tecnologia de control i robòtica (i)
TRANSCRIPT
INS Lluís Domènech i MontanerDepartament de Tecnologies
Professor: Enric Abadal
La tecnologia de control abasta tots els
procediments i dispositius que permeten
automatitzar les màquines i els processos.
Un sistema automàtic té per objectiuaconseguir que una màquina o un procés faciles seves funcions reduint al mínim laintervenció humana, tant física com mental.
Hi ha sistemes semiautomàtics, en els qualscal la intervenció humana en alguna de lesaccions que fa la màquina o el procés.
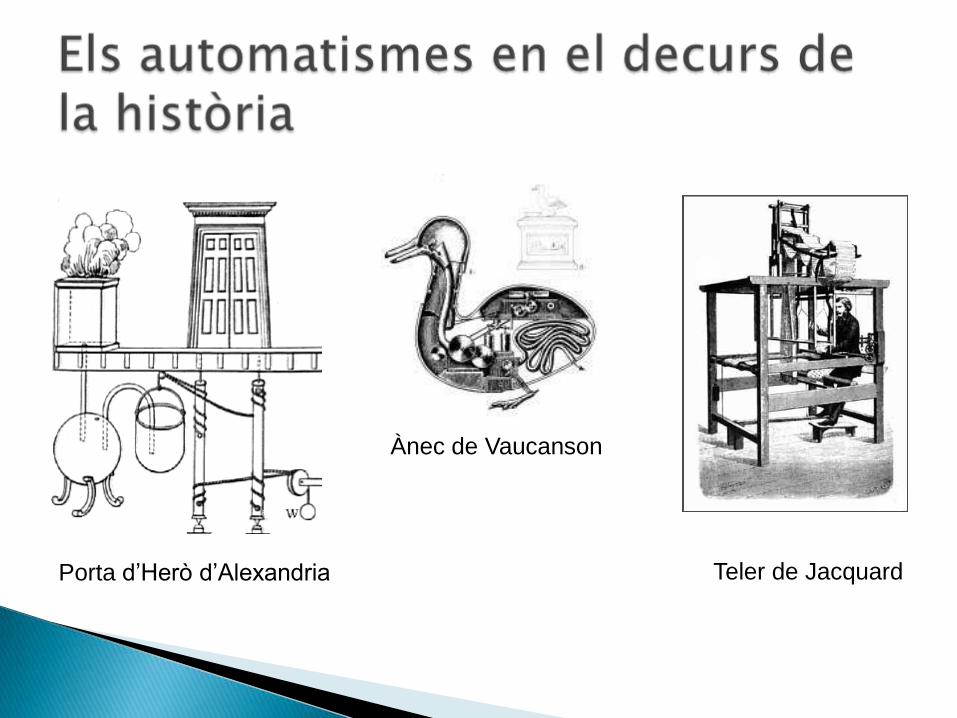
Porta d’Herò d’Alexandria
Ànec de Vaucanson
Teler de Jacquard
El terme robot prové d’unes màquines esclavesdels homes que apareixien a l’obra Rossum’sUniversal Robots, de l’autor txec Karel Capek,representada al teatre l’any 1920, moment a partirdel qual es va estendre l’ús del mot.
En txec, la paraula robot vol dir “treballador”.
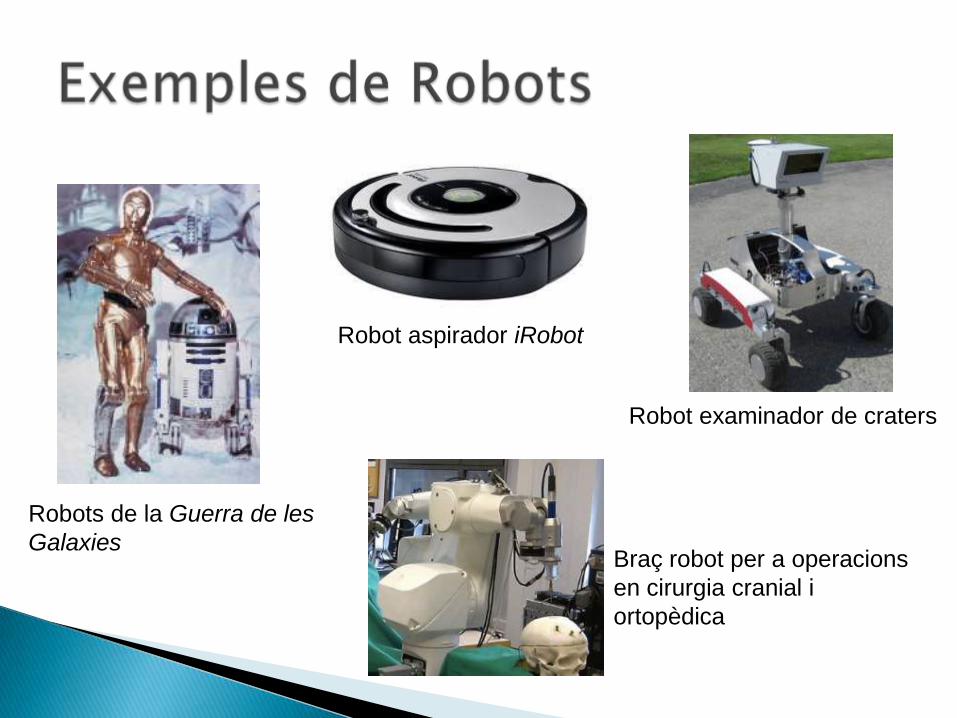
Robots de la Guerra de les
Galaxies
Robot aspirador iRobot
Robot examinador de craters
Braç robot per a operacions
en cirurgia cranial i
ortopèdica
7
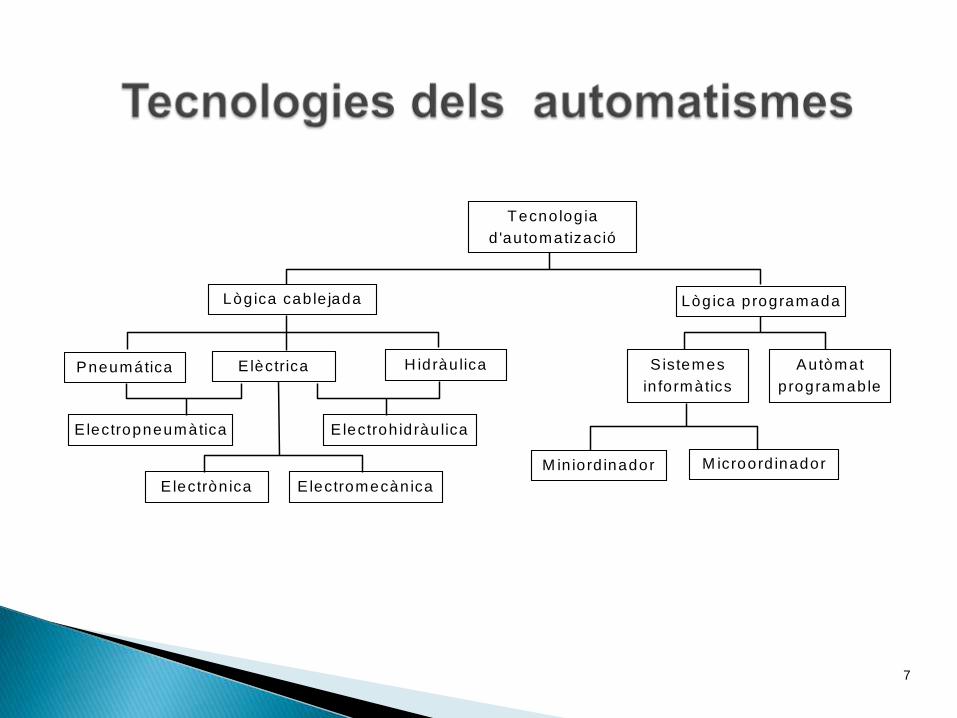
Tecnolog ia
d 'automatizació
Lògica cab le jada Lòg ica programada
Elèctrica Pneumática H idràu lica
Electromecànica Electròn ica
Sistemes
in formàtics
M in iord inador M icroord inador
Autòmat
programable
Electropneumàtica Electroh idràu lica
8
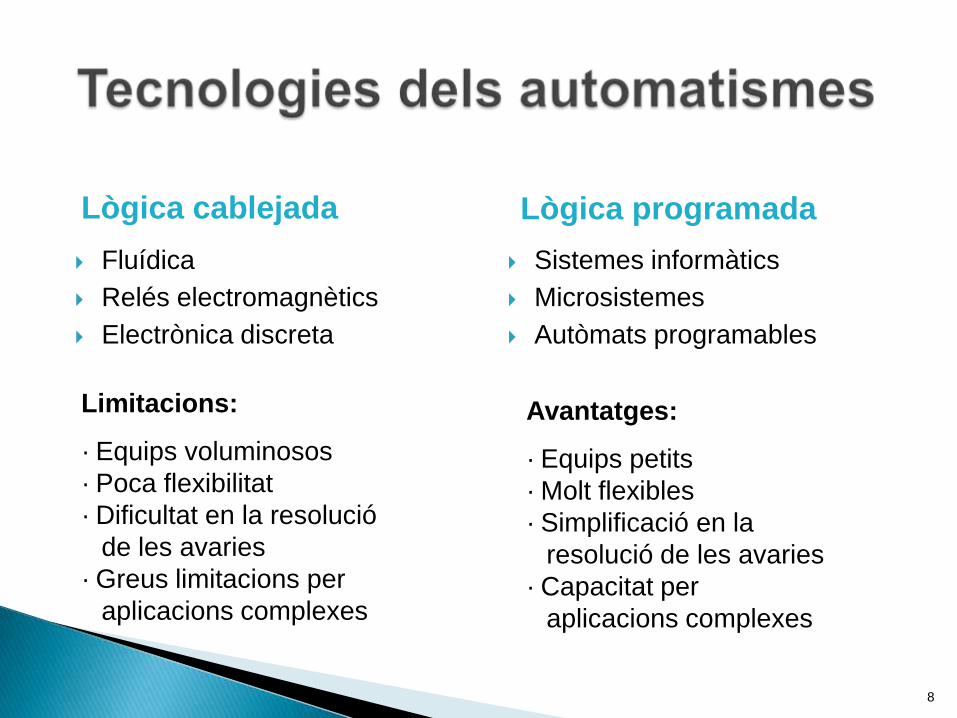
Fluídica
Relés electromagnètics
Electrònica discreta
Sistemes informàtics
Microsistemes
Autòmats programables
Lògica cablejada Lògica programada
Limitacions:
· Equips voluminosos
· Poca flexibilitat
· Dificultat en la resolució
de les avaries
· Greus limitacions per
aplicacions complexes
Avantatges:
· Equips petits
· Molt flexibles
· Simplificació en la
resolució de les avaries
· Capacitat per
aplicacions complexes
9
Senyal digital
Una informació digital consisteix en
la presència o l’absència d'un
esdeveniment.
Si el senyal és present
l'identificarem amb un 1 i si no hi ha
senyal se li atorga el valor 0.
Una altra forma d'indicar-ho seria tot-
res.
Exemples: bombeta (encesa-
apagada), interruptor (obert-tancat)...
Senyal analògic
Variable que pot prendre qualsevol
valor dins d'un rang fixat prèviament,
dins una escala continua.
Exemples: temperatura, pressió,
tensió, distància...
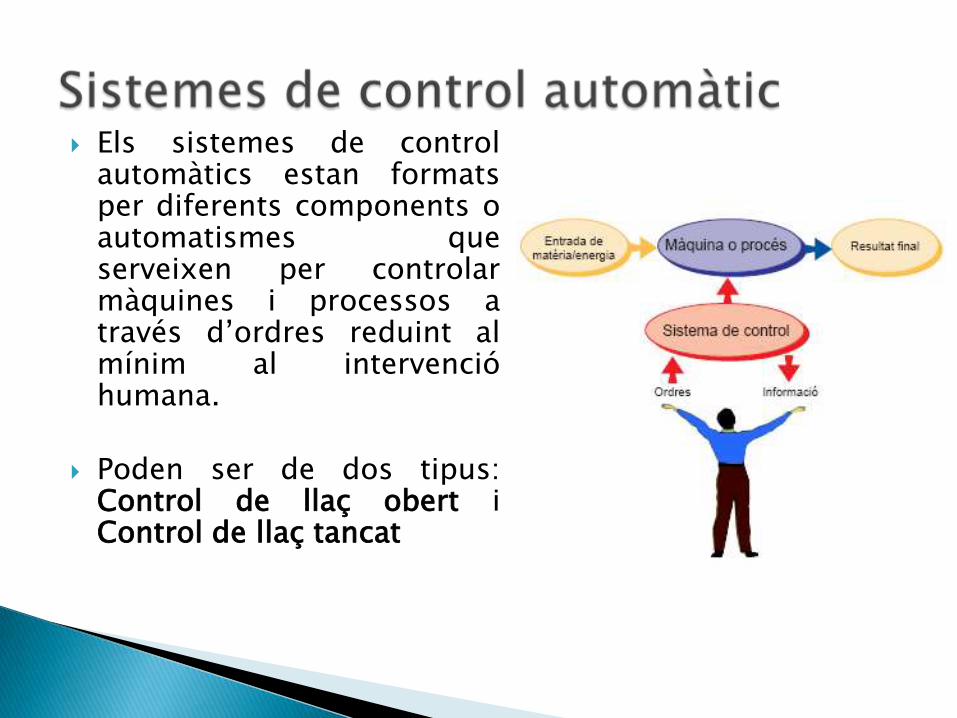
Els sistemes de controlautomàtics estan formatsper diferents components oautomatismes queserveixen per controlarmàquines i processos através d’ordres reduint almínim al intervencióhumana.
Poden ser de dos tipus:Control de llaç obert iControl de llaç tancat
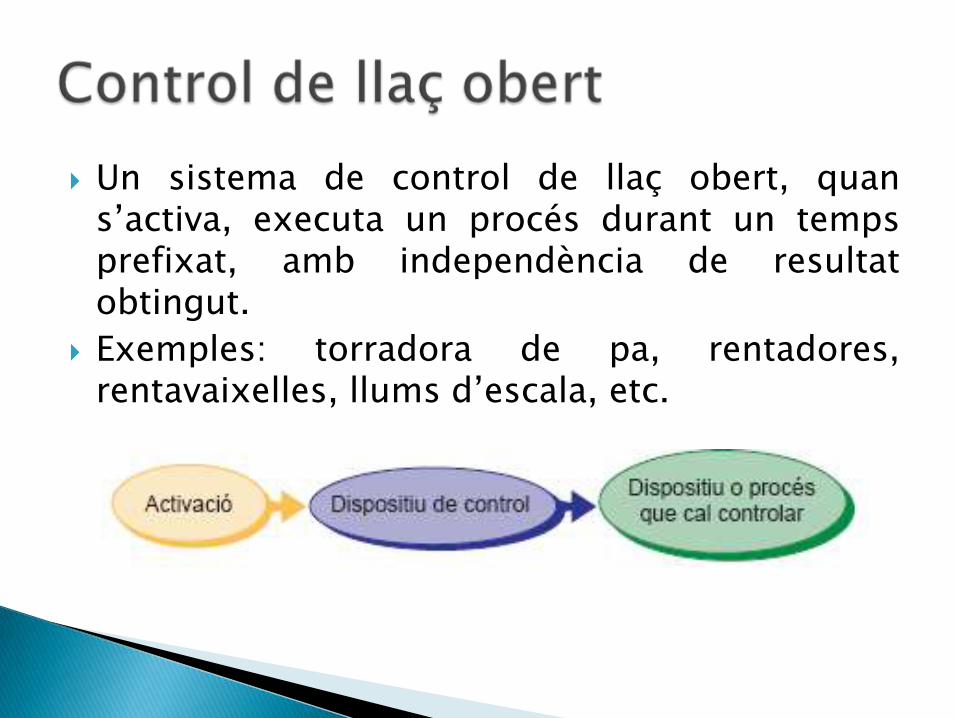
Un sistema de control de llaç obert, quans’activa, executa un procés durant un tempsprefixat, amb independència de resultatobtingut.
Exemples: torradora de pa, rentadores,rentavaixelles, llums d’escala, etc.
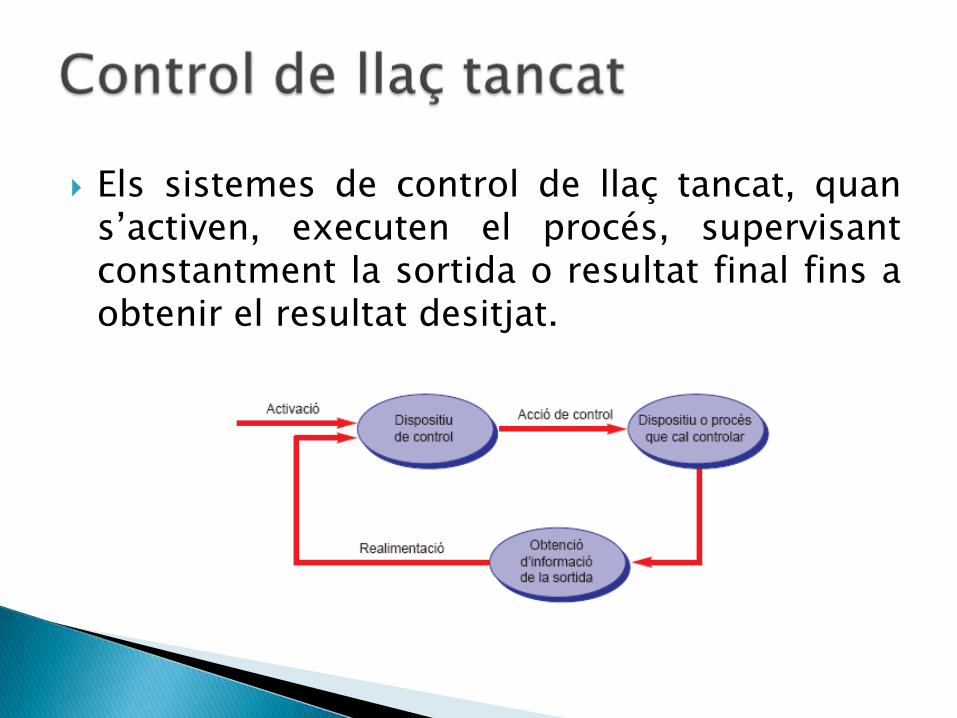
Els sistemes de control de llaç tancat, quans’activen, executen el procés, supervisantconstantment la sortida o resultat final fins aobtenir el resultat desitjat.
La consigna és el valor de referència que esdesitja obtenir com a resultat de l’acció.
La realimentació consisteix en mantenir lamàquina o el procés activats mentre lasortida o resultat final no sigui l’establert a laconsigna.
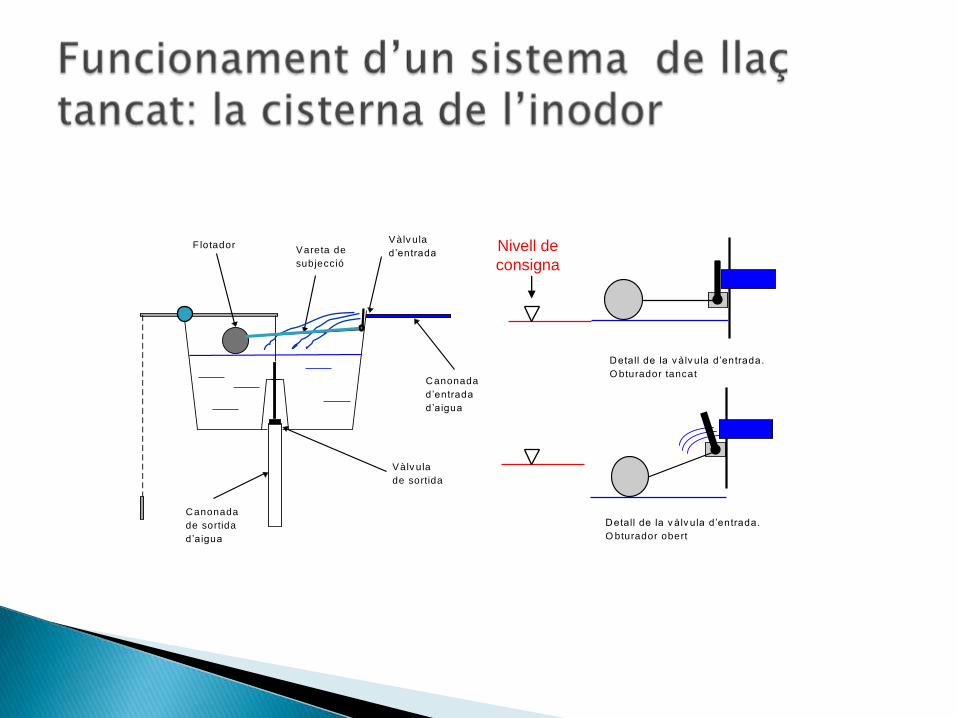
F lotadorVareta de
subjecció
Vàlv ula
d’entrada
Canonada
d’entrada
d’aigua
Canonada
de sortida
d’aigua
Vàlv ula
de sortida
Detall de la v àlv ula d’entrada.
O bturador tancat
Detall de la v àlv ula d’entrada.
O bturador obert
Nivell de
consigna
Calefacció o aire condicionat amb termòstat.
Cisterna del wàter.
Llums d’escala amb sensors de presència.
Portes automàtiques
Alarmes.
La marieta !!!
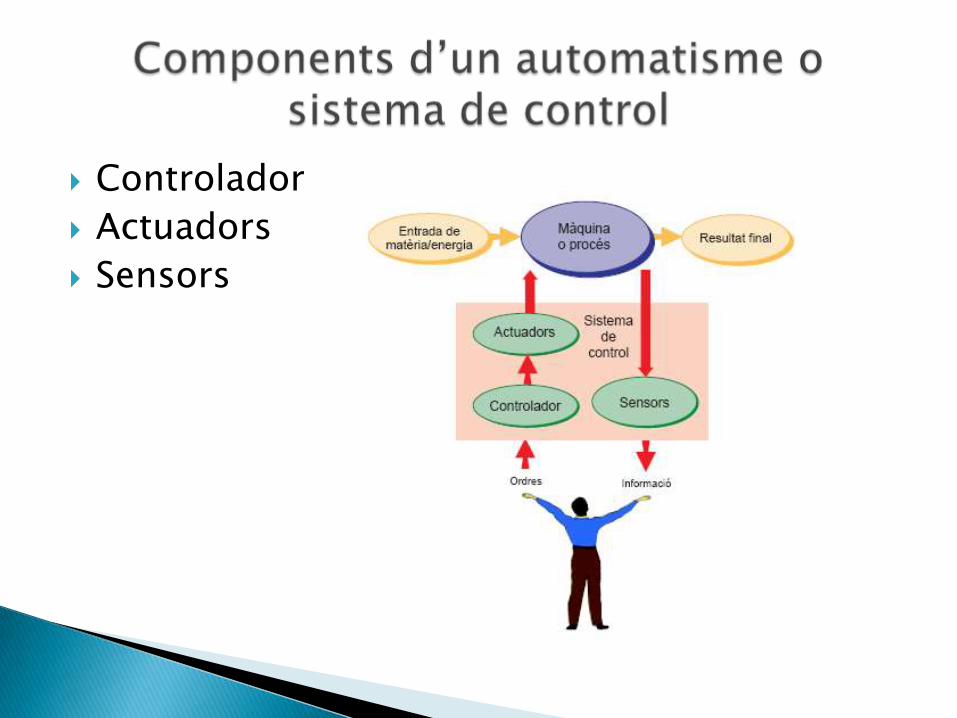
Controlador
Actuadors
Sensors
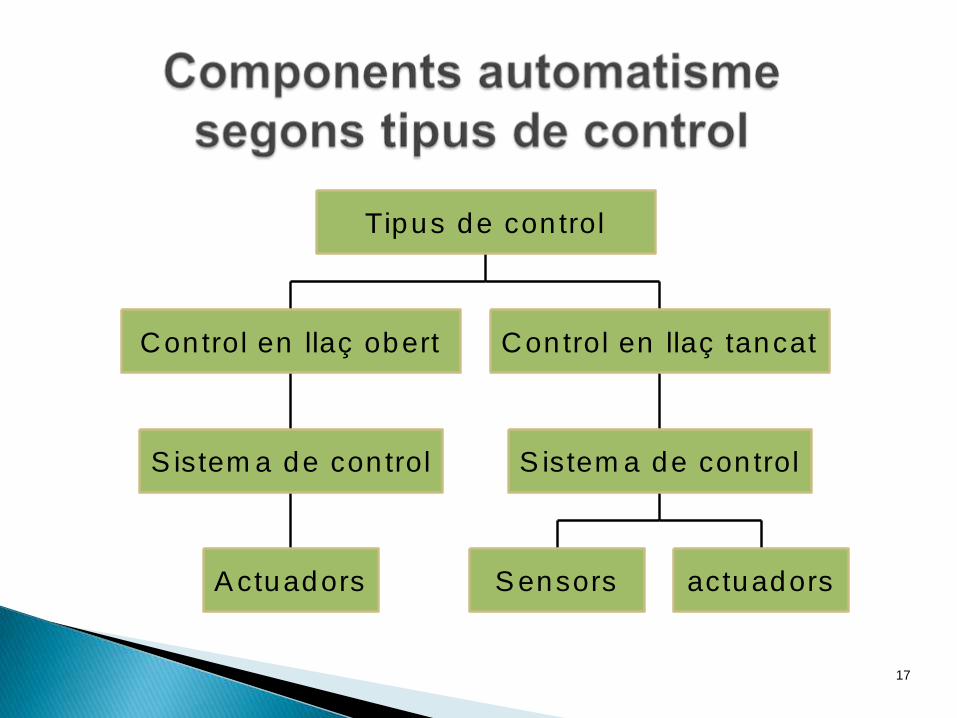
A ctuadors
S istem a de con trol
Con trol en llaç obert
S ensors actuadors
S istem a de con trol
Con trol en llaç tancat
Tipus de con trol
17
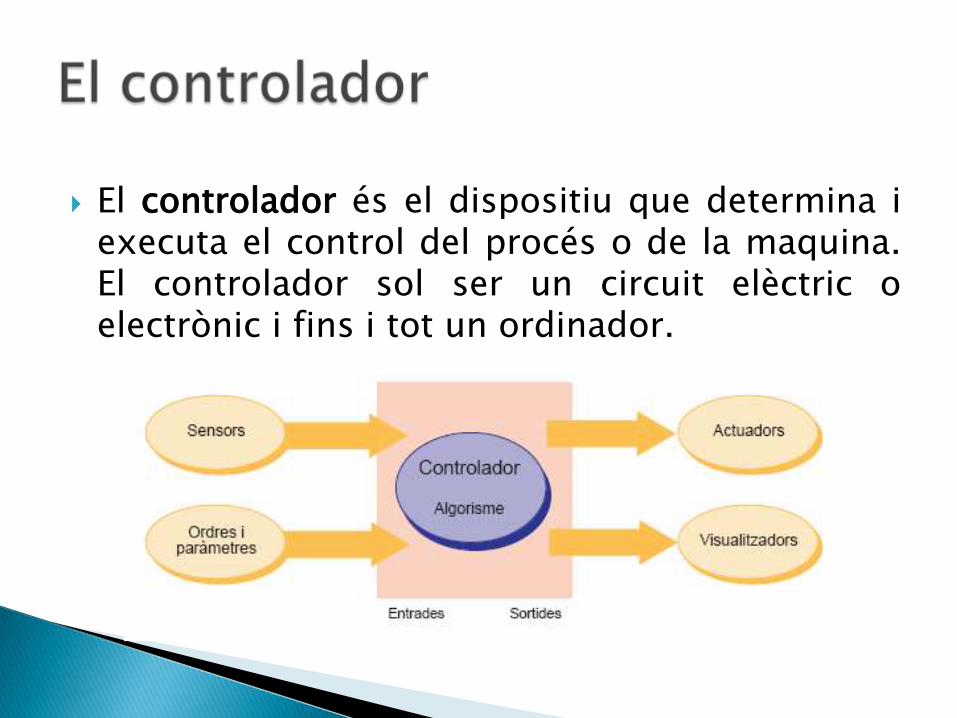
El controlador és el dispositiu que determina iexecuta el control del procés o de la maquina.El controlador sol ser un circuit elèctric oelectrònic i fins i tot un ordinador.

Conjunt de passos o instruccions quecontenen les accions a efectuar sobre elsactuadors per controlar el procés o lamàquina, segons la informació subministradapels sensors.
Si el controlador és un ordinador, l’algorismede control és el programa.
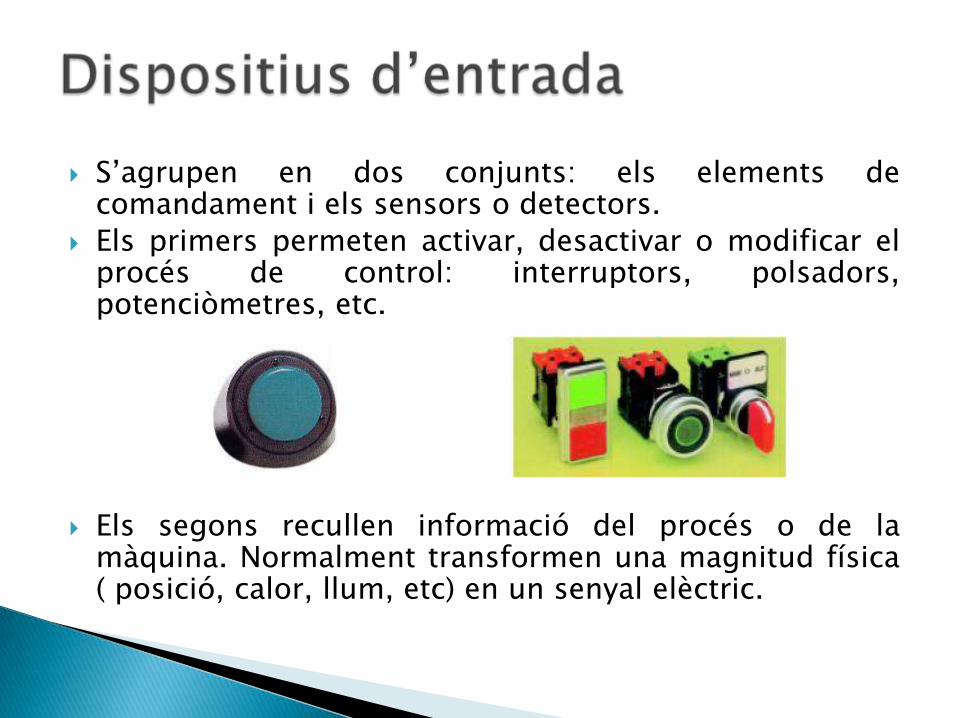
S’agrupen en dos conjunts: els elements decomandament i els sensors o detectors.
Els primers permeten activar, desactivar o modificar elprocés de control: interruptors, polsadors,potenciòmetres, etc.
Els segons recullen informació del procés o de lamàquina. Normalment transformen una magnitud física( posició, calor, llum, etc) en un senyal elèctric.

Els sensors són dispositius que prenen dadesde la situació del procés (posició, temperatura,etc.) i les transmeten al controlador. Sóndispositius d’entrada.
Detector o sensor
de fums Detectors de presènciaDetector fotoelèctric
23
Detector de proximitat Fotoelèctric
Detector de proximitat Inductiu
Detector de proximitat Capacitiu
Característiques dels sensors de proximitat:
· Sense manteniment i resistents al desgast
· No hi ha contacte físic
· Sense contacte, i per tant lliures de rebots
· Alta freqüència operativa
· Es poden instal·lar en qualsevol posició
· Temps de vida independent de la freqüència operativa
· Insensibles a les vibracions
· Insensibles a l'acumulació de pols
· Estancs a l'aigua
· Molt resistents als productes químics
24
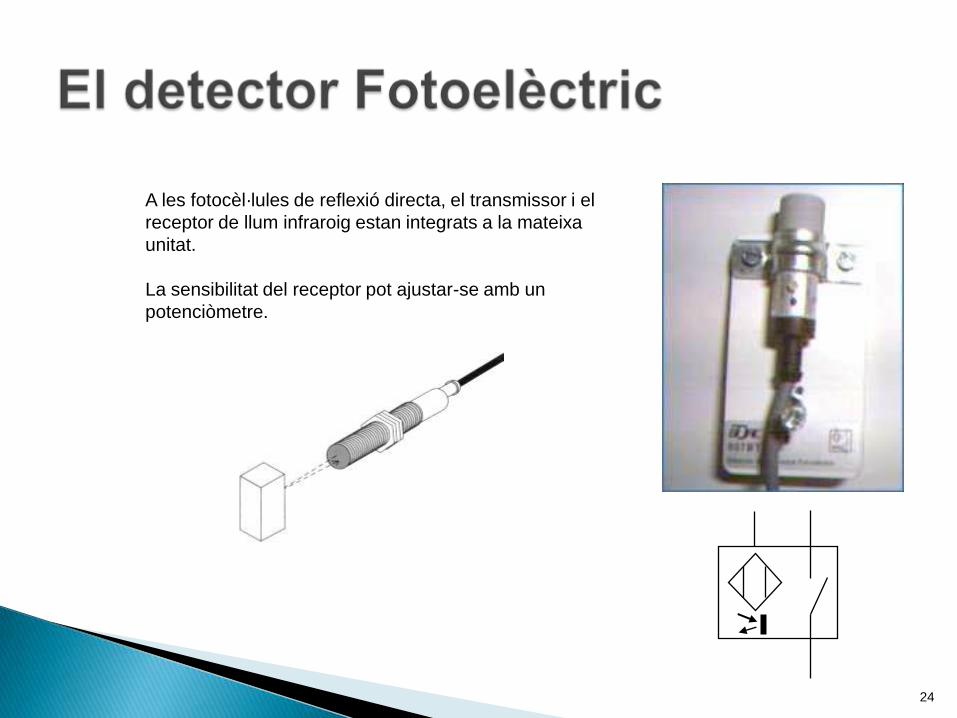
A les fotocèl·lules de reflexió directa, el transmissor i el
receptor de llum infraroig estan integrats a la mateixa
unitat.
La sensibilitat del receptor pot ajustar-se amb un
potenciòmetre.
25
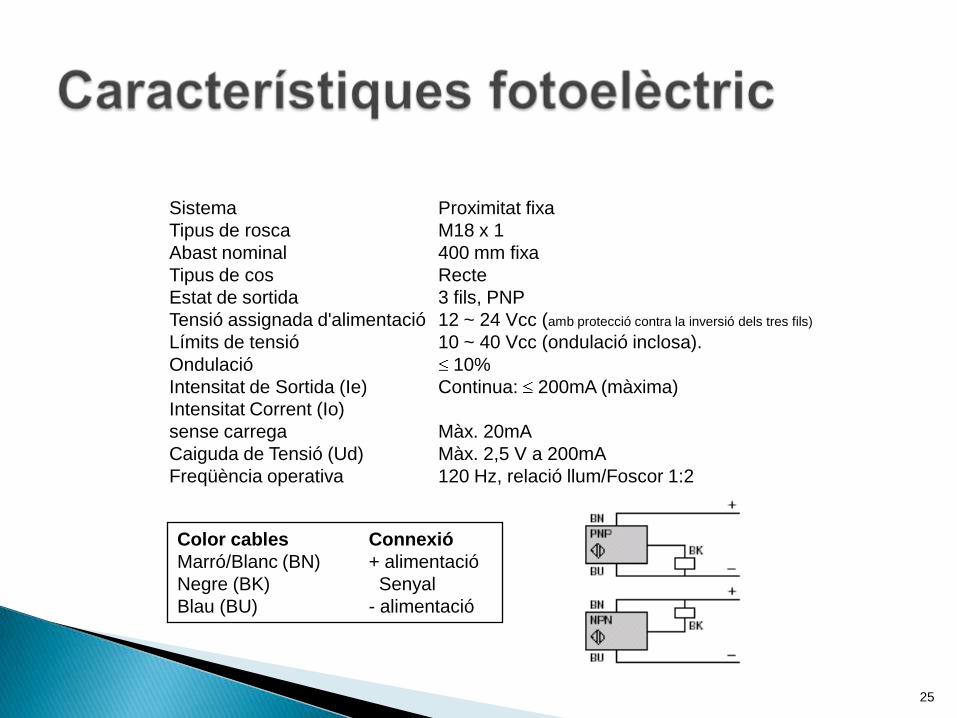
Sistema Proximitat fixa
Tipus de rosca M18 x 1
Abast nominal 400 mm fixa
Tipus de cos Recte
Estat de sortida 3 fils, PNP
Tensió assignada d'alimentació 12 ~ 24 Vcc (amb protecció contra la inversió dels tres fils)
Límits de tensió 10 ~ 40 Vcc (ondulació inclosa).
Ondulació 10%
Intensitat de Sortida (Ie) Continua: 200mA (màxima)
Intensitat Corrent (Io)
sense carrega Màx. 20mA
Caiguda de Tensió (Ud) Màx. 2,5 V a 200mA
Freqüència operativa 120 Hz, relació llum/Foscor 1:2
Color cables Connexió
Marró/Blanc (BN) + alimentació
Negre (BK) Senyal
Blau (BU) - alimentació
26
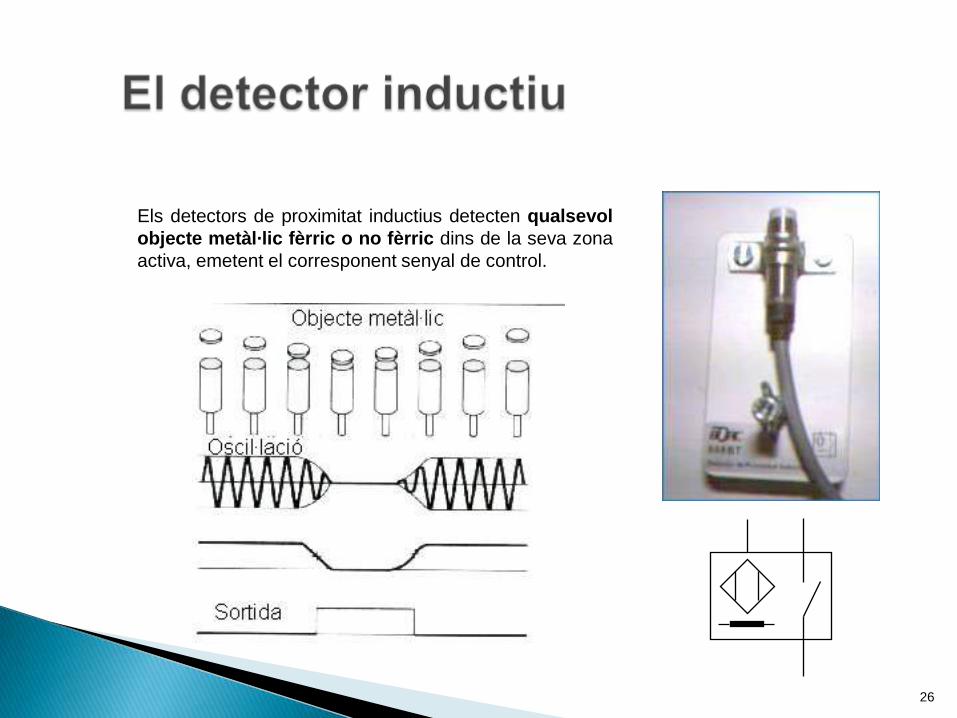
Els detectors de proximitat inductius detecten qualsevol
objecte metàl·lic fèrric o no fèrric dins de la seva zona
activa, emetent el corresponent senyal de control.
27
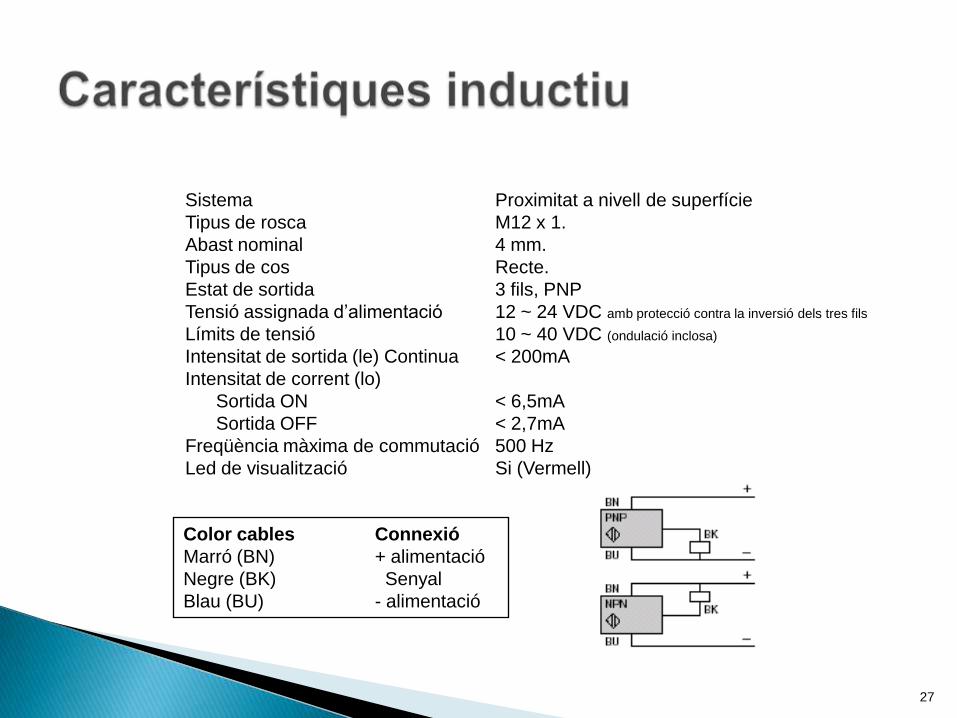
Sistema Proximitat a nivell de superfície
Tipus de rosca M12 x 1.
Abast nominal 4 mm.
Tipus de cos Recte.
Estat de sortida 3 fils, PNP
Tensió assignada d’alimentació 12 ~ 24 VDC amb protecció contra la inversió dels tres fils
Límits de tensió 10 ~ 40 VDC (ondulació inclosa)
Intensitat de sortida (le) Continua < 200mA
Intensitat de corrent (lo)
Sortida ON < 6,5mA
Sortida OFF < 2,7mA
Freqüència màxima de commutació 500 Hz
Led de visualització Si (Vermell)
Color cables Connexió
Marró (BN) + alimentació
Negre (BK) Senyal
Blau (BU) - alimentació
28
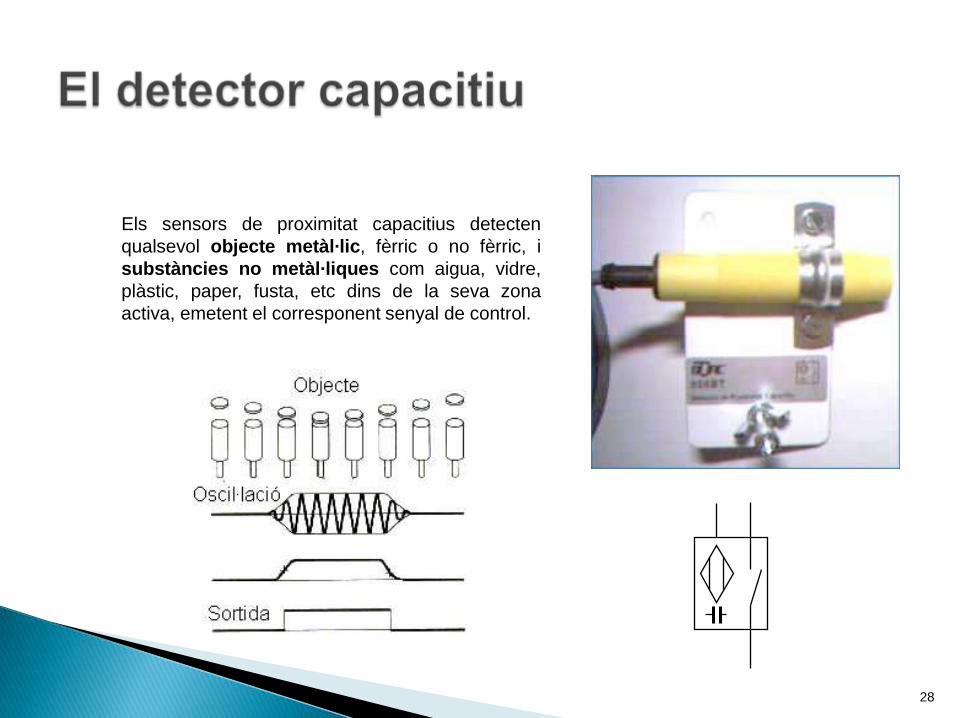
Els sensors de proximitat capacitius detecten
qualsevol objecte metàl·lic, fèrric o no fèrric, i
substàncies no metàl·liques com aigua, vidre,
plàstic, paper, fusta, etc dins de la seva zona
activa, emetent el corresponent senyal de control.
29
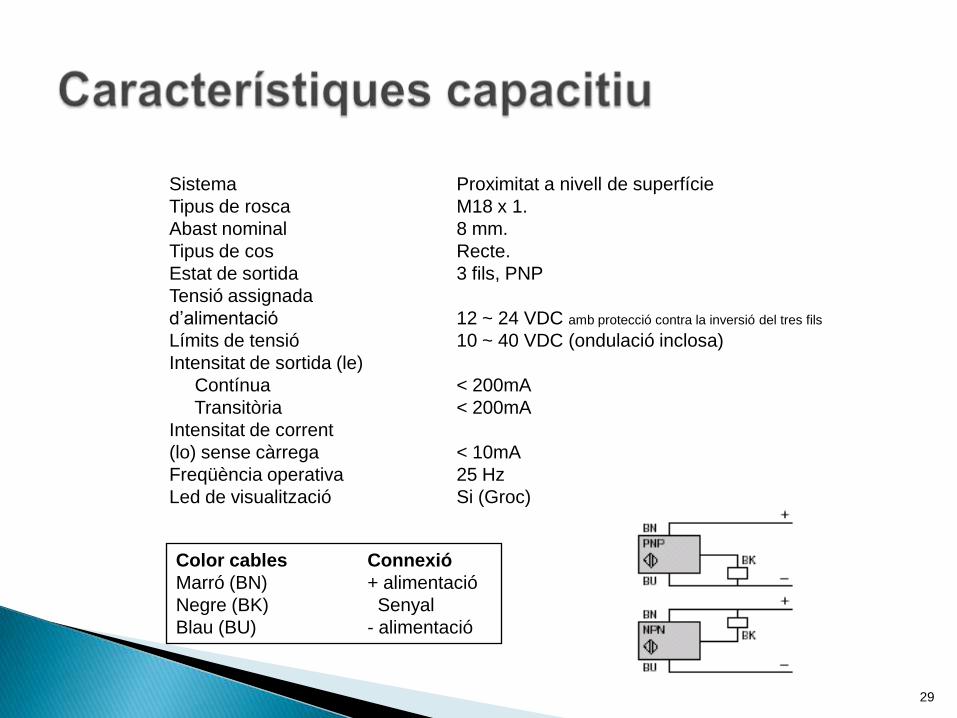
Color cables Connexió
Marró (BN) + alimentació
Negre (BK) Senyal
Blau (BU) - alimentació
Sistema Proximitat a nivell de superfície
Tipus de rosca M18 x 1.
Abast nominal 8 mm.
Tipus de cos Recte.
Estat de sortida 3 fils, PNP
Tensió assignada
d’alimentació 12 ~ 24 VDC amb protecció contra la inversió del tres fils
Límits de tensió 10 ~ 40 VDC (ondulació inclosa)
Intensitat de sortida (le)
Contínua < 200mA
Transitòria < 200mA
Intensitat de corrent
(lo) sense càrrega < 10mA
Freqüència operativa 25 Hz
Led de visualització Si (Groc)
30
Informacions útils per
aprofitar-ne o construir-ne
de nous.
31
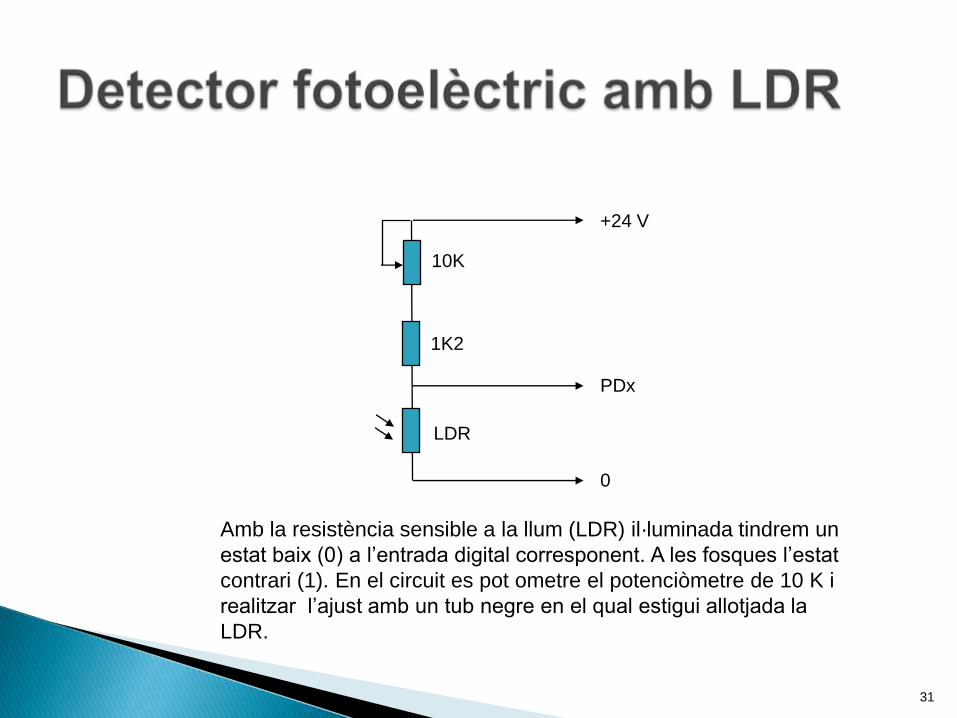
0
PDx
+24 V
LDR
1K2
10K
Amb la resistència sensible a la llum (LDR) il·luminada tindrem un
estat baix (0) a l’entrada digital corresponent. A les fosques l’estat
contrari (1). En el circuit es pot ometre el potenciòmetre de 10 K i
realitzar l’ajust amb un tub negre en el qual estigui allotjada la
LDR.
32
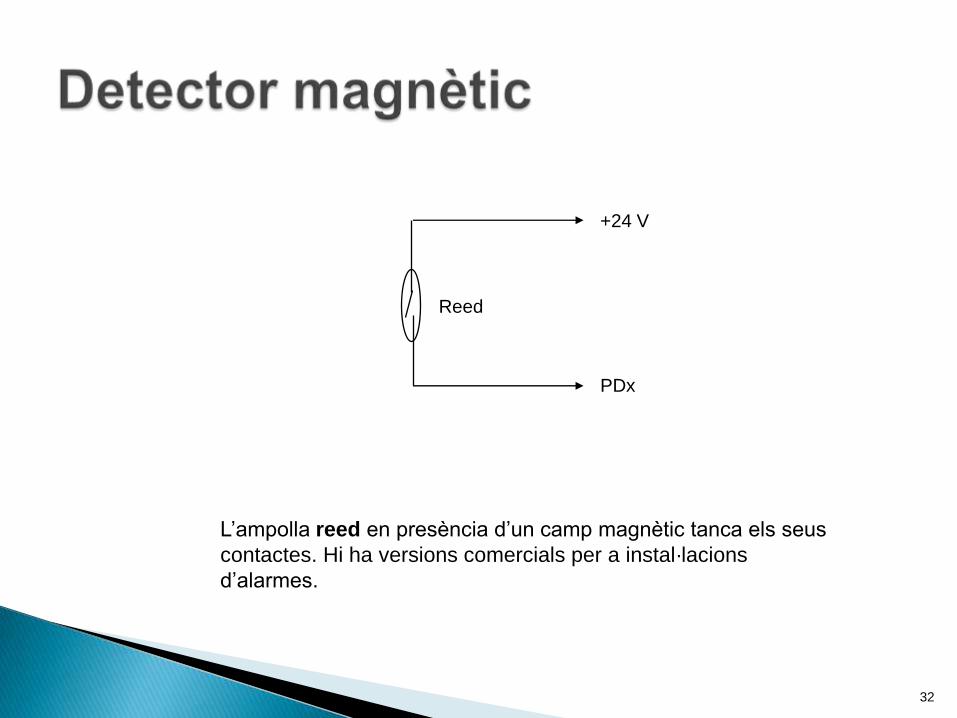
PDx
+24 V
Reed
L’ampolla reed en presència d’un camp magnètic tanca els seus
contactes. Hi ha versions comercials per a instal·lacions
d’alarmes.
33
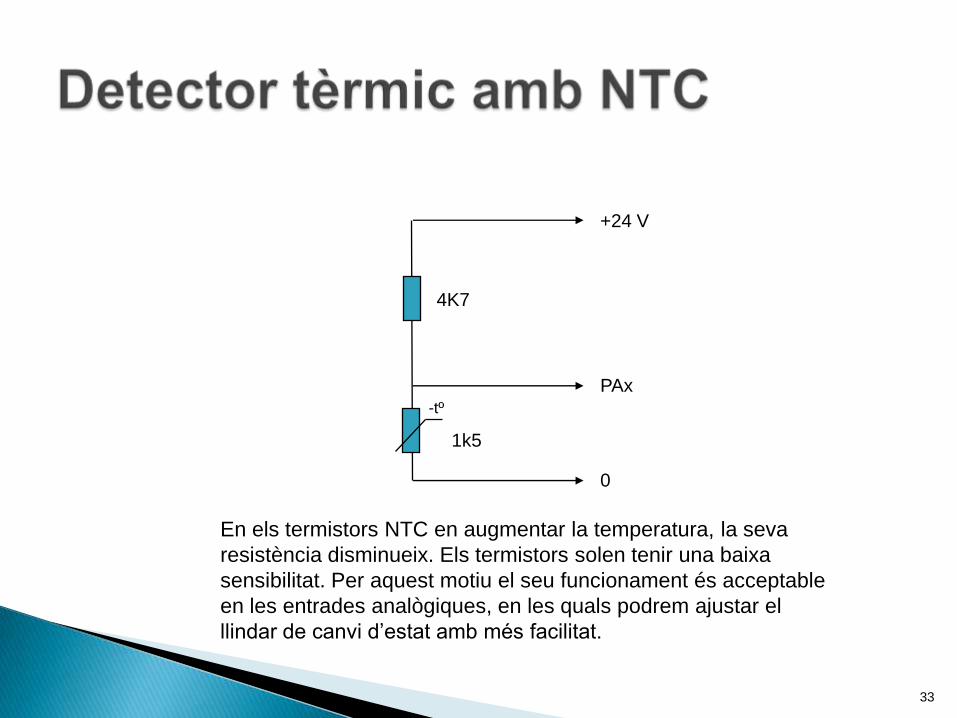
0
PAx
+24 V
1k5
4K7
En els termistors NTC en augmentar la temperatura, la seva
resistència disminueix. Els termistors solen tenir una baixa
sensibilitat. Per aquest motiu el seu funcionament és acceptable
en les entrades analògiques, en les quals podrem ajustar el
llindar de canvi d’estat amb més facilitat.
-tº

Els actuadors, els presentadors de informació ovisualitzadors i els indicadors acústics, són dispositiusde sortida.
Pantalles, indicadors lluminosos (Led’s), rellotgesanalògics o digitals, timbres, brunzidors, etc. formenels dispositius de sortida, a més dels actuadors.

Els actuadors són els elements finals del procés i sónels que provoquen el resultat a la sortida: motors,resistències calefactores, equips de refrigeració,cilindres pneumàtics o hidràulics. Són dispositius de
sortida.
El controlador: és un circuit integrat.

Són sensor de posició. .
Quan el robot troba un obstacle els detectorsn’informen al controlador.
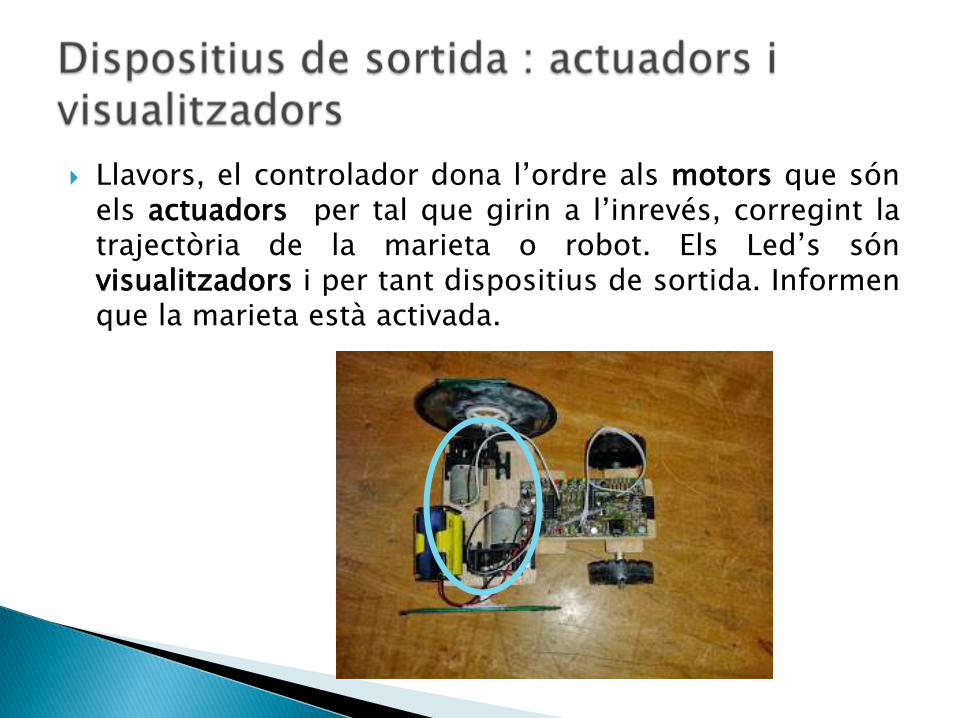
Llavors, el controlador dona l’ordre als motors que sónels actuadors per tal que girin a l’inrevés, corregint latrajectòria de la marieta o robot. Els Led’s sónvisualitzadors i per tant dispositius de sortida. Informenque la marieta està activada.
El cotxe robot du un control de llaç obert o de llaç tancat?
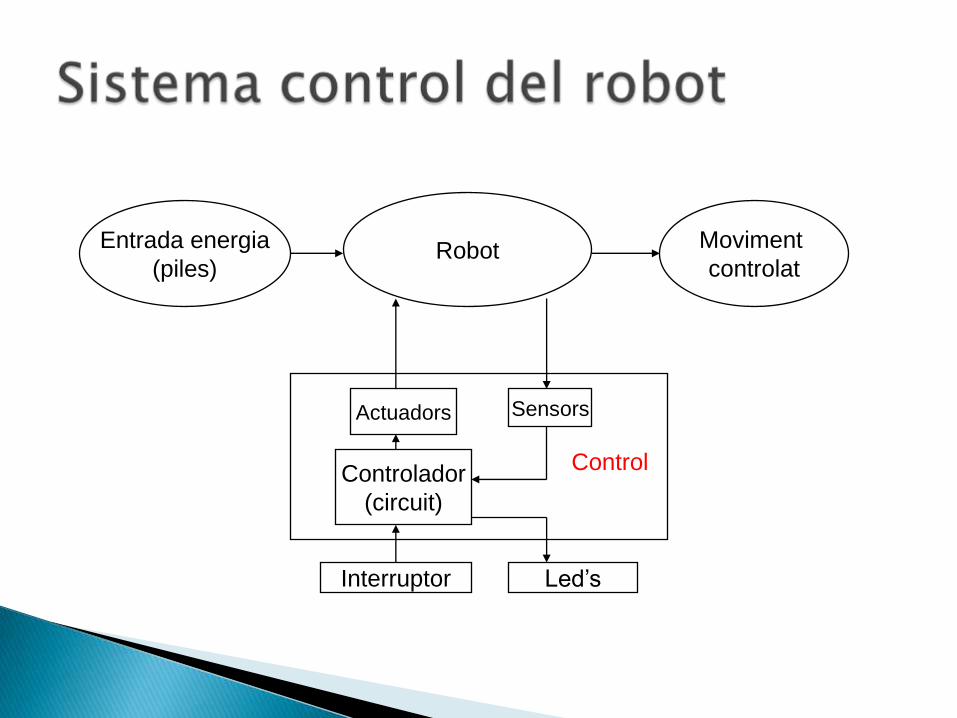
Entrada energia
(piles)Robot Moviment
controlat
Controlador
(circuit)
SensorsActuadors
Control
Interruptor Led’s
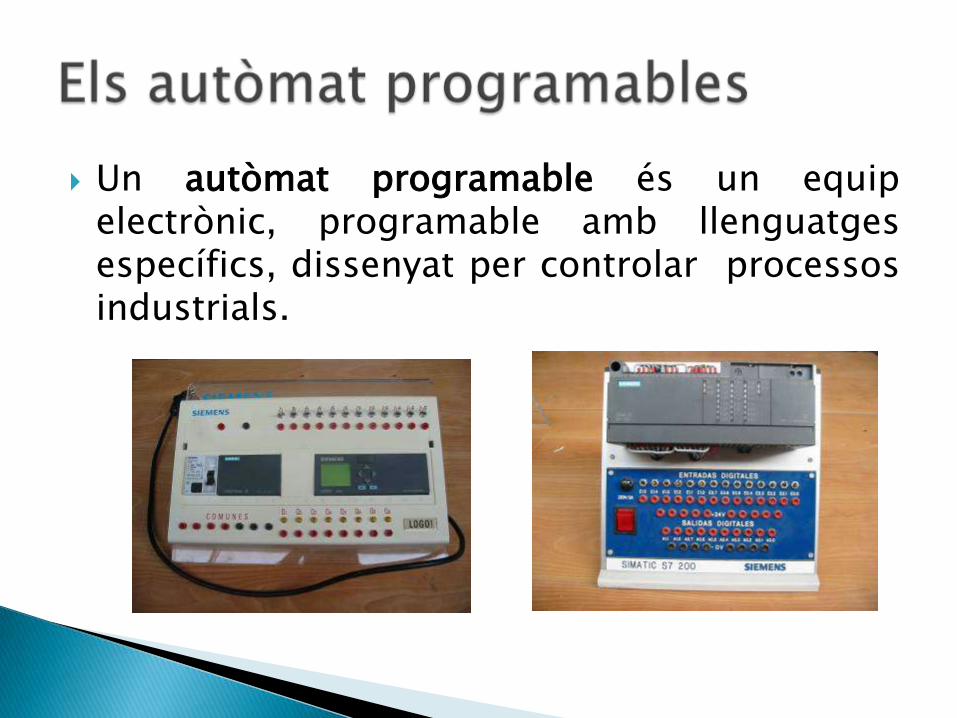
Un autòmat programable és un equipelectrònic, programable amb llenguatgesespecífics, dissenyat per controlar processosindustrials.
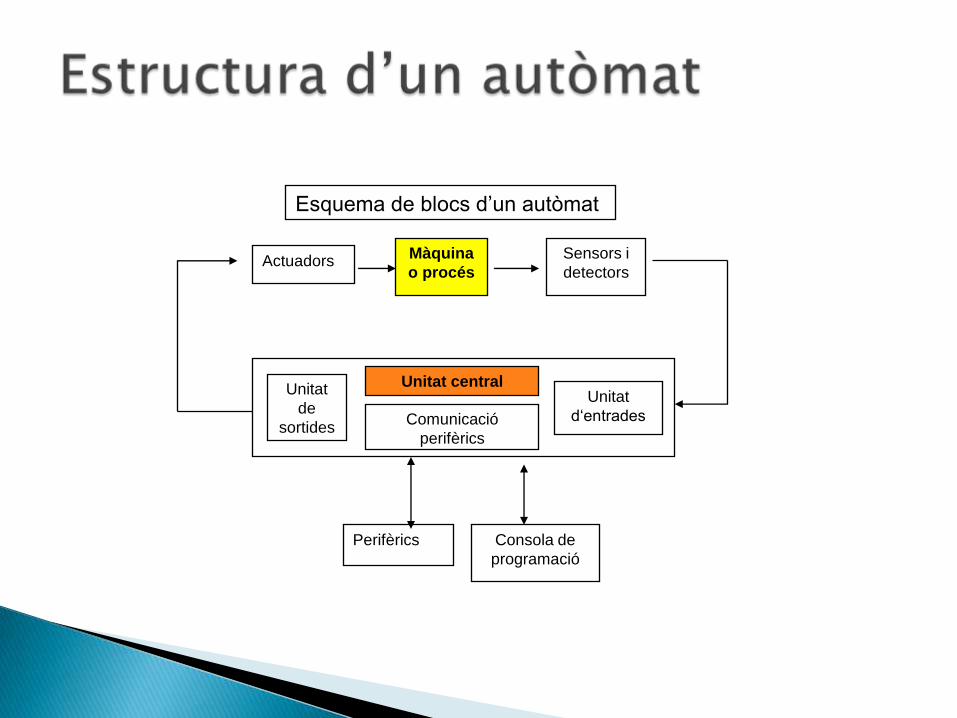
Esquema de blocs d’un autòmat
Unitat
d‘entrades
Unitat centralUnitat
de
sortidesComunicació
perifèrics
Sensors i
detectorsActuadors
Màquina
o procés
Perifèrics Consola de
programació
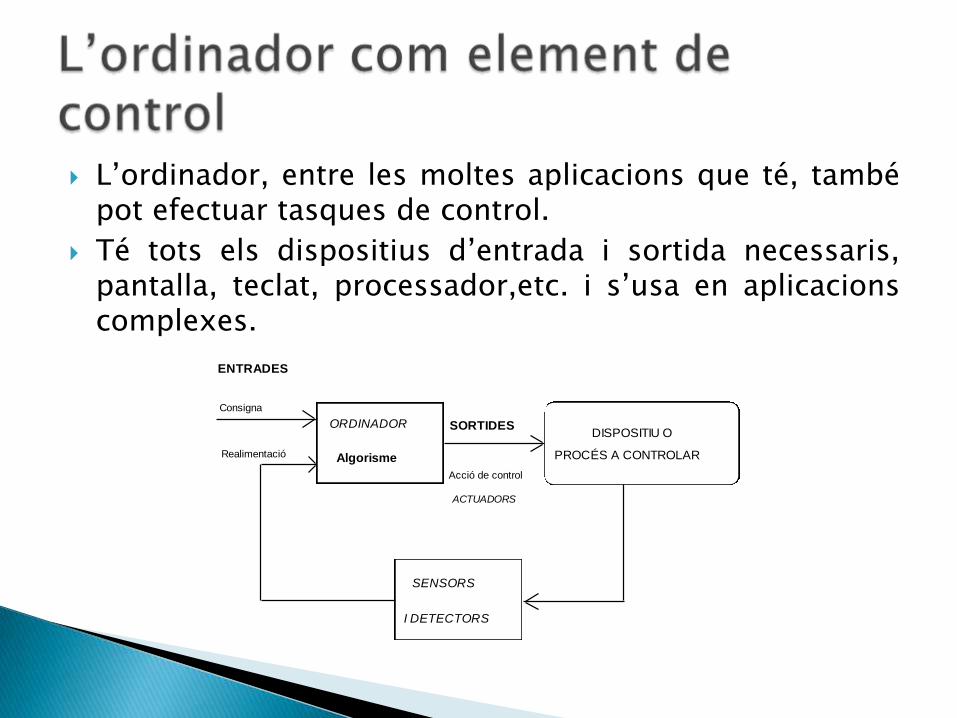
L’ordinador, entre les moltes aplicacions que té, tambépot efectuar tasques de control.
Té tots els dispositius d’entrada i sortida necessaris,pantalla, teclat, processador,etc. i s’usa en aplicacionscomplexes.
ENTRADES
SORTIDESDISPOSITIU O
PROCÉS A CONTROLAR
ORDINADOR
Consigna
Realimentació
SENSORS
I DETECTORS
Acció de control
ACTUADORS
Algorisme
Per a poder comunicar-se amb els dispositiusd’entrada i de sortida i controlar-los,l’ordinador necessita un circuit electrònicintermedi, la interfície electrònica de control
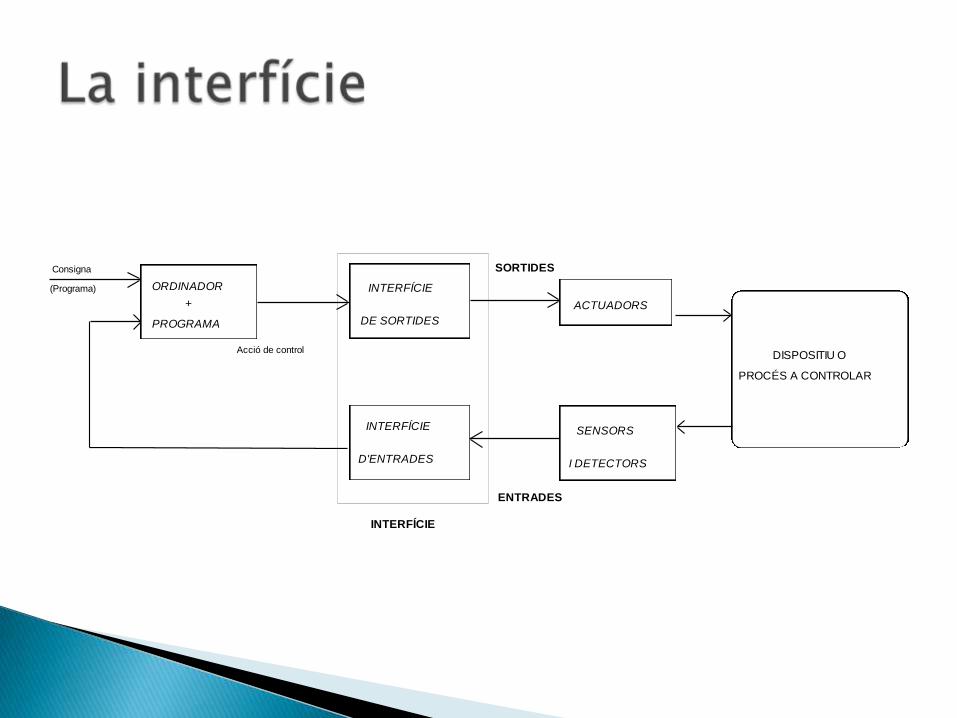
ENTRADES
SORTIDES
DISPOSITIU O
PROCÉS A CONTROLAR
ORDINADOR
Consigna
SENSORS
I DETECTORS
Acció de control
INTERFÍCIE
D'ENTRADES
INTERFÍCIE
DE SORTIDESPROGRAMA
+
(Programa)
ACTUADORS
INTERFÍCIE
La comunicació entre l’ordinador i la interfíciees realitza a través d’un llenguatge deprogramació amb el que s’escriu el programa.
Els llenguatges més utilitzats són llenguatgesd’alt nivell com ara el Visual Basic, el Logo, elC++, el Pascal, etc..
El programa conté l’algorisme de control.
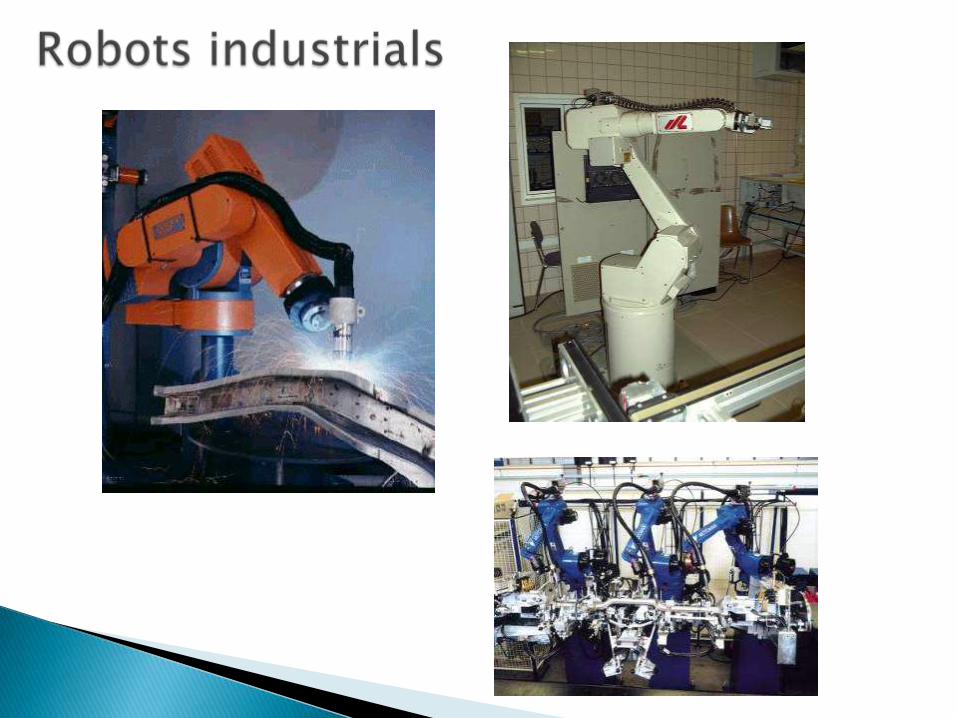
Els manipuladors, són braços articulats que nopermeten la realització simultània demoviments. S’usen en tasques senzilles decàrrega i descàrrega.
Els robots industrials en canvi, poden efectuarmoviments complexos i es controlen perordinador. S’usen molt a la indústria perefectuar operacions perilloses i/o repetitivescom la soldadura, el muntatge, la pintura, etc.
L’arquitectura dels robots i manipuladors esrefereix a les formes constructives dels robots ia les seves capacitats de mobilitat (moviment).
El més important són els graus de llibertat omoviments que pot efectuar l’element terminal,que és on se situa l’eina o dispositiu acontrolar.
Els graus de llibertat depenen de coms’enllacen els diferents elements (articulacions)i de l’estructura.
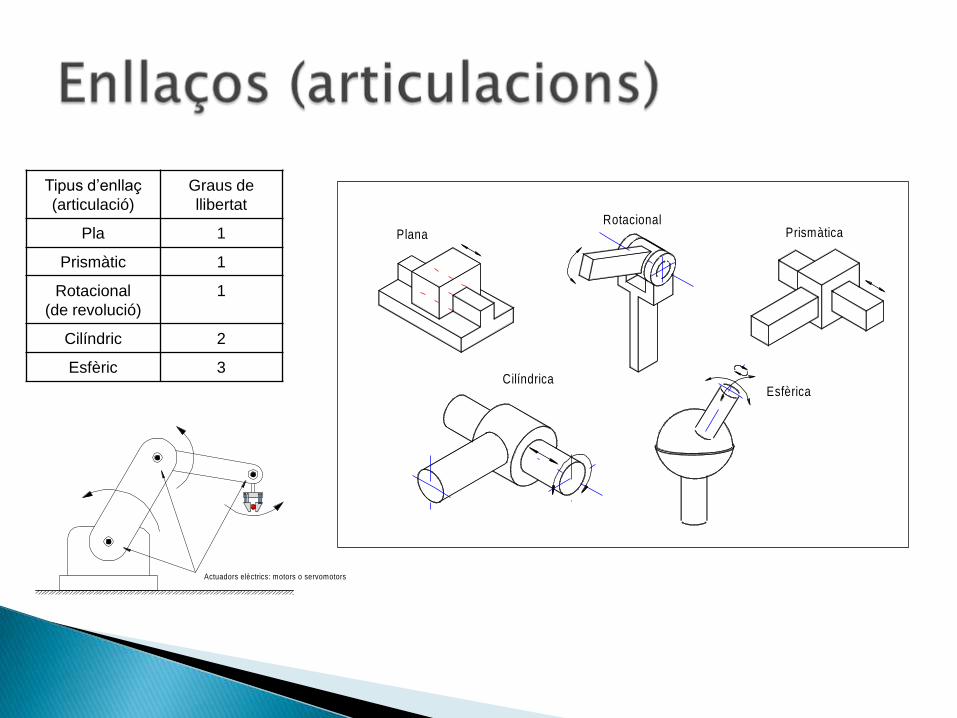
Actuadors elèctrics: motors o servomotors
Tipus d’enllaç
(articulació)
Graus de
llibertat
Pla 1
Prismàtic 1
Rotacional
(de revolució)
1
Cilíndric 2
Esfèric 3
PlanaRotacional
Prismàtica
CilíndricaEsfèrica
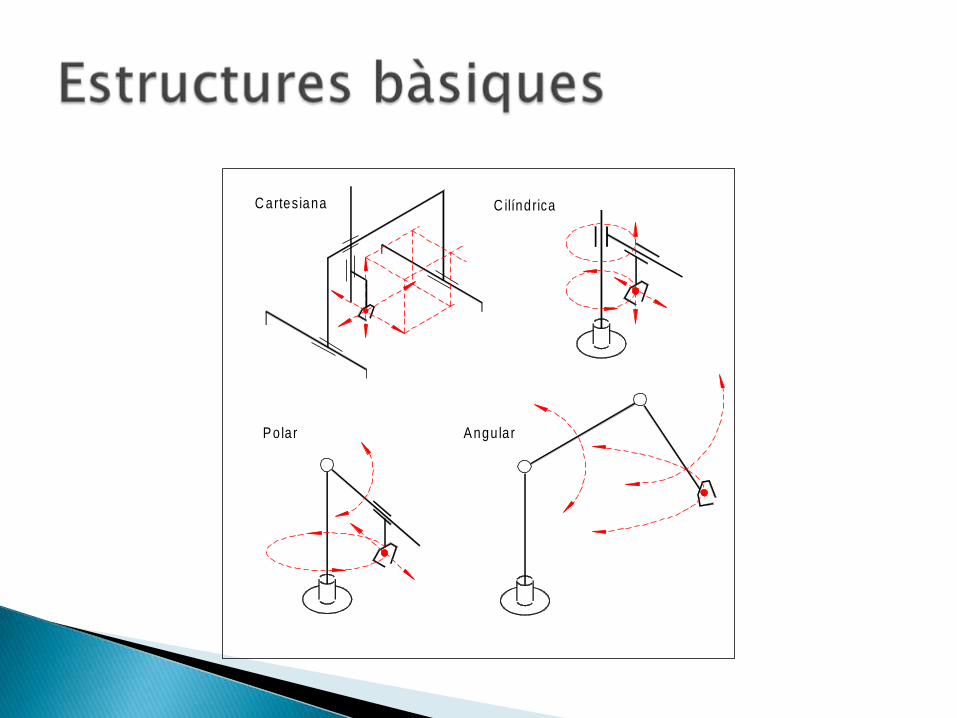
C artesiana C ilíndrica
Polar Angu lar
El robot amb estructura cartesiana es pot mourelinealment en tres eixos, totes les articulacions sónprismàtiques. L’espai de treball de l’element terminal seràun volum paral·lelepipèdic.
El robot amb estructura cilíndrica substitueix el movimentlineal sobre la base per un moviment giratori, aleshoresdisposa de dues articulacions prismàtiques i una derotacional. L’espai de treball de l’element terminal serà unvolum cilíndric.
El robot amb estructura polar té dos moviments giratoris iun de lineal, amb dues articulacions rotacionals i unaprismàtica.
El robot amb estructura angular té tres movimentsgiratoris, amb tres articulacions rotacionals. És el mésversàtil atès que el seu espai de treball és el més ampli.
Els primers robots tenien funcions de manipuladorsindustrials i progressivament s’han anat introduint enmolts camps, especialment en la fabricació i enl’exploració.
La manipulació inclou operacions com la càrrega idescàrrega de peces en màquines o en cadenes deproducció; la fabricació inclou operacions de tall, detrepanat, de fressat, de soldadura, d’encolat, d’inserció,de mesura, etc.
En l’àmbit de l’exploració els robots s’han usat endiferents medis: el terrestre, el marítim i en l’espai.