝑡
2−
𝑔𝑡2
2) ∧ 𝑡 ∈ [0,
𝑣0√2
𝑔]}
Para la definición implícita de la trayectoria 𝑇 (como conjunto de nivel), se elimina el
parámetro de las ecuaciones de la definición paramétrica y se igualan las ecuaciones
resultantes a constantes, para definir un conjunto de nivel.
31
De
𝑥 = 𝑣0√6 𝑡
4
𝑦 = 𝑣0√2 𝑡
4
𝑧 = 𝑣0√2 𝑡
2−
𝑔𝑡2
2
Se puede eliminar 𝑡 hallándola en una ecuación (por ejemplo, de la ecuación de 𝑥, para
obtener 4𝑥
𝑣0√6= 𝑡) y reemplazándola en las otras dos ecuaciones se llega a:
𝑦 =𝑥
√3
𝑧 =2𝑥
√3−
4𝑔𝑥2
3𝑣02
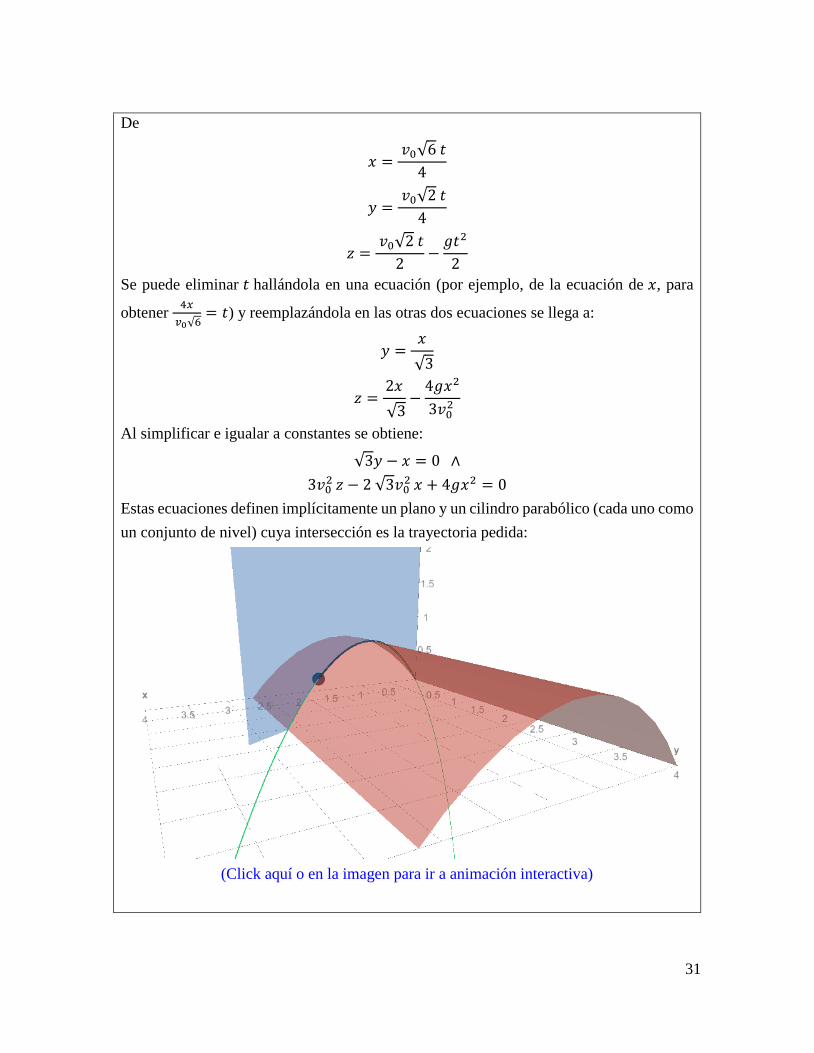
Al simplificar e igualar a constantes se obtiene:
√3𝑦 − 𝑥 = 0 ∧
3𝑣02 𝑧 − 2 √3𝑣0
2 𝑥 + 4𝑔𝑥2 = 0
Estas ecuaciones definen implícitamente un plano y un cilindro parabólico (cada uno como
un conjunto de nivel) cuya intersección es la trayectoria pedida:
(Click aquí o en la imagen para ir a animación interactiva)

32
Al representar esas dos ecuaciones de forma vectorial se puede encontrar una función que
sirve para definir implícitamente a la trayectoria 𝑇:
𝑠 (𝑥, 𝑦, 𝑧) = [√3𝑦 − 𝑥
3𝑣02 𝑧 − 2 √3𝑣0
2 𝑥 + 4𝑔𝑥2] = [
00],
con
𝑠 ∶ 𝐑3 → 𝐑2
(𝑥, 𝑦, 𝑧) ↦ 𝑠 (𝑥, 𝑦, 𝑧) = (√3𝑦 − 𝑥 ,3𝑣02 𝑧 − 2 √3𝑣0
2 𝑥 + 4𝑔𝑥2).
Nótese que el conjunto de nivel �⃑� = (0,0) de la función 𝑠 define implícitamente a la
parábola 𝑃 que incluye a la trayectoria 𝑇 del móvil.
𝑃 = 𝑁𝑖𝑣(0,0)(𝑠 ) =
= {(𝑥, 𝑦, 𝑧) ∈ 𝐑3: 𝑠 (𝑥, 𝑦, 𝑧) = (√3𝑦 − 𝑥 ,3𝑣02 𝑧 − 2 √3𝑣0
2 𝑥 + 4𝑔𝑥2) = (0,0)}
No obstante, la trayectoria 𝑇 no es toda la parábola definida por 𝑁𝑖𝑣(0,0)(𝑠 ); entonces, para
definir implícitamente a 𝑇 se puede cambiar la definición de la función con un dominio
más restringido (que sólo incluya la parte correspondiente a 𝑧 ≥ 0):
ℎ⃑ ∶ 𝐑2 × 𝐑+ → 𝐑2
(𝑥, 𝑦, 𝑧) ↦ 𝑠 (𝑥, 𝑦, 𝑧) = (√3𝑦 − 𝑥 ,3𝑣02 𝑧 − 2 √3𝑣0
2 𝑥 + 4𝑔𝑥2),
Así, la definición de 𝑇 queda:
𝑇 = 𝑁𝑖𝑣(0,0)(ℎ⃑ ) =
= {(𝑥, 𝑦, 𝑧) ∈ 𝐑3: ℎ⃑ (𝑥, 𝑦, 𝑧) = (√3𝑦 − 𝑥 ,3𝑣02 𝑧 − 2 √3𝑣0
2 𝑥 + 4𝑔𝑥2) = (0,0)}.
Alternativamente, también se pudo definir implícitamente a 𝑇, con base en la definición
respectiva de la parábola 𝑃, agregándole una restricción en las condiciones del conjunto:
𝑇 = {(𝑥, 𝑦, 𝑧) ∈ 𝐑3: 𝑠 (𝑥, 𝑦, 𝑧) = (√3𝑦 − 𝑥 ,3𝑣0
2 𝑧 − 2 √3𝑣02 𝑥 + 4𝑔𝑥2) = (0,0)
∧ 𝑧 ≥ 0}
Para la definición explícita de 𝑇 se puede encontrar la función necesaria, despejando las
últimas variables del vector 𝑥 en términos de sus primeras variables, partiendo de las
ecuaciones de la definición implícita.

33
En este caso, de
[√3𝑦 − 𝑥
3𝑣02 𝑧 − 2 √3𝑣0
2 𝑥 + 4𝑔𝑥2] = [
00]
se obtiene
𝑦 =𝑥
√3
𝑧 =2𝑥
√3−
4𝑔𝑥2
3𝑣02 .
Al escribirlo en forma vectorial se llega a una función
𝐺 ∶ 𝐑 → 𝐑2
𝑥 ↦ 𝐺 (𝑥) = (𝑦, 𝑧) = (𝑥
√3 ,
2𝑥
√3−
4𝑔𝑥2
3𝑣02 ) ,
con
𝑃 = 𝐺𝑟𝑎𝑓(𝐺 ) = {(𝑥, (𝑦, 𝑧)) = (𝑥, 𝑦, 𝑧) ∈ 𝐑3: (𝑦, 𝑧) = (𝑥
√3 ,
2𝑥
√3−
4𝑔𝑥2
3𝑣02 )}.
Es claro que 𝑃 = 𝐺𝑟𝑎𝑓(𝐺 ) es la parábola que incluye al arco 𝑇 sobre el plano 𝑥𝑦. Pero si
queremos definir explícitamente sólo al arco 𝑇, hay que restringir el dominio de la función,
en su variable 𝑥, para sólo tener en cuenta el arco con 𝑧 ≥ 0.
De dicha condición: 𝑧 =2𝑥
√3−
4𝑔𝑥2
3𝑣02 ≥ 0 se tiene:
𝑥 (2
√3−
4𝑔𝑥
3𝑣02 ) ≥ 0
Lo anterior implica 𝑥 ≥ 0 y 𝑥 ≤√3𝑣0
2
2𝑔. Entonces, se puede definir la función como:
𝐺 ∶ [0,√3𝑣0
2
2𝑔] → 𝐑2
𝑥 ↦ 𝐺 (𝑥) = (𝑦, 𝑧) = (𝑥
√3 ,
2𝑥
√3−
4𝑔𝑥2
3𝑣02 ) ,
y la trayectoria pedida se definiría explícitamente como:

34
𝑇 = 𝐺𝑟𝑎𝑓(𝐺 ) =
= {(𝑥, (𝑦, 𝑧)) = (𝑥, 𝑦, 𝑧) ∈ 𝐑3: (𝑦, 𝑧) = (𝑥
√3 ,
2𝑥
√3−
4𝑔𝑥2
3𝑣02 ) ∧ 𝑥 ∈ [0,
√3𝑣02
2𝑔]}.
Nótese que si no se requiere la definición detallada de la función, se puede hacer con la
definición de la parábola completa 𝑃, simplemente agregándole la restricción para la 𝑥:
𝑇 = {(𝑥, (𝑦, 𝑧)) = (𝑥, 𝑦, 𝑧) ∈ 𝐑3: (𝑦, 𝑧) = (𝑥
√3 ,
2𝑥
√3−
4𝑔𝑥2
3𝑣02 ) ∧ 𝑥 ∈ [0,
√3𝑣02
2𝑔]}.