estudio de la modulación ofdm y de los efectos no lineales...
TRANSCRIPT

UNIVERSIDAD DE SEVILLAEscuela Superior de Ingenieros
Departamento de Teoría de la Señal y Comunicaciones
PROYECTO FIN DE CARRERAIngeniería de Telecomunicación
Estudio de la modulación OFDM y de los efectos no lineales mediante
simulación en Matlab
TUTOR: Dr. D. Carlos Crespo CadenasAUTOR: Daniel Castaño del Castillo
Sevilla, Septiembre de 2008


Índice
1. Capítulo 1: Introducción ..................................................................... 7
1.1. Motivación del proyecto .............................................................. 7
1.2. Objetivos y alcance del proyecto ..................................................... 8
1.3. Organización de la memoria ........................................................... 8
2. Capítulo 2: Modulación OFDM .................................................................. 9
2.1. Introducción histórica ............................................................... 9
2.2. Definición de OFDM ................................................................... 10
2.3. Características de OFDM .............................................................. 11
2.3.1. Ventajas ..................................................................... 112.3.2. Inconvenientes................................................................ 11
2.4. Modelo general del sistema OFDM ...................................................... 12
2.4.1. Modelo en tiempo continuo .................................................... 132.4.2. Modelo en tiempo discreto .................................................... 162.4.3. Imperfecciones con respecto al modelo ideal .................................. 19
2.5. Propiedades importantes de OFDM ...................................................... 20
2.5.1. Importancia de la ortogonalidad .............................................. 202.5.2. Espectro de una señal OFDM ................................................... 212.5.3. Concepto del intervalo de guarda y del prefijo cíclico ....................... 222.5.4. Tasa de error de bits para canales AWGN....................................... 232.5.5. Número óptimo de portadoras y del intervalo de guarda ........................ 232.5.6. Parámetros de una señal OFDM real ............................................ 24
2.6. Problemas en OFDM .................................................................... 25
2.6.1. Problema del multitrayecto ................................................... 252.6.1.1. Visión en el tiempo: Dispersión del retardo ......................... 252.6.2.2. Visión en la frecuencia: Ancho de banda de coherencia ............... 26
2.6.2. Ecualización ................................................................. 282.6.3. Sincronización ............................................................... 30
2.6.3.1. Sincronización de símbolo y Ruido de fase ........................... 302.6.3.2. Sincronización de la frecuencia de muestreo ......................... 322.6.3.3. Sincronización de la frecuencia de subportadora...................... 332.6.3.4. Sincronización con multitrayecto .................................... 342.6.4. Potencia pico y efectos no lineales ................................... 352.6.5. Potencia fuera de banda ............................................... 36

3. Capítulo 3: El canal no lineal. Análisis de sus efectos ...................................... 39
3.1. Introducción ......................................................................... 39
3.2. Estudio general de las no linealidades ............................................... 40
3.2.1. Modelado del canal con y sin memoria ......................................... 403.2.1.1. Representación en banda base ........................................ 413.2.1.2. El caso cuasi-sin memoria ........................................... 43 3.2.1.3. El caso sin memoria ................................................. 433.2.1.4. Algunos casos especiales ............................................ 453.2.1.5. Conclusión .......................................................... 47
3.2.2. Modelos de Saleh para sistemas no lineales ................................... 483.2.2.1. Modelo de Amplitud-Fase ............................................. 483.2.2.2. Modelo de Cuadratura ................................................ 493.2.2.3. Modelo en cuadratura dependiente de la frecuencia ................... 50
3.2.3. Efecto de las no linealidades de un PA ....................................... 523.2.3.1. Distorsión de la constelación (warping) ............................. 523.2.3.2. Regeneración del espectro (spectral regrowth) ....................... 523.2.3.3. Reducción de la eficiencia de la batería ............................ 54
3.2.4. Efecto de la memoria ......................................................... 543.2.4.1. Medidas de dos tonos ................................................ 57
3.2.5. Input Back-Off y Output Back-Off ............................................. 58
3.3. No linealidad en OFDM ................................................................ 59
3.3.1. Formulación del problema ..................................................... 593.3.2. Caracterización de la variable de decisión ................................... 613.3.3. Evaluación de la probabilidad de error ....................................... 66
4. Capítulo 4: Experiencia en Matlab ............................................................ 67
4.1. Introducción ......................................................................... 67
4.2. Creación y transmisión de la señal OFDM .............................................. 684.2.1. Datos.m ...................................................................... 694.2.2. Transmision.m ................................................................ 704.2.3. Graf.m ....................................................................... 714.2.4. GrafDDP.m .................................................................... 72
4.3. Recepción y análisis de la señal OFDM ................................................ 734.3.1. Canal.m ...................................................................... 734.3.2. Recepcion.m .................................................................. 74
4.4. Colección de simulaciones ............................................................ 754.4.1. GrafSNR.m .................................................................... 774.4.2. GrafMulti.m .................................................................. 774.4.3. GrafICI.m .................................................................... 784.4.4. GrafSinc.m ................................................................... 784.4.5. GrafOBO.m .................................................................... 784.4.6. GrafDEG.m .................................................................... 79

5. Capítulo 5: Resultados y conclusiones ........................................................ 81
5.1. Introducción ......................................................................... 81
5.2. Señal OFDM ........................................................................... 825.2.1. Transmisión de la señal ...................................................... 825.2.2. Recepción de la señal ........................................................ 855.2.3. Efectos del ruido ............................................................ 865.2.4. Efectos del multitrayecto .................................................... 875.2.5. Efectos de la ICI ............................................................ 885.2.6. Efectos de un offset frecuencial ............................................. 89
5.3. Señal OFDM con modelo no lineal del SSPA ............................................. 905.3.1. Transmisión de la señal ...................................................... 915.3.2. Recepción de la señal ........................................................ 935.3.3. Efectos del ruido ............................................................ 945.3.4. Figura de la degradación ..................................................... 95
5.4. Señal OFDM con modelo no lineal del TWT .............................................. 965.4.1. Transmisión de la señal ...................................................... 975.4.2. Recepción de la señal ........................................................ 995.4.3. Efectos del ruido ........................................................... 1005.4.4. Figura de la degradación .................................................... 101
6. Capítulo 6: Futuras líneas de investigación ................................................. 103
6.1. Introducción ........................................................................ 103
6.2. Líneas de investigación propuestas .................................................. 103
A1. Anexo 1: Código fuente ..................................................................... 105
A2. Anexo 2: Bibliografía ...................................................................... 119

Capítulo 1 Introducción
Capítulo 1: Introducción
1.1. Motivación del proyecto
A lo largo de los últimos años, la evolución de las telecomunicaciones ha ido encaminada principalmente a ofrecer al usuario final una gama de servicios cada vez más extensa y variada. Es por ello que cada vez hemos ido necesitando un mayor aprovechamiento de ese limitado recurso de las telecomunicaciones, que es el espectro radioeléctrico.
De esta manera, el concepto de la banda ancha, aunque todavía incomprendido por la mayoría, ha superado las fronteras de las regiones más técnicas, para situarse como una entelequia propia de los tiempos de la sociedad del bienestar. Así, a lo largo de los últimos años, hemos asistido a una evolución de las transmisiones digitales, donde las nuevas modulaciones creadas iban sustituyendo a las antiguas por aportar una mayor eficiencia espectral.
Es con esta filosofía como nació OFDM (Orthogonal Frecuency Division Multiplexing), que además de ofrecer una gran velocidad de datos derivada de su excelente eficiencia espectral, presenta una característica robustez frente al efecto multitrayecto, que la hace idónea para multitud de aplicaciones. Gracias a estas características, la modulación OFDM se ha implantado en numerosos campos de las telecomunicaciones, entre los que podemos citar:
• La televisión digital terrestre (DVB-T).
• La línea de abonado ADSL.
• El protocolo de red de área local IEEE 802.a/g.
• El sistema de transmisión inalámbrica WiMAX.
• Y quizás lo más importante, la próxima generación de móviles 4G podría ser implementada empleando OFDM, desbancando así a UMTS. De hecho, Wide OFDM está ya patentada y presenta enormes ventajas en la banda ancha inalámbrica.
Es por todo estos campos de las telecomunicaciones en los que OFDM se ha hecho imprescindible, y por todos los campos en los que se sigue proponiendo su implantación, por los que OFDM constituye un tema idóneo para un proyecto fin de carrera.
Página 7
Capítulo 1 Introducción
1.2. Objetivos y alcance del proyecto
El objetivo de este proyecto es el estudio de OFDM, haciendo un enfoque principalmente teórico. Así, se propondrán diversos análisis para comprobar la respuesta de esta modulación ante diferentes situaciones y efectos, propios del canal radio.
De esta manera, haremos especial incapié en la no linealidad que puede introducir el subsistema radio, concretamente los amplificadores, en OFDM, ya que esta modulación es especialmente sensible a los efectos negativos derivados de amplificadores no lineales. Desde aquí, nuestra meta final será llegar a una relación entre la degradación que sufre nuestra señal OFDM para distintos puntos de trabajo de un amplificador.
Para realizar todo esto, nos apoyaremos fundamentalmente en la simulación. Esto tiene como ventaja la diversidad de análisis que podemos hacer, la rapidez y la automatización, que no podríamos conseguir abordando el estudio mediante pruebas experimentales.
1.3. Organización de la memoria
Para llevar a cabo los objetivos que hemos propuesto, se ha organizado la memoria en varios capítulos, con la intención de estructurar adecuadamente los conceptos abordados en el proyecto.
En el segundo capítulo, Modulación OFDM, se estudia desde un punto de vista teórico todo lo relacionado con la modulación OFDM. Se empieza con un análisis histórico para ver los orígenes que han dado lugar a esta modulación, posteriormente analizamos el modelo, sus ventajas e inconvenientes, y otros temas teóricos interesantes en OFDM como pueden ser su sincronización o la ecualización del canal.
En el tercer capítulo, El canal no lineal. Análisis de sus efectos, se estudia también desde un punto de vista teórico, los efectos no lineales en las telecomunicaciones y en OFDM. Empezaremos con un estudio general, veremos la diferencia entre el modelado del canal con memoria y sin memoria, centrándonos en este segundo caso, y veremos diversos estudios realizados sobre los efectos no lineales (como los modelos de Saleh que utilizaremos para la implementación de estos efectos en la simulación), para terminar centrando el estudio en los efectos no lineales en OFDM.
En el cuarto capítulo, Matlab. Análisis de la simulación, abordaremos la implementación de los códigos que hemos utilizado para las simulaciones. Este será el capítulo más personal de la memoria, y en él se expondrá la experiencia con Matlab a lo largo del periodo de trabajo, las consideraciones tenidas en cuenta a la hora de llevar OFDM a las líneas de código, y la evolución de las de las funciones implementadas hasta llegar a sus versiones definitivas, más óptimas en cuanto a simplicidad y tiempo de ejecución.
En el quinto capítulo, Resultados y Conclusiones, se han incluído todos los resultados obtenidos en las simulaciones antes citadas, en la mayoría de las ocasiones con diversas reiteraciones y variaciones para obtener resultados más concluyentes. Con los resultados obenidos, se comentarán si son coherentes, el rango de validez de los mismos, y la relación que tienen con los análisis teóricos que habíamos realizado.
En el sexto capítulo, Futuras líneas de investigación, se propondrán y comentarán nuevas líneas de investigación que se pueden llevar a cabo a partir del trabajo realizado en este proyecto.
Por último, se dejará a modo de anexo el código utilizado para las simulaciones, así como la bibliografía empleada en la documentación para el presente proyecto.
Página 8

Capítulo 2 Modulación OFDM
Capítulo 2: Modulación OFDM
2.1. Introducción histórica de OFDM
La utilización de OFDM se remonta a comienzos de siglo. En telegrafía, las señales eran transmitidas a través de un canal de ancho de banda relativamente grande utilizando una frecuencia portadora distinta para cada señal. Las portadoras estaban separadas por cierta banda de guarda para evitar solapamientos. Así, la eficiencia espectral era deficiente.
La primera solución adoptada a los problemas de eficiencia de la transmisión multitono es el sistema Kineplex. Fue desarrollado por Collins Radio Co. para la transmisión de datos a través de un canal radio HF sometido a severo fading multipath. En este sistema, cada uno de los veinte tonos se modula con una diferencial 4-PSK sin filtro. Sin embargo, de forma análoga a OFDM moderno, los tonos se espacian a intervalos de frecuencia casi iguales a la tasa de señal y es posible su fácil separación en el receptor.
A mediados de los años 60, Chang publicó un artículo sobre la síntesis de señales limitadas en banda para transmisiones multicanal. Se trataba de un estudio de la transmisión de varios mensajes empleando un canal limitado en banda y evitando por primera vez los fenómenos ICI (interferencia interportadora) e ISI (interferencia intersímbolo).
Es en 1971 con la contribución de Weinstein y Ebert cuando se comienza a hablar de OFDM propiamente dicho. Fueron ellos los que propusieron la Transformada Discreta de Fourier (IDFT, DFT) para modular y demodular en banda base. Además, para evitar interferencias entre canales, utilizaron un enventanado por coseno alzado que, si bien no conseguía la ortogonalidad perfecta, supuso una gran contribución al desarrollo de la técnica.
Otro gran avance fue introducido por Peled y Ruiz en 1980, quienes idearon la utilización de un prefijo cíclico, que resolvían los problemas que se producían en la ortogonalidad de las señales. En vez de utilizar un periodo de guarda vacío, ellos propusieron transmitir en ese espacio una extensión cíclica del símbolo OFDM. Esto, efectivamente, simula un canal que realiza una convolución cíclica, lo que implica ortogonalidad sobre canales dispersivos cuando el prefijo cíclico es mayor que la respuesta impuliva del canal. Sin embargo, esto introduce una pérdida de energía proporcional a la longitud del prefijo cíclico, pero queda justificada por la nula ICI.
Actualmente se utiliza OFDM en el estándar europeo de la DAB (Digital Audio Broadcasting) así como en varios sistemas propuestos para Norteamérica. Durante los últimos años, la aceptación del OFDM como tecnología de base para el 802.16a que es un estándar de IEEE para redes de área metropolitana inalámbrica que puede proveer extensión inalámbrica para acceso de última milla de banda ancha en instalaciones de cable y DSL.
Página 9

Capítulo 2 Modulación OFDM
2.2. Definición de OFDM
La modulación OFDM (Orthogonal Frequency Division Multiplexing), es un tipo de modulación multiportadora que surgió con el propósito de conseguir altos régimenes binarios y de subsanar los problemas relacionados con la transmisión multitrayecto. La modulación multiportadora consiste en enviar la información, modulada en QAM o en PSK, en un conjunto de portadoras de diferente frecuencia. En este contexto se suelen denominar como subportadoras, aunque a partit de ahora nos referiremos a ellas indistintamente como portadoras o subportadoras sin pérdida de generalidad.
En multitud de ocasiones se realiza la modulación OFDM tras pasar la señal por un codificador de canal con el objetivo de corregir los errores producidos en la transmisión, entonces esta modulación se denomina COFDM, del inglés Coded OFDM.
Se podría pensar que la implementación de la modulación OFDM es inviable, debido al problema técnico que supone la generación y la detección en tiempo continuo de los cientos, o incluso miles, de portadoras equiespaciadas que forman una modulación OFDM. Esto supondría entre otras cosas, una cadena transmisora y receptora, así como de un oscilador independiente por cada portadora, con los problemas de sintonización y sincronización que ello conllevaría.
Afortunadamente, sólo se requiere una cadena en cada sentido de transmisión, que modula o demodula todas las portadoras a la vez. De hecho como veremos más adelante, una señal OFDM es la transformada inversa de Fourier de los coeficientes mapeados en las portadoras, y en consecuencia, los coeficientes son la transformada directa de la señal OFDM. Es por esto, por lo que en los procesos de modulación y demodulación, se aprovecha esta peculiaridad caracteríatica de OFDM, y se llevan a cabo en tiempo discreto mediante los algoritmos IFFT y la FFT respectivamente. Con ello se soluciona el problema anterior, ya que sólo se requiere de una cadena de transmisión para modular y demodular todas las portadoras. Además, se consigue de esta manera una solución a la implementación de una manera elegante y computacionalmente eficiente.
Pero quizás la característica que más diferencia a OFDM de otros procedimientos de multiplexación en frecuencia es la ortogonalidad, pues el “espaciamiento adecuado” entre portadoras es, en este caso, un espaciamiento óptimo. Este espaciamiento consiste en que la separación espectral entre portadoras consecutivas es siempre la misma, e igual al inverso del periodo de símbolo. Viendo una señal OFDM en el tiempo se aprecia que en el periodo de la portadora más baja caben varios periodos de las otras portadoras, alineadas todas en fase, mientras que en la representación espectral el máximo de cada portadora coincide con un nulo de las demás.
Figura 2.1. Representación temporal y frecuencial de la señal OFDM
Página 10

Capítulo 2 Modulación OFDM
2.3. Características de OFDM
Ahora, una vez hecha esta breve exposición de lo que es OFDM, podemos empezar a discutir las ventajas e inconvenientes de esta modulación. Ventajas de OFDM
• Elevada eficiencia espectral al utilizar múltiples portadoras que pueden ser ubicadas en un ancho de banda muy reducido permitiendo así transmitir elevadas tasas de información por segundo y por ancho de banda.
• Ecualización simplificada en la mayoría de los casos, más sencilla que la ecualización adaptativa de las modulaciones monoportadoras. Además, en conjunción con una modulación diferencial, no es necesario un estimador de canal.
• Menor sensibilidad a la sincronización temporal que las modulaciones monoportadora.
• Resistencia ante interferencias multitrayecto: si un determinado rango de frecuencias sufre interferencias severas, dicho rango puede ser deshabilitado para la transmisión.
• Posibilidad de variar las velocidades superior e inferior, según el empleo de más o menos portadoras en función del propósito de la comunicación.
• Eliminación de Interferencias Intersímbolo (ISI), además de robustez frente a Interferencias Interportadora (ICI) al introducir el Prefijo Cíclico (CP).
• Implementación simple y eficiente gracias a la utilización de los algoritmos de IFFT y FFT para la modulación y demodulación respectivamente.
Inconvenientes de OFDM
• Son altamente sensibles al offset en frecuencia y a los ruidos de fase. La presencia de una distorsión no lineal en la cadena de transmisión afectan de manera crítica las prestaciones de estos sistemas imponiendo severos límites a su viabilidad. Por ello, cobran gran importancia los circuitos de sincronización que se estudian en el apartado siguiente.
• La necesidad de los intervalos de guarda con prefijo cíclico suponen en coste en energía que acaba suponiendo una menor eficiencia en energía.
• Una alta relación Peak Average Power Ratio (PAPR). Es decir, uma gran diferencia entre la potencia máxima y la potencia media de la señal modulada, lo que dificulta la elección de un punto de trabajo en potencia, condicionando aún más el problema de las no linealidades.
• Mayor coste de los sistemas transmisores y receptores.
Página 11

Capítulo 2 Modulación OFDM
2.4. Modelo general del sistema OFDM
En este apartado abordaremos analíticamente la señal OFDM transmitida y recibida, así como los distintos modelos de sus sistemas, tanto en tiempo continuo como en tiempo discreto. Así, comenzando por un análisis en banda base de OFDM, lo que nos dará una visión más aproximada de la implementación digital que dichos sistemas soportan en la actualidad. Además se asumirán las siguientes condiciones:
• El uso de un prefijo cíclico.
• La respuesta impulsiva del canal es menor que el prefijo cíclico.
• El transmisor y el receptor están perfectamente sincronizados.
• El canal introduce ruido complejo, aditivo y Gaussiano.
• El desvanecimiento es lo suficientemente lento como para considerarlo constante en la duración de un símbolo OFDM.
Bajo estas suposiciones, tendríamos un sistema en banda base que podemos representar con el esquema de la figura siguiente.
Figura 2.2. Esquema general de un sistema con modulación OFDM
El anterior sistema permite la transmisión en paralelo de un conjunto de N símbolos M-arios, habiéndose formado previamente dichos símbolos a partir del flujo binario generado de forma aleatoria. En la práctica la entrada de nuestro sistema será atacada por una línea digital.
Tras el Mapper/Modulator (M-PSK o M-QAM), el flujo binario es convertido de serie a paralelo, con lo que se tiene un conjunto de N números complejos xk provenientes de una determinada constelación de señales. Así pues los datos xk son modulados sobre N portadoras mediante la aplicación de la Transformada Inversa de Fourier (IDFT), generándose los valores complejos ak .
Esta señal ataca a un serializador que copia las últimas L muestras a modo de preámbulo prefijo cíclico (CP) y origina el símbolo OFDM, el cual será transmitido a través de un canal discreto en el tiempo.
Figura 2.3. Creación del símbolo OFDM con el prefijo cíclico
Página 12

Capítulo 2 Modulación OFDM
En el receptor la extensión cíclica es extraída y la señal resultante se demodula mediante la aplicación de un bloque DFT. La inserción del prefijo cíclico es comunmente aceptada como la forma de evitar la ISI y preservar la ortogonalidad entre los tonos.
Existe otra posibilidad que se basa en que en el proceso de creación del símbolo OFDM, éstos no se originan añadiendo las últimas muestras del símbolo a las primeras, sino que se añade una cola de ceros de la misma longitud L que el prefijo cíclico. A esta técnicase le denomina Zero-Padding (ZP).
La dificultad de realizar un análisis teórico completo de un sistema OFDM, hace que sea imposible abordarlo completamente. Por ello, usaremos modelos simplificados que nos permitan un análisis más simple sin pérdida de generalidad. El modelo general de OFDM se suele desglosar en dos modelos, uno de tiempo continuo y otro de tiempo discreto.
2.4.1. Modelo en tiempo continuo
Los primeros sistemas OFDM no empleaban modulación ni demodulación digital. Por ello, el modelo de tiempo continuo para OFDM puede ser considerado como el sistema OFDM ideal, que en la práctica es sintetizado digitalmente. Así, el modelo continuo se puede representar por el esquema de la siguiente figura.
Figura 2.3. Modelo de un sistema OFDM en tiempo continuo
El modelo analítico del sistema de transmisión OFDM viene dado por las ecuaciones que expresan la funcionalidad de los distintos bloques que lo integran. Supongamos que tenemos un conjunto de señales base de transmisión φ, donde φp es el p-ésimo elemento. Se dice que las señales son ortogonales si se cumple:
Un conjunto de señales que cumple la condición de ortogonalidad serían los senos y cosenos.
Por último, gracias a la ortogonalidad se puede transmitir sin interferencia entre las portadoras, y debido a su importancia en el estudio de OFDM, será abordada más adelante en mayor profundidad.
Página 13
* 1( ) ( ) (2.1)
0
b
p qa
si p qt t dt
si p qφ φ
== ≠∫

Capítulo 2 Modulación OFDM
• Transmisor :
Supongamos un sistema OFDM con N subportadoras, un ancho de banda de W Hz y una longitud de símbolo de T segundos, de los cuales Tcp segundos son la longitud del prefijo cíclico, en ese caso, el transmisor usa las siguientes formas de onda:
donde T = N/W + Tcp.
Por otra parte φk(t) es un pulso rectangular modulado en una frecuencia de potadora kW/N, y la interpretación más usual de OFDM es que se están utilizando N subportadoras, cada una de las cuales transporta una baja tasa de bits.
Las señales φk(t) se utilizan en la modulación de forma que la señal en banda base transmitida para el l-ésimo símbolo OFDM es:
donde x0,l, x1,l, ... , xN-1,l, son números complejos que provienen de los puntos de una constelación de señales. Observando la ecuación (2.3), se aprecia que la señal en banda base tiene la misma expresión que una IDFT. Esto hace que se usen los algoritmos rápidos de la IFFT para la transmisión.
Cuando se transmite una secuencia infinita de símbolos OFDM, la salida del transmisor no es más que la yuxtaposición de símbolos OFDM individuales:
• Canal:
Pasemos a hacer un análisis matemático del canal. Asumiremos que la respuesta impulsiva del canal g(τ;t) está restringida al intervalo τ [∈ 0,Tcp], es decir a la longitud del prefijo cíclico. La señal recibida será:
donde g(τ;t) es la respuesta impulsiva del canal, y donde ñ(t) es ruido gaussiano blanco aditivo (AWGN) con densidad espectral de potencia No/2.
Página 14
0
( ) ( )( ) ( ; ) ( ) ( ) (2.5)cpT
r t g s t g t s t d n tτ τ τ= ∗ = − +∫ %
1
,0
( ) ( ) ( ) (2.4)N
l k l kl l k
s t s t x t lTφ∞ ∞ −
= − ∞ = − ∞ =
= = −∑ ∑ ∑
1
,0
( ) ( ) (2.3)N
l k l kk
s t x t lTφ−
=
= −∑
[ ]2 ( )1 0,( ) (2.2)
0
cpWj k t TN
cpk
e si t TT Tt
en otro caso
π
φ−
∈ −=

Capítulo 2 Modulación OFDM
• Receptor:
El receptor OFDM consiste en un banco de filtros adaptados a la última parte [Tcp, T] de las señales del transmisor φk. Esto es:
Como podemos comprobar, el prefijo cíclico se elimina en el receptor. Como el CP contiene toda la información acerca de la ISI del símbolo anterior, la muestra de salida procedente del banco de filtros del receptor no contiene interferencia. A partir de ahora no tendremos en cuenta el índice temporal l cuando calculamos la muestra de salida en el k-ésimo filtro adaptado. Con esto, y utilizando las ecuaciones anteriores del canal y el transmisor podemos llegar a:
Si consideramos el canal constante en todo el intervalo de un símbolo OFDM y lo denotamos como g(τ), podemos escribir:
Teniendo en cuenta que los intervalos de integración son Tcp < t < T y 0 < τ < Tcp , lo que implica que 0 < t-τ < T, y la teniendo en cuenta la expresión de la Transformada de Fourier, se puede deducir la siguiente expresión:
Como los filtros de transmisión son ortogonales, entonces tenemos que el producto de ambas funciones de la señal resulta:
donde δ[k] es la función Delta de Kronecker, y resultando finalmente la ecuación simplificada:
Página 15
*( ) 0,( ) (2.6)
0k cp
k
T t si t T Tt
en otro caso
φψ
− ∈ − =
(2.11)k k k ky h x n= +
[ ]*' ( ) ( ) ' (2.10)
cp
T
k kT
t t dt k kφ φ δ= −∫
1* *
' ' ''
( ) ( ) ( ) ( ) (2.9)cp cp
T TN
k k k k k kk T T
y x h t t dt n T t t dtφ φ φ−
= + −∑ ∫ ∫ %
1* *
' '' 0
( ) ( ) ( ) ( ) ( ) (2.8)cp
cp cp
TT TN
k k k k kk T T
y x g t d t dt n T t t dtτ φ τ τ φ φ−
= − + − ∑ ∫ ∫ ∫ %
1* *
0
( * )( ) ( ) ( )
( ; ) ( ) ( ) ( ) ( ) (2.7)cp
cp cp
k k t T
TT TN
k k k kkT T
y r t r t t dt
g t x t d t dt n T t t dt
ψ φ τ
τ φ τ τ φ φ
∞
=− ∞
−
= = − =
= − + −
∫
∑∫ ∫ ∫ %

Capítulo 2 Modulación OFDM
Esta última expresión es de suma importancia, porque refleja claramente el doble beneficio del prefijo cíclico. Por un lado evita el ICI, ya que la componente k-ésima de la salida sólo depende de la componente k-ésima de la entrada. Se dice que se mantiene la ortogonalidad. Por otra parte, se evita el ISI, ya que la salida en un periodo de símbolo sólo depende de su periodo de símbolo correspondiente en la entrada. El medio por el que vamos a transmitir presenta un desvanecimiento que depende de la frecuencia pero el hecho de dividir el ancho de banda en subcanales hace que cada uno de estos vea un desvanecimiento particular que se puede considerar plano y que se refleja en el término hk.
2.4.2. Modelo en tiempo discreto
Un modelo frecuencial de un sistema OFDM se puede asemejar al de la figura 2.4. Comparando con el modelo en tiempo continuo, el modulador y el demodulador son reemplazados por módulos de IDFT y de DFT respectivamente, y el canal es una convolución en tiempo discreto. Así pues la principal diferencia radica en que las integrales serán sustituidas por sumatorios ya que el tratamiento que se le hace al CP es idéntico en ambos casos.
Figura 2.4. Modelo de un sistema OFDM en tiempo discreto
Como se aprecia en la figura 2.4, la secuencia de símbolos de entrada procedentes del mapeador se agrupan en bloques de N símbolos de datos denotados por xm = [x0,L, x1,L, ... , xN-1,L]. A continuación, se aplica la transformada N-IDFT y se le añade un prefijo de longitud Ncp para crear el símbolo OFDM. El resultado es una señal en banda base discreta en el tiempo del m-ésimo símbolo OFDM, que se puede escribir como:
donde n es el índice de tiempo discreto.
La señal completa en el tiempo s(n) es la concatenación de todos los símbolos OFDM. Esto sería lo siguiente:
Página 16
12 ( ) /
,0
1 [0, 1]( ) (2.12)
0
Nj k n N N
k m cpkm
x e si n N Ns n N
en otro caso
π−
−
=
∈ + −=
∑
( )0
( ) ( ) (2.13)m cpm
s n s n m N N∞
=
= − +∑
Capítulo 2 Modulación OFDM
En general, la señal recibida es la suma de la convolución lineal con la respuesta discreta al impulso del canal g(n) y el ruido blanco, gaussiano y aditivo n(n). Se suponen transmisor y receptor perfectamente sincronizados. Basándonos en el hecho de que el prefijo cíclico es suficientemente largo como para ajustarse a la respuesta impulsiva del canal, es decir, g(n) = 0 para n<0 y n>Ncp-1, podemos escribir:
En el receptor, la secuencia recibida es separada en bloques de longitud N+Ncp , de los que se descarta el prefijo cíclico de cada uno de ellos. Así resulta el vector rm.
El símbolo de datos recicidos yk,m se obtiene aplicando Transformada Discreta de Fourier (DFT) a este vector rk,m, quedando yk,m :
Sustituyendo r(n) de la ecuación (2.14) en la ecuación (2.15), nos queda la expresión en función de la señal trasmitida y el ruido:
Sustituyendo ahora sm(n) de la ecuación (2.12), y denominando nk,n a la muestra k-ésima del ruido n(n) (que será una muestra blanca y gaussiana como el ruido del que procede), resulta:
Como g(η) = 0 para todo η>Ncp-1, η debe tomar valores de 0 a N-1 en lugar de 0 a Ncp-1. Con esto, y reordenando y agrupando todas las fórmulas anteriores, tenemos:
Y resolviendo las ecuaciones anidadas, obtenemos como resultado final una expresión análoga a la que obtuvimos para el modelo en tiempo continuo:
Página 17
, , , (2.19)k m k k m k my h x n= +
( ) 2 / 2 / 2 /1 1 1
, , ,0 0 0
1 (2.18)j k N j kn N j kn N
N N N
k m k m k nn k
DFT
IDFT
DFT
y g e x e e nN
π η π π
η
η− −
− − −
= = =
= +
∑ ∑ ∑1442443
144444424444443144444444424444444443
( ) 2 ( ) / 2 /11 1
, , ,0 0 0
1 (2.17)cp
j k n N j kn NNN N
k m k m k nn k
y g x e e nN
π η π
η
η− −
−− −
= = =
= +
∑ ∑ ∑
( ) ( ) 2 /11 1
2 /,
0 0 0( ) (2.16)
cpj kn N
NN Nj kn N
k m m cpn n
ny g s N n e n eπ π
ηη η
−−− −
−
= = =
= + − +
∑ ∑ ∑
12 /
,0
( ) (2.15)N
j kn Nk m
ny r n e π
−
=
= ∑
1
0
( ) ( ) ( ) ( ) (2.14)cpN
r n g s n nη
η η η−
=
= − +∑
Capítulo 2 Modulación OFDM
Esta fórmula demuestra que el símbolo recibido yk,m, es igual al símbolo transmitido, multiplicado por el coeficiente de la transformada de la respuesta del canal hk, sumado a la contribución de la tranformada del ruido nk,m, lo que implica que el símbolo recibido solo depende de ese instante y no de instantes anteriores.
Enfocando el estudio del sistema de una forma más analítica, la entrada en el receptor es la covolución lineal de la señal transmitida por el canal, más el ruido del canal. Desde el punto de vista del receptor, el uso de un CP con una longitud mayor que la del canal, implica la transformación de la convolución lineal en una convolución circular. De esta manera, podemos expresar el sistema OFDM completo como:
donde yl contiene los N datos recibidos, xl los N puntos pertenencientes a la constelación en el transmisor, de la misma manera que g es la respuesta impulsiva del canal (rellenada de ceros hasta obtener la longitud N), y que ñl es el ruido introducido por el canal. Como el ruido lo consideramos blanco y gaussiano, entonces el término nl = DFT(ñl) representa un ruido gaussiano incorrelado.
Así la DFT de la convolución circular de dos señales es equivalente al producto de las transformadas de cada una de las señales de forma individual. Denotando al producto elemento a elemento como ''.'', podemos escribir:
donde hl = DFT(gl) es la respuesta en frecuencia del canal. Así hemos encontrado el mismo tipo de sistema que en el caso frecuencial con la única diferencia de que la atenuación del canal hl viene dada por la DFT de N puntos del canal discreto, en lugar de la respuesta frecuencial dada por hl = G(k'W/N), es decir, lo que sería la Transformada de Fourier de g(τ).
Página 18
( ) (2.21)l l l l l l ly x DFT g n x h n= ⋅ + = ⋅ +
( ) ( )( ) ( ) (2.20)l l l l l l ly DFT IDFT x g n DFT IDFT x g n= + = +% %e e

Capítulo 2 Modulación OFDM
2.4.3. Imperfecciones con respecto al modelo ideal
Dependiendo de la situación que se analice, las imperfecciones en un sistema real OFDM deben ser ignoradas o explícitamente incluidas en el modelo. A continuación, mencionamos algunas de estas imperfecciones y sus correspondientes efectos.
• Dispersión Tanto la dispersión en tiempo como en frecuencia pueden destruir la ortogonalidad del sistema, es
decir, introducen ISI e ICI. Si estos efectos no son lo suficientemente solucionados con la inclusión de un prefijo cíclico o con un gran espaciamiento entre portadoras, deberán ser incluidos en el modelo. Una forma de modelar esto será incrementar la potencia de ruido aditivo.
• No linealidades Los sistemas OFDM tienen una gran relación potencia de pico a potencia media (PAPR) y son muy
exigentes en cuanto a linealidad en los amplificadores de potencia. Las no linealidades en los amplificadores causan tanto ISI como ICI en el sistema. Especialmente, si los amplificadores no se diseñan para un back-off de salida (OBO) adecuado. Estos problemas los abordaremos con una mayor ptofundidad en el tercer capítulo.
• Interferencias externas Tanto los sistemas sobre cable como los inalámbricos están sujetos a interferencias externas. Para el
caso inalámbrico, la interferencia suele provenir de otras transmisiones y equipamiento electrónico situado en la vecindad de los propios del sistema. Para los sistemas sobre soporte físico, lo más común será encontrarnos con crosstalk. En cualquier caso, la interferencia suele modelarse como un ruido coloreado.
Página 19

Capítulo 2 Modulación OFDM
2.5. Propiedades importantes de OFDM
En este apartado veremos más en profundidad diversos aspectos de OFDM, que debido a su particular importancia en el funcionamiento de esta modulación, o por los conceptos básicos que contienen, merecen un mayor detenimiento en su estudio.
2.5.1. Importancia de la ortogonalidad
El principal concepto de las señales OFDM es la ortogonalidad de las subportadoras. Si usamos como portadoras una señal senosoidal, el área de un periodo es cero ya que la parte positiva de la señal se cancela con la negativa. Esta afirmación se comprueba fácilmente en la figura 2.5:
Figura 2.5. Señales sinusoidales de área nula
Consideremos una onda senoidal de frecuencia m y la multiplicaremos por otra de frecuencia n, siendo n y m enteros. Mediante una sencilla regla trigonométrica, su producto viene dado por:
Cada una de estas dos componentes es también una sinusoide, por lo que la integral bajo su área es cero. Podemos concluir pues que en general para todos los números enteros n y m las señales senosoidales de frecuencias n y m son ortogonales entre sí. Este concepto de ortogonalidad es clave en OFDM ya que nos permite la transmisión simultánea en un estrecho rango de frecuencias y sin que se produzcan interferencias entre ellas.
Figura 2.6. El producto de una señal senoidal por un armónico suyo es cero
Página 20
( ) ( )1 1( ) sin( ) sin( ) cos ( ) cos ( ) (2.22)2 2
f t m t n t m n t m n tω ω ω ω= ⋅ = − − +

Capítulo 2 Modulación OFDM
2.5.2. Espectro de una señal OFDM
Las señales QPSK/QAM producen un espectro en la frecuencia, cuyo ancho de banda se puede expresar como BW = 2(1+α)Rs. En OFDM, las portadoras adyacentes, pueden solaparse tal y como se ve en la figura siguiente.
Figura 2.7. Eficiencia espectral de OFDM gracias al solapamiento
Así, la suma de N portadoras, permite ahora transmitir N cadenas de transmisión sobre un ancho de banda de BW = (N+1)Rs. Esto supone una eficiencia espectral de N/N+1 por símbolo para el caso de N portadoras, creciendo con el valor de N, hasta conseguir una eficiencia espectral que es prácticamente el doble de la de las señales QPSK/QAM para valores grandes de N.
Toda esta explicación hace que el espectro de una señal OFDM coja una forma muy característica, sobre todo para un número N de portadoras relativamente grande. El espectro presenta una forma de meseta debido a la contribución de todos los lóbulos principales de las portadoras. Esta meseta caerá súbitamente a una bandas laterales cuando termine la zona de las portadoras, habiendo sólo lóbulos secundarios que contribuyan a su amplitud. Pero aún estando mucho más bajas, estas bandas laterales irán decayendo muy lentamente con la frecuencia. Si comparamos el espectro de la señal OFDM con el de una QPSK, observamos que la señal OFDM presenta una menor varianza, una caída mucho más brusca al terminar su ancho de banda, y un decaimiento mucho más lento de sus bandas laterales.
Figura 2.8. a) Espectro de una OFDM de 1024 portadoras. b) Espectro de una QPSK.
Página 21
Capítulo 2 Modulación OFDM
2.5.3. Concepto del intervalo de guarda y del prefijo cíclico
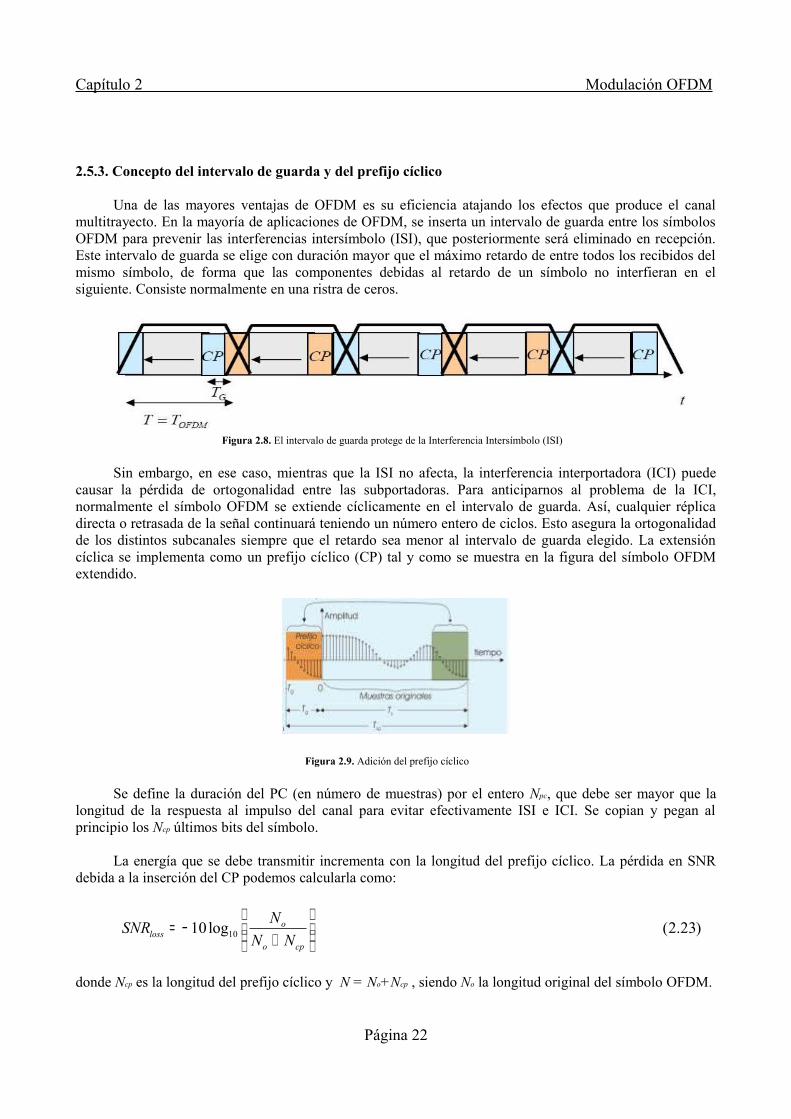
Una de las mayores ventajas de OFDM es su eficiencia atajando los efectos que produce el canal multitrayecto. En la mayoría de aplicaciones de OFDM, se inserta un intervalo de guarda entre los símbolos OFDM para prevenir las interferencias intersímbolo (ISI), que posteriormente será eliminado en recepción. Este intervalo de guarda se elige con duración mayor que el máximo retardo de entre todos los recibidos del mismo símbolo, de forma que las componentes debidas al retardo de un símbolo no interfieran en el siguiente. Consiste normalmente en una ristra de ceros.
Figura 2.8. El intervalo de guarda protege de la Interferencia Intersímbolo (ISI)
Sin embargo, en ese caso, mientras que la ISI no afecta, la interferencia interportadora (ICI) puede causar la pérdida de ortogonalidad entre las subportadoras. Para anticiparnos al problema de la ICI, normalmente el símbolo OFDM se extiende cíclicamente en el intervalo de guarda. Así, cualquier réplica directa o retrasada de la señal continuará teniendo un número entero de ciclos. Esto asegura la ortogonalidad de los distintos subcanales siempre que el retardo sea menor al intervalo de guarda elegido. La extensión cíclica se implementa como un prefijo cíclico (CP) tal y como se muestra en la figura del símbolo OFDM extendido.
Figura 2.9. Adición del prefijo cíclico
Se define la duración del PC (en número de muestras) por el entero Npc, que debe ser mayor que la longitud de la respuesta al impulso del canal para evitar efectivamente ISI e ICI. Se copian y pegan al principio los Ncp últimos bits del símbolo.
La energía que se debe transmitir incrementa con la longitud del prefijo cíclico. La pérdida en SNR debida a la inserción del CP podemos calcularla como:
donde Ncp es la longitud del prefijo cíclico y N = No+Ncp , siendo No la longitud original del símbolo OFDM.
Página 22
1010log (2.23)oloss
o cp
NSNRN N
= − +

Capítulo 2 Modulación OFDM
2.5.4. Tasa de error de bits para canales AWGN
Derivado de lo que acabamos de analizar, un aspecto interesante sería estudiar la probabilidad de error que existe en un sistema OFDM. Para ello definimos los siguientes parámetros, To como la duración del símbolo original OFDM, Tcp como la duración del prefijo cíclico, y T = To+Tcp como la duración total del símbolo OFDM. De esta manera, asumiendo que el receptor conoce con exactitud el tiempo de enventanado de la DFT (tema que analizaremos más adelante), la salida del proceso de la DFT para la k-ésima subportadora en el intervalo [iT+Tcp,(i+1)T] será:
La ecuación anterior muestra que la señal recibida es integrada sobre el periodo de símbolo completo considerado. Por consiguiente, en un canal AWGN, es preciso tener en cuenta la pérdida de energía debida a la inserción del intervalo de guarda ya que esta energía no es utilizada para la detección.
Con esto, utilizaremos a modo de ejemplo el caso de una BPSK/QPSK, que será el que utilizaremos en las simulaciones poteriormente. En este caso, la curva del error de una OFDM vendrá dada por:
donde erfc es la función complementaria del error, Eb es la energía de bit y No la magnitud del ruido.
Así pues, podíamos prever, la pérdida de energía debida a la inclusión del prefijo cíclico repercute directamente en la probabilidad de error de OFDM. De esta manera, si la probabilidad de error es nuestra restricción prioritaria, debemos incrementar la energía requerida en proporción a lo perdido en la adición del prefijo cíclico. Es importante mencionar, que aún así, el prefijo cíclico es una medida que de sobra compensa en relación a la probabilidad de error, ya que como comentamos anteriormente, evita los efectos del multitrayecto, que potencialmente pueden producir probabilidades de error de órdenes mucho más altos.
2.5.5. Número óptimo de portadoras y del intervalo de guarda
Cuando la tasa de transmisión de símbolos, la selectividad temporal y frecuencial del canal son restricciones, las prestaciones en la transmisión se vuelven más sensibles a la selectividad temporal. Esto es tanto más cierto cuanto mayor sea el número de portadoras, puesto que la mayor duración del símbolo hace al sistema más sensible al ruido FM aleatorio. Mientras que un número pequeño de portadoras hace al sistema menos robusto frente a la selectividad en frecuencia.
Por otro lado, las prestaciones de la transmisión se vuelven más pobres con un intervalo de guarda excesivamente largo, ya que éste supone una pérdida neta de energía. Mientras que si hacemos el intervalo de guarda demasiado corto, éste no será capaz de compensar la dispersión temporal producida por el multitrayecto, haciéndolo menos resistente a este efecto.
Página 23
( )1 ' , ' (2.25)2
o o be b b b
o cp o cp o
T T EP erfcT T T T N
γ γ γ= = =+ +
( 1)2 ( )1 ( ) (2.24)
cp
i T Wj k t iTN
kio iT T
r r t e dtT
π+
−
+
= ∫

Capítulo 2 Modulación OFDM
2.5.6. Parámetros de una señal OFDM realizados
Por último, veremos los parámetros reales de los sistemas OFDM en cualquiera de las aplicaciones típicas de este tipo de modulación, como puede ser por ejemplo la DVB o el ADSL. Así, los valores característicos de los parámetros de OFDM son los siguientes:
– Tasa de datos: 6 Mbits/s – 48 Mbits/s.– Tipo de modulación: BPSK, QPSK, 16-QAM y 64-QAM.– Codificación: Convolucional concatenado con Reed Solomon.– Periodo de símbolo/FFT: 3.2 μs.– Tamaño de la FFT: 64 canales entre los cuales, 48-58 para datos, 4 para señales piloto.– Separación de frecuecia entre portadoras: 20 M<hz divididos en 64 portadoras de 0.3125 MHz.– Duración del periodo de guarda: 0.8 μs (un cuarto del símbolo).– Tiempo total de símbolo: 4 μs.
Página 24

Capítulo 2 Modulación OFDM
2.6. Problemas en OFDM
En este apartado abordaemos los problemas más importantes que presenta OFDM. De esta manera veremos las didstintas soluciones que ofrece esta modulación para los problemas más comunes, o en su defecto, en qué medida le afecta a su funcionamiento el problema en custión. Aprovecharemos en este apartado para hablar de dos temas muy importantes en OFDM, como son la sincronización y la ecualización.
2.6.1. Problema del multitrayecto
La propagación de señales por el canal radio no es tan suave como una transmisión por cable. El medio de propagación es el aire y la señal no sólo se ve afectada por ruido, sino además interferida por obstáculos materiales como edificios o desniveles del terreno. Esto produce que al receptor llega la señal enviada (rayo directo), seguida de múltiples réplicas distorsionadas en amplitud y fase (rayos reflejados). Esto se conoce como efecto multitrayecto, y es uno de los problemas más importantes que se presentan en las comunicaciones por canal radio.
Figura 2.10. Efecto multitrayecto
Este problema tiene dos enfoques distintos, uno es la visión temporal y otro es la visión en el espectro. Para analizar más en profundidad este problema, lo idóneo es que analicemos cada uno por separado, para poder apreciar mejor los problemas que conllevan cada uno.
2.6.1.1. Visión en el tiempo: Dispersión del retardo
La visión temporal del problema del multitrayecto es la llegada de diversas réplicas desfasadas de la señal principal. Esto hace que la respuesta impulsiva del canal no seal ideal, y que tenga una duración larga, y a veces indefinida.
La estimación de un canal multitrayecto bajo este enfoque se obtiene mediante repetidas mediciones para obtener el denominado Perfil de Retardo de Potencia (PDP).
El PDP no es más que un promedio temporal o espacial de medidas consecutivas de respuestas al impulso recolectadas y promediadas sobre un área local. Los tiempos son dados respecto al rayo directo, cuyo momento de llegada se considera el instante 0. A partir de él podemos obtener la Dispersión de Retardo y el Ancho de Banda de Coherencia.
Página 25

Capítulo 2 Modulación OFDM
Matemáticamente el PDP se define como la distribución en el tiempo de potencia recibida desde un cierto impulso unidad transmitido:
donde ak es la amplitud de cada réplica de la señal, y τk el retardo con el que llega.
Figura 2.11. Respuesta impulsiva de canal multitrayecto
La dispersión del retardo (τRMS), es una medida de cómo de dispersa resulta la respuesta al impulso del canal. Caracteriza el retardo debido al canal en términos de momento de segundo orden del PDP. Tiene en cuenta tanto la potencia relativa de los pulsos como también sus retardos, haciéndolo el mejor indicador de desempeño del sistema.
Si la dispersión del retardo es menor que el periodo de símbolo de la señal (τRMS < T), no se produce Interferencia Intersímbolo (ISI). Es por tanto necesario evaluar estadísticamente el retardo de propagación para tener una indicación de la máxima velocidad de datos que puede ser utilizada de manera fiable en el canal en cuestión. Los valores típicos son de microsegundos en comunicaciones al aire libre y del orden de nanosegundos en comunicaciones interiores.
Si la dispersión del retardo es mayor que el periodo de símbolo de la señal (τRMS > T), se produce Interferencia Intersímbolo (ISI), ya que esto supone que la señal recibida en un momento dado depende de la señal transmitida en ese instante y en el anterior. El problema es crítico cuando la dispersión de retardo es muy grande en comparación con el período de símbolo. En concreto, en los canales actuales de banda ancha que proveen velocidades de datos muy altas, el periodo de símbolo deseado es a menudo mucho menor que el τRMS, y por tanto la interferencia intersímbolo es severa.
Ya vimos como la modulación OFDM solucionaba este problema, gracias a la gran duración de los símbolos OFDM, y con la adición de un intervalo de guarda que se aseguraba de eliminar los intervalos de tiempo en que un símbolo podía ser perjudicado por las réplicas del símbolo anterior.
2.6.1.2. Visión en la frecuencia: Ancho de banda de coherencia
Otra visión de los efectos de un canal multitrayecto, es cómo afecta éste al espectro de la señal que se transmite. En el multitrayecto, las señales reflejadas que están retrasadas se añaden a la señal principal y provocando interferencias. Esto, en el espectro de la señal se traduce como atenuaciones a distintas frecuencias. De esta manera, se conoce por el nombre de desvanecimiento a toda disminución de la potencia de la señal por debajo de su valor nominal, si bien el multitrayecto no es la única causa por el que se puede producir.
Página 26
12
0
( ) ( ) (2.26)N
k kk
P a tτ δ τ−
=
= −∑

Capítulo 2 Modulación OFDM
El desvanecimiento más común es el denominado desvanecimiento plano, que se traduce en una leve atenuación en un amplio rango de frecuencias en el espectro de la señal. Por el lado que nos ocupa, tenemos el desvanecimiento debido al multitrayecto, que suele ser mucho más profundo y más selectivo en frecuencia. Esto lo hace mucho más dañino que el desvanecimento plano, ya que distorsiona mucho más el espectro de la señal, lo que se traduce en la alteración de la información transmitida. Estos desvanecimientos se modelan con una función densidad de probabilidad de Rayleigh, por lo que muchas veces son denominados desvanecimentos Rayleigh.
Figura 2.12. Desvanecimiento lento (plano) y rápido (selectivo) en función de la distnacia
El desvanecimiento debido al multitrayecto es muy común cuando hay movimiento entre el transmisor y el receptor, ya que en este caso, cambian los distintos trayectos de la señal transmitida, es decir, cambia la estructura multitrayecto del canal.
Bajo este enfoque, existe una medida relacionada con la dispersión del retardo que vimos antes, es el denominado ancho de banda de coherencia (Bc). Se trata de una medida también propia del canal radio, que indica el rango de frecuecias sobre el cual el desvanecimiento se comporta como plano, es decir, donde la atenuación del canal permanece aproximadamente constante.
Así, si un canal presenta un ancho de banda de coherencia mayor que el ancho de banda de la señal a transmitir (Bc > B), se considera que la transmisión se realiza con desvanecimiento plano (flat fading). Esto es una característica deseable del canal, ya que en este caso la estructura del canal es tal que las características del espectro de la señal transmitida son preservadas en el receptor.
Si el ancho de banda del canal es menor que el ancho de banda de la señal a transmitir (Bc < B), hay desvanecimento selectivo en frecuencia, y por tanto, habrá una distorsión en el espectro que se acabará traduciendo en Interferencia Intersimbolo (ISI).
Figura 2.13. Efectos de los desvanecimientos plano y selectivo
Página 27

Capítulo 2 Modulación OFDM
Este problema también se soluciona bastante bien en OFDM, ya que al poder disponer de un gran número de portadoras (cada una con un ancho de banda muy reducido), un desvanecimento selectivo les afecta como si fuera un desvanecimento plano, con lo que sólo tendrían que ajustar su amplitud en recepción dependiendo de la atenuación que haya sufrido cada una. Desde un punto de vista más conceptual, es como si hubiéramos hecho el ancho de banda de la señal mucho más pequeño que el ancho de banda de coherencia del canal.
Figura 2.14. Ajuste de cada portadora para resolver el desvaneicmiento selectivo
2.6.2. Ecualización
Acabamos de ver como la solución para el desvanecimiento selectivo es escalar cada portadora según la atenuación que haya sufrido por el canal. A este reajuste de componentes en frecuencia se le denomina ecualización, y es un concepto muy importante en las telecomunicaciones.
Sabiendo esto, para poder escalar las portadoras, antes tenemos que conocer las atenuaciones que han sufrido por el canal, es decir, tenemos que conocer la respuesta en frecuencia del canal. Al proceso por el cual se calcula esto se le denomina estimación del canal.
Aquí tenemos que hacer un inciso para hablar de modulaciones coherentes y diferenciales. Cuando se usa una modulación diferencial no se necesita la estimación de canal, ya que la información está codificada en la diferencia entre dos símbolos consecutivos. Esta es una técnica común en sistemas inalámbricos, en los que si no se necesita implementar el estimador de canal se reduce la complejidad del receptor. Los inconvenientes de la modulación diferencial son una pérdida de 3-4 dB en la SNR y la imposibilidad de aumentar la eficiencia espectral con constelaciones multiamplitud.
Una interesante alternativa a la modulación coherente es la modulación DAPSK, es decir PSK con amplitud diferencial, donde la eficiencia espectral es mayor que en DPSK, y es alcanzada con una codificación diferencial también de la amplitud. Esto requiere una distribución de amplitudes no uniforme. Atendiendo a otros aspectos, podemos comentar que la modulación coherente permite usar constelaciones de señales arbitrarias y es una elección obvia en los sistemas cableados, donde el canal es prácticamente constante en el tiempo. En sistemas inalámbricos la eficiencia de la modulación coherente la hace interesante cuando la tasa binaria a transmitir es elevada. Estos esquemas de modulación coherentes presentan el problema de la necesidad de ecualización, lo cual hace necesario el desarrollo de algoritmos de estimación decanal. Aunque existe una variada gama de algoritmos de estimación de canal, todos proceden de los esquemas que presentamos a continuación.
Página 28

Capítulo 2 Modulación OFDM
Partamos del modelo discreto de sistema OFDM que analizamos anteriormente, donde a partir de este punto se denominará Xm a cada uno de los N símbolos que serán modulados mediante la IDFT.
Las muestras de la señal OFDM resultante se puede expresar como:
donde xn representa la n-ésima muestra de salida del bloque IDFT.
Considerando que el canal discreto está constituido por L muestras, la señal recibida se puede expresar como:
donde hn,l representa la l-ésima muestra compleja de la respuesta impulsiva del canal y wn es el ruido AWGN en el instante temporal n.
Por simplicidad se ha obviado en las ecuaciones al prefijo cíclico correspondiente a las N muestras del símbolo OFDM. La señal demodulada en el dominio frecuencial se obtiene mediante la DFT de yn como:
donde Wm denota la DFT de wn y H, representa la DFT de la respuesta impulsiva del canal como:
Si expresamos todo el anterior desarrollo de manera matricial, obtendremos una expresión algo más compacta del tipo:
donde cada uno de los elementos de la matriz H puede ser reescrito como:
Dada la anterior expresión matricial el problema de la ecualización se centra en estimar la matriz H y calcular su inversa, lo cual requiere algoritmos encaminados hacia la reducción de la carga computacional que las operaciones matriciales requieren.
Página 29
21
0
1 0 (2.27)mnN j
Nn m
mx X e n N
N
π−
=
= ≤ ≤∑
1
. .1 1 .2 2 . 1 10
... 0 (2.28)L
n n l n l n n n n n n L n L nl
y h x w h x h x h x w n N−
− − − − − +=
= + = + + + + ≤ ≤∑
21 1
0 0
0 1 (2.29)lkN L jm k N
m k l mk l
Y X H e W m Nπ− − −−
= =
= + ≤ ≤ −∑ ∑
( )1
,0
(2.30)n m kN jm k N
l n ln
H h eπ −− −−
=
= ∑
(2.31)Y HX W= +
2 2 ( 1)
, 0 1 1... 0 , 1 (2.32)k k Lj jm k m k m kN N
m k La H H e H e m k Nπ π −− −− − −
−= + + + ≤ ≤ −

Capítulo 2 Modulación OFDM
2.6.3. Sincronización
El principal argumento que hay en contra de OFDM es sin duda su alta sensibilidad a errores de sincronización, en particular al offset frecuencial. En lo que sigue veremos los tres niveles en los que podemos situar el problema de la sincronización: sincronización de símbolo, de frecuencia de portadora y de frecuencia de muestreo.
2.6.3.1. Sincronización de símbolo
En los sistemas OFDM se presta una gran atención a la sincronización de símbolo por su gran importancia, sin embargo los requerimientos de temporización se relajan gracias a la inclusión del CP. Un offset de temporización provoca una rotación de las subportadoras dentro de la constelación de señales usada, mayor cuanto más cerca se encuentren de los extremos de la banda de frecuencia. Realizaremos un análisis de este fenómeno.
Supongamos que la señal en recepción lleva un retraso de nε muestras no corregidas, es decir:
Los puntos de la constelación que toma el demodulador en recepción sufren un doble efecto:
Por un lado ak toma el efecto del canal mediante el producto con la función de transferencia H(k):
Por el otro ak también sufre una rotación que viene determinada por el término de la exponencial compleja. Podemos apreciar como dicho efecto es más intenso a medida que incrementamos la frecuencia, o lo que es lo mismo cuanto más nos acerquemos al extremo de la banda. Comprobamos el efecto particularizando para una constelación QPSK:
Figura 2.15. Error de sincronización de símbolo sobre una constelación QPSK
Página 30
2 2 ( )1
0
1( ) ( ) (2.33)ki k n nN j j
N Nk
kr n n h i a e e
N
π π ε
ε−− − −
=
− =
∑ ∑
2 2
( ) (2.34)ki knj j
N Nk kz a h i e e
π π ε− − =
∑
2
( ) ( ) (2.35)kij
NH k h i eπ−
= ∑
Capítulo 2 Modulación OFDM
Si el error de sicronización es lo suficientemente pequeño como para mantener la respuesta impulsiva del canal constante dentro del CP, entonces la ortogonalidad se mantiene. En este caso el offset se puede considerar como un desplazamiento de fase introducido por el canal, de manera que las rotaciones de fase introducidas pueden compensarse mediante un estimador de canal. Sin embargo, si el desplazamiento es mayor que la longitud del CP, entonces la ISI sí afectará nuestro sistema. Describiremos dos posibles alternativas para minimizar las consecuencias de este negativo efecto: una primera opción basada en pilotos y otra en el prefijo cíclico.
➢ Opción basada en pilotos: Fueron Warner y Leung los que propusieron una solución basada en pilotos. Utilizaron un esquema donde la señal OFDM se transmitía en FM, y el transmisor codificaba un cierto número de subcanales reservados con fases y amplitudes conocidas. El algoritmo está compuesto por tres fases. 1. En la primera (detección de potencia) se detecta si hay presencia de señal OFDM midiendo el nivel
de potencia y comparándolo con un cierto umbral.
2. En la segunda fase (detección gruesa) se adquiere un alineamiento de sincronización con un error máximo de 0.5 muestras. Este grado de alineamiento no es aceptable, sino que se usa para simplificar el posterior proceso de captura, ya que éste supone que el error de temporización es pequeño. Esta sincronización gruesa se obtiene correlando la señal recibida con una copia retrasada de la misma. Para poder detectar el pico de correlación con suficiente precisión, se usa un filtro digital que interpola los datos a una velocidad cuatro veces superior a la original.
3. Por último en la última fase (sincronización fina), los subcanales reservados se ecualizan con la estimación de canal obtenida a partir de los pilotos. Dado que la sincronización gruesa garantiza que el error de temporización es menor que 0.5 muestras, la respuesta impulsiva del canal se encuentra dentro del CP.
➢ Opción basada en prefijo cíclico: También se puede emplear el prefijo cíclico para solucionar este problema. La diferencia entre dos muestras espaciadas N posiciones es r(k )− r(k + N) . Cuando una muestra pertenece al prefijo cíclico y la otra al símbolo OFDM del cual se ha copiado, dicha diferencia es pequeña. Si se enventana con una ventana rectangular de la misma longitud que el CP obtendremos una serie de mínimos, cada uno de los cuales se encontrará al comienzo de los símbolos OFDM.
Esta idea se formaliza matemáticamente mediante la función de verosimilitud, la cual se maximiza para obtener de manera simultánea los offsets temporal y frecuencial. Veámosla para el caso de offset frecuencial nulo y offset temporal θ:
Página 31
2
( ) ( ) (2.35)kij
NH k h i eπ−
= ∑

Capítulo 2 Modulación OFDM
➢ Ruido de fase de portadoras
El ruido de fase es causado por las imperfecciones de los osciladores del transmisor y del receptor. Para canales selectivos en frecuencia, la rotación de fase que introduce esta anomalía es indistinguible de las rotaciones de fase debidas a un error de temporización.
El ruido de fase se modela mediante un proceso de Wiener θ(t) con:
donde β va en Hz.
Se puede estimar la degradación en la SNR provocada por el ruido de fase, o lo que es lo mismo, el incremento en la SNR necesario para mantener la calidad del enlace, como:
donde W representa el ancho de banda y ES/No la SNR por símbolo.
Nótese que la degradación aumenta con el número de portadoras. Debido a las rápidas variaciones de la fase del ruido, se pueden producir grandes problemas.
2.6.3.2. Sincronización de la frecuencia de muestreo
La señal continua recibida debe ser muestreada en instantes de tiempo dados por el reloj de recepción. Existen dos tipos de métodos que tratan con el error en la frecuencia de muestreo.
En sistemas de muestreo sincronizado, un algoritmo de temporización controla un oscilador de cristal controlado por tensión con objeto de alinear los relojes de transmisión y recepción.
El otro método es el de muestreo no sincronizado, en el cual la tasa de muestreo permanece fija y se realiza un post-procesado digital.
El efecto de un offset en la frecuencia es doble: la componente útil de la señal se ve rotada y atenuada, y por otro lado se introduce ICI en el sistema. A partir de los estudios publicados hasta la fecha se desprende que los sistemas de muestreo no sincronizados son mucho más sensibles al offset de reloj que los de muestreo sincronizado.
Página 32
( ){ }2( ) ( ) 4 (2.37)o oE t t t tθ θ π β+ − =
11( ) 4 (2.38)6ln(10)
S
o
ED dB NW Nβπ ≈
Capítulo 2 Modulación OFDM
2.6.3.3. Sincronización de la frecuencia de subportadora
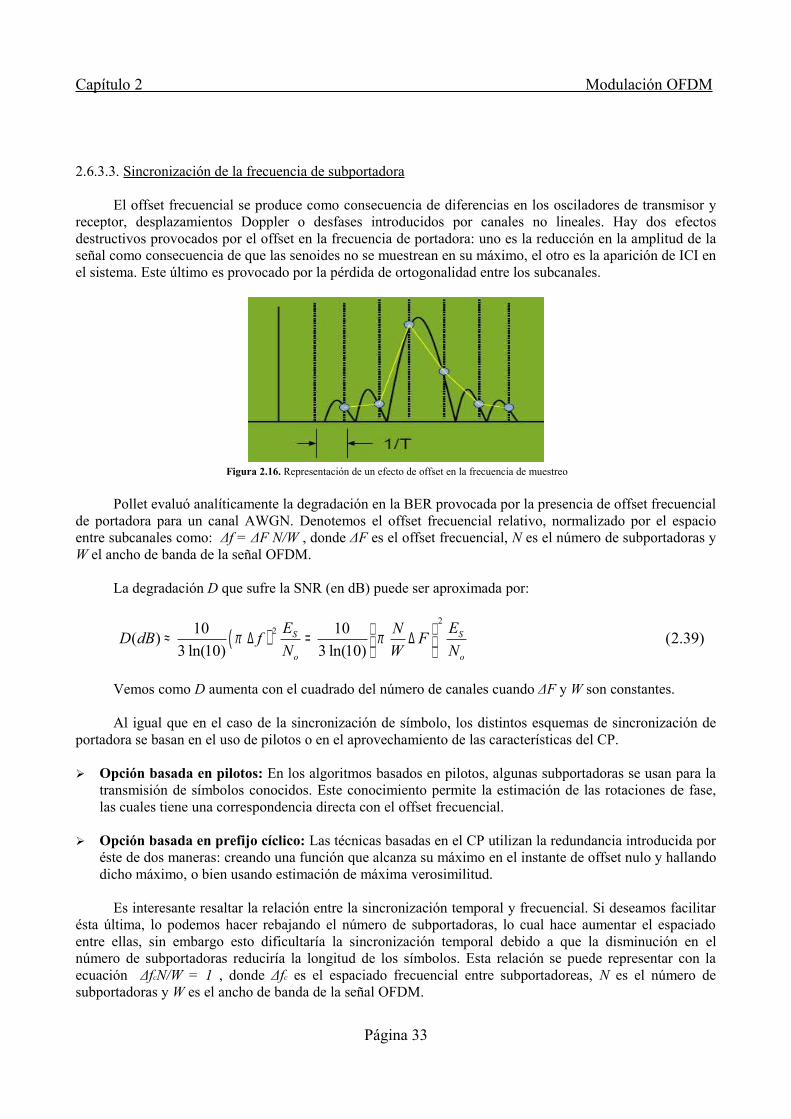
El offset frecuencial se produce como consecuencia de diferencias en los osciladores de transmisor y receptor, desplazamientos Doppler o desfases introducidos por canales no lineales. Hay dos efectos destructivos provocados por el offset en la frecuencia de portadora: uno es la reducción en la amplitud de la señal como consecuencia de que las senoides no se muestrean en su máximo, el otro es la aparición de ICI en el sistema. Este último es provocado por la pérdida de ortogonalidad entre los subcanales.
Figura 2.16. Representación de un efecto de offset en la frecuencia de muestreo
Pollet evaluó analíticamente la degradación en la BER provocada por la presencia de offset frecuencial de portadora para un canal AWGN. Denotemos el offset frecuencial relativo, normalizado por el espacio entre subcanales como: Δf = ΔF N/W , donde ΔF es el offset frecuencial, N es el número de subportadoras y W el ancho de banda de la señal OFDM.
La degradación D que sufre la SNR (en dB) puede ser aproximada por:
Vemos como D aumenta con el cuadrado del número de canales cuando ΔF y W son constantes.
Al igual que en el caso de la sincronización de símbolo, los distintos esquemas de sincronización de portadora se basan en el uso de pilotos o en el aprovechamiento de las características del CP.
➢ Opción basada en pilotos: En los algoritmos basados en pilotos, algunas subportadoras se usan para la transmisión de símbolos conocidos. Este conocimiento permite la estimación de las rotaciones de fase, las cuales tiene una correspondencia directa con el offset frecuencial.
➢ Opción basada en prefijo cíclico: Las técnicas basadas en el CP utilizan la redundancia introducida por éste de dos maneras: creando una función que alcanza su máximo en el instante de offset nulo y hallando dicho máximo, o bien usando estimación de máxima verosimilitud.
Es interesante resaltar la relación entre la sincronización temporal y frecuencial. Si deseamos facilitar ésta última, lo podemos hacer rebajando el número de subportadoras, lo cual hace aumentar el espaciado entre ellas, sin embargo esto dificultaría la sincronización temporal debido a que la disminución en el número de subportadoras reduciría la longitud de los símbolos. Esta relación se puede representar con la ecuación ΔfcN/W = 1 , donde Δfc es el espaciado frecuencial entre subportadoreas, N es el número de subportadoras y W es el ancho de banda de la señal OFDM.
Página 33
( )2
210 10( ) (2.39)3 ln(10) 3 ln(10)
S S
o o
E END dB f FN W N
π π ≈ ∆ = ∆
Capítulo 2 Modulación OFDM
2.6.3.4. Sincronización con multitrayecto
Aunque hasta ahora sólo hayamos hecho un análisis del sincronismo considerando un canal perfecto, ahora se considerará un canal real en el cual se produce el fenómeno del multitrayecto. Supondremos que la longitud del CP es mayor que la de la respuesta impulsiva del canal multitrayecto, evitando así la ISI y la ICI debidas a posibles errores en el sincronismo de símbolo.
La parte de la señal transmitida sin el prefijo es:
La señal recibida debida a un único trayecto después de eliminar el prefijo cíclico tendrá entonces la expresión siguiente:
donde gp es la amplitud y τp el retardo del eco p.
La rotación de fase se debe a dos componentes θp = −2πfcτp y kφp = − 2kπfcτp . El primer término es el mismo para todas las subportadoras. Para casos típicos el retraso introducido por un eco, τp, es mucho mayor que el periodo de la portadora y los valores de θp, de forma aproximada, se distribuyen uniformemente sobre 2π. Si la duración de la respuesta impulsiva del canal es mucho menor que la duración del símbolo OFDM, kφp es muy pequeño y prácticamente no tiene efecto. Cuando esto ocurre hay desvanecimiento plano y entonces para un eco todas las subportadoras sufren la misma atenuación.
Si los ecos crean un cambio en la frecuencia de la portadora (efecto Doppler), esta variación se estudia igual que se estudió el offset entre los osciladores. Para este caso y si se cumple la condición de desvanecimiento plano tenemos que en el receptor las salidas para un determinado canal son:
El sumando cl-m,p es el peso para calcular la ICI sobre la subportadora m introducida por la subportadora 1. Esto es:
En esta última espresión, el término Δfp representa el cambio de frecuencia que introduce el eco p, y que por tanto, repercute en la ICI.
Página 34
212
,0
( ) ( 1) (2.40)c
ktN jj f t Tk i cp
kx t e a e i T T t iT
ππ
−
=
= − + < <∑
( )2 ( ) 21 1
2 ( ) 2, ,
0 0
( ) (2.41)p
p pc p c
k t ktN Nj j j kj f t j f tT Tp p k i k i
k kt g e a e e a e e
π τ πθ φπ τ πυ
−− −+−
= =
= =∑ ∑
1
, , , ,0
(2.42)pN
jm i p p l m p l i
iz g e c aθ
−
−=
= ∑
( ) 11 (1 )
,0
sin (1 )1 (2.43)(1 )
sin
pNN j m f tp N
l m pl p
m f tc e
m f tNN
πππ
− − − + ∆ −
=
− + ∆=
− + ∆
∑

Capítulo 2 Modulación OFDM
La ICI total viene dada por:
Si no consideramos el CP, entonces aparecen ISI e ICI, debido a que cada eco p llega con un retardo asociado. Este fenómeno se estudia igual que si no existiera sincronismo en el receptor. Entonces si zm,i,p, es el símbolo recibido en la subportadora m, en el símbolo I, debido al eco p, se tiene:
Para cada camino, cada zm,i,p tiene una ICI que se calcula igual que calculamos la ICI debida a un error de duración p en el sincronismo.
2.6.4. Potencia Pico y efectos no lineales
Un problema importante en las señales es que sus amplitudes (o potencias instantáneas) tengan una gran dispersión. Esto requiere que los amplificadores usados sean muy lineales y tengan un rango dinámico muy grande, ya que el amplio rango de amplitudes que puede emplear la señal dificulta considerablemente un punto de trabajo óptimo para todas ellas.
Este es un problema especialmente caracterísitico de OFDM. La señal que se obtiene a la salida de un transmisor OFDM llega a tener picos de potencia mucho mayores que la potencia media. Esto es debido a la posibilidad de que todas las subportadoras se puedan sumar en fase en un momento dado, consiguiendo una contribución de potencia muy importante. Si bien es muy improbable que se produzca una coincidencia en fase tan mayoritaria de las subportadoras, la posibilidad de que haya un pico importante y la magnitud de este pico son causas suficientes para disparar la dispersión de las amplitudes de una señal OFDM.
Figura 2.17. Gran pico de potencia en una señal OFDM
Página 35
2
0,
1 2int
,
(2.44)p
portadora deseada pN
portadora erferentel m p
p l m
cP
ICIP c
∀−
−∀ ≠
= =∑
∑ ∑
, , , (2.45)m i m i pp
z z∀
= ∑

Capítulo 2 Modulación OFDM
Este fenómeno se estudia con un figura denominada PAPR (Peak to Average Power Ratio), que no es más que la relación entre la potencia máxima de una señal y su valor medio. De esta manera, un valor grande de PAPR nos da una idea de una señal con una gran dispersión en sus amplitudes. Por lo tanto el máximo teórico de PAPR se dará cuando el total de las subportadoras se encuentren en fase. Pero, como ya comentamos, esto es sumamente improbable y en la práctica se suelen tener unos valores de PAPR que no superan los 13 ó 14 dB.
Todo esto hace que la falta de linealidad en los amplificadores recorten la amplitud de los picos más importantes de una señal OFDM. Estos recortes suponen cambios bruscos en la amplitud de la señal, lo que se traduce en componentes de alta frecuencia, que hacen que se ensanche el espectro de OFDM, produciendo finalmente Interferencia Interportadora (ICI).
Para mitigar todos estos problemas en los amplificadores no lineales, existen varias posibilidades relacionadas con la suavización de los picos de las señales OFDM:
➢ Mantener el nivel de potencia: Podemos mantener la potencia de la señal en un cierto nivel deseado. Esto reduce los picos de la señal, pero introduce otro tipo de distorsiones.
➢ Mapeo selectivo: Se trata de multiplicar la señal de datos por un conjunto de códigos, calcular la IFFT de cada uno, y escoger aquél que presente un menor PAPR.
➢ IFFT parcial: Consiste en dividir la señal en celdas, calcular la IFFT de cada celda, y combinarlas.
2.6.5. Potencia fuera de banda
Para reducir la interferencia con otros sistemas en las frecuencias adyacentes a la banda que estamos utilizando, hay que minimizar la señal en el ancho de banda deseado.
Para simplificar los cálculos suponemos que vamos a medir la potencia a la frecuencia f = qΔf, donde Δf es la separación entre portadoras y q es un número entero. Así, para una subportadora la señal transmitida en el periodo de símbolo OFDM es:
Como lo que en este caso nos importa es el espectro de la señal, transformamos la expresión anterior obteniendo:
que para una frecuencia normalizada k = ΔfT nos queda:
Página 36
2
( ) (0, ) (2.46)j pt
Nx t e rect Tπ
=
( ) ( )( )( ) (2.48)
( )j k p
p
sen k pX k e
k pππ
π− −−
=−
( ) ( )sin ( )( ) (2.47)
( )j Tf pTf p
X f eTf p
πππ
− −−=
−

Capítulo 2 Modulación OFDM
La potencia a la frecuencia f = qΔf , es la suma de las potencias de todas las subportadoras. Esto quiere decir que:
Por último, si los datos a transmitir ap se suponen estadísticamente independientes, con media nula y potencia unidad, la expresión se reduce a:
Página 37
1
0
( ) ( ) (2.49)N
p pp
P q E a X k−
=
=
∑
1
0
( ) ( ) (2.50)N
pp
P q E X k−
=
=
∑

Capítulo 2 Modulación OFDM
Página 38

Capítulo 3 El canal no lineal. Análisis de sus efectos
Capítulo 3: El canal no lineal. Análisis de sus efectos
3.1. Introducción
En general en el mundo de las comunicaciones, existen ciertos problemas (siendo unos intrínsecos a la comunicación en sí, y otros dependientes de la situación en concreto), que deterioran la calidad de la transmisión de la información, y por tanto dificultan su implementación. Es por eso que estos problemas deben ser estudiados en profundidad, para que a la hora de diseñar un sistema de comunicaciones, sus efectos sean mínimos.
Ya vimos en el capítulo anterior, como para el caso concreto de OFDM, la presencia de elevados picos de potencia en su señal la hacían muy sensible a los efectos no lineales propios de ciertos dispositivos.
De esta manera, es muy común encontrar sistemas que usan amplificadores de alta potencia, que producen una cierta distorsión de las señales que pasan a través de ellos. Por lo general, esta distorsión se suele asociar al hecho de que, para mejorar la eficiencia de un transmisor, se suele polarizar el transistor en una zona no lineal, por lo que la señal sufre lo que se denomina una distorsión no lineal. Esta distorsión no lineal provocará efectos nocivos a nuestra señal (recrecimiento espectral y aumento de la tasa de error de bits principalmente).
En particular, asumiremos que la no linealidad viene producida únicamente por el amplificador de potencia, lo cual es una buena aproximación. De esta forma, parece interesante estudiar la forma de operar de un amplificador de potencia, intentando hallar un modelo que relacione la entrada con la salida, teniendo en cuenta los efectos no lineales y de memoria.
Este capítulo pretende estudiar los conocimientos generales sobre la no linealidad, profundizando en el caso de OFDM, que es el tema principal de este proyecto. Para ello, este capítulo se ha dividido en dos partes bien diferenciadas.
➢ Estudio general de la no linealidad: En esta primera sección pretende estudiar las bases de los efectos no lineales, para posteriormente poder abordar el caso de OFDM. Para ello, analizaremos los distintos tipos de no linealidades, los modelos que se utilizan y los efectos que causan normalmente en los sistemas de comunicación.
➢ No linealidad en OFDM: Esta segunda sección se centrará en el caso de las no linealidades en OFDM. Se procederá de manera anlaítica para acabar llegando a unas ecuaciones que modelen los efectos no lineales sobre OFDM.
Página 39

Capítulo 3 El canal no lineal. Análisis de sus efectos
3.2. Estudio general de las no linealidades
Como se acaba de comentar, en esta sección se va a realizar un estudio general sobre los efectos no lineales, analizando primero los tipos que existen, posteriormente los modelos matemáticos que se utilizan para estudiarlos de una manera analítica, y por último, los efectos que producen en los sistemas de telecomunicaciones.
3.2.1. Modelado del canal con y sin memoria
Los amplificadores de potencia (PA o HPA) son elementos indispensables de los sistemas de comunicaciones modernos y son componentes inherentemente no lineales. Los PAs se pueden clasificar de acuerdo al grado de no linealidad que presenten, lo cual también dicta su eficiencia. Una alta linealidad del amplificador implica baja eficiencia, lo que significa que la potencia que llega a la carga es reducida. Por otra parte, una alta no linealidad, causa efectos nocivos como recrecimiento espectral y un aumento en la tasa de error de bit. Así pues, la linealización de los PA es a menudo necesaria con el objetivo de mejorar la linealidad manteniendo una buena eficiencia.
La predistorsión es un método popular para linealizar un PA para lo cual, el modelado del PA a veces es un importante primer paso. Antes de escoger un método de linealización, se debe decidir si el PA muestra efectos de memoria. Las causas de los efectos de memoria pueden ser eléctricos o electro-térmicos. Amplificadores de alta potencia (HPA) tales como los usados en las estaciones bases de sistemas wireless presentan esos efectos de memoria; las señales de banda ancha también tienden a incluir efectos de memoria en el PA. En estos casos, una predistorsión sin memoria sería inefectiva. Entonces, una representación de los efectos de memoria de los PA parece crucial para emprender la tarea del diseño de los métodos de linealización.
Denotemos por x t la señal de entrada en banda base al PA y por y t la salida en banda base. La conversión AM/AM se define como la función que recoge el cambio entre la amplitud de la señal en banda base de entrada, ∣x t ∣ , y la amplitud de la señal en banda base de la salida, ∣y t ∣ ; la conversión AM/PM se define como la función que recoge el cambio entre la amplitud de la señal en banda base de entrada, ∣x t ∣ , y la desviación de la fase de la señal en banda base de la salida, es decir, la diferencia de sus fases angle { y t }−angle {x t } . La linealización de dispositivos no lineales que pueden ser completamente caracterizados con las conversiones AM/AM y AM/PM no suele ser demasiado complicada. Por ejemplo, estos predistorsionadores pueden ser implementados con una tabla de correspondencia LUT (look up table). La LUT crea las funciones de mapeo (AM/AM y AM/PM) para el predistorsionador, con valores que son complementarios a los que genera el PA antes esas mismas entradas. Consideremos un ejemplo, un modelo en banda base de un PA no lineal de orden (2K+1):
donde a2k+1 es el coeficiente del término no lineal de orden (2K+1).
Desde el punto de vista del procesado de señal, el sistema (3.1) es sin memoria, ya que la salida y(t) depende sólo de la entrada x(t) en ese mismo instante. Sin embargo, en la literatura de Microondas y RF, si {a2k+1} son reales, el modelo de (3.1) se llama sin memoria, si la conversión AM/PM es constante. De otro modo, el sistema (3.1) es considerado cuasi-sin memoria, lo que implica que existen efectos de memoria de término corto.
Página 40
22 1
0
( ) ( ) ( ) (3.1)K
kk
ky t a x t x t+
=
= ∑% % %
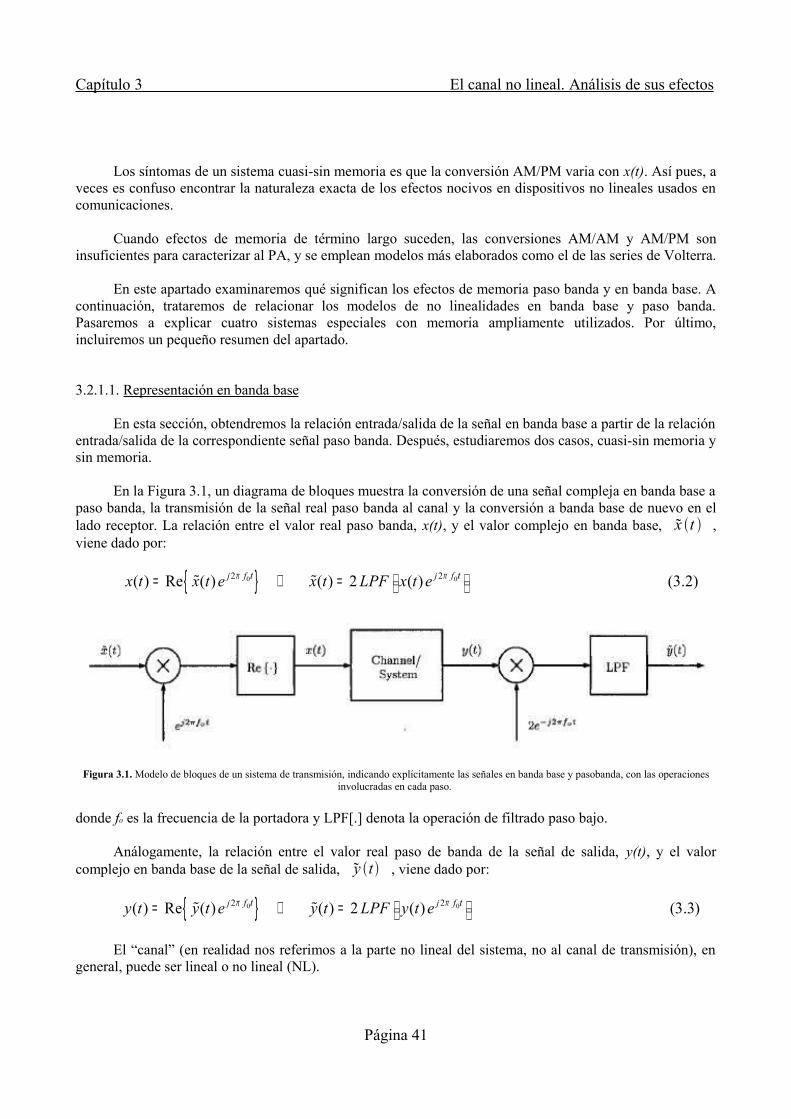
Capítulo 3 El canal no lineal. Análisis de sus efectos
Los síntomas de un sistema cuasi-sin memoria es que la conversión AM/PM varia con x(t). Así pues, a veces es confuso encontrar la naturaleza exacta de los efectos nocivos en dispositivos no lineales usados en comunicaciones.
Cuando efectos de memoria de término largo suceden, las conversiones AM/AM y AM/PM son insuficientes para caracterizar al PA, y se emplean modelos más elaborados como el de las series de Volterra.
En este apartado examinaremos qué significan los efectos de memoria paso banda y en banda base. A continuación, trataremos de relacionar los modelos de no linealidades en banda base y paso banda. Pasaremos a explicar cuatro sistemas especiales con memoria ampliamente utilizados. Por último, incluiremos un pequeño resumen del apartado.
3.2.1.1. Representación en banda base
En esta sección, obtendremos la relación entrada/salida de la señal en banda base a partir de la relación entrada/salida de la correspondiente señal paso banda. Después, estudiaremos dos casos, cuasi-sin memoria y sin memoria.
En la Figura 3.1, un diagrama de bloques muestra la conversión de una señal compleja en banda base a paso banda, la transmisión de la señal real paso banda al canal y la conversión a banda base de nuevo en el lado receptor. La relación entre el valor real paso banda, x(t), y el valor complejo en banda base, x t , viene dado por:
Figura 3.1. Modelo de bloques de un sistema de transmisión, indicando explícitamente las señales en banda base y pasobanda, con las operaciones involucradas en cada paso.
donde fo es la frecuencia de la portadora y LPF[.] denota la operación de filtrado paso bajo.
Análogamente, la relación entre el valor real paso de banda de la señal de salida, y(t), y el valor complejo en banda base de la señal de salida, y t , viene dado por:
El “canal” (en realidad nos referimos a la parte no lineal del sistema, no al canal de transmisión), en general, puede ser lineal o no lineal (NL).
Página 41
{ }0 02 2( ) Re ( ) ( ) 2 ( ) (3.2)j f j ft tx t x t e x t LPF x t eπ π = ⇔ = % %
{ }0 02 2( ) Re ( ) ( ) 2 ( ) (3.3)j f j ft ty t y t e y t LPF y t eπ π = ⇔ = % %

Capítulo 3 El canal no lineal. Análisis de sus efectos
Sujeto a ciertos requerimientos (que supondremos que se cumplen), las series de Volterra pueden ser utilizadas para representar un sistema invariante en el tiempo y NL como sigue:
donde k=[1 ,... ,k ]T , hk(.) es el kernel de Volterra de k-ésimo orden, y d k=[d 1 ... d k ] . Así,
asumiendo que es limitada en banda con ancho de banda Bx <<< fo , y sustituyendo (3.2) y (3.3) en (3.4), la señal de salida compleja, se simplifica en:
donde:
Si definimos la transformada k-dimensional de Fourier de hk(τk):
donde d f k=[d f 1...d f k ]T , se sigue que la transformada de Fourier de (3.6) es:
donde 1k=[1,...,1]T es un vector columna k-dimensional de unos. Por ejemplo, con k=1, la ecuación (3.8) resulta:
Examinaremos las ramificaciones de la relación entrada/salida en banda base bajo dos escenarios.
Página 42
1
( ) ... ( ( )) (3.4)k
k k i kk i
y t h x t dτ τ τ=
= −∑ ∏∫ ∫
1 2 1*
2 1 2 1 11 2
( ) ... ( ) ( ) ( ) (3.5)k k
k k i i kk i i k
y t h x t x t dτ τ τ τ+ +
+ + += = +
= − −∑ ∏ ∏∫ ∫% % %
2( ) ... ( ) (3.7)T
k kj fk k k k kH f h e dπ ττ τ= ∫ ∫
1 2 1
1 2
2
2 1 2 1 2 1 2 12
2 11( ) ( ) (3.6)2
k k
o i ii i k
j f
k k k kk
kh h e
k
π τ τ
τ τ
+ +
= = +
−
+ + + +
∑ ∑+ = ×
3 1 2 3 3 1 2 33( , , ) ( , , ) (3.9)4 o o oH f f f H f f f f f f= + + −%
2 1 2 1 2 1 2 1 12
2 11( ) ( [1 1 ]) (3.8)2
T Tk k k k o k kk
kH f H f f
k+ + + + +
+ = × + −
%

Capítulo 3 El canal no lineal. Análisis de sus efectos
3.2.1.2. El caso cuasi – sin memoria
Si la señal x(t) es de banda estrecha, entonces se cumple que:
Si se cumple la condición de banda estrecha expresada en la ecuación anterior, entonces sobre cada kernel, hk(τk), podemos sustituir x t−i por x t en (3.5) para obtener:
donde 0k=[0,...,0]T . Como el lado derecho depende de x t solamente, estamos ante una señal sin memoria desde el punto de vista del procesado de señal. Comparando con (3.1), podemos ver que:
Así pues, tanto H 2k102k1 como H 2k1 f o[1k 1T ,−1k
T ]T pueden determinar la relación polinomial en banda base entre x t e y t . La relación en banda base (3.10) es sin memoria pero el dispositivo físico, como describe hk k , tiene memoria. El hecho de que la señal sea de banda estrecha hace que la transformada de Fourier del kernel, H k f k , sea de banda ancha en comparación. Como también hk k ocupa un pequeño periodo de tiempo comparado con la variación temporal de x t , el efecto de memoria es considerado de término corto. Además, el término H 2k102k1 , proporcional al término H 2k1 f o[1k1
T ,−1kT ]T , es un valor en general complejo, luego la desviación de fase entre la
salida y la entrada, angle { y t }−angle {x t } no es constante (conversión AM/PM presente). Tales sistemas son referidos como cuasi-sin memoria en la literatura de microondas RF.
3.2.1.3. El caso sin memoria
Si el dispositivo físico es estrictamente sin memoria, tendremos que:
donde ck es un valor real. Sustituyendo (3.13) en (3.6), obtenemos:
Página 43
( )
2 22 1 2 1 2 1 2 1 2 1
22 1 1 12
( ) ... ( ) ( ) ( ) (0 ) ( ) ( )
2 11 1 , 1 ( ) ( ) (3.11)2
k kk k k k k
k k
T kT Tk o kk
k
y t h d x t x t H x t x t
kH f x t x t
k
τ τ+ + + + +
+ +
= =
+ = × −
∑ ∑∫ ∫
∑
% %% % % %
% %
( ) ( ) (3.10)ix t x tτ− ≈% %
( ) ( )2 1 2 1 2 1 2 1 1 10 1 , 1 (3.12)TT T
k k k k o ka H H f+ + + + + = = − %
1
( ) ( ) (3.13)k
k k k ii
h cτ δ τ=
= ∏
2 1
2 1 2 1 2 1 2 1 2 121
2 11( ) ( ) , (3.14)2
k
k k k i k kki
kh c con c c
kτ δ τ
+
+ + + + +=
+ = =
∏% % %

Capítulo 3 El canal no lineal. Análisis de sus efectos
Como c2k1 es un valor real, tanto c2k1 como h2k12k1 son valores reales también. Dicho de otro modo, no sólo el sistema paso banda es sin memoria, sino que también el sistema en banda base lo es. Como resultado, la señal compleja en banda base es:
Si la relación entrada salida de un PA obedece (3.15), su característica AM/AM es:
donde la ganancia compleja es
y la relación AM/PM se describe como:
Nótese que como los coeficientes c2k1 son reales, la fase de G(r) es 0 ó π. Sin embargo, para que la fase cambie, la ganancia, G(r), debe ser nula en el punto de cambio de fase, haciendo a la vez nula la salida del PA. Como la señal no puede ser atenuada hasta cero por un PA, se concluye que la desviación de fase entre la entrada y la salida permanece constante. De este modo, demostramos que un PA NL sin memoria no tiene conversión AM/PM.
Página 44
2 22 1 2 1 2 1( ) (0 ) ( ) ( ) ( ) ( ) (3.15)k k
k k kk k
y t H x t x t c x t x t+ + += =∑ ∑%% % % % % %
( ) ( ) ( ) (3.16)y t G x t x t=% % %
22 1( ) , ( ) (3.17)k
kk
G r c r con r x t+= =∑ % %
[ ( )] [ ( )] [ ( ) ] (3.18)angle y t angle x t angle G x t− =% % %

Capítulo 3 El canal no lineal. Análisis de sus efectos
3.2.1.4. Algunos casos especiales
Acabamos de ver que un sistema NL estrictamente sin memoria tiene conversión AM/AM pero no tiene conversión AM/PM (es constante). Por el contrario, un sistema NL cuasi-sin memoria presenta tanto distorsión AM/AM como AM/PM. En esta sección, investigaremos lo contrario: si una conversión AM/PM constante implica un comportamiento no lineal sin memoria. Veremos que hay dos casos especiales del modelo de Volterra, por ejemplo, los sistemas de Hammerstein y Wiener, que son con memoria pero pueden mantener aún una conversión AM/PM constante cuando se aplica una señal de banda estrecha.
➢ Sistemas de Kernel diagonal
Consideremos el sistema de kernel diagonal, cuyo kernel de k-ésimo orden viene dado por:
Nótese que los valores del kernel son sólo no nulos en los términos de la diagonal τ1 = τ2 = ... = τk. Sustituyendo (3.19) en (3.4), la relación entrada/salida paso banda viene dada por:
La parte de la derecha de (3.20) es también conocida como el polinomio de memoria de x(t). Si la señal de entrada a este sistema es de banda estrecha, la relación entrada/salida viene dada por (3.1) con:
donde Φk(f) es la transformada de Fourier de φk(τ). Nótese que aunque φk(τ) es un valor real, Φk(fo) no es un valor real en general y, por tanto, AM/PM no es constante. Sin embargo, casos especiales del kernel diagonal existen donde la conversión AM/PM es constante.
➢ Sistemas de Hammerstein
Si una no linealidad sin memoria es seguida por una sistema LTI, el sistema conjunto se llama sistema de Hammerstein. Se trata de un caso especial de un sistema de kernel diagonal, donde φk(τ) = ck φ(τ). Así, sustituyendo esta relación de kernel en (3.21), obtenemos
La ecuación de arriba considera que pasa primero por un sistema sin memoria no lineal y después por un sistema LTI para obtener y(t), y así el sistema completo de Hammerstein.
Página 45
1 11
( ) ( ) ( ) (3.19)k
k k k ii
h τ φ τ δ τ τ=
= −∏
1 1 1( ) ( ) ( ) (3.20)kk
ky t x t dφ τ τ τ= −∑ ∫
1 1 1( ) ( ) ( ) ( )* ( ) (3.22)kk
ky t c x t d t u tφ τ τ τ φ= − =∑∫
2 1 2 12
2 11 ( ) (3.21)2k k ok
ka f
k+ +
+ = Φ

Capítulo 3 El canal no lineal. Análisis de sus efectos
Si la entrada del sistema de Hammerstein es de banda estrecha, la relación entrada salida viene dada por (3.1) con:
donde Φ(f) es la transformada de Fourier de φ(τ).
Como {ck} son valores reales, a2k+1 en (3.23) tiene angle[a2k+1] = angle[Φ(fo)], que no depende de k. Como consecuencia, la conversión AM/PM es constante.
➢ Sistemas de Kernel Separable
Consideremos el caso del kernel de Volterra de orden k-ésimo pueda ser escrito como el producto de k funciones unidimensionales
donde cada función ψk tiene valor real y una dimensión. Este sistema se llama de kernel separable. Sustituyendo (3.24) en (3.4) y simplificando, la relación entrada/salida paso banda es :
Si la entrada x(t) es de banda estrecha, la relación entrada/salida en banda base de este sistema viene dada por (3.1) como:
donde Ψk(f) es la transformada de Fourier de ψk(τ). Nótese que aunque ψk(τ) es real, Ψk(f) no es real en general, por lo que la conversión AM/PM no es constante. Sin embargo, hay casos especiales de kernel diagonal donde la conversión AM/PM es constante.
Página 46
2 1 2 12
2 11 ( ) (3.23)2k k ok
ka c f
k+ +
+ = Φ
22 1 2 1 2 12
2 11 ( ) ( ) (3.26)2
kk k o k ok
ka f f
kψ ψ+ + +
+ =
1
( ) ( ) (3.24)k
k k k ii
h τ ψ τ=
= ∏
( )( ) ( ) ( ) (3.25)k
kk
y t x t dψ τ τ τ= −∑ ∫

Capítulo 3 El canal no lineal. Análisis de sus efectos
➢ Sistemas de Wiener
Si un sistema LTI es seguido por un sistema sin memoria no lineal, el sistema global se llama sistema de Wiener. El sistema de Wiener es un caso especial de kernel separable, donde k =
k ck . Entonces tenemos que:
Como u t =t ∗x t , y t =∑ ck uk t el sistema que transforma x(t) en y(t) es de Wiener. El kernel de Volterra de orden k-ésimo viene dado por:
donde ck y ψ(τ) son reales. Si la entrada x(t) al sistema de Wiener es de banda estrecha, la relación entrada/salida en banda base viene dada por (3.1) con:
donde Ψ(f) es la transformada de Fourier de ψ(τ). Como angle[a2k+1] = angle[Ψ(fo)] es independiente de k, la conversión AM/PM es constante.
3.2.1.5. Conclusión
Como hemos visto, las series de Volterrra son un modelo general de sistema no lineal con memoria. Para comenzar, describimos la relación entrada/salida en banda base de un modelo de PA de series de Volterra cuya entrada es una señal paso banda. Cuando un PA físico (dispositivo) presenta efectos de memoria de término corto, se dice que es cuasi-sin memoria, porque la correspondiente relación entrada/salida en banda base es sin memoria. Este es un punto potencial de confusión a lo largo de la literatura al respecto. En general, las conversiones AM/AM y AM/PM no pueden describir completamente el PA, aunque sí podrá si el sistema es cuasi-sin memoria.
Por otro lado, si el dispositivo PA es estrictamente sin memoria, la salida es simplemente una función polinómica de la entrada, y la conversión AM/PM resultante es constante. Así, la conversión AM/AM sola es suficiente para caracterizar completamente al PA. Este, sin embargo, no es el único caso en el que no hay AM/PM. Hemos visto que si una señal de banda estrecha pasa a través de un sistema no lineal de Wiener o de Hammerstein, la conversión AM/PM es también constante. Será importante distinguir los casos de no linealidades con memoria de término largo, de término corto y sin memoria, ya que afectaran de manera distinta la estrategia de linealización que queramos seguir.
Página 47
( )( ) ( ) ( ) (3.27)k
kk
y t c x t dψ τ τ τ= −∑ ∫
1
( ) ( ) (3.28)k
k k k ii
h cτ ψ τ=
= ∏
22 1 2 12
2 11 ( ) ( ) (3.29)2
kk k o ok
ka c f f
kψ ψ+ +
+ =

Capítulo 3 El canal no lineal. Análisis de sus efectos
3.2.2. Modelos de Saleh para sistema no lineales
Como hemos visto en el apartado anterior, los amplificadores de potencia, en general, presentan una distorsión no lineal tanto en amplitud (conversión AM/AM) como en fase (conversión AM/PM). En la literatura se puede encontrar dos modelos no lineales, paso banda e independientes de la frecuencia equivalentes para estudiar los efectos negativos de estas no linealidades en varios sistemas de comunicación. Estos son el modelo de amplitud-fase y el modelo de cuadratura, en los cuales la porción de señal de salida que cae en la misma zona espectral que la señal de banda limitada de entrada, se describe en términos de la envolvente de la señal de entrada, en vez de en su valor instantáneo. Para especificar cada modelo, uno tiene que conocer dos funciones, la función de amplitud y fase para el primer modelo, y la función de fase y cuadratura para el segundo. Se han propuestos varias soluciones para estas funciones que, por lo general, tienen en común que son complejas o requieren el conocimiento de algún parámetro. La validez de cada una de estas fórmulas se comprueba mediante medidas experimentales, tras procesos de ajuste.
3.2.2.1. Modelo de Amplitud-Fase
Pasemos a comentar el modelo de Amplitud-Fase propuesto por Saleh, por ser uno de los más utilizados en simulaciones actuales, debido a su sencillez y sus buenos resultados. Consideremos que la señal de entrada es:
donde ωo es la portadora de frecuencia, y r(t) y ψ(t) son la envolvente y la fase de la señal modulada, respectivamente. En el modelo de Amplitud-Fase, la salida del sistema no lineal se suele escribir como:
donde A(r) es función impar de r, con un término lineal dominante que representa la conversión AM/AM, y Φ(r) es función par de r, con un término cuadrático dominante que representa la conversión AM/PM.
Para el modelado de A(r) y de Φ(r), se han propuesto numerosas alternativas, más o menos acordes a la realidad de los dispositivos, por muchos autores a lo largo de los años. El modelo que aquí presentaremos es, como se mencionó al principio de este apartado, el propuesto por Saleh. En este caso, las fórmulas para A(r) y Φ(r) son:
Nótese cómo para grandes valores de r, A(r) es proporcional a 1/r, y Φ(r) permanece constante.
Página 48
[ ]( ) ( ) cos ( ) (3.30)ox t r t t tω ψ= +
[ ] [ ]( ) ( ) cos ( ) [ ( )] (3.31)oy t A r t t t r tω ψ= + + Φ
[ ]
[ ]
2
2
2
( )( ) (3.32 )1 ( )
( )( ) (3.32 )
1 ( )
a
a
r tA r t ar t
r tr t b
r tφ
φ
αβ
αβ
=+
Φ =+

Capítulo 3 El canal no lineal. Análisis de sus efectos
3.2.2.2. Modelo de Cuadratura
En el modelo en cuadratura, si la señal de entrada es la misma que en el caso anterior, ecuación (3.30), la señal de salida viene dada por la suma de las componentes en fase y cuadratura.
donde P(r) y Q(r) son funciones impares de r con términos lineales y cúbicos dominantes, respectivamente. En realidad, (3.33) puede deducirse de (3.31) con:
Para las funciones P(r) y Q(r) se han propuestos distintas formas, tales como polinomios impares y series de Bessel. Según Saleh, una representación suficiente para obtener resultados que se ajustan muy bien a los experimentales y que igualan o mejoran a las funciones propuestas anteriores, sería la siguiente:
Veamos que para valores grandes de r, tanto P(r) como Q(r) tienden a 1/r, mientras que para el caso de funciones de Bessel, por ejemplo, se tendería a una constante.
Una propiedad útil de (3.35) es que se cumple la relación:
De esta forma, calcular el espectro de a partir del de para un dado se simplifica enormemente.
Figura 3.2. Esquema del Modelo en Cuadratura
Página 49
[ ] [ ][ ] [ ]
( ) ( ) cos ( ) (3.33 )
( ) ( ) sin ( ) (3.33 )o
o
p t P r t t t a
q t Q r t t t b
ω ψ
ω ψ
= +
= − +
[ ][ ]
( ) ( ) cos ( ) (3.34 )
( ) ( ) sin ( ) (3.34 )
P r A r r a
Q r A r r b
= Φ
= Φ
( )
2
3
22
( ) (3.35 )1
( ) (3.35 )1
p
p
p
p
rP r a
r
rQ r b
r
αβ
α
β
=+
=+
( )( ) , (3.36)p q p qp
P rQ r si α α β ββ
∂= − → →∂

Capítulo 3 El canal no lineal. Análisis de sus efectos
Como se puede imaginar, ambos modelos se han de someter a un proceso de ajuste para hallar las constantes involucradas en cada caso. Esto se puede hacer mediante un ajuste de mínimos cuadrados en torno a una serie de medidas practicadas. Estas medidas, debido a la sencillez de los modelos, pueden ser baterías de medidas de un tono, a las que posteriormente se le aplicarían procedimientos computacionales, como los comentados. Además, una simple interpretación de las medidas obtenidas a diferentes frecuencias permite incluir en el modelo en cuadratura los efectos de selectividad en frecuencia. Esto puede ser particularmente interesante para amplificadores de banda no muy ancha o cuando las señales de entrada son de banda ancha.
3.2.2.3. Modelo en cuadratura dependiente de la frecuencia
Hasta ahora en el Apartado 3.2.2, se ha considerado que las características del amplificador eran independientes de la frecuencia en la banda de interés, lo cual en la práctica sucede en algunos casos. Sin embargo, cuando se usan señales de banda ancha, o cuando no todos los componentes de un sistema tienen el mismo ancho de banda que el amplificador, se hace necesario el empleo de un modelo dependiente en frecuencia. Trataremos de encontrar un modelo de esas características cuyos parámetros puedan ser inferidos a partir de medidas de un solo tono.
Consideremos un test de un tono en el que la señal de entrada podemos ajustarla en amplitud, r, y en frecuencia, f. Consideremos que la amplitud y la fase de la señal de salida son A(r,f) y Φ(r,f). Además supondremos que:
es la respuesta de pequeña señal. Es decir, Φ(r,f) − Φ0(r,f) → 0 cuando r → 0. Usando (3.34), podemos así obtener la componente en fase y en cuadratura de la señal de salida:
Para cada f, se podrían ajustar las fórmulas de (3.35) a unos datos experimentales. Esto se podría expresar como una dependencia de los parámetros con respecto a la frecuencia: αp(f), βp(f), αq(f), βq(f). Definamos ahora las funciones:
Página 50
[ ][ ]
( , ) ( , ) cos ( , ) ( , ) (3.38 )
( , ) ( , ) sin ( , ) ( , ) (3.38 )o
o
P r f A r f r f r f a
P r f A r f r f r f b
= Φ − Φ
= Φ − Φ
( ) 3
( ) ( ) (3.39 )
( )( ) (3.39 )
( )
( ) ( ) (3.39 )
( )( ) (3.39 )
( )
p p
pp
p
q q
q
H f f a
fG f b
f
H f f c
fG f d
f
β
αβ
β
α
β
=
=
=
=
0 0( ) lim ( , ) (3.37)
rf r f
→Φ = Φ

Capítulo 3 El canal no lineal. Análisis de sus efectos
Definamos las envolventes independientes de frecuencia normalizadas:
que se obtiene de (3.35) haciendo unidad las constantes.
Se puede observar a partir de (3.35), (3.39), (3.40) y la Figura 3.2, que el paso de una señal de un tono a través de la rama de la componente en fase se puede dividir en tres pasos. Primero, la amplitud de entrada se escala por Hp(f); después, la señal resultante pasa a través de la envolvente no lineal independiente de frecuencia Po(r); finalmente, la amplitud de salida se escala por Gp(f). Otros tres pasos similares se pueden proponer para la rama en cuadratura. Ahora, desarrollando cada una de las operaciones de escala de amplitud dependientes de frecuencia mencionadas, las operaciones se pueden interpretar como una señal que pasa a través de un serie de sistemas lineales que tienen la correspondiente respuesta real en frecuencia. Esto lleva al modelo en cuadratura dependiente de frecuencia que se muestra en la Figura 3.3.
Figura 3.3. Esquema del modelo en cuadratura dependiente de frecuencia
Este modelo es válido para señales de entrada de un solo tono, por la originalidad del proceso, y los pasos seguidos. Sin embargo, su validez para una señal arbitraria de entrada es objeto de estudio. La caja final del modelo de la Figura3.3 es lineal, pasa todo, con una respuesta en frecuencia unidad, y una respuesta en fase Φ0(f) definida en [3.37], que servirá para igualar la fase.
Página 51
2
3
2 2
( ) (3.40 )1
( ) (3.40 )(1 )
o
o
rP r arrQ r br
=+
=+

Capítulo 3 El canal no lineal. Análisis de sus efectos
3.2.3. Efectos no lineales de un PA
La distorsión que se introduce en la señal que queremos transmitir es consecuencia de las características no lineales de los subsistemas de los que consta el sistema de comunicación completo. Podemos citar como causantes, pues, algunos como antenas, mezcladores, convertidores A/D y, sobre todo por ser el centro de estudio de este apartado, los amplificadores. En el caso particular de amplificadores a semiconductor, la no linealidad viene heredada de la no linealidad de los elementos semiconductores. Las consecuencias de las no linealidades en sistemas de comunicaciones serán: distorsión de la constelación, modificación de las características espectrales y reducción de la eficiencia en potencia.
3.2.3.1. Distorsión de la constelación (warping)
Uno de los efectos más importantes en comunicaciones digitales que producen las no linealidades será la corrupción de la información: cuando aumenta la potencia de entrada, haciéndose la no linealidad más fuerte, los símbolos transmitidos se desvían de los previstos en gran medida, lo que hace que la constelación sufra una distorsión característica (warping). Esto resultará, si la perturbación es lo suficientemente dura, en una distorsión en los límites de decisión de la constelación, aumentando con ello la tasa de error del sistema.
En sistemas de comunicación inalámbricos modernos, en donde se están adoptando constelaciones con símbolos cada vez más cercanos para conseguir tasas de transferencia lo suficientemente competitivas, una modificación leve de las fronteras de decisión podría perjudicar muy gravemente la transmisión. Este es el caso de esquemas OFDM, en donde la IFFT que hay que aplicar a los símbolos de entrada (QPSK, QAM,...) hace que la constelación se transforme en una constelación con más puntos y, por tanto, con menos espacio entre unos símbolos y otros. Es decir, más sensible a no linealidades.
3.2.3.2. Regeneración del espectro (espectral regrowth)
La regeneración del espectro es un efecto significativo de la distorsión de dispositivos no lineales, particularmente en amplificadores de potencia en aplicaciones wireless – nuestro caso- , que está relacionada con la distorsión de intermodulación (IMD). Cuando una señal modulada pasa por un dispositivo no lineal, su ancho de banda se ensancha por las no linealidades de orden impar. Esto es causa de la creación de productos de mezcla entre las componentes de frecuencia individuales del espectro. Podemos ver su efecto, de forma gráfica, en la siguiente figura.
Figura 3.4. Distorsión no lineal en el espectro de un señal OFDM. En verde, la señal sin distorsionar. En rojo, señal a la salida de la no linealidad
Página 52

Capítulo 3 El canal no lineal. Análisis de sus efectos
Cuando los niveles de potencia (de la señal de entrada) aumentan, la no linealidad provoca que el espectro se ensanche. La IMD no puede ser reducida filtrando, en general, porque está cerca de la frecuencia de la señal deseada. La problemática de este fenómeno radica en que la IMD de un usuario puede caer en el ancho de banda destinado a otro usuario cuyo ancho de banda, además, es bastante limitado. Recordemos en este punto que lo normal en comunicaciones actuales es tener un espectro superpoblado. En la siguiente figura exponemos esta situación.
Figura 3.5. Interferencia de un canal sobre otro tras pasar por una no linealidad
Como podemos ver en la figura, hay dos canales, en verde y en azul. El primero de ellos, al pasar por la no linealidad, en rojo, ha aumentado sus niveles de potencia demasiado en una zona del espectro que corresponde al canal vecino, lo que supone parte de la señal de un usuario interfiere con la banda del espectro dedicada a otro usuario, provocando un aumento del ACPR (Adjacent Channel Power Rejection).
El ACPR se puede definir como:
donde S(f) es el espectro de potencia de todo el espectro compartido por los usuarios; y f1 y f2 son las frecuencias de inicio y fin de la banda de un usuario, lo mismo que f3 y f4 son las frecuencias de inicio y fin del usuario vecino.
Existen métodos basados en estadística de la señal de entrada y en modelado de los dispositivos que predicen, en mayor o menor medida, el posible recrecimiento espectral de un sistema.
Por último, señalaremos que las autoridades reguladoras imponen reglas muy estrictas sobre la regeneración o recrecimiento espectral, que deben ser conocidas para que un producto nuevo concreto pueda ser aprobado. De nuevo, debido a la complejidad de los esquemas de modulación modernos, y especialmente el uso de técnicas multiportadora como OFDM, diseñar amplificadores que cubran tales especificaciones se pone cada vez más difícil.
Página 53
4
3
2
1
( )(3.41)
( )
f
ff
f
S f dfACPR
S f df=
∫∫

Capítulo 3 El canal no lineal. Análisis de sus efectos
3.2.3.3. Reducción de la eficiencia de la batería
Un impacto indirecto de la no linealidad es una reducción en la eficiencia y, por lo tanto, en la vida de la batería. Una definición común de la eficiencia es:
Por lo tanto, cuando aumenta la potencia de RF (PRF) para una potencia DC constante (PDC), aumenta la eficiencia.
Sin embargo, esto también redunda en un aumento de la distorsión. Para cubrir especificaciones de distorsión, los diseñadores a menudo recurren a reducir la potencia de RF, que a su vez implica reducción de la eficiencia. El compromiso entre linealidad y eficiencia es evidentemente importante para el diseño de sistemas y circuitos de comunicación, siendo cada vez más importante con la evolución de los estándares.
3.2.4. Efecto de memoria
Los efectos de memoria se definen como cambios en la amplitud y en la fase de las componentes de distorsión causados por cambios en la frecuencia de modulación. Este efecto es particularmente importante para disminuir la distorsión, cuando ésta es reducida por una distorsión similar pero de fase contraria. Los efectos de memoria se han considerado como un gran obstáculo a la hora de diseñar amplificadores lineales para wireless. La memoria, en este contexto, puede ser definida como una variación de las características de distorsión del amplificador con el ancho de banda de la señal. Estos efectos pueden producir que los niveles de intermodulación varíen con el ancho de banda de la señal, así como asimetrías entre los niveles de intermodulación superior e inferior. Por ello, estos efectos son denominados también efectos de distorsión dependiente del ancho de banda.
Los amplificadores han sido tradicionalmente modelados con una relación entrada-salida sin memoria, que puede ser escrita como:
donde los coeficientes ai son complejos.
Si se aplica una señal de dos tonos x = A1cos(ω1t) + A2cos(ω2t), la amplitud para las bandas laterales de la intermodulación de tercer orden inferior y superior (IM3) se puede escribir como:
donde se puede apreciar que IM3 es independiente del espaciado de los tonos.
Página 54
(3.42)RF
DC
PP
η =
2 30 1 2 3 ... (3.43)y a a x a x a x= + + + +
33
33 (3.44)4
IM a A=

Capítulo 3 El canal no lineal. Análisis de sus efectos
Desafortunadamente, los amplificadores de potencia no se comportan de esta forma. Su conducta viene explicada con más detalle en la Figura 3.6, donde se muestra la fase del tono IM3 como función de la diferencia en frecuencia de una señal de dos tonos.
La ecuación (3.35) describe una línea recta como función de la diferencia entre tonos, como se observa en la línea azul de la Figura 3.6. La línea roja presenta la fase de la componente IM3 de un amplificador de potencia real. Tales limitaciones del ancho de banda de la modulación que son desviaciones de amplitud o de fase de las respuestas de Intermodulación (IM) causadas por la diferencia entre tonos de una señal de dos tonos son llamadas Efectos de Memoria.
Es importante enfatizar que la distorsión por sí misma no es un efecto de memoria, pero cualquier comportamiento de distorsión no constante a diferentes frecuencia de modulación (espaciado entre tonos) puede ser visto como uno.
Figura 3.6. En la figura vemos los efectos de memoria en cuanto a al fase para IM3
Los efectos de memoria suaves no son perjudiciales para el propio amplificador de potencia. Una rotación de fase de 10-20 grados o un cambio de amplitud de menos de 0.5 dB no tienen efecto dramático en cuanto al ACPR se refiere.
Sin embargo, la situación cambia cuando se usa linealización para cancelar las bandas laterales. La predistorsión, nuestro caso, es un método de linealización que produce componentes de señal que son de igual amplitud y fase contraria comparada con los productos de distorsión. Las señales de predistorsión suelen tener fase constante, por lo que es evidente que los efectos de memoria limitan seriamente el máximo rendimiento de este método.
Desafortunadamente, los demás métodos de linealización también presentan el mismo efecto. Como consecuencia de ello, los efectos de memoria hacen que el uso de linealización no sea tan efectivo como podría ser en muchas aplicaciones.
Página 55

Capítulo 3 El canal no lineal. Análisis de sus efectos
La distorsión dependiente del ancho de banda (otra forma de referirse a los efectos de memoria) provoca algunos problemas importantes, tres de los cuales se describen a continuación:
1. El primero tiene que ver con la veracidad de lo expuesto en los datasheet de los fabricantes. Las medidas en las que se basan los fabricantes para la IMD normalmente viene determinada para un ancho de banda específico, sin tener en cuanta la dependencia que tiene el IMD con la separación en frecuencia, como hemos visto para IM3. Además, la IMD superior e inferior no son de la misma amplitud.
2. El segundo problema tiene que ver con el modelado. Los métodos de modelado tradicionales no tienen la capacidad de pronosticar la dependencia de la distorsión con el ancho de banda.
3. La consecuencia de la distorsión dependiente del ancho de banda está relacionada con la linealización. La reducción de la regeneración espectral se da cuando el ancho de banda de la señal es pequeño. Sin embargo, la mejora para la señal de banda ancha es muy mala. Esta incapacidad de los linealizadores de funcionar de forma correcta en el caso de señales de banda ancha es un problema serio en el desarrollo de sistemas de comunicaciones modernos.
Para finalizar, diremos que las causas que generan los efectos de memoria son de origen térmico y eléctrico. De ellas, explicaremos brevemente la última, es decir, las causas eléctricas de la memoria. En principio, un polinomio para modelar un amplificador falla en dos sentidos. En primer lugar, aunque las expresiones de (3.34) modelan la relación entrada-salida, se ignora el hecho de que las componentes de distorsión en un nodo crean órdenes superiores. En segundo lugar, las ecuaciones de (3.35) no se corresponden a la realidad, pues siempre habrá más de un mecanismo que cause las no linealidades en el amplificador. Por ello, se suele mejorar el modelado de un amplificar mediante la consideración de la cascada de dos polinomios (si bien, sigue siendo bastante simplificado).
Aunque la justificación de este uso de dos polinomios se hace a partir del análisis circuital y modelado circuital del amplificador, también se llega a la conclusión de que modelar un amplificador mediante el sistema formado por la cascada de dos polinomios a partir de consideraciones de tratamiento de la señal. Este caso se ha comentado en los subapartados anteriores, en donde se intentaba conseguir un modelo matemático de la relación entrada/salida de un PA (Wienner y Hammerstein).
Página 56
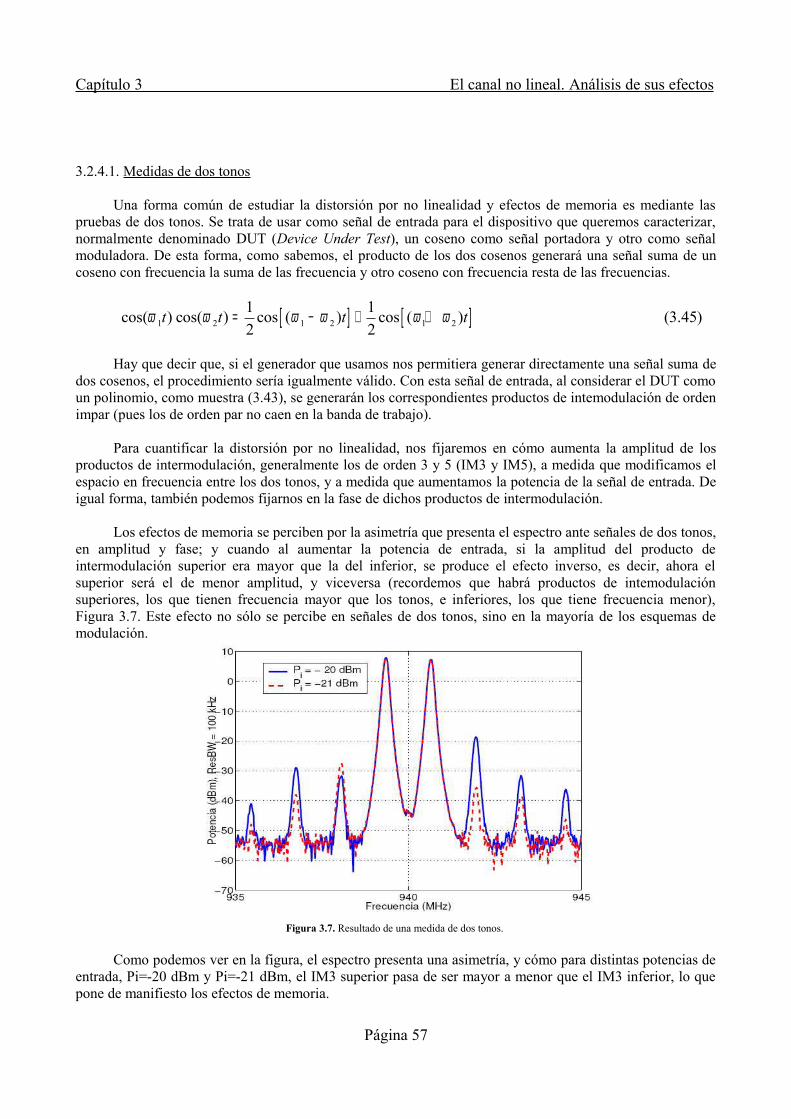
Capítulo 3 El canal no lineal. Análisis de sus efectos
3.2.4.1. Medidas de dos tonos
Una forma común de estudiar la distorsión por no linealidad y efectos de memoria es mediante las pruebas de dos tonos. Se trata de usar como señal de entrada para el dispositivo que queremos caracterizar, normalmente denominado DUT (Device Under Test), un coseno como señal portadora y otro como señal moduladora. De esta forma, como sabemos, el producto de los dos cosenos generará una señal suma de un coseno con frecuencia la suma de las frecuencia y otro coseno con frecuencia resta de las frecuencias.
Hay que decir que, si el generador que usamos nos permitiera generar directamente una señal suma de dos cosenos, el procedimiento sería igualmente válido. Con esta señal de entrada, al considerar el DUT como un polinomio, como muestra (3.43), se generarán los correspondientes productos de intemodulación de orden impar (pues los de orden par no caen en la banda de trabajo).
Para cuantificar la distorsión por no linealidad, nos fijaremos en cómo aumenta la amplitud de los productos de intermodulación, generalmente los de orden 3 y 5 (IM3 y IM5), a medida que modificamos el espacio en frecuencia entre los dos tonos, y a medida que aumentamos la potencia de la señal de entrada. De igual forma, también podemos fijarnos en la fase de dichos productos de intermodulación.
Los efectos de memoria se perciben por la asimetría que presenta el espectro ante señales de dos tonos, en amplitud y fase; y cuando al aumentar la potencia de entrada, si la amplitud del producto de intermodulación superior era mayor que la del inferior, se produce el efecto inverso, es decir, ahora el superior será el de menor amplitud, y viceversa (recordemos que habrá productos de intemodulación superiores, los que tienen frecuencia mayor que los tonos, e inferiores, los que tiene frecuencia menor), Figura 3.7. Este efecto no sólo se percibe en señales de dos tonos, sino en la mayoría de los esquemas de modulación.
Figura 3.7. Resultado de una medida de dos tonos.
Como podemos ver en la figura, el espectro presenta una asimetría, y cómo para distintas potencias de entrada, Pi=-20 dBm y Pi=-21 dBm, el IM3 superior pasa de ser mayor a menor que el IM3 inferior, lo que pone de manifiesto los efectos de memoria.
Página 57
[ ] [ ]1 2 1 2 1 21 1cos( ) cos( ) cos ( ) cos ( ) (3.45)2 2
t t t tω ω ω ω ω ω= − + +
Capítulo 3 El canal no lineal. Análisis de sus efectos
3.2.5. Input Back-Off y Output Back-Off
Un parámetro interesante que conviene conocer a la hora de trabajar con amplificadores en su región no lineal, es el punto de operación o back-off. Distinguiremos dos puntos de operación: punto de operación de entrada (Input Back-Off, IBO) y de salida (Output Back-Off, OBO). Cada uno de ellos se define como:
donde Pin es la potencia media de la señal de entrada, Pout es la potencia media de la señal de transmitida, y Pin,max y Pou,maxt son la potencia de saturación (máxima que puede dar/recibir el amplificador) a la entrada y a la salida, respectivamente.
Los efectos de las no linealidades pueden ser reducidos trabajando con elevados back-off, lo que corresponde con mover el punto de operación del amplificador a la región lineal. Desafortunadamente, esto conlleva una pérdida de la eficiencia de potencia del HPA. En este contexto, una medida útil del modo de funcionamiento del sistema es la degradación total (TD), como función del OBO y del HPA:
donde SNR(dB) es la relación señal a ruido en dB requerida a la entrada del detector para obtener una BER determinada para un valor concreto de OBO, y SNR0(dB) es la relación señal a ruido en dB requerida para obtener la misma BER en ausencia de no linealidad.
El punto de operación óptimo (que conlleva la mejor relación entre la potencia de salida y degradación por distorsión no lineal) corresponde al OBO(dB) que minimiza la función TD(dB). Se puede deducir la existencia de un punto de trabajo óptimo, porque valores pequeños en el OBO suponen un punto altamente no lineal, lo que se traduce en la necesidad de compensar un valor mayor de SNR para compensar sus efectos. En cambio, si nos situamos en un punto con un valor de OBO grande, aunque sea muy lineal, se tratará de un punto de trabajo altamente ineficiente para el amplificador porque, al estar lejos de su valor de saturación, desaprovecha su rango dinámico. Por tanto, debe haber un punto de trabajo intermedio que sea óptimo en cuanto a que ninguno de estos efectos sea tan importante.
Página 58
0( ) ( ) ( ) ( ) (3.48)TD dB SNR dB SNR dB OBO dB= − +
,max10
,max10
( ) 10log (3.46)
( ) 10log (3.47)
in
in
out
out
PIBO dB
P
POBO dB
P
=
=

Capítulo 3 El canal no lineal. Análisis de sus efectos
3.3. No linealidad en OFDM
La señal OFDM, modulada con un largo número de portadoras, es muy sensible a la distorsión no lineal debido a la gran variabilidad de su envovente, la cual depende del valor de fase instantáneo de cada portadora. Si suponemos un alto número de portadoras, y considerándolas procesos estadísticamente independientes, podemos utilizar el Teorema Central del Límite, llegando a que el proceso total tenderá a un proceso complejo Gaussiano, con una distribución Rayleigh para la envolvente. Esto permite un tratamiento analítico de los sistemas no lineales OFDM haciendo uso de los resultdos generales para distorsiones no lineales de señales Gaussianas.
Convertidores anlógico/digital, mezcladores y amplificadores de potencia son las más usuales fuentes de distorsión no lineal debido al limitado rango que permiten para una señal dinámica. Es posible distinguir entre dos clases diferentes de distorsiones no lineales. La distorsión denominada Cartesiana, actúa por separado sobre los componentes de la banda base de la señal compleja, mientras que la distorsión de envolvente actúa directamente sobre la envolvente compleja de la señal. La distorsión de los convertidores analógico/digital es de tipo Cartesiana, mientras que la distorsión AM/AM y la distorsión AM/PM de los amplificadores es del tipo de envolvente.
La distorsión no lineal en el transmisor causa interferencias tanto dentro de la banda de la señal como fuera de dicha banda. La interferencia dentro de la banda causa una degradación de la BER del sistema, mientras que la interferencia fuera de la banda de la señal afecta a las señales adyacentes, que muchas veces hace la emisión intolerable aunque la degradación de la BER sea aceptable.
En esta sección nos vamos a centrar en los efectos dentro de la banda de le señal. Más concretamente, en analizar un sistema OFDM que incluye un bloque paso de banda sin memoria no lineal en el transmisor, como puede ser un amplificador de potencia, y llegar a una descripción teórica del efecto de la distorsión en el sistema de transmisión. Como resumen de esos resultados se puede decir que veremos como esta no linealidad tiene dos efectos sobre el sistema, por un lado la distorsión de los puntos de la constelación del sistema, y por otro la presencia de un ruido aditivo que llamaremos ruido de distorsión no lineal (NLD).
3.3.1. Formulación del problema
Primero vamos a introducir el esquema de bloques equivalentes de un sistema OFDM, con no linealidad y un canal AWGN, mostrado en la figura 3.8.
Figura 3.8. Sistema OFDM no lineal y canal AWGN
Página 59

Capítulo 3 El canal no lineal. Análisis de sus efectos
En cada periodo, un vector de N símbolos complejos, Ak, k = 0,1,...,N-1, es transformado por medio de un IFFT a un vector de N símbolos complejos, que son en realidad las muestras de la señal OFDM en banda base. La envolvente compleja de la señal viene dada por i(t):
donde inm es obtenido como:
donde T es el periodo de símbolo y g(t) es la forma del pulso. A su vez, Ak pertenece a un alfabeto A de M elementos que tienen la misma probabilidad, los cuales dependen de la modulación adoptada, además se asume que por cada k, h = 0,1,N-1 , y por cada m y l:
La señal modulada es transmitida a través de un canal no lineal sin memoria NL, el cual es descrito por las características de distorsión AM/AM y AM/PM. Esto puede también ser definido como las características de no linealidad de un amplificador de potencia, que será lo que simularemos en el siguiente capítulo. La señal a la salida del bloque NL es:
donde FA y FP son las funciones de distorsión AM/AM y AM/PM.
En el receptor se introduce un ruido AWGN con densidad espectral de potencia No. Se va a considerar además que la interferencia en las bandas adyacentes causadas por el sistemade transmisión no va a ser tenido en cuenta.
La señal recibida es primero procesada por un filtro paso de baja con función de transferencia R(f) y muestreada en los instantes t n
m=nTmNT . Vamos a indicar la señal filtrada como v(t), y sus muestras como, vn
m=znmwn
m , donde znm y wn
m son las componentes de señal y de ruido respectivamente. Las secuencias de muestras son procesadas trama por trama por el bloque FFT. En la entrada del decisor se tendra la variable de decisión V k
m
la cual incluye la distorsión no lineal y el ruido Gaussiano.
Página 60
1( )
0
( ) ( ) ( ) ( ) ( ) (3.49)N
j t mn
m ni t x t jy t t e i g t nT mNTφρ
∞ −
= − ∞ =
= + = = − −∑ ∑
12 /
0
1 (3.50)N
m m jnk Nn k
ki A e
Nπ
−
=
= ∑
{ } { }{ }
0
, 1(3.51)
0
m m lk k h
m lk h
E A E A A
P si h k mE A A
en otro caso
= =
= ==
[ ] [ ] [ ] [ ] [ ]( ) ( )( ) ( ) ( ), ( ) ( ), ( ) ( ), ( ) (3.52)PjF t j tA I Qu t F t e e F x t y t jF x t y t F x t y tρ φρ= = + =
12 /
0
(3.53)N
m m jnk Nk n
nV v e π
−−
=
= ∑

Capítulo 3 El canal no lineal. Análisis de sus efectos
La probabilidad de error de síbolo Pe puede ser evaluada considerando la probabilidad de error condicionada a la transmisión de cada símbolo del alfabeto de la modulación como sigue a continuación:
donde SA es la región de decisión para el símbolo A. Esto requiere la caracterísitica estadística de la variable de decisión V k
m , cuando A km está sujeto a A, lo cual veremos en el siguiente apartado.
3.3.2. Caracerización de la variable de decisión
Como se ha comentado anteriormente, en este apartado vamos a intentar hallar las caractrísitcas estadísticas de la variable de decisión en el modulador para comprender el efecto de la no linealidad sobre el sistema OFDM.
3.3.2.1. Señal a la entrada del bloque NL
Vamos a comenzar con una asunción básica con respecto a la señal i(t) a la entrada del bloque no lineal. Mirando las ecuaciones (3.49) y (3.50), i(t) incluye la suma de las N contribuciones, las cuales son independientes y tienen las mismas estadísticas. Si N es suficientemente grande, i(t) puede ser considerada como un proceso aleatorio complejo Gaussiano como consecuencia del Teorema Central del Límite. Es más, el bloque IFFT, para valores altos de N, es considerado como un bloque el cual transforma un set de N variables aleatorias complejas independientes en un set de N variables complejas Gaussianas.
Si observamos la ecuación (3.54), hay que considerar el proceso aleatorio i(t), condicionado a la transmisión del símbolo genérico Ak
m fijado a A. Cuando Akm , para m=m y también para k=k ,
está fija a A, el proceso aleatorio i(t) no es estacionario. Su media y su varianza vienen dadas por:
Por otra parte, si nos fijamos en el análisis espectral, el símbolo Akm fijo podría ser evitado, y se
tendría simplemente:
Notar que esto representa el límite que buscamos cuando indicamos que N es suficientemente grande. De hecho cuando N ∞ , t 0 y t / 2t 0 .
Página 61
{ }( )1 (3.54)m me k A k
A AP P V S A A
∈
= − ∈ =∑
( )1
2 2
0
( ) ( ) (3.57)N
m
t
Pt g t nT mNTN
β
σ−
= − ∞
=
= − −∑
( ) ( )
( )
12 /
0
1 22 22
( ) ( ) (3.55)
( ) ( ) (3.56)
Nj nk N
x yn
N
m
At t j t e g t nT mNTN
P Pt g t nT mNT tN A
πβ β β
σ β
−
=
−
= − ∞
= + = − −
= − − −
∑
∑

Capítulo 3 El canal no lineal. Análisis de sus efectos
3.3.2.2. Señal a la salida del bloque NL
Ahora nos vamos a centrar en la salida del bloque no lineal u(t). Nuestro primer objetivo es representar esta salida como
donde d(t) es un término de ruido aditivo y K(t) es una función arbitraria determinista compleja. Más exactamente, es deseable que la media de d(t) sea nula, y que sea un proceso incorrelado con i(t).
Teniendo esto en mente, nosotros podemos investigar las propiedades estadísticas de d(t), evaluando su media y su correlación cruzada con el proceso de i(t):
Con la ayuda de teoremas se puede llegar a la conclusión que si se da la condición
entonces tenemos que
lo que quiere decir que d(t) es un proceso no correlado con i(t+τ) de media nula. A partir de ahí, se puede llegar a la siguiente expresión para K(t)
Por tanto, el punto más importante es verificar que se cumple la condición de la ecuación (3.61). Para simplificar, denotarmos t = , 2t = 2 ,t = ,t= y F A e jF P=S . Realizando el cambio de coordenadas se obtiene:
Página 62
( ) ( ) ( ) ( ) (3.58)u t k t i t d t= +
{ } { } { }{ } { } { }* * * *
( ) ( ) ( ) ( ) (3.59)
( ) ( ) ( ) ( ) ( ) ( ) ( ) (3.60)
E d t E u t K t E i t
E d t i t E u t i t K t E i t i tτ τ τ
= −
+ = + − +
( , ) ( , ) (3.61)F x y F x yE jEx y
∂ ∂ = − ∂ ∂
{ }{ }
*( ) ( ) 0 (3.62)
( ) 0 (3.63)
E d t i t
E d t
τ+ =
=
1 ( , ) ( , )( ) (3.64)2
F x y F x yK t E jx y
∂ ∂= − ∂ ∂
( ) ( )
( ) ( )
2 2
2 2
( , ) ( )'( ) cos ( ) sin( ) cos( ) sin ( ) sin( ) cos( ) (3.65)
( , ) ( )'( ) sin ( ) sin( ) cos( ) cos ( ) sin( ) cos( ) (3.66)
F x y SS j jxF x y Sj S j j
x
ρρ φ φ φ φ φ φρ
ρρ φ φ φ φ φ φρ
∂ = + + +∂∂− = + + +
∂

Capítulo 3 El canal no lineal. Análisis de sus efectos
La función densidad de probabilidad de las variables aleatorias ρ y φ es:
Sustituyendo (3.67) y (3.68) en (3.66) se obtiene:
y en primera instancia se obtiene como conclusión que la ecuación (3.63) no se verifica.
Sin embargo cuando N es suficientemente grande y β(t) es despreciable con respecto a σ(t), la variable aleatoria φ llega a ser independiente respecto a la variable aleatoria ρ, y uniformemente distribuida en el rango [0,2π]. Haciendo que K(t) tienda a Ko(t) = K(t)|β(t)=0 , la ecuación (3.61) tiende a ser verdad y la esperanza E[d(t)] se hace prácticamente nula. Por lo tanto, en adelante asumiremos que la ecuación (3.61) es válida a condición de que N sea lo suficientemente grande.
Después de validar la posibilidad de descomponer la salida u(t) en dos partes incorreladas (la señal útil y el ruido) como indica la ecuación (3.58), ahora vamos a centrar la atención en la Ko(t) función, la cual caracteriza a la parte útil de la señal. Se puede notar que la función sólo depende de la varianza 2t , que es función del tiempo debido a la no estacionalidad del proceso aleatorio i(t). Esta dependencia del tiempo es introducida por la forma del pulso como se puede ver en la ecuación (3.49).
Es interesante buscar la consición que hace Ko(t) independiente del tiempo, por ejemplo que sea una constante la varianza 2t . Examinando la ecuación (3.57), podemos ver que si el número de portadoras N es suficientemente grande, entonces la varianza puede ser vista como una repetición periódica del pulso al cuadrado g2 t . De ahí se concluye que sea una constante cuando las muestras de la transformada de Fourier, en la frecuencia n/t siendo n un entero, satisface:
Hay deos casos teóricos interesantes donde se cumple esta condición:
1. Si g(t) es un pulso rectangular definido en el rango (-T/2, T/2).
2. Si G(f) es una función limitada en banda en el rango (-1/2T, 1/2T).
Por tanto, hasta ahora hemos visto que la señal OFDM al pasar a través de un sistema no lineal se puede descomponer como indica la ecuación (3.58), ya que N suele ser un número suficientemente y los pulsos empleados cumplen la relación anteriormente comentada.
Página 63
2 2
22 cos( )
2( , ) (3.67)f eρ β ρ β φ
σρ φ
ρρ φπ σ
+ −−=
1 ( )( ) '( ) (3.68)2
SK t E S p ρρ
= +
22
(0) 0( / ) (3.69)
0 0G n
G n Tn
== ≠

Capítulo 3 El canal no lineal. Análisis de sus efectos
Nos vamos a centrar en la relación 1 para obtener resultados numéricos. En el caso general, cuando el término de la varianza es despreciable, la función compleja Ko(t) puede ser representada como serie de Fourier por:
donde
Por lo tanto, sustituyendo en (3.58), obtenemos:
Para los casos 1 y 2, se tiene o≈Ko y l≈0 , l≠0 .
3.3.2.3. Vector de salida del bloque FFT
Empezamos definiendo las funciones grl(t), irl(t) y dr(t), como la respuesta del filtro del receptor a las otras funciones 2 / 2 /( ) , ( ) , ( )j lt T j lt Tg t e i t e d tπ π . Además, asumiremos que el filtro del receptor está adaptado al pulso g(t), cuya amplitud está escalada a 1. Por tanto podemos escribir la salida del filtro receptor como:
En el caso 1 y 2 de la sección anterior, esta expresión puede ser simplificada a:
Viendo esta ecuación podríamos tener otro caso interesante donde se cumple la ecuación (3.74). Este caso se refiere a un sistema donde G(f)R(f) es una función limitada en banda en el rango [-B,B], con la condición 1/2T < B < 1/T, y con portadoras virtuales insertadas para evitar el efecto del aliasing. Un efecto de interés práctico, lo llamaremos caso 3, es un sistema con G(f)R(f) = CR(f), con la función coseno alzado. En este caso, cuando N es suficientemente grande, las componentes espectrales de i(t) que se salen del rango [1/2T , 1/T] son despreciables. De ahí que el filtro del receptor elimina su contribución de las componentes con índice l distinta de 0, y a la salida del filtro se tiene la ecuación (3.74).
Página 64
2 /( ) (3.70)j lt To l
lK t e πα
∞
= − ∞
= ∑
/ 22 /
/ 2
1 ( ) (3.71)2
Tj lt T
l oT
K t e dtπα −
−
= ∫
2 /( ) ( ) ( ) (3.72)j lt Tl
lu t i t e d tπα
∞
= − ∞
= +∑
( ) ( ) ( ) (3.73)l rl rl
z t i t d tα∞
= − ∞
= +∑
00( ) ( ) ( ) (3.74)r rz t i t d tα= +

Capítulo 3 El canal no lineal. Análisis de sus efectos
Vamos a centrar el estudio en estos tres casos que además son los más habituales. Muestreando z(t) en el instante t n
m se obtiene:
donde
A la salida del bloque FFT después de fijar Akm=A
donde W km es la componente de ruido Gaussiano de varianza w
2 =N 2=2NN0/T , y además:
es la componente de ruido introducida por la no linealidad de varianza D2 .
Esta ecuación, consecuencia del teorema de Bussgang, indica que el efecto de los bloques no linelaes sin memoria en las señales que son obtenidas como suma de muchas componentes independientes (en nuestro caso, que N sea suficientemente grande), producen una rotación en el receptor en la constelación, una atenuación y un ruido incorrelado. Esto es la consecuencia diferente respecto a un sistema con una única portadora, ya que en esos casos se produce una compresión y un ruido correlado.
Por tanto, podemos concluir que el efecto de una no linealidad sin memoria paso de banda en la variable de decisión de un sistema OFDM puede ser descrita introduciendo una ganancia compleja αo que incluye una atenuación y una rotación de fase, y un término de ruido aditivo Gaussiano NLD de media cero y varianza D
2 .
Página 65
0,0 (3.75)m m mn r n rnz i dα= +
0,
1 1
0 00
( ) (0) (3.76)N N
m m m m mr n s r n n r n
m si i g t sT mNT i g i
− −
= − ∞ =
= − − = =∑ ∑
0 (3.77)m m mk k kV A D Wα= + +
12 /
0
(3.78)N
m m jnk Nrnk
nD d e π
−
=
= ∑

Capítulo 3 El canal no lineal. Análisis de sus efectos
3.3.3. Evaluación de la probabilidad de error
Comenzando desde la expresión de la variable de decisión en la entrada del bloque de decisión dado por (3.77), podemos evaluar la probabilidad de error como función de la modulación utilizada y la SNR.
Se puede derivar una expresión para varios formatos de modulación como M-QAM o M-PSK. En este caso nos vamos a centrar en M-QAM, que es una modulación en amplitud y fase. En este caso, los símbolos M-arios son obtenidos mapeando grupos de log2 M bits, de ahí que se pueda derivar la siguiente expresión:
Aquí, la relación señal ruido en la raíz cuadrada depende del punto de trabajo del amplificador de potencia y es también función de Eb/No, donde:
es la energía por bit de la señal a la salida del bloque no lineal. Observando la ecuación (3.80) se puede ver que hay un límite para la probabilidad de error que no se puede reducir, ya que aunque el canal fuera ideal y no introdujera ruido, tendríamos una probabilidad de error vestigial:
la cual depende de la relación señal ruido no lineal ∣o∣2/D
2 .
Página 66
20
2 2 (3.79)w D
SN
ασ σ
=+
20
2 22
2 1 (3.80)logb
w D
MP erfcM M
ασ σ
− = +
20
min 22
2 1 (3.82)logb
D
MP erfcM M
ασ
− =
{ }2
2 0 2
2 2
1 1( ) 2 (3.81)2 log 3 2 logb D
T M TE E u tM N M
ασ
−= = +
Capítulo 4 Experiencia en Matlab
Capítulo 4: Experiencia en Matlab
4.1. Introducción
Como ya introducimos al principio de la memoria, este cuarto capítulo es el más personal, y en él trataremos sobre los códigos implementados en Matlab para realizar las simulaciones del estudio que estamos realizando sobre OFDM.
Así, aprovecharemos este capítulo para exponer la ideación inicial de los códigos, las consideraciones supuestas a la hora de implementar la modulación OFDM, las mejoras y adiciones que se han ido añadiendo para hacer el estudio más completo, los diversos problemas surgidos a la hora de enfrentarse a la programación en Matlab, la evolución de los códigos desde su fase inicial hasta sus versiones definitivas más eficientes y sencillas. En definitiva presentaremos toda la experiencia de trabajo que se ha tenido en este estudio, destacando la solución a los distintos problemas que se presentaron, y las anécdotas que puedan parecer más interesantes desde un punto didáctico.
Para poder exponer de una manera más comprensible y ordenada todos los conceptos que se manejan en el código implementado, hemos estructurado este capítulo reflejando las fases de trabajo por las que se han pasado hasta completar todas las funciones que comprenden este estudio de simulación, y las funciones asociadas a cada una de estas fases.
De esta manera, después de esta breve introducción presentaremos una primera parte que tiene que ver con la creación y transmisión de la modulación OFDM, posteriormente una segunda parte con la simulación del canal y la recepción de la señal, y por último, una tercera parte que comprende el grueso de las simulaciones realizadas como objetivo del análisis de diversas características de OFDM.
Página 67
Capítulo 4 Experiencia en Matlab
4.2. Creación y transmisión de la señal OFDM
En esta primera sección vamos a abordar cómo se idea inicialmente en este estudio la implementación de la creación de la señal OFDM en código Matlab, las consideraciones y variables tenidas en cuenta, y las versiones definitivas de las funciones relacionadas con este aspecto.
Inicicialmente, se intenta implementar toda la creación de la señal OFDM en una sola función Transmision.m. De esta manera se creó una cadena larga de símbolos QPSK, y para un número de puntos de la IFFT concreto, se van agrupando en símbolos OFDM de esa longitud, y haciendo la antitransformada de cada uno de ellos. Posteriormente se procedía a hallar la figura de la PAPR, y a representar la señal en el tiempo y en la frecuencia.
Posteriormente, viendo el problema con un poco más de perspectiva, se separó de la función de creación de la señal OFDM, un fichero inicial Datos.m, con todos los datos que pudieran ser necesarios para la señal. De esta manera, se podría cambiar fácilmente cualquier dato de la señal en este fichero, y las demás funciones trabajarían en función de esos datos. También se separó de la función Transmision.m, la función que representaba a la señal en el tiempo y en la frecuencia, Graf.m. Con esto conseguimos simplificar la función de cración de la señal OFDM, y además, como la función de representación funcionaba por paso de variables por valor, la función tiene total flexibilidad con sus variables para representar la señal OFDM sin cambiar los datos globales de la simulación.
Por último se añadió una función adicional GrafDDP.m, que realiza el histograma de los valores del módulo y la fase de la señal OFDM creada, con el objetivo de justificar los valores de PAPR que se estaban obteniendo.
Por tanto, esta parte de los códigos de Matlab contiene cuatro ficheros .m cuya función resumimos a continuación, antes de entrar en una descripción más detallada de cada uno, donde ya se explicará más en profundidad su funcionamiento:
1. Datos.m: Es un fichero inicial donde se cargan todos los datos necesarios para el resto de las funciones que forman parte del código.
2. Transmision.m: Función que se encarga de la creación de la señal OFDM como si de un transmisor se tratara. Comprende la posible inclusión del prefijo cíclico si procede, la adición de no linealidades, el cálculo de la figura PAPR e invocación a la función Graf.m tanto para el caso lineal como para el caso no lineal.
3. Graf.m: Función que a partir del paso de las variables necesarias por valor, representa la señal OFDM en el tiempo y en la frecuencia.
4. GrafDDP.m: Función que pasándole por valor solamente la señal OFDM transmitida, representa el histograma de los valores de su módulo y de su fase.
Una vez presentados estos cuatro ficheros, procederemos a la descripción detallada de cada uno de ellos, según el orden expuesto.
Página 68

Capítulo 4 Experiencia en Matlab
4.2.1. Datos.m
El fichero de Datos.m, es un fichero inicial donde se cargan todos los datos que van a ser necesarios a lo largo de las simulaciones. Por tanto, es el primer fichero que debe ejecutarse del código, y cada vez que se quiera hacer un cambio en cualquier característica, sólo habrá que efectuarlo en este fichero inicial y todas las demás funciones se adaptarán en función de estos valores.
En principio, se añadieron los datos más obvios en la implementación de OFDM en el código, como la longitud de la cadena de transmisión Lx, número de subportadoras Nc, número de puntos de la FFT N. Con esto la simulación ya funcionaba correctamente.
Luego, conforme el resto del código iba evolucionando, empezaron a necesitarse más datos. Así, se necesitó el número de símbolos de la constelación M, y la cantidad de símbolos OFDM que resultaban de la cadena inicial Nsym.
Se utiliza el comando ceil, para que se asegurase de coger toda la cadena aleatoria de datos, rellenando con más datos aleatorios en caso de exceso del último símbolo OFDM. De esta manera, la longitud de la cadena de datos se tiene que reajustar al valor:
Posteriormente, se intenta introducir datos generales de la transmisión como el régimen binario Rb, y la frecuencia de muetreo fs. Se consiguen incluir en el número de muestras T del símbolo OFDM. Se utiliza el comando round para que resulte en un número entero de muestras
Además como se trata del número de muestras de la IFFT, tiene que ser igual que el número de muestras sw la FFT, N = T. A partir de aquí, se pasó a implementar el prefijo cíclico. Esto hizo necesario la inclusión de una variable binaria condicional PC, que cuando valía 1 hacía que se incluyera prefijo cíclico en la transmisión, y cuando valía 0 hacía que no se incluyese. También se introdujo el número de muestras del prefijo cíclico Tg, en función de T. Por último se incluyó el número total de muestras Tt del símbolo OFDM, que para el caso PC = 1 vale Tt = T, mientras que para PC = 0 vale Tt = T + Tg, para sí asegurarnos de que hubiera prefijo cíclico o no, Tt represente siempre la longitud total del símbolo.
Debido a las características de la función Graf.m que veremos más adelante, fue necesario imponer la condición de que el número de puntos de la FFT N fuera mayor que 3 veces el número de subportadoras Nc. Para ello tuvimos que introducir un algoritmo que se aseguraba de corregirlo en caso de que no ocurriese, y de que Nc terminase como potencia de 2.
Por último se añadieron otros datos que se hicieron necesarios más adelante como la amplitud de saturación del amplificador no lineal asat, la relación señal a ruido por bit EbNo que le va a introducir el canal radio (preferible a la SNR, porque la primera es la que se utiliza para modulaciones digitales), y el filtro que modela el comportamiento multitrayecto del canal Multipath.
Página 69
(4.2)sym cLx N N= ⋅
( / ) (4.1)sym x cN ceil L N=
( ) 22
log ( )( ) log ( ) (4.3)s c M s c b s cb
MT round f N T round f N M T round f NR
= ⋅ ⋅ = ⋅ ⋅ ⋅ = ⋅ ⋅

Capítulo 4 Experiencia en Matlab
4.2.2. Transmision.m
La función Transmision.m fue en un principio la función principal del código, y se encarga de crear la señal OFDM como si de un transmisor se tratase, a partir de los datos almacenados en Datos.m.
Lo primero que realiza esta función es generar la cadena de longitud de datos aleatorios X que serán posteriormente modulados en OFDM. Estos datos serán símbolos QPSK, elegida debido a su simplicidad tanto de estudio como de generación. Para implementarla sólo hay que hacer uso de las órdenes randn y sign, en la componente en fase y en la componente en cuadratura.
Posteriormente se intenta ir agrupando la cadena en grupos de Nc datos, que serán posteriormente tratados por la IFFT. Esta parte se correspondería con el convertidor serie-paralelo del transmisor OFDM. Inicialmente estaba implementado mediante un bucle for que iba recorriendo los índices de las cadenas de datos, cogiéndolos de Nc en Nc, para después pasarlos al bloque IFFT. Ahora está implementado de otra manera. Primero se utilizan las propiedades del comando reshape sobre la cadena X, transformando la cadena/fila en una matriz de dimensiones Nc por Nsym. De esta forma, cada columna es el grupo de Nc datos que intentábamos formar. Después no tendríamos más que usar el comando ifft, que como actúa en vectores columna, no nos dará ningún problema. Esta segunda implementación es mejor que la primera por tres razones: mejora el tiempo de ejecución (significativo en cadenas largas), el código es más sencillo (una línea de código corta frente a un bucle con índices), y es visualmente más intuitivo (el agrupar en columnas tiene cierta analogía a lo que hace el convertidor serie-paralelo).
El siguiente paso en la transmisión sería pasar por el bloque IFFT los Nc datos que se van recibiendo cada vez. Como hemos mencionado antes, sólo tenemos que usar el comando ifft en la matriz que hemos formado. El resultado es otra matriz de dimensiones T por Nsym. Cada columna de esta matriz será un símbolo OFDM.
Después de este paso, se realiza la adición del prefijo cíclico si procede (esto es, si CP = 1). Esta parte de la función no tiene mucho que comentar, simplemente actuamos directamente sobre las columnas de la función ayudándonos con el operador '':'' para evitar bucles innecesarios. El resultado en cualquier caso será una matriz de dimensiones Tt por Nsym.
El último paso en la transmisión de la señal OFDM sería el convertidor paralelo-serie. De nuevo hacemos uso del comando reshape, obteniendo una cadena/fila Tx que es ya la señal OFDM transmitida. Estos pasos conforman todo el proceso de generación de la señal OFDM.
Lo siguiente que realiza la función, es el cálculo de la figura PAPR para la señal OFDM ya creada. Esta parte se realiza de una manera sencilla utilizando los operadores max y mean.
Otro tema interesante una vez creada la señal OFDM sería representar tanto su señal en el tiempo como su espectro. Para ello se invoca a la función Graf.m, pasándoles por valor todos los datos que necesite, y delegándole así todas las complicaciones asociadas al proceso de representación.
Por último, tenemos que comentar algo que no hemos tenido en cuenta en el proceso de transmisión de la señal OFDM, y es la adición de efectos no lineales. Para ello nos podemos aprovechar de que ya tenemos la señal Tx creada, le calculamos su módulo y su fase, y les aplicamos algún modelo matemático del efecto no lineal (en nuestro caso serán los modelos de Saleh), pues resultaría lo más sencillo. Así obtenemos la señal no lineal Tx2, a la que también calcularemos su figura PAPR y representaremos en tiempo y frecuencia. Se ha decidido tener otra variable para la señal no lineal, para poder así disponer de las dos a la vez en el resto del código, pudiendo comparar sus resultados entre otras cosas.
Página 70

Capítulo 4 Experiencia en Matlab
4.2.3. Graf.m
La función Graf.m es la encargada de representar a la señal OFDM tanto en el tiempo como en la frecuencia. Para ello se le pasa por valor la señal Tx, pudiendo hacerle libremente los cambios que se consideren oportunos porque ya se tratará de una variable local a la función. Algo que se debe mencionar es que tanto en esta función como en el resto del código, se va a trabajar en banda base, ya que resulta mucho más sencillo, y no nos hace falta un modelo paso de banda para las simulaciones que tenemos pensado hacer.
Lo primero que hace la función es, si la cadena de transmisión Tx resulta ser muy larga, truncarla a una longitud lo suficientemente significativa como para representarla en el tiempo y en la frecuencia. Con esto conseguimos no sobrecargar la función en coste computacional, pero que la cadena de datos Tx pueda ser lo suficientemente larga fuera de la función para otros propósitos.
Para representar la señal en el tiempo, sólo tenemos que ajustar el eje de abcisas (tiempo), ya que ya tenemos el eje de ordeadas (señal). Para ello, sólo tenemos que calcular la duración de la cadena Tx:
Para representar la señal en la frecuencia, en cambio, también tenemos que hallar el eje de ordenadas. Para ello hacemos uso del comando fft con tantos puntos como tenga la señal, obteniendo así la transformada de la señal. Si la represenatáramos veríamos un primer problema, la parte significativa del espectro está al comienzo, y no centrada. Para solucionar esto se usa el comando fftshift, que intercambia las dos mitades del eje de frecuencias.
Pero si lo volviéramos a representar, el espectro estaría ahora descentrado, ya que la que inicialmente consideraba como frecuencia cero no era el centro de la parte significativa de la señal, sino su banda pasante izquierda. La manera más sencilla para solucionar esto es quedarnos con la parte del espectro que nos interese, seleccionando un intervalo ya centrado. Con esto además podemos representar directamente la parte interesante de la señal, y no coger todo el rango de bandas laterales. En nuestro caso, se decide seleccionar desde el centro de la señal, un ancho de banda hacia la izquierda y un ancho de banda hacia la derecha, es decir, coger la parte significativa entera de la señal OFDM, más medio ancho de banda más a la derecha y a la izquierda. Ahora, para ajustar el eje de abcisas (frecuencia), sólo tenemos que calcular el ancho de banda de la señal OFDM:
Con esto surge un problema, y es que el rango de la señal que hemos seleccionado exige que N > 3Nc por problemas con los índices, por eso lo forzamos en el fichero Datos.m. Por otro lado, si Nc << N, la parte significativa de la señal (la que seleccionamos), es muy pequeña en comparación con el espectro total, con lo que se pierde mucha resolución. Una forma de solucionarlo sería multiplicar el número de puntos cuando usamos el comando fft, por el factor N/Nc. Esto podría cargar mucho computacionalmente la función cuando se usara el comando fft, pero para eso truncamos inicialmente la señal Tx, para que no fuera excesiva la carga de datos de la función.
Página 71
2max 2
log ( )log ( ) (4.4)sym c M sym c b sym cb
Mt N N T N N M T N NR
= ⋅ ⋅ = ⋅ ⋅ ⋅ = ⋅ ⋅
2 2 2
2
1 1 1 12 2 (4.5 )2 2 log ( ) 2 log ( ) log ( )
, 1 (4.5 )log ( )
c c c b c bOFDM QPSK c
c c
bOFDM
N N N R N RB B R aM M N N M
RB si Nc bM
+ + + + = = = =
≈ ?

Capítulo 4 Experiencia en Matlab
4.2.4. GrafDDP.m
La función GrafDDP.m se encarga de hallar y representar los histogramas del módulo y de la fase de la señal transmitida Tx. Para ello sólo se necesita que se le pase por valor la señal Tx.
Lo primero que que hace la función es hallar el módulo r y la fase de la señal w, lo cual no supone ningún problema. A partir de aquí, abordaremos el caso del histograma del módulo sin pérdida de generalidad, ya que el caso de la fase será totalmente análogo.
El siguiente paso en la función es preparar los ejes de abcisas (todos los valores del módulo, esto es, desde 0 hasta max(r)), y el eje de ordenadas (el número de ocurrencias por cada valor, inicializados a 0).
Una vez realizado esto, se procede a la realización del histograma en sí. La manera que se ideó al principio fue ir recorriendo con un bucle for los valores del eje de abcisas, y para cada valor encontrar el número de ocurrencias usando la orden find (lo que evita otro bucle), y calculando su longitud con la orden length.
El único problema con este planteamiento es que la condición que pedimos a la orden find, era que buscara valores en el módulo r exactamente iguales al valor de abcisas seleccionado en la iteración. Esto obligaba a redondear los valores de r a los valores que teníamos fijados en el vector de abcisas. Aunque este problema se llega a solucionar, existe un planteamiento más sencillo.
La alternativa es utilizar exactamente el mismo esquema, pero pidiendo esta vez como condición a la orden find que encontrara valores en el módulo r que fueran menores que el valor de abcisas seleccionado en la iteración. Con este planteamiento sólo tendríamos que solucionar un par de asuntos. El primero es ir eliminando los valores de r que vamos encontrando, ya que como a cada iteración el valor de abcisas se va haciendo mayor, irá contando las ocurrencias que ya se habían contado antes. Para solucionarlo, podemos por ejemplo asignarle a los valores del módulo que vamos encontrando el valor 2 max(r), ya que es un valor tan grande que no cumplirá la condición de la orden find. El otro asunto a solucionar, es que en el caso de la fase es imponer a 0 los valores límites, para que aparezca las líneas verticales propias de los bordes de las distribuciones uniformes.
Página 72

Capítulo 4 Experiencia en Matlab
4.3. Recepción y análisis de la señal OFDM
En esta sección abordaremos todo el código relacionado con la recepción de la señal OFDM ya creada, las consideraciones y variables tenidas en cuanta, y las funciones definitivas relacionadas con este aspecto.
En un principio pasó como en el caso de la creación de la señal OFDM, se dejó todo el problema de la recepción de la señal OFDM a una sola función Recepcion.m. Esta función simulaba los efectos negativos que degradaban la señal en su propagación, recibía la señal, representaba la constelación recibida y calculaba la probabilidad de error.
Posteriormente, de nuevo se buscó una mayor modularidad y surgieron dos nuevas funciones. La función Canal.m se encargaría de la simulación del canal radio y de los efectos negativos que tiene sobre la señal OFDM, mientras que la función GrafRX.m será invocada por la función Recepcion.m para representar la constelación recibida. De esta manera, esta parte del código tiene tres funciones que resumimos:
1. Canal.m: Función que recibe por valor la señal transmitida Tx, y simula las condiciones de ruido y multitrayecto sobre la señal.
2. Recepcion.m: Función que simula el comportamiento de un receptor OFDM, detectando la señal, demodulándola, extrayendo el prefijo cíclico si procede, ecualizándola según el canal, representando su constelación invocando a la función GrafRX.m, y calculado la probabilidad de error producida.
3. GrafRX.m: Función que recibe una cadena de datos recibidos Y, representando su constelación.
4. Equ.m: Función invocada por Recepcion.m, y que ecualiza la señal con repecto al canal.
A continuación entraremos en una descripción más detallada de estas funciones, profundizando e el comportamiento de cada una de ellas.
4.3.1. Canal.m
La función Canal.m realiza la simulación de los efectos del canal radio cuando la señal OFDM se propaga a través de él. Para ello recibe por valor el vector de la señal transmitida Tx que creamos en la sección anterior. Se trata de una función muy sencilla, que sólo realiza dos acciones.
Lo primero que hace la función es la adición de ruido AWGN sobre la señal. Así, la mejor forma de modelar el ruido es como una señal incorrelada en el tiempo (muestras gaussianas con el comando randn), y de amplitud la raíz de su potencia. La potencia del ruido la podemos despejar a partir de la potencia de la señal y de la relación SNR. La potencia de la señal la podemos calcular como la varianza de la señal, var(Tx). La relación SNR la podemos obtener a partir de la relación EbNo como:
Lo segundo es la simulación del comportamiento multitrayecto del canal, que se soluciona con el uso del comando filter con la respuesta impulsiva del canal Multipath definida en Datos.m.
Página 73
( )2
0 00
2
2 log ( ) (4.6)1
2 2 log ( )
S b b b b b c
N c bN
c c
P E T E R E M NSNR NP N NNN RNBN N M
= = = ≈+
Capítulo 4 Experiencia en Matlab
4.3.2. Recepcion.m
La función Recepcion.m se encarga de detectar y demodular la señal OFDM como si de un receptor OFDM se tratase, y después representar la constelación recibida y calcular la probabilidad de error.
Para ello, lo primero que realiza la función es invocar a la función Canal.m, que transforma la señal transmitida Tx, en la señal recibida Rx tras pasar por los efectos del canal radio. El vector de la señal Rx puede ser más largo que el de la señal Rx debido a los ecos del multitrayecto, por lo que lo siguiente de lo que se tiene que asegurar la función es de truncar las sañeal Rx a la longitud de la señal Tx. Esto conformaría todo lo que es la parte de detección.
La siguiente fase de un receptor OFDM constaría del demodulador. Este empieza por el convertidor serie-paralelo, problema que ya resolvimos en la fase de transmisión, y que sólo necesita del uso del comando reshape, transformando la cadena/fila Rx en una matriz de dimensiones Tt por Nsym, siendo cada columna de la matriz un símbolo OFDM recibido.
Luego vendría la extracción del prefijo cíclico si procede, con lo que si la condición de prefijo cíclico está activa (PC = 1), la función extrae el prefijo cíclico de cada símbolo OFDM actuando sobre las columnas de la matriz y ayudándose del operador '':''. Con esto nos dejaría como resultado en cualquier caso una matriz de dimensiones T por Nsym.
El bloque siguiente en un receptor OFDM es el de la FFT, para ello usamos el comando fft que actuará sobre cada columna/símbolo. El número de puntos N de la FFT lo definimos al principio en el fichero datos, y como nos aseguramos de que tuviera el mismo número de puntos que la IFFT, N = T, no habrá problemas de dimensionamiento con las transformadas. Como resultado sale una matriz de dimensiones N por Nsym. De esta matriz, cogemos la parte correspondiente a las subportadoras, quedándonos con una matriz de datos Y de dimensiones Nc por Nsym.
Prácticamente el único problema que se tuvo en toda la recepción OFDM viene a partir de aquí (los demás problemas que surgieron eran comunes a la transmisión OFDM). Se daba el caso de que en presencia de multitrayecto, a pesar de contar con prefijo cíclico, se observaba que la constelación recibida presentaba una rotación característica que repercutía en la probabilidad de error. Se había olvidado implementar la ecualización de la señal por la respuesta del canal. Pero una vez identificado el problema, era fácil de resolver. Sólo había que coger la respuesta impulsiva del canal Multipath, aplicarle el comando fft con los mismos N puntos que se le aplicó a la señal, coger la parte correspondiente a las Nc subportadoras, y por último dividir la señal Y por las amplitudes de esta respuesta frecuencial H del canal. Posteriormente se dejó toda esta fase de ecualización de la señal a la función Equ.m.
El último paso en la fase de demodulación OFDM, sería el convertidor paralelo-serie, que de nuevo utilizando la orden reshape, convertimos la matriz Y en una cadena/fila Y de datos recibidos, que ya podemos comparar con la cadena X de datos originales.
Una vez terminadas las fases de detección y demodulación, se representa la constelación recibida invocando la función GrafRX.m (que lo único que hace es ajustar los ejes y poco más), y se calcula la probabilidad de error acontecida en la transmisión. Para ello pasamos la señal Y por el decisor (al ser una QPSK sólo hay que aplicar la orden sign a cada una de sus componentes), calculamos la cadena de errores como e = Y – X , sumamos cualquier componente no nula del error y lo dividimos por la longitud del vector.
Por último, se vuelve realizar todo el proceso para el caso no lineal, obteniendo primero la señal transmitida Tx2, la cadena de datos recibidos Y2, y la cadena de errores e2.
Página 74
Capítulo 4 Experiencia en Matlab
4.4. Batería de simulaciones de OFDM
En esta sección abordaremos todo el código relacionado con todas las pruebas que le hemos realizado a la modulación OFDM. Por eso, esta sección recoge todos los fundamentos en los que nos hemos basado, y será la base del siguiente capítulo, donde ya expondremos los resultados y las conclusiones.
Esta parte del código consta de una multitud de funciones, todas muy parecidas entre sí. De hecho para explicar la evolución que han sufrido todas ellas, sólo nos hace falta explicar la evolución que ha tenido una de ellas, GrafSNR.m. Esta función se fue mejorando tanto en sencillez como en carga computacional y tiempo de ejecución (fue víctima de numerosas monitorizaciones), hasta lograr una versión definitiva mucho más óptima. Por ello, todas las demás se han basado en su código, habiéndose implementado mucho más rápidamente. La única excepción sería la función GrafDEG.m, que debido a su especial dificultad que comentaremos más adelante, fue necesario dedicarle mucha más atención. También hay un último fichero de ejecución Simulaciones.m que surgió con el propósito de ejecutar todas las funciones de simulación en cadena y evaluar sus tiempos de ejecución.
La primera función que se ideó de este código fue la función GrafSNR. De hecho, en principio iba a ser la única función de este estilo que íbamos a añadir. El objetivo de la función es representar la curva de la probabilidad de error Pe (eje de ordenadas) en función de EbNo (eje de abcisas). Para ello se partió de la parte de decisión y cálculo de error de la función Recepcion.m.
Al principio se intentó abordar con la obsesión de no tener que usar ningún bucle. De esta manera se tuvo que trabajar con matrices de enormes dimensiones, donde cada columna iba encaminada a calcular un punto de la gráfica (esto es una para cada valor del eje de abcisas EbNo), siendo las columnas tan largas como las cadenas de transmisión que se simulaban para cada punto de la gráfica. Este algoritmo se llegó a lograr implementar, formando así una matriz de transmisión, una matriz de ruido multiplicada por otra matriz diagonal que conseguía poner cada columna a una distinta potencia de ruido. Se sumaban la matriz de transmisión y de ruido formando una matriz de recepción. Luego se comparaban la matriz de transmisión y recepción y se calculaba la probabilidad de error acontecida en cada columna (de manera análoga a como se hizo en la función Recepcion.m), formando un vector fila de probabilidades de error (eje de ordenadas). Ya sólo faltaba representar el eje de ordenadas en función del eje de abcisas.
Pese a que se logró utilizar un código sin ningún bucle, éste pecaba de varios problemas. El primero, es que pese a no presentar ningún bucle, el tiempo de ejecución era todavía mayor debido a lo rebuscado que era el código. Un segundo problema era que las cadenas de transmisión podían hacer las matrices tan grandes como para saturar la función. Y un último problema era que pese a que la gráfica de Pe(EbNo) se había podido solucionar matricialmente, otras gráficas no iban a tener una implementación matricial inmediata.
Por ello se decidió cambiar el planteamiento de la función. Así, una solución posterior fue usar un bucle for para recorrer todos los puntos de la gráfica (valores del eje de abcisas EbNo), y para cada valor simularlo con una cadena muy larga para sacar resultados concluyentes. Esta solución pese a que fuese implementable en cualquier problema, resultó ser una solución intermedia en carga computacional y en tiempo de ejecución.
Por último se adoptó la solución de seguir usando un bucle for para recorrer todos los puntos de la gráfica (valores del eje de abcisas EbNo), pero para cada punto de la gráfica, usar otro bucle for para simular una cadena más corta un determinado número de iteraciones. Esta solución fue la que se tornó idónea, con lo que se comprobó que no hay que evitar el uso de bucles en Matlab a toda costa, pues en numerosas ocasiones constituye la solución más sencilla.
Página 75

Capítulo 4 Experiencia en Matlab
De esta manera, prácticamente todas las funciones de modulación siguen el mismo modelo, que describiremos a continuación.
Lo primero que hacen las funciones es definir los límites del número de iteraciones en los bucles que utilizan. El primer bucle recorrerá todos los valores del eje de abcisas (puntos de la gráfica), con lo cual el número de iteraciones será igual al número de puntos que habrá en la gráfica. En el segundo bucle, el número de iteraciones representa, para cada punto de la gráfica, el número de cadenas de transmisión Tx que se utilizará para la simulación. Este número lo calcularemos en función de la longitud de la cadena, de manera que siempre se simule el mismo número de datos independientemente de la longitud de la cadena Tx. Antes de terminar con esta parte, se debe explicar que estos valores no se definieron en el fichero Datos.m, debido a que varían dependiendo de la necesidad y naturaleza de cada función, siendo más recomendable tenerlos como variables locales a éstas.
El segundo paso en estas funciones es la definición de las variables que se harán necesarias en su ejecución. Común a todas ellas es el valor inicial del eje de abcisas, el valor final del eje de abcisas, y el valor de paso en función de los dos anteriores.
Con estas variables definidas, lo siguiente que hacen estas funciones es entrar en el primer bucle, con el que recorrerán el eje de abcisas. De esta manera, en cada iteración lo primero que se hace es actualizar el punto del eje de abcisas en el que se encuentra, a partir de las variables de simulación que acabamos de comentar. Luego se entraría en el segundo bucle, que tras pasar por todas sus iteraciones, nos devuelve al final de la iteración del primer bucle, donde se calcula el valor del eje de ordenadas ponderando todas las iteraciones del segundo bucle. Lo último que se hace en la iteración es calcular el porcentaje de iteraciones terminadas, con la idea de poder seguir el progreso de la función cuando se esté ejecutando.
Tras terminar los dos bucles, tendremos todos los valores de abcisas y sus correspondientes valores de ordenadas, con lo que sólo restará representarlos.
Este es el esquema general que siguen las funciones de análisis de OFDM que se han realizado. Por tanto, en la descripción más detallada que haremos de cada una de ellas, sólo tendremos que comentar las particularidades de cada una de ellas. Pero antes, las resumimos todas a continuación:
1. GrafSNR.m: Función que representa la probabilidad de error en función de la relación EbNo.
2. GrafMulti.m: Función que representa la probabilidad de error en función del retardo de un rayo reflejado, producido por el multitrayecto.
3. GrafICI.m: Función que representa la probabilidad de error en función de la ICI.
4. GrafSinc.m: Función que representa la probabilidad de error en función del offset de frecuencia.
5. GrafOBO.m: Función que representa la probabilidad de error en función del OBO presente.
6. GrafDEG.m: Función que representa el factor de degradación en función del OBO.
7. Simulaciones.m: Función que realiza en cadena la ejecucución de todas las simulaciones anteriores, evaluando sus tiempos de ejecución mediante el comando cputime.
Con esto, ya podemos entrar en la descripción detallada de cada una de ellas, y como todas comparten prácticamente el mismo algoritmo, nos centraremos en sus particularidades.
Página 76

Capítulo 4 Experiencia en Matlab
4.4.1. GrafSNR.m
La función GrafSNR.m fue la primera de estas funciones en implementarse. Su código ha sufrido una gran evolución a lo largo del desarrollo de este estudio, llegándose al esquema definitivo que se comentó antes. Este esquema definitivo fue el que sirvió de base para todas las demás funciones de análisis que le siguen. Por tanto, a todos los efectos ésta debe ser la primera función de análisis que expliquemos.
La función GrafSNR.m se encarga de representar la curva característica del error, es decir, la probabilidad de error en función de la relación señal a ruido por bit EbNo. Para ello, lo único que hace es que para la cadena transimitida Tx, para distintos valores de EbNo (eje de abcisas), invocar la función Canal.m, recibir la señal y calcular la probabilidad de error (eje de ordenadas).
Posteriormente se intentó representar también la curva teórica, que irónicamente es donde se encontraron más problemas. La idea inicial era implementarla a partir de la función Q(.), que no se encuentra definida en Matlab. Así, la única solución que surgió fue implementar la función Q(.). La función consistía en coger el vector de entrada, y para cada elemento, entrar en una tabla gigantesca buscando el valor que le correspondiese, interpolando en caso de que fuese necesario. Luego se percató la presencia de la función del error complementario erfc(.), con la que la descripción de la curva teórica del error era inmediata. La implementación de la función Q(.) pasó entonces a ser un vestigio anecdótico en el código. Exponemos a continuación la descripción de la curva teórica en el código, para M=4 por ser QPSK.
Por último, se decidió incluir también la curva del error para el caso no lineal. Para ello, partiendo de la señal no lineal Tx2 que creamos al principio, le hacemos los mismos pasos que a la señal Tx, haciendo que ambas señales fueran recorriendo los bucles a la vez con el objetivo de minimizar el tiempo de ejecución.
Por tanto, la versión definitiva de esta función representa tres curvas de error, la teórica, la de la señal OFDM y la de la señal OFDM tras pasar por un bloque no lineal.
4.4.2. GrafMulti.m
La función GrafMulti.m fue ideada con el propósito de evaluar la eficacia del prefijo cíclico. De esta manera, esta función representa la probabilidad de error en función del retardo de una señal retrasada con respecto a la señal principal por motivo del comportamiento multitrayecto del canal. Para ello coge la señal transmitida Tx, y para distintos valores de retardo DEL (eje de abcisas), formar una respuesta impulsiva del canal, invocar la función Canal.m con esta respuesta impulsiva, recibir la señal y calcular la probabilidad de error (eje de ordenadas) de manera análoga a como se hizo en el esquema de recepción.
Lo más interesante con respecto a su código es comentar como se forma la respuesta impulsiva del canal a partir del valor del retardo DEL. La manera más sencilla es, en cada iteración, reservar un vector de longitud DEL, para posteriormente asignarle el valor 1 a su primer elemento (que representa a la señal principal), y el valor de amplitud correspondiente a su último elemento (que representa a la señal retrasada).
Página 77
2log ( ) sin (4.7)be
o
EP erfc MN M
π =

Capítulo 4 Experiencia en Matlab
4.4.3. GrafICI.m
La función GrafICI.m, en cambio, se escribió para evaluar como afecta la ICI en OFDM. Por ello representa la probabilidad de error en función de la potencia interferente de la subportadora adyacente. Para ello coge la señal transmitida Tx, y para distintos valores de interferencia ICI (eje de abcisas), en el esquema de recepción añadir a la señal de cada subportadora parte de la señal de las subportadoras más cercanas, y terminar calculando la probabilidad de error (eje de ordenadas).
Aquí merece la pena comentar cómo se implementó la parte de añadir a la señal de cada subportadora parte de la señal de las subportadoras más cercanas. La idea es multiplicar la matriz de recepción de las subportadoras por una matriz multidiagonal donde: la diagonal principal (puesta a 1) representa las subportadoras, las diagonales inferior y superior representan el efecto de las subportadoras adyacentes, las segundas diagonales inferior y superior el efecto de las subportadoras anterior y posterior a las adyacentes, y así consecutivamente.
4.4.4. GrafSinc.m
La función GrafSinc.m surgió para comprobar los efectos que un offset de frecuencia puede tener en la recepción de una señal OFDM. Por lo tanto, esta función representa la probabilidad de error en función de un offset de frecuencia OF. Para ello coge la señal transmitida Tx, y para distintos valores del offset de frecuencia OF (eje de abcisas), simular el esquema de recepción con ese offset, y calcular la probabilidad de error (eje de ordenadas).
Para implementar el offset de frecuencia, lo más sencillo fue simular el bloque de la FFT de recepción con muchos más puntos, y de esta manera, desfasar la señal por todos esos nuevos puntos intermedios que aparecen entre subportadora y subportadora haciendo uso del comando circshift.
4.4.5. GrafOBO.m
La función GrafOBO.m fue la primera incursión de estas funciones de análisis cuando se decició abordar el problema de los efectos no lineales en OFDM. Se encarga de representar la probabilidad de error en función del back-off de salida OBO. Para ello, lo único que hace es que para la cadena transimitida Tx, para distintos valores de amplitud de saturación del modelo no lineal, pasar la cadena por el bloque no lineal, calcular el back-off a la salida (eje de abcisas), seguir el esquema de recepción de la señal y calcular la probabilidad de error (eje de ordenadas).
La adición del efecto no lineal se implementa como en su momento se hizo en el esquema de transmisión de la señal OFDM, calculando su módulo y su fase, y transformarlos siguiendo un modelo matemático concreto. Inicialmente los modelos matemáticos que utilizábamos era distorsionar el módulo con una función definida en dos regiones, una lineal y otra que trunca los valores a una amplitud máxima, presentando el límite entre ambas regiones un cambio muy brusco. Posteriormente, tras estudiar mejor el tema de las no linealidades, se decidió incorporar los modelos de Saleh.
Página 78

Capítulo 4 Experiencia en Matlab
4.4.6. GrafDEG.m
La función GrafDEG.m es sin duda la función más complicada de todas estas últimas funciones, y por ello profundizaremos un poco más en su funcionamiento. Su cometido es representar la degradación total del sistema DEG, en función del back-off de salida OBO. Ya comentamos en su momento cómo se define la figura de la degradación total, pero para dejar más claro el funcionamiento de esta función lo repetimos a continuación:
Esto significa que la degradación total es el nivel de señal a ruido que tiene que compensar un sistema no lineal para lograr la misma probabilidad de error que un sistema que no presenta efectos no lineales. De aquí se desprende la dificultad que tiene esta función, la probabilidad de error está fijada, a diferencia de las otras funciones, donde es una variable obtenida mediante simulación.
Es por esto que no podemos fijar una probabilidad de error en la simulación, porque es una variable que se obtiene precisamente por simulación. Esto nos obligará a buscar un valor de EbNo (que sí que se puede usar como dato en simulación) que satisfaga la probabilidad de error pedida, lo que nos llevará a la inclusión de un tercer bucle con respecto a las funciones anteriores.
De esta manera la función empieza por la definición de los datos y variables que se van a hacer necesarios en esta simulación. Uno de estos datos es, obviamente, la probabilidad de error fijada.
Después de esto, se entra en un primer bucle que va recorriendo todos los valores de la amplitud de saturación del modelo no lineal, aplicándole esta no linealidad a la señal transmtida Tx, y calculándole el back-off a la salida (eje de abcisas).
Por cada iteración de este primer bucle, se entra en un segundo bucle que va recorriendo todos los valores de EbNo buscando la probabilidad de error fijada. Cuando se encuentra, se utiliza la orden break para salir del bucle, y ahorrar así en tiempo de ejecución. Esto sólo se hace para la señal no lineal, para la señal lineal calculamos el valor de EbNo a partir de la expresión inversa de la probabilidad de error de la ecuación (4.7), ahorrándonos la mitad del tiempo de ejecución.
Con todo esto, el proceso de búsqueda del valor de EbNo para la señal no lineal, consiste en ir calculando la probabilidad de error en cada punto, y cuando la diferencia entre la probabilidad de error fijada y la que hallamos cambia de signo, es que se ha encontrado la solución entre esos dos puntos. Entonces se interpola para calcular el valor de la solución de EbNo del caso no lineal, y junto al valor de la solución del caso lineal calculada antes, se calcula la degradación DEG (eje de ordenadas).
Por último, por cada iteración del segundo bucle, se entra en un tercer bucle que es el encargado de enviar varias veces la cadena de transmisión Tx2, simular los efectos del canal radio, aplicarle el esquema de recepción y calcular la probabilidad de error.
Página 79
( ) ( ) ( ) ( ) (4.8)oTD dB SNR dB SNR dB OBO dB= − +
( )2
1
2
1 (4.9)log ( ) sin
eb
o
erfc PEN M
Mπ
− =

Capítulo 4 Experiencia en Matlab
Página 80

Capítulo 5 Resultados y Conclusiones
Capítulo 5: Resultados y Conclusiones
5.1. Introducción
Este quinto capítulo es el objetivo al que iba encaminado todo el proyecto. Aquí recogeremos todos los resultados de las simulaciones que se han realizado en este estudio. De esta manera, empezamos viendo un análisis teórico de la modulación OFDM, posteriormente se hizo un estudio analítico de los efectos no lineales que centramos en OFDM, y ahora simularemos el comportamiento de todo esto ayudándonos de los códigos que comentamos en el capítulo anterior.
Con este propósito, se han incluído todos los resultados obtenidos en las simulaciones antes citadas, en la mayoría de las ocasiones con diversas reiteraciones y variaciones para obtener resultados más concluyentes. Con los resultados obenidos, se comentarán si son coherentes, el rango de validez de los mismos, y la relación que tienen con los análisis teóricos que se han realizado.
Hemos estructurado este capítulo en tres partes atendiendo a la naturaleza de las simulaciones que se han realizado. En la primera parte se ha realizado el estudio de la señal OFDM, características propias de ellas como su forma temporal y su espectro; y el análisis de ciertos efectos como el comportamiento ante un canal multitrayecto, ante una interferencia ICI, o ante un offset de frecuencia. En la segunda parte se ha simulado la señal OFDM con el modelo no lineal de Saleh para un SSPA, haciendo especial hincapié en los efectos de la no linealidad en la probabilidad de error, y llegando como objetivo último a la figura de la degradación total en función del OBO. La tercera parte será análoga a la segunda, pero esta vez se utilizará el modelo no lineal de Saleh para un TWT.
Por último, comentaremos en esta introducción las características del modelo y de las simulaciones que se han realizado. Todas las simulaciones se han realizado para Matlab 6.5, y ahora enumeramos todas las consideraciones que se han tenido en cuenta:
• Se ha utilizado el esquema en banda base de la señal OFDM.
• Excepto a efectos de representación del espectro, se trabaja con frecuencias adimensionales, escaladas en relación al espacio que hay entre subportadoras.
• Como mapeador se ha utilizado una constelación QPSK/4-QAM.
• Salvo cuando se indique lo contrario, se ha utilizado siempre el prefijo cíclico, ya que el correcto funcionamiento de la modulación OFDM depende de éste.
• El canal utilizado es un canal AWGN con posibilidad de multitrayecto.
Página 81
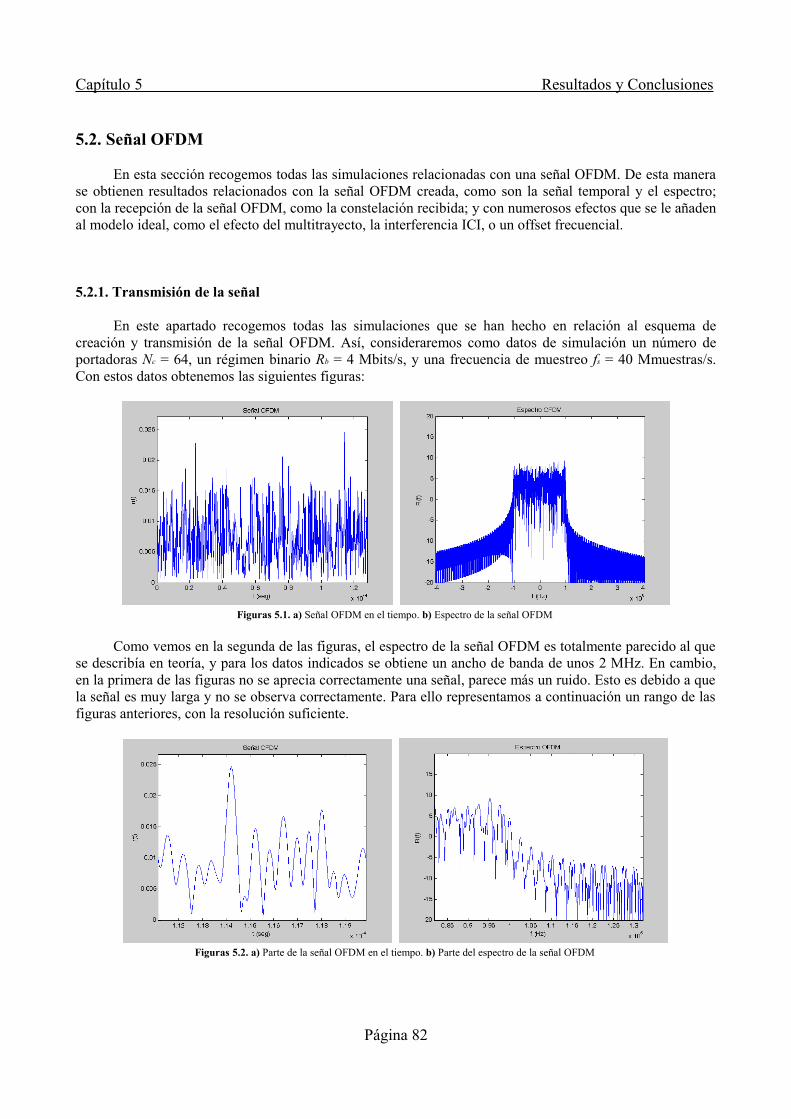
Capítulo 5 Resultados y Conclusiones
5.2. Señal OFDM
En esta sección recogemos todas las simulaciones relacionadas con una señal OFDM. De esta manera se obtienen resultados relacionados con la señal OFDM creada, como son la señal temporal y el espectro; con la recepción de la señal OFDM, como la constelación recibida; y con numerosos efectos que se le añaden al modelo ideal, como el efecto del multitrayecto, la interferencia ICI, o un offset frecuencial.
5.2.1. Transmisión de la señal
En este apartado recogemos todas las simulaciones que se han hecho en relación al esquema de creación y transmisión de la señal OFDM. Así, consideraremos como datos de simulación un número de portadoras Nc = 64, un régimen binario Rb = 4 Mbits/s, y una frecuencia de muestreo fs = 40 Mmuestras/s. Con estos datos obtenemos las siguientes figuras:
Figuras 5.1. a) Señal OFDM en el tiempo. b) Espectro de la señal OFDM
Como vemos en la segunda de las figuras, el espectro de la señal OFDM es totalmente parecido al que se describía en teoría, y para los datos indicados se obtiene un ancho de banda de unos 2 MHz. En cambio, en la primera de las figuras no se aprecia correctamente una señal, parece más un ruido. Esto es debido a que la señal es muy larga y no se observa correctamente. Para ello representamos a continuación un rango de las figuras anteriores, con la resolución suficiente.
Figuras 5.2. a) Parte de la señal OFDM en el tiempo. b) Parte del espectro de la señal OFDM
Página 82

Capítulo 5 Resultados y Conclusiones
Como podemos apreciar en estas figuras, la señal en el tiempo tiene realmente una forma sinusoidal, y no el ruido incorrelado que aparecía antes. Además se ha seleccionado una parte de la señal donde se puede observar la gran diferencia que puede haber entre un pico de la señal y su media. Por otro lado, del espectro hemos seleccionado el límite derecho de la banda pasante, donde ahora se pueden apreciar los lóbulos propios de las funciones Sampling que forman el espectro.
Ahora generaremos más señales OFDM con distintos datos para comentar las diferencias que van apareciendo en el espectro, eligiendo éste por ser más adecuado para apreciar las diversas características de la señal OFDM. Así, las siguientes figuras representan los espectros de la señal OFDM para unos valores de régimen binario de Rb = 2 Mbits/s y Rb = 8 Mbits/s respectivamente.
Figuras 5.3. a) Espectro OFDM para Rb = 2 Mbits/s. b) Espectro OFDM para Rb = 8 Mbits/s.
Como vemos para el primer caso, obtenemos un ancho de banda de 1 MHz (la mitad que antes), y para el segundo caso, un ancho de banda de 4 MHz (el doble que antes). Esto demuestra que el ancho de banda es proporcional al régimen binario que fijemos, algo intuitivo por otra parte y que ya habíamos demostrado en la ecuación (4.5).
Haremos otras siulaciones, pero esta vez cambiando el valor del número de potadoras Nc. De esta manera conseguimos las gráficas siguientes:
Figuras 5.4. a) Espectro OFDM para Nc = 32. b) Espectro OFDM para Nc = 128.
Como podemos ver, el ancho de banda parece mantenerse constante independientemente del número de portadoras como se demostró en la ecuación (4.5). Esto se debe a que aunque aumentemos el número de portadoras, si el régimen binario es constante, se tiene que repartir entre todas ellas.
Página 83
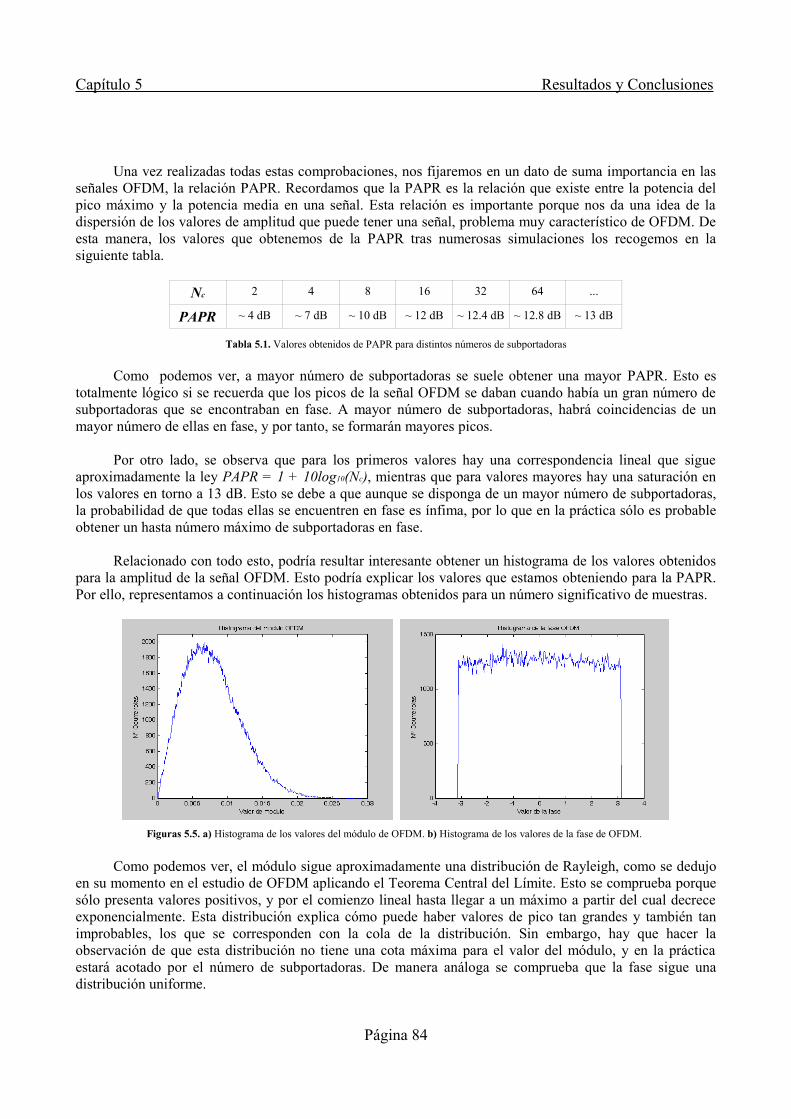
Capítulo 5 Resultados y Conclusiones
Una vez realizadas todas estas comprobaciones, nos fijaremos en un dato de suma importancia en las señales OFDM, la relación PAPR. Recordamos que la PAPR es la relación que existe entre la potencia del pico máximo y la potencia media en una señal. Esta relación es importante porque nos da una idea de la dispersión de los valores de amplitud que puede tener una señal, problema muy característico de OFDM. De esta manera, los valores que obtenemos de la PAPR tras numerosas simulaciones los recogemos en la siguiente tabla.
Nc 2 4 8 16 32 64 ...
PAPR ~ 4 dB ~ 7 dB ~ 10 dB ~ 12 dB ~ 12.4 dB ~ 12.8 dB ~ 13 dB
Tabla 5.1. Valores obtenidos de PAPR para distintos números de subportadoras
Como podemos ver, a mayor número de subportadoras se suele obtener una mayor PAPR. Esto es totalmente lógico si se recuerda que los picos de la señal OFDM se daban cuando había un gran número de subportadoras que se encontraban en fase. A mayor número de subportadoras, habrá coincidencias de un mayor número de ellas en fase, y por tanto, se formarán mayores picos.
Por otro lado, se observa que para los primeros valores hay una correspondencia lineal que sigue aproximadamente la ley PAPR = 1 + 10log10(Nc), mientras que para valores mayores hay una saturación en los valores en torno a 13 dB. Esto se debe a que aunque se disponga de un mayor número de subportadoras, la probabilidad de que todas ellas se encuentren en fase es ínfima, por lo que en la práctica sólo es probable obtener un hasta número máximo de subportadoras en fase.
Relacionado con todo esto, podría resultar interesante obtener un histograma de los valores obtenidos para la amplitud de la señal OFDM. Esto podría explicar los valores que estamos obteniendo para la PAPR. Por ello, representamos a continuación los histogramas obtenidos para un número significativo de muestras.
Figuras 5.5. a) Histograma de los valores del módulo de OFDM. b) Histograma de los valores de la fase de OFDM.
Como podemos ver, el módulo sigue aproximadamente una distribución de Rayleigh, como se dedujo en su momento en el estudio de OFDM aplicando el Teorema Central del Límite. Esto se comprueba porque sólo presenta valores positivos, y por el comienzo lineal hasta llegar a un máximo a partir del cual decrece exponencialmente. Esta distribución explica cómo puede haber valores de pico tan grandes y también tan improbables, los que se corresponden con la cola de la distribución. Sin embargo, hay que hacer la observación de que esta distribución no tiene una cota máxima para el valor del módulo, y en la práctica estará acotado por el número de subportadoras. De manera análoga se comprueba que la fase sigue una distribución uniforme.
Página 84

Capítulo 5 Resultados y Conclusiones
5.2.2. Recepción de la señal
Aquí recogemos las simulaciones que tiene que ver con el esquema de recepción de la señal OFDM tras haber pasado por un canal AWGN. En este contexto, posiblemente la gráfica que puede resultar más ilustrativa es la constelación recibida. Para ello presentamos primero la constelación transmitida, que como recordamos se trata de la constelación de una QPSK.
Figura 5.6. Constelación transmitida
Como vemos, la constelación transmitida toma cuatro valores. Una vez la señal OFDM viaje por el canal radio, que nosotros hemos modelado como un canal AWGN ideal, el ruido desplazará aleatoriamente cada una de las muestras, lo que se traducirá en una gran dispersión de valores en la constelación recibida.
Figuras 5.7. Constelaciones recibidas. a) EbNo = 5 dB. b) EbNo = 10 dB. c) EbNo = 20 dB. d) EbNo = 100 dB.
Página 85

Capítulo 5 Resultados y Conclusiones
Como vemos, en las constelaciones recibidas todavía se puede apreciar que se corresponden con unas constelaciones QPSK. El primer caso, EbNo = 5 dB, se trata de unas condiciones de señal a ruido muy desfavorables, consiguiendo que las muestras de la constelación se encuentren muy dispersas (a simple vista se puede ver como traspasan las fronteras de decisión en numerosos casos, lo que se traducirá en una probabilidad de error no nula). A medida que vamos aumentando la relación EbNo, podemos ver como las muestras de la constelación se encuentran cada vez menos dispersas más cerca de sus valores medios y más lejos de las fronteras de decisión. El caso extremo lo encontramos en el cuarto caso, EbNo = 100 dB, donde la magnitud del ruido es tan despreciable que no se aprecia el desplazamiento de las muestras de la constelación con respecto a su configuración inicial, esto a todos los efectos supone unaprobabilidad de error nula.
El ruido provoca el desplazamiento de las muestras de la constelación, siendo este desplazamiento menor, y por tanto, menor la probabilidad de error, cuanto mayor sea la relación EbNo.
5.2.3. Efectos del ruido
En consonancia con lo que acabamos de comentar, la figura más característica que se puede representar para una señal es la de la probabilidad de error en función de la relación señal a ruido.
Para una señal OFDM, ya comentamos que la probabilidad de error sigue la misma ley que la de la constelación utilizada para cada subportadora. Para nuestro caso, que tenemos una QPSK, la recordamos a continuación:
De esta manera, representamos a continuación la probabilidad de error de la señal OFDM, para distintas magnitudes de EbNo, tanto de la expresión teórica como de los resultados obtenidos mediante simulación:
Figura 5.8. Representación de la probabilidad de error teórica y experimental
Como vemos, la curva exprimental se ajusta totalmente a la curva teórica, lo que demuestra la validez de la expresión que acabamos de exponer para la probabilidad de error.
Página 86
( )1 ' , ' (5.1)2
o o be b b b
o cp o cp o
T T EP erfcT T T T N
γ γ γ= = =+ +

Capítulo 5 Resultados y Conclusiones
5.2.4. Efectos del multitrayecto
Una de las causas principales por las que se ideó OFDM es para combatir los efectos que se derivan del multitrayecto. Para ello, como ya comentamos, hace uso del intervalo de guarda y del prefijo cíclico. Una manera de comprobar la eficacia de este mecanismo es obtener mediante simulación la probabilidad de error producida en un canal multitrayecto en dos casos: utilizando el prefijo cíclico y careciendo de él. Para simular el efecto multitrayecto del canal se ha decidido considerar una señal principal, y una réplica retrasada a distintos retardos con el objetivo de representar la probabilidad de error en función de este retardo.
Ahora presentaremos las gráficas obtenidas en las simulaciones de los casos comentados. En ambos casos se ha considerado una relación EbNo = 10 dB, y una señal retardada de amplitud 0.6 veces la amplitud de la señal principal. Empezamos con el caso de no utilizar prefijo cíclico:
Figura 5.9. Efecto del multitrayecto cuando no se utiliza el prefijo cíclico
Como podemos observar, si no utilizamos prefijo cíclico, con que exista un pequeño retardo entre la señal principal y la señal retardada, aparece una probabilidad de error no nula. Esta probabilidad de error además coge valores mayores que 0.01, haciendo inviable el sistema en condiciones generales de multitrayecto. En cambio, para el caso de utilizar prefijo cíclico, tenemos la siguiente figura:
Figura 5.10. Efecto del multitrayecto utilizando el prefijo cíclico
En este caso, vemos como la probabilidad de error aparece justamente cuando el retardo supera la duración del prefijo cíclico. Esto supone que el sistema se hace inmune ante cualquier dispersión de retardos de menor duración que el prefijo cíclico, lo que concuerda totalmente con lo que se explicó anteriormente en el estudio teórico de OFDM.
Página 87

Capítulo 5 Resultados y Conclusiones
5.2.5. Efectos de la ICI
Uno de los conceptos a los que se les dió una mayor importancia en el estudio teórico de OFDM, es la ortogonalidad. La ortogonalidad era importante entre otras cosas para poder evitar la interferencia entre portadoras (ICI). Por eso, uno de los objetivos que nos propusimos fue simular los efectos que tiene una interferencia de estas características en el funcionamiento de OFDM.
Para simular la ICI, tomamos como criterio representarla en función del nivel de potencia interferente de la portadora adyacente con respecto a la potencia principal, variando este valor desde -20 dB a 0 dB (cuando se igualan en cada portadora su potencia con la potencia de la portadora adyacente). A continuación presentamos los resultados de las simulaciones para distintos valores de EbNo.
Figuras 5.11. Efectos de la ICI. a) EbNo = 5 dB. b) EbNo = 10 dB. c) EbNo = 15 dB. d) EbNo = 20 dB.
Como podemos observar, la probabilidad de error aumenta muy significativamente en todos los casos en función del nivel de ICI, si bien cada caso presenta particularidades que podemos comentar. En el primer caso, EbNo = 5 dB, la magnitud del ruido es muy desfavorable, lo que añadido al efecto de la ICI se traduce en probabilidades de error intolerables desde los -20 dB a los que empezamos a simular. En el segundo caso,EbNo = 10 dB, si bien también aparece probabilidad de error desde los -20 dB, el orden de esta probabilidad de error es dos órdenes de magnitud menor, haciéndose intolerable en cualquier caso para valores mayores de la ICI. En el tercer caso, EbNo = 15 dB, la magnitud del ruido es lo suficientemente débil por sí sola como para producir una probabilidad de error no nula, dejando esta de ser nula para una ICI de -13 dB. Y en el último caso, EbNo = 20 dB, se puede comprobar que la ICI provoca errores a partir de un nivel de -10 dB.
Página 88
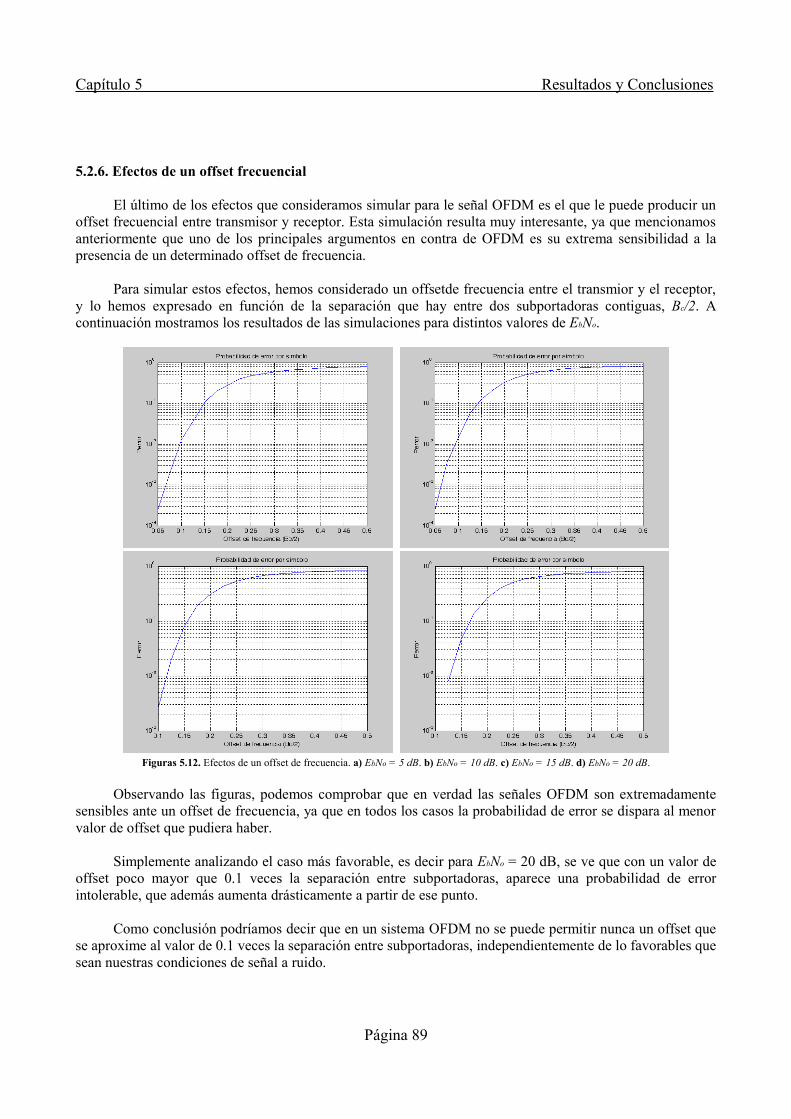
Capítulo 5 Resultados y Conclusiones
5.2.6. Efectos de un offset frecuencial
El último de los efectos que consideramos simular para le señal OFDM es el que le puede producir un offset frecuencial entre transmisor y receptor. Esta simulación resulta muy interesante, ya que mencionamos anteriormente que uno de los principales argumentos en contra de OFDM es su extrema sensibilidad a la presencia de un determinado offset de frecuencia.
Para simular estos efectos, hemos considerado un offsetde frecuencia entre el transmior y el receptor, y lo hemos expresado en función de la separación que hay entre dos subportadoras contiguas, Bc/2. A continuación mostramos los resultados de las simulaciones para distintos valores de EbNo.
Figuras 5.12. Efectos de un offset de frecuencia. a) EbNo = 5 dB. b) EbNo = 10 dB. c) EbNo = 15 dB. d) EbNo = 20 dB.
Observando las figuras, podemos comprobar que en verdad las señales OFDM son extremadamente sensibles ante un offset de frecuencia, ya que en todos los casos la probabilidad de error se dispara al menor valor de offset que pudiera haber.
Simplemente analizando el caso más favorable, es decir para EbNo = 20 dB, se ve que con un valor de offset poco mayor que 0.1 veces la separación entre subportadoras, aparece una probabilidad de error intolerable, que además aumenta drásticamente a partir de ese punto.
Como conclusión podríamos decir que en un sistema OFDM no se puede permitir nunca un offset que se aproxime al valor de 0.1 veces la separación entre subportadoras, independientemente de lo favorables que sean nuestras condiciones de señal a ruido.
Página 89

Capítulo 5 Resultados y Conclusiones
5.3. Señal OFDM con modelo no lineal del SSPA
Una vez que hemos simulado el comportamiento de la modulación OFDM ante diferentes efectos, llega la hora de simular su respuesta ante los efectos no lineales. Como vimos en el estudio teórico, la manera más sencilla de hacer esto es considerar que la señal pasa por un bloque no lineal en el esquema de transmisión. Esto no dista mcho de la realidad, ya que a la salida del transmisor se encuentra normalmente un amplificador de potencia, que son dispositivos característicos por su no linealidad.
Para modelar el comportamiento no lineal de los amplificadores en las simulaciones, se va a utilizar los modelos de Saleh de los dos amplificadores de potencia más comunes: el tipo SSPA y el tipo TWT. Empezaremos analizando el modelo del primero, cuyos efectos en la amplitud y en la fase son:
Para una mayor comprensión del modelo representamos ambas funciones:
Figuras 5.13. Modelos de Saleh para el SSPA. a) Modelo de la amplitud. b) Modelo de la fase.
Atendiendo a las figuras, podemos comprobar como el modelo para la amplitud refleja una primera zona lineal con la amplitud de entrada, hasta llegar a una zona de saturación, donde se tiende a una amplitud máxima Ao. En el modelo para la fase se puede ver que no existen cambios en ella, es decir, se deja intacta.
Con esto recordamos que una medida bastante útil para evaluar la no linealidad de un punto de trabajo es el factor de back-off de salida (OBO), que medía la relación entre la potencia máxima que podía dar un amplificador a la salida y la potencia media de la señal a la salida. Así, un valor grande del OBO reflejaba un punto de trabajo muy lineal, y un valor pequeño del OBO todo lo contrario. Para nuestro caso, el modelo de Saleh del SSPA, el OBO resultaría:
Una vez definido el modelo no lineal del SSPA, sólo nos queda ver sus efectos en los diversos aspectos de la señal OFDM.
Página 90
20 (5.2)
1
inout out
in
oA
ρρ φρ
= =
+
10( ) 20log (5.3)o
out
AOBO dBρ
=

Capítulo 5 Resultados y Conclusiones
5.3.1. Transmisión de la señal
Lo primero que vamos a analizar son los efectos del modelo no lineal del SSPA en el esquema de transmisión de la señal OFDM, es decir veremos las diferencias entre la señal a la entrada del bloque no lineal y a la salida del mismo. Para ello empezaremos centrándonos en el efecto visible sobre la señal en el tiempo y sobre su espectro. Representamos primero ambos casos para la señal lineal, es decir, la señal antes de entrar en el bloque no lineal:
Figuras 5.14. Señal lineal. a) Representación en el tiempo. b) Representación en la frecuencia
Como podemos ver, en el caso de la señal en el tiempo hemos seleccionado un intervalo donde hay un pico de amplitud importante con el propósito de hacer el efecto de la no linealidad más notorio. Ahora representamos ambas figuras para la señal al salir del bloque no lineal:
Figuras 5.15. Señal no lineal SSPA. a) Representación en el tiempo. b) Representación en la frecuencia
Podemos ver en el caso de la señal en el tiempo como prácticamente todas las amplitudes de la señal han menguado significativamente, teniendo la distorsión más drástica en el caso del pico más alto que se ha dejado prácticamente a la altura de los demás picos que eran mucho menores.
En el espectro se puede ver el fenómeno del recrecimiento espectral al que se aludió en un capítulo anterior, que ha cambiado la caída de la banda principal de un valor original de unos 12 dB a un valor de unos 6 dB. Esto era debido al truncamiento que ha habido en los picos, que suponen cambios más bruscos en la amplitud que se traducen en un crecimiento de las frecuencias más altas del espectro.
Página 91

Capítulo 5 Resultados y Conclusiones
Otro punto de vista para comparar las señales a la entrada y a la salida del bloque del bloque no lineal, es comparar los histogramas de los valores que toman la amplitud y la fase.
Para ello empezamos representando los histogramas de la amplitud y la fase de la señal antes de entrar en el bloque no lineal:
Figuras 5.16. Señal lineal. a) Histograma de la amplitud. b) Histograma de la fase.
Aprovechamos para recordar que el módulo de la señal seguía una distribución de Rayleigh, y que la fase seguía una distribución uniforme. Haciendo lo mismo para la señal a la salida del bloque no lineal tenemos las siguientes figuras:
Figuras 5.17. Señal no lineal SSPA. a) Histograma de la amplitud. b) Histograma de la fase.
Como podemos apreciar en estas figuras, el modelo de Saleh del SSPA provoca que para la amplitud obtengamos una distribución de Rayleigh degenerada, con un comienzo cuadrático en vez de lineal y sin su característica larga cola. Además, se fijó como amplitud de saturación del modelo Ao, la media de la señal a la entrada, lo que explica que la distribución no presente valores más altos que su antigua media.
Por otro lado, el histograma de la fase permanece totalmente inalterado, lo que era previsible, ya que el modelo de Saleh del SSPA no introduce cambios en la fase.
Página 92

Capítulo 5 Resultados y Conclusiones
5.3.2. Recepción de la señal
El siguiente paso en el análisis de los efectos del modelo no lineal del SSPA, será comprobar las repercusiones en el esquema de recepción. Para ello, la figura más representativa sería la constelación recibida, ya que la probabilidad de error es cualitativamente visible en este caso. Pero primero, a efectos comparativos representaremos la constelación recibida que tendría la señal en caso de que no pasara por el bloque no lineal:
Figura 5.18. Constelación recibida para la señal lineal
Como vemos, tenemos la constelación de una QPSK con las muestras dispersas debido a la presencia del ruido. Veamos ahora la constelación recibida de la señal no lineal:
Figura 5.18. Constelación recibida para la señal no lineal SSPA
A simple vista se puede apreciar la diferencia entre las constelaciones de ambas señales, y es que en el caso de la señal no lineal la amplitud de las muestras ha disminuido considerablemente, y además se encuentran más dispersas en relación a sus valores medios. Todo esto supone que las muestras se encuentran mucho más cerca de las fronteras de decisión, lo que a posteriori supone una mayor probabilidad de error. Esto era previsible si recordamos que en el estudio teórico de un sistema OFDM no lineal, la señal a la salida del bloque no lineal se podía descomponer en: la señal de entrada atenuada por un valor α, en este caso real (lo que explica la disminución de la amplitud de las muestras), y un ruido nd(t) de media nula (lo que explica la mayor dispersión de sus valores).
Página 93
( ) ( ) ( ) (5.4)d ds t s t n tα= +

Capítulo 5 Resultados y Conclusiones
5.3.3. Efectos del ruido
Siguiendo con los análisis del apartado anterior, una vez comprobado que los efectos no lineales repercuten en la probabilidad de error, el siguiente paso lógico sería ver cómo afecta exactamente en la forma de la curva del error.
Con este propósito se han hecho numerosas simulaciones cuyos resultados mostramos a continuación. Nótese que se han representado tanto la curva teórica (en azul), como la curva de la señal lineal (en rojo), y de la señal no lineal (en magenta), todo para diferentes valores del OBO.
Figuras 5.19. Representación de la probabilidad de error para el modelo SSPA. a) OBO = 1dB. b) OBO = 3dB. c) OBO = 5dB. d) OBO = 10dB.
Una vez representadas las figuras podemos pasar a comentarlas. En general es obvio lo que todas las figuras tienen en común, y es que la probabilidad de error de la señal no lineal es mayor que el de la señal lineal en todos los casos. Eso ya lo sabíamos, pero hay otro patrón interesante podríamos no haber previsto, y es que la diferencia en la probabilidad de error entre la señal no lineal y la señal lineal va aumentando con el valor de EbNo. Esto lo explicaremos en el primer caso, donde es más evidente la causa de este fenómeno.
En el primer caso, OBO = 1dB, estamos en un punto altamente no lineal. Esto se refleja en la gran diferencia entre la probabilidad de error de la señal lineal y de la señal no lineal. Además, mientras la probabilidad de error de la señal lineal tiende a cero con el valor de EbNo, el de la señal no lineal tiende a una probabilidad de error vestigial no nula, que es la que explica la diferencia creciente entre ambas curvas de probabilidad de error. Esta probabilidad de error se debe al ruido aditivo nd(t) del bloque lineal, que acotará la mínima probabilidad de error independientemente de lo pequeño que sea el ruido del canal AWGN.
Página 94

Capítulo 5 Resultados y Conclusiones
Observando las figuras, vemos cómo va decreciendo la probabilidad de error de la señal no lineal conforme aumentamos el OBO (lo cual es totalmente lógico, pues estamos reduciendo el grado de no linealidad). De hecho la probabilidad de error residual ya no se distingue en las siguientes figuras, y en el último caso, OBO = 10 dB, las curvas de la señal no lineal y la señal lineal prácticamente coinciden. Por ello, resultaba interesante ver cómo decrecía la probabilidad de error con el OBO fijado un valor de EbNo. Lo representamos a continuación:
Figura 5.20. Evolución de la probabilidad de error en función del back-off de salida para el modelo SSPA.
5.3.4. Figura de la degradación
El objetivo último del estudio de la no linealidad era llegar a la figura de la degradación en función del factor de back-off de salida. Recordamos que la degradación se definía como la relación EbNo que tendría que compensar un sistema no lineal para mantener la misma probabilidad de error que un sistema lineal. A continuación representamos las figuras para distintas probabilidades de error:
Figuras 5.21. Degradación en función del back-off de salida para el modelo SSPA. a) Pe = 10ˉ4. b) Pe = 10ˉ5.
Vemos como en ambos casos obtenemos un punto óptimo de trabajo, como se dedujo en el análisis teórico de las no linealidades, y que en este caso está en torno a 5 dB de OBO. Para valores menores de OBO, la no linealidad se hace más fuerte, teniendo que compensar una mayor relación de EbNo debido a sus efectos. En cambio, para valores mayores de OBO, aunque estemos en un punto de trabajo muy lineal, se trata de un punto altamente ineficiente para el amplificador por el desaprovechamiento de su rango dinámico, algo que se puede ver claramente en que la degradación tiende al OBO para valores grandes de éste.
Página 95

Capítulo 5 Resultados y Conclusiones
5.4. Señal OFDM con modelo no lineal del TWT
Ahora analizaremos los efectos no lineales del amplificador TWT. Para ello, Saleh propone los siguientes modelos para la amplitud y la fase de la señal:
Para poder comentar mejor estas funciones las representamos a continuación:
Figuras 5.22. Modelos de Saleh para el TWT. a) Modelo para la amplitud. b) Modelo parala fase.
A primera vista podemos apreciar dos diferencias significativas del modelo del TWT con el modelo del SSPA. La primera, en la amplitud de la señal no se tiende a un valor de saturación Ao, sino que se llega a un máximo Ao/2, para después ir decreciendo linealmente, lo que representa un truncamiento de las amplitudes mucho más brusco. La otra diferencia radica en la fase, ya que el modelo del TWT sí introduce un desfase dependiente de la amplitud de entrada, que tiende a π/3. Estas dos diferencias hacen que el modelo del TWT sea más severo que el del SSPA para un mismo valor de amplitud de saturación Ao.
Existe además un problema relacionado con la primera diferencia comentada anteriormente, y es que para valores grandes de la amplitud, el OBO vuelve a crecer (ya que la amplitud Ao se mantiene constante, mientras que el valor medio de la señal se va haciendo más pequeño), lo que haría creer que se trata de puntos de trabajo más lineales, cuando realmente se son puntos de trabajo mucho menos lineales. Esto nos obliga a redefinir el OBO para el caso del TWT. Finalmente se adopta el siguiente criterio para el OBO, se ignora la amplitud de saturación Ao por ser un valor constante, y se sustituye por la amplitud máxima que alcanza la señal a la salida, que decrecerá junto con la amplitud media:
Si bien este criterio no es del todo perfecto, si deja un rango de valores del OBO de 1 a 10 dB, donde el OBO crece con la amplitud de saturación del amplificador, que es lo que debiera ser normal. Como este rango de valores para el OBO es el que utilizamos para las simulaciones, el criterio nos servirá perfectamente para nuestros propósitos.
Página 96
2
2 2 2 (5.5)3
1
inout out
oin
o
A
A
ρ π ρρ φρρ
= =+
+
|max10( ) 20log (5.6)out
out
OBO dBρ
ρ
=
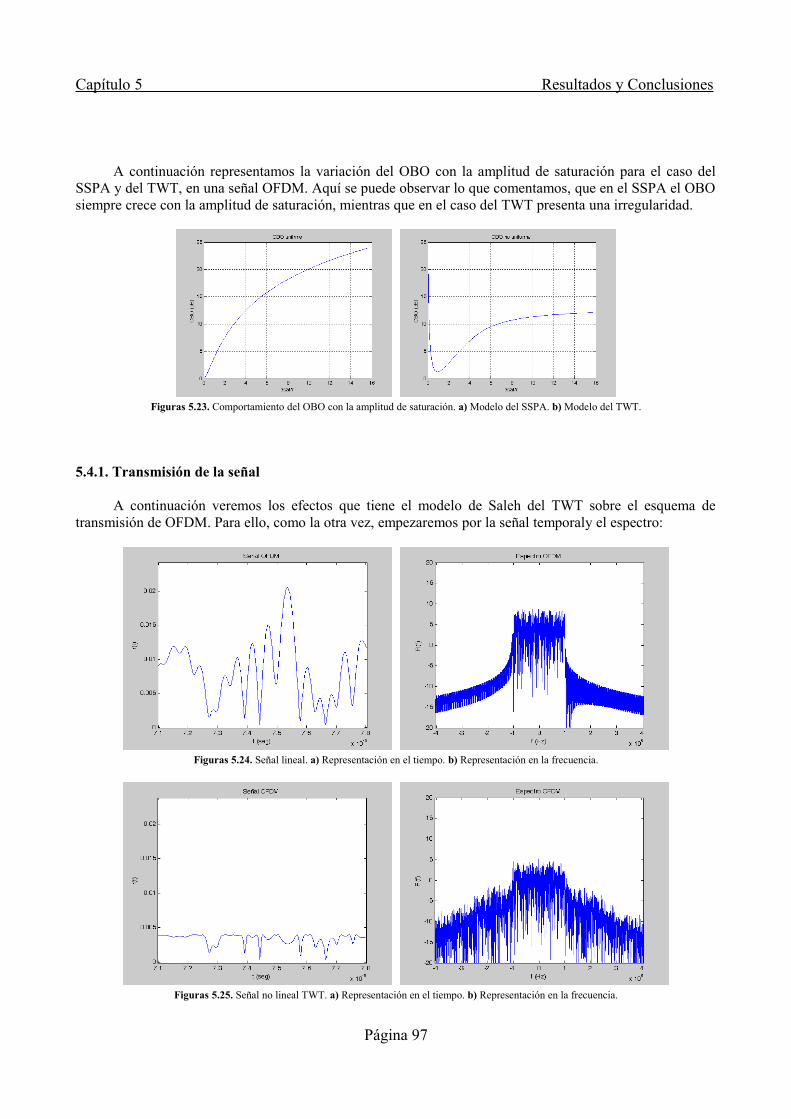
Capítulo 5 Resultados y Conclusiones
A continuación representamos la variación del OBO con la amplitud de saturación para el caso del SSPA y del TWT, en una señal OFDM. Aquí se puede observar lo que comentamos, que en el SSPA el OBO siempre crece con la amplitud de saturación, mientras que en el caso del TWT presenta una irregularidad.
Figuras 5.23. Comportamiento del OBO con la amplitud de saturación. a) Modelo del SSPA. b) Modelo del TWT.
5.4.1. Transmisión de la señal
A continuación veremos los efectos que tiene el modelo de Saleh del TWT sobre el esquema de transmisión de OFDM. Para ello, como la otra vez, empezaremos por la señal temporaly el espectro:
Figuras 5.24. Señal lineal. a) Representación en el tiempo. b) Representación en la frecuencia.
Figuras 5.25. Señal no lineal TWT. a) Representación en el tiempo. b) Representación en la frecuencia.
Página 97

Capítulo 5 Resultados y Conclusiones
Como podemos ver en las figuras anteriores, los efectos del TWT son mucho más fuertes que los del SSPA, tal y como habíamos predicho. Por un lado, en la señal temporal el truncamiento de los picos es mucho más radical, produciendo mínimos donde antes había máximos. Por otro lado, el recrecimiento espectral deja una caída en la banda pasante de unos 4 dB, frente a los 6 dB que dejaba el SSPA.
Para poder analizar desde más enfoques todos los efectos del modelo del TWT en la señal transmitida, comprobaremos el efecto en los histogramas de la amplitud y de la fase de la señal transmitida. Primero, representaremos a efectos comparativos los histogramas de la señal lineal:
Figuras 5.26. Señal lineal. a) Histograma de la amplitud. b) Histograma de la fase.
Aprovechamos para recordar que el módulo seguía una distribución de Rayleigh y la fase seguía una distribución uniforme, como en un proceso complejo gaussiano. Ahora representamos las figuras de la señal no lineal del TWT:
Figuras 5.27. Señal no lineal TWT. a) Histograma de la amplitud. b) Histograma de la fase.
De nuevo se puede apreciar la mayor severidad de los efectos del TWT. Observando el primer histograma, podemos comprobar cómo los valores altos de la amplitud son eliminados, pero esta vez de una manera mucho más brusca y anticipada, cayendo el número de valores verticalmente a cero, sin dejar vestigio alguno de la cola de la distribución Rayleigh.
Para el caso de la fase, aparentemente no hay cambios, ya que seguimos obteniendo una distribución uniforme. Pero si nos fijamos en valores concretos, vemos que no coinciden. Esto se debe a que realmente existe una rotación en la fase de la señal, pero al ser ésta periódica, no se distingue en la distribución. Este fenómeno será más distinguible en el siguiente apartado.
Página 98

Capítulo 5 Resultados y Conclusiones
5.4.2. Recepción de la señal
A continuación mostraremos los efectos que tiene el modelo de Saleh del TWT en el esquema de recepción de la señal. De nuevo utilizaremos la constelación de las muestras recibidas como la figura más característica para poder comentar estos efectos. De esta manera, representamos primero el caso de la señal lineal para poderlo comparar:
Figura 5.28. Constelación recibida para la señal lineal.
Se puede ver como teníamos una serie de muestras relativamente dispersas alrededor de los cuatro valores de la QPSK. Para la señal no lineal tenemos:
Figura 5.29. Constelación recibida para la señal no lineal TWT.
Aquí se puede comprobar que de nuevo seguimos teniendo una disminución de los valores de las muestras acercándolas al centro de la constelación, debida a la atenuación α de la ecuación (5.4), y una mayor dispersión de los valores en relación a sus valores medios, debido al ruido nd(t) de la ecuación (5.4). Esta dispersión es mayor que en el caso del SSPA, y por sí sola justificaría una mayor probabilidad de error en el modelo del TWT que en el modelo del SSPA.
Pero es que además nos encontramos con un fenómeno nuevo que merece toda nuestra atención. Podemos ver que la constelación de la señal no lineal presenta una rotación con respecto a la señal lineal, que se ha derivado del desfase dependiente de la amplitud de entrada que se considera en el modelo del TWT. Esto también tiene una explicación con respecto al modelo del bloque no lineal de la ecuación (5.4), y es que en este caso α será complejo, introduciendo además de una atenuación, un desfase. Pero lo verdaderamente importante es que esta rotación de la constelación acerca a muchas más muestras a las fronteras de decisión, disparando aun más la probabilidad de error del modelo del TWT.
Página 99

Capítulo 5 Resultados y Conclusiones
5.4.3. Efectos del ruido
Ante todos los efectos negativos del modelo del TWT que repercuten en la probabilidad de error, lo más sensato sería hacer diversas simulaciones de la probabilidad de error, con la intención de tener un análisis más detallado y preciso de los efectos de este modelo. Para ello se procede de la misma manera que se procedió para el caso del SSPA, simulando la curva del error para distintos valores del OBO, y representando en cada caso la curva teórica (en azul), la curva de la señal lineal (en rojo) y la curva de la señal no lineal (en magenta):
Figuras 5.30. Representación de la probabilidad de error para el modelo TWT. a) OBO = 1dB. b) OBO = 3dB. c) OBO = 5dB. d) OBO = 10dB.
Podemos observar los mismos efectos que observamos la vez anterior. La probabilidad de error de la señal no lineal siempre es mayor que la probabilidad de error de la señal lineal; la diferencia entre ambas crece con el valor de EbNo, debido a que la curva de la señal no lineal tiende a una probabilidad de error vestigial; y por último, conforme se va aumentando el OBO, la probabilidad de error de la señal no lineal va decreciendo, acercándose su curva a la de la señal lineal.
Todo esto ya lo habíamos comentado antes para el caso del SSPA, pero hay ciertas diferencias en el caso del TWT que merece la pena mencionar. Primeramente, para cada valor de OBO, la señal no lineal del modelo del TWT suele presentar una probabilidad de error mucho mayor que la señal no lineal del modelo del SSPA (esto era previsible a tenor de todas las razones que explicamos con respecto a las constelaciones). Esto es tanto más cierto cuanto menor es el valor del OBO, teniendo para el primer caso, OBO = 1dB, una curva del error de la señal no lineal muy por encima de la señal lineal, y para el último caso, OBO = 10 dB, ambas curvas prácticamente coinciden. También es destacable un mayor ruido residual en el modelo del TWT, hecho que también se había detectado en las constelaciones.
Página 100
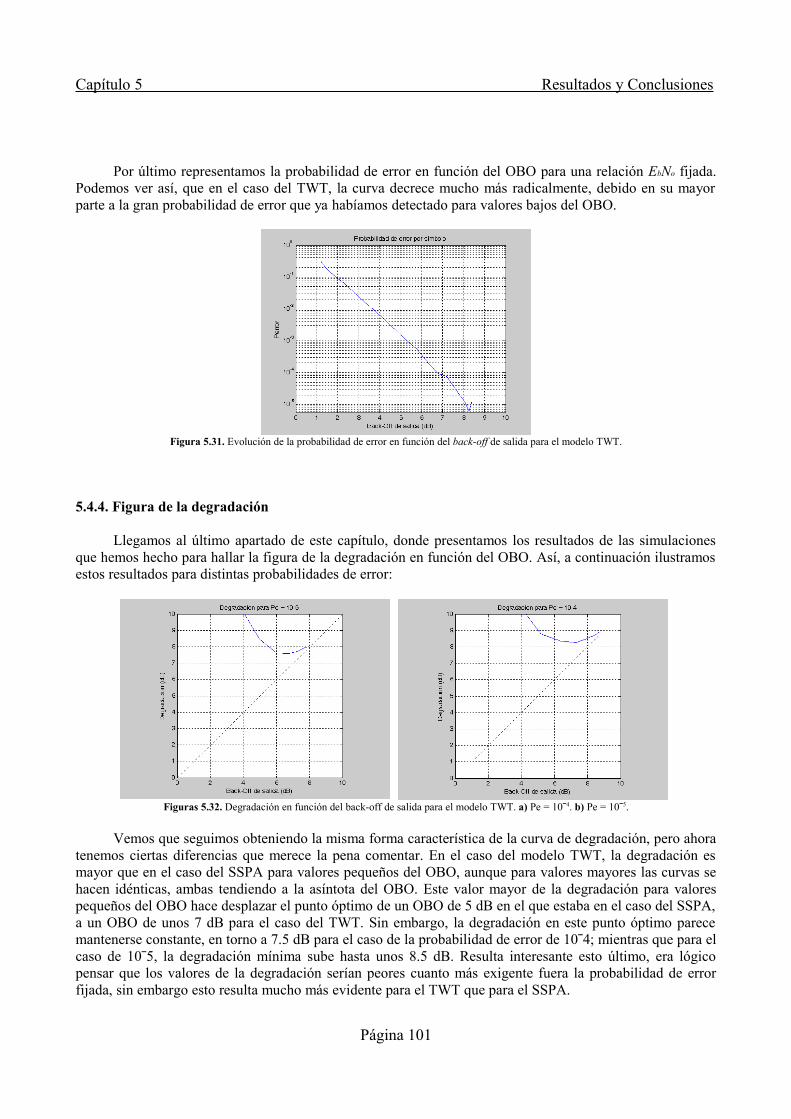
Capítulo 5 Resultados y Conclusiones
Por último representamos la probabilidad de error en función del OBO para una relación EbNo fijada. Podemos ver así, que en el caso del TWT, la curva decrece mucho más radicalmente, debido en su mayor parte a la gran probabilidad de error que ya habíamos detectado para valores bajos del OBO.
Figura 5.31. Evolución de la probabilidad de error en función del back-off de salida para el modelo TWT.
5.4.4. Figura de la degradación
Llegamos al último apartado de este capítulo, donde presentamos los resultados de las simulaciones que hemos hecho para hallar la figura de la degradación en función del OBO. Así, a continuación ilustramos estos resultados para distintas probabilidades de error:
Figuras 5.32. Degradación en función del back-off de salida para el modelo TWT. a) Pe = 10ˉ4. b) Pe = 10ˉ5.
Vemos que seguimos obteniendo la misma forma característica de la curva de degradación, pero ahora tenemos ciertas diferencias que merece la pena comentar. En el caso del modelo TWT, la degradación es mayor que en el caso del SSPA para valores pequeños del OBO, aunque para valores mayores las curvas se hacen idénticas, ambas tendiendo a la asíntota del OBO. Este valor mayor de la degradación para valores pequeños del OBO hace desplazar el punto óptimo de un OBO de 5 dB en el que estaba en el caso del SSPA, a un OBO de unos 7 dB para el caso del TWT. Sin embargo, la degradación en este punto óptimo parece mantenerse constante, en torno a 7.5 dB para el caso de la probabilidad de error de 10ˉ4; mientras que para el caso de 10ˉ5, la degradación mínima sube hasta unos 8.5 dB. Resulta interesante esto último, era lógico pensar que los valores de la degradación serían peores cuanto más exigente fuera la probabilidad de error fijada, sin embargo esto resulta mucho más evidente para el TWT que para el SSPA.
Página 101

Capítulo 5 Resultados y Conclusiones
Página 102

Capítulo 6 Futuras líneas de investigación
Capítulo 6: Futuras líneas de investigación
6.1. Introducción
Este sexto capítulo está dedicado a proponer diversas ampliaciones del estudio realizado, para poder seguir con el trabajo desarrollado a lo largo de la realización de este proyecto, o también, proponer nuevos estudios que hayan podido surgir mientras se trabajaba con el presente.
6.2. Líneas de investigación propuestas
Una vez terminado todo el trabajo del proyecto, podemos proponer varias líneas de trabajo entre las que destacamos las siguientes:
1. Hemos analizado los efectos que produce un bloque no lineal en la señal OFDM, pero nos hemos centrado principalmente en los modelos de Saleh del SSPA y del TWT. Por ello sería conveniente extender las líneas de estudio hacia otros modelos matemáticos, con el fin de tener una visión más global de los efectos no lineales.
2. Otra carencia del estudio presente sobre la no linealidad ha sido que solamente hemos abordado los efectos negativos que ésta produce. Esto puede ser la base para una línea que verse sobre diferentes soluciones para paliar estos efectos, como puede ser un predistorsionador, o la introducción de codificación en OFDM.
3. Por otro lado, en este estudio nos hemos centrado mucho en el estudio de las no linealidades en OFDM, pero hay muchos otros problemas a los que se tiene que enfrentar esta modulación, como puede ser el tema de la sincronización, o de su sensibilidad a un offset de frecuencias. Una posible línea de trabajo podría centrarse en alguno de estos problemas, y estudiarlo más en profundidad.
4. Posiblemente la mayor limitación del presente trabajo es que se ha centrado en un estudio puramente teórico y de simulación, y no ha incluído ninguna implementación real. Así, una línea interesante a seguir podría ser la utilización de equipos reales para comparar sus resultados con los resultados hallados por teoría.
5. Por último, la mayor virtud de este proyecto es posiblemente la calidad del código realizado, con lo que sería de muy fácil utilización para el diseño de una interfaz gráfica con el fin de facilitar y automatizar las simulaciones que se han realizado aquí.
Página 103

Capítulo 6 Futuras líneas de investigación
Página 104

Anexo 1 Código fuente
Anexo 1: Código Fuente
Página 105

Anexo 1 Código fuente
Datos.m
%==========================% Datos para la simulacion%==========================
clear all;close all;clc
% Inclusion de prefijo ciclicoPC = 1; % Variable condicional para la adicion del prefijo ciclico
% Datos generales de transmisionRb = 4*10^6; % Regimen binario total M = 4; % Constelacion M-ariafs = 40*10^6; % Frecuencia de muestreoasat = 8.83; % Amplitud de saturacion en relacion a la media del modulo
% Datos de la creacion de OFDMLx = 1024; % Longitud de la cadena de transmision Nc = 64; % Numero de subportadoras por simbolo (primera estimacion)Nsym = ceil(Lx/Nc); % Numero de simbolos en la cadenaT = round(fs*Nc*(log2(M)/Rb)); % Numero de puntos de la IFFTN = T; % Numero de puntos de la FFTTg = floor(T/4); % Longitud del prefijo ciclico
if PC Tt = T+Tg; % Longitud total del simbolo cuando hay prefijo ciclicoelse Tt = T; % Longitud total del simbolo cuando NO hay prefijo ciclicoend
% Reajustamos algunos datosif N <= 3*Nc nc = floor(log2(N/3)); % Reajustamos nc para que N > 3*Nc, y Nc sea potencia de 2 Nc = 2^(nc) % Reajustamos Nc a partir de nc clear ncendLx = Nsym*Nc % Reajustamos la longitud de la cadena de transmision
% Datos del canalEbNo = 10; % Relacion energia de bit/ruido en dBMultipath = [1 0 0 0 0 0 0.5]; % Filtro que modela el multitrayecto
Página 106

Anexo 1 Código fuente
Transmision.m
%===========================% Creacion de la señal OFDM%===========================
% Inicializacion de variablesX = zeros(1,Lx); % Cadena de simbolosx = zeros(T,Nsym); % IFFT de cada simbolo agrupadas en columnasTx = zeros(1,Nsym*Tt); % Señal transmitida
X = sign(randn(1,Lx)) + j*sign(randn(1,Lx)); % Cadena aleatoria de datos 4-QAM
% Creacion de la señal OFDM X = reshape(X,Nc,Nsym); % Bloque S/P: Separamos la cadena en simbolos OFDMx = ifft(X,T); % Bloque IFFT: Hacemos la IFFT de cada simboloif PC % Bloque PC: Añadimos el prefijo ciclico si procede xg(1:Tg,:) = x(T-Tg+1:T,:); xg(Tg+1:Tt,:) = x; x = xg; clear xg;endTx = reshape(x,1,Nsym*Tt); % Bloque P/S: Señal transmitida en cadena
% Calculo de la figra PAPRPAPR = max(abs(Tx(:)))/mean(abs(Tx(:))); % Peak/Average Power RatioPAPR = 20*log10(PAPR) % Peak/Average Power Ratio (dB)
% Representacion de la señal transmitidaGraf(Tx,Rb,M,Tt,N,Nc,Nsym)
pause
% Adicion del efecto no linealTxmod = abs(Tx); % Amplitud de la señalTxfas = angle(Tx); % Fase de la señalasat = asat*mean(Txmod);Txmod2 = Txmod./sqrt(1+(Txmod./asat).^2); % Compresion de la amplitudTxfas2 = Txfas; % Efecto en la faseTx2 = Txmod2.*exp(i*Txfas2); % Señal no lineal transmitida
% Calculo de la figura PAPR y OBOPAPR2 = max(abs(Tx2(:)))/mean(abs(Tx2(:))); % Peak/Average Power RatioPAPR2 = 20*log10(PAPR2) % Peak/Average Power Ratio (dB)OBO = 20*log10(asat/mean(Txmod2)) % Back-Off a la salida
% Representacion de la señal transmitidaGraf(Tx2,Rb,M,Tt,N,Nc,Nsym)
clear Txmod;clear Txfas;clear Txmod2;clear Txfas2;X = reshape(X,1,Nc*Nsym); % Cadena original para posteriores comparaciones
Página 107
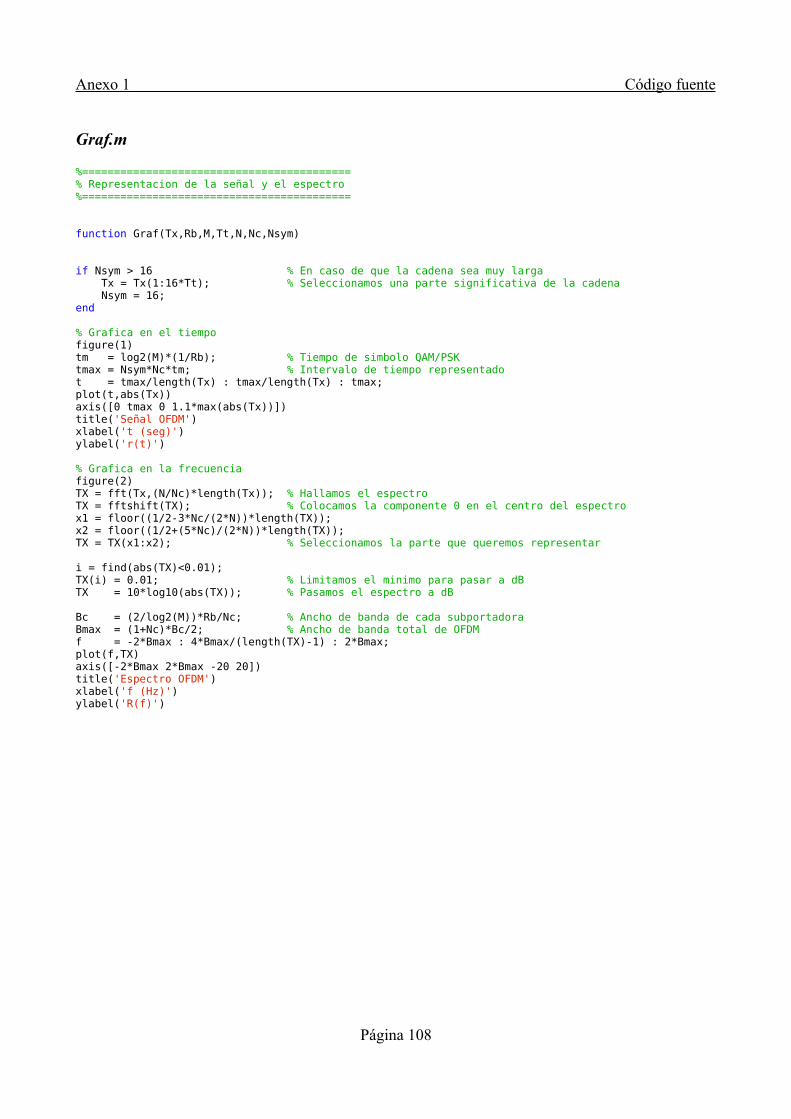
Anexo 1 Código fuente
Graf.m
%==========================================% Representacion de la señal y el espectro%==========================================
function Graf(Tx,Rb,M,Tt,N,Nc,Nsym)
if Nsym > 16 % En caso de que la cadena sea muy larga Tx = Tx(1:16*Tt); % Seleccionamos una parte significativa de la cadena Nsym = 16;end
% Grafica en el tiempofigure(1)tm = log2(M)*(1/Rb); % Tiempo de simbolo QAM/PSKtmax = Nsym*Nc*tm; % Intervalo de tiempo representadot = tmax/length(Tx) : tmax/length(Tx) : tmax; plot(t,abs(Tx))axis([0 tmax 0 1.1*max(abs(Tx))])title('Señal OFDM')xlabel('t (seg)')ylabel('r(t)')
% Grafica en la frecuenciafigure(2)TX = fft(Tx,(N/Nc)*length(Tx)); % Hallamos el espectroTX = fftshift(TX); % Colocamos la componente 0 en el centro del espectrox1 = floor((1/2-3*Nc/(2*N))*length(TX));x2 = floor((1/2+(5*Nc)/(2*N))*length(TX));TX = TX(x1:x2); % Seleccionamos la parte que queremos representar
i = find(abs(TX)<0.01); TX(i) = 0.01; % Limitamos el minimo para pasar a dBTX = 10*log10(abs(TX)); % Pasamos el espectro a dB Bc = (2/log2(M))*Rb/Nc; % Ancho de banda de cada subportadora Bmax = (1+Nc)*Bc/2; % Ancho de banda total de OFDM f = -2*Bmax : 4*Bmax/(length(TX)-1) : 2*Bmax;plot(f,TX)axis([-2*Bmax 2*Bmax -20 20])title('Espectro OFDM')xlabel('f (Hz)')ylabel('R(f)')
Página 108

Anexo 1 Código fuente
GrafDDP.m
%===================================% Histogramas de modulo y fase OFDM%===================================
function GrafDDP(Tx)
r = abs(Tx); % Hallamos el modulorx = 0:0.01*mean(r):max(r); % Creamos el eje de abcisas (rango de valores del modulo)ry = zeros(1,length(rx)); % Reservamos el eje de ordenadas (numero de ocurrencias)for i=1:length(rx) % Recorremos los valores del modulo n = find(r<=rx(i)); %Comprobamos las ocurrencias que ocurren en el rango ry(i) = length(n); %Calculamos el numero de estas ocurrencias r(n) = 2*max(r); %Sacamos estos valores del rango de comprobacionendry(length(ry))=0;figure(1)plot(rx,ry)title('Histograma del modulo OFDM')xlabel('Valor de modulo')ylabel('Nº Ocurrencias') axis([0 0.03 0 1.05*max(ry)])pause w = angle(Tx); % Hallamos la fasewx = -pi:0.01*pi:pi; % Creamos el eje de abcisas (rango de valores del modulo)wy = zeros(1,length(wx)); % Reservamos el eje de ordenadas (numero de ocurrencias)for i=1:length(wx) % Recorremos los valores del modulo n = find(w<=wx(i)); %Comprobamos las ocurrencias que ocurren en el rango wy(i) = length(n); %Calculamos el numero de estas ocurrencias w(n) = 2*pi; %Sacamos estos valores del rango de comprobacionendwy(length(wy))=0;figure(2)plot(wx,wy)title('Histograma de la fase OFDM')xlabel('Valor de la fase')ylabel('Nº Ocurrencias')
Página 109

Anexo 1 Código fuente
Recepcion.m
%=============================% Recepcion de la señal OFDM%=============================
% Deteccion de la señal OFDMRx = Canal(Tx,EbNo,M,N,Nc,Multipath); % Señal recibida a traves del canal radioRx = Rx(1:length(Tx)); % Cogemos la parte de la señal sin los ultimos ecos
% Demodulacion de la señal OFDMy = reshape(Rx,Tt,Nsym); % Bloque S/P: Separamos la cadena por simbolosif PC % Bloque PC: Extraemos el prefijo ciclico si procede y = y(Tg+1:Tt,:); endY = fft(y,N); % Bloque FFT: Hallamos la FFT de la señal recibidaY = Y(1:Nc,:); % Cogemos la parte del espectro correspondiente a las subportadorasY = Equ(Y,Multipath,Nsym,N,Nc); % Bloque EQU: Ecualizamos la señal Y = reshape(Y,1,Nc*Nsym); % Bloque P/S: Cadena de datos recibidos
% Representamos la señal recibida Graf(Rx,Rb,M,Tt,N,Nc,Nsym) % Representacion en tiempo/frecuenciaGrafRX(Y) % Representacion de la constelacion
% Decision y calculo de la tasa de errorY = sign(real(Y)) + i*sign(imag(Y)); % Pasamos las subportadoras por el decisore = Y - X; % Hallamos la cadena de erroresPerror = (sum(abs(real(e)|imag(e))))/(length(e)) % Calculamos la tasa de error
pause
% Deteccion de la señal OFDM no linealRx2 = Canal(Tx2,EbNo,M,N,Nc,Multipath); % Señal recibida a traves del canal radioRx2 = Rx2(1:length(Tx)); % Cogemos la parte de la señal sin los ultimos ecos
% Demodulacion OFDM de la señal no linealy2 = reshape(Rx2,Tt,Nsym); % Bloque S/P: Separamos la cadenaif PC % Bloque PC: Extraemos el prefijo ciclico si procede y2 = y2(Tg+1:Tt,:); endY2 = fft(y2,N); % Bloque FFT: Hallamos la FFT de la señal recibidaY2 = Y2(1:Nc,:); % Cogemos parte del espectro correspondiente a las subportadoras Y2 = Equ(Y2,Multipath,Nsym,N,Nc); % Bloque EQU: Ecualizamos la señalY2 = reshape(Y2,1,Nc*Nsym); % Bloque P/S: Cadena de datos recibidos
% Representamos la señal recibida Graf(Rx,Rb,M,Tt,N,Nc,Nsym) % Representacion en tiempo/frecuenciaGrafRX(Y2) % Representacion de la constelacion
% Decision y calculo de la tasa de errorY2 = sign(real(Y2)) + i*sign(imag(Y2)); % Pasamos las subportadoras por el decisore2 = Y2 - X; % Hallamos la cadena de erroresPerror = (sum(abs(real(e2)|imag(e2))))/(length(e2)) % Calculamos la tasa de error
Página 110

Anexo 1 Código fuente
Equ.m
%==========================% Ecualizacion de la señal%==========================
function Yeq = Equ(Y,Multipath,Nsym,N,Nc)
H = fft(Multipath,N); % Obtencion de la respuesta del canalH = H(1:Nc); % Cogemos la parte del espectro correspondiente a las subportadorasH = kron(ones(1,Nsym),H); % La alargamos tanto como simbolos OFDM haya H = reshape(H,Nc,Nsym); % Ponemos la respuesta del canal en el formatos de la señal YYeq = Y./H; % Ecualizamos la señal
GrafRX.m
%=============================================================% Representacion de la constelacion de las muestras recibidas%=============================================================
function GrafRX(Y)
% Constelacion de las muestras recibidasfigure(3)plot(Y,'b.')title('Muestras recibidas')axis squareaxis ([-2 2 -2 2])
Página 111

Anexo 1 Código fuente
GrafSNR.m
%==================================================% Representacion de la Perror en funcion de la SNR%==================================================
function GrafSNR(PC,M,X,Tx,Tx2,T,Tg,Tt,N,Nc,Nsym)
% Limite de iteraciones de los buclesC = ceil(5000000/length(Tx)); % C es el numero de cadenas simuladas para el mismo punto en las graficasK = 21; % K es el numero de puntos que vamos a representar en las graficas de Perror
% Variables de simulacionENmin = 0; % Valor minimo de EbNo que vamos a simularENmax = 20; % Valor maximo de EbNo que vamos a simularENh = (ENmax-ENmin)/(K-1); % Valor de paso de EbNo que vamos a simular
for k = 1:K % Actualizacion de variables EN(k) = ENmin + (k-1)*ENh; % Vamos cambiando el valor de EbNo en dB en = 10.^(EN(k)/10); % Vamos cambiando el valor de EbNo a unidades naturales P1 = 0; % Perror para las C iteraciones P2 = 0; % Perror para las C iteraciones (caso NL) for c = 1:C % Detecccion de la señal OFDM Rx = Canal(Tx,EN(k),M,N,Nc,1); % Simulamos el canal con ese valor de EbNo Rx2 = Canal(Tx2,EN(k),M,N,Nc,1); % Simulamos el canal con ese valor de EbNo (caso NL) % Demodulacion de la señal OFDM y = reshape(Rx,Tt,Nsym); % Bloque S/P: Separamos la cadena por simbolos y2 = reshape(Rx2,Tt,Nsym); % Bloque S/P: Separamos la cadena por simbolos (caso NL) if PC y = y(Tg+1:Tt,:); % Bloque CP: Extraemos el prefijo ciclico si procede y2 = y2(Tg+1:Tt,:); % Bloque CP: Extraemos el prefijo ciclico si procede (caso NL) end Y = fft(y,N); % Bloque FFT: Hallamos la FFT de la señal recibida Y2 = fft(y2,N); % Bloque FFT: Hallamos la FFT de la señal recibida (caso NL) Y = Y(1:Nc,:); % Cogemos parte del espectro correspondiente a las subportadoras Y2 = Y2(1:Nc,:); % Cogemos parte del espectro correspondiente a las subportadoras (caso NL) Y = reshape(Y,1,Nc*Nsym); % Bloque P/S: Cadena de datos recibidos Y2 = reshape(Y2,1,Nc*Nsym); % Bloque P/S: Cadena de datos recibidos (caso NL)
% Decision y calculo de la tasa de error Y = sign(real(Y)) + i*sign(imag(Y)); % Pasamos las subportadoras por el decisor Y2 = sign(real(Y2)) + i*sign(imag(Y2)); % Pasamos las subportadoras por el decisor (caso NL) e = Y - X; % Hallamos el vector de errores e2 = Y2 - X; % Hallamos el vector de errores (caso NL) P1 = P1 + (sum(abs(real(e)|imag(e))))/(length(e)); % Acumulamos la tasa de error P2 = P2 + (sum(abs(real(e2)|imag(e2))))/(length(e2)); % Acumulamos la tasa de error (caso NL) end Pe0(k) = erfc(sqrt(log2(M)*en)*sin(pi/M)); % Calculamos la tasa de error teorica Pe1(k) = P1/C; % Calculamos la tasa de error de las C iteraciones Pe2(k) = P2/C; % Calculamos la tasa de error de las C iteraciones (caso NL) fprintf('\t Porcentaje completado: %2.2f \n',100*(k/K))end % Representacion de la graficafigure(4)semilogy(EN,Pe0,'b:',EN,Pe1,'r',EN,Pe2,'m')title('Probabilidad de error por simbolo')xlabel('Eb/No (dB)')ylabel('Perror')legend('Perror teorica','Perror experimental','Perror experimental (no lineal)')axis([ENmin ENmax 10^(-6) 1])grid
Página 112

Anexo 1 Código fuente
GrafMulti.m
%===============================================================================% Representacion de la Perror en funcion del retardo principal en multitrayecto%===============================================================================
function GrafMulti(PC,M,X,Tx,T,Tg,Tt,N,Nc,Nsym)
% Limite de iteraciones de los buclesC = ceil(600000/length(Tx)); % C es el numero de cadenas simuladas para el mismo punto en las graficasK = 20; % K es el numero de puntos que vamos a representar en las graficas de Perror
% Variables de simulacionEbNo = 10; % Relacion energia de bit/ruido en dBa = 0.6; % Amplitud de la señal retardada en unidades naturales DELmin = 2; % Valor minimo del retardo que vamos a simularDELmax = 2*Tg; % Valor maximo del retardo que vamos a simularDELh = (DELmax-DELmin)/(K-1); % Valor de paso del retardo que vamos a simular
for k = 1:K % Actualizacion de variables DEL(k) = DELmin + round((k-1)*DELh); % Vamos cambiando el valor del retardo principal Multi = zeros(1,DEL(k)); % Vamos modelando el efecto multitrayecto con ese retardo Multi(1) = 1; % El rayo directo tendra amplitud 1 Multi(DEL(k)) = a; % El rayo retrasado tendra amplitud a P = 0; % Perror para las C iteraciones for c = 1:C % Deteccion de la señal OFDM Rx = Canal(Tx,EbNo,M,N,Nc,Multi); % Simulamos el canal con ese valor de retardo Rx = Rx(1:length(Tx)); % Cogemos la parte de la señal sin los ultimos ecos % Demodulacion de la señal OFDM y = reshape(Rx,Tt,Nsym); % Bloque S/P: Separamos la cadena por simbolos if PC % Bloque CP: Extraemos el prefijo ciclico si procede y = y(Tg+1:Tt,:); end Y = fft(y,N); % Bloque FFT: Hallamos la FFT de la señal recibida Y = Y(1:Nc,:); % Cogemos la parte del espectro correspondiente a las subportadoras Y = Equ(Y,Multi,Nsym,N,Nc); % Bloque EQU: Ecualizamos la señal Y = reshape(Y,1,Nc*Nsym); % Bloque P/S: Cadena de datos recibidos % Decision y calculo de la tasa de error Y = sign(real(Y)) + i*sign(imag(Y)); % Pasamos las subportadoras por el decisor e = Y - X; % Hallamos el vector de errores P = P + (sum(abs(real(e)|imag(e))))/(length(e)); % Acumulamos la tasa de error end Pe(k) = P/C; % Calculamos la tasa de error de las C iteraciones fprintf('\t Porcentaje completado: %2.2f \n',100*(k/K)^2)end
% Representacion de la graficafigure(4)semilogy(DEL/Tg,Pe)title('Probabilidad de error por simbolo')xlabel('Retardo principal (Tg)')ylabel('Perror')axis([DELmin/Tg DELmax/Tg 0.001 0.316])grid
Página 113

Anexo 1 Código fuente
GrafICI.m
%==================================================% Representacion de la Perror en funcion de la ICI%==================================================
function GrafICI(PC,M,X,Tx,T,Tg,Tt,N,Nc,Nsym)
% Limite de iteraciones de los buclesC = ceil(800000/length(Tx)); % C es el numero de cadenas simuladas para el mismo punto en las graficasK = 21; % K es el numero de puntos que vamos a representar en las graficas de Perror
% Variables de simulacion EbNo = 10; % Relacion energia de bit/ruido en dBICImin = -20; % Valor minimo de ICI en dB que vamos a simularICImax = 0; % Valor maximo de ICI en dB que vamos a simularICIh = (ICImax-ICImin)/(K-1); % Valor de paso del retardo que vamos a simular
for k = 1:K % Actualizacion de variables ICI(k) = ICImin +(k-1)*ICIh; % Vamos cambiando el valor de ICI en dB a = 10^(ICI(k)/20); % Vamos pasando el valor a unidades naturales P = 0; % Perror para las C iteraciones for c = 1:C % Deteccion de la señal a traves del canal Rx = Canal(Tx,EbNo,M,N,Nc,1); % Simulamos el canal % Demodulacion de la señal OFDM y = reshape(Rx,Tt,Nsym); % Bloque S/P: Separamos la cadena por simbolos if PC % Bloque CP: Extraemos el prefijo ciclico si procede y = y(Tg+1:Tt,:); end Y = fft(y,N); % Bloque FFT: Hallamos la FFT de la señal recibida Y = Y(1:Nc,:); % Cogemos la parte del espectro correspondiente a las subportadoras
% Generamos el ICI mediante una matriz multidiagonal H = diag(ones(1,Nc)); H = H + (diag(ones(1,Nc-1),1) + diag(ones(1,Nc-1),-1))*a; H = H + (diag(ones(1,Nc-2),2) + diag(ones(1,Nc-2),-2))*a^2; H = H + (diag(ones(1,Nc-3),3) + diag(ones(1,Nc-3),-3))*a^3; H = H + (diag(ones(1,Nc-4),4) + diag(ones(1,Nc-4),-4))*a^4; Y = H*Y; Y = reshape(Y,1,Nc*Nsym); % Bloque P/S: Cadena de datos recibidos % Decision y calculo de la tasa de error Y = sign(real(Y)) + i*sign(imag(Y)); % Pasamos las subportadoras por el decisor e = Y - X; % Hallamos el vector de errores P = P + (sum(abs(real(e)|imag(e))))/(length(e)); % Acumulamos la tasa de error end
Pe(k) = P/C; % Calculamos la tasa de error de las C iteraciones fprintf('\t Porcentaje completado: %2.2f \n',100*(k/K)) end % Representacion de la graficafigure(4)semilogy(ICI,Pe)title('Probabilidad de error por simbolo')xlabel('ICI de la portadora contigua (dB)')ylabel('Perror')grid
Página 114

Anexo 1 Código fuente
GrafSinc.m
%=================================================================% Representacion de la Perror en funcion de un offset frecuencial %=================================================================
function GrafSinc(PC,M,X,Tx,T,Tg,Tt,N,Nc,Nsym)
% Limite de iteraciones de los buclesC = ceil(100000/length(Tx)); % C es el numero de cadenas simuladas para el mismo punto en las graficasK = 21; % K es el numero de puntos que vamos a representar en las graficas de Perror
% Variables de simulacionEbNo = 10; % Ruido despreciableOFmin = 0; % Valor minimo del offset de frecuenciaOFmax = 0.5; % Valor maximo del offset de frecuenciaOFh = (OFmax-OFmin)/(K-1); % Valor de paso del offset de frecuencia que vamos a simularKn = round((K-1)/(OFmax-OFmin)); % Valor de ampliacion del numero de puntos de la FFT
for k = 1:K % Actualizacion de variables OF(k) = OFmin + (k-1)*OFh; % Vamos cambiando el valor del offset de frecuencia P = 0; % Perror para las C iteraciones for c = 1:C % Deteccion de la señal OFDM Rx = Canal(Tx,EbNo,M,N,Nc,1); % Simulamos el canal % Demodulacion de la señal OFDM y = reshape(Rx,Tt,Nsym); % Bloque S/P: Separamos la cadena por simbolos if PC % Bloque CP: Extraemos el prefijo ciclico si procede y = y(Tg+1:Tt,:); end Y = fft(y,Kn*N); % Bloque FFT: Hallamos la FFT de la señal recibida D = round(Kn*OF(k)); Y = circshift(Y,[D 0]); % Introducimos el offset de frecuencia Y = Y(1:Kn:Kn*Nc,:); % Cogemos la parte del espectro correspondiente a las subportadoras Y = reshape(Y,1,Nc*Nsym); % Bloque P/S: Cadena de datos recibidos % Decision y calculo de la tasa de error Y = sign(real(Y)) + i*sign(imag(Y)); % Pasamos las subportadoras por el decisor e = Y - X; % Hallamos el vector de errores P = P + (sum(abs(real(e)|imag(e))))/(length(e)); % Acumulamos la tasa de error end Pe(k) = P/C; % Calculamos la tasa de error de las C iteraciones fprintf('\t Porcentaje completado: %2.2f \n',100*(k/K))end
% Representacion de la graficafigure(4)semilogy(OF,Pe)title('Probabilidad de error por simbolo')xlabel('Offset de frecuencia (Bc/2)')ylabel('Perror')grid
Página 115

Anexo 1 Código fuente
GrafOBO.m
%===========================================================% Representacion de la Perror en funcion del Power Clipping%===========================================================
function GrafOBO(PC,M,X,Tx,T,Tg,Tt,N,Nc,Nsym)
% Limite de iteraciones de los buclesC = ceil(4000000/length(Tx)); % C es el numero de cadenas simuladas para el mismo punto en las graficasK = 20; % K es el numero de puntos que vamos a representar en las graficas de Perror
% Variables de simulacionEbNo = 10; % Relacion energia de bit/ruido en dBASmin = 20*log10(0.325*mean(abs(Tx))); % Valor minimo de amplitud de saturacion del amplificador en dB que ...ASmax = 20*log10(2.870*mean(abs(Tx))); % Valor maximo de amplitud de saturacion del amplificador en dB que ...ASh = (ASmax-ASmin)/(K-1); % Valor de paso de amplitud de saturacion del amplificador en dB que ...
for k = 1:K % Actualizacion de variables AS(k) = ASmin + (k-1)*ASh; % Vamos cambiando el valor de la amplitud de saturacion en dB asat = 10^(AS(k)/20); % Pasamos la amplitud de saturacion a unidades naturales P = 0; % Perror para las C iteraciones % Adicion del efecto no lineal Txmod = abs(Tx); % Amplitud de la señal Txfas = angle(Tx); % Fase de la señal Txmod2 = Txmod./sqrt(1+(Txmod/asat).^2); % Compresion de la amplitud Txfas2 = Txfas; % Efecto en la fase Tx2 = Txmod2.*exp(i*Txfas2); % Señal no lineal transmitida OBO(k) = 20*log10(asat/mean(abs(Tx2))); % Calculamos el Back-Off de salida en dB for c = 1:C % Deteccion de la señal OFDM Rx = Canal(Tx2,EbNo,M,N,Nc,1); % Simulamos el canal % Demodulacion de la señal OFDM y = reshape(Rx,Tt,Nsym); % Bloque S/P: Separamos la cadena por simbolos if PC % Bloque CP: Extraemos el prefijo ciclico si procede y = y(Tg+1:Tt,:); end Y = fft(y,N); % Bloque FFT: Hallamos la FFT de la señal recibida Y = Y(1:Nc,:); % Cogemos la parte del espectro correspondiente a las subportadoras Y = reshape(Y,1,Nc*Nsym); % Bloque P/S: Cadena de datos recibidos
% Decision y calculo de la tasa de error Y = sign(real(Y)) + i*sign(imag(Y)); % Pasamos las subportadoras por el decisor e = Y - X; % Hallamos el vector de errores P = P + (sum(abs(real(e)|imag(e))))/(length(e)); % Acumuulamos la tasa de error end Pe(k) = P/C; % Calculamos la tasa de error de las C iteraciones fprintf('\t Porcentaje completado: %2.2f \n',100*(k/K))end % Representacion de la graficafigure(4)semilogy(OBO,Pe)title('Probabilidad de error por simbolo')xlabel('Back-Off de salida (dB)')ylabel('Perror')axis([0 10 0.9*min(Pe) 1])grid
Página 116
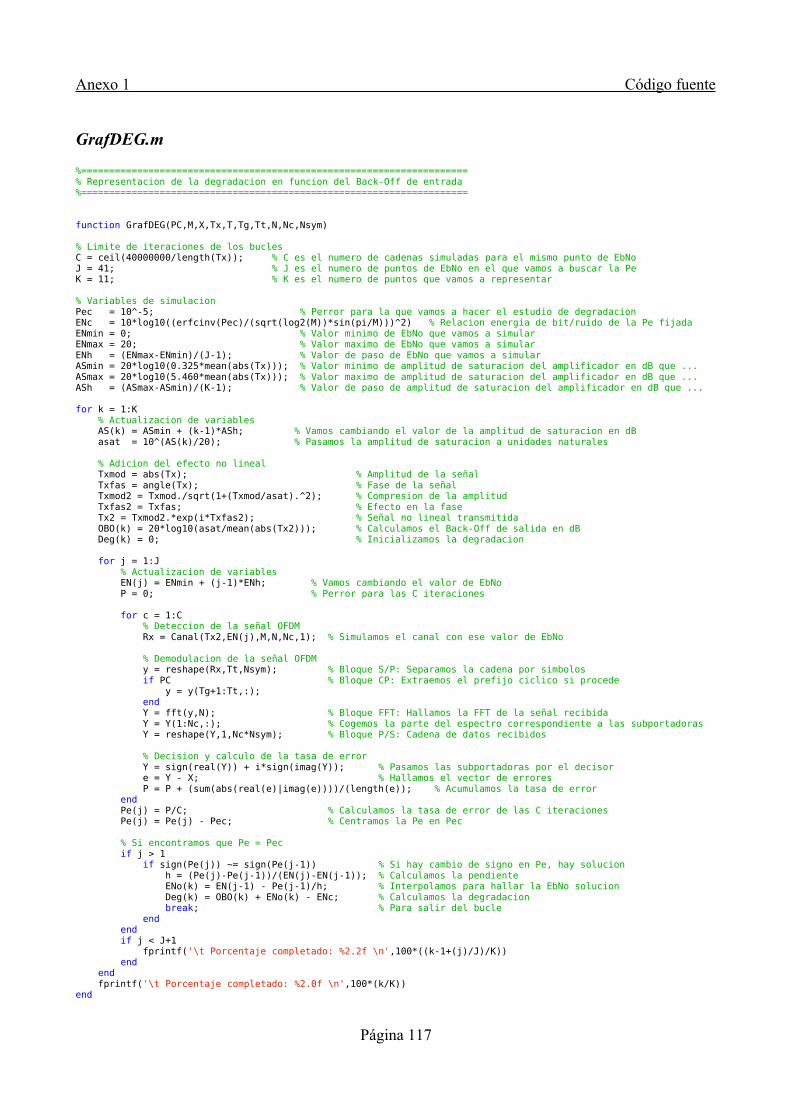
Anexo 1 Código fuente
GrafDEG.m
%=====================================================================% Representacion de la degradacion en funcion del Back-Off de entrada%=====================================================================
function GrafDEG(PC,M,X,Tx,T,Tg,Tt,N,Nc,Nsym)
% Limite de iteraciones de los buclesC = ceil(40000000/length(Tx)); % C es el numero de cadenas simuladas para el mismo punto de EbNoJ = 41; % J es el numero de puntos de EbNo en el que vamos a buscar la PeK = 11; % K es el numero de puntos que vamos a representar
% Variables de simulacionPec = 10^-5; % Perror para la que vamos a hacer el estudio de degradacionENc = 10*log10((erfcinv(Pec)/(sqrt(log2(M))*sin(pi/M)))^2) % Relacion energia de bit/ruido de la Pe fijadaENmin = 0; % Valor minimo de EbNo que vamos a simularENmax = 20; % Valor maximo de EbNo que vamos a simularENh = (ENmax-ENmin)/(J-1); % Valor de paso de EbNo que vamos a simularASmin = 20*log10(0.325*mean(abs(Tx))); % Valor minimo de amplitud de saturacion del amplificador en dB que ...ASmax = 20*log10(5.460*mean(abs(Tx))); % Valor maximo de amplitud de saturacion del amplificador en dB que ...ASh = (ASmax-ASmin)/(K-1); % Valor de paso de amplitud de saturacion del amplificador en dB que ...
for k = 1:K % Actualizacion de variables AS(k) = ASmin + (k-1)*ASh; % Vamos cambiando el valor de la amplitud de saturacion en dB asat = 10^(AS(k)/20); % Pasamos la amplitud de saturacion a unidades naturales % Adicion del efecto no lineal Txmod = abs(Tx); % Amplitud de la señal Txfas = angle(Tx); % Fase de la señal Txmod2 = Txmod./sqrt(1+(Txmod/asat).^2); % Compresion de la amplitud Txfas2 = Txfas; % Efecto en la fase Tx2 = Txmod2.*exp(i*Txfas2); % Señal no lineal transmitida OBO(k) = 20*log10(asat/mean(abs(Tx2))); % Calculamos el Back-Off de salida en dB Deg(k) = 0; % Inicializamos la degradacion for j = 1:J % Actualizacion de variables EN(j) = ENmin + (j-1)*ENh; % Vamos cambiando el valor de EbNo P = 0; % Perror para las C iteraciones for c = 1:C % Deteccion de la señal OFDM Rx = Canal(Tx2,EN(j),M,N,Nc,1); % Simulamos el canal con ese valor de EbNo % Demodulacion de la señal OFDM y = reshape(Rx,Tt,Nsym); % Bloque S/P: Separamos la cadena por simbolos if PC % Bloque CP: Extraemos el prefijo ciclico si procede y = y(Tg+1:Tt,:); end Y = fft(y,N); % Bloque FFT: Hallamos la FFT de la señal recibida Y = Y(1:Nc,:); % Cogemos la parte del espectro correspondiente a las subportadoras Y = reshape(Y,1,Nc*Nsym); % Bloque P/S: Cadena de datos recibidos % Decision y calculo de la tasa de error Y = sign(real(Y)) + i*sign(imag(Y)); % Pasamos las subportadoras por el decisor e = Y - X; % Hallamos el vector de errores P = P + (sum(abs(real(e)|imag(e))))/(length(e)); % Acumulamos la tasa de error end Pe(j) = P/C; % Calculamos la tasa de error de las C iteraciones Pe(j) = Pe(j) - Pec; % Centramos la Pe en Pec % Si encontramos que Pe = Pec if j > 1 if sign(Pe(j)) ~= sign(Pe(j-1)) % Si hay cambio de signo en Pe, hay solucion h = (Pe(j)-Pe(j-1))/(EN(j)-EN(j-1)); % Calculamos la pendiente ENo(k) = EN(j-1) - Pe(j-1)/h; % Interpolamos para hallar la EbNo solucion Deg(k) = OBO(k) + ENo(k) - ENc; % Calculamos la degradacion break; % Para salir del bucle end end if j < J+1 fprintf('\t Porcentaje completado: %2.2f \n',100*((k-1+(j)/J)/K)) end end fprintf('\t Porcentaje completado: %2.0f \n',100*(k/K))end
Página 117

Anexo 1 Código fuente
Deg(find(Deg==0)) = max(Deg);
% Representacion de la graficafigure(4)plot(OBO,Deg,'b',OBO,OBO,'k:')title('Degradacion para Pe = 10-4')xlabel('Back-Off de salida (dB)')ylabel('Degradacion (dB)')axis squareaxis([0 15 0 15])grid
Página 118

Anexo 2 Bibliografía
Anexo 2: Bibliografía
Página 119

Anexo 2 Bibliografía
An introduction to orthogonal frequency division multiplexing, Over Edfors, Magnus Sandel
Synthesis of band-limited orthogonal signals for multichannel data Transmission, R. W. Chang
Frequency domain data transmission using reduced computational complexity algorithms, A. Peled, A. Ruiz
Manuales de Matlab (www.mathworks.com)
Vector Signal Generator. Operating Manual (Volume 1 & 2), Rhode & Schwarz.
Nonlinear Amplifier Effects in Communications System, Cheng-Po Liang, Je-Hong Jong, Wayne E. Stark.
Microwave Signal Generator R&S SMR20. Operating Manual, Rhode & Schwarz.
Distortion in RF power amplifiers, J. Vuolevi, T. Rahkonen.
Frequency-Independent and Frequency-Dependent Nonlinear Mdela of TWT, Adel A. M. Saleh
Fundamentals of Nonlinear Behavioral Modeling for RF and Microwave Design, J.Wood, D. Root
Página 120