robotica movil
DESCRIPTION
Trabajo escrito sobre la robotica movil, propuesta de investigación aplicada.TRANSCRIPT
1
PROPUESTA DE INVESTIGACION
APLICACIÓN DE LA ROBÓTICA MÓVIL EN EL CEAD PALMIRA
SEMINARIO DE INVESTIGACIÓN
STEVEN TIGREROS MOJICA c.c. 1.113.656.335
CLAUDIA MILENA RAMIREZ BOLAÑOS c.c. 29.674.984
PROPUESTA DE INVESTIGACIÓN
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS TECNOLOGIAS E INGENIERIAS ECBTI
INGENIERIA DE SISTEMAS
PALMIRA
2011
2
INTRODUCCION
El estudio de la robótica requiere de un amplio conocimiento de la misma, y
aunque es un área relativamente nueva, los avances realizados en sus pocos
años de historia han sido muy relevantes e importantes en el ámbito global y
general ya que es un área que ha aportado de alguna u otra forma en casi todas
las áreas de conocimiento tanto científico y tecnológico como de las demás áreas
existentes.
Existen dos grandes grupos en los que se divide la robótica, robots manipuladores
y robots móviles. Los primeros están implantados de forma muy importante en la
industria, los robots móviles son mucho más recientes y la investigación es mucho
más activa en este segundo grupo.
A través de los grandes avances de la robótica se pretende crear un mecanismo
electrónico que pueda desplazarse vía terrestre en zonas planas, evadir
obstáculos, identificar rostros y abarcar un medio de comunicación con las
personas; DEIWA como se llamará nuestro dispositivo electromecánico será
producto del estudio de una profunda investigación sobre la robótica móvil.
Debido a la importante investigación que se está realizando en el área de la
robótica, es complicado abarcar un rango representativo de ella. Por ello, en el
siguiente apartado, se investigara la robótica móvil y se implementará al construir
a DEIWA como un avance significativo en la robótica, el cual pretende no solo
cumplir tareas de movilización terrestre, sino también, cumplir con otras funciones
que harán de DEIWA un producto innovador, donde se consolide en grandes
avances tecnológicos.
3
RESUMEN
La robótica es un área de investigación y desarrollo de aplicaciones muy diversas.
Su utilización masiva en la industria, y actualmente su creciente uso en
aplicaciones de asistencia y servicio, hacen de ella un área de mucho interés
tanto en el presente como en el futuro. Sus campos de aplicación se extienden
desde la asistencia a personas minusválidas hasta sofisticadas exploraciones
espaciales, pasando por un amplio rango de tareas a realizar.
Un estudio completo del área de la robótica es prácticamente imposible, por lo
que es necesario centrarse en un tema muy concreto donde poder profundizar de
forma eficiente. Pero antes de ello, es importante tener una visión general y
conocer las diferentes ramas de la robótica.
4
CONTENIDO
Portada
Introducción
Resumen
Índice General
1. El problema
1.1 Formulación del problema
1.1.1 Importancia y alcances
1.1.2Delimitación del estudio propuesto
Mecanismos de movilidad
Aprovechamiento de la energía
Computación y Control
Sensores y Navegación
2. Revisión y análisis bibliográfico y documental
2.1 Literatura más reciente e importante acerca del problema
Robots Móviles
Movimiento
2.2 Resumen del estado del arte del estudio del problema
2.2.1 Estado del arte de la Robótica
Algunas patentes de robots que se realizaron son:
Isaac
Unimate
Puma
Genghis
Dante
Soujourner
2.3 Estado del arte de la robótica y sus aplicaciones con Java.
Introducción
¿Qué es un robot?
¿Qué es la robótica?
2.3.1 Clasificación de los robots
3. Plan de Trabajo
3.1 Consideraciones Generales
3.2 Etapas del trabajo, principales actividades de cada etapa
Conclusiones
Referencias
5
1. EL PROBLEMA
1.1 Formulación del problema
1.1.1 IMPORTANCIA Y ALCANCES
Durante los periodos cursados dentro de la UNAD, no se ha desarrollado un
mecanismo electrónico, que incentive a las estudiantes de carreras como la
electrónica, ingeniería de sistemas entre otras afines a la aplicación de conceptos
teóricos a provechando los avances tecnológicos del día de hoy. A pesar de ser
un área interdisciplinaria, compleja es necesario que los estudiantes de la UNAD
se enfrente a situaciones de gran nivel que les permita desarrollar competencias;
para ser profesionales exitosos reconocidos en el mercado.
Es por esto que nos motivamos a la realización de DEIWA como propuesta
investigativa que permita motivar, a los estudiantes a la creación de sus propios
robots y porque no contribuir a la comunidad estudiantil en la ubicación de los
tutores programados los fines de semana, además de otras aplicaciones que se
le puedan dar.
1.1.2 DELIMITACIÓN DEL ESTUDIO PROPUESTO:
El área de la robótica es una área sumamente extensa es por esto que nos
enfocaremos en la robótica móvil, que emplea un mecanismo que permite
desplazarse autónomamente, en nuestro caso 2 ruedas que reciben la
información del entorno con sus propios sistemas sensores, aun siendo este un
tema bien amplio nuestro robot tendrá mecanismo de locomoción en superficies
lisas, planas lo que hacen que el mecanismo sea diferente a superficies rugosas e
inclinadas, para ello utilizara soluciones tecnologías como las Estrategias wheels
and props, esta utiliza ruedas o cadenas.
El desarrollo de la microelectrónica y los sistemas embebidos ha hecho posible el
diseño de sistemas que combinan la movilidad y la autonomía, dos de los puntos
de interés más relevantes de la investigación robótica.
Se podría hablar de 4 áreas dominantes en la investigación de los robots
Móviles:
Mecanismos de movilidad
Como ya se ha descrito, existen dos tendencias para el diseño de robots móviles,
los diseños de ingeniería y los diseños biocinéticas. Actualmente, ambas
estrategias son la base de una importante área de investigación.
Los estudios sobre la cinemática y dinámica del movimiento en cualquier contexto
(tierra, aire o agua), continúan siendo fundamentales en el desarrollo de los
modernos sistemas. Éstos pueden aprovechar al máximo las fuerzas con las que
interactúan para reducir el gasto energético.
6
Las propiedades de los materiales y el diseño, son también un punto de interés
principal en los nuevos mecanismos. El uso de materiales ligeros y a su vez de
una gran resistencia e incluso deformables dinámicamente, es un área muy
importante de investigación.
Aprovechamiento de la energía
Un mayor tiempo de autonomía de los vehículos implica una eficiencia energética
del movimiento mayor es por esto que debemos elegir el mejor recurso energético
para nuestro robot que le permita mantenerse el mayor tiempo posible en
movimiento y con el cumplimiento efectivo de sus tareas de reconocimiento de
rostros y comunicación.
Computación y control
La introducción de la microinformática ha posibilitado el uso de los sistemas
embebidos más pequeños, ligeros y eficientes que los anteriores sistemas de
control. Estos nuevos sistemas embebidos, han permitido a los robots ser
capaces de contener una arquitectura avanzada de programación, basada en la
captación de información por medio de sensores y en una toma de decisiones
inteligente “a bordo”.
Sensores y navegación
Los sensores tienen 2 propósitos principales en los vehículos robóticos:
1. Los sensores monitorizan el entorno y son usados para el control de tareas
interactivas. Por ejemplo, DEIWA nuestro robot terrestre puede desplazarse,
evadir obstáculos, identificar rostros e informar a la comunidad en general de
situaciones de interés.
2. Los sensores son fundamentales para permitir la navegación autónoma de un
robot móvil. Cada vehículo debe ser capaz de saber dónde está localizado y qué
estructura tiene el área que lo rodea, para ser capaz de moverse sin peligro.
7
2. REVISION Y ANALISIS BIBLIOGRAFICO Y DOCUMENTAL
2.1 Literatura más reciente e importante acerca del problema
Robots móviles
Los robots móviles están provistos de algún tipo de mecanismo que les permite
desplazarse de lugar autónomamente, como pueden ser patas, ruedas u orugas y
reciben la información del entorno con sus propios sistemas sensores.
Son empleados en plantas industriales para el transporte de mercancías y para la
exploración de lugares de difícil acceso o muy distantes, como es el caso de la
exploración espacial y de las investigaciones o rescates submarinos.
Movimiento
Con el conocimiento de la cinemática y la dinámica de un manipulador con
elementos series, sería interesante mover los actuadores de sus articulaciones
para cumplir una tarea deseada controlando al manipulador para que siga un
camino previsto. Antes de mover el brazo, es de interés saber si hay algún
obstáculo presente en la trayectoria que el robot tiene que atravesar (ligaduras de
obstáculos) y si la mano del manipulador necesita viajar a lo largo de una
trayectoria especificada (ligaduras de trayectoria). El problema del control de un
manipulador se puede dividir convenientemente en dos subproblemas coherentes:
el subproblema de planificación de movimiento (o trayectoria) y el subproblema de
control del movimiento.
La curva espacial que la mano del manipulador sigue desde una localización
inicial (posición y orientación) hasta una final se llama la trayectoria o camino. La
planificación de la trayectoria (o planificador de trayectoria) interpola y/o aproxima
la trayectoria deseada por una clase de funciones polinomiales y genera una
secuencia de puntos de consignas de control en función del tiempo para el control
del manipulador desde la posición inicial hasta el destino.
En general, el problema de control de movimientos consiste en: 1) obtener los
modelos dinámicos del manipulador, 2) utilizar estos modelos para determinar
leyes o estrategias de control para conseguir la respuesta y el funcionamiento del
sistema deseado. Desde el punto de vista de análisis de control, el movimiento del
brazo de un robot se suele realizar en dos fases de control distintas. La primera
es el control del movimiento de aproximación en el cual el brazo se mueve desde
una posición/orientación inicial hasta la vecindad de la posición/orientación del
destino deseado a lo largo de una trayectoria planificada. El segundo es el control
del movimiento fino en el cual el efector final del brazo interacciona
dinámicamente con el objeto utilizando información obtenida a través de la
realimentación sensorial para completar la tarea.
El sistema de reconocimiento facial es una aplicación dirigida por ordenador que
identifica automáticamente a una persona en una imagen digital. Esto es posible
8
mediante un análisis de las características faciales del sujeto extraídas de la
imagen o de un fotograma clave de una fuente de video, y comparándolas con
una base de datos.
Identificación de rostros
El reconocimiento facial se ha convertido en los últimos años en un área de
investigación activa que abarca diversas disciplinas, como procesado de
imágenes, reconocimiento de patrones, visión por ordenador y redes neuronales.
Involucra tanto a investigadores del área de informática como a seudocientíficos y
psicólogos. Se podría considerar también dentro del campo de reconocimiento de
objetos, donde la cara es un objeto tridimensional sujeto a variaciones de
iluminación, pose, etc., y ha de ser identificada basada en su proyección 2D
(excepto cuando se utilizan técnicas 3D).
El objetivo de un sistema de reconocimiento facial es, generalmente, el siguiente:
dada una imagen de una cara "desconocida", o imagen de test, encontrar una
imagen de la misma cara en un conjunto de imágenes "conocidas", o imágenes
de entrenamiento. La gran dificultad añadida es la de conseguir que este proceso
se pueda realizar en tiempo real. El sistema identificará las caras presentes en
imágenes o videos automáticamente. Puede operar en dos modos:
Verificación o autentificación de rostros: compara una imagen de la cara con otra
imagen con la cara de la que queremos saber la identidad. El sistema confirmará
o rechazará la identidad de la cara.
Identificación o reconocimiento de rostros: compara la imagen de una cara
desconocida con todas las imágenes de caras conocidas que se encuentran en la
base de datos para determinar su identidad.
Por su naturaleza amigable, este tipo de sistemas siguen siendo atractivos a
pesar de la existencia de otros métodos muy fiables de idenficiación personal
biométricos, como el análisis de huellas dactilares y el reconocimiento del iris.
Se utiliza principalmente en sistemas de seguridad para el reconocimiento de
usuarios. En estos sistemas se utiliza un lector que define las características del
rostro, y cuando este solicita el acceso, se verifica comparando los datos
obtenidos con la base de datos. Sin embargo, estos sistemas no son útiles a largo
plazo ya que, a medida que pasan los años, los rasgos faciales varían y al
solicitar el acceso ya no coinciden con la imagen en la base de datos. Para
solucionar este problema se puede utilizar un algoritmo que interprete el paso de
los años, aunque igualmente sigue sin ser del todo fiable), o bien, renovar
frecuentemente la base de datos.
También se utiliza en aplicaciones de interacción persona-ordenador, en gestión
multimedia, y en software como Google's Picasa, Apple iPhoto, Sony's Picture
Motion Browser (PMB), Facebook y Asus Smart Logon.
9
Sensores del robot
La utilización de mecanismos sensores externos permite a un robot interaccionar
con su entorno de una manera flexible, esto está en contraste con operaciones
reprogramadas en las cuales a un robot se le enseña para efectuar tareas
repetitivas mediante un conjunto de funciones pre programadas. Aunque esto
último es con mucho la forma más predominante de operación de los robots
industriales actuales, la utilización de tecnología sensorial para dotar a las
máquinas con un mayor grado de inteligencia al tratar con su entorno es
realmente un tema de investigación y desarrollo activo en el campo de la robótica.
La función de los sensores del robot se pueden dividir en dos categorías
principales: estado interno y estado externo. Los sensores del estado interno
tratan con la detección de variables tales como la posición de la articulación del
brazo, que se utiliza para controlar el robot. Por otra parte, los sensores de estado
externo tratan con la detección de variables tales como alcance, proximidad y
contacto. Los sensores externos se utilizan para guiado de robots, así como para
la identificación y manejo de objetos. Aunque los sensores de proximidad,
contacto y fuerza juegan un papel significativo en la mejora del funcionamiento del
robot, se reconoce que la visión es la capacidad sensorial más potente del robot.
La visión del robot se puede definir como el proceso de extraer, caracterizar e
interpretar información de imágenes de un mundo tridimensional. Este proceso,
también comúnmente conocido visión de máquina o de ordenador, se puede
subdividir en seis áreas principales:
1) sensor 2) pre procesamiento 3) segmentación 4) descripción 5) reconocimiento 6) interpretación.
Es conveniente agrupar estas diversas áreas de visión de acuerdo con la
sofisticación que lleva su desarrollo. Consideramos tres niveles de procesamiento:
visión de bajo, medio y alto nivel. Aunque no existen fronteras nítidas entre estas
subdivisiones, proporcionan un marco útil para categorizar los distintos procesos
que son componente inherente de un sistema de visión por máquina. En nuestra
discusión, trataremos los sensores y el pre procesamiento como funciones de
visión de bajo nivel.
Esto nos llevará desde el propio proceso de formación de imagen hasta
compensaciones tales como la reducción de ruido, y finalmente a la extracción de
características primitivas de imágenes tales como discontinuidades en la
intensidad. Asociaremos con la visión de medio nivel aquellos procesos que
10
extraen, caracterizan y etiquetan componentes en una imagen resultante de la
visión de bajo nivel. En términos de nuestras seis subdivisiones, trataremos la
segmentación, descripción y reconocimiento de objetos individuales como
funciones de visión de medio nivel. La visión de alto nivel se refiere a procesos
que intentan emular el conocimiento.
Lenguaje de programación
Un gran obstáculo en la utilización de los manipuladores como máquinas de uso
general es la falta de comunicación eficaz y apropiada entre el usuario y el
sistema robótico, de forma que éste pueda dirigir al manipulador para cumplir una
tarea dada. Hay algunas formas de comunicarse con un robot, y los tres grandes
enfoques para lograrlo son: el reconocimiento de palabra discreta, enseñar y
reproducir y lenguajes de programación de alto nivel.
El estado actual del reconocimiento de voz es bastante primitivo y generalmente
depende del orador. Pueden reconocer un conjunto de palabras discretas de un
vocabulario limitado y normalmente requiere que el usuario pare entre palabras.
Aunque es posible reconocer palabras en tiempo real debido a componentes de
ordenador más rápidos y algoritmos de procesamientos eficientes, la utilidad del
reconocimiento de palabras discretas para describir una tarea es limitada. Más
aún, requiere una gran cantidad de memoria para almacenar el discurso, y
normalmente se necesita un período de entrenamiento para incorporar patrones
de voz con fines de reconocimiento.
El método de enseñar y reproducir lleva consigo el instruir al robot al dirigirlo a
través de los movimientos que va a realizar. Esto se suele efectuar en los pasos
siguientes: 1) dirigir al robot en movimiento lento utilizando control manual a
través de la tarea de montaje completa, siendo grabados los ángulos de las
articulaciones del robot en posiciones apropiadas con el fin de reproducir el
movimiento; 2) edición y reproducción del movimiento enseñado, y 3) si el
movimiento enseñado es correcto, entonces el robot lo ejecuta a una velocidad
apropiada de forma repetitiva. Este método se conoce también como guiado y es
el enfoque más comúnmente utilizado en los robots industriales de hoy día.
Un planteamiento más general para resolver los problemas de comunicación
hombre-robot es la utilización de programación de alto nivel. Los robots se utilizan
comúnmente en áreas tales como soldadura por arco, soldadura de punto y
pintura al spray". Estas tareas no requieren interacción entre el robot y el entorno
y se pueden programar fácilmente mediante guiado. Sin embargo, el uso de
robots para efectuar tareas de montaje requiere generalmente técnicas de
programación de alto nivel. Se necesita este esfuerzo porque el manipulador se
controla normalmente por un ordenador, y la manera más efectiva para que los
humanos se comuniquen con el ordenador es a través de un lenguaje de
11
programación de alto nivel. Más aún, al utilizar programas para describir tareas de
montaje, permite a un robot efectuar trabajos diferentes simplemente ejecutando
el programa apropiado. Esto aumenta la flexibilidad y versatilidad del robot.
2.2 RESUMEN DEL ESTADO DEL ARTE DEL PROBLEMA
2.2.1 ESTADO DEL ARTE DE ROBOTICA
Por siglos el ser humano ha construido máquinas que imitan las partes del cuerpo
humano, los griegos tenían una palabra específica para denominar estas
máquinas: autómatas. De esta palabra deriva la actual autómata: máquina que
imita la figura y movimientos de un ser animado.
La palabra robot fue usada por primera vez en el año 1921, cuando el escritor
checo carel Capel (1890-1938) estrena en el teatro nacional de Praga su obra
Rossum´s Universal Robot (T.U.R). Su origen es la palabra eslava robota, que se
refiere al trabajo realizado de manera forzada.
Se le atribuye a Asimov la creación del término robotics (robotica) que desde su
obra literaria, ha contribuido decisivamente a la divulgación y difución de la
robótica. Asimov es considerado el padre de la robotica.
La RIA (Robot Industries Association) lo define así: un robot es un manipulador
reprogramable y multifuncional, diseñado para mover cargas, piezas,
herramientas o dispositivos especiales, según trayectorias variadas y
programadas.
ROBÓTICA: El diseño, fabricación y utilización de máquinas automáticas
programables con el fin de realizar tareas repetitivas como el ensamble de
automóviles, aparatos, etc. y otras actividades. Básicamente, la robótica se ocupa
de todo lo concerniente a los robots, lo cual incluye el control de motores,
mecanismos automáticos neumáticos, sensores, sistemas de cómputos, etc."
El desarrollo en la tecnología, donde se incluyen las poderosas computadoras
electrónicas, los actuadores de control retroalimentados, transmisión de potencia
a través de engranes, y la tecnología en sensores han contribuido a flexibilizar los
mecanismos autómatas para desempeñar tareas dentro de la industria. La
investigación en inteligencia artificial desarrolló maneras de emular el
procesamiento de información humana con computadoras electrónicas e inventó
una variedad de mecanismos para probar sus teorías.
Algunas patentes de robots que se realizaron son:
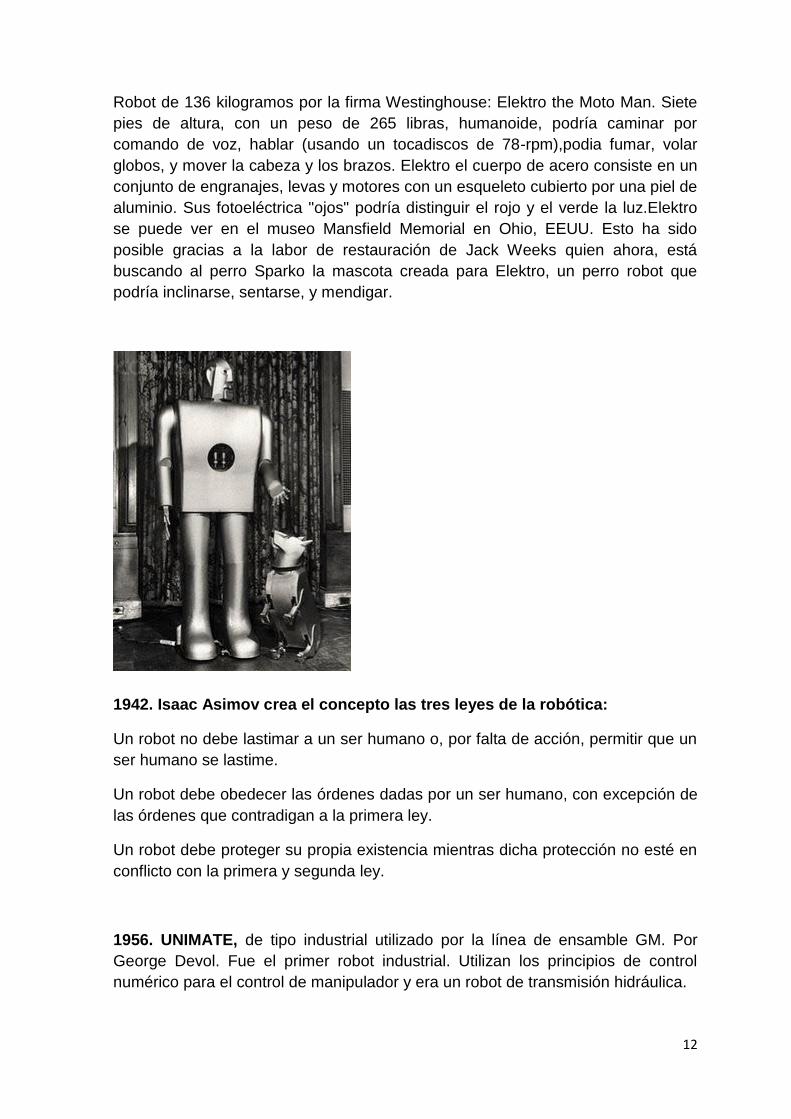
1938 ELEkTRO. Humanoide presentado en la feria mundial de Nueva York.
12
Robot de 136 kilogramos por la firma Westinghouse: Elektro the Moto Man. Siete
pies de altura, con un peso de 265 libras, humanoide, podría caminar por
comando de voz, hablar (usando un tocadiscos de 78-rpm),podia fumar, volar
globos, y mover la cabeza y los brazos. Elektro el cuerpo de acero consiste en un
conjunto de engranajes, levas y motores con un esqueleto cubierto por una piel de
aluminio. Sus fotoeléctrica "ojos" podría distinguir el rojo y el verde la luz.Elektro
se puede ver en el museo Mansfield Memorial en Ohio, EEUU. Esto ha sido
posible gracias a la labor de restauración de Jack Weeks quien ahora, está
buscando al perro Sparko la mascota creada para Elektro, un perro robot que
podría inclinarse, sentarse, y mendigar.
1942. Isaac Asimov crea el concepto las tres leyes de la robótica:
Un robot no debe lastimar a un ser humano o, por falta de acción, permitir que un
ser humano se lastime.
Un robot debe obedecer las órdenes dadas por un ser humano, con excepción de
las órdenes que contradigan a la primera ley.
Un robot debe proteger su propia existencia mientras dicha protección no esté en
conflicto con la primera y segunda ley.
1956. UNIMATE, de tipo industrial utilizado por la línea de ensamble GM. Por
George Devol. Fue el primer robot industrial. Utilizan los principios de control
numérico para el control de manipulador y era un robot de transmisión hidráulica.
13
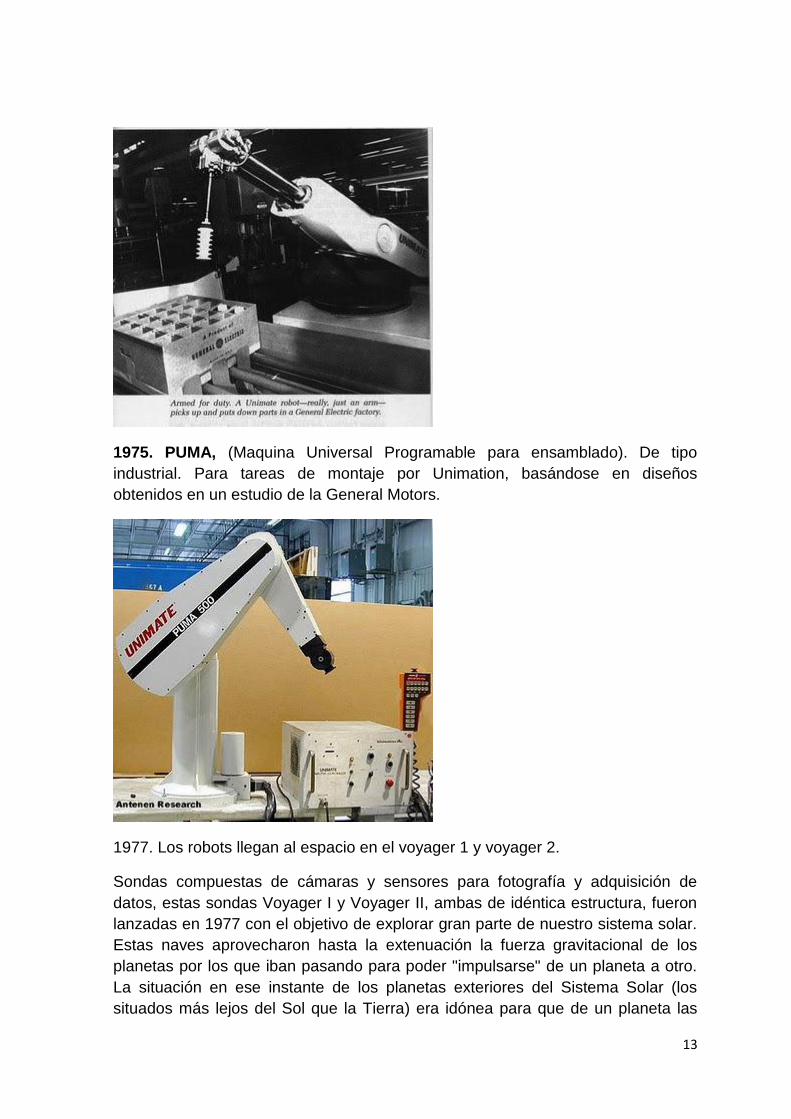
1975. PUMA, (Maquina Universal Programable para ensamblado). De tipo
industrial. Para tareas de montaje por Unimation, basándose en diseños
obtenidos en un estudio de la General Motors.
1977. Los robots llegan al espacio en el voyager 1 y voyager 2.
Sondas compuestas de cámaras y sensores para fotografía y adquisición de
datos, estas sondas Voyager I y Voyager II, ambas de idéntica estructura, fueron
lanzadas en 1977 con el objetivo de explorar gran parte de nuestro sistema solar.
Estas naves aprovecharon hasta la extenuación la fuerza gravitacional de los
planetas por los que iban pasando para poder "impulsarse" de un planeta a otro.
La situación en ese instante de los planetas exteriores del Sistema Solar (los
situados más lejos del Sol que la Tierra) era idónea para que de un planeta las
14
sondas pudieran pasar a otro y así ganar velocidad. Exploraron Júpiter, Saturno,
Urano y Neptuno proporcionando información tremendamente útil sobre estos
planetas y hoy en día (Enero 2005) están al doble de distancia del Sol que Pluto,
el planeta más alejado de los que giran en torno al Sol.
Ruta de los voyager:
1979. se funda el instituto de robótica en la universidad Carnegie Mellon (RI)
1981. brazo de transmisión directa que tiene motores en las articulaciones para
que el movimiento sea más fino y preciso. Por takeo kanade.
1986. media Lab del MIT y LEGO, desarrollan y venden productos educativos.
15
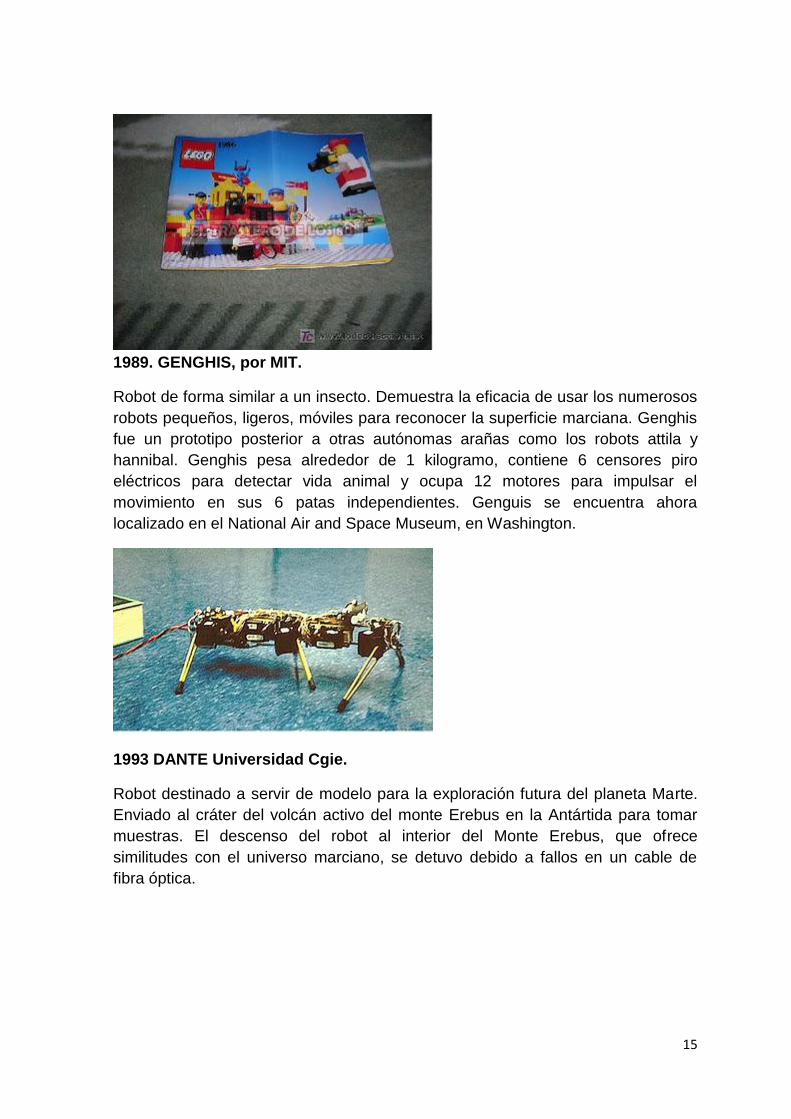
1989. GENGHIS, por MIT.
Robot de forma similar a un insecto. Demuestra la eficacia de usar los numerosos
robots pequeños, ligeros, móviles para reconocer la superficie marciana. Genghis
fue un prototipo posterior a otras autónomas arañas como los robots attila y
hannibal. Genghis pesa alrededor de 1 kilogramo, contiene 6 censores piro
eléctricos para detectar vida animal y ocupa 12 motores para impulsar el
movimiento en sus 6 patas independientes. Genguis se encuentra ahora
localizado en el National Air and Space Museum, en Washington.
1993 DANTE Universidad Cgie.
Robot destinado a servir de modelo para la exploración futura del planeta Marte.
Enviado al cráter del volcán activo del monte Erebus en la Antártida para tomar
muestras. El descenso del robot al interior del Monte Erebus, que ofrece
similitudes con el universo marciano, se detuvo debido a fallos en un cable de
fibra óptica.
16
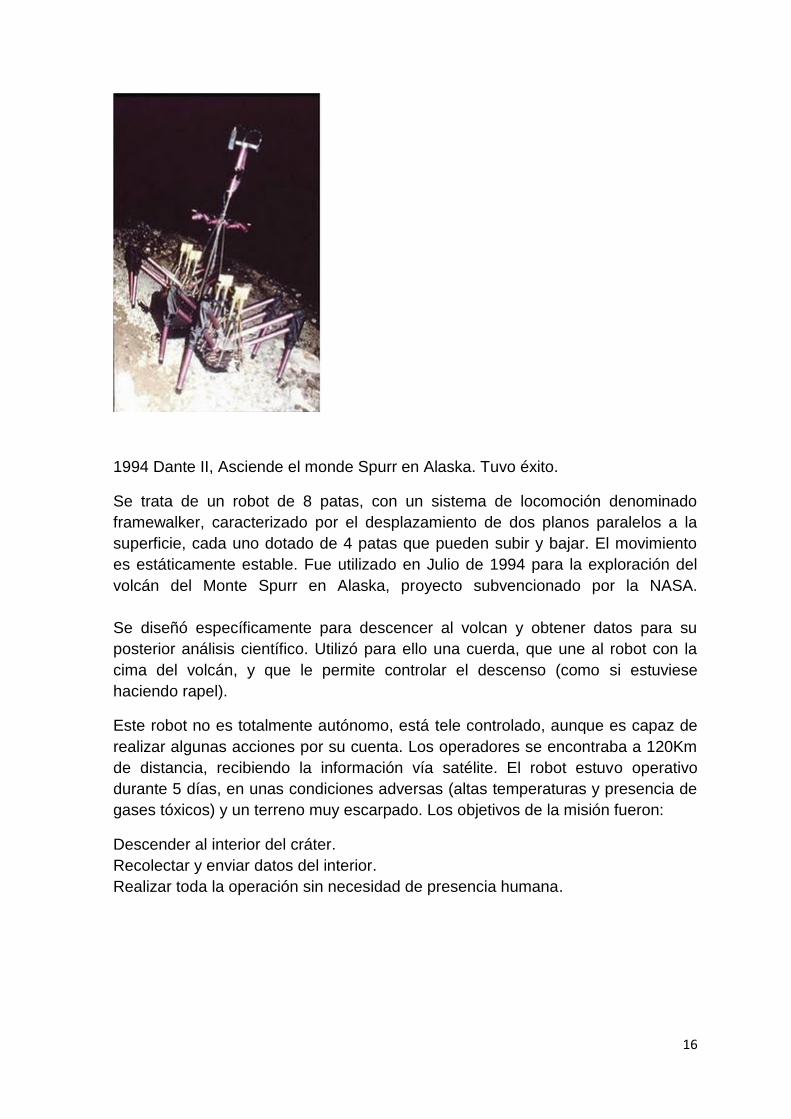
1994 Dante II, Asciende el monde Spurr en Alaska. Tuvo éxito.
Se trata de un robot de 8 patas, con un sistema de locomoción denominado
framewalker, caracterizado por el desplazamiento de dos planos paralelos a la
superficie, cada uno dotado de 4 patas que pueden subir y bajar. El movimiento
es estáticamente estable. Fue utilizado en Julio de 1994 para la exploración del
volcán del Monte Spurr en Alaska, proyecto subvencionado por la NASA.
Se diseñó específicamente para descencer al volcan y obtener datos para su
posterior análisis científico. Utilizó para ello una cuerda, que une al robot con la
cima del volcán, y que le permite controlar el descenso (como si estuviese
haciendo rapel).
Este robot no es totalmente autónomo, está tele controlado, aunque es capaz de
realizar algunas acciones por su cuenta. Los operadores se encontraba a 120Km
de distancia, recibiendo la información vía satélite. El robot estuvo operativo
durante 5 días, en unas condiciones adversas (altas temperaturas y presencia de
gases tóxicos) y un terreno muy escarpado. Los objetivos de la misión fueron:
Descender al interior del cráter.
Recolectar y enviar datos del interior.
Realizar toda la operación sin necesidad de presencia humana.
17
1996 P3, humanoide desarrollado por Honda, 10 años en desarrollo.
El robot P3 de honda es posiblemente el robot más famoso del mundo, sobre
todo, desde que protagonizo un anuncio publicitario de la multinacional japonesa.
En este anuncio se podía ver al robot P3 ejerciendo una de las tareas que ningún
otro robot podía hacer hasta entonces (y es posible que todavía no haya ninguno):
subir escaleras. Este robot es de los conocidos como humanoides, debido a su
aparente forma humana.
Honda define la inteligencia como la "capacidad de establecer estrategias de
resolución de problemas para lograr un objetivo concreto mediante el
reconocimiento, el análisis, la asociación y la combinación de datos, la
planificación y la toma de decisiones". Honda es la primera en reconocer que
ASIMO todavía dista mucho de tener todas estas capacidades, pero considera
que se han realizado avances importantes.
Además de las capacidades cognitivas asociadas al sistema de "avance
inteligente", las versiones de ASIMO que se están desarrollando en Japón
cuentan con varias funciones inteligentes, entre las que destacan la capacidad de
reconocer a personas, objetos y gestos, calcular las distancias y el sentido de
desplazamiento de varios objetos.
Estas informaciones visuales se registran, interpretan y traducen en acciones.
Gracias a estas funciones, ASIMO puede evitar los objetos que se encuentran en
su camino, saber que alguien quiere darle la mano y actuar en consecuencia
tendiéndole la suya.
En cierta medida, ASIMO también puede entender y hablar. Puede reconocer
voces, distinguir sonidos y palabras, responder a determinadas instrucciones e
intercambiar frases simples y saludos con una persona. Actualmente, ASIMO
18
puede entender 50 saludos y tratamientos distintos, así como 30 instrucciones, y
actuar en consecuencia.
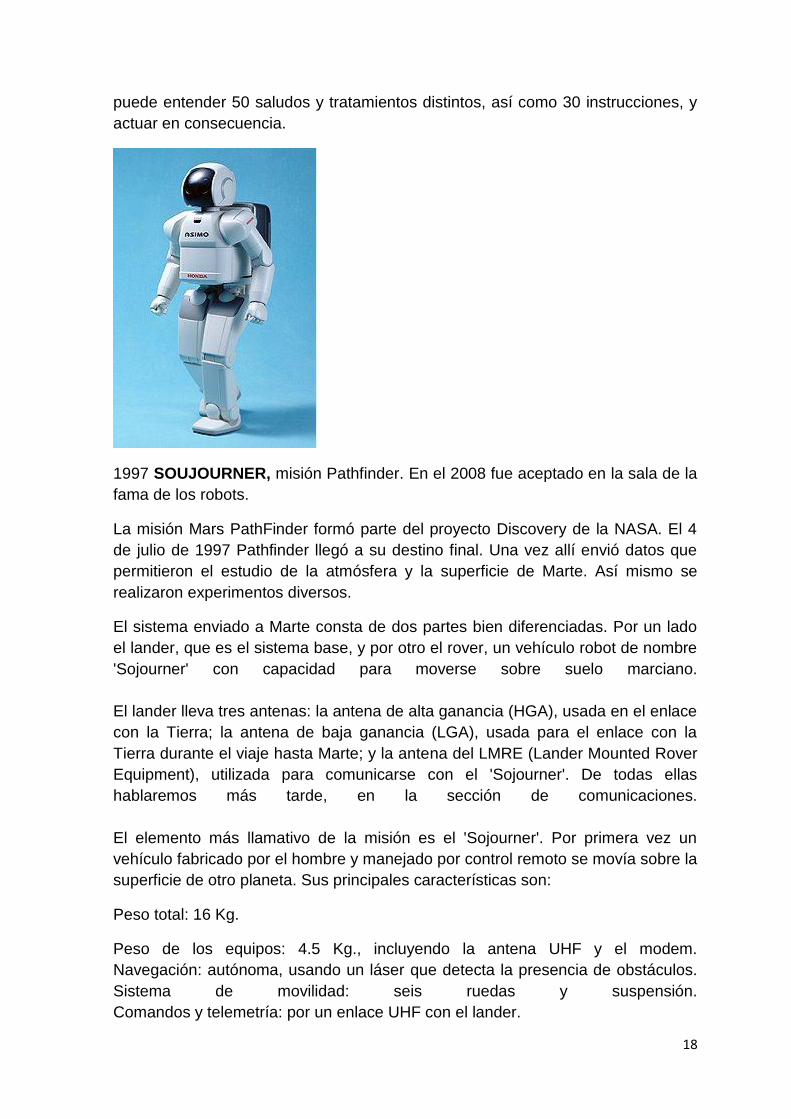
1997 SOUJOURNER, misión Pathfinder. En el 2008 fue aceptado en la sala de la
fama de los robots.
La misión Mars PathFinder formó parte del proyecto Discovery de la NASA. El 4
de julio de 1997 Pathfinder llegó a su destino final. Una vez allí envió datos que
permitieron el estudio de la atmósfera y la superficie de Marte. Así mismo se
realizaron experimentos diversos.
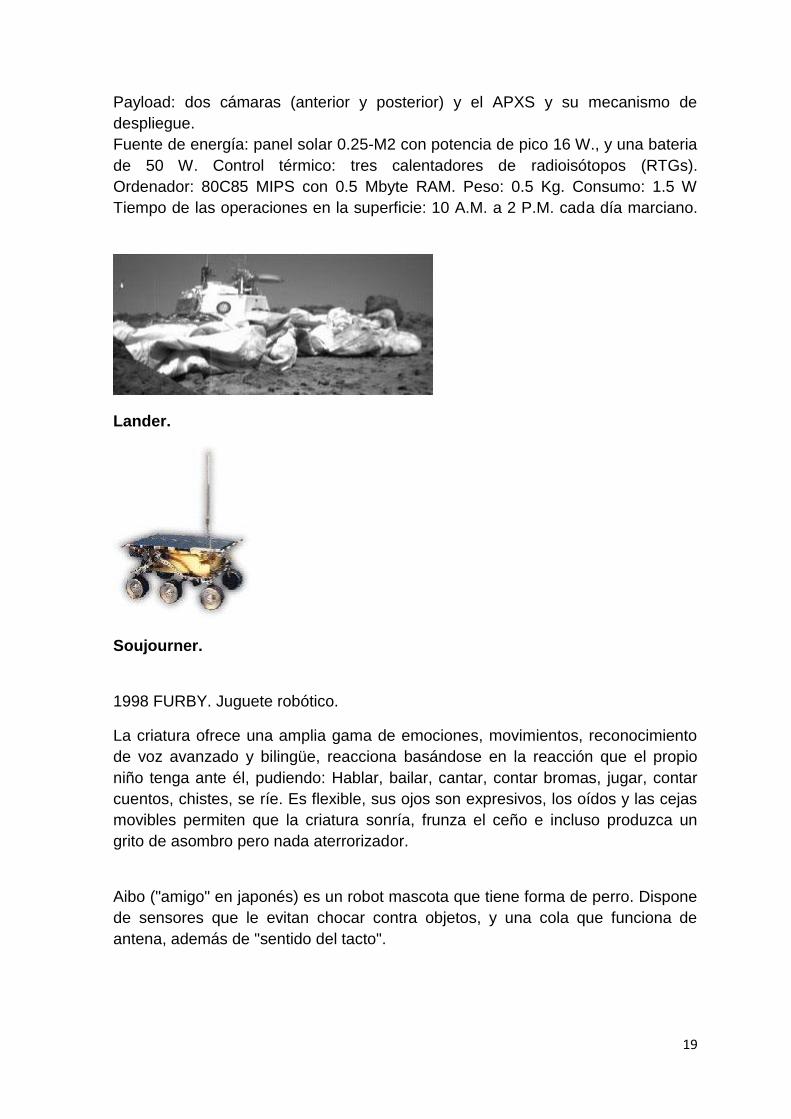
El sistema enviado a Marte consta de dos partes bien diferenciadas. Por un lado
el lander, que es el sistema base, y por otro el rover, un vehículo robot de nombre
'Sojourner' con capacidad para moverse sobre suelo marciano.
El lander lleva tres antenas: la antena de alta ganancia (HGA), usada en el enlace
con la Tierra; la antena de baja ganancia (LGA), usada para el enlace con la
Tierra durante el viaje hasta Marte; y la antena del LMRE (Lander Mounted Rover
Equipment), utilizada para comunicarse con el 'Sojourner'. De todas ellas
hablaremos más tarde, en la sección de comunicaciones.
El elemento más llamativo de la misión es el 'Sojourner'. Por primera vez un
vehículo fabricado por el hombre y manejado por control remoto se movía sobre la
superficie de otro planeta. Sus principales características son:
Peso total: 16 Kg.
Peso de los equipos: 4.5 Kg., incluyendo la antena UHF y el modem.
Navegación: autónoma, usando un láser que detecta la presencia de obstáculos.
Sistema de movilidad: seis ruedas y suspensión.
Comandos y telemetría: por un enlace UHF con el lander.
19
Payload: dos cámaras (anterior y posterior) y el APXS y su mecanismo de
despliegue.
Fuente de energía: panel solar 0.25-M2 con potencia de pico 16 W., y una bateria
de 50 W. Control térmico: tres calentadores de radioisótopos (RTGs).
Ordenador: 80C85 MIPS con 0.5 Mbyte RAM. Peso: 0.5 Kg. Consumo: 1.5 W
Tiempo de las operaciones en la superficie: 10 A.M. a 2 P.M. cada día marciano.
Lander.
Soujourner.
1998 FURBY. Juguete robótico.
La criatura ofrece una amplia gama de emociones, movimientos, reconocimiento
de voz avanzado y bilingüe, reacciona basándose en la reacción que el propio
niño tenga ante él, pudiendo: Hablar, bailar, cantar, contar bromas, jugar, contar
cuentos, chistes, se ríe. Es flexible, sus ojos son expresivos, los oídos y las cejas
movibles permiten que la criatura sonría, frunza el ceño e incluso produzca un
grito de asombro pero nada aterrorizador.
Aibo ("amigo" en japonés) es un robot mascota que tiene forma de perro. Dispone
de sensores que le evitan chocar contra objetos, y una cola que funciona de
antena, además de "sentido del tacto".

20
Usa una combinación de tecnologías robóticas y multimedia e inteligencia artificial
para hacer posible que una serie de hardware y software, normalmente
“inanimado”, pueda tratarse como si fuera un compañero interactivo. Bajo una
“vestimenta” en forma de perro, el Aibo genera interacción con su operador: Es
capaz de reconocer los gestos e incluso la actitud corporal de su dueño. Es
sensible a las caricias, tiene una enorme capacidad de movimientos, equilibrio y
flexibilidad, y lo más importante: aprende.
Según la compañía, Aibo verdaderamente tiene emociones e instintos
programados en su cerebro, según la situación.
21
2.3 ESTADO DEL ARTE DE LA ROBÓTICA Y SUS APLICACIONES CON
JAVA.
INTRODUCCIÓN
La robótica, como se conoce hoy en día nació con el primer robot de la era
moderna llamado “Hélice la Tortura”, creada por Grey Walters en la década de los
40. Sin embargo, la robótica tiene su origen hace miles de años. Basándose en la
historia, cuando la robótica no era una ciencia y los robots eran llamados
autómatas. En sí, la palabra robot fue creada por un checoslovaco llamado Karel
Capek que dio el nombre de robot por primera vez en una obra teatral titulada,
R.U.R. (Rossum´s Universal Robot). La palabra “robota” en checoslovaco significa
“trabajador que proporciona servicio obligatorio (esclavo)”.
Isaac Asimov presenta en sus libros de ciencia ficción un mundo futuro en que
existían reglas de seguridad para que los robots no puedan ser dañinos para los
seres humanos, por tal razón propuso las tres leyes para la robótica y luego
adicionó la ley cero.
Ley Cero: Un robot no puede afectar a la humanidad, o permitir que por su
inacción la humanidad resulta afectada.
Ley Uno: Un robot no puede dañar a un ser humano o, a través de la inacción,
permitir que se dañe a un ser humano.
Ley Dos: Un robot debe obedecer las órdenes dadas por los seres humanos,
excepto cuando tales órdenes estén en contra de la primera ley.
Ley Tres: Un robot debe de proteger su propia existencia siempre y cuando esta
protección no entre en conflicto con la primera y segunda ley.
¿QUÉ ES UN ROBOT?
Es un manipulador automático servo controlado, reprogramable, polivalente
(apropiado), capaz de posicionar y orientar piezas, útiles o dispositivos
especiales, siguiendo trayectorias variables programables, para la ejecución de
diversas tareas. Su unidad de control incluye un dispositivo de memoria y
ocasionalmente de percepción del entorno.
¿QUÉ ES LA ROBÓTICA?
La Robótica es una ciencia aplicada, que surgió aproximadamente en 1960.
Desde entonces ha despertado un interés de cualquier previsión. El auge de la
Robótica y la imperante necesidad de su implantación en numerosas
instalaciones industriales, requiere el concurso de un buen número de
especialistas en la materia.
22
A continuación se muestra un cronograma resumido de los avances de la
robótica.
2.3.1CLASIFICACIÓN DE LOS ROBOTS.
La potencia del software en el controlador determina la utilidad y flexibilidad del
robot dentro de las limitantes del diseño mecánico y la capacidad de los sensores.
Los robots han sido clasificados de acuerdo a su generación, a su nivel de
inteligencia, a su nivel de control, y a su nivel de lenguaje de programación. Estas
clasificaciones reflejan la potencia del software en el controlador, en particular, la
sofisticada interacción de los sensores.
Androides:
Los androides son robots que se asemejan y actúan como los seres humanos. Es
el nombre que se le da a un robot antropomorfo, es decir, que tiene forma o
apariencia humana, y además imita algunos aspectos de su conducta de manera
autónoma. La palabra androide posee un origen etimológico griego, al estar
constituido por andro (hombre) y eides (forma).
Móviles:
Los robots móviles están provistos de patas, ruedas que los capacitan para
desplazarse de acuerdo su programación. Elaboran la información que reciben a
través de sus propios sistemas de sensores y se emplean en determinado tipo de
instalaciones industriales y situaciones.
Zoomórficos:
Robots caracterizados principalmente por su sistema de locomoción que imita a
diversos seres vivos. Los androides pueden ser considerados robots zoomórficos.
Se agrupan en dos categorías principales: caminadores y no caminadores.
Médicos:
Los robots médicos son, fundamentalmente, prótesis para disminuidos físicos que
se adaptan al cuerpo y están dotados de potentes sistemas de mando. Con ellos
se logra suplir las extremidades o incluso órganos de los seres humanos.
Industriales:
Los robots industriales son artilugios mecánicos y electrónicos destinados a
realizar de forma automática determinados procesos de fabricación o
manipulación.
UNO DE TANTOS EJEMPLOS QUE SE TIENE HOY EN DÍA DENTRO DEL
ESTADO DE ARTE EN LA ROBÓTICA Y SUS APLICACIONES JAVA, LO
TENEMOS EN EL PLANETA ROJO.
El primer explorador espacial que arribó a tierras marcianas tiene un sistema de
control basado en las capacidades de la tecnología Java de Sun Microsystems,
que operan científicos de la NASA desde el Jet Propultion Laboratory (JPL).
23
Java™3D y Java™ Advanced Imaging Technology, son claves para la operación
del software que utiliza el JPL para retener e interpretar las imágenes de tiempo
real que captura el Spirit. La NASA ha creado una versión del software, disponible
en la Red, que demuestra simulaciones en 3D del paisaje marciano, visión que les
permite a los expertos en la Tierra manejar los movimientos del robot en ese
agreste paisaje.
Existen múltiples razones por la cuales JPL se apoya en la tecnología Java para
el control y el sistema de imágenes del robot: la NASA obtiene una grandiosa
rentabilidad y productividad, al mismo tiempo que reconoce la habilidad de Java
de correr en cualquier plataforma.
En la actualidad Sun y el JPL de la NASA suman esfuerzos para el desarrollo de
un sistema de control de tecnología Java que proporcione a futuros robots la
capacidad de tomar decisiones inteligentes e independientes mientras exploran el
planeta rojo.
LA CONTRIBUCIÓN DE HP:
El mismo software que permite en todo el mundo ejecutar videojuegos en
teléfonos celulares es el que ahora permite que los científicos conduzcan el
vehículo de última tecnología controlado remotamente sobre la superficie de
Marte. Java es utilizado para manejar el vehículo por la superficie del planeta rojo,
mientras que Hewlett Packard (HP) ha contribuido en el desarrollo de la
tecnología de transmisión de imágenes. Esto último ha sido posible gracias a las
investigaciones de tres científicos israelíes del centro de investigaciones de Haifa,
"Technion", vinculado a los laboratorios de Hewlett Packard.
ARQUITECTURA ACROMOVI:
Los avances en robótica móvil, poder de computación y comunicaciones
inalámbricas han hecho posible el desarrollo de comunidades de robots
autónomos. En los últimos años, hay un creciente interés en sistemas de múltiples
robots autónomos capaces de llevar a cabo tareas cooperativas.
La implementación de la arquitectura tiene la capacidad de permitir al equipo de
robots el cumplimiento de tales tareas, y también tiene herramientas y
características que permiten a los programadores desarrollar aplicaciones
complejas en un tiempo razonable.
La arquitectura Acromovi es un framework para el desarrollo de aplicaciones por
medio de agentes embebidos y agentes interfaz con código nativo de bajo nivel.
La arquitectura además implementa la compartición de los recursos de un robot
entre todo el grupo. También facilita la cooperación entre los robots de manera
que se puedan realizar tareas de modo coordinado. Además, Acromovi es una
24
arquitectura distribuida que trabaja como middleware de otra arquitectura global
para la programación de los robots.
Aunque la programación de robots se ha hecho mayoritariamente en C o C++, se
ha elegido un sistema de desarrollo de sistemas multiagente basado en Java para
el desarrollo de la arquitectura de nuestro equipo de robots. Cualquier sistema de
desarrollo de sistemas multiagente común podría haber sido elegido, pero se ha
optado por implementar la arquitectura por medio de JADE, una herramienta para
el desarrollo de sistemas multiagente, implementada en Java, que cumple las
especificaciones FIPA.
El estado del arte se hace mención a lo relacionado con las arquitecturas de
control y sistemas de múltiples robots trabajando cooperativamente.
Arquitecturas:
GOPHER: Fue pensada para resolver problemas de una manera distribuida
mediante multirobots en entornos internos.
CTPS: Sistema Central de Planificación de Tareas, comunica con todos los robots
y dispone de una visión global de las tareas que han sido hechas o de la
disponibilidad de los robots para realizar el resto de tareas.
MICRobES: Es un experimento de robótica colectiva que trata de estudiar la
adaptación a largo plazo de una micro-sociedad de robots autónomos en un
entorno con humanos.
CEBOT: (CEllular roBOTics System) Es una arquitectura jerárquica
descentralizada inspirada por la organización celular de las entidades biológicas.
Es capaz de reconfigurarse dinámicamente para adaptarse a las variaciones del
entorno.
ThinkingCap-II: Es una arquitectura desarrollada en un proyecto de plataforma
distribuida basada en agentes para robots móviles. Implementada sobre una
máquina virtual en tiempo real (RT-Java), efectuando un conjunto de
comportamientos reactivos.
Miro: Es un middleware para crear aplicaciones para robots móviles autónomos.
Este software además proporciona servicios abstractos genéricos, los cuales
pueden ser aplicados en diferentes plataformas robóticas sin realizar
modificaciones.
25
3. PLAN DE TRABAJO 3.1 Consideraciones generales
DEIWA, es un proyecto costoso que requiere la financiación de un ente privado o
público para la consecución del mismo, se estudiaran cuáles son los materiales
apropiados de acuerdo a la relación costo beneficio, para poder lograr que DEIWA
sea una realidad.
3.2 Etapas del trabajo, principales actividades de cada etapa Trabajaremos con el método científico cada una de sus etapas harán nuestras etapas de trabajo para esto:
1. Observación: Observar es aplicar atentamente los sentidos a un objeto o a un fenómeno, para estudiarlos tal como se presentan en realidad, puede ser ocasional o causalmente.
Para ello visitaremos Universidades de la ciudad de Palmira, públicas o privadas, que desarrollen robótica y permitan darnos una visión amplia del caso.
2. Inducción: La acción y efecto de extraer, a partir de determinadas observaciones o experiencias particulares, el principio particular de cada una de ellas.
2.2.1 Recolección de la información 2.2.2 Clasificación de la información de acuerdo a la utilidad del proyecto 2.2.3 Procesar la información
3. Hipótesis: Planteamiento mediante la observación siguiendo las
normas establecidas por el método científico. 3.1 Implementación de la teórica en desplazamiento, identificación de rostros y
comunicación.
4. Probar la hipótesis por experimentación.
4.1 En este apartado entraría cada una de las pruebas que se desarrollan de acuerdo a los avances en la creación de DEIWA.
5. Demostración o refutación (antítesis) de la hipótesis.
6. Tesis o teoría científica (conclusiones).
26
CONCLUSIÓN:
Durante el desarrollo de la investigación nos dimos cuenta de la importancia que
hoy en día tienen los Robots y lo que han tenido desde su origen. Por ejemplo, el
comportamiento de un robot autónomo viene determinado por el programa que
gobierna sus actuaciones. La creación de programas para robots debe cumplir
con ciertos requisitos específicos frente a la programación en otros entornos más
tradicionales, como el ordenador personal. Por lo general el software de los robots
se estructura actualmente en tres niveles: sistema operativo, plataforma de
desarrollo y aplicaciones concretas.
El principal objetivo de la robótica es la construcción de máquinas capaces de
realizar tareas con la flexibilidad, la robustez y la eficiencia que exhiben los
humanos. Los robots son potencialmente útiles en escenarios peligrosos para el
ser humano, aburridos, sucios o difíciles. En este sentido los brazos robóticos que
se emplean en las fábricas de coches para soldar y pintar, los robots móviles que
se envían a Marte, o los que se utilizan para limpiar centrales nucleares son
varios ejemplos de aplicaciones reales en las cuales se utilizan robots hoy día.
Por lo que la existencia de robots que realicen autónomamente tareas de modo
eficiente dependiendo fundamentalmente de su construcción mecánica y de su
programación. (Como Ejemplo el lenguaje de programación de Java que es uno
de los encargados de manipular las actividades que realicé).
27
REFERENCIAS
[1] K-team. Khepera user manual. Lausana: EPFL, 1998.
[2] Nomadic Technologies, Inc. http://www.robots.com/. Diciembre/2005
[3] Real world interface. http://www.rwii.com/. Enero/2006.
[4] Bacca EB y Paz EA. “Diseño e implementación de un robot móvil modular”.
Energía y computación. 2000, Vol. 9, No. 2, p. 34-39.
[5] Cubas C, Consuegra M, López R et al. ”Dispositivos autómatas para navegación, detección, recolección de pelotas de tenis en ambientes conocidos”. Ingenieríay Desarrollo. 2001, No. 9, p. 98-112.
[6] Muñoz ND, Trespalacios E, Aedo JE. “Giraa_01: Una plataforma para investigación en robótica móvil. Revista Silicio. 2002, Vol.1, n.14, p. 26 – 31.
[7] Ramirez G. “Método de aprendizaje simple para navegación de minirobots móviles rodantes”. Dyna. 2003, Vol. 70, No. 138. p. 47-54
[8] Córdoba JP, Restrepo C, Ríos LE. “Descripción de una plataforma móvil implementada para el estudio de técnicas inteligentes de navegación: p-metin”. Scientia et Técnica. 2005, Año XI, No 27, p.37-42.
[9] Jones J, Flynn A, Seiger B. Mobile Robots Inspiration to implementation. Massachusetts: Editorial A K Peters, Ltd, 1998.
[10] Ollero A. Robótica manipuladores y robots móviles. Marcombo, Barcelona, 2001.