universidad a utonoma metropolitana a …148.206.53.84/tesiuami/uam5085.pdfprofesor donaciano...
TRANSCRIPT

UNIVERSIDAD A UTONOMA METROPOLITANA
UNIDAD IZTAPALAPA A CIENCIAS BASICAS E INGENIERIA
INGENIERIA BIOMEDICA
J
ASESOR:
' ALUMNAS:
DAOTU5UA LETVA R O W
5IORALES BALAN MOLBl4 LEUU~UA. Matricula 91322515
Matricula 92221362
TRIMESTRE 99-P /México D.F., Julio 1999 --

Profesor Donaciano Jiménez Vazquez
Le agradecemos todo el apoyo y facifidades que nos proporciono, para la realliación de este trabajo, gracias también, por su asesor& y amistad que nos ha brindado durante todo este tiempo.
Hil¿a y Rocio


I N D I C E
Objetivo
Introducción
Conceptos fundamentales
Instrumentación electrónica de equipos para obtención de imágenes
Circuito temporizador
Generador de ultrasonido
Generador de pulsos de voltaje
Detección del ultrasonido
Limitador
A m plif ¡cad or de radiof recuencia
De m odula d or
Compensación de ganancia en función del t iempo
Señal de vídeo compuesta
Construcción de la señal de vídeo compuesta
Polaridad de sincronismo en la señal de vídeo compuesta
Impulsos de borrado o blanqueo
Tiempo de borrado horizontal
Tiempo de borrado vertical
Información de imagen y amplitudes de la señal de vídeo
Información de imagen y frecuencias de la señal de vídeo
1
2
4
4
4
4
5
5
6
6
7
7
8
9
1 1
13
14
15
16
17

Desarrollo del diseño
Fijación de niveles de voltaje
Amplif icación de la señal de vídeo y eliminación del offset
Convertidor analógico/digital
Generador de pulsos de reloj
Generadores de direcciones
Subsistema de memoria
Decodificación de direcciones
Programación de la tarjeta
Pruebas y resultados
Conclusiones
22
22
25
25
26
27
28
29
31
36
41
Bi bl i og r a f fa 43

OBJETIVO.
ETAPA 1: Diseñar y construir una tarjeta de expansión para adquirir y digitalizar una
seiíal de vídeo, para ser: almacenada temporalmente y desplegada en
monitor, utilizando el convertidor anaiógico digital MC10319.
ETAPA 2 Desarrollar el software para controlar la tarjeta expansión, la cual se encuentra
colocada en un slot de la PC.
1

INTRODUCCION
La necesidad de diagnosticar y tratar enfermedades por medio de imágenes
médicas ha ido en aumento en los Últimos años, creando la necesidad de desarrollar
equipo médico dedicado a ésta área, entre los que se encuentra el equipo de ultrasonido.
Las imágenes en ultrasonido son generadas produciendo ondas en un transductor
externo, dirigiéndolas hacia el cuerpo y midiendo varias propiedades de los ecos
producidos por reflectores en el interior del cuerpo. Esta tecnología posee una gran
potencialidad y continua desarrollándose. Debido al alto grado de complejidad del equipo
necesario para captar el ultrasonido, ya sea acústica o visualmente, la interface
ultrasonido-observador fue tecnológicamente realizable hace sólo tres décadas.
Las imágenes ultrasónicas poseen dos propiedades únicas que las distinguen de
las imágenes médicas obtenidas mediante otras técnicas.
En primer lugar es posible visualizar estructuras en tejidos blandos, lo cual
permite la identificación de los diferentes Órganos, así como el diagnóstico de
estados patológicos focalizados o difusos.
En segundo lugar, ha demostrado producir efectos biológicos en el paciente,
muy pequeños o nulos, lo cual lo hace ideal para estudios del feto in útero, así como en otros exámenes ginecoobstétricos. Es decir se trata de una
t ec n o I og ía práctica mente n o i nva si va.
Por otra parte, la digitalización de imágenes es posible sobre un monitor de
computadora cuando las imágenes producidas por éste y la forma en que son colocadas
en un televisor es similar.
Una imagen es una formación ordenada de áreas pequeñas obscuras y luminosas
Cada área pequeña de luz o sombra es un elemento o detalle de imagen. Todos los
elementos en conjunto contienen la información visual de la imagen; similarmente en la
memoria de vídeo de una computadora la imagen es igualmente almacenada punto por
2

punto en registros dedicados para éste propósito y el conjunto total conforman la imagen
almacenada en la memoria.
Para poder capturar y después digitalizar una imagen, primero se tiene que
obtener de la señal compuesta de vídeo la información correspondiente a la imagen,
haciendo una similitud en la forma en que se realiza en un receptor de televisión, La
forma de obtener la información es por medio de la separación de la señai de imagen de
las de sincronización y borrado que se encuentran incluidas en la señal de vídeo
compuesta.
La señal de vídeo compuesta es la forma más común en que se encuentra
formada una imagen, esta se puede encontrar como salida de una cámara o de una
reproductora de vídeo (estándar RCA), también es la señal que se separa de la señal de
audio dentro de un receptor de televisión en la etapa final de pre-amplificación de vídeo y
que utiliza el tubo de rayos catódicos (TRC) para formar la imagen.
3

CONCEPTOS FUNDAMENTALES
INSTRUMENTACION ELECTRdNlCA DE EQUIPOS PARA OBTENCION DE IMAGENES.
En todos los instrumentos que emplean el sistema pulso-eco, la circuiteria
electrónica empleada en la transmisión y en la recepción es muy similar. Sus
componentes básicos son: el generador de pulsos de sincronía, el generador de los
pulsos ultrasónicos, el trasductor, el receptor de los ecos y el circuito para el
procesamiento analógico de la señal de vídeo. A continuación se describe cada uno.
Circuito ternporizador. Frecuencia de recepción.
El generador de pulsos de sincronía se encarga de sincronizar toda la generación y
recepción de las ráfagas ultrasónicas que rastrean el tejido vivo. La frecuencia de dichos
pulsos oscila entre un mínimo indispensable para mantener un trazo estable en la pantalla
de fósforo, y un máximo que permite todavía el regreso de los ecos a producidos en las
interfaces más lejanas al transductor. Esto implica un rango de frecuencias de repetición
de pulsos, entre 50 y 3,000 pulsos/seg.
Esta sección puede implantarse con cualquier circuito tem porizador programable o en
equipos más complejos con un reloj maestro controlado por cristal. En realidad no es
necesaria una gran estabilidad de dicha frecuencia, ya que su variación con temperatura
o con voltaje de alimentación, afecta a todos los circuitos del sistema por igual, sin
afectar la exactitud en la medición de distancias.
Generación de uitrasonido.
El primer bloque de circuitos que va conectado directamente al transductor es el que
compone el transmisor de ultrasonido. Esta etapa es la encargada de generar pulsos de
voltaje de gran amplitud y de muy corta duración.

En la mayoría de los equipos hay un control de amplitud que atenúa los pulsos de
excitación antes de aplicarlos al trasductor, de tal forma que el operador puede controlar
la amplitud de los pulsos ultrasónicos emitidos.
Generador de pulsos de alto voltaje.
Para desarrollar esta etapa se emplea generalmente un circuito que consiste en un
condensador previamente cargado con alto voltaje (entre 200 y 600 Volts), el cual es
descargado rápidamente sobre el trasductor por medio de un interruptor electrónico.
Como la resolución longitudinal del haz ultrasónico es función de la duración de los
pulsos de excitación, se procura emplear como interruptores rectificadores controlados
de silicio de alta velocidad (semejantes a los empleados en radar). Estos circuitos
producen pulsos de voltaje unipolares, con una complejidad cercana a la del alto voltaje
aplicado y con un tiempo de levantamiento alrededor de 1 O nanosegundos.
En respuesta a esta excitación, el trasductor genera un tren de ondas de presión,
separadas en el tiempo, un intervalo proporcional al grueso del cristal piezoeléctrico.
La carga eléctrica en el condensador es de aproximadamente 1 pC por pulso, y puede
ser aumentada al elevar el valor de la capacitancia. La energía del pulso puede ser
incrementada también, aumentando la amplitud de alto voltaje. En la práctica, tanto los
incrementos en carga como en energía pueden aumentar la potencia, siempre y cuando
la duración de cada pulso no exceda la mitad del periodo de la onda ultrasónica.
Detección del ultrasonido. El receptor.
Los ecos ultrasónicos captados por el transductor son convertidos, por el efecto
piezoeléctrico, en pulsos eléctricos, cuya amplitud es proporcional a la diferencia de
impedancias acústicas de la superficie reflectora y depende también de la atenuación por
absorción, transmisión y reflexión, que ocurre al propagarse la energía ultrasónica por
tejido vivo.
5

El receptor está constituido por una serie de circuitos electrónicos analógicos, y tiene
como función amplificar los ecos recibidos a un nivel que permita su observación en una
pantalla de tubo de rayos catódicos.
Limita do r.
Esta etapa tiene la función de proteger el resto de la circuiteria del receptor de los pulsos
del transmisor. Puesto que tanto el transmisor como el receptor deben estar conectados
al transductor, el transmisor queda directo a la entrada del receptor. Si los pulsos de alto
voltaje entraran al receptor sin ser atenuados, lo saturarían por un período de tiempo
largo, ya que el receptor está diseñado para manejar señales débiles.
El limitador es un circuito que permite pasar a las señales débiles (ecos) sin modificarlas,
pero limita o recorta a cualquier señal por encima de un umbral de voltaje, con el objeto
de proteger al receptor.
Amplificador de radio frecuencia.
Como su nombre lo indica, en esta etapa se amplifican las señales de eco, con una
ganancia que va de 40 a 100 dB. Debido al rango dinámico tan amplio de amplitudes
contenidas en una imagen ultrasónica, se utiliza generalmente un amplificador
logarítmico. En este tipo de amplificador, el voltaje de salida es proporcional al logaritmo
del voltaje de entrada. Empleando un amplificador con estas características, pueden ser
vistos en la misma imagen los ecos fuertes y los ecos débiles, con diferencias en
amplitud relativamente pequeñas.
En esta etapa debe ponerse especial atención en emplear un circuito con un nivel muy
bajo de ruido electrónico, ya que de lo contrario el ruido continuaría amplificándose en
las etapas subsecuentes, lo cual reduciría considerablemente el rango dinámico de la
señal de vídeo y la calidad de las imágenes obtenidas.
6
Demoduiador.
El primer paso para demodular una señal es rectificarla. En el proceso de rectificación,
los hemiciclos negativos de la señal de voltaje son convertidos hemiciclos positivos.
Demodulación significa que la señal con la frecuencia fundamental (frecuencia de
oscilación del transductor ultrasónico) sobre la cual ha sido transportada la información
de las amplitudes de los ecos, debe ser eliminada. AI final de éste proceso sólo queda la
envolvente de la señal de radiofrecuencia inicial. El demodulador es, pues un circuito con
una respuesta muy lenta, que responde solamente a la envolvente del pulso y no a la
frecuencia de oscilación del cristal.
Compensación de ganancia en función de/ tiempo.
La salida del demodulador contiene la seiial requerida para visualizar una imagen: la
amplitud de la señal de eco y su retraso con respecto al inicio del pulso de transmisión.
En esta etapa el operador tiene la posibilidad de modificar, por medio de controles
externos, las amplitudes con las que serán visualizados los ecos en la imagen. Este
control del operador es necesario, debido a la gran variabilidad de anatomías y
parámetros acústicos en los tejidos a explorar.
7

SEÑAL DE VIDEO COMPUESTA
Las tres partes esenciales de la señal de vídeo compuesta se ilustran en la figura 1 .
1. La señal de cámara correspondiente u las variaciones de luz en la escena.
2. Los impulsos de sincronización, o sincronismo, para la exploración.
3. Los impulsos de borrado que hacen invisibles los retrazos en el TRC.
Señal de cámara
Tiempo (a)
impulso de borrado +
Impulso de + sincronismo
Tiempo
(c)
FIGURA 1. - Formación de la señal compuesta de video.
La señal de cámara de la figura 1-a está combinada con el impulso de borrado en
la figura 1-b, luego se añade el sincronismo para producir la señal de vídeo compuesta en
la figura 1-c. El resultado que aquí se muestra es la señal para una línea horizontal de
exploración.
Dadas las señales para todas las líneas, la señal de vídeo compuesta contiene
toda la información necesaria para la imagen completa, línea por línea, y campo por
campo. En el tubo de imagen se utiliza la señal de vídeo para reproducir la imagen en la
trama de exploración.
8

CONSTRUCCION DE LA SEÑAL DE VIDEO COMPUESTA
En la figura 2 están indicados los valores sucesivos de las amplitudes de tensión y
de corriente para la exploración de dos líneas horizontales en la imagen. Cuando aumenta
el t iempo en la dirección horizontal, las amplitudes varían para los matices de blanco, gris
y negro en la imagen. Empezando en el extremo de la izquierda de la figura, en el
instante cero, la señal está en un nivel de blanco y el haz explorador esth en el lado
izquierdo de la imagen. Cuando es explorada la primera línea de izquierda a derecha, son
obtenidas las variaciones de señal de cámara con varias amplitudes que corresponden a
la información de imagen necesaria. Después de que la traza horizontal produce la señal
de cámara para una línea, el haz explorador está en el lado derecho de la imagen. Luego
se inserta el impulso de borrado para poner la tensión de la señal de vídeo al nivel más
negro que el nivel de negro para que el retrazo de la línea horizontal sea invisible, esto
ocurre cuando al polarizar el tubo de rayos catódicos con ésta señal, éste se encontrara
en el estado de saturación y por lo tanto, no enviará el haz electrónico hacía la pantalla.
Señal de Impulso de cámara sincronismo horizontal
I
. - - - - - - - t - -
- - - Pico desincronismo
Nivel de borrado - - - - - - - -
Impulso de - borrado horizontal
Máximo nivel de blanco
- - - - - - - -
I I
I n 5.750 s Tiempo
Negro
Escala de
Grises
blanco
FIGURA 2.- Señal compuesta de vídeo y su relación con la escala de grises.
9
Después de transcurrido un tiempo de borrado suficientemente largo para que
quede incluida la retraza, se suprime la tensión de borrado. Entonces el haz explorador,
está en el lado de la izquierda, dispuesto a explorar la línea siguiente. De esta manera
son exploradas sucesivamente las líneas horizontales. La segunda línea muestra una
información oscura de imagen cercana al nivel del negro.
Con respecto al tiempo, las amplitudes de la señal inmediatamente después del
borrado en la figura 2 representan la información correspondiente al lado izquierdo en el
comienzo de una línea de exploración. Inmediatamente antes del borrado, las variaciones
de señal corresponden al lado derecho. La información en el centro exacto de una línea
de exploración se produce en un instante intermedio entre los impulsos de borrado.
10

POLARIDAD DE SINCRONISMO EN LA SEÑAL DE VIDEO COMPUESTA ~~
La señal de vídeo puede tener dos polaridades:
1 . Una polaridad positiva de sincronismo, con los impulsos de sincronismo en la posición
superior, como en la figura 2.
2. Una polaridad negativa de sincronismo, con los impulsos de sincronismo, con los
impulsos de sincronismo en la posición inferior, como muestra la figura 3.
Tiempo
+-
Máximo nivel de .blanco
Impulso de borrado horizontal
Nivel de borrado
Pico de sincronismo
Señal de Impulso de c6mara sincronismo horizontal
FIGURA 3- Polaridad negativa de la señal de vídeo.
Existen dos maneras de reproducir la imagen en el TRC; el primer caso es
necesario que la señal de vídeo con la polaridad negativa de sincronismo polarice la rejilla
del tubo de imagen. Luego el nivel de borrado es negativo para cortar la corriente del haz
para el negro. En el otro caso, es necesario que la señal de vídeo con polaridad positiva
de sincronismo se inserte en el cátodo del tubo de imagen.
11

Además, la polaridad negativa de sincronismo esta normalizada para las señales
dentro y fuera del equipo de vídeo, ta l como la cámara de T.V., el equipo da control de
vídeo. La amplitud estándar o normalizada es de 1V pp con sincronismo negativo.
Para cualquiera de las polaridades las partes blancas de la señal de vídeo son
opuestas a los impulsos del sincronismo. El nivel de borrado debe corresponder al negro.
Las amplitudes de sincronismo están en lo que se llama nivel del infranegro o más negro
que el negro.
12
IMPULSOS DE BORRADO O BLANQUEO
c
Impulsos de borrado
(sin información de imagen)
+ vertical -
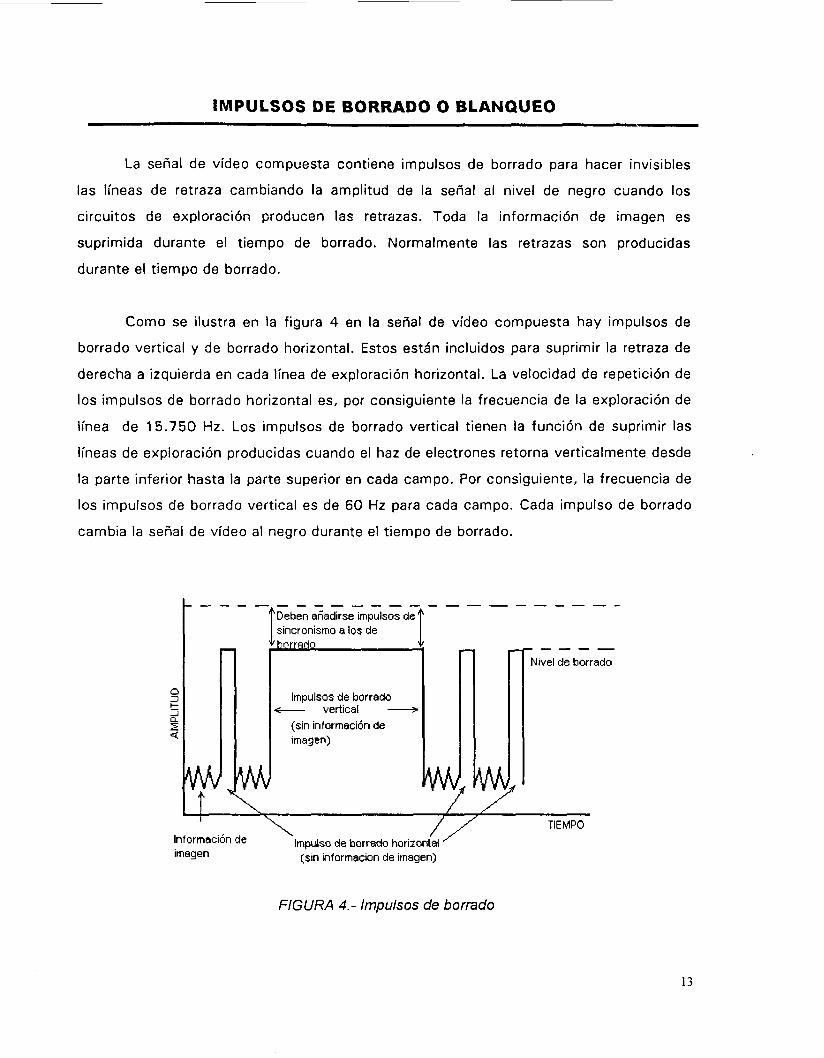
La señal de vídeo compuesta contiene impulsos de borrado para hacer invisibles
las líneas de retraza cambiando la amplitud de la señal al nivel de negro cuando los
circuitos de exploración producen las retrazas. Toda la información de imagen es
suprimida durante el t iempo de borrado. Normalmente las retrazas son producidas
durante el t iempo de borrado.
Como se ilustra en la figura 4 en la señal de vídeo compuesta hay impulsos de
borrado vertical y de borrado horizontal. Estos están incluidos para suprimir la retraza de
derecha a izquierda en cada línea de exploración horizontal. La velocidad de repetición de
los impulsos de borrado horizontal es, por consiguiente la frecuencia de la exploración de
línea de 15.750 Hz. Los impulsos de borrado vertical tienen la función de suprimir las
líneas de exploración producidas cuando el haz de electrones retorna verticalmente desde
la parte inferior hasta la parte superior en cada campo. Por consiguiente, la frecuencia de
los impulsos de borrado vertical es de 60 Hz para cada campo. Cada impulso de borrado
cambia la señal de vídeo al negro durante el t iempo de borrado.
M i 1
T Deben añadirse impulsos de sincronismo a los de
- - - - - Nivel de borrado
I TIEMPO Información de Impulso de borrado horizontal imagen (sin informacion de imagen)
FIGURA 4.- Impulsos de borrado
13

TIEMPO DE BORRADO HORIZONTAL
l o o - -
* 75,- u $ $50
25--
En la figura 5 están ilustrados los detalles del período de borrado horizontal. EL
intervalo marcado H es el tiempo necesario para explorar una línea completa, incluyendo
el trazo y retrazo. El t iempo para H es 6 3 . 5 ~ s .
- - información
‘delmagen a 0.1 6H
horizontal - Impulso de borrado
f >
I I I
Tiempo i
Barras de borrado, t- derecha e izquierda
FIGURA 5.-Detalles de borrado horizontal.
La anchura del impulso de borrado horizontal es sólo de 0.14 H a 0.18 H. en el
borrado H es necesario un tiempo de 10.2 ps para el retrazo horizontal. Superpuestos a
los impulsos de borrado horizontal hay impulsos de sincronismo horizontal más estrechos
de duración 0.008H esto es aproximadamente 5ps, o sea, la mitad del tiempo de
borrado.
Durante la mitad restante del tiempo de borrado, que también es de 5ps, la señal
está en el nivel de borrado. La parte inmediatamente anterior al impulso de sincronismo

se llama umbral anterior (o pórtico) con un tamaño de 0.02H (1.27p.s) y la parte que
sigue al impulso de sincronismo se llama umbral posterior con una anchura de 0.06H
( 3 . 8 1 ~ ~ ) . El t iempo de borrado es ligeramente más largo que los valores normales del
t iempo de retrazo.
TIEMPO DE BORRADO VERTICAL.
Los impulsos de borrado vertical cambian la amplitud V de la señal de vídeo hasta
el nivel de negro, por lo que el haz explorador es suprimido durante los retrazos
verticales. La anchura del impuiso de 0.05V a O.O8V, donde V es igual a 1/60 s.
Los impulsos de borrado vertical repetidos a 60 Hz son insertados en cada campo
de exploración vertical para borrar los retrazos V. El impulso de borrado V tiene una
duración de 1.333ps, tiempo suficiente para explorar 21 lineas horizontales completas en
cada campo.
El impulso de sincronismo se repite también a 60 Hz para sincronizar la
exploración vertical en cada campo. Cada impulso de sincronismo V tiene anchura para
seis medias líneas horizontales, o tres líneas H completas. El impulso de sincronismo V
es mucho más ancho que los impulsos de sincronismo H por lo que pueden ser
separados en los circuitos de sincronismo del receptor. Cada impulso de sincronismo V
tiene hendiduras en intervalos de media línea con el f in de mantener la continuidad de la
sincronización horizontal durante el t iempo de sincronismo V.
Inmediatamente antes y después de cada impulso de sincronismo V hay un grupo
de seis impulsos ecualizadores o igualadores. Dada la separación de medía línea de los
impulsos igualadores, cada grupo tiene una longitud de tres líneas H. con la separación
de media línea se mantiene la continuidad de la sincronización horizontal por los impulsos
igualadores alternos durante el t iempo de borrado vertical.
Con dos impulsos en el t iempo de una línea completa H, los impulsos igualadores
se repiten a razón de 2x15.750=31.500 Hz. Los grupos de impulsos igualadores
15

inmediatamente antes y después del sincronismo V se utiliza para mejorar la
sincronización vertical en los campos pares e impares.
Las hendiduras de media línea en el impulso de sincronismo vertical tienen también una
frecuencia de 31.500 Hz. Realmente, los impulsos igualadores y los verticales son
impulsos similares pero de polaridades opuestas.
INFORMACION DE IMAGEN Y AMPLITUDES DE LA SEÑAL DE VIDEO.
La figura 6 presenta dos ejemplos para explicar cómo la señal de vídeo
compuesta corresponde a la información visual. En la figura 6-a la señal de vídeo
corresponde a una línea de exploración para una imagen con una barra vertical negra en
el centro de un cuadro blanco. En la figura 6-b los valores del negro y del blanco de la
imagen están invertidos con respecto a los de la figura 6-a. Estas señales están
representadas con polaridad positiva de sincronismo, pero la misma idea es aplicable con
polaridad negativa de sincronismo.
U 3 r o E 4
Tiempo
(al
'z1 3 s a E Q
Tiempo
(b)
FIGURA 6.-Ejemplo de información visual de la señal compuesta de vídeo
16

Una imagen que tenga cualquier distribución de luz y sombra. Si la figura
completa contiene cinco barras negras verticales contra un fondo blanco, la señal de
vídeo compuesta correspondiente a cada línea horizontal incluirá cinco variaciones
rápidas de amplitud desde el blanco hasta el negro.
Por ejemplo, supongamos la figura compuesta por un abarra negra horizontal en el
centro de un cuadro blanco. Entonces la mayoría de las líneas horizontales contendrán
información de la imagen blanca para todo el período de traza. La amplitud de la señal de
cámara permanece en el nivel de blanco, excepto para los intervalos de borrado. Sin
embargo para estas líneas horizontales que explora la barra negra, la señal de cámara es
producida en el nivel de negro.
Una imagen real consiste en elementos que tiene diferentes cantidades de luz y
sombra con una distribución no uniforme en las líneas horizontales y en los campos
verticales. Cuando hay movimiento en la escena, la señal de vídeo contiene una sucesión
de tensiones continuamente cambiantes. Dentro de cada línea la amplitud de la señal de
cámara varía para diferentes elementos de la imagen. Por otra parte, las formas de onda
de la señal de cámara para las líneas cambian dentro del campo.
Las formas de onda resultantes se pueden observar en las fotografías de
osciloscopio u oscilogramas de una señal de vídeo típica.
En los oscilogramas de la señal de cámara se puede observar que las variaciones
aparecen borrosas o confusas cuando cambian con el movimiento en la escena. Sin
embargo, la traza en el osciloscopio aparece inmóvil para los impulsos de borrado H y
sincronismo a una frecuencia fija de 15.750 Hz o de 60 Hz para los impulsos V.
INFORMACION DE IMAGEN Y FRECUENCIAS DE LA SEÑAL DE VIDEO
Las frecuencias de !a señal de cámara varían desde aproximadamente 30 Hz hasta
4 MHz. la primera cantidad en el extremo inferior es una audiofrecuencia y la segunda en
el extremo superior es una radiofrecuencia. Este enorme margen de las frecuencias hace
17
que la señal de vídeo sea una señal de banda ancha. Abarca un margen de
aproximadamente 17 octavas.
La señal de cámara tiene cambios muy rápidos dentro de una línea a causa de la
exploración horizontal es rápida. En esoecial, una señal de 4 MHz. representa un cambio
de amplitud entre dos elementos de imagen sucesivos cuya exploración horizontal dura
0.25 ps. El límite de 4 MHz es sólo una restricción legal determinada por el canal de
6MHz. de las estaciones de difusión de televisión.
En la exploración vertical, las variaciones de la señal de cámara tienen frecuencias
mucho más bajas porque la velocidad de exploración es más lenta. Una señal de 30 Hz
representa un cambio de amplitud entre dos campos sucesivos repetidos al r i tmo de
60Hz. Las frecuencias inferiores a 30 Hz se pueden considerar como cambio de nivel de
C.C.
Frecuencias de vídeo asociadas
carta o imagen de prueba de la figura
con la exploración horizontal. Con referencia a la
7, la señal de onda cuadrada en la parte superior
representa las variaciones de la señal de cámara de la señal de vídeo compuesta
obtenida en la exploración de una línea horizontal. Se desea hallar la frecuencia de esta
onda cuadrada.
Para determinar la frecuencia de cualquier variación de señal debe ser conocido el
t iempo correspondiente a un ciclo completo. Un ciclo incluye el t iempo contado desde un
punto de la forma de onda de señal hasta el punto inmediatamente siguiente que tiene la
misma magnitud y sentido. Entonces se puede hallar la frecuencia como inversa del
período respectivo correspondiente a un ciclo. Las variaciones de la señal de cámara
dentro de una línea horizontal tienen que ser, sin embargo, de período más corto y
frecuencia más elevada.
Un ciclo completo de señal de cámara en la figura 7 incluye la información de dos
elementos de imagen adyacentes, uno blanco4 y otro negro. Sólo después de explorar el
segundo cuadrado la señal de cámara tiene la misma magnitud y sentido que al principio
del primer cuadrado. Por consiguierite, para hallar la frecuencia de las variaciones de la
18
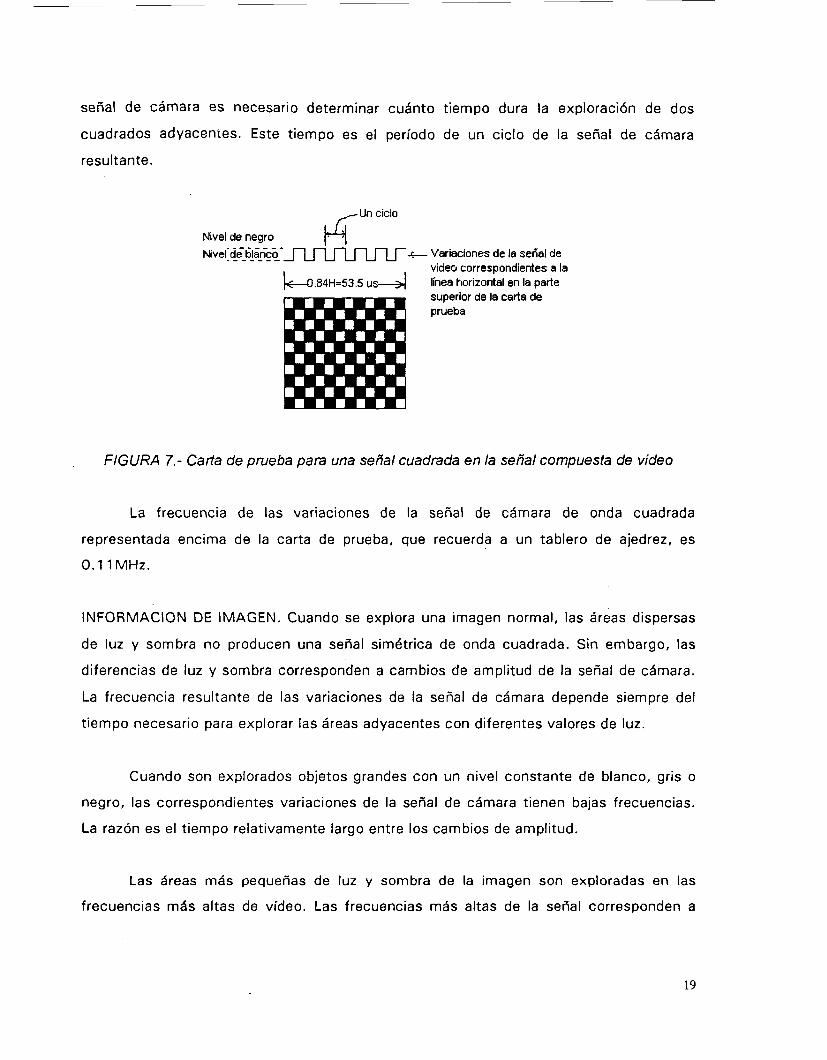
señal de cámara es necesario determinar cuánto tiempo dura la exploración de dos
cuadrados adyacentes. Este tiempo es el período de un ciclo de la señal de cámara
resultante.
Un ciclo
Nivel de negro N i v e l - < e - b ! a @ - m C Variaciones de la señal de
video correspondientes a la linea horizontal en la parte
. _ - _ _ _
b " . 8 4 ~ = 5 3 . 5
FIGURA 7.- Carta de prueba para una señal cuadrada en la señal compuesta de vídeo
La frecuencia de las variaciones de la señal de cámara de onda cuadrada
representada encima de la carta de prueba, que recuerda a un tablero de ajedrez, es
0.1 1 MHz.
INFORMACION DE IMAGEN. Cuando se explora una imagen normal, las áreas dispersas
de luz y sombra no producen una señal simétrica de onda cuadrada. Sin embargo, las
diferencias de luz y sombra corresponden a cambios de amplitud de la señal de cámara.
La frecuencia resultante de las variaciones de la señal de cámara depende siempre del
t iempo necesario para explorar las áreas adyacentes con diferentes valores de luz.
Cuando son explorados objetos grandes con un nivel constante de blanco, gris o
negro, las correspondientes variaciones de la señal de cámara tienen bajas frecuencias.
La razón es el t iempo relativamente largo entre los cambios de amplitud.
Las áreas más pequeñas de luz y sombra de la imagen son exploradas en las
frecuencias más altas de vídeo. Las frecuencias más altas de la señal corresponden a
19

variaciones entre elementos de imagen muy pequeños de una línea horizontal,
especialmente el borde vertical entre un área blanca y un área negra.
FRECUENCIAS DE VIDEO ASOCIADAS CON LA EXPLORACION VERTICAL. En el
extremo opuesto, las variaciones de señal que corresponden a elementos de imagen
adyacentes en dirección vertical tienen frecuencias bajas a causa de una exploración
vertical es comparativamente lenta. Las variaciones entre una línea y la siguiente
corresponden a una frecuencia de aproximadamente 10 KHz. Los cambios más lentos en
distancias más largas producen frecuencias más bajas en la exploración vertical. La
frecuencia muy baja de 30 Hz corresponde a una variación de nivel de iluminación entre
dos campos sucesivos.
RELACION DE UTlLlZAClON Y DETALLE VERTICAL. Cada exploración de línea puede
representar, todo lo más, un detalle en la dirección vertical. Pero una línea de exploración
puede no representar detalle vertical alguno por falta de detalle vertical. Además, un
elemento de imagen puede quedar comprendido entre dos líneas, con lo que el problema
que presenta e l establecimiento de detalle vertical útil es determinar cuántos elementos
de imagen pueden ser reproducidos por un número dado de líneas exploradas.
El número de líneas exploradas Útiles en la representación de detalles verticales
dividido por el número total de líneas exploradas visibles es lo que se llama relación de
utilización. Los cálculos teóricos y las figuras experimentales dan márgenes de relación
de utilización de 0.6 a 0.8 para diferentes imágenes con contenido normal de imagen.
Podemos utilizar como promedio 0.7.
Ahora puede ser determinado el máximo número posible de elementos verticales.
El número de líneas visibles es 525 menos e l de los explorados durante el borrado
vertical. Con un tiempo de borrado vertical del 8 % , el número de líneas suprimidas en
todo el cuadro es 0.08 X 525, o sea, 42 líneas aproximadamente. Algunas de estas
líneas ocurren durante la retraza vertical y otras son exploradas en las partes superior e
inferior del cuadro, pero todas son suprimidas. Restando 42 de 5 2 5 quedan483 líneas
visibles. Con una relación de utilización de 0.7, el número de líneas útiles para mostrar
un detalle vertical es: 483 X 0.7 = 338.
20
Este valor representa el número de líneas de exploración efectivas, por tanto, el
número máximo de detalles verticales que se pueden reproducir con 4 8 3 líneas de
exploración visibles es aproximadamente 338, dependiendo el valor exacto de la relación
de utilización.
De acuerdo a los cálculos anteriores, el número máximo de elementos de imagen posible
para toda la imagen es 426 X 338, o aproximadamente 144,000. Este número es
independiente de las dimensiones de la imagen.
Además de las variaciones continuas de amplitud en los elementos individuales de
imagen, la señal de vídeo debe tener un valor medio que corresponda al brillo medio de
la escena de otra manera el receptor no puede seguir los cambios de brillo. Un nivel de
C.C. incorrecto da lugar a brillo incorrecto o erróneo.
2 1

DESARROLLO DEL DISEÑO
La arquitectura de la tarjeta se muestra en la figura 8, como se puede apreciar en
el diseño de esta tarjeta se puede separar en dos partes:
1)Parte analógica, encargada de amplificar y eliminar el offset de la señal de
vídeo.
1.1
1.2
Fijación de niveles de voltaje
Amplificación de la señal de vídeo y eliminación del offset
2L)Parte digital, encargada de controlar la captura y almacenar la información
de la imagen obtenida de la señal de vídeo,
2.1 Convertidor analógico digital
2.2 Generador de pulsos de reloj
2.3 Generador de direcciones
2.4 Subsistema de memoria
2.5 Decodificación de direcciones.
A continuación, describiremos cada una de las partes que componen cada etapa.
1.1 - FlJAClON DE NIVELES DE VOLTAJE:
El convertidor analógico digital MC103 1 9 digitaliza una señal con ciertas
características en voltajes, por lo que se necesita voltajes de referencia para evitar que la
señal de entrada no este fuera de los límites. Para esta fijación de voltajes se utiliza un
diseño m u y sencillo, como lo muestra las figuras 9 y 10. Los reguladores que se
utilizaron es el LM317LZ para el voltaje de referencia VRT y el LM337MT para el vcltaje
de referencia VRB; estos reguladores aunque no son tan precisos están dentro de los
límites de los voltajes de referencia.
22

I I I
4
o
Y
> > K a v>
FIGURA 8. - Circuito General
23

LM317 LZ + 5.ov
- 5.ov
1 - m
-
FIGURA
200
T "uur
I2 1 f-iSl0
=!= - 9. - Regulador de tensión positivo.
LM337 MT
+ -
1 O0
FIGURA 10.- Regulador de tensión negativo.

1.2- AMPLlFlCAClON DE LA SEÑAL DE VIDEO Y ELlMlNAClON DEL OFFSET.
El amplificador operacional que se utiliza es el MC34082, éste dispositivo es tipo JFET,
tiene un ancho de banda de 8 MHz, tiene una alta impedancia de entrada y tiene una
baja impedancia a la salida; debido a estas características nos permite tener una señal de
vídeo con mayor nitidez.
El diseño que se utiliza se puede ver en la figura 11. La función de éste
amplificador operacional es acoplar la señal de vídeo al circuito sin ser recortada.
I-- VRT
VRB
3.3 pF L, ENTRADA DE VIDEO (1 Vpp)
FIGURA 1 1 .- Acoplador del sistema para la serial de vídeo.
2.1 - CONVERTIDOR ANALOGICO DIGITAL:
Los convertidores analógico/digital (ADC) y digital/analógico (DAC) se utilizan, para
conectar el microprocesador con el mundo analógico. Muchos de los acontecimientos
que se monitorean y controlan con el microprocesador, son analógicos. A menudo
incluyen vigilancia de todas las formas de acontecimiento, incluso voz, hasta el control
25

de motores y dispositivos similares. Para poder efectuar la interface del microprocesador
con estos acontecimientos, se debe conocer la interfaz y el control del convertidor.
El convertidor utilizado es el MC10319, el cual es un convertidor analógico digital
de 8 bits. Este dispositivo emplea una estructura interna que elimina rápidamente errores
de la señal de entrada, es compatible con dispositivos TTL, requiere un voltaje positivo
de + 5 V y un voltaje negativo con un ancho de tolerancia de -3 a 6 V. Tiene una
resolución de 8 bits y una exactitud de 9, tiene salida de tres estados que es habilitada
con una lógica, tiene un rango de velocidad de muestras de 25 MHz, la entrada tiene un
ancho de largo de 1 .O hasta 2.0 Vpp.
El convertidor analógico digital es habilitado por la lógica de la decodificación y la
lógica del mismo convertidor. Así al momento de llevarse a cabo la digitalización el bus
de datos esta en baja impedancia y se estará almacenando los datos en memoria,
cuando se requiera leer los datos de memoria este bus estará en alta impedancia para
evitar que se tenga una contingencia en el bus
2.2- GENERADOR DE PULSOS DE RELOJ.
Las características eléctricas que debe tener la señal de reloj son: oscilación de
una fase con niveles TTL (-0.3 a 0.45V para cero lógico y Vcc de -0.6 a Vcc +0.3 para
uno lógico). Una forma de satisfacer todos los requerimientos de voltaje es por medio de
una resistencia de activación de 3 3 0 ohms conectada entre Vcc y la terminal de salida
de un oscilador implantado con circuitos TTL que generan la señal de reloj.
Algo que no es claro a primera vista es que el convertidor MC10319 al igual que
otros convertidores no tienen una frecuencia de operación Única. En lugar de esto tienen
un intervalo de frecuencia recomendado por el fabricante. Arriba de esta frecuencia la
confiabilidad del sistema se deteriora. La frecuencia máxima de operación de éste
convertidor es de 25 Mhz.
El diseño del sistema requiere para el convertidor MC10319 una señal de reloj de
frecuencia de 14.31 81 8 MHz, la razón de ésta frecuencia es que este convertidor utiliza
26

un múltiplo de la sub-portadora de color en el sistema NTSC, dicha sub-portadora es de
3.579545 MHz. Según el teorema del muestreo, se requiere como mínimo al menos 2
veces el valor del ancho de banda de la señal analógica, pero para la mayoría de los sistemas de conversión analógico-digitales de vídeo marca en los estándares utilizar
como referencia la sub-portadora de color, razón por la cual se emplea cuatro veces
3 .579545 MHz para dicha señal de reloj.
El circuito utilizado emplea tres compuertas NAND y un conjunto de capacitores y
resistencias que funcionan como estabilizadores de frecuencia, como se puede ver en
circuito de la figura 12. En este caso la frecuencia de oscilación del cristal determina la
frecuencia de la señal de reloj, esta frecuencia es de 14.31 MHz y gracias a la
estabilidad del cristal se puede mantener un tiempo de ejecución constante. Este circuito
de reloj tiene a la salida una resistencia de activación (pull-up) de 330 ohms para
satisface los requerimientos tanto de AC como de DC. Este reloj se utiliza para el
convertidor, las memorias y los contadores
1 K 1 K 1- 2 1- 2
U?Q U?Q
3 - ' 1
74LS00 74LS00
FIGURA 12.-Oscilador del sistema.
2.3- GENERADORES DE DIRECCIONES.
El contador es uno de los subsistemas más útiles versátiles de los sistemas
digitalec. Un contador activado por reloj se puede utilizar para contar el número de ciclos
de reloj, puesto que los impulsos de reloj ocurren a intervalos conocidos, el contador se
27

puede utilizar como instrumento de medida del tiempo y por tanto, del período o de la
frecuencia. Hay básicamente dos tipos de contadores: Slncrono y Asincrono.
El contador asincrono es sencillo tanto en operación como en construcción pero
esta sometido a una limitación de velocidad, también se le llama contador serie, estos
contadores tienen un tiempo de establecimiento acumulativo; éste tiempo de
establecimiento es igual al tiempo de retardo de un sólo Flip-flop. Se puede aumefitar la
velocidad de operación mediante el uso de contadores sincronos.
El circuito TTL 74LS193, es un contador ascendente-descendente sincrono de 4
bits, que también puede ser borrado y preajustado en cualquier cuenta deseada.
Se utilizan cuatro contadores 74LS 193, con configuración ascendente. Estos
contadores generan las direcciones en las memorias en donde se están almacenando los
datos digitalizados provenientes del convertidor. Los contadores están configurados para
contar desde la dirección OOOOH hasta la dirección FFFFH. Por software da un reset a los
contadores cuando se desee digitalizar nuevamente y se estará preguntando cuando
termina el conteo para leer las memorias y desplegar a monitor.
2.4- SUBSISTEMA DE MEMORIA.
Para éste subsistema de memoria se utiliza dos memorias RAM 62256, los
contadores son los encargados de generar las direcciones para estas memorias, los pines
de control de estas memorias están conectados como sigue:
- 1. CS. Es controlado por la Última dirección de los contadores -
2. WE. Esta conectado al reloj -
3. OE. Esta conectado a la lógica de decodificación.
Así, cuando se esta digitalizando las memorias están habilitadas para recibir los datos
provenientes del convertidor.
28

2.5- DECODlFlCAClON DE DIRECCIONES.
En ésta etapa se desarrolla el hardware que permite direccionar a la tarjeta, para
realizar la lectura/escritura desde una computadora y poder procesar la información para
llevar a cabo ésta decodificación se describirá brevemente el canal de expansión de la
Computadora.
En la figura 13 muestra el canal de expansión de la PC junto con la tabla
descriptiva del número de Pin y la función del mismo. El canal de expansión U0 contiene
62 Líneas que pueden ser clasificadas por la función que estas llevan a cabo:
Direcciones: El Bus de direcciones.
Datos: El Bus de datos
Control: El Bus de control.
DMA: Líneas usadas para implementar funciones de DMA.
Interrupciones: Líneas usadas para implementar funciones de interrupción
Suministro de potencia; Líneas de alimentación y tierra.
De las 20 líneas de dirección que tiene el canal de expansión que tiene la PC, sólo
10 (de A 0 a A91 son decodificadas para direccionar a los dispositivos de entradakalida.
La PC. Proporciona diferentes intervalos de direcciones para direccionar a los
periféricos que permiten accesar a los dispositivos de I/O, dentro de 1 K de direcciones y
poder comunicar la PC con el mundo exterior, entre ellos esta el intervalo de
300HA31FH, que nos permite direccionar a la tarjeta y poder realizar ciclos de
lectura/escritura a través del Bus de datos, direcciones y control.
De los 10 bits de direcciones los bits más significativos no cambia cuando se
programa una dirección dentro de este intervalo, para realizar una lectura o escritura de
la PC hacía la tarjeta, con los bits menos significativos se decodifica direcciones
suficientes para direccionar a la tarjeta.
29

/GURA 13 Canal de expansión de la PC y Tabla descriptiva.
30

PROGRAMACION DE LA TARJETA
La programación de la tarjeta esta codificada en lenguaje "C", pero el programa
fue compilado en Borland C + + versión 3.0, por lo cual el programa tiene algunas
características de C + +. Para controlar la tarjeta se cuenta con dos bits de control para
la entrada y dos bits de control para la salida.
Bits de entrada:
DO: Bit de habilitación, se encarga de habilitar al contador y a las memorias
D1: Bit de RESET, inicializa la cuenta inicial de los contadores en cero.
Bits de salida:
0 DO: Bit de terminación de conteo, indica el fin del proceso de los contadores y por
lo tanto, el llenado completo de las memorias.
DI: Bit Overrange: Verifica que el rango de voltaje de la señal de entrada no
sobrepase los niveles de fijación del convertidor.
3 1

A continuación se presenta el programa que muestra la utilización de las palabras de
control y su secuencia para digitalizar imágenes
#include < graphics.h > #include < d0s.h > #include < stdi0.h > #include < coni0.h > #include < bi0s.h > #include < string.h >
const CTROL-IN = 0x302; const CTROL-OUT = 0x301 ; const CTROL-DATA = 0x300; const BORRAR = 0x0; const HABILITA = 0x3; const DESABILITA = 0x2;
i n t ve r i f i c a T a r j e t a ( v o¡ d ; void Digitaliza(void); int slmagen0; void Despliega(void);
int x,y;
void main0
int c, cdato = 1; char valor;
{
x=o; y=o; clrscr0; c =verif ica - TarjetaO;
gotoxy( 1 I1 ); printf("e1 valor de verifica tarjeta es:%d\n",c);
while(cdato> =O)
gotoxy( l ,4) ; {
printf("Dat0 al puerto 302: "1; gotoxy(21,4); sc a n f ( " % x " , &cd a t o) ;
if(cdato > =O)
out port b (CT R O L-O UT ,cd a t o) ;
32

p r i n t f ( " \n " ; cdato =inportb(CTROL - IN); gotoxy( l ,5) ; printf("dat0 del puerto 302:%x\n",cdato); cdato = inportbíCTROL-DATA); gotoxy( l ,6) ; printf("dat0 del puerto 300:%x\n",cdato); print f ( " \n " ) ;
1 1
gotoxyí 1,8); printf("desea dibujar n:para no, cualquier otra tecla para si:"); valor = getch0;
if(valor! =In')
slmagen0; {
DigitalizaO;
while((inportb(0x302~&OxO)! = 0x0);
outportb(Ox30 1 ,Ox2);
while(! bioskey( 1 ))DespliegaO; closegraph();
1 1 int stmagen0
int gdriver = DETECT,gmode,errorcode; detectgraph(&gdriver,&gmode); i nit g r a p h ( & g d river , & g m od e, I' C : \TC\BG I I' 1 ; errorcode = graphresulto;
{
if(errorcode ! = grOk)
printf ("\nError en inicializacion de graficos"); print f ( " \ n % s " , g r a p he r r orm sg (err orc od e 1) ; getchi); return(0);
{
1 else return(1);
1
33

int verifica - Tarjeta(void)
unsigned char dato,aux int i:
{
for (i =O; i < 5;i + + int j = 1 ; int cont =O; dato = in port b(CTR O L-I N &Ox2;
{
while (1 )
aux = in port b(CTR0 L-I N) &Ox2; {
if (aux! =dato)
j = - l ; {
1 break;
cont + + ; if (cont > 5)
j = 1 ; break;
I
} 1
i f ( í > = 4 & & j = =-1) return(-3);
1 return(0); 1 void Digitaliza(void)
long int dato; outportb(CTR0L OUT,BORRAR); o ut p o r t b ( CT R O L-O - UT, HA B I LIT A ; dato = 1 ;
{
while(1)
dato = inportb(CTR0L-IN); {
i f ( ( d a t o & & l ) = =O) break;
1 1
34

void Despliega(void)
int z; outportb(Ox301 ,Ox1 ); z = in port b (CT R O L-D AT A /64; switch(z1
t
case3:putpixel(x,y,Ox3); break;
{
case2:putpixel(x,y,0xl~; break;
case1 :putpixeI(x,y,Ox2); break;
case0 : put pixel (x,y,OxO); break;
} x + +; if ( x= =256) {x=O;y+ +;}
1
35

FIGURA 14. Diseño de la tarjeta de expansión.
Cabe mencionar que previamente se verifico por separado, el buen
funcionamiento de cada uno de los circuitos integrados.
REGULADOR. Las pruebas realizadas para éste circuito integrado, fue en primer lugar
regular el voltaje al rango requerido para el funcionamiento del convertidor.
Resultado: Lo anterior se logro variando la resistencia de ajuste, permitiendo
así, mantener un voltaje mínimo de 1.25 V para la fijación del nivel de voltaje
36

que requiere como valor mínimo el convertidor, éste valor se verificó dentro
de las tablas recomendadas para los límites de operación del convertidor. El
valor del voltaje ideal es lV., Sin embargo, el circuito integrado en el que se
puede obtener este voltaje ideal es el circuito MC1400G2, circuito poco
comercial.
RELOJ. Las pruebas realizadas fueron para lograr la estabilización de la frecuencia a
través de las resistencias. La frecuencia a la cual se estabilizo esta dentro de
los limites de operación del convertidor, resultado al que si se llego a obtener
la frecuencia deseada de 14.3 1 MHz.
AMPLIFICADOR DE LA SEmAL DE VIDEO Y ELlMlNAClON DE OFFSET. Para lograr
mantener la entrada de la señal de vídeo de 2 Vpp fue necesario adicionar un
circuito seguidor de voltaje a la entrada de la señal de vídeo
Resultado: Con esto se evito la caída de la señal y a través del offset se pudo
mejorar la señal de entrada.
CONVERTIDOR. Una vez integradas todas las partes con la etapa del convertidor se
verifico su funcionamiento a través de un arreglo de Leds. Todos los circuitos
TTL se alimentaron con +/- 5 V y etapa del amplificador de la señal de vídeo
con +/- 12V.
Para la entrada analógica al sistema se utilizó la señal de una vídeograbadora,
como se muestra en la figura 15.
Se emplearon una señal de prueba proporcionada por la videograbadora, ésta
señal analógica de prueba es mostrada en la figura 16 .
Posterior a esta, se empleo una señal analógica de vídeo con todas sus
características, la cual se muestra en la figura 17. En ambas se emplea la
polaridad negativa, pero para su mejor observación, estas fueron invertidas en
el osciloscopio.
37

c
FIGURA 15. Equipo utilizado.
. ..
. FIGURA 16.-Señal de vídeo analógica proporcionada por la videograbadora
38

FIGURA 77.-Señal compuesta de vídeo con todas sus características.
Se verifico a través de la comparación de imágenes de la señal de vídeo entre
la entrada al sistema y en el convertidor, que no hubiera descompensación en
el voltaje a la entrada del convertidor. La salida de datos digitalizados fue
interceptada por un arreglo de leds, donde se pudo observar que cuando se
tenía una señal el convertidor empezaba a digitalizarla, por lo tanto los leds
permanecían encendidos siempre debido a que la frecuencia era muy alta y no
se podía apreciar un cambio de estado lógico en la digitalización. No obstante
cuando se quitaba la señal de vídeo en arreglo de leds nunca se activaba
(encendía).
39

DECODIFICACION. E n esta etapa básicamente se comprobo con el analizador de estados
lógicos el buen funcionamiento de los dispositivos mostrados en la tabla
pines que se verificaron se muestran en la misma tabla.
1. Los
No DE PIN
19
4
1 3 con IOR
1 4 con IOR
1 5 con ¡OW
1 8
1 2
DISPOSITIVO
74LS688
74LS138
74LS 138
74LS 1 3 8
74LS138
74LS138
MC10319
74LS193
RESULTADO
Una vez que compara la misma longitud se
tiene un cambio lógico O, en éste Pin
Se selecciona la dirección de trabajo
Se activa en bajo a través del Pin 19 del
7 4LS 6 8 8
Se habilitan los buffer de tercer estado
Se habilita el Lach 74LS373 de control
Se habilita el Latch 74LS373 de datos
Funcionamiento adecuado del Reloj.
Verifica conteo terminado y memorias
llenas.
TABLA I . Dispositivos comprobados.

CONCLUSlONES
En México existen muchas carencias y necesidades y uno de los sectores con el
mayor número de estas es el de la salud, al cual se le asigna un presupuesto anual muy
bajo para poder realizar investigación para el desarrollo de nuevas tecnologías.
Los Ingenieros Biomédicos, estamos conscientes que a través del trabajo y
aportación de nuevas ideas en el diseño y servicio para el sector salud, nos toca
desempeñar un papel muy importante, para colaborar con el desarrollo de México.
Hemos sido por años consumidores de tecnología de todo tipo, como
consecuencia de que en México no existe una infraestructura necesaria para desarrollar
tecnología propia. Sin embargo como una nueva generación de Ingenieros Biomédicos no
estamos limitados a poder realizar investigación para empezar a diseñar y desarrollar
nuestra propia tecnología y de esta manera empezar a avanzar hacía el desarrollo de
México.
En el mercado existen actualmente muchas marcas y modelos de tarjetas de
imagenología, sin embargo sus costos son elevados y muchas veces n o justifica su
compra para el modelo del equipo a ser sustituido. Esta limitación y la necesidad de
contar con una tarjeta para adquirir señal de vídeo para un equipo de Ultrasonido nos
llevo a plantear el diseño para el desarrollo de ésta tarjeta.
Para poder empezar este diseño, primero buscamos un convertidor que cumpliera
con el parámetro de rango de frecuencia para la señal a utilizar, ya que la señal de vídeo
es de una frecuencia muy alta y por lo tanto muy difícil de trabajar, debido a los
problemas de sincronía.
41

Algunos de los convertidores que cumplen con esta característica son:
MP7682JN
HA19216 de Hitachi
pP06951 de Nec
MC10329 y MC10319 de Motorola
Sin embargo, debido a ésta y otras características, estos convertidores son caros y
difíciles de conseguir.
Una vez que verificamos la disponibilidad en el mercado y el costo de cada uno,
optamos por el MC10319.
Para éste convertidor se propone en el manual un diseño para la digitalización de
una señal de vídeo, el cual es adecuado para nuestra aplicación y además con la certeza
de que funciona al 100%.
Así, partiendo de éste diseño, se desarrollo el diseño deseado, integrando a él las
etapas requeridas para almacenar temporalmente los datos y a través del software el
procedimiento para el despliegue a monitor.
Además, cada una de las etapas mencionadas en éste trabajo se probo que
funcionara y cumpliera con los parámetros de diseño deseados.
El objetivo de éste proyecto se logro cubrir ambas etapas, pero falto realizar
mayores pruebas a la tarjeta, es decir los resultados obtenidos no fueron totalmente
satisfactorios y por falta de tiempo no pudieron realizarse pruebas con el equipo de
ultrasonido, dejando como base estos antecedentes puede retomarse el proyecto para
posteriores aplicaciones.
Con esto queda demostrado que con la información que se tiene y empleando
materiales de bajo costo se pueden diseñar tarjetas, como en éste caso para una
aplicación útil.
42

BIBLIOGRAFIA
URUÑUELA M. J.: Microprocesadores, Programación e Interfaces; 2 d ed; McGraw-
Hill/lnteramericana de México. Naucalpan de Juárez, estado de México 1989. 131 -1 33
BARRY B. B.; Los Microprocesadores intel, Arquitectura Programación e Interfaces;
3 d ed; Prentice Hall Hispanoamericana, Naucalpan de Juárez, estado de México 1995.
VALDEZ C. R., AZPIROZ L. J., ET.AL, Imagenologi'a Medica, Universidad Autónoma
Metropolitana, México, D.F.1995, 181 -270
GROB, BERNARD. Basic Television, Principle and Servicing, Mc-Graw Hill, New York
MURRAY W. H., PAPPAS C. H. , Microsoft C/C+ + , Mc-Graw Hill, Madrid España 1 9 9 4
MANUAL IC MEMORY DATA BOOK, Hitachi, 1990
MANUAL TTL DATA BOOK V2, Texas Instruments, 1993.
MANUAL LINEAR INTERFACE Ics DEVICE DATA, Motorola, 7989.