universidad autonoma metropolitana …148.206.53.84/tesiuami/uam7332.pdf · métodos químicos la...
TRANSCRIPT
UNIVERSIDAD AUTONOMA METROPOLITANA UNIDAD IZTAPALAPA
DEPARTAMENTO DE ELECI'RICA
AREA INGENERIA BIOMEDICA
y EQUIPO PARA MEDIR LA TENSION SUPERFICIAL EN LIQUIDO AMNIOTIC0
ELABORADO POR:
ASESORES:
ING. JUAN RAMON JIMENEZ
.
CONTENIDO
1 I ntroduc c i 6n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...... 7
. 7 Capítulo 1 .Descrípci6n del equipo.. . . . .. . . . .......
1.1 .Electrónica. . . . . . . . . . . . . . . . . . . . .. . . . ....... 7 1 .l. 1 Contro les de los motores.. . . . .......
1 .1 .2 Detector de gotas.. . . . . ... .. ........ 16 1 .1 .3 Sistema de control y deplegado ...... 21
1 . 1 . 3 . 1 Sistema de control.. . . ....... 2 2.
1 . 1 . 3 . 2 Despliegue.. . . . .... . ........ 2 4
1 .1 .4 Fuente de alimentación. .... . ......... 20 1.2 Mecanica.. . . . . . . . . . . . . . . . .. . . ... . . ........ 31
1 .2 .1 Bomba de succi6n. . . . . . . . .. . . . ....... 31
1 .2 .2 Brazo mechico.. . . . . . . . ... . . ........ 36 í .3 Programa. . . . . . . . . . . . . . . . . . . . . . . . . . . . ...... 43
Capítulo 2 Resultados . . . . . . . . . . .................. 50
capítulo 3 Conclusiones.. . . . . ................... 63 64 Bibliografía. . . . . . . . . . . . . . . . . . . . . . .. . . . .......

d
INTRODUCCION * . 6 '
Los pulmones tienen una tendencia elástica
constante al coiapso, separandose de la pared torAxica.
Esta tendencia depende de dos factores : en primer
lwar , en todo el pulm6n hay muchas fibras
elásticas que son estiradas por la insuflaci6n
pulmonar y tienen tendencia a retraerse. El segundo y
quizás mAs importante, es la tensión superficial de los
líquidos que recubren los alvéolos, provocando una
tendencia continua de éstos a colapsarce.
Una mezcla de lipoproteinas, llamada sustancia
tenso-activa, es secretada por células especiales que
existen en el epitelio alveolar. Es ta mezcla que en
especial contiene el fosfolípido dipalmitoil lecitina,
disminuye la tensi6n superficial de los líquidos que
recubren los alvéolos. Cuando no existe La expansión
pulmonar es extremadamente difícil y con frecuencia se
necesitan presiones intrapleurales (presión negativa en
los espacios intrapleurales para evitar el colapso
puimonar; normalmente -4 rnmHg> tan bajas como -20 a -30
mmHg para vencer la tendencia de los alvéolos al
colapso.
Es t e hecho ilustra la extrema importancia del
tenso-activo para reducir ai mínimo el efecto de la
tensión superficial, que causa colapso en los pulmones.
Un porcentaje de recién nacidos, en especial los
prematuros, no secretan cantidades adecuadas de
1
sustancias tenso-activas y ello dificulta la expansibn i.
pulmonar.
Sin un tratamiento inmediato y muy cuidadoso,
la mayoría muere poco después de nacer por ventilación
inadecuada. Este grave trastorno de los pulmones de los
neonatos recibe el nombre de enfermedad hialina o
síndrome de dificultad respiratoria CSDR) y es el
principal causante de muertes en los recién nacidos.
Los neonatos que desarrollan SDR en su gran
mayoría son prematuros.En el parto o un breve tiempo
después comienzan a mostrar signos tales como:
disminución de La frecuencia respiratoria, gruñidos en
ia fase expiratoria y retracci6n de la pared
toraxica ;esto acompañado por cianosis y períodos de
apnea.
El principal criterio para el diagnóstico
patológico es la presencia de membrana hialina en los
pulmones. Como se mencionó en los párrafos anteriores,
la deficiencia de surfactantes (sustancia
tenso-activa) en los pulmones prematuros es el
principal defecto etiOl6giCO de esta enfermedad. Esta
sustancia tenso-activa, la cual determina el erado de
madurez de los pulmones fetales, si no esti presente en
suficientes cantidades, el neonato desarrollar& SDR.
Antes 'del nacimiento el líquido de los pulmones
fetaies se intercambia con el liquido anmi6tic0, la
2
I
cantidad de sustancias tenso-acthvase en el Uquido
anmi6tico demuestra un preciso reflejo de la J '
cantidad de tenso-activo en los alvéolos fetaless.
Por lo tanto un e s i s de líquido amniótico
puede identif icar de manera precisa, antes del
nacimiento a estos neonatos quienes desarrollarh SDR.
As í se han desarroilado diferentes métodos para
la predicción de SDR, la mayoría de eiios midiendo por
métodos químicos la cantidad de surfactantes en
líquido anmi6tico.
La relación entre lecitina y esfingomielin en
líquido anmi6tic0, asi como el CMCUlO de
fosfatiklicerol también en líquido anmi6tic0, son los
métodos mAs comi'inmente usados, sin embargo, estos son
complicados y requieren un procedimiento de
laboratorio de muchas horas.
Un método desarrollado por Aberg y Qislen para
medir la tensión superficial en líquido anmi6tico es
derivado del modelo de H a r k i n s y Brown. Este modelo,
piantea una igualdad de fuerzas en una gota, así la
fuerza de gravedad es igual a la fuerza de la
tensi6n superficial Césta puede ser definida como La
fuerza que actiia sobre una unidad de longitud> en el
orificio donde se forma la gota, esto puede
expresarse mediante la siguiente iguaidad
3
d
8-
V x P x Q - 2nr x y ' (1, d '
donde V = volumen de la gota
P - densidad
Q = gravedad
r - radio del orificio
y = tensión superficial
En esta fórmula,se desprecian ciertas condiciones:
la gota que se forma en el orificio puede que no
sea totalmente vertical wl volumen de la gota que cae
puede no ser igual ai volumen de la gota que se forma en
el orificio. De esta manera , si se quiere una
aproximación más exacta, tiene que tomarse en cuenta
Las anteriores condiciones y formular una nueva
igualdad, incluyendo una función clue sea
dependiente de la relación Cr/L>, donde L es una
medida de la gota.
y/p - V x Q A n r x @ C i U L > C2>
Por lo tanto, el método de Aberg: y Qislen mide
la cantidad de surfactantes en el liquido anmiótico,con
el hecho de que el volumen de una gota que caeCec 2>del
liquido es inversamenke proporcional a la cantidad de
sustancia tenso activa, Ya que a mayor
sustancia tenso-activa, menor tensión superficial
en el liquido anmiótico.
De esta manera, un macpoproyecto propuesto en el
INPER, Area de bioingeniería, se pretende iievar a cabo,
basandose en el método recién mencionado, para obtener
un procedimiento ,rApido y senciiio,en iaprediccion
4
I '-
de SDR del recien nacido,con esto se' obtendria una
importante adición en el manejo clínico de los embarazos
d '
de aito riesgo.
La primera etapa de este macroproyecto,la cual me
tocó desarrollar , fue la construcción del primer
prototipo de un equipo automtizado9ara obtener con
este, un parametro Cni'unero de pasos por gota>,con el
cual,se pueda encontrar una relaci6n con el volumen de
una gota de líquido amniótico y basandose en el
método de Aberg y Qislen ,ec C2>,poder lievar a cabo una
estimación de la cantidad de sustancia tenso-activa en
el liquido amniótico.
En este prototipo el líquido muestra, se empuja a
través de una columna de aire para formar las
gotas en una aguja, colocada verticalmente y con
un di-etro conocido. E s t a s gotas caen a través
de un detector óptico, el cual, por medio de un
puiso,nos indica la presencia de una gota.
La columna de aire, esta controlada por un pistón
y éste a su vez por un motor de paso. Como los pasos
<movimiento de un determinado ángulo del eje del motor
de pasos), para el movimiento del eje de este motor,
pueden ser controlados,de una manera precisa por un
microcontrolador, se puede liegar a contar cuantos
pasos hay entre cada gota que cae.
Como se menciono anteriormenteteste parametro, n-ro
5

s-
de pasos Por gota, es 10 que se utilizar'á en una parte 4 '
'posterior del macroproyecto, para llevar a cabo un
proceso estimativo de La probabiildad de que un recién
nacido desarrolle el síndrome de dlf icuitad
respiratoria.
6

I
LDESCRXPCION DEL EQÚIPO I '
El equipo puede ser dividido para su descripción en
tres partes: electr6nica, mechica y programaci6n.
1.1. ELECTRONICA.
1.1.1. Controles de los motores de paso.
Tanto para el movimiento de la bomba como para el
brazo mecaiiicocver secc 1.2.1 y 1.2.2>,utilizamos dos
motores de pasos SIO-SYN Cm061fd02>.Estos motores son
construidos con el rotor de imAn permanente y estatores
de 8 polos, su eje rota en un determinado anC;ulo cada
vez que una corriente es activada a través de su
embobinado. Entre sus principales características se
destacan:
- precisión entre cada paso , 5%;
- tiempo mínimo entre cada paso 2.5 ms;
- voltaje entre cada embobinado 5 vdc;
- corriente por embobinado 1 ampere;
- resistencia nominal por embobinado 5 Ohms;;
- inductancia por fase 10.4 mh;
- nr'unero de terminales 6
Debido al imAn permanente, estos motores tienen una
torca residual, la cual mantiene el eje en posición
cuando ei motor no es enePgiZad0. Una torca de
sostenimiento mucho mayor, puede presentarse
energizando con un voltafe vdc, uno o ambos de los
embobinados .Para el motor utilizado, estas
7
I
f
características son Las siguientes: . ,
4 '
- mínima torca residual 0.09 u-cm;
- mínima torca de sostenimiento 3.8 kg-cm;
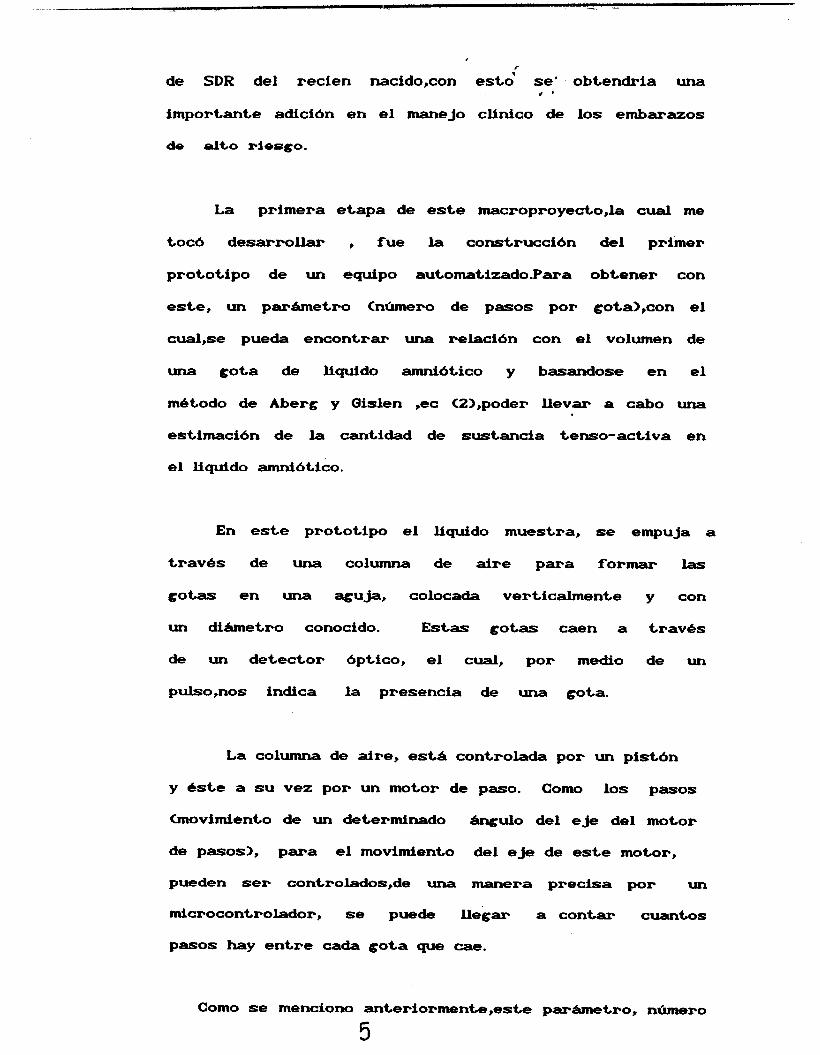
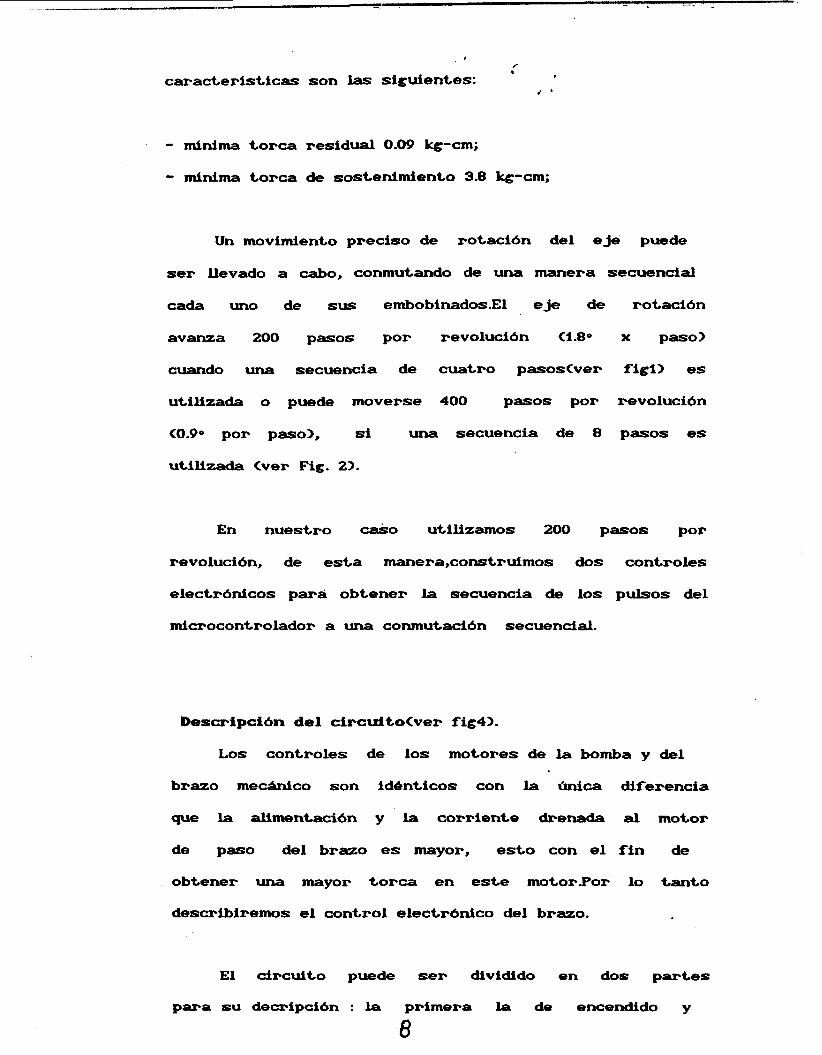
Un movimiento preciso de rotacidn del eje puede
ser llevado a cabo, conmutando de una manera secuencial
cada uno de sus embobinados.El eje de rotaci6n
avanza 200 pasos por revoluci6n (1.80 x paso>
cuando una secuencia de cuatro pasos<ver figl> es
utilizada o puede moverse 400 pasos por revoluci6n
<0.90 por paso), si una secuencia de 8 pasos es
utiiizada <ver Fig. 2).
En nuestro caSo utilizamos 200 pasos por
revoluci6n, de esta manera,construímos dos controles
electr6nicos para obtener la secuencia de los pulsos del
microcontrolador a una conmutaci6n secuencial.
Descripci6n del circuitoCver fi64>.
Los controles de los motores de la bomba y del
brazo mecanico son idénticos con la iLnica diferencia
que la alimentacibn y La corriente drenada al motor
de paso del brazo es mayor, esto con el fin de
ob+ener una mayor torca en este motor.Por lo +anto
describiremos el control electrónico del brazo.
El circuito puede ser dividido en dos partes
para su decripción : La primera la de encendido y
8
figura 1
fiqura 2
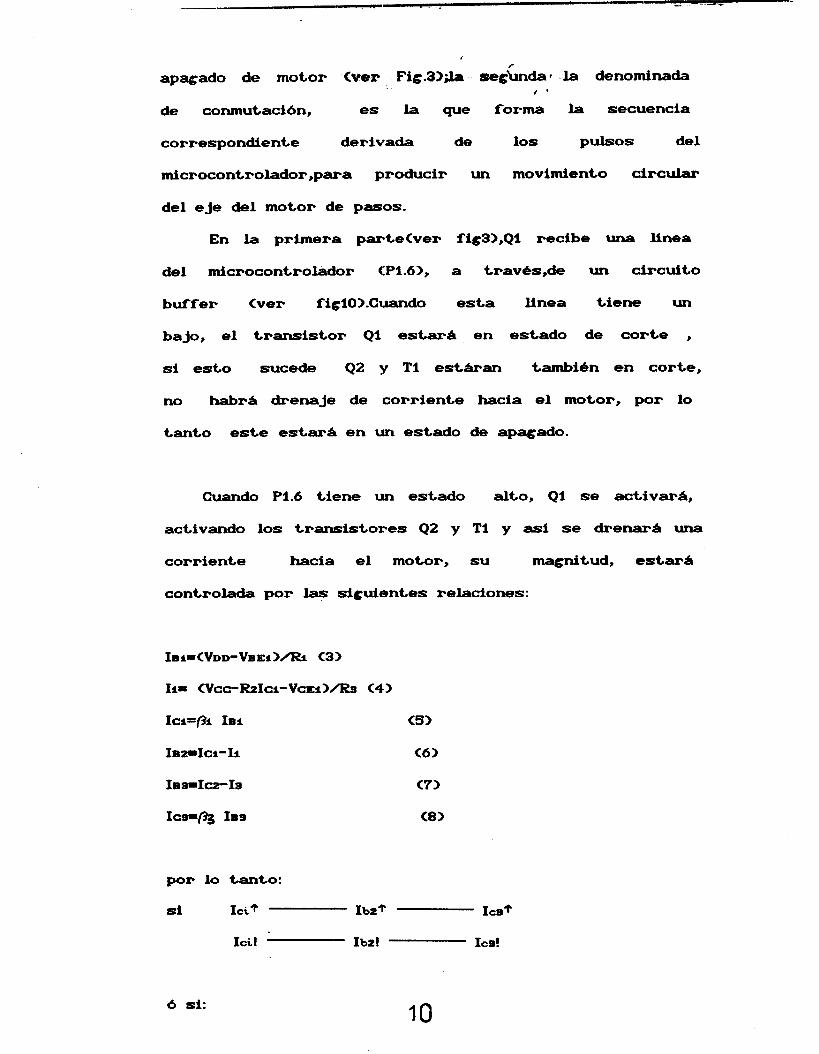
apagado de motor <ver Fig.3>* se&&@ ia denominada
de conmutaci6n, es la que forma la secuencia 4 '
correspondiente derivada de los pulsos del
microcontrolador,para producir un movimiento circuiar
del eJe del motor de pasos.
En la primera partecver fi@>,Ql recibe una iínea
del microcontrolador CP1.6>, a través,de un circuito
buffer <ver figlO>.Cuando esta Unea tiene un
bajo, el transistor Q l estar& en estado de corte ,
si esto sucede Q2 y T i estáran también en corte,
no habrá drenaje de corriente hacia el motor, por lo
tanto este estar& en un estado de apwado.
Cuando P1.6 tiene un estado alto, Q1 se activara,
activando los transistores Q2 y T i y así se drenará una
corriente hacia el motor, su magnitud, estará
controlada por las siguientes relaciones:
IB~-CVDD-VBE~ >/Ri C3>
la= CVCC-RZIC~-VCES>/RS <4>
ICi=pá hi cs>
IEZ=ICi-1í C6>
I~s=Icz-Is c n IC-& IBS C8>
por lo tanto:
Si Ici t Ib2t ica?
Ici! 1b2! ICs!
6 si: 10
z 4 3 m a
o e o t
Para este caso se eSCOgi6 a Ql como un transistor
de conmutación de baja potencia, Q2 un transistor
de mediana potencia y T í como transistor de potencia.
En la segunda parte dos iíneas del puertolCpl.2
y ~1.3) del microcontrolador ,pasando a través de un
circuito buffer ,van a la base de cuatro transistores de
conmutacióncver Fig.4) .Cada par de estos transistores
< 43 ,Q4 y QS,Qó>estan ne(gados, o sea, que cuando uno
est6 activado el otro está desactivado , a s 5
encendiendo a los transistores de potencia<T2,T3,T4,TS>,
los cuales manejan la corriente por cada embobinado;
cuando P1.2 está en un estado bajo, T2 se activa y
T3 se apaga suando P1.2 tiene un estado alto, T3 se
activa y T2 se apaga. Lo mismo sucede con P1.3 y los
correspondientes transistores QS, 46, T4 y TS,de esta
manera, se forma la secuencia correspondiente para mover
el motorCver fig22 y23 de la seccl.3).
Los voltaJes transitorios, generados cuando la
corriente es conmutada a través de los embobinados,
pueden producir que el motor entre en osciiaciCSn,
pudiéndose dañar Bste, o +unos de los elementos
semiconductores del control electrónico, a d e m de
provocar que el sistema funcione incorrectaments.De esta
12

L
manera, un circuito iimitador de 'estos transitorios
fue Incluido, el cual está formado por los diodos D4, d '
D5, D6, D7, D8 y un diodo Zener (ver Fig. 4) , así
cuando se genera un voltage transitorio , el circuito
diodo-Zener , f i ja el voltaje en cada uno de los
embobinados al voltaje del Zener.
13

d- x
1.1.2. Detector de las gotas. ( 9
Este circuito es el encargado de detectar la caí&
de las gotas, y formar un pulso de determlnado tiempo
para ser reconocido por el microcontrolador C8751).
Descripci6x-a del circirito<ver fi67>
Este circuito esta formado por cinco etapas:
a> Etapa de deteccibn.
Es ta parte esta constituida por un detector
óptico, el cual esta formado por un diodo emisor de
infrarroja y un fototransistor.
luz
Un diodo emisor de luz infrarroja es aquel que
emite radiaci6n cercana al infrarrojo, cuando se le
polariza directamente y el fototransistor es un
transistor controlado por la radiaci6n de luz. De esta
manera,se polarizo el diodo emisorcver fig7> mediante
CR45>, y en el fotodetector se utilizó una
configuraci6n . para que cuando normalmente, no se
obstruya la luz proveniente del diodo emisor, una
corriente circule en el colector del fototransistor.
A consecuencia de lo anteriormente sef'íalado, una
caída de 3v. se presenta en la CR46>, dando un voltaje
de 2v en el colector, esto con el fin de montar el
pulso debido a la gota,en una s e w de DC, con el
objeto que la luz externa, la cual se presenta como
una filtraci6n de señal constante, no nos influya y que
16
I r
el sistema sea más sensible d pequeños cambios
de corriente de colector. I '
Cuando una gota pasa por el detector 6ptic0, cierta
emisi6n de luz del diodo emisor sera obstruida, ia cual
se refleja como disminución en la corriente de colector,
de esta manera se disminuye la caida de voltqe en
R46,así formandose un pulso, sobre los 2 v.,en el
colector del fototransistor.
b> Filtro paso bajo.
La señal formada mediante el detector 6ptico es
llevada a un filtro, paso bajo, esto con el fin de
eliminar la señal de DC y filtrar el pulso para he60
~ p ~ f f C a P l O < V e P fi67).
c3 A~p l i f i c ac i6n y forniaCi6n del p m o .
El pulso que puede variar en su magnitud y en su
duraci6n debido al tamaño de la gota y a la
colocación de la aguja en el detector óptico, es
amplificado mediante una amplificador no inversor <ver
Fig7 >.
Luego que este pulso es ampiificado se deriva a un
comparador con histéresisCver fig63 Cia hist6resis es
utilizada con el fin de que no se produzcan disparos
múlltipies>,así este pulso el cual es aplicado en ia
entrada positiva, se compara con un voltaje
prestablecido en la entrada negadora.Al sobrepasar es+e
voltaje ,el comparador se dispara ob+eniéndose un
17
, ,-
pulso de amplitud constante, para lbeg0' ser aplicado a
la entrada de un monoestable. 4 '
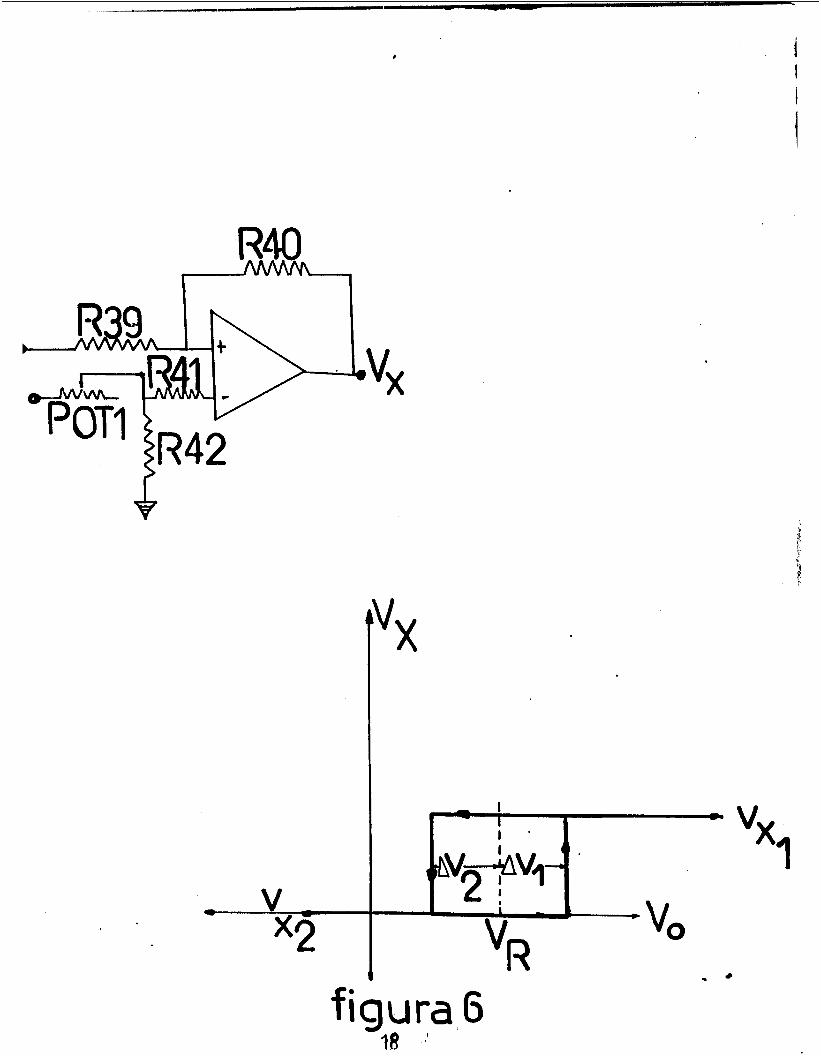
Como se muestra en la Fig6 el comparador se
disparara un voltaje V i > VR y volvera a su estado un
voltaje
Las siguientes relaciones:
V2 < VR . V i y V2, pueden ser determinados por
V2 CR39/R40> CVxi - VR> C9>
Vi = CR39/R40> CVx2 + VR> (10)
donde Vx2 = O
VR - R42 x Vcc/Potl + R42
Cuando cae una gota a través de la aguja, otra
más pequeña cae trás de e h , así como el
monoestable se dispara y no se vuelve a disparar
-+a que no haya transcurrido el tiempo de salida,
controlando el tiempo, mediando C l y Pot1 <ver Fig7>
evitaremos este iiltimo efecto, así como obtendremos el
tiempo mínimo para el reconocimiento de la interrupci6nl.
18
1,
.
1 "X
f i g u ra, G

V$C R39
vcc 1'
t
PO13
I
I CR OPT OT RRNStliSOR DETECT OR
CIRCUITO DETECTOR
3 er
I I ate: October 4, 199- eet 1 of
figura7
1.1.4. Sistema de control y desplegado. ' d '
1.1.4.1. Sistema de control.
Nuestro sistema de control<ver , figlo> est&
compuesto por un microcontroiador;este es un
microprocesador donde están inteórados puertos de
entrada, saiida y periféricos. En nuestro caso
utilizamos el microcontrolador de 8 bits de la familia
Intel (8751); sus principales características son:
- 128 bytes de RAM interna;
- 4 puertos bidireccionaies;
- 5 fuentes de interrupciones con 2 niveles de
prioridad;
- oscilador interno;
- 4 k bytes de EPROM
Otros recursos utilizados fueron:
- 2 microinterruptores, uno para tener el nivel de
referencia en la bomba , el otro para posicionar el
brazo mecánico.
-un buffer C74Ls2443 interfase entre el microcontrolador
y los controles de los motores de paso, esto
para protección del 8751;
- un cristal de 7.37 Mhz
Descripci6n del circuito<ver fib;lO>.
Seis líneas del puerto uno, fueron utiiizadas para
.el manejo de los motores, de esta manera,Pl.O y P1.l
para las secuencias del motor de la bomba y P1.7 para el .
encendido y apagado de este motor. De la misma manera,
21
I
P1.2 y P1.3 para la secuencia dei motor del brazo
mecánico y P1.6 para el encendido apqado. # '
El puerto cero,es el medio del microprocesador,
junto con el puerto dos, de acceso a memoria ex+erna.
El primero, es el byte menos signif icativode las
direcciones y además es multiplexado en el tiempo
para escribir un &to. El puerto dos es el
byte más sie;nificativo de las direcciones.
En nuestro caso, como solamente utilizamos
un byte de direcciones, el puerto cero fue utiUzado
para el control del desplegado y el puerto dos como bit
direccionable para detectar ciertas condiciones en el
equipo, como son: el posicionamiento del pistón de la
bomba,esto mediante un microinterruptor conectado a
P2.7; el punto de referencia del brazo mecánico también
es detectado a través de un microinterruptor y el
bit P2.6;para comenzar ciertas funciones <succionar y
analizar), se utilizaron los bits p2.5 y p2.2 del
puerto dos; por Caltimo para activar o desactivar
el desplegado el bit P2.3.
La interrupción 1 fue utilizada para contar el
nheros de pasos por gota.
La pata EA/VPP, la cual tiene la doble funcibn,
de recibir el voltage de programación cuando se grava
la EPROM y para indicar si la memoria del programa
es interna o externa, en nuestro caso, como esta
22
, ,-
memoria está integrada al microprbcesador conectamos
esta pata a 5 v.
# *
La COnfi6~raCih del resetCver figlo) nos
indica 8 cuando se conecta el equipo8el 8751 se
resetea ,o en cualquier momento se puede resetear con el
uso de la tecla del reset. Por tiltimo se utAliz6
el oscilador interno mediante el uso de un cristal de
7.37 Mhz.
23

, r
1.1.3.2. Despiiegue. . 6 .
Debido a que se requirió que se desplieguen tanto
caracteres indicadores de la funci6n que está llevando a
cabo el equipo <succión. anaiizar), así como el valor
del número de pasos por gota, se utilizó un manejador
<MM?4C911> de cuatro displays, el cual nos permite el
control de cualquiera de los segmentos en los cuatro
dígitos. Así la conversión de Binario a Bcd ser&
efectuada por el programa <software>.
Dezscripci6n del circuitocver figlo>.
El controiador del displays recibe información
a través de ocho iíneas Ca ... ... Dpt>
el dato es escrito hacia el registro seleccionado del
controlador mediante dos entradas de direcciones
K1 y K2.
Por lo tanto, como necesitamos dos direcciones
K1, JC2 y un habilitador CE , utilizamos un byte
de direcciones proveniente del microcontrolador, donde
el bit más significativo es para habilitar el
controlador y los dos bits menos significativos
son para seleccionar el registro a ser escrito .
La iínea para habilitar la captura de direcciones
CALE) está normalmente oscilando a una frecuencia de un
1/6 del oscilador, sin embarco, cuando se envía un &to
ai controlador de displays, el byte de direcciones
es capturado por e1 74LS373 en La transici6n negativa de
24
la ALE, el cual dura diez períGdos0. de oscilacibn.
Luepcso el &to P u e ~ eaax4t.o apmoao on o1 puerto cepo, # '
un tiempo después WE es activado Cestado aito>.El
dato es capturado cuando W E regresa a su estado
<bajo> <ver fig8 y9>.
Una vez que los datos son capturados por el
controlador de displgys,un oscilador interno presenta la
informci6n almacenada secuenciaimente, a un maneMdor
de saiida del controlador, el cual maneja los -ocho
segmentos de los displays. Este manejador es habilitado
cuando la ünea SOE proveniente del P2.5 del
microcontrolador está con un estado bajo.
Utilicé displays de cátodo comiui, así como
darlington para el drenaje de corriente, estos son
activados Por cuatro iíneas provenientes del
controlador.
25
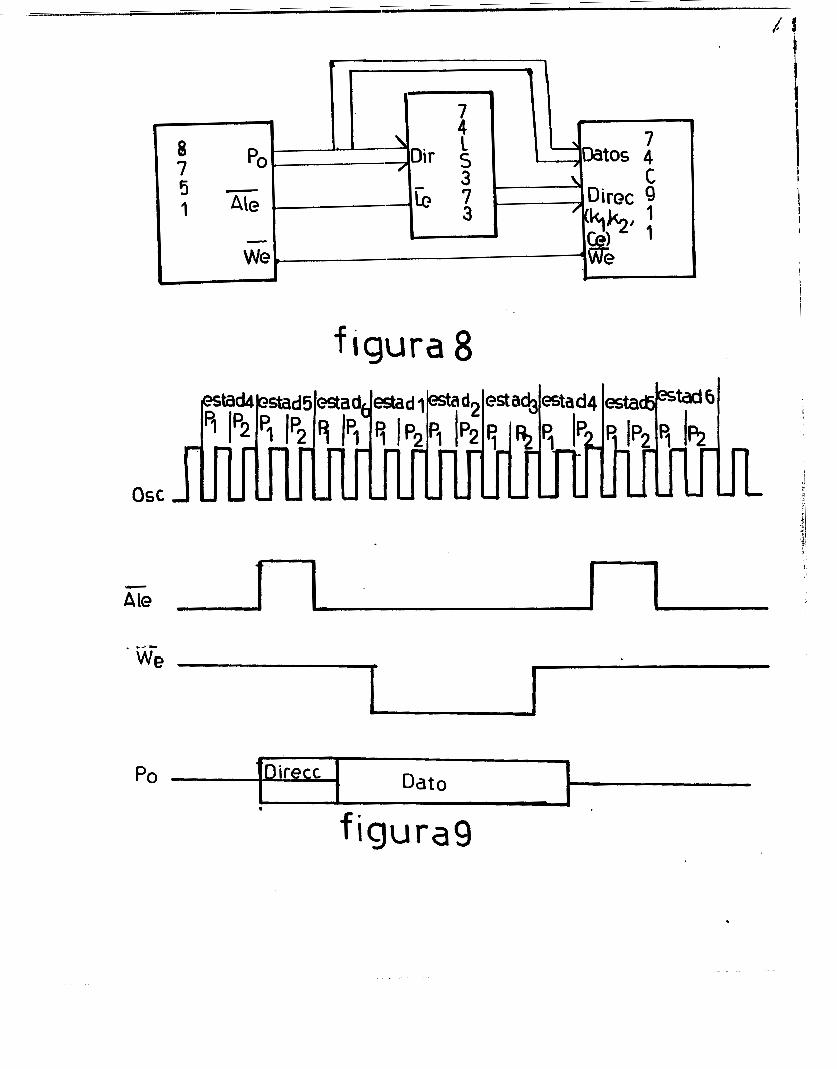
figura 8
0 irecc Dato
OSC I
8 L

i I
I i I I
F I I
i I
-I in a
i - !
i 4
ü 4 1 ek
I r .
e .
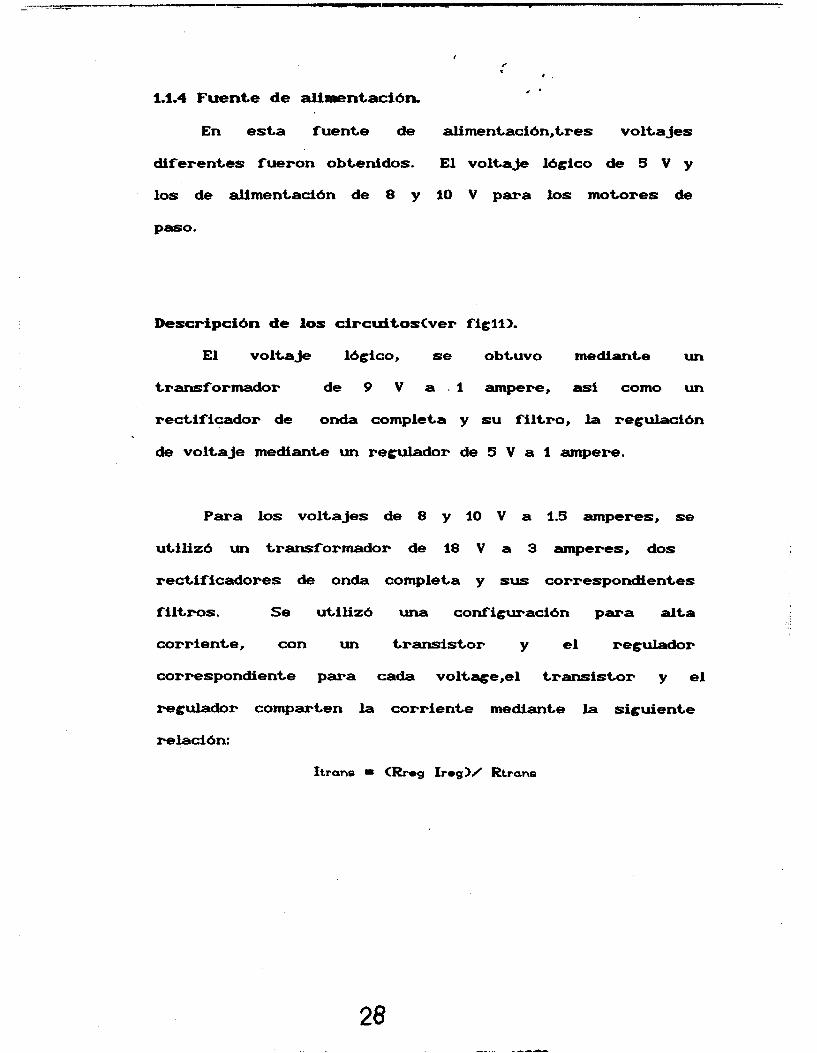
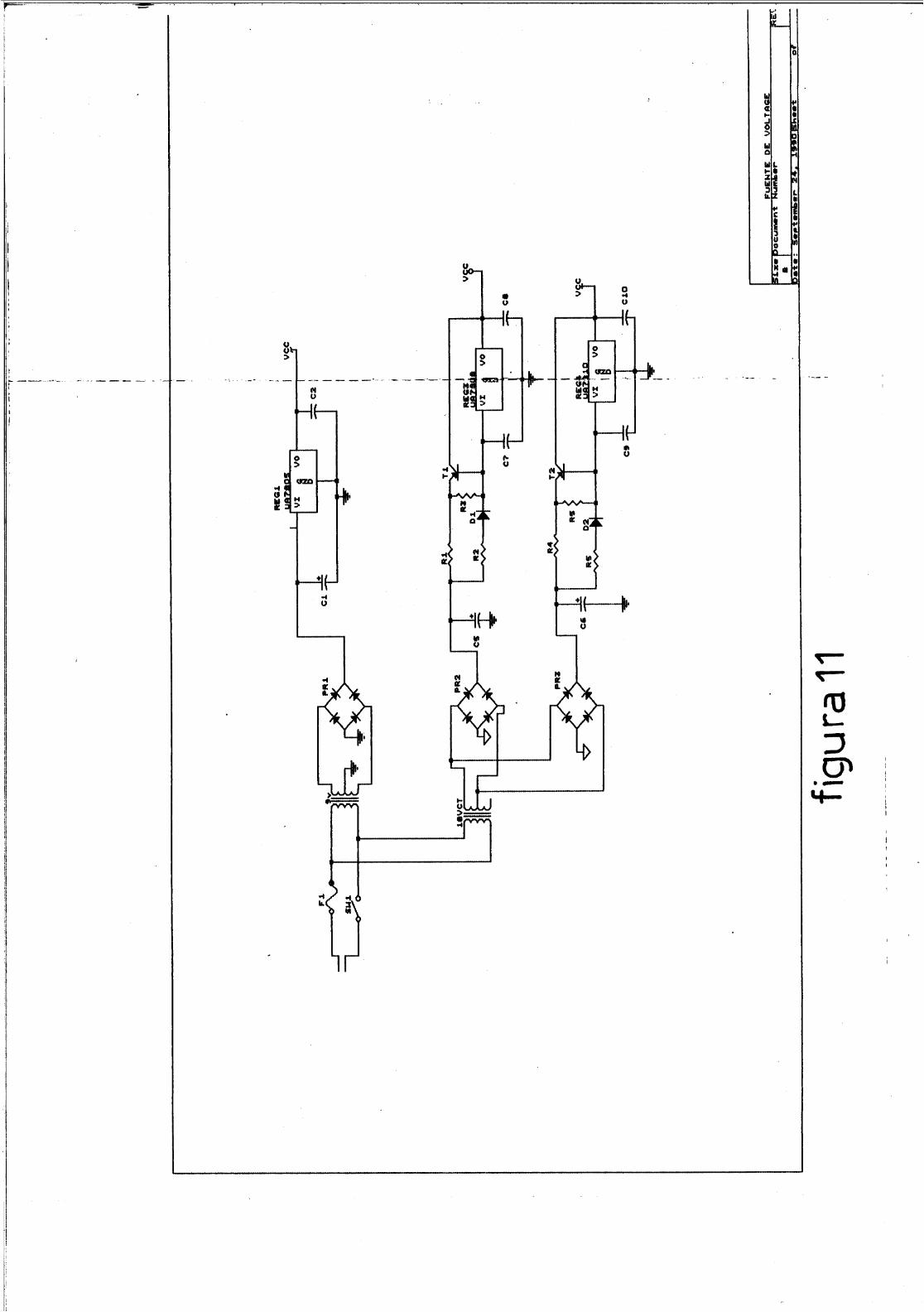
# ' 1.1.4 Fuente de alimentación
En esta fuente de aUmentación,tres volta jes
diferentes fueron obtenidos. El voltaje lógico de 5 V y
los de dmentaci6n de 8 y 10 V para los motores de
paso.
Descripci6n de los circuitoscver figll).
El voltaje 1661~0, se obtuvo mediante un
transformador de 9 V a , 1 ampere, así como un
rectificador de onda completa y su filtro, la regulación
de voltaje mediante un regulador de 5 V a 1 ampere.
Para los voltajes de 8 y 10 V a 1.5 amperes, se
utiiiz6 un transformador de 18 V a 3 amperes, dos
rectificadores de onda completa y sus correspondientes
filtros . Se utiiiz6 una conficuración para alta
corriente, con un transistor y el regulador
correspondiente para cada voltage,el transistor y el
regulador comparten la corriente mediante la siguiente
relación:
k a n a * < b e g hag>/ Rirans
28
- - -.-
IC O >
C -
I C-IC E
i II
a L
e- +

05 1
I ‘
1

rc4n CEXT
R E X T K E X T
a R B
si CLR 74L 322 1
A e I .-
* ¿ POT3 rc
* ICR
OPT OT NHNStU SON DETECTOR
vcc 1'
I . -+
R49
-14
I
11
d
r . * # '
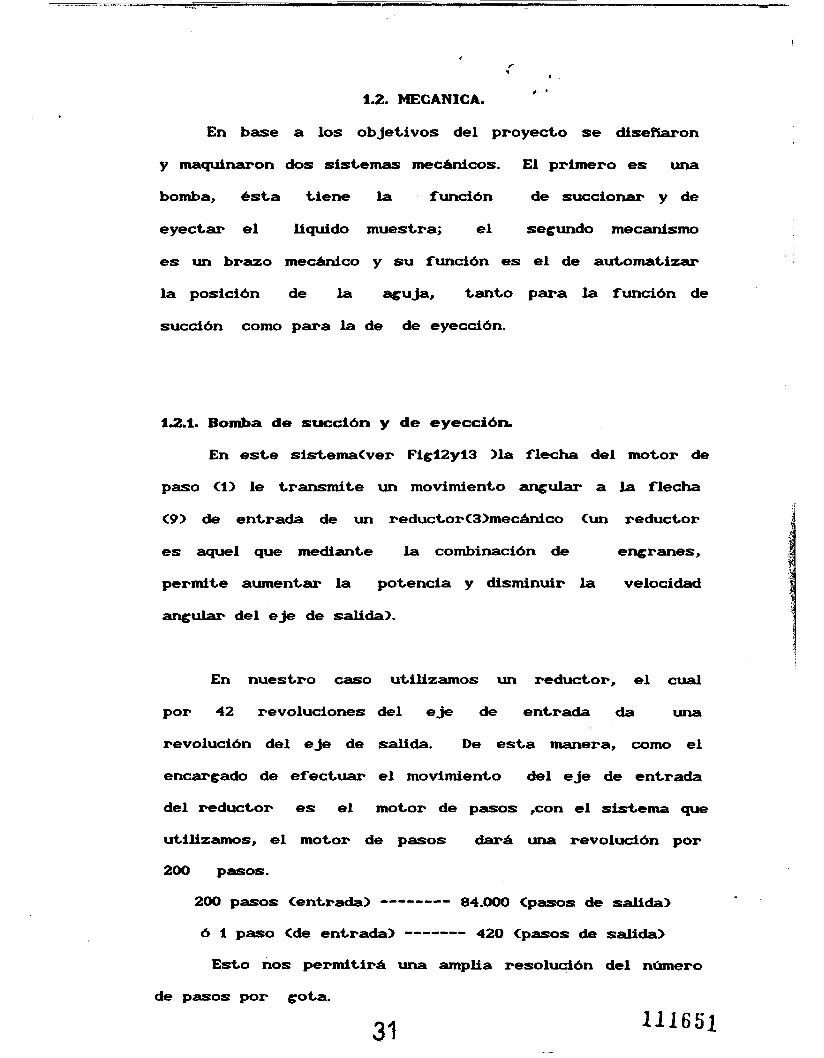
1.2. MECANICA.
En base a los objetivos del proyecto se diseRiaron
y maquinaron dos sistemas mecanices. El primero es una
bomba, ésta tiene la función de succionar y de
eyectar el líquido muestra; el secundo mecanismo
es un brazo mecánico y su función es el de automatizar
la posición de la e u j a , tanto para la funci6n de
succión como para la de de eyección.
1.2.1. Bomba de succión y de eyección.
En este sistema<ver Fig12yi3 >la flecha del motor de
paso <l> le transmite un movimiento an6ular a la flecha
( 9 ) de entrada de un reductor<3>mecánico <un reductor
es aquel que mediante la combinación de engranes,
permite aumentar la potencia y disminuir la velocidad
ary;uiar del eje de salida).
En nuestro caso utiiizamos un reductor, el cud
por 42 revoluciones del eje de entrada da una
revolución del eje de salida. De esta manera, como el
encargado de efectuar el movimiento del eje de entrada
del reductor es el motor de pasos ,con el sistema que
utliizamos, el motor de pasos dar& una revolución por
200 pasos.
200 pasos <entrada> -------- 84.000 <pasos de salida)
6 1 paso <de entrada) ------- 420 Cpasos de salida>
Esto nos permitirsi una amplia resolución del niunero
de pasos por gota.
111651 31
I r
e
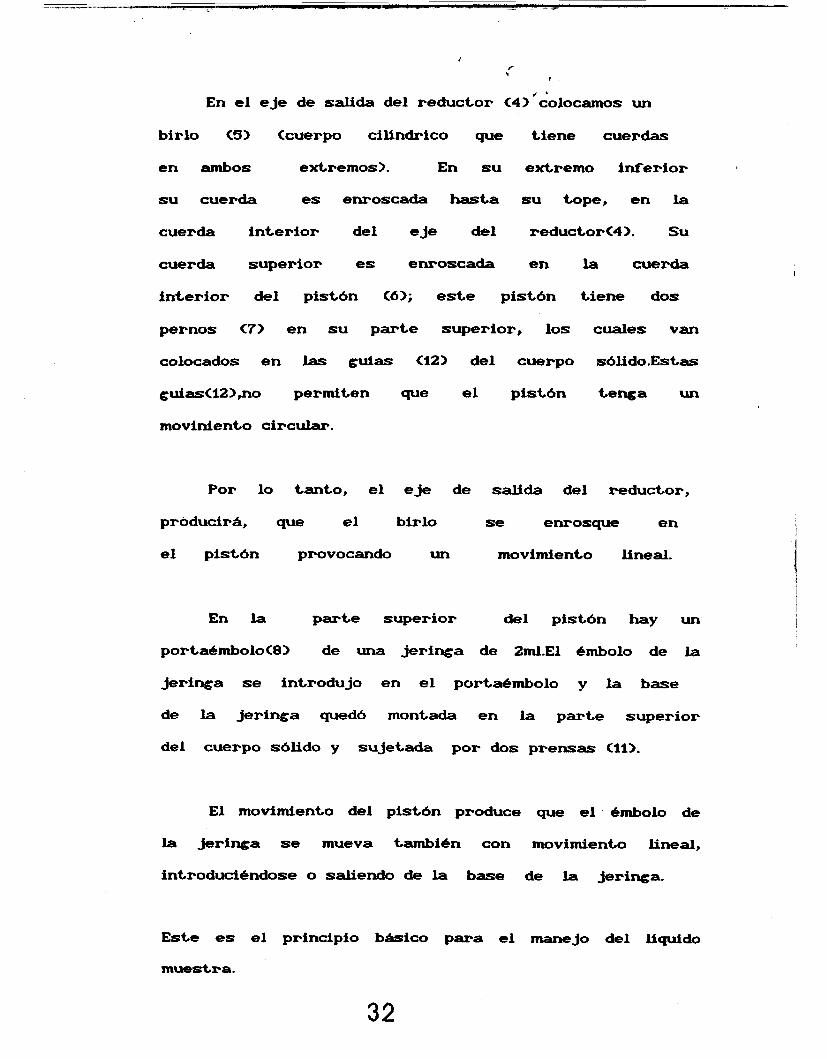
En el eje de salida del reductor <4>'colocamos un
birlo (5) (cuerpo cilíndrico que tiene cuerdas
en ambos extremos>. En su extremo inferior
su cuerda es enroscada hasta su tope, en la
cuerda interior del eje del reductorC4). su
cuerda superior es enroscada en la cuerda
interior del pistón (6); este pistón tiene dos
pernos <7> en su parte superior, los cuales van
colocados en las guías (12) del cuerpo sóiido.Estas
guiasCl2>,no permiten que el pist6n tenga un
moviniento circular.
Por lo tanto, el eje de salida del reductor,
próducirA, que el birlo se enrosque en
el pist6n provocando un movimiento iineal.
En la parte superior del pistón hay un
portaémboloC8> de una jeringa de 2ml.El émbolo de la
jeringa se introdujo en el portaémbolo y la base
de la jeringa quedó montada en la parte superior
del cuerpo s6iido y sujetada por dos prensas (11).
El movimiento del pistón produce que el émbolo de
la jeringa se mueva también con movimiento lined,
introduciéndose o saliendo de la base de la jeringa.
Este es el principio básico para el manejo del liquido
muestra.
32
I
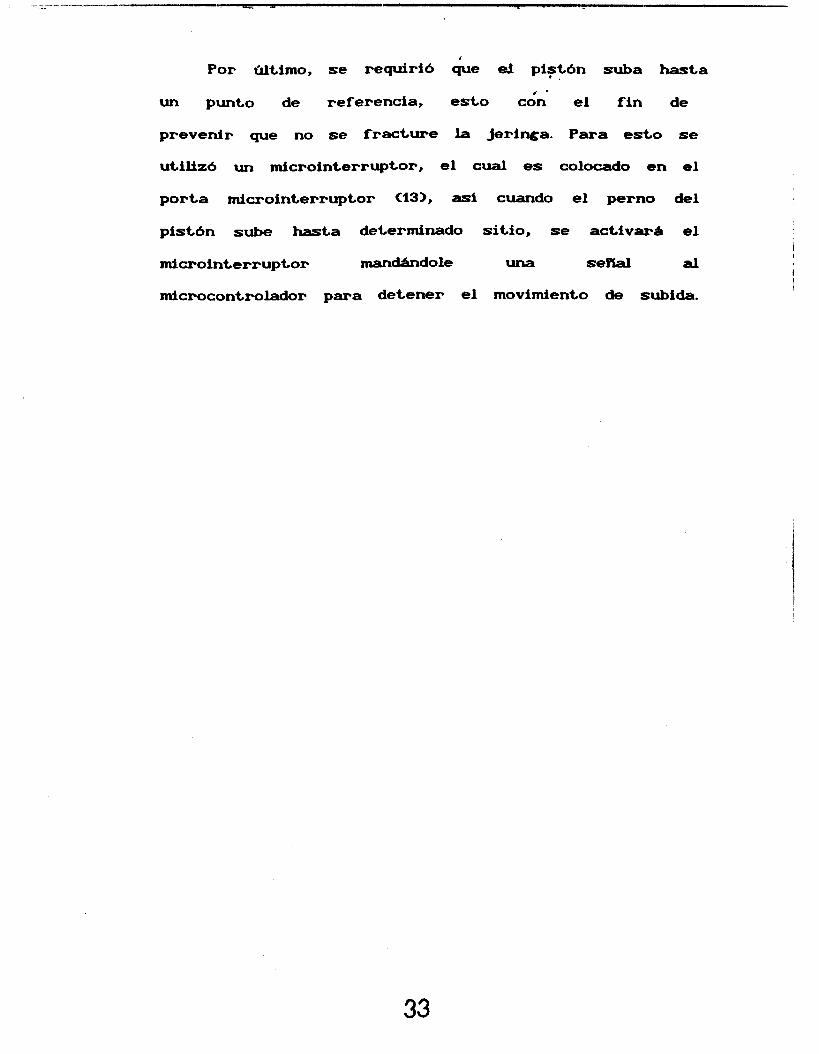
Por Utimo, se requirió que e4 pistón * . suba hasta I '
un punto de referencia, esto con el fin de
prevenir que no se fracture la jeriwa. Para esto se
utilizó un microinterruptor, el cual es colocado en el
porta microinterruptor C13), asi cuando el perno del
pist6n sube hasta determinado sitio, se activara el
microinterruptor mandándole una señal al
microcontrolador para detener el movimiento de subida.
33

1.2.2. Brazo mecánico. r w v
Este sistema, para la automatiza6ión de la aguja,
<ver Fig19> está compuesto por un motor de
pasos, el cual transmite movimiento angular a un
ciiíndro<Z>,este cuerpo tiene una varilla de transmisi6n
<3> a una distancia <D> de su centro, como se ve en la
PiglS.
El control electrónico del motor mueve a éste 200
pasos por revoluci6n o 1.80+ 5% por paso, el movimiento
en X y en Y de la variiia de transmisión, puede ser
determinado por el W u l o <a>, que se mueve el eje del
motor de pasos <ver Figíó).
A s í el movimientose puede dividir en X y en Y,
<ver fig17 yi8>,utilizando dos piezas, una para el
movimiento en X (4) y otra para Y <8>.La pieza<4>
se apoya en la varilla de transmisi6n <3>,la cual le
transmite un movimiento en X, aplicando una fuerza
que empuja el tornillo <.Si>.Esto provoca que la pieza
C 4 > tenga un desplazamiento en X hacia afuera; cuando
el movimiento en X de la varilla, cambia de sentido
una fuerza de restituci6n tiene que utilizarse
para regresar a la pieza C4>, en este caso se utilizó
un resorte. Esta pieza C4>,se desplaza apoyandose
sobre dos rieles que la atraviesan (7).
El movimiento en Y <ver figl8)se iieva a cabo
mediante otra pieza (83, ésta recibe la transmisi6n a
través de los rieles de X <7>, los cuales est& fi jos
36
en esta pieza <8>, así esta se mueve a través de
dos rieles C9). # '
Cuando hay un recreso en y de la variiia de
transmisión,ia gravedad se encarga de rebiresar esta
pieza .
Una barra la cuai esta f i ja en C4>,y se desplaza por
<8>, es la que perpedicuiarmente porta al brazo, el cual
en su punta Lleva una base para soportar la ryuja. Por
medio de un tubo flexible se conecta esta aguja con la
Jeringa.
Por úitimo cabe mencionar que para disminuir
la fuerza de fricci6n entre los rieles y las piezas, el
desplazamiento entre estos es llevado a cabo,por medio
de balines.
37

figura15

L
l o*
1
I I I I
1 I I
1 I i
,
! ! I
I I !
3
I

i
111651

.
f igural9
1.3 PROORAMA # ’
Mediante la programación del 8751, se obtuvo el
procedimiento funcional del equipo <ver Figí’lO).
Para esto en el programa, se crearon doce
subrutinasp1 manejo de una interrupción externa
(interrupción 1) y una tabla de decodificación de 7
segmentos. Las subrutinas fueron las siguientes:
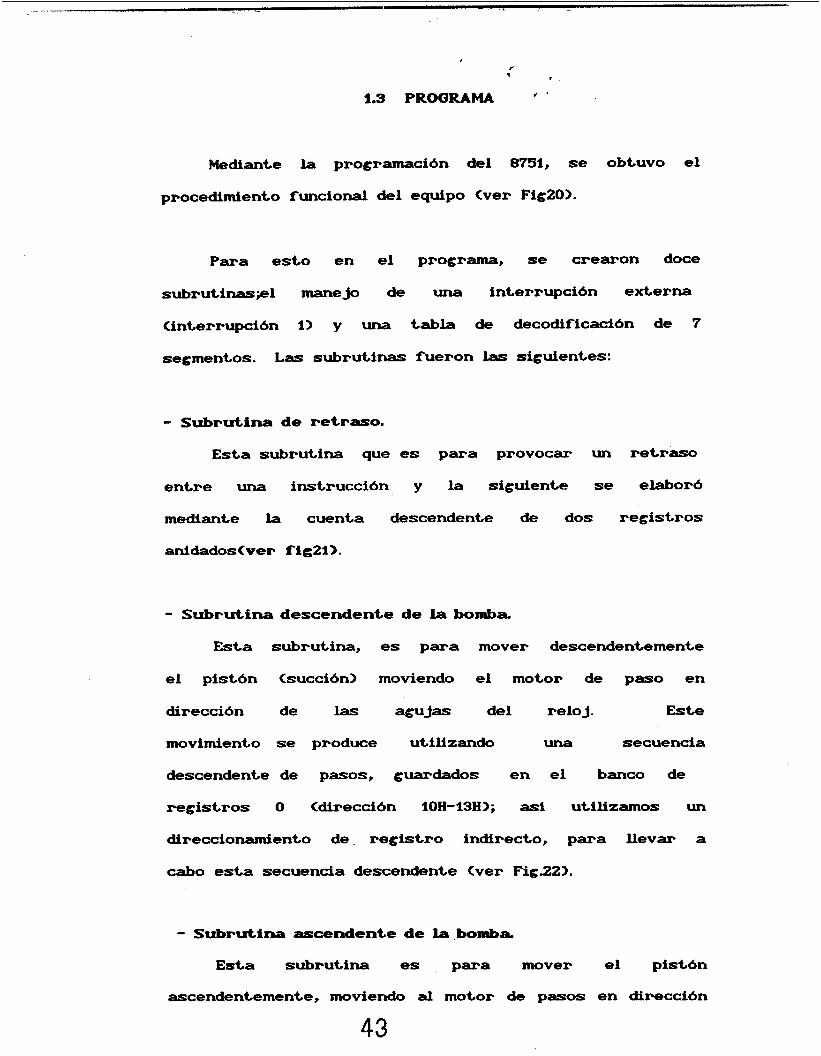
- Subrutina de retraso.
E s t a subrutina que es para provocar un retraso
entre una instrucción y la siguiente se elaboró
mediante la cuenta descendente de dos registros
anidados<ver fig21>.
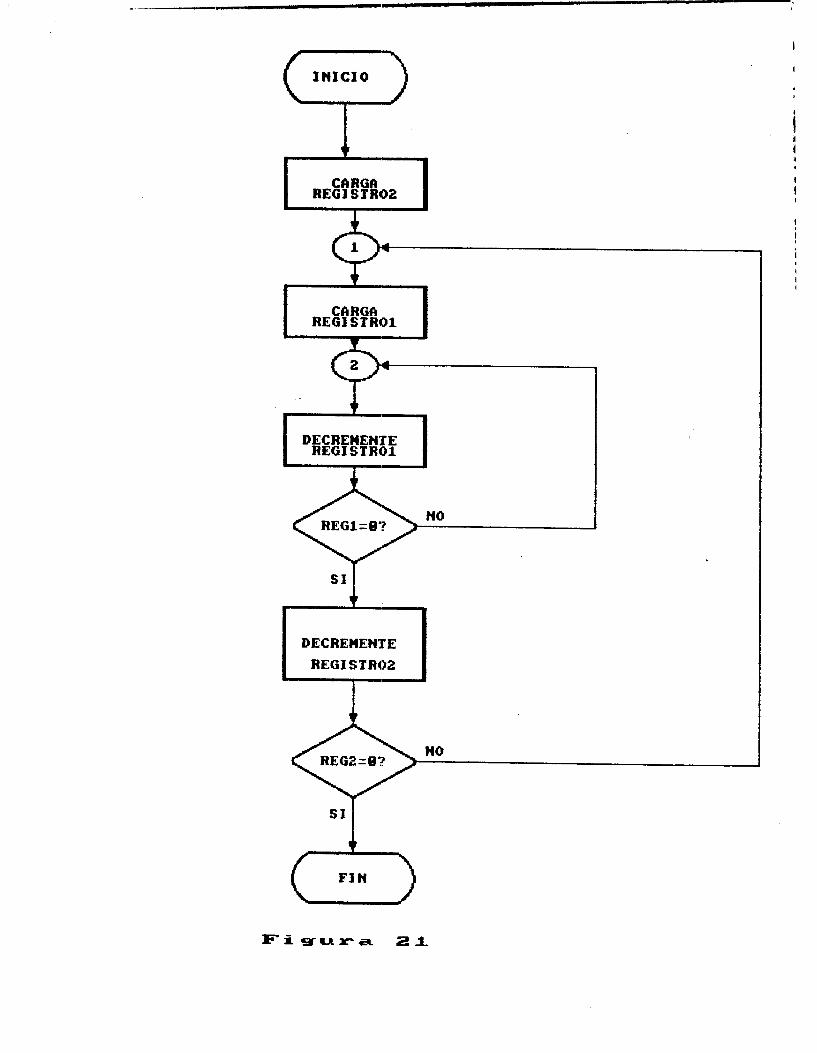
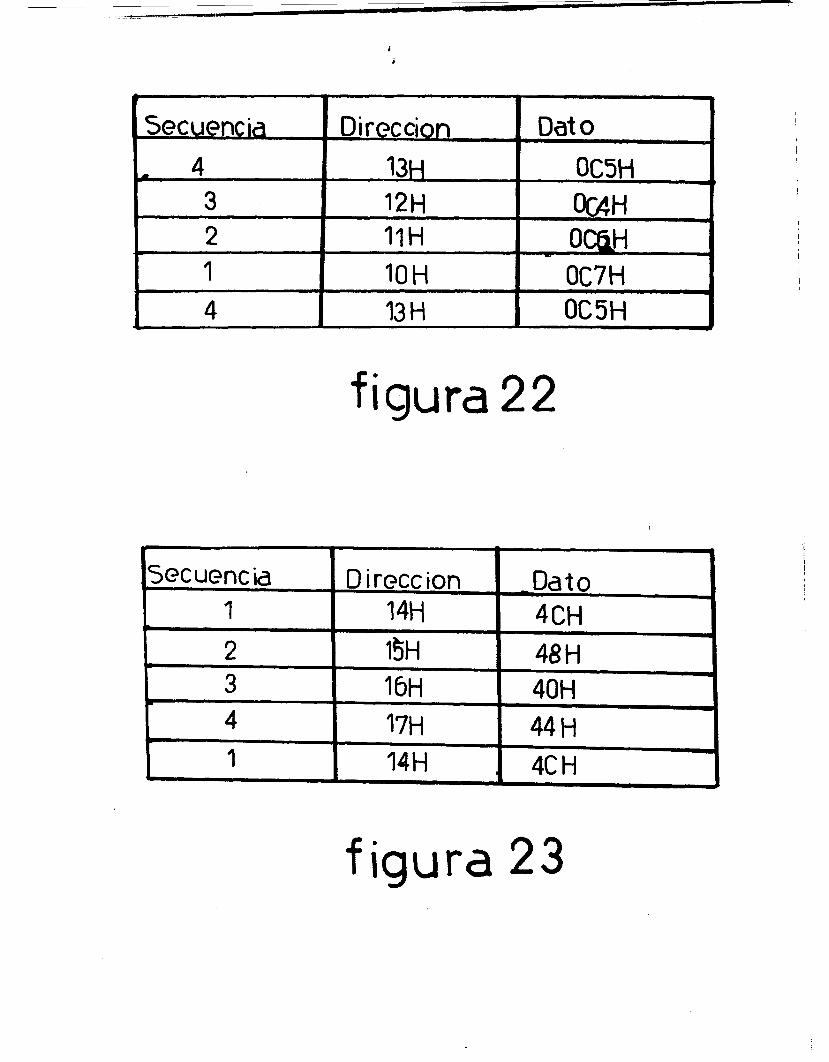
- Subrutina descendente de La bomba
Esta subrutina, es para mover descendentemente
el pistón Csucci6n) moviendo el motor de paso en
dirección de las agujas del reloj. Este
movimiento se produce utilizando una secuencia
descendente de pasos, guardados en el banco de
registros O (dirección 10H-l3H>; así utiiizamos un
direccionamiento de. resistro indirecto, para llevar a
cabo esta secuencia descendente (ver Fig.22).
- Subrutina ascendente de la bomba
E s t a subrutina es para mover el pistón
ascendentemente, moviendo al motor de pasos en dirección
43

4 . - -
?
INICIO 0 INICIALIZA
BOMBA
INICIALIZA
BRAZO
SUCCION
VOLUMEN 1/2!4L
ANALIZAR (17 GOTAS)
S I
1
F i s ru r a 2 8
INICIO 9 CñRGñ REG1 STRO2
CñRGñ REGISTRO1
I DECREHENTE I REGISTRO1
DECREUENTE REGISTRO2
Fisura 2 1
i
i
t 1
, Secuencia D i r ec cion Dato I
rn 4 13H OC5H I )
3 12H OUH 1
L 2 11 H -. OmH I
1 IO H OC7i-i I
4 13 H OC5H i I
.I - I J
Secuencia O i recc ion -Dato v I 14H 4CH
2 1SH 48 H b 3 16H 40H
B 4 17H 44 H 1 14H 4C H
I
I
I
I
I
I
~-
I
L
1
figura 23

contraria a las agujas del reloj,por ,lo tanto una
secuencia contraria <ascendente> a la anterior subrutina 8 .
fue utillzada, empleando la misma forma de
direccionamiento anterior.
En esta subrutina ,se detecta el punto maxim0
de subida del pistón,si el bit P2.7,tienen un nivel
alto.
- Subrutina para el movimiento descendente del brazo.
Se utiüzó el mismo procedimiento que Las
subrutinas para mover la bomba, con la diferencia que
aquí se utilizan las direcciones C14H - 17H> . El brazo
descenderá hasta que se activa,el microinterruptor
correspondiente.
- Subrutina para el movimiento ascendente del brazo.
En esta subrutina, se utiüzd el mismo
procedimiento anterior,nada mzIs que utilizando una
secuencia ascendente Cver fig23>..
- Subrutirra para anaiizar.
En esta subrutina, se mueve el pistdn en forma
ascendente, y a la vez se va incrementando un contador
de dos bytes CDPTR) cada 4 pasos del motor. Cuando cae
una gota, esta subrutina se interrumpe, para dar
servicio a La interrupci6nl.
Esta subrutina terminara, cuando el niúmero de gotas
ha sido contado o el pistdn ha llegado a su punto
47
mhimo .
- Subrutina de inferrupcidn.
En la direccidn apartada en la memoria del programa
<13H>, para dar servicio a esta interrupci6n, la cual se
habilita por nivel , se Uama a una subrutinas, para
desplegar el n h e r o de pasos por gota.
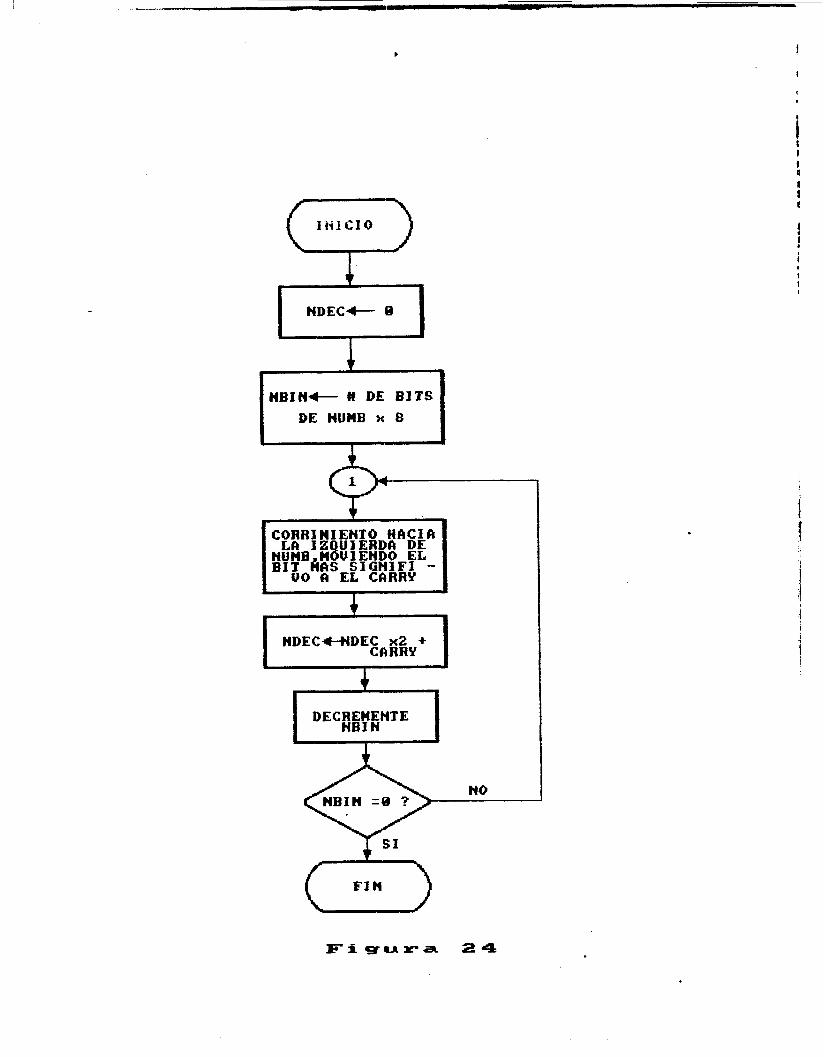
- Subrutina de conversibn binario-BCD
Esta subrutina para desplepr el n h e r o de pasos
por gota,en BCD , se basa en un algoritmo, el cual es
una operaci6n de sumar ciciicamente en BCDCaprovechando
la instruccion DA>..
NDec = NDec x 2 + bi
E s t a operacihn de sumar ciclicamente, se repite el
numero de veces correspondientes a los bits del numero
binario<NBIN>,donde NDEC sera el numero en BCD y bi
el valor del carry después de hacer un corrimiento
hacia la izquierda del nr'unero binario <NBIN> <ver
f 1624 >
49
? !
I
I
NDEC+ E w
I
* i
N B l N f - U DE BlTS DE NUMB x 8
I CORRI N l ENTO iifiC1 II LL I 2 UIERDL DE
NUUB H8VIENDO EL BIDOktSEEIZtkRi - I
I N D E C H D E C x2 + CfiiRRY I
Figura 2 4
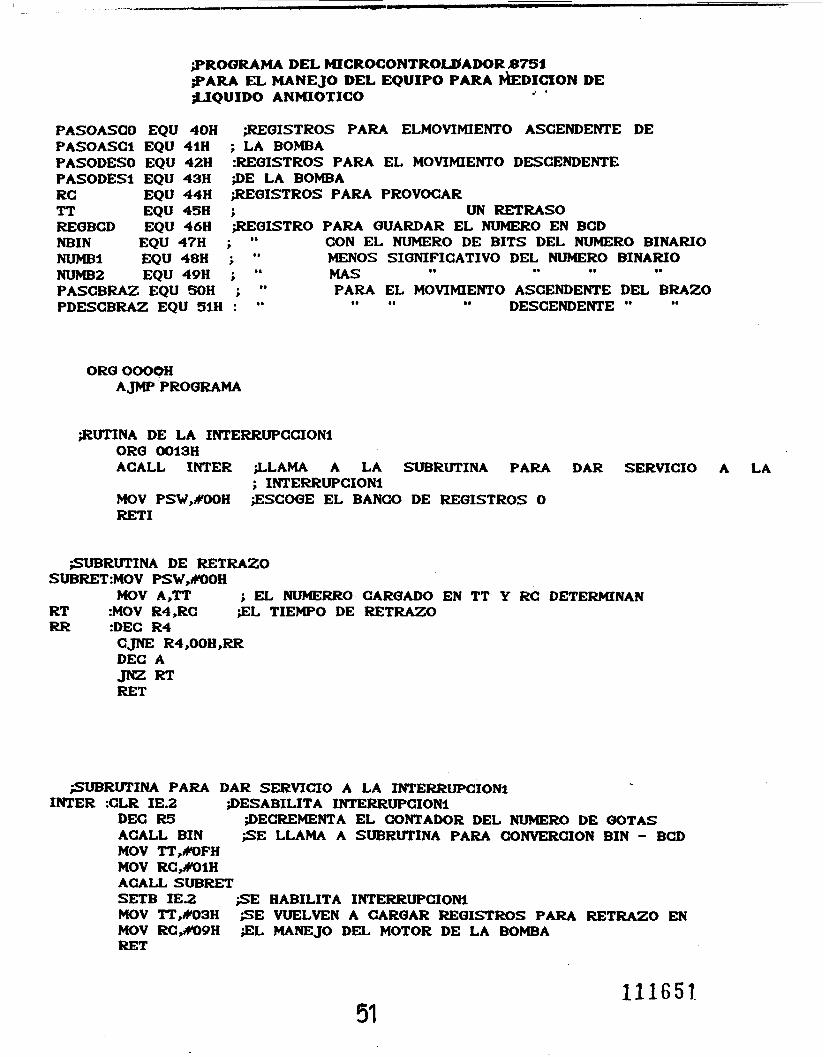
;PROQRAMA DEL MICROCONTROWADOR 8751
;LIQUIDO ANMIOTICO ;PARA EL MANEJO DEL EQUIPO PARA ~ D I C I O N DE
d '
PASOASOO EQU 40H ;REQISTROS PARA ELMOViMIENTO ASCENDENTE DE PASOASCl EQU 41H ; LA BOMBA PASODESO EQU 42H :REQISTROS PARA EL MOVIMIENTO DESCENDENTE PASODESl EQU 43H ;DE LA BOMBA RC EQU 44H ;REQISTROS PARA PROVOCAR
REQBCD EQU 46H ;REQISTRO PARA QUARDAR EL NUMERO EN BCD NBIN EQU 47H ; " CON EL NUMERO DE BITS DEL NUMERO BINARIO NUMB1 EQU 48H ; I'
PASCBRAZ EQU SOH ; "
PDESCBRAZ EQU 51H : **
TT EQU 45H ; UN RETRASO
MENOS SIQNIFICATIVO DEL NUMERO BINARIO I* I* .I I . NUMB2 EQU 49H ; ' I MAS
PARA EL MOVIMIENTO ASCENDENTE DEL BRAZO .. DESCENDENTE I' I . I* ..
ORQ OOOCm AJ" PROQRAMA
SUTINA DE LA INTERRUPCCIONl ORO 0013H ACALL INTER ;LLAMA A LA SUBRUTINA PARA DAR SERVICIO A LA
MOV PSW,#OOH ;ESCOOE EL BANCO DE REQISTROS O RET1
; INTERRüPCIONl
;SUBRUTINA DE RETRAZO SUBRETMOV PSW,#OOH
RT :MOV R4,RC ;EL TIEMPO DE RETRAZO RR :DEC R4
MOV A,TT ; EL " E R R O CARQADO EN TT Y RC DETERMINAN
CJNE R4,OOH,RR DEC A JNZ RT RET
SUBRUTINA PARA DAR SERViCIO A LA INTERRupCIONl INTER :CLR IE.2 DESABILITA INTERRüPCIONl
DEC R5 ;DECREMENTA EL COIiPTADOR DEL NUMGRO DE UOTAS ACALL BIN S E LLAMA A SUBRUTINA PARA CONVERCION BIN - BCD MOV TT,IYOFH MOV RC,IYOlH ACALL SUBRET SETB IE.2 ;SE HABILITA INTERRUPCIONl MOV TT,#O3H ;SE VUELVEN A CARUAR REUISTROS PARA RETRAZO EN MOV RC,X09H ;EL MANEJO DEL MOTOR DE LA BOMBA RET
111651 51
L r t
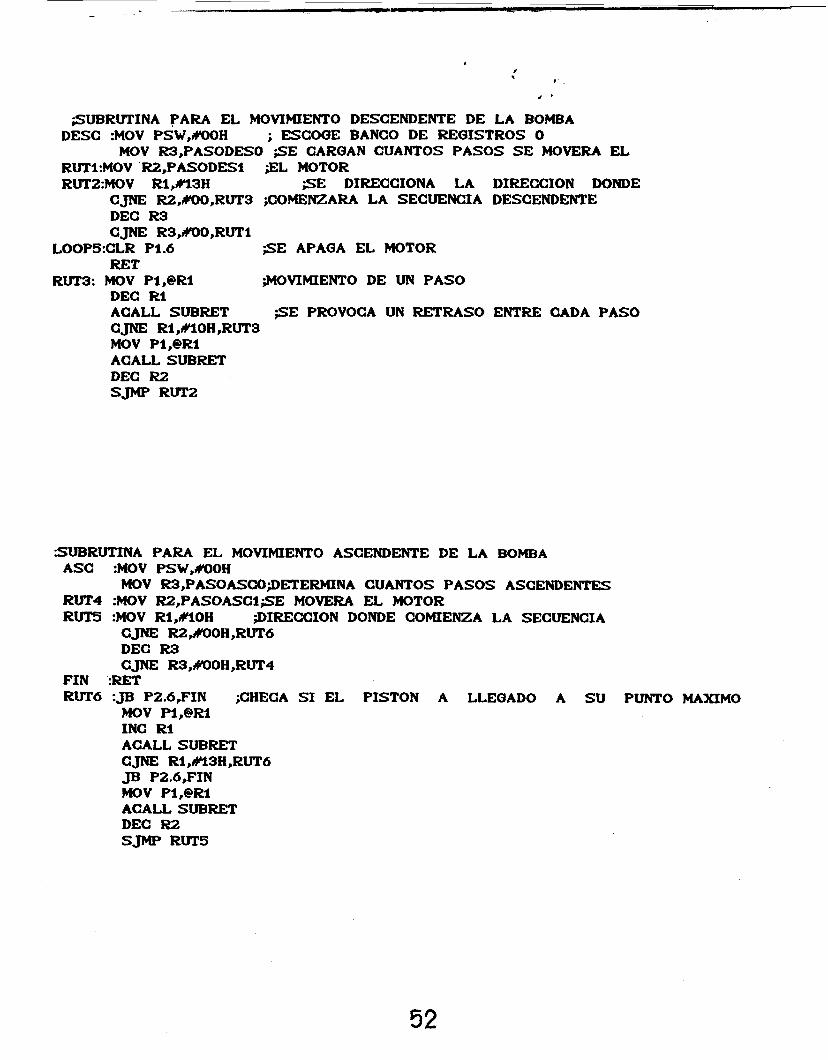
6 .
SUBRUTINA PARA EL MOVIMIENTO DESCENDENTE DE LA BOMBA DESC :MOV PSW,#OOH ; ESCOQE BANCO DE REQISTROS O
MOV R3,PASODESO ;SE CARQAN CUANTOS PASOS SE MOVERA EL RUT1:MOV R2,PASODESl RUT2:MOV Rl,#l3H
CJNE R2,#OO,RüT3 DEC R3 CJNE RS,#OO,RUTl
LO0PS:CLR P1.6 RET
RUT3: MOV Pl,@Rl DEC R l ACALL SUBRET CJNE Rl,#lOH,RUT3 MOV Pl,@Rl ACALL SüBRET DEC R2 SJMP RUT2
$L MOTOR
;COMENZARA LA SECUENCIA DESCENDENTE ;SE DIRECCIONA LA DIRECCION DONDE
;SE APAQA EL MOTOR
;MOVIMIENTO DE UN PASO
;SE PROVOCA UN RETRASO ENTRE CADA PASO
SUBRUTINA PARA EL MOVIMIENTO ASCENDENTE DE LA BOMBA ASC :MOV PSW,#OOH
RUT4 :MOV R2,PASOASCl;SE MOVERA E L MOTOR RUTS :MOV Rl,#lOH ;DIRECCION DONDE COMIENZA LA SECUENCIA
MOV R3,PASOASCO;DETERMINA CUANTOS PASOS ASCENDENTES
CJNE R2,#0OH,RUT6 DEC R3 CJNE R3,#OOH,RUT4
FIN :RET RUT6 :JB P2.6,FIN ;CHECA SI EL PISTON A LLEQADO A SU PUNTO MAXIM0
MOV PI,@R1 INC Rl ACALL SUBRET CJNE R l ,#l3H ,RUT6 JB P2.6,FIN MOV Pl,@Rl ACALL SüBRET DEC R2 SJMP RUTS
52
8
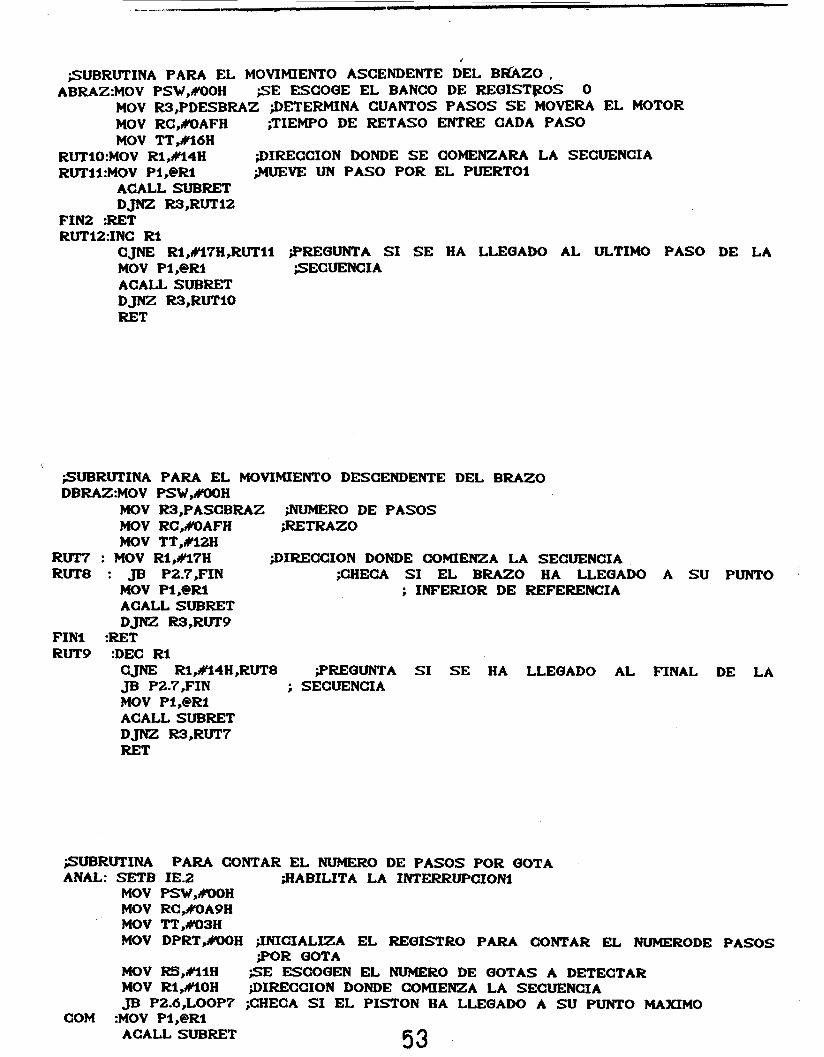
SUBRUTINA PARA EL MOVIMIENTO ASCENDENTE DEL B-ZO, ABRAZMOV PSW,#OOH ;SE ESCOGE EL BANCO DE REQISTROS O
MOV R3,PDESBRAZ ;DETERMINA CUANTOS PASOS SE MOVERA EL MOTOR MOV RC,MIAFH ;TIEMPO DE RETAS0 ENTRE CADA PASO MOV TT,#lbH
RUT1O:MOV Rl,#l4H ;DIRECCION DONDE SE COMENZARA LA SECUENCIA RüTl1:MOV Pl,@Rl ;MUEVE UN PASO POR EL PUERTO1
ACALL SUBRET DJNZ -,RUT12
FIN2 :RET RUTl2:INC R l
CJNE Rl,#l7H,RüTl1 PREQUNTA SI SE HA LLEQADO AL ULTIMO PASO DE LA MOV Pl,@Rl SECUENCIA ACALL SUBRET DJNZ R3,RUTlO RET
;SUBRUTINA PARA EL MOVIMIENTO DESCENDENTE DEL BRAZO DBRA2:MOV PSW,#OOH
MOV R3,PASCBRAZ ;NUMERO DE PASOS MOV RC,#OAFH ;RETRAZO MOV TT,#l2H
RUT7 : MOV Rl,#l7H ;DIRECCION DONDE COMIENZA LA SECUENCIA RUT8 : JB P2.7,FIN ;CHECA SI EL BRAZO HA LLEGADO A SU PUNTO
MOV Pl,@Rl ; INFERIOR DE REFERENCIA ACALL SUBRET DJNZ R3,RUTP
FIN1 :RET RUT9 :DEC R l
CJNE Rl,#l4H,RüT8 ;PREQüNTA SI SE HA LLEQADO AL FINAL DE LA JB P2.7,FIN ; SECUENCIA MOV Pl,@Rl ACALL SUBRET DJNZ R3,RuT7 RET
SUBRUTINA ANAL: SETB IE.2 ;HABILITA LA INTERRüPCIONl
PARA CONTAR EL NUMERO DE PASOS POR QOTA
MOV PSW,#OOH MOV RC,MIA9H MOV TT,#O3H MOV DPRT,#OOH $NICIALIZA EL REUISTRO PARA CONTAR EL NUMERODE PASOS
MOV RS,mlH ;SE ESCOUEN EL NUMERO DE UOTAS A DETECTAR MOV Rl,#lOH ;DIRECCION DONDE COMIENZA LA SECUENCIA JB P2.6,LOOP? ;CHECA SI EL PISTON HA LLEUADO A SU PUNTO MAXIM0
ACALL SüBRET
;POR QOTA
COM :MOV Pl,@Rl
53
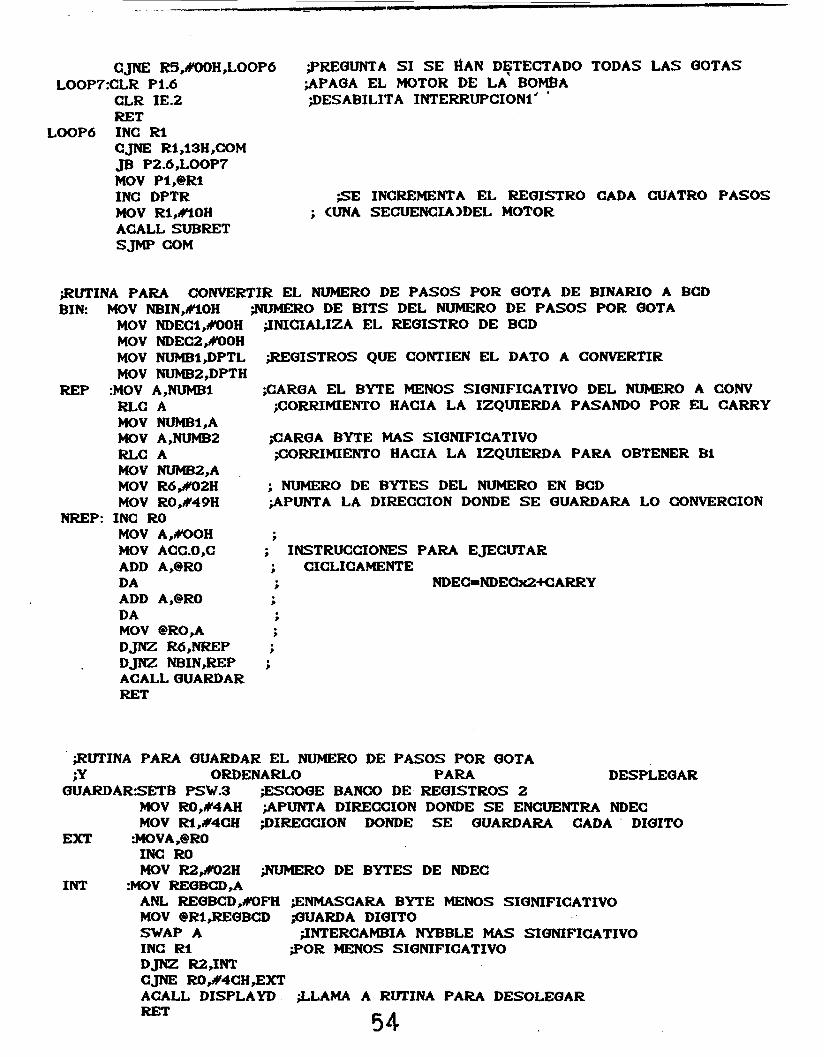
CJNE RS,#OOH,LOOPó LOOP7:CLR P1.6
CLR IE.2
;PREQUNTA SI SE CfAN DETECTADO TODAS LAS QOTAS ;APAQA EL MOTOR DE LA BOMBA ~ESABIL ITA INTERRUPCIONI’ ’
RET
CJNE Rl,l3H,COM JB P2.6,LOOP7 MOV Pl,@Rl INC DPTR MOV R1,HOH ACALL SUBRET SJMP COM
LOOP6 INC R l
;SE INCREMENTA EL REUISTRO CADA CUATRO PASOS ; <UNA SECUENCIA>DEL MOTOR
;RUTINA PARA CONVERTIR EL NUMERO DE PASOS POR QOTA DE BINARIO A BCD BIN: MOV NBIN,#íOH ;NUMGRO DE BITS DEL NüMERO DE PASOS POR OOTA
MOV NDECl,mW)H MOV NDECZ,#OOH MOV NUMB1,DPTL MOV MIMB2,DPTH
REP :MOV A,NUMBl RLC A MOV NUMB1,A MOV A,NUMB2 RLC A MOV NUMB2,A MOV R6,#02H MOV RO,#49H
MOV A,#OOH MOV ACC.O,C ADD A,@RO DA ADD A,QRO DA MOV @RO,A DJNZ R6,NREP DJNZ NBIN,REP ACALL QUARDAR RET
NREP: INC RO
;INICIALIZA EL REQISTRO DE BCD
WQISTROS QUE CONTIEN EL DATO A CONVERTIR
;CARGA EL BYTE MENOS SIQNIFICATIVO DEL NUMERO A CONV ;COFüZIMIENTO HACIA LA IZQUIERDA PASANDO POR EL CARRY
;CARQA BYTE MAS SIQNIFICATIVO ;CORRIMIENTO HACIA LA IZQUIERDA PARA OBTENER Bi
; NUMERO DE BYTES DEL NUMERO EN BCD ;APUNTA LA DIRECCION DONDE SE QUARDARA LO CONVERCION
?
; INSTRUCCIONES PARA EJECUTAR ; CICLICAMENTE ? NDEC=NDECx2+CARRY
?
?
i
?
?
;RUTINA PARA QUARDAR EL NUMERO DE PASOS POR UOTA ;y ORDENARLO PARA DESPLEQAR
QUARDARSETB PSW.3 ;ESCOaE BANCO DE REQISTROS 2 MOV R0,#4AH ;APUNTA DIRECCION DONDE SE ENCUENTRA NDEC MOV Rl,#4CH ;DIRECCION DONDE SE QUARDARA CADA DIUITO
INC RO MOV R2,#02H ;NUMERO DE BYTES DE NDEC
A M REQBCD,#OFH ;ENMASCARA BYTE MENOS SIUMFICATIVO MOV @Rl,REQBCD ;QUARDA DIQITO SWAP A ;INTERCAMBIA NYBBLE MAS SIQNIFICATIVO INC R l ;POR MENOS SIQMFICATIVO DJNZ FL2,INT CJNE R0,#4CH,EXT ACALL DISPLAYD ;LLAMA A RUTINA PARA DESOLEQAR
EXT :MOVA,@RO
INT :MOV REQBCD,A
RET 54
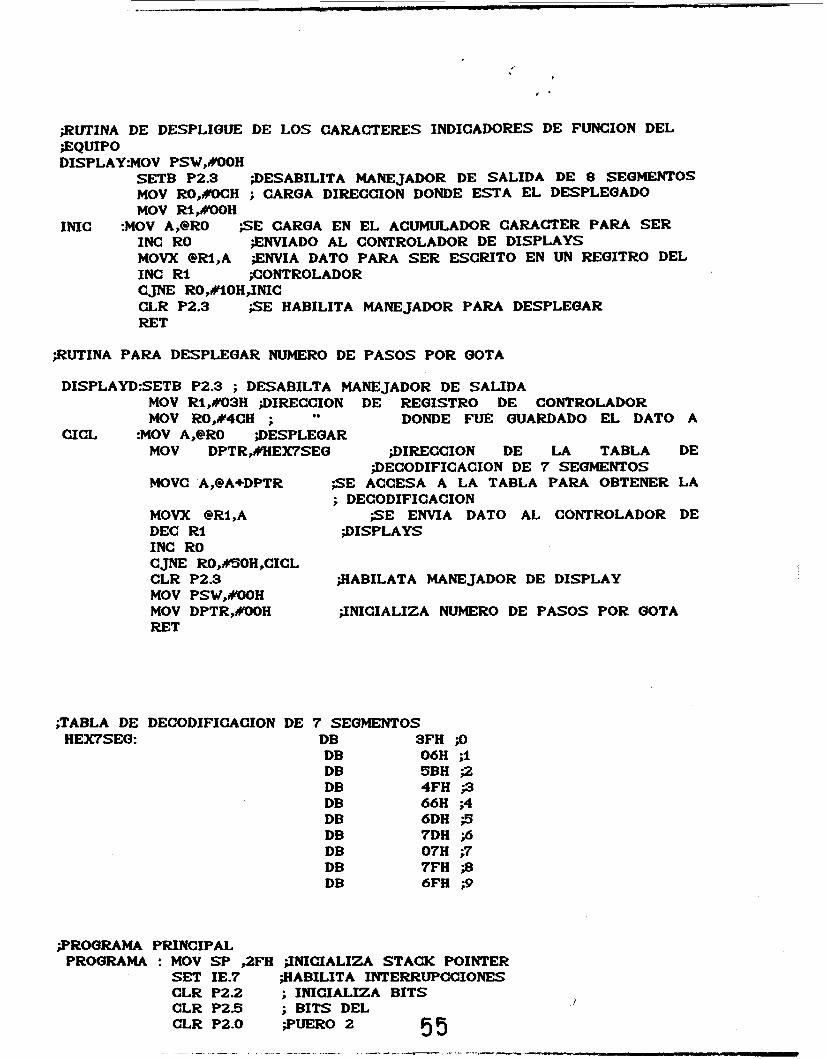
SUTINA DE DESPLIQUE DE LOS CARACTERES INDICADORES DE FUNCION DEL ;EQUIPO D1SPLAY:MOV PSW,m)OH
SETB P2.3 aESABILITA MANEJADOR DE SALIDA DE 8 SEUMENTOS MOV R0,m)CH ; CARQA DIRECCION DONDE ESTA EL DESPLEQADO MOV R1,AW)H
INC RO ;ENVIADO AL CONTROLADOR DE DISPLAYS MOW @Rl,A INC R1 ;CONTROLADOR CJNE RO,#lOHJNIC CLR P2.3 S E HABILITA MANEJADOR PARA DESPLEQAR RET
INIC :MOV A,@RO ;SE CARQA EN EL ACUMULADOR CARACTER PARA SER
;ENVIA DATO PARA SER ESCRITO EN UN REQITRO DEL
;RUTINA PARA DESPLEQAR NUMERO DE PASOS POR QOTA
D1SPLAYD:SETB P2.3 ; DESABILTA MANE JADOR DE SALIDA MOV Rl,m)3H ;DIRECCION DE REUISTRO DE CONTROLADOR MOV RO,#4CH ; I* DONDE FUE lljlUARDAD0 EL DATO A
MOV DPTR,#HEX7SEQ ;DIRECCION DE LA TABLA DE
MOVC A,@A+DPTR ;SE ACCESA A LA TABLA PARA OBTENER LA
MOW OR1,A ;SE ENVIA DATO AL CONTROLADOR DE DEC R l ;DISPLAYS INC RO CJNE RO,K3OH,CICL CLR P2.3 ;HABILATA MANEJADOR DE DISPLAY MOV PSW,m)OH MOV DPTR,m)iDH SMCIALIZA NUMERO DE PASOS POR QOTA RET
CICL :MOV A,@RO ;DESPLEQAR
;DECODIFICACION DE 7 SEQMENTOS
; DECODIFICACION
;TABLA DE DECODIFICACION DE 7 SEQMENTOS HEX7SEQ: DB 3FH ;O
DB O6H ;l DB 5BH ;Z DB 4FH ;3 DB 66H ;4 DB 6DH ;S DB 7DH $3 DB 07H ;7 DB 7FH ;8 DB 6FH ;9
PROQRAMA PRINCIPAL PROORAMA : MOV SP ,2FH ;INICIALIZA STACK POINTER
SET IE.7 ;HABILITA INTERRUPCCIONES CLR P2.2 ; IMCIALIZA BITS CLR P2.5 ; BITS DEL CLR P2.0 ;PUERO 2
!
55
r . I
I '
LOOP1
LOOP2
LOOP3
LOOP4
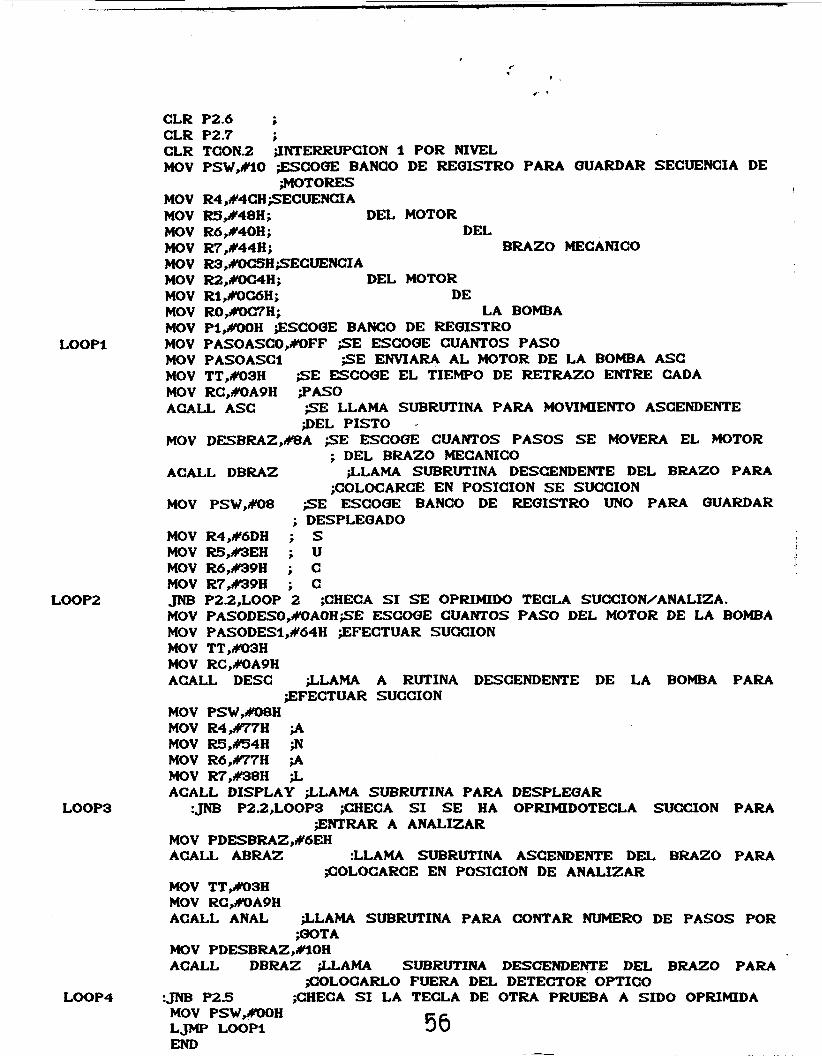
CLR P2.6 , CLR P2.7 , CLR TCON.2 ;INTERRUPCION 1 POR NIVEL MOV PSW,#lO ;ESCOOE BANCO DE REQISTRO PARA QUARDAR SECUENCIA DE
NOTORES MOV R4,#4CH;SECUENCIA MOV RS,#48H; DEL MOTOR MOV R6,#40H; DEL MOV R7,#44H; BRAZO MECANICO MOV R3,MH;SECUENCIA MOV R2,#OC4H; DEL MOTOR MOV Rl,#OCóH; DE MOV RO,#OC?H; LA BOMBA MOV P1,ArOOH ;ESCOQE BANCO DE REQISTRO MOV PASOASCO,#OFF ;SE ESCWE CUANTOS PASO MOV PASOASCl ;SE ENVIARA AL MOTOR DE LA BOMBA ASC MOV TT,#O3H ;SE ESCOQE EL TIEMPO DE RETRAZO ENTRE CADA MOV RC,#OA9H FASO ACALL ASC ;SE LLAMA SUBRUTINA PARA MOVIMIENTO ASCENDENTE
MOV DESBRA2,NA ;SE ESCOüE CUANTOS PASOS SE MOVERA EL MOTOR
ACALL DBRAZ ;LLAMA SUBRUTINA DESCENDENTE DEL BRAZO PARA
MOV PSW,#O8 ;SE ESCOQE BANCO DE REQISTRO UNO PARA QUARDAR
MOV R4,#6DH ; S MOV R5,#3EH ; U MOV R6,#39H ; C MOV R7,#39H ; C JNB P2.2,LOOP 2 ;CHECA SI SE OPRIMIDO TECLA SUCCION/ANALIZA. MOV PASODESO,#OAOH;SE ESCWE CUANTOS PASO DEL MOTOR DE LA BOMBA MOV PASODES1,#64H ;EFECTUAR SUCCION MOV TT,#'O3H MOV RC,#OA9H ACALL DESC ;LLAMA A RUTINA DESCENDENTE DE LA BOMBA PARA
MOV PSW,#OSH MOV R4,#77H ;A MOV R!3,#!34H ;N MOV R6,#77H ;A MOV R7,#38H ;L ACALL DISPLAY ;LLAMA SUBRUTINA PARA DESPLEUAR
;DEL PISTO -
; DEL BRAZO MECANICO
;COLOCARCE EN POSICION SE SUCCION
; DESPLEQADO
;EFECTUAR SUCCION
:JNB P2.2,LOOP3 ;CHECA SI SE HA OPRIMIDOTECLA SUCCION PARA ZNTRAR A ANALIZAR
MOV PDESBRAZ,#6EH ACALL ABRAZ :LLAMA SUBRUTINA ASCENDENTE DEL BRAZO PARA
MOV TT,#O3H MOV RC,#OA9H ACALL ANAL ;LLAMA SUBRUTINA PARA CONTAR NUMERO DE PASOS POR
MOV PDESBRAZ,#íOH ACALL DBRAZ ;LLAMA SUBRUTINA DESCENDENTE DEL BRAZO PARA
;COLOCARCE EN POSICION DE ANALIZAR
;OOTA
;COLOCARLO FUERA DEL DETECTOR OPTIC0 :JNB P2.5 ;CHECA SI LA TECLA DE OTRA PRUEBA A SIDO OPRiMiDA
56 MOV PSW,#OOH LJMP LOOP1 END

I
#- * r
4 '
11. RESULTADOS
Una serie de experimentos fueron reaiizados para
checar ciertas condiciones del equipo, los cuales
fueron:
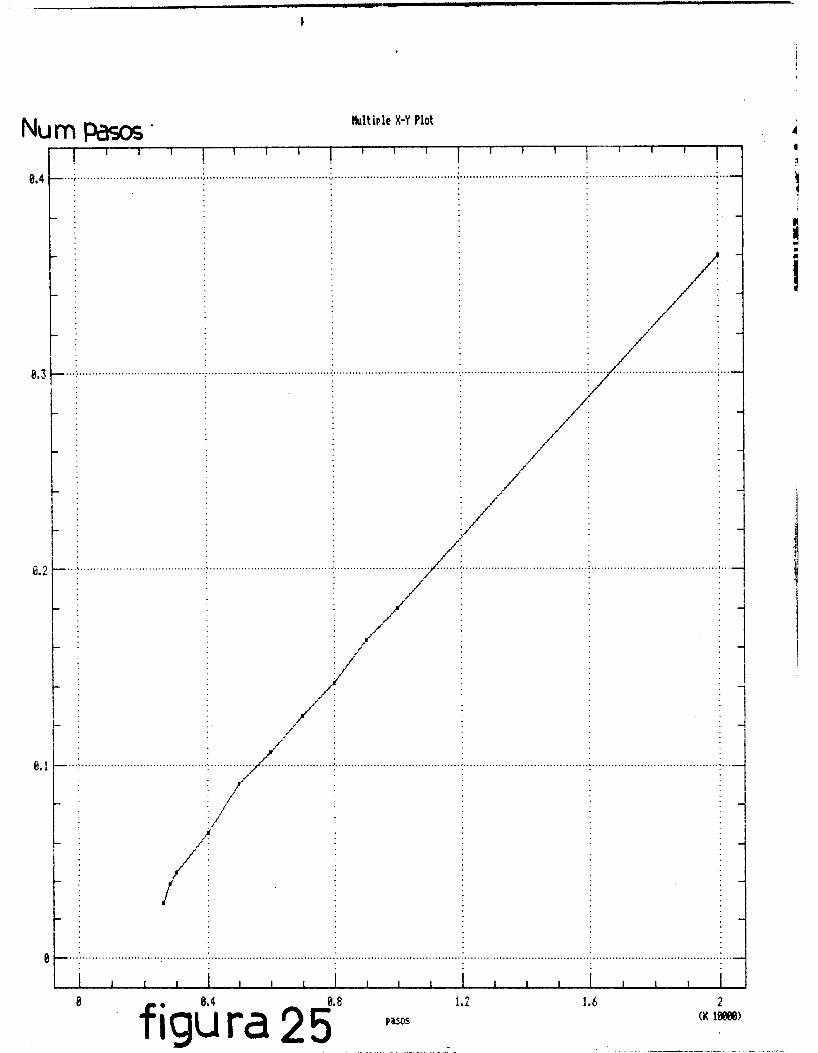
a> Debido a que el encargado de mover la bomba para la
succión es el motor de pasos, se pretendió obtener cuAi
era la relación entre el n h e r o de pasos con respecto al
volumen manejado por la bomba. Así se diseñó un
experimento, en el cual al mover el motor un nhtero de
pasos determinados se succionará un volumen. Para esto
se obtuvieron 15 muestras de volumen, variando el número
de pasos en intervalos de mil, leyendo el volumen
succionado por medio de dos micropipetas C1 ml y 0.2
ml), conectada con la jeringa a través de un tubo
flexible.
Este experimento se repitió 3 veces y se calculó la
media de cada volumen con respecto ai n h e r o de pasos
correspondientes para obtener los datos graficados en La
Fig25 Lo que se observó es que por debajo de 2400 pasos
no se puede registrar un volumen succionado, pero por
encima de 3000 pasos, al sistema de succi6n se comporta
de manara aproximadamente lineal.Este experimento se
realiz6 con agua destilada.
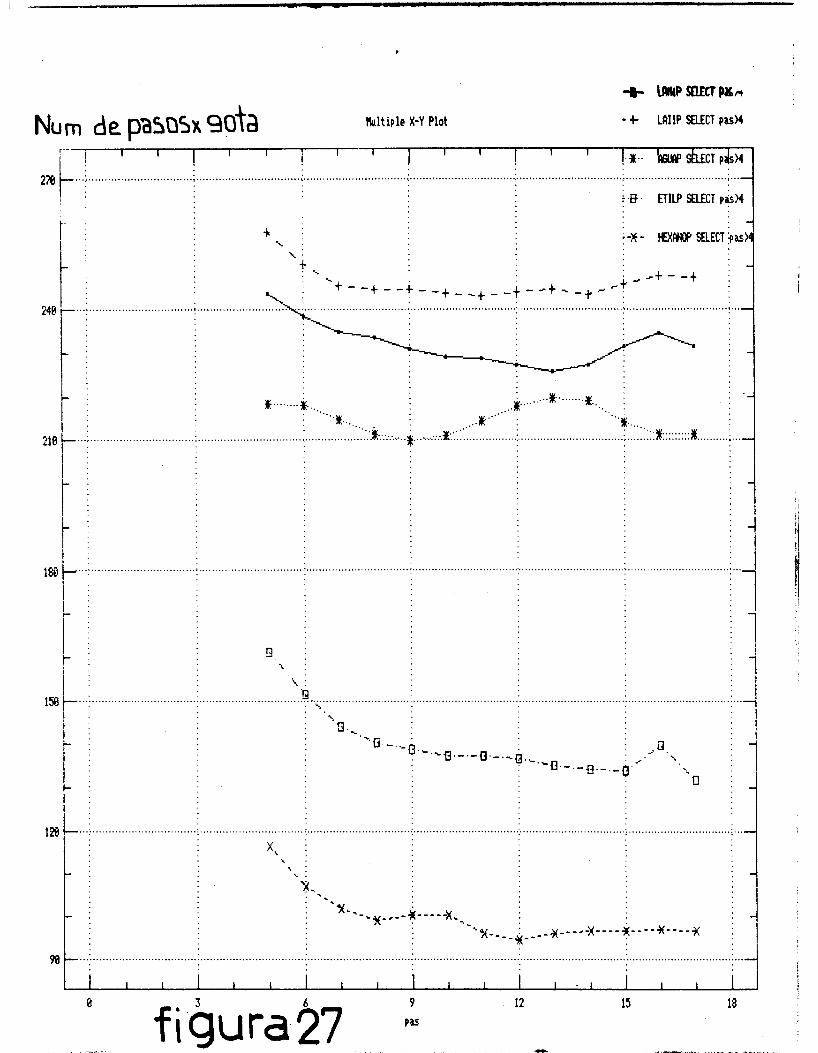
b3 Lo segundo que se quiso observar, fue si al variar la
relación tensión SuperficiaWdensidad, variaba el número
57
d
desplegado de pasos por gotas uin paso por gota
corresponde a cuatro pasos de motor). Así se escogieron * .
3 líquidos diferentes, agua, etanol y hexano, con
tensiones superficiales de 74,22,18 respectivamente Y
densidades muy parecidas.
De esta forma, se detectaron 17 gotas de cada
líquido . Esto se repitió tres veces con cada líquido
y así se calculó la media del numero de pasos por
gotas para ser graficados en la Fig27.
Lo que pudimos observar,son las diferencias de
tension SuperficiaVdensidad en cada líquido
usado.
c> En este punto lo que se trat6 de observar, fue si el
sistema era capaz de discernir por medio del parámetro
de pasos por gota, la diferencia entre líquidos
anmióticos con diferentes grados de madurez fetal. De
esta forma se realizó el experimento con dos líquidos
anmióticos diferentes. Uno maduro y uno inmaduro.
Se detectaron 17 gotas,reaiizando con cada
líquido tres pruebas, obteniéndose la media del n\'unero
de pasos por (bota. Así, los datos fueron graficados
en la Fig27.
d> Finalmente, se quiso observar si variando el
diámetro de la aguja varía el n h e r o de pasos por gota.
Para esto se utilizaron dos agujas con diámetros
58
0-
diferentes C5/8 mm y 1 mm>. La prubba * f u e reaiizada
con cada aguja con el mismo liquido (agua destilada). # '
Utilizando el mismo procedimiento que los dos
experimentos anterioresJos datos obtenidosfueron
eraficados en La Fig26. I I
,
59
I
I I I 1 I I I I I I I 1
Hultiple X-Y Plot
I I 1
8.4
...
I I I I I _...; ....................................................................................................................... ; ....................................... ; ....................................... ; ...-
8 -... : ....................................... : ........................................................................................................................ : ....................................... :...
I 1 I I I I I I I I I I I I I 1 I I 1 I 1

;j 278 1 .................................... i ................................ t ................................ 1 ................................ ; ................................. J ....................................
....
....
....
...
+--4 ......................................................
....
.....
....
....
....
. I
~i .... ~1 , ...
~~ :$
........ :I
........
I ] .... I...
........ q
: - I ........................................................................................... + - - .p .................... : ................................. : ....................................
I I I I I I I I 1 I I I 1 I I I I I I 8
. .
12 15 18
111651
Multiple X-Y Plot
_. . . I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
218
18i
13
1%
m ........ s. - . ...
_. ........................................................................ ...
_ ...................................................................... ;... ............................................................................................. ................................s.... ...
_ .............................................................................................................................................................................................................. x\ ; \ .
\ . t :
8 P
figura27 p=
12 15 18

I
c <<
9
I f *
111. CONCLUSIONES
Con la construcción del equipo y los resultados
obtenidos, los cuales nos indican que con el parámetro
(pasos por 6otas1 se pueden llegar a discernir
diferencias de tensi6n superficial entre diferentes
líquidos.
El equipo puede ser un puente para encontrar
una relaci6n mAs estrecha entre la tensi6n superficial y
el volumen de una gota de líquido amni6tico Cmetodo de
Aberg y Qislen).
Cabe aclarar, que con los datos obtenidos hasta
estos momentos, no podemos, en primer lugar decir que
la relaci6n encontrada entre el número de pasos y el
volumen ,mostrado en la Fi625. sea un medio para
calcular el volumen de ia Cota.
De la misma manera, el número de pasos por gota
desplegados sea un parámetro directamente proporcionai,
con el volumen de ia gota o con la relaci6n tensión
superf iciUdensidad.
Por lo tanto, el próximo paso del macroproyecto
sersi llevar a cabo por medio de este aparato, un
desarrollo experimental y estadístico para encontrar
las relaciones que permitian reaiízar un proceso
estimativo para ayudar a la detección del síndrome de
dif icuitad respiratoria.
63

4 r t
I
I '
BIBLIOQRAFIA
1-Anders Aberg ,Lars gislen Metod the drop volume of amniotic fluid in estimating: therisk of respiratory distress syndrome in the newborn American Journal of obstetlcs and 6ynecoloy:enero 1986
2-Bryant Brown,Harvey Qabert,Morton Stenchever Respiratory distress syndrome,surf anctant biochemistry and acceleracion of fetal lung maturity Obstetrical and gynecology survey:1975
3-Romero 1,Castiiio Rafae1,Qr-a Pedro Teoria y practica en el diseño de dispositivos de sujecibn para el maquinado de piezas UAM,Unidad Azcapozalco,División Ciencias Basicas e inC;enieria,Dto de [email protected]&dco 1989
4-Shingleu Joseph ,Larry Mitchell. DiseKo en ingeniería mecaca Trad de Francisco PanlaguaBocanegra,4ta edicion México,Mc Q r a w Hiii.
5-Slo Syn ,Dc steppimg Motors Superior Electric Company;USA
6-Ward CS Anaesthetic equipment physical principles and maintenance 2da edicion,Bailllere Tindall
6-Microcontrolier handbook Intel Company
7-John Peatman Microcomputer based design Mc Qraw Hiii
8-Linear Databook National Semiconductor- Corporation
9-Optoelectronics device data Motorola
10- Quyton Tratado de fisiologia médica 6a edicíon ,Ed Interamericana
11-Mahan Quimica curso universitario Edicíon 3ra,ed Fondo de Educativo Interamericano