ci-2657 robótica prof. kryscia ramírez benavides · en un robot de 2 piernas el polígono de...
TRANSCRIPT
Arquitectura General
CI-2657 RobóticaProf. Kryscia Ramírez Benavides

Componentes de un Robot
Un robot está formado por:Sistema de control (sistema nervioso)SensoresEfectores y actuadoresSistema de locomoción/manipulación
CI-2657 RobóticaArquitectura General 2

Componentes Típicos de Robots Móviles
Un conjunto de sensores:Sonares, utilizan el sonido para medir las posiciones de los objetos.Buscadores de alcance láser, utilizan un rayo láser para determinar la distancia de un objeto.Detectores infrarrojos de proximidad, utilizan la luz para determinar la presencia de objetos.Cámaras de video, pueden ser utilizadas para una serie de tareas diferentes.Táctiles, informan las fuerzas ejercidas sobre el robot de los objetos de su alrededor.
CI-2657 RobóticaArquitectura General 3

Componentes Típicos de Robots Móviles (cont.)
Un conjunto de efectores:Ruedas, piernas, y brazos.Altavoces (para sonidos).Dispensadores para diversos materiales, etc.
CI-2657 RobóticaArquitectura General 4

CI-2657 RobóticaArquitectura General 5
Introducción a RobóticaIntroducción a RobóticaSistema de Control

Sistema de Control
Su función es controlar las acciones que ejecuta el robot de tal forma que pueda cumplir con la tarea que le ha sido asignada y tomando en consideración la información del medio ambiente.
CI-2657 RobóticaArquitectura General 6

Sistema de Control (cont.)
Corresponde al sistema nervioso del robot, el cual puede variar en complejidad, de igual forma como varía la complejidad del sistema nervioso de los diferentes animales.
CI-2657 RobóticaArquitectura General 7
Sistema de Control (cont.)
Las acciones a desarrollar por un robot son gatilladas por la información que éste capta del medio ambiente, pero considerando el estado interno (mental) del mismo y la tarea a realizar.
CI-2657 RobóticaArquitectura General 8
Estrategias de Control
Las diferentes estrategias de control que pueden ser utilizadas se dividen en:
Control Reactivo (no piense, reaccione)Control Deliberativo (piense intensamente, luego actúe)Control Híbrido (Piense y actúe independientemente, en paralelo)Control basado en la conducta (Piense en la forma en que actúa)
CI-2657 RobóticaArquitectura General 9

Control Reactivo
Conjunto de reglas estímulo/respuesta Sensar → Actuar
Inherentemente concurrente (paralelo)No hay memoriaMuy rápido y reactivoIncapaz de planificar y aprender
CI-2657 RobóticaArquitectura General 10

Control Deliberativo
Basado en el modelo clásico Sensar → Planificar → Actuar
Inherentemente secuencialPlanificar requiere búsqueda, la cual es lenta
Buscar requiere poseer internamente un modelo del mundoLa búsqueda y la planificación requieren mucho tiempo
El modelo del mundo muchas veces queda obsoleto (el mundo cambia)
CI-2657 RobóticaArquitectura General 11
Control Híbrido
Combina los dos esquemas anteriores y es llamado frecuentemente sistemas de 3 capas:
Reactivo en su capa inferiorDeliberativo en su capa superiorTercer capa que conecta las 2 capas anteriores
Las capas deben operar en forma concurrenteExisten diferentes tipos de representaciones y escalas de tiempo en las diferentes capas
CI-2657 RobóticaArquitectura General 12

Control Basado en la Conducta
Alternativa a los sistemas híbridos, pero sin capa intermediaTambién posee la habilidad de actuar en forma reactiva y deliberativaUtiliza una representación y una escala de tiempo única en todo el sistema, esto permite la existencia de conductas concurrentes
CI-2657 RobóticaArquitectura General 13
Familias de Robots
La forma en que el sistema de control es construido da lugar a dos grandes familias de robots:
Robots clásicos. Están construidos en base a componentes digitales, microprocesadores que procesan información en base a programas, y memorias que almacenan la información y los programas. Similar al sistema nervioso central de los humanos.Robots BEAM (Biology Electronics AestheticsMechanics). Están construidos en base a componentes analógicos, los cuales implementan en hardware (su estructura) la funcionalidad que necesitan. Similar al sistema nervioso de los insectos.
CI-2657 RobóticaArquitectura General 14

CI-2657 RobóticaArquitectura General 15
Introducción a RobóticaIntroducción a RobóticaSensores
Sensores
Son dispositivos físicos que miden cantidades físicas. El objetivo es permitir que los robots puedan recibir y percibir información desde el mundo que los rodea. Su función es similar a la de nuestros sentidos.El tipo de sensores a utilizar dependerá de la de propiedad física que necesita ser sensada (ver la siguiente tabla).
CI-2657 RobóticaArquitectura General 16

Tipo de Sensores
Propiedad Física Tecnología
Contacto Switch, sensor de contacto
Distancia Ultrasonido, radar, infrarrojo
Luz Diodo infrarrojo, fotoresistencia
Nivel de luz / Imagen Cámaras
Sonido Micrófono
Olor Química
Temperatura Termal, infrarrojo
Inclinación Inclinómetro, giroscopio
Altitud Altímetro
… …
CI-2657 RobóticaArquitectura General 17

Conjuntos de Sensores
Buscadores de alcance: sonar (tierra, bajo el agua), telémetro de láser, radar (aviones), sensores táctiles, GPS.Sensores propioceptivos: decodificadores de eje (articulaciones, ruedas), sensores inerciales, sensores de fuerza, sensores de torque.Codificadores de eje: miden la rotación de un eje de la rueda o el motor como el odómetro de un automóvil.
Esta información puede utilizarse para medir la velocidad o para calcular la posición.
Sensores de movimiento pyro-eléctricos: reportan la presencia de una fuente de calor en movimiento, como un ser humano.
CI-2657 RobóticaArquitectura General 18

Características
El rango de complejidad de los sensores varía dependiendo de la cantidad de información que estos entregan:
Un switch es un sensor simple de tipo on/offUna cámara de video entrega una gran cantidad de información (ej. 512x512 pixeles)
Los sensores no proveen directamente la información que uno necesita (símbolos) sino que señales.
Generalmente estas señales deben ser procesadas (ej. digitalizadas, filtradas) para poder obtener información que el robot pueda entender.
CI-2657 RobóticaArquitectura General 19

Características (cont.)
Los sensores de los robots pueden ser manejados de forma activa o pasiva.
Un sensor de temperatura es generalmente un sensor de tipo pasivo, es decir, solo capta información del medio ambiente. Una cámara de video puede ser activa si posee la capacidad para moverse y “activamente” buscar objetos en su medio ambiente (por ejemplo: nuestros ojos).
El tipo de percepción que tiene un robot puede ser dividida en:
Propio-percepción: Sensa estados internos (por ejemplo: tensión de los músculos, posición de un motor)Extero-percepción: Sensa estados externos (por ejemplo: visión, audición)
CI-2657 RobóticaArquitectura General 20
CI-2657 RobóticaArquitectura General 21
Introducción a RobóticaIntroducción a RobóticaEfectores y Actuadores

Efectores y Actuadores
Un efector corresponde a cualquier dispositivo que afecte o modifique al medio ambiente.
Ejemplos: piernas, ruedas, brazos, dedos y pinzas.Un efector robótico está siempre bajo el control del robot.
Un actuador corresponde a cualquier mecanismo que permita al efector ejecutar una acción.
Ejemplos: motores eléctricos (servomotores, de paso, de corriente continua, etc.), cilindros neumáticos y cilindros hidráulicos.
CI-2657 RobóticaArquitectura General 22
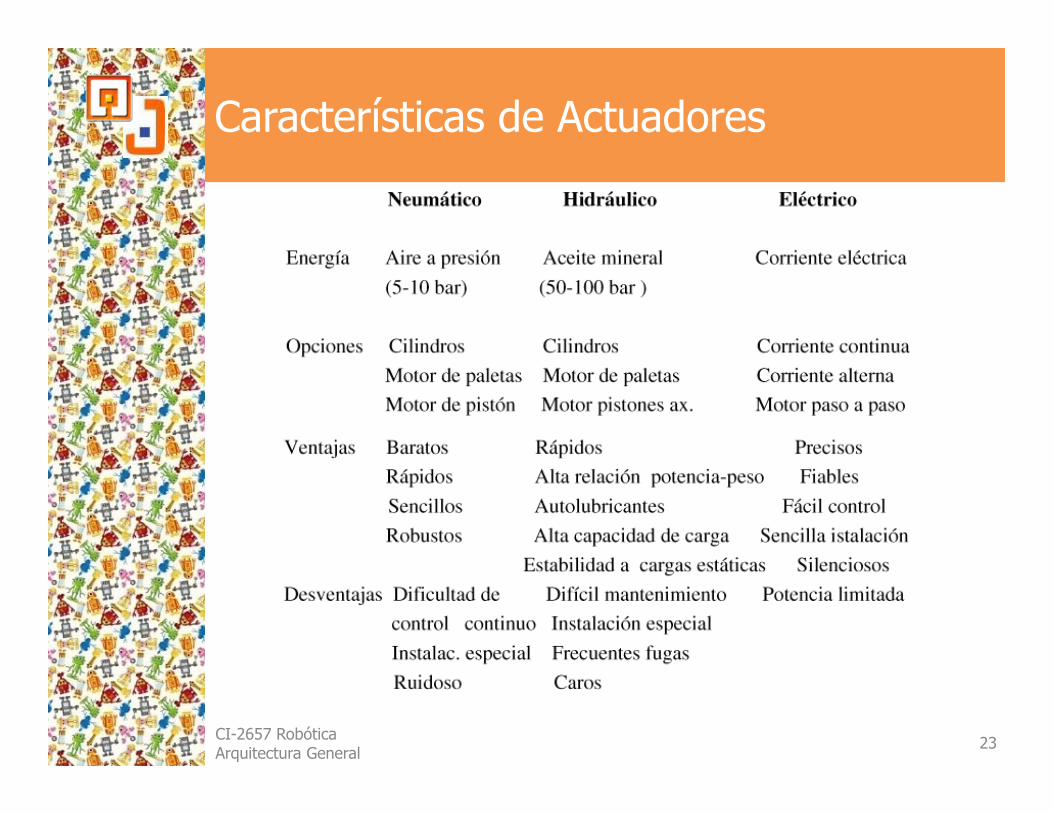
Características de Actuadores
CI-2657 RobóticaArquitectura General 23

CI-2657 RobóticaArquitectura General 24
Introducción a RobóticaIntroducción a RobóticaSistema de
Locomoción/Manipulación
Sistema de Locomoción/Manipulación
Los robots pueden tener un sistema de locomoción y/o de manipulación.
El sistema de locomoción permite que el robot se mueva. El sistema de manipulación permite que el robot pueda mover o alcanzar objetos que estén cerca de él.
En base a estas características los robots se dividen en robots móviles y manipuladores robóticos.
CI-2657 RobóticaArquitectura General 25

División según Locomoción/Manipulación
CI-2657 RobóticaArquitectura General 26
Robots móviles Manipuladores robóticos
Robot mixtos

Tipos de Efectores para Locomoción
Los tipos de efectores que pueden ser utilizados son:
Piernas/patas (para caminar, gatear, trepar, saltar, rebotar)Ruedas (para rodar)Brazos (para trepar, gatear, colgar)Aletas (para nadar)
CI-2657 RobóticaArquitectura General 27

Estabilidad en la Locomoción
La locomoción en base a piernas es mucho más complicada que la en base a ruedas.Esto principalmente debido a problemas de estabilidad.Existen dos tipos de estabilidad:
EstáticaDinámica
CI-2657 RobóticaArquitectura General 28

Estabilidad en la Locomoción (cont.)
La estabilidad estática implica que el robot puede estar parado sin caerse. La estabilidad dinámica implica que el robot puede desplazarse sin caerse.
Poseer estabilidad dinámica no quiere decir que se posea estabilidad estática (por ejemplo: saltar en un pie, equilibrar una escoba invertida en la palma de la mano).
CI-2657 RobóticaArquitectura General 29

Estabilidad en la Locomoción (cont.)
A modo de ejemplo los seres humanos no poseemos estabilidad estática.Nosotros podemos estar de pie porque poseemos un control activo de nuestro balance, logrado por la acción de músculos, nervios y tendones. Este control es aprendido y es la razón de que los bebés no puedan estar de pie.
CI-2657 RobóticaArquitectura General 30

Estabilidad en la Locomoción (cont.)
Para que un robot posea estabilidad estática su centro de gravedad debe estar dentro de su polígono de soporte.El polígono de soporte es la proyección de sus puntos de soporte en la superficie sobre la que se encuentra.
En un robot de 2 piernas el polígono de soporte es una línea y por lo tanto no estable.En un robot de 3 piernas, con las piernas organizadas en forma de trípode y con el cuerpo sobre las mismas, el polígono de soporte es estable.
CI-2657 RobóticaArquitectura General 31

Estabilidad en la Locomoción (cont.)
Normalmente mientras más piernas posea un robot más estable será.La mayor parte de los robots posee 6 piernas (hexápodos) tal como los insectos.El controlar la caminata de un robot es una tarea complicada, dado que se deben enviar las órdenes a los actuadores que controlan el movimiento de éstas.
CI-2657 RobóticaArquitectura General 32

Estabilidad en la Locomoción (cont.)
Desde el punto de vista de gasto de energía es más eficiente el utilizar ruedas para desplazarse.
Al utilizar piernas siempre se debe levantar parte del cuerpo del robot para mover una pierna.
Por otra parte, al utilizar piernas se posee la capacidad de caminar por diferentes tipos de terrenos (este es el motivo por el cual los animales poseen piernas y no ruedas).
CI-2657 RobóticaArquitectura General 33

Estabilidad en la Locomoción (cont.)
En este ámbito las posibles tareas a realizar son:
Llegar a una posición determinadaSeguir una trayectoria determinada (más complicado)
CI-2657 RobóticaArquitectura General 34

Manipulación Robótica
El objetivo de un manipulador robótico es mover parte de su cuerpo de tal forma que uno de sus efectores (mano, dedo, pinza) alcance una posición y una orientación dada en el espacio.
Con el objetivo de tomar o tocar algún objeto.La manipulación es una tarea bastante complicada.Los manipuladores robóticos más comunes son los brazos robóticos.
CI-2657 RobóticaArquitectura General 35
Manipulación Robótica (cont.)
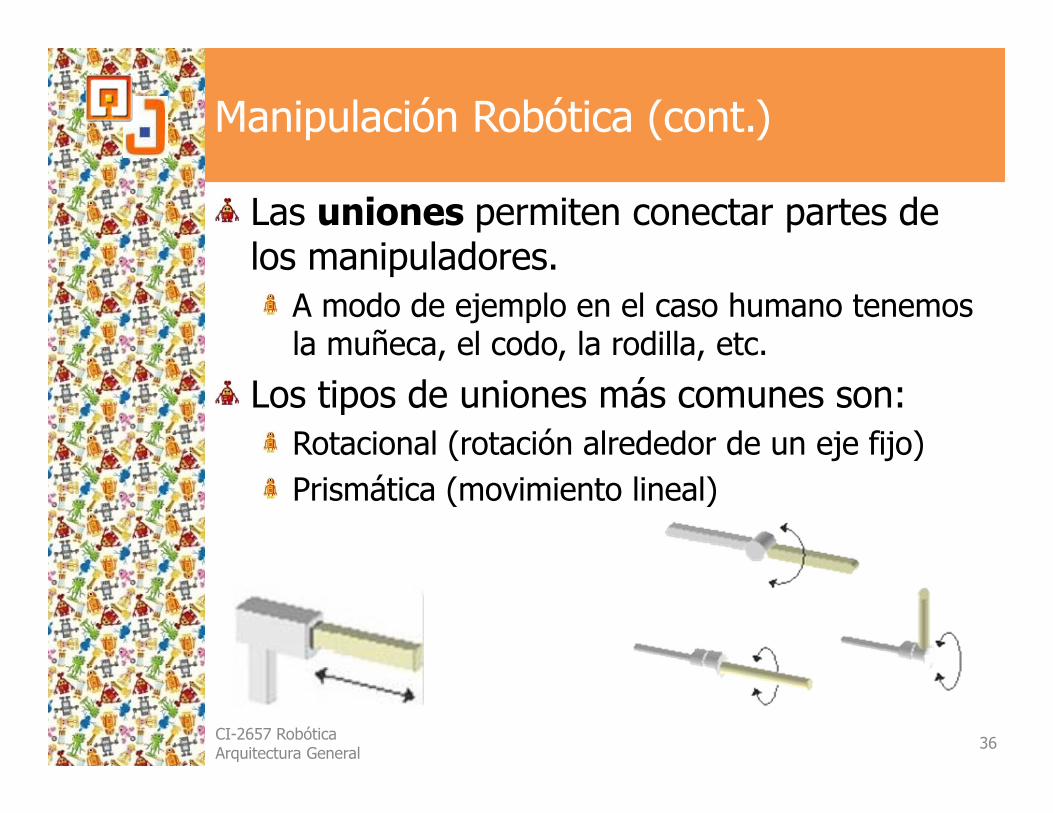
Las uniones permiten conectar partes de los manipuladores.
A modo de ejemplo en el caso humano tenemos la muñeca, el codo, la rodilla, etc.
Los tipos de uniones más comunes son:Rotacional (rotación alrededor de un eje fijo)Prismática (movimiento lineal)
CI-2657 RobóticaArquitectura General 36

Manipulación Robótica (cont.)
CI-2657 RobóticaArquitectura General 37
Robot con tres ejes prismáticos3 DOF
Robot con tres ejes rotacionales3 DOF

Manipulación Robótica (cont.)
La manipulación robótica es una tarea bastante complicada.Al alcanzar un objeto dado en el espacio, el robot debe poseer mecanismos de control en las uniones que permiten mover la parte del manipulador que alcanzará dicho objeto, respetando las leyes físicas de la cinemática y la dinámica.
CI-2657 RobóticaArquitectura General 38

Manipulación Robótica (cont.)
En el contexto de la robótica se entiende por cinemática a la correspondencia que debe existir entre el movimiento del actuador y el movimiento resultante del efector.Para controlar un manipulador debemos conocer su cinemática (que está conectado con qué, cuántas uniones existen, los DOF de cada unión, etc.).Este conocimiento se formaliza utilizando ecuaciones, que generalmente relacionan ángulos de una unión con movimientos traslacionales (x,y,z) del efector.
CI-2657 RobóticaArquitectura General 39

Manipulación Robótica (cont.)
La dinámica tiene que ver con la leyes que rigen los movimiento del manipulador (la velocidad y la aceleración de algún efector).Generalmente en las tareas de manipulación no solamente se necesita alcanzar un objeto, sino que también tomarlo. La tarea de tomar un objeto introduce una dificultad adicional dado que se debe controlar la fuerza que se aplica al tomar el objeto, de tal forma de no romperlo.
A modo de ejemplo el tomar un huevo o una ampolleta sin romperlos es una tarea difícil para un robot.
CI-2657 RobóticaArquitectura General 40
CI-2657 RobóticaArquitectura General 41
Introducción a RobóticaIntroducción a RobóticaCinemática y Dinámica

Cinemática, Cinética y Dinámica
La cinemática (kinematics) estudia los movimientos aislados desde las fuerzas y toques asociados con el movimiento linear y angular respectivamente.
Además de las derivadas del movimiento con respecto al tiempo, es decir, velocidad y aceleración, incluso derivadas de orden superior están todas combinadas en la cinemática.
En pocas palabras la cinemática en robótica puede ser interpretada como los objetos de movimiento mecánico de todo tipo.
CI-2657 RobóticaArquitectura General 42

Cinemática, Cinética y Dinámica (cont.)
La cinética (kinetic) involucra fuerzas, torques, energía, momentos de inercia, masa, equilibrio, estabilidad, etc.La cinemática y la cinética están juntas combinadas dentro de la dinámica (dynamic).
CI-2657 RobóticaArquitectura General 43

CI-2657 RobóticaArquitectura General 44
Introducción a RobóticaIntroducción a RobóticaConceptos Importantes

Grados de Libertad (DOF)
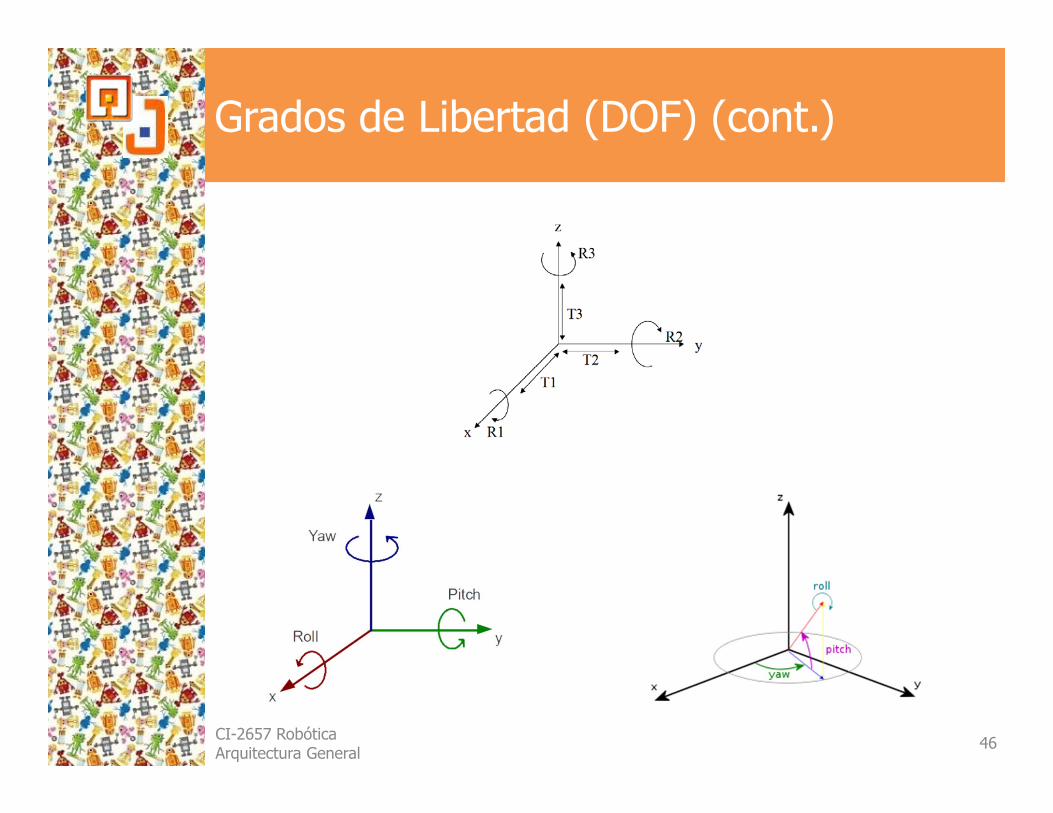
Un concepto clave en robótica es el de grado de libertad (DOF – degree of freedom).Grado de libertad significa la capacidad de moverse a lo largo de un eje o de rotar a lo largo de un eje.En general un cuerpo libre en el espacio tiene 6 DOF, tres de traslación (x,y,z) y tres de orientación/rotación (roll, pitch and yaw).
CI-2657 RobóticaArquitectura General 45
Grados de Libertad (DOF) (cont.)
CI-2657 RobóticaArquitectura General 46

Grados de Libertad (DOF) (cont.)
Un automóvil posee 3 DOF, 2 de posición (x,y) y uno de orientación (theta).
De estos 3 DOF solamente los de posición pueden ser controlados (por este motivo estacionarse es complicado).
El brazo humano posee 7 DOF (3 en la espalda, 1 en el codo y 3 en la muñeca), todos los cuales pueden ser controlados. A esto se debe sumar los DOF de la mano.
Dado que para tomar alcanzar cualquier objeto en el espacio se necesitan solo 6 DOF.
CI-2657 RobóticaArquitectura General 47
Grados de Libertad (DOF) (cont.)
La complejidad de las acciones que pueda realizar un robot dependerá de los DOF que posea.
Mientras más DOF posea un robot, más complejas serán las tareas que pueda realizar. Lamentablemente más complejo será también el control de estas acciones.
No todos los DOF que posea un robot pueden ser controlados (recordemos ejemplo automóvil).Por cada DOF que pueda ser controlado deberá existir al menos un actuador.
CI-2657 RobóticaArquitectura General 48

Grados de Libertad (DOF) (cont.)
Holonómico. El número de DOF controlados es igual al número de DOF totalesNo Holonómico. El número de DOF controlados es menor al número de DOF totalesRedundante. El número de DOF controlados es mayor al número de DOF totalesLa característica si un robot es holonómico o no, está relacionada con su movilidad
Los sistemas holonómicos son aquellos capaces de modificar su dirección instantáneamente (en esta consideración se considera masa nula), y sin necesidad de rotar previamente
CI-2657 RobóticaArquitectura General 49
Volumen de Trabajo (Work Space)
Corresponde al espacio en el cual el robot puede manipular su muñeca, esta es la convención que se adopta para evitar complicaciones de tamaños diferentes de los efectores que pueden ser colocados en la muñeca del robot, ya que el efector es un adicional al robot básico.Se determina por las siguientes características físicas del robot:
Configuración física del robotTamaño de las componentes del cuerpo, brazo y muñeca.Limites de las articulaciones del robot.
CI-2657 RobóticaArquitectura General 50

Precisión y Repetibilidad
Precisión (acurracy) es la capacidad del robot para moverse a una posición comandada a una velocidad especificada en su área de trabajo establecida.
La precisión corresponde a una medida de error, es decir, que está definida como la diferencia entre el valor medido y el valor comandado.
Repetibilidad (repeatability) es una medida de la velocidad de posición en una serie de intentos para posicionar el manipulador en una posición fija.
CI-2657 RobóticaArquitectura General 51

Precisión y Repetibilidad (cont.)
CI-2657 RobóticaArquitectura General 52
Fuente de Alimentación
Depende de la aplicación que se les dé a los robots.
Así si el robot se tiene que desplazar autónomamente, se alimentará seguramente con baterías eléctricas recargables, mientras que si no requiere desplazarse o sólo lo debe hacer mínimamente, se puede alimentar mediante corriente alterna a través de un convertidor.
En los robots de juguete o didácticos se pueden emplear baterías comunes o pilas, y en los de muy bajo consumo celdas solares.
CI-2657 RobóticaArquitectura General 53

Referencias Bibliográficas
Esteve, Juan Domingo. “Apuntes de Robótica”. Universidad de Valencia. España.Fu, K.S.; González, R.C. y Lee, C.S.G. “Robotics: Control, Sensing, Vision, and Intelligence”. McGraw-Hill. 1987.Mataric, Maja. “The Robotics Primer”. MIT Press. 2007Murphy, R. “An Introduction to AI Robotics”. MIT Press. 2000.Ruíz del Solar, J. y Salazar, R. “Introducción a la Robótica”. Universidad de Chile.
CI-2657 RobóticaArquitectura General 54

CI-2657 RobóticaArquitectura General 55
CI-2657 RobóticaArquitectura General 56
¡Gracias!
Dra. Kryscia Daviana Ramírez BenavidesProfesora e InvestigadoraUniversidad de Costa RicaEscuela de Ciencias de la Computación e Informática
Sitio Web: http://www.kramirez.net/E-Mail: [email protected]
[email protected] Sociales: