sistemas electrónicos de control curso 2013/2014-1...
TRANSCRIPT
Sistemas Electrónicos de Control
Curso 2013/2014-1
Tema 4. Control digital
Profesora: Rosa Mª Fernández-Cantí

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 2
Contenido
1. Control digital .......................................................................................................................................... 3 1.1 Transformada Z ................................................................................................................................. 3
1.1.1 Definición y propiedades .......................................................................................................... 3 1.1.2 Teorema del valor inicial (TVI) y teorema del valor final (TVF) ............................................. 4 1.1.3 Solución de E (lineales y de coeficientes constantes) en el dominio z ................................... 4
1.2 Respuesta temporal de los sistemas discretos ................................................................................... 4 1.3 Respuesta frecuencial de los sistemas discretos ................................................................................ 9 1.4 Métodos de discretización ............................................................................................................... 10
1.4.1 Aproximaciones numéricas (I). De la derivada ..................................................................... 11 1.4.2 Aproximaciones numéricas (II). De la integral ...................................................................... 12 1.4.3 Transformación bilineal (I) ..................................................................................................... 13 1.4.4 Transformación bilineal (II). Prewarping .............................................................................. 13 1.4.5 Invariancia de la respuesta temporal (I). Impulsional ............................................................ 14 1.4.6 Invariancia de la respuesta temporal (II). Indicial ................................................................. 15 1.4.7 Transformación directa (mapping) de ceros y polos finitos ................................................... 16
1.5 Discretización de reguladores PID ................................................................................................. 19 1.6 Análisis de controladores digitales ................................................................................................. 22
1.6.1 Lugar geométrico de las raíces ............................................................................................... 22 1.6.2 Análisis de estabilidad. Criterio de Jury ................................................................................ 24
1.7 Diseño de controladores digitales ................................................................................................... 26 1.7.1 Controlador dead beat ............................................................................................................. 26 1.7.2 Controlador de Kalman .......................................................................................................... 27 1.7.3 Controlador de Dahlin ............................................................................................................ 29
1.8 Ejercicios resueltos ......................................................................................................................... 30
2. Control digital de 2 grados de libertad ................................................................................................. 34 2.1 Controlador RST digital .................................................................................................................. 34
2.1.1 Configuración RST ................................................................................................................. 34 2.1.2 Funciones de sensibilidad ....................................................................................................... 36
2.2 Conformación de las funciones Syp y Sup ......................................................................................... 37 2.2.1 Propiedades de la función de sensibilidad de la salida Syp ...................................................... 37 2.2.2 Propiedades de la función de sensibilidad de la entrada Sup ................................................... 42 2.2.3 Plantillas para las funciones de sensiblidad ............................................................................ 43 2.2.4 Descripción de la incertidumbre. Condiciones de estabilidad robusta................................... 44 2.2.5 Plantillas para el margen de módulo y de retardo en Syp ........................................................ 45
2.3 Control digital de dos grados de libertad ....................................................................................... 46 2.4 Fijación de polos (para seguimiento y regulación) ......................................................................... 46
2.4.1 Formulación del problema ...................................................................................................... 47 2.4.2 Solución del problema ............................................................................................................ 47 2.4.3 Ejemplo .................................................................................................................................. 49
2.5 Seguimiento y regulación con objetivos independientes ................................................................. 50 2.5.1 Formulación del problema ...................................................................................................... 50 2.5.2 Solución del problema ............................................................................................................ 50 2.5.3 Ejemplos ................................................................................................................................. 52
2.6 Internal model control (IMC) .......................................................................................................... 55 2.6.1 Formulación del problema ...................................................................................................... 55 2.6.2 Solución del problema ............................................................................................................ 56 2.6.3 Ejemplo .................................................................................................................................. 58
2.7 Fijación de polos para conformar las funciones de sensibilidad .................................................... 60 2.7.1 Formulación del problema ...................................................................................................... 60 2.7.2 Solución del problema ............................................................................................................ 60
2.8 Ejercicio resuelto ............................................................................................................................ 61

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 3
1. Control digital Formas equivalentes de describir un sistema dinámico Todo filtro, controlador o sistema dinámico puede ser descrito de diversas maneras, cada una con sus ventajas propias pero equivalentes entre sí, siendo la de Ecuaciones de Estado (EE) la más general.
Continuo Discreto Ecuación diferencial (ED) Ecuación en diferencias (E) Función de transferencia H(s) Función de transferencia H(z) Respuesta frecuencial H(j) Respuesta frecuencial H(ejT) Ecuaciones de estado en t, EE(t) Ecuaciones de estado en n, EE(n)
Tabla 1
1.1 Transformada Z
1.1.1 Definición y propiedades
En los sistemas discretos en el tiempo se usa la variable de tiempo discreto n en vez de la variable de tiempo continuo t y se utiliza la transformada Z en lugar de la transformada de Laplace. Notar las similitudes y diferencias entre ambas transformadas: La transformada Z se define como:
Unilátera:
0
)()()(n
nznynyZzY
Bilátera:
n
nIIII znynyZzY )()()(
En cuanto a las propiedades, la relación entre un retardo en n y en el dominio transformado Z es:
)1(1 nz siendo la delta de Kronecker. Filtro generador
La función de transferencia H(z) del filtro generador de la señal y(n) = an es az
zzH
)( ya que,
al excitar dicho filtro con un impulso u(n) = (n), la salida del mismo es
naaz
zZzUzHZzYZny
1)()()()( 111 , n 0.
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 4
Si a>1, este filtro presenta un polo inestable (exterior al círculo unitario centrado en el origen del plano z) de valor p = a.
1.1.2 Teorema del valor inicial (TVI) y teorema del valor final (TVF)
Sistemas discretos:
TVI: )(lim)()1(lim)(lim)1( 1
1zYzYznyy
zzn
TVF: )()1(lim)(lim)( 1
1zYznyy
zn
1.1.3 Solución de E (lineales y de coeficientes constantes) en el dominio z
Dada la ecuación en diferencias (E):
)()()1()2()3( 1321 nubnyanyanyany ,
con las condiciones iniciales (CI): )0(y , )1(y , )2(y ,
la solución se obtiene a partir de los pasos siguientes:
1) Aplicar Z[ ] a ambos lados de la ecuación.
2) Despejar )(
)()(
zD
zNzY (función racional).
3) Descomponer z
zY )( en suma de fracciones simples (de primer orden):
3
3
2
2
1
1)(pz
Az
pz
Az
pz
AzzY
.
3.1) Hallar los polos (raíces de D(z)): p1, p2, p3.
3.2) Hallar los residuos ipzii pzzYA
))(( . (Nota: si los polos son complejos, conviene
determinar los residuos gráficamente a partir del diagrama de polos y ceros)
4) Aplicar Z-1[ ].
4.1) Polo real (p = r): nrArz
zAZ
1 .
4.2) Polos complejos: )cos(2*
*1 AnrApz
zA
pz
zAZ n
; ( rp , rp* )
1.2 Respuesta temporal de los sistemas discretos La correspondencia entre los resultados para sistemas en tiempo continuo y sistemas en tiempo discreto es la siguiente:

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 5
Continuo (tiempo: t) Discreto (tiempo: n)
Transformada Laplace, H(s) Z, H(z) Polo real p
ps 1
11
1
pzpz
z
Modo natural asociado al polo real p
pte np
Ganancia en continua
(0)H (1)H
Eje de frecuencias
Frecuencia: rad/s Eje imaginario del plano complejo, j
Frecuencia: rad Círculo unitario (c.u.) centrado en el origen en el plano complejo
Respuesta frecuencial
)()(
jHsHjs
( ) ( )j
j
z eH z H e
En sistemas muestreados: sT
Región de estabilidad
Semiplano izquierdo (SPI) del plano complejo
Interior del c.u.
Teorema del valor final (TVF)
)(lim0
ssYs
)()1(lim 1
1zYz
z
Teorema del valor inicial (TVI)
)(lim ssYs
)()1(lim 1 zYzz
Constantes de error en régimen permanente
0
0
2
0
lim ( )
lim ( )
lim ( )
p s
p s
a s
k L s
k sL s
k s L s
1
1
0
21
20
lim ( )
1lim ( )
1lim ( )
pz
ps
s
as
s
k L z
zk L z
T
zk L z
T
Tabla 2
En sistemas muestreados, la relación de frecuencias es sT , donde es la frecuencia del
sistema discreto/muestreado (en rad), es la frecuencia del sistema analógico y Ts es el periodo de muestreo. Notar que la relación exacta entre los planos s y z en sistemas muestreados es
ssTz e , 1
lns
s zT
Transformada Z directa y región de convergencia (ROC) Dadas las muestras de la respuesta impulsional h(n) de un sistema., su transformada Z (unilátera) es:
0
)()()(n
nznhnhZzH

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 6
Transformada básica
Dada la señal nanu )( , 0n , su transformada Z es
1
11
1
0
1
0 1
11si
1
1)()(
azaz
az
azazzanuZzU
n
n
n
nn
La condición 11 az (o equivalentemente az ), necesaria para que la transformada tenga una
expresión cerrada, define la llamada región de convergencia (ROC, region of convergence).
Para el análisis de estabilidad nos fijamos en el círculo unitario 1z puesto que
si 1a la señal na crece fuertemente con el tiempo n (inestabilidad)
si 1a la amplitud de la señal na se mantiene constante con el tiempo n (oscilación
sostenida)
si 1a la señal na decrece con el tiempo n (estabilidad)
Por ello se dice también que un modo natural asociado al polo de un sistema es estable si su ROC incluye al c.u. Tabla de transformadas Z
Modo natural na
az
zaZ n
Escalón unitario n1
11
1
11
zz
zZ n
Rampa unitaria n (muestreo a Ts) 2
1s
zT
z
Tabla 3
Ejemplo 1. Transformada Z directa. Hallar la transformada Z unilátera de ( ) cos( )u n n .
Puesto que ( ) cos( )2
j n j ne eu n n
podemos calcular su transformada como
1
( )2 j j
z zU z
z e z e
Agrupando términos,
2 2
( cos )( )
2 ( ) 1 2 cos 1
j j
j j
z z e z e z zU z
z z e e z z

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 7
Transformada Z inversa Cada factor z-1 puede interpretarse como una delta de Kronecker decalada una muestra (Nota: la delta de Kronecker (n) vale 1 en n=0 y vale 0 para el resto de valores de n). Por ejemplo, la transformada Z inversa de la señal
64.02.164.02.1)( 12
zzzz
zzY
es, directamente, )(64.0)1(2.1)1()( nnnny También es posible obtener la respuesta a partir de las transformadas inversas de cada uno de los modos naturales. Por ejemplo,
0,)1(2)(1
2)1)(2(
)2(2
23
42)(
2
2
nnyz
z
zz
zz
zz
zzzY n
Notar además que la división del numerador entre el denominador de Y(z) nos da las muestras en tiempo:
...222
23
420
)462(
420
)462(
4221
2
1
1
2
2
zz
zz
z
zz
z
zz
zz
Cálculo de residuos En casos más complicados se procede igual que en tiempo continuo (descomposición en suma de fracciones simples y cálculo de residuos). Las fórmulas para el cálculo de residuos son análogas al
caso continuo, 1
)1()(
zz
zzYA .
Ejemplo 2. Transformada Z inversa vía cálculo de residuos. Vamos a obtener la transformada
inversa de 2
(3 0.6)( )
0.8 0.2
z zY z
z z
. Puesto que no es estrictamente propia, dividimos el numerador
entre el denominador y obtenemos:
2 2
(3 0.6) 1.8 0.6( ) 3
0.8 0.2 0.8 0.2
z z zY z
z z z z
Y ahora realizamos la descomposición en suma de fracciones simples del término estrictamente propio:
2
1.8 0.6
0.8 0.2 1 2
z Az Bz
z z z z
Los residuos son:
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 8
1
1.8 0.6 ( 1) 1.8 0.6 2.42
( 1)( 0.2) 1.2 1.2z
z zA
z z z
0.2
1.8 0.6 ( 0.2) 0.36 0.6 0.241
( 1)( 0.2) ( 1.2)( 0.2) 0.24z
z zB
z z z
Por tanto, la señal en el dominio temporal es:
( ) 2(1) ( 0.2) 3 ( ) , 0n ny n n n Teoremas del valor inicial y final
Para el señal 2
( )( 1)
zY z
z
, tenemos:
TVF: 2)1(
2)1(lim)()1(lim)(
1
1
1
z
z
z
zzYzy
zz
TVI: 2)1(
2)1(lim)()1(lim)0( 1
z
z
z
zzYzy
zz
Representación de la respuesta indicial con MATLAB Considerar el sistema
29.0
6.0)(
2
zz
zzH
Para obtener su respuesta indicial, se puede usar dstep:
>> dstep([1 -0.6],[1 -1 0.29])
O bien, se puede usar step
>> H=tf([1 -0.6],[1 -1 0.29],1) Transfer function: z - 0.6 -------------- z^2 - z + 0.29 Sampling time: 1 >> step(H)
El resultado es:

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 9
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6Step Response
Time (sec)
Am
plit
ude
Fig. 1
A continuación, verificamos el valor inicial y el valor final de la anterior respuesta indicial:
0129.0
6.0)1(lim)()1(lim)0(
)(
)(
21
zY
zH
zz z
z
zz
z
z
zzYzy
379.129.0
4.0
29.011
6.01
129.0
6.0)1(lim)()1(lim)(
)(
)(
21
1
1
zY
zH
zz z
z
zz
z
z
zzYzy
1.3 Respuesta frecuencial de los sistemas discretos
La respuesta frecuencial en un sistema discreto es )()(
j
ezeHzH j
, donde es la frecuencia
discreta (en rad). En los sistemas muestreados, la frecuencia discreta es sT , donde es la
frecuencia angular continua (en rad/s) y Ts es el periodo de muestreo (en s). Obtención punto a punto Se procede igual que en el caso de los sistemas continuos en el tiempo. Por ejemplo, considerar el siguiente sistema junto con su diagrama de polos y ceros:
5.0
5.0)(
2
zz
zzH
1
1 p1
p2 z
2 Re
Im
Fig. 2

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 10
La siguiente tabla muestra los valores de la respuesta frecuencial.
0
2.05.15.0
5.02
22
H
º0H
4
35.0H 18.9ºH
2
15.15.05.02
15.0222
2
H
0ºH
4
3 9.3H 85ºH
3
5.0
5.1
5.025.02
5.122
H180ºH
Tabla 4
Notar que en los sistemas discretos la respuesta frecuencial toma valores entre 0 y 2 y que, en realidad, basta con calcular la respuesta entre 0 y puesto que entre y 2 es simétrica.
0 0.5 1 1.5 2 2.5 3 3.5-200
-100
0
100
Pha
se (
degr
ees)
Frequency (rad)
0 0.5 1 1.5 2 2.5 3 3.50
2
4
6
Mag
nitu
de
Frequency (rad)0 1 2 3 4 5 6 7
0
2
4
6
Mag
nitu
de
Frequency (rad)
0 1 2 3 4 5 6 7-200
-100
0
100
200
Pha
se (
degr
ees)
Frequency (rad) Fig. 3. Respuesta frecuencial (a) de 0 a , (b) de 0 a 2
1.4 Métodos de discretización Diacretización Los distintos métodos de discretización tratan de aproximar mediante sistemas discretos ciertas características dinámicas (respuesta frecuencial o temporal) de los sistemas analógicos. Ya que no existe el “mejor universal”, para seleccionar un método se puede atender a los siguientes aspectos:
1) Fidelidad en la reproducción de una determinada característica dinámica (respuesta impulsional, respuesta indicial, respuesta frecuencial, polos y ceros, etc.).
2) Dificultad de su cálculo. Los distintos métodos pueden agruparse en diferentes categorías:
1) Aproximación numérica de la derivada y/o la integral.
2) Invariancia de las respuestas temporales (impulsional e indicial).

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 11
3) Transformación directa (mapping o matching) de polos y ceros finitos.
4) Por último existe el método de la transformación bilineal (transformada de Tustin), con y sin prewarping. Esta transformada puede incluirse en la primera categoría pero su utilidad, sobretodo en la reproducción aproximada de la respuesta frecuencial, le asigna un carácter propio.
Selección del muestreo Un tema previo es la elección de la frecuencia de muestreo fs (o de su inversa, el periodo de muestreo, Ts). Como criterio temporal, en sistemas con polos reales se recomienda tomar un mínimo de 5 muestras por constante de tiempo (considerando la constante de tiempo más rápida de entre las que son de interés). En sistemas con polos complejos conjugados, hay que tomar 10 muestras por ciclo (correspondiente a los polos dominantes). Como criterio frecuencial, la frecuencia de muestreo fs ha de ser, aproximadamente, de 5 a 10 veces la mayor frecuencia (o polo) de interés del sistema (su ancho de banda). O bien hay que asegurar que la modificación que introduce el muestreo en la frecuencia de crossover co (paso por 0dB) es
inferior a 5º, 5º2 180ºco sT
.
1.4.1 Aproximaciones numéricas (I). De la derivada
0) La transformación exacta es: zT
s ln1
.
1) Diferencia progresiva: T
nxnx
dt
dx )()1(
T
zs
1
Comentarios: Es sencilla pero puede producir inestabilidades. El SPI (s) se transforma en el círculo de la figura No presenta aliasing.
z
2) Diferencia regresiva: T
nxnx
dt
dx )1()(
Tz
z
T
zs
11 1
Comentarios: Es sencilla y no produce inestabilidad. El SPI (s) se transforma en el círculo de la figura No presenta aliasing.
z
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 12
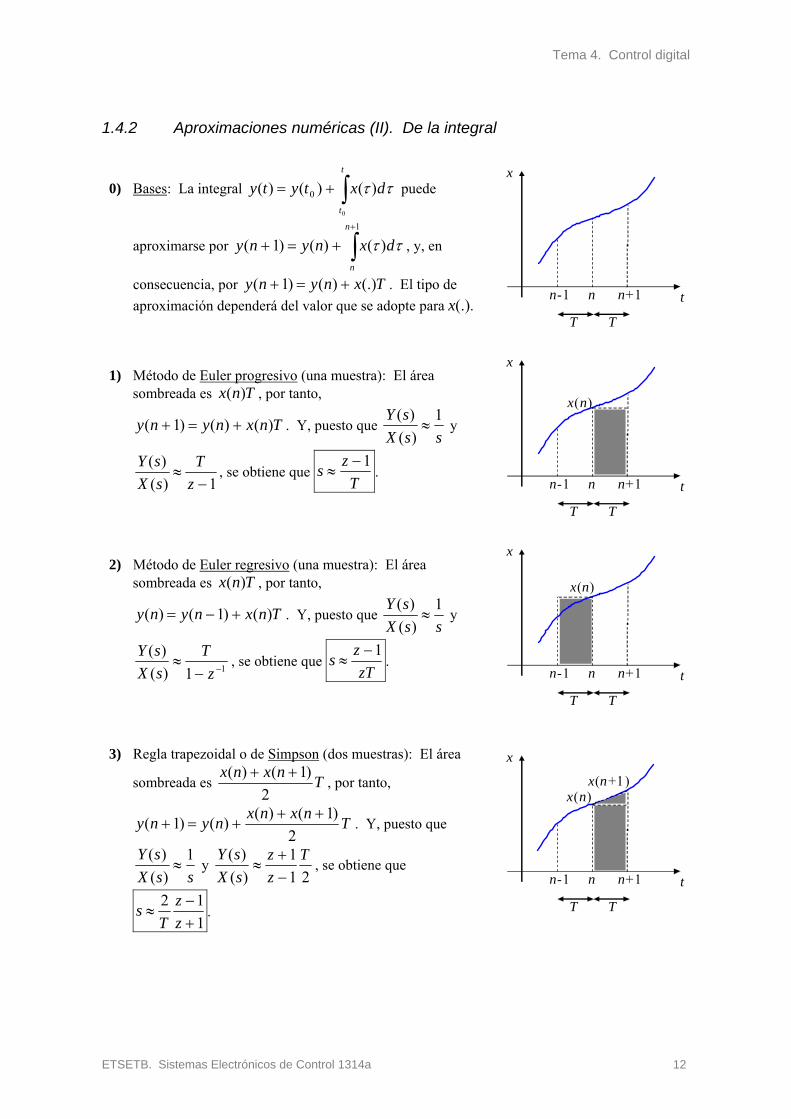
1.4.2 Aproximaciones numéricas (II). De la integral
0) Bases: La integral t
t
dxtyty
0
)()()( 0 puede
aproximarse por
1
)()()1(n
n
dxnyny , y, en
consecuencia, por Txnyny (.))()1( . El tipo de
aproximación dependerá del valor que se adopte para x(.).
n-1 n n+1 t
x
T T
1) Método de Euler progresivo (una muestra): El área sombreada es Tnx )( , por tanto,
Tnxnyny )()()1( . Y, puesto que ssX
sY 1
)(
)( y
1)(
)(
z
T
sX
sY, se obtiene que
T
zs
1 .
n-1 n n+1 t
x
T T
x(n)
2) Método de Euler regresivo (una muestra): El área sombreada es Tnx )( , por tanto,
Tnxnyny )()1()( . Y, puesto que ssX
sY 1
)(
)( y
11)(
)(
z
T
sX
sY, se obtiene que
zT
zs
1 .
n-1 n n+1 t
x
T T
x(n)
3) Regla trapezoidal o de Simpson (dos muestras): El área
sombreada es Tnxnx
2
)1()( , por tanto,
Tnxnx
nyny2
)1()()()1(
. Y, puesto que
ssX
sY 1
)(
)( y
21
1
)(
)( T
z
z
sX
sY
, se obtiene que
1
12
z
z
Ts .
n-1 n n+1 t
x
T T
x(n) x(n+1)

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 13
1.4.3 Transformación bilineal (I)
Además de obtenerla con razonamientos numéricos (regla de Simpson) es interesante obtenerla también como una aproximación de Padé de primer orden de la transformación exacta
2/1
2/12/
2/
sT
sT
e
eez
sT
sTsT
. Operando obtenemos 1
12
z
z
Ts .
Comentarios: Es sencilla.
Mejor aproximación que las otras dos. El SPI (s) se transforma en el círculo de la figura No produce inestabilidad. No presenta aliasing.
z
1
1.4.4 Transformación bilineal (II). Prewarping
La transformación bilineal supone una compresión de la frecuencia según se evidencia en la Figura (a):
D
A
3N
N
TN
)2/(
DT
2
z s
jA
(a) (b)
Fig. 4
A partir de 1
12
z
z
Ts , igualando los puntos correspondientes de las frecuencias A y D (ver
Figura (b)), 1
12
Tj
Tj
AD
D
e
e
Tj
, se obtiene
2
tg2
TT DA y, finalmente,
2
tg2 T
TD
A
cuya relación se representa en la Figura (a). Comentarios:
1) Si A es pequeña, el valor de ambas frecuencias coinciden DA .
2) La aproximación es muy buena (error menor que 1%) para ND 3
1 , siendo
TN
2/ .
3) Warping: Si la D se aleja de estos límites, la característica frecuencial de ambos filtros puede diferir (warping) bastante ( AD 11 ).
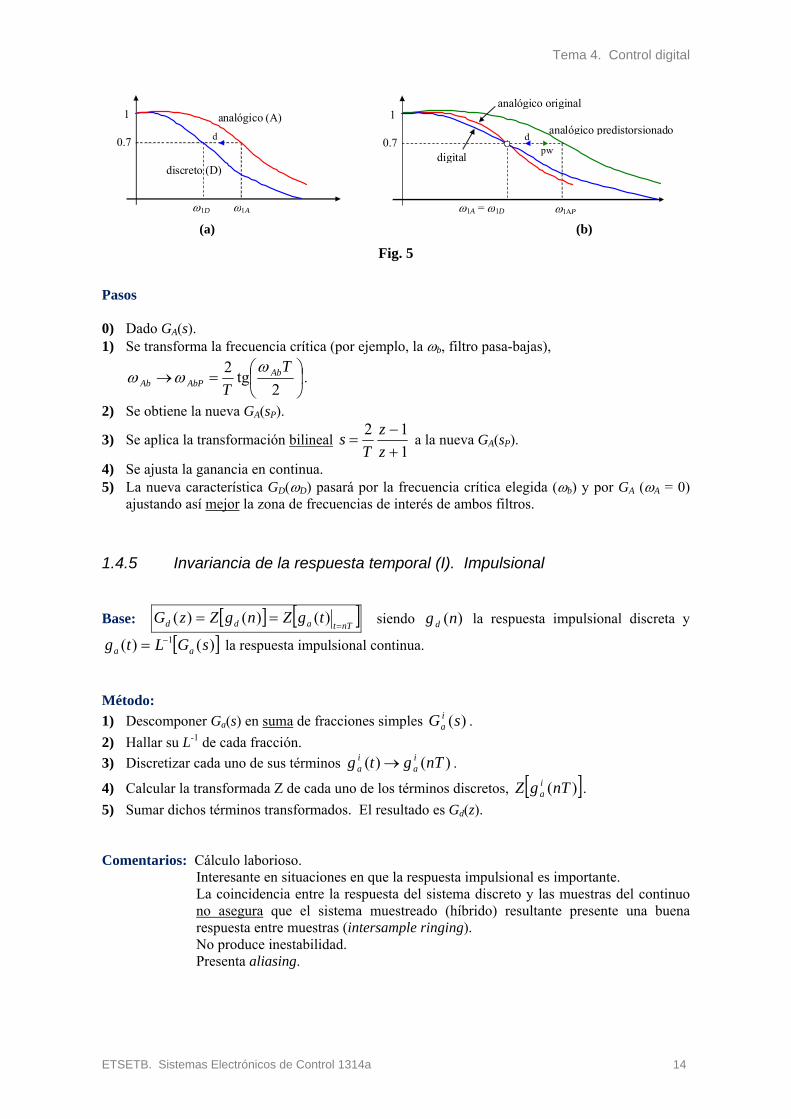
4) Prewarping: Para compensarla se puede hacer una predistorsión o prewarping (expansión) tal que luego recupere su valor ( ADPAP 212 ) original.
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 14
1
0.7
1A = 1D 1AP
1
0.7
1D 1A
discreto (D)
analógico (A) analógico original
analógico predistorsionado
digital
d pw
d
(a) (b)
Fig. 5
Pasos 0) Dado GA(s). 1) Se transforma la frecuencia crítica (por ejemplo, la b, filtro pasa-bajas),
2
tg2 T
TAb
AbPAb
.
2) Se obtiene la nueva GA(sP).
3) Se aplica la transformación bilineal 1
12
z
z
Ts a la nueva GA(sP).
4) Se ajusta la ganancia en continua. 5) La nueva característica GD(D) pasará por la frecuencia crítica elegida (b) y por GA (A = 0)
ajustando así mejor la zona de frecuencias de interés de ambos filtros.
1.4.5 Invariancia de la respuesta temporal (I). Impulsional
Base: nTtadd tgZngZzG
)()()( siendo )(ng d la respuesta impulsional discreta y
)()( 1 sGLtg aa la respuesta impulsional continua.
Método:
1) Descomponer Ga(s) en suma de fracciones simples )(sG ia .
2) Hallar su L-1 de cada fracción.
3) Discretizar cada uno de sus términos )()( nTgtg ia
ia .
4) Calcular la transformada Z de cada uno de los términos discretos, )(nTgZ ia .
5) Sumar dichos términos transformados. El resultado es Gd(z). Comentarios: Cálculo laborioso.
Interesante en situaciones en que la respuesta impulsional es importante. La coincidencia entre la respuesta del sistema discreto y las muestras del continuo no asegura que el sistema muestreado (híbrido) resultante presente una buena respuesta entre muestras (intersample ringing). No produce inestabilidad. Presenta aliasing.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 15
1.4.6 Invariancia de la respuesta temporal (II). Indicial
Base: La respuesta indicial del sistema discreto es igual a las muestras de la respuesta indicial del
sistema analógico )(1
)(1
sGs
zGz
zAD
s
sGLZ
z
zzG A
D
)(1)( 1 .
Comentarios:
1) El símbolo Z[ ] implica, como en el caso anterior: 1.1) la respuesta impulsional de )(1
sGs a .
1.2) Las muestras (t nT). 1.3) La transformada Z de la señal discreta. 2) Cálculo laborioso. 3) Puede interpretarse también con la discretización (invariancia impulsional) del sistema
precedido por un convertidor D/A tipo ZOH (modelo: 2
1 sTe).
Permite una aproximación sencilla (en el estudio de Leron) de añadir un retardo 2/sTe .
Ejemplo 3. Discretización. Dado el sistema en tiempo continuo 12
10)(
ssGc se pide obtener
a mano su equivalente discreto GD(z) por el método de la invariancia indicial, es decir, anteponiéndole un mantenedor de orden cero (ZOH, zero order hold). Tomar como periodo de muestreo Ts=0.1s. Invariancia indicial significa que la respuesta indicial de Gc muestreada a 0.1s coincidirá con las muestras de la respuesta indicial de GD:
snTtcD sG
sLZzG
z
z)(
1)(
11
Por tanto el procedimiento es el siguiente: Hallar la respuesta indicial de Gc:
sss
B
s
A
sssY 12
101210
1212
1
12
10)(
tety 12112
10)(
Muestrear la respuesta indicial:
s
s
nT
nTetyny 121
12
10)()(
Aplicar la transformada Z a la anterior respuesta indicial muestreada:
sTez
z
z
zzY 12112
10)(
Despejar el término GD, )()(1
zYzGz
zD

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 16
))(1(
1
12
10)1(
112
101)( 12
12
12 s
s
s T
T
TD ezz
zezz
ez
z
z
z
z
zzG
3012.0
5823.0
3012.0
6988.0
12
10)(
zzzGD
Verificación por MATLAB;
>> G=tf(10,[1 12]) Transfer function: 10 ------ s + 12 >> c2d(G,0.1,'zoh') Transfer function: 0.5823 ---------- z - 0.3012 Sampling time: 0.1
1.4.7 Transformación directa (mapping) de ceros y polos finitos
Pasos:
1) Transformar mediante sTez los polos (pA) y los ceros (zA) finitos: TpD
Aep , TzD
Aez . 2) Añadir e ceros en –1 (factores (z+1)e) siendo e el exceso del número de polos finitos sobre el de
ceros finitos. 3) Añadir un factor k para ajustar la amplitud de continua.
4) Resultado:
n
D
m
De
DA
pz
zzz
kzGsG
)(
)()1(
)()( .
Comentarios: Cálculos laboriosos. Facilita mantener la asociación polos/modos naturales.
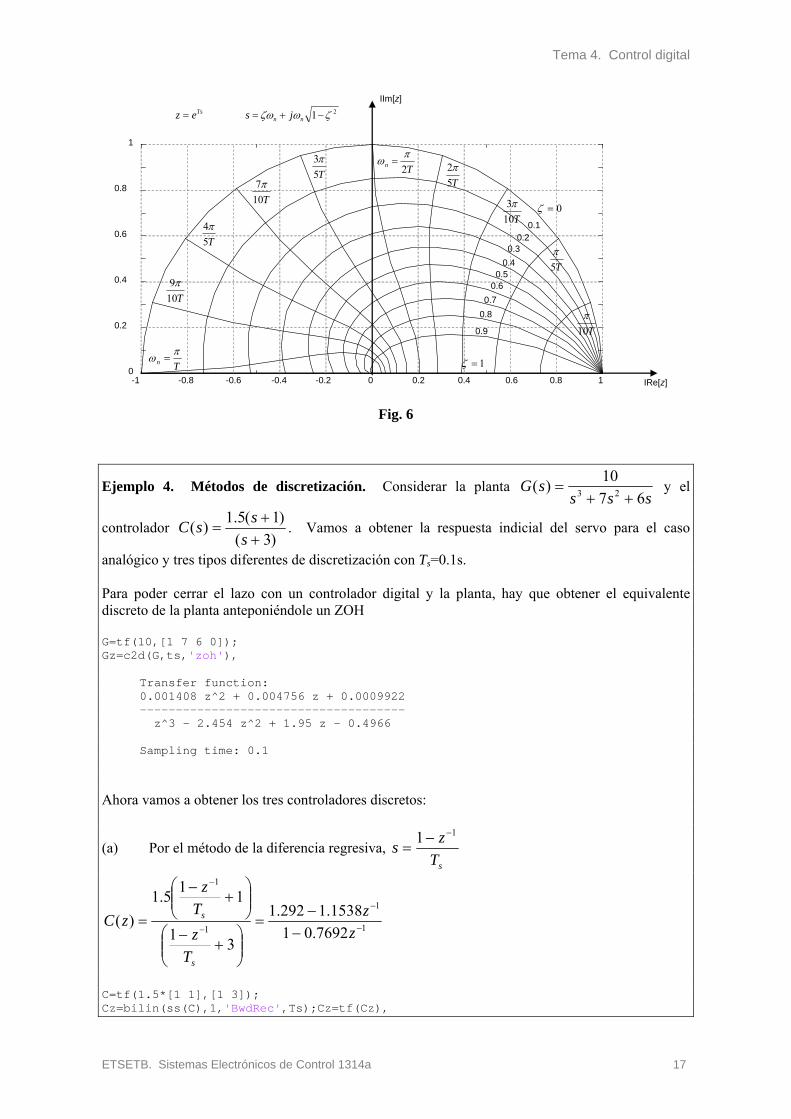
El siguiente ábaco permite ver la relación entre los polos discretos y , n correspondientes en continuo.
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 17
-1 -0.8 0 0.6 1 0
-0.4
0.2
-0.6
0.4
0.2
0.6
0.4
0.8
0.8
1
-0.2
IIm[z]
IRe[z]
T10
9
T5
4
T10
7
Tn 2
Tn
T5
3
T5
2
T10
3
T5
T10
0
0.6
1
Tsez 21 nn js
0.4
0.3 0.2
0.1
0.8
0.7
0.5
0.9
Fig. 6
Ejemplo 4. Métodos de discretización. Considerar la planta sss
sG67
10)(
23 y el
controlador )3(
)1(5.1)(
s
ssC . Vamos a obtener la respuesta indicial del servo para el caso
analógico y tres tipos diferentes de discretización con Ts=0.1s. Para poder cerrar el lazo con un controlador digital y la planta, hay que obtener el equivalente discreto de la planta anteponiéndole un ZOH G=tf(10,[1 7 6 0]); Gz=c2d(G,ts,'zoh'),
Transfer function: 0.001408 z^2 + 0.004756 z + 0.0009922 ------------------------------------- z^3 - 2.454 z^2 + 1.95 z - 0.4966 Sampling time: 0.1
Ahora vamos a obtener los tres controladores discretos:
(a) Por el método de la diferencia regresiva, sT
zs
11
1
1
1
1
7692.01
1538.1292.1
31
11
5.1
)(
z
z
T
z
T
z
zC
s
s
C=tf(1.5*[1 1],[1 3]); Cz=bilin(ss(C),1,'BwdRec',Ts);Cz=tf(Cz),

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 18
Transfer function: 1.269 z - 1.154 --------------- z - 0.7692 Sampling time: 0.1
(b) Por el método de Tustin, 1
1
1
12
z
z
Ts
s
1
1
1
1
1
1
7391.01
2931.13696.1
31
12
11
125.1
)(
z
z
z
z
T
z
z
TzC
s
s
Cz=c2d(C,ts,'Tustin'),
Transfer function: 1.37 z - 1.239 -------------- z - 0.7391 Sampling time: 0.1
(c) Por el método de transformación directa de polos y ceros finitos.
1
1
1.03
1.01
74082.01
2322.13618.1
74082.0
90484.0)(
z
z
z
zA
ez
ezAzC
A se escoge para que la ganancia a bajas frecuencias sea la misma que para el caso analógico. El teorema del valor final para el controlador analógico establece que la ganancia en continua de éste es 5.0)30/()10(5.1)0( C . En el caso discreto, puesto que )exp( ssTz , cuando s=0
tenemos z=1. La ganancia en continua del controlador discreto es
5.03672.0)74082.01/()90484.01()(1
AAzCz
, por tanto, A=1.3618.
Cz=c2d(C,ts,'matched'),
Transfer function: 1.362 z - 1.232 --------------- z - 0.7408 Sampling time: 0.1
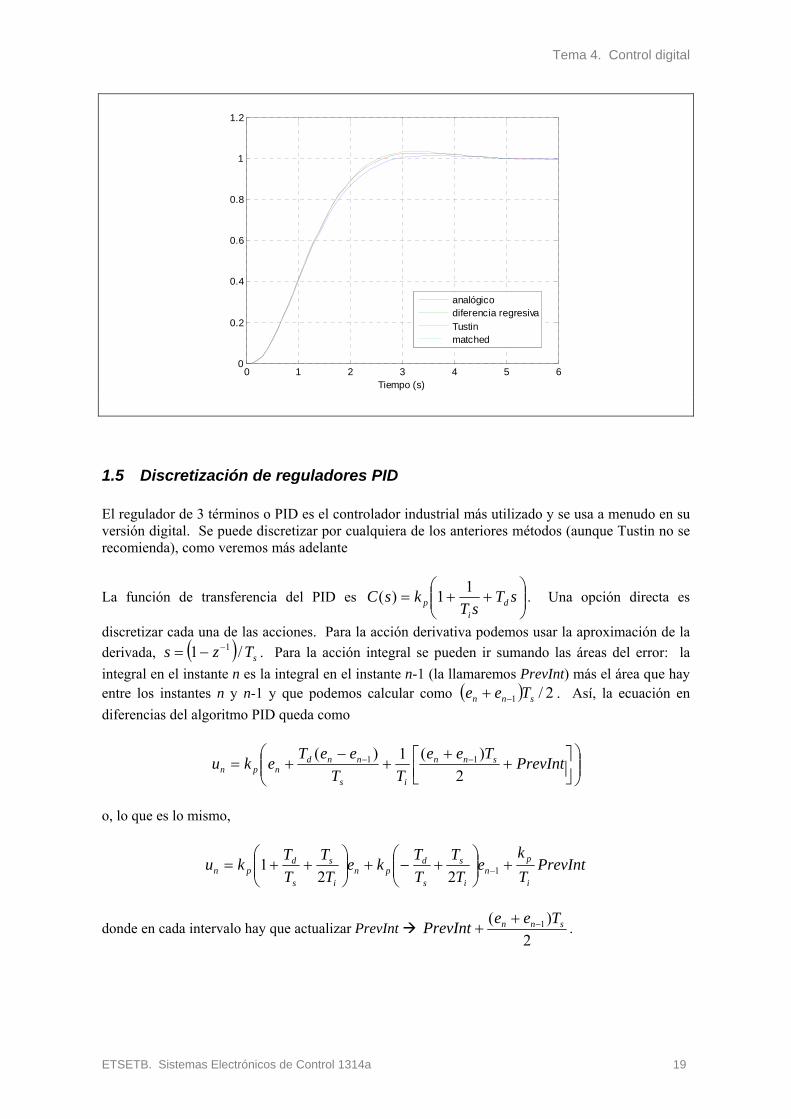
Si cerramos el lazo para cada uno de los controladores y comparamos las respuestas indiciales el resultado es el mostrado en la siguiente figura (donde se observa la ligera degradación de la respuesta que introduce la discretización). L3=series(Cz,Gz);T3=feedback(L3,1); y3=step(T3,t); figure(1),plot(t,ya,t,y1,t,y2,t,y3,'--'),grid, legend('analógico','diferencia regresiva','Tustin','matched'), axis([0 6 0 1.2]),xlabel('Tiempo (s)')
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 19
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
Tiempo (s)
analógicodiferencia regresivaTustinmatched
1.5 Discretización de reguladores PID El regulador de 3 términos o PID es el controlador industrial más utilizado y se usa a menudo en su versión digital. Se puede discretizar por cualquiera de los anteriores métodos (aunque Tustin no se recomienda), como veremos más adelante
La función de transferencia del PID es
sT
sTksC d
ip
11)( . Una opción directa es
discretizar cada una de las acciones. Para la acción derivativa podemos usar la aproximación de la
derivada, sTzs /1 1 . Para la acción integral se pueden ir sumando las áreas del error: la
integral en el instante n es la integral en el instante n-1 (la llamaremos PrevInt) más el área que hay entre los instantes n y n-1 y que podemos calcular como 2/1 snn Tee . Así, la ecuación en
diferencias del algoritmo PID queda como
PrevInt
Tee
TT
eeTeku snn
is
nndnpn 2
)(1)( 11
o, lo que es lo mismo,
PrevIntT
ke
T
T
T
Tke
T
T
T
Tku
i
pn
i
s
s
dpn
i
s
s
dpn
122
1
donde en cada intervalo hay que actualizar PrevInt 2
)( 1 snn TeePrevInt
.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 20
PID incremental Hay una versión de este algoritmo mucho más utilizada que consiste en calcular sólo los cambios de la señal de control con respecto a la muestra anterior. Este algoritmo recibe el nombre de algoritmo de velocidad o PID incremental y tiene diversas ventajas: no hay que guardar el valor absoluto de la integral hasta ese momento y se puede pasar de manera más suave del control manual al automático (bumpless transfer). Ello es así porque cuando el controlador ya está en marcha solo hay que calcular el primer movimiento incremental y no se debe inicializar para dar la misma señal absoluta un que se tenía en control manual. Además, muchos actuadores, como los motores paso a paso, ya esperan entradas de control incrementales. Para obtener el incremento de la señal de control basta con calcular 1 nn uuu .
Notar que el área añadida a la integral en el instante n es 2
)( 1 snn Tee mientras que el área
añadida en el instante n-1 es 2
)( 21 snn Tee siendo PrevIntn-1 la integral hasta el momento n-1.
Así,
PrevInt
snn1-n
snn
is
nndnpn
TeePrevInt
Tee
TT
eeTeku
2
)(
2
)(1)( 2111
2
)(1)( 212111
snn1-n
is
nndnpn
TeePrevInt
TT
eeTeku
Restando, el algoritmo incremental queda como:
1 2 11 1
( 2 ) ( )1
2d n n n n n s
n n p n ns i
T e e e e e Tu u u k e e
T T
Ejemplo 5. Métodos de discretización de reguladores PID. Considerar la planta
10178
10)(
23
ssssG y el PID con kp=3, Td=0.333 y Ti=1.5s. Comparar la respuesta
indicial del servo para varios métodos de discretización con Ts=1s. Para poder simular el lazo digital hallamos la función de transferencia de la planta discreta equivalente anteponiéndole un ZOH: G=tf(10,[1 8 17 10]); Gz=c2d(G,Ts),
Transfer function: 0.001369 z^2 + 0.0045 z + 0.0009179 ----------------------------------- z^3 - 2.33 z^2 + 1.786 z - 0.4493 Sampling time: 0.1
La función de transferencia del PID analógico es
Tema 4. Control digital
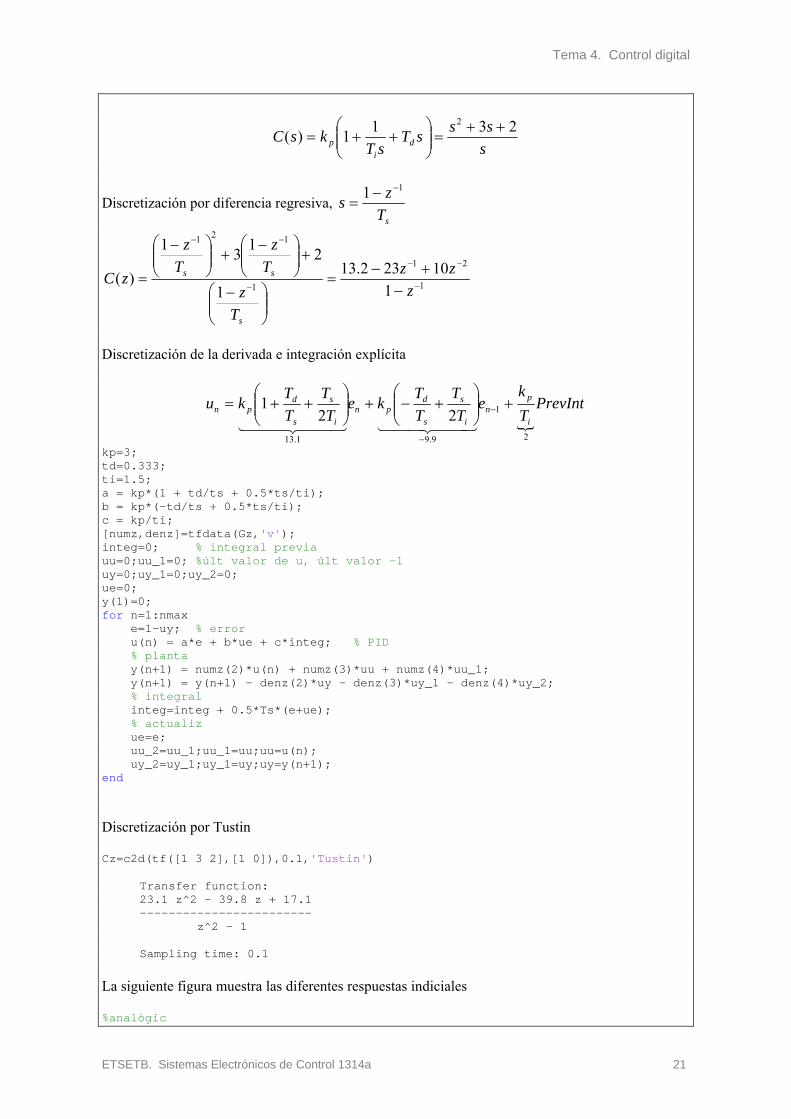
ETSETB. Sistemas Electrónicos de Control 1314a 21
s
sssT
sTksC d
ip
2311)(
2
Discretización por diferencia regresiva, sT
zs
11
1
21
1
121
1
10232.13
1
21
31
)(
z
zz
T
z
T
z
T
z
zC
s
ss
Discretización de la derivada e integración explícita
PrevInt
T
ke
T
T
T
Tke
T
T
T
Tku
i
pn
i
s
s
dpn
i
s
s
dpn
2
1
9.91.13
221
kp=3; td=0.333; ti=1.5; a = kp*(1 + td/ts + 0.5*ts/ti); b = kp*(-td/ts + 0.5*ts/ti); c = kp/ti; [numz,denz]=tfdata(Gz,'v'); integ=0; % integral previa uu=0;uu_1=0; %últ valor de u, últ valor -1 uy=0;uy_1=0;uy_2=0; ue=0; y(1)=0; for n=1:nmax e=1-uy; % error u(n) = a*e + b*ue + c*integ; % PID % planta y(n+1) = numz(2)*u(n) + numz(3)*uu + numz(4)*uu_1; y(n+1) = y(n+1) - denz(2)*uy - denz(3)*uy_1 - denz(4)*uy_2; % integral integ=integ + 0.5*Ts*(e+ue); % actualiz ue=e; uu_2=uu_1;uu_1=uu;uu=u(n); uy_2=uy_1;uy_1=uy;uy=y(n+1); end Discretización por Tustin Cz=c2d(tf([1 3 2],[1 0]),0.1,'Tustin')
Transfer function: 23.1 z^2 - 39.8 z + 17.1 ------------------------ z^2 - 1 Sampling time: 0.1
La siguiente figura muestra las diferentes respuestas indiciales %analògic

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 22
La=series(C,G); Ta=feedback(La,1); ya=step(Ta,t); plot(t,y,t,y2,t,y3,t,ya),axis([0 5 0 1.2]),xlabel('Tiempo (s)'),grid legend('integración directa','diferencia regresiva','Tustin','analógico'),
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
Tiempo (s)
salid
a d
el
serv
o y
integración directadiferencia regresivaTustinanalógico
El comportamiento del PID discretizado vía Tustin no es adecuado debido a la aparición de un polo con parte real negativa (también llamado ringing pole). La siguiente figura muestra los esfuerzos de control de las tres discretizaciones:
0 1 2 3 4 5-20
-15
-10
-5
0
5
10
15
20
25
Tiempo (s)
esfu
erz
o de
con
trol
u
Así, el PID discretizado vía Tustin no es adecuado porque desgasta físicamente al sistema, aumenta el consumo, además de conllevar oscilaciones en la respuesta del servo.
1.6 Análisis de controladores digitales
1.6.1 Lugar geométrico de las raíces
El trazado e interpretación del lugar geométrico de las raíces para el caso de sistemas discretos en el tiempo es análogo al caso de sistemas continuos en el tiempo. Las reglas de trazado son las mismas (eje real, asíntotas, puntos de emergencia/incidencia del/al eje real, ajustes) con la única diferencia de que la determinación del límite de estabilidad se realiza hallando los cruces con el círculo unitario (c.u.). A nivel de cálculo, para obtener el corte con el c.u. hay que transformar L(z) en L(w) y aplicar el criterio de Routh-Hurwitz de los sistemas continuo en el tiempo.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 23
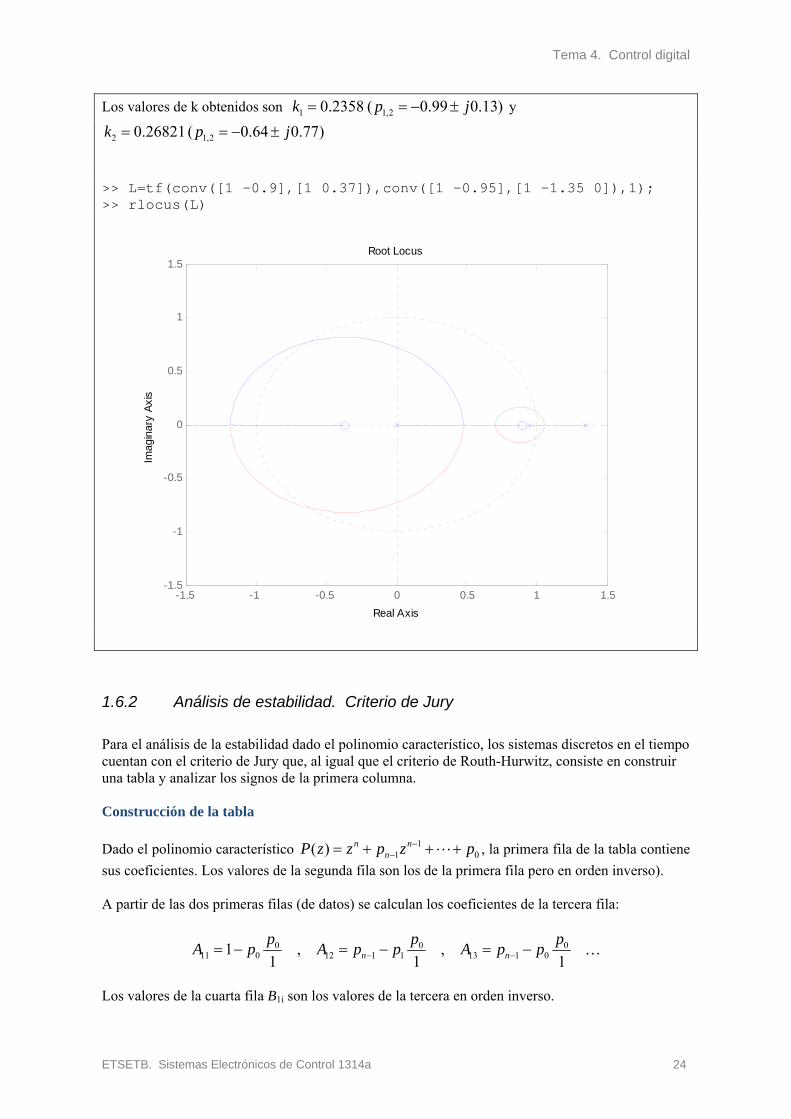
Ejemplo 6. Trazado del lugar geométrico de las raíces. Representar el LGR correspondiente a la ecuación característica:
( 0.9)( 0.37)1 ( ) 1 0
( 0.95)( 1.35)
z zkL z k
z z z
La aplicación de la regla del eje real indica que hay LGR de -∞ a -0.37, entre 0 y 0.9, y entre 0.95 y 1.35. Sólo hay un cero en el infinito y la primera regla ya nos indica que la recta asintótica es la recta de pendiente -180º.
La solución de 0dk
dz tiene 4 raíces que corresponden a otros a tantos puntos de ruptura. En
concreto, como puntos de emergencia del eje real tenemos a 1 11.056 ( 0.148)e ek y
2 20.484 ( 0.55)e ek . Y como puntos de incidencia al eje real tenemos
1 10.703 ( 0.531)i ik y 2 21.185 ( 3.77)i ik .
Para obtener los cortes con el c.u. aplicamos la transformación 1
2
12
Tw
zT
w
a L(z). Tomando T=1,
queda: 3 2
3 2
0.2612 0.6411 2.208 0.2392( )
1.753 0.5085 0.03055
w w wL w
w w w
.
La ecuación característica 1 ( ) 0kL w resultante es:
3 21 0.2612 1.735 0.6411 0.5085 2.208 0.0355 0.2392 0a b c d
w k w k w k k
La tabla de Routh-Hurwitz es:
3
2
11
0
w a c
w b d
w A
w d
donde debemos forzar A1=0 a fin de tener una fila de ceros.
2 2
1
( 1.4155 4.1966 0.8914) ( 0.0625 0.2485 0.0355)bc ad k k k kA
b b
2
1
1.3531 3.9482 0.85590
k kA
b
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 24
Los valores de k obtenidos son 1 1,20.2358 ( 0.99 0.13)k p j y
2 1,20.26821 ( 0.64 0.77)k p j
>> L=tf(conv([1 -0.9],[1 0.37]),conv([1 -0.95],[1 -1.35 0]),1); >> rlocus(L)
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5Root Locus
Real Axis
Imag
inar
y A
xis
1.6.2 Análisis de estabilidad. Criterio de Jury
Para el análisis de la estabilidad dado el polinomio característico, los sistemas discretos en el tiempo cuentan con el criterio de Jury que, al igual que el criterio de Routh-Hurwitz, consiste en construir una tabla y analizar los signos de la primera columna. Construcción de la tabla
Dado el polinomio característico 11 0( ) n n
nP z z p z p , la primera fila de la tabla contiene
sus coeficientes. Los valores de la segunda fila son los de la primera fila pero en orden inverso). A partir de las dos primeras filas (de datos) se calculan los coeficientes de la tercera fila:
0 0 011 0 12 1 1 13 1 01 , ,
1 1 1n n
p p pA p A p p A p p
Los valores de la cuarta fila B1i son los valores de la tercera en orden inverso.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 25
La quinta fila se obtiene a partir de las dos anteriores:
1121 11 11
11
BA A B
A
Y así sucesivamente. Interpretación Si los coeficientes pn, A11, A21,… son positivos entonces todas las raíces de P(z) están dentro del círculo unitario.
Ejemplo 7. Criterio de Jury. Considerar el lazo 10
( )( 1)
TL z
z
. Se desea saber qué rango de
valores de T aseguran la estabilidad del servo con retroacción unitaria negativa alrededor de L(z).
Primer método: Aplicar la transformación 1
2
12
Tw
zT
w
a L(z) y analizar el polinomio característico
resultante. Éste es
121 ( ) 1 10 0 (1 5 ) 10 0
Tw
L w w Tw
Para que el sistema sea estable, 1 5 0T , por tanto 0 0.2T Segundo método: Aplicar el criterio de Jury a la ecuación característica en z,
1 0
101 ( ) 1 0 (10 1) 0
( 1)
TL z z T p z p
z
1 0
0 1
1 2
1
1 10 1
10 1 1
0
p p T
p T p
A A
B
20 01 1 0 2 0 0
1 1
21 1 2 1
1
1 (10 1) , 0p p
A p p T A p pp p
AB A A A
A
La condición de estabilidad es que p1 y A1 sean positivas, por tanto,
21 1 (10 1) 0 1 10 1 0 0.2A T T T

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 26
1.7 Diseño de controladores digitales
1.7.1 Controlador dead beat
Una respuesta dead beat es la que sigue exactamente la excitación con una única muestra de retardo. Ello sólo puede conseguirse adecuadamente en sistemas de primer orden. Suponer que la planta es G(z). Si se excita con un escalón unitario, la respuesta deseada es
1
1
1)( 1
zz
z
zzY . La función de transferencia en lazo cerrado será
zzz
z
zR
zYzT
1
)1/(
)1/(1
)(
)()(
. Así, el controlador será )(/11
/1
)(1
)(
)(
1)(
zGz
z
zT
zT
zGzC
.
Ejemplo 8. Controlador dead beat. Comportamiento entre muestras. (Dutton) Considerar la
planta 42
8)(
2
sssG , cuya versión discreta anteponiéndole un ZOH con Ts=0.4s es
449329.003157.1
361449.0474069.0)(
2
zz
zzG .
El controlador dead beat es
361449.011262.0474069.0
449329.003157.1
449329.003157.1
361449.0474069.0/11
/1)(
2
2
2
zz
zz
zz
zz
zzC
21
21
7624.02376.01
9478.0176.21094.2)(
zz
zzzC
Si realizamos la simulación con Simulink (variable step, ode45, max step size = 1e-2),
y representamos el resultado, >> t=db(:,1); >> plot(t,db(:,2)),hold on,stem(0:0.4:5,y,'r') >> xlabel('Tiempo (s)'),title('salida del servo (analógica y muesteada a 0.4s)') >> G=tf(8,[1 2 4]); >> Gz=c2d(G,0.4,'zoh'); >> Cz=tf([2.1094 -2.176 0.9478],[1 -0.2376 -0.7624],0.4) >> Tu=feedback(Cz,Gz);figure(2),u=step(Tu,0:0.4:5);stairs(0:0.4:5,u) >> xlabel('Tiempo (s)'),title('salida del controlador')

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 27
Vemos que, efectivamente, si tomamos muestras a 0.4s podemos pensar que el seguimiento al escalón discreto es perfecto, con sólo una muestra de retardo. Sin embargo el comportamiento del sistema entre muestras dista mucho de ser el ideal. Es por ello por lo que el controlador dead beat no se usa en sistemas de orden 2 o superior
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo (s)
salida del servo (analógica y muesteada a 0.4s)
0 1 2 3 4 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Tiempo (s)
salida del controlador
1.7.2 Controlador de Kalman
A la vista de las limitaciones del controlador dead beat del apartado anterior, Kalman razonó que ya que es imposible que un sistema siga la excitación en un solo intervalo de muestreo de retardo, quizá pueda seguirlo en un número mayor de intervalos de muestreo, tantos como el orden de la planta. Así, si la planta es de segundo orden, se trata de diseñar un controlador capaz de seguir perfectamente consignas con dos intervalos de retardo.
Considerar que la consigna es un escalón unitario, ...1)( 21 zzzr En la salida, la
primera muestra será 0, la segunda muestra valdrá cierto valor y a partir de la tercera muestra ya
tendremos el escalón unitario: ...0)( 21 zzzy En cuanto a la señal de control capaz de
conseguir esto, la primera muestra deberá ser mayor que el régimen permanente, la segunda muestra deberá “frenar” al sistema a fin de situarlo en el punto adecuado y, a partir de la tercer muestra, tendremos un escalón unitario dividido por la ganancia en continua de la planta k:
...1
)( 21 zk
zzu .
Para diseñar el controlador usaremos de nuevo la expresión )(1
)(
)(
1)(
zT
zT
zGzC
. Por tanto
necesitamos obtener la expresión de T(z) y G(z).
......
1
1...0
)(
)()( 3211321
1
321
zzzzzzz
z
zzz
zr
zyzT
21 )1()( zzzT Para obtener G(z), multiplicaremos y(z), u(z) por (1-z-1),
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 28
21
21
3211
3211
1)(
)1(
...1
)1(
...)1(
)(
)()(
zk
z
zz
zzk
zz
zzzz
zu
zyzG
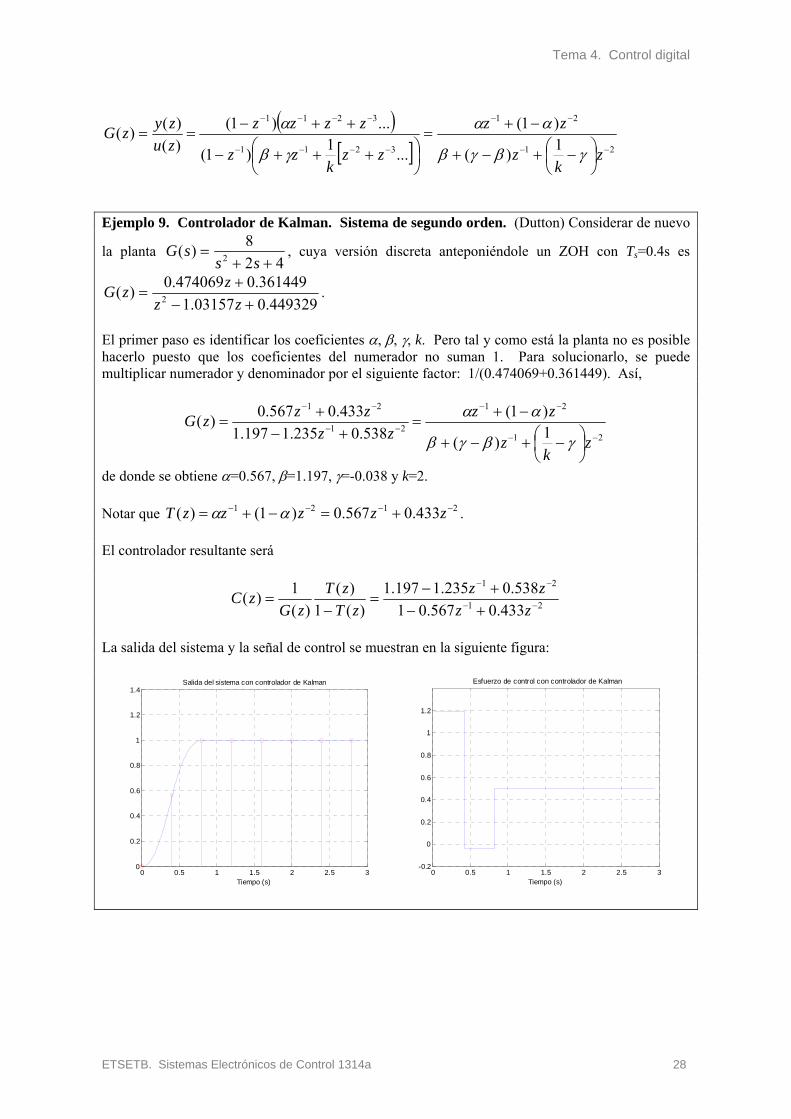
Ejemplo 9. Controlador de Kalman. Sistema de segundo orden. (Dutton) Considerar de nuevo
la planta 42
8)(
2
sssG , cuya versión discreta anteponiéndole un ZOH con Ts=0.4s es
449329.003157.1
361449.0474069.0)(
2
zz
zzG .
El primer paso es identificar los coeficientes , , , k. Pero tal y como está la planta no es posible hacerlo puesto que los coeficientes del numerador no suman 1. Para solucionarlo, se puede multiplicar numerador y denominador por el siguiente factor: 1/(0.474069+0.361449). Así,
21
21
21
21
1)(
)1(
538.0235.1197.1
433.0567.0)(
z
kz
zz
zz
zzzG
de donde se obtiene =0.567, =1.197, =-0.038 y k=2.
Notar que 2121 433.0567.0)1()( zzzzzT . El controlador resultante será
21
21
433.0567.01
538.0235.1197.1
)(1
)(
)(
1)(
zz
zz
zT
zT
zGzC
La salida del sistema y la señal de control se muestran en la siguiente figura:
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo (s)
Salida del sistema con controlador de Kalman
0 0.5 1 1.5 2 2.5 3-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Tiempo (s)
Esfuerzo de control con controlador de Kalman

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 29
1.7.3 Controlador de Dahlin
Los problemas del controlador de Kalman se deben a que éste es muy dependiente del tiempo de muestreo. El tiempo de establecimiento depende de Ts. Si Ts es muy corto, la señal de control debe ser muy grande (la selección más común para el tiempo de muestreo mínimo es 5 veces la frecuencia natural más alta del sistema en lazo cerrado). Pero tampoco se puede hacer Ts demasiado largo puesto que este valor está limitado por el teorema de muestreo de Shannon y puede provocar problemas de aliasing. Una alternativa es usar el controlador de Dahlin. El controlador de Dahlin es una versión suavizada del controlador dead beat y su objetivo es conseguir una respuesta de tipo (1-exp(at)) al ser el sistema excitado con un escalón. Así, la velocidad de respuesta se ajusta con los parámetros del controlador y no es necesario cambiar Ts.
Si la respuesta indicial del servo es del tipo atety 1)( , tenemos que sanTeny 1)( y, por tanto,
1
11
1
1)(
zez
ze
ezzzY
s
s
s aT
aT
aT
y
s
s
aT
aT
ez
ezT
1
)(
Ejemplo 10. Controlador de Dahlin. Ringing poles. Considerar de nuevo la planta
42
8)(
2
sssG , cuya versión discreta anteponiéndole un ZOH con Ts=0.4s es
449329.003157.1
361449.0474069.0)(
2
zz
zzG . Se desea diseñar una respuesta de primer orden con una
contante de tiempo de 1.5s, por tanto, a=1/1.5.
La función de transferencia del servo será: 76593.0
23407.01)(
zez
ezT
s
s
aT
aT
Y el controlador resultante es
21
21
7624.0237.01
222.0509.0494.0
)(1
)(
)(
1)(
zz
zz
zT
zT
zGzC
0 2 4 6 8 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo (s)
Respuesta del controlador de Dahlin
0 2 4 6 8 10-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Tiempo (s)
Esfuerzo de control del controlador de Dahlin
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 30
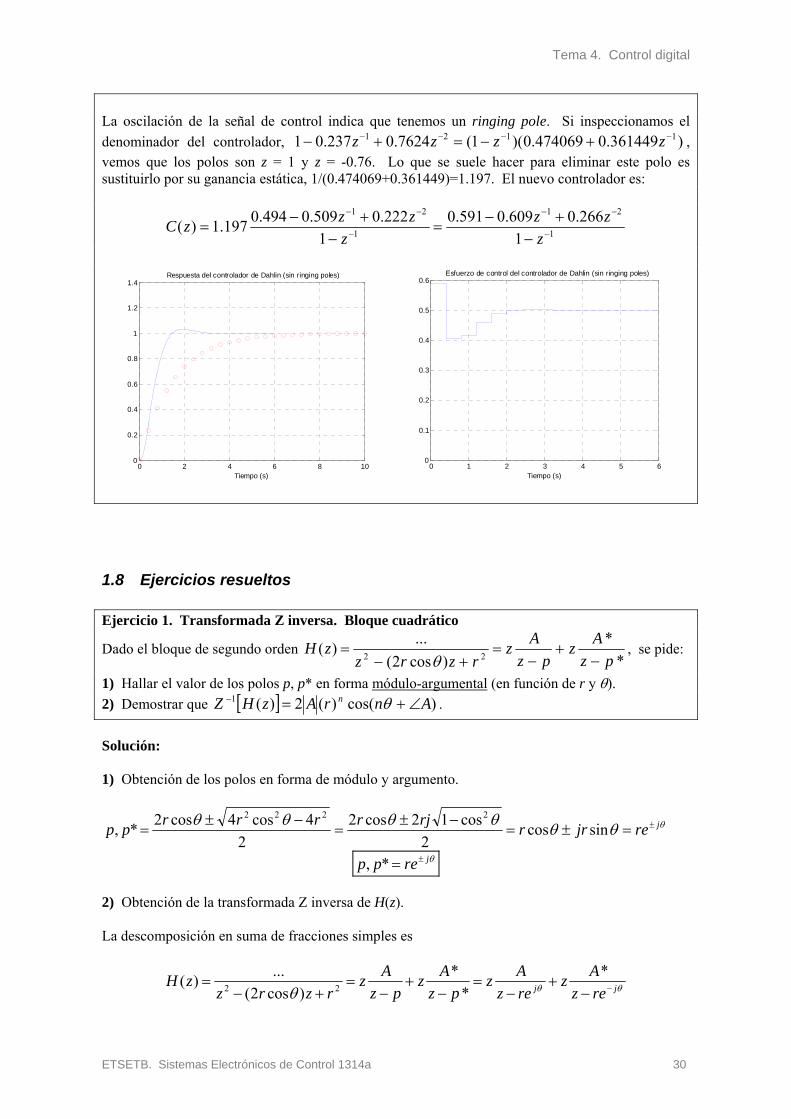
La oscilación de la señal de control indica que tenemos un ringing pole. Si inspeccionamos el
denominador del controlador, )361449.0474069.0)(1(7624.0237.01 1121 zzzz , vemos que los polos son z = 1 y z = -0.76. Lo que se suele hacer para eliminar este polo es sustituirlo por su ganancia estática, 1/(0.474069+0.361449)=1.197. El nuevo controlador es:
1
21
1
21
1
266.0609.0591.0
1
222.0509.0494.0197.1)(
z
zz
z
zzzC
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo (s)
Respuesta del controlador de Dahlin (sin ringing poles)
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
0.6
Tiempo (s)
Esfuerzo de control del controlador de Dahlin (sin ringing poles)
1.8 Ejercicios resueltos Ejercicio 1. Transformada Z inversa. Bloque cuadrático
Dado el bloque de segundo orden *
*
)cos2(
...)(
22 pz
Az
pz
Az
rzrzzH
, se pide:
1) Hallar el valor de los polos p, p* en forma módulo-argumental (en función de r y ).
2) Demostrar que )cos()(2)(1 AnrAzHZ n .
Solución: 1) Obtención de los polos en forma de módulo y argumento.
jrejrrrjrrrr
pp
sincos2
cos12cos2
2
4cos4cos2*,
2222
jrepp *, 2) Obtención de la transformada Z inversa de H(z). La descomposición en suma de fracciones simples es
jj rez
Az
rez
Az
pz
Az
pz
Az
rzrzzH
*
*
*
)cos2(
...)(
22

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 31
Sabiendo que az
zaZ n
, la transformada inversa de H(z) queda como
njnnjn erAeArzHZ *)(1 Puesto que el residuo A es complejo, también puede expresarse en forma módulo-argumental,
njnAjnjnAj ereAereAzHZ )(1
Agrupando términos,
AnrAzHZ n cos2)(1 c.q.d.
Ejercicio 2. Sistemas discretos.
1) Obtener el valor inicial y el valor final de la señal cuya transformada es 7.0
6.05.1)(
z
zzX .
2) Dada la señal 5.01
)(
z
z
z
zzX , obtener su expresión temporal x(n).
3) Dado el filtro analógico 61.1
1)(
s
ssH , obtener su equivalente discreto H(z) por el método de
la invariancia impulsional. Tomar periodo de muestreo Ts=0.1.
Solución: 1) TVI, TVF
Valor inicial: 5.17.0
6.05.11lim)()1(lim)1( 1
z
z
z
zzXzx
zz
Valor final:
7.0
6.05.11lim)()1(lim)(
1
1
1 z
z
z
zzXzx
zz0
Comprobación por Matlab (opcional): >> X=tf([1.5 0.6],[1 -0.7],1) Transfer function: 1.5 z + 0.6 ----------- z - 0.7 Sampling time: 1 >> impulse(X)
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Impulse Response
Time (sec)
Am
plit
ude
2) Transformada inversa
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 32
0,)5.0()1(5.01
)()( 11
n
z
z
z
zZzXZnx nn
3) Discretización por invariancia impulsional “Invariancia impulsional” significa que la respuesta impulsional del sistema continuo muestreado coincide con la respuesta impulsional del sistema equivalente discreto:
nTtthnh
)()(
O, lo que es lo mismo,
nTt
sHLzHZ
)()( 11
De ahí,
nTt
sHLZzH
)()( 1
Los pasos son los siguientes:
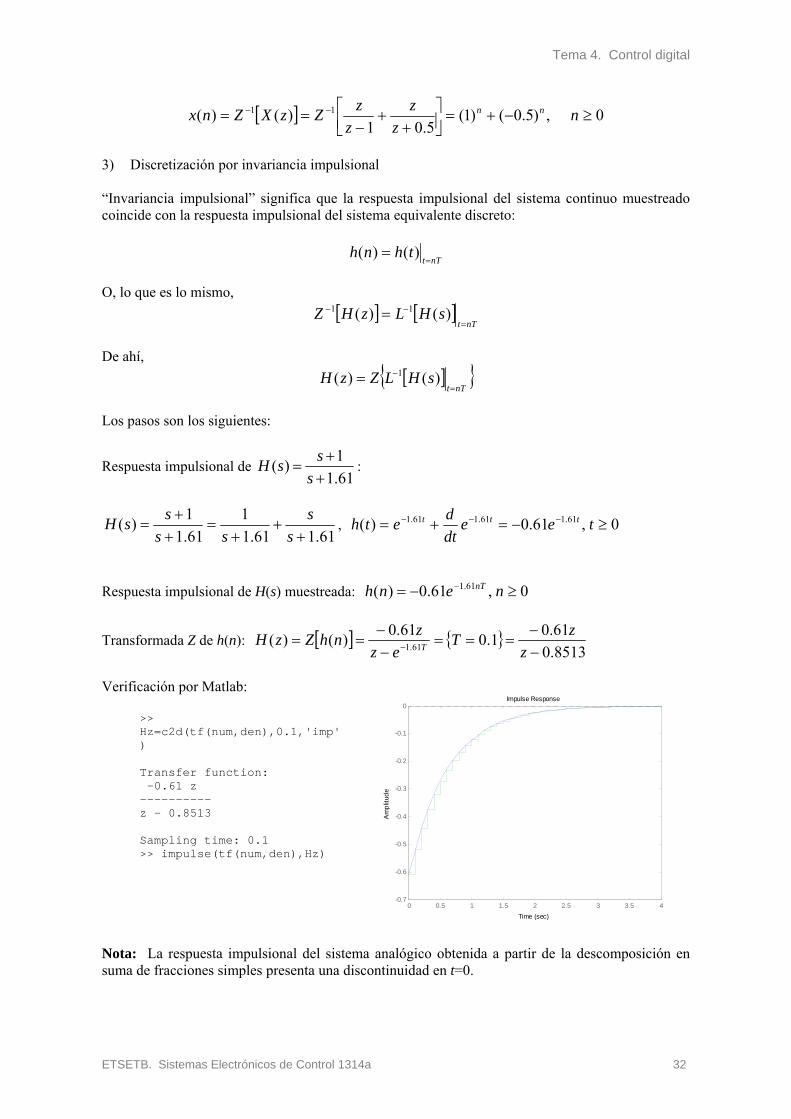
Respuesta impulsional de 61.1
1)(
s
ssH :
61.161.1
1
61.1
1)(
s
s
ss
ssH , 0,61.0)( 61.161.161.1 tee
dt
deth ttt
Respuesta impulsional de H(s) muestreada: 0,61.0)( 61.1 nenh nT
Transformada Z de h(n): 8513.0
61.01.0
61.0)()(
61.1
z
zT
ez
znhZzH
T
Verificación por Matlab:
>> Hz=c2d(tf(num,den),0.1,'imp') Transfer function: -0.61 z ---------- z - 0.8513 Sampling time: 0.1 >> impulse(tf(num,den),Hz)
0 0.5 1 1.5 2 2.5 3 3.5 4-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0Impulse Response
Time (sec)
Am
plit
ude
Nota: La respuesta impulsional del sistema analógico obtenida a partir de la descomposición en suma de fracciones simples presenta una discontinuidad en t=0.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 33
61.1
61.01
61.1
1)(
ss
ssH , 0,61.0)()( 61.1 tetth t
Esto puede verse con ayuda de la función residue o con la funció ilaplace:
>> num=[1 1];den=[1 1.61]; >> [r,p,k]=residue(num,den) r = -0.6100 p = -1.6100 k = 1 >> syms s >> ilaplace((s+1)/(s+1.61)) ans = dirac(t)-61/100*exp(-161/100*t)
Sin embargo, para poder aplicar el método de discretización de la invarianza impulsional tal y como está en los apuntes es necesario que la respuesta impulsional del sistema analógico sea continua. Por ello, en la práctica, lo que se hace es tomar la respuesta impulsional del sistema analógico a partir de t=0+ (a fin de evitar la delta de Dirac). Esto es lo que hemos considerado implícitamente al suponer que la respuesta impulsional era derivable. Este tema está tratado con más detalle en la siguiente referencia: L. Jackson, "A correction to impulse invariance", IEEE Signal Processing Letters, Vol. 7, Oct. 2000. Ejercicio 3. Criterio de Jury. Comprobar mediante el criterio de Jury que el polinomio
3 2( ) ( 1.5)( 0.5) 2 0.75P z z z z z z z presenta una raíz en el exterior del círculo unitario.
Solución:
11 12 13
21 22
31 32
1 2 0.75 0
0 0.75 2 1
1 2 0.75 14
0.75 2 1
0.43 0.5 23
0.5 0.43
0.133
0.133
A A A A
A A A
A A
11 12 13 14
0 0 0 01 0 1 , 2 0.75 2 , 0.75 0 0.75 , 0 0 0
1 1 1 1A A A A
21 22 23
0.75 0.75 0.751 0.75 0.4375 , 2 2 0.5 , 0.75 1 0
1 1 1A A A
31 32
0.5 ( 0.5)0.43 0.5 0.133 , 0.5 0.44 0
0.44 0.44A A
Puesto que el coeficiente A31 es negativo (mientras que el resto, p3, A11, A21 son positivos), hay una raíz fuera del círculo unitario.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 34
2. Control digital de 2 grados de libertad Este apartado está basado en el trabajo de LANDAU, I.D., Commande des Systèmes. Conception, identification et mise en oeuvre, Hermès
Lavoisier, 2002. Para más detalles, se recomienda su consulta.
2.1 Controlador RST digital La figura muestra un esquema de control digital. El bloque "Planta" incluye el proceso a controlar así como los actuadores y transductores con los que se ha instrumentado el lazo de control. La variable temporal t corresponde al tiempo discreto (muestras).
Procesador (controlador) D/A + ZOH Planta A/D
reloj
r(t) u(t) y(t)
Planta discretizada
2.1.1 Configuración RST Los controladores de dos grados de libertad, tales como el controlador RST de la siguiente figura, permiten obtener simultáneamente seguimiento (tracking) y rechazo de las perturbaciones (regulación). El tracking se obtiene gracias al polinomio T mientras que la regulación se implementa con 1/S y R. Para la robustez, solo los polinomios S y R son importantes.
)(
)(1
1
qA
qBq d
)(
)(1
1
qA
qB
m
m )(
11qS
T(q-1)
R(q-1)
r(t) u(t)
y(t)
controlador
modelo de la planta
+
_
+ +
d(t)
+
p(t)
+
+
+ v(t)
y
d(t) y p(t) son perturbaciones a la entrada y a la salida de la planta respectivamente. v(t) es el ruido de medida. El efecto del mantenedor de orden cero (ZOH) se traduce en un retardo de una muestra de duración.
El operador retardo se denota como )1()(1 tytyq . Nota: No vamos a considerar qué sucede entre las muestras (inter-sampling behaviour). Por tanto, no consideraremos rechazo de las perturbaciones entre muestras. Tampoco se van a considerar efectos tales como los de la inicialización, discetización/cuantización, reset-windup,...

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 35
Modelo de la planta:
)(
)(~
1)(
)()(
1
11
11
11
1
11
qA
qBq
qbqa
qbqbq
qA
qBqqG
d
nn
nn
dd
A
A
B
B
,
donde q-d corresponde a un retardo entero (un retardo fraccional introduce ceros de fase no mínima en el polinomio B). Notar que B captura el efecto del ZOH (contiene q-1). Controlador R-S-T:
)()()1(~)()()( 111 tyqRdtyqTtuqS , donde la trayectoria deseada para el lazo, )1(~ dty , es la predicción del valor futuro (a d+1
muestras) de la salida. En general, no se considera el valor ideal )(~ ty debido a que no se va a
cancelar el numerador de la planta )(~ 11 qBq d .
Polinomio característico:
)()()()()( 11111 qRqBqqSqAqP d , contiene los polos del lazo cerrado deseados. Función de lazo:
)(
)(
)(
)()(
1
1
1
11
qA
qBq
qS
qRqL
d
El seguimiento (tracking) de señales de referencia viene dado por la siguiente función de transferencia:
)()()()(
)()(
)(
)()(
1111
11
1
11
qRqBqqSqA
qBqTq
qA
qBqM
d
d
m
m
donde P(q-1) contiene los polos en lazo cerrado deseados. Y desde r hacia u tenemos:
)()()()(
)()(
)(
)()(
1111
11
1
11
qRqBqqSqA
qAqTq
qA
qBqM
d
d
m
mu .

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 36
2.1.2 Funciones de sensibilidad Se pueden definir diversas funciones de sensibilidad que caracterizan la variación de la entrada u(t) y la salida y(t) de la planta en función de las distintas señales de entrada al lazo (p(t), d(t), v(t)). Función de sensibilidad de la entrada Sup: Es la función de transferencia en lazo cerrado desde p hacia u. Caracteriza el efecto de la perturbación p en la señal de control u. Si queremos bloquear la señal de control u para cierta frecuencia de perturbación p, Sup deberá presentar un cero a dicha frecuencia.
)(
)()(
)()()()(
)()(
)(
)(
)(
)(1
)(
)(
)(1
11
1111
11
1
1
1
1
1
1
1
qP
qRqA
qRqBqqSqA
qRqA
qA
qBq
qS
qR
qS
qR
qSddup
Función de sensibilidad de la salida Syp: Es la función de transferencia en lazo cerrado desde p hacia y. Caracteriza el efecto de la perturbación p en la salida y (así, describe el rechazo de la perturbación p). Para cancelar totalmente el efecto de una perturbación p de frecuencia sobre la salida y, Syp debe presentar un cero a dicha frecuencia.
)(
)()(
)()()()(
)()(
)(
)(
)(
)(1
1)(
1
11
1111
11
1
1
1
1
1
qP
qSqA
qRqBqqSqA
qSqA
qA
qBq
qS
qRqS
ddyp
Función de sensibilidad de la salida con respecto al ruido de medida Syv: Es la función de transferencia en lazo cerrado desde v hacia y. Caracteriza el efecto del ruido de medida v en la salida y. También se conoce como función de sensibilidad complementaria puesto que
1 yvyp SS . Notar también que, para T=R, Syr=-Syv.
)(
)()(
)()()()(
)()(
)(
)(
)(
)(1
)(
)(
)(
)(
)(1
11
1111
11
1
1
1
1
1
1
1
1
1
qP
qRqBq
qRqBqqSqA
qRqBq
qA
qBq
qS
qR
qA
qBq
qS
qR
qSd
d
d
d
d
yv
Función de sensibilidad de la salida con respecto a la perturbación de entrada Syd: Es la función de transferencia en lazo cerrado desde d hacia y. No se suele utilizar. Aún así, es importante para estudiar la estabilidad de la configuración IMC (internal model control).
)(
)()(
)()()()(
)()(
)(
)(
)(
)(1
)(
)(
)(1
11
1111
11
1
1
1
1
1
1
1
qP
qSqBq
qRqBqqSqA
qSqBq
qA
qBq
qS
qR
qA
qBq
qSd
d
d
d
d
yd
Las más utilizadas son Sup y Syp. Es necesario que las cuatro funciones de sensibilidad sean estables a fin de evitar diseños inapropiados tales como los que, por ejemplo, cancelan los polos inestables de la planta con ayuda del polinomio R. En ese caso, notar que Sup, Syp y Syv pueden ser estables, pero Syd será inestable:

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 37
)()(
)()(
11
11
qBqqS
qAqS
dup ,
)()(
)()(
11
11
qBqqS
qSqS
dyp
)()(
)()(
11
11
qBqqS
qBqqS
d
d
yv , )()()(
)()()(
111
111
qBqqSqA
qSqBqqS
d
d
yd
En consecuencia, las perturbaciones a la entrada de la planta d son capaces de desestabilizar el sistema.
2.2 Conformación de las funciones Syp y Sup Las funciones de sensibilidad juegan un papel clave en los estudios de robustez. De hecho, el control robusto puede interpretarse como una metodología para conformar las diferentes funciones de sensibilidad a fin de satisfacer diferentes familias de especificaciones. Por ello es fundamental entender e interpretar el comportamiento de las funciones de sensibilidad en el dominio frecuencial. 2.2.1 Propiedades de la función de sensibilidad de la salida Syp
)()()()(
)()()(
1111
111
qRqBqqSqA
qSqAqS
dyp
Propiedad 1: Amplificación/atenuación. El módulo de Syp a cada frecuencia nos da el
factor de amplificación o atenuación de la perturbación p a la salida de la planta y.
Si |Syp()|>1 (|Syp()|>0dB) el sistema amplifica la perturbación p de frecuencia .
Si |Syp()|=1 (|Syp()|=0dB) el sistema opera en lazo abierto (notar que es equivalente a cortar el lazo a la frecuencia , es decir, a hacer R=0)
Si |Syp()|<1 (|Syp()|<0dB) el sistema atenúa la perturbación p de frecuencia .
Si |Syp()|=0 (|Syp()|=-dB) el rechazo de la perturbación p de frecuencia es total.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 38
Propiedad 2: Margen de módulo. El margen de módulo es
max
1
ypSM . Su valor mínimo se
suele tomar como )dB8(4.0min M . Típicamente se pide )dB6(5.0 M . Un margen de
módulo de )dB6(5.0 M implica que 2MG y 29MF (pero el recíproco en general no es cierto). El margen de módulo también define la tolerancia a las no linealidades. Propiedad 3. Efecto "cama de agua" (waterbed effect). Si el lazo abierto (KG) es estable, se cumple la siguiente propiedad
0)(log5.0
0
/2 s
sf ffj
yp dfeS
El área que define la curva Syp por debajo del eje de 0dB es igual al área definida por encima de los 0dB. Por tanto, la atenuación de las perturbaciones en una región frecuencial implica la amplificación de éstas en otras regiones. Y la ampliación de la zona de atenuación tiene como resultado una mayor amplificación fuera de la zona de atenuación y, consecuentemente, una reducción de la robustez (puesto que se reduce el margen de módulo).
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-30
-25
-20
-15
-10
-5
0
5
10
f/fs
dB
|Syp| con cancelación de continua
wn=0.4
wn=0.6
wn=1.0
Propiedad 4. Cancelación total de las perturbaciones. Cancelar totalmente una frecuencia es hacer |Syp()|=0. Esto se consigue añadiendo un cero a esa frecuencia al numerador de Syp. Si el numerador A(ej)S(ej) no contiene dicho cero, es posible añadirlo al polinomio S: A(ej)S(ej)HS(e
j). Si queremos cancelar totalmente la frecuencia 0 en régimen permanente, basta con escoger
210
1 )cos(21)( qqTqH sS . Si queremos cancelar totalmente las perturbaciones tipo
escalón basta con escoger 11 1)( qqH S .
Ejemplo: Considerar la planta 1
12
1
1
7.01
3.0
)(
)(
q
qA
qBq d , Ts=1s. Se desea un comportamiento
equivalente a un sistema de segundo orden con =0.9 y n=0.4 (tiempo continuo). Para ello se escogen los polinomios S y R de manera que el polinomio característico sea
2111111 48.037.11)()()()()( qqqRqBqqSqAqP d . (Nota: Los polos en
tiempo continuo son 17.036.0 j . Aplicando la transformación ssTez , se obtiene que los

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 39
polos en tiempo discreto correspondientes a P(q-1) son 12.068.0 j o, lo que es lo mismo, 17.069.0 e . El polinomio correspondiente a estos polos es el que se especifica como polinomio
característico de la regulación). La función Syp resultante es:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
f/fs
dB
|Syp|
Si se desea cancelar la continua, hay que añadir el factor 11 1)( qqH S al polinomio S(q-1).
Si, además de la continua, se desea cancelar la frecuencia f0=0.25Hz, hay que añadir el factor
212111 11)25.02cos(211)( qqqqTqqH sS al polinomio S(q-1).
Los resultados, para ambos casos, son:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-50
-40
-30
-20
-10
0
10
f/fs
dB
|Syp
| con Hs=(1-q-1)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-50
-40
-30
-20
-10
0
10
f/fs
dB
|Syp| con Hs=(1-q-1)(1+q-2)
Propiedad 5. Operación en lazo abierto. Operar en lazo abierto a la frecuencia es forzar que, a dicha frecuencia, el polinomio R(q-1) se anule. Notar que, entonces, tendremos |Syp()|=1 (0dB). Para forzar que R se anule lo que haremos será añadirle un cero a la frecuencia que queremos anular. Así, R(ej) se convierte en R(ej)HR(ej). Si queremos operar en lazo abierto a la frecuencia
0, basta con escoger 210
1 )cos(21)( qqTqH sR .
Ejemplo: Considerar de nuevo el ejemplo anterior. Suponer que, además de cancelar la continua,
queremos operar en lazo abierto a f=0.25Hz. Así, habrá que escoger 11 1)( qqH S y 21 1)( qqH R . La función Syp resultante (para n=0.4 y n=1 ) es:

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 40
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-20
-15
-10
-5
0
5
10
f/fs
dB
|Syp
| con Hs=(1-q-1) y H
r=(1+q-2)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-30
-25
-20
-15
-10
-5
0
5
10
f/fs
dB
|Syp
| con Hs=(1-q-1) y H
r=(1+q-2)
Propiedad 6. Polos auxiliares. En general, la introducción de polos auxiliares estables, es decir, la inclusión en el polinomio característico P(q-1) de un factor auxiliar estable (y más rápido que los polos dominantes PD(q-1)), P(q-1)=PD(q-1)PA(q-1), tiene como resultado la reducción de |Syp| en la banda de atenuación correspondiente a dicho factor auxiliar. En particular, notar que si se reduce |Syp|max, aumentará el margen de módulo y, en consecuencia, aumentará la robustez del sistema.
La elección típica es PAnA pqqP )1()( 11 donde 05.05.0 p y PDPPA nnn . En
muchas aplicaciones, la introducción de polos auxiliares de alta frecuencia es suficiente para asegurar los márgenes de robustez requeridos. Ejemplo: Considerar de nuevo el ejemplo anterior con n=1. Se ha añadido el factor
11 1)( qqH S para cancelar las perturbaciones de frecuencia 0. El efecto de añadir un par de
polos auxiliares 211 )2.01()( qqPA al polinomio característico se muestra en la siguiente figura.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-30
-25
-20
-15
-10
-5
0
5
10
f/fs
dB
|Syp
| con Pa=1 y P
a=(1-0.2q-1)2
Pa=1
Pa=(1-0.2q-1)2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-4
-3
-2
-1
0
1
2
3
4
Módulo de Pa=(1-0.2q-1)2
f/fs
dB
Propiedad 7. Efecto de un dipolo. Atenuación/amplificación local. Si se quiere introducir una atenuación o amplificación local, se puede ampliar Syp con la introducción de un factor del tipo
22
11
22
11
1
1
1
1
)(
)(
qP
qH
A
S
El procedimiento es como sigue: Se define una función de transferencia en tiempo continuo,

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 41
200
2
200
2
2
2)(
ss
sssF
den
num
donde 3.0den
y se discretiza mediante la transformación bilineal 1
1
1
12
q
q
Ts
s
a fin de
obtener )(
)(1
1
qP
qH
A
S . (No se discretiza mediante ZOH puesto que interesa conservar el valor de la
frecuencia).
Si dennum se introduce una atenuación local de valor
den
num
log20 a la frecuencia
discretizada
2arctg2 0 s
discr
T . Si dennum se introduce una amplificación local.
Ejemplo: Considerar de nuevo el ejemplo anterior. Los polos dominantes del polinomio característico del diseño corresponden ahora a =0.9 y n=1 (tiempo continuo) y se ha añadido el
factor 11 1)( qqH S para cancelar las perturbaciones de frecuencia 0. El efecto de añadir el
factor
22
22
1134.02
02.102.121.02)(
ss
sssF
y su inversa se muestra en las siguientes figuras.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-30
-25
-20
-15
-10
-5
0
5
10
f/fs
dB
|Syp
| con atenuación local
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-30
-25
-20
-15
-10
-5
0
5
10
15
f/fs
dB
|Syp
| con amplificación local
Para frecuencia inferiores a 0.17fs, se puede asumir que 000 dennumdiscr . Por ejemplo,
si fs=1Hz y queremos atenuación a 0.1Hz, podemos escoger una F(s) con 1.020 ,
25.0num , .4.0den El filtro F(s) discretizado mediante la transformación bilineal se muestra
en la figura:
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 42
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-6
-4
-2
0
2
f/fs
dB
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-20
-10
0
10
20
f/fs
deg
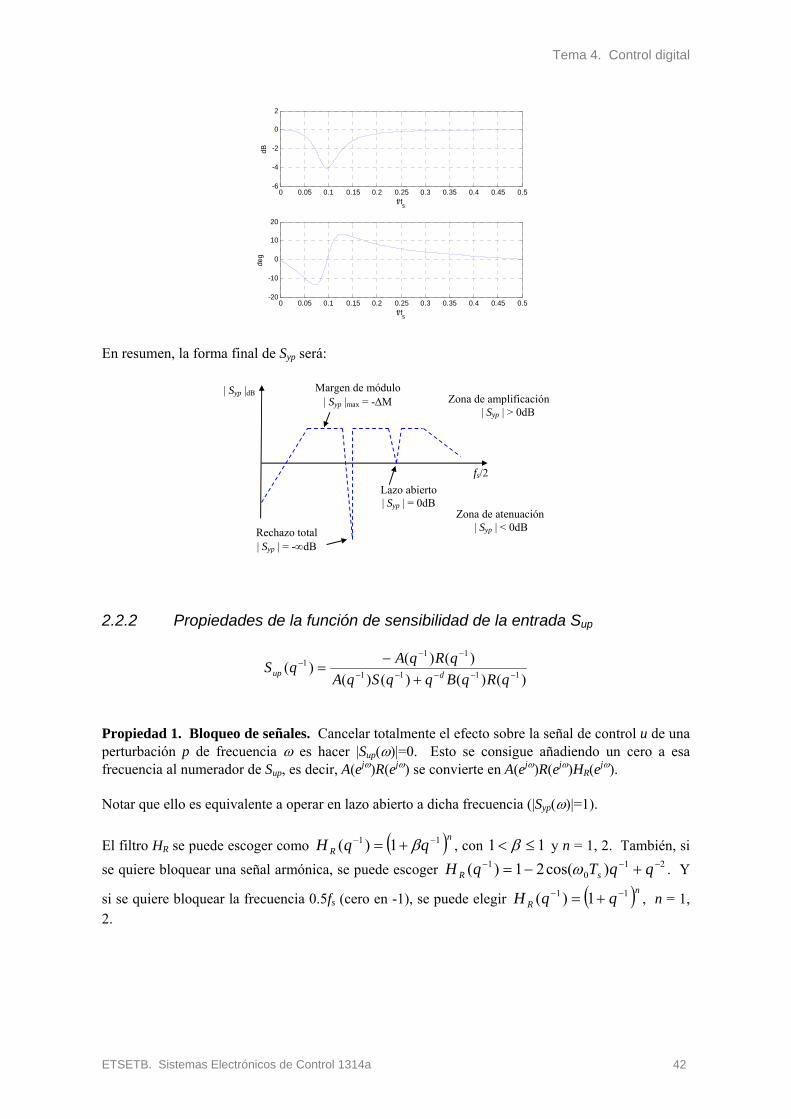
En resumen, la forma final de Syp será:
Zona de atenuación| Syp | < 0dB
Zona de amplificación | Syp | > 0dB
fs/2
| Syp |dB
Lazo abierto | Syp | = 0dB
Rechazo total | Syp | = -dB
Margen de módulo | Syp |max = -M
2.2.2 Propiedades de la función de sensibilidad de la entrada Sup
)()()()(
)()()(
1111
111
qRqBqqSqA
qRqAqS
dup
Propiedad 1. Bloqueo de señales. Cancelar totalmente el efecto sobre la señal de control u de una perturbación p de frecuencia es hacer |Sup()|=0. Esto se consigue añadiendo un cero a esa frecuencia al numerador de Sup, es decir, A(ej)R(ej) se convierte en A(ej)R(ej)HR(ej). Notar que ello es equivalente a operar en lazo abierto a dicha frecuencia (|Syp()|=1).
El filtro HR se puede escoger como nR qqH 11 1)( , con 11 y n = 1, 2. También, si
se quiere bloquear una señal armónica, se puede escoger 210
1 )cos(21)( qqTqH sR . Y
si se quiere bloquear la frecuencia 0.5fs (cero en -1), se puede elegir nR qqH 11 1)( , n = 1, 2.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 43
Propiedad 2. Inversa de la planta. A las frecuencias donde |Syp()|=0 (cancelación total del efecto de la perturbación p sobre la salida de la planta y), es decir, donde A(ej)S(ej)HS(e
j)=0,
notar que 1
)()(
)()(
G
B
ASup (la función de sensibilidad es la inversa de la planta).
Cancelar totalmente una perturbación allá donde la ganancia de la planta es pequeña no es aconsejable puesto que fuerza mucho al actuador. Además, disminuye la robustez, puesto que
1)(
upS es la tolerancia con respecto a la incertidumbre aditiva en el modelo de la planta (un
valor alto de )(upS implica baja robustez).
Propiedad 3. Efecto de un dipolo. Atenuación/amplificación local. De manera análoga a lo visto en Syp, si se quiere introducir una atenuación o amplificación local, se puede ampliar Sup con la introducción de un factor del tipo
22
11
22
11
1
1
1
1
)(
)(
qP
qH
A
R
resultado de discretizar, vía la transformación de Tustin, un factor 200
2
200
2
2
2)(
ss
sssF
den
num .
En resumen, la forma final de Sup será del tipo:
2.2.3 Plantillas para las funciones de sensiblidad Las condiciones de robustez de la estabilidad permiten definir plantillas en el dominio frecuencial para las funciones de sensibilidad. Estas plantillas son esenciales para diseñar un buen controlador. Las plantillas típicas para Syp y Sup son:
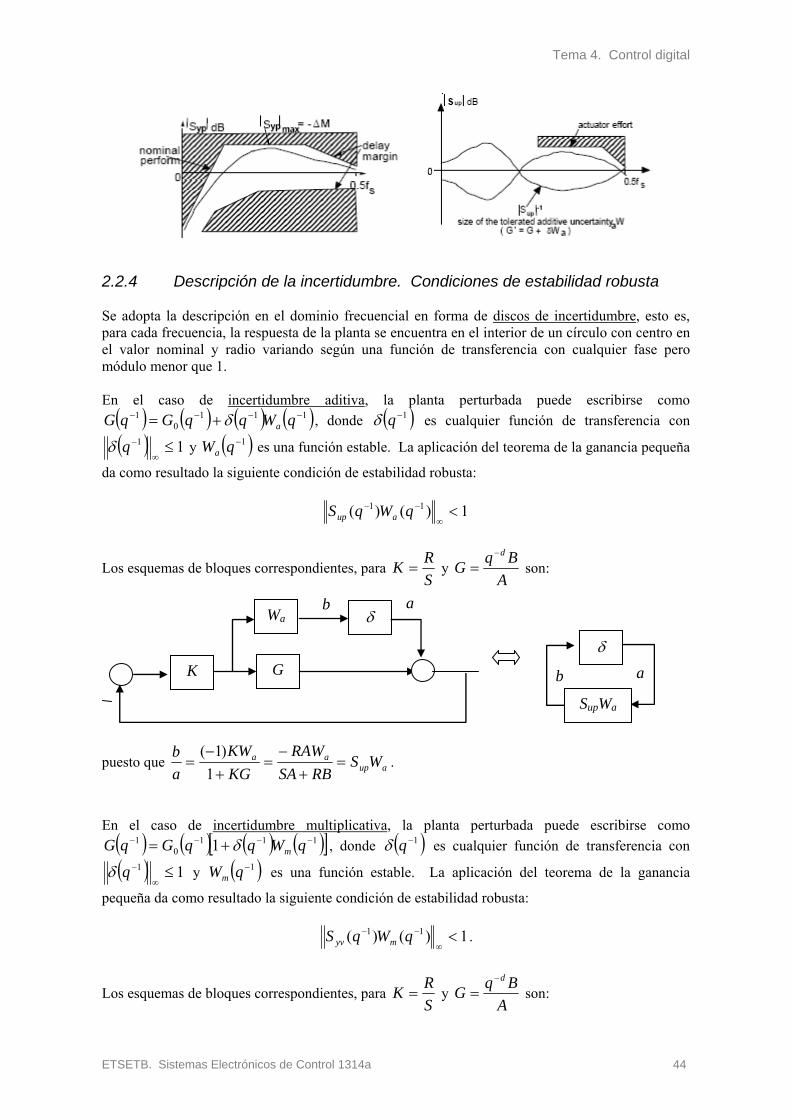
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 44
2.2.4 Descripción de la incertidumbre. Condiciones de estabilidad robusta Se adopta la descripción en el dominio frecuencial en forma de discos de incertidumbre, esto es, para cada frecuencia, la respuesta de la planta se encuentra en el interior de un círculo con centro en el valor nominal y radio variando según una función de transferencia con cualquier fase pero módulo menor que 1. En el caso de incertidumbre aditiva, la planta perturbada puede escribirse como
1110
1 qWqqGqG a , donde 1q es cualquier función de transferencia con
11
q y 1qWa es una función estable. La aplicación del teorema de la ganancia pequeña
da como resultado la siguiente condición de estabilidad robusta:
1)()( 11
qWqS aup
Los esquemas de bloques correspondientes, para S
RK y
A
BqG
d
son:
K G
Wa a b
a b
SupWa
puesto que aupaa WS
RBSA
RAW
KG
KW
a
b
1
)1(.
En el caso de incertidumbre multiplicativa, la planta perturbada puede escribirse como
1110
1 1 qWqqGqG m , donde 1q es cualquier función de transferencia con
11
q y 1qWm es una función estable. La aplicación del teorema de la ganancia
pequeña da como resultado la siguiente condición de estabilidad robusta:
1)()( 11
qWqS myv .
Los esquemas de bloques correspondientes, para S
RK y
A
BqG
d
son:
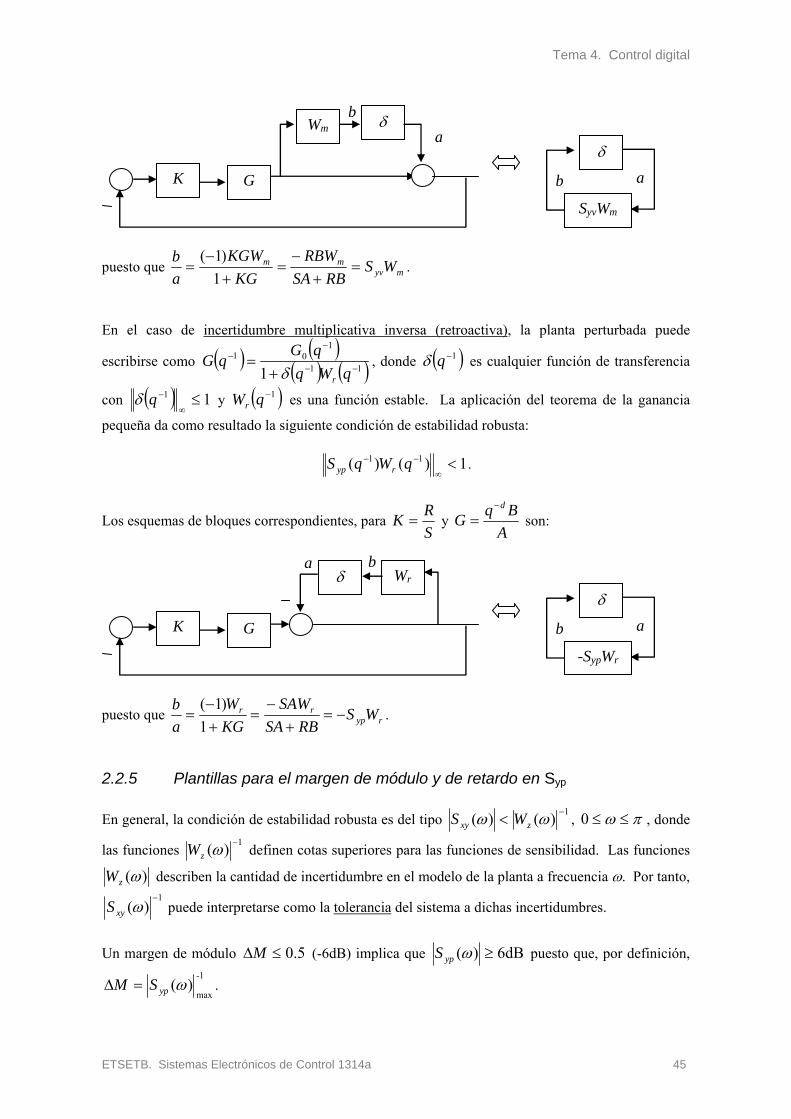
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 45
K G
Wm a
b
a b
SyvWm
puesto que myvmm WS
RBSA
RBW
KG
KGW
a
b
1
)1(.
En el caso de incertidumbre multiplicativa inversa (retroactiva), la planta perturbada puede
escribirse como 11
101
1
qWq
qGqG
r, donde 1q es cualquier función de transferencia
con 11
q y 1qWr es una función estable. La aplicación del teorema de la ganancia
pequeña da como resultado la siguiente condición de estabilidad robusta:
1)()( 11
qWqS ryp .
Los esquemas de bloques correspondientes, para S
RK y
A
BqG
d
son:
K G
Wr a b
a b
-SypWr
puesto que ryprr WS
RBSA
SAW
KG
W
a
b
1
)1(.
2.2.5 Plantillas para el margen de módulo y de retardo en Syp
En general, la condición de estabilidad robusta es del tipo 1
)()( zxy WS , 0 , donde
las funciones 1
)(zW definen cotas superiores para las funciones de sensibilidad. Las funciones
)(zW describen la cantidad de incertidumbre en el modelo de la planta a frecuencia . Por tanto, 1
)(
xyS puede interpretarse como la tolerancia del sistema a dichas incertidumbres.
Un margen de módulo 5.0M (-6dB) implica que dB6)( ypS puesto que, por definición,
-1
max)(ypSM .

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 46
Un margen de retardo sT implica que )(/)()( 1110
qAqBqqG d y
)(/)()( 1111 qAqBqqG d . En términos de incertidumbre multiplicativa,
)1(/)( 100 qGGGWm . Por tanto, la condición sobre Syv es
1
1)(
jyve
S .
Puesto que yvyp SS 1 , yvypyv SSS 11 y, por tanto, una condición aproximada es:
111111
jyp
j eSe .
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-25
-20
-15
-10
-5
0
5
10
f/fs
dBPlantillas para S
yp
M
2.3 Control digital de dos grados de libertad Los controladores digitales se pueden diseñar por los siguientes métodos:
Fijación de polos (para seguimiento y regulación) Seguimiento y regulación con objetivos independientes Internal Model Control (IMC) Fijación de polos con conformación de las funciones de sensibilidad
Todos estos métodos de diseño se basan en la estructura RST de dos grados de libertad y pueden interpretarse como casos particulares del problema de fijación de polos. El diseño y sintonización de los controladores necesita un modelo en tiempo discreto de la planta. El número de parámetros del controlador (memoria) depende de la complejidad del modelo de la planta y de las especificaciones de robustez. 2.4 Fijación de polos (para seguimiento y regulación) Permite el diseño de controladores RST para:
Sistemas estables o inestables. Sistemas con ceros de fase mínima o de fase no mínima. No hay restricción de orden en los polinomios A y B.
No cancela los ceros del modelo de la planta. El PID digital puede diseñarse usando este método.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 47
2.4.1 Formulación del problema
Problema: Dada la planta )(
)()(
1
11
qA
qBqqG d y las especificaciones del diseño en forma de
polinomio característico )( 1qP (para la regulación) y modelo )(
)(1
1
qA
qB
m
m (para el seguimiento),
obtener los polinomios )( 1qR , )( 1qS y )( 1qT . Polinomio característico: El primer paso es la selección de los polos en lazo cerrado deseados:
P(q-1)= PD(q-1) PA(q-1) Los polos dominantes PD(q-1) se seleccionan a partir de las especificaciones. A menudo se dan especificaciones en tiempo continuo (tr, Rpt) que se pueden traducir a bloques de segundo orden (n, ). Para obtener PD(q-1) hay que discretizar (Ts) dichos bloques. Unas especificaciones correctamente seleccionadas cumplen 0.25nTs1.5, 0.71. Los polos auxiliares PA(q-1) se introducen para dar robustez al diseño y suelen ser más rápidos que los polos dominantes. 2.4.2 Solución del problema Paso 1. Regulación (cálculo de los polinomios R y S). Consiste en resolver la ecuación diofántica (o ecuación de Bézout)
)()()()()( 11111 qRqBqqSqAqP d Existe solución y es única si
o A y B no tienen factores en común o 1 dnnn BAP
En esas condiciones, la solución tiene 1 dnn BS y 1 AR nn
o )(~
11)( 1111
1 qSqqsqsqS S
S
nn
o R
R
nn qrqrrqR 1
101 )(
La ecuación diofántica se resuelve fácilmente de forma matricial, pMx , pMx 1 .

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 48
0
0
11
000
0
0
0
000
000
0
1
0
1
001
1
1
0
1
2
1
2
12
1
2
1
2
12
1
np
nr
ns
nA
nB
nB
nB
dnB
nA
nA
nA p
p
r
r
r
s
s
b
bb
bb
b
bb
b
a
aa
aa
a
aa
a
Los polinomios R y S pueden incorporar partes fijas HR y HS que permiten imponer condiciones adicionales de comportamiento/robustez al lazo (acción integral en el controlador, rechazo de cierta frecuencia de perturbación a la salida,…). En estas situaciones el procedimiento es el mismo pero añadiendo estas partes fijas a la planta: A’=AHS, B’=BHR. La solución de la ecuación diofántica es entonces S' y R',
)(')(')(')(')( 11111 qRqBqqSqAqP d , con lo que los polinomios S y R finales serán S=S’HS, R=R’HR. Las condiciones de existencia y unicidad de la solución deben reflejar estos cambios. Paso 2. Seguimiento (cálculo del polinomio T)
El caso ideal )()(
)()(~
1
1)1(
trqA
qBqty
m
md
no puede conseguirse debido al retardo y los ceros de la
planta, por tanto, el objetivo es conseguir )()(
)()1(~
1
1
trqA
qBdty
m
m
.
Selección de T: Puesto que la función de transferencia entre r e y es
)()()()(
)()(
)(
)()(
1111
11
1
11
qRqBqqSqA
qBqqT
qA
qBqM
d
d
m
m ,
se escoge )()( 11 qHPqT , donde H es una ganancia estática (T debe ser un polinomio) entre
)(~ ty e y(t) (H=1/B(1) si B(1)0 y H=1 si B(1)=0). Entonces, )1(
)(
)(
)()(
1
1
11
B
qBq
qA
qBqM
d
m
m
.
Un caso particular es cuando coinciden la dinámica de regulación y la de seguimiento. En ese caso, T(q-1)=H.
Ley de control resultante: Puesto que )()()1(~)()()( 111 tyqRdtyqTtuqS con
)(~
1)( 111 qSqqS , la ley de control es:
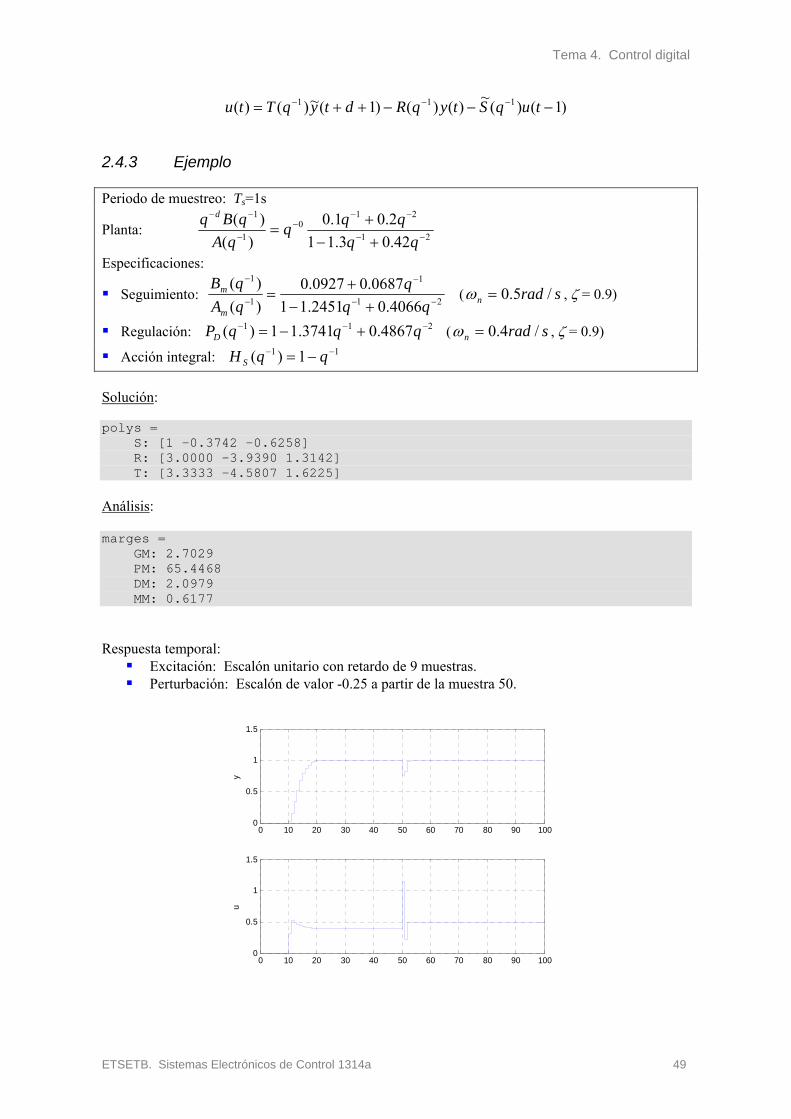
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 49
)1()(~
)()()1(~)()( 111 tuqStyqRdtyqTtu 2.4.3 Ejemplo Periodo de muestreo: Ts=1s
Planta: 21
210
1
1
42.03.11
2.01.0
)(
)(
qqq
qA
qBq d
Especificaciones:
Seguimiento: 21
1
1
1
4066.02451.11
0687.00927.0
)(
)(
q
qA
qB
m
m ( sradn /5.0 , = 0.9)
Regulación: 211 4867.03741.11)( qqqPD ( sradn /4.0 , = 0.9)
Acción integral: 11 1)( qqH S
Solución: polys = S: [1 -0.3742 -0.6258] R: [3.0000 -3.9390 1.3142] T: [3.3333 -4.5807 1.6225] Análisis: marges = GM: 2.7029 PM: 65.4468 DM: 2.0979 MM: 0.6177 Respuesta temporal: Excitación: Escalón unitario con retardo de 9 muestras. Perturbación: Escalón de valor -0.25 a partir de la muestra 50.
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
y
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
u

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 50
2.5 Seguimiento y regulación con objetivos independientes Es un caso particular de la fijación de polos en el cual los polos en lazo cerrado contienen los ceros de la planta. Por tanto, solo es válido para plantas con ceros de fase mínima. Así, permite el diseño de controladores RST para:
Sistemas estables o inestables No hay restricción en el orden de los polinomios A y B No hay restricción en el retardo entero de la planta d Los ceros de la planta deben ser estables. Por tanto, no se permite retardo fraccional >0.5Ts
puesto que ello implica ceros "inestables".
Al contrario que la fijación de polos simple, este método cancela los ceros de la planta y,
por tanto, permite alcanzar perfectamente las especificaciones de comportamiento (sigue
perfectamente la trayectoria deseada). Para ello, los ceros de la planta deben ser estables y
su coeficiente de amortiguamiento debe ser adecuado, >0.2 (ello define una región
admisible para los ceros del modelo de la planta).
2.5.1 Formulación del problema
Problema: Dada la planta )(
)()(
1
11
qA
qBqqG d , con )(
~)( 111 qBqqB , y las especificaciones
del diseño en forma de polinomio característico conteniendo los ceros de la planta
)(~
)(')( 111 qBqPqP (para la regulación) y modelo )(
)(1
1
qA
qB
m
m (para el seguimiento), obtener
los polinomios )( 1qR , )( 1qS y )( 1qT . 2.5.2 Solución del problema Regulación: El polinomio característico deseado contiene los ceros de la planta,
)(~
)(')()(~
)()()( 11111111 qBqPqRqBqqSqAqP d
Si se toma )(~
)(')( 111 qBqSqS , con S’ mónico (entonces s0 en S será igual a b1,
)1)(()(')(~
)( 1'1
121
11110
1 qsqbbqSqBqssqS ), la ecuación a
resolver se simplifica y queda como:
)(')()(')( 11111 qPqRqqSqA d

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 51
Existe solución y es única si o dnn AP '
En esas condiciones, la solución tiene dnS ' y 1 AR nn
o '
'''1)(' 1
11 S
S
nn qsqsqS
o R
R
nn qrqrrqR 1
101 )(
La ecuación diofántica se resuelve fácilmente de forma matricial, pMx , pMx 1 . Puesto que la matriz M es triangular inferior, este problema es más sencillo de resolver y numéricamente más robusto que el del problema de fijación de polos general.
dnA
nA
nA
nr
d
nAd
nA
nA
p
p
p
p
r
r
r
s
s
a
a
aa
a
aa
a
1
1
1
0
1
1
2
1
2
12
1
1
'
'
1
100
01
00
1
0
000
00
0
1
0
1
001
La inserción de los filtros HS y HR es análoga al caso de fijación de polos general. Seguimiento: El lazo cerrado es
)()()()(
)()(
)(
)()(
1111
11
1
11
qRqBqqSqA
qBqqT
qA
qBqM
d
d
m
m
La trayectoria de referencia es )()(
)()1(~
1
1
trqA
qBdty
m
m
. Puesto que
)(')(
)(
)()(
1
11
1
11
qP
qqT
qA
qBqM
d
m
m , el resultado es )(')( 11 qPqT .
Ley de control: Como antes, )()()1(~)()()( 111 tyqRdtyqTtuqS . Ahora,
)()()1(~)(')()( 111 tyqRdtyqPtuqS ,
donde ))(~
1()( 10
110
1 qSsqssqS , con s0=b1. Entonces,

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 52
)1()(~
)()()1(~)('1
)( 111
1
tuqStyqRdtyqPb
tu ,
)1()(
~)()()(
)(
)()('
1)( 11
1
11
1
tuqStyqRtrqA
qBqP
btu
m
m
2.5.3 Ejemplos Periodo de muestreo: Ts=1s
Planta: 21
210
1
1
42.03.11
1.02.0
)(
)(
qqq
qA
qBq d
Especificaciones:
Seguimiento: 21
1
1
1
4066.02451.11
0687.00927.0
)(
)(
q
qA
qB
m
m ( sradn /5.0 , = 0.9)
Regulación: 211 4867.03741.11)( qqqPD ( sradn /4.0 , = 0.9)
Acción integral: 11 1)( qqH S
Solución: polys = S: [0.2000 -0.1000 -0.1000] R: [0.9258 -1.2332 0.4200] T: [1 -1.3742 0.4868] Efectivamente, S tiene un integrador S(1)=0 y T=P. Análisis: marges = GM: 2.1093 PM: 65.3277 DM: 1.2040 MM: 0.5259 Respuesta temporal: Excitación: Escalón unitario con retardo de 9 muestras. Perturbación: Escalón de valor -0.25 a partir de la muestra 50.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 53
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
y
t/Ts
0 10 20 30 40 50 60 70 80 90 100-1
0
1
2
u
t/Ts
El ringing observado es debido al cero de la planta (igual a -0.5, correspondiente a =0.2, en el límite del amortiguamiento deseable), el cual ahora forma parte del polinomio característico del sistema. En concreto: >> zpk(trfn.Sup) Zero/pole/gain: -4.629 (z-0.7) (z-0.6) (z^2 - 1.332z + 0.4537) ----------------------------------------------- (z+0.5) (z^2 - 1.374z + 0.4868) Sampling time: 1 Periodo de muestreo: Ts=1s
Planta: 21
213
1
1
42.03.11
1.02.0
)(
)(
qqq
qA
qBq d
Especificaciones:
Seguimiento: 21
1
1
1
4066.02451.11
0687.00927.0
)(
)(
q
qA
qB
m
m ( sradn /5.0 , = 0.9)
Regulación: 211 4867.03741.11)( qqqPD ( sradn /4.0 , = 0.9)
Acción integral: 11 1)( qqH S
Robustez: 5.0M , sT 1
Solución: polys = S: [0.2000 0.0852 -0.0134 -0.0045 -0.1785 -0.0889] R: [0.8914 -1.1521 0.3732] T: [1 -1.3742 0.4868] Análisis:
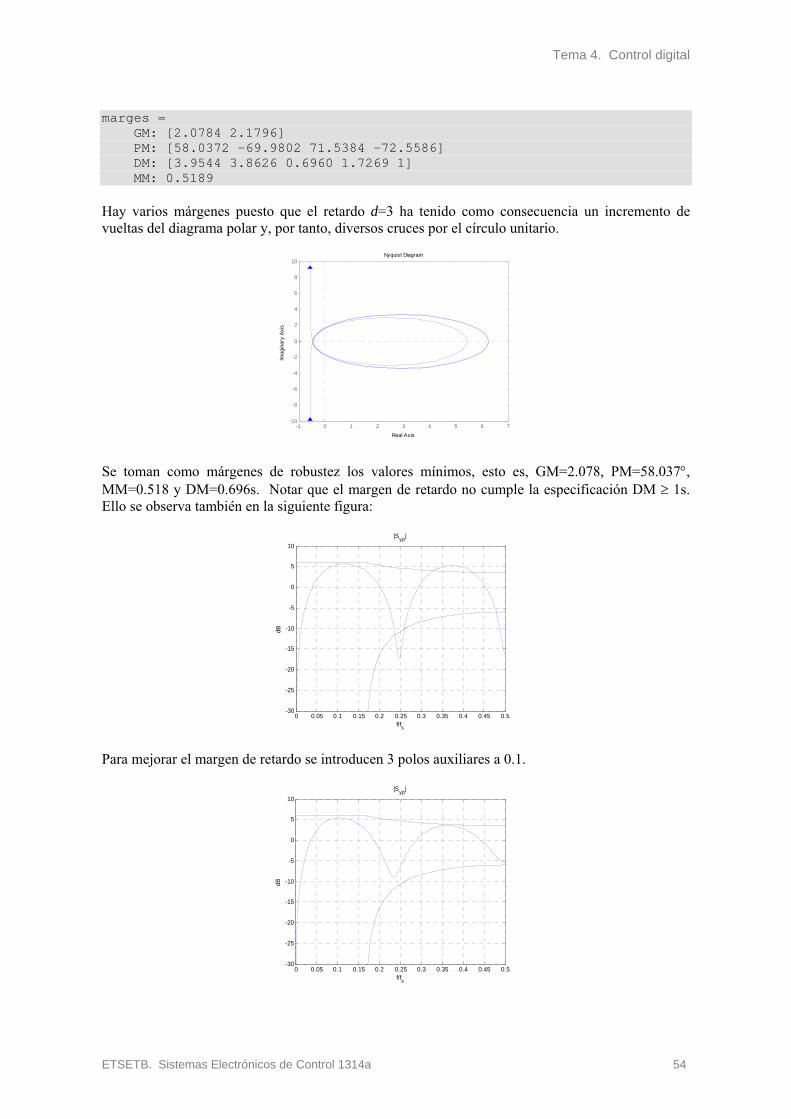
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 54
marges = GM: [2.0784 2.1796] PM: [58.0372 -69.9802 71.5384 -72.5586] DM: [3.9544 3.8626 0.6960 1.7269 1] MM: 0.5189 Hay varios márgenes puesto que el retardo d=3 ha tenido como consecuencia un incremento de vueltas del diagrama polar y, por tanto, diversos cruces por el círculo unitario.
-1 0 1 2 3 4 5 6 7-10
-8
-6
-4
-2
0
2
4
6
8
10Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Se toman como márgenes de robustez los valores mínimos, esto es, GM=2.078, PM=58.037, MM=0.518 y DM=0.696s. Notar que el margen de retardo no cumple la especificación DM 1s. Ello se observa también en la siguiente figura:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-30
-25
-20
-15
-10
-5
0
5
10
f/fs
dB
|Syp
|
Para mejorar el margen de retardo se introducen 3 polos auxiliares a 0.1.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-30
-25
-20
-15
-10
-5
0
5
10
f/fs
dB
|Syp
|

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 55
La introducción de polos auxiliares también ha reducido el ringing. Las siguientes figuras muestran la respuesta temporal antes y después de introducir los polos auxiliares.
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
y
t/Ts
0 10 20 30 40 50 60 70 80 90 100-1
0
1
2
u
t/Ts
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
y
t/Ts
10 20 30 40 50 60 70 80 90 100-1
0
1
2
u
t/Ts Los nuevos polinomios y márgenes de robustez son: polys = S: [0.2000 0.0252 -0.0329 0.0019 -0.1295 -0.0647] R: [0.6508 -0.8403 0.2716] T: [1 -1.6742 0.9290 -0.1883 0.0160 -4.8675e-004] marges = GM: [2.1586 2.9741] PM: [58.5372 -94.0039 110.9487] DM: [4.2981 3.6034 1.1869] MM: 0.5344 2.6 Internal model control (IMC) Es otro caso particular de la fijación de polos. IMC es un nombre comercial pero puede llevar a confusión puesto que no tiene nada que ver con el "principio del modelo interno". De hecho, implementa una estrategia de control trivial. Los polos dominantes del lazo cerrado coinciden con los de la planta. Por tanto, no permite acelerar la respuesta del sistema en lazo cerrado. Y, además, el modelo de la planta deberá ser estable y bien amortiguado. Se usa en los casos en que existe un retardo muy grande (horas), mayor que la dinámica de la planta sin retardo (del orden de 2 o más de 2 veces superior). 2.6.1 Formulación del problema
Problema: Dada la planta )(
)()(
1
11
qA
qBqqG d , con )(
~)( 111 qBqqB , y las especificaciones
del diseño en forma de polinomio característico conteniendo los polos de la planta

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 56
)()()( 111 qAqPqP A (para la regulación) y modelo )(
)(1
1
qA
qB
m
m (para el seguimiento), obtener
los polinomios )( 1qR , )( 1qS y )( 1qT . 2.6.2 Solución del problema Regulación: El polinomio característico del sistema en lazo cerrado tiene como polos dominantes
los de la planta ( )( 1qA ).
)()()()()()()( 1111111 qPqAqRqBqqSqAqP Ad ,
Como polos auxiliares )( 1qPA se suelen usar factores del tipo PAnA qqP )1()( 11 .
Si se toma )( 1qR de la forma )(')()( 111 qRqAqR , la ecuación a resolver queda simplificada a:
)()(')()( 1111 qPqRqBqqS Ad ,
Existe solución y es única si
o 1 BPA ndn En esas condiciones, la solución tiene 1 BS ndn y 0' Rn
o S
S
nn qsqsqS
'
11
1 1)(
o 01 ')(' rqR
La inserción de los filtros HS y HR es análoga al caso de fijación de polos general. Solución para el caso con integrador: En el caso de controlador con acción integral,
)(')1()( 111 qSqqS , la ecuación a resolver queda como:
)()(')()(')1( 11111 qPqRqBqqSq Ad
El valor de R' se puede obtener fácilmente para el caso estático, q=1: )1(/)1('0 BPr A . Así,
)1(
)1()()( 11
B
PqAqR A y
)1(
)1()()()(')1()( 11111
B
PqBqqPqSqqS Ad
A
Si, además, se añaden un filtro fijo HR, la solución queda como:
)1(
)(
)1(
)1()()(
111
R
RA
H
qH
B
PqAqR
y
)1(
)(
)1(
)1()()()(
1111
R
RAdA H
qH
B
PqBqqPqS
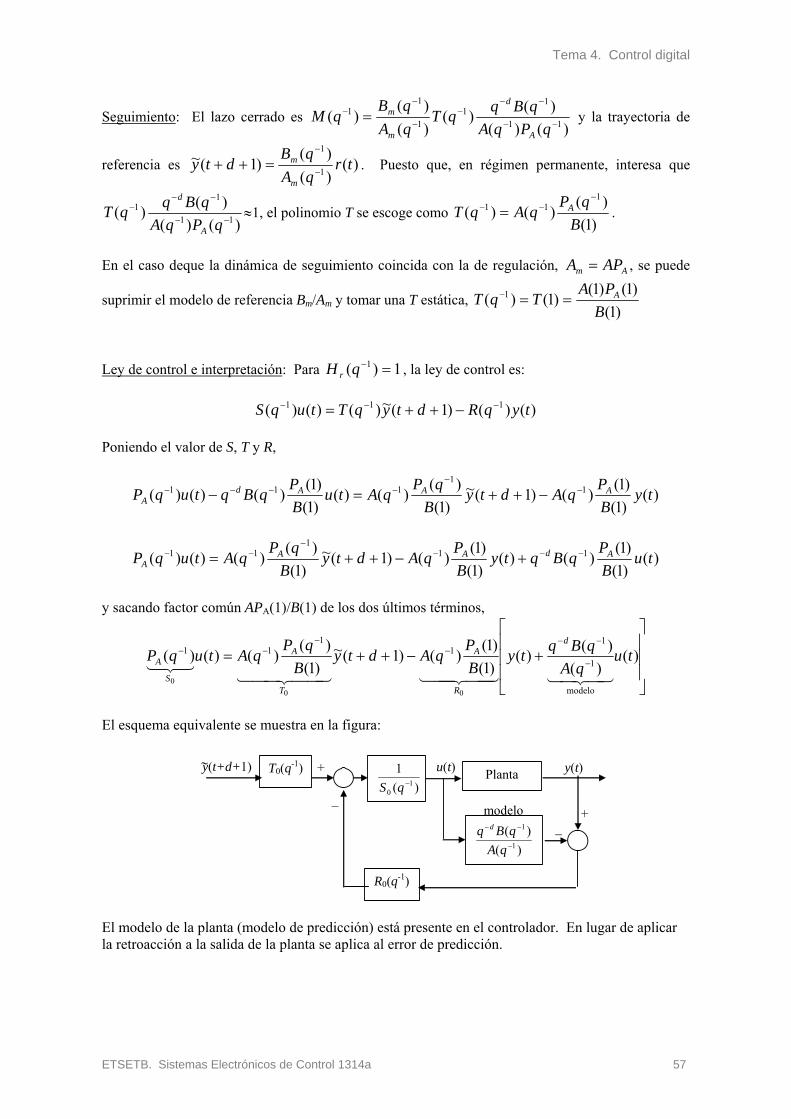
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 57
Seguimiento: El lazo cerrado es )()(
)()(
)(
)()(
11
11
1
11
qPqA
qBqqT
qA
qBqM
A
d
m
m y la trayectoria de
referencia es )()(
)()1(~
1
1
trqA
qBdty
m
m
. Puesto que, en régimen permanente, interesa que
)()(
)()(
11
11
qPqA
qBqqT
A
d
1, el polinomio T se escoge como )1(
)()()(
111
B
qPqAqT A
.
En el caso deque la dinámica de seguimiento coincida con la de regulación, Am APA , se puede
suprimir el modelo de referencia Bm/Am y tomar una T estática, )1(
)1()1()1()( 1
B
PATqT A
Ley de control e interpretación: Para 1)( 1 qH r , la ley de control es:
)()()1(~)()()( 111 tyqRdtyqTtuqS Poniendo el valor de S, T y R,
)()1(
)1()()1(~
)1(
)()()(
)1(
)1()()()( 1
1111 ty
B
PqAdty
B
qPqAtu
B
PqBqtuqP AAAd
A
)()1(
)1()()(
)1(
)1()()1(~
)1(
)()()()( 11
111 tu
B
PqBqty
B
PqAdty
B
qPqAtuqP AdAA
A
y sacando factor común APA(1)/B(1) de los dos últimos términos,
)(
)(
)()(
)1(
)1()()1(~
)1(
)()()()(
modelo
1
11
111
00
0
tuqA
qBqty
B
PqAdty
B
qPqAtuqP
d
R
A
T
A
S
A
El esquema equivalente se muestra en la figura:
)(
)(1
1
qA
qBq d
)(
11
0qS
T0(q
-1)
R0(q-1)
y(t+d+1) u(t) y(t) Planta +
_
_ + modelo
El modelo de la planta (modelo de predicción) está presente en el controlador. En lugar de aplicar la retroacción a la salida de la planta se aplica al error de predicción.
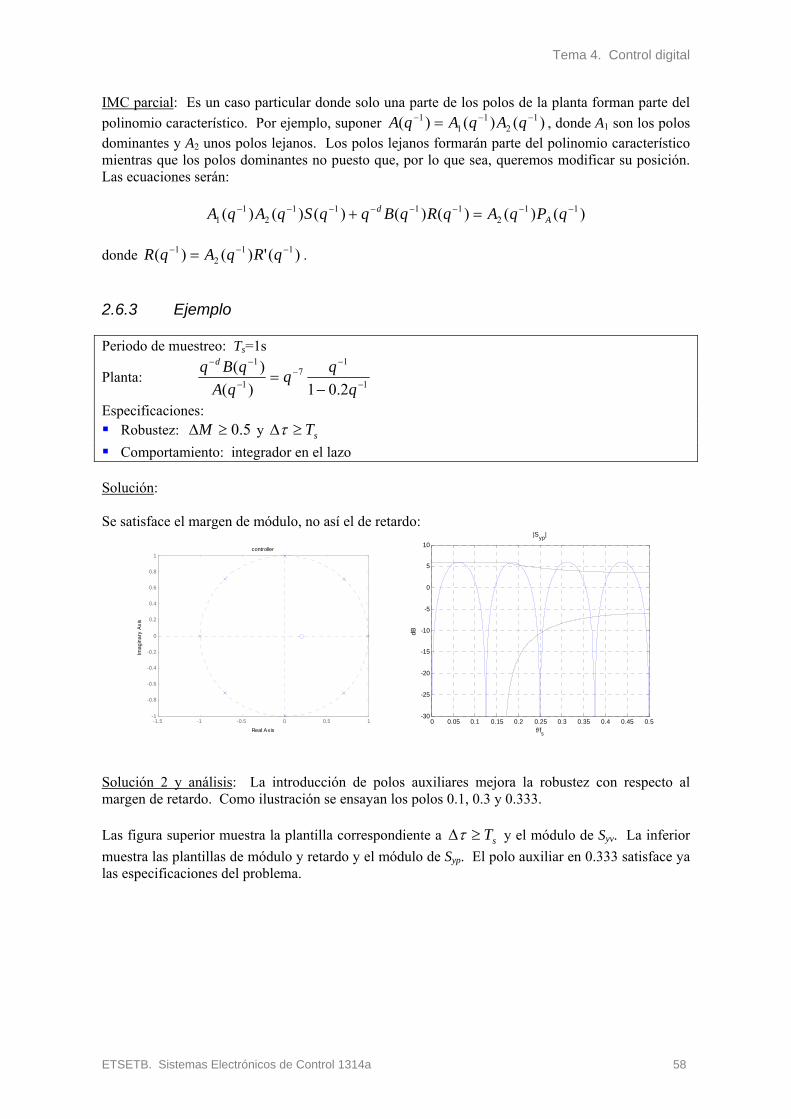
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 58
IMC parcial: Es un caso particular donde solo una parte de los polos de la planta forman parte del
polinomio característico. Por ejemplo, suponer )()()( 12
11
1 qAqAqA , donde A1 son los polos dominantes y A2 unos polos lejanos. Los polos lejanos formarán parte del polinomio característico mientras que los polos dominantes no puesto que, por lo que sea, queremos modificar su posición. Las ecuaciones serán:
)()()()()()()( 112
11112
11
qPqAqRqBqqSqAqA Ad
donde )(')()( 112
1 qRqAqR . 2.6.3 Ejemplo Periodo de muestreo: Ts=1s
Planta: 1
17
1
1
2.01)(
)(
q
qA
qBq d
Especificaciones: Robustez: 5.0M y sT
Comportamiento: integrador en el lazo Solución: Se satisface el margen de módulo, no así el de retardo:
-1.5 -1 -0.5 0 0.5 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1controller
Real Axis
Imag
inar
y A
xis
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-30
-25
-20
-15
-10
-5
0
5
10
f/fs
dB
|Syp
|
Solución 2 y análisis: La introducción de polos auxiliares mejora la robustez con respecto al margen de retardo. Como ilustración se ensayan los polos 0.1, 0.3 y 0.333. Las figura superior muestra la plantilla correspondiente a sT y el módulo de Syv. La inferior
muestra las plantillas de módulo y retardo y el módulo de Syp. El polo auxiliar en 0.333 satisface ya las especificaciones del problema.
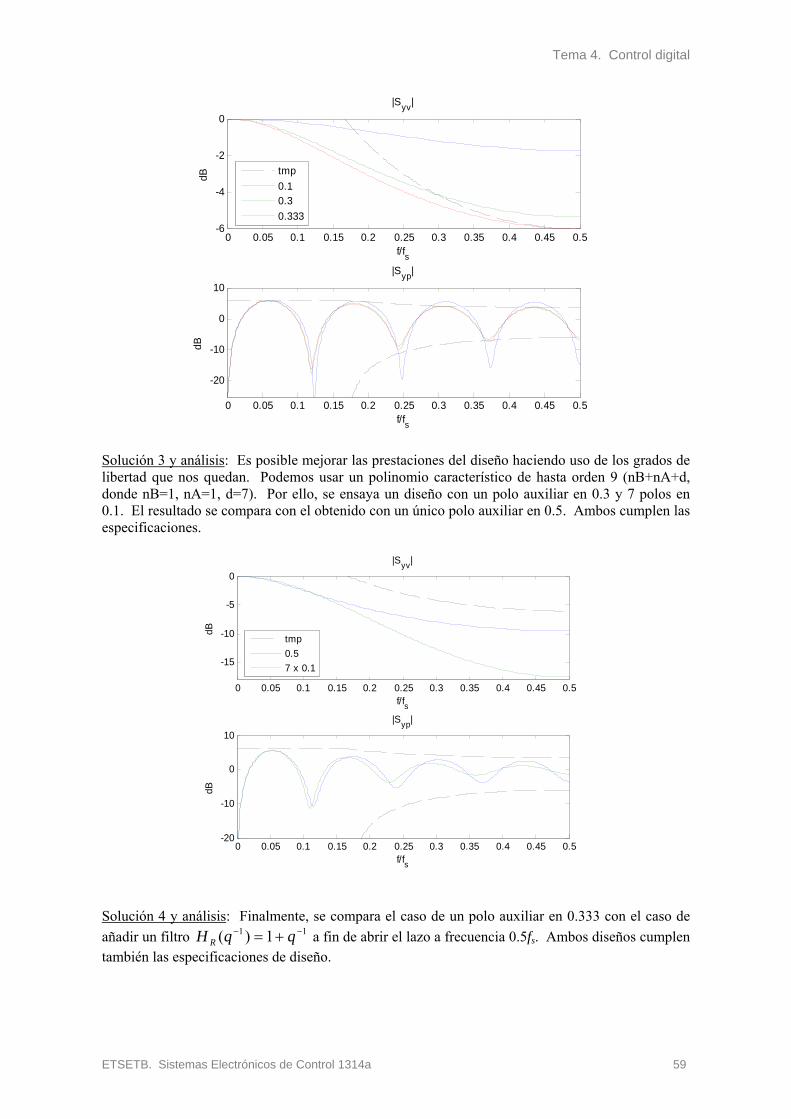
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 59
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-6
-4
-2
0
f/fs
dB
|Syv
|
tmp
0.10.3
0.333
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-20
-10
0
10
f/fs
dB
|Syp
|
Solución 3 y análisis: Es posible mejorar las prestaciones del diseño haciendo uso de los grados de libertad que nos quedan. Podemos usar un polinomio característico de hasta orden 9 (nB+nA+d, donde nB=1, nA=1, d=7). Por ello, se ensaya un diseño con un polo auxiliar en 0.3 y 7 polos en 0.1. El resultado se compara con el obtenido con un único polo auxiliar en 0.5. Ambos cumplen las especificaciones.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-15
-10
-5
0
f/fs
dB
|Syv
|
tmp
0.5
7 x 0.1
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-20
-10
0
10
f/fs
dB
|Syp
|
Solución 4 y análisis: Finalmente, se compara el caso de un polo auxiliar en 0.333 con el caso de
añadir un filtro 11 1)( qqH R a fin de abrir el lazo a frecuencia 0.5fs. Ambos diseños cumplen también las especificaciones de diseño.

Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 60
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
-5
0
f/fs
dB
|Syv|
tmp
Hr=1+q-1
Paux
=1-0.333q-1
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-20
-10
0
10
f/fs
dB
|Syp
|
2.7 Fijación de polos para conformar las funciones de sensibilidad 2.7.1 Formulación del problema El objetivo del control es conformar las funciones de sensibilidad de la entrada Sup y de la salida Syp. Estas dos funciones contienen todas las especificaciones del problema de control y se conforman mediante la introducción de polos auxiliares en el polinomio característico del sistema y la introducción de filtros en los controladores. 2.7.2 Solución del problema Los pasos son:
1) Elegir los polos dominantes y los polos auxiliares del lazo cerrado. 2) Elegir la parte fija de los controladores (HS y HR) 3) Si es necesario, elegir de manera simultánea los polos auxiliares y las partes fijas de los
controladores.
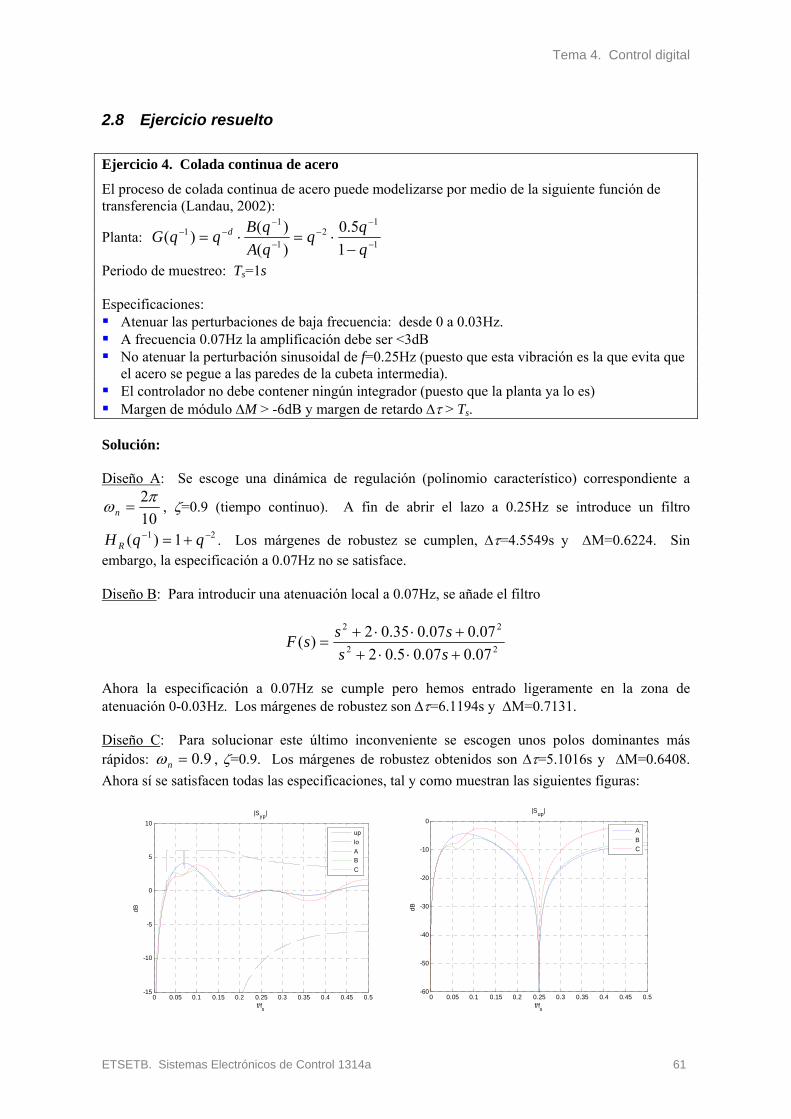
Tema 4. Control digital
ETSETB. Sistemas Electrónicos de Control 1314a 61
2.8 Ejercicio resuelto
Ejercicio 4. Colada continua de acero
El proceso de colada continua de acero puede modelizarse por medio de la siguiente función de transferencia (Landau, 2002):
Planta: 1
12
1
11
1
5.0
)(
)()(
q
qA
qBqqG d
Periodo de muestreo: Ts=1s Especificaciones: Atenuar las perturbaciones de baja frecuencia: desde 0 a 0.03Hz. A frecuencia 0.07Hz la amplificación debe ser <3dB No atenuar la perturbación sinusoidal de f=0.25Hz (puesto que esta vibración es la que evita que
el acero se pegue a las paredes de la cubeta intermedia). El controlador no debe contener ningún integrador (puesto que la planta ya lo es) Margen de módulo M > -6dB y margen de retardo > Ts. Solución: Diseño A: Se escoge una dinámica de regulación (polinomio característico) correspondiente a
10
2 n , =0.9 (tiempo continuo). A fin de abrir el lazo a 0.25Hz se introduce un filtro
21 1)( qqH R . Los márgenes de robustez se cumplen, =4.5549s y M=0.6224. Sin embargo, la especificación a 0.07Hz no se satisface. Diseño B: Para introducir una atenuación local a 0.07Hz, se añade el filtro
22
22
07.007.05.02
07.007.035.02)(
ss
sssF
Ahora la especificación a 0.07Hz se cumple pero hemos entrado ligeramente en la zona de atenuación 0-0.03Hz. Los márgenes de robustez son =6.1194s y M=0.7131. Diseño C: Para solucionar este último inconveniente se escogen unos polos dominantes más rápidos: 9.0n , =0.9. Los márgenes de robustez obtenidos son =5.1016s y M=0.6408.
Ahora sí se satisfacen todas las especificaciones, tal y como muestran las siguientes figuras:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-15
-10
-5
0
5
10
f/fs
dB
|Syp
|
up
lo
AB
C
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-60
-50
-40
-30
-20
-10
0
f/fs
dB
|Sup
|
A
BC