tecnicas geomaticas1
DESCRIPTION
todo sobre la geomatica en la mineriaTRANSCRIPT
CAPITULO. 1:
1.1.- ANTECEDENTES GENERALES
La necesidad de conocer el espacio geográfico ha llevado al hombre a
descubrir, investigar e inventar formas de representar la superficie de la
Tierra, que van desde dibujar símbolos sobre madera y cueros de animales,
hasta la obtención de imágenes provenientes de satélites.
En la actualidad, se requiere de información precisa en el menor
tiempo posible y con costos económicos bajos; para ello se han creado
diversos sistemas que permiten lograr estos propósitos. Entre estos se
encuentran las técnicas desarrolladas por la geomática, las cuales han ido
adquiriendo una importancia creciente debido a las ventajas que ofrece el
tratamiento digital de información.
Actualmente han aparecido software especializados en procesos
fotogramétricos y tratamiento digital de imágenes, con esto, las
posibilidades de explotación de las imágenes se amplían y se simplifican
permitiendo, por ejemplo, la generación automática de un Modelo de
Elevación Digital ( DEM)1, de ortoimágenes, la generación y visualización de
fotomodelos tridimensionales, la extracción automática de entidades y
elementos cartográficos (carreteras, edificios,...), la captura y visualización
de fenómenos dinámicos, etc.
1 DEM significa Digital Elevation Model y se traduce como Modelo de Elevación Digital.
El avance de la tecnología hace que los medio digitales sean cada vez
más abiertos y extendido en la sociedad, y por otro lado, que la
fotogrametría tradicional pueda avanzar y ser desarrollada no sólo por
organismos oficiales y grandes firmas comerciales, sino por profesionales
especializados.
Respecto de estos antecedentes el presente trabajo tiene por finalidad
poner a disposición del usuario común el potencial de esta nueva tecnología,
mediante la aplicación del sistema de análisis geoespacial TNT mips versión
6.5
Este trabajo consistirá en el desarrollo del proceso de Modelado
Fotogramétrico para la obtención de material de apoyo cartográfico para la
ejecución de un proyecto de ingeniería específico. La aplicación está
orientada a optimizar la gestión de las etapas preliminares de estudio de
pre-factibilidad, factibilidad y desarrollo del proyecto, con el fin de evaluar
las posibilidades de esta técnica en su aplicación a futuros proyectos.
1.2.- DESCRIPCION DEL PROBLEMA
1.2.1.- PLANTEAMIENTO DEL PROBLEMA
En la actualidad existe una gran demanda de información geoespacial, tanto
de organismos estatales como del sector privado.
La planificación y desarrollo de las distintas etapas de un proyecto de
ingeniería requiere de la generación y producción de información espacial
georreferenciada.
Este material cartográfico debe cumplir las siguientes características:
• Utilidad: la información debe cumplir con los estándares o
especificaciones técnicas que requiera el desarrollo del proyecto, en
términos de precisión y exactitud
• Costos: la generación, producción y edición del material cartográfico
debe considerar un costo razonable en relación a las dimensiones del
proyecto.
• El tiempo: los tiempos de generación y producción de la información
deben ser mínimos dentro de las posibilidades del proceso.
En la actualidad la disponibilidad oportuna de información cartográfica
frente al desarrollo de un proyecto no satisface las condiciones
anteriormente descritas sobre todo en los costos y tiempo de producción y
edición.
En este sentido la generación, actualización y producción de información
cartográfica georreferenciada, apoyada en un sistema digital representa un
gran avance, si se considera que el tiempo calidad y costos del proceso
tienden a disminuir, lo cual significa optimizar la gestión de las diferentes
etapas del proyecto.
1.2.2- HIPOTESIS DE TRABAJO
• Es posible optimizar el desarrollo de proyectos de ingenieria, en las
etapas de pre-factibilidad, factibilidad, diseño de ingeniería, ejecución,
seguimiento y control, a través de esta tecnología.
• Es probable, mediante el uso de un software de PC relativamente
sencillo, que la Fotogrametría digital este hoy mas cerca de un
profesional evolutivo, que crea e interactúa con el avance de las técnicas
de la geomática

1.2.3- OBJETIVOS GENERALES Y ESPECIFICOS
OBJETIVOS GENERALES
• Desarrollar cartografía digital de apoyo a las distintas fases de un
proyecto de ingeniería
• Evaluar la calidad y eficacia de los sistema digitales geomaticos
aplicados, en términos de precisión, costos y tiempo de elaboración del
producto final
OBJETIVOS ESPECIFICOS
• Revisar los fundamentos teóricos de la Fotogrametría tradicional y su
evolución hasta la era digital.
• Buscar un proyecto que requiera de esta aplicación
• Generar el DEM para el Levantamiento Fotogramétrico
• Generar la Ortofoto y curvas de nivel.
• Análisis comparativo de los resultados obtenidos con la producción
cartográfica regular.
• Analizar las ventajas y desventajas del sistema en su aplicación a
proyectos.

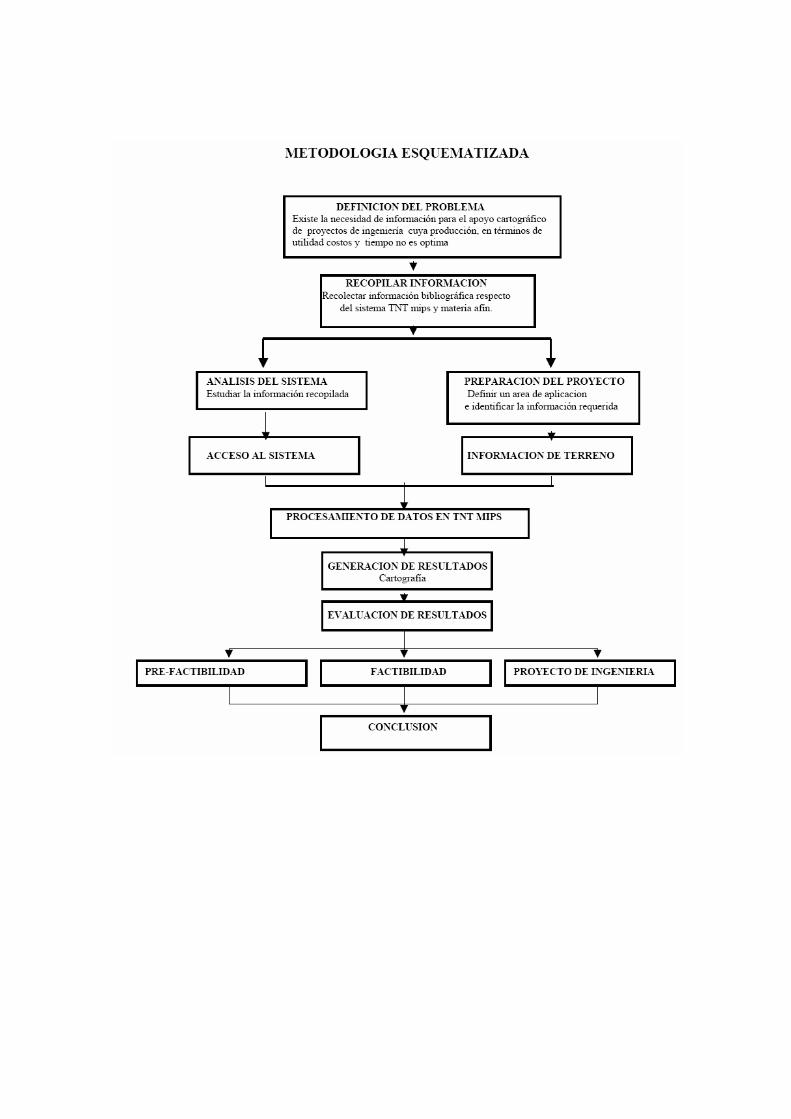
1.3.- METODOLOGIA DE TRABAJO
1. DEFINICION DEL PROBLEMA.
La planificación y gestión de las distintas etapas de un proyecto de
ingeniería requieren de la generación y producción de información
cartográfica dispuesta a cumplir con las disposiciones técnicas de calidad, y
otros requerimientos que dicen relación con el tiempo y costos de
producción
Por otro lado las técnicas desarrolladas por la geomática, orientadas a la
generación, actualización y producción de información cartográfica, permite
optimizar el procesamiento de información, lo cual significa minimizar costos
y tiempo de elaboración.
Debido a esto se debe evaluar la aplicabilidad de esta tecnología, en
relación a la producción de este material como apoyo cartográfico a
proyectos de ingeniería.
2. RECOPILAR LA INFORMACION
Buscar la información necesaria para definir las distintas variables y
problemáticas que constituyen en si el entorno de este trabajo de titulo.
3. PREPARACION DEL PROYECTO
Definir un área de aplicación específica e identificar la información
requerida para la ejecución del proyecto
4. ANALISIS DEL SISTEMA
Estudiar toda la información recopilada con la finalidad de conocer el
funcionamiento de este sistema, estudiar las diferentes variables o factores
que influyen al momento de cumplir los objetivos trazados.
5. INFORMACION DE TERRENO
Esta etapa consistirá en obtener toda la información del área en estudio
tanto las fotografías como la obtención de las coordenadas para el proceso
de georreferenciación además de otros datos como la calibración de la
cámara etc.
6. ACCESO AL SISTEMA
Luego de haber analizado y estudiado las diferentes funciones del sistema,
para el proceso de Modelado Fotogrametrico, se procederá a ejecutar
algunos ejercicios prácticos.
7. PROCESAMIENTO DE DATOS
Consiste en ingresar la información que requiere cada uno de los cuatro
pasos del Modelado Fotogramétrico que son la orientación interna,
orientación externa, generación del DEM y ortorectificación.
8. GENERACION DE RESULTADOS
Realizar todo el proceso de depurado y aplicación de las diferentes etapas
del proceso de modelado Fotogrametrico hasta editar el material
cartográfico acabado.
9. EVALUACION DE RESULTADOS
Es la etapa más importante de todo este proyecto y consistirá en realizar un
análisis de la calidad de la cartografía obtenida además de los costos y
tiempo de producción. Para determinar cuales son las posibilidades de esta
la aplicación de esta técnica como apoyo a las etapas de prefactibilidad
factibilidad y desarrollo y control del proyecto de ingeniería.
10. CONCLUSIONES
En esta etapa corresponde dar una explicación acabada de los resultados
obtenidos y su implicancia para en el producto fina y su aplicación.
CAPITULO 2: FUNDAMENTOS TEORICOS
2.1.- RESEÑA HISTORICA DE LA FOTOGRAMETRIA
Como todos los campos del saber, muchos talentos han aportado su
conocimiento al nacimiento y desarrollo de la fotogrametría, el inicio de esta
ciencia se sitúa en 1850, pero ya en el siglo XV Leonardo Da Vinci centra su
estudio en materias como proyección óptica y aerodinámica.
En el año 1726, el físico Suizo F. Kapeller construyó, a partir de
dibujos estereoscópicos un plano topográfico del monte Pilatus, sobre el lago
Lucerna, siendo esta, la primera incursión en la aplicación de la
fotogrametría en levantamientos topográficos.
Luego, en 1835, se invento el estereoscopio, el que introduce el
concepto de la doble imagen para la observación en tercera dimensión; y en
1839 Francois Arago y Jaques Daguerre anunciaron el proceso de captura de
imágenes, marcando el inicio de la aplicación de la fotografía en los
levantamientos topográficos.
En 1850 Aime Laussedat, oficial francés, construyó un instrumento
apropiado para el levantamiento de mapas con fotografías terrestres y
estableció el primer método de restitución. Con esto, nace una de las más
importantes herramientas cartográficas, “La Fotogrametría”, Laussedat ha
sido llamado el padre de la fotogrametría. En 1867 presentó el primer
fototeodolito, que es una combinación de teodolito y cámara; y presenta el
primer plano de Paris levantado por medio de fotos terrestres.

En 1858 el alemán Meydeubauer, realizo un levantamiento de obras
arquitectónicas por medio de la inserción fotogramétrica a base de dos
fotografías del mismo objeto tomada desde ángulos diferentes, lo que hoy
se conoce como modelo fotográfico.
Al tiempo después, en 1892 Ftoltz descubre el principio de la marca
flotante y en 1901 Pulfrich de Alemania, desarrolló un método práctico de
medición utilizando esta marca flotante. Este método es materializado con la
construcción del primer estereo comparador por la fábrica Zeiss de
Alemania.
Luego, el nacimiento de la aviación abrió nuevos horizontes en la
utilización de las cámaras aéreas en el levantamiento de grandes
extensiones de terreno. Durante la Primera Guerra Mundial, El uso de la
fotografía aérea fue explotado principalmente con fines de fotointerpretación
militar. Después de la guerra la fotogrametría toma un considerable empuje
motivado por la necesidad de contar con nuevos mapas de los territorios
afectados por ese conflicto.
Esta etapa se caracteriza por la producción de una serie de
instrumentos y la creación de diversos procedimientos fotogramétricos.
Fue así, como en 1921 Hugershoff, construyó el primer restituidor
análogo universal, el autocartógrafo, con el que era posible realizar tanto
fotogrametría terrestre como aérea.
En 1923 la fabrica Zeiss de Alemania, produce un instrumento de
restitución universal llamado estereoplanígrafo y la fabrica Wild de suiza,
desarrollo una serie de instrumentos que hoy dia tienen una gran aceptación
de las disciplinas fotogramétricas y topográficas.

Durante la Segunda Guerra Mundial, la fotogrametría tuvo un fuerte
impacto en su desarrollo. La aplicación de nuevas técnicas en los
reconocimientos aerofotogramétricos y la navegación aérea dio una
importancia fundamental a la fotointerpretación.
En este periodo aparecen diversas gamas de restituidores, como son,
el estereocartógrafo modelo IV y V de Santoni, Planicart E3 de Zeiss, los
autógrafos A7, A9, A10 y los aviones B8 y AMH de Wild.
En la actualidad el uso de satélites, radares, plataformas espaciales,
abre un campo en el futuro de la fotogrametría, cuyas aplicaciones
proyectaran nuevos horizontes científicos y tecnológicos.

2.2.- PRINCIPIOS FOTOGRAMETRICOS BASICOS
2.2.1.- CONCEPTO DE LA FOTOGRAMETRÍA
Fotogrametría es la ciencia o arte que trata de la obtención de
medidas confiables por medio de fotografías, a fin de determinar las
características geométricas –tamaño, forma y posición- del objeto
fotografiado2.
En esencia, es el estudio métrico de la fotografía aérea o terrestre, que
consiste en la transformación de una Proyección Central (fotograma) en una
Proyección Ortogonal (carta o mapa).
2.2.2.- PROYECCION CENTRAL Y ORTOGONAL: La imagen del objeto,
terreno, que se obtiene en la fotografía, es una proyección central, es decir,
que los rayos de luz provenientes del objeto, en su camino hacia el plano de
la imagen, pasan a través de un solo punto, que es el centro de proyección
del objetivo de la cámara. Sin embargo, en la mayoría de los casos se
requiere la información gráfica del terreno en forma de una proyección
ortogonal, o sea, que los elementos del terreno sean proyectados, a una
cierta escala, por rayos perpendiculares al plano de referencia. Este plano
puede ser horizontal o paralelo a una superficie de referencia dada.
2 Manual de Fotogrametría de la Sociedad Americana de Fotogrametria, 3ra. Ed., Washington, 1965.
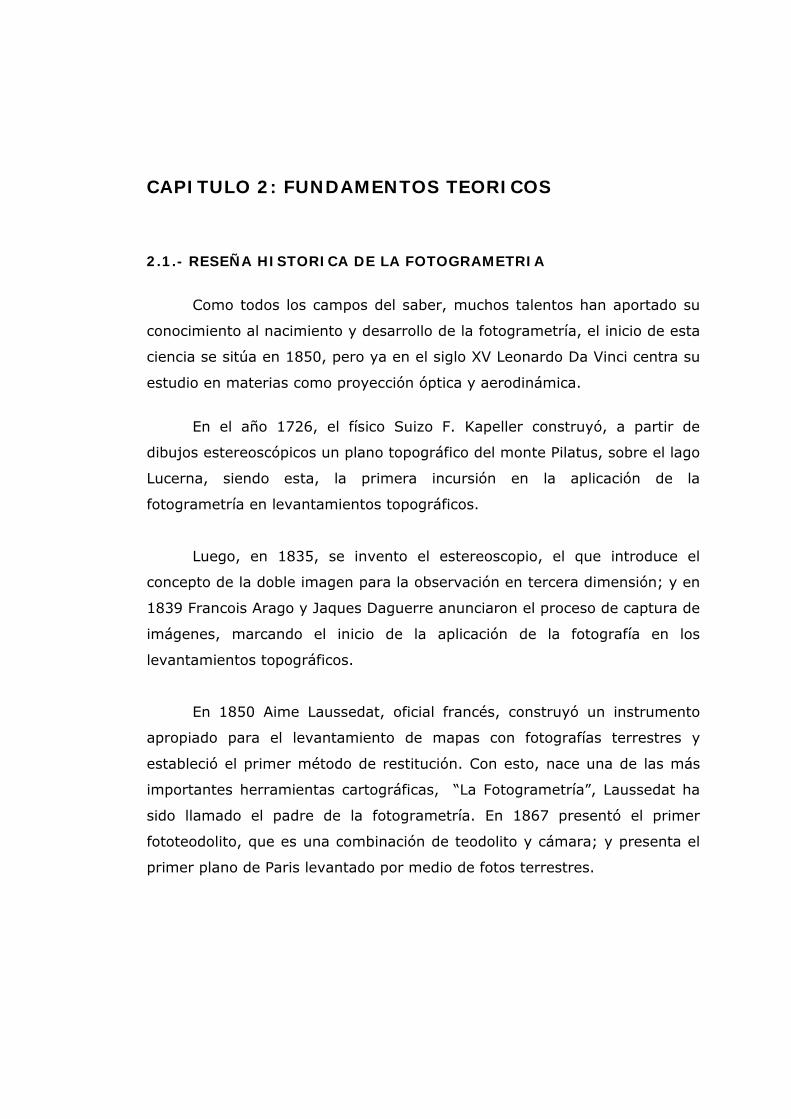
2.2.3.- PROPIEDADES GEOMETRICAS DE UNA FOTOGRAFIA
• PUNTO PRINCIPAL: El punto principal corresponde a la proyección
ortogonal del centro de proyección sobre la fotografía. Se materializa en
la fotografía por la unión de las marcas fiduciales. El punto principal en la
fotografía se le designa con la letra h y en terreno con H . Ver figura 2.1
• PUNTO NADIRAL: Corresponde a la intersección de la vertical que pasa
por el punto centro de la proyección y corta al plano del negativo en un
punto llamado nadir. Este punto se indica con la letra n en la fotografía y
con N en el terreno.
• PUNTO ISOCENTRO: Isocentro es el punto en que la bisectriz del
ángulo que forma la perpendicular al negativo y la vertical, intersecta el
plano del negativo. Según la figura 2.1 se denomina i en la fotografía y
en el terreno I.
• DISTANCIA FOCAL: La distancia focal de una cámara calibrada se
denomina distancia principal, y se puede definir con la expresión:
c = l / tg α (2.1)
l = Distancia radial de la imagen, de un objeto, desde el punto (h).
α = Angulo formado por los rayos correspondientes del punto principal (h) y
de la imagen.
• ALTURA DE VUELO: Corresponde a la la altura de vuelo del avión sobre
el plano de referencia del terreno se le designa la letra Z.

2.2.4.- TIPOS DE FOTOGRAFIAS AEREAS: Hay tres tipos, que se
diferencian según el valor del ángulo de inclinación del eje óptico con
respecto al vertical:
• Verticales: Cuando el ángulo de inclinación no excede, normalmente,
del valor de 2º. En exposiciones aisladas y en condiciones atmosféricas
adversas este ángulo de inclinación puede llegar a alcanzar los 4º.
Debido a estos considerandos se le suele asignar el valor medio de 3º.
• Oblicuas: Cuando el referido ángulo, alcanza valores superiores a los 3º.
• Panorámicas: En estas fotografías, aparece la impresión del horizonte
sobre la fotografía.
2.2.5.-RESTITUCION FOTOGRAMETRICA
El par estereoscópico, constituye el soporte básico de la información para el
análisis métrico de un par de fotogramas. Al instrumento que permite
realizar de forma análoga todo el proceso de orientación interna, relativa y
absoluta, y finalmente, dibujar el mapa o plano se llama restituidor. La
extracción de la información métrica del modelo, por medios estereoscopicos
y con ayuda de un índice móvil, registra fielmente los desplazamientos del
modelo en una mesa de dibujo (pantógrafo), conociéndose tal proceso con
el nombre de restitución.
A continuación se detallan algunos de los conceptos mas usados en este
proceso
• FOTOGRAMA: Se conoce con el nombre de fotograma, a toda fotografía
aerea, tomada con una cámara métrica calibrada. Las condiciones de
calibración de cámara, encierran el conocimiento de los parámetros de
orientación interna: distancia focal corregida, punto principal y distorsión.
• ESCALA DE LA FOTOGRAFIA: La escala de la fotografía viene dada por
la relación: E= c / Z (2.2) donde c = distancia principal.
Z = altura de vuelo sobre el terreno
En un perfil de terreno no llano existirán infinitos valores de escala.
Por ello, al referirse a la escala de una fotografía, se esta haciendo a un
valor medio, respecto a un plano de referencia, elegido con el criterio de que
se encuentre equidistante, entre el plano tangente a las mayores
elevaciones del terreno, y al de mayor depresión.
La escala aproximada de una fotografía se puede calcular, por la
razón entre las distancias medidas en la foto y sus correspondientes sobre el
terreno o un plano. O bien por el conocimiento de la altura de vuelo que
registra el altímetro de la cámara, y la distancia principal de esta.
• PARALAJE ESTEREOSCÓPICO: Es uno de los métodos utilizados para
obtener la relación entre el desplazamiento de dos puntos
correspondientes, lo que equivale a expresarlo en diferencia de altura. Es
el cambio de posición de la imagen de un punto en dos fotografías
sucesivas, debido al cambio en posición de la cámara.
• RECUBRIMIENTO O TRASLAPE: El objeto de los recubrimientos
fotográficos tiene por finalidad, el poder aplicar el principio de la visión
estereoscópica a los fotogramas aéreos. La parte común, entre dos
fotografías consecutivas, se le llama modelo estereoscópico, debiendo
poderse enlazar estos modelos, tanto en sentido transversal como
longitudinal. El recubrimiento longitudinal, que se expresa en tanto por
ciento, debe tener un valor normalizado de un 60 por ciento y de 15 a 20
por ciento de traslape transversal . Existen otras aplicaciones donde se
usan traslapes de un 90 por ciento que es el caso de las generación de
ortofotografía.
2.3.- ETAPAS DE LA RESTITUCION
Es el proceso mediante el cual el par de fotogramas, son orientados,
de la misma manera en que fueron captados, logrando establecer su
posición original.
2.3.1.- ORIENTACION INTERNA
Para todas las mediciones fotogramétricas es necesario contar con
una cámara cuya orientación interior sea conocida. Los elementos de la
orientación interior son los siguientes:
a) La distancia principal o constante de la cámara, c, medida desde el
centro de proyección hasta el plano de la imagen. Esta Debe ser
introducida en el instrumento restituidor en cada una de sus cámaras.
b) Centrado de Placas: La posición del punto principal en el plano de la
imagen; este punto es el pie de la perpendicular que pasa por el
centro de proyección, y se define con relación a las cuatro marcas
fiduciales. El punto principal de la fotografía se localiza en la
intersección de las dos diagonales que unen las marcas fiduciales. En
una cámara bien ajustada el punto principal coincide con el punto
principal.
2.3.2.- ORIENTACION RELATIVA
Fundamentalmente consiste en restablecer la posición relativa en el
momento de la toma, de dos fotogramas consecutivos. Se forma así un
modelo estereoscópico a partir de rayos homólogos, que al cortarse en un
mismo punto conforman una imagen tridimensional de éste en el plano de
proyección. Si ello no sucede, se produce un desplazamiento en sentido “X e
Y” de las imágenes de dicho punto en cada diapositiva. Este desplazamiento
denominado paralaje “Px, Py”, según sea su sentido, impedirá la correcta
formación de la imagen estereoscópica, siendo necesario corregirlo mediante
los elementos de orientación siguientes:
2.3.3.- ORIENTACION ABSOLUTA
Esta fase tiene 2 subfases que son la puesta en escala y basculamiento o
nivelación del modelo.
a) Puesta en Escala: En el instrumento retituidor, la escala se controla
mediante La distancia entre los centros de los haces de rayos (base).
Al aumentar la base aumenta la escala del modelo y viceversa. De
esta forma es necesario conocer las coordenadas de terreno de dos
puntos del modelo, con el fin de obtener la escala deseada.
b) Nivelación del Modelo: Para el efecto de la nivelación del modelo es
necesario conocer la elevación terrestre de tres puntos definidos en el
modelo, estos puntos deben cumplir la condición de no estar
alineados.
Resumiendo, para la orientación absoluta de un modelo
fotogramétrico, se requieren tres puntos identificables en el modelo:
de dos de ellos deben conocerse las tres coordenadas terrestres y,
por lo menos, la elevación del tercero. Para verificar es conveniente
contar mas puntos tanto para el control horizontal como vertical.
2.4.- FOTOGRAMETRIA DIGITAL
2.4.1.- EVOLUCION DE LA FOTOGRAMETRIA DIGITAL
La fotogrametría digital comprende un número de procedimientos y
productos muy sofisticados. Así como la instrumentación juega un papel
cada vez menos importante en el proceso, los programas (software) asumen
un rol fundamental.
Así como la tecnología fotogramétrica análoga fue reemplazada por
instrumentos analíticos que no son más que una hibridización de la
tecnología análoga mecánicamente precisa y computarizada, esta luego ha
sido suplantada por la fotogrametría digital
En el ambiente de producción de fotogrametría los procesadores
personales están rápidamente reemplazando el instrumento fotogramétrico.
En lugar de visualizar el espacio de la imágen en tres dimensiones a través
de instrumentos ópticos altamente precisos y una sucesión mecánica, la
imágen raster de la fotografía aérea, o escena detectada en forma remota,
puede ser representada sobre una simple pantalla de computadora y ser
vista estereoscópicamente.
En esencia, lo que una vez fue una voluminosa tecnología mecánica
usada ya sea en copias análogas o salidas gráficas de computadora, es
ahora un proceso completamente computarizado, empezando por el punto
de la conversión del documento donde una imágen de película aérea es
escaneada dentro de un archivo de datos. Todo eso permanece para la
adquisición de datos originales (cámara de película aérea) para llegar a ser
digital para recurso del usuario en el proceso digital.
La fotogrametría digital está hoy en día reemplazando la
fotogrametría tradicional. La con el advenimiento de esta tecnología el
profesional de la geomática ha sido capaz producir sus propias bases de
datos para la generación de cartografía con la edición de información
procesada por métodos digitales.
En resumen la Fotogrametría digital está siendo implantada hoy en
todos los ámbitos de la Cartografía (CAD, GIS, etc.), al ofrecer nuevas
posibilidades, al permitir la integración de herramientas para la generación
de modelos digitales del terreno, ortofotos, mosaicos, aerotriangulaciones
automáticas, etc., de forma rápida y sencilla.
2.5.- MODELO DIGITAL DE ELEVACIONES (DEM)
ORIGEN
El termino DigitaL Model Terrain tiene su origen en el Laboratorio de
Fotogrametría del Instituto de Tecnología de Massachussets en la década de
los años 50. En el trabajo pionero de Millar y Lafglamme, en el año 1958, se
establecen ya los primeros principios del uso de los modelos digitales para el
tratamiento de los problemas tecnológicos, científicos y militares. La
definición del MDT que se menciona en sus trabajos es “una representación
estadística de la superficie continua del terreno, mediante un numero
elevado de puntos selectos con coordenadas (x, y, z) conocidas, en un
sistema de coordenadas arbitrario”.
Puede observarse el uso del termino MDT como sinónimo de DEM, sin
embargo el DEM es un caso particular de de MDT pues refleja solo la
distribución espacial altimétrica, en cambio la variable descriptiva del MDT
puede tomar cualquier atributo como por ejemplo la temperatura de la
superficie.
2.5.1.- DEFINICION DEL MODELO DIGITAL DE ELEVACION (DEM)
Un modelo digital de elevaciones es una estructura numérica de datos
que representa la distribución espacial de la altitud de la superficie del
terreno.
Un terreno real puede describirse de forma genérica como una función
bivariable continua z=ζ (x, y) donde z representa la altitud del terreno en el
punto de coordenadas (x, y) y ζ es una función que relaciona la variable con
su labor geográfica. En un modelo digital de elevaciones se aplica la función
anterior sobre un dominio espacial concreto, D. En consecuencia, un DEM
puede describirse genéricamente como DEM= (D,ζ).
En la practica, la función no es continua sino que se resuelve a
intervalos discretos, por lo que el DEM esta compuesto por un conjunto
finito y explicito de elementos. Los valores de x e y suelen corresponder a
las abscisas y ordenadas de un sistema de coordenadas plano,
habitualmente un sistema de proyección cartográfica.
La generación inherente a la discretizacion del modelo implica una
perdida de información que incrementa el error del DEM y, en consecuencia,
se propaga a los modelos derivados.
Por este motivo, se han ensayado numerosas opciones en la
búsqueda de una forma de representar y almacenar la altitud que equilibre
la perdida de información y algunos efectos secundarios indeseables como el
excesivo tamaño de los archivos o la dificultad del manejo.
2.5.2.-ESTRUCTURA DE DATOS DEL DEM
De forma general, la unidad básica de información en un DEM es un
punto acotado, definido como una terna compuesta por un valor de altitud,
z, al que acompañan los valores correspondientes de x e y. Las variaciones
aparecen cuando estos datos elementales se organizan en estructuras que
representan las relaciones espaciales y topológicas.
Mientras que los mapas impresos usan casi exclusivamente una única
conversión, las curvas de nivel, para la representación de la superficie del
terreno, en los MDE se han utilizado alternativas algo mas variadas.
Históricamente, las estructuras de datos en los sistemas de información
geográfica y, por extensión, en los modelos digitales de terreno, se han
dividido en dos grupos en función de la concepción básica de la
representación del los datos: vectorial y raster:
• El modelo de datos vectoriales esta basado en entidades u objetos
geométricos definidos por las coordenadas de sus nodos y vértices.
• El modelo de datos raster esta basado en localizaciones espaciales,
a cada una de las cuales se les asigna el valor de la variable para la
unidad elemental de superficie.
En el modelo vectorial los atributos del terreno se representan
mediante puntos, líneas o polígonos con sus respectivos atributos. Los
puntos se definen mediante una par de valores de coordenadas con un
atributo de altitud, las líneas mediante un vector de puntos, de altitud única
o no y los polígonos mediante una agrupación de líneas.
En el modelo raster, los datos se interpretan como el valor medio de
unidades elementales de superficie no nula que cubre el terreno con una
distribución regular, sin solapamiento y con recubrimiento total del área
representada. Estas unidades se llaman celdas, que es equivalente al
concepto de téselas, si se admite la analogía con los términos usados en
procesos de imágenes, es equivalente al concepto de píxel.
Cada modelo de datos puede expresarse mediante diferentes
estructuras de datos; dentro de los dos modelos básicos, la practica y el
tiempo han reducido las potenciales variantes de estructuración a una
pocas. Las representativas son dos estructuras vectoriales: la basada en
isohipsas o contornos y la red irregular de triángulos, TIN ( triangulated
irregular networ), y dos estructuras raster: las matrices regulares, URG
(uniform regular grids), y las matrices jerárquicas (quadtrees):
2.5.2.1.- Estructuras vectoriales, basadas en entidades/ objetos
• Contornos: polilineas de altitud constante
• TIN : red de triángulos irregulares adosados
2.5.2.2.- Estructuras Raster, basadas en localizaciones
• matrices regulares: maya de celda cuadrada
• quadtrees: matrices imbricadas en una estructura jerárquica
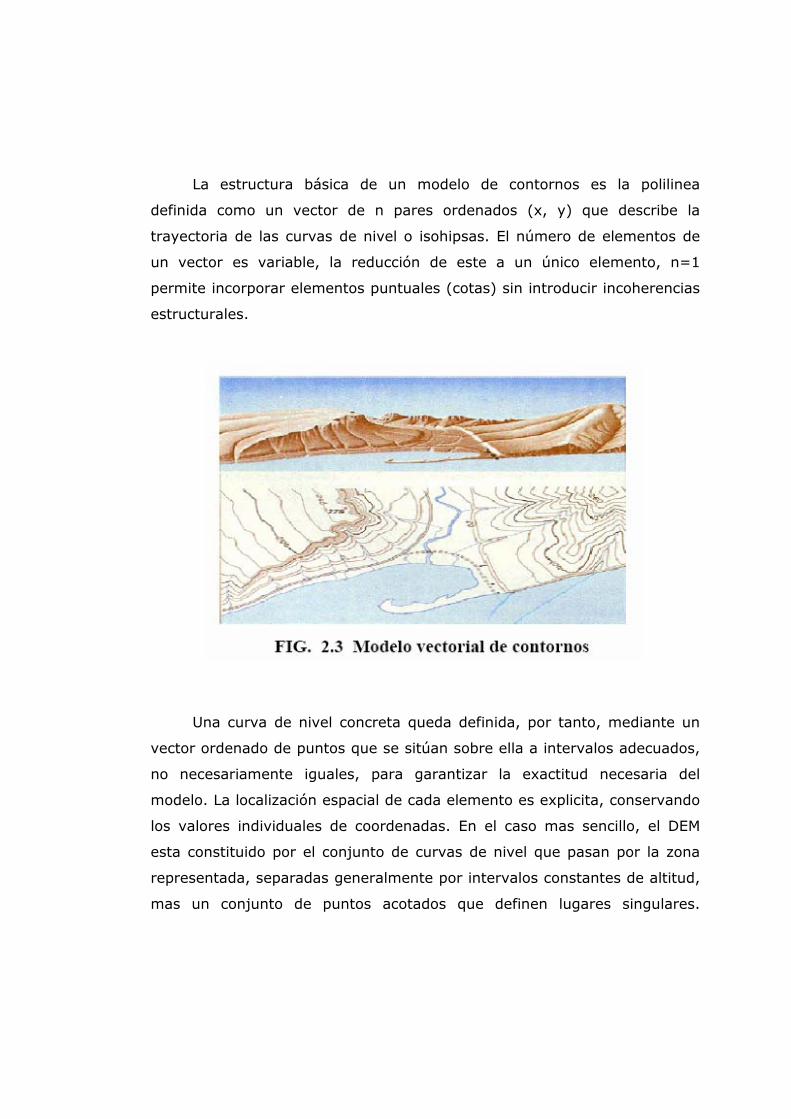
La estructura básica de un modelo de contornos es la polilinea
definida como un vector de n pares ordenados (x, y) que describe la
trayectoria de las curvas de nivel o isohipsas. El número de elementos de
un vector es variable, la reducción de este a un único elemento, n=1
permite incorporar elementos puntuales (cotas) sin introducir incoherencias
estructurales.
Una curva de nivel concreta queda definida, por tanto, mediante un
vector ordenado de puntos que se sitúan sobre ella a intervalos adecuados,
no necesariamente iguales, para garantizar la exactitud necesaria del
modelo. La localización espacial de cada elemento es explicita, conservando
los valores individuales de coordenadas. En el caso mas sencillo, el DEM
esta constituido por el conjunto de curvas de nivel que pasan por la zona
representada, separadas generalmente por intervalos constantes de altitud,
mas un conjunto de puntos acotados que definen lugares singulares.

2.5.3.- CONSTRUCCION DEL DEM
La captura de la información hipsométrica constituye el paso inicial en
el proceso de construcción del DEM, e incluye la fase de transformación de
la realidad geográfica a la estructura digital de datos. Se trata de una fase
de gran trascendencia porque la calidad de los datos es el principal factor
limitante para los tratamientos que se realicen posteriormente. Tras obtener
los datos, estos deben ser estructurados para formar el DEM de alguna de
las formas descritas anteriormente.
2.5.4.- CAPTURA DE DATOS
Los métodos básicos para conseguir los datos de alturas pueden dividirse en
dos grupos:
Directos, cuando las medidas se realizan directamente sobre el terreno real,
e indirectos cuando se utilizan instrumentos análogos o como en el caso de
este trabajo, en que se utilizara un método digital. La jerarquía de los
métodos más usuales es la siguiente:
2.5.4.1.- Métodos directos: medida directa de alturas sobre el terreno
(fuentes primarias)

a) Altimetria: altímetros radar o láser transportados por plataformas
aéreas o satelitales.
b) GPS: (siglas en inglés de Global Positioning System), es un método
de posicionamiento y navegación basado en las señales transmitidas
por la constelación de satélites NAVSTAR (siglas en inglés de
Navigation Satellite Timing And Ranging), que son recibidas por
receptores portátiles en Tierra. Las señales múltiples que se reciben
simultáneamente provenientes de las sucesivas posiciones de los
satélites, se utilizan para resolver las ambigüedades y permitir con
esto, la determinación de la posición tridimensional del punto por
conocer.
c) Levantamiento topográfico: estaciones topográficas con salida
digital
2.5.4.2 Métodos indirectos: medida estimada a partir de documentos
previos (fuentes secundarias)
a) Restitución a partir de pares de imágenes
• Estereo imágenes digitales: imágenes tomadas por satélites
• Estereo imágenes analógicas: imágenes fotográficas
convencionales
b) Interferometria radar: imágenes de interferencia de sensores radar
c) Digitalización de mapas topográficos
• Automática: mediante escáner y vectorización.
• Manual: mediante tablero digitalizador
2.5.5.- METODOS DE CONSTRUCCION DEL DEM
a construcción de un DEM entendido como matriz regular a partir de
la información vectorial, es básicamente un problema de interpolación: se
definen las localizaciones de los puntos problema, intersecciones de filas y
columnas, y se estima la altitud de cada uno de ellos en función de los
datos del entorno existentes en el modelo vectorial.
Los algoritmos de interpolación deben tener en cuenta, asimismo, las
diversas estructuras auxiliares para introducir variantes en los mecanismos
de calculo.
El planteamiento global del problema podría ser, por tanto, como
sigue:
Dado un conjunto de puntos con coordenadas (x,y,z), distribuidos
irregularmente, generar un nuevo conjunto de puntos localizados en los
nodos de una red regular de forma que la superficie interpolada sea una
representación de la original con una perdida mínima de información.
En el caso de la creación de una estructura TIN, en lugar de
interpolar, se realiza una selección de puntos descartando los que no
aporten una información relevante para la descripción de la altitud.
2.5.51.- Interpolación en Función de la Distancia
El valor del punto problema se estima asignando pesos a los datos del
entorno en función inversa de la distancia que los separa del punto
problema, Inverse Distance Weighting, (IDW). Se establece, por tanto, que
los puntos más cercanos tienen un peso mayor en el cálculo, aun que la
relación no tiene porque ser lineal.
a) El método general
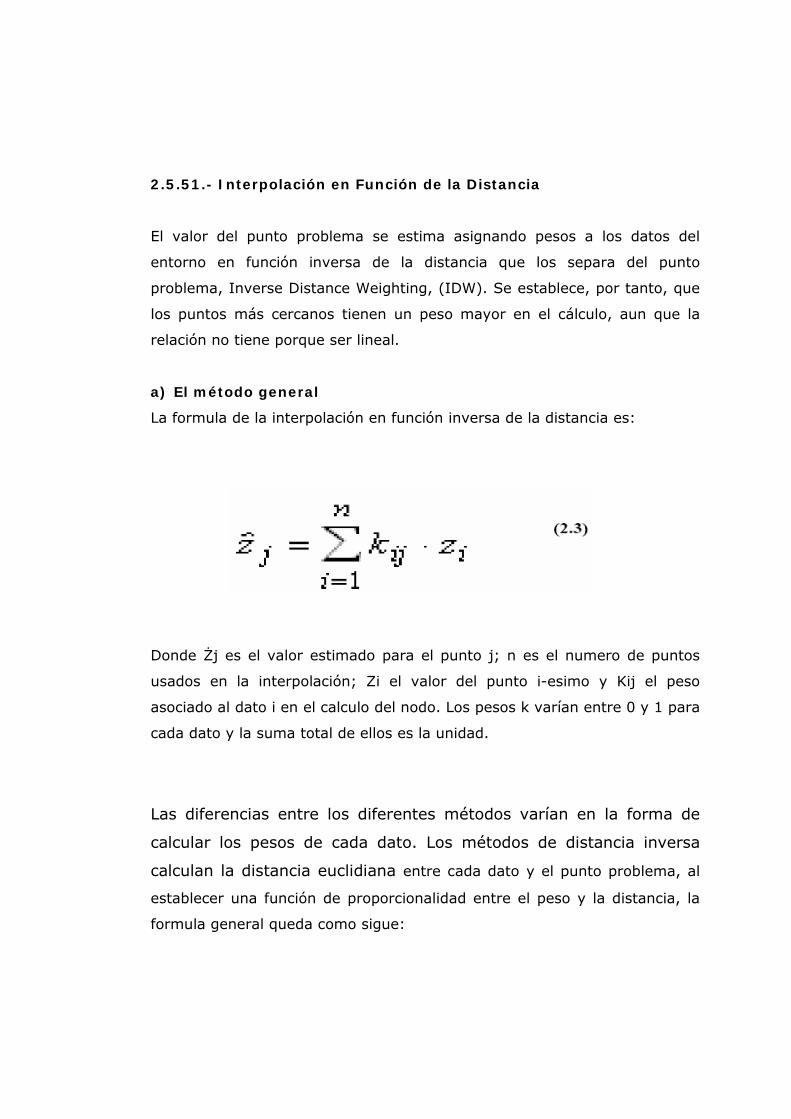
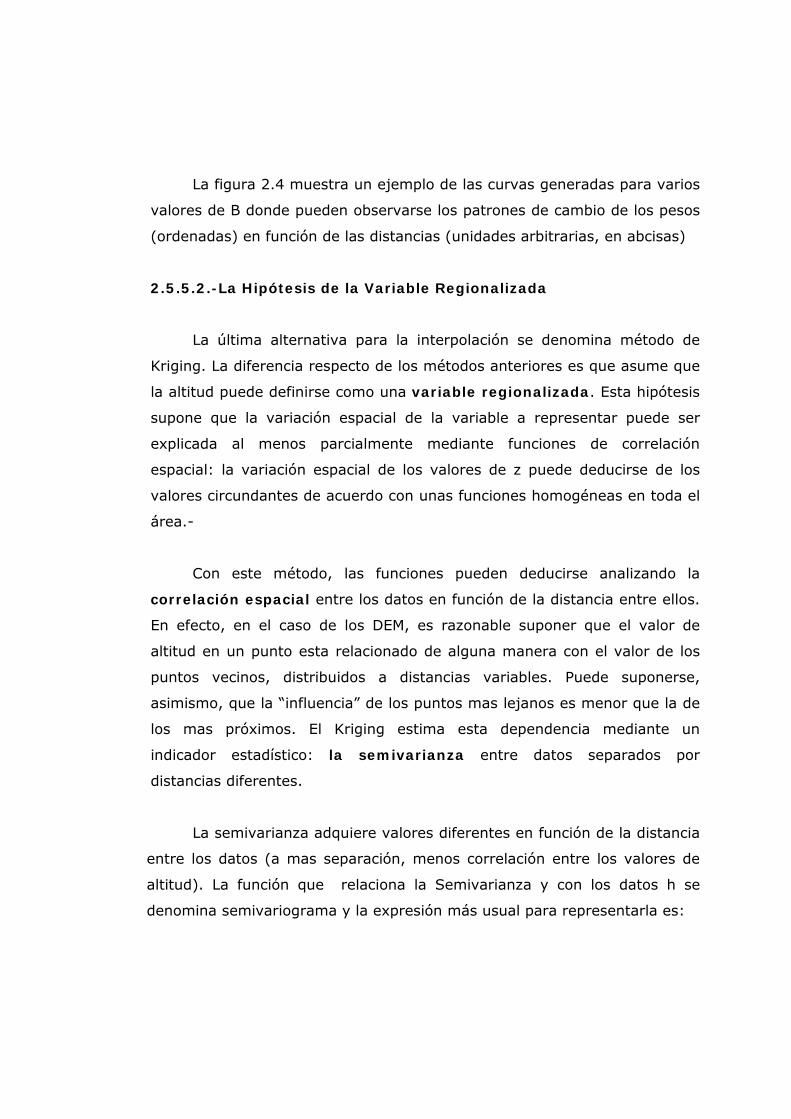
La formula de la interpolación en función inversa de la distancia es:
Donde Żj es el valor estimado para el punto j; n es el numero de puntos
usados en la interpolación; Zi el valor del punto i-esimo y Kij el peso
asociado al dato i en el calculo del nodo. Los pesos k varían entre 0 y 1 para
cada dato y la suma total de ellos es la unidad.
Las diferencias entre los diferentes métodos varían en la forma de
calcular los pesos de cada dato. Los métodos de distancia inversa
calculan la distancia euclidiana entre cada dato y el punto problema, al
establecer una función de proporcionalidad entre el peso y la distancia, la
formula general queda como sigue:
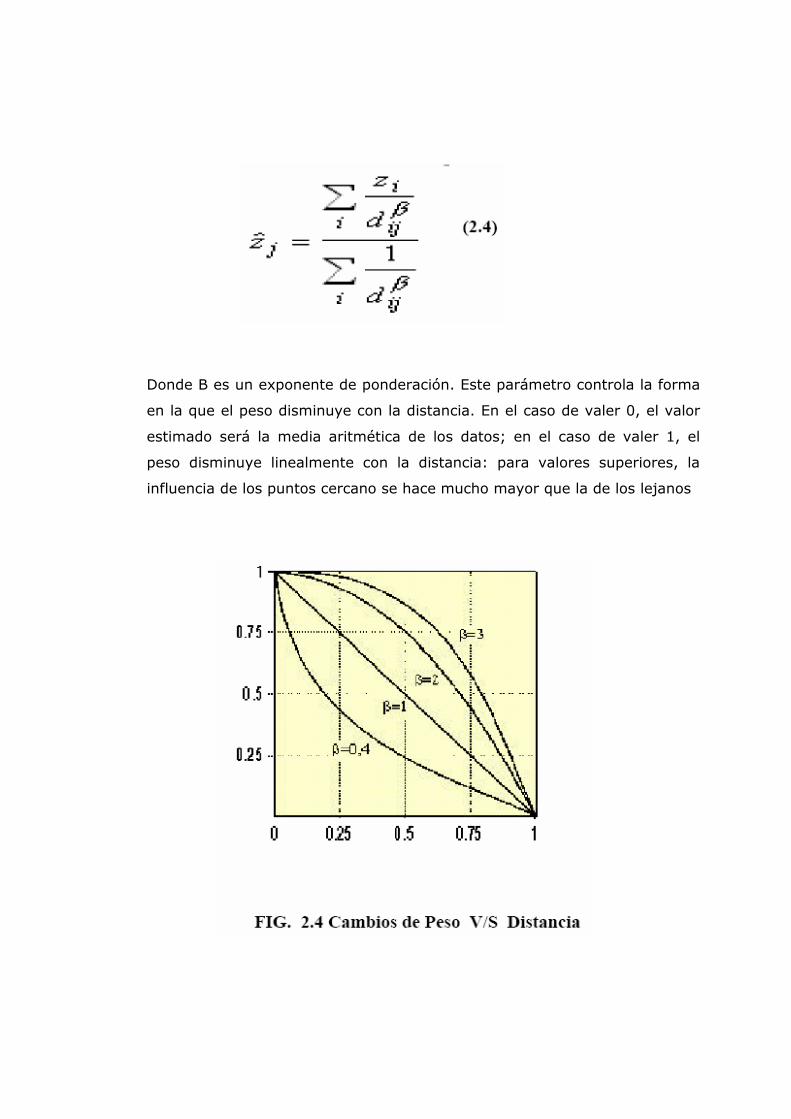
Donde B es un exponente de ponderación. Este parámetro controla la forma
en la que el peso disminuye con la distancia. En el caso de valer 0, el valor
estimado será la media aritmética de los datos; en el caso de valer 1, el
peso disminuye linealmente con la distancia: para valores superiores, la
influencia de los puntos cercano se hace mucho mayor que la de los lejanos
La figura 2.4 muestra un ejemplo de las curvas generadas para varios
valores de B donde pueden observarse los patrones de cambio de los pesos
(ordenadas) en función de las distancias (unidades arbitrarias, en abcisas)
2.5.5.2.-La Hipótesis de la Variable Regionalizada
La última alternativa para la interpolación se denomina método de
Kriging. La diferencia respecto de los métodos anteriores es que asume que
la altitud puede definirse como una variable regionalizada. Esta hipótesis
supone que la variación espacial de la variable a representar puede ser
explicada al menos parcialmente mediante funciones de correlación
espacial: la variación espacial de los valores de z puede deducirse de los
valores circundantes de acuerdo con unas funciones homogéneas en toda el
área.-
Con este método, las funciones pueden deducirse analizando la
correlación espacial entre los datos en función de la distancia entre ellos.
En efecto, en el caso de los DEM, es razonable suponer que el valor de
altitud en un punto esta relacionado de alguna manera con el valor de los
puntos vecinos, distribuidos a distancias variables. Puede suponerse,
asimismo, que la “influencia” de los puntos mas lejanos es menor que la de
los mas próximos. El Kriging estima esta dependencia mediante un
indicador estadístico: la semivarianza entre datos separados por
distancias diferentes.
La semivarianza adquiere valores diferentes en función de la distancia
entre los datos (a mas separación, menos correlación entre los valores de
altitud). La función que relaciona la Semivarianza y con los datos h se
denomina semivariograma y la expresión más usual para representarla es:

Donde n es el número de pares de valores separados por una distancia h.
Cambiando progresivamente este ultimo valor, es posible elaborar el
semivariograma empírico para la zona concreta que trabajemos. Finalmente
los pesos k correspondientes a cada distancia entre datos se estiman a
partir de los valores del semivariograma por métodos de cálculo matricial.

La figura 2.5 es un ejemplo de un semivariograma donde la varianza
real se ajusta a una distribución teórica, esta es la que se aplica para la
estimación de los pesos en la interpolación mediante Kriking.
Los métodos descritos anteriormente tienen como resultado un DEM
raster. Algunos de ellos permiten incorporar parte de las estructuras
auxiliares como las zonas de recorte, incluso líneas de ruptura. Sin
embargo, todos los métodos basados en pesos son básicamente filtros
ponderados y responden mejor ante variables con distribuciones suaves.
2.6.- LA RED IRREGULAR DE TRIANGULOS TIN
La solución aparentemente mas adecuada hasta el presente ha sido el
tratamiento del relieve mediante una estructura vectorial espacial: la red
irregular de triangulo o TIN, siglas de triangulated irregular network,
propuestas por Poiker en el año 1978.
El modelo TIN tiene varias cualidades de gran interés para los DEM:
• No presupone ni exige la continuidad estadística de la superficie a
representar.
Puede generarse incorporando una amplia variedad de estructuras
auxiliares, especialmente las líneas estructurales y de inflexión, que
son incorporadas al modelo como los lados de triángulos.
• Se adapta a la complejidad local del terreno, creando redes
localmente más densas en función de la irregularidad del relieve.
Respeta los valores de datos, que son usados como vértices y
mantienen su altitud exacta.
De esta forma un TIN es un conjunto de triangulos adosados que
cubren el terreno de forma completa. La creación del TIN se compone de
dos partes diferentes: la triangulación propiamente dicha y la selección de
los puntos que deben usarse como vértices.
La triangulación ha sido estudiada desde hace más de un siglo y,
actualmente, es un tópico bien conocido utilizado en numerosas aplicaciones
como robóticas, análisis de elementos finitos, visión artificial y síntesis de
imágenes. En el caso de los SIG el método más habitual es el conocido como
Triangulación de Delaunay.
2.6.1.- TRIANGULACIÓN DE DELAUNAY
La triangulación de Delaunay se entiende mejor partiendo de un concepto
complementario, la teselacion de Voronoi , este concepto es equivalente a
producir un mosaico de celdas cuyos argumentos basicos son los siguientes:
• Dados 2 puntos Pi y Pj, en un plano T, la perpendicular al segmento
PiPj en su punto medio divide el plano en dos regiones Vi y Vj: la
región Vi contiene todos y solo los puntos cuya distancia a Pi es
menor que a Pj; la región Vj contiene el resto.
• El concepto se extiende a múltiples puntos Pn de forma que cada uno
de ellos se asocia a una región Vn que contiene todos los puntos del
plano mas próximos:
• Si el concepto se aplica a un dominio cerrado se genera un conjunto
de polígonos convexos que teselan el plano denominados regiones de
Voronoi.
• Finalmente, si se conectan entre si los puntos que comparten un
borde de una región se obtiene una Triangulación de Delaunay.
La triangulación de Delaunay genera una solución única para un conjunto
de puntos dado salvo en algunos casos especiales, por ejemplo, cuando
cuatro puntos pertenecen a una circunferencia, donde pueden existir

triangulaciones alternativas validas. Las propiedades principales del la
Triangulacion de Delaunay son:
• Un punto P perteneciente a la red es siempre un vértice de un
triangulo T(Pi,Pj,Pk)
• Dos triángulos de una red pueden estar conectados por un vértice o
un lado común: no existe superposición.
• Dado un triangulo T(Pi,Pj,Pk) no existe otro punto de la triangulación
interno al circulo que pasa por Pi Pj Pk.
• Dados 4 puntos y el cuadrilátero definido por ellos, la diagonal que lo
divide en dos triángulos es aquella que hace máximo el menor de los
ángulos internos, es decir, la triangulación de Delaunay tiende a crear
triángulos lo mas equiláteros posibles.
El problema de la triangulación es la selección de los puntos que se
deben usar como vértices. Formalmente el problema puede plantearse como
sigue:
Dado un conjunto H de n puntos acotados, elegir un subconjunto
mínimo S de H constituido por m puntos, a partir del cual pueda
reconstruirse H con el menor error posible.
Los dos enfoques básicos son:

• Hacer la selección antes de la triangulación de forma que los algoritmos
para la triangulación de Delaunay conozcan previamente el conjunto
completo de vértices y realicen posteriormente un modelo masivo.
• Utilizar un algoritmo de triangulación que realice la selección según
realiza la construcción de la red.
2.6.2.- MÉTODOS DE CONSTRUCCIÓN DE TIN
Los métodos de construcción del TIN más utilizados pueden agruparse en las
siguientes clases:
• Inserción incremental: esta comienza con una triangulación mínima y
a la que se añaden progresiva y selectivamente nuevos puntos como
vértices de la red. El proceso continua hasta conseguir un objetivo
concreto, definido en función de un valor umbral de error.
• Reducción selectiva: esta se aplica por eliminación de puntos a partir
de un modelo masivo mediante criterios de incremento mínimo de error.
Aunque la triangulación de Delaunay es probablemente el método
mas utilizado en los SIG actualmente, se trata de un método bidimensional
puro: los triángulos se construyen con criterios geométricos en el plano de
proyección, usando solo coordenadas x e y, independientemente del valor
de la altitud. Por este motivo, la triangulación de Delaunay se integra entre
los métodos que solo tienen en cuenta la forma de la triangulación.
2.7.- TRANSFORMACION DE VECTOR A RASTER
El problema más importante de los métodos basados en triángulos es
que generan una estructura más difícil de manejar que la matriz regular,
específicamente en procesos de análisis, superposición y combinación
temática. Es decir a pesar de ser el TIN la estructura más adecuada para
construir un DEM por la capacidad de representar un relieve complejo con
precisión, esta sometido a problemas típicos de las estructuras vectoriales.
Por este motivo, y por la ausencia de un desarrollo suficiente de
algoritmos de análisis, lo más usual es crear un DEM según el modelo TIN y,
posteriormente, generar un DEM matricial mediante procesos de
interpolación específicos. Asimismo, es frecuente realizar una selección de
puntos críticos a partir de datos matriciales para “alimentar” una
Triangulación de Delaunay.
En el primer caso, el proceso de interpolación asigna a cada nodo del
DEM matricial un valor de altitud estimado a partir de un TIN. Obviamente,
la estructura matricial no puede representar puntos singulares ni estructuras
singulares como un TIN, por lo que parte de los beneficios de la riangulación
se pierden. Sin embargo, el proceso aprovecha parcialmente la capacidad
del TIN para integrar discontinuidades en la generación del DEM por lo que
es preferible a la generación directa de la matriz regular a partir de los datos
de entrada.
La interpolación puede realizarse por dos métodos básicos:
• Interpolación lineal: donde la altitud del punto problema se estima
directamente a partir de la ecuación del plano definido por los tres
vértices del triangulo que lo contiene; en el caso de que el punto coincida
exactamente con un vértice, se le asigna la altitud de este. La
interpolación lineal, aunque es muy rápida, provoca la discontinuidad
entre triángulos, con cambios bruscos de orientación y pendiente.
• Interpolación quintica: que considera la superficie definida por el TIN,
como un continuo y, por tanto, suaviza las zonas de los vértices y lados;
para esta interpolación se utiliza una ecuación polinómica bivariable de
quinto grado. En algunos SIG se ha incorporado la posibilidad de
incorporar las líneas de rotura de forma que rompan la continuidad
realizando una interpolación lineal a lo largo de la línea. Salvo en esta
circunstancia, la interpolación conserva la continuidad de las pendientes
entre triángulos, generando un DEM sin facetas.
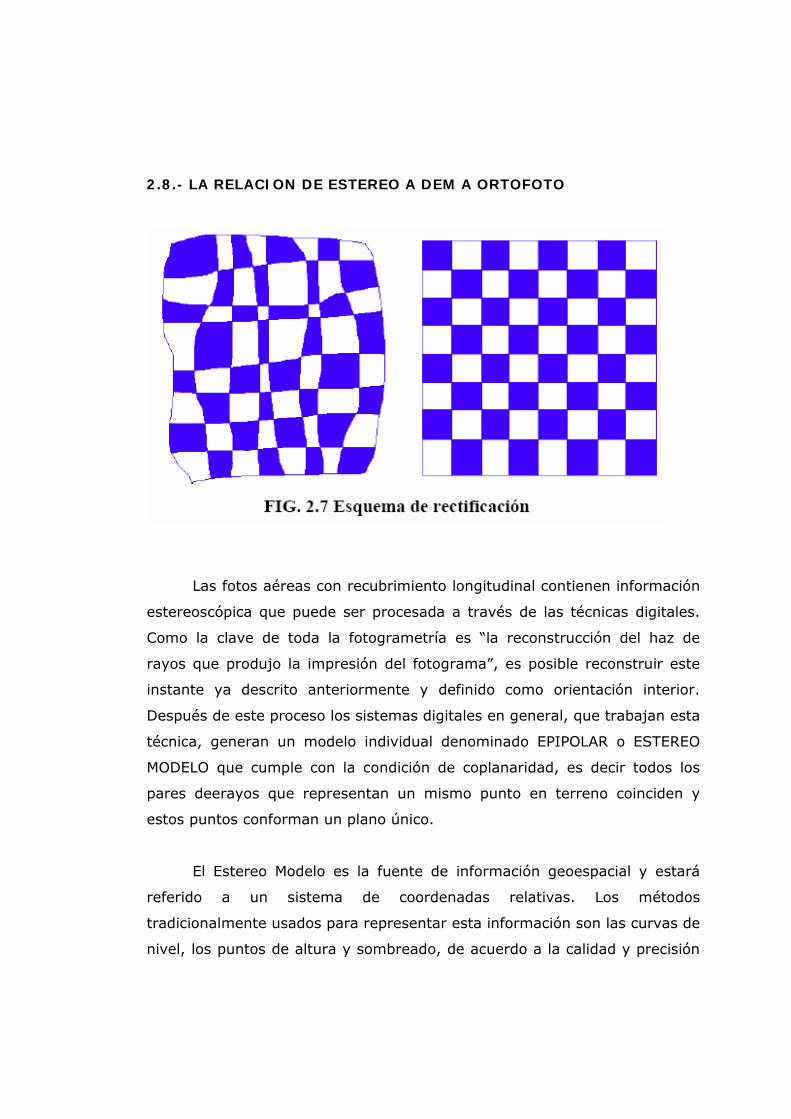
2.8.- LA RELACION DE ESTEREO A DEM A ORTOFOTO
Las fotos aéreas con recubrimiento longitudinal contienen información
estereoscópica que puede ser procesada a través de las técnicas digitales.
Como la clave de toda la fotogrametría es “la reconstrucción del haz de
rayos que produjo la impresión del fotograma”, es posible reconstruir este
instante ya descrito anteriormente y definido como orientación interior.
Después de este proceso los sistemas digitales en general, que trabajan esta
técnica, generan un modelo individual denominado EPIPOLAR o ESTEREO
MODELO que cumple con la condición de coplanaridad, es decir todos los
pares deerayos que representan un mismo punto en terreno coinciden y
estos puntos conforman un plano único.
El Estereo Modelo es la fuente de información geoespacial y estará
referido a un sistema de coordenadas relativas. Los métodos
tradicionalmente usados para representar esta información son las curvas de
nivel, los puntos de altura y sombreado, de acuerdo a la calidad y precisión
requerida. Sin embargo, estos métodos requieren de más tiempo y personal
altamente calificado para su ejecución.
Las técnicas digitales, han abierto una nueva posibilidad para obviar
esta dificultad, especialmente cuando se intenta representar distintas formas
de relieve, mediante el Modelo Digital de Elevación.
Como se ha señalado anteriormente el Modelo Digital de Elevación es
una representación digital del relieve en una forma adecuada para el
procesamiento computacional. Con la generación del DEM se dispone de la
información geoespacial para realizar el proceso de ortorectificacion de la
imagen corregida de las diferentes deformaciones que la afectan, este
producto final es conocido como ortofotografia.
El producto final conocido como ortofoto no es mas que una
rectificación diferencial, es decir una rectificación a través de áreas
elementales,para corregir los desplazamientos en la imagen causadas por la
inclinación de la cámara y las variaciones de pendiente del terreno.
CAPITULO.3: SISTEMA DIGITAL TNT MIPS
3.1.- PRESENTACION DEL SISTEMA
TNTmips es un avanzado sistema para análisis geoespacial desarrollado
por un equipo de profesionales de la Compañía MicroImages. Fundada en el
año 1986 en Nebraska, Estados Unidos.
Es un sistema profesional para completa integración GIS diseñado con los
últimos avances de la era digital , suministrando todo lo que se necesita
para crear, mantener, analizar y editar geodatos en proyectos de alta
complejidad.
• GEODATOS INTEGRADOS
TNTmips interactúa directamente con estructuras raster, vector, CAD, Bases
de datos relacionales, y otras capas o niveles de información en el formato
TNT u otro geodato de uso regular. Los materiales de Bases de Datos
pueden ser conservados dentro del editor espacial de TNT o accederlos vía
Access, Oracle, u otro producto.
• RAPIDEZ Y EFICIENCIA
La Piramidación, organización, y compresión de las imágenes permiten que
el tiempo de acceso sea rápido para un millón de aerofotos individuales,
mapas a gran escala y mosaicos de imágenes de muchos gigabytes cada
uno. Estos materiales pueden ser una mezcla de proyecciones de mapas que
son automáticamente reconocidas por el servidor cuando son requeridos.
• FACTOR ECONÓMICO
El sistema TNTmips es económico comparado con otros programas de
proceso de imágen que deben incorporar costosos paquetes de módulos
adicionales a nivel comercial o empresarial. Los costos de montaje son bajos
dado que el sistema es fácil de instalar, actualizar, y mantener. El sistema
posee una multilectura para tomar ventaja de las diferentes plataformas y
multiprocesadores, y pueden también ser usado sobre computadores de
bajo costo en un sistema de redes. TNTmips ha sido usado para servir
grandes colecciones de geodatos rápidamente sobre un MODEM para acceso
mundial, y su interfase puede ser fácilmente traducida a cualquier idioma.
• USO DE COBERTURA MUNDIAL
El sistema TNT profesional se encuentra instalado en más de 150
países en diversos idiomas. TNTlite, la versión libre de TNTmips, es usado
para proyectos de análisis geoespaciales en casi todas las naciones. Bases
de Datos geoespaciales de todos los estados o naciones publicados con TNT
en Internet o una LAN. MI/X, un servidor X para plataformas Windows y
Mac, ha sido instalado en más de un millón de computadores en todo el
mundo.
• TNT MIPS ES UN SOLO SISTEMA INTEGRADO QUE CUBRE TODAS
LAS PLATAFORMAS:
•Sistemas de Información Geográfica (SIG) •Uso de GeoFórmulas
•Diseño Asistido por Computador (CAD) •Uso de Consultas
•Gestión de Bases de Datos Relacionales •Análisis de Vectores
•Visualización Compleja en 2D y 3D •Análisis de Regiones
•Navegación •Gestión de Bases de Datos
•Visualización en 2D •Gestión de Atributos
• Visualización en 3D •Uso de Estilos
•Adquisición de Datos •Composición de Mapas
•Importación de Datos •Obtención de Buen Color
•Exportación de Datos •Boceto &Medición
•Edición Raster •Filtrado de Imágenes
•Edición de Vectores •Mosaico de Imágenes
•Edición CAD •Modelamiento de Superficies
•Edición TIN •Georeferenciación
•Mapeo por Características •DEMs/Ortofotos
•Mapeo Temático •Proyecciones de Mapas
•Mapeo por Situación • HyperIndices

•Combinación de Rastrees •Lenguaje de Guiones
•Clasificación de Imágenes •Modelamiento de Riesgos
•Intercambio de Idiomas •Características Técnicas
• Análisis de Superficies •Análisis de Imágenes
•Cartografía de Escritorio •Mapeo Temático
•Publicacion de Geomedia
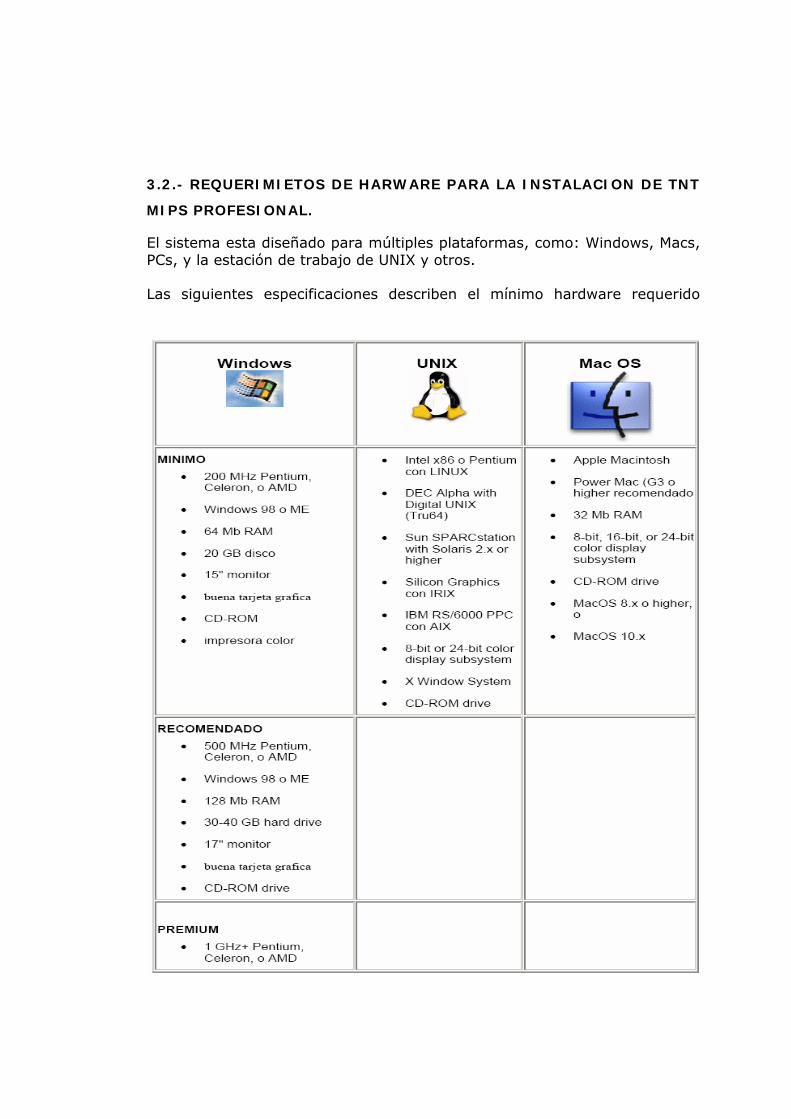
3.2.- REQUERIMIETOS DE HARWARE PARA LA INSTALACION DE TNT
MIPS PROFESIONAL.
El sistema esta diseñado para múltiples plataformas, como: Windows, Macs, PCs, y la estación de trabajo de UNIX y otros.
Las siguientes especificaciones describen el mínimo hardware requerido
NOTA:
• Cualquiera de las configuraciones anteriores ejecutará TNTmips 6.7
usando un monitor de 17”.
• El sistema corre sin problema en cualquier computadora portátil que
utilice Windows.
• TNTmips es un producto completo de ninguna forma por módulos.
• La llave de licencia de software proporcionada para ejecutar la versión
profesional de TNTmips para Windows está disponible para puerto
paralelo o puerto de USB.
3.3.- ESTRUCTURA DE DATOS DE TNTMIPS
Dependiendo de sus fuentes, los geodatos pueden venir de diferentes
estructuras de información. Esta información debe ser reconocida e
integrada. Así el análisis geoespacial es consumado cuando toda la
información geoespacial puede ser procesada en conjunto.
El poder de este sistema radica en la posibilidad de importar
/exportar, desplegar, convertir, editar, combinar y analizar principalmente
los siguientes tipos de geodatos:
3.3.1.-Vectores: Los datos de un Sistema de Información Geográfica (SIG)
son usualmente en forma de vectores con topología controlada. El sistema
usa objetos vectores para cualquier tamaño y mantiene la topología en cada
operación.
Objetos Vectores: Los objetos vectores pueden contener distintos tipos de
elementos, con un control de asignación topológica Un objeto vector puede
estar constituido por: polígonos, líneas, puntos aislados, rótulos, nodos.etc.
3.3.2.-CAD: Los datos espaciales como planos de edificios y planos de sitios
son usualmente encontrados en formato orientado a componentes CAD). El
sistema hace un amplio uso de objetos CAD.
Un objeto CAD: (Computer Aided Design=Diseño Asistido por Computador)
usualmente contiene dibujos o estructuras de ingeniería y otras líneas y
formas geométricas cuyos usos corrientes no requieren restricciones
topológicas (p.e. desde un punto de vista del análisis espacial, objetos CAD
son a menudo pensados como un conjunto de líneas independientes y
objetos geométricos). Todas las Coordenadas de los puntos que definen un
objeto CAD tienen doble precisión.
3.3.3.- Rasters: Las imágenes son una fuente muy importante de
información, su uso esta orientado a la creación y actualización de geodatos
para representar la superficie de la tierra y su uso.El sistema TNTmips
provee herramientas extensivas para la gestión, interpretación, y análisis de
imágenes. Cada raster pude ser analizado con valores de celdas de cualquier
tipo de datos numéricos.
Objetos Raster: Un objeto raster usualmente representa imágenes o
mapas. Es un ordenamiento de celdas de valores de datos, los cuales
pueden ser de 1 a 128 bits en tamaño y codificados para representar una
amplia variedad de tipo de datos (binarios, enteros, reales, composición de
color, imaginarios, etc.).
Por ejemplo si el tamaño máximo de cada objeto raster es de 314,368
celdas, con una máxima dimensión de 1024. Entonces todas las imágenes
que tengan estos formatos 1024 x 307, 614 x 512, y 307 x 1024 caben
dentro de este límite.
3.3.4.- TINs: Las superficies 3D son comúnmente almacenadas en formato
TIN (Triangulated Irregular Network=Redes Irregulares Trianguladas).
TNTmips crea y gestiona superficies usando TINs.
Un objeto (TIN): esta hecho enteramente de triángulos cuyas
orientaciones espaciales y conexiones representa alguna o toda una
superficie tridimensional. Un objeto TIN también tiene restricciones
topológicas rígidas por lo cual el área interna de cualquier triángulo no
puede ser compartido con otro. Todas las coordenadas de los puntos que
definen objetos TIN tienen doble precisión.
3.3.5 Bases de Datos Relacionales: Ellas pueden suministrar conexiones
extensivas de información geolocalizada. También son utilizadas como
deposito de información para los atributos que describen los componentes
en todos los otros tipos de geodatos. El sistema viene con su propia Base de
Datos relacional orientada geoespacialmente y una interface para otros
productos de Bases de Datos relacionales.
Objeto de Base de Datos Relacionales: Un objeto base de datos está
hecho totalmente de tablas interrelacionadas que contienen registros hechos
de campos de datos. Si una de las tablas contiene alguna clase de X-Y,
latitud-longitud, u otra coordenada espacial, o la información a partir de lo
cual ellos pueden ser inferidos (p.e. direcciones de calles), entonces esto
puede ser un objeto espacial independiente. Si ninguna de las tablas
contienen elementos espaciales que referencian la tabla, entonces ellos
contienen atributos asociados con el contenido de otros objetos (p.e. celdas
en un objeto raster, elementos en un vector u objeto CAD, triángulos en un
objeto TIN, o los registros en otro objeto base de datos). Cualquier clase de
datos puede ser almacenado en un campo de base de datos (p.e. números,
caracteres, comentarios, etc.).
3.4.- COMUNICACIÓN CON OTROS SISTEMAS
3.4.1.- FORMATO DE IMPORTACION
Los datos geoespaciales pueden estar en diferentes formas producto de que
provienen de diferentes fuentes. Este sistema permite trabajar con
estructuras de datos raster, vector, CAD y TIN, y guardar todas ellas como
objetos dentro de un Archivo de Proyecto individual.
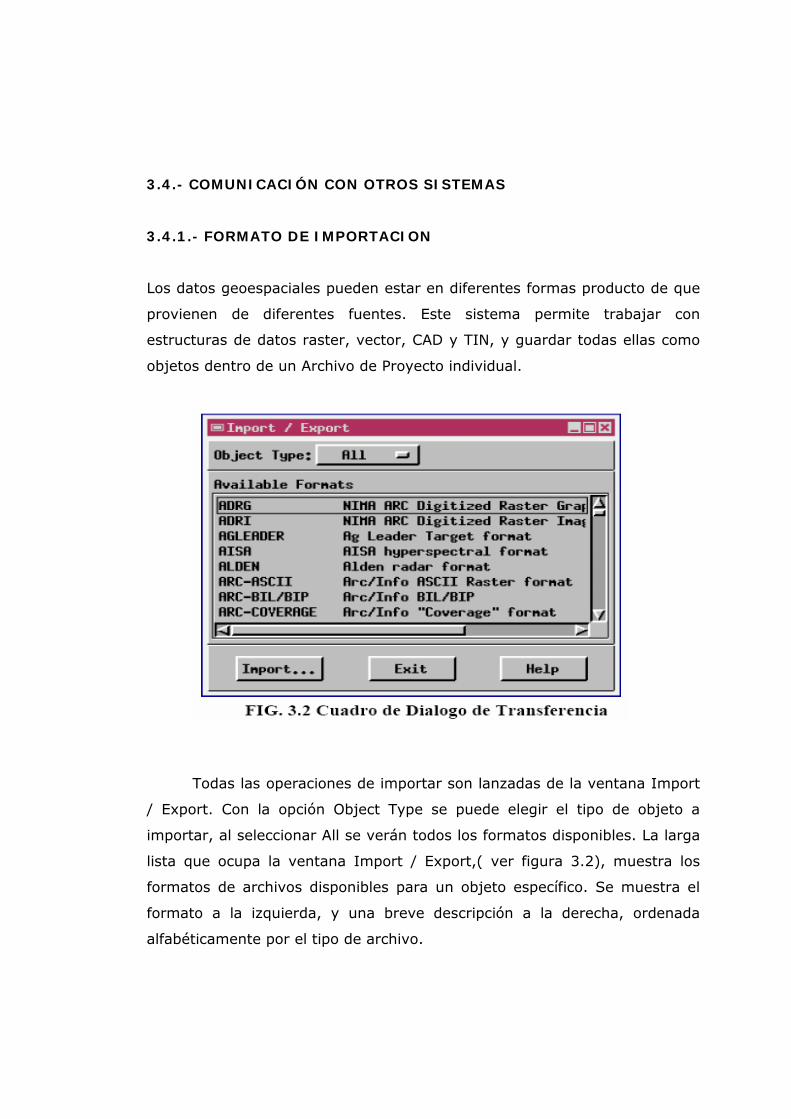
Todas las operaciones de importar son lanzadas de la ventana Import
/ Export. Con la opción Object Type se puede elegir el tipo de objeto a
importar, al seleccionar All se verán todos los formatos disponibles. La larga
lista que ocupa la ventana Import / Export,( ver figura 3.2), muestra los
formatos de archivos disponibles para un objeto específico. Se muestra el
formato a la izquierda, y una breve descripción a la derecha, ordenada
alfabéticamente por el tipo de archivo.

3.4.1.1.- IMPORTAR UN RASTER TIFF GEORREFERENCIADO
Las imágenes TIFF (Tag Image File Format), pueden traer información
georreferenciada en un archivo de Arc-Info World , el que debe tener el
mismo nombre que el archivo TIFF, pero con una extensión .tfw. Se debe
fijar el Sistema de Coordenadas y los parámetros de la Protección para la
imagen tal que el proceso de importar TIFF puedan usar la información del
.tfw para crear el subobjeto Georreferenciado para el raster importado. Esta
información se encuentra en el archivo de tipo texto de descripción
(extensión .txg) que acompaña el archivo TIFF.
Los TIFF pueden también tener información georreferenciada
incorporada dentro del archivo (formato GeoTIFF). Esta información es leída
automáticamente y usada para crear la georreferencia de la imagen.
3.4.1.2.- IMPORTAR PUNTOS VECTOR DE TEXTO
Es posible usar el proceso Import para crear un objetor vector punto
de grupos de valores de coordenadas 2D o 3D en archivos de texto o de
base de datos. Los valores de coordenada en archivos de texto pueden ser
alineados en columnas o separados por delimitadores de carácter (por
defecto delimitadores por coma) Se debe especificar el Sistema de
Coordenada y la Proyección para el objeto e identificar el campo texto que
contiene cada uno de los valores de coordenada (X, Y, y Z).

3.4.2.- FORMATO DE EXPORTACION
Una vez desarrollada, procesada y analizada la información
geoespacial para un proyecto específico, se puede exportar los datos en
formato de archivo compatible con otros software.
El proceso export puede exportar estructuras raster, vector, CAD,
TIN, y objetos de base de datos a una variedad de formatos externos.
Muchos de los procesos de exportación de vectores y CAD permiten
seleccionar una tabla de atributo individual o una por tipo de elemento, para
ser exportada con los elementos del plano.
Los procesos de exportación, ofrecen opciones que permiten ajustar el
proceso para acomodar mejor las características a la estructura del formato
del archivo deseado. Por ejemplo, algunos formatos de datos espaciales
usados por otros GIS están basados en el modelo de datos CAD, y no
mantienen la estructura topológica encontrada en los objetos vectores de
TNTmips. Al exportar un objeto vector polígonal a uno de estos formatos, se
puede elegir si la forma cerrada por la intersección de las líneas son tratadas
como polígono o líneas separadas el archivo de salida. Se puede también
elegir que tipo de elemento espacial es asociado con el dato atributo.
3.4.2.1.- EXPORTAR UN RASTER GEORREFERENCIADO A TIFF
TIFF es uno de los formatos mas flexibles y ampliamente soportados
de archivo raster. Los TIFF son comúnmente usados para guardar imágenes
de color. Sin embargo se pueden exportar raster binarios o de escalas de
grises a un TIFF. Se pueden aplicar también alguna de las opciones de
compresión, siendo por defecto la opción Uncompressed (sin comprimir). Al
exportar un raster georreferenciado a un formato TIFF, la opción
Georeference permite guardar la información de georreferencia en un
archivo aparte que lo acompaña. El archivo de georreferencia tiene el mismo
nombre que el TIFF pero distinta extensión, la que varía dependiendo del
tipo de salida elegida:
ArcInfo World (.tfw), Map Info (.tab), o Descriptive Text (.txg).
Se puede también crear ambos ArcInfo World y archivos Text. EL
archivo de georreferencia contiene coordenadas por cada esquina del raster
usando la proyección especificada por el subobjeto Georeference ligado al
raster exportado.
Si el raster tiene más de un subobjeto Georeference, se exporta el
último usado. Se puede exportar raster a formato GEOTIFF, el que incluye la
información de georreferencia

3.4.2.2.- EXPORTAR UN OBJETO RASTER A ASCII
Se puede elegir la opción ASCII para exportar un objeto raster a un
archivo de texto ASCII, que pueda ser visualizado, reformateado, o editado
usando un editor de texto o procesador de palabras. Los valores del raster
son escritos línea por línea en el archivo de texto, al que se le asigna la
extensión .txt La opción por defecto Mínima Formatting ubica un espacio
entre valores, o se puede elegir la opción Uniform Formatting para ordenar
los valores. El parámetro Maximum Line Length tiene por defecto el valor de
512 caracteres; se puede ajustar para acomodarlo al editor de texto. Si el
número requerido de caracteres para una línea excede el valor de Maximum
Line Length, cada línea será escrita en una secuencia de líneas de texto
contiguas. Una nueva línea de texto es creada para el inicio de cada línea de
raster.
3.4.2.3.- EXPORTAR UN OBJETO VECTOR COMO DXF
Es posible exportar objetos vectores ya sea a formato vector o CAD,
utilizando la extención DXF. El cuadro de dialogo DXF para objetos vectores
tiene distintas opciones además de las opciones para objetos CAD. Porque
los objetos vectores pueden contener distintos tipos de elementos, hay
control de asignación de capas para puntos, líneas y polígonos La selección
de la opción, exportar un polígono, controla la forma en la que los polígonos
formados por intersección de líneas de redes son escritas en el archivo DXF.
Si se elige la opción ONE Line Polygon (por defecto), todas las líneas de
vectores que forman un polígono se transforman en un polígono cerrado en
el archivo de salida.
3.5.- SALIDA GRAFICA
3.5.1.- VISTA 3D
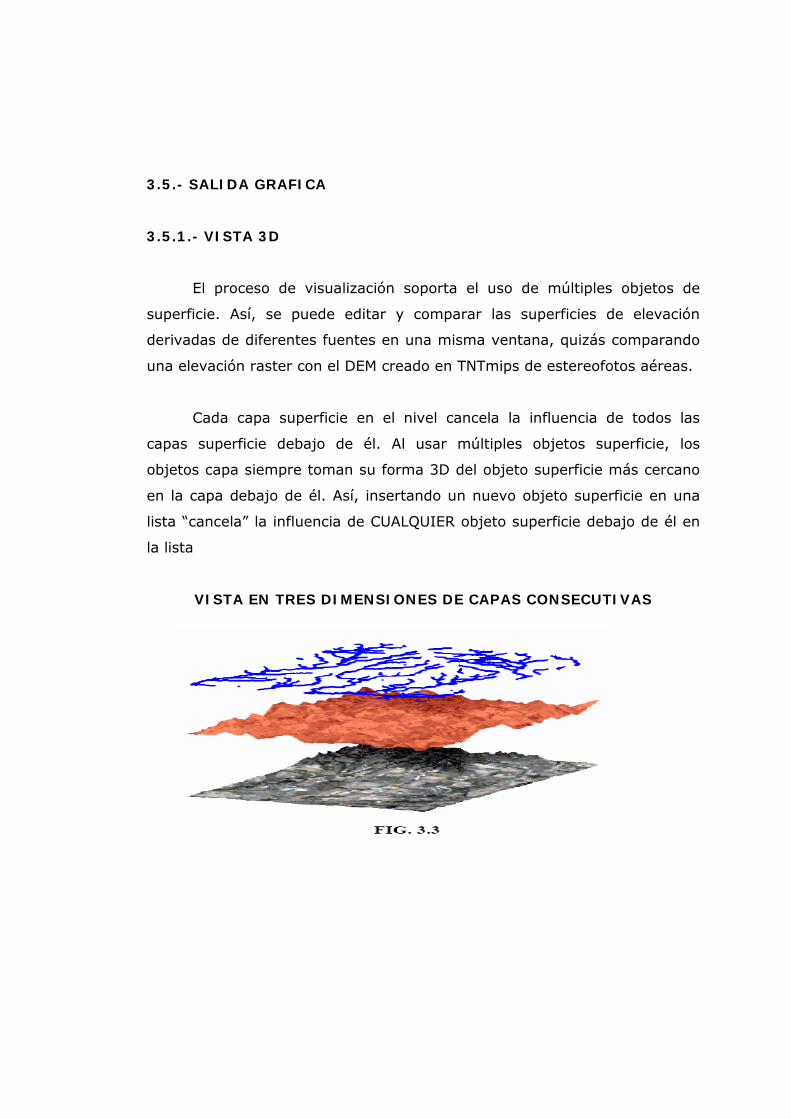
El proceso de visualización soporta el uso de múltiples objetos de
superficie. Así, se puede editar y comparar las superficies de elevación
derivadas de diferentes fuentes en una misma ventana, quizás comparando
una elevación raster con el DEM creado en TNTmips de estereofotos aéreas.
Cada capa superficie en el nivel cancela la influencia de todos las
capas superficie debajo de él. Al usar múltiples objetos superficie, los
objetos capa siempre toman su forma 3D del objeto superficie más cercano
en la capa debajo de él. Así, insertando un nuevo objeto superficie en una
lista “cancela” la influencia de CUALQUIER objeto superficie debajo de él en
la lista
VISTA EN TRES DIMENSIONES DE CAPAS CONSECUTIVAS
3.5.2.- ARCHIVOS DE IMPRESION
Un archivo de impresión contiene toda la información necesaria para
enviar layout o capa a una impresora. Sin embargo, no es un archivo
visualizable, y no está en el formato RVC (Raster Vector Cad). Al grabar la
información como archivo de impresión se esta generando un par de
archivos, ambos con el nombre que se asignó pero uno con una extensión
.prf (el archivo pequeño), y uno con una la extensión .p1(el archivo grande).
Si un layout cubre varias páginas y esta grabado con los drivers de
TNTmips, habrá un .p1 y .p2, y así sucesivamente, dónde el número
corresponde al número de la página mas un archivo .prf . Si se graba un
archivo usando el driver de Windows es un solo archivo con una extensión
.prn sin tener en cuenta el número de páginas.
Si la impresora que se quiere usar no está disponible en la red y se
conecta a una máquina que no tiene TNTmips instalado, se puede imprimir
transfiriendo su impresión sobre archivos a esa máquina y copiándolos
directamente al puerto de la impresora si ellos se crearon con uno de los
drivers de este sistema.
Para imprimir sobre archivo en el sistema Windows que no tiene
TNTmips instalado, se hace lo siguiente:
copy / b filename.p1 port: en el prompt del DOS e inserte el nombre
correcto del archivo hoja numero (.p1, .p2, etc.), y el nombre del puerto
(lpt1, lpt2, com1, etc.).
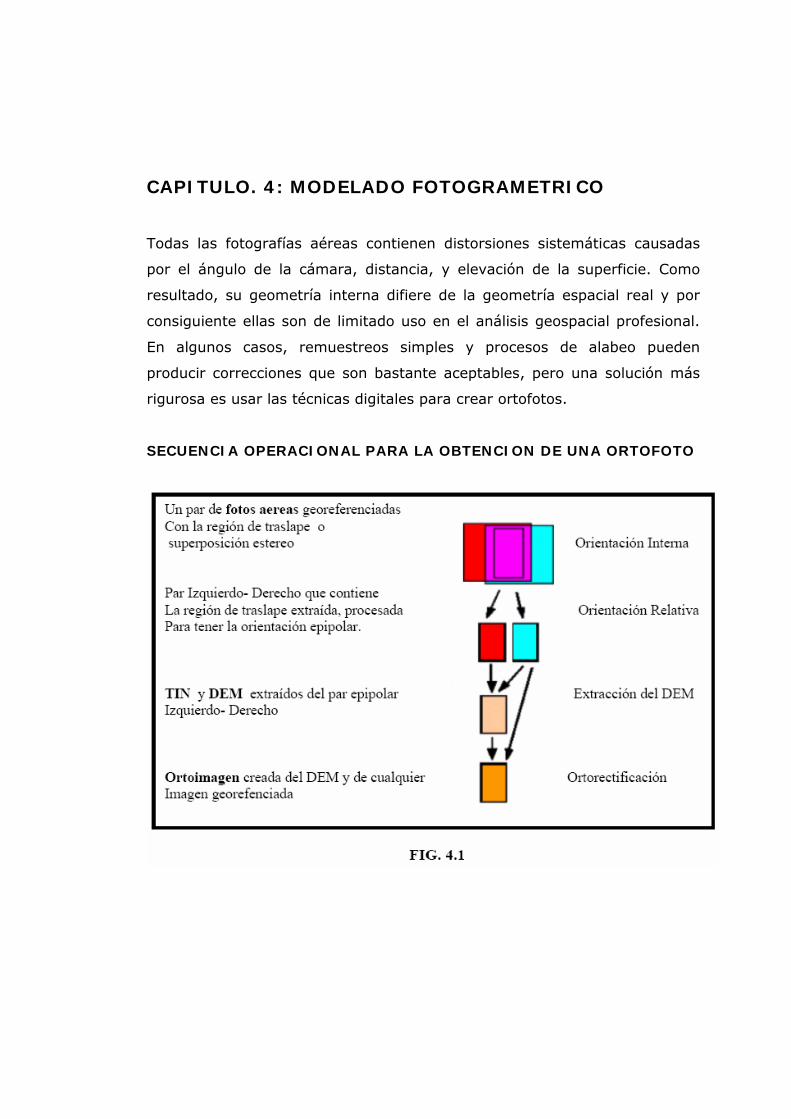
CAPITULO. 4: MODELADO FOTOGRAMETRICO
Todas las fotografías aéreas contienen distorsiones sistemáticas causadas
por el ángulo de la cámara, distancia, y elevación de la superficie. Como
resultado, su geometría interna difiere de la geometría espacial real y por
consiguiente ellas son de limitado uso en el análisis geospacial profesional.
En algunos casos, remuestreos simples y procesos de alabeo pueden
producir correcciones que son bastante aceptables, pero una solución más
rigurosa es usar las técnicas digitales para crear ortofotos.
SECUENCIA OPERACIONAL PARA LA OBTENCION DE UNA ORTOFOTO

El proceso de Modelado Fotogrametrico en TNTmips produce ortofotos en
cinco pasos:
• Georreferenciación
• Orientación Interna
• Orientación Relativa
• Extracción del DEM
• Ortorrectificación
A continuación se hace una descripción de estos cinco procesos hasta
obtener el producto cartografico final que es la ortofoto
4.1.- GEORREFERENCIACION
El proceso de georreferenciación permite crear y guardar información de
control que relaciona celdas raster o elementos vector, CAD, o TIN a un
Sistema de Coordenadas y una Proyección Cartográfica definida. El sistema
conserva los valores de coordenadas para los puntos de control y
parámetros relacionados, como un archivo de georreferencia.
Si no se tiene control de georreferencia, se puede extraer la elevación
relativa. Pero si se quiere valores de la elevación real en el DEM, y producir
una ortoimagen, se debe proporcionar valores de coordenadas absolutas.
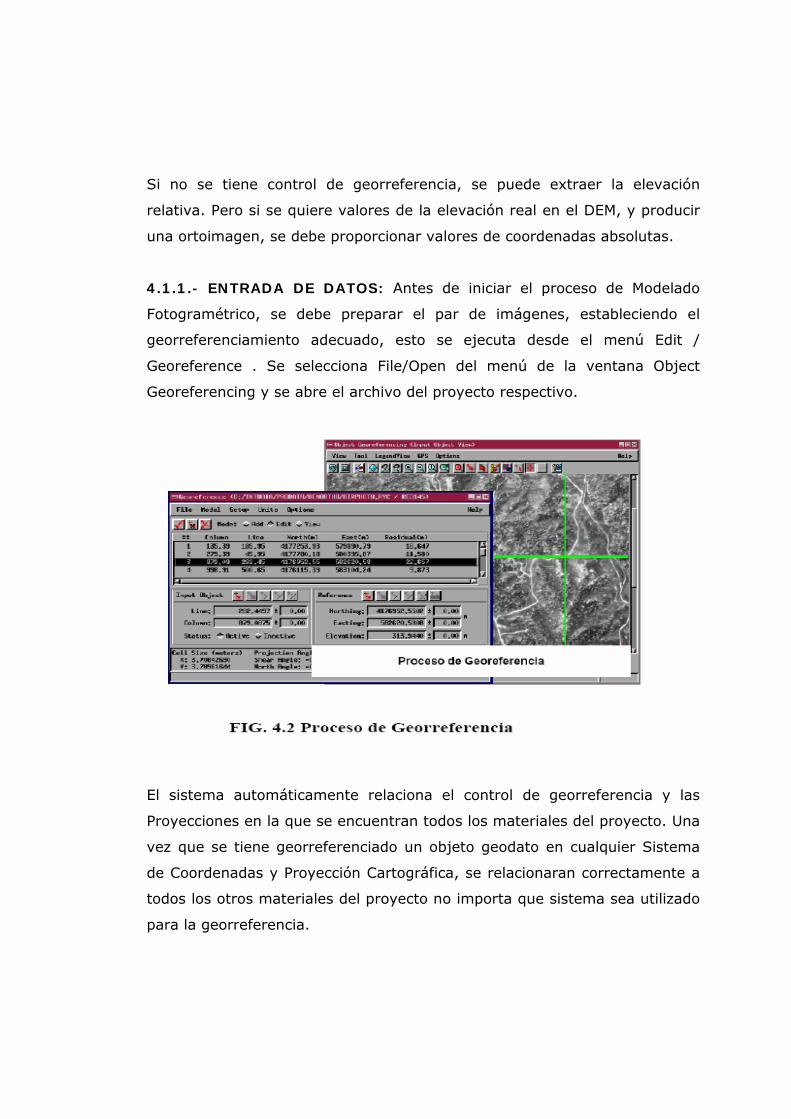
4.1.1.- ENTRADA DE DATOS: Antes de iniciar el proceso de Modelado
Fotogramétrico, se debe preparar el par de imágenes, estableciendo el
georreferenciamiento adecuado, esto se ejecuta desde el menú Edit /
Georeference . Se selecciona File/Open del menú de la ventana Object
Georeferencing y se abre el archivo del proyecto respectivo.
El sistema automáticamente relaciona el control de georreferencia y las
Proyecciones en la que se encuentran todos los materiales del proyecto. Una
vez que se tiene georreferenciado un objeto geodato en cualquier Sistema
de Coordenadas y Proyección Cartográfica, se relacionaran correctamente a
todos los otros materiales del proyecto no importa que sistema sea utilizado
para la georreferencia.
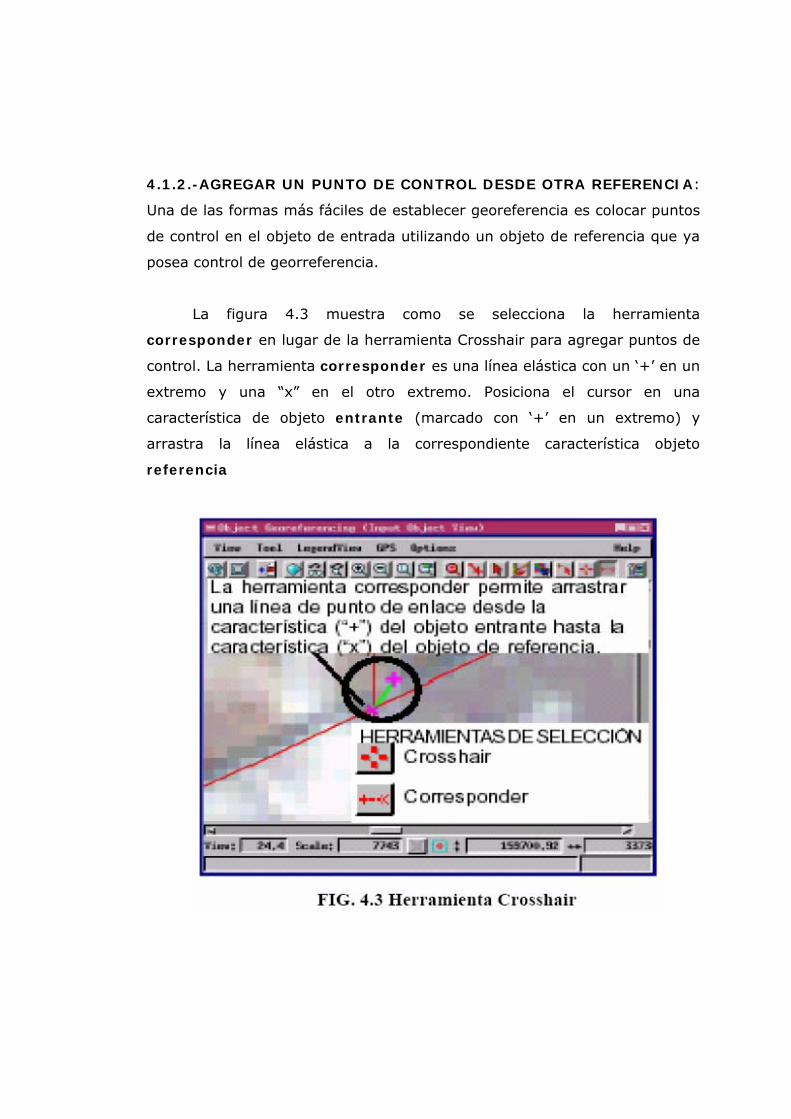
4.1.2.-AGREGAR UN PUNTO DE CONTROL DESDE OTRA REFERENCIA:
Una de las formas más fáciles de establecer georeferencia es colocar puntos
de control en el objeto de entrada utilizando un objeto de referencia que ya
posea control de georreferencia.
La figura 4.3 muestra como se selecciona la herramienta
corresponder en lugar de la herramienta Crosshair para agregar puntos de
control. La herramienta corresponder es una línea elástica con un ‘+’ en un
extremo y una “x” en el otro extremo. Posiciona el cursor en una
característica de objeto entrante (marcado con ‘+’ en un extremo) y
arrastra la línea elástica a la correspondiente característica objeto
referencia
4.1.3.- ELIMINAR Y EDITAR PUNTOS DE CONTROL: La edición de los
puntos de control permite mover o ajustar una localización existente de
puntos de control. Consiste en, presionar el botón Edith _ODE. Luego se
escoje el punto de control deseado desde la lista en la ventana
Georeference. El color resaltado del punto de control seleccionado cambia en
la ventana de visualización. Se utiliza la herramienta corresponder para
reposicionar el punto de control.
4.1.4.- SELECCIONAR UN SISTEMA DE COORDENADAS: El proceso de
georreferencia permite seleccionar el Sistema de Coordenadas y Proyección
Cartográfica para el control de georreferencia. La elección puede ser
determinada por las características geométricas del objeto entrante, como
un mapa escaneado que haya sido impreso en una proyección dada, o el
sistema usado por otros materiales del proyecto, como un objeto de
referencia utilizado para puntos de control.
Se puede escoger cualquier Proyección Cartográfica coincidente con el
objeto entrante. La proyección de salida puede ser diferente de la
proyección entrante. Se pueden visualizar coordenadas en cualquier otra
proyección y sistema de coordenadas. Además se podrían ingresar puntos
de control en Lat./Lon, visualizar coordenadas en UTM, y guardar la
georreferencia en State Plane.
4.1.5.- OTROS PARÁMETROS DE PROYECCIÓN: Es posible especificar
valores para otros parámetros de proyección asociados con un Sistema de
Coordenadas escogido. Los parámetros de proyección por defecto,
incluyendo la proyección, datum, y elipsoide, son desplegados en otros
campos de texto. Detallados campos de control de proyección pueden ser
visualizados cuando los botones de Parámetros de Proyección son
presionados. Estos campos difieren de proyección a proyección; por ejemplo

para la proyección Lambert Conformal Conic utilizado con State Plane, estos
campos incluyen los paralelos estándares norte y sur, el meridiano central,
el origen de latitud, valores falsos de norte y este, y factor de escala.
4.1.6.-GEORREFERENCIAR UN RASTER USANDO UN RASTER: En este
módulo se puede agregar puntos de control usando cualquier tipo de objeto
georreferenciado como objeto referencia: raster, vector, CAD, o TIN.
El modulo de georreferencia permite utilizar dos raster en una sola ventana
View, automáticamente visualizándolos en colores monocromáticos
complementarios. El raster entrante se visualiza en escala roja; el raster
referencia se superpone en escala verde transparente, y el efecto
combinado en escala amarilla. Donde las imágenes estén mal alineadas,
bordes rojos y verdes son visibles junto con los bordes característicos.
4.1.7.- GEORREFERENCIACIÓN POR COORDENADAS CONOCIDAS:
Otra forma de establecer georreferencia es adquiriendo coordenadas de un
levantamiento por Posicionamiento Global, mapas de referencia, o
información convencional de levantamientos de suelos. Se localiza la
posición del levantamiento del punto usando el mouse, y se escriben los
valores de las coordenadas como se describe en la figura 4.4.
Se utiliza la herramienta Crosshair en la ventana Input Object View para
seleccionar la localización posicionando el cursor del mouse, y click el botón
izquierdo del mouse en la localización deseada en la ventana View.
Después se ingresa los valores de las coordenadas conocidas en los campos
numéricos Reference en la ventana Georeference. Luego clic en el botón
icono Apply para aceptar los parámetros, y agregar el nuevo punto de
control.
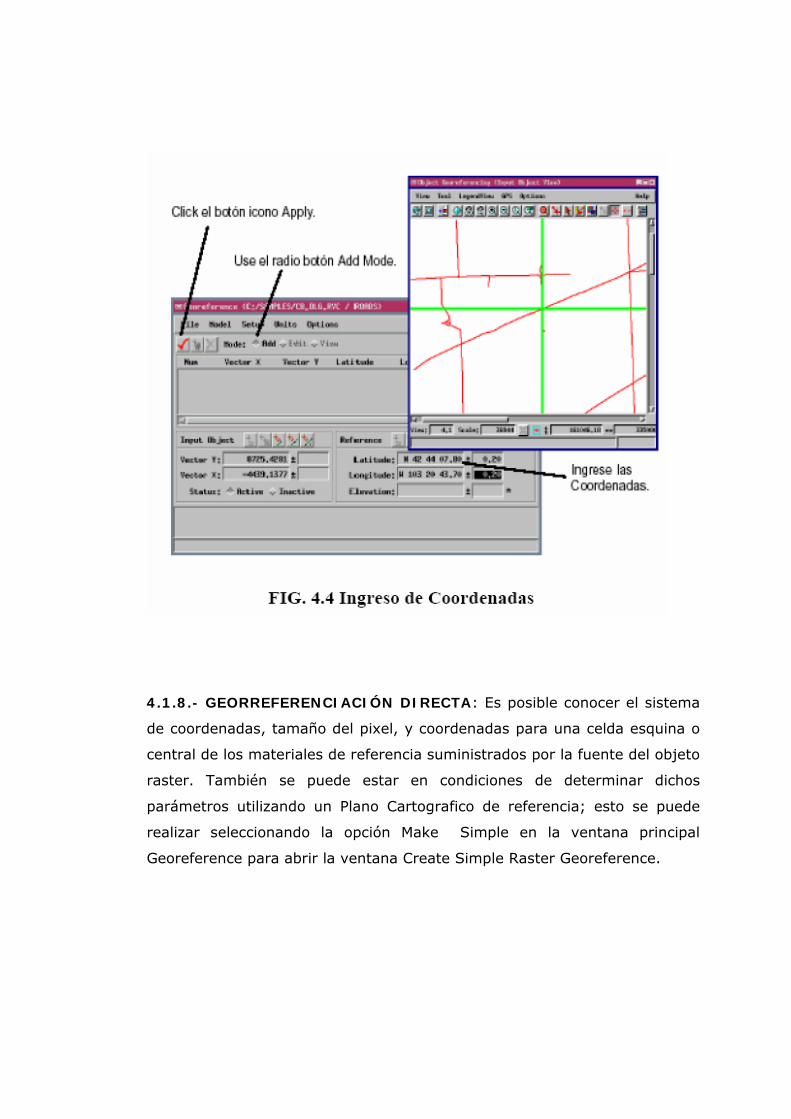
4.1.8.- GEORREFERENCIACIÓN DIRECTA: Es posible conocer el sistema
de coordenadas, tamaño del pixel, y coordenadas para una celda esquina o
central de los materiales de referencia suministrados por la fuente del objeto
raster. También se puede estar en condiciones de determinar dichos
parámetros utilizando un Plano Cartografico de referencia; esto se puede
realizar seleccionando la opción Make Simple en la ventana principal
Georeference para abrir la ventana Create Simple Raster Georeference.
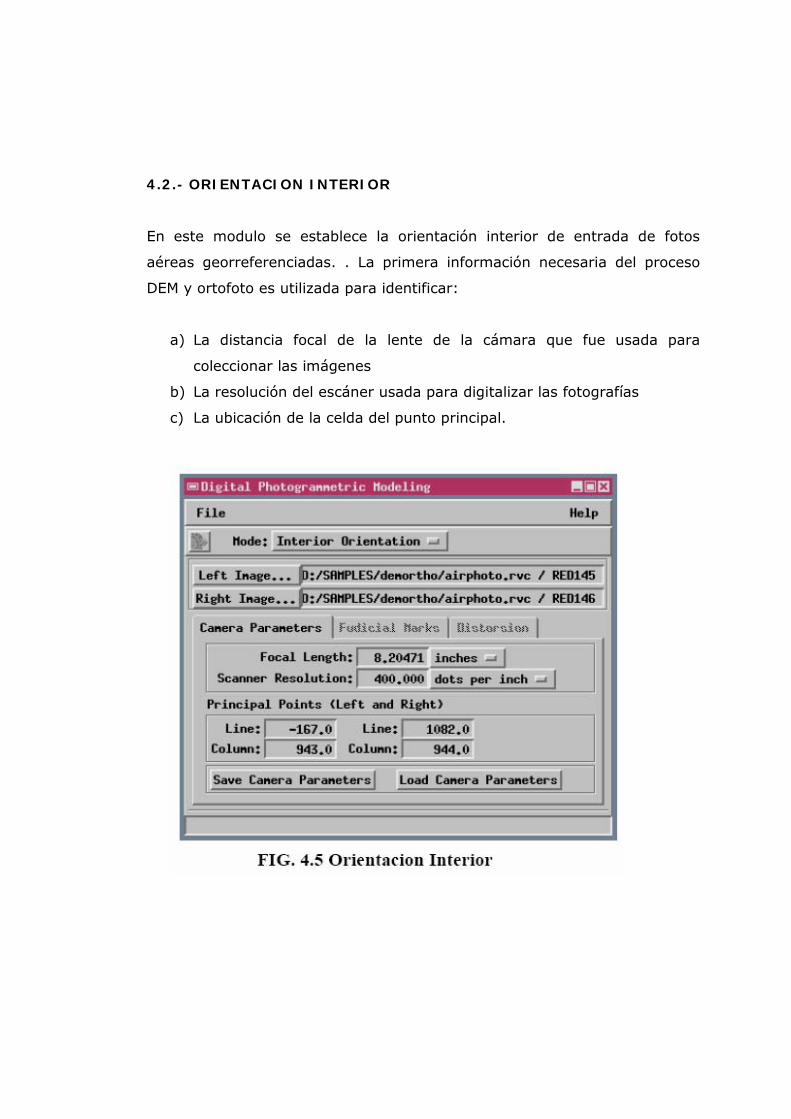
4.2.- ORIENTACION INTERIOR
En este modulo se establece la orientación interior de entrada de fotos
aéreas georreferenciadas. . La primera información necesaria del proceso
DEM y ortofoto es utilizada para identificar:
a) La distancia focal de la lente de la cámara que fue usada para
coleccionar las imágenes
b) La resolución del escáner usada para digitalizar las fotografías
c) La ubicación de la celda del punto principal.
4.2.1.- INGRESO DE LA INFORMACION
a) Distancia focal: La distancia focal permite especificar la distancia focal
de la lente de la cámara al instante de tomar la foto aérea. La distancia
focal es una medida del nivel de zoom de la lente de la cámara. Las
distancias focales más grandes crean un nivel del zoom más alto,
capturan un área más pequeña de una toma, e introducen errores de
desplazamiento más pequeños. La distancia focal afecta la geometría de
la fotografía y por lo tanto afecta los procesos de generación del DEM y
la Ortoimagen. En este modulo el sistema permite seleccionar la unidad
de medida para la distancia focal como pulgadas o milímetros.
b) Resolución del escáner: En este icono se especificar la resolución del
escáner al momento de digitalizar la foto aérea. Pueden ponerse las
unidades de resolución de escáner en puntos por pulgada o puntos por el
milímetro.
c) Punto Principal: En los campos numéricos Línea y columna se pueden
ajustar la posición de los puntos principales para la imagen Izquierda e
imagen Derecha. Las coordenadas de puntos principales puede
determinarse basado en las marcas fiduciarias, normalmente cuatro, qué
se conecta rígidamente con el cuerpo de la cámara y qué imágenes de la
forma en el negativo y normalmente define el punto principal de la
fotografía. Las marcas fiduciales generalmente muestran como los
agujeros de alfiler en los bordes o esquinas de fotos. El punto Principal
es la dirección celular localizada a medio camino entre los puntos
fiduciarios opuestos.
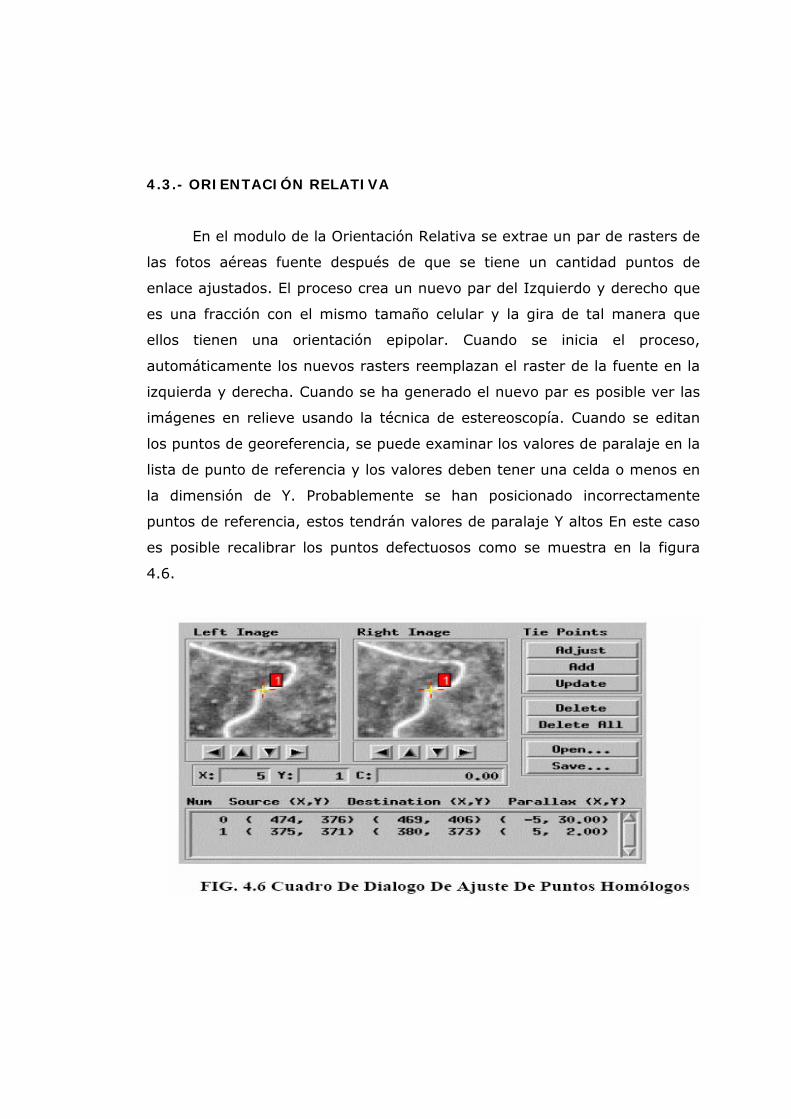
4.3.- ORIENTACIÓN RELATIVA
En el modulo de la Orientación Relativa se extrae un par de rasters de
las fotos aéreas fuente después de que se tiene un cantidad puntos de
enlace ajustados. El proceso crea un nuevo par del Izquierdo y derecho que
es una fracción con el mismo tamaño celular y la gira de tal manera que
ellos tienen una orientación epipolar. Cuando se inicia el proceso,
automáticamente los nuevos rasters reemplazan el raster de la fuente en la
izquierda y derecha. Cuando se ha generado el nuevo par es posible ver las
imágenes en relieve usando la técnica de estereoscopía. Cuando se editan
los puntos de georeferencia, se puede examinar los valores de paralaje en la
lista de punto de referencia y los valores deben tener una celda o menos en
la dimensión de Y. Probablemente se han posicionado incorrectamente
puntos de referencia, estos tendrán valores de paralaje Y altos En este caso
es posible recalibrar los puntos defectuosos como se muestra en la figura
4.6.
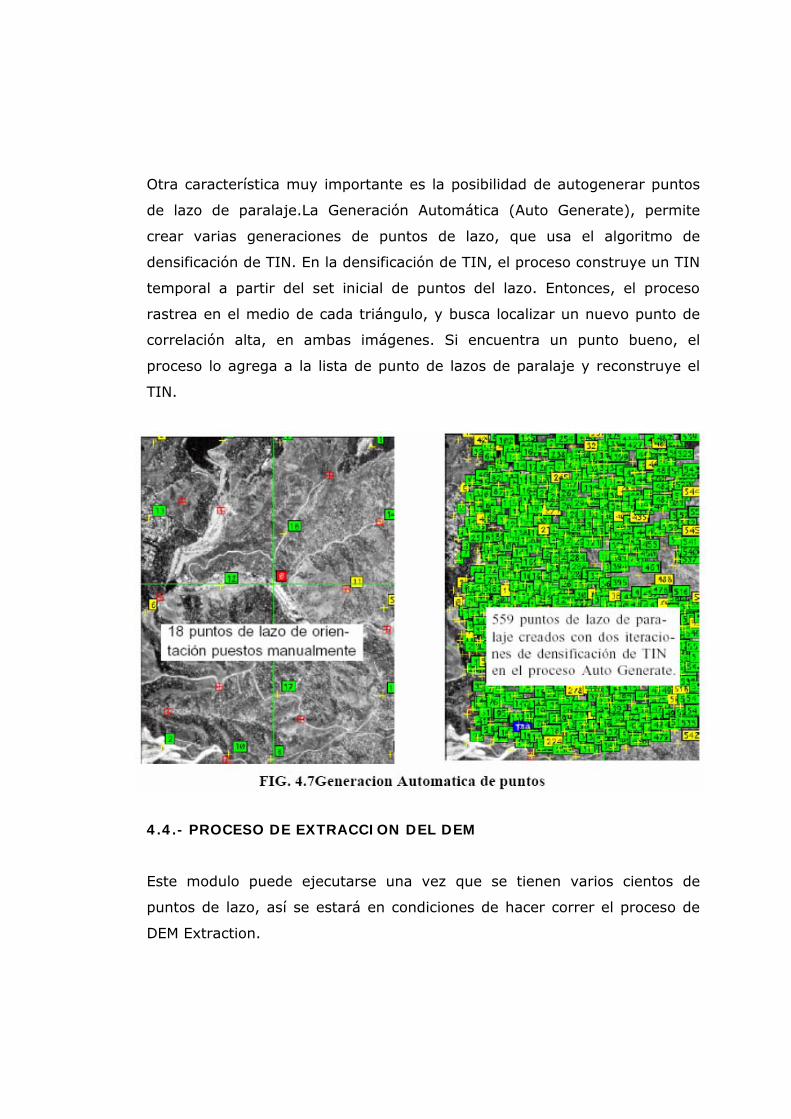
Otra característica muy importante es la posibilidad de autogenerar puntos
de lazo de paralaje.La Generación Automática (Auto Generate), permite
crear varias generaciones de puntos de lazo, que usa el algoritmo de
densificación de TIN. En la densificación de TIN, el proceso construye un TIN
temporal a partir del set inicial de puntos del lazo. Entonces, el proceso
rastrea en el medio de cada triángulo, y busca localizar un nuevo punto de
correlación alta, en ambas imágenes. Si encuentra un punto bueno, el
proceso lo agrega a la lista de punto de lazos de paralaje y reconstruye el
TIN.
4.4.- PROCESO DE EXTRACCION DEL DEM
Este modulo puede ejecutarse una vez que se tienen varios cientos de
puntos de lazo, así se estará en condiciones de hacer correr el proceso de
DEM Extraction.
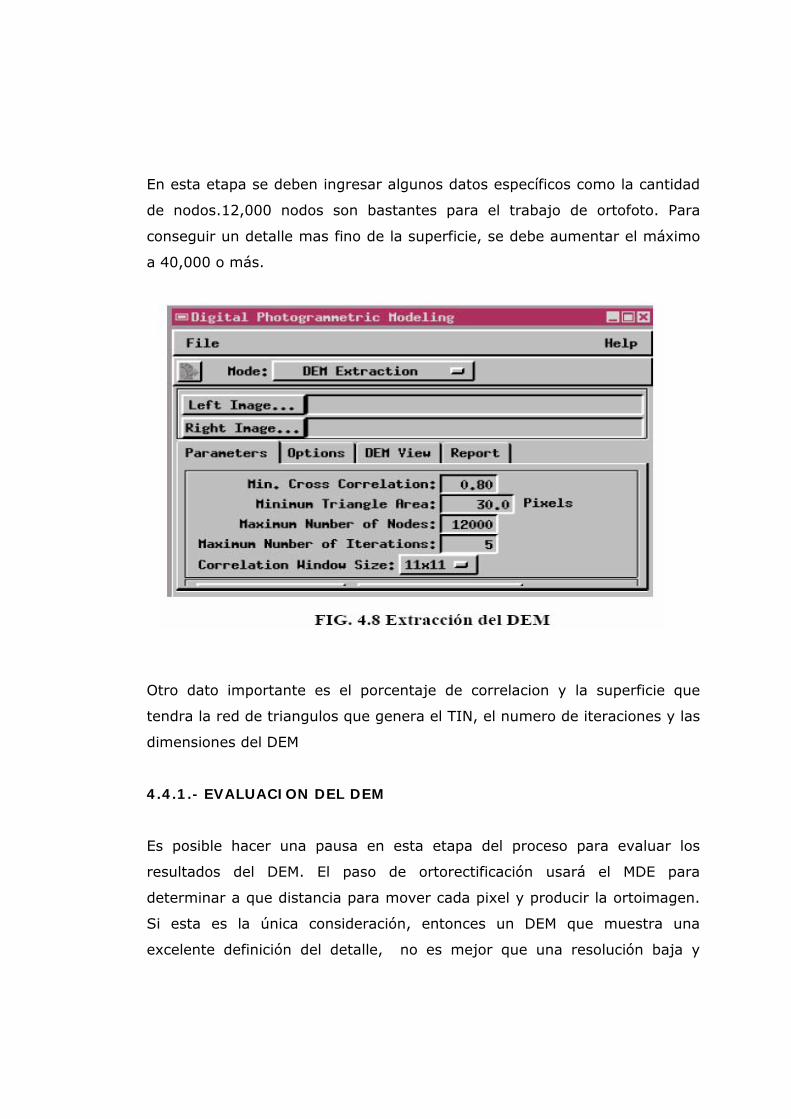
En esta etapa se deben ingresar algunos datos específicos como la cantidad
de nodos.12,000 nodos son bastantes para el trabajo de ortofoto. Para
conseguir un detalle mas fino de la superficie, se debe aumentar el máximo
a 40,000 o más.
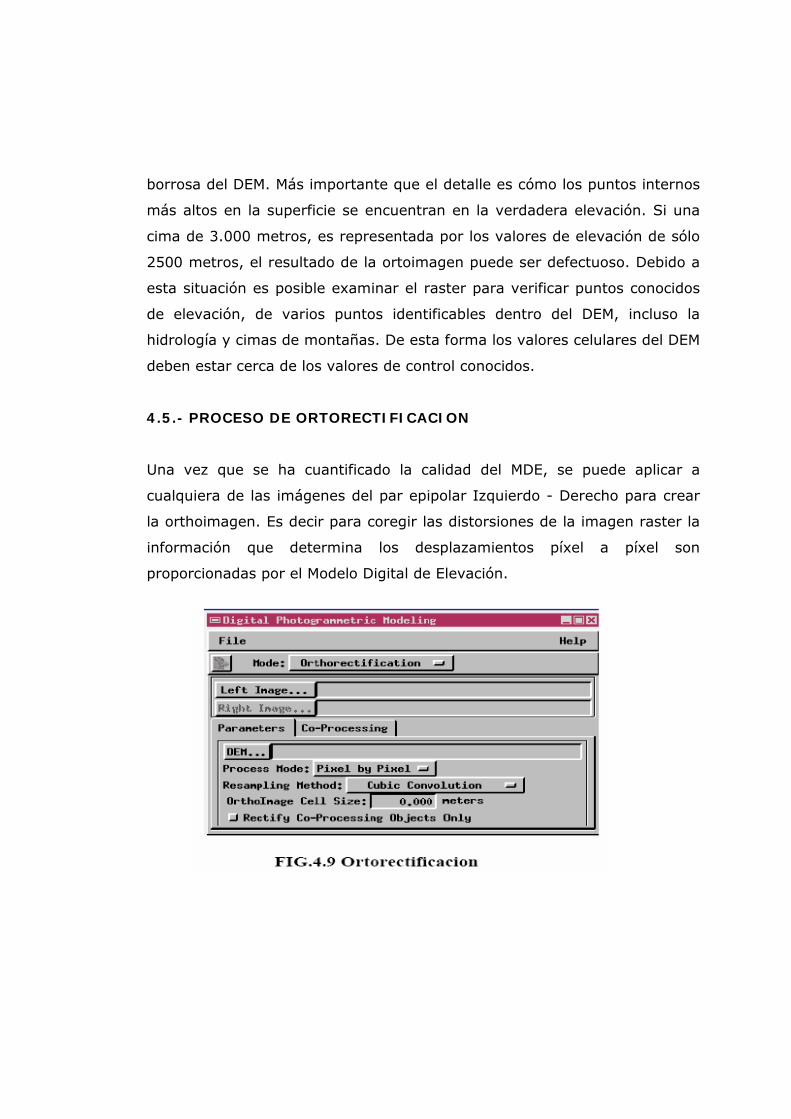
Otro dato importante es el porcentaje de correlacion y la superficie que
tendra la red de triangulos que genera el TIN, el numero de iteraciones y las
dimensiones del DEM
4.4.1.- EVALUACION DEL DEM
Es posible hacer una pausa en esta etapa del proceso para evaluar los
resultados del DEM. El paso de ortorectificación usará el MDE para
determinar a que distancia para mover cada pixel y producir la ortoimagen.
Si esta es la única consideración, entonces un DEM que muestra una
excelente definición del detalle, no es mejor que una resolución baja y
borrosa del DEM. Más importante que el detalle es cómo los puntos internos
más altos en la superficie se encuentran en la verdadera elevación. Si una
cima de 3.000 metros, es representada por los valores de elevación de sólo
2500 metros, el resultado de la ortoimagen puede ser defectuoso. Debido a
esta situación es posible examinar el raster para verificar puntos conocidos
de elevación, de varios puntos identificables dentro del DEM, incluso la
hidrología y cimas de montañas. De esta forma los valores celulares del DEM
deben estar cerca de los valores de control conocidos.
4.5.- PROCESO DE ORTORECTIFICACION
Una vez que se ha cuantificado la calidad del MDE, se puede aplicar a
cualquiera de las imágenes del par epipolar Izquierdo - Derecho para crear
la orthoimagen. Es decir para coregir las distorsiones de la imagen raster la
información que determina los desplazamientos píxel a píxel son
proporcionadas por el Modelo Digital de Elevación.
El procedimiento comienza seleccionando Ortorectification del menu de
opciónes Mode. El proceso de ortorectificación es muy sensible al
georreferenciamiento y control de la orientación asociadas a las imágenes.
Después de que se selecciona la entrada de la foto aérea y el DEM, el
proceso despliega la orientación estadística y distorsión de la cámara.
Incluso los errores pequeños en el control de georreferencia, pueden
producir que los objetos de entrada sean inutilizables. En particular,se
deben revisar los angulos de Orientación: se supone que la cámara está
apuntando casi recto hacia abajo: así es que los primeros dos valores en los
ángulos de orientación deben acercarse 0, 0 (el tercer ángulo no es crítico).
Aunque el botón de entrada se etiqueta “Left Image...” puede seleccionar
cualquier foto aérea georreferenciada que comparta un área de traslape con
su MDE respectivo es recomendable trabajar con el epipolar.
CAPITULO. 5: APLICACIÓN DEL SISTEMA TNT MIPS
Este capitulo describe la generación y producción de información
cartográfica de apoyo desarrollo de un proyecto de Exploración Minera.
5.1.- ANTECEDENTES GENERALES DEL PROYECTO
Nombre Del Proyecto: “Exploración de Depósitos de Minerales El
Salado”
Ubicación: 20 Km. Sur Oeste del Salvador, sector El Salado. III Región,
Chile.
Empresas Participantes:
GEOPLUS SCIENCE OF THE EARTH
• Geofísica
• Fotogrametría Digital
• Sensores Remotos
PLACER DOME EXPLORATION
• Geología
• Geoquímica
• Apoyo Terrestre
Breve Descripción: En la minería, la utilización fundamental de la
fotogrametría esta basada en el apoyo para la planificación y ejecución de
obras de mineras “a tajo abierto y de cantería” y en obras complementarias,
como son tranques de relaves, obras viales, ferroviarias etc.
Con el objeto de ordenar cronológicamente las actividades generales del
proyecto exploración, este estará conformado por cuatro fases
fundamentales que se deben considerar en el análisis de prefactibilidad,
factibilidad y desarrollo del proyecto:
1ª Fase Se inicia con la recopilación de la información geológica y minera
conocida, ademas el reconocimiento del area sobre fotografías aéreas y
cartas. Posteriormente se realizará la fotointerpretación geológica y si es
posible un reconocimiento en terreno. Se comprueba su ubicación y se
estudian las afinidades con la estructura regional y local.
Se ejecutan estudios geoquímicos. Al término de estas actividades se
confeccionara un mapa geológico- minero.
2ª Fase: En esta fase se interpretan los datos del levantamiento geofísico
aéreo, aprovechando el material Fotogramétrico utilizado en la etapa
anterior se genera una ortofotocarta para el apoyo del levantamiento
geológico y levantamientos geoquímicos semidetallados y se detallan los
puntos de las áreas de interés.
3ª Fase Se hace el levantamiento geológico detallado, el que si es necesario
se acompaña de un levantamiento geofísico terrestre, en las áreas
anómalas. Se da comienzo la ejecución de trincheras, perforaciones y
minería exploratoria.

4 Fase Se confecciona el informe final, con el resultado de la exploración,
específicamente de las anomalías.
En la etapa de Exploración no se justifica el uso de cartografía de gran
precisión. Pero se acordara de inmediato generar escalas adecuadas para
aprovecharlas en las etapas posteriores. La necesidad de apoyo de ortofotos
y cartografía en esta etapa esta dado por el siguiente recuadro:
TIPO DE LEVANTAMIENTO AREA
KM 2
ESCALA
CARTA
ESCALA
ORTOFOTO
Regional de reconocimiento Semidetallado Detallado
2.500 25-2500 25
1:100.000 1:250.000 1:25.000 1:50.000 1:1.000 1:10.000
1:40.000 a 1: 60.000 1:20.000 a 1:30.000 1:2.000 a 1:20.000
TABLA 5.1
5.2.- INICIO DE LA PRODUCCION CARTOGRAFICA
Este proceso parte con definir los requerimientos del proyecto para definir la
escala de trabajo, el tipo de procedimiento y en función de esto la
adquisición de los insumos específicos como el instrumental de trabajo, el
par de fotogramas del área en estudio, etc.
5.2.1.- PROCESO DE IMAGEN
Cada fotograma posee algunas anomalías, se observa que no existe una
distribución de tonalidad de grises homogénea en el par de fotogramas.
Debido a esta alteración se debió realizar un proceso de ajuste de imagen,
para normalizar la distribución espectral en la escala de grises de cada
imagen. Este procedimiento es analizado mas detenidamente en el próximo
capitulo.
Datos Fotogramétricos
• Resolución: 800 DPI
• Extensión: TIFF
• Numero de fotos: 02 (15431, 15432)
• Altura de vuelo 7.500 m
• Distancia focal: 6.02204 pulgadas
• Vuelo SAF 99, 50.000 Línea L2,El Salvador
5.2.2.- GEORREFERENCIACION
La etapa de georreferenciación se realizó por el método de
Georeferenciación Directa, ya que se conocen las coordenadas de gran
cantidad de puntos de apoyo identificables en las fotografías, estas
coordenadas fueron obtenidas de la campaña realizada por compañía Placer
Dome Exploration. Las especificaciones sobre el Sistema de Coordenadas
utilizado y Proyección son las siguientes:
Datos Cartográficos de georeferenciacion
• Proyección Universal Transversal Mercator (UTM)
• Elipsoide internacional 1925
• Origen de las Abcisas 500 Km. al Oeste del MC 69º
• Origen de las Ordenadas (N) 10.000 Km. al sur del ecuador
• Datum altimétrico: Nivel Medio del Mar
• Datum Horizontal: PSAD 56
Como se dispone de una cantidad importante de puntos tanto en zonas
hidrológicas como en algunas elevaciones. Se tomaron 9 puntos que fueron
más identificables en cada fotografía.

5.3.- INGRESO DE DATOS A TNT MIPS
5.3.1.-ORIENTACIÓN INTERNA
Se ingresar el par estereoscópico especificando la ruta donde se encuentra
el archivo que contiene la fotografía derecha y luego la fotografía izquierda.
Esta etapa de orientación interna es relativamente rápida, basta ingresar la
siguiente información:
Parámetros de la Cámara: en esta opción se ingresa la información
dispuesta en el certificado de calibración de la cámara, proporcionado por el
SAF. Este dato es la distancia focal .Además se debe especificar la resolución
a la que fueron escaneados el par de fotogramas Especificando las unidades
en puntos por pulgadas o milímetros.
Por ultimo se procede a grabar esta información en la opción SAVE, para
utilizarla en caso de replantear el proceso.
5.3.2.- ORIENTACION RELATIVA
Antes de iniciar este proceso se debe tener claro la rigurosidad del
procedimiento en relación a las precisiones esperadas, para definir los
parámetros que controlan este proceso el porcentaje de correlación , la
superficie mínima de cada triangulo del TIN , el máximo numero de Nodos y
el numero de iteraciones para generar la Red Irregular de Triángulos.
Generación de Tie Point: Esta opción consiste en identificar la posición de
un conjunto de aproximadamente 10 a 15 puntos en la fotografía izquierda y
sus correspondientes homologos en la fotografia derecha, el proceso se
realiza manualmente.
El sistema edita de inmediato aquellos puntos de correlación baja y o
aquellos que tengan un grado de paralaje alto en “Y”.
Estos puntos, el sistema los detalla con otro color para poder ajustarlos o
eliminarlos cuando corresponda, e introducir uno nuevo o pedirle al sistema
que auto genere el punto mas adecuado en esa zona.
Autogenerate: mediante esta opción es posible generar una red de nuevos
puntos de lazo entre ambas fotografías, estos puntos son generados por la
una serie de iteraciones de la Red Irregular de Triángulos.
5.3.3.- GENERACION DEL DEM. Una vez que se ha obtenido una buena
cantidad de puntos de enlace en el modelo estereoscópico. Se procede a
generar el MDE pero antes se debe especificar la siguiente información:
- Save result as TIN: en esta opción se graba el resultado de la
triangulación
- Display TIN as Contours: esta es la opción más importante que nos
permitirá generar las curvas de nivel
- Output data: definir el tamaño de la información que puede ser de
24 bit.

La figura 5.1 muestra el DEM obtenido, se puede apreciar que el modelo
conserva la estructura hidrológica y además posee buena definición.
5.3.4.- ORTORECTIFICACION
El proceso de ortorectificacion se desarrollo utilizando como fuente de
información el Modelo Digital de Elevación generado en el paso anterior.
Este archivo raster actúa de medida patrón para corregir las imperfecciones
de cualquier superficie georeferenciada de esta aplicación. Claro está que el
mejor archivo, por sus condiciones geométricas a corregir, es el epipolar
generado en la orientación relativa.

Como existe la posibilidad de producir varios modelos de elevación a
distintas escalas de iteración, fue posible realizar varias pruebas para
obtener el mejor ajuste de imágen.
5.4 EDICION DE LA ORTOFOTO
La etapa final de edición del producto cartográfico final consistió en unir en
una capa el epipolar ortorectificado y la información altimétrica obtenida del
proceso de interpolación de la Red Irregula de Triángulos para conformar un
plano del área de desarrollo del proyecto a escala 1: 10.000.
En la opción SPATIAL DATA del menú EDIT se edito la ortofoto y en un
segundo layer las curvas de nivel, las cuales fueron enumeradas definiendo
las curvas indice y valores intermedios para esta escala cuyas cotas fueron
referidas al N.M.M.
El segundo paso fue cortar la zona de interés del proyecto a la zona de
trabajo finalmente se unió a la primera capa y se ajusto la zona de interés
final. Este paso es relativamente sencillo y se puede apreciar la
concordancia entre la topografia definida por la imagen y el ajuste de las
curvas de nivel al terreno, ver figura 5.2.
Finalmente se incorporan todas las decripciones adicionales que definen el
plano como la información cartográfica, la cuadricula, la escala, el norte,
viñeta, Nombre del lugar etc.
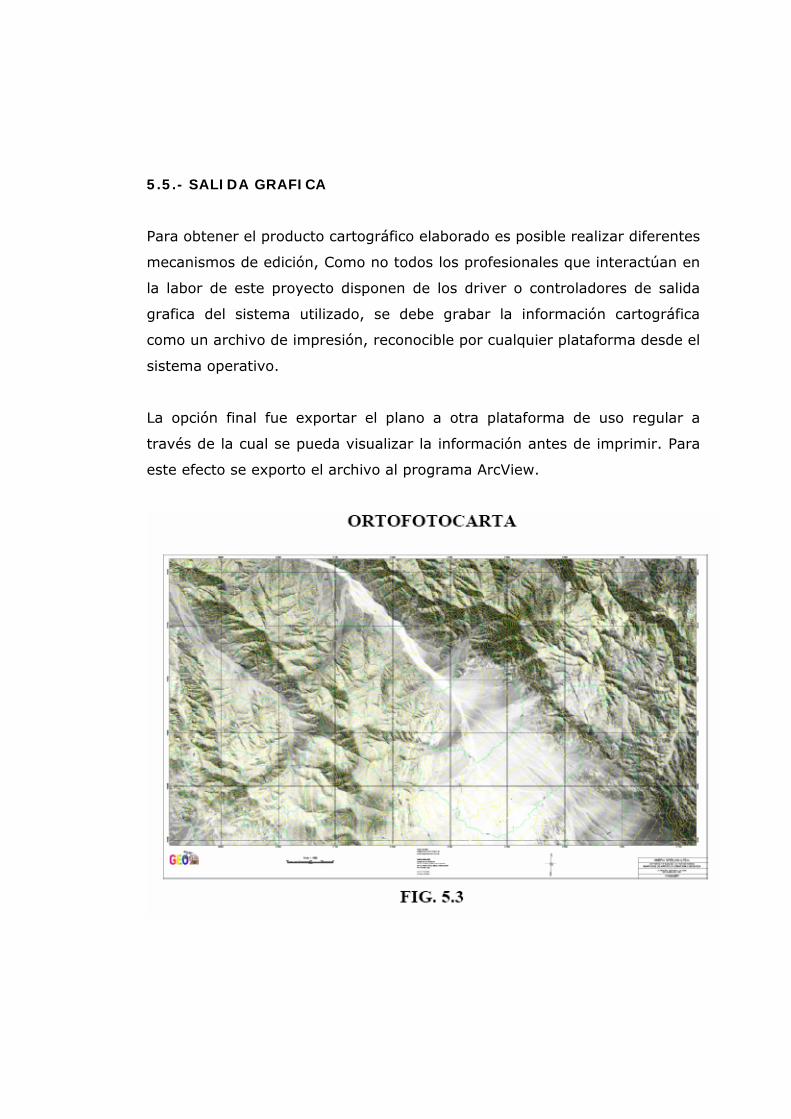
5.5.- SALIDA GRAFICA
Para obtener el producto cartográfico elaborado es posible realizar diferentes
mecanismos de edición, Como no todos los profesionales que interactúan en
la labor de este proyecto disponen de los driver o controladores de salida
grafica del sistema utilizado, se debe grabar la información cartográfica
como un archivo de impresión, reconocible por cualquier plataforma desde el
sistema operativo.
La opción final fue exportar el plano a otra plataforma de uso regular a
través de la cual se pueda visualizar la información antes de imprimir. Para
este efecto se exporto el archivo al programa ArcView.
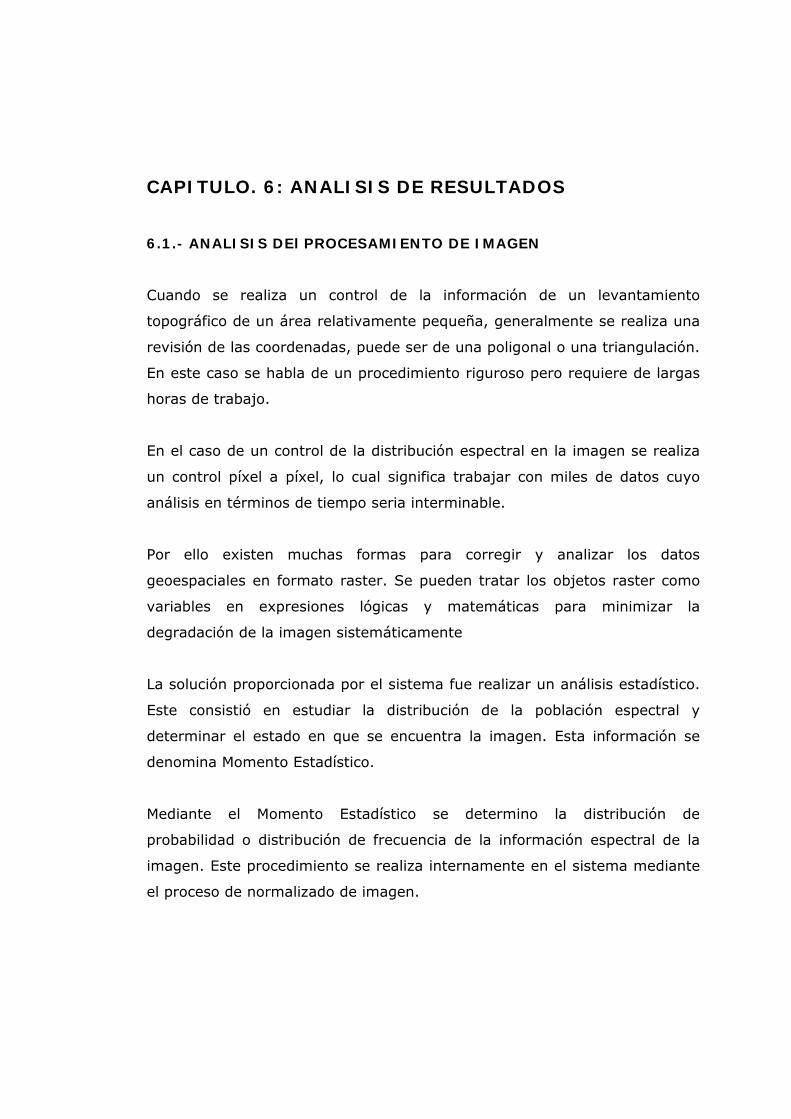
CAPITULO. 6: ANALISIS DE RESULTADOS
6.1.- ANALISIS DEl PROCESAMIENTO DE IMAGEN
Cuando se realiza un control de la información de un levantamiento
topográfico de un área relativamente pequeña, generalmente se realiza una
revisión de las coordenadas, puede ser de una poligonal o una triangulación.
En este caso se habla de un procedimiento riguroso pero requiere de largas
horas de trabajo.
En el caso de un control de la distribución espectral en la imagen se realiza
un control píxel a píxel, lo cual significa trabajar con miles de datos cuyo
análisis en términos de tiempo seria interminable.
Por ello existen muchas formas para corregir y analizar los datos
geoespaciales en formato raster. Se pueden tratar los objetos raster como
variables en expresiones lógicas y matemáticas para minimizar la
degradación de la imagen sistemáticamente
La solución proporcionada por el sistema fue realizar un análisis estadístico.
Este consistió en estudiar la distribución de la población espectral y
determinar el estado en que se encuentra la imagen. Esta información se
denomina Momento Estadístico.
Mediante el Momento Estadístico se determino la distribución de
probabilidad o distribución de frecuencia de la información espectral de la
imagen. Este procedimiento se realiza internamente en el sistema mediante
el proceso de normalizado de imagen.
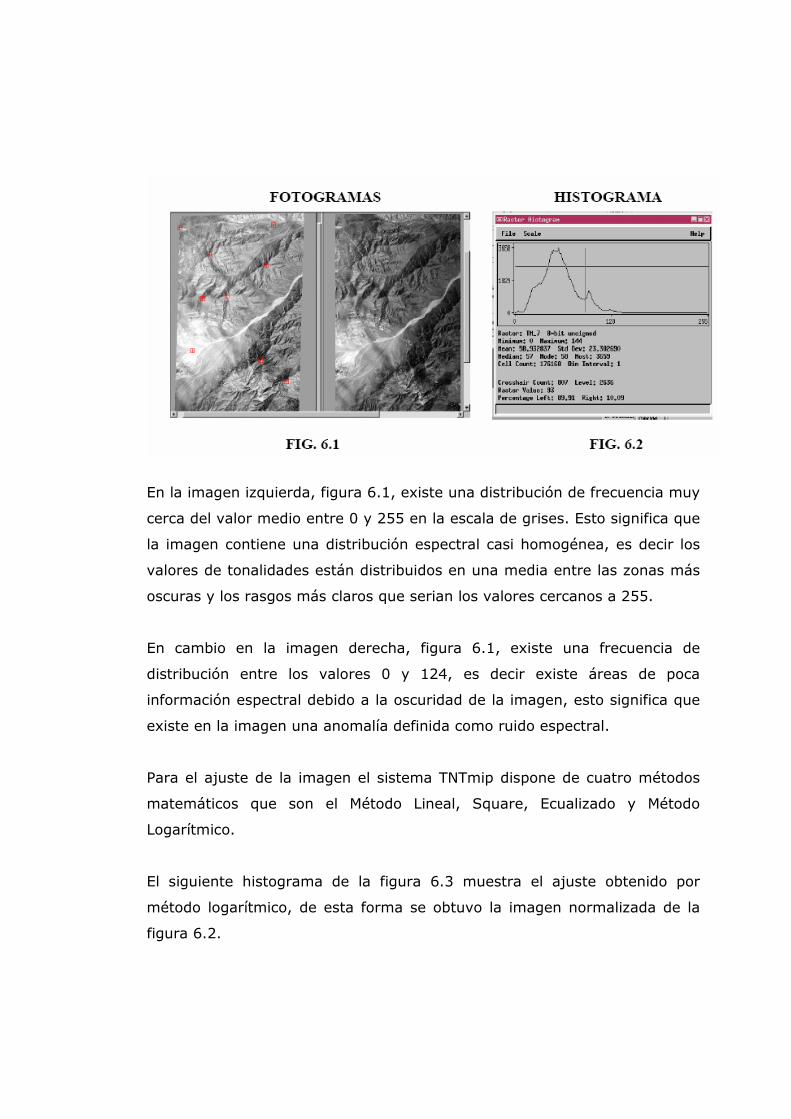
En la imagen izquierda, figura 6.1, existe una distribución de frecuencia muy
cerca del valor medio entre 0 y 255 en la escala de grises. Esto significa que
la imagen contiene una distribución espectral casi homogénea, es decir los
valores de tonalidades están distribuidos en una media entre las zonas más
oscuras y los rasgos más claros que serian los valores cercanos a 255.
En cambio en la imagen derecha, figura 6.1, existe una frecuencia de
distribución entre los valores 0 y 124, es decir existe áreas de poca
información espectral debido a la oscuridad de la imagen, esto significa que
existe en la imagen una anomalía definida como ruido espectral.
Para el ajuste de la imagen el sistema TNTmip dispone de cuatro métodos
matemáticos que son el Método Lineal, Square, Ecualizado y Método
Logarítmico.
El siguiente histograma de la figura 6.3 muestra el ajuste obtenido por
método logarítmico, de esta forma se obtuvo la imagen normalizada de la
figura 6.2.
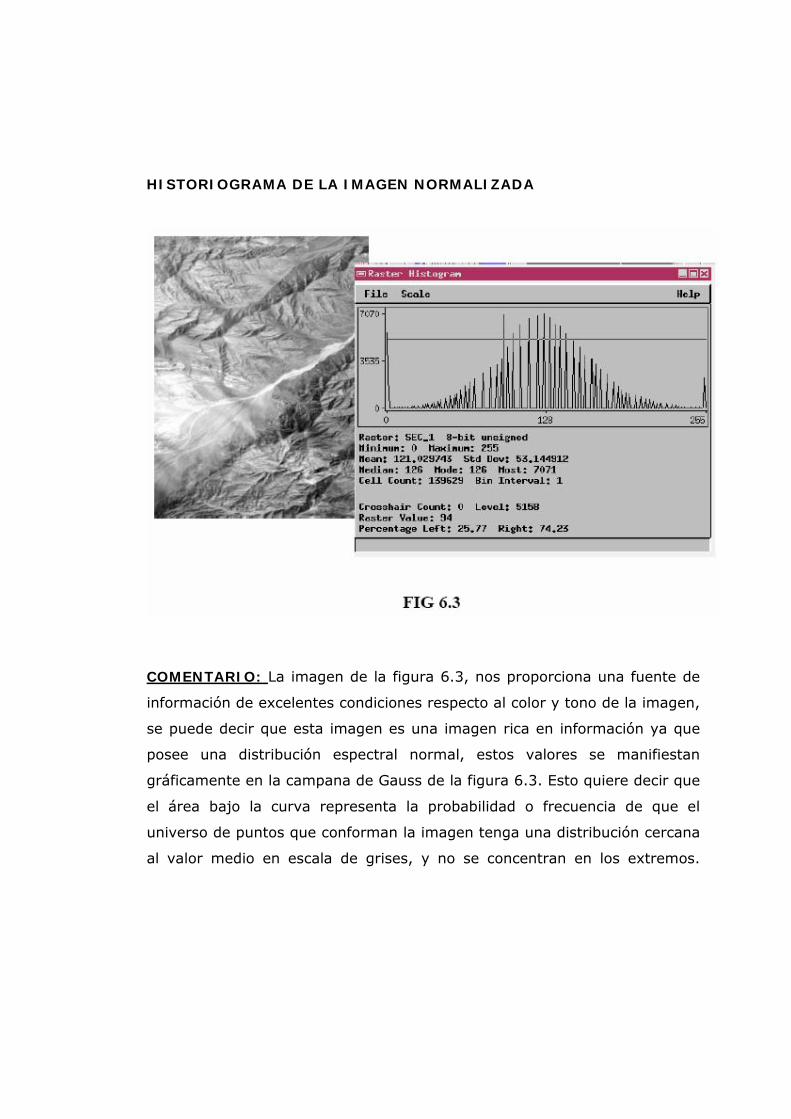
HISTORIOGRAMA DE LA IMAGEN NORMALIZADA
COMENTARIO: La imagen de la figura 6.3, nos proporciona una fuente de
información de excelentes condiciones respecto al color y tono de la imagen,
se puede decir que esta imagen es una imagen rica en información ya que
posee una distribución espectral normal, estos valores se manifiestan
gráficamente en la campana de Gauss de la figura 6.3. Esto quiere decir que
el área bajo la curva representa la probabilidad o frecuencia de que el
universo de puntos que conforman la imagen tenga una distribución cercana
al valor medio en escala de grises, y no se concentran en los extremos.
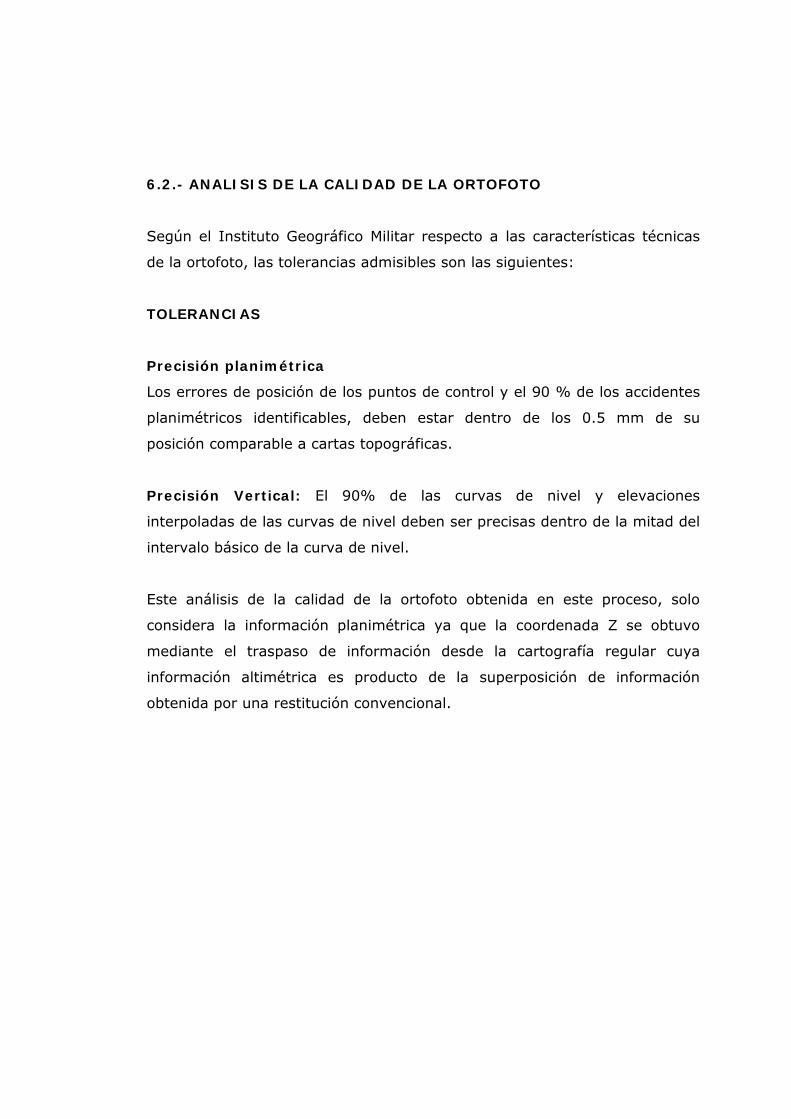
6.2.- ANALISIS DE LA CALIDAD DE LA ORTOFOTO
Según el Instituto Geográfico Militar respecto a las características técnicas
de la ortofoto, las tolerancias admisibles son las siguientes:
TOLERANCIAS
Precisión planimétrica
Los errores de posición de los puntos de control y el 90 % de los accidentes
planimétricos identificables, deben estar dentro de los 0.5 mm de su
posición comparable a cartas topográficas.
Precisión Vertical: El 90% de las curvas de nivel y elevaciones
interpoladas de las curvas de nivel deben ser precisas dentro de la mitad del
intervalo básico de la curva de nivel.
Este análisis de la calidad de la ortofoto obtenida en este proceso, solo
considera la información planimétrica ya que la coordenada Z se obtuvo
mediante el traspaso de información desde la cartografía regular cuya
información altimétrica es producto de la superposición de información
obtenida por una restitución convencional.
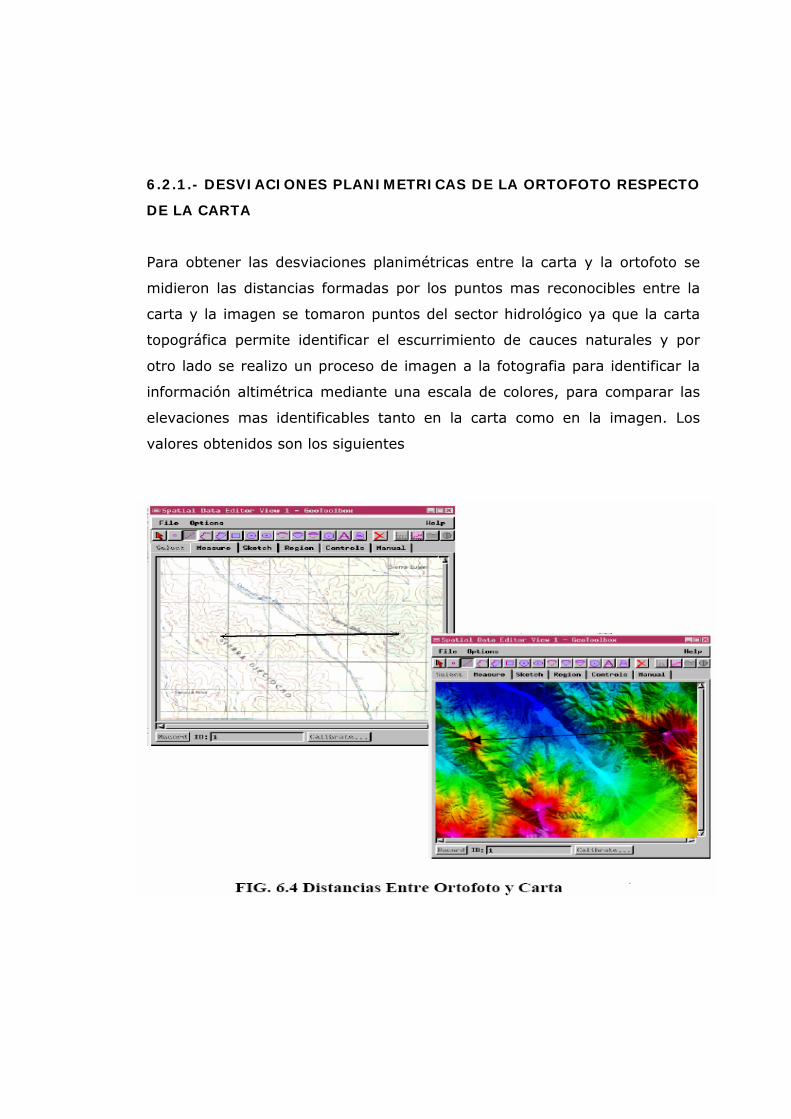
6.2.1.- DESVIACIONES PLANIMETRICAS DE LA ORTOFOTO RESPECTO
DE LA CARTA
Para obtener las desviaciones planimétricas entre la carta y la ortofoto se
midieron las distancias formadas por los puntos mas reconocibles entre la
carta y la imagen se tomaron puntos del sector hidrológico ya que la carta
topográfica permite identificar el escurrimiento de cauces naturales y por
otro lado se realizo un proceso de imagen a la fotografia para identificar la
información altimétrica mediante una escala de colores, para comparar las
elevaciones mas identificables tanto en la carta como en la imagen. Los
valores obtenidos son los siguientes

Las mediciones fueron realizadas sobre la ortofoto y carta de escala
1.10.000 y las desviaciones obtenidas fueron las siguientes:
• Análisis
La medida del píxel en la imagen es de 20.13 micrones lo que significa que
se puede tener una precisión o discriminación de un punto en la imagen de
0.2 mm que a la escala 1: 10.000 equivale a 2.000 milímetros, es decir en
terreno tiene un valor de 2 metros aprox.
Llevado este análisis a un modelo análogo, que es la información geográfica
impresa en el papel, existen instrumentos de medición para lectura directa
de 0.5 mm.
El error de lectura directa sobre la carta puede obtenerse con una precisión
de 0.2 mm, que a la escala 1: 10.000 corresponde a mas menos 2 metros.
Esto indica que existe una excelente calidad de la imagen en cuanto a su
homogeneidad espectral y buena resolución que son dos cosas muy
distintas.
COMENTARIO
Según los resultados obtenidos de las desviaciones planimétricas de la
ortofoto respecto de la carta. se puede observar que el valor de la
desviación estándar de +- 4.88 m. a la escala 1: 10.000 equivale a 0.49
mm. aprox., esta magnitud estaría dentro de la tolerancia ya que esta dice
que los errores de posición de los puntos de control y el 90 % de los
accidentes planimétricos identificables, deben estar dentro de los 0.5 mm de
su posición comparable a cartas topográficas.

6.3.- ANALISIS DE COSTOS DE EQUIPAMIENTO METODO UTILIZADO
Y PRODUCCION CARTOGRAFICA
6.3.1.- COSTOS DE EQUIPAMIENTO DEL SISTEMA
La incorporación de nueva tecnología actualmente en nuestro país tiene
costos relativamente elevados .Específicamente el precio del software
TNTmips para Windows es de US $6000 . Este precio esta considerado para
países como el nuestro que se encuentra fuera de la región NAFTA.
EQUIPAMIENTO PESOS
SISTEMA TNT MIPS PROFESIONAL 4.200.000
COMPUTADOR 500.000
TOTAL 4.700.000
TABLA 6.2 FUENTE: MICROIMAGES
Estos valores están considerados para un equipamiento de hardware
mínimo, un procesador de 200 MHz, puede ser Pentium o Celeron, Windows
98 ,64 Mb RAM, un disco duro de 20 GB, monitor de 15”, buena tarjeta
grafica y CD-ROM.
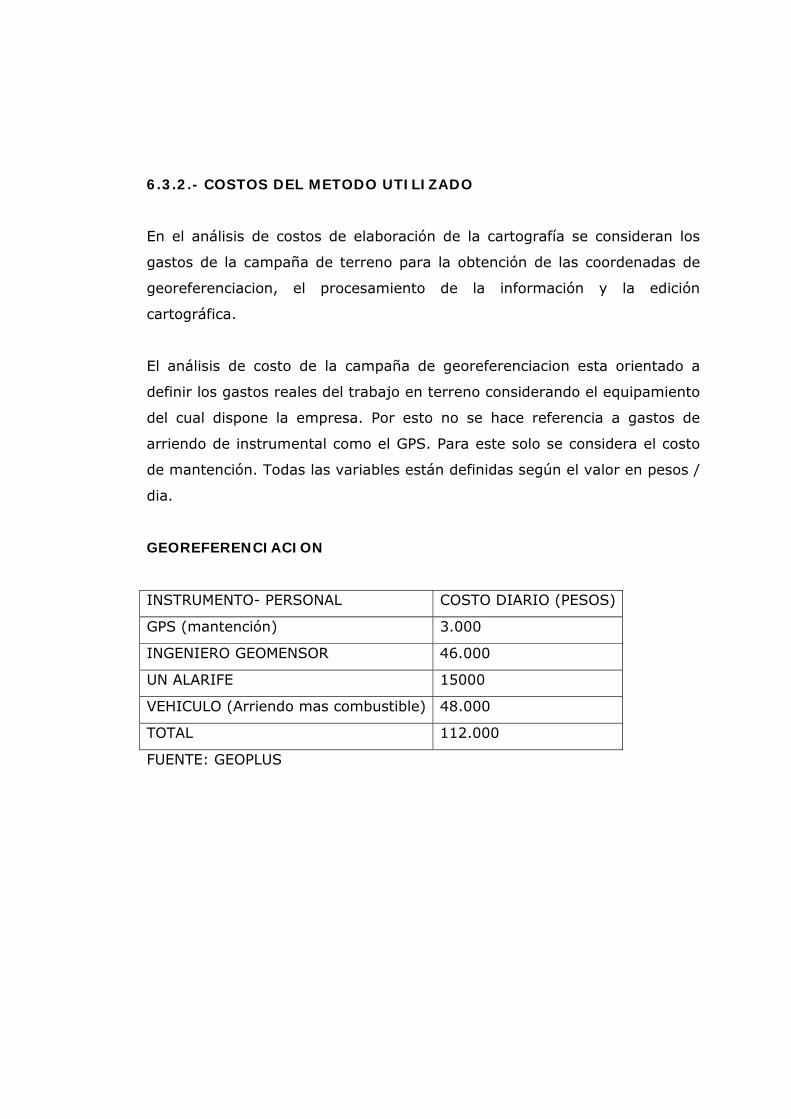
6.3.2.- COSTOS DEL METODO UTILIZADO
En el análisis de costos de elaboración de la cartografía se consideran los
gastos de la campaña de terreno para la obtención de las coordenadas de
georeferenciacion, el procesamiento de la información y la edición
cartográfica.
El análisis de costo de la campaña de georeferenciacion esta orientado a
definir los gastos reales del trabajo en terreno considerando el equipamiento
del cual dispone la empresa. Por esto no se hace referencia a gastos de
arriendo de instrumental como el GPS. Para este solo se considera el costo
de mantención. Todas las variables están definidas según el valor en pesos /
dia.
GEOREFERENCIACION
INSTRUMENTO- PERSONAL COSTO DIARIO (PESOS)
GPS (mantención) 3.000
INGENIERO GEOMENSOR 46.000
UN ALARIFE 15000
VEHICULO (Arriendo mas combustible) 48.000
TOTAL 112.000
FUENTE: GEOPLUS
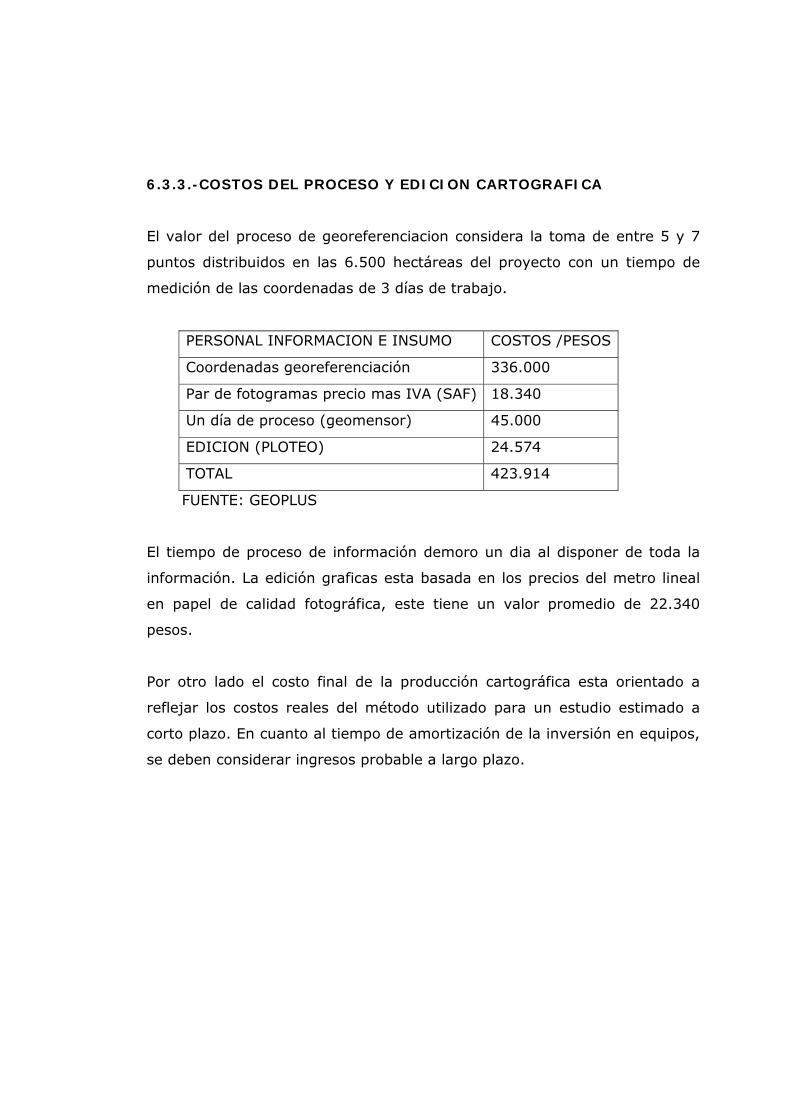
6.3.3.-COSTOS DEL PROCESO Y EDICION CARTOGRAFICA
El valor del proceso de georeferenciacion considera la toma de entre 5 y 7
puntos distribuidos en las 6.500 hectáreas del proyecto con un tiempo de
medición de las coordenadas de 3 días de trabajo.
PERSONAL INFORMACION E INSUMO COSTOS /PESOS
Coordenadas georeferenciación 336.000
Par de fotogramas precio mas IVA (SAF) 18.340
Un día de proceso (geomensor) 45.000
EDICION (PLOTEO) 24.574
TOTAL 423.914
FUENTE: GEOPLUS
El tiempo de proceso de información demoro un dia al disponer de toda la
información. La edición graficas esta basada en los precios del metro lineal
en papel de calidad fotográfica, este tiene un valor promedio de 22.340
pesos.
Por otro lado el costo final de la producción cartográfica esta orientado a
reflejar los costos reales del método utilizado para un estudio estimado a
corto plazo. En cuanto al tiempo de amortización de la inversión en equipos,
se deben considerar ingresos probable a largo plazo.

6.4.- ANALISIS DE LA GESTACION DEL PROYECTO DE EXPLORACION
MINERA EL SALADO
El perfil de este proyecto esta fundado en las cuatro fases ya descritas en el
capitulo anterior y que dicen relación con la recopilación de la información
geológica y minera conocida para la realización de estudios geológicos ,
geoquímicas y geofísicos del área a fin de identificar el tipo de mineral y las
condiciones o estado natural de deposito y su posible exploración y
explotación.
Para iniciar este proceso se debió preparar un estudio preliminar e informal
que no demandó mucho tiempo ni la inversión de grandes recursos, más
que nada surgió la intervención de expertos con conocimientos técnicos
tanto del área geológica (analisis mineralógico), como de la geofísica
(prospección) , a fin de definir la factibilidad técnica de la exploración de
estos depósitos, basados en estimaciones de los costos totales en inversión
y los beneficios incluyendo el rango de variación de estos.
Cuando ya se ha realizado un analisis de la factibilidad tecnica como
economica de la ejecución del proyecto de exploracion se decidio ordenar un
estudio de pre-factibilidad.
6.4.1.-ESTUDIO DE PRE-FACTIBILIDAD
Este estudio permitió disminuir los riesgos asociados a la decisión, dicho de
otra manera, persiguió mejorar la calidad de la información para decidir si se
ejecuta el proyecto.
Esta etapa demando la intervención de distintos profesionales especialmente
la parte de geológica, geofísica y geomensura .Además se elaboro un juicio
sobre su factibilidad en los aspectos de Ingeniería Civil , eléctrica, quimica y
otros como los factores técnicos, económicos, financieros, legal (Código
Minero), cumplimiento de fechas y Procedimientos Administrativos. Estos
especialistas definieron la estructura global del proyecto y los sub proyectos
que lo componen.
El apoyo cartográfico en esta etapa fue de gran utilidad ya que minimizo los
tiempos de elaboración de los distintos informes técnicos por la generación
oportuna de la información y el fácil acceso a esta, permitiendo definir en un
corto plazo el Re- estudio , Rechazo Definitivo o el paso siguiente a la
elaboración de un Estudio de Factibilidad.
6.4.2.- ESTUDIO DE FACTIBILIDAD
Este estudio incluyo básicamente las mismas etapas que el de pre-
factibilidad pero la gran diferencia es que con una mayor profundidad y
menor rango de variación en los montos de los costos y beneficios. En este
estudio participaron directamente los expertos del área de prospección
geológica , geoquímica y geofísica y el rol importante lo jugo la generación
de cartografía digital de calidad (actualizada) ya que esta etapa exige una
mayor investigación y precisión de la información. En este estudio se
estableció definitivamente los aspectos técnicos mas fundamentales como:
la superficie total del área de interés , tecnología y metodología a utilizar
para la etapa de exploración, calendario de ejecución, ingeniería básica y
obras complementarias elaboradas y diseñadas a partir de la cartografía
generada (Ortofotocarta)
Para estos estudios, el equipo de profesionales realizo un análisis cualitativo
y cuantitativo del área de estudio para determinar el monto de inversión en
capital y costos asociados a estos estudios considerando la operación futura
de este proyecto.
En resumen el aporte de esta técnica de generación cartográfica en esta
etapa optimizó el acceso a la información geográfica, ya que las decisiones
tomadas para definir las inversiones, para los costos de operación del
proyecto, se tomaron en condiciones de tiempo mínimas. Una forma de
describir la variable tiempo, es señalando que los resultados obtenidos en la
generación y producción cartográfica de este proyecto tiene un ahorro de
tiempo de un 80 % respecto a organismos de producción cartográfica
regular. ya que el proceso total de generación cartográfica demoro entre 7 a
12 días, de los cuales 1 dia fue de proceso de información y el resto, la
adquisición de datos.
Por otro Instituto Geográfico Militar genera el mismo producto en un tiempo
de 40 a 60 días. Considerando también que debe realizar una campaña de
terreno, pero gran parte de este tiempo es ocupado en el proceso de
información ya que trabajan con equipamientos mecánicos ópticos para
orientación y digitales para el proceso datos.
6.4.3.-DESARROLLO Y CONTROL DEL PROYECTO
Uno de los elementos que determinará el éxito del proyecto, se encuentra
directamente relacionado con el seguimiento y control del proyecto a fin de
optimizar el uso de recursos y plazos contemplados en la ejecución de este.
Según este criterio, el aporte entregado por la generación cartográfica
mediante esta técnica, en esta etapa, tiene su potencial en que la
información cartográfica digital es dúctil, es decir que se pudo producir
material cartográfico de control para diferentes aplicaciones utilizando una
misma fuente y tiempos de procesos mínimos lo que lleva a una
optimización de recursos.
Respecto a la calidad del material cartográfico producido se puede señalar
que los resultados obtenidos permitieron realizar la etapa de ejecución y
control de varios trabajos tanto en el área geológica como los trazados de
perfiles, y el estudio mineralógico mediante las técnicas de Sensores
remotos.
Por ultimo cabe señalar que los costos de producción obtenidos mediante
esta técnica, son un 40 % más bajo que los valores actuales de producción
de ortofotos por parte del Instituto Geográfico Militar.
Un solo ejemplo de ello es que para la escala 1:10.000 una ortofoto
generada por el IGM tiene un valor de 700.000 a 800.000 pesos. a
diferencia del costo obtenido de esta aplicación que es de 424.000
aproximadamente.
BIBLIOGRAFIA
(1) Aguila Pérez M. A.: “Temas de Fotogrametría Introducción”,(libro), 3ª
Edición, Foro Europa, España, 1980.
(2) Jensen, John R.: “Introductory Digital Image Processing: a Remote
Sensing erspective”, Prentice-Hall.Vol. 18, N 3º, 1996, pp. 197-256.
(3) Johnston, R. L.: (1978). “Multivariate Statistical Analysis in Geography:
A Primer on the General Linear Mode”, Longman, Inc, Vol 24, Nº 10, 1978.
pp. 234-252.
(4) José Luis Lerna.: “Fotogrametría Moderna Analítica y Digital”, (libro),
Universidad Politécnica de Valencia, 1999.
(5) Khesin Boris A. y Edgar S. A.: “The Digital Elevation Model” ,
Photogrammetrie Engineering And Remote Sensing, Vol 38, Nº 42, June
1999, pp. 238-242.
(6) Lillesand, Thomas M. y Kiefer, Ralph W. (1994). “Remote Sensing and
Image Interpretation”, Digital Image Processing.Vol 42, Nº 6 , 1994, pp.
585-618.
(7) Manual Profesional TNT mips versión 6.5- versión 6.7
(8) “Manual de Fotogrametría” de la Sociedad Americana de Fotogrametría,
3ra. Ed. Washington, 1965.pp. 140-180.

(9) Merry P. Skrdla.: “Digital Orthophoto Quadrangle And Global Ecosystem
Database, Microimages, Inc, Nebraska ,Vol 25,Nº2, October 2001, pp 1046-
1154.
(10) Murria R. S.: “Estadistica”,(libro), 2ª Edición, McGraw-Hill,
Madrid,España 1991.
(11) Schwidefsky K.: “Fotogrametría Aérea Terrestre”,(libro), 2ª Edición,
Springer Verlag, New York,1985
(12) Schenk Tomy.: “Fotogrametría Digital”, (libro), Marcombo S.A. 2002.
(13) Schowengerdt, Robert A. (1997).” Remote Sensing: Models and
Methods for Image Processing”, Thematic Classification. Vol 27, Nº 6, July
1997, pp. 389-438.
(14) Tou, Julius T. and Gonzales, Raphael C. (1974). Pattern Recognition
Principles. Reading, MA: Addison-Wessley. 377 pp.
ANEXOS

ANEXO 1. FORMATOS DE IMPORTACION
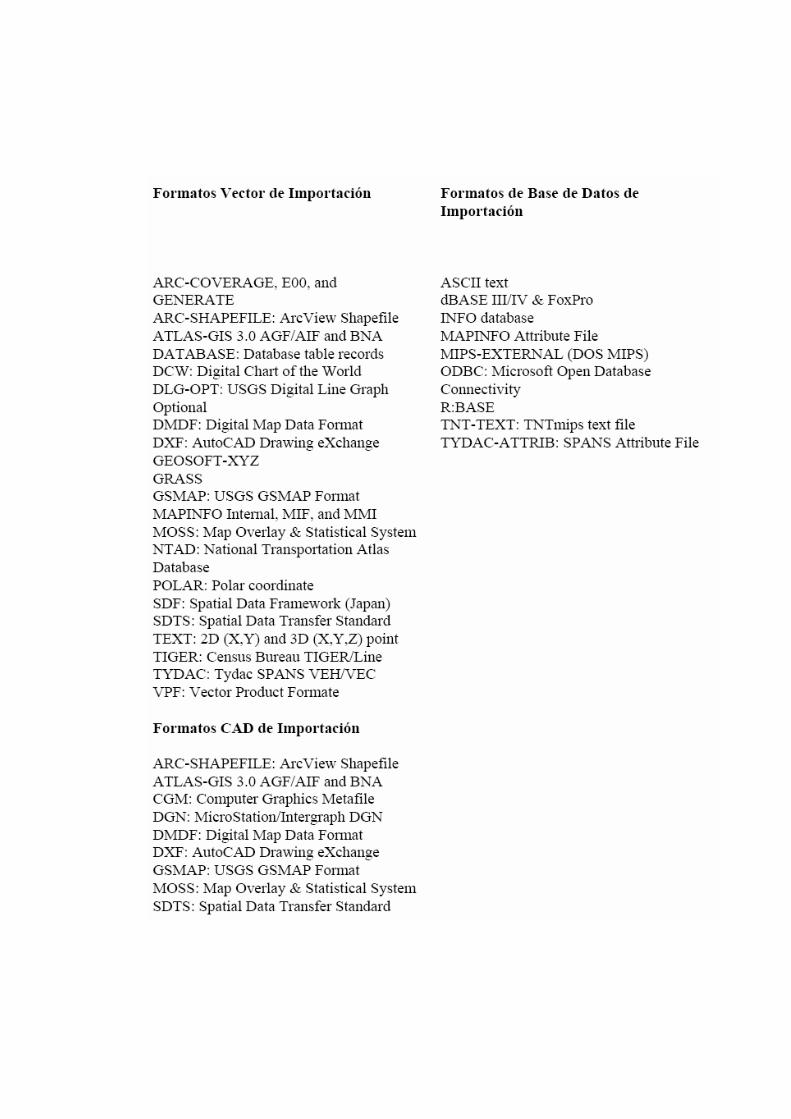
ANEXO 2. FORMATOS DE EXPORTACIÓN SOPORTADOS