rs 83001 1997-01 s01-17 -...
TRANSCRIPT

1RS 83001/01.97
RS 83 001/01.97
Carros lineales
Linear Motion andAssembly Technologies

2 RS 83001/01.97
El programa Tecnología en movimiento lineal
REG.-NR.1617 - 01
Deutsche Star GmbHD-97419 Schweinfurt
Sistemas de guiado con Rodamientos linealesrodamientos lineales Sets lineales
EjesRaíles soporte de ejes, soportes brida de ejes
Bolas transportadoras
Otros elementos
Sistemas de guiado con Patines de roldanas sobre raíles
patines y raílesPatines de bolas sobre raíles
Patines de rodillos sobre raíles
Husillos de accionamiento Husillos de bolasSoportes con rodamientos y portatuercas
Sistemas de guiado Carros lineales
Módulos linealesSistemas de fijación para módulos
Mesas compactas
Mesas con patines de bolas sobre raíles
Componentes
Elementos de mando y controlAccesorios eléctricos

3RS 83001/01.97
Carros lineales
Descripción 4
Tipos 6
Capacidad de carga y momentos 8
Características generales 9
Características técnicas 10- Tamaño 8-65 / 12-85 10- Tamaño 16-100 / 20-130 12- Tamaño 25-160 / 30-180 14- Tamaño 40-230 / 50-280 16
Carros lineales cerrados sin accionamiento 18
Carros lineales cerrados con husillo de bolas 22
Carros lineales abiertos sin accionamiento 30
Carros lineales abiertos con husillo de bolas 34
Montaje de motor 42
Carros lineales con correa dentada 44
- Estructura y datos técnicos 44
Montaje 52- Montaje de detectores 52- Montaje de motor 55- Montaje de motor con correa 56- Acoplamientos 58- Motores 60
Documentación 62
Consulta/Pedido (Formulario) 63

4 RS 83001/01.97
DescripciónSTAR – Carros lineales
STAR – Carros lineales :
En ejecución cerrada - Sin raíles soporte de apoyo
En ejecución abierta - Con raíles soporte de apoyo
Funcionamiento extra suave ylarga duración de vida gracias alos rodamientos de bolas Super
Engrasadores situados a amboslados de la mesa
Fuelles de protección en PUcontra aceite y humedad. (Lasujeción se efectúa mediantechapas metálicas, situadas enlos últimos pliegues).
Sin accionamiento
Diferentes posibilidades demontaje de los motores
Engrase centralizado
Con accionamiento mediantehusillo de bolas (KGT)
Se puede conseguir mayor velocidadcon husillos de mayor peso y diámetro

5RS 83001/01.97
sin accionamiento con husillo de bolas con correa dentada
Mayores carreras conlongitudes predefinidas
Husillos de bola de precisiónlaminados clase de tolerancia T7según DIN 69051 con tuercacilíndrica precargada.
Nuevasversiones
Cabezales de accionamiento consistema de tensado. Estesistema permite una largaduración de vida.
Correa dentada de poliuretanoarmada con cables de aceropara conseguir las más altasexigencias de rigidez y precisiónde posicionado.
Con accionamiento mediante correa dentada.
Longitud según demanda
Sistemaflexible demontaje debidoa la posibilidadde múltiplescombinaciones
Optimización de cargas

6 RS 83001/01.97
TiposSTAR – Carros lineales
Tipos (tamaños)Los carros lineales se distinguen por lareferencia del tipo y del tamaño.
El concepto Carro designa unacombinación determinada de tipo ytamaño.
En estas tablas se utiliza la palabra"carro" como forma abreviada de"carros lineales".
Carro (ejemplo) =
Sistema S = Carro lineal
Guiado G = Rodamiento lineal cerradoO = Rodamiento lineal abierto
Accionamiento O = Sin accionamientoK = Con husillo de bolaR = Con correa dentada
Diametro deeje =
Medidadel ancho =
Tipo Tamaño
S G K 16-100
d
B
SGK
SGO
SGR
Tipo Carro Guiado Accionamiento
STAR –Ejecucióncerrada
SOK
SOO
SOR
Con correa dentada
Con correa dentada
Con husillo de bolas
Con husillo de bolas
STAR –Ejecuciónabierta
Sin accionamiento
Sin accionamiento
Rodamiento Super Aejecución abierta
Rodamiento Super Aejecución cerrada
1)
1) El tamaño 8-65 lleva rodamientos STANDARD

7RS 83001/01.97
Para el cálculo de duración de vida, sepuede aumentar la capacidad de cargadinámica aprox. un 20% de los valores(C, Mt, ML ) que se consideran normales.
Funcionamiento con cargasmedias(Recomendaciones prácticas)
No se deben superar los siguientesvalores:- la máxima flexión admisible de los ejes- el máximo momento de accionamiento
permitido.
Tamaño: d-B 8-65 12-85 16-100 20-130 25-160 30-180 40-230 50-280
Página 18 1040 2500 3050 6040 11820 14360 24660 36060
Página 22 2500 3050 6040 11820 14360 24660 36060
Página 48 11820
Página 32 2850 3440 6100 11950 14520 24950 36380
Página 48 11950
Página 36 2850 3440 6100 11950 14520 24950 36380
Capacidad de carga dinámicaC (N)
Bd
Indicaciones sobre las capacidadesde carga y momentos:
El cálculo de las capacidades de carga dinámicas (y pares) se basa en 100 000 mde carrera. Pero casi siempre se toman solamente 50 000 m. Para establecer unacomparación es preciso multiplicar por 1,26 el valor C, Mt y ML de la tabla.
8 RS 83001/01.97
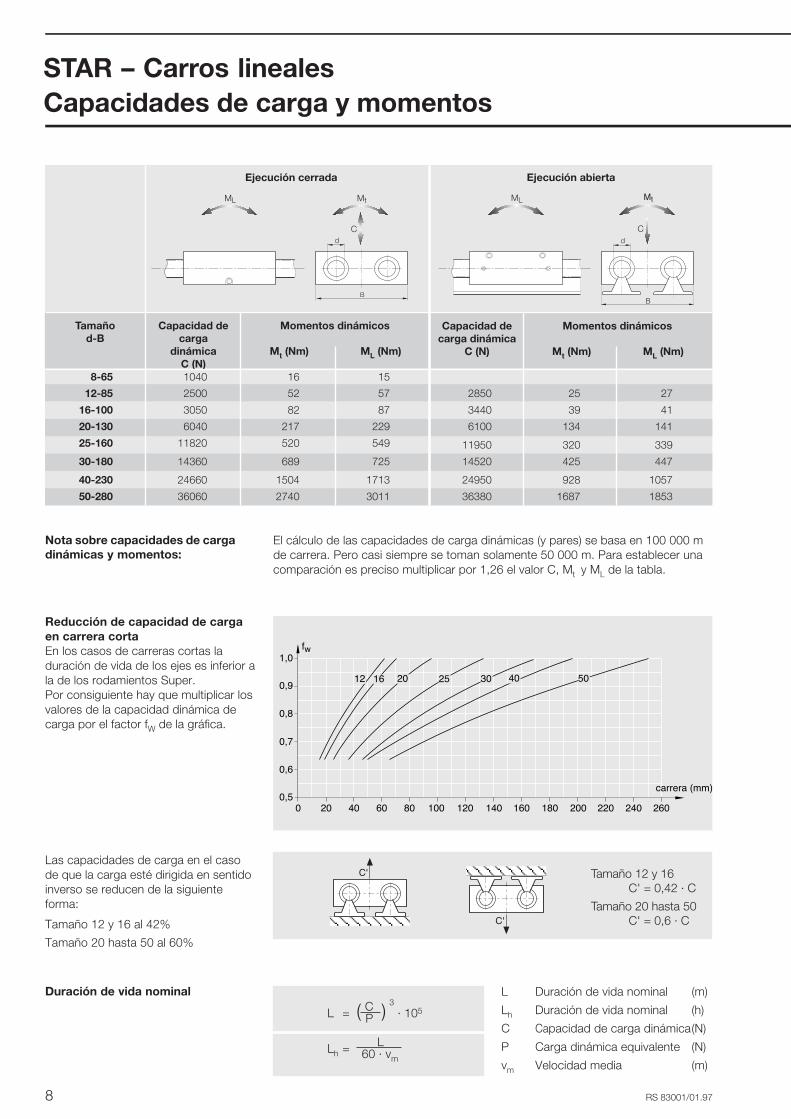
STAR – Carros linealesCapacidades de carga y momentos
Ejecución cerrada
Tamañod-B
Momentos dinámicos
Mt (Nm) ML (Nm)
Capacidad decarga
dinámicaC (N)
Ejecución abierta
Capacidad decarga dinámica
C (N)
Momentos dinámicos
Mt (Nm) ML (Nm)
8-65 1040 16 15
12-85 2500 52 57
16-100 3050 82 87
20-130 6040 217 229
25-160 11820 520 549
30-180 14360 689 725
40-230 24660 1504 1713
50-280 36060 2740 3011
2850 25 27
3440 39 41
6100 134 141
11950 320 339
14520 425 447
24950 928 1057
36380 1687 1853
Nota sobre capacidades de cargadinámicas y momentos:
El cálculo de las capacidades de carga dinámicas (y pares) se basa en 100 000 mde carrera. Pero casi siempre se toman solamente 50 000 m. Para establecer unacomparación es preciso multiplicar por 1,26 el valor C, Mt y ML de la tabla.
Duración de vida nominal
Reducción de capacidad de cargaen carrera cortaEn los casos de carreras cortas laduración de vida de los ejes es inferior ala de los rodamientos Super.Por consiguiente hay que multiplicar losvalores de la capacidad dinámica decarga por el factor fW de la gráfica.
Las capacidades de carga en el casode que la carga esté dirigida en sentidoinverso se reducen de la siguienteforma:
Tamaño 12 y 16 al 42%
Tamaño 20 hasta 50 al 60%
L Duración de vida nominal (m)
Lh Duración de vida nominal (h)
C Capacidad de carga dinámica(N)
P Carga dinámica equivalente (N)
vm Velocidad media (m)
MtML
C
B
d
B
MtML
Cd
C'
C' Tamaño 12 y 16C' = 0,42 · C
Tamaño 20 hasta 50C' = 0,6 · C
0 20 40 60 80 100 120 140 160 180 200 220 240 2600,5
0,6
0,7
0,8
0,9
1,0fw
carrera (mm)
12 16 20 25 30 40 50
PL = ( ) 3 · 105
60 · vmLh = L
C

9RS 83001/01.97
Forma de suministro:
Características generales
Sin accionamiento:
Los carros lineales Star con husillo de bolas y correa dentada (SGK, SGR, SOR ySOK) se suministran montados completos y engrasados.
Con accionamiento:
Longitud L: Las longitudes y carreras de los carros lineales se pueden solicitar bajo pedido.Longitudes superiores a la máxima longitud indicada Lmax sobre consulta.
Cálculo de la flexión máx. admisibleen ejecución cerrada:
Gracias a la aplicación de rodamientos lineales Star-Super (salvo tamaño 8-65), sepermite, en comparación con los rodamientos lineales existentes hasta ahora unmayor flexión del eje.Al seleccionar la longitud (L) y el tamaño, tener en cuenta la flexión del eje admisible(tan α)!
tan αmax = 8,72 · 10-3 = 0,5°
tan α ≤ tan αmax
^
Máximo momento de accionamientoadmisible Mzul:
Los valores representados en los diagramas (página 11 hasta 17) de Mzul rigen bajolas siguientes condiciones:
• Servicio horizontal
• Ninguna carga radial sobre los husillos
• No se tiene en cuenta el momento nominal del acoplamiento
El máximo momento de arranque admisible se reduce cuando la salida del husillolleva chaveta debido al efecto de entalla y de la reducción del diámetro útil.Consúltenos sobre los reenvíos de correa.
Peso del carro lineal: Cálculo del peso sin montaje de motor, transmisión de correa y detectores.
Peso (kg/mm) · longitud L (mm) + peso de los accesorios (kg).
Tipos de ejes en los carros lineales: Los carros lineales también se pueden suministrar con:
-ejes de acero inoxidable según DIN 17230/EN 10088
-ejes de acero STAR-Resist: Revestimiento de zinc-hierro con cromado amarillo
Más información sobre STAR-Resist: Impreso RD 82 050
Más información sobre rodamientos lineales STAR/ejes de acero de precisión STAR:catálogo RD 83 100
El suministro se realiza sin montar. La mesa está montada como grupo compacto.Los tornillos de fijación no están dentro del suministro.
Ejecución abierta SOO:Los ejes de acero de precisión Star están atornillados con los apoyos de ejes.
tan αmax = 10 · 10-4
Tamaño. 8-65:

10 RS 83001/01.97
L/2
L
F
α
tan α ≤ tan αmax
STAR – Carros lineales tamaños 8-65 / 12-85Características técnicas
8-65 Carro Cap. de cargadinámica
C(N)
Momentos dinámicos Masamovida
(kg)
Pesodel carroL en mm
(kg)
Longitud máx.Lmax
(mm)
Rozamiento
(N)
Cerrado
Mt(Nm)
ML(Nm)
tan α = F · (L - 9) · 4,970 · 10-8
tan αmax = 10 · 10-4
Cálculo la flexión admisible en losejes1)
tan α Flexión del ejeF Carga exterior (N)L Longitud “L” (mm)
En el carro lineal SGO 8-65 están montados los rodamientos lineales Standard.Dependiendo de la flexión de los ejes, hay que tener en cuenta una reducción decapacidad de carga y de duración de vida.
Más datos: catálogo RD 83 100 “Rodamientos lineales a bolas”
SGO 8-65 1040 16 15 0,28 0,0008 · L + 0,39 700 3
1) véase también “Observaciones generales”
Nota sobre capacidades de carga dinámicas y momentos, véase páginas 7 y 8.

11RS 83001/01.97
12-85 Carro
Cerrado
Abierto
Mt(Nm)
Husillo debolasdo x P(mm)
Cap. de carga dinámica Momentos din.
ML(Nm)
Masamovida
(kg)
Peso delcarro
L en mm(kg)
Long. máx.Lmax
(mm)Guía(N)
Rodamiento(N)
Husillo(N)
SGO 12-85 2500 52 57 0,55 0,0018 · L + 0,80 1000
SGK 12-85 8 x 2,5 2500 5280 2900 52 57 0,54 0,0021 · L + 0,92 1000
SOO 12-85 2850 25 27 0,47 0,0035 · L + 0,47 4000
SOK 12-85 8 x 2,5 2850 5280 2900 25 27 0,47 0,0040 · L + 0,82 1000
Cálculo de la flexión admisible enlos ejes1):
tan α = F · (L - 18) · 1,376 · 10-8
tan αmax = 8,72 · 10-3
Carros lineales con accionamiento de husillo de bolas:
Máxima velocidad Máximo par de accionamiento admisible 1)
Momento de inercia del carro lineal:
L/2
L
F
α
tan α ≤ tan αmax
tan α Flexión del ejeF Carga externa (N)L Longitud “L” (mm)
JS = ( 0,203 + 0,002 · L + 0,158 · mfr ) · 10-6
JS Momento de inercia del carro linealincluyendo la masa externa (kgm2)
mfr Masa externa (kg)L Longitud “L” (mm)
100 200 300 400 500 600 700 8000,00
0,20
0,40
0,60
0,80
1,00
L (mm)
8x2,5
900 1000
1,20
1,40Mzul (Nm)
200 300 400 500 600 700 800 900 10001000,0
5,0
10,0
15,0
20,0
25,0
v (m/min)
L (mm)
8x2,5
Rozamiento, momentos de rozamiento:Sin accionamiento
SOO 12-85
SGO 12-85
Rozamiento(aprox. N)
7SOK 12-85
SGK 12-850,06
Mom. de rozamiento(aprox. Nm)
8 x 2,5
Con accionamiento de husillo de bolas
1) véase también “Características generales”
Nota sobre capacidades de carga dinámicas y momentos véase páginas 7 y 8.

12 RS 83001/01.97
L/2
L
F
α
STAR – Carros lineales tamaño 16-100 / 20-130Observaciones técnicas
16-100 Carro
Cerrado
Abierto
Mt(Nm)
Husillo debolas
do x P(mm)
Cap. de carga dinámica Momentos din.
ML(Nm)
Masamovida
(kg)
Peso delcarro
L en mm(kg)
Long. máx.Lmax
(mm)Guía(N)
Rodamiento(N)
Husillo(N)
SGO 16-100 3050 82 87 0,82 0,003 · L + 1,2 1500
Cálculo de la flexión admisible enlos ejes1):
Carro lineal con accionamiento de husillo de bolas:
Máxima velocidad
tan α Flexión del ejeF Carga externa (N)
L Longitud “L” (mm)
tan α = F · (L - 21) · 5,381 · 10-9
tan αmax = 8,72 · 10-3
Momento de inercia del carrolineal:
Rozamiento, momentos de rozamiento:
SGK 16-100 12 x 5 3050 5280 4990 82 87 0,80 0,004 · L + 1,4 1500
SOO 16-100 3440 39 41 0,75 0,005 · L + 0,75 4000
SOK 16-100 12 x 5 3440 5280 4990 39 41 0,76 0,006 · L + 1,3 1500
Máximo par de accionamiento admisible1)
JS = ( k1 + k2 · L + k3 · mfr ) · 10-6
JS Momento de inercia del carro linealincluyendo la masa externa (kgm2)
k1, k2, k3 Constante (véase tabla)mfr Masa externa (kg)L Longitud “L” (mm)
Sin accionamiento
Rozamiento(aprox. N)
SOO 16-100
SGO 16-1009
Con accionamiento de husillo de bolas
Mom. de rozamiento (aprox. Nm)
12 x 5
SOK 16-100
SGK 16-1000,13
250 275 500 625 750 875 1000 1125 1250 1375 15000,0
5,0
10,0
15,0
20,0
25,0
30,0
35,0v (m/min)
L (mm)
12x5
250 275 500 625 750 875 1000 1125 1250 1375 1500
0,00
0,50
1,00
1,50
2,00
2,50
L (mm)
12x5
Mzul (Nm)
tan α ≤ tan αmax
1) véase también “Características generales”
Nota sobre capacidades de carga dinámicas y momentos véase páginas 7 y 8.
12 x 10 3270
12 x 10 3270
k1 3,238 6,692
k2 0,039 0,039
k3 0,633 2,533
Husillo de bolas: do x P
12 x 5 12 x 10
12 x 10
0,16

13RS 83001/01.97
20-130 Carro
Cerrado
Abierto
Mt(Nm)
Husillo debolas
do x P(mm)
Cap. de carga dinámica Momentos din.
ML(Nm)
Masamovida
(kg)
Pesodel carroL en mm
(kg)
Long. máx.Lmax
(mm)Guía(N)
Rodamiento(N)
Husillo(N)
SGO 20-130 6040 217 229 1,8 0,005 · L + 2,6 2500
Cálculo de la flexión admisible enlos ejes1):
tan α = F · (L - 36) · 2,932 · 10-9
tan αmax = 8,72 · 10-3
SOO 20-130 6100 134 141 1,6 0,008 · L + 1,6 4000
SOK 20-130 16 x 10 6100 13400 9600 134 141 1,6 0,010 · L + 2,7 2500
SGK 20-130 16 x 10 6040 13400 9600 217 229 1,8 0,006 · L + 3,0 2500
16 x 16 7700
16 x 5 12300
16 x 16 7700
16 x 5 12300
L/2
L
F
α tan α Flexión del ejeF Carga externa (N)L Longitud “L” (mm)
tan α ≤ tan αmax
Máximo par de accionamiento admisible1)
Husillo de bolas con chavetero: max. par de accionamiento 3,2 Nm
JS = ( k1 + k2 · L + k3 · mfr ) · 10-6
k1 3,238 6,692 13,878
k2 0,039 0,039 0,039
k3 0,633 2,533 6,485
SOO 20-130
SGO 20-130
Rozamiento(aprox. N)
11
Momentos de rozamiento (aprox. Nm)
SGK 20-130
SOK 20-130
Rozamiento, momentos de rozamiento:Con accionamiento de husillo de bolasSin accionamiento
JS Momento de inercia del carro linealincluyendo la masa externa (kgm2)
k1, k2, k3 Constante (véase tabla)mfr Masa externa (kg)L Medida “L” (mm)
Husillo de bolas: do x P
16 x 5 16 x 10 16 x 16
16 x 5 16 x 10 16 x 16
0,40 0,43 0,46
Momento de inercia del carro lineal:
Máxima velocidad
2500,0
L (mm)
500 750 1000 1250 1500 1750 2000 2250 2500
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0v (m/min)
16x16
16x10
16x5
2500,00
L (mm)
500 750 1000 1250 1500 1750 2000 2250 2500
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,0016x16
16x10
16x5
Mzul (Nm)
1) véase también “Características generales”
Observación sobre capacidades de carga dinámicas y momentos véase páginas 7 y 8.
Carro lineal con accionamiento de husillo de bolas:

14 RS 83001/01.97
L/2
L
F
α
tan α ≤ tan αmax
Husillo de bolas con chavetero: máx. par de accionamiento 4,5 Nm
STAR – Carros lineales tamaños 25-160 / 30-180Observaciones técnicas
25-160 Carro
Cerrado
Abierto
Mt(Nm)
Husillo debolas
do x P(mm)
Cap. de carga dinámica Momentos din.
ML(Nm)
Masamovida
(kg)
Peso delcarro
L en mm(kg)
max. long.Lmax
(mm)Guía(N)
Rodamiento(N)
Husillo(N)
SGO 25-160 11820 520 549 3,3 0,008 · L + 4,8 3000
Cálculo de la flexión admisible enlos ejes1):
tan α = F · (L - 43) · 1,468 · 10-9
tan αmax = 8,72 · 10-3
SOO 25-160 11950 320 339 2,8 0,011 · L + 2,8 4000
SOK 25-160 20 x 20 11950 17000 9100 320 339 2,9 0,015 · L + 5,0 3000
SGK 25-160 20 x 20 11820 17000 9100 520 549 3,3 0,011 · L + 5,5 3000
25 x 10 15800
20 x 5 14300
25 x 10 15800
20 x 5 14300
Máxima velocidad
tan α Flexión del ejeF Carga exterior (N)L Longitud “L” (mm)
JS = ( k1 + k2 · L + k3 · mfr ) · 10-6
Momento de inercia del carrolineal:
JS Momento de inercia del carro linealincluyendo la masa externa (kgm2)
k1, k2, k3 Constante (véase tabla)mfr Masa externa (kg)L Longitud “L” (mm)
Rozamiento, momentos de rozamiento:
SOO 25-160
SGO 25-160
Fuerza de fricción(aprox. N)
14
sin accionamiento Con accionamiento de husillo de bolas
k1 8,216 39,990 23,575
k2 0,100 0,100 0,256
k3 0,633 10,132 2,533
Momentos de rozamiento (aprox. Nm)
SGK 25-160
SOK 25-160
Husillo de bolas: do x P
20 x 5 20 x 20 25 x 10
20 x 5 20 x 20 25 x 10
0,53 0,64 0,66
2500,0
L (mm)
500 750 1000 1250 1500 1750 2000 2250 2500
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0v (m/min)
2750 3000
20x20
25x10
20x5
2500,0
L (mm)
500 750 1000 1250 1500 1750 2000 2250 2500
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
2750 3000
20x20
25x10
20x5
Mzul (Nm)
Máximo par de accionamiento admisible1)
1) véase también “Características generales”
Observación de capacidades de carga dinámicas y momentos véase páginas 7 y 8.
Carros lineales con accionamiento de husillo de bolas:
15RS 83001/01.97
L/2
L
F
α
tan α ≤ tan αmax
Husillo de bolas con chavetero: máx. par de accionamiento 4,5 Nm
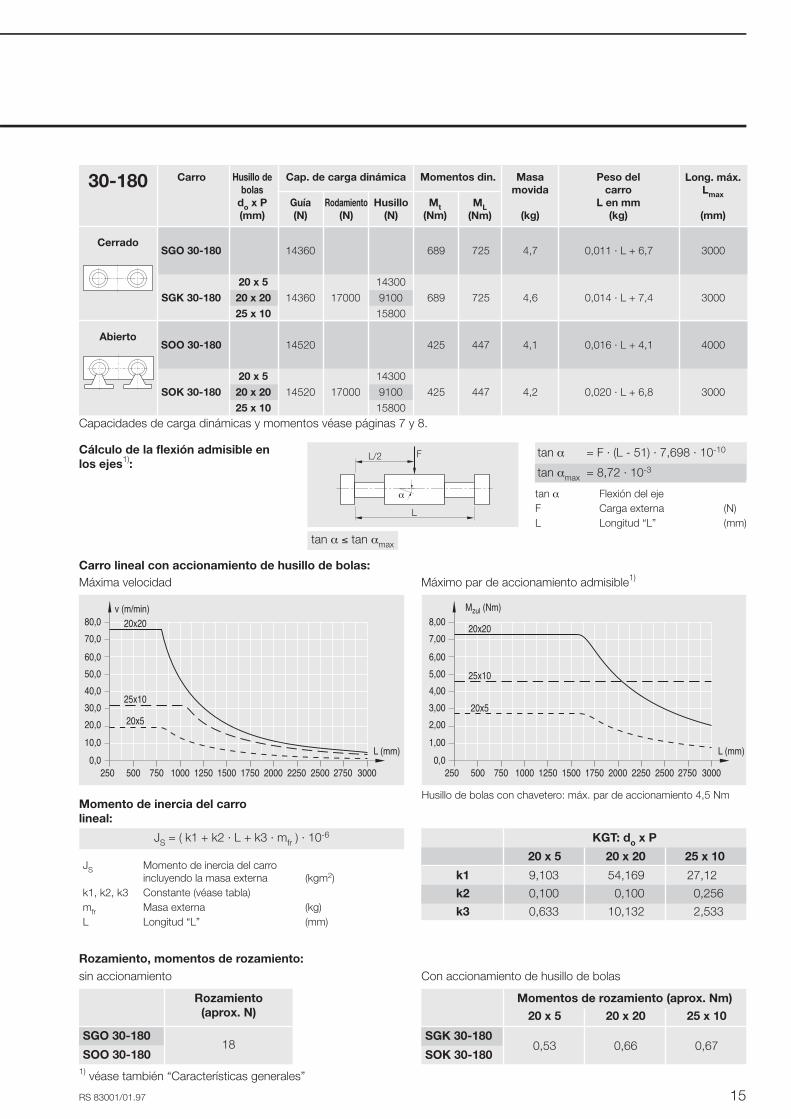
30-180 Carro
Cerrado
Abierto
Mt(Nm)
Husillo debolas
do x P(mm)
Cap. de carga dinámica Momentos din.
ML(Nm)
Masamovida
(kg)
Peso delcarro
L en mm(kg)
Long. máx.Lmax
(mm)Guía(N)
Rodamiento(N)
Husillo(N)
Cálculo de la flexión admisible enlos ejes1):
SOO 30-180 14520 425 447 4,1 0,016 · L + 4,1 4000
SOK 30-180 20 x 20 14520 17000 9100 425 447 4,2 0,020 · L + 6,8 3000
SGK 30-180 20 x 20 14360 17000 9100 689 725 4,6 0,014 · L + 7,4 3000
25 x 10 15800
20 x 5 14300
25 x 10 15800
20 x 5 14300
Máxima velocidad
SGO 30-180 14360 689 725 4,7 0,011 · L + 6,7 3000
tan α Flexión del ejeF Carga externa (N)L Longitud “L” (mm)
Máximo par de accionamiento admisible1)
Momento de inercia del carrolineal:
JS = ( k1 + k2 · L + k3 · mfr ) · 10-6
JS Momento de inercia del carroincluyendo la masa externa (kgm2)
k1, k2, k3 Constante (véase tabla)mfr Masa externa (kg)L Longitud “L” (mm)
Rozamiento, momentos de rozamiento:
SOO 30-180
SGO 30-180
Rozamiento(aprox. N)
18
sin accionamiento
k1 9,103 54,169 27,12
k2 0,100 0,100 0,256
k3 0,633 10,132 2,533
Momentos de rozamiento (aprox. Nm)
SGK 30-180
SOK 30-180
KGT: do x P
20 x 5 20 x 20 25 x 10
20 x 5 20 x 20 25 x 10
0,53 0,66 0,67
Con accionamiento de husillo de bolas
2500,0
L (mm)
500 750 1000 1250 1500 1750 2000 2250 2500
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0v (m/min)
2750 3000
20x20
25x10
20x5
2500,0
L (mm)
500 750 1000 1250 1500 1750 2000 2250 2500
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
2750 3000
20x20
25x10
20x5
Mzul (Nm)
tan α = F · (L - 51) · 7,698 · 10-10
tan αmax = 8,72 · 10-3
1) véase también “Características generales”
Capacidades de carga dinámicas y momentos véase páginas 7 y 8.
Carro lineal con accionamiento de husillo de bolas:

16 RS 83001/01.97
L/2
L
F
α
tan α ≤ tan αmax
Husillo de bolas con chavetero: max. par de accionamiento 18 Nm
STAR – Carros lineales tamaño 40-230 / 50-280Observaciones técnicas
40-230 Carro
Cerrado
Abierto
Mt(Nm)
Husillo debolas
do x P(mm)
Cap. de carga dinámica Momentos din.
ML(Nm)
Masamovida
(kg)
Peso delcarro
L en mm(kg)
Long. máx.Lmax
(mm)Guía(N)
Rodamiento(N)
Husillo(N)
SGO 40-230 24660 1504 1713 9,4 0,020 · L + 13,3 4000
32 x 10 2620032 x 5 21500
Cálculo de la flexión admisible enlos ejes1):
Máxima velocidad
Momento de inercia del carro lineal:
tan α = F · (L - 79) · 3,407 · 10-10
tan αmax = 8,72 · 10-3
tan α Flexión del ejeF Carga externa (N)L Longitud “L” (mm)
Máximo par de accionamiento admisible1)
JS = ( k1 + k2 · L + k3 · mfr ) · 10-6
Rozamiento, momentos de rozamiento:Sin accionamiento
SOO 40-230
SGO 40-230
Rozamiento(aprox. N)
22
Husillo de bolas: do x P
k1 51,583 69,446 138,21 286,83
k2 0,712 0,712 0,667 0,667
k3 0,633 2,535 10,132 25,938
32 x 5 32 x 10 32 x 20 32 x 32
Momentos de rozamiento (aprox. Nm)
SGK 40-230
SOK 40-230
32 x 5 32 x 10 32 x 20 32 x 32
JS Momento de inercia del carro linealincluyendo la masa externa (kgm2)
k1, k2, k3 Constante (véase tabla)mfr Masa externa (kg)L Longitud “L” (mm)
1,14 1,24 1,23 1,27
Con accionamiento de husillo de bolas
32 x 32 17800
32 x 10 2620032 x 20 17900
32 x 5 21500
32 x 32 17800
32 x 20 17900
SGK 40-230 24660 26000 1504 1713 9,3 0,025 · L + 14,2 4000
SOO 40-230 24950 928 1057 8,3 0,026 · L + 8,3 4000
SOK 40-230 24950 26000 928 1057 8,5 0,032 · L + 13,2 4000
0,0L (mm)
500 1000 1500 2000 2500
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
v (m/min)
3000 3500 4000
32x32
32x20
32x10
32x5
0,0L (mm)
500 1000 1500 2000 2500
5,0
10,0
15,0
20,0
25,0
30,0
35,0
40,0
Mzul (Nm)
3000 3500 4000
32x32
32x20
32x10
32x5
1) véase tambie´n “Características generales”
Observación sobre capacidades de carga dinámicas y momentos véase páginas 7 y 8.
Carro lineal con accionamiento de husillo de bolas:
17RS 83001/01.97
L/2
L
F
α
tan α ≤ tan αmax
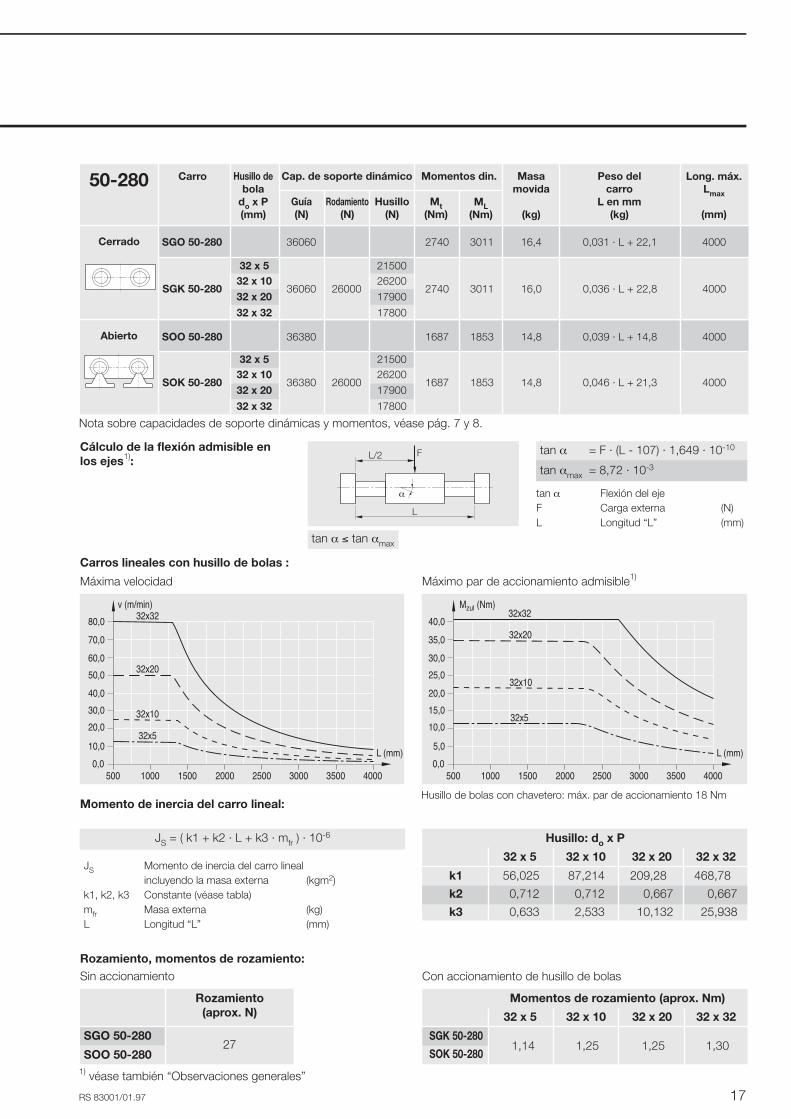
50-280 Carro
Cerrado
Abierto
Mt(Nm)
Husillo debola
do x P(mm)
Cap. de soporte dinámico Momentos din.
ML(Nm)
Masamovida
(kg)
Peso delcarro
L en mm(kg)
Long. máx.Lmax
(mm)Guía(N)
Rodamiento(N)
Husillo(N)
Carros lineales con husillo de bolas :
SGO 50-280 36060 2740 3011 16,4 0,031 · L + 22,1 4000
32 x 10 2620032 x 5 21500
Cálculo de la flexión admisible enlos ejes1):
Máxima velocidad
Momento de inercia del carro lineal:
tan α = F · (L - 107) · 1,649 · 10-10
tan αmax = 8,72 · 10-3
tan α Flexión del ejeF Carga externa (N)L Longitud “L” (mm)
Máximo par de accionamiento admisible1)
JS = ( k1 + k2 · L + k3 · mfr ) · 10-6
Rozamiento, momentos de rozamiento:Sin accionamiento
SOO 50-280
SGO 50-280
Rozamiento(aprox. N)
27
Husillo: do x P
k1 56,025 87,214 209,28 468,78
k2 0,712 0,712 0,667 0,667
k3 0,633 2,533 10,132 25,938
32 x 5 32 x 10 32 x 20 32 x 32
Momentos de rozamiento (aprox. Nm)
SGK 50-280
SOK 50-280
32 x 5 32 x 10 32 x 20 32 x 32
JS Momento de inercia del carro linealincluyendo la masa externa (kgm2)
k1, k2, k3 Constante (véase tabla)mfr Masa externa (kg)L Longitud “L” (mm)
1,14 1,25 1,25 1,30
Con accionamiento de husillo de bolas
32 x 32 17800
32 x 10 26200
32 x 20 17900
32 x 5 21500
32 x 32 17800
32 x 20 17900
SGK 50-280 36060 26000 2740 3011 16,0 0,036 · L + 22,8 4000
SOO 50-280 36380 1687 1853 14,8 0,039 · L + 14,8 4000
SOK 50-280 36380 26000 1687 1853 14,8 0,046 · L + 21,3 4000
0,0L (mm)
500 1000 1500 2000 2500
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
v (m/min)
3000 3500 4000
32x32
32x20
32x10
32x5
0,0L (mm)
500 1000 1500 2000 2500
5,0
10,0
15,0
20,0
25,0
30,0
35,0
40,0
Mzul (Nm)
3000 3500 4000
32x32
32x20
32x10
32x5
Husillo de bolas con chavetero: máx. par de accionamiento 18 Nm
1) véase también “Observaciones generales”
Nota sobre capacidades de soporte dinámicas y momentos, véase pág. 7 y 8.

18 RS 83 001/01.97
Componentes y pedido SGO 8-65 hasta SGO 50-280STAR – Carros lineales cerrados sin accionamiento
Datos de pedido
Ejemplo de pedidoDescripción
Carro lineal(Referencia): 0260-400-00, 890 mm
Ejecución = OA01
Guía = 01Accionamiento = 02Mesa = 01Protección = 00Documentación = 01
Carro lineal SGO 30-180Longitud L = 890 mm
sin accionamiento
con ejes de acero de precisión STARcon travesaño tipo Bcon mesa standardsin fuellecon instrucciones de mantenimiento
Carro
(no utilizarpara pedido)
SGO 8-65
SGO 12-85
SGO 16-100
SGO 20-130
SGO 25-160
SGO 30-180
SGO 40-230
SGO 50-280
Referencias antiguas
Las referencias válidas hasta ahora se sustituyenpor el nº 0260.
Intercambiable con :
1040-…-..
1040-708-00 : con travesaño tipo A
1040-808-00 : con travesaño tipo B
1040-712-00 : con travesaño tipo A
1040-812-00 : con travesaño tipo B
1040-716-00 : con travesaño tipo A
1040-816-00 : con travesaño tipo B
1040-720-00 : con travesaño tipo A
1040-820-00 : con travesaño tipo B
1040-725-00 : con travesaño tipo A
1040-825-00 : con travesaño tipo B
1040-730-00 : con travesaño tipo A
1040-830-00 : con travesaño tipo B
1040-740-00 : con travesaño tipo A
1040-840-00 : con travesaño tipo B
1040-750-00 : con travesaño tipo A
1040-850-00 : con travesaño tipo B
Referencia
0260-900-00
0260-000-00
0260-100-00
0260-200-00
0260-300-00
0260-400-00
0260-500-00
0260-600-00
Ejecución
OA01
0260-X00-00,…. mm
*
* En los travesaños se han modificado las alturas H4, H5, H6, y el avellanado H13, S2

19RS 83 001/01.97
Guía = ..
Trav
esañ
o A
Trav
esañ
o B
sin con
Protección = ..
Fuelleen PU
Standard
Eje
s st
anda
rdDocumentación =
..
Instrucciones de mantenimiento
01 02 03 01 02 01 00 01 01
Mesa = ..Fijación = ..(Travesaño)
Ejes
de
acer
oin
oxid
able
Eje
s de
ace
roS
TAR
-Res
ist

20 RS 83 001/01.97
Esquemas tamaños SGO 8-65 hasta SGO 50-280STAR – Carros lineales cerrados sin accionamiento
Carro d A R B1 H H1 H2 H3 H4 H10 H13 H14 D1
h6 ± 0,02 ± 0,015
Los carros lineales STAR secomponen de:
- Mesa (aleación aluminio)
- Cuatro rodamientos lineales STAR-Super; tamaño 8: rodamientoslineales STAR-Standard
- Cuatro retenes
- Dos travesaños (aleación dealuminio)
- Dos ejes de acero de precisiónSTAR, tolerancia h6
- Con taladro de compensación deaire en montaje con fuelle
Travesaño tipo APara casos de aplicación con travesaños atornillados y mesamóvil.
se suministra suelto sin tornillos
Vista por A
Dimensiones (mm)
8 65 32 12 11,5 24 23 12,5 23,5 19,5 18,1 17,5 16
12 85 42 14 16 34 32 18 33 27 26,6 25 22
16 100 54 18 18 38 36 20 37 31 28,6 29 26
20 130 72 20 23 48 46 25 47 39 36,6 37,5 32
25 160 88 25 28 58 56 30 57 48 44,6 45 40
30 180 96 25 32 67 64 35 66 55 53,6 50,5 47
40 230 122 30 40 84 80 44 83 71 66,6 64 62
50 280 152 30 48 100 96 52 99 86 82,6 80 75
Centrado
Taladro decompensación
de aire
Engrasador
B1B1
2
B1
A
L/2
A
H10
L
H1
d12
D1
d S1
N HH
14H
2
S
S2 R
E2
H3H
13H4
A
E1
Rec. despl. max.2
Rec. despl. max.2
SGO 8-65
SGO 12-85
SGO 16-100
SGO 20-130
SGO 25-160
SGO 30-180
SGO 40-230
SGO 50-280
Sól
o pa
ra tr
aves
año
A
21RS 83 001/01.97
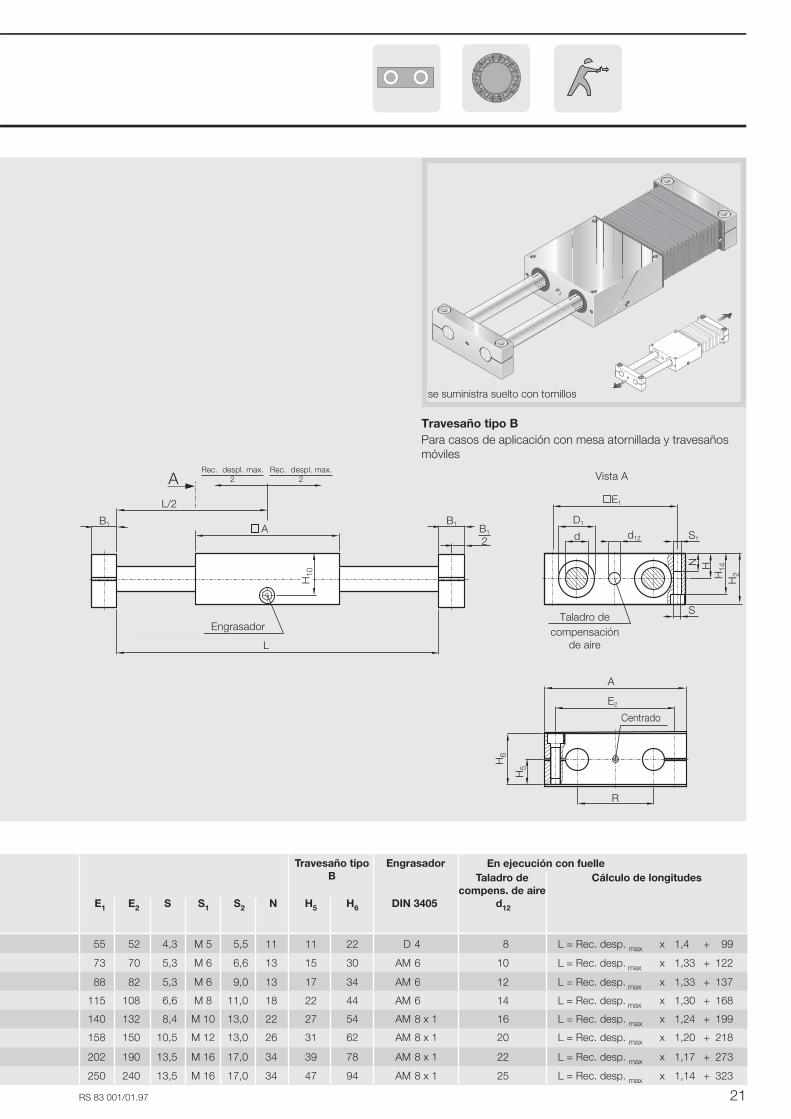
E1 E2 S S1 S2 N H5 H6 DIN 3405 d12
55 52 4,3 M 5 5,5 11 11 22 D 4 8 L = Rec. desp. max x 1,4 + 99
73 70 5,3 M 6 6,6 13 15 30 AM 6 10 L = Rec. desp. max x 1,33 + 122
88 82 5,3 M 6 9,0 13 17 34 AM 6 12 L = Rec. desp. max x 1,33 + 137
115 108 6,6 M 8 11,0 18 22 44 AM 6 14 L = Rec. desp. max x 1,30 + 168
140 132 8,4 M 10 13,0 22 27 54 AM 8 x 1 16 L = Rec. desp. max x 1,24 + 199
158 150 10,5 M 12 13,0 26 31 62 AM 8 x 1 20 L = Rec. desp. max x 1,20 + 218
202 190 13,5 M 16 17,0 34 39 78 AM 8 x 1 22 L = Rec. desp. max x 1,17 + 273
250 240 13,5 M 16 17,0 34 47 94 AM 8 x 1 25 L = Rec. desp. max x 1,14 + 323
se suministra suelto con tornillos
Rec. despl. max.2
Rec. despl. max.2 Vista A
Travesaño tipo BPara casos de aplicación con mesa atornillada y travesañosmóviles
B1B1
2
B1
L/2
A
H10
L
d12
D1
d S1
N HH
14H
2
S
R
E2
H5
H6
A
E1
A
Cálculo de longitudesTaladro decompens. de aire
Travesaño tipoB
Engrasador En ejecución con fuelle
Centrado
Taladro decompensación
de aire
Engrasador

22 RS 83 001/01.97
Componentes y pedido SGK 12-85 hasta SGK 20-130STAR – Carros lineales cerrados con husillo de bolas
Carro
Husillo de bolas
Accionamiento = ..
ExtremoEjes standard
8 x
2,5
12 x
5
16 x
5
16 x
10
16 x
16
SGK 12-85
SGK 16-100
SGK 20-130
0261-000-00
0261-100-00
0261-200-00
ø6
ø6
ø9ø9 con
chavetero
SGK 12-85
SGK 16-100
SGK 20-130
0261-000-00
0261-100-00
0261-200-00
ø6
ø6
ø9
Datos de pedido
Ejemplo de pedidoDescripción
Carro linealSGK 16-100, longitud (L) = 890 mm
Con brida
Con eje de precisión STARCon husillo de bolas 12 x 5Con mesa standardCon brida para motor VRDM 566Con motor VRDM 566Con fuelle de PUDetector mecánico, posición parada derecha + 250 mmDetector inductivo PNP, abierto, pos. detec. dcha - 150 mmDetector mecánico, posición parada derecha - 250 mmCanal para cable suelto, longitud = 500 mmConector (suelto)Con leva de detección lado conectoresDocumentación standard
Carros lineales(Referencia): 0261-100-00, 890 mm
Ejecución = MF01
Guía = 01Accionamiento = 01Mesa = 01Brida de motor = 01Motor = 21Protección = 011º detector = 15-R+ 250 mm2º detector = 11-R– 150 mm3º detector = 15-R– 250 mmCanal para cable = 20, 500 mmConector = 17Leva detección = 16Documentación = 01
Bajo pedido se suministran con travesaño tipo B
01
01
01
01
01
01
Referencia Guía= ..
Ejecución= ….0261-X00-00,
…. mm
OF01
MF01
12 x
10
01
01 02
01 02 03
04 05 06
01
01 02
01 02 03

23RS 83 001/01.97
Standard Tipo demotor
i =
Montaje demotor = ..
Motor = ..
sin con
Protección = ..
sin detector
Prot
ocol
ost
anda
rd
Prot
ocol
ode
med
ició
n
PNP Trabajo
PNP Reposo 11 -. ±….
Levaexterior
Conectorexteriorsuelto
17
Detectorexterior
TipoLong. en mm
Canal de cable suelto
01 03
01
01
01
00
00
00
01
01
01
01
1
1
1
1
00
00
16
13 -. ±….
Mecánico 15 -. ±….
Canal cable 20 - X....
1) Tener en cuenta el par máximo admisible
02
00
00
00
paramotor 1)
*Montajede motor
VRDM 564
VRDM 566
VRDM 564
VRDM 566
MKD 41 B
VRDM 597
VRDM 5910
VRDM 5913
01
01
01
01
02
01
20
21
20
21
* Todas las bridas de motor también se pueden recibir sin motor. Por favor pongaen la opción motor “00”
10
26
22
23
Mesa = .. Documen-tación = ..
1º detector = .. - . ± ….. mm2º detector = .. - . ± ….. mm3º detector = .. - . ± ….. mm
Canal de cable = .. - . .... mm Conector = .. Leva detección = ..
FuellePU
Descripciónvéase página 62
0
TM
L/2
L
- Sentido de desplazamiento +
derecha (R)
izquierda (L)
DetectorLado mont.
Distan. con.Sent. despl.
Pos
ició
nco
nexi
ón
sin canal de cable
Situación de la posicióndetecciónLa situación de los detectores se debedefinir en el momento de suconstrucción. (Véase tabla y ejemplo)Posición de montaje: los detectores sepueden montar tanto a la izquierda (L)como a la derecha (R).Igualmente se pueden colocar en laparte negativa o positiva de la carrera.Distancia de detección: la distancia dedetección se calcula entre el puntomedio del carro y el momento que seproduce la detención de un detector.(Medidas en mm).Para más información sobre el montajede los detectores, tipo de detectores ymontaje del canal de los cables, ver“Montaje detectores”, pág. 52.

24 RS 83 001/01.97
STAR – Carros lineales cerrados con husillo de bolasEsquemas tamaños SGK 12-85 hasta SGK 20-130
Carro Dimensiones (mm)
d A R B1 B4 B5 H H1 H2 H3 H4 H10 H13 H14 D1
h6 ± 0,02 ± 0,015
12 85 42 14 24 17 16 34 32 18 33 27 26,6 25 22
16 100 54 18 24 15 18 38 36 20 37 31 28,6 29 26
20 130 72 20 29 19 23 48 46 25 47 39 36,6 37,5 32
SGK 12-85
SGK 16-100
SGK 20-130
Carro Geometría del extremoaccionamiento
6 28 18 25 2,1 40 33 23 M4 - 8 prf 53 9,5 11,5 M4 - 8 prf
6 28 18 25 2,1 40 33 23 M4 - 8 prf 60 11 14 M4 - 8 prf
9 40 25 34,5 2,1 52 40 28 M6 - 12 prf 74 15,5 18,5 M5 - 12 prf
d1 d2 L1 L2 Z1 E4 a b S4 F5 F6 F7 S5h7 H7
Fijación
Sólo
trav
. A
L
L/2
B15
ød1
H15
H10
S15
B4B5
E4E2
A
L1
L2
E1
A
A
B1B1
2
H1
Esquemas para montaje de motor véase capítulo: Montaje de motor.
Rec. desp. max.2
Carr. seg. Carr. seg.
Rec. desp. max.2
Carrera efectiva2
Carrera efectiva2
Engrasador
SGK 12-85
SGK 16-100
SGK 20-130

25RS 83 001/01.97
B15 H15 S15 F12 H12 d12
Leva de detección Compensación de aire
30 13,5 M4-7prf. 16 10,4 6,8 L = Rec. de des. max x 1,33 + 122
30 13 M4-7prf. 24,4 12 8,5 L = Rec. de des. max x 1,33 + 137
64 23 M4-8prf. 37 15,5 10 L = Rec. de des. max x 1,30 + 168
Cálculo de longitud con fuelle
Si se desea efectuar un mecanizadoposterior tener en cuenta las tablas
correspondientes
TB02-016-01
TB02-016-02
TB02-016-03
EngrasadorCon travesaño B
E1 E2 S S1 S2 S8 N S6 H5 H6 DIN 3405
73 70 5,3 M 6 6,6 M 6 x 35 13 M 6 x 22 15 30 AM 6
88 82 5,3 M 6 9 M 8 x 40 13 M 8 x 25 17 34 AM 6
115 108 6,6 M 8 11 M 10 x 55 18 M10 x 30 22 44 AM 6
Prof. centrado Z1
(Centr. interno)
Tornillo S6 - DIN912
Vista A
SGK 20-130 conmotor paso a paso
SGK 20-130con servomotor MKD 41B
SGK 12-85 y SGK 16-100motor paso a paso VRDM
H5
H6
77,5 243
82
77,5
86
X
60
45 Y
F5a
d2
S5 S4
bH4
F 7F 6
H3H
13
R
S2
H12
d d12 S1
F12 S
D1
H2H
14HN
Tornillo S8 - DIN912
con travesaño B se puedesuministrar sobre consulta
Accionamiento con chaveteroPara tamaño SGK 20-130
h=1,8
202,5
3P9
Motor X Y
VRDM 597: 106 mmVRDM 5910: 139 mmVRDM 5913: 172 mmVRDM 564: 82 mmVRDM 566: 100 mm
Taladros compensación de aire

26 RS 83 001/01.97
Componentes y pedido SGK 25-160 hasta SGK 50-280STAR – Carros lineales cerrados con husillo de bolas
Carro Referencia
Ejesstandard
Guía= ..
Husillo de bolas
Accionamiento = ..
Extremo
20 x
5
20 x
20
25 x
10
32 x
5
32 x
10
32 x
20
ø10
ø16
ø10ø10 con
chavetero
ø16ø16 con
chavetero
01
01
01 02 04
01 02 03 04
ø10
ø10
ø16
ø16
Bajo pedido se suministran con travesaño tipo B; ejemplo de pedido véase pág. 22; posición del detector: véase pág.23
01
01
RV01
RV02
RV03
RV04
0261-X00-00, …. mm
Ejecución= ….
MF01
32 x
32
02.36.1102.36.1202.56.1002.56.11
01 02 04
05 06 08
01 02 03 04
05 06 07 08
OF01
0261-300-00
0261-400-00
0261-500-00
0261-600-00
SGK 25-160
SGK 30-180
SGK 40-230
SGK 50-280
SGK 25-160
SGK 30-180
SGK 40-230
SGK 50-280
0261-300-00
0261-400-00
0261-500-00
0261-600-00
0261-300-00
0261-400-00
0261-500-00
0261-600-00
SGK 25-160
SGK 30-180
SGK 40-230
SGK 50-280
RV01
RV02
02.36.21
RV03
RV04
02.36.20
RV01
RV02
02.56.21
RV03
RV04
02.56.20
01
01
01
01
11 12 14
11 12 14
01 02 03 04
01 02 03 04

27RS 83 001/01.97
Standard
Mesa = ..
Tipo de motor
Brida demotor = ..
Motor = ..
Fuelle
sin con
Protección = ..
Prot
ocol
ost
anda
rd
Prot
ocol
ode
med
ició
n
00
00
01
01
i =
Serv
omot
orM
otor
pas
o a
paso
01
01
sin detector
sin canal de cable
PNP trabajo
PNP reposo 11 -. ±….
Levaexterior
Conectorexteriorsuelto
17
Detectorexterior
TipoLongitud en mm
Canal de cable suelto
00
16
13 -. ±….
Mecánico 15 -. ±….
Canal cable 20 - X....
Serv
o-m
otor
Mot
or p
aso
a pa
so
MKD 71 B-061
MKD 71 B-097
RDM 51117
RDM 51122
VRDM 597
VRDM 5910
VRDM 5913
MKD 41 B
01
03
02
00
00
*Bridade motor
03 10
26
22
23
Documen-tación = ..
paramotor 1)
1º detector = .. - . ± ….. mm2º detector = .. - . ± ….. mm3º detector = .. - . ± ….. mmCanal de cable = .. - . .... mm
Conector = ..Leva detec. = ..
Descripciónvéase página 62
01 030100
02
11
12
24
25
10
12 DetectorLado de mon
Distanc. con.Sent. de desp.
Pos
. de
cone
xión
MKD 41 B 10
MKD 41 B 10
1
1,5
MKD 41 B 10
MKD 41 B 10
14
16
1
1,5
10
12
14
16
MKD 71 B-061
MKD 71 B-097
MKD 71 B-061
MKD 71 B-097
MKD 71 B-061
MKD 71 B-097
MKD 71 B-061
MKD 71 B-097
11
12
11
12
11
12
11
12
1
2
1
2
01
01
01
01
* Todas las bridas de motor se pueden recibir también sin motor. Por favor poner en la opción motor “00” 1) observar máx. momento admisible

28 RS 83 001/01.97
Carro Dimensiones (mm)
d A R B1 B4 B5 H H1 H2 H3 H4 H10 H13 H14 D1
h6 ± 0,02 ± 0,015
Esquemas tamaños SGK 25-160 hasta SGK 50-280STAR – Carros lineales cerrados con husillo de bolas
L
B1
L/2
A
B15
A
S15
H15
H10
ød1
B4B5
E4E2
A
L1
L2
E1
H1
B1
2
Rec. desp. max.2
Rec. desp. max.2
SGK 25-160
SGK 30-180
SGK 40-230
SGK 50-280
25 160 88 25 33 20,5 28 58 56 30 57 48 44,6 45 40
30 180 96 25 33 20,5 32 67 64 35 66 55 53,6 50,5 47
40 230 122 30 30 15 40 84 80 44 83 71 66,6 64 62
50 280 152 30 30 15 48 100 96 52 99 86 82,6 80 75
SGK 25-160
SGK 30-180
SGK 40-230
SGK 50-280
Carro Geometría del extremoaccionamiento
d1 d2 L1 L2 Z1 E4 a b S4 F5 F6 F7 S5h7
Fijación
Sólo
trav
. A
Esquemas para montaje de motor véase capítulo: Montaje de motor
Engrasador
Carrera efectiva2Carr. seg.
Carrera efectiva2 Carr. seg.
10 48H7 25 35,5 2,1 63 40 40 M6–12prf 104 17,5 16,5 M5–12prof
10 48H7 25 35,5 2,1 63 40 40 M6–12prf 126 14,5 19,5 M5–12prof
16 68-0,01 35 58 8 - 90 46 M8–16prf 221 14 20 M5–12prof
16 68-0,01 35 58 8 - 90 46 M8–16prf 271 22 12 M5–12prof

29RS 83 001/01.97
Engrasadorcon travesaño B
E1 E2 S S1 S2 S8 N S6 H5 H6 DIN 3405
B15 H15 S15 F12 H12 d12
Leva de detección Compensación de aire
64 26 M4-10prf. 40 18,5 12,5 L = Rec. desp. max x 1,24 + 199
64 33 M4-10prf. 40 21 15 L = Rec. desp. max x 1,20 + 218
64 21 M4-10prf. 54 28 18 L = Rec. desp. max x 1,17 + 273
64 21 M4-10prf. 60 30 22 L = Rec. desp. max x 1,14 + 323
Cálculo de longitud con fuelle
140 132 8,4 M 10 13,0 M12 x 60 22 M12 x 40 27 54 AM 8 x 1
158 150 10,5 M 12 13,0 M12 x 70 26 M12 x 45 31 62 AM 8 x 1
202 190 13,5 M 16 17,0 M16 x 90 34 M16 x 60 39 78 AM 8 x 1
250 240 13,5 M 16 17,0 M16 x 100 34 M16 x 60 47 94 AM 8 x 1
Si se desea efectuar un mecanizadoposterior, tengan en cuenta las tablas
correspondientes
TB02-016-04
TB02-016-05
TB02-016-06
TB02-016-07
KGT-Zapfen mit Paßfedernut
Vista A
Tornillo S6 - DIN912
S2
S1
F12 S
N
d12
H5
H6
H2
H14H
H12
dD1
F5a
d2
H3H
13
RbH4
F 7F 6
S4S5
Prof. de centrado Z1
(Centrado interno)
Tornillo S8 - DIN912
h=1,8
202,5
3P9h=3
284
5P9
L1
B4
ød1
ød2
H7
Z1
L2
L1 Z1L2 B4
ød1
ød2
-0,0
1
Tamaño
con chavetero sin chavetero
con centraje Z1exterior
con centraje Z1interior
SGK 25-160
SGK 30-180
SGK 40-230
SGK 50-280
Husillo de bolas - Extremo
Con travesaño Bsuministrable sobre consulta
Taladros de compens. deaire

30 RS 83 001/01.97
Componentes y pedido SOO 12-65 hasta SOO 50-280STAR – Carros lineales abiertos sin accionamiento
SOO 12 - 85
SOO 16 -100
SOO 20 -130
SOO 25 -160
SOO 30 -180
SOO 40 -230
SOO 50 -280
Datos de pedido
Ejemplo de pedidoDescripción
Carro lineal(Referencia): 0265-400-00, 890 mm
Ejecución = OA 01
Guía = 01Mesa = 01Protección = 00Documentación = 01
Carro lineal SOO 30-180Longitud L = 890 mm
sin accionamiento
con ejes de acero de precisión STARcon mesa standardsin fuellecon instrucciones de mantenimiento
Viejas referencias
Las referencias válidas hasta ahorase sustituyen por el nº 02...
Intercambiable con :
1045-…-..
1045-112-00
1045-116-00
1045-120-00
1045-125-00
1045-130-00
1045-140-00
1045-150-00
Carro
(no utilizar parapedido)
Referencia Ejecución
0265-X00-00,…. mm
* Las nuevas mesas tienen una distancia entre los apoyos de los ejes (B6, H18)
0265-000-00
0265-100-00*
0265-200-00*
0265-300-00*
0265-400-00
0265-500-00
0265-600-00
OA01

31RS 83 001/01.97
Eje
s co
nre
vest
imie
nto
STA
R-R
esis
t Guía = ..
sin con
Protección = ..
FuellePU
Standard
Eje
s st
anda
rd
Documen-tación = ..
Instruccionesde mantenimiento
En el carro lineal STAR abierto SOO con fuelles, estos se sujetan alcarro, con unas chapas de fijación en los extremos(según dibujo pág. 33)
01 02 03 01 00 01 01
Mesa = ..
04 05 06
para fuelle
Ejes
de
acer
oin
oxid
able

32 RS 83 001/01.97
Esquemas tamaños SOO 12-160 hasta SOO 50-280STAR – Carros lineales abiertos sin accionamiento
Los carros lineales STAR secomponen de:
- Mesa (aleación aluminio)
- Cuatro rodamientos lineales; STAR-Super
- Cuatro retenes
- Dos ejes de acero de precisiónSTAR, tolerancia h6,con apoyo de ejes (aleación aluminio)
Carro d A R H H7 H8 H18 B6 W Angulo D1
h6 ± 0,02 α
Dimensiones (mm)
12 85 42 18 40 30 - - 6,5 66 22
16 100 54 22 48 35 3 15 9,0 68 26
20 130 72 25 57 42 3,5 12 9,0 55 32
25 160 88 30 66 51 2,5 15 11,5 57 40
30 180 96 35 77 60 - - 14,0 57 47
40 230 122 45 95 77 - - 19,5 56 62
50 280 152 55 115 93 - - 22,5 54 75
Vista AL/2
A
L
A1
T2T2 T1
H8
HN
E1
R
D1
WE3
S3
α
H7
H16
H11
B6
H18
A
S1d
Rec. desp. max.2
Rec. desp. max.2
Centrado
Las distancias de taladro T2son iguales en ambos lados
SOO 12-85
SOO 16-100
SOO 20-130
SOO 25-160
SOO 30-180
SOO 40-230
SGO 50-280
2 engrasadores

33RS 83 001/01.97
E1 S1 N H16 H17 S3 E3 T1 T2 A1 H11 DIN 3405
73 M 6 13 5 6,5 4,5 29 75 min.15 57 7 AM 6 L = Rec. desp. max x 1,33 + 122
88 M 6 13 5 8,3 5,5 33 100 min.20 68 7,2 AM 6 L = Rec. desp. max x 1,33 + 137
115 M 8 18 6 9,8 6,6 37 100 min.20 94 7,2 AM 6 L = Rec. desp. max x 1,30 + 168
140 M 10 22 6 9,8 6,6 42 120 min.24 116 9,5 AM 8 x 1 L = Rec. desp. max x 1,24 + 199
158 M 12 26 7 10,0 9,0 51 150 min.30 130 9,5 AM 8 x 1 L = Rec. desp. max x 1,20 + 218
202 M 16 34 8 11,8 9,0 55 200 min.30 170 11,5 AM 8 x 1 L = Rec. desp. max x 1,14 + 269
250 M 16 34 9 14,3 11,0 63 200 min.30 220 15 AM 8 x 1 L = Rec. desp. max x 1,112 + 320
Cálculo de longitud con fuelleEngrasadorApoyo de ejes
con fuelle
Con una longitud L > 600 y L < 660para los tamaños
SOO 40-230 y SOO 50-280por favor consultar
Las distancias de taladro T2son iguales en ambos lados
Rec. desp. max.2
Rec. desp. max.2
Carrera efectiva2Carr. seg. Carr. seg.
Carrera efectiva2
Engrasador
Centrado
Avellanado para tornillos segúnDIN 6912
Raíl de apoyo suelto en suministro
B6
H18
R
T2 T1 T2
L/2
A
A
H11
L
A1
d S1
E3
D1
H8HN
H17
H16 H
7
E1
S3
Vista A
3 mm

34 RS 83 001/01.97
Componentes y pedido SOK 12-85 hasta SOK 20-130STAR – Carros lineales abiertos con husillo de bolas
Datos de pedido
Ejemplo de pedidoDescripción
Carro linealSOK 20-130, longitud (L) = 890 mm
Con brida
con eje de precisión STARKGT 16 x 16Con mesa standardCon brida para motor MKD 41BCon MKD 41BCon fuelle de PUDetector mecánico, posición parada derecha + 250 mmDetector inductivo PNP, pos. detec. derecha - 150 mmDetector mecánico, posición parada derecha - 250 mmCanal para cable suelto, longitud = 500 mmConectorCon leva detección lado conectoresDocumentación standard
Carros lineales(Referencia): 0266-200-00, 890 mm
Ejecución = MF 01
Guía = 01Accionamiento = 03Mesa = 01Brida de motor = 01Motor = 10Protección = 011º detector = 15-R+ 250 mm2º detector = 11-R– 150 mm3º detector = 15-R– 250 mmCanal para cable = 20, 500 mmConector = 17Leva detección = 16Documentación = 01
Carro
Husillo de bolas
Accionamiento = ..
PivoteEjes standard
8 x
2,5
12 x
5
16 x
10
16 x
10
16 x
16
ø6
ø6
ø9
ø9 conchavetero
ø6
ø6
ø9
Referencia Guía= ..
Ejecución= ….0266-X00-00,
…. mm
OF01
MF01
SOK 12-85
SOK 16-100
SOK 20-130
SOK 12-85
SOK 16-100
SOK 20-130
0266-000-00
0266-100-00
0266-200-00
0266-000-00
0266-100-00
0266-200-00
02
02
02
02
02
02
12 x
5
01
01 02
01 02 03
01
01 02
01 02 03
04 05 06

35RS 83 001/01.97
Situación de la posicióndetecciónLa situación de los detectores se debedefinir en el momento de suconstrucción. (Véase tabla y ejemplo)Posición de montaje: los detectores sepueden montar tanto a la izquierda (L)como a la derecha (R).Igualmente se pueden colocar en laparte negativa o positiva de la carrera.Distancia de detección: la distancia dedetección se calcula entre el puntomedio del carro y el momento que seproduce la detención de un detector.(Medidas en mm).Para más información sobre el montajede los detectores, tipo de detectores ymontaje del canal de los cables, ver"Montaje detectores", pág. 52.
Standard Tipo demotor
i =
Brida demotor = ..
Motor = ..
Fuelle PU
sin con
Protección = ..
sin detector
sin canal de cable
Prot
ocol
ost
anda
rd
Prot
ocol
ode
med
ició
n
PNP Trabajo
PNP Reposo 11 -. ±….
Levaexterior
Caja con.fuera
exterior
17
Detectorexterior
TipoLongitud en mm
Canal de cable suelto
01 03
01
01
01
00
00
00
01
01
01
01
1
1
1
1
00
00
16
13 -. ±….
Mecánico 15 -. ±….
Canal cable 20 - X....
02
00
00
00
*Bridade motor
VRDM 564
VRDM 566
VRDM 564
VRDM 566
MKD 41 B
VRDM 597
VRDM 5910
VRDM 5913
01
01
01
01
02
01
20
21
20
21
10
26
22
23
Mesa = .. Documen-tación = ..
* Todas las bridas de motor se pueden recibir también sin motor. Por favor poner laopción motor en “00”
1) Tener en cuenta el momento máx. admisible
para motor1)
Descripciónvéase pág. 62
1º detector = .. - . ± ….. mm2º detector = .. - . ± ….. mm3º detector = .. - . ± ….. mmCanal de cable = .. - . .... mm
Conector = .. Leva detección = ..
0
TM
L/2
L
izquierda (L)
derecha (R)
- Sentido de desplazamiento +
DetectorLado de mon.
Distancia con.Sentido desp.
Pos
ició
n de
cone
xión

36 RS 83 001/01.97
Esquemas tamaños SOK 12-85 hasta SOK 20-130STAR – Carros lineales abiertos con husillo de bolas
Carro Dimensiones (mm)
d A R B1 B4 B5 H H5 H6 H7 H8 H9 H18 B6 D1
12 85 42 14 24 17 18 15 30 40 30 22 - - 22
16 100 54 18 24 15 22 17 34 48 35 26 3 15 26
20 130 72 20 29 19 25 22 44 57 42 32 3,5 12 32
Carro Geometría del extremo accionamiento
6 28 18 25 2,1 40 33 23 M4 - 8prf 53 9,5 11,5 M4 - 8prf
6 28 18 25 2,1 40 33 23 M4 - 8prf 60 11 14 M4 - 8prf
9 40 25 34,5 2,1 52 40 28 M6 - 12prf 74 15,5 18,5 M5 -12prf
d1 d2 L1 L2 Z1 E4 a b S4 F5 F6 F7 S5h7 H7
Fijación
B1B1
2
T2 T1 T2
L/2
B15 S15
A
A
ød1
H15
E4E2A
L1
L2
E1
L
B4B5
A1
H9
H11
Carr. seg. Carr. seg.
h6 ± 0,02
Las distancias de taladro T2son iguales en ambos lados
Esquemas para montaje de motor véase capítulo: Montaje de motor.
Engrasador
Rec. de desp. max.2
Rec. desp. max.2
Carrera efectiva2
Carrera efectiva2
SOK 12-85
SOK 16-100
SOK 20-130
SOK 12-85
SOK 16-100
SOK 20-130

37RS 83 001/01.97
77,5 243
82
77,5
86
X
60
45 Y
B15 H15 S15
Leva de detección
Si se desea efectuar un mecanizadoposterior tener en cuenta las tablas
correspondientes
TB02-016-11
TB02-016-12
TB02-016-13
Engrasador
E1 E2 S1 N H16 H17 E3 S3 T1 T2 A1 H11 DIN 3405
73 70 M6x22 13 5 6,5 29 4,5 75 min.15 57 7 AM 6
88 82 M8x25 13 5 8,3 33 5,5 100 min.20 68 7,2 AM 6
115 108 M10x30 18 6 9,8 37 6,6 100 min.20 94 7,2 AM 6
Cálculo de longitud con fuelle
30 13,5 M4-7prf L = Rec. desp. max x 1,33 + 122
30 13 M4-7prf L = Rec. desp. max x 1,33 + 137
64 23 M4-8prf L = Rec. desp. max x 1,30 + 168
Apoyo de ejes
SGK 20-130con motores de paso VRDM
SGK 20-130con servomotor MKD 41B
SGK 12-85 y SGK 16-100 conmotor paso a paso
B6 H18
S4
S5
F5a
d2
bF 6
H5
R
H6
dS1
E3
D1
H8
HN
S3
H17
H16
H7
F 7
Tornillo S6 - DIN912
Avellanado para tornillos segúnDIN 6912
Se suministra raíl de apoyo suelto
Prof. de centrado Z1
Vista A
Accionamiento con chaveteroPara tamaño SOK 20-130
h=1,8
202,5
3P9
Motor X Y
VRDM 597: 106 mmVRDM 5910: 139 mmVRDM 5913: 172 mmVRDM 564: 82 mmVRDM 566: 100 mm

38 RS 83 001/01.97
ø10
ø10
ø16
ø16
Bajo pedido se suministran con travesaño tipo B; posición del detector: véase página 23
RV01
RV02
RV03
RV04
0266-300-00
0266-400-00
0266-500-00
0266-600-00
SOK 25-160
SOK 30-180
SOK 40-230
SOK 50-280
RV01
RV02
02.36.21
RV03
RV04
02.36.20
RV01
RV02
02.56.21
RV03
RV04
02.56.20
02
02
02
02
11 12 14
11 12 14
01 02 03 04
01 02 03 04
Carro
SOK 25-160
SOK 30-180
SOK 40-230
SOK 50-280
0266-300-00
0266-400-00
0266-500-00
0266-600-00
SOK 25-160
SOK 30-180
SOK 40-230
SOK 50-280
0266-300-00
0266-400-00
0266-500-00
0266-600-00
Referencia
Ejesstandard
Guía= ..
Husillo de bolas
Accionamiento = ..
Extremo
20 x
5
20 x
20
25 x
10
32 x
5
32 x
10
32 x
20
ø10
ø16
ø10ø10 con
chavetero
ø10ø10 con
chavetero
ø16
ø16 conchavetero
01 02 04
05 06 08
01 02 04
05 06 08
01 02 03 04
05 06 07 08
01 02 04
01 02 03 04
0266-X00-00, …. mm
Ejecución= ….
OF01
MF01
32 x
32
02.36.1102.36.1202.56.1002.56.11
Componentes y pedido SOK 25-160 hasta SOK 50-280STAR – Carros lineales abierto con husillo de bolas
02
02
02
02
02

39RS 83 001/01.97
10
12
MKD 41 B 10
MKD 41 B 10
1
1,5
MKD 41 B 10
MKD 41 B 10
14
16
1
1,5
10
12
14
16
MKD 71 B-061
MKD 71 B-097
MKD 71 B-061
MKD 71 B-097
MKD 71 B-061
MKD 71 B-097
MKD 71 B-061
MKD 71 B-097
11
12
11
12
11
12
11
12
1
2
1
2
01
01
01
01
DetectorLado de mon.
Distancia con.Sentido despl.
Pos
ició
n de
cone
xión
Standard
Mesa = ..
Tipo de motor
Brida demotor = ..
Motor = ..
Fuelle PU
sin con
Protección = ..
Prot
ocol
ost
anda
rd
Prot
ocol
ode
med
ició
n
00
00
00
01
01
01
i =
Serv
omot
orM
otor
pas
o a
paso
01
01
sin detector
sin canal de cable
PNP trabajo
PNP reposo 11 -. ±….
Levaexterior
Conectorexteriorsuelto
17
Detectorexterior
TipoLongitud en mm
Canal de cable suelto
00
16
13 -. ±….
Mecánico 15 -. ±….
Canal cable 20 - X....
Serv
o-m
otor
Mot
or p
aso
a pa
so
* Todas las bridas de motor también suministrables sin motor. Opción motor “00”
MKD 71 B-061
MKD 71 B-097
RDM 51117
RDM 51122
VRDM 597
VRDM 5910
VRDM 5913
MKD 41 B
01
03
02
00
00
00
*Bridade motor
03 10
26
22
23
Documen-tación = ..
paramotor 1)
1º detector = .. - . ± ….. mm2º detector = .. - . ± ….. mm3º detector = .. - . ± ….. mmCanal de cable = .. - . .... mm
Conector = .. Leva detección = ..
Descripciónvéase pág. 62
01 030100
02
11
12
24
25
1) tener en cuenta el par máx. admisible

40 RS 83 001/01.97
Esquemas tamaños SOK 25-160 hasta SOK 50-280STAR – Carros lineales abiertos con husillo de bolas
Carro Dimensiones (mm)
SOK 25-160
SOK 30-180
SOK 40-230
SOK 50-280
d A R B1 B4 B5 H H5 H6 H7 H8 H9 H18 B6 D1
25 160 88 25 33 20,5 30 27 54 66 51 36 2,5 15 40
30 180 96 25 33 20,5 35 31 62 77 60 42 - - 47
40 230 122 30 30 15 45 39 78 95 77 50 - - 62
50 280 152 30 30 15 55 47 94 115 93 60 - - 75
SOK 25-160
SOK 30-180
SOK 40-230
SOK 50-280
Carro Geometría del extremo accionamiento
10 48H7 25 35,5 2,1 63 40 40 M6 - 12prf. 104 17,5 16,5 M5 - 12prf
10 48H7 25 35,5 2,1 63 40 40 M6 - 12prf. 126 14,5 19,5 M5 - 12prf
16 68-0,01 35 58 8 - 90 46 M8 - 16prf. 221 14 20 M5 - 12prf
16 68-0,01 35 58 8 - 90 46 M8 - 16prf. 271 22 12 M5 - 12prf
d1 d2 L1 L2 Z1 E4 a b S4 F5 F6 F7 S5h7
Fijación
h6 ± 0,02
Esquemas para montaje de motor véase capítulo: Montaje de motor.
B1B1
2
A
T2 T1 T2
L/2
B15
S15
A
ød1
H15
E4E2A
L1
L2
E1
L
B4B5
A1
H9
H11
Las distancias de taladro T2son iguales en ambos lados
Rec. desp. max.2
Rec. desp. max.2
Carrera efectiva2
Carrera efectiva2carr. seg. carr. seg.
Engrasador

41RS 83 001/01.97
B15 H15 S15
Leva de detección
Si se desea efectuar un mecanizadoposterior tener en cuenta las tablas
TB02-016-14
TB02-016-15
TB02-016-16
TB02-016-17
Engrasador
E1 E2 S1 N H16 H17 E3 S3 T1 T2 A1 H11 DIN 3405
140 132 M12x40 22 6 9,8 42 6,6 120 min.20 116 9,5 AM 8 x 1
158 150 M12x45 26 7 10 51 9,0 150 min.30 130 9,5 AM 8 x 1
202 190 M16x60 34 8 11,8 55 9,0 200 min.30 170 11,5 AM 8 x 1
250 240 M16x60 34 9 14,3 63 11 200 min.30 220 15 AM 8 x 1
Cálculo de longitud con fuelle
64 28 M4-10prf L = Rec. desp. max x 1,24 + 199
64 36 M4-10prf L = Rec. desp. max x 1,20 + 218
64 26 M4-10prf L = Rec. desp. max x 1,14 + 269
64 28 M4-10prf L = Rec. desp. max x 1,112 + 320
Apoyo de ejes
sin chavetero
Husillo de bolas - Extremo
Prof. centrado Z1
SOK 25-160
SOK 30-180
SOK 40-230
SOK 50-280
con centraje Z1interior
con centraje Z1exterior
Vista A
con chavetero
Tamaño
Tornillo S6 - DIN 912
h=1,8
202,5
3P9
h=3
2845P
9
L1
B4
ød1
ød2
H7
Z1
L2
L1 Z1L2 B4
ød1
ød2
-0,0
1
Se suministra raíl de apoyo suelto
Avellanado para tornillos segúnDIN 6912
Con una longitud L > 600 y L < 660para los tamaños
SOK 40-230 y SOK 50-280consulten por favor
S2
B6 H18
d2
F5a
H5
H6
Rb
F 7F 6
S4S5
dS1
E3
D1
H8
HN
S3
H17
H16
H7
42 RS 83 001/01.97
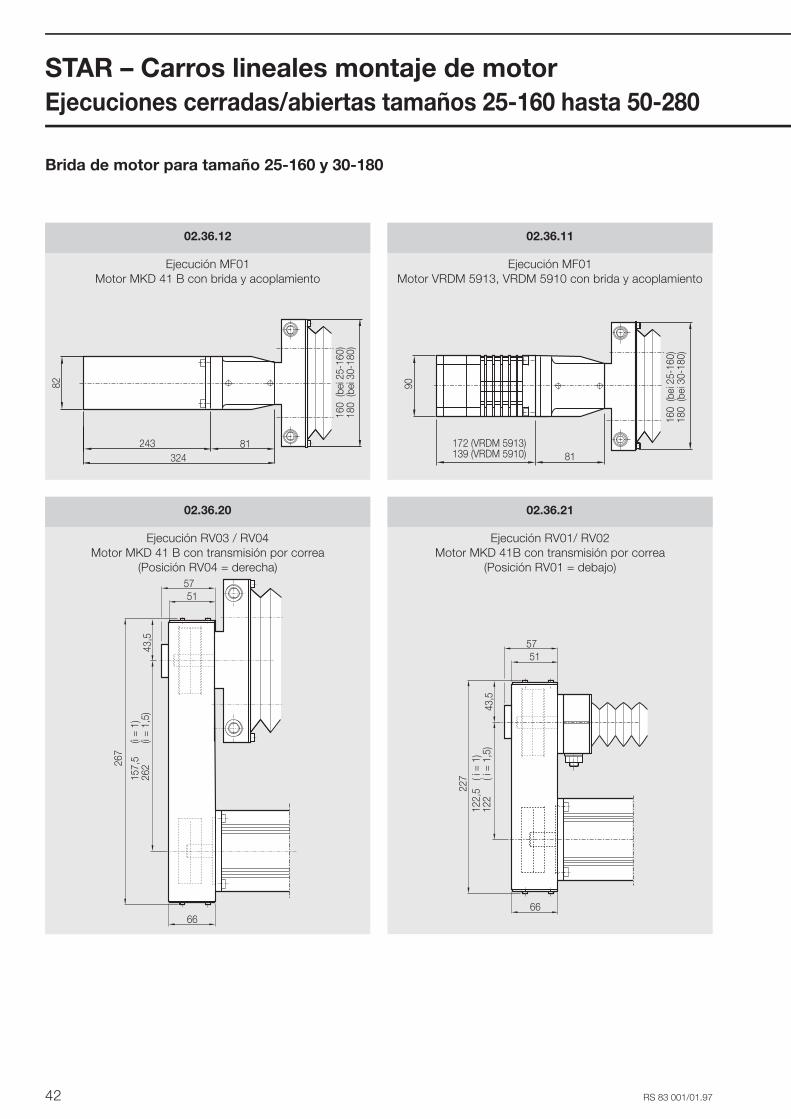
Ejecuciones cerradas/abiertas tamaños 25-160 hasta 50-280STAR – Carros lineales montaje de motor
Brida de motor para tamaño 25-160 y 30-180
Ejecución MF01Motor VRDM 5913, VRDM 5910 con brida y acoplamiento
02.36.11
Ejecución MF01Motor MKD 41 B con brida y acoplamiento
02.36.12
Ejecución RV03 / RV04Motor MKD 41 B con transmisión por correa
(Posición RV04 = derecha)
02.36.20
Ejecución RV01/ RV02Motor MKD 41B con transmisión por correa
(Posición RV01 = debajo)
02.36.21
157,
5
(i =
1)
262
(i =
1,5
)
267
43,5
66
5157
122,
5 (
i =
1)12
2
( i
= 1,
5)43
,5
227
66
5157
81243324
160
(bei
25-
160)
180
(bei
30-
180)
82
160
(bei
25-
160)
180
(bei
30-
180)
172 (VRDM 5913)139 (VRDM 5910) 81
90

43RS 83 001/01.97
Ejecución MF01Motor MKD 71B con brida y acoplamiento
02.56.10
Ejecución RV03 / RV04Motor MKD 71 B con transmisión de correa
(Posición RV04 = derecha)
02.56.20
Ejecución MF01Motor RDM 51117, RDM 51122 con brida y acoplamiento
02.56.11
Ejecución RV01/ RV02motor MKD 71B con transmisión de correa
(Posición RV01 = debajo, cerrado)
02.56.21
Brida de motor para tamaño 40-230 y 50-28026
7,5
(i
= 1
)26
5
(i
= 2
)
403
59
66
125
112
230
(bei
40-
230)
280
(bei
50-
280)
264
115
125194 (RDM 51117)242 (RDM 51122)
110
230
(bei
40-
230)
280
(bei
50-
280)
165
( i =
1)
162
( i =
2)
59
300
66

44 RS 83 001/01.97
STAR – Carros lineales con correa dentada
Carros lineales en cualquier longitud hasta Lmax
Cerrado o abierto con apoyos de ejes STAR
Alta precisión de posicionamiento y repetibilidad
Engrase centralizado
Soluciones especialmente económicas
Reductor integrado con diferentes reducciones
Servoaccionamiento AC o motor paso a paso, con CNC
Ejecución cerrada
Posibilidad de engrase porambos lados del sistema deguiado.
Ejecución abierta
Cabezal fnal tensor. Con unsistema tensor de correaintegrado. Rodamientoslubricados de por vida.
Mesa con taladros de fijaciónpara el montaje de accesorios.
Correa dentada ancha depoliuretano con estructura deacero para máximas exigenciasen rigidez y precisión deposición.
Cabezal de accionamiento quepermite una larga duración devida y una segura transmisión depotencia. Excelentesprestaciones en la inversión demovimiento.
Desarrollo especialmentesilencioso y larga duracióngracias a rodamientos linealesSTAR-Super.
45RS 83 001/01.97
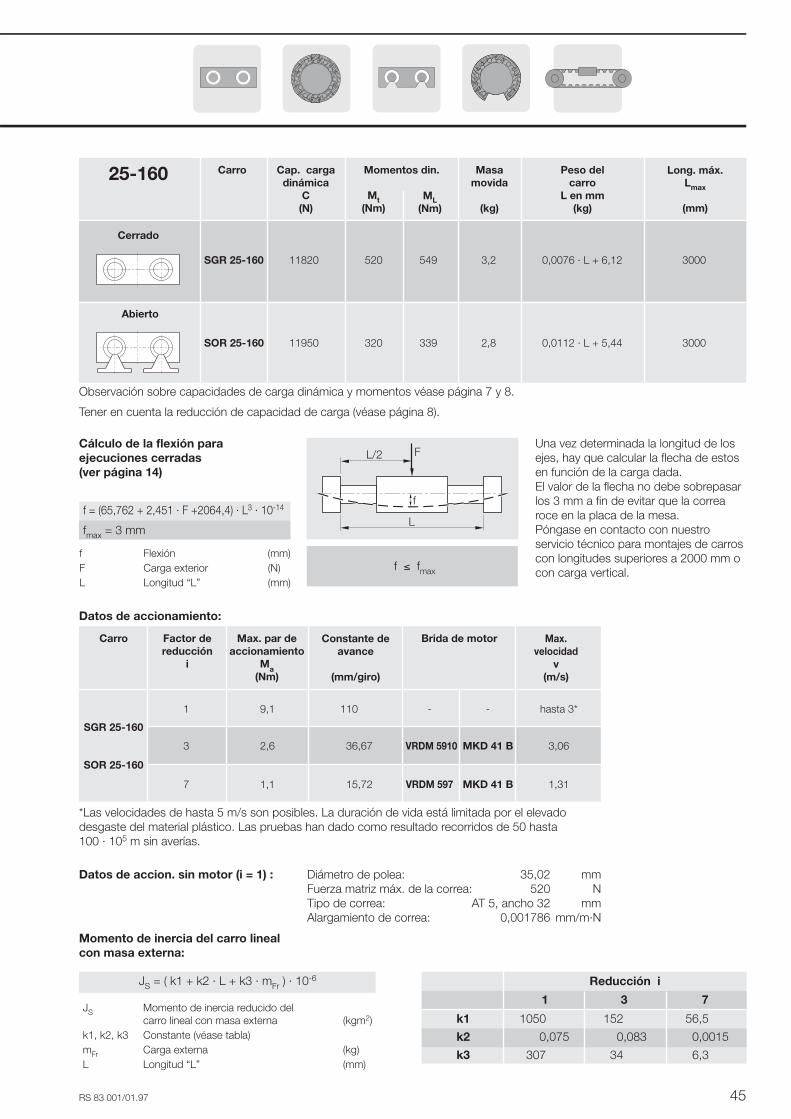
25-160
Cerrado
JS = ( k1 + k2 · L + k3 · mFr ) · 10-6
k1 1050 152 56,5
k2 0,075 0,083 0,0015
k3 307 34 6,3
Reducción i
1 3 7
Momento de inercia del carro linealcon masa externa:
JS Momento de inercia reducido delcarro lineal con masa externa (kgm2)
k1, k2, k3 Constante (véase tabla)mFr Carga externa (kg)L Longitud “L” (mm)
Carro Cap. cargadinámica
C(N)
Momentos din. Masamovida
(kg)
Peso delcarro
L en mm(kg)
Long. máx.Lmax
(mm)Mt
(Nm)ML
(Nm)
Datos de accion. sin motor (i = 1) : Diámetro de polea: 35,02 mmFuerza matriz máx. de la correa: 520 NTipo de correa: AT 5, ancho 32 mmAlargamiento de correa: 0,001786 mm/m·N
Abierto
SGR 25-160 11820 520 549 3,2 0,0076 · L + 6,12 3000
SOR 25-160 11950 320 339 2,8 0,0112 · L + 5,44 3000
Observación sobre capacidades de carga dinámica y momentos véase página 7 y 8.
Tener en cuenta la reducción de capacidad de carga (véase página 8).
Cálculo de la flexión paraejecuciones cerradas(ver página 14)
Una vez determinada la longitud de losejes, hay que calcular la flecha de estosen función de la carga dada.El valor de la flecha no debe sobrepasarlos 3 mm a fin de evitar que la correaroce en la placa de la mesa.Póngase en contacto con nuestroservicio técnico para montajes de carroscon longitudes superiores a 2000 mm ocon carga vertical.
f = (65,762 + 2,451 · F +2064,4) · L3 · 10-14
fmax = 3 mm
f Flexión (mm)F Carga exterior (N)L Longitud “L” (mm)
f ≤ fmax
L/2
L
F
f
Carro Factor dereducción
i
Max. par deaccionamiento
Ma(Nm)
Constante deavance
(mm/giro)
Brida de motor Max.velocidad
v(m/s)
SGR 25-160
SOR 25-160
Datos de accionamiento:
3 2,6 36,67 VRDM 5910 MKD 41 B 3,06
7 1,1 15,72 VRDM 597 MKD 41 B 1,31
1 9,1 110 - - hasta 3*
*Las velocidades de hasta 5 m/s son posibles. La duración de vida está limitada por el elevadodesgaste del material plástico. Las pruebas han dado como resultado recorridos de 50 hasta100 · 105 m sin averías.
46 RS 83 001/01.97
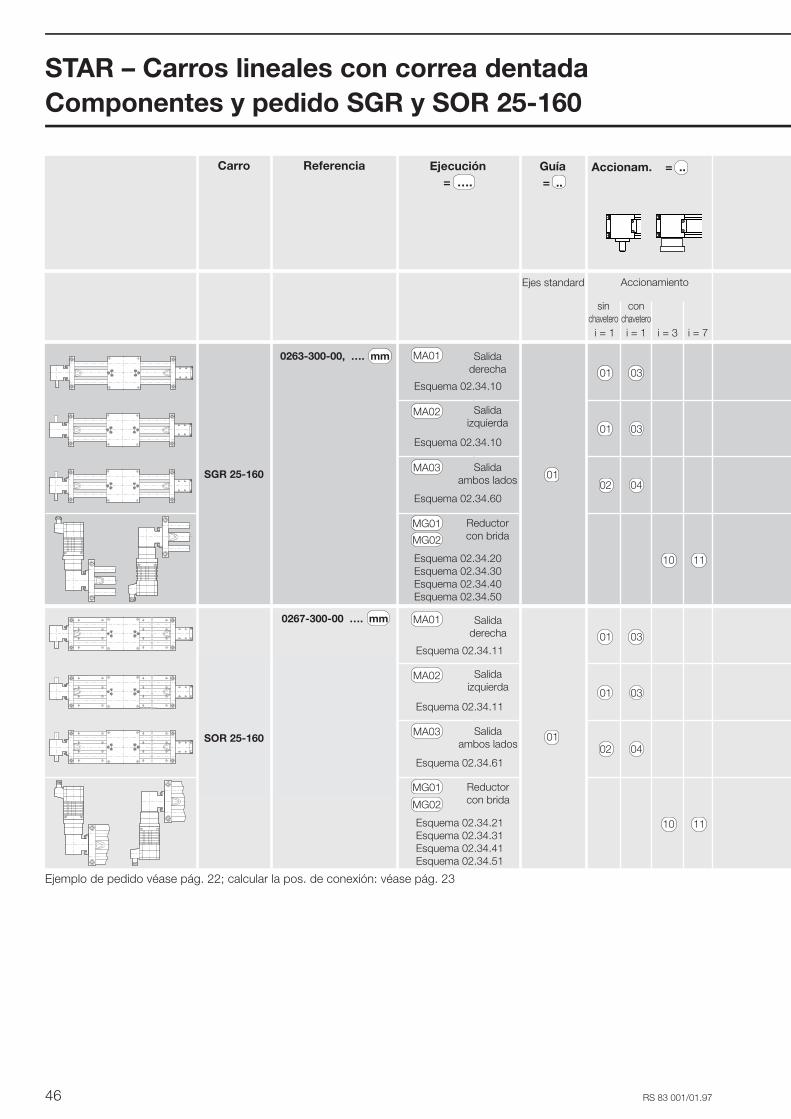
Carro
Accionamiento
Componentes y pedido SGR y SOR 25-160STAR – Carros lineales con correa dentada
i = 1 i = 1 i = 3 i = 7
sinchavetero
01 03
01 03
02 04
10 11
Referencia
01 03
01 03
02 04
10 11
Accionam. = ..
Ejes standard
Guía= ..
Ejecución= ….
MA02
MA03
MG01
MA02
MA01
MA03
MG01
MA01
Esquema 02.34.10
Esquema 02.34.10
Esquema 02.34.60
Esquema 02.34.20Esquema 02.34.30Esquema 02.34.40Esquema 02.34.50
MG02
MG02
SOR 25-160
0267-300-00 …. mm
0263-300-00, …. mm
SGR 25-160
conchavetero
Ejemplo de pedido véase pág. 22; calcular la pos. de conexión: véase pág. 23
01
01
Salidaderecha
Salidaizquierda
Salidaambos lados
Reductorcon brida
Esquema 02.34.11
Esquema 02.34.11
Esquema 02.34.61
Esquema 02.34.21Esquema 02.34.31Esquema 02.34.41Esquema 02.34.51
Salidaderecha
Salidaizquierda
Salidaambos lados
Reductorcon brida

47RS 83 001/01.97
Standard
Mesa = ..
i = Tipo demotor
Motor = ..
Prot
ocol
ost
anda
rd
Prot
ocol
ode
med
ició
n
01
01
01
01
00
22
01
01
01
01
00
10
22
10
i = 3
i = 7
sin detector
sin canal de cable
PNP trabajo
PNP reposo 11 - . ±….
Levaexterior
Conectorexteriorsuelto
17
Detectorexterior
TipoLong. en mm
Canal de cable suelto
00
16
13 - . ±….
Mecánico 15 - . ±….
Canal cable 20 - X....
Brida de motor = ..
Documen-tación = ..
Brida demotor
00
i = 3
i = 7
VRDM 5910
01
02
01
00
01
02
01
MKD 41 B
VRDM 5910
MKD 41 B
26VRDM 59702
26VRDM 59702
paramotor 1)
1º detector = .. - . ± ….. mm2º detector = .. - . ± ….. mm3º detector = .. - . ± ….. mm
Canal cable = .. - . .... mm Conector = ..
Leva detección = ..
10MKD 41 B
10MKD 41 B
Descripciónvéase pág. 62
1) tener en cuenta el par máx.admisible
* Todas las bridas de motor se pueden recibir también sin motor. Por favor pongan laopción motor “00”
01 02
DetectorLado mont.
Pos
ició
n de
cone
xión
Distan. de con.Sentido desp.

48 RS 83 001/01.97
Esquemas tamaño SGR 25-160STAR – Carros lineales cerrados con correa
02.34.10 02.34.60 02.34.20
8267
,18
10067,18
61,5
15
Centradoø 42H7 / 4 prf
M6
12,5
ø16h7
A
L/2
31,5
140
77 65
59 25 81
53
3016030
L
40
25
31
90
4053
1
Rec. desp. max.2
M6 - 12 prf
Centrado-ø 42 H7
4prf
Engrasador AM8x1 DIN 3405
Centradoø 42H7 / 4 prf
53 40
40
59
90
40
77
ø16
31,5
h7
Centradoø 42H7 / 4 prf
53 40
40
59
90
40
77
ø16
31,5
h7
ø16h7
h=3,8
5 P9
203
h=3,8
5 P9
203
M6 - 12 prf M6 - 12 prf
Soporteø 14H7 / 32 prf
para salida de motor
Cálculo de longitud: L = Recorrido de desplazamiento max. + 220 mm
Carr. seg. Carr. seg.Carrera efectiva
2Carrera efectiva
2
Rec. desp. max.2

49RS 83 001/01.97
45 56
ø8,4
160160
88
132
58
28
Vista A
M 10 - 22 prf
02.34.30 02.34.40 02.34.50
Esquema de taladros de fijación
L + 25± 0,5
132
± 0,
3
M 12-16 prf
10035
82 5361
,5
304,
5
34
MKD 41 B
15
10231
86 2561
,5
167,
5
15
22,5 VRDM 597
10231
86 2561
,5
200,
5
22,5
15
VRDM 5910

50 RS 83 001/01.97
Esquemas tamaño SOR 25-160STAR – Carros lineales abiertos con correa dentada
02.34.11 02.34.61 02.34.21
Centr.ø 42H7 / 4 prf
* Distancia de taladros en ambos lados igual
M6
Engrasador M8x1
DIN 3405
Rec. desp. max.2
12,5
ø16h7
A
L/2
31,5
140
77 65
59 25 81
53
3016030
L
40
25
31
90
4053
3
min 20*
120
min 20*
132
Carr. seg.
Rec. desp. max.2
M6 - 12 prfCentrado-ø 42 H7
4prf
h=3,8
5 P9
203
M6 - 12 prf Centr.ø 42H7 / 4 prf
53 40
4059
90
40
77
ø16
31,5
53 40
5990
40
77
ø16
31,5
ø16
h7
h7
M6 - 12 prf Centrø 42H7 / 4 prf
h=3,8
5 P9
203
8267
,18
10067,18
61,5
15
Soporteø 14H7 / 32 prf
para salida de motor
Cálculo de longitud: L = Recorrido de desplazamiento max. + 220 mm
Carrera efectiva2
Carrera efectiva2
Carr. seg.

51RS 83 001/01.97
Vista A
02.34.31 02.34.41 02.34.51
M10 -22 prf
51
160
160
88
66
140
42ø6,6
6
30
10035
82 5361
,5
304,
5
34
15
MKD 41 B
10231
86 2561
,5
167,
5
22,5
15
VRDM 597
10231
86 2561
,5
200,
5
22,5
15
VRDM 5910

52 RS 83 001/01.97
Montaje de detectoresSTAR – Carros lineales
Repetibilidad = ± 0,05 mmTemperatura ambiente = -5ºC hasta +80ºCadmisibleTipo de protección = DIN 40050 IP 67Tiempo de rebote = < 2 msAislamiento = Grupo C según VDE 0110Tensión nominal = 250 V ACIntensidad = 5 ACapacidad220 V, 40-60 Hz = cosϕ = 0,8 en 2 AResistencia de transmisiónen estado nuevo = < 240 mΩConexión = Racor roscadoSistema de contacto = Unipolar, normal abiertoSistema de conmutación = Ruptura brusca
Detector mecánico (datos técnicos)
Detector miniatura con cable apantallado(3 x 0,14 mm2 Unitronic),Forma de contacto = NOMinisensor = Forma A DIN 41635Tensión continua = 10...30 V DCOndulación residual = ≤ 10 %Carga = 200 mAIntensidad nominal = ≤ 20 mAConmutación = max. 1500 HzTemperaturade contacto = ≤ 4 µm/ºCTiempo respuestade la señal de salida = ≥ 1V/µsRepetibilidad delpunto de conexión s. EN 50008 = ≤ 0,1 mm
Detector inductivo (datos técnicos) Detector inductivocon pieza de montaje
Detector mecánico conpieza de montaje
7
34
2
6
1
5
Piezas de montaje delsistema de detectores
1 Caja y conector2 Detector mecánico
(con piezas de montaje)3 Detector inductivo (con piezas de
montaje)4 Leva de detección5 Canal de cable (aleación de aluminio)6 Angulo de fijación7 Perfil de soporte
620
40
71
60
12,5
930
10,5
25
30
9
30
71
30
22
60
Longitud de cable: 3 m

53RS 83 001/01.97
50 30
35
12,6
PG
16
51
conector de 16 polos
Caja y conector• Poner la caja en el lado donde se
encuentran la mayoría de losdetectores (véase ejemplo en páginasiguiente).
El conector exterior y la base sesuministran sin cablear.La posición de los detectores se puedeoptimizar en el momento de la puestaen marcha.El conector se puede suministrarmontando en cualquiera de las tresdirecciones. (Ver dibujo).
Pedido de los detectores ypiezas de montaje
Tomar las referencias de la tablasiguiente.Las piezas de montaje también sepueden pedir individualmente.
Tamaño
Pos. 12-85 16-100 20-130 / 25-16030-180 / 40-230 / 50-280
1 Caja / conector 1414-000-612 Detector mecánico con piezas de montaje 0236-203-01
Detector mecánico solo 8453-040-163 Detector inductivo
- Piezas de montaje sin interruptor 0236-203-02- PNP contacto de reposo 8453-040-01- NPN contacto de reposo 8453-040-02- PNP contacto detrabajo 8453-040-03- NPN contacto de trabajo 8453-040-04
4/6 Leva de detección + codo de fijación + piezas de montaje 0236-003-03 0236-103-03 0236-203-035 Canal de cable 0396-620-077 Perfil soporte 0396-620-08

54 RS 83 001/01.97
Montaje de detectores - DistanciasSTAR – Carros lineales
Ejemplo de montajeLa posición de detección vienemarcada por el punto medio de la masa(TM). El punto de detección seencuentra en L/2.
Posición de detección máxima =0,5 · recorrido máximo - recorridoseguridad
Para un correcto funcionamiento decarro lineal, el recorrido de seguridaddebe ser superior a la distancia defrenado.
Equipamiento standard recomendado:- 2 detectores mecánicos- 1 detector inductivoInsertar las placas de montaje condetectores en la ranura y fijar con lostornillos y las tuercas cuadradas.
Tener en cuenta la distancia deconexión mínima posible:mecánico-mecánico = 62 mmmecánico-inductivo = 49 mminductivo-inductivo = 35 mmAquí se deben montar las placas demontaje en forma inversa.
0 L/2
TM
derecha (R)
izquierda (L)
Vistadetector mecánico
Vistadetector inductivo
Vistaángulo de fijación
con canal de cable
30A
2,5+0,2
43
37C
55
33D
0,4+0,2
17
20
5B
3030
A
Carro Med. A Med. B Med. C Med. D
SGK 12-85 5,5 27 +4 +0,5
SGK 16-100 5,5 30 +6 3,5
SGK 20-130 6,5 40 4 13,5
SGK 25-160 6,5 40 7 16,5
SGK 30-180 7,5 40 14 23,5
SGK 40-230 9,0 40 2 11,5
SGK 50-280 9,0 40 2 11,5
Carro Med. A Med. B Med. C Med. D
SOK 12-85 5,5 27 +2 1,5
SOK 16-100 5,5 30 +2 7,5
SOK 20-130 6,5 40 6 15,5
SOK 25-160 6,5 40 9 18,5
SOK 30-180 7,5 40 17 26,5
SOK 40-230 9,0 40 7 16,5
SOK 50-280 9,0 40 9 18,5
El montaje de los detectores se realizaen todos los tamaños de la mismaforma:
En valores positivos (+), se sobrepasa el travesaño del carro.
canal de cable
12 -
85
ajustar en montaje
- +
Las posiciones de los detectores tantoinductivos como mecánicos deben serfijadas con anterioridad al montaje de lamesa. En vista de las condiciones detrabajo que existen, los detectoresdeben ser protegidos.
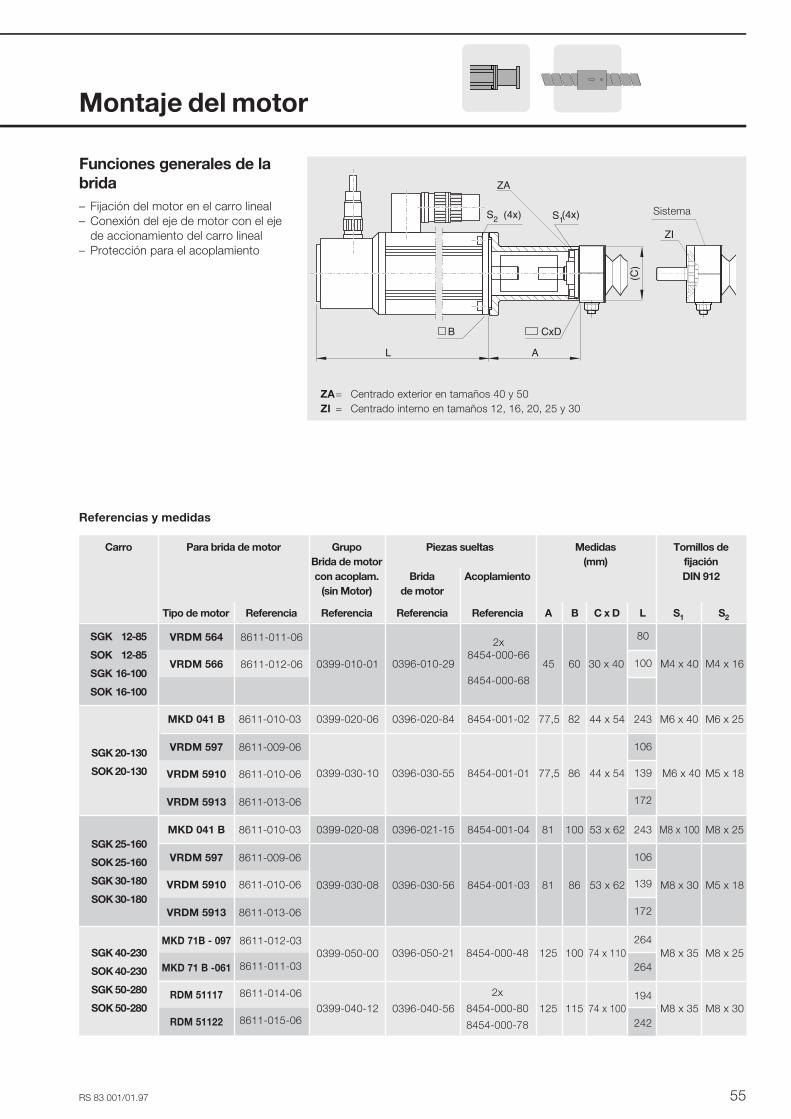
55RS 83 001/01.97
M8 x 35 M8 x 25
M8 x 35 M8 x 30
Montaje del motor
Funciones generales de labrida– Fijación del motor en el carro lineal– Conexión del eje de motor con el eje
de accionamiento del carro lineal– Protección para el acoplamiento
Carro Para brida de motor Grupo Piezas sueltas Medidas Tornillos deBrida de motor (mm) fijacióncon acoplam. Brida Acoplamiento DIN 912
(sin Motor) de motor
Tipo de motor Referencia Referencia Referencia Referencia A B C x D L S1 S2
Referencias y medidas
VRDM 564
VRDM 566 0399-010-01 0396-010-29 M4 x 40 M4 x 16
0396-020-84
0396-030-55
8454-001-02
8454-001-01
M6 x 40 M6 x 25
M6 x 40 M5 x 18
SGK 20-130
SOK 20-130
0399-020-08
0399-030-08
0396-021-15
0396-030-56
8454-001-04
8454-001-03
M8 x 100 M8 x 25
M8 x 30 M5 x 18
MKD 71B - 097
MKD 71 B -061
RDM 51117
RDM 51122
0399-050-00
0399-040-12
0396-050-21
0396-040-56
8611-012-03
8611-011-03
8611-014-06
8611-015-06
8611-011-06
8611-012-06
MKD 041 B
VRDM 597
VRDM 5910
VRDM 5913
8611-010-03
8611-009-06
8611-010-06
8611-013-06
2x8454-000-66
8454-000-68
SGK 12-85
SOK 12-85
SGK 16-100
SOK 16-100
SGK 40-230
SOK 40-230
SGK 50-280
SOK 50-280
SGK 25-160
SOK 25-160
SGK 30-180
SOK 30-180
0399-020-06
0399-030-10
MKD 041 B
VRDM 597
VRDM 5910
VRDM 5913
8611-010-03
8611-009-06
8611-010-06
8611-013-06
8454-000-48
2x
8454-000-80
8454-000-78
ZA= Centrado exterior en tamaños 40 y 50ZI = Centrado interno en tamaños 12, 16, 20, 25 y 30
264
264
194
242
139
172
243
106
139
172
243
106
80
10045
77,5
77,5
81
81
125
125
30 x 4060
82
86
44 x 54
44 x 54
100
86
53 x 62
53 x 62
100
115
74 x 110
74 x 100
L
B
S2 S1
A
(C)
ZA
(4x) (4x)
CxD
ZI
Sistema

56 RS 83 001/01.97
En carros lineales a partirdel tamaño 25-160
En los carros lineales a partir deltamaño 25-160 existe la posibilidad demontar el motor a través de una correadentada, la longitud total del carro lineales menor que en el montaje de motorcon brida y acoplamiento.La correa dentada se puede montar encuatro sentidos:– inferior (RV01)– superior (RV02)– izquierda (RV03)– derecha (RV04)
Brida de motor con transmisión por correaSTAR – Carros lineales
Referencias y medidas
Carro Sentido para brida Reduc- Grupo Dimensiones Tipo dedel montaje de motor ción trans. por correa (mm) correa
RV Tipo de motor i (sin motor) A A1 A2 B B1 H L(Referencia) Referencia
RV01y
RV02227 43,5 51 57 88 16AT5
RV03y
RV04267 43,5 51 57 88 16AT5
RV01y
RV02
MKD 71B-061(8611-011-03)
MKD 71B-097(8611-012-03)
300 59
165
162
165
162
66 - 116
RV03y
RV04
MKD 71B-061(8611-011-03)
MKD 71B-097(8611-012-03)
1
2
1
2
0390-350-17
0390-350-19
0390-350-17
0390-350-19
403 59
267,5
265
267,5
265
66 - 116
*
*
*
0390-350-12
0390-350-14
0390-350-12
0390-350-14
SGK 40-230
SOK 40-230
SGK 50-280
SOK 50-280
1
2
1
2
SGK 30-180
SOK 30-180
SGK 25-160
SOK 25-160
MKD 41B-144(8611-010-03))
MKD 41B-144(8611-010-03)
0390-340-08
0390-340-09
1
1,5
0390-340-10
0390-340-11
1
1,5
122,5
122
157,5
162
Véas
e m
otor
pág
ina
60Vé
ase
mot
or p
ágin
a 60
25AT5
32AT5
25AT5
32AT5
25AT5
32AT5
25AT5
32AT5
*Jred del RVen el extremo
de motor(kg cm2)
14,0
2,6
14,0
2,6
14,5
2,8
14,5
2,8
2,4
0,82
2,5
0,84
En el suministro se indica la fuerza de pre-tensión.
* Momento de inercia reducido
En la combinación de montaje lateral transmisión por correa (sentido de montaje ala izquierda RV03 y derecha RV04)
- El montaje de transmisión por correa sólo es posible en el lado opuesto a losdetectores.
- El montaje de los detectores hay que realizar antes del montaje de transmisiónpor correa.

57RS 83 001/01.97
A1
A2
Fv
A
X
B
B1
L
H
Vista en detalle de la
transmisión por correa
1 Carcasa compacta, cerrada comoprotección de correa y soporte demotor
2 Carro lineal3 En carros lineales tamaño 25-160 y
30-180:Protección con tuerca
4 Accionamiento a través de correadentada con reducción:– i = 1 : 1– i = 1 : 1,5 (tamaño 25-160, 30-180)– i = 2 (tamaño 40-230, 50-280)
5 Servomotor AC6 Fuerza de tensado FV con el motor
montado.
7 Fijación de las poleas con lostensores.
8 Perfil de aluminio anodizado.
Vista X
1
2
3
4
5
6
longitud de motor
7
8
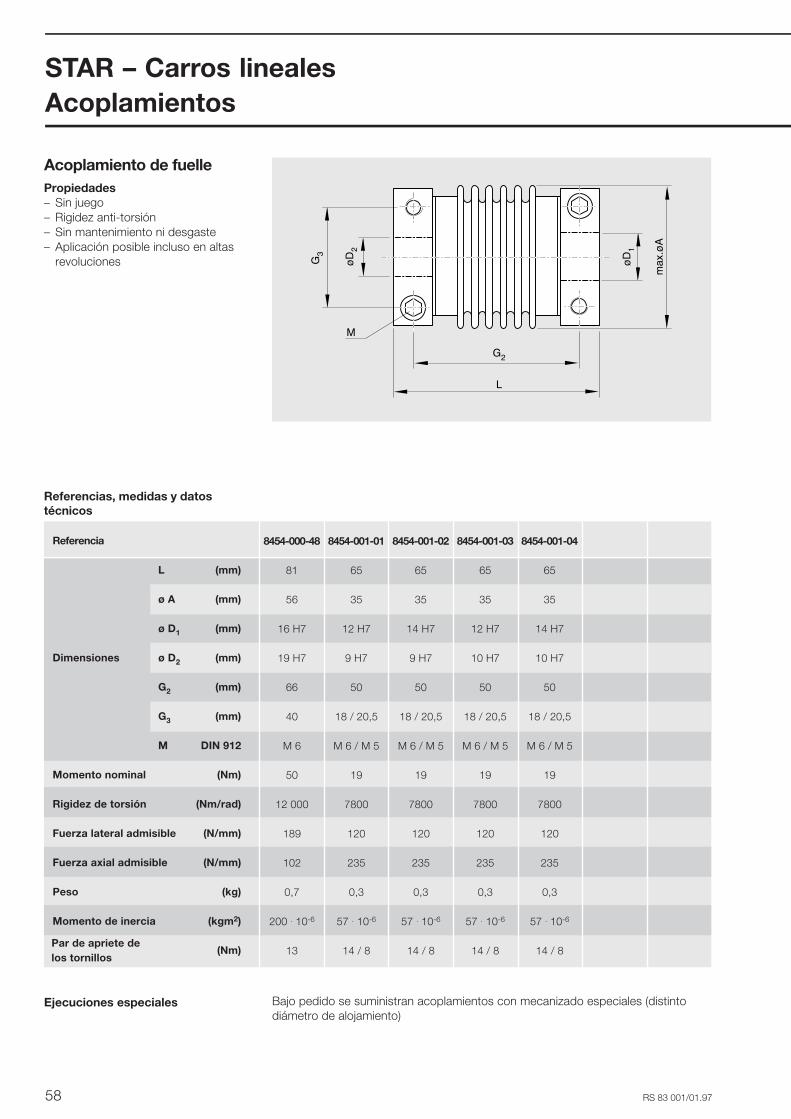
58 RS 83 001/01.97
AcoplamientosSTAR – Carros lineales
L
M
øD
2
max
.øA
øD
1
G2
G3
Bajo pedido se suministran acoplamientos con mecanizado especiales (distintodiámetro de alojamiento)
Acoplamiento de fuellePropiedades– Sin juego– Rigidez anti-torsión– Sin mantenimiento ni desgaste– Aplicación posible incluso en altas
revoluciones
Referencias, medidas y datostécnicos
8454-000-48
81
56
16 H7
19 H7
66
40
M 6
50
12 000
189
102
0,7
200 . 10-6
13
8454-001-01
65
35
12 H7
9 H7
50
18 / 20,5
M 6 / M 5
19
7800
120
235
0,3
57 . 10-6
14 / 8
8454-001-02
65
35
14 H7
9 H7
50
18 / 20,5
M 6 / M 5
19
7800
120
235
0,3
57 . 10-6
14 / 8
8454-001-03
65
35
12 H7
10 H7
50
18 / 20,5
M 6 / M 5
19
7800
120
235
0,3
57 . 10-6
14 / 8
8454-001-04
65
35
14 H7
10 H7
50
18 / 20,5
M 6 / M 5
19
7800
120
235
0,3
57 . 10-6
14 / 8
Referencia
L (mm)
ø A (mm)
ø D1 (mm)
Dimensiones ø D2 (mm)
G2 (mm)
G3 (mm)
M DIN 912
Momento nominal (Nm)
Rigidez de torsión (Nm/rad)
Fuerza lateral admisible (N/mm)
Fuerza axial admisible (N/mm)
Peso (kg)
Momento de inercia (kgm2)
(Nm)
Ejecuciones especiales
Par de apriete delos tornillos

59RS 83 001/01.97
Acoplamiento Al-H-GSPropiedades– Sin juego– Acoplamiento de tres piezas en
suspensión Cardan simple– Conectable axialmente– Medida pequeña– Sin mantenimiento– Revisión visual
Par de aprietede los tornillos
* A partir de 30ºC se reduce lacapacidad de absorción en la torsión
Ejecuciones especiales Ejecuciones especiales (por ejemplo otros diámetros de taladro) de losacoplamientos Al-H-GS sobre consulta
øA
øD
øD
L M
Referencias, dimensiones y datostécnicos
Parte 1 Parte 2Corona dentada98 Shore A-GS
Designación 9/24-Al-H-GS 24/28-Al-H-GSParte 1+2 Cardan Parte 1+2 Cardan
Referencia 8454-000-66 8454-000-68 8454-000-80 8454-000-78
L (mm) 30 78
ø A (mm) 20 55Dimensiones
ø D (mm) 6 F7 16 F7
DIN 912 M 2,5 M6
Momento nominal (Nm) 1,6 26
Momento de torsión *(Nm/rad) 51,6 2063
Fuerza axial admisible (N/mm) 518 2560
Peso (. 10-3 kg) 9 1,6 132 18
Momento de inercia (kgm2) 0,9 . 10-6 0,08 . 10-6 50,8 .10-6 7,5 . 10-6
(Nm) 0,76 10,5

60 RS 83 001/01.97
MotoresSTAR – Carros lineales
Servomotor AC
G
45° 45°
E
Z1
øZ
j6
øD
k6
FB
TK
Referencias, dimensiones ydatos técnicos
NotaLos motores sólo se pueden suministrarcon elementos de control.Más datos sobre motores y controlesen el catálogo RD 82 700.
Momento deinercia
Máx. par de giroteórico*
Par de frenada
ResolverMultiturn
ResolverMultiturn
ResolverMultiturn
* Los n.d.r. que se pueden conseguir en el regulador correspondiente, se pueden consultar en las tablas de selección RD 82 700 “Controles,accesorios eléctricos”.
Tipo de motor MKD:
Motor MKD 041B- MKD 071B- MKD 71B-144 KG1 061 KG1 097 KG1
Referencia 8611- 8611- 8611-010-03 011-03 012-03
Regulador DKC, DKS, DDS DKC DKS, DDS
N.d.r. nominal* (min-1) 6000 4500 4000
Par nominal (Nm) 2,7 8 8
(Nm) 11 32 32
(10-3 kgm2) 0,21 0,76 0,76
Masa con freno (kg) 4,39 9,2 9,2
(Nm) 2,2 5 5
Transductor
L (mm) 243 264 264D (mm) 14 19 19E (mm) 30 40 40Z (mm) 50 95 95
Dimensiones Z1 (mm) 2,5 3 3F (mm) 82 115 115G (mm) 8 9,5 9,5TK (mm) 95 130 130B (mm) 6,6 9 9
L

61RS 83 001/01.97
Motor paso a pasoVRDM ...
G
E L
Z1
øZ
h7
øD
h6
RDM ...
NotaLos motores se pueden suministrarcompletos con control.Para datos más detallados sobremotores y controles vea el catálogoRD 82 700.
VRDM ...
RDM ...
Máximopar de giroMomento deinercia
Referencias, dimensiones y datostécnicos
Motor VRDM 564/ VRDM 566/ VRDM 597/ VRDM 5910/ VRDM 5913/ RDM 51117/ RDM 51122/50 LHC 50 LNC 50 LHC 50 LHC 50 LNC 50 LTC 50 LTC
Referencias 8611-011-06 8611-012-06 8610-009-06 8611-010-06 8611-013-06 8611-014-06 8611-015-06
Nº de pasos HS/VS 1000 / 500
Angulo de pasos HS/VS (°) 0,36 / 0,72
(Nm) 0,3 0,6 1,4 2,8 4,2 6,5 10,0
(.10-3 kgm2) 0,008 0,016 0,06 0,12 0,18 0,75 1,15
Par de parada (Nm) 0,33 0,66 1,55 3,1 4,65 7,0 11,0
Peso (kg) 0,53 0,78 1,9 3,0 4,1 9,7 12,5
L (mm) 82 100 106 139 172 194 242D (mm) 6 12 16E (mm) 20 30 56Z (mm) 36 60 56
Dimensio. Z1 (mm) 1,5 2,5 2F (mm) 60 86 110G (mm) 6 9 14TK (mm) 50 70 89B (mm) 4,5 5,5 8,5
F
B
TK
TK
Z1
øD
g6
øZ
h8
GE L
Vista X(dibujado sin conexiones)

62 RS 83 001/01.97
Documentación standardOpción 01
La documentación standard sirve comoconfirmación de que se han realizadolos controles detallados y de que losvalores medidos están dentro de lastolerancias admisibles.
Desviación de paso delhusillo de bolas para SGK ySOKOpción 03
Además de la representación gráfica(véase figura), se suministra unprotocolo de medición en forma detablas.
La documentación standard incluye lossiguientes controles:– Control de funcionamiento de los
componentes mecánicos– Control de funcionamiento de los
componentes eléctricos– Ejecución según confirmación de
pedido
Medición del momento defricción del sistemacompletoOpción 02
El momento de fricción se mide a travésdel recorrido completo dedesplazamiento.
-300
200 400 600 800 1000 1200 1400
Messweg (mm)
Abw
eich
ung
(mm
)
1600 1800 20000
300
-240
240
-180
180
-120
120
-60
60 0
3.2
2.4
1.6
0.8
0
0.8
1.6
2.4
3.2
M (Nm)
M (Nm)
t (ms)
(µm
)
Avance Retroceso
DocumentaciónSTAR – Carros lineales
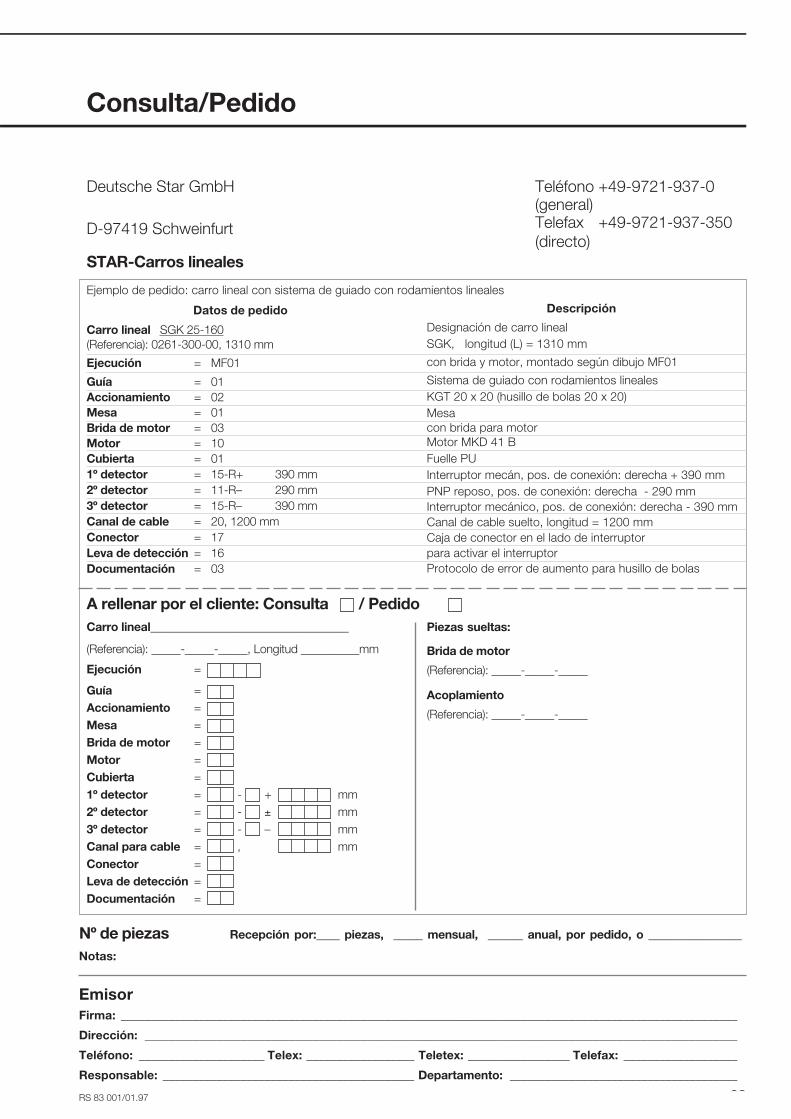
63RS 83 001/01.97
Ejemplo de pedido: carro lineal con sistema de guiado con rodamientos lineales
STAR-Carros lineales
Datos de pedido Descripción
A rellenar por el cliente: Consulta / PedidoCarro lineal__________________________________
(Referencia): _____-_____-_____, Longitud __________mm
Ejecución =
Guía =Accionamiento =Mesa =Brida de motor =Motor =Cubierta =1º detector = - + mm2º detector = - ± mm3º detector = - – mmCanal para cable = , mmConector =Leva de detección =Documentación =
Nº de piezas Recepción por:____ piezas, _____ mensual, ______ anual, por pedido, o ________________
Notas:
EmisorFirma: _______________________________________________________________________________________________________
Dirección: ___________________________________________________________________________________________________
Teléfono: _____________________ Telex: __________________ Teletex: _________________ Telefax: ___________________
Responsable: __________________________________________ Departamento: ______________________________________
Teléfono +49-9721-937-0(general)Telefax +49-9721-937-350(directo)
Carro lineal SGK 25-160(Referencia): 0261-300-00, 1310 mm
Ejecución = MF01
Guía = 01Accionamiento = 02Mesa = 01Brida de motor = 03Motor = 10Cubierta = 011º detector = 15-R+ 390 mm2º detector = 11-R– 290 mm3º detector = 15-R– 390 mmCanal de cable = 20, 1200 mmConector = 17Leva de detección = 16Documentación = 03
Piezas sueltas:
Brida de motor
(Referencia): _____-_____-_____
Acoplamiento
(Referencia): _____-_____-_____
Consulta/Pedido
Deutsche Star GmbH
D-97419 Schweinfurt
Designación de carro linealSGK, longitud (L) = 1310 mm
con brida y motor, montado según dibujo MF01
Sistema de guiado con rodamientos linealesKGT 20 x 20 (husillo de bolas 20 x 20)Mesacon brida para motorMotor MKD 41 BFuelle PUInterruptor mecán, pos. de conexión: derecha + 390 mmPNP reposo, pos. de conexión: derecha - 290 mmInterruptor mecánico, pos. de conexión: derecha - 390 mmCanal de cable suelto, longitud = 1200 mmCaja de conector en el lado de interruptorpara activar el interruptorProtocolo de error de aumento para husillo de bolas

Impr
eso
sobr
e pa
pel s
in c
lora
r
Rexroth Star GmbHD-97419 Schweinfurt
Teléfono +49 - 97 21 - 9 37-0
Telefax +49 - 97 21 - 9 37-275(general)
Telefax +49 - 97 21 - 9 37-350(directo)
Carros linealesRS 83 001/01.97
La reproducción sólo está permitida connuestra autorización.
Printed in Germany - p 97/10/10/5
Este impreso se ha realizado con sumo cuidado.Todos los datos han sido comprobadosSi, de todas formas, hubierta algún error o datosimcompletos, no asumimos la responsabilidad.
Para los suministros y otras prestaciones en las relacionescomerciales, rigen las condiciones generales parasuministors y prestaciones que aparecen detalladas en latarifa vigente correspondiente y en las confirmaciones depedido.
Debido a un desarrollo constante de nuestros productos,nos reservamos el derecho a introducir modificaciones.
Linear Motion andAssembly Technologies