robÓtica (rob74) – aula 1joinville.ifsc.edu.br/~michael.klug/rob74/aulas/aula1_introducao.pdf ·...
TRANSCRIPT

ROBÓTICA (ROB74) – AULA 1
INTRODUÇÃO A ROBÓTICA
PROF.: Michael Klug

PROGRAMA
• Introdução a Robótica:
– Origens
– Componentes
– Aplicações – Aplicações
– Classificação
– Cinemática: Direta, Inversa, Diferencial (Jacobiano)
– Controle: Geração/Planejamento de Trajetórias
– Programação de Robôs Industriais
– Projeto

Contexto Geral
• O que é Robótica?

Contexto Geral
• O que é Robótica?

Contexto Geral
• O que é Robótica?

Contexto Geral
• O que é Robótica?

Contexto Geral
• O que é Robótica?

Máquinas que...
• Realizam tarefas que envolvem movimentos: maior mobilidade e habilidade que máquinas tradicionais;
• São comandadas por computador• São comandadas por computador
• São programáveis
• Possuem comunicação com o meio (tato, visão, proximidade)
• Têm capacidade de autoprogramação

Máquinas que...

Estrutura de Máquinas

Origens
• Manipulação remota
• Dispositivos de manipulação de
• Duas tecnologias antecessoras: comando numérico e manipulação remota
manipulação de materiais (George Devol, 1954, Unimation)

Robótica Industrial
• Estrutura geral de um sistema robótico
Tarefa (referência de posição, força, trajetórias)
Controle e Supervisão
Acionamento Mecânico
Sensores

Componentes
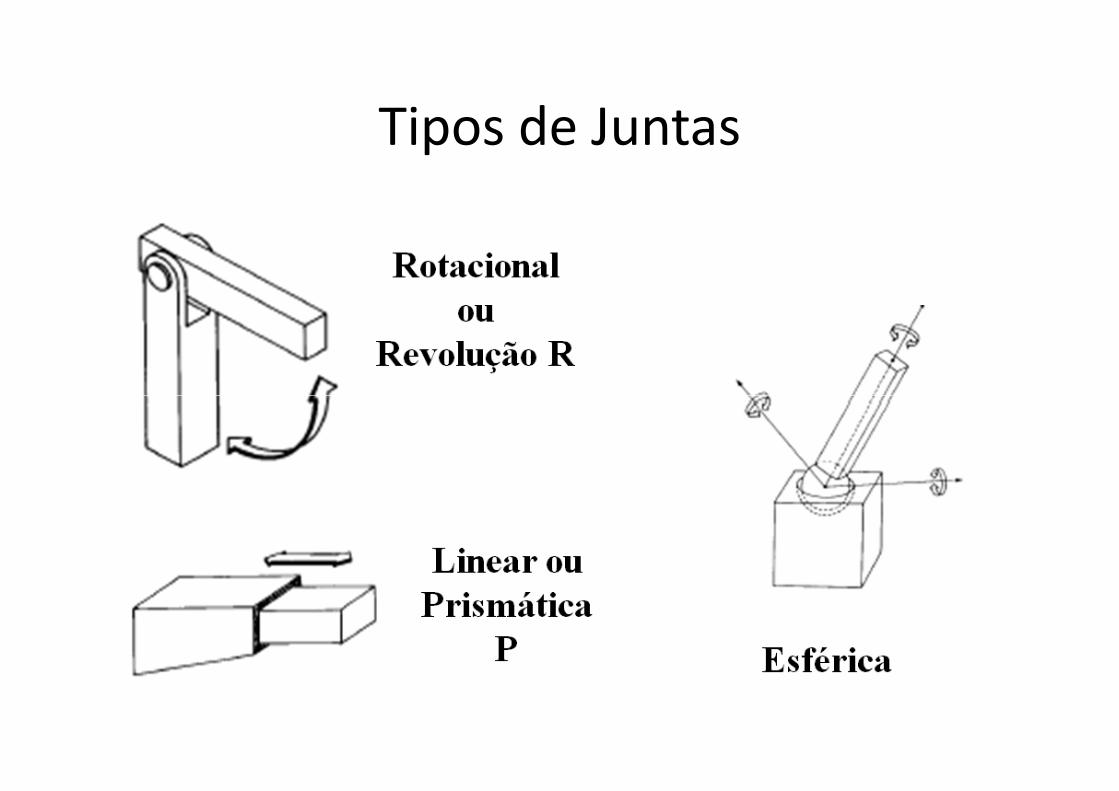
Tipos de Juntas
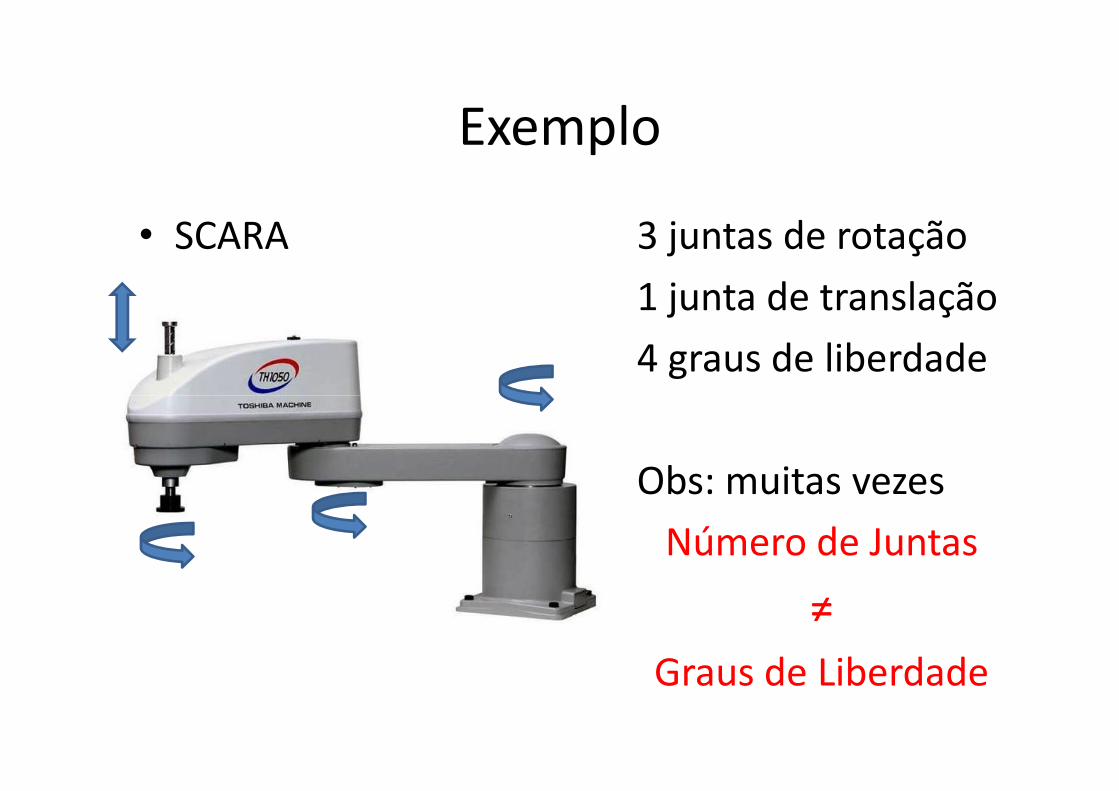
3 juntas de rotação
1 junta de translação
4 graus de liberdade
• SCARA
Exemplo
Obs: muitas vezes
Número de Juntas
≠
Graus de Liberdade

Estrutura da Cadeia Cinemática
• Cadeia Cinemática Aberta (Robôs Seriais)

Estrutura da Cadeia Cinemática
• Cadeia Cinemática Fechada (Robôs Paralelos)
Envelope de Trabalho
• Envelope/Volume de trabalho é o espaço em que o robô pode manipular a extremidade de seu punho;
• Configurações Seriais:• Configurações Seriais:
– Cartesiano (PPP)
– Cilíndrico (RPP)
– Esférico (RRP)
– Scara (RRP)
– Vertical Articulado (RRR)

Classificação dos Robôs
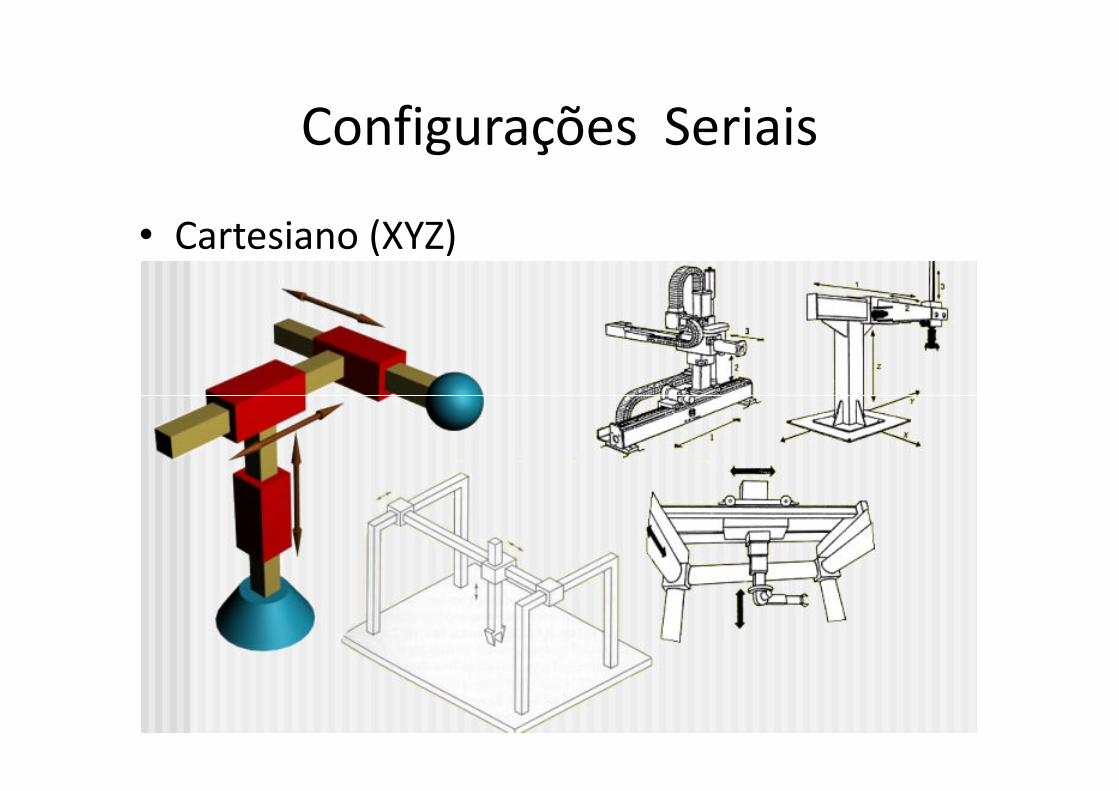
Configurações Seriais
• Cartesiano (XYZ)

Configurações Seriais
• Cartesiano

Configurações Seriais
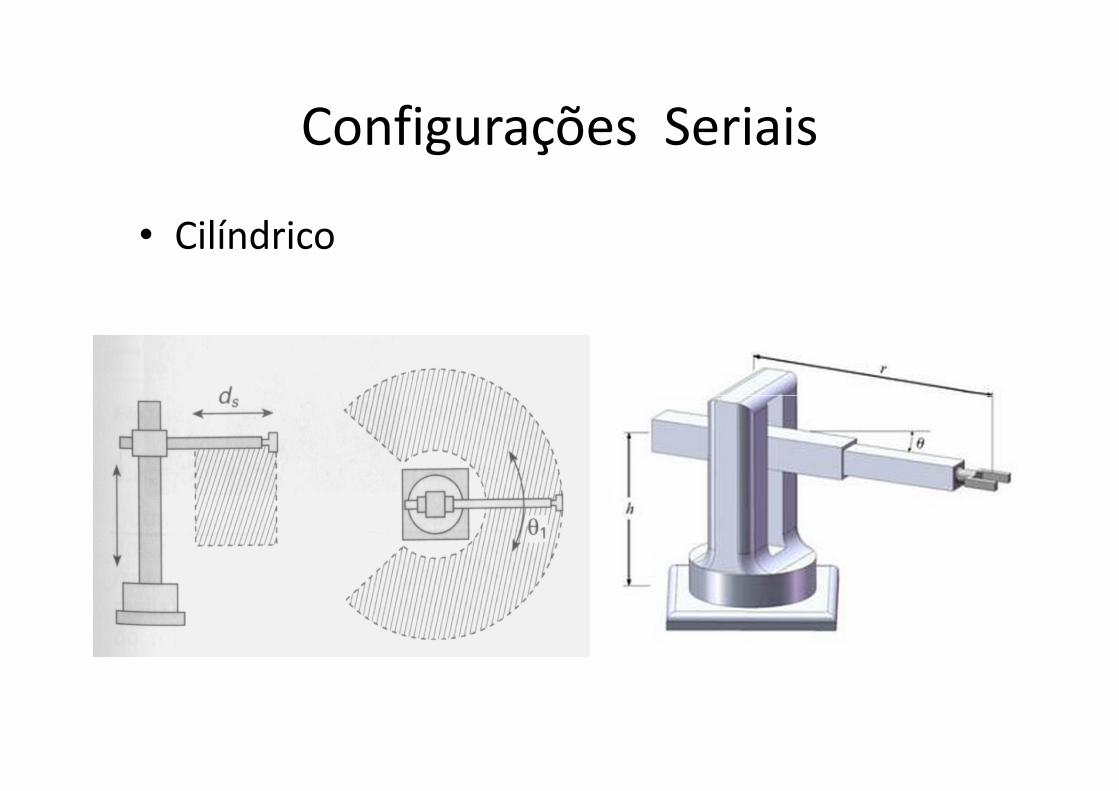
• Cilíndrico
Configurações Seriais
• Cilíndrico

Configurações Seriais
• Cilíndrico

Configurações Seriais
• Esférico (Polar)

Configurações Seriais
• Esférico (Polar)

Configurações Seriais
• Esférico (Polar)

Configurações Seriais
• Scara

Configurações Seriais
• Vertical Articulado

Configurações Seriais
• Vertical Articulado

Configurações Paralelas
• Delta (3 GdL)

Configurações Paralelas
• Tricept (3 GdL)
Configurações Paralelas
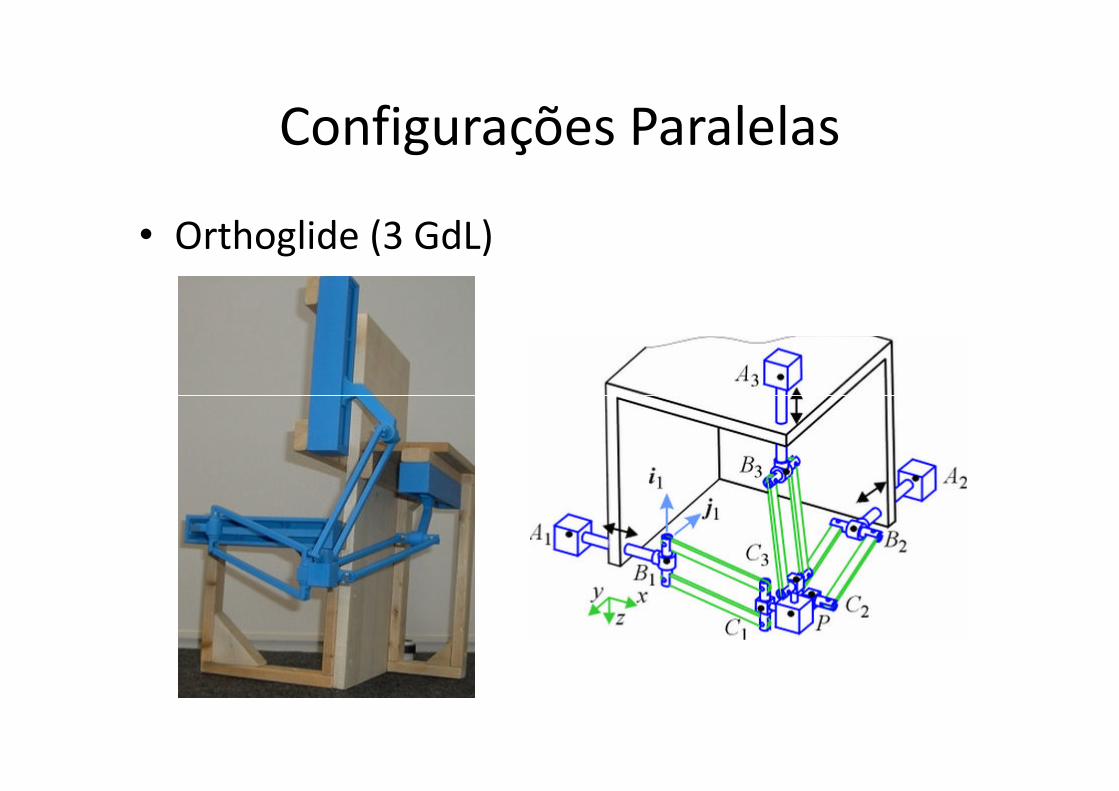
• Orthoglide (3 GdL)

Configurações Paralelas
• Quattro (4 GdL)

Configurações Paralelas
• Plataforma de Stewart (6 GdL)
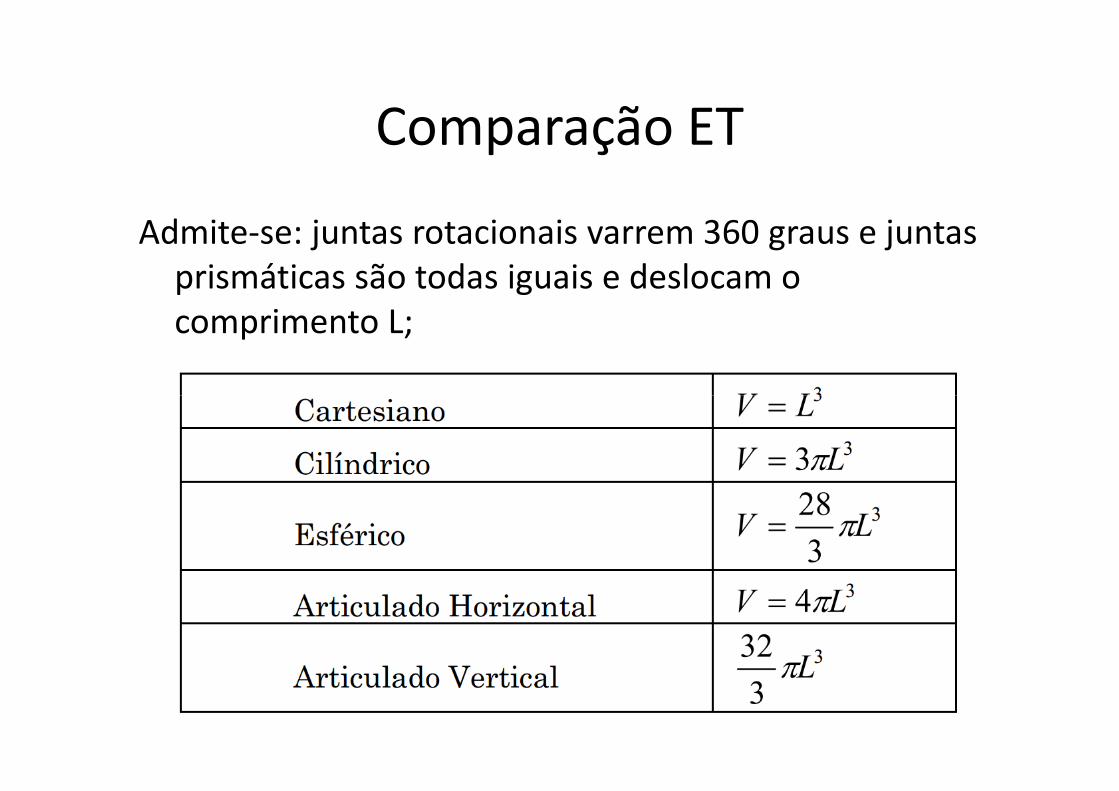
Comparação ET
Admite-se: juntas rotacionais varrem 360 graus e juntas prismáticas são todas iguais e deslocam o comprimento L;

Seriais X ParalelosNÍVEL CARACTERÍSTICAS
MANIPULADOR SERIAL
MANIPULADOR PARALELO
MECANISMO
Inércia Grande Pequena *
Volume de Trabalho Grande * Pequeno
Aparência Antropomórfica Base Estrutural
Fabricação Difícil Fácil *
Controle de posição no espaço de trabalho
Difícil Fácil *
Controle de força no
CONTROLE
Controle de força no espaço de trabalho
Fácil * Difícil
Detecção de Forças Difícil Fácil *
Erro de Posição Acumulado Média *
Erro de controle de Forças
Média * Acumulado
Perto de Pontos Singulares
Degeneração no controle de força
Diminuição de exatidão no
posicionamento
Grande movimento do atuador
Grande força no atuador
Dinâmica Complicada *Muito mais complicada

GdL X GdM
• Graus de Liberdade (GdL) – movimentos independentes
• Graus de Movimento (GdM)

GdL X GdM
OBS: Geram uma outra classificação de Robôs.
Classificação Segundo GdL’s
• Robôs de Propósito Geral (6 GdL): conseguem atingir qualquer posição e orientação no espaço de trabalho.
• Robôs Redundantes (GdM > GdL): quando • Robôs Redundantes (GdM > GdL): quando possuem articulações adicionais, utilizados para alcançar locais de difícil acesso contornando obstáculos (ou robôs com trilhos).
• Robôs Limitados (< 6 GdL): movimentação limitada.
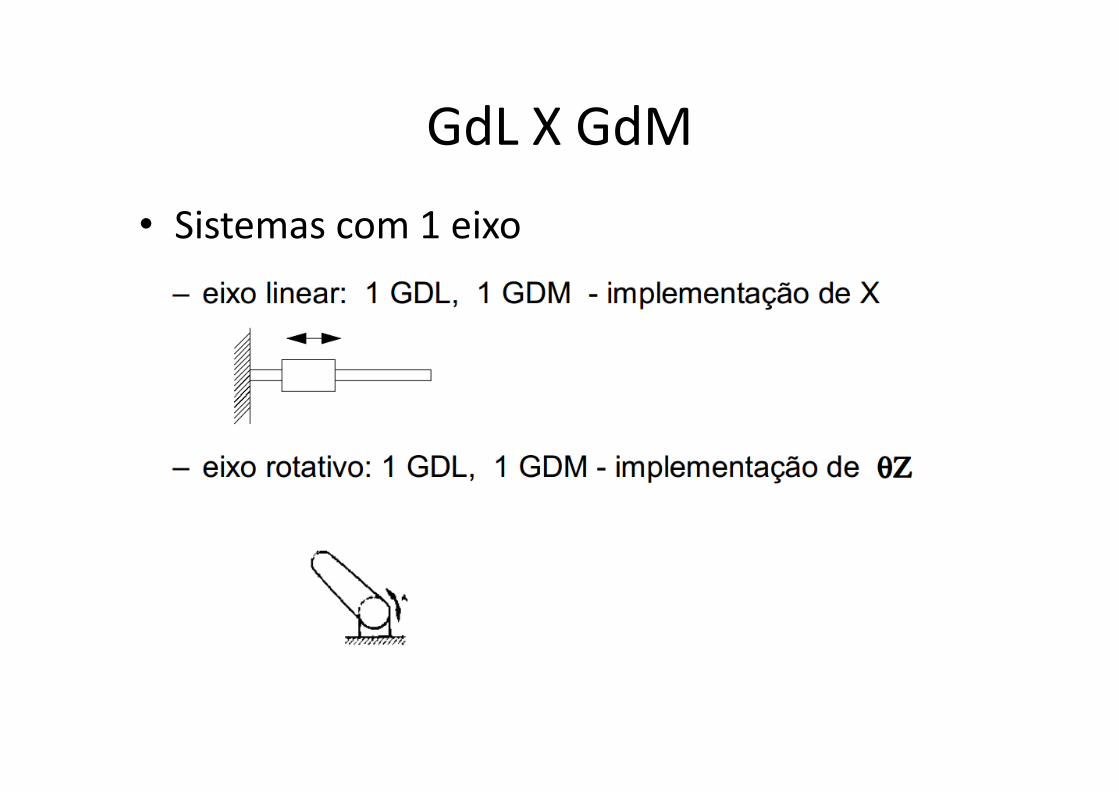
GdL X GdM
• Sistemas com 1 eixo

GdL X GdM• Sistemas com 2 eixos
• Sistemas com 3 eixos
Aplicações
• Manipulação de materiais: não há transformação dos objetos:*Palletização; *Preparação de máquinas
*Carregamento * Empacotamento
• Fabricação:*Soldagem *Colagem e selamento *Corte (laser, jato)
* Pintura *Montagem (mec. e elet.) *Acabamento
• Inspeção e medição:
*Qualidade

Aplicações
• Motivações para aplicação na indústria
– Tarefas repetitivas e em ambientes insalubres
–Precisão
–Qualidade–Qualidade
–Rapidez
–Marketing
–Redução de custos

Aplicações - Paralelo
• Simuladores de vôo e de automóveis;
• Montagem de placas de circuito impresso;
• Processo de fresagem de alta velocidade;
OBS: como a força é distribuída entre diversoselos paralelos e só há um “estágio de elos” antesdo efetuador, o peso do robô e seu momento deinércia são reduzidos, possibilitando a realizaçãode tarefas precisas em alta velocidade.
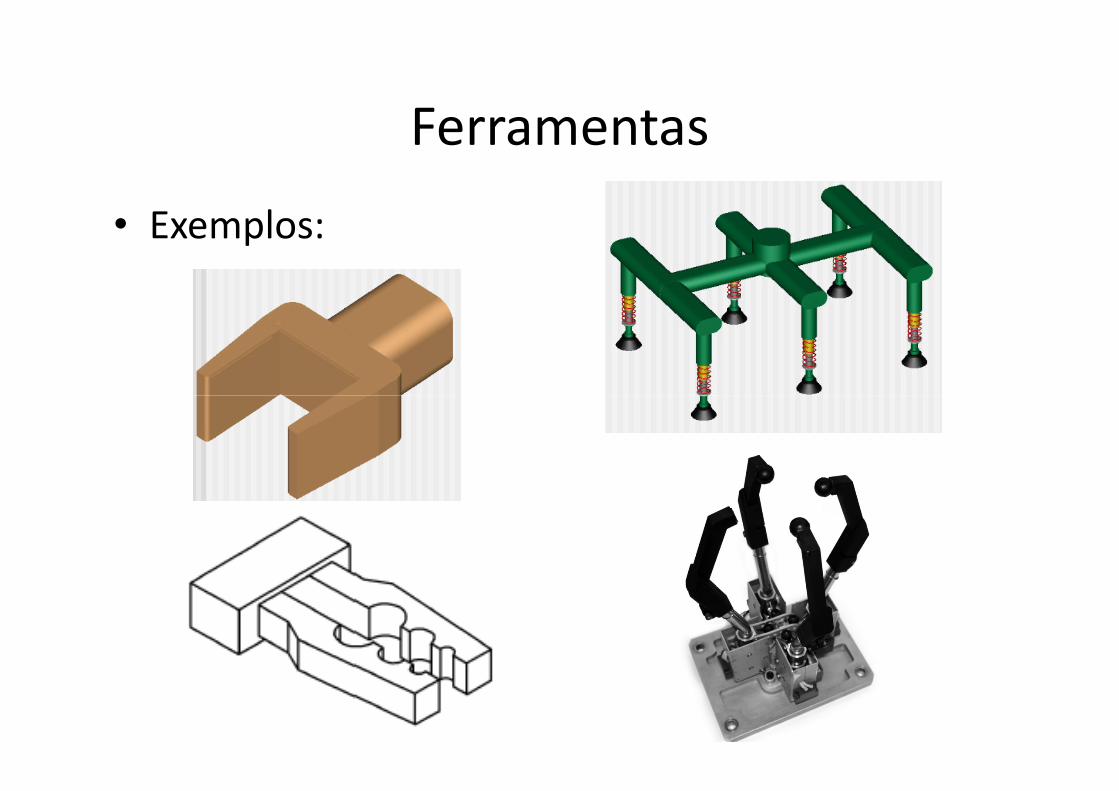
Ferramentas
• Exemplos:

Ferramentas
• Exemplos:

Ferramentas
• Exemplos:

Ferramentas
• Exemplos:

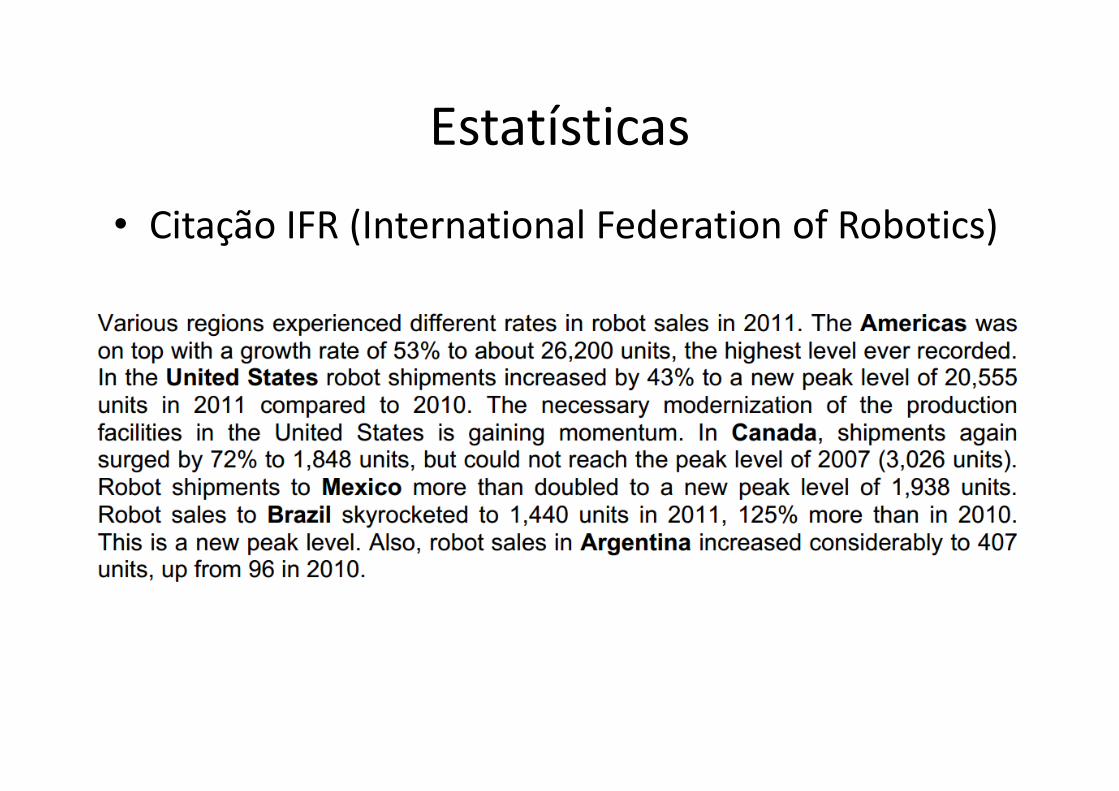
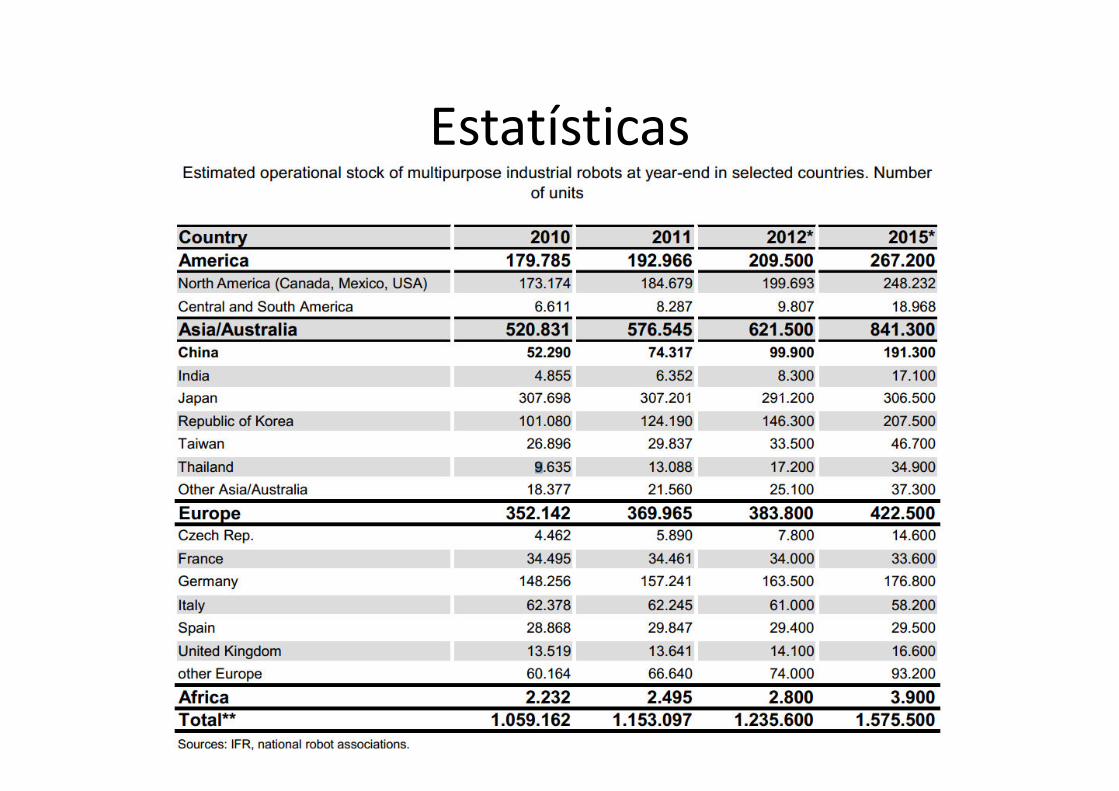
Estatísticas
Estatísticas
• Citação IFR (International Federation of Robotics)

Estatísticas

Estatísticas
Estatísticas

Mercado no Brasil
• Maiores consumidores:
– Setor automobilístico (montadoras e fornecedores de autopeças): ~65%
– Médias e pequenas empresas: ~18%

Robótica
• TEMAS ATUAIS:
–Controle de Força;–Controle de Força;
–Cooperação;
–Programação;
–Projeto de robôs.

Cinemática
• Direta:
• Espaço das juntas
– q=[q1 q2 ... qn]’– q=[q1 q2 ... qn]’
• Espaço operacional
– x=[px py pz α θ γ]

Cinemática
• Inversa:
• Espaço operacional
– x=[px py pz α θ γ]– x=[px py pz α θ γ]
• Espaço das juntas
– q=[q1 q2 ... qn]’

Cinemática
• Trajetórias
• ponto-a-ponto
• Contínuas• Contínuas
- path motion
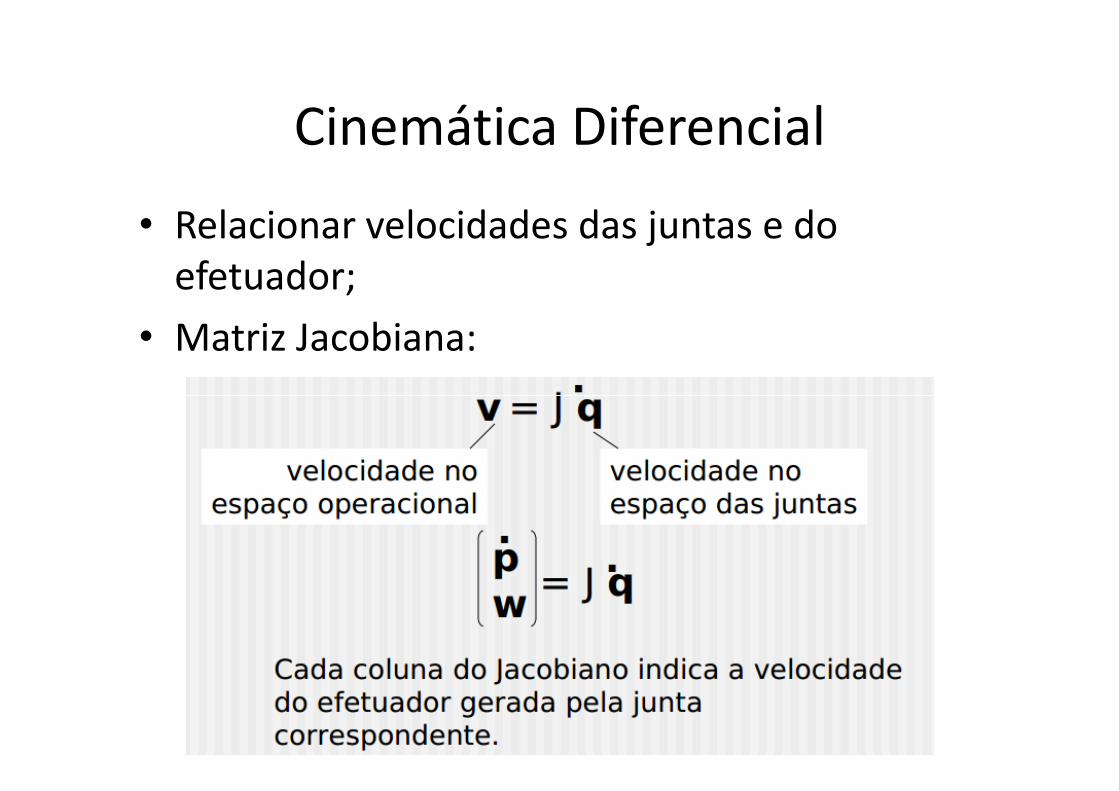
Cinemática Diferencial
• Relacionar velocidades das juntas e do efetuador;
• Matriz Jacobiana:

Programação
• Caixa de Comando (teach/flex - pendant)

Programação
• Linguagens de Programação:
– VAL II (Unimation)
– AML (IBM)
– PDL-2 (Comau)– PDL-2 (Comau)
– RAPID (ABB)
– ACL (Eshed)
– Exemplo:
• MOVL P1
• MOVC P2,P3,P4
• WAIT S2