ayudas didÁcticas para cursos del departamento …
TRANSCRIPT
AYUDAS DIDÁCTICAS PARA CURSOS DEL DEPARTAMENTO DE G EOMÁTICA
Fotogrametría y Percepción Remota Prof. Ing. Agrim. Miguel Aguila Sesser
P.G. Phot. Eng. (ITC)
UDELAR - [email protected] básicosDEPARTAMENTO DE GEOMÁTICA - INSTITUTO DE AGRIMENSUR A
FACULTAD DE INGENIERÍA - UNIVERSIDAD DE LA REPUBLICA - MONTEVIDEO - URUGUAY
julio 2004
página en construcción página diseñada para una resolución de pantalla de 800 x 600
VOLVER AL MENU PRINCIPAL
MENUBIBLIOGRAFIA
Paginas relacionadasTransformaciones
Anexo 1: Matrices
definiciónes básicas
Como definición clásica puede indicarse que la FOTOGRAMETRIA es la técnica que tiene por objeto estudiar ydefinir con precisión las formas, las dimensiones y la posición en el espacio de un objeto cualquiera, utilizando medidasrealizadas sobre una o más fotografías de ese objeto.
Esta definición puede ampliarse e incluir la interpretación de fotografías o fotointerpretación como una funciónde equivalente importancia, definida como la técnica de reconocer o identificar los detalles visibles en una imagenfotográfica.
Lo que resulta implícito en el concepto de fotogrametría es el concepto de medida, perteneciendo esta técnica a lacategoría general de las técnicas de medida, siéndole aplicables sus formas conceptuales.
etimología
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
1 de 14 02/04/2014 19:01
Deriva de las palabras griegas photos (jotos) que significa "luz", gramma ( gramma) que significa "lo que es dibujado oescrito" y metron (metron) que significa "medir", o sea "medir o graficar por medio de la luz" .
características de una imagen fotográfica
La aplicabilidad de una técnica que utiliza medidas hechas en fotografías, pasa por el análisis de las características deuna imagen fotográfica:
brinda una representación completa del objeto desde el punto de vista de la cámara, sin omisiones(no discreta), pasible de una gran precisión.proporciona un documento fácilmente manejable, de conservación prácticamente ilimitada,disponible en todo momento.la medida se realiza sin contacto físico con el objeto, permitiendo el estudio de objetos inaccesibles,que no pueden ser tocados o peligrosos, etc.el registro es instantáneo, permitiendo el estudio de objetos en movimiento, vivos o de fenómenosfugaces, y permitiendo el uso de puntos de vista móviles en relación al objeto que aseguran unrendimiento considerable (caso de la fotografía aérea)el trabajo de campo directo, se reduce a la toma de vistas, realizándose las medidas en cualquiermomento, diferido en el tiempo.
imágenes no fotográficas
Hoy en día nos encontramos en una inflexión en las formas de aplicación de esta técnica, debido al uso cada vez másgeneralizado de imágenes, no ya provenientes de cámaras fotográficas sino de instrumentos electrónicos formadores deimágenes (cámaras CCD, barredores, barredores multiespectrales, radares, etc.).Dichos instrumentos, aún cuando todavía no logran la precisión de la imagen fotográfica, brindan una informacióncualitativa del objeto de una riqueza excepcional, permitiendo su análisis en bandas del espectro electromagnético queno pueden ser registradas por las emulsiones fotográficas.También el uso cada vez más generalizado de las herramientas informáticas, hace que nos encontremos frente a unprofundo cambio, que será más notorio en los próximos años, en cuanto al uso cada vez más generalizado de lastécnicas fotogramétricas, aún cuando cambiando radicalmente sus formas de aplicación y sus costos.
definición general
Las circunstancias reseñadas, hace que podamos acuñar una definición más general para la fotogrametría como:"la técnica o arte de obtener medidas a partir de i mágenes de instrumentos (activos o pasivos) de regi stro deradiaciones electromagnéticas"
clasificaciones en fotogrametría
La fotogrametría es frecuentemente dividida en especialidades o categorías, de acuerdo a los tios de fotografíasusadas, o la forma en que éstas son utilizadas. Así, podríamos pensar en las siguientes divisiones o clasificaciones:
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
2 de 14 02/04/2014 19:01
1) por el tipo de imágenes utilizadas:
fotogrametría convencional , mediante el uso directo de imágenes fotográficas.fotogrametría digital , mediante el uso de imágenes de barredores o de fotografías digitalizadas en un barredor(scanner, que transforman las imágenes en matrices de tonos de gris. El uso de este tipo de imágenes se estáhaciendo cada vez más normal, por lo que en cierto tiempo ésta pasará a ser la Fotogrametría convencional y laactual convencional, quizá sea la clásica...radargrametría , mediante el uso de imágenes de radar.fotogrametría no convencional , por el uso de otros tipos de imágenes, como Rayos X, etc.
2) por la distancia entre el instrumento formador de imagen y el objeto (def. apta para cámaras):
fotogrametría a corta distancia , cuando la cámara no puede estar enfocada a infinito.fotogrametría a larga distancia , cuando la cámara está enfocada permanentemente a infinito.
3) por la posición del instrumento formador de la imagen:
fotogrametría terrestre (incluyendo la fotogrametría a corta distancia), cuando el instrumento formador deimágenes se encuentra en tierra.fotogrametría aérea , cuando el instrumento formador de imágenes es aeroportado.fotogrametría satelital , cuando el instrumento formador de imágenes es transportado en un satélite,trasbordador o estación espacial.
4) por la técnica de tratamiento de la información:
fotogrametría analógica, cuando se utilizan instrumentos que buscan reconstruir la geometría de la fotografíapor medios ópticos, óptico-mecánicos o mecánicos..fotogrametría analítica , cuando se utilizan procedimientos de cálculo para la reconstrucción de la geometría dela fotografía..fotogrametría digital , cuando la fotografía es transformada en una matriz de tonos de gris (o cuando se utilizanimágenes de barredores) y se utilizan procedimientos de cálculo para la reconstrucción de la propia imagen y desu geometría.
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
3 de 14 02/04/2014 19:01

principios básicos de óptica geométrica
sistema óptico centrado
Un sistema óptico centrado es un conjunto de dióptricos esféricos con sus centros alineados definiendo una rectadenominada eje óptico del sistema.Considerando rayos de luz monocromática emitidos por objetos luminosos o iluminados, situados en el eje o próximos aél (aproximación de Gauss), el sistema hará corresponder a un punto-objeto un punto-imagen (puntos conjugados)Asimismo, a un elemento de un plano-objeto perpendicular al eje, le corresponderá un elemento de un plano-imagentambién perpendicular al eje, denominándose a éstos planos conjugados.
propiedades y definiciones básicas
Cualquier sistema de lentes, puede definirse por seis parámetros denominados elementos cardinales, que son laposición de los focos y las posiciones de los puntos nodales y principales.La localización corresponde a lo siguiente:
los rayos paralelos al eje del sistema en el espacio objeto, se concentran (enfocan) en el punto focal imagen en elespacio imagen, así como los rayos que pasan por el punto focal objeto en el espacio objeto, emergen delsistema paralelos al eje en el espacio imagen.
los puntos principales son la intersección con el eje del sistema,del par de planos conjugados de aumento lateral unitario, que sedenominan planos principales (elementos contenidos en el planoprincipal objeto se reproducen de idéntico tamaño en el planoprincipal imagen.
PoA = PiA' PoB = P iB'
los puntos nodales son puntos conjugados de igual aumentoangular, o sea que un rayo ingresando al sistema en la direccióndel punto nodal anterior u objeto, saldrá del sistema según un rayocuya dirección pasa por el punto nodal posterior o imagen,abriendo el mismo ángulo con el eje que el rayo incidente.
si el índice de refracción del medio del espacio imagen (ii) es el mismo que el del medio del espacio objeto (io) lospuntos pirncipales y nodales son coincidentes, situación ésta normal en el caso de la fotogrametría terrestre oaérea. Por lo tanto, en el uso normal de una cámara fotográfica, nos encontramos solamente con cuatroparámetros, a sabler: la posición de los puntos focales y nodales.
si i i = io ---> Po = No y Pi = Ni
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
4 de 14 02/04/2014 19:01
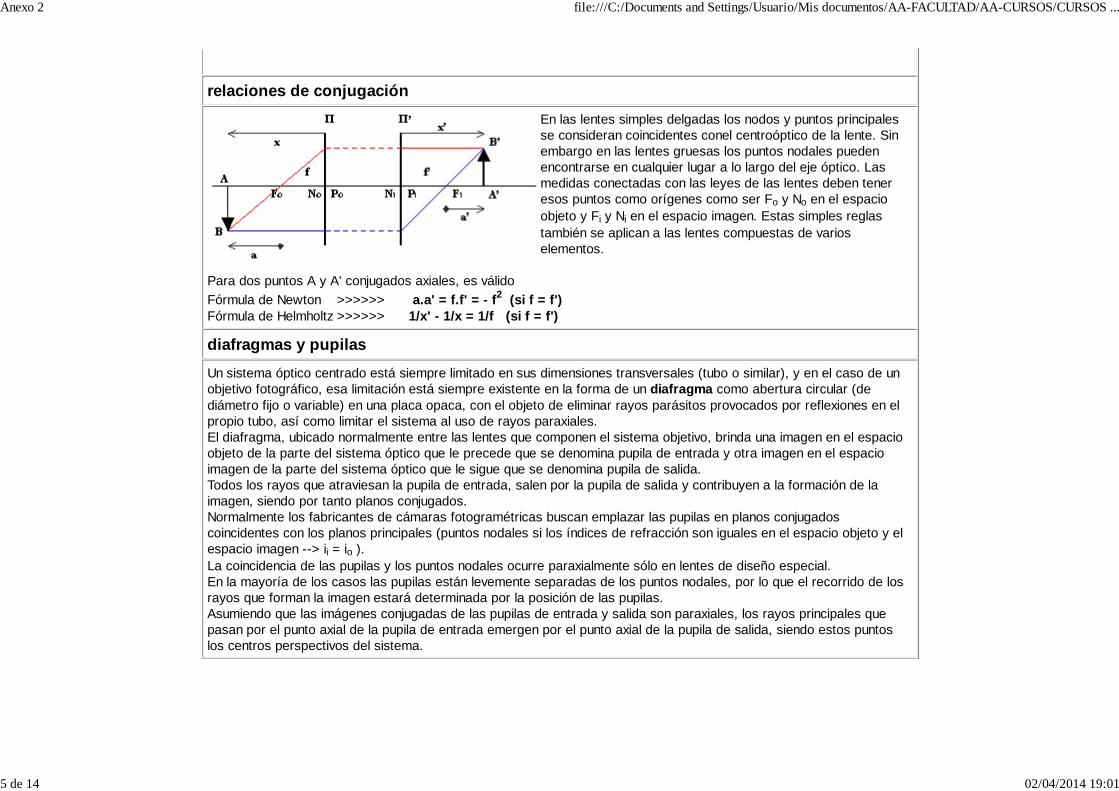
relaciones de conjugación
En las lentes simples delgadas los nodos y puntos principalesse consideran coincidentes conel centroóptico de la lente. Sinembargo en las lentes gruesas los puntos nodales puedenencontrarse en cualquier lugar a lo largo del eje óptico. Lasmedidas conectadas con las leyes de las lentes deben teneresos puntos como orígenes como ser Fo y No en el espacioobjeto y Fi y Ni en el espacio imagen. Estas simples reglastambién se aplican a las lentes compuestas de varioselementos.
Para dos puntos A y A' conjugados axiales, es válidoFórmula de Newton >>>>>> a.a' = f.f' = - f 2 (si f = f')Fórmula de Helmholtz >>>>>> 1/x' - 1/x = 1/f (si f = f')
diafragmas y pupilas
Un sistema óptico centrado está siempre limitado en sus dimensiones transversales (tubo o similar), y en el caso de unobjetivo fotográfico, esa limitación está siempre existente en la forma de un diafragma como abertura circular (dediámetro fijo o variable) en una placa opaca, con el objeto de eliminar rayos parásitos provocados por reflexiones en elpropio tubo, así como limitar el sistema al uso de rayos paraxiales.El diafragma, ubicado normalmente entre las lentes que componen el sistema objetivo, brinda una imagen en el espacioobjeto de la parte del sistema óptico que le precede que se denomina pupila de entrada y otra imagen en el espacioimagen de la parte del sistema óptico que le sigue que se denomina pupila de salida.Todos los rayos que atraviesan la pupila de entrada, salen por la pupila de salida y contribuyen a la formación de laimagen, siendo por tanto planos conjugados.Normalmente los fabricantes de cámaras fotogramétricas buscan emplazar las pupilas en planos conjugadoscoincidentes con los planos principales (puntos nodales si los índices de refracción son iguales en el espacio objeto y elespacio imagen --> ii = io ).La coincidencia de las pupilas y los puntos nodales ocurre paraxialmente sólo en lentes de diseño especial.En la mayoría de los casos las pupilas están levemente separadas de los puntos nodales, por lo que el recorrido de losrayos que forman la imagen estará determinada por la posición de las pupilas.Asumiendo que las imágenes conjugadas de las pupilas de entrada y salida son paraxiales, los rayos principales quepasan por el punto axial de la pupila de entrada emergen por el punto axial de la pupila de salida, siendo estos puntoslos centros perspectivos del sistema.
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
5 de 14 02/04/2014 19:01
principios básicos de perspectiva
haz perspectivo
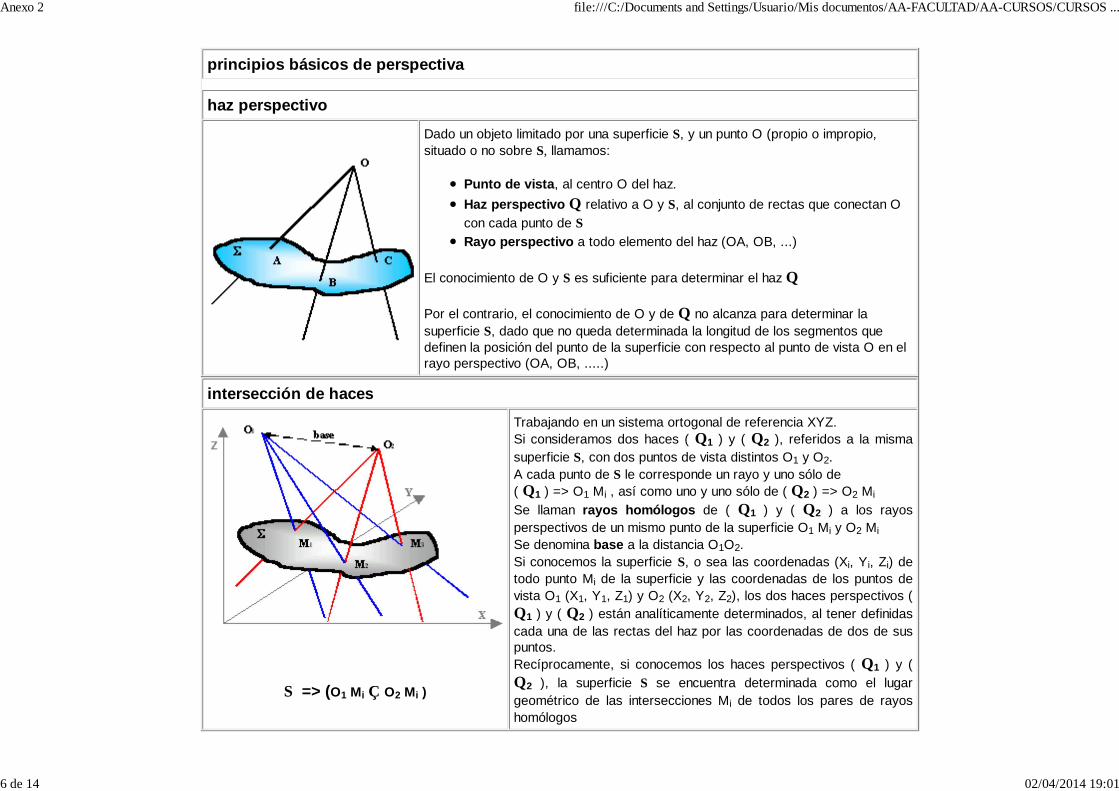
Dado un objeto limitado por una superficie S, y un punto O (propio o impropio,situado o no sobre S, llamamos:
Punto de vista , al centro O del haz.
Haz perspectivo Q relativo a O y S, al conjunto de rectas que conectan Ocon cada punto de SRayo perspectivo a todo elemento del haz (OA, OB, ...)
El conocimiento de O y S es suficiente para determinar el haz Q
Por el contrario, el conocimiento de O y de Q no alcanza para determinar lasuperficie S, dado que no queda determinada la longitud de los segmentos quedefinen la posición del punto de la superficie con respecto al punto de vista O en elrayo perspectivo (OA, OB, .....)
intersección de haces
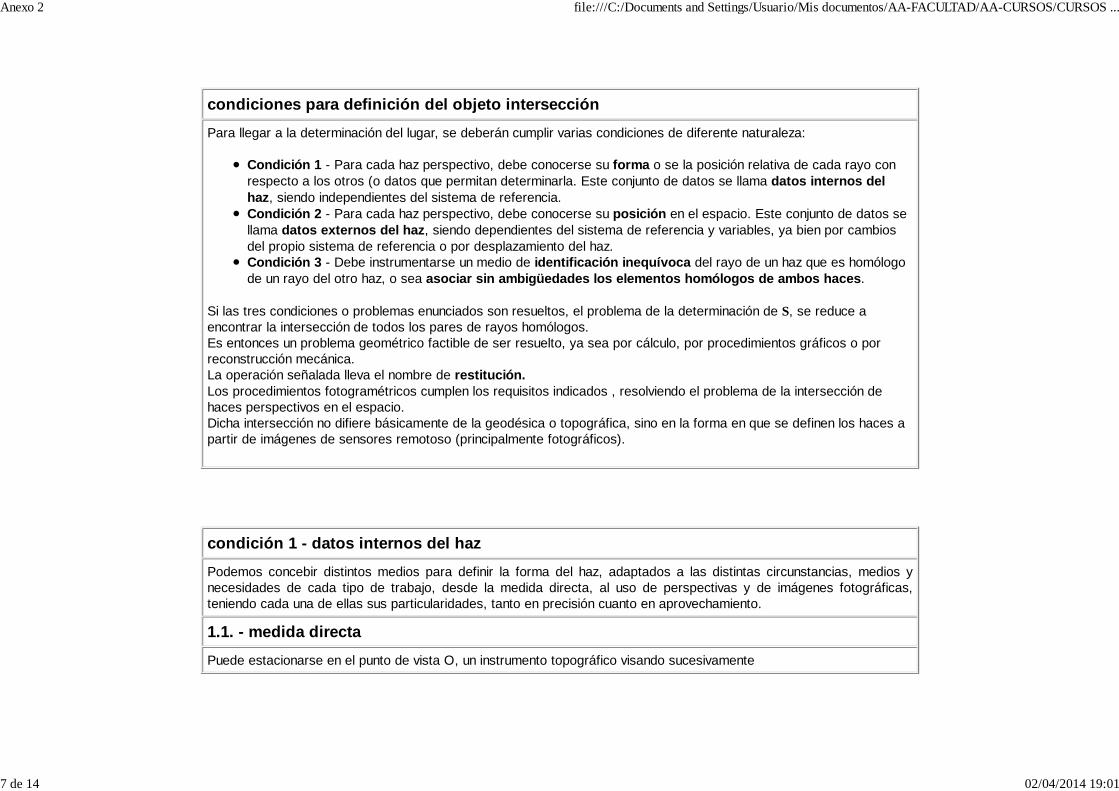
S => (O1 Mi Ç O2 Mi )
Trabajando en un sistema ortogonal de referencia XYZ.Si consideramos dos haces ( Q1 ) y ( Q2 ), referidos a la mismasuperficie S, con dos puntos de vista distintos O1 y O2.A cada punto de S le corresponde un rayo y uno sólo de ( Q1 ) => O1 Mi , así como uno y uno sólo de ( Q2 ) => O2 Mi
Se llaman rayos homólogos de ( Q1 ) y ( Q2 ) a los rayosperspectivos de un mismo punto de la superficie O1 Mi y O2 Mi Se denomina base a la distancia O1O2.Si conocemos la superficie S, o sea las coordenadas (Xi, Yi, Zi) detodo punto Mi de la superficie y las coordenadas de los puntos devista O1 (X1, Y1, Z1) y O2 (X2, Y2, Z2), los dos haces perspectivos (Q1 ) y ( Q2 ) están analíticamente determinados, al tener definidascada una de las rectas del haz por las coordenadas de dos de suspuntos.Recíprocamente, si conocemos los haces perspectivos ( Q1 ) y (Q2 ), la superficie S se encuentra determinada como el lugargeométrico de las intersecciones Mi de todos los pares de rayoshomólogos
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
6 de 14 02/04/2014 19:01
condiciones para definición del objeto intersección
Para llegar a la determinación del lugar, se deberán cumplir varias condiciones de diferente naturaleza:
Condición 1 - Para cada haz perspectivo, debe conocerse su forma o se la posición relativa de cada rayo conrespecto a los otros (o datos que permitan determinarla. Este conjunto de datos se llama datos internos delhaz, siendo independientes del sistema de referencia.Condición 2 - Para cada haz perspectivo, debe conocerse su posición en el espacio. Este conjunto de datos sellama datos externos del haz , siendo dependientes del sistema de referencia y variables, ya bien por cambiosdel propio sistema de referencia o por desplazamiento del haz.Condición 3 - Debe instrumentarse un medio de identificación inequívoca del rayo de un haz que es homólogode un rayo del otro haz, o sea asociar sin ambigüedades los elementos homólogos de ambos haces .
Si las tres condiciones o problemas enunciados son resueltos, el problema de la determinación de S, se reduce aencontrar la intersección de todos los pares de rayos homólogos.Es entonces un problema geométrico factible de ser resuelto, ya sea por cálculo, por procedimientos gráficos o porreconstrucción mecánica.La operación señalada lleva el nombre de restitución.Los procedimientos fotogramétricos cumplen los requisitos indicados , resolviendo el problema de la intersección dehaces perspectivos en el espacio.Dicha intersección no difiere básicamente de la geodésica o topográfica, sino en la forma en que se definen los haces apartir de imágenes de sensores remotoso (principalmente fotográficos).
condición 1 - datos internos del haz
Podemos concebir distintos medios para definir la forma del haz, adaptados a las distintas circunstancias, medios ynecesidades de cada tipo de trabajo, desde la medida directa, al uso de perspectivas y de imágenes fotográficas,teniendo cada una de ellas sus particularidades, tanto en precisión cuanto en aprovechamiento.
1.1. - medida directa
Puede estacionarse en el punto de vista O, un instrumento topográfico visando sucesivamente
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
7 de 14 02/04/2014 19:01

1.2. - uso de perspectivas
Si cortamos el haz perspectivo Q con un plano P, el conjunto de los puntos deintersección de cada rayo perspectivo con P , se llama imagen perspectiva operspectiva del objeto considerado.Llamaremos:- plano de la imagen : al plano secante P.- eje principal : la recta perpendicular al plano P, que pasa por el centroperspectivo O.- punto principal : el punto PP intersección del eje principal con el plano de laimagen P.- distancia principal : longitud co del segmento OPp
El conocimiento de una perspectiva no alcanza para definir el haz que ledió origen.Debe conocerse el punto principal PP o sea su posición en la imagenperspectiva y la distancia principal co .El punto principal y la distancia principal se denominan parámetrosinternos de la perspectiva.El procedimiento descrito se reduciría al dibujo de una imagenperspectiva y a la medida de sus parámetros internos.Se obtiene así un registro del haz perspectivo bastante más completoque por medida directa, pero el dibujo de una perspectiva no brinda niuna gran precisión ni un adecuado rendimiento.Sin embargo, es éste procedimiento, que fuera muy usado en los siglosXVII y XVIII por algunos pintores, el que, aplicado a partir de laaparición de la fotografía, ha dado nacimiento al método fotogramétrico.
1.3. - uso de imágenes fotográficas
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
8 de 14 02/04/2014 19:01
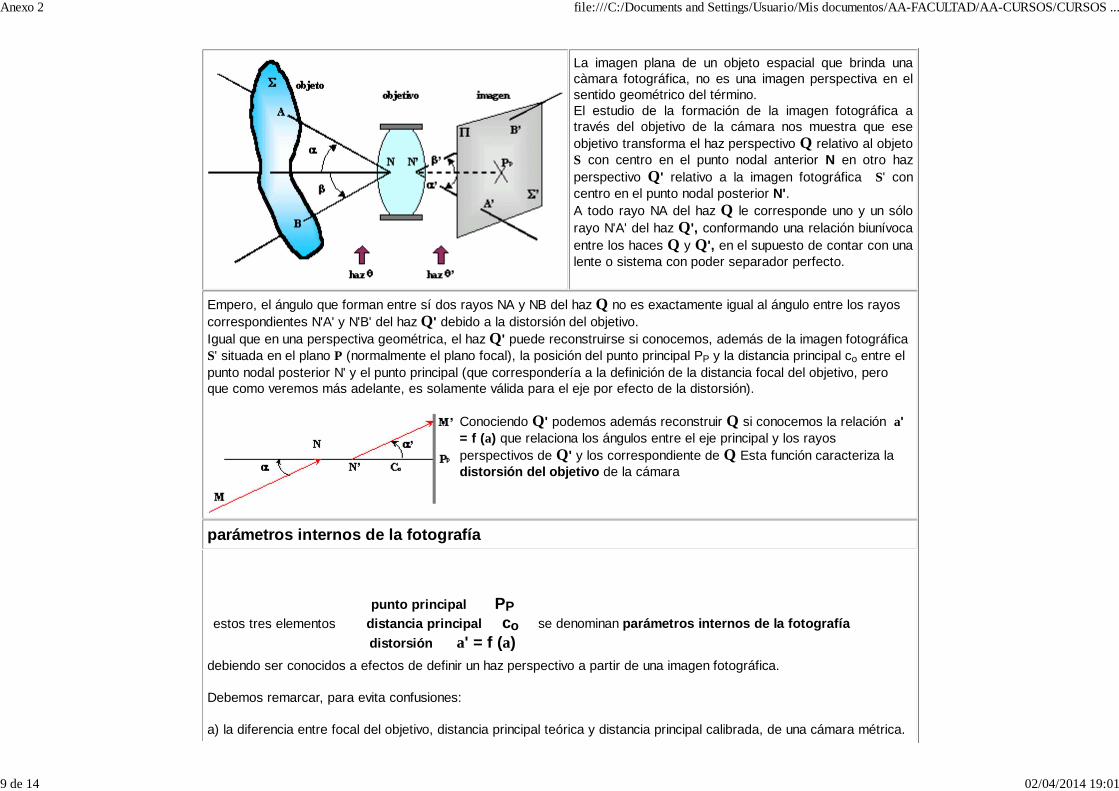
La imagen plana de un objeto espacial que brinda unacàmara fotográfica, no es una imagen perspectiva en elsentido geométrico del término.El estudio de la formación de la imagen fotográfica através del objetivo de la cámara nos muestra que eseobjetivo transforma el haz perspectivo Q relativo al objetoS con centro en el punto nodal anterior N en otro hazperspectivo Q' relativo a la imagen fotográfica S' concentro en el punto nodal posterior N'.A todo rayo NA del haz Q le corresponde uno y un sólorayo N'A' del haz Q', conformando una relación biunívocaentre los haces Q y Q', en el supuesto de contar con unalente o sistema con poder separador perfecto.
Empero, el ángulo que forman entre sí dos rayos NA y NB del haz Q no es exactamente igual al ángulo entre los rayoscorrespondientes N'A' y N'B' del haz Q' debido a la distorsión del objetivo.Igual que en una perspectiva geométrica, el haz Q' puede reconstruirse si conocemos, además de la imagen fotográficaS' situada en el plano P (normalmente el plano focal), la posición del punto principal PP y la distancia principal co entre elpunto nodal posterior N' y el punto principal (que correspondería a la definición de la distancia focal del objetivo, peroque como veremos más adelante, es solamente válida para el eje por efecto de la distorsión).
Conociendo Q' podemos además reconstruir Q si conocemos la relación a'= f (a) que relaciona los ángulos entre el eje principal y los rayosperspectivos de Q' y los correspondiente de Q Esta función caracteriza ladistorsión del objetivo de la cámara
parámetros internos de la fotografía
estos tres elementos
punto principal PP distancia principal co distorsión a' = f (a)
se denominan parámetros internos de la fotografía
debiendo ser conocidos a efectos de definir un haz perspectivo a partir de una imagen fotográfica. Debemos remarcar, para evita confusiones: a) la diferencia entre focal del objetivo, distancia principal teórica y distancia principal calibrada, de una cámara métrica.
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
9 de 14 02/04/2014 19:01

a.1.) la distancia focal del objetivo tiene una definición puramente óptica: distancia entre el punto nodalposterior al punto focal imagen.Sólo se define con precisión en el caso de la aproximación de Gauss, para rayos objeto paraxiales y luzmonocromática.
a.2.) la distancia principal teórica de una cámara métrica, tiene una definición öptico-mecánica: distanciadel centro de la pupila de salida al plano de la emulsión.La distancia principal teórica es muy cercana a la distancia focal y para aplicaciones de poca precisión (ydependiendo de la calidad de la cámara), pueden considerarse aproximadamente iguales.Ella es sin embargo diferente, no solamente porque el centro de la pupila de salida difiere del punto nodalposterior (que no existe como tal para objetivos de gran campo y apertura), sino principalmente porque elplano de la emulsión no coincide con el plano focal.El fabricante busca emplazar la emulsión en el plano de mejor definición de la imagen, cuya posicióndependerá de la curvatura de campo de la lente, pudiendo diferir sensiblemente del plano focal.En otro orden: ni la distancia focal ni la principal teórica son definibles y medibles en la práctica con laprecisión necesaria para la reconstrucción del haz perspectivo relativo al objeto.
a.3.) la distancia principal calibrada ( o de calibración), es unadistancia ficta, sin realidad física, que difiere de la distanciaprincipal teórica por efecto de la distorsión de la lente y que puededefinirse como el límite de la función c (a) = L / tg a para a -->0 Esta definición es teóricamente correcta, empero el valor c (a)queda mejor determinado para un valor de a grande (lo que implica L grande), siendo entoncesconveniente, elegir como origen el valor de esa función para una condición prefijada por una norma queimplique la consideración de distancias L de cierta importancia (p.ej.: L0 = 80mm para cámaras formato18x18 cm ó L0 = 100mm para formato 23x23 cm), que definan un radio que determine una circunferenciacontenida totalmente en el formato útil, sin alcanzar sus bordes.Cumpliendo con los requisitos anteriores, se utilizan las siguientes formas de definir esa distancia:a) distancia tal que la media aritmética de las distorsiones medidas en un gran número de puntosdistribuído regularmente sea nula.b) distancia tal que los valores extremos de la distorsión sean iguales y de signo contrario.c) distancia para la cual la distorsión media de los puntos que se encuentran a una distancia dada del puntoprincipal, es nula.
1.4. - uso de imágenes no fotográficas
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
10 de 14 02/04/2014 19:01
Dispositivos modernos, tales como los barredores multiespectrales, los radiómetros de matriz de sensores, cámarasCCD, radares, termógrafos, etc. también forman o pueden formar imágenes que se asemejan mucho a una imagenperspectiva.Las dificultades para su uso, radican en los problemas de la definción geométrica de los parámetros de formación deesas imágenes.Dado que las soluciones aplicadas no corresponden (en general) a soluciones que permitan una abstracción geométrica,deberán ser tratadas con las descripciones y el estudio del aprovechamiento de cada instrumento en especial.
condición 2 - datos externos del haz
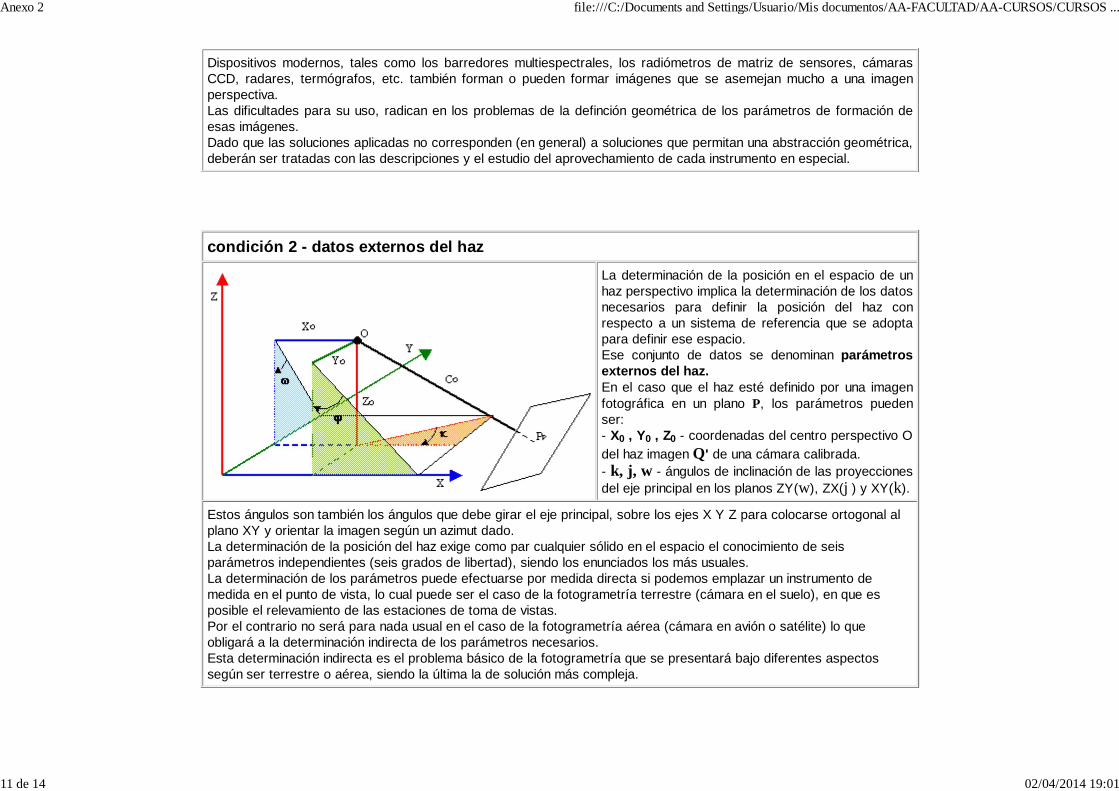
La determinación de la posición en el espacio de unhaz perspectivo implica la determinación de los datosnecesarios para definir la posición del haz conrespecto a un sistema de referencia que se adoptapara definir ese espacio.Ese conjunto de datos se denominan parámetrosexternos del haz.En el caso que el haz esté definido por una imagenfotográfica en un plano P, los parámetros puedenser:- X0 , Y0 , Z0 - coordenadas del centro perspectivo Odel haz imagen Q' de una cámara calibrada.- k, j, w - ángulos de inclinación de las proyeccionesdel eje principal en los planos ZY(w), ZX(j ) y XY(k).
Estos ángulos son también los ángulos que debe girar el eje principal, sobre los ejes X Y Z para colocarse ortogonal alplano XY y orientar la imagen según un azimut dado.La determinación de la posición del haz exige como par cualquier sólido en el espacio el conocimiento de seisparámetros independientes (seis grados de libertad), siendo los enunciados los más usuales.La determinación de los parámetros puede efectuarse por medida directa si podemos emplazar un instrumento demedida en el punto de vista, lo cual puede ser el caso de la fotogrametría terrestre (cámara en el suelo), en que esposible el relevamiento de las estaciones de toma de vistas.Por el contrario no será para nada usual en el caso de la fotogrametría aérea (cámara en avión o satélite) lo queobligará a la determinación indirecta de los parámetros necesarios.Esta determinación indirecta es el problema básico de la fotogrametría que se presentará bajo diferentes aspectossegún ser terrestre o aérea, siendo la última la de solución más compleja.
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
11 de 14 02/04/2014 19:01
condición 3 - identificación de los rayos homólogos
3.1.) medida directaEn el caso de medida directa de las direcciones de los rayos de cada haz (caso topográfico), el procedimiento obliga ala discretización del objeto, limitándonos a intersectar visuales orientadas a un reducido número de puntos de inequívocaidentificación, que permitan definir el objeto, no siendo inusual el uso de un tercer punto de vista para evitar errores.El uso de intersecciones simultáneas (p.ej.: dos teodolitos) , con accesorios de puntería laser facilitan la identificación,quedando su uso restringido a distancias cortas.En cualquier caso se obtiene un modelo discreto del objeto que se releva, función de la habilidad del operador paradefinirlo. 3.2.) uso de perspectivas geométricas dibujadas
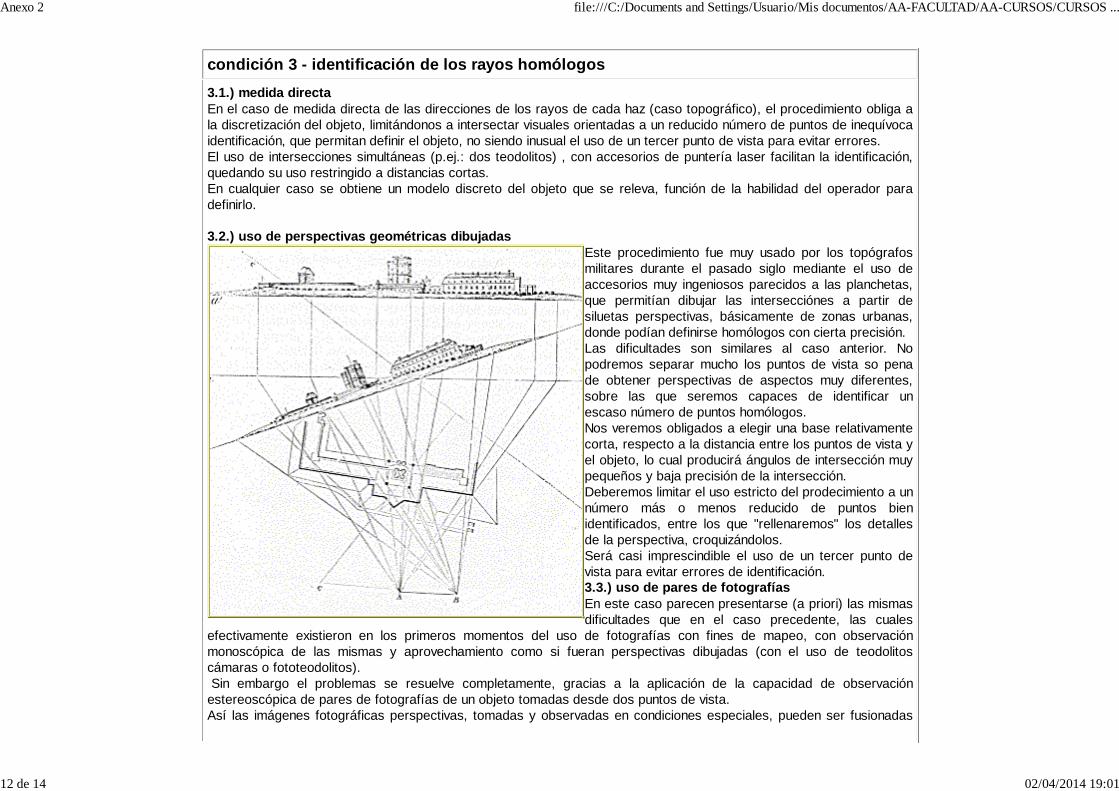
Este procedimiento fue muy usado por los topógrafosmilitares durante el pasado siglo mediante el uso deaccesorios muy ingeniosos parecidos a las planchetas,que permitían dibujar las intersecciónes a partir desiluetas perspectivas, básicamente de zonas urbanas,donde podían definirse homólogos con cierta precisión.Las dificultades son similares al caso anterior. Nopodremos separar mucho los puntos de vista so penade obtener perspectivas de aspectos muy diferentes,sobre las que seremos capaces de identificar unescaso número de puntos homólogos.Nos veremos obligados a elegir una base relativamentecorta, respecto a la distancia entre los puntos de vista yel objeto, lo cual producirá ángulos de intersección muypequeños y baja precisión de la intersección.Deberemos limitar el uso estricto del prodecimiento a unnúmero más o menos reducido de puntos bienidentificados, entre los que "rellenaremos" los detallesde la perspectiva, croquizándolos.Será casi imprescindible el uso de un tercer punto devista para evitar errores de identificación.3.3.) uso de pares de fotografíasEn este caso parecen presentarse (a priori) las mismasdificultades que en el caso precedente, las cuales
efectivamente existieron en los primeros momentos del uso de fotografías con fines de mapeo, con observaciónmonoscópica de las mismas y aprovechamiento como si fueran perspectivas dibujadas (con el uso de teodolitoscámaras o fototeodolitos). Sin embargo el problemas se resuelve completamente, gracias a la aplicación de la capacidad de observaciónestereoscópica de pares de fotografías de un objeto tomadas desde dos puntos de vista.Así las imágenes fotográficas perspectivas, tomadas y observadas en condiciones especiales, pueden ser fusionadas
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
12 de 14 02/04/2014 19:01

por el cerebro del observador, percibiendo una sola imagen en relieve del objeto examinado, denominado modeloestereoscópico .La sensibilidad del fenómeno fisiológico de la visión estereoscópica, es tan grande que resuelve completamente y deforma instantánea el problema de la definición de los rayos homólogos, con una precisión muy alta, aún para basescortas en relación a la distancia al objeto.Este fenómeno permite la definición de rayos homólogos que caen en puntos de las imágenes fotográficas nodistinguibles por ningún detalle especial, permitiendo la restitución con líneas continuas , eliminando la necesidad deprocedimientos de interpolación, resultando una precisión más uniforme para todos los puntos del objeto.El método fotogramétrico brindará un resultado de una fidelidad y homogeneidad en la restitución de los objetosrelevados muy difícil de obtener con otros procedimientos de medida.
restitución
La determinación y materialización (gráfica o analítica) del conjunto de los puntos de intersección de los rayoshomólogos de los dos haces perspectivos constituye la etapa final del procedimiento de reconstrucción del objeto apartir de imágenes perspectivas del mismo, tal como en los procedimientos fotogramétricos.Obtendremos como resultado la posición de un punto cualquiera del objeto en el sistema de referencia que adoptemos,a partir de tener definidos dos haces perspectivos diferentes y sus parámetros externos.En procedimientos de relevamiento directo, la posición de un punto puede realizarse ya por cálculo o en forma gráfica.En el caso de haces perspectivos definidos por fotografías, podremos igualmente usar procedimientos de cálculo ográficos, relevando punto a punto.Sin embargo, en base a lo dicho, resulta posible en el método fotogramétrico la representación por líneas continuas.Para ello se han diseñado instrumentos que permiten la determinación inmediata (o casi) de las coordenadas del puntode intersección M de un par de rayos homólogos definidos por sus imágenes mi y md en dos fotografías, haciendo usode la observación estereoscópica para asociar instantánea y continuamente los puntos homólogos de las dos imágenes.Los instrumentos antedichos, denominados aparatos de restitución, materializarán por procedimientos ópticos,medánicos o analíticos los elementos necesarios para la solución geométrica del problema.En estos instrumentos, mientras un observador realiza un punteo estereoscópico mediante la observación de un modeloestereoscópico del objeto y relevamiento (discreto o continuo) del modelo geométrico o representación a escala delmismo objeto reconstruída por el instrumento los mecanismos de éste darán al punto restituído su posición correcta.Para lograr ese objetivo, los instrumentos de restitución comprenden:
a) un sistema de reconstrucción de cada haz perspectivo a partir de la imagen fotográfica y susparámetros internos.b) un sistema de referencia al cual se referirán ambos haces y la restitución correspondiente.c) un sistema de orientación que permita definir y reproducir los parámetros externos de los hacesperspectivos, para rehacer a una escala dada la posición de los haces reconstruídos en el sistema dereferencia, ligados uno a otro en el espacio.
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
13 de 14 02/04/2014 19:01

d) un sistema de observación permitiendo la observación estereoscópica del par de imágenesfotográficas.e) un sistema de restitución que permita materializar los rayos homólogos y su intersección en el sistemade referencia del instrumento.
La forma cómo se realicen las reconstrucciones reseñadas, y las soluciones a los sistemas necesarios, darán una gamade instrumentos de características técnicas diferentes, con precisiones distintas, adaptados o adaptables a necesidadesdiversas.Resulta además posible la sustitución del observador humano, por correladores de imágenes, capaces de identificar(dentro de ciertos límites) en forma automática los rayos homólogos de los haces perspectivos (como en las solucionesde la fotogrametría digital), aún cuando la solución general del sistema no diferirá de la presentada.
BIBLIOGRAFIA
Anexo 2 file:///C:/Documents and Settings/Usuario/Mis documentos/AA-FACULTAD/AA-CURSOS/CURSOS ...
14 de 14 02/04/2014 19:01