control de posicion_dinamica
TRANSCRIPT

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 1/58
Mecanica Orbital y Vehıculos EspacialesTema 7: Dinamica y Control de la Actitud
Rafael Vazquez Valenzuela
Departamento de Ingenierıa AeroespacialEscuela Superior de Ingenieros, Universidad de Sevilla [email protected]
7 de enero de 2014
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 2/58
Introduccion I
La mayor parte de los vehıculos espaciales tienen instrumentoso antenas que deben apuntar en una direccion. Por ejemplo:
Telescopios espaciales (Hubble).Los satelites de comunicacion deben orientar sus antenas.Los paneles solares deben maximizar su exposicion al Sol.Las camaras de fotografıa deben apuntar a una localizacion.Los radiadores deben estar orientados al espacio profundo.
Las toberas propulsivas de un vehıculo espacial deben estarcorrectamente alineadas.Otros instrumentos o sensores cientıficos.
Ademas existen otro tipo de requisitos:Telescopios espaciales (Hubble).Seguimiento de objetivos.
Direcciones prohibidas (p.ej. la direccion del Sol para opticasensible).
La orientacion de un vehıculo espacial (respecto a otrosistema de referencia de interes, p.ej. inercial o los ejes orbita)se denomina actitud.
2 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 3/58
Introduccion II
Si un vehıculo tiene varias partes moviles, estas tendran supropia actitud (relacionada con la del cuerpo principal). Sinembargo en principio esto es indeseable por la complejidadadicional que aporta. Se suele reservar para casosindispensables (p.ej. grandes paneles solares que deben seguir
al Sol para maximizar la generacion de potencia, oinstrumentos cientıficos muy concretos).
Hipotesis simplificadora: En esta asignatura, consideraremos elvehıculo como solido rıgido. Por tanto, tiene 6 grados delibertad, de los cuales 3 determinan la actitud, que
vendra dada por la orientacion de unos ejes solidarios alvehıculo (ejes cuerpo) respecto a los ejes de interes.
Si existe alguna parta movil la trataremos por separado.
3 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 4/58
Introduccion III
El subsistema encargado de conocer y controlar la actitud, esel Sistema de Determinacion y Control de Actitud, en inglesADCS (Attitude Determination and Control System) cuyasfunciones basicas son:
Determinar la actitud actual o instantanea, a partir de lasmedidas de los sensores y el conocimiento de la actitud previo
(problema de estimacion).Emplear los actuadores disponibles para estabilizar la actitud ycorregir posibles desviaciones respecto a una actitud deseada(problema de control).
Otras funciones posibles:
Generar maniobras de actitud, por ejemplo, para pasar de unaactitud inicial a una final deseada (problema de transferenciade actitud)Seguir un objetivo (problema de seguimiento o tracking).
4 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 5/58
ADCS
Esquema generico de un ADCS:
sing external torquers
to
ol.
This
process
is known
upon the mission,
and it
such
xample, and a
momentum
g will
be
required during
he difference between the
commodate consequential
ist
of
the potential sources
must also be assessed
in
lly dominant
m·
m
m
device is used,
and
this
may
well
be
done
in order
to
enhance the reliability, then
it
must
be
remembered
that
their
momenta
add vectorially
to
produce only
one
gyroscopically
rigid axis.
9.2.4 The ACS block diagram
The
block diagram
in
Figure 9.2 shows the
major
components of a general
ACS
system.
The
links between components identify major interactions, with arrows indicating that
there is a
cause-effect
relationship;
it
is convenient
to
think of them as channels along
which information flows.
For
example, the main structure of the spacecraft
is
subjected
to
time-varying torques from torquers, and will respond with attitude motion that will
be
Ground
control
Figure 9.2 Block diagram for an attitude control system
5 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 6/58
Introduccion IV
El problema de estimacion de la actitud (“¿A dondeesta apuntando el vehıculo espacial?”) requiere:
Un modelo de la cinematica de la actitud del vehıculo.Algoritmos de estimacion (estadısticos, filtro de Kalman...)Sensores
Opticos (sensores solares, de horizonte terrestre, de estrellas).Mecanicos (giroscopos, que tambien pueden ser electronicos).Magneticos (magnetometros).
Los sensores mecanicos proporcionan directamente la velocidadangular, que puede ser integrada para obtener una estimacioncontinua de actitud (navegacion inercial). No obstante estetipo de estimacion comete errores que crecen en el tiempo.Otros sensores proporcionan una direccion (Sol, Tierra,
estrellas) medida en ejes cuerpo; si dicha direccion es conocidaen otros ejes, se puede emplear la medida para estimar laactitud.
El problema de estimacion se complica debido a la presenciade incertidumbre (errores) en los sensores.
6 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 7/58
Introduccion V
El problema de control de la actitud requiere:Modelos de cinematica y dinamica de la actitud del vehıculo.Algoritmos de control (PIDs, control optimo, no-lineal...).Actuadores
Propulsivos.Mecanicos (volantes, ruedas, giroscopos...).Magneticos (magnetopares).
Los objetivos principales del sistema de control de actitud son:Alcanzar la actitud deseada (o seguir un perfil de actitud).Estabilizar el sistema en dicha actitud deseada.Reducir el impacto de las perturbaciones.
Otros objetivos adicionales pueden ser:Evitar actitudes no deseadas (por ejemplo, que expongan
optica delicada directamente al Sol).Minimizar el consumo energetico.
Este sistema se puede ver como un sistema de gestion demomento cinetico; dicho momento puede ser modificado,aumentado, disminuido o conservado segun las necesidades.
7 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 8/58
Introduccion VI
El problema de control se complica debido a la presencia de
diversas fuentes de error.Por ejemplo, momentos perturbadores externos que afectan ladinamica de actitud del vehıculo espacial, tales como:
Pares aerodinamicos (importantes en orbita baja).Gradiente gravitatorio (por la forma no esferica del vehıculo
espacial), acopla la dinamica orbital con la dinamica de actitud.Pares causados por la presion de radiacion solarPares magneticos.
Tambien existen momentos perturbadores internos:
Movimiento de fluidos (combustible).Movimiento de la tripulacion.
Otras fuentes de error son debidas a errores de modelado, porejemplo:
Errores de fabricacion del vehıculo.Efectos de flexibilidad (paneles solares, vehıculos muy grandes).
8 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 9/58
Perturbaciones
Ordenes de magnitud de perturbaciones
.
as its eccentricity, imply rotation
as
shown in Figure 9.1, for example, and a momentum
component l
w
along the normal to the orbit plane. Dumping will
be
required during
every orbit unless the store
can
accommodate
at
least
half of
the difference between the
maximum and the minimum values
of
I w In addition, it must accommodate consequential
momentum arising from disturbance torques. Table 9 1 shows a list
of
the potential sources
of
these.
Manoeuvres such as the repointing one shown
in
Figure 9.7 must also
be
assessed
in
a similar way.
Table
9 1
Disturbance torques
Height range
xternal torques
source
over which it is potentially dominant
Aerodynamic
Magnetic
Gravity gradient
Solar radiation
Thrust misalignment
Internal torques
source
Mechanisms
Fuel movement
Astronaut movement
Flexible appendages
General mass movement
·Values depend upon the level of solar activity.
<about 500km·
500-35000km
500-35000km
>700km·
all heights
9.2
The
The
ther
whi
to ti
9 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 10/58
Introduccion VII
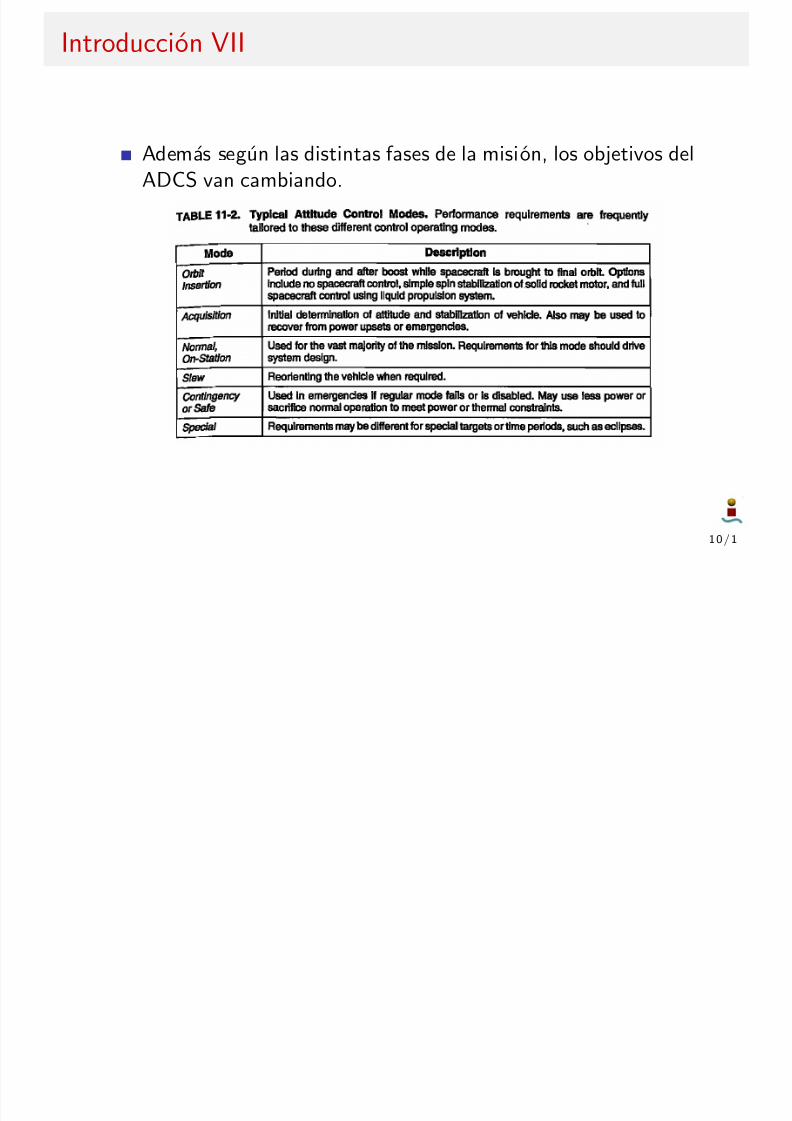
Ademas segun las distintas fases de la mision, los objetivos delADCS van cambiando.
1 1
d for designing the
t Example
: none-provlded
icle
pointing,
tonomous
Earth-relatlve)
: One 30 deg
r
month
to
portunity
es stabilization
heel,
electro-
omentum
optionally,
lewing
V system
nt
1.8
x 1 N'm
g; 4.4 x 1 )-5 N'm
t-opportunlty
x 1
)-5
N'm
11 1
Attitude Determination and Control
357
TABLE 11-2. Typical
ttitude
Control Modes. Performance requirements are frequently
taUored
to these different control operating modes. .
Mode
Description
rbit
Period during and after boost while spacecraft Is brought to final orbit. OptIons
Insertfon
Include no
spacecraft control, simple
spin stabHlzatlon ofsoOd
rocket
motor,
and
full
spacecraftcontrol using liquid propulsion
system.
AcqUIsition
Initial determination of attitude and stabilization of
vehicle.
Also
may
be
used
to
recover from power upsets or emergencies.
Normal
Used for the vast majority of the miSS/on. Requirements for this mode should drive
On-StatJon
system design.
lew
Reorienting the vehicle when required.
Contingency
Used
In
emergencies if
regular mode fans or
Is
disabled. May use
less
power or
orSafe
sacrifice normal operation to meet power or thermal constraints.
SpecIal
Requirements may be different for special targets or
time
periods, such as eclipses.
TABLE 11-3. Typica l AHltude Determination and Control Performance Requirements.
Area
Requirements
need to
be specified for each mode. The following lists the areas of
perfonmanca frequently specified.
Definition·
Examples/Comments
DETERMIN TION
1 0 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 11/58
Representacion de la Actitud
v
!
r
!
!
w
!
!
1o
2o
3o
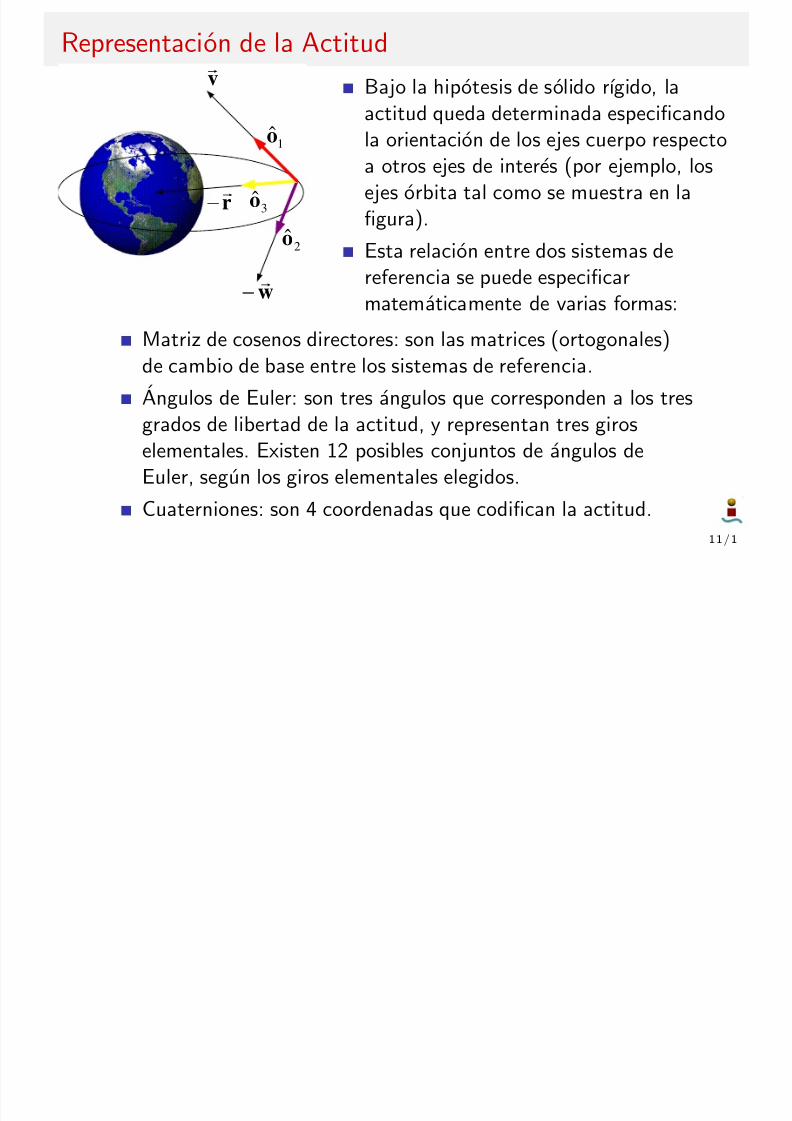
Bajo la hipotesis de solido rıgido, laactitud queda determinada especificando
la orientacion de los ejes cuerpo respectoa otros ejes de interes (por ejemplo, losejes orbita tal como se muestra en lafigura).
Esta relacion entre dos sistemas de
referencia se puede especificarmatematicamente de varias formas:
Matriz de cosenos directores: son las matrices (ortogonales)de cambio de base entre los sistemas de referencia.
Angulos de Euler: son tres angulos que corresponden a los tresgrados de libertad de la actitud, y representan tres giroselementales. Existen 12 posibles conjuntos de angulos deEuler, segun los giros elementales elegidos.
Cuaterniones: son 4 coordenadas que codifican la actitud.
1 1 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 12/58
Cinematica de la Actitud
La cinematica relaciona la velocidad y la posicion. Para elmovimiento del centro de masas (un punto), la cinematica
viene dada sencillamente por x = v .Similarmente, la cinematica de la actitud son un conjunto derelaciones (en forma de ecuaciones diferenciales) entre lavelocidad angular del vehıculo, ω, y su actitud, representadamediante cualquiera de los metodos antes especificados.
Estas ecuaciones diferenciales se denominan ecuacionesdiferenciales cinematicas (EDC).
Por ejemplo, para la representacion mediante la matriz decosenos directores C (t ), las EDC vienen dadas por C = −ΩC
donde Ω es una matriz antisimetrica que se forma a partir de
las coordenadas de ω = [ω1 ω2 ω3]T
de la siguiente forma:
Ω =
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
1 2 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 13/58
Dinamica de la Actitud I
La dinamica relaciona la velocidad con sus causas. En el caso
del movimiento del centro de masas (un punto), las causasson fuerzas y la dinamica viene dada por la segunda ley deNewton m x = F .
La dinamica de la actitud relaciona la velocidad angular delvehıculo con los momentos de las fuerzas que actuan en el, y
se basa en el teorema del momento cinetico; las ecuacionesdiferenciales resultantes se denominan Ecuaciones de Euler.
El momento cinetico respecto a un sistema de referencia fijo,centrado en el centro de gravedad del vehıculo, se definecomo Γ = ¯
I · ω, donde ¯I es el tensor de inercia del vehıculo.
El teorema del momento cinetico determina que Γ = M ,donde M es el momento de las fuerzas respecto al centro degravedad. Esta ecuacion, escrita en el sistema de referenciamovil ejes cuerpo, resulta en ¯
I · ω + ω × (I · ω) = M .
1 3 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 14/58
Dinamica de la Actitud II
Recordatorio: para todo solido rıgido con tensor de inercia ¯I
existen unos ejes, llamados principales, tales que
¯I =
I 1 0 00 I 2 00 0 I 3
Escribiendo la anterior ecuacion en ejes cuerpo principales, seobtienen las Ecuaciones de Euler:
I 1 ω1 + (I 3 − I 2)ω2ω3 = M 1
I 2 ω2 + (I 1 − I 3)ω1ω3 = M 2
I 3 ω3 + (I 2 − I 1)ω2ω1 = M 3
Observese que las ecuaciones de Euler son tres ecuacionesdiferenciales de primer orden, no lineales y acopladas. Lasecuaciones relacionan la velocidad angular con los momentos.
1 4 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 15/58
Solido en rotacion libre
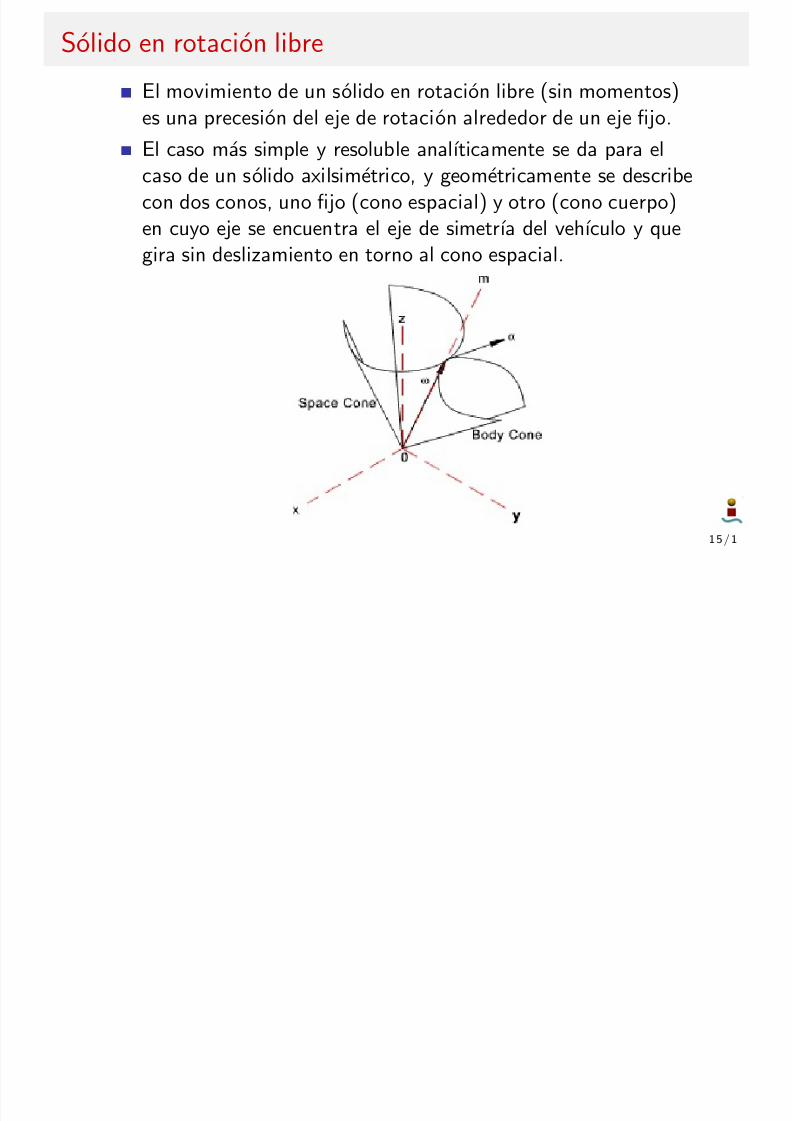
El movimiento de un solido en rotacion libre (sin momentos)es una precesion del eje de rotacion alrededor de un eje fijo.
El caso mas simple y resoluble analıticamente se da para elcaso de un solido axilsimetrico, y geometricamente se describecon dos conos, uno fijo (cono espacial) y otro (cono cuerpo)en cuyo eje se encuentra el eje de simetrıa del vehıculo y quegira sin deslizamiento en torno al cono espacial.
1 5 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 16/58
Rigidez giroscopica
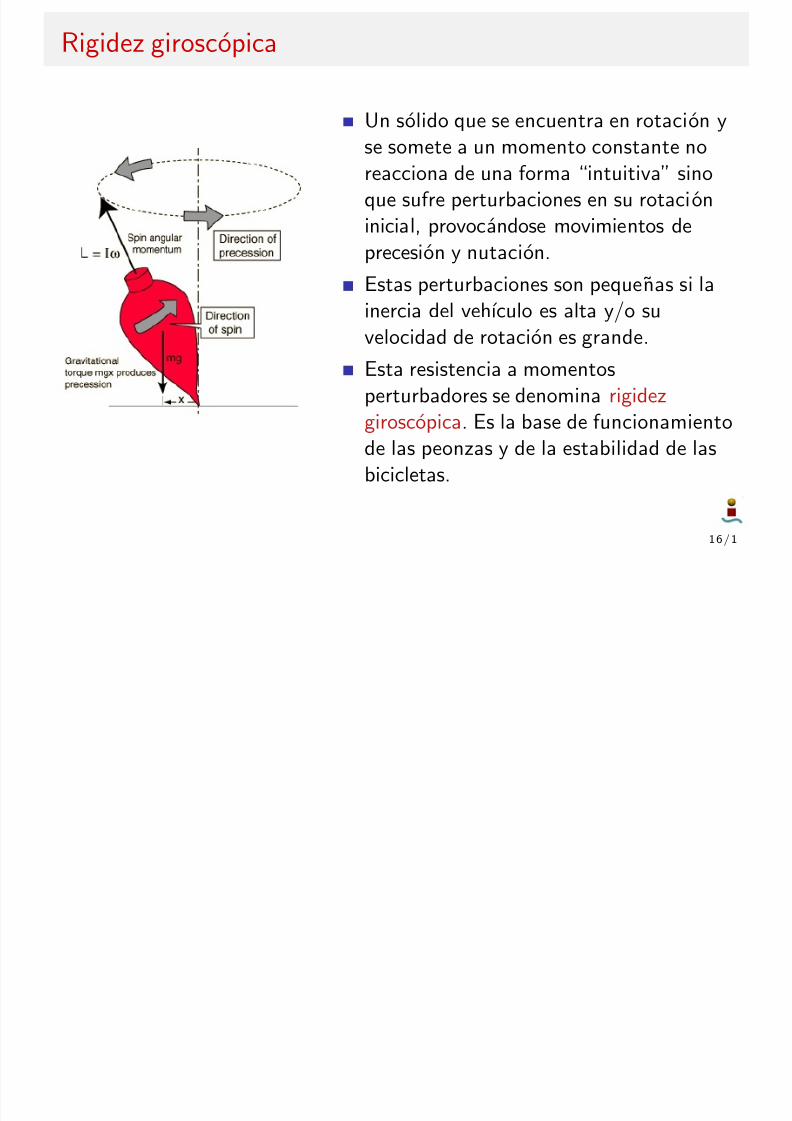
Un solido que se encuentra en rotacion y
se somete a un momento constante noreacciona de una forma “intuitiva” sinoque sufre perturbaciones en su rotacioninicial, provocandose movimientos deprecesion y nutacion.
Estas perturbaciones son pequenas si lainercia del vehıculo es alta y/o suvelocidad de rotacion es grande.
Esta resistencia a momentosperturbadores se denomina rigidez
giroscopica. Es la base de funcionamientode las peonzas y de la estabilidad de lasbicicletas.
1 6 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 17/58
Estabilidad de sistemas en rotacion
X
Y
Z
MAJOR
I N T E R M E D I A T E
MINOR
Para el solido de la figura, I 1 = I x , I 2 = I y , I 3 = I x sonlos momentos principales de inercia (dada la forma del
solido). Ademas I 1 > I 2 > I 3 por las dimensionesaparentes en la figura, luego el eje x es el eje mayorde inercia, el y el eje intermedio, y el z el eje menorde inercia.
Se demuestra que si el solido rota alrededor del eje
mayor o del eje menor, estas rotaciones son estables(realmente son neutralmente estables: cuando larotacion es perturbada, la perturbacion no crece).
Sin embargo si la rotacion es alrededor del eje intermedio,dicha rotacion es inestable (una perturbacion se amplificarıa y
el eje instantaneo de rotacion se alejarıa del eje intermedio).Estos resultados cambian en presencia de disipacion deenergıa (que siempre existe): El eje menor es inestable siexiste disipacion de energıa (Regla del Eje Mayor).
1 7 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 18/58
Sputnik vs. Explorer I
El Sputnik fue lanzado en 1957
El satelite estaba estabilizado porrotacion en torno a su eje mayor.
Los ingenieros de la NASA no eran
conscientes de este hecho, ni de laregla del eje mayor (que no se puedededucir con un modelo de solidorıgido).
El Explorer I fue lanzado en
1958, “estabilizado” porrotacion en torno a su ejemenor.
1 8 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 19/58
Sputnik vs. Explorer II
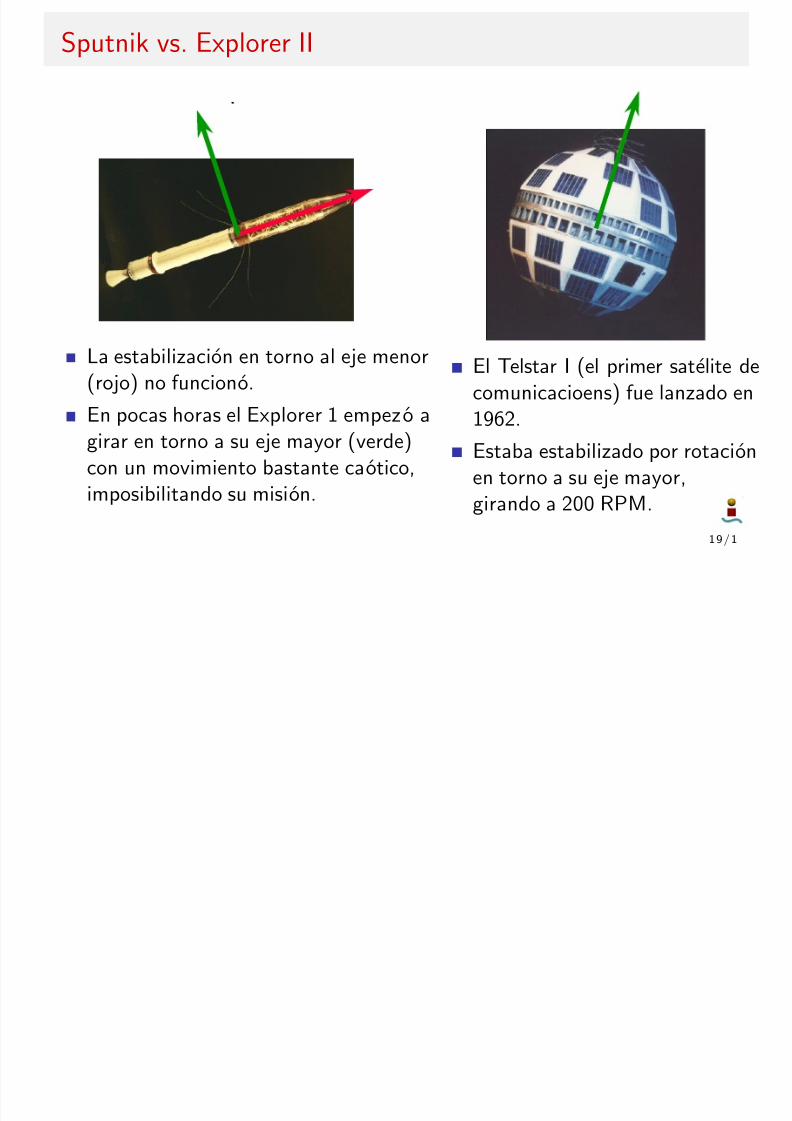
La estabilizacion en torno al eje menor(rojo) no funciono.
En pocas horas el Explorer 1 empezo agirar en torno a su eje mayor (verde)con un movimiento bastante caotico,imposibilitando su mision.
El Telstar I (el primer satelite decomunicacioens) fue lanzado en
1962.Estaba estabilizado por rotacionen torno a su eje mayor,girando a 200 RPM.
1 9 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 20/58
Regla del Eje Mayor: Excepciones
El eje menor es inestable, pero eltiempo caracterıstico de lainestabilidad es lento (horas).
Tıpicamente se estabiliza por rotacionen torno al eje menor en las ultimasetapas de los vehıculos lanzadores,antes de encender dichas etapas.
Esta rotacion causa rigidezgiroscopica, que disminuyemucho los errores causados poruna alineacion no perfecta entrela direccion deseada depropulsion y la fuerza propulsiva
real.Tras el encendido, dicharotacion se detiene, por ejemplocon un mecanismo yo-yo, o sepermite que la propia dinamica
la transfiera a una rotacion entorno al eje mayor.
Ejemplo: Mars Odissey.
2 0 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 21/58
Efecto de una rueda en la dinamica rotacional
X
Y
Z
! !! ! R
R
Platform
Una rueda, volante de inercia o rotor situadaen el interior o exterior del vehıculo y que se
encuentre en rotacion, produce un efecto deestabilizacion al proporcionar rigidezgiroscopica al conjunto.
Ademas, con una rueda se puede estabilizarel eje intermedio, o el menor, incluso en
presencia de disipacion de energıa.
Ademas se pueden provocar rotaciones (maniobras) porreaccion: si la rueda se acelera en un sentido, en ausencia demomentos externos el vehıculo ha de girar en sentido contrario
debido a que el momento cinetico total no puede cambiar.El ejemplo mas extremo de este principio es un CMG(giroscopo de control de momentos); consiste en una rueda dealta inercia y gran velocidad fija pero ejes moviles.
2 1 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 22/58
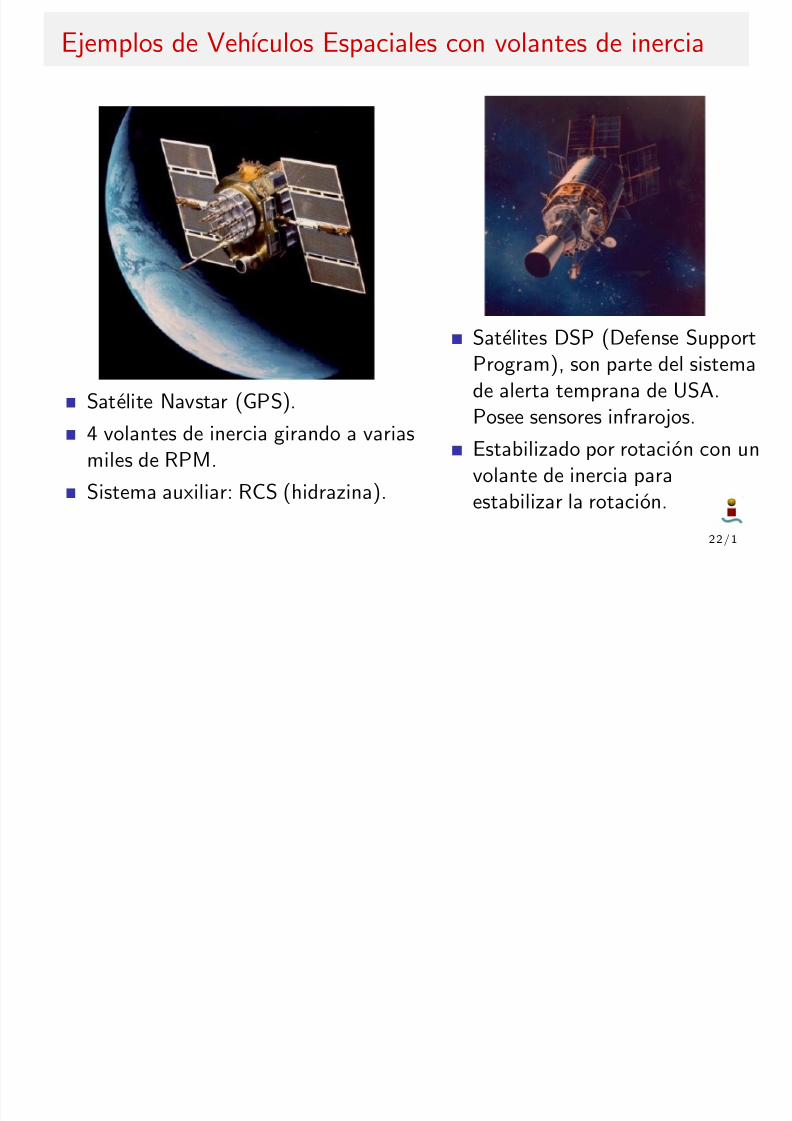
Ejemplos de Vehıculos Espaciales con volantes de inercia
Satelite Navstar (GPS).
4 volantes de inercia girando a variasmiles de RPM.
Sistema auxiliar: RCS (hidrazina).
Satelites DSP (Defense SupportProgram), son parte del sistemade alerta temprana de USA.
Posee sensores infrarojos.Estabilizado por rotacion con unvolante de inercia paraestabilizar la rotacion.
2 2 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 23/58
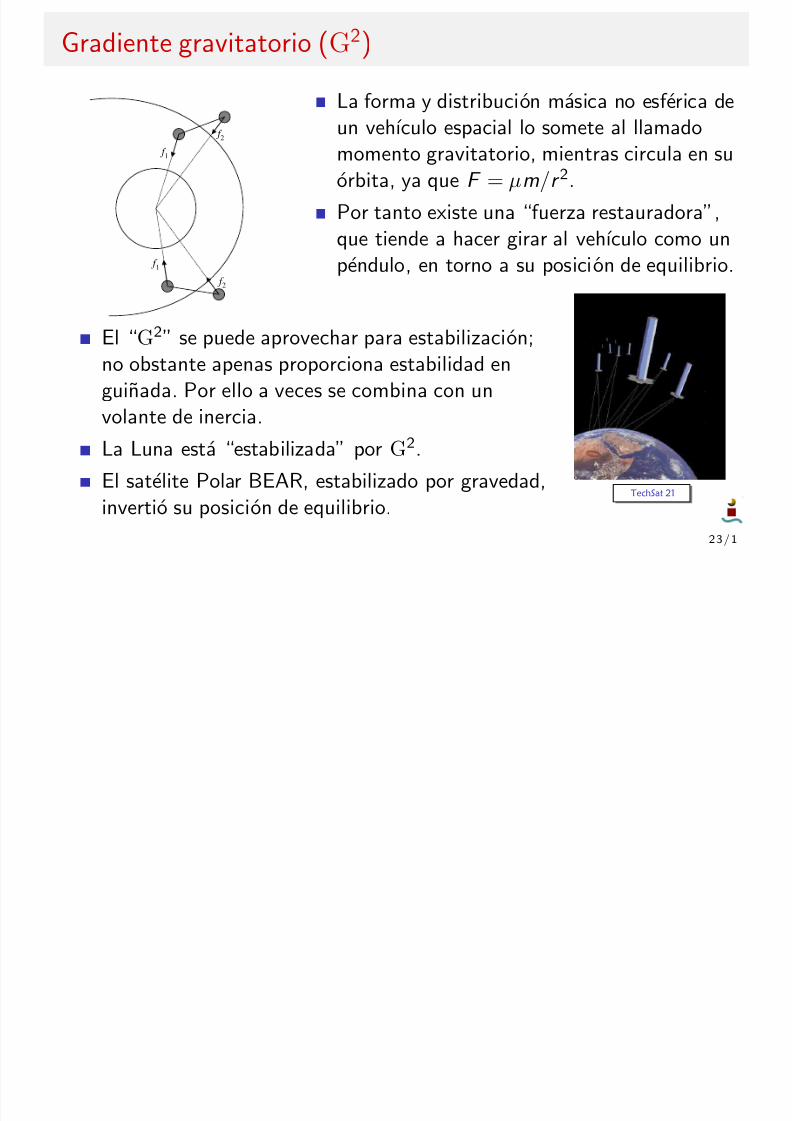
Gradiente gravitatorio (G2)
f 1
f 2
f 1
f 2
La forma y distribucion masica no esferica deun vehıculo espacial lo somete al llamadomomento gravitatorio, mientras circula en suorbita, ya que F = µm/r 2.
Por tanto existe una “fuerza restauradora”,que tiende a hacer girar al vehıculo como unpendulo, en torno a su posicion de equilibrio.
El “G2” se puede aprovechar para estabilizacion;no obstante apenas proporciona estabilidad enguinada. Por ello a veces se combina con un
volante de inercia.La Luna esta “estabilizada” por G2.
El satelite Polar BEAR, estabilizado por gravedad,invertio su posicion de equilibrio.
G*=4-#& @HG*=4-#& @H
2 3 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 24/58
Sistemas estabilizados en tres ejes
Los satelites que tienen un sistema ADCS que controla
totalmente su actitud se denominan estabilizados en tres ejes.Por ejemplo, el sistema de control de actituddel telescopio Hubble es uno de los sistemasmas precisos jamas construidos por el hombre.
El telescopio principal tiene que ser capaz de
mantener su posicion respecto a un blanco conuna precision de 0.007 segundos de arco (elancho de un cabello humano visto a 1.5 km dedistancia).
Un golfista con esa precision (y la fuerza necesaria) serıa capaz
de realizar un “hoyo en uno” en un campo de golf en Malagaefectuando la salida desde Moscu, 19 de cada 20 veces!
El Hubble realiza su control de actitud en tres ejes empleandoruedas de reaccion y volantes de inercia.
2 4 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 25/58
Sensores y Actuadores para ADCS
Ademas de los algoritmos y ordenadores de a bordo, elsistema ADCS requiere un hardware especializado para llevara cabo su mision.
Clasicamente, los dispositivos se dividen en actuadores ysensores.
Como sucede en muchos dispositivos realizados para vehıculosespaciales, muchas veces los sensores y actuadores sonfabricados especıficamente para cada mision(“custom-made”), si bien hay un cierto numero dedispositivos estandar disponibles en el mercado.
Aunque no se mencionara, tıpicamente todos los disenos sonredudantes, permitiendo fallos (incluso simultaneos) de variosdispositivos.
2 5 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 26/58
Sensores
Existen tres tipos fundamentales de sensores, de acuerdo alfenomeno fısico en el que se basan:
Opticos: detectan la direccion relativa de un cuerpo planetarioo estelar.Mecanicos: miden la velocidad angular del vehıculo respecto aun sistema de referencia inercial.Magneticos: solo se pueden usar en la proximidad (LEO) deplanetas con un campo magnetico de intensidad suficiente
(p.ej. la Tierra).
Aunque no es tecnicamente sencillo, esta demostrado que esposible usar el sistema GPS para altitudes desde LEO hastaGEO. Su uso se basa en usar varias antenas receptoras,deduciendose la actitud de la diferencia en la senal recibida en
ambas.
Tıpicamente se mezclan varios tipos de sensores con variosanchos de banda y se obtiene la actitud de las medidasmediante un Filtro de Kalman o similar.
2 6 / 1
ree
months-too
long for use in this way In practice, the Earth vector direction will

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 27/58
Sensores
Precision de algunos sensores:
be monitored continuously; the '90° time' merely gives an indication
of
the degradation
in accuracy due to the sensor system's reliance upon inertial sensors.
The accuracy required will normally be set
by
the payload, its pointing direction and the
required
measurement accuracy. There
wiII be
an ultimate accuracy
of
measurement that
is determined by the object used by the sensor; stars provide the most accurate sources,
with the Sun and Earth being progressively less accurate
by
virtue
of
the angle that they
subtend at the sensor and the fuzziness
of
the Earth horizon. A rough guide to accuracies
is shown in Table 9.3.
Table 9.3 Potential accuracies
of
reference sensors
Reference object
Stars
Sun
Earth (horizon)
RF
beacon
Magnetometer
Narstar Global Positioning System (GPS)
Potential accuracy
1 arc second
1
arc minute
6
arc minutes
1 arc minute
30 arc minutes
6 arc minutes
Note:
This
table gives
only
a guideline. The GPS estimate depends
upon
the
baseline
used
(see text).
2 7 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 28/58
Sensores Opticos
Un sensor optico trata de deducir la direccion (respecto al
sistema de ejes en el que se encuentra montado, es decir, ejescuerpo) de un cuerpo planetario o estelar de referencia.
Tıpicamente estos cuerpos seran el Sol, la Tierra o unaestrella.
Si bien en general determinan una direccion (es decir dos
angulos), en algunos casos de sensores mas sencillo seencuentra un unico angulo.
Un solido rıgido tiene tres grados de libertad en su actitud, ypuesto que tıpicamente se obtendran bastantes medidas, elproblema de la estimacion estara sobre-determinado. Para
resolverlo se emplean metodos estadısticos y/o filtros deestimacion (p.ej. el Filtro de Kalman, si tambien se usangiroscopos).
2 8 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 29/58
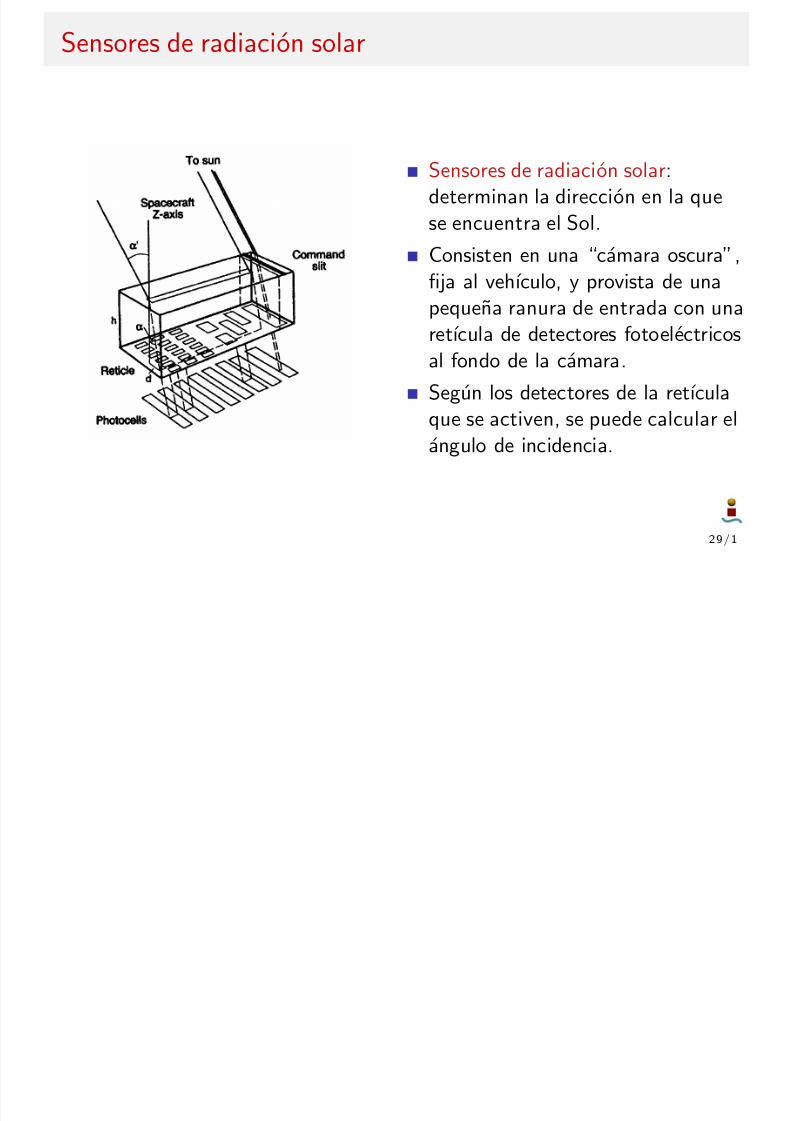
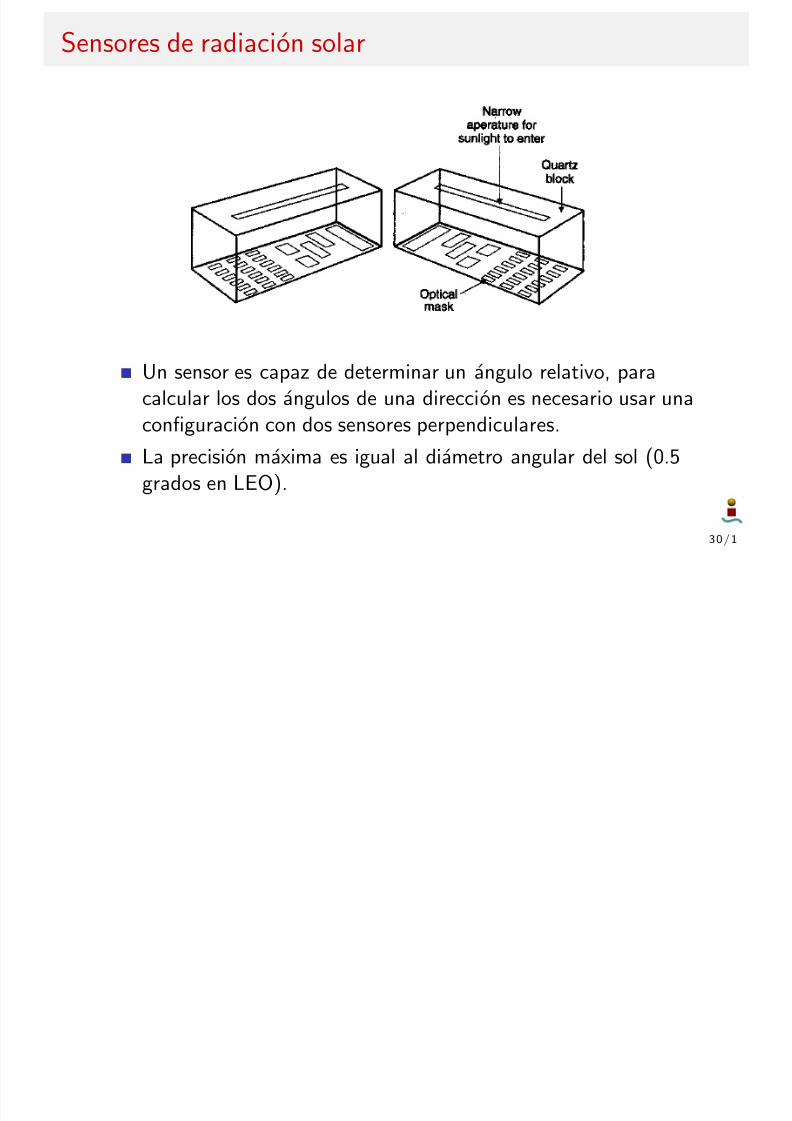
Sensores de radiacion solar
Sensores de radiacion solar:determinan la direccion en la quese encuentra el Sol.
Consisten en una “camara oscura”,
fija al vehıculo, y provista de unapequena ranura de entrada con unaretıcula de detectores fotoelectricosal fondo de la camara.
Segun los detectores de la retıcula
que se activen, se puede calcular elangulo de incidencia.
2 9 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 30/58
Sensores de radiacion solar
Un sensor es capaz de determinar un angulo relativo, paracalcular los dos angulos de una direccion es necesario usar una
configuracion con dos sensores perpendiculares.
La precision maxima es igual al diametro angular del sol (0.5grados en LEO).
3 0 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 31/58
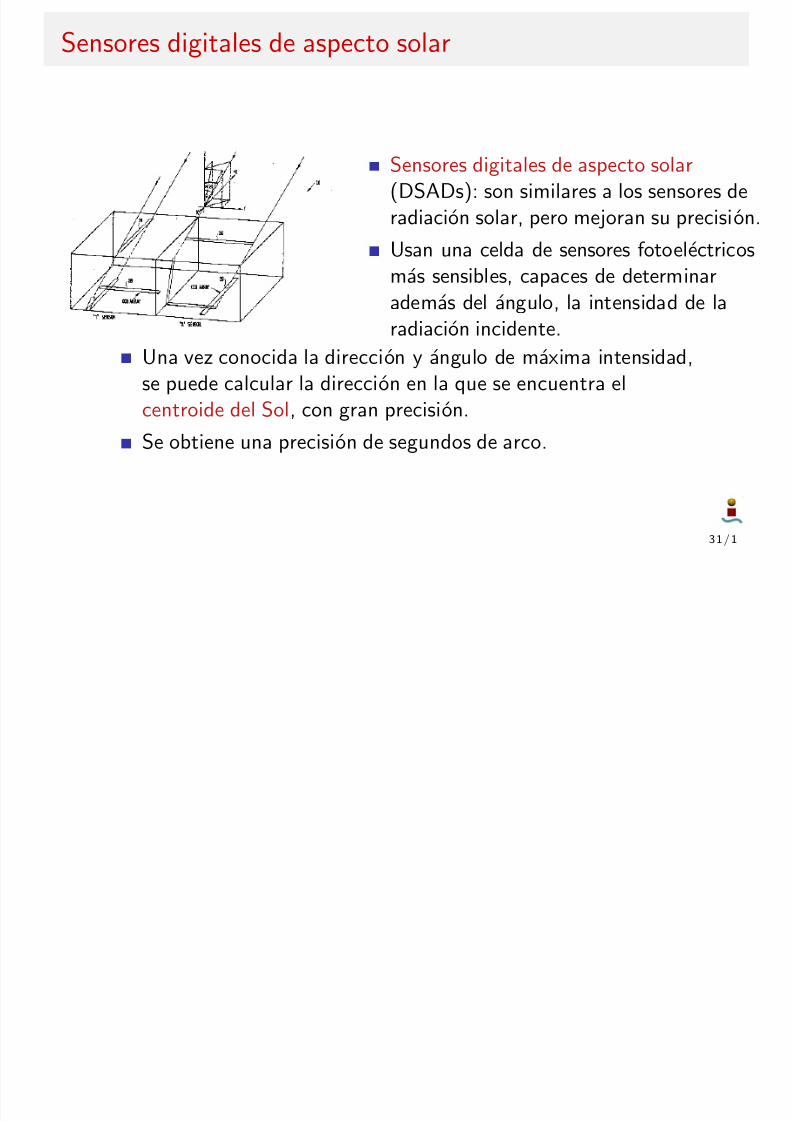
Sensores digitales de aspecto solar
Sensores digitales de aspecto solar(DSADs): son similares a los sensores deradiacion solar, pero mejoran su precision.
Usan una celda de sensores fotoelectricos
mas sensibles, capaces de determinarademas del angulo, la intensidad de laradiacion incidente.
Una vez conocida la direccion y angulo de maxima intensidad,se puede calcular la direccion en la que se encuentra el
centroide del Sol, con gran precision.Se obtiene una precision de segundos de arco.
3 1 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 32/58
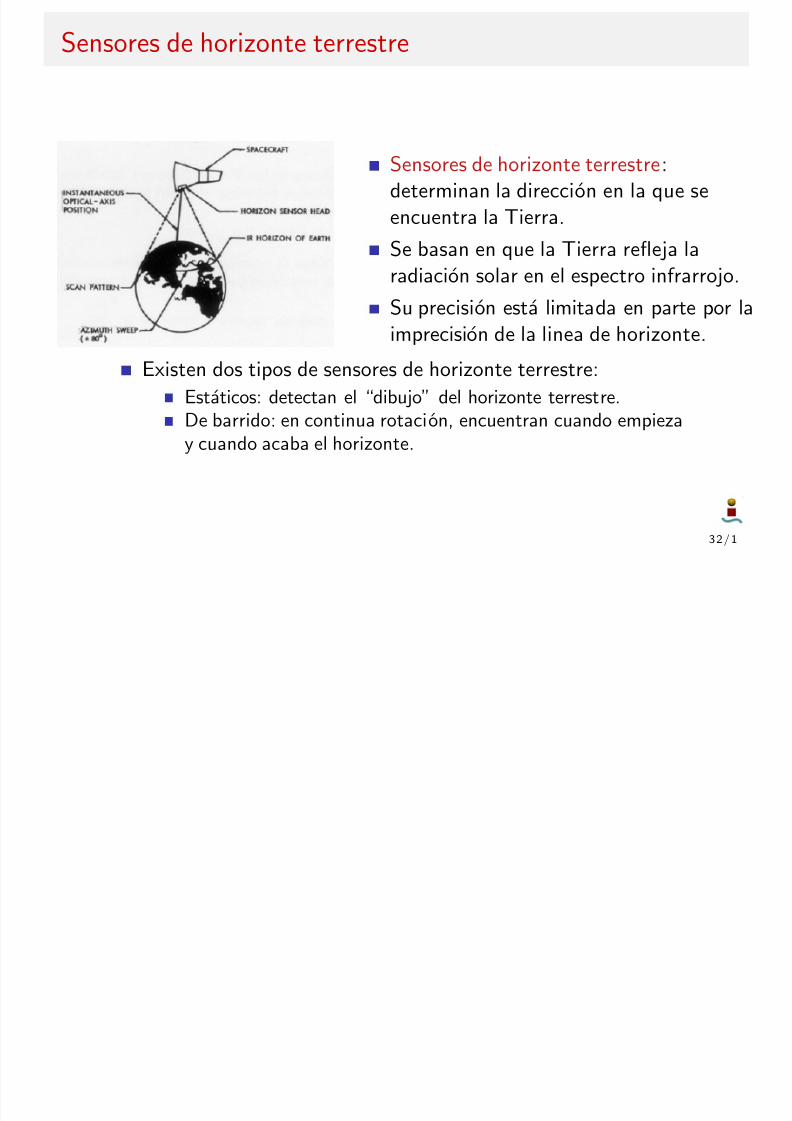
Sensores de horizonte terrestre
Sensores de horizonte terrestre:determinan la direccion en la que seencuentra la Tierra.
Se basan en que la Tierra refleja la
radiacion solar en el espectro infrarrojo.Su precision esta limitada en parte por laimprecision de la linea de horizonte.
Existen dos tipos de sensores de horizonte terrestre:
Estaticos: detectan el “dibujo” del horizonte terrestre.
De barrido: en continua rotacion, encuentran cuando empiezay cuando acaba el horizonte.
3 2 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 33/58
Sensores de horizonte terrestre
Sensor de tipo estatico.
Complejo en orbitas
excentricas.Su precision va de 0.1 grados(LEO) a 0.01 grados (GEO).
Sensor de tipo barrido.
Se calcula el ancho del horizonte en basea cuando aparece y desaparece la senal.
Precision variable (minutos de arco omenos).
3 3 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 34/58
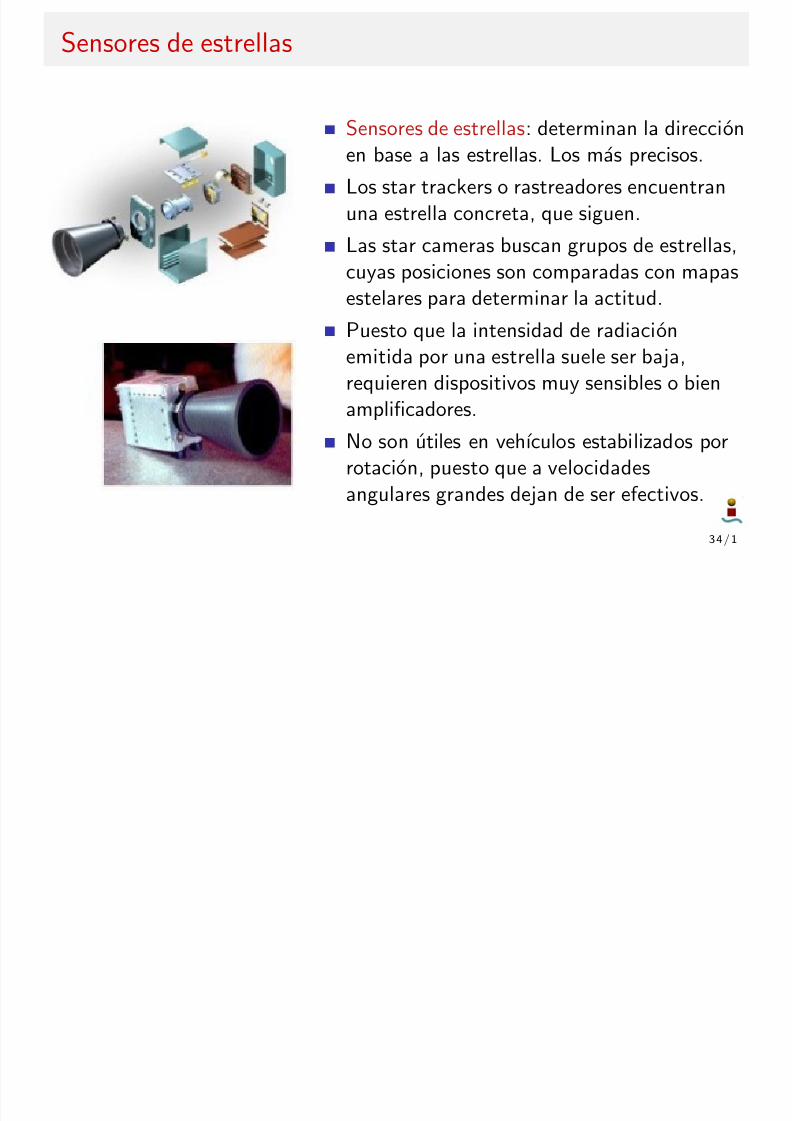
Sensores de estrellas
Sensores de estrellas: determinan la direccionen base a las estrellas. Los mas precisos.
Los star trackers o rastreadores encuentranuna estrella concreta, que siguen.
Las star cameras buscan grupos de estrellas,
cuyas posiciones son comparadas con mapasestelares para determinar la actitud.
Puesto que la intensidad de radiacionemitida por una estrella suele ser baja,requieren dispositivos muy sensibles o bien
amplificadores.No son utiles en vehıculos estabilizados porrotacion, puesto que a velocidadesangulares grandes dejan de ser efectivos.
3 4 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 35/58
Sensores mecanicos: giroscopos
Giroscopos: Tıpicamente en configuracion“strap-down” (fijos a los ejes cuerpo), losgiroscopos miden la velocidad angular en uneje.
Tres giroscopos en ejes perpendiculares
podran calcular todas las componentes de lavelocidad angular.
El principal problema de los giroscopos es que, aunque soncapaces de realizar medidas de gran precision (desde 1 gradopor hora hasta 10 segundos de arco por hora), no
proporcionan una medida angular, sino de velocidad angular.Dicha medida debe ser integrada en el tiempo (usando lasecuaciones diferenciales cinematicas) para obtener la actitud.
3 5 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 36/58
Sensores mecanicos: giroscopos
Inevitablemente pequenos errores se acumularan y provocaranun error de deriva en la medida.
Por ese motivo, los sensores giroscopicos siempre se usan encombinacion con otros sensores.
No obstante son muy deseables por su elevado ancho debanda (bajo en el resto de los sensores).
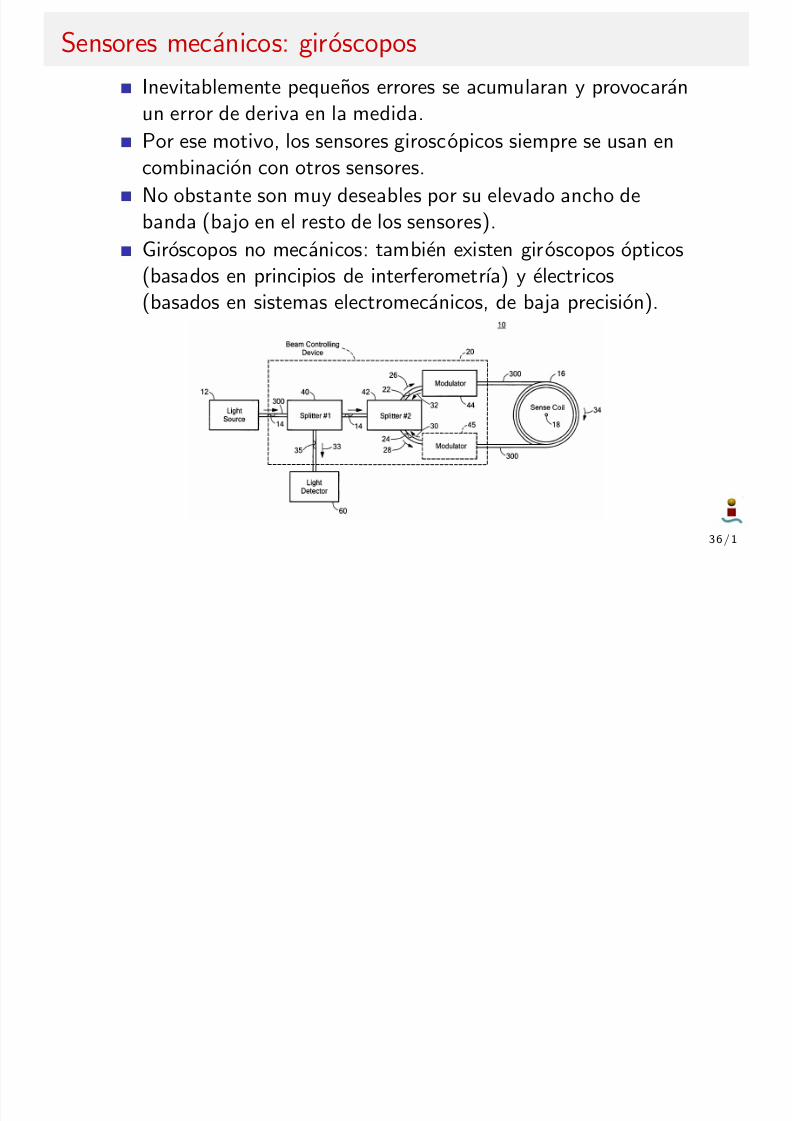
Giroscopos no mecanicos: tambien existen giroscopos opticos
(basados en principios de interferometrıa) y electricos(basados en sistemas electromecanicos, de baja precision).
3 6 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 37/58
Sensores magneticos (magnetometros)
Un magnetometro mide el vectorcampo magnetico en el sistema dereferencia ejes cuerpos.
Se compara con el campomagnetico teorico en los ejes fijos
de la Tierra, para hallar la actitud.
No muy precisos por lairregularidad del campo magneticoterrestre.
Satelite Ørsted, medidas precisas
del campo magnetico terrestre.“Boom” (mastil) de 8 metros paraminimizar las interferencias delpropio satelite en el magnetometro.
3 7 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 38/58
Actuadores
Existen diferentes tipos de actuadores para controlar la
actitud de un vehıculo espacial, entre los que destacan:Propulsores: basados en la expulsion de masa a alta velocidad.Ruedas/Volantes de inercia: discos de velocidad variables, quecontrolan la actitud basandose en el intercambio de momentocinetico.Giroscopos de control de momento (CMG): son volantes de
inercia que rotan a velocidad constante, pero que pueden serrotados en el espacio, de forma que provocan una reaccion porla conservacion de momento cinetico.Magnetopares o varillas magneticas, que utilizan el campomagnetico para provocar un par.Elementos estructurales para control pasivo: mastiles,
“booms”, disipadores, sistemas yo-yo...Tıpicamente habra dos o mas tipos de actuadores en unvehıculo, ya que son complementarios en sus caracterısticas.
3 8 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 39/58
Propulsores
Son el actuador mas eficaz, capazde ejercer actuaciones de elevadamagnitud con rapidez.
El mas costoso y de uso limitado,ya que utilizan combustible.
Para ejercer un par, se utilizan enuna configuracion en pareja (porcada eje que se pretenda controlar).
Nunca se utiliza un unico par por
eje, sino varias toberas de formaredundante.
El conjunto de elementos depropulsion junto con la logica decontrol se denomina Sistema de
Control de Reaccion (RCS)
3 9 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 40/58
Ejemplos de RCS
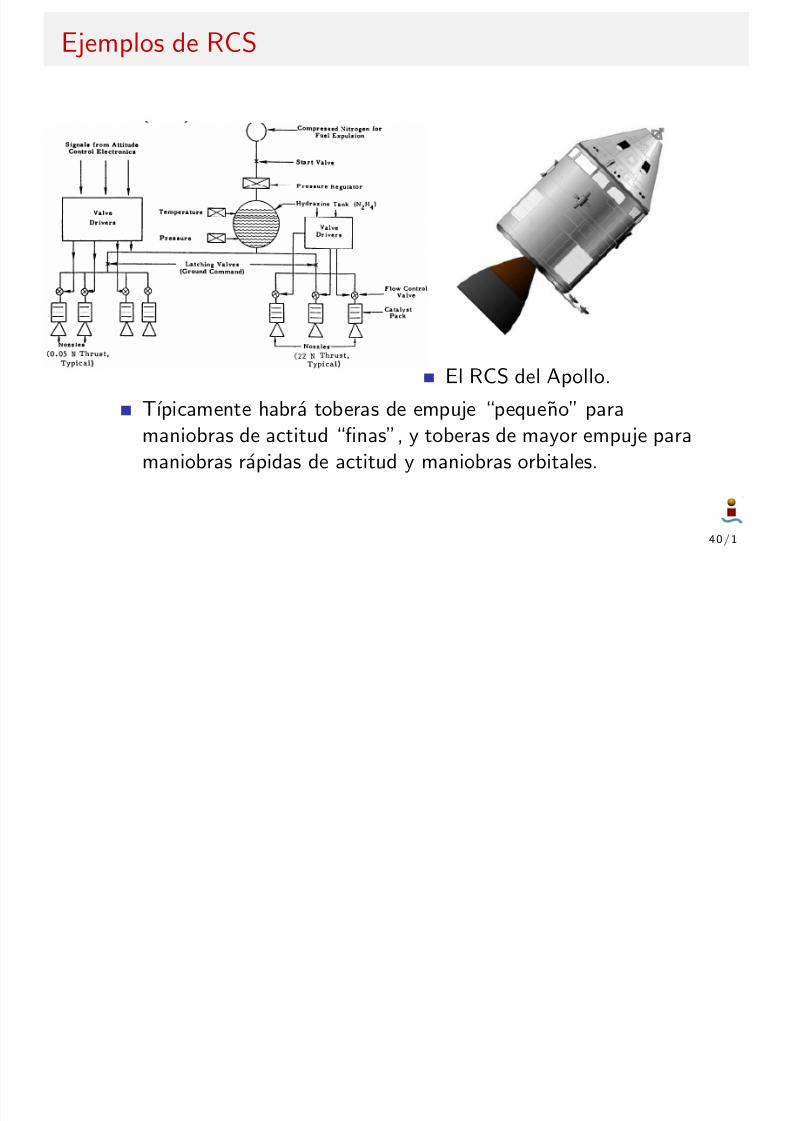
El RCS del Apollo.
Tıpicamente habra toberas de empuje “pequeno” paramaniobras de actitud “finas”, y toberas de mayor empuje paramaniobras rapidas de actitud y maniobras orbitales.
4 0 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 41/58
Ruedas y Volantes de Inercia
Son elementos compuestos por undisco de elevada inercia (muyelevada en el caso de los volantesde inercia).
Poseen un motor electrico que hacegirar al disco con la velocidaddeseada.
La diferencia fundamental entre losvolantes de inercia y las ruedas dereaccion es que los volantes deinercia (bias momentum wheel)estan disenados para rotarpermanentemente a una ciertavelocidad de base (que proporciona
estabilidad giroscopica), sobre laque se pueden realizar cambiospara absorber momentosperturbadores o rotar el vehıculo.
4 1 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 42/58
Ruedas y Volantes de Inercia
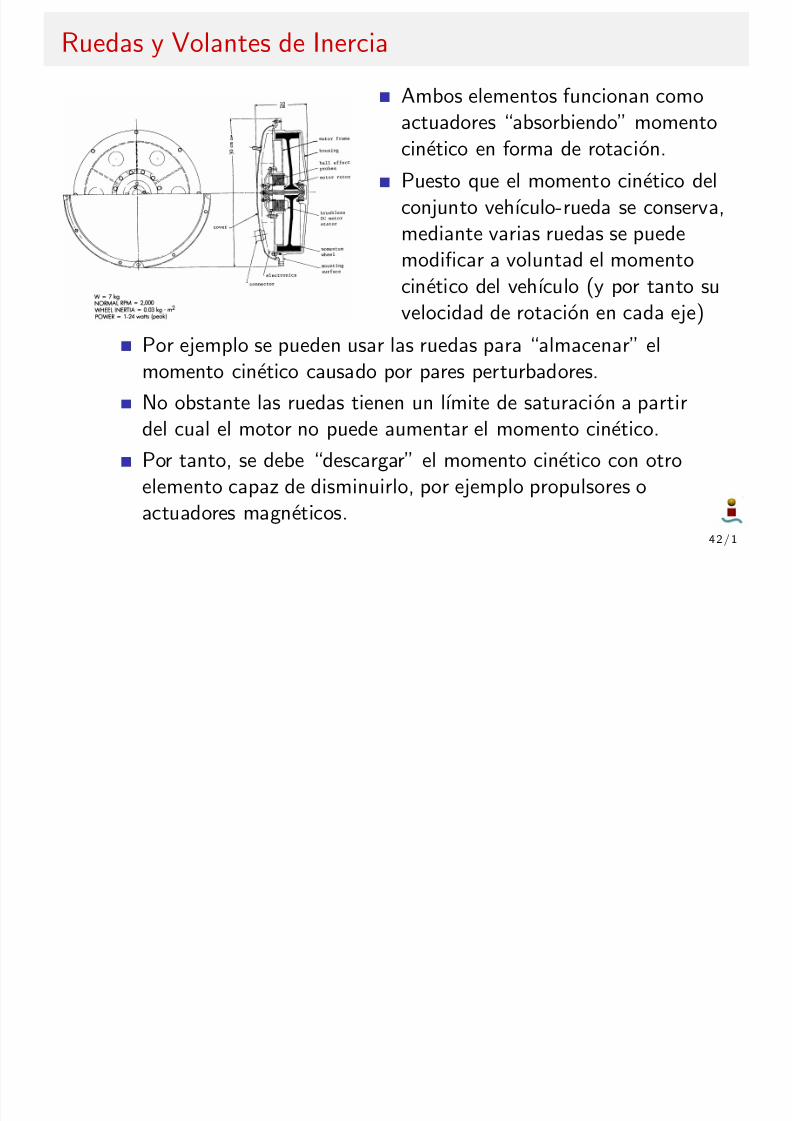
Ambos elementos funcionan comoactuadores “absorbiendo” momento
cinetico en forma de rotacion.
Puesto que el momento cinetico delconjunto vehıculo-rueda se conserva,mediante varias ruedas se puedemodificar a voluntad el momento
cinetico del vehıculo (y por tanto suvelocidad de rotacion en cada eje)
Por ejemplo se pueden usar las ruedas para “almacenar” elmomento cinetico causado por pares perturbadores.
No obstante las ruedas tienen un lımite de saturacion a partir
del cual el motor no puede aumentar el momento cinetico.
Por tanto, se debe “descargar” el momento cinetico con otroelemento capaz de disminuirlo, por ejemplo propulsores oactuadores magneticos.
4 2 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 43/58
Magnetopares
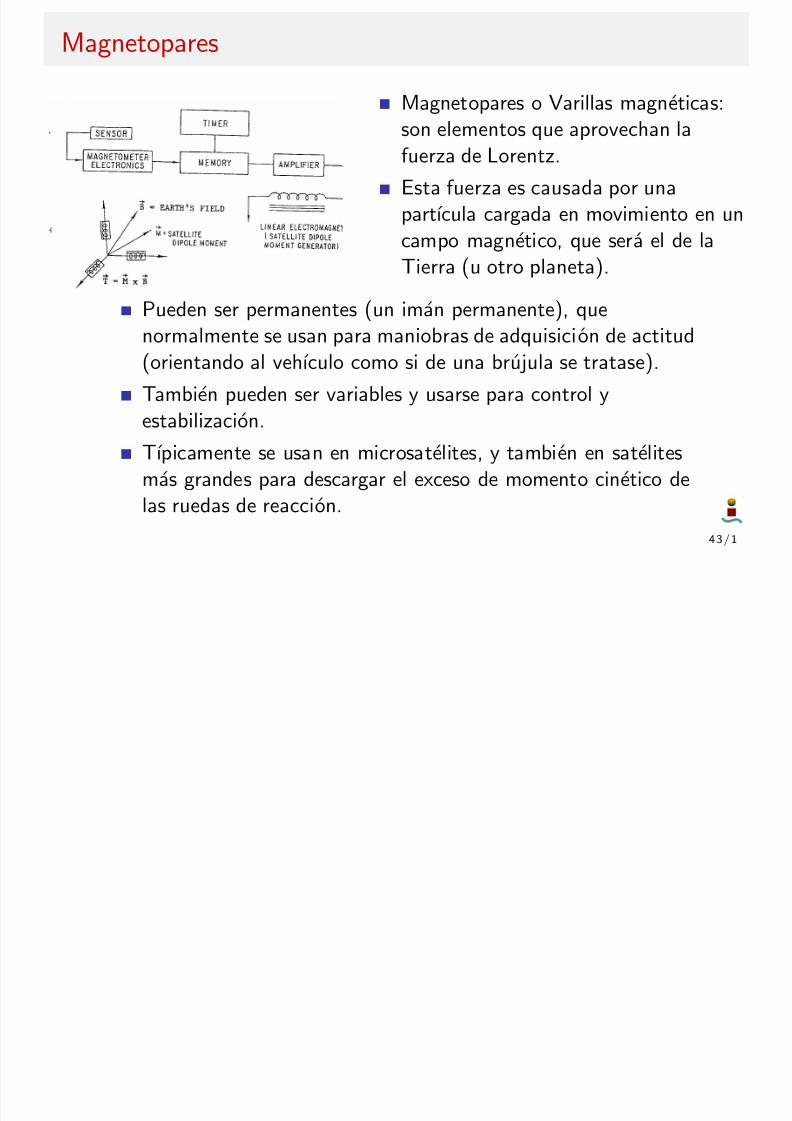
Magnetopares o Varillas magneticas:son elementos que aprovechan lafuerza de Lorentz.
Esta fuerza es causada por unapartıcula cargada en movimiento en uncampo magnetico, que sera el de laTierra (u otro planeta).
Pueden ser permanentes (un iman permanente), quenormalmente se usan para maniobras de adquisicion de actitud(orientando al vehıculo como si de una brujula se tratase).
Tambien pueden ser variables y usarse para control y
estabilizacion.Tıpicamente se usan en microsatelites, y tambien en satelitesmas grandes para descargar el exceso de momento cinetico delas ruedas de reaccion.
4 3 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 44/58
Elementos de control estructurales
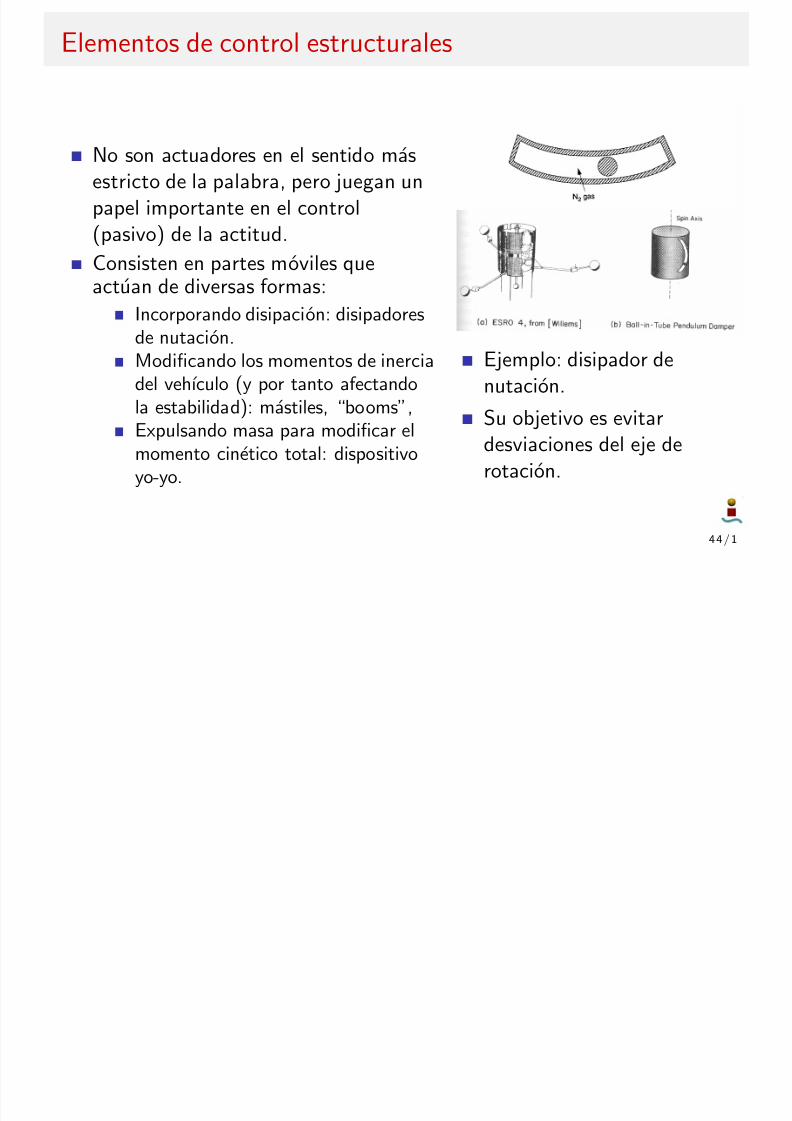
No son actuadores en el sentido masestricto de la palabra, pero juegan unpapel importante en el control(pasivo) de la actitud.
Consisten en partes moviles que
actuan de diversas formas:Incorporando disipacion: disipadoresde nutacion.Modificando los momentos de inerciadel vehıculo (y por tanto afectandola estabilidad): mastiles, “booms”,Expulsando masa para modificar elmomento cinetico total: dispositivoyo-yo.
Ejemplo: disipador denutacion.
Su objetivo es evitardesviaciones del eje derotacion.
4 4 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 45/58
Elementos de control estructurales
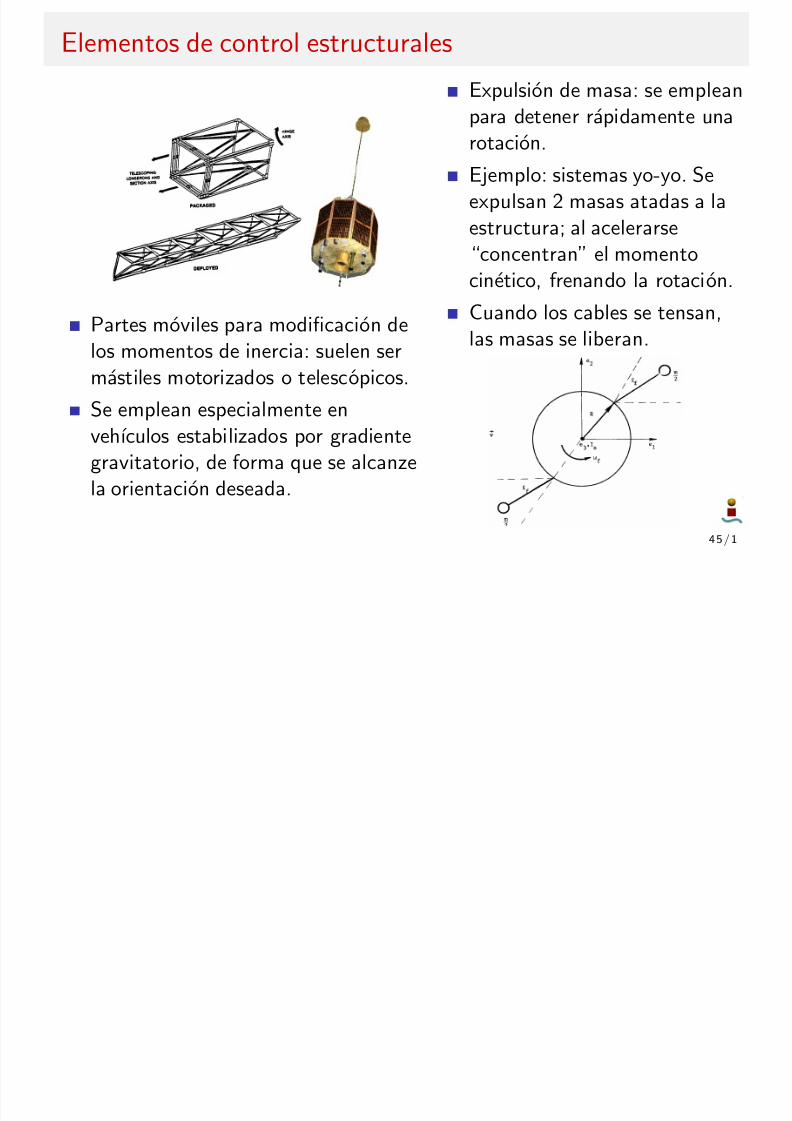
Partes moviles para modificacion delos momentos de inercia: suelen sermastiles motorizados o telescopicos.
Se emplean especialmente envehıculos estabilizados por gradientegravitatorio, de forma que se alcanzela orientacion deseada.
Expulsion de masa: se empleanpara detener rapidamente una
rotacion.Ejemplo: sistemas yo-yo. Seexpulsan 2 masas atadas a laestructura; al acelerarse“concentran” el momento
cinetico, frenando la rotacion.Cuando los cables se tensan,las masas se liberan.
4 5 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 46/58
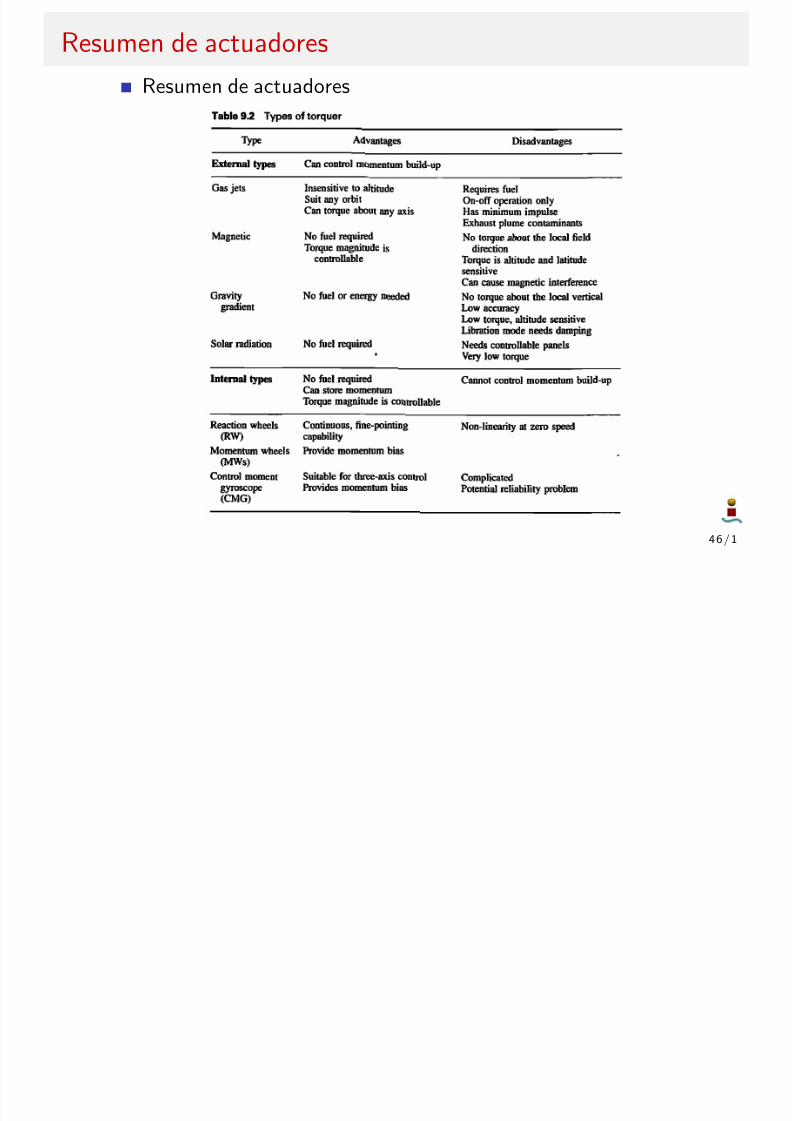
Resumen de actuadores
Resumen de actuadores00 A
TTITUDE CONTROL
Table 9.2 Types of torquer
External types
Gas jets
Magnetic
Gravity
gradient
Solar radiation
Internal types
Reaction wheels
(RW)
Momentum wheels
MWs)
Control moment
gyroscope
CMG)
Advantages
Can control momentum build-up
Insensitive
to
altitude
Suit
any
orbit
Can torque about any axis
No fuel
required
Torque
magnitude is
controllable
No fuel or energy needed
No fuel required
No
fuel
required
Can
store momentum
Torque magnitude
is
controllable
Continuous, fine-pointing
capability
Provide momentum bias
Suitable for three-axis control
Provides momentum bias
Disadvantages
Requires fuel
On-off operation only
Has minimum impulse
Exhaust plume contaminants
No
torque about the local field
direction
Torque is altitude and latitude
sensitive
Can cause magnetic interference
No torque about the local vertical
Low accuracy
Low torque, altitude sensitive
Libration mode needs damping
Needs controllable panels
Very
low torque
Cannot control momentum build-up
Non-linearity at zero speed
Complicated
Potential reliability problem
Thrusters with very much lower levels
of
thrust are in common use in attitude-control
systems for providing controllable external torquing, and hence controIIing the total
impulses, and thei
mum torque bein
required
with a t
is a reaction whe
momentum dump
may be used perh
A variety of thr
as indicated in Se
The fact that t
fuel is not norma
number
of
spacec
9.4.2
Magn
The magnetic fiel
and thereby exert
a compass needle
spacecraft s mag
reacts with the lo
Care must be tak
significant disturb
Electromagnets
can
be
controlled
the couple:
where
n
is the
is the
e s the
Rod-like electr
4 6 / 1
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 47/58
Control de actitud
El sistema de control de actitud de los satelites se puededividir a muy grandes rasgos en dos grandes tipos:
Satelites estabilizados por rotacion: se aprovechan del efectogiroscopico para mantener una direccion inercialmente fija.Mas barato y sencillo.Satelites estabilizados en los tres ejes: utilizan algunmecanismo de control activo para mantener su actitud fijarespecto a alguna referencia.
Muchos satelites pueden usar los dos modos, segun la fase dela mision (particularmente sondas interplanetarias).
Tambien se pueden estabilizar satelites utilizando el gradientegravitatorio (no require control activo de ningun tipo, pero es
poco preciso), o mediante algun sistema de rotacion doble(esencialmente similares a los estabilizados por rotacion). Enlas siguientes transparencias veremos los tipos deestabilizacion comunmente empleados.
4 7 / 1

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 48/58
Metodos de control de actitud
Otra clasificacion de los metodos de control de actitud en dosclases: control activo y control pasivo.
No obstante, la palabra pasivo tiene, en teorıa de control,varias interpretaciones.Control pasivo en el sentido energetico: un sistema de controlque no requiere ningun tipo de fuente de energıa adicional parasu funcionamiento.Pasivo en el sentido estructural: un sistema de control que
carece de logica de comando, es decir, no necesita ningun tipode procesado de informacion para su actuacion, puesto queaprovecha algun tipo de efecto fısico o natural.Ademas, existe el concepto de “Sistema Pasivo”, unadefinicion matematica utilizada en control no lineal.
Esto no se debe confundir con la distincion entre BucleAbierto y Bucle Cerrado.
Los sistemas que denominaremos de Control Pasivo no lo sonestrictamente, sino que en general incorporan algun elementoactivo complementario.
4 8 / 1
S

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 49/58
Sistemas de control pasivos
Los sistemas de Control Pasivo tipicamente encontrados envehıculos espaciales son los siguientes:
Estabilizacion por rotacion (spin stabilized systems).Estabilizacion por rotacion doble (dual-spin stabilized systems).Estabilizacion por gradiente gravitatorio (G2).Estabilizacion por volante de inercia (bias-momentumstabilized systems). Este metodo tambien se puede consideraractivo.Estabilizacion por momentos magneticos. Este metodotambien se puede considerar activo.
4 9 / 1
E b l ´ ´

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 50/58
Estabilizacion por rotacion
Estabilizacion por rotacion: Sistemasimple y economico para estabilizar la
actitud.Si el sistema es puramente pasivo, eleje de rotacion debe ser el eje mayor.
Tıpico en vehıculos con simetrıa derevolucion, que deben ser oblatos y no
prolatos.Las perturbaciones provocaran unmovimiento de nutacion del eje derotacion, que puede ser eliminadomediante amortiguadores de nutacion.
Para acelerar o frenar la rotacion se emplean propulsores o(para frenar) sistemas yo-yo.
Los propulsores tambien se pueden emplear para re-orientar eleje de rotacion (coning o “coneo”).
5 0 / 1
E bili i´ i´ d bl

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 51/58
Estabilizacion por rotacion doble
Estabilizacion por rotacion doble: Cuando
se requiere mayor precision de actitud opor requisitos de lanzamiento el vehıculono puede ser oblato, se recurre al sistemade estabilizacion de rotacion doble.
Una parte del vehıculo (rotor) gira a una
cierta velocidad, mientras que otra partedel vehıculo (plataforma o estator) nogira o rota muy despacio.
En la plataforma se suelen ubicarinstrumentos de medida.
Si el rotor adquiere el suficiente momento cinetico, la rotacionpuede ser alrededor del eje menor o incluso el intermedio,permitiendo mayor libertad en la forma del vehıculo ymejorando la maniobrabilidad.
5 1 / 1
E bili i´ di di i i

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 52/58
Estabilizacion mediante gradiente gravitatorio
El G2 puede ser utilizado paraestabilizar de forma simple y barata,de forma que siempre se apunte a uncuerpo central y la orbita seacasi-circular.
Es un mecanismo lento y poco preciso,requiere elementos disipadores.
Proporciona baja maniobrabilidad ypoca estabilidad en guinada.
El gradiente gravitatorio tiendea alinear el eje menor con la
vertical local, el eje intermediocon la direccion de la orbita yel eje mayor perpendicular alplano de la orbita, lo que debeser considerado en el diseno.
5 2 / 1
E bili i´ di di i i

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 53/58
Estabilizacion mediante gradiente gravitatorio
El G2 en algunos casos es un mecanismo secundario, paraahorrar combustible en los momentos en los que no es crıtico
una actitud precisa.
Los satelites de mas larga vida incorporan este tipo deestabilizacion.
5 3 / 1
E bili i´ l d i i
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 54/58
Estabilizacion con volante de inercia
El mismo concepto de los sistemasde rotacion doble se puede incorporara un vehıculo espacial con una rueda
interna (volante de inercia) rotando auna cierta velocidad base, eliminandoası la necesidad de elementosexternos rotatorios.
Ademas se puede emplearcomo parte de un sistema decontrol activo.
El volante de inercia se suelecolocar con el ejeperpendicular al plano orbital,combinandose con el G2.
Para realizar maniobras en elplano orbital, si se acelera ofrena el volante, provoca que elvehıculo rote en la direccionopuesta, por conservacion delmomento cinetico.
5 4 / 1
E t bili i´ t ´ti
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 55/58
Estabilizacion por momentos magneticos
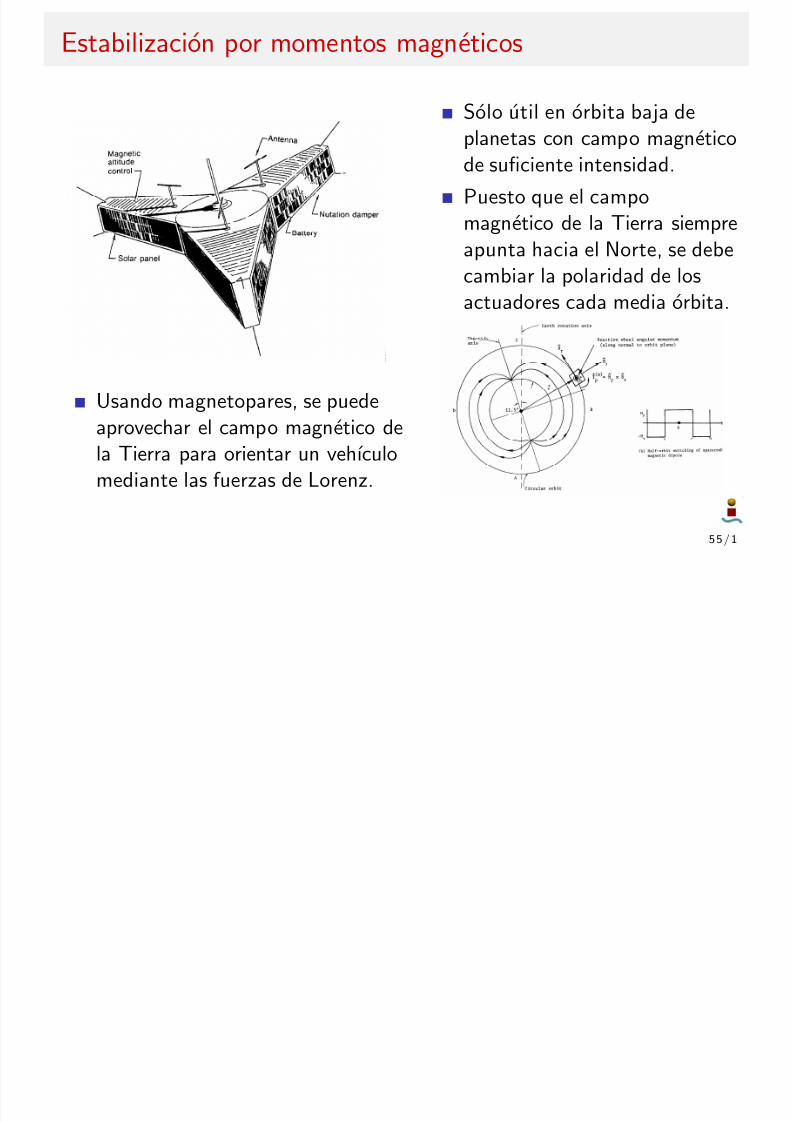
Usando magnetopares, se puede
aprovechar el campo magnetico dela Tierra para orientar un vehıculomediante las fuerzas de Lorenz.
Solo util en orbita baja de
planetas con campo magneticode suficiente intensidad.
Puesto que el campomagnetico de la Tierra siempreapunta hacia el Norte, se debe
cambiar la polaridad de losactuadores cada media orbita.
5 5 / 1
Si t d t l ti
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 56/58
Sistemas de control activos
Los sistemas de Control Pasivo permiten un nivel deestabilidad adecuado para muchas aplicaciones
No obstante (sobre todo al principio de su vida util), todos losvehıculos necesitan realizar:
Maniobras de actitud.Ajustes de la velocidad de rotacionManiobras de stationkeeping (mantener el apuntamiento a la
estacion o estaciones base).Para ello es necesario un sistema de control que sera activotanto en el sentido energetico como en el estructural,precisando de una fuente de energıa y una logica de control.
En misiones que requieran gran precision en la actitud dicho
sistema sera primario. En este caso se dice que el sateliteesta estabilizado en tres ejes o triaxialmente estabilizado.
En otros casos puede ser un sistema secundario que solo seactivara cuando sea necesario.
5 6 / 1
Si t d C t l d R i´ (RCS)

8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 57/58
Sistemas de Control de Reaccion (RCS)
En sistemas que requieran elevaday/o rapida maniobrabilida, seemplea un sistema de control dereaccion o RCS, que emplea unconjunto de propulsoresdistribuidos por el vehıculo paramodificar la actitud.
La llamada “logica depropulsion” establece cuando
se disparan los propulsores ycuando se acepta un pequenoerror de actitud/velocidad.
Normalmente es unacombinacion de “zonas
muertas” (sin actuacion) ehisteresis (para evitar el disparorepetitivo de propulsores).
Ademas los propulsores suelenser actuadores “todo o nada”,
con lo que siempre actuan ensaturacion.
Por tanto un RCS esintrınsecamente no-lineal.
5 7 / 1
Si t d I t bi d M t Ci ´ti
8/20/2019 Control de Posicion_dinamica
http://slidepdf.com/reader/full/control-de-posiciondinamica 58/58
Sistemas de Intercambio de Momento Cinetico
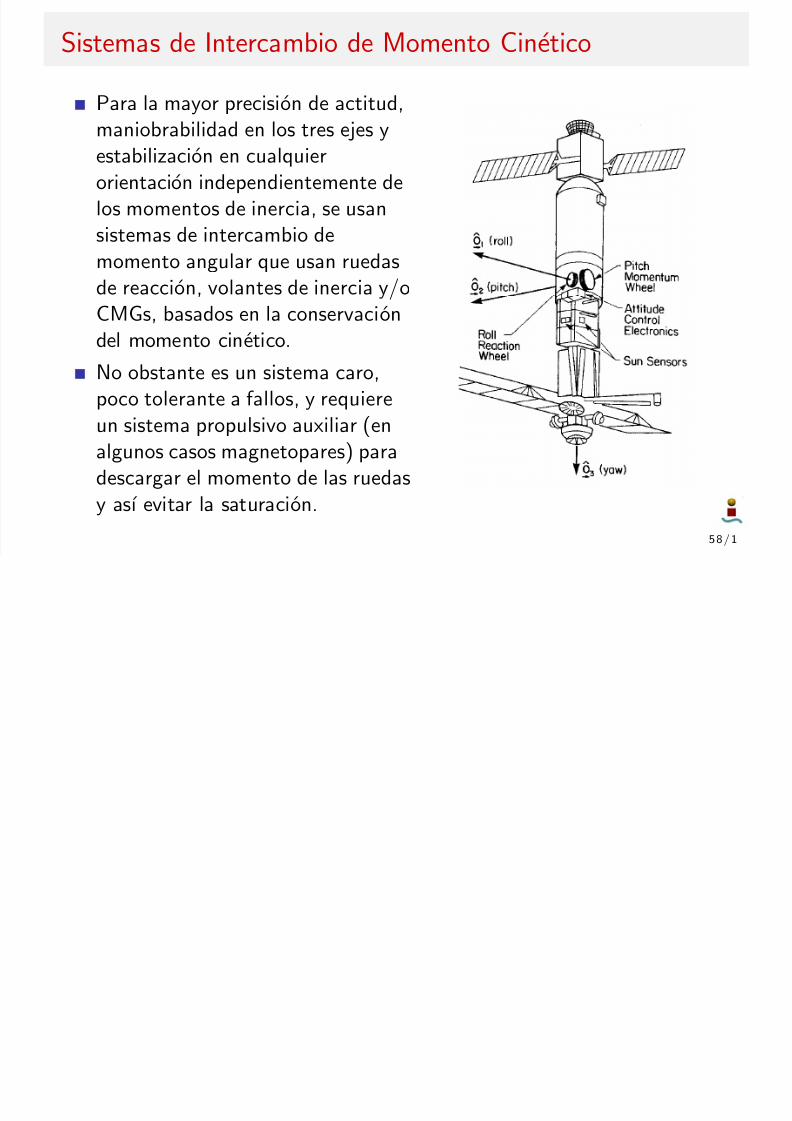
Para la mayor precision de actitud,maniobrabilidad en los tres ejes y
estabilizacion en cualquierorientacion independientemente delos momentos de inercia, se usansistemas de intercambio demomento angular que usan ruedas
de reaccion, volantes de inercia y/oCMGs, basados en la conservaciondel momento cinetico.
No obstante es un sistema caro,poco tolerante a fallos, y requiere
un sistema propulsivo auxiliar (enalgunos casos magnetopares) paradescargar el momento de las ruedasy ası evitar la saturacion.