memoria completa.pdf
TRANSCRIPT
Máster de Electrónica, Tratamiento de Señal y Comunicaciones
PROYECTO FIN DE MÁSTER
SIMULACIÓ� Y MO�ITORIZACIÓ� E� TIEMPO REAL DE GE�ERACIÓ�
DE TRAYECTORIA DE AERO�AVES
AUTOR: NEREA MARTÍN GARCÍA SEPTIEMBRE 2012
TUTOR: Mª ÁNGELES MARTÍN PRATS
Agradecimientos
Se lo quiero agradecer a quien ha hecho posible este proyecto, Mª Ángeles y a los
alumnos que crearon el modelo básico, Moisés y Alberto. Gracias por vuestra ayuda.
A la persona que me animo a inscribirme en el Máster, mi compañero Ángel.
A quien hizo posible este sueño, sin él no estaría aquí, mi amigo Javi.
Pero sobre todo a mi familia que siempre está animándome en todas las aventuras que
emprendo.
i
�DICE
1. I�TRODUCCIÓ� .......................................................................... 1
1.1. OBJETIVOS ........................................................................................................ 2
2. CO�CEPTOS BÁSICOS SOBRE AERO�AVES ...................... 3
2.1. PRINCIPIOS AERODINÁMICOS ..................................................................... 3
2.1.1. Sustentación. ............................................................................................... 3
2.1.2. Peso. ............................................................................................................ 6
2.1.3. Tracción o empuje. ..................................................................................... 6
2.1.4. Resistencia. ................................................................................................. 6
2.2. SUPERFICIES AERODINÁMICAS. ................................................................. 7
2.2.1. SUPERFICIES DE MANDO Y DE CONTROL ....................................... 8
2.2.1.1. Ejes del avión. .............................................................................. 8
2.2.1.2. Superficies primarias. ................................................................... 9
2.2.1.3. Superficies secundarias. ............................................................. 11
2.3. ECUACIONES DINÁMICAS .......................................................................... 13
3. DESCRIPCIÓ� DEL MODELO DISEÑADO Y
DESARROLLADO ........................................................................... 15
3.1. LIBRERÍA AEROSIM ...................................................................................... 15
3.1.1. AERODINÁMICA. .................................................................................. 18
3.1.2. GA PROPULSION SYSTEM. ................................................................. 20
3.1.3. AIRCRAFT INERTIAL. .......................................................................... 20
3.1.4. ATMÓSFERA. ......................................................................................... 21
3.1.5. TOTAL ACCELERATION. ..................................................................... 22
3.1.6. TOTAL MOMENT. .................................................................................. 22
3.1.7. ECUACIONES DEL MOVIMIENTO. .................................................... 23
3.1.8. EARTH. .................................................................................................... 24
3.2. DESCRIPCIÓN DE LA HERRAMIENTA UTILIZADA PARA
MONITORIZACIÓN Y GENERACIÓN DE TRAYECTORIA (GUIDE). .................. 26
3.3. IMPLEMENTACIÓN EN MATLAB/SIMULINK ........................................... 29
3.3.1. BLOQUES AEROSIM. ............................................................................ 31
3.3.2. APROXIMACIÓN DE TIERRA PLANA. .............................................. 34
ii
3.3.3. PILOTOAUTOMATICO.M ..................................................................... 34
3.3.4. CONTROLES PI Y PID. .......................................................................... 41
3.3.5. OTRAS FUNCIONES DE MATLAB. ..................................................... 45
4. VALIDACIÓ� DEL MODELO DE SIMULACIÓ�. .............. 52
5. CO�CLUSIO�ES ......................................................................... 65
6. L�EAS FUTURAS. ..................................................................... 67
AP�DICES ...................................................................................... 68
A. MANUAL DE USUARIO ................................................................................... 68
BIBLIOGRAFÍA ............................................................................... 79
iii
LISTA DE FIGURAS
Figura 1. Fuerzas que actúan sobre el vuelo. ........................................................ 3
Figura 2. Sustentación. .......................................................................................... 3
Figura 3. Efecto del viento relativo en el ala. ....................................................... 4
Figura 4. Trayectoria de vuelo y viento relativo. .................................................. 5
Figura 5. Ángulo de incidencia. ............................................................................ 5
Figura 6. Ángulo de ataque y viento relativo. ....................................................... 5
Figura 7. Fuerza de empuje. .................................................................................. 6
Figura 8. Fuerza de resistencia. ............................................................................ 6
Figura 9. Estructura aeronave. .............................................................................. 7
Figura 10. Representación de los ejes del avión. .................................................. 8
Figura 11. Movimiento alerones. .......................................................................... 9
Figura 12. Efecto en la aeronave con el movimiento de los alerones. .................. 9
Figura 13. Movimiento del timón de profundidad. ............................................. 10
Figura 14. Efecto del movimiento del timón de profundidad en el avión. ......... 10
Figura 15. Movimiento del timón de dirección. ................................................. 10
Figura 16. Efecto en el avión con el movimiento del timón de dirección. ......... 11
Figura 17. Superficies secundarias. .................................................................... 11
Figura 18. Movimiento flaps. ............................................................................. 11
Figura 19. Funcionamiento slats. ........................................................................ 12
Figura 20. Funcionamiento spoilers. ................................................................... 12
Figura 21. Bloque de jerarquía superior de AeroSim. ........................................ 16
Figura 22. Bloques que componen “Modelo simple de una aeronave. ............... 17
Figura 23. Bloque Aerodinámica. ....................................................................... 18
Figura 24. Bloques básicos que componen el bloque Aerodinámica. ................ 19
Figura 25. Bloque básico GA Propulsion System. ............................................. 20
Figura 26. Bloque básico Aiercraft Inertial. ....................................................... 20
Figura 27. Bloque Atmósfera. ............................................................................. 21
Figura 28. Componentes básicos del bloque Atmósfera. .................................... 21
Figura 29. Bloque básico Total Acceleration. .................................................... 22
Figura 30. Bloque básico Total Moment. ........................................................... 22
Figura 31. Bloque de Ecuaciones del movimiento. ............................................ 23
iv
Figura 32. Bloques básicos que componen el bloque Ecuaciones de movimiento.
23
Figura 33. Bloque Earth. ..................................................................................... 24
Figura 34. Bloques básicos que componen el bloque Earth. .............................. 25
Figura 35. Mensaje GUIDE de error. ................................................................. 28
Figura 36. Mensaje GUIDE para preguntar. ....................................................... 28
Figura 37. Mensaje GUIDE de aviso. ................................................................. 28
Figura 38. Autopiloto.mdl .................................................................................. 30
Figura 39. Bloques AeroSim. ............................................................................. 31
Figura 40. Conversor de grados a radianes. ........................................................ 32
Figura 41. Componentes de Bloques AeroSim ................................................... 33
Figura 42. Diagrama del bloque de Aproximación de Tierra Plana. .................. 34
Figura 43. Gráfica en dos dimensiones de la trayectoria. ................................... 36
Figura 44. Gráfica en 3D de la trayectoria de la aeronave.................................. 36
Figura 45. Representación gráfica de los ángulos de alabeo, cabeceo y guiñada.
37
Figura 46. Representación gráfica del ángulo de guiñada. ................................. 38
Figura 47. Gráfica de la velocidad de la aeronave. ............................................ 39
Figura 48. Representación del ángulo de descenso. ........................................... 40
Figura 49. Control PID. ...................................................................................... 42
Figura 50. Control PI del timón de dirección. .................................................... 42
Figura 51. Control PID del timón de profundidad. ............................................. 43
Figura 52. Control PI de alerones. ...................................................................... 44
Figura 53. Control PID de parámetro del motor. ................................................ 44
Figura 54. Interfaz gráfica................................................................................... 45
Figura 55. Crear ruta nueva. ............................................................................... 46
Figura 56. Ventana introducción ruta. ................................................................ 47
Figura 57. Ventana cambio ruta. ......................................................................... 47
Figura 58. Visualización de los cambios de la ruta. ........................................... 48
Figura 59. Cambio de ruta. ................................................................................. 49
Figura 60. Visualización de simulación por defecto. .......................................... 50
Figura 61. Visualización simulación con opciones. ........................................... 51
Figura 62. Visualización simulación 3D. ............................................................ 51
Figura 63. Representación ruta1. ........................................................................ 52

v
Figura 64. Simulación ruta1. ............................................................................... 53
Figura 65. Punto de origen .................................................................................. 53
Figura 66. Cambio de punto de origen de la aeronave. ...................................... 54
Figura 67. Subrutina6b. ...................................................................................... 55
Figura 68. Simulación ruta1 con cambio a subrutina6b. .................................... 55
Figura 69. Visualización simulación figura 66. .................................................. 56
Figura 70. Gráfica en 3D de la simulacion2. ...................................................... 57
Figura 71. Gráfica en 2D de la simulacion2. ...................................................... 57
Figura 72. Simulación fallida. ............................................................................. 58
Figura 73. Simulación con velocidad por defecto. ............................................. 59
Figura 74. Simulación con cambio de velocidad. ............................................... 59
Figura 75. Simulacion5. ...................................................................................... 60
Figura 76. Simulacion6. ...................................................................................... 60
Figura 77. Simulación de doble giro. .................................................................. 61
Figura 78. Ascenso y descenso con doble giro. .................................................. 62
Figura 79. Ruta10. .............................................................................................. 63
Figura 80. Simulación de ruta10. ........................................................................ 63
Figura 81. Simulación en dos dimensiones de la ruta10. .................................... 64
Imagen 1 ............................................................................................................. 68
Imagen 2 ............................................................................................................. 69
Imagen 3 ............................................................................................................. 70
Imagen 4 ............................................................................................................. 70
Imagen 5 ............................................................................................................. 70
Imagen 6 ............................................................................................................. 71
Imagen 7 ............................................................................................................. 71
Imagen 8 ............................................................................................................. 72
Imagen 9 ............................................................................................................. 72
Imagen 10 ........................................................................................................... 73
Imagen 11 ........................................................................................................... 74
Imagen 12 ........................................................................................................... 74
Imagen 13 ........................................................................................................... 75
Imagen 14 ........................................................................................................... 75
Imagen 15 ........................................................................................................... 75
Imagen 16 ........................................................................................................... 76

vi
Imagen 17 ........................................................................................................... 77
Imagen 18 ........................................................................................................... 77
Imagen 19 ........................................................................................................... 78
CAPÍTULO 1: I TRODUCCIÓ .
1
1. I�TRODUCCIÓ�
El objetivo principal es crear una aplicación gráfica que simule y monitorice en tiempo
real dada la trayectoria de la aeronave. Se explicara el principio de sustentación de las
aeronaves y las superficies aerodinámicas que intervienen en el control del vuelo de un
avión. Se hará un estudio de las ecuaciones dinámicas del movimiento de un avión1 que
servirán para calcular los futuros movimientos de dichas superficies.
Para construir la aplicación se ha utilizado un modelo básico proporcionado por
alumnos de Ingeniería Aeronáutica2. En el cual se implementan las ecuaciones
dinámicas del movimiento, utilizando sólo dos superficies para el control de la
trayectoria, los alerones y el timón de profundidad. Los alerones para controlar la
dirección y el timón de profundidad para la velocidad. Como se pretende que el control
de trayectoria se realice en los tres ejes del avión, se deben de realizar algunos cambios.
El control de dirección debe de ser del timón de dirección, y los alerones se utilizaran
para realizar giros. El timón de profundidad se dejará igual. Además el modelo básico
no puede realizar despegues, por lo que se hallará la forma para que la aeronave los
ejecute correctamente.
La simulación se implementa con Matlab y Simulink, específicamente con la librería
AeroSim de Simulink. En el capítulo 3 se explicará la implementación de los bloques de
dicha librería con el control PID realizado para el movimiento de las superficies
aerodinámicas.
En cuanto a la aplicación gráfica ha sido realizada con GUIDE y se comentará
brevemente las estructuras utilizadas.
Por último se mostrarán los resultados de las simulaciones de diferentes trayectorias.
1 Para más información ver bibliografía (2). 2 Ver bibliografía (1).

CAPÍTULO 1: I TRODUCCIÓ .
2
1.1. OBJETIVOS
El proyecto tiene varios objetivos descritos a continuación:
• Conociendo la ruta de la aeronave crear una aplicación que simule y monitorice
la trayectoria de la aeronave. Se utilizará el modelo básico comentado
anteriormente en el cual el control únicamente se realiza con un par de
superficies aerodinámicas. Por lo que uno de los objetivos de este proyecto es
realizar el control de la trayectoria con varias superficies aerodinámicas
haciendo que el vuelo sea menos brusco en los virajes y más preciso.
• Realizar una interfaz gráfica la cual permita al usuario realizar todos los
cambios, acciones, etc… sin necesidad de manipular Simulink.
• Si se desea se puede cambiar la trayectoria durante la realización de la
simulación.
• La herramienta desarrollada permite guardar las simulaciones realizadas, para
posteriormente visualizarlas.
• La simulación puede realizarse con los valores de los parámetros que el usuario
desee, como por ejemplo la velocidad máxima.

CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
3
2. CO�CEPTOS BÁSICOS SOBRE AERO�AVES
2.1. PRINCIPIOS AERODINÁMICOS
Sobre una aeronave actúan varias fuerzas, algunas favorables y otras desfavorables. Las
fuerzas básicas que actúan sobre una aeronave durante el vuelo son: sustentación, peso,
empuje y resistencia. La sustentación es opuesta al peso y el empuje a la resistencia.
Figura 1. Fuerzas que actúan sobre el vuelo.
Una aeronave se mantiene estática en el suelo debido a la acción de la gravedad, peso,
que lo mantiene en el suelo, y a la inercia o resistencia al avance, que lo mantiene
parado. Para que la aeronave vuele se necesitara contrarrestar el efecto de estas dos
fuerzas, mediante la sustentación y la tracción (o empuje). La sustentación debe superar
el peso del avión manteniéndolo en el aire y el empuje ha de superar la resistencia que
opone el avión.
2.1.1. Sustentación.
La sustentación es la fuerza de ascensión que permite al avión mantenerse en el aire. Se
crea principalmente en las alas, la cola y, en menor cuantía, en el fuselaje o estructura.
Para que el avión pueda volar la fuerza de sustentación debe igualar a su peso,
contrarrestando así la fuerza de gravedad, como se comentaba anteriormente.
Figura 2. Sustentación.
CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
4
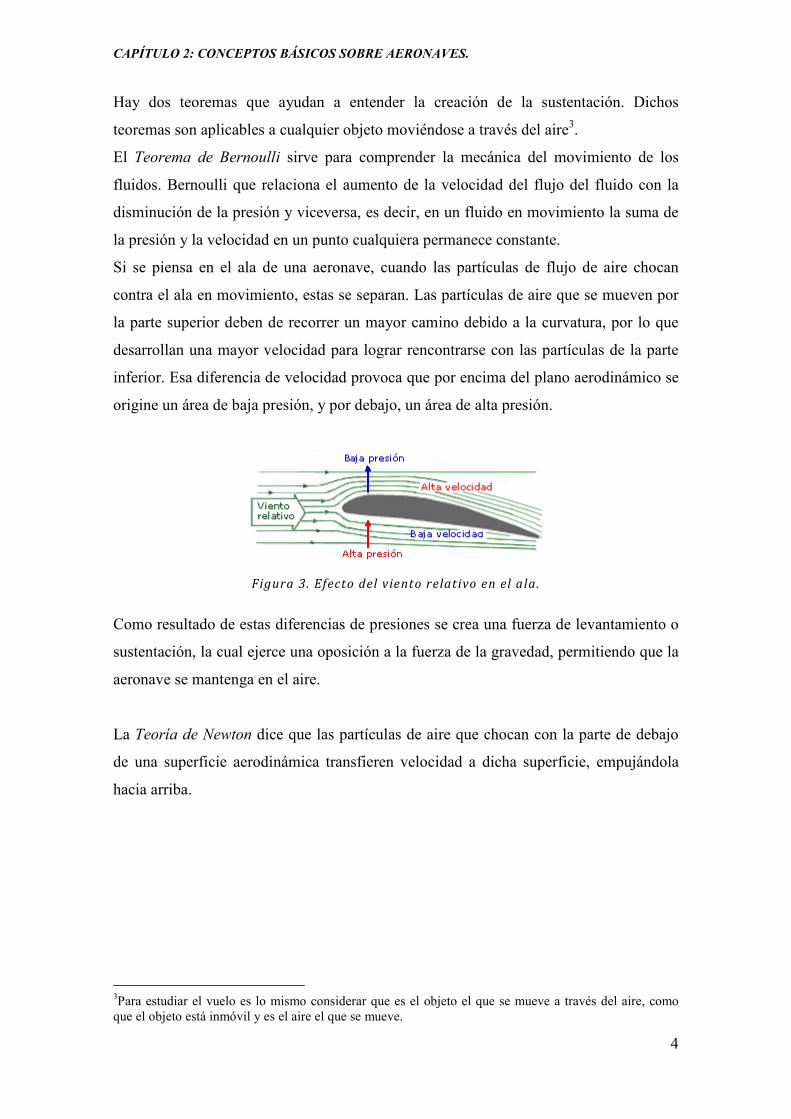
Hay dos teoremas que ayudan a entender la creación de la sustentación. Dichos
teoremas son aplicables a cualquier objeto moviéndose a través del aire3.
El Teorema de Bernoulli sirve para comprender la mecánica del movimiento de los
fluidos. Bernoulli que relaciona el aumento de la velocidad del flujo del fluido con la
disminución de la presión y viceversa, es decir, en un fluido en movimiento la suma de
la presión y la velocidad en un punto cualquiera permanece constante.
Si se piensa en el ala de una aeronave, cuando las partículas de flujo de aire chocan
contra el ala en movimiento, estas se separan. Las partículas de aire que se mueven por
la parte superior deben de recorrer un mayor camino debido a la curvatura, por lo que
desarrollan una mayor velocidad para lograr rencontrarse con las partículas de la parte
inferior. Esa diferencia de velocidad provoca que por encima del plano aerodinámico se
origine un área de baja presión, y por debajo, un área de alta presión.
Figura 3. Efecto del viento relativo en el ala.
Como resultado de estas diferencias de presiones se crea una fuerza de levantamiento o
sustentación, la cual ejerce una oposición a la fuerza de la gravedad, permitiendo que la
aeronave se mantenga en el aire.
La Teoría de �ewton dice que las partículas de aire que chocan con la parte de debajo
de una superficie aerodinámica transfieren velocidad a dicha superficie, empujándola
hacia arriba.
3Para estudiar el vuelo es lo mismo considerar que es el objeto el que se mueve a través del aire, como que el objeto está inmóvil y es el aire el que se mueve.

CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
5
Algunos de los factores que influyen en la sustentación son:
- Actitud del avión: es la orientación de los ejes longitudinal y transversal4 del
avión con respecto al horizonte. Se especifica en términos de posición del morro
o pitch y posición de las alas o bank.
- Trayectoria del vuelo: es la dirección seguida por el perfil aerodinámico (alas o
lo que es lo mismo el avión) durante su desplazamiento en el aire.
- Viento relativo: es el flujo de aire que produce el avión al desplazarse.
Figura 4. Trayectoria de vuelo y viento relativo.
- Ángulo de incidencia5: es el ángulo formado por la cuerda del ala con respecto al
eje longitudinal6 del avión.
Figura 5. Ángulo de incidencia.
- Ángulo de ataque7: es el ángulo formado por la cuerda del ala y la dirección del
viento relativo.
Figura 6. Ángulo de ataque y viento relativo.
4 Para ver más información sobre los ejes del avión ver el punto 2.2.1.1. 5 Este ángulo es fijo, respondiendo a consideraciones de diseño. 6 Para ver más información sobre los ejes del avión ver el punto 2.2.1.1. 7 Este ángulo es variable, dependiendo de la dirección del viento relativo y de la posición de las alas con respecto a este.
CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
6
2.1.2. Peso.
El peso es la fuerza gravitatoria sobre un cuerpo. La fuerza de la gravedad se opone al
levantamiento o sustentación de la aeronave, tanto en tierra como durante el vuelo.
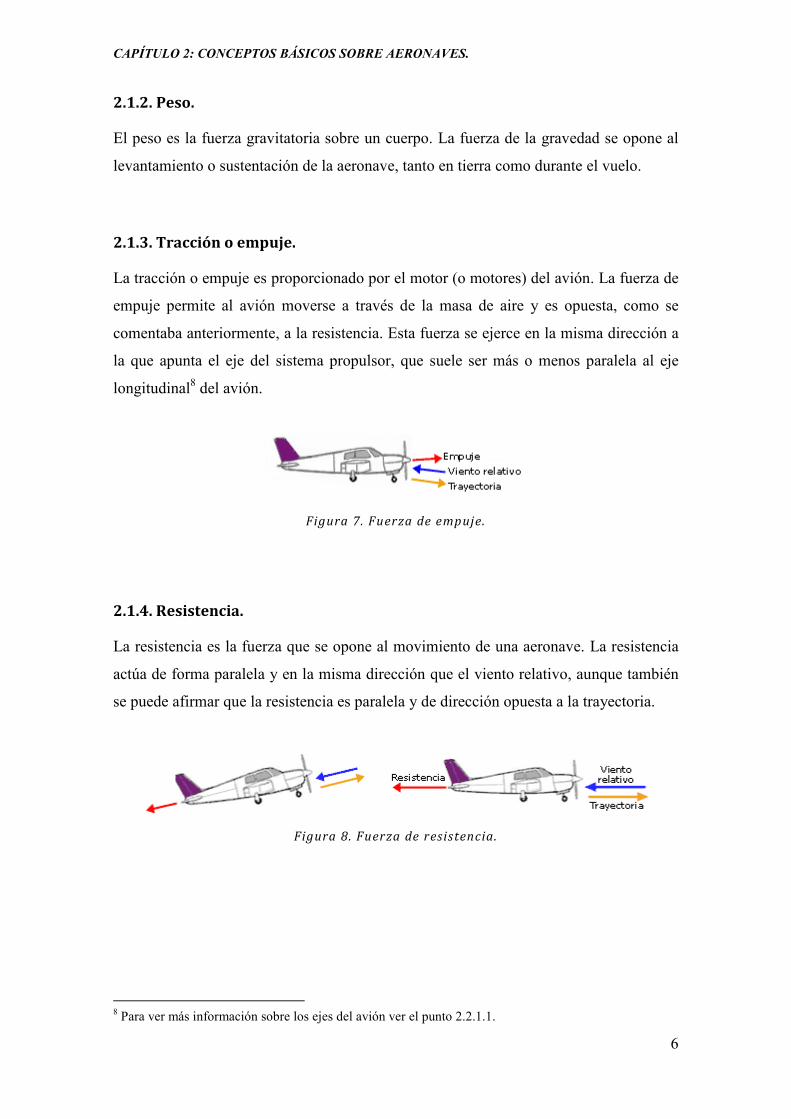
2.1.3. Tracción o empuje.
La tracción o empuje es proporcionado por el motor (o motores) del avión. La fuerza de
empuje permite al avión moverse a través de la masa de aire y es opuesta, como se
comentaba anteriormente, a la resistencia. Esta fuerza se ejerce en la misma dirección a
la que apunta el eje del sistema propulsor, que suele ser más o menos paralela al eje
longitudinal8 del avión.
Figura 7. Fuerza de empuje.
2.1.4. Resistencia.
La resistencia es la fuerza que se opone al movimiento de una aeronave. La resistencia
actúa de forma paralela y en la misma dirección que el viento relativo, aunque también
se puede afirmar que la resistencia es paralela y de dirección opuesta a la trayectoria.
Figura 8. Fuerza de resistencia.
8 Para ver más información sobre los ejes del avión ver el punto 2.2.1.1.

CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
7
2.2. SUPERFICIES AERODINÁMICAS.
Todas las aeronaves están formadas por las siguientes partes principales:
- Fuselaje: es la parte donde se acomoda la tripulación, el pasaje y la carga,
además de servir de soporte principal al resto de los componentes.
- Alas: constituyen la parte estructural donde se crea la sustentación que permite
volar al avión.
- Superficies de mando y control: son las superficies movibles situadas en las alas
y en los empenajes de cola, las cuales con sus movimientos provocan el
movimiento del avión sobre cualquiera de sus ejes (vertical horizontal o
transversal). En este grupo también se consideran las superficies secundarias
cuya función es proporcionar mejoras en la sustentación.
- Sistema estabilizador: su misión es la de contribuir a la estabilidad del avión
sobre sus ejes vertical y horizontal.
- Tren de aterrizaje: su misión es amortiguar el impacto del aterrizaje y permitir el
movimiento del avión en tierra.
- Motor: es el encargado de proporcionar la potencia necesaria para poder volar.
- Sistemas auxiliares: son el resto de sistemas destinados a ayudar a los sistemas
anteriores o para proporcionar confort.
Figura 9. Estructura aeronave.
CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
8
2.2.1. SUPERFICIES DE MANDO Y DE CONTROL
Las superficies de mando y control modifican la aerodinámica del avión provocando un
desequilibrio de fuerzas. Este desequilibrio, es lo que hace que el avión se mueva sobre
uno o más de sus ejes, haciendo que incremente la sustentación o la resistencia.
Se denominan superficies primarias a las que proporcionan control, y superficies
secundarias a las que modifican la sustentación.
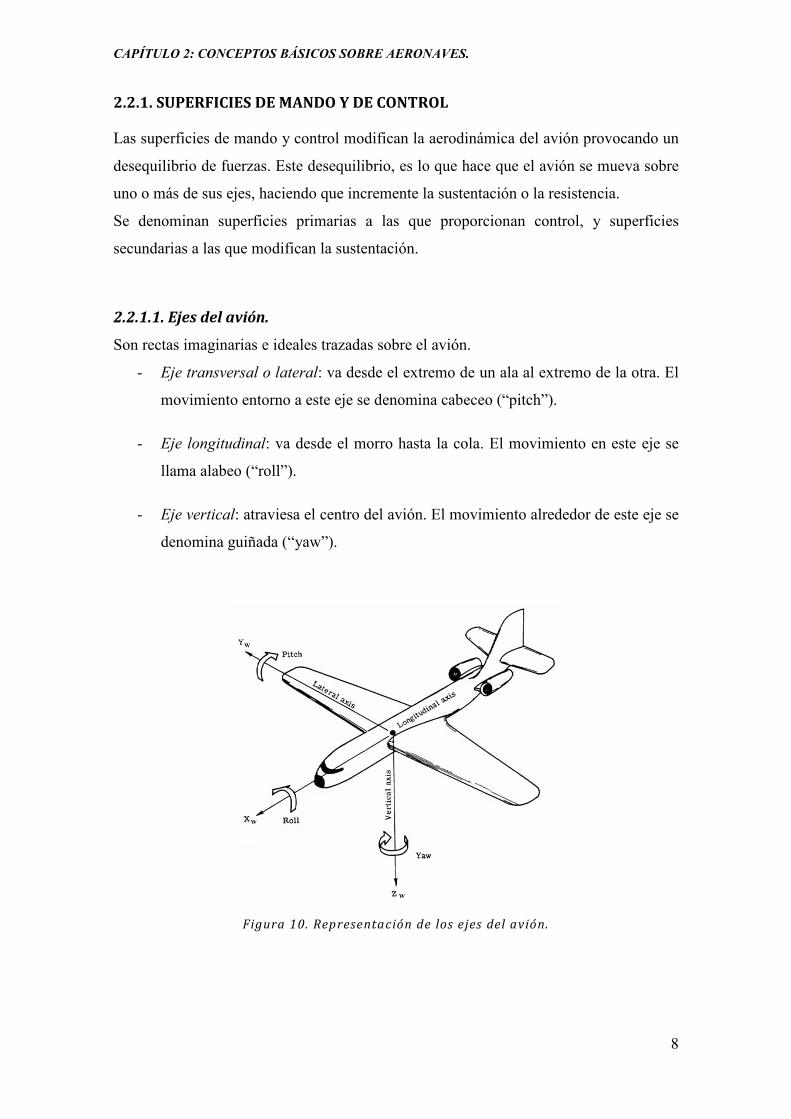
2.2.1.1. Ejes del avión.
Son rectas imaginarias e ideales trazadas sobre el avión.
- Eje transversal o lateral: va desde el extremo de un ala al extremo de la otra. El
movimiento entorno a este eje se denomina cabeceo (“pitch”).
- Eje longitudinal: va desde el morro hasta la cola. El movimiento en este eje se
llama alabeo (“roll”).
- Eje vertical: atraviesa el centro del avión. El movimiento alrededor de este eje se
denomina guiñada (“yaw”).
Figura 10. Representación de los ejes del avión.
CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
9
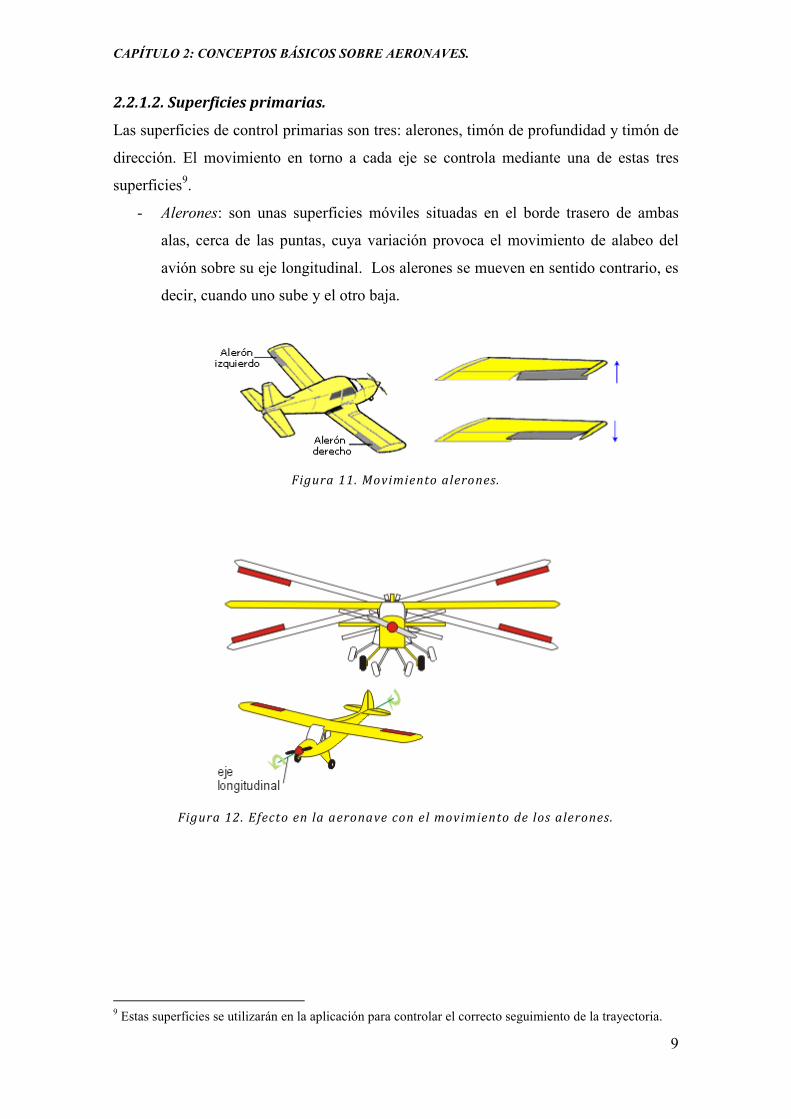
2.2.1.2. Superficies primarias.
Las superficies de control primarias son tres: alerones, timón de profundidad y timón de
dirección. El movimiento en torno a cada eje se controla mediante una de estas tres
superficies9.
- Alerones: son unas superficies móviles situadas en el borde trasero de ambas
alas, cerca de las puntas, cuya variación provoca el movimiento de alabeo del
avión sobre su eje longitudinal. Los alerones se mueven en sentido contrario, es
decir, cuando uno sube y el otro baja.
Figura 11. Movimiento alerones.
Figura 12. Efecto en la aeronave con el movimiento de los alerones.
9 Estas superficies se utilizarán en la aplicación para controlar el correcto seguimiento de la trayectoria.
CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
10
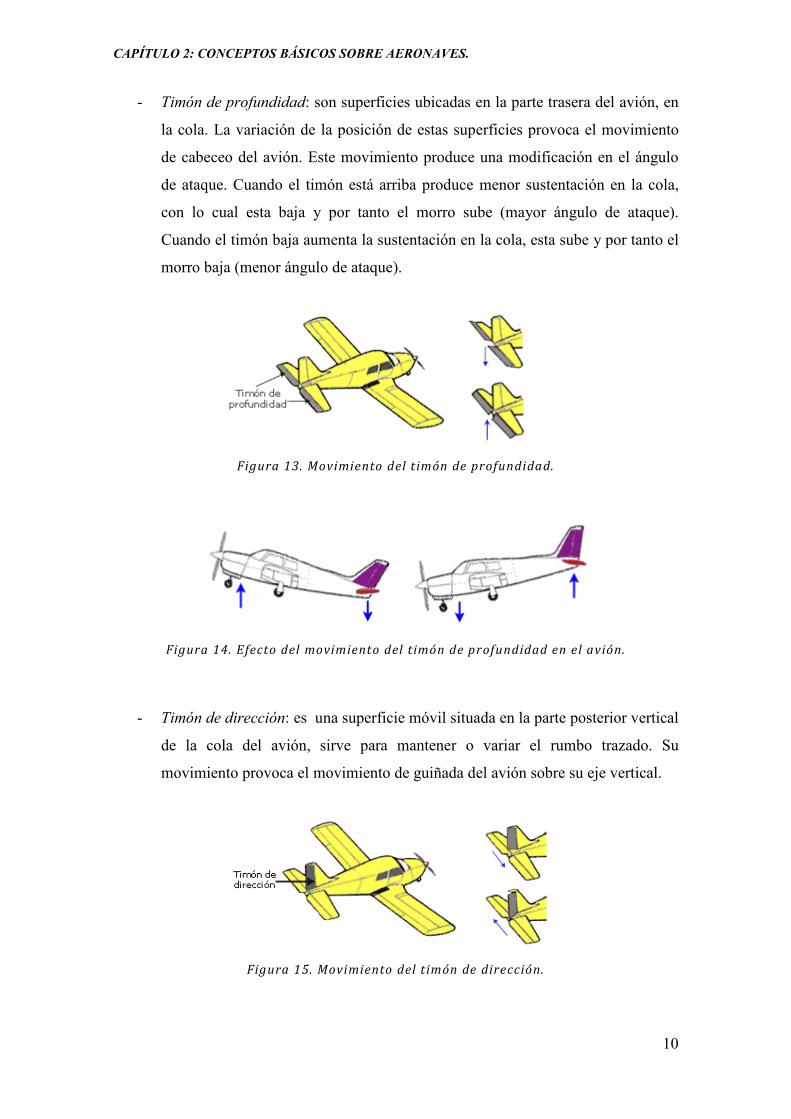
- Timón de profundidad: son superficies ubicadas en la parte trasera del avión, en
la cola. La variación de la posición de estas superficies provoca el movimiento
de cabeceo del avión. Este movimiento produce una modificación en el ángulo
de ataque. Cuando el timón está arriba produce menor sustentación en la cola,
con lo cual esta baja y por tanto el morro sube (mayor ángulo de ataque).
Cuando el timón baja aumenta la sustentación en la cola, esta sube y por tanto el
morro baja (menor ángulo de ataque).
Figura 13. Movimiento del t imón de profundidad.
Figura 14. Efecto del movimiento del t imón de profundidad en el avión.
- Timón de dirección: es una superficie móvil situada en la parte posterior vertical
de la cola del avión, sirve para mantener o variar el rumbo trazado. Su
movimiento provoca el movimiento de guiñada del avión sobre su eje vertical.
Figura 15. Movimiento del t imón de dirección.
CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
11
Figura 16. Efecto en el avión con el movimiento del t imón de dirección.
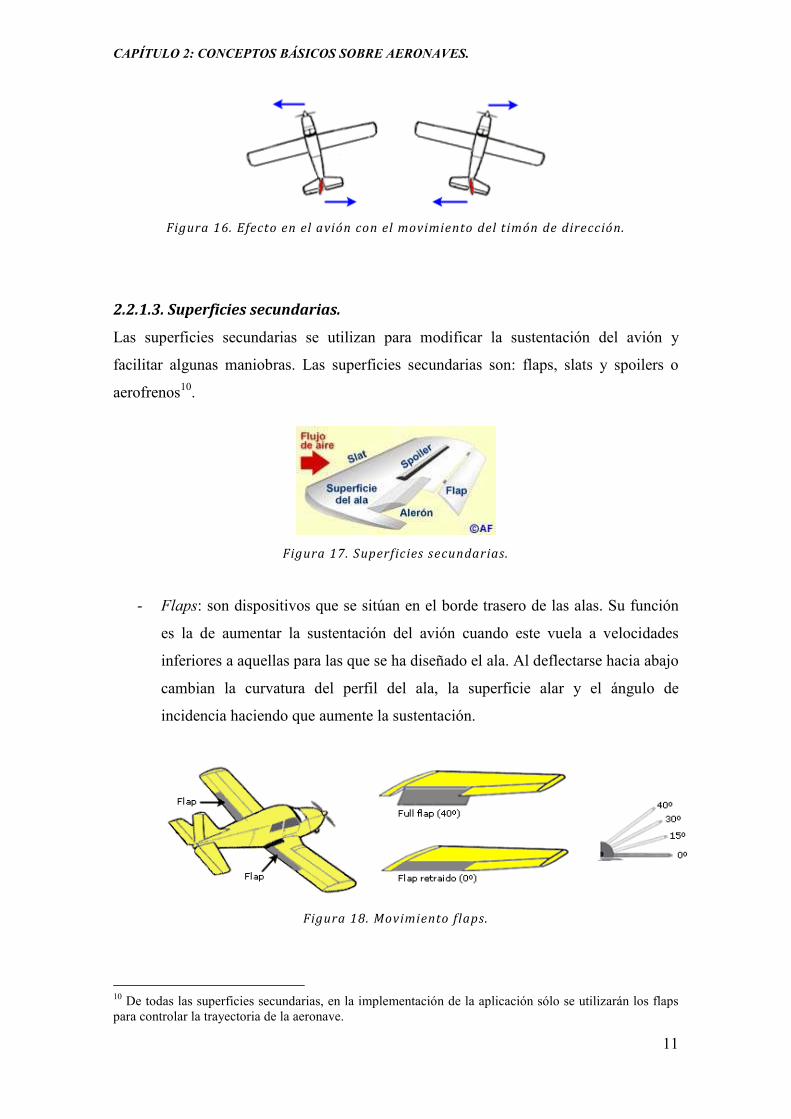
2.2.1.3. Superficies secundarias.
Las superficies secundarias se utilizan para modificar la sustentación del avión y
facilitar algunas maniobras. Las superficies secundarias son: flaps, slats y spoilers o
aerofrenos10.
Figura 17. Superficies secundarias.
- Flaps: son dispositivos que se sitúan en el borde trasero de las alas. Su función
es la de aumentar la sustentación del avión cuando este vuela a velocidades
inferiores a aquellas para las que se ha diseñado el ala. Al deflectarse hacia abajo
cambian la curvatura del perfil del ala, la superficie alar y el ángulo de
incidencia haciendo que aumente la sustentación.
Figura 18. Movimiento flaps.
10 De todas las superficies secundarias, en la implementación de la aplicación sólo se utilizarán los flaps para controlar la trayectoria de la aeronave.
CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
12
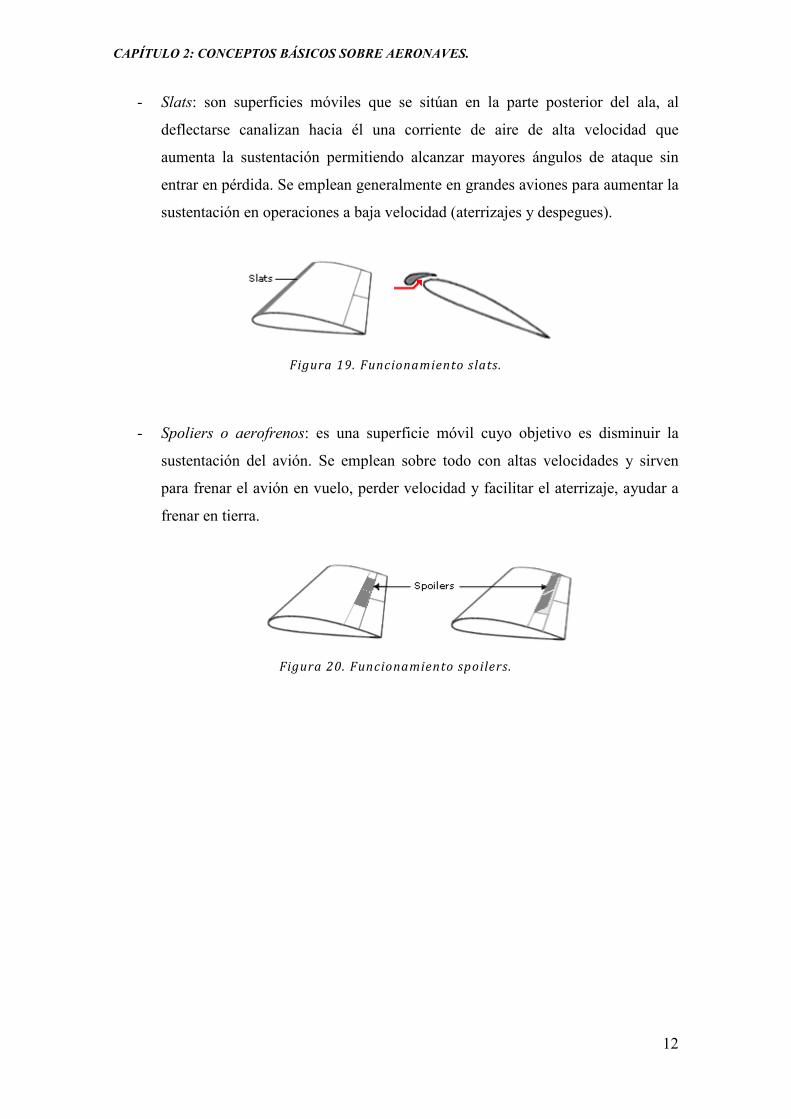
- Slats: son superficies móviles que se sitúan en la parte posterior del ala, al
deflectarse canalizan hacia él una corriente de aire de alta velocidad que
aumenta la sustentación permitiendo alcanzar mayores ángulos de ataque sin
entrar en pérdida. Se emplean generalmente en grandes aviones para aumentar la
sustentación en operaciones a baja velocidad (aterrizajes y despegues).
Figura 19. Funcionamiento slats.
- Spoliers o aerofrenos: es una superficie móvil cuyo objetivo es disminuir la
sustentación del avión. Se emplean sobre todo con altas velocidades y sirven
para frenar el avión en vuelo, perder velocidad y facilitar el aterrizaje, ayudar a
frenar en tierra.
Figura 20. Funcionamiento spoilers.

CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
13
2.3. ECUACIONES DINÁMICAS
Para poder definir las ecuaciones dinámicas de vuelo, es necesario explicar los sistemas
de referencia usados. Existen seis sistemas de referencia en mecánica de vuelo: sistema
de referencia inercial, sistema de referencia geocéntrico giratorio, sistema de ejes tierra,
sistema de ejes horizonte local, sistema de ejes cuerpo y sistema de ejes viento. De los
seis se utilizarán únicamente tres:
- Sistema ejes tierra (�� �� ��). Un sistema global con origen fijo situado en la
tierra.
- Sistema ejes horizonte local (�� �� ��). Un sistema con origen en el centro de
masas del vehículo y paralelo a los ejes tierra.
- Sistema ejes velocidad (�� �� ��).
Para poder establecer una relación entre los ejes de horizonte local y los ejes velocidad
se define un sistema auxiliar (�� �� ��) para poder realizar la transformación entre
ambos.
��� = cos � ����� 0−����� cos � 00 0 1� ��� = cos � −����� 0����� cos � 00 0 1�
��� = cos � 0 �����0 1 0−����� 0 cos �� ��� = cos � 0 −�����0 1 0����� 0 cos � �
� = ������ℎ = ���ℎ
ℎ = ������� = ����
Siendo: � → �á������ ��!�"��#���[−% 2' , % 2' ] � → á������ ����"ñ! !��[0, 2%]

CAPÍTULO 2: CO CEPTOS BÁSICOS SOBRE AERO AVES.
14
Si a las relaciones dinámicas de fuerzas y momentos se proyectan los teoremas de la
cantidad de movimiento y del momento cinético en el sistema de ejes cuerpo,
finalmente se obtiene:
+,���- cos � − . −/������ − / 0 # = 0
+,���-������ − 1 +/�,���������3 + /0 4 � # ����3 − � # cos � cos 35 = 0
−+����- − � + /�,���� cos 3 + /0 4 � # cos 3 + � # cos ������35 = 0
Siendo - el ángulo de ataque, T el empuje, � el resbalamiento del empuje, D, Q y L son
las fuerzas aerodinámicas en los tres ejes (x, y, z).
Quedando las relaciones cinemáticas lineales:
6 # = 0,���� cos �
7 # = 0,����������
8 # = −0������ → � ℎ # = 0�����
La última relación se puede formular de la siguiente manera: 0� = 9�9: = 0����� donde 0� es la velocidad ascensional del avión y h la altitud11.
11 Esta relación se utilizará para calcular la velocidad de descenso deseada, la cual es necesaria para saber el movimiento del timón de profundidad. Para saber más sobre las ecuaciones ver la bibliografía (2).
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
15
3. DESCRIPCIÓ� DEL MODELO DISEÑADO Y
DESARROLLADO
El modelo básico utilizado se compone de bloques de la librería AeroSim los cuales
simulan el comportamiento de la aeronave. Para ello se necesita unos parámetros que
son proporcionados por los controles PI y PID de las superficies además de otros que
son directamente suministrados por la función de Matlab, autopiloto.m. Esta función
determina los ángulos de alabeo, cabeceo y guiñada, necesarios para el cálculo del
movimiento de las superficies aerodinámicas. A continuación se describe cada uno de
los bloques de la librería AeroSim utilizados.
3.1. LIBRERÍA AEROSIM
Los bloques de simulación aeronáutica que componen la librería AeroSim proporcionan
una completa herramienta para desarrollar modelos dinámicos de aviones con seis
grados de libertad. También incluye modelos completos de aviones que pueden ser
personalizados a través de los archivos de parámetros. 12
Para poder analizar los bloques de dicha librería se empieza por el bloque de jerarquía
superior que se muestra en la figura 21.
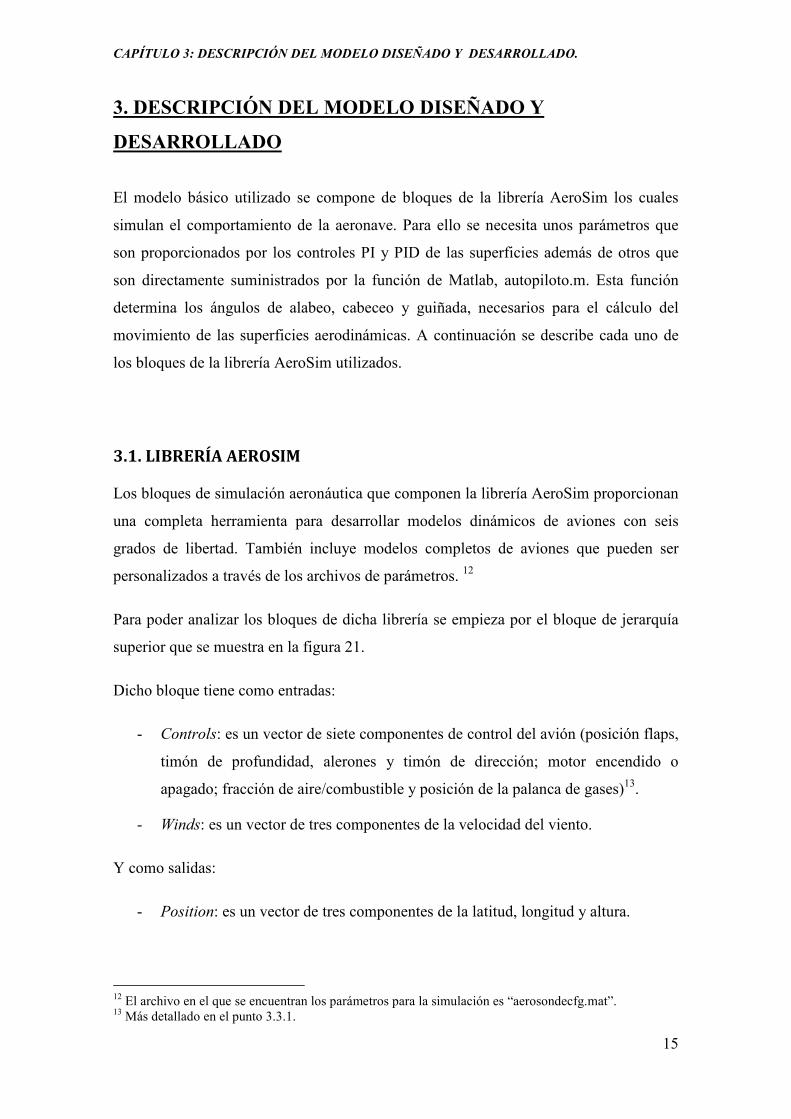
Dicho bloque tiene como entradas:
- Controls: es un vector de siete componentes de control del avión (posición flaps,
timón de profundidad, alerones y timón de dirección; motor encendido o
apagado; fracción de aire/combustible y posición de la palanca de gases)13.
- Winds: es un vector de tres componentes de la velocidad del viento.
Y como salidas:
- Position: es un vector de tres componentes de la latitud, longitud y altura.
12 El archivo en el que se encuentran los parámetros para la simulación es “aerosondecfg.mat”. 13 Más detallado en el punto 3.3.1.
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
16
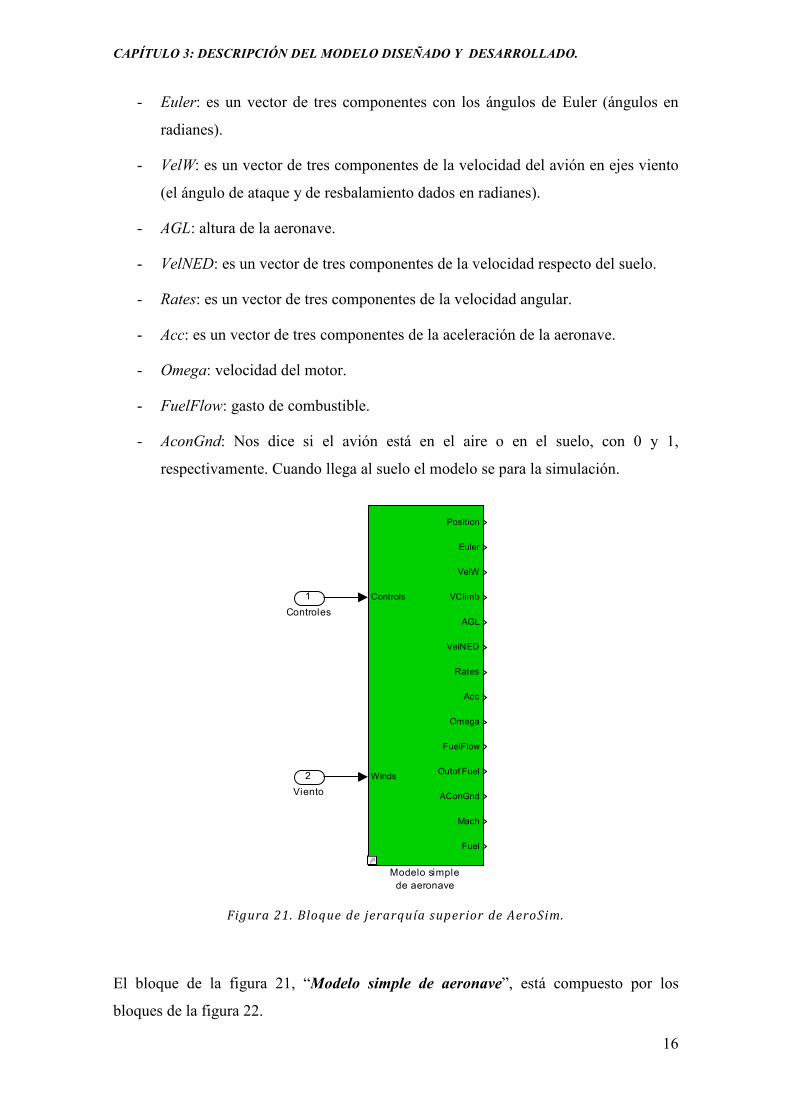
- Euler: es un vector de tres componentes con los ángulos de Euler (ángulos en
radianes).
- VelW: es un vector de tres componentes de la velocidad del avión en ejes viento
(el ángulo de ataque y de resbalamiento dados en radianes).
- AGL: altura de la aeronave.
- Vel�ED: es un vector de tres componentes de la velocidad respecto del suelo.
- Rates: es un vector de tres componentes de la velocidad angular.
- Acc: es un vector de tres componentes de la aceleración de la aeronave.
- Omega: velocidad del motor.
- FuelFlow: gasto de combustible.
- AconGnd: Nos dice si el avión está en el aire o en el suelo, con 0 y 1,
respectivamente. Cuando llega al suelo el modelo se para la simulación.
Figura 21. Bloque de jerarquía superior de AeroSim.
El bloque de la figura 21, “Modelo simple de aeronave”, está compuesto por los
bloques de la figura 22.
Controls
Winds
Position
Euler
VelW
VClimb
AGL
VelNED
Rates
Acc
Omega
FuelFlow
Outof Fuel
AConGnd
Mach
Fuel
Modelo simplede aeronave
2
Viento
1
Controles

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
17
Figura 22. Bloques que componen “Modelo simple de una aeronave.
14
Fuel
13
Mach
12
AConGnd
11
OutofFuel
10
FuelFlow
9
Omega
8 Acc
7
Rates
6
VelNED
5
AGL4
VClimb
3
VelW
2
Euler
1
Position
Faero
Maero
Fprop
Mprop
CGpos
Mcg
Total Moment
Faero
Fprop
Mass
Acc
Total Acceleration
Control
OutofFuel
p T rho
WindAxesVel
RST
Fprop
Mprop
Omega
FuelFlow
EngCoeff
PropCoeff
GA Propulsion System
Accel
Moment
Inertia
Rearth
Gravity
AConGnd
RST
VelB
Rates
Quaternions
Position
Groundspeed
DCM
Euler
Ang Acc
Ecuaciones del
movimiento
Position
DCM
MSL
AGL
AConGnd
Rearth
Requiv
Gravity
MagField
ECEF
Earth
Demux
Demux
MSL
AGL
Winds
VelB
VelW
DCM
pstatic
OAT
rho a
WindVel
WindRates
Atmósfera
FuelFlow
RST
Fuel
Mass
CGpos
Inertia
OutofFuel
Aircraft Inertia
VelB
WindB
Rates
WindRates
AeroCon
rho
a
Faero
Maero
AeroCoeff
VelW
Mach
pdyn
Aerodinámica
2
Winds
1
Controls
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
18
3.1.1. AERODINÁMICA.
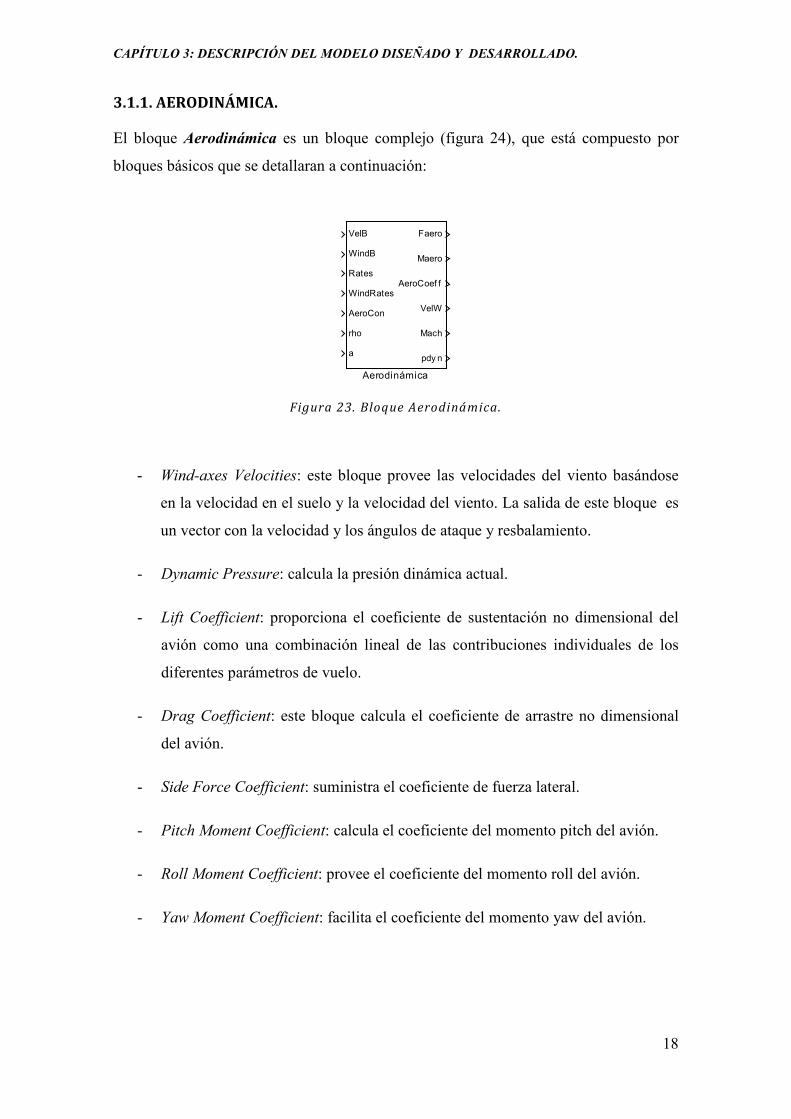
El bloque Aerodinámica es un bloque complejo (figura 24), que está compuesto por
bloques básicos que se detallaran a continuación:
Figura 23. Bloque Aerodinámica.
- Wind-axes Velocities: este bloque provee las velocidades del viento basándose
en la velocidad en el suelo y la velocidad del viento. La salida de este bloque es
un vector con la velocidad y los ángulos de ataque y resbalamiento.
- Dynamic Pressure: calcula la presión dinámica actual.
- Lift Coefficient: proporciona el coeficiente de sustentación no dimensional del
avión como una combinación lineal de las contribuciones individuales de los
diferentes parámetros de vuelo.
- Drag Coefficient: este bloque calcula el coeficiente de arrastre no dimensional
del avión.
- Side Force Coefficient: suministra el coeficiente de fuerza lateral.
- Pitch Moment Coefficient: calcula el coeficiente del momento pitch del avión.
- Roll Moment Coefficient: provee el coeficiente del momento roll del avión.
- Yaw Moment Coefficient: facilita el coeficiente del momento yaw del avión.
VelB
WindB
Rates
WindRates
AeroCon
rho
a
Faero
Maero
AeroCoef f
VelW
Mach
pdy n
Aerodinámica
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
19
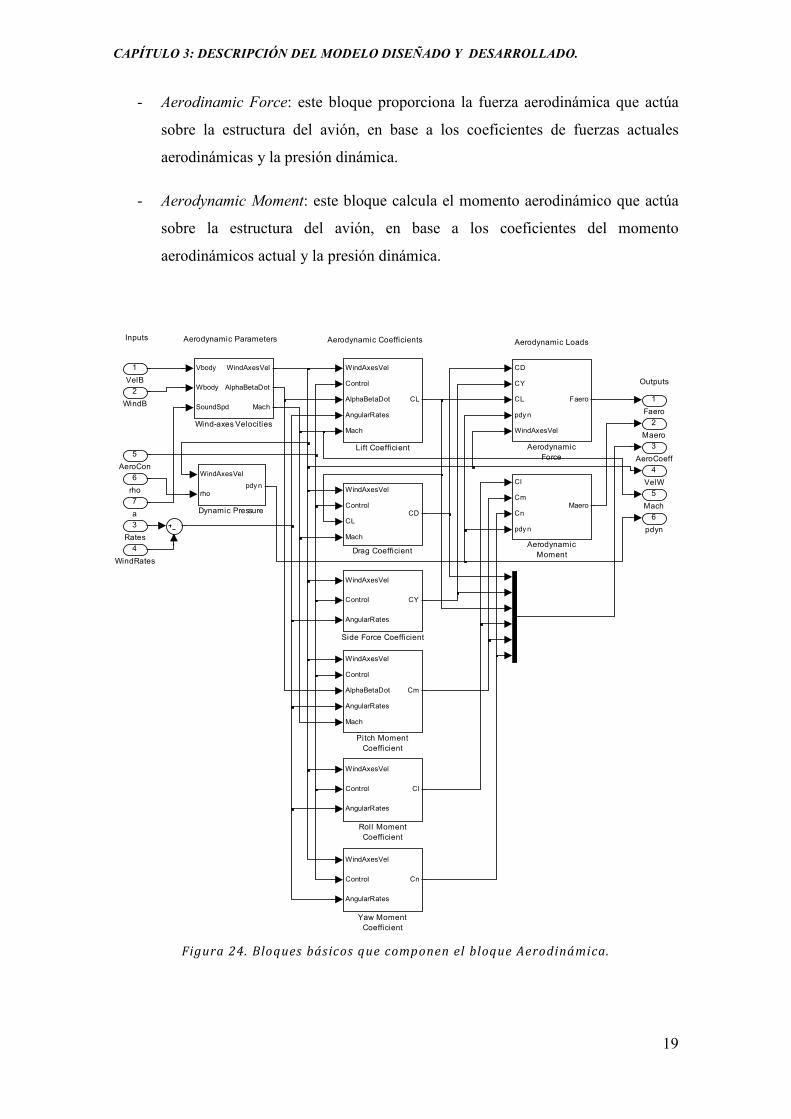
- Aerodinamic Force: este bloque proporciona la fuerza aerodinámica que actúa
sobre la estructura del avión, en base a los coeficientes de fuerzas actuales
aerodinámicas y la presión dinámica.
- Aerodynamic Moment: este bloque calcula el momento aerodinámico que actúa
sobre la estructura del avión, en base a los coeficientes del momento
aerodinámicos actual y la presión dinámica.
Figura 24. Bloques básicos que componen el bloque Aerodinámica.
Inputs
Outputs
Aerodynamic Parameters Aerodynamic Coefficients Aerodynamic Loads
6
pdyn
5
Mach
4
VelW
3
AeroCoeff
2
Maero
1
Faero
WindAxesVel
Control
AngularRates
Cn
Yaw MomentCoefficient
Vbody
Wbody
SoundSpd
WindAxesVel
AlphaBetaDot
Mach
Wind-axes Velocities
WindAxesVel
Control
AngularRates
CY
Side Force Coefficient
WindAxesVel
Control
AngularRates
Cl
Roll MomentCoefficient
WindAxesVel
Control
AlphaBetaDot
AngularRates
Mach
Cm
Pitch MomentCoefficient
WindAxesVel
Control
AlphaBetaDot
AngularRates
Mach
CL
Lift Coefficient
WindAxesVel
rhopdyn
Dynamic Pressure
WindAxesVel
Control
CL
Mach
CD
Drag Coefficient
Cl
Cm
Cn
pdyn
Maero
AerodynamicMoment
CD
CY
CL
pdyn
WindAxesVel
Faero
AerodynamicForce
7
a
6
rho
5
AeroCon
4
WindRates
3
Rates
2
WindB
1
VelB
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
20
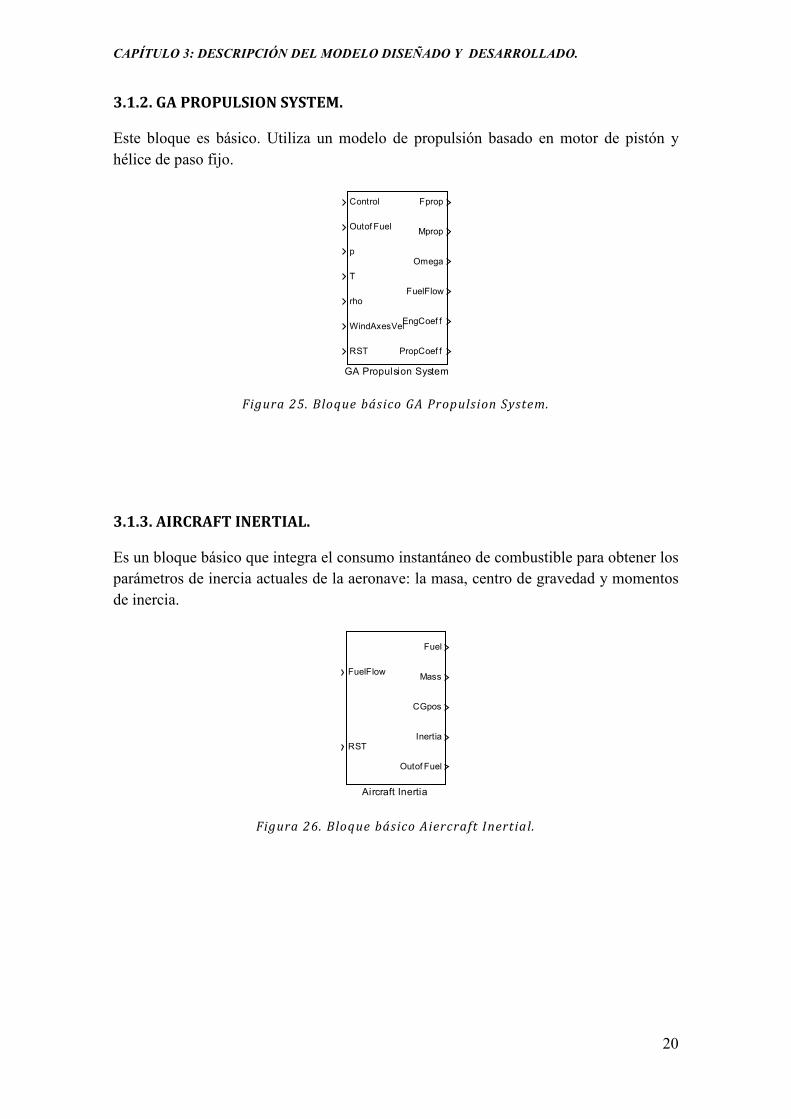
3.1.2. GA PROPULSION SYSTEM.
Este bloque es básico. Utiliza un modelo de propulsión basado en motor de pistón y hélice de paso fijo.
Figura 25. Bloque básico GA Propulsion System.
3.1.3. AIRCRAFT INERTIAL.
Es un bloque básico que integra el consumo instantáneo de combustible para obtener los parámetros de inercia actuales de la aeronave: la masa, centro de gravedad y momentos de inercia.
Figura 26. Bloque básico Aiercraft Inertial.
Control
Outof Fuel
p
T
rho
WindAxesVel
RST
Fprop
Mprop
Omega
FuelFlow
EngCoef f
PropCoef f
GA Propulsion System
FuelFlow
RST
Fuel
Mass
CGpos
Inertia
Outof Fuel
Aircraft Inertia
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
21
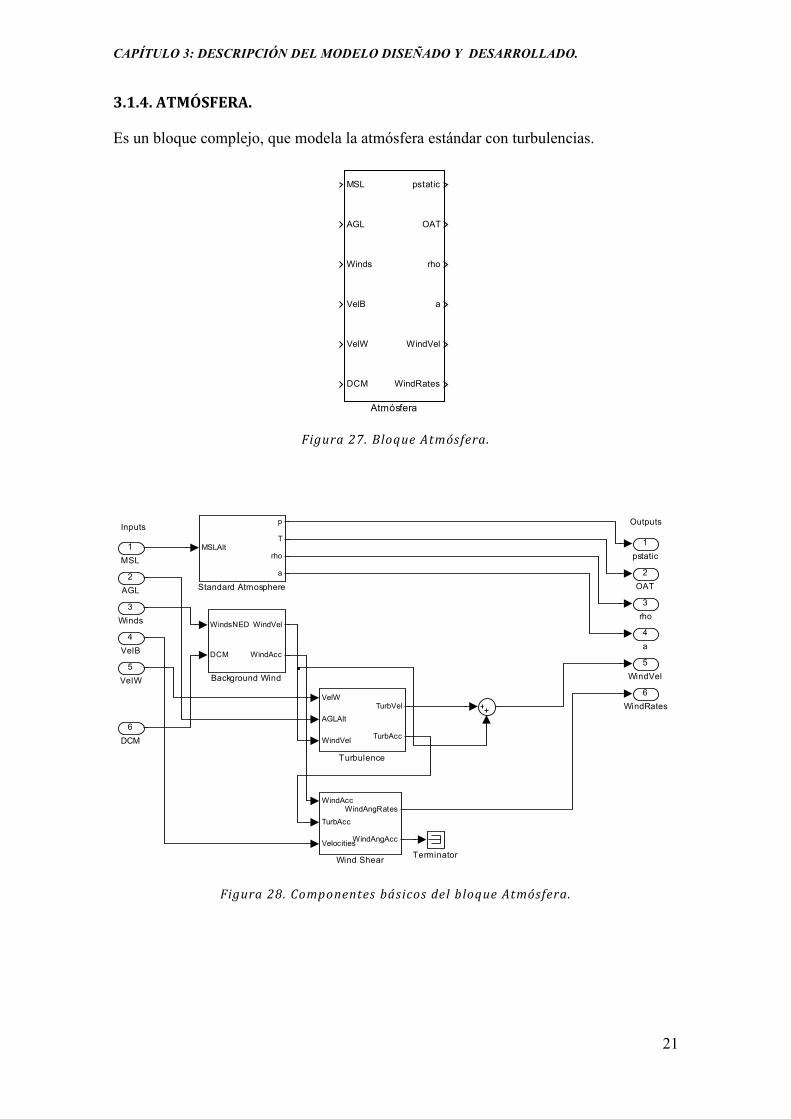
3.1.4. ATMÓSFERA.
Es un bloque complejo, que modela la atmósfera estándar con turbulencias.
Figura 27. Bloque Atmósfera.
Figura 28. Componentes básicos del bloque Atmósfera.
MSL
AGL
Winds
VelB
VelW
DCM
pstatic
OAT
rho
a
WindVel
WindRates
Atmósfera
OutputsInputs
6
WindRates
5
WindVel
4
a
3
rho
2
OAT
1
pstatic
WindAcc
TurbAcc
Velocities
WindAngRates
WindAngAcc
Wind Shear
VelW
AGLAlt
WindVel
TurbVel
TurbAcc
Turbulence
Terminator
MSLAlt
p
T
rho
a
Standard Atmosphere
WindsNED
DCM
WindVel
WindAcc
Background Wind
6
DCM
5
VelW
4
VelB
3
Winds
2
AGL
1
MSL
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
22
Los bloques básicos que componen al bloque Atmósfera son:
- Standart Atmosphere: provee los parámetros de aire para la altitud actual.
- Background Wind: El bloque proporciona los componentes de la velocidad
viento en ejes cuerpo.
- Turbulence.
- Wind Shear: el bloque calcula los efectos de velocidad angular causados por la
variación en el tiempo/espacio del viento y las velocidades de turbulencia.
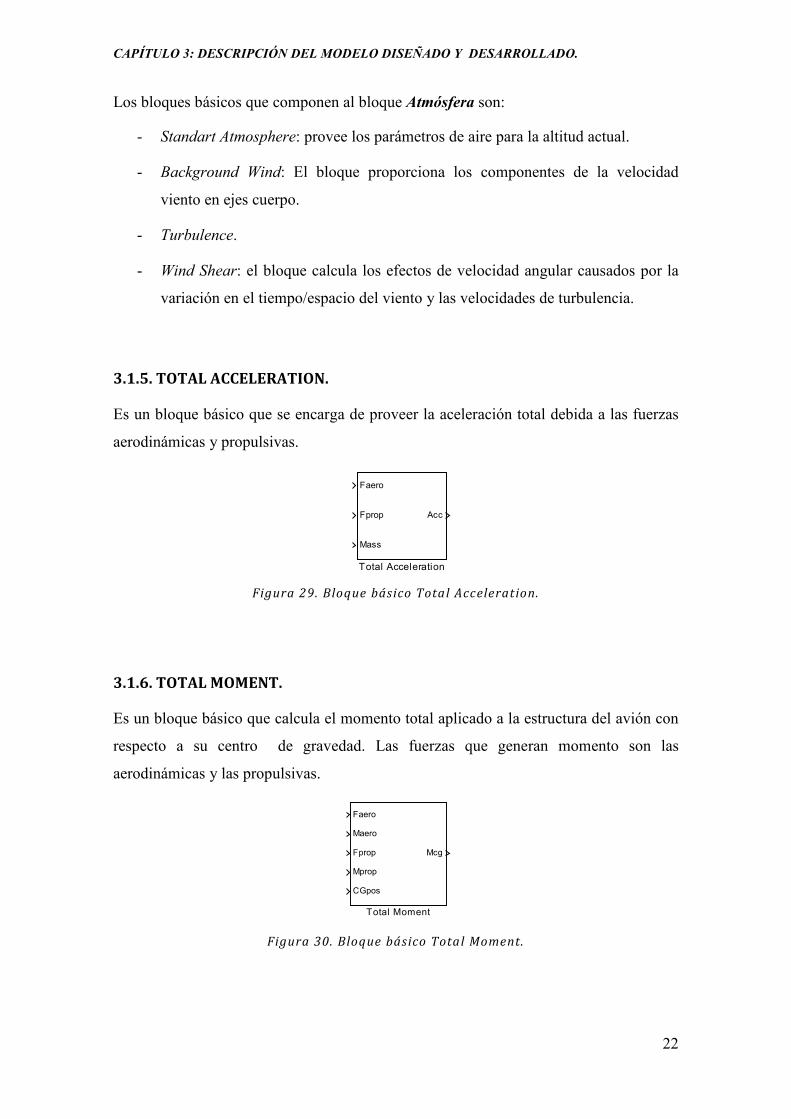
3.1.5. TOTAL ACCELERATION.
Es un bloque básico que se encarga de proveer la aceleración total debida a las fuerzas
aerodinámicas y propulsivas.
Figura 29. Bloque básico Total Acceleration.
3.1.6. TOTAL MOMENT.
Es un bloque básico que calcula el momento total aplicado a la estructura del avión con
respecto a su centro de gravedad. Las fuerzas que generan momento son las
aerodinámicas y las propulsivas.
Figura 30. Bloque básico Total Moment.
Faero
Fprop
Mass
Acc
Total Acceleration
Faero
Maero
Fprop
Mprop
CGpos
Mcg
Total Moment
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
23
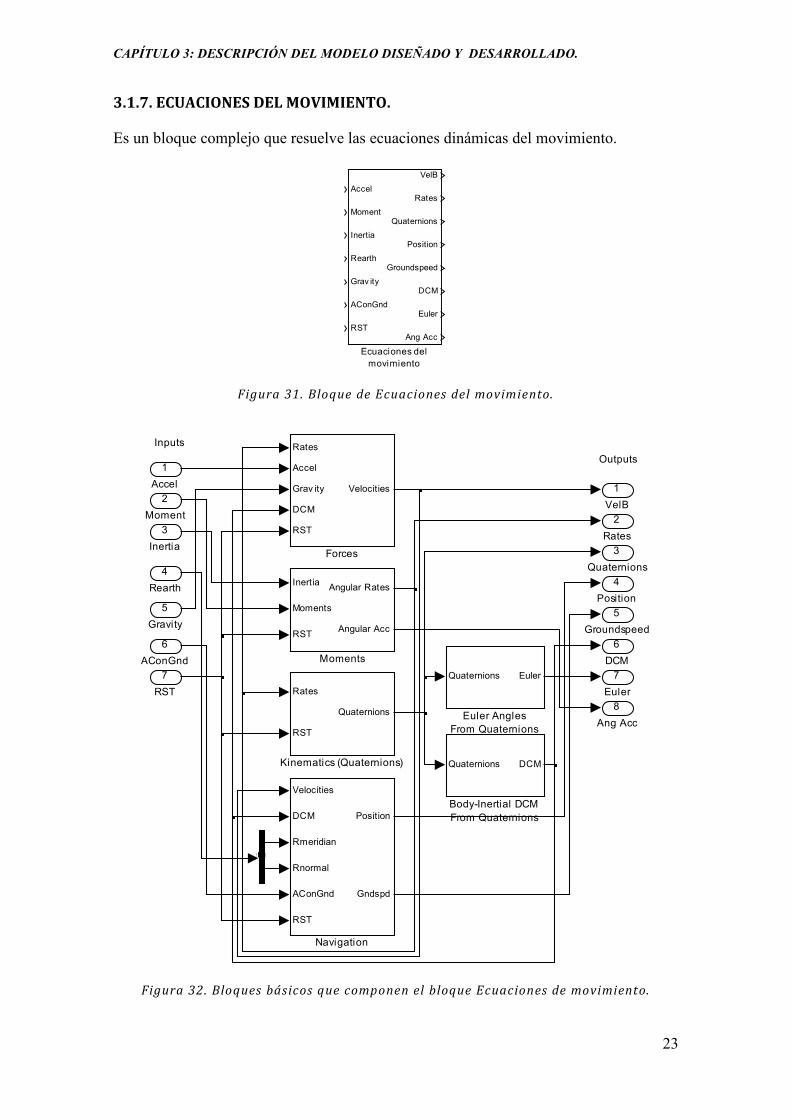
3.1.7. ECUACIONES DEL MOVIMIENTO.
Es un bloque complejo que resuelve las ecuaciones dinámicas del movimiento.
Figura 31. Bloque de Ecuaciones del movimiento.
Figura 32. Bloques básicos que componen el bloque Ecuaciones de movimiento.
Accel
Moment
Inertia
Rearth
Grav ity
AConGnd
RST
VelB
Rates
Quaternions
Position
Groundspeed
DCM
Euler
Ang Acc
Ecuaciones delmovimiento
Inputs
Outputs
8
Ang Acc
7
Euler
6
DCM
5
Groundspeed
4
Position
3
Quaternions
2
Rates
1
VelB
Velocities
DCM
Rmeridian
Rnormal
AConGnd
RST
Position
Gndspd
Navigation
Inertia
Moments
RST
Angular Rates
Angular Acc
Moments
Rates
RST
Quaternions
Kinematics (Quaternions)
Rates
Accel
Grav ity
DCM
RST
Velocities
Forces
Quaternions Euler
Euler AnglesFrom Quaternions
Demux
Quaternions DCM
Body-Inertial DCMFrom Quaternions
7
RST
6
AConGnd
5
Gravity
4
Rearth
3
Inertia
2
Moment
1
Accel
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
24
A continuación se detalla cada uno de los bloques:
- Forces: este bloque implementa las ecuaciones de fuerza de seis grados de
libertad de cuerpo rígido las cuales describen la variación en el tiempo de las
velocidades del avión.
- Moments: implementa las ecuaciones de momento de seis grados de libertad de
cuerpos rígidos para obtener los tipos de cuerpo angular instantáneo.
- Kinematic (Quaternions): integra las velocidades angulares de obtener la actitud
de la aeronave.
- �avigation: El bloque incorpora las ecuaciones de navegación para obtener la
posición actual del avión.
- Euler angles from quaternions: convierte cuaterniones en ángulos de Euler.
- Body-Inertial DCM from quaternions: calcula la matriz de dirección coseno para
la transformación inercial de estructura.
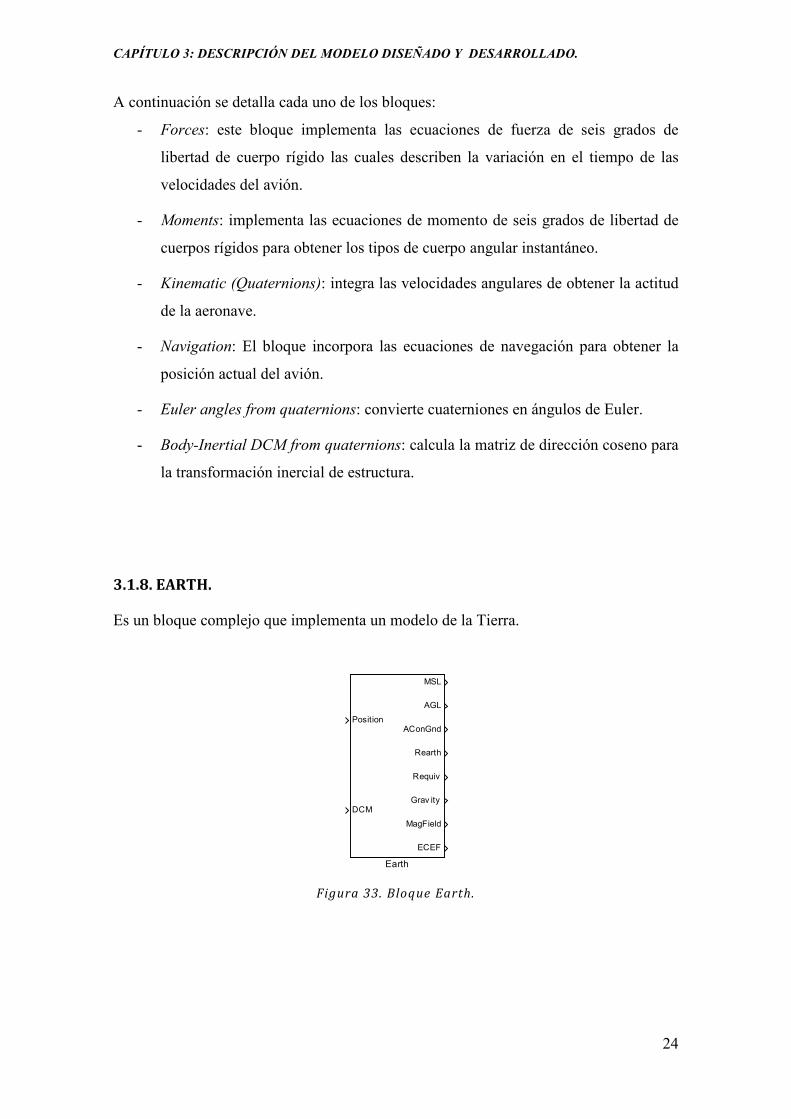
3.1.8. EARTH.
Es un bloque complejo que implementa un modelo de la Tierra.
Figura 33. Bloque Earth.
Position
DCM
MSL
AGL
AConGnd
Rearth
Requiv
Grav ity
MagField
ECEF
Earth

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
25
Figura 34. Bloques básicos que componen el bloque Earth.
Los bloques por los que está compuesto son:
- WGS-84: calcula el radio de la Tierra y la gravedad de la actual posición del
avión usando los coeficientes del modelo WGS-84.
- EGM-96: proporciona la altitud del nivel del mar con respecto a la elipsoide
WGS-84 usando el modelo EGM-96.
- WMM-2000: provee las componentes de campo magnético de la Tierra en la
actual posición.
- ECEF Position: proporciona la altura del nivel del mar con respecto al elipsoide
WGS-84.
- Ground Detection: El bloque de detección de baja altitud de la aeronave calcula
el nivel del suelo y establece un indicador si es cero.
OutputsInputs
8
ECEF
7
MagField
6
Gravity
5
Requiv
4
Rearth
3
AConGnd
2
AGL
1
MSL
Position
DCM
MagField
WMM-2000
Position
Rmeridian
Rnormal
Re
Grav ity
WGS-84
MSLAlt
GndAlt
AConGnd
AGLAlt
Ground Detection
-C-
Ground Alt
Position MSLAlt
EGM-96
LLA ECEF
ECEF Position
2
DCM
1
Position

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
26
3.2. DESCRIPCIÓN DE LA HERRAMIENTA UTILIZADA PARA
MONITORIZACIÓN Y GENERACIÓN DE TRAYECTORIA (GUIDE).
GUIDE es un entorno de programación visual en MATLAB que sirve para realizar y
ejecutar programas en tiempo real. En este caso se utilizará para implementar la interfaz
gráfica de la aplicación en la cual se podrán cargar desde los datos de la trayectoria para
que comience la simulación, como la posibilidad de representar cualquier simulación
realizada con anterioridad.
Los componentes de GUIDE que han sido utilizados son:
- Push button: es un botón que invoca un evento cuando es pulsado.
- Radio button: indica una opción que puede ser seleccionada.
- Check box: indica el estado de una opción.
- Edit text: cuadro para editar texto.
- Static text: muestra texto en un cuadro.
- Listbox: es una lista deslizable.
- Axes: permite representar gráficas o imágenes.
- Panel: agrupa componentes.
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
27
- Table: es una tabla en la que se puede escribir.
Una aplicación GUIDE consta de dos archivos: .m y .fig. El archivo .m es el que
contiene el código con las correspondencias de los botones de control de la interfaz, y el
archivo .fig contiene los elementos gráficos. En el caso de la aplicación que se
desarrolla en este trabajo, dichos archivos se llaman Menu (Menu.m y Menu.fig).
Cada uno de los componentes lleva asociado una función del tipo Callback:
function componente_Callback(hObject, eventdata, handles)
la cual se corresponde con la subrutina que se ejecutará cuando se realice una
determinada acción sobre el elemento. Por ejemplo, cuando se pulse el botón Comenzar
se empezará la subrutina correspondiente a comenzar la simulación14.
Los valores de las propiedades de los componentes (posición, texto,…) y los valores de
las variables transitorias del programa se almacenan en una estructura. Dichos valores
se pueden acceder mediante un único y mismo identificador:
handles.output = hObject;
handles, es el identificador de los datos de la aplicación.
guidata, es la sentencia para salvar los datos de la aplicación, de la siguiente manera:
guidata(hObject, handles);
La asignación u obtención de valores de los componentes se realiza mediante las
sentencias get y set. Por ejemplo si se quiere que la variable var tenga el valor del Text15
se escribe:
var= get(handles.text1,'Value');
14 Ver punto 4. 15 Siendo text1, un recuadro de texto estático.
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
28
Además GUIDE contiene instrucciones especificas que producen ventanas para mostrar
errores, preguntas, advertencias, etc… Entre ellas las más destacadas son:
- Errordlg: sirve para mostrar mensajes de error.
errordlg('Mensaje de error.',' Título ');
Figura 35. Mensaje GUIDE de error.
- Questdlg: sirve para preguntar al usuario y en función de lo contestado realizar
una u otra acción.
questdlg('¿Pregunta a realizar?','Título','Si','No','No');
Figura 36. Mensaje GUIDE para preguntar.
- Warndlg: son ventanas de aviso que informan al usuario sobre algún hecho en
particular.
warndlg('Mensaje de información','Aviso')
Figura 37. Mensaje GUIDE de aviso.
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
29
3.3. IMPLEMENTACIÓN EN MATLAB/SIMULINK
Como anteriormente se ha comentado la aplicación elaborada en este trabajo, consiste
en una interfaz gráfica que permite simular y monitorizar la trayectoria deseada de una
aeronave. Se utiliza GUIDE para implementar la interfaz de usuario. Desde esta se
podrá ejecutar la simulación con Matlab/Simulink, autopiloto.mdl, gracias a los puntos
proporcionados en la trayectoria deseada. Además desde la interfaz de usuario se
ejecutan otras ventanas GUIDE para realizar cambios en la trayectoria o guardar
simulaciones, etc16.
Al usuario se le da la posibilidad de poder simular en modo normal o rápido. Por
defecto se realiza en modo rápido, pero existe la posibilidad de simularlo en modo
normal para que el usuario pueda visualizar con más claridad toda la trayectoria además
de poder realizar cambios en ella.
Autopiloto.mdl (figura 38) está compuesto por:
- Bloques AeroSim que engloba el bloque de jerarquía superior de la librería
Aerosim: Modelo simple de aeronave17y un bloque de Flight Gear18.
- Bloque de Simulink Aproximación de Tierra Plana.
- Función de Matlab, autopiloto.m.
- Controles PI y PID: control alerones, parámetro del motor, timón de dirección y
timón de profundidad.
16 Para más detalle ver punto 3.3.5. 17 Para más información ver punto 31. 18 A continuación se detallará con más información.

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
30
Figura 38. Autopiloto.mdl
Velocidad (m/s) e
n ejes tie
rra. Eje X
Longitud (º)
Altitu
d (m)
Velocidad (m/s) e
n ejes tie
rra. Eje Y
Velocidad (m/s) e
n ejes tie
rra. Eje Z
Latitud (º)
Velocidad del vie
nto
Ángulo de desliza
miento
Ángulo de guiñada
Ángulo de cabeceo
Ángulo de alabeo
Ángulo de ataque
Mach
Combustible
Coordenada x
Coordenada y
Parámetro
del motor
Alerones
Timón de
profundidad
Flaps
Flaps
Timón de
direcció
n
(0 0 0)
Viento
STOP
Parar sim
ulación
al lle
gar al suelo
1
Motor
ON/OFF
13
Fracció
naire/combustible
Demux
DISPLAY
Velocidad descenso actual
Velocidad descenso deseada
Parámetro del motor
Control PID del parámetro del motor
para velocidad de descenso deseada
(CONTROL DE ALTITUD)
Vel. ref. a
ctual
Vel. re
f. deseada
Timón de profundidad
Control PID de tim
ón de profundidad
para Vel. re
f. deseada
Angulo de guiñada actual
Ang. de
guiñada deseado
Timón dirección
Control PI de tim
ón direcció
npara ángulo de guiñada deseado
Angulo de alabeo actual
Ang. de alabeo deseado
Alerones
Control PI de alerones
para ángulo de álabeo deseado
Controles
Viento
Latitu
d (rad)
Longitud(ra
d)
Altura
Display
Ángulo de alabeo (º)
Ángulo de guiñada (º)
Ángulo cabeceo (º)
Vel. Descenso
Vel. Ref
Bloques AeroSim
Latitu
d
Longitud
Altura
coordenada x
coordenada y
coordenada z
Aproxim
ación de
TIERRA PLANA
Interpreted
MATLAB Fcn
AUTOPILOTO

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
31
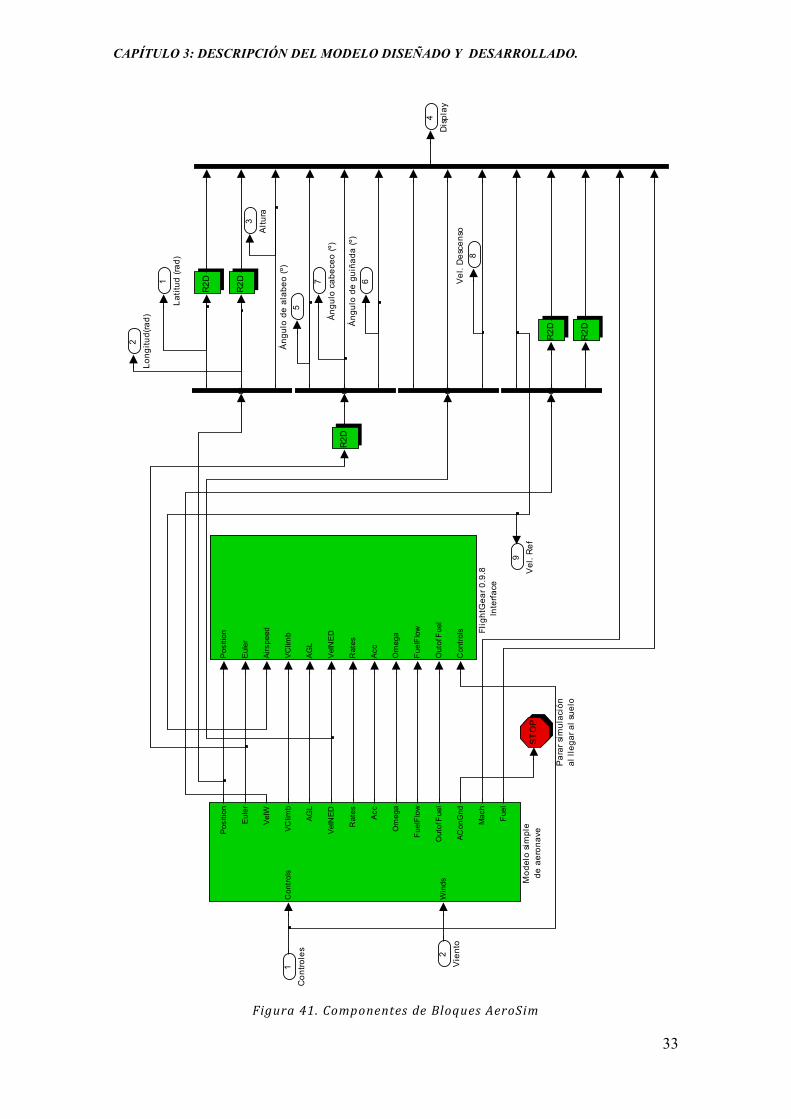
3.3.1. BLOQUES AEROSIM.
Como se menciono anteriormente Bloques AeroSim contiene el Modelo simple de
aeronave comentado en el apartado 3.1 y un bloque de Fligth Gear19 (figura 41). Este
bloque sirve por si se quiere visualizar la trayectoria de la aeronave desde dicha
aplicación, la cual muestra gráficamente los movimientos del avión.
Figura 39. Bloques AeroSim.
Las salidas se corresponden con parámetros necesarios para poder realizar el control de
la aeronave y son proporcionadas por el Modelo simple de la aeronave.
- Latitud, longitud y altura: gracias a ellos y al bloque de Aproximación a tierra
plana, se obtiene la posición actual de la aeronave.
- Display: sirve para mostrar en Simulink los diferentes parámetros que se
mostrarían en la cabina de la aeronave. (El usuario para poder visualizarlos
tendría que abrir autopiloto.mdl).
- Ángulos de alabeo, guiñada y cabeceo: son necesarios para estabilizar el avión
mediante los controles PI y PID.
- Velocidad de descenso y velocidad de referencia: al igual que los ángulos se
utilizan para controlar el vuelo.
19 Este bloque ha sido heredado del trabajo de los alumnos del Grado de Aeronáutica, ver bibliografía, pero no será utilizado en las simulaciones.
Controles
Viento
Latitud (rad)
Longitud(rad)
Altura
Display
Ángulo de alabeo (º)
Ángulo de guiñada (º)
Ángulo cabeceo (º)
Vel. Descenso
Vel. Ref
Bloques AeroSim
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
32
Algunas de las salidas son convertidas a radianes para poder trabajar con mayor
facilidad, para ello se utiliza este bloque:
Figura 40. Conversor de grados a radianes.
En cuanto a las entradas de este bloque, se corresponden con las del Modelo simple de
aeronave, al cual se le proporciona, cuatro parámetros aerodinámicos20 y tres de motor:
- Flaps: posición de esta superficie secundaria. Es proporcionado directamente
desde la función autopiloto.m.
- Timón de profundidad: es la posición de esta superficie primaria que controla el
ángulo de cabeceo. Este parámetro es obtenido con el control PID de timón de
profundidad21.
- Alerones: proporciona la posición de esta superficie aerodinámica, la cual
produce el ángulo de alabeo. Se consigue con el control PI de alerones22.
- Timón dirección: marca la posición de esta superficie que produce el ángulo de
guiñada. Se obtiene del control PI de timón de dirección.
- Parámetro del motor: es la posición de la palanca de gases, que varía entre 0 1.
- Fracción aire/combustible: es un parámetro fijo de valor 13.
- Motor O�/OFF: dice si el motor está en funcionamiento o no.
A parte también se introduce otro parámetro que es el viento, el cual se dejará fijo a (0 0
0), es decir, no habrá turbulencias.
20 Los parámetros aerodinámicos están normalizados entre [-1, 1]. 21 Posteriormente se comenta más ampliamente. 22 Posteriormente se comenta más ampliamente.
R2D
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
33
Figura 41. Componentes de Bloques AeroSim
9
Vel. Ref
8
Vel. Descenso
7
Ángulo cabeceo (º)
6
Ángulo de guiñada (º)
5
Ángulo de alabeo (º)
4
Display
3
Altura
2
Longitud(rad)
1
Latitud (rad)
R2D
R2D
R2D
R2D
R2D
STOP
Parar simulación
al llegar al suelo
Controls
Winds
Position
Euler
VelW
VClimb
AGL
VelNED
Rates
Acc
Omega
FuelFlow
OutofFuel
AConGnd
Mach
Fuel
Modelo simple
de aeronave
Position
Euler
Airspeed
VClimb
AGL
VelNED
Rates
Acc
Omega
FuelFlow
OutofFuel
Controls FlightGear 0.9.8
Interface
Demux
Demux
Demux
Demux
2
Viento
1
Controles

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
34
3.3.2. APROXIMACIÓN DE TIERRA PLANA.
El bloque de Aproximación de Tierra Plana permite transformar la posición
proporcionada en forma de latitud, longitud y altura; a coordenadas x, y, z23. A
continuación se muestra dicho bloque.
Figura 42. Diagrama del bloque de Aproximación de Tierra Plana.
3.3.3. PILOTOAUTOMATICO.M
La función pilotoautomatico.m es la encargada de proporcionar la posición futura de las
superficies aerodinámicas, en función de la posición actual de la aeronave y el punto de
referencia siguiente.
Como entrada tiene la posición actual de la aeronave que es facilitada por el bloque de
Aproximación de Tierra Plana. Además se cuenta con variables globales, algunas de
las cuales pueden ser suministradas por el usuario a través de la interfaz gráfica. A
continuación se muestran algunas de ellas:
- x_ref, y_ref e h_ref: son vectores que almacenan las diferentes coordenadas
de los puntos de referencia de la trayectoria deseada.
- anguloAlabeo: es un vector que contiene el ángulo de alabeo que se le debe
aplicar a cada uno de los puntos de referencia.
23 Siendo z la altura a la que se encuentra la aeronave.
3
coordenada z
2
coordenada y
1
coordenada x
6371000
Radio de la Tierra
Product1
Product
-5.893106*pi/180
Longitud del punto de aterrizaje
37.418*pi/180
Latitud del punto de aterrizaje
3
Altura
2
Longitud
1
Latitud
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
35
- VIni: es un vector que contiene dos valores que se corresponden con la
velocidad mínima y máxima que puede tomar la aeronave durante el vuelo.
Dicho parámetro por defecto es de 20 m/s y 30 m/s, respectivamente, pero puede
ser cambiado por el usuario en la interfaz gráfica24.
- flapsIni: es un vector que contiene dos valores, uno de los cuales se
corresponde con la altura máxima en la que los flaps se están extendiendo y a
partir de la cual se empiezan a plegar hasta llegar a la altura que marque en el
segundo valor. Por defecto dichos parámetros son 250m y 400m,
respectivamente.
- cuenta y contador, la primera de ellas marca el punto de referencia que se
esta tomando en ese momento, esto sirve para cuando se necesita cambiar de
trayectoria la aeronave. El segundo parámetro almacena el número de puntos de
la trayectoria actual, y sirve también para cuando se realiza un cambio de
trayectoria.
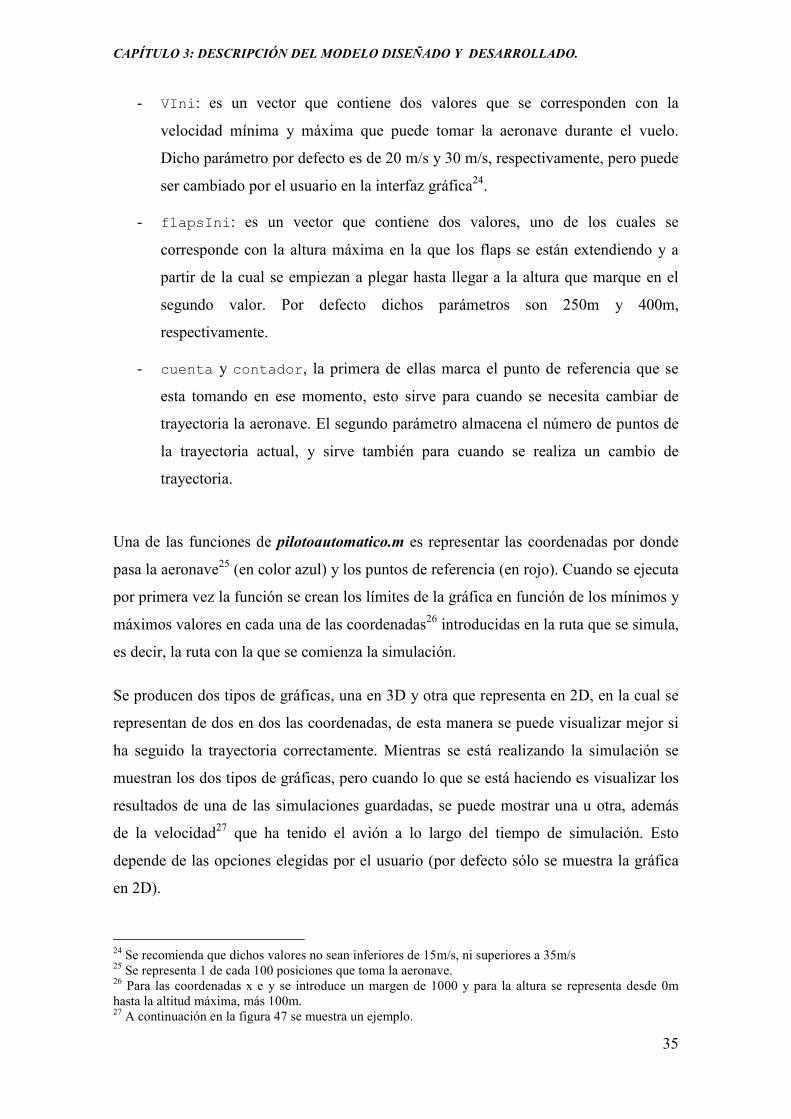
Una de las funciones de pilotoautomatico.m es representar las coordenadas por donde
pasa la aeronave25 (en color azul) y los puntos de referencia (en rojo). Cuando se ejecuta
por primera vez la función se crean los límites de la gráfica en función de los mínimos y
máximos valores en cada una de las coordenadas26 introducidas en la ruta que se simula,
es decir, la ruta con la que se comienza la simulación.
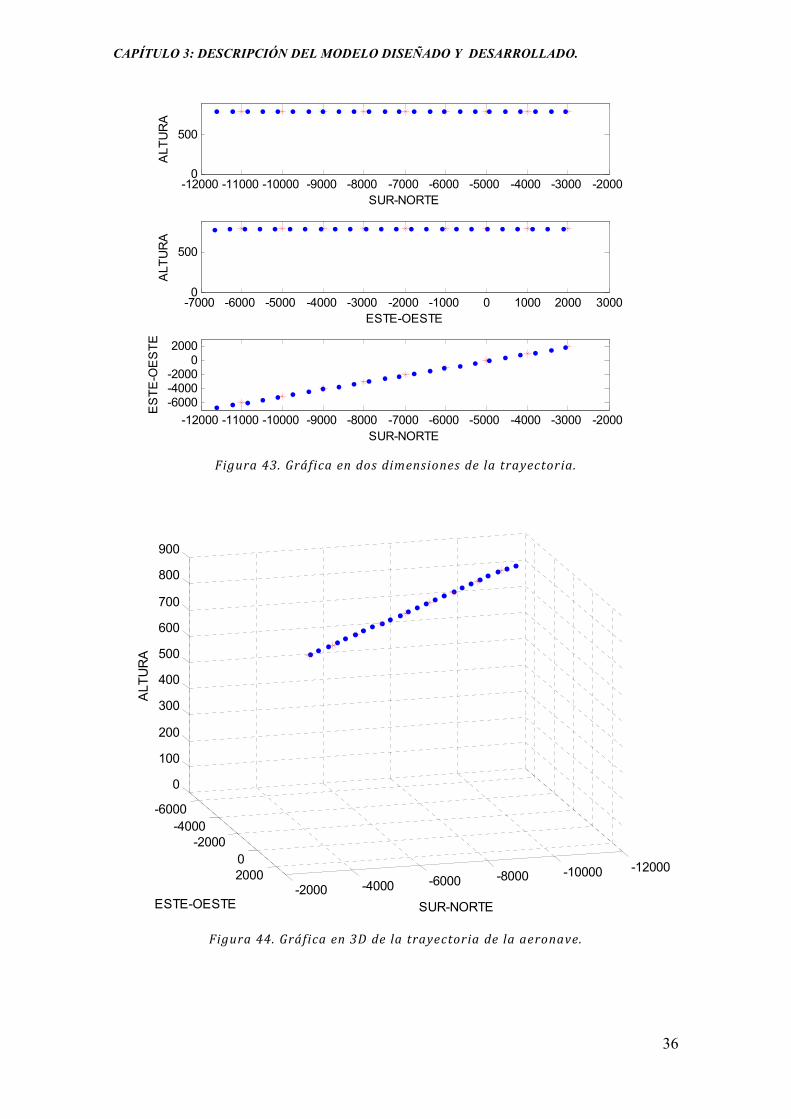
Se producen dos tipos de gráficas, una en 3D y otra que representa en 2D, en la cual se
representan de dos en dos las coordenadas, de esta manera se puede visualizar mejor si
ha seguido la trayectoria correctamente. Mientras se está realizando la simulación se
muestran los dos tipos de gráficas, pero cuando lo que se está haciendo es visualizar los
resultados de una de las simulaciones guardadas, se puede mostrar una u otra, además
de la velocidad27 que ha tenido el avión a lo largo del tiempo de simulación. Esto
depende de las opciones elegidas por el usuario (por defecto sólo se muestra la gráfica
en 2D).
24 Se recomienda que dichos valores no sean inferiores de 15m/s, ni superiores a 35m/s 25 Se representa 1 de cada 100 posiciones que toma la aeronave. 26 Para las coordenadas x e y se introduce un margen de 1000 y para la altura se representa desde 0m hasta la altitud máxima, más 100m. 27 A continuación en la figura 47 se muestra un ejemplo.
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
36
Figura 43. Gráfica en dos dimensiones de la trayectoria.
Figura 44. Gráfica en 3D de la trayectoria de la aeronave.
-12000 -11000 -10000 -9000 -8000 -7000 -6000 -5000 -4000 -3000 -20000
500
SUR-NORTE
ALTURA
-7000 -6000 -5000 -4000 -3000 -2000 -1000 0 1000 2000 30000
500
ESTE-OESTE
ALTURA
-12000 -11000 -10000 -9000 -8000 -7000 -6000 -5000 -4000 -3000 -2000
-6000-4000-2000
02000
SUR-NORTE
ESTE-OESTE
-12000-10000-8000-6000-4000-2000
-6000-4000-2000
02000
0
100
200
300
400
500
600
700
800
900
SUR-NORTEESTE-OESTE
ALTURA

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
37
Para poder entender como se calculan algunos parámetros, a continuación se debe se
muestra geométricamente como son los movimientos de cabeceo (pitch), alabeo (roll) y
guiñada (yaw).
Figura 45. Representación gráfica de los ángulos de alabeo, cabeceo y guiñada.
Se aprecia que el ángulo de guiñada sirve para desplazar el avión en línea recta a través
del aire, es decir, sirve para girar cuando entre el origen y el destino se puede trazar una
línea recta imaginaria; el de alabeo se utiliza para realizar giros del avión, es decir, para
cuando la trayectoria a seguir por el avión ha de ser una curva; el de cabeceo sirve para
aumentar o disminuir la altitud de la aeronave (es decir, para subir o bajar de altura).
autopiloto.m proporciona varias salidas, algunas de las cuales son las entradas a los PI y
PID, otra de las salidas se envía directamente como entrada a Simulink y la última sirve
para parar la simulación de Simulink. A continuación se cuenta detalladamente como
han sido calculadas implementando las ecuaciones dinámicas del capítulo 2:
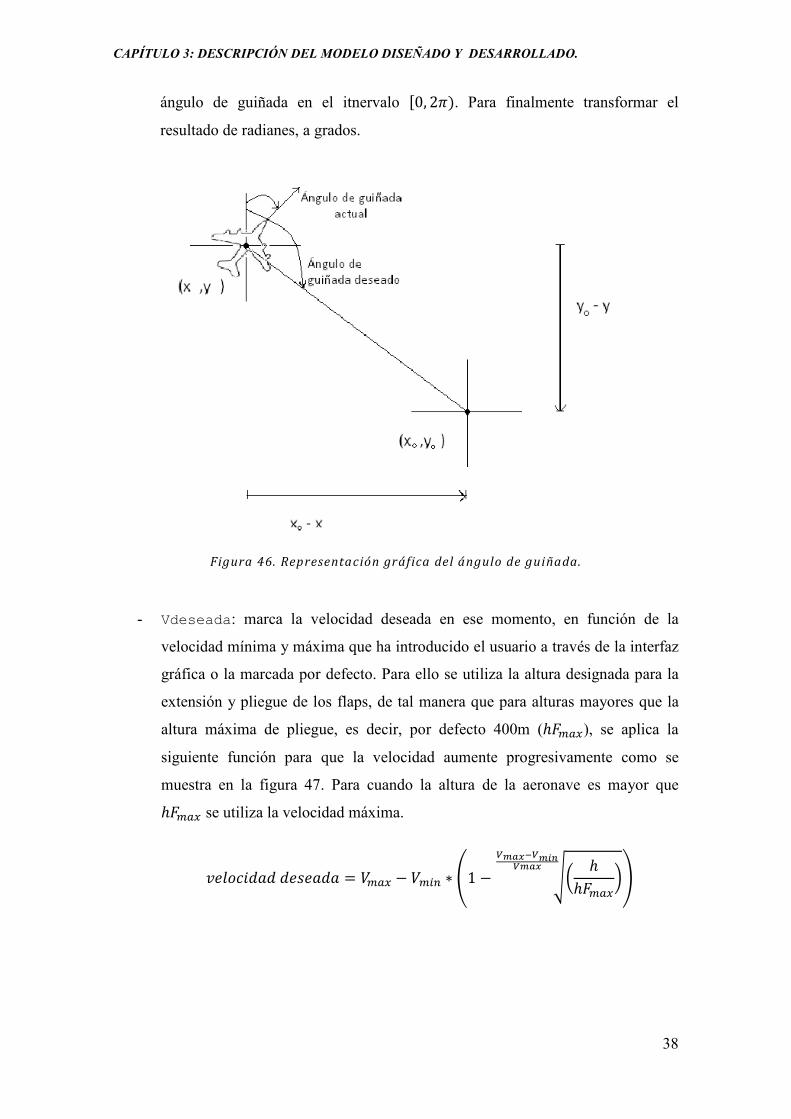
- rumboDeseado: este valor se corresponde con el ángulo de guiñada de la
aeronave. Para ello se utiliza la trigonometría utilizando únicamente las
coordenadas x e y, tanto actuales (x, y) como las del punto de referencia que se
esté manejando en ese momento (x0, y0). Siendo:
á��������"ñ! ! = atan2(6? − 6, 7? − 7) Se utiliza la función atan2 de Matlab que calcula la arcotangente en los cuatro
cuadrantes en el intervalo (−%, %]. Posteriormente se suma 2π para obtener el
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
38
ángulo de guiñada en el itnervalo [0, 2%). Para finalmente transformar el
resultado de radianes, a grados.
Figura 46. Representación gráfica del ángulo de guiñada.
- Vdeseada: marca la velocidad deseada en ese momento, en función de la
velocidad mínima y máxima que ha introducido el usuario a través de la interfaz
gráfica o la marcada por defecto. Para ello se utiliza la altura designada para la
extensión y pliegue de los flaps, de tal manera que para alturas mayores que la
altura máxima de pliegue, es decir, por defecto 400m (ℎAB�C), se aplica la
siguiente función para que la velocidad aumente progresivamente como se
muestra en la figura 47. Para cuando la altura de la aeronave es mayor que ℎAB�C se utiliza la velocidad máxima.
����," ! � ���! ! = 0B�C − 0BDE ∗ G1 − H4 ℎℎAB�C5IJKLMIJNOIJKL P

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
39
Figura 47. Gráfica de la velocidad de la aeronave.
Esta velocidad se utiliza para calcular cual debe de ser el movimiento del timón
de profundidad que es el encargado de variar la altitud.28
- VdescensoDeseado: es el parámetro que marca la velocidad de descenso
deseada que servirá para calcular el parámetro del motor. Al igual que antes se
utiliza la trigonometría para realizar el cálculo del ángulo de descenso necesario,
a partir del cual se calcula la velocidad de descenso necesaria. Ahora también se
utiliza la altura actual (h) y la altura del punto de referencia (h0):
á������ �� ��,���� = !#!� Q ℎ − ℎ?R(6 − 6?)S + (7 − 7?)ST
����," ! � ��,����� ���! ! = ����," ! � ���! ! ∗ sin(á������ ��,����)
28 Ver control PID del timón de profundidad.
0 1000 2000 3000 4000 5000 600015
20
25
30
35Velocidad a lo largo del recorrido

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
40
Figura 48. Representación del ángulo de descenso.29
- flaps: anteriormente se ha hablado de este parámetro como entrada en
Simulink. En Matlab se calcula exactamente como debe de ser desplazada dicha
superficie. Para ello se utilizan dos alturas que por defecto son 250m (ℎAB�CV),
y 400m (ℎAB�C), para altitudes menores de 250m los flaps se despegan y se
pliegan para altitudes entre 250 y 400 m. En el caso de no aplicar las alturas por
defecto sería de la misma manera pero con los datos proporcionados por el
usuario a través de la aplicación gráfica, mediante las siguientes curvas no
lineales:
W�!X� = 0.2 ∗ 4 ℎℎAB�C5 �������������ℎ < ℎAB�CV
W�!X� = 0.2 ∗ 41 − ℎℎAB�C5����������ℎAB�CV < ℎ < ℎAB�C
29 Siendo ([? − [) = R(6 − 6?)S + (7 − 7?)S
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
41
- anguloAlabeoDeseado: sirve para determinar el ángulo de alabeo de la
aeronave. Para ello se utiliza el fichero de la ruta a seguir, en él está escrito cual
debe ser el ángulo de alabeo para cada uno de los puntos de referencia.
- parar: este parámetro permite parar la ejecución Simulink.
Justo antes de parar la ejecución de la simulación se guardan varios parámetros en el
fichero “temporal.mat”, esto se hace para que después si el usuario quiere guardar la
simulación tenga esa posibilidad, es decir, en ese fichero se guarda la última simulación,
si el usuario por el motivo que fuera quisiera guardar la penúltima simulación, no
podría. Los parámetros que se guardan son: los puntos de referencia, los puntos con la
posición de la aeronave y la velocidad, durante la simulación.
3.3.4. CONTROLES PI Y PID.
Las características básicas de un controlador PID, siendo e(t) la entrada y u(t) la salida,
son:
�(#) = \ ]�(#) + 1+D^ �(_) _ + +9 �(#) #:? `
Siendo la entrada en este caso, la diferencia entre lo que se tiene y lo que se desea, es
decir, por ejemplo en el caso del ángulo de guiñada, sería la diferencia entre el ángulo
de guiñada actual y el deseado.
La salida sería una suma de tres términos: el término P (proporcional a la entrada), el
término I (proporcional a la integral de la entrada) y D (proporcional a la derivada de la
entrada).
A continuación se muestran los efectos de los términos proporcional, derivativo e
integral:

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
42
Figura 49. Control PID.
Los controles PI y PID proporcionan los movimientos de las superficies aerodinámicas
y el parámetro del motor. Los criterios que se han seguido para la configuración manual
de los parámetros de los controladores PI y PID han sido: establecer los valores I y D a
cero, para a continuación incrementar P hasta que la salida oscile. Luego se establece P
a aproximadamente la mitad del valor configurado previamente. Después se incrementa
I hasta que el proceso se ajuste en el tiempo requerido. Finalmente incrementar D (si es
necesario) hasta que la salida sea lo suficientemente rápida para alcanzar la referencia
tras una variación brusca de la carga.
Se utilizan dos controles PI y dos controles PID, a continuación se detalla con más
precisión cada uno de ellos:
- Control PI de timón de dirección para ángulo de guiñada30 deseado: este bloque
compara el ángulo de guiñada deseado con el actual, devolviendo el valor del
movimiento de dicha superficie aerodinámica y enviándole como entrada al
bloque de AeroSim. El valor deseado para el ángulo de guiñada lo determina el
bloque autopiloto (es decir, la función pilotoautomatico.m) en base al punto de
referencia siguiente.
Figura 50. Control PI del timón de dirección.
30En el modelo que se utiliza como base (ver bibliografía) el ángulo de guiñada no era utilizado para controlar la trayectoria de la aeronave.
1
Timón dirección
0.5*pi/180
0.005*pi/180 1s
2
Ang. de guiñadadeseado
1
Angulo de guiñada actual
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
43
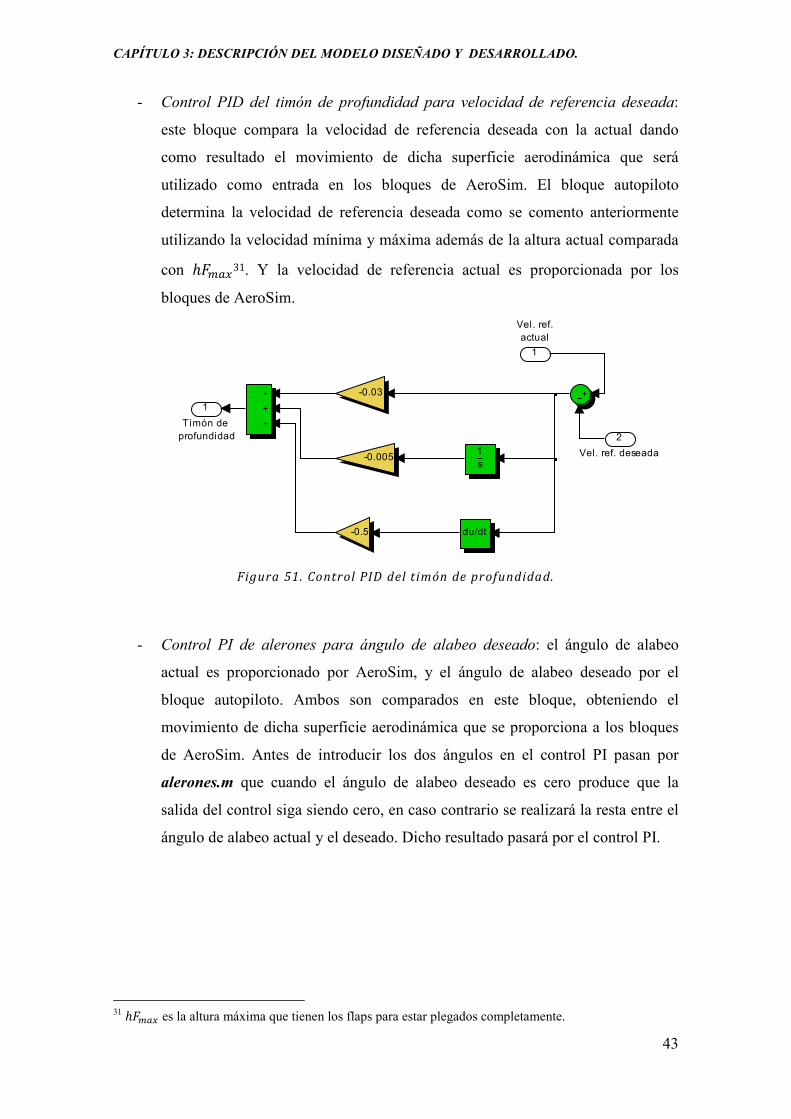
- Control PID del timón de profundidad para velocidad de referencia deseada:
este bloque compara la velocidad de referencia deseada con la actual dando
como resultado el movimiento de dicha superficie aerodinámica que será
utilizado como entrada en los bloques de AeroSim. El bloque autopiloto
determina la velocidad de referencia deseada como se comento anteriormente
utilizando la velocidad mínima y máxima además de la altura actual comparada
con ℎAB�C31. Y la velocidad de referencia actual es proporcionada por los
bloques de AeroSim.
Figura 51. Control PID del t imón de profundidad.
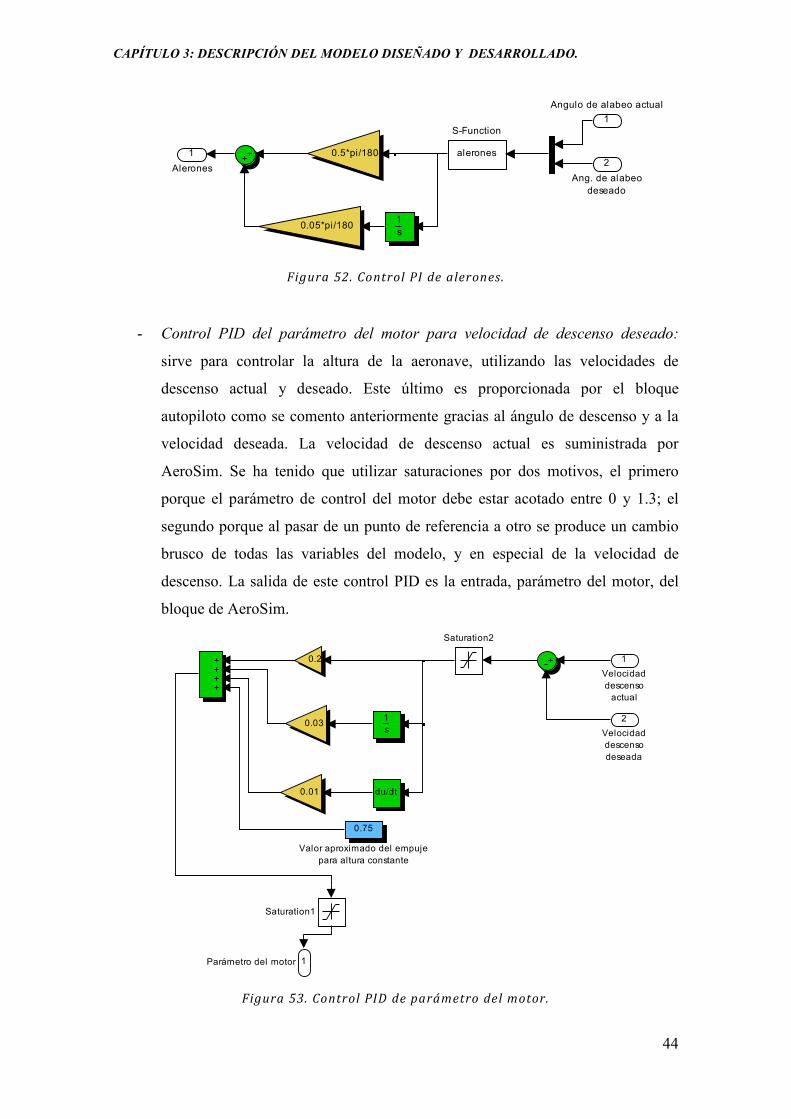
- Control PI de alerones para ángulo de alabeo deseado: el ángulo de alabeo
actual es proporcionado por AeroSim, y el ángulo de alabeo deseado por el
bloque autopiloto. Ambos son comparados en este bloque, obteniendo el
movimiento de dicha superficie aerodinámica que se proporciona a los bloques
de AeroSim. Antes de introducir los dos ángulos en el control PI pasan por
alerones.m que cuando el ángulo de alabeo deseado es cero produce que la
salida del control siga siendo cero, en caso contrario se realizará la resta entre el
ángulo de alabeo actual y el deseado. Dicho resultado pasará por el control PI.
31 ℎAB�C es la altura máxima que tienen los flaps para estar plegados completamente.
1
Timón de profundidad
-0.03
-0.005
-0.5
1s
du/dt
2
Vel. ref. deseada
1
Vel. ref.actual
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
44
Figura 52. Control PI de alerones.
- Control PID del parámetro del motor para velocidad de descenso deseado:
sirve para controlar la altura de la aeronave, utilizando las velocidades de
descenso actual y deseado. Este último es proporcionada por el bloque
autopiloto como se comento anteriormente gracias al ángulo de descenso y a la
velocidad deseada. La velocidad de descenso actual es suministrada por
AeroSim. Se ha tenido que utilizar saturaciones por dos motivos, el primero
porque el parámetro de control del motor debe estar acotado entre 0 y 1.3; el
segundo porque al pasar de un punto de referencia a otro se produce un cambio
brusco de todas las variables del modelo, y en especial de la velocidad de
descenso. La salida de este control PID es la entrada, parámetro del motor, del
bloque de AeroSim.
Figura 53. Control PID de parámetro del motor.
1
Alerones
alerones
S-Function
0.5*pi/180
0.05*pi/1801s
2
Ang. de alabeodeseado
1
Angulo de alabeo actual
1Parámetro del motor
0.75
Valor aproximado del empujepara altura constante
Saturation2
Saturation1
0.2
0.03
0.01
1s
du/dt
2
Velocidaddescensodeseada
1
Velocidaddescensoactual
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
45
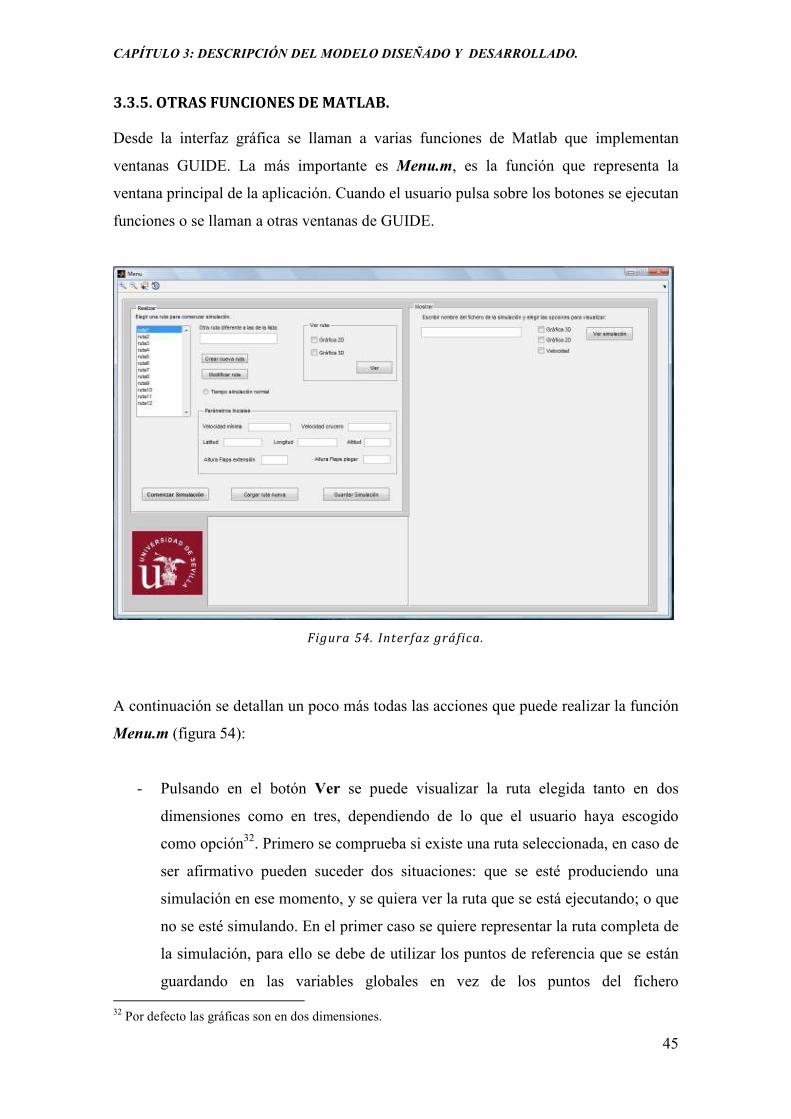
3.3.5. OTRAS FUNCIONES DE MATLAB.
Desde la interfaz gráfica se llaman a varias funciones de Matlab que implementan
ventanas GUIDE. La más importante es Menu.m, es la función que representa la
ventana principal de la aplicación. Cuando el usuario pulsa sobre los botones se ejecutan
funciones o se llaman a otras ventanas de GUIDE.
Figura 54. Interfaz gráfica.
A continuación se detallan un poco más todas las acciones que puede realizar la función
Menu.m (figura 54):
- Pulsando en el botón Ver se puede visualizar la ruta elegida tanto en dos
dimensiones como en tres, dependiendo de lo que el usuario haya escogido
como opción32. Primero se comprueba si existe una ruta seleccionada, en caso de
ser afirmativo pueden suceder dos situaciones: que se esté produciendo una
simulación en ese momento, y se quiera ver la ruta que se está ejecutando; o que
no se esté simulando. En el primer caso se quiere representar la ruta completa de
la simulación, para ello se debe de utilizar los puntos de referencia que se están
guardando en las variables globales en vez de los puntos del fichero 32 Por defecto las gráficas son en dos dimensiones.
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
46
seleccionado (segundo caso). Esto es debido a que la ruta puede variar durante la
ejecución de la simulación, en cuyo caso se quieren representar todos los
cambios que se puedan haber producido. Una vez representadas las gráficas se
deshabilitan las opciones de representación.
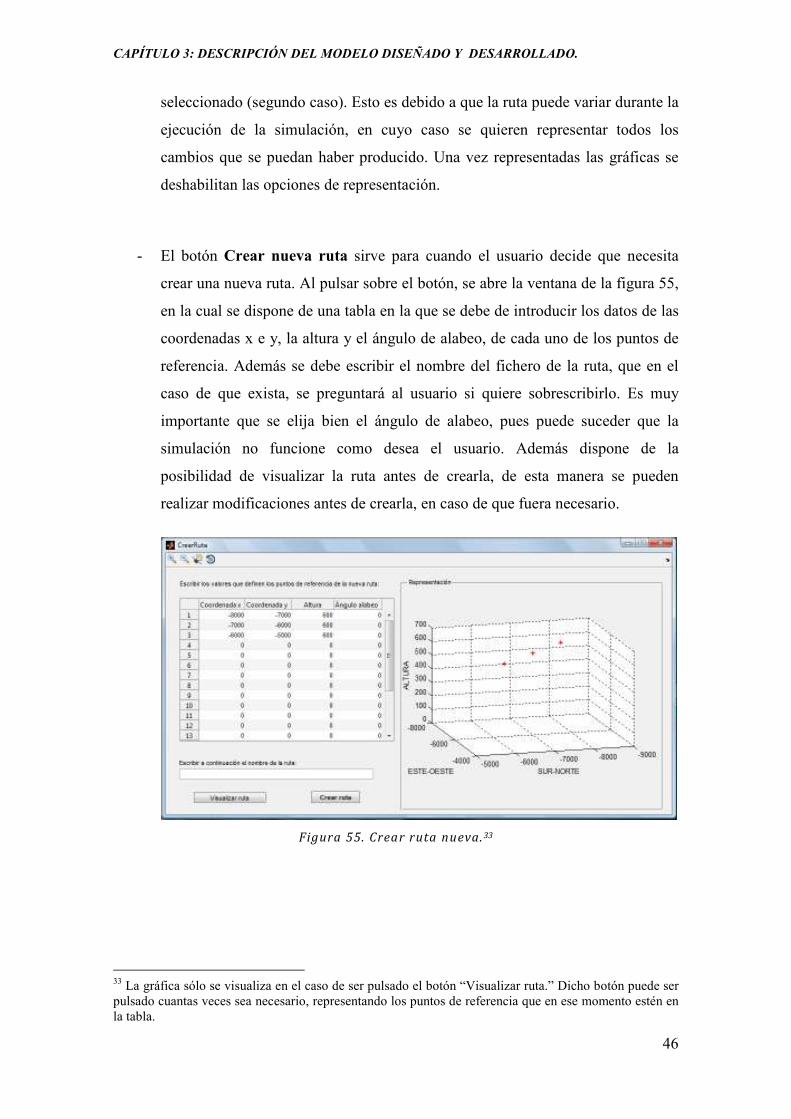
- El botón Crear nueva ruta sirve para cuando el usuario decide que necesita
crear una nueva ruta. Al pulsar sobre el botón, se abre la ventana de la figura 55,
en la cual se dispone de una tabla en la que se debe de introducir los datos de las
coordenadas x e y, la altura y el ángulo de alabeo, de cada uno de los puntos de
referencia. Además se debe escribir el nombre del fichero de la ruta, que en el
caso de que exista, se preguntará al usuario si quiere sobrescribirlo. Es muy
importante que se elija bien el ángulo de alabeo, pues puede suceder que la
simulación no funcione como desea el usuario. Además dispone de la
posibilidad de visualizar la ruta antes de crearla, de esta manera se pueden
realizar modificaciones antes de crearla, en caso de que fuera necesario.
Figura 55. Crear ruta nueva. 33
33 La gráfica sólo se visualiza en el caso de ser pulsado el botón “Visualizar ruta.” Dicho botón puede ser pulsado cuantas veces sea necesario, representando los puntos de referencia que en ese momento estén en la tabla.

CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
47
- El botón Modificar ruta sirve para que en el caso de que el usuario desee
realizar un cambio en alguna ruta, lo pueda hacer con facilidad antes de simular.
Primeramente se pide el nombre de la ruta34 (figura 56). Posteriormente
aparecerá una ventana (figura 57) en la cual se mostrará los valores de los puntos
de referencia de la ruta que se desea modificar y dichos puntos se representarán
en una gráfica. Si se pulsa el botón Visualizar cambios ruta, se podrá ver la
gráfica con los puntos de referencia que en ese momento estén en la tabla (figura
58). De esta manera el usuario puede ver los cambios antes de guardarlos.
También existe la posibilidad de guardar los cambios con otro nombre diferente.
Figura 56. Ventana introducción ruta.
Figura 57. Ventana cambio ruta.
34 El nombre de la ruta se debe introducir sin extensión.
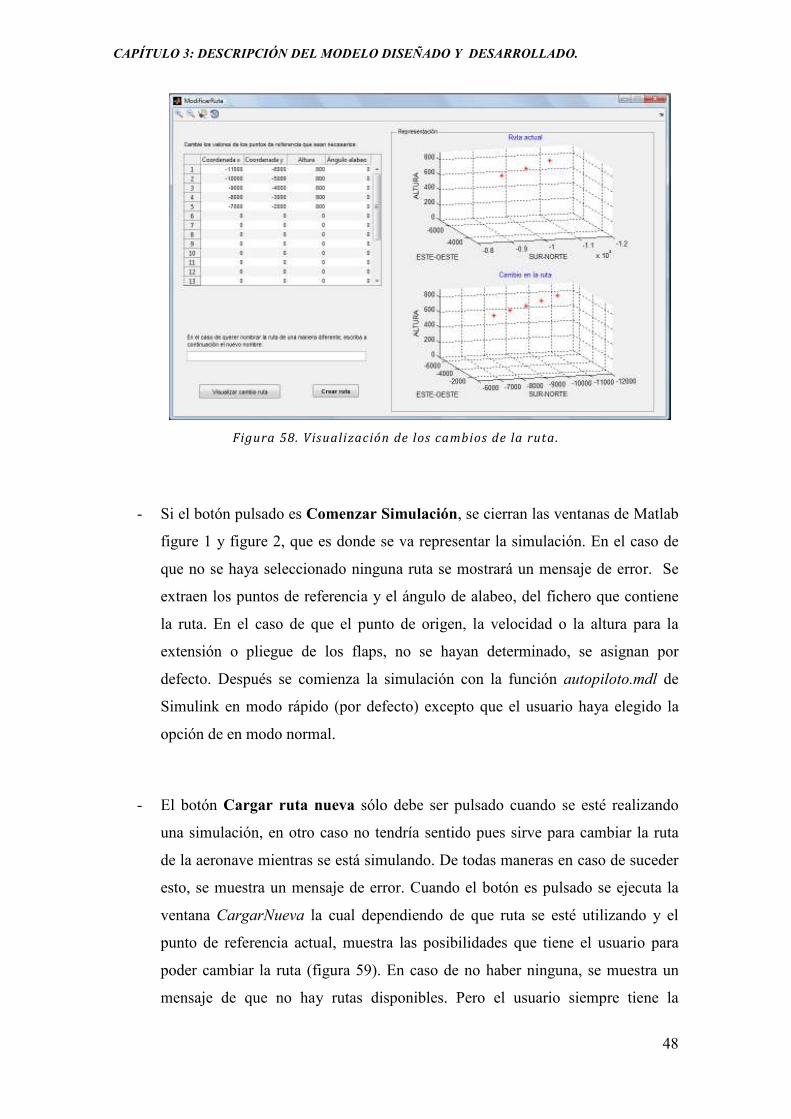
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
48
Figura 58. Visualización de los cambios de la ruta.
- Si el botón pulsado es Comenzar Simulación, se cierran las ventanas de Matlab
figure 1 y figure 2, que es donde se va representar la simulación. En el caso de
que no se haya seleccionado ninguna ruta se mostrará un mensaje de error. Se
extraen los puntos de referencia y el ángulo de alabeo, del fichero que contiene
la ruta. En el caso de que el punto de origen, la velocidad o la altura para la
extensión o pliegue de los flaps, no se hayan determinado, se asignan por
defecto. Después se comienza la simulación con la función autopiloto.mdl de
Simulink en modo rápido (por defecto) excepto que el usuario haya elegido la
opción de en modo normal.
- El botón Cargar ruta nueva sólo debe ser pulsado cuando se esté realizando
una simulación, en otro caso no tendría sentido pues sirve para cambiar la ruta
de la aeronave mientras se está simulando. De todas maneras en caso de suceder
esto, se muestra un mensaje de error. Cuando el botón es pulsado se ejecuta la
ventana Cargar�ueva la cual dependiendo de que ruta se esté utilizando y el
punto de referencia actual, muestra las posibilidades que tiene el usuario para
poder cambiar la ruta (figura 59). En caso de no haber ninguna, se muestra un
mensaje de que no hay rutas disponibles. Pero el usuario siempre tiene la
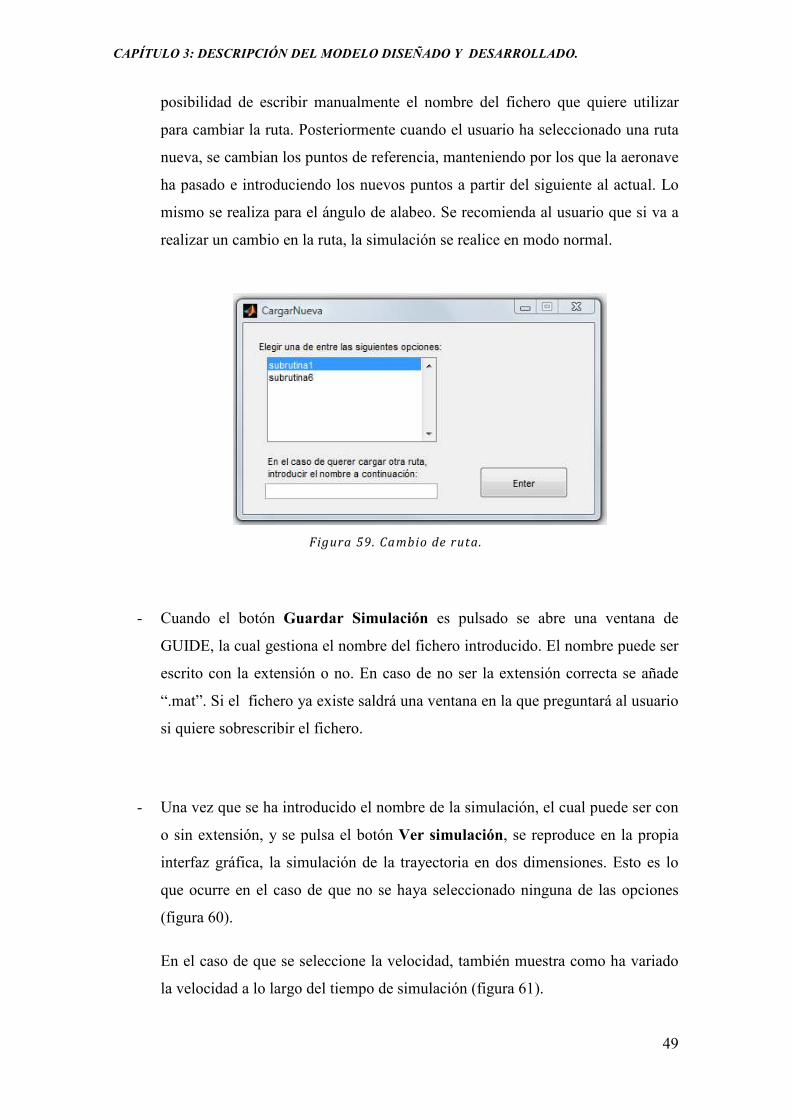
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
49
posibilidad de escribir manualmente el nombre del fichero que quiere utilizar
para cambiar la ruta. Posteriormente cuando el usuario ha seleccionado una ruta
nueva, se cambian los puntos de referencia, manteniendo por los que la aeronave
ha pasado e introduciendo los nuevos puntos a partir del siguiente al actual. Lo
mismo se realiza para el ángulo de alabeo. Se recomienda al usuario que si va a
realizar un cambio en la ruta, la simulación se realice en modo normal.
Figura 59. Cambio de ruta.
- Cuando el botón Guardar Simulación es pulsado se abre una ventana de
GUIDE, la cual gestiona el nombre del fichero introducido. El nombre puede ser
escrito con la extensión o no. En caso de no ser la extensión correcta se añade
“.mat”. Si el fichero ya existe saldrá una ventana en la que preguntará al usuario
si quiere sobrescribir el fichero.
- Una vez que se ha introducido el nombre de la simulación, el cual puede ser con
o sin extensión, y se pulsa el botón Ver simulación, se reproduce en la propia
interfaz gráfica, la simulación de la trayectoria en dos dimensiones. Esto es lo
que ocurre en el caso de que no se haya seleccionado ninguna de las opciones
(figura 60).
En el caso de que se seleccione la velocidad, también muestra como ha variado
la velocidad a lo largo del tiempo de simulación (figura 61).
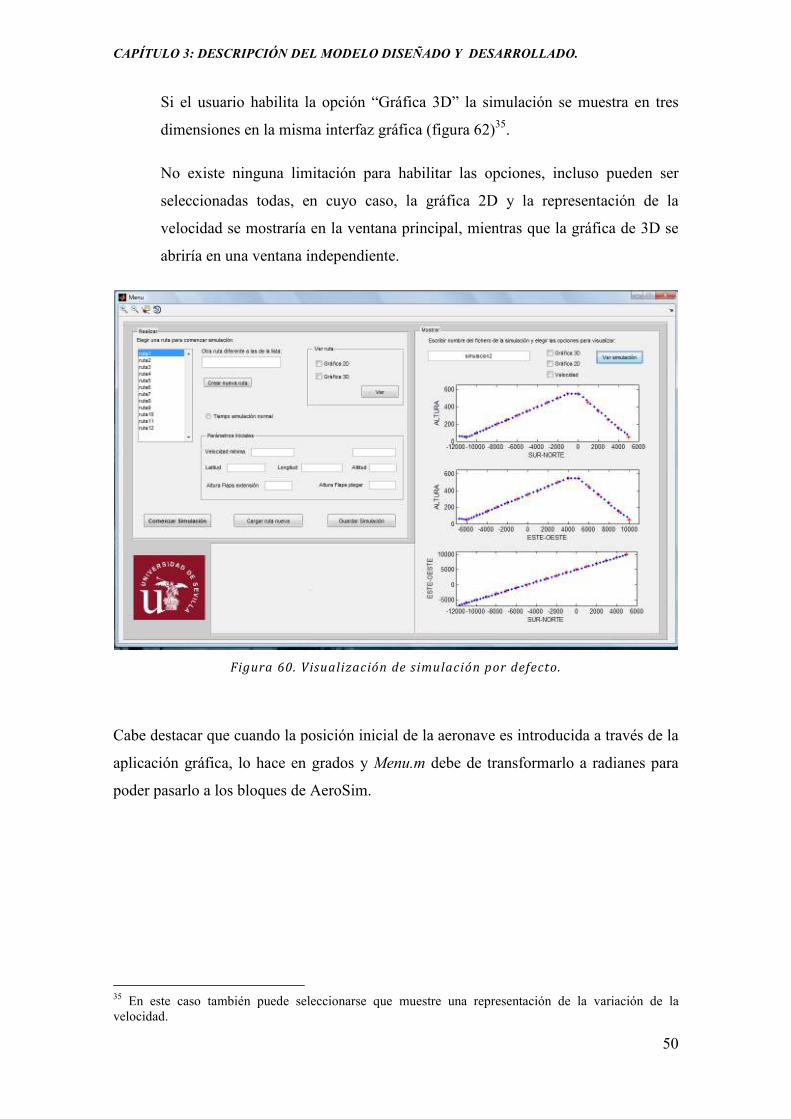
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
50
Si el usuario habilita la opción “Gráfica 3D” la simulación se muestra en tres
dimensiones en la misma interfaz gráfica (figura 62)35.
No existe ninguna limitación para habilitar las opciones, incluso pueden ser
seleccionadas todas, en cuyo caso, la gráfica 2D y la representación de la
velocidad se mostraría en la ventana principal, mientras que la gráfica de 3D se
abriría en una ventana independiente.
Figura 60. Visualización de simulación por defecto.
Cabe destacar que cuando la posición inicial de la aeronave es introducida a través de la
aplicación gráfica, lo hace en grados y Menu.m debe de transformarlo a radianes para
poder pasarlo a los bloques de AeroSim.
35 En este caso también puede seleccionarse que muestre una representación de la variación de la velocidad.
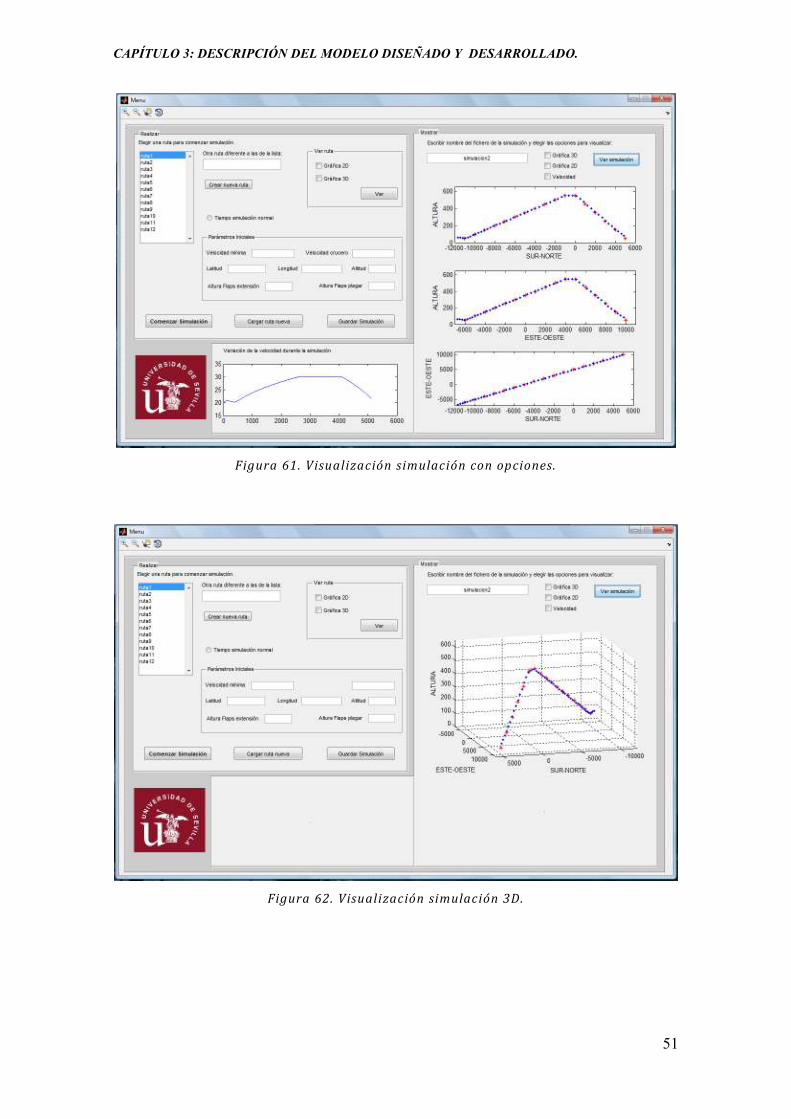
CAPÍTULO 3: DESCRIPCIÓ DEL MODELO DISEÑADO Y DESARROLLADO.
51
Figura 61. Visualización simulación con opciones.
Figura 62. Visualización simulación 3D.
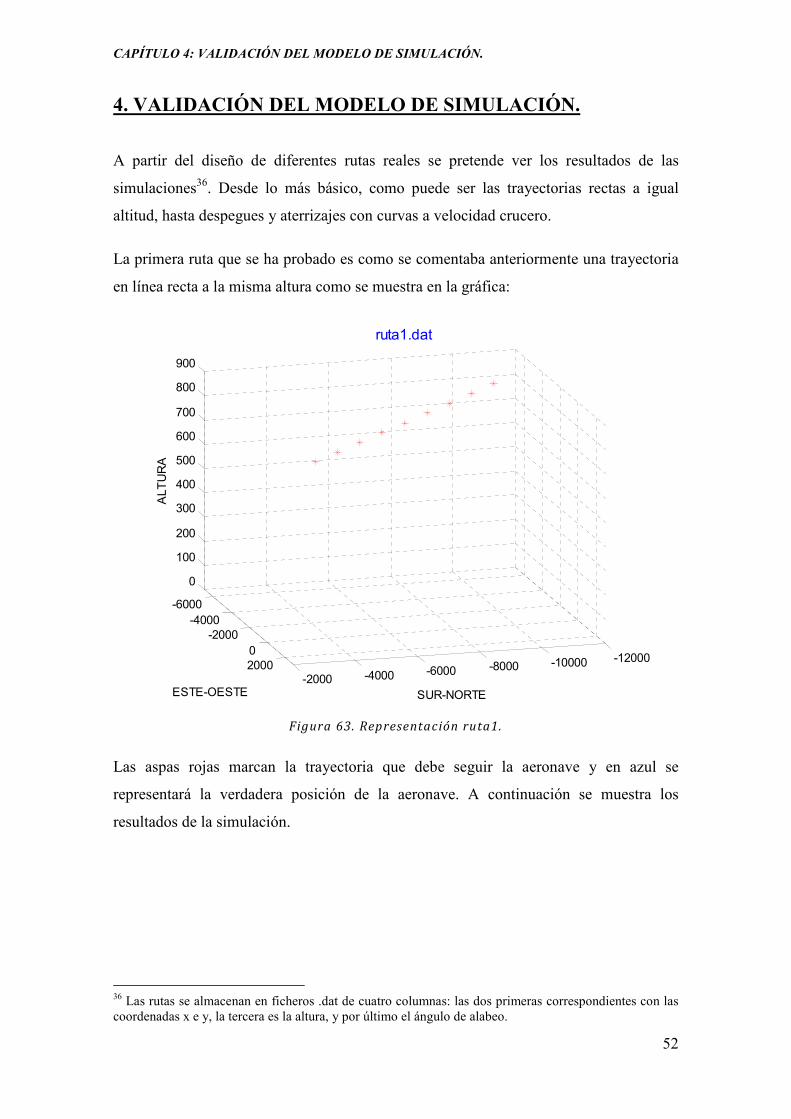
CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
52
4. VALIDACIÓ� DEL MODELO DE SIMULACIÓ�.
A partir del diseño de diferentes rutas reales se pretende ver los resultados de las
simulaciones36. Desde lo más básico, como puede ser las trayectorias rectas a igual
altitud, hasta despegues y aterrizajes con curvas a velocidad crucero.
La primera ruta que se ha probado es como se comentaba anteriormente una trayectoria
en línea recta a la misma altura como se muestra en la gráfica:
Figura 63. Representación ruta1.
Las aspas rojas marcan la trayectoria que debe seguir la aeronave y en azul se
representará la verdadera posición de la aeronave. A continuación se muestra los
resultados de la simulación.
36 Las rutas se almacenan en ficheros .dat de cuatro columnas: las dos primeras correspondientes con las coordenadas x e y, la tercera es la altura, y por último el ángulo de alabeo.
-12000-10000-8000-6000-4000-2000
-6000-4000-2000
02000
0
100
200
300
400
500
600
700
800
900
ALTURA
ruta1.dat
SUR-NORTEESTE-OESTE
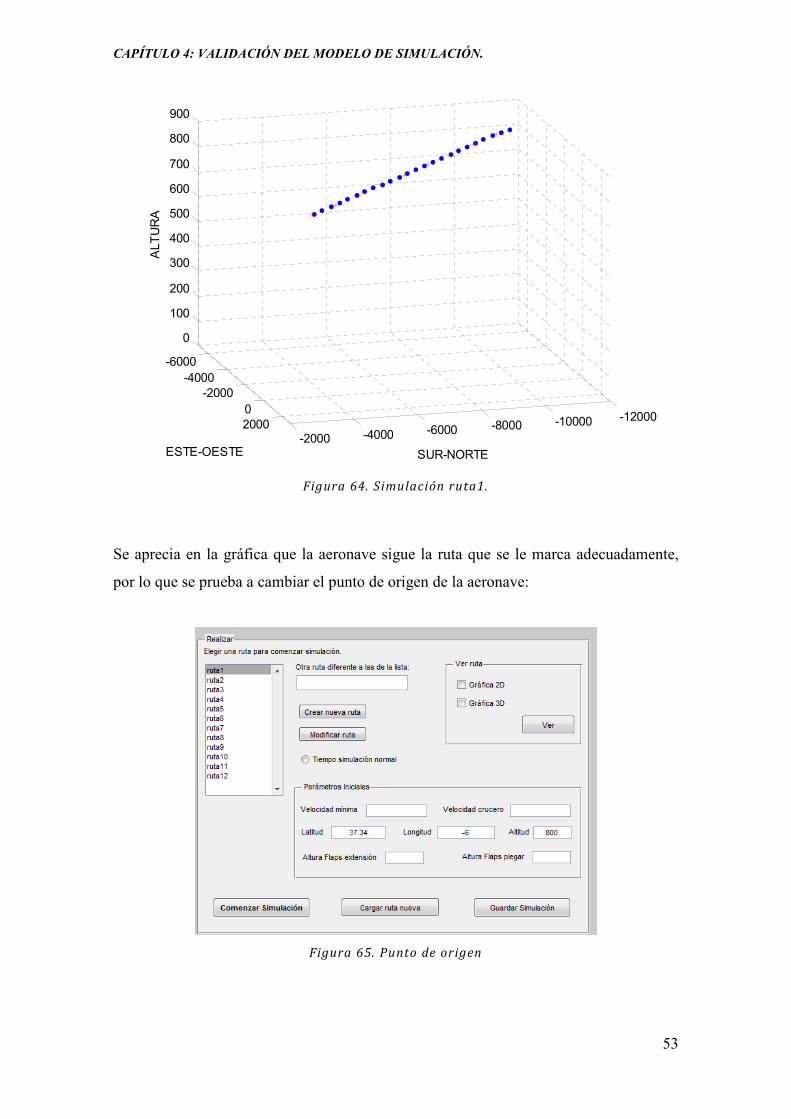
CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
53
Figura 64. Simulación ruta1.
Se aprecia en la gráfica que la aeronave sigue la ruta que se le marca adecuadamente,
por lo que se prueba a cambiar el punto de origen de la aeronave:
Figura 65. Punto de origen
-12000-10000-8000-6000-4000-2000
-6000-4000-2000
02000
0
100
200
300
400
500
600
700
800
900
SUR-NORTEESTE-OESTE
ALTURA

CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
54
Obteniendo como resultado la siguiente trayectoria de la aeronave:
Figura 66. Cambio de punto de origen de la aeronave.
La aeronave traza la ruta correctamente. Si se compara con la figura 64, se aprecia que
el comienzo de la trayectoria es diferente, eso es debido al cambio del punto de origen
de la aeronave.
El usuario mientras se está ejecutando una simulación puede realizar un cambio en la
ruta. Por eso teniendo como ruta elegida ruta1, es decir, la ruta de la figura 62; se
procede a cambiarla por la subrutina6b (figura 66), haciendo que la trayectoria de la
aeronave cambie como muestra la figura 67.
-12000-10000-8000-6000-4000-2000
-6000-4000-2000
02000
0
100
200
300
400
500
600
700
800
900
SUR-NORTEESTE-OESTE
ALTURA

CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
55
Figura 67. Subrutina6b.
Figura 68. Simulación ruta1 con cambio a subrutina6b.
-7000-6000-5000-4000-3000-2000-1000
-4000
-2000
0
0
100
200
300
400
500
600
700
800
900
ALTURA
SUR-NORTEESTE-OESTE
-12000-10000-8000-6000-4000-2000
-6000-4000-2000
02000
0
100
200
300
400
500
600
700
800
900
ALTURA
SUR-NORTEESTE-OESTE
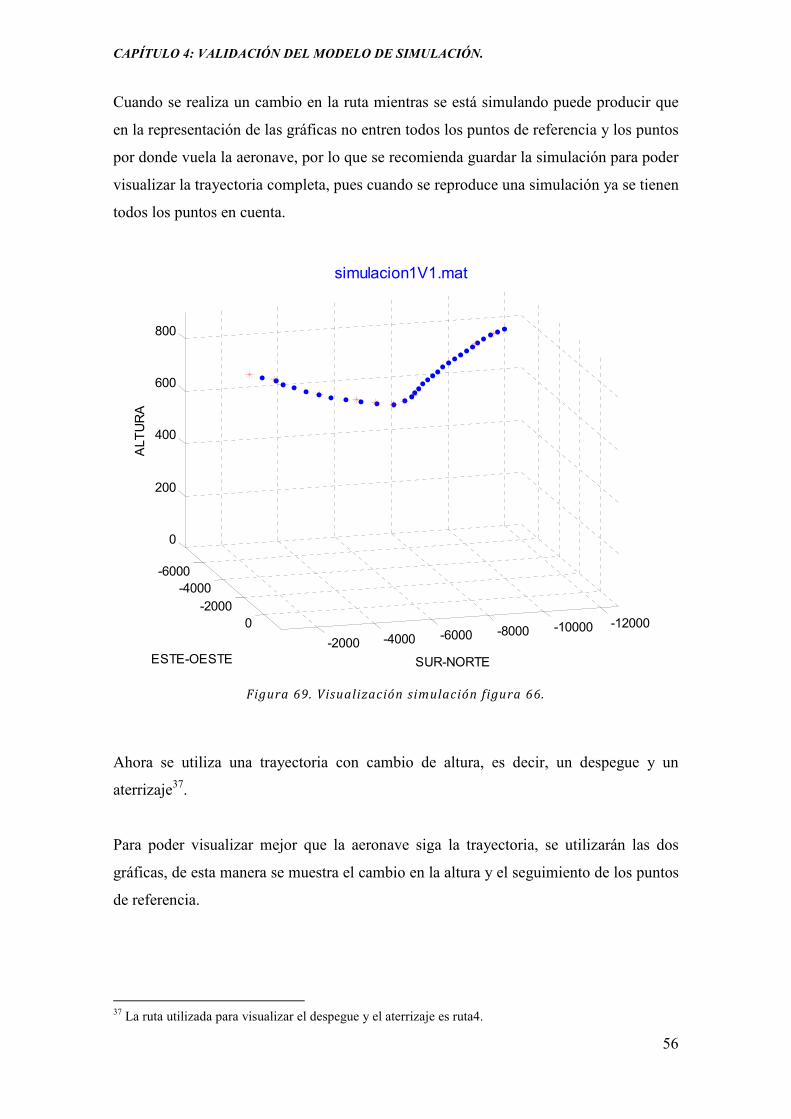
CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
56
Cuando se realiza un cambio en la ruta mientras se está simulando puede producir que
en la representación de las gráficas no entren todos los puntos de referencia y los puntos
por donde vuela la aeronave, por lo que se recomienda guardar la simulación para poder
visualizar la trayectoria completa, pues cuando se reproduce una simulación ya se tienen
todos los puntos en cuenta.
Figura 69. Visualización simulación figura 66.
Ahora se utiliza una trayectoria con cambio de altura, es decir, un despegue y un
aterrizaje37.
Para poder visualizar mejor que la aeronave siga la trayectoria, se utilizarán las dos
gráficas, de esta manera se muestra el cambio en la altura y el seguimiento de los puntos
de referencia.
37 La ruta utilizada para visualizar el despegue y el aterrizaje es ruta4.
-12000-10000-8000-6000-4000-2000
-6000-4000
-20000
0
200
400
600
800
SUR-NORTE
simulacion1V1.mat
ESTE-OESTE
ALTURA
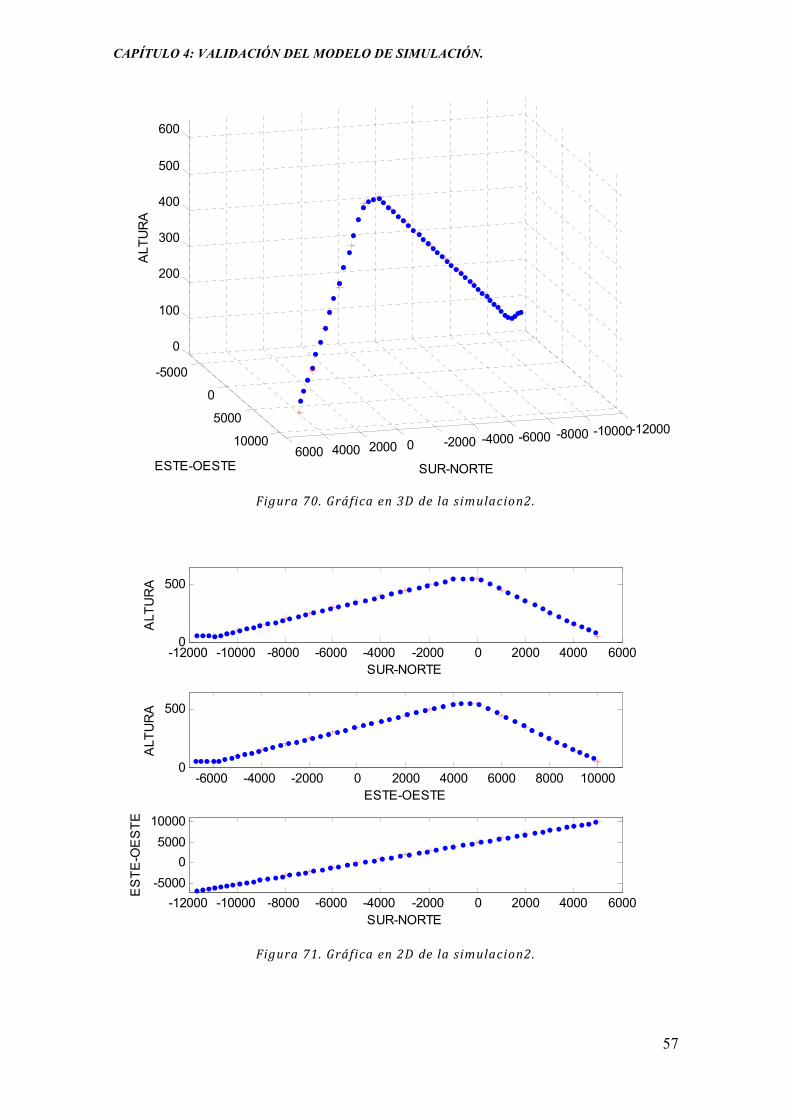
CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
57
Figura 70. Gráfica en 3D de la simulacion2.
Figura 71. Gráfica en 2D de la simulacion2.
-12000-10000-8000-6000-4000-20000200040006000
-5000
0
5000
10000
0
100
200
300
400
500
600
SUR-NORTEESTE-OESTE
ALTURA
-12000 -10000 -8000 -6000 -4000 -2000 0 2000 4000 60000
500
SUR-NORTE
ALTURA
simulacion2.mat
-6000 -4000 -2000 0 2000 4000 6000 8000 100000
500
ESTE-OESTE
ALTURA
-12000 -10000 -8000 -6000 -4000 -2000 0 2000 4000 6000
-5000
0
5000
10000
SUR-NORTE
ESTE-OESTE
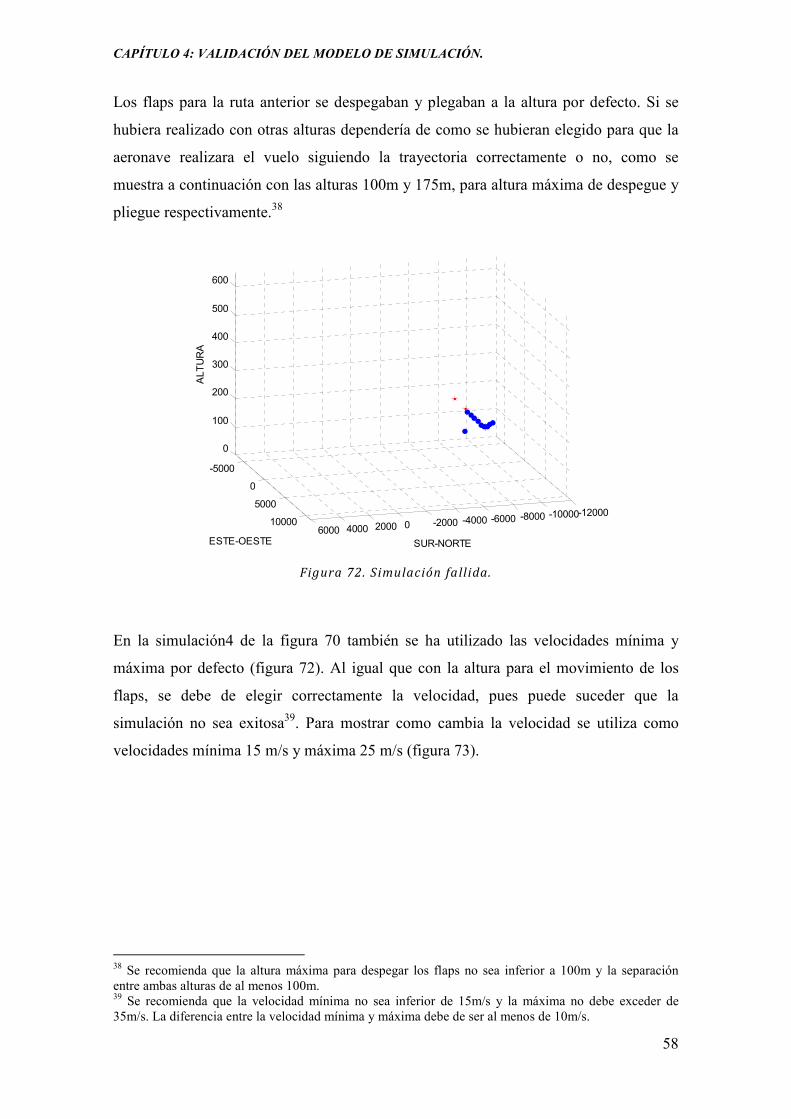
CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
58
Los flaps para la ruta anterior se despegaban y plegaban a la altura por defecto. Si se
hubiera realizado con otras alturas dependería de como se hubieran elegido para que la
aeronave realizara el vuelo siguiendo la trayectoria correctamente o no, como se
muestra a continuación con las alturas 100m y 175m, para altura máxima de despegue y
pliegue respectivamente.38
Figura 72. Simulación fallida.
En la simulación4 de la figura 70 también se ha utilizado las velocidades mínima y
máxima por defecto (figura 72). Al igual que con la altura para el movimiento de los
flaps, se debe de elegir correctamente la velocidad, pues puede suceder que la
simulación no sea exitosa39. Para mostrar como cambia la velocidad se utiliza como
velocidades mínima 15 m/s y máxima 25 m/s (figura 73).
38 Se recomienda que la altura máxima para despegar los flaps no sea inferior a 100m y la separación entre ambas alturas de al menos 100m. 39 Se recomienda que la velocidad mínima no sea inferior de 15m/s y la máxima no debe exceder de 35m/s. La diferencia entre la velocidad mínima y máxima debe de ser al menos de 10m/s.
-12000-10000-8000-6000-4000-20000200040006000
-5000
0
5000
10000
0
100
200
300
400
500
600
ALTURA
SUR-NORTEESTE-OESTE

CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
59
Figura 73. Simulación con velocidad por defecto.
Figura 74. Simulación con cambio de velocidad.
En este caso la aeronave nunca viaja a la velocidad mínima debido a que la altura
mínima es de 50 m.
Una vez controlados los vuelos sencillos con despegue y aterrizaje se procede a probar
con curvas con misma altura durante todo el trayecto. Para ello se utilizan dos rutas con
una única curva pero en cada caso hacia un lado diferente.
0 1000 2000 3000 4000 5000 600015
20
25
30
35Con velocidad por defecto
0 1000 2000 3000 4000 5000 6000 700015
20
25
30
35Cambio en la velocidad
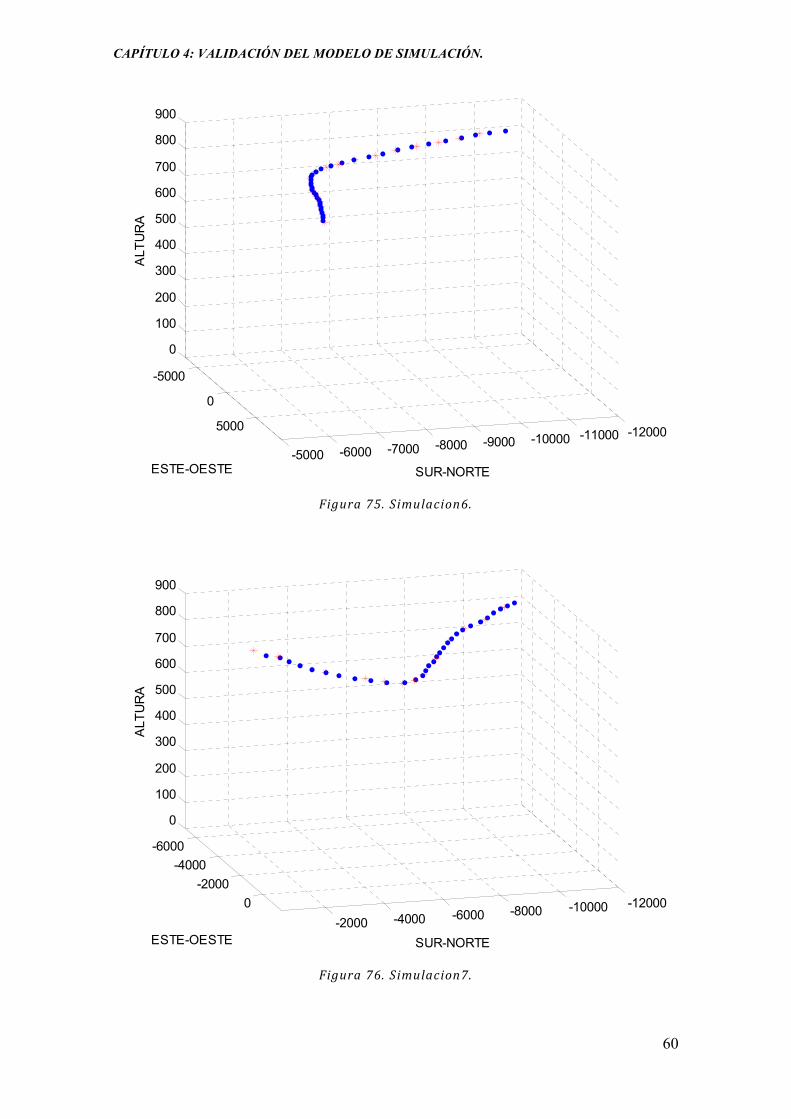
CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
60
Figura 75. Simulacion6.
Figura 76. Simulacion7.
-12000-11000-10000-9000-8000-7000-6000-5000
-5000
0
5000
0
100
200
300
400
500
600
700
800
900
SUR-NORTEESTE-OESTE
ALTURA
-12000-10000-8000-6000-4000-2000
-6000
-4000
-2000
0
0
100
200
300
400
500
600
700
800
900
SUR-NORTEESTE-OESTE
ALTURA

CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
61
En ambos casos se ve como se controla perfectamente la trayectoria de la aeronave
siguiendo todos los puntos de referencia. Para ello se debe de elegir correctamente los
valores del ángulo de alabeo40, pues si no es así puede ser que la aeronave no siga los
puntos de referencia cayéndose precipitadamente.
Se implementa un giro seguido de otro, pero de sentido contrario y menor de 90º para
ver el control de la trayectoria que realiza el modelo, obteniendo:
Figura 77. Simulación de doble giro41.
El control en un doble giro se ha controlado correctamente, por lo que se prueba pero
teniendo un despegue y un aterrizaje. Es decir, el avión ascenderá y cuando se encuentre
a altura constante se realizará el doble giro y posteriormente descenderá.
40 Se recomienda que el ángulo de alabeo no varíe bruscamente ni tampoco debe tener valores altos (-5,5). 41 Se ha utilizado la ruta9.
-12000-11000-10000-9000-8000-7000-6000-5000-4000
-5000
0
5000
0
200
400
600
800
SUR-NORTEESTE-OESTE
ALTURA
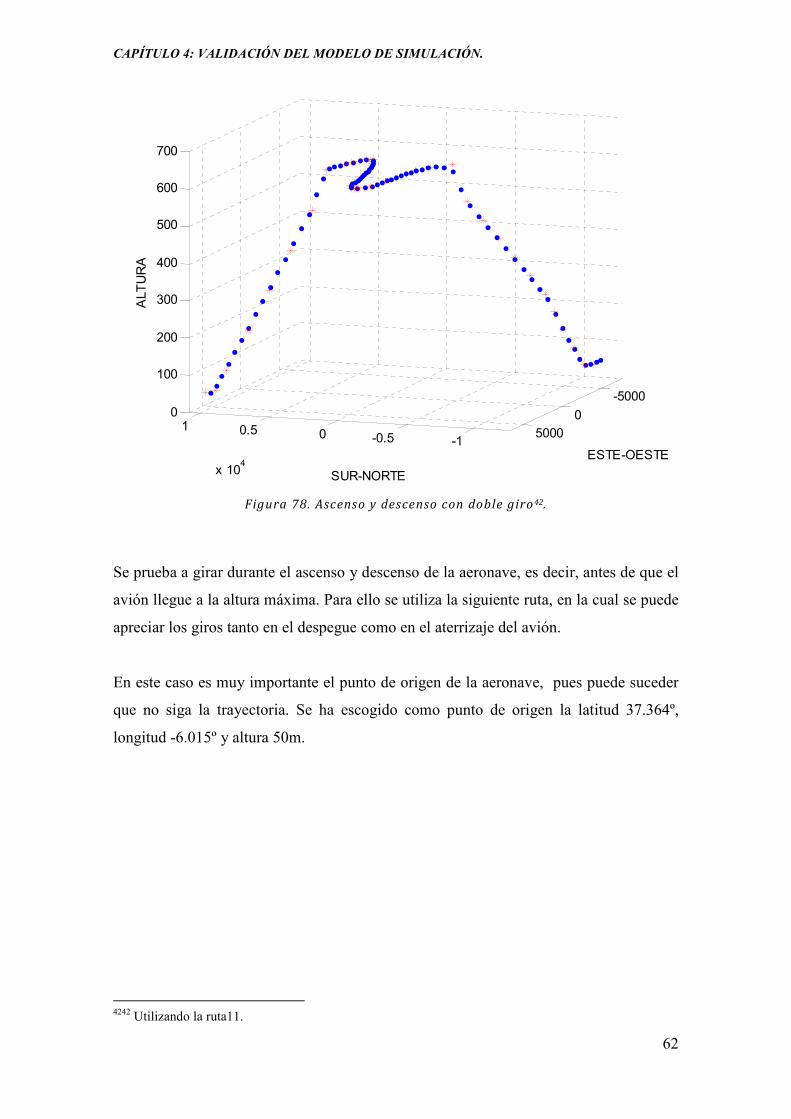
CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
62
Figura 78. Ascenso y descenso con doble giro42.
Se prueba a girar durante el ascenso y descenso de la aeronave, es decir, antes de que el
avión llegue a la altura máxima. Para ello se utiliza la siguiente ruta, en la cual se puede
apreciar los giros tanto en el despegue como en el aterrizaje del avión.
En este caso es muy importante el punto de origen de la aeronave, pues puede suceder
que no siga la trayectoria. Se ha escogido como punto de origen la latitud 37.364º,
longitud -6.015º y altura 50m.
4242 Utilizando la ruta11.
-1-0.500.51
x 104
-5000
0
5000
0
100
200
300
400
500
600
700
ESTE-OESTE
SUR-NORTE
ALTURA
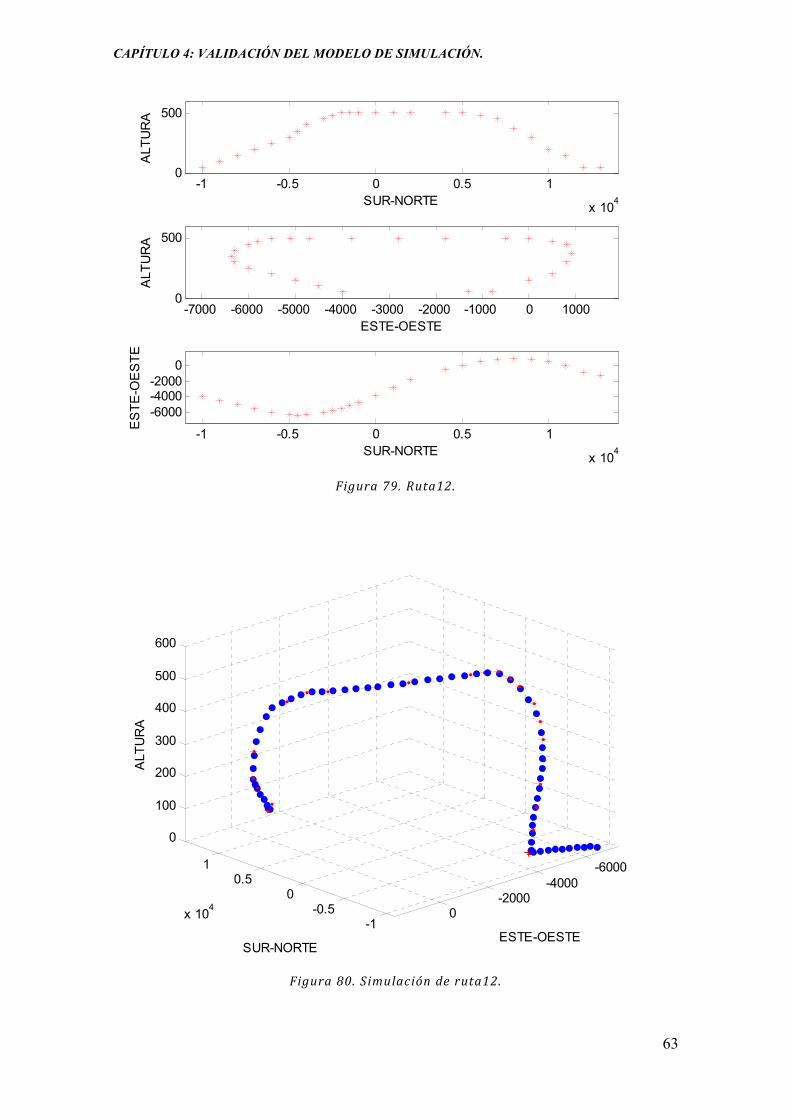
CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
63
Figura 79. Ruta12.
Figura 80. Simulación de ruta12.
-1 -0.5 0 0.5 1
x 104
0
500
SUR-NORTE
ALTURA
ruta10.dat
-7000 -6000 -5000 -4000 -3000 -2000 -1000 0 10000
500
ESTE-OESTE
ALTURA
-1 -0.5 0 0.5 1
x 104
-6000-4000-2000
0
SUR-NORTE
ESTE-OESTE
-1-0.5
00.5
1
x 104
-6000-4000
-20000
0
100
200
300
400
500
600
ALTURA
SUR-NORTEESTE-OESTE
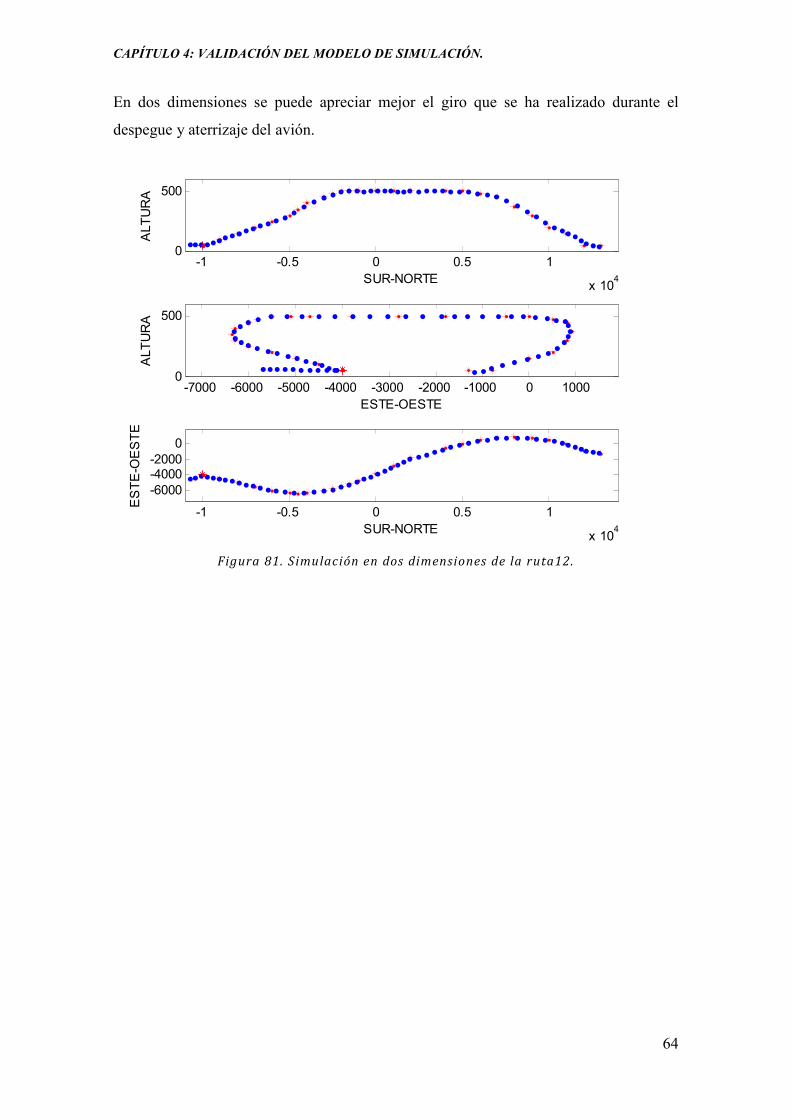
CAPÍTULO 4: VALIDACIÓ DEL MODELO DE SIMULACIÓ .
64
En dos dimensiones se puede apreciar mejor el giro que se ha realizado durante el
despegue y aterrizaje del avión.
Figura 81. Simulación en dos dimensiones de la ruta12.
-1 -0.5 0 0.5 1
x 104
0
500
SUR-NORTE
ALTURA
-7000 -6000 -5000 -4000 -3000 -2000 -1000 0 10000
500
ESTE-OESTE
ALTURA
-1 -0.5 0 0.5 1
x 104
-6000-4000-2000
0
SUR-NORTE
ESTE-OESTE

CAPÍTULO 5: CO CLUSIO ES.
65
5. CO�CLUSIO�ES
El objetivo principal del proyecto es crear una aplicación que simule y monitorice la trayectoria de la aeronave gracias a la ruta proporcionada. Dicha ruta puede ser suministrada por la aplicación o cualquier otra que el usuario introduzca.
Para ello se ha utilizado un modelo básico43, aplicando varios cambios necesarios para poder tener el control de la aeronave en todo tipo de rutas reales:
- En el modelo básico el control se realizaba en dos de los ejes de la aeronave, en
el lateral y el longitudinal (ángulos de alabeo y cabeceo). Utilizando el ángulo de
guiñada para calcular el de alabeo. Ahora la aplicación controla la aeronave en
sus tres ejes, utilizando todos los ángulos correctamente. Es decir, el ángulo
utilizado para controlar la dirección será el de guiñada y no el de alabeo como
utilizaba el modelo básico. Los ángulos son necesarios para suministrar el
movimiento de las superficies aerodinámicas a través de los controles PI y PID.
- El modelo básico sólo podía realizar aterrizajes pero no despegues, por lo que se
ha añadido dicha funcionalidad.
- Los giros no eran ejecutados con precisión por lo que se ha procedido a definir
las rutas con mayor número de puntos de referencia.
Como se ha comprobado en el capítulo de validación del modelo de simulación, si a la aplicación se le proporciona los puntos de referencia y opcionalmente algunos parámetros más, esta puede realizar un correcto control del vuelo de la aeronave. Pero para ello deben de cumplirse los siguientes requisitos:
- Los puntos de referencia deben escogerse con cuidado. Por ejemplo en las
curvas debe de proporcionarse un mayor número de puntos para que la aeronave
siga la trayectoria adecuadamente. Es importante fijarse en el primer punto de
referencia pues dependiendo de su valor habría que elegir la posición inicial de
la aeronave, para que tenga coherencia la trayectoria. Por este motivo no siempre
es recomendable ejecutar la simulación con la posición inicial por defecto.
- El ángulo de alabeo se recomienda que se encuentre en el rango (-5,5). Si no
fuera así puede ocurrir que la simulación no se realice con éxito.
43 Ver bibliografía (1).
CAPÍTULO 5: CO CLUSIO ES.
66
- La velocidad, en caso de no utilizarse la de por defecto, no debería de ser mayor
de 35m/s ni menor de 15m/s. Y la diferencia entre la velocidad mínima y
máxima se recomienda que sea al menos de 10m/s.
- Lo mismo ocurre con la altura máxima de despegue y pliegue de los flaps. La
altura máxima de despegue no debe de ser inferior a 100m y la diferencia entre
las dos alturas se recomienda que sea al menos de 100m.
Hay varias consideraciones que deben de tenerse en cuenta:
- Cuando se está simulando una trayectoria y se decide cambiar de ruta, puede
suceder que se introduzca otra ruta diferente a las que se muestran en la lista
(figura 50), en ese caso no se asegura que la simulación funcione, pues quedaría
pendiente de la correcta elección de los puntos de referencia.
- La librería de AeroSim tiene una limitación respecto a la dirección que puede
tomar el avión. Para entenderlo mejor se pone un ejemplo: en el caso de que la
aeronave se encontrase a altura constante y en la coordenada x en el punto -
8000, independientemente del valor de la coordenada y, la aeronave no puede
dirigirse a un punto que tenga como coordenada x, -9000.
- Si la simulación no se ha terminado correctamente no se podrá guardar, pues en
caso de que se intentara la simulación que se guardaría sería la última realizada
con éxito.
Se han diseñado trayectorias reales, por ese motivo puede que en ocasiones el avión no
termine la trayectoria debido a que no se cumplen las ecuaciones dinámicas.
Para realizar las simulaciones se han creado múltiples opciones para añadir
funcionalidad a la aplicación y que el usuario no deba de introducirse en el código de
Matlab o en los bloque se Simulink para efectuar ninguna acción.
CAPÍTULO 6: LÍ EAS FUTURAS.
67
6. L�EAS FUTURAS.
Algunas de las posibles líneas de futuro de la aplicación pueden ser:
- Realizar la implementación hardware de la aplicación de la cual se podría
encargar el grupo con el que he colaborado durante la elaboración de dicha
aplicación.
- La aplicación puede ser utilizada para la docencia de varias maneras: en un
futuro proyecto se desea añadir los mandos de control de vuelo a un simulador,
si se pudiera hacer lo mismo pero con la aplicación, se podría ver con Flight
Gear (el cual ya está implementado en la aplicación) el vuelo en tiempo real,
dejando que el piloto (en este caso los alumnos), pudieran tomar el control en
ciertas ocasiones. Si a esto se le añade que la aplicación de alguna manera
pudiera guardar toda la simulación realizada por el piloto, a posteriori se podría
analizar detenidamente toda la trayectoria seguida.
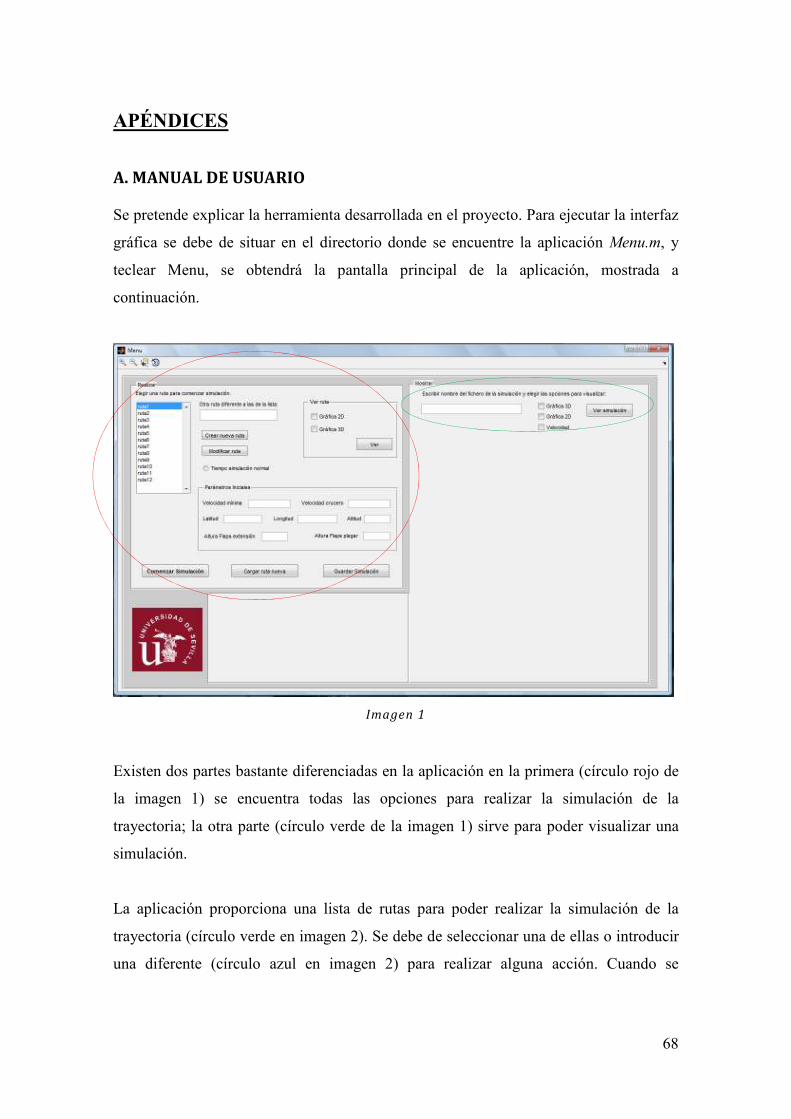
68
AP�DICES
A. MANUAL DE USUARIO
Se pretende explicar la herramienta desarrollada en el proyecto. Para ejecutar la interfaz
gráfica se debe de situar en el directorio donde se encuentre la aplicación Menu.m, y
teclear Menu, se obtendrá la pantalla principal de la aplicación, mostrada a
continuación.
Imagen 1
Existen dos partes bastante diferenciadas en la aplicación en la primera (círculo rojo de
la imagen 1) se encuentra todas las opciones para realizar la simulación de la
trayectoria; la otra parte (círculo verde de la imagen 1) sirve para poder visualizar una
simulación.
La aplicación proporciona una lista de rutas para poder realizar la simulación de la
trayectoria (círculo verde en imagen 2). Se debe de seleccionar una de ellas o introducir
una diferente (círculo azul en imagen 2) para realizar alguna acción. Cuando se
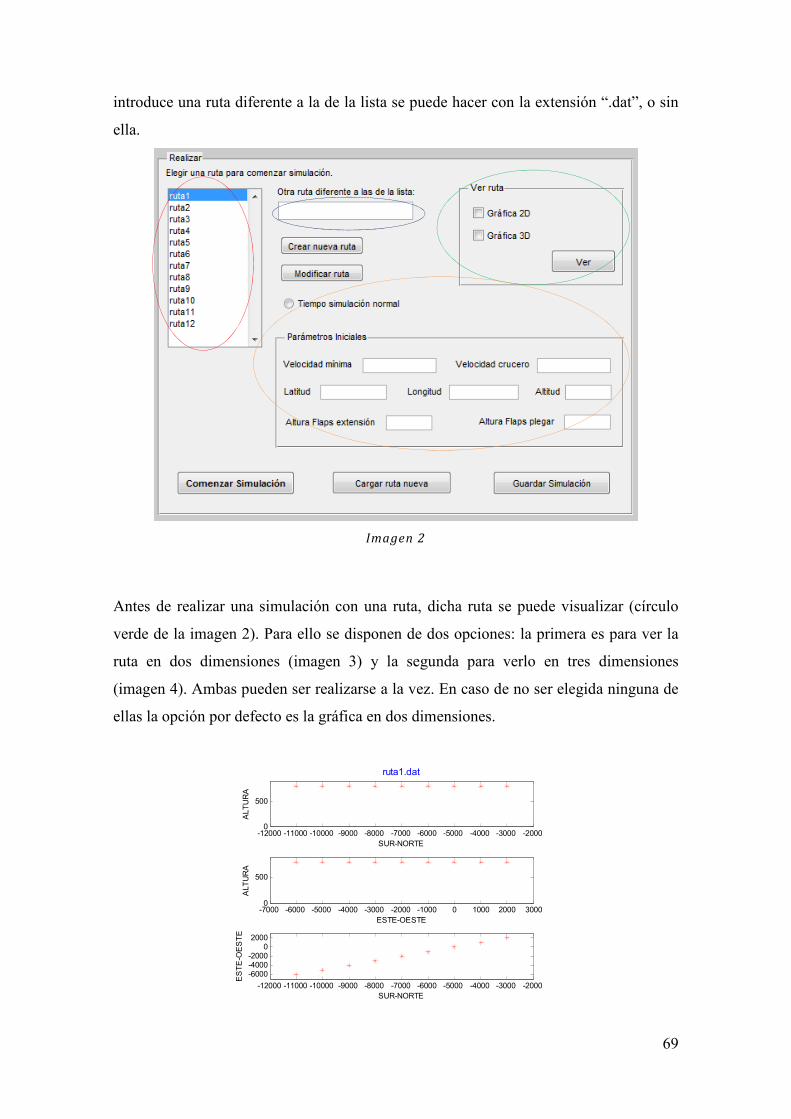
69
introduce una ruta diferente a la de la lista se puede hacer con la extensión “.dat”, o sin
ella.
Imagen 2
Antes de realizar una simulación con una ruta, dicha ruta se puede visualizar (círculo
verde de la imagen 2). Para ello se disponen de dos opciones: la primera es para ver la
ruta en dos dimensiones (imagen 3) y la segunda para verlo en tres dimensiones
(imagen 4). Ambas pueden ser realizarse a la vez. En caso de no ser elegida ninguna de
ellas la opción por defecto es la gráfica en dos dimensiones.
-12000 -11000 -10000 -9000 -8000 -7000 -6000 -5000 -4000 -3000 -20000
500
SUR-NORTE
ALTURA
ruta1.dat
-7000 -6000 -5000 -4000 -3000 -2000 -1000 0 1000 2000 30000
500
ESTE-OESTE
ALTURA
-12000 -11000 -10000 -9000 -8000 -7000 -6000 -5000 -4000 -3000 -2000
-6000-4000-2000
02000
SUR-NORTE
ESTE-OESTE

70
Imagen 3
Imagen 4
Existen botones en la aplicación que crean o modifican rutas. Cuando es pulsado el
botón de crear se abre una ventana con una tabla en la que se pueden introducir los
puntos de referencia que definirán la ruta (imagen 5).
Imagen 5
Antes de crear la ruta se puede visualizar con el botón Visualizar ruta, para que en el
caso de que no fuera como se desea, se pueda modificar antes de crearla (imagen 6).
En el caso de que la ruta exista se mostrará una ventana preguntando si se desea
sobrescribir el fichero.
-12000-10000-8000-6000-4000-2000
-6000-4000-2000
02000
0
100
200
300
400
500
600
700
800
900
ALTURA
ruta1.dat
SUR-NORTEESTE-OESTE

71
Imagen 6
El botón Modificar ruta sirve para cambiar o crear puntos de referencia de la
trayectoria que debe seguir la aeronave. Cuando se pulsa el botón se pide el nombre de
la ruta que se desea modificar (imagen 7). Una vez introducido aparece una ventana con
los valores de los puntos de referencia y la representación de los mismos (imagen 8). Al
igual que antes se puede visualizar los cambios antes de hacerlos definitivos (imagen 9).
Si no se introduce ningún nombre nuevo para la trayectoria, los cambios se guardan con
el nombre del fichero de la ruta que se abrió. En caso contrario se crearía una nueva ruta
con el nombre escrito sin modificar la ruta de partida.
Imagen 7
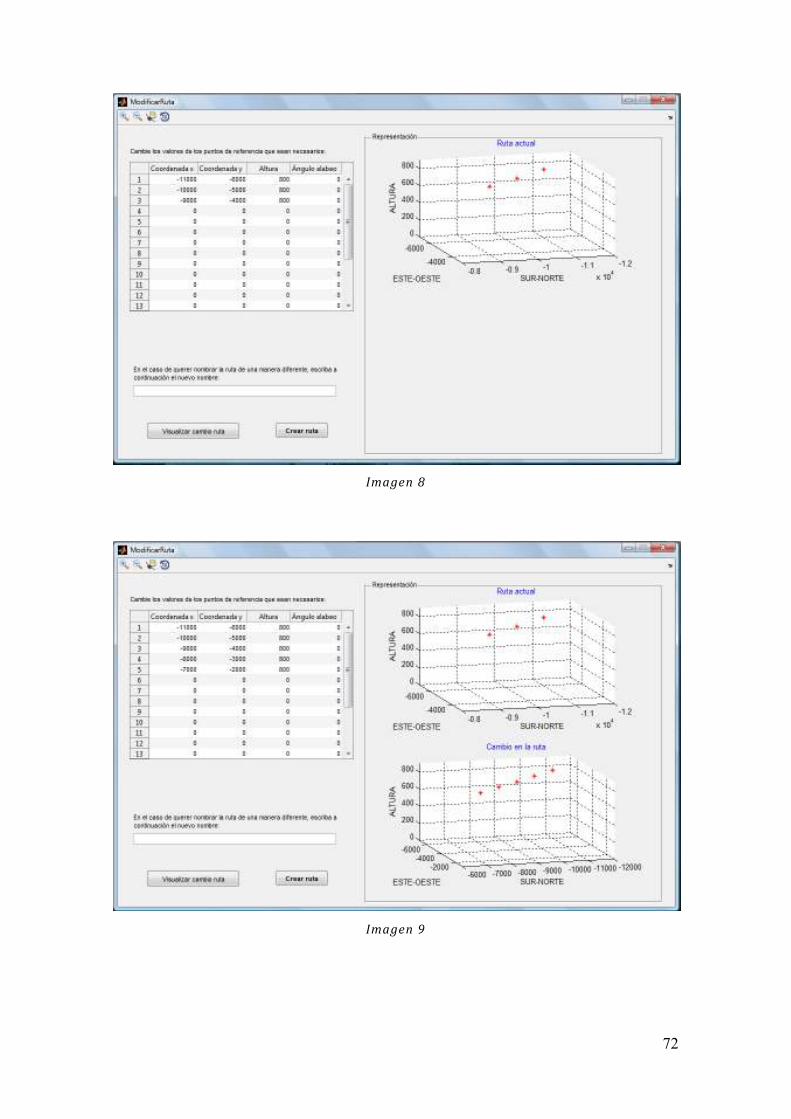
72
Imagen 8
Imagen 9
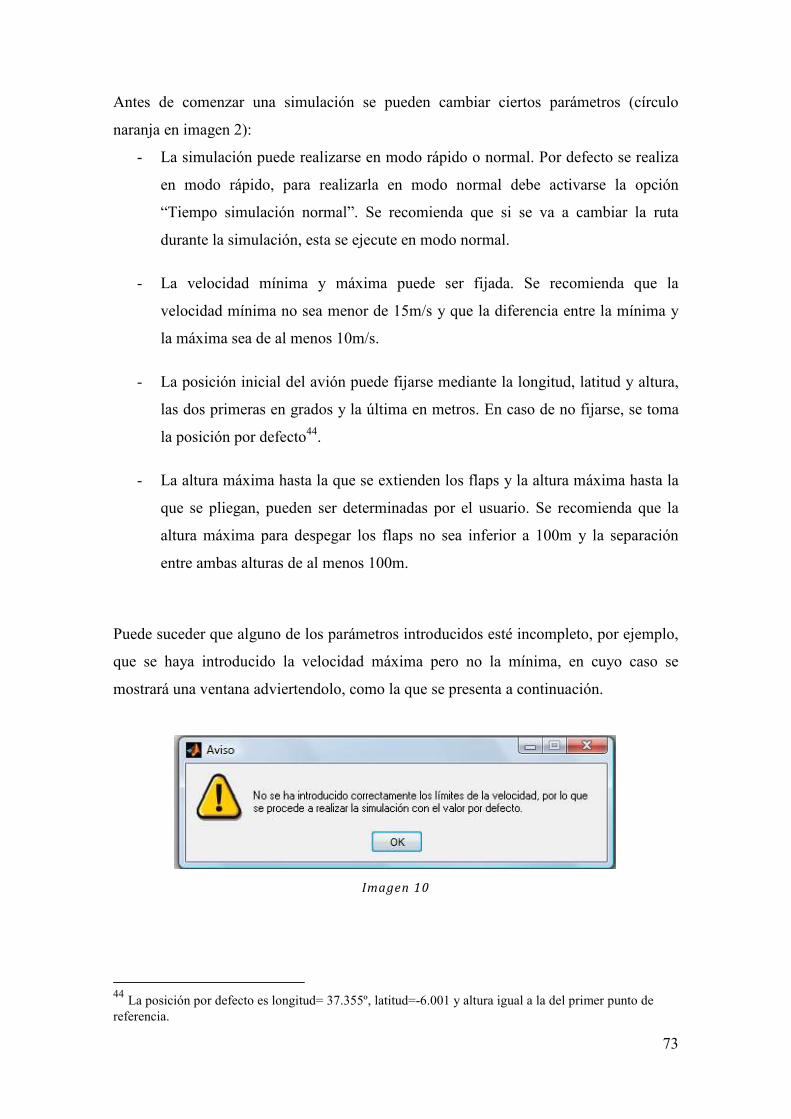
73
Antes de comenzar una simulación se pueden cambiar ciertos parámetros (círculo
naranja en imagen 2):
- La simulación puede realizarse en modo rápido o normal. Por defecto se realiza
en modo rápido, para realizarla en modo normal debe activarse la opción
“Tiempo simulación normal”. Se recomienda que si se va a cambiar la ruta
durante la simulación, esta se ejecute en modo normal.
- La velocidad mínima y máxima puede ser fijada. Se recomienda que la
velocidad mínima no sea menor de 15m/s y que la diferencia entre la mínima y
la máxima sea de al menos 10m/s.
- La posición inicial del avión puede fijarse mediante la longitud, latitud y altura,
las dos primeras en grados y la última en metros. En caso de no fijarse, se toma
la posición por defecto44.
- La altura máxima hasta la que se extienden los flaps y la altura máxima hasta la
que se pliegan, pueden ser determinadas por el usuario. Se recomienda que la
altura máxima para despegar los flaps no sea inferior a 100m y la separación
entre ambas alturas de al menos 100m.
Puede suceder que alguno de los parámetros introducidos esté incompleto, por ejemplo,
que se haya introducido la velocidad máxima pero no la mínima, en cuyo caso se
mostrará una ventana adviertendolo, como la que se presenta a continuación.
Imagen 10
44 La posición por defecto es longitud= 37.355º, latitud=-6.001 y altura igual a la del primer punto de referencia.
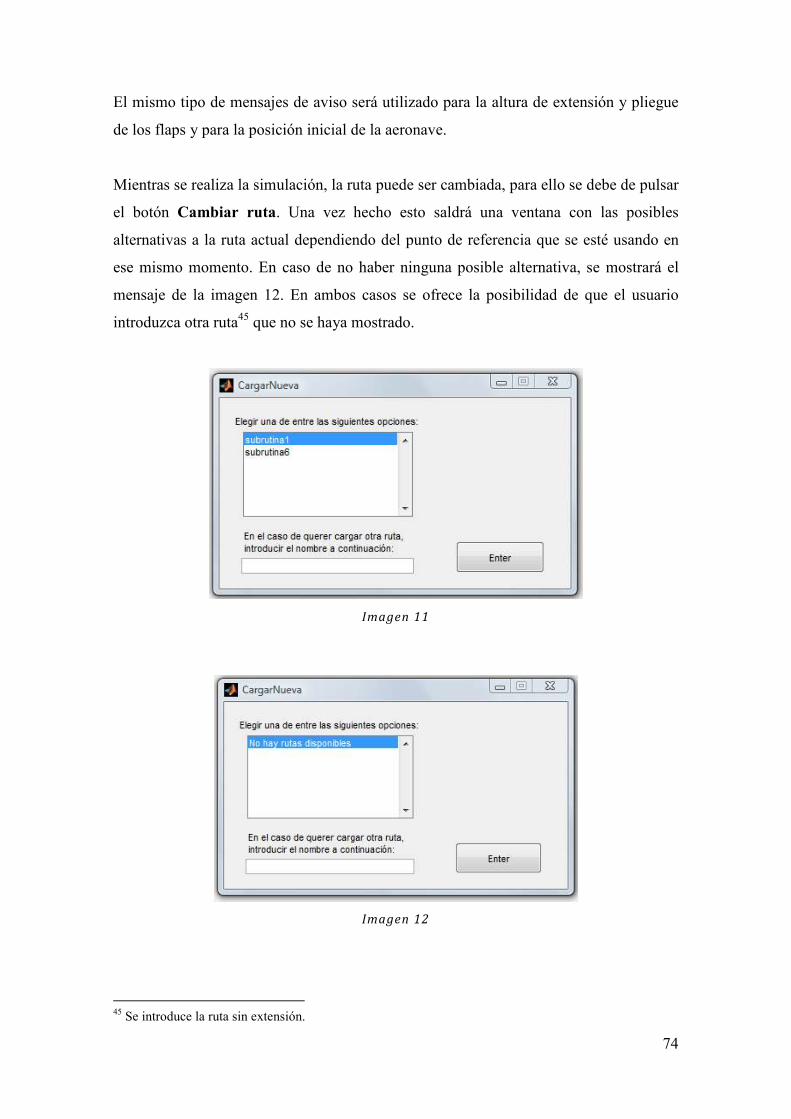
74
El mismo tipo de mensajes de aviso será utilizado para la altura de extensión y pliegue
de los flaps y para la posición inicial de la aeronave.
Mientras se realiza la simulación, la ruta puede ser cambiada, para ello se debe de pulsar
el botón Cambiar ruta. Una vez hecho esto saldrá una ventana con las posibles
alternativas a la ruta actual dependiendo del punto de referencia que se esté usando en
ese mismo momento. En caso de no haber ninguna posible alternativa, se mostrará el
mensaje de la imagen 12. En ambos casos se ofrece la posibilidad de que el usuario
introduzca otra ruta45 que no se haya mostrado.
Imagen 11
Imagen 12
45 Se introduce la ruta sin extensión.

75
AVISO: En el caso de que no se esté realizando ninguna simulación aparecerá la
siguiente ventana avisando de ello.
Imagen 13
Cuando se ha terminado de realizar una simulación existe la posibilidad de que dicha
simulación sea guardada en un fichero. Cuyo nombre será introducido por el usuario46.
Si el nombre introducido para el fichero ya existe, se ofrecerá la posibilidad de
sobrescribir el fichero.
Puede ocurrir que en ese momento no haya ninguna simulación que guardar, en cuyo
caso se mostrará el siguiente mensaje:
Imagen 14
Si no ha sido seleccionada ninguna ruta cuando se pulse alguno de los botones (Ver,
Comenzar Simulación y Guardar Simulación) aparezca el siguiente mensaje:
Imagen 15
46 El nombre puede ser escrito con la extensión o sin ella.
76
En caso de suceder esto, pinchar sobre la ruta deseada o introducirla (círculo azul de la
imagen 2) y volver a presionar el botón.
Para poder visualizar una simulación únicamente se debe de escribir el nombre del
fichero que la contenga. Al igual que anteriormente se puede introducir con extensión o
no. En caso de no existir el fichero aparecerá el siguiente mensaje de error:
Imagen 16
Existen múltiples formas de visualizar la simulación dependiendo de las opciones que
se seleccionen. Hay tres opciones (círculo verde de la imagen 1):
- Representación de la trayectoria de la aeronave en dos dimensiones.
- Representación de la trayectoria de la aeronave en tres dimensiones.
- Variación de la velocidad de la aeronave a lo largo del tiempo de simulación.
Por defecto si no se selecciona la manera de representar la trayectoria, se visualiza la
simulación en dos dimensiones (círculo rojo de la imagen 17).
En la siguiente imagen se muestra la simulación habiendo elegido como opciones la
velocidad y la gráfica en 2D. En el caso de que también se hubiera seleccionado la
opción de gráfica en 3D, esta se representaría en una ventana independiente (imagen
18).
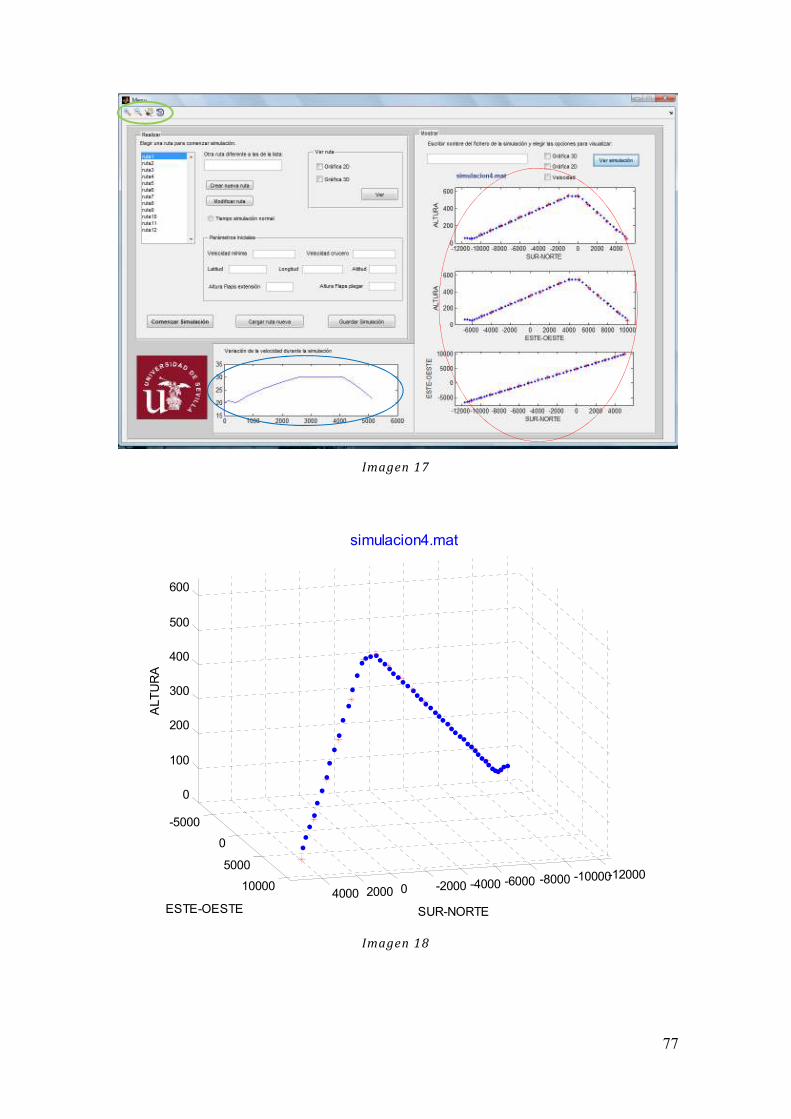
77
Imagen 17
Imagen 18
-12000-10000-8000-6000-4000-2000020004000
-5000
0
5000
10000
0
100
200
300
400
500
600
SUR-NORTE
simulacion4.mat
ESTE-OESTE
ALTURA
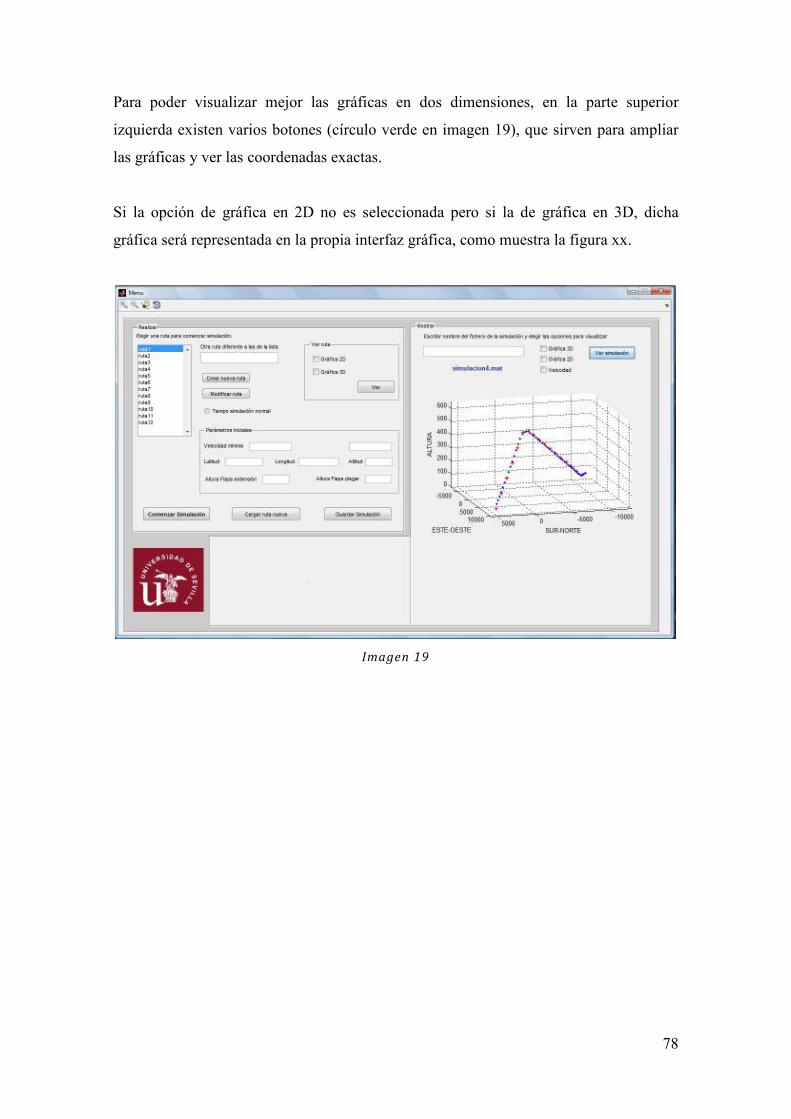
78
Para poder visualizar mejor las gráficas en dos dimensiones, en la parte superior
izquierda existen varios botones (círculo verde en imagen 19), que sirven para ampliar
las gráficas y ver las coordenadas exactas.
Si la opción de gráfica en 2D no es seleccionada pero si la de gráfica en 3D, dicha
gráfica será representada en la propia interfaz gráfica, como muestra la figura xx.
Imagen 19
79
BIBLIOGRAFÍA
(1) “Control de trayectoria en tiempo real para un aterrizaje de un modelo simple de
aeronave mediante Simulink, mostrando los resultados a través de la interfaz gráfica
Fligth Gear 0.9.8” por los alumnos Alberto Bernat Blanch y Moisés Jalón Baudet.
(2) Mecánica del vuelo. M.A.Gómez Tierno, M.Pérez Cortés, C.Puentes Márquez.
(3) Airplane flight dynamics and automatic flight controls. Part I. Jan Roskam.
(4) Funcionamiento avión: http://www.asifunciona.com/aviacion/af_avion/
af_avion1.htm
(5) Mando del avión: http://www.skytechnologies.net/controlplane/
index.html
(6) Conceptos sobre aeronaves: http://www.manualvuelo.com/indice.html
(7) Manual GUIDE: http://www.dspace.espol.edu.ec/bitstream/123456789/
10740/11/MATLAB_GUIDE.pdf
(8) Manual librería AeroSim: http://people.rit.edu/pnveme/EMEM682n/
Matlab_682/aerosim_ug.pdf
(9) Control PID: http://www.frlr.utn.edu.ar/descargas%5CAlumnos%
5Cingelectronica%5CApuntes%5C38SCA%5CPublicaciones%5CControl_PID_Enfoq
ue_Descriptivo.pdf