control i-3er laboratorio final
DESCRIPTION
Laboratorio #3 de control ITRANSCRIPT

UNIVERSIDAD TECNOLÓGICA DEL PERÚFACULTAD DE INGENIERÍA DE SISTEMAS Y ELECTRÓNICA
CURSO : Control I
DOCENTE : CASQUERO ZAIDMAN, Julio Cesar
TEMA : Balotario final
CARRERA : INGENIERÍA ELECTRÓNICA
INTEGRANTES : Rivas Gutierrez, Junior Antony Plasencia
TURNO : Noche
LIMA – PERÚ2015
-1-
Balotario Final – CONTROL I
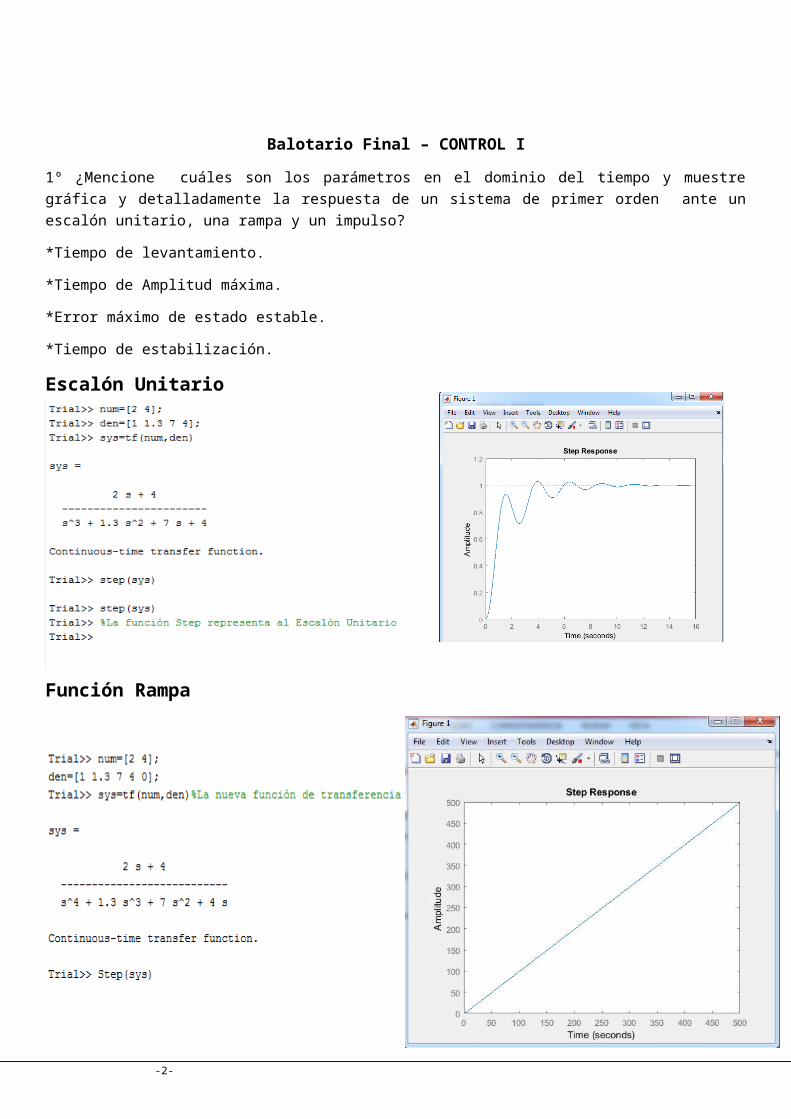
1º ¿Mencione cuáles son los parámetros en el dominio del tiempo y muestre gráfica y detalladamente la respuesta de un sistema de primer orden ante un escalón unitario, una rampa y un impulso?
*Tiempo de levantamiento.
*Tiempo de Amplitud máxima.
*Error máximo de estado estable.
*Tiempo de estabilización.
Escalón Unitario
Función Rampa
Función Impulso
-2-

2º¿ Muestre la forma estandarizada de un sistema de segundo orden, la clasificación de la respuesta del sistema en función del factor de amortiguamiento ante un escalón unitario y la forma de sus respuestas respectivamente?
-3-

Esta forma se denomina forma estándar del sistema de segundo orden.
Clasificación:1) Caso subamortiguado (0<ξ<1): en este caso, C(s)/R(s) se escribe como
wn=1;E=0.8;num=[wn*wn];den=[1 2*E*wn wn*wn];sys=tf(num,den)step(sys)
2) Caso críticamente amortiguado (ξ=1): si los dos polos de C(s)/R(s) son casi iguales, el sistema se aproxima mediante uno críticamente amortiguado. Para una entrada escalón unitario, R(s)=1/s y C(s) se escribe como
-4-

wn=1; E=1; num=[wn*wn]; den=[1 2*E*wn wn*wn]; sys=tf(num,den) step(sys)
3) Caso sobreamortiguado (ξ >1): En este caso, los dos polos de C(s)/R(s) son reales negativos y diferentes. Para una entrada escalón unitario, R(s)%1/s y C(s) se escriben como
-5-

wn=1; E=2; num=[wn*wn]; den=[1 2*E*wn wn*wn]; sys=tf(num,den) step(sys)
3º ¿Muestre la manera como se obtiene la función de transferencia de la planta mostrada compuesta por un resorte, una masa y un amortiguador conectados en serie?
-6-
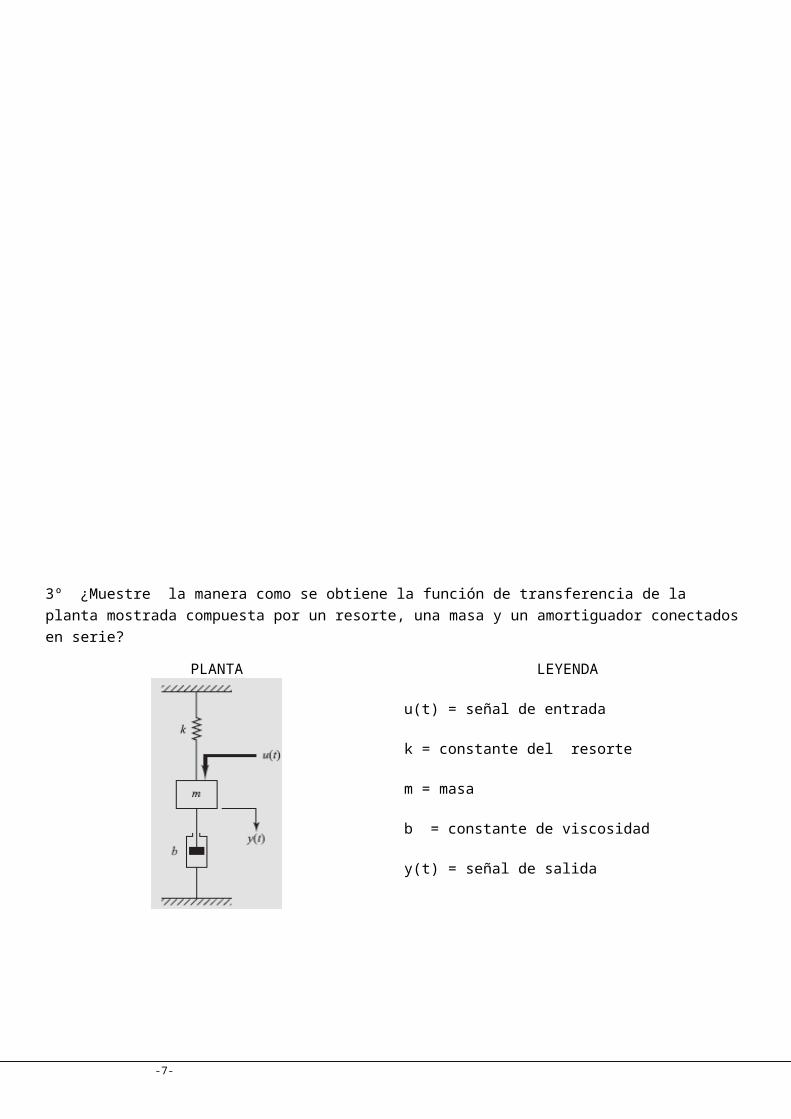
PLANTA LEYENDA
u(t) = señal de entrada
k = constante del resorte
m = masa
b = constante de viscosidad
y(t) = señal de salida
4º ¿Muestre la manera como se obtiene la función de transferencia de un motor cd controlado por campo?
-7-

PLANTA
LEYENDAIf (t) = corriente de campoIa = corriente de armadura constante(t) = parRf = resistencia de campoRa = resistencia de armaduraLf = inductancia de campo = coeficiente de amortiguamiento viscosoJ = momento de inercia del motor y la carga
K = constante de par
Entrada (V): Fuente de Tensión* posición del eje:Θ-Se supone rotor y eje rígidos. La cupla (T ) está relacionada con la corriente de armadura y la fem (e) con la velocidad de rotación, según las ecuaciones:
Estamos agregando una segunda fórmula para poder evaluar ya que en clase no se pudo evaluar porque falto hacer una diferencia
siendo ambas constantes iguales (Kt=Ke=K ) En base a la ley de Newton y la ley de Kirchoff, resultan las siguientes ecuaciones diferenciales que describen la dinámica del sistema:
-8-

Función de Transferencia
Aplicando la Transformada de Laplace y haciendo cero las condiciones iniciales, las ecuaciones del sistema quedan expresadas en el dominio de s:
Eliminando I(s) se obtiene la transferencia entre la entrada de tensión de armadura V y la velocidad de rotación Θ como salida:
5º ¿Muestre la manera como se obtiene la función de transferencia del siguiente sistema de suspensión?
PLANTA LEYENDA
-9-

u(t) = señal de entrada
m1 = masa 1m2 = masa 2
x(t) = desplazamiento de la masa m1 y(t) = desplazamiento de la masa m2
k1= resorte k2 = resorte
b = Coeficiente de amortiguación
y(t) = señal de salida
6º ¿Muestre la manera como se obtiene la función de transferencia del siguiente circuito eléctrico?
-10-

PLANTA
LEYENDA R1 = Resistencia () R2 = Resistencia () C1 = Condensador (F) C2= Condensador (F) ei = Tensión de entrada (V) eo = Tensión de salida (V) i1 = corriente (A) i2 = corriente (A)
-11-

7º ¿Qué forma tiene el diagrama de Bode del circuito anterior?
C1=5;R1=2;R2=3;C2=5;num=[1];den=[R1*C1*R2*C2 (R1*C1+R2*C2+R1*C2) 1];sys=tf(num,den)bode=(sys)grid
8º ¿Qué es el margen de fase y el margen de ganancia?
8.1 Margen de fase.-
Que es un diagrama de la magnitud logarítmica en decibelios con respecto al ángulo de fase, es la diferencia entre el ángulo de fase real h y .180o; es decir, h.(.180o)%180o!h.] La curva se gradúa en función de la frecuencia u. Estos diagramas de la magnitud logarítmica con respecto a la fase se denominan diagramas de Nichols. En los diagramas de Bode, las características de la respuesta en frecuencia de G( ju) aparecen en papel semilogarítmico mediante dos curvas separadas, la curva de magnitud logarítmica y la curva de ángulo de fase; en el diagrama de magnitud logarítmica con respecto a la fase, en cambio, las dos curvas de los diagramas de Bode se combinan en una
8.2 Margen de ganancia.-
G( ju) para tres valores diferentes de la ganancia K en lazo abierto. Para un valor grande de laganancia K, el sistema es inestable. Conforme la ganancia se disminuye hacia cierto valor, ellugar geométrico G( ju) pasa por el punto .1!j0. Esto significa que, para este valor de laganancia, el sistema está al borde de la inestabilidad y presenta oscilaciones mantenidas. Para unvalor pequeño de la ganancia K, el sistema es estable. En general, cuanto más se acerca el lugar geométrico G( ju) a rodear el punto .1!j0, más oscilatoria es la respuesta del sistema. La proximidad del lugar geométrico G( ju) al punto 1!j0 se utiliza como una medida del margen de estabilidad. (Sin embargo, esto no se aplicaa los sistemas condicionalmente estables.) Es una práctica común representar la proximidad entérminos del margen de fase y el margen de ganancia.
-12-

-13-

9º ¿Explique el criterio de Routh?
El criterio de estabilidad de Routh dice si existen o no raíces inestables en una ecuación polinomial, sin tener que obtenerlas en realidad. Este criterio de estabilidad sólo se aplica a los polinomios con una cantidad finita de términos. Cuando se aplica el criterio a un sistema de control, la información sobre la estabilidad absoluta se obtiene directamente de los coeficientes de la ecuación característica. El procedimiento en el criterio de estabilidad de Routh es el siguiente:
1. Se escribe el polinomio en s de la forma siguiente:
donde los coeficientes son cantidades reales. Se supone que anÇ0; es decir, se elimina cualquier raíz cero
2. Si alguno de los coeficientes es cero o negativo, ante la presencia de al menos un coeficientepositivo, hay una raíz o raíces imaginarias o que tienen partes reales positivas. Ental caso, el sistema no es estable. Si sólo interesa la estabilidad absoluta, no es necesariocontinuar con el procedimiento. Obsérvese que todos los coeficientes deben ser positivos.Esta es una condición necesaria, como se aprecia a partir del argumento siguiente.Un polinomio en s con coeficientes reales siempre puede factorizarse en factores linealesy cuadráticos tales como (s!a) y (s2!bs!c), donde a, b y c son números reales. Losfactores lineales producen las raíces reales y los factores cuadráticos producen las raícescomplejas del polinomio. El factor (s2!bs!c) produce las raíces con partes reales negativassólo si b y c son ambas positivas. Para todas las raíces que tienen partes realesnegativas, las constantes a, b, c, ... deben ser positivas en todos los factores. El productode cualquier cantidad de factores lineales y cuadráticos que contengan sólo coeficientespositivos siempre produce un polinomio con coeficientes positivos. Es importante señalarque la condición de que todos los coeficientes sean positivos no es suficiente paraasegurar la estabilidad. La condición necesaria, pero no suficiente, para la estabilidad esque todos los coeficientes de la Ecuación (5-61) estén presentes y tengan un signo positivo.(Si todas las a son negativas, se hacen positivas multiplicando ambos miembros de laecuación por .1.)
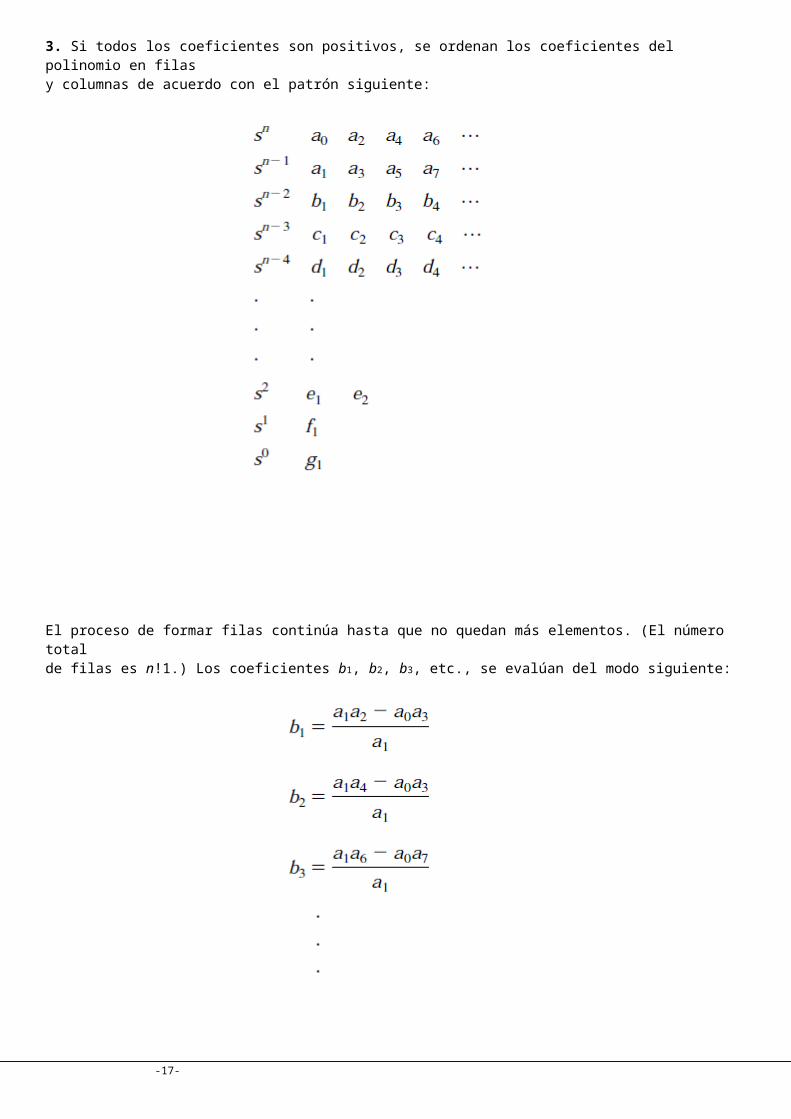
3. Si todos los coeficientes son positivos, se ordenan los coeficientes del polinomio en filasy columnas de acuerdo con el patrón siguiente:
-14-

El proceso de formar filas continúa hasta que no quedan más elementos. (El número totalde filas es n!1.) Los coeficientes b1, b2, b3, etc., se evalúan del modo siguiente:
La evaluación de las b continúa hasta que todas las restantes son cero. Se sigue el mismopatrón de multiplicación cruzada de los coeficientes de las dos filas anteriores al evaluarlas c, las d, las e, etc. Es decir
Este proceso continúa hasta que se completa la n-ésima fila. El array completo de loscoeficientes es triangular. Obsérvese que, al desarrollar el array, una fila completa sedivide entre, o se multiplica por, un número positivo para simplificar el cálculo numéricosubsecuente sin alterar la conclusión de la estabilidad
-15-

10º ¿En que consiste el criterio de Nyquist?
El criterio de estabilidad de Nyquist determina la estabilidad de un sistema en lazo cerrado apartir de la respuesta en frecuencia en lazo abierto y los polos en lazo abierto.Esta sección presenta el criterio de estabilidad de Nyquist y su base matemática. Considéreseel sistema en lazo cerrado
Para la estabilidad, todas las raíces de la ecuación característica
-16-
11º ¿Explique el método de Ziegler (los dos casos) usados para sintonizar un controlador PID.?
Hay dos métodos denominados reglas de sintonía de Ziegler-Nichols: el primero y el segundométodo. A continuación se hace una breve presentación de estos dos métodos.
11.1 Primer método. En el primer método, la respuesta de la planta a una entrada escalón unitariose obtiene de manera experimental, tal como se muestra en la. Si la planta nocontiene integradores ni polos dominantes complejos conjugados, la curva de respuesta escalónunitario puede tener forma de S, como se observa. Este método se puede aplicarsi la respuesta muestra una curva con forma de S. Tales curvas de respuesta escalón se puedengenerar experimentalmente o a partir de una simulación dinámica de la planta.La curva con forma de S se caracteriza por dos parámetros: el tiempo de retardo L y la constantede tiempo T. El tiempo de retardo y la constante de tiempo se determinan dibujando unarecta tangente en el punto de inflexión de la curva con forma de S y determinando las interseccionesde esta tangente con el eje del tiempo y con la línea c(t)%K, tal como se muestra en la
-17-

Segundo método. En el segundo método, primero se fija Ti%ä y Td%0. Usando sólola acción de control proporcional (véase la Figura 8-4), se incrementa Kp desde 0 hasta un valorcrítico Kcr, en donde la salida presente oscilaciones sostenidas. (Si la salida no presenta oscilacionessostenidas para cualquier valor que pueda tomar Kp, entonces este método no se puedeaplicar.) Así, la ganancia crítica Kcr y el periodo Pcr correspondiente se determinan experimentalmente.
-18-