t e s i s i n g e n i e r o e l e c t r i c i s t a
TRANSCRIPT

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ESQUEMA DE TELEPROTECCIÓN PARA LA LÍNEA DE TRANSMISIÓN 93C30 INSTALADA ENTRE LAS SUBESTACIONES MAGDALENA Y SANTA CRUZ
ESTABLECIENDO LA COMUNICACIÓN DE EXTREMO A EXTREMO MEDIANTE MENSAJES GOOSE DE ACUERDO
A LO ESTIPULADO EN EL ESTÁNDAR DE COMUNICACIONES IEC 61850-Ed. 2
T E S I S
PARA OBTENER EL TÍTULO DE:
I N G E N I E R O E L E C T R I C I S T A
PRESENTAN:
ALVAREZ BUSTOS ABRAHAM
RODRÍGUEZ CLAVEL MAX JOSHUA
ASESORES:
ING. ABRAHAM ROMERO BUGARÍN ING. YEBRA MORÓN PEDRO
MÉXICO D.F. DICIEMBRE 2012

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGFNIERÍA MECÁNICA Y ELECTRICA
UNIDAD PROFESIONAL "ADOLFO LÓPEZ MATEOS"
TEMA DE TESIS
QUE PARA OBTENER EL TITULO DE
POR LA OPCIÓN DE TITULACIÓN
DEBERA(N)DESARROLLAR
INGENIERO ELECTRICISTA
TESIS COLECTIVA Y EXAMEN ORAL JNOTVTOUAL
AHRAHAM ALVAREZ BUSTOS
MAX JOSHUA RODRÍGUEZ CLAVEL
"ESQUEMA DE TELEPROTECCIÓN PARA LA LÍNEA DE TRANSMISIÓN 93C30 INSTALADA ENTRE LAS SUBESTACIÓNES MAGDALENA Y SANTA CRUZ ESTABLECIENDO LA
COMUNICACIÓN DE EXTREMO A EXTREMO MEDIANTE MENSAJES GOOSE DE ACUERDO A LO ESTIPULAUO EN EL ESTÁNDAR DE COMlTNTC:ACIONES IEC 61850-ED.2. "
OBJETIVO DEL TEMA
PROPONER UN ESQUEMA DE TELEPROTECCIÓN BASADO EN LO ESTIPULADO EN EL ESTÁNDAR IEC 61850-ED.2 Y LA NORMA DE REFERENCIA NRF-041-2010 DE C.F.E., DONDE SE PROPONE QUE ESTE ESQUEMA SEA APLICADO A LA LÍNEA DE TRANSMISIÓN MAG-93C30-CRU.
PUNTOS A DESARROLLAR:
> INTRODUCCIÓN AL PROYECTO DE TELEPROTECCIÓN MEDIANTE MENSAJES GOOSE.
> PROTECCIÓN DE LÍNEAS DE TRANSMISIÓN
> DESCRIPCIÓN DE LOS ESQUEMAS DE DISPARO EN LAS LÍNEAS DE TRANSMISIÓN .
> APLICACIÓN DE LA COMUNICACIÓN CON MENSAJES GOOSE ENTRE SUBESTACIONES
> DESCRIPCIÓN DEL ESTÁNDAR DE COMUNICACIÓN IEC 61850.
> ESTUDIO PROPUESTO DEL ESQUEMA DE TELEPROTECCIÓN DE LA LÍNEA MAG-93C30-CRU.
)M ING. ABRA AM ROMERO BUGARÍN
ING JEF
MÉXICO D.F., A 29 NOVIEMBRE DEL 2013.
ASESORES

Teleprotección IEC 61850 Ed. 2
Teleprotección Página 2
AGRADECIMIENTOS Abraham Alvarez Bustos Al finalizar un trabajo tan arduo y lleno de dificultades muestra inmediatamente que para mí hubiese sido imposible sin la participación de personas e instituciones que han facilitado las cosas para que este trabajo llegue a un feliz término. Por ello, es para mí un verdadero placer utilizar este espacio para expresarles mis agradecimientos. A Dios, por haberme acompañado y guiado a lo largo de mi carrera, por ser mi fortaleza en los momentos de debilidad y por brindarme una vida llena de aprendizajes, experiencias y sobre todo llena de felicidad al lado de mis seres queridos. A mi familia, que sin su apoyo, colaboración e inspiración habría sido imposible llevar a cabo esta dura labor. A mis padres, Margarita y Abraham, por su ejemplo de lucha y honestidad; a mi hermana Raquel por su alegría y compañía. A mi hermano Diego por su apoyo y generosidad. Toda mi familia esta tesis es por ellos y para ellos. Debo agradecer de manera especial y sincera al Ing. Abraham Romero por su apoyo y confianza en mi trabajo y su capacidad para guiar el mismo con conocimiento. Agradezco también el haberme facilitado siempre los medios suficientes para llevar a cabo todas las actividades propuestas durante el desarrollo de esta tesis. Para aquellos amigos que han compartido conmigo los “ires y venires” en el plano personal
durante esta estancia en la licenciatura. En especial a mi buen amigo Max Joshua, con
quien aún la conversación más ligera te deja algo provechoso, de quien siempre he recibido
palabras de aliento, en las buenas y malas hemos estado juntos hermano.
Finalmente, debo agradecer al Instituto Politécnico Nacional por brindarme un lugar de
estudio y enseñanza además de un conocimiento invaluable. Max Joshua Rodríguez Clavel A toda mi familia, muy en especial a Mama Y Papa, por haberme dado la vida y ser un ejemplo a seguir, a mis hermanos Isis y Hussein por quererme, apoyarme en cada uno de mis sueños y soportarme. Quiero además, reconocer el esfuerzo y la paciencia de mi amigo y hermano Abraham ya que sin él hubiese estado perdido en muchas situaciones, con quien tuve la oportunidad de ver cristalizado este sueño.
Teleprotección IEC 61850 Ed. 2
Teleprotección Página 3
RESUMEN En este trabajo se presenta una propuesta de un esquema de teleprotección basado en lo estipulado en el estándar IEC 61850 Ed. 2 y la norma de referencia NRF-041-2010 de la Comisión Federal de Electricidad (CFE), donde se propone que este esquema sea aplicado a la línea de transmisión MAG-93C30-CRU de 230kV y una longitud de 3.7km, instalada entre las subestaciones de CFE Magdalena y Santa Cruz. Esta tesis sólo se enfocará a la teleprotección, describiendo la elección del esquema de transferencia de disparo en base a una comparación entre los mismos, la elección del canal de teleprotección principal y de respaldo, además de mostrar las ventajas y desventajas de la implementación del esquema de teleprotección propuesto. Los relevadores utilizados para la protección son de tipo UR de General Electric Multilin. Primeramente se menciona la justificación del tema a desarrollar, el objetivo, los alcances y limitaciones, así como una pequeña introducción a esta tesis. A continuación se realiza una descripción de los conocimientos básicos para la protección de una línea de transmisión, los estándares bajo los cuales CFE por normatividad protege las líneas de transmisión mostrando cuales son los esquemas normalizados de protección y de teleprotección de acuerdo a las características propias de la línea. Además, se familiarizará al lector con las zonas de protección y el cómo interactúan en nuestro sistema, así como dar hincapié en la importancia de un esquema de protección distancia con comunicación piloto. Para apreciar la importancia del canal de comunicación de la protección distancia, los esquemas de transferencia de disparo, también conocidos como esquemas piloto de teleprotección, así como la justificación de la selección de un esquema de disparo permisivo transferido de sobrealcance (POTT) para la protección de la línea de transmisión. Una vez entendida esta importancia se describen los diversos canales de comunicación, sus ventajas y desventajas, así como una comparación entre los mismos para la selección del más conveniente según lo estipulado en esta tesis. Esta tesis además contiene una pequeña reseña histórica del estándar, una descripción a detalle del llamado bus de proceso y bus de estación, además de la topología de red que usa el estándar, así como los tipos de mensajes que se manejan en el mismo, para posteriormente describir claramente como se establece la comunicación entre las subestaciones. Para finalizar se describe a detalle el esquema de teleprotección propuesto, la línea de trasmisión a proteger, así como los resultados de la selección del esquema de disparo y el canal de comunicación además de las pruebas realizadas en el laboratorio y los resultados de las mismas.

Teleprotección IEC 61850 Ed. 2
Teleprotección Página 4
ABSTRACT In this paper a proposed aided scheme based on the provisions of IEC 61850 Ed. 2 standard and reference standard NRF-041-2010 of the Federal Electricity Commission (CFE) is presented. It is proposed that this scheme is applied to the transmission line MAG-93C30-CRU 230kV and a length of 3.7km, installed between substations CFE Magdalena and Santa Cruz. This thesis will focus only on the Teleprotection, describing the choice of shooting transfer scheme based on a comparison between them, the choice of channel aided primary and backup, and shows the advantages and disadvantages of implementing the scheme Teleprotection proposed. The relays are used for protection of UR type of General Electric Multilin. First justification of the theme to be developed, the objective, scope and limitations, as well as a brief introduction to this thesis is mentioned. A description of the basic knowledge for the protection of a transmission line is performed, the standards under which CFE legislation protects the transmission lines showing which are the standard protection schemes and Teleprotection according to the characteristics of line. In addition, the reader will become familiar with the areas of protection and how they interact in our system and give emphasis on the importance of a protection scheme pilot distance communication. To appreciate the importance of the communication channel distance protection, transfer schemes shooting, also known as pilot aided schemes as well as the rationale for the selection of a scheme permissive overreaching transfer trip (POTT) for protection transmission line. Once understood this importance the various channels of communication, their advantages and disadvantages, and a comparison between them to select the most convenient as stipulated in this thesis are described. This thesis also contains a historical summary of the standard, a detailed description called process bus and bus station, in addition to the network topology using standard as well as the types of messages that are handled in the same; then clearly describe how communication between substations is established. Finally describes in detail the proposed scheme aided, the transmission line to be protected, and the results of the selection scheme shot the communication channel in addition to the tests performed in the laboratory and the results thereof.

Teleprotección IEC 61850 Ed. 2
Teleprotección Página 5
ÍNDICE 1 INTRODUCCIÓN AL PROYECTO DE TELEPROTECCIÓN MEDIANTE MENSAJES GOOSE.............................................................................................................................................................. 8
1.1 Justificación de la implementación del Estándar IEC 61850 Ed. 2 ......................... 8
1.2 Estado del Arte ........................................................................................................................ 10
1.3 Objetivo del proyecto ............................................................................................................ 11
1.4 Alcances y Limitaciones ....................................................................................................... 12
1.5 Estructura de la Tesis ........................................................................................................... 12
2 PROTECCIÓN DE LÍNEAS DE TRANSMISIÓN ...................................................................... 15
2.1 Introducción al conocimiento teórico ............................................................................ 15
2.2 Protección de líneas de Transmisión .............................................................................. 15
2.2.1 Esquemas Normalizados de Protección ................................................................ 15
2.2.2 Esquemas Normalizados de Teleprotección ....................................................... 18
2.2.3 Esquema de Protección Asumido ............................................................................ 30
2.2.4 PP1 Protección Diferencial (87L) ............................................................................ 30
2.2.5 PP2 Protección Distancia (21) .................................................................................. 36
3 III. ESQUEMAS DE TRANSFERENCIA DE DISPARO Y DISPARO PERMISIVO TRANSFERIDO DE SOBREALCANCE (POTT) ................................................................................ 50
3.1 Introducción a los Esquemas Piloto de Teleprotección .......................................... 50
3.2 Tipos de Esquemas Piloto de Teleprotección.............................................................. 52
3.2.1 Esquema de Disparo Directo Transferido de Bajo Alcance (DUTT) .......... 52
3.2.2 Esquema de Disparo Permisivo Transferido de Bajo Alcance (PUTT) ..... 55
3.2.3 Esquema de Disparo Permisivo Transferido de Sobre Alcance (POTT) .. 58
3.3 Alimentación Débil (Weak Infeed) .................................................................................. 62
4 COMUNICACIÓN ENTRE SUBESTACIONES .......................................................................... 65
4.1 Introducción a las Comunicaciones entre Subestaciones ....................................... 65
4.2 Tipos de Canales de Comunicación ................................................................................. 66
4.2.1 Hilos Piloto (Cables) ..................................................................................................... 66
4.2.2 Ondas Portadoras en Líneas de Alta Tensión (OPLAT) .................................. 68
4.2.3 Canales de Radio de Alta Frecuencia (Micro Onda) ......................................... 72
4.2.4 Fibra Óptica (F.O.) ......................................................................................................... 74
5 ESTÁNDAR DE COMUNICACIÓN IEC 61850 Ed. 1 & Ed. 2.............................................. 83
5.1 Descripción General .............................................................................................................. 83
5.2 Historia del Estándar ............................................................................................................ 83
Teleprotección IEC 61850 Ed. 2
Teleprotección Página 6
5.3 Partes del Estándar ................................................................................................................ 85
5.4 Niveles de Estación, Interfaces Lógicas & Nodos Lógicos ..................................... 87
5.5 Redes Físicas en una Subestación IEC 61850 .............................................................. 90
5.6 Bus de Proceso ........................................................................................................................ 91
5.7 Bus de Estación ....................................................................................................................... 92
5.7.1 Switches de Comunicación ......................................................................................... 92
5.7.2 Comunicación Punto a Punto, Punto a Multipunto, Arreglos de la Red (Topologías de Red) y Redundancia. ...................................................................................... 93
5.8 Tipos de mensajes IEC 61850 (Evento Genérico de Subestación) ...................... 95
5.8.1 Evento Genérico del Estado de la Subestación (GSSE) .................................... 95
5.8.2 Eventos Genéricos de Objeto Orientado de la Subestación (GOOSE) ........ 96
5.9 GOOSE en el Relevador Universal UR ............................................................................. 97
5.9.1 GOOSE Fijo (Fixed GOOSE)......................................................................................... 99
5.9.2 GOOSE Configurable ...................................................................................................100
5.10 Comunicación entre Subestaciones con Mensajes GOOSE ...............................102
6 PROPUESTA DE ESQUEMA DE TELEPROTECCIÓN ........................................................106
6.1 Introducción a la Propuesta de Esquema de Teleprotección ..............................106
6.2 Descripción de la Línea de Transmisión “MAG-93C30-CRU” ..............................107
6.3 Descripción del Esquema de Teleprotección Propuesto ......................................111
6.4 Comunicación Primaria del Esquema (IEC 61850 GOOSE) .................................113
6.5 Comunicación Secundaria del Esquema (Entradas/Salidas en el Canal de la Protección Diferencial) ...................................................................................................................115
6.6 Pruebas Funcionales de Laboratorio ............................................................................116
6.6.1 Esquema de disparo permisivo transferido de sobrealcance POTT vía canal de teleprotección 1 y protección diferencial bloqueada. ..................................119
6.6.2 Esquema de disparo permisivo transferido de sobrealcance POTT vía canal de teleprotección 2 y protección diferencial bloqueada. ..................................131
6.6.3 Esquema de disparo permisivo transferido de sobrealcance POTT vía canal de teleprotección 1 y 2, con protección diferencial desbloqueada. ..............143
7 CONCLUSIONES & REFERENCIAS ..........................................................................................157
7.1 Conclusiones, Ventajas y Desventajas ..........................................................................157
7.2 Aportaciones ..........................................................................................................................158
7.3 Recomendaciones para Trabajos Futuros ..................................................................159
7.4 Referencias .............................................................................................................................159
ANEXOS ......................................................................................................................................................162

CAPÍTULO I Introducción al Proyecto a Desarrollar
Teleprotección Página 7
CAPÍTULO I
INTRODUCCIÓN AL PROYECTO DE TELEPROTECCIÓN MEDIANTE MENSAJES GOOSE
CAPÍTULO I Introducción al Proyecto a Desarrollar
Teleprotección Página 8
1 INTRODUCCIÓN AL PROYECTO DE TELEPROTECCIÓN MEDIANTE MENSAJES GOOSE
1.1 Justificación de la implementación del Estándar IEC 61850 Ed. 2 Actualmente, el objetivo de cualquier compañía suministradora de energía eléctrica es mantener el suministro constante de energía eléctrica a un costo razonable. A pesar de que el sistema eléctrico de potencia ha sido diseñado en base a un riguroso análisis para su funcionamiento óptimo, aún en este se pueden presentar fallas por diversas razones tales como: descargas atmosféricas, efectos de la contaminación aérea en aislamientos externos (contaminación salina, industrial, polvos, etc.), envejecimiento prematuro de los aislamientos (sobrecargas permanentes, selección inadecuada, etc.), fallas del equipo, vandalismo, errores humanos. Los tipos principales de fallas en los sistemas trifásicos se expresan en la Tabla 1.1 [Blackburn, 2006].
Tipo de Falla Porcentaje de Aparición Fallas de Línea a Tierra 80%
Fallas de Fase a Fase (Línea a Línea) 13% Fallas de dos Líneas a tierra 5%
Fallas Trifásicas 2% Tabla 1.1 Porcentaje de Aparición de las Fallas en los Sistemas Trifásicos
(Adaptada de [Harper, 2003]) Cuando ocurre una falla debe interrumpirse el flujo de corriente en la sección o equipo fallado de inmediato, sin suspender la energía en las zonas restantes. Por lo tanto, esto interrumpe el servicio continuo y de no ser así puede generarnos daños en equipos, líneas de transmisión, generadores, donde cualquiera de estos daños causaría un lapso indefinido de interrupción crítico y, por consiguiente, pérdidas de energía en máquinas, computadoras, laboratorios y muchos otros servicios, dando como resultado pérdidas de tiempo de producción y con esto una perdida monetaria impresionante. Por lo tanto, el número de interrupciones debe ser reducido al mínimo. Es por esto que la protección del sistema eléctrico de potencia es indispensable. Esto se logra mediante dispositivos que tienen como función detectar las fallas y efectuar la desconexión. Unos de los principales elementos de un sistema eléctrico de potencia son las líneas de transmisión, cuyas longitudes van desde algunos cuantos kilómetros hasta cientos de kilómetros. Los costos de las líneas de transmisión suelen ser muy elevados y además el tiempo de instalación es considerable, por lo tanto no deben de llevarse a niveles que comprometan su estado de operación. Para la protección de una línea de transmisión es necesario emplear relevadores que trabajen de manera eficaz y eficiente, mitigando las fallas para restablecer el suministro de energía eléctrica al usuario en el menor tiempo posible y sin poner en riesgo la instalación.
CAPÍTULO I Introducción al Proyecto a Desarrollar
Teleprotección Página 9
En el caso particular de México para la Comisión Federal de Electricidad CFE dichos relevadores deben de encontrarse en el listado de LAPEM05L, el cual es otorgado por el Laboratorio de Pruebas a Equipos y Materiales (LAPEM). Como se mencionó previamente, el objetivo de un sistema de protección es desconectar en el menor tiempo posible y con un alto grado de selectividad la sección fallada del sistema de potencia. El propósito de esta desconexión es evitar daños en algún elemento del sistema de alto voltaje si se produjese una falla. La protección de una línea de alta tensión requiere un estudio de la aplicación específica para determinar los ajustes necesarios de los parámetros indicados en los equipos de protección, los cuales necesitan un sistema de comunicaciones de alta disponibilidad y confiabilidad para poder establecer una comunicación entre estos equipos de protección que permitan tomar decisiones cada vez que ocurra una falla; a esto se le conoce como teleprotección [G0000-81, 2008]. Para cumplir este requisito es necesario configurar y establecer la comunicación de los relevadores de manera rápida, segura, eficaz y eficiente para que así los relevadores realicen su algoritmo de protección pre configurado adecuadamente. Como hemos mencionado hasta ahora, la importancia de la liberación de una falla adecuadamente en el sistema eléctrico potencia es indispensable, por ello se establecen esquemas de protección normalizados donde se describen las protecciones principales que debe cumplir un esquema de protección, la descripción de los esquemas de teleprotección utilizados, además de los medios de comunicación disponibles para la teleprotección. Actualmente, la comunicación de los relevadores en un esquema de protección de línea se realiza de diversas formas entre las cuales destacan: Cables (hilos piloto), ondas portadoras en líneas de alta tensión (OPLAT), la cual es la más común, cable telefónico (Ethernet), microonda (Radio) y fibra óptica (F.O.) [Yaoyu, 2004]. Todas estas formas de envío de la información presentan un inconveniente en común: ninguna de ellas garantiza que la información enviada y posteriormente recibida llegue a su destino sin tener ninguna modificación, debido a ciertos eventos que pudiesen comprometer el mensaje. En base a esta desventaja surge una pregunta: ¿Cómo saber si la información recibida en el extremo de la línea de transmisión hacia el relevador es confiable? Mediante la implementación del estándar IEC 61850 Edición 2, se propone enviar la información mediante un mensaje de evento de objeto genérico de subestación orientado (GOOSE), el cual no puede garantizar que el mensaje no será alterado, pero si indica si el mensaje que arribó al relevador remoto es confiable o no, a través de un bit de calidad que incluye el mensaje, justificando el uso del estándar IEC 61850 Edición 2.

CAPÍTULO I Introducción al Proyecto a Desarrollar
Teleprotección Página 10
1.2 Estado del Arte El transporte de señales de teleprotección entre subestaciones es una aplicación crítica para las compañías eléctricas. Estas señales ayudan a manejar cargas en las redes de energía y proteger el equipo de potencia de daños graves. A lo largo de los años se han utilizado diversos tipos de canales de comunicación y esquemas de comparación para la teleprotección de los equipos. En 1935 los primeros esquemas de teleprotección instalados utilizaban un canal de Hilos Piloto de corriente alterna para la comunicación de los relevadores, los cuales aún eran electromecánicos y sólo se utilizaban para proteger las líneas de transmisión cortas [Ebrecht, 2012]. Conforme los años pasaron, diversos problemas se presentaban ante la acción de los disparos transferidos directos y fue necesario implementar una nueva lógica de teleprotección; así nació la comparación direccional, la cual le dio un giro completo al mundo de la teleprotección. Este avance no fue suficiente, de tal forma que nuevas y nuevas tecnologías de comunicación se fueron desarrollando. Durante los años 1975-1978 una nueva tecnología de comunicación fue creada, el Power Line Carrier o bien Onda Portadora en Línea de Alta Tensión, donde su respectivo protocolo de comunicación fue creado por la empresa escocesa Pico Electronics, fruto de un proyecto de control de equipos de audio realizado para BSR en EUA. La industria eléctrica al descubrir el potencial de este hallazgo la introdujo a la teleprotección en 1978 [Yaoyu, 2004]. Durante muchos años continuó la búsqueda de una tecnología económica y adecuada para aplicaciones de teleprotección. En 1978 EDF (Électricité de France) creó y estandarizadó un sistema llamado "difusión por desplazamiento de frecuencia" o S-FSK, tecnología que hasta ese momento no había sido introducida para el uso de teleprotección. Sin embargo, dos años más tarde se comenzó a modificar dicha tecnología para el intercambio de comunicación entre las subestaciones eléctricas. A pesar de que la difusión por desplazamiento de frecuencia había sido introducida a la industria eléctrica después del OPLAT, esta nueva tecnología no se popularizó debido a que los canales de comunicación vía OPLAT presentaban mayores ventajas en cuestión de instalación e inversión económica. Los nuevos tipos de relevadores de protección se fueron desarrollando y en 1983 se comenzó a implementar la teleprotección utilizando relevadores de comparación de fase, los cuales son un tipo de relevador diferencial que compara los ángulos de fase de las corrientes que entran en un terminal de una línea de transmisión con los ángulos de fase de las corrientes que entran en todas las terminales remotas de la misma línea. Para las condiciones de una falla dentro de la zona protegida (falla interna), las corrientes que entran todas las terminales estarán en fase. Para las condiciones de una falla fuera de la zona de protección (externa), o para el flujo de

CAPÍTULO I Introducción al Proyecto a Desarrollar
Teleprotección Página 11
carga simplemente, las corrientes que entran en cualquier terminal serán 180 grados fuera de fase con las corrientes que entran en al menos una de las terminales remotas, donde toda esta comunicación se realiza a través de OPLAT. Alrededor de 1985, con el desarrollo de la tecnología y la inquietud por una teleprotección más segura, confiable y eficaz, los relevadores diferenciales fueron apareciendo, aunque con una nueva tecnología en comunicación basada en canales digitales. Este fue el salto que comenzó la revolución en la comunicación de los equipos. En 1988 el “Instituto de Investigación de la Energía Eléctrica o Electric Power Research Institute (EPRI)” y el Instituto de Ingenieros Eléctricos y Electrónicos o Institute of Electrical and Electronics Engineers (IEEE), iniciaron una arquitectura de comunicación especialmente desarrollada para la industria eléctrica llamada UCA. El objetivo del proyecto UCA era facilitar la interoperabilidad entre los sistemas de control utilizados para monitorear y controlar los servicios públicos de energía eléctrica [Blond, 2012]. A pesar de que esto no había sido llevado a esquemas de teleprotección, el nacimiento de esta arquitectura de comunicación dio un paso para la creación del estándar de comunicaciones IEC 61850. Este estándar fue desarrollado en 1997 cuando EPRI y la IEEE unieron esfuerzos con el “Grupo de Trabajo 10 o Work Group 10 (WG10)” de la Comisión Electrotécnica Internacional o International Electrotechnical Commission (IEC) para construir un estándar internacional común para las comunicaciones de servicios eléctricos públicos. [Nordell, 2008]. El estándar IEC 61850 fue publicado en 2005 y fue desarrollado para control y protección de sistemas eléctricos mediante la estandarización del intercambio de información entre todos los “Dispositivos Electrónicos Inteligentes o Intelligent Electronic Devices (IED´s)” al interior de una subestación automatizada. Con el desarrollo del estándar IEC 61850 en el 2011, se incorporó la comunicación entre las subestaciones para aplicaciones de teleprotección a este se le llama típicamente IEC 61850 Ed. 2, el cual engloba una nueva forma de comunicación entre subestaciones mejorando drásticamente la teleprotección.
1.3 Objetivo del proyecto El propósito de esta tesis es proponer un esquema de teleprotección basado en lo estipulado en el estándar IEC 61850 Ed. 2 y la norma de referencia NRF-041-2010 de la Comisión Federal de Electricidad (CFE), donde se propone que este esquema sea aplicado a la línea de transmisión MAG-93C30-CRU de 230kV y una longitud de 3.7km, instalada entre las subestaciones de CFE Magdalena y Santa Cruz, puesto que esta es una subestación se encuentra operando aún con relevadores electromecánicos, así que se puede aprovechar su actualización para implementar el estándar IEC 61850. Cabe resaltar que esta tesis sólo se enfocará a la teleprotección, describiendo la elección del esquema de transferencia de disparo en base a una comparación entre los

CAPÍTULO I Introducción al Proyecto a Desarrollar
Teleprotección Página 12
mismos, la elección del canal de teleprotección principal y de respaldo, además de mostrar las ventajas y desventajas de la implementación del esquema de teleprotección propuesto. Los relevadores utilizados para la protección son de tipo UR de General Electric Multilin.
1.4 Alcances y Limitaciones ALCANCES
Proponer un esquema de teleprotección basado en lo estipulado en el estándar IEC 61850 Ed. 2 y la norma de referencia NRF-041-2010 de la Comisión Federal de Electricidad (CFE).
Elegir el esquema de transferencia de disparo para la teleprotección mediante la comparación y análisis de los mismos.
Elegir el canal de comunicación para la teleprotección principal mediante la comparación de los mismos.
Aprovechar el canal de comunicación de la protección diferencial para transmitir el disparo de la teleprotección de respaldo.
Aplicar el esquema propuesto a la línea de transmisión MAG-93C30-CRU, de 230kV y una longitud de 3.7km, instalada entre las subestaciones de CFE Magdalena y Santa Cruz, aprovechando su actualización para implementar el Estándar.
Utilizar los relevadores de protección UR de General Electric Multilin para el esquema de teleprotección propuesto.
LIMITACIONES
No se describe la forma de calcular los ajustes para los arranques de las protecciones del esquema., Ya que para probar el esquema de teleprotección basta con inyectar cualquier valor de corriente que supere el ajuste de arranque que se le programa al relevador y observar que el esquema de teleprotección funcione.
Los pickups para las pruebas fueron seleccionados únicamente para verificar el funcionamiento del esquema de teleprotección.
1.5 Estructura de la Tesis Capítulo 1.- En este capítulo se menciona la justificación del tema a desarrollar, el objetivo, los alcances y limitaciones, así como una pequeña introducción a esta tesis. Capítulo 2.- Este capítulo contiene los conocimientos básicos para la protección de una línea de transmisión, los estándares bajo los cuales CFE por normatividad protege las líneas de transmisión mostrando cuales son los esquemas normalizados de protección y de teleprotección de acuerdo a las características propias de la línea. Además, se da una breve descripción de las protecciones: Diferencial de línea y protección distancia; incluyendo su participación en el esquema de protección propuesto. También, se muestra la forma en que se toma ventaja del canal de comunicación de la protección diferencial; Este capítulo tiene como objetivo familiarizar al lector con las zonas de

CAPÍTULO I Introducción al Proyecto a Desarrollar
Teleprotección Página 13
protección y el cómo interactúan en nuestro sistema, así como dar hincapié en la importancia de un esquema de protección distancia con comunicación piloto. Capítulo 3.- En este capítulo se analizan los esquemas de transferencia de disparo, también conocidos como esquemas piloto de teleprotección, así como la justificación de la selección de un esquema de disparo permisivo transferido de sobrealcance (POTT) para la protección de la línea de transmisión. Además, se muestra al lector la importancia del canal de comunicación en la protección de distancia. Capítulo 4.- En este capítulo se describen los diversos canales de comunicación, sus ventajas y desventajas, así como una comparación entre los mismos para la selección del más conveniente según lo estipulado en esta tesis. Capítulo 5.- Este capítulo contiene una pequeña reseña histórica del estándar, una descripción a detalle del llamado bus de proceso y bus de estación, además de la topología de red que usa el estándar, así como los tipos de mensajes que se manejan en el mismo, para posteriormente describir claramente como se establece la comunicación entre las subestaciones. Capítulo 6.- En este capítulo se describe a detalle el esquema de teleprotección propuesto, la línea de trasmisión a proteger, así como los resultados de la selección del esquema de disparo y el canal de comunicación además de las pruebas realizadas en el laboratorio y los resultados de las mismas. Capítulo 7.- En este capítulo se muestran los resultados del trabajo realizado, así como sus ventajas y desventajas.

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 14
CAPÍTULO II
PROTECCIÓN DE LÍNEAS DE TRANSMISIÓN

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 15
2 PROTECCIÓN DE LÍNEAS DE TRANSMISIÓN 2.1 Introducción al conocimiento teórico Este capítulo contiene los conocimientos básicos para la protección de una línea de transmisión, con el fin de entender los estándares bajo los cuales CFE, por normatividad, protege las líneas de transmisión, mostrando cuales son los esquemas normalizados de protección y de teleprotección de acuerdo a las características propias de la línea. Además, se dauna breve descripción de las protecciones diferencial de línea y protección distancia, ya que su participación en el esquema de teleprotección propuesto es vital.
2.2 Protección de líneas de Transmisión Las líneas de transmisión son el punto de unión entre las diferentes partes del sistema de potencia y el equipo asociado. La energía se genera a bajos voltajes y se eleva a voltajes más altos para transmitirlo a diferentes subestaciones donde se vuelve a reducir para distribuirlo a los usuarios de tipo industrial, comercial y residencial [Agapito, 1998]. Según el voltaje de operación las líneas se clasifican de acuerdo a la norma de referencia NRF-041-2010, de CFE, de la siguiente manera:
Tipo de Línea Nivel de Tensión Líneas de distribución. Desde 2.4kV hasta 34.5 kV
Líneas de subtransmisión Desde 69kV hasta 161kV Líneas de transmisión Desde 230kV, 400kV y mayores.
Tabla 2.1 Niveles de Tensión normalizados [NRF-041-2010, 2010]
La experiencia ha demostrado que la mayoría de las fallas de un sistema de potencia ocurren en las líneas de transmisión. Si las fallas no se liberan rápidamente pueden causar la perdida de estabilidad del sistema o un daño mayor. Por esta razón, el sistema de transmisión debe protegerse adecuadamente en base a sus características, longitud e importancia [Harper, 2008].
2.2.1 Esquemas Normalizados de Protección La definición de un esquema de protección de acuerdo a la norma de referencia de la Comisión Federal de Electricidad (CFE), la NRF-041-2010 es: “Grupo o arreglo de dispositivos llamados relevadores que se interconectan o interrelacionan para proteger a los equipos eléctricos primarios, detectando condiciones anormales de operación para evitar o reducir daños mayores al elemento primario” [NRF-041-2010, 2010].
CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 16
En México, la Comisión Federal de Electricidad recomienda utilizar los esquemas normalizados propuestos en la norma de referencia NRF-041-2010 para la protección de una línea de transmisión, donde se describen las protecciones principales que debe cumplir un esquema de protección, la descripción de los esquemas de teleprotección utilizados, además de los medios de comunicación disponibles para la teleprotección en México. Es de vital importancia la mención de estos esquemas de protección normalizados, debido a que para la construcción de la propuesta del esquema de teleprotección desarrollado en esta tesis, se toma como base el estándar IEC 61850 Ed. 2 y como apoyo los esquemas normalizados descritos en la norma de referencia NRF-041-2010. La norma de referencia NRF-041-2010 divide los esquemas de protección para las líneas de transmisión y subtransmisión de acuerdo a la longitud de la línea instalada con tensiones de operación de 69 kV y mayores, como se muestra en la Tabla 2.2.
Tipo de Línea Descripción Línea Larga Cuya longitud es mayor a los 40 km Línea Media Cuya longitud va desde los 10km hasta los 40 km Línea Corta Cuya longitud es de 10km o menor
Tabla 2.2 Clasificación de las Líneas de Transmisión de acuerdo a su longitud (Adaptada [NRF-041-2010, 2010]).
A continuación se describen las características que debe cumplir cada uno de los esquemas en base a la tensión de las líneas y su longitud, de acuerdo a la norma de referencia NRF-041-2010. 1) Esquemas para protecciones de 400kV y 230 kV [NRF-041-2010, 2010]
Los esquemas de protección que se encuentren en el rango de tensión indicado y la longitud deben contar con lo siguiente: a) PP1 protección primaria 1 (Líneas de transmisión). b) PP2 protección primaria 2 (Líneas de transmisión). c) PR protección de respaldo (Excepto líneas de distribución). d) 50FI protección contra falla de interruptor (Excepto líneas de distribución).
2) Esquemas para protecciones de 69kV a 161 kV [NRF-041-2010, 2010] Los esquemas de protección que se encuentren en el rango de tensión indicado y la longitud deben contar con lo siguiente: a) P1 protección primaria (líneas de subtransmisión). b) P2 protección primaria (líneas de subtransmisión). Nota en caso de líneas de enlace el relevador 50 FI se incorpora en esta protección. c) PPA protección primaria de alimentador (línea de distribución radial). d) PR protección de respaldo (excepto líneas de distribución). e) 50FI protección contra falla de interruptor (excepto líneas de distribución).

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 17
La norma de referencia NRF-041-2010 muestra una serie de tablas donde se proporcionan las aplicaciones de los esquemas normalizados dependiendo de su aplicación y las condiciones de la línea: longitud y medios de comunicación disponibles. A continuación, se muestran las tablas descritas en la norma de referencia. La mención de estas tablas es importante debido a que muestra una idea más clara de los esquemas de teleprotección con los que actualmente se protege una línea de transmisión en base a su longitud; de estos podremos partir para describir nuestra propuesta de esquema de teleprotección.
1) Nota A. Para esquemas PP1 y/o PP2 que van a operar con fibra óptica multiplexada, de existir un
anillo de comunicación, programar además de la ruta directa una ruta alterna, siempre y cuando cumpla con los tiempos de TX y RX requeridos por el esquema de protección.
2) Nota B. la tabla No1 indica un resumen genérico de los medios y esquemas de protecciones y el detalle técnico se observa en las figuras y diagramas correspondientes del anexo A, los cuales deben ser aplicados en el desarrollo de la ingeniería.
3) Nota C el relevador 50 FI será un relé independiente, y que junto como el envío del DTD se detallan en la figura correspondiente xxx
4) Las protecciones PP1 y PP2 deben estar preparadas para operar en líneas compensadas con capacitor serie, disparo y recierre monopolar.
5) En la tabla anterior las protecciones PP1, PP2 deben ser equipos independientes. 6) Cuando las PP1 y PP2 sean relevadores diferenciales de línea, la PP1 debe ser con conexión de
fibra óptica directa (dedicada) y la PP2 con un canal multiplexado. 7) Para la aplicación de relevadores diferenciales de línea aplicados con fibra óptica dedicada o a través
de multiplexor, es responsabilidad del fabricante asegurar que la interfase óptica funcione adecuadamente en la distancia especificada.
8) La protección diferencial de línea con función adicional de distancia (87L / 21/21N), debe contar como respaldo con al menos tres zonas de distancia, dos de ellas hacia delante y la tercera seleccionable hacia adelante o hacia atrás.
9) Para los esquemas de protección PP1 y PP2 se deben tener servicios separados de teleprotección. 10) Para el caso de 230 kV, para líneas de 230 kV compensadas con capacitores serie o adyacentes a
líneas compensadas, los esquemas de protección se debe aplicar la misma filosofía que para las líneas de 400 kV.
11) Los esquemas de protección aprobados para tensiones superiores pueden ser aplicados en tensiones menores, siempre y cuando se cuente con la infraestructura de comunicación necesaria.
Tabla 2.3 Esquemas de protección para líneas con tensiones de 400 y 230 kV [NRF-041-2010, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 18
Nota D La función 50 FI debe estar integrada en la P2. NOTAS:
1) Para todas las líneas en la tabla anterior, las protecciones P1 y P2 deben ser independientes.
2) La función 67 se acepta como función adicional del relevador P1 y P2. En caso de que uno de los relevadores no cuente con esta función se debe suministrar un relevador independiente. Para la aplicación de relevadores diferenciales de línea utilizados con fibra óptica dedicada o a través de multiplexor, es responsabilidad del fabricante asegurar que la interfaz óptica funcione adecuadamente en la distancia especificada
3) Los esquemas de protección aprobados para tensiones superiores pueden ser aplicados en tensiones menores, siempre y cuando se cuente con la infraestructura de comunicación necesaria.
4) *Este esquema no aplica para líneas con una o más terminales en subestaciones con tensiones de 230 y 400 kV, ni para líneas paralelas, ni para líneas adyacentes a subestaciones de la red troncal.
5) ** Para la aplicación de este esquema se requiere tener “línea de vista” entre las antenas transmisoras – receptoras y contar con el permiso para utilizar la frecuencia seleccionada.
Tabla 2.4 Esquemas de protección para líneas con tensiones de 69kV hasta 161kV [NRF-041-2010, 2010]
2.2.2 Esquemas Normalizados de Teleprotección La norma de referencia NRF-041-2010 describe más a detalle, a través de una serie de figuras, los arreglos de teleprotección normalizados. Es relevante que se muestren estas figuras, ya que son complemento del esquema de teleprotección para su entendimiento y así partir también para nuestra propuesta de esquema de teleprotección.

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 19
A continuación se muestran los arreglos de teleprotección normalizados:
* MUX.‐ En el caso de que se trate solamente de una protección 87 L, y no se requieran otros servicios, se podrá usar un convertidor de nX64 a E1 en lugar del Multiplexor.
Figura 2.1 Arreglo normalizado de teleprotección para línea de 400 kV y 230 kV y
L<10 km, con medio de comunicación principal fibra óptica dedicada y respaldo por fibra óptica multiplexada (PP1 – 87L/21/67 y PP2 – 87L/21/67)
[NRF-041-2010, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 20
* MUX.‐ En el caso de que se trate solamente de una protección 87 L, y no se requieran otros servicios, se podrá usar un convertidor de n X64 a E1 en lugar del Multiplexor. Nota: En caso de requerirse otros servicios para la Subestación (canales E&M, V.24, entre otros) será factible la implementación del esquema Fibra Óptica.
Figura 2.2 Arreglo normalizado de Teleprotección para línea de 400 kV y 230kV y L>10 km ≤ 40 km, con medio de comunicación principal vía fibra óptica dedicada
(PP1-87L/21/67 y PP2 -21/21N/67) y respaldo por OPLAT (PP2-21/21N) (PP1–87L/21/67 y PP2 – 87L/21/67)
[NRF-041-2010, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 21
* MUX.‐ Sólo de requerirse otros servicios
Figura 2.3 Arreglo normalizado de Teleprotección para línea de 400kV /230kV y L>40 km, con medio de comunicación principal vía Fibra Óptica Multiplexada (PP1-85L/67
y PP2-21/21N/67) y respaldo por OPLAT (PP1-85L/67) [NRF-041-2010, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 22
* MUX.‐ En el caso de que se trate solamente de una protección 87 L, y no se requieran otros servicios, se podrá usar un convertidor de nX64 a E1 en lugar del Multiplexor. ** PP2: Esta protección podrá ser por fibra óptica dedicada en caso de que la distancia no exceda 80 km.
Figura 2.4 Arreglo normalizado de Teleprotección para línea de 400kV /230kV y L >
40 km, con medio de comunicación principal vía Fibra Óptica Multiplexada (PP1-85L) y Fibra Óptica Dedicada (PP2-87L/21/67) y respaldo por OPLAT (PP1 – 85L)
[NRF-041-2010, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 23
* MUX.‐ En el caso de que se trate solamente de una protección 87 L, y no se requieran otros servicios, se podrá usar un convertidor de nX64 a E1en lugar del Multiplexor. **PP1 para 40 km ** PP2: Esta protección podrá ser por fibra óptica dedicada en caso de que la distancia no exceda 80 km.
Figura 2.5 Arreglo normalizado de Teleprotección para línea de 400kV /230 kV y
L>40 km, con medio de comunicación principal vía Fibra Óptica Multiplexada (PP1-87L/21//67) y respaldo por OPLAT (PP2 – 21/67)
[NRF-041-2010, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 24
B* MUX.‐ En el caso de que se trate solamente de una protección 87 L, y no se
requieran otros servicios, se podrá usar un convertidor de n X64 a E1en lugar del Multiplexor .
Figura 2.6 Arreglo normalizado de Teleprotección para línea de 69kV a 161 kV y L<=10 km, con medio de comunicación vía fibra óptica dedicada (P1 – 85LT) y
respaldo por fibra óptica multiplexada (P2-87L/21/67) [NRF-041-2010, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 25
Figura 2.7 Arreglo normalizado de Teleprotección para línea en 69kV a 161 kV L<=10
km, con medio de comunicación vía fibra óptica dedicada (P1 – 87L/21/67 y P2-67 POTT)
[NRF-041-2010, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 26
NOTA: EL POTT PUEDE SER POR EL EDT
Figura 2.8 Arreglo normalizado de Teleprotección para línea de 69kV a 161 kV y
L<=10 km, con medio de comunicación vía radio digital (P1 – 85LT tripolar y P2 67 POTT)
[NRF-041-2010, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 27
* P1: Esta protección podrá ser por fibra óptica dedicada en caso de que la distancia no exceda 80km.
Figura 2.9 Arreglo normalizado de Teleprotección para línea de 69kV a 161 kV y L>10
km, con medio de comunicación vía fibra óptica dedicada (P1- 87L y P2 – 21/21N) [NRF-041-2010, 2010]
CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 28
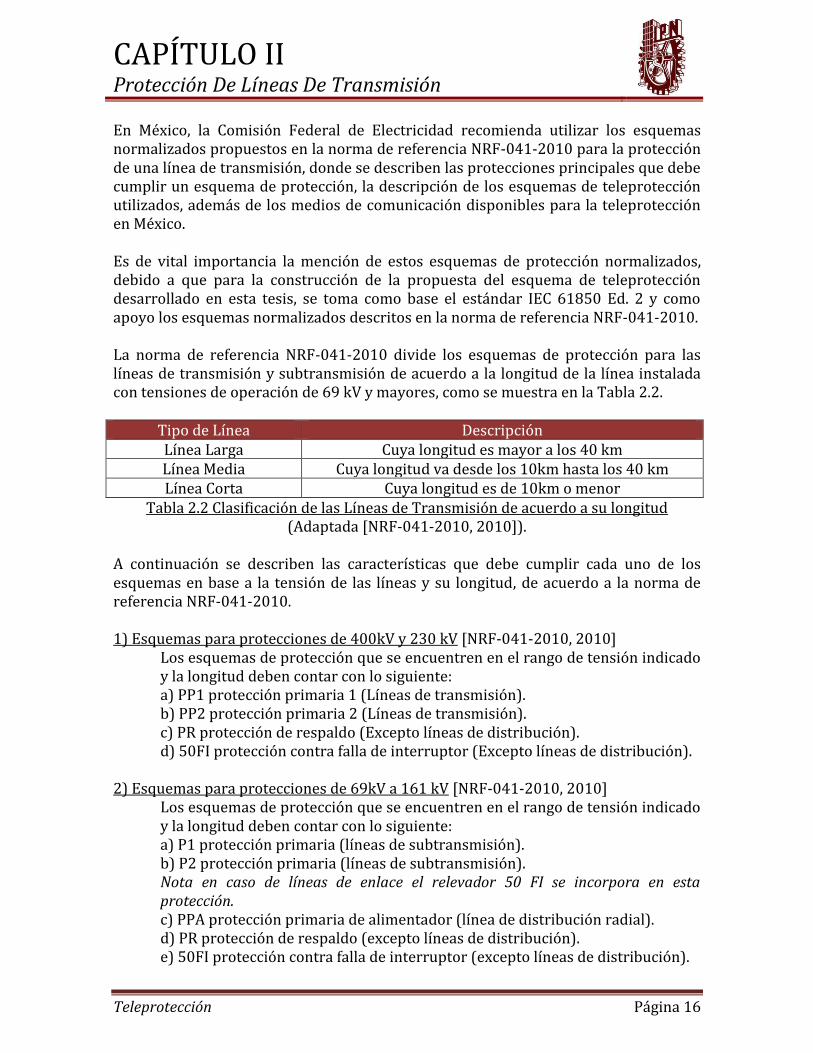
NOTA: Para este caso, el ETO puede ser un convertidor de E1 a FO.
Figura 2.10 Arreglo normalizado de Teleprotección para línea de 69kV a 161 kV y
L>10 km, con medio de comunicación vía fibra óptica (P1 – 87L/67 y P2-21/67)
[NRF-041-2010, 2010]
CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 29
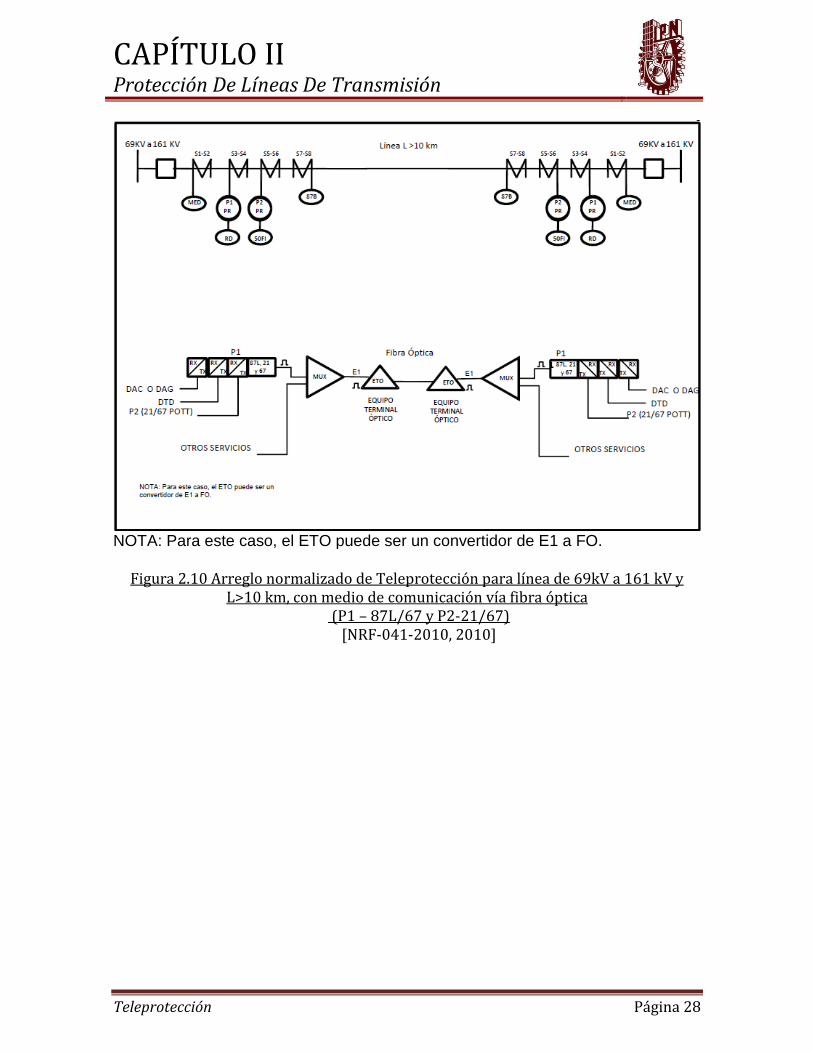
Figura 2.11 Arreglo normalizado de Teleprotección para línea de 69kV a 169 kV y L >
10 km, con medio de comunicación vía OPLAT (P1- 21/67 y P2-21/67) [NRF-041-2010, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 30
2.2.3 Esquema de Protección Asumido Como se pudo observar en los puntos anteriores, un esquema de protección debe cumplir con ciertas condiciones, como tener una protección primaria 1 (PP1), una Protección Primaria 2 (PP2), una Protección de Respaldo (PR) y una protección de Falla de Interruptor (50FI) [NRF-041-2010, 2010]. En base los esquemas de protección normalizados establecidos en la norma de referencia NRF-041-2010, y tomando en cuenta que nuestra línea instalada es de 230kV y 3.7 km de longitud, se puede considerar un esquema de protección con las características descritas en la Tabla 2.5. Protección Descripción Número ANSI
PP1 Relevador de protección diferencial de línea. 87L PP2 Relevador de protección de distancia. 21 PR Relevador de protección de sobrecorriente direccional. 67/67N
50FI Relevador de protección de falla de interruptor. 50FI Tabla 2.5 Elementos del esquema de protección asumido en base a la norma de
referencia NRF-041-2010 para líneas de transmisión de 230kV y L≤10km
En base a este esquema, podemos tomar ventaja de sus características de funcionamiento y aprovecharlas para el esquema de teleprotección propuesto. Para poder tomar ventaja del sistema que se instalará, es necesario analizarlo paso a paso, y así mostrar de manera más detallada en qué punto se toma ventaja del esquema de protección seleccionado. Además dentro de este mismo análisis, describir la importancia del mensaje a enviar, para este caso el disparo permisivo transferido de sobrealcance, y en qué protección se utiliza.
2.2.4 PP1 Protección Diferencial (87L) Para comenzar el análisis, se describe brevemente la operación de una protección diferencial de un relevador electromecánico, para así después llevar esos principios a aplicaciones con relevadores digitales y con estas bases, mostrar cómo se tomara ventaja de esta protección, siendo esta nuestra protección primaria uno (PP1), de acuerdo al esquema seleccionado en base a la norma de referencia NRF-041-2010 de CFE. Los relevadores diferenciales tienen una variedad de formas, dependiendo el equipo que estén protegiendo. La definición de un relevador diferencial es: “Aquel relevador que opera cuando el vector, que es resultado de la diferencia de dos cantidades eléctricas similares, exceda un valor predeterminado” [Agapito, 1998]. La mayoría de las aplicaciones de los relevadores diferenciales son las de “corriente diferencial”. El ejemplo más sencillo en un arreglo es el mostrado en la figura 2.12.
CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 31
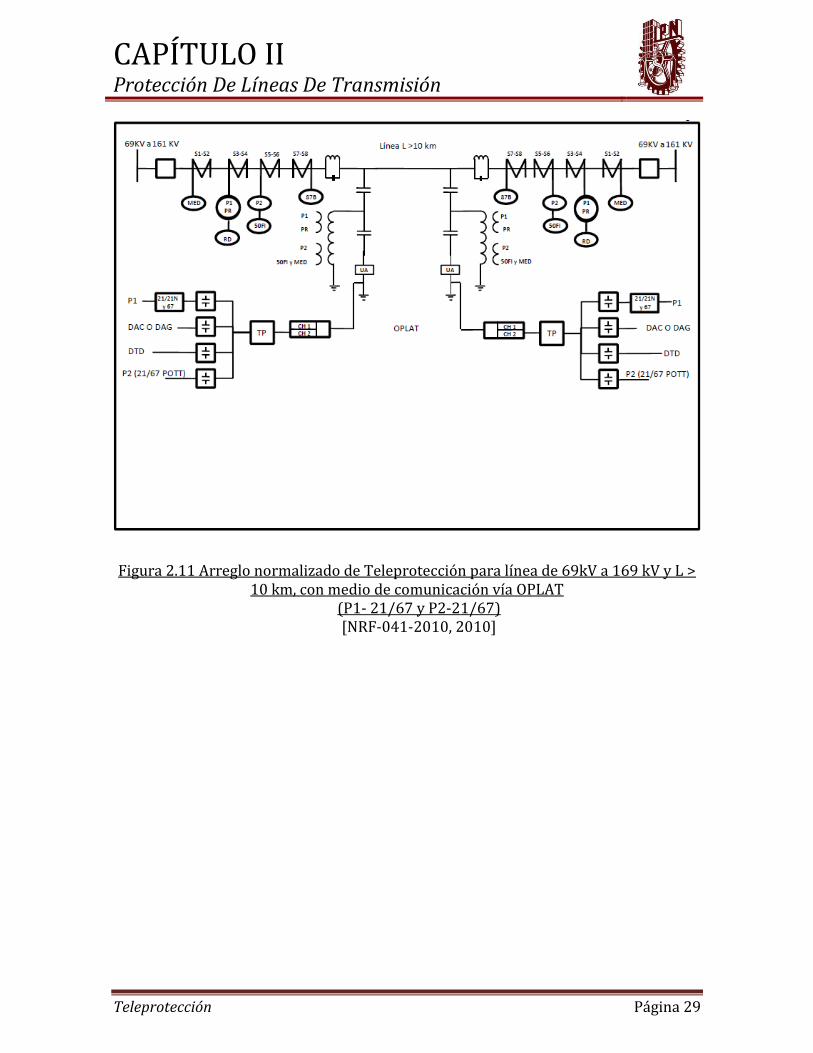
Figura 2.12 Aplicación simple de un relevador diferencial electromecánico
[Russell, 2010] En la figura 2.12 se puede apreciar una aplicación simple de un relevador diferencial electromecánico. La sección punteada del circuito representa el elemento del sistema que es protegido por el relevador diferencial. Este elemento del sistema, puede ser una línea de transmisión, un devanado de un generador, una porción de un bus, etc. Para nuestro caso será una línea de transmisión. Un transformador de corriente (TC) es conectado en cada extremo del elemento a proteger. Los secundarios de los transformadores de corriente (TC’s) están interconectados, una bobina del relevador de corriente está conectada a través del circuito secundario de los TC’s [Harper, 2008]. Ahora, supongamos que fluye corriente a través del circuito primario hacia una carga o a un corto circuito localizado en X. Las condiciones serían como se muestra en la Figura 2.13. Si los transformadores de corriente tienen la misma relación de transformación, y están conectados apropiadamente, la corriente que pasa por el secundario, se limitara a circular entre los dos TC’s como se muestra en la figura, y ninguna corriente fluirá por el relevador diferencial [Russell, 2010].
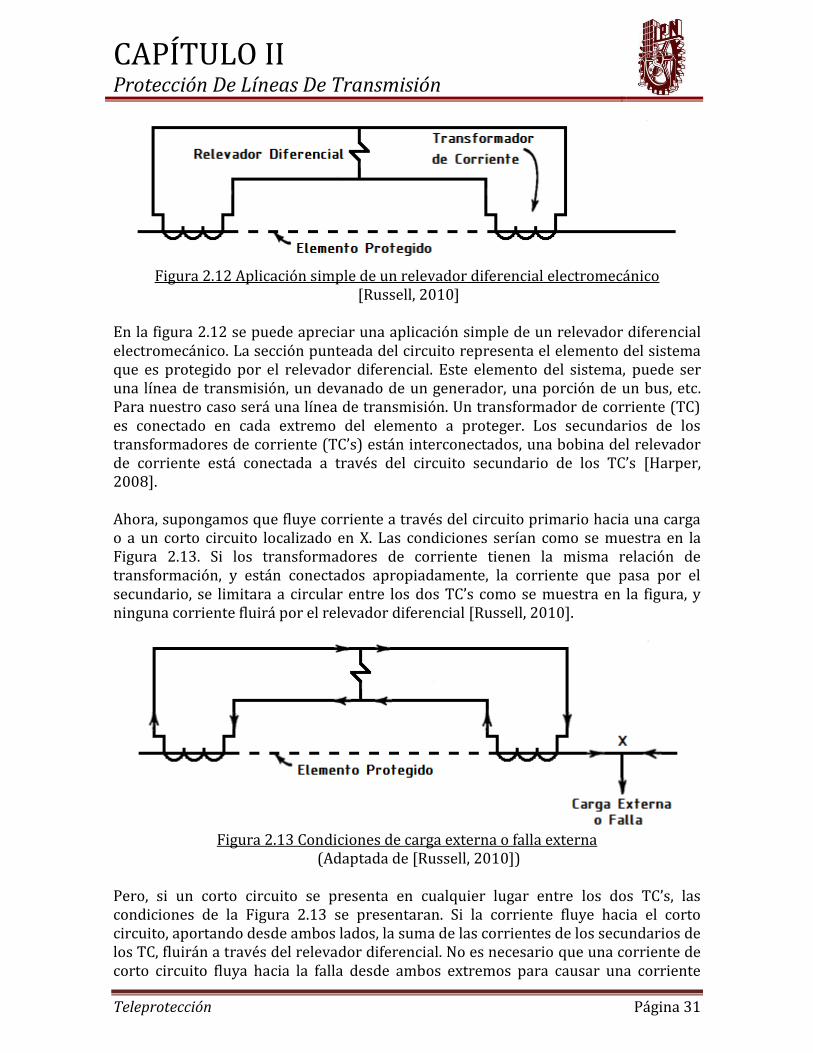
Figura 2.13 Condiciones de carga externa o falla externa
(Adaptada de [Russell, 2010]) Pero, si un corto circuito se presenta en cualquier lugar entre los dos TC’s, las condiciones de la Figura 2.13 se presentaran. Si la corriente fluye hacia el corto circuito, aportando desde ambos lados, la suma de las corrientes de los secundarios de los TC, fluirán a través del relevador diferencial. No es necesario que una corriente de corto circuito fluya hacia la falla desde ambos extremos para causar una corriente
CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 32
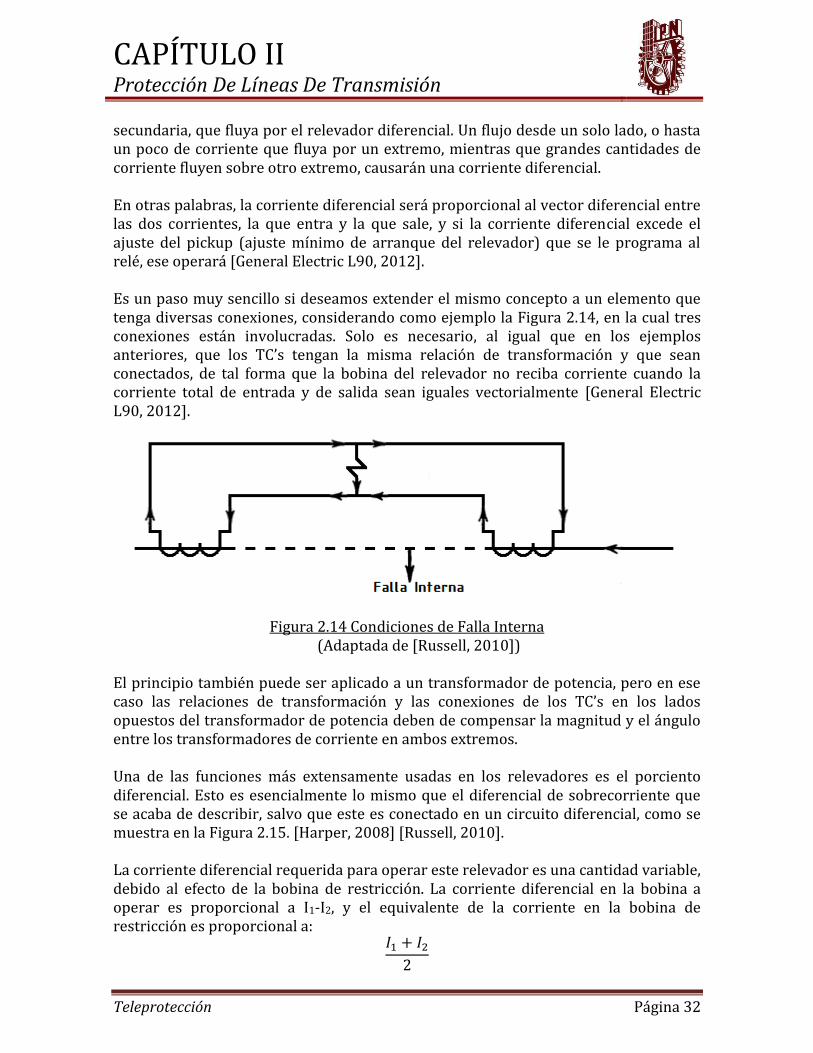
secundaria, que fluya por el relevador diferencial. Un flujo desde un solo lado, o hasta un poco de corriente que fluya por un extremo, mientras que grandes cantidades de corriente fluyen sobre otro extremo, causarán una corriente diferencial. En otras palabras, la corriente diferencial será proporcional al vector diferencial entre las dos corrientes, la que entra y la que sale, y si la corriente diferencial excede el ajuste del pickup (ajuste mínimo de arranque del relevador) que se le programa al relé, ese operará [General Electric L90, 2012]. Es un paso muy sencillo si deseamos extender el mismo concepto a un elemento que tenga diversas conexiones, considerando como ejemplo la Figura 2.14, en la cual tres conexiones están involucradas. Solo es necesario, al igual que en los ejemplos anteriores, que los TC’s tengan la misma relación de transformación y que sean conectados, de tal forma que la bobina del relevador no reciba corriente cuando la corriente total de entrada y de salida sean iguales vectorialmente [General Electric L90, 2012].
Figura 2.14 Condiciones de Falla Interna (Adaptada de [Russell, 2010])
El principio también puede ser aplicado a un transformador de potencia, pero en ese caso las relaciones de transformación y las conexiones de los TC’s en los lados opuestos del transformador de potencia deben de compensar la magnitud y el ángulo entre los transformadores de corriente en ambos extremos. Una de las funciones más extensamente usadas en los relevadores es el porciento diferencial. Esto es esencialmente lo mismo que el diferencial de sobrecorriente que se acaba de describir, salvo que este es conectado en un circuito diferencial, como se muestra en la Figura 2.15. [Harper, 2008] [Russell, 2010]. La corriente diferencial requerida para operar este relevador es una cantidad variable, debido al efecto de la bobina de restricción. La corriente diferencial en la bobina a operar es proporcional a I1-I2, y el equivalente de la corriente en la bobina de restricción es proporcional a:
𝐼1 + 𝐼2
2

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 33
puesto que la bobina de operación es conectada al punto medio de la bobina de restricción; en otras palabras, si dejamos que sean N el número de vueltas en la bobina de restricción, el total de los ampere-vueltas serán I1N/2+I2N/2, que es lo mismo que si tuviésemos (I1+I2)/2 y estos fueran los amperes fluir a través de toda la bobina. La característica de operación de esa función es mostrada en la Figura 2.16.
Figura 2.15 Ejemplo de Relevador Porciento Diferencial
(Adaptada de [Russell, 2010]) Una vez observando la figura podemos apreciar que la proporción de la corriente diferencial de operación con respecto al promedio de la corriente de restricción está dada en un porcentaje fijo, lo que explica el nombre de esta función del relevador [Harper, 2008] [Russell, 2010].
Figura 2.16 Característica de Operación de un Relevador Porciento Diferencial
[Russell, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 34
La ventaja de este relevador es que es menos probable que opere incorrectamente que un relevador de sobrecorriente cuando un corto circuito ocurre en modo de falla externa, es decir, fuera del área a proteger. Una vez que se detalló la operación de un relevador diferencial electromecánico, se describirá un esquema utilizando relevadores digitales. Esto es para que el lector comprenda perfectamente la importancia de la comunicación entre los relevadores digitales y así conforme el desarrollo de esta tesis se podrá observar de manera clara cómo podremos tomar ventaja del canal de fibra óptica de la protección diferencial. En la Figura 2.17 se muestra un ejemplo de una protección diferencial utilizando relevadores digitales.
Figura 2.17 Ejemplo de Protección Diferencial 87L con Relevadores Digitales (Adaptada de [Russell, 2010] y [General Electric L90, 2012])
Como se observa en la Figura 2.17, para la aplicación de la protección diferencial con relevadores digitales es necesario tener dos relevadores, uno en cada extremo de la línea de transmisión a proteger. Si se tiene una terminal más, se requeriría un relevador más [General Electric L90, 2012]. Al igual que en el esquema con relevadores electromecánicos, la señal de corriente de los TC´s debe ser comparada para saber si existe corriente diferencial y de este modo en caso de que existiese dicha corriente diferencial, se mande abrir el interruptor, el cual es definido por el número “52” de acuerdo a la nomenclatura ANSI [Yaoyu, 2004]. Todas las técnicas diferenciales se basan en el hecho de que, en condiciones normales, la suma de las corrientes que entran en cada fase de una línea de transmisión de todas las terminales conectadas es igual a la corriente de carga de esa fase. Más allá del principio diferencial fundamental visto anteriormente, debido a que ahora existen dos relevadores, cada uno con su señal de corriente, el relevador del extremo local no puede tener la información de los fasores de corriente del extremo remoto sin que exista un canal de comunicación.

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 35
Recordando los esquemas normalizados, se puede observar que para una línea de transmisión de 230kV con una longitud menor a 10km, la comunicación principal se da en base a un canal de fibra óptica dedicada. En la Figura 2.17 se puede observar claramente este canal. Nótese que en realidad existen dos fibras ópticas: una es para transmitir datos y la otra es para recibirlos. Las tres consideraciones técnicas más importantes para la comparación de los fasores de corriente en la aplicación de relevadores digitales son: la consolidación de datos, la característica de restricción y la sincronización del muestreo [General Electric L90, 2012] [NRF-041-2010, 2010]. La consolidación de datos se refiere a la extracción de los parámetros adecuados a transmitir de las muestras de las corrientes de fase de la línea de transmisión [General Electric L90, 2012]. La consolidación es posible a lo largo de dos dimensiones: el tiempo de consolidación y la consolidación de las fases [General Electric L90, 2012].
El tiempo de consolidación reduce los requisitos de ancho de banda de las comunicaciones. La consolidación de tiempo también mejora la seguridad al eliminar la posibilidad de falsas interpretaciones de una sola muestra datos que se encuentren dañados, interpretando los mismos como una falla.
La consolidación de las fases consiste en combinar información de las tres fases y el neutro. Aunque la consolidación de fase es posible, no se emplea generalmente en esquemas digitales, ya que se desea detectar en qué fase se encuentra la falla, así que la mayoría de los relevadores digitales envía datos de las tres fases.
La característica de restricción es la frontera de decisión entre las situaciones que se declaran como falla y las que no lo son.
El tercer elemento más importante es la sincronización de las muestras. Para que un esquema diferencial funcione, los datos que están siendo comparados deben ser tomados al mismo tiempo.
Para explicar mejor como funciona, de manera sencilla, y la importancia del canal de fibra óptica en el esquema diferencial, se tomará como base al relevador universal diferencial L90 de General Electric. El sistema del L90 utiliza una técnica de consolidación nueva llamada "Phaselets" o en su traducción al español “Fasoletas”. Las Fasoletas, son las sumas parciales de los términos involucrados para el cómputo o construcción de los fasores. Como tal no son fasores, pero se pueden combinar para construir fasores exactos. En otras palabras dentro del canal de comunicación de la protección diferencial no se envían los fasores como tal y tampoco se consolidan, sino que se envían los componentes para recrear los mismos, y así poder comparar un fasor con el otro[General Electric L90, 2012]. La sincronización de las muestras en el L90 no se realiza conforme a un reloj maestro, sino que entre los relevadores se envían datos con una estampa de tiempo y se realiza

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 36
un cálculo de que tanto es el desfase, y en base a una lógica, acelera o reduce el giro del reloj hasta estar perfectamente sincronizados. Este proceso se realiza dentro de una ventana de 8 ciclos [General Electric L90, 2012] [G0000-81, 2008]. Como se podrá ver, el canal de fibra óptica es vital para el funcionamiento de la protección diferencial, ya que sin ella no se puede compartir la información a través de las fasoletas ni sincronizar los relojes; por lo tanto, no existe comparación de fasores y como resultado no se puede implementar una protección diferencial [General Electric L90, 2012]. Puesto que la fibra óptica es esencial en el esquema de teleprotección propuesto para la línea de transmisión instalada, se puede tomar ventaja de la existencia de esta vía de comunicación como un canal alternativo para la teleprotección.
2.2.5 PP2 Protección Distancia (21) Para continuar nuestro análisis, avanzamos hacia la protección de distancia, siendo esta nuestra protección primaria 2 (PP2) del esquema de protección propuesto. Para esta segunda sección, comenzaremos describiendo la operación de un relevador electromecánico de distancia, con el objeto de la mención de las zonas de protección, el esquema de distancia escalonada y así llevar esos principios a aplicaciones con relevadores digitales y poder visualizar de manera más clara la importancia de los disparos transferidos y la selección del mismo, así como dar pauta al disparo permisivo transferido de sobre alcance (POTT), el cual se mencionará en este capítulo de manera sencilla y se profundizara sobre el mismo en el siguiente capítulo. En la sección anterior describimos los relevadores diferenciales digitales y electromecánicos, en los cuales una corriente estaba balanceada con respecto a otra corriente, y observamos que la característica de operación puede ser expresada como un cociente entre las dos corrientes. En los relevadores de distancia existe un balance entre la tensión y la corriente, la cual se puede expresar en términos de impedancia. La impedancia es una medida eléctrica de una distancia a lo largo de una línea de transmisión, lo cual explica el nombre que se le aplica a este tipo de relevadores.
Dado que este tipo de relevador involucra unidades de impedancia, familiaricémonos un poco con éstas. Hablando en general, el termino de “impedancia” pude ser aplicado solamente a la resistencia, reactancia, o a una combinación de ambos. Sin en cambio, en la terminología de protección por relevadores, un relevador de impedancia tiene una característica que es diferente a cualquier relevador que responda a cualquier componente de impedancia. Por lo tanto “relé de impedancia” es un término muy específico [Russell, 2010]. En un relé de impedancia, el par producido por un elemento de corriente se equilibra con el par producido por un elemento de tensión. El elemento de corriente produce un par positivo (Pickup o Arranque), mientras que el elemento de tensión produce un par negativo (Reset o Restablecimiento). En otras palabras, el relevador de impedancia es un relevador de sobrecorriente restringido por tensión [Blackburn, 2006].

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 37
Para poder explicar de manera más clara los efectos de los torques, obsérvese la Figura 2.18, en la cual se observa un diagrama de actuación de un relevador de sobrecorriente direccional electromecánico. Note en la figura que se tiene una armadura movible con un eje; esta armadura es quien mediante atracción y repulsión puede o no activar los contactos. Como tal para activar los contactos simplemente se requiere de dos condiciones. Primero, la polarización de la bobina de polarización debe ser la adecuada, esto es, que la tensión indique una falla hacia enfrente; esto nos ayuda a saber la direccionalidad. Segundo, la corriente que fluya por la bobina actuadora debe ser lo suficientemente grande como para romper la fuerza de atracción que mantiene los contactos separados, generando un torque positivo [Russell, 2010].
Figura 2.18 Diagrama de Actuación de Relevador de Sobrecorriente Direccional Electromecánico [Russell, 2010]
Como podemos darnos cuenta, si quisiéramos que la bobina actuadora inicializara a cierta tensión por parte de la fuente actuadora, se podría aplicar el mismo principio. Esto se menciona para explicar la forma de actuar de un relevador de distancia. Extendamos este mismo concepto, pero esta vez teniendo dos bobinas. La primera bobina será actuadora, controlada por corriente generando un torque positivo, cerrando así los contactos. La segunda bobina será la bobina de restricción, que está basada en el principio anterior: genera un torque negativo alejando los contactos. De manera que el torque para accionar este dispositivo físico, suponiendo que los efectos del resorte de control están dados por K3, se define como:
𝑇 = 𝐾1𝐼2 − 𝐾2𝑉2 − 𝐾3 [Russell, 2010]

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 38
donde I y V son magnitudes rms de la corriente y la tensión, respectivamente. Debido a que la acción del dispositivo electromecánico está dada por la variación indirectamente proporcional entre la tensión y la corriente, existe un punto de balance entre ambas. En el punto de balance, cuando el relevador se encuentra en el punto de operación, el par es cero, así:
𝐾2𝑉2 = 𝐾1𝐼2 − 𝐾3 Si dividimos entre K2I2, obtenemos:
𝑉2
𝐼2=
𝐾1
𝐾2−
𝐾3
𝐾2𝐼2 𝑉
𝐼= 𝑍 = √
𝐾1
𝐾2−
𝐾3
𝐾2𝐼2
Se acostumbra despreciar el efecto del resorte de control, ya que su efecto es perceptible sólo en las magnitudes de corriente muy inferiores a las que se encuentran normalmente. Por lo tanto, K3 es cero, de tal forma que la ecuación anterior se convierte en:
𝑍 = √𝐾1
𝐾2 [Russell, 2010]
En otras palabras, un relevador de impedancia está a punto de operar a un valor constante dado de la relación de V a I, que puede ser expresado como una impedancia. La característica de funcionamiento en términos de voltaje y de corriente se muestra en la Figura 2.19, en donde se muestra el efecto del resorte de control como causante de una curva notable en la característica sólo en el extremo de baja corriente.
Figura 2.19 Característica de Operación de un Relé de Impedancia (Distancia)
(Adaptada de [Russell, 2010])
CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 39
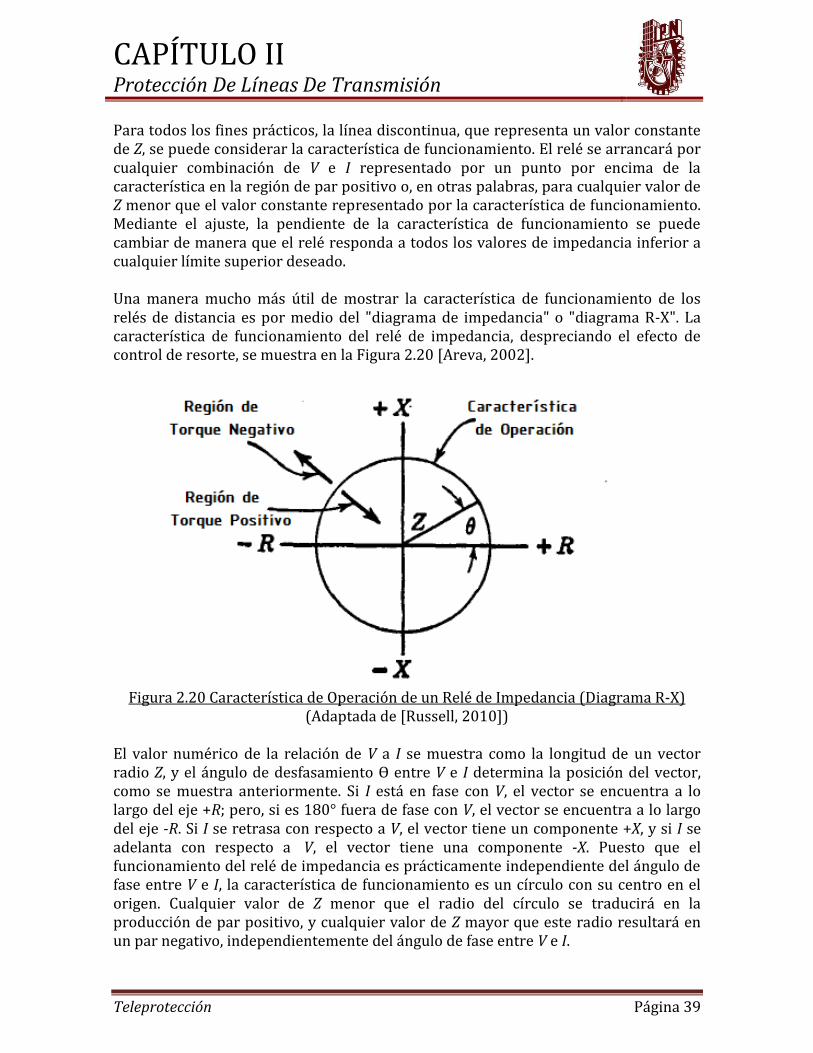
Para todos los fines prácticos, la línea discontinua, que representa un valor constante de Z, se puede considerar la característica de funcionamiento. El relé se arrancará por cualquier combinación de V e I representado por un punto por encima de la característica en la región de par positivo o, en otras palabras, para cualquier valor de Z menor que el valor constante representado por la característica de funcionamiento. Mediante el ajuste, la pendiente de la característica de funcionamiento se puede cambiar de manera que el relé responda a todos los valores de impedancia inferior a cualquier límite superior deseado. Una manera mucho más útil de mostrar la característica de funcionamiento de los relés de distancia es por medio del "diagrama de impedancia" o "diagrama R-X". La característica de funcionamiento del relé de impedancia, despreciando el efecto de control de resorte, se muestra en la Figura 2.20 [Areva, 2002].
Figura 2.20 Característica de Operación de un Relé de Impedancia (Diagrama R-X)
(Adaptada de [Russell, 2010]) El valor numérico de la relación de V a I se muestra como la longitud de un vector radio Z, y el ángulo de desfasamiento Ɵ entre V e I determina la posición del vector, como se muestra anteriormente. Si I está en fase con V, el vector se encuentra a lo largo del eje +R; pero, si es 180° fuera de fase con V, el vector se encuentra a lo largo del eje -R. Si I se retrasa con respecto a V, el vector tiene un componente +X, y si I se adelanta con respecto a V, el vector tiene una componente -X. Puesto que el funcionamiento del relé de impedancia es prácticamente independiente del ángulo de fase entre V e I, la característica de funcionamiento es un círculo con su centro en el origen. Cualquier valor de Z menor que el radio del círculo se traducirá en la producción de par positivo, y cualquier valor de Z mayor que este radio resultará en un par negativo, independientemente del ángulo de fase entre V e I.

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 40
Para la protección de línea de transmisión, un relé de distancia común consta de una unidad direccional monofásica, tres unidades de relevador de impedancia de alta velocidad y una unidad de temporización. La Figura 2.21 muestra esquemáticamente los circuitos de contacto de las unidades principales. Note que las tres unidades de impedancia están etiquetadas como Z1, Z2, y Z3. Las características de operación de estas tres unidades son ajustables independientemente. En el diagrama R-X de la Figura 2.22, el círculo de Z1 es el más pequeño, el círculo de Z3 es el más grande y el círculo de Z2 es intermedio.
Figura 2.21 Esquema de Conexiones del Circuito de Contactos de un Relé de Distancia
Tipo Impedancia (Adaptada de [Russell, 2010])
Es evidente, pues, que cualquier valor de impedancia que esté dentro del círculo Z1 hará que las tres unidades de impedancia operen. La operación de Z1 y la unidad direccional dispararán un interruptor directamente en un tiempo muy corto, que llamaremos T1. Siempre que Z3 y la unidad direccional operen, la unidad de temporización se energizará. Después de un retardo definido, la primera unidad de temporización cerrará su contacto T2, y después el contacto T3; ambos retardos de tiempo son ajustables independientemente. Por consiguiente, se puede observar que un valor de la impedancia dentro del círculo Z2, pero fuera del círculo Z1, dará como resultado el disparo en el momento T2. Finalmente, un valor de Z fuera de los círculos Z1 y Z2, pero dentro del círculo Z3, resultará en el disparo en el momento T3. La figura 2.22 muestra también la relación de la característica de funcionamiento de la unidad direccional y la característica de funcionamiento de la unidad de impedancia en el mismo diagrama R-X [Russell, 2010].

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 41
Figura 2.22 Características de Funcionamiento y de Retardo de un Relé de Distancia
Tipo Impedancia (Adaptada de [Russell, 2010]) Debido a que la unidad direccional solamente permite el disparo en la región de su torque positivo, las porciones inactivas de la característica de operación del relé de impedancia se muestran con líneas discontinuas. El resultado es que el disparo se produce sólo para los puntos que están dentro de los círculos y por encima de la característica de operación de la unidad direccional. Estrictamente hablando, la unidad direccional tiene una característica de funcionamiento de línea recta, como se muestra anteriormente, sólo si el efecto del resorte de control se desprecia, que consiste en suponer que no hay ningún par de restricción. Cabe recordar que, si despreciamos el efecto del resorte de control, el par de la unidad direccional es:
𝑇 = 𝐾1𝑉𝐼𝑐𝑜𝑠(𝜃 − 𝜏) [Blackburn, 2006]
Cuando el par neto es cero, 𝐾1𝑉𝐼𝑐𝑜𝑠(𝜃 − 𝜏) = 0
Dado que K1, V, o I no son necesariamente cero, entonces, con el fin de satisfacer esta ecuación, suponemos que son 1; así:
𝑐𝑜𝑠(𝜃 − 𝜏) = 0 → (𝜃 − 𝜏) = ±90 Por lo tanto, cos(ϴ-τ) describe la característica de operación del relé. En otras palabras, cualquier vector de radio Z a 90° sobre la línea característica de operación direccional, indicara una operación y esto describe la línea recta punteada que está a un ángulo τ que se muestra en la Figura 2.22. También debemos desarrollar la característica de operación de un relé direccional cuando el efecto del resorte de control se tiene en cuenta. La ecuación de torque como ya se ha determinado es:

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 42
𝑇 = 𝐾1𝑉𝐼𝑐𝑜𝑠(𝜃 − 𝜏) − 𝐾2 [Blackburn, 2006] En el punto de equilibrio el torque neto es cero, y por lo tanto:
𝐾1𝑉𝐼𝑐𝑜𝑠(𝜃 − 𝜏) = 𝐾2 Pero I = V / Z, y por lo tanto:
𝑉2
𝑍𝑐𝑜𝑠(𝜃 − 𝜏) =
𝐾2
𝐾1 → 𝑍 =
𝐾1
𝐾2𝑉2𝑐𝑜𝑠(𝜃 − 𝜏)
Esta ecuación describe un número infinito de círculos, uno para cada valor de V, un círculo de los cuales se muestra en la Figura 2.23 para las mismas conexiones del relé y el mismo valor de T como en la figura 2.22. El hecho de que algunos valores de ϴ resultan en valores negativos de Z debe ser ignorado. Una Z negativa no tiene ningún significado y no puede ser mostrada en el diagrama R-X.
Figura 2.23 Características de un Relé Direccional para un Valor de Tensión
(Adaptada de [Russell, 2010]) Los centros de todos los círculos se encuentran sobre la línea discontinua dirigidos desde “O” a través de “M”, que está en el ángulo de torque máximo. El diámetro de cada círculo será proporcional al cuadrado de la tensión [Russell, 2010]. Tomando pauta hacia la aplicación de los relés de distancia para la protección de línea de transmisión, podemos mostrar el tiempo de funcionamiento frente a la característica impedancia como en la Figura 2.24.
CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 43
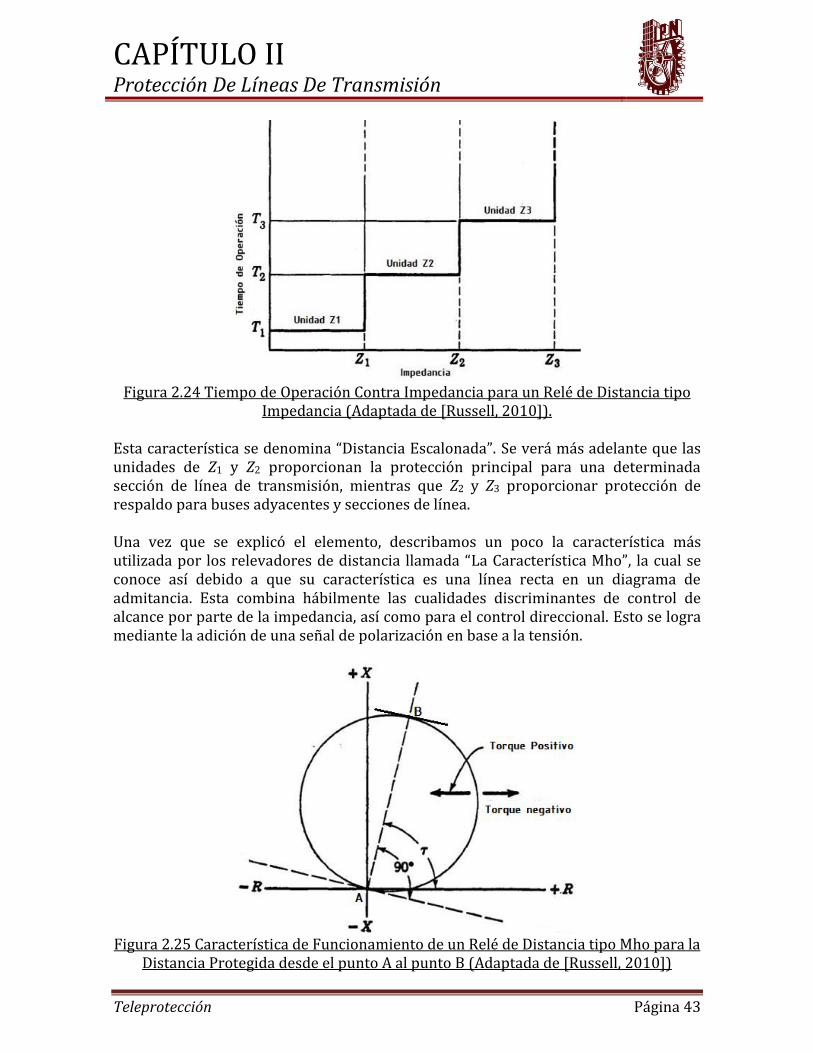
Figura 2.24 Tiempo de Operación Contra Impedancia para un Relé de Distancia tipo
Impedancia (Adaptada de [Russell, 2010]).
Esta característica se denomina “Distancia Escalonada”. Se verá más adelante que las unidades de Z1 y Z2 proporcionan la protección principal para una determinada sección de línea de transmisión, mientras que Z2 y Z3 proporcionar protección de respaldo para buses adyacentes y secciones de línea. Una vez que se explicó el elemento, describamos un poco la característica más utilizada por los relevadores de distancia llamada “La Característica Mho”, la cual se conoce así debido a que su característica es una línea recta en un diagrama de admitancia. Esta combina hábilmente las cualidades discriminantes de control de alcance por parte de la impedancia, así como para el control direccional. Esto se logra mediante la adición de una señal de polarización en base a la tensión.
Figura 2.25 Característica de Funcionamiento de un Relé de Distancia tipo Mho para la
Distancia Protegida desde el punto A al punto B (Adaptada de [Russell, 2010])

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 44
La característica de un elemento de impedancia Mho, cuando se representa en un diagrama R-X, es un círculo cuya circunferencia pasa por el origen, como se ilustra en la Figura 2.25. Esto demuestra que el elemento de impedancia es inherentemente direccional, de tal manera que sólo funciona para fallas en la dirección hacia adelante a lo largo de la línea AB [Russell, 2010]. Ahora, llevando estos principios a la aplicación con diferentes alcances en impedancias, se puede observar que el relé de distancia completo para la protección de la línea de transmisión se compone de tres unidades de alta velocidad tipo Mho (M1, M2, y M3) y una unidad de temporización, conectada de una manera similar a la mostrada para un relé de tipo impedancia, excepto que no se requiere una unidad direccional aparte, ya que las unidades Mho son inherentemente direccionales, como se observa en la Figura 2.25. La característica de funcionamiento completa del relé se muestra en la Figura. 2.26.
Figura 2.26 Característica de Funcionamiento de un Relé de Distancia tipo Mho, con
Tres Zonas de Protección [Russell, 2010] Ya entendido perfectamente este concepto, podemos llevarlo a la representación con una línea de transmisión sencilla. Supongamos una línea de transmisión, en la cual solo protegeremos con una zona, y esta abarcará el cien por ciento de la línea, como se puede observar en la Figura 2.26.

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 45
Figura 2.27 Ejemplo de Relevador de Distancia tipo Mho con una Zona de Protección (Adaptada de [Russell, 2010])
Cuando se produce un cortocircuito, la onda de corriente tiende a ser compensada inicialmente. Bajo tales condiciones, los relés de distancia tienden a “sobrealcanzar” durante el periodo inicial; en otras palabras, tienden a operar para un valor mayor de impedancia que aquél para el cual fueron ajustados bajo condiciones de estado estable. Observando la Figura 2.27, si esto sucediese, estaríamos abarcando zonas de protección en las cuales no debemos operar, ya que corresponden a otras secciones del sistema, y esto podría resultar en operar bajo condiciones de falla externa. Esta tendencia a sobrealcanzar se minimiza en el diseño de los elementos del circuito del relé, pero aún es necesario para compensar parte de esta tendencia a sobrealcanzar en los ajustes de los relés. La compensación por sobrealcance, así como para las inexactitudes en las fuentes de corriente y de tensión, se obtienen mediante el ajuste de los relés para funcionar al 10% o 20% menor que la impedancia para la que de otro modo hubiesen sido ajustados [General Electric D60 CD, 2008]. La selección cuidadosa de los ajustes de alcance y tiempos de disparo para las distintas zonas de medición permite una correcta coordinación entre los relés de distancia en un sistema de potencia, para esto existen esquemas de protección de distancia [General Electric D60 CD, 2008]. La protección de distancia básica incluirá una zona (Z1) instantánea direccional y una o más zonas (Z2, Z3,…, Zn) con tiempo de retraso (T2, T3,…, Tn), tal y como se explicó anteriormente. La configuración típica de distancia y tiempo puede ser observada de manera clara en la Figura 2.27 [Bugarín, 2008]. Los relés suelen tener un ajuste de alcance de hasta el 80% de la impedancia de la línea protegida para la Zona 1 de protección instantánea. Para los relés de distancia digitales, ajustes de hasta un 85% pueden ser seguros, aunque se ajusta generalmente al 80% de la impedancia de la línea [Areva, 2002].

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 46
Figura 2.28 Ejemplo Básico de Zonas de Protección con Distancia Escalonada y Lógica de Operación Simplificada para Distancia Escalonada en un Relevador Digital UR
(Adaptada de [Bugarín, 2008]) El resultante margen de 15-20% de seguridad garantiza que no hay riesgo de la protección de la zona 1 a sobrealcanzar la línea protegida debido a errores en los transformadores de corriente y tensión. La zona 2 de la protección de distancia debe cubrir el 15-20% restante de la línea [Areva, 2002]. Para asegurar una cobertura completa de la línea con una previsión de las fuentes de error ya mencionadas en el apartado anterior, el ajuste de alcance de la protección de la Zona 2 debe ser de al menos el 120% de la impedancia de la línea protegida. En muchas aplicaciones, es práctica común establecer el alcance de la zona 2 para ser igual a la sección de la línea protegida más el 50% de la línea más corta adyacente. Esto asegura que el máximo alcance eficaz de la zona 2 no se extienda más allá del alcance efectivo mínimo de la protección por zona 1 de la línea adyacente [Areva, 2002] [Bugarín, 2008]. El disparo por zona 2 debe ser retardado en el tiempo para asegurar la liberación de las fallas con la protección primaria aplicada a circuitos adyacentes que caen dentro del alcance de la zona 2. Así, la cobertura completa de una sección de línea se obtiene con una liberación instantánea de la falla en la primera zona con alcance del 80-85% de la línea y la liberación más lenta de fallas en la sección restante de la línea. La protección de respaldo remota para todas las fallas en las líneas adyacentes puede ser
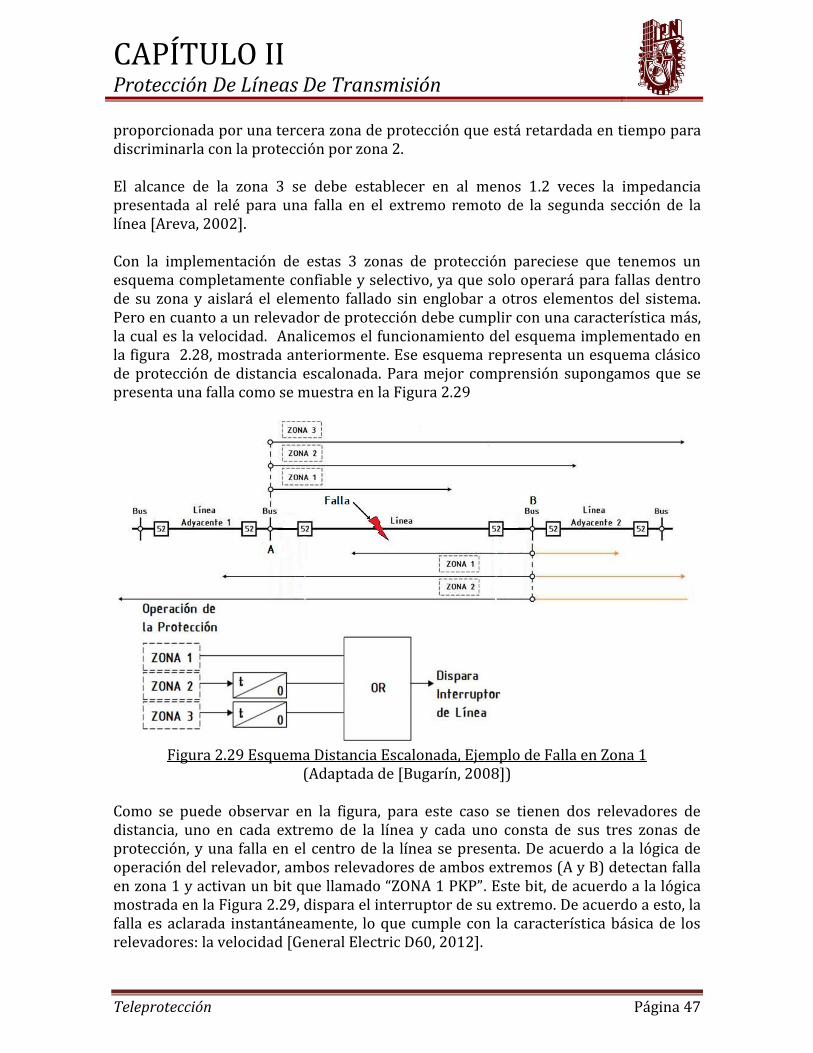
CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 47
proporcionada por una tercera zona de protección que está retardada en tiempo para discriminarla con la protección por zona 2. El alcance de la zona 3 se debe establecer en al menos 1.2 veces la impedancia presentada al relé para una falla en el extremo remoto de la segunda sección de la línea [Areva, 2002]. Con la implementación de estas 3 zonas de protección pareciese que tenemos un esquema completamente confiable y selectivo, ya que solo operará para fallas dentro de su zona y aislará el elemento fallado sin englobar a otros elementos del sistema. Pero en cuanto a un relevador de protección debe cumplir con una característica más, la cual es la velocidad. Analicemos el funcionamiento del esquema implementado en la figura 2.28, mostrada anteriormente. Ese esquema representa un esquema clásico de protección de distancia escalonada. Para mejor comprensión supongamos que se presenta una falla como se muestra en la Figura 2.29
Figura 2.29 Esquema Distancia Escalonada, Ejemplo de Falla en Zona 1
(Adaptada de [Bugarín, 2008])
Como se puede observar en la figura, para este caso se tienen dos relevadores de distancia, uno en cada extremo de la línea y cada uno consta de sus tres zonas de protección, y una falla en el centro de la línea se presenta. De acuerdo a la lógica de operación del relevador, ambos relevadores de ambos extremos (A y B) detectan falla en zona 1 y activan un bit que llamado “ZONA 1 PKP”. Este bit, de acuerdo a la lógica mostrada en la Figura 2.29, dispara el interruptor de su extremo. De acuerdo a esto, la falla es aclarada instantáneamente, lo que cumple con la característica básica de los relevadores: la velocidad [General Electric D60, 2012].

CAPÍTULO II Protección De Líneas De Transmisión
Teleprotección Página 48
Ahora analicemos este mismo entorno pero supongamos una falla 2 en la línea de transmisión, como se muestra en la Figura 2.30.
Figura 2.30 Esquema Distancia Escalonada, Ejemplo de Falla 2 Zona 1 y Zona 2
(Adaptada de [Bugarín, 2008]) Para este caso analicemos cómo se comporta el sistema ante estas condiciones, teniendo los mismos relevadores en los extremos A y B. Para la falla 2, el relevador del extremo A detecta la falla en zona 1 y, de acuerdo a su lógica, dispara el interruptor del extremo A de la línea a proteger, eliminando así la aportación de corriente de corto circuito proveniente del sistema conectado a la línea adyacente 1. Para la falla 2, el relevador del extremo B no detecta la falla en zona 1, pero la logra detectar en zona 2, activando el bit “ZONA 2 PKP”. De acuerdo a la lógica de operación, este relevador solo disparará el interruptor hasta que el retardo de tiempo T2 haya transcurrido. Una vez transcurrido T2, dispara el interruptor de la línea a proteger, ubicado en el extremo B. Note que para este caso, a pesar de que el relevador del extremo A eliminó la aportación de corto circuito proveniente de su extremo, la falla no fue liberada sino hasta que se disparó el interruptor de línea del extremo B [Bugarín, 2008]. Con esto podemos determinar que este esquema podría ser más veloz si el relevador del extremo A enviara su información al relevador del extremo B para que este disparase instantáneamente su interruptor propio y viceversa. A esto se le llama “Protección Piloto”, y a los bits de disparo se les llama “Disparos Transferidos” [General Electric D60, 2012] [Areva, 2002].

CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 49
CAPÍTULO III
ESQUEMAS PILOTO DE TELEPROTECCIÓN Y DISPARO PERMISIVO TRANSFERIDO DE SOBREALCANCE (POTT)
CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 50
3 III. ESQUEMAS DE TRANSFERENCIA DE DISPARO Y DISPARO PERMISIVO TRANSFERIDO DE SOBREALCANCE (POTT)
3.1 Introducción a los Esquemas Piloto de Teleprotección En el capítulo anterior se describió nuestro esquema de protección y como se tomará ventaja del mismo utilizando el canal de comunicación de la protección diferencial Tambiénse describió la protección distancia con el objeto de familiarizar al lector con las zonas de protección y cómo interactúan en nuestro sistema, así como dar hincapié en la importancia de un esquema de protección distancia con comunicación piloto. En este capítulo se analizarán los tipos de esquemas de transferencia de disparo y se mostrará al lector la justificación de la selección de nuestro esquema utilizando un esquema de disparo permisivo transferido de sobrealcance (POTT), para la protección de nuestra línea de transmisión. La protección convencional de distancia escalonada ilustrada en la Figura 2.27, como se observó en el capítulo anterior, tiene por sus características propias una desventaja clara, siendo en este esquema que la Zona 1 de protección instantánea en cada extremo de la línea protegida no se puede ajustar para cubrir la totalidad de la longitud del alimentador y se fija generalmente a aproximadamente un 80% debido a su sobrealcance. Esto deja dos "zonas finales", cada una de alrededor del 20% de la longitud de la línea protegida. Las fallas en estas zonas son liberadas en un tiempo instantáneo por la protección de zona 1 en un extremo de la línea y por el otro extremo de la línea por la protección de la zona 2, en tiempos propios de operación de zona 2 (habitualmente de 200ms a 400ms). Esta situación no puede ser tolerada en algunas aplicaciones, por dos razones principales:
1) La liberación de las fallas en los extremos restantes en tiempos de zona 2 pueden provocar que el sistema se vuelva inestable.
2) En esquemas donde un autorrecierre de alta velocidad es implementado, la
apertura no simultánea de los interruptores de la línea en ambos extremos de la sección fallada resulta en una ausencia de tiempo muerto (dead time) en el ciclo del recierre para que se extinga la falla y se desionicen los gases alrededor de esta. Esto se traduce en la posibilidad de que una falla transitoria cause el cierre permanente de los interruptores (Lockout) en cada extremo de la línea fallada [General Electric D60, 2012].
Incluso cuando la inestabilidad no suceda, el aumento de la duración de la perturbación puede dar lugar a problemas de calidad de energía y puede resultar en daño de la planta.

CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 51
Los esquemas de protección unitarios que comparan las condiciones en los dos extremos de la línea de transmisión simultáneamente, pueden detectar si la falla es interna o externa a la sección protegida y proporcionar una protección de alta velocidad para toda la línea de transmisión sin exceder la misma. El esquema más conveniente es, obviamente, una combinación de las mejores características de ambos arreglos, es decir, disparo instantáneo de ambos extremos con la totalidad de la línea de transmisión cubierta más protección de respaldo a los alimentadores adyacentes. Esto se puede lograr mediante la interconexión de los relés de protección de distancia en cada extremo de la línea de transmisión protegida, con un canal de comunicaciones. Así, el relevador podrá actuar de acuerdo a una lógica pre-programada de acuerdo al tipo de esquema de teleprotección piloto que le sea implementado. La representación de la protección distancia para esquemas de teleprotección piloto con relevadores digitales mostrando el canal de comunicación y las zonas de protección se muestra en la figura 3.1.
Figura 3.1 Protección Distancia con Relevadores Digitales para Esquemas de
Teleprotección Piloto & Zonas de Protección Como se puede observar en a Figura 3.1, se encuentran de manera más esquemática las zonas de protección con el objetivo de que el lector pueda apreciar de manera clara la información descrita anteriormente. Cabe resaltar que el canal de comunicación no está definido de ninguna forma. Esto se debe a que existen diversas formas de enviar la información (disparos o bloqueos). El propósito del canal de comunicaciones es transmitir la información acerca de las condiciones del sistema de un extremo de la línea protegida al otro, incluyendo las solicitudes para iniciar o bloquear el disparo del interruptor remoto. La disposición anterior se conoce generalmente como “Esquema Piloto de Teleprotección” o "Esquema de Transferencia de Disparo"[Areva, 2002] [Bugarín, 2008].
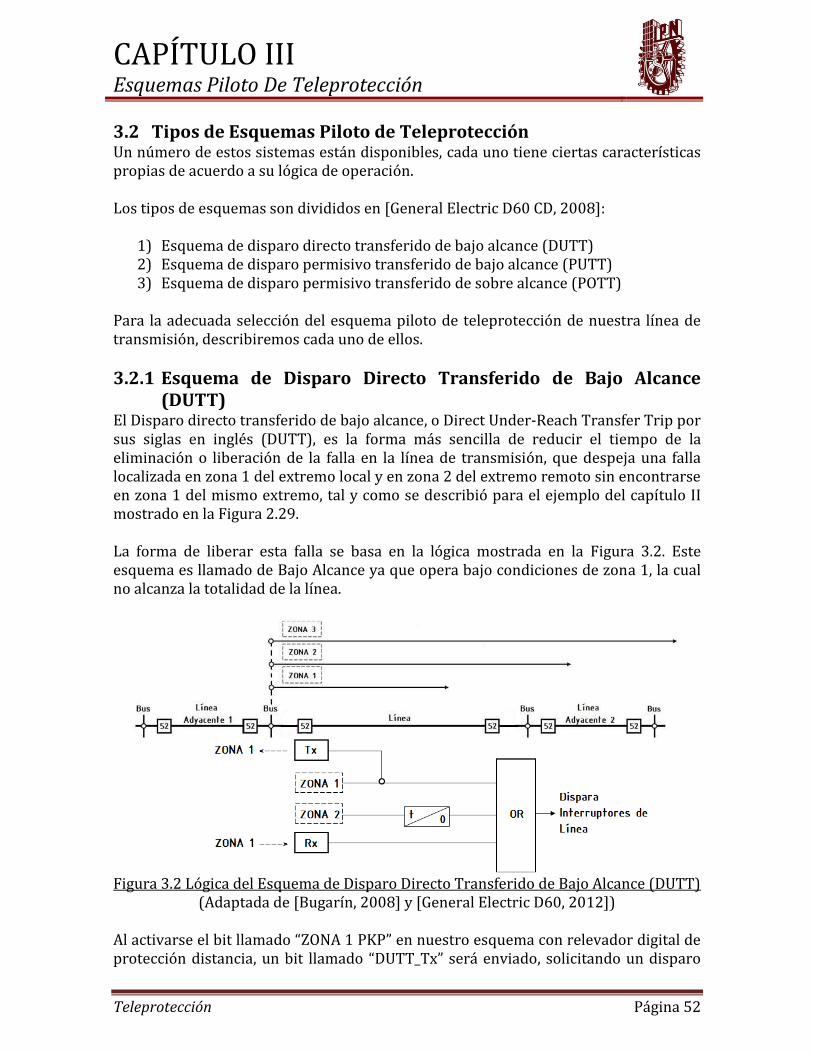
CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 52
3.2 Tipos de Esquemas Piloto de Teleprotección Un número de estos sistemas están disponibles, cada uno tiene ciertas características propias de acuerdo a su lógica de operación. Los tipos de esquemas son divididos en [General Electric D60 CD, 2008]:
1) Esquema de disparo directo transferido de bajo alcance (DUTT) 2) Esquema de disparo permisivo transferido de bajo alcance (PUTT) 3) Esquema de disparo permisivo transferido de sobre alcance (POTT)
Para la adecuada selección del esquema piloto de teleprotección de nuestra línea de transmisión, describiremos cada uno de ellos.
3.2.1 Esquema de Disparo Directo Transferido de Bajo Alcance (DUTT)
El Disparo directo transferido de bajo alcance, o Direct Under-Reach Transfer Trip por sus siglas en inglés (DUTT), es la forma más sencilla de reducir el tiempo de la eliminación o liberación de la falla en la línea de transmisión, que despeja una falla localizada en zona 1 del extremo local y en zona 2 del extremo remoto sin encontrarse en zona 1 del mismo extremo, tal y como se describió para el ejemplo del capítulo II mostrado en la Figura 2.29. La forma de liberar esta falla se basa en la lógica mostrada en la Figura 3.2. Este esquema es llamado de Bajo Alcance ya que opera bajo condiciones de zona 1, la cual no alcanza la totalidad de la línea.
Figura 3.2 Lógica del Esquema de Disparo Directo Transferido de Bajo Alcance (DUTT)
(Adaptada de [Bugarín, 2008] y [General Electric D60, 2012]) Al activarse el bit llamado “ZONA 1 PKP” en nuestro esquema con relevador digital de protección distancia, un bit llamado “DUTT_Tx” será enviado, solicitando un disparo
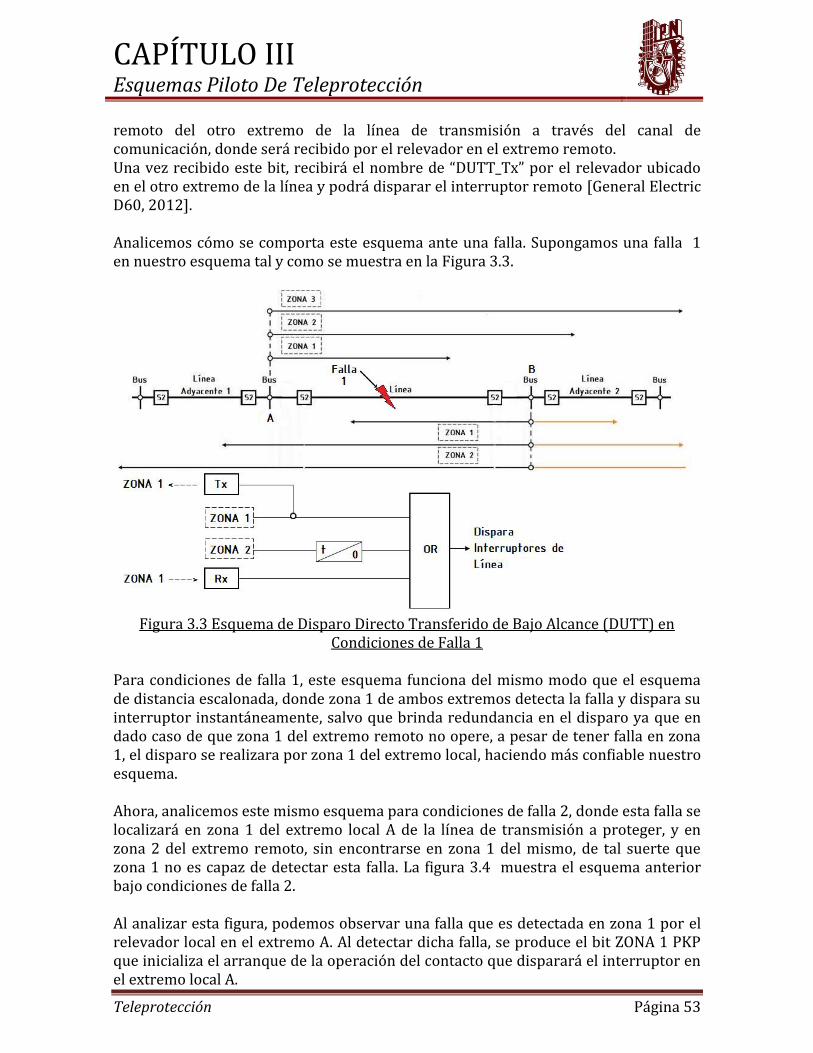
CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 53
remoto del otro extremo de la línea de transmisión a través del canal de comunicación, donde será recibido por el relevador en el extremo remoto. Una vez recibido este bit, recibirá el nombre de “DUTT_Tx” por el relevador ubicado en el otro extremo de la línea y podrá disparar el interruptor remoto [General Electric D60, 2012]. Analicemos cómo se comporta este esquema ante una falla. Supongamos una falla 1 en nuestro esquema tal y como se muestra en la Figura 3.3.
Figura 3.3 Esquema de Disparo Directo Transferido de Bajo Alcance (DUTT) en
Condiciones de Falla 1 Para condiciones de falla 1, este esquema funciona del mismo modo que el esquema de distancia escalonada, donde zona 1 de ambos extremos detecta la falla y dispara su interruptor instantáneamente, salvo que brinda redundancia en el disparo ya que en dado caso de que zona 1 del extremo remoto no opere, a pesar de tener falla en zona 1, el disparo se realizara por zona 1 del extremo local, haciendo más confiable nuestro esquema. Ahora, analicemos este mismo esquema para condiciones de falla 2, donde esta falla se localizará en zona 1 del extremo local A de la línea de transmisión a proteger, y en zona 2 del extremo remoto, sin encontrarse en zona 1 del mismo, de tal suerte que zona 1 no es capaz de detectar esta falla. La figura 3.4 muestra el esquema anterior bajo condiciones de falla 2. Al analizar esta figura, podemos observar una falla que es detectada en zona 1 por el relevador local en el extremo A. Al detectar dicha falla, se produce el bit ZONA 1 PKP que inicializa el arranque de la operación del contacto que disparará el interruptor en el extremo local A.

CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 54
Figura 3.4 Esquema de Disparo Directo Transferido de Bajo Alcance (DUTT) en
Condiciones de Falla 2 Simultáneamente, la solicitud de disparo “DUTT_Tx” es enviada al relevador en el extremo B. Al recibir esta señal como “DUTT_Rx” el relevador disparará inmediatamente, tal y como se muestra en la lógica implementada. Con esto, se obtiene un disparo veloz para la falla que con el esquema de distancia escalonada sin comunicación no podría ser mitigada o liberada hasta que sucediese el disparo por zona 2 una vez transcurrido el tiempo de retardo. La desventaja de este sistema es la posibilidad de disparos no deseados por operación accidental, mal funcionamiento de los equipos de señalización o interferencias en el canal de comunicaciones. A fin de mostrar el esquema piloto de teleprotección más conveniente, se crea una tabla con la cual se podrá observar de manera precisa cual esquema es el más adecuado.
CRITERIO DISTANCIA ESCALONADA
DUTT PUTT POTT
Velocidad de Operación
Bajo Alto ***** *****
Confiabilidad Bajo Medio ***** ***** Selectividad Medio Medio ***** ***** Sensibilidad Bajo Bajo ***** *****
Compatibilidad con AutoRecierre
No Si ***** *****
Tabla 3.1 Comparación de los esquemas de distancia y disparos transferidos (Incompleta)

CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 55
3.2.2 Esquema de Disparo Permisivo Transferido de Bajo Alcance (PUTT)
El esquema de disparo transferido antes descrito, se hace más selectivo mediante la supervisión de la señal recibida con la detección de la falla en zona 2 mediante el bit “ZONA 2 PKP”, antes de permitir un disparo instantáneo. Este esquema es conocido como Esquema de disparo permisivo transferido de bajo alcance, o bien Permissive Under-Reach Transfer Trip (PUTT) por sus siglas en ingles, ya que ambos equipos deben de detectar una falla antes de que el relé del extremo remoto tenga permiso para el disparo en tiempos de zona 1. La Figura 3.5 muestra la lógica de operación de este esquema [General Electric D60, 2012].
Figura 3.5 Lógica del Esquema de Disparo Permisivo Transferido de Bajo Alcance
(PUTT) (Adaptada de [Bugarín, 2008] y [General Electric D60, 2012]) De acuerdo a la lógica mostrada, una vez activado el bit ZONA 1 PKP en el relevador ubicado en el extremo local A, está listo para transferir el bit “PUTT_Tx” al extremo remoto B, donde este recibirá el bit como “PUTT_Rx”. Note que en lugar de realizar el disparo directo, solicita confirmación de disparo, siendo nuestra confirmación la detección de la falla en el extremo B por zona 2. Esto puede verse en la sección de la lógica con una compuerta “AND” o “Y” en español, la cual al tener los elementos conectados como entradas con pulsos positivos, o bien llamados unos lógicos, resultará en un pulso positivo; de lo contrario, será un cero lógico. Analicemos cómo se comporta este sistema ante las fallas anteriores. Primero la falla 1, en la cual ambos relevadores detectan falla en zona 1. La Figura 3.6 describe esta falla.
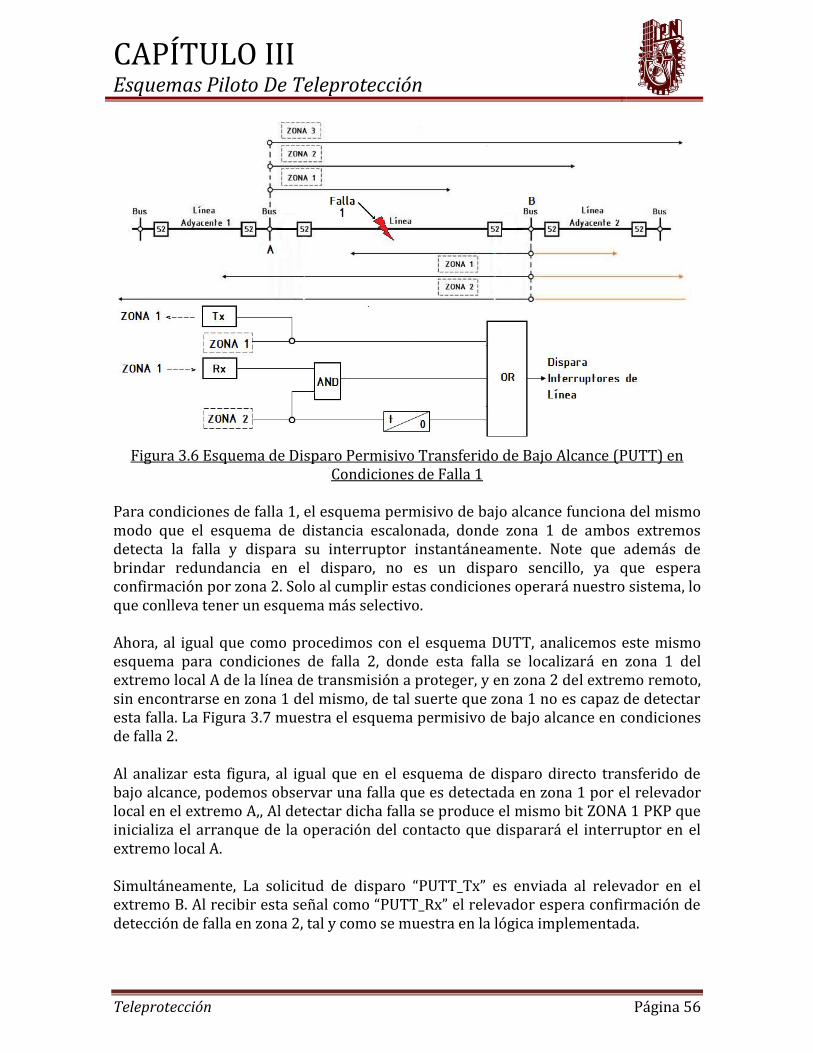
CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 56
Figura 3.6 Esquema de Disparo Permisivo Transferido de Bajo Alcance (PUTT) en
Condiciones de Falla 1 Para condiciones de falla 1, el esquema permisivo de bajo alcance funciona del mismo modo que el esquema de distancia escalonada, donde zona 1 de ambos extremos detecta la falla y dispara su interruptor instantáneamente. Note que además de brindar redundancia en el disparo, no es un disparo sencillo, ya que espera confirmación por zona 2. Solo al cumplir estas condiciones operará nuestro sistema, lo que conlleva tener un esquema más selectivo. Ahora, al igual que como procedimos con el esquema DUTT, analicemos este mismo esquema para condiciones de falla 2, donde esta falla se localizará en zona 1 del extremo local A de la línea de transmisión a proteger, y en zona 2 del extremo remoto, sin encontrarse en zona 1 del mismo, de tal suerte que zona 1 no es capaz de detectar esta falla. La Figura 3.7 muestra el esquema permisivo de bajo alcance en condiciones de falla 2. Al analizar esta figura, al igual que en el esquema de disparo directo transferido de bajo alcance, podemos observar una falla que es detectada en zona 1 por el relevador local en el extremo A,, Al detectar dicha falla se produce el mismo bit ZONA 1 PKP que inicializa el arranque de la operación del contacto que disparará el interruptor en el extremo local A. Simultáneamente, La solicitud de disparo “PUTT_Tx” es enviada al relevador en el extremo B. Al recibir esta señal como “PUTT_Rx” el relevador espera confirmación de detección de falla en zona 2, tal y como se muestra en la lógica implementada.

CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 57
Figura 3.7 Esquema de Disparo Permisivo Transferido de Bajo Alcance (PUTT) en
Condiciones de Falla 2 El elemento de detección por zona 2, llamado ZONA 2 PKP del extremo B, detecta la falla y envía la confirmación del disparo al activarse el bit ZONA 2 PKP. Al entrar ambos bits con un uno lógico, se obtiene un uno lógico a la salida de la compuerta AND y se dispara el interruptor del extremo B. Esto convierte nuestro esquema en un esquema más selectivo, ya que como se mencionó anteriormente, el ruido o perturbación en el canal de comunicación ocasionaba disparos indeseados. Ahora analicemos, para corroborar, un agente extraño que produce ruido en nuestro canal de comunicación; un ruido de tal magnitud que el relevador lo detecta como un bit PUTT_Tx. El esquema se muestra en la Figura 3.8.
Figura 3.8 Esquema de Disparo Permisivo Transferido de Bajo Alcance (PUTT) en
Condiciones de Agentes Externos y Distorsiones de la Señal

CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 58
De acuerdo a la lógica de operación, el bit PUTT_Rx es recibido por el relevador en el extremo B de la línea de transmisión. Al intentar operar, solicita la confirmación de falla por zona 2. Sin embargo, debido a que no existe falla, el esquema no dispara. Para este tipo de condiciones, en un esquema con disparos directos, nuestro sistema hubiese disparado. En base a estos resultados, podemos continuar con el rellenado de la tabla comparativa (Tabla 3.2).
CRITERIO DISTANCIA ESCALONADA
DUTT PUTT POTT
Velocidad de Operación
Bajo Alto Alto *****
Confiabilidad Bajo Medio Alto ***** Selectividad Medio Medio Alto ***** Sensibilidad Bajo Bajo Medio *****
Compatibilidad con AutoRecierre
No Si Si *****
Tabla 3.2 Comparación de los esquemas de distancia y disparos transferidos (Incompleta Parte 2)
3.2.3 Esquema de Disparo Permisivo Transferido de Sobre Alcance (POTT)
En este esquema utilizamos el elemento de zona 2 de distancia que sobrealcanza la línea de transmisión para enviar la señal de solicitud de disparo al extremo remoto, con el objetivo de convertir nuestro esquema anterior en un esquema más sensible y más rápido. En base a esto, zona 2 es más sensible que zona 1 y, a su vez, al detectar fallas un poco antes, acelera la operación de los equipos en milisegundos. El esquema es conocido como Esquema de disparo permisivo transferido de sobrealcance, o Permissive Over-Reach Transfer Trip (POTT). La lógica por medio de la cual opera este esquema se representa en la Figura 3.9.
Figura 3.9 Lógica del Esquema de Disparo Permisivo Transferido de Sobre Alcance
(POTT) (Adaptada de [Bugarín, 2008] y [General Electric D60, 2012])
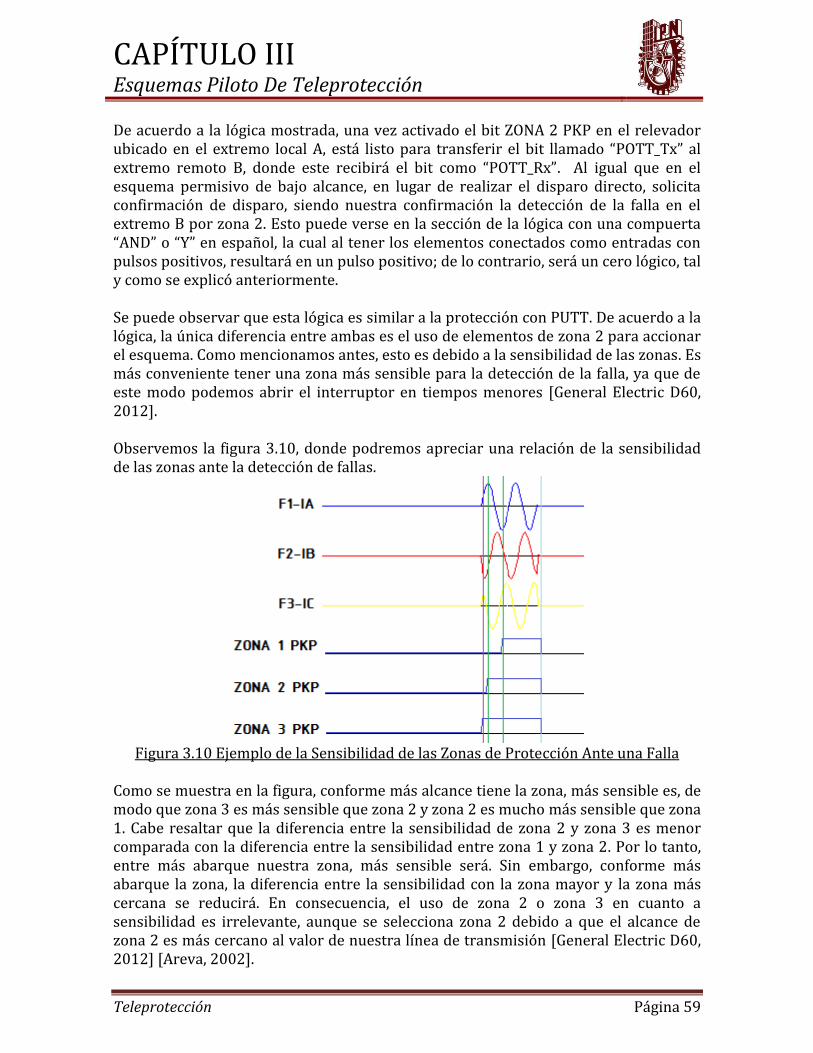
CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 59
De acuerdo a la lógica mostrada, una vez activado el bit ZONA 2 PKP en el relevador ubicado en el extremo local A, está listo para transferir el bit llamado “POTT_Tx” al extremo remoto B, donde este recibirá el bit como “POTT_Rx”. Al igual que en el esquema permisivo de bajo alcance, en lugar de realizar el disparo directo, solicita confirmación de disparo, siendo nuestra confirmación la detección de la falla en el extremo B por zona 2. Esto puede verse en la sección de la lógica con una compuerta “AND” o “Y” en español, la cual al tener los elementos conectados como entradas con pulsos positivos, resultará en un pulso positivo; de lo contrario, será un cero lógico, tal y como se explicó anteriormente. Se puede observar que esta lógica es similar a la protección con PUTT. De acuerdo a la lógica, la única diferencia entre ambas es el uso de elementos de zona 2 para accionar el esquema. Como mencionamos antes, esto es debido a la sensibilidad de las zonas. Es más conveniente tener una zona más sensible para la detección de la falla, ya que de este modo podemos abrir el interruptor en tiempos menores [General Electric D60, 2012]. Observemos la figura 3.10, donde podremos apreciar una relación de la sensibilidad de las zonas ante la detección de fallas.
Figura 3.10 Ejemplo de la Sensibilidad de las Zonas de Protección Ante una Falla
Como se muestra en la figura, conforme más alcance tiene la zona, más sensible es, de modo que zona 3 es más sensible que zona 2 y zona 2 es mucho más sensible que zona 1. Cabe resaltar que la diferencia entre la sensibilidad de zona 2 y zona 3 es menor comparada con la diferencia entre la sensibilidad entre zona 1 y zona 2. Por lo tanto, entre más abarque nuestra zona, más sensible será. Sin embargo, conforme más abarque la zona, la diferencia entre la sensibilidad con la zona mayor y la zona más cercana se reducirá. En consecuencia, el uso de zona 2 o zona 3 en cuanto a sensibilidad es irrelevante, aunque se selecciona zona 2 debido a que el alcance de zona 2 es más cercano al valor de nuestra línea de transmisión [General Electric D60, 2012] [Areva, 2002].

CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 60
Ahora analicemos las fallas 1 y 2 para el esquema con disparo permisivo transferido de sobrealcance. La Figura 3.11 representa la falla 1 para este esquema.
Figura 3.11 Esquema de Disparo Permisivo Transferido de Sobre Alcance (POTT) en
Condiciones de Falla 1 Para condiciones de falla 1, el esquema permisivo de sobrealcance funciona del mismo modo que el esquema de distancia escalonada: ambos relés detectan falla en zona 1 y operan instantáneamente. Note que al implementar el esquema POTT, zona 2 detecta antes la falla que zona 1, debido a las características de sensibilidad que se mostraron en la Figura 3.10. Por lo tanto, dependiendo de los tiempos de transmisión de datos del canal de comunicación, es probable que la operación de disparo del interruptor se realice por medio de POTT y no por zona 1, ya que ninguna de las protecciones tienen un retraso intencionado de tiempo. Ahora, al igual que como procedimos con el esquema DUTT y PUTT, analicemos este mismo esquema para condiciones de falla 2. Esta falla se localizará en zona 1 del extremo local A de la línea de transmisión a proteger y en zona 2 del extremo remoto, sin encontrarse en zona 1 del mismo, de tal suerte que zona 1 no es capaz de detectar esta falla. La figura 3.12 muestra el esquema permisivo de sobrealcance en condiciones de falla 2. Al analizar esta figura, el relevador en el extremo A a través de zona 1, zona 2 y zona 3 detecta falla, y el relevador en el extremo B detecta falla por zona 2 y zona 3. De acuerdo a la lógica de operación del POTT, “ZONA 1 PKP” del extremo local A activa el bit “ZONA 1 OP” para mandar el disparo al interruptor instantáneamente. Simultáneamente, “ZONA 2 PKP” del extremo local A detecta la falla antes que zona 1 y envía el bit “POTT_Tx”, manteniéndose en espera para la recepción del “POTT_Rx”, que simultáneamente ha sido enviado por el relevador en el extremo B.
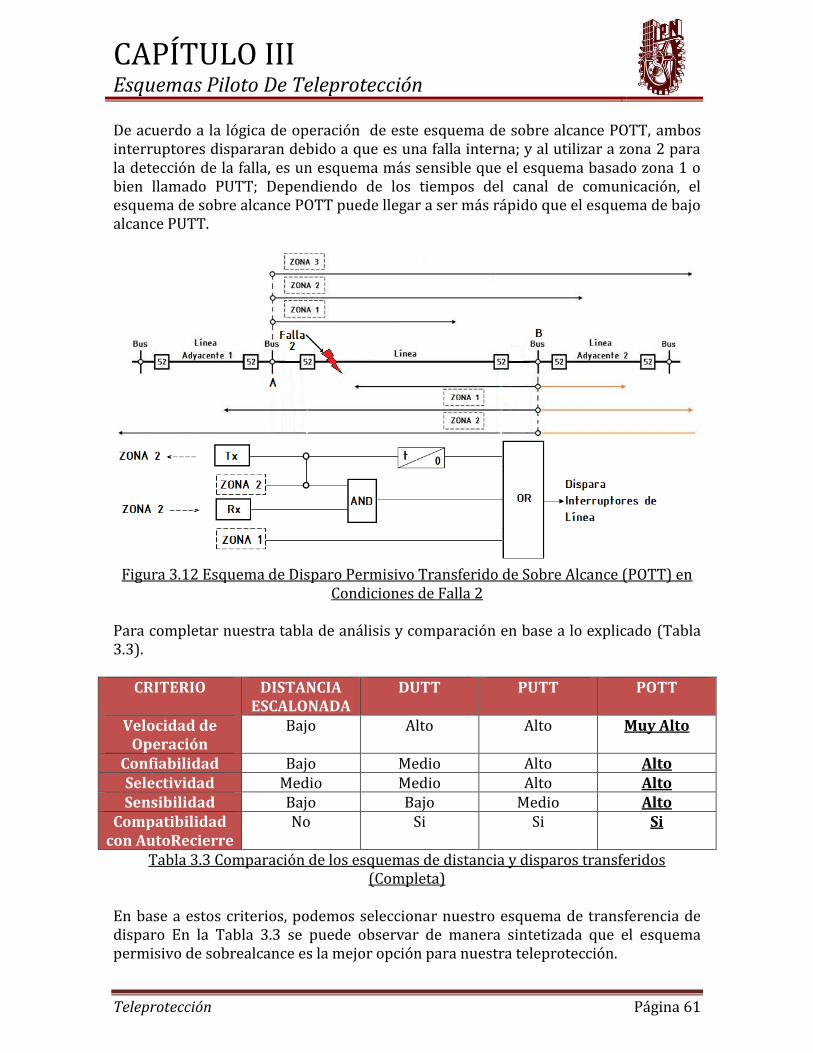
CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 61
De acuerdo a la lógica de operación de este esquema de sobre alcance POTT, ambos interruptores dispararan debido a que es una falla interna; y al utilizar a zona 2 para la detección de la falla, es un esquema más sensible que el esquema basado zona 1 o bien llamado PUTT; Dependiendo de los tiempos del canal de comunicación, el esquema de sobre alcance POTT puede llegar a ser más rápido que el esquema de bajo alcance PUTT.
Figura 3.12 Esquema de Disparo Permisivo Transferido de Sobre Alcance (POTT) en
Condiciones de Falla 2 Para completar nuestra tabla de análisis y comparación en base a lo explicado (Tabla 3.3).
CRITERIO DISTANCIA ESCALONADA
DUTT PUTT POTT
Velocidad de Operación
Bajo Alto Alto Muy Alto
Confiabilidad Bajo Medio Alto Alto Selectividad Medio Medio Alto Alto Sensibilidad Bajo Bajo Medio Alto
Compatibilidad con AutoRecierre
No Si Si Si
Tabla 3.3 Comparación de los esquemas de distancia y disparos transferidos (Completa)
En base a estos criterios, podemos seleccionar nuestro esquema de transferencia de disparo En la Tabla 3.3 se puede observar de manera sintetizada que el esquema permisivo de sobrealcance es la mejor opción para nuestra teleprotección.

CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 62
Durante la descripción de esta sección se mencionaron los esquemas de transferencia de disparo. Sin embargo, a estas lógicas sencillas se les agregan factores debido a ciertas condiciones que pudiesen llegar a presentarse y comprometer la operación adecuada del esquema mismo, tales como “alimentación débil o weak infeed”. Una vez agregadas estas lógicas, el esquema se convierte en un POTT Híbrido para el caso del relevador D60. Dado que nuestra línea no presenta esas condiciones, solo se describirá la condición sin analizar su lógica. En la Figura 3.13 se puede apreciar el esquema lógico completo del disparo permisivo transferido del relevador de protección distancia UR D60 de General Electric Multilin.
3.3 Alimentación Débil (Weak Infeed) En el esquema estándar de disparo permisivo transferido de sobre alcance (POTT), así como en el esquema estándar de disparo permisivo transferido de bajo alcance (PUTT), la liberación instantánea no puede lograrse para fallas de “zona final” bajo condiciones de alimentación débil. Para superar este inconveniente, el relevador D60 cuenta con la característica Echo, o Eco en español. Esta característica permite al relé remoto repetir la señal de disparo de nuevo al relé emisor, incluso si el elemento de protección correspondiente del relevador remoto no ha operado [General Electric D60, 2012]. Esto es apto para las condiciones en las que el extremo remoto tiene un circuito de alimentación débil, de modo que el elemento relevante del relé de distancia no funciona. Con la característica Echo activada, el disparo rápido de ambos interruptores de línea puede ser obtenido.
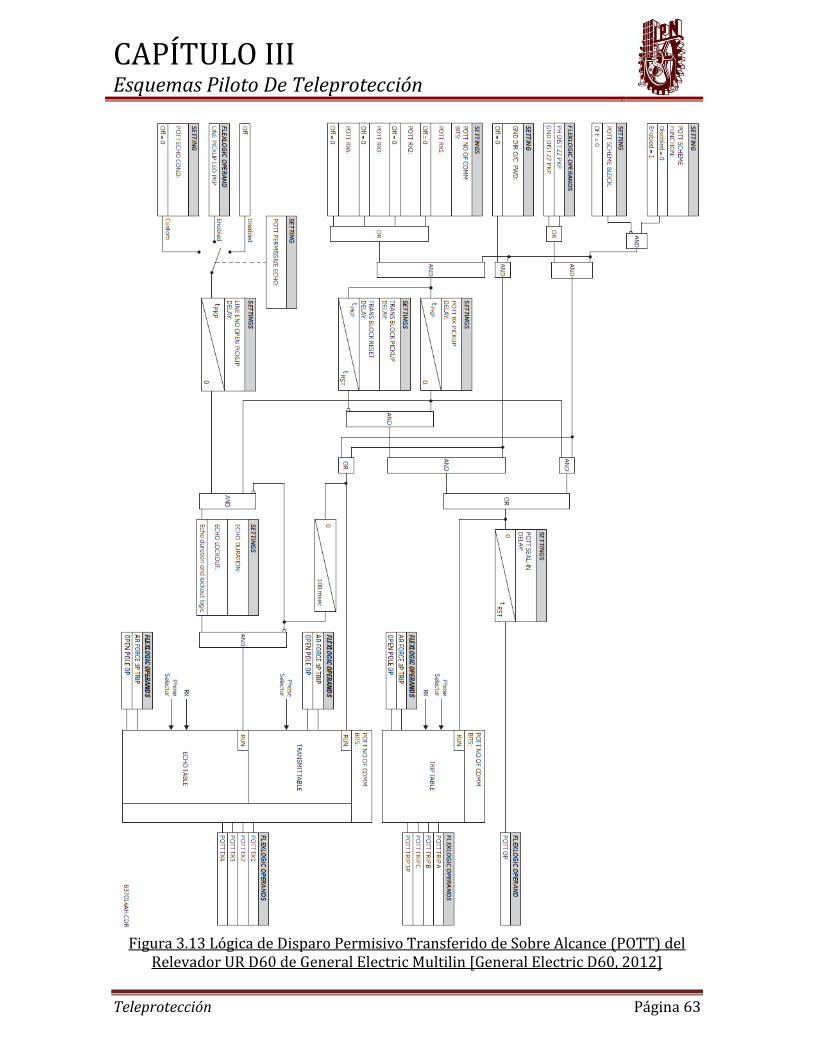
CAPÍTULO III Esquemas Piloto De Teleprotección
Teleprotección Página 63
Figura 3.13 Lógica de Disparo Permisivo Transferido de Sobre Alcance (POTT) del
Relevador UR D60 de General Electric Multilin [General Electric D60, 2012]

CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 64
CAPÍTULO IV
COMUNICACIÓN ENTRE SUBESTACIONES
CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 65
4 COMUNICACIÓN ENTRE SUBESTACIONES 4.1 Introducción a las Comunicaciones entre Subestaciones En el capítulo III se describió y analizó cada uno de los esquemas de transferencia de disparo, también llamados esquemas piloto de teleprotección, con el objetivo de seleccionar el esquema más adecuado para la protección de nuestra línea de transmisión y mostrar al lector la importancia del canal de comunicación en la protección distancia. En este capítulo se describirán los diversos canales de comunicación con el objetivo de seleccionar el más adecuado para nuestra protección distancia y de este modo, complementando con el capítulo V, poder describir el esquema de teleprotección propuesto. Los esquemas de protección unitaria están formados por una serie de relés ubicados remotamente el uno del otro. Algunos esquemas de protección de distancia requieren alguna forma de comunicación entre los mismos con el fin de lograr la protección del elemento con las mejores características posibles de confiabilidad, sensibilidad, selectividad y velocidad, de acuerdo a su esquema seleccionado. A esta forma de comunicación se le conoce como señalización de protección. Adicionalmente, como se observó de manera clara en el Capítulo III, las instalaciones de comunicaciones también son necesarias cuando la operación remota de un interruptor de circuito se requiere como resultado de un evento local o teledisparo. Desde que se construyó el primer sistema de protección de línea utilizando canales de comunicación, las diferentes opciones entre los tipos de canales de comunicación han incrementado y se les ha dado atención a los métodos para incrementar su seguridad e independencia. Los mensajes de comunicación implicados pueden ser tan simples que al recibirlos el extremo remoto podrá tomar una decisión de acuerdo a su esquema implementado. La integridad del canal de comunicaciones es extremadamente crítica durante los periodos de mayor estrés en el sistema, para prevenir falsos disparos y garantizar que el equipo de protección opere en caso de ser necesario. La selección del enlace adecuado depende de factores tales como la disponibilidad de una red de comunicación apropiada, la distancia entre los puntos a interconectar, el terreno sobre el que se construye la red de alimentación, el nivel de tensión y el costo. La norma de referencia NRF-041-2010, como se observó en el Capítulo II, nos brinda una tabla de referencia para la selección del canal en base al nivel de tensión y la longitud. Nótese que la selección del canal también depende de la importancia de la línea. Además, la norma de referencia no es un estándar a cumplir, sino un apoyo para el Ingeniero de protecciones. Es prudente recordar que para el desarrollo del esquema propuesto en esta tesis se tomará como base la norma y el estándar IEC 61850; sin embargo, se propondrá un nuevo esquema de teleprotección, el cual no se encuentra en la norma de referencia.
CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 66
4.2 Tipos de Canales de Comunicación Los canales de comunicación, también llamados medios de transmisión de datos, implicados en la señalización de protección son:
1) Hilos Piloto (Cables) 2) Ondas Portadoras en Líneas de Alta Tensión (OPLAT) 3) Canales de Radio de Alta Frecuencia (Micro Onda) 4) Fibra Óptica
Históricamente, los cables de hilo piloto y los canales de hilo piloto (cables discontinuos piloto con transformadores de aislamiento o repetidores a lo largo de la ruta entre los puntos de señalización) han sido los más ampliamente usados debido a su disponibilidad, seguido de la comunicación mediante técnicas de ondas portadoras en líneas de alta tensión (OPLAT) y las técnicas de microondas de radio de altas frecuencias [Agapito, 1998]. En años recientes, los sistemas de fibra óptica se han convertido en la opción más habitual para las nuevas instalaciones esto se debe principalmente a su completa inmunidad de interferencias eléctricas. El uso de cables de fibra óptica también aumenta en gran medida el número de canales de comunicación disponibles para cada conexión de fibra física y, por lo tanto, permite un control más completo del sistema de potencia que se consigue mediante la disposición de un gran número de canales de comunicación. Para la selección adecuada de nuestro canal de comunicación es necesario describir cada uno de ellos.
4.2.1 Hilos Piloto (Cables) Los cables piloto son conexiones continuas de cobre que interconectan las estaciones de señalización, también llamadas casetas de control de las subestaciones, mientras que los canales piloto son alambres discontinuos piloto con transformadores de aislamiento o repetidores a lo largo de la ruta que también interconectan las casetas de control. Estos pueden ser colocados en trincheras o como un cable tendido en postes por una ruta separada para evitar los efectos de inducción que se presentarían al colocarlos cerca de la línea de transmisión [Areva, 2002]. Para este tipo de canal probablemente sean necesarios relés especiales de envío y recepción con el objetivo de aumentar los niveles de señal y proporcionar inmunidad contra tensiones inducidas de los circuitos de energía (a pesar de la distancia entre los circuitos de potencia y el hilo piloto), caída de rayos a tierra de la ruta de los hilos piloto, etc. Los transformadores de aislamiento también pueden ser necesarios para proteger contra las subidas de potencial del suelo de la subestación debido a fallas a tierra. La forma de comunicación mediante este canal es la operación de contactos del relé que activará el equipo de envió de tonos para transmitir el tono de una subestación a otra [Voloh, 2009].

CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 67
La capacidad del enlace de comunicación se puede incrementar si se utilizan las técnicas de multiplexado por división de frecuencia para el uso de un sistema de señalización en paralelo, pero algunos prefieren el enlace exclusivo para ser utilizado sólo para la señalización de protección. Uno de los inconvenientes más grandes es la interferencia eléctrica de otros sistemas de señalización, en particular cuando dentro de la misma ruta se encuentran canales de comunicación telefónica con tonos de llamada de 17, 25 y 50 Hz. Además, la resistencia e inductancia del cable de hilo piloto debe ser controlada para asegurar un nivel de señal adecuado [Yaoyu, 2004]. El riesgo más importante que debe soportar un sistema de señalización de protección utilizando este medio de comunicación se produce cuando el personal de pruebas inadvertidamente conecta un oscilador de baja impedancia en el canal piloto de la línea de transmisión para la realización de pruebas a un canal adyacente. Este error puede simular los tonos de señalización para solicitar un disparo remoto en el caso de los esquemas de disparo directo, lo que daría lugar a la operación incorrecta de la protección. El sistema puede estar expuesto a riesgos naturales tales como: descargas atmosféricas, viento, granizo, hielo, etc. Estos riesgos pueden dañar las partes expuestas del sistema, las cuales están protegidas por transformadores aisladores, tubos, y capas protectoras. Los conductores enterrados son susceptibles a ser cortados por equipo de excavación. Los conductores aéreos pueden ser víctimas de tormentas o ser dañados por el humano mismo. Los cables de hilo piloto poco a poco se han dejado de utilizar debido a todos sus inconvenientes, a tal grado que dentro de los esquemas que sugiere la norma de referencia NRF-041-2010, descrita en el Capítulo II, no se encuentran como medio de comunicación principal o de respaldo. Para la comparación entre los canales de comunicación y la selección del más adecuado se compararán mediante la Tabla 4.1. En dicha tabla, dependabilidad se define como la capacidad de proveer un servicio en el cual se puede confiar en forma justificada, mientras que seguridad se define como la capacidad de no recibir alteraciones externas en los mensajes [Areva, 2002]. Tipo de Canal Costo Dependabilidad Seguridad Importancia
de la Línea Hilos Piloto Bajo Bajo Medio Baja OPLAT ***** ***** ***** ***** Radio ***** ***** ***** ***** Fibra Óptica ***** ***** ***** *****
Tabla 4.1 Comparación de los Canales de Comunicación (Incompleta Parte 1)
CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 68
4.2.2 Ondas Portadoras en Líneas de Alta Tensión (OPLAT) Cuando largas secciones de línea están involucradas, o si la ruta implica dificultades de instalación, el gasto de proporcionar conexiones físicas piloto o restricciones operacionales asociados con la longitud de ruta requiere de otros medios para proporcionar las instalaciones de señalización necesarias. La “Onda Portadora en Línea de Alta Tensión (OPLAT), o Power Líne Carrer (PLC), por sus siglas en inglés, es una técnica que consiste en la transmisión de señales de alta frecuencia a lo largo de la línea eléctrica aérea. Puesto que las líneas de transmisión son robustas y usan grandes conductores espaciados ampliamente entre los mismos, dan alta confiabilidad y muy baja atenuación a las señales de onda portadora, lo que constituye un camino de bajas pérdidas en la transmisión de los datos. Este se encuentra completamente controlado por la empresa eléctrica [Agapito, 1998]. Las señales de OPLAT pueden viajar hasta por 300 millas, sin repetidores. Las líneas de transmisión están construidas para sobreponerse a los peligros y elementos naturales. Así, la línea provee de un canal confiable a los sistemas vía OPLAT. Sin embargo, la línea por si sola puede ser abierta por los interruptores, y siendo así, la comunicación que se tenía a través de la línea de alta tensión puede seguir utilizándose para mantener la integridad del canal, aunque, bajo condiciones de falla sobre la fase en la cual se establece la comunicación, la información enviada deja de ser confiable, aunque para fallas en las otras fases, funciona sin ningún problema [Agapito, 1998] [Yaoyu, 2004]. El rango de frecuencia más utilizado en la onda portadora es de 30 a 300 kHz. Este rango de frecuencia es suficientemente alto para que quede aislado de la frecuencia del sistema, que es de 60Hz, y del ruido que este produce; sin embargo, no es tan alto como para tener una atenuación excesiva. El espectro limitado (30-500 kHz) aplicable al OPLAT, ha presentado problemas en algunas funciones, en las cuales no se ha aplicado la adecuada frecuencia planeada y las estrategias de frecuencia asignadas a los sistemas [Dahlin, 2005]. El ruido en las líneas y las fallas requieren niveles de señal mucho más altos para canales más confiables tanto en el envío como en la recepción. Aunque se pueden utilizar frecuencias menores de 30 kHz, es difícil acoplarlos eficientemente a la línea usando condensadores de acoplamiento. La diferencia primaria entre la transmisión de energía eléctrica (sistema de potencia) y la transmisión de una onda portadora es su frecuencia de operación [Dahlin, 2005]. Se utilizan capacitores de alta tensión junto con bobinas de drenaje, con el fin de inyectar la señal a la línea y la extracción de la señal de la línea. La inyección de señal puede llevarse a cabo mediante la impresión de tensión entre el conductor de fase y tierra o entre dos conductores de fase. Las unidades básicas se pueden ser construidas como un filtro pasa altos o un filtro pasa bandas, como se muestra en la Figura 4.1.
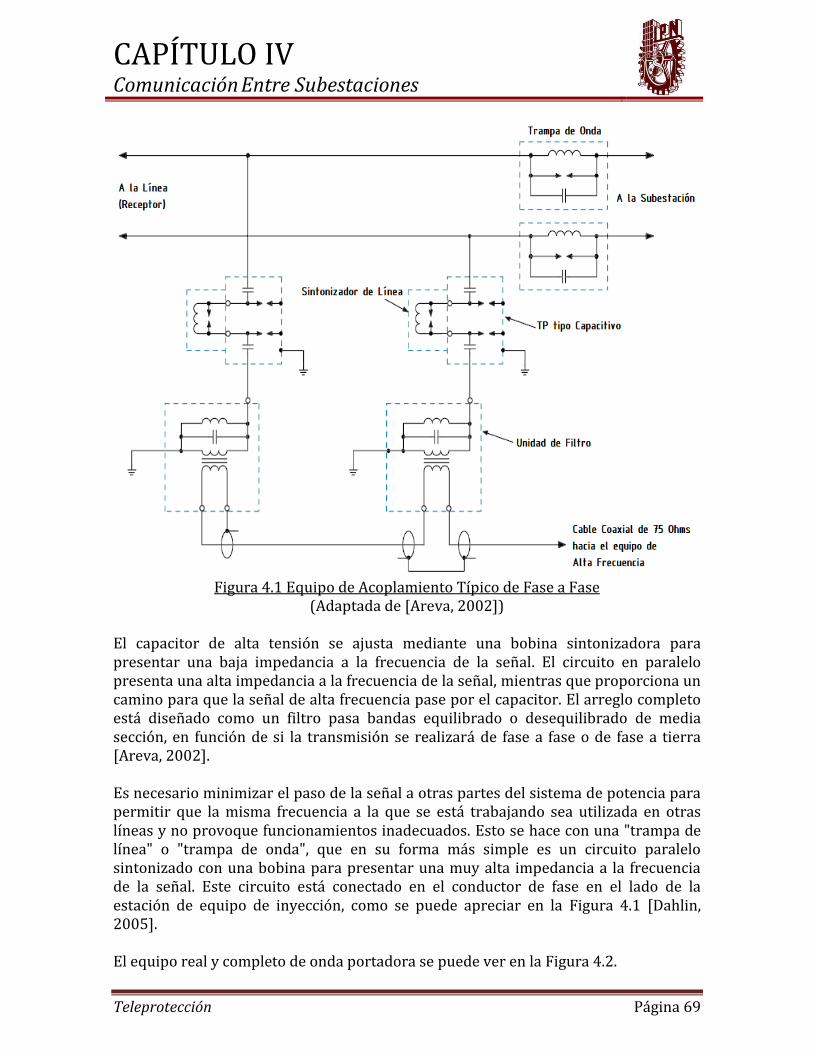
CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 69
Figura 4.1 Equipo de Acoplamiento Típico de Fase a Fase
(Adaptada de [Areva, 2002]) El capacitor de alta tensión se ajusta mediante una bobina sintonizadora para presentar una baja impedancia a la frecuencia de la señal. El circuito en paralelo presenta una alta impedancia a la frecuencia de la señal, mientras que proporciona un camino para que la señal de alta frecuencia pase por el capacitor. El arreglo completo está diseñado como un filtro pasa bandas equilibrado o desequilibrado de media sección, en función de si la transmisión se realizará de fase a fase o de fase a tierra [Areva, 2002]. Es necesario minimizar el paso de la señal a otras partes del sistema de potencia para permitir que la misma frecuencia a la que se está trabajando sea utilizada en otras líneas y no provoque funcionamientos inadecuados. Esto se hace con una "trampa de línea" o "trampa de onda", que en su forma más simple es un circuito paralelo sintonizado con una bobina para presentar una muy alta impedancia a la frecuencia de la señal. Este circuito está conectado en el conductor de fase en el lado de la estación de equipo de inyección, como se puede apreciar en la Figura 4.1 [Dahlin, 2005]. El equipo real y completo de onda portadora se puede ver en la Figura 4.2.

CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 70
Figura 4.2 Equipo de Acoplamiento para Onda Portadora en Línea de Alta Tensión
[Areva, 2002] La trampa de onda puede ser entendida como una parte integral del equipo de inyección completo para acomodar dos o más sistemas de onda portadora. Sin embargo, pueden surgir dificultades en un diseño general a ciertas frecuencias. La reactancia de la estación real, que es normalmente capacitiva, se sintoniza con la trampa, que es inductiva por debajo de su frecuencia de resonancia. El resultado será un flujo de señal a lo largo del sistema, impidiendo el funcionamiento de esta frecuencia en otras líneas. Esto se soluciona utilizando trampas de onda de doble frecuencia. Además de estas precauciones debe tomarse en cuenta que las trampas de onda no aíslan la señal completamente a una línea en particular y no es suficiente para evitar la interferencia en líneas adyacentes. El filtro de acoplamiento y el equipo de onda portadora están conectados por cable coaxial de alta frecuencia. Un transformador de emparejamiento está incorporado en el filtro de línea de acoplamiento para hacerlo coincidir con el cable de alta frecuencia y desviadores de sobretensiones que están equipados para proteger los componentes contra sobretensiones transitorias. La atenuación de un canal es de primordial importancia en la aplicación de la señalización de onda portadora, ya que determina la cantidad de energía transmitida disponible en el extremo receptor para superar el ruido y tensiones de interferencia. La pérdida de cada terminal de línea será de 1 a 2 dB a través del filtro de acoplamiento, un máximo de 3 dB a través de su trampa de banda ancha y no más de 0,5 dB por cada 100 metros a través del cable de alta frecuencia. Las características de transmisión de la señal en la línea de transmisión son buenas; las pérdidas ascienden de 0,02 a 0,2 dB por kilómetro en función de la tensión de línea y la frecuencia [Dahlin, 2005]. La atenuación de la señal en la línea no se verá afectada sensiblemente por la lluvia, pero existe una grave pérdida de señal cuando los conductores de fase están

CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 71
densamente cubiertos de escarcha o hielo. Es por ello que el equipo receptor comúnmente incorpora un Control automático de ganancia o Automatic Gain Control (AGC), por sus siglas en inglés, para compensar las variaciones en la atenuación de las señales. Los altos niveles de ruido se derivan de la caída de rayos y la inicialización de una falla o liberación de la misma sobre la fase que lleva la señal. Aunque estos son de corta duración, durando sólo unos pocos milisegundos como máximo, pueden causar sobrecarga de los equipos de recepción de la onda portadora. Los sistemas de señalización utilizados para disparo en particular, deben incorporar características de seguridad adecuadas para evitar mal funcionamiento, implementando ya sea un esquema tipo PUTT o POTT [Dahlin, 2005]. El sistema completo para ambos lados de la línea de transmisión se muestra en la Figura 4.3.
Figura 4.3 Diagrama elemental de una línea que muestra el equipo de onda portadora
(OPLAT) para un sistema de protección (Adaptada de [Agapito, 1998]). En los últimos 30 años la onda portadora se ha usado para la teleprotección entre subestaciones. Sin embargo, el 27 de Octubre del 2005 se publicó un documento con el título “Selection of Pilot Relaying Communication” en los Estados Unidos, en la 32da Conferencia Anual de Relevadores de Protección del Oeste (32nd Annual Western Protective Relay Conference), donde describe la actualización de los canales de comunicación en la subestación “Tigre” (o Tiger en inglés). Esta subestación consta de 7 líneas de transmisión de 230kV protegidas por esquemas de comparación direccional a través de OPLAT. En este documento se especifica que los equipos de acoplamiento del mismo generaron disparos en falso en múltiples ocasiones y, dado que estas líneas eran de gran importancia, se realizó una actualización total, sustituyendo el esquema de comparación direccional vía OPLAT por un esquema de protección distancia permisivo POTT a través de fibra óptica multiplexada [Dahlin, 2005].

CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 72
En base a las características descritas en esta sección se puede continuar con nuestra tabla de selección (Tabla 4.2). Tipo de Canal Costo Dependabilidad Seguridad Importancia
de la Línea Hilos Piloto Bajo Bajo Medio Baja OPLAT Medio Medio/Alta Medio Media/Alta Radio ***** ***** ***** ***** Fibra Óptica ***** ***** ***** *****
Tabla 4.2 Comparación de los Canales de Comunicación (Incompleta Parte 2)
4.2.3 Canales de Radio de Alta Frecuencia (Micro Onda) Un sistema de microonda o de radio es un sistema de comunicación de banda ancha mediante la transmisión de varios canales de comunicación. En áreas donde la onda de frecuencia asignada no es limitada y donde las formas de comunicación son permitidas sin obstrucción, este sistema puede ser usado para la protección de un sistema de transmisión eléctrica. El equipo típico de portadora de radio funciona en las frecuencias de microondas de 0,2 GHz a 10 GHz. Otra función es que las señales de protección pueden ser enviadas a través de radio. Instalar un solo sistema de microonda de protección no es económicamente justificable [Yaoyu, 2004]. El canal de teleprotección por microonda requiere que el operador del sistema eléctrico porte una licencia que establece las restricciones técnicas de la señal de radio, ya que las señales deben tener una línea de visión, esto es, que entre las subestaciones no existan obstrucciones imprevistas (tales como un cerro entre las subestaciones), como se observa en la Figura 4.4. Esto es necesario para que el mensaje transmitido por señal de microonda o de radio no tenga que ser redirigido con un repetidor. Cabe mencionar que en líneas de transmisión largas hay estaciones repetidoras de señal a lo largo de las líneas de transmisión; esto hace muy costoso su empleo [Areva, 2002].
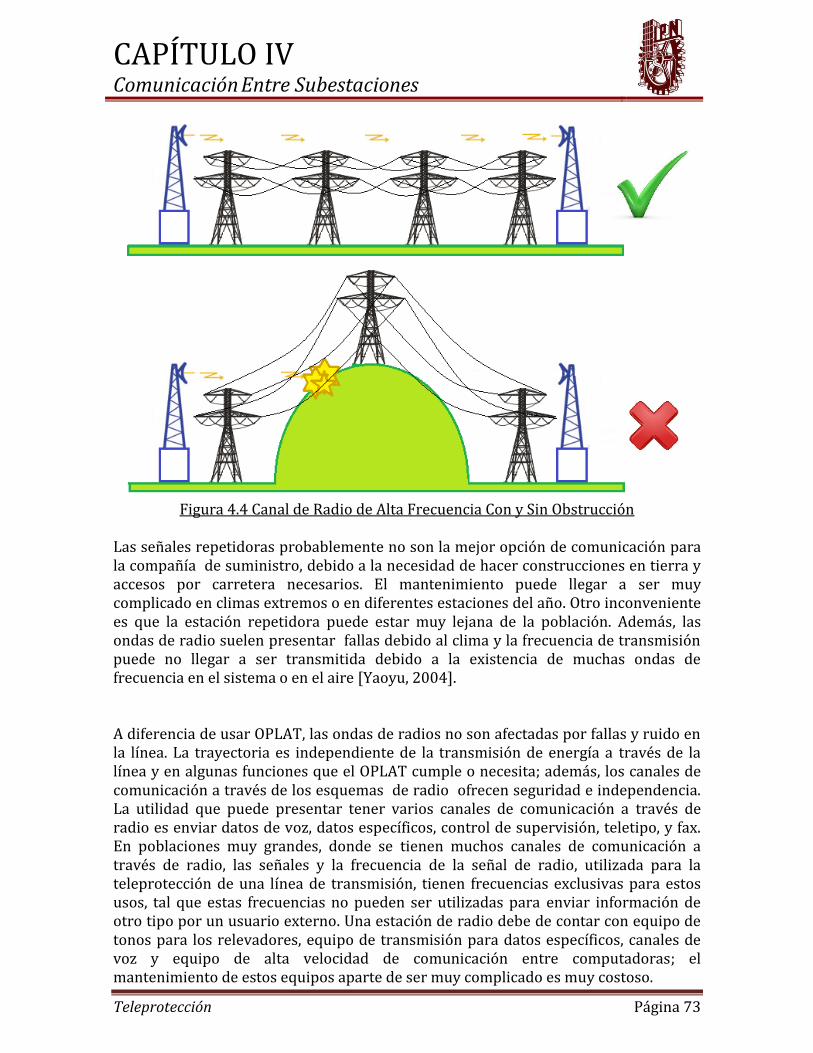
CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 73
Figura 4.4 Canal de Radio de Alta Frecuencia Con y Sin Obstrucción
Las señales repetidoras probablemente no son la mejor opción de comunicación para la compañía de suministro, debido a la necesidad de hacer construcciones en tierra y accesos por carretera necesarios. El mantenimiento puede llegar a ser muy complicado en climas extremos o en diferentes estaciones del año. Otro inconveniente es que la estación repetidora puede estar muy lejana de la población. Además, las ondas de radio suelen presentar fallas debido al clima y la frecuencia de transmisión puede no llegar a ser transmitida debido a la existencia de muchas ondas de frecuencia en el sistema o en el aire [Yaoyu, 2004]. A diferencia de usar OPLAT, las ondas de radios no son afectadas por fallas y ruido en la línea. La trayectoria es independiente de la transmisión de energía a través de la línea y en algunas funciones que el OPLAT cumple o necesita; además, los canales de comunicación a través de los esquemas de radio ofrecen seguridad e independencia. La utilidad que puede presentar tener varios canales de comunicación a través de radio es enviar datos de voz, datos específicos, control de supervisión, teletipo, y fax. En poblaciones muy grandes, donde se tienen muchos canales de comunicación a través de radio, las señales y la frecuencia de la señal de radio, utilizada para la teleprotección de una línea de transmisión, tienen frecuencias exclusivas para estos usos, tal que estas frecuencias no pueden ser utilizadas para enviar información de otro tipo por un usuario externo. Una estación de radio debe de contar con equipo de tonos para los relevadores, equipo de transmisión para datos específicos, canales de voz y equipo de alta velocidad de comunicación entre computadoras; el mantenimiento de estos equipos aparte de ser muy complicado es muy costoso.
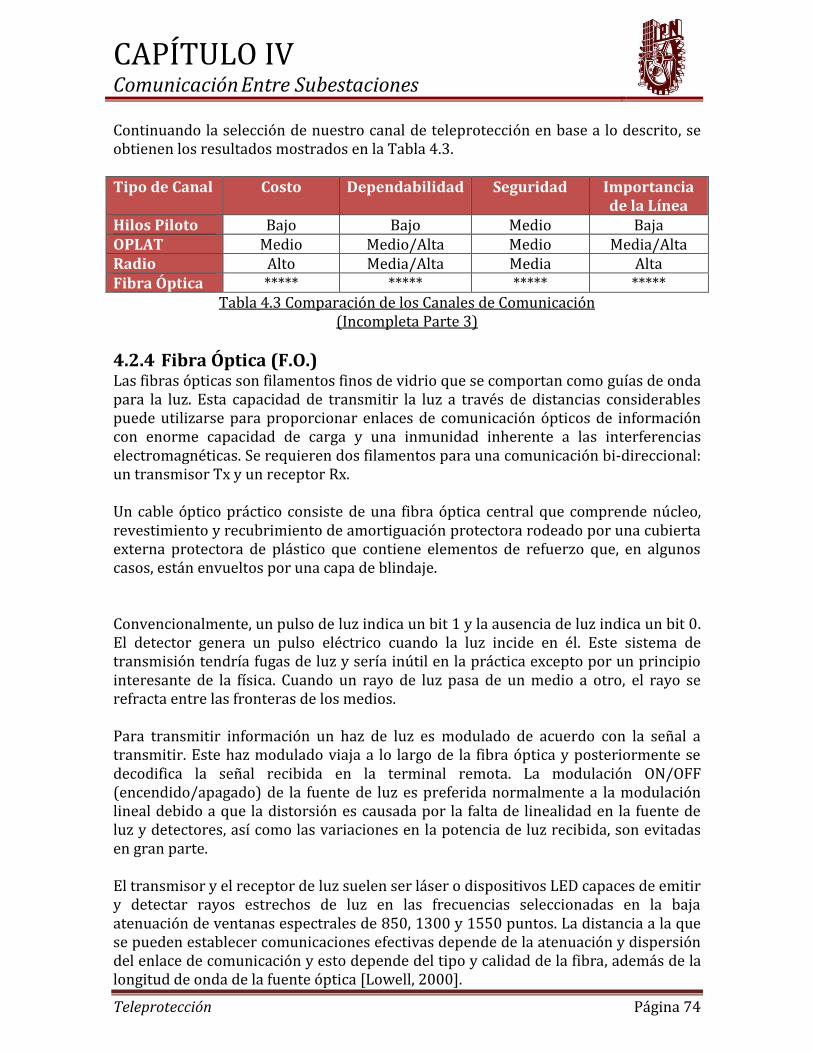
CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 74
Continuando la selección de nuestro canal de teleprotección en base a lo descrito, se obtienen los resultados mostrados en la Tabla 4.3. Tipo de Canal Costo Dependabilidad Seguridad Importancia
de la Línea Hilos Piloto Bajo Bajo Medio Baja OPLAT Medio Medio/Alta Medio Media/Alta Radio Alto Media/Alta Media Alta Fibra Óptica ***** ***** ***** *****
Tabla 4.3 Comparación de los Canales de Comunicación (Incompleta Parte 3)
4.2.4 Fibra Óptica (F.O.) Las fibras ópticas son filamentos finos de vidrio que se comportan como guías de onda para la luz. Esta capacidad de transmitir la luz a través de distancias considerables puede utilizarse para proporcionar enlaces de comunicación ópticos de información con enorme capacidad de carga y una inmunidad inherente a las interferencias electromagnéticas. Se requieren dos filamentos para una comunicación bi-direccional: un transmisor Tx y un receptor Rx. Un cable óptico práctico consiste de una fibra óptica central que comprende núcleo, revestimiento y recubrimiento de amortiguación protectora rodeado por una cubierta externa protectora de plástico que contiene elementos de refuerzo que, en algunos casos, están envueltos por una capa de blindaje. Convencionalmente, un pulso de luz indica un bit 1 y la ausencia de luz indica un bit 0. El detector genera un pulso eléctrico cuando la luz incide en él. Este sistema de transmisión tendría fugas de luz y sería inútil en la práctica excepto por un principio interesante de la física. Cuando un rayo de luz pasa de un medio a otro, el rayo se refracta entre las fronteras de los medios. Para transmitir información un haz de luz es modulado de acuerdo con la señal a transmitir. Este haz modulado viaja a lo largo de la fibra óptica y posteriormente se decodifica la señal recibida en la terminal remota. La modulación ON/OFF (encendido/apagado) de la fuente de luz es preferida normalmente a la modulación lineal debido a que la distorsión es causada por la falta de linealidad en la fuente de luz y detectores, así como las variaciones en la potencia de luz recibida, son evitadas en gran parte. El transmisor y el receptor de luz suelen ser láser o dispositivos LED capaces de emitir y detectar rayos estrechos de luz en las frecuencias seleccionadas en la baja atenuación de ventanas espectrales de 850, 1300 y 1550 puntos. La distancia a la que se pueden establecer comunicaciones efectivas depende de la atenuación y dispersión del enlace de comunicación y esto depende del tipo y calidad de la fibra, además de la longitud de onda de la fuente óptica [Lowell, 2000].

CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 75
Con canales de fibra óptica, la comunicación a velocidades de datos de cientos de Megahertz es alcanzable a través de unas pocas decenas de kilómetros, mientras que distancias mayores requieren el uso de repetidores. Una fibra óptica puede ser utilizada como un enlace dedicado entre dos equipos terminales o como un enlace multiplexado que transporta todo el tráfico de comunicación, tales como voz, telecontrol y señalización de protección. En el último caso, el ancho de banda disponible de un enlace está dividido por medio de una técnica llamada Multiplexado por división de tiempo, o Time Division Multiplexing (TDM, por sus siglas en inglés), en un número de canales, cada uno de 64 kbits/s. Los equipos que llevan a cabo esta multiplexación en cada extremo de la línea se conocen como terminales de Modulación de Código de Pulso, o Pulse Code Modulation (PCM, por sus siglas en ingles) [Lowell, 2000]. Las comunicaciones por fibra óptica están bien establecidas en la industria del suministro eléctrico. Ellas son el medio preferido para el enlace de comunicación entre subestaciones y además se puede aprovechar la técnica del multiplexado de la fibra óptica para que una central telefónica de una compañía externa pueda rentar el uso de la fibra, ya que con el multiplexado de esta, es posible utilizar la misma fibra óptica para enviar la información, así la compañía suministradora de energía eléctrica podría obtener ganancias extra por la renta de las fibras que se encuentren multiplexadas. Los canales de comunicación descritos anteriormente han demostrado que en su implementación suelen ser susceptibles a la interferencia debida a inducción o bien a las fallas propias del sistema. Gracias a las características propias de la fibra óptica este es el medio de comunicación más adecuado para la industria eléctrica. Mientras que estas fibras se pueden poner en trincheras para cables, hay una fuerte tendencia a asociarlos con los propios conductores mediante la producción de cables compuestos que comprenden fibras ópticas dentro de los conductores, ya sea de tierra o fase. Para líneas aéreas la instalación de la fibra óptica dentro del hilo de guarda es muy común, mientras que una alternativa es envolver el cable óptico helicoidalmente (rodeando este, o formando una espiral a lo largo del mismo) alrededor de un conductor de fase o tierra, aunque no es una práctica muy común. Dentro de la fibra existen diversos modos de propagación con diferentes caminos ópticos que causan la dispersión de la señal de luz y, como resultado, se obtiene la ampliación del pulso. La degradación de la señal se puede reducir mediante el uso de fibras de "índice graduado” que por medio del rebote del haz de luz dentro de la fibra, o el envío directo del mismo varía la amplitud del pulso, logrando la degradación de la señal. La distancia sobre la cual se pueden transmitir las señales se incrementa significativamente por el uso de fibras "Monomodo" que soportan sólo un modo de propagación.

CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 76
Las diferentes trayectorias que puede seguir un haz de luz en el interior de una fibra se denominan modos de propagación. Según el modo de propagación tendremos dos tipos de fibra óptica:
1) Fibra Óptica Multimodo 2) Fibra Óptica Monomodo
El grado de refracción depende de las propiedades de los dos medios (en particular, de sus índices de refracción). Para ángulos de incidencia por encima de cierto valor crítico, la luz se refracta de regreso; ninguna función escapa hacia el otro medio, de esta forma el rayo queda atrapado dentro de la fibra y se puede propagar por muchos kilómetros virtualmente sin pérdidas [Downing, 2004].
4.2.4.1 Fibra Óptica Multimodo Una fibra multimodo es aquella en la que los haces de luz pueden circular por más de un modo o camino. Esto supone que no llegan todos a la vez. Una fibra multimodo puede tener más de mil modos de propagación de luz. Las fibras multimodo se usan comúnmente en aplicaciones de corta distancia, menores a 1 km; es simple de diseñar y económico. El núcleo de una fibra multimodo tiene un índice de refracción superior, pero del mismo orden de magnitud, que el revestimiento. Debido al gran tamaño del núcleo de una fibra multimodo, es más fácil de conectar y tiene una mayor tolerancia a componentes de menor precisión. Dependiendo el tipo de índice de refracción del núcleo, tenemos dos tipos de fibra multimodo:
1) Índice escalonado: En este tipo de fibra el núcleo tiene un índice de refracción constante en toda la sección cilíndrica; tiene alta dispersión modal.
Figura 4.5 Fibra Óptica Multimodo Índice Escalonado
(Adaptada de [Keiser, 2000] y [Downing, 2004])
2) Índice gradual: En este tipo de fibra el índice de refracción no es constante; tiene menor dispersión modal y el núcleo se constituye de distintos materiales.

CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 77
Figura 4.6 Fibra Óptica Multimodo Índice Gradual (Adaptada de [Keiser, 2000] y [Downing, 2004])
4.2.4.2 Fibra Óptica Monomodo Una fibra monomodo es una fibra óptica en la que sólo se propaga un modo de luz. Se logra reduciendo el diámetro del núcleo de la fibra hasta un tamaño (8,3 a 10 micrones) que sólo permite un modo de propagación. Su transmisión es paralela al eje de la fibra. A diferencia de las fibras multimodo, las fibras monomodo permiten alcanzar grandes distancias (hasta 400 km máximo, mediante un láser de alta intensidad) y transmitir elevadas tasas de información (decenas de Gb/s).
Figura 4.7 Fibra Óptica Monomodo Índice Escalonado
(Adaptada de [Keiser, 2000] y [Downing, 2004])
De acuerdo a su diseño, existen dos tipos de cable de fibra óptica:
1) Cable de estructura holgada Es un cable empleado tanto para exteriores como para interiores que consta de varios tubos de fibra rodeando un miembro central de refuerzo y provisto de una cubierta protectora. Cada tubo de fibra, de dos a tres milímetros de diámetro, lleva varias fibras ópticas que descansan holgadamente en él. Los tubos pueden ser huecos o estar llenos de un gel hidrófugo que actúa como protector anti humedad impidiendo que el agua entre en la fibra. El tubo holgado aísla la fibra de las fuerzas mecánicas exteriores que se ejerzan sobre el cable. Su núcleo se complementa con un elemento que le brinda resistencia a la tracción que bien puede ser de varilla flexible metálica o dieléctrica como

CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 78
elemento central o de hilaturas de fibra de vidrio situadas periféricamente [Yousif, 2009].
2) Cable de estructura ajustada Es un cable diseñado para instalaciones en el interior de los edificios; es más flexible y con un radio de curvatura más pequeño que el que tienen los cables de estructura holgada. Contiene varias fibras con protección secundaria que rodean un miembro central de tracción, todo ello cubierto de una protección exterior. Cada fibra tiene una protección plástica extrusionada (proceso utilizado para crear objetos con sección transversal definida y fija) directamente sobre ella, hasta alcanzar un diámetro de 900 µm rodeando al recubrimiento de 250 µm de la fibra óptica. Esta protección plástica además de servir como protección adicional frente al entorno, también provee un soporte físico que serviría para reducir su coste de instalación al permitir reducir las bandejas de empalmes [Yousif, 2009].
Para finalizar con nuestra comparación de los canales de comunicación con el objetivo de seleccionar el más adecuado para nuestra línea de transmisión, se completa la tabla comparativa (Tabla 4.4). Tipo de Canal Costo Dependabilidad Seguridad Importancia
de la Línea Hilos Piloto Bajo Bajo Medio Baja OPLAT Medio Medio/Alta Medio Media/Alta Radio Alto/Muy Alto Media/Alta Media Alta Fibra Óptica Alto Alta Alta Baja (Líneas
Cortas)/ Media/Alta
Tabla 4.4 Comparación de los Canales de Comunicación (Completa)
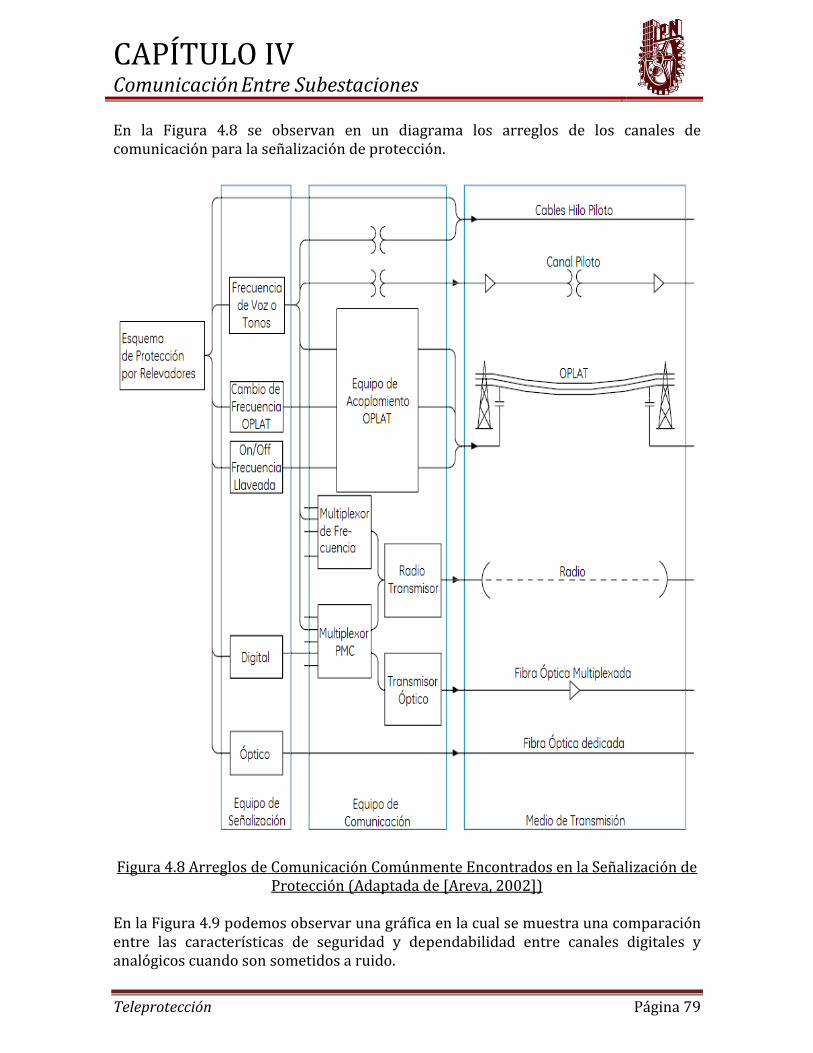
CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 79
En la Figura 4.8 se observan en un diagrama los arreglos de los canales de comunicación para la señalización de protección.
Figura 4.8 Arreglos de Comunicación Comúnmente Encontrados en la Señalización de
Protección (Adaptada de [Areva, 2002]) En la Figura 4.9 podemos observar una gráfica en la cual se muestra una comparación entre las características de seguridad y dependabilidad entre canales digitales y analógicos cuando son sometidos a ruido.
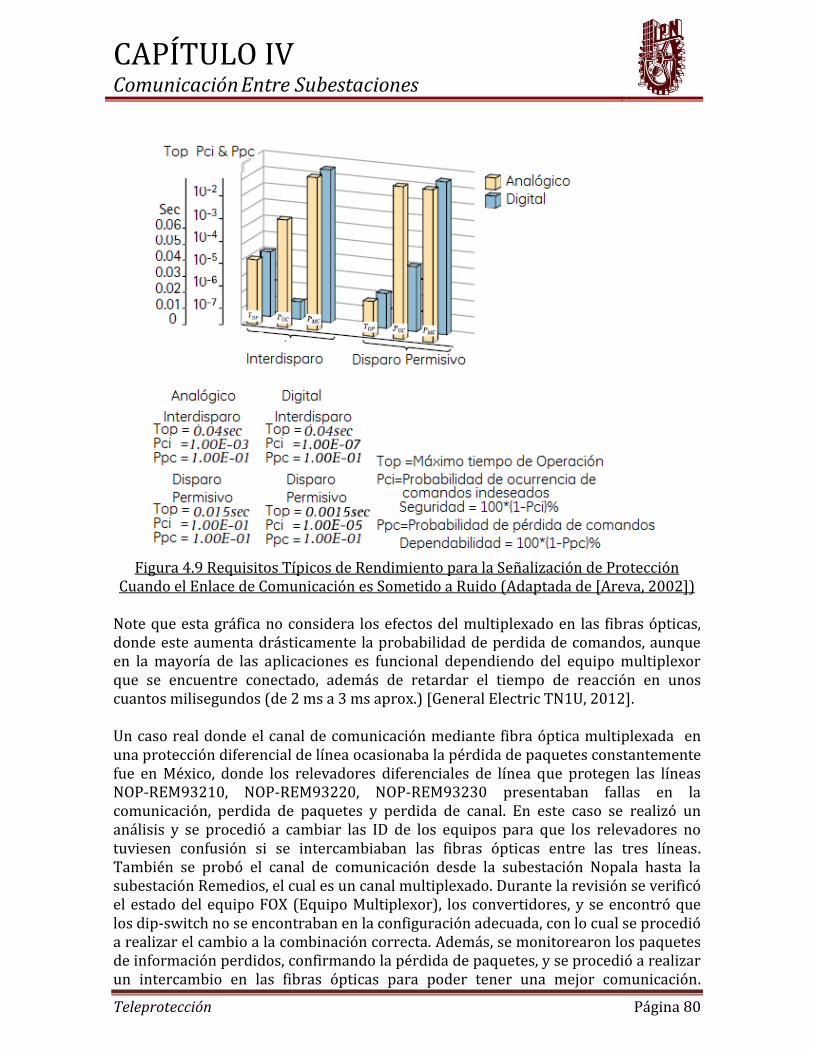
CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 80
Figura 4.9 Requisitos Típicos de Rendimiento para la Señalización de Protección
Cuando el Enlace de Comunicación es Sometido a Ruido (Adaptada de [Areva, 2002])
Note que esta gráfica no considera los efectos del multiplexado en las fibras ópticas, donde este aumenta drásticamente la probabilidad de perdida de comandos, aunque en la mayoría de las aplicaciones es funcional dependiendo del equipo multiplexor que se encuentre conectado, además de retardar el tiempo de reacción en unos cuantos milisegundos (de 2 ms a 3 ms aprox.) [General Electric TN1U, 2012]. Un caso real donde el canal de comunicación mediante fibra óptica multiplexada en una protección diferencial de línea ocasionaba la pérdida de paquetes constantemente fue en México, donde los relevadores diferenciales de línea que protegen las líneas NOP-REM93210, NOP-REM93220, NOP-REM93230 presentaban fallas en la comunicación, perdida de paquetes y perdida de canal. En este caso se realizó un análisis y se procedió a cambiar las ID de los equipos para que los relevadores no tuviesen confusión si se intercambiaban las fibras ópticas entre las tres líneas. También se probó el canal de comunicación desde la subestación Nopala hasta la subestación Remedios, el cual es un canal multiplexado. Durante la revisión se verificó el estado del equipo FOX (Equipo Multiplexor), los convertidores, y se encontró que los dip-switch no se encontraban en la configuración adecuada, con lo cual se procedió a realizar el cambio a la combinación correcta. Además, se monitorearon los paquetes de información perdidos, confirmando la pérdida de paquetes, y se procedió a realizar un intercambio en las fibras ópticas para poder tener una mejor comunicación.
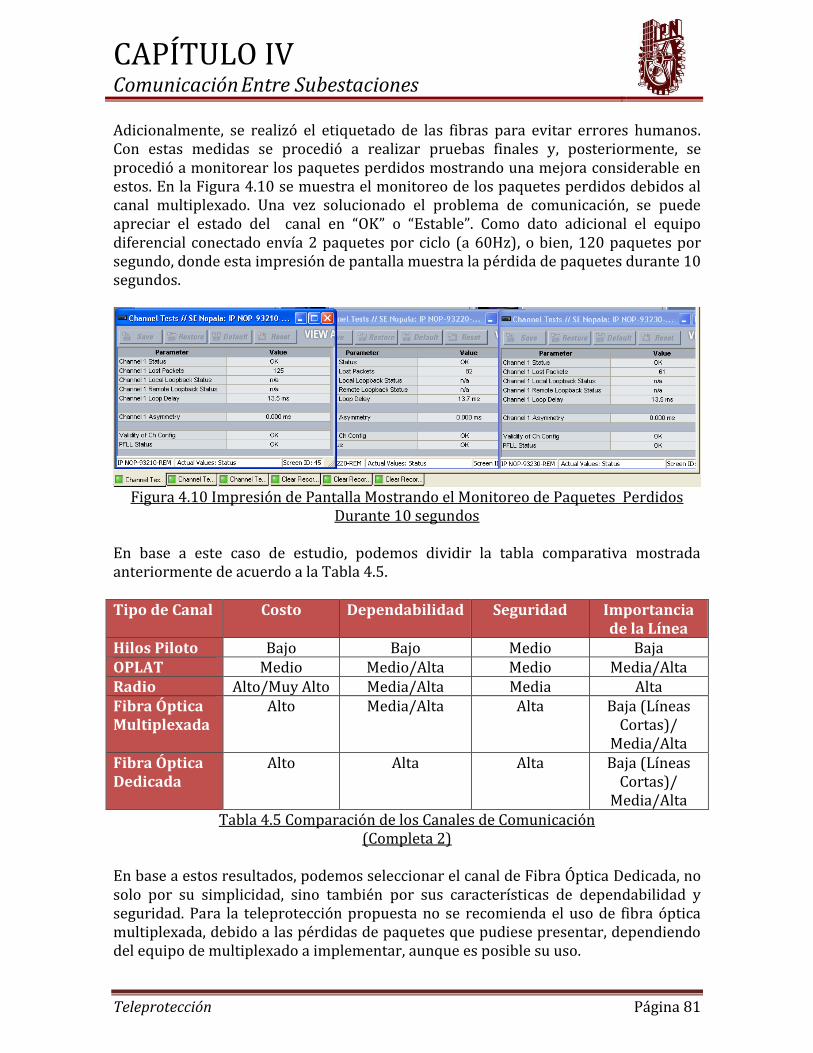
CAPÍTULO IV Comunicación Entre Subestaciones
Teleprotección Página 81
Adicionalmente, se realizó el etiquetado de las fibras para evitar errores humanos. Con estas medidas se procedió a realizar pruebas finales y, posteriormente, se procedió a monitorear los paquetes perdidos mostrando una mejora considerable en estos. En la Figura 4.10 se muestra el monitoreo de los paquetes perdidos debidos al canal multiplexado. Una vez solucionado el problema de comunicación, se puede apreciar el estado del canal en “OK” o “Estable”. Como dato adicional el equipo diferencial conectado envía 2 paquetes por ciclo (a 60Hz), o bien, 120 paquetes por segundo, donde esta impresión de pantalla muestra la pérdida de paquetes durante 10 segundos.
Figura 4.10 Impresión de Pantalla Mostrando el Monitoreo de Paquetes Perdidos
Durante 10 segundos En base a este caso de estudio, podemos dividir la tabla comparativa mostrada anteriormente de acuerdo a la Tabla 4.5. Tipo de Canal Costo Dependabilidad Seguridad Importancia
de la Línea Hilos Piloto Bajo Bajo Medio Baja OPLAT Medio Medio/Alta Medio Media/Alta Radio Alto/Muy Alto Media/Alta Media Alta Fibra Óptica Multiplexada
Alto Media/Alta Alta Baja (Líneas Cortas)/
Media/Alta Fibra Óptica Dedicada
Alto Alta Alta Baja (Líneas Cortas)/
Media/Alta Tabla 4.5 Comparación de los Canales de Comunicación
(Completa 2) En base a estos resultados, podemos seleccionar el canal de Fibra Óptica Dedicada, no solo por su simplicidad, sino también por sus características de dependabilidad y seguridad. Para la teleprotección propuesta no se recomienda el uso de fibra óptica multiplexada, debido a las pérdidas de paquetes que pudiese presentar, dependiendo del equipo de multiplexado a implementar, aunque es posible su uso.

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 82
CAPÍTULO V
ESTÁNDAR DE COMUNICACIÓN IEC 61850 Ed. 1 & Ed. 2

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 83
5 ESTÁNDAR DE COMUNICACIÓN IEC 61850 Ed. 1 & Ed. 2 5.1 Descripción General Hasta el momento en el desarrollo de nuestra tesis, se han seleccionado el esquema de transferencia de disparo para nuestra teleprotección y el canal de comunicación más adecuado en base a las características de la línea, siendo el esquema de disparo permisivo transferido de sobrealcance el esquema de transferencia de disparo más adecuado y el canal de fibra óptica dedicada para la comunicación. El IEC 61850 Ed. 2 especifica en la sección 90.1 la forma de comunicación entre subestaciones mediante el uso de mensajes GOOSE para aplicaciones de teleprotección, cuya implementación es el objetivo principal de esta tesis. Más específicamente, este estándar se refiere a la interconexión de los buses de estación de cada una de las dos subestaciones. El término bus de proceso y bus de estación se encuentran descritos a lo largo de las secciones 8.1, 9.1 y 9.2 del estándar. En este capítulo se da una reseña de la historia del estándar y sus principios. Además, se proporciona una explicación de manera simplificada del bus de proceso y del bus de estación en los cuales el estándar divide las comunicaciones dentro de la propia subestación, para posteriormente describir claramente como se establece la comunicación entre las subestaciones utilizando el estándar. Con esta información, en el capítulo siguiente se describirá la propuesta del esquema de teleprotección. En la última década, la digitalización y la electrónica han crecido a un ritmo exponencial. Las compañías suministradoras, las industriales, la sección comercial, e incluso los consumidores residenciales están transformando todos los aspectos de sus vidas en el dominio digital. Con una mira hacia el futuro, se espera que cada pieza de equipo, cada receptáculo, cada switch, e incluso cada bombilla, posean algún tipo de configuración, supervisión y/o control digital. Con el fin de ser capaz de manejar el gran número de dispositivos y permitir que los diversos dispositivos se comuniquen entre sí, se necesita un nuevo modelo de comunicación. [Adamiak, 2012.
5.2 Historia del Estándar IEC 61850 Edición 1 En 1988 el “Instituto de Investigación de la Energía Eléctrica o Electric Power Research Institute (EPRI) y el Instituto de Ingenieros Eléctricos y Electrónicos o Institute of Electrical and Electronics Engineers (IEEE), iniciaron una arquitectura de comunicación especialmente desarrollada para la industria eléctrica o “Utility Communication Architecture (UCA)” por sus siglas en ingles. El objetivo del proyecto UCA era facilitar la interoperabilidad entre los sistemas de control utilizados para monitorear y controlar los servicios públicos de energía eléctrica. Inicialmente, el proyecto se centró en las comunicaciones entre centros de control y comunicaciones entre subestaciones y centros de control. EPRI y la IEEE llevaron a cabo el proyecto UCA en colaboración con la empresa “Pacific Gas and Electric Light” y la empresa de energía “Houston”. El resultado de esta colaboración es una arquitectura estándar de comunicaciones conocida como UCA versión 1.0 [Blond, 2012].

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 84
La UCA versión 1.0 proporcionó una descripción detallada de cómo debía aplicarse la arquitectura en la práctica y ser utilizada en dispositivos de campo. Por lo tanto, la adopción de la UCA en la industria de la energía eléctrica es limitada. EPRI y la IEEE continuaron con sus esfuerzos para mejorar la arquitectura de la UCA mediante el patrocinio de una serie de proyectos de investigación, tales como la protección de la subestación integrada y el control y adquisición de datos. Estos esfuerzos condujeron a las especificaciones completas de modelos de objetos de dispositivos de campo, es decir, definiciones de datos y funciones de control provistas por estos dispositivos de campo; esto dio como resultado la UCA versión 2.0. En 1997 EPRI y la IEEE unieron esfuerzos con el Grupo de Trabajo 10 o Work Group 10 (WG10) de la Comisión Electrotécnica Internacional o International Electrotechnical Commission (IEC) para construir un estándar internacional común para las comunicaciones de servicios eléctricos públicos. Estos esfuerzos se basan en conceptos y definiciones de la arquitectura de la UCA y dieron lugar a la creación de un estándar denominado IEC 61850, que fue diseñado para proveer interoperabilidad, comunicaciones rápidas entre los dispositivos de campo, el tiempo garantizado de entrega de datos y soporte de configuración [Nordell, 2008]. El estándar IEC 61850, publicado en 2005, fue desarrollado para control y protección de sistemas eléctricos mediante la estandarización del intercambio de información entre todos los “Dispositivos Electrónicos Inteligentes o Intelligent Electronic Devices (IED´s)” al interior de una subestación automatizada. IEC 61850 proporciona un marco de referencia para la integración de la subestación al especificar los requisitos de las comunicaciones, las características funcionales, la estructura de los datos en los dispositivos, la nomenclatura para los datos y la descripción de cómo interactúan las aplicaciones y controlan los dispositivos.
Figura 5.1 Evolución en la Automatización de Subestaciones[Nordell, 2008]

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 85
IEC 61850 Edición 2 El desarrollo de la norma IEC 61850 es continuo, es por ello que se dio lugar a la Edición 2 de la misma, publicada entre 2010 y 2011. IEC 61850 se había definido exclusivamente para sistemas de automatización de subestaciones, pero desde entonces se ha extendido a otras áreas de aplicación, como se refleja en el cambio del título “IEC 61850 Ed. 2. Communication Networks and Systems for Power Utility Automation” IEC 61850 Ed. 2: Redes y sistemas de comunicación para la automatización de empresas de energía [Ariza, 2011].
5.3 Partes del Estándar El estándar IEC 61850 es una serie de estándares que describen las comunicaciones Cliente/Servidor y las comunicaciones punto a punto o peer-to-peer, así como el diseño y configuración de una subestación, pruebas, estándares ambientales y de proyecto [IEC, 2004]. El IEC 61850 Edición 1 se divide en 10 secciones: IEC 61850 Edición 1
IEC 61850-1: Introducción y Panorama General IEC 61850-2: Glosario IEC 61850-3: Requisitos Generales IEC 61850-4: Sistema y Gestión de proyectos IEC 61850-5: Requisitos de comunicación para las funciones y modelos de los
dispositivos. IEC 61850-6: Descripción del idioma de configuración para la comunicación en
subestaciones eléctricas relacionadas con IEDs IEC 61850-7-1: Estructura de comunicación básica para equipos de subestaciones
y alimentadores - Principios y Modelos IEC 61850-7-2: Estructura de comunicación básica para equipos de subestaciones
y alimentadores - Servicios de Comunicación Abstractos (ACSI) IEC 61850-7-3: Estructura de comunicación básica para equipos de subestaciones
y alimentadores - Clases de datos comunes. IEC 61850-7-4: Estructura de comunicación básica para equipos de subestaciones
y alimentadores – Clases de Nodos Lógicos Compatibles y Clases de Datos. IEC 61850-8-1: Asignación Específica Servicio de Comunicación (SCSM) Mapeo de
MMS y el estándar ISO/IEC 8802‐3. IEC 61850-9-1: Asignación Específica de Servicio de Comunicación (SCSM) -
Valores Muestreados en el Enlace Serial Unidireccional Punto a Punto. IEC 61850-9-2: Asignación Específica de Servicio de Comunicación (SCSM) -
Valores Muestreados en la ISO 8802‐3. IEC 61850-10: Pruebas de Conformidad
Debido a que el IEC 61850 es un estándar que continuamente estáa en desarrollo, nuevas secciones del mismo se han agregado. A estas secciones se les conoce como la edición 2, dado que sirven como aplicación de la edición 1 y se integran conforme a los incisos, quedando en conjunto el IEC61850 Ed.1 y Ed.2 como: IEC 61850 Edición 1 & Edición 2 [IEC, 2011].

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 86
IEC 61850-1: Introducción y Panorama General
IEC 61850-2: Glosario
IEC 61850-3: Requisitos Generales
IEC 61850-4: Sistema y Gestión de proyectos
IEC 61850-5: Requisitos de comunicación para las funciones y modelos de los
dispositivos.
IEC 61850-6: Descripción del idioma de configuración para la comunicación en
subestaciones eléctricas relacionadas con IEDs
IEC 61850-7-1: Estructura de comunicación básica para equipos de
subestaciones y alimentadores - Principios y Modelos
IEC 61850-7-2: Estructura de comunicación básica para equipos de
subestaciones y alimentadores - Servicios de Comunicación Abstractos (ACSI)
IEC 61850-7-3: Estructura de comunicación básica para equipos de
subestaciones y alimentadores - Clases de datos comunes.
IEC 61850-7-4: Estructura de comunicación básica para equipos de
subestaciones y alimentadores – Clases de Nodos Lógicos Compatibles y Clases
de Datos.
IEC 61850-7-410: Plantas Hidroeléctricas - Comunicación para el monitoreo y
control
IEC 61850-7-420: Estructura de Comunicación Básica - Recursos Energéticos
Distribuidos con Nodos Lógicos
IEC 61850-8-1: Asignación Específica Servicio de Comunicación (SCSM)
Mapeo de MMS y el estándar ISO/IEC 8802‐3.
IEC 61850-9-1: Asignación Específica de Servicio de Comunicación (SCSM) -
Valores Muestreados en el Enlace Serial Unidireccional Punto a Punto.
IEC 61850-9-2: Asignación Específica de Servicio de Comunicación (SCSM) -
Valores Muestreados en la ISO 8802‐3.
IEC 61850-10: Pruebas de Conformidad
IEC 61850-80-1: Guía para el intercambio de información a partir de un modelo
de datos basado en CDC con IEC 60870-5-101 o IEC 60870-5-104
IEC 61850-90-1: El uso de la norma IEC 61850 para la comunicación entre las
subestaciones
La construcción arquitectónica principal que el IEC 61850 adopta es la de "abstraer" la definición de los elementos de datos y los servicios, es decir, la creación de elementos de datos/objetos y servicios que son independientes de los protocolos subyacentes. Las definiciones abstractas, permiten el "Mapeo" de los objetos de datos y servicios a cualquier otro protocolo que pueda cumplir con los requisitos de datos y servicios [IEC, 2011].

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 87
5.4 Niveles de Estación, Interfaces Lógicas & Nodos Lógicos Niveles de Estación En toda subestación eléctrica, sin importar su tamaño, su nivel de tensión y complejidad se pueden definir tres niveles de interfaz física [IEC, 2011]:
Nivel de estación
Nivel de bahía
Nivel de proceso
En el nivel de estación encontramos a la interfaz hombre máquina (IHM), computadora central con su base de datos, unidad terminal remota, equipos de telecomunicaciones, entre otros. En el nivel de bahía se encuentran los equipos de protección, control y medición. En el nivel de proceso se encuentra el equipo primario, es decir, los interruptores de potencia, seccionadores, sensores, transformadores de corriente, transformadores de potencial, etc. En la Figura 5.2 siguiente se pueden apreciar más claramente estos niveles.
Figura 5.2 Niveles de Estación
(Adaptada de [Adamiak, 2012])
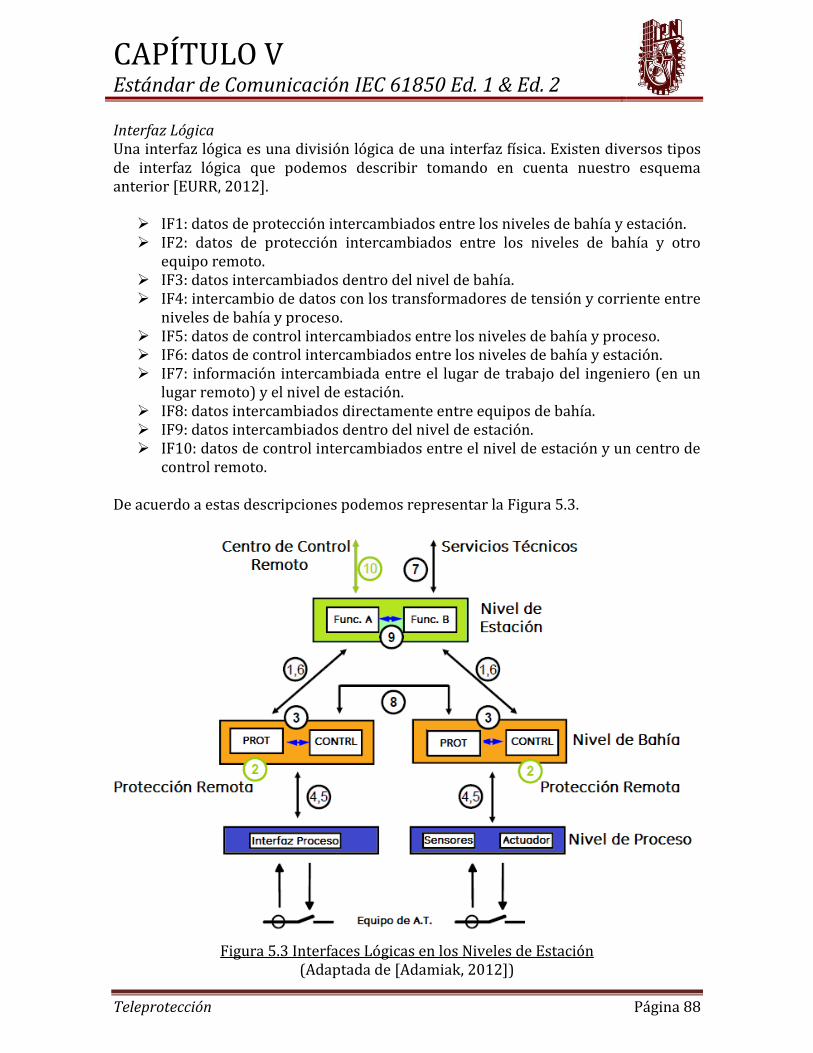
CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 88
Interfaz Lógica Una interfaz lógica es una división lógica de una interfaz física. Existen diversos tipos de interfaz lógica que podemos describir tomando en cuenta nuestro esquema anterior [EURR, 2012].
IF1: datos de protección intercambiados entre los niveles de bahía y estación. IF2: datos de protección intercambiados entre los niveles de bahía y otro
equipo remoto. IF3: datos intercambiados dentro del nivel de bahía. IF4: intercambio de datos con los transformadores de tensión y corriente entre
niveles de bahía y proceso. IF5: datos de control intercambiados entre los niveles de bahía y proceso. IF6: datos de control intercambiados entre los niveles de bahía y estación. IF7: información intercambiada entre el lugar de trabajo del ingeniero (en un
lugar remoto) y el nivel de estación. IF8: datos intercambiados directamente entre equipos de bahía. IF9: datos intercambiados dentro del nivel de estación. IF10: datos de control intercambiados entre el nivel de estación y un centro de
control remoto.
De acuerdo a estas descripciones podemos representar la Figura 5.3.
Figura 5.3 Interfaces Lógicas en los Niveles de Estación
(Adaptada de [Adamiak, 2012])

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 89
Nodos Lógicos Para lograr una distribución libre de las funciones entre los IEDs, la interoperabilidad deberá estar dada entre funciones, no sólo a nivel de equipos. Estas funciones podrán estar divididas en partes que se desarrollan en distintos IEDs pero comunicándose entre ellas (funciones distribuidas). Las partes más pequeñas que componen a una función se denominan “Nodos Lógicos”, y son la vía para intercambiar información. Un Nodo Lógico (LN) es la representación abstracta de una funcionalidad necesaria para la automatización de una subestación. Una de las características del nodo es que esta función no puede ser descompuesta en otras más elementales y que los datos producidos por cada IED se deben presentar en un formato normalizado [General Electric L90, 2012]. La base de este formato está dada por los grupos de nodos lógicos. La siguiente lista corresponde a los nodos lógicos más comunes [Adamiak, 2012]. Grupos de Nodos Lógicos
Grupo L: LNs del sistema (2) Grupo P: Protección (28) Grupo R: Relacionados con protección (10) Grupo C: Control (5) Grupo G: Genéricos (3) Grupo I: Interfaz y archivamiento (4) Grupo A: Control automático (4) Grupo M: Medidas (8) Grupo S: Sensores y monitorización (4) Grupo X: Switchgear (2) Grupo T: Transformadores de medida (2) Grupo Y: Transformadores de potencia (4) Grupo Z: Otros equipos del sistema eléctrico (15)
Dado que los datos deben presentar un formato normalizado, el estándar especifica un modelado de datos, como se muestra en la Figura 5.4.
Figura 5.4 Modelado de Datos
[Adamiak, 2012]
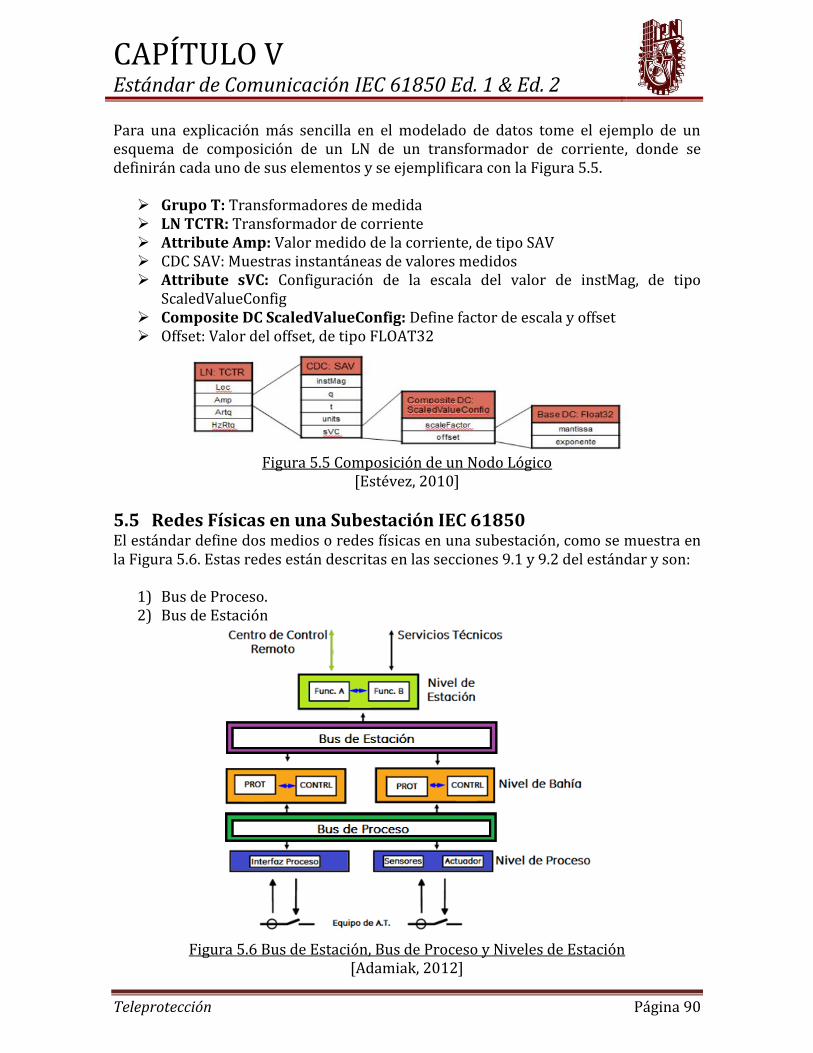
CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 90
Para una explicación más sencilla en el modelado de datos tome el ejemplo de un esquema de composición de un LN de un transformador de corriente, donde se definirán cada uno de sus elementos y se ejemplificara con la Figura 5.5.
Grupo T: Transformadores de medida LN TCTR: Transformador de corriente Attribute Amp: Valor medido de la corriente, de tipo SAV CDC SAV: Muestras instantáneas de valores medidos Attribute sVC: Configuración de la escala del valor de instMag, de tipo
ScaledValueConfig Composite DC ScaledValueConfig: Define factor de escala y offset Offset: Valor del offset, de tipo FLOAT32
Figura 5.5 Composición de un Nodo Lógico
[Estévez, 2010]
5.5 Redes Físicas en una Subestación IEC 61850 El estándar define dos medios o redes físicas en una subestación, como se muestra en la Figura 5.6. Estas redes están descritas en las secciones 9.1 y 9.2 del estándar y son:
1) Bus de Proceso. 2) Bus de Estación
Figura 5.6 Bus de Estación, Bus de Proceso y Niveles de Estación
[Adamiak, 2012]

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 91
5.6 Bus de Proceso Mientras que la tecnología migra a la próxima generación con sensores de bajo consumo de voltaje y de corriente, la capacidad de digitalizar las cantidades base en el origen y transmitir los valores de la muestra resultantes hacia la caseta de control de la subestación se convierte en una necesidad. Además de los valores muestreados, la capacidad de adquirir remotamente la información del estado así como establecer controles de salida es muy deseable. El IEC 61850 aborda esta necesidad a través de la definición de los servicios de valores medidos muestreados y la implementación de un bus de proceso. El nivel de proceso de la subestación está relacionado con la recopilación de información, tales como corriente, tensión y la información de estado de los transformadores y transductores conectados al proceso de alimentación del sistema principal, siendo esta la transmisión de electricidad a través de un dispositivo llamado “Merging Unit”. La Figura 5.7 muestra el concepto de Merging Unit [IEC, 2004].
Figura 5.7 Esquema Concepto de Merging Unit
(Adaptada de [IEC, 2002])
Figura 5.8 Esquema Tradicional & Esquema Utilizando una Merging Unit
[IEC, 2002]
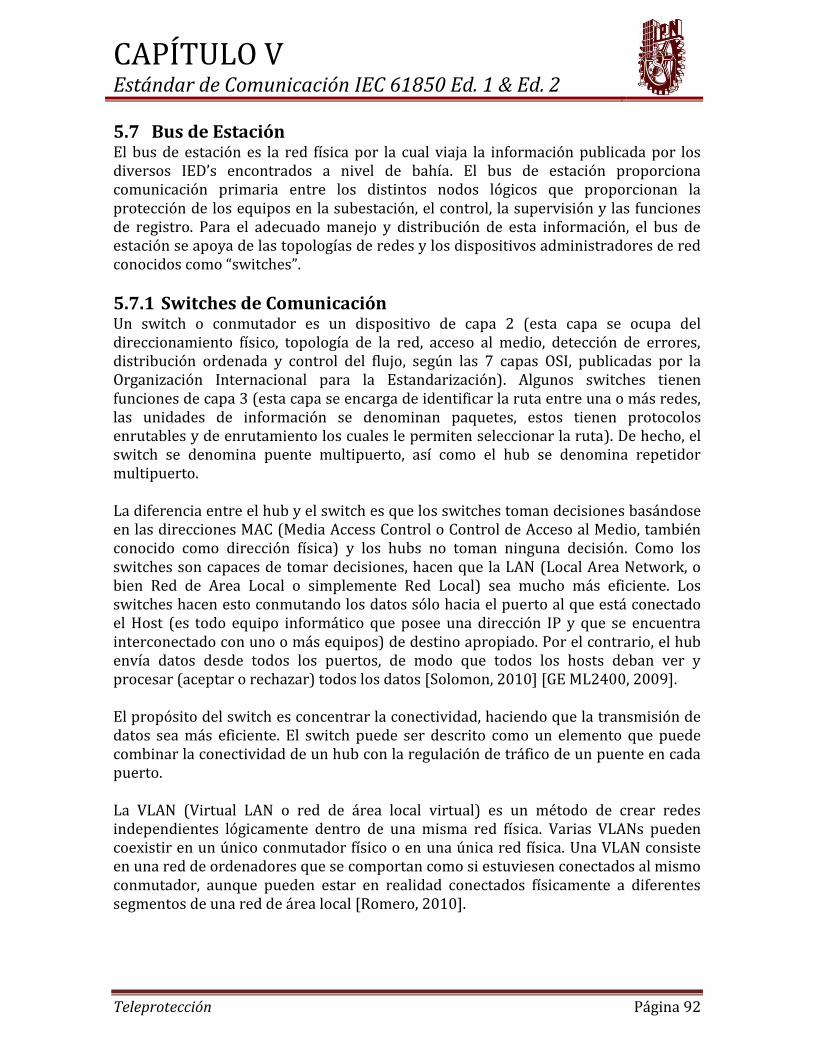
CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 92
5.7 Bus de Estación El bus de estación es la red física por la cual viaja la información publicada por los diversos IED’s encontrados a nivel de bahía. El bus de estación proporciona comunicación primaria entre los distintos nodos lógicos que proporcionan la protección de los equipos en la subestación, el control, la supervisión y las funciones de registro. Para el adecuado manejo y distribución de esta información, el bus de estación se apoya de las topologías de redes y los dispositivos administradores de red conocidos como “switches”.
5.7.1 Switches de Comunicación Un switch o conmutador es un dispositivo de capa 2 (esta capa se ocupa del direccionamiento físico, topología de la red, acceso al medio, detección de errores, distribución ordenada y control del flujo, según las 7 capas OSI, publicadas por la Organización Internacional para la Estandarización). Algunos switches tienen funciones de capa 3 (esta capa se encarga de identificar la ruta entre una o más redes, las unidades de información se denominan paquetes, estos tienen protocolos enrutables y de enrutamiento los cuales le permiten seleccionar la ruta). De hecho, el switch se denomina puente multipuerto, así como el hub se denomina repetidor multipuerto. La diferencia entre el hub y el switch es que los switches toman decisiones basándose en las direcciones MAC (Media Access Control o Control de Acceso al Medio, también conocido como dirección física) y los hubs no toman ninguna decisión. Como los switches son capaces de tomar decisiones, hacen que la LAN (Local Area Network, o bien Red de Area Local o simplemente Red Local) sea mucho más eficiente. Los switches hacen esto conmutando los datos sólo hacia el puerto al que está conectado el Host (es todo equipo informático que posee una dirección IP y que se encuentra interconectado con uno o más equipos) de destino apropiado. Por el contrario, el hub envía datos desde todos los puertos, de modo que todos los hosts deban ver y procesar (aceptar o rechazar) todos los datos [Solomon, 2010] [GE ML2400, 2009]. El propósito del switch es concentrar la conectividad, haciendo que la transmisión de datos sea más eficiente. El switch puede ser descrito como un elemento que puede combinar la conectividad de un hub con la regulación de tráfico de un puente en cada puerto. La VLAN (Virtual LAN o red de área local virtual) es un método de crear redes independientes lógicamente dentro de una misma red física. Varias VLANs pueden coexistir en un único conmutador físico o en una única red física. Una VLAN consiste en una red de ordenadores que se comportan como si estuviesen conectados al mismo conmutador, aunque pueden estar en realidad conectados físicamente a diferentes segmentos de una red de área local [Romero, 2010].

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 93
Figura 5.9 Switch de Comunicaciones de General Electric con Funciones de Capa 2 y 3
[GE ML2400, 2009]
5.7.2 Comunicación Punto a Punto, Punto a Multipunto, Arreglos de la Red (Topologías de Red) y Redundancia.
A los arreglos físicos o lógicos en los cuales los dispositivos o nodos de una red se interconectan entre sí sobre un medio de comunicación, se les conoce como topología de red. Cuando nos referimos a una determinada topología, podemos utilizarla para representar la forma de conexionado y el flujo físico de los datos, como por ejemplo: punto a punto y punto a multipunto [Herrera, 2003]. Comunicación Punto a Punto (Peer to Peer) Cuando hablamos de un enlace punto a punto, nos referimos a uno en el cual toda la comunicación se produce entre dos puntos, y sólo entre éstos. El caso más simple y tal vez el más común es el de la unión de dos equipos mediante un cable [Herrera, 2003].
Figura 5.10 Comunicación Punto a Punto (Peer to Peer)
[General Electric L90, 2012] Punto a Multipunto En un enlace punto a multipunto existe un punto central que se comunica con varios puntos remotos. Generalmente esto implica que la comunicación es solamente entre el punto central y los remotos y de éstos hacia el central; no existe comunicación entre los remotos [Romero, 2010]. Existen varias topologías de red básicas (Bus, estrella, anillo y malla), pero también existen redes híbridas que combinan una o más de las topologías anteriores en una misma red. En la Figura 5.11 se puede apreciar una red en anillo. De acuerdo a sus características propias, cada red tiene beneficios y contradicciones que generalmente radican en la fiabilidad, confiabilidad, retardo en el envío y el costo. El arreglo recomendado en el estándar para el bus de estación es el arreglo tipo estrella, mostrado en la Figura 5.12.

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 94
El estándar recomienda esta topología debido a la característica propia del estándar que se basa en una comunicación tipo publicador suscriptor; así, si uno de los IED’s publicara un mensaje, el IED que necesite del mensaje se suscribirá a él, mientras que los demás IED’s no se verán afectados. Sin embargo, en una topología en anillo si un IED publicase un mensaje, forzosamente deberá pasar por cada uno de los IED’s de la red en anillo para llegar a su IED de destino.
Figura 5.11 Arreglo de Red en Anillo
Figura 5.12 Arreglo de Red en Estrella
(Adaptada de [Herrera, 2003])
Redundancia Los sistemas redundantes, son aquellos en los que se repiten (dos o más iguales) aquellos datos o equipos de carácter crítico que se quiere asegurar ante los posibles fallos que puedan surgir. Se presenta como una solución a los problemas de protección y confiabilidad. Este tipo de sistemas se encarga de realizar el mismo proceso en más de una estación, ya que si por algún motivo alguna dejara de funcionar o colapsara, inmediatamente otro tendría que ocupar su lugar y realizar las tareas del anterior.
Figura 5.13 Arreglo de Red en Estrella Redundante
CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 95
5.8 Tipos de mensajes IEC 61850 (Evento Genérico de Subestación) Evento genérico de subestación (GSE) es un modelo de control definido de acuerdo con el estándar IEC 61850 que proporciona un mecanismo rápido y fiable de transferencia de datos de eventos a través de redes de subestaciones enteras. Cuando se implementa, este modelo asegura que el mismo mensaje de evento es recibido por varios dispositivos físicos que utilizan los servicios multicast (multidifusión) /broadcast (Forma de transmisión de información donde un nodo emisor envía información a una multitud de nodos receptores de manera simultánea, sin necesidad de reproducir la misma transmisión nodo por nodo). El modelo de control de GSE se subdivide en GOOSE (Eventos genéricos de objeto orientado de la subestación) y GSSE (Evento genérico del estado de la subestación) [IEC, 2004]. El IEC 61850 especifica dos tipos de servicios de transferencia de datos punto a punto: Eventos Genéricos de Estado de la subestación (GSSE) y Eventos Genéricos de Objeto Orientado de la Subestación (GOOSE). Los servicios tipo GSSE son compatibles con UCA 2.0 GOOSE. Los servicios tipo IEC 61850 GOOSE proporcionan soporte virtual a la LAN, el etiquetado de prioridad Ethernet y la configuración Ethertype ID de aplicación. El soporte para VLANs y el etiquetado de prioridad permite la optimización del tráfico en la red Ethernet. A los mensajes GOOSE se les puede otorgar una prioridad mayor que al tráfico estándar en la red Ethernet, y estos mismos pueden ser separados en VLANs específicas [IEC, 2004]. Los dispositivos que transmiten GSSE y/o mensajes GOOSE también funcionan como servidores. Cada publicador GSSE contiene un “Bloqueo de Control GSSE” para configurar y controlar la transmisión. Cada publicador GOOSE contiene un “Bloqueo de Control GOOSE” para configurar y controlar la transmisión. La transmisión también se controla a través de la configuración del dispositivo. Esta configuración se puede ver en la ICD (Capacidad de Auto descripción del mensaje para definir el modelo de objeto y la información para el mapeo) o en el software de configuración de dispositivos o archivos [General Electric L90, 2012].
5.8.1 Evento Genérico del Estado de la Subestación (GSSE) Los eventos genéricos del estado de la subestación son una extensión del mecanismo de eventos de transferencia en UCA 2.0. Sólo los datos de estado pueden ser intercambiados a través de GSSE y utiliza una lista de estado (cadena de bits) en lugar de un conjunto de datos como se utiliza en GOOSE. Los mensajes GSSE se transmiten directamente a través de IEC/ISO 8802-2 y 8802-3 con un mecanismo similar a los mensajes GOOSE [IEC, 2004]. La comunicación del evento genérico de estado de la subestación IEC61850 (GSSE) es compatible con la comunicación GOOSE. Los mensajes GSSE contienen un número de elementos de estado dobles, esos elementos son transmitidos en dos estructuras de datos predefinidas llamadas “DNA UserSt”. Cada elemento DNA (Digital Network Architecture, o bien Arquitectura de Red Digital) y cada elemento UserSt es referido como un “bit par”. Los mensajes GSSE son transmitidos en respuesta a los cambios de estado de los puntos de información que se contienen en el mensaje. Los mensajes

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 96
GSSE siempre contienen el mismo número de bits pares de DNA Y USER ST. Dependiendo la configuración solamente algunos de estos bits pares tendrán valores que le interesen a los dispositivos receptores. Los ajustes GSSE FUNCTION, GSSE ID, y GSSE DESTANITION MAC ADDRESS son utilizados para configurar la transmisión del mensaje GSSE. El ajuste GSSE FUNCTION se establece en “habilitado” para habilitar la transmisión. Si una dirección válida multicast Ethernet MAC es ingresada para el ajuste GSSE DESTINATION MAC ADDRESS, esta dirección será utilizada como la dirección de destino MAC para los mensajes GSSE. Si una dirección válida multicast ETHERNET MAC no es ingresada (por ejemplo, 00 00 00 00 00 00) el L90 utilizará la fuente de dirección ETHERNET MAC como el destino con el bit multicast [General Electric L90, 2012].
5.8.2 Eventos Genéricos de Objeto Orientado de la Subestación (GOOSE)
El evento genérico de objeto orientado de la subestación es un modelo de mecanismo de control en el que se agrupa cualquier formato de datos (estado, valor) en un conjunto de datos y se transmiten dentro de un periodo de tiempo de 4 milisegundos. Los siguientes mecanismos que utiliza el GOOSE aseguran la velocidad de transmisión especificada y su fiabilidad [IEC, 2004] [Apostolov GOOSE, 2010].
Los datos GOOSE están directamente integrados en paquetes de datos Ethernet y trabajan sobre el mecanismo de publicador-suscriptor en direcciones MAC, ya sean Multicast o Broadcast.
El mensaje GOOSE utiliza VLAN y el etiquetado de prioridad de acuerdo con
IEEE 802.1Q para tener una red virtual independiente dentro de la misma red física y establece el nivel adecuado de prioridad del mensaje.
El mismo mensaje GOOSE se retransmite con intervalos de retransmisión
diferentes y en incremento.
Los mensajes GOOSE están diseñados para ser completamente independientes. Algunos proveedores ofrecen dispositivos electrónicos inteligentes (IED) totalmente compatibles con IEC61850 para un enfoque verdaderamente interoperable dentro de la red de la subestación sin necesidad de cables de proveedores específicos o algoritmos.
Los mensajes GOOSE contienen información que permite al dispositivo
receptor saber que un estado ha cambiado y el tiempo del último cambio de estado.

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 97
Un dispositivo recién activado, tras el encendido o el restablecimiento del servicio, enviará los datos actuales (estado) o valores como el mensaje GOOSE inicial.
Todos los dispositivos que envían mensajes GOOSE deberán continuar enviando el mensaje con tiempo durante un ciclo largo de tiempo, incluso si no se ha producido un cambio de estado/valor. Esto asegura que los dispositivos que se han activado recientemente conocerán los valores de estado actuales de los dispositivos.
Los equipos UR con IEC soportan dos tipos de comunicación IEC61850 GOOSE: El GOOSE fijo y El GOOSE configurable. Todos los mensajes GOOSE contienen información IEC61850 reunida en un conjunto de datos (dataset). Este es el conjunto de datos es transmitido en los servicios de mensajería GOOSE [General Electric L90, 2012]. El estándar IEC 61850 recomienda un valor de prioridad predeterminado de 4 para los mensajes GOOSE. El tráfico de Ethernet que no contiene una etiqueta de prioridad tiene una prioridad predeterminada de 1. Los niveles de prioridad fueron establecidos por el grupo de trabajo IEEE P802.1p quien es el responsable de agilizar el tráfico en las redes al crear clases de prioridad. La tabla de prioridad de clase de servicio (CoS, Class of Service) es un campo de 3 bits llamado “Código de Prioridad de Punto, o Priority Code Point (PCP)”, el cual jerarquiza la comunicación en una tabla de 7 niveles (Tabla 5.1) [IEC, 2004] [Szigeti, 2009].
PCP Prioridad Acrónimo Tipo de Tráfico
1 0 (El más Bajo) BK Fondo 0 1 BE Mejor Eficiencia 2 2 EE Excelente Eficiencia 3 3 CA Aplicaciones Críticas 4 4 VI Video, Latencia <100ms y
fluctuaciones 5 5 VO Voz, <10ms y fluctuaciones 6 6 IC Control de Red Interna 7 7 (El más Alto) NC Control de Red
Tabla 5.1 Niveles de Prioridad
5.9 GOOSE en el Relevador Universal UR La comunicación punto a punto (peer-to-peer) es una conexión no orientada de comunicación de alta velocidad. Generalmente esta comunicación es entre equipos de subestación como los relevadores de protección. Los mensajes GSSE y GOOSE son los métodos de comunicación punto a punto (peer-to-peer).

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 98
El estándar IEC61850 define un objeto orientado como una aproximación de datos y servicios. Un dispositivo físico compatible, que bien puede ser un IED, contiene uno o más dispositivos lógicos. Cada dispositivo lógico puede contener muchos nodos lógicos. Cada nodo lógico contiene muchos objetos con datos. Cada objeto con datos está compuesto por atributos del dato y está compuesta por información de sus atributos e información de los atributos de los componentes. Los servicios están disponibles en cada nivel para realizar varias funciones tales como leer, escribir, controlar comandos y reportar [Adamiak, 2012]. Cada dispositivo electrónico inteligente IED representa un dispositivo físico IEC61850. El dispositivo físico contiene un dispositivo lógico y el dispositivo lógico contiene muchos nodos lógicos. El nodo lógico LPHD1 contiene información sobre el dispositivo físico electrónico inteligente IED. El nodo lógico LLN0 contiene información sobre el dispositivo lógico electrónico inteligente IED [General Electric L90, 2012]. El nodo lógico GGIO1 está disponible en el relevador para proveer de un acceso de hasta 128 estados digitales, su estampa de tiempo asociada y su bandera de calidad. El contenido de los datos debe ser configurado antes de que el dato pueda ser utilizado. El nodo lógico GGIO1 provee de puntos de estados digitales para el acceso por los clientes [General Electric L90, 2012]. El objetivo es que los clientes utilicen GGIO1 para así poder accesar a los estados digitales del relevador. Se provee de ajustes de configuración para permitir la selección de un número de indicadores de estados digitales disponibles en GGIO1 (8 a 128), y permitir la elección de los operandos FlexLogic que conducirán el estado de los indicadores de estado GGIO1. Los clientes pueden utilizar las características de reporte de datos amplificadas y desamplificadas disponibles de GGIO1 para así construir secuencias de eventos. El nodo lógico GGIO2 está disponible para proporcionar acceso a las entradas virtuales del IED. Las entradas virtuales manejan un lenguaje binario y cada una es configurada desde un solo punto de control; los valores de las entradas pueden ser escritos por los clientes, estas entradas generalmente son utilizadas como entradas para el control. El nodo lógico GGIO2 proporciona un acceso virtual a las entradas a través del modelo de control estándar (ctlModel) el cual despliega los siguientes datos de la entrada[General Electric L90, 2012]:
Estado de la entrada.
Control directo de la seguridad normal.
SBO control con seguridad normal.
Los valores de configuración están disponibles para der seleccionados en el modelo de control para cada punto. Cada entrada virtual utilizada por la GGIO2 debe tener su
CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 99
propia configuración. Su función de entrada virtual 1 (De 64 disponibles) debe estar programada como "habilitado" y su correspondiente ajuste llamado CF GGIO2 CF SPSCO1 (64) CTLMODEL programado en la configuración de control apropiado. El nodo lógico GGIO3 está disponible para proporcionar el acceso de clientes a los valores recibidos a través de mensajes GOOSE configurables. Los valores de las indicaciones del estado digital y los valores analógicos en GGIO3 se originan por medio de mensajes GOOSE enviados desde otro dispositivo. El nodo GGIO4 lógico proporciona acceso a un máximo de 32 puntos de valor analógico, así como marcas de tiempo asociadas y banderas de calidad. El contenido de los datos puede ser configurado antes de que los datos puedan ser utilizados. El nodo GGIO4 proporciona valores analógicos para que el cliente tenga acceso a este[General Electric L90, 2012]. Se pretende que los clientes utilicen GGIO4 para acceder a valores genéricos analógicos desde el relé. Los valores de configuración permiten la selección de un número de valores analógicos disponibles en GGIO4 (4 a 32) y la elección de los valores FlexAnalog ™ que determinan el valor de las entradas analógicas GGIO4. Los clientes pueden utilizar la función IEC 61850 (Llamada así en el menú del relevador) , la cual provee los valores analógicos proporcionados por el GGIO4 [General Electric L90, 2012].
5.9.1 GOOSE Fijo (Fixed GOOSE) El conjunto de datos, utilizando el mensaje GOOSE fijo, es la misma información que es transmitida utilizando la característica GSSE; esto es, los bits pares de DNA y los bits pares UserSt. Los operandos de FlexLogicTM que determinan el estado de los bits pares DNA y UserSt son configurables a través de los ajustes, pero el conjunto de datos del GOOSE fijo siempre contiene la misma estructura de datos DNA/UserSt. Para actualizar los servicios GSSE a los servicios GOOSE solamente se tiene que deshabilitar la opción GSSE y habilitar la opción de GOOSE fijo. Las entradas y salidas remotas son configuradas de la misma manera para ambos (GSSE y GOOSE fijo) [General Electric L90, 2012]. Se recomienda que el GOOSE fijo sea utilizado para implementaciones que requieran transmisión de datos GOOSE entre dos dispositivos electrónicos inteligentes de la serie UR y el GOOSE configurable sea utilizado para la transmisión de datos GOOSE entre un dispositivo electrónico inteligente de la serie UR y un dispositivo electrónico inteligente de otro fabricante.

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 100
Figura 5.14 GOOSE Fixed (Fijo) & GOOSE Configurable
5.9.2 GOOSE Configurable La característica del GOOSE configurable permite que la configuración del conjunto de datos sea transmitida o recibida por el L90. El L90 soporta la configuración de 8 conjuntos de datos de transmisión y recepción permitiendo la optimización de la transmisión de datos entre los dispositivos. Los objetos programados para el conjunto de datos 1 y 2, podrían tener cambios de estado, los cuales son transmitidos tan pronto como el cambio sea detectado. El conjunto de datos 1 debe ser usado para la transmisión de datos de alta velocidad, el cual es requerido para aplicaciones como los disparos transferidos, bloqueos, e inicialización de falla del interruptor. Por lo menos un valor de estado digital debe ser configurado en el conjunto de datos 1 para habilitar la transmisión de toda la información configurada para el conjunto de datos 1. El hecho de configurar solamente los datos analógicos para el conjunto de datos 1 no activara la transmisión de datos. Los objetos programados para el conjunto de datos 3 a 8 podrían tener cambios de estado, los cuales son transmitidos a un alcance máximo de 100 ms. El conjunto de datos 3 a 8 analizará cada objeto de datos configurados en ellos cada 100 ms para identificar si algún cambio se ha realizado o ha sucedido. Si cualquier cambio en los objetos es detectado, estos cambios serán transmitidos a través de un mensaje GOOSE. Si no existen cambios detectados durante el periodo de 100 ms no se enviara ningún mensaje GOOSE. Para todos los conjuntos de datos de 1 a 8 el mensaje de integridad GOOSE seguirá siendo enviado a la taza preconfigurada incluso si no hay cambios detectados en los elementos de datos.

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 101
El relevador L90 tiene la habilidad de detectar si un objeto de datos en uno de los conjuntos de datos GOOSE está oscilando erróneamente. Esto puede ser causado por ciertos eventos como errores en la lógica de programación, entradas siendo afirmadas o negadas incorrectamente o componentes dañados de la estación. Si una oscilación errónea es detectada, el relevador L90 detendrá la emisión de mensajes GOOSE del conjunto de datos por un periodo mínimo de un segundo. Si la oscilación persiste después del periodo de un segundo, el relevador L90 pasará a bloquear la transmisión del envió de datos. El relevador L90 activará la alerta de mantenimiento, mostrando también el mensaje de error de autoprueba “MAINTENANCE ALERT:GGIO Ind XXX oscill” en el display de panel frontal, donde XXX denota el objeto de dato detectado como oscilatorio [General Electric L90, 2012]. La característica del GOOSE configurable es recomendada para aplicaciones que requieren la transferencia de mensajes GOOSE entre dispositivos electrónicos inteligentes UR y dispositivos de otras marcas. Se recomienda el uso de GOOSE fijo para aplicaciones que requieran la transferencia de datos. Los mensajes IEC61850 GOOSE contienen un número de parámetros configurables, los cuales deben ser correctos para alcanzar una transmisión de datos exitosa. Es muy importante que los conjuntos de datos configurados en los dispositivos de transmisión y recepción sean exactamente iguales en términos de estructura de datos, y que la dirección GOOSE y la cadena de nombre correspondan sin ninguna clase de error.
Figura 5.15 Bus de Proceso & Bus de Estación Redundante
(Adaptada de [Apostolov IEC, 2010])
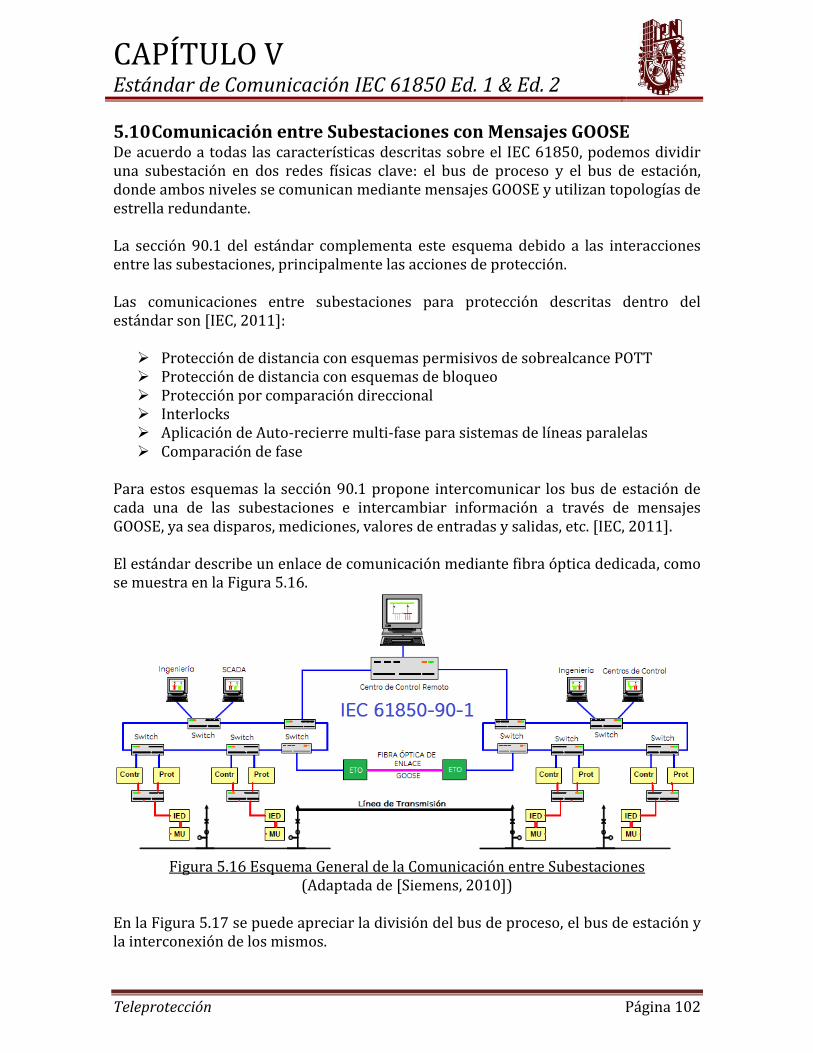
CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 102
5.10 Comunicación entre Subestaciones con Mensajes GOOSE De acuerdo a todas las características descritas sobre el IEC 61850, podemos dividir una subestación en dos redes físicas clave: el bus de proceso y el bus de estación, donde ambos niveles se comunican mediante mensajes GOOSE y utilizan topologías de estrella redundante. La sección 90.1 del estándar complementa este esquema debido a las interacciones entre las subestaciones, principalmente las acciones de protección. Las comunicaciones entre subestaciones para protección descritas dentro del estándar son [IEC, 2011]:
Protección de distancia con esquemas permisivos de sobrealcance POTT Protección de distancia con esquemas de bloqueo Protección por comparación direccional Interlocks Aplicación de Auto-recierre multi-fase para sistemas de líneas paralelas Comparación de fase
Para estos esquemas la sección 90.1 propone intercomunicar los bus de estación de cada una de las subestaciones e intercambiar información a través de mensajes GOOSE, ya sea disparos, mediciones, valores de entradas y salidas, etc. [IEC, 2011]. El estándar describe un enlace de comunicación mediante fibra óptica dedicada, como se muestra en la Figura 5.16.
Figura 5.16 Esquema General de la Comunicación entre Subestaciones
(Adaptada de [Siemens, 2010]) En la Figura 5.17 se puede apreciar la división del bus de proceso, el bus de estación y la interconexión de los mismos.
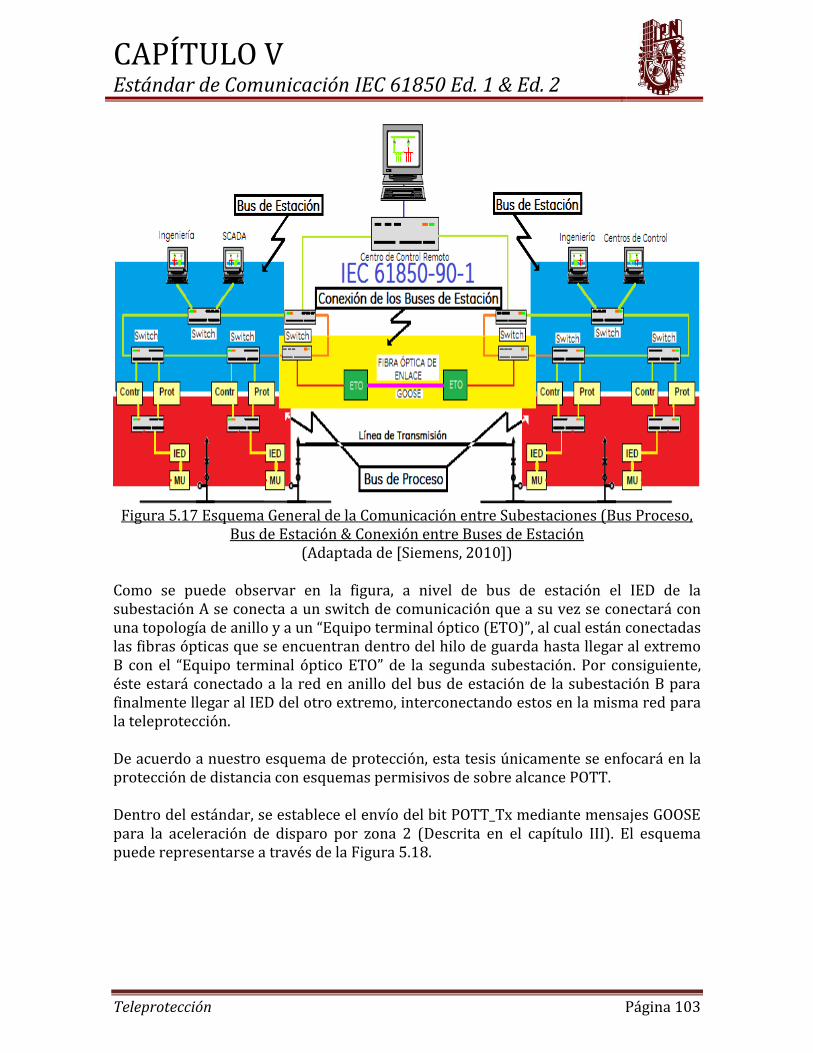
CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 103
Figura 5.17 Esquema General de la Comunicación entre Subestaciones (Bus Proceso,
Bus de Estación & Conexión entre Buses de Estación (Adaptada de [Siemens, 2010])
Como se puede observar en la figura, a nivel de bus de estación el IED de la subestación A se conecta a un switch de comunicación que a su vez se conectará con una topología de anillo y a un “Equipo terminal óptico (ETO)”, al cual están conectadas las fibras ópticas que se encuentran dentro del hilo de guarda hasta llegar al extremo B con el “Equipo terminal óptico ETO” de la segunda subestación. Por consiguiente, éste estará conectado a la red en anillo del bus de estación de la subestación B para finalmente llegar al IED del otro extremo, interconectando estos en la misma red para la teleprotección. De acuerdo a nuestro esquema de protección, esta tesis únicamente se enfocará en la protección de distancia con esquemas permisivos de sobre alcance POTT. Dentro del estándar, se establece el envío del bit POTT_Tx mediante mensajes GOOSE para la aceleración de disparo por zona 2 (Descrita en el capítulo III). El esquema puede representarse a través de la Figura 5.18.

CAPÍTULO V Estándar de Comunicación IEC 61850 Ed. 1 & Ed. 2
Teleprotección Página 104
Figura 5.18 Esquema de Aceleración por Zona 2 por POTT Mediante Mensajes GOOSE
Con este esquema de teleprotección se obtienen todos los beneficios del canal de fibra óptica dedicada más los beneficios del uso de mensajes GOOSE, lo cual conllevaría a extender la Tabla 4.5 del capítulo IV, a la siguiente (Tabla 5.2). Tipo de Canal
Costo Dependa. Segurid. Estado de Calidad
Prioridad del Mensaje
Hilos Piloto Bajo Bajo Medio No No OPLAT Medio Medio/Alta Medio No No Radio Alto/
Muy Alto Media/Alta Media No No
Fibra Óptica Multipx.
Alto Media/Alta Alta No No
Fibra Óptica Dedicada
Alto Alta Alta No No
Fibra Óptica Dedicada GOOSE
Alto Alta Alta Sí Sí
Tabla 5.2 Comparación de los Canales de Comunicación Tradicionales & Canal IEC 61850-90-1 para la Comunicación entre Subestaciones

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 105
CAPÍTULO VI
PROPUESTA DE ESQUEMA DE TELEPROTECCIÓN

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 106
6 PROPUESTA DE ESQUEMA DE TELEPROTECCIÓN 6.1 Introducción a la Propuesta de Esquema de Teleprotección En el capítulo III se describió la importancia de la teleprotección en un esquema de protección distancia, siendo esta teleprotección el esquema de disparo transferido. Como se mencionó dentro de la justificación del proyecto, hasta la fecha no existe ningún esquema de teleprotección que garantice la recepción de la información en el extremo remoto de la línea, en otras palabras, no existe un esquema que garantice una transmisión de datos exitosa de un extremo a otro en una línea de transmisión. Tal y como se describió en el capítulo IV, debido a la inexistencia de esta garantía, la elección del canal de comunicaciones es un punto vital que debe tomar en cuenta el ingeniero de protecciones cuando desea implementar la protección 21 en esquemas de disparo transferido. Aunque el ingeniero de protecciones seleccione el canal más adecuado, sigue existiendo la posibilidad de que el mensaje sea alterado por diversos factores, incluso seleccionando un canal de fibra óptica dedicada, el cual presenta las mejores características de dependabilidad y seguridad; el mensaje siempre estará expuesto ante estas situaciones. Dentro de lo que conlleva la implementación del estándar IEC 61850-90-1, se especifica la comunicación entre subestaciones mediante mensajes GOOSE, como se pudo observar dentro de la descripción del capítulo anterior. El hecho de implementar una comunicación mediante mensajes GOOSE es un avance mayúsculo en cuanto a la teleprotección y protección de cualquier línea de transmisión que se actualice a este estándar. El mensaje GOOSE no garantiza que no recibirá alteraciones debidas a factores externos, pero si puede garantizarnos la descripción de su nivel de confiabilidad con respecto al estado del paquete de datos. En esquemas de teleprotección ordinarios no existe forma en la cual el relevador pueda discriminar entre cual información es confiable y cual no. Es por ello que para el esquema de teleprotección propuesto la implementación del estándar es indiscutible. En México no existe hasta la fecha un esquema de teleprotección que intercambie los disparos transferidos mediante mensajes GOOSE. Como tal, un ingeniero de protecciones que utilizará la teleprotección para la protección de la línea de la cual está encargado, no puede fiarse de un esquema de teleprotección que no conoce o del cual no tiene experiencia. La manera más práctica para implementar un nuevo esquema sería en una línea de baja o media importancia, y respaldarlo con alguna otra protección de la cual el ingeniero de protecciones tenga amplio conocimiento y vasta experiencia en la implementación de la misma. Es por ello que nuestra propuesta de teleprotección combina las bondades del estándar IEC 61850 con la seguridad de tener un esquema de protección que nos brinde resultados positivos en cuanto a la protección.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 107
6.2 Descripción de la Línea de Transmisión “MAG-93C30-CRU” Para la elección de una transmisión para la cual exista la posibilidad de combinar dos esquemas mencionados en el punto 6.1 y realizar el estudio para la implementación de nuestra propuesta de teleprotección, se solicitó apoyo de la compañía suministradora de energía eléctrica. Con esto, se acudió a la “Gerencia Regional de Transmisión Valle de México” de la Comisión Federal de Electricidad, donde se realizó la petición para que se nos proporcionasen la información de una línea de transmisión bajo la cual pudiéramos realizar nuestra propuesta, así como también el apoyo para el ingreso a las subestaciones que esta interconectase, con el objetivo de conocer las características generales de la línea tales como nivel de tensión, longitud, esquema de protección instalado actualmente, comunicación entre subestaciones con la cual cuenta, etc. En respuesta a nuestra petición, la Comisión Federal de Electricidad nos proporcionó información de una línea de transmisión que interconecta las subestaciones Magdalena y Santa Cruz. De manera más propia, se proporcionó información de la línea de transmisión con el número de filiación MAG-93C30-CRU. Esta línea cuenta con un nivel de tensión de 230 kV y una longitud de 3.7 km. En la Figura 6.1 se muestra una fotografía de la subestación Magdalena, donde se puede apreciar el interruptor de fase B y sus transformadores de corriente.
Figura 6.1 Interruptor de Fase B de la Línea de Transmisión MAG-93C30-CRU

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 108
Para familiarizar al lector con las características de las subestaciones implicadas, describiremos de manera general los datos de cada una de las subestaciones relacionados con la línea de transmisión que se va a utilizar. La subestación Magdalena maneja tres niveles de tensión: 230 kV, 85 kV y 23 kV. El diagrama unifilar donde se encuentra instalada nuestra línea de transmisión se muestra en la Figura 6.2 (la línea de transmisión utilizada se encuentra resaltada en color azul).
Figura 6.2 Diagrama Unifilar de la Subestación Magdalena en el Bus de 230kV & Línea de Transmisión Utilizada

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 109
La subestación Santa Cruz maneja tres niveles de tensión: 400 kV, 230 kV y 23 kV. El diagrama unifilar donde se encuentra instalada nuestra línea de transmisión se muestra en la Figura 6.3 (La línea de transmisión utilizada se encuentra resaltada en color azul).
Figura 6.3 Diagrama Unifilar de la Subestación Santa Cruz en el Bus de 230kV &
Línea de Transmisión Utilizada

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 110
La línea de transmisión MAG-93C30-CRU se encuentra operando con relevadores electromecánicos, cuenta con una protección primaria diferencial con hilos piloto (87H) y con tres protecciones de respaldo de sobrecorriente direccional de fase (67P) y una de neutro (67N). En la figura 6.4 se muestra una fotografía de las mismas, así como sus diagramas unifilares..
Figura 6.4 Tablero de Protección con Relevadores Electromecánicos & Diagrama
Unifilar de la Línea de Transmisión MAG-93C30-CRU

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 111
6.3 Descripción del Esquema de Teleprotección Propuesto En base a todos los puntos descritos a lo largo de esta tesis, podemos describir nuestra propuesta a través de 6 puntos principales.
1) Se debe de utilizar un esquema de disparo transferido se alta confiabilidad, selectividad y velocidad, de acuerdo al estudio realizado en las lógicas de operación de los esquemas piloto de teleprotección descrito en el capítulo III.
2) Los canales de comunicación deben tener una característica de dependabilidad y seguridad de alto rango, se acuerdo al estudio realizado en el capítulo IV (Canales de comunicación).
3) La teleprotección debe ser enviada a través de mensajes GOOSE, según lo marca el estándar IEC 61850-90-1, descrito en el capítulo V.
4) Debe manejarse comunicación redundante a nivel de bus de estación, según lo recomienda el estándar IEC 61850-9-2.
5) Debe existir una protección lista para responder en caso de que el disparo transferido por medio de GOOSE falle.
6) Deben existir al menos 2 canales de comunicación entre subestaciones, según lo indica la norma de referencia NRF-041-2010 de CFE.
De acuerdo a estos puntos, en la Figura 6.5 se muestra el esquema de teleprotección propuesto.
Figura 6.5 Esquema de Teleprotección Propuesto

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 112
Enseguida se describen las razones por las cuales este esquema cumple con cada uno de los puntos antes mencionados. Para el punto número 1, tomamos como referencia los resultados obtenidos del estudio sobre los disparos transferidos (Tabla 6.1), donde se observa claramente cómo es que el esquema de disparo permisivo transferido de sobrealcance supera a los otros esquemas de disparo transferido gracias a las características propias de su lógica de operación, obteniendo de esta forma el rango más alto en cuanto a velocidad de operación, confiabilidad, selectividad y sensibilidad.
CRITERIO DISTANCIA ESCALONADA
DUTT PUTT POTT
Velocidad de Operación
Bajo Alto Alto Muy Alto
Confiabilidad Bajo Medio Alto Alto Selectividad Medio Medio Alto Alto Sensibilidad Bajo Bajo Medio Alto
Compatibilidad con AutoRecierre
No Si Si Si
Tabla 6.1 Comparación de los esquemas de Distancia y Disparos Transferidos Para los puntos 2 y 3 se toman como referencia los resultados obtenidos del estudio de selección del canal de comunicación. En la Tabla 6.2 se observa que el canal de comunicaciones que sobrepasa a los demás es el canal de fibra óptica dedicada utilizando mensajes GOOSE, además de cumplir el objetivo principal de esta tesis mediante el uso de los mismos gracias al bit de calidad con el que cuenta. Nótese que este canal tiene con las características más altas de dependabilidad y seguridad. Aunque el costo suele ser elevado, cuando se desea implementar un nuevo esquema, este es probado ante las mejores condiciones con el objetivo de determinar puntos de falla, para poco a poco decrementar estas condiciones y así establecer un criterio de aprobación. Tipo de Canal
Costo Dependa. Segurid. Estado de Calidad
Prioridad del Mensaje
OPLAT Medio Medio/Alta Medio No No Fibra Óptica Multipx.
Alto Media/Alta Alta No No
Fibra Óptica Dedicada
Alto Alta Alta No No
F.O. Dedicada GOOSE
Alto Alta Alta Sí Sí
Tabla 6.2 Comparación de los Canales de Comunicación Tradicionales & Canal IEC 61850-90-1 para la Comunicación entre Subestaciones

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 113
Para el punto número 4, basta con integrar un switch más a la subestación en el nivel de bus de estación y establecer una comunicación redundante entre los relés, con una topología en anillo como lo descrita en la sección 5.7.2. Respecto al punto número 5, el esquema de protección asumido para la actualización incluye un relevador diferencial de línea; el cual, por las características propias de operación y sensibilidad del relevador, operará más rápido ante una falla que la protección activada por el esquema de aceleración por zona 2. De esta forma, se tendrá la oportunidad de observar el comportamiento del esquema de teleprotección propuesto sin comprometer a la línea; y ya que el relevador L90 contiene una serie de protecciones adicionales, se pueden configurar las mismas en caso de no operar la protección diferencial. De esta forma se es redundante en la protección de la línea. Además no debe olvidarse que también se tiene la protección de respaldo en el esquema de protección asumido para la actualización. De esta forma nos aseguramos de no comprometer la integridad de protección de la línea de transmisión cuando se implemente el esquema de teleprotección propuesto. Con respecto al punto número 6, no solo se encuentra contabilizado un doble canal de teleprotección desde el momento en que se escogió la protección diferencial, sino que además podemos aprovechar el canal de la protección diferencial tal y como es marcado en el capítulo II, para enviar el POTT_Tx del D60 recibido por el relevador L90 mediante un mensaje GOOSE, para que este a su vez envíe la información a través de entradas y salidas digitales, siendo este el canal de teleprotección 2. Por lo tanto, el esquema propuesto envía 2 bits de POTT_Tx: uno mediante mensajes GOOSE a través del canal de teleprotección 1 (flechas de color azul en la Figura 6.5) y otro mediante entradas y salidas digitales a través del canal de fibra óptica de la protección diferencial (flechas de color amarillo en la Figura 6.5).
6.4 Comunicación Primaria del Esquema (IEC 61850 GOOSE) Para nuestro canal de teleprotección 1 trabajaremos bajo el modelo de comunicación “publicador-suscriptor” debido a las características propias del mensaje GOOSE. El relevador D60 de la subestación Magdalena será llamado LOCAL y a su vez el relevador D60 de la subestación Santa Cruz será llamado REMOTO. Para la mejor comprensión de la comunicación por mensajes GOOSE en nuestro esquema de teleprotección, supongamos una falla al 10% de la línea con respecto al relevador LOCAL; esta falla fue descrita en el capítulo III. En la Figura 6.6 se puede observar esta falla (dado que solo analizaremos la comunicación, la zona 3 de protección no será mencionada)

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 114
Figura 6.6 Esquema de Teleprotección Propuesto Bajo condiciones de Falla 2
Bajo estas condiciones de falla, nuestro relevador LOCAL D60 detectará la falla en zona 1 y zona 2, disparando sin un retraso de tiempo intencionado bajo zona 1 y con el pickup de zona 2 el bit POTT_Tx está listo para ser transmitido; dado que se enviará por mensajes GOOSE el D60 LOCAL actuará como publicador. En esta forma de comunicación el relevador LOCAL publica un mensaje GOOSE 1 el cual contendrá dos elementos de dato: el bit de POTT_Tx y el bit de calidad del mismo. Visto desde este punto los elementos que se suscribirán al mensaje serán el L90 LOCAL y el D60 REMOTO. Así, el mensaje, al ser publicado, inmediatamente será direccionado para ser recibido en el menor lapso de tiempo posible. Estos dos bits viajarán dentro del mensaje GOOSE 1 a través de la red de comunicación del bus de estación hasta llegar al switch de comunicaciones. Una vez en el switch, este direccionará el mensaje de acuerdo a los IED suscritos a este mensaje, el cual podrá arribar a cada uno de ellos. Analicemos el viaje del mensaje GOOSE hacia el D60 con una comunicación sin intermediarios. En el siguiente punto se analizará la comunicación con intermediarios.
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 115
Como se mencionó anteriormente el D60 REMOTO se encuentra en el otro extremo de la línea de transmisión en la subestación Santa Cruz. El mensaje GOOSE arribará al switch para ser direccionado, donde viajará a un administrador de fibras ópticas llamado “Equipo Terminal Óptico, o ETO”, lo cual tal y como su nombre lo expresa, es un proceso transparente para el mensaje. A este equipo terminal óptico se conectan todas las fibras ópticas que se encuentran dentro del hilo de guarda. El mensaje GOOSE viajará a través de una fibra óptica dedicada, la cual recorre la línea de transmisión hasta llegar al equipo terminal óptico propio de la subestación, el cual se encuentra conectado al bus de estación de la subestación Santa Cruz, será direccionado a través del switch y será recibido por el dispositivo suscriptor D60, el cual, gracias al bit de calidad que viene incluido en el mensaje GOOSE, podrá discriminar si este mensaje se encuentra en buen estado, o dicho en otras palabras si es confiable y seguro, de tal suerte que no haya sufrido alteraciones a lo largo del canal de comunicación. Así, este relevador REMOTO lo recibirá con el nombre de POTT_Rx y ahora nuestro esquema de teleprotección 1 puede realizar el algoritmo para la aceleración del disparo por zona 2. Del mismo modo puede ser aplicado para fallas al 90% de la línea o fallas externas vistas desde ambos extremos de la línea. La respuesta que presentará el relevador ante cada una de estas depende de la lógica de operación propia del algoritmo de protección por POTT descrita a detalle en el Capítulo III. Note que ambos relevadores D60 son publicadores y suscriptores de mensajes GOOSE, ya que ambos deben estar preparados para transmitir el mensaje GOOSE y recibirlo para la implementación de la teleprotección por POTT. Como se puede ver a través de esta tesis esta forma de comunicación no solo es rápida sino que también describe el estado de recepción del mensaje. Como se observa en puntos anteriores, el mensaje GOOSE logra esto a través de su bit de calidad, lo cual es de suma importancia puesto que las otras formas de comunicación solo envían el mensaje sin que el extremo receptor pueda saber si la información recibida es confiable. De este modo sabemos que para que exista una comunicación adecuada la información que comparten debe de llegar con una excelente calidad. Si el relevador de distancia llegase a tener información alterada podría operar una falla externa o sin la existencia de una falla, es por ello que se escoge esta forma de comunicación entre subestaciones como teleprotección primaria.
6.5 Comunicación Secundaria del Esquema (Entradas/Salidas en el Canal de la Protección Diferencial)
En esta forma de comunicación, se aprovechará el canal de comunicación de la protección diferencial para enviar el disparo permisivo transferido de sobre alcance. Debido a las capacidades propias del módulo de comunicaciones del relevador diferencial, esté no es capaz de enviar mensajes GOOSE a través de esta fibra óptica, ya que el envío de mensajes GOOSE se realiza desde la unidad central de procesos, o bien llamada CPU del relevador y no desde el módulo utilizado para la comunicación en la implementación de una protección diferencial.
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 116
Para el mejor análisis de esta forma de comunicación, continuemos con el ejemplo del punto 6.4, donde un mensaje GOOSE que contiene el bit POTT_Tx y su bit propio de calidad es recibido en el relevador L90 LOCAL. El objetivo de utilizar el canal de fibra óptica para enviar el POTT de un extremo a otro es aprovechar la existencia del canal. Como se mencionó en el Capítulo IV, la fibra óptica es capaz transportar enormes cantidades de información, por lo que con el simple envío de las fasoletas para la protección diferencial, el canal se encuentra “sobrado”. Por lo tanto, el envío del POTT a través del mismo canal no altera el funcionamiento de la protección diferencial, ya que no existe un denso tráfico de red sobre este canal. En esta forma de comunicación el relevador D60 LOCAL publicará un mensaje GOOSE a la red del bus de estación de la subestación Magdalena. El relevador L90 LOCAL, quien se encuentra suscrito a este mensaje, lo recibirá y asignará una salida digital con el objetivo de enviar el disparo permisivo transferido POTT_Tx al relevador L90 REMOTO a través del canal de la protección diferencial. El relevador L90 REMOTO, al recibir la entrada digital con el POTT, publicará un mensaje GOOSE a la red del bus de estación de la subestación Santa Cruz. El relevador D60 REMOTO se encontrará suscrito a este mensaje y recibirá de esta forma el POTT_Rx. Es claro que el esquema de teleprotección distancia tiene 2 vías de comunicación por fibra óptica: una con mensaje GOOSE y otra con entradas y salidas digitales. Cabe resaltar que actualmente las subestaciones Magdalena y Santa Cruz cuentan con dos hilos de guarda independientes y dentro de cada uno de ellos se encuentran una serie de fibras ópticas integradas. Con esto, si se llega a dañar la fibra óptica dedicada de la teleprotección primaria tendremos el respaldo de la teleprotección vía entradas y salidas digitales, lo cual hace nuestro esquema mas confiable y, si se llegase a romper la fibra óptica de teleprotección de respaldo, la teleprotección primaria funcionaría sin ningún problema. Con esto garantizamos la confiabilidad de nuestro esquema de teleprotección.
6.6 Pruebas Funcionales de Laboratorio En esta sección se muestran los resultados de las pruebas realizadas en el laboratorio, así como una descripción de cada una de ellas y una tabla comparativa por prueba de los resultados esperados y los obtenidos. Todas las pruebas funcionales de laboratorio se realizaron con ayuda de un equipo especial que inyecta tensión y corriente a los relevadores. Este equipo es de la marca OMICRON modelo CMC 356 y se muestra en la Figura 6.7. Para una mejor percepción de cómo se encuentran físicamente los relevadores de protección puede apreciarse la Figura 6.8.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 117
Figura 6.7 Equipo de Pruebas OMICRON
Figura 6.8 Rack con Relevadores de Protección
Para lograr simular cada una de las fallas se utilizó un pequeño algoritmo en Excel, el cual nos brinda las magnitudes y ángulos que se le deben inyectar al relevador. En esta hoja de Excel solo es necesario modificar los parámetros que se encuentran en las casillas blancas y así podrá simularse la falla. Los datos de tensión y corriente se deben inyectar a través del equipo de pruebas para poder simular las distintas fallas con sus características de distancia y fase a fallar. Esta hoja de Excel se muestra en la Figura 6.9.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 118
Figura 6.9 Hoja de Excel para Pruebas de Localizador de Fallas (Falla al 10% de la
Línea)
Figura 6.10 Valores Inyectados al Equipo de Pruebas OMICRON (Falla al 10% de la
Línea)

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 119
Las pruebas funcionales de laboratorio pueden ser divididas en tres secciones principales, las cuales se refieren a la configuración del equipo. A su vez, cada sección principal tiene tres sub-secciones secundarias, las cuales se refieren a la distancia de falla. Las tres secciones principales son las siguientes:
1) Esquema de disparo permisivo transferido de sobrealcance POTT vía canal de teleprotección 1 y protección diferencial bloqueada.
2) Esquema de disparo permisivo transferido de sobrealcance POTT vía canal de teleprotección 2 y protección diferencial bloqueada.
3) Esquema completo con diferencial activada y disparo permisivo POTT por ambos canales de comunicación.
Las tres secciones secundarias son las siguientes:
Falla 1.- tipo AG al 10% del relevador Local. Falla 2.- tipo AG al 90% del relevador Local. Falla 3.- tipo AG al 110% del relevador Local.
NOTA: Para la realización de las pruebas se utilizaron cuatro relevadores L90, ya que
estos cuentan con todas las protecciones necesarias y utilizadas del relevador D60; es
por ello que los resultados son equivalentes.
6.6.1 Esquema de disparo permisivo transferido de sobrealcance POTT vía canal de teleprotección 1 y protección diferencial bloqueada.
En esta prueba se desea demostrar el funcionamiento óptimo del canal de teleprotección 1 el cual utiliza el mensaje GOOSE para enviar el POTT, como se describió anteriormente. Durante esta prueba se tiene configurado en el relevador L90 la protección diferencial y en el relevador D60 la protección distancia. Dado que nos enfocaremos únicamente al canal de teleprotección 1, se bloqueó la protección diferencial del relevador L90. Para demostrar el funcionamiento correcto y óptimo del POTT enviado por mensajes GOOSE, se simularan las fallas 1, 2 y 3 descritas en el Capítulo III. FALLA 1 En esta falla se espera que el relevador D60 LOCAL vea la falla al 10% de la línea, detecte la falla en zona 1, 2 y 3, dispare por zona 1 la fase A, y publique el mensaje POTT_Tx al relevador remoto debido al pickup de zona 2, activando los bits mostrados en la Tabla 6.3, donde se incluyó el resultado real obtenido.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 120
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 1.1 Esperado Real
Teleprotección: 1 GND DIST Z1 OP OK Mensaje GOOSE TRIP ONE POLE OK
Subestación: Magdalena TRIP PHASE A OK Relevador: D60_MAG
LOCAL POTT_Tx OK
POTT_Rx On(R/1) OK Tipo de Falla: AG
Distancia de Falla [%]: 10% Distancia de Falla [km]: 0.37km Tabla 6.3 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 1 en
Condiciones de Falla 1 En la Figura 6.11 se pueden apreciar los LEDs indicadores del relevador D60 LOCAL, donde se muestra la actividad de los bits mencionados. Asimismo, en la figura 6.13 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits mencionados. Además, como complemento, en la Figura 6.12 se incluye un acercamiento del reporte de falla, donde se muestra que el relevador local disparó por zona 1, tal y como se esperaba.
Figura 6.11 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 1 en
Condiciones de Falla 1
Figura 6.12 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 1

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 121
Figura 6.13 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 1 Asimismo, en esta falla se espera que el relevador D60 REMOTO vea la falla al 90% de la línea, detecte la falla en zona 2 y 3, publique el mensaje POTT_Tx al relevador remoto (debido al pickup de zona 2) y reciba el mensaje POTT_Rx del relevador D60_MAG, además de disparar la fase A por POTT, creando así la aceleración de disparo por zona 2. Los bits activados son mostrados en la Tabla 6.4, donde se incluyó el resultado real obtenido.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 1.1 Esperado Real
Teleprotección: 1 GND DIST Z2 PKP OK Mensaje GOOSE TRIP ONE POLE OK
Subestación: Santa Cruz TRIP PHASE A OK Relevador: D60_CRU
REMOTO POTT OP OK POTT_Tx OK
Tipo de Falla: AG POTT_Rx On(R/1) OK Distancia de Falla [%]: 90%
Distancia de Falla [km]: 3.33km Tabla 6.4 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 1 en
Condiciones de Falla 1 En la Figura 6.14 se pueden apreciar los LEDs indicadores del relevador D60 REMOTO, donde se muestra la actividad de los bits mencionados. Asimismo, en la Figura 6.15 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits mencionados. Además, como confirmación, en la Figura 6.16 se incluye un acercamiento del reporte de falla, verificando el disparo del relevador por POTT.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 122
Figura 6.14 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 1
en Condiciones de Falla 1
Figura 6.15 Acercamiento de Oscilografía relevador D60 REMOTO, Canal de
Teleprotección 1 en Condiciones de Falla 1
Figura 6.16 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 1

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 123
FALLA 2 En esta falla se espera que el relevador D60 LOCAL vea la falla al 90% de la línea, detecte la falla en zona 2 y 3, publique el mensaje POTT_Tx al relevador remoto (debido al pickup de zona 2) y reciba el mensaje POTT_Rx del relevador D60_CRU, además de disparar la fase A por POTT, creando así la aceleración de disparo por zona 2, al igual que como sucedió en el caso anterior pero con el intercambio entre local y remoto. Los bits activados son mostrados en la Tabla 6.5.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 1.2 Esperado Real
Teleprotección: 1 GND DIST Z2 PKP OK Mensaje GOOSE TRIP ONE POLE OK
Subestación: Magdalena TRIP PHASE A OK Relevador: D60_MAG
LOCAL POTT OP OK POTT_Tx OK
Tipo de Falla: AG POTT_Rx On(R/1) OK Distancia de Falla [%]: 90%
Distancia de Falla [km]: 3.33km Tabla 6.5 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 1 en
Condiciones de Falla 2 En la Figura 6.17 se pueden apreciar los LEDs indicadores del relevador D60 LOCAL, donde se muestra la actividad de los bits mencionados. Asimismo, en la Figura 6.18 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits mencionados. Además, como complemento, en la Figura 6.19 se incluye un acercamiento del reporte de falla, donde se muestra que el relevador local disparó por POTT, tal y como se esperaba.
Figura 6.17 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 1 en
Condiciones de Falla 2
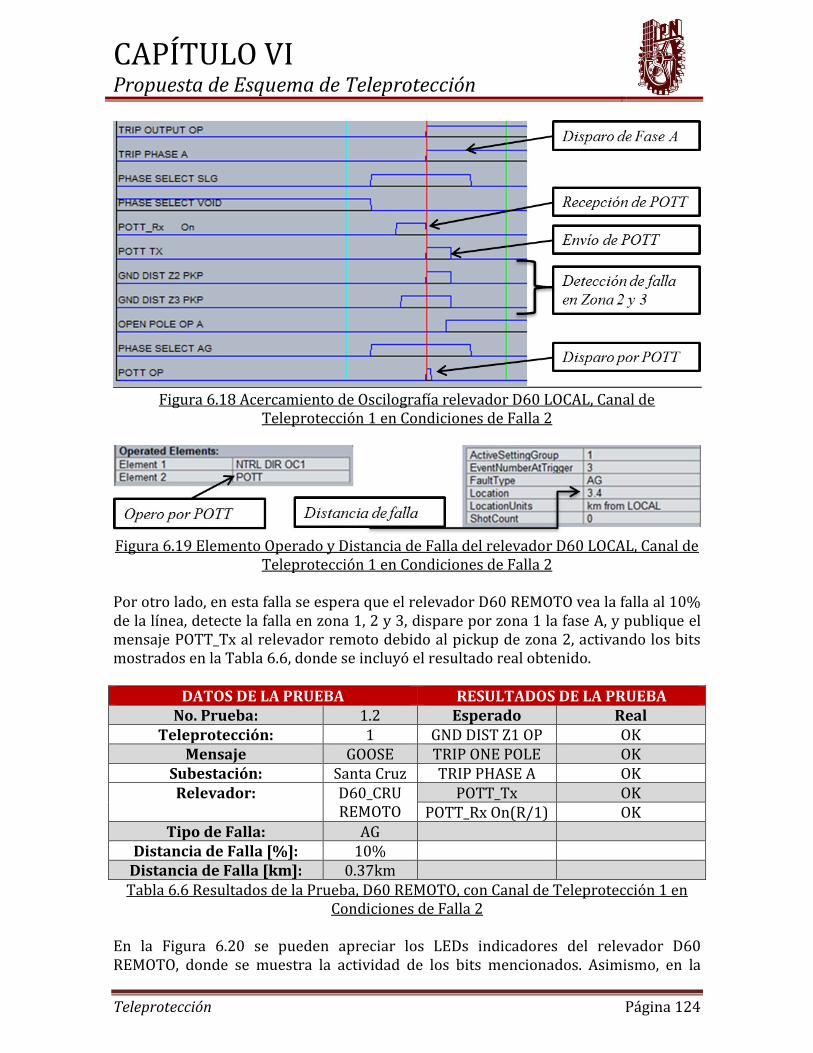
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 124
Figura 6.18 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 2
Figura 6.19 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 2 Por otro lado, en esta falla se espera que el relevador D60 REMOTO vea la falla al 10% de la línea, detecte la falla en zona 1, 2 y 3, dispare por zona 1 la fase A, y publique el mensaje POTT_Tx al relevador remoto debido al pickup de zona 2, activando los bits mostrados en la Tabla 6.6, donde se incluyó el resultado real obtenido.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 1.2 Esperado Real
Teleprotección: 1 GND DIST Z1 OP OK Mensaje GOOSE TRIP ONE POLE OK
Subestación: Santa Cruz TRIP PHASE A OK Relevador: D60_CRU
REMOTO POTT_Tx OK
POTT_Rx On(R/1) OK Tipo de Falla: AG
Distancia de Falla [%]: 10% Distancia de Falla [km]: 0.37km Tabla 6.6 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 1 en
Condiciones de Falla 2 En la Figura 6.20 se pueden apreciar los LEDs indicadores del relevador D60 REMOTO, donde se muestra la actividad de los bits mencionados. Asimismo, en la

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 125
Figura 6.21 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de ellos. Además, como una verificación en la Figura 6.22 se incluye un acercamiento del reporte de falla, verificando el disparo del relevador por zona 1.
Figura 6.20 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 1
en Condiciones de Falla 2
Figura 6.21 Acercamiento de Oscilografía relevador D60 REMOTO, Canal de
Teleprotección 1 en Condiciones de Falla 2

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 126
Figura 6.22 Elemento Operado y Distancia de Falla del relevador D60 REMOTO, Canal
de Teleprotección 1 en Condiciones de Falla 2 FALLA 3 En esta falla se espera que el relevador D60 LOCAL vea la falla al 110% de la línea, detecte la falla en zona 2 y 3, publique el mensaje POTT_Tx al relevador remoto (debido al pickup de zona 2). Dado que el relevador D60 REMOTO ve la falla hacia atrás (Falla Externa), el relevador D60 REMOTO no publicará ningún mensaje de POTT_Tx; por lo tanto, el relevador D60 LOCAL no operará por POTT, sino que esperará 300ms a que se mitigue la falla por operación de relevadores externos. Ya que estos relevadores externos no se encuentran simulados, nuestro relevador deberá operar por zona 2 una vez transcurridos los 300 milisegundos, disparando las fases A, B y C, lo que corresponde a un disparo tripolar, de acuerdo a la filosofía de protección. Los bits activados son mostrados en la Tabla 6.7.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 1.3 Esperado Real
Teleprotección: 1 GND DIST Z2 OP OK Mensaje GOOSE TRIP THREE POLE OK
Subestación: Magdalena TRIP PHASE A,B,C OK Relevador: D60_MAG
LOCAL POTT_Tx OK
Tipo de Falla: AG
Distancia de Falla [%]: 110% Distancia de Falla [km]: 4.07km Tabla 6.7 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 1 en
Condiciones de Falla 3 En la Figura 6.23 se muestra un acercamiento del reporte de falla, donde se observa que el relevador local disparó por zona 2 y a su vez se muestra la distancia de falla, confirmando que sea una falla fuera de la línea de transmisión a proteger (recordando que la longitud de la línea de transmisión es de 3.7 km). Además, en la Figura 6.24 se pueden apreciar los LEDs indicadores del relevador D60 LOCAL, donde se muestra la actividad de los bits mencionados. Para verificar el tiempo de disparo, en la Figura 6.25 se incluye un acercamiento donde se compara el tiempo desde la detección de falla en zona 2 hasta el levantamiento del bit de disparo de zona 2 y el disparo tripolar (note que el tiempo del bit de disparo tripolar y el bit de disparo por zona 2 es el mismo). De la misma manera, en la Figura 6.26 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits generados.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 127
Figura 6.23 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 3
Figura 6.24 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 1 en
Condiciones de Falla 3

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 128
Figura 6.25 Reporte de Eventos del Relevador D60 LOCAL, Canal de Teleprotección 1
en Condiciones de Falla 3
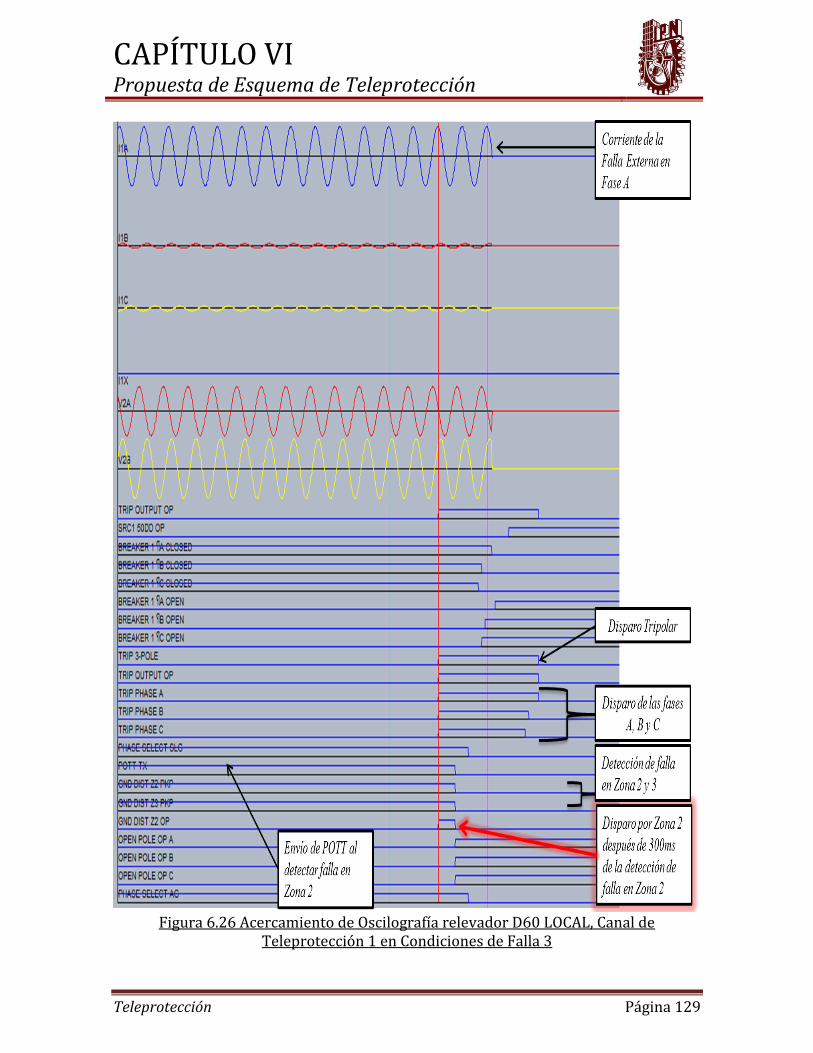
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 129
Figura 6.26 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 3
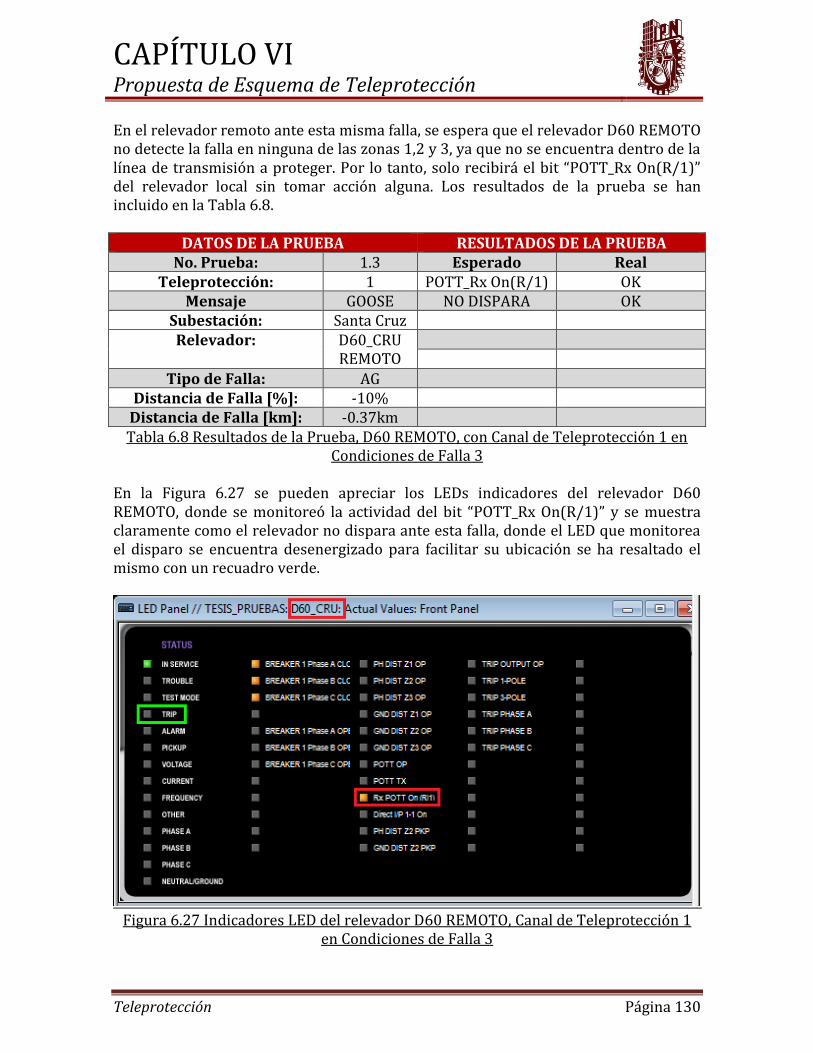
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 130
En el relevador remoto ante esta misma falla, se espera que el relevador D60 REMOTO no detecte la falla en ninguna de las zonas 1,2 y 3, ya que no se encuentra dentro de la línea de transmisión a proteger. Por lo tanto, solo recibirá el bit “POTT_Rx On(R/1)” del relevador local sin tomar acción alguna. Los resultados de la prueba se han incluido en la Tabla 6.8.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 1.3 Esperado Real
Teleprotección: 1 POTT_Rx On(R/1) OK Mensaje GOOSE NO DISPARA OK
Subestación: Santa Cruz Relevador: D60_CRU
REMOTO
Tipo de Falla: AG Distancia de Falla [%]: -10%
Distancia de Falla [km]: -0.37km Tabla 6.8 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 1 en
Condiciones de Falla 3 En la Figura 6.27 se pueden apreciar los LEDs indicadores del relevador D60 REMOTO, donde se monitoreó la actividad del bit “POTT_Rx On(R/1)” y se muestra claramente como el relevador no dispara ante esta falla, donde el LED que monitorea el disparo se encuentra desenergizado para facilitar su ubicación se ha resaltado el mismo con un recuadro verde.
Figura 6.27 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 1
en Condiciones de Falla 3
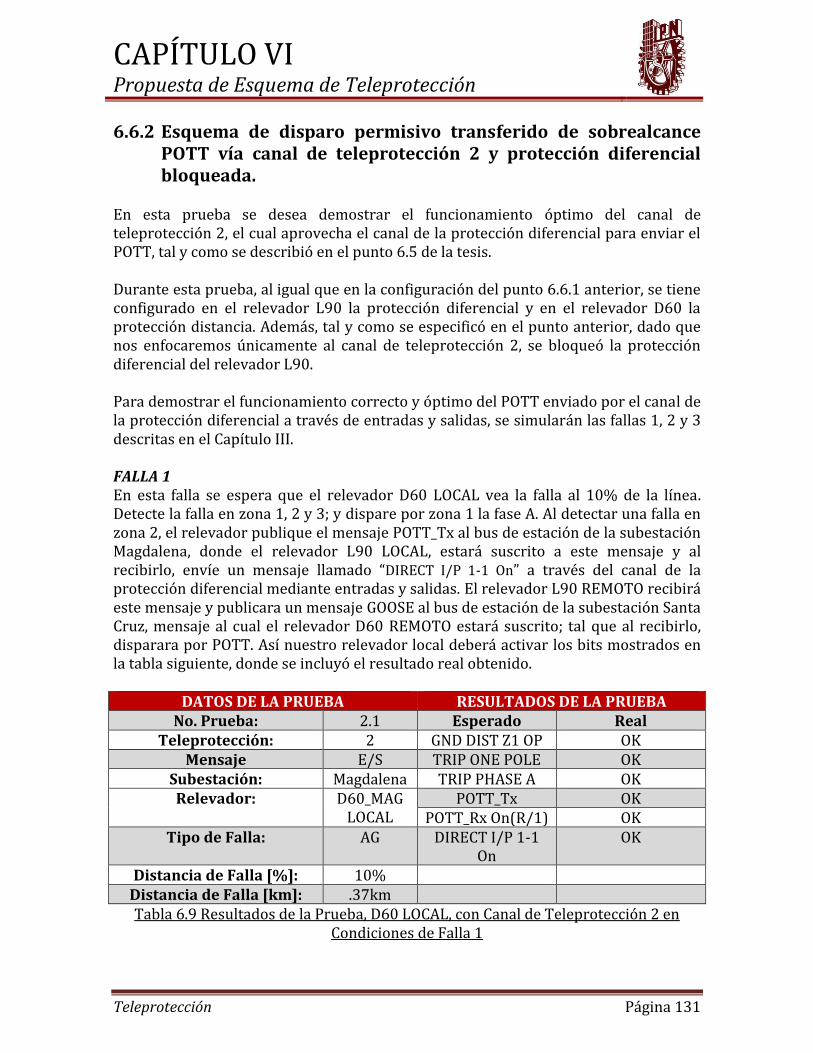
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 131
6.6.2 Esquema de disparo permisivo transferido de sobrealcance POTT vía canal de teleprotección 2 y protección diferencial bloqueada.
En esta prueba se desea demostrar el funcionamiento óptimo del canal de teleprotección 2, el cual aprovecha el canal de la protección diferencial para enviar el POTT, tal y como se describió en el punto 6.5 de la tesis. Durante esta prueba, al igual que en la configuración del punto 6.6.1 anterior, se tiene configurado en el relevador L90 la protección diferencial y en el relevador D60 la protección distancia. Además, tal y como se especificó en el punto anterior, dado que nos enfocaremos únicamente al canal de teleprotección 2, se bloqueó la protección diferencial del relevador L90. Para demostrar el funcionamiento correcto y óptimo del POTT enviado por el canal de la protección diferencial a través de entradas y salidas, se simularán las fallas 1, 2 y 3 descritas en el Capítulo III. FALLA 1 En esta falla se espera que el relevador D60 LOCAL vea la falla al 10% de la línea. Detecte la falla en zona 1, 2 y 3; y dispare por zona 1 la fase A. Al detectar una falla en zona 2, el relevador publique el mensaje POTT_Tx al bus de estación de la subestación Magdalena, donde el relevador L90 LOCAL, estará suscrito a este mensaje y al recibirlo, envíe un mensaje llamado “DIRECT I/P 1-1 On” a través del canal de la protección diferencial mediante entradas y salidas. El relevador L90 REMOTO recibirá este mensaje y publicara un mensaje GOOSE al bus de estación de la subestación Santa Cruz, mensaje al cual el relevador D60 REMOTO estará suscrito; tal que al recibirlo, disparara por POTT. Así nuestro relevador local deberá activar los bits mostrados en la tabla siguiente, donde se incluyó el resultado real obtenido.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 2.1 Esperado Real
Teleprotección: 2 GND DIST Z1 OP OK Mensaje E/S TRIP ONE POLE OK
Subestación: Magdalena TRIP PHASE A OK Relevador: D60_MAG
LOCAL POTT_Tx OK
POTT_Rx On(R/1) OK Tipo de Falla: AG DIRECT I/P 1-1
On OK
Distancia de Falla [%]: 10% Distancia de Falla [km]: .37km Tabla 6.9 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 2 en
Condiciones de Falla 1

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 132
En la Figura 6.28 se pueden apreciar los LED indicadores del relevador D60 LOCAL, donde se muestra la actividad de los bits mencionados. Asimismo, en la Figura 6.29 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits mencionados. Además, como complemento, en la Figura 6.30 se incluye un acercamiento del reporte de falla, donde se muestra que el relevador local disparó por zona 1, tal y como se esperaba.
Figura 6.28 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 2 en
Condiciones de Falla 1
Figura 6.29 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de
Teleprotección 2 en Condiciones de Falla 1

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 133
Figura 6.30 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 2 en Condiciones de Falla 1 Asimismo, en esta falla, se espera que el relevador D60 REMOTO vea la falla al 90% de la línea, detecte la falla en zona 2 y 3, publique un mensaje GOOSE al relevador L90 REMOTO, el cual enviará el mensaje POTT_Tx a través del canal de la protección diferencial al relevador L90 LOCAL mediante entradas y salidas, para que después este publique un mensaje GOOSE y pueda recibirlo el relevador D60 LOCAL, el cual estará suscrito a este mensaje. El relevador D60 REMOTO deberá recibir el mensaje “DIRECT I/P 1-1 On” enviado de la misma forma a través del canal de la diferencial y disparar por POTT la fase A. Cabe resaltar que el mensaje “DIRECT I/P 1-1 On” es el POTT pero enviado a través de una entrada y salida cumpliendo la teleprotección 2 y creando así la aceleración de disparo por zona 2 aprovechando el canal de la protección diferencial. Los bits activados son mostrados en la Tabla 6.10, donde se incluyó el resultado real obtenido.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 2.1 Esperado Real
Teleprotección: 2 GND DIST Z2 PKP OK Mensaje E/S TRIP ONE POLE OK
Subestación: Santa Cruz TRIP PHASE A OK Relevador: D60_CRU
REMOTO POTT OP OK POTT_Tx OK
Tipo de Falla: AG DIRECT I/P 1-1 On
OK
Distancia de Falla [%]: 90% Distancia de Falla [km]: 3.33km
Tabla 6.10 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 2 en Condiciones de Falla 1
En la Figura 6.31 se pueden apreciar los LED indicadores del relevador D60 REMOTO, donde se muestra la actividad de los bits mencionados. Asimismo, en la Figura 6.32 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits generados. Además, como complemento, en la Figura 6.33 se incluye un acercamiento del reporte de falla, donde se muestra que el relevador remoto disparó por POTT, tal y como se esperaba.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 134
Figura 6.31 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 2
en Condiciones de Falla 1
Figura 6.32 Acercamiento de Oscilografía relevador D60 REMOTO, Canal de
Teleprotección 2 en Condiciones de Falla 1
Figura 6.33 Elemento Operado y Distancia de Falla del relevador D60 REMOTO, Canal
de Teleprotección 2 en Condiciones de Falla 1

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 135
FALLA 2 En esta falla se espera que el relevador D60 LOCAL vea la falla al 90% de la línea, detecte la falla en zona 2 y 3, publique un mensaje GOOSE al relevador L90 LOCAL, el cual enviará el POTT_Tx mensaje a través del canal de la protección diferencial al relevador L90 REMOTO mediante entradas y salidas, para que después este publique un mensaje GOOSE y pueda recibirlo el relevador D60 REMOTO, el cual estará suscrito a este mensaje. El relevador D60 LOCAL deberá recibir el mensaje “DIRECT I/P 1-1 On” (POTT enviado por Entradas y Salidas) de la misma forma a través del canal de la diferencial y disparar por POTT la fase A, creando así como en la falla anterior la aceleración de disparo por zona 2 aprovechando el canal de la protección diferencial. Los bits activados son mostrados en la Tabla 6.11, donde se incluyó el resultado real obtenido.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 2.2 Esperado Real
Teleprotección: 2 GND DIST Z2 PKP OK Mensaje E/S TRIP ONE POLE OK
Subestación: Magdalena TRIP PHASE A OK Relevador: D60_MAG
LOCAL POTT OP OK POTT_Tx OK
Tipo de Falla: AG DIRECT I/P 1-1 On
OK
Distancia de Falla [%]: 90% Distancia de Falla [km]: 3.33km Tabla 6.11 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 2 en
Condiciones de Falla 2 Al igual que en todos los casos, en la Figura 6.34 se incluye un acercamiento del reporte de falla, donde se muestra que el relevador local disparó por POTT. Asimismo, en la Figura 6.35 se pueden apreciar los LED indicadores del relevador D60 LOCAL, donde se muestra la actividad de los bits mencionados. Además, en la Figura 6.36 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits generados.
Figura 6.34 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 2 en Condiciones de Falla 2
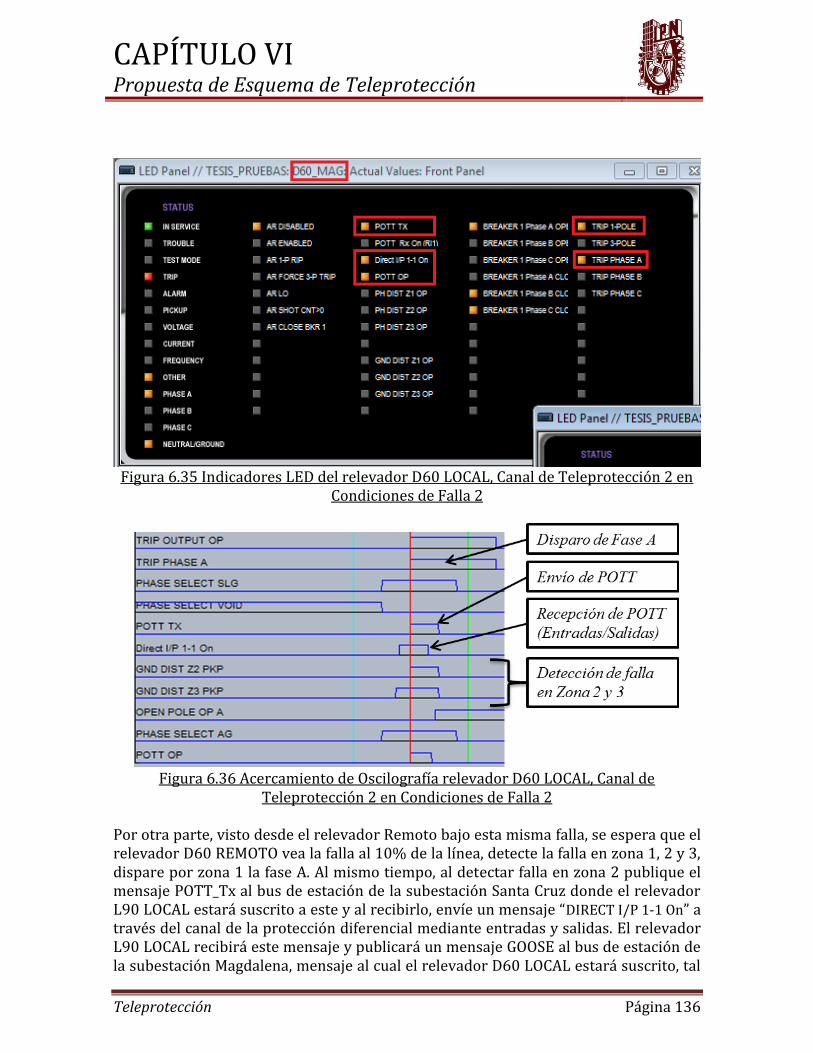
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 136
Figura 6.35 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 2 en
Condiciones de Falla 2
Figura 6.36 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de
Teleprotección 2 en Condiciones de Falla 2 Por otra parte, visto desde el relevador Remoto bajo esta misma falla, se espera que el relevador D60 REMOTO vea la falla al 10% de la línea, detecte la falla en zona 1, 2 y 3, dispare por zona 1 la fase A. Al mismo tiempo, al detectar falla en zona 2 publique el mensaje POTT_Tx al bus de estación de la subestación Santa Cruz donde el relevador L90 LOCAL estará suscrito a este y al recibirlo, envíe un mensaje “DIRECT I/P 1-1 On” a través del canal de la protección diferencial mediante entradas y salidas. El relevador L90 LOCAL recibirá este mensaje y publicará un mensaje GOOSE al bus de estación de la subestación Magdalena, mensaje al cual el relevador D60 LOCAL estará suscrito, tal
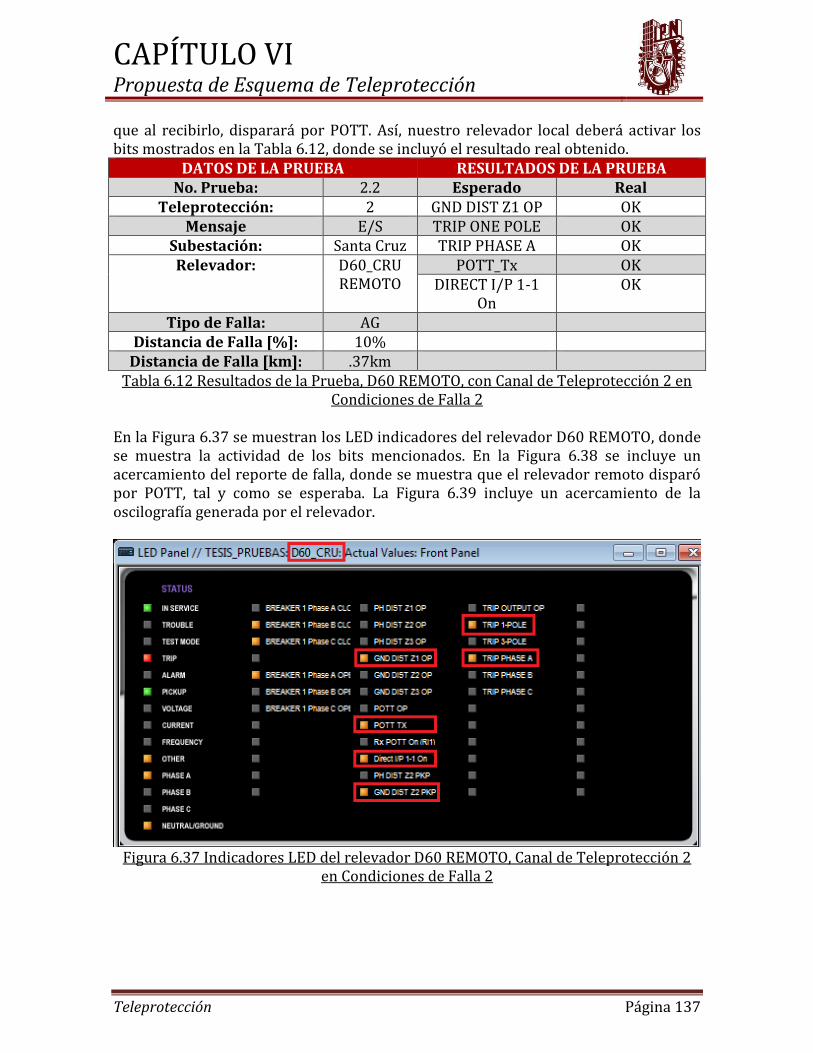
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 137
que al recibirlo, disparará por POTT. Así, nuestro relevador local deberá activar los bits mostrados en la Tabla 6.12, donde se incluyó el resultado real obtenido.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 2.2 Esperado Real
Teleprotección: 2 GND DIST Z1 OP OK Mensaje E/S TRIP ONE POLE OK
Subestación: Santa Cruz TRIP PHASE A OK Relevador: D60_CRU
REMOTO POTT_Tx OK
DIRECT I/P 1-1 On
OK
Tipo de Falla: AG Distancia de Falla [%]: 10%
Distancia de Falla [km]: .37km Tabla 6.12 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 2 en
Condiciones de Falla 2 En la Figura 6.37 se muestran los LED indicadores del relevador D60 REMOTO, donde se muestra la actividad de los bits mencionados. En la Figura 6.38 se incluye un acercamiento del reporte de falla, donde se muestra que el relevador remoto disparó por POTT, tal y como se esperaba. La Figura 6.39 incluye un acercamiento de la oscilografía generada por el relevador.
Figura 6.37 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 2
en Condiciones de Falla 2

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 138
Figura 6.38 Elemento Operado y Distancia de Falla del relevador D60 REMOTO, Canal
de Teleprotección 2 en Condiciones de Falla 2
Figura 6.39 Acercamiento de Oscilografía relevador D60 REMOTO, Canal de
Teleprotección 2 en Condiciones de Falla 2
FALLA 3 En esta falla se espera que el relevador D60 LOCAL vea la falla al 110% de la línea, detecte la falla en zona 2 y 3, publique el mensaje POTT_Tx al bus de estación de la subestación Magdalena, donde el relevador L90 LOCAL estará suscrito a este y al recibirlo, envíe un mensaje “DIRECT I/P 1-1 On” a través del canal de la protección diferencial mediante entradas y salidas. El relevador L90 REMOTO recibirá este mensaje y publicará un mensaje GOOSE al bus de estación de la subestación Santa Cruz, mensaje al cual el relevador D60 REMOTO estará suscrito. Dado que el relevador D60 REMOTO verá la falla hacia atrás (Falla Externa), el relevador D60 REMOTO no publicará ningún bit de POTT_Tx. Por lo tanto, el relevador D60 LOCAL no operará por POTT, sino que esperará 300ms a que se mitigue la falla por operación de relevadores externos. Como se mencionó previamente, estos relevadores externos no se encuentran simulados, por lo tanto nuestro relevador deberá operar por zona 2 una vez transcurridos los 300 milisegundos, disparando las fases A, B y C, lo que corresponde a un disparo tripolar, de acuerdo a la filosofía de protección. Los bits activados son mostrados en la Tabla 6.13.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 2.3 Esperado Real
Teleprotección: 1 GND DIST Z2 OP OK Mensaje E/S TRIP THREE POLE OK
Subestación: Magdalena TRIP PHASE A,B,C OK

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 139
Relevador: D60_MAG LOCAL
POTT_Tx OK
Tipo de Falla: AG Distancia de Falla [%]: 110%
Distancia de Falla [km]: 4.07km Tabla 6.13 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 2 en
Condiciones de Falla 3 En la Figura 6.40 se pueden apreciar los LED indicadores del relevador D60 LOCAL, donde se muestra la actividad de los bits mencionados. En la Figura 6.41 se muestra un acercamiento del reporte de falla, donde se observa que el relevador local disparó por zona 2 y a su vez se muestra la distancia de falla, confirmando que sea una falla fuera de la línea de transmisión a proteger (recordando que la longitud de la línea de transmisión es de 3.7 km).
Figura 6.40 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 2 en
Condiciones de Falla 3
Figura 6.41 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 2 en Condiciones de Falla 3 En la Figura 6.42 se incluye un acercamiento al Reporte de Eventos donde se realizan dos comparaciones de tiempo. La primera comparación se muestra a la derecha de la imagen como una resta entre el tiempo desde la detección de falla en zona 2 hasta el levantamiento del bit de disparo de zona 2 (los tiempos utilizados para la resta se

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 140
resaltaron con un recuadro negro). La segunda comparación muestra la diferencia de tiempo entre la operación de Zona 2 y el disparo tripolar. Además, note que el tiempo del bit de disparo tripolar y el bit de disparo por zona 2 es el mismo.
Figura 6.42 Reporte de Eventos del Relevador D60 LOCAL, Canal de Teleprotección 2
en Condiciones de Falla 3 En la Figura 6.42, la diferencia del tiempo que existe entre el pickup de zona 2 y el disparo tripolar es debida a la lógica creada para el disparo. Con esta comparación, se puede observar la rapidez del procesamiento de la lógica. Para completar los resultados de esta falla, en la Figura 6.43 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits generados.
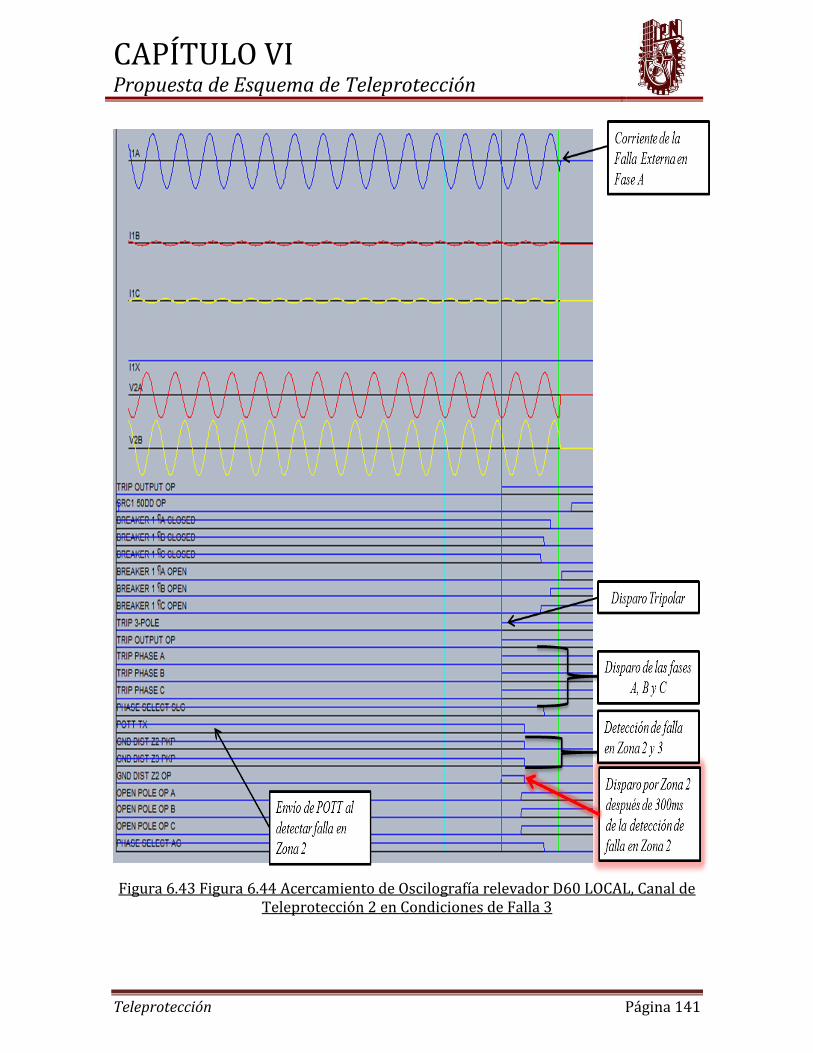
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 141
Figura 6.43 Figura 6.44 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de
Teleprotección 2 en Condiciones de Falla 3

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 142
Ante esta misma falla, en el relevador remoto se espera que el relevador D60 REMOTO no detecte la falla en ninguna de las zonas 1,2 y 3, ya que no se encuentra dentro de la línea de transmisión a proteger. Por lo tanto, solo recibirá el bit “DIRECT I/P 1-1 On” (POTT por Entradas y Salidas) del relevador local, sin tomar acción alguna de acuerdo a la lógica del POTT analizada en el Capítulo III. Los resultados de la prueba se han incluido en la Tabla 6.14.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 2.3 Esperado Real
Teleprotección: 1 DIRECT I/P 1-1 On
OK
Mensaje E/S NO DISPARA OK Subestación: Santa Cruz Relevador: D60_CRU
REMOTO
Tipo de Falla: AG Distancia de Falla [%]: -10%
Distancia de Falla [km]: -0.37km Tabla 6.14 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 2 en
Condiciones de Falla 3 En la Figura 6.44 se pueden apreciar los LED indicadores del relevador D60 REMOTO, donde se monitoreó la actividad del bit “DIRECT I/P 1-1 On” y se muestra claramente como el relevador no dispara ante esta falla: el LED que monitorea el disparo se encuentra desenergizado (para facilitar su ubicación se ha resaltado el mismo con un recuadro verde).
Figura 6.45 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 2
en Condiciones de Falla 3

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 143
6.6.3 Esquema de disparo permisivo transferido de sobrealcance POTT vía canal de teleprotección 1 y 2, con protección diferencial desbloqueada.
Hasta el momento, ya hemos demostrado el funcionamiento óptimo del esquema de teleprotección operando por separado. En esta sección se desea probar el esquema de teleprotección completo, donde además se incluirá la protección diferencial del esquema, es decir, estarán activas las dos protecciones principales PP1 y PP2 para demostrar que es irrelevante que se utilice el canal de la protección diferencial como canal de teleprotección de respaldo de la PP2 para el envío del POTT. Los bits de la protección diferencial son monitoreados desde el relevador D60 para poder comparar los tiempos de operación. Para demostrar el funcionamiento correcto y óptimo del esquema de teleprotección propuesto y la irrelevancia del uso del canal de la protección diferencial de la PP1 como canal de teleprotección de respaldo para la PP2, se probarán las tres fallas descritas en el Capítulo III, tal como se realizó en los puntos 6.6.1 y 6.6.2. Como nota final, es posible que el esquema no llegue a disparar por POTT, ya que la protección diferencial es más rápida que la aceleración de disparo por zona 2, pero este hecho no significa que el esquema no esté operando adecuadamente; es por ello que fue probado individualmente en los puntos 6.6.1 y 6.6.2. Además, el objetivo de esta prueba es comprobar el envío y recepción del POTT por ambos canales de teleprotección y que su envío no interfiera con la operación de la protección diferencial. FALLA 1 En esta falla se espera que los relevadores L90 LOCAL y L90 REMOTO vean falla interna (falla dentro de la línea a proteger) en fase A, opere la protección diferencial activando el bit “87L DIFF OP”, dispare la fase A activando el bit “87L TRIP OP A” y, dado que el disparo es monopolar, active el bit “87L TRIP 1P OP”, todo en ambos relevadores. Al mismo tiempo, se espera que el relevador D60 LOCAL vea la falla al 10% de la línea, detecte la falla en zona 1, 2 y 3, dispare por zona 1 la fase A, envíe el mensaje POTT_Tx al relevador D60 REMOTO por los dos canales de teleprotección, publicando el mensaje mediante mensajes GOOSE y aprovechando el canal de la protección diferencial mediante Entradas y Salidas. Los bits generados en los relevadores LOCALES son mostrados en la Tabla 6.15, donde se incluye el resultado real obtenido. Además, en la Figura 6.46 se pueden apreciar los LED indicadores del relevador D60 LOCAL, donde se muestra la actividad de los bits. Asimismo, en la Figura 6.47 se incluye un acercamiento del reporte de falla, en la cual se muestra que el relevador local disparó por 87L y por zona 1, tal y como se esperaba. Para verificar esto, en la Figura 6.48, se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits mencionados.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 144
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 3.1 Esperado Real
Teleprotección: 1 & 2 87L DIFF OP OK Mensajes GOOSE & E/S 87L TRIP OP OK
Subestación: Magdalena 87L TRIP 1P OP OK Relevadores: D60_MAG
L90_MAG LOCAL
GND DIST Z1 OP OK TRIP ONE POLE OK TRIP PHASE A OK
Tipo de Falla: AG POTT_Tx OK Distancia de Falla [%]: 10% POTT_Rx On(R/1) OK
Distancia de Falla [km]: 0.37km Direct I/P 1-1 On OK Tabla 6.15 Resultados de la Prueba, D60 LOCAL, Canal de Teleprotección 1 & 2 con
Protección Diferencial Activada, Condiciones de Falla 1
Figura 6.46 Indicadores LED del Relevador D60 LOCAL, Canal de Teleprotección 1&2
con Protección Diferencial Activada, Condiciones de Falla 1
Figura 6.47 Elemento Operado y Distancia de Falla del Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 1
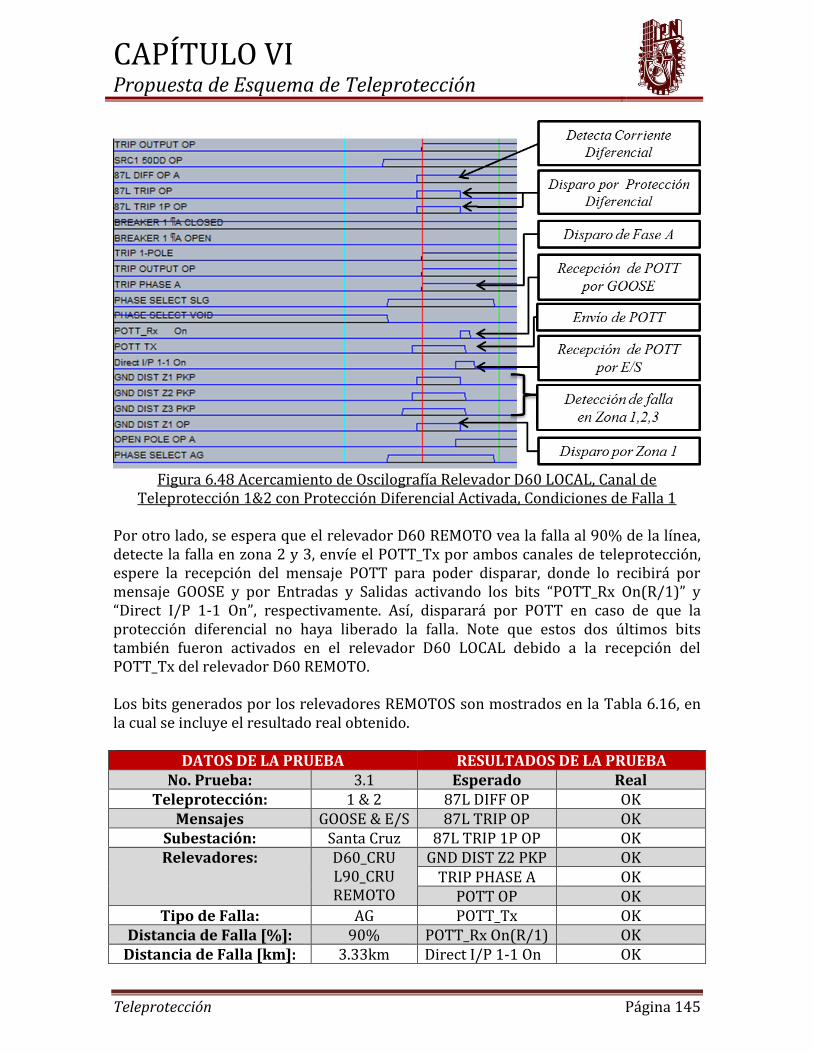
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 145
Figura 6.48 Acercamiento de Oscilografía Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 1 Por otro lado, se espera que el relevador D60 REMOTO vea la falla al 90% de la línea, detecte la falla en zona 2 y 3, envíe el POTT_Tx por ambos canales de teleprotección, espere la recepción del mensaje POTT para poder disparar, donde lo recibirá por mensaje GOOSE y por Entradas y Salidas activando los bits “POTT_Rx On(R/1)” y “Direct I/P 1-1 On”, respectivamente. Así, disparará por POTT en caso de que la protección diferencial no haya liberado la falla. Note que estos dos últimos bits también fueron activados en el relevador D60 LOCAL debido a la recepción del POTT_Tx del relevador D60 REMOTO. Los bits generados por los relevadores REMOTOS son mostrados en la Tabla 6.16, en la cual se incluye el resultado real obtenido.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 3.1 Esperado Real
Teleprotección: 1 & 2 87L DIFF OP OK Mensajes GOOSE & E/S 87L TRIP OP OK
Subestación: Santa Cruz 87L TRIP 1P OP OK Relevadores: D60_CRU
L90_CRU REMOTO
GND DIST Z2 PKP OK TRIP PHASE A OK
POTT OP OK Tipo de Falla: AG POTT_Tx OK
Distancia de Falla [%]: 90% POTT_Rx On(R/1) OK Distancia de Falla [km]: 3.33km Direct I/P 1-1 On OK

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 146
Tabla 6.16 Resultados de la Prueba, D60 REMOTO, Canal de Teleprotección 1 & 2 con Protección Diferencial Activada, Condiciones de Falla 1
En la Figura 6.49 se pueden apreciar los LED indicadores del relevador D60 REMOTO, donde se muestra la actividad de los bits. Asimismo, en la figura 6.50 se incluye un acercamiento del reporte de falla, donde se muestran los elementos operados en el relevador. Cabe resaltar que la operación de la protección diferencial es más rápida que la aceleración de disparo por zona 2. Por lo tanto, es posible que en el reporte de falla no se observe el disparo por POTT, no porque no cumpla las condiciones de disparo, sino porque la falla ya habrá sido liberada por la acción de la protección diferencial. Para confirmar la operación del POTT, la Figura 6.51 presenta un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits mencionados.
Figura 6.49 Indicadores LED del Relevador D60 REMOTO, Canal de Teleprotección
1&2 con Protección Diferencial Activada, Condiciones de Falla 1
Figura 6.50 Elemento Operado y Distancia de Falla del Relevador D60 REMOTO, Canal
de Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 1

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 147
Figura 6.51 Acercamiento de Oscilografía Relevador D60 REMOTO, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 1
Note en la oscilografía que hubo un ligero pickup en zona 2 cuando ya se había recibido el mensaje POTT_Tx del relevador D60 LOCAL, por lo que, de acuerdo a la lógica de operación del POTT, este mando operar y es por ello que el LED que monitoreaba la operación del POTT fue activado. Además, note que la operación de la protección diferencial no fue comprometida por el uso del canal de la diferencial como canal de teleprotección de respaldo. Es por esto que la protección diferencial puede operar sin ningún problema. FALLA 2 En esta falla, se espera que los relevadores L90 LOCAL y L90 REMOTO vean falla interna en fase A, opere la protección diferencial disparando la fase A, donde se activarán los siguientes bits: “87L DIFF OP”, “87L TRIP OP A” y “87L TRIP 1P OP”, al igual que en falla 1.
Al mismo tiempo, se espera que el relevador D60 LOCAL vea la falla al 90% de la línea, detecte la falla en zona 2 y 3, envíe el POTT_Tx por ambos canales de teleprotección, espere la recepción del mensaje POTT para poder disparar, donde lo recibirá por mensaje GOOSE y por Entradas y Salidas activando los bits “POTT_Rx On(R/1)” y “Direct I/P 1-1 On”, respectivamente.
Los bits generados por los relevadores LOCALES son mostrados en la Tabla 6.17, donde se incluye el resultado real obtenido. En la Figura 6.52 se pueden apreciar los LED indicadores del relevador D60 REMOTO, donde se muestra la actividad de los bits. Además, en la Figura 6.53 se incluye un acercamiento del reporte de falla, donde se muestran los elementos operados en el relevador.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 148
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 3.2 Esperado Real
Teleprotección: 1 & 2 87L DIFF OP OK Mensajes GOOSE & E/S 87L TRIP OP OK
Subestación: Magdalena 87L TRIP 1P OP OK Relevadores: D60_CRU
L90_CRU LOCAL
GND DIST Z2 PKP OK TRIP PHASE A OK
POTT OP SIN ACTIVIDAD Tipo de Falla: AG POTT_Tx OK
Distancia de Falla [%]: 90% POTT_Rx On(R/1) OK Distancia de Falla [km]: 3.33km Direct I/P 1-1 On OK
Tabla 6.17 Resultados de la Prueba, D60 LOCAL, Canal de Teleprotección 1 & 2 con Protección Diferencial Activada, Condiciones de Falla 2
Figura 6.52 Indicadores LED del Relevador D60 LOCAL, Canal de Teleprotección 1&2
con Protección Diferencial Activada, Condiciones de Falla 2
Figura 6.53 Elemento Operado y Distancia de Falla del Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 2 Note que en la tabla de resultados el bit “POTT OP”, encerrado en un recuadro verde, no presenta actividad. Esto se debe a que la protección diferencial detectó la falla mucho antes de que fuese detectada por zona 2 e incluso antes de que fuese detectada
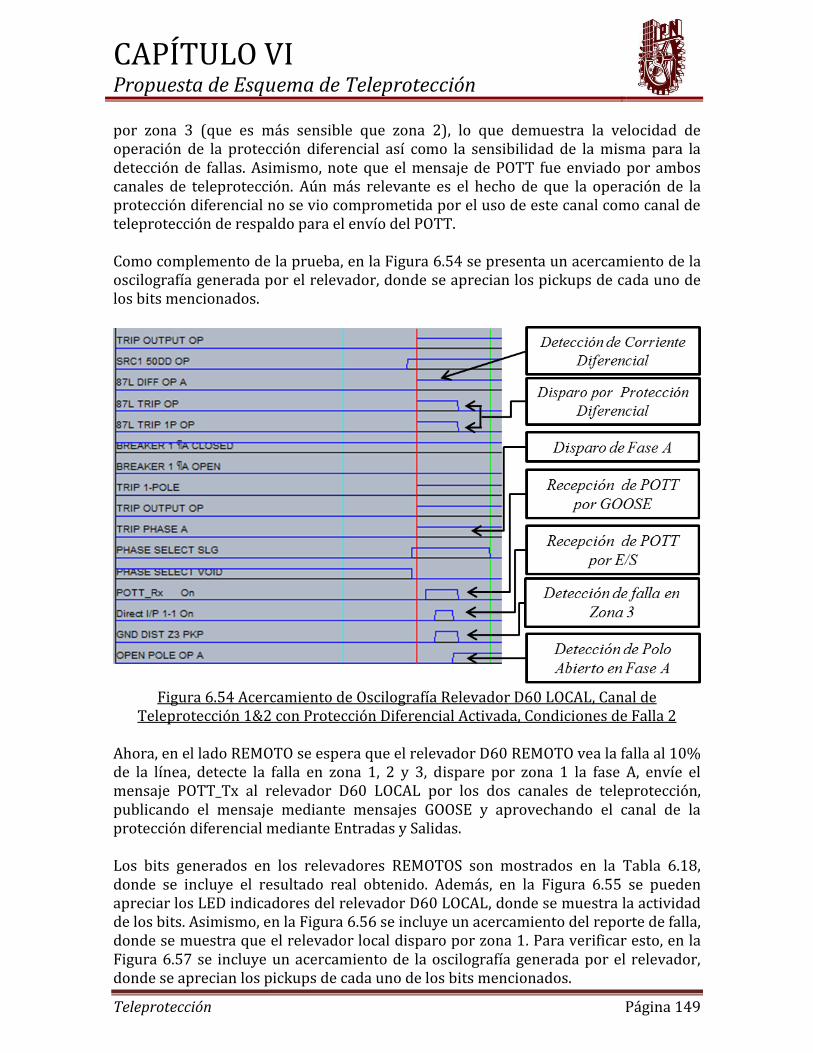
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 149
por zona 3 (que es más sensible que zona 2), lo que demuestra la velocidad de operación de la protección diferencial así como la sensibilidad de la misma para la detección de fallas. Asimismo, note que el mensaje de POTT fue enviado por ambos canales de teleprotección. Aún más relevante es el hecho de que la operación de la protección diferencial no se vio comprometida por el uso de este canal como canal de teleprotección de respaldo para el envío del POTT. Como complemento de la prueba, en la Figura 6.54 se presenta un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits mencionados.
Figura 6.54 Acercamiento de Oscilografía Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 2 Ahora, en el lado REMOTO se espera que el relevador D60 REMOTO vea la falla al 10% de la línea, detecte la falla en zona 1, 2 y 3, dispare por zona 1 la fase A, envíe el mensaje POTT_Tx al relevador D60 LOCAL por los dos canales de teleprotección, publicando el mensaje mediante mensajes GOOSE y aprovechando el canal de la protección diferencial mediante Entradas y Salidas. Los bits generados en los relevadores REMOTOS son mostrados en la Tabla 6.18, donde se incluye el resultado real obtenido. Además, en la Figura 6.55 se pueden apreciar los LED indicadores del relevador D60 LOCAL, donde se muestra la actividad de los bits. Asimismo, en la Figura 6.56 se incluye un acercamiento del reporte de falla, donde se muestra que el relevador local disparo por zona 1. Para verificar esto, en la Figura 6.57 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits mencionados.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 150
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA
No. Prueba: 3.2 Esperado Real Teleprotección: 1 & 2 87L DIFF OP OK
Mensajes GOOSE & E/S 87L TRIP OP OK Subestación: Santa Cruz 87L TRIP 1P OP OK Relevadores: D60_CRU
L90_CRU REMOTO
GND DIST Z1 OP OK TRIP ONE POLE OK TRIP PHASE A OK
Tipo de Falla: AG POTT_Tx OK Distancia de Falla [%]: 10% POTT_Rx On(R/1) OK
Distancia de Falla [km]: 0.37km Direct I/P 1-1 On OK Tabla 6.18 Resultados de la Prueba, D60 REMOTO, Canal de Teleprotección 1 & 2 con
Protección Diferencial Activada, Condiciones de Falla 2
Figura 6.55 Indicadores LED del Relevador D60 REMOTO, Canal de Teleprotección
1&2 con Protección Diferencial Activada, Condiciones de Falla 2
Figura 6.56 Elemento Operado y Distancia de Falla del Relevador D60 REMOTO, Canal
de Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 2

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 151
En esta prueba se puede observar como el relevador operó de manera instantánea por zona 1. Aunque en el reporte de falla se esperaba que la protección diferencial fuese activada, esto no se muestra ya que al estar la falla más cerca al relevador, fue más sencillo detectarla por zona 1. Note que la ausencia de la protección diferencial en el reporte de falla no significa que no se activara, solo nos indica que la protección por zona 1 se activó más rápido que la protección diferencial. Una clara demostración de este hecho es que en el panel de LED donde los bits correspondientes a la protección diferencial fueron activados. Para corroborar estos datos, en la Figura 6.57 se muestra un acercamiento a la oscilografía mostrada en la figura 6.56.
Figura 6.57 Acercamiento de Oscilografía Relevador D60 REMOTO, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 2 FALLA 3 En esta falla, se espera que los relevadores L90 LOCAL y L90 REMOTO detecten falla, ya que se trata de una falla externa. Por otro lado, se espera que el relevador D60 LOCAL vea la falla al 110% de la línea, detecte la falla en zona 2 y 3, envíe el POTT_Tx por ambos canales de teleprotección y se mantenga en espera de la recepción del mensaje POTT para poder disparar. Dado que el relevador D60 REMOTO ve la falla hacia atrás (Falla Externa), el relevador D60 REMOTO no enviará ningún bit de POTT_Tx por ninguno de los canales de teleprotección. Por lo tanto, el relevador D60 LOCAL no operará por POTT, sino que
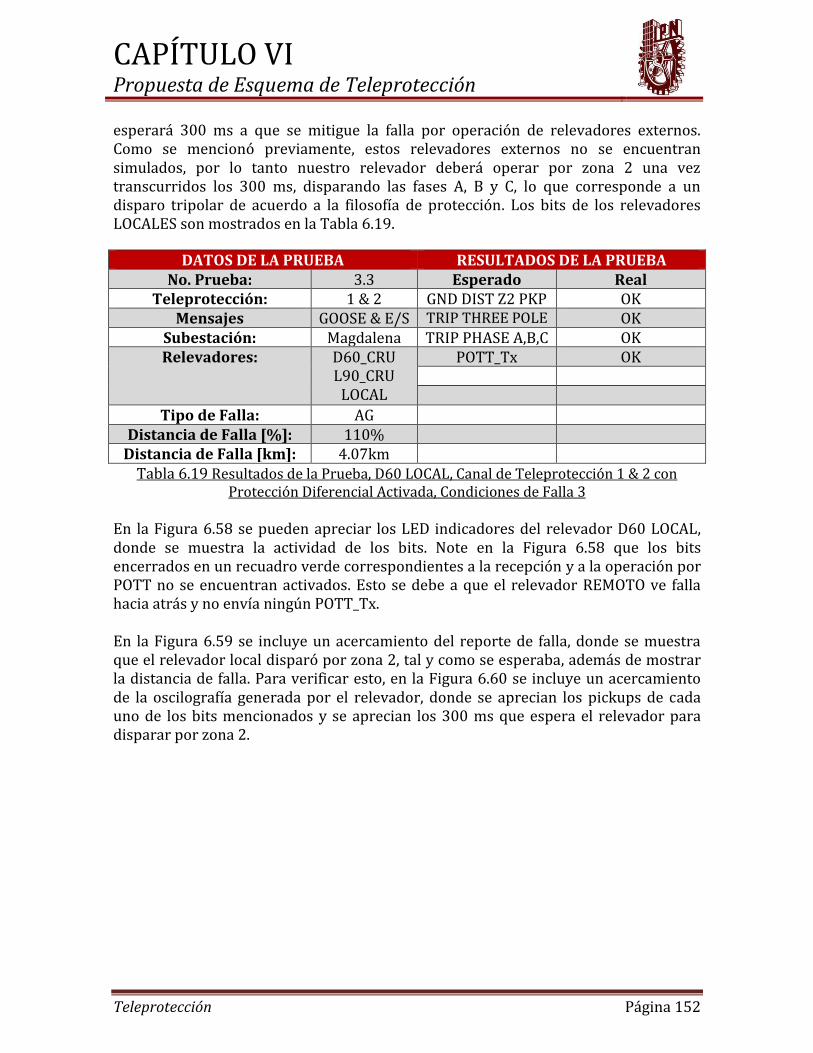
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 152
esperará 300 ms a que se mitigue la falla por operación de relevadores externos. Como se mencionó previamente, estos relevadores externos no se encuentran simulados, por lo tanto nuestro relevador deberá operar por zona 2 una vez transcurridos los 300 ms, disparando las fases A, B y C, lo que corresponde a un disparo tripolar de acuerdo a la filosofía de protección. Los bits de los relevadores LOCALES son mostrados en la Tabla 6.19.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 3.3 Esperado Real
Teleprotección: 1 & 2 GND DIST Z2 PKP OK Mensajes GOOSE & E/S TRIP THREE POLE OK
Subestación: Magdalena TRIP PHASE A,B,C OK Relevadores: D60_CRU
L90_CRU LOCAL
POTT_Tx OK
Tipo de Falla: AG Distancia de Falla [%]: 110%
Distancia de Falla [km]: 4.07km Tabla 6.19 Resultados de la Prueba, D60 LOCAL, Canal de Teleprotección 1 & 2 con
Protección Diferencial Activada, Condiciones de Falla 3 En la Figura 6.58 se pueden apreciar los LED indicadores del relevador D60 LOCAL, donde se muestra la actividad de los bits. Note en la Figura 6.58 que los bits encerrados en un recuadro verde correspondientes a la recepción y a la operación por POTT no se encuentran activados. Esto se debe a que el relevador REMOTO ve falla hacia atrás y no envía ningún POTT_Tx. En la Figura 6.59 se incluye un acercamiento del reporte de falla, donde se muestra que el relevador local disparó por zona 2, tal y como se esperaba, además de mostrar la distancia de falla. Para verificar esto, en la Figura 6.60 se incluye un acercamiento de la oscilografía generada por el relevador, donde se aprecian los pickups de cada uno de los bits mencionados y se aprecian los 300 ms que espera el relevador para disparar por zona 2.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 153
Figura 6.58 Indicadores LED del Relevador D60 LOCAL, Canal de Teleprotección 1&2
con Protección Diferencial Activada, Condiciones de Falla 3
Figura 6.59 Elemento Operado y Distancia de Falla del Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 3

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 154
Figura 6.60 Acercamiento de Oscilografía Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 3
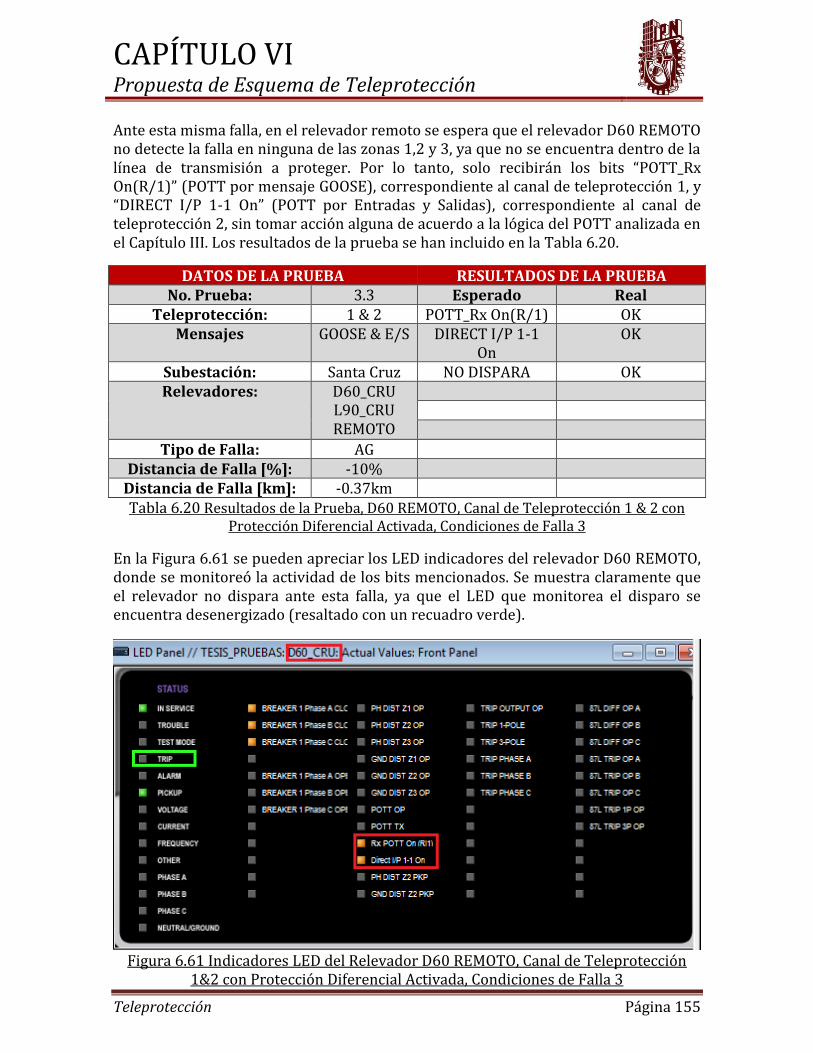
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 155
Ante esta misma falla, en el relevador remoto se espera que el relevador D60 REMOTO no detecte la falla en ninguna de las zonas 1,2 y 3, ya que no se encuentra dentro de la línea de transmisión a proteger. Por lo tanto, solo recibirán los bits “POTT_Rx On(R/1)” (POTT por mensaje GOOSE), correspondiente al canal de teleprotección 1, y “DIRECT I/P 1-1 On” (POTT por Entradas y Salidas), correspondiente al canal de teleprotección 2, sin tomar acción alguna de acuerdo a la lógica del POTT analizada en el Capítulo III. Los resultados de la prueba se han incluido en la Tabla 6.20.
DATOS DE LA PRUEBA RESULTADOS DE LA PRUEBA No. Prueba: 3.3 Esperado Real
Teleprotección: 1 & 2 POTT_Rx On(R/1) OK Mensajes GOOSE & E/S DIRECT I/P 1-1
On OK
Subestación: Santa Cruz NO DISPARA OK Relevadores: D60_CRU
L90_CRU REMOTO
Tipo de Falla: AG Distancia de Falla [%]: -10%
Distancia de Falla [km]: -0.37km Tabla 6.20 Resultados de la Prueba, D60 REMOTO, Canal de Teleprotección 1 & 2 con
Protección Diferencial Activada, Condiciones de Falla 3
En la Figura 6.61 se pueden apreciar los LED indicadores del relevador D60 REMOTO, donde se monitoreó la actividad de los bits mencionados. Se muestra claramente que el relevador no dispara ante esta falla, ya que el LED que monitorea el disparo se encuentra desenergizado (resaltado con un recuadro verde).
Figura 6.61 Indicadores LED del Relevador D60 REMOTO, Canal de Teleprotección
1&2 con Protección Diferencial Activada, Condiciones de Falla 3

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 156
CAPÍTULO VII
CONCLUSIONES & REFERENCIAS

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 157
7 CONCLUSIONES & REFERENCIAS 7.1 Conclusiones, Ventajas y Desventajas A lo largo de esta tesis, se ha descrito paso a paso la forma en que nuestro esquema de teleprotección funciona, desde los principios básicos de la operación de los relevadores que utiliza, hasta la consolidación del esquema de teleprotección propuesto. Para un mejor análisis de resultados, podemos describir las ventajas y desventajas que presenta la implementación de nuestro esquema de teleprotección.
Ventajas
1) Es un esquema de teleprotección de alta confiabilidad, selectividad y velocidad, como resultado de la utilización del disparo permisivo transferido de sobrealcance POTT.
2) Es un esquema que cuenta con un canal de comunicaciones con una característica de dependabilidad y seguridad de alto rango, ya que cuenta con la implementación de la fibra óptica y el mensaje GOOSE.
3) Es un esquema que cuenta con múltiples respaldos para la protección listos para actuar en caso de pérdida de alguna de las fibras ópticas.
4) Dado que está diseñado para probar la fiabilidad del mensaje GOOSE, este esquema puede ser implementado para líneas de mayores distancias, tensiones y diversas importancias en el sistema.
5) Es un esquema más selectivo, ya que discrimina entre mensajes en un estado sano y mensajes que hayan sido alterados a lo largo del proceso de comunicación entre las subestaciones, gracias a la característica informativa del estado de calidad del mensaje.
6) Debido al nivel de prioridad que se le puede configurar al mensaje GOOSE, la comunicación, no presenta problemas de tráfico en la red a nivel de bus de estación.
7) Es un sistema muy seguro a nivel de bus de estación, debido a su topología de comunicación en estrella y su redundancia.
8) Es un esquema que toma como base el estándar IEC 61850-90-1 de nivel internacional, la norma de referencia NRF-041-2010 que tiene un alto grado de reconocimiento por los ingenieros de protecciones, así como un análisis técnico-ingenieril para unir ambos sistemas para la teleprotección de las líneas de transmisión.
9) Los relevadores implementados se encuentran certificados y dentro del listado de LAPEM-05L.
Desventajas
1) Es un sistema que representa un alto costo de inversión.
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 158
2) La fibra óptica es un material muy delicado y puede ser dañado con facilidad si no se toman las precauciones necesarias durante su instalación.
De acuerdo con estas características podemos concluir que este esquema de teleprotección no es un esquema de teleprotección convencional, sino que utiliza las nuevas tecnologías que se han ido desarrollando para mejorar la protección utilizada actualmente, sin dejar por un lado las bases de la filosofía de protección; además de seguir la normatividad adecuada. Además, es un esquema que no es propuesto como la protección primaria uno de la línea de transmisión, sino que esta tesis lo propone como protección primaria dos como un modo prueba. Una de las grandes ventajas de la línea seleccionada con ayuda de los ingenieros de la Comisión Federal de Electricidad, es que no es una línea de vital importancia para la estabilidad del sistema y se encuentra protegida con un sistema austero en comparación con el avance constante de la tecnología. Es un perfecto caso de estudio para la implementación de un estándar como lo es el IEC 61850 edición 1 y edición 2, para dar pie a la próxima implementación del mismo a lo largo de la República. No se debe dejar pasar el hecho de que se encuentra innovando la comunicación entre subestaciones al indicar el estado de calidad de los mensajes que son enviados entre las mismas y cómo este sistema puede ser aplicable no solo a esta línea, sino a líneas de diversos niveles de tensión y diversas longitudes. La implementación del estándar IEC 61850-90-1 es un gran paso en la comunicación entre subestaciones. Por lo tanto, se necesita de un acoplamiento con las normas actuales como la NRF-041-2010 para su inclusión y así formar parte de los esquemas que se utilizarán en el futuro.
7.2 Aportaciones Dentro del desarrollo de esta tesis, se propuso un esquema de teleprotección basado en lo estipulado en el estándar IEC 61850 Ed. 2 y la norma de referencia NRF-041-2010 de la Comisión Federal de Electricidad (CFE), donde se recomendó la implementación de este esquema en la línea de transmisión MAG-93C30-CRU debido a que la protección de esta línea se encuentra operando aún con relevadores electromecánicos; así, se puede aprovechar su actualización para implementar el esquema propuesto. Se eligió el esquema de transferencia de disparo en base a una comparación entre las lógicas de operación de cada uno de los disparos disponibles en el relevador, donde se analizó el comportamiento de cada disparo ante diversas distancias de falla y se mostró la clara ventaja del esquema seleccionado. Se realizó la selección del canal de teleprotección principal y de respaldo, presentando la comparación de los tipos de canal de acuerdo a sus características propias,

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 159
mostrando sus ventajas y desventajas, además de agregar la ventaja de la implementación del esquema de teleprotección propuesto con IEC 61850 Ed.2. Para finalizar, se demostró la operación correcta del esquema de teleprotección mediante pruebas funcionales de laboratorio.
7.3 Recomendaciones para Trabajos Futuros Para el continuar con la implementación del estándar IEC 61850 Ed. 2 y su aplicación en la teleprotección, se recomienda realizar diversos trabajos tales como:
Transmisión de bloqueos y desbloqueos entre subestaciones por mensajes
GOOSE para esquemas de comparación direccional.
Implementación de esquemas de bloqueo para protección distancia con
comunicación entre subestaciones mediante mensajes GOOSE.
Aplicación de auto-recierre multi-fase para sistemas de líneas paralelas con
comunicación vía mensajes GOOSE.
Protección diferencial con comunicación mediante mensajes GOOSE.
Interlocks entre subestaciones mediante mensajes GOOSE.
Además, se recomienda aplicar o proponer la aplicación del trabajo realizado a subestaciones reales para poder observar el comportamiento de los mismos.
7.4 Referencias [Blackburn, 2006] J. Lewis Blackburn, Thomas J. Domin. Protective Relaying Principles and Applications. CRC Press, Tercera Edición, 2006. [Harper, 2008] Gilberto Enríquez Harper. Elementos de Protección de Sistemas Eléctricos Teoría y Práctica. Limusa, Primera Edición, 2008. [G0000-81, 2008] Comisión Federal de Electricidad. Características Técnicas para Relevadores de Protección. CFE, Revisión 080411, Edición Abril , 2008. [Yaoyu, 2004] Mohammad Shahidehpour, Yaoyu Wang. Communication and Control in Electric Power Systems: Applications of Parallel and Distributed Processing, John Wiley & Sons, 2004. [Agapito, 1998] Agapito Mendoza Romero. Protección por Relevadores a Sistemas de Potencia. Instituto Politécnico Nacional, Primera Edición, 1998.
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 160
[NRF-041-2010, 2010] Comisión Federal de Electricidad. NRF-041-2010 Esquemas Normalizados de Protecciones para Líneas de Transmisión. CFE, Primera Edición, 2010. [Russell, 2010] C. Russell Mason. The Art & Science of Protective Relaying. General Electric, Tercera Edición, 2010. [General Electric L90, 2012] GE Multilin. L90 Line Current Differential System UR Series Instruction Manual. General Electric, Revisión 6.0 2012. [Areva, 2002] Areva. Network Protection & Automation Guide. Areva, Primera Edición, 2002. [Bugarín, 2008] Abraham Romero Bugarín. Curso Fundamentos de Protecciones Eléctricas. General Electric, 2008. [Glover, 2010] J. Duncan Glover, Mulukutla S. Sarma, Thomas J. Overbye, Power System Analysis & Design. CENGAGE Learning, Quinta Edición, 2010. [General Electric D60 CD, 2008] General Electric Training Center. Distance Protection & D60 Training CD. General Electric, 2008 [General Electric D60, 2012] GE Multilin. D60 Line Distance Protection System Instruction Manual. General Electric, Revisión 6.0 2012. [Voloh, 2009] Ilia Voloh, Ray Johnson. Applying Digital Line Current Differential Relays Over Pilot Wires. General Electric, 2009. [Dahlin, 2005] T. Dahlin, J. O’Brien. Selection of Pilot Relaying Communication Channels- A Case Study. 32nd Annual Western Protective Relay Conference, 2005. [Lowell, 2000] Djafar K. Mynbaev, Lowell L. Scheiner. Fiber-Optic Communications Technology. Pearson, Primera Edición, 2000. [Downing, 2004] James N. Downing. Fiber Optic Communications. Thomson Delmar Learning, Primera Edición, 2004. [Keiser, 2000] Gerd Keiser. Optical fiber communications. McGraw-Hill, Tercera Edición, 2000. [Yousif, 2009] John M. Senior, M. Yousif Jamro. Optical Fiber Communications: Principles and Practice. Prentice Hall, Tercera Edición, 2009. [General Electric TN1U, 2012] GE Digital Energy. TN1U SDH Multiplexer Brochure. General Electric, 2012. [Blond, 2012] Digital Blond Inc. IEC 61850. WordPress & Atahualpa, 2012.
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 161
[Nordell, 2008] Daniel E. Nordell. Substation Communication History and Practice. IEEE, PES DA Tutorial, 2008. [Ariza, 2011] James Ariza, René Aguilar. Consideraciones para pruebas con IEC 61850. MEGGER. NotiGERS, GERS, Boletín Informativo #54, 2011. [Adamiak, 2004] Mark Adamiak, Ashish Kulshrestha. Design and Implementation of a UCA based Substation Control System. General Electric, GER-3994, 2004. [Apostolov, 2011] Alexander Apostolov, Damien Tholomier, Simon Richards. Communications Based Protection of Transmission Lines. Protection Automation & Control World, 2011. [IEC, 2004] International Electrotechnical Commission's. IEC 61850 Communication Networks And Systems For Power Utility Automation. Edición 1, 2004. [IEC, 2011] International Electrotechnical Commission's. IEC 61850 Communication Networks And Systems For Power Utility Automation - Communication Between Substations. Edición 2, 2011. [Adamiak, 2012] Mark Adamiak. Seminario de General Electric para CFE (IEC 61850). General Electric, Hotel Sheraton, 2012. [EURR, 2012] EU Roaming Regulation III. Interface & Protocol Detailed Technical specifications. Versión 1.0, 2013. [Estévez, 2010] Gabriel Estévez, Ariel Sabiguero Yawelak. Diseño e implementación de un prototipo para comunicación con IED’s en base a la norma IEC 61850 y utilizando como medio la mensajería MMS. Instituto de Computación Facultad de Ingeniería Universidad de la República UDELAR, 2010. [Solomon, 2010] Michael G. Solomon, David Kim. Fundamentals of Communications and Networking. World Headquarters, 2010. [IEC, 2002] International Electrotechnical Commission's. IEC 60044-8 Instrument Transformers. 2002. [GE ML2400, 2009] GE Multilin. MultiLink ML2400 Ethernet Communications Switch Instruction Manual. General Electric, Firmware Revision 3.x, 2009. [Romero, 2010] Maria del Carmen Romero Ternero, Julio Barbanacho Concejero, Jaime Benjumea Mondéjar, Octavio Rivera Romero, Jorge Ropero Rodríguez, Gemma Sánchez Antón, Francisco Sivianes Castillo. Redes Locales. Paraninfo Ciclos Formativos, Primera Edición, 2010.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 162
[Herrera, 2003] Enrique Herrera. Tecnologías y Redes de Transmisión de Datos. LIMUSA, Primera Edición, 2003. [Szigeti, 2009] Tim Szigeti, Kevin McMenamy, Roland Saville, Alan Glowacki. CISCO Telepresence Fundamentals. CISCO Systems, Cisco Press, 2009. [Apostolov IEC, 2010]Alexander Apostolov. IEC 61850 Systems and Their Components. OMICRON. Curso de IEC 61850 de OMICRON, 2010. [Apostolov GOOSE, 2010]Alexander Apostolov. GOOSE Messages, Publishing and Subscription. OMICRON. Curso de IEC 61850 de OMICRON, 2010. [Siemens, 2010] Siemens Energy Automation Sector. Aspects on IEC 61850 Edition 2.0 & Current Activities. IEEE / PES T&D, 2010.
[Ebrecht, 2012] James W. Ebrecht. Teleprotection Schemes and Equipment. Young Power Equipment. Scottsdale AZ, 2012.
ANEXOS INDICE DE TABLAS
Tabla 1.1 Porcentaje de Aparición de las Fallas en los Sistemas Trifásicos .......................... 8 Tabla 2.1 Niveles de Tensión normalizados ......................................................................... 15
Tabla 2.2 Clasificación de las Líneas de Transmisión de acuerdo a su longitud ................. 16
Tabla 2.3 Esquemas de protección para líneas con tensiones de 400 y 230 kV [NRF-041-
2010, 2010] ........................................................................................................................... 17 Tabla 2.4 Esquemas de protección para líneas con tensiones de 69kV hasta 161kV........... 18
Tabla 2.5 Elementos del esquema de protección asumido en base a la norma de referencia
NRF-041-2010 para líneas de transmisión de 230kV y L≤10km ......................................... 30
Tabla 3.1 Comparación de los esquemas de distancia y disparos transferidos (Incompleta)
.............................................................................................................................................. 54 Tabla 3.2 Comparación de los esquemas de distancia y disparos transferidos (Incompleta
Parte 2) .................................................................................................................................. 58
Tabla 3.3 Comparación de los esquemas de distancia y disparos transferidos (Completa) . 61 Tabla 4.1 Comparación de los Canales de Comunicación ................................................... 67 Tabla 4.2 Comparación de los Canales de Comunicación ................................................... 72 Tabla 4.3 Comparación de los Canales de Comunicación ................................................... 74
Tabla 4.4 Comparación de los Canales de Comunicación ................................................... 78 Tabla 4.5 Comparación de los Canales de Comunicación ................................................... 81 Tabla 5.1 Niveles de Prioridad ............................................................................................. 97
Tabla 5.2 Comparación de los Canales de Comunicación Tradicionales & ...................... 104 Tabla 6.1 Comparación de los esquemas de Distancia y Disparos Transferidos ............... 112 Tabla 6.2 Comparación de los Canales de Comunicación Tradicionales & ...................... 112 Tabla 6.3 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 1 en
Condiciones de Falla 1 ....................................................................................................... 120 Tabla 6.4 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 1 en
Condiciones de Falla 1 ....................................................................................................... 121
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 163
Tabla 6.5 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 1 en
Condiciones de Falla 2 ....................................................................................................... 123
Tabla 6.6 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 1 en
Condiciones de Falla 2 ....................................................................................................... 124 Tabla 6.7 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 1 en
Condiciones de Falla 3 ....................................................................................................... 126 Tabla 6.8 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 1 en
Condiciones de Falla 3 ....................................................................................................... 130 Tabla 6.9 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 2 en
Condiciones de Falla 1 ....................................................................................................... 131 Tabla 6.10 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 2 en
Condiciones de Falla 1 ....................................................................................................... 133
Tabla 6.11 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 2 en
Condiciones de Falla 2 ....................................................................................................... 135 Tabla 6.12 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 2 en
Condiciones de Falla 2 ....................................................................................................... 137 Tabla 6.13 Resultados de la Prueba, D60 LOCAL, con Canal de Teleprotección 2 en
Condiciones de Falla 3 ....................................................................................................... 139
Tabla 6.14 Resultados de la Prueba, D60 REMOTO, con Canal de Teleprotección 2 en
Condiciones de Falla 3 ....................................................................................................... 142
Tabla 6.15 Resultados de la Prueba, D60 LOCAL, Canal de Teleprotección 1 & 2 con
Protección Diferencial Activada, Condiciones de Falla 1 .................................................. 144 Tabla 6.16 Resultados de la Prueba, D60 REMOTO, Canal de Teleprotección 1 & 2 con
Protección Diferencial Activada, Condiciones de Falla 1 .................................................. 146
Tabla 6.17 Resultados de la Prueba, D60 LOCAL, Canal de Teleprotección 1 & 2 con
Protección Diferencial Activada, Condiciones de Falla 2 .................................................. 148 Tabla 6.18 Resultados de la Prueba, D60 REMOTO, Canal de Teleprotección 1 & 2 con
Protección Diferencial Activada, Condiciones de Falla 2 .................................................. 150 Tabla 6.19 Resultados de la Prueba, D60 LOCAL, Canal de Teleprotección 1 & 2 con
Protección Diferencial Activada, Condiciones de Falla 3 .................................................. 152 Tabla 6.20 Resultados de la Prueba, D60 REMOTO, Canal de Teleprotección 1 & 2 con
Protección Diferencial Activada, Condiciones de Falla 3 .................................................. 155
INDICE DE FIGURAS Figura 2.1 Arreglo normalizado de teleprotección para línea de 400 kV y 230 kV y L<10
km, con medio de comunicación principal fibra óptica dedicada y respaldo por fibra óptica
multiplexada (PP1 – 87L/21/67 y PP2 – 87L/21/67) ........................................................... 19
Figura 2.2 Arreglo normalizado de Teleprotección para línea de 400 kV y 230kV y L>10
km ≤ 40 km, con medio de comunicación principal vía fibra óptica dedicada (PP1-
87L/21/67 y PP2 -21/21N/67) y respaldo por OPLAT (PP2-21/21N) ................................. 20 Figura 2.3 Arreglo normalizado de Teleprotección para línea de 400kV /230kV y L>40 km,
con medio de comunicación principal vía Fibra Óptica Multiplexada (PP1-85L/67 y PP2-
21/21N/67) y respaldo por OPLAT (PP1-85L/67) ............................................................... 21 Figura 2.4 Arreglo normalizado de Teleprotección para línea de 400kV /230kV y L > 40
km, con medio de comunicación principal vía Fibra Óptica Multiplexada (PP1-85L) y Fibra
Óptica Dedicada (PP2-87L/21/67) y respaldo por OPLAT (PP1 – 85L) ............................. 22
CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 164
Figura 2.5 Arreglo normalizado de Teleprotección para línea de 400kV /230 kV y L>40
km, con medio de comunicación principal vía Fibra Óptica Multiplexada (PP1-87L/21//67)
y respaldo por OPLAT (PP2 – 21/67) .................................................................................. 23 Figura 2.6 Arreglo normalizado de Teleprotección para línea de 69kV a 161 kV y L<=10
km, con medio de comunicación vía fibra óptica dedicada (P1 – 85LT) y respaldo por fibra
óptica multiplexada (P2-87L/21/67) ..................................................................................... 24 Figura 2.7 Arreglo normalizado de Teleprotección para línea en 69kV a 161 kV L<=10 km,
con medio de comunicación vía fibra óptica dedicada ......................................................... 25 Figura 2.8 Arreglo normalizado de Teleprotección para línea de 69kV a 161 kV y L<=10
km, con medio de comunicación vía radio digital ................................................................ 26 Figura 2.9 Arreglo normalizado de Teleprotección para línea de 69kV a 161 kV y L>10
km, con medio de comunicación vía fibra óptica dedicada .................................................. 27
Figura 2.10 Arreglo normalizado de Teleprotección para línea de 69kV a 161 kV y L>10
km, con medio de comunicación vía fibra óptica ................................................................. 28 Figura 2.11 Arreglo normalizado de Teleprotección para línea de 69kV a 169 kV y L > 10
km, con medio de comunicación vía OPLAT ...................................................................... 29 Figura 2.12 Aplicación simple de un relevador diferencial electromecánico ...................... 31 Figura 2.13 Condiciones de carga externa o falla externa .................................................... 31
Figura 2.14 Condiciones de Falla Interna ............................................................................. 32 Figura 2.15 Ejemplo de Relevador Porciento Diferencial .................................................... 33
Figura 2.16 Característica de Operación de un Relevador Porciento Diferencial ................ 33 Figura 2.17 Ejemplo de Protección Diferencial 87L con Relevadores Digitales ................. 34 Figura 2.18 Diagrama de Actuación de Relevador de Sobrecorriente Direccional
Electromecánico [Russell, 2010] .......................................................................................... 37
Figura 2.19 Característica de Operación de un Relé de Impedancia (Distancia) ................. 38 Figura 2.20 Característica de Operación de un Relé de Impedancia (Diagrama R-X) ........ 39 Figura 2.21 Esquema de Conexiones del Circuito de Contactos de un Relé de Distancia
Tipo Impedancia (Adaptada de [Russell, 2010]) .................................................................. 40 Figura 2.22 Características de Funcionamiento y de Retardo de un Relé de Distancia Tipo
Impedancia (Adaptada de [Russell, 2010]) .......................................................................... 41 Figura 2.23 Características de un Relé Direccional para un Valor de Tensión .................... 42
Figura 2.24 Tiempo de Operación Contra Impedancia para un Relé de Distancia tipo
Impedancia (Adaptada de [Russell, 2010]). ......................................................................... 43 Figura 2.25 Característica de Funcionamiento de un Relé de Distancia tipo Mho para la
Distancia Protegida desde el punto A al punto B (Adaptada de [Russell, 2010]) ................ 43 Figura 2.26 Característica de Funcionamiento de un Relé de Distancia tipo Mho, con Tres
Zonas de Protección [Russell, 2010] ................................................................................... 44 Figura 2.27 Ejemplo de Relevador de Distancia tipo Mho con una Zona de Protección ..... 45
Figura 2.28 Ejemplo Básico de Zonas de Protección con Distancia Escalonada y Lógica de
Operación Simplificada para Distancia Escalonada en un Relevador Digital UR ............... 46 Figura 2.29 Esquema Distancia Escalonada, Ejemplo de Falla en Zona 1 .......................... 47 Figura 2.30 Esquema Distancia Escalonada, Ejemplo de Falla 2 Zona 1 y Zona 2 ............. 48 Figura 3.1 Protección Distancia con Relevadores Digitales para Esquemas de
Teleprotección Piloto & Zonas de Protección ...................................................................... 51 Figura 3.2 Lógica del Esquema de Disparo Directo Transferido de Bajo Alcance (DUTT) 52 Figura 3.3 Esquema de Disparo Directo Transferido de Bajo Alcance (DUTT) en
Condiciones de Falla 1 ......................................................................................................... 53

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 165
Figura 3.4 Esquema de Disparo Directo Transferido de Bajo Alcance (DUTT) en
Condiciones de Falla 2 ......................................................................................................... 54
Figura 3.5 Lógica del Esquema de Disparo Permisivo Transferido de Bajo Alcance (PUTT)
(Adaptada de [Bugarín, 2008] y [General Electric D60, 2012]) .......................................... 55 Figura 3.6 Esquema de Disparo Permisivo Transferido de Bajo Alcance (PUTT) en ......... 56 Figura 3.7 Esquema de Disparo Permisivo Transferido de Bajo Alcance (PUTT) en ......... 57 Figura 3.8 Esquema de Disparo Permisivo Transferido de Bajo Alcance (PUTT) en ......... 57
Figura 3.9 Lógica del Esquema de Disparo Permisivo Transferido de Sobre Alcance
(POTT) ................................................................................................................................. 58 Figura 3.10 Ejemplo de la Sensibilidad de las Zonas de Protección Ante una Falla ........... 59 Figura 3.11 Esquema de Disparo Permisivo Transferido de Sobre Alcance (POTT) en ..... 60 Figura 3.12 Esquema de Disparo Permisivo Transferido de Sobre Alcance (POTT) en ..... 61
Figura 3.13 Lógica de Disparo Permisivo Transferido de Sobre Alcance (POTT) del
Relevador UR D60 de General Electric Multilin [General Electric D60, 2012] .................. 63 Figura 4.1 Equipo de Acoplamiento Típico de Fase a Fase ................................................. 69
Figura 4.2 Equipo de Acoplamiento para Onda Portadora en Línea de Alta Tensión ......... 70 Figura 4.3 Diagrama elemental de una línea que muestra el equipo de onda portadora
(OPLAT) para un sistema de protección (Adaptada de [Agapito, 1998]). ........................... 71
Figura 4.4 Canal de Radio de Alta Frecuencia Con y Sin Obstrucción ............................... 73 Figura 4.5 Fibra Óptica Multimodo Índice Escalonado ....................................................... 76
Figura 4.6 Fibra Óptica Multimodo Índice Gradual ............................................................. 77 Figura 4.7 Fibra Óptica Monomodo Índice Escalonado....................................................... 77 Figura 4.8 Arreglos de Comunicación Comúnmente Encontrados en la Señalización de
Protección (Adaptada de [Areva, 2002]) .............................................................................. 79
Figura 4.9 Requisitos Típicos de Rendimiento para la Señalización de Protección Cuando el
Enlace de Comunicación es Sometido a Ruido (Adaptada de [Areva, 2002]) ..................... 80 Figura 4.10 Impresión de Pantalla Mostrando el Monitoreo de Paquetes Perdidos Durante
10 segundos .......................................................................................................................... 81 Figura 5.1 Evolución en la Automatización de Subestaciones[Nordell, 2008] .................... 84
Figura 5.2 Niveles de Estación ............................................................................................. 87 Figura 5.3 Interfaces Lógicas en los Niveles de Estación .................................................... 88
Figura 5.4 Modelado de Datos ............................................................................................. 89 Figura 5.5 Composición de un Nodo Lógico ....................................................................... 90 Figura 5.6 Bus de Estación, Bus de Proceso y Niveles de Estación..................................... 90 Figura 5.7 Esquema Concepto de Merging Unit .................................................................. 91 Figura 5.8 Esquema Tradicional & Esquema Utilizando una Merging Unit ....................... 91
Figura 5.9 Switch de Comunicaciones de General Electric con Funciones de Capa 2 y 3 .. 93 Figura 5.10 Comunicación Punto a Punto (Peer to Peer) ..................................................... 93
Figura 5.11 Arreglo de Red en Anillo .................................................................................. 94 Figura 5.12 Arreglo de Red en Estrella ................................................................................ 94 Figura 5.13 Arreglo de Red en Estrella Redundante ............................................................ 94 Figura 5.14 GOOSE Fixed (Fijo) & GOOSE Configurable ............................................... 100 Figura 5.15 Bus de Proceso & Bus de Estación Redundante ............................................. 101 Figura 5.16 Esquema General de la Comunicación entre Subestaciones ........................... 102 Figura 5.17 Esquema General de la Comunicación entre Subestaciones (Bus Proceso, Bus
de Estación & Conexión entre Buses de Estación .............................................................. 103

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 166
Figura 5.18 Esquema de Aceleración por Zona 2 por POTT Mediante Mensajes GOOSE
............................................................................................................................................ 104
Figura 6.1 Interruptor de Fase B de la Línea de Transmisión MAG-93C30-CRU ............ 107 Figura 6.2 Diagrama Unifilar de la Subestación Magdalena en el Bus de 230kV & ......... 108 Figura 6.3 Diagrama Unifilar de la Subestación Santa Cruz en el Bus de 230kV & ......... 109 Figura 6.4 Tablero de Protección con Relevadores Electromecánicos & Diagrama Unifilar
de la Línea de Transmisión MAG-93C30-CRU ................................................................. 110
Figura 6.5 Esquema de Teleprotección Propuesto ............................................................. 111 Figura 6.6 Esquema de Teleprotección Propuesto Bajo condiciones de Falla 2 ................ 114 Figura 6.7 Equipo de Pruebas OMICRON ......................................................................... 117 Figura 6.8 Rack con Relevadores de Protección ................................................................ 117 Figura 6.9 Hoja de Excel para Pruebas de Localizador de Fallas (Falla al 10% de la Línea)
............................................................................................................................................ 118
Figura 6.10 Valores Inyectados al Equipo de Pruebas OMICRON (Falla al 10% de la
Línea) .................................................................................................................................. 118
Figura 6.11 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 1 en
Condiciones de Falla 1 ....................................................................................................... 120 Figura 6.12 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 1 ....................................................................... 120 Figura 6.13 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de Teleprotección
1 en Condiciones de Falla 1 ................................................................................................ 121 Figura 6.14 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 1 en
Condiciones de Falla 1 ....................................................................................................... 122
Figura 6.15 Acercamiento de Oscilografía relevador D60 REMOTO, Canal de
Teleprotección 1 en Condiciones de Falla 1 ....................................................................... 122 Figura 6.16 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 1 ....................................................................... 122
Figura 6.17 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 1 en
Condiciones de Falla 2 ....................................................................................................... 123
Figura 6.18 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de Teleprotección
1 en Condiciones de Falla 2 ................................................................................................ 124
Figura 6.19 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 2 ....................................................................... 124 Figura 6.20 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 1 en
Condiciones de Falla 2 ....................................................................................................... 125 Figura 6.21 Acercamiento de Oscilografía relevador D60 REMOTO, Canal de
Teleprotección 1 en Condiciones de Falla 2 ....................................................................... 125 Figura 6.22 Elemento Operado y Distancia de Falla del relevador D60 REMOTO, Canal de
Teleprotección 1 en Condiciones de Falla 2 ....................................................................... 126 Figura 6.23 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 1 en Condiciones de Falla 3 ....................................................................... 127 Figura 6.24 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 1 en
Condiciones de Falla 3 ....................................................................................................... 127 Figura 6.25 Reporte de Eventos del Relevador D60 LOCAL, Canal de Teleprotección 1 en
Condiciones de Falla 3 ....................................................................................................... 128 Figura 6.26 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de Teleprotección
1 en Condiciones de Falla 3 ................................................................................................ 129

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 167
Figura 6.27 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 1 en
Condiciones de Falla 3 ....................................................................................................... 130
Figura 6.28 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 2 en
Condiciones de Falla 1 ....................................................................................................... 132 Figura 6.29 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de Teleprotección
2 en Condiciones de Falla 1 ................................................................................................ 132 Figura 6.30 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 2 en Condiciones de Falla 1 ....................................................................... 133 Figura 6.31 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 2 en
Condiciones de Falla 1 ....................................................................................................... 134 Figura 6.32 Acercamiento de Oscilografía relevador D60 REMOTO, Canal de
Teleprotección 2 en Condiciones de Falla 1 ....................................................................... 134
Figura 6.33 Elemento Operado y Distancia de Falla del relevador D60 REMOTO, Canal de
Teleprotección 2 en Condiciones de Falla 1 ....................................................................... 134 Figura 6.34 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 2 en Condiciones de Falla 2 ....................................................................... 135 Figura 6.35 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 2 en
Condiciones de Falla 2 ....................................................................................................... 136
Figura 6.36 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de Teleprotección
2 en Condiciones de Falla 2 ................................................................................................ 136
Figura 6.37 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 2 en
Condiciones de Falla 2 ....................................................................................................... 137 Figura 6.38 Elemento Operado y Distancia de Falla del relevador D60 REMOTO, Canal de
Teleprotección 2 en Condiciones de Falla 2 ....................................................................... 138
Figura 6.39 Acercamiento de Oscilografía relevador D60 REMOTO, Canal de
Teleprotección 2 en Condiciones de Falla 2 ....................................................................... 138 Figura 6.40 Indicadores LED del relevador D60 LOCAL, Canal de Teleprotección 2 en
Condiciones de Falla 3 ....................................................................................................... 139 Figura 6.41 Elemento Operado y Distancia de Falla del relevador D60 LOCAL, Canal de
Teleprotección 2 en Condiciones de Falla 3 ....................................................................... 139 Figura 6.42 Reporte de Eventos del Relevador D60 LOCAL, Canal de Teleprotección 2 en
Condiciones de Falla 3 ....................................................................................................... 140 Figura 6.43 Figura 6.44 Acercamiento de Oscilografía relevador D60 LOCAL, Canal de
Teleprotección 2 en Condiciones de Falla 3 ....................................................................... 141 Figura 6.45 Indicadores LED del relevador D60 REMOTO, Canal de Teleprotección 2 en
Condiciones de Falla 3 ....................................................................................................... 142
Figura 6.46 Indicadores LED del Relevador D60 LOCAL, Canal de Teleprotección 1&2
con Protección Diferencial Activada, Condiciones de Falla 1 ........................................... 144
Figura 6.47 Elemento Operado y Distancia de Falla del Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 1 .......... 144 Figura 6.48 Acercamiento de Oscilografía Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 1 .......... 145 Figura 6.49 Indicadores LED del Relevador D60 REMOTO, Canal de Teleprotección 1&2
con Protección Diferencial Activada, Condiciones de Falla 1 ........................................... 146 Figura 6.50 Elemento Operado y Distancia de Falla del Relevador D60 REMOTO, Canal
de Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 1 ..... 146

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 168
Figura 6.51 Acercamiento de Oscilografía Relevador D60 REMOTO, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 1 .......... 147
Figura 6.52 Indicadores LED del Relevador D60 LOCAL, Canal de Teleprotección 1&2
con Protección Diferencial Activada, Condiciones de Falla 2 ........................................... 148 Figura 6.53 Elemento Operado y Distancia de Falla del Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 2 .......... 148 Figura 6.54 Acercamiento de Oscilografía Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 2 .......... 149 Figura 6.55 Indicadores LED del Relevador D60 REMOTO, Canal de Teleprotección 1&2
con Protección Diferencial Activada, Condiciones de Falla 2 ........................................... 150 Figura 6.56 Elemento Operado y Distancia de Falla del Relevador D60 REMOTO, Canal
de Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 2 ..... 150
Figura 6.57 Acercamiento de Oscilografía Relevador D60 REMOTO, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 2 .......... 151 Figura 6.58 Indicadores LED del Relevador D60 LOCAL, Canal de Teleprotección 1&2
con Protección Diferencial Activada, Condiciones de Falla 3 ........................................... 153 Figura 6.59 Elemento Operado y Distancia de Falla del Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 3 .......... 153
Figura 6.60 Acercamiento de Oscilografía Relevador D60 LOCAL, Canal de
Teleprotección 1&2 con Protección Diferencial Activada, Condiciones de Falla 3 .......... 154
Figura 6.61 Indicadores LED del Relevador D60 REMOTO, Canal de Teleprotección 1&2
con Protección Diferencial Activada, Condiciones de Falla 3 ........................................... 155
Glosario de Términos
IEC 61850 Ed. 2 Estándar creado para “Communication Networks and Systems for Power Utility Automation”; Redes y sistemas de comunicación para la automatización de empresas de energía.
NRF-041-2010 Norma de referencia por parte de la Comisión Federal de Electricidad OPLAT Onda Portadoras en Líneas de Alta Tensión.
Ethernet Cable Telefónico. Microonda Radio
F.O. Fibra Óptica GOOSE Mensaje de Evento de Objeto Genérico de Subestación Orientado.
Estándar Es el proceso de elaborar, aplicar y mejorar las normas que se aplican a distintas actividades científicas, industriales o económicas con el fin de ordenarlas y mejorarlas.
MAG-93C30-CRU
Línea de transmisión instalada entre Magdalena y Santa Cruz llamada 93C30.
CFE Comisión Federal de Eléctricidad. GSSE Mensajes de evento genérico de estado de la subestación. PP1 Protección primaria 1. PP2 Protección primaria 2. PR Protección de respaldo.
50FI Protección de falla de interruptor. L90 Relevador universal diferencial de General Electric.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 169
87L Protección diferencial. 21 Protección de distancia llamado también de impedancia TP’s Transformadores de potencial TC’s Transformadores de corriente.
Fasor Rrepresenta la magnitud y fase de la oscilación resultante de la superposición de varias oscilaciones en un proceso de interferencia.
Fasoletas Son las sumas parciales de los términos involucrados para el cómputo o construcción de los fasores.
Polarización
Pequeño desplazamiento, en sentidos opuestos, de las cargas negativas y positivas de un material dieléctrico, producido por un campo eléctrico externo.
V Tensión. I Corriente.
rms Raíz cuadrada del valor cuadrático medio Z Impedancia.
T1 Tiempo 1 T2 Tiempo 2 T3 Tiempo 3 M Angulo de torque máximo
Mho Es una línea recta en un diagrama de admitancia. M1, M2, M3 Unidades de alta velocidad tipo Mho.
Z1 Zona 1. Z2 Zona 2. Z3 Zona 3.
BUS Línea eléctrica (Barras) por la que circulan cargas eléctricas diversas. Equivale a conductor ómnibus, compartido por diversas cargas.
Relé Relevador. Disparo Apertura.
ms Metros. Interconexión La interconexión es la conexión física y lógica entre dos o más redes de
telecomunicaciones. DUTT Esquema de disparo directo transferido de bajo alcance PUTT Esquema de disparo permisivo transferido de bajo alcance POTT Esquema de disparo permisivo transferido de sobre alcance
Redundancia Es un proceso idéntico corriendo al mismo tiempo, para que en caso que uno falle, tenga un respaldo constante y las tareas no se detengan.
Ruido Señal que deforma el paquete de datos enviado de un extremo a otro. Weak Infeed Alimentación Débil
PLC Power Líne Carrer LED Diodo semiconductor que emite luz. TDM Multiplexado por división de tiempo. PCM Modulación de Código de Pulso.
Refracción La refracción es el cambio de dirección que experimenta una onda al pasar de un medio material a otro.

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 170
FOX Equipo multiplexor. ID
EPRI Electric Power Research Institute (Instituto de Investigación de la Energía Eléctrica).
IEEE Institute of Electrical and Electronics Engineers (Instituto de Ingenieros Eléctricos y Electrónicos).
UCA Utility Communication Architecture (Utilidad de Arquitectura de Comunicación).
WG10 (Work Group 10 )Grupo de Trabajo 10 IEC International Electrotechnical commission (Comisión Electrotécnica
Internacional) IED´s Intelligent Electronic Devices (Dispositivos Electrónicos Inteligentes).
Peer-to-Peer Punto a Punto. ACSI Servicios de Comunicación Abstractos SCSM Asignación Específica Servicio de Comunicación. IHM Interfaz Hombre Maquina. ISO Organización Internacional para la Estandarización.
Hidrófugo Sustancia que evita la humedad o las filtraciones. Dispersión
modal Es un mecanismo de distorsión que ocurre en las fibras multimodo , en el que la señal se transmite en el tiempo debido a que la velocidad de propagación de la señal óptica no es el mismo para todos los modos.
ON Prendido. OFF Apagado.
Multiplexación. Es la combinación de dos o más canales de información en un solo medio de transmisión usando un dispositivo llamado multiplexor.
Abstraer Considerar aisladamente las cualidades de un objeto. Mapeo Búsqueda y análisis de datos o términos
Interfaz Zona de comunicación o acción de un sistema sobre otro. Nodo Punto de unión entre 2 o más elementos eléctricos de un sistema
LN Nodo lógico. Sensor Dispositivo que detecta variaciones en una magnitud física y las
convierte en señales útiles para un sistema de medida o control. Transductor Dispositivo que recibe la potencia de un sistema mecánico,
electromecánico o acústico y lo transmite a otro generalmente de forma distinta.
Topología Rama de las matemáticas que estudia las propiedades de las figuras con independencia de su tamaño y forma
OSI International Organization for Standardization (Organización Internacional para la Estandarización)
hub Repetidor multipuerto LAN Local Area Network ( Red de Area Local)
Conmutar Cambiar o sustituir HOSTS Computadoras conectadas a una Red de computadoras de red, que
proveen y utilizan servicios de ella. VLAND Red de área local virtual.
GSSE Eventos Genéricos de Estado de la subestación. GOOSE Eventos Genéricos de Objeto Orientado de la Subestación
DNA Digital Network Architecture (Arquitectura de Red Digital)

CAPÍTULO VI Propuesta de Esquema de Teleprotección
Teleprotección Página 171
dataset Conjunto de datos CoS Class of Service (clase de servicio) PCP Priority Code Point (Código de Prioridad de Punto)
Subestación Eléctrica
Es una instalación destinada a modificar y establecer los niveles de tensión de una infraestructura eléctrica, para facilitar el transporte y distribución de la energía eléctrica.
ETO Equipo terminal óptico. 87H protección primaria diferencial con hilos piloto 67P Protección de sobrecorriente 67N Protección de neutro
Pickup Arranque CPU Unidad central de procesos.
Mapeo Es la acción por la cual se asigna una letra a una unidad de disco, que se encuentra compartida en una red de ordenadores, como si se tratara de un disco más del ordenador.