tema 04 introducciÓn a la cinemÁtica · la física moderna ha trasformado nuestra realidad de tal...
TRANSCRIPT

TEMA 04INTRODUCCIÓN A LA CINEMÁTICA
1
Prof. Ricardo Nitsche Corvalán

4.1.- CINEMÁTICA Y MATEMÁTICA
4.1.1.- ¿Qué es cinemática?.
La cinemáticacinemáticacinemáticacinemática es la rama de la mecánica clásicamecánica clásicamecánica clásicamecánica clásica que estudia las leyes del
movimiento de los cuerpos sin tener en cuenta las causas que lo producen,
limitándose, esencialmente, al estudio de la trayectoria en función del tiempo.
En la cinemáticacinemáticacinemáticacinemática se utiliza un sistema de coordenadassistema de coordenadassistema de coordenadassistema de coordenadas para describir las
trayectorias, denominado sistema de referencia. La velocidadLa velocidadLa velocidadLa velocidad es el ritmo con que
cambia la posición un cuerpo. La aceleraciónLa aceleraciónLa aceleraciónLa aceleración es el ritmo con que cambia su
velocidad. La velocidad y la aceleración son las dos principales cantidades que
describen cómo cambia la posición de un cuerpo en función del tiempo.
En la Mecánica ClásicaMecánica ClásicaMecánica ClásicaMecánica Clásica se admite la existencia de un espacio absolutoespacio absolutoespacio absolutoespacio absoluto y
de un tiempo absolutotiempo absolutotiempo absolutotiempo absoluto; es decir, el espacio es el escenario donde ocurren todos
los fenómenos físicos y el espacio es anterior a todos los objetos materiales e
independiente de la existencia de estos. En todo ese espacio se supone que todas
las leyes de la física se cumplen igual y todos esos eventos duran lo mismo para
cualquiera que los observe.
Con la Teoría de la Relatividad Especial de Albert Einstein en 1905 se
inició una nueva etapa, la Cinemática relativista, donde el tiempo y el espacio no
son absolutos, lo único absoluto es la magnitud de la velocidad de la luz. Todo
observador en un sistema de referencia inercial, no importa su velocidad relativa,
va a medir la misma magnitud de velocidad de la luz que otro observador en otro
sistema de referencia inercial distinto. En esta nueva forma de ver al mundo se
tiene que espacio y tiempo no son absolutos, varían según quien haga la
medición; y no son aspectos independientes entre si; espacio y tiempo forman un
continuo de cuatro dimensiones.
2
Prof. Ricardo Nitsche Corvalán

La física moderna ha trasformado nuestra realidad de tal manera que a
semejanza de las imágenes inferiores, muchas del artista holandés MauritsMauritsMauritsMaurits
CornelisCornelisCornelisCornelis EscherEscherEscherEscher (1898-1972), donde la realidad depende del punto de vista del
observador.
3
Prof. Ricardo Nitsche Corvalán

4.1.2.- Los sistemas de Coordenadas.
El primer aspecto a entender para comprender la cinemática es definir lo
que son sistemas de coordenadassistemas de coordenadassistemas de coordenadassistemas de coordenadas. Nuestro espacio físico tiene tres dimensiones;
nos podemos mover a la derecha o la izquierda, hacia adelante o hacia atrás,
hacia arriba o hacia abajo. Cada uno de esos ejes de movimiento define una
dirección y sentido; cuánto nos desplazamos en cada eje para alcanzar un punto
en el espacio nos indica las coordenadas que a lo largo de cada eje (distancias)
son necesarias para llegar a ese punto, distancias las cuales por costumbre
indicamos de la forma (x,y,z).
Cuando indicamos un punto en el espacio por medio de tres distancias
(“+” o “–” según el sentido) recorridas a lo largo de tres ejes o direcciones
perpendiculares entre, que se cortan o cruzan en un punto común llamado origenorigenorigenorigen
de coordenadas del sistemade coordenadas del sistemade coordenadas del sistemade coordenadas del sistema, decimos que estamos ante un sistema desistema desistema desistema de
coordenadas rectangulares en el espaciocoordenadas rectangulares en el espaciocoordenadas rectangulares en el espaciocoordenadas rectangulares en el espacio (x,y,z); si eliminamos una de las
dimensiones el sistema se conoce como sistema de coordenadas rectangularessistema de coordenadas rectangularessistema de coordenadas rectangularessistema de coordenadas rectangulares
en el planoen el planoen el planoen el plano (x,y); y si sólo medimos distancias en un solo eje, tenemos el sistemasistemasistemasistema
de coordenadas rectangulares de coordenadas rectangulares de coordenadas rectangulares de coordenadas rectangulares unidimencionalesunidimencionalesunidimencionalesunidimencionales (x).
4
Prof. Ricardo Nitsche Corvalán

Existen otros sistemas de coordenadas para ubicar un punto, y no
necesariamente se requieren distancias, así por ejemplo en el plano el sistema deel sistema deel sistema deel sistema de
coordenadas polares en el planocoordenadas polares en el planocoordenadas polares en el planocoordenadas polares en el plano (r,θ) requiere una distancia (las distancias son
en este caso siempre positivas) y un ángulo. Lo cual es equivalente a lo que vimos
en el capitulo anterior a magnitud y dirección de un vector.
Para transformar de un sistema a otro tenemos:
x = r $ cos �
y = r $ sen�
r2 = x2 + y2
tan� =yx
_______Nota: todas las formulas anteriores son validas siempre, salvo el caso de la tangente, ya que elvalor real del ángulo depende de los signos de “x” y de “y” . Por ejemplo si x= -3 y y = -4; losresultados de la calculadora son: ; pero el valor correcto es 233O o –127O,� = atan(−4/ − 3) = 53osi giramos en sentido horario.
En el espacio existen varios sistemas de coordenadas, el uso de uno u otro
depende de la necesidad geométrica del problema. Entre los más conocidos
tenemos el ya mencionado coordenadas rectangulares en el espacio (x,y,z); el
sistema de coordenadas cilíndricascoordenadas cilíndricascoordenadas cilíndricascoordenadas cilíndricas (r,θ,z), que es equivalente al polares en el
plano, pero se agrega la componente “z”. Otro más usado en geografía es el
5
Prof. Ricardo Nitsche Corvalán
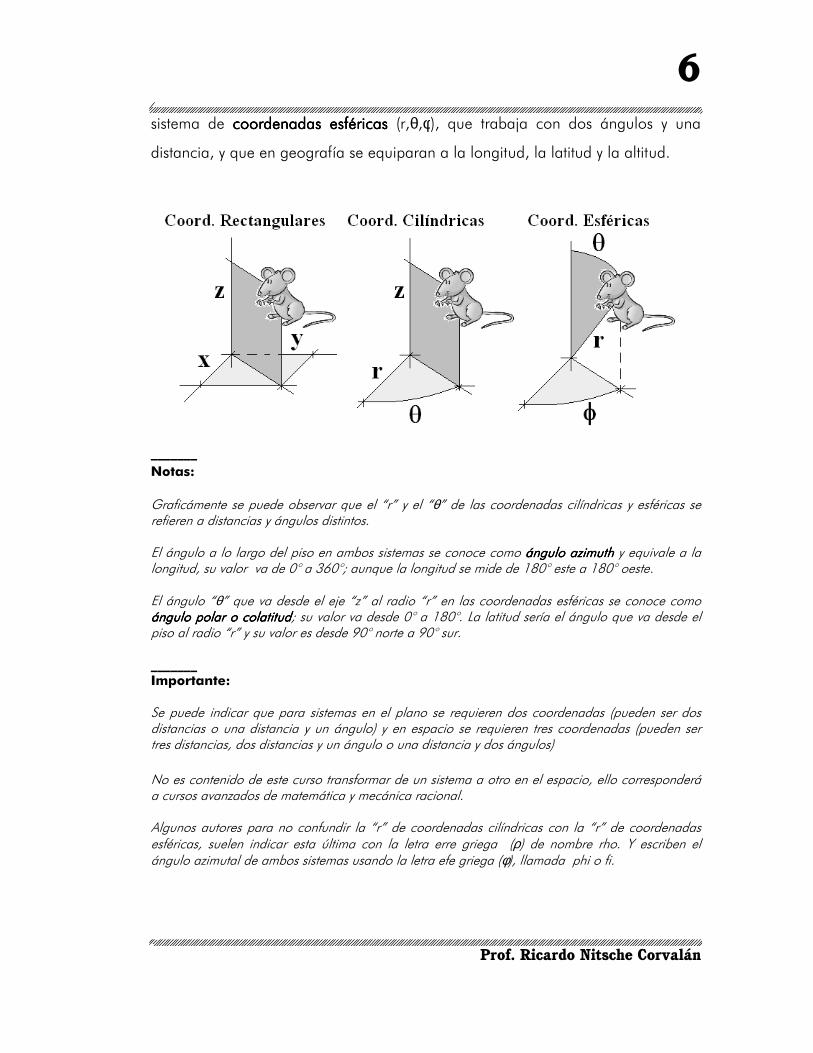
sistema de coordenadas esféricascoordenadas esféricascoordenadas esféricascoordenadas esféricas (r,θ,φ), que trabaja con dos ángulos y una
distancia, y que en geografía se equiparan a la longitud, la latitud y la altitud.
_______Notas:
Graficámente se puede observar que el “r” y el “θ” de las coordenadas cilíndricas y esféricas serefieren a distancias y ángulos distintos.
El ángulo a lo largo del piso en ambos sistemas se conoce como ángulo ángulo ángulo ángulo azimuthazimuthazimuthazimuth y equivale a lalongitud, su valor va de 0° a 360°; aunque la longitud se mide de 180° este a 180° oeste .
El ángulo “θ” que va desde el eje “z” al radio “r” en las coordenadas esféricas se conoce comoángulo polar o colatitudángulo polar o colatitudángulo polar o colatitudángulo polar o colatitud; su valor va desde 0° a 180°. La latitud sería el ángulo que va desde elpiso al radio “r” y su valor es desde 90° norte a 90° sur.
_______Importante:
Se puede indicar que para sistemas en el plano se requieren dos coordenadas (pueden ser dosdistancias o una distancia y un ángulo) y en espacio se requieren tres coordenadas (pueden sertres distancias, dos distancias y un ángulo o una distancia y dos ángulos)
No es contenido de este curso transformar de un sistema a otro en el espacio, ello corresponderáa cursos avanzados de matemática y mecánica racional.
Algunos autores para no confundir la “r” de coordenadas cilíndricas con la “r” de coordenadasesféricas, suelen indicar esta última con la letra erre griega (ρ) de nombre rho. Y escriben elángulo azimutal de ambos sistemas usando la letra efe griega (φ), llamada phi o fi.
6
Prof. Ricardo Nitsche Corvalán

4.1.3.- Los vectores matemáticos y la posición.
Un vectorvectorvectorvector es un término que tiene distintos significados de acuerdo al
contexto; en biología y medicina un vector se trata de un animal que trasmite un
parasito; en el mundo militar es un vehículo capaz de transportar una carga
nuclear. La palabra vector proviene del latín y significa “conductor de un
vehículo”. En física y geometría la palabra se aleja de su definición original y se
refiere a aquellas cantidades que tienen magnitud, dirección y sentido y que son
representadas como un segmento de recta orientado. En el siglo XIX la
matemática generalizó y modificó la noción de vector aun más; un vector en
matemática es todo cuerpo u objeto que formado por varios elementos simples,
llamados escalares, cumple con dos operaciones básicas (suma de vectores y
multiplicación de escalar por vector).
Dentro de los distintos espacios vectoriales de la matemática, citaremos
uno en particular, por su relación con los vectores en física. El espacio en
cuestión se define como: espacio espacio espacio espacio euclídeoeuclídeoeuclídeoeuclídeo; y empecemos de forma simple:
Una línea recta esta constituida por puntos, sea “x” un punto de esa línea,
entonces “ ”; siendo “ ” el conjunto de los números reales. Cada valor “x”x c ‘ ‘
es lo que constituye una cantidad escalar.
Un plano está formado por todos los pares asociados de dos valores: “x1”
y “x2”, ambos reales y lo denotamos “ ”; si nos vamos al espacio(x1, x2 ) c ‘2
tridimensional tendremos tres valores: “x1”, “x2” y “x3”, los tres reales y lo
denotamos “ ”; la idea es extensible no sólo al espacio de tres(x1, x2, x3 ) c ‘3
dimensiones, sino también a espacios de dimensiones mayores, e incluso
formados por infinitos elementos, cuyos ejes son todos perpendiculares entre si.
Podemos generalizar y señalar que un vector en un espacio un vector en un espacio un vector en un espacio un vector en un espacio euclideanoeuclideanoeuclideanoeuclideano
de “n” dimensionesde “n” dimensionesde “n” dimensionesde “n” dimensiones en matemáticas es la cantidad: . (x1, x2, x3, ..., xn ) c ‘n
7
Prof. Ricardo Nitsche Corvalán

En este punto señalamos que “vector en un espacio vector en un espacio vector en un espacio vector en un espacio euclideanoeuclideanoeuclideanoeuclideano de ‘n’ de ‘n’ de ‘n’ de ‘n’
dimensionesdimensionesdimensionesdimensiones” en matemática es lo que en física y geometría se corresponde con
“coordenadas rectangulares o cartesianas de un puntocoordenadas rectangulares o cartesianas de un puntocoordenadas rectangulares o cartesianas de un puntocoordenadas rectangulares o cartesianas de un punto” y en física clásica sólo
trabajamos con una, dos y máximo tres dimensiones.
Para poder hacer corresponder ambos modelos, los físicos definieron al
vector posiciónvector posiciónvector posiciónvector posición como aquel vector que va desde el origen de coordenadas
—punto (0,0,0)— hasta un punto en el espacio de coordenadas (x,y,z);;;; el v el v el v el vectorectorectorector
posición posición posición posición es entonces un vector de la forma:
→ r = x $ i + y $ j + z $ k
_______Notas:
Es un error muy común mezclar nomenclaturas, en matemática un vector es una cantidad de laforma ; en física esa cantidad no es un vector sino las coordenadas de un punto (x, y, z)
en el espacio.
Es muy común el error de combinar ambos conceptos y surgen cosas como: ; perox $ i ; y $ j ; z $ k
eso no existe ni en la matemática, ni en la física;eso no existe ni en la matemática, ni en la física;eso no existe ni en la matemática, ni en la física;eso no existe ni en la matemática, ni en la física; respete la nomenclatura de cada ciencia y no mezcle ideas.
8
Prof. Ricardo Nitsche Corvalán
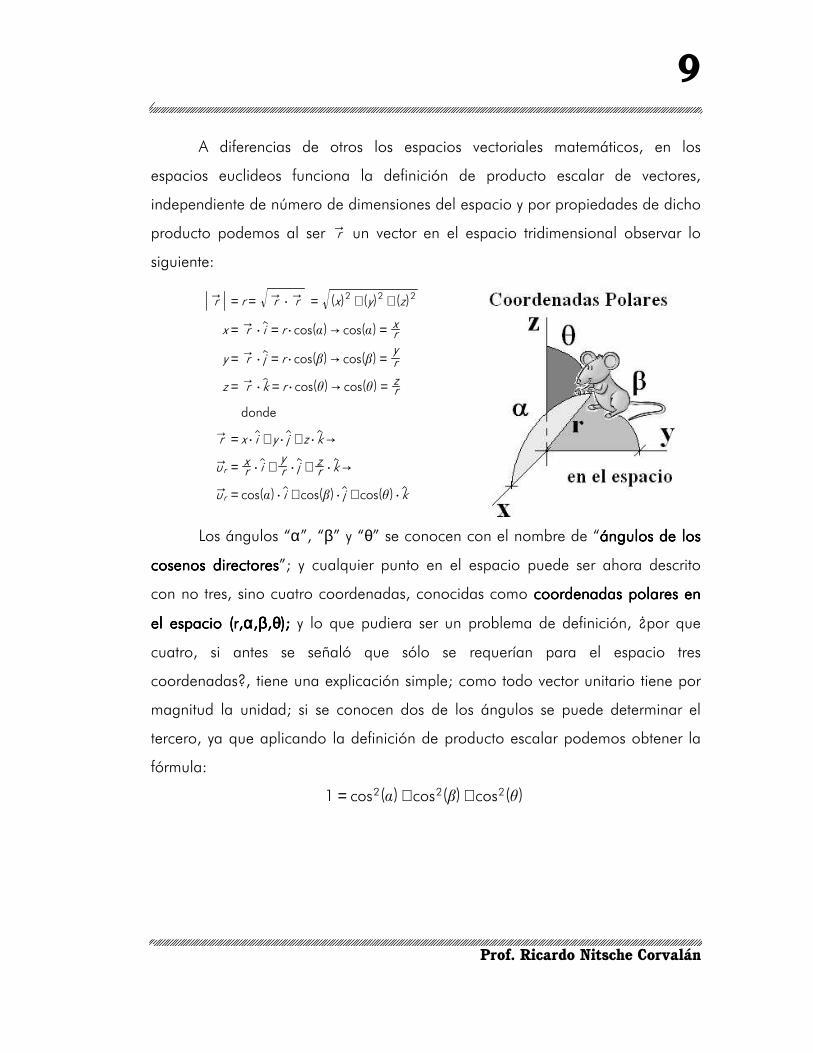
A diferencias de otros los espacios vectoriales matemáticos, en los
espacios euclideos funciona la definición de producto escalar de vectores,
independiente de número de dimensiones del espacio y por propiedades de dicho
producto podemos al ser un vector en el espacio tridimensional observar lo→ r
siguiente:
→ r = r = →
r $→ r = (x)2 + (y)2 + (z)2
x = → r $ i = r $ cos(�) d cos(�) = x
r
y = → r $ j = r $ cos(�) d cos(�) =
yr
z = → r $ k = r $ cos(�) d cos(�) = z
r
donde
→ r = x $ i + y $ j + z $ k d
→ ur = x
r $ i +yr $ j + z
r $ k d
→ ur = cos(�) $ i + cos(�) $ j + cos(�) $ k
Los ángulos “α”, “β” y “θ” se conocen con el nombre de “ángulos de losángulos de losángulos de losángulos de los
cosenos directorescosenos directorescosenos directorescosenos directores”; y cualquier punto en el espacio puede ser ahora descrito
con no tres, sino cuatro coordenadas, conocidas como coordenadas polares encoordenadas polares encoordenadas polares encoordenadas polares en
el espacio el espacio el espacio el espacio (r,(r,(r,(r,αααα,,,,ββββ,,,,θθθθ);););); y lo que pudiera ser un problema de definición, ¿por que
cuatro, si antes se señaló que sólo se requerían para el espacio tres
coordenadas?, tiene una explicación simple; como todo vector unitario tiene por
magnitud la unidad; si se conocen dos de los ángulos se puede determinar el
tercero, ya que aplicando la definición de producto escalar podemos obtener la
fórmula:
1 = cos2(�) + cos2(�) + cos2(�)
9
Prof. Ricardo Nitsche Corvalán

sea :→ r = 2 $ i + 3 $ j + 4 $ k
entonces : r = (2)2 + (3)2 + (4)2 = 4 + 9 + 16 = 29 = 5, 385
donde : cos(�) = 25, 385
d � = arco cos(0, 371) = 68o
: cos(�) = 35, 385
d � = arco cos(0, 557) = 56o
: cos(�) = 45, 385
d � = arco cos(0, 742) = 42o
Ejemplo 4.1:Sean las coordenadas de un punto en el espacio (2,3,4) determinar las coordenadas polares del vector posición.
Tenemos : x = 5, 00 $ cos(45o ) = 3, 54
: y = 5, 00 $ cos(60o ) = 2, 50
: z = 5, 00 $ cos(120o ) = −2, 50
por tanto :→ r = 3, 54 $ i + 2, 50 $ j − 2, 50 $ k
Ejemplo 4.2:Sean las coordenadas polares de un punto en el espacio (5,00;45°;60°;120°)determinar las coordenadas rectangulares del vector posición.
(4; 0; −3) d (5, 0; 37o; 90o; 127o )
(−5; −2; 3) d (6, 2; 144o; 109o; 61o )
(0; 5; 1) d (5, 1; 90o; 11o; 79o )
(7, 0; 60o; 75o; 34o ) d (3, 5; 1, 8; 5, 8)
(3, 0; 30o; 110o; 58o ) d (2, 6; −1, 0; 1, 1)
(5, 0; 120o; 120o; 135o ) d (−2, 5; −2, 5; −3, 5)
Ejercicios propuestos 4.1 Confirme las siguientes transformaciones
10
Prof. Ricardo Nitsche Corvalán
4.2.- CAMBIOS Y RAZONES
4.2.1.- Cambios, diferencias y diferenciales.
En muchas circunstancias no interesa conocer una cantidad particular,
sino como cambia; así, por ejemplo, la duración de un viaje la medimos
tomando la hora de inicio o salida del viaje (ti) y la hora final o llegada del mismo
(tf), el tiempo transcurridotiempo transcurridotiempo transcurridotiempo transcurrido es la diferencia o resta de la hora final menos la inicial.
Para efectos de indicar ese intervalo de tiempo se hace uso de la letra mayúscula
griega delta (∆∆∆∆) que significa “cambio”; y tenemos entonces que “Tiempo“Tiempo“Tiempo“Tiempo
Transcurrido” Transcurrido” Transcurrido” Transcurrido” es igual al cambio o diferencia de tiempo:
�t = t f − t i
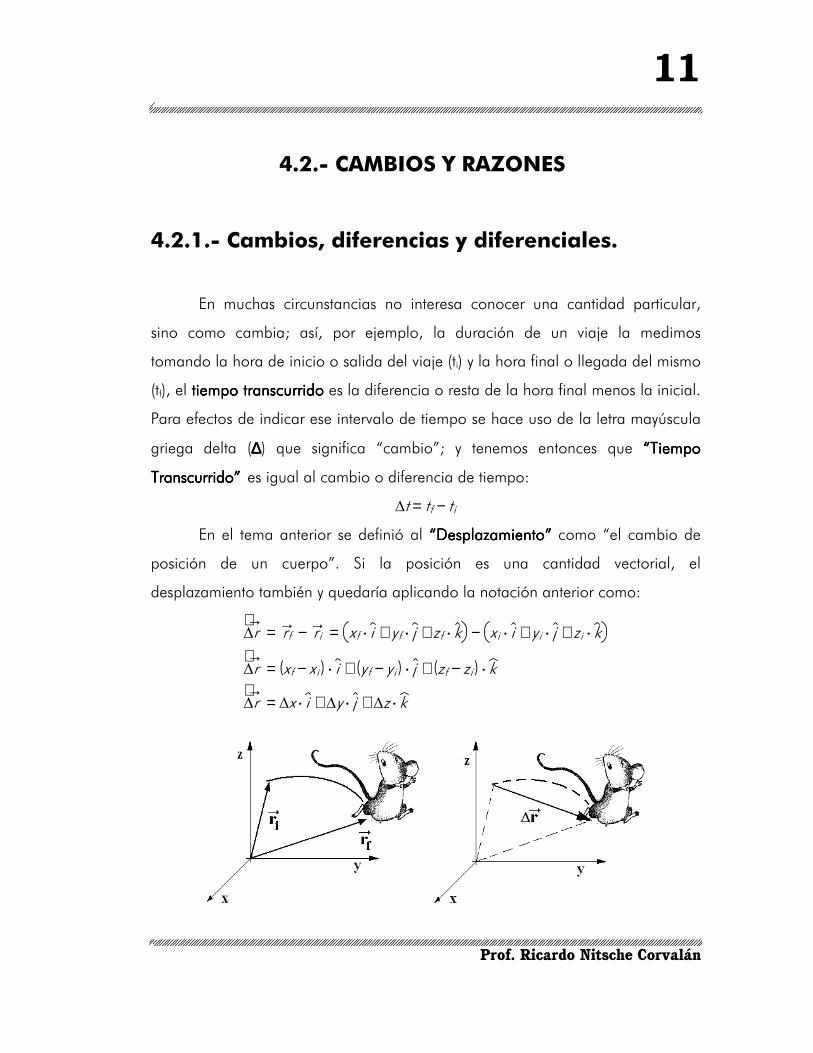
En el tema anterior se definió al “Desplazamiento”“Desplazamiento”“Desplazamiento”“Desplazamiento” como “el cambio de
posición de un cuerpo”. Si la posición es una cantidad vectorial, el
desplazamiento también y quedaría aplicando la notación anterior como:
→ �r = →
rf − → r i = x f $ i + y f $ j + z f $ k − x i $ i + y i $ j + z i $ k
→ �r = (x f − x i ) $ i + (y f − y i ) $ j + (z f − z i ) $ k
→ �r = �x $ i + �y $ j + �z $ k
11
Prof. Ricardo Nitsche Corvalán
La distanciadistanciadistanciadistancia (denotada “s”, no usaremos “d” para no confundir con la
notación de un diferencial —definición abajo—) entre dos puntos de un espacio
euclideano viene dada por la magnitud del desplazamiento total; así la
“Distancia entre dos puntos en el espacio” “Distancia entre dos puntos en el espacio” “Distancia entre dos puntos en el espacio” “Distancia entre dos puntos en el espacio” es la cantidad:
s = (x f − x i )2 + (y f − y i )
2 + (zf − z i )2 = (�x)2 + (�y)2 + (�z)2
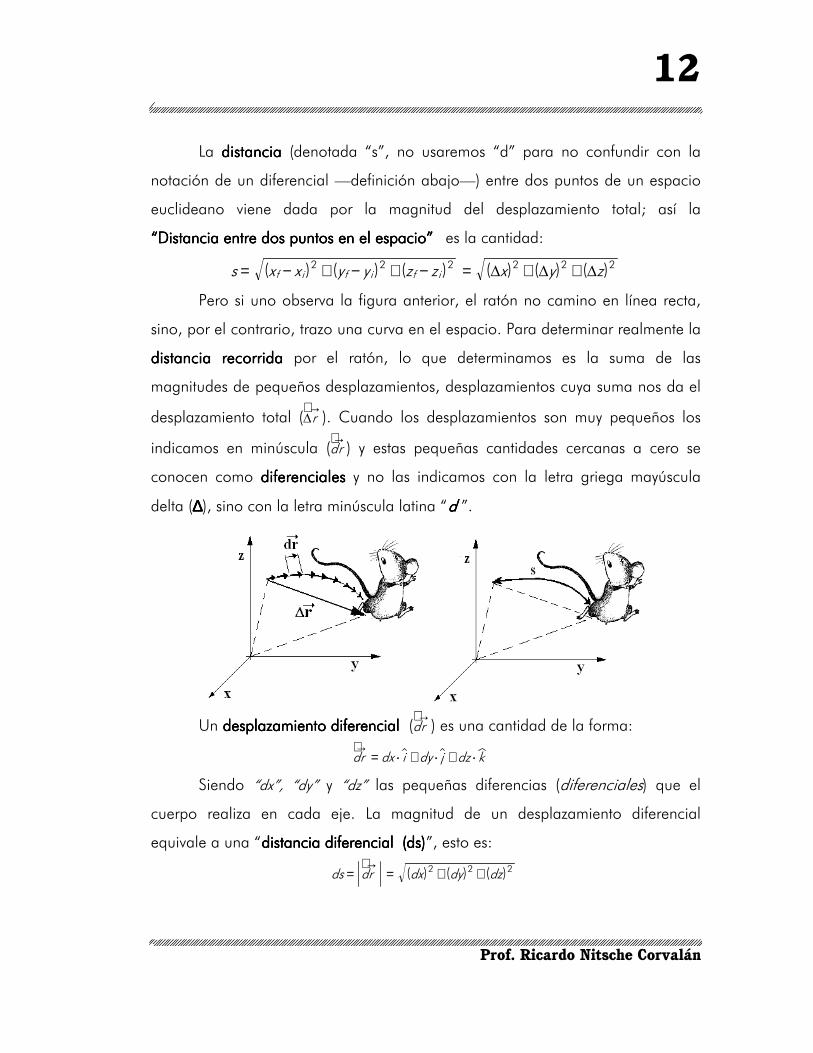
Pero si uno observa la figura anterior, el ratón no camino en línea recta,
sino, por el contrario, trazo una curva en el espacio. Para determinar realmente la
distancia recorridadistancia recorridadistancia recorridadistancia recorrida por el ratón, lo que determinamos es la suma de las
magnitudes de pequeños desplazamientos, desplazamientos cuya suma nos da el
desplazamiento total ( ). Cuando los desplazamientos son muy pequeños los→ �r
indicamos en minúscula ( ) y estas pequeñas cantidades cercanas a cero se→ dr
conocen como diferencialesdiferencialesdiferencialesdiferenciales y no las indicamos con la letra griega mayúscula
delta (∆∆∆∆), sino con la letra minúscula latina “dddd ”.
Un desplazamiento diferencialdesplazamiento diferencialdesplazamiento diferencialdesplazamiento diferencial ( ) es una cantidad de la forma:→
dr
→ dr = dx $ i + dy $ j + dz $ k
Siendo “dx”, “dy” y “dz” las pequeñas diferencias (diferenciales) que el
cuerpo realiza en cada eje. La magnitud de un desplazamiento diferencial
equivale a una “distancia diferencial distancia diferencial distancia diferencial distancia diferencial (ds)(ds)(ds)(ds)”, esto es:
ds =→
dr = (dx)2 + (dy)2 + (dz)2
12
Prof. Ricardo Nitsche Corvalán

Entonces el desplazamiento totalel desplazamiento totalel desplazamiento totalel desplazamiento total de un cuerpo es la suma de sus muchos
desplazamientos:
→ �r =
→ �r 1 +
→ �r 2 +
→ �r 3 + ... +
→ �r n
→ �r = →
r1 − → r0 + →
r2 − → r1 + →
r3 − → r2 + ... + →
rn − → rn−1 = →
rn − → r0 h
→ r f − →
r i
Y la distancia recorrida por un cuerpo es la suma de las magnitudes de
todos esos desplazamientos:
s = �i =1
n → �r i =
→ �r 1 +
→ �r 2 +
→ �r 3 + ... +
→ �r n ú
→ �r
Si se trabaja con cantidades diferenciales las expresiones quedan:
La distancia recorrida:La distancia recorrida:La distancia recorrida:La distancia recorrida:
s = ¶x i
x f
¶yi
yf
¶z i
zf
ds = ¶x i
x f
¶yi
yf
¶z i
zf
(dx)2 + (dy)2 + (dz)2
El desplazamiento total:El desplazamiento total:El desplazamiento total:El desplazamiento total:
→ �r = ¶
→ ri
→ rf →
dr = ¶x i
x f
dx $ i + ¶y i
y f
dy $ j + ¶z i
zf
dz $ k
_______Nota: El símbolo “∫ “ se llama “integralintegralintegralintegral” y significa “suma de cantidades diferencialessuma de cantidades diferencialessuma de cantidades diferencialessuma de cantidades diferenciales ”; esta esuna operación matemática del calculo diferencial conocida como integración. No forma parte deeste curso explicar cómo se calcula, más si entender el concepto, cuando hablamos de
integración, hablamos de suma de muchos pedazos muy, pero muy, muy, muy pequeños.
V � F �6.- Siempre debe ocurrir que la distancia recorrida es una cantidad mayor que la magnitud del desplazamiento
V � F �5.- Es imposible que la distancia recorrida sea menor que la magnitud del desplazamiento total
V � F �4.- Es imposible que la distancia recorrida sea igual a la magnitud de un desplazamiento total
V � F �3.- Un diferencial de distancia es igual a la magnitud de un diferencial de desplazamiento
V � F �2.- Un corredor recorre una pista circular, la distancia recorrida es nula, si vuelve al punto de partida
V � F �1.- Un corredor recorre una pista circular, el desplazamiento final es nulo si vuelve al punto de partida
Preguntas 4.1 A las siguientes frases indique si son falsas o verdaderas
13
Prof. Ricardo Nitsche Corvalán

sea :→ r0 = 2m $ i + 3m $ j + 4m $ k
:→ r1 = 3m $ i + 4m $ j + 5m $ k
:→ r2 = 4m $ i + 5m $ j + 7m $ k
entonces :→ �r1 = →
r1 − → r0 = (3m − 2m) $ i + (4m − 3m) $ j + (5m − 4m) $ k = 1m $ i + 1m $ j + 1m $ k
:→ �r2 = →
r2 − → r1 = (4m − 3m) $ i + (5m − 4m) $ j + (7m − 5m) $ k = 1m $ i + 1m $ j + 2m $ k
donde :→ �r =
→ �r1 +
→ �r2 = (1m + 1m) $ i + (1m + 1m) $ j + (1m + 2m) $ k = 2m $ i + 2m $ j + 3m $ k
:→ �r1 = + (1m)2 + (1m)2 + (1m)2 = 3m2 = 1, 73m
:→ �r2 = + (1m)2 + (1m)2 + (2m)2 = 6m2 = 2, 45m
Siendo : s =→ �r1 +
→ �r2 = 1, 73m + 2, 45m = 4, 18m
Nota(1) :→ �r = + (2m)2 + (2m)2 + (3m)2 = 17m2 = 4, 12m ñ s
Nota(2) :→ �r = →
r f − → r i = →
r2 − → r0 = (4m − 2m) $ i + (5m − 3m) $ j + (7m − 4m) $ k
:→ �r = 2m $ i + 2m $ j + 3m $ k
Ejemplo 4.3:Un cuerpo se mueve en el espacio, inicialmente se ubica en la posición origen (2m;3m;4m); se traslada a una primera posición ubicada en (3m;4m;5m) yluego a una segunda posición ubicada en coordenadas (4m,5m, 7m).Determinar el desplazamiento final y la distancia recorrida por el cuerpo.
Confirmar:
→ �r = −6m $ i + 1m $ j + 14m $ k
s = 15, 86m
(15, 26m; 113o; 86o; 23o )
→ r0 = 2m $ i + 4m $ j + 6m $ k
→ r1 = 1m $ i + 5m $ j + 8m $ k
→ r2 = −2m $ i + 6m $ j + 12m $ k
→ r3 = −4m $ i + 5m $ j + 20m $ k
Ejercicios propuestos 4.2 La posición de un cuerpo varia como se indicaabajo; determinar desplazamiento total y distancia recorrida por el cuerpo.
Determinar también magnitud y ángulos de los cosenos directores deldesplazamiento total.
14
Prof. Ricardo Nitsche Corvalán
4.2.2.- Razones de Cambio.
La ocurrencia de cambios implica la existencia de interacciones entre
objetos; la física es la ciencia de las interacciones; la mecánica la rama que
estudia al movimiento y sus causas; y la cinemática estudia la trayectoria en
función del tiempo del movimiento de los cuerpos. Ya se señaló que se requiere
definir coordenadas para ubicar un cuerpo en el espacio; los cambios de esas
coordenadas nos dan dos cantidades, distancia recorrida y desplazamiento; la
primera de naturaleza escalar, la segunda de naturaleza vectorial.
El cuán rápido ocurre ese cambio de posición, define dos nuevas
cantidades, la rapidezrapidezrapidezrapidez y la velocidadvelocidadvelocidadvelocidad. Se define como rapidezrapidezrapidezrapidez ( ) la razón entre lav
distancia recorridadistancia recorridadistancia recorridadistancia recorrida y el tiempo transcurridotiempo transcurridotiempo transcurridotiempo transcurrido; se define como velocidadvelocidadvelocidadvelocidad ( ) la→ v
razón entre desplazamientodesplazamientodesplazamientodesplazamiento y tiempo transcurridotiempo transcurridotiempo transcurridotiempo transcurrido. Si las razones son el resultado
de dividir diferencias se suele hablar de cantidades promediocantidades promediocantidades promediocantidades promedio; si por el contrario
dividimos diferenciales (cantidades muy pequeñas) se habla de cantidadescantidadescantidadescantidades
instantáneasinstantáneasinstantáneasinstantáneas .
Expliquemos esto; cuando usted hace un viaje, por ejemplo de Ciudad
Bolívar a Puerto Ordaz, la distancia recorrida es unos 120 km; y tardo una hora;
la rapidez promedio fue 120 km/h; y la velocidad promedio fue 120 km/h hacia
el este; pero no siempre en todo el trayecto el velocímetro del carro marcaba una
rapidez de 120 km/h, ni el carro iba hacia el este siempre; así, lo que marca el
velocímetro en cada momento que se lo mire es la rapidez instantánea y hacia
adonde apunte el carro indica la dirección de la velocidad en ese instante.
Velocidad PromedioVelocidad PromedioVelocidad PromedioVelocidad Promedio
→ vp =
→ �r�t
Velocidad InstantáneaVelocidad InstantáneaVelocidad InstantáneaVelocidad Instantánea
→ v =
→ drdt
Rapidez PromedioRapidez PromedioRapidez PromedioRapidez Promediovp = s
�tRapidez instantáneaRapidez instantáneaRapidez instantáneaRapidez instantánea
v = dsdt
15
Prof. Ricardo Nitsche Corvalán

La figura superior muestra que las velocidades (instantáneas)velocidades (instantáneas)velocidades (instantáneas)velocidades (instantáneas) son vectores
que apuntan en la dirección del movimiento. Las razones de cambio respecto al
tiempo de la rapidez y la velocidad definen dos nuevas cantidades, la celeridadceleridadceleridadceleridad y
la aceleraciónaceleraciónaceleraciónaceleración .
Aceleración PromedioAceleración PromedioAceleración PromedioAceleración Promedio
→ ap =
→ �v�t
Aceleración InstantáneaAceleración InstantáneaAceleración InstantáneaAceleración Instantánea
→ a =
→ dvdt
Celeridad PromedioCeleridad PromedioCeleridad PromedioCeleridad Promedio
ap = �v�t
Celeridad instantáneaCeleridad instantáneaCeleridad instantáneaCeleridad instantánea
a = dvdt
La aceleraciónaceleraciónaceleraciónaceleración es por norma (como muestra la figura superior) un vector
que apunta hacia la concavidad de la curva, salvo que se trate de movimientos
rectilíneos o en puntos donde cambie la concavidad.
_______Nota: La división (razón de cambio) entre dos cantidades diferenciales es otra operaciónmatemática del calculo diferencial conocida como derivaciónderivaciónderivaciónderivación. Igualmente no forma parte de estecurso explicar cómo se calcula, más si entender el concepto, cuando hablamos de derivada,hablamos de división entre dos cantidades muy, pero muy, muy, muy pequeñas.
16
Prof. Ricardo Nitsche Corvalán

__________Importante:
Al igual que con la distancia y la magnitud del desplazamiento , rapidez promedio y las ú→ �r
magnitud de la velocidad promedio, así como la celeridad y la magnitud de la aceleración no sonnecesariamente iguales. Por lo general y ; pero en cantidades instantáneasvp ú
→ vp ap ú
→ ap
ocurre que y .v = → v a = →
a
________Nota: para calcular el promedio sume las tres cantidades y divida entre tres. No olvidar queunas cantidades son escalares y otras vectoriales
Ejercicios propuestos 4.3 Con los datos y resultados del problema 4.2;
Determinar:
a. la rapidez promedio y la velocidad promedio de cada cambio (0a1), (1a2)y (2a3); sabiendo que el tiempo de cada intervalo fue: 0,75 s; 0,50 s y0,25 s.
b. Promedie las tres rapidez y las velocidades anteriores.
c. La rapidez promedio y velocidad promedio total (0 a3); y compareresultados.
¿Qué concluye? ¿Qué concluye? ¿Qué concluye? ¿Qué concluye?
17
Prof. Ricardo Nitsche Corvalán