escuela politÉcnica nacional facultad de...
TRANSCRIPT
ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA
MEDIDOR DIGITAL DE FACTOR DE POTENCIA PARA
VOLTAJES Y CORRIENTES NO SINUSOIDALES
TESIS PREVXA A LA OBTENCIÓN DEL TITULO D.E INGENIEROEN LA ESPECIALIZACION DE ELECTRÓNICA Y CONTROL
Diego X. Zambrano Mora
Quito,, marzo de 199Q

Certifico que el presentebraba, j o de Tesi s ha si dodesarrollado por el Sr. DIEGOzmBRAMO MORAf ' en sutotalidad y bajo midirección.
ING. B 'LEDESMA G.
DIRECTOR DE TESIS
Este trabajo esta dedicado amis padres, por habermeapoyado a lo largo de todosmis estudiosf y especialmentea mi madre, por habercaminado junto a mí toda, lavida.
Agradezco al Ing. BolívarLedesrna,por su valiosa ypaciente ayuda, ya qqe sinella no habría sido posibleculminar este trabajo.

ÍNDICE
Pág.
INTKODUCCION , , 1
1_ GKNKRALIDADKS
1.1. Conceptos generales 4
-1.1.1. Evaluación de los métodos y t'écnicaa utilizados ..,,.. 7
1.1.2. Análisis teórico ...... .' 10
1.1.3. Análisis de la distorsión armónica en la linea
para circuitos rectificadores 15
1.1.4. Filtro Digital 18
1.1.5. Filtro pasabanda de segundo orden 20
1.2. Métodos numéricos y técnicas para medir el factor de
potencia, y el factor de desplazamiento 22
1.2.1. Valor Eficaz 22
1.2.2. Filtro Digital 2 , 23
2. DISKIJO DKL MKDIDQR
2.1. Descripción general y especificaciones del 31
digital de factor de potencia.
2.1.1. Consideraciones Generales 31
2.1.2. Descripción General 32
Pag.
2.1.3. Diagrama de bloques general , 34
2.1.4. Especificaciones 35
2.2. Diseño del módulo de adquisición de datos 37
de voltaje y corriente.
2.2.1. Descripción General — 37
2.2.2. Amplificador Diferencial " , 38
2.2.3. Acondicionador de voltaj e 38
2.2.4. Acondicionador de corriente . 40
2.2.5. Conversión arialógico-digital ; ... 41
2.2.6. Conexión del converaor AD con el microprocesador 43
2.2.7. Fuentes de error en la adquisición de datos 44
2.2.8. Circuito impreso 45
2.3. Diseño del módulo de procesamiento de datos 46
2.4. Circuitos auxiliares y montaje general 50
2.4.1. Módulo de conversión digital-analógica 50
2.4.2. Módulo de visualisación'y entrada de datos 53
2.4.3 Montaje general del equipo 56
2.5. Diseño de loa programas para el cálculo 59
del factor de potencia, y los otros parámetros eléctricos.
2.5.1. Organización de la memoria 61
Pag.
2.5.2. Subrutina de arranque del microcontrolador 64
2.5.3. Programa principal 67
2.5.5. Subrutina de adquisición de datos 67
2.5.6. Subrutina para inicializar el equipo 71
2.5.7. Subrutina para manej o del display LCD 78
2.5.8. Subrutina de cálculo V,I,P,S5fp 80
2.5.9. Subrutina de cálculo: VI, II, fpd, THV, THI 85
2.5.10. Subrutinaa generales 89
2.5.11. Subrutina para mostrar los resultados y enviarlos .... 90
al computador.
3. PRUEBAS Y KKSUIíTADOS
3.1. Pruebas Iniciales , 95
3.2. Pruebas en Sistemas Industriales 100
3.3. Análisis de los resultados 150
4_ CONCLUSIONES
4.1. Análisis económico 152
4.2. Discuaión de resultados experimentales 155
4.3. Conclusiones y recomendaciones 159
BIBLIOGRAFÍA 163

ANtíXOS-
1, Diagramas circuítales completos del equipo.
2. Manual de utilización del equipo.
4. Programa ensamblador para el micro 8052 AH-BAS1C, y
programas auxiliares.

INTRODUCCIÓN
151 rápido crecimiento en la utilización de conversoretí e/jtáticoa, seanestos AC-DC o AC-AC, para el control de motores eléctricos, máquinas, y
o broa procesos de automatización en el sector industrial ha provocado
efectos secundarios sobre la red de alimentación a estos equipos.
Entre los principales efectos negativos están, el deterioro del factor
de potencia y la inyección de armónicos indeseables en las corrientes de
red.
Para compensar estos efectos sobre la red, en la actualidad se realiza
tanto la corrección del factor de potencia por generación de potencia
reactiva, así como la inclusión de flibros, con el fin de limitar las
corrientes armónicas que fluyen hacia la red.
Para la corrección del factor de potencia en la mayoría de industrias se
utiliza reguladores que miden la corriente y el voltaje en las líneas deentrada, fistos- reguladores miden el facbor de potencia de desplazamiento,
que es una aproximación del -factor de potencia real, válida sólo en el
caso de que las ondas de corriente y voltaje sean sinusoidales.
Pero la introducción de armónicos en la red produce distorsión y por lo
tanto un error en la aproximación del factor de potencia real.
DIOXTAL, DK FACTOR UK PDTJCWC1A,

Asimismo para ei diseño de ios filtros se debe tener un conocimiento
previo de la composición armónica de la onda de corriente.
El medidor a diseñarse en este trabajo de Tesis, utiliza un
microprocesador, lo cjue permite la medición correcta del factor de
potencia, y su comparación con la medición convencional. Permite además
el análisis de la distorsión y el factor dü potencia de sistemas
individuales, tales como conversores AOAC, AC-DC, arrancadores demotores trifásicos, etc.
El medidor toma las señales de corriente y voltaje de un sistema,
utilizando para ello un conversón analógico digital y un ínterfas de
entrada. En el microprocesador se ejecutan las rutinas de análisis de
las ondas que permiten obtener el valor numérico del factor de potencia,
y almacenar datos que pueden luego ser transferidos hacia un computador.
•En el microprocesador se incluye una rutina de filtrado digital de las
señales, lo ejue permite hacer un análisis en el dominio del tiempo tantodel voltaje como de la corriente, y obtener los parámetros eléctricos
deseados.
Cabe mencionar que oí .medidor digital aventaja a vino hecho en base a
elementos analógicos, en su mayor precisión, la no utilización de
componentes pasivos con valores de tolerancias críticos, y su mayor
versatilidad.
Este trabajo de tesis pretende dar continuidad a otros realisadospreviamente. En trabajos anteriores, se han utilizado técnicas como la
Transformada Rápida de Fourier CFFD, para la misma aplicación, con
resultados satisfactorios, pero con tiempos de ejecución muy altos, parala obtención de cada nuevo resultado.
En usté trabajo se utilizará la técnica de filtrado digital, mediante laimplementación de las ecuaciones de diferencias de un filtro, para
obtener los datos de distorsión armónica y en base a estos los de factor
de potencia y factor de potencia de desplazamiento.
Ge estima que los resultados serán satisfactorios y que los tiempos de
ejecución pueden ser menores.
MKDIDOK DIOITAL DK FACTOR Dtt POTEHCiA

Entre las aplicaciones del equipo a diseñaras, se pueden nombrar:
monltoreo de sistemas eléctricos con el i'ln de diseñar
sistemas de compensación, o reemplazar sistemas existentes,
con el fin de "hacerlos más eficientes.
acoplada a un equipo para generación de potencia reactiva-
se puede utilizar como un compensador estático de potencia
reactiva.
L>e todo lo expuesto anteriormente, se pueden plantear laa siguientes
hipótesis para este trabajo:
1. ¿ Se pueden mejorar los tiempos de ejecución para un medidor digital
de energía utilizando como técnica el análisis en el dominio del
tiempo ?
2. ¿ Es posible la implementación satisfactoria de un filtro digital
utilizando un microprocesador de mediana velocidad y no dedicado para
procesamiento digital de señales ?
WBOXDOR DIGITAL. DK FACTOK DJ2 POTKWO1A

CAPITULO 1
GENERALIDADES
1.1 CONCEPTOS GEtfEKALISS
La mayoría de sistemas) industriales modernos de accionamiento de motores,
y otras aplicaciones que funcionan en base a convertidores estáticos de
energía, introducen armónicos en las formas de onda de voltaje ycorriente de la fuente de alimentación.
Como consecuencia de la distorsión en la línea, debida a los armónicos,
ae producen a nivel industrial y de sistemas de comunicación 3 efectoscorno loa siguientes:
Interferencia
Degradación de los elementos aislantes, y disminución de su vidaútil.
MÍE DI DOK. DIGITAL OÍS FACTOR D1L POTJIWC1A
Sobrecalentamiento en las máquinas, y otros elementos como
transformadores, motores, bancos de capacitores, etc.£11 incremento de temperatura se traduce en pérdidas, y por lo tantouna disminución en la eficiencia de los equipos.
Darío en elementos de estado sólido
Mal funcionamiento de protecciones y elementos de control.
Resonancia: Los capacitores, encargados de elevar el factor depotencia eri un sistema, pueden entrar en resonancia, con laimpedaricia equivalente de dicho sistema, i->ara un armónico de ciertoorden.
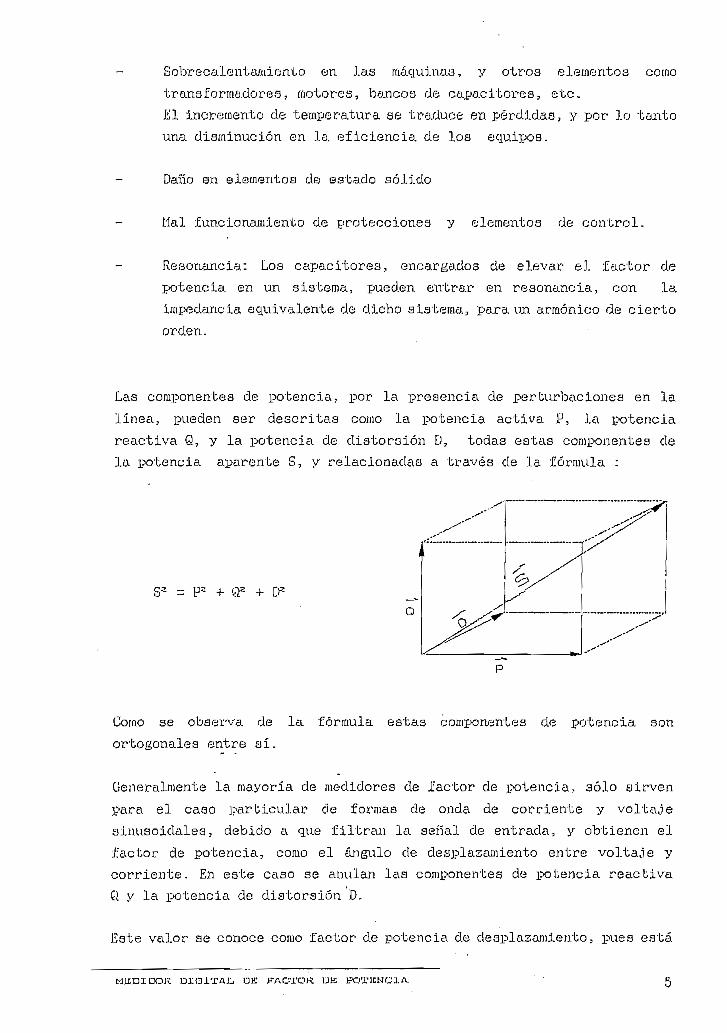
Las componentes de potencia, por la presencia de perturbaciones en la
línea, pueden ser descritas como la potencia activa P, la potenciareactiva Q, y la potencia de distorsión D, todas estas componentes dela potencia aparente S, y relacionadas a través de la fórmula :
Como se observa de la fórmula estas componentes de potencia sonortogonales entre si.
Generalmente la mayoría de medidores de factor de potencia, sólo sirvenpara el caso particular de formas de onda de corriente y voltajesinusoidales, debido a que filtran la serial de entrada, y obtienen el
factor de potencia, como el ángulo de desplazamiento entre voltaje ycorriente. En este caso se anulan las componentes de potencia reactivaQ y la potencia de distorsión D.
Este valor se conoce como factor de potencia de desplazamiento, pues está
MJÍDIDOR OieU-TAL, DK FACTOR DE POTKNO1A
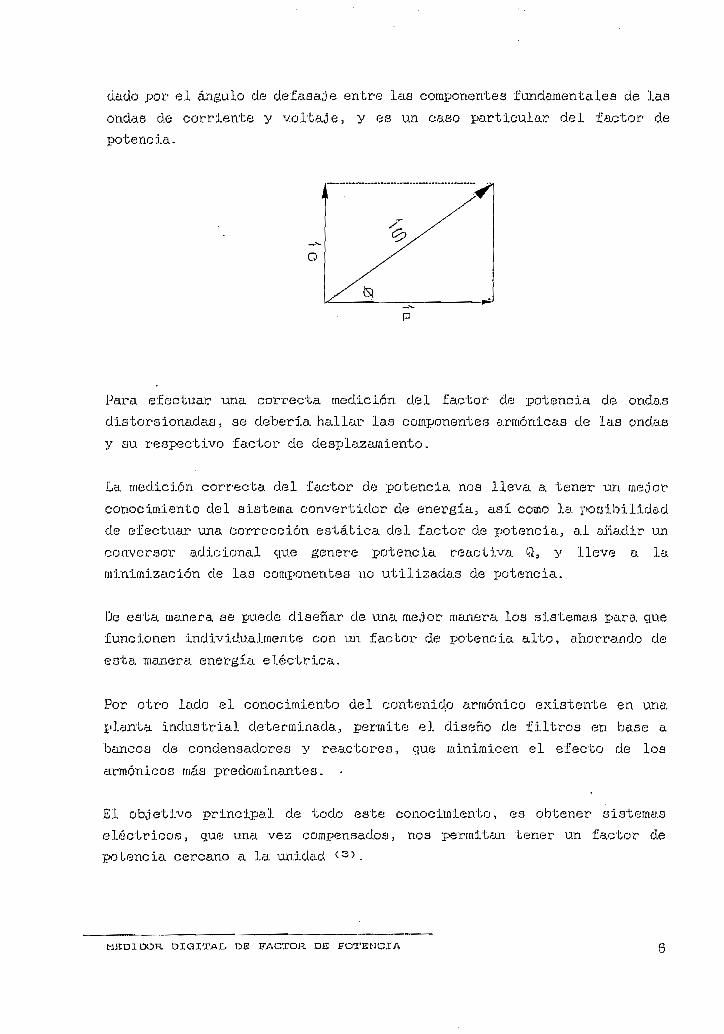
dado por- el ángulo de defasaje entre las componentes fundamentales de las
ondas de corriente y voltaje, y es un caso particular- del factor de
potencia.
Para efectuar una correcta medición del factor de potencia de ondas
distorsionadas , se debería hallar las componentes armónicas de las ondas
y su respectivo factor de desplazamiento.
La medición correcta del factor de potencia nos lleva a tener un mejor
conocimiento del sistema convertidor de energía, así como la posibilidad
de efectuar una corrección establea del factor de potencia, al añadir un
convcrsor adicional que genere potencia reactiva Q3 y lleve a la
minimizaclón de las componentes no utilizadas de potencia.
De esta manera, se puede diseñar de una mejor manera los sistemas para que
funcionen individualmente con un factor de potencia alto, ahorrando de
esta manera energía eléctrica.
Por otro lado el conocimiento del contenido armónico existente en una
planta industrial determinada., permite el diseño de filtros en base a
bancos de condensadores y reactores, que minimicen el efecto de los
armónicos más predominantes. •
El objetivo principal de 'todo este conocimiento, es obtener sistemas
eléctricos, que una vez compensados, nos permitan tener un factor de
potencia cercano a la unidad C3>.
MJSD1DOR -DiaiT-AJL DE FACTOR DE POTENCIA

1.1.1." EVALUACIÓN DE LAS TÉCNICAS Y MÉTODOS DIS MEDICIÓN UTILIZADOS.
Todo lo dicho anteriormente, fue tratado por mucho, tiempo y. a través de
numerosas publicaciün&s que tgfií&fi par objetivo encontrar un método .para
medir la potencia reactiva Q, y por lo tanto, dejar definidas' las' tres
componentes ortogonales de la potencia. .- S, porque al conocer el
valor de Q (potencia reactiva), y con los valores de P y S (potencia
activa y aparente), se tenia perfectamente definido el valor D.
Para el cálculo de las la potencia reactiva Q , se utilizaban métodos
como:
Dividir a la corriente en componentes ortogonales? e interpretar lapotencia reactivo. con)o un flujo de energía oscilante entre la fuente yla carga. Haciendo un análisis de la onda de corriente en &1 tlemj:>of sepueden obtener una componente en fase y otra en cuadratura con elvoltaje, permitiendo conocer d& esta manera la potencia reactiva.
Convertido!'1 analógico hecho en base a operaclonales y Multiplicadores,para dividir a la corriente y al voltaje en dos componentes ortogonales,y llegar a conocer el valor instantáneo de la potencia reactiva Q. < I 3 >
Como ejemplo de todo este estudio que abarcó muchos años, tomemos un
caso: - - . . . . . . > . . . . , . . . , . , . . , . . .
"MEDICIÓN DE LA CORRIENTE DE DJSWItSIQN Y IA POTENCIA DE DIS1.VRSIQN"
En este articulo-se describe un convertidor que permite transformar, la
corriente o él voltaje en tres comj;-onentes mutuamente ortogonales?
activa, reactiva y de distorsión.
El problema de medición de la potencia de distorsión, puede ser resuelto
usa.f]do el análisis de potencia en el dominio del tiempo, utilisajido para
ello la tranformada de Hllbert.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA.

Se utiliza la transformada de Hilbert, para, hacer im convertidor, "g.ue
permita dividir a la corriente o al voltaje en sus componentes mutuamenteortogonales. "
Pero 'al mismo tiempo, con el advenimiento de los microprocesadores, ae
pudo obtener instrumentos que hacían un procesamiento digital de la señalpara obtener loa diferentes parámetros eléctricos, y de paso, ae
abandonaron muchoa conceptos demasiado ficticios.
Asi se llega a concluir guo las jw Leticias reactivas y de distorsióndefinidas por Bodeanu a.nos' atrás, no tenían un significado físico delfenómeno que estaba ocurriendo en el sistema eléctrico., y no dabanninguna información, respeto a circuitos de compensación, para eliminarlas componentes no deseadas de la potencia. t&> • '
Es a través del uso de los microprocesadores, y de sistemas de
adquisición de datos, que se enfoca el estudio del análisis de las ondasde voltaje y corriente, a la. obtención de sus diferentes parámetros
físicamente interpretables, y al estudio del contenido armónico de cadaonda, en base a diferentes métodos numéricos.
El uso de técnicas de adquisición de datos se ve apoyada por el continuoavance en el desarrollo de microprocesadores asi como de sus elementos
periféricos, como son los conversores analógico - digitales. Dicho avancese da en la velocidad de procesamiento, el costo de los elementos, y sufacilidad de operación y programación.
Es así como este tema de tesis va a dar continuidad a otros que se han
realisado antes, hechos en base a microprocesadores, y con resultadossatisfactorios: •• •-
1- Medidor digital de ma/zni Ludes eléctricas, hecho on baso
En este caso se toman las señales de voltaje y corriente, a travéa de
MEDIDOR DIGITAL, DE FACTOR DE IPOTENOIA

transformadores de voltaje y potencial, se obtiene luego del
acondicioneminto de la señal, valores proporcionales a los valores -RMS,
y los cruces por cero de la onda.
Como desventajas de este método se tienen el uso de transformadores que
introducen errores en la medición. No se trata directamente la forma de
onda, por lo que se pierde información respecto a su contenido armónico.
El.factor de potencia medido, es el de desplazamiento, y. la potencia real
P, se obtiene en base a este valor.
Como ventaja principal está el tiempo de procesamiento bajo, que es de
aproximadamente 2 segundos, y cjue se trata de un módulo industrial-C9:>
2_ Existen luego otros trabajos, que se encargan sólo de la parte de
adquisición de señales, dejando que un computador, sea el encargado del
procesamiento de dichas señales, utilizando para ello programas como el
WICROCAP, LABVIEW, o similares.
Como ventajas de este método están el uso de un computador para el
análisis de las señales, la mayor exactitud en los cálculos hechos en el
computador y el tratamiento de la forma de onda real.
Como desventaja se tiene que el equipo no es autónomo, sino que necesita
estar conectado a un computador. Los datos además tienen que ser
adquiridos, y luego deben ser procesados.
3- Un tercer trabajo, se aproxima más al actual, y consiste en. un módulo
de laboratorio, que trata las formas de onda de voltaje y corrriente, en
el dominio de la frecuencia, y, olpt.iene datos tanto de .distorsión
armónica, así como del contenido .armónico de .dichas ondas.
Como ventajas, este equipo permite la obtención de datos reales, con
tiempos de ejecución medios. Permite el tratamiento posterior de los
datos, a través de un computador.
Coroo desventaja se tiene, que es un módulo didáctico, y no presenta la
versatilidad de uno industrial. C3
MEDIDOR DXaiTAIv DE FACTOR DE JPOTJ3NCJA
El medidor digital-desarrollado en la presente tesis, trata de recoger
•bodas las ventaja de loa equipos diseñados anteriormente, es decir,
ser un módulo de tipo industrial, tener tiempoa de ejecución buenos,
pooeer la opción de comunicación con un computador, generar salidas
analógicas proporcionales a las señales medidas/ y servir para la
medición en el caso de formas de onda distorsionadas. . de voltaje y
corriente, . • . • • • • -
Pretende además utilizar como método, el análisis en el dominio del
tiempo, en lugar del análisis en el dominio de la frecuencia, tal como
se lo hizo en la referencia <3>? para ello se utilizará un. filtro
digital, para la obtención del primer armónico. Filtro hecho en "baae a
ecuaciones de diferencias.
1.1.2.- ANÁLISIS XBQRIOO
Para caracterizar sistemas de alimentación no sinusoidales y
condiciones de carga diversas, se utiliza en la mayoría de casos el
factor de potencia y el factor de pico, en aplicaciones tales como
rectificadores aemicontroladoa, controlados, y otros tipoa de carga
estática utilizados en la actualidad.
Estos factores son generales para cualquier onda no sinusoidal de
voltaje y corriente y permiten una mejor comprensión y análisis de los
diversos circuitoa para control electrónico en potencia:
Factor de Potencia:
La relación entre la potencia activa y potencia aparente:
ÍP= P/S,
donde: P, es la potencia activa definida como:
MEDIDOR DIGITAL DE FACTOR DE POTENCIA

T
S, es la potencia aparente:
Donde V,I, son loa valores RllS de v(t): e i(t), en un período T.
En al caso de sistemas trifásicos equilibrados, gue ea el que se va a
analizar, la potencia trifásica esta dada por laa mismas fórmulas
anteriores , pero afectadas por el factor f3:
T
J V Ctt
Donde V>F? es el voltaje fase-fase, e IL, es la corriente de línea
Análisis del Factor de Potencia en una red generalizada
En el caso general se considera una red conformada por elementoseléctricos o electrónicos, que presenten características lineales o no
lineales.
. RED
ELECTRICA
MKDXDOR DIGITAL DE FACTOR DE POTENCIA 11

Las formas de onda dé corriente y voltaje, pese a ser distorsionadas,
cumplen las condiciones de periodicidad. •
¿(fe
P><3.>n> para la mayoría de casos son números enteros .
Por laa condiciones de periodicidad antes indicadas, se expresa el
voltaje y la corriente como series de Fourier:
donde w0j es la frecuencia de la fundamental de voltaje, y los valores
pico se relacionan con los valores eficaces por el factor V2:
El valor medio cuadrático, valor eficaz, esta dado para laa
expansiones anteriores como:
Av3 • i-va -• -*• .
La potencia activa en este caso es igual a la potencia desarrollada
por las componentes continuas y el sumatorio de las componentes de
potencia aparente de los armónicos de similar orden (n m),
multiplicadas por ~su respectivo ángulo de defasamiento:
P= V T
La potencia aparente en cambio se expresa como el producto de las
componentes eficaces de voltaje y corriente:
MEDIDOR DIGITAL DE FACTOR DE POTENCIA

n] D-O.i-Q
Entonces se obtiene una nueva expresión general para el factor de
potencia:.
vn r. Vn Jn
En esta fórmula ee tiene en primer lugar una componente de factor de
potencia que corresponde a las componentes continuas y que se puede
representar como el inverso de los factores de forma de corriente y
voltaje; se tiene además el aumatorio de loa factores de potencia para
componentes armónicas de orden similar:
F F,-*• •*
La relación entre valores RMS de laa componentes armónicas, respecto
al valor KMS de la función periódica, ee conoce como FACTOR ESPECTRAL.
El FACTOR DE DESPLAZAMIENTO, se define como el coseno del ángulo de
defasamiento de las componentes armónicas de igual orden.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA

1-1.3-- Análisis de la distorsión armónica eu la línea para
circuitos rectificadores.
En la mayoría de rectificadores estáticos (conversores AC/DC), el
conversor genera hacia la linea cíe entrada ondaa ds voltaje y corriente
distorsionadas.
Loa tiristores actúan en un conversor trifásico, conmutando la corriente
entre los diferentes ramales formados por parea de tiriatores. Durante
el proceso de conmutación, suceden breves cortocircuitos que producen
distorsión en la forma de onda del voltaje de línea.
La distorsión producida durante la conmutación viene caracterizada por
el ancho de la perturbación u, y por la profundidad de perturbación p.
El ancho de la perturbación depende entre otros factores de la reactcinciade conmutación, la corriente de línea, el voltaje de línea y el ángulode conmutación.
Armónicos de Corriente.
La conmutación de carga en la línea produce cambios bruscos de corriente,
debidos al cambio de carga entre líneas.
Debido a la forma no sinusoidal de la corriente de línea, se la describe
como la suma de su componente fundamental y un número de armónicos cuyoorden y magnitud dependen de:
El tipo y la conexión de transformador utilizado.
El número de elementos rectificadores (# de pulsos).
La impedancia de conmutación.
El ángulo del control de fase.
WKDIDOK DIGITAL DE FACTOR DE POTENCIA

En el análisis de armónicos de línea generalmente se asumen formas de
onda de corriente formadas con segmentos rectos, lo que simplifica su
análisis con una precisión razonable.
Los armónicos para un rectificador de 6 pulsos están dados por:
6n ± 1 ; n'= 1,2,3...
Un rectificador de p fases prodiice en la linea armónicos de orden:
pn ± 1 ; n = 1,2,3...
Pero este orden de armónicos no se cumple para sistemas de
rectificación que sean semicontrolados con diodo de conmutación, y con
conducción discontinua, ya que en este caso loe armónicos aparecen en
forma arbitraria.
Loa armónicos poseen las siguientes características:
- Su magnitud es inversamente proporcional al orden del armónico -
- La presencia de armónicos resulta en un incremento en la
magnitud de la corriente eficaz.
- En los sistemas reales la corriente no es perfectamente
' cuadrada, sino que presenta pendientes, que hacen que disminuyanlas magnitudes de dichos armónicos.
MEDIDOR DIGITAL DE FACTOR DK POTENCIA 16

ARMÓNICOS EN SISTEMAS RECTIFICADORES AC
R E C 1 I E I C A Í O R 38
CE á PULSOS
5
7
11
13
17
1?
23
25
2?
K C Í I F I C A D O R 3f ...
IE 12 PULSOS
11
13
23
25
• F R E C U E N C I A D E L AíWICO . -
.BASE: AG Hi
300
120
¿-ÍO
790
1070
1HO
1380
1500
1740
H A G m U D . p E LA C U K R I E U I E
(í )E LA F U H D f l H E N T A L )
20
H
9.1
7.7
5.?
5.3
4.3
U
3.1
En la práctica^ la amplitud de loa armónicos está afectada por la
reactancia de conmutación Xc, y el ángulo de retardo a. Asimismo ee
tienen factores como el deabalance en los sistemas eléctricos, y en
los circuitos de disparo, que son causa del aparecimiento de armónicos
no característicos, y de corrientes en el lazo de tierra,
Dlatoreión Armónica
Se define a la distorsión armónica individual, o 11)%, como la
corriente o voltaje armónicos;, expresados como un porcentaje de la
fun'dárnental.
La distorsión armónica total, o THD% se define como:
MEDIDOR DIOITAL DE FACTOR DE POTENCIA 17

49
Nj'raí*/ ; • "i ••
donde : Vi e Ii , son loa valores RUS de las fundamentales.
1.1-4.- ÍILTRO DIGITAL
El filtrado de la señal consiste en la implementación de un bloque,
cuya función de transferencia representa al filtro. El paso de laa
señales digitales maestreadas a través del filtro permite obtener a lasalida una nueva señal digital.
Características del filtro:
El filtro debe eliminar el ruido de alta frecuencia presente en las
líneas por interferencia externa, y debe mantener únicamente la señal
fundamental de corriente y voltaje a su salida'.
Para obtener la función de transferencia del filtro, se fijan la
frecuencia central del filtro, y las frecuencias laterales. El filtro
no debe atenuar la señal, por lo gue si; ganancia debe aer unitaria,
además debe tener una pendiente alta, para asegurar que únicamente se
tengan a la salida la frecuencia deseada.
El filtro que se va a utilizar es un filtro pasa-banda cuya frecuencia
central es 60 Hz.
•Los filtros activos cumplen la función de dejar pasar ciertas señales,
MEDIDOR DIGITAL DE FACTOR DE POTENCIA
y eliminar las restantes, esto se debe a que su respuesta de frecuencia,
está ciada de tal manera, que tiene una ganancia unitaria para las
frecuencias que no van a ser atenuadas, y una ganancia mínima para el
resto de frecuencias.
Los filtros activos de uso general están "hechos en base, a amplificadores
o .¡..'oracionales, además de elementos pasivos: resistencias, condensadores,
inductoncias, por esta rasen los filtros activos convencionales tienen
ciertas limitaciones:
o Variaciones térmicas,
o Errores de fase,
o Diferente atenuación de acuerdo al orden del filtro, el orden del
filtro depende del número de polos y ceros que tenga la función de
transferencia, es decir del grado de los .polinomios en la función
de transferencia.
Q Diferente respuesta a diversas frecuencias centrales.
Según el tipo de función existen filtros: pasa-bajos, pasa-altos, pasa-
banda y ellmina-banda.
En la práctica se llega a obtener un filtro apropiado tomando en cuenta
los niveles de atenuación requeridos, y el retardo de fase que depende
del orden del filtro, asi se tiene que:
- Filtro de ÍQlr orden: pendiente de 20 dB /. década, retardo
de 0°. ' .
* Filtro de 2do orden: pendiente de 40 dB / década, retardode 90°.
fis decir que al aumentar el orden del filtro se tiene una mejor
pendiente, y una frecuencia más exacta de corte, pero a la ves se aumenta
el retardo de fase.
MEDIDOR D'IOIXAL DE FACTOR DE FOTEHCIA, 19
De 'las curvas ideales de los filtros se concluye además que para el
filtro pasa-banda, no se tiene simetría aritmética, sino simetría
geométrica, porgue la frecuencia central del filtro corresponde a la
media geométrica de las doa frecuencias laterales :
fo-
Los filtros según el tipo de polinomios que utilizan para su
aproximación a la respuesta de frecuencia ideal se dividen en filtros
de Butterworth, Legendre, Tchebyscheff , Canner, cada uno de ellos
busca simplificar el uso de los elementos activos y pasivos, además de
presentar individualmente ventajas tanto en su respuesta de frecuencia
como en su respuesta de fase,
1.1.5.- FILTRO PAGA BANDA Dlí SEGUNDO ORDEN:
El filtro que se va a diseñar para el medidor de factor de potencia es
un filtro de segundo orden pasa-banda, con una frecuencia central de
60 Hz.
El filtro se caracteriza por:
> Sxxs frecuencias de corte y sus frecuencias centrales
> El factor de calidad Q, que es un indicador de que tan buenas
características de atenuación y retardo de fase posee el filtro.
> El anclio de banda B, definido como la relación entre la
frecuencia central wo y el factor de calidad Q.
> La forma general de un filtro de segundo orden tipo Butterworth
está dada por una función de transferencia cuyo denominador es
xui polinomio de 2do orden:
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 20

va r +jío
Donde: w = frecuencia central
Q - factor de calidad
K = ganancia del filtro
La función de un filtro pasa-batida se obtiene matemáticamente al
desplazar en un filtro pasa bajo el punto de origen f=0 al punto en
el que se encuentra la frecuencia central.
De acuerdo a la función de transferencia que tenga el filtro se tendrá
una diferente reapuesta de frecuencia.
En el caso del filtro digital, se obtiene en primer lugar una función
de transferencia con la frecuencia central correspondiente, y una
adecuada atenuación por sobre los valores de las frecuencias
laterales, escogiendo para ello un valor de Q (factor de calidad)
alto, luego ae ajusta la ganancia en la función de transferencia para
que no se tenga atenuación en la frecuencia central.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 21

1.2-- MÉTODOS NUMÉRICOS Y TÉCNICAS MATEMÁTICAS
Paira la obtención de loe diferentes parámetros eléctricos
se parte de las fórmulas especificadas en la parte teórica, para de
allí pasar a expresiones "discretas", que puedan ser manejadas por el
microproceaador
1,2.1.- VALOR KJTICAZ
"Se dice que la. corriente periódica l(t)'} • "tiene un valor efectivo
Irma, sí una corriente constante de ese valor produce la. misma
potencia promedio de la corriente periódica11
dt
En el caso del valor eficaz o efectivo , este se define como la raíz
cuadrática media (RMS), es decir que se toma la raíz cuadrada de la
media de la función elevada al cuadrado.
Para una función periódica la integral tiene como límite el período de
la onda.
'SMS
T
-i f r i íTÍ U l0
t) ] 3 dt
Asumiendo que el número de muestras tomadas para un período de la onda
es lo suficientemente grande, se aproxima la integral a un sumatorio
de cada uno de los valores cuadráticos, multiplicados por el
incremento de tiempo úb. El Incremento de tiempo en este caso
representa el período de mueatreo, y para una onda de período T:
ISM3
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 22

Finalmente incluyendo en esta ecuación el número de datos n, como
función del período de muestreo, y sacando el incremento de tiempo
fuera del sumatorio, por ser constante, la ecuación anterior queda
como:
-í21-1
De "acuerdo a esto, las ecuaciones utilizadas para hallar los
diferentes parámetros eléctricos , se expresan como sumatorios gue
tienen como límite el número de muestras por período:
V = SQRT [ (1/n) -*'
•I = SQRT [ (1/n)
P = (1/n)
S - V * /
fp= P/S
+ v2*v2 + ... + vn*vn) J
(il*il + Í2*i2 + ... + in*in) J
-f , _ .
donde :
V - Vrma = valor eficaz o R^JS del voltaje
I - Irms - valor eficaz o RMS de la corriente
P = potencia activa
S ~ potencia aparente
fp - factor de .potencia
vi = valor Instantáneo de voltaje
ii = valor instantáneo de corriente
SQRT = raíz cuadrada.
n = número de muestras por período
1.2.2.- FILTRO DIGITAL.
Para el filtro digital se debe pasar desde una función de
transferencia en el dominio del tiempo a una ecuación de diferencias
dependiente del número de muestras y del período de muestreo.
MEDIDOR. DIGITAL DE FACTOR DE POTBHCIA 23

- I/UNCIÓN DE TKMSFKRIíNCIA DKL FILTRO: cía 5
•V2_ __ -ZKCRp• VÍ #2C2
K'/WO
O
Si se toma como wo - 27r60 ~ 377 y con mi factor de calidad Q = 3,77
ae obtiene la función de transferencia del filtro para una frecuencia
de 60 Hz.
CONSIDKRACIONKS:
1) Un valor "bueno de factor de calidad en los filtros es mayor que
2, se escoge entonces: Q - 3,77.
2) Para frecuencias bajas no es importante tener una atenuación
alta, ya que se supone en el sistema que no existe distorsión a
baja frecuencia- t
3) Para frecuencias por encima de la frecuencia central, y tomando
en cuenta que el sistema de. adquisición de datos es de por sí un
filtro de alta frecuencia, se toma como criterio el hecho de que
al aumentar el número del armónico, disminuye su magnitud.
Por ello se considera, que Be debe filtrar hasta aproximadamente
el armónico número 20, _en el que la magnitud del armónico
disminuye hasta aproximadamente la décima parte de la
fundamental.
El valor de 20 corresponde a una frecuencia de 7540 rad/s (1200
Ha).
4) Estas consideraciones se 'hacen por el hecho de que en ladiscretización se toma un período de muestreo del que depende lacalidad en la aproximación, por ello un período alto de
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 24

maestreo, no permite una buena dlscretización, y un período
bajo, debe ser lo suficientemente pequeño para atenuar la onda
hasta las frecuencias deseadas.
Por estas razones ee escoge una función de transferencia con un factor
de calidad Q = 3,77, del1 güé se obtiene: -•'/'-
377K
Se calcula el valor de K para obtener una atenuación nula: K=100,
quedando la función de transferencia como:
O 37700
£r2+100.3-f-142129
La respuesta de frecuencia se indica a continuación:
! i
uij -2t
Í H
-w
-II
.'i
i i i i l i l i
-72
-144
m
281
De esta figura ae extraen los siguientes resultados:
v/Crad/a) (u)
37,7
377
754
7540
0.2523
1
0.0822
0.000624
-1.42
-90
-170
-180
MJJDXDOR DIGITAL DE FACTOR DK POTBNOIA 25

La respueata de frecuencia es por lo tanto la esperada.
El siguiente paso consiste entonces en la diacretizáción de la función
de transferencia, es decir su paso del plano s al plano z, para ello
se xvbiliza el programa CC, g.ue posee 10 modos de discretización, de
ellos se escoge el modo de discretización: Tustin wlth Prewarping.
Este método de transformación, aproxima la función de transferencia en
s a una función de transferencia en z, utilizando la substitución :
T 2*1
Además, para evitar distorsión en al tía frecuencia, se utiliza una
aproximación Inicial desde la frecuencia crítica en el dominio del
tiempo al dominio de la frecuencia.
Este tipo de transformación bilineal, permite una aproximación
bastante cercana a la función de traiisferen cía analógica^ y es la
técnica más usada. C13)
Con un período de maestreo de T = 1 / (60 *113) - 0.0001474926,
correspondiente a 113 muestras por ciclo se obtiene la siguiente
función de transferencia:
SU)- * 2.03479410000 z2-1,98229Bz+Q.9853662
De esta nueva función de transferencia se obtiene un nuevo resultado,
que corresponde aproximadamente al resultado obtenido con la función
de transferencia en s. Además cada xmo de los coeficientes de la
ecuación corresponden a los coeficientes de la ecuación de diferencias
del filtro digital.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 26

rt "g"A5
í e
Ud -26e
dB ~W
-60
-na i i n i i i i i i i i i i i mi
"""'\;\
i \\
s
\•.\ MI 1 1 1 1 I I I
" P
hA
-U *f
-144
-216
-208
-Sfifl
Ifl,-1 IB1 I*2
Los resultados obtenidos son:
v/Crad/s) (u)
37.7
377
754
7Í34Ü
0.25
0.9999
0.0821
0.00061
-1,55
-91.08
-172.7
-200
Para comprobar que tan buena, es la aproximación se utiliza un programa
en QBASIC, en el que se realiza el lilbro, a una frecuencia y un. periodo
de maestreo determinados, utilizando para ello la ecuación de diferenciasde la función de transferencia discretisada:
Loa gráficos mostrados a continuación, nos indican la forma de ondaresultante al pasar diferentes formas de onda simuladas en el computador,a través del filtro.Loo gráficos corresponden al quinto ciclo de la onda, y se puede notarclaramente el error de fase (-90°).
MKDl'DOK DIGITAL, UBI FACTOR Dtt POTENCIA 97ii< i

RESULTADOS
FORMA DE ONDA CUADRADA EN DOS NIVELES
--100.
/ \2
BflHí PftSG FIUEfi
FORMA DE ONDA CUADRADA CON TRES NIVELES :
/7 \> RETTOI \í EflSS FIUO
JDJGJTAL DK FACTOR DK 28

FORMA DE ONDA TRIANGULAR
92.60
60,91
BflND PfiSS FILFER
FORMA DE ONDA SINUSOIDAL CON RUIDO
/*\( ü A fi./ \f Wh. i .vi
/,./
i/
4) HFTURN
BftttD EftSS FILTKR
¿>j el Anexo 3, se Incluye el programa, en BASIC., gus sirvió para la
simulación del filtro digital.
MEDIDOR DIGITAL 1DK FAOTOK DK POTBNC1A
uiaxawr., DK FAOJ/OR .D.IE
CAPITULO 2
DISEÑO DEL MEDIDOR
. i, - DESCRIPCIÓN G.BNEKAL Y ESPECIFICACIONES DELMEDIDOR.
2.1.1.- COMSIDERAC10NKS GJi
£1 equipo de medición de factor de potencia servirá para sistemas derectificación AODC, AC-AC hechos en base a semiconductores, y otros decaracterísticas similares, ya sean cargas trifásicas equilibradas, ocargas monofásicas.
Tamblén será aplicable a sistemas industriales tales como lineas de
producción , o loa equipos que forman las mismas, para el monitoreo delos diferentes parámetros eléctricos y su posterior evaluación.
MKDJ.JUÍJK tU í*J .£ TAL UIC FAtJTOK UE POTJZWOXA 31

Loo parámetros necesarios para la medición dol factor de potencia son los
valores eficaces de la corriente y del voltaje. Para el calculo del
factor de potencia de desplazamiento, se necesita conocer loa valores delas componentes fundamentales del voltaje y la corriente, así como elángulo de diferencia entre.ellas.
JEn el diseño se considera que se tiene a la entrada del conversor A/D,valores normalizados de corriente y voltaje tomados desde las lineas del
sistema.
Asimismo el medidor genera señales de voltaje-, normalizadas, yproporcionales a las señales medidas.
El equipo estará montado dentro de una caja metálica, que sirve deblindaje contra el ruido, y como una protección adecuada al ambiente detrabaj o.
Para la conexión de las señales de voltaje y corriente se provee una
bornera con terminales claramente identificados.
2,1.2.-
Las muestras de corriente y de voltaje se normalizan, mediante el uso dedivisores de tensión resistivos, y" amplificadores, en configuracióndiferencial. Los amplificadores se encargan de acondicionar la señal demanera que a la entrada del conversor A/D, se tengan señales alternas quevaríen entre O y 5 V.
El conversor A/D, al recibir la orden del microprocesador, inicia la
conversión de datos, los que son ingresados hacia la memoria RAM delmicroprocesador, para ahorrar de esta manera tiempo de adquisición ypoder tomar la mayor cantidad de muestras.
Para la adquisición de datos se útilisan dos conversores analógicodigitales ADC0804.
Lotí dato a correspondientes a un ciclo de voltaje y uno de corriente, sonprocesados en el uP, y los resultados obtenidos, se sacan luego hacia la
MJKDXDOK JJK3ITAL DK ITACTOK DK POTENCIA

pari.tai.La LCD en la que st- indican dicho valores.
Corno el procesamiento de la señal dentro del uP, temará un tiempo en el
orden de los segundos, se provee un tiempo máximo en el que se actualizan
los valores, es decir que una vez terminado un procesamiento de datos,ae vuelve a iniciar un nuevo ciclo de captura y procesamiento de datos.
En cada ciclo, ademas, se envían los resultados hacia el computador, en
donde se generan archivos para su posterior análisis, tanto numérico cornográfico.
Finalmente se tiene el módulo de salida analógica, que se encarga de
convertir una señal digital proporcional a la variable escogida, en sucorrespondiente analógica. El módulo tiene dos canales, para dos
variables.
Cada canal utilisa un conversor digital- analógico DAC083Ü.
Para la comunicación con el usuario, se tiene un teclado básico con 3
tcclüs y una pantalla LCD. Además el usuario puede utillsar un. computador
"en linea", para observar las formas de onda capturadas.
El procesamiento digital de la señal se realisa utilizando el
mlerccontrolador 1HTEL 80b2 AH-BASIC. En la tarjeta del nlicrocontrolador
se tiene un bloque de memoria RAM para los datos, y uno de memoria EPROM,
para el programa.
Además se tiene un interfas paralelo que permite la comunicación del
nlicrocontrolador con el teclado, la pantalla, y el interfas de entrada.
La fuente de polarización utilizada es del tipo "switchlng". Loa voltajes
internos para polarizar cada una de las tarjetas son: -i-5Vde, -»-12Vdc, -
U'Vdc.
Para la comunicación con el computador, se utiliza el protocolo RS-232.
El equipo envía los datos de las formas de onda de voltaje y corriente,
y los resultados de los cálculos hacia el computador.
Con un registrador C plotter ), oe pueden gralicar las variables
provenientes de la salida analógica.
MICUUJOR DXCUT/VL, DU, tf-A{_rj.'OK DIZ POTKtJClA
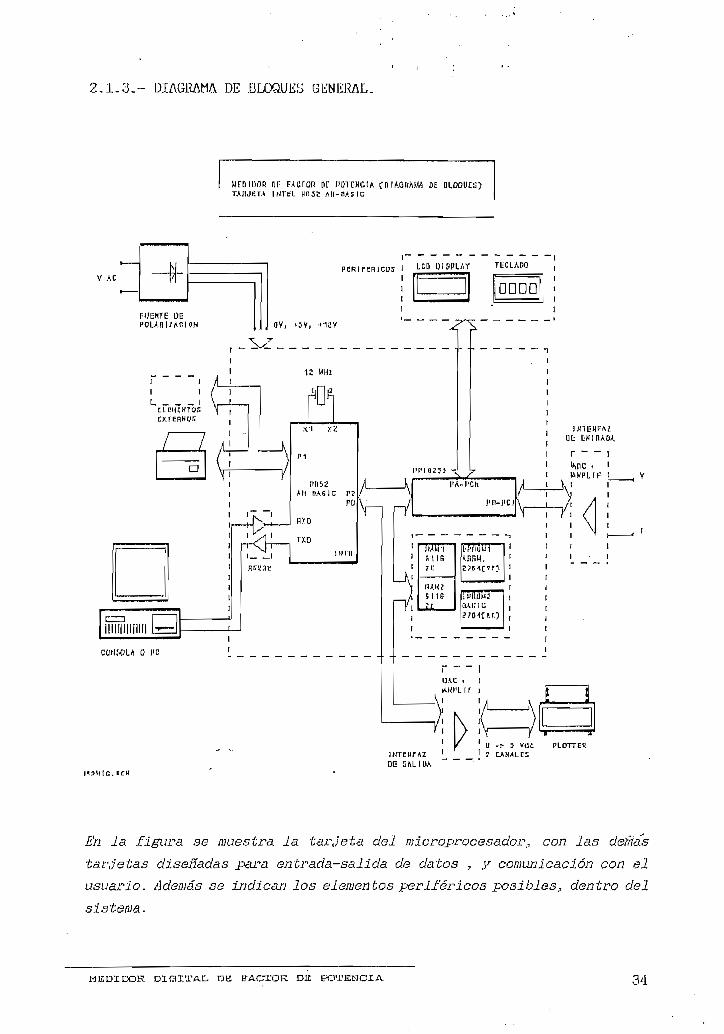
2.1.3,- DIAGRAMA DE BLOQUJiü GfcWRAL.
UFQIDOR nr FAcroR nr POTCHCIA CDIAGRMW DE DLOOUCS)TAIIJETA I N T E L HH52 A H - B A 5 I G
V AC _±FUENTE ÜEPOUflUARION . i
TUCtAPO
J ov, 43 v, 4-iav
IMMBZJJ -^_J?-
l'A-J'Ch
Ni lllllliiill br— i-I
II
'II
l'P-PCl!
JWM-I
Mlfi
7 ir
u AK;5 ) 1 6
L-T'/iijuíWÍIM.
U'llflMJ
270HCÍK?
U -> 3 Vtlt PLOTTER? CAMALCS
OG
j5h jía figura se muestra la tarjeta del microprocesador., con las denlas
tarjetas diseñadas para entrada-sal ida de datos , y comunicación con el
usuario. Además se indican los elementos periféricos posibles, dentro del
sistema.
MEDIDOR DE JTAOTOK DIC POTENCIA 34

2.1.4..- JESPECmCACIONKS:
o Voltaje, de alimentación del medidor: 110 YAC ± 10%
O Voltaje de polarización interno: ± 12Vdc? -'• OVdc.
o Frecuencia nominal de la red: 60 Hz
Medición de corriente:
salida de un transformador de corriente normalizado del ti 1x5 In/5A,o plnsa amper imé trica de hasta 400A, con una salida de ImV AC porAmperio .
v Para el transformador de corriente:corriente del secundario : 5A (máx. )impedancia de entrada : 0.154 Q.apreciación : 0.02 A
v Para la piusa amper Imé trica:raV del secundario : 40rnV -> 400mV (2 RANGOS)
impedancia de entrada : 500 JCQ
apreciación :
2A, usando la escala #1, en el rango de 400mV (400A)
1A, usando la escala #10, en el rango de 40mV (40A)
Medición de voltaje: 220V AC ó 440V AC, entre fases, Ge utillsa
un divisor resistivo, para la adquisición de la señal.
Voltaje máximo rms : 220 V + 10% = 242 Vrms
440 V + 10% = 484 VrmsVoltaje pico máximo: 342 V (escala de 220 V)
684 V (escala de 440 V)
Precisión en las lecturas : 1.5%
ancia de entrada: 450 KQ en la escala de 220 V900 m en la escala de 440 V
MEDIDOR DIGITAL DK irACXOR -DE POTENCIA 35

ESPECIFICACIONES DE DISESO
Conversión analógica/digital: voltaje de entrada de O a 5 voltios,resolución de salida de 8 bita y tiempo de conversión de 147 us.
Üblllsaim mlcroprocesador 8052 AH-BAS1C, compatible con los ciernaselementos.del sistema, el mlcroprocesador se encarga del controly el almacenamiento de las diferentes señales.
Conversión corriente-voltaje; por medio de arreglos resistivos yamplificadores operacionalea, que incluyen elementos adicionalespara.obtener la normalización de la señal.
Protección del conversor A/D: diodos sener q.ue limitan voltajessuperiores a los 5 V e inferiores a los O V,, que podrían 'producirse
a las salidas de operacionales y dañar al conversor.
MEDIDOR maiTAC DE FACTOR DE FOTJZI-JCXA

DISESO DEL MODULO DE ADQUISICIÓN DE DATOS DE
VOLTAJE Y CORRIENTE . '
2.2.1.- DJSSCRIPCIGH GENERAL.
Las muestras de voltaje se toman directamente de las líneas dealimentación al sistema, y se normalizan, mediante el uso de divisoresde tensión resistivos, de acuerdo al voltaje de entrada.
La de corriente con un transformador de corriente CCT), externo al
sistema.La muestra de corriente se puede tomar además a través de una pinza
amperimétrica, gue genere señales en el orden de loa mllivoltios.
2.2-2-- AMPLIIíICADOK DIFERENCIAL:
El amplificador diferencial usado para acondicionar las señales de
voltaje y corriente, cumple las siguientes características:
G A N A N C A
Z2
Vo
I I - C V = 1 - V s 2 -, -J —Z 1 4- Z 2 21
Z2"ir - c - 5 - vo- 3 -
21 -i- za 2 a
Vo = - C Vs1 - Va 2
WJSDIDOR JDIGJTA-C DK FACTOR. DK POTENCIA 37

Vo
F R E C U E N C I A DE CORTE
Vo = C V2 - VI 3 A
I / R 2 C 3A =
R1 S -*- C 'i / R 2 C 2 }
)
.- Acondicionador de VOLTAJE:
n 1 a1 . B7K
H Q A D E R -1H 1= A O C n 3
El acondicionador de voltaje está formado por el divisor de tensión y el
amplificador diferencial
Para el divisor de tensión se considera mía variación en el voltaje de
-i-/- 10%, y con voltajes nominales de 220 y 440 Vac, se tienen los
siguientes valores pico:
máximo
220 242 195 342 2 = 884
440 4B4 396 684*2 - 1368
WJIJ3JDOR D-COITAL DK FACTOR DR POTKt-JC-TA38

Del divisor d.e tensión indicado, se pueden extraer los siguientes datos:
1 VRH8220
440
VO-VRS
1.805
1,8128
Zin(KQ)
450
900
VT*P máximo
5.106
5.64
Para el diseño se tomó como criterio tener una irnpedancia aproximadla a1MS.Í, para la entrada de 440V.
Además las resistencias usadas son de precisión, con una tolerancia del1%, con esto se consigue tener ráenos errores en la medición porvariaciones térmicas.
Ge observa que a la salida del divisor de tensión se tiene una señal de5 Vp]?, aproximadamente, y esta será la que ingrese a la etapa deamplificación.
PÜ1ion*: - r-l c a
3 . O B n F<SKE>
Un amplificador en configuración diferencial, es usado para aislar el
ruido externo, la ganancia de este amplificador es 1. El amplificador
operacional escogido es el LF353, caracterizado por:
» Producto Ganancia-Ancho de banda: 4 llhz,
3> Bajo voltaje de entrada offset : 10 raV @ 25PC,
UKQI.DOR DIGITAL nK FACTOR JDK FOTSNCJA 39
» Baja corriente de entrada offset : 100 pA @ 25 "C
» Rápida respuesta de tiempo : 2|as,»' Rango de temperatura : O a 70°C; • . •' ' '
» • tecnología FET.
Adicionalmente el amplificador diferencial posee un filtro pasaba joa,
cuya frecuencia de corte debe ser aproximadamente del doble de la máximafrecuencia gue se desea muestrear. En el caso nuestro, esta frecuenciacorresponde a 1200 Hs (armónico #20), por lo gue el filtro deberá atenuarlas señales por encima de los 3KHs.Se tiene entonces una frecuencia de corte de 2340 Hs, gue corresponde al
armónico -// 39.De las fórmulas presentadas antes, y con un valor de resistencia de 100Kfi, se escoge un capacitor de 0.68 nF.
Como protección del amplificador, se tiene dos diodos conectados en
antiparalelo, entre los pines de entrada del amplificador,
A la salida del amplificador se obtiene una señal alterna de 5 Vpp, a la
que se suma una señal continua de 2.5 V proveniente de una referencia de
voltaje de precisión LM329 (6.9 V), esta señal es ajustable mediante un
potenciómetro .
La señal finalmente obtenida corresponde a una sinusoide de 5Vpp,
centrada en 2.5 V.
Para desacoplar las señales de continua- y alterna a la salida del
amplificador se utillsa un condensador de 4.7j.iF, que actúa como filtro
pasa altos, con una -frecuencia de corte de aproximadamente 6 Hs..
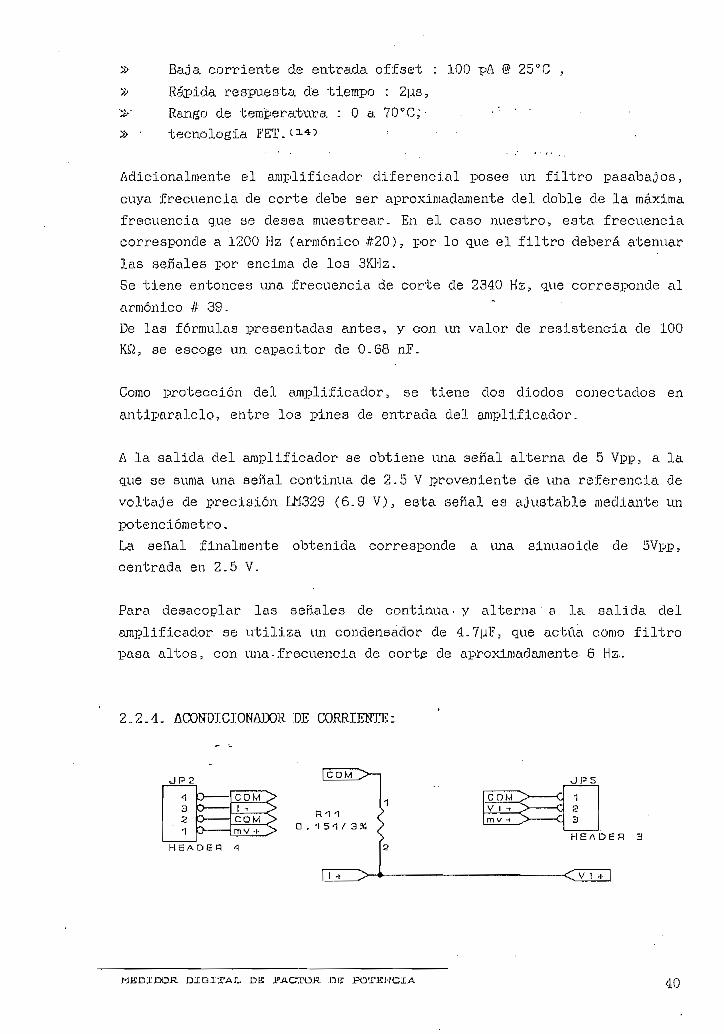
2.2.4- ACONDICIONADOR 'DE CORRIENTE:
JP2
G .
H E A D E R
JP5
1
<<
ta—
CQM > C
^v ^ 5*1 C/
>
1
3
HE A DER 3
..- ' '"iL........ i. i ... i i .... f^ W t i I
WJSDXDOR DJGITAL DK PACTCDR POTEWCXA 40

Si se utiliza la salida normalizada de 0-5 A proveniente de un
transformador de corriente, esta señal se convierte a voltaje a través
de una resistencia, de 0.153 ñ, es decir cjue se obtiene un voltaje de
Q,7V, Este voltaje pasa a un divisor resistivo, que sirva para calibrar
la señal, luego se entra, a una etapa de amplificación de tipodiferencial, similar a la ya descrita, para la señal de voltaje.
Si se utiliza la pinza ainperimétrica en cambio, un potenciómetro sirve
como etapa previa al amplificador Cimpedancia : 500 K.Q),
líl equipo de medición de corriente (pinza o transformador), se escoge
rned.ia.nte un interruptor interno. • '
Asimismo mediante un interruptor interno3 se escoge una. segunda, etapa de
amplificación (xlO), útil en el caso de que se use la pinza, para medidas
inferiores a los 40A (40mV a la salida de la pinza).
2-Ü.5.- CONVERSIÓN ANAUX5ÍCO-D1GITAL:
Su función es la conversión de señales análogas a su correspondiente
formato digital (código, binario).
Un conversor A/D, recibe una entrada Vin y la transforma en palabra
digital, con una precisión y resolución dadas, mediante una comparación
con una tensión de referencia Vref.
WBJDJJDOR DK lí'ACTDK. DE

Para el sistema de adquisición de datos y control se escogió el conversor
A/D ADCQ804, cuyas características principales son: (li3)
-'/-• El ÁDCÜ804, es un conversor A/D compatible con. /jCM' Contiene 8 bits de conversión analógico-digital.-/•' La técnica de conversión utilizada es la. d& aproximaciones
sucesivas,, para ello presenta un comparador estable de altaimpedancia, un divisor de voltaje 256R, con un interruptor
analógico y un registro de aproximaciones sucesivas .# Entradas de voltaje analógico de tipo diferencial, lo que aumenta
su RRMC..& Presenta ademas como características? iwa alta precisión y
velocidad.- iwa mínima dependencia de la temperatura? mínimo consumo
de potencia.•* Resolución de 8 bits, tiempo de conversión tipleo de 100 (,is
El registro de aproximaciones sucesivas produce iteracionespara aproximar el voltaje de entrada.
# Salidas digitales tres estados.& La conversión se -.inicia con la transición positiva del pulso de
habilitación y continúa hasta que llegue otro pulso, que indicael final de la conversión.
CONSIDERACIONES: (is,i7)
# El tiempo de maestreo del conversor AD es mayor a lOOus lo que
eguivale a una frecuencia de maestreo menor a 10 KHz.
# Para an ciclo de la señal a SO Hs, se pueden tomar 113 maestras,
trabajando a 8,8 KJ-Iz de frecuencia de maestreo.
# Para analizar hasta el armónico #20, la frecuencia de maestreo debe
ser mayor al doble de la máxima frecuencia a analizar, es decir
debe ser mayor a 60Hs#2Q#2 = 2400Hz7. por lo que es suficiente el
conversor AD0804.
# Para el caso de un sistema trifásico equilibrado, considerando eldefasaje original entre las señales de voltaje y corriente ( 90°),lo gue en tiempo representa 4,16 ms, se deben empezar a tomar las
muestras de voltaje luego de qae se han tomado 28 maestras decorriente.
iXDK D1DITAL DK FACTOR UlC POTttHOIA 42

Vr.
Vk
Para los 2 conversores analógico digitales, se conecta una señal de relojhecha en base a un arreglo RC
R - 5 K2 C - 150 PF
El reloj tiene una frecuencia de 689 KHs, y permite tomar 113 datos porciclo, para la muestra de voltaje y corriente. • •
También se conecta al conversor una referencia de 2,5 V proveniente de
un arreglo hecho en base a un diodo zener de precisión £113-36.
2.2.6.- CONEXIN DE COWVJiKSOK A/U CON EL fjCOÍOTÍO] uDOR.
Se conectan al conversor desde el i_iC3 las señales que habilitan la
lectura y escritura, mientras que ingresan hacia el rnicroprocesador lasseñales digitales , en este modo de operación se habilita el inicio de la
conversión, desde el uC de manera que al terminar, la conversión de ungrupo de datos, el conversar queda habilitado para recibir otra señalanalógica enviando una señal de interrupción hacia el uC,
La lógica de control del sistema de entrada análoga es la siguiente:
$ Se envía desde el microoontrolador un pulso de inicio de maestreoy retención (WRÍTIi) hacia la entrada de inicio de conversión delA/D.
El conversor recibe los datoo e inicia la conversión.
El rniorocontrolador entra a un laso de espera de la interrupciónproveniente del conversor analógicü-digital (INTR), que indica quese ha terminado con la conversión y los datos están listos.
MBDIDOK DIGITAL DE FACTOR D£C 43
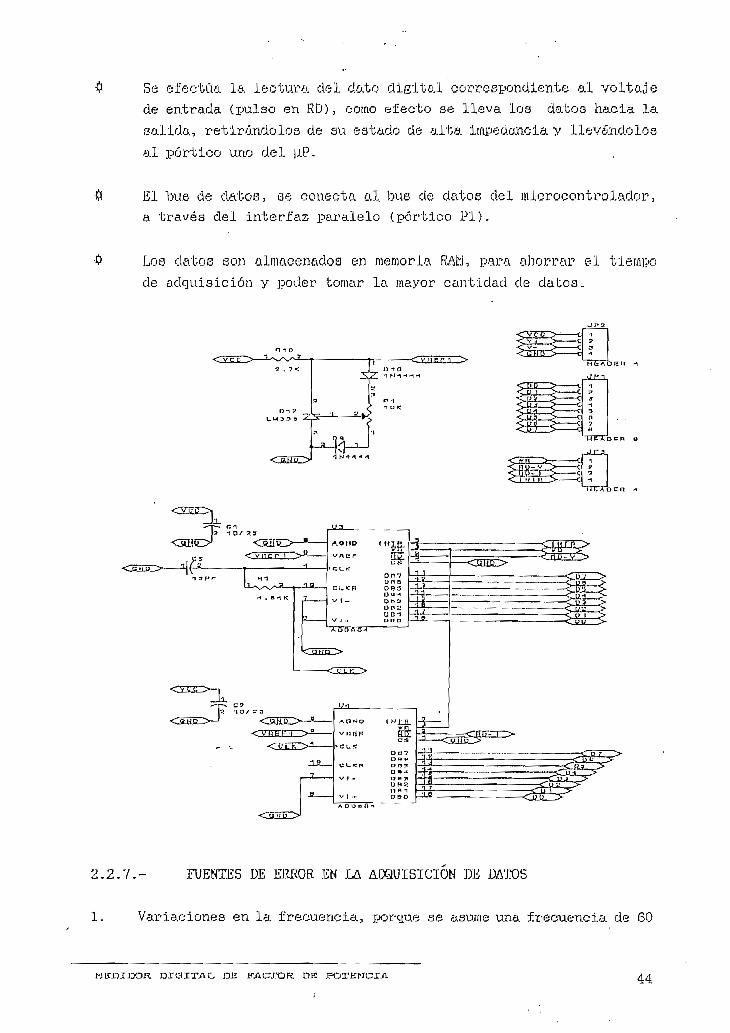
Se efectúa la lectura del dato digital cor-respondiente al voltajede entrada (pulso en RD), como efecto se lleva los datos hacia lasalida, retirándolos de su estado de alta impedancia y llevándolosal pórtico uno del |iP.
El bus de datos, se conecta al bus de datos del mlcrocontralaclor,a través del interfas paralelo (pórtico Pl).
Loe datos son almacenados en memoria RAM, para ahorrar el tiempode adquisición y poder tomar la mayor cantidad de da boa.
2.2.7.- ITUENXJES DE KRKOR .EN LA ADQUISICIÓN DK DATOS
1. Var-iaciones en la frecuencia, porque se asume una frecuencia de 60
MJCJDXJDOIt JO I (3 J TAL Dlí FACTOR JDJ5 POTENCIA

Hz para la adquisición de datos.A
2. Error e s propio s de los instrumentos ut i 1 izado s para medir- e 1
voltaje y la corriente
3. Ruido.externo asociado a la señal maestreada.
4. Filtrado de la serial (alta frecuencia), y limitación del número dearmónicos que se van a analizar.
5. Retardo debido al error- de fase al tornar las muestras ríe VRS e IT.
6. En la adquisición de datos =, el error aumenta al disminuir la
potencia requerida por el sistema» ya que en esta condición las
muestras de corriente que se pueden tornar en un periodo-serán de
menor magnitud. Además la corriente de magnetización propia del TC,llega a ser- apreciadle frente a la corriente real de la línea, locual introduce un error en la medición.
2.2.8. CIRCUITO IMPRESO CORRESFUNDIENTE A E A TARJETA DE
ADQUISICIÓN DE DATOS
MEDIDOR DIOITAÍ- DE FACTOR DE POTENCIA 45
2-3.- MSEtfO DJEL MODULO DE PROCESAMIENTO DE DATOS.
El sistema utiliza para el cálculo del factor de potencia el
raicroccntrclador 8052 AH-IÍA3IC, que se encarga del procesamiento de lasseñales de corriente y voltaje, digitallsadas y adquiridas desde elconversor A/D.
Dentro del microprocesadcr se cumplen laa siguientes tareas:
1) Adquisición y almacenamiento de datos desde los transductores de
corriente y voltaje a través del conversar A/D, hacia lugares
especificados de memoria RAM.
2) Filtrado de las señales de corriente y voltaje, para obtener lacomponente fundamental
3) Medida del ángulo de desplazamiento entre corriente (componente
fundamental), y voltaje, por medio del retardo de tiempo, en elcruce, por cero de las dos señales, para ello se debe almacenar enmemoria para cada ciato de tiempo, el valor correspondiente alcoseno del ángulo correspondiente.
4) Con las señales de corriente y voltaje filtradas se calcula dentro
del nP la relación entre los valores eficaces de la corriente deentrada y de su primer armónico, y luego se calcula el ángulo dedesplazamiento entre la corriente y voltaje, con ello se puedeobtener el valor aproximado del factor de potencia dedesplasamiento.
5) Luego de obtenido el módulo de la fundamental, tanto en voltaje
como en corriente, se puede estimar loa parámetros de distorsiónarmónica,
6) Se tiene- también la opción dentro del uC de enviar los datos a
través de un pórtico .serial hacia un computador en donde serealizará el análisis de laa ondas de corriente y voltaje.
Dentro del uC por lo tanto se realizarán operaciones matemáticas de suma,multiplicación, extracción de raís cuadrada, división, etc.
WIEDXDOK DIGITAL UÍC FACTOR D£ POTE W CU A

Las características principales de los microprocesadores de la familia
MCS-51 son:
Bajo número de instrucciones ( ranemónicos ),
Compatibilidad de software entre sistemas similares,
Relojes de 12 MHz, 8 MHz;, 6 MHz, que permiten la ejecución
rápida de Instrucciones, y un adecuado manejo de los datos.
Poseen instrucciones de: Transferencia de datos, aritméticas,
lógicas, y de transferencia de control.
Poseen modos de interrupción a través de software o de hardware,
con niveles de interrupción manejados desde software- El esquema
de prioridades de interrupción puede ser programado por software,
con modos de.prioridades tipo "Daicy Chain", o en paralelo.
Pueden ser conectados a periféricos que sean compatibles, y que
permiten el manejo de elementos tales como teclados, displays,
contadores, conversores A/D , D/A, e interfaces de comunicación.
Integran en un solo chip, adetaás del CPU, los puertos de entrada
salida, temporizadores, memoria, interna y externa (expondible), y
el reloj ? lo que representa un ahorro en espacie, costo, y la menor
complejidad del sistema.
121 microcontrolador utilizado es el 8052 AH_BASIC3 que presenta lassiguientes características: 1£5>
- CPU de 3 hits
- 128 bytes de memoria RAM interna- Oscilador y-circuito de reloj incorporado
- 32 lineas de entrada/salida programables- 2 contadores/temporizadores de 16 bits- Permite un direccionamiento para 64 K de memoria It¿\M externa- Permite un direccionamiento para 64 K de memoria ROtí externa- 5 fuentes de interrupción programabies- Puerto de comunicación asincrónica fuil-duplex- Procesador booleano- Fuente única de alimentación de 5 voltios
WIEDIDOH. DIGITAL DK FACTOR DÍS POXKHCTA . . 47

- Intérprete completo BASIC, interno en el mlcrocontrolador.
- Todas las rutinas aritméticas y lógicas, pueden ser llamadas desdelenguaje ensamblador.
Se utiliza la tarjeta diseñada y desarrollada para aplicaciones en base
al 8052 AH-BASIC.
En la tarjeta del microprocesador, se utilisa el interfas paralelo para
comunicarse con loa converaorea analógico digitales, con el teclado y con
la pantalla de cristal líquido.
Pantalla LCD: puerto A -> 8255 : modo de salida (out)
Conversares aclcIN (V,l): puerto B -> 0255 : modo de entrada (in)
Teclado, líneas de control-conversores: puerto c -> 8255 : modo ds
entrada salida (in-out)
Se configura el inüerfas paralelo, para este modo de trabajo, enviando
una palabra de control 'a través del bus de-datos (control word : 8AH)
El arranque del sistema es a través de un pulsante "RESET" externo .
Para manejar loa convertidores digital-analógicos, se ocupan dos salidas
de habilitación de memoria externa (plnea 7 y S de conector H4), y el bus
de datos disponible en el conector H8.
Es decir que se maneja a los convertidores DA, como si se tratara dememoria externa a la tarjeta principal.
Para poder manejar el microprocesador, con un programa hecho en lenguaje
ensamblador, y llamando a subrutinas BASIC, se debe habilitar una opción
llamada de memoria solapada, para ello se utilisa un puente en la tarjeta
(JUHPER 14).
A continuación -se indican los esquemas tanto de la memoria externa al
íiiicroprocesador, como de la -ubicación cíe conectares y "¿umpers" dentro
de la tarjeta-
Toda la información adicional pertinente se puede encontrar . en la
referencia:
de memoria para la tarjeta del 8052 AH-BAS1G
MBJJIUOR Diai'l'At, DK FACTOR DI£ FOTJSWC1A

BAU3 a n-t -\H32K - Q
HA"1 c at-te:»
nOtm cu oíod;)•jcpH C'ni^a^
O O O H coooo-)
B 3 S 9 FP 1
r>A j i«uiiH cfM-curj
n<! I •IIJOPII C f - i in i t jCV J T O O . TU C« 1* *íd J
I «e noMI
T
Mapa de memoria, -para la tarjeta' del 8052 AH-BASIC
11
JP5CH1D j PAO - o*7[_
JPSCH-I;) .jpncne^I I
_ „_ I II I I II I
UJr>7i''" i •JP'1»-M
" l I I I1 I I IL__ J L |
i " i r~ ~ i1 1 1 Jp-ncHTi
JP-H * '""*
1 i[ 1 JP1SI I *"*•*I I JP1
l i r
f i i* i ii i
ii
JI'OCMZJ I PDO - PH7LII
III
JPflCH-O | C.1 7, 3. 3, n, 7I es i n, cuan, cti'JnL _ -1
JpstHsj i n.o - P1.7
^
II
JIM1CM"OI P01.AIII7AC10H IMI-I
IJP12< Hnj | LIMÍ*S tie ciiHinou
BUSE) *OD/D* r»
11
- i r~ i ~ " -1 jpi I nou l IHT/EXTp_ p, J¡ Jps j Epnou?! Z7n-i/77i2nr r ~í~ ~I Jpa I ncan I IHT/CXTI I I
I JPÍ l VpP j IMT/FXT
j JP13 j VKC I IHT/FXT! -j j, —
J Jpii j itttinn j C X T / O V I A P
11j PUERTO * DEL 1*333 Pf 1
11| PUERTO 11 DEL 8^33 ppl
_ JL11j PUgfiio c OCL nif3T PPI
I1| 3 UNCA3 UrCODIr ICAIIA3j 3 L INFAS OCCOOIPICADAÍ ;
~_ J. __
111
1I1
I11
11
(71L3 I3P3|
i 1TU in, le l/c, P*U oiJt, /Ai.r DIBI
I /Ai.t¡ oía, /i>ni)i( Mitt, /nnocí PNA, ¡
ICÜÜÜÍT 1iiEXT,| VSfi, FXT VKC. CKT Vpp.
1 AC-1, AG3, AC!2, AC1LI| VCC, VPP, BEK, TU, »(!,
00-D7, «D-i-13, »UE, OEpac>f, no, n, cxriHin,
I
-j. ... „ 1
I IMT: OIIS3 A l I t lAGIC I
.[.JiSli.JJi2.aAH J
j lUniLIIA LA 1 IHCA > 13 1
~1 ~ ™ " " Ij t l A O . LA L INCA 3 DPI. Hit 1
-r - - _ -, j
1 -1? VDC I
~r ~~ iI _:; VDC j
_r _ _ ^ ^
I I1 I
I
ve, )I
_ „ _JI
nn, VRB iPP
CXTIH71, IlI
Esgaema de Jumpers y Conectóles: tarjeta del 8052 AH-BASIC
tílSDIJDOH JDK KACX1*OR DE POTKÍJOl'A 49

2.4,- CIRCUITOS AUXILIARES Y MONTAJE GENERAL.
2.4.1.- WODULO DE. CONVERSIÓN DIGITAL - ANALÓGICA
HGADER 3X2
H E A D E R 2
U1
E) I DU I 101 ?DI 3DI t015DI DDI 7RFB
lUE
t U U T PIOIJT 1viirrAÜMÜ.
CH"
-}f<vc£>1?
•iiia
— L-<Tü|T>o^cooao
geDI DD 1 1DI ZDI 3DI-4
DI 3DI BÜI7RFB
1 LE
IOUT2lüín 1VHEPAtfHtl
VIH'WH'l
es
-I g ^ ' — s.
12
¿f ^1H
J
— L-<cIE>D A C D 0 3 D
U3tlC 8 5 6 M 5
,-T C1 -pvI» D.1UF 2
HEAOER 3
,K1 objetivo de este módulo ea obtener-. una salida doble, de tipoanalógico, de O a 5 V, para con ella poder tener acceso a:
o Ol'itener' una señal proporcional a cualquiera de loe parámetroscalculados, la cual puede ser utilizada por un módulo de
compensación del factor de potencia, o por otro tipo de
controlador.
El tipo de señal que se tenga a la salida se escoge en
MKDXDOR DIGITAL DÍC tfACTOK FOTKNC'IA. 50

las pantallas iniciales a través del teclado,
o Poder tener- un aparato que funcione independientemente de uncomputador, ya que la señal analógica puede ser conectada a un
plotter, que trabaje "en línea" con el medidor de factor de
potencia, y de esta manera se pueden obtener gráficos, de dos
variables., cjue pueden ser : voltaje y corriente, potencia activa
y reactiva, factor de potencia real y de desplazamiento.
listos datos pueden ser directamente analizados, sin tener por ello
que usar el computador para el análisis y graficación de estos.
El módulo de conversión analógico-digital, esta compuesto por dos
conversares (DAC), del tipo DAC0830, que están conectados al bus de datos
DO-D7, de la tarjeta del raicroprocesador, para habilitar la escritura de
datos y la salida de los mismos, se utilizan dos lineas de selección
(CS1,CS2), provenientes de salidas ya decodificadas y con direcciones
establecidas desde la tarjeta del microprocesador-
A la salida de cada conversor se coloca un amplificador operacional del
tipo LF353 (FET).
El primer operacional permite la obtención de la salida analógica
invertida, y el segundo (actuando como un amplificador de ganancia
unitaria), permite obtener la salida de O a 5V de.
Los conversores DAC, se conectan de manera que se tenga un flujo continuode datos que refleje el estado de la entrada digital, cada ves que seactualiza dicha entrada.
Para esto simplemente se coloca a tierra el pin WR2? y se deja en alto
el pin ILE.
Para actualizar los registros internos se utiliza la señal CS, que se
activa en bajo, es decir que se tienen dos señales de habilitación, una
para cada canal analógico: CS1 y CE2.
Además se conecta la señal cíe escritura, proveniente de la tarjeta del
micrpcontrolador (WR), al pin llamado WR1.
MEDIDOR DIGITAL Dfí FACTOR ÜK POTENCIA.

La salida analógica se encuentra a disposición del usuario a través de
tres terminales tipo poste. -. - -•
La tarjeta diseñada funciona como un módulo independiente capaz de ser
conectado a otro sistema, siempre y cuando se recjuiera un flujo continuo
de datos en la salida analógica.
CIRCUITO IMPRESO (CONVERSOR D/A):
MEDIDOR DIGITAL DS FACTOR JDK POTBWCIA

2.4.Ü.- M01X/LO DE VISUAL1 ¿ACIÓN Y KNTRADA DE DATOS
1 30 A C HEADER 3
Para la visualización de los resultados se utiliza una pantalla de
cristal liquido LTN1113 con las siguientes características:
Permite la comunicación cürsot.s conbits.
es de 4 y 8
Poe&e una memoria tiM In t&rna gne: perml te alwacen&r 80 car&oters(80^8 bits) y esta juewpria es accesible- desde el nilcir
Posee 180 QüP&ctereB almacenados- Intern&jnente en RGM. El formatode los caracteres es una jo&tris de 5x7 pirntos.
Oscilador Interno y circuito de "rssst" Interno.
Ea una ixu] falla de una sola linea, en la gue se pueden mostrarhasta 16 caracteres. Desplazando las lljieas, se pueden mostrar los80 caracteres en 5 pantallas.
MBÜIUOR DIGITAL DK FACTOR DK POTEHCHA. 53

Para la conexión con el microprocesador, se utilizan las líneas de datos
D4 a D7, es decir 4 bits, conectadas a los 4 bits menos significativos
del bus de datos que viene desde el interfas paralelo; Puerto A.
Para las líneas de control: E (habilitación), R/W (lectura, escritura);,
RS (selector de registros), se utilizan los 3 bits siguientes del bus de
datos.
El microprocesador solo envía datos, y señales de control hacia la
pantalla, no se envían datos desde la pantalla.
Utiliza la memoria KAM de la pantalla para almacenar ahí, los 80
caracteres gue se desplegarán por páginas, es decir que se escribe
directamente en la memoria KAM, las pantallas de inlciallsación y de
resultados, y sólo se alteran los datos actualizados.
La pantalla incorpora además una lúa-trasera, alimentada con 12 Vdc, a
través de una resistencia.
Existe una entrada nombrada Vo7 que permite ajustar el contraste de la
pantalla, para ello se conecta un potenciómetro de 5 KQ, a la fuente del
equipo, y su terminal variable a Vo.
El teclado esta formado por 3 teclas., que al presionarse, fuerzan la
salida a O lógico, mientras que en estado normal están "en alto" (5 Vdc).
Para ello se utilizan resistencias de 10 KQ, conectadas a la fuente de
polarización y a la tecla respectiva.
Para la conexión con el microprocesador se utilizan 3 líneas provenientes
del puerto C, del interfas paralelo 8255.
El puerto C trabaja en el modo de entrada salida (in-out), con los 4 bits
mas significativos.trabajando en el modo de entrada, así tenemos:
SW1 -> C5 tecla de modo
SW2 -> CG • tecla de avance (up)
-> C7 tecla de retroceso(dcwn)
MED I COK DiaXXAL, DE FACTOR DE

La línea C'i, se utiliza para leer la interrupción proveniente desde el
modulo de adquisición de datos.
La tecla de MODO, se utiliza para-aceptar un dato desplegado, mientras
que las teclas UJ^DQWN, permiten avanzar entre pantallas3 o escoger los
datos de trabajo para el equipo durante el arranque.
CIRCUITO IMPRESO:
oCo o o o o ó o
P I l o
o í I n
O D o o o o a o a o o o o n o
LCDl
o
o (bóooj LJ \aaj U \a_Q/ U
O
O
D
^ O
MEDIDOR DK FACTOR DK POTENCIA
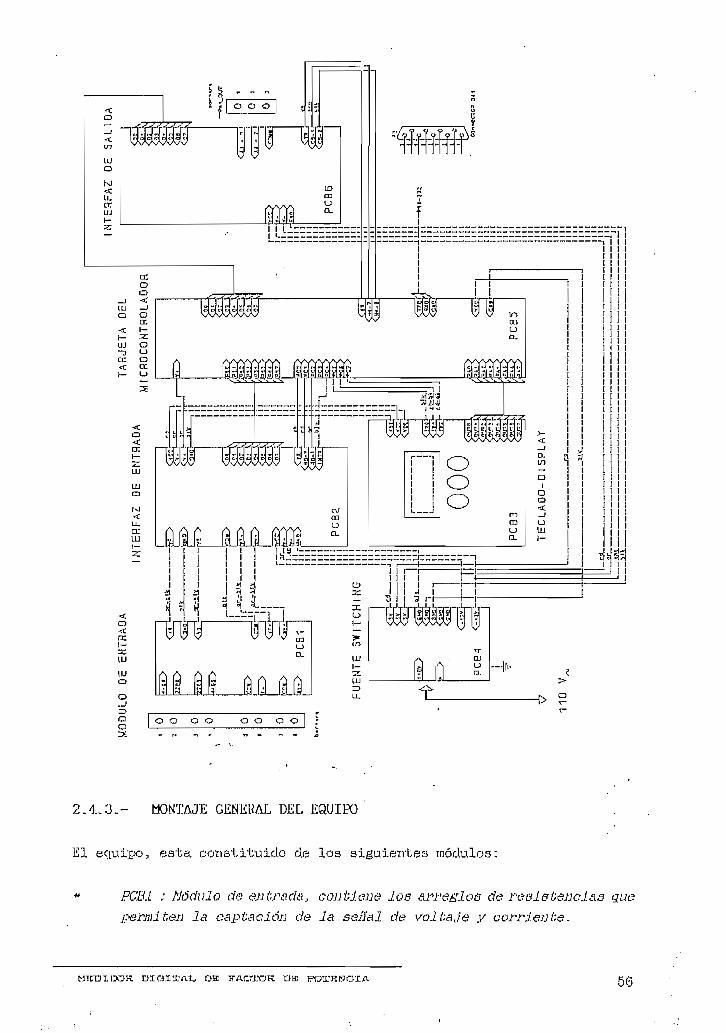
.4.3.- MONTAJE GENKIÍAL DEL EQUIPO
El equipo., esta constituido de los siguientes módulos:
PCB1 : Módulo ctó etitifacte, coMÜdGüe loe ¿uwegloe de pesie tiendas gue.la captación de la sefial de voltaje y corriente.
MBDIDOR DIGITAL DK FACTOR t)K POTKHCXA

PCB2: intzrfüz de entrada, gue s& encarga d&l acondicionamiento efelau señales, y do su conversión digital.
PCB3: Módulo de vluuails&clón, se snG&rga de la comunicación conel usuario, tanto para la entrada de datos (teclado) , como parala visualisación de parámetros y resultados (pantalla LCD),
PCB4 : fuente c'/c? ptxfer., alimentada por 110 V'ac? gen$?a los voltajesde polarización para las demás tarjetas electrónicas.
PGB5: Tarjeta del mlcroeontrolador, .se &nc¿\r¿s& del procesamientode las s&ñ'ales, y de (-.¿ir&cis de comunicación con los demás módulosy con per i ferióos tales como la computadora.
FCBS: itit&rfas de salida, p&ra la conversión cte Zdigitales a sus equivalentes analógicos.
'; datos
Todos loa elementos mencionados han sido ubicados en una caja metálica,que asegure el aislamiento del ruido.
Dimensiones : largo: 30cm, ancho: 20 cm, esp&sor: Id cm,
Mediante oí uso de conectoros y cables idenl-ilicados por colores, cada,uno de los módulos es fácilmente desmontable.
La tarjeta correspondiente al módulo de entrada (PCB1), tiene asociada
una bornera identificada de manera que se puedan conectar las señalesexternas, de voltaje y de corriente (transformador de corriente o pinsaamperimétrica).
1'¿
34
56
7
1- *
-> Vr
-> Vr--> VS
-> Vs
-> COM
-:> It
-> com-> mV
440
220
220
440
tr-.tr.
pin-env
Vac, fase
Vac.3. 'laseVac, faseVac , fase
corrientecorriente
aa : común"ü.d.a de mv
1122
:;
;
(R) •CR).(3)CS)
comúnfane 3
fase 3
(T)
(T)
MttJUIUQK ÜirJITAL DE FACTOR Ü1C POTENCIA 57

A continuación se tiene un diagrama esquemático del equipo., mostrando
cada una de sus partes:
1. alimentación : 110 Vac
2. conector para salidas analógicas3. conector serial RS - 232
4. ajaste del contraste
5. laz indicadora de encendido
6. teclado
7. chapa de la caja
8. pulsante para restablecer el sistema
9. hornera para conexiones
10. pantalla LCD
11. interruptor de encendido
En el Anexo 1, ae tienen los diagramas esquemáticos completos delcircuito diseñado.
MKDIDOR DIGITAL. Dl£ JTACrJL'On. OH: tf ¡58

2_5_ DISEflO DK IOS PROGRAMAS PARA EL MEDIDOR DK MOTOR Dfi POTENCIA
El microcontrolador 8052 AJ-I-BASIC, presenta dentro de
características, la opción de trabajar con programas desarrollados en
lenguaje ensamblador, tal como lo haría 'íin 'microcontrolador
'convencional, y además : tiene el lenguaje BASIC incorporado .
Para acceder al BASIC, se puede utilizar un terminal externo^ que por
medio de la comunicación serial se encarga de ejecutar comandos,
instrucciones y programas, los que pueden ser editados en memoria RAM,
o grabados en memoria ROW.
Pero la ventaja de poder desarrollar un programa en BASIC, en lugar de
utilizar el lenguaje ensamblador , para aprovechar opciones tales como
las operaciones en punto flotante, se ve limitada por laa velocidades
de procesamiento, pues un programa realisado en BASIC, resulta muy
lento respecto del mismo programa desarrollado en lenguaj e
ensamblador,
Estableciendo una comunicación entre los dos lenguajes, se llega a
optimizar el uso del microcontrolador, porgue se aprovechan las
opciones de operaciones en punto flotante, mejorando los tiempos de
ejecución.
El programa a desarrollarse debe realizar para el cálculo de los
parámetros eléctricos, operaciones matemáticas ' de suma,
multiplicación, extracción de la raíz cuadrada, etc.
Se decide finalmente' para • impléméntar 'el programa;1' utilizar' el
lenguaje ensamblador como base principal, y desde allí llamar a'
subrutlnas en BASIC que ejecuten todas los operaciones con números en
punto flotante.
Las operaciones en punto flotante, se harán aprovechando loe
"Qpcodes", gue son subrutinas propias del AH-BASIC, para lo que se
debe utilizar la opción de solapamiento de memoria. t21>
Para establecer la comunicación entre lenguajes, primero se requiere
organizar la memoria y la comprensión de todo el sistema incorporado
en el AH-BASIC.
Dentro del listado del lenguaje ensamblador 3 se explica como se
realiza la comunicación (liak), entre los dos lenguajes.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA

Para realizar el software, que permite el cálculo de los parámetros
eléctricos, se siguieron los siguientes pasos:
1) Organización de la memoria-.'KAÍá•'externa, 'que es.-.-la-que almacenará
los datos adquiridos, loe calculados, y los resultados.
Asi también otras variables relacionadas como las 'constantes,
factores de escala y punteros.
2) La pantalla LCD, es tratada también como una memoria RAM
externa, en la que se escriben: los formatos de presentación de
los resultados, transferidos desde ROM, asi como también las
pantallas de iniciación , que permiten escoger las escalas.
Los dos conjuntos de pantallas son transferidas desde ROM.
3) En la memoria ROM , se han organizado los espacios:
• módulo de inicialisación,
• programa principal,• subrutinae,
• espacio asignado para las constantes, escalas, datos,
• espacio para loa mensajes tanto de ínicialización, y de
presentación de resultados.
4) Para escoger las escalas, y otras variables de cálculo, se
utilizan valores fijos xibicados en la memoria ROM. Luego de
escogidas las escalas, estos valores son transferidos a espacios
asignados para el efecto en mertfória • RAM, desde donde ya pueden
ser utilizadas en los diferentes cálculos.
5) Organización del programa principaL y las subrutinas:
INIGIÁLIZACIÓN: Arranque del mlcroprocesador
/SUBRUTINAS ínicialización del dlapl&y
GENERALES: Manejo del display
Manejo del teclado
Adquisición de datos
Estas eubrutinas están basadas en programas ya existentes, pero
adaptados al sistema, tanto en hardware como en software.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 60
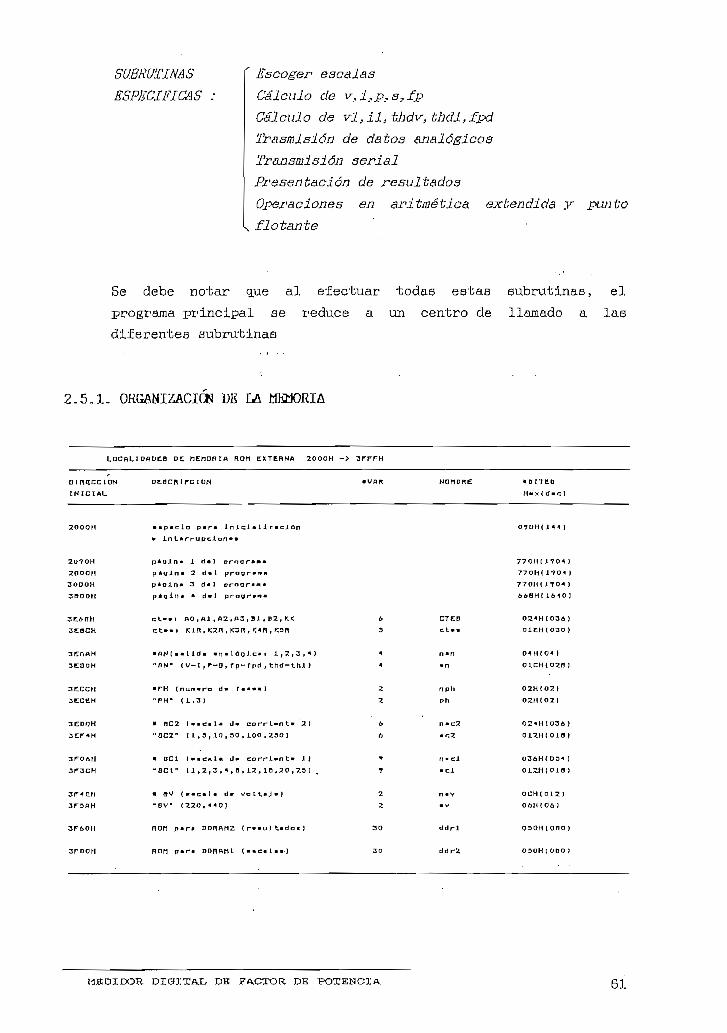
SUBRUTINAS
ESPECIFICAS :
Escoger escalas
Cálculo de v9lyp,syfp
Cálculo de vl,il,thdv3thdl,fpd
Trasmisión de datos analógicos
Transmisión serial
Presentación de resultados
Operaciones en aritmética extendida y punto
flotante
Se debe notar gue al efectuar todas estas aubrutinas, el
programa principal se reduce a un centro de llamado a las
diferentes subrutinas
2.5-1. ORGANIZACIÓN OK LA MEMORIA
LDCRLIDODCB Dt flEflORtA ROM EXTERNA 2OOOH -> 3rrPH
DIRECCIÓN
I N I C I A L
2070H
2QOOM
3OOOH
3BOOH
3E6BH
3E8CH
p »yin • 2 d " l proor»™»
página 4 d» 1 proor«i»«
ct" i K1R, K2R,K:3R,K4R, KS1\)
770HUT04 )
4¿8M<1650)
O l E H ( 0 3 0 )
3ECCH
3ECEH
3F061I
3r3CH
• PH (nun«ro d« fi
"PH' (L,3)
)
* BC2 (..c-1- d« corrL-nt- 2)
"OC2" (1.3, -10, 30. LOO, ZOO}
« BC1 l » « c * l « d- corrl."nt« i)
"SCI" [1,2,3,4,0, 1.2,10, 20, 2.3)
« OV (••£•)« d. volt-J»)
"BV (220,440)
ROM R « r «
ROH p«r«
( r»»u J. t*di
(»«c«1««)
nph
oh
n-cl
• el
ddrl
ddr2
036HÍ034)012H(010)
OÜH1012)06H106)
030HIOBO)
O30H t OOO)
MKDIDOR DIGITAL DK FACTOR DE POTENCIA 61

LOCALIDADES DE MCttCmiA RRM EXTERNA OOOFH -> OFrTH
DIRECCIÓN
1M1 Cl AL
OOOOH
O1FFH .
070711
OT37H
OA57H
OR77H
OB7CH
OB-MH
OB7OH
ODBCH
OBFAH
OCOOH
OCB1H
ODÓOH
OE1CH
OEDOH
OTIOH
DESCRIPCIÓN «VA«
r*««rv»do BOa,lG-32
d«ta« i 1 dim D1->D7Z ' ' * 72-'"
« B t f . t a « r r " " l i r . l - > p 4 H - *fl
1fl it«to« 0 «fi..r»nt«i H1->84B 1B
con- t«n t-« r HP , AH , HDAT, HANOV , NflMH I D
ch.-.i 8CV,8CI1,BCI7. 4
d«td- «n-Ifiqlco-i ftNV.AMI , AHP, ANB ó
Ct««i AO i AI , A2. Bl , 82, B3 ó
Ct... OK.ttK,W,XDOfKDl.xOZ 6
v.ri.bi.. p.r- -X -n.,0 d.i t«i.- 6
100 d» ta« i vol t«J •vi'-JvlOO iOO
1OO doto» í volt«J« t V L ) i VI->V1BO 100
1BO d«to» d» corr.t-nt-( 11) i I1->I1BO IDO
IOO d«to* d« corrían t» 11~>11OO 1BO
r-mult*do»i Vfl.Vl.H.FofB.fp.fpd, 10
THI ,THD29 v«rl»bln« BASIC 30
MOMBRt «BÍTER
01FFH
O1TFH
K« 120H1200)
kv. 120HUOB)
CTC3 OOSH(OOO)
CTC2 01011(024)
006HIOOM
CTEB 02^H( 03íi }
CTCB 024H103A)
006HÍOOÍ)
•dcv OU4H(inO)
• tfcl On4H(lBO)
• dcvl OB4H(.I.BO )
•dcll OB4H1 100)
DRTA O3CHIO60)
OroHI240)
Una vez organizada toda la memoria, se debe asignar a cada variable su
dirección correspondiente
Is necesario notar que los números en punto flotante utilizados por
el MCS BÁSIC-52; son almacenados en un formato BGD, con un
exponente BINARIO, ocupando 6 bytes de memoria, tal como se indica
a continuación: (21)
PI = 3.1415926 - 0.31415926 E+l
DIRECCIÓN
X
JC+1x+2x+3x+4x+5
VALOR
31H41H591126HQOH81H - -
DESCRIPCIÓN
.¿ios dígitos más significativossiguientes dos di ff i tossiguientes dos dígitossiguientes dos dígitosOOH -> (+) 01H -> (-)exponente: 10 "1 - 81H, 10 ~ 2 - Q2H,
10~0 = 80H, 10~-1 = 7FH...
Por lo tanto cada variable BASIC ocupará no solo su dirección, sino
también los 5 espacios siguientes, es decir 6 bM;ea de memoria.
Si se quiere dlreccionar al exponente por ejemplo^ se apunta a la
dirección del número BASIC siguiente y se le resta 1.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 62

LISTADO DK CONSXANTHS
Direcciones iniciales de localidades de memoria para acceder
al dlsplay, teclado, memoria del dlsplay, conversores analógico-
digitalea, y digital-analógico, estos se acceden a través del
PPI 8255 o como localidades de memoria externa.
rJRPA — > 1BOOH d.:Le:ple.-y LCD : puertio A -> B25G outDRFB -> 1B01H adcIN (V,!): pu K-to B -> S26B lnDRPC — > 13O2H -teclado— con-b: puerto a — > 8255 In—
:DA1 — > :UAOOH dilección d«l conv«r«o^ DA *tl K4— BDA2 — > 1COOH cLireeelón. del conversen?' DA 4*2 H-4— 7
ETIQUETA DEL CONTROL, WORD C CVO DEL, PPI-B266
DTIH -> OBAH MODO ' DB TRABAJO : 8256 PPI
ETIQUETAS PARA KL NUtJBRO DK DATOS
LiDT — > O9BH ít de da,toe de» V ; -e '1 •: 15Od— > O71H ndner-o do d«.t;oa : 113d
ETIQUETAS PARA CONTROL, DEL TECLADO
mods -> OOXOH CIBOJIM) AMD OO2OH ~> MODEup ~> OO4OH C18O2H) AND OO4OH -> UP
-> OOBÜH C1BO2H) AWD OO8OH -> DOWN
ASIGNACIÓN DE DIRECCIONES A MEMORIA RAM PARA KL MANEJO DEL TECLADOAUXLCD -:> OBtf.AHCOWTLCD -> OBFBHCURSOR -> OBPCHDDRAM -> OBFDHCARÁCTER -> OBFBHDI13ITO -> OBFFK
DIRECCIONES DE INICIO; MENSAJES Y RESULTADOSciclan. — > 3FBOM poJT."ti«.D.lí*- deddr2 —> 3FBOH p«Ln.-Ua.lls. de reaul"badoa
DIRECCIOWKB EN HOM PARA LAS ESCALAS A UTILIZARSEevR —> 3ITGA.H d3.e:plí .y: eflcn.1». de •vol-t**.;) <j-jtavR ~> 31T4EH ndm«»)po: oaa«.lo. do vol^Rjo
— > 3F3CH d:Lopl«.y: ««CSL!». d«— > 3FOBH nCtnioj?o= «*oe«.n.«. d<*
—> 3ECEH dJ.»pl«.y: mimoso d-» r«.a«ci— > 3KCCH nOmero " númc-iro da JTft.de o~> 3EBOH—> 3EAAH
DIRECCIONES EN RAM PARA LAS ESCALAS A UTILIZARSE
rav —> OE7CI-I
— > OBB8H opCAlA. de corrA.on.-te 2opo ~-> OE3EH »«o«vl«. da pot-nncl*.3?li — > DE77H nuimei-o d** f.^.s^aají — > OB7SH -Cipo de
DIRECCIONES INICIALES .-PARA AIlt-lACUNAMIENTO DE DATOS EN RAM~> OBS-U-I— > OB8Í5H— > OB9SH P — > e «.1:1 el A.~> OBS7H • S-> OE98H THDV --> OB09H THDT. --> OCOOH pt-lnifar* d^-Co VI. en RAM 2
«id al -> ODOOH p**:Í.mex- d«,to II. *n RAM 2«vuíi'J. — > O.BE2H ^GUniulAdor' oum^ 1
— > OB7AH &n/cailo en el q.ue *>3Cle-Ue Vp±co— > OB7BH .4.í-xsu,lo en «1 q,iao &3tlata Iplco
14BDIDOR DIGITAL DE FACTOR DE POTENCIA 63

XDOXD1XD2TOO•yniYT>2
OBDOHOBDBHO BDCHOBKSHOBBEHOBF4H
: cUxto • con ir**»-t;A_rdo O
clivtjo don iro"t*urdo Ocon. rv«»t«.ir-do 1con £*<•*~tiO.irdo 2
«jrmonlao 1 el»11po
tlil
DIRECCIONES EW RAM PARA RESULTADOS-> OICDQH-> OEDSH-> OEDOH-> OTIlíSH-> OJEJJSH-> OKK.KH-> OJL'FAH-> OEFAH-> OJPOOH-> OFOSH
dle-toirslón «jrmi5nd.cs.
C
K1K1 ->IC21C ->AO ->Al ->A2 —>Bl ->
KX ->
DIRBCX3IONBB EN RAM PARA CONETAJITES
OBBKH dljr«acGlon, d*a 1«.OBCWH ato s= FFH~2 / 4OBOAJ"! co"3if*"1.G3 **n"t^ n,O cOB AO HOBA6HOBACHOBB2HOBBíBH
lo«IB" 4
cls
= 6553S d = .65536
£ litro
en-Gí> 1 1 deletnf? T32 del
IC1RKSRAORAIRA2RB1RB2RKKR
DIRECCIONES> 3KSCH di> 3B92H
3KSBH3ET4H3BTAH3E8OH3ES6H
ROM PAKA CON6TAHTBS
de
"bl dAlo2 d«l
del
1B~4 = SO536 d = -SD53B «8G= 16258 d = .162OB «B5
- 1OOOO
2.5.2. SUBRUTINA DK ARRANQUK DKL ttlCROOONllíOIADOR
Sata eubrutina esta tomada del manual MCS-BASIC52 C2i)? y permite el
arranque del sistema a través de un RESET externo. En el arranque, se
iriiclaliaan lae localidades de memoria interna, y al menos las
primeras 512 localidades de memoria externa. Se iniclalizan además
las diferentes variables que intervienen en el programa.
Se inicialisan además los punteros, las pilas de argumentos y control,
el valor del cristal, la localización del programa usuario BASIC, y
la velocidad de tramsmisión (9600 baudioa)
Se "hace un arranque de manera que se corra directamente el programa
ensamblador ubicado en RAtí, pero desde el programa ensamblador a su
vez, se puede pasar al modo de comandos.
La primera instrucción indica al BASIC que el RESIÍT es externo
ORG
DB
2001H
OMH
MEDIDOR DIQITAC DK FACTOR DE POTENCIA64
Luego ae llama a la primera localidad del programa ensamblador:
Localidad a la que el BASIC invoca para efectuar el RfíSET
ORG 2090H
Se escoge mediante el teclado el modo de trabajo;para consola se debe
presionar las teclas UP,DOWN al mismo tiempo, para el MICRO, solo la
tecla MODK .
INICIALIZAR LCD Y KNVIAR MKNSAJJÍS
i
Se •• inicialisa el interfaa PPI, enviando un valor CONTROL WORD a la
dirección : «DRCW
Para inicializar la pantalla LCD5 se invoca a la subrutina de
arranque de la pantalla LCD : DCDON
Luego se escoge el modo de trabajo: consola o micro,para ellos se debe
chequear el teclado:
Si las teclas UP-DOWN eon aplastadas se pasa al modo de comandos y se
envía iin mensaje a la CONSOLA.
Si se aplasta la tecla MODO, se pasa a definir el tipo de sistema con
el que se va a trabadar, a través de las escalas y los punteros.
A continuación se indica un programa de prueba ejecutado para probar
la subrutina de arranque del microprocesador, y para mane j ar
básicamente el teclado y la pantalla.
Una vea inicializada la pantalla y el microproceGador, se transfieren
los mensajes iniciales desde ROM hasta la RAM del diaplay, usando para
ello la tecla MODO, se puede avanzar entre pantallas con las teclas
UP-DOWN.
MEDIDOR DIGITAL DE FACTOR. DE POTENCIA 65

flRRflNQUE: RESETfiL flSSEHBLER
HEhl:
ENCERO HEHORlfl DEDflTOS INTERNA VEXTERHñ.
HEH2:
INICIftLIZftCIOH:
DE LOS ESPACIOSDE MEMORIftIHTERHñ/EXTERHfi.
IHlCIflLIZflCIDISPLfiY LCD
PROHLCD:
TRfiHSHITO HEHSftJEDE ROM DEL MICROA Rfih DEL DISPLfiV
MEDIDOR DIGITAL DE FACTOR DE POTENCIA66

2.5-3. EROGKAMA MttWCIPAL :
El programa principal, ae inicia en la localidad 2156H, y 'lo:gue hace
•es actuar como un centró de llamada'a las diferentes subrutinae, y
entrar en un lazo continuo, de cálculo.de parámetros y- envío de datos
hacia el terminal y la salida analógica.
LAZO:
ACALL ESCALDE
**
ACALL
ACALL
LGA3UL
LX3ALL
AJDQUI
CALCU
CALC2
6HOWX
y É»!
peí.!"».
de olotona®.
¿le
CÍ10 cAIcruILo 1
de c-41au.lo 2
: raosi;irve.if loo
lata
2.5.5. SUBRUTIM D.E ADQUISICIÓN DK EWTOS PA1ÍA EL 8052 AM-BASIC
C ADQt/I )
Eate programa toma los datos provenientes de dos conversores
Analógico- Digitales, cada dato representa las señales de voltaje y
corriente, el "bits de 8 "bits de datos de loa conversores analógico-
digitales, ingresa al interfaz paralelo (8255PPI).
ü'l rnicroproceeador toma los datos uno a uno de cada conversor, y
transfiere estos datos a direcciones especificas de memoria RAtí
Al final de la subrutina de adquisición,' se obtienen 150 datos de
voltaje, y 150 datos de corriente, en las localidades'asignadas
de memoria, listos a ser procesados por un programa BASIC.
Estos datos corresponden a 1 ciclo (360 grados = 113 datos),
grados (28 datoa) si se trata de un sistema trifásico equilibrado.
90
El raicroprocesador 8052 controla loe 2 conversores analógico-
digitales, generando las señales de control:
WKrrü, para iniciar la conversión, KIÍAO, para leer el dato de salida
en cada uno de los conversores. El rnicroprocesador espera también la
señal de interrupción INTÍÍ, proveniente de uno de loa conversores, lina
ves que se ha finalizado la conversión y ee tiene un dato listo a la
salida del conversor.
MKDIDOR DIGITAL DE FACaXDR DE POTENCIA 67

Al enviar el dato de CONTROL WOED? durante la inicializacióñ, se
inicialisa el Irrberfaz PPI, en el modo de trabajo adecuado a loarequerimientos de los diferentes interfaces:
MODO DE TRABAJO DEL INTERFAZ PPI
PUERTO A: 7 BITS -> OUT miune J o d«l tÜoplay LCD
AO
D4
Al
DB
A2
DG
A3
D7
A4
EE-7
A5
K/W
AS
R6
A7
XX
PUERTO B: 8 BITS -> IN B BITS d»l tJUfl ADOC dsjCoo de V o I
BO
dO
El
di
B2
d2
B3
d3
B4
d4
se
d6
ES
d6
BT
dT
PUERTO C: 8 BITE -> IJSf-OUT : p*vr/a oí -beclfxdo yi«.a de aorrtirol
C: -> C4-CV IN
ADC
-> CO-C3 OUT CLQWER)
CXD
-KRCA/D)
01
-RDVCA/D)
C2
-.RDICA/D)
C3
XX
Oí
-IWTRCA/D)
C6
SWlCmode)
ce
BW2 C VAP )
OY
SWSCdown.)
SWl. SW2T BW3, -fceelae ds modo. up. downCO . Cl . C2 , C4. , 1 J.na^.p d-a oowfcr-ol J>«-1^«. loo A/D
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 68

A D Q U I S I C I Ó N DE D A T O S 1
D E T E C C I Ó N D E C R U C E P O R C E R O
I N I C I f t L I Z O E L PPIPARA EL INGRESODE D A T O S A T R A V É SDEL PUERTO 'B'
< CU <— PPI )
ZITO;
ENVIÓ UN PULSOPARA INICIAR LACONVERSIÓN ENLOS ADC,(-HR -> PC )
,EO EL PATO DEVOLTAJE: Vi
* VOY AL SIGUIENTE PASO ENLA.SUBRUTIKA DEADQUISICIÓN DE DATOS
MEDIDOR DIGITAL DE FACTOR DB POTENCIA 69
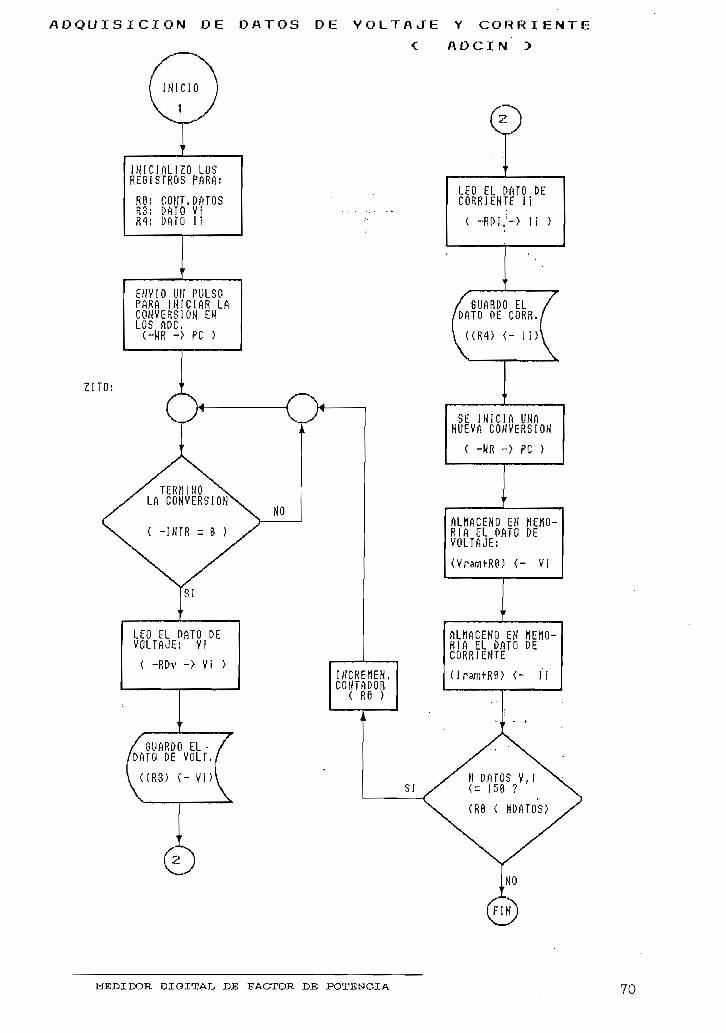
A D Q U I S I C I Ó N DE DATOS DE V O L T A J E Y C O R R I E N T E
< ADCIN >
Z I T O ¡
INICIALIZO LOSREGISTROS PARñ:
R0¡ CONT.PATOSR3; DATO ViR4¡ DATO l i
ENVIÓ LUÍ PULSOPARA INICIAR LACONVERS OH ENLOS £)PC,
(-HB -> PC )
/GUARDO EL -/ P A T O PE V O L T ,
1 C ( R 3 ) <- V¡
©
LEO EL O f tTO DEC O R R I E N T E li
/^GUARDO EL/DATO PE CORR.
1 Í(
SE I N I C I A UNANUEVA CONVERSIÓN
( -HR -> PC )
/1LHACENO EN HEMORÍA EL PATO PEVOLTAJE:
<Vram+R0) <- Vi
ALMACENO EN MEMORIA EL PATO DECORRIENTE
(Irarm-RB) <- I I
MEDIDOR DIGITAL DE FAt^TOR DE POTENCIA 70
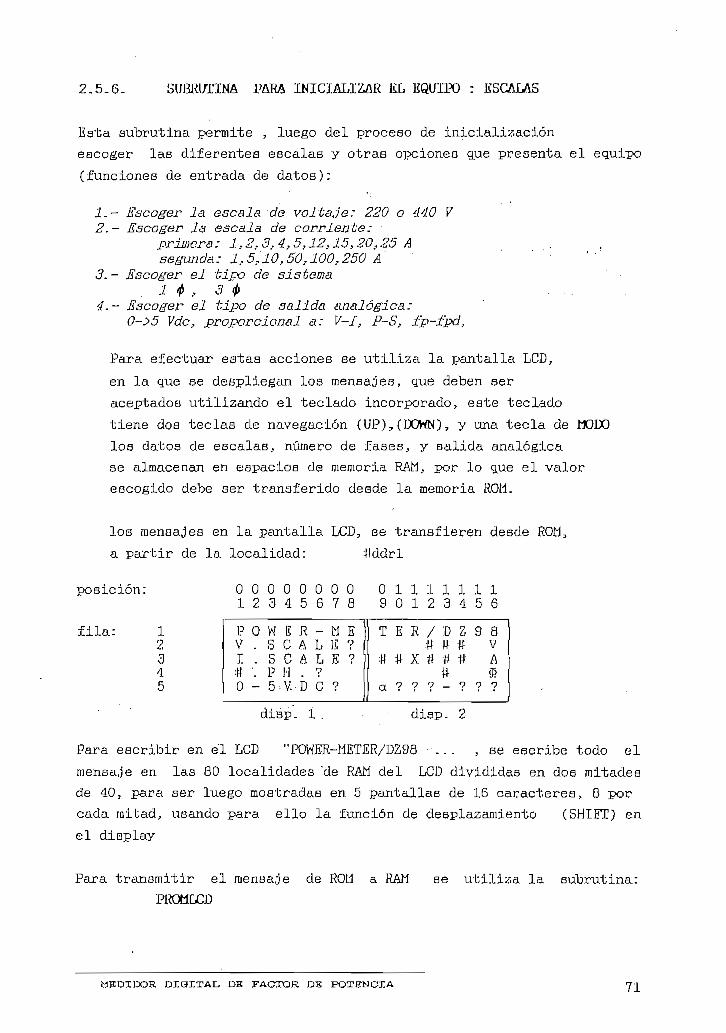
2,5_6_ SUBRUTINA PARA INICIALIZAR 1£L KQU1PO : KSGALAS
Esta subrutina permite , luego del proceso de inicializaciónescoger las diferentes escalas y otras opciones que presenta el equipo
(funciones de entrada de datos):
1.- Escoger la escala de voltaje: 220 o 440 V2.- Escoger 2a escala de corriente:
primera: 1,2, 3, 4,5,12,15,20,25 A . ,segunda : 1, 5ff ÍO, 50,100,250 A ' '
3.- Escoger el tipo de sistema.14,3$ . ...
4.- Escoger el tipo de salida analógica:0->5 Vete, proporcional a: V-I, P-S, fp-fpd,
Para efectuar estas acciones se utiliza la pantalla LCD,
en la que se despliegan los mensajes, que deben ser
aceptados utilizando el teclado incorporado, este teclado
tiene dos teclas de navegación (UP),(DOWN), y una tecla de MODO
los datos de escalas, numero de fases, y salida analógica
se almacenan en espacios de memoria RAM, por lo que el valor
escogido debe ser transferido desde la memoria ROM.
los mensajes en la pantalla LCD, se transfieren desde ROM3
a partir de la localidad: #ddrl
posición:
fila:
0 0 0 0 0 0 0 01 2 3 4 5 6 7 8
0 1 1 1 1 1 1 19 0 1 2 3 4 5 6
12345
PVI#0
0 W. s. s'. P- 5
K RC AC AH .V - D
- ML EL E7C ?
E '?7
T
#
a
E
tt
7
R
X
?
/##
?
D Ztt tt# #tt_ 7
9 8VAíl?
idisp. Í . disp. 2
Para escribir en el LCD "POWER-METER/DZ98 • ... , se escribe todo el
mensaje en las 80 localidades 'de RAM del LCD divididas en dos mitades
de 40, para ser luego mostradas en 5 pantallas de 16 caracteres, 8 por
cada mitad, usando para ello la función de desplazamiento (SHIFT) en
el display
Para transmitir el mensaje de ROM a RAM se utiliza la subrutina:
MEDIDOR DIQITAD DE FACTOR DE POTENCIA 71

Para escribir los diferentes valores en la pantalla, se utilizan los
.números asociados a cada valor numérico:
220 voltios = 0,22 x HT3
22 00 [00 00 00 00 83
2 2 0 "
valor numérico NPF
número Iransferible a la pantalla
Una vea que se ha escogido un valor a través del teclado, se utiliza
una subrutina para transferir un número en punto flotante desde ROM
hacia la correspondiente localidad en RAM ROtJKAM
De la misma manera se transfieren las constantes del filtro hacia los
espacios en ROM correspondientes:
Una vez que se ha concluido el proceso de escoger las escalas, el
número de fases, y el tipo de salida analógica, se debe transferir la
pantalla de resultados a DDRAM (memoria RAM para datos en la
pantalla). Se transfiere desde ROM, a partir de la localidad ddr2.
posición:
fila: 12345
0 0 0 0 0 0 0 01 2 3 4 5 6 7 8
0 1 1 1 1 1 1 19 0 1 2 3 4 5 6
VPsirT
;
I
;
P
H
üCC
;
I :
ttKK4í#
# VW )V A. ## %
)tt
i
I
FT
-4•ttDH
tttt^V
tt íf^1 Iftt -íf
íí1
: #
tt...#
# Ail tt-lí ^tt tt%
.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 72

E S C A L A DE V O L T A J E
X—x
INICIALIZACIONDÍSPLñV LCD
PROMLCD:
TRANSMITO MENSAJEDE ROH DEL hICROA RAM DEL DISPLflV
ESCRIBO EL ierVALOR DE VOLTAJEEN LA PANTALLA
PUNTERO = H 220W2e0" ROM -> DRAM
• SI•
ESCRIBO El. 2doVALOR DE VOLTAJEEH LA PANTALLAPUNTERO = H140»W ROM -> DRAM
-W4-
'SI•
ESCRIBO EL ierVALOR DE VOLTAJEEN LA PANTALLAPUNTERO = H 229"228" ROM -> DRñH
TRANSFIERO VALORESCOGIDO: V,ESCA-LA A HEHORIA RAM
(ROH) -> (RAM)
(nvsR)~>vs
©
O
M.KDIDOK DIGITAL DK FACTOR DE POTENCIA73
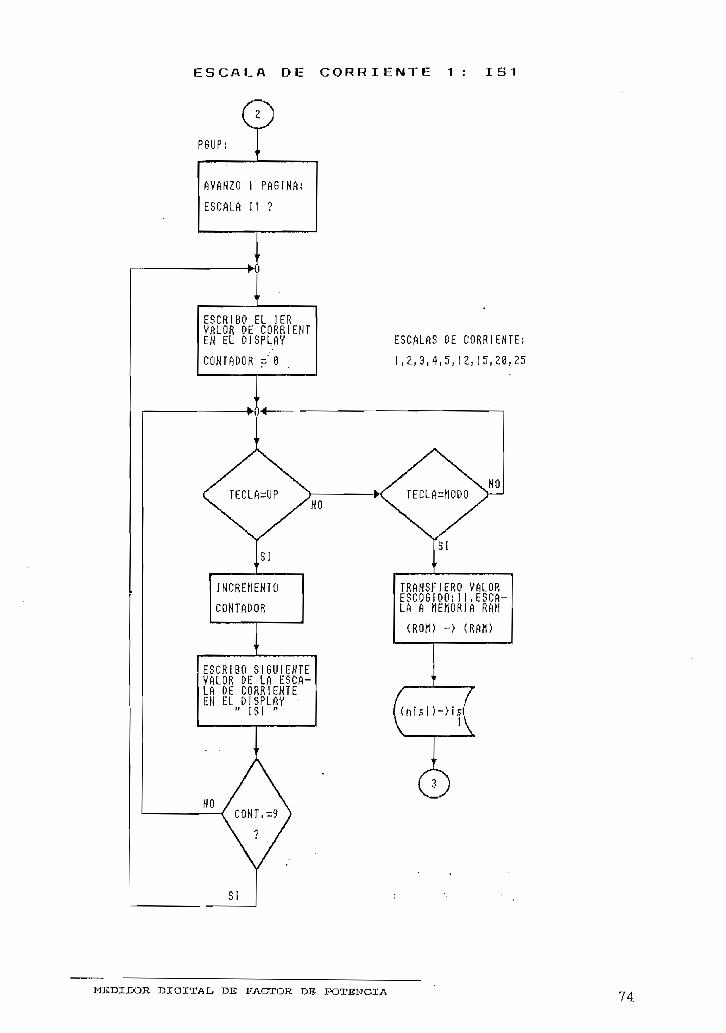
E S C A L A DE C O R R I E N T E 1 : IB1
PGUP:
AVANZO I PAGINA:
ESCALA I I ?
-MI
ESCRIBO EL IERVALOR PE CORRÍENTEN EL OISPLAV
CONTADOR ='e
ESCRIBO SIGUIENTEVALOR DE Lñ ESCA-LA DE CORRIENTEEN EL DISPLAY '
" ISI "
ESCALAS DE CORRIENTE:
1,2,3,4,5,12,15,20,25
TRANSFIERO VALORESCOGIDO;11,ESCA-LA A flEflÜRIñ RAM
ÍROtt) -> (RAM)
(nisD-)is
©
MEDIDOR DIGITAL DE FACTOR DE POTENCIA74

E S C A L A DE C O R R I E N T E 2 : IS2
PBUP:
AVANZO 1 PAGINA:
ESCñLft 12 ?
ESCRIBO EL IERVALOR DE CQRRIENTEN EL DISPLAV
CONTADOR =-8
ESCRIBO SIGUIENTEVfiLOR OE Lfl ESCft-Lfl DE CORRIENTEEN EL DISPLAY
" 182'"
SI
TRANSFIERO VALORESCOGIDO;12.ESCA-LA ñ rtEHORIA RñH
(RON) -> (RAM)
(nis2>->¡5i 2\
MEDIODR DIGITAL DE FACTOR DE POTENCIA75

N U M E R O DE F A S E S S I S T E M A M O N O F Á S I C O - IC PHS > SISTEMA TRIFÁSICO = 3
0PGUP:
51
AVANZO I PA6INAEN EL DISPLfiV
tt FASES ?
ESCRIBO EL ierVALOR DE H FASESEN LA PANTALLA
PUNTERO = H I" I " ROM -> DRAM
'SI•
ESCRIBO EL 2doVALOR DE H FASESEN LA PANTALLAPUNTERO = H 3" 3 " ROh -> DRAM
Tl-i
'SI
1
ESCRIBO EL IerVALOR DE H FASESEN LA PANTALLAPUNTERO = H 1" i » ROM -> DRAM
TRANSFIERO VALORESCOGIDO!HPH,A LA M E M O R I A RAh
(ROh) -> (RAM)
(nphR)->ph
MKDIDOR- DXQITAL DE FACTOR DE POTENCIA76
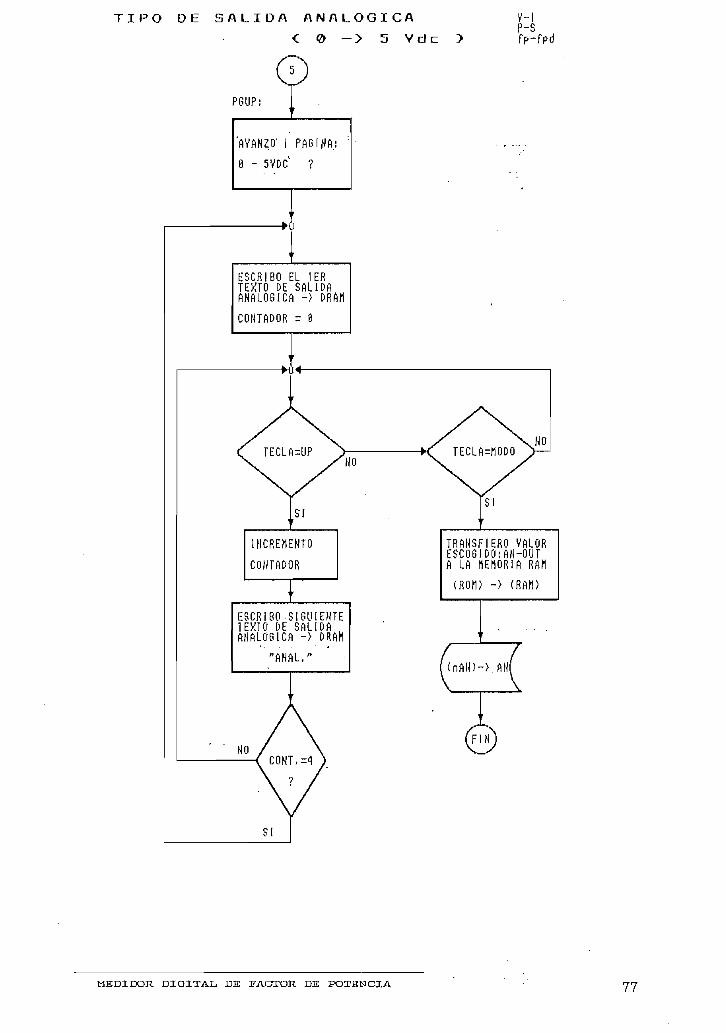
T IPO D E S A L I D A A N A L Ó G I C A
< <Z> -> 5 V e l e >
PGUP:
V-lP-Sfp-fpd
'AVANZO' I PAGINA:
e - SVDC ?
ESCRIBO EL IERTEXTO DE SALIDAANALÓGICA -> DRAH
CONTADOR = 9
E S C R I B O - S I S U i e H T ET E X T O DE S A L I D AftHALOBICft -> DRfiH
"ANAL,"
TRANSFIERO VALORESCOBIDOiAH-OÜTA LA HEHORIA Rñh
(ROM) -> (RAM)
(nAH)->
MEDIDOR DIGITAL DE FACTOR DE POTBNCIA77

2.5.7. SUBRUTINAS PARA MANEJO DEL DISPLAY LCD
22 )
Es xma RAM de 80x6~bitB. Almacena hasta 80 caracteres de 8-bita como
datos de dlaplay. El área que no se usa de esta RAM puede aer
utilizada por el microprocesador como una RAM de propósito general. La
dirección de la DD RAM, ae expresa en hexadecimal, asi por ejemplo:
DD RAM "4BH"1 o o 1 1 1 0 '
1/ /
4 E
La dirección de la DC RAM corresponde a una posición en la celda delLCD:1 2 3 4 5 8 7 8 9 1O 11 12 13 14 15 16
OÜH O1H O2H O3H O4H 06H OSH O7H 4OH 41H 42H 43H 44H 4BH 4SH 47H
El panel LCD, consta de una linea de 16 caracteres en arreglos dematriz de puntos de 7x5.
Una página completa de la memoria DDRAM del display tendrá lassiguientes direcciones:
01 O3 O5 O6 O7 OS O0 10 IX 12 13 14 15 16
1
2
3
4
e
OO Oí O2 O3 D4 O5 OB 07
OS O9 OA OB OC O'D OE OF
1O 11 12 13 14 15 16 17
1S 19 1A IB 1C ID 1K lí-
aO 21 22 23 24 26 20 27
4O 4.1 42 43 44 4O 4B 4.7
48 49 4A 4B 4C 4D 4E 41'
5O 51 D2 53 54 65 56 B7
58 D9 CA 5B 5C BD 5K 5F
6O 61 62 63 64 65 66 67
Laa aubrutinas para el manejo del display LCD? se basan en el
envío de diferentes códigos a través del puerto A, del interfaz
paralelo PPI 8255.
El formato de las instrucciones que se envían al LCD, es como se
indica a continuación:A7 A6 A5 A4 A3 A2 Al AO
RS -> O
1
registro de Instrucción
registro de datos
RW -> 0: escritura
1: lectura
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 78

Para escribir un dato. .se. transfieren -primero , los. 4 bits más
significativos. • . ¡ • '.- ' - . - ' . - • . '
> SUBRUT1NA DE INICIALIZACION DEL DISPLAY'LCD : LCDON
Restablece el LCD a una condición inicial, \ibica el cursor en la
posición OOH. Restablece toda la memoria de datos DDRAM.
* SUBRUTINA DISP1 PARA ESCRIBIR EN LA la MITAD LCD
Ubica el cursor el cualquiera de las 40 primeras posiciones de
memoria correspondientes a las 8 primeras posiciones de la pantalla
del LCD-
> SUBRUTINA ÜOVDDRAM PARA DIRECCIONAR LA DDRAM
Se direcciona la DDRAM, que puede tornar valores desde O hasta 79d
SUBRUTINA PARA COPIAR CONTENIDO DE EPROM AL DISPLAY LCD: PKOtfLCD
Se copia desde la página direccionada previamente a la ejecución de
la subrutina, se utilizan dos posiciones de memoria como registros
auxiliares:
AUXLCD -> memoria temporal
CONTLCD -> contador de caracteres
SUBRUTINA PARA ESCRIBIR'UN CARÁCTER EN LA POSICIÓN DDRAM: ERINTCHAR
El carácter a escribir esta almacenado en la localidad RAM:
CARÁCTER, por lo tanto antes de invocar a la aubrutina, se debe
transferir el carácter a dicha localidad.
SUBRUTINA PARA ESCRIBIR UN NUMERO EN LA POSICIÓN DDRAM: FRINTDIG
El número a escribir es un dígito decimal de O a 9, almacenado en
la localidad de RAM : DÍGITO
SUBRUTINA PARA RETROCEDER DE PAGINA EN EL DISPLAY: PGDN
Utiliza la función de desplazamiento hacia la derecha, incorporada
en una línea de comando del diaplay LCD, con lo que se recorre 8
veces el diaplay hacia la derecha.
LINEA DE COMANDO : 01H,OFH
SUBRUTINA PARA AVANZAR DE PAGINA EN EL DISPLAY: PGUP
Utiliza la función de desplazamiento hacia la izquierda.
LINEA DE COMANDO : 01H,08H
MEDIDOR DIGITAL DE FACTOR DE POTENCIA

2.5.0. SUBRUTIKA DJi CALCUIjO V,I,P,S,FP
En esta eubrutina, Be utilizan loa valores almacenados en RAM
para las escalas, y loa datos obtenidos desde la adquisición
analógica-digital, para calcular el voltaje eficaz, la corriente
eficaz, la potencia activa y reactiva, y el factor de potencia
real: V,I,P,S,FP
Las fórmulas utilizadas en los diferentes casos son:
V = SQT [ (1/n) * (vl*rl + v2*v2 + ... + vn*vn) JI - SQT [ (1/n) * (il*il + 12*12 + ... + in*in) ]P - (1/n) * (vl*il + v2*i2 + . . . + vn*in)S - V * Ifp- P/S
donde: V = Vnaa ~ valor eficaz o RMS del voltajeI = irmg = valor eficaz o RMS de la corrienteP = potencia activaS ~ potencia aparentefp = factor de potenciavi - valor instantáneo de voltajeII = valor instantáneo de corrienteSQRT = raíz cuadrada.
Para obtener los resultados se opera con loe valoree hexadecimales ,
tomando en cuenta que:
o En un ciclo se obtienen 113 datos (71H).' . • . * : i
o A cada valor hexadecimal entre OH y Fli'H le corresponde un valor de
voltaje o de corriente.
o Se debe corregir el valor RMS obtenido por un valor correspondiente
al cuadrado de FFH/2, este tipo de corrección es válida para una
onda periódica,- cuyo valor medio sea cero.
Vrmso = SRQT (Vrms~2 - JT2)
el proceso para hallar los diferentes parámetros se
transforma en:
V - sv * SQT C(l/n) * (vl*vl + v2*v2 + ... + vn*vn) - K~2]I = Qd *' sc2 * SW [ d/n) * (11*11 + 12*12 + ... + ln*in)- K~2JP - spo * KT X[ (1/n) * (vl*il + v2*i2 + ... + vnXin) - K"2 JS = KT * V * Ifp= P/S
l-ÍRDXDOR DIGITAL DE FACTOR DE POTENCIA 80

donde: sv - escala de voltajesel = escala de corriente 1sc2 = escala de corriente 2spo - escala de potenciak2 = K~2 = FFH~2/4 : 3F30H (16384d)KT - cte. según el sistema : 1 -> monofásico
1,73 -> trifásico
* En el caso de un sistema monofásico:
se toman loe 113 (71H) • datos de- voltaje y -corriente,
correspondientes a un ciclo, -ubicados' a'partir de • la posición-deRAM - ;
OC05H -> para los datos de voltaje ( OCOOH + 5 )
OD05H -> para los datos de corriente ( ODOOH + 5 )
# Para un sistema trifásico:
se debe tener en cuenta que existe un retardo de 90 grados de la
onda de corriente respecto a la de voltaje, que corresponde a 28
datos de diferencia, por lo tanto las posiciones iniciales de RAM
son:
OC05H -> para los datos de voltaje ( OCOOH + 5 )
OD21H -> para los datos de corriente ( ODOOH + 5 4- 1C )
-> simplemente se suma al puntero de los datos de corriente el
valor 1CH, escogido mediante el teclado, y almacenado en
"ph".
~> KT, afecta al valor de las potencias en el factor V3, para
que el valor mostrado sea el de potencia trifásica, en un
sistema equilibrado.
Dentro del procesamiento, se inicia con los valores individuales
correspondientes a cada'dalso, expresados en valores hexadecimales.
La multiplicación de loe valores individuales, se hace en lenguaje
ensamblador (multiplicación de 16 bits), y cada producto individual se
acumula haciendo para ello una euma de 24 bita.
Jís decir que el sumatorio de los valores al cuadrado, o del producto
vi, se hace en lenguaje ensamblador, para luego convertir el resultado
a un número en punto flotante NPF, en BASIC.
M3IDIDQR DIGITAL DK FACTOR DE POTENCIA

C A L C U L O DEL V O L T A J E RMS
SIGUIENTEVALOR DEVOLTAJE
í vi )
PRIMERVALOR DEVOLTAJE( v i , )
ENCERO EL SUMADORV EL MULTPL1CAD,INICIAL, CONTADOR
CALCULO ELVALOR EFICAZDE VOLTAJE)
1 •
Virus = sv #
sqrtí $
ndat - KA2)
O
OVnns -)(v mis)
vrms : VALOR RMS' DE-VOLTAJEsvf ESCALA DE.YaLTAJE..ndat ; NUMERO DE DAÍOSk : CONSTANTE = FFH/2
MEDIDOR DIGITAL DE FACTOR DE POTBNCIA82
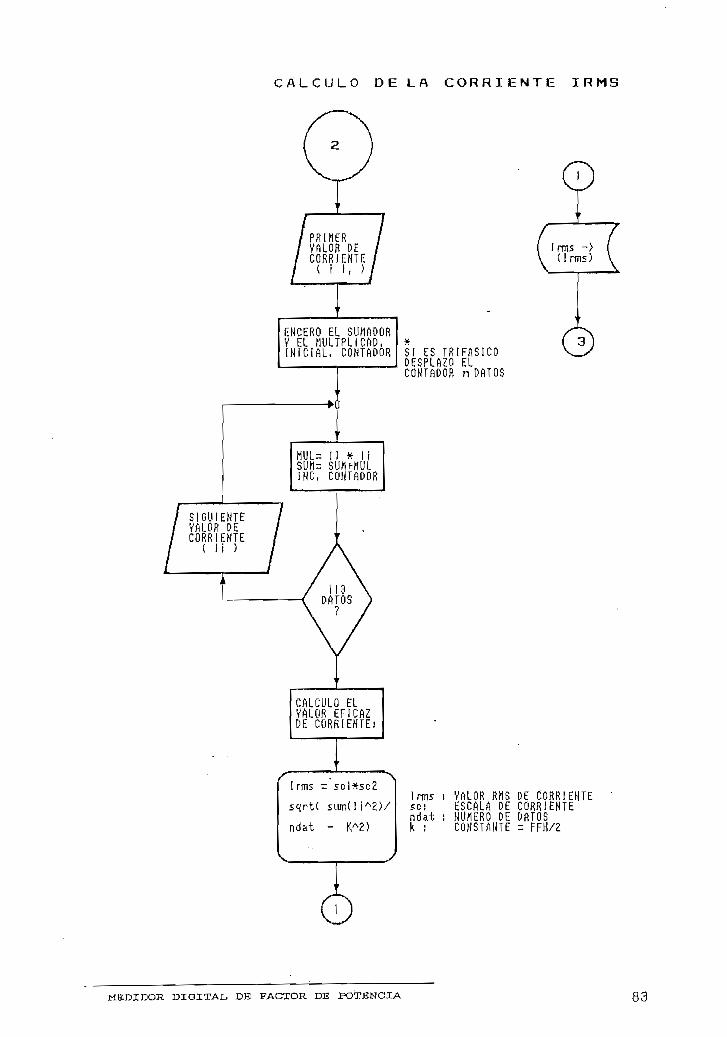
C A L C U L O DE LA C O R R I E N T E IRMS
PRIMERVALOR PEC O R R I E N T E
C i I, )
Irms ->(Irms)
ENCERO EL SUMADORV EL HULTPLICAD,INICIAL, CONTADOR
SIGUIENTEVALOR DECORRIENTE( l i )
SI ES TRIFÁSICODESPLAZO ELCONTADOR n DATOS
CALCULO ELVALOR EFICAZDE CORRIENTE)
- '
Irms = scl#sc2
sqrtC sLUn(MA2)/
ndat - KA2)
Inris i VALOR RHS DE CORRIENTEso ESCALA DE CORRIENTEndai ; NUMERO DE DATOSk : CONSTANTE = FFH/2
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 83

C A L C U L O D E L A P O T E N C I A A C T I V A
S I G U I E N T EPAR DE V A L O -RES!
í V i . I I )
(
PRIMERVALOR
v l . i l , )
SI ES TRIFÁSICODESPLAZO ELCONTADOR DE DATOS[>E CORRIENTE
S- scl#sc2*sv*
* KT * Vrrns *
# I rms
FP - S / P
P =
* KT *
(sum(Ií*y¡)/
ndat - KA2)
P : VALOR IHST.DE POTENCIAsc,svi ESCALASndat ; HUNERO DE DATOS •K ¡ CONSTANTE - FFH/2
KT : I SI ES MONOFÁSICOSQT(3) SI ES TRIFÁSICO
O84

Para el filtro digital, ee deben tomar 113 datos, correspondientes
a un ciclo, y obtener los datos de salida, Ixzego de procesados 5
ciclos, gue equivalen a un numero de ciclos que se requieren para
tener una atenuación en magnitud menor al 10%.
FILTRO DIGITAL
X(t)F(t)
Y(t)É
constantes del filtro:BO - 1: -Bl '- 1.985833: B2' = .9876991AO = 1.332812: Al = 2.665624: A2 = 1.332812KK=10000 . . . .
—> B0=l-.-> AO-A2
'= -B2ecuaciones para obtener la función de transferencia:XD2 = XDl: XDl - XDOYD2 - YD1: YD1 = YDO
Yl - Bl ' * YD1 - (B2) * YD2XI = AO X XDO + Al * XDl + A2 * XD2YDO = -Yl + XI / KK
YDO = [ AO*(XDO+XD2)+ Al^XDl ] / KK + B1*YD1 + B2*YD2
CALCICO ME, HilMKR ARÍ50NIOO
registros usados: R3: contador del número de ciclos : 5 max.
RO: contador del número de datos :113d+5 = 071H+5
Se ubica el inicio de la tabla de datos, se desplazan los datos de
entrada y los datos de salida , luego ae efectúa la función de
transferencia del filtro.
Este proceso se hace durante 6 CICLOS, para los 113 datos, y es solo
en el sexto ciclo que se pasa a encontrar el valor pico y el ángulo en
el que ae produce el cruce por cero.
Con estos valores se puede calcular la distorsión armónica y el factor
de potencia de desplazamiento usando las fórmulas señaladas antes.
Se implementan en el programa dos subrutinas: para desplazar los
datos del filtro y obtener un dato nuevo a la entrada : SFI1,
Para efectuar la función de transferencia del filtro: Jfl?Tl-
MEDIDOR DIGITAL DE FACTOR DK POTENCIA 86

FACTOR DE P O T E N C I A DE D E S P L A Z A M I E N T O
C F I L T R O D I G I T A L )
FILTRO DEVOLTAJE :
TRANSFIERO LASCTES, DEL FILTRO
INIC1ALIZO PNTRS.DE D A T O S
AB, Al, A2B l , 82, KKXe^XDI^XDZ-eY8=YDI=YD2=8
IH1CIALIZO RE6.II DE DATOS : R lH DE' CICLOS ! R3
INC, H CCLOSí R3
CERO-> «DATOS: R l
DATO ; X9
(X0)H -> (XB)npf
DATO : X0
CX0)H -> (X8)npr
HVIO AL STACKHUMEROS VCTES. XDi.Ai.Bi
EJECUTO Lft F.T.DEL FILTRO ;
, XD0 -> VD0
oV8 = -BI#YDi-B2*YD2
I/KK
ODESPLAZO LOSVALORES DEL FLTRO
DIGITAL DE FACTOR DE POTENCIA87

FACTOR DE POTENCIA DE D E S P L A Z A M I ENTO
< FPD , THI , T H V >
FILTRO DECORRIENTE!
MRAM ' •
TRANSFIEROCTES, DEL
INICIftLIZODE DfiTOS
i
LASFILTRO
PNTRS,
'
¡NICIflLIZO RE6.H DE DfiTOS : Rití DE CICLOS : R3
•'-WM-
INC. tt CCLOS: R3
CERO=> HDATOS: R l
DATO ¡ X8
CX0)H -> (X8)npf
DATO i X0
(X8)H -> (X8)npf
(ENVIÓ AL STACKNÚMEROS Y(¿TES, XDi,Ai-,8i
EJECUTO LA F.T.DEL FILTRO :
XDB -> YD0
O
f ie, A I , fieB l , B2, KKX8=XD1=XD2=8V 8 = Y D I = V D 2 = 8
SI ES TRIFÁSICODESPLAZO ELCONTADOR DE DATODE CORRIENTE
CON ! V I . I I . V . ISE CALCULA: THV
THICON AN6V-AN6ISE CALCULA ¡ FPD
-> THV,THI,FPD
O1 r
DESPLAZO LOSVALORES DEL FLTRO
MEDIDOR DIGITAL DE FACTOR DE POTENCIA88
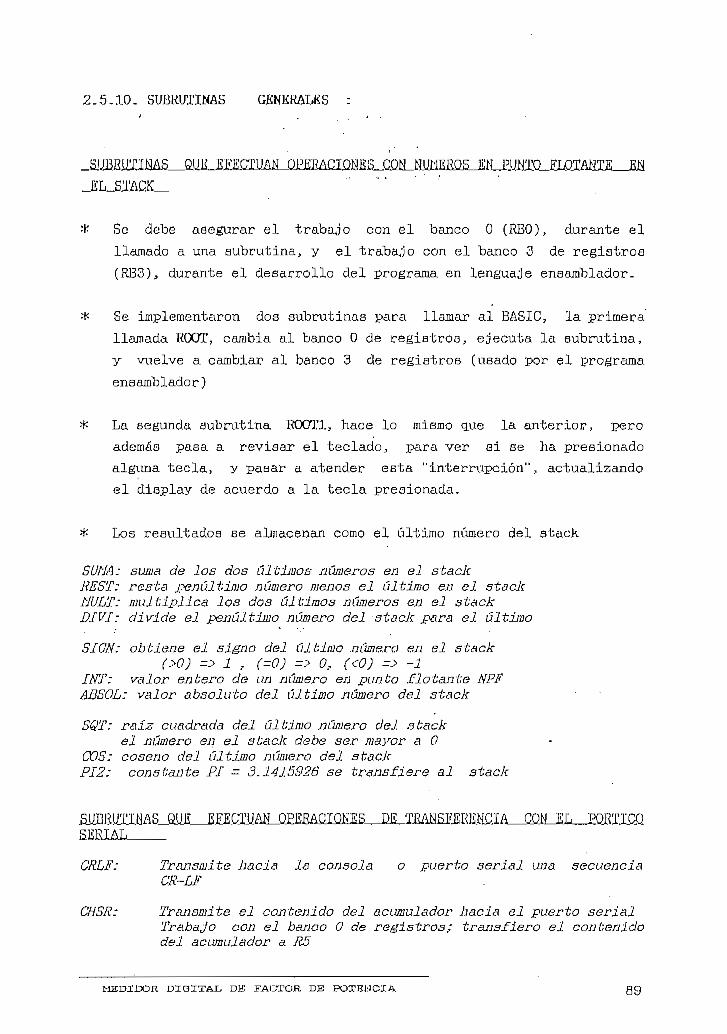
SUBRUTINAS GKNKRALKS
# Se debe asegurar el trabajo con el banco O (RBO), durante el
llamado a una aubrutina, y el trabajo con el banco 3 de registroe
(RES), durante el desarrollo del programa en lenguaje ensamblador.
# Se implementaron dos aubrutinas para llamar al BASIC, la primera
llamada KOOT, cambia al banco O de registros, ejecuta la subrutina,
y vuelve a cambiar al banco 3 de registros (usado por el programa
ensamblador)
# La segunda aubrutina ROOT1, hace lo mismo que la anterior, pero
además pasa a revisar el teclado, para ver si se ha presionado
alguna tecla, y pasar a atender esta " interrupción" , actualizando
el display de acuerdo a la tecla presionada.
# Los resultados se almacenan como el último número del stack
SUMA: sunia de los dos últimos números en el stacktfEST: resta penúltimo número menos el último en el stackMULT: multiplica los dos últimos números en el stackDIVI: divide el penúltimo número del stack para el último
SION: obtiene el signo del ultimo número en el stack(>0) --> 1 , (=0) => O, (<0) --> -1
fNT: valor entero de un número en punto flotante NPFABSOL: valor absoluto del último número del stack
SQT: raíz cuadrada del último número del stackel número en el stack debe ser mayor a O
COS: coseno del último número del stackPI2: constante PI = 3.1415926 se transfiere al stack
SERIAL
CRLF: Transmite hacia la consola o puerto serial una secuenciaCR-LF
CHSR: Transmite el contenido del acumulador hacia el puerto serialTrabajo con el banco O de registros; transfiero el contenidodel acumulador a R5
MEDIDOR DIGITAL DE FACTOR DE POTENCIA
TOSR: Transmite el contenido del STÁCKserial
NPF, hacia el puerto
TOHJSX:
FROHST:
TOST:
CNV4:
CNV6:
conversión de un número en punto flotante ubicado en elSTACK, a su equivalente hexadeciwal ubicado en ' el par deregistros R3:R1. ' STACK npf => (R3:R1)HEX
Saca un número en punto flotante del stack hacia la direcciónindicada por el par de registros R3:.R1
' STACK => (R3:R1)... (R3:Rl-6)
Envía al STACK un número en punto flotante desde (R2:RO)(R2:RQ)...(R2:RQ-6) => STÁCK
Convierte un número hexadeciwal de 8 bits , contenido en A,a un número en punto flotante en el STÁCK
# hexadeclmal de 8 bits -_> NPFA contiene el número, se transfiere a R2:RO
(R2:RQ)H => (STÁCK) NPF
en DPl'R, a un
ParaNPF,DPTR
ROUND:
Convierte un número hexadecimal de 16 bitsnumero en punto flotante en el STACK
# hexadeciüial de 8 bits --> NPF.DPTR, contiene el número, se transfiere a R2:RQ
(R2:RO)H => (STACK) NPF
Convierte un número hexadecimal de 24 bita , contenido ensumí., a un número en punto flotante en el STACK
# hexadecimal de 24 bita ->(R2:RO)H => (STACK) NPF
hacer la conversión, dependiendo de la posición del dígito deleste se multiplica por la constante: 16~~4 - 65536dapunta al número, que se transfiere a 1&:RO
Aproxima con dos decimales ur; n.p.f., almacenado en el STACKINT [ (n*10*lQQ+5)/10 J / 100
2.5.11. SUBRUTINA PARA MOSl'fíAR JJOS RESULTADOS Y JCNVIAREOS AL
Esta siibrutina toma los resultados almacenados en las respectivas
localidades de memoria y loe transfiere hacia el display, el puerto
serial y la salida analógica.
Todos los números se hallan almacenados en el formato de punto
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 90

flotante: 4 bites para los dígitos7 1 bite para el signo y 1 bite
para el exponente.
Las diferentes páginas para loe resultados, se transfieren desde
ROM, a partir de la localidad: #ddr2
VPs
# # # V I :( K W ) IHí tf:( K V A ) ít # tt
F P : # - U' # F P D : 41- . # #T H I : # # % T H V : tt # %
Una vea transferidos los datos hacia la pantalla, se transfieren
mismos hacia el computador. Los datos se transfieren en el forma-
t o d é punto flotante, separados p o r una " ," . . . , . . • •
A la salida analógica se transfieren los datos, dependiendo de la
opción escogida, desde las diferentes localidades de memoria en las
que. se hallan almacenados los resultados.
REGISTROS UTILIZADOS
RO número de ceros a la izquierda de la cifra en .pantallaRl níuuero de enteros de la cifra: ai no tiene decimales R1=FFHR2 Jiume.ro de cifras: enteros + decimalesR3 bandera: según el tipo de dato:
nibble mas significativo -> R3=0nlbble menos significativo -J> R3=l
R6:R4 par de registros en los que se guarda el DPTR
SUBRUTINAS:
Para escribir los ceros a la izquierda de un número en punto
flotante mostrado en formato BCD en la pantalla TEQC1
Para eacribir los dígitos del un número en punto flotante en la
pantalla TDX2
Estas subrutinas son generales y usadas para cada-dató que se
transfiere a la pantalla. ' '
MEDIDOR DIGITAL DE FACTOR DE POTENCIA

TRftNIFERIR UN NUMEROPUNTO FLOTANTE A LA PANTALLA LCD
PANTALLA
0 8 8 8 . 8 8 ( 4 enteros, 2 d e c i m a l e s )
posición en DDRAM
UBICO LA POSICIÓNINICIAL EN ODRAM
UUICO EL EXPONEN-TE DEL NPF CB6)
FORHATO; 6 hites
NPF
puntero
* B l : 2 dígitos mas signí f.# B2¡ 2 dígitos sjguientes% B3: ? ( l i u i t n t ; <; í aii i pni.P*;B3* 84* 85* 86
c u i y i vos 5 i gui eni-es2 djyitos siguientes2 di gitos menos siani f.bit del signo "--oí ' —exponente
CARGO EN R0 LA DIFEREMCIft ENTRE ELEXPOHEHTE DE REFEREMCIA V EL EXPO-NENTE DEL NPF.
R9¡ H de ceros a la derechaR l : f l de enteros (FFH si no tiene d e c i m a l e s )R2¡ H total de c i f ras del numero en la pantal laR3: bit de la p o s i c i ó n del dato a transferir
8 1 : 4— - 4'bits menos si g n i f i c a t i v o s
— 1 bits mas significativos
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 92

MENSAJE DK INICIALIZACION DEL DISPLAY:
"8052 AH-BASIC --- > LISTO ! "
Mensaje observado en la consola si se pasa directamente al modo de
comandos
ESCALAS:
Para las escalas se debe tomar en cuenta gue el valor pico máximo
ingresado a través de cualquier entrada es:
= ZB6 , que eoirro ej>ond.e jnumér-lasLmentie «. un v«.3.or- RMS d« :
128/-T2 = 9O.G1 RMS'
Pero este valor corresponderá numéricamente en la pantalla y a la
salida serial al valor máximo admisible en cada entrada
22OV — > CmAjcinio) 2-42 Vrma
44.OV — > Cmájclmo) 484 Vrms
De aguí se obtienen los valores de escalamiento para el voltaje
22O -> Z.S7374.76 44O -> 5.34Y47D4
AsJjiiismo para las escalas de corriente, es en la escala 2 donde se
toma en cuenta el valor de escalamiento:
Q a cal a.
B GGH.24H,2YH.17H,OOH,7FH
1O 11H , O-4H , 85H , 43H . OOH , BOH
BO 65H.24H.27H.17H,OOH.BOH
1OO 3.1H . O4H , B6W , 43H , OOH, S1H
25O 27H,62H.13H,68H,OOH,aiH
I<LEDIIX)R DIGITAL DK FACTOR DE POTENCIA
CONSTANTKSi
Factor para converaión a decimal de loa númeroa de 24 bits:
16~~4 - 65536 d = .65536 e85 NPF
Factor para a justar loa valores RMS desplazados en 128d:
FFH"2/4 = 16384 d - .16384 e85 NPF
CONSTANTES DKIi FILTRO DIGITAL
AO - A2 = 2.034794 d - 0.2034794 ed'l NPF
Al - 4.069588 d = 0.4069588 e81 NPF
Bl = 1.982298 d = 0.1982298 e81 NPF
B2 - 0. 9853662 d = O. 9853662 &80 NPF
KK - 10000 d = 0.1 e.85 NPF
En el ANJ3XO 3, se encuentra el listado completo del
programa ensamblador.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 94

PRUEBAS Y RESULTADOS
3.1.- PRUEBAS INICIALES
Una vez; construido el equipo, y con loa programas funcionando según lo
esperado, se procede a efectuar las diferentes pruebas del equipo
Lae pruebas se dividen en 4 partes:
Pruebas de exactitud para las mediciones de voltaje y corriente,
Comprobación del funcionamiento del filtro digital,
Pruebas en sistemas reales, tales como equipos, máquinas y lineas de
producción, como los que existen en una fábrica,
Graficación de resultados a través del uso de un computador y la
opción serial, y comprobación de 'la señal analógica proporcional a los
diferentes parámetros.
No ¿JG pudo hacer _ um_j2aajfcm a¿f5a _ adecuadéi del GQUÍPO* con uno de
Las pruebas se remiten a contrastar los datos de voltaje y corriente
contra los obtenidos mediante el uso del multímetro Flúke 87.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 95

Para contrastar loa datos de voltaje ae utilizó un autotransformador ,
que nos permite obtener en la salida voltajes entre O y 220 Vac, que
se conectan a la entrada de 220 Vac del equipo.
Para la corriente, se utiliza un transformador de 110/12 Vac, con un
arreglo resistivo como carga, para obtener señales entre O y 400 mV,
similares a las obtenidas usando la pinza amperimétrica.
El programa se modificó de manera que solo realice la primera parte
del cálculo (V,I,P,S,fp). Asi se logra que los datos se actualicen
aproximadamente cada segundo, y se pueden contrastar de esta manera
las lecturas obtenidas del equipo, contra las observadas usando el
multímetro.
VOLTAJE (V) CORRIENTE (mV)
14 18,9 21 18 1,4 -34 38 10,5 33 30,5 854 58 7 100 95 574 77 3,8 165 155 693 96 3,1 218 201 8112 116 3 266 247 7134 137 2,1 342 316 8.154 155 0,6 420 390 B170 171 0,6187 188 0,5
Observando los resultados se puede concluir que existe un error alto
en los datos cuando estos tienen una magnitud pequeña.
Asimismo se observa en el caao del voltaje que existe un error en la
ganancia, ya que el error disminuye cuando se aumenta la magnitud del
voltaje.
En el caso de la corriente el error de nivel, se mantiene
aproximadamente alrededor del 7%.
Para probar la eficiencia del filtro, se ingresaron a través de la
entrada de milivoltios, señales provenientes de un generador, a una
frecuencia de 60 Hz.
MHDICQR DIGITAL DE FACTOR DK POTBHCIA 96

Tres tipos de señales son observadas: sinusoidal, cuadrada, y
triangular. Para cada una de ellas se gráfica la forma de onda y se
calcula la distorsión armónica. Los resultados se observan a
continuación.
THD* 5.«e
Señal Sinusoidal
-80.0C
TÍID= 33
SeJJal Cuadrada
MEDIDOR DIOITAL DK FACXOR DB POTENCIA

-25.BC
THD= 15,1
Señal Triangular
1) Para una onda totalmente sinusoidal, el valor de la distorsión
armónica debe tender a cero, y se obtiene a la salida un valor
de 5%, el error se debe a gue la señal no está totalmente
encerada a la entrada, la atenuación propia del filtro, y el
hecho de que la onda no sea totalmente sinusoidal.
X= 16,05
V- -47,53
BflHD PfiSS FILTER
flV= 0.00
0.00
Phfc 35.22
RtíS= 35.14
THD= 6.78
= 8
MEDIDOR DIGITAL DE FACTOR DE POTENCIA98
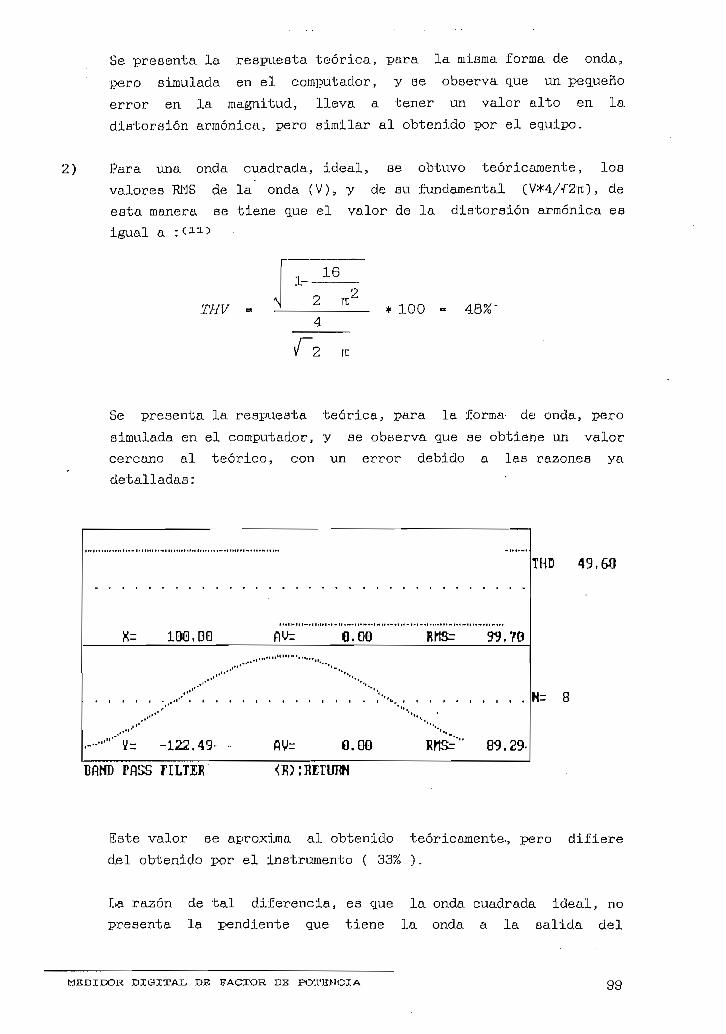
Se presenta la respuesta teórica, para la misma forma de onda,
pero simulada en el computador, y se observa que un pequeño
error en la magnitud, lleva a tener un valor alto en la
distorsión armónica, pero similar al obtenido por el equipo.
2) Para una onda cuadrada, ideal, se obtuvo teóricamente, los
valorea RMS de la onda (V), y de su fundamental (V#4/Y"27O> de
esta manera ae tiene aue el valor de la distorsión armónica es
igual a
THV
16
* 100 48%-
TC
Se presenta la respuesta teórica, para la forma de onda, pero
simulada en el computador, y se observa que se obtiene un valor
cercano al teórico, con un error debido a laa razones ya
detalladas:
X= 100,00 0,00 RHS= 99.70
-122.49- 0.00 89.29-
THD 49,60
= 8
BfiMD PflSS FILTER
Este valor se aproxima al obtenido teóricamente-, pero difiere
del obtenido por el instrumento ( 33% ).
La razón de tal diferencia, es que la onda cuadrada ideal, no
presenta la pendiente que tiene la onda a la salida del
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 99

generador de funciones, y que hace que disminuya sxi porcentaje
de distorsión armónica.
Como conclusión ae ve que los resultados obtenidos por el
equipo, son cercanos a los reales, pese a la existencia de las
fuentes de error mencionadas.
3.2.- PHUEBAS EN SISTEMAS INDUSTRIALES
Como el objetivo principal de la tesis es probar el instrumento en
sistemas industriales, se efectuaron diferentes pruebas en la empresa
CABLEC.
Las pruebas fueron hechas en diferentes máquinas, con diferentes tipos
de carga, y en los períodos de tiempo adecuados para obtener datos de
un ciclo completo da trabajo de la máquina.
Para almacenar y evaluar los resultados, se elaboró una hoja de datos
que es llenada para cada prueba, dentro de esta hoja se toma en cuenta
lo siguiente:
La fecha y hora en la que se inició y se dio termino a la
prueba.
La descripción del equipo o sistema, su nombre, ubicación, y
centro de costo (CC). Esto permite tener una identificación
inequívoca del equipo analizado.
Los datos nominales de la máquina, tales como voltaje,
corriente, y potencia instalada.
Una breve descripción del sistema, con los principales equipos y
elementos de los que esta conformado, así como las observaciones
pertinentes.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA

En las pruebas, utilizando la salida serial y los programas de
apoyo, se obtienen varios archivos de resultados: -
# : archivo que contiene los 113 datoa para la forma de
onda del voltaje. N indica el número de la prueba y 4I# indica el
número de la forma de onda.
$ : archivo que contiene los 113 datos para la forma de
onda del corriente. N indica el número de la prueba y ## indica
el número de la forma de onda.
ÁDAW : archivo gue contiene los datos secuencíales obtenidos
cada minuto, para : corriente , voltaje, potencia real y
aparente, factor e potencia y de desplazamiento, y distorsión de
voltaje y corriente. Es decir, 8 datos por cada ciclo de cálculo
en el equipo. N indica el número de la prueba.
tf : archivo qiie contiene \in gráfico del voltaje y la
corriente (formas de onda) , y loa datos obtenidos para :
corriente, voltaje, potencia real y aparente, factor e potencia
y de desplazamiento, y distorsión de voltaje y corriente, Es
decir, 8 datos. N indica el número de la prueba, ## el número de
la forma de onda graficada.
Luego se tienen los datos obtenidos en tiempo real, valor medido
en el equipo (m), y valor real medido con el multimetro (r), y
el error promedio (e), además de los datos obtenidos del archivo
secuencial.
Finalmente se tienen las conclusiones para cada prueba
realizada.
A cada prueba se adjuntan tres 'tipos de gráficos, obtenidos de los
archivos descritos anteriormente:
1) Los gráficos obtenidos para el voltaje y la corriente, con los
resultados enviados desde el equipo, y graficados a través del
programa hecho en QBASIC.
2) El gráfico de voltaje y corriente, obtenido de loe archivos de
MEDIDOR DIGITAL DE FACTOR DJ3 POTENCIA 101
forma de onda, y graficados a través del programa QPRO.
3) Los gráficos hechos en QPRO, en base al archivo eecuencial. Se
han graficado dos paree de datos: V-I, P-S, fp-fpd, THV__THI.
Se debió corregir mientras ae realizaban las pruebas, doa errores en
el cálculo:
1) Multiplicar los valores de potencia por el factor f3, en el caso
de sistemas trifásicos equilibrados.
2) Tomar en cuenta el signo del ángulo de desfase, entre voltaje y
corriente, para decir si el sistema es de tipo inductivo, en que
la corriente eata atrasada z*especto al voltaje (ángulo
positivo), o de tipo capacitivo, en que la corriente esta
adelantada respecto al voltaje (ángulo negativo).
A continuación se presentan los resultados para las diferentes pruebas
realizadas-
MEDIDOR DIGITAL DE FACTOR DK POTEMCIA 102

INICIOTERMINOMAQUINA;
UBICACIÓN;Cableadora7-M
CableadorasVOLTAJE (V): 440
POTENCIA INSTALADA:S(KVA): 125
FECHA: 14/02/1998FECHA: 1 4/02/1 998
CC;EQUIPO:
CORRIENTE (A);
P(KW):
130moior AC
150
118
HORA; 10:30HORA: 1 4:ao
NUMERO1
DESCRIPCIÓN DEL SISTEMA- sistema trifásico con motor AC, 125 HP
_- arranque por resistencias en el'estatorOBSERVACIONEScarga Inercia! alta, existe un pico de corriente durante el arranquey una carga ba)a durante el trabajo normal „___
ARCHIVOSVOLTAJE : ADV1JD1 , ADV1_02(
CORRIENTE : ADI1_01 , ADH_02,WPG: GR1 01, GR1 02, ...
.. , ADV1_09. , ADI1_09GR1 09
DATOS: ADAT1
DATOS OBTENIDOS EN TIEMPO REAL466r 459m
46m 50r
3 REALn I 457r
I 40m451 m
44r,469rriim
0
465m45r
1,6%
8,6%DATOS OBTENIDOS EN ARCHIVO SECUENCIAL;
V(V)I(A)
P(KW)S(KVA):
fp:fpd:
THDV:THDI:
MAX464145
89.1 63112.82
10.991484
MIN4473
4.42
4.38
0.240.29
85
AVG454.839.8916,3
36.780.54 "0.4
1133.6
HORA3
3
3
3
VI 1
PS 1
FPD 1
THVI 1
CONCLUSIONESLos dalos se toman aproximadamente cada minuto, no se pueden observar*'-'los picos máximos durante el arranque.
Durante el arranque el motor llega a 160 A, y presenta un fp alto (0.76).. .trabajo normal consume 44 A, con un fp bajo (0.45).
Luego del arranque, el motor trabaja aproximadamente a 1/3 de su carga--,nominal, es decir como si estuviera en vacio, .--. j
En los gráficos, se deben multiplicar los valores de P y S porV?
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 103
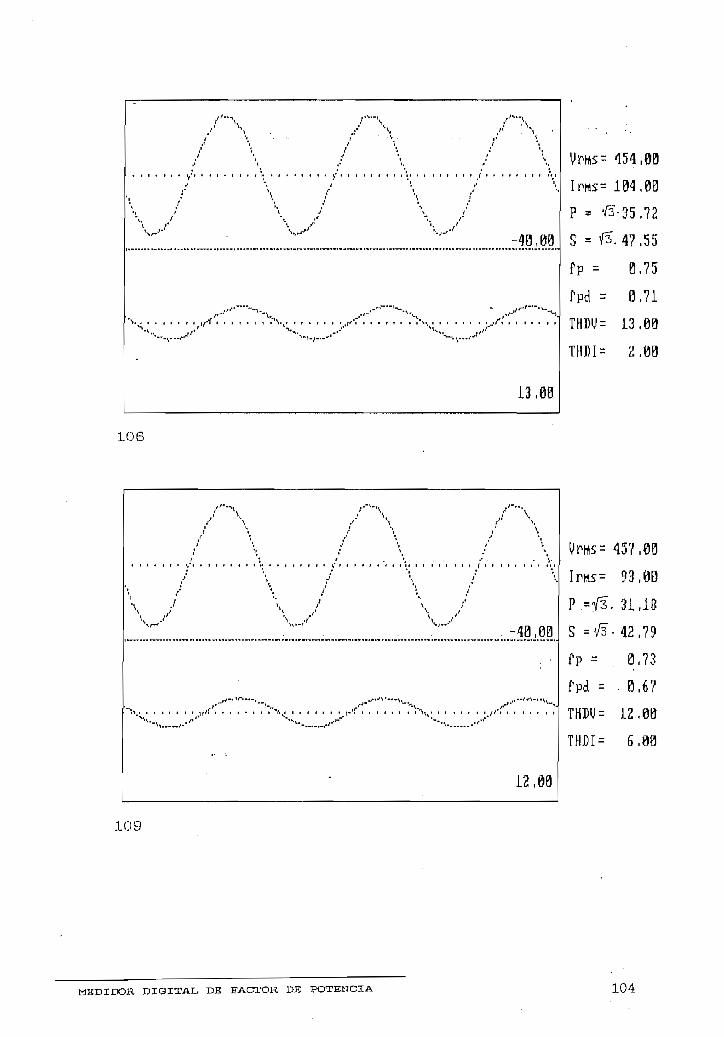
/''"\\\ N .;• *. ," . \ •e • « _ . . . , v _ . ,, -i
\' '< í '. .' ',
¡' l( r \ i
\ ' . 1 \ \
V / '•. >' " /"i ;• \ y '. /\- \ '-. ,r''
,f''"'''' ""U"v--1% .-""''""" ""*X ~/'""J'^' **'""'"
"'*-..-.-?'*' '"i",.,.,.-1'" '"•T-..Í...J->!'
13,09
.06
/'••i. .--i->. .'--..' \ \ S
N .'• \
i '. ••' \ \ '' ' "" .' v
t \ t( .• . . - V
/ '*' ,r' ''. '',•'' *'. '* '; '
\ i /• \V V \ '"• S
- v . ."'" -40,00
.-/•-1"— •-, .^"••^••™^.t ^.-'^-"v_'"•X. xf' ^M '.X N; ./'•' •'
'^•-i ." "•*- irf'' •-.. ./•••i.,-™^- -._,-. _r' ••- •
12,09
VFMS= 154,09
ITMS= 104,00
P = V s - 3 5 , 7 2
S = ^-47,55
fp - 0 ,75
fpd = 0,71T U T M I — 1 O ftB1 H Ü V - U ,üo
T H B I = 2,09
Vn*s= «7,09
Irws= 93,09
P =Y3. 31,18
S « V 3 - 4 2 , 7 9
fp = .0,73
fpd = . 0 , 6 7
THPU= 12,00
T H J ) I = 6 ,09
109
MUDIDOR DIGITAL DE FACTOR DE POTENCIA 104

128-
113 226
VOLTAJE CORRIENTE
128-
96-
64-
32-
0-
-32-
-64-
-96-
-1 28-0 113 226
VOLTAJE CORRIENTE
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 105

128
113 226
VOLTAJE CORRIENTE
113 226
MEDIDOR DIGITAL DE
VOLTAJE CORRIENTE106

500
450-
400-
350-
300-
250-
200-
150-
100-
50-
0-60 120 180
VOLTAJE CORRIENTE
120-r
100-
120 180
P (KW) S (KVA)
MBDIDOR DIGITAL DB FACTOR DE POTENCIA 107
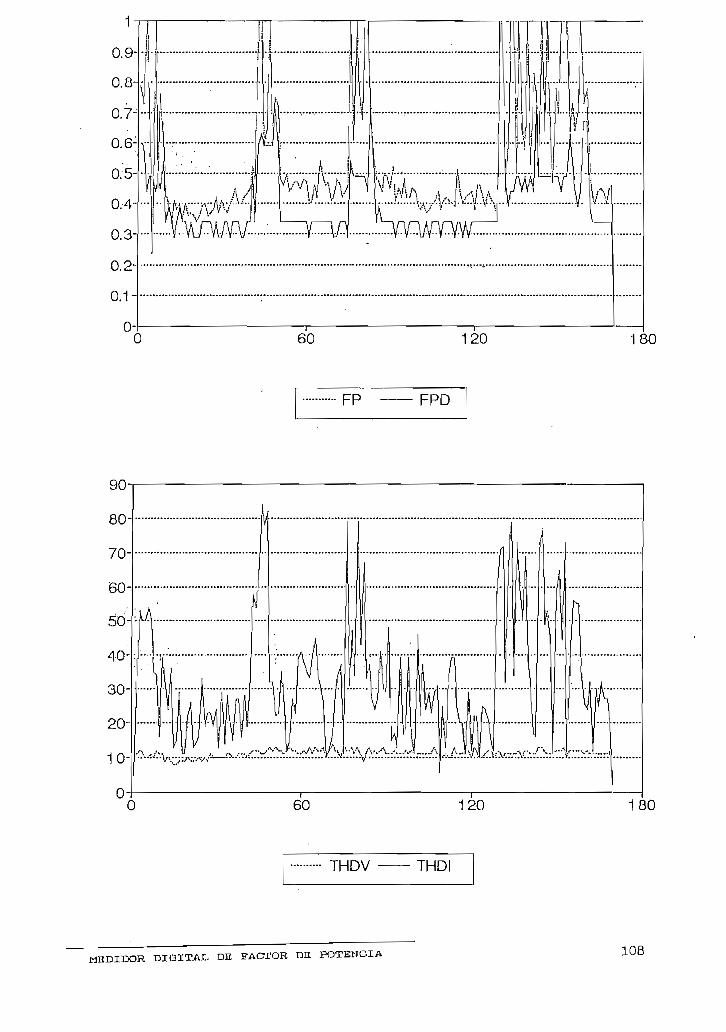
0.8-
120 180
FP FPD
180
THDV THDI
MEDIDOR DIGITAL DK FACTOR DE POTENCIA 108

INICIOTERMINOMAQUINA:
UBICACIÓN:
FECHA: 1 9/02/1 998 HORA: 1 3:30FECHA: 1 9/02/1 998 HORA: 1 5:30
Trafo. de Iluminación 1Cámara de dlstrlb.
. VOLTAJE (V): ' '440/220,110'POTENCIA INSTALADA:
S(KVA); 75
CC: 431 NUMEROEQUIPO: íraío, 4
CORRIENTE (A): 190
P(KW): 70DESCRIPCIÓN DEL SISTEMA- transformador de Iluminación, datos tomados en el secundario- carga: resistiva. Iluminación, Oficinas, etc. •OBSERVACIONESse tomo la corriente en la fase mas cargada.
ARCHIVOSVOLTAJE : ADV4_01 , ADV1J32,CORRIENTE : ADI4J31 , ADl4_02,WPG: GR4 05, GR4 06, ...
.. , ADV4_04. , ADI4J34GR4 09
DATOS: ADT4
DATOS OBTENIDOS EN TIEMPO REAL eprom.lV(V):KA):
208m210r
84 r 83 m
206m 211 T-
83 r 87 m1,6%2,8%
DATOS OBTENIDOS EN ARCHIVO SECUENCIAL:
V(V)
KA)P(KW)
S(KVA):
fp:fpd:
THDV:THDI:
MAX220119
40.5544.53
10.982031
MIN20743
12.9615.790.69
0.8851
AVG213.279,0724.51
29.50.830.9512.511.6
HORA1.5
• 1.5
1.5
1.5
VI 4
PS 4
FPD 4
THVI 4
CONCLUSIONESLa carga prácticamente se comporta como una resistiva, con un fpd alto, tiendea la unidad, mientras fp tiende a 0,9
El transformador esta .cargado'a,un 60% de su capacidad
Se corrige-(a formula de fpd, para tomar en cuenta el signodel ángulo entre voltaje y corrientesL£orríge el factor de escala en P y S: SQT(3)~1,73
MJIDIDOR DIGITAL DE FACTOR IDE FQTBHCIA 109
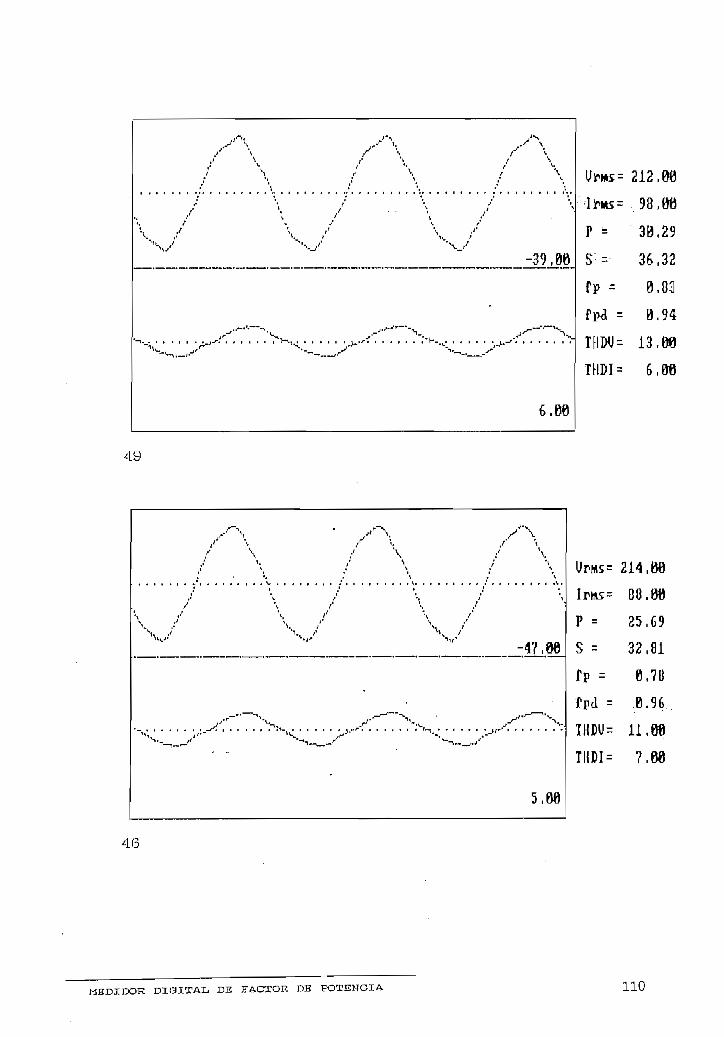
% I I—= 212,00
= - 9 8 , 0 8
. . ' \ \ P = 30.29X/
-39.00 S: = 36,32
fp = 0,83
fpd = 0 ,94
^ "^__^ TH1W= 13|€W
T H D I = 6
6.1
\ \;/ \ürhis= 214,06
Irtts= 88.00/' \/v / \ \ P = 25,69
S = 32,81
fp = 8,78
fpd = .0.96
T H D U = 11,00
1IIDI= 7,00
5,00
46
MKDIDOK DIGITAL DE FACTOR DE POTENCIA 110

-1 28-113 226
VOLTAJE CORRIENTE
128-
96-
64-
32-
0-
-32-
-64-
-96-
-128-0 113 226
VOLTAJE CORRIENTE
MKÜIDOR DIGITAL DE FACTOR DE POTENCIA 111
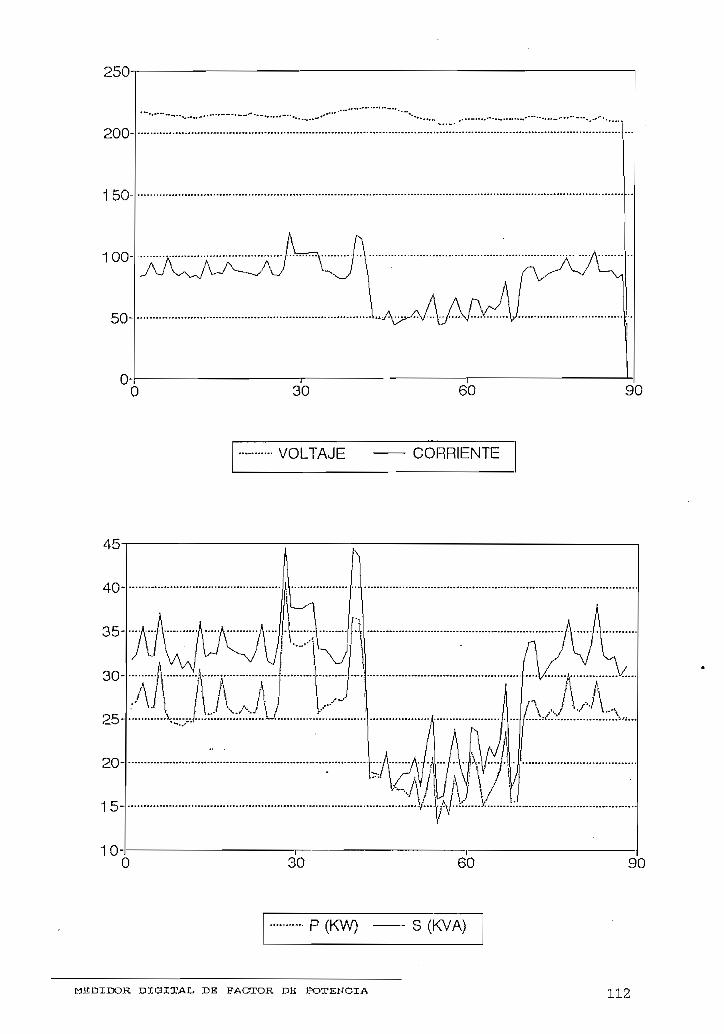
250
200-
150-
100-
50-
VOLTAJE CORRIENTE
P (KW) S (KVA)
MEDIDOR DIGITAL DE FACTOR DK POTENCIA 112

0.65-
FP - FPD
THDV THD1
MEDIDOR DIGITAL DK FACTOR UB POTENCIA113
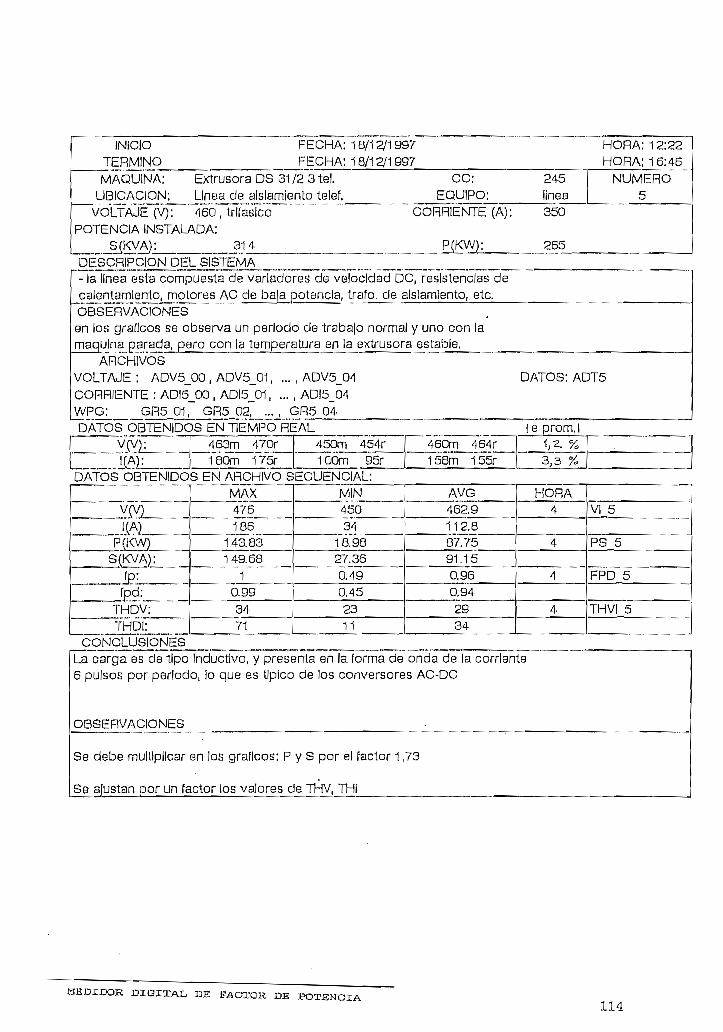
INICIOTERMINOMAQUINA;
UBICACIÓN;
FECHA: 18/12/1997FECHA; 18/12/1997
Extrusora DS 31/2 3 tel.Linea de aislamiento telef.
VOLTAJE (V); 460,POTENCIA INSTALADA;
S(KVA):
trifásico
314
CC:EQUIPO;
CORRIENTE (A);
P(KW):
245linea350
265
HORA: 1 2:22HORA; 16:46
NUMERO5
DESCRIPCIÓN DEL SISTEMA- la linea esta compuesta de vertedores de velocidad DC, resistencias decalentamiento, motores AC de ba|a potencia, trafo. de aislamiento, etc.OBSERVACIONESen los gráficos se observa un periodo de trabajo normal y uno con lamaquina parada, pero con la temperatura en la extrusora estable.
ARCHIVOSVOLTAJE : ADV5_00 , ADV5_01, ... , ADV5J34CORRIENTE : ADI5_00 , AD15_01, ... t AD!í5_04WPG: GR5 01, GR5 02, ... , GR5 04DATOS OBTENIDOS EN TIEMPO REAL
V(V) ; 463m 470r 450m 454rI (A): 180m 175r 100m 95r
DATOS: ADT5
{e prom.l460m 464r 1,158m I55r 3
-p esf~- /o
3 er/1°
DATOS OBTENIDOS EN ARCHIVO SECUENCIAL:
V(V)l(A)
P(KW)S(KVA);
fp:fpd;
THDV;THDl:
COÑCLUSIONE'S
MAX476
186143.83149.68
1
0.9934
71
MIN
450
34
18.9827.360.490.4523
11
AVG462.9112.887.7591.150.960.942934
HORA4
4
4
4
VI 5
PS 5
FPD 5
THVl_5
La carga es de tipo Inductivo, y presenta en la forma de onda de la corriente6 pulsos por periodo, lo que es tipleo de los conversores AC-DC
OBSERVACIONES
Se debe multiplicar en los gráficos; P y S por el factor 1 ,73
Se ajustan por un factor los valores de THV, THI
MEDIDOR DIGITAL DE FACTOR DE POTENCIA114
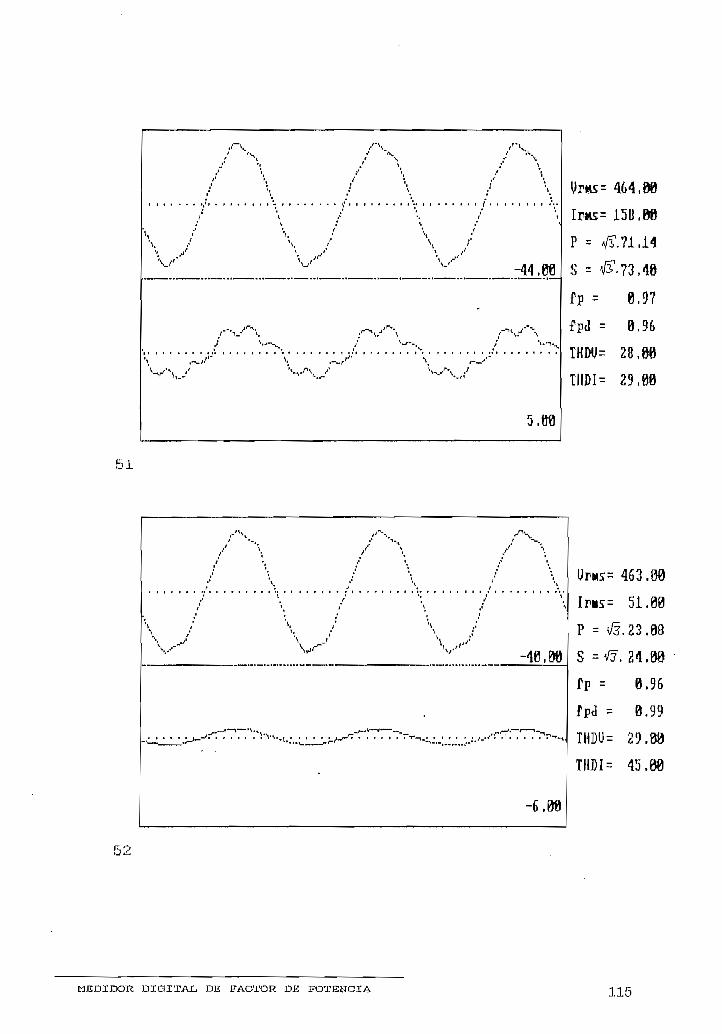
' " í= 464,88
' v Irns= 15B.80
P * V£?i,14
-44.TO S = VJ-73,48
fp = 8,97
THW= 28,80
TIIDI= 29,00
5.1
51
,-"\. /"S,
/ "\ %\ ^
UrM5= 463.90
Iras= 51.00
" V J '
X^ v -40.00 S =V5. 24.00
fp = 0.96
fpd = 0.99^--^~>—^^, /--/-"™í -»-_ ,/-^-~' - TUTMI--^ • • •^j--/- ^Si-u:..: • • -. ^^ - -i,:..' • • i..:.j-t/ ^^H IHDU =
-6.08
= 45.30
MEDIDOR DIGITAL DK FACTOR DE POTENCIA 115
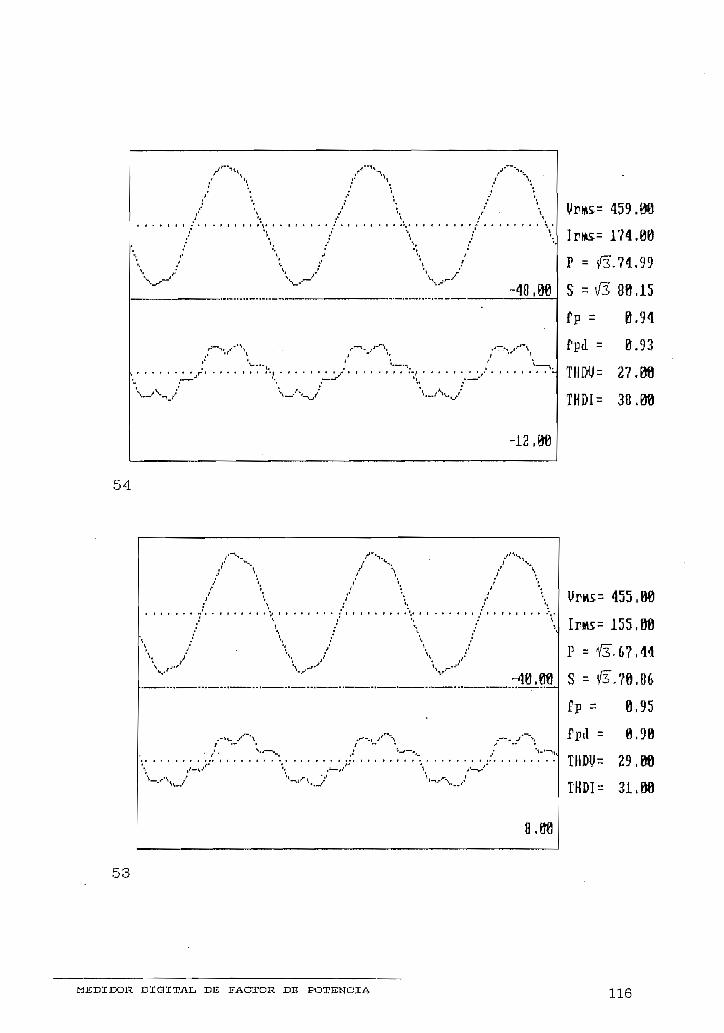
;= 459. m
Iri*5= 174.88
P = 1(3.74,99
-48,00 S = te~ BB.15
fp = 0.94
.-.. fpd = 0.93
TIIDU= 27.BB
THDI= 38.BB
-12, BB
54
i--v /'x .''xV f '•i. i V
,' \ V. .' v'. i \''. / '" í *•
,' • j . J ',' " .- ', > '.
i '. i , .'
" '""• : ' •' " 1^=155,80
p = A^" 'n AÁ
-4B.BB S =
0,95
= 0,98
THWI= 29,00
THCI= 31.00
8.00
53
MKDIDOR DIGITAL DE FACTOR DE POTENCIA 116
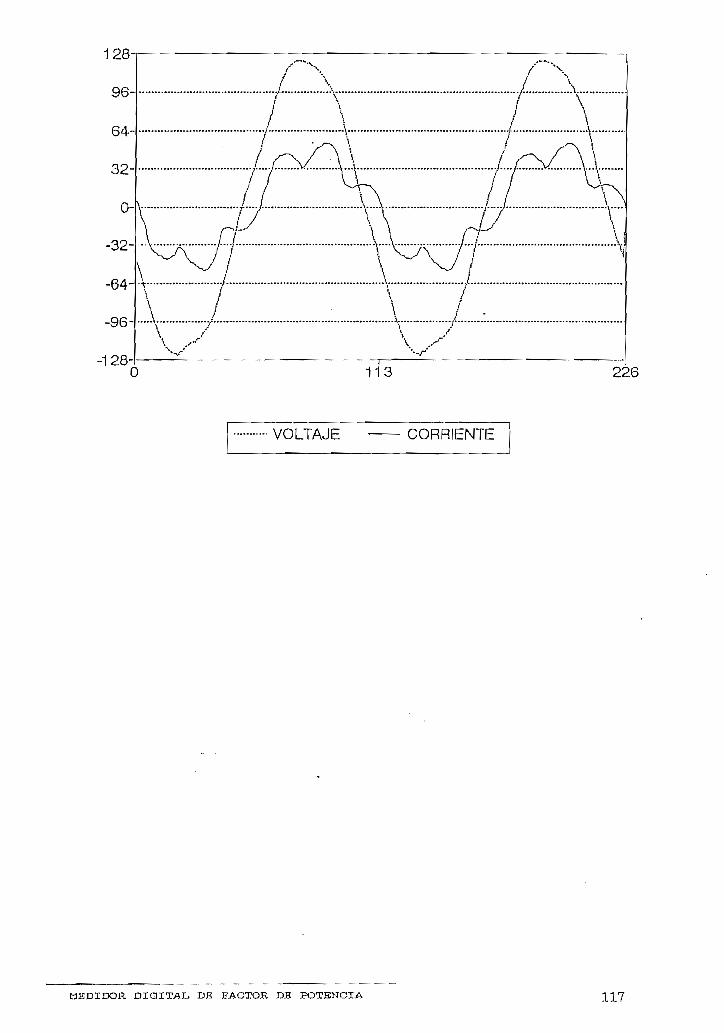
128
113 226
VOLTAJE CORRIENTE
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 117
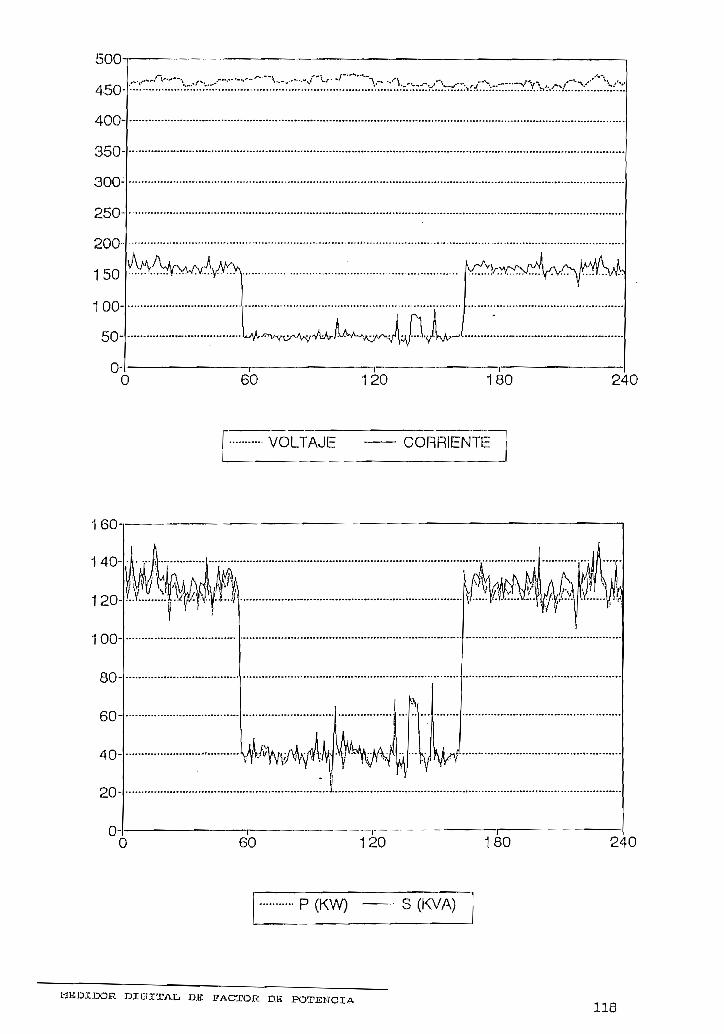
500-i
450
400-
350-
300-
250-
200
150
100-
50H
0-O
J r\L
60 120 180 240
VOLTAJE CORRIENTE
160-1
140-
120-
100-
80-
60H
40-
20-
0-o 60 120 180 240
P (KW) S (KVA)
MEDIDOR DIGITAL DE FACTOR DB POTENCIA118
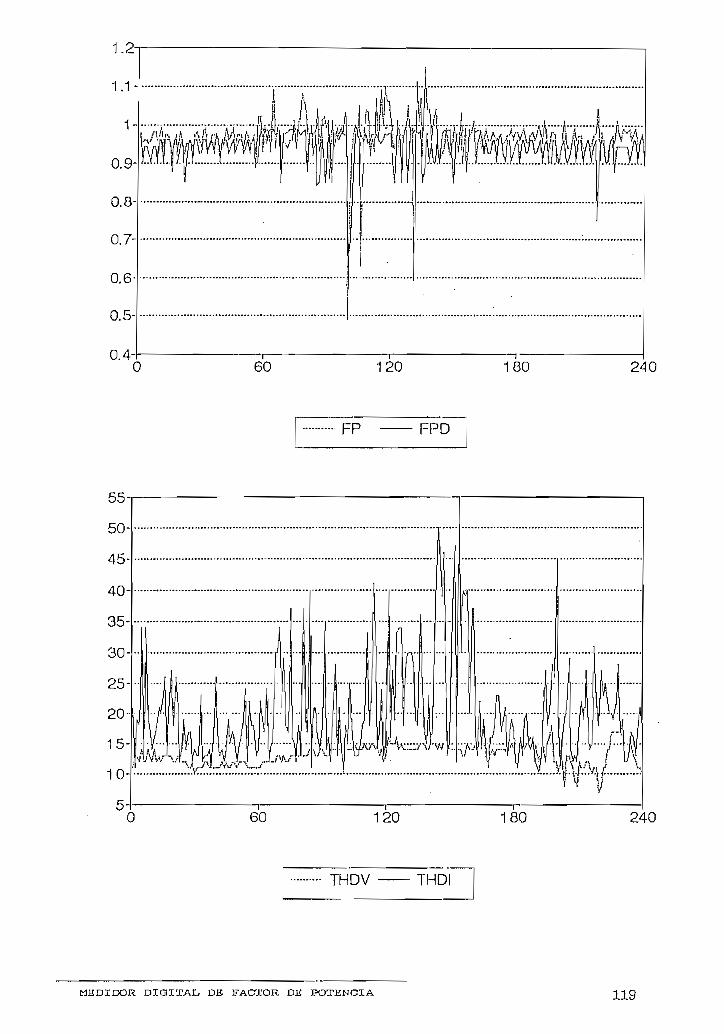
1.
1.1-
1-
0.9-
0.0-
0.7-
í í¥ U...M-U
0.4-i60 120 180
FP FPD
240
240
THDV • THDI
MEDIDOR DIGITAL DE FACTOR DJi POTENCIA 119

INICIOTERMINOMAQUINA;
UBICACIÓN;
FECHA: 18/12/1997FECHA; 18/12/1997
ExtrusoraDS 31/23 leí.Linea de aislamiento telef.
VOLTAJE (V); 460POTENCIA INSTALADA:
S(KVA): 50
monofásico
ce:EQUIPO;
CORRIENTE (A):
P(KW):
245recocedor
113
46
HORA; 12:00HORA: 13:00
NUMERO6
control de fase hecho en base a tiristoresel recocedor precallenta el cobre para darle un porcentaje de elongación.OBSERVACIONESla potencia en traba]o normal, es baja respecto a la Instalada (la 5ta parte)
ARCHIVOSVOLTAJE: ADVB_01 ADV6JD2 DATOS: ADT6CORRIENTE : ADI6_01 , ... , ADI6_02WPG: GR6 00, GR6 01, ... , GR6 03DATOS OBTENIDOS EN TIEMPO REAL |e prora |
V(V); 24 Om 238rl(A): 36m 34r
236m 235r 234m 234r 0,6%46m 44r 60m 58r 4,5%
DATOS OBTENIDOS EN ARCHIVO SECUENCIAL;
V(V)
"(A)P(KW)
S(KVA):rp:fpd: •
THDV;THDI:
MAX25246
7.511.55 •
1
0.7
86
97
MIN23410
3.845.27
. 0.50.5970
10
AVG
243.432.565.588.180.7
0.6579
54
HORA1
1
1
1
Vl_6
PS 6
FPD 6
THVl 6
CONCLUSIONESLa carga es de tipo Inductivo, y corresponde al primarlo de un transformadorLos valores de distorsión en las ondas de voltaje y corriente son altosfp > fpd , (FPD:valores tomados manualmente")
OBSERVACIONES
No se obtuvieron datos de fpd, se debe hacer una corrección en e! programapara tomar en cuenta el signo del ángulo.Se corrige ademas los datos THV.THI por el factor de ajuste K
MEDIDOR DH3ITAL DE FACTOR DE POTENCIA120

-18,1
3.08
Urȣ= 242 .00
Irws= 36.98
P = 5.44
S = 8.85
fp = 0.61
THDU= 94
THDI = 89
60
3,1
240.98
- 31.88
P = • 5,14
S = 7.66
fp = 0.67
fpa = 0.08
THDU= 93,W
= 59.08
f31
MEDIDOR DIGITAL, DE FACTOK DE POTENCIA
121

113 226
VOLTAJE CORRIENTE
MKDIDOK DIGITAL DE FACTOR DE POTENCIA 122
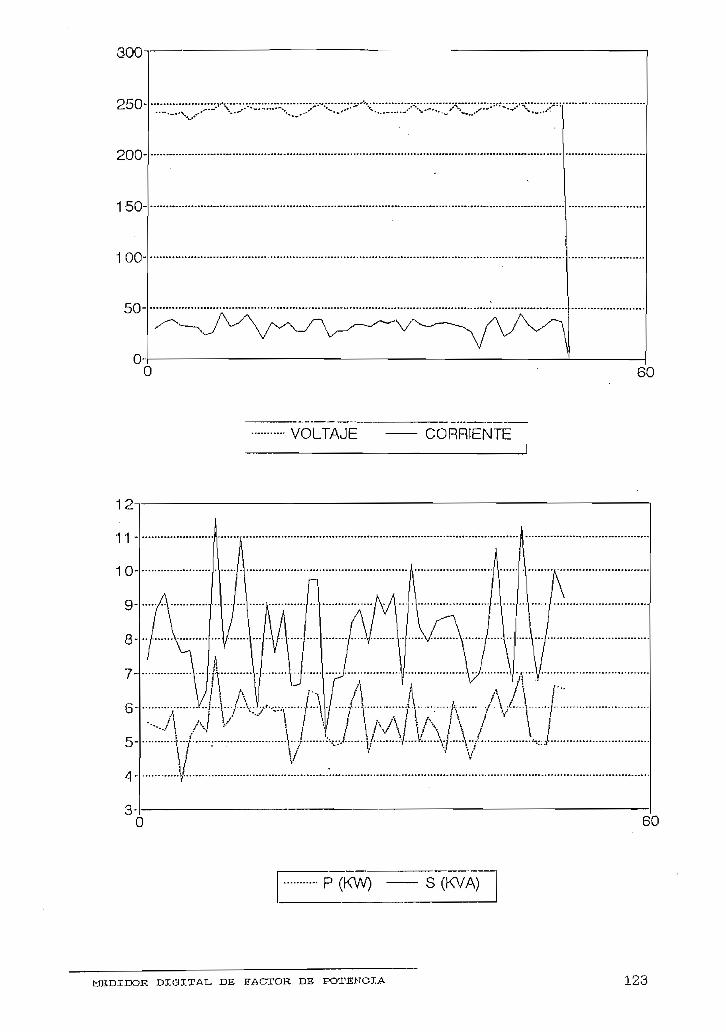
300
250-
200-
150-
100-
50-
0~60
VOLTAJE CORRIENTE
11-
10-
9-
6-
5-
4-
60
P (KW) • • S (KVA)
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 123

s H tí H O H O w
O -H X O
Ti
TJ TI
O

INICIOTERMINOMAQUINA:
UBICACIÓN;Compresor AtlasEnergía - aire
VOLTAJE (V):POTENCIA INSTALADA;
S(KVA);
460
108
FECHA:FECHA:Copeo
trifásico
20/02/1 99820/02/1 998
ce:EQUIPO:
CORRIENTE (A);
P(KW):
530compresor
150
90
HORA:HORA:
15:40t7:40
NUMERO»8
DESCRIPCIÓN DEL SISTEMAMotor AC con varlador de frecuencia para el control de velocidad -
La velocidad varia según lacantldad de aire que se requiere en la plantaOBSERVACIONESel factor de potencia es alto respecto a otros sistemas operados con. motores AC
ARCHIVOSVOLTAJE: ADV8JD1, .., , ADV8_04 DATOS: ADTSCORRIENTE: ADI8JJ1, ... , ADI8JHWPG: GRB 01, GR8 02, ... , GR8 04DATOS OBTENIDOS EN TIEMPO REAL I e prora |
V(V); 471 rn 475rI (A); 75m 64r
470m 474r 470m 475r 1 %113m 83r 93m 79r ' 1 5 x
DATOS OBTENIDOS EN ARCHIVO SECUENCIAL:
V(V)KA)
P(KW)S(KVA):
fp:Fpd:
THDV:THDI:
MAX483125
75
103
1
0.591799
MIN453
17
3439
0.590.85
728
AVG
471.167.12
5162.20.870,91
13
59.9
HORA2
2
2
2
VI 8
PS 8
FPD 8
THVl 8
CONCLUSIONESEl error en la medición de la corriente es alto, por variaciones en la cargaEl valor de distorsión en la onda de corriente es altoSe debe al tipo de carga: AC DRtVE
OBSERVACIONES
Los valores de FPD son buenos , y se aproximan a 0,85 .El fabricante asegura un factor de potencia mejor que 0.9para su equipo
MEDIDOR DIGITAL DE FACTOR DE POTENCIA125

/'X /x.
-29.ee
31
-2.ee
= 472,08
= B5.0Í)
P = 51,15
S = 71,13
fp = 8,72
fpa = 8,85
THDU= 12,08
THDI= 76,00
/'X. /X /'"X/ ' '• '.
' * •' *'. '' \ \' *•• •'
\ \ '• f
\ \ \
//'~í'i' ^.ii ;"""'~1. -M. ' ;' — '"'i v, ' — " * , / " •. : ~r" i
"\ ,""1 " *" \ /'~ J ~* \ /•""•>./
-4.ee
Urws= 473
Irns= 113
P = 66
S = 92
Fp = 0
fpd = -B
THDU= 14
THDI= 94
,06
M
M
,83
,72
.88
M
,00
82
MEDIDOR DIGITAL DE FACTOR DE POTENCIA126
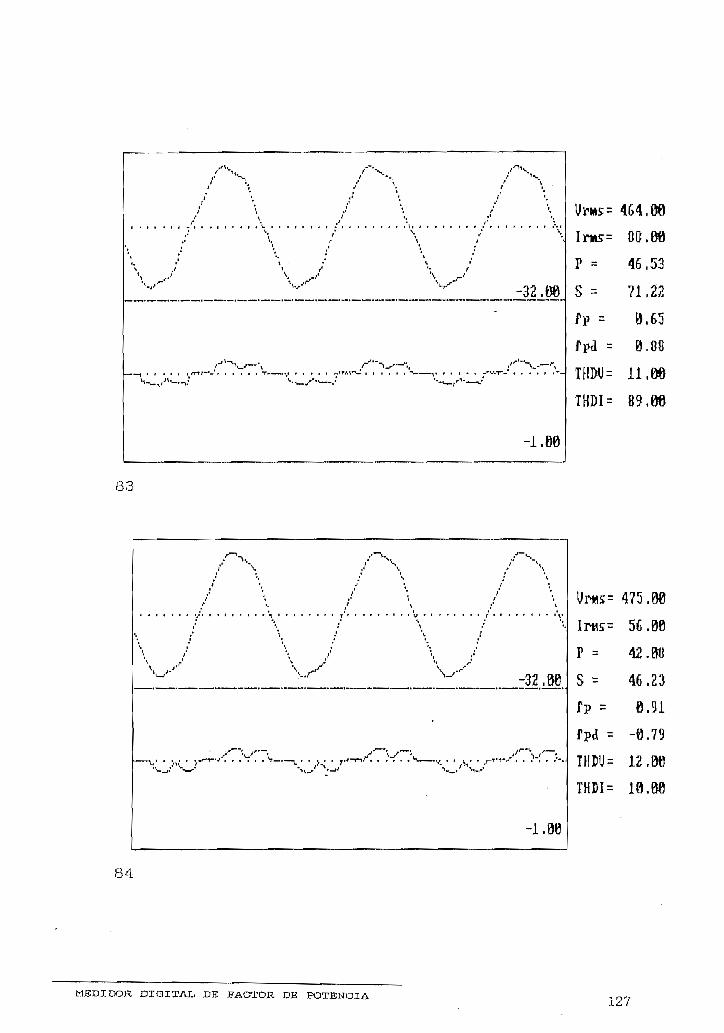
-32.0»
= 4G4.88
Irws = 80.86
P = 46,53
S = 71,22
fp = (3.65
0.88
= 11,08
= 89,88
/•"V ••">-. ••""•%
/ \ \ \ '< •* "•
' '. -1 1 ' •'•* '. '' ", l'f . .' ' 1
/ -• ,' * :' '•
r \ \' \'
'"• ;' i '/ '', / ',
'\ \ \/_;^ ;C; ^_ :32.|8
-1.90
Urw= 4?5
Irns^ 56
P = 42
S = 46
fp = 8
fpd = -8
TU Til I- 1?H1UV- 1¿
T H D I = 10
M
.mM
.23
.91
.79
M
84
MEDIDOR DIOITAL DE FACTOR. DE POTENCIA 127
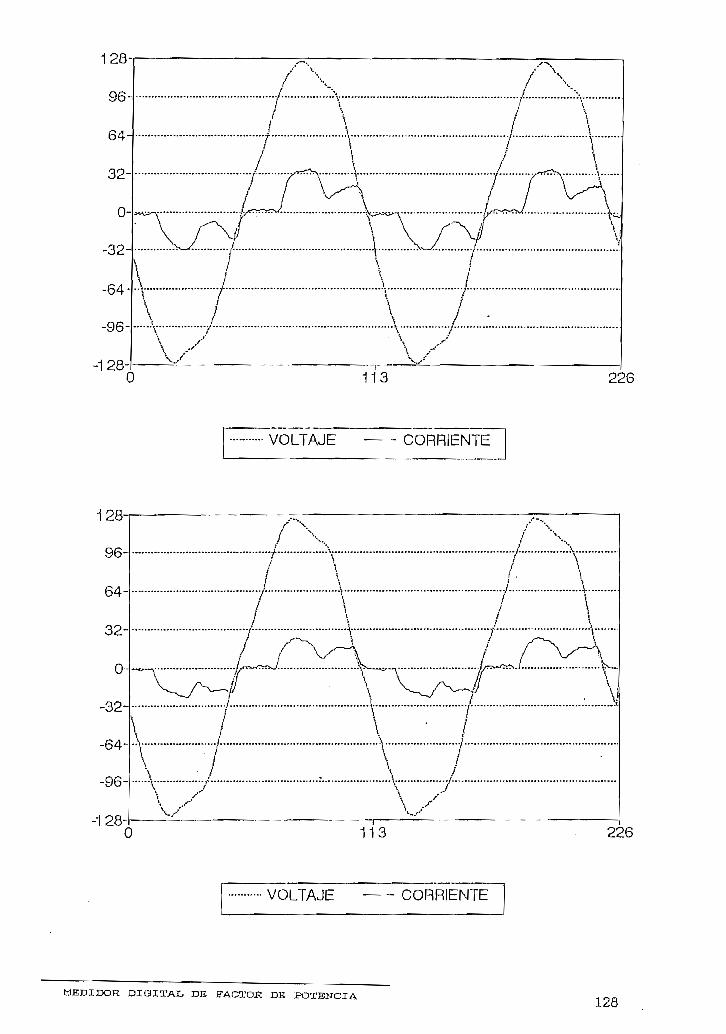
128-
113 226
VOLTAJE CORRIENTE
128
113 226
VOLTAJE CORRIENTE
MEDIDOR DIGITAL DE FACTOR DE POTENCIA128

128-i
113 226
VOLTAJE CORRIENTE
128-
113 226
VOLTAJE CORRIENTE
MKDIDOR DIGITAL DE FACTOR DK POTENCIA129

500
450
400-
350-
300-
250-
200-
150-
100-
50-
0-60 120
VOLTAJE CORRIENTE
100-
90-
80-
70-
60-
50-
40-
30-:60 120
P(KW)
WKDIDOK DIGITAL DE FACTOR DE POTENCIA 130
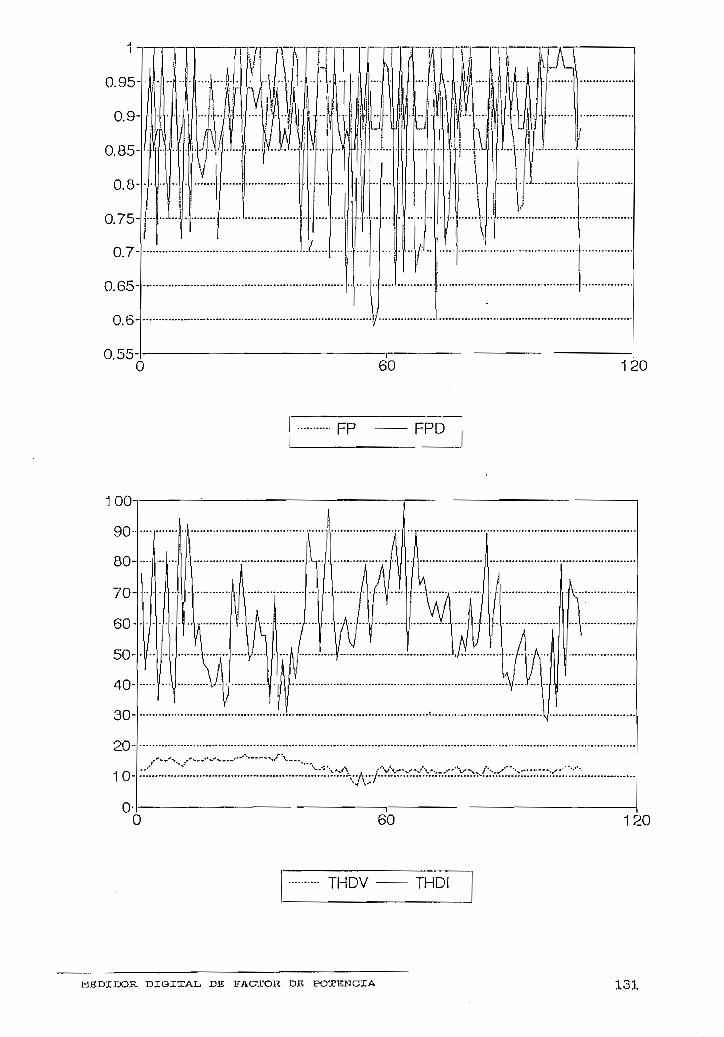
0.55-120
FP FPD
100-1
90
60 120
THDV THDI
MEDIDOR DIGITAL DE FACTOR DE .POTENCIA 131
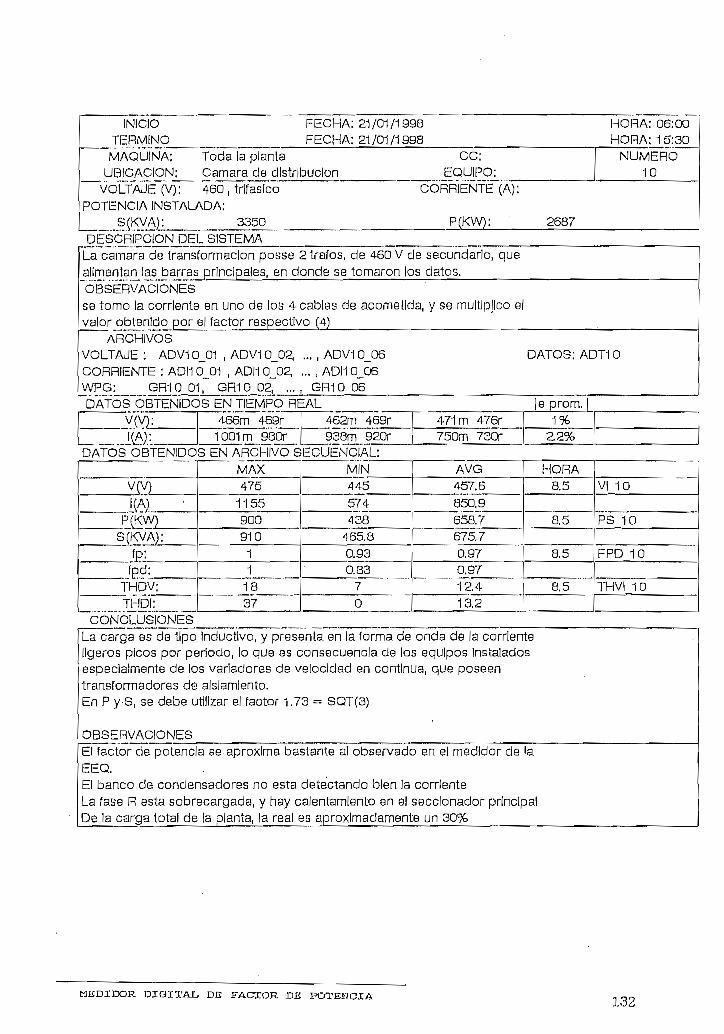
INICIOTERMINOMAQUINA;
UBICACIÓN;
FECHA: 21/01/1998FECHA: 21/01/1998
Toda la plantaCámara de distribución
VOLTAJE (V): 460,POTENCIA INSTALADA:
S(KVA):
trifásico
3350
ce:EQUIPO:
CORRIENTE (A):
P(KW): 2687
HORA: 06:00HORA: 1 5:30
NUMERO10
DESCRIPCIÓN DEL SISTEMALa cámara de transformación posse 2trafos. de 460 V de secundarlo, quealimentan las barras principales, en donde se tomaron los datos.OBSERVACIONESse tomo la corriente en uno de los 4 cablas de acometida, y se multiplico e!valor obtenido por el factor respectivo (4)
ARCHIVOSVOLTAJE : ADV1 0_01 , ADV1 0_02,CORRIENTE : ADI1 0_01 , ADI1 0_02,
GR1 Q_01 . GR1 0__02. ...
.. , ADV1 0_06. , ADI1 0_06GR1Q_06
DATOS: ADT10
DAT OSBTEIDOS EN TIEMPO REAL e prom.V(V):
KA):
466m 469r10Q1m 980r
4G2m 469r93Bm 920T
471 rn 476r750m 730T
1%22%
DATOS OBTENIDOS EN ARCHIVO SECUENCIAL:
V(V)
KA)P(KW)
S(KVA):fp:
fpd:THDV:THDI:
MAX475
115590091011
18
37
MIN445
574
438
465.80.930.837
0
AVG
457.6850.9S58.7675.70.970.9712.413.2
HORA8.5
8.5
8.5
8.5
VI 10
PS 10
FPD 10
THVi 1 0
CONCLUSIONESLa carga es de tipo Inductivo, y presenta en la forma, de onda de la corrienteligeros picos por periodo, lo que es consecuencia de los equipos Instaladosespecialmente de los varladores de velocidad en continua, que poseentransformadores de aislamiento.En P y-S, se debe utilizar el factor 1 .73 = SQT(3)
OBSERVACIONESEl factor de potencia se. aproxima bastante al observado en el medidor de laEEQ.El banco de condensadores no esta detectando bien la corrienteLa fase R esta sobrecargada, y hay calentamiento en el seccionador principalDe la carga total de la planta, la real es aproximadamente un 30%
MUDIDOR DIGITAL DE FACTOR -DE POTENCIA132

= 466.98
|> - iS. ' \ \ l ~\ \ \y
fp = B.96*••• \\d - ..w
./ '-'\- TH1W= I7.W^\ %. ,. \= 23.1
. /• --\ 'v. xr\ v \-48,06
101
/^x /trxx /'-'N/
«s= 4&3.60
= 930,68
\ P =-Í3_415,24
S =^,435,65
fp = B.95
\ / -N fpd = B.99
/ \ •• / \ THD*J= 14,60
THDI= 28,60
-48.00
102
MJSDIJDOR DÍGITA!, DE FACTOR DE POTKNOIA133

-f S
104
-52.ee
;= 462,80
Iro= 750, fle
P = '6,299,57
Pp = 0,86
1= 14.08
•THDI= 25,08
\s-J
••--%X \ 473.80
= 546 -M
P =iís.Z2B.72
S ='&258.6B
fp = 0.85
B.94
T H D I = 31.3»
105
DIGITAL DE FACTOR DB JPOTENCIA134
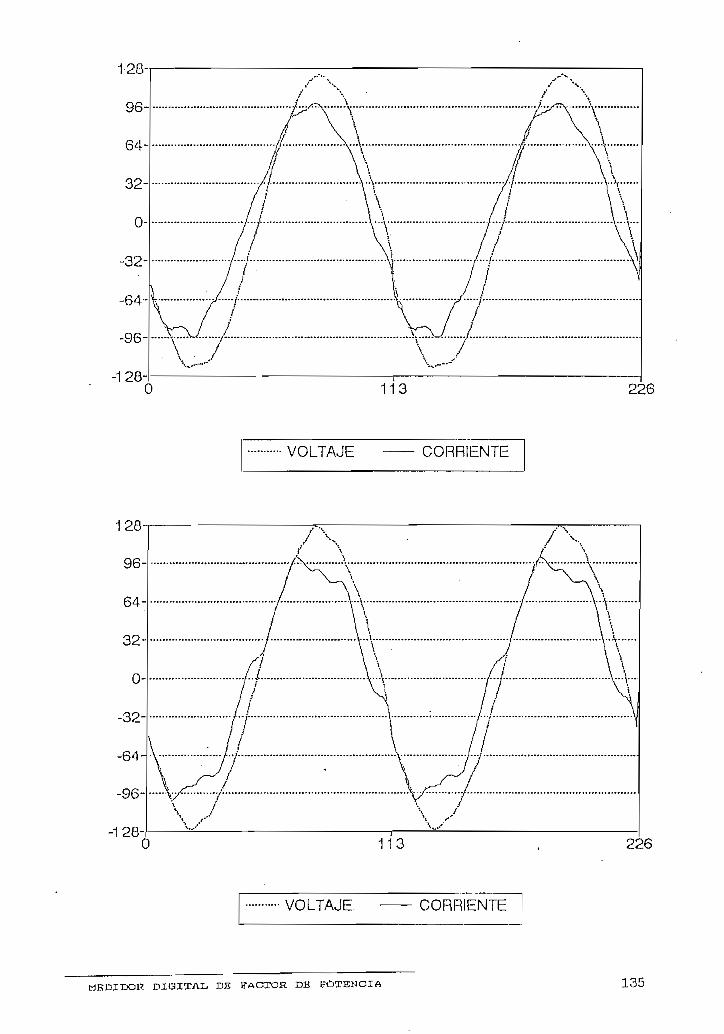
128-
-128-1113 226
VOLTAJE CORRIENTE
128
113 226
VOLTAJE. CORRIENTE
MEDIDOR DIGITAL DE FACTOR DK POTENCIA 135

128-
-128-113 226
VOLTAJE CORRIENTE
128
113 226
VOLTAJE CORRIENTE
MEDIDOR DIGITAL DK FACTOR DE POTENCIA 136
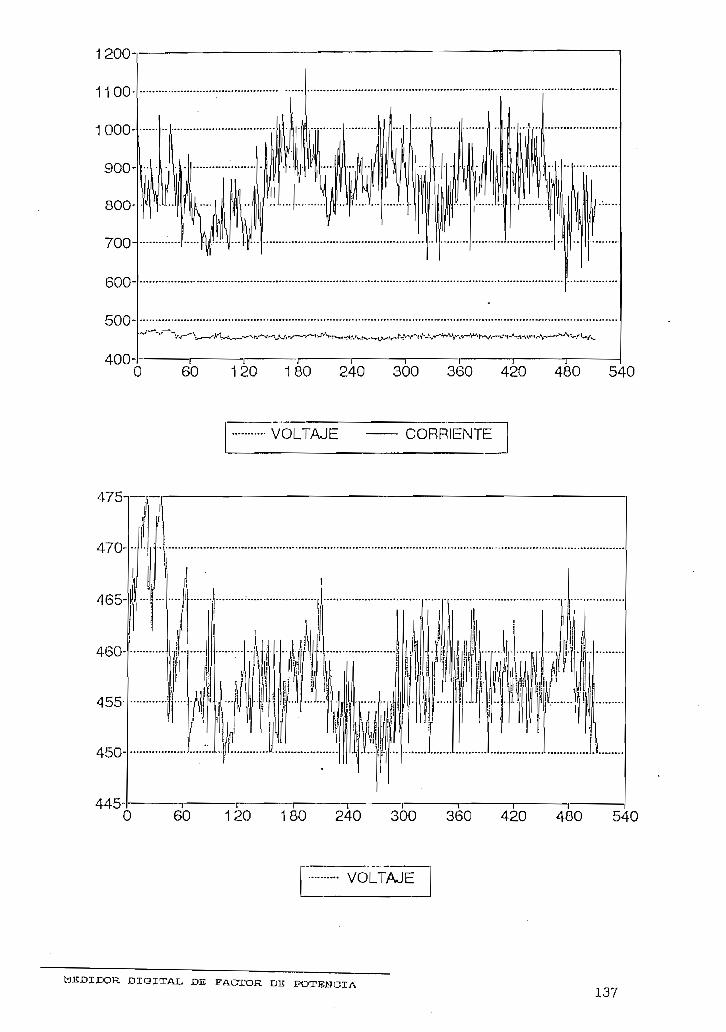
1200
1100-
1000-
900-
800-
700-
600-
500-
40CHO 60 120 180 240 300 360 420 480 540
475i
445-
VOLTAJE CORRIENTE
60 120 180 240 300 360 420 480 540
VOLTAJE
MEDIDOR DIGITAL DE FACTOR DU POTENCIA137

1000-
900-
800-
700-
600-
500-
400-
! 1
O 60 120 180 240 300 360 420 480 540
P(KW)
950-T
900-
550-
500-
450-i
S(KVA)
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 138

0.95-
0.85-
O 60 120 180 240 300. 360 420 480 540
FP FPD
0-0 60 120 180 240 300 360 420 480 540
THDV THDi
MEDIDOR DIGITAL DB FACTOR DE POTENCIA 139
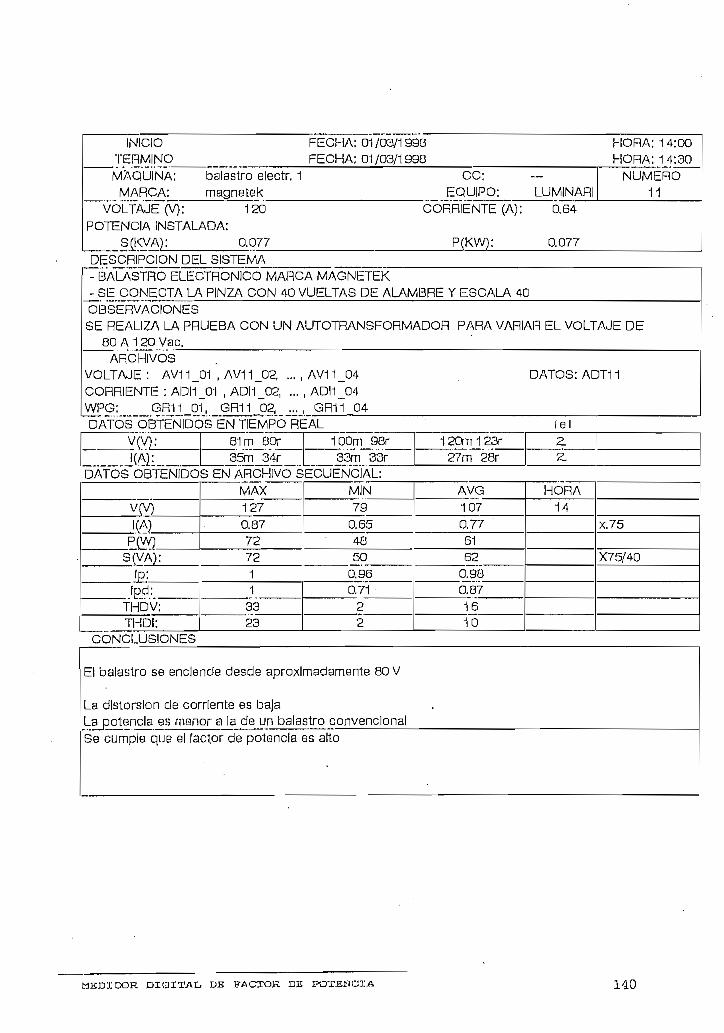
INICIOTERMINOMAQUINA:MARCA:
balastro electr. 1magnetek
VOLTAJE (V): 120POTENCIA INSTALADA:
S(KVA): 0.077
FECHA: 01/03/1990FECHA: 01/03/1990
CC;EQUIPO:
CORRIENTE (A):
P(KW):
LUMINAR!0.64
0.077
HORA: 14:00HORA: 14:30
NUMERO11
DESCRIPCIÓN DEL SISTEMA- BALASTRO ELECTRÓNICO MARCA MAGNETEK- SE CONECTA LA PINZA CON 40 VUELTAS DE ALAMBRE Y ESCALA 40OBSERVACIONESSE REALIZA LA PRUEBA CON UN AUTOTRANSFORMADOR PARA VARIAR EL VOLTAJE DE
80 A 1 20 Vac.ARCHIVOS
VOLTAJE: AV11_01 , AV11_02, ... ,CORRIENTE : ADI1_01 , ADI1__02, ...WPG: GR11 01, GR11 02, ...
AV11_04 DATOS: ADT11ADI1_04GR11 04
DATOS OBTENIDOS EN TIEMPO REAL I e IV(V):
_„ . KA}:81 m OOr
35m 34r1 OOm 98r 1 20rn 1 23r 2.33m 33r 27m 28r 2.
DATOS OBTENIDOS EN ARCHIVO SECUENCIAL:
V(V)KA)
P(W)S(VA):
íp:fpd:
THDV:THDI:
MAX1270.877272
1•1
33
23
MIN79
0.654850
0.960.71
22
AVG
107
0.7761
62
0.980.8716
10
HORA14
X.75
X75/40
CONCLUSIONES
El balaslro se enciende desde aproximadamente 80 V
La distorsión de corriente es bajaLa potencia es menor a la de un balastrp convencionalSe cumple que el factor de potencia es alto
MEDIDOR DI(31 TAL DB FACTOR -DE POTENCIA 140

r- co
ST>
cr>
C£>
en
CO
II
II
II
^p
>—
«
su
=c
=:
r^s
e\
u u
&
&
~-{
LO
C
Oi
rsa
^H
N nsU
II
rH -^ rH
\i
c*- i
/'3D
£D
H O
V 1
C'J
—í
T-I
i H Q W

150
100-
113 226
VOLTAJE CORRIENTE
128-
-1 28-,113 226
VOLTAJE CORRIENTE
MEDIDOR DIGITAL DE FACTOR DK POTENCIA 142

130-1
120-
110-
100-
90-
80'
70-
r
60-O
75n
50-
45-
10 15 20 25
VOLTAJE CORRIENTE * 1 00
P (W) S (VA)
30
MEDIIX5R DIGITAL DE FACTOR DE POTENCIA 143
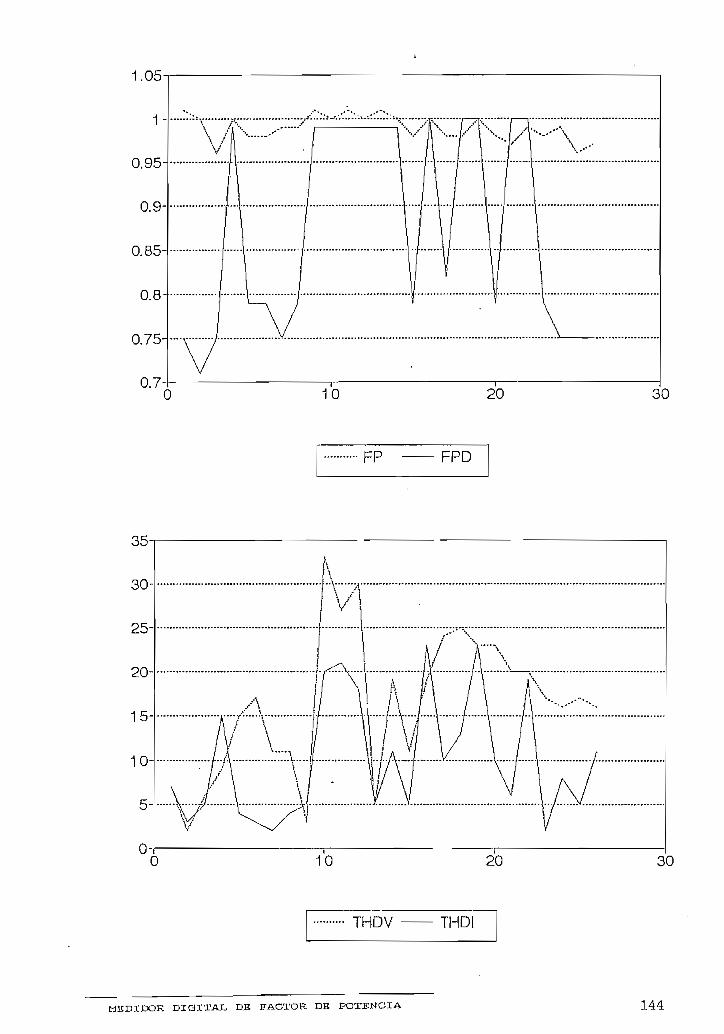
1.05-]
1 -
0.95-
0.9-
0.85-
0.8-
0.75^
0.7-10
FP
20
FPD
30
0-
THDV THDI
MBDIDOK DIGITAL DE FACTOR DB POTENCIA

INICIOTERMINO
MAQUINA:MARCA:
balastro electr.HOWART
VOLTAJE (V): 120POTENCIA INSTALADA:
S(KVA): 59
FECHA: 01/03/1998FECHA: 01/03/1998
2 CC:EQUIPO:
CORRIENTE (A):
P(KW):
LUMINARI0.49
59
HORAHORA
: 1: 1
5:oo5:40
NUMERO12
DESCRIPCIÓN DEL SISTEMA- BALASTRO ELECTRÓNICO MARCA HOWARD-IND.- SE CONECTA LA PINZA CON 40 VUELTAS DE AUXMBRE Y ESCALA 40OBSERVACIONESSE REALIZA LA PRUEBA CON UN AUTOTRANSFORMADOR PARA VARIAR EL VOLTAJE DE
80 A 1 20 Vac.ARCHIVOS
VOLTAJE : AV12_01 , AV12J32, ... ,CORRIENTE : ADI12_01 , ADI1 2_02,WPG: GR12 01, GR12 02, ...
AV1 2_04 DATOS: ADT1 1... , ADI12J34
GR1 2 04DATOS OBTENIDOS EN TIEMPO REAL e
V(V); 81 m 78rI (A): 11 m 15r
1 05m 1 QOr 1 22m 1 1 8r 4%18m 20r I9m 21 r 12%
DATOS OBTENIDOS EN ARCHIVO SECUENCIAL:
V(V>l(mA)P(W)
S(VA):
fp:fpd:
THDV;THDI:
MAX.127480757611
2530
MIN771801717
0.950,71
21
AVG1053545555
0.970,8716
15.5
HORA14
x.75
X75/40
CONCLUSIONES
El balastro se enciende desde aproximadamente 80 V
La distorsión de corriente es MAS ALTA QUE EL CASO ANTERIORLa potencia es menor a la del balastro anteriorSe cumple que el factor de potencia es alto
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 145

/' N/ \ \ \• • / • • • • v / \ v,x^ v.../ v.y
-28,00
. .' , . J / , , ; . . -• •• , . ,' • • •" ' .
•.*:•'"'' "'V.\' "';.'.\''.'.*/„'."/ • '.'.",'.'.*' * ',.".', VJ' •
-36,00
Urws= 118.80
IPHS= 21.00
P = 2.53
S = 2,59
fp = 0.98
fpd = -0.99
THWJ= 12.00
T H D I = 15.00
,_._,. , j ^V S \_< , is , jt, , , , , , , , >., , , . j- ' , , , , , , , , >,,X X x • ^ • • • • • ' X ' X
X r1 %- ^ \r
-16,00
M.r'./í/'.vt MÍ/.O/'U t.flj..v«%v.,_,;•- %1^; ,y- "v,. . , ""••.
' . //" 'S, .../" V-'V-A.^M." W»s'" "W ".'."
-13.00
yr«s= 78T rv1 rwi-S — j
P = 0
S = 9
fp = 1fpd = -0TnDv11 6
THDT= 1fl1 [1A/ 1 ~ %>U
,68na[Hj
,78
,78
,00
,71CMA
,üü
,00
MEDIDOR DIGITAL DE FACTOR DB F^DTEMCIA 146

128
-128-113 226
VOLTAJE CORRIENTE
128
96-
-1 28-113 226
VOLTAJE CORRIENTE
MEDIDOR DIGITAL DE FACTOR DB POTENCIA 147

500-r
450
400-
350-
300-
50-O
VOLTAJE CORRIENTE (mA)
10-,
P (W) S (VA)
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 148
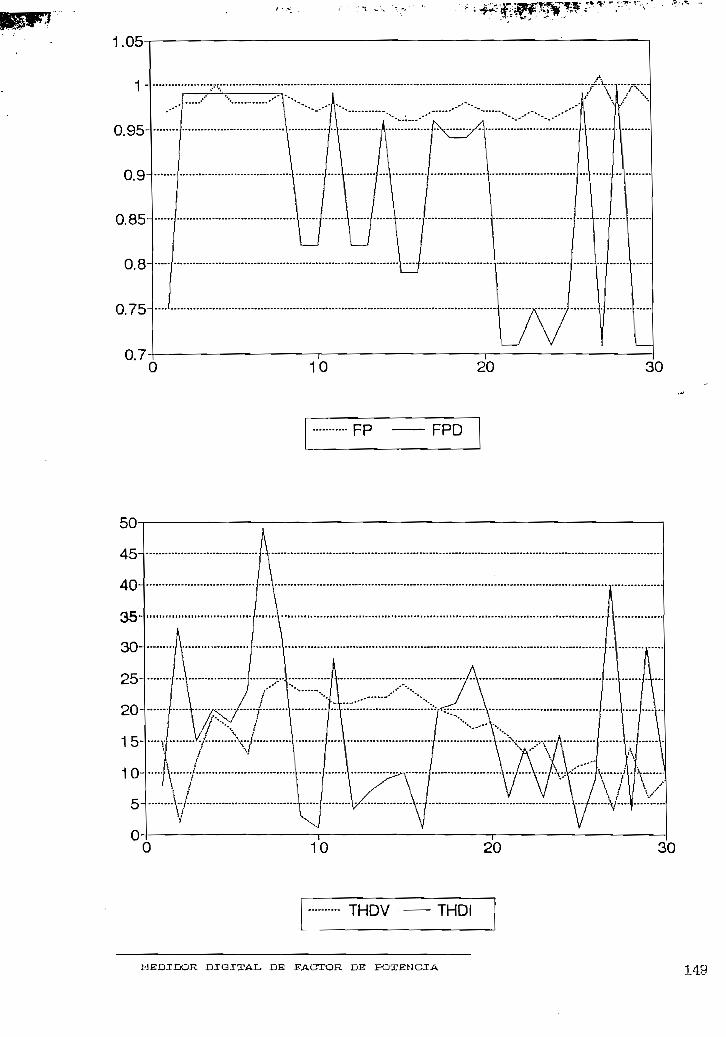
1.05
0.95
o
FP FPD
15-
10-
5-
0O
THDV THDI
-DXQXTAIL DE FACTOR DE POTENCIA 149
- ' "^''" * **' **-'":"; "

3.3.- ANÁLISIS DE LOS RESULTADOS
Hay algunos grupos de datos obtenidos en las diferentes pruebas, que
no deben ser considerados como válidos, y son aquellos en loa que la
potencia real es superior a la aparente.
Se podría hacer una discriminación para eliminar estos valores en 'el
archivo secuencial, analizando el valor del factor de potencia, que no
debe ser mayor a la unidad.
Este error se debe principalmente a que se asume que la frecuencia de
la línea es 60 Hz (113 datos por ciclo), lo que no es cierto,
especialmente en sistemas que poseen alta distorsión en su forma de
onda : controles de fase, balastros electrónicos, rectificadores
controlados sin transformador de aislamiento, etc.
Asimismo la frecuencia de reloj para el manejo de los conversores
analógico-digitales, está hecho en base a una red RC, esto presenta
una limitación de la precisión en la adquisición de datos.
Se produjeron errores en la medición cuando: los cables para la señal
de corriente no estaban adecuadamente ajustados, se conecta o
desconecta algún elemento: computador, multímetro, plotter, al equipo
cuando este se encuentra trabajando.
Loa datos de distorsión armónica de voltaje, se mantienen estables,
alrededor del 12 % , cuando se toma el voltaje directo de las líneas,
es decir, para voltaje prácticamente sinusoidal.
Cuando ae tomó los datos de toda la planta,- (PRUEBA 10), se tomó la
señal del sistema ya compensado con el banco de capacitores, y se pudo
contrastar con el "medidor digital de la Empresa Eléctrica, viendo que
en los dos casos el factor de potencia es aproximadamente la unidad.
Loa datos promedio, hallados desde el archivo secuencial, nos dan una
mejor idea de como se comporta el sistema, especialmente en los casos
en los que existe mucha distorsión en la forma de onda.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA150

Para contrastar los resultados, se planteó inicialmente usar algún
programa que permita hacer el análisis de la onda, como el MICROLAB,
MICROCAP, etc.
Pero el MICROCAP presentaba la limitación de que solo permite hacer el
análisis para 256 datos por ciclo, frente a 113 que entrega el equipo.
Además el análisis se haría en base a las mismas formas de onda
adquiridas desde el equipo, por lo que en realidad no se haría una
contratación, porque una contrastación real se haría sólo con un
equipo de instrumentación similar, calibrado apropiadamente -
El equipo actualiza los datos cada 30 segundos, es decir que el tiempo
de respuesta obtenido es alto y mayor al esperado.
En el programa de graficación y generación del archivo secuencial, se
utilizó un artificio para hacer que se almacenen los datos cada minuto
El tiempo de respuesta alto también es un limitante porque no se
tomarían en cuenta los datos máximos y mínimos transitorios, que
ocurran en lapsos de tiempo menores al indicado.
MEDIDOR DIGITAL DE FACTOR DB POTENCIA 151

CONCLUSIONES
4.1-- ANÁLISIS ECONÓMICO
La importancia del realizar el análiaia económico, del costo que tuvo
el diseno y construcción del equipo medidor del factor de potencia, ea
principalmente contrastarlo con equipos similares, con sus ventajas y
limitaciones, y evaluar la posibilidad de construcción de equipos
similares, pero optimizados y adeciiados a nuestro medio.
El desarrollo de este prototipo, llevó un trabajo en diseño de
aproximadamente 5 meses, lo que representa aproximadamente un costo de
$ 2000,00. Este costo debe asumirse inlcialmente, en el caso de que se
vaya a fabricar algunos módulos para una aplicación determinada.
Tomando como referencia la cotización del dólar en el periodo de
construcción del equipo, (s/. 2500 por dólar), se obtiene un costo
estimado del equipo de $325,
Tomando en cuenta la devaluación monetaria, a febrero del año 1998,
costaría aproximadamente $350
MEDIDOR DIGITAL DE FACTOR DE POTENCIA

Sí se estima im margen de utilidad del 80%, para cubrir los costos de
desarrollo y construcción, el precio actual del equipo seria de $650
(aproximadamente 3'000000 de sucres).
Como alternativa de inversión, se podría pensar en el alquiler de este
equipo, ($80 por día por ejemplo), o vender el servicio de medición
por puntos en una fábrica, empresa eléctrica, etc.
Los potenciales compradores para este tipo de equipos serían:
# fábricas en general,
# empresas eléctricas,
* empresas que se dediquen al mantenimiento industrial,
* empresas que vendan equipos para corrección del fp.
Cabe indicar que tener un equipo, que nos permita optimizar sistemas
para ahorrar energía eléctrica, asegura un pago en la inversión
inicial hecha por el cliente, en la compra o alquiler de este equipo.
Es hacia allí que se debería enfocar la atención del potencial
cliente.
Como contrapartida, tomamos un analizador portátil:
marca: FLUKE modelo : 39
precio: $1200
Es decir gue un equipo similar, pero con características mejores en
precisión, y exactitud, cuesta el doble del equipo diseñado.
Como conclusión de todo lo expuesto, se puede decir que como existen
equipos similares, de iguales o mejores características, y el mercado
es limitado, la mejor opción para utilizar este equipo es vender el
servicio de medición y análisis de los parámetros eléctricos.
A continuación se presenta un desglose de los costos de todos los
elementos utilizados para la construcción del equipo, sin tomar en
cuenta aquellos que no fiieron utilizados finalmente.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA153

DESCRIPCIÓN _ UWIT- CANT- _ XOTAT.
ELEMENTOS PARA EL MONTAJE*
BomQirfl. S— tiQjrmlnaloeiEoK*n,e> cíe» conexión 3TCAble í*22AWae*.};>le plsuio (20-1-0CíO;>10 plano C1O—H)QíO:>ln.*>t;.e Mí^&lieo 3O*:1BCo;»a«3Gtor* DB9Cli^ciU.l'to impide a o C AD )Clrcul-üo Impreso (DA)Clirc;ull;o Impr-eea (mlar-o— S762)ClK*anll;o Impjreoo ( LCD—Jtxb^d )FUENTE ewl^GHlnsCon^G-fcox- DBS, DB2B, Cm-^)PLiILsaJTfco (cíxJflL)Swi.-tc!h con lampar1».ConeO^tor 14.— plln^eOorv-s*c'Cojr 4O— piñataConec'to.ir 8— .pJLneeCon^c'bojr 4— p.1,neeXtiGívlo Q— pinosScjGeJ.o 3.4.— pln««2¡6cít.n.o 1S— plnsgZiicaJ.o 28— pin» eZoo.iv.lo -4O— pilleaStice.lo 2O— pin© e3(5o«,lo 24.— pln-30íí'ÍGí*.lo 32— plnssiTumpo ir eT* J?ra m«.3. e sI'or-nlllosBpa.gxie'ti'tl tiex'inoencogl'ble
TOTAL 1
5.OOO1.600
2.7OO2_3OO
7O-OOO2-6OO
25,OOO1Ü.36O95-ÜOO10.0004O - OOO2.5OO2 _ 4.OO1_7OO
BOO3.6OO2.6OO1-40O
22O48O7GO
163O3OOO
8BÜ650
1OOO750180
60
122OmO , 6raO, 6m11
11111411116842•432724.
1012102m
5 -OOO3. OOO5 -OOO2.7OO2.3OO
7O.OOO2-5OO
25. OOO1O.36O95.OOO1O,OOO•4O.OOO1O.OOO
2.4OO1 . 70O
eoo3. BOO
20.00011.200
eao©60
3. OOO4. seos.ooo5.95O1.300-4. OOO7.5002. ISO
BOO2.5OO
aeo _ oso
CIRCUITOS INXKCJRAOOB Y BrJíMJÍNTOS ELHCXKONI CX)E
LED jrojoDIP SWITCH C4JÍÍO)UXI33B (2)«n»r- 2.5V)CM329 C^oner- 6.9V)2 Y 64. CBPRÜM 12. 6V)86BM CAWPLI.FIOADOR)BUS (RAM 2K)T4I.G138 CUECXDDER)74LS139 CPECODER5- •74GS07 CBUFFER)V^LBOB CAND OÍATE)74L8373 CLATCH)
MAX- 232A.DCO8O4 CCOtTVERSOR AD)DACO83O Cl^OWVEREOR DA)AMX116-ND (16X1 t/3D MODULE)CRISTAL (12 MHíz HC-1B)
B7B2 AH-BASICS2CBB PPI
TOTAX, 2
3OO3.5OO2 -BOO5. OOO
ZO-OOO3.OOO
1O-OOO•4-OOO•4- OOO-4-4OOl'.4OO3-BOO
13 -OOO12.9OO15. OOO85.OOO
6 _ O O O
SO. OOOle.ooo
3.1'Z24.4 .21111213.211
11
3OO3.GOO5 . 6OO
1O.OOOSO. OOO12.OOO2O .OOO
4. OOO4 . O O O -A.4OO1 . 4.OO7. eoo
13 -OOO25.80O3O . OOO8B.OOO
6.OOO
SO. OOO18. OOO
411 -BOO
MEDIJX)R DIGITAL DE FACTOR DE POTENCIA 154

DKGCRIJPCIOH J?_ UNIT- CANT_ TOTAJC.
CAPACXTOKB B
B8OPJ7 , 5OVO.OOljaF. 1KVO. lylT. OOOVBBO PP,1KV1OUF.36V47lJ.F,16VlO|_lF, 1SVlOO;pF , 11CV
KK 15 X STKNCI AS
1/4 W1/2 WO . O3C2 5W1/2 W. d& pr-eelalSn
Pot*nc:J.É>m*-bro 1OKPoH^noliSme-tro 5KPoli »rvo J.ijm<=* tiro BOOKReíale-Cencla. á.n't^gra.cla. 3 . 3K
TOTAL 3
2BO75OGOO7OO7OO2QOeoo6BO
6O15O
l.OOOl.OOO
1.8OOl.BOOl.BOO1.5OO
4A.
94.
6253
34.G
18
3211
1.3.4.2.4.
4.1.
1.
1-B.
6.3.1.1.
46.
ooooooGOOSOO2O OOOOooo74O
7OOQOOOOOOOO
4OOSOOSOO5OO
O4O
TOTAL '_ 81T_33O
4-2.- ÜISCUSI™ DE LOS RESULTADOS EXPERIMENTALES
IXirante las pruebas de loa diferentes móduloa, se utilizó una
fuente convencional, y para armar ya el eguipo, ee utilizó en
cambio una fuente switching.
Esta fuente es ideal para alimentar a un sistema microprocesado
de mediana potencia como el planteado.
Midiendo la corriente en la fase de pruebas, se observa que el
sistema consume una potencia inferior a la mitad de la estimada.
La fuente en todas las pruebas funciona en forma eficiente9
inclusive en las condiciones de cortocircuito creadas gracias a
errores de conexión en el circuito de interfaa.
fin el interfaz, se probó en primer lugar, la eficacia del filtro
de entrada (del amplificador diferencial) 9 mediante el uso de
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 155

im generador de señales, luego se probaron varios esquemas de
acoplamiento de la señal DC de -1-2,5 V, pero muchoa de ellos
fallaron, decidiendo finalmente adoptar el sistema inicial, que
consiste en sumar a la señal original de alterna, una señal DC
proveniente de un -zener de precisión, pero desacoplada
previamente por medio de un condensador, que actúa como filtro
pasa altos,
Se probó luego la digitalización de la señal, y se calibra la
señal de entrada al conversor AD0804, proveniente del generador
de señales, de manera de obtener a la salida una señal
"centrada" en 2.5 V.
La prueba final que se realizó es la de ingreso a la tarjeta del
8052-AHBASIC, utilizando para ello uno de los pórticos de
entrada del PPI 8055 (interfas paralelo), con los conversorea
actuando individualmente en el modo FHKE RUNNING, y una
subrutina simple de entrada, mediante la cual se leen datos del
pórtico paralelo, y se los transmite a localidades de memoria,
esta subrutina está hecha en lenguaje ensamblador del 51.
Se encontraron problemas en el divisor de tensión^ ya que la
señal de llegada resulta tener mucho ruido a la salida, por lo
que se sugiere realisar las pruebas con el transformador
reductor, en lugar del divisor de tensión, hasta resolver el
problema.
En la simulación del programa ensamblador para la adquisición de
datos, se observan algunos errores, como son el no dar en forma
correcta el pulso de lectura y escritura, ya que no se
inicializa dichos procesos.
Otro error .es no considerar los tiempos de espera en cada
instrucción, debido a la .velocidad del micro, y al valor de cada
ciclo de máquina (CM), estos datos debieron ser consultados en
las hojas de datos del ADC0804, así como en el manual de
operación del 8751.
El divisor de tensión tiene el inconveniente de no ser aislado,
mientras que el transformador presenta errores debido a la
corriente de Ser armónico*
MEDIDOR DIGJIXAI, DE FACTOR DE POTENCIA
fín la utilización de un transductor (pinza de corriente), el
inconveniente radica en el rango de trabajo, y la escala de
amplificación, en el momento de calcular los valorea de
potencíamete, pero posee la ventaja de ser de fácil utilización
y adaptación a diferentes medios de trabajo.
La utilización del transformador de corriente con un secundario
de 5 A presupone la existencia del mismo, o su colocación en la
línea de entrada del sistema analizado, lo que en la mayoría de
los casos resulta ser dificultoso.
Además se tiene el error en el caso de que la corriente medida
sea muy pequeña para el tipo de transformador, frente al valor
de la corriente de saturación del entrehierro, pero si la
corriente es pequeña- se .puede utilizar el "truco" , de dar
varias vueltas del alambre .alrededor del núcleo del
transformador de corriente para así multiplicar el valor de
corriente por el número de vueltas del alambre y escalar dicho
valor en el resultado a través del software.
* La secuencia de fases en los sistemas trifásicos se asume
correcta, para todos los cálculos, pero es de gran ayuda
utilizar un indicador de secuencia de fases, o simplemente
observar las formas de onda, y el signo de la potencia en la
pantalla del computador, para saber si la pinza de corriente
eata bien conectada.
* Durante las pruebas en el micro, no funcionó inicialmente la
instrucción de programación para salvar los programas de BÁSICA
ee revisó toda la parte concerniente, y se descubre que el error
se debe al 74HC08, por usar un HC y no un LS, al cambiarlo, se
pudo grabar un programa de prueba.
* Se analiza el filtro pasa-banda en todo lo que se refiere a
tiempo de establecimiento, atenuación del 2do armónico, y factor
de calidad. Se comprueba con un programa en BASIC en
funcionamiento del filtro, y el número de cicloa necesarios para
el establecimiento de la señal.
* Como solución final para implementar el programa se decide hacer
el programa principal en lenguaje ensamblador, y desde allí
MEDIDOR DiaiTAL DE FACTOR DE POTENCIA 157

llamar a subrutinas en BASIC que ejecuten todas los operaciones
con números en punto flotante.
Las operaciones en punto flotante, se harán en base a "Opcodes"
propios del AH-BASIC, para lo que se debe reorganizar la
memoria, y utilizar la opción de eolapamiento de memoria.
Ea imprescindible el "link" entre los dos lenguajes. Eato
implica la organización adecuada de la memoria y la comprensión
de todo el sistema incorporado en el AH-Basic.
Para realizar la calibración del equipo, primero se utilizó un
generador de señales, y luego las señales de voltaje y corriente
reales. Se nota que se debe hacer una recalibración al utilizar
las señales reales.
Durante la fase experimental, se probó primero los valores
obtenidos para voltaje y corriente, y se trató de optimizar y
minimizar los errores de medición.
Esto se pudo lograr esencialmente al iniciar la adquisición de
datos, desde que se encuentra un cruce por cero del voltaje.
Un error en el converaor A/D que no se pudo eliminar, se debe al
ruido que existe en las entradas para las señales de voltaje y
corriente, y que generan valores 129, cuando no se tiene señal,
en lugar de 128, que corresponderían a 2 5 V (valor cero para el
conversor). listos valores esporádicos de 129, hacen que se
tengan valores de voltaje y corriente "falsos", aún cuando no se
tiene señales conectadas en la entrada, y afectan especialmente
las lecturas obtenidas cuando las señales son pequeñas en
magnitud.
Durante las pruebas de operación del equipo, no se pudo hacer
una contrastación adecuada de los resultados obtenidos, porque
lo ideal hxibiese sido tener un analizador de armónicos de tipo
industrial tal como el Medidor de Potencia 39, de Fluke, o un
equipo similar-
Lo que si se pudo hacer es analizar cada sistema, de acuerdo a
los equipos de los que estaba conformado, y de esta manera ya se
tenía una idea de los resultados que se debían obtener.
Así se pudo corregir un error inicial, que era el factor f3,
para los sistemas trifásicos equilibrados, y que no estuvo
MEDIJDOR DIGITAL, DE FACTOR DE FÜTJ3NCIA

tomado en cuenta inicialmente.
Lo mismo ocurre con el signo del factor de potencia de
desplazamiento, que corresponde al adelanto (+ ~ inductivo) o
retardo (- = capacitivo), de la onda de corriente respecto a la
de voltaje,
Los valorea de distorsión armónica son muy variables, para las
diferentes ondas, esto se debe a que un pequeño error en el
valor RMS del primer armónico, debido a la atenuación propia del
filtro o a errores en la conversión analógica- digital, se
traduce en un error grande en el valor de distorsión armónica.
En las formas de onda se pueden observar errores, durante
ciertos lapsos de tiempo, en que hay variaciones de la
frecuencia de 60 Hz. La variación de frecuencia implica que no
se cumpla la condición de 113 datos por ciclo, y esto se traduce
en datos erróneos, que deben ser diacriminados.
4-3.- CONCLUSIONES Y RECOMENDACIONES
Respecto a las hipótesis planteadas , se puede concluir que ai
se piído implementar adecuadamente el filtro digital, utilizando
las opciones que posee el microprocesador 8052 AH-BASIC,
especialmente las operaciones en punto flotante.
Pero el tiempo de ejecución fue mayor al esperado. Asi, para un
mismo analizador de ondas, utilizando la técnica del dominio de
la frecuencia, y la transformada rápida de Fourier, los tiempos
de ejecución son del orden de 17 segundos . Es así como no se
cumple el objetivo de reducir el tiempo de ejecución.
Si se utiliza solo parte del programa que contiene el cálculo de
voltaje, corriente, factor de potencia y potencias, el tiempo de
ejecución es de aproximadamente 2-5 segundos, pero al incluir elfiltro digital para obtener los otros parámetros, el tiempo de
ejecución llega a 30 segundos.
MEDIDOR DIGITAL DE FACTOR DE POTENCIA

Pese a esto ee pudo observar que loe datos graficados son
adecuados, y dan. una idea certera de gue ea lo gue paaa en un
sistema eléctrico, en un ciclo de trabajo, que generalmente está
en el orden de Is horas.
Los equipos de medición tal como el diseñado, se pueden utilizar
en laa empresas eléctricas, al igual que loa medidores digitales
de energía, para poder obtener datos como picos de voltaje ,
picos de potencia, factor de potencia, etc. Pero el limitante en
eate caso es gue se debe tener conectado un computador en linea,
para ir recibiendo los datos y almacenarlos en su memoria.
Mediante el uso de este módulo industrial se pudo observar • los
efectos negativos causados en la red, el deterioro del factor de
potencia y la inyección de armónicos indeseables en las
corrientes, especialmente en sistemas que poseen conversores, y
que no tienen un transformador de aislamiento.
Se pudo comprobar además durante las pruebas , que el
controlador del factor de potencia funciona adecuadamente,
porque le valor de factor de potencia en la entrada de la red de
440 Vac, se mantiene dur.ante todo el tiempo, en un valor cercano
a la unidad, pese a los cambios bruscos de carga gue existen en
la fábrica.
Cabe mencionar que el medidor demostró sus ventajas respecto a
los de tipo analógico, especialmente en su mayor versatilidad,
principalmente por ser portátil, por adaptarse a las diferentes
condiciones de carga, y por su fácil_instalación, gracias a la
utilización de una pinza amperimétrica.
El medidor diseñado aprovecha al máximo todas las opciones
presentadas por la tarjeta de desarrollo para el 8052 AH-BASIC,
Así se utiliza en su totalidad el interfaz paralelo, tanto para
la adquisición de datos, como para manejar el display-teclado.
Se utiliza la memoria RAM interna del display LCD_ Se trata a
los conversorea digital-analógico, como espacios de memoria
externa, y se utiliza la comunicación serial con una
MEDIDOR DIGITAL DE FACTOR DE .POTENCIA

computadora.
En la práctica, ee utilizó en la mayoría de casos la entrada de
milivoltíos y la piusa amper imétríca, para la medición de
corriente. El medidor de corriente se utilizó menos.,
principalmente debido a que no estaba disponible, o siempre se
mantenía bajo carga.
El monitoreo de sistemas eléctricos mediante este equipo permite
establecer para una fábrica, una línea de producción , una
máquina o un equipo, las condiciones reales de trabajo, los
picos de energía, los ciclos de trabajo, y las diferentes curvas
de carga.
Este conocimiento permite la optimización de los sistemas
detallados anteriormente, o su modificación, para hacerlos más
ef icientes.
Para los sistemas trifásicos, que generalmente son de 3 hilos,
casi nunca ae cumple en la práctica que sean equilibrados, por
lo gue se midió la potencia máxima total, conectando la pinza en
la fase gue tiene mayor corriente.
Si es un sistema trifásico de 4 hilos, es posible medir las
potencias individuales por fase.
En las pruebas de la salida analógica, se utilizó un graficador
"plotter", gue es otra opción para tener información "en línea"
de un par de datos a la vez. Pero la principal aplicación de
esta salida analógica , sería acoplar este equipo de medición a
un equipo para generación de potencia reactiva, que se puede
utilizar como un compensador estático de potencia reactiva.
o Si bien se -han optimizado los errores provenientes de la
medición , como son la -eliminación de los transformadores de
potencial, estos deberían ser utilizados para monitorear altos
voltajes, utilizando para ello transformadores que tengan un
secundario de 220 Vac, o 440 Vac.
o El equipo funciona adecuadamente, a nivel industrial, pese a las
condiciones extremas de temperatura y ruido eléctrico y
características de cualquier planta industrial.
MEDIDOR DIGITAL DB FACTOR DE POTENCIA

En trabajos anteriores, se han utilizado técnicas como la
Transformada Rápida de Fourier (FFT), para la misma aplicación,
con resultados satisfactorios.
En este trabajo se utilizó la técnica de filtrado digital,
mediante la implementación de las ecuaciones de diferencias de
un filtro.
Sería interesante, implementar la técnica en el dominio de la
frecuencia, para este equipo, y ver las diferencias.
Sería además interesante aplicar para el filtrado de la señal unfiltro pasabajos, en lugar del filtro pasabanda, especialmenteporque la función de transferencia del filtro pasabajos es más
simple y esto implica menor tiempo de procesamiento para la
señal.
Asimismo se podría filtrar solo la señal de corriente, en los
casos en los que el voltaje sea prácticamente sinusoidal, que
son la mayoría.
Para tener un equipo de monitoreo independiente, se deberíapensar en opciones tales como las de- almacenar en memoria KAM
los datos obtenidos, para luego -. transferirlos hacia un
computador, y la opción de una fuente independiente de energía
(baterías)
Para mejorar los tiempos de ejecución y la precisión de este
tipo de equipos, se debe pensar en la utilización de conversores
de 12 bits, y de microprocesadores dedicados al procesamiento
digital de señales (DSP), como los de la familia del TMS320
(TEXAS INSTRUMENTS).
Este microprocesador, posee entre sus aplicaciones principales,lo implementación de filtros digitales, de transformadas rápidas
de Fourier (FíT), control de motores, rebotica, etc.
Se podría pensar además en la utilización de una pantalla LCDmás grande y que posea una opción gráfica. De esta manera se
podrían graficar los resultados, y mostrar más datos en una
sola pantalla.
MKÜIDOK DIGITAL DE FACTOR DE POTENCIA
l.~ IEEE, "Standard Practices, and Regueriments for GeneralPurpo-se Thyristor DC Drives", New York, USA, 1983.
2.- BANDA HUGO, "Factor de potencia en circuitos con formade onda compleja", EPN, Quito, 1983,
3.- PALACIOS JULIO, "Medidor de Factor de potencia paraondas distoraionedas en base al microprocesador 8052",EPN, Quito, 1994.
4.- CZARNECKI LESZ-EK; "Measurement Principie of aReactive Power Meter for Nonsinúsoidal Syetems" IEEETransactlon on inatrumentation and Measurement, VolIM30, No 3, 1981.
5.- PAGE CHESTER, "Reactive Power in NonsinúsoidalSituatlons" IEEE Transaction on instrumentation andMeasurement, Vol IM29, No 4, 1980.
6.~ FILIPSKI PRIOR, "A New Approach to Reactive Currentand Reactive Power Measurement in NonsinúsoidalSystems" IEEE Transaction on instrumentation andMeasurement, Vol IM29, No 4, 1980,
7.- FILIPSKI PRIOR, "The Measurement Of DistorsiónCurrent an Distortion Power " IEEE Transaction oninstrumentation and Measurement, Vol IM33, No 1, 1984.
8.- CZARNECKI LESZEK, "What is Wrong In the BodeanuConceppt of Reactive and Distortion Power and Why ItShould be Ataandoned" IEEE Transaction oninstrumentation and Measurement, Vol IM36, No 3, 1987.
9.- SOSA KATHERINE, "Medidor digital de parámetroseléctricos en base al microprocesador 8051", EPN,Quito, 1993,
10.~ CAMBRÓN MALCOLM, "Trends In power Factor CorrectlonWith Harmonic Filtering" IEEE Transaction on IndustryApplications, Vol 29, No 1, 1993.
11.~ EDMINISTER JOSEPH, "Circuitos Eléctricos", Schaum, MeGraw Hill, Segunda Edición, Madrid, 1985,
MEDIDOR DIGITAL DE FACTOR DE POTENCIA 163

12.- BERSTEIN PAUL, "Filtros Activos", Marcombo, Madrid,1982.
13.- TEXAS INSTRUMENTS, "Digital Signal Processing with theTMS320 Family", Texas Instruments, Vol 1, USA, 1989.
14.~ NATIONAL SEMICONDUCTOR, "Linear Databook". 1984.
15.- INTEL, "Microcontroller MCS-51 Handbook", IntelCorporation, 1986, USA.
16.- MOMPÍN JOS£, "Convertidores A/D y D/A",Colección MundoElectrónico, Tomo 29 ? 1987.
17.- JAEGER R, "Tutorial: Analog Data AdguisitionTecnology, Part I - Digital to Analog Conversión",IEEE Micro, Vol 2, No. 2, May 1982.
18.- GRAY, DELINCK, PINEDA, "Kilowatt-Hour Demand MeterUsing An IBM PC", IECON 86 Proceedings, sep 29 - oct3, 1986.
19.- REYER STEVEN, "A Demonstration Unit For DSPDevelopment And Implementation", IECON 86 Proceedings,sep 29 - oct 3, 1986.
20.- ONTANEDA MARLON, "Sistema de desarrollo de programasde control basado en el Microcontrolador INTEL 8052AH-BASIC", EPN, Quito, 1993.
21.- INTEL, "Microcontroller MCS BASIC-52 Handbook", IntelCorporation, 1986, USA.
22.- PHILIPS, "Character type LCD Modules TeohnicalPublication ", Amperex Electronic Company, july 1988,USA.
23.- OGATA KATSUHIKO, "Sistemas de Control en TiempoDiscreto", Prentice Hall, Segunda Edición, México,1996.
MEDIDOR DiaiTAL DE FACTOR DE POTENCIA 164

ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA
MEDIDOR DIGITAL DE FACTOR DE POTENCIA PARA
VOLTAJES Y CORRIENTES NO SINUSOIDALES
ANEXO 1
Diagramas cjLrcrui talas cornpletos del equipo
Diego X. -Zambrano Mora
Marzo, 1998

MEDIDOR DE FACTOR DE POTENCIA (DIAGRAMA DE BLOQUES?
TARJETA INTEL 6052 ftH-SfiSIC
V
AC
-*FU
EN
TE
DE
PO
LA
RIZ
AC
IÓN
,
i i
PE
RIF
ÉR
ICO
S
QV
,+
Í2V
Í2
MH
z
CO
NS
OLA
O
PC
LCD
O
ISP
Lñ
Y
TEC
LñD
O
PPI82SS
Pft
-PC
h
PB
-PC
1
Rft
Ml
6116
2K RA
M2
6116
?K
iPR
OH
l^S
SM
.27
64 C
8K 5
iPR
ÓH
z3A
SIC
2764
C8K
5
INT
ER
FfiZ
DE
E
NT
RA
DA
WD
C -
fiA
MP
LIF
30
52
HIC
.5C
H
INTERFñZ
DE SALIDA
O -> 5 VHc
PLOTTER
2 CANALES

"JP6CH25
JP2
H3
5
¿
JP
«*
^ J
JP3
JfUiCHTJ)
JP14
JPÍ3
JP1
JPSCHÍ3
JP6CH25
JP7CH33
JPBCH«5
JP9CH53
JP10CH63
JPÍ1CH75
JP12CH83
PAO - PA7
PBO - PB7
PCO - PC7
CS 2,3,5,6,7
CSie.C52B.CD3B
Pl.O - P.1.7
RS-232 TxR
POLARIZACIÓN INT-EXT.
LINEftS DE CONTROL
BUSES «DD/DflTA
PUERTO O DEL 8255 PPI
PUERTO B DEL 9255 PPI
PUERTO C DEL 8255 PPI
5 LINEAS DECODIFICADAS C74LS1383
3 LINEAS DECODiriCADAS C74LS139)
T2 TR, T2 T/C, PHM OUT, /ALE DIS
/ALE OÍS, /PROC PUL, /PROG ENA,
VSS, EXT VCC. EXT VPP, NC.
AC1, AC3, ftC2, AGÍ
VCC, VPP, RES, TO, HR, RD, VSS
DO-07, AO-A15, ALE, PE, PP
PSEN, RD. Ti, EXTINTO, EXTINT1,
JP1
JP2
JP3
JP4
JP13
JP14
ROM
EPROM2
RESET
VPP
VCC
4000H
INT/EXT
2764/27128
INT/EXT
INT/EXT
INT/EXT
EXT/OVLftP
INT! 8052 AHBASIC
...EXJ.;...9.Q.3.?AH.
HABILITA LA LINEA A13
HAB. LA LINEA 3 DEL HS
+12 VDC
+5 VDC
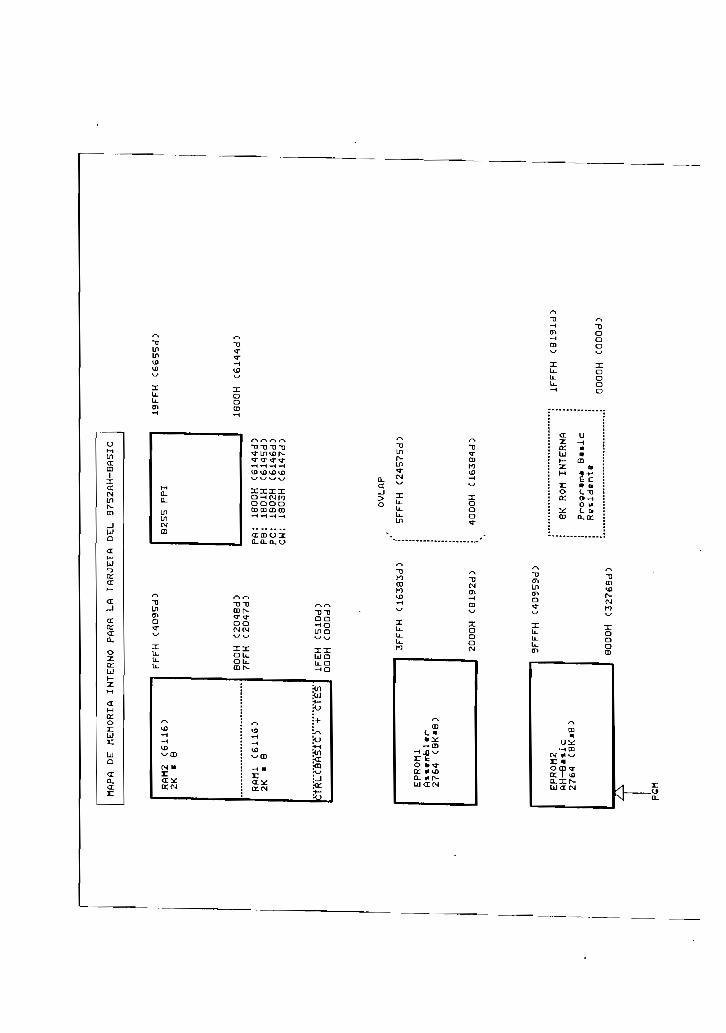
.*
MAPA
DE MEMORIA INTERNO PARA LA TARJETA
DEL 8752AH-BASIC
RAM2 C6Ü65
2K • 6
RAM1 C61165
2K • 8
FFFH C1095d>
800H C2048d3
7FFH C2047d:>
ÍFEH
OOOH COGOd)
8255 PPI
PA: 1800H
PB:
180J.H
PCI 1B02H
CW: Í803H C6117d?
Í9FFH C6655d>
1800H
EPROM1
ñ«*»mbl*r
276-í
<8K»8?
3FFFH C16383d)
200DH CB192d5
OVLAP
5FFFH C24S7Sd3
-ÍOOOH C16384dJ
EPROM2
AH-9«»ic
2764
ce
K«e:
>
9FFFH C10959dí
8000H C32768d?
BK ROh INTERNA
Prooram* B«*ic
Residente
1FFFH CBiSld)
OOOOH COOOd}
PGM
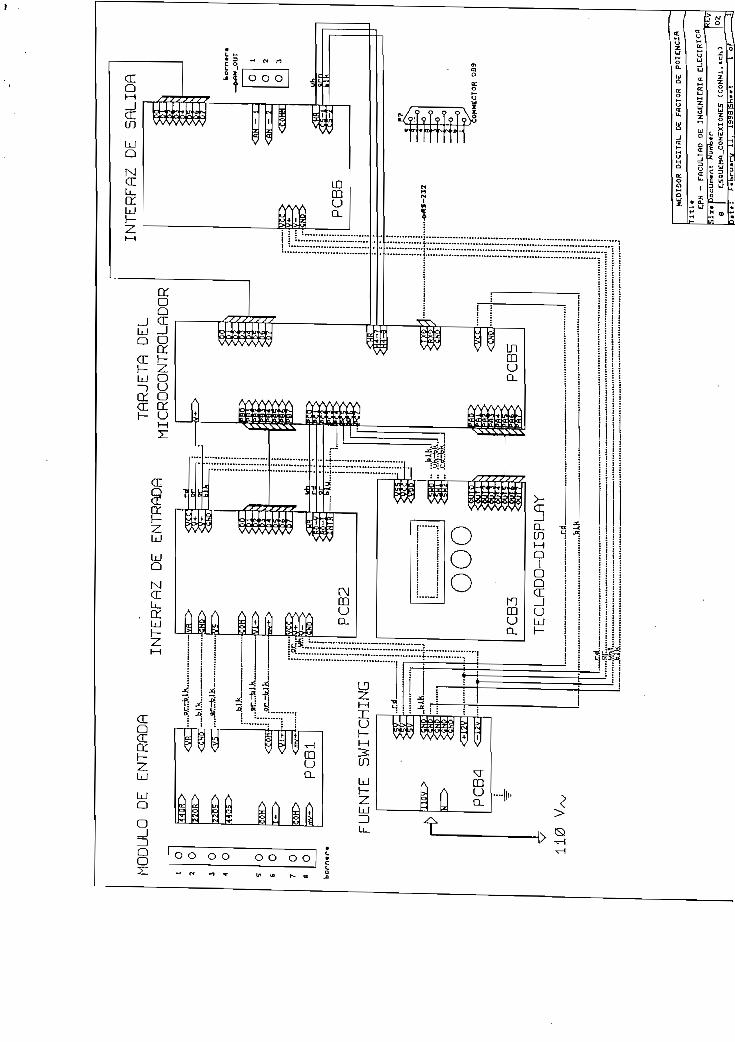
MODULO DE ENTRADA
INT
ER
FA
Z
DE
E
NTR
AD
ATARJETA DEL
MICROCONTROLADOR
=iD
OR
\ V V
IhJT
ER
FAZ
DE
S
ALI
DA i b
«
•v « k \ s
ko
rn
— f
r«W
_0
[oí
P \E
SW
ITC
HIN
G
TE
CLA
DO
-DI5
PLP
1Y
;ONN
CCTO
R
DH
9
ME
DID
OR
OIC
ITfl
U
DE
Ffl
CIO
R
DE
pOT
EN
CIf
l
"ÉPH
-
FflC
UL
Tfi
O
DE
INC
EN
IER
Ifi
EL
EC
TR
lc^_
po
cu
nw
nt
Num
fa«r
ES
OU
EM
ft^C
ON
EX
ION
ES
<
CO
NH
l.»
ch5
:
Ubru
.ry il.

R13
HEADER
JP2
KEñDER 3
HEADER 4
HE75DER 3
EPN - FACULTfiO DE INC. ELÉCTRICA
MEDIDOR DE FP
(Document Numb«r
JNTERFAZ DE ENTRftDA
DZ

R21
ÍOO
K
-T-
C6
p
.68n
F
<3E
EI>

JP2
HEADER 5X2
JP3
HEADER 2
Ul
DIO
DI1
012
01
3
IOU
T2
DI
4 IO
UT
1O
ÍS
VR
EF
016
DI 7
RF
B
DA
CQ
83
Ü
U2 DIO
012
ÉTER"
DI3 IOUT2
014
IOUTÍ
OÍS
VREF
DI6
DI7
RFB
OAC0830
HEftDER 3
U3B
CBSBM3
JP4
HEADER 8
U4B
C858M)
MEDIDOR DIGITAL F P
Title MO
DU
LO
DE
Sfl
LID
ft
AN
ALÓ
GIC
O0-5
V
dc
Siz
*
A
!>a
te:
i
Cft
NA
LO
G.S
CH
í
23
, i9
98
|Sh
e«
t
DZ
1
of

?t-
x-T
-x C
l
E
4.7
MF
<22I
>—'
RE - 150
AK
12
34
55
u c
rt 5
/
ni
'88
osíí
Oil
TC
DI
LT
Nil
l
JP1
JP2
HEADER 8
HE
AD
ER
JP3
HEADER 3
LCD, DISPLAY
P.C.B.
DIGITftL
ENERGY METER
5ocu
m*n
t N
um
brr
FIL
E :
LC
DK
Y.S
CH
'RE
TÍ
DZ
13
,I
of
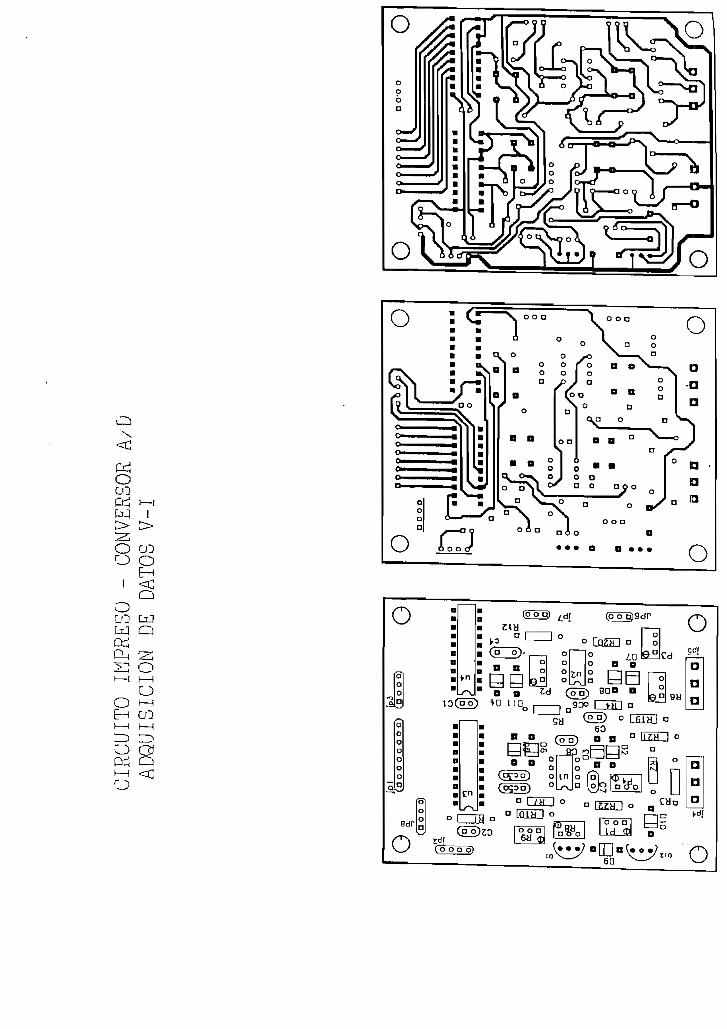
CIR
CU
ITO
IM
PRES
O -
CON
VER
SOR
A/D
AD
QU
ISIC
IÓN
DE
DATO
S V
-I
J£J
^ te
Co o
o o
o o
o o
) CG
ó o
iO
••
BB
BB
BB
•O
áoO
Qaf
SlS
O
O O
O O
DO
©vi K
O
o <—
'c
n
o
[Da
a o
o o
SE-
nCD
"B H5P5
ID
o o
I a o
o[
Jo
o a
D|
10
y—
v
•z O
o i rjllllllIJll"
* 1
/_
^°^
3 [A
(.<^^
r°
.U»
»D
I /_
*1
_
o

CIRCUITO IMPRESO: PANTALLA-TECLADO
(
LCDKY )
O
nin
fo
[oo
^^
Q
jS|
Inlo
.
OQ
Un
^B U
r0
a»
aa
aa_ -. Ia o o o o o o [o
í— H.
->
O
0
0
a o a D a o D O O D O O D 3U U _I
0
0
CQ
a)u /o
oK
( )
,An
oí/
K)\
*y
i/)^
-— x n
oí
la
/o
«\v
5^
U)
tM.
. o:
oí
i a"~ S
N
TO
oK
( )
Va
°y-í-
^*- ^r-
31
, ,
\X.
go
l ID
1
/-!
ñ
° 0£
o~
3l — ' O
o o o a DO
OO
D a o o o o o o o
o
D
O
o o
o a o a o a o a a a a a o D
Oo
a
a o
a o
a a
a a
D a
a D
a a
D
a
a a
o o o a O

CIRCUITO IMPRESO:
CONVERSOR
D/A
SALIDA
ANALÓGICA
- 2
CANALES

ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE 'INGENIERÍA 'ELÉCTRICA
MEDIDOR DIGITAL DE FACTOR DE POTENCIA PARA
VOLTAJES Y CORRIENTES NO SINUSOIDALES
ANEXO 2
Manual de utilización del equipo
Diego Xa Zambra no Mora,
Marzo, 1993

1.
El medidor digital de factor de potencia es un equipo
microprocesado, que permite la medición del factor de
potencia, y de otros parámetros eléctricos.
La adquisición de datos utiliza un conversor analógico-
digital y una ínterfaz de entrada, para digitalizar las
señales de corriente y voltaje de un sistema. "
En el microprocesador se realiza el análisis numérico de las
ondas de voltaje y corriente, para obtener los diferentes
parámetros eléctricos.
También, se almacenan datos que pueden ser transferidos hacia
un computador, o hacia una salida analógica.
El equipo incluye:
• Un indicador digital de cristal líquido (LCD), para
visualizar los diferentes parámetros calculados.
• Un puerto de comunicación serial, para lainterconexión con un computador.
• Una salida analógica doble, de propósito general.
El teclado, .permite escoger las diferentes escalas de
voltaje y corriente, así,como el tipo de salida
analógica. También mediante el teclado se accede a las
diferentes magnitudes calculadas que se despliegan por
pantallas.
MANUAI, ÜK OPERACIÓN

• Una bornera de conexión, para las señales de voltaje y
corriente.
FIG.'l vista general du.í equipo
©'
1. ' ALIMENTACIÓN : 110 YAC
2. CONECTOR PARA SALIDAS ANALÓGICAS
3. CONECTOR SERIAL RS - 232
4. AJUSTE DEL CONTRASTE
5- LUZ INDICADORA DE ENCENDIDO
6. TECLADQ ..
7. CHAPA DE LA CAJA
8. PULSANTE PARA RESTABLECER EL SISTEMA
9. BORNERA PARA CONEXIONES10. PMJTALLA LCD
11. INTERRUPTOR DE ENCENDIDO
MAtJUAL DE Ol'KTWTlOtl

2. ESPECIFICACIONES:
Voltaje de alimentación del medidor: 110 VAC ± 10%
Frecuencia nominal de la red: 60 Hz
Medición de corriente:
salida de un transformador de corriente normalizado del
tipo In/5A, o- pinza amperimétrica de hasta 400A, con
una salida de ImV AC por Amperio.
Para el transformador de corriente:
corriente del secundario : 5A (máx.}
impedancia de entrada : 0.154 O
apreciación : 0.02 A
Para la pinza, amperimétrica:
mV del secundario : 40mV -> 400mV'(2 RANGOS)
impedancia de entrada : 500 KO
apreciación :2Af usando la escala *1, en el rango de 400mV (400A)
•LA, usando la escala *10, en. el rango de 40mV (40A)
Medición de voltaje: 220V AC ó 440V AC, entre fases.
Se utiliza un divisor resistivo, para la adquisición
de la señal.
Voltaje máximo rms : 220 V + 10% = 242 Vrms
440 V + 10% = 484 Vrms
Voltaje pico máximo: 342 V (escala de 220 V)
684 V (escala de 440 V)
Precisión en las lecturas : 1.5%
MAMUAL DE OI'ERACIOH
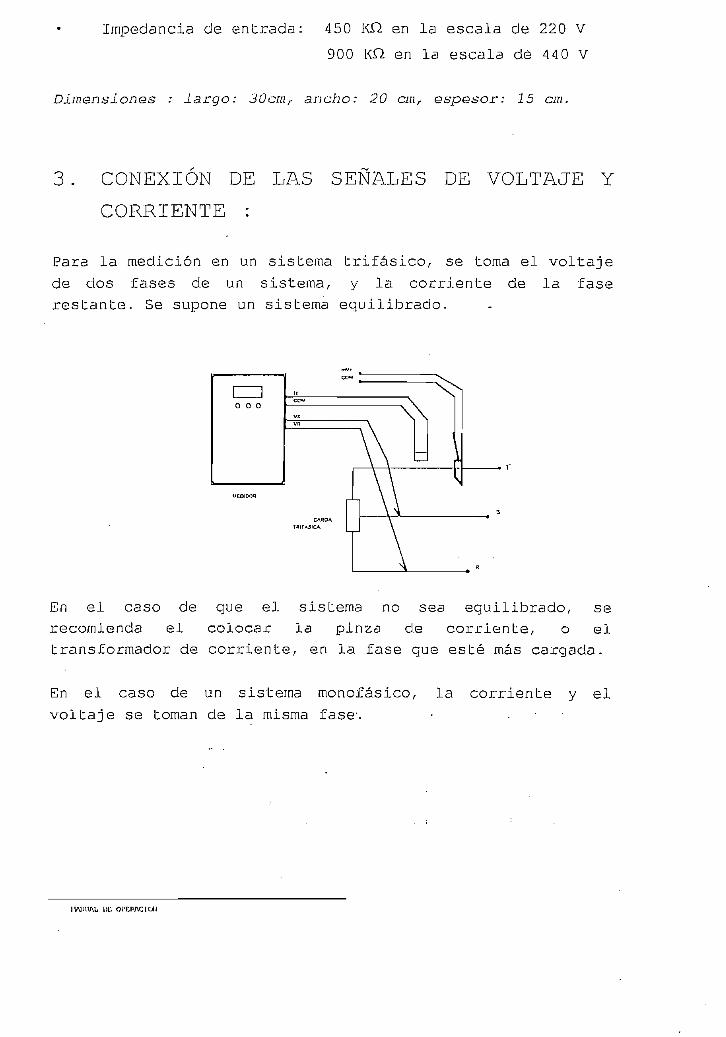
Irnpedancia de entrada: 450 KÍ2 en la escala de 220 V
900 K^ en la escala dé 440 V
Dimensiones : largo: 30cmr ancho: 20 cm, espesor: 15 cm.
3 . CONEXIÓN DE LAS SEÑALES DE VOLTAJE Y
CORRIENTE :
Para la medición en un sistema trifásico, se toma el voltaje
de dos fases de un sistema, y la corriente de la faserestante. Se supone un sistema equilibrado.
En el caso de que el sistema no sea equilibrado, se
recomienda el colocar la pinza de corriente, o el
transformador de corriente, en la. fase que esté más cargada.
En el caso de un sistema monofásico, la corriente y el
voltaje se toman de la misma fase'. - -
I)t. OPEPAC10M

1
En la medición, de corriente se debe tomar en. cuenta lo
siguiente:
O Las pinzas deben tener una respuesta de frecuencia tal
que permitan analizar el suficiente número de
armónicos. Se recomienda el uso de la pinza: FLUKE
SOi-810., o de un instrumento de características
similares.
O Se puede poner la pinza solo en uno de los cables de
acometida a un sistema, en el caso de que haya más de
uno por linea, y multiplicar al escoger la escala, por
el número de cables por fase.
O En el caso de que la señal de corriente sea muy
pequeña, se recomienda el dar varias vueltas al alambre
que lleva, la corriente, ya sea en el transformador de
corriente o en la pinza, con el fin de amplificar dicha
corriente, y esperar de esta manera una mejor respuesta
de los elementos de medición. El numero de vueltas debe
ser tomado,, en cuenta al escoger la escala, ya que laescala real vendrá dada, por la relación entre la escala
del instrumento, y el número de vueltas de alambre a
través del mismo-
O Para trabajar con la pinza, se recomienda utilizar
MANUAL DE OPERACICN
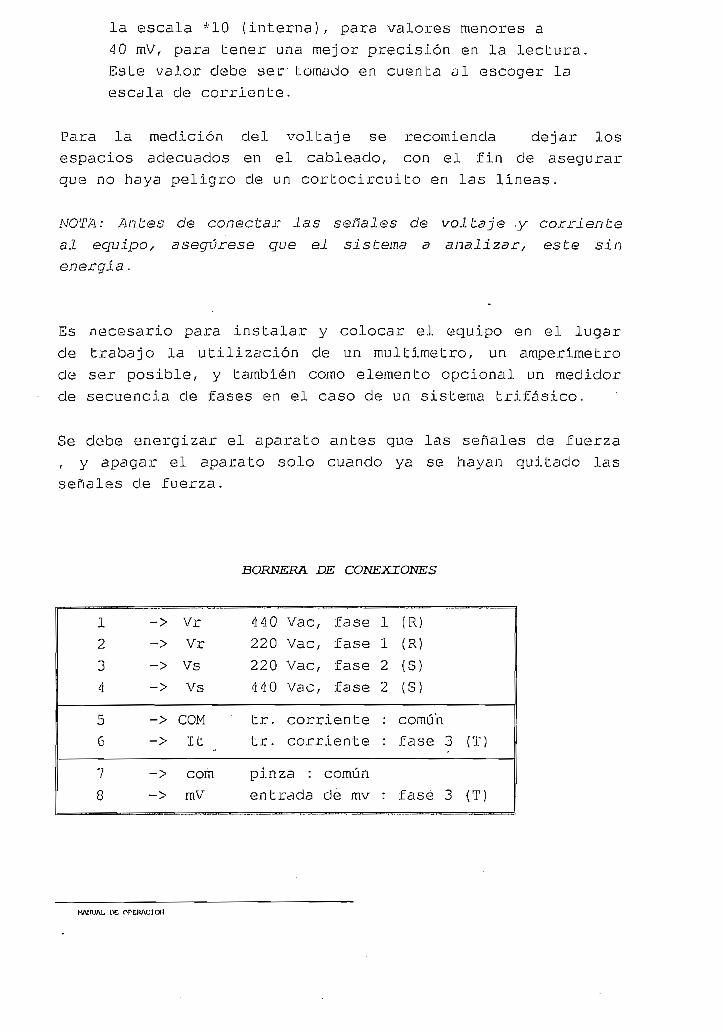
la escala *10 (interna), para valores menores a
40 mV, para tener una mejor precisión en la lectura.
Este valor debe ser tomado en cuenta al escoger la
escala de corriente.
Para la medición del voltaje se recomienda dejar los
espacios adecuados en el cableado, con el fin de asegurar
que no haya peligro de un cortocircuito en las líneas.
NOTA: Antes de conectar las señales de voltaje .y corriente
al equipo f asegúrese que el sistema a analizar, este sin
energía.
Es necesario para instalar y colocar el equipo en el lugar
de trabajo la utilización de un muítimetro, un amperímetro
de ser posible, y también como elemento opcional un medidor
de secuencia de fases en el caso de un sistema trifásico.
Se debe energizar el aparato antes que las señales de fuerza
, y apagar el aparato solo cuando ya se hayan quitado las
señales de fuerza.
BORNERA VE CONEXIONES
1234
5
6
7
8
-> Vr-> vr
-> Vs
-> Vs
-> COM
-> It
~> com
-> mV
440
220
220440
tr.tr.
Vac,Vac,
Vac,
Vac,
fase
fase
fase
fase
1122
corriente :
corriente :
pinza :
entrada
común
de mv ;
(R)(R)(S)(S)
común
fase 3
fase 3
(T)
(T)
MWHJAL, DE OPEIVvCIOTI
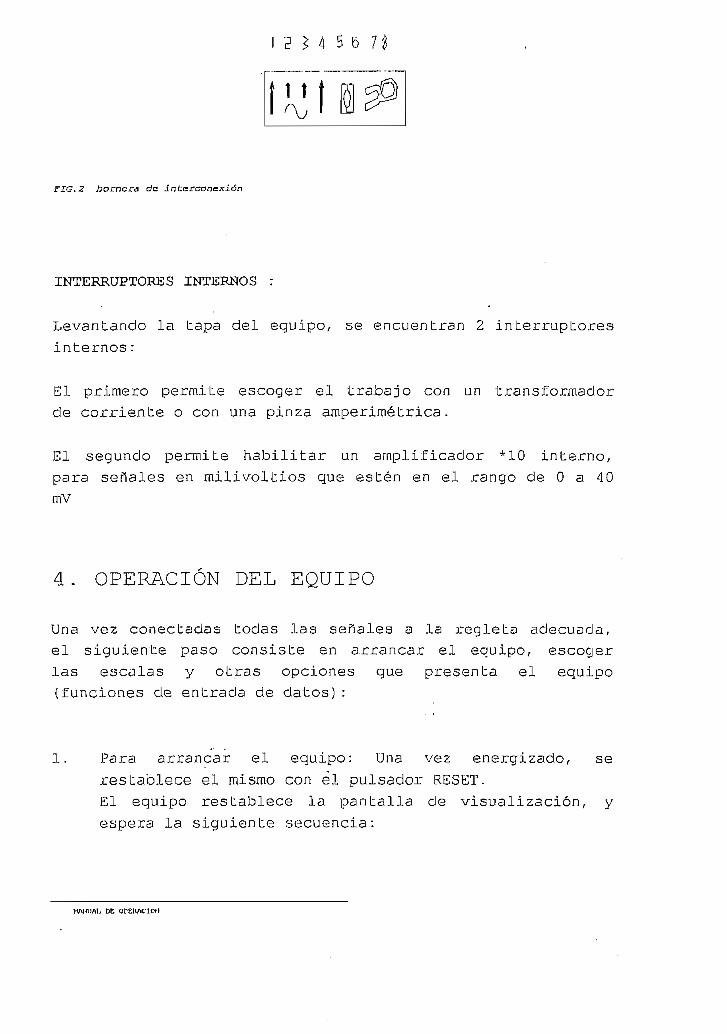
I 2 * 4 5 b 7
1 t
FIG.2 tornera de interconexión
INTERRUPTORES INTERNOS :
Levantando la tapa del equipo, se encuentran 2 interruptores
internos:
El primero permite escoger el trabajo con un transformador
de corriente o con una pinza amperimétrica.
El segundo permite habilitar un amplificador *10 interno,
para señales en milivoltios que estén en el rango de O a 40
mV
4. OPERACIÓN DEL EQUIPO
Una vez conectadas todas las señales a la regleta adecuada,
el siguiente paso consiste en arrancar el equipo, escoger
las escalas y otras opciones que presenta el equipo
(funciones cié entrada de datos) :
1. Para arrancar el equipo: Una vez energizado, se
restablece el mismo con el pulsador RESET.
El equipo restablece la pantalla de visualización, y
espera la. siguiente secuencia:
MMfllAI. DE orEMACIOtl

Si se presiona la becla de MODO, se avanza hacia las
pantallas que permiten escoger las escalas.
Si se presiona las teclas (+),{-), simultáneamente, sepasa al modo de comandos que permite la comunicacióndirecta con un computador, conectado a través delpuerto serial.
2. Escoger la escala de voltaje: 220 o 440 V
3. Escoger la escala de corriente:
primera: 1,2,3,4,5,12,15,20,25 A
segunda: 1,5,10,50,100,250 A
* Si se esta utilizando un transformador de corriente,el valor en la escala de corriente estará dado por el
valor del primario del transformador In (Tn/5A)
JSJM: TC (500/5) -> escala: 2 * 250 A
* Si se utiliza la pinza amperimétrica, se debe escogerel fondo de escala adecuado al instrumento.
Para un instrumento con un rango de 400mV, se escogeuna escala de 400, y la amplificación (*1), en el
interruptor interno.
Para un instrumento con un rango de 40mV, se escoge
una escala de 40, y la amplificación (*10), en elinterruptor interno.
4. Escoger el tipo de sistema: monofásico o trifásico.
1 <|> , 3 <|>
5. Escoger el tipo de salida analógica:
0-> 5 Vdc, proporcional a V-I
0-> 5 Vdc, proporcional a P-S
MAM JAI. IT 01 KIlACIOtl

0-> 5 Vdc, proporcional a fp-fpd
*' Para efectuar estas acciones se utiliza una pantalla LCD,en la que se despliegan los mensajes, que deben seraceptados utilizando el teclado incorporado, este tecladotiene dos teclas de navegación (UP: +) , (DOWN: -) r paraavanzar entre los datos, y una tecla de MODO: (M) , que sirvepara aceptar el dato visualizado.
Los mensajes iniciales en la pantalla aparecen asi:
POWER-METER/DZ97.
V.SCALE? / f f f f í V
I .SCALE?HlíX| í f f í f A
H Pll ? II <!)
0-5VDC? ???-???
* Una vez escogidas las escalas el aparato empieza, a arrojarlos primeros resultados.
La pantalla de resultados es la siguiente:
V: HiUtv I: f f H H A
I?: ( K W ) Wlf . f í í f
S: (KVA) fltfJfJí.ffJf
F P : / f . í f J f PPD:Jf. | |
A la salida analógica se transfieren los datos,, dependiendode la opción escogida.
Para observar los • resultados, se puede avanzar entre lasdiferentes páginas, utilizando las teclas de navegación (UP:+ ) , y { DOWN : - ) .
t-VVNUAL DE OPEIIACIOTI

5. COMUNICACIÓN SERIAL RS - 232
m El equipo envía todos los resultados obtenidos a través del
puerto serial, y los va actualizando a medida que prosigue
la toma de datos.
Si se desea, se puede hacer uso del programa realizado en Q-
3ASIC para graficar los resultados en linea, es decir las
formas de onda capturadas de corriente y voltaje, y los
resultados de los cálculos hechos por el equipo.
Una tercera opción es la de utilizar los archivos generados
por el mismo programa en Q-BA3IC, y graficarlos para su
posterior análisis.
Los archivos generados en Q-BASIC son:
1. adtvi.prn : archivo ASCII, con 113 datos de la forma de
^ onda de voltaje.
2. adtil.prn : archivo ASCII, con 113 dalos de la forma de
onda de corriente.
3. adatll.prn : archivo ASCII, de tipo secuencia1, en el que
se almacenan los resultados que se van obteniendo delequipo, aproximadamente cada minuto.
Con estos 3 archivos, se puede hacer uso de una hoja
electrónica para graficar los diferentes resultados.
Como ejemplo, se desarrollo 2 programas en QPRO, y en Excel:fe
1. ADAT1.WKQ r para graficar las formas de onda de voltaje
y corriente,.
2. ADATA.WKQ , para graficar los pares de datos : V-I,
P-S, fp-fpd en un cierto periodo de tiempo.