sep dgeti selt - cenidet.edu.mx luis felipe... · cnad mecatronica sep dgeti selt centro nacional...
TRANSCRIPT
CNAD MECATRONICA
SEP DGETI SElT
CENTRO NACIONAL DE A.CTUALIZACI~N DOCENTE EN MECATRÓNICA
CNAD - CenideT
TRABAJO RECEPCIONAL
ENTRENADOR MECATRÓNICO
Prototipo Mecatrónico
Que Presentan: Para obtener el reconocimiento de especialista en Ingeniería Mecatrónica.
SUBESPECIALIDAD MAQUINAS: SUBESPECIALIDAD CONTROL:
Ing. Luis Felipe Albarran Leyva Ing. Domingo Rodriguez Peralta Ing. Bautista Quintero Ricardo
. ASESORES:
Máquinas : Ing. Rodolfo González Manzano. Control : Ing. Juan Martin Albarrán Jiménez Pedagogía : Lic. Diana Bolanos Alonso.
Diciembre 99
ENTRENADOR MECATRbNlCO
--

!
..

SEP SEIT DGETI Centro Naciond de Acnialimión Docente Mecatrónica Av. Ertanirlao Ramirez dn csq. Mar de lar lluvias Col. Selene Delegation :n&huac Tel. F a 8 4 1 1431 841 1432 México. D.F.
14 de diciembre de 1999
Asunto: Autorización de Impresión del Trabajo Recepcional
CT 09FMPOOOlQ C.P. 12430
c.c Ricardo Bautista Quintero Primo Cerón Obregón Domingo Rodriguez Peralta Luis Felipe Albarrán Leyva Arturo Rosas Franco Emilio Sánchez Rodriguez Docentes en formación de la 1”. Generación P R E S E N T E S
Una vez que ha sido revisado el informe académico, elaborado como trabajo recepcional del proyecto mecatrónico titulado “Entrenador Mecatrónico Didáctico”, por los asesores de las tres áreas y al no encontrar errores en los aspectos técnicos, en la estructura de contenidos y en la redacción de cada uno de los apartados que lo integran. Se ha determinado que el informe cumple con los aspectos necesarios para que pueda imprimirse de forma definitiva.
A T E N T A M E N T E
ASESORES
Ing. Rodolfo González Manzano Area de Máquinas
Lic. biana-Bolaños Alonso . .?&;a de Pedagogía /-i-

íNDlCE TEMÁTICO . *
íNDlCE TEMÁTICO ............................................ 1 .............................. 3
INDICE DE FIGURAS ........................................................................ 6
P R O L O G O ................................................................................. I O
INTRODUCCI~N ............................................................................. I I
OBJETIVO ................................................................................................ 13 JUSTlFlCAClON ....................................................................................... 14
CAPITULO 1 GENERALIDADES DEL SISTEMA .......................... 15
1.1 INTRODUCCIÓN A LA ROBÓTICA ................................................... 15 1.1.1 PRECISIÓN .............................................................................................. 15 1.1.2 REPETIBILIDAD ............................................... ..................... 15 1.1.3 CONFIGURACIONES BASICAS DE UN ROBO ..................... 16 1.2 ELEMENTOS NECESARIOS PARA EL DISENO DE UN ROBOT ... 19 1.2.1 CINEMÁTICA DIRECTA ...................................... ......... 19 1.2.2 CINEMATICA INVERSA ' 1.2.3 VELOCIDAD CINEMATI 1.2.3 DINAMICA .................... ......................... 24 1.2.5 CONTROL DE POSICIÓN ............................................................... 1.2.6 CONTROL DE FUERZA ................... 1.3 DESCRIPCION GENERAL DEL SISTEMA ........................................ 26 1.3.1 DESCRIPCIÓN MECANICA DEL SISTEMA ROBOT. .... ........ 26 1.3.2 TRANSMISION MECANICA DEL MOTOR ............................................... 27 1.3.3 SISTEMA DE,CONTROL ................ 1.3.3 INTERFASE ..... .............................................. 1.3.5 ETAPA DE POT .......................................... 1.3.6 CONTROL DE ........................ 31 1.3.7 COMPUTADO 1.3.8 CRITERIOS CONSIDERADOS ....................
3

CAPITULO 2 DISEÑO MECÁNICO ................................................ 35
'2.1 DESCRIPCIÓN Y DIBUJOS DE LOS ELEMENTOS MECÁNICOS .. 35 2.1.1 CINTURA Y BASE ........ ................................................ 35 2.1.2 HOMBRO .................................................. 2.2 CALCULO DE LOS ELEMENTOS Y MECANISMOS ........................ 38 2.2.1 CALCULO DE ENGRANES RECTOS ................................. 2.2.2 BANDA DENTADA ................. .......................................... USOS PRINCIPALES ............................................................................... 44 2.2.3 CONTROL MECANICO DE VELOCIDAD DE LA CINTURA ..................... 45 2.2.4 CONTROL MECANICO PARA LA VELOCIDAD DEL HOMBRO .. 47
ANTEBRAZO ............................................................................................ 50 2.3 CALCULO MECANICO PARA LA ARTICULACION DEL BRAZO-
CAPITULO 3 DISEÑO DE CIRCUITOS DE CONTROL ................. 62
3.1 DiSEfiO DE LA TARJETA DEL MC68HC11 ..................................... 63 3.1 . 1 DISEÑO DE LA TARJETA DE CONTROL ................................................ 65 3.1.2 MULTIPLEXACI6N DE DATOS Y DIRECCIONES ..... 3.1.3 MAPEO DE LA RAM .. ..................................... 3.1.3 MAPEO DEL PPI ........ 3.1.5 MAPEO DE LA MEMORIA EPROM ............................. 70 3.1.6 CIRCUITO DE RESET .................................................. 72 3.1.7 RELOJ DEL MICROCONTROLADOR ...................................................... 73 3.2 SERVO AMPLIFICADOR .................................................................. 74 3.2.1 MODULACION POR ANCHO DE PULSO ................................................. 74 3.2.2 CIRCUITO DE MUESTRE0 Y RETENCIÓN ............................................ 76 3.2.3 CONVERTIDOR DIGITAL-ANALÓGICO ............ 3.2.3 CIRCUITO COMBINATORIO .............. ........................ 3.2.5 SENALES DE RETROALIMENTACI6 ........................ 80 3.3 ETAPA DE POTENCIA ...................................................................... 82 3.6.1 PROTECCION DE SOBRE CORRIENTE .................. ......................... 85 3.6.2 CIRCUITO DE CONTROL DEL GIRO DE LA MUÑECA ............... 3.7 FUENTE DE ALIMENTACION GENERAL ............................. 3.7.1 PROTECCION CONTRA SOBRECORRIENTE
.................................. ........................ ........................
........................ go
CAPITULO 5 CONTROL Y PROGRAMACION ............................... 93
5.2 MODELO MATEMÁTICO DE UN MOTOR ......................................... 94 5.2.1 MODELO A LAZO CERRADO DE UN MOTOR DE CD ............................ 95 5.2.2 LAZO DE CONTROL DE VELOCIDAD Y POSICIÓN ............................... 96 5.2.3 REPRESENTACION EN VARIABLES DE ESTADO ................................. 99 5.3 MC68HCll COMO ELEMENTO DE CONTROL .............................. 99
4

* - 4 . ...... L. . I ,
'. !
5.3.1 PROGRAMACIÓN DEL CONVERTIDOR ANALÓGICO DIGITAL .......... 100 5.3.2 PROGRAMACION DELTOC .................................................................. 103 5.3.3 PROGRAMACION DEL TIC .................................................................... 109 5.3.3 SISTEMA DE COMUNlCAClÓN SERIAL (SCI) ...................................... 113
CONCLUSIONES .......................................................................... 124
LISTA DE MATERIALES Y COSTOS DEL BRAZO DE ROBOT ARTICULADO ............................................................................... 127
BIBLIOGRAFIA ............................................................................. 131
MANUALES .................................................................................. 132
APENDICE A DIBUJOS DEL ROBOT ......................................... 133
APENDICE B PROGRAMAS DE CNC .......................................... 134
APENDICE C PROGRAMAS DE INTERPOLACION .................... 135
APENDICE D HOJAS DE DATOS ................................................ 136
5

INDICE DE FIGURAS FIG. 2.1 ROBOT ARTICULADO .................... FIG. 2.2 ROBOT DE COORDENADAS ClLfND FIG. 2.3 EJEMPLO DE ROBOTCARTESIANO
FIG. 2.7 MODELO DMÁMICO BÁSICO DE UN ROBOT DE 1 FIG. 2.8 SISTEMA COMPLETO DEL SISTEMA ROBOT ... FIG. 2.9 ARTICULACIONES DEL ROBOT
.............. ..............................
FIG. 2.3 RELACIÓN DE LA DINÁMICA EN UN MANIPULAD .................... ......................... 25
.............................. FIG. 2.10 MECANISMO CORONA-SMF FIG. 2.1 I DIAGRAMA A BLOQUES DEL SISTEMA DE ROBOT .. FIG. 2.12 DIAGRAMA A BLOQUES DEL CIRCUITO DEL MOTO
FiG.2.13 FORMACION DE PULSOS PARA EL CONTROL DE VELOCIDAD Y POSICION FIG. 3.1 MULTIPLEXACIÓN DEL BUS DE DATOS Y DIRECCIONES
FIG. 2.13 DIAGRAMA A BLOQUES DEL ClRCUlTO DE CONTROL DE VELOCID AD ............................ 32
FIG. 3.2 M A ~ A DE MEMORIA DEL MICROCONTROLADOR EN MODO EXPANDIDO MLJLTIPLEXADO. 66
FIG. 3.3A HABILITACI~N DEL PPI. .................
FIG. 3.7 c IRCUlT0 DEL RESET PARA EL MICROCONTROLADOR MC68HC1 1 ................................. 72
FIGURA 3.2.1 CIRCUITO PARA GENERAR LA ONDA ~ I Á N G U L AR ................................................... 74
FIG. 3.2.3 C O M P W O R DE VOLTAJE PARA FORMAR EL ANCHO DEL PULSO ................................ 76 FIG. 3.2.3 CIRCUITO MUESTREADOR Y RETENEDOR
FIG. 3.8 ARREGLO PARA EL CIRCUITO DE RELOJ ..73
.. 75 FIG. 3.2.2 CIRCUITO'PARA REFORZAR LA SEÑAL TRIÁNGULAR DEL PWM. ...
FIG. 3.3.2 FORMA DE ONDA OBTENIDA DEL ENCODER
FIG. 3.3.5 SHUNTY AMPLIFICADOR ....................................................... FIG. 3.3.6 COMPARADOR DEL NIVEL DE CORRIENTE ........................................ 86 FIG. 3.3.7 CIRCUITO PARA MEMORIZAR DATO DE CORRIEN TE...
FIG. 5.2 RESPUESTA AL ESCAL6N UNITARIO P FIG. 5.3 RESPUESTA AL ESCALÓN UNITARIO CON AMORTIGUAMIENTO CRITICO .......... FlG.5.3 RESPUESTA AL ESCALbN UNITARIO E FIG. 5.5 RAMPA DE ACELERACI~N Y DESACELERACI~N DEL MOTOR A PASOS 109 FIG. 5.6 FORMATO DE DATOS ..................................... 1 I4 FIG. 5.7 CONECTORES DE25 Y 1 x 9 ...................................................... I19
............................ ......
6

CNAD MECATRONICA
P R O L O G 0
Es sin duda la falta de tecnología mexicana uno de los factores más importantes en la escasa productividad de nuestra industria pero no es por falta de creatividad o habilidad ya que el mexicano es reconocido a nivel internacional, como una persona creativa y llena de ingenio con muchas habilidades.
Es en este punto donde se piensa, cual es la causa del problema, sin mucho abundar podemos saber que es la falta de incentivos y apoyos a los proyectos que constantemente surgen para mejorar nuestra producción o en la creación de nuevos productos, ya que desde los alumnos de nivel de secundaria sorprenden a sus maestros al desarrollar prototipos muy sencillos pero muy útiles a los cuales se les guarda en un archivo que esta repleto de grandes ideas pero que no se llevan a la producción por falta de recursos económicos.
El presente proyecto rompe con este problema creando un producto que sustituirá importaciones con tecnologia mexicana, y que por otra parte cubrir la falta de equipo para prácticas tecnológicas en el subsistema D.G.E.T.I.
Como este trabajo esta dedicado al adiestramiento mecatrónico de los estudiantes de nivel medio superior, es fundamental tratar de ciencia e ingenieria, y es que la ingeniería es el arte de aplicar las ciencias físicas a los problemas prácticos de la humanidad, en su mayor parte ,las ciencias que pretende integrar el adiestrador mecatrónico didáctico son: la Electrónica, la Mecánica, la Robótica y la Informática.
ENTRENADOR MECATRbNlCO 5

CNAD MECATRONICA
6 ENTRENADOR MECATRÓNICO

CNAD MECATRONICA
INTRODUCCI~N
El presente trabajo describe el diseño y construcción de un brazo de robot articulado de 5 grados de libertad. Para establecer el diseño se revisan las diferentes posibilidades que existen, desde la estructura mecánica, los actuadores. la electrónica y la programación.
En el capitulo numero 1 se establecen los criterios generales para el diseño del manipulador desde el punto de vista mecánico, eléctrico, electrónico y de programación con la finalidad especificar las características propias del sistema mecatrónico.
En el capítulo 2 se tratan los aspectos de diseño y construcción de los elementos mecánicos del robot. Así como los materiales empleados para la elaboración del prototipo.
El capitulo 3 aborda el diseño’de los circuitos eléctricos y electrónicos de la instrumentación y el control del sistema de robot.
En el capítulo 4 se tratan las consideraciones necesarias de la teoría de control de un motor de corriente continua con carga inercia1 y de fricción con el fin de diseñar un programa de control de este problema en especifico.
En cuanto a la programación se muestran los diagramas de flujo y codificación de programas para el microcontrolador MC68HC11, para que el usuario utilice estas subrutinas en el control y la medición de parámetros del robot.
La lista de materiales, costos y cronograma serán integrados al final de los capítulos con el fin de tener una referencia de los gastos del prototipo.
En el apéndice A se incluyen los dibujos mecánicos del robot de manera integrada, es decir, uniendo todas las partes descritas.
Para el apéndice B se listan los programas de CNC para la fabricación de partes mecánicas con dimensiones no comerciales.
El diseño de un robot también involucra generar algoritmos de que lleven una trayectoria que cumpla con diversos requerimientos, por ejemplo: evitar diversos objetos, gastar el mínimo de energía para ir de un punto a otro, etc. Es por esto que el apéndice C muestra un programa hecho en lenguaje C que utiliza la teoría de cinemática inversa, directa y planeador de trayectorias que son utilizadas para hacer la interpolación de los ejes del robot, muy útiles en trabajos industriales.
En el apéndice D se incluye las hojas de datos los dispositivos electrónicos mas importantes que están incluidos en el controlador del robot, con el fin de hacer esta una guía de referencia en futuros proyectos de este tipo.
ENTRENADOR MECATR6NICO 7

CNAD MECATRONICA
OBJ ETlVO
DISENAR Y CONSTRUIR UN ROBOT ARTICULADO DE CINCO GRADOS DE LiBERTAD DE ARQUITECTURA ABIERTA, QUE LE PERMITA AL USUARIO TENER ACCESO A LOS CIRCUITOS DEL SISTEMA PARA COMPROBAR ALGORITMOS DE CONTROL.
8 ENTRENADOR MECATR6NICO

CNAD MECATRONICA
En su ámbito profesional el ingeniero tiene la necesidad de apropiarse de varios conocimientos científicos y tecnológicos, con la intención de diseñar productos que faciliten las tareas del hombre.
Uno de los productos que en los Últimos 30 años son utilizados por diversas industrias, en la realización de tareas peligrosas y rutinarias para el ser humano, son los robots, y la complejidad de la tarea determina el tipo de robot a utilizar y por ende sus grados de libertad.
El producir un robot articulado de cinco grados de libertad, tiene la finalidad de obtener un manipulador que posea alta flexibilidad al realizar sus movimientos, puesto que un robot con menos grados de libertad no es tan versátil. Con ello se pretende encontrar el justo medio entre flexibilidad y complejidad, porque es uno de los que se utiliza con mas frecuencia y satisface un buen número de necesidades industriales.
Con este proyecto se busca desarrollar la circuiteria electrónica y de control del tipo abierta, para que se tenga acceso a ella, es decir, el usuario podrá interactuar para realizar cambios en el funcionamiento, al programar los dispositivos electrónicos empleando algoritmos de control.
También cabe aclarar, que el sistema electromecánico es menos avanzado que un sistema mecatrónico, es decir, en el primero intervienen dos disciplinas: la electricidad y la mecánica, y en el segundo se trata de una interdisciplina donde participan: la ingenieria mecánica, electrónica, electricidad, computación y control.
En este sentido este proyecto constituye una aportación, que permite a los especialistas en el área de mecatrónica, utilizarlo como objeto de estudio del sistema de control de un robot, lo que les facilitará adentrarse en este campo a pesar de que se trata de una disciplina muy incipiente en México.
ENTRENADOR MECATRONiCO 9

-
CNAD MECATRONICA
10 ENTRENADOR MECATRbNICO

CNAD MECATRONICA
CAPITULO 1 GENERALIDADES DEL SISTEMA
Este capitulo tiene la finalidad de mostrar el marco teórico de la robótica industrial y finalidad de describir los conceptos básicos necesarios de un sistema robot, y las consideraciones técnicas propias del diseno del entrenador mecatrónico didáctico (Brazo articulado)
1.1 INTRODUCCIÓN A LA ROBÓTICA
La robótica es un nuevo campo de la tecnología moderna la cual involucra conocimientos de ingeniería eléctrica, industrial, informática, economía y matemáticas [I].
El término robot fue introducido por el dramaturgo checo Karel Capek en 1920, dicho término es derivado de la palabra robota que significa trabajo. Desde entonces esta palabra se ha aplicado a gran variedad de dispositivos mecánicos con cierto grado de autonomía, usualmente controlados por una computadora.
La definición oficial de robot es del Instituto Americano de Robots (RIA):
Un robot es un manipulador multifuncional reprogramable para mover materiales, partes, herramientas o dispositivos especializados a través de movimientos programados para e l desarrollo de varias tareas.
1.1.1 PRECISI~N
La precisión de un manipulador es la diferencia entre el punto deseado y el valor obtenido en el manipulador en su espacio de trabajo. (21.
1.1.2 REPETlBlLlDAD
El grado de repetibilidad es la medición de que tan cerca queda el manipulador del punto previamente enseñado.
- 0 1 - 0 5 4 5 ENTRENADOR MECATR6NICO I I
~
CNAD MECATRONICA
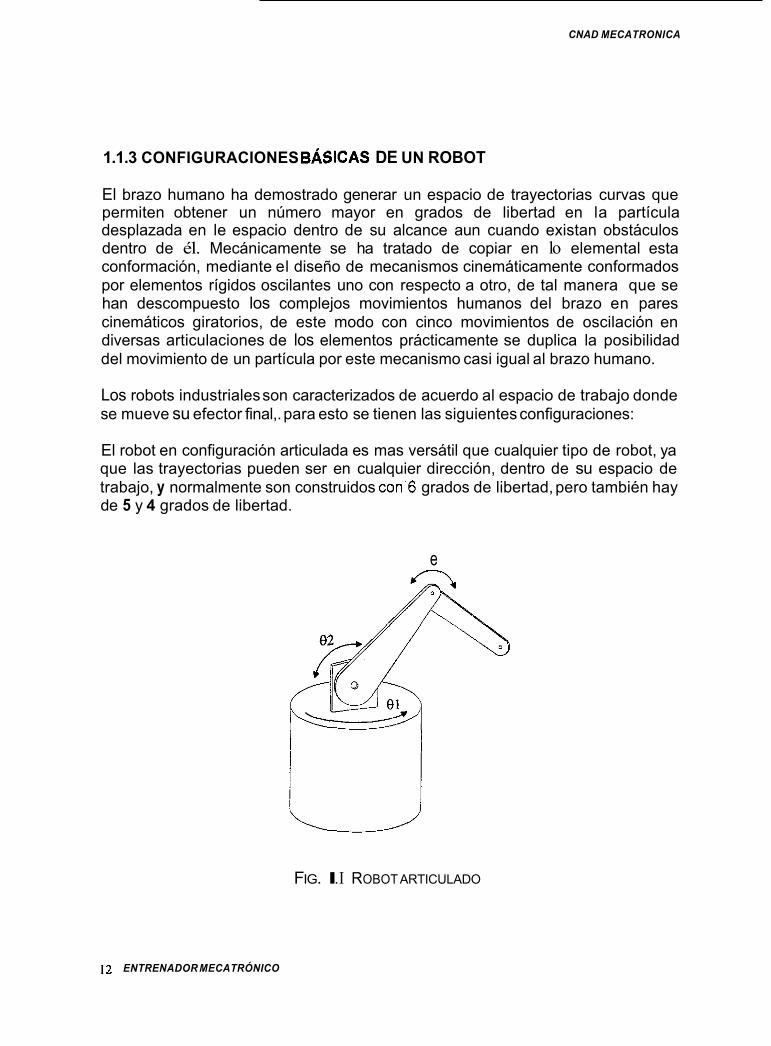
1.1.3 CONFIGURACIONES BASICAS DE UN ROBOT
El brazo humano ha demostrado generar un espacio de trayectorias curvas que permiten obtener un número mayor en grados de libertad en la partícula desplazada en le espacio dentro de su alcance aun cuando existan obstáculos dentro de él. Mecánicamente se ha tratado de copiar en lo elemental esta conformación, mediante el diseño de mecanismos cinemáticamente conformados por elementos rígidos oscilantes uno con respecto a otro, de tal manera que se han descompuesto los complejos movimientos humanos del brazo en pares cinemáticos giratorios, de este modo con cinco movimientos de oscilación en diversas articulaciones de los elementos prácticamente se duplica la posibilidad del movimiento de un partícula por este mecanismo casi igual al brazo humano.
Los robots industriales son caracterizados de acuerdo al espacio de trabajo donde se mueve su efector final,. para esto se tienen las siguientes configuraciones:
El robot en configuración articulada es mas versátil que cualquier tipo de robot, ya que las trayectorias pueden ser en cualquier dirección, dentro de su espacio de trabajo, y normalmente son construidos con'6 grados de libertad, pero también hay de 5 y 4 grados de libertad.
e
FIG. I. I ROBOT ARTICULADO
12 ENTRENADOR MECATRÓNICO
CNAD MECATRONICA
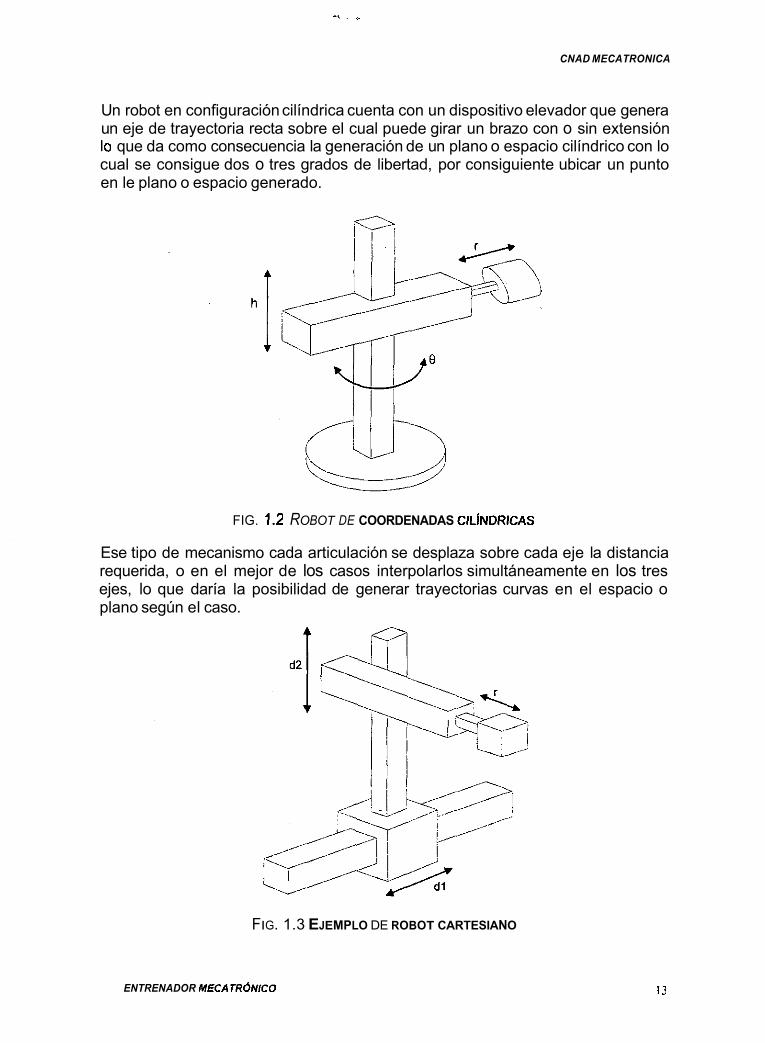
Un robot en configuración cilíndrica cuenta con un dispositivo elevador que genera un eje de trayectoria recta sobre el cual puede girar un brazo con o sin extensión Io que da como consecuencia la generación de un plano o espacio cilíndrico con lo cual se consigue dos o tres grados de libertad, por consiguiente ubicar un punto en le plano o espacio generado.
FIG. 1.2 ROBOT DE COORDENADAS ClLINDRlCAS
Ese tipo de mecanismo cada articulación se desplaza sobre cada eje la distancia requerida, o en el mejor de los casos interpolarlos simultáneamente en los tres ejes, lo que daría la posibilidad de generar trayectorias curvas en el espacio o plano según el caso.
FIG. 1.3 EJEMPLO DE ROBOT CARTESIANO
ENTRENADOR MECATR~N~CO 13
CNAD MECATRONICA
1.2 ELEMENTOS NECESARIOS PARA EL DISEÑO DE UN ROBOT
Si alguien decidiera diseñar un robot cuales serian los principales aspectos para iniciar a comprender el problema. Actualmente la información sobre robótica es amplia, pero a pesar de eso, no se tiene una guía práctica que nos permita diseñar y construir un robot por muy sencillo que este sea.
A continuación se presenta un resumen de los problemas generales para el diseño de sistemas de robots [I].
1.2.1 CINEMÁTICA DIRECTA
El primer problema encontrado es para describir la posición del efector final en términos de las variables de las articulaciones. Para lograr este análisis se requiere de transformaciones lineales, dada en una representación de Denavit- Hartenberg.
Ejemplo:
Manipulador planar 2DOF
Podemos asociar cada enlace i por un marco de coordenadas (x i , yi, zi) atado a cada enlace.( fig. 1.4 ). Lo cual es una manera gráfica de la representación de Denavit-Hartenberg (D-H) El eje atado al enlace O ( base del manipulador ) es llamado eje base o eje inercial. La relación entre el eje i-I y la coordenada del eje i es dada por la matriz de transformación.
cose, - c o s a , sine, s ina , sine, a , COSO,
sine, cosa, cos0, -Sinai cose, a , sine, A, =
s ina , cosa, di I: o O 1
A i es el producto de cuatro matrices generalizadas las cuales son:
A i = Rot,,, Trans:,, Trans,,,, Rot,,,
14 ENTRENADOR MECATRbNlCO

CNAD MECATRONICA
Ai =
cose, -sine, O O 1 O O O 1 O O a, 1 O O sine, cose, O O O 1 O O O 1 O O O cosa, -sina, O 0 i o][ 0 0 i d][o 0 i o][o si;, c o y , i] O o 0 1 0 0 0 1 O 0 0 1 o
x,
enlace i-l
FIG. 1.4 RELAC16N DE LA DINAMICA EN UN MANIPULADOR
Siguiendo con el ejemplo se encuentra las matrices A, para cada grado de libertad de la figura 1.4.
A, =
cose, -sine, O alcose , cose, -sine, O a,cose, sine, COSO, O a,sine, sine, cose, o a,sine,
1 O O O O O 0 1 O 1 ] , * ; _ I o O o O 0 1
J
Fig. 1.5 Planar de 2 DOF
ENTRENADOR MECATR6NICO

~
CNAD MECATRONICA
De acuerdo a la representación D-H los elementos del manipulador planar son los siguientes:
1 I a r I O
Tabla 1.1 Elementos del manipulador
rcos(e, + e 2 ) -sin(@, +e,) 0 a,cos0, +a,cos(e, +e2 ) sin@, +e2) cos(0, +e,) O a , sin0, + a 2 sin(0, +0 , )
O 1 O A,A, =
O O 1
Encontrando que la última columna son las componentes del actuador final con respecto al eje base:
x = a , c o s 0 , +a2cos(8, +e,) y = a , s i n e , +a2sin(0, + O , )
1.2.2 CINEMÁTICA INVERSA
El segundo problema en robótica es encontrar la variables de las articulaciones en términos de la posición del efector final o herramienta. Para conseguir esto se sigue una serie de procedimientos matemáticos que pueden llegar a ser muy complejos en la medida que se aumente la complejidad del robot. Para este caso se pueden encontrar más de una solución, es decir, intentar conocer las variables de las articulaciones con base a un punto en el espacio no es condición necesaria para establecer una solución única, es por esto que hay tantas soluciones como grados de libertad del robot.
Para el ejemplo del manipulador planar 2DOF Para este caso se implementara una solución geométrica, ya que la cinemática inversa, utiliza algoritmos mas generalizados que salen del contexto de estos apuntes.
16 ENTRENADOR MECATRÓNICO

CNAD MECATRONICA
1.6 Cinemática inversa para el planar 2 DOF
De acuerdo a la figura 1.6 tenemos que: r2 = x2 + y2
y usando la ley de cosenos se obtiene:
r2 = a: + ai - 2a,a, cos(x -e2) r2 = a: +a: +2a,a, cose,
Por lo tanto se tiene que: 2 2 2 r - a , - a cose2 = E C
%a,
De acuerdo a la figura se puede tener dos soluciones para el y 02, es decir el codo puede estar por arriba del vector r, pero el codo también puede estar por debajo del vector, como se determina estas dos posibles soluciones, se procede de la siguiente manera:
sine, = 4 1 - c2 3 D O 2 = farctan(D / C)
Para la solución por encima del vector, tomar el signo positivo y para la que esta debajo se toma el signo la negativo.
Para determinar 01 se define un ángulo auxiliar cp en la figura, por inspección determinamos que:
a, sine, a , + a, cos0,
tancp =
ENTRENADOR MECA TRbNlCO 17

CNAD MECATRONICA
Además,
As¡ que:
) Y a, sine, X a, + a 2 cose,
e , = arctan-) - arctan(
Note que el depende de e2 1.2.3 VELOCIDAD CINEMÁTICA
La velocidad cinemática relaciona la velocidad de las articulaciones con la velocidad de el efector final, a la matriz que define lo anteriormente mencionado se le conoce como matriz Jacobiana. Conociendo esta matriz podemos determinar la velocidad del efector final en base a las velocidades de las variables de las articulaciones, o de igual manera se puede calcular con la matriz jacobiana inversa la velocidad de las variables de cada articulación en base a la velocidad del actuador final.
Ejemplo para el planar 2DOF Teniendo conocidas las coordenadas del efector final, con respecto a las variables de las articulaciones podemos determinar su velocidad derivando las expresiones de las articulaciones, es decir , si las coordenadas x, y son:
x = a, cos0, +a, cos(8, +e2) y = a , sine, + a 2 sin@, +e,)
Haciendo derivadas parciales, con respecto a las dos variables (0, y el+&) se tiene:
x = - a , s i n e , ~ , - a , s i n ( ~ , +e,)(ei+e2)
y = a, cose, 6 + a2 cos(e, +e,)(& +e2)
Usando notación vectorial x = [ z ] y 8 = [e:] Por lo tanto podemos escribir la
función de la velocidad en forma matricial:
-a, sine, -a2 sin(€), +8,)-a2sin(e1 +e2) a , cose, +a , cos(8, +e,) a,cos(e, +e,)
I8 ENTRENADOR MECATR6NICO

CNAD MECATRONICA
Donde la matriz J es llamada el jacobiano del manipulador, la cual expresa la velocidad del actuador final en base a las velocidades de 8, y 02.
Ahora para determinar las velocidades de las articulaciones en base a la velocidad del actuador final.
0 = J-' x
O también:
Ixl [,e:]= ala , sine, [-a, cose, - a 2 cos(e, +e2) a , sine, - a 2 sin(@, +e2) y 1 a,cos(e, +e,) a, sin(@, + e 2 )
Note que cuando e2 vale O o múltiplos de R el inverso del jacobiano se indetermina y esto es para condiciones donde el brazo manipulador no alcanza a los puntos de singularidad.
1.2.4 DINÁMICA
En el problema de la dinámica se determina la fuerza necesaria para mover las articulaciones del robot. Esto es posible con cálculos que relacionan las dimensiones y el peso de los brazos , así como, el peso que llevará la herramienta, con esto se estima de manera general el tipo y la capacidad del motor a utilizarr para moverlo con un torque o fuerza lineal apropiada según sea el caso. Para ello caso existen las ecuaciones de Euler-Lagrange, la cuales describen la evolución del sistema mecánico, en resumen, la energía potencial y la energía cinética. las cuales son ligadas con el par desarrollado, la potencia y elementos necesarios para la dinámica de los robots.
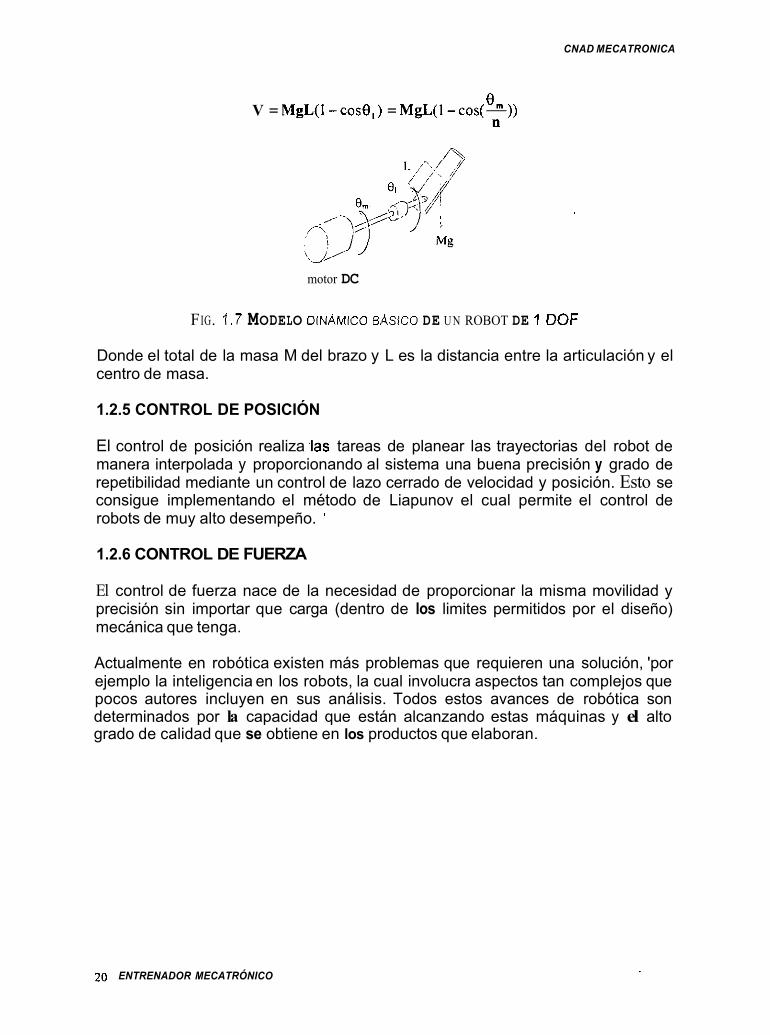
Ejemplo: Manipulador de un enlace
Considerar un brazo de un simple enlace mostrado en la fig. 1.7 , el cual consiste de un eje rígido acoplado a través de un tren de engranes a un motor de DC, en donde el y em son los ángulos del enlace y del eje del motor respectivamente,
entoncese, = -e,, y n es la relacion de los engranes la energía cinética del
sistema, que esta dada por:
1 U
k = - J r n e 2 1 + 5 J , e i 1 2 2 rn
Donde J, y JI son la inercias rotacionales del motor y del enlace, respectivamente. La energía potencial está dada por:
ENTRENADOR MECATR6NICO 19
CNAD MECATRONICA
e V = MgL(1 -cose,) = M g L ( l - ~ o s ( ~ ) )
n
L,,'', el s'
motor DC
FIG. 1.7 MODELO DINAMICO BASIC0 DE U N ROBOT DE 1 DOF
Donde el total de la masa M del brazo y L es la distancia entre la articulación y el centro de masa.
1.2.5 CONTROL DE POSICIÓN
El control de posición realiza .las tareas de planear las trayectorias del robot de manera interpolada y proporcionando al sistema una buena precisión y grado de repetibilidad mediante un control de lazo cerrado de velocidad y posición. Esto se consigue implementando el método de Liapunov el cual permite el control de robots de muy alto desempeño. '
1.2.6 CONTROL DE FUERZA
El control de fuerza nace de la necesidad de proporcionar la misma movilidad y precisión sin importar que carga (dentro de los limites permitidos por el diseño) mecánica que tenga.
Actualmente en robótica existen más problemas que requieren una solución, 'por ejemplo la inteligencia en los robots, la cual involucra aspectos tan complejos que pocos autores incluyen en sus análisis. Todos estos avances de robótica son determinados por la capacidad que están alcanzando estas máquinas y el alto grado de calidad que se obtiene en los productos que elaboran.
20 ENTRENADOR MECATRÓNICO

CNAD MECATRONICA
1.3 DESCRIPCION GENERAL DEL SISTEMA
A continuación en la fig. 1.8 se muestran los diagramas generales del sistema mecatrónico propuesto.
ROBOT
PC
UNIDAD DE CONTROL
FIG. I .a SISTEMA COMPLETO DEL SISTEMA ROBOT
1.3.1 DESCRIPCIÓN MECANICA DEL SISTEMA ROBOT.
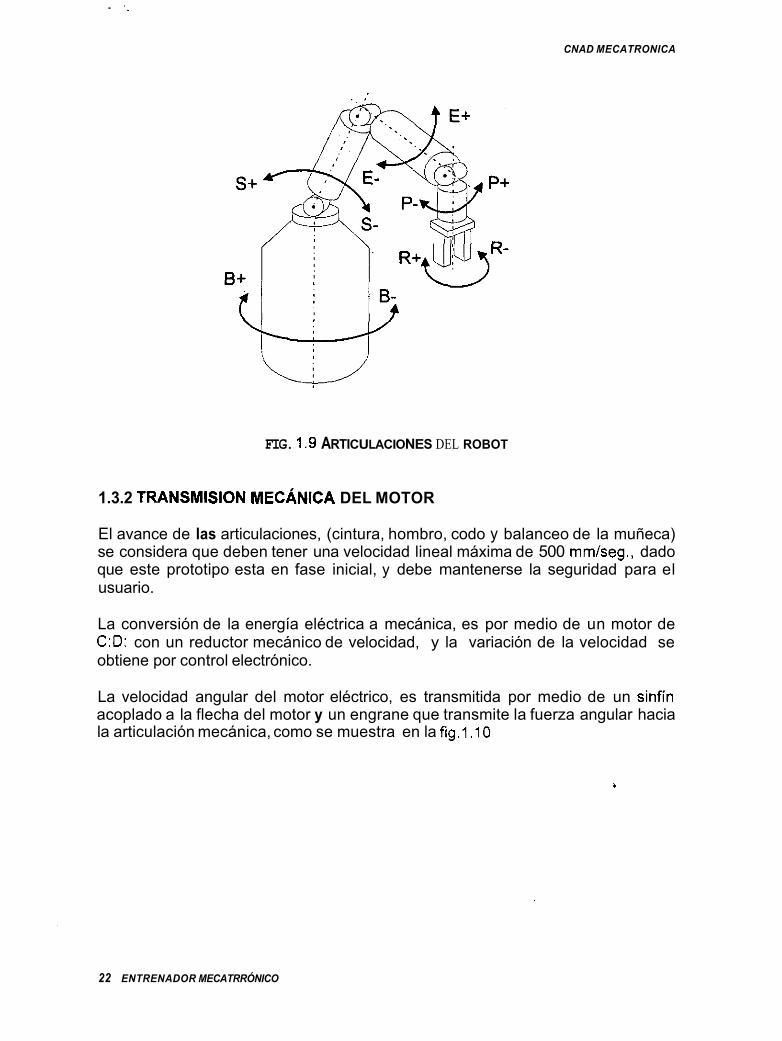
Para poder obtener una variedad de posiciones diferentes, se decidio diseñar un robot del tipo articulado de cinco grados de libertad mostrándose en la figura 1.9. En ella podemos observar que cuenta con 5 ejes independientes, es decir, cinco grados de libertad, los cuales son los siguientes:
Giro de la cintura (E+ en sentido de las manecillas del reloj, y B- en sentido contrario a las manecillas del reloj) Movimiento del hombro (S+ hacia arriba y S- hacia abajo) Movimiento del codo (E+ hacia arriba y E- hacia abajo) Balanceo de la muñeca ( P+ hacia arriba y P- hacia abajo) Giro de la muñeca (R+ en sentido de las manecillas del reloj y R- en sentido contrario).
ENTRENADOR MECATRRÓNICO 21
.. ..
CNAD MECATRONICA
FIG. 1.9 ARTICULACIONES DEL ROBOT
1.3.2 TFUNSMISION MECÁNICA DEL MOTOR
El avance de las articulaciones, (cintura, hombro, codo y balanceo de la muñeca) se considera que deben tener una velocidad lineal máxima de 500 mmlseg., dado que este prototipo esta en fase inicial, y debe mantenerse la seguridad para el usuario.
La conversión de la energía eléctrica a mecánica, es por medio de un motor de C:D: con un reductor mecánico de velocidad, y la variación de la velocidad se obtiene por control electrónico.
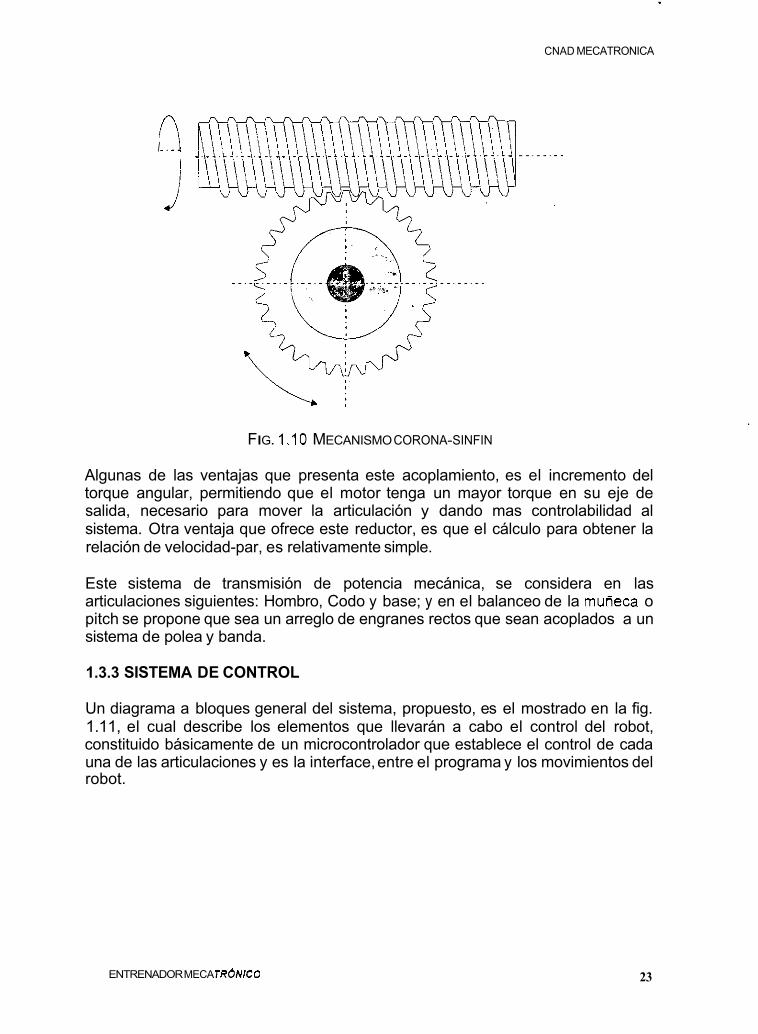
La velocidad angular del motor eléctrico, es transmitida por medio de un sinfin acoplado a la flecha del motor y un engrane que transmite la fuerza angular hacia la articulación mecánica, como se muestra en la fig.l.10
22 ENTRENADOR MECATRRÓNICO
CNAD MECATRONICA
I /?i I
FIG. 1.10 MECANISMO CORONA-SINFIN
Algunas de las ventajas que presenta este acoplamiento, es el incremento del torque angular, permitiendo que el motor tenga un mayor torque en su eje de salida, necesario para mover la articulación y dando mas controlabilidad al sistema. Otra ventaja que ofrece este reductor, es que el cálculo para obtener la relación de velocidad-par, es relativamente simple.
Este sistema de transmisión de potencia mecánica, se considera en las articulaciones siguientes: Hombro, Codo y base; y en el balanceo de la mutieca o pitch se propone que sea un arreglo de engranes rectos que sean acoplados a un sistema de polea y banda.
1.3.3 SISTEMA DE CONTROL
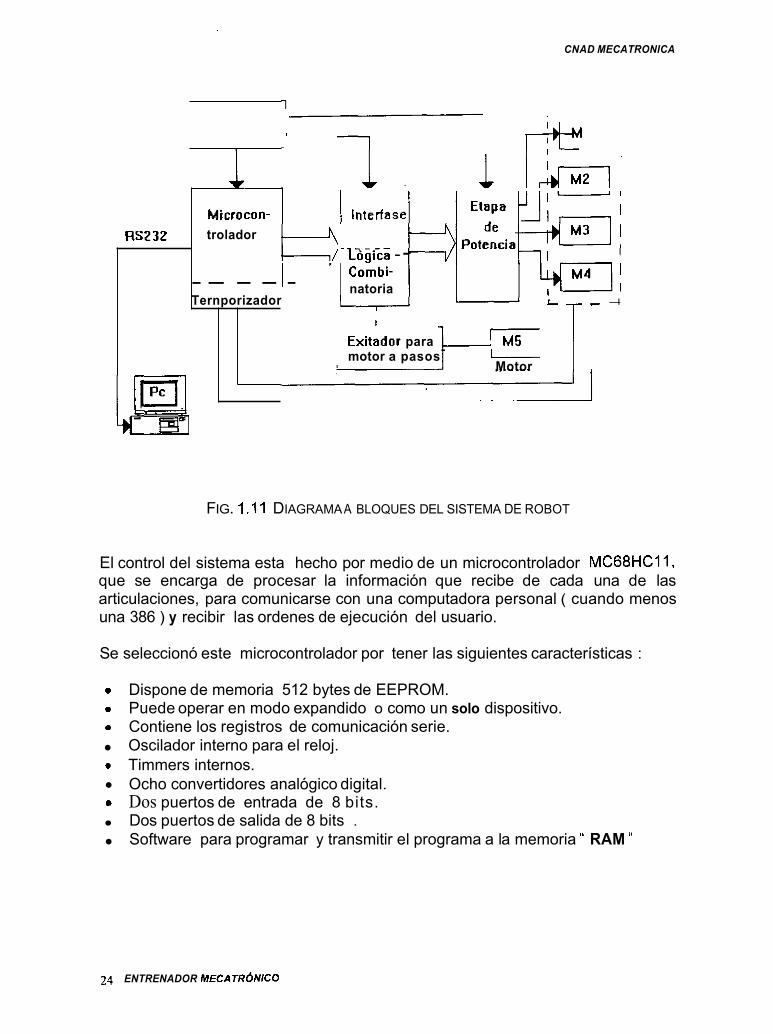
Un diagrama a bloques general del sistema, propuesto, es el mostrado en la fig. 1.11, el cual describe los elementos que llevarán a cabo el control del robot, constituido básicamente de un microcontrolador que establece el control de cada una de las articulaciones y es la interface, entre el programa y los movimientos del robot.
ENTRENADOR MECA TR6NICO 23
CNAD MECATRONICA
RS232 Microcon- lnteríase trolador
- L'ogka - - Cornbi- natoria - - - - -
Ternporizador -I
FIG. 1.1 1 DIAGRAMA A BLOQUES DEL SISTEMA DE ROBOT
Exitador para M5 motor a pasos
Motor
El control del sistema esta hecho por medio de un microcontrolador MC68HC11, que se encarga de procesar la información que recibe de cada una de las articulaciones, para comunicarse con una computadora personal ( cuando menos una 386 ) y recibir las ordenes de ejecución del usuario.
Se seleccionó este microcontrolador por tener las siguientes características :
0 Dispone de memoria 512 bytes de EEPROM. 0 Puede operar en modo expandido o como un solo dispositivo. 0 Contiene los registros de comunicación serie.
Oscilador interno para el reloj. 0 Timmers internos.
Ocho convertidores analógico digital. 0 Dos puertos de entrada de 8 bits.
Dos puertos de salida de 8 bits . Software para programar y transmitir el programa a la memoria " RAM "
24 ENTRENADOR MECATRbNlCO
CNAD MECATRONICA
1.3.4 INTERFACE
La interfase entre el microcontrolador y el manejador de potencia esta constituida por un puerto de salida en paralelo y circuito combinatorio que se encarga de enlazar las señales enviadas por el microcontrolador a sus periféricos.
1.3.5 ETAPA DE POTENCIA
La etapa de potencia o servoamplificador es la sección que se encarga de enviar la energía necesaria para el movimiento de cada uno de los servomotores. El amplificador debe tener como característica sobresaliente muy alta eficiencia, para ahorrar espacio y energía [6].
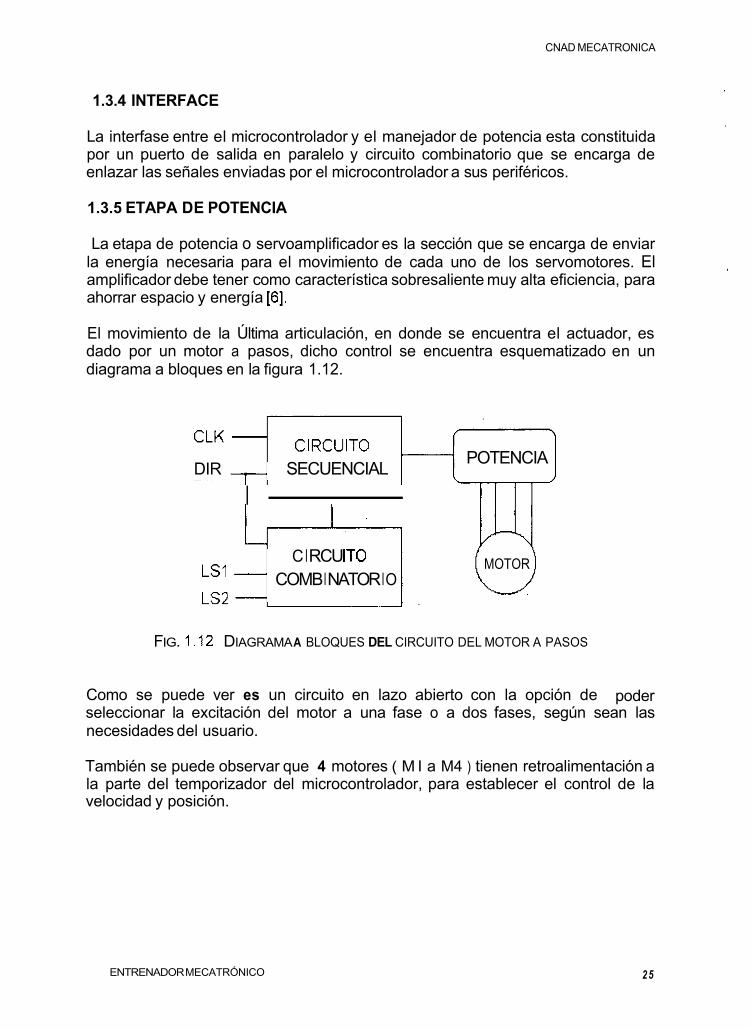
El movimiento de la Última articulación, en donde se encuentra el actuador, es dado por un motor a pasos, dicho control se encuentra esquematizado en un diagrama a bloques en la figura 1.12.
DIR SECUENCIAL
I-
C I RCU IT0 COMB I NATOR I O LS1
LS2
POTENCIA
MOTOR
FIG. 1.12 DIAGRAMA A BLOQUES DEL CIRCUITO DEL MOTOR A PASOS
Como se puede ver es un circuito en lazo abierto con la opción de poder seleccionar la excitación del motor a una fase o a dos fases, según sean las necesidades del usuario.
También se puede observar que 4 motores ( M I a M4 ) tienen retroalimentación a la parte del temporizador del microcontrolador, para establecer el control de la velocidad y posición.
ENTRENADOR MECATRÓNICO 2 5
CNAD MECATRONICA
1.3.6 CONTROL DE MOTOR
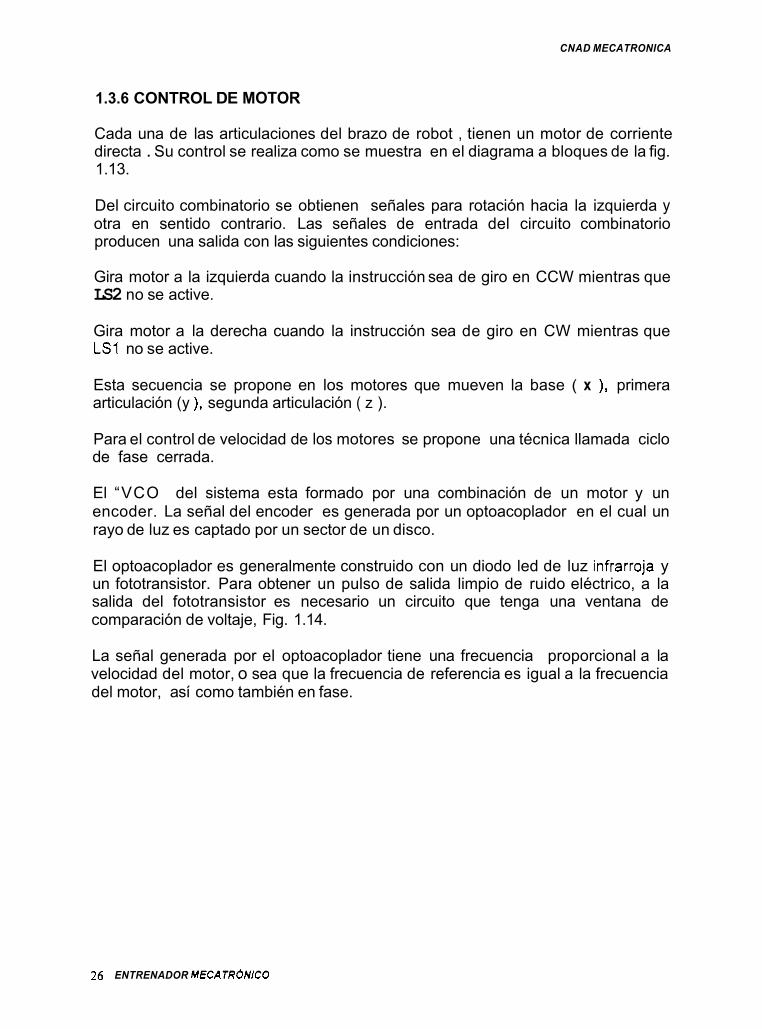
Cada una de las articulaciones del brazo de robot , tienen un motor de corriente directa . Su control se realiza como se muestra en el diagrama a bloques de la fig. 1.13.
Del circuito combinatorio se obtienen señales para rotación hacia la izquierda y otra en sentido contrario. Las señales de entrada del circuito combinatorio producen una salida con las siguientes condiciones:
Gira motor a la izquierda cuando la instrucción sea de giro en CCW mientras que LS2 no se active.
Gira motor a la derecha cuando la instrucción sea de giro en CW mientras que LS1 no se active.
Esta secuencia se propone en los motores que mueven la base ( x ), primera articulación (y ), segunda articulación ( z ).
Para el control de velocidad de los motores se propone una técnica llamada ciclo de fase cerrada.
El “VCO del sistema esta formado por una combinación de un motor y un encoder. La señal del encoder es generada por un optoacoplador en el cual un rayo de luz es captado por un sector de un disco.
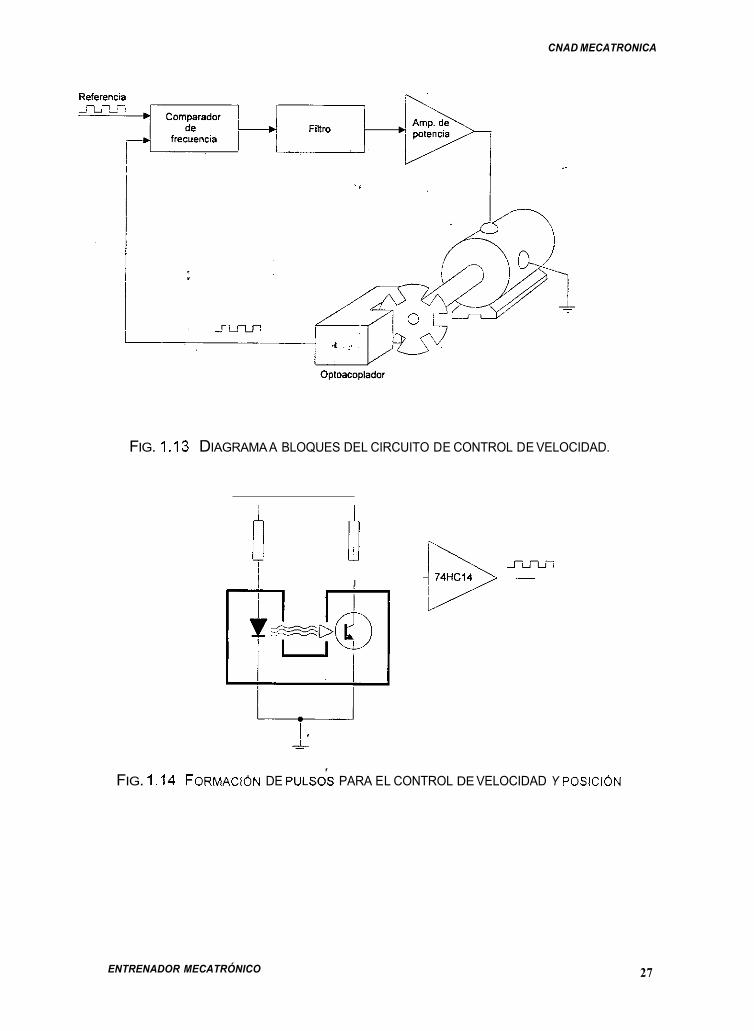
El optoacoplador es generalmente construido con un diodo led de luz infrarroja y un fototransistor. Para obtener un pulso de salida limpio de ruido eléctrico, a la salida del fototransistor es necesario un circuito que tenga una ventana de comparación de voltaje, Fig. 1.14.
La señal generada por el optoacoplador tiene una frecuencia proporcional a la velocidad del motor, o sea que la frecuencia de referencia es igual a la frecuencia del motor, así como también en fase.
26 ENTRENADOR MECATRbNlCO
CNAD MECATRONICA
FIG. 1 . I 3 DIAGRAMA A BLOQUES DEL CIRCUITO DE CONTROL DE VELOCIDAD.
d i I
i I 4 74HC14 >::,.,.
I . I
FIG. 1 . I 4 FORMAC16N DE PUL& PARA EL CONTROL DE VELOCIDAD Y POSICIÓN
ENTRENADOR MECATRÓNICO 27
CNAD MECATRONICA
1.3.7 COMPUTADORA DE CONTROL
En sistemas mecatronicos se hace necesario el uso de un elemento programable para otorgarle un grado de inteligencia y autonomía. Para este proyecto se propone como elemento programable el microcontrolador MC68HCl1, en el cual la programación es en lenguaje ensamblador de este microcontrolar. El microcontrolador 68HC11 tiene la tarea de establecer el control del robot, y la PC se pretende que planee trayectorias de movimiento de los ejes. La comunicación serial con que cuenta el microcontrolador permite la transmisión de información a la computadora personal (PC).
Generalmente un microcontrolador [E] dispone de poca memoria RAM, por lo que es necesario incrementar esta memoria. Para hacer este incremento es necesario saber la organización de la memoria interna del micro M68HC11, y es la siguiente:
Tabla 1.2 Mapa de memoria y registros del MC68HC11
Las direcciones que se proponen para la expansión de memoria pueden ser establecidas en este rango:
De la $2000 a la $3FFFF Para la memoria RAM De la $A000 a la $BFFF Para la memoria EPROM De la $4000 a la $4003 Para puertos de entrada y salida Quedando las direcciones restantes para otras necesidades
Para transmitir el programa, que se hace en lenguaje ensamblador de la computadora personal al microcontrolador ( 68HC11E9 ) se hace uso de la interfase serial, dado que ya se disponen de los registros de transmisión, programa monitor (BUFFALO), faltando únicamente la adecuación de las señales TTL a el estándar RS 232.
28 ENTRENADOR MECATR6NICO
- . ., . . ,
CNAD MECATRONICA
1.3.8 CRITERIOS CONSIDERADOS
Para la realización del brazo articulado se tomaron en cuenta los siguientes aspectos, en orden de importancia para las condiciones de trabajo existentes en el Centro Nacional de Actualización Docente:
a) Económico.- Basándose en el presupuesto otorgado, se definieron las caracteristicas del brazo articulado. ($12000 M.N.)
b) Tiempo de realización Se dispone de 3 meses de tiempo asignado para diseñar y construir el sistema, lo que limita a realizar un proyecto mecatrónico completo.
c) lnfraestructura Debe tomarse en cuenta la necesidad de contar con herramientas, equipos suficientes y adecuadas para considerar realizable el producto.
d) Soporte técnico Este criterio se considero la capacidad técnica de contrapartes mexicanos, japoneses, alumnos y documentación de estos.
e) Seguridad Es uno de los criterios más importantes en cuanto al uso y manejo del equipo, no debe generar actos inseguros Ó condiciones peligrosas en el manejo y operación el proyecto seleccionado.
9 Mantenimiento Se busca en todo sistema mecatrónico que el mantenimiento sea mínimo, para lograr alta confiabilidad.
ENTRENADOR MECATRbNlCO 29

CNAD MECATRONICA
CAPíTULO 2 DISEÑO'MECÁNICO
La parte mecánica en un proyecto mecatrónico parte de un estudio cinemático. Una vez definidos ios movimientos, se inicia un análisis dinámico del modelo del sistema, con el objeto de garantizar que los actuadores ejecuten los movimientos con la estabilidad requerida, de acuerdo a la aplicación.
La funcionalidad del sistema también depende en forma muy acentuada de los materiales empleados y los requerimientos de calidad en la elaboración de las piezas.
2.1 ELEMENTOS DEL ROBOT
El robot consta de una base principal en la que se apoya la cintura, que es donde soporta todo el movimiento de el brazo, antebrazo (hombro y codo), un elemento balanceo de la muñeca (pitch), rotación de la muñeca (roil) y un efector final.
2.1.1 BASE Y CINTURA
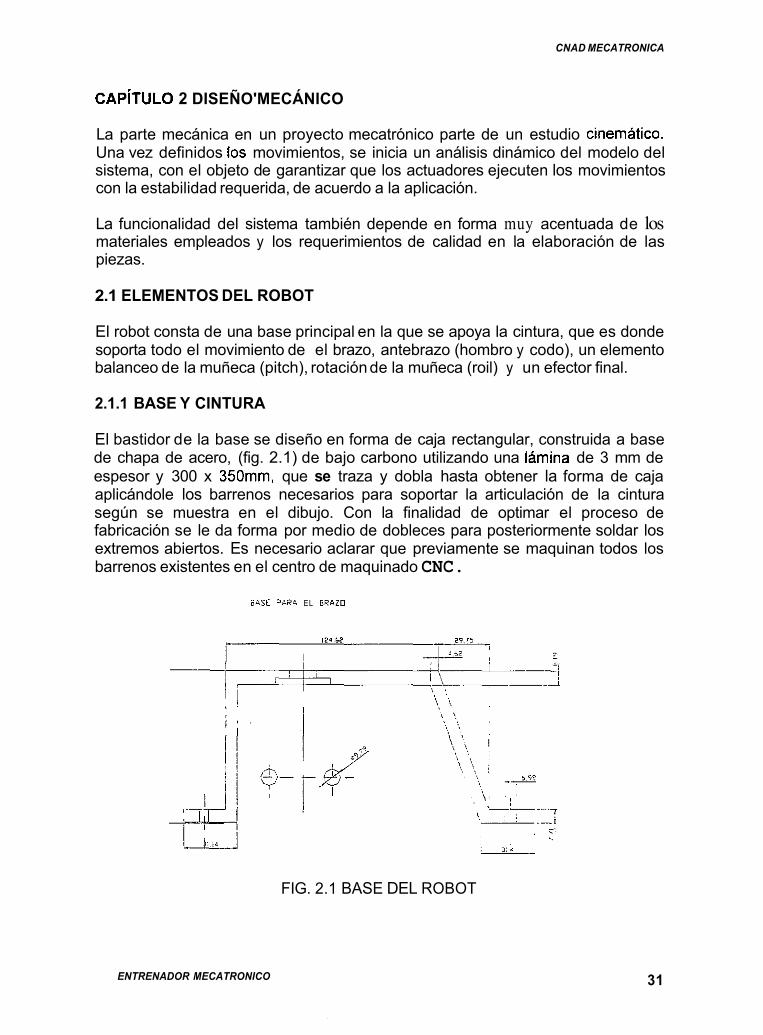
El bastidor de la base se diseño en forma de caja rectangular, construida a base de chapa de acero, (fig. 2.1) de bajo carbono utilizando una lámina de 3 mm de espesor y 300 x 350mm, que se traza y dobla hasta obtener la forma de caja aplicándole los barrenos necesarios para soportar la articulación de la cintura según se muestra en el dibujo. Con la finalidad de optimar el proceso de fabricación se le da forma por medio de dobleces para posteriormente soldar los extremos abiertos. Es necesario aclarar que previamente se maquinan todos los barrenos existentes en el centro de maquinado CNC.
EASE P62S EL Esa20
FIG. 2.1 BASE DEL ROBOT
ENTRENADOR MECATRONICO 31

CNAD MECATRONICA
La cintura se hizo con dos rodamientos (fig. 2. 2); uno de tipo de agujas (esfuerzo axial) y otro de tipo cónico (esfuerzo axial-tangencial) con el objeto de eliminar al máximo los juegos entre la base y la cintura del robot. [3]
El montaje de los rodamientos se hace por medio de un eje ensamblado a la cintura que atraviesa la base, donde se han colocado asientos para apoyar los rodamientos. El ajuste de los mismos se logra mediante un par de tuercas ranuradas aseguradas por una laina de seguridad.
El movimiento a la cintura es hecho por un motor de c.d. de 12 Volts, 2 Amp a 2200 r.p.m. como actuador.
La relación de movimiento se reduce primeramente por un engranaje de tornillo sinfin integrado a la carcaza del motor siendo de una entrada el tornillo y el engrane de 90 dientes lo que resulta una velocidad de 23.3 r.p.m., esta velocidad es reducida, aun mas, por un sistema de poleas y banda síncrona, donde la polea motriz es de 12 dientes y la polea conducida de 36 dientes con lo que la velocidad se reduce hasta 8.13 r.p.m. que aplicada a la máxima longitud del brazo extendido nos resulta una velocidad lineal de 368.25 mmls.
Comparando la velocidad obtenida (368.25 mmís) contra la velocidad máxima del robot industrial RVMI de Mitsubishi en interpolación articulada que es de 1000 mm/s, resulta lento, pero facilita el control del robot.
32 ENTRENADOR MECATRONICO

CNAD MECATRONICA
i
1 i I
i o ' I
, 1" I I I@ I I I 1 II0 I
I FIG. 2.2 CINTURA DEL ROBOT
2.1.2 HOMBRO Y CODO
Se denomina como hombro al primer elemento rígido del brazo articulado inmediato a la cintura. Esta pieza se construye alrededor de una articulación compuesta por un eje cilíndrico de acero que se apoya en sus extremos por dos rodamientos esféricos (esfuerzo axial-tangencial) sobre dos goznes que sirven de alojamiento a los rodamientos. Sobre este eje se monta la polea conducida que recibe su movimiento de otro motor igual al de la cintura y otra polea doble escalonada de giro libre para la transmisión del movimiento del antebrazo colocada en el eje mediante cojinetes antifricción [GI.
ENTRENADOR MECATRONICO 33

CNAD MECATRDNICA
I
f2 ~
..... . ...~ .
J f3 . .~ ' I
FIG. 3.3 COJINETE DE RODAMIENTO ESFERICO
La reducción del movimiento se calcula de forma similar al de la cintura variando Únicamente la longitud del elemento (brazo) que es de 300 mm entre centros.
La construcción de esta parte se hace en forma de yugo donde ambos extremos de este sirven de apoyos para el eje de la articulación. El material empleado es aluminio comercial de baja aleación de cobre por su poco peso y su fácil maquinable además de su rigidez.
Físicamente se maquinan dos goznes que se ensamblan sobre una placa de soporte para formar el cuerpo de la bisagra de la articulación; el-ensamble se realiza por medio de pernos roscados disponiendo nervaduras exteriores para aumentar su rigidez.
Sobre la placa de soporte se colocan las bases para los motores que moverán el brazo y antebrazo del mecanismo, y en su parte inferior se acoplara el eje de la cintura.
34 ENTRENADOR MECATRONICO

CNAD MECATRONICA
2.2 CÁLCULO DE LOS ELEMENTOS Y MECANISMOS
Dentro de los elementos utilizados para la transmisión de movimiento están los engranes, bandas sincrocinturon o dentadas y cremalleras.
El engrane es un mecanismo utilizado desde hace mucho tiempo al igual que el tornillo, los engranes que cambian muy poco la velocidad no se utilizan como antes. No obstante el engranaje es aun un mecanismo importante de transmisión para dispositivos mecatrónicos. Los reductores que utilizan engranes pueden ganar una mayor rotación que el engranaje reductor electrónico, sin embargo, el juego provocado por el engranaje crea problemas cuando se utiliza para posiciones precisas. Las características de estos engranajes son aplicables a los diferentes movimientos de robots.
Los engranes que se utilizan en este proyecto son engranes de forma recta, debido a que su carga es tangencial.
2.2.1 CALCULO DE ENGRANES RECTOS
El engrane recto tiene una taza dentada paralela a un eje y es fácil de fabricar, por lo tanto se utiliza con mayor frecuencia para la transmisión de movimiento.
Los cálculos de los engranes rectos utilizados en este robot se realizaron en base a los siguientes datos:
Engrane 1: Diámetro primitivo = 20mm Numero de dientes = 12
Engrane 2: Diámetro primitivo = 55mm Numero de dientes = 22
Con estos datos partimos calculando el modulo:
MODULO DEL ENGRANE ( M).
Es la relación del diámetro primitivo al numero de dientes expresado en milímetros, o sea que el modulo representa una longitud que es el numero de milímetros del diámetro primitivo por diente.
Engrane 1:
ENTRENADOR MECATRONICO 35

CNAD MECATRONICA
DIMENSIONES DE ENGRANE 1
PASO DIAMETRAL:
N 12
D 20 P=-=-=0,6rnrn
PASO CIRCULAR:
n n p1=-=- - - 5.23 rnrn
P 0.6
DIAMETRO PRIMITIVO:
N 12
P 0.6 D =-=-= 20 mm
SUPLEMENTO:
1 1
P 0.6 S=- =- = 1.66rnrn
BASE:
1 1
P 0.6 B=-=-=1.66rnrn
CLARO:
0.157 0.157
P 0.6 C =- = - = 0.261 rnrn
36 ENTRENADOR MECATRONICO

CNAD MECATRONICA
PROFUNDIDAD TOTAL DEL DIENTE:
2.157 2.157
P 0.6 W=- = - =3.5mm
PROFUNDIDAD UTlL DEL DIENTE:
L L W1 =- = - =3.33mm
P 0.6
DIAMETRO EXTERIOR:
N+2 1 2 + 2
P 0.6 $ = - = - = 23.33 mm
DIAMETRO DE FONDO:
$1 = D + 2s = 20 + 2(1.66) = 23.32 rnm
DIAMETRO DE CLARO:
DC = D - 2 s = 20 - 3.32 = 16.67 mm
ESPESOR DEL DIENTE:
E = 1.5708lP = 1.5708/0.6 = 2.61 mm
DIMENSIONES DE ENGRANE 2
PASO DIAMETRAL:
N 22
D 55 p=-=-- - 0.4 mm
PASO CIRCULAR:
l c l l
P I =-=-=7.85mm P 0.4
I
ENTRENADOR MECATRONICO 37
CNAD MECATRONICA
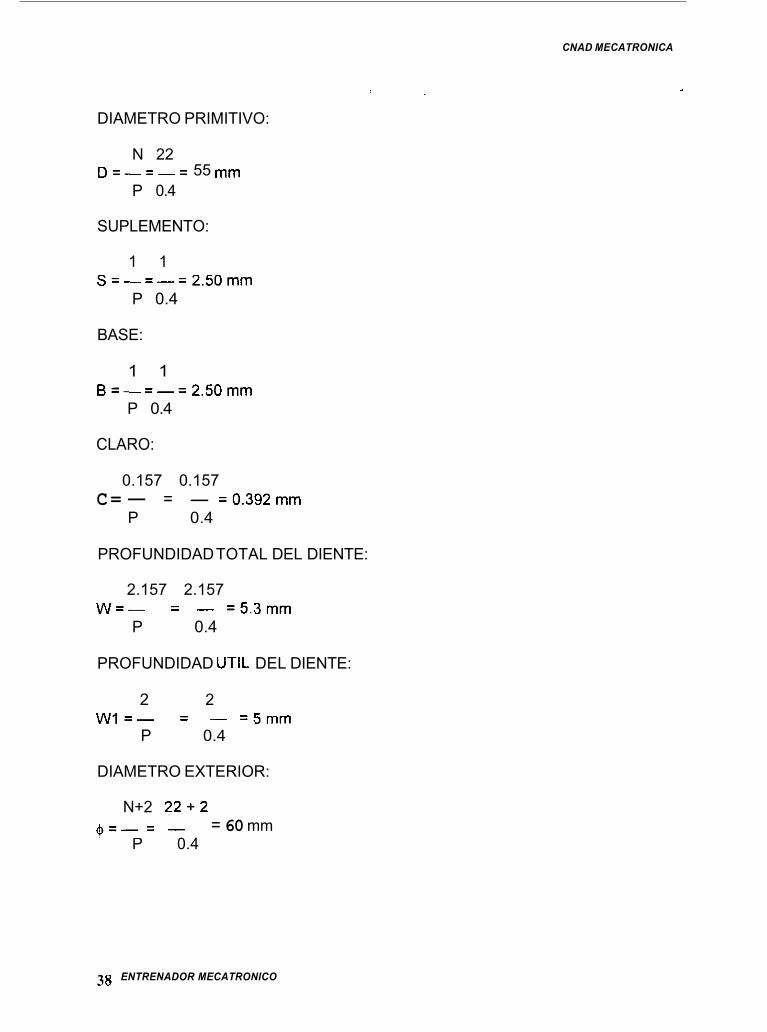
DIAMETRO PRIMITIVO:
N 22
P 0.4
SUPLEMENTO:
D =-= - = 55 mm
1 1
P 0.4 S=-=-=2.50mm
BASE:
1 1
P 0.4 B=-=-=2.50mm
CLARO:
0.157 0.157
P 0.4 C=- = - =0.392mm
PROFUNDIDAD TOTAL DEL DIENTE:
2.157 2.157
P 0.4 W = - = - =5,3mm
PROFUNDIDAD UTlL DEL DIENTE:
2 2
P 0.4
DIAMETRO EXTERIOR:
W1=- = - = 5 m m
N+2 2 2 + 2
P 0.4 $ = - = - = 60 mm
38 ENTRENADOR MECATRONICO

CNAD MECATRONICA
DIAMETRO DE FONDO:
$1 = D + 2 s = 55 + 2(1.66) = 182.60 mm
DIAMETRO DE CLARO:
DC=D-2S=55-3.32=51.68mm
ESPESOR DEL DIENTE:
E = 1.5708/P = 1.5708/0.4 = 3.92 mm
De acuerdo a estos cálculos se fabricaron las poleas dentadas que por sus dimensiones no se encuentran en el mercado. De aquí partimos para la selección de la banda dentada.
2.2.2 BANDAS SINCROCINTURON
Las bandas que se utilizan generalmente en el mecanismo de transmisión son bandas dentadas y poleas dentadas. Las razones son las siguientes:
A) No necesita ninguna lubricación y se mantiene al ambiente. 6) El ruido es menor. C) No hay deslizamientos. D) La distancia entre los ejes es expansible.
Por el contrario, este tipo de banda no es adecuado para velocidades muy altas ni para manejar grandes pesos.
La banda es de forma dentada estándar, esta utiliza un material de fibra de vidrio en su parte central con el propósito de eliminar el estiramiento.
Para especificaciones especiales hay bandas de doble dentado, bandas a prueba de aceite y bandas anchas. Por otra parte, el material de las sincropoleas o engranes se toma de piezas de fundición de acero o de aluminio mezclado para cargas débiles. La banda dentada no es para transmisión por fricción sino para transmisión por enclavamiento y teóricamente no tiene deslizamientos aun si la fuerza tensil es pequeña.
La banda puede reducir su vida útil si se tensiona demasiado, por Io tanto, se debe tener mucho cuidado.
Los tipos de banda mas comunes son presentados en la siguiente tabla:
.
ENTRENADOR MECATRONICO 39
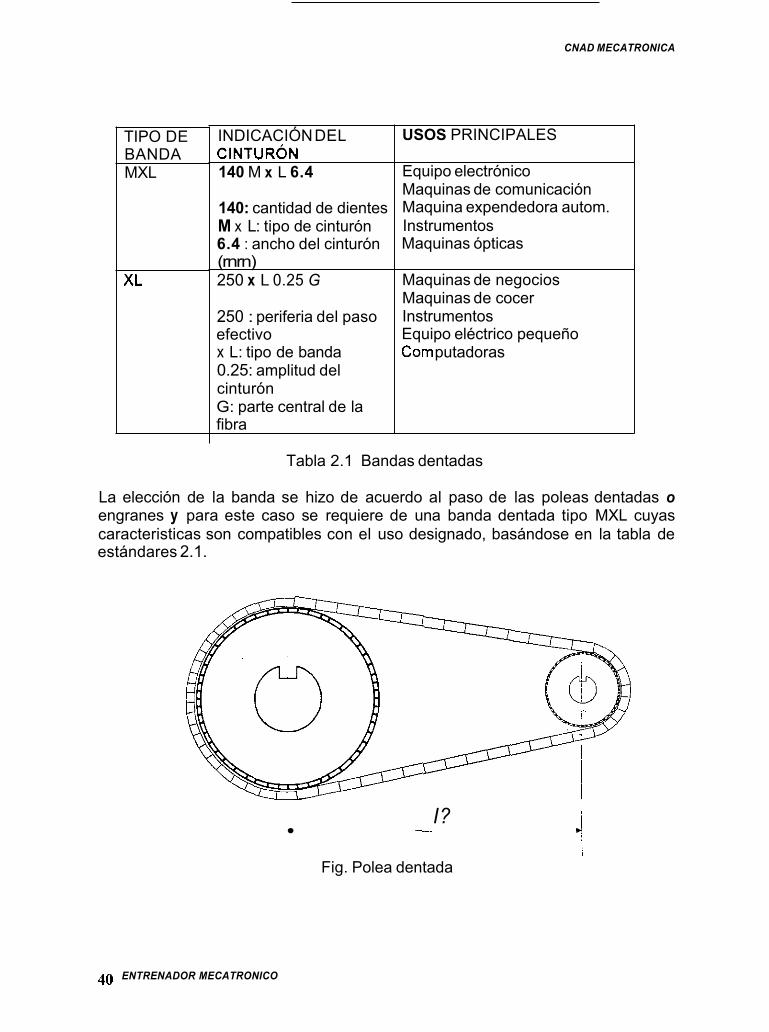
CNAD MECATRONICA
INDICACIÓN DEL
140 M x L 6.4
140: cantidad de dientes M x L: tipo de cinturón 6.4 : ancho del cinturón (rnrn) 250 x L 0.25 G
250 : periferia del paso efectivo x L: tipo de banda 0.25: amplitud del cinturón G: parte central de la fibra
CINTUR~N TIPO DE BANDA MXL
USOS PRINCIPALES
Equipo electrónico Maquinas de comunicación Maquina expendedora autom. Instrumentos Maquinas ópticas
Maquinas de negocios Maquinas de cocer Instrumentos Equipo eléctrico pequeño Corn putadoras
XL
Tabla 2.1 Bandas dentadas
La elección de la banda se hizo de acuerdo al paso de las poleas dentadas o engranes y para este caso se requiere de una banda dentada tipo MXL cuyas caracteristicas son compatibles con el uso designado, basándose en la tabla de estándares 2.1.
I? i 7 Fig. Polea dentada
40 ENTRENADOR MECATRONICO
CNAD MECATRONICA
2.2.3 REDUCTOR DE VELOCIDAD EN LA CINTURA
Como se diseñó la cintura utilizando una articulación con un grado de libertad (giro) se propuso la utilización de dos rodamientos; uno de tipo de agujas (esfuerzo axial) y otro de tipo cónico (esfuerzo axial-tangencial) con el objeto de eliminar al máximo los juegos entre la base y la cintura del robot. 14) El montaje de los rodamientos se hace por medio de un eje ensamblado a la cintura que pasa a través de la base donde se han colocado asientos para apoyar los rodamientos. El ajuste de los mismos se logra mediante un par de tuercas ranuradas aseguradas por una laina de seguridad.
El movimiento a la cintura se aplica mediante un motor de c.d. de 12 Volts, 2 Amperes 2200 r.p.m. como actuador.
La relación de movimiento se reduce primeramente por un engranaje de tornillo sinfín integrado a la carcaza del motor siendo de una entrada el tornillo y el engrane de 90 dientes lo que resulta una velocidad de 24.4 r.p.m., que a su vez se reduce mediante la utilización de dos poleas dentadas conectadas por bandas síncronas donde la polea motriz es de 12 dientes y la polea conducida de 36 dientes con lo que la velocidad se reduce hasta 8.13 r.p.m. que aplicada a la maxima longitud del brazo extendido nos resulta una velocidad lineal de 468.25 mm/s, comparada con la velocidad de un robot industrial típico (1000 mm/s) resulta lento pero fácilmente controlable (cálculo en tiempo real) por el diseño de circuitos utilizado.
Calculos para la Relación de velocidad del engranaje reductor en la cintura.
DATOS Nl=velocidad del motor = 2200 r.p.m. Z2=N0Dientes del engrane= 90 ZI=N"Entradas del tornillo= 1
PARTIENDO DE LA FÓRMULA PARA TRANSMISION DE TORNILLO:
N l *Z l= N2*Z2 DE DONDE: N2= Nl*Zl/Z2
sustituyendo:
N2 = (2200 r.p.m.) 1 190) = 24.4 rpm
N2= VEL.DE SALIDA EN RPM= ?
La velocidad de salida del motor se reduce aún mas mediante un arreglo de poleas dentadas síncronas.
ENTRENADOR MECA TRONICO 41
CNAD MECATRONICA
Calculo de la segunda reducción entre eje del motor y eje del robot
Polea motriz: Z1= No. De dientes = 12 NI= Velocidad de giro = 24.4 r.p.m.
Polea conducida: 22 = No. De dientes = 36 N2 =Velocidad de giro = ? RPM
PARTIENDO DE LAFÓRMULA:
NI*ZI= N2'22 DE DONDE : N2 = N I * 21/22
Sustituyendo:
N2= (24.4 r.p.m. ) I 2 I 3 6 = 8.13 r.p.m.
Aplicando esta velocidad de giro calculamos la velocidad lineal en el alcance máximo del brazo extendido.
Calculo de la velocidad lineal en el alcance máximo del brazo extendido
DATOS:
L= Longitud brazo articulado extendido = 550 mm N2=Velocidad de giro de la cintura = 8.13 r.p.m. Vs = Velocidad deseada en el extremo del brazo articulado = vel. De salida = ?
PARTIENDO DE LA FÓRMULA:
V s = N 2 [ (1/60s)( r r ) ( Z L ) ]
sustituyendo:
Vs = 8.13 r.p.m. [(l /60 s) (n) (1100 mm)]= 468.25 mm/s
Este tipo de transmisión también se utiliza para el brazo. El emplear un engranaje de tornillo sinfín acoplado al motor asegura la posición del elemento al final de su trayectoria haciendo innecesario el uso de otros dispositivos para este fin (embragues o frenos).
42 ENTRENADOR MECATRONICO
C N h MECATRONICA
2.2.4 CONTROL MECANICO PARA LA VELOCIDAD DEL HOMBRO.
Se denomina como hombro al primer elemento rígido del brazo articulado inmediato a la cintura. Esta pieza se construye alrededor de una articulación compuesta por un eje cilíndrico de acero que se apoya en sus extremos por dos rodamientos esféricos (fig.3.3 esfuerzo axial-tangencial) sobre dos goznes que sirven de alojamiento a los rodamientos. Sobre este eje se monta la polea conducida que recibe su movimiento de otro motor igual al de la cintura y otra polea doble escalonada de giro libre para la transmisión del movimiento del antebrazo colocada en el eje mediante cojinetes antifricción [GI.
La reducción del movimiento se calcula de forma similar al de la cintura variando Únicamente la longitud del elemento (brazo) que es de 300 mm entre centros. La construcción de esta parte se hace en forma de yugo donde ambos extremos de este sirven de apoyos para el eje de la articulación. El material empleado es aluminio comercial de baja aleación de cobre por su poco peso y su fácil maquinable además de su rigidez.
Físicamente se maquinan dos goznes que se ensamblan sobre una placa de soporte para formar el cuerpo de la bisagra de la articulación; el ensamble se realiza por medio de pernos roscados disponiendo nervaduras exteriores para aumentar su rigidez.
Sobre la placa de soporte se colocan las bases para los motores que moverán el brazo y antebrazo del mecanismo, y en su parte inferior se acoplara el eje de la cintura.
Calculo de la reducción de velocidad del hombro con respecto a la longitud del brazo:
Relación de velocidad del engranaje reductor para el hombro. [9]
DATOS
Nl=velocidad del motor = 2200 r.p.m Z2=No Dientes del engrane = 90 ZI=N" Entradas del tornillo = 1 N2 = Velocidad de salida.
PARTIENDO DE LA FÓRMULA:
NI*ZI= N2*Z2 DE DONDE: N2= N I *ZI/Z2
sustituyendo:
N2= (2200 r.p.m.) 1 / 90) = 24.4 RPM.
ENTRENADOR MECA TRONICO
CNAD MECATRONJCA
La velocidad de salida del motor se reduce aún más mediante un arreglo de poleas dentadas síncronas..i ~ . , ,
REDUCTOR DE,VELOCIDAD PARA POLEAS DENTADAS . , , .
DATOS: : Polea motriz: . ! . *.' .
Zl=No. De dientes *= 12 N1 =Velocidad de giro = 24.4 r.p.m.
Polea conducida: 22 = No. De.dientes = 36 N2 = Velocidad de giro = ?
PARTIENDO DE LAFÓRMULA:'
NI'Z1 = N2*Z2 DE DONDE : N2= NI*Zl/Z2
Sustituyendo:
N2= 12 (24.4 r.p.m.) / 36 ='8.13 r.p.m.
Aplicando esta velocidad de giro calculamos la velocidad lineal en el' alcance máximo del brazo extendido. .
Calculo de la velocidad para el alcance máximo del brazo extendido
DATOS:
L= Longitud brazo extendido = 300 mm NZ=Velocidad de giro de la cintura = 8.13 r.p.m. Vs =Velocidad deseada en el extremo del brazo = vel. de salida =?
PARTIENDO DE LA FÓRMULA:
Vs= N2 [(I /60 s) (n) (2 L)]
sustituyendo:
Vs = 8.13 r.p.m. [(I /60 s) (n) (600 mm)]= 255 mmls
44 ENTRENADOR MECATRONICO
CNAD MECATRONICA
2.2.5 CÁLCULO MECÁNICO PARA LA ARTICULACI~N DEL BRAZO- ANTEBRAZO.
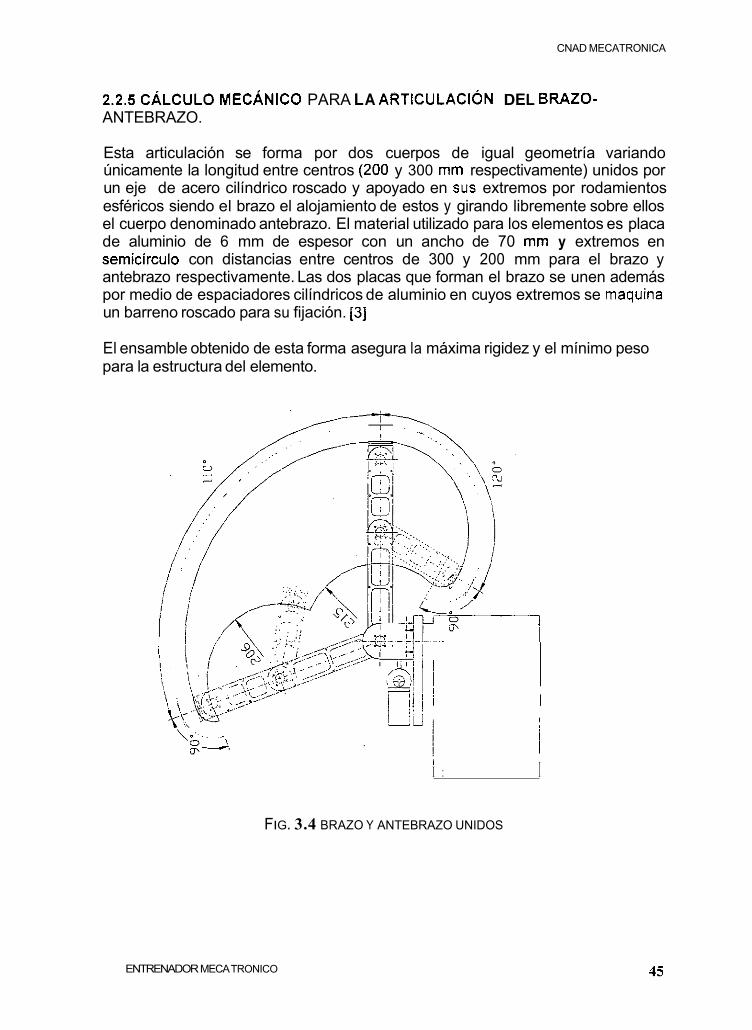
Esta articulación se forma por dos cuerpos de igual geometría variando únicamente la longitud entre centros (200 y 300 mm respectivamente) unidos por un eje de acero cilíndrico roscado y apoyado en sus extremos por rodamientos esféricos siendo el brazo el alojamiento de estos y girando libremente sobre ellos el cuerpo denominado antebrazo. El material utilizado para los elementos es placa de aluminio de 6 mm de espesor con un ancho de 70 mm y extremos en semicírculo con distancias entre centros de 300 y 200 mm para el brazo y antebrazo respectivamente. Las dos placas que forman el brazo se unen además por medio de espaciadores cilíndricos de aluminio en cuyos extremos se maquina un barreno roscado para su fijación. (31
El ensamble obtenido de esta forma asegura la máxima rigidez y el mínimo peso para la estructura del elemento.
I i I
I I i
i I : I
FIG. 3.4 BRAZO Y ANTEBRAZO UNIDOS
ENTRENADOR MECA TRONICO
CNAD MECATRONICA
CALCULO PARA LA REDUCCION DE VELOCIDAD DEL BRAZO Y ANTEBRAZO. i .
Relación de velocidad del engranaje reductor del brazo y antebrazo:
DATOS: Nl=velocidad del motor = 2200 r.p.m. Z2=N0 Dientes del engrane = 90 21 =No Entradas del tornillo = 1 N2= Velocidad de salida. = ?
PARTIENDO DE LA FÓRMULAF6RMULA:
N l *Z l = N2*Z2 DE DONDE : N2 = Nl"Z1 /Z2
sustituyendo:
N2 =( 82200 r . p m ) I I90) =.24.4 RPM
. .
La velocidad de salida del motor se reduce aún más mediante un arreglo de poleas dentadas sincronas.
Calculo para la reducción de velocidad por poleas dentadas de brazo y antebrazo
DATOS:
Polea motriz: Zl=No. de dientes = 12 Nl=Velocidad de giro = 24.4 r.p.m.
Se sabe que el arreglo de poleas será compuesto por lo que tendremos cuatro poleas donde la polea de entrada escalonada tendrá 36 dientes y en la salida 22 dientes.
Polea conducida: Z2=No. de dientes = 36 N2=Velocidad de giro = ?
Cálculos para la reducción de la velocidad en el engrane reductor del brazo y antebrazo.
Relación de velocidad del engranaje reductor del brazo y antebrazo.
DATOS:
Nl=velocidad del motor = 2200 r.p.m Z2=N0 Dientes del engrane= 90
46 ENTRENADOR MECATRONICO

CNAO MECATRONICA
Z3=N0 Entradas del tornillo = 1 N2= Vel. De salida. = ?
PERTIENDO DE LA FÓRMULA:
Nl'ZI= N2'Z2 DE DONDE : N2=( N1/Z2) 1
sustituyendo:
N2 =( 2200 r.p.m. I90) 1 = 24.4 RPM
La velocidad de salida del motor se reduce aún más mediante un arreglo de poleas dentadas cincronas.
CALCULOS PARA LA REDUCCION DE VELOCIDAD DE BRAZO Y ANTEBRAZO POR MEDIO DE UNA TRANSMISION DOBLE.
DATOS:
Polea motriz: I
Z1 =No. de dientes = 12 Nl=Velocidad de giro = 24.4 r.p.m. para el arreglo doble
Se sabe que el arreglo de poleas será compuesto por lo que tendremos cuatro poleas donde la polea de entrada escalonada tendrá 36 dientes y en la salida 22 dientes.
Polea conducida: 22 Y 24 =No. De dientes = 36 23 = 22 N2=Velocidad de giro: ?
PARTIENDO DE LA FÓRMULA DEL MISMO PRINCIPIO DE TRANSMISIÓN SENCILLA.
TENEMOS: N2 = NlrZ1*Z3/ 22 *Z4
Sustituyendo:
N2=(24.4r.p.m.)(12)(22)/ (36)(36) =4.97r.p.m. .
Aplicando esta velocidad de giro calculamos la velocidad de giro del antebrazo
ENTRENADOR MECATRONICO
CNAD MECATRONICA
Cálculo para la velocidad de giro del antebrazo
DATOS:
L= Longitud antebrazo = 200 mm N2=Velocidad de giro del antebrazo = 4.97 r.p.m. Vs =Velocidad deseada en el extremo del antebrazo = vel. de salida = ?
PARTIENDO DE LA FÓRMULA:
Vs = N2 [ ( l /60 s)(n)(2 L)]
sustituyendo:
Vs = 4.97 r.p.m. [ ( I /60 s) (n) (400 mm)J= 104.1 mm/s
2.2.6 CALCULO MECÁNICO DEL ANTEBRAZO - MUNECA
Esta articulación se diseño de igual forma que las anteriores, es decir por una bisagra integrada cuyos goznes son el extremo libre del antebrazo y el extremo de la muñeca unidos por un eje de rotación cilíndrico de acero, en cuyos extremos roscados se ajustan rodamientos del tipo esférico (fig. 3.3 esfuerzo axial tangencial). [2] Su alojamiento esta en el antebrazo de forma similar a los demás elementos. En el eje cilíndrico se ensamblan la polea conducida que dará movimiento a la muñeca y que recibirá el movimiento de un motor de corriente continua, alojado en el interior de la armadura del antebrazo, lo mas cercano a la articulación brazo-antebrazo con el objeto de minimizar el efecto de la inercia .Y cuyos datos son los siguientes RPM de trabajo 1500, potencia 1/50 HP, además cuenta con un mecanismo reductor de engranajes rectos que reducen las RPM de salida a 25 RPM. Para posteriormente mediante un arreglo de poleas escalonadas reducirse a 8.33 RPM en la muñeca, que nos da un a velocidad lineal de 4.908 m/s.
Calculo de velocidad de salida de la muñeca
Relación de velocidad del engranaje reductor de la muñeca
DATOS:
Nl=velocidad del motor = 1500 rpm. Z2=relación del engranaje reductor =60= No de dientes z l= 1 N2= ?
48 ENTRENADOR MECATRONICO

CNAD MECATRONICA
PARTIENDO DE LA FÓRMULA
NI*ZI = N2*Z2 DE DONDE : N2 = N I * 21/22
sustituyendo:
N2 =( 1500 r.p.m.)l I60 = 25 r.p.m.
La velocidad de salida del motor se reduce aún más mediante un arreglo de poleas dentadas síncronas.
Cálculo para reducir la velocidad de la muñeca.
DATOS:
Polea motriz: Zl=No. De dientes = 12 Nl=Velocidad de giro=25 r.p.m.
Polea conducida: Z2=No. De dientes = 36 NZ=Velocidad de giro = ?
PARTIENDO DE LA FÓRMULA
N l *Z l = N2'22 DE DONDE : N2 = N1 21/22
Sustituyendo:
N2= (25 r.p.m.) 12 / 36= 8.33 r.p.m
Aplicando esta velocidad de giro calchamos la velocidad lineal en el alcance al extremo de la muñeca.
Calculo para la velocidad lineal de salida en el extremo de la muñeca
DATOS:
L=Longitud de la muñeca = 50mm N2=Velocidad de giro de la muñeca= 8.33 r.p.m. Vs=Velocidad deseada en el extremo dela muñeca: ?
PARTIENDO DE LA FÓRMULA:
!i
Vs =N2 [ ( I /60 s) (R) (2 L)]
ENTRENADOR MECATRONICO 49
CNAD MECATRONICA
Sustituyendo:
Vs = 8.33 r.p.m. [(I /60 s) ( x ) ( I00 mm)]= 43.61mls
Por último para dar el pich o giro perpendicular de la muñeca se dispuso de un motor a pasos colocado en el interior del cuerpo de la muñeca, de tal manera que el sobre el eje de este motor se colocara una brida circular para soportar el actuador neumática del tipo garra de movimiento pendular .La distancia desde el eje del giro de la muñeca hasta la base del efector ( pinza) es de 50mm .
Para efectos de control se considero necesario el tratar de conservar valores similares de las velocidades de giro en cada articulación, mas que las velocidades lineales tangenciales. De tal manera que los últimos elementos articulados tengan velocidades tangenciales mas o menos proporcionales a los brazos de o palanca ejercidos por efecto de las cargas soportadas . Con el objeto de minimizar el efecto de la gravedad en la dinámica del brazo articulado se compenso el mecanismo mediante la adición de una muelle helicoidal que elimine el efecto de la gravedad cuando el brazo o una de sus partes se aproxime a la posición horizontal , Con esta premisa se calculo la carga normal de trabajo que puede desplazar el brazo a través de su area de alcance
2.2.7 CÁLCULO MECÁNICO DE LA CARGA MÁXIMA DEL BRAZO.
Datos del motor
Wm=Vel. Angular = 2200 r.p.m. P=Potencia = 1/24 Hp
Wb=Reducción de velocidad = 8.13 rpm Tm = carga en el eje de motor.
De donde: 2200í60 = 36.6 r.p.s
W, = 2200 r.p.m. = 36.6r.p.s.
Partiendo de la FÓRMULA: '
Tm = 1 2m
Considerando la conversi6n de potencia
1Hp = 745.7 W 1/24 Hp = x
sustituyendo:
P= 31 w
50 ENTRENADOR MECATRONICO
CNAD MECATRONICA
TM = 31 w = 0.13Nm 2rI(36.6 r.p.s.)
Para el eje del brazo se considera una velocidad angular de:
Wg=8.13r.p.m./60 =0.135r.p.s
‘Como la potencia es la misma en el eje del motor y el eje de brazo entonces:
PARTIENDO DE LA FdRMULA:
I P = W T
Y CONSIDERANDO QUE: Pm = Pb
P = WmTm = WbTb
Tb =WmTm Wb
Sustituyendo:
Tb= (36.6r.p.s.) (0.13Nm) 0.135 r.p.s.
Tb = 35.24 N
Para calcular la carga máxima real se desarrolla una suma de momentos con respecto al punto b del brazo.
ZMb = O
35.24 Nm - FW (0.55177) = O
Despejando FW= carga máxima.
FW = 35.24Nm = 64.08 N 0.55m
Expresando la carga en kilogramos denotamos la siguiente conversion:
IKG =9.81 N X = 64.08N I
ENTRENADOR MECATRONICO 51

CNAD MECATRONICA
Entonces:
I La carga que tendrá como máximo a soportar el brazo del robot
Materiales del brazo y sus caracteristicas.
1).- Base de el mecanismo.
Esta se fabricó de aluminio de fundición comercial
Ventajas: es ligera de poco peso y fácil de maquinar; lo cual le permite al brazo tener mejor acoplamiento para desarrollar el trabajo.
2).- Eje de cintura.
Este eje se fabrico de aluminio y esta acoplado ala base, por medio de un rodamiento y tornillos allen.
Ventajas: permite que desarrolle giros en dos sentidos y hace que el brazo sea mas ligero en sus movimientos.
3).- Bisagra de cintura del brazo
Esta fabricada de duroaluminio que es un material mas resistente que el aluminio comercial, soporta el brazo de todo el mecanismo.
Ventajas: es una de las partes importantes del brazo mecánico, ya que en el se soporta la mayoría del trabajo quedesarrolla en conjunto con la base .
Aquí a su vez desarrolla uno de sus grados de giro, conocido como grado de libertad. Esta ensamblado por medio de tornillos allen a la base y por medio de varillas con tornillos Para unir las dos piezas, que también contienen rodamientos para poder moverse.
4).- Brazo del mecanismo.
Este se fabrico de duroaluminio, que como ya se menciono es un material maquinable pero a su vez muy resistente; esta compuesto de dos partes una izquierda y una derecha que se ensamblan con las varillas y van acoplados a la bisagra, con sus' rodamientos. Se fabrico con maquinados en sus partes medias para poder hacerlo mas ligero.
Ventajas: el material es resistente y es la parte media de el mecanismo en donde se desarrollaran algunos esfuerzos, en esta parte pueden existir también algunos choques por parte de el robot.
52 ENTRENADOR MECATRONICO
CNAD MECATRONICA
5).- Antebrazo del mecanismo.
Este se fabrico también de duroaluminio es de caracteristicas semejantes al brazo y también se maquino con vacíos en sus puntos intermedios.
Ventajas: tiene la cualidad de poder resistir diferentes choques y a su vez su función es la de moverse en uno de sus ejes, soportando también a la garra de sujeción, esta acoplado también en dos partes por medio de varillas con tornillos allen y a su vez esta acoplado al brazo de todo el robot; posee su grado de libertad y movimiento ensamblado con rodamientos
6).- Garra de sujeción.
Esta fabricada de acero inoxidable en todas sus partes,
Ventajas: proporciona menos desgaste conforme se trabaje con el mecanismo y es neumática , acoplada al antebrazo por medio de una placa redonda de aluminio con tornillos allen.
7).- Engranes de transmisión. de el movimiento de los brazos
Estos están fabricados de aluminio y son con dientes en forma recta .
Ventajas:
Proporcionan mejor agarre en cuanto a la transmisión de el movimiento ya que es por medio de bandas dentadas. Para no sufrir de patinaje en el momento de moverse.
8)- Flechas de montaje de rodamientos.
Estas se fabricaron de acero sw55 maquinable y comercial.
Ventajas: es resistente y fácil de maquinar a su vez que evita el desgaste por movimiento que se pudiera tener.
9).- Varillas de sujeción de brazo y antebrazo.
Estas se fabricaron de aluminio maquinable .
ENTRENADOR MECATRONICO 53

. :
CNAD MECA TRONlCA
CAPITULO 3 DISENO DE CIRCUITOS DE CONTROL
En este presente capítulo se presentan los tópicos relacionados al diseño de los circuitos que gobiernan los actuadores del sistema. Estos elementos se basan en la integración de circuitos flexibles, es decir, programables que han sido concebidos con el fin de adaptarse a las necesidades de carga que el sistema emplea. Como es bien conocido el modelo dinámico de un robot es demasiado complejo y cambiante, esto produce que el control debe ser lo mas robusto posible y mantener condiciones en las que el consumo de energía de los actuadores que mueven al sistema sean mínimas, en otras palabras,, ser eficientes y de muy alto tiempo de vida útil.
La parte medular de este capítulo es el diseño de la electrónica de control, la cual consiste en el diseño de.una tarjeta con microcontrolador, que envía las señales necesarias para las tarjetas de control de potencia, la etapa de sensores y la transmisión con un sistema mas completo, en este caso, una PC. Posteriormente este capítulo se tratará del diseño de la tarjeta de los servoamplificadores en la cual el objetivo es diseñar un circuito que proporcione de energía suficiente comandada por el microcontrolador, y dar la corriente que el motor requiera, pero al mismo tiempo protegiendo la etapa de potencia de salida y protegiendo al motor contra una sobrecarga, todo esto debidamente instrumentado de acuerdo, a las características de cada servomotor. También este sistema debe tener la capacidad de leer el encoder de cada motor que a su vez esta conectado a cada articulación, de tal manera.que cada "Juntura" del robot se pueda conocer su velocidad y su posición.
ENTRENADOR MECA TRONlCO 5 5
CNAD MECATRONICA
3.1 DICEÑO DE LA TARJETA DEL MC68HCll
A continuación se muestra el diseño de la tarjeta de control usada para control del robot de 5DOF
[EILas caracteristicas mas sobresalientes de este microcontrolador son la siguientes:
VDD y VSS Líneas por las cuales se establece la alimentación del microcontrolador, VDD es la fuente de alimentación y VSS es la tierra. RESET Serial de control de doble dirección. Actúa como una entrada para inicializar el microcontrolador y también se usa como una salida de drenador abierto para indicar que una falla ha sido detectada en el reloj monitor. XTAL y EXTAL Pines donde se conecta el cristal del microcontrolador. E Es la salida de conexión para generar el reloj interno E. La señal es
usada como referencia de tiempo. IRQ Interrupción mascarable sensible a un flanco 'de bajada disparado por
un nivel programado por el registro interno OPTION. XIRQ Esta linea es usada para interrupciones no mascarables. A menudo
se usa como una interrupción de falla de alimentación. MODNLIR y M O D B N S T ~ ~ Durante el RESET MODA y MODB permiten
seleccionar por medio de la combinación de sus entradas se seleccionan los 4 modos de operación, los cuales son: Chip sencillo, Expandido multiplexado, modo de arranque y modo de prueba. Después de seleccionar el modo estos pines se convierten en LIR (Registro de instrucción de carga) y VsTBy que proporcionan depuración en asistencia de un programa la primera y la segunda usada como un pin de alimentación para modo espera, el cual mantiene energizado la parte esencial del sistema para no perder información.
VRL y VRH Estos dos pines proporcionan la referencia del convertidor analógico digital, en donde para máxima resolución se conectará VRL a O volts y VRH a 5 volts.
STRNAS Este pin tiene dos funciones separadas si está en modo de Chip sencillo STRA es una entrada de protocolo (especificamente: entrada strobe ). Y en modo multiplexado expandido es usado como decodificador de direcciones.
STRB/RMf AI igual que el pin anterior su funcionamiento es basado por el modo de funcionamiento, y en chip sencillo actúa como salida de strobe, es decir, para protocolo de comunicación en paralelo, en modo multiplexado expandido se usa como la linea de lectura o escritura en donde se pone en estado alto en la lectura y bajo en la escritura.
PORT A Conjunto de pines que conforman el puerto A, el cual puede ser configurado para tres entradas de captura y cuatro salidas de comparación.
PORT B Conjunto de 8 lineas que constituyen el puerto 6 el cual en modo de chip sencillo se establece como puerto de salida de propósito general o de
56 ENTRENADOR MECA TRONICO
CNAD MECATRONICA
protocolo en paralelo, según se te programe. En modo expandido multiplexado actúa como la parte alta del bus de direcciones.
PORT C Conjunto de 8 líneas que en modo de chip sencillo son salidas o entradas de propósito general, así como también se pueden usar para un sistema de protocolo completo de comunicación paralela. En modo expandido multiplexado los pines son usados como bus de datos y parte baja de direcciones simultáneamente.
PORT D Puerto que puede ser usado como bits de salida y/o entrada de propósito general o como interface de comunicación síncrona y asíncrona.
PORT E Este puerto también es de 8 bits, es usado como entrada al convertidor analógico digital.
CONVERTIDOR ANALÓGICO DIGITAL Un convertidor en modo multiplexado para ocho entradas
COMUN/CAClÓN SERlAL Cuenta con registros de comunicación asincrona y sincrona.
TEMPORIZADOR PROGRAMABLE Temporizador de carrera libre asociado con el sistema principal de interrupciones
ENTRENADOR MECA TRONlCO 57
-1 CNAD MECATRONICA
3.1.1 DISENO DE LA TARJETA DE CONTROL
Para' el diseño de este- circuito se emplea al ,microcontrolador en modo multiplexado expandido, para poder adicionar memoria I M , EPROM y. puertos de salida y entrada. Para hacer funcionar al microcontrolador en este modo es necesario conectar lasterminales 2 y 3 (MOD A y MOD B) a VDD, es decir, a nivel alto. Con esto el microcontroladór opera como microprocesador. Con este modo los puertos B y C se cambian por büs de datos y direcciones, multiplexando esta última; donde el puerto B es la parte alta del bus de direcciones y C es la parte baja-del ' . ' Ijusde'direcciones , y multiplexa al bus de datos.
3.1.2 MULTIPLEXACI~N DE DATOS Y DIRECCIONES
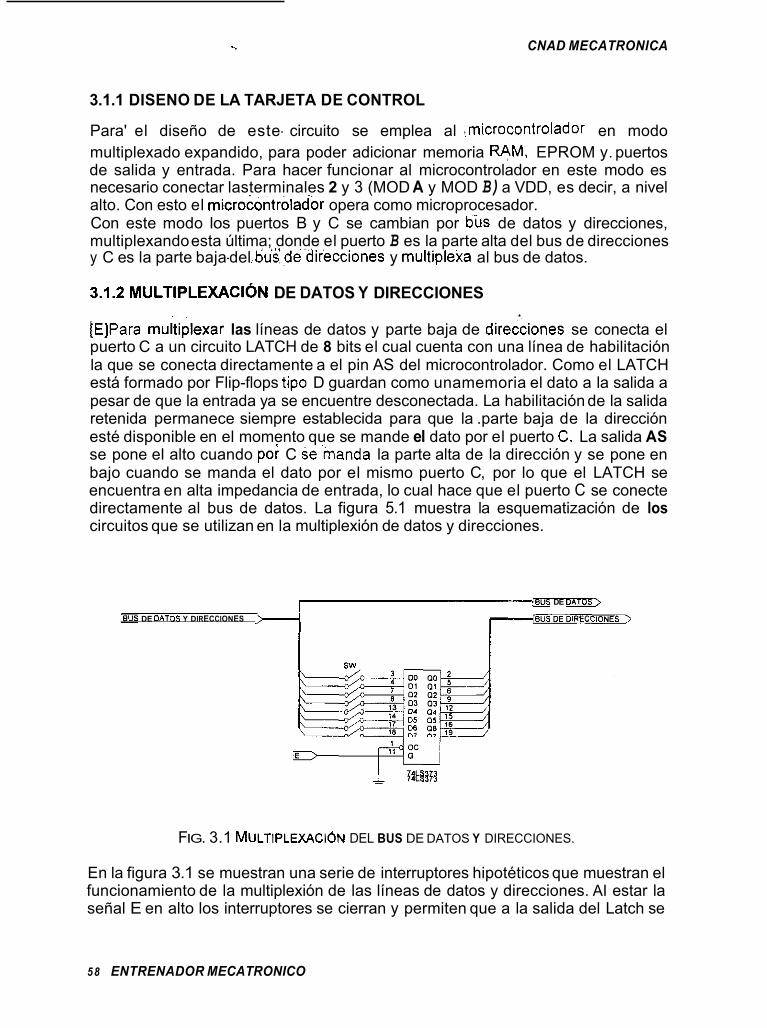
[Elpara mukiplexar las líneas de datos y parte baja de direcciones se conecta el puerto C a un circuito LATCH de 8 bits el cual cuenta con una línea de habilitación la que se conecta directamente a el pin AS del microcontrolador. Como el LATCH está formado por Flip-flops tipo^ D guardan como unamemoria el dato a la salida a pesar de que la entrada ya se encuentre desconectada. La habilitación de la salida retenida permanece siempre establecida para que la .parte baja de la dirección esté disponible en el momento que se mande el dato por el puerto C. La salida AS se pone el alto cuando poi C se'manda la parte alta de la dirección y se pone en bajo cuando se manda el dato por el mismo puerto C, por lo que el LATCH se encuentra en alta impedancia de entrada, lo cual hace que el puerto C se conecte directamente al bus de datos. La figura 5.1 muestra la esquematización de los circuitos que se utilizan en la multiplexión de datos y direcciones.
:BüS DE DATOS>
IBUS DE DATOS Y DIRECCIONES y
;, ' o c =-I-- 74LS373
FIG. 3.1 MULTIPLEXAC16N DEL BUS DE DATOS Y DIRECCIONES.
En la figura 3.1 se muestran una serie de interruptores hipotéticos que muestran el funcionamiento de la multiplexión de las líneas de datos y direcciones. AI estar la señal E en alto los interruptores se cierran y permiten que a la salida del Latch se
58 ENTRENADOR MECATRONICO
CNAD MECATRONICA
transfiera la parte baja de las direcciones, posteriormente la señal E se establece en bajo, por lo que se produce una alta impedancia de entrada al latch, es decir, los interruptores se abren, por lo que ahora las líneas que fueron el bus de direcciones ahora es el bus de datos, estableciendo comunicación con otro periférico que en ese momento se encuentre habilitado.
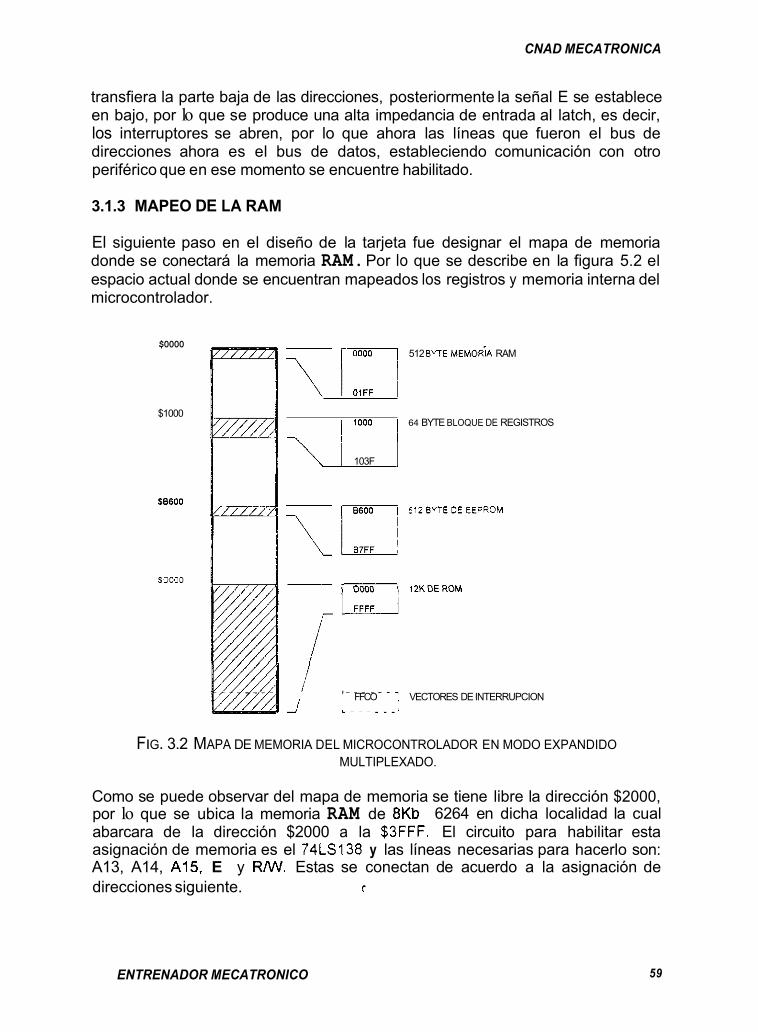
3.1.3 MAPEO DE LA RAM
El siguiente paso en el diseño de la tarjeta fue designar el mapa de memoria donde se conectará la memoria RAM. Por lo que se describe en la figura 5.2 el espacio actual donde se encuentran mapeados los registros y memoria interna del microcontrolador.
$0000
$1000
$8600
$DO00
512 BYTE MEMOR¡A RAM
64 BYTE BLOQUE DE REGISTROS I 'Ooo
\ ¡ 103F 1 rl 512BYTEDEEEPROM
i I ~ ~ ~ ~ _ _ ' FFCO -, VECTORES DE INTERRUPCION I
i L - - - . . . , 2
FIG. 3.2 MAPA DE MEMORIA DEL MICROCONTROLADOR EN MODO EXPANDIDO MULTIPLEXADO.
Como se puede observar del mapa de memoria se tiene libre la dirección $2000, por lo que se ubica la memoria RAM de 8Kb 6264 en dicha localidad la cual abarcara de la dirección $2000 a la $3FFF. El circuito para habilitar esta asignación de memoria es el 74LS138 y las líneas necesarias para hacerlo son: A13, A14, A15, E y RNV. Estas se conectan de acuerdo a la asignación de direcciones siguiente. r
ENTRENADOR MECATRONICO 59
CNAD MECA TRONICA
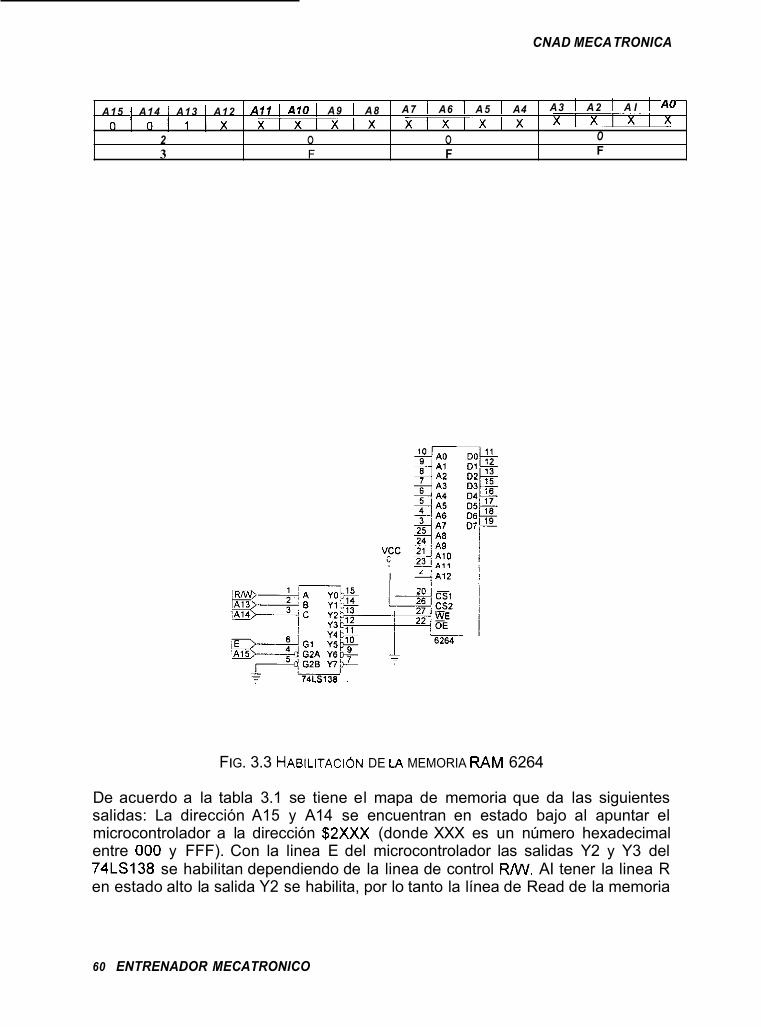
A15 I A14 I A13 I A12 A l l I A l 0 [ A9 I A8 A7 1 A6 I A 5 I A4 0 1 0 1 1 I X X l X l X l X X l X l X l X
2 O O 3 F F
A3 I A 2 I A I I A0 X l X l X l X
O F
L ' I - ,A12 ~
FIG. 3.3 HABlLlTACldN DE LA MEMORIA RAM 6264
De acuerdo a la tabla 3.1 se tiene el mapa de memoria que da las siguientes salidas: La dirección A15 y A14 se encuentran en estado bajo al apuntar el microcontrolador a la dirección $2XXX (donde XXX es un número hexadecimal entre O00 y FFF). Con la linea E del microcontrolador las salidas Y2 y Y3 del 74LS138 se habilitan dependiendo de la linea de control RNV. AI tener la linea R en estado alto la salida Y2 se habilita, por lo tanto la línea de Read de la memoria
60 ENTRENADOR MECATRONICO
CNAD MECATRONICA
se habilita. De igual manera al habilitarse 1a.línea W (habilita con cero) la salida del decodificador multiplexor Y3 habilita el pin Write de la memoria.
3.1.4 MAPEO DEL PPI
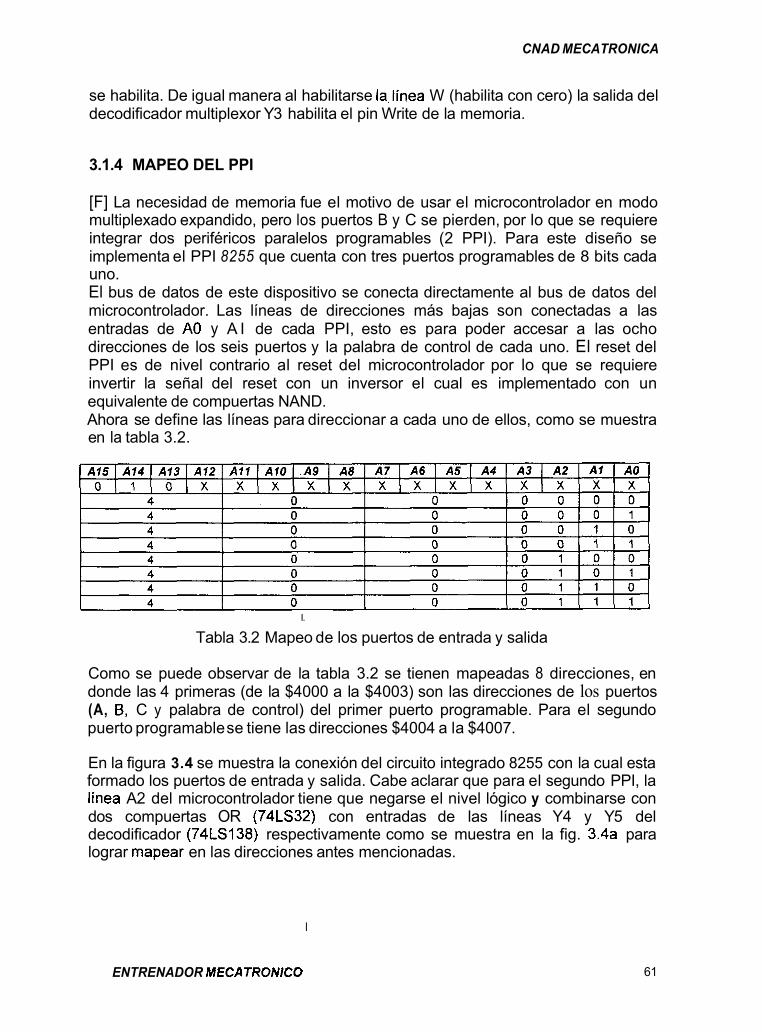
[F] La necesidad de memoria fue el motivo de usar el microcontrolador en modo multiplexado expandido, pero los puertos B y C se pierden, por lo que se requiere integrar dos periféricos paralelos programables (2 PPI). Para este diseño se implementa el PPI 8255 que cuenta con tres puertos programables de 8 bits cada uno. El bus de datos de este dispositivo se conecta directamente al bus de datos del microcontrolador. Las líneas de direcciones más bajas son conectadas a las entradas de A0 y A I de cada PPI, esto es para poder accesar a las ocho direcciones de los seis puertos y la palabra de control de cada uno. El reset del PPI es de nivel contrario al reset del microcontrolador por lo que se requiere invertir la señal del reset con un inversor el cual es implementado con un equivalente de compuertas NAND. Ahora se define las líneas para direccionar a cada uno de ellos, como se muestra en la tabla 3.2.
I.
Tabla 3.2 Mapeo de los puertos de entrada y salida
Como se puede observar de la tabla 3.2 se tienen mapeadas 8 direcciones, en donde las 4 primeras (de la $4000 a la $4003) son las direcciones de los puertos (A, 6, C y palabra de control) del primer puerto programable. Para el segundo puerto programable se tiene las direcciones $4004 a la $4007.
En la figura 3.4 se muestra la conexión del circuito integrado 8255 con la cual esta formado los puertos de entrada y salida. Cabe aclarar que para el segundo PPI, la línea A2 del microcontrolador tiene que negarse el nivel lógico y combinarse con dos compuertas OR (74LS32) con entradas de las líneas Y4 y Y5 del decodificador (74LS138) respectivamente como se muestra en la fig. 3.4a para lograr mapear en las direcciones antes mencionadas.
I
ENTRENADOR MEChTRONlCO 61
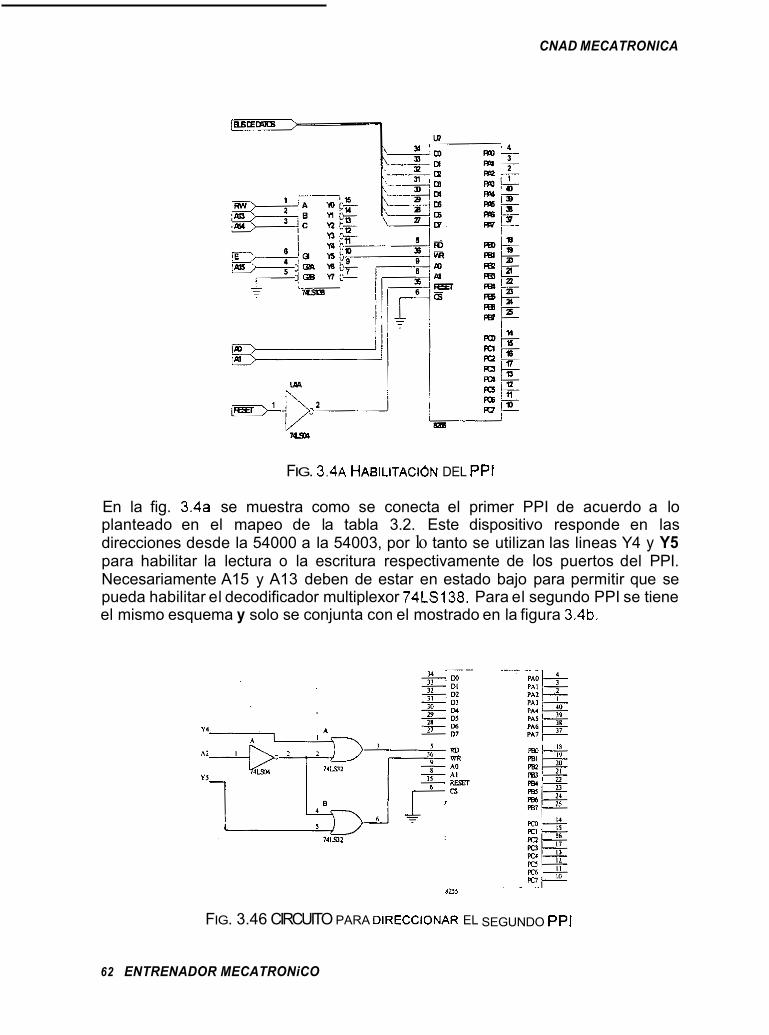
CNAD MECATRONICA
FIG. 3.4A HABILITAC16N DEL PPI
En la fig. 3.4a se muestra como se conecta el primer PPI de acuerdo a lo planteado en el mapeo de la tabla 3.2. Este dispositivo responde en las direcciones desde la 54000 a la 54003, por lo tanto se utilizan las lineas Y4 y Y5 para habilitar la lectura o la escritura respectivamente de los puertos del PPI. Necesariamente A15 y A13 deben de estar en estado bajo para permitir que se pueda habilitar el decodificador multiplexor 74LS138. Para el segundo PPI se tiene el mismo esquema y solo se conjunta con el mostrado en la figura 3.4b.
8x3
FIG. 3.46 CIRCUITO PARA DIRECCIONAR EL SEGUNDO PPI
62 ENTRENADOR MECATRONiCO

CNAD MEGA TRONiCA
_A75 1 A f 4 1 A13 1 A12 A l l I A10 I A9 I A8 A7 I A6 I A5 I A4 I A3 I A2 I A l I A0 1 J O J l ) X X 1 x / x / x X I X I X J X J x J x J X ) X
A O O I O B F F F
U1A I -7 m-
.~ .-
FIG. 3.5 HABILITACIÓN DE LA MEMORIA 2764
I ENTRENADOR MECATRONICO 63

CNAD MECATRONICA
Para la habilitación de la memoria se imF.-menta un arreglo de compuertas NAND las cuales sólo permaneciendo las señales de control en estado alto se habilitará la lectura de la memoria. Para la transmisión serial a una computadora se implementa un circuito que convierte los niveles TTL a niveles RS232 de tal manera que a la salida de este circuito se puede conectar un DB9 de superficie que permita enlazar la comunicación con una PC por medio de una interfase RS232.
al puerto serial del microcontrolador
de PC TXD o RTS
FIG. 3.6 CIRCUITO PARA CONVERTIR NIVELES A RS232C
Los niveles lógicos para la comunicación estandar RS232C hacen necesario cambiar los niveles de 5 volts a niveles de +/- 10 volts. Para lograr esto se emplea el CI max232 que cuenta con un convertidor DClDC con únicamente un voltaje de 5 volts de entrada. Los capacitores C1 a C4 recomienda el fabricante que pueden ser entre 1 uf. a 47 uf. por los que se toma, 22 uf. para este diseño.
La velocidad de transferencia del microcontrolador depende de la frecuencia de reloj con la que cuente, por lo tanto para un cristal de 8MHz la velocidad maxima es de 9600 baudios.
64 ENTRENADOR MECATRONICO
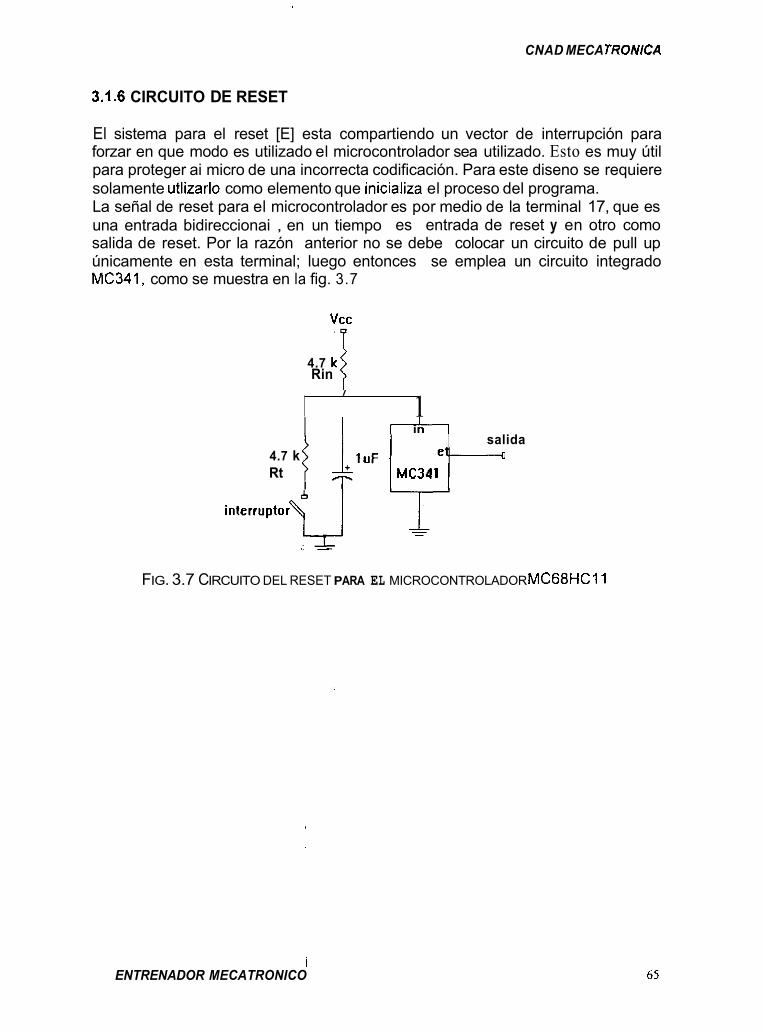
CNAD MECA TRONlCA
3.1.6 CIRCUITO DE RESET
El sistema para el reset [E] esta compartiendo un vector de interrupción para forzar en que modo es utilizado el microcontrolador sea utilizado. Esto es muy útil para proteger ai micro de una incorrecta codificación. Para este diseno se requiere solamente utlizarlo como elemento que inicializa el proceso del programa. La señal de reset para el microcontrolador es por medio de la terminal 17, que es una entrada bidireccionai , en un tiempo es entrada de reset y en otro como salida de reset. Por la razón anterior no se debe colocar un circuito de pull up únicamente en esta terminal; luego entonces se emplea un circuito integrado MC341, como se muestra en la fig. 3.7
4.7 k j Rin
I
1
i 4.7 k Rt
I ¿
interruptor\
salida
MC341
- ,Y - FIG. 3.7 CIRCUITO DEL RESET PARA EL MICROCONTROLADOR MC68HC11
i ENTRENADOR MECATRONICO 65
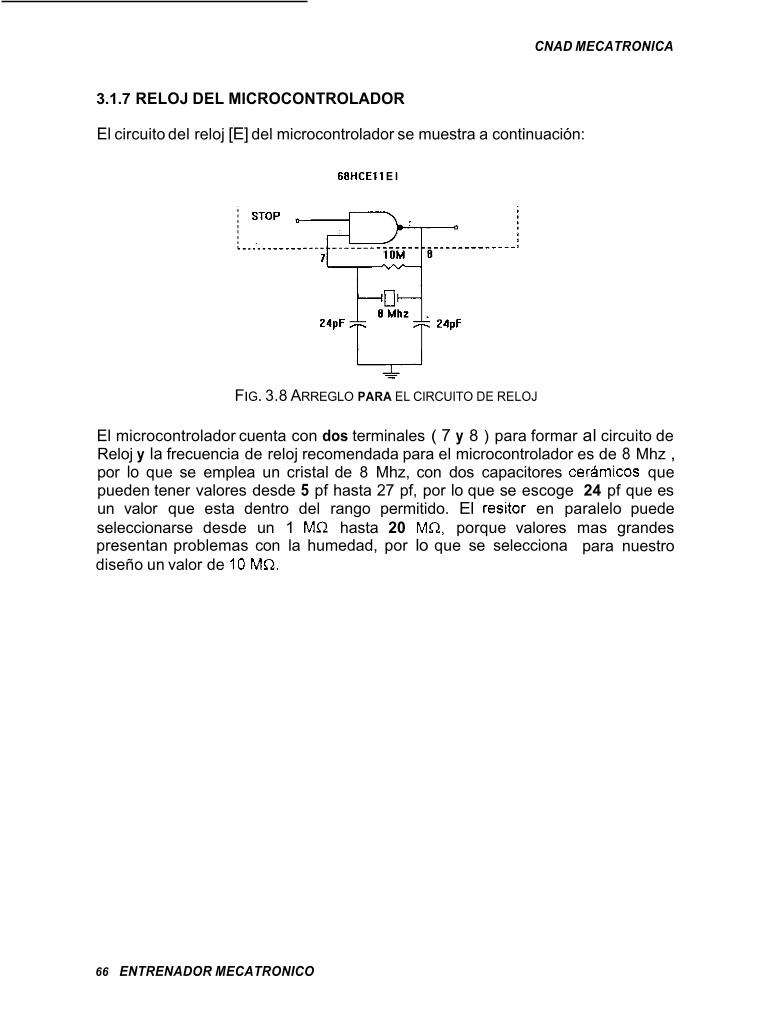
CNAD MECATRONICA
3.1.7 RELOJ DEL MICROCONTROLADOR
El circuito del reloj [E] del microcontrolador se muestra a continuación:
68HCE11 E l
24pF
- FIG. 3.8 ARREGLO PARA EL CIRCUITO DE RELOJ
El microcontrolador cuenta con dos terminales ( 7 y 8 ) para formar al circuito de Reloj y la frecuencia de reloj recomendada para el microcontrolador es de 8 Mhz , por lo que se emplea un cristal de 8 Mhz, con dos capacitores cerámicos que pueden tener valores desde 5 pf hasta 27 pf, por lo que se escoge 24 pf que es un valor que esta dentro del rango permitido. El resitor en paralelo puede seleccionarse desde un 1 MQ hasta 20 MQ, porque valores mas grandes presentan problemas con la humedad, por lo que se selecciona para nuestro diseño un valor de 10 MQ.
66 ENTRENADOR MECATRONICO
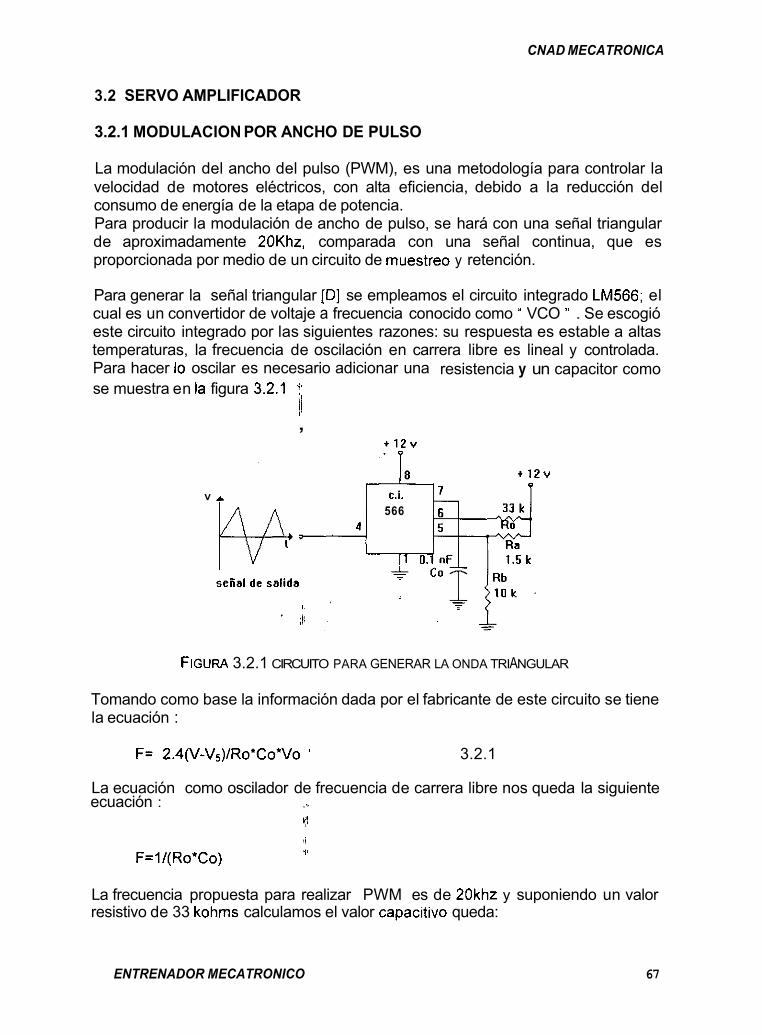
CNAD MECATRONICA
3.2 SERVO AMPLIFICADOR
3.2.1 MODULACION POR ANCHO DE PULSO
La modulación del ancho del pulso (PWM), es una metodología para controlar la velocidad de motores eléctricos, con alta eficiencia, debido a la reducción del consumo de energía de la etapa de potencia. Para producir la modulación de ancho de pulso, se hará con una señal triangular de aproximadamente 20Khz, comparada con una señal continua, que es proporcionada por medio de un circuito de muestre0 y retención.
Para generar la señal triangular [DI se empleamos el circuito integrado LM566; el cual es un convertidor de voltaje a frecuencia conocido como '' VCO " . Se escogió este circuito integrado por las siguientes razones: su respuesta es estable a altas temperaturas, la frecuencia de oscilación en carrera libre es lineal y controlada. Para hacer Io oscilar es necesario adicionar una resistencia y un capacitor como se muestra en la figura 3.2.1 i:
/I
V
, + 1 2 v
566
Ra I
FIGUW 3.2.1 CIRCUITO PARA GENERAR LA ONDA TRIANGULAR
Tomando como base la información dada por el fabricante de este circuito se tiene la ecuación :
F= ~.~(V-VS)/RO'CO*VO ' 3.2.1
La ecuación como oscilador de frecuencia de carrera libre nos queda la siguiente ecuación : , -.
!! :i % * F=l/(Ro'Co)
La frecuencia propuesta para realizar PWM es de 20khz y suponiendo un valor resistivo de 33 kohms calculamos el valor capacitivo queda:
ENTRENADOR MECATRONICO 67
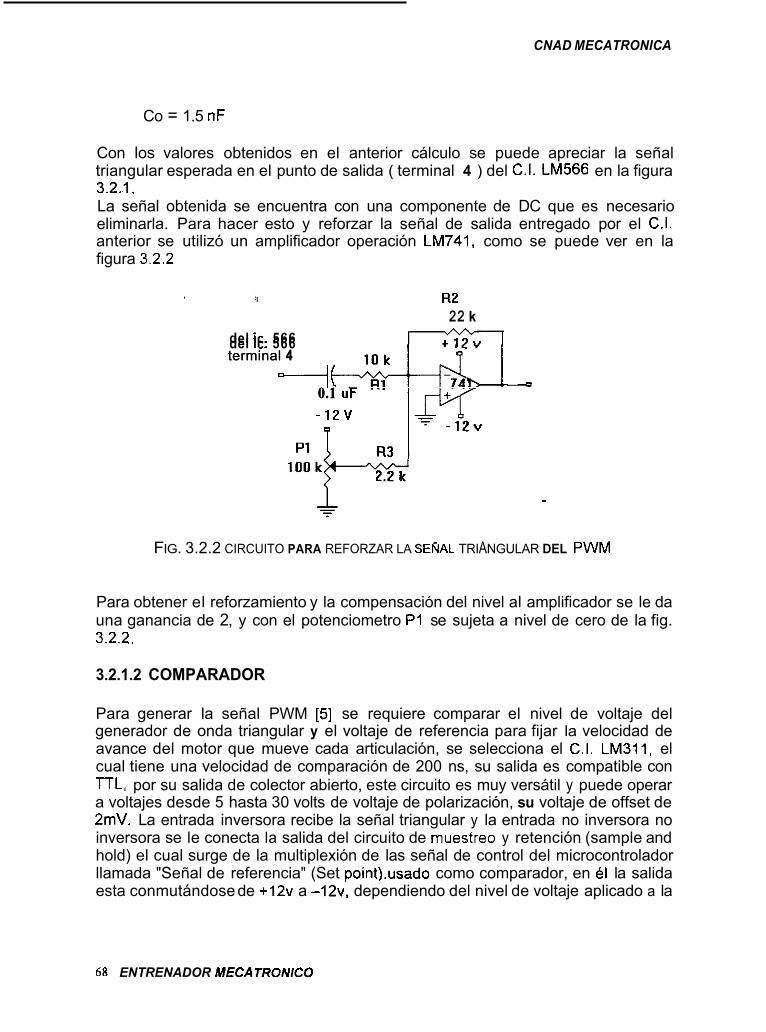
CNAD MECATRONICA
Co = 1.5 nF
Con los valores obtenidos en el anterior cálculo se puede apreciar la señal triangular esperada en el punto de salida ( terminal 4 ) del C.I. LM566 en la figura 3.2.1. La señal obtenida se encuentra con una componente de DC que es necesario eliminarla. Para hacer esto y reforzar la señal de salida entregado por el C.I. anterior se utilizó un amplificador operación LM741, como se puede ver en la figura 3.2.2
R2 22 k
del ic. 566 terminal 4 --
0.1 UF
del ic. 566 m terminal 4
0.1 UF
FIG. 3.2.2 CIRCUITO PARA REFORZAR LA SEÑAL TRIANGULAR DEL PWM
Para obtener el reforzamiento y la compensación del nivel al amplificador se le da una ganancia de 2, y con el potenciometro P1 se sujeta a nivel de cero de la fig. 3.2.2.
3.2.1.2 COMPARADOR
Para generar la señal PWM [5] se requiere comparar el nivel de voltaje del generador de onda triangular y el voltaje de referencia para fijar la velocidad de avance del motor que mueve cada articulación, se selecciona el C.I. LM311, el cual tiene una velocidad de comparación de 200 ns, su salida es compatible con TTL, por su salida de colector abierto, este circuito es muy versátil y puede operar a voltajes desde 5 hasta 30 volts de voltaje de polarización, su voltaje de offset de 2mV. La entrada inversora recibe la señal triangular y la entrada no inversora no inversora se le conecta la salida del circuito de muestre0 y retención (sample and hold) el cual surge de la multiplexión de las señal de control del microcontrolador llamada "Señal de referencia" (Set point).usado como comparador, en él la salida esta conmutándose de +12v a -12v, dependiendo del nivel de voltaje aplicado a la
68 ENTRENADOR MECATRONICO
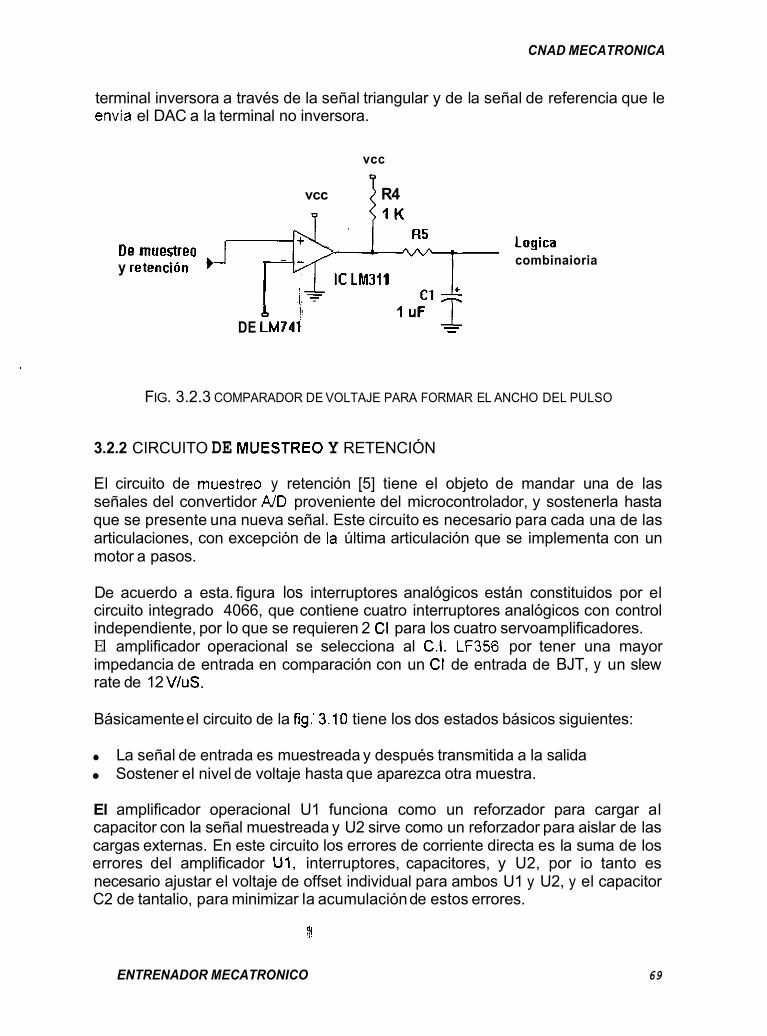
CNAD MECATRONICA
terminal inversora a través de la señal triangular y de la señal de referencia que le envia el DAC a la terminal no inversora.
vcc
vcc R4
Logica combinaioria Demuestreo ,-]
y retencibn
- DE LM741 -
FIG. 3.2.3 COMPARADOR DE VOLTAJE PARA FORMAR EL ANCHO DEL PULSO
3.2.2 CIRCUITO DE MUESTRE0 Y RETENCIÓN
El circuito de muestre0 y retención [5] tiene el objeto de mandar una de las señales del convertidor AíD proveniente del microcontrolador, y sostenerla hasta que se presente una nueva señal. Este circuito es necesario para cada una de las articulaciones, con excepción de la última articulación que se implementa con un motor a pasos.
De acuerdo a esta. figura los interruptores analógicos están constituidos por el circuito integrado 4066, que contiene cuatro interruptores analógicos con control independiente, por lo que se requieren 2 CI para los cuatro servoamplificadores. El amplificador operacional se selecciona al C.I. LF356 por tener una mayor impedancia de entrada en comparación con un CI de entrada de BJT, y un slew rate de 12 V/uS.
Básicamente el circuito de la fig.'3.10 tiene los dos estados básicos siguientes:
La señal de entrada es muestreada y después transmitida a la salida Sostener el nivel de voltaje hasta que aparezca otra muestra.
El amplificador operacional U1 funciona como un reforzador para cargar al capacitor con la señal muestreada y U2 sirve como un reforzador para aislar de las cargas externas. En este circuito los errores de corriente directa es la suma de los errores del amplificador U1, interruptores, capacitores, y U2, por io tanto es necesario ajustar el voltaje de offset individual para ambos U1 y U2, y el capacitor C2 de tantalio, para minimizar la acumulación de estos errores.
y1
ENTRENADOR MECATRONICO 69
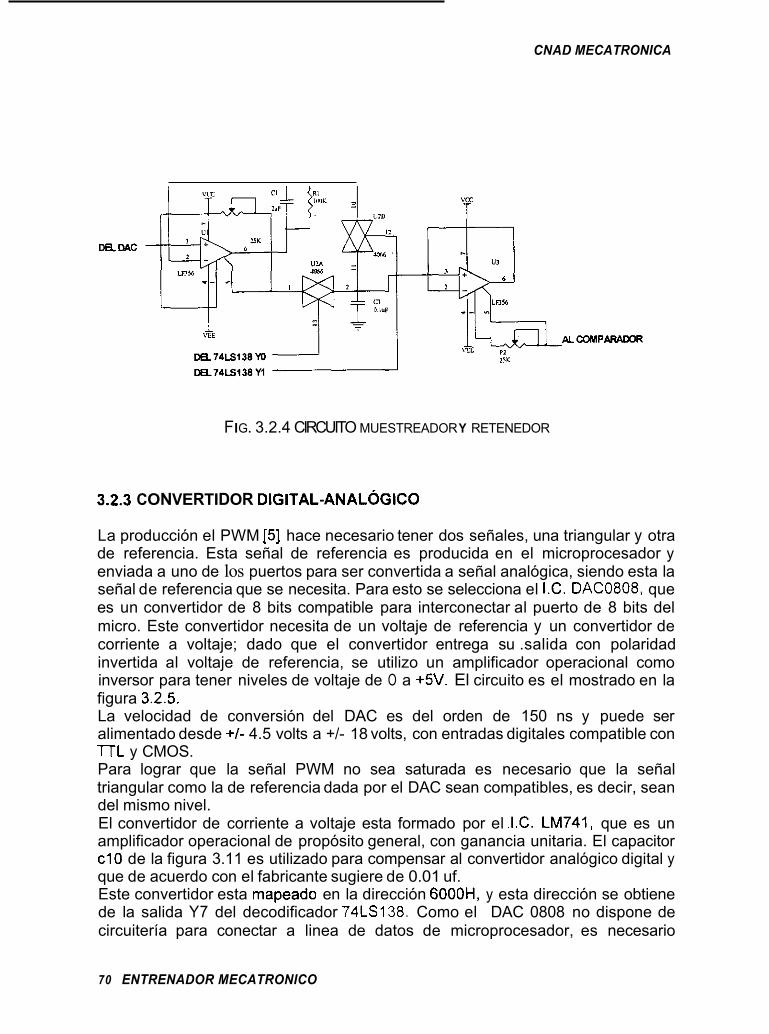
CNAD MECATRONICA
FIG. 3.2.4 CIRCUITO MUESTREADOR Y RETENEDOR
3.2.3 CONVERTIDOR DIGITAL-ANAL~GICO
La producción el PWM [5] hace necesario tener dos señales, una triangular y otra de referencia. Esta señal de referencia es producida en el microprocesador y enviada a uno de los puertos para ser convertida a señal analógica, siendo esta la señal de referencia que se necesita. Para esto se selecciona el I.C. DAC0808, que es un convertidor de 8 bits compatible para interconectar al puerto de 8 bits del micro. Este convertidor necesita de un voltaje de referencia y un convertidor de corriente a voltaje; dado que el convertidor entrega su .salida con polaridad invertida al voltaje de referencia, se utilizo un amplificador operacional como inversor para tener niveles de voltaje de O a +5V. El circuito es el mostrado en la figura 3.2.5. La velocidad de conversión del DAC es del orden de 150 ns y puede ser alimentado desde +I- 4.5 volts a +/- 18 volts, con entradas digitales compatible con TTL y CMOS. Para lograr que la señal PWM no sea saturada es necesario que la señal triangular como la de referencia dada por el DAC sean compatibles, es decir, sean del mismo nivel. El convertidor de corriente a voltaje esta formado por el LC. LM741, que es un amplificador operacional de propósito general, con ganancia unitaria. El capacitor c10 de la figura 3.11 es utilizado para compensar al convertidor analógico digital y que de acuerdo con el fabricante sugiere de 0.01 uf. Este convertidor esta mapeado en la dirección 6000H, y esta dirección se obtiene de la salida Y7 del decodificador 74LS138. Como el DAC 0808 no dispone de circuitería para conectar a linea de datos de microprocesador, es necesario
70 ENTRENADOR MECATRONICO
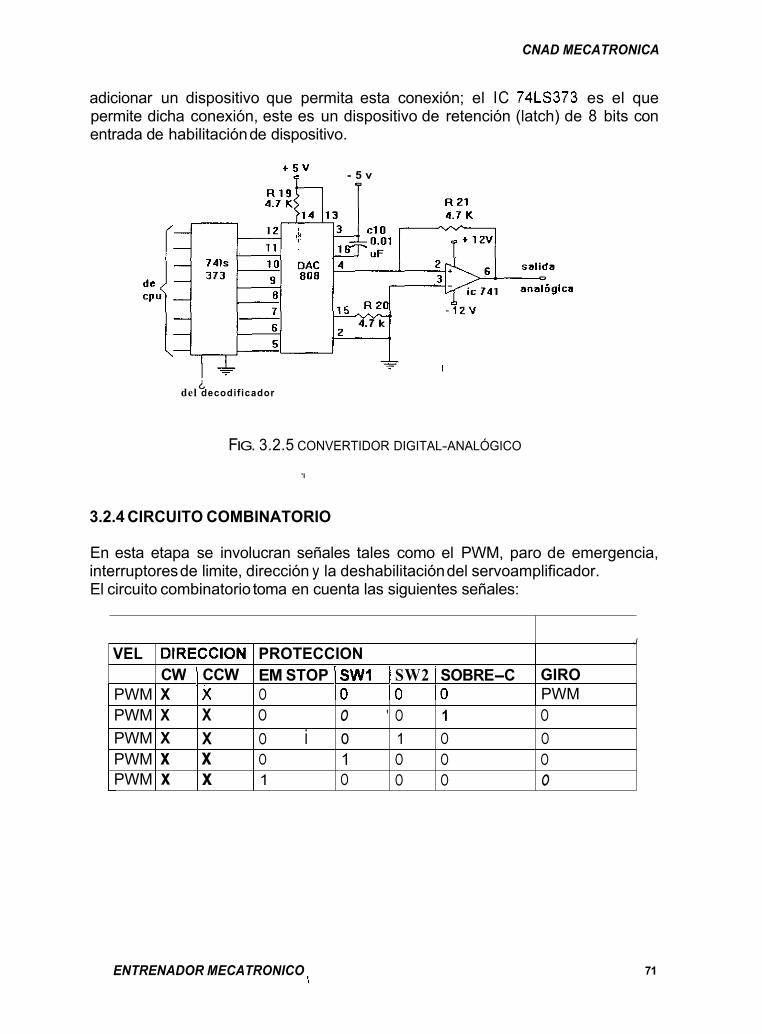
CNAD MECATRONICA
VEL DlRECClON PROTECCION
PWM X I X O Io I o I o CW 1 CCW EM STOP I SW1 1 SW2 I SOBRE-C
adicionar un dispositivo que permita esta conexión; el IC 74LS373 es el que permite dicha conexión, este es un dispositivo de retención (latch) de 8 bits con entrada de habilitación de dispositivo.
- 5 v t 5 V
J
GIRO PWM
¿ del decodificador
PWM X X O O ' O 1 O PWM X X O i o 1 O O PWM x x O 1 O O O PWM x x 1 O O O O -
FIG. 3.2.5 CONVERTIDOR DIGITAL-ANALÓGICO
'I
3.2.4 CIRCUITO COMBINATORIO
En esta etapa se involucran señales tales como el PWM, paro de emergencia, interruptores de limite, dirección y la deshabilitación del servoamplificador. El circuito combinatorio toma en cuenta las siguientes señales:
ENTRENADOR MECATRONICO 71
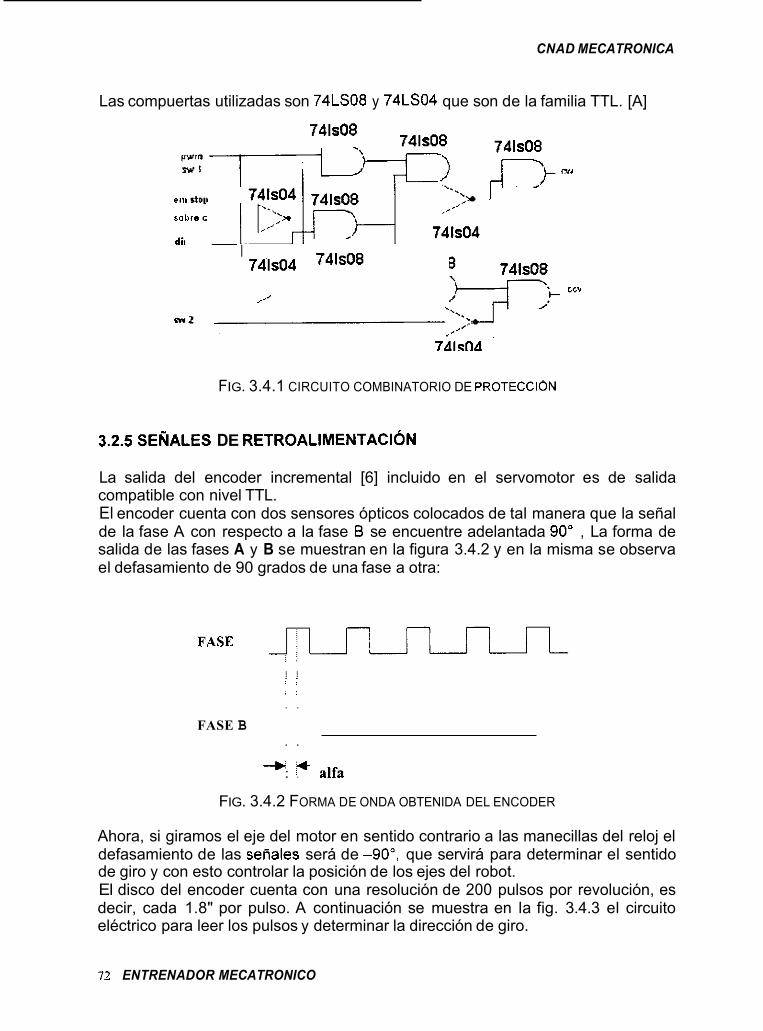
CNAD MECATRONICA
Las compuertas utilizadas son 74LS08 y 74LS04 que son de la familia TTL. [A]
741~08 I 74'1~04
,,' ..
FIG. 3.4.1 CIRCUITO COMBINATORIO DE PROTECC16N
3.2.5 SENALEC DE RETROALIMENTACI~N
La salida del encoder incremental [6] incluido en el servomotor es de salida compatible con nivel TTL. El encoder cuenta con dos sensores ópticos colocados de tal manera que la señal de la fase A con respecto a la fase B se encuentre adelantada 90" , La forma de salida de las fases A y B se muestran en la figura 3.4.2 y en la misma se observa el defasamiento de 90 grados de una fase a otra:
. . . . . . . . . . . . : : . . . . . . . .
FASE B . . . . * * : . . ~ alfa
FIG. 3.4.2 FORMA DE ONDA OBTENIDA DEL ENCODER
Ahora, si giramos el eje del motor en sentido contrario a las manecillas del reloj el defasamiento de las setiales será de -go", que servirá para determinar el sentido de giro y con esto controlar la posición de los ejes del robot. El disco del encoder cuenta con una resolución de 200 pulsos por revolución, es decir, cada 1.8" por pulso. A continuación se muestra en la fig. 3.4.3 el circuito eléctrico para leer los pulsos y determinar la dirección de giro.
71 ENTRENADOR MECATRONICO
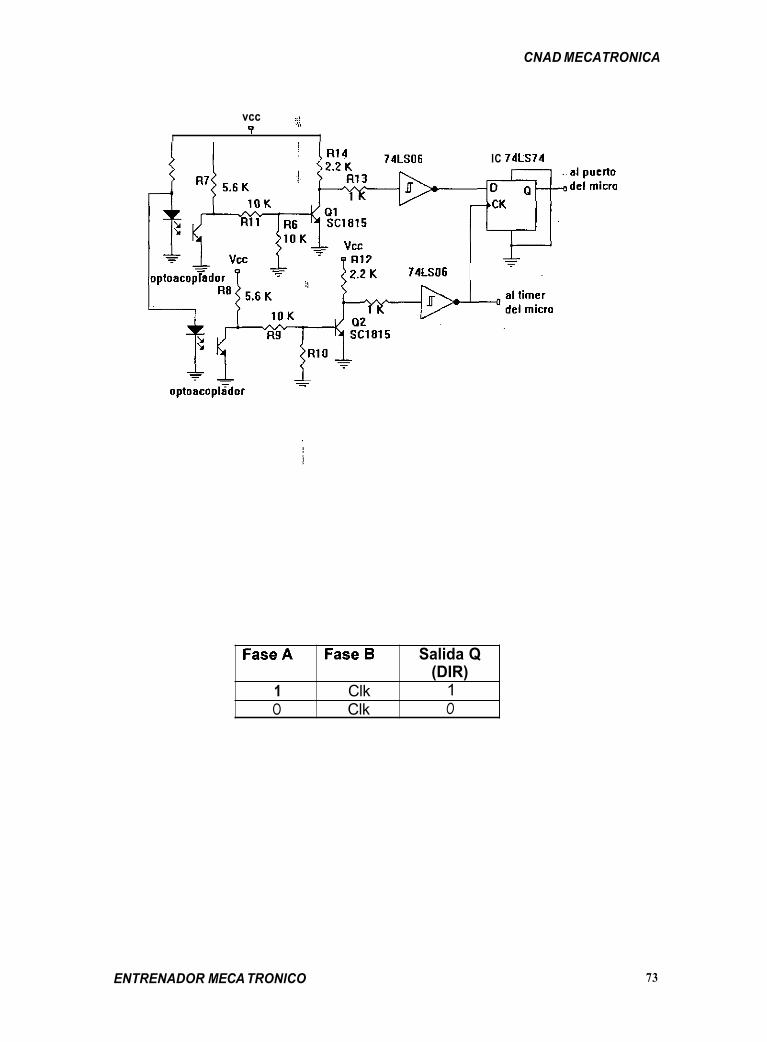
CNAD MECATRONICA
FaseA FaseB
1 Clk O Clk
vcc / / /
7 I 1
Salida Q (DIR)
1 O
IC 74LS74
2 .2K 74LS06
- - oploacoplador
ENTRENADOR MECA TRONlCO 73
CNAD MECATRONICA
Para el diseno de esta etapa, es necesario, saber que los motores que se emplean en las articulaciones son de corriente directa, de alta eficiencia, alimentados con 12 Volts y 2 amperes de corriente.
Las ventajas mas sobresalientes de este motor, es que su modelo matemático es lineal en la mayor parte de su rango de trabajo. Esto quiere decir que a cada nivel de voltaje le corresponde un nivel proporcional de velocidad, y a cada nivel de torque demandado existe una corriente correspondiente proporcional.
Con la capacidad de motor seleccionada se obtiene una potencia de 24 watts aproximadamente, que se convertirán en potencia mecánica para mover la cintura, el hombro y el codo, para el pitch se utilizó un motor mas pequeño, el cual es de 12 volts y 0.5 ampers, con esto se tiene una potencia máxima aproximada de 6 watts, por otro lado el roll es articulado con un motor a pasos de 10 watts de potencia.
El amplificador de potencia, debe tener la capacidad para poder establecer el cambio de rotación del motor con velocidad variable. Existen diferentes métodos para realizar estas funciones, por lo que se opta por emplear una arreglo H como el mostrado en la figura 3.4.4.
74 ENTRENADOR MECATRONICO

CNAD MECA TRONiCA
F IG 3.4.4 PUENTE H
Analizando la figura 3.14 se observa que, cuando la entrada “A” esta en 1 lógico y la entrada “B” esta en O lógico, se satura el transistor Q5, Q1, Q3, Q4 y Q7. quedando en corte los restantes. Es importante notar que existe un pequetio retardo intrinseco en el la saturación de los transistores, el retardo es dado por la capacitancia de las uniones del transistor bipolar al pasar de la region de corte a saturación. Cuando la entrada A esta en cero lógico y B en 1 Iógicd los transitores Q2, Q3, Q6 y Q8 se saturan, produciendo la inversión del giro del motor.
Para resumir el funcionamiento del circuito, se emplea la siguiente tabla que muestra las condiciones para el giro del motor.
ENTRENADOR MECATRONiCO 75
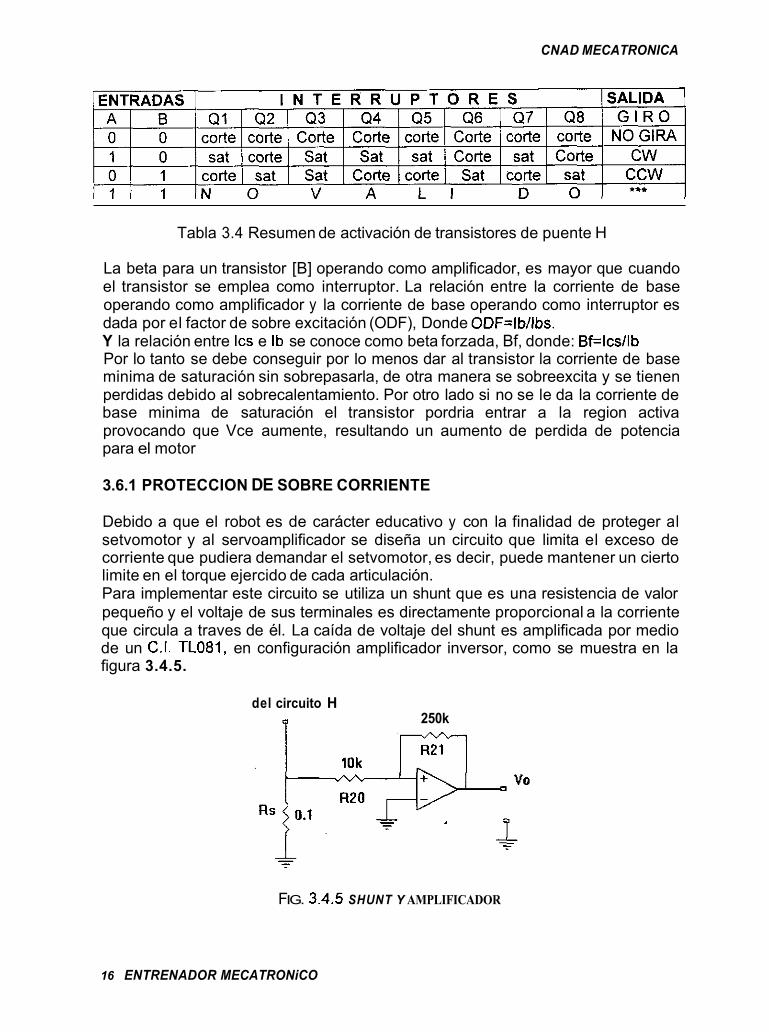
CNAD MECATRONICA
Tabla 3.4 Resumen de activación de transistores de puente H
La beta para un transistor [B] operando como amplificador, es mayor que cuando el transistor se emplea como interruptor. La relación entre la corriente de base operando como amplificador y la corriente de base operando como interruptor es dada por el factor de sobre excitación (ODF), Donde ODF=lb/lbs. Y la relación entre Ics e Ib se conoce como beta forzada, Bf, donde: Bf=lcsílb Por lo tanto se debe conseguir por lo menos dar al transistor la corriente de base minima de saturación sin sobrepasarla, de otra manera se sobreexcita y se tienen perdidas debido al sobrecalentamiento. Por otro lado si no se le da la corriente de base minima de saturación el transistor pordria entrar a la region activa provocando que Vce aumente, resultando un aumento de perdida de potencia para el motor
3.6.1 PROTECCION DE SOBRE CORRIENTE
Debido a que el robot es de carácter educativo y con la finalidad de proteger al setvomotor y al servoamplificador se diseña un circuito que limita el exceso de corriente que pudiera demandar el setvomotor, es decir, puede mantener un cierto limite en el torque ejercido de cada articulación. Para implementar este circuito se utiliza un shunt que es una resistencia de valor pequeño y el voltaje de sus terminales es directamente proporcional a la corriente que circula a traves de él. La caída de voltaje del shunt es amplificada por medio de un C.I. TL081, en configuración amplificador inversor, como se muestra en la figura 3.4.5.
del circuito H 250k
FIG. 3.4.5 SHUNT Y AMPLIFICADOR
16 ENTRENADOR MECATRONiCO

CNAD MECATRONICA
El amplificador debe proporcionar 5 volts cuando exista una caída de 0.2 Volts en el shunt, (Dos amperes medidos a través del shunt), por lo que la ganancia debe ser de 25. Para el amplificador se propone a R20 de 10k y por lo tanto R21 es de 250k. Una vez amplificado este nivel de voltaje, se hace pasar por un comparador de voltaje con el C.I. LM311, en donde la salida será -Vsat cuando rebase el limite de corriente establecido por el potenciometro P2. de la figura 3.4.6
vcc
luF 1 - DE LM741 -
FIG. 3.4.6 COMPARADOR DEL NIVEL DE CORRIENTE
Una vez obtenido un voltaje mayor al de referencia [A], se requiere memorizar para que el sistema deshabilite por circuitería el servoamplificador, al mismo tiempo, el usuario de programación del microprocesador puede conocer esta señal de alerta y reinicializar el sistema nuevamente, ver figura 3.4.7.
~
I
IC 74LS74 w
A la lógica combintoria y
Del comparador
micro
FIG. 3.4.7 CIRCUITO PARA MEMORIZARDATO DE CORRIENTE
3.6.2 CIRCUITO DE CONTROL DEL GIRO DE LA MUÑECA
ENTRENADOR MECATRONICO 77
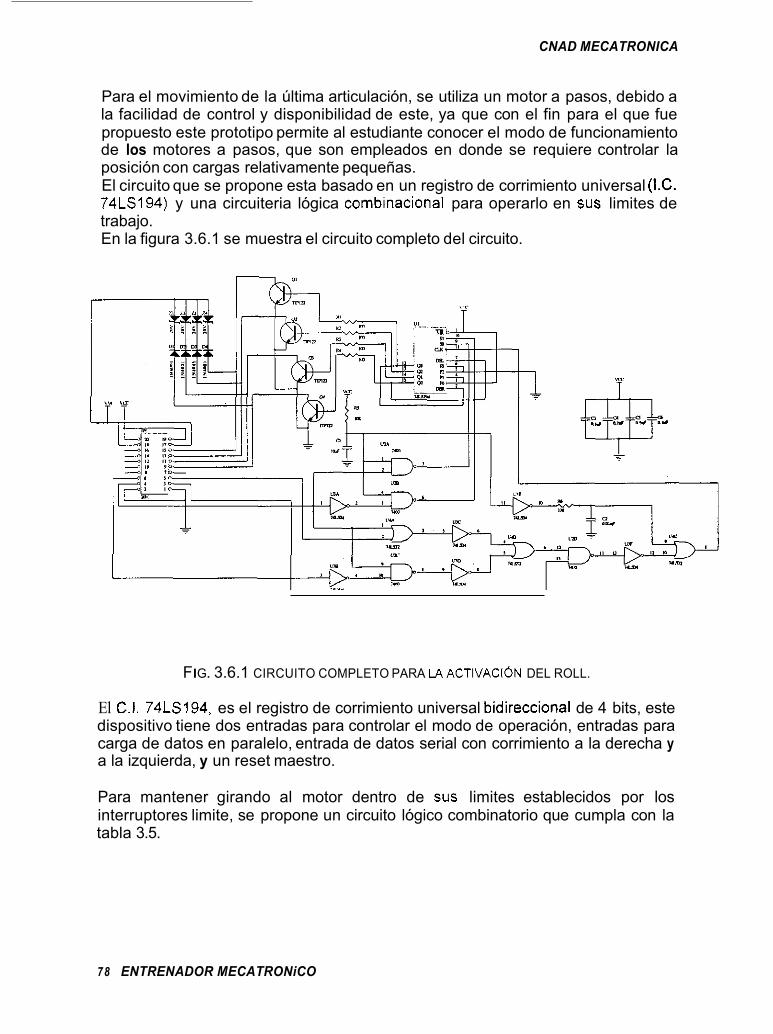
CNAD MECATRONICA
Para el movimiento de la última articulación, se utiliza un motor a pasos, debido a la facilidad de control y disponibilidad de este, ya que con el fin para el que fue propuesto este prototipo permite al estudiante conocer el modo de funcionamiento de los motores a pasos, que son empleados en donde se requiere controlar la posición con cargas relativamente pequeñas. El circuito que se propone esta basado en un registro de corrimiento universal (I.C. 74LS194) y una circuiteria lógica combinacional para operarlo en sus limites de trabajo. En la figura 3.6.1 se muestra el circuito completo del circuito.
FIG. 3.6.1 CIRCUITO COMPLETO PARA LAACTIVAC16N DEL ROLL.
El C.I. 74LS194, es el registro de corrimiento universal bidireccional de 4 bits, este dispositivo tiene dos entradas para controlar el modo de operación, entradas para carga de datos en paralelo, entrada de datos serial con corrimiento a la derecha y a la izquierda, y un reset maestro.
Para mantener girando al motor dentro de sus limites establecidos por los interruptores limite, se propone un circuito lógico combinatorio que cumpla con la tabla 3.5.
78 ENTRENADOR MECATRONiCO
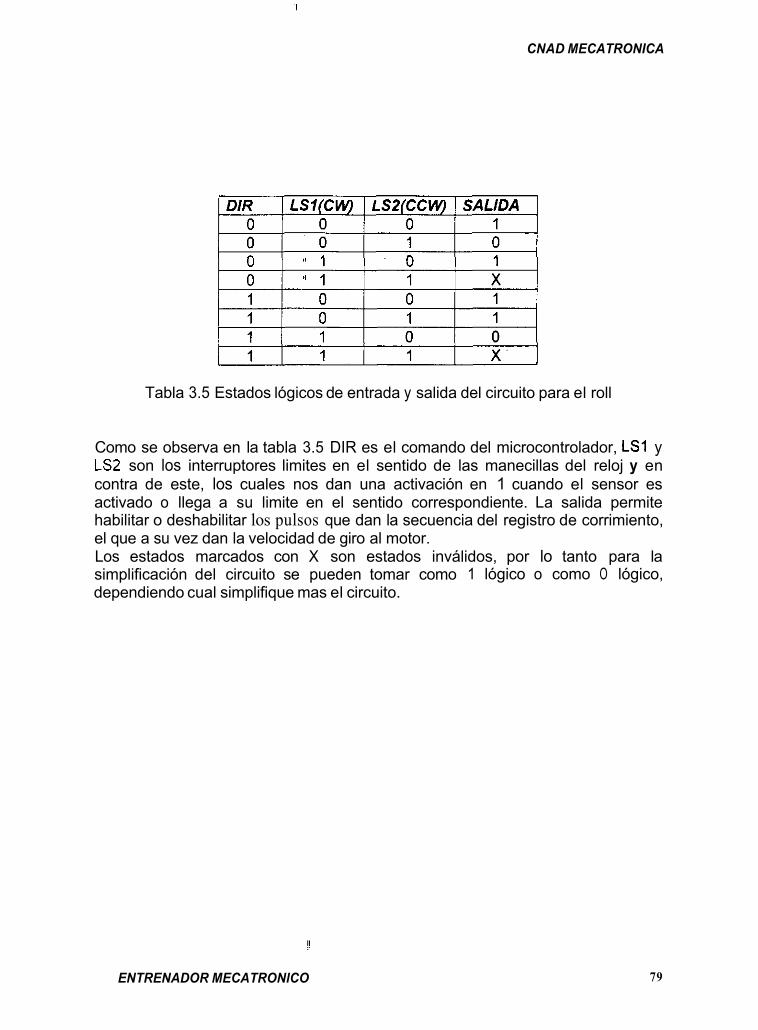
CNAD MECATRONICA
Tabla 3.5 Estados lógicos de entrada y salida del circuito para el roll
Como se observa en la tabla 3.5 DIR es el comando del microcontrolador, LS1 y LS2 son los interruptores limites en el sentido de las manecillas del reloj y en contra de este, los cuales nos dan una activación en 1 cuando el sensor es activado o llega a su limite en el sentido correspondiente. La salida permite habilitar o deshabilitar los pulsos que dan la secuencia del registro de corrimiento, el que a su vez dan la velocidad de giro al motor. Los estados marcados con X son estados inválidos, por lo tanto para la simplificación del circuito se pueden tomar como 1 lógico o como O lógico, dependiendo cual simplifique mas el circuito.
ENTRENADOR MECATRONlCO 79

CNAD MECATRONICA
3.6.3 FUENTE DE ALIMENTACION
La fuente de alimentación es la última etapa por diseñar, ya que se conocen las demandas de voltaje y corriente necesarios para el sistema. Estos requerimientos se resumen a continuación:
+I2 volts a 9 Ampers. para los motores de CD y amplificadores operacionales. -12 volts a 300 mA, para los amplificadores operacionales +5 Volts a 1 Amper, para el microcontrolador y los circuitos TTL -5 Volts a 100 mA , para el DAC.
La fuente de alimentación por emplear en este sistema es del tipo lineal, con indicador ( D6 )y protección de corto circuito en la fuente de +I2 volts, de los motores, dado que estos son los que mas probablemente puedan dañar a la fuente de alimentación. Las otras fuentes de energía se obtienen con un circuito integrado 7805 con encapsulado T03, que pueden soportar hasta 3 Amperes. Para las fuentes de - 12V y -5V se emplea un regulador 7912 y 7905 respectivamente, con encapsulado T0220. Ver fig. 3.6.2
80 ENTRENADOR MECATRONICO

CNAD MECATRONICA
Q12
Q1 1
R37 0.2
salida
- - c4,6,c6,cB de 0.0luF
FIG. 3.6.2 FUENTE DE ALIMENTAC16N GENERAL :i: ~
Como se puede ver en el diagrama las fuentes de voltaje de +5 volts. -5 volts y - 12 volts son fuentes fijas que no necesitan ningún ajuste, situación que no es con la fuente de + 12 volts, dado que el ajuste de voltaje se obtiene con el valor de la resistencia R36 y el ajuste de corriente se realiza con el control P10. Para controlar los 9 ampers que necesitan los motores se emplean dos transistores darlington ( DST1011 ). El detector de corriente esta formado con el IC LF411 que es un comparador de entrada bifet. Este comparador es capaz de sensar voltajes de rnilivolts, que produce el resistor R37, que es de 0.1 ohms a 10 watts.
El circuito que proporciona la corriente del sistema esta expuesto fácilmente a sobrecargas, debido a que el sistema mecánico tiene perturbaciones de tipo dinámico que pueden dañar dicho circuito, debido a esto se diseña una fuente con protección de corriente para los servomotores. En la figura 3.6.2 se tiene un arnplicador operacional como amplificador (LF41 l ) , dicho circuito tiene conectado a la entrada un puente de Wheatstone que registra una variación limite de voltaje correspondiente a una variación considerable en la
ENTRENADOR MECATRONICO 81

CNAD MECA TRONICA
carga que puede dañar el sistema, por lo que la salida del operacional se pone en estado bajo, poniendo al C.I. LM317 en su terminal de ajuste de voltaje a un valor 2.5 volts. Reduciendo el valor del voltaje de la fuente de alimentación e impidiendo su daño.
82 ENTRENADOR MECATRONiCO
1
i( CNAD MECATRONICA i ..
~
CAPITULO 4 CONTROL ~PROGRAMACION' !I,
!.
En este capitulo se tratan los &pectos.de programación necesarios para realizar el control del robot. Es importante mencionar que el objetivo de esta sección no es hacer un lenguaje de program&iÓn para el robot, ya que esto no daría el acceso al usuario de realizar rutinas' propias, es decir, permitir el uso de toda la arquitectura del sistema de manera abierta. El tener un robot de arquitectura abierta permite dar lecciones básicas de robótica, hasta temas de mayor nivel:! hasta aquellos que pudieran ser utilizados en investigación. Normalmente sistemas como este son difíciles de encontrar, ya que no producen un beneficio economico directo.
El capitulo está dividido en las siguientes secciones: Descripción del modelo matemático de un motor de "CD, esto es con el objeto de hacer un control independiente pero coordinad0"de cada eje del robot, ya que el modelo dinámico completo resulta muy difícil de modelar. Se mostrará como interpretar este modelo parcial del robot y de como poder generar un algoritmo que controle cada eje, comparando con otros algoritmos para conocer las ventajas y desventajas ofrecen estas diversas técnicas. Toda):esta primera sección llega solamente llega al nivel de simulación en Matlab. Otra sección de este capitulo muestra como utilizar el microcontrolador MC68HC11 en el control del robot, es decir, se dan los elementos fundamentales que permiten medir las posiciónes de las articulaciones, obtener señales de salida hacia los servomotores, comunicarse con un PC, señalizar y mostrar datos del robot. El sistema tiene la instrhentación para mandar al microcontrolador estos datos que se pueden utilizar-i para hacer un algoritmo que realice planeo de trayectorias, control de torque'etc., elementos que con un robot industrial no se pueden realizar, ya que este tiene arquitectura cerrada. En términos generales este capitulo se constituye y el resultado y parte de la conclusión del objetivo de estetrabajo.
/j ti
,
ENTRENADOR MECATRONICO , 83
I '
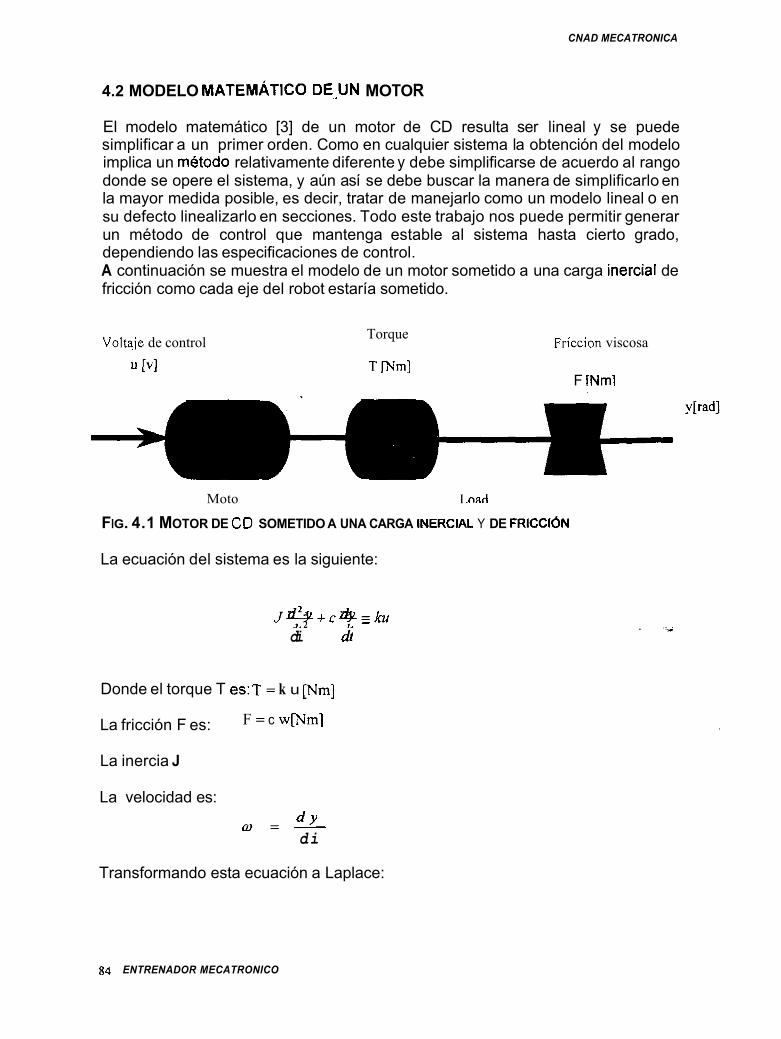
CNAD MECATRONICA
4.2 MODELO MATEMÁTICO DE,UN MOTOR
El modelo matemático [3] de un motor de CD resulta ser lineal y se puede simplificar a un primer orden. Como en cualquier sistema la obtención del modelo implica un metodo relativamente diferente y debe simplificarse de acuerdo al rango donde se opere el sistema, y aún así se debe buscar la manera de simplificarlo en la mayor medida posible, es decir, tratar de manejarlo como un modelo lineal o en su defecto linealizarlo en secciones. Todo este trabajo nos puede permitir generar un método de control que mantenga estable al sistema hasta cierto grado, dependiendo las especificaciones de control. A continuación se muestra el modelo de un motor sometido a una carga inercia1 de fricción como cada eje del robot estaría sometido.
Voliaje de control
u [VI
Torque
T INmI Friccion viscosa
F INml
Moto I .nad
FIG. 4.1 MOTOR DE CD SOMETIDO A UNA CARGA INERCIAL Y DE FRICC16N
La ecuación del sistema es la siguiente:
J ? + c - - ~ d2Y dY - di di
Donde el torque T es:T = k u wm]
La fricción F es: F = c wmm]
La inercia J
La velocidad es: d Y a = - di
Transformando esta ecuación a Laplace:
84 ENTRENADOR MECATRONICO

Js2Y + csY = kU .'
-
CNAD MECATRONICA
La función de transferencia de la ecuación es:
Esta función de transferencia relaciona la posición del eje del motor y el voltaje aplicado a este.
4.2.1 MODELO A LAZO CERRADO DE UN MOTOR DE CD
Si hacemos un control de lazo cerrado del sistema anterior tenemos lo siguiente:
Donde:
a, = /C/J,b, =
li
85
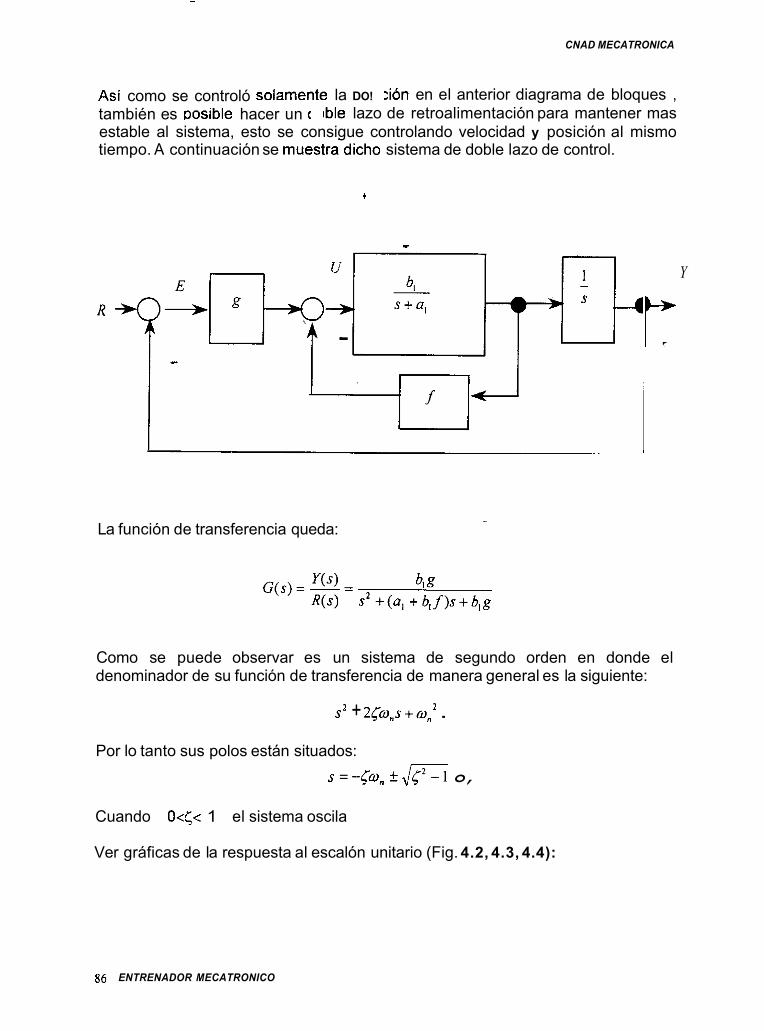
~~ ~ ~
As¡ como se controló r también es Dosible hacer un (
ite la DO!
CNAD MECATRONICA
:ión en el anterior diagrama de bloques , ible lazo de retroalimentación para mantener mas
estable al sistema, esto se consigue controlando velocidad y posición al mismo tiempo. A continuación se muestradicho sistema de doble lazo de control.
La función de transferencia queda: -
Y
r
Como se puede observar es un sistema de segundo orden en donde el denominador de su función de transferencia de manera general es la siguiente:
2 s2 + 2&,s +o, .
s = -60, k f i o,
Por lo tanto sus polos están situados:
Cuando O<<< 1 el sistema oscila
Ver gráficas de la respuesta al escalón unitario (Fig. 4.2, 4.3, 4.4):
86 ENTRENADOR MECATRONICO

CNAD MECATRONICA
fl:~.
Amplitud deseada
4.2 RESPUESTA AL ESCALÓN UNITARIO PARA FACTOR o<<< 1 -
Cuando <=l El sistema tiene un factor de amortiguamiento crítico
... deseada
O 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 Time (secs)
FIG. 4.3 RESPUESTA AL ESCAL6N UNITARIO CON AMORTIGUAMIENTO CRITICO
ENTRENADOR MECATRONICO 87
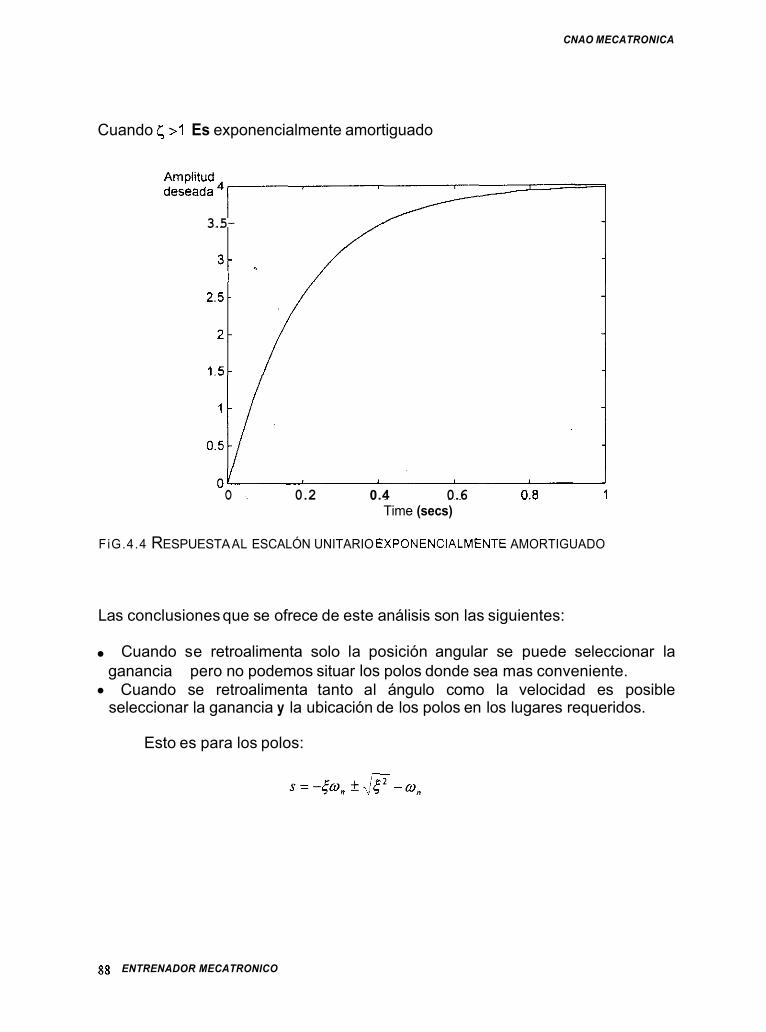
CNAO MECATRONICA
Cuando C; >I Es exponencialmente amortiguado
3.5 -
O 0.2 0.4 0.6 0.8 Time (secs)
FiG.4.4 RESPUESTA AL ESCALÓN UNITARIO EXPONENCIALMENTE AMORTIGUADO
Las conclusiones que se ofrece de este análisis son las siguientes:
Cuando se retroalimenta solo la posición angular se puede seleccionar la
Cuando se retroalimenta tanto al ángulo como la velocidad es posible ganancia pero no podemos situar los polos donde sea mas conveniente.
seleccionar la ganancia y la ubicación de los polos en los lugares requeridos.
Esto es para los polos:
88 ENTRENADOR MECATRONICO
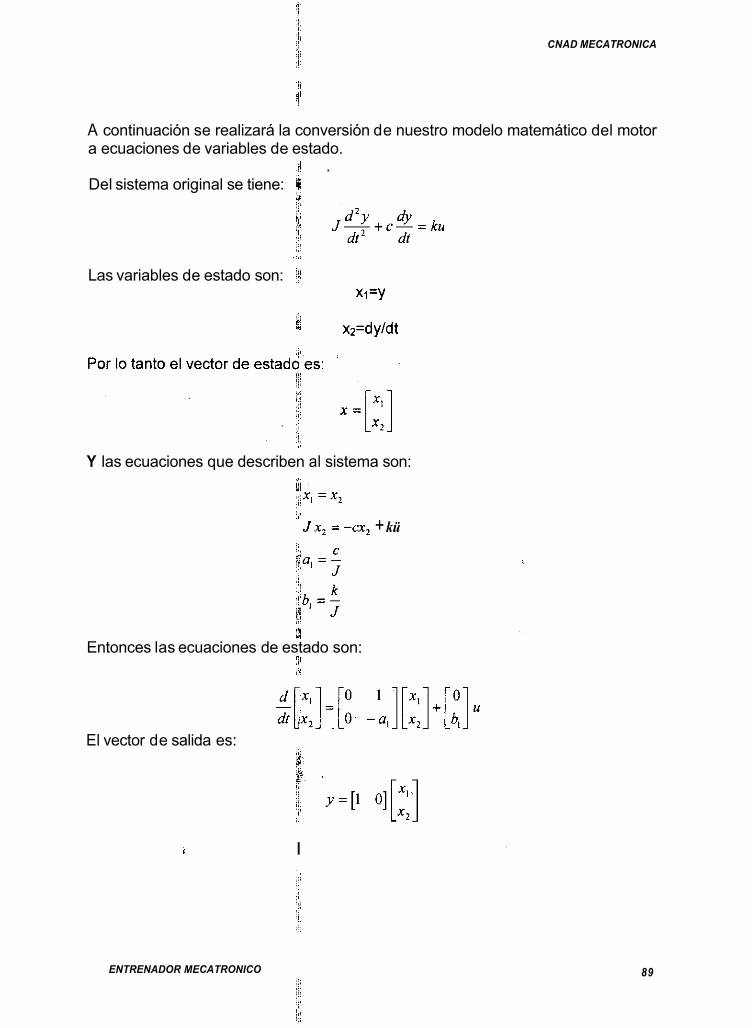
CNAD MECATRONICA
'!I q A continuación se realizará la conversión de nuestro modelo matemático del motor a ecuaciones de variables de estado.
Del sistema original se tiene: .!I ,
$
.:.,
Las variables de estado son: !! xi=y
xz=dy/dt f;
Y las ecuaciones que describen al sistema son:
'/ '
J X' = -CX? + kü
:I Entonces las ecuaciones de estado son:
7 , l: ,::
El vector de salida es:
i I
ENTRENADOR MECATRONICO 89

CNAD MECATRONICA
4.3 MC68HCll COMO ELEMENTO DE CONTROL
El microcontrolador 68HC11 cuenta con la arquitectura que facilita la programación para la obtención de la señal PWM, así como la factibilidad de adquisición y control de las variables del robot, esto es porque contiene de manera integrada un sistema temporizador, un convertidor analógico digital y el sistema de transmisión serial para la comunicación a una computadora personal. La integración de todos estos elementos constituyen un base flexible para esta aplicación. En este capítulo se desglosa por medio de gráficas, diagramas de flujo y explicaciones la estructura del programa en lenguaje ensamblador, para la generación de señales y monitoreo de variables.
4.3.1 PROGRAMACIÓN DEL CONVERTIDOR ANALÓGICO DIGITAL
Con el objeto de controlar el torque de cada articulación por programación es necesario monitorear la corriente de cada motor. Como la señal que se recibe del circuito sensor de corriente es analógica, es necesario convertirla a serial digital, para lo cual se emplea el convertidor que se dispone internamente en el microcontrolador.
El convertidor analógico digital integrado es un sistema convertidor de carga distribuida de 8 bits con 8 canales de entrada multiplexada con precisión de % LSB' dentro del rango de temperatura permitido por el microcontrolador. Con el diagrama de flujo 4.1 se muestra el algorítmo para digitalizar 4 señales analógicas de entrada conjuntamente. El proceso para realizar esto involucra los siguientes registros del microcontrolador:
+ OPTION Registro localizado en la dirección $1039 (el símbolo "$" en leguaje ensamblador de Motorola significa que el número a continuación está en hexadecimal). El MSB2 de este registro, mejor conocido como ADPU controla la habilitación del convertidor.
ADPU = 1 ADPU = O
Habilita al convertidor Deshabilita al convertidor ( En el reset ADPU es cero )
+ ADCTL Registro localizado en la dirección $1030. Este registro es encargado del control y estatus del convertidor analógico digital. El bit 4 de este registro identificado por el nombre de MULT controla el número de entradas disponibles del convertidor.
MULT = 1 Cuatro entradas simultáneas leídas en el nibble bajo del Puerto E
' Bit menos significativo ' Bit mas significativo
90 ENTRENADOR MECATRONICO

e,..-- I
\'
CNAD MECATRONICA
'!
'! MULT = O Una entrada leída.en el LSB del puerto E
El mismo registro ADCTL, contiene en el MSB, la bandera de conversión completa, es decir, el bit que'ise establece en 1 lógico cuando 4 conversiones fueron terminadas.
ADRX Registros del 1 al?$ que permiten leer los datos convertidos de las 4 entradas correspondientes del puerto E, según se programe, se puede seleccionar el nibble bajo o;el alto para digitalizar.
Una vez descritas las características básicas de los registros para programar al convertidor analógico digital, se muestra en el diagrama de flujo 3.1, programando a dicho sistema para digitalizar,:cuatro señales simultáneamente.
;I
I / :
'I 4,
ENTRENADOR MECATRONICO !I
,?! 91

CNAD MECATRONICA
lNlClD
L
DATO EN . LEE REGISTRO 1
ADR3
DATO EN
Diagrama de flujo 4.1 Convertidor analógico digital
De manera simplificada el diagrama de flujo se codifica en lenguaje ensamblador del microcontrolador 68HC11 de la siguiente forma. en el programa 4.1:
92 ENTRENADOR MECATRONICO

i CNAD MECATRONICA
'!
.<. ...................................... . . t * . * t t ~ i t * t t . * * * * * ~ ~ * ~ ~ ~ ~ ~ ~ ~ * ~ ~ ~ ~ ~ ~ * . * ~ ~ ~ ~ ~ ~ * ~ ~ ~ * ~ ~ ~ ~ ~ ~ ~ ~ * * ~ ~
PROGRAMA 4.1 ESTE .PR~GRAMA MANDA A LA PC 4 VALORES DIGITALIZADOS LOCALIZAD@ EN ADRl ADR2 ADR3 ADR4
OPTION EQU $39 ;Registro de opciones de configuración ADRI EQU $31 ;Registro de resultados 1 ADR2 EQU $32 ;Registro de resultados 2 ADR3 EQU $33 ;Registro de resultados 3 ADR4 EQU $34 ;Regidro de resultados 4 ADCTL EQU $30 ;Registro de estado y control del c d d
******.*=.***~.t*tt*t********t**********
ORG $2000 ;Dirección de inicio del programa LDX #REGBAS ;Apunta x al área de registros BSET OPTION,X,$80 ; 1000 O000 prender el d d
INICIO BSET ;Habilita múltiple conversión
8 CICLOS'*'"*':'
0,CONV ;Lee .adctl, hace la máscara del ; Bit ccf (bandera de conversión ;corr¡pleta) y salta a la etiqueta de conv
;mientras no se tennine la conversión.
e*******
CONV BRCLR
9 :
LDAA ADRI ,X ;Lee el valor de peO STAA $1200 ;Guarda dato en dir $1200
STAA $1201 ;Guarda dato en dir$l201 LDAA ADR3,X ;Leeel valor de pe2 STAA $1202 ;Guarda dato en dir$1202 LDAA ADR4,X ;Lee'e/ valor de pe3 '
STAA $1203 ;Guarda dato en &$I203
BRA INICIO ;Salta a in ar otra conversión . .
LDAA ADR2,X ;Lee,el valor de pe l - I I
3L
j
ENTRENADOR MECATRONICO f
93

CN4D MEC4TRONIC4
O
1 1
O
4.3.2 PROGRAMACION DEL TOC
La arquitectura del microcontrolador [E] contiene un sistema temporizador al cual se le asocia el sistema de interrupciones para las salidas de comparación (TOC). Para el microcontrolador la representación física del tiempo está representada por un contador de corrida libre de 16 bits. Las salidas de comparación se usan para programar una acción que ocurre a un tiempo específico (cuando el contador de corrida libre es igual a una cuenta previamente programada). Para cada una de las 5 salidas, existe un registro de comparación y un comparador dedicado de 16 bits. El valor del registro de comparación es igual con el contador de corrida libre se genera una interrupción, si esta se encuentra habilitada. Este modulo también permite capturar pulsos y acumularlos, de tal manera que pueden integrar la velocidad, lo que en términos de control es leer la posición de la articulación. Este sistema también está asociado a el timmer del micocontrolador. de tal manera que funciona de manera independiente al programa principal y evita tener problemas de lecturas equivocadas (aliasing) y da la posibilidad de conocer en un determinado tiempo de muestre0 una señal lo que evita la desincronización. Para este trabajo el empleo timmer del microcontrolador es esencial, ya que es factible leer los pulsos del encoder, de manera que no interfieran en el programa principal, es decir, el sistema fempokador mantiene su funcionamiento independiente del proceso del programa y sólo lo interrumpa en cortos periodos de tiempo para contar los pulsos e incorporarlos a una variable.
AI iguai que en la explicación del módulo convertidor analógico digital, el sistema temporizador contará con una descripción de los registros de configuración.
TCTLl Registro localizado en la dirección $1020. Con este registro es posible seleccionar las acciones de salida de las patas del puerto A cuando ocurra una interrupción.
exitosa O Sin cambio
O Salida a cero (Reset) 1 Salida a uno (Set)
1 Tipo flip-flop tipo T
I OMx I OLx I Acción a tomar en comparación 1
94 ENTRENADOR MECATRONICO
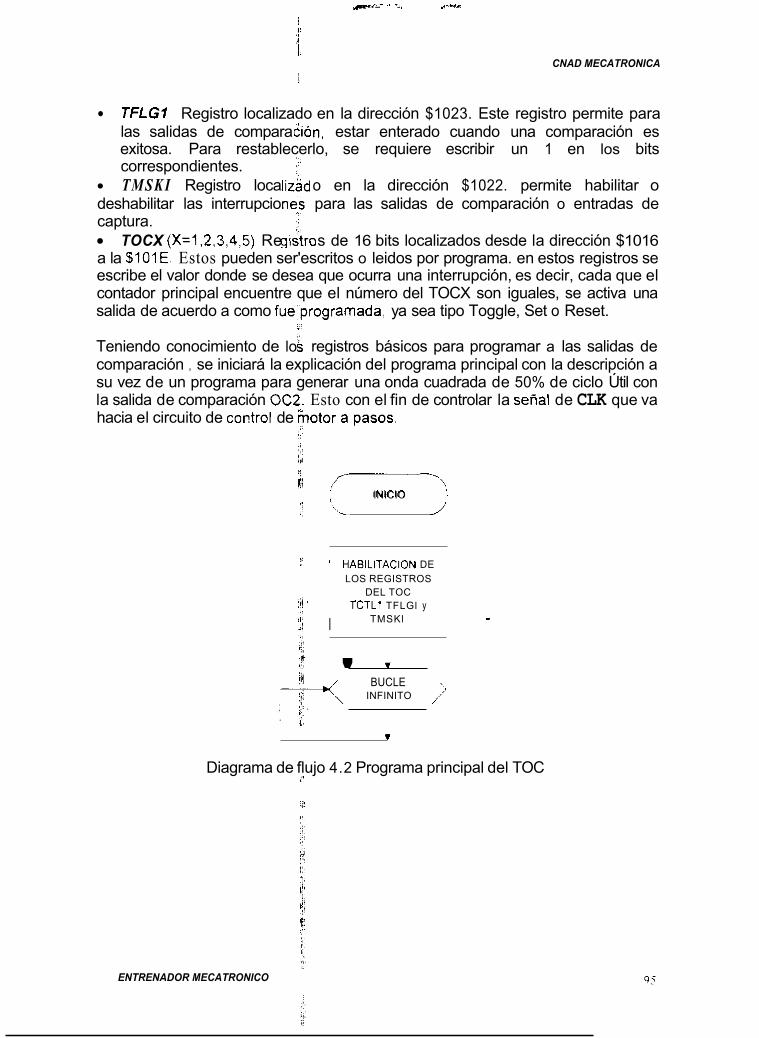
-'; ~. ~ ~ .'"-.,. i i I. j.
1:
CNAD MECATRONICA
TFLGI Registro localizado en la dirección $1023. Este registro permite para las salidas de compara n, estar enterado cuando una comparación es exitosa. Para restablecerlo, se requiere escribir un 1 en los bits correspondientes. TMSKI Registro loca o en la dirección $1022. permite habilitar o
deshabilitar las interrupcio para las salidas de comparación o entradas de captura.
TOCX (X=l.2,3,4,5) Re s de 16 bits localizados desde la dirección $1016 a la SlOlE. Estos pueden ser'escritos o leidos por programa. en estos registros se escribe el valor donde se desea que ocurra una interrupción, es decir, cada que el contador principal encuentre que el número del TOCX son iguales, se activa una salida de acuerdo a como fue:programada, ya sea tipo Toggle, Set o Reset.
Teniendo conocimiento de lo registros básicos para programar a las salidas de comparación , se iniciará la explicación del programa principal con la descripción a su vez de un programa para generar una onda cuadrada de 50% de ciclo Útil con la salida de comparación OC2. Esto con el fin de controlar la setial de CLK que va hacia el circuito de coritrol de
i !Y'\, INICIO
'..,.. ,/
.' ' HABlLlTAClON DE LOS REGISTROS
DEL TOC TCTLl TFLGl y
TMSKl I
T ' BUCLE INFINITO ,,;"
T
Diagrama de flujo 4.2 Programa principal del TOC / '
i j !
ENTRENADOR MECATRONICO
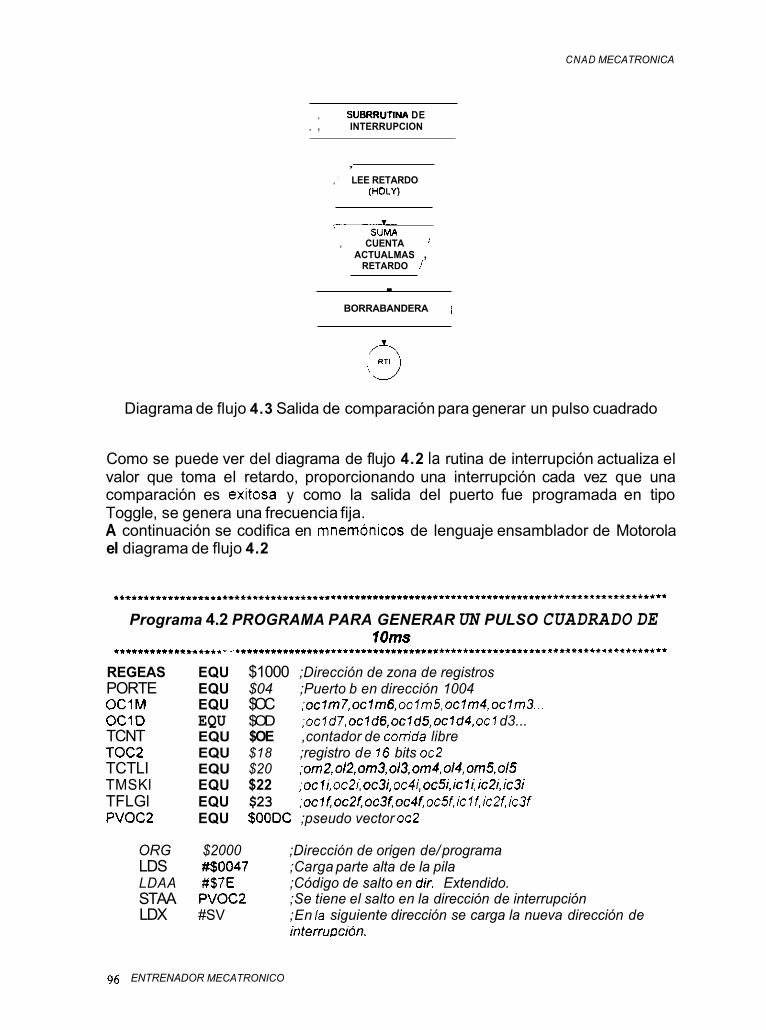
CNAD MECATRONICA
, SUBRRVTINA DE , , INTERRUPCION
,- , ' LEE RETARDO
(HOLY)
-SUMA , CUENTA '
ACTUALMAS , RETARDO i
. BORRABANDERA I
A ,, RTI ) u
Diagrama de flujo 4.3 Salida de comparación para generar un pulso cuadrado
Como se puede ver del diagrama de flujo 4.2 la rutina de interrupción actualiza el valor que toma el retardo, proporcionando una interrupción cada vez que una comparación es exitoca y como la salida del puerto fue programada en tipo Toggle, se genera una frecuencia fija. A continuación se codifica en mnemónicos de lenguaje ensamblador de Motorola el diagrama de flujo 4.2
** tt*t~..t.tl.t.t.*t~~.~~..~.."~..~*..~..~.~.~..~....*~*.*.*.***~~~~~.~~.~*~"~...~~~~*~~~~~* Programa 4.2 PROGRAMA PARA GENERAR UN PULSO CUADRADO DE
10ms *******. t*t*ttt***--..,~.*..*******..***..*....*.*****,~*"****.****~****~******~**~*.*~*****
REGEAS EQU $1000 ;Dirección de zona de registros PORTE EQU $04 ;Puerto b en dirección 1004 OC1M EQU $OC ;oclm7,oclm6, oclm5, oclm4, oclm3. .. OClD EQU $OD ;ocld7, ocld6,ocld5,ocld4, oc1 d3. .. TCNT EQU $OE ,contador de com'da libre TOC2 EQU $18 ;registro de 16 bits oc2 TCTLI EQU $20 ;om2,0/2,om3,0/3,om4,014,om5,0/5 TMSKl EQU $22 ;oc l i , oc2i. Oc3i, Oc4i. oc5, ic l i , ic2i, ic3i TFLGl EQU $23 ; o c l b o c 2 ~ o c 3 ~ o c 4 ~ oc5biclf. ic2b ic3f PVOC2 EQU $OODC ;pseudo vector oc2
ORG $2000 ;Dirección de origen de/ programa LDS #$O047 ;Carga parte alta de la pila LDAA #$7E ;Código de salto en dir. Extendido. STAA PVOC2 LDX #SV
;Se tiene el salto en la dirección de interrupción ;En la siguiente dirección se carga la nueva dirección de interrumión.
96 ENTRENADOR MECATRONICO
."&.. . ~ -.: .=
CNAD MECATRONICA
STX PVOC2+1 ;Es dirección corresponde a la etiqueta pvoc2 y la
LDX #REGBAS LDAA #%O1 O00000 ;Carga de datos para programar registros STAA TCTLI ,X ;Habilita salida oc2 en tipo toggle STAA TFLGl ,X ;Limpia bandera de oc2 STAA TMSKI ,X ;Habilita interrupción LDD #$4E20 STD HDLY ;Carga a la dirección hdly con d CLI ;Habilita interrupción máscarable BRA * blece bucle infinito
localidad siguiente. ;Se:carga x con $1000 para apuntar al área de registros.
;Caiga a d con 20000 decimal, es decir, 4e20h
*t~*******.*+*t+t*t*****-**t*tttt *t,*+tt*****.**l.t****,~*"**"**,**~**~,,**~"**"*"************,*.
***********f.**** SUBRUTINA DE /NTERRUpC\ÓN OC2 *******.*****tl+*++tt.t****"
******tt*++tt*******"*.~****~**""** +t~t+*~***~*****ttt~******"**tttlt*****"**~"*"****~*~,*~*~**....*~
SV LDD #$HDLY ;Caiga a d con el retardo programado ADDD TOC2,X ;Suma retardo más cuenta actual STD TOC2,X ;Actualiza la cuenta destino BCLR TFLG1 ,X,$BF ;Lihpia bandera RTI ;Retorna al programa principal
¡!(
La generación de la señal tiene un periodo igual a 2 veces HDLY, para generar una señal de diferente frecuencia, sólo se requiere modificar la localidad de
La modificación de esta localidad de memoria, puede ser función directa de una señal de entrada analógica, de tal manera, que con el programa 4.1 y el 4.2 se pueden complementar para desarrollar un algoritmo que permita dar diferentes frecuencias las cuales variarán dependiendo el numero que tenga HDLY, por lo tanto se puede variar la velocidad del motor, a partir, de la señal de OC2 y por lo tanto también controlar la posición.
memoria HDLY. Y ;
I I
ENTRENADOR MECATRONICO 91
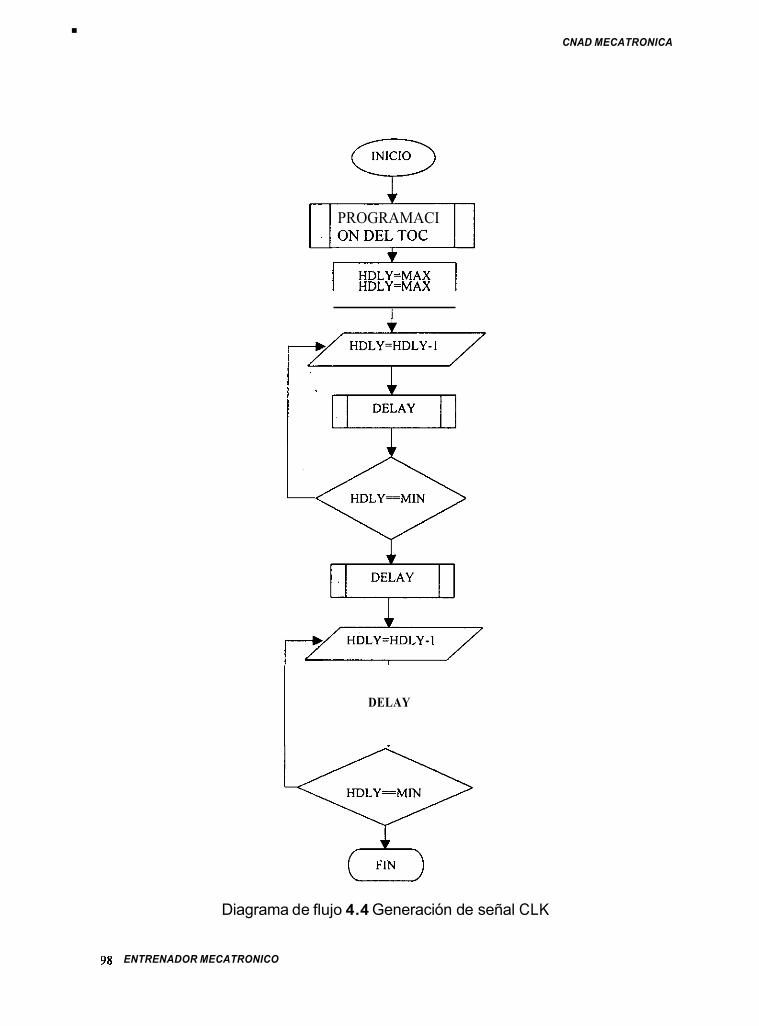
. CNAD MECATRONICA
PROGRAMACI
r--l HDLY=MAX
HDLY=HDLY - 1 y*: HDLY-MIN Lo
7 23 HDLY=HDLY-l
DELAY
i-, Diagrama de flujo 4.4 Generación de señal CLK
98 ENTRENADOR MECATRONICO

./ j: CNAD MECATRONICA
:! '!
El programa anterior, es para generar un rampa de aceleración y desaceleración para el movimiento del giroi:de.la muñeca, (ROLL) constituido por un motor a pasos. La dirección de movimiento es proporcionado por el establecimiento del bit O del puerto B dirección $4001 del microcontrolador.
T
FIG. 4.5 RAMPA DE ACELERACI Y DESACELERAClbN DEL MOTOR A PASOS h ?: La rampa de aceleración y desaceleración permite disminuir los efectos no
deseables de inercia, ver fig. 4.5, ya que se debe regular en el arranque la corriente del motor sin sobrepasar un limite. Posteriormente el frenado debe ser gradual, ya que un sistema inercia1 lleva mucha energía cinética. En el diagrama de flujo 4.3 quiere la subrutina de interrupción mostrada en el diagrama de flujo 4.2. La relación entre ángulo del del roll y el paso del motor es de 1.8", por pulso de reloj en excitación por fase. (Half Stepping), en el caso de excitación a dos fases (Full stepping) la relació es de 0.9", que es la resolución minima del desplazamiento ángular.
4.3.3 PROGRAMACION D
La entrada de los pulsos q,ue provienen. del encoder, son recibidos por el microcontrolador, el cual uiere programar los siguientes registros: PACTL, TCTL2, TMSKI y el TFLGl. '+ Registro de control 2 .- registro de control, tiene la función de programar al
timer como entrada de flancos de subida o flancos de bajada o ambos , en donde los 8 bits se programan de manera independiente entre si. En la tabla 4.2 se muestra de forma explicita como programar este registro
i' !
';
r ENTRENADOR MECATRONICO 99

CNAD MECATRONICA
Deshabilitado
Tabla 4.2 Configuración del timer de control
TIC1- TIC3.- Cuando un flanco ha sido detectado y sincronizado con el contador de corrida libre, el valor es transferido hacia el TIC respectivo a cada señal de entrada. Cuando ocurre otra interrupción debida a un flanco de subida o de bajada, se incrementa o decrementa el contador interno manteniendo en sus registros de 16 bits; el tiempo en ciclos de máquina de la llegada de los pulsos del encoder que son directamente proporcionales a la velocidad de los ejes del robot y la posición se calcula contando los pulsos. Para saber la dirección de avance existe un circuito que indica con un bit la
dirección de giro( dir. $4001,bit 1 motor 1 )
El diagrama de flujo de la rutina de interrupción, se muestra a continuación (Diagrama de flujo 4 4)
CONTA++ I CONTA- I I:
Diagrama de flujo 4.5 Programa de interrupción para discriminar modo de contador I (ascendente o descendente)
100 ENTRENADOR MECATRONICO

CNAD MECATRONICA
El programa principal se encarga de leer el registro TIC (TIC1 para motor de la base, TIC2 para motor del hombro, TIC3 para motor del codo y TIC4 para motor del pitch), donde se encuentra el número de pulsos leídos que provienen del encoder, o en otras palabras la posición absoluta de las articulaciones respectivas.
LEER ENC 'a HABILITA INT fi
PORT A,B=REGISTRO D e Diagrama de flujo 4.6 Programa principal del TIC para leer el dato del encoder
3,. . 1 . . . La codificación del programa anterior se encuentra en el programa.
* * t t t * * t * * * * * * t * * * t * * ~ * * * * * f t t t t t f * * * *
Programa 4.3 LECTURA DE ENCODER POR MEDIO DEL TIC *****
. . . ..i , . .
******* t**t*************~***~~*t******ttN.**H********
!.:
REGBAS EQU $1000 ;Direction de zona de registros PORTE EQU $04 ;Puerto b dirección 1004 OCIM EQU $OC ;oclm7,oclm6,oclm5,oclm4,oclm3 ... OCID EQU $OD ;ocld7, ocld6, ocld5,oc1d4,ocld3.. .
TIC1 EQU $10 ;regisfro de 16 bits icl TOCl EQU $16 ;Registro de 16 bits ocl TOC2 EQU $16 ;Registro de 16 bits 0c2 TOC3 EQU $1A ;Registro de 16 bits oc3 TCTLI EQU $20 ;om2,0/2,om3,0/3,om4,0/4,om5,0/5 TCTL2 ' EQU $21 ;edglb,edgla,edg2b,edg2a,edg3b,edg3a TMSKI TFLGI EQU $23 , ;Ocl~Oc2~oc3foc4~oc5~ic l f , ic2~ic3f TMSK2 EQU $24 ;toi,rtii,paovi,paii; pr1,pfU
TCNT EQU $OE ;Contadorde com'da libre ! *
EQ U $22 ; Oc 1 i, Oc2i, oc3i. oc4i. oc5i, ic 1 i, ic2i, ic3i
i
ENTRENADOR MECATRONICO 101
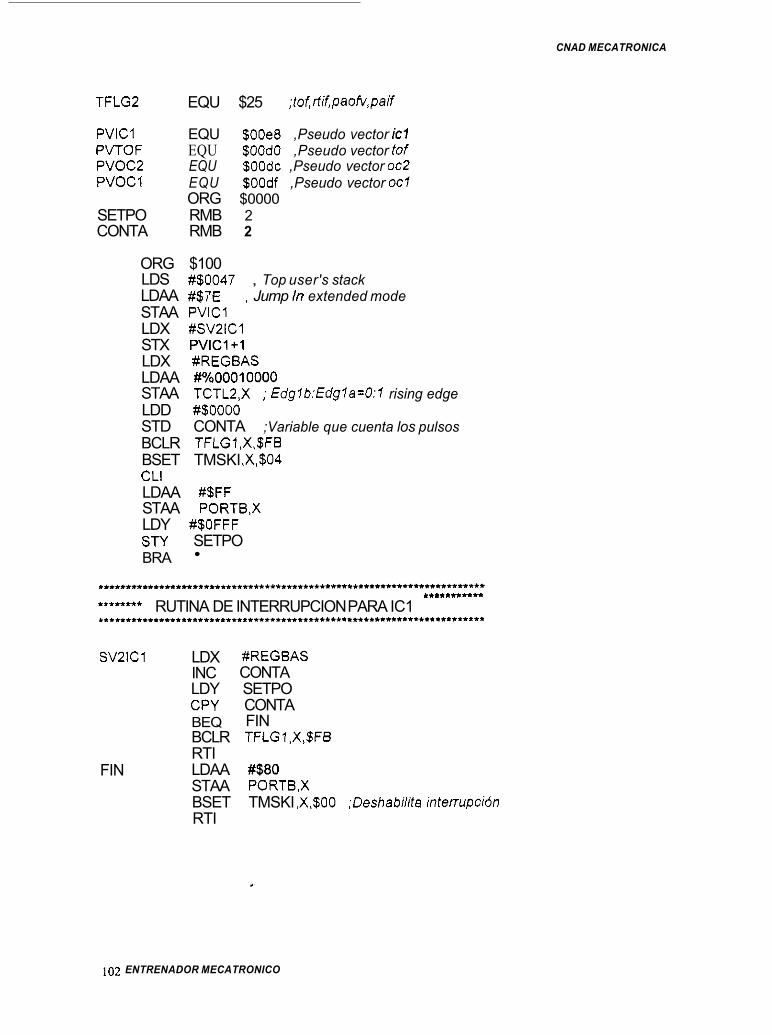
CNAD MECATRONICA
TFLG2 EQU $25 ,tof,rtif,paofv,parf
PVlCl EQU $00e8 ,Pseudo vector rcl PVTOF EQU $00d0 ,Pseudo vector tof PVOC2 EQU $OOdc ,Pseudo vector oc2 PVOCI EQU $OOdf ,Pseudo vector ocl
SETPO RMB 2 CONTA RMB 2
ORG $0000
ORG $100 LDS #$O047 , Top user's stack LDAA #$7E ~ Jump In extended mode STAA PVIC1 LDX #SV21CI STX PVIC1+1 LDX #REGBAS LDAA #%O0010000 STAA TCTL2,X ; Edglb:Edgla=O:l rising edge LDD #$O000 STD CONTA ;Variable que cuenta los pulsos BCLR TFLGI,X,$FB BSET TMSKI ,X,$04 CLI LDAA #$FF STAA PORTB,X LDY #$OFFF STY SETPO BRA
****f*.**.***t*ffil*~~.~*~*****tlt.*.*~~**
RUTINA DE INTERRUPCION PARA IC1 *********** >If******
t******tt.*.*.tt*.**~"*~*~*."****~**",**~~*."~*,*~*.""".,*~**."~~**~*.
sv21c1 LDX INC LDY CPY BEQ BCLR RTI LDAA STAA BSET RTI
FIN
#REGBAS CONTA SETPO CONTA FIN TFLGl,X,$FB
#$80 PORTB,X TMSKI ,X,$OO ;Deshabilita intempción
102 ENTRENADOR MECATRONICO
CNAD MECATRONICA
Con los programas anteriores se puede leer. los encoders de cada articulación, mandar los pulsos que controlen la velocidad y posición del motor a pasos, también hasta ahora ha sido posible leer desde el convertidor los niveles de corriente de cada servomotor. A continuación se muestra la sección de comunicación serial con una PC, ya que esta permite al usuario controlar ylo medir los parámetros del robot.
4.3.4 SISTEMA DE COMUNICACIÓN SERIAL (SCI)
Para la comunicación entre el robot y una computadora se' integra en la programación una rutina de comunicación serial que hace posible el monitoreo de los parámetros del robot. Esto se logra gracias a que el microcontrolador cuenta con el sistema de comunicación serial integrado. Este sistema de comunicación tiene una interfaz serial asíncrona FULL-DUPLEX (SCI) con una formato estándar NRZ (Un bit de arranque, ocho o nueve bits de datos y un bit de paro) y una gran variedad de BAUD RATES, es decir, bits por segundo). La transmisión y recepción del SCI. son funcionalmente independientes, pero usan el mismo formato de datos y baudrate.
4.3.4.1 CARACTERíSTlCAS DEL SISTEMA SCI A DOS HILOS
Formato estándar NZR (marca-espacio) Metodo de detección de errores, incluyendo detección de ruido. Operación Full dúplex. Capacidad para programar 32 diferentes baud rates. Posibilidad de selección de 8 o 9 bits de palabra. Bits separados para la habilitación de la recepción y la transmisión
4.3.4.2 CARACTERkTlCAS DE RECEPCIÓN Y TRANSMISIÓN DEL SCI
Recepción Wake-up. Detección de flanco. Detección de error de framing. Detección de ruido. Bandera indicadora de registro de recepción de datos lleno. Bandera indicadora de registro de transmisión de datos vacio Bandera de transmisión completa. Envío de rompimiento.
La transmisión de datos es inicializada por una escritura en el registro de datos de comunicación serial (SCDR). Previendo que la transmisión ha sido habilitada. el dato almacenado en el SCDR es transmitido a un registro para ser transmitido. La transferencia del dato, coloca a uno ai bit TDRE del registro de estado del CSI y se puede generar una interrupción si en este momento se desea. La transferencia del
ENTRENADOR MECATRONICO I03

CNAD MECATRONICA
dato por el registro latch de transmisión es llevada a cabo en sincronización con la razón de transmisión (BAUD). Todos los datos son transmitidos iniciando con el LSB. Ya realizada la transmisión del dato el bit de transmisión completa (TC) del SCSR se pone automáticamente en uno, indicando que este proceso ha sido realizado. Cuando el SCDR es leido, este contiene el último Byte recibido, esto previendo que la recepción ha sido habilitada. El Bit RDRF del SCSR se coloca a uno automáticamente para indicar que el dato recibido o al SCDR. La transferencia del dato del registro de recepción al SCDR es sincronizada por la razón de reloj para la recepción. Los Bits OR, NF o FE del SCSR se ponen a uno, si un error ha sido detectado en la recepción.
4.3.4.3 FORMATO DE DATOS
La recepción y transmisión de datos utiliza el formato NZR, mostrado en la figura 4.6 y es usado de acuerdo a los siguientes criterios.
1. El nivel de linea de transportación es un estado de lógica uno, prioritario para la transmisión o recepción de datos.
2. Un bit de arranque (Lógica cero) es usado para indicar el arranque de una palabra de bits. 3. El dato es transmitido y recibido comenzando por el LSB. 4. Un bit de parada (Lógica uno) es usado para indicar el fin de la palabra. La palabra consiste de un bit de arranque, un caracter de ocho o nueve bits y un bit de parada.
DATOS
O 1 2 3 4 5 6 7
1 1 1 -_
¡ I I I / , ; I , _- START STOP
FIG. 4.6 FORMATO DE DATOS
El SCI tiene dos registros de control de comunicación serial (SCR1) el primero posee bits indicadores tales como; bit indicador de longitud de palabra (M bit) del SCI. En el registro de control de comunicación serial dos (SCR2) posee los bits de control, los cuales habilitan y deshabilitan en forma individual la transmisión y recepción (TE y RE respectivamente) habilitación del sistema de interrupción (TIE, TCIE. ILIE) y el bit de código de rompimiento. El registro de baud rate (BAUD) en
1 o4 ENTRENADOR MECATRONICO
CNAD MECATRONICA
donde permite la elección de diferentes velocidades de transmisión y recepción de SCI. Para que el inversor transmita a una computadora personal sus parámetros se requiere de un programa que habilite el SCI y lo disponga para un protocolo de comunicación estándar entre el computador y el microcontrolador, por lo que a continuación se' analizan los registros necesarios para programar el microcontrolador para este propósito.
Para programar el subsistema SCI se requiere de cinco registros, los cuales son BAUD, SCCR1, SCCR2 , SCDR y SCRR2. Es importante mencionar que sólo se especifica los bits necesarios para programar al sistema para este trabajo específico. El registro BAUD sirve para la selección de la velocidad de transmisión y contiene los siguientes bits:
El registro BAUD localizado en la dirección $1028 permite seleccionar la velocidad de transmisión. Con los bits SCPl y SCPO de dicho registro se selecciona la velocidad de transmisión de acuerdo a la frecuencia de reloj. De la misma manera que se selecciona la velocidad de transmisión por medio de SCPl y SCPO los tres bits restantes (SCRX) programan a la velocidad previamente seleccionada un factor de división. El'registro de control SCCR1 que se encuentra en la dirección $102C permite programar el tamaiio de palabra de transmisión y/o recepción; poniendo a O el bit M de este registro cuando es de 8 bits y 1, cuando la palabra es de 9 bits. El registro SCCR2 permite habilitar la transmisión serial, esto se hace con el bit TIE. Este bit es el que habilita la interrupción de transmisión, con cero permanece deshabilitada. Los bits TE y RE son los bits encargados de habilitar la transmisión y la recepción del sistema, con O se deshabilita transmisión y/o recepción, y con 1 se habilita transmisión y/o recepción. Los siguientes bits definen la configuración de trabajo del transmisor y del receptor respectivamente, es decir, en modo normal o standby, para este caso se transmitirá en modo normal. El registro encargado del estado de la comunicación es el denominado SCSR el cual es de vital importancia porque se encarga de dar el estado de la transmisión. TC el cual es una bandera que verifica si el transmisión está ocupado, por lo tanto proporciona el control de la transmisión.
TC=O TC= 1
El transmisor está enviando la información. El transmisor ha completado el envío de la información
Por ultimo el registro que se encarga de recibir ylo transmitir los datos es el SCDR se encuentra en la dirección $102F el cual sirve para los dos propósitos: Transmitir cuando se hace un almacenamiento con el rnnemónico STA, y una recepción cuando se hace una lectura con el mnemónico LDA.
ENTRENADOR MECATRONICO I os
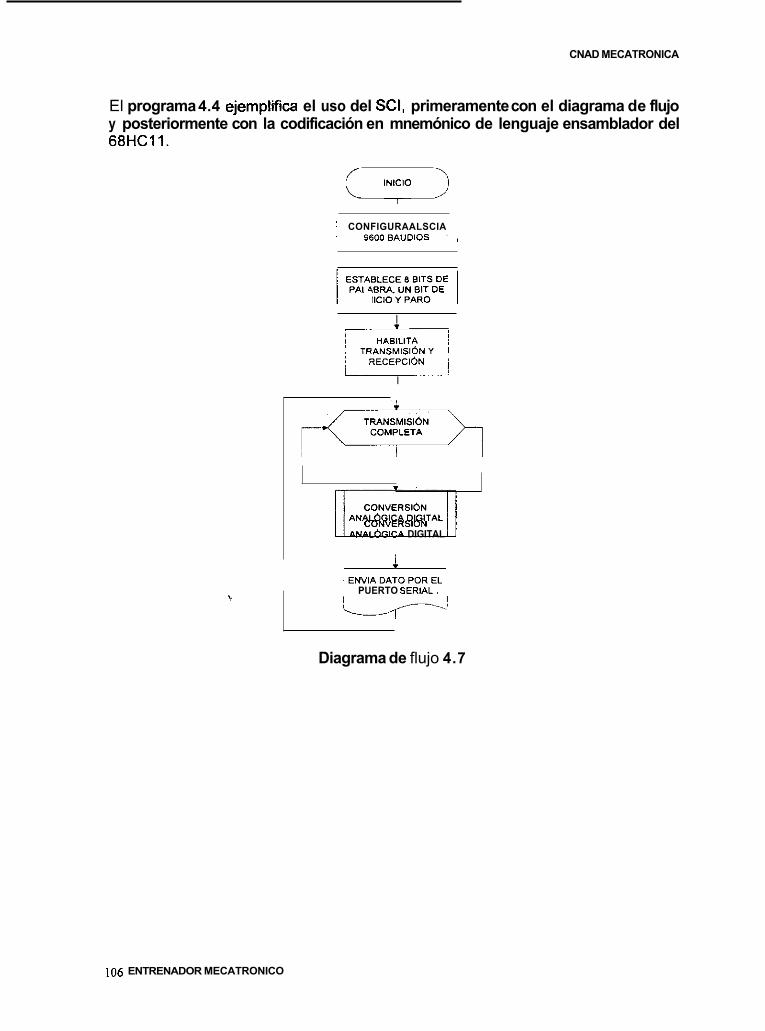
CNAD MECATRONICA
El programa 4.4 ejemplifica el uso del SCI, primeramente con el diagrama de flujo y posteriormente con la codificación en mnemónico de lenguaje ensamblador del 68HC11.
( ,N IP , ] 1 CONFIGURAALSCIA 1
9600BAUDIOS ' 1
ESTABLECE 8 B T S DE PALABRA UN BIT DE
hlClO Y PARO
I' I
CONVERSION i ANALOGICA DIGITAL
PUERTO SERIAL,
Diagrama de flujo 4.7
106 ENTRENADOR MECATRONICO

CNAD MECATRONIW
- ***t**t*+~tt*****Ht**tt**tt*it******Wff***
PROGRAMA 4.4 ESTE PROGRAMA TRANSMITE DATOS DlGlTALIiADOS POR EL CONVERTIDOR AID Y TRANSFERIDOS POR EL SCI. LA TRANSMISIÓN ES A 9600 BAUDIOS CON EL CRISTAL DE 8MHZ SIN
PARIDAD UN BIT PARADA Y OCHO BITS DE TAMAÑO DE PALABRA
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . BAUD SCCRI SCCR2 SCSR SCDR REGBAS OPTlON ADRl ADCTL
- SACASCl
€QU EQU EQU EQU EQU EQU EQU EQU EQU
$28 ;Velocidad de transmisión (Baudaje). 82C ;Registro 1 de control. $20 ;Registro 2 de control. $2E ;Registro De Estado. $2F ;Registro de datos. $1000 ;Apuntador de registro $39 ;Registro de opciones de configuración $31 ;Registro de resultados 1 $30 ;Regisfro de estado y control del c a/d
ORG$2000 . LDAA #$30 STAA BAUD
LDAA #$O0 STAA SCCRI
LDAA #$OC STAA SCCR2 LDX #REGBAS
;Dirección de inicio. ;Se carga A con 00110000 (binario) ;Se selecciona 9600 Bauds teniendo un Xtal de 8Mhz y factor de división 1. ;Se carga A con cero. ;programa a SCl con palabra de 8 bits, I bit de ;paro y 1 bit de inicio.
;Carga A con 00001 100 en binario. ;Habilita transmisión y recepción. ;Carga a X con 1000 para apuntar a el Brea de registros.
BRCLR SCSR,X,$80,SACASCl ;Espera bandera de transmisión completa.
BSR CONVERT/ ' ;Subrutina de conversih (Programa 3.1). LDAA ADR1.X ;Carga dato digitalizado. STAA SCDR . ;Manda al registro de corrimiento para trasmifirse. BRA SACASCI ;Salta al inicio.
Este programa se utiliza para el monitoreo de los parámetros del robot, es decir, transferir dichos parámetros digitalizados al puerto serial de comunicación. Estos datos digitalizados requieren de una rutina de recepción. Esta rutina esta elaborada en lenguaje "C" y permite recibir los datos mandados por el microcontrolador a traves de una interface RS232. Las rutinas implementadas en la PC y el microcontrolador supervisan y controlan el enlace entre los dos dispositivos, el flujo de la información y el monitoreo del estado bajo el cual se encuentra el sistema. Las dos rutinas implementadas cuentan con un medio de comunicación previamente establecido que garantiza una eficiencia en la transferencia de la información.
ENTRENADOR MECATRONICO I07
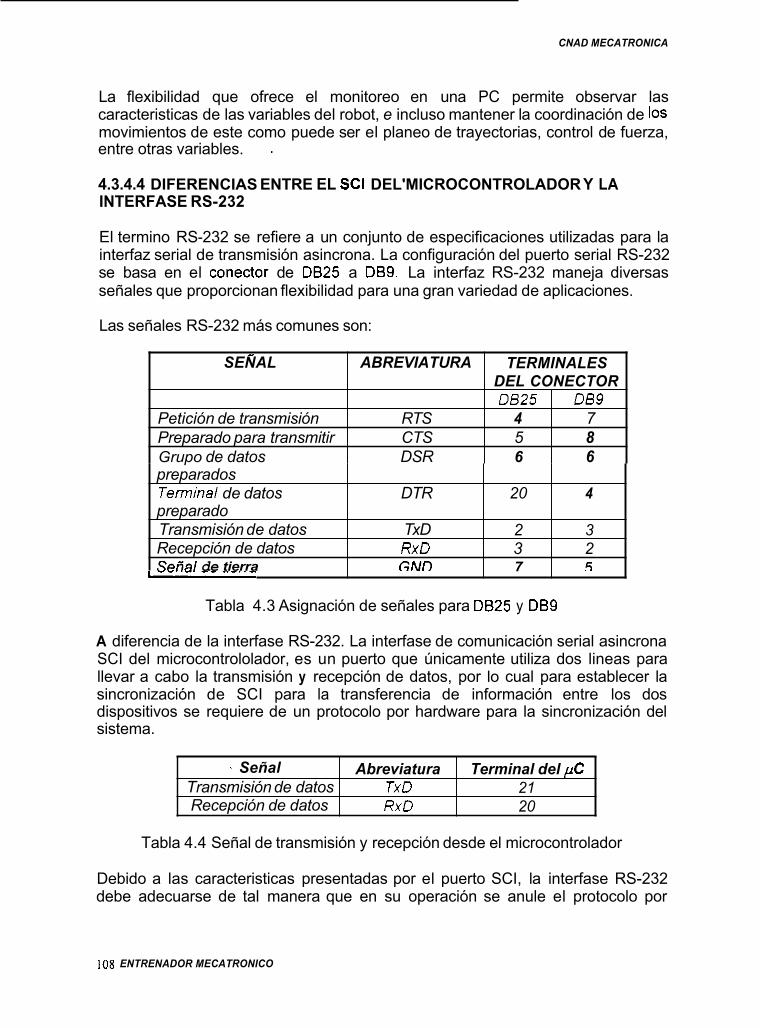
CNAD MECATRONICA
- SENAL ABREVIATURA
Petición de transmisión RTS Preparado para transmitir CTS Grupo de datos DSR
La flexibilidad que ofrece el monitoreo en una PC permite observar las caracteristicas de las variables del robot, e incluso mantener la coordinación de los movimientos de este como puede ser el planeo de trayectorias, control de fuerza, entre otras variables. I
4.3.4.4 DIFERENCIAS ENTRE EL SCI DEL'MICROCONTROLADOR Y LA INTERFASE RS-232
El termino RS-232 se refiere a un conjunto de especificaciones utilizadas para la interfaz serial de transmisión asincrona. La configuración del puerto serial RS-232 se basa en el conector de DE25 a DB9. La interfaz RS-232 maneja diversas señales que proporcionan flexibilidad para una gran variedad de aplicaciones.
Las señales RS-232 más comunes son:
TERMINALES DEL CONECTOR DE25 DE9
4 7 5 8 6 6
preparados Terminal de datos preparado Transmisión de datos
Señal de tierra Recepción de datos
DTR 20 4
Tx D 2 3 RxD 3 2 GNn 7 5
Tabla 4.3 Asignación de señales para DB25 y DB9
A diferencia de la interfase RS-232. La interfase de comunicación serial asincrona SCI del microcontrololador, es un puerto que únicamente utiliza dos lineas para llevar a cabo la transmisión y recepción de datos, por lo cual para establecer la sincronización de SCI para la transferencia de información entre los dos dispositivos se requiere de un protocolo por hardware para la sincronización del sistema.
' Señal Transmisión de datos Recepción de datos
Abreviatura Terminal del pC TxD 21 RxD 20
Tabla 4.4 Señal de transmisión y recepción desde el microcontrolador
Debido a las caracteristicas presentadas por el puerto SCI, la interfase RS-232 debe adecuarse de tal manera que en su operación se anule el protocolo por
108 ENTRENADOR MECATRONICO
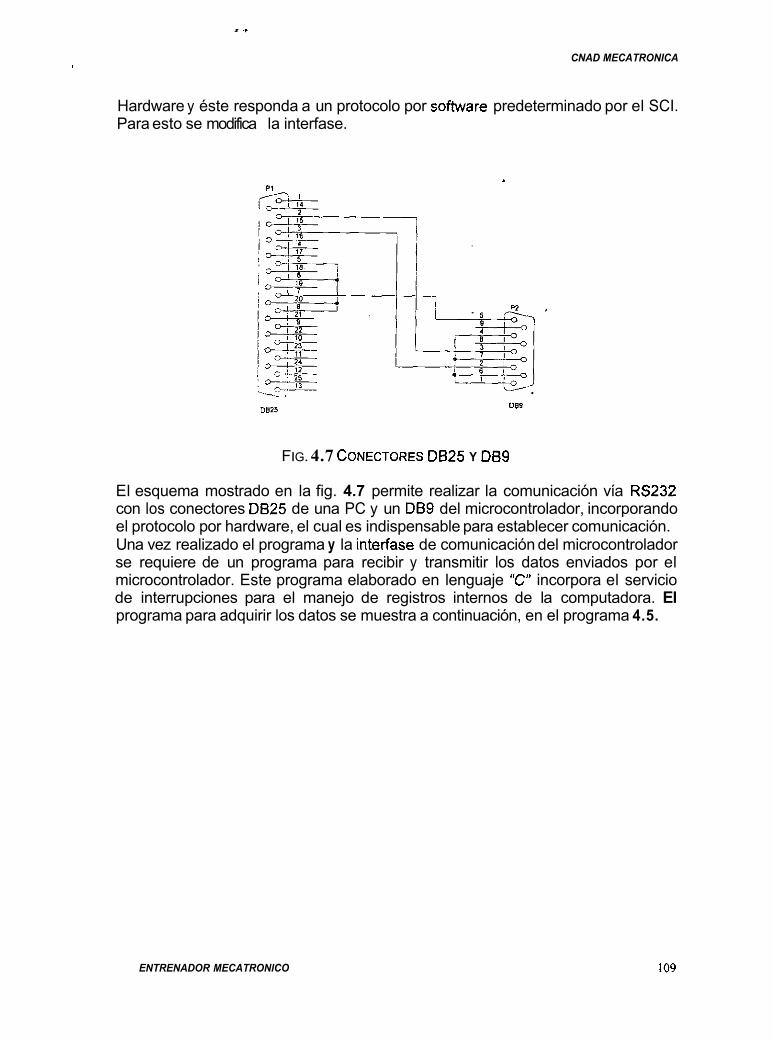
CNAD MECATRONICA
Hardware y éste responda a un protocolo por software predeterminado por el SCI. Para esto se modifica la interfase.
DB9 O825
FIG. 4.7 CONECTORES DE25 Y DE9
El esquema mostrado en la fig. 4.7 permite realizar la comunicación vía R S 2 3 2 con los conectores DE25 de una PC y un DB9 del microcontrolador, incorporando el protocolo por hardware, el cual es indispensable para establecer comunicación. Una vez realizado el programa y la intetfase de comunicación del microcontrolador se requiere de un programa para recibir y transmitir los datos enviados por el microcontrolador. Este programa elaborado en lenguaje ’%” incorpora el servicio de interrupciones para el manejo de registros internos de la computadora. El programa para adquirir los datos se muestra a continuación, en el programa 4.5.
ENTRENADOR MECATRONICO 109
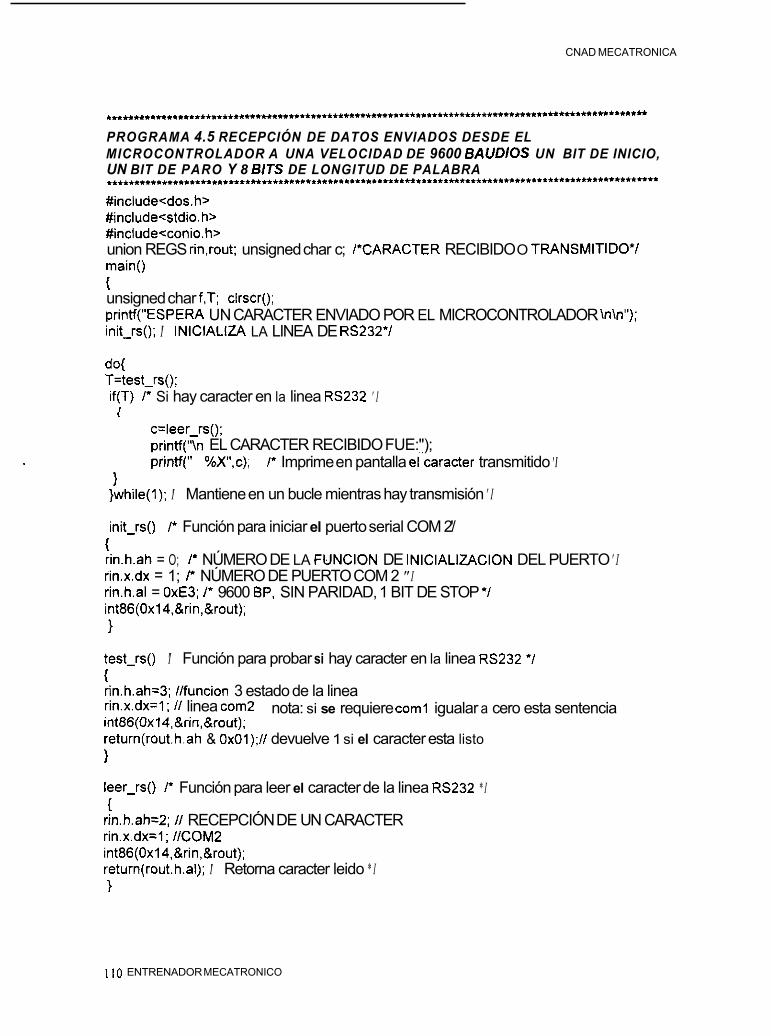
CNAD MECATRONICA
.t.ti)t****l*tt..tt*~**~**.tttt*.*~**~**.~.,*~.*~"**.*~****"*.****~***".*******~"ti)**~~**~~*~~ti)*~
PROGRAMA 4.5 RECEPCIÓN DE DATOS ENVIADOS DESDE EL MICROCONTROLADOR A UNA VELOCIDAD DE 9600 BAUDIOS UN BIT DE INICIO, UN BIT DE PARO Y 8 BITS DE LONGITUD DE PALABRA . t t t t t ~ t * * * l * * * * t * * t * t t l t * * ~ ~ ~ ~ ~ * ~ ~ ~ * ~ . ~ ~ . . ~ ~ ~ ~ ~ ~ * ~ ~ * * * ~ ~ ~ ~ * * * * . ~ ~ ~ . ~ ~ ~ ~ ~ ~ * ~ ~ * * ~ ~ * * ~ ~ ~ ~ * ~ ~ ~ ~ . ~ ~ . ~ ~ ~ ~ ~ . ~ ~
#includecdos.h> #include<stdio. h> #includecconio.h> union REGS rin,rout; unsigned char c; ITARACTER RECIBIDO O TRANSMITIDO'/ main() I unsigned char f,T; cirscr(); printf("ESPERA UN CARACTER ENVIADO POR EL MICROCONTROLADOR \n\n"); init-rs0; I' INICIALIZA LA LINEA DE RS232'1
do{ T=test-rs(); if(T) I* Si hay caracter en la linea RS232 ' I
c=leer-rs(); printí("\n EL CARACTER RECIBIDO FUE:"); printf(" %X",c); I* Imprime en pantalla el.caracter transmitido ' I
1 }while(l); I' Mantiene en un bucle mientras hay transmisión ' I
init-rs() /' Función para iniciar el puerto serial COM 2'/
rin.h.ah = O; I* NÚMERO DE LA FUNCION DE INlClALlZAClON DEL PUERTO ' I rin.x.dx = 1; P NÚMERO DE PUERTO COM 2 " I rin.h.al = OxE3; I* 9600 BP, SIN PARIDAD, 1 BIT DE STOP *I int86(0~14.&rin,&rout);
(
1
{ test-rs() I' Función para probar si hay caracter en la linea RS232 " I
rin.h.ah=3; IIfuncion 3 estado de la linea rin.x.dx=l; / I linea com2 int86(0~14.&rin,&rout); return(rout.h.ah & OxOI);// devuelve 1 si el caracter esta listo
nota: si se requiere coml igualar a cero esta sentencia
}
leer-rso I* Función para leer el caracter de la linea RS232 * I { rin.h.ah=2; / I RECEPCIÓN DE UN CARACTER rin.x.dx=l; IICOM2 int86(0~14,&rin,&rout); return(rout.h.al); I' Retorna caracter leido * I 1
110 ENTRENADOR MECATRONICO

CNAO MECATRONICA
Como se puede ver, las funciones del programa 4.5 permiten establecer la comunicación con el programa elaborado en lenguaje ensamblador. Con esta idea se pueden transferir o recibir desde la PC los datos de cada velocidad en cada eje, de tal manera que la PC sirve de enlace para programar al robot en lo que es mas fácil de hacer con una PC, permitiendo hacer con lenguaje ensamblador y el microcontrolador lo que es de mas bajo nivel, es decir, el contacto directo con la circuitería de control y medición de parámetros.
Un ejemplo del cálculo de trayectorias es el mostrado en el apéndice C en donde un manipulador de 3 DOF se puede manipular en sus ejes independientes, pero también es posible mover simultáneamente las 3 articulaciones para generar trayectorias en línea recta en los ejes cartesianos. Este proceso solo llego a programación con la visualización del robot en la PC, el siguiente paso es mandar esta información de manera organizada en paquetes al microcontrolador para generar trayectorias en lo que se le llama en robots industriales modo XYZ.
CALIBRACI~N Y AJUSTES
Para realizar la calibración es necesario realizarlo sin programa de carga, tomando en cuenta los siguientes puntos:
Nota: Todas Las mediciones de voltaje deben realizarse con multimetro digital
1 .- Con el interruptor en la posición de apagado desconecte las cargas de la fuente de alimentación y en el resistor R38, conecte un resistor en paralelo de 1.5 ohms a 25 waits. 2. - Encienda la fuente y conecte el multimetro , ajuste el preset hasta obtener 12 volts +- 5 Yo
3. - Circuito reforzador.- ajuste el control P I para obtener un voltaje de 9 volts mas menos 1 % en el resistor R3.
4.- Circuito muestrador y retenedor.- ajuste P4 y P3 hasta obtener un voltaje de cero volts a la salida de cada ic lf356.
5.- Circuito comparador de corriente .- ajuste P2 hasta obtener un voltaje de 4.8 volts +- % 1 En la terminal 3 del ic lm311.
ENTRENADOR MECATRONICO
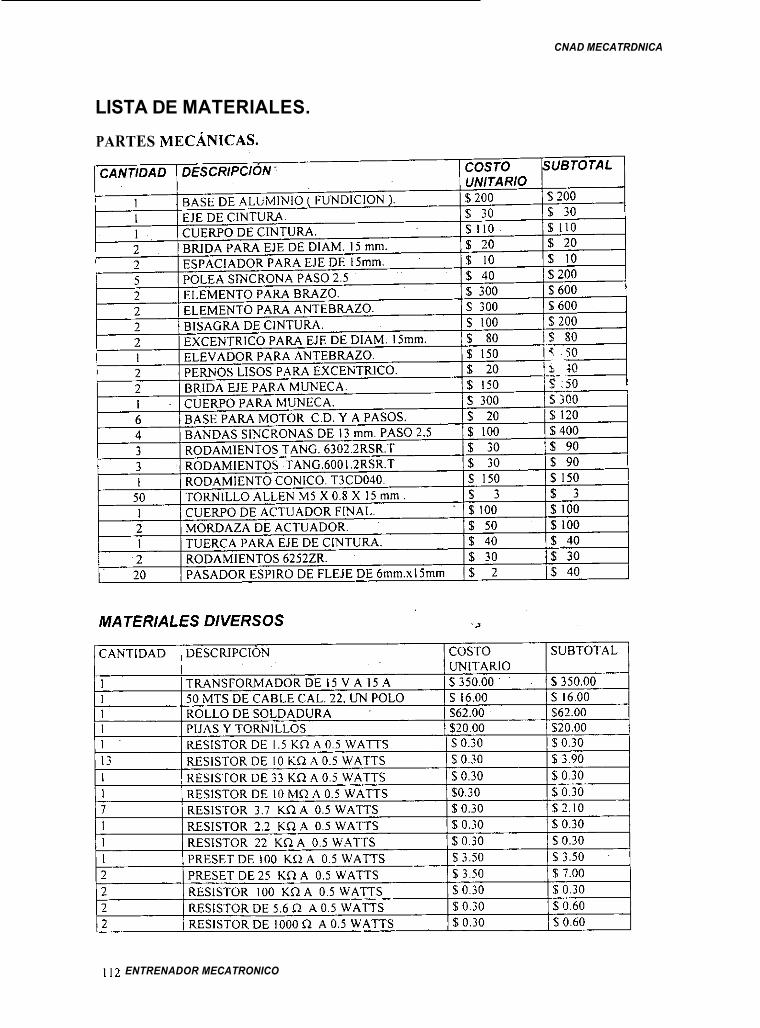
CNAD MECATRDNICA
LISTA DE MATERIALES.
PARTES MECANICAS.
112 ENTRENADOR MECATRONICO

>-"."--.a.
k
CNAD MECATRONlC 1
LISTA DE SEMiCONDUCTORES
ENTRENADOR MECATRONICO 1 I3
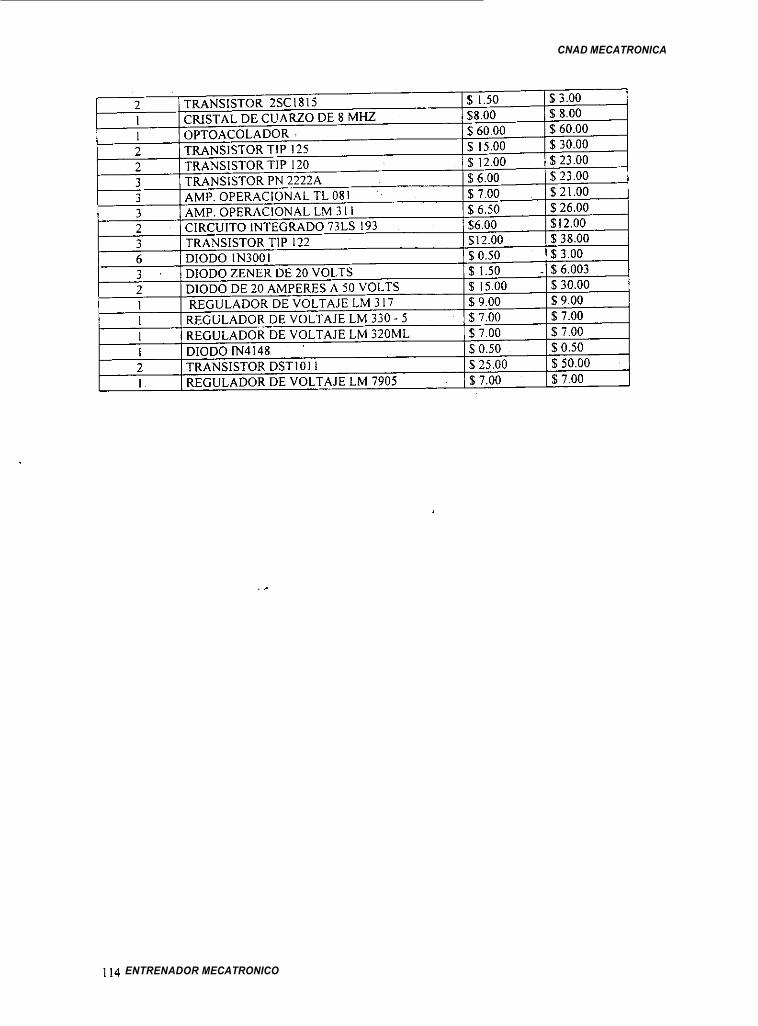
CNAD MECATRONICA
. ..
114 ENTRENADOR MECATRONICO
CNAD MECATRONICA
CONCLUSIONES
Este trabajo constituye el Punto de partida de futuros proyectos en el área de la robótica, fundamentalmente fue basado en un análisis del diseño de robots, como caracterizarlos, bajo que criterios se construyen, en base al conocimiento adquirido de uso y mantenimiento de robots industriales, como poder diseñar uno con características similares.
El tener un conocimiento teórico sin haberlo puesto en practica, ocasiona que el hombre piense, que domina ambos campos, y cuando se ponen en practica aparecen diversos aspectos técnicos que no han sido tomados en consideración, ocasionando que'el sistema no funcione del todo como se modelo.
El conjunto de información acumulada en las dos principales áreas (control electrónico y diseño mecánico ) permiten dar una visión mas profunda de como funcionan las máquinas mecatrónicas las cuales no son solo sistemas electromecánicos que tienen partes móviles y son controlados por secuencias simples, sino sistemas de alto grado de complejidad, con control mas inteligente mecanismos flexibles y de alto desempeño como su control electrónico.
El beneficio que otorga utilizar sistemas mecatrónicos radica en la necesidad o grado de complejidad que reclame la aplicación. Los robots del tipo industrial son el ejemplo mas justificable debido a que se requiere rapidez, precisión, buen terminado en el proceso a elaborar, etc.
La necesidad de utilizar robots cada vez mas en la industria, reclama el conocimiento mas profundo de como funcionan y como diseñarlos, para lo cual la tarea como docentes y/o investigadores es poner en práctica el conocimiento obtenido para que en un futuro se desarrolle tecnología mexicana propia, en mayor escala.
Es por tanto que a nivel pais existe un compromiso como docentes ylo investigadores en aplicar todos los conocimientos adquiridos, reiterando una vez mas que este trabajo representó una excelente oportunidad de descubrir que lo aprendido durante el curso de ingeniería mecatrónica tiene un impacto increíble en los cambios de actitud y se refleja en una constante inquietud por saber mas con el objetivo del bien común.
ENTRENADOR MECATRONJCO I I5
. . i~,. 7
. . .
CNAD MECATRONICA
BlBLlOGRAFlA
[I] Mark W. Spong M. Vidyasagar ROBOTS DYNAMICS AND CONTROL First Edition John Wiley ¿? Sons
[2]James L. Fuller ROBOTICS Introduction, programming and projects Second edition Prentice Hall
[3] William F. Riley Leroy D. Sturges DYNAMICS First Edition John wiley & sons, inc.
[4] Joseph Edward Shigley John Joseph Uicker, Jr. TEORIA DE MAQUINAS Y MECANISMOS Primera edición McGrawn-Hill
[SIThomas I , Floyd BASIC OPERATIONAL AMPLIFIERS AND LINEAR INTEGRATED CIRCUITS First Edition Merrill, an Imprint of Macmillan Publishing Company
[6] T. Kenjo and S. Nagamori
And Brushless DC Motors Fisrl Edition Oxforf science publications
m Britt Rorabaugh MECHANICAL DEVICES FOR THE ELECTRONICS EXPERIMENTER First Edition TAB Books Division of McGraw-Hill
I ' :e . . t . I .
PERMANENT-MAGNET
ENTRENADOR YECATRONICO 1 I7
CNAD MECATRONICA
[SIRonald j. Tocci SISTEMAS DIGITALES Principios y aplicaciones Prentice Hall
[SIC. Almonte y M. Gonzáles Tecnología aplicada en la capacitación de las máquinas Herramientas Segunda edición Editorial Razo y Aguilai
[ IO ] Frederick F. Driscoll Robert F. Coughlin Robert S. Villanucci DATA ADQUlSlTlON AND PROCESS CONTROL WITH THE MC68HC11 MICROCONTROLLER Prentice Hall
MANUALES
[A] MOTOROLA FAST AND LS TTL DATA Fifth Edition
[e] MOTOROLA POWER TRANSISTORS Fith Edition
[C] MOTOROLA SMALL SIGNAL BJT, FETS and DIODES Device Data Sixth Edition
[DI NATIONAL Semiconductor Linear Aplication Specific IC's Databook
[E] MOTOROLA Reference Manual 68HC11
[F] INTEL Periferical Devices and memory data
[GI NSK RODAMIENTOS Catalogos de rodamientos NSK
118 ENTRENADOR MECATRONICO
CNAD HECATRONICA
APENDICE A DIBUJOS DEL ROBOT
ENTRENADOR MECATRONICO i I9
~
, . , , j 2 . i "
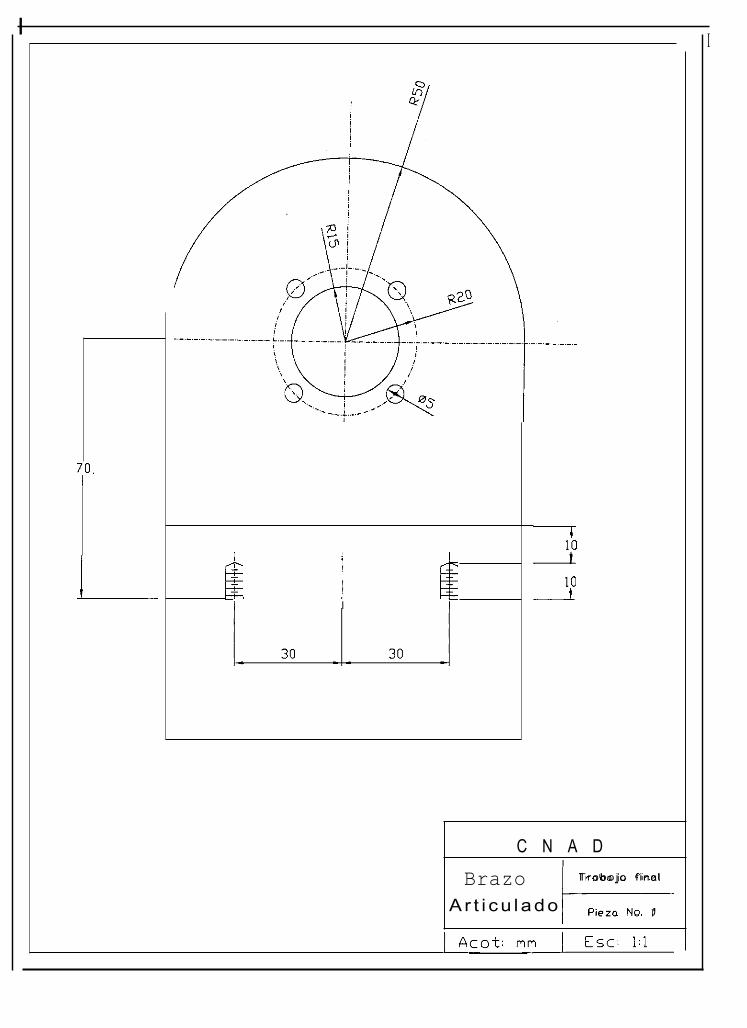
I I
70. I
I !
! !
I I I
I 'p I
IO 2
C N A D I
T r o b o j o f inal I Brazo A r t i c u l a d o NO, ,
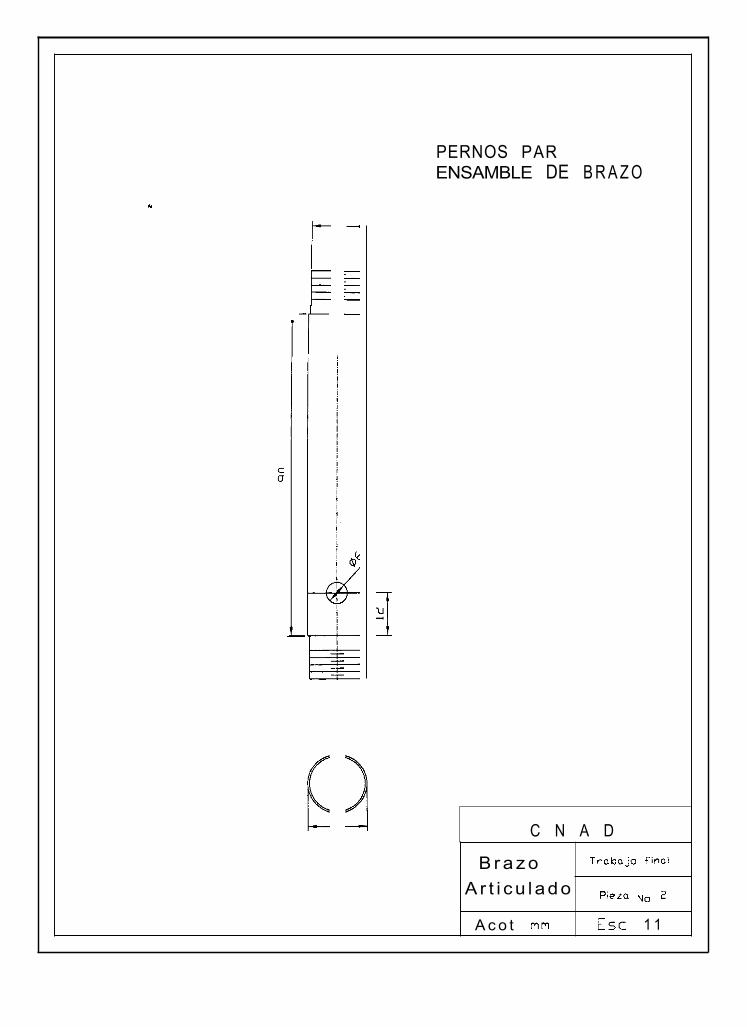
t-
B r a z o A r t i c u l a d o
A c o t nn
I E
T r a b a j o finai
NO
Esc 1 1
PERNOS PAR ENSAMBLE DE B R A Z O
C N A D
. . . .. . . ~ . . ...- .,... ~ -. .
. . .. . . .. .. .
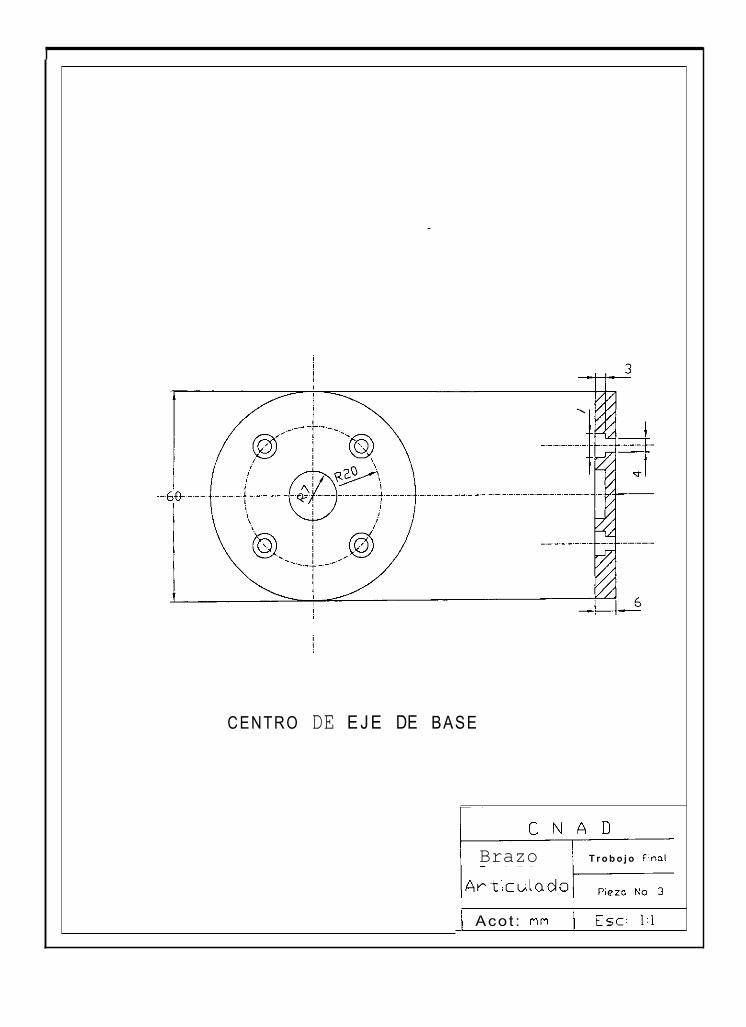
CENTRO DE E J E DE BASE
Brazo T r o b o j o final
1 Esc: 111 1 Aco t : m n
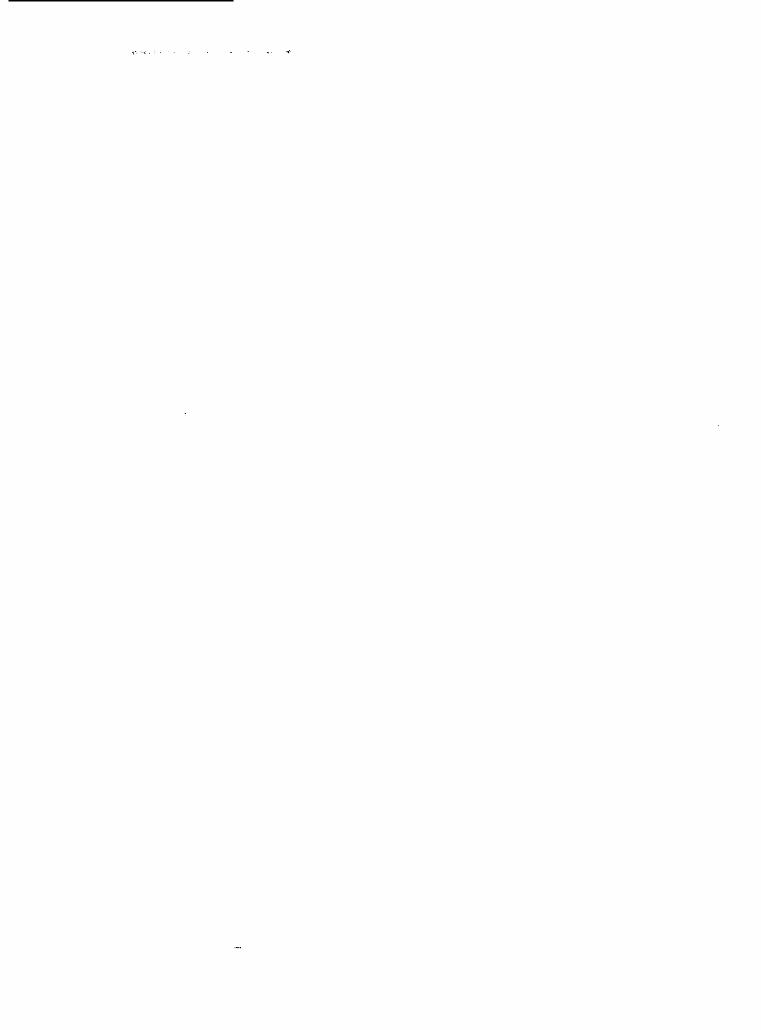
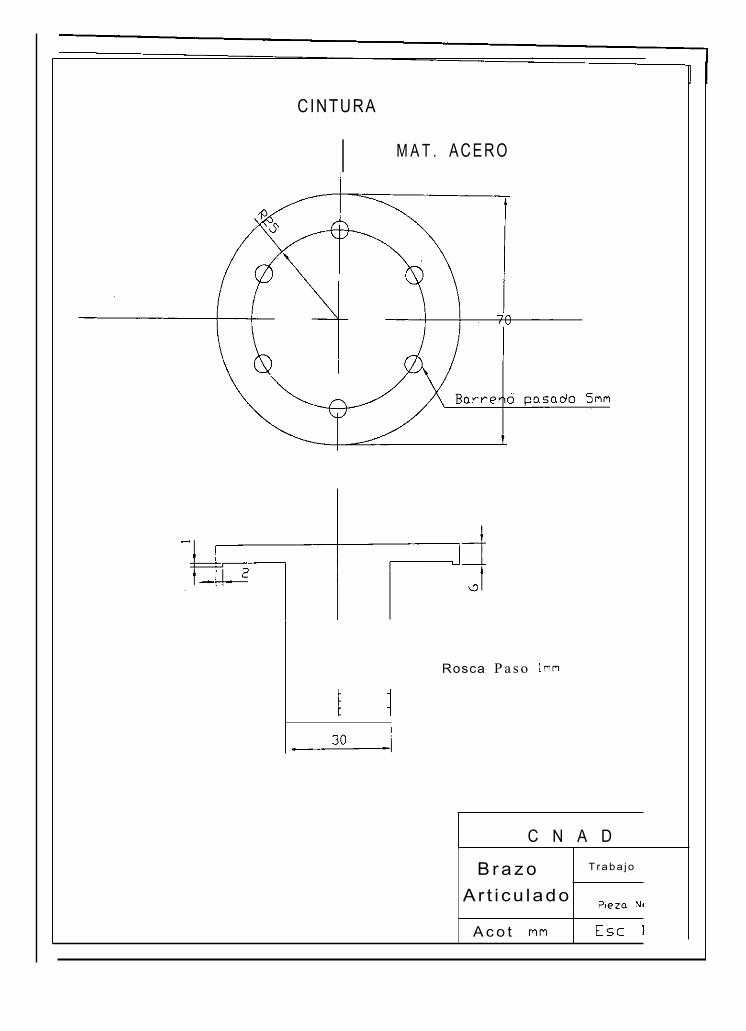
I CINTURA
I M A T . A C E R O
B r a z o A r t i cu lado
A c o t m n
a/--- Rosca P a s o Inn
T raba jo
Pieza Ni
Esc 1
- C N A D

~
,. .. . . . - ..
BASE DE CINTURA
B r a z o Ar t i cu lado
A c o t n m
O O
l r o b a j o Final
NO
E s c i i
75
C N A D I
. ... . .. . . . . ..~. . .
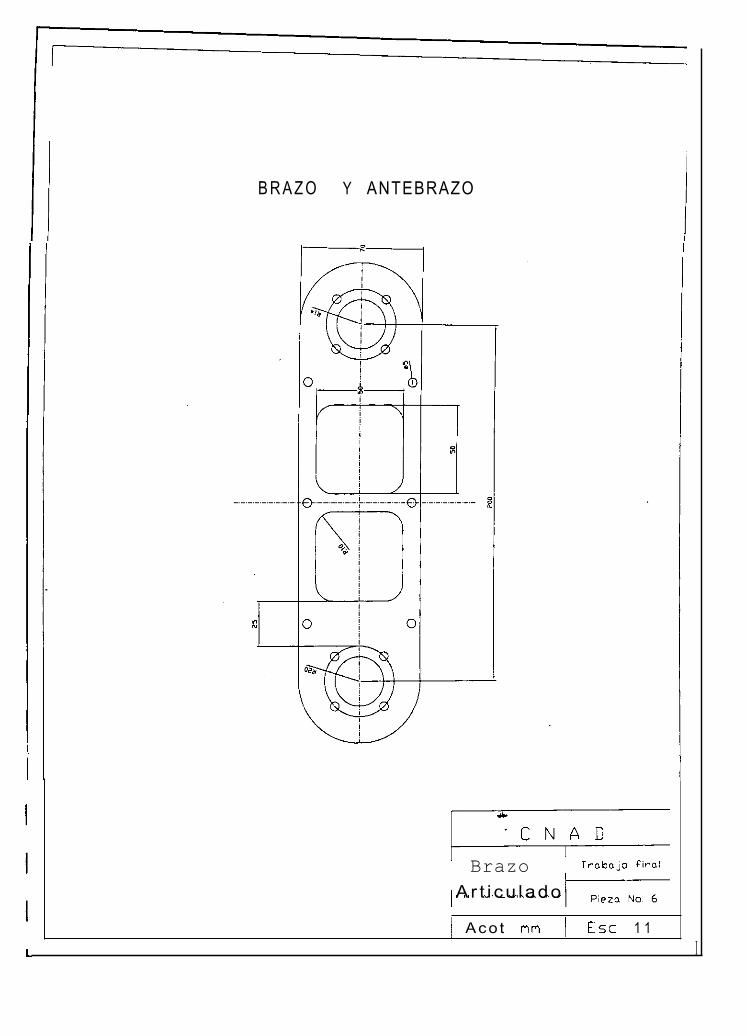
B R A Z O Y ANTEBRAZO
Troba jo fino1 Brazo Ar t i cu lado
1 Aco t mm 1 Esc 1 1 I

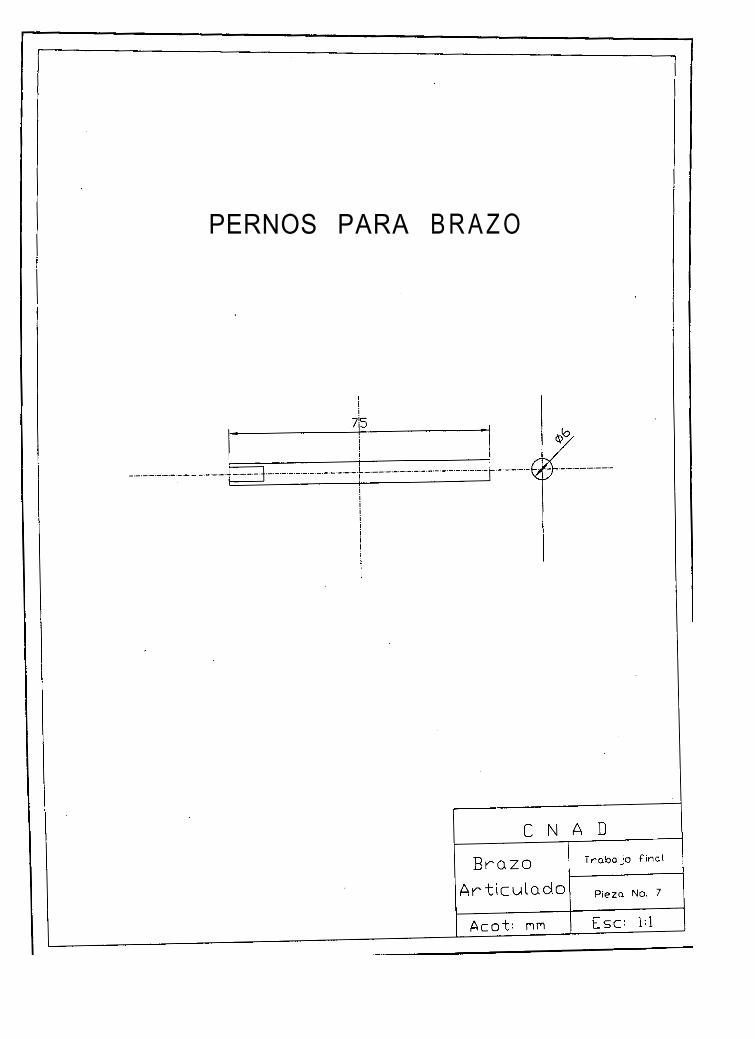
PERNOS PARA B R A Z O
. .. . . .. ... . . .. . .

I -0-
I . I
A\
't - 3 c,- - -
I
.l a 3
z u w .a u A m T (n z w w P
Y (n Q m
r -


O n N \I a c
n rY m r
_I
W
a CY a a W v) Q m
CNAD MECATRONICA
APENDICE B PROGRAMAS DE CNC
120 ENTRENADOR MECATRONICO

. . . . . . .\ . . .

PROGRAMA PARA FABRICAR ANTEBRAZO G05:Start of File M03&indle ON M06TOl;TOOLCHANGE TO TOOL #O1 s900.00 GOZ0.700 GOX85.0000Y13.1500 GOZ0.0050 G 12-2. OOOOF20. O G 1 XI 20.0000F50.0 G3X126.8500Y20.0000l0.0000J6.8500 G I Y50.0000
GlX85.0000
GIY20.0000 G3X85.0000YI 3.150016.8500J0.0000 GOZ0.700
G3X12O.OOOOY56.85001-6.85OOJO.0000
G3X78.1500Y50.000010.0000J-6.8500
GOZ-1.9950 GI 2-3.5OOOF20.0 G1X120.0000F50.0 G3X126.8500Y20.000010.0000J6.8500 G I Y50.0000
GI X85.0000
GIY20.0000 G3X85.0000Y13.150016.8500J0.0000 GOZ0.700
G3X12O.OOOOY56.85001-6.85OOJO.0000
G3X78.1500Y50.000010.0000J-6.8500
GOZ-3.4950 GIZ-5.0000F20.0 GlXl2O.OOOOF5O.O G3X126.8500Y20.000010.0000J6.8500 GlY50.0000
GlX85.0000
GIY20.0000 G3X85.0000Y13.150016.8500J0.0000 GOZ0.700 GOZ-4.9950 GI Z-6.5OOOF20.0 GlXl2O.OOOOF5O.O G3X126.8500Y20.000010.0000J6.8500
G3X12O.OOOOY56.85001-6.85OOJO.0000
G3X78.1500Y50.000010.0000J-6.8500
GlY50.0000 G3X12O.OOOOY56.85001-6.85OOJO.0000 G 1 X85.0000
GIY20.0000 G3X85.0000Y13.150016.8500J0.0000 GOZ0.700
G3X78.15OOY5O.OOOOlO.OOOOJ-6.8500

5900.00 G0X143.1500Y50.0000 GOZ0.0050
G I Y20.0000F50.0 G3X150.0000Y13.150016.8500J0.0000 GlX185.0000 G3X191.8500Y20.0000l0.0000J6.8500
GIZ-2.OOOOF20.0
GlY50.0000 G3X185.OOOOY56.85001-6.85OOJO.000~ GlXl50.0000
GOZ0.700 G3X143.1500Y50.000010.0000J-6.8500
GOZ-1.9950 GI 2-3.5OOOF20.0 G1Y20.0000F50.0 G3X150.0000Y13.150016.8500J0.0000 GlX185.0000 G3X191.8500Y20.000010.0000J6.8500 G I Y50.0000
GI X I 50.0000
GOZ0.700
G3X185.OOOOY56.85001-6.85OOJO.0000
G3X143.1500Y50.000010.0000J-6.8500
GOZ-3.4950 G 1 Z-5.OOOOF20.0 G1Y20.0000F50.0 G3X150.0000Y13.150016.8500J0.0000 GlX185.0000 G3X191.8500Y20.000010.0000J6.8500 GlY50.0000
GIXI 50.0000 G3X143.1500Y50.000010.0000J-6.8500 GOZO. 700
G3X185.OOOOY56.85001-6.85OOJO.0000
GOZ-4.9950 GIZ-6.5000F20.O GI Y20.0000F50.0 G3X150.0000Y13.150016.8500J0.0000 GIXI 85.0000 G3X191.8500Y20.000010.0000J6.8500 GlY50.0000
G 1 X? 50.0000 G3X185.OOOOY56.85001-6.85OOJO.0000
G3X143.1500Y50.000010.0000J-6,8500 GOZ0.700 s900.00 GOX237.8530Y35.0000 GOZ0.0050 GI Z-2.OOOOF20.0 GZX232.14701-2.853OJO.OOOOF5O.O

GlX45.8530
X45.8530110.8530J0.0000 GOZ0.700 GOX36.4120
G2X24.14701-10.8530J0.0000
GOZ-0.4950 G 1Z-2.OOOOF20.0 G2X33.58801-1.412OJO.OOOOF5O.O X36.412011.4120J0.0000 GlX39.5590
X39.559014.559OJO.0000 G1 X42.7060
X42.706017.7060J0.0000 GlX45.8530
X45.8530110.8530J0.0000 GOZ0.700 GOX36.4120
G2X30.44101-4.559OJO.0000
G2X27.29401-7.7060J0,OOOO
G2X24.14701-10.853OJO.0000
GOZ-1.9950 G1Z-3.5OOOF20.0 G2X33.58801-1.412OJO.OOOOF5O.O X36.412011.4120J0.0000 GlX39.5590 G2X30.44101-4.5590J0.0000 X39.559014.5590JO. O000 GlX42.7060
X42.706017.7060J0.0000 G 1 X45.8530
X45.8530110.8530J0.0000 GOZ0.700 GOX36.4120
G2X27.29401-7.7060JO.0000
G2X24.14701-10.853OJO.0000
GOZ-3.4950 G1 Z-5.OOOOF20.0 G2X33.58801-1.412OJO.OOOOF5O.O X36.412011.4120J0.0000 GlX39.5590 G2X30.44101-4.5590J0.0000 X39.559014.559OJO.0000 GlX42.7060
X42.706017.7060J0.0000 G2X27.29401-7.7060JO.0000
GlX45.8530 G2X24.14701-10.853OJO.0000 X45.8530110.8530J0.0000 GOZ0.700 M06T01 ;TOOLCHANGE TO TOOL #O1 S1500.00

~ ~ 3 7 . 8 5 3 0 1 2 . 8 5 3 0 J ~ . ~ ~ ~ ~ GQZQ.700 GOZ-1.9950 GIZ-3.5000F20.0 ~ ~ ~ ~ . ~ ~ 7 0 1 - 2 . 8 5 3 O J O . 0 0 0 0 ~ ~ ~ . ~ X237.853012.853OJO.000~ GOZ0.700 GOZ-3.4950
X232.14701-2.853OJO.OOOOF5O.O X237.853012.853OJO.0000 GOZ0.700
G I Z-5.OOOOF20.0
GOZ-4.9950 G1 Z-6.5OOOF20.0 X232.14701-2.853OJO.OOOOF5O.O X237.853012.853OJO.0000 GOZ0.700 s900.00 GOX38.0530 GOZ0.0050 G I Z-2.OOOOF20.0 G2X31.94701-3.0530J0.0000F50.0 X38.053013.0530J0.0000 GOZ0.700 GOZ-1.9950 GIZ-3.5000F20.0 X31.94701-3.0530J0.0000F50.0 X38.053013.0530J0.0000 GOZ0.0700 602-3.4950 G I 2-5.OOOOF20.0 X31.94701-3.0530J0.0000F50.0 X38.053013.0530J0.0000 GOZ0.700 GOZ-4.9950 G 1 Z-6.5OOOF20. O X31.94701-3.0530J0.0000F50.0 X38.053013.0530J0.0000 GOZ0.700 s900.00 GOX36.4120 GOZ0.0050 G 1 Z-O. 5000F20. O G2X33.58801-1.412OJO.OOOOF5O.O X36.412011.4120J0.0000 G 1X39.5590
X39.559014.559OJO.0000 G 1 X42.7060
X42.706017.7060J0.0000
G2X30.44101-4.559OJO.0000
G2X27.29401-7.7060JO.0000
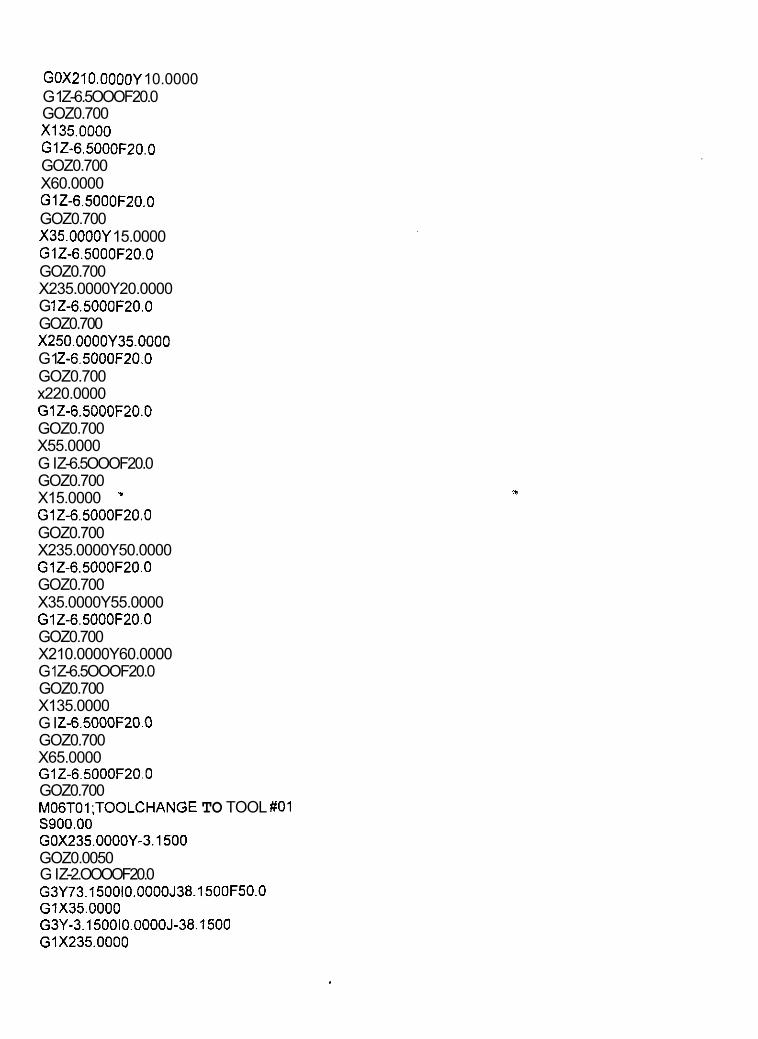
GOX210.0000Y 10.0000 G 1 Z-6.5OOOF20.0 GOZ0.700 X135.0000 GIZ-6.5000F20.0 GOZ0.700 X60.0000 GIZ-6.5000F20.0 GOZ0.700 X35.0000Y 15.0000
GOZ0.700 X235.0000Y20.0000
GOZ0.700 X250.0000Y35.0000 G 1 Z-6.5OOOF20.0 GOZ0.700 x220.0000 GIZ-6.5000F20.0 GOZ0.700 X55.0000
GOZ0.700 X15.0000
GOZ0.700 X235.0000Y50.0000
GOZ0.700 X35.0000Y55.0000
GOZ0.700 X210.0000Y60.0000
GOZ0.700 X135.0000
GOZ0.700 X65.0000
GOZ0.700 M06TOl;TOOLCHANGE TO TOOL #O1 s900.00 GOX235.0000Y-3.1500 GOZ0.0050 G I Z-2.OOOOF20.0 G3Y73.150010.0000J38.15OOF50.0 GlX35.0000
GlX235.0000
GIZ-6.5000F20.0
G 1Z-6.5OOOF20.0
G I Z-6.5OOOF20.0
GIZ-6.5000F20.0
G1Z-6.5000F20.0
GIZ-6.5000F20.O
G 1 Z-6.5OOOF20.0
G I 2-6.5OOOF20.0
GIZ-6.5000F20.0
G3Y-3.15OOlO.OOOOJ-36.1500
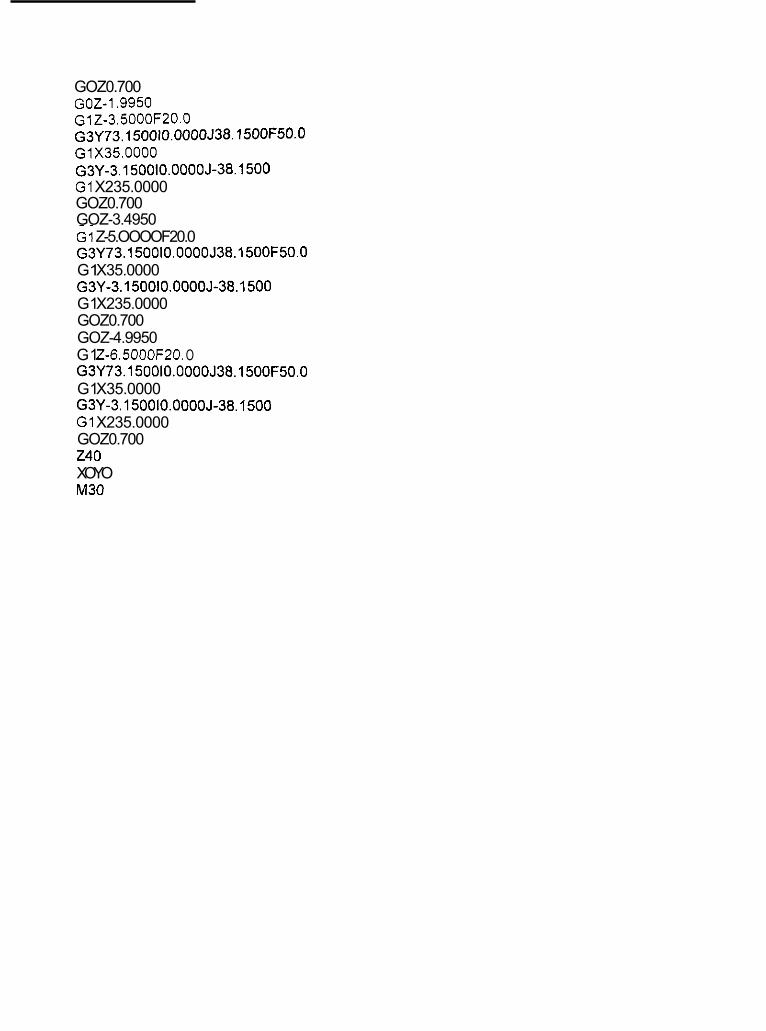
GOZ0.700 GOZ-1.9950 G1Z-3.5000F20.0 G3Y73.150010.0000J38.15OOF50.0 GlX35.0000
G1 X235.0000 GOZ0.700 GOZ-3.4950
G3Y-3.15001O.OOOOJ-38.1500
_._ ~
G1 Z-5.OOOOF20.0 G3Y73.1500l0.0000J38.1500F50.0 G 1 X35.0000
G 1 X235.0000 GOZ0.700
G3Y-3.15001O.OOOOJ-38.1500
GOZ-4.9950 G 1 Z-6.5OOOF20. O G3Y73.150010.0000J38.1500F50.0 G 1 X35.0000
G1 X235.0000 GOZ0.700 240 XOYO PA30
G3Y-3.150010.0000J-38,1500

PROGRAMA PARA FABRICAR CODO
G05;Start of File M03;Spindle ON M06TOl;TOOLCHANGE TO TOOL #O1 s1000.00 GOZ1.OOOO GOX78.1500Y50.0000 GOZ0.0050
GlY20.0000F40.0 G3X85.0000Y13.150016.8500J0.0000 GlX145.0000 G3X151.85OOY20.000010.0000J6.8500 GlY50.0000
G1 X85.0000
GOZl .O000
G1 Z-2.OOOOF15.0
G3X145.0000Y56.85001-6.8500JO.0000
G3X78.1500Y50.000010.0000J-6.8500
GOZ-1.9950 G1Z-3.5000F15.0 G1 Y20.0000F40.0 G3X85.0000Y13.150016.8500JO.0000 G1 X145.0000 G3X151.8500Y20.000010.0000J6.8500 GlY50.0000
GlX85.0000
GOZl .O000
G3X145.0000Y56.85001-6.8500JO.0000
G3X78.1500Y50.000010.0000J-6.8500
(302-3.4950 G1Z-5.0000F15.0 G1Y20.0000F40.0 G3X85.0000Y13.150016.8500J0.0000 GlX145.0000 G3X151.8500Y20.000010.0000J6.8500 G1 Y50.0000
G 1 X85.0000
GO21 .O000
G3X145.0000Y56.85001-6.8500JO.0000
G3X78.1500Y50.000010.0000J-6.8500
GOZ-4.9950 G1Z-6.5000F15.0 G1Y20.0000F40.0 G3X85.0000Y 13.150016.8500J0.0000 GlX145.0000 G3X151.8500Y20.000010.0000J6.8500 G1 Y50.0000 G3X145.0000Y56.85001-6.8500JO.0000 G1 X85.000O G3X78.1500Y50.000010.0000J-6.8500
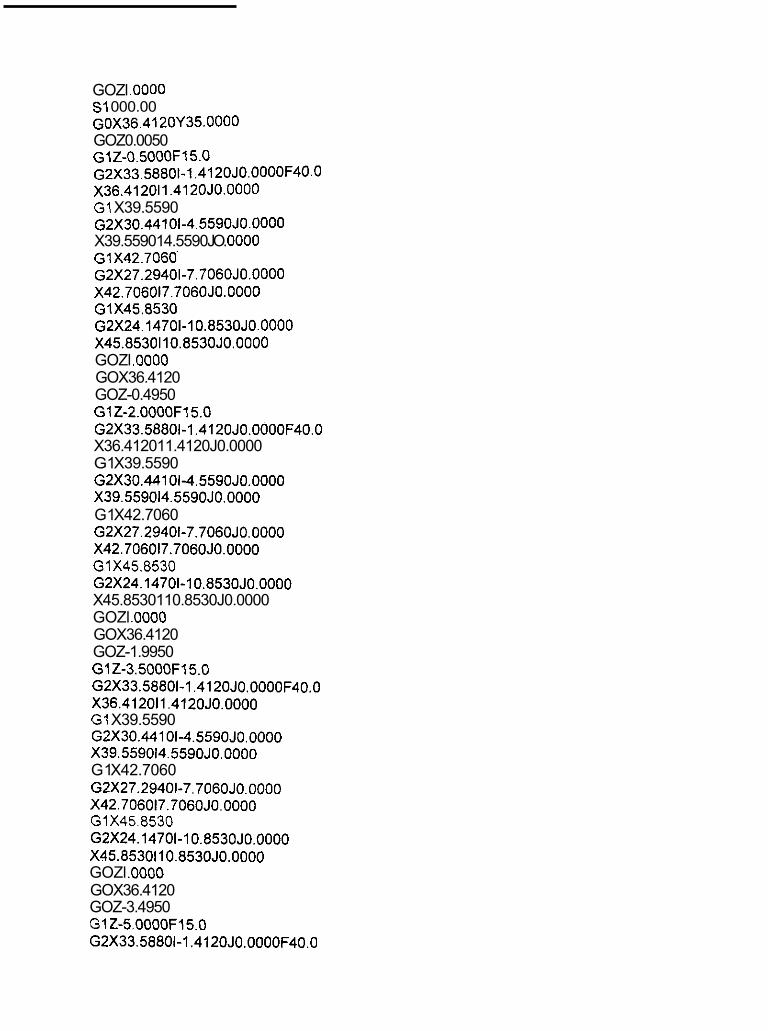
GOZl .O000 SI 000.00 GOX36.4120Y35.0000 GOZ0.0050
G2X33.58801-1.412OJO.OOOOF4O.O G I Z-0.5OOOF15.O
X36.412011.4120J0.0000 G I X39.5590
X39.559014.5590 JO. O000 GlX42.7060
X42.706017.7060J0.0000 GlX45.8530
X45.8530l10.8530J0.0000 GOZl .O000 GOX36.4120
G2X30.44lOI-4.5590JO.OOOO
G2X27.29401-7.7060JO.0000
G2X24.14701-10.853OJO.0000
GOZ-0.4950 G I Z-2.OOOOF15.0 G2X33.58801-1.412OJO.OOOOF4O.O X36.412011.4120J0.0000 G 1 X39.5590 G2X30.44101-4.5590J0.0000 X39.559014.559OJO.0000 G 1 X42.7060
X42.706017.7060J0.0000 GlX45.0530
X45.8530110.8530J0.0000 GOZl .O000 GOX36.4120
G2X27.29401-7.7060JO.0000
G2X24.14701-10.853OJO.0000
GOZ-1.9950 GIZ-3.5000F15.0 G2X33.58801-1.412OJO.OOOOF4O.O X36.4120l1.4120J0.0000 G1 X39.5590
X39.559014.559OJO.0000 G 1 X42.7060
X42.706017.7060J0.0000 GlX45.8530
G2X30.44101-4.559OJO.0000
G2X27.29401-7.7060JO.0000
G2X24.14701-10.853OJO.0000 X45.8530110.8530J0.0000 GOZl .O000 GOX36.4120 GOZ-3.4950 G1 Z-5.OOOOF15.0 G2X33.58801-1.412OJO.OOOOF4O.O
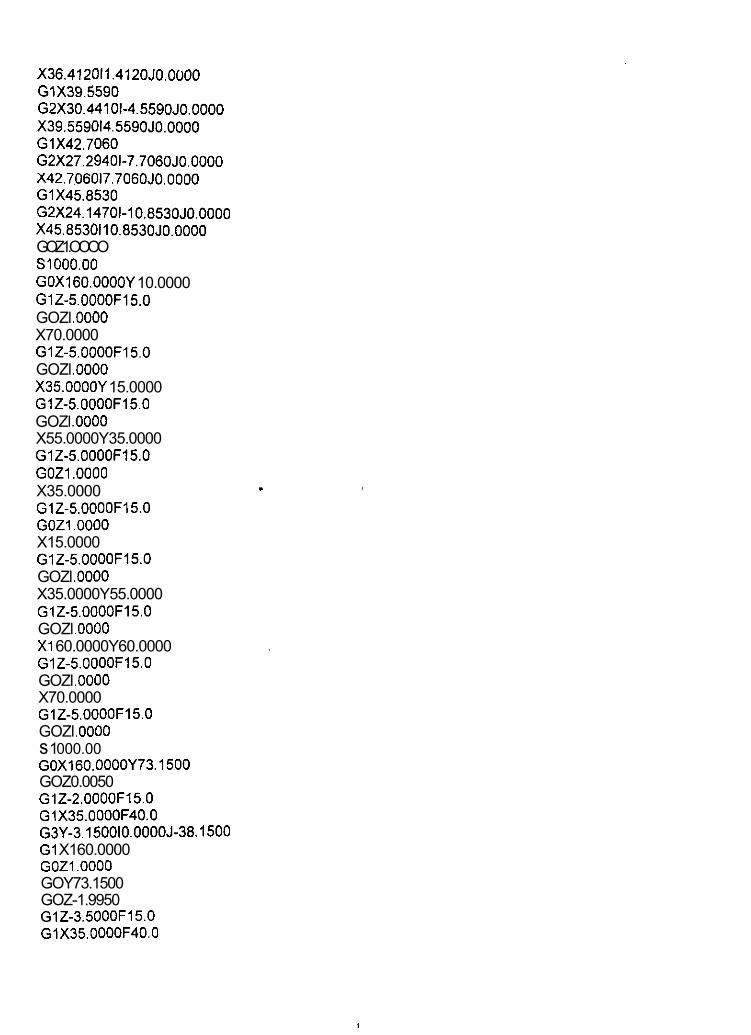
X36.412011.4120J0.0000 GlX39.5590
X39.559014.559OJO.0000 GlX42.7060
X42.7.06017.7060J0.0000 GlX45.8530
X45.8530110.8530J0.0000 GOZ1.OOOO s1000.00 GOXI 60.0000Y 10.0000 G1Z-5.0000F15.0 GOZl .O000 X70.0000
GOZl .O000 X35.000OY 15.0000
GOZl .O000 X55.0000Y35.0000
GO21 .O000 X35.0000
GO21 .O000 X15.0000
GOZl .O000 X35.0000Y55.0000
GOZl .O000 XI 60.0000Y60.0000
GOZl .O000 X70.0000 G1Z-5.0000F15.0 GOZl .O000 s 1 000.00 GOX160.0000Y73.1500 GOZ0.0050
G1X35.0000F40.0
G1 X160.0000 GO21 .O000 GOY73.1500
G2X30.44101-4.559OJO.0000
G2X27.29401-7.7060J0,OOOO
G2X24.14701-10.853OJO.0000
G1Z-5.OOOOFl5.0
G1Z-5.OOOOFl5.0
G1 Z-5.OOOOF15.0
G1Z-5.0000F15.0
G1 Z-5.OOOOF15.0
G1Z-5.0000F15.0
G1Z-5.0000F15.0
G1Z-2.0000F15.0
G3Y-3.150010.0000J-38.1500
GOZ-1.9950 G1Z-3.5000F15.0 G1X35.0000F40.0
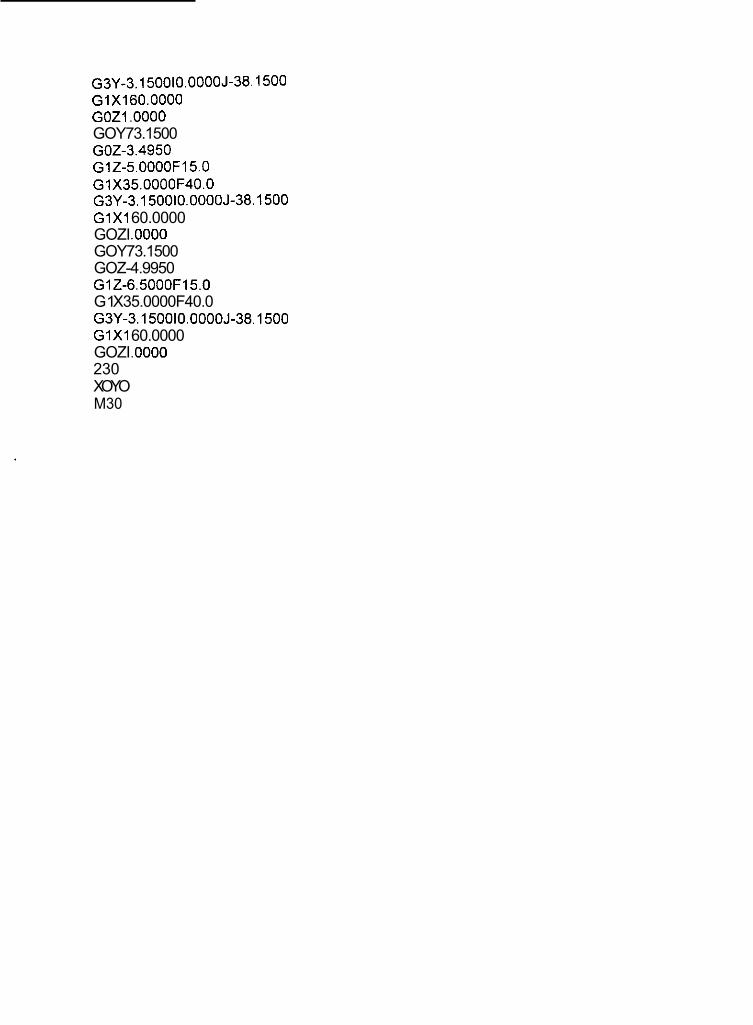
G3Y-3.15001O.OOOOJ-38. I500 GlX160.0000 GO21 .O000 GOY73.1500 (302-3.4950 GIZ-5.0000F15.0
G3Y-3.15001O.OOOOJ-38.1500 G1X35.0000F40.0
G I X I 60.0000 GOZI .O000 GOY73.1500 GOZ-4.9950 GIZ-6.5000F15.0 G 1 X35.0000F40.0
G I X I 60.0000 GOZI .O000 230 XOYO M30
G3Y-3.15001O.OOOOJ-38,1500
-
CNAD MECATRONICA
APENDICE C PROGRAMAS DEINTERPOLACION
ENTRENADOR MECATRONlCO 121


PROGRAMA DE INTERPOLACIÓN DE TRAYECTORIAS PARA UN ROBOT PLANAR DE 3 DOF
#include <graphics.h> #include <stdlib.h> #include <stdio.h> #include <conio.h> #include <math.h> #define pi 3.1415926
unsigned int basex, basey,al, a2,tecla; double alfa, tetal, teta2, teta3, end, D,C, r,xl, yl,x2,yZ,E, F,G, yo,xo;
int main (void) (
/ * request auto detection * / int gdriver = DETECT, gmode, errorsode;
/ * initialize graphics and local variables * / initgraph (&gdriver, Qgmode, "c: \\tc\\bgi") ;'
/ * read result of initialization * / errorcode = graphresult();, / * an error occurred * / if (errorcode ! = gr0k) (
printf("Graphics error: %s\n", grapherrormsg(errorcode)l; printf("Press any key to halt:"); getch í 1 ; exit (11 ;
setcolor(getmaxcolor~1~;
al=lOO;a2=80,end=35; teta3=-pi/2; xo=70;yo=55.3; base(100,lOO); do {
r=sqrt (pow(xo,2) tpow(yo,2) 1; C= (pow (r, 2) -pow (ai, 2 ) -pow (a2,2) I / (Z*al*aZ) ; tetaZ=acos ( C l ; E=atan(yo/xol ; F=aZ*sin(tetaZ); G=al+aZ*cos (teta2) ; tetal=Etatan(F/Gl; alfa=tetal-teta2; xl=cos (teta11 ; yl=sin (tetal) ; x2=cos (teta21 ; y2=sin(tetaZi ; setcolor(l5) ;

. . brazo(100; 100)"; ' , . l . ~ . ' I i ,>.. . tecla=getch ( 1 ; if ( !tecla) ( tecia=getch í ) ; switch(tec1a) { case 7 2 : yo++;break; case 80: yo--;break; case 7 7 : xo++;break; case 75: xo--;break; case 73: teta3=teta3tpi/180; case 81: teta3=teta3-pi/180; default: break;
setcolor (O) ; brazo(100,lOO) ; 1
1
1while(tecla!=27);
/ * clean up * / closegraph ( I ;
return O; )
brazofint x,int y) { int Rx, Ry, xasp, yasp;
basex = xt128; basey = y+177;
//lineibasex, b a s e y , b a ' s e x t a l * x l , b a s e v - a l * y l i ; line(basex+al*xl,basey-al*yl,basextal*xl+a2*cos~alfa),basey-al*yl-
aZ'sin(a1fa) ) ;
arc (xt128, y+177,90+teta1+180/pi, 2jO+teta1+180/pi, 16) ; circle (x+128, y+177,14) ; circle(basex+al*xl,basey-al*yl,l2);
circle~basextal*xlta2tcos~alfal,basey-al~yl-a2~sin(alfa),lO); a r c ( b a s e x + a l * x l t a 2 * c o s ( a l f a ) , b a s e y - a l + y l -
. a r c ~ b a s e x + a l * x l , b a s e y - a l ' y l , 2 7 0 t t e t a l * l ~ O / p i , 3 O t t e t a l * l ~ O / p i , l ~ ) ;
a2'sin(alfa),270+alfa*l8O/pi,9Otalfa*lEO/pi,l2);
line~basex-16*cos~pi/2-tetal~,basey-l6*sin~pi/2-tetall,basextal+xl-l4~cos(pi/2-
line~basex+l7*cosipi/2-tetal),basey+l6*sin~pi/2-tetal~,basex+al*xltl4+cos~pi/Z- t e t a l ) , b a s e y - a l * y l - l 4 C s i n ( p i / Z - t e t a l ) ) ;
tetal),basey-al*yl+l4*sin(pi/2-tetal)); //arc (xt279, y+134,270,90,i6) ;
//line(xti48,yt150,x+271,ytl50]; I
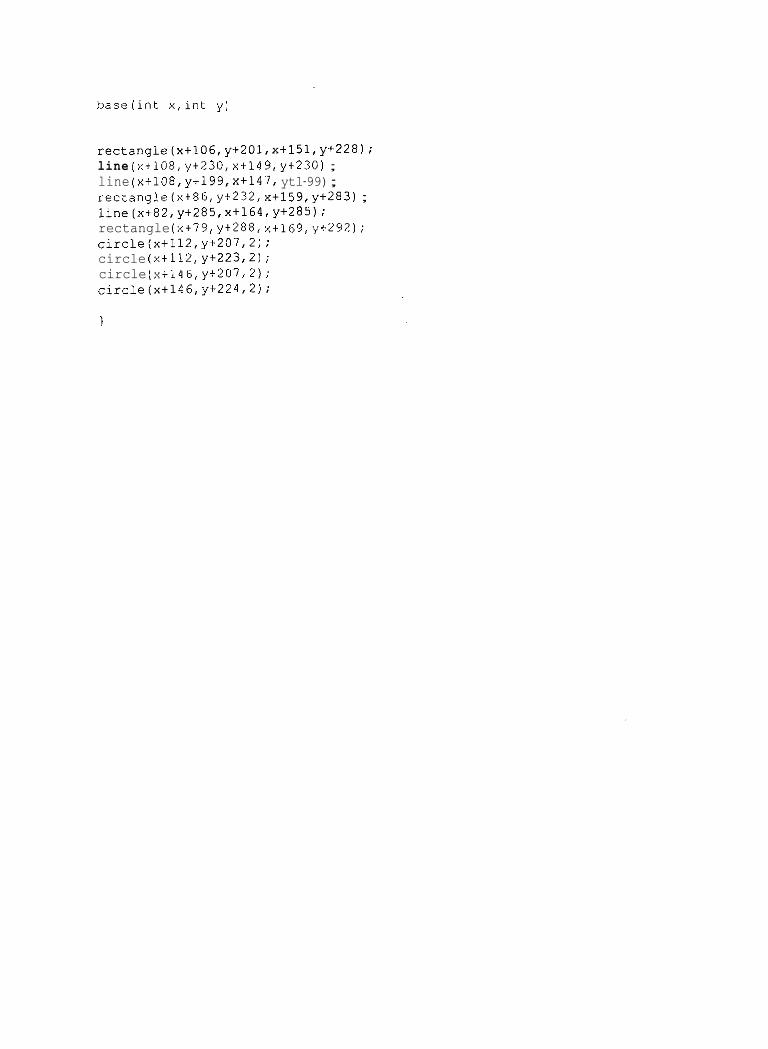
baseiint x,int y1
rectangle(xt106,yt20l,xtl5l,y+228); line (xtiO8, yt230, x+149, yt230) ; line (x+108,yt199,xt147, ytl-99) ; rectangle(xt86,yt232, x+159,yt283) ; line(xt82,y+285,~+164,y+285); rectangle (xt79, yt288, x+169, yt292) ; circle(x+112,y+207,21; circle (xt112, y+223,2) ; circle (xt146, y+207,2) ; circle(xt146,y+224,21;
1

CNAD MECATRONICA
APENDICE C HOJAS DE DATOS
122 ENTRENADOR MECATRONICO

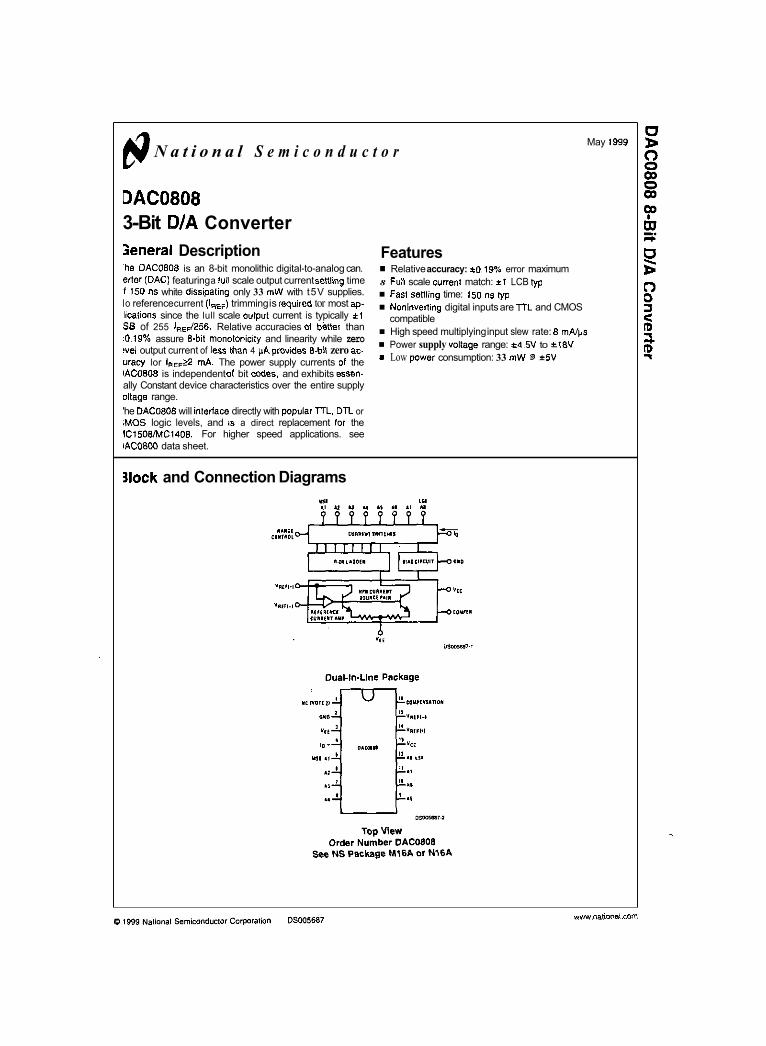
N a t i o n a l S e m i c o n d u c t o r
DAC0808 3-Bit DIA Converter
May 19-39
jeneral Description .he DACOüOü is an 8-bit monolithic digital-to-analog can. erter PAC) featuring a lull scale output current senling time
m f 150 ns white dissipaling only 33 mW with t5V supplies. lo reference current (IssG) trimming is requiied tor most ap- licalions since the lull scale ovlput current is typically k t CB of 255 1,,,1256. Relative accuracies o1 bener than :O.l9% assure &bit monotonicily and linearity while zero !vel output current of less than 4 PA piovides Bait zero ac. uracy lor 1,,,>2 mA. The power supply currents o1 the IAC0808 is independent 01 bit d e s , and exhibits essen- ally Constant device characteristics over the entire supply oltage range. 'he DACOüOü will inteitace directly with wpulai TTL. DTL or :MOS logic levels, and ts a direct replacement for the iC1508/MC1408. For higher speed applications. see IAC0800 data sheet.
Features Relative accuracy: t0.19% error maximum
8 Full scale cumenl match: LI LCB typ Fast senling time: 150 ns lyp Noninvelting digital inputs are l T L and CMOS
High speed multiplying input slew rate: 8 m A l p Power supply vollage range: t 4 .5V to +18V
m Low power consumption: 33 mW @ *5V
compatible
~~
3lock and Connection Diagrams
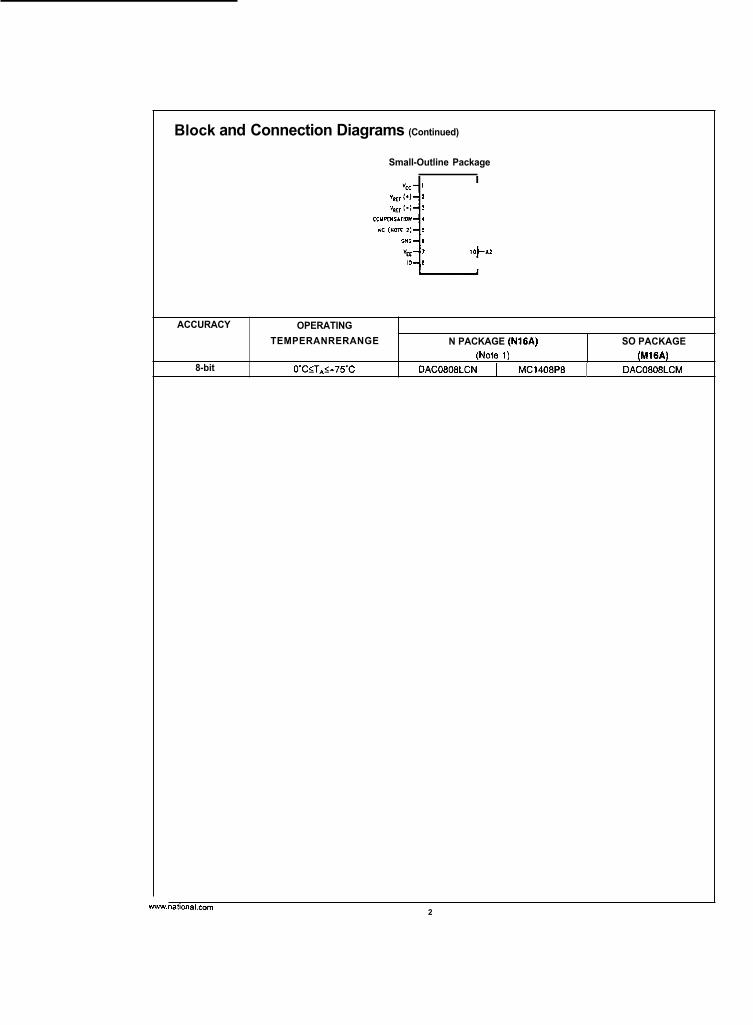
Block and Connection Diagrams (Continued)
Small-Outline Package
ACCURACY
8-bit
OPERATING TEMPERANRERANGE N PACKAGE (N16A) SO PACKAGE
o'cIT,<+7sc DACOü08LCN I MC1408P8 I DACOüOüLCM (Nole 1) (M16A)
2 m.nafimal.mm
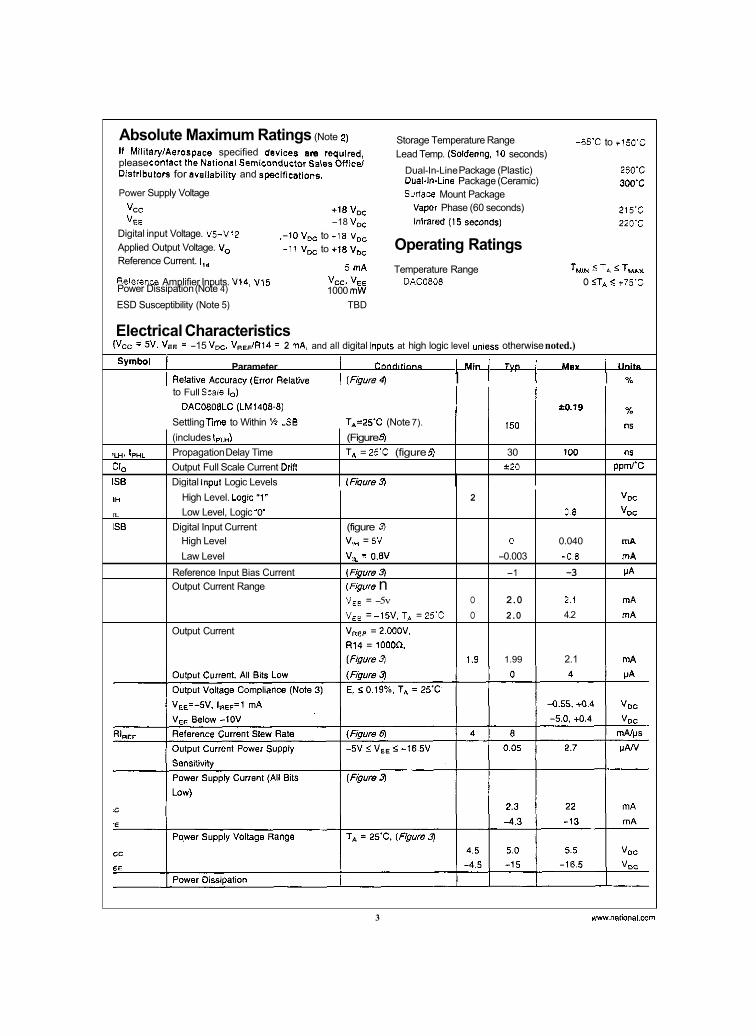
Absolute Maximum Ratings (Note 2) If MililarylAerospace specified davlces are required, please conlac1 the Nationel Semlconductw Salea Onicel Dlslrtbulols for avallablllty and specincalions.
Power Supply Voltage
Storage Temperature Range Lead Temp. (Soldedng, 10 seconds)
Duabin-Line Package (Ceramic) Surfaca Mount Package
Vapor Phase (60 seconds) VE, -18 vw Intiared ( I 5 second$)
-65'C to t150'C
Dual-In-Line Package (Plastic) 280'C 300'C
215'C 220'c
VCC +I8 voc
.-lo v,, to 118 v,, -11 VDC to +I8 v,,
Digital input Voltage. V5-Vl2 Applied Output Voltage. V, Operating Ratings
5 mA Temperature Range TMW c TA 5 TMAX Reference Current. I I a
Power Dissipation (Note 4) 1000 mW ESD Susceptibility (Note 5) TBD
Reference Amplifier Inputs. V14. V i 5 vcc, VE, DAC0808 o STA 5 +75'C
Electrical Characteristics
.LHI I,,, CIO ISB
(Vcc = 5V. VE, = -15 VDc, V.EF¡R14 = 2 mA, and all digital inputs at high logic level unless otherwise noted.)
Parameter I Condillons ] MI" 1 Typ 1 Mar I un118 I Relative A C C U ~ ~ C ~ (EW Relative I ( f i g m q I I I I x
symbol 1
(includes tpLII) (Figure 5) Propagation Delay Time T, = 2SC. (figure 5) 30 100 ns Output Full Scale Current Ddfl *20 P P d C Digital inpul Logic Levels í Fñ7ure 3
to Full Scale io)
Settling Time to Within LSB TA=25'C (Note 7). 1 1 150 1 1 m DAC0808LC (LM1408-8)
IH
4L
ISB
~. High Level. Logic"1" 2 V,, Low Level, Logic "0' 0.8 VOC
High Level v,, = 5v O 0.040 mA
Reference Input Bias Current (figurs 3 -1 -3 PA Output Current Range ( R g m n
Digital Input Current (figure 4
Law Level v,L = 0.8V -0.003 -0.8 mA
v,, = -5v O 2.0 2.1 mA V,, = -15V. TA = 2SC O 2.0 4.2 mA
Output Current VREF = 2.000v. ~ 1 4 = tooon. ( R g m 3 1.9 1.99 2.1 mA
3 w."alionai.mm
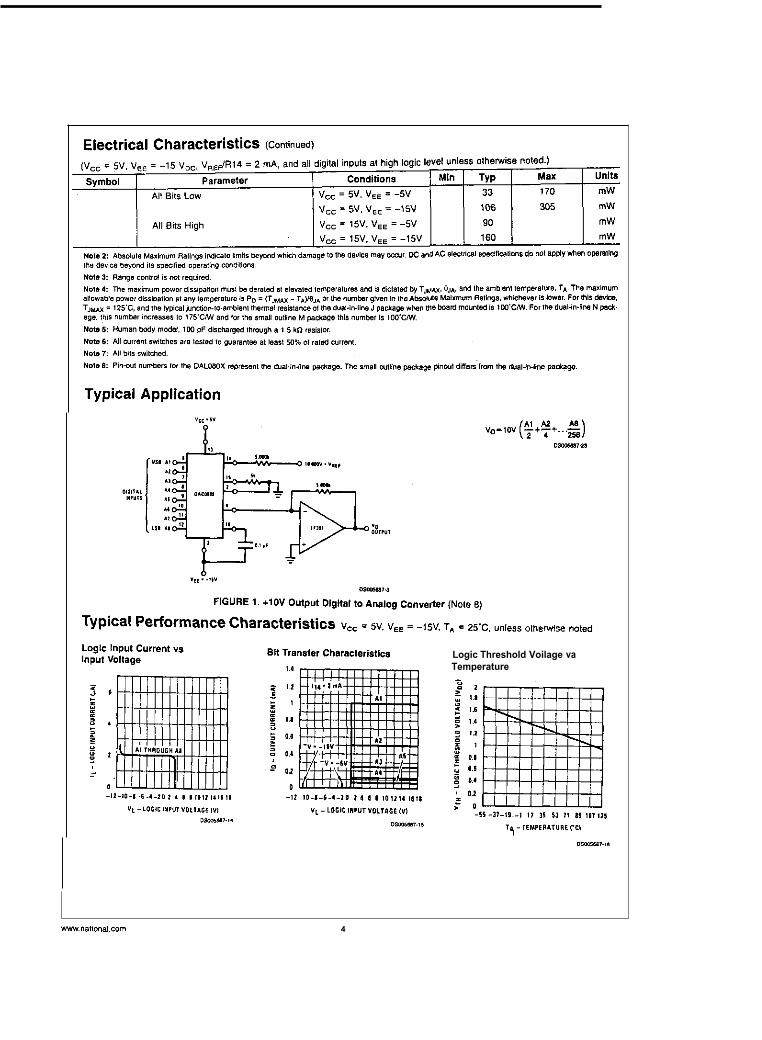
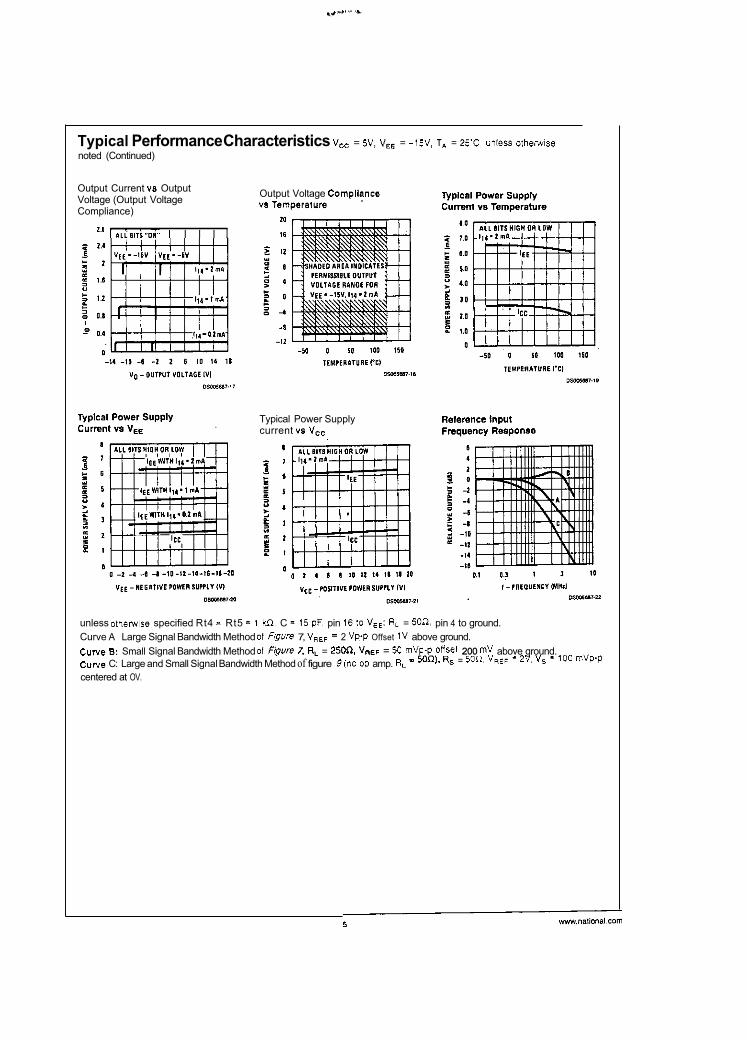
Typical Performance Characteristics v,, = 5v, v,, = -15V. T, = 2 s c . unless othenwse noted (Continued)
Output Current vs Output Voltage (Output Voltage Compliance)
2.1 . , , I 1 L L I I l " O I I . . I I I I I
Output Voltage Cornpilance YS Temptratwe
Typical Power Supply current "8 v..
unless ofhewise specified Rt4 = Rt5 = 1 kn, C = 15 pF. pin 16 lo VEE: R, = 50n. pin 4 to ground. Curve A Large Signal Bandwidth Method o1 figurn 7, VREF = 2 Vp-p Offset 1V above ground. CUNe 8: Small Signal Bandwidth Method o1 Figure Z R, = 250Q. VmSF = 50 mVp-p onset 200 mV above ground. Curve C: Large and Small Signal Bandwidth Method of figure 9 (no ap amp. R, centered at OV.
50% R, = 5052 VSEF = 2V. V, = 100 mVP-P

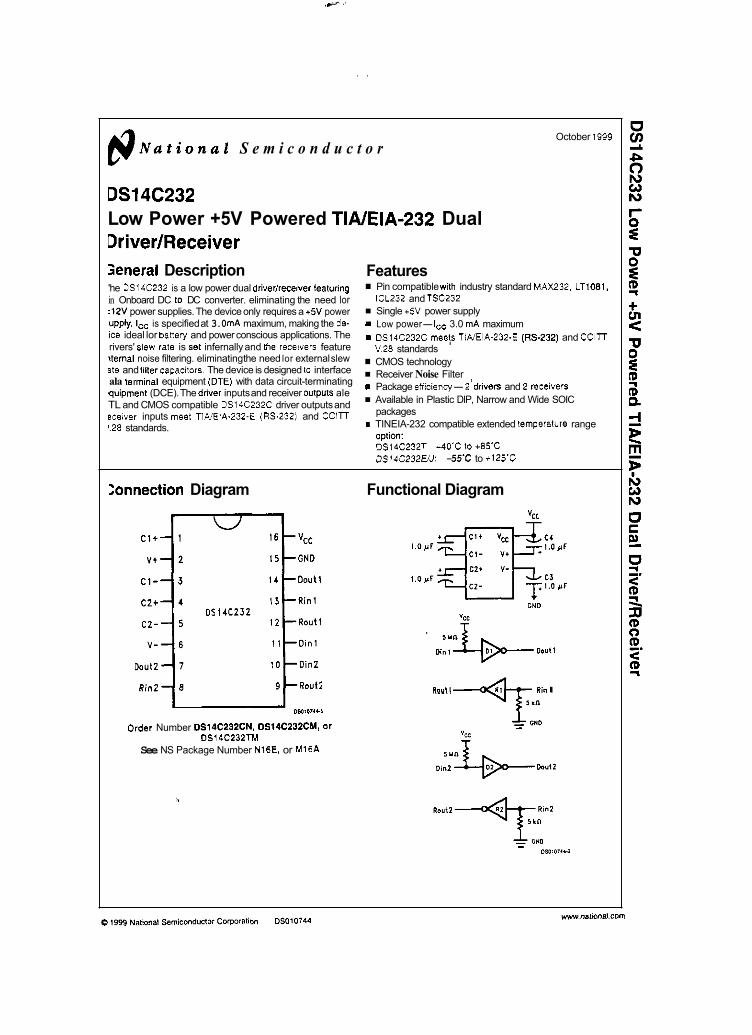
N a t i o n a 1 S e m i c o n d u c t o r
DS14C232 Low Power +5V Powered TINEIA-232 Dual Driver/Receiver
October 1999
jeneral Description 'he DSi4C232 is a low power dual drivedreceiver featuring in Onboard DC Io DC converter. eliminating the need lor :12V power supplies. The device only requires a t 5V power upply. ICc is specified at 3.0 mA maximum, making the de- icB ideal lor banery and power conscious applications. The rivers' slew rate is se1 infernally and lhe receivers feature ,temal noise filtering. eliminating the need lor external slew st8 and liller capaciiors. The device is designed lo interface ala lerminal equipment (DTE) with data circuit-terminating quipment (DCE). The dWw inputs and receiver ou1pu1s ale TL and CMOS compatible DS14C232C driver outputs and eceiver inputs meel ilNülA-232-E (RS.232) and C C l n !28 standards.
Features Pin compatible with industry standard MAX232. LTt081, ICL232 and TSC232 Single +5V power supply
* Low power- Ice 3.0 mA maximum m DS14C232C mee!s TINEIA-232-E (RS-232) and C C I n
V.28 standards CMOS technology Receiver Noise Filter I
m Package eflicienq-2 ddvm and 2 reCeNen Available in Plastic DIP, Narrow and Wide SOIC
m TINEIA-232 compatible extended temperature range packages
option: 0S14C232T -4üC to +8SC DS14C232WJ: 55'C to +125'C
:onnection Diagram Functional Diagram
V t
c1-
c2*
CZ- DS l 4 C Z 3 2
DlOlO,.L<
Order Number DS14C23ZCN, üS14C232CM, Or üS14C232TM
See NS Package Number N16E. or M16A
Y",
CNO
R d l Rin I

-65'C to +150'C
+260'C
2 2.5 kV
Absolute Maximum Ratings (Note 1) storage Temp. R a w Lead Temp' sec.) ESD Rating
specificstions 10, the 883 version of this product are listed separately on the following Pages.
-0.3V to 6V Supply Voltage. V m V' Pi" (vcc - 0.3)V to +14V
river Input Voltage -0.3V IO ( V a + 0.3'4 Conditions ~ n v e r output Voltage
(HEM, 1.5 kn, 100 PF)
v- Pi" , 1 0 . 3 ~ 10 -14v Recommended Operating (V' + 0.3V) IO 1v- - 0.3V) Min Max Units
Receiver Input Voltage +25V supply Voltage. V,, 4.5 5.5 v
Junction Temperature +150'c DS14C232C o +70 'C ~eceiver Output Voltage
~ax imum Package Power Dissipation @ 2% (Note 6) DSt4C232T -40 +85 'c
-0.3V IO IVcc + 0 . W Operating Free Air Temp. FA)
N Package 1698 mW M Package 1156 mW
Continuous Short Circuit Duration. DO",
Electrical Characteristics (Note 2) Over recommended operating conditions. unless athewise specilied
Parsmeter Conditions I MI" 1 TYP 1 M ~ X \units I
I
ymbol I DC TO DC CONVERTER CHARACTERISTICS
I I 9.0 I I v I -8.5 I I v I
Positive Power Supply I R, = 3 k n . Ct-C4 = 1.0 pF, D,. = 0.8V V' I v- I Negative Power Supply R, = 3 kn. Ct-C4 = 1.0 pF. D,, = 2.OV
I 1.0 I 3.0 I mA I supply (vcc) Current 1 NoLoad DRIVER CHARACTERISTICS

~ P L H
h i
1% SRl
SR2 RECEIVER tpLH
tpHL
1% I.,
R , = 3 k n Figure 1 1.0 4.0 ps Propagation Delay Low to High C, = 50 pF and Propagation Delay High to LOW
Skew ItpLH - tPHLl Output Slew Rate R, = 3 kn to 7 kfl. C, = (Note 7) 4 0 30 V/p
1.0 4.0 ps
0.1 1.0 p*
Figuro 2
50 pF Output Slew Rate R, = 3 kn. C, = 2500 pF 4.5 v/ps CHARACTERISTICS
2.9 6.5 ps Propagation Delay Low to High
2.5 6.5 ps Propagation Delay High to LOW
Skew It., - lPHLl (Figures 3, 4) 0.4 2.0 ps Noise Pulse Width (Figures 3, 4) 0.7 0.5 ps Rejected
Input Pulse Width > t o p
C, = 50 pF
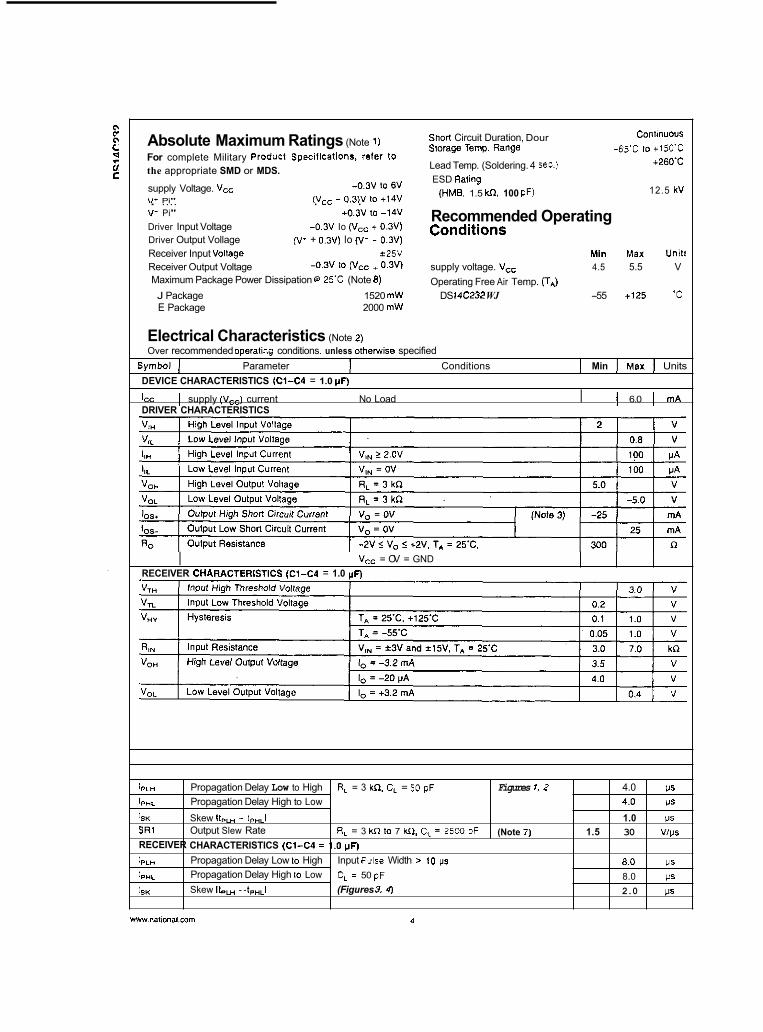
Continuous -65'C 10 +150'C
+260'C
12.5 kV
Absolute Maximum Ratings (Note 1) For complete Military Product Spfsilicatlons, refer to the appropriate SMD or MDS.
supply Voltage. v,, "' Pi"
Shoe Circuit Duration, Dour Storage Temp. Range Lead Temp. (Soldering. 4 sec.) ESD Rating -0.W lo 6V
lVrr - 0.3iV to +14V (HME. 1.5 kn. 100 PF)
IPLH
IbW
1% CR1 RECEIVER IPLH
LPYL
1%
. .... . -_. . Recommended Operating v- Pi" r0.3V to -14V
Driver Input Voltage -0.3V Io (Vcc + 0.3Vl Driver Output Vollage (V* + 0.3V) lo (V- - 0.3V) Conditions
Propagation Delay Low to High R, = 3 kn, C, = 50 pF Figures 1. 2 4.0 "5
Skew IkPLH - tpHLI 1.0 Y5
Propagation Delay High to Low 4.0 YS
Output Slew Rate CHARACTERISTICS (Cl-C4 = 1.0 V F )
1.5 30 VlV5 R, = 3 kR to 7 U, C, = 2500 PF (Note 7)
Propagation Delay Low 10 High Input Pulse Width D t o ps 8.0 YS Propagation Delay High to Low C, = 50 pF 8.0 "S
Skew ItpLH - tpHLl (Figures 3. Q 2.0 "S
Receiver Input VoiIage i25V MI" Max Units
Maximum Package Power Dissipation @ 25% (Note 8) Receiver Output Voltage -0.3v 10 IVcc + 0 . W supply voltage. v,, 4.5 5.5 V
Operating Free Air Temp. ITA) J Package 1520 mW DS 14C232 WJ -55 t125 'C E Package 2000 mW
Electrical Characteristics (Note 2) Over recommended opriratiry conditions. unless othewise specified
Symbol 1 Parameter Conditions ] Min 1 Max I Units DEVICE CHARACTERISTICS (Ct-C4 = 1.0 pF)
DRIVER CHARACTERISTICS
I ICC I supply (V,,) current I No Load I I 6.0 I mA
I I V,, = OV = GND RECEIVER CHARACTERiSTlCS (Cl-C4 = 1.0 pF)

N u t i o n a 1 S e m i c o n d u c t o r @ June 1992
CD4066BMKD4066BC Quad Bilateral Switch General Description Ihe C04066üMlCO4066üC is a quad bilateral Switch in- ended for the transmission or multiplexing of analog or digi- al Slgnais. It is pn4or-pin compalibie With CD4016üMJ >D4016BC. but has a much loww "ON" resistance, and ' O N resistance is relatkeiy constan1 over the input-signal ange.
I Extremely low " O F F
I Extremely high control inpm impedance
0.1 nA (in.) P VQO-V~S=IOV.TR=Z~*C
tüWn(in.) -50 dB (Np.)
Blir=Q.9MHr. R L = ~ k n 40 MHz (tp.)
switch leakage
Low ciomtalk betWBBn SWittheS
rn Frequency response, SMlch "ON'
Features Applications I Wide suppiy voltage range 3v Io I Analog signal Switchinglmultipienng I High noise immunity 0.45 VDQ (W.) . signa\
* Squelch conhol I Wide range of digital and
I "ON' resistance for t5V operation I Matched " O N resistance (9p') - Commutating switch
I " O N resistance flat Over peak-tweak signal range
I High ''ON"/''OFP' 65 d' (w) rn A ~ a i o g - t p d i ~ t a i / d i ~ ~ - ~ . a ~ l ~ conversion
Chopper analog switching
'On McdulatarlDemodulaior
I Digital signal SwitChingfmUitiple~ing over 15V signal input CMOS logic
output vdlage ratio
High degree iineanty High degree linaadty
@ kH*s R L = t o kn
O f.=1 kHz. V,-5Vw VDD-VSS=IOV. R L = I Q kn
I Digital control of frequency. impedance. phase. and an- I High degree linearity 0.1 % di3tOidOn (in.) aiog-signd.gain
Schematic and Connection Dlagrams '"'I'
Order Number CD4066E
u TOP view
TLiFi5665.1
o O a O o) o) z o Q a O o) o) m o Q E Lt P
E !? E
8
-.
5
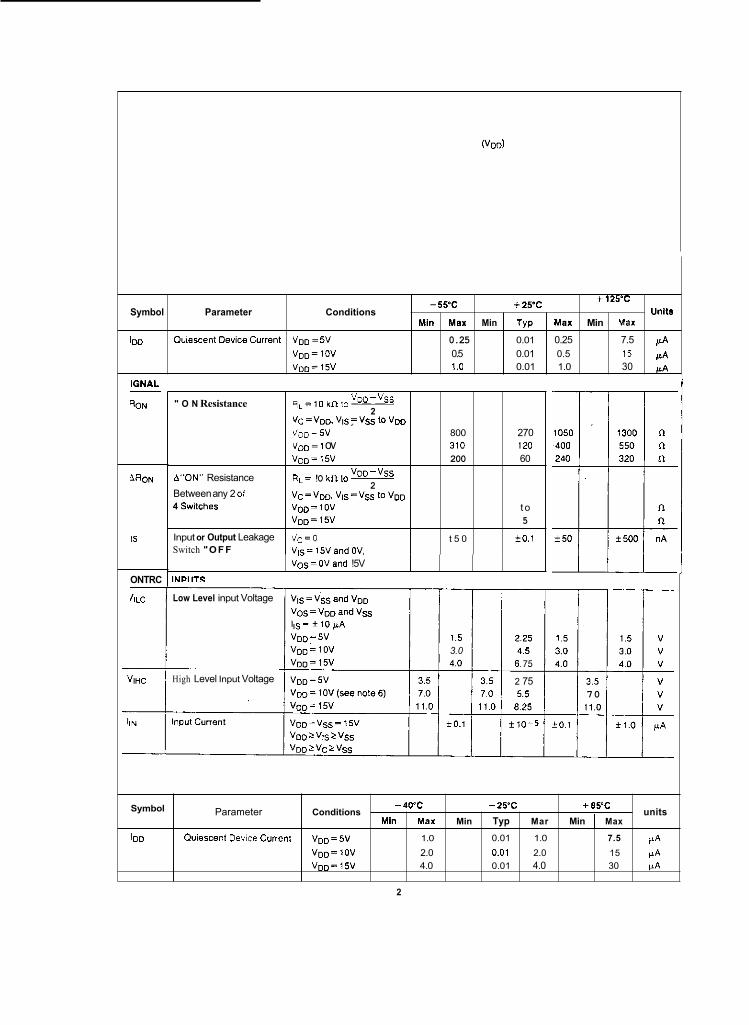
+t25.C -55% + 25.C Symbol Parameter Conditions
Mi" Max Min Typ Max Min Max
iD0 mescent ~ e ~ i ~ ~ current voo = 5v 0.25 0.01 0.25 7.5 v o ~ = l o v 0.5 0.01 0.5 15 Vo0=15V 1.0 0.01 1.0 30
IGNAL
-ON
~
U"ltll
p.4 p.4
I5
" O N Resistance
A"ON" Resistance
4 Swiches
Input or Output Leakage
Between any 2 01
Switch "OFF
ONTRC ~
flLC
voo-vs5 R L = 10 k í i 10-
voo= 5v 800 270
Voo=15V 200 60
RL= !O k í i 10-
2 v c = v o o . v I s ~ v ~ tovoo
voo = 1 ov 310 I20
voo-v5c 2
vC=vOD, VIS=v5S 10 VOO voo=lov t o voo=t5v 5
Vc=O t 5 0 + O . l V1q=15VandOV.
Symbol
loo
.. VOS=OVand !5V
IUDIITC
-4wc a 25% +85*C Parameter Conditions units Mln Max Min Typ Mar Min I Max
Ouiesceot Device CUrrent voo=5v 1.0 0.01 1.0 7.5 pA
v ~ ~ = l o v 2.0 0.01 2.0 15 PA Voo=iSV 4.0 0.01 4.0 30 pA
Low Level input Voltage
~~
High Level Input Voltage
3.0
I
6 75
2 75 70 I t 0
7-
2
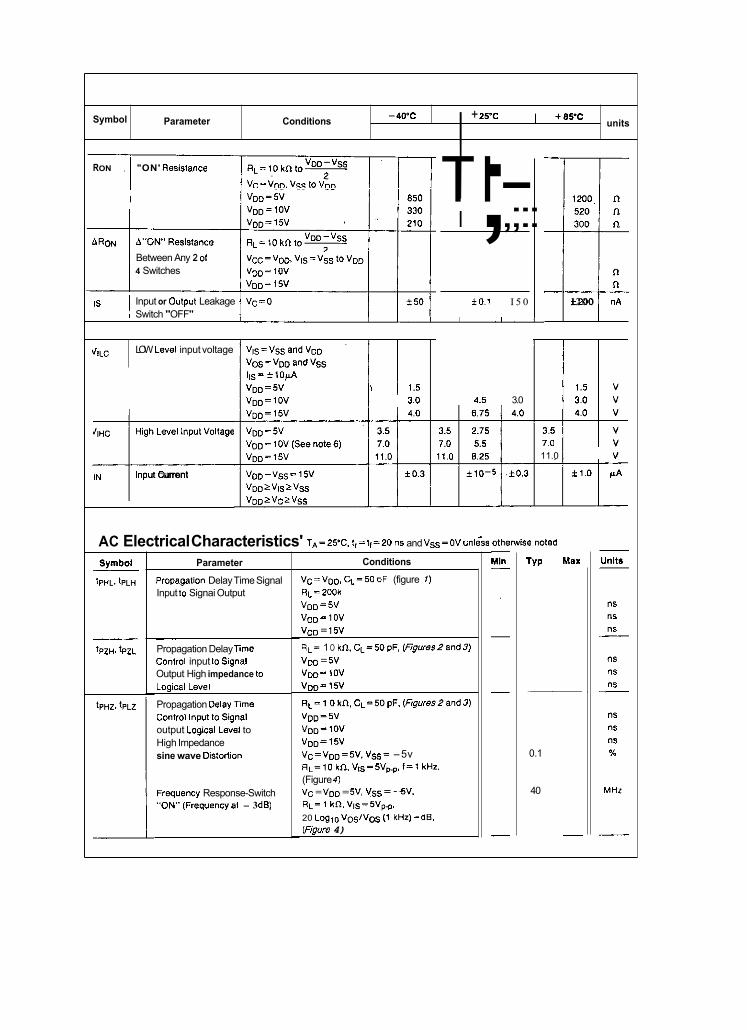
Symbol
RON , 1 "ON' Resi~fance
1 +a50C units -40.C + 25.C Parameter Conditions
Between Any 2 Of 4 Switches
dILC
Input or Outpul Leakage I Switch "OFF"
LOW Level input voltage 7 Input current
vDo=tov
vcc=voD.vIs=vsstovoo vDo=tov vDD=t5v
3.0
TI- ! ; ,;:: iO.1 I 5 0
4.5 3.0
1 I200 nA
7.0 11.0 v
AC Electrical Characteristics' ~ ~ = 2 5 * C . t,=i1=20 "S and vss=ov &SS Otherwise noted
Parameter
Propagalion Delay Time Signal Input Io Signai Output
~~
Propagation Delay Tlme COntrol input IO signai Output High impedance to Logical Level
Propagation Delay Tlme Control inputto Signai output Logical Level to High Impedance sine wave OiStOrh"
F ~ ~ W ~ C Y Response-Switch "0N"FrequencyaI - 3 dB)
Conditions
Vc=Voo, %=SO pF. (figure I ) R~=200k vDD=5v veo= 1ov VOD = 15V
RL= 1 O kn. C~=50pF. (FiguresZand3) VDD = 5v vDD=lov voo=i5v
vDD=5v vDD=tov V~o=15V v c = v D o = 5 v , v ~ = -5v R ~ = l 0 hn,Vis=5V,,.I=i kHz. (Figure 4) vc = VD0 = 5v. vss = - 5v. R ~ = 1 ~n,vIs=5vp.p,
R L = ~ Okn.C~=50pF. ( f ig~~esZand3)
20 Log,ovosJvos(l kHz)-dB, (Figure 4)
Typ Max
0.1
40
-

AC El ___ Symbol
~
'AC Para"
:trical Characteristic ~ ~
Parameter Faarllhrouoh - Swilch "OFF" __.. . ~ = ~
(Frequency at -50 d6)
Crosstalk Between Any Two Switches (Frequency at -50 d6)
Crosstalk; Control Input to signa1 output
~
Signal Input Capacitance Signal Output Capacitance Feedthmugh Capantame
iless <
TYP - - 1.25
0.9
150
6.0 8.0 8.5 8.0
8.0 0.5 5.0
- - - - -
ewss noted
4
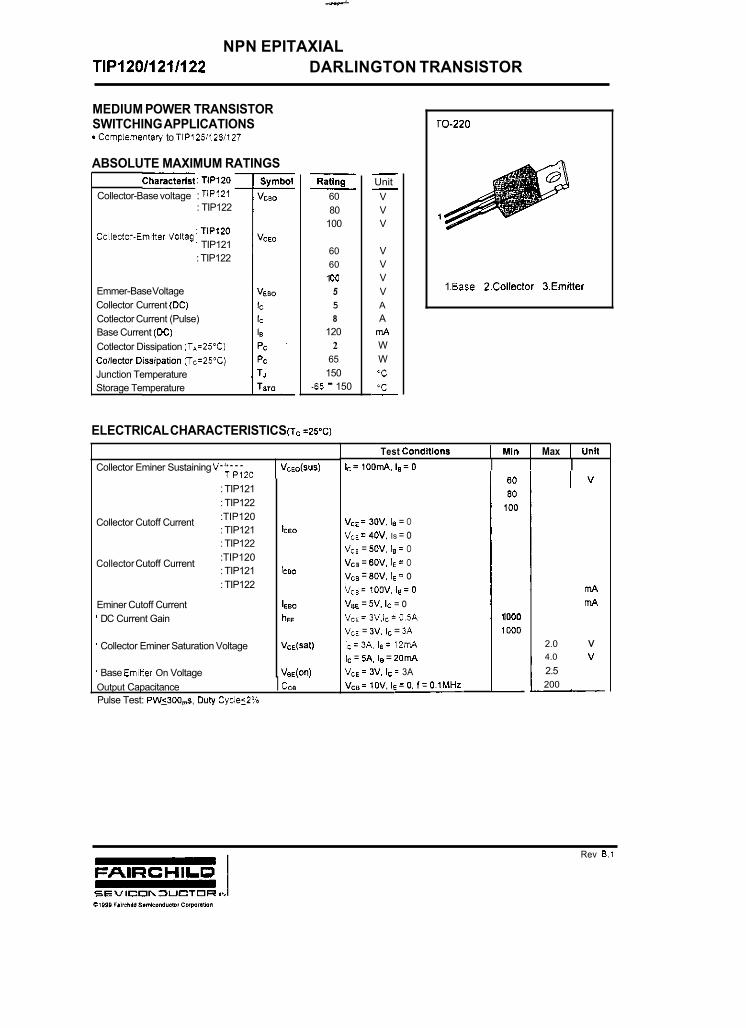
NPN EPITAXIAL TlPl20/121/122 DARLINGTON TRANSISTOR
Collector Eminer Sustaining V-"--- TIP120
MEDIUM POWER TRANSISTOR SWITCHING APPLICATIONS -Complementary to TIP125/126/127
ABSOLUTE MAXIMUM RATINGS
VCEO(SUS1
Collector-Base voltage : TIP121 : TIP122
: TIP121 : TIP122 :TIP120 : TIP121 : TIP122 :TIP120 : TIP121 : TIP122
Collector Cutoff Current
Collector Cutoff Current
Eminer Cutoff Current ' DC Current Gain
' Collector Eminer Saturation Voltage
' Base Emitter On Voltage
Collector-Eminer Voltag : TIP121
lCEO
lcBo
IEBO
hrc
v d s a t )
V d m )
: TIP122
Emmer-Base Voltage Collector Current (DC) Cotlector Current (Pulse) Base Current (DC) Cotlector Dissipation (TA=25"C) Cotlector Dt~sipation (Tc=25"C) Junction Temperature Storage Temperature
- Rathg -
60 80
100
60 60
1 O0 5 5 8
120 2
65 150
6 5 - 150
ELECTRICAL CHARACTERISTICS (i, =25'C)
Output Capacitance I cos Pulse Test: PW~300&, Duly Cycles?%
- Unit V V V
V V V V A A
mA W W 'C 'C
-
-
ro-zzo
1 .Base 2.Collector 3.Emitter
Test Condltlons I Mln I Max I UnR Ir= lOomA.la=O I I I
V,, = 30W. Is = O v,, = 4ov. Is = o V,, = 50V. l8 = O V,, = 60V. IE = O vcs = aov. IE = o v,,= 1oov. I e = o v,, = 5v. IC = o VCE=3V.IC=0.5A VCE = 3V. IC = 3A I s=3A. Is= 12mA IC = 5A. Is = 20mA V,, = 3V. IC = 3A Vcs=lOV.I~=O.f=O.lMHz
I:lo 1 O00
mA mA
2.0 v 4.0 W 2.5 200
Rev 8.1
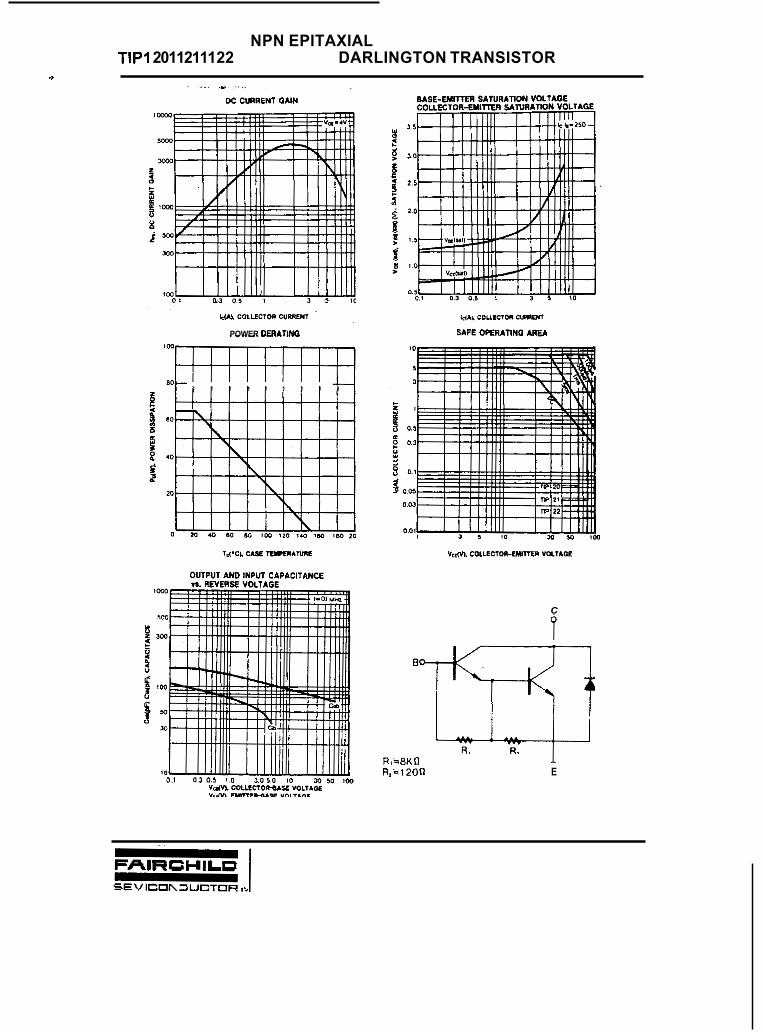
POWER DERAnNG 100
80 , , , , , , , , ,
NPN EPITAXIAL TIP1 20112111 22 DARLINGTON TRANSISTOR
*
C
P
R i = 8 K B R,=120<1 E

~
TRADEMARKS
Datasheel Ident i f icat ion
Advance Information
Preliminary
No Identification Needed
The lot on ng are 'eg stereo ano "nregmereo traoemarKs Faircn d Sem conoxto! owns or IS a~~ho r i zeo IO s e ana is no1 mlenoea 10 be an exhadsfwe SI o1 a s,cn Iraaemams
Product Sialus
Formative or In Design
First Production
Full Production
ACExTM lSOPLANARTM CoolFETTM MICROWIRErM CROSSVOLTTM POPTM E2CMOS" PowerTrenchTM FACTTM QSTM FACT Quiet SeriesTM Quiet SeriesT" FAST@ SuperSOTTM-3 FASTrTM SuperSOF'M-6 GTOTM SuperSOTTM-8 HiSeCTM TinyLogicrM
DISCLAIMER
Obsolele
FAIRCHILD SEMICONDUCTOR RESERVES THE RIGHTTO MAKE CHANGES WITHOUT FURTHER NOTICE TO ANY PRODUCTS HEREIN TO IMPROVE RELIABILITY, FUNCTION OR DESIGN. FAIRCHILD DOES NOTASSUME ANY LlABlLlTYARlSlNG OUTOFTHE APPLICATION OR USEOF ANY PRODUCT OR CIRCUIT DESCRIBED HEREIN; NEITHER DOES IT CONVEY ANY LICENSE UNDER ITS PATENT RIGHTS, NOR THE RIGHTS OF OTHERS.
Not In Production
LIFE SUPPORT POLICY
FAIRCHILD'S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT DEVICES OR SYSTEMS WITHOUTTHE EXPRESS WRITEN APPROVAL OF FAIRCHILDSEMICONDUCTOR CORPORATION. As used herein: 1. Life support devices or systems are devices or systems which, (a) are intended for surgical implant into the body, or (b) support or sustain life, or (c) whose failure to pefiorm when properiy used in accordance with instructions for use provided in the labeling. can be reasonably expected to result in significant injury to the user.
2. A critical component is any component of a life support device or system whose failure to perform can be reasonably expected to cause th6 failure of the life support device or system. or to affect its safely or effectiveness.
PRODUCT STATUS DEFINITIONS
Definition of Terms
Definition
This datasheet contains the design specificalions for product development. Specifications may change in 1 any manner without notice.
~
This datasheet contains preliminary data. and supplementary data will be published at a later date. Fairchild Semiconductor reserves the right to make changes at any time without notice in order lo improve design.
This datasheel contains final specifications. Fairchild Semiconductor reserves the right to make changes ai any time without notice in order to improve design.
This dalasheel contains specifications on a product that has been discontinued by Fairchild semiconductor. The datasheet is printed for reference information only.

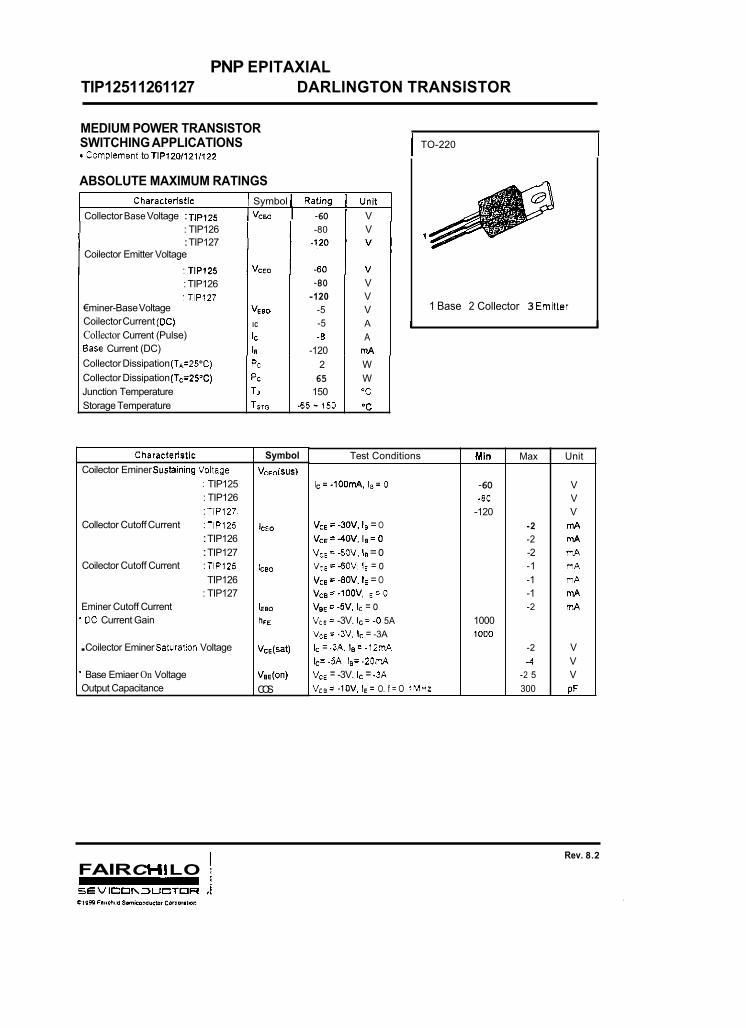
PNP EPITAXIAL TIP12511 261127 DARLINGTON TRANSISTOR
: TIP126 : TIP127
€miner-Base Voltage Coilector Current (DC) Collector Current (Pulse) Base Current (DC)
MEDIUM POWER TRANSISTOR SWITCHING APPLICATIONS -Complement to TIP12ol1211122
ABSOLUTE MAXIMUM RATINGS
VE80
IC
IC
IS
Characterlotic I Symbol I RaUng I Unit Collector Base Voltage : ~ 1 ~ 1 2 5 I vcm I -60 I V
Collector Dissipation (TA=25'C) Collector Dissipation (Tc=250C) Junction Temperature Storage Temperature
I : TIP126 I 1 -80 I V I
PC 2 W PS 65 W TJ 150 "C TITO 6 5 - 1 5 0 'c
: TIP127 Coilector Emitter Voltage
Test Conditions
IC'.l0OmA, IS '0
VCE I -3OV. IB = O VcE=40V,Ig=0 Vcr = sov, Is = o vcs i 60V. IE = o V,. I -6OV. IE = O v,.--ioov. iE=o VBE I -5v. IC = o V,, = -3V. IC = -0 5A VCE = .3V. IC = -3A IC = 3 A . Is = -12mA IC= -5A. IS= -2OmA V,, = -3V. IC = .3A VcB= -1OV. IE= O. f = O lMHz
Mi" Max Unit
-60 V -80 V
-120 V -2 mA -2 mA -2 mA -1 mA -1 mA -1 mA -2 mA
1000 to00
-2 V -4 V
-2 5 V 300 pF
-80 -120
-5 -5 -8
-120
. - : TIP125 : TIP126 : TIP127.
Collector Cutoff Current : Tip125 : TIP126 : TIP127
Coilector Cutoff Current : TIP125 TIP126
: TIP127 Eminer Cutoff Current ' DC Current Gain
. Coilector Eminer Saluration Voltage
* Base Emiaer On Voltage Output Capacitance
V V V A A
mA
ICEo
lcBo
IEBO
hcE
VcE(sat)
Vdon) COS
Charactedslic I Symbol i VrFnisu~l Coilector Eminer Sustainma Voltaoe
I I TO-220
1
1 Base 2 Collector 3 Emilier
I I
-1 FAIR C HI LO - SEVICOI\3UCTOR #,I
Rev. 8.2
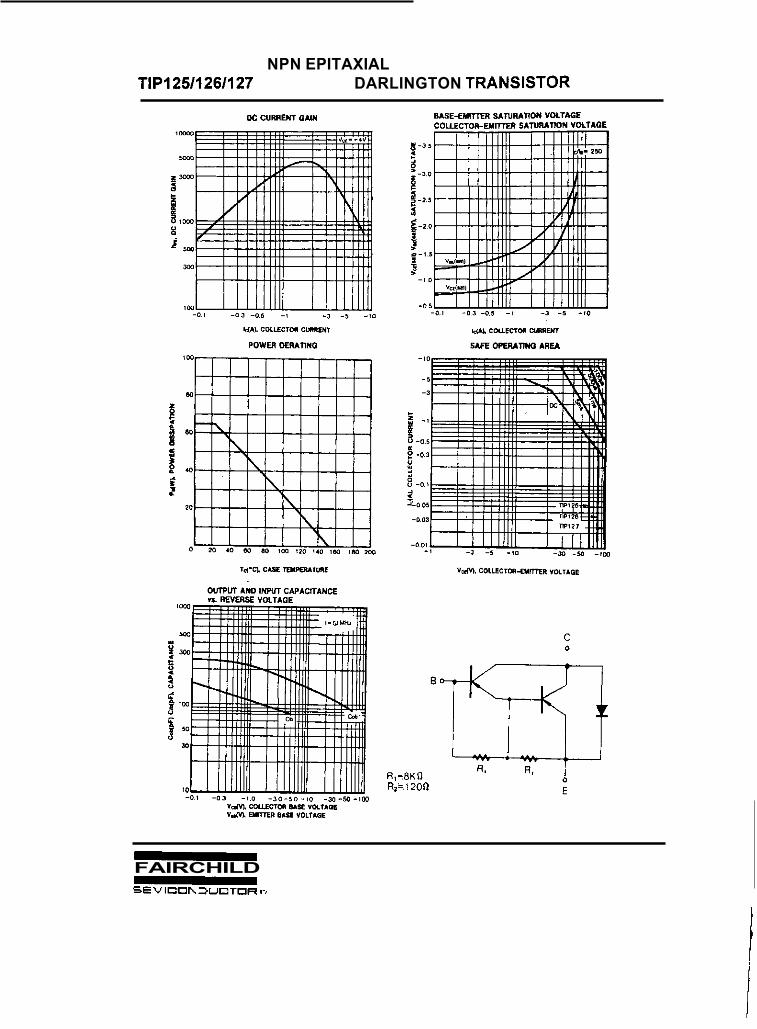
NPN EPITAXIAL TlPl25/126/127 DARLINGTON TRANSISTOR
Dc CURREHT CAW
R,=.BKll ~,i 1 zoo
R,
- FAIRCHILD - SEVICOh2UCTOR r,
TRADEMARKS The following are registered and unregistered trademarks Fairchild Semiconductor owns or is authorized to use and is not intended to be an exhaustive list of all such trademarks.
Advance Information
Preliminary
No Identification Needed
ACExTM CoolFEFM CROSSVOLTTM EZCMOSN FACTTM FACT Quiet SeriesTM
FASTrTM GTOTM HiSeCTM
FAST"
Formative 01 In Design
First Production
Full Production
lSOPLANARTM UHCTM MICROWIRETM VCFM POPTM PowerTrenchTM QSTM Quiet SeriesTM
SuperSOTTM-3
SuperSOFM-8 TinyLogicTM
S U ~ ~ S O T T ~ - ~
Obsolete Not In Production
DISCLAIMER
FAIRCHILD SEMICONDUCTOR RESERVES THE RIGHTTO MAKE CHANGES WITHOUT FURTHER NOTICE TO ANY PRODUCTS HEREIN TO IMPROVE RELIABILITY, FUNCTION OR DESIGN. FAIRCHILD DOES NOT ASSUME ANY LlABlLlTYARlSlNG OUTOFTHE APPLICATION OR USE OF ANY PRODUCT OR CIRCUIT DESCRIBED HEREIN; NEITHER DOES IT CONVEY ANY LICENSE UNDER ITS PATENT RIGHTS, NOR THE RIGHTS OF OTHERS
This datasheet contains specifications on a product that has been discontinued by Fairchild semiconductor. The datasheet is printed for reference information only.
LIFE SUPPORTPOLICY
FAIRCHILD'S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LiFE SUPPORT DWICES OR SYSTEMS WITHOUTTHE EXPRESS WRlTiEN APPROVAL OF FAIRCHILD SEMICONDUCTOR CORPORATION. As used herein: 1. Life support devices or systems are devices or systems which. (a) are intended for surgical implant into the body, or (b) support or sustain life. or (c) whose failure to perform when properly used in accordance with instructions for use provided in the labeling. can be reasonably expected to result in significant injury to the user.
2. A critical component is any component of a life support device or system whose failure lo pedomi c a n be reasonably expected to cause the failure of the life support device or system, or to affect its safety or effectiveness.
PRODUCT STATUS DEFINITIONS
Def ln i t ion of Terms
Datasheet Ident i f icat ion I Product Status I Definition
This datasheet contains the design specifications for product development. Specifications may change in any manner without notice.
This datasheet contains preliminary data, and supplementary data will be published at a later date. Fairchild Semiconductor reserves the right to make changes at any time without notice in order to improve design.
This datasheet contains final specifications. Fairchild Semiconductor reserves the right to make changes at any time without notice in order lo improve design.
i
o-.; ,. .
- FAIRCHILD - SEMICDNDUCTOR <u
Symbol Parameter VCEO Coliecta- Emitter Vdiage
VCSO Collector-Base Vdiage VEW Emii iwüase Voltage
b Cdlecta Current - Continuous
TJ, T,,, Opwaüng and Staage Junctia- Temperature Range
Discrete POWER & Signal Technologies
Value Units 40 V 75 V 6 0 V 1 .o A
-55 to c150 "C
PN2222A MMBT2222A PZT2222A
c@ . . B E E
SOT-223 SOT-23 Mark 1P
MMPQ2222 NMT2222
C SOIC-16 Mark .18
NPN General Purpose Amplifier This device is for use as a medium power amplifier and switch requiring collector currents up to 500 mA. Sourced from Pro- cess 19.
* T h e w ralings ore limiling values above which the BewiceabiliC/ o1 any semiconductor device may Qe impaired.
WIEs: I ) These ratings are bare6 on a maximum iunciion temperalure 01 1M degree3 C. 2) These are steady state limits. The IanOV should be Consulted on application9 Involving pulsed or low duly W e Opelalioos

a (u (u (u e n \
(u (u (u
c! E z (u (u (u
\
o n I I a
c!
a
\
(u (u (u
I z \
cu (u (u (u z n
Symbol Characteristic Max Units
Typical Characteristics
Symbol
PO
R W A
Typical Pulsed Current Gain z vs Collector Current o 500 j
4 200
Em a n 300 w
P
2 100
i o Y 0.1 03 1 3 10 30 1W 300
IC-COLLECTOR CURRENT (mA) r
Characteristic Max Units “MMBT22PA MMW2P2
Tcid Device Dissipatim 350 1 .om mW
Thennd Resistme. Junction 10 Ambient 357 -ChV Effective 4 Die 125 SChV Each Die 249 “ C m
Derate above 25T 2.8 8.0 mWPC
Base-Emitter Saturation
10 1 O0 500 IC . WLLECTOR CURRENT (mA)
Collector-Emitter Saturation Y Voltage vs Collector Current : 0 4 5 E y 03 E I Ly 02 a O
$ 0 1
? m i l t i
2 \ I I - a 0 2
10 100 500 IC - COLLECTOR CURRENT (d) >
Base-Emitter ON Voltage vs s Collector Current
5 U ’ a O > 0.8 z O a
E o.6
go.,
Y ?: i1i 0.4
m
1 10 25 0.1 IC -COLLECTOR CURRENT (mA) 9
PN2222A / MMBT2222A / MMBQ2222 / NMT2222 / PZT2222A
E
2 c
t m C c U
fn C
.-
? E 3 U al ” 2 a ” m fn
w 3
U
.. - a c
> 2
o
E t m
‘2
? E iI
C S U
u) E
.-
U al
a m fn N w 3
U
c
i? c
.. a c
t I -
+
- FA1 RCH I LP - .. April 199f
DM74LS194A 4-Bit Bidirectional Universal Shifi Register
data tor this mode is entered at the Shift-right data input When SO is low and S1 Is high. data shifts len SynChronüuSI) and new data is Clocking o1 the flip-flop is inhibited when both mode cmtm inputs are low.
General Description ihis bidirectional Shin register is designed to incorporate vir- ually all 01 the features a system designer may want in a ;hilt register: they teature parallel inputs. parallel outputs. 'ight-shin and 1en.shin Serial inputs, operating-mode-control "puts. and a direct overridmg clear line. The register has
at the Shift.len Serial input,
our distinct modes 01 operation, namely: Features Parallel (broadside) load Shin right (in the direction O, toward OD) Shin left (in the direction O, toward O,) Inhibit clock (do nothing)
Parallel inputs and outputs Four operating modes:
Synchronous parallel load Right shin Len Shin Do nothing 3ynChronom parallel loading is accomplished by applying
he tour bits 01 data and taking both mode control inputs, SO ind S1, high. The data is loaded into the associated ~lip-~lops md appear at the outputs aHer the positive transition o1 the :lock input. During loading. serial data flow IS inhibited. ;hill tight is accomplished synchronously with the rising fdQe O1 the clock DUISB when SO is hiah and C1 is low. Serial
Positive edge-triggered clacking m oirect overnding
Connection Diagram Dual-In-Llne Package
I)-,.,
Order Number 54LS194ADMOü,54LS194AFMOü, 54LS194ALMOB, DM74LS194AM or DM74LS194AN
See Package Number EZQA, JlSA, M16A. N16E or W16A
+
- -
I 1
+ PnntDate=1998/03/26 PnnlTime=10:40:54 37023 ds006107 R ~ V . NO. 3 cmscrv Proof
I

t
IIY
IIL
105
ICC
t
Input Voltage
LOW Level lnput Current V,, = Max. V, = 0.4U -0.4 mA V,, = Max 54LS -20 -lw mA Shorl Circuit
Output Current V,, = Max (Note 7) 15 23 mA Supply Current
High Level Input Current U,, = Max, V, = 2.7V 20 VA
(Note 6) DM74 -20 -100
54LS - 5 s c to +12sc Absolute Maximum Ratings (Note 1) DM74LS O'C to +70'c supply Voltage 7V Storage Temperature Range -6SC to + t W C
Operating Free Air Temperature Range
Input Voltage 7V
Recommended Operating Conditions
Noti 1: CL i 15 pF, 11 = 2SC end Vcc = 5V N D V ~ : cL - 50 p ~ . R~ = 2 xn TI = 2SC and Vcc = 5V
"i a, T I = 2SC ano vcc 5v
Electrical Characteristics
LOW Levsloutpul
2 m.lsmhildremi.mm
+
2
. ... ,*+" ...
Switching Characteristics al Y,, = 5Y and 1, = 25'C (See for Test Wavelons and Output Load
aximum Clock
RinlDaie=1998/03i26. RintTime=IO:4055 37023 ds006107 Rev. No. 3 cmsem hoof
+
3
+

N a t i o n a l S e m i c o n d u c t o 7 N LM565/LM565C Phase Locked Loop General Description The LM565 and LM565C are general purpose phase locked loops containing a stable. highly linear voltage contmlled OS- cillator lor low distortion FM demodulation. and a double bal- anced phase detector with good carrier suppression. The VCO frequency is set with an external resistor and capacitor, and a tuning range 01 1O:t can be Obtained with the same Capacitor. The characteristics o1 the closed loop System-bandwidth. response speed. capture and pull in range- may be adlusted over a wide range With an external resistol and Capacitor. The loop may be broken beiween the VCO and the phase detector lor insenion of a digital Ire- qusncy divider to obtain frequency multiplication. The LM565H is specified tor opemtion over the -55'C 10 +125'C military temperature range. The LM565CN is speci- tied lor Operation over the O'C to r7O'C temperature range.
May 1999
m o 2% linearity o1 demodulated output m Linear triangle wave with in phase zero crossings
T i L and DTL compalible phase detector input and
Adjustable hold cn range from e l % to D S O %
available
square wave output
Applications * Data and tape Synchronization
Modems m FSK demodulation
FM demodulation m Frequency synthesizer
Tone decoding m Frequency multiplication and division m SCA demodulators m Telemetry meivers
Signal regeneration Coherent demodulators
Features m 200 ppmrc frequency stabllily at the vco m Power supply range 01 i5 Io +12 volts with 100 ppml%
tvpical
Connection Diagrams
Metal Can Package
VLO INPUT o w e 2 - 1
Order Number LM565H See NS Package Number HIOC
Dual.in-Line Package
NC
IWVUI MC
lNP"1 NC
NC V C O
V M A S t COUILRAlüR VCOlNIUl
nulpur * V C C
n t f i n í w t llMlNG
vco cownoL 1lHlNG OUlVUT CAPMITOR
V O L l A G i RtSlSTOR
_ m l _ >
Order Number LMS65CN See NS Package Number NI4A
O 1999 National Semiconductor Coiporalion DSWiü53 w . n a t i o n 4 . c o m
Absolute Maximum Ratings (Note 1 )
I1 MilitavIAerospace specified devices are required, please contact the National SemiCondUCtOr Cales Olticd Dlstributom lor availability and SpBCifiCaiionS.
Operaling Temperature Range LM565H - 5 s c to r12SC LM565CN o'c to +7o'c
Slorage Temperature Range -65'C lo t l5o'C
Supply Voltage Power Dissipation (Note 2) Oinerenlial Input Voltage
+12v Lead Temperalure (Soldering, 10 sec.)
1400 m W * IV
260C
Electrical Characteristics AC Test Circuit T i. 2%. V = *6V
mnvnationa1.com 2
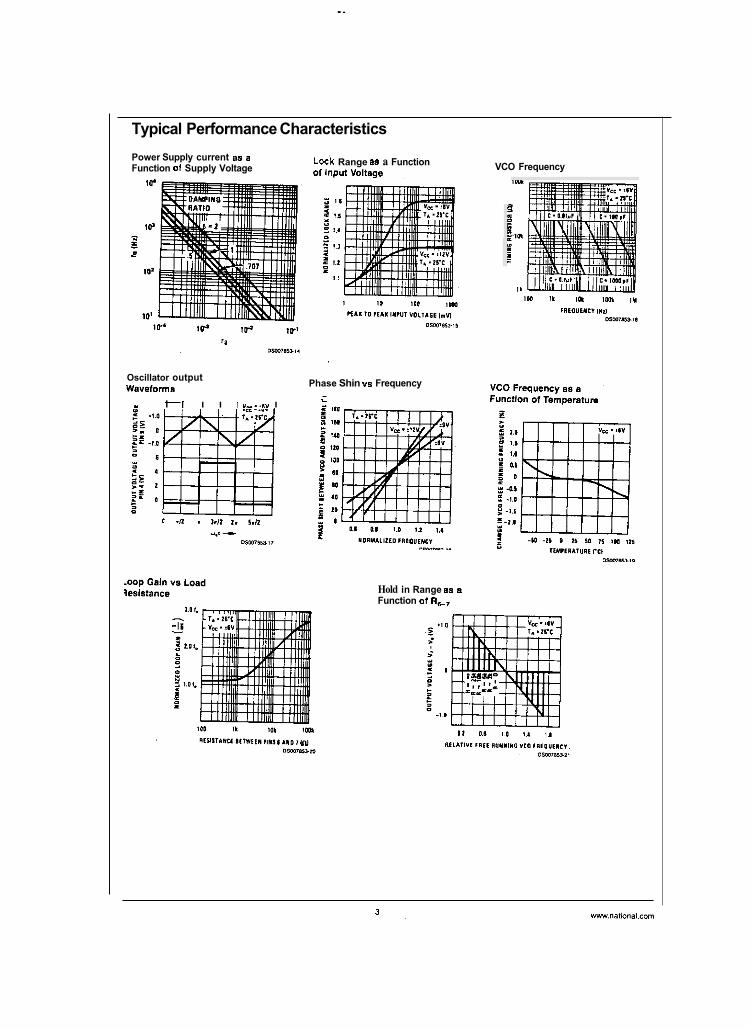
. ..
Typical Performance Characteristics
L o i k Range as a Function o1 i"D"t voltme
Power Supply current 8s B Function o1 Supply Voltage
Oscillator output wave10ms I I I I I I Y-.."" I
Phase Shin vo Frequency - i
VCO Frequency
Hold in Range as a Function 01 it,,
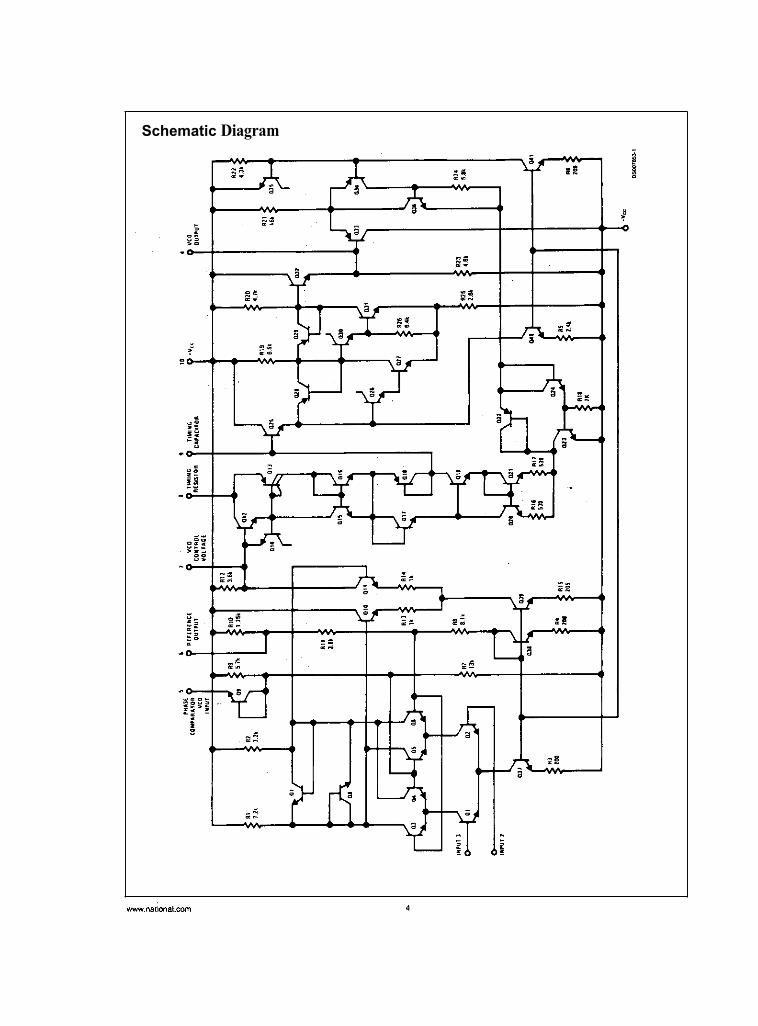
Schematic Diagram
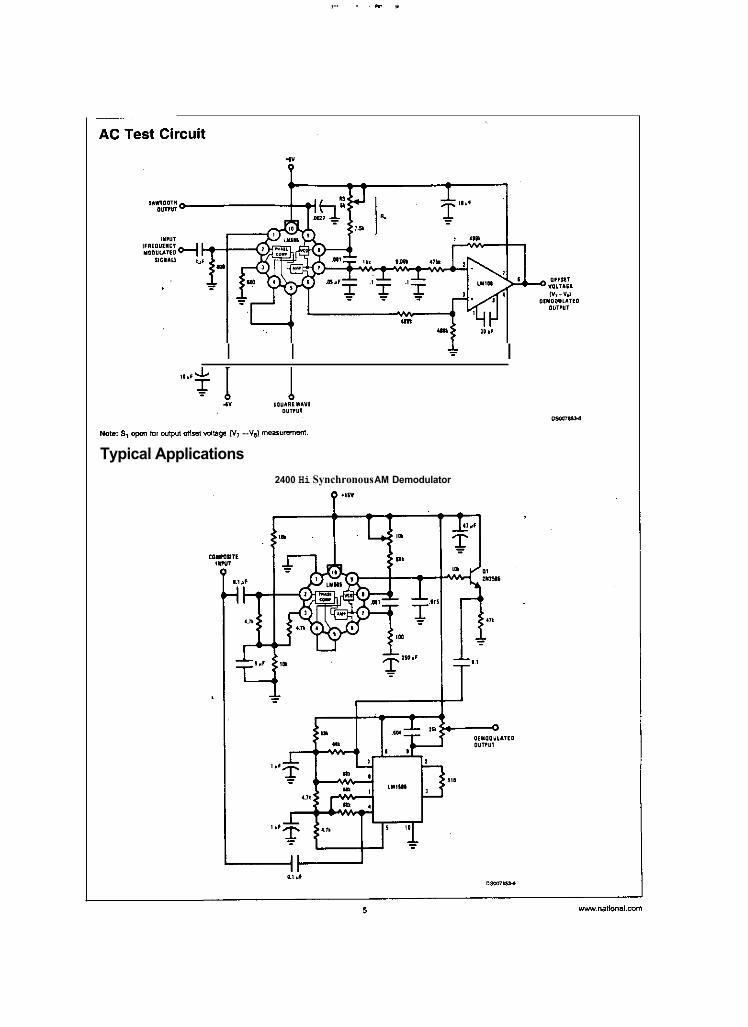
,.. . .".. ,
I I I
NO,* s, opsn IO, wui ansat w l m i p rv, - Val massu-m.
Typical Applications 2400 Hi Synchronous AM Demodulator
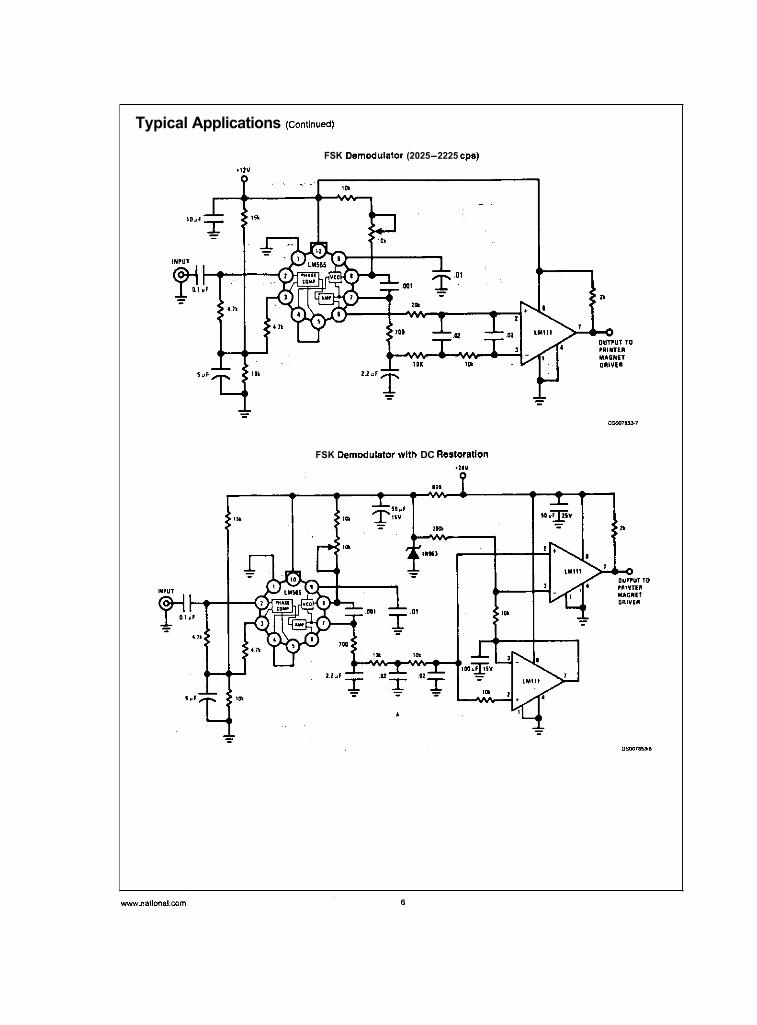
Typical Applications (ContinuEd)
FSK DemdUlatOr (2025-2225 cps) .,*Y
- -
FSK Derndulalor Wllh DC Restorallon .*,Y
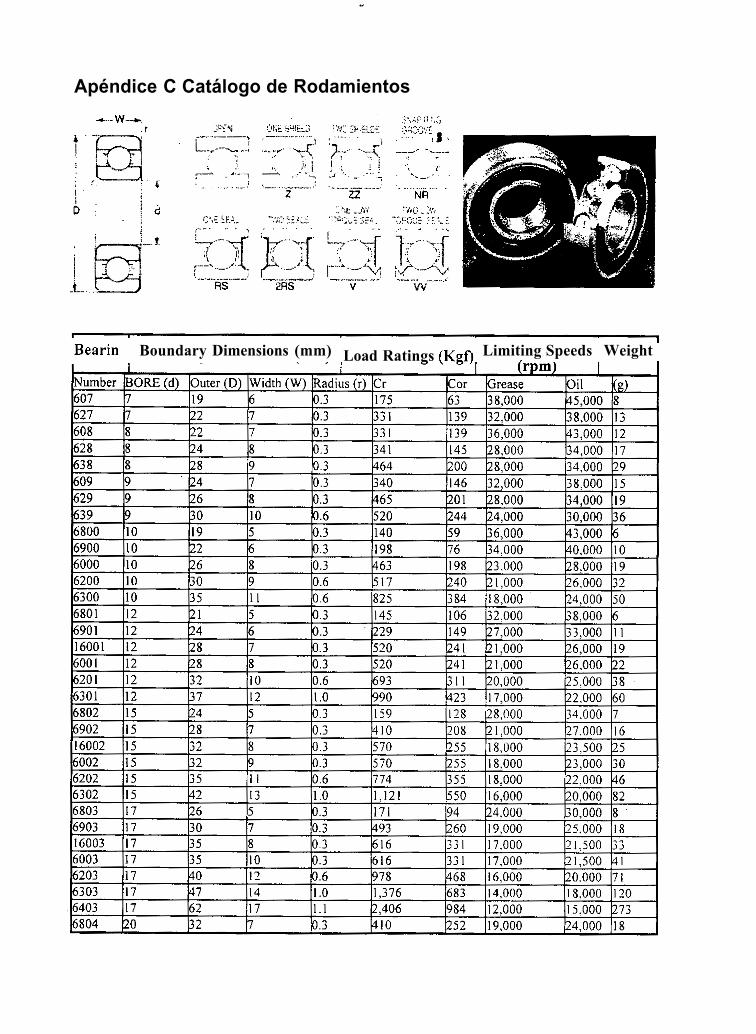
Apéndice C Catálogo de Rodamientos
Bearin Boundary Dimensions (mm) Limiting Speeds Weight Load Ratings (Kgfj
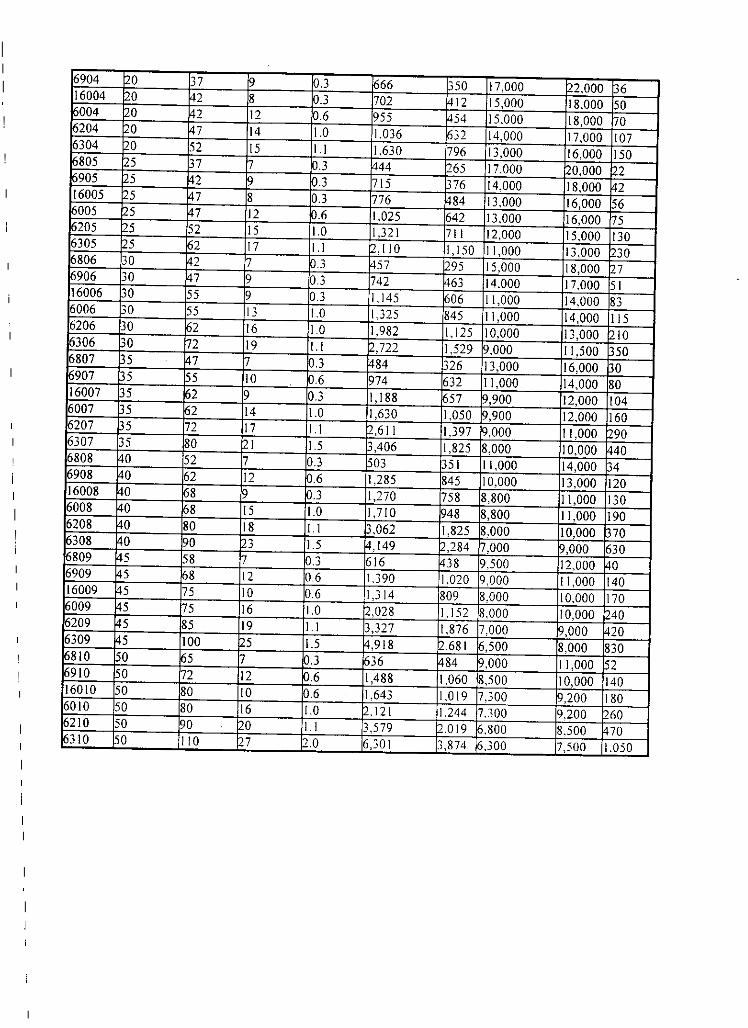
I I I
!
!
I
i
I
I I
i
1 I
I I I
I I
I
!
i
I !
I
i I I I
I
! ! I
I I
I
I I
I I
I I I I 1 I
i
I

I
I
I
! I I
I
I
MICROCONTROLADOR MC68HC11 CARACTERISTICAS GENERALES
The 68HC11 is a powerful 8-bit data, 16-bit address microcontroller from Motorola with an instruction set that is similar to the older 68xx (6801, 6805, 6809) parts. Depending on the variety, the 68HC1.1. has built-in EEPROMIOTPROM, RAM, digital 110, timers, A/D converter, PWM generator, and synchronous and asynchronous communications channels (RS232 and SPI).
Architecture
The M68HCll is optimized for low power consumption and high-performance operation at bus frequencies up to 4 MHz. The CPU has two 8 bit accumulators (A & B) that can be concatenated to provide a 16 bit double accumulator (D). Two 16 bit index registers are present (X,Y) to provide indexing to anywhere in the memory map. Having the two index registers means the 68HC11 is very good for processing data. Although an eight bit processor, the 68HC11 has some 16 bit instructions (add, subtract, 16 16 divide, 8.* 8 multiply, shift, and rotates). A 16 bit stack pointer is also present, and instructions are provided for stack manipulation. Typically multiplexed address and data bus. Other features include:
. . . Typical current draw is less than loma. . ...
. .
Powerful bit-manipulation instructions I .
Six powerful addressing modes (Immediate, Extended, Indexed, Inherent, and Relative)
Power saving STOP and WAIT modes
Memory mapped 110 and special functions
The 68HC11 is a powerful 8-bit data, 16-bit address microcontroller from Motorola with an instruction set that is similar to the older 68xx (6801, 6805, 6809) parts. Depending on the variety, the 68HC11 has built-in EEPROMIOTPROM, RAM, digital 110, timers, A/D converter, PWM generator, and synchronous and asynchronous communications channels (RS232 and SPI). Typical current draw is less than loma.
Architecture
The M68HC11 is optimized for low power consumption and high-performance operation at bus frequencies up to 4 MHz. The CPU has two 8 bit accumulators (A & B) that can be concatenated to provide a 16 bit double accumulator (D). Two 16 bit index registers are present (X,Y) to provide indexing to anywhere in

the memory map. Having the two index registers means the 68HC11 is very good for processing data. Although an eight bit processor, the 68HC11 has some 16 bit instructions (add, subtract, 16 16 divide, 8 8 multiply, shift, and rotates). A 16 bit stack pointer is also present, and instructions are provided for stack manipulation. Typically multiplexed address and data bus. Other features include:
Powerful bit-manipulation instructions
' Six powerful addressing modes (Immediate, Extended; Indexed, Inherent,
', Power saving STOP and WAIT modes
Memory mapped 110 and special functions
and Relative)
Onboard subsystems
Memory
The M68HC11 ,Family leads in microcontroller memory technology. In fact, the 68HC711E9 was the first device to integrate EPROM and EEPROM technologies on the same chip. In many applications, the M68HC11 provides a single chip solution with mask programmed ROM or user-programmable EPROM.
The M68HC11 Family's RAM uses a fully static design, and the contents can be preserved during periods of processor inactivity.
One Time Programmable (OTP).and windowed EPROM versions of M68HC11 devices are offered across the family providing a cost effective, user- programmable ROM facility for small volume prototypes and development runs. Secure EPROM devices are also available for applications where code is at risk of being compromised.
The M68HCIl 's EEPROM is ideal for the secure storage of essential calibration, diagnostic and security information.
A 4 channel Direct Memory Access (DMA) unit on some devices permits fast data transfer between two blocks of memory (including externally mapped memory in expanded mode), between registers or between registers and memory.
Instruction set
The instruction set table lists all the valid op codes and the details of the corresponding instruction. It is a principal aid to machine language and assembly language programmers. The instruction set table lists the instructions in alphabetic order by name. Unfortunately, this means that you must know the name of an instruction before you cab find it in the table. However, the names of most instructions strongly imply the operation performed, so a little creative guessing will help you find the desired instruction quickly.
register a = 8 bit register b = 8 bit register d = 16 bit (a = MSB, b = LSB) register x = 16 bit register y = 16 bit
r .
cc notes: - not changed x updated according to data O set to O 1 set to 1 3 cl=(msn>g) 4 Most significant bit of b. 5 Set when interrupt occurs. If previously set,
a Non-Maskable interrupt is required to'exit the wait state
addressing modes
instruct. immed direct ind,x ind,y extend inherent

Serial Communications Interface (SCI)
The SCI features a full duplex Universal Asynchronous Receiver/ Transmitter system, using the.non-return-to zero (NRZ) format for microcontroller-to PC connections, or to form a serial communications network connecting several widely distributed microcontrol1ers:Through the SCI, the built-in bootstrap interface allows in-circuit programming, and facilitates diagnostic and test operation of your application.
, . I
..:
Data format - 1 Start, 8 or 9 data, and one stop bit. Data rate - 150 - 312500 Baud (312500 is using 4 mhz E clock)
Serial Peripheral Interface (SPI)
The SPI is capable of inter-processor communication in a --multiple master system. Synchronous serial communications, comprises CLK, DATA IN, DATA OUT and optionally chip selects. As well as using specific SPI devices, it is very easy to expand 10 using the SPI and standard logic devices (e.g. 74HC595 and 74HC165). The SPI also enables synchronous communication between the microcontroller and peripheral , devices such as:
Shift registers
Liquid Crystal Display (LCD) drivers
Analog to Digital Converters
Other microprocessors
Pulse Width Modulation
The M68HC11 Family offers a selection of Pulse Width Modulation (PWM) options to support a variety of applications. Up to six PWM channels can be selected to create continuous waveforms with programmable rates and software selectable duty cycles from O to 100%.

Timer
The industry standard M68HC11 timer provides flexibility, performance and ease of use. The system is based on a free-running 16-bit counter with a programmable prescaler, overflow interrupt, and separate function interrupts. Additional M68HC1 I timer features include:
Fixed periodic rate interrupts
Computer Operating Properly (COP) protection against software failures
Pulse accumulator for external event counting or gated time accumulation
An optional PWM offering up to six channels and up to 16 bit PWM outputs
Optional event counter system for advanced timing operations
Multiple input capture functions and multiple output compares
It also provides a selection of timer sub systems geared towards timing-intensive applications; each supported by additional features associated with specific family members, including:
input Captures
Output Compares
Real-Time Interrupt
Pulse Accumulator
Watchdog function
A-D Convertor
AID systems are available with 8 to 12 channels and 8 and 10 bit resolution. The A/D is software programmable to provide single or continuous conversion modes. The M68HC11 Family now also offers D/A conversion for added versatility.

..
...

14.33 dias
5
6
7
8
ELABORACiON DE MAQUETA 9.89 dias
DISENO DE ARTICULACIONES 9.89 dias
SELECCl6N DE MATERIALES 14.33dias
DISENO DE REDUCTOR DE VEL. 9.89 dias
9
10
11
12
13
DISENO DE LA TRANSMISION
SELECC16N DE RODAMIENTOS
SELECCI6N DE MOTORES
DIBUJOS DE PIEZAS MECANICAS
PROGRAMAS DE CNC
9 89 dias
9 89 dias
5 44 dias
14 33 dias
18 78 dias
Resumen t v Progreso resumido - 18
19
20
21
22
SELECCION DEL MiCROCONTROLADOR
DISENO DEL LA TARJETA DEL Uc
DISENO DEL CTO PWM
DISENO DEL CTO FORMADOR DE PULSOS
SELECCION DE SENSORES
14 33 dias
5 44 dias
9 89 dias
1 dia
5 44 dias
I Página 1
Proyecto: ROBOT 5DOF PLANEACIC Fecha: sá 4112199
Tarea resumlda - Tareas edemas 1 1 1 1 1 1 1 1 1 1 . 1 1 < 1 . 1 . 1 , , , . , . < , . I ,
Progreso - Di"iSi6" r eswma ,..,, 1 , 1 1 1 1 1 1 ,,,.,, ,,,,,.., ,,, Resumen del proyecto -4 Hito Hilo resumido o


Id Nombre de tarea Duracion J I V I S ( D I L I M I M I J ( V I S I D ~ L ~ M ~ M ~ J ~ V ~ S ~ D ~ L ~ M ~ M ~ J ~ V ~ S ~ D ~ L ~ M ~ M ~ J ~ V ~ S ~ D 23 IDISEÑO DE CTO COMBINATORIO 5 44 dias
24
25
26
27
28
29
30
DISEÑO DEL CONVERTIDOR AJD
DISENO DEL CTO. M8R
SELECCION DEL PUENTE H
DISEÑO DE CTO DE PROTECCION
FABRICACION DE TARJETA DEL UC
5 44 dias
9.89 dias
9.89 dias
9.89 dias
14.33 dias
FABRICACION DE SERVOAMPLIFICADOR 27.67 dias
FABRICACION DEL CTO. SECUENCIAL 9.89 dias
31
32
Htto Hito resumido O Pagina 2
FABRICACION DE LA FUENTE
PRUENEAS ELECTRICAS
33 I PROGRAMACION 76 56 dias
34 RESULTADOS 9 89 dias
I
Proyecto ROBOT 5DOF PLANEACIC Fecha: sa 4112199
Resumen t-4 Progreso resumido - Tarea
Tarea resumida - Tareas externas ' : ,&Gq . , . . , , , . , , . , . . , , , , , , . ,
Resumen del proyecto b-4 Progreso - Divisi6n resumida ,. ...........................

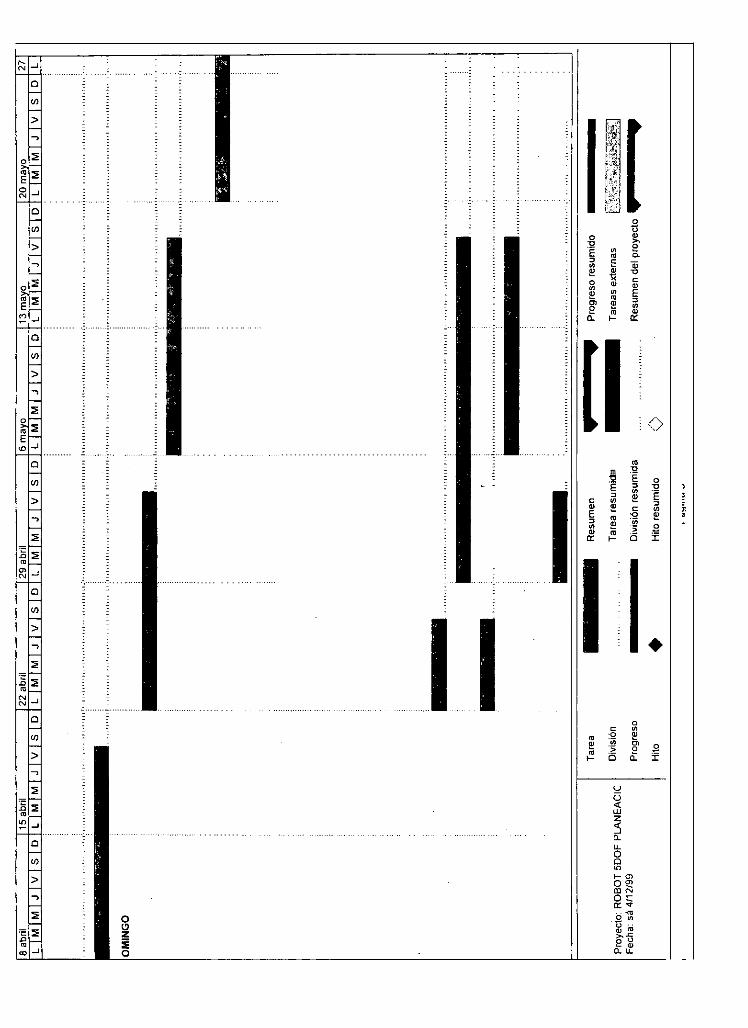
. . . . . . .
..........
..........
.....
......
. .
. . . .
......
.....
. . . .
. . . . .
. . . . .
. . . .
. . . . . .
. . . .
. . . .
. . . .
. . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . ~. . . . . . . . . . . . . . ~. ~. . . ~. . . ~. . . . . ~.
. -
-0 . . . .
m 0
I I


>royedo: ROBOT 5DOF PIANEACIC :echa: sá 4/12/99
Tarea - Resumen +-+ Progreso resumido - Divisi''
Progreso - División resumida ,,,,,,llllllll,,,,,,,,.,,,,,,, Resumen del proyecto t-4 , 1 1 1 1 1 1 ....................... Tarea resumida - Tareas externas
Hito + Hito resumido O
f

, , , , , , , , , , , , , , , ,
. , , , , , , , , , , , , . , . , , . , . , , , ,
... < . . . . < . . . < . . . .
, , . , , , ,
, , . , , , . , , . . . . , . , , , , , , , , , , , , , , , , , , , , , , .
, , , , , , , , , , , , , , , ,
,,. <.,......... ,., . < . , . . . < , . . . I .......
I'
.
.......................... . . . . . . . . . . . . . .
j ~ .................................................................................. ~ . . . . . ............................................................................................ .........................................
.........................
.................................... . . . . ................. , , , , , . . , . , , . , . . . . . . . . . . . . . . ~

.............
. . . . . . . .
...........
. . . . . . .
. . . .
.........
...........
...
...
...
...
. .
..............
.............
...............
.........
. . . . . . . .
. . . . . . . .
.............
...
...
...
...
...
...
...
...
...
...
...
....
....
...
...
...
. , ,
..................
%
9 4 n 8
................ 2 2s + o >
O = [L"
5 .. o 4
?!i Pu.


Proyecto: ROBOT 5DOF PLANEACIC Fecha: sá 4/12/99
I P6gi"a 8
Tarea - Resumen -4 Progreso resumido - Tarea resumida Tareas externas , , , , , , , , , , , , , , , , , , , , . , , , , , , , ,
Progreso - Di"iSi6" resumida I .. , I , I < I , I , , I < .. ,. , , . , I , , .I . I
Resumen del proyecto b-4 Hit0 + Hito resumido o
.............
............
-
......
~
..........
. . . . .
...............
..............
. . . . . . . . . . . .
. . . .
. . . . .
. . . . . . . .
..............
.............

, . .
~ __ ~~~~
Tarea - Resumen - Progreso resumido - Tarea resumida Tareas externas >royecto: ROBOT 5DOF PLANEACIC ..... < . . I ......... < . < . . < . . I , . .
Progreso - IJivisidn reswnida ., <.,.....,<,,,,,,,,,,,,.,.,,, Resumen del proyecto -4 :echa: sa 4/12/99
nit0 Hito resumido O Pagina 10