del radar primario al modo s, y mas alla
DESCRIPTION
Controlador aéreo (Aena) para conseguirlo el controlador aéreo tenía que dar instrucciones a cada pilo- to para que hiciera varios giros a dere- cha e izquierda con el fin de llevar a cabo una identificación positiva del vuelo, ya que lo que aparecía en su pantalla radar era tan solo un mancha fosforescente. Por tanto, a pesar de la “ventaja” el “inconveniente” limitaba la capacidad de gestión de forma signifi- cativa. Antena de radar primario PSr. 1TRANSCRIPT
Nú
m. 3
90 (E
NEr
o -
FEb
rEro
200
9)
1
Del radar primario al Modo S, y más allá...
Jorge OntiverosControlador aéreo (Aena)
ReSuMen
A pesar de que el “radar secundario de vigilancia” ha permitido durante décadas gestionar de forma adecuada el espacio aéreo, aumentando de facto su capacidad mientras se mantenía la se-guridad que proporcionaba el ATC, sus limitaciones funcionales y técnicas merman las posibilida-des de desarrollo futuro del transporte aéreo. Es por ello, que con el fin de alcanzar una solución hace años que comenzaron a desarrollarse mejoras y sistemas complementarios cuya utilización en la vigilancia y en la gestión del tráfico, ofrecen ya hoy la precisión y la funcionalidad necesarias para dar respuesta al futuro incremento de densidad de tráfico aéreo en Europa, al tiempo que reducen la carga de trabajo de tripulaciones y ATC. En este trabajo se aborda su génesis y evolu-ción, así como las diversas alternativas disponibles.
IntRODuccIón
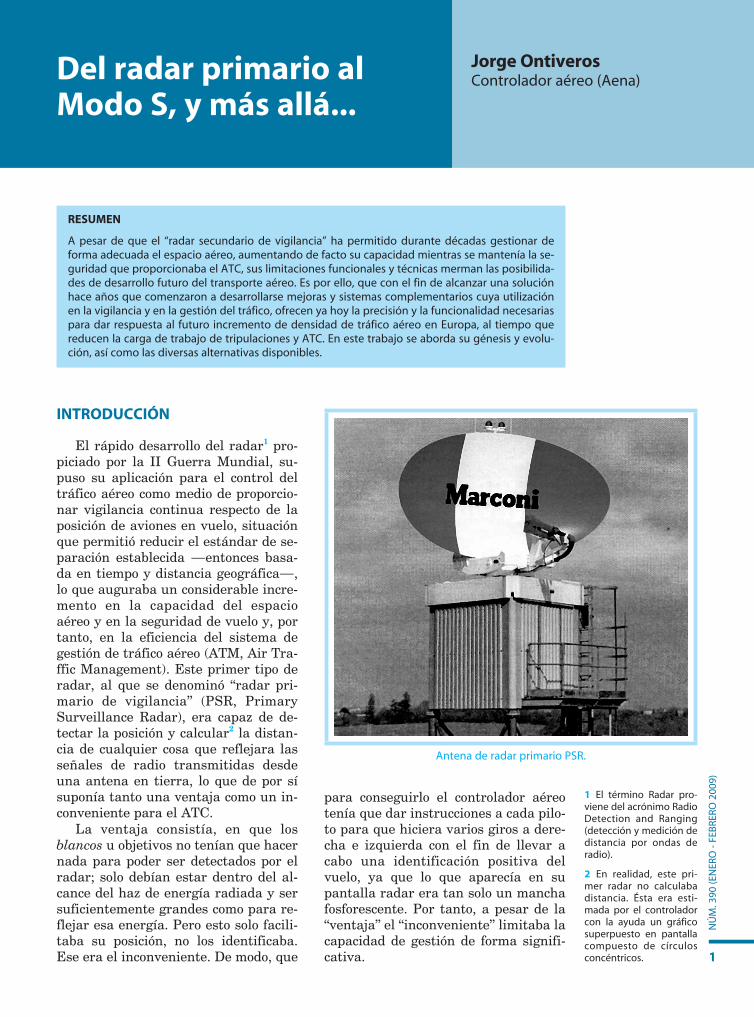
El rápido desarrollo del radar1 pro-piciado por la II Guerra Mundial, su-puso su aplicación para el control del tráfico aéreo como medio de proporcio-nar vigilancia continua respecto de la posición de aviones en vuelo, situación que permitió reducir el estándar de se-paración establecida ‑entonces basa-da en tiempo y distancia geográfica‑, lo que auguraba un considerable incre-mento en la capacidad del espacio aéreo y en la seguridad de vuelo y, por tanto, en la eficiencia del sistema de gestión de tráfico aéreo (ATM, Air Tra-ffic Management). Este primer tipo de radar, al que se denominó “radar pri-mario de vigilancia” (PSR, Primary Surveillance Radar), era capaz de de-tectar la posición y calcular2 la distan-cia de cualquier cosa que reflejara las señales de radio transmitidas desde una antena en tierra, lo que de por sí suponía tanto una ventaja como un in-conveniente para el ATC.
La ventaja consistía, en que los blancos u objetivos no tenían que hacer nada para poder ser detectados por el radar; solo debían estar dentro del al-cance del haz de energía radiada y ser suficientemente grandes como para re-flejar esa energía. Pero esto solo facili-taba su posición, no los identificaba. Ese era el inconveniente. De modo, que
para conseguirlo el controlador aéreo tenía que dar instrucciones a cada pilo-to para que hiciera varios giros a dere-cha e izquierda con el fin de llevar a cabo una identificación positiva del vuelo, ya que lo que aparecía en su pantalla radar era tan solo un mancha fosforescente. Por tanto, a pesar de la “ventaja” el “inconveniente” limitaba la capacidad de gestión de forma signifi-cativa.
1 El término radar pro-viene del acrónimo radio Detection and ranging (detección y medición de distancia por ondas de radio).
2 En realidad, este pri-mer radar no calculaba distancia. Ésta era esti-mada por el controlador con la ayuda un gráfico superpuesto en pantalla compuesto de círculos concéntricos.
Antena de radar primario PSr.
DEl rADAr PrimArio Al moDo S, y máS Allá... iN
GEN
iErÍ
A A
Ero
Ná
UTi
CA
y A
STro
Ná
UTi
CA
2
controlador aéreo la identificación de la aeronave, así como datos sobre su nivel (Modo C) tomado directamente del altímetro del avión. Además, en base a cálculos de los ecos radar pro-porciona información de posición con respecto a la estación (azimut), así como velocidad con respecto al suelo (GS, Ground Speed).
LIMItacIOneS
El radar SSR tiene tres principales limitaciones que lo hacen poco adecua-do para el futuro, una de tipo funcional y dos de tipo técnico, a saber:
código de identificación
En áreas de alta densidad de tráfi-co, el número de códigos disponibles en un momento dado ‑de los 4.096 posi-bles‑ puede resultar insuficiente, no sólo por el número de ellos utilizados por los aviones en vuelo, sino también porque muchos de esos posibles códigos no están disponibles por estar asigna-dos permanentemente para diferentes usos, entre ellos el militar. De modo, que considerando un caso extremo en un futuro más o menos cercano un vue-lo podría llegar a tener que ser demo-rado en la salida a la espera de que hubiese un código SSR disponible para él una vez hubiera sido liberado por un vuelo que hubiera aterrizado o abando-nado el espacio aéreo de referencia, lo que no resulta una perspectiva hala-güeña. Por otro lado, a nivel operacio-nal el tema se complica cuando los vuelos atraviesan áreas que implican la asignación obligatoria de un nuevo código al no ser posible retener el que ya lleve el vuelo, simplemente porque los sistemas de tierra no están prepa-rados para ello, debiendo gastar códi-gos “propios”.
Por tanto, al margen de que una primera y evidente conclusión sea la necesidad de que cada avión tenga asignado un único código de identifica-ción desde que comienza su vuelo has-ta que lo finaliza ‑objetivo que casi se
eL RaDaR SSR
La solución llegó de la mano de otro desarrollo procedente de la contienda: la “identificación amigo / enemigo” por medio del sistema IFF (Identification Friend / Foe), que permitía discriminar de forma positiva aviones del propio bando de los del bando contrario. Este sistema, que se conocería en su uso ci-vil como “radar secundario de vigilan-cia” (SSR, Secondary Surveillance Ra-dar), se apoyaba en un equipo de cabi-na denominado “transpondedor” que no era otra cosa que un transmisor-recep tor de radio que recibía en 1.030 MHz señales de un sistema inte-rrogador situado en tierra, y transmi-tía a su vez una señal de respuesta co-dificada en 1.090 MHz conteniendo la información solicitada.
Si bien este sistema resultaba ade-cuado para gestionar áreas donde no existiesen demasiados aviones en vue-lo, ni numerosas estaciones radar en tierra, en los años 60 se detectó que al incrementarse el número de ambos los problemas relacionados con las interfe-rencias limitaban sus posibilidades operativas. Y así se ha llegado a la ac-tualidad.
en qué cOnSISte
De forma breve y simplificada se puede decir, que el SSR convencional es un sistema por el que una estación radar de tierra equipada con un equipo interrogador envía al éter, a través de una antena que gira 360°, una señal de radio con el fin de que un equipo de a bordo ‑denominado transpondedor (transmisor+respondedor) o, simple-mente, respondedor‑ al que se le ha introducido por parte del piloto una clave específica asignada por el ATC (basada en un código octal de 4 dígitos elegidos de un total de 4.096 posibles, que utiliza números entre el 0 y el 7 y que se conoce como Modo A), conteste con una respuesta codificada que es interpretada por el equipo terrestre. Una vez realizado el correspondiente proceso de datos, el sistema ofrece al

DEl rADAr PrimArio Al moDo S, y máS Allá...
Nú
m. 3
90 (E
NEr
o -
FEb
rEro
200
9)
3
tra en la cobertura super-puesta de dos a más estacio-nes radar interrogadoras.
b) Confusión síncrona: efecto que se produce cuando dos aeronaves, aún estando sepa-radas en el plano vertical, se encuentran muy próximas una de otra y, por tanto, sus respectivas distancias con respecto a la estación radar son prácticamente iguales. Al ser interrogadas con una dife-rencia de tiempo muy peque-ña, se provoca que las res-puestas de sus respectivos transpondedores se superpon-gan en la antena interrogado-ra de tierra que, incapaz de realizar una discriminación, las presenta tal cual en la pantalla radar del controla-dor con el fin de que éste so-lucione la ambigüedad.
ha conseguido en Europa con la aplica-ción del Método de Asignación de Clave en Región de Origen (ORCAM, Origi-nating Region Code Assignment Me-thod)‑ y con la mejora de los sistemas de tierra para que puedan retener có-digos de otras áreas, esto también re-sulta insuficiente a medida que la den-sidad del tráfico aéreo aumenta, por lo que lo ideal sería que cada avión dis-pusiera de un código exclusivo para toda su vida operativa utilizable en cualquier parte del globo. Más adelan-te volveremos sobre esta cuestión.
Solape de respuestas
Cuando dos o más aviones están muy cercanos, las respuestas de los respectivos transpondedores pueden solaparse en la pantalla radar del con-trolador, con lo que la vigilancia se ve dificultada. Este efecto, que se conoce como FRUIT (False Replies Unsyn-chronised In Time, respuestas falsas desincronizadas en el tiempo) o, sim-plemente, “solape” (garbling), se ha ido haciendo más persistente en algunas áreas a medida que aumentaba la den-sidad de tráfico aéreo. Aunque hay más, este efecto se debe básicamente a dos causas:
1. Frecuencias de uso: la utilización de las mismas dos frecuencias de radio para todas las interroga-ciones procedentes de estaciones terrestres (1.030 Mhz) y para to-das las respuestas de los respon-dedores de a bordo (1.090 Mhz) satura el sistema.
2. Situación del avión respecto de la antena: el método de medición del azimut con el SSR convencio-nal resulta imperfecto debido a dos tipos de interferencias cuyo efecto negativo aumenta con la densidad de tráfico:a) Respuesta no deseada: térmi-
no que se aplica a la interfe-rencia provocada por la recep-ción de respuestas enviadas por el transpondedor de una aeronave cuando se encuen-

DEl rADAr PrimArio Al moDo S, y máS Allá... iN
GEN
iErÍ
A A
Ero
Ná
UTi
CA
y A
STro
Ná
UTi
CA
4
Aunque la incorporación de esta técnica tiene innegables ventajas, si-gue teniendo limitaciones a medida que aumenta el tráfico aéreo, si bien no de tipo técnico, si de tipo operacio-nal.
eL RaDaR MODO S
El Modo S es un sistema avanzado de interrogación asociado al radar se-cundario de vigilancia, que se caracte-riza por poder interrogar de un modo Selectivo ‑de ahí su denominación‑ a los aviones equipados con un trans-pondedor compatible. Esa interroga-ción selectiva mejora la calidad y la inte gri dad de la detección, la identifi-cación y la información de altitud. Unas mejoras que se traducen en bene-ficios en términos de seguridad, capaci-dad y eficiencia, todos ellos clave para poder dar respuesta en el futuro al in-cremento de densidad de tráfico aéreo. Asociada a ella ‑y esto es lo mejor de todo‑, una segunda e importante ca-racterística es que también permite el intercambio bidireccional de datos en-tre la estación de tierra y la de a bordo, o entre estaciones de a bordo a efectos TCAS, como luego veremos. Pero antes algo de historia.
Una vez identificadas las limitacio-nes del SSR ya mencionadas, a comien-zos de los años 70 el Reino Unido y USA se pusieron en marcha de forma coordinada para llevar a cabo lo que hasta entonces habían hecho de forma separada: el desarrollo del Modo selec-tivo “S”, por el que desde tierra se pu-diera seleccionar individualmente la aeronave interrogada para eliminar las respuestas solapadas del SSR conven-cional. Así, en 1977, tras el desarrollo de un sistema experimental se inicia-ron los ensayos en Estados Unidos. Eurocontrol tomó buena nota y esta-bleció, en febrero de 1980, un grupo de trabajo en el que también estaban re-presentadas IATA (Asociación de Transporte Aéreo Internacional), IFALPA (Federación Internacional de Asociaciones de Pilotos de Línea Aérea) y OACI (Organización de Aviación Ci-
cálculo de posición
Con el radar SSR las respuestas del transpondedor recibidas por el equipo interrogador de tierra se pueden pre-sentar directamente en la pantalla ra-dar, o bien ser procesadas antes por un extractor de respuestas. En el primer caso, el azimut del blanco, o posición relativa del avión respecto de la ante-na con el norte magnético, se presenta directamente en la pantalla radar, mientras que en el segundo se utiliza una técnica denominada “ventana des-lizante”, que consiste en detectar el co-mienzo y el final de una secuencia de respuestas válidas para, a continua-ción, calcular el azimut por extrapola-ción de las marcaciones magnéticas de la antena del interrogador en estos dos puntos. A pesar de su sofisticación, este tipo de proceso resulta impreciso, requiere de “demasiado” tiempo para el cálculo y su presentación en panta-lla adolece de falta de precisión.
eL RaDaR MOnOpuLSO
Se conoce como monopulso una téc-nica aparecida en la década de los años 80 que solo necesita un impulso de cualquier respuesta del transpondedor de a bordo para determinar, mediante radiogoniometría, el azimut de un blanco dado. El radar secundario pasa así a denominarse MSSR, Monopulse Secondary Surveillance Radar. Al po-der secuenciar las interrogaciones en función del tiempo y de la distancia desde la antena radar al blanco, y al necesitar menos respuestas para ase-gurar la exactitud de la información, que es de cuatro a cinco veces más pre-cisa que la obtenida con los detectores convencionales de “ventana deslizan-te”, se reducen los efectos de la confu-sión síncrona ya mencionada, con lo que el sistema deja de saturarse. El resultado, es una mejora de la función de vigilancia y un aumento de la capa-cidad del sistema ATC. Además, tiene la ventaja de que no es necesaria modi-ficación alguna de los transpondedores de a bordo.
DEl rADAr PrimArio Al moDo S, y máS Allá...
Nú
m. 3
90 (E
NEr
o -
FEb
rEro
200
9)
5
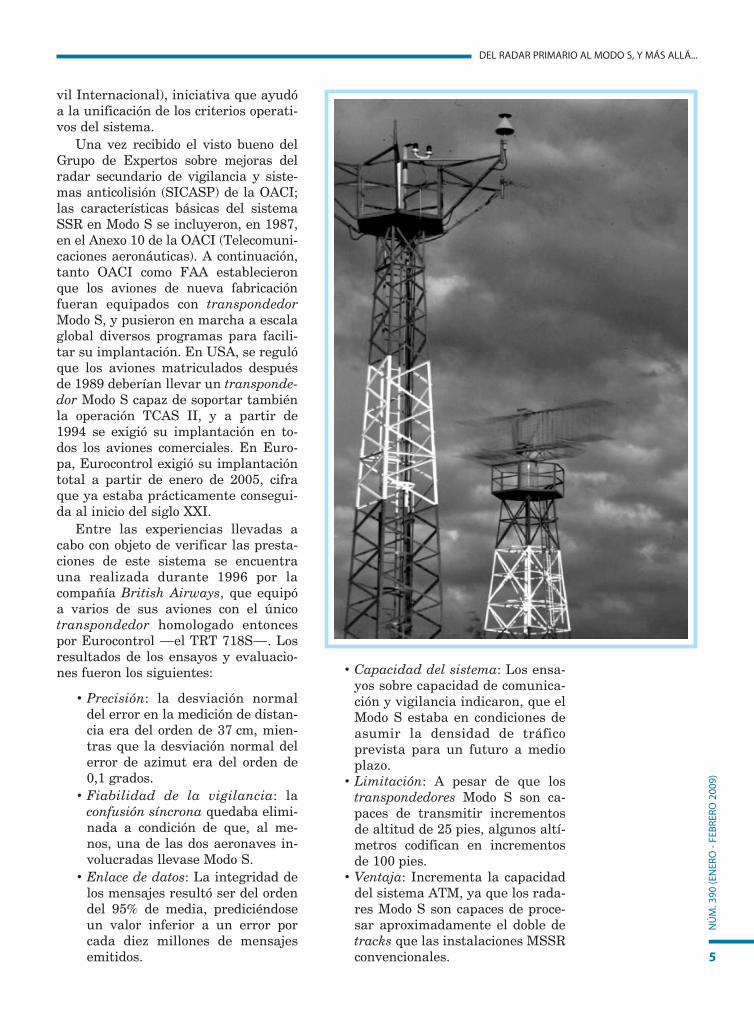
•Capacidad del sistema: Los ensa-yos sobre capacidad de comunica-ción y vigilancia indicaron, que el Modo S estaba en condiciones de asumir la densidad de tráfico prevista para un futuro a medio plazo.
•Limitación: A pesar de que los transpondedores Modo S son ca-paces de transmitir incrementos de altitud de 25 pies, algunos altí-metros codifican en incrementos de 100 pies.
•Ventaja: Incrementa la capacidad del sistema ATM, ya que los rada-res Modo S son capaces de proce-sar aproximadamente el doble de tracks que las instalaciones MSSR convencionales.
vil Internacional), iniciativa que ayudó a la unificación de los criterios operati-vos del sistema.
Una vez recibido el visto bueno del Grupo de Expertos sobre mejoras del radar secundario de vigilancia y siste-mas anticolisión (SICASP) de la OACI; las características básicas del sistema SSR en Modo S se incluyeron, en 1987, en el Anexo 10 de la OACI (Telecomuni-caciones aeronáuticas). A continuación, tanto OACI como FAA establecieron que los aviones de nueva fabricación fueran equipados con transpondedor Modo S, y pusieron en marcha a escala global diversos programas para facili-tar su implantación. En USA, se reguló que los aviones matriculados después de 1989 deberían llevar un transponde-dor Modo S capaz de soportar también la operación TCAS II, y a partir de 1994 se exigió su implantación en to-dos los aviones comerciales. En Euro-pa, Eurocontrol exigió su implantación total a partir de enero de 2005, cifra que ya estaba prácticamente consegui-da al inicio del siglo XXI.
Entre las experiencias llevadas a cabo con objeto de verificar las presta-ciones de este sistema se encuentra una realizada durante 1996 por la compañía British Airways, que equipó a varios de sus aviones con el único transpondedor homologado entonces por Eurocontrol ‑el TRT 718S‑. Los resultados de los ensayos y evaluacio-nes fueron los siguientes:
•Precisión: la desviación normal del error en la medición de distan-cia era del orden de 37 cm, mien-tras que la desviación normal del error de azimut era del orden de 0,1 grados.
•Fiabilidad de la vigilancia: la confusión síncrona quedaba elimi-nada a condición de que, al me-nos, una de las dos aeronaves in-volucradas llevase Modo S.
•Enlace de datos: La integridad de los mensajes resultó ser del orden del 95% de media, prediciéndose un valor inferior a un error por cada diez millones de mensajes emitidos.

DEl rADAr PrimArio Al moDo S, y máS Allá... iN
GEN
iErÍ
A A
Ero
Ná
UTi
CA
y A
STro
Ná
UTi
CA
6
naves de la zona ignorarán toda inte-rrogación que no vaya dirigida a ellas. Con esta tecnología las interrogaciones y las respuestas de los aviones se se-cuencian de forma individual, con lo que los problemas de respuestas sola-padas (FRUIT o garbling) son elimina-dos.
enLace De DatOS
Aunque se utilice principalmente para asegurar la identificación inequí-voca de aeronaves, así como su nivel, el enlace de datos tierra-aire del Modo S puede tener otras interesantes y poten-ciales aplicaciones. Publicadas en el manual de la OACI sobre los “Servicios propios del Modo S”, se pueden dividir en: Servicios ATC y Servicios de aseso-ramiento de vuelo. Entre otros, los mensajes que se pueden generar son los siguientes:
•Mensajes entrantes: confirmación de la ruta, nueva frecuencia de comunicaciones para cambiar de sector ATC, aviso de altitud míni-ma de seguridad, e información de la red VOLMET (meteorología) y ATIS (aeropuerto).
•Mensajes salientes: matrícula de la aeronave, identificación del vuelo, confirmación de que el ni-vel queda libre, confirmación de la autorización de despegue, acuse
DIReccIón excLuSIva De aeROnave
Una característica destacable del Modo S se refiere al número de códigos disponibles, ya que en vez del límite de 4096 códigos del Modo A del SSR con-vencional, el Modo S puede asignar 224, casi 17 millones (concretamente 16.777.214), con lo que cada aeronave puede tener su propio código indivi-dualizado y permanente mientras dure su vida operativa. Al disponer de una dirección exclusiva para cada aeronave que resulta compatible con los modos A (identificación) y C (nivel) actuales ya vistos más arriba, se consigue una ma-yor precisión en la identificación de los vuelos con tráfico intenso comparada con la que ofrece el radar secundario de convencional por sí solo, ya que la función selectiva evita interferencias en la presentación radar de aviones que estén muy cercanos (con la única condición de que uno de ellos esté equi-pado con transpondedor Modo S).
cóMO funcIOna
La operativa es la siguiente: al reci-bo de la interrogación, el transponde-dor de la aeronave la examina para verificar su propia dirección y, tras re-conocerla, transmite la respuesta opor-tuna. Por su parte, las restantes aero-
Métodos de interrogaciónUn sensor modo S cuenta con dos métodos de inte-rrogación: global y selecti-va. la primera es transmiti-da de forma regular como lo hace el SSr convencional. Cualquier transpondedor modo S que no se encuen-tre bloqueado responderá a esta interrogación transmi-tiendo su dirección de aero-na ve de 24 bits. Una vez que el transpondedor es re-conocido por el interroga-dor y su derrota ha sido es-tablecida, puede ser blo-queado para que responda solo a interrogaciones se-lectivas.
DEl rADAr PrimArio Al moDo S, y máS Allá...
Nú
m. 3
90 (E
NEr
o -
FEb
rEro
200
9)
7
Y por lo que se refiere al ATC, en la actualidad con la información de alti-tud conseguida a través del Modo C se le facilita la utilización de la función de “Alerta de conflicto a corto plazo” (STCA, Short Term Conflict Alert), que advierte al controlador acerca del posi-ble riesgo de que se reduzcan las míni-mas de separación entre aeronaves, mientras que con el empleo del Modo S esa función mejora de forma significa-tiva, principalmente en lo relativo a:
a) Falsas alarmas. La alerta de conflicto podría mejorarse si se contara con datos relativos a la altitud instantánea y a la veloci-dad vertical de ascenso y descen-so seleccionadas a bordo, así como con el rumbo que mantiene el avión y su velocidad sobre el suelo.
b) Avisos de resolución TCAS. Al activarse a bordo, el aviso puede transmitirse instantáneamente al controlador, con lo que su uti-lidad resulta evidente a la hora de evitar transmitir instruccio-nes a ese o a otros vuelos que pudieran interferir con la manio-bra de resolución que ejecuta el piloto aconsejada por su equipo TCAS.
IMpLantacIón
En Europa, el Modo S se está im-plantando a dos escalas: Vigilancia elemental (ELS, Elementary Survei-llance) y Vigilancia Mejorada (EHS, Enhanced Surveillance). La primera, aporta las mejoras genéricas de tipo técnico y funcional sobre el SSR con-vencional ya mencionadas, mientras que en el segundo caso, además, aporta valor añadido a nivel operativo ya que:
a) Mejora de la conciencia de la si-tuación del ATC al facilitar una imagen más clara del espacio aéreo.
b) Mejora del seguimiento y acceso a información directamente des-de el avión, lo que permite al controlador beneficiarse de un
de recibo de las autorizaciones ATC, parámetros de vuelo, altitud seleccionada en el piloto automá-tico, rumbo y velocidad de la aero-nave, latitud y longitud según el GNSS (Global Navigation Satelli-te System), avisos de resolución TCAS, condiciones meteorológicas en vuelo (dirección y velocidad del viento) y la actitud del avión.
A nivel operativo, el Modo S permi-te al ATC conocer y trabajar con: velo-cidad indicada, velocidad sobre el sue-lo, rumbo, régimen de ascenso o des-censo y el nivel que mantiene o al que está ascendiendo o descendiendo un avión sin tener que preguntárselo al piloto. Esto no solo ahorra una gran cantidad de tiempo, sino también car-ga de trabajo en la forma reducción de comunicaciones entre pilotos y contro-ladores, especialmente útil en la fase de aproximación.
SISteMaS antIcOLISIón y MODO S
Como ya ha quedado establecido más arriba, existen ciertas ventajas para el sistema ATC y para la seguri-dad de las operaciones de vuelo si se emplea el radar monopulso y el Modo S. Dichas ventajas se relacionan, por un lado, con la mejora de la vigilancia en tierra y, por otro, con el hecho de que los transpondedores equipados con Modo S contribuyen de forma decisiva al funcionamiento del sistema anticoli-sión de a bordo TCAS II, equipo que ofrece avisos de resolución en el plano vertical (RA, Resolution Advisory) con el fin evitar una colisión en vuelo. Fun-cionamiento que también emplea las interrogaciones y respuestas en 1.030 y 1.090 Mhz del SSR, así como infor-mación proveniente de los modos C y S para identificar a las aeronaves que representan una amenaza y, si la aero-nave contraria también está equipada con TCAS y Modo S, utilizan el enlace de datos aire-aire para coordinar la maniobra de evasión y solucionar el conflicto de tráfico.
DEl rADAr PrimArio Al moDo S, y máS Allá... iN
GEN
iErÍ
A A
Ero
Ná
UTi
CA
y A
STro
Ná
UTi
CA
8
•Presentarlaexperienciadelaim-plantación del EHS llevada a cabo por el proveedor de servicios de navegación aérea del Reino Unido NATS (National Air Traffic Servi-ces) en el TMA de Londres, inclu-yendo consideraciones técnicas, entrenamiento de las tripulacio-nes y del ATC y cuestiones rela-cionadas con el factor humano.
•ExponerlosbeneficiosdelEHSentérminos se seguridad operacio-nal, capacidad / eficiencia y comer-cial.
•Explorar el desarrollo potencialfuturo del Modo S EHS.
El lector puede encontrar informa-ción relativa al programa de Eurocon-trol que coordina la introducción de tecnología del Modo S en Europa en: www.eurocontrol.int / mode-s
y MáS aLLá...
Ya se ha visto a lo largo de este tra-bajo, que el Modo S lleva el proceso de la vigilancia ATC un paso más allá al facilitar contar con información adicio-nal de cada avión junto a su identidad y nivel de vuelo. Así como que mejora las características de la alerta de con-flicto a corto plazo y del TCAS, un re-quisito esencial si se quieren implantar nuevos modelos de navegación aérea como el Free Route o el Free Flight, con-ceptos ambos en los que el piloto conta-rá con autonomía para decidir la ruta a seguir sin necesidad de autorización específica del control del tráfico aéreo.
El desarrollo futuro en la gestión del tráfico aéreo, que tendrá a la auto-matización como protagonista ineludi-ble, exige contar con un sistema de vi-gilancia que a nivel técnico resulte preciso, fiable e inmune a las interfe-rencias, y que a nivel funcional incor-pore el enlace de datos tierra-aire (CP-DLC, Controller Pilot Data Link), cuyo principal objetivo es reducir la carga de trabajo de pilotos y controladores aéreos y aumentar la eficiencia ATM.
Por otro lado, la llegada de la tecno-logía satélite a finales de los años 80
reconocimiento más rápido y preciso de los eventos en vuelo.
c) Reduce la carga de trabajo por avión en las comunicaciones. Al mostrar datos del vuelo al ATC, se obvia la necesidad de inter-cambio de información vía voz, particularmente importante en las áreas terminales y en la fase de aproximación donde puede haber en pocos minutos más co-municaciones ATC que durante un vuelo de varias horas.
d) Mejoras en la seguridad de vue-lo. El acceso de los controladores a datos como la altitud seleccio-nada por el piloto, permite la comprobación cruzada de ins-trucciones de ascenso / descenso y ayuda a la identificación tempra-na de incidentes potenciales del tipo level bust (situación que tie-ne lugar cuando un avión en as-censo o descenso atraviesa sin autorización el nivel asignado), tal y como se ha podido experi-mentar en el Reino, donde un sistema Modo S EHS fue implan-tado en el área terminal de ma-niobras de Londres (TMA, Ter-minal Manoeuvering Area) en diciembre de 2005. Al año si-guiente, el número de level busts se había reducido un 24% gra-cias a que los controladores eran informados del nivel selecciona-do en la cabina por el piloto, una característica que parece ser la más valorada por los usuarios. Desde entonces, otros países de Europa han iniciado experien-cias similares en relación con la utilización del enlace de datos aire-tierra mediante Modo S EHS.
DIfuSIón
El 17 de diciembre de 2008 tuvo lu-gar, en la sede de Eurocontrol, en Bru-selas, una jornada de información so-bre los beneficios, mejores prácticas y oportunidades operacionales del Modo S, cuyos principales objetivos fueron:

DEl rADAr PrimArio Al moDo S, y máS Allá...
Nú
m. 3
90 (E
NEr
o -
FEb
rEro
200
9)
9
dentes de un transpondedor convencio-nal, sistema este del que ya se trató de forma detallada en el número 383 de esta revista, bajo el título “La multila-teración como alternativa al radar se-cundario de vigilancia”.
LectuRaS RecOMenDaDaS
Opportunities for innovation. Russell Huls-trom. Era corporation. Air traffic tech-nology international, 2009.
ADS-B towards Free Flight and collabora-tive ATM. Kim O´Neil. Advanced Avia-tion Technology Ltd. Air traffic techno-logy International 2000.
La multilateración como alternativa al ra-dar secundario de vigilancia. Jorge On-tiveros. Revista IAA nº 383, octubre 2007.
Free Flight, ¿la navegación aérea que viene? Jorge Ontiveros. Revista Itavia nº 67, julio 2008.
El escenario de vuelo en el siglo XXI. Jorge Ontiveros. Revista Itavia nº 65, enero 2008.
TCAS vs. ATC ¿quién lleva el control? Jor-ge Ontiveros. Revista Aviador, septiem-bre 2002,
trajo con ella la posibilidad de otro tipo de equipamiento para la vigilancia ATC, principalmente para el uso en áreas donde la cobertura radar no exis-te o no puede existir, como es el caso de las zonas montañosas o sobre el mar. Originariamente conocido por el acrónimo FANS (Future Air Naviga-tion System), ha evolucionado hacia un sistema que se conoce como Vigilancia Dependiente Automática (ADS, Auto-matic Dependant Surveillance). Es auto má ti ca porque no necesita de los inputs del piloto o del controlador aéreo para funcionar (más allá de po-ner en marcha el equipo de a bordo y entrar en el sistema), y dependiente porque requiere de un equipo operativo a bordo (como el SSR).
A nivel funcional, se trata básica-mente de un sistema de enlace de da-tos entre el sistema de navegación de a bordo en relación con su posición, alti-tud e intenciones (senda de vuelo pla-nificada) y el sistema de tierra. Por otro lado, aunque fue la capacidad de la tecnología satélite la génesis del ADS, el sistema también puede enla-zar en VHF (tomando la denominación VDL, VHF datalink) y HF (tomando la denominación HFDL, HF datalink) con las estaciones de tierra.
Una aplicación de este sistema es el (la) ADS-B (ADS-difusión), en el que la aeronave cuenta con un transpondedor Modo S que difunde del mismo modo la información reseñada antes. Una infor-mación que puede ser recibida, bien por una estación de tierra por ejemplo para uso de los servicios de tránsito aéreo, o bien por otras aeronaves, lo que permi-tirá la aplicación de lo que se conoce como Cockpit Display of Traffic Infor-mation (CDTI), algo parecido a tener una pantalla de radar ATC en cabina con cuya información es posible aumen-tar el rendimiento del espacio aéreo y mejorar las operaciones de vuelo.
Finalmente, otra posibilidad en el campo de la vigilancia que será explo-tada en el futuro, se encuentra en la Multilateración, técnología que se basa en cierto número de estaciones de tie-rra con las que es posible realizar una triangulación con señales SSR proce-