tema3 sintonia pid
TRANSCRIPT

TEMA 3:
Reguladores PID. Sintonía de parámetros.
2
TEMA 3:Reguladores PID. Sintonía de parámetros.
• Control PID.
• Criterios para la sintonía de parámetros del PID.
• Métodos de sintonía en lazo abierto y en lazo cerrado.
• Estructuras del algoritmo PID
• Implementación digital

3
Reguladores PID. Sintonía de parámetrosControl PID.
Configuración serie o en cascada: Gc se diseña para modificar la función de transferencia global en LA, de forma que se obtenga las características de respuesta deseadas en LC.
H(s)
Gc(s)+ -Gp(s)
R(s) E(s) U(s) Y(s)Controlador Planta
Los distintos tipos de controladores contemplados en este capítulo, suponen su aplicación en una configuración de sistema de un único lazo (o un sistema reducible a esta configuración) con un modelo lineal.
4
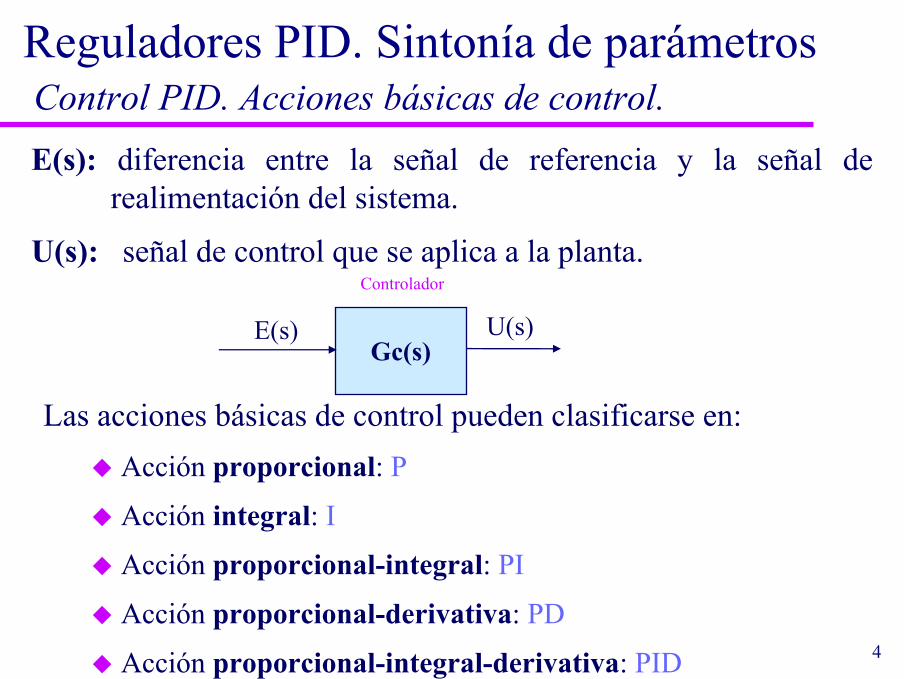
Reguladores PID. Sintonía de parámetros Control PID. Acciones básicas de control.E(s): diferencia entre la señal de referencia y la señal de
realimentación del sistema.
U(s): señal de control que se aplica a la planta.
Gc(s)E(s) U(s)
Controlador
Las acciones básicas de control pueden clasificarse en:Acción proporcional: P
Acción integral: I
Acción proporcional-integral: PI
Acción proporcional-derivativa: PD
Acción proporcional-integral-derivativa: PID

5
Reguladores PID. Sintonía de parámetros Control PID. Acciones básicas de control.
Acción Proporcional (P):
Gc(s)=KpE(s) U(s)
Controlador
La relación entre la salida y la entrada del controlador es un factor de ganancia ajustable:
e
t
u
t
)()( teKtu p=
6
Reguladores PID. Sintonía de parámetros Control PID. Acciones básicas de control.
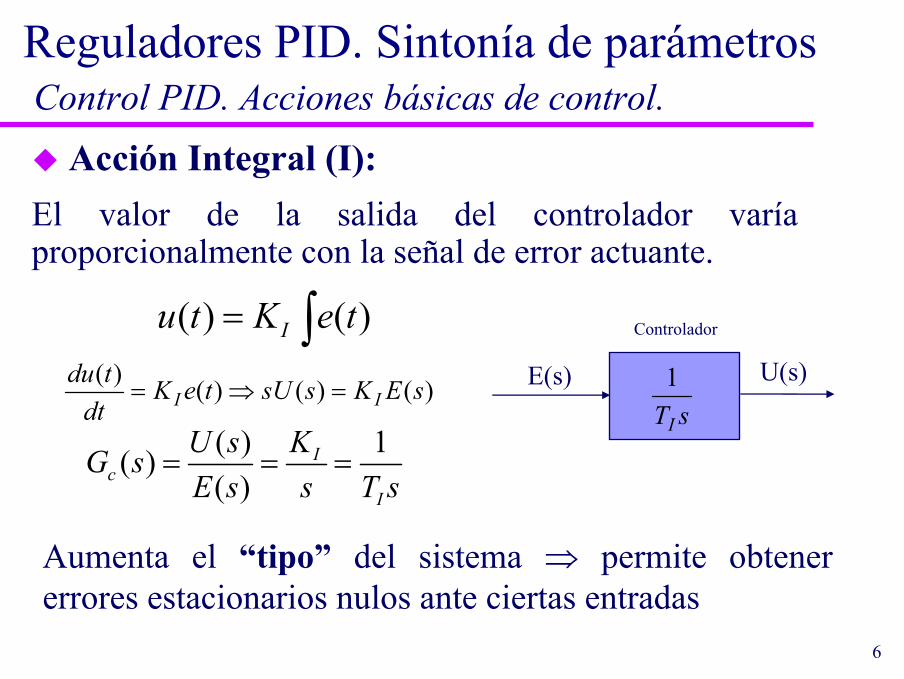
Acción Integral (I):El valor de la salida del controlador varía proporcionalmente con la señal de error actuante.
Aumenta el “tipo” del sistema ⇒ permite obtener errores estacionarios nulos ante ciertas entradas
)()()()( sEKssUteKdt
tduII =⇒= E(s) U(s)
Controlador
sTI
1
( ) 1( )( )
Ic
I
U s KG sE s s T s
= = =
( ) ( )Iu t K e t= ∫
7
Reguladores PID. Sintonía de parámetros Control PID. Acciones básicas de control.
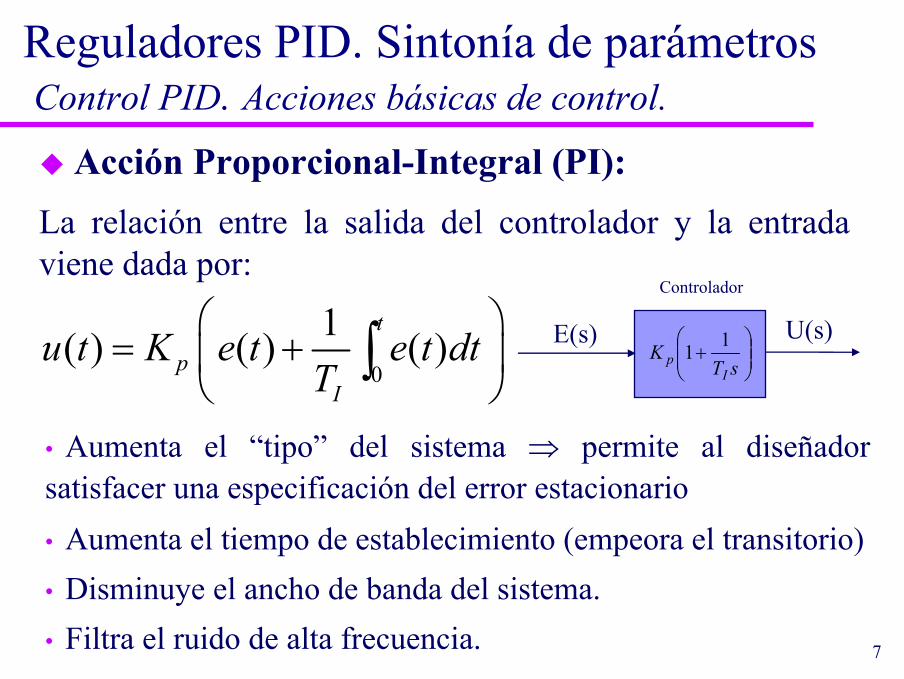
Acción Proporcional-Integral (PI):La relación entre la salida del controlador y la entrada viene dada por:
• Aumenta el “tipo” del sistema ⇒ permite al diseñador satisfacer una especificación del error estacionario• Aumenta el tiempo de establecimiento (empeora el transitorio)• Disminuye el ancho de banda del sistema.• Filtra el ruido de alta frecuencia.
0
1( ) ( ) ( )t
pI
u t K e t e t dtT
= +
∫ E(s) U(s)
Controlador
+
sTK
Ip
11
8
Reguladores PID. Sintonía de parámetros Control PID. Acciones básicas de control.
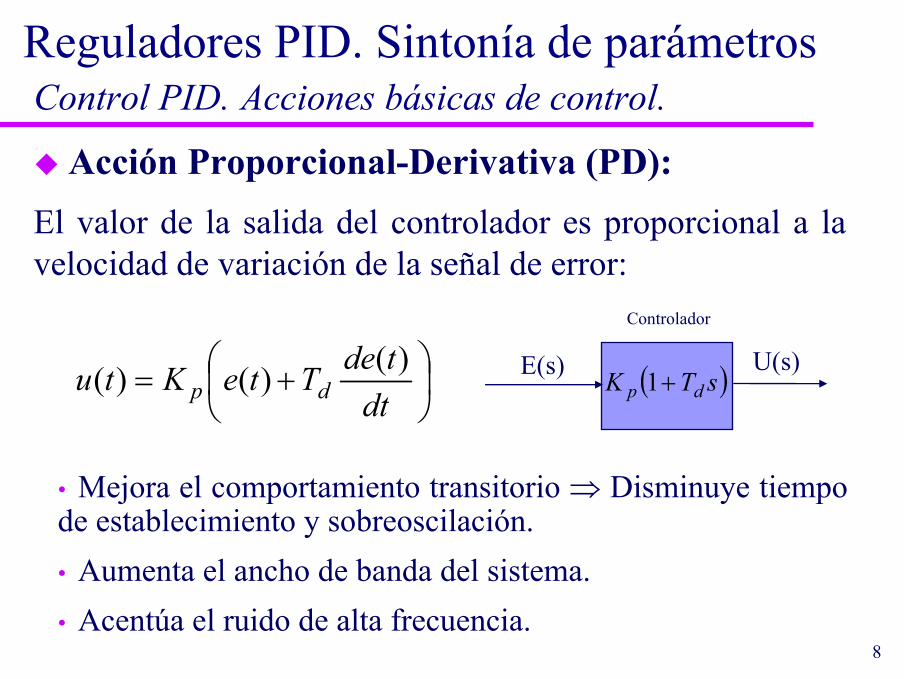
Acción Proporcional-Derivativa (PD):El valor de la salida del controlador es proporcional a la velocidad de variación de la señal de error:
• Mejora el comportamiento transitorio ⇒ Disminuye tiempo de establecimiento y sobreoscilación.• Aumenta el ancho de banda del sistema.• Acentúa el ruido de alta frecuencia.
+=
dttdeTteKtu dp)()()( E(s) U(s)
Controlador
( )sTK dp +1

9
Reguladores PID. Sintonía de parámetros Control PID. Acciones básicas de control.
Acción Proporcional-Integral-Derivativa (PID):Combina las tres acciones, siendo la relación entre la salida y la entrada:
Acción derivativa ⇒ mejora el comportamiento transitorio.
Acción integral ⇒ mejoras en el estacionario.
++= ∫
t
idp dtte
TdttdeTteKtu
0
)(1)()()(
E(s) U(s)
++
sTsTK
idp
11

10
Reguladores PID. Sintonía de parámetros Control PID.
Aspecto de un regulador mecánico (PD):
Ej.: Columna Mc. Pherson (amortiguador+muelle)Regulador “PD” (mecánico)
Gc(s)
11
Reguladores PID. Sintonía de parámetros Control PID.
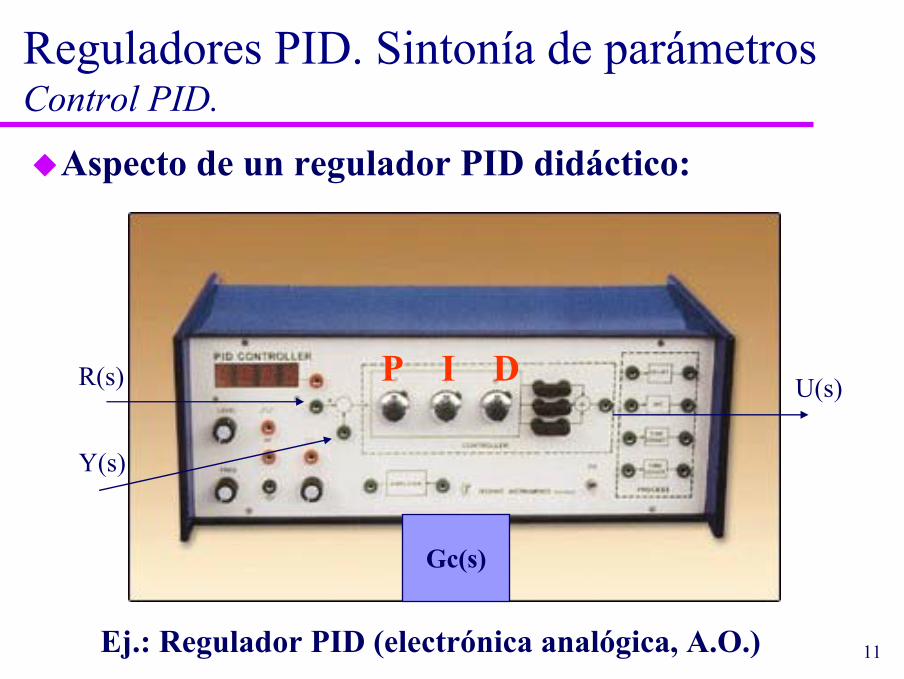
Aspecto de un regulador PID didáctico:
Ej.: Regulador PID (electrónica analógica, A.O.)
Gc(s)
R(s) U(s)
Y(s)
P I D
12
Reguladores PID. Sintonía de parámetros Control PID.
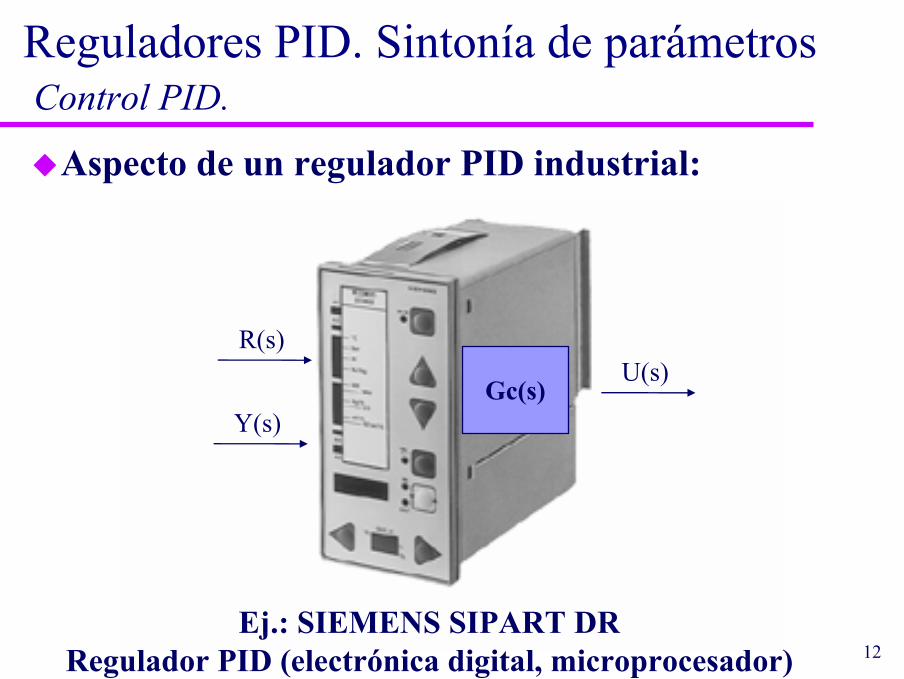
Aspecto de un regulador PID industrial:
Ej.: SIEMENS SIPART DRRegulador PID (electrónica digital, microprocesador)
Gc(s)
R(s)
Y(s)
U(s)
13
Reguladores PID. Sintonía de parámetros Controlador PI.
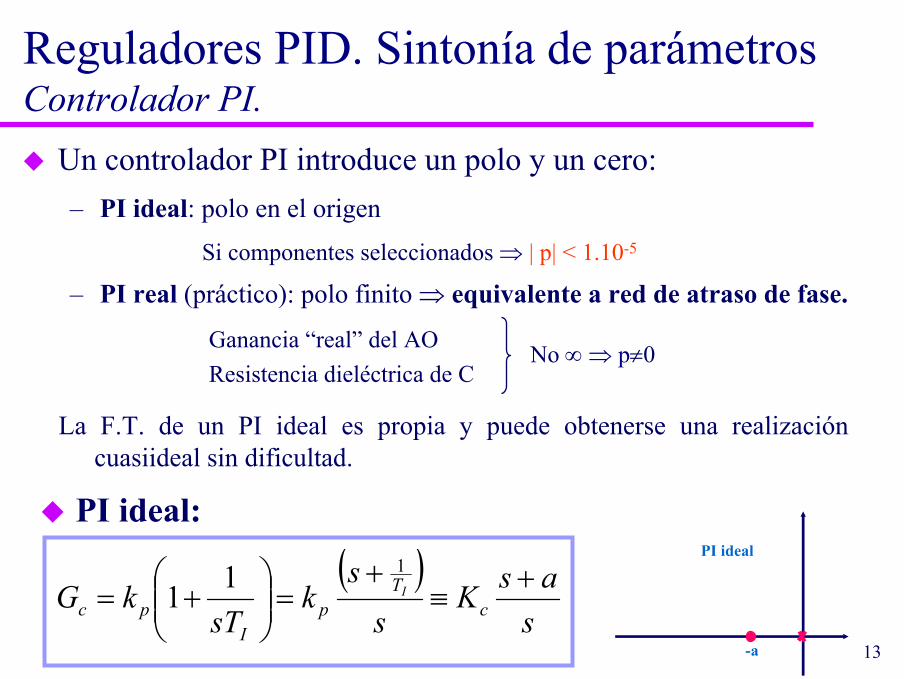
Un controlador PI introduce un polo y un cero:– PI ideal: polo en el origen
– PI real (práctico): polo finito ⇒ equivalente a red de atraso de fase.
-a
PI ideal( )s
asKs
sk
sTkG c
Tp
Ipc
I +≡
+=
+=
111
Ganancia “real” del AOResistencia dieléctrica de C
No ∞⇒ p≠0
PI ideal:
Si componentes seleccionados ⇒ | p| < 1.10-5
La F.T. de un PI ideal es propia y puede obtenerse una realización cuasiideal sin dificultad.
14
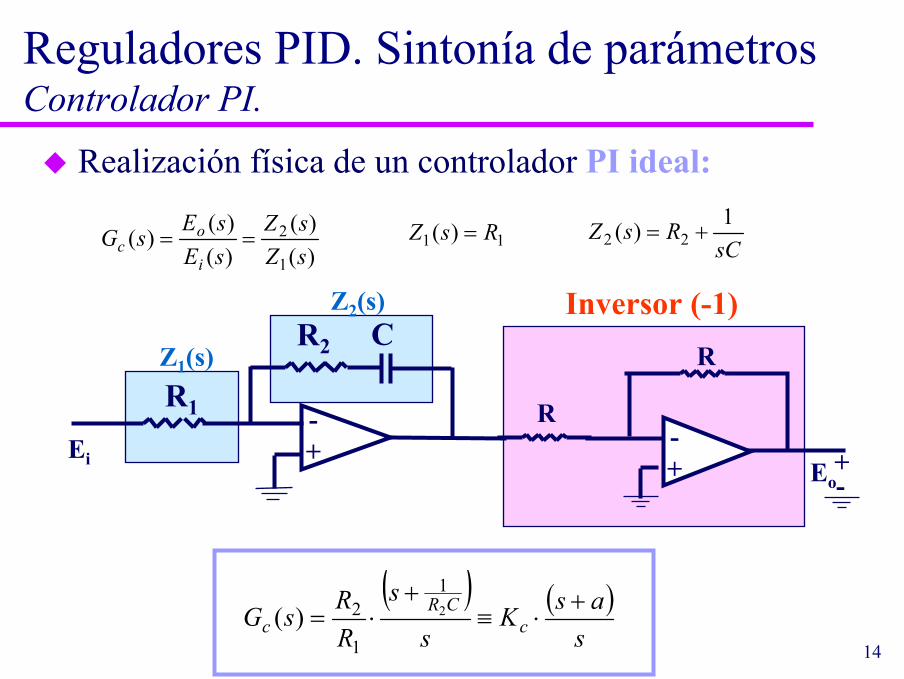
Reguladores PID. Sintonía de parámetros Controlador PI.
Realización física de un controlador PI ideal:
+-Eo
-+
R
R
Z2(s)
Z1(s)
-+
R1
R2 C
Ei
)()(
)()(
)(1
2
sZsZ
sEsE
sGi
oc == 11 )( RsZ =
sCRsZ 1)( 22 +=
( ) ( )s
asKs
s
RRsG c
CRc
+⋅≡
+⋅= 2
1
1
2)(
Inversor (-1)

15
Reguladores PID. Sintonía de parámetros Controlador PD.
Un controlador PD introduce:– PD ideal: introduce un cero en semiplano Real(s) < 0
PD ideal:
( ) ( ) )(1 1 bsKsTksTkG cTDpDpc D+≡+=+=
» Gc función impropia, físicamente no realizable. Resultados en simulación, nivel académico. La conversión a una función propia requiere, al menos, añadir un polo.
– PD real (práctico): introduce un par z-p ⇒ equivalente a red de adelanto de fase
-b
PD ideal

16
Reguladores PID. Sintonía de parámetros Controlador PD.
Realización física de un controlador PD ideal:
R2
+-
R1
C
Ei
Z1(s)
Z2(s)
-+ +
-Eo
-+
R
R
)()()()(
)()(
)( 121
2 sYsZsZsZ
sEsE
sGi
oc === sC
RsZsY +==
111
1)(
1)(22 )( RsZ =
( ) ( )bsKsCRsG cCRc +⋅≡+⋅=1
12)(
OJO:Aparentemente realizable,
pero no en la práctica.
Inversor (-1)

17
Reguladores PID. Sintonía de parámetros Controlador PID.
Un controlador PID ideal introduce un polo en el origen más dos ceros en el semiplano Re[s]<0
– Gc función impropia, físicamente no realizable. Resultados en simulación, no realistas. La conversión a una función propia requiere al menos añadir un polo (en la componente derivativa).
-b -a
PID ideal
Localizaciones z-p en el plano complejo:
( ) ( )( )s
bsasKs
ssTksT
sTkG c
TTTDpD
Ipc
DID ++≡
++=
++=
11211

18
Reguladores PID. Sintonía de parámetros Controlador PID.
Realización física de un controlador PID ideal:
ED(s)-+
Cd
RdKpTD
1
2
)()(
RR
sEsEP −=
sCRsEsE
ii
I 1)()(
−=
sCRsEsE
ddD −=
)()(
Eo(s)EI(s)-+
Ri
CiKp/TI
REP(s)
-+
R1
R2Kp
E(s) -+
R
R
R( ))()()()( sEsEsEsE DIpo ++−=
DpT
k
pc Tsks
ksG Ip
++=)(
sCRsCRR
RsG ddii
c ++==1)(
1
2

19
Reguladores PID. Sintonía de parámetros Controlador PID.
Localizaciones z-p en el plano complejo
Un controlador PID real o práctico introduce dos polos y dos ceros en el semiplano Re[s]<0.
Si PIDreal ≡ PDreal+PI ideal: uno de los polos estará en el origen
Si PIDreal ≡ PDreal+PI real: equivalente a la red de atraso-adelanto
( )( )
( )s
asdscsK
sTN
sTsTKG c
id
dpc
+++
=
++
+=1
11
Reguladores industriales
(p. ej. SIPART)
-d -a-c
PID real
-a -b-c-d
PID real

20
Reguladores PID. Sintonía de parámetros Controlador PID. Tipos
Tipos de controladores:– PI ideal: cero más un polo en el origen. Cuasiideal sí realizable.
– PI real (práctico), idéntico a red de atraso, cero más un polo próximo al origen pero no nulo ( |p| < |z|).
– PD ideal: un cero. Gc función impropia, físicamente no realizable. Resultados en simulación, no realistas. La conversión a una función propia requiere al menos añadir un polo.
– PD real (práctico) (PD ideal con un polo añadido), idéntico a la red de adelanto (|z| < |p| )
– PID ideal: un polo en el origen más dos ceros en el semiplano izquierdo.
– PID real (práctico) requiere al menos un polo adicional. Puede ser PD real +PI ideal, o PD real + PI real. Este último idéntico a red de atraso-adelanto
21
Definición de Sintonía (Tuning) :
La Sintonía consiste en el proceso llevado a cabo para ajustar los Parámetros de un Regulador.
Existen dos criterios de Sintonía:
Criterio Analítico: sólo aplicable si se conoce el Modelo Matemático de la Planta a controlar. Mediante técnicas de análisis temporal y/o frecuencial (no vistas aquí ), es posible calcular los Parámetros del Regulador.
Criterio Empírico: permite calcular los Parámetros del Regulador sin conocer el Modelo Matemático de la Planta.
Reguladores PID. Sintonía de parámetros Criterios para la sintonía de parámetros del PID

22
Proceso de los Criterios Empíricos de Sintonía:
1.-Identificación de la Planta: estimación de ciertas características de la dinámica del Proceso a Controlar.
2.-Criterio de Optimización: objetivos de ajuste (transitorio, permanente, etc.) perseguidos con la aplicación del Regulador.
3.-Ajuste de Parámetros: a partir de los resultados anteriores, del tipo de regulador elegido y del método de sintonía utilizado, se obtienen los Parámetros del Regulador.
Reguladores PID. Sintonía de parámetros Criterios para la sintonía de parámetros del PID

23
Método de Ziegler-Nichols.1.- Identificación de la Planta:
Se supone que la planta es aproximable por un Sistema de Primer Orden con Retardo.La estimación se realiza en Lazo Abierto, sometiendo
a la Planta a una entrada escalón y observando su respuesta ⇒ Identificación.
0
1T s
p
K eT s
−
+Proceso o
PlantaActuadorSeñal de entrada
Variable de salida
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo abierto

24
Seis posibles respuestas a un escalón (Lazo Abierto): Las reglas de tuningfueron desarrolladas, esencialmente, para las respuesta escalón de tipo A. Las reglas, sin embargo, pueden funcionar con las respuestas de tipo B y E ( y F).
Referencia: The Design of the PID Controller. Robert A. Paz. Junio, 2001

25
Método de Ziegler-Nichols.1.- Identificación de la Planta:
y
t
u
t∆u
∆y0.632∆y
0.283∆y
t2
t1 K = ∆y / ∆u
Tp = 1.5 * (t2 - t1)
T0 = t2 – Tp
0
1T s
p
K eT s
−
+
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo abierto

26
Método de Ziegler-Nichols.2.- Criterio de Optimización:
En este caso, se aplica el denominado Criterio QDR o de la Razón de Amortiguamiento 1/4.Proporciona buenos resultados, tanto para el
Transitorio como para el Tiempo de establecimiento.
AB
14
BA=
y
t
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo abierto

27
Método de Ziegler-Nichols.3.- Ajuste de Parámetros:
Especificado en el año 1942. Requiere ajuste fino. Proporciona buenos resultados, tanto para el
transitorio como para el tiempo de establecimiento.Este método está referido para el cálculo del modelo
de PID denominado serie o de “Libro de Texto”:
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo abierto
++= ∫
t
idp dtte
TdttdeTteKtu
0
)(1)()()(

28
Método de Ziegler-Nichols.3.- Ajuste de Parámetros (cont.):
En función del tipo de regulador elegido, para el ajuste de los parámetros se utiliza la tabla:
Kp 1/Ti Td P
0
pTT K⋅
PI 0
0,9 pTT K⋅
⋅ 0
10,3T⋅
PID 0
1, 2 pTT K⋅
⋅ 0
10,5T⋅
00,5 T⋅
--
-
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo abierto

29
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo abierto
Método de Chien - Hrones - Reswick (CHR)Es una variante del método de Ziegler-Nichols en lazo abierto.
sseKspG ⋅+⋅−⋅= τ
θ1)( τ
θ⋅⋅= Ka 632.0
20 % overshoot
0 % overshoot

30
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo abierto
0.42⋅θ0.47⋅θ0.42⋅θ0.5⋅θTd2⋅θ1.4⋅τ2.4⋅θ1⋅τTi1.2 / a0.95 / a0.95 / a0.6 / aKp
DisturbanceSetpointDisturbanceSetpoint
20 % overshoot With shortest oscillation duration
0 % overshoot With shortest oscillation duration
Método de Chien - Hrones - Reswick (CHR)Proponen ajustes diferentes de los parámetros para obtener la repuesta mas rápida sin sobreoscilación (overshoot) o con 20 % de sobreoscilación . También es importante si prima la respuesta ante un cambio de consigna (setpoint) o ante perturbaciones en la carga (disturbance). En función del tipo de regulador elegido, para el ajuste de los parámetros proponen la siguiente tabla:
31
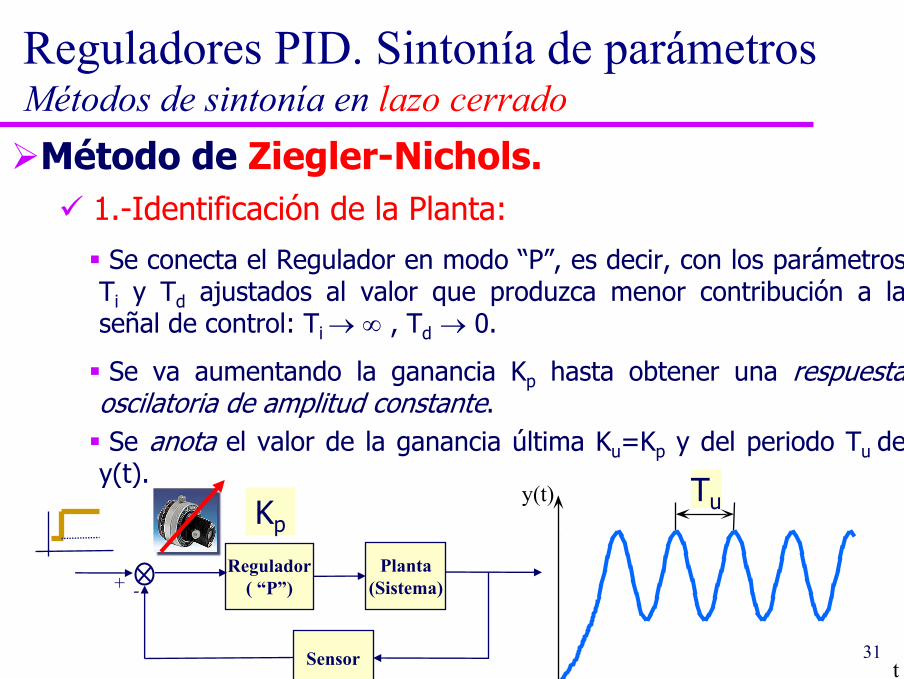
Método de Ziegler-Nichols.1.-Identificación de la Planta:Se conecta el Regulador en modo “P”, es decir, con los parámetros
Ti y Td ajustados al valor que produzca menor contribución a la señal de control: Ti → ∞ , Td → 0.
Se va aumentando la ganancia Kp hasta obtener una respuesta oscilatoria de amplitud constante.Se anota el valor de la ganancia última Ku=Kp y del periodo Tu de
y(t).
tSensor
Regulador( “P”)+ -
Planta(Sistema)
y(t) TuKp
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo cerrado
32
Método de Ziegler-Nichols.2.- Criterio de Optimización:
En este caso, también se aplica el Criterio QDR o de la Razón de Amortiguamiento 1/4.
3.- Ajuste de Parámetros:
Especificado en el año 1942. Requiere ajuste fino.
Es un método más preciso que el de L.A., pero requiere prueba y error. Puede inestabilizar el sistema y comprometer su integridad (avería).
También está referido para el cálculo del modelo de PID denominado serie o de “Libro de Texto”:
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo cerrado
++= ∫
t
idp dtte
TdttdeTteKtu
0
)(1)()()(

33
Método de Ziegler-Nichols.3.- Ajuste de Parámetros (cont.):
En función del tipo de regulador elegido, para el ajuste de los parámetros se utiliza la tabla:
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo cerrado
0.125 Tu0.5 Tu0.6 KuPID0.8 Tu0.4 KuPI
0.5 KuP
TdTiKpRegulador

34
Método del Relé. (Aström y Hägglund, 1984)El método de Ziegler-Nichols en bucle cerrado generalmente es arriesgado,
ya que fuerza a la planta a operar cerca de la inestabilidad. También, es difícil mantener la amplitud constante (!importante por seguridad!).En general, es un método difícil de automatizar. Una variante está basada en
el diagrama de la figura. En él, se utiliza un relé para conseguir los valores de Ku y Tu. Posteriormente se aplica la misma tabla de sintonía que en Ziegler-Nichols en lazo cerrado.
Reguladores PID. Sintonía de parámetros Métodos de sintonía en lazo cerrado
u (t) = , e (t) ≥ 0- , e (t) < 0
Este control, para la mayoría de los sistemas de interés, dará como resultado una oscilación ante una entrada escalón. La salida del sistema será una señal oscilatoria de periodo Tu y de amplitud α. En este caso, se obtiene la ganancia última mediante la fórmula:
Planta Relé
E(s) R(s) U(s) Y(s) G(s)
l
l−
παl4
=uK
ll

35
Reguladores PID. Sintonía de parámetrosEstructuras del algoritmo PID
Algoritmos de regulación:- Todo/Nada- PID- PID no lineal- Especiales

36
Reguladores PID. Sintonía de parámetrosEstructuras del algoritmo PID
Algoritmo de regulación Todo/Nada:- Produce una salida de un 0% o un 100% en función del signo del error. - Para evitar estados inestables en cuanto a la conmutación de salida (ruido, etc.) se dota al regulador de cierta histéresis. - La variable a regular permanece oscilando entre ciertos límites. La amplitud de dichas oscilaciones es más grande cuanto más grande sea la histéresis.
actuación
100%
0%-h ref +h variable
a regular

37
Reguladores PID. Sintonía de parámetrosEstructuras del algoritmo PID
Regulación Todo/Nada de 3 posiciones:- Es una variante del anterior, pero la salida del regulador varía entre el 0% y el +100% o entre el 0% y el -100%.- Consta en realidad de dos reguladores de dos posiciones, separados por una zona muerta para evitar solapes.- Una aplicación típica es el caso de motores reversibles de velocidad fija que actúan sobre válvulas o posicionadores.
actuación
+100%
0%
-100%
ref variable a regular
38
Reguladores PID. Sintonía de parámetrosEstructuras del algoritmo PID
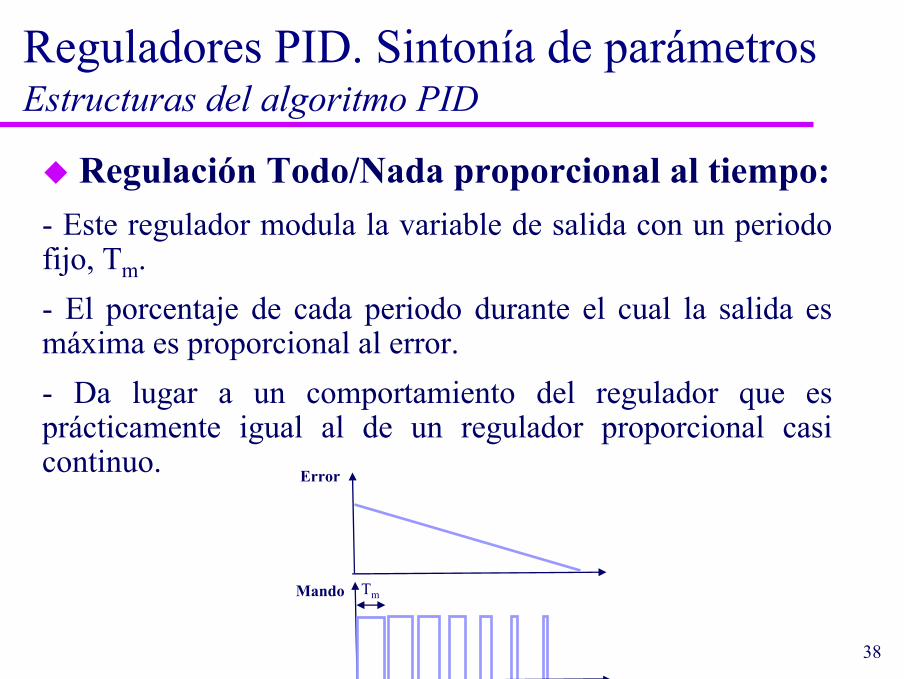
Regulación Todo/Nada proporcional al tiempo:- Este regulador modula la variable de salida con un periodo fijo, Tm. - El porcentaje de cada periodo durante el cual la salida es máxima es proporcional al error.- Da lugar a un comportamiento del regulador que es prácticamente igual al de un regulador proporcional casi continuo. Error
Mando Tm

39
Reguladores PID. Sintonía de parámetrosEstructuras del algoritmo PID
Estructura de un Regulador PID:- La estructura típica de un regulador PID es la siguiente:
- Si la entrada presenta discontinuidades, la gran ganancia a frecuencias altas del término D proporciona una elevada señal de control => inestabilidad. Para evitarlo, en ocasiones se emplea una estructura alternativa en la que solamente la salida pasa por el término derivador.
PIDr e
- yu
r e uPI
-yD

40
Reguladores PID. Sintonía de parámetrosEstructuras del algoritmo PID
Tipos de Reguladores PID:-Libro de texto- PID´s industriales- PID-D2.
41
Reguladores PID. Sintonía de parámetrosEstructuras del algoritmo PID
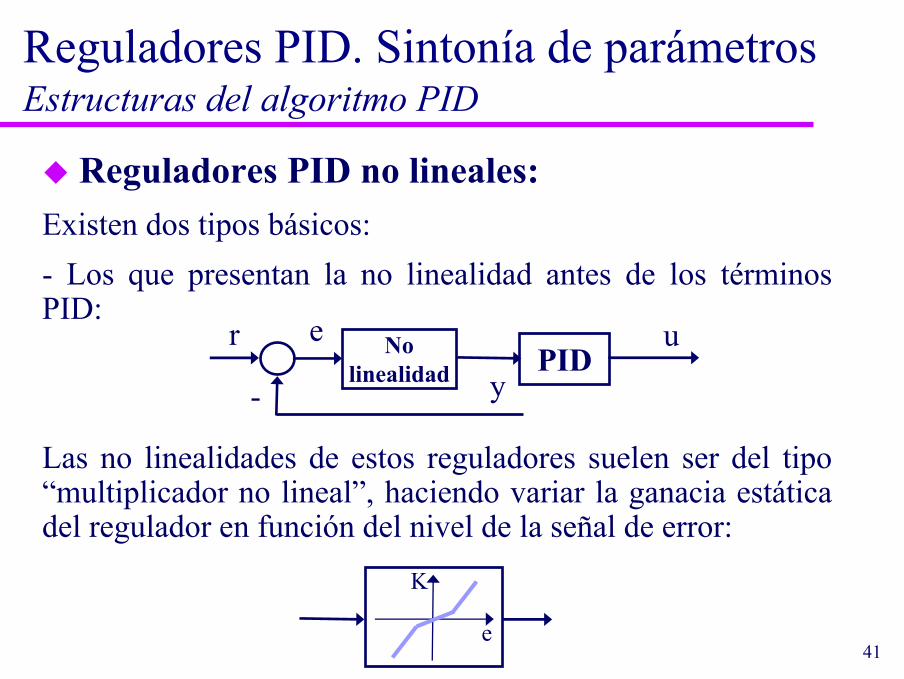
Reguladores PID no lineales:Existen dos tipos básicos:- Los que presentan la no linealidad antes de los términos PID:
Las no linealidades de estos reguladores suelen ser del tipo “multiplicador no lineal”, haciendo variar la ganacia estática del regulador en función del nivel de la señal de error:
PIDr e
- yuNo
linealidad
e
K

42
Reguladores PID. Sintonía de parámetrosEstructuras del algoritmo PID
Reguladores PID no lineales:- Los que presentan la no linealidad entre la etapa PID y la planta:
Las no linealidades en este caso pueden ser de cualquier tipo, aunque es habitual que sean del tipo “relé todo-nada”, como las empleadas en el control bang-bang para, por ejemplo, comandar electroválvulas de dos posiciones.
PIDr e
- yuNo
linealidad

43
Reguladores PID. Sintonía de parámetrosEstructuras del algoritmo PID
Reguladores especiales:Existen otros algoritmos de regulación que, a pesar de su interés y utilización, no constituyen todavía una mayoría frente a los reguladores PID tradicionales:
- Reguladores basados en lógica borrosa (fuzzy)- Reguladores basados en redes neuronales- Reguladores basados en control adaptativo- Reguladores basados en control óptimo- etc…