aspectos innovadores en la navegación de los rpas: el...
TRANSCRIPT

© GMV, 2014 Propiedad de GMV
Todos los derechos reservados
Aspectos innovadores en la navegación de los RPAS: el caso del ATLANTE
CURSO RPAS
Manuel Pérez Cortés Director General de Defensa y Seguridad GMV

© GMV, 2014 31/03/2014 Página 2 CURSO RPAS
Disponer de una función de navegación precisa y segura es esencial para el desarrollo de los RPAS y su inserción en el espacio aéreo
En el documento“Roadmap for the integration of civil Remotely-Piloted Aircraft Systems into the European Aviation System” (European RPAS Steering Group, Junio 2013) se identifican estos gaps tecnológicos: o Integración dentro del espacio aéreo y ATM o Verificación y validación o Enlaces de comunicaciones de datos, incluyendo la gestión del espectro o Sistemas de detectar y evitar y procedimientos operacionales o Aspectos de seguridad o Procedimientos y sistemas operacionales para situaciones de contingencia o Operaciones en superficie, incluyendo despegue y aterrizaje
Varios implican disponer de una navegación precisa, fiable y segura
Una implementación correcta de esta función exige la selección de un hardware adecuado (sensores y procesamiento), unos algoritmos eficientes y un desarrollo de SW según normas
IMPORTANCIA DE LA FUNCIÓN DE NAVEGACIÓN
Foto: cortesía de Airbus Defence & Space

© GMV, 2014 31/03/2014 Página 3 CURSO RPAS
Un RPAS puede controlarse con una navegación no muy precisa, pero la precisión aporta ventajas, pues permite:
- Una identificación más precisa de POIs - Un control mejor de la aeronave - Aterrizajes automáticos suaves - Servir de entrada fiable para otras funciones (S&A, carga de pago)
Los RPAS de mayor tamaño tienen mayores requisitos de precisión. Ése es el caso de ATLANTE, para el que GMV ha desarrollado el FCC incluyendo toda la navegación.
NECESIDAD DE ALTA PRECISIÓN EN LA NAVEGACIÓN
Foto: cortesía de Airbus Defence & Space

© GMV, 2014 31/03/2014 Página 4
CURSO RPAS
Para conseguir una implementación completa y correcta de la navegación se deben cumplir ciertos requisitos:
Una buena elección de sensores, destacando especialmente la elección de la IMU
Una adecuada disposición de los sensores
Algoritmos diseñados para obtener la precisión requerida
Una estrategia para mejorar la navegación en ciertas fases de vuelo
Un hardware certificable de acuerdo con normas aeronáuticas
Un desarrollo de software cumpliendo las normas aeronáuticas adecuadas
REQUISITOS PARA LA IMPLEMENTACIÓN DE LA LA NAVEGACIÓN

© GMV, 2014 Página 5
Aproximación basada en tecnología de bajo coste, no certificable y con poca capacidad de proceso
ELEMENTOS DE BAJO COSTE PARA NAVEGACIÓN
Receptor GNSS IMU Transductor presión
Tubo pitot-estática Medidor AoA
31/03/2014 CURSO RPAS
Proceso

© GMV, 2011
ATLANTE
Página 6
Foto: cortesía de EADS
Sistema financiado por el CDTI (crédito a riesgo) con CASSIDIAN (ahora Airbus DS) como contratista principal
Características: Autonomía de 10 horas con 60 Kg.
de carga de pago Capacidad de operar con o sin
pistas de aterrizaje y despegue Sistema de comunicaciones operable
en entorno táctico Capacidad de operación noche/día y
todo tiempo Certificable Modularidad/Mantenimiento sencillo Transportabilidad en vehículos todo
terreno (Avión Táctico de Largo Alcance No Tripulado Español
31/03/2014 CURSO RPAS

© GMV, 2011
FCC DEL ATLANTE: ELEMENTOS HW
Página 7
El FCC de ATLANTE está compuesto por los siguientes elementos HW: Sensores
Receptor GPS IMU Magnetómetro Transductores de presión Radioaltímetro
Tarjeta de proceso Tarjeta de interfaces Tarjeta de alimentación Tarjeta de hold-up Caja + conexiones externas Dispositivos anti-vibratorios
Aplicables DO-160 Y DO-254
31/03/2014 CURSO RPAS

© GMV, 2010
FCC DEL ATLANTE: SENSORES
Página 8
GPS. Se ha elegido una tarjeta que: - Opera en banda L1 y L2 para eliminar error
ionosférico - Es capaz de proporcionar datos crudos
(necesarios para los algoritmos de navegación)
- Funciona hasta a 20 Hz
IMU. La IMU es un elemento clave pues es la que proporcionará la actitud, y la integración de sus datos es la base de la navegación. Para su elección se analizaron prácticamente todas las IMUs del mercado con un bias de alrededor de 1º/h
31/03/2014 CURSO RPAS

© GMV, 2010 Página 9
MAGNETÓMETRO. El magnetómetro fue elegido entre unos pocos disponibles. Se buscaba un magnetómetro 3D con la precisión suficiente.
TRANSDUCTORES DE PRESIÓN. El avión necesita un transductor diferencial para proporcionar la velocidad aerodinámica y uno absoluto para dar la altura barométrica.
FCC DEL ATLANTE: SENSORES
31/03/2014 CURSO RPAS

© GMV, 2010 Página 10
RADIOALTÍMETRO. Externamente a la caja y para ayudar en la fase de aterrizaje se incluye un radio-altímetro que da la altura con respecto al suelo. Este radio-altímetro da la distancia mínima dentro de un haz de unos 30º (minimizando el efecto de oscilaciones de la actitud en el aterrizaje) con una precisión de 5 cm.
FCC DEL ATLANTE: SENSORES
31/03/2014 CURSO RPAS

© GMV, 2014 31/03/2014 Página 11
CURSO RPAS
1) Ecuaciones de mecanización de la IMU
La mecanización parte de las aceleraciones y velocidades angulares medidas por la IMU y, con un modelo de gravedad, las integra para obtener una estimación del estado actual del avión. Simplificaciones frecuentes:
- Modelo de gravedad demasiado simple - Suponer que los ejes horizonte son ejes ECI.
Estas simplificaciones son innecesarias Lo ideal es manejar los ejes cuerpo, horizonte, ECEF (WGS84) y ECI.
ALGORITMOS DE NAVEGACIÓN (1)

© GMV, 2014
Estado propagado:
Posición, velocidad y actitud
𝑍𝑘
Loose: 𝑍𝑘 = �⃗�𝐸𝐸𝐸𝐸, �⃗�𝑁𝐸𝑁
IMU
GPS
Ecuaciones de mecanización
EKF
Vector de medidas
Tight: 𝑍𝑘 = pseudo-rangos,
Doppler
Fase
(para cada satellite)
𝑟𝑘−, �⃗�𝑘−, �⃗�𝑘−, Estado estimado:
Posición, velocidad y actitud
�̃�𝑘, �̃⃗�𝑘 , �⃗��𝑘 + errores IMU
31/03/2014 Página 12
CURSO RPAS
2) Esquema de hibridación Los datos de la IMU se tienen a mucha frecuencia y con poco error, pero ese error no es corregible y la mecanización de los datos diverge con el tiempo. Los de GNSS son estables en el tiempo pero a poca tasa y con mayor error, de manera que una hibridación GNSS-IMU resulta ideal. Se puede elegir entre una hibridación de datos “poco acoplada” y una “fuertemente acoplada” Normalmente, tal y como se indica en el esquema, el filtro utilizado para la hibridación de medidas es un Extended Kalman Filter (EKF).
ALGORITMOS DE NAVEGACIÓN (2)
© GMV, 2014 31/03/2014 Página 13
CURSO RPAS
El esquema de hibridación”poco acoplado” es más sencillo y permite usar los datos de posición y velocidad del receptor tal cual llegan.
El esquema “fuertemente acoplado” es más complejo de implementar y exige preprocesado de los datos GNSS, pero a cambio permite: Corregir el estado del sistema usando Doppler Implementar algoritmos de integridad que monitorizan la calidad de los
datos de cada satélite Pasar a navegación diferencial o relativa cambiando simplemente la
combinación de los datos recibidos, manteniendo el esquema base del filtro Kalman original.
En ambos casos hay que tener en cuenta el brazo antena GNSS-IMU.
ALGORITMOS DE NAVEGACIÓN (3)

© GMV, 2014 31/03/2014 Página 14
CURSO RPAS
3) Pre-procesado de datos GNSS En el caso de usar un esquema “fuertemente acoplado” se usan los observables dados por el receptor GNSS, de manera que hace falta pre-procesarlos antes de usarlos para eliminar los errores conocidos de los mismos: Errores relativistas Corrección del retardo ionosférico Corrección del retardo troposférico Filtrado de fase (incluyendo detección de saltos de ciclo) Algoritmo RAIM (Receiver Autonomous Integrity Monitoring) para
eliminación de satélites con observables incorrectos
Los algoritmos de pre-procesado pueden ser más o menos complejos dependiendo de la precisión que se quiera alcanzar y de los datos suministrados por el receptor.
ALGORITMOS DE NAVEGACIÓN (4)

© GMV, 2014 31/03/2014 Página 15
CURSO RPAS
4) Inclusión de más medidas en el esquema de hibridación Puesto que el RPA dispone de más sensores lo ideal es tenerlos en cuenta en el esquema de hibridación:
- Magnetómetro - Datos aire - Radio-altímetro / Láser-altímetro
TAS, hbarométrica
H sobre el terreno
Estado propagado:
Posición, velocidad y actitud
𝑍𝑘 Loose: 𝑍𝑘 = �⃗�𝐸𝐸𝐸𝐸, �⃗�𝑁𝐸𝑁
IMU
GPS
Ecuaciones de mecanización
EKF
Vector de
medidas
Tight: 𝑍𝑘 = pseudo-rangos,
Doppler
Fase
(para cada satellite)
𝑟𝑘−, �⃗�𝑘−, �⃗�𝑘−, Estado estimado:
Posición, velocidad y actitud
�̃�𝑘, �̃⃗�𝑘 , �⃗��𝑘 + errores IMU
Magnetómetro
Medida de campo magnético en ejes body
Datos aire
Altímetro
ALGORITMOS DE NAVEGACIÓN (5)

© GMV, 2014 31/03/2014 Página 16
CURSO RPAS
5) Eliminación de medidas incorrectas
Una de las herramientas más potentes que permite el filtro EKF es la eliminación de medidas incorrectas según criterios estadísticos.
Esto da gran robustez al filtro pues permite eliminar medidas poco razonables y también avisar de fallos en sensores.
A la vez, inevitablemente, dificulta admitir medidas buenas cuando nos creemos un estado incorrecto del sistema.
Consecuentemente, hace falta una correcta sintonización del filtro para aumentar la incertidumbre sobre el estado del sistema si medidas de varios sensores empiezan a rechazarse sistemáticamente.
ALGORITMOS DE NAVEGACIÓN (6)

© GMV, 2014 31/03/2014 Página 17
CURSO RPAS
6) Manejo de medidas retrasadas
Uno de los puntos más importantes a manejar es el retraso de las medidas. Por ejemplo es típico un retraso de unos 30ms entre que el receptor GNSS genera una medida y que ésta puede procesarse. Eso son unos 1.25 metros de error volando a 150 km/h.
El caso es más importante en la fase terminal, pues llegan datos desde tierra con un delay mucho mayor, de hasta 1 segundo, lo que sería un error de 41 m!!
Para manejar esto satisfactoriamente hay que disponer de un receptor GNSS que envíe pulsos PPS e implementar un algoritmo de manejo de señales retrasadas dentro del EKF.
ALGORITMOS DE NAVEGACIÓN (7)
© GMV, 2014 31/03/2014 Página 18
CURSO RPAS
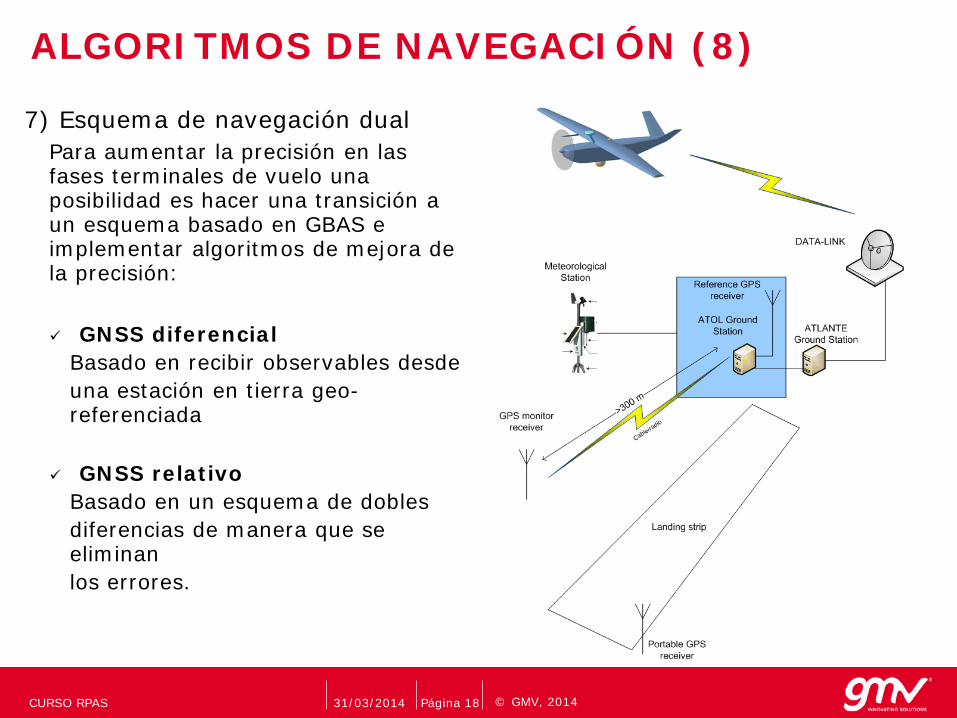
7) Esquema de navegación dual Para aumentar la precisión en las fases terminales de vuelo una posibilidad es hacer una transición a un esquema basado en GBAS e implementar algoritmos de mejora de la precisión: GNSS diferencial
Basado en recibir observables desde una estación en tierra geo-referenciada
GNSS relativo Basado en un esquema de dobles diferencias de manera que se eliminan los errores.
ALGORITMOS DE NAVEGACIÓN (8)

© GMV, 2014 Página 19
DESARROLLO DE SW CRÍTICO SEGÚN LA DO-178B Y SAFETY El SW del FCC del ATLANTE se desarrolla según la norma DO-178B nivel B Esto impone una estricta metodología de desarrollo, así como de verificación y
validación totalmente documentada Limita también el hardware a utilizar, los entornos de desarrollo, el sistema
operativo a utilizar, etc. Por ser un SW crítico exige un detallado estudio de Safety para asegurar la
seguridad del mismo: Básicamente se empieza con un estudio a nivel de sistema que identifique
los riesgos para la plataforma entera (FHA, “Failure Hazard Analysis”). A partir de este estudio se deriva el nivel de criticidad necesario para cada subsistema. De ahí se derivó la necesidad de Nivel B para el FCC
Una vez decidido esto para cada subsistema (FCC) se hace el análisis de las causas (failure) y la criticidad de los fallos (FMECA “Failure Modes Effects and Criticality Analysis”) y de ahí se deducen los requisitos de Safety y los mecanismos de mitigación para el sistema (SSA, “System Safety Assessment”).
De esta manera se generan nuevos requisitos al sistema. El análisis de Safety es iterativo y no acaba hasta el final del proyecto.
SINASA 2011
13/04/2011

© GMV, 2010
ARQUITECTURA CON PARTICIONES IMA (ARINC 653)
Página 20
Se ha aprovechado la capacidad que ofrece el SO para distribuir por particiones independientes la funcionalidad del FCC:
- Una partición de interfaces (I/O) que recoge toda la información que llega a la CPU procedente de los sensores internos a la caja, del radio-altímetro, del Mission Computer, así como algunas señales externas y la señal analógica de posición de los actuadores.
- Una partición de navegación (NAV) que a partir de la información de
todos los sensores y de la información de anteriores ciclos estima el estado del sistema mediante filtrado Kalman.
- Una partición de leyes de control (FCL) que recoge la información de
misión y de estado de la aeronave y genera la salida a comandar a los actuadores.
- Una partición de detección de fallos (FDIR). Esta partición chequea el
comportamiento de todos los elementos HW y SW del FCC y decide las acciones a tomar, incluyendo el fin del vuelo comandando la FTU. También comanda los BIT.
Introducción al ATLANTE 10/06/2010

© GMV, 2014 31/03/2014 Página 21
CURSO RPAS
En el caso del ATLANTE se hicieron pruebas en avión cautivo (C212 del INTA) para comprobar la precisión de la navegación.
Los resultados fueron muy satisfactorios. Se puede estimar que las precisiones observadas son:
Precisión en posición: horizontal: 1.7m 3σ vertical: 0.3m 1σ
Precisión en actitud: heading: 0.4 deg 1σ pitch: 0.2 deg 1σ roll: 0.2 deg 1σ
RESULTADOS OBTENIDOS EN ATLANTE (1)

© GMV, 2014 31/03/2014 Página 22 CURSO RPAS
RESULTADOS OBTENIDOS EN ATLANTE (2)