valores vectores svd - diegopat.ueuo.comdiegopat.ueuo.com/presentaciones/semana_7_lin.pdf ·...
TRANSCRIPT
CAPITULO 2 VALORES, VECTORES PROPIOS y
SVD
Ing. Diego A. Patiño M.Sc., Ph.D.

2
Valores y Vectores PropiosMuchas de las transformaciones que se necesitan en el diseño de sistemas de control se realizan sobre vectores dentro del mismo espacio:
XXA →:
Estos operadores conducen a vectores y escalares especiales llamados vectores y valores propios.
Subespacios Invariantes – Vectores y Valores
En cualquier espacio y para cualquier operador A existen ciertos subespacios en los cuales, si se toma un vector y A opera sobre él, el resultado permanece en el subespacio.
3
Valores y Vectores Propios
Subespacio Invariante – A: sea X1 un subespacio de un espacio vectorial X. Este espacio se denomina A –Invariante si para cada vector x ∈ X1, Ax ∈ X1. Normalmente se sobrentiende el operador A y se dice que X1 es invariante.
El operador A es simplemente una regla que asigna un nuevo vector Ax al vector x. En general A toma acciones arbitrarias sobre x: escalar, rotar, mover, etc., a través del espacio.

4
Valores y Vectores Propios
Caso especial: A simplemente escaliza al vector x:
Si el factor de escala se denomina λ, entonces
xAx λ=
Esta relación solo es válida en casos especiales:
Vectores y Valores Propios.
5
Valores y Vectores PropiosLos vectores propios definen un subespacio A – invarianteunidimensional: el espacio cubierto por cualquier colección de vectores propios diferentes es un subespacio A – invariante.
En la relación Ax = λx los vectores x no nulos se denominan Vectores Propios y los valores de λ correspondientes, que pueden ser cero, son los Valores Propios.
( ) ( ) 0xAλIxIA0xAxxAx =−=−→=−→= λλλ
Dado que
el vector propio x se puede interpretar como un elemento del espacio nulo de (λI -A), correspondiente al valor propio λ.
Se define el espectro de un operador como el conjunto de todos sus valores propios.

6
Valores y Vectores Propios
Para encontrar los valores y vectores propios de un operador A, es necesario forzar a (λI- A) para que tenga un espacio nulo no trivial.Para ello se necesita determinar la representación matricial para A y
ajustar | λI- A | = 0. El resultado para una matriz de dimensiones n×nserá un polinomio característico de orden n en la variable λ. Este polinomio tendra n raices y por lo tanto cada matriz n×n, o
cada operador de dismensión n tendrá exactamente n valores propios (aunque no necesariamente n vectores propios).
Para un sistema SISO la función de transferencia tiene un denominador dado por |sI – A|. Todas las raíces de | sI – A| son valores propios, pero no todos los valores propios son polos.
7
Valores y Vectores Propios
Bases de Vectores Propios – Formas Canónicas:Cuando se emplea como base para la representación de un operador el conjunto n vectores propios se obtienen representaciones sencillas, llamadas Formas Canónicas.Para formar una base de vectores propios, se debe tener un conjunto de n vectores propios LI.Primero se demostrará que los vectores propios de un operador A correspondientes a λ’s diferentes son LIPara λ’s repetidos no siempre se pueden encontrar vectores propios LI y es necesario definir los vectores propios generalizados.

8
Valores y Vectores PropiosTeorema: Los vectores propios de un operador A correspondientes a valores propios diferentes son LI.Sea A un operador con valores propios diferentes
Sea el conjunto de vectores propios.Se asume que solamente los k primeros vectores son LI, por lo tanto los (n – k) vectores restantes son una combinación lineal de los k primeros.
jiji ≠∀≠ λλ{ }n21 x...xx
0 algunos 1
≠≤<= ∑=
ij
k
iiijj aynjkcona xx

9
Valores y Vectores Propios
Como los x son vectores propios:
También se puede escribir como:
njkak
iijijjjj ≤<== ∑
=1 xxAx λλ
∑∑∑===
==⎟⎠
⎞⎜⎝
⎛=
k
iiiij
k
iiij
k
iiijj aaa
111xAxxAAx λ

10
Valores y Vectores Propios
Comparando las dos expresiones:
Para que la igualdad sea cierta y como los aij no son todos nulos entonces λi = λj lo cual contradice la suposición inicial:→ Todos los xi ,i = 1…n, son Linealmente independientes. (QED)
( ) 01
11
=−=
=
∑
∑∑
=
==
iji
k
iij
ii
k
iijij
k
iij
xa
xaxa
λλ
λλ

11
Valores y Vectores PropiosPara hacer el cambio de base solamente es necesario encontrar lamatriz que relaciona a la base inicial con la nueva base compuesta por los vectores propios.Por facilidad se expresará la nueva base en términos de la original y por lo tanto se empleara la matriz recíproca M
Sea e = {e1 e2 … en} la base normal original, sea x = {x1 x2 … xn} la nueva base formada por los vectores propios
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
ni
i
i
i
x
xx
ML 2
1
Nuevan21 eeex

12
Valores y Vectores PropiosGeneralizando,
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=⎥⎥⎦
⎤
⎢⎢⎣
⎡
nnnn
n
n
xxx
xxxxxx
L
MOMM
L
L
L44 344 21
L
21
22221
11211
Nueva
n21n21 eeexxx
con xji el j-esimo componente del vector xi.
La base recíproca M:
Propios Vectores
2
21
22221
11211
1
||||
||||
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
== −n
nnnn
n
n
xxx
xxxxxx
xxxBM 1Modal MatrizL
L
MOMM
L
L

13
Valores y Vectores PropiosLa nueva matriz A se encuentra por medio de una transformación similar
Considerando que la i-esima columna de un operador matricial representa el efecto del operador actuando sobre el i-esimo vector de la base; cuando un operador actúa sobre un vector propio (Ax) el resultado es una versión escalizada del vector propio (λx). Entonces cuando la base es el conjunto de vectores propios xi , el
operador actuando sobre esta base dará vectores con compenentesúnicamente en la dirección de los vectores propios: la i-esimacolumna de  tendra componentes no nulos solo en la posición i-esima, de esta manera  es una matriz diagonal, esto es:
AMMAXXMXMX 11 −− =⇒=⇒= ˆˆˆ

14
Valores y Vectores Propios
pero
M
ni
Propios Vectores
21
||||
||||
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡= AxAxAxAxAM LL
[ ][ ]
[ ]Tnnnn
T
T
λλ
λλλλ
L
M
L
L
000
000000
2222
1111
MxAx
MxAxMxAx
==
====
[ ]M
niPropios Vectores
21 xxxxAAM LL=

15
Valores y Vectores PropiosEntonces
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
=
nn λ
λλ
λ
λλ
L
MOMM
L
L
L
M
L
MM
00
0000000
000
0
0
0
0
00 2
1
2
1
MMMMAM
AAMM 1 ˆ
00
0000000
2
1
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=−
nλ
λλ
L
MOMM
L
L
L

16
Forma canónicaLa ecuación de estado transformada es:
DDCMC
BMBAMMA
UDXCYU;BXAX
DUXCMY
UBMXAMMX
BUXAMXM
XMX
DUCXYBU;AXX
1
1
==
==
+=+=
+=
+=
+=
=
+=+=
−−
−−
ˆ;ˆ
ˆ;ˆ
ˆˆˆˆˆˆˆ
:
ˆ)(ˆ)(ˆ
ˆˆ
ˆ
1
1
&
&
&
&
comparando

17
Valores y Vectores Propios
Ventajas de la forma canónica:
Pero:
A es no singular si y solo si no tiene valores propios nulos.
( ) ( ) ( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )AAMM
AMMMAMAMMA
detdetdet detdetdet
detdetdetdetˆdet
1
1
11
==
=
==
−
−
−−
n
n
AA
λλλλλλ
.......det
.......ˆdet
21
21
===

18
Valores y Vectores PropiosEjemplo: Sea
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−=122230
203A
( ) 0)1)(3)(5(122
230203
detdet =+−−=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
−−=− λλλ
λλ
λλ AI
Los valores propios:
531 321 ==−= λλλ

19
Valores y Vectores PropiosVectores propios:
• Para λ1 = -1
[ ] 0000240204
222240204
0
31
21
11
31
21
11
11 =⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−−→=−
xxx
xxx
xAIλ
Escogiendo x31 = 1 se tiene x11 = - ½ y x21 = ½, entonces
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
15.05.0
1x

20
Valores y Vectores Propios• Para λ2 = 3
[ ] 0222200000
222200200
0
23
22
21
23
22
21
22 =⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−→=−
xxx
xxx
xAIλ
x23 = 0, x21 = 1 y x22 = 1, entonces
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
011
2x

21
Valores y Vectores Propios• Para λ3 = 5
[ ] 0000220202
220220202
422220202
0
33
32
31
33
32
31
33
32
31
23 =⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−→=−
xxx
xxx
xxx
xAIλ
Escogiendo x33 = 1 : x31 = 1 y x32 = -1 y:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=11
1
3x

22
Valores y Vectores PropiosEntonces
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
=→
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
== −
31
31
31
021
21
32
31
31
101112
1112
11
321 MxxxM
Por lo tanto
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
=500030001
101112
1112
1
122230
203
31
31
31
021
21
32
31
31
A
23
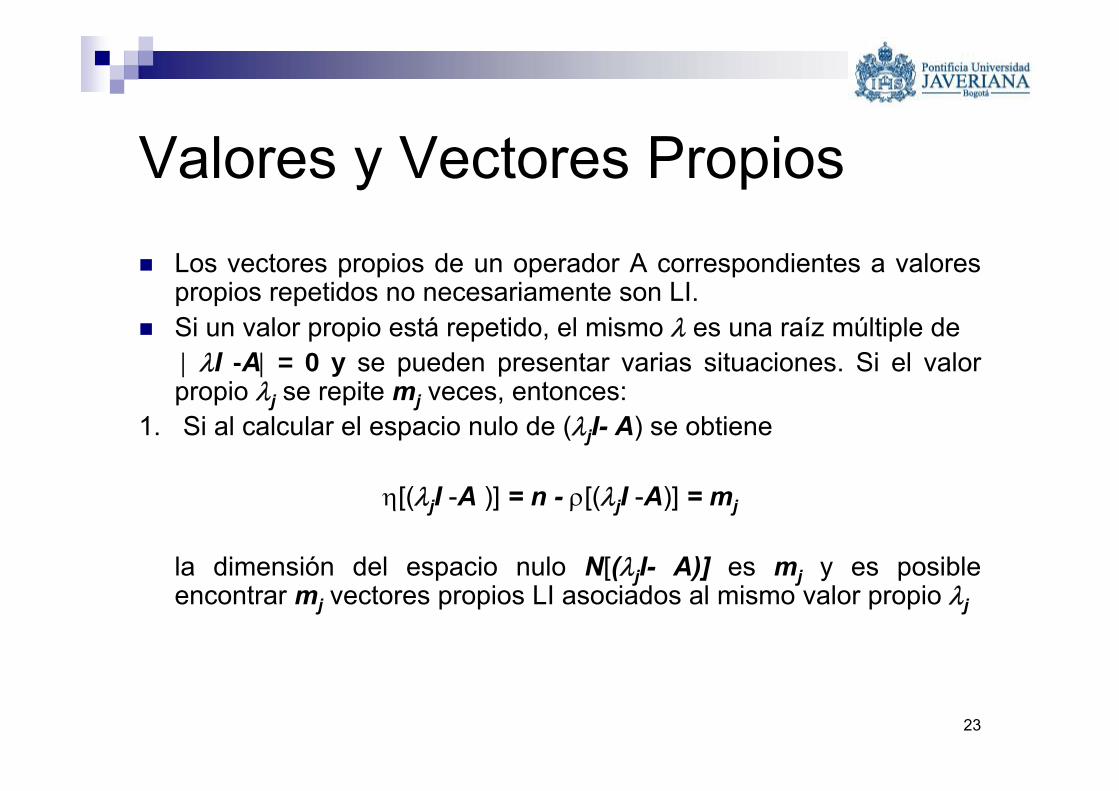
Valores y Vectores PropiosLos vectores propios de un operador A correspondientes a valorespropios repetidos no necesariamente son LI.Si un valor propio está repetido, el mismo λ es una raíz múltiple de | λI -A| = 0 y se pueden presentar varias situaciones. Si el valor
propio λj se repite mj veces, entonces:1. Si al calcular el espacio nulo de (λjI- A) se obtiene
η[(λjI -A )] = n - ρ[(λjI -A)] = mj
la dimensión del espacio nulo N[(λjI- A)] es mj y es posible encontrar mj vectores propios LI asociados al mismo valor propio λj

24
Valores y Vectores Propios2° Si al calcular el espacio nulo de (A – λjI) se obtine
η[(λjI -A ] = n - ρ[(λjI -A)] < mj
no es posible encontrar mj vectores propios LI porque el espacio nulo N[(A – λjI)] no es lo suficientemente grande.
Aunque una matriz de n×n tenga n valores propios no siempre es posible encontrar un conjunto completo de vectores propios.
El caso 1° define un subespacio A – invariante asociado a un valor propio λj, dicho subespacio se denomina Espacio Propio de λj y su base está definida por el conjunto de todos los vectores propios correspondientes al valor propio λj .

25
Valores y Vectores PropiosEjemplo: Diagonalizar A, si es posible
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
200010101
A
( ) ( ) ( ) 2y 1 021det 3212 ===→=−−=− λλλλλλ AI
Valores propios:
Para λ1 = λ2 = 1
[ ] 0000000100
100000100
0
13
12
11
13
12
11
21 =⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−→=−
xxx
xxx
xAIλ
26
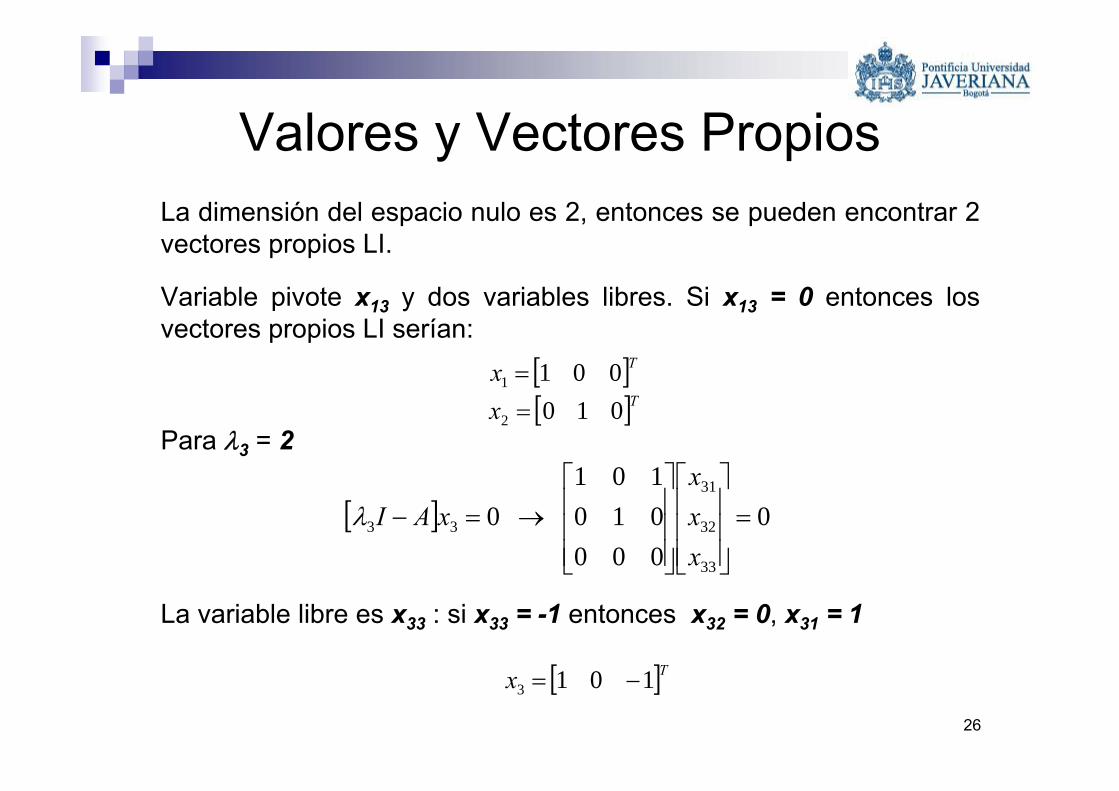
Valores y Vectores PropiosLa dimensión del espacio nulo es 2, entonces se pueden encontrar 2 vectores propios LI.
[ ][ ]T
T
xx
010001
2
1
==
Para λ3 = 2
[ ] 0000010101
0
33
32
31
33 =⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡→=−
xxx
xAIλ
Variable pivote x13 y dos variables libres. Si x13 = 0 entonces los vectores propios LI serían:
La variable libre es x33 : si x33 = -1 entonces x32 = 0, x31 = 1
[ ]Tx 1013 −=

27
Valores y Vectores PropiosLa matriz modal:
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=→
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−== −
100010101
100
010101
1321 MxxxM
Por lo tanto
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
200010001
100010101
200010101
100010101
A

28
Vectores Propios GeneralizadosVectores Propios Generalizados:
ni
i <∑η
Cuando se presenta el caso 2º, no se pueden encontrar todos los vectores propios asociados al valor propio λj de multiplicidad mj, por lo tanto la suma de los espacios nulos asociados a todos los vectores propios es menor que n (dimensión del operador A),
No es posible construir la matriz M y no se puede diagonalizar A.
Para resolver este problema se definen los Vectores Propios Generalizados.

29
Vectores Propios Generalizados
Si para este valor propio ηi < mi, es necesario obtener ηi - mi vectores propios adicionales linealmente independientes.Índice de un valor propio repetido es el menor entero k tal que:
Donde n es la dimensión del espacio, mi es la multiplicidad de λi
ik
i mn −=− )( IA λρ

30
Vectores Propios Generalizados
Para el valor propio λi con índice ki encontrar todas las soluciones linealmente independientes de:
si k = 1, entonces
( )( ) 0vIA
0vIA
≠−
=−−1y
i
i
ki
ki
λ
λ
( ) PropioVector un de Definición y ←≠=− 0v0vIA iλ

31
Vectores Propios Generalizados
Cada solución LI da origen a una cadena de vectores propios generalizados.No existen mas de mi soluciones: esta es la nulidad del espacio
Estas soluciones se pueden representar por:
Pueden existir menos soluciones porque algunos vectores no cumplen la segunda condición
1m
12
11
iv....vv
iki )( IA λ−

32
Vectores Propios Generalizados
Si Vj es un vector propio generalizado para j = 1,..,mi evaluar:
Hasta llegar a:
Que es un vector propio regular
( )( )( ) 43
32
21
jj
jj
jji
VVλIAVVλIAVVIλA
=−=−=−
( ) 0iki j− =A λ I V

33
Vectores Propios Generalizados
El conjunto {V1 V2 ··· Vki} es una cadena de vectores propios generalizados de longitud ki y son linealmente independientes.
( )( )
ii
jjjjj
jjjjj
kji
kj
i
i
λ
λoλo
VAV
VVAVVVIAVVAVVVIA
=
+==−
+==−
M
23232
12121
λλ
Una vez obtenidos todos los vectores propios generalizados asociados con los diferentes valores propios, se construye la matriz M.

34
Vectores Propios Generalizados
Si las cadenas de longitud ki no producen todos los vectores propios generalizados se sigue con la secuencia:
Esto genera una secuencia de longitud ki - 1Una vez obtenidos todos los vectores propios generalizados asociados con los diferentes valores propios, se construye la matriz M.
( )( ) 0vIA
0vIA
≠−
=−−
−
2
1
y
i
i
ki
ki
λ
λ
35
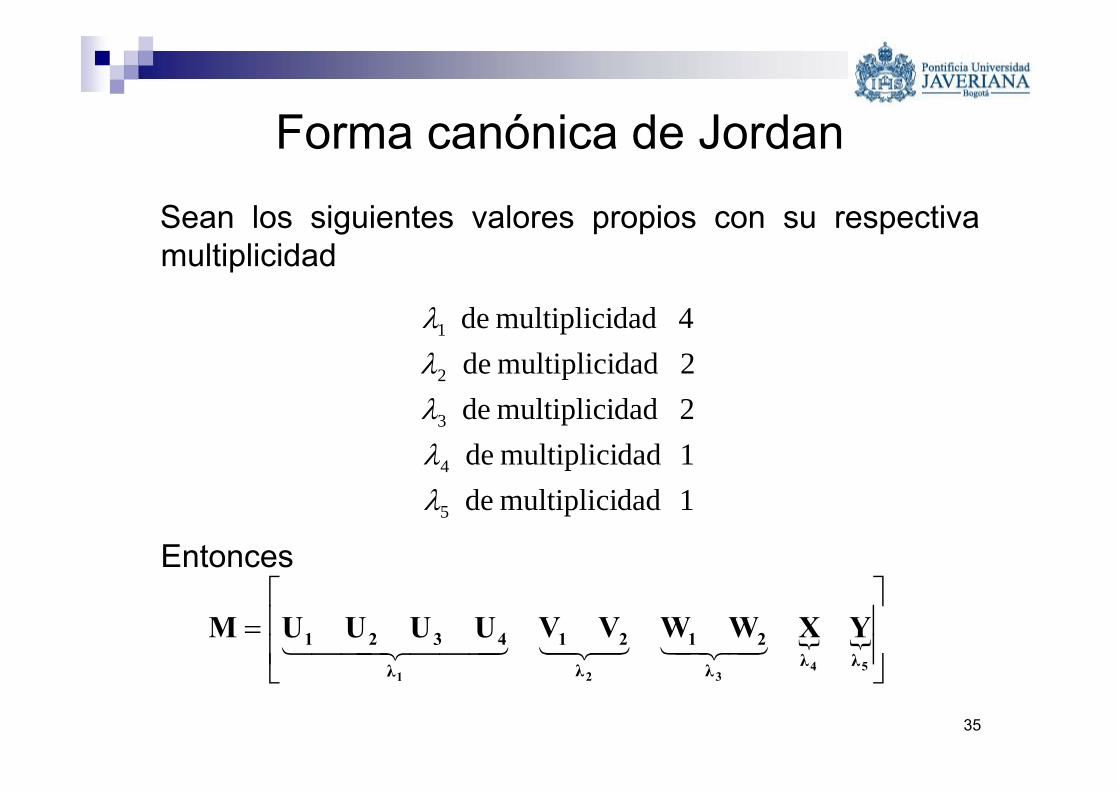
Forma canónica de JordanSean los siguientes valores propios con su respectiva multiplicidad
1 dadmultiplici de 1 dadmultiplici de 2 dadmultiplici de 2 dadmultiplici de 4 dadmultiplici de
5
4
3
2
1
λλλλλ
Entonces
{ {⎥⎥
⎦
⎤
⎢⎢
⎣
⎡=
54321
λλλ
21
λ
21
λ
4321 YXWWVVUUUUM4342143421444 3444 21

36
Forma canónica de JordanComo (A - λ1I)kU4 = 0 → (A - λ1I)k[(A - λ1I)k-1U4] = 0 (U4 = U)
( )( )( )( ) 341
231
121
11 0
UUIAUUIAUUIA
UIA
=−=−=−=−
λλλλ
Ahora,
Entonces
[ ][ ][ ][ ]T
T
T
T
MUUAUMUUAUMUUAU
MUAUUAU
010000100001
00 0
14134
13123
12112
1111111
L
L
L
L
λλλλ
λλλλλ
=+==+==+=
==→=−
37
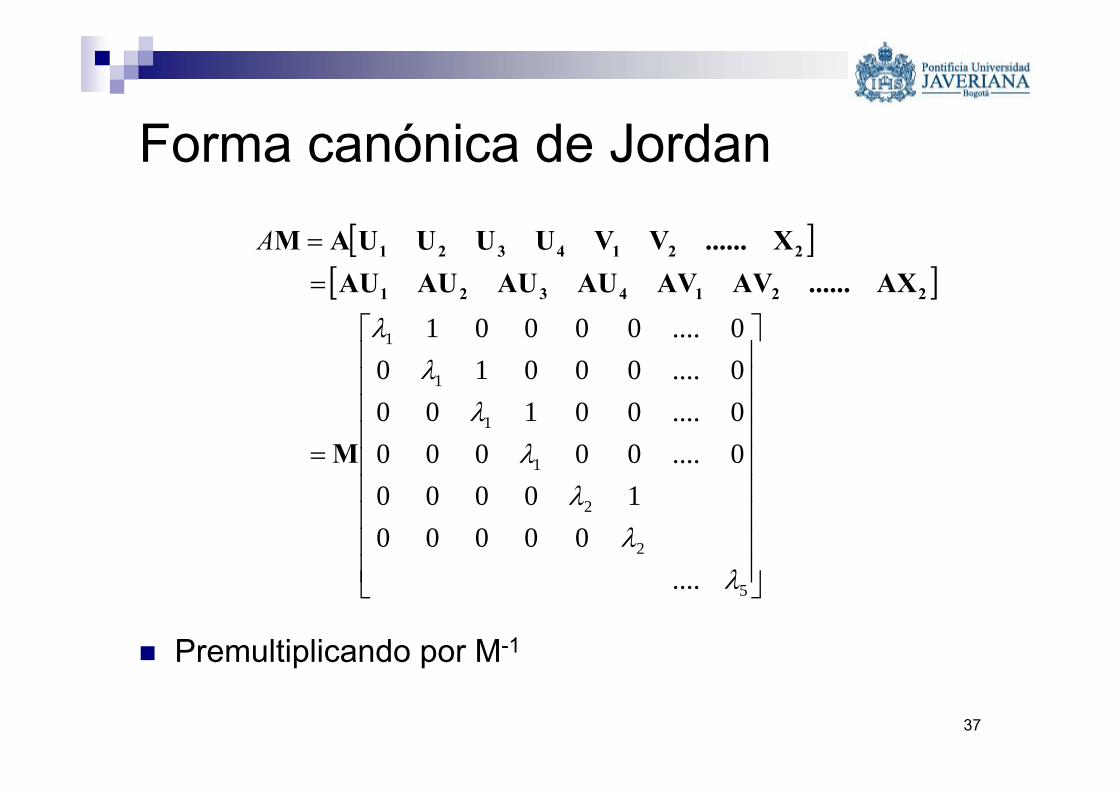
Forma canónica de Jordan
Premultiplicando por M-1
[ ][ ]
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
==
5
2
2
1
1
1
1
....00000
100000....000000....001000....000100....00001
λλ
λλ
λλ
λ
M
AX......AVAVAUAUAUAU X......VVUUUUAM
2214321
2214321A

38
Forma canónica de JordanLa nueva representación  =M-1AM
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
5
4
3
3
2
2
1
1
1
1
00000000000000000000
00
01
0000
00000000
00
00
0000
01
00000000
0000
0000
00000000
00000000
000100010001
ˆ
λλ
λλ
λλ
λλ
λλ
A
Forma canónica de Jordan.

39
Valores y Vectores PropiosLa representación de  es de la forma
{ }21diagˆ JJA =
Bloque de Jordan k
Una matriz A de 5 × 5 con valores propios λ1 (m1 = 4) y λ2 (m2 = 1) puede tener la siguiente forma canonica de Jordan:
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
2
1
1
1
1
1
00000000010000100001
ˆ
λλ
λλ
λ
A
Bloque de Jordan l
Si η(A - λ1I) = 1,

40
Valores y Vectores PropiosSi η(A - λ1I) = 2,
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
2
1
1
1
1
2
00000000000000100001
ˆ
λλ
λλ
λ
A
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
2
1
1
1
1
3
00000000010000000001
ˆ
λλ
λλ
λ
A
Si η(A - λ1I) = 3, Si η(A - λ1I) = 4
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
2
1
1
1
1
4
00000000000000000001
ˆ
λλ
λλ
λ
A
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
2
1
1
1
1
5
00000000000000000000
ˆ
λλ
λλ
λ
A

41
Valores y Vectores PropiosEjemplo: Considerar la matriz
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
200310211
A
Los valores propios son λ1 = 1, λ2 = 1 y λ3 = 2. Un vector propio asociado a λ3 es
[ ]Tv 1353 =
Por otra parte, el rango de (A - λ1I) es 2, por lo cual solo es posible encontrar un vector propio asociado con λ1. En consecuencia es necesario emplear vectores propios generalizados.

42
Valores y Vectores Propios
( ) ( )⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=−
100300500
y 100300210
211 IAIA λλ
El rango de (A - λ1I)2 es 1 (n – m). Un vector V tal que (A - λ1I)2V = 0y (A - λ1I)V ≠ 0.
Se puede escoger
[ ]TV 010=

43
Valores y Vectores PropiosEntonces
( )⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡==
001
010
112 VIAVVV λ
Y la matriz  sería
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
200010011
A
 también se puede obtener haciendo
AQQA 1ˆ −=
44
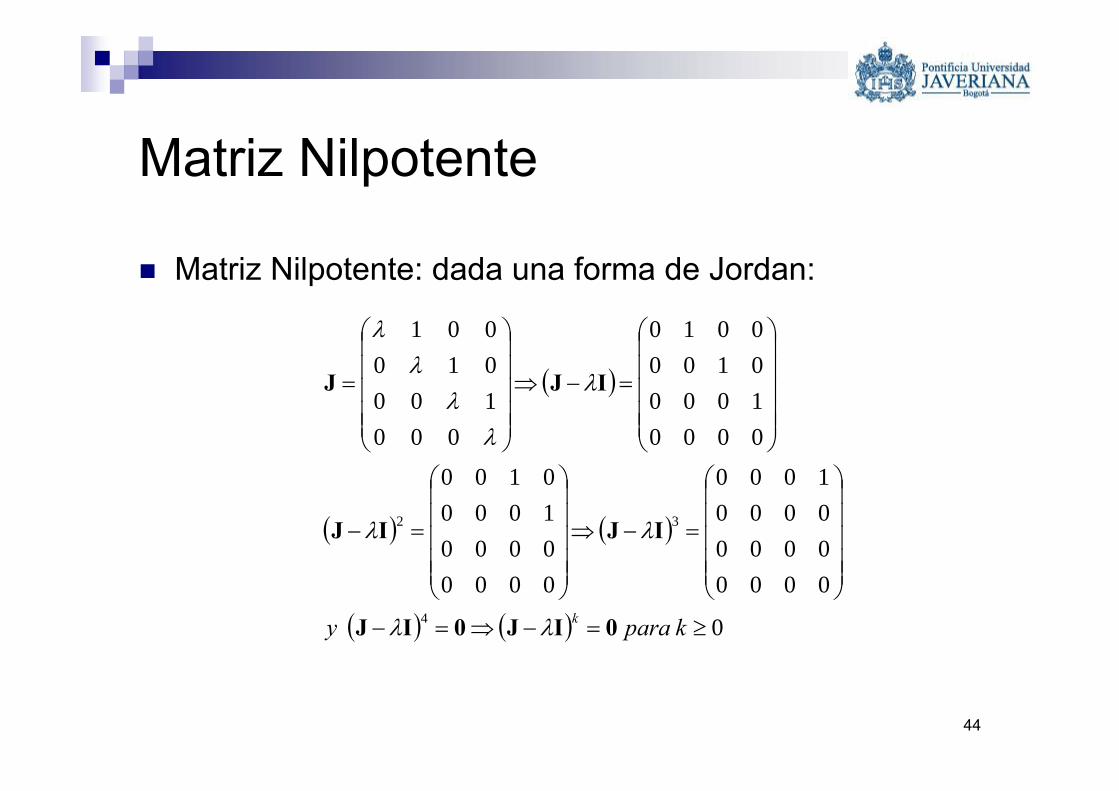
Matriz Nilpotente
Matriz Nilpotente: dada una forma de Jordan:
( )
( ) ( )
( ) ( ) 0
0000000000001000
0000000010000100
0000100001000010
000100010001
4
32
≥=−⇒=−
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=−⇒
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=−
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=−⇒
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
kparay k 0IJ0IJ
IJIJ
IJJ
λλ
λλ
λ
λλ
λλ
45
SVDLos valores y vectores propios tiene una aplicación importante en el análisis de estabilidad y control de sistemas de ecuaciones diferenciales. Conociendo los λ’s y v’s se conocen muchas de las propiedades numéricas de los operadores lineales.
Los valores y vectores propios solamente están definidos para matrices cuadradas, o transformaciones de ℜn → ℜn.Una definición mas general es la de los Valores Singulares y el procedimiento de Descomposición en Valores Singulares (SVD).
SVD: sea A una matriz compleja de m × n. Existen dos matrices unitarias U y V tales que
TVUA Σ=

46
SVDdonde
[ ] nmS
nmS
<=Σ
>⎥⎦
⎤⎢⎣
⎡=Σ
para 0
para 000
S es una matriz diagonal:
Los r valores reales σ1 , σ2 , … , σr están arreglados de tal forma que σ1≥σ2≥…≥σr > 0 y los demás σr+1 = σr+1 = …σk = 0
},min{ };,..,,....,{ 121 nmkcondiagS krr == + σσσσσ

47
SVD
Los σi se denominan Valores Singulares de la matriz A. El valor r corresponde al rango de la matriz A. El número de valores singulares nulos es igual a la “degeneración” de la matriz A.Los σi corresponde a las raíces cuadradas positivas de los valores propios de:
)()()( Ti
Tii AAAAA λλσ ==
48
SVD
Una matriz U compleja es unitaria si:
Todos sus valores singulares son uno.
Las matrices U (mxm) y V (nxn) forman bases ortogonales para el espacio de salida y el de entrada de A.
TUU 1 =−

49
SVD
Las columnas de la matriz U (mxm) se denominan “vectores singulares izquierdos” o de salida : son los vectores propios de la matriz AAT y son ortonormales.Las columnas de la matriz V (nxn) se denominan “vectores singulares derechos” o de entrada: son los vectores propios de la matriz ATA y son ortonormales.SVD se calcula por computador:
Matlab: svd(A)

50
APLICACIONES SVD
El rango de una matriz es igual al número de valores singulares no nulos.“Condition Number”: que tan cerca está una matriz a ser deficiente en rango. (Singular para una matriz cuadrada):
“Condition Number” grande: matriz “ ill-conditioned”“Condition Number” pequeño: matriz “ well- conditioned”
r
NumberConditionσσ1 =

51
APLICACIONES SVD
Cálculo de la matriz inversa: si A es una matriz cuadrada (nxn) entonces U y V también son cuadradas:
Como U y V son ortonormales:
( ) ( ) 11111 −−−−− Σ==
=
UVV
VTT
T
UΣA
UΣA
T
r
diag UVA ⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛=−
σσσ1....1,1
21
1

52
APLICACIONES SVD
Solución de ecuaciones simultáneas:
La solución es:
La matriz:
mnmn AyxyAx ℜ→ℜℜ∈ℜ∈= :;,
[ ]YUVXYVUX
T
T
+
−
−
Σ=
Σ=
=1
YΑX 1
⎥⎦
⎤⎢⎣
⎡=Σ
−+
0001S

53
SVD - Normas matriciales inducidas
Se definen las normas inducidas 1, 2 e ∞ como:
La norma inducida 2 es igual al valor singular mas grande y se denomina “Norma espectral”
{
{
( ) { ( ) espectral" norma" max)(
fila" suma maxima" max
columna" suma maxima" max
2
1
AAAArAA
aA
aA
Ti
i
Ti
jij
ii
iij
ji
λσ ===
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎟⎠
⎞⎜⎝
⎛=
∑
∑
∞
54
SVD – Ganancia
Para un sistema MIMO la respuesta en frecuencia se evalúa como una extensión del caso SISO: una entrada seno aplicada a la entrada j produce una señal seno yi
El número complejo define la amplificación (ganancia) y el corrimiento de fase.
( ) ( ) ( ) ( )jjijjj wtytywtutu βα +=→+= sin sin 00
( )jwgij
( ) ( )jwgjwguy
ijjiijj
j ∠=−= αβ ;0
0

55
SVD – Ganancia
Empleando superposición se puede obtener las respuesta total yi debida a las p señales seno de entrada:
Para un sistema MIMO completo, en forma matricial
( ) ( ) ( ) ( ) ( ) ( ) ( )wujwgwujwgwujwgwy pipiii +++= L2211
( ) ( ) ( )∑=
=p
jjiji wujwgwy
1
( ) ( ) ( )wjww uGy =

56
SVD – Ganancia( )( )
( )
( )
( )( )
( )43421
M
43421
M
Entradas p
2
1
Salidas q
2
1
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
wu
wuwu
jwG
wy
wywy
pq
Para un sistema SISO y = Gu y la ganancia para una frecuencia dada es:
( )( )
( ) ( )( ) ( )jwGwuwujwG
wuwy
==
La ganancia depende de w, y para sistemas lineales, no depende de la magnitud de la entrada.

57
SVD – Ganancia
Para un sistema MIMO, entradas y salidas son vectores: para definir una “ganancia” es necesario “sumar” las magnitudes de los elementos de cada vector empleando alguna norma.
( ) ( ) )()()( 222
21
1
2
2wuwuwuwuwu p
p
jj +++== ∑
=
L
Si se toma la norma 2 (medida de la longitud), para una frecuencia wdada la magnitud del vector de señales de entrada es:
y la magnitud del vector de salida es
( ) ( ) )()()( 222
21
1
2
2wywywywywy q
q
ii +++== ∑
=
L

58
SVD – GananciaLa ganancia del sistema para un vector de entrada de frecuencia ωes:
La ganancia depende de la frecuencia, pero es independiente de la magnitud de la entrada. Para un sistema MIMO existen grados de libertad adicionales y la
ganancia depende de la dirección de la entrada u.
( )( ) )()()(
)()()(22
221
222
21
2
2
wuwuwu
wywywywuwy
p
q
+++
+++=
L
L

59
SVD – Ganancia
↓
⎥⎦
⎤⎢⎣
⎡−=⎥
⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡=
2.02.0
8.06.0
2345
1y
Ejemplo: Considerar el sistema de dos entradas y dos salidas descrito por la matriz G, para una ω0
⎥⎦
⎤⎢⎣
⎡=
2345
G
La ganancia para cinco vectores de entrada con norma unitaria pero con distintas direcciones es:
• u1 = [0.6 -0.8]T
( ) ( ) ( ) ( ) 28.0 28.02.02.0 ;18.06.021
212221
2221 =→=+==+=
uy
yu

60
SVD – Ganancia• u2 = [1 0]T
↓
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=
35
01
2345
2y
83.534 34925 ;10122
222122 ==→=+==+=
uy
yu
• u3 = [0 1]T
↓
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=
24
10
2345
3y
47.420 20416 ;11023
232323 ==→=+==+=
uy
yu

61
• u4 = [1/1.4142 1/1.4142]T
↓
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=
2529
2121
2345
4y
3.7 7.32106225281 ;1212124
242424 =→==+==+=
uy
yu
• u5 = [1/1.4142 -1/1.4142]T
SVD – Ganancia
↓
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
−⎥⎦
⎤⎢⎣
⎡=
2121
2121
2345
5y
1 12121 ;1212125
252525 =→=+==+=
uy
yu

62
SVD – GananciaGraficando la relación entre las componentes del vector u = [u1 u2] (medida de la dirección: + igual , - opuesta)) contra ||y||2/||u||2 se tiene
Los valores propios de la matriz son 7.27 y -0.27Los σ son 7.34 y 0.27

63
Los valores propios de la matriz G(s) no son una buena indicación de la ganancia de un sistema MIMO, dada la matriz G(s):
SVD – Ganancia
Esta matriz tiene dos valores propios en λ = 0, sin embargo para la entrada u = [0 1]T :
⎥⎦
⎤⎢⎣
⎡=
001000
1G
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=
0100
10
001000
y
y la ganancia sería
1002
2 =uy
64
Los valores propios miden la ganancia para el caso especial en que las entradas y las salidas están en la misma dirección: las direcciones definidas por los vectores propios.
SVD – Ganancia
Sea vi un vector propio de la matriz G y sea una entrada ui = vi, entonces y = Gvi, pero por definición
iii vGvy λ==
||λi|| es una medida de la ganancia cuando la entrada está en la dirección dada por el vector propio correspondiente.
Entonces
ii
ii
i
i
vv
vGv
uy
λλ
===
65
SVD – Ganancia
La matriz G de ganancia de un sistema MIMO de p entradas y q salidas se puede descomponer:
Donde:
TVUG Σ=
"ectorssingular vInput :" :"ectorssingular vOutput :" :
singulares valores},min{ :
pxpmatrizVqxqmatrizU
pqqxpconkmatriz =Σ

66
SVD – Ganancia
Los vectores columna de la matriz U, notados μi representan las direcciones de salida de la planta.Los vectores columna de la matriz V, notados νi representan las direcciones de entrada de la planta.Vectores y matrices son ortonormales:
iiiGUGV
μσυ =
Σ=

67
SVD – Ganancia
Si se considera una entrada en la dirección νi la salida estará en la dirección μi
Como los vectores son unitarios, el i – esimo valor singular σi da directamente la ganancia de la matriz G en esa dirección:
2
22
)(i
iii
GGG
υ
υυσ ==

68
SVD – Ganancia
El valor singular da mejor información sobre la ganancia de la plantaLas direcciones obtenidas son ortogonalesSVD se aplica a plantas de dimensión nxm

69
SVD – Ganancia
El máximo valor de la ganancia cuando la dirección de la entrada cambia es el máximo valor singular de G:
El mínimo valor de la ganancia es el mínimo valor singular de G:
{ )()(max 1max21
21
2
2
0
GGG
uGu
u
σσυυ
===≠
{ )()(min min2
2
2
2
0GG
GuGu
kk
k
uσσ
υυ
===≠
70
SVD – Ganancia
Para el sistema ya analizado:
SVD:
⎥⎦
⎤⎢⎣
⎡=
2345
G
T
VU T
G444 3444 2144 344 21444 3444 21
⎥⎦
⎤⎢⎣
⎡ −⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
=
Σ
794.0608.0608.0794.0
272.000343.7
872.049.049.0872.0
71
SVD – Ganancia
La mayor ganancia es de 7.343 en la dirección de entrada:
La menor ganancia es de 0.272 en la dirección de entrada:
⎥⎦
⎤⎢⎣
⎡=
608.0794.0
1υ
⎥⎦
⎤⎢⎣
⎡−=
794.0608.0
2υ

72
SVD – Ganancia
El “condition number” :
El sistema es “ill conditioned”: unas combinaciones de entradas tienen mayor efecto que otras y algunas son muy débiles
27272.0343.7 ==numberCondition

73
REFERENCIAS
1. BAY J.S. " Fundamentals of Linear State Space Systems", New York: McGraw Hill International Edition,. 1999. Chapter 4
2. CHEN Chi- Tsong. Linear Systems Theory and Design. 3rd Edition. New York: Oxford University Press. 1999. Chapter 3.

74
REFERENCIAS
3. KLEMA V. and LAUB A. The singular value decomposition: its computation and some applications. – IEEE Transactions on Automatic Control. Vol. AC-25 # 2. April 1980. pp 63-79
4. SKOGESTAD Sigurd & POSTLETHWAITE Ian. Multivariable Feedback Control. Chichester: John Wiley & Sons 1996.