teorías matemáticas
DESCRIPTION
MATEMATICATRANSCRIPT

TEORÍAS MATEMÁTICAS
Antony Diaz
FUNCIONES
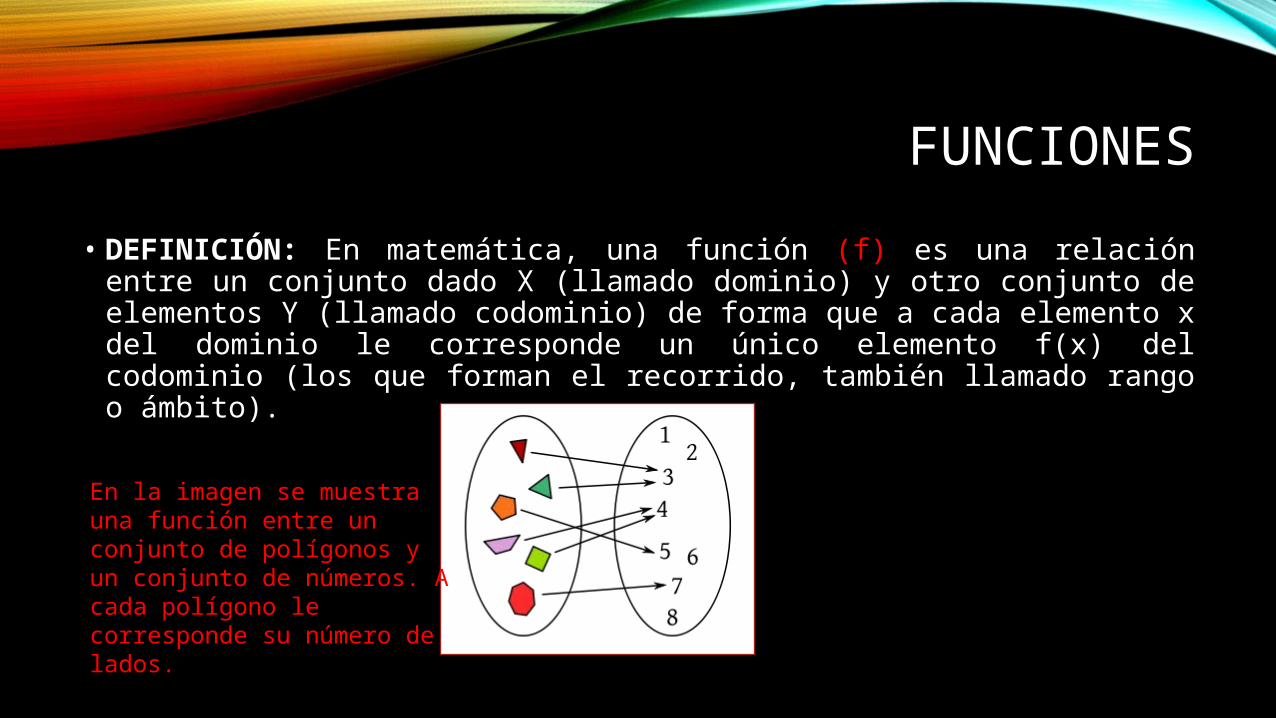
• DEFINICIÓN: En matemática, una función (f) es una relación entre un conjunto dado X (llamado dominio) y otro conjunto de elementos Y (llamado codominio) de forma que a cada elemento x del dominio le corresponde un único elemento f(x) del codominio (los que forman el recorrido, también llamado rango o ámbito).
En la imagen se muestra una función entre un conjunto de polígonos y un conjunto de números. A cada polígono le corresponde su número de lados.
FUNCIONES• Notación Nomenclatura:
La notación habitual para presentar una función f con dominio A y codominio B es:
f: A → B
a → b = f(a)
También se dice que f es una función «de A a B» o «entre A y B». El dominio de una función f se denota también por dom(f), D(f), Df, etc. Por f(a) se resume la operación o regla que permite obtener el elemento de B asociado a un cierto a ∈ A, denominado la imagen de a
FUNCIONESEjemplos:
• La función «cubo» puede denotarse ahora como f: R → R, con f(x) = x3 para cada número real x.
• La función «inverso» es g: R \ {0} → R, con g(x) = 1/x para cada x real y no nulo.
• La función «clasificación en géneros» puede escribirse como γ: M → G, donde γ(m) = Género de m, para cada mamífero conocido m.
• La función «área» se puede denotar como A: T → R, y entonces A(t) = Área de t = B · H/2, donde t es un triángulo del plano, B su base, y H su altura.
• La función «voto» se puede escribir como v: E → P, donde v(a) = Partido que a votó, para cada votante a.

TIPOS DE FUNCIONES
En las funciones algebraicas las operaciones que hay que efectuar con la variable independiente son: la adición, sustracción, multiplicación, división, potenciación y radicación.
Las funciones algebraicas pueden ser:
• Funciones explícitas
Si se pueden obtener las imágenes de x por simple sustitución.
f(x) = 5x − 2
• Funciones implícitas
Si no se pueden obtener las imágenes de x por simple sustitución, sino que es preciso efectuar operaciones.
5x − y − 2 = 0

TIPOS DE FUNCIONES
Funciones polinómicas
Son las funciones que vienen definidas por un polinomio.
f(x) = a0 + a1x + a2x² + a2x³ +··· + anxn
Su dominio es R, es decir, cualquier número real tiene imagen.
Funciones constantes
El criterio viene dado por un número real.
f(x)= k
La gráfica es una recta horizontal paralela a al eje de abscisas.

TIPOS DE FUNCIONES
Funciones polinómica de primer grado
f(x) = mx + n
Su gráfica es una recta oblicua, que queda definida por dos puntos de la función.
Son funciones de este tipo las siguientes:
• Función a fín.
• Función lineal.
• Función identidad.

TIPOS DE FUNCIONES
• FUNCIÓN AFÍN: La función afín es del tipo:
y = mx + n
m es la pendiente de la recta.
La pendiente es la inclinación de la recta con respecto al eje de abscisas.
Dos rectas paralelas tienen la misma pendiente.
TIPOS DE FUNCIONES
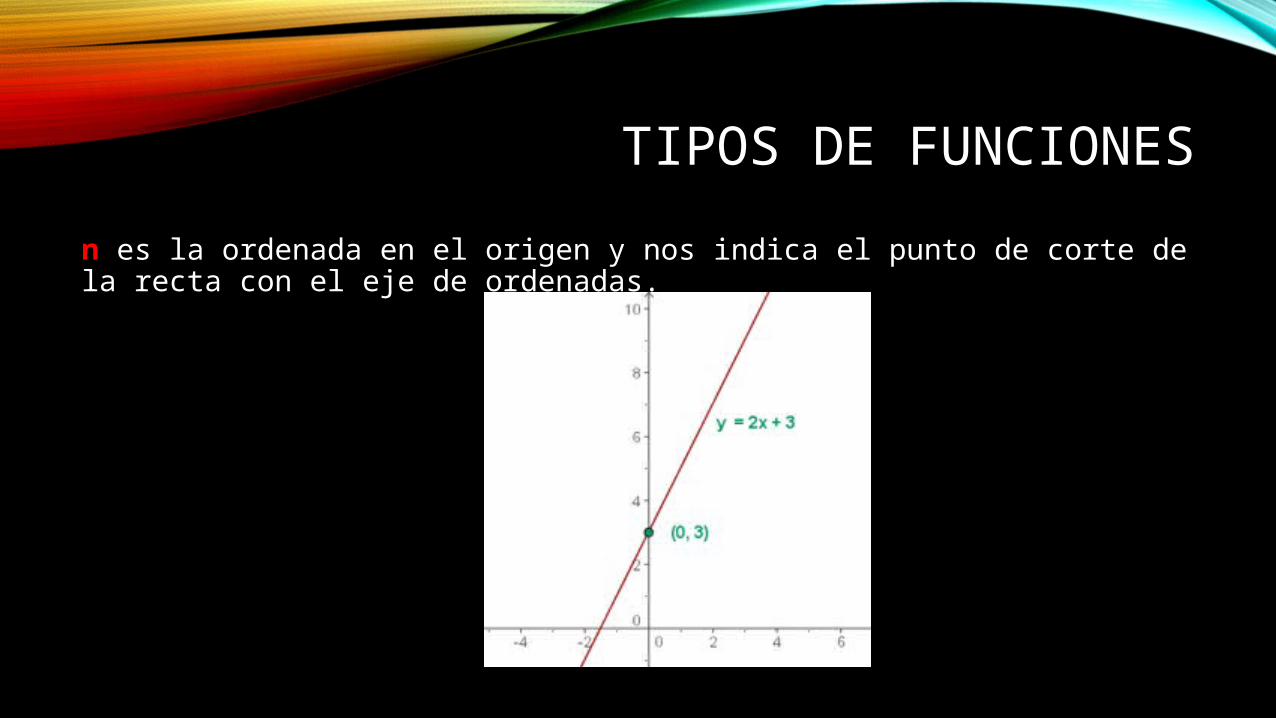
n es la ordenada en el origen y nos indica el punto de corte de la recta con el eje de ordenadas.

TIPOS DE FUNCIONES
• EJEMPLO DE FUNCIÓN AFÍN:
1. y = 2x - 1
x y = 2x-1
0 -1
1 1 y = 2x - 1

TIPOS DE FUNCIONES:
• EJEMPLO DE FUNCIÓN AFÍN:
2. y = -¾x - 1
x y = -¾x-1
0 -1
4 -4

TIPOS DE FUNCIONES:
• FUNCIÓN LINEAL: La función lineal es del tipo:
y = mx
Su gráfica es una línea recta que pasa por el origen de coordenadas.
y = 2x
y = 2x
x 0 1 2 3 4
y = 2x 0 2 4 6 8

TIPOS DE FUNCIONES
Pendiente
m es la pendiente de la recta.
La pendiente es la inclinación de la recta con respecto al eje de abscisas.
Si m > 0 la función es creciente y el ángulo que forma la recta con la parte positiva del eje OX es agudo.
Si m < 0 la función es decreciente y el ángulo que forma la recta con la parte positiva del eje OX es obtuso.

TIPOS DE FUNCIONES
• Función identidad
f(x) = x
Su gráfica es la bisectriz del primer y tercer cuadrante.

TIPOS DE FUNCIONES
• FUNCIÓN CUADRATICA: Son funciones polinómicas es de segundo grado, siendo su gráfica una parábola.
f(x) = ax² + bx + c
Representación gráfica de la parábola
Podemos construir una parábola a partir de estos puntos:
1. Vértice
Por el vértice pasa el eje de simetría de la parábola.
La ecuación del eje de simetría es:
TIPOS DE FUNCIONES
• 2. Puntos de corte con el eje OX
En el eje de abscisas la segunda coordenada es cero, por lo que tendremos:
ax² + bx + c = 0
Resolviendo la ecuación podemos obtener:
Dos puntos de corte: (x1, 0) y (x2, 0) si b² − 4ac > 0
Un punto de corte: (x1, 0) si b² − 4ac = 0
Ningún punto de corte si b² − 4ac < 0
3. Punto de corte con el eje OY
En el eje de ordenadas la primera coordenada es cero, por lo que tendremos:
f(0) = a · 0² + b · 0 + c = c (0,c)
TIPOS DE FUNCIONES
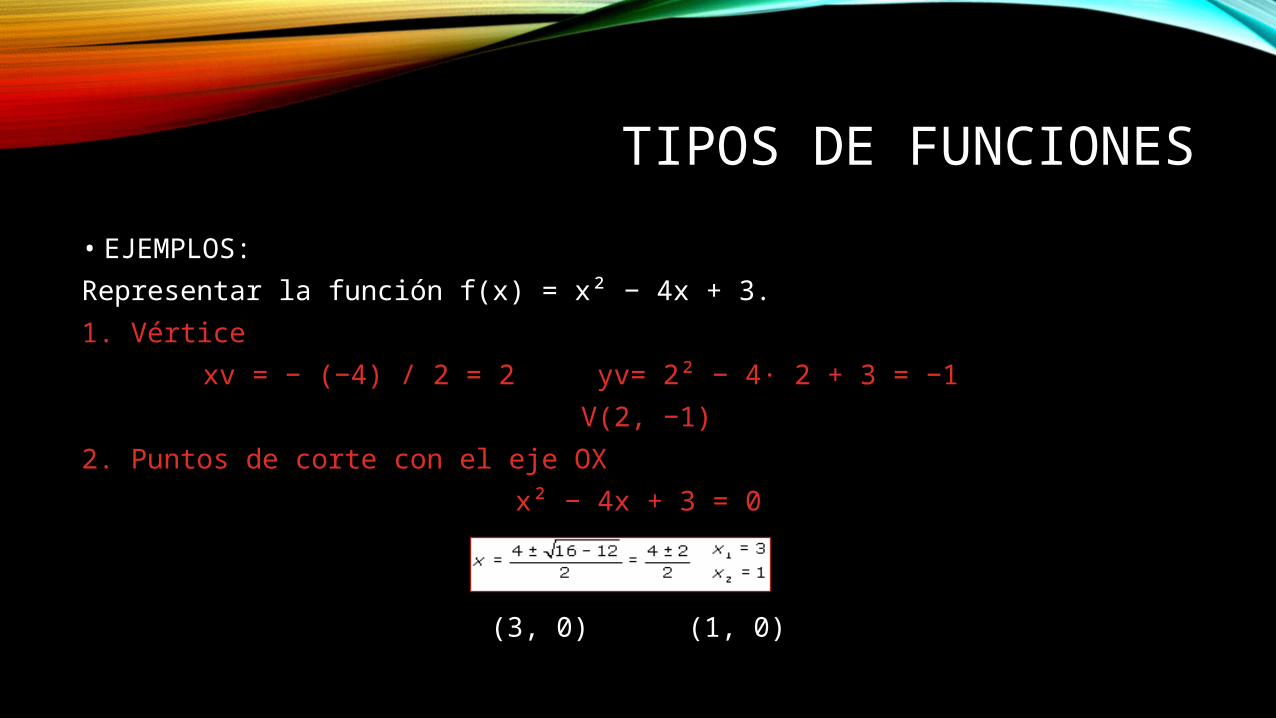
• EJEMPLOS:
Representar la función f(x) = x² − 4x + 3.
1. Vértice
xv = − (−4) / 2 = 2 yv= 2² − 4· 2 + 3 = −1
V(2, −1)
2. Puntos de corte con el eje OX
x² − 4x + 3 = 0
(3, 0) (1, 0)

TIPOS DE FUNCIONES:ALGEBRAICAS
3. Punto de corte con el eje OY
(0, 3)
TIPOS DE FUNCIONES
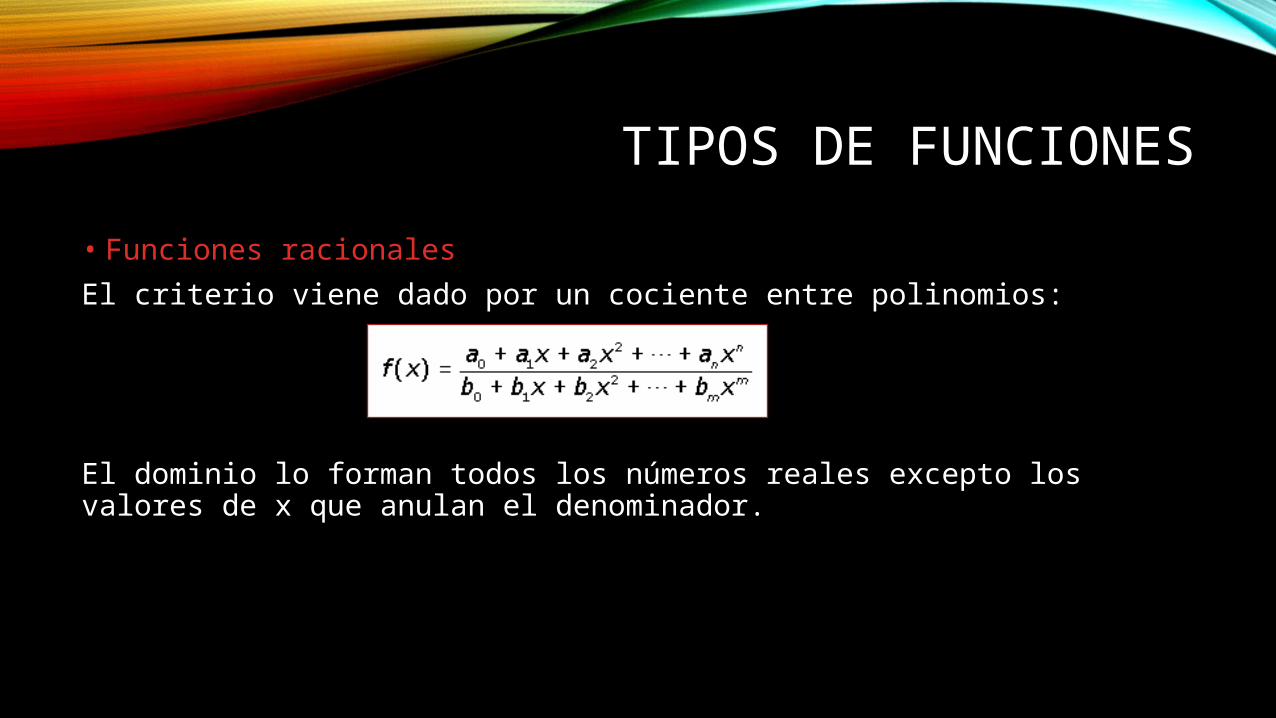
• Funciones racionales
El criterio viene dado por un cociente entre polinomios:
El dominio lo forman todos los números reales excepto los valores de x que anulan el denominador.

PLANO CARTESIANO
Para representar los puntos en el plano, necesitamos dos rectas perpendiculares, llamados ejes cartesianos o ejes de coordenadas:
• El eje horizontal se llama eje X o eje de abscisas.
• El eje vertical se llama eje Y o eje de ordenadas.
• El punto O, donde se cortan los dos ejes, es el origen de coordenadas.
• Las coordenadas de un punto cualquiera P se representan por (x, y).
• La primera coordenada se mide sobre el eje de abscisas, y se la denomina coordenada x del punto o abscisa del punto.
• La segunda coordenada se mide sobre el eje de ordenadas, y se le llama coordenada y del punto u ordenada del punto.

PLANO CARTESIANO
• EJEMPLOS:
Tiene pendiente −3 y ordenada en el origen −1.
y = −3x −1
x y = −3x − 1
0 −1
1 −4

PLANO CARTESIANO
• EJEMPLOS:
Tiene por pendiente 4 y pasa por el punto (−3, 2).
y = 4 x + n 2 = 4 · (−3) + n n = 14
y = 4x + 14
x y = 4x +14
0 14
1 18
VECTORES
Un vector fijo vector es un segmento orientado que va del punto A (origen) al punto B (extremo).
Un Vector tiene:
Una dirección
La direcccíon del vector es la dirección de la recta que contiene al vector o de cualquier recta paralela a ella.
Un sentido
El sentido del vector vector es el que va desde el origen A al extremo B.

VECTORES
Un modulo:
El módulo del vector es la longitud del segmento AB, se representa por
El módulo de un vector es un número siempre positivo o cero.
• Módulo de un vector a partir de sus componentes

VECTORES
• Módulo a partir de las coordenadas de los puntos

VECTORES
• Coordenadas de un vector:
Si las coordenadas de los puntos extremos, A y B, son:
Las coordenadas del vector son las coordenadas del extremo menos las coordenadas del origen.

TRANSFORMACIONES EN EL PLANO
La traslación es una transformación puntual por la cual a todo punto A del plano le corresponde otro punto A' también del plano de forma que .
Siendo el vector que define la traslación.
La traslación se designa por , luego .
• El punto A' es el punto trasladado de A.
• Un punto y su trasladado se dice que son homólogos.

TRANSFORMACIONES EN EL PLANO
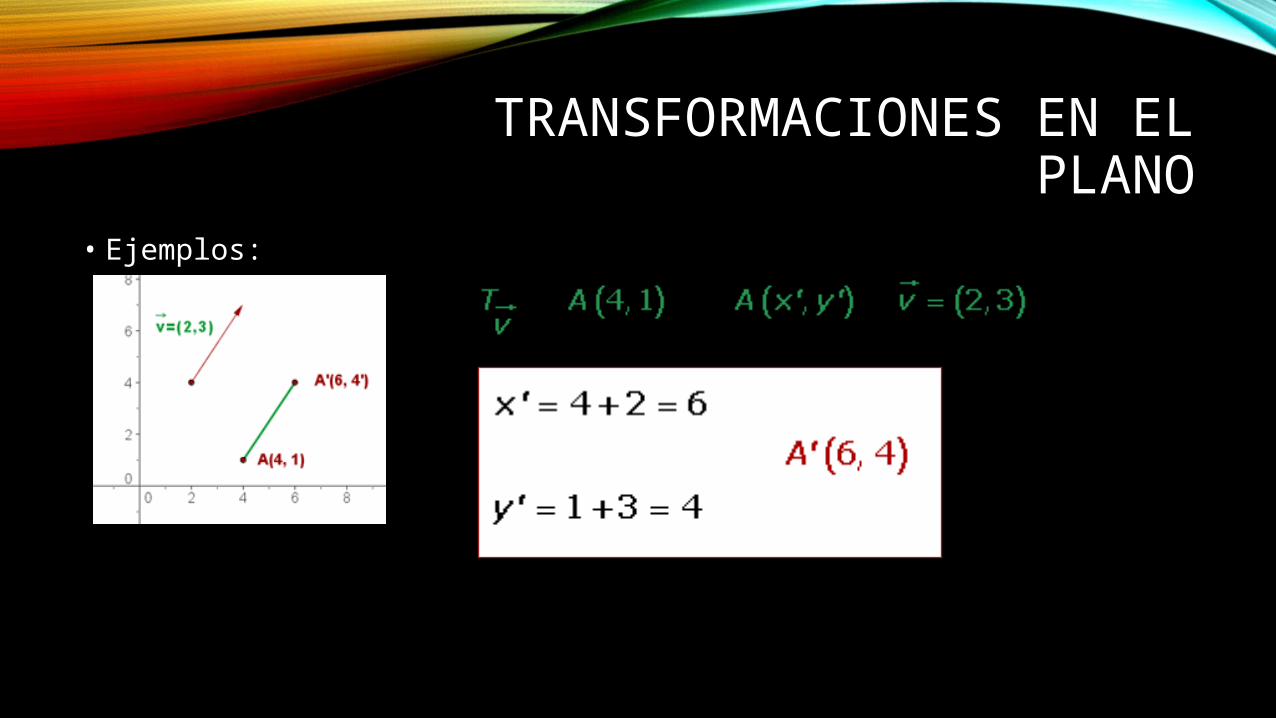
• Coordenadas de un punto mediante una traslación
TRANSFORMACIONES EN EL PLANO
• Ejemplos:
TRANSFORMACIONES EN EL PLANO
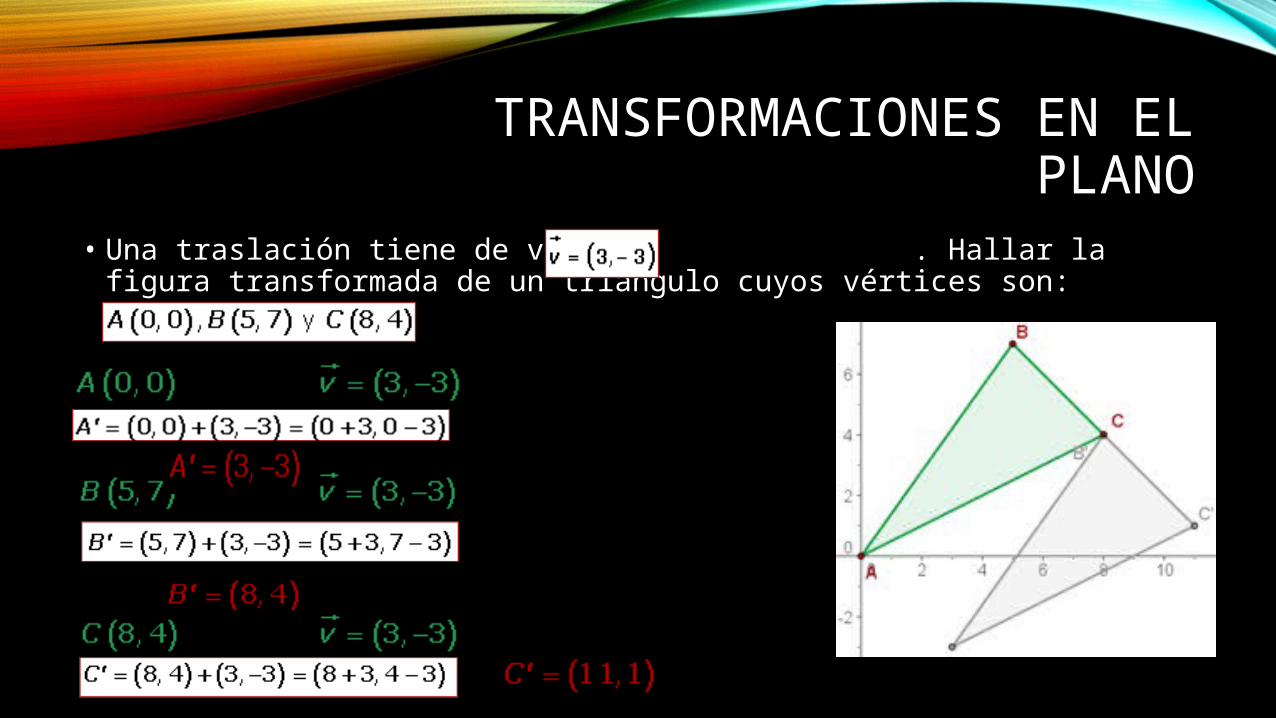
• Una traslación tiene de vector . Hallar la figura transformada de un triángulo cuyos vértices son: