radio digital bajo el mar
DESCRIPTION
Un paper acerca de la transmisión inalámbrica submarina, haciendo énfasis especial en el medio submarino.TRANSCRIPT

1
Resumen— En el siguiente documento se hablará sobre las
comunicaciones subacuáticas digitales, poniendo especial énfasis en
las comunicaciones digitales bajo el mar. Se hablará en una
primera instancia sobre las características del canal submarino
para la propagación de las señales, correspondiendo este último al
canal acústico que es el medio de propagación de ondas que se
utiliza en las comunicaciones bajo el mar. Posteriormente se
hablará sobre las comunicaciones con submarinos y las bandas de
frecuencias utilizadas para ello, incluyendo la descripción del uso
de la tierra como una antena gigante de baja frecuencia, para
luego describir los tipos de modulaciones digitales usadas por
módems acústicos submarinos como por ejemplo FSK, PSK y
QAM, sus velocidades de transmisión y sus aplicaciones, ya sea
dentro de una red de sensores submarinos acústicos (UW- ASNs) o
en combinación con vehículos submarinos no tripulados (AUVs).
Finalmente se hablará sobre una empresa española (SAES) que se
dedica al desarrollo de electrónica submarina, dando a conocer sus
procesos de tratamiento de señales, para luego dar ejemplos de
dispositivos desarrollados (Sonares, Minas submarinas), además de
mostrar una pequeña referencia sobre los países e instituciones a
los cuales presta sus servicios y productos.
Palabras clave— canal acústico, ELF, SLF, MSK, FSK, PSK,
QAM, UW-ASNs, AUVs, SAES, MINEA.
I. ÍNDICE
Tema Página
I.ÍNDICE 1
II.INTRODUCCIÓN 1
III.DESCRIPCIÓN DEL CANAL SUBMARINO 2
A. Conductividad del agua 2
B. Atenuación 2
C. Ruido 2
D. Relación señal sobre ruido (SNR) 3
E. Propagación multicamino 3
F. Respuestas del canal acústico submarino 4
G. Velocidad de Propagación 5
IV.COMUNICACIÓN CON SUBMARINOS 5
A. La tierra como antena 6
B. Descripción del sistema
ELF y SLF Ruso ZEVS 6
C. La Ubicación de ZEVS 7
D. Modo de Transmisión 7
V.COMUNICACIÓN DIGITAL BAJO EL MAR 8
A. Redes de sensores submarinos 8
B. Problemas de Diseño 9
1) Diferencias con las redes
de sensores terrestres 9
2) Factores que influyen en el diseño
de protocolos submarinos 9
C. Arquitecturas de comunicación 10
1) Redes de sensores submarinos 2D 10
2) Redes de sensores submarinos 3D 11
3) Redes de sensores con vehículos
submarinos autónomos 11
D. Modem acústico y topologías de redes 12
VI. FABRICACION DE TECNOLOGÍA
INALÁMBRICA BAJO EL MAR 14
A. Sonares 14
B. Descripción empresa SAES 14
C. Procesamiento digital de ondas acústicas
según SAES 15
D. Producto MINEA de SAES 16
VII. CONCLUSIONES 16
VIII. BIBLIOGRAFÍA 17
II. INTRODUCCIÓN
ientras que las tecnologías de comunicación inalámbrica
hoy en día se convierten en parte de nuestro diario vivir,
la idea de la comunicación inalámbrica bajo el mar puede
parecer exagerada. Sin embargo las investigaciones en esta
área han estado activas por más de una década en el diseño de
métodos para la transmisión de información inalámbrica bajo
el agua.
Lo que los seres humanos saben del mundo oceánico, es
que este constituye la mayor parte de nuestro planeta, lo que se
basa en la habilidad de recolectar información desde remotos
lugares submarinos. Los mayores descubrimientos de las
décadas pasadas como los restos del Titanic, y otros tantos,
han sido hechos mediante el uso de cables sumergibles.
Aunque estos sistemas siguen siendo indispensables debido a
la alta velocidad de comunicación entre el punto de enlace
remoto y la superficie, es natural preguntarse lo que se podría
lograr sin la carga y el costo de los cables pesados. Por lo
tanto la motivación, y el interés apunta a la comunicación
Juan Pablo Ureta Carmona, Estudiante Ingeniería Electrónica Universidad Tecnológica
Metropolitana
Radio Digital Bajo el Mar (06 Marzo 2012)
M

2
inalámbrica bajo el agua. Junto con la tecnología de sensor y
tecnología vehicular, las comunicaciones inalámbricas
permitirán nuevas aplicaciones que van desde el monitoreo
ambiental a la recopilación de datos oceanográficos,
arqueología marina y misiones de búsqueda y rescate.
Las señales que se utilizan para llevar la información digital a
través del canal submarino no son señales de radio, porque las
ondas electromagnéticas se propagan sólo en distancias muy
cortas. En su lugar, son utilizadas ondas acústicas, que pueden
propagarse muy largas distancias. Sin embargo, un canal
acústico submarino presenta un sistema de comunicación con
muchas dificultades. Las tres características que distinguen a
este canal es la pérdida de propagación por dependencia de la
frecuencia, graves multicaminos, y baja velocidad de
propagación del sonido. Ninguna de estas características se
pronuncia demasiado en los canales con base en tierra en
comparación con el canal submarino que hacen que las
comunicaciones en este medio sean extremadamente difíciles
de realizar.
III. DESCRIPCIÓN DE CANAL SUBMARINO
A. Conductividad del agua
El agua en su estado puro es un aislante, pero tal y como la
encontramos en la naturaleza, contiene sales disueltas y otros
materiales que la hacen parcialmente conductora. Cuanto
mayor es su conductividad, mayor es la atenuación de las
señales de radio que pasan a través de ella.
La conductividad (s) varía tanto con la salinidad como con la
temperatura. El agua de mar tiene un alto contenido salino y
alta conductividad variando desde 2 mhos por metro en las
regiones frías del ártico hasta 8 mhos por metro en las aguas
cálidas y altamente salinas del Mar Rojo. La conductividad
media del mar normalmente se considera que es de 4 mhos por
metro. Lo que significa que en un cubo de 1 metro de lado de
agua mar tiene una conductividad de 4 mhos o una resistencia
de 0,25 ohm.
Lo que llamamos agua dulce tiene menor
conductividad y como base de esto, se utiliza una muestra de
análisis de agua de Adelaida tomada en 1983. Esta muestra fue
tomada de un área principalmente abastecida por el embalse
de Barrosa y el análisis muestra que las sales totales disueltas
son aproximadamente 300mg/litro y la conductividad de
0,0546 mhos por metro. Se toma generalmente este valor
como referencia para modo de estudio.
B. Atenuación
La atenuación dentro del canal submarino se puede describir
mediante la siguiente fórmula:
Atenuación (perdida por el camino) =
Descomponiendo la formula en forma logarítmica se tiene
que:
Donde
1: perdida por propagación
2: perdida por absorción del medio (coeficiente de absorción)
d = distancia (km)
f = frecuencia (kHz)
k= constante que puede tener los siguientes valores según el
tipo de propagación
k = 2 propagación esférica
1.5 propagación practica
1 propagación cilíndrica
Para calcular el coeficiente de absorción se tiene la fórmula
empírica de Thorp’s:
( )
Fórmula que se obtiene empíricamente del gráfico de la
figura 1 que muestra el coeficiente de absorción (dB/Km) en
comparación a la frecuencia (kHz).
Ésta dependencia entre frecuencia y distancia limita el
ancho de banda disponible: por ejemplo, a distancias en el
orden de 100km, el ancho de banda disponible es sólo del
orden de 1kHz. A cortas distancias, un ancho de banda más
grande está disponible, pero en la práctica esto está limitado
por el transductor. También en contraste al sistema de radio,
una señal acústica es rara vez de un ancho de banda angosto es
decir este ancho de banda no es despreciable con respecto a la
frecuencia central.
C. Ruido
Existen distintos tipos de ruidos, los que se pueden separara
en dos grandes grupos:
1) Ruidos en sitios específicos
Producido por el hombre
Biológico
Rompimiento de hielos (glaciares), lluvia
Eventos sísmicos
2) Ruidos a mar abierto
Se mide en p.s.d [dB re uPa], f [kHz]
Turbulencia: 17 – 30log f
Navegación de barcos: 40 + 20(s-0.5) + 26log f –
60log(f+0.03)
Superficial: 50 + 0.7w0.5
+ 20log f – 40log(f + 0.4)
Térmico: -15 + 20log f
3
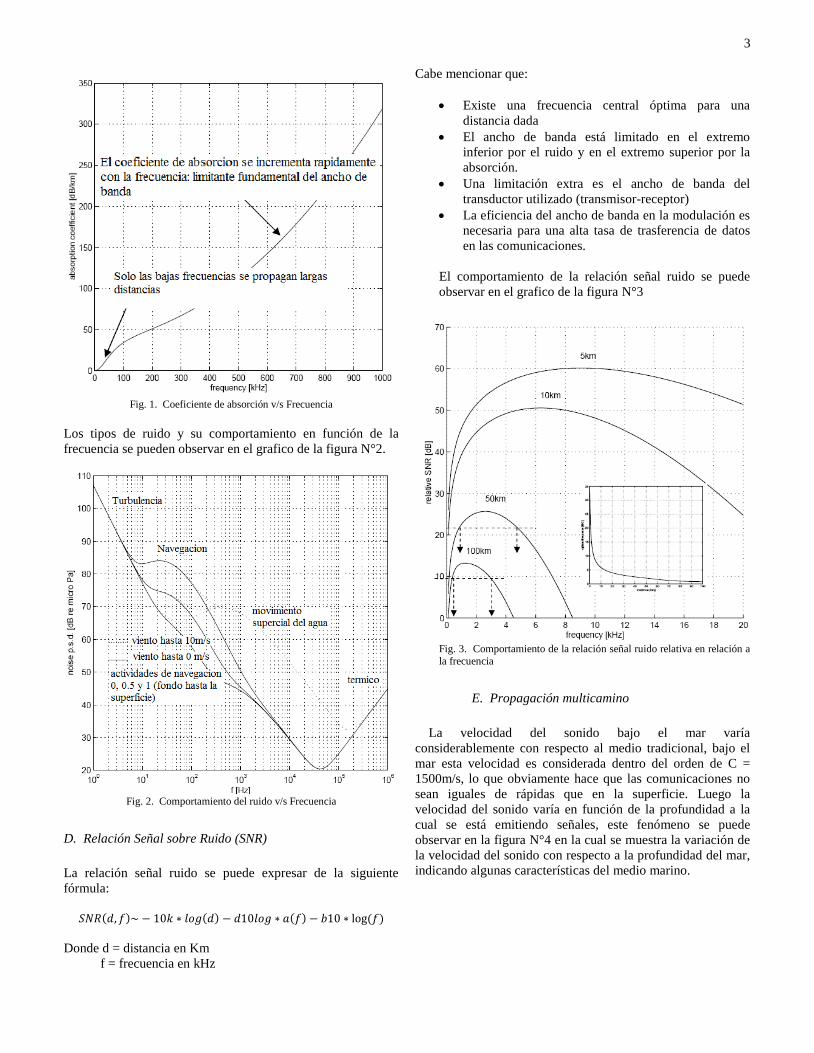
Fig. 1. Coeficiente de absorción v/s Frecuencia
Los tipos de ruido y su comportamiento en función de la
frecuencia se pueden observar en el grafico de la figura N°2.
Fig. 2. Comportamiento del ruido v/s Frecuencia
D. Relación Señal sobre Ruido (SNR)
La relación señal ruido se puede expresar de la siguiente
fórmula:
( ) ( ) ( ) ( )
Donde d = distancia en Km
f = frecuencia en kHz
Cabe mencionar que:
Existe una frecuencia central óptima para una
distancia dada
El ancho de banda está limitado en el extremo
inferior por el ruido y en el extremo superior por la
absorción.
Una limitación extra es el ancho de banda del
transductor utilizado (transmisor-receptor)
La eficiencia del ancho de banda en la modulación es
necesaria para una alta tasa de trasferencia de datos
en las comunicaciones.
El comportamiento de la relación señal ruido se puede
observar en el grafico de la figura N°3
Fig. 3. Comportamiento de la relación señal ruido relativa en relación a
la frecuencia
E. Propagación multicamino
La velocidad del sonido bajo el mar varía
considerablemente con respecto al medio tradicional, bajo el
mar esta velocidad es considerada dentro del orden de C =
1500m/s, lo que obviamente hace que las comunicaciones no
sean iguales de rápidas que en la superficie. Luego la
velocidad del sonido varía en función de la profundidad a la
cual se está emitiendo señales, este fenómeno se puede
observar en la figura N°4 en la cual se muestra la variación de
la velocidad del sonido con respecto a la profundidad del mar,
indicando algunas características del medio marino.

4
Fig. 4. Variación de la velocidad del sonido con respecto a la
profundidad en el mar
Dentro del ancho de banda limitado, la señal está sujeta a
la propagación multicamino, que es particularmente
pronunciada en el canal horizontal. En aguas
superficiales, el multicamino se produce por la reflexión
de la señal en la superficie y el fondo, como se muestra en
la figura N° 5. En aguas profundas- profundidad mayor a
100 metros- los rayos se producen debido a la flexión, es
decir la tendencia de las ondas acústicas a viajar a lo largo
del eje bajo la velocidad del sonido, tal como se observa
en la figura N° 6. El canal responde variando en el
tiempo, y también cambia si el receptor se mueve. Sin
importar el origen de esto, la propagación multicamino
crea ecos de señal, resultando una interferencia
intersimbólica en un sistema de comunicación digital.
Mientras que en un sistema de radio celular el
multicamino se extiende en algunos intervalos de
símbolos, en un canal acústico bajo el agua esto se puede
extender algunas decenas, o incluso cientos de intervalos
de símbolo. Para evitar interferencia intersimbólica, un
tiempo de espera de duración menor o igual al de la
propagación multicamino debe ser sucesivamente
insertado entre la trasmisión de los símbolos. Sin
embargo, esto reducirá el total de la tasa de símbolo, que
ya está limitado por el ancho de banda del sistema. Para
maximizar la tasa de símbolo, el receptor debe ser
diseñado para contrarrestar la larga interferencia
intersimbólica.
Fig. 5. Propagación multicamino en aguas de baja profundidad: en suma al
camino directo, la señal se propaga a través de los reflejos de la superficie y el
fondo
Fig. 6. Propagación multicamino debido a la flexión en aguas profundas
debido a la mayor velocidad del sonido en la profundidad del agua.
F. Respuestas del canal acústico submarino
A continuación se muestran ejemplos de respuestas del
canal acústico bajo distintos parámetros:
Fig. 7 Respuesta del canal acústico a gran distancia y en aguas profundas
Fig. 8 Respuesta del canal acústico a baja distancia y en aguas superficiales

5
Fig. 9 Respuesta del canal acústico a media distancia y en aguas de media
profundidad
G. Velocidad de propagación
La velocidad del sonido bajo el agua varía con la
profundidad y también depende de la vegetación o ambiente.
Este valor nominal es sólo 1500 m/s, y este hecho tiene una
doble implicancia en el diseño del sistema de comunicación.
Primero, que implica largo retardo de la señal, que reduce
drásticamente la eficiencia de cualquier protocolo de
comunicación en que esté basado la retroalimentación del
receptor, o la interacción entre el transmisor y receptor.
La latencia resultante es similar a los sistemas de
comunicación espaciales, aunque esto es una consecuencia de
las largas distancias recorridas. Segundo, la baja velocidad del
sonido resulta en una severa distorsión Doppler en el sistema
acústico móvil. Nombrando, si la relativa velocidad entre el
transmisor y el receptor es +-v, entonces una señal de
frecuencia fc se observa en el receptor con frecuencia fc (1 +-
v/c). Al mismo tiempo, una onda de duración T será observada
en el receptor con la duración T (1 +-v/c). Por lo tanto el
cambio Doppler y la propagación ocurren. Para la velocidad v
en el orden de algunos m/s, el factor v/c, que determina la
gravedad de la distorsión Doppler, pueden ser de un orden de
magnitud mayor que la observada en un sistema de radio
móvil terrestre. Para evitar esta distorsión, un detector de
modulación no coherente debe ser empleado. Un detector de
modulación coherente ofrece una utilización mucho mejor del
ancho de banda, pero el receptor debe estar diseñado para
hacer frente a la distorsión Doppler extrema.
Resumiendo las características del canal, se puede llegar a
la conclusión que un enlace acústico bajo el agua combina en
sí mismo el peor de los aspectos los canales de radio: mala
calidad en enlaces móviles terrestres, y la alta latencia de un
enlace en el espacio. Además la tecnología actual ofrece
transductores limitados en ancho de banda (típicamente unos
pocos KHz, o unas decenas de KHz en un sistema de banda
ancha), operación half-duplex, y fuente de alimentación
limitada de instrumentos operados con baterías.
IV. COMUNICACIÓN CON SUBMARINOS
Como se vio anteriormente las ondas electromagnéticas
tienen la desagradable propiedad de atenuarse
exponencialmente al pasar por un medio conductor, como por
ejemplo el agua salada del océano. A frecuencias de radio
habituales, la atenuación es casi completa bajo la superficie.
Esto las hace muy inadecuadas para comunicarse con un
submarino sin que éste tenga que subir a la superficie.
Resolver adecuadamente el problema de la comunicación
con los submarinos tiene, gran importancia estratégica. Para
esto se intentaron diferentes soluciones, quizás una de las más
fantasiosas fue plantear el uso de neutrinos. Los neutrinos son
partículas estables subatómicas de masa muy pequeña y sin
carga eléctrica. Esas tres características hacen que puedan
viajar sin atenuación a través de la materia. Se calculó que
usando el Fermilab, se podrían trasmitir 15 bits de
información en cada ciclo de 8 segundos del acelerador, pero
no se llego a aplicar.
Una idea que sí que se llegó a aplicar es el uso de
ondas sonoras. El sonido se propaga con mayor velocidad y
menor atenuación a través del agua que en el aire. Si un
submarino está en las proximidades de un altavoz y un
hidrófono- como el que se observa en la Figura N° 10- ,
entonces podría existir comunicación. Se sabe, por ejemplo,
que el gobierno de los EEUU instaló una decena de estas
estaciones en el Atlántico Norte, y actualmente sigue
investigando esta posibilidad con programas como el Deep
Siren Tactical Paging (DSTP).
Fig. 10 Hidrófono
Más eficiente es el uso de ondas de muy baja frecuencia
(VLF, decenas de KHz), que permiten la comunicación con
submarinos que estén a menos de 20 metros de la superficie.
La OTAN tiene una red de decenas de emisoras VLF en todo
el mundo. Rusia ha construido seis, dos de ellas en países
vecinos Bielorrusia y Kyrgyztan.
Desafortunadamente, la comunicación por ondas sonoras o
electromagnéticas VLF no es posible con submarinos que
estén lejos de la superficie. Para llegar a grandes
profundidades, hay que hacer uso de ondas electromagnéticas
de súper baja frecuencia y extremada baja frecuencia (SLF y
ELF). A frecuencias menores de 100 Hz, un submarino puede
detectar una emisión en SLF y ELF incluso cuando está
sumergido a grandes profundidades (varios centenares de
metros).
Sin embargo, el uso de SLF y ELF tiene un importante
problema técnico. Para emitir con una eficiencia aceptable, se
requieren antenas de dimensiones similares a la longitud de
onda de la radiación emitida. Así, por ejemplo, mientras la
telefonía móvil usa longitudes de onda de sólo una decena de

6
centímetros, y la radio AM de centenares de metros, las
bandas SLF y ELF usan longitudes de onda de miles de
kilómetros.
Es imposible, por el momento, construir una antena emisora
de ese tamaño. La solución ideada por el científico griego
Nicholas Christófilos fue la más adecuada: usar parte de la
Tierra como antena.
A. La tierra como antena
Esta fue la solución que adoptaron finalmente las dos
superpotencias de forma independiente durante la guerra fría.
Rusia construyó ZEVS, su emisora de 82Hz, en la península
de Kola, mientras que EEUU emitía a 76Hz desde el estado de
Michigan en red con Wisconsin con su WMT/MTF. Reino
Unido estudió construir una estación similar en Glengarry,
Escocia, algo que fue abandonado, igual que un gran proyecto
de EEUU (Sanguine) que involucraba una gigantesca
estructura con 10.000 Km de líneas de cable.
ZEVS está formado por dos largos cables de 60 Km de
longitud cada uno, enterrados una zona con un terreno de una
extraordinariamente pequeña conductividad eléctrica.
WMT/MTF tiene 5 de estas estructuras, que en este caso no
están enterradas. Los extremos de cada cable se hunden en la
tierra hasta una profundidad de cientos de metros.
Cuando el generador de onda se activa, la corriente de 200-
300A que genera cierra el circuito a gran profundidad, en
capas más conductoras de la corteza terrestre, formando una
enorme antena de tipo dipolo magnético. En el ZEVS esto
ocurre a unos 10Km de profundidad. Aun así, la antena es
demasiado pequeña como para emitir eficientemente: se
requiere toda una central eléctrica para poder alimentar la
antena, y la potencia final emitida es apenas de 1 Watt.
A pesar de ello, la señal resultante se puede detectar en
cualquier lugar de la tierra, ya que a esas frecuencias tan bajas,
la ionosfera y la superficie terrestre se comportan
efectivamente cómo una guía de ondas, que trasmite la señal
por todo el mundo sin que escape al espacio. La descripción
grafica del funcionamiento de estos sistemas se puede
observar en la figura N° 11 en donde se observa la forma de
transmisión de un sistema ELF y los alcances de los
receptores.
La baja frecuencia y débil señal emitida por estas antenas
hace que no se pueda enviar información a mucha velocidad a
través de ellas. Velocidades típicas serían del orden de los bits
por segundo y servirían para trasmitir órdenes simples como
pedir al submarino que emerja, de modo que se pueda
establecer contacto usando otros sistemas más rápidos.
Fig. 11 Descripción grafica de un sistema ELF con sus respectivos receptores
Una vez terminada la Guerra Fría estas gigantescas
estructuras ya no fueron tan necesarias. El gran costo de
mantenerlas y operarlas durante las 24 horas del día, y la
alarma que causan entre la población (aunque nunca se pudo
demostrar que afectaran la salud), están provocando su cierre.
EEUU ha decomisionado ya su sistema SLF y ELF, y ya sólo
puede comunicarse con sus submarinos cuando están cerca de
la superficie. Desde 1995 el sistema ruso ZEVS no es de
exclusivo uso militar, y se usa también para la investigación
geológica.
B. Descripción del sistema ELF y SLF Ruso ZEVS
La principal razón del uso de señales de baja frecuencia es
por la capacidad que tiene estas de penetrar bajo la superficie
del océano. No sólo las frecuencias ELF penetran en el agua,
sino también en el espesor del hielo marino, haciendo posible
que los submarinos puedan recibir órdenes cuando se dirijan a
los casquetes polares.
Bajo el océano generalmente a profundidades de 300 metros
conviven distintos tipos de submarinos que cumplen tareas de
vigilancia que pueden permanecer semanas sumergidos sin la
necesidad de salir a la superficie para tomar aire fresco u otros
suministros. El principal problema es obtener información de
lo que está sucediendo en la superficie.
En aguas internacionales en único medio de comunicación
con los submarinos, es el rango de frecuencias ELF o VLF. En
el medio del océano Atlántico, con una salinidad del 3.2%,
una señal de muy baja frecuencia puede penetrar hasta una
profundidad de 10 a 20 metros, que es el largo de un
periscopio de un submarino de escala moderna.
En zonas de menor salinidad, como el mar mediterráneo o
en las aguas del mar Báltico, es posible recibir la misma señal
a una profundidad de más de 40 metros. Para los submarinos
que operan a mayor profundidad, la única solución es un
enlace de una vía con la superficie utilizando ondas de radio
ELF.
7
C. La ubicación de ZEVS
Los transmisores rusos ZEVS ELF, se encuentran al
noroeste de Múrmansk (69° N 33°E) en la península de Kola,
al noroeste de Rusia, como se ve en la figura N° 12. En esta
zona está ubicado el puerto base de la flota Rusa del norte y
una multitud de otras instalaciones militares, como la pista de
aterrizaje de la fuerza operativa de la flota aérea del Ártico
Ruso.
Fig. 12 Ubicación geográfica ELF ZEVS Ruso
La regla número uno, para la ubicación de un transmisor
ELF es ubicarlo en un lugar con suelo de conductividad muy
baja, suelos arenosos, granito, o de cadenas montañosas.
Estas instalaciones no eran conocidas abiertamente, pero
durante la década de1990 esta señal se detecta en todo el
mundo, por varios sistemas de radio operados por la
Universidad de Stanford. La señal de 82Hz, incluso fue
detectada en una base en la Antártida (78° S, 167°O). En ese
momento no hubo información disponible sobre otros
transmisores ELF además del generador de 76 Hz de EE.UU.
Los científicos de la universidad de Stanford, rápidamente
asumieron que la fuente de la señal de 82Hz se encontraba en
Rusia. Esta deducción lógica se basaba en la gran fuerza de la
señal en una estación científica de Groenlandia y de
referencias literarias de una novela sobre un transmisor ELF
Ruso del autor Tom Clancy, que tiene una gran reputación por
su precisión en lo respecta a los asuntos de defensa.
Una vez que esto fue confirmado por fuentes rusas se supo
que el transmisor se compone de dos generadores de
frecuencia de tensión senoidal y dos antenas horizontales
paralelas a la tierra, cada uno de unos 60Km de largo. Los
generadores proporcionan entre 200 y 300 Amperes a las
antenas, en el rango de frecuencia de 20Hz a 250Hz. Ahora
cabe decir que lo que se denomina antena es el conductor de la
corriente entre extremos, porque la antena en sí misma es la
Tierra a través de sus capas conductoras inferiores, puesto que
en la capa superficial no debiera conducir porque la estación
se construye como se dijo anteriormente sobre una superficie
con baja conductividad.
El aspecto real de la parte visible de la línea de transmisión
de esta antena gigante es muy parecido a los cables
telegráficos que colgaban de los postes de telégrafo, como se
muestra en la figura N° 13.
Fig. 13 Vista típica de una línea de alimentación para un transmisor ELF
Cálculos realizados en datos recogidos en 1990, muestran
que el transmisor ZEVS de 82 Hz es 10dB más potente que los
transmisores ELF de los sitios de Wisconsin y Michigan
(WMT/MTF) de 76Hz de la marina de los EE.UU.
D. Modo de transmisión
La transmisión de 82 Hz se realiza haciendo uso de
modulación por desplazamiento mínimo MSK (minium
shifted keying). Este tipo de modulación esta en uso en casi
todos los modernos submarinos de comunicación de banda
VLF, entre 3 y 30KHz. La razón que hace que el modo de
transmisión ELF sea único es que el cambio en frecuencia de
la portadora es muy estrecho, durante la fase de mensaje de la
transmisión.
El cambio de frecuencia más amplio que se observa, está en
el intervalo estrecho de 81Hz a 83.3Hz al comienzo de un
mensaje transmitido. Este cambio de portadora de solo 2.3Hz
marca la diferencia de la señal MSK. Para la decodificación se
requiere de un software más complejo utilizado por el equipo
de comunicación a bordo del sistema submarino. La
frecuencia de la portadora ELF (SLF en estricto rigor) se
desplaza de la frecuencia de portadora normal de 82Hz, hasta
81,6 Hz y hasta 82.7 Hz antes del mensaje, luego lo más
probable es que se realice la comunicación teniendo un
mensaje de espera, la cual es la función con que se llama al
ZEVS Ruso, tal como se detecto en Italia el 8 de Diciembre
del año 2000, a las 08:40 como se observa en la figura N°14.
El “mensaje en espera” de la señal, entre los 8 minutos a
81.6Hz y los 4 minutos de 82.7Hz se detecta en el
espectrograma, luego la señal baja nuevamente a 81Hz y sube
a 83.3Hz posteriormente, para dar paso al mensaje de larga
duración de 16 minutos, para que después la transmisión
vuelva a los 82Hz. 81,6 Hz y hasta 82.7 Hz antes del mensaje,
luego lo más probable es que se realice la comunicación
teniendo un mensaje de espera, la cual es la función con que se
llama al ZEVS Ruso, tal como se detecto en Italia el 8 de
Diciembre del año 2000, a las 08:40 como se observa en la
figura N°14. El “mensaje en espera” de la señal, entre los 8
minutos a 81.6Hz y los 4 minutos de 82.7Hz se detecta en el
espectrograma, luego la señal baja nuevamente a 81Hz y sube
a 83.3Hz posteriormente, para dar paso al mensaje de larga

8
duración de 16 minutos, para que después la transmisión
vuelva a los 82Hz.
Fig. 14 Análisis espectral de una comunicación ELF/SLF en la cual se nota el
cambio de frecuencia mínimo (MSK) de los 82Hz para después de la entrega del mensaje volver a la frecuencia original.
Las transmisiones ELF son de una velocidad muy lenta tal
como se observó en el ejemplo anterior, es por eso que no se
pueden dar órdenes de alta complejidad desde la superficie al
submarino. En la década de 1990 el transmisor ZEVS fue
varias veces observado utilizando la telegrafía y código
Morse. El protocolo de transmisión es de varios minutos, y si
no se cumple totalmente se puede decir que se aborta la
operación, es decir si la transmisión de datos se interrumpe, se
espera establecer toda la comunicación desde un principio con
el fin de evitar errores que en el área militar seria de una
gravedad importante.
Al contrario del transmisor de EE.UU, el ZEVS no se
utiliza exclusivamente para comunicaciones militares. Las
ondas electromagnéticas ELF no solo penetran en el agua, sino
también a grandes profundidades de la tierra. Esta propiedad
es utilizada en la investigación geofísica. Una resonancia
electromagnética y el seguimiento de la corteza terrestre
fueron realizados en 1994 por el Instituto de San Petesburgo y
el Instituto Geológico del centro de Ciencias de Kola. Las
frecuencias utilizadas se encontraban en el rango de 31-166
Hz y una alta resolución de las señales se podía medir hasta
varios miles de kilómetros de la fuente. También se utiliza este
método en China para lograr algún día la predicción de
terremotos utilizando la frecuencia de 82Hz.
V. COMUNICACIÓN DIGITAL BAJO EL MAR
Además de la comunicación con submarinos
correspondientes a fines militares, la comunicación digital
bajo el mar tiene otras aplicaciones principalmente en el área
de la investigación científica, a través de la comunicación
entre vehículos autónomos submarinos AUVs utilizando
distintas topologías de comunicación y las redes de sensores
acústicos submarinos UW-ASNs. A continuación se revisarán
estas formas de comunicación bajo el agua las cuales si bien
usan el canal acústico, se consideran digitales por el tipo de
modulación usada y los datos trasmitidos.
A. Redes de sensores Submarinos
Las comunicaciones acústicas están en la capa física en la
tecnología de redes submarinas. Luego como se ha dicho
anteriormente, la propagación de las ondas de radio a largas
distancias a través de agua salada solo puede realizarse a
frecuencias extra bajas (30 – 300Hz), que requieren una larga
antena y un transmisor de gran potencia. Las ondas ópticas no
sufren ésta alta atenuación, pero se ven afectados por la
dispersión. Además, la transmisión de señales ópticas requiere
alta precisión señalando las estrechos haces de láser. Así, los
enlaces en las redes submarinas son basados en
comunicaciones inalámbricas acústicas.
Las redes de sensores submarinos tienen la ventaja de
permitir aplicaciones inexploradas y de mejorar nuestra
habilidad para observar y predecir el comportamiento del
océano. Los vehículos no tripulados o vehículos autónomos
submarinos (UUVs, AUVs), equipados con sensores
submarinos, están también previstos para encontrar
aplicaciones en la exploración de la naturaleza bajo el mar, en
los recursos y la recolección de datos científicos y en misiones
de colaboración de monitoreo. Estas potenciales aplicaciones
harán posible la comunicación entre dispositivos bajo el agua.
Los sensores acústicos de redes submarinas (UW-ASNs)
estarán formados por sensores y vehículos desplegados bajo el
agua y la red a través de enlaces de acústicos para realizar
tareas de colaboración de vigilancia.
Las redes de sensores acústicos permiten un rango general
de aplicaciones, incluyendo:
Red de muestreo en el océano: redes de sensores y
AUVs pueden realizar presentaciones sinópticas,
cooperación en la toma de muestras ambientales 3D
en la costa del océano.
Monitoreo ambiental: los UW-ASNs pueden
monitorear la polución (química, biológica y
nuclear), corrientes oceánicas, monitoreo del viento,
y monitoreo biológico como el rastreo de peces o
micro organismos. También, UW-ASNs pueden
mejorar el pronóstico del tiempo, detectar cambios en
el clima, y entender y predecir el efecto de las
actividades humanas en el ecosistema marino.
Exploraciones bajo el mar: Redes de sensores
submarinos pueden ayudar a detectar yacimientos o
reservas de petróleo, determinar rutas para cables
submarinos, y ayudar en la exploración para
minerales valiosos.
Prevención de catástrofes: redes de sensores que
miden la actividad sísmica desde remotos lugares
pueden dar aviso de alertas de tsunami en áreas
costeras, o estudiar los efectos de los terremotos
submarinos (maremotos).

9
Monitoreo Sísmico: un monitoreo sísmico frecuente
es de gran importancia en la extracción de petróleo
de praderas submarinas para así evaluar el
rendimiento en terreno.
Equipos de vigilancia: las redes de sensores remotos
permitirían en seguimiento y control temporal de
equipos de alto costo, inmediatamente después de su
despliegue, con el fin de detectar errores en la
implementación inicial o detectar problemas.
Navegación Asistida: los sensores pueden ser usados
para identificar los peligros en el fondo marino,
buscar rocas peligrosas en aguas poco profundas,
posiciones de anclaje, naufragios sumergidos y
realizar perfiles de batimetría.
Distribuir tácticas de vigilancia: loa AUVs y los
sensores submarinos fijos, pueden colaborar
monitoreando áreas de vigilancia, reconocimiento y
detección de intrusos.
Reconocimiento de minas: la operación simultánea de
múltiples AUVs con sensores acústicos y ópticos
pueden ser usados para realizar una rápida evaluación
del medio ambiente y detectar objetos similares a
minas.
El enfoque tradicional del trabajo en el océano es
desplegar los sensores que registran datos durante
seguimientos. Este enfoque tiene severas desventajas: i)
se puede acceder a los datos grabados hasta que los
instrumentos se recuperan, lo que puede ser varios meses
después del monitoreo. ii) No es posible la interacción
entre los sistemas de control, y los instrumentos de
monitoreo lo que impide cualquier ajuste adaptativo o
reconfiguración del sistema; iii) si ocurren fallas o
configuraciones incorrectas no es posible detectarlo antes
de que se recuperen los instrumentos; y iv) La cantidad
de datos que pueden ser registrados por cada sensor
durante la misión de vigilancia se encuentra limitado a la
capacidad del almacenamiento a bordo del dispositivo.
Estas desventajas pueden superarse conectando
instrumentos autoinstalables por medio de conexiones
inalámbricas que se basen en la comunicación acústica.
Aunque existen muchos protocolos recientemente
desarrollados para las redes inalámbricas de sensores, la
única característica del canal acústico de comunicación
submarino, como capacidad limitada y un alto y variable
retardo en la propagación, requiere mucha eficiencia y un
nuevo protocolo de comunicación de datos.
Los mayores cambios en el diseño de redes acústicas
submarinas son:
La disponibilidad de ancho de banda es muy
limitada
El canal submarino se ve deteriorado a causa de
los multicaminos y el desvanecimiento;
El retardo en la propagación es 5 veces mayor en
magnitud que en canales de radio frecuencia
terrestre (RF) y variable;
Se puede experimentar un alto error en la tasa de
bit y pérdidas temporales de conectividad (zonas
oscuras);
Los sensores submarinos se caracterizan por su
alto costo a causa del pequeño número de
proveedores ( es decir no es economía de escala);
La potencia de la batería es limitada y
usualmente las baterías no se pueden recargar;
Los sensores submarinos están propensos a
fallas debido a la suciedad y la corrosión.
B. Problemas de diseño
1) Diferencias con las redes de sensores terrestres
La principal diferencia entre las redes de sensores terrestres
y submarinos se muestra a continuación:
Costo: Mientras se espera que los nodos de sensores
terrestres sean cada vez más baratos, los dispositivos
submarinos son caros. Esto es especialmente porque
los transductores submarinos son más complejos y el
hardware necesita una protección mayor, debido las
condiciones ambientales submarinas. También,
porque se trata de una economía de pequeña escala,
esto es causado por una pequeña cantidad de
proveedores, lo que caracteriza a los sensores
submarinos con un alto costo.
Despliegue: Mientras los sensores de redes terrestres
son desarrollados densamente, en los submarinos, el
despliegue es generalmente más escaso.
Potencia: La potencia necesaria para las
comunicaciones submarinas es mayor que las radio
comunicaciones terrestres porque existe una
diferencia física en la tecnología (acústica versus
ondas de radiofrecuencia), las mayores distancias, y
más complejas técnicas de procesamiento de señal
aplicadas en los receptores para compensar las
deficiencias del canal.
Memoria: Mientras los nodos sensores terrestres
tienen muy limitada capacidad de almacenamiento,
los sensores submarinos deberán ser capaces de
almacenar algunos datos en la memoria caché debido
a que el canal acuático es intermitente.
Correlación espacial: Mientras las lecturas de los
sensores terrestres a menudo están correlacionadas,
esto es más probable que ocurra en las redes
submarinas de sensores debido a la mayor distancia
entre éstos.
2) Factores que influyen en el diseño de protocolos
submarinos
Las comunicaciones acústicas en el medio submarino son
principalmente influenciadas por pérdidas en la transmisión,
ruido, multicaminos, propagación Doppler, y un alto y
variable retardo en la propagación. Todos éstos factores
determinan la variabilidad temporal y espacial del canal
acústico, y hacen que el ancho de banda disponible del canal

10
acústico submarino sea limitado y dependiente tanto del
alcance como la frecuencia. Los sistemas de largo alcance
operan sobre decenas de kilómetros y tienen un ancho de
banda de algunos pocos kHz, mientras los sistemas de corto
alcance operan sobre decenas de metros y tienen un ancho de
banda de cientos de kHz. En ambos casos, estos factores
llevan a bajar la tasa de bit, en el orden de decenas de Kbps
para los dispositivos existentes.
TABLA I
ANCHO DE BANDA DEL CANAL ACÚSTICO SUBMARINO PARA DIFERENTES
RANGOS DE FRECUENCIA
Los enlaces de comunicación acústica submarina pueden ser
clasificados de acuerdo a los siguientes rangos que son: muy
largo, largo, medio, corto y enlaces muy cortos. La tabla 1
muestra los típicos anchos de banda del canal acústico
submarino para diferentes rangos. Los enlaces acústicos
también son clasificados generalmente como vertical y
horizontal, de acuerdo a la dirección del rayo de sonido con
respecto al fondo del océano. Éstas características de
propagación difieren considerablemente, especialmente con
respecto al tiempo de dispersión, propagación multicamino y
la variación en el retardo. En lo que sigue, esto está
usualmente en la literatura oceánica, las aguas superficiales se
refieren a las aguas con menos de 100 metros de profundidad,
mientras que el término aguas profundas es usado para las
profundidades del océano. A continuación se analizará
brevemente los factores que influyen las comunicaciones
acústicas:
Pérdida en la transmisión: Esto consiste en la
atenuación y propagación geométrica. La atenuación
es principalmente provocada por la absorción por la
conversión de la energía acústica en calor, y el
incremento con distancia y frecuencia. La
propagación geométrica se refiere a la pérdida de
energía del sonido que resulta de la expansión del
frente de ondas. Estos se incrementan con la distancia
de propagación y es independiente de la frecuencia.
Ruido: Este puede ser clasificado como en ruido
producido por el hombre y el ruido ambiental. La
anterior es principalmente causado por el ruido de
maquinas (bombas, engranajes reductores, plantas de
energía) y actividades de transporte marítimo,
mientras que el segundo está relacionado con la
hidrodinámica (movimiento de aguas incluyendo las
mareas, corrientes, tormentas, viento y lluvia), y
fenómenos sísmicos y biológicos.
Multicaminos: La propagación multicamino es
responsable de la degradación de la señal acústica de
comunicación, desde la generación de interferencia
intersimbólica (ISI), la geometría multicamino
depende de la configuración del enlace. Los canales
verticales se caracterizan por el pequeño tiempo de
dispersión, mientras que los canales horizontales
tienen larga propagación multicamino. El alcance de
propagación es importante en función de la
profundidad y la distancia entre transmisor y
receptor.
Alto retardo y variación de retardo: La velocidad de
propagación en un canal acústico submarino es del
orden de 5 veces más baja en magnitud que la del
canal de radio. Este largo retardo en la propagación
(0.67s/km) y esta variación puede reducir el
rendimiento (throughput) del sistema.
Propagación Doppler: La propagación de la
frecuencia Doppler puede ser importante en los
canales acústicos submarinos, causando degradación
en la presentación de la comunicación digital: las
transmisiones a una alta tasa de transferencia causa
muchos símbolos adyacentes que interfieren al
receptor. La propagación Doppler genera dos efectos:
una simple traslación en la frecuencia y una
propagación continua de frecuencias, que constituye
una señal no codificada. Mientras que el primero es
fácilmente compensado en el receptor, el efecto de
esto último es más difícil de ser compensado.
Más factores que causan esto último por sus propiedades
químicas y físicas del medio acuático por ejemplo la
temperatura, la salinidad y densidad, y por variación espacio
tiempo. Estas variaciones son causadas en el canal acústico
por variables temporales y de espacio. En particular, el canal
horizontal es lejos más rápido en variación que el canal
vertical, especialmente en aguas superficiales.
C. Arquitecturas de comunicación
1) Redes de sensores submarinos 2D
Una arquitectura de referencia para una red submarina de
dos dimensiones es mostrada en la figura N°15. Un grupo de
nodos sensores están anclados más abajo en el océano. Los
nodos sensores están interconectados para uno o más
compuertas submarinas (gateways) por medio de enlaces
inalámbricos acústicos. Las compuertas submarinas son
dispositivos de red a cargo de la retransmisión de datos desde
el fondo de los océanos a una estación en la superficie. Para
conseguir este objetivo, está equipado con dos transmisores-
receptores acústicos, particularmente un transmisor – receptor
vertical y horizontal. El transmisor –receptor horizontal es
usado por la compuerta submarina para comunicarse con los
nodos sensores en orden para: i) enviar comandos y
configurar datos de los sensores (de la compuerta submarina a
los sensores); ii) recolectar los datos del monitoreo (de los

11
sensores a la compuerta submarina). El enlace vertical es
usado por la compuerta submarina para transmitir datos a la
estación en superficie. En aplicaciones de aguas profundas el
transmisor –receptor debe tener un rango más largo. La
estación de superficie está equipada con un transmisor-
receptor acústico que es capaz de manejar múltiple
comunicación paralela con las compuertas submarinas
desplegadas. Esto es también proveer con un largo rango de
radio frecuencia y/o transmisor satelital para comunicarse con
la estación en tierra y/o con la estación en la superficie. En
aguas superficiales, los sensores-módems desplegados abajo
se comunican directamente con la superficie flotante, con un
nodo bajo no especializado.
2) Redes de sensores submarinos 3D
Las redes tridimensionales son usadas para detectar y
observar fenómenos que no pueden ser observados
adecuadamente por medio de nodos sensores bajo el océano,
es decir para actuar cooperando en el muestreo del ambiente
oceánico en 3D. En esta arquitectura, que se muestra en la
figura N°16, cada sensor es anclado al océano y es equipado
con una mantención flotante que se puede inflar y bombear.
Los soportes empujan la torre del sensor hacia la superficie.
La profundidad del sensor puede ser regulada ajustando el
largo del cable que conecta el sensor con el ancla, de manera
controlada electrónicamente por una máquina que está en el
sensor. La teleobservación y cobertura de las comunicaciones
en un entorno 3D son rigurosamente investigados. El
diámetro, el grado mínimo y máximo de alcance gráfico que
describe la red están derivados como una función del rango de
comunicación, mientras los diferentes grados de cobertura
para el ambiente 3D se caracterizan como una función de
sensibilidad.
Fig. 15 Red de sensores submarinos 2D
Fig. 16 Redes de sensores submarinos 3D
3) Redes de sensores con vehículos submarinos
autónomos
Los AUVs pueden funcionar sin correas, cables o control
remoto, y por consiguiente estos tienen una multitud de
aplicaciones en oceanografía, monitoreo ambiental y estudio
de recursos submarinos. Un trabajo experimental previo
muestra la factibilidad o relatividad de precio de vehículos
submarinos autónomos equipados con múltiples sensores
submarinos que pueden llegar a cualquier profundidad en el
océano. La integración de las UW-ASNs con los AUVs
requieren una nueva red de coordinación de algoritmos como:
Muestreo adaptativo: Esto incluye estrategias de
control para comandar vehículos móviles a lugares
donde estos datos sean más útiles. Por ejemplo, la
densidad de nodos sensores puede ser adaptativa
incrementándose en un área cuando una alta tasa de
muestreo sea necesaria para monitorear fenómenos.
Autoconfiguración: Esto incluye el control de
procedimientos para detectar automáticamente
agujeros de conectividad por fallas de nodo o canal
deteriorado, y requiere la intervención de un AUV.
Además, cualquier AUV puede ser usado para la
instalación y mantención de la infraestructura de la
red de sensores o para desplegar nuevos sensores.
Uno de los objetivos de diseñar con AUVs es hacer las
redes dependientes de inteligencia local y ser menos
dependientes de la comunicación con la costa. En general,
las estrategias de control son necesarias para la
coordinación autónoma, evasión de obstáculos, y dirigir
estrategias. Los sistemas de energía solar permiten que se
incremente el tiempo de vida de los AUVs, es decir no es
necesario recoger y recargar los vehículos diariamente.

12
Por lo tanto, la energía solar permite a los AUVs adquirir
información de forma continua por periodos de tiempos
del orden de meses. Una referencia de ésta arquitectura
para UW-ASNs con AUVs se muestra en la figura N°17.
Fig. 17 Red de sensores submarinos con AUVs
D. Modem acústico y topologías de redes
La tecnología de modem acústico ofrece hoy en día dos tipos
de modulación/detección: Modulación por desplazamiento en
frecuencia (frequency shift keying FSK) con detección no
coherente y modulación por cambio de fase (phase- shift
keying PSK) con detección coherente con una velocidad de
hasta 5000 bps. FSK ha sido utilizado tradicionalmente para
comunicaciones acústicas robustas a baja tasa de transferencia
(comúnmente del orden de 100 bps). Para lograr la eficiencia
del ancho de banda, es decir para transmitir a una velocidad
mayor que el ancho de banda disponible, la información debe
ser codificada en la fase o en la amplitud de la señal, como se
hace en PSK o en modulación de amplitud en cuadratura
(QAM). Por ejemplo, en un sistema 4-PSK, los bits de
información (0 y 1) se asignan en uno de los posibles
símbolos, +-1+-j. El flujo de símbolos modula la portadora y
se obtiene la señal que es transmitida por el canal. Para
detectar éste tipo de señal en un canal acústico con distorsión
multicamino, un receptor debe emplear un ecualizador cuya
tarea consiste en descomponer la interferencia intersimbólica.
Ya que la respuesta del canal no es conocida a-priori (además
es variable en el tiempo) el ecualizador debe aprender el canal
para así invertir éste efecto. Un diagrama de bloques de un
ecualizador de decisión retroalimentada (DFE) es mostrada en
la figura N° 18.
Ésta configuración, con múltiples señales de entrada,
obtenidas desde el espacio con diversos hidrófonos receptores,
puede ser usado para mejorar el rendimiento del sistema. Los
parámetros del receptor han sido optimizados para minimizar
el error cuadrático medio del flujo de datos detectados
Fig. 18 Un Ecualizador multicanal adaptativo con decisión en la
retroalimentación (DFE) es usado para comunicaciones acústicas bajo el agua
de alta velocidad. Éste soporta cualquier formato de modulación lineal, como son M-ary PSK o M-ary QAM.
. Después del período inicial de entrenamiento, durante el
cual una secuencia de símbolos conocidos se transmite, el
ecualizador se ajusta adaptativamente, con los símbolos de
decisión en la salida. Un algoritmo integrado de seguimiento
Doppler permite al ecualizador operar en un escenario móvil.
Esta estructura de receptor es usada en varios tipos de canales
acústicos. Los logros actuales incluyen la transmisión a
velocidades del orden de un Kbps a largas distancias (10 -100
millas marinas) y varias decenas de Kbps en distancias cortas
(pocos kilómetros), como las tasas más altas obtenidas hasta la
fecha. En una nota más inusual una operación exitosa se
demostró en una cuenca (3000km) a 10 bps, así como más de
un canal vertical corta a una velocidad de más de 100 Kbps.
La DFE multicanal es la base de un módem acústico de alta
velocidad implementadas en la Institución Oceanográfica
Woods Hole. El módem mostrado en la figura N° 19, es
implementado en un DSP de punto fijo, con un punto flotante
de co-procesador de alta velocidad en modo de operación.
Cuando se encuentra estático, consume alrededor de 3W en
modo receptor, y entre 10 y 50W en modo de transmisor. La
placa mide entre 1.75 a 5 pulgadas, y tiene capacidad para
cuatro canales de entrada. El módem ha sido desplegado con
éxito en una serie de ensayos, incluyendo los vehículos
submarinos autónomos (AUV), con comunicaciones a 5 Kbps.
Figura N°19 Micro-Modem 5416 DSP Board
TI 6713 Co-processor Daughter Card El micro-modem WHOI tiene dos modos de operación: baja tasa FSK
(100bps) y alta tasa PSK (5000bps).

13
Con los avances en la tecnología de módem acústico,
tecnología de sensor y tecnología vehicular, la ingeniería
apunta a la integración de éstos componentes en redes
autónomas bajo el agua. Mientras que las aplicaciones actuales
incluyen la supervisión del control individual de los AUVs y
la telemetría de datos oceanográficos de instrumentos
montados en el fondo, la visión de futuro es la de un "océano
digital" en el que las redes integradas de instrumentos,
sensores, robots y vehículos operarán en conjunto en la
variedad del medio ambiente submarino. Ejemplos de las
aplicaciones emergentes incluyen las flotas de vehículos
autónomos submarinos desplegados en misiones de
colaboración de búsqueda y las redes ad hoc de despliegue de
sensores para el monitoreo ambiental.
Fig. 20 Topología de red centralizada
Dependiendo de la aplicación, las futuras redes submarinas
evolucionarán probablemente en dos direcciones: redes
centralizadas y redes descentralizadas. Estos dos tipos de
topologías están ilustradas en la figura N° 20 y en la figura N°
21. En la red centralizada, los nodos se comunican a través de
una estación base que cubre una celda. Una gran área está
cubierta por más celdas cuyas estaciones base están
conectados a través de una infraestructura de comunicaciones
por separado.
Fig. 21 Topología de red descentralizada
Éstas estaciones bases pueden estar en la superficie y
comunicarse enlaces de radio, como se muestra en la figura, o
pueden estar en el fondo conectados por un cable.
Alternativamente, la estación base puede ser también móvil en
la superficie. En una red descentralizada los nodos se
comunican vía peer to peer, con multisaltos en la transmisión
de los paquetes de datos. Los paquetes deben ser trasmitidos
para llegar al destino, y puede haber un nodo final designado a
la entrada en la superficie. Los nodos también pueden formar
grupos para una utilización más eficiente del canal de
comunicación.
Para acomodar los múltiples usuarios entre la topología de
red seleccionada, el canal de comunicación debe ser
compartido, es decir el canal debe ser regulado. Los métodos
para compartir el canal están basados en la programación o en
la contención. Programación, o determinista de acceso
múltiple, incluye frecuencias, tiempos y división de código
por acceso múltiple (FDMA, TDMA, CDMA) así como una
técnica más elaborada de acceso múltiple por división de
espacio (SDMA). Este argumento basado en el intercambio de
canal no se basa en una división a priori de los recursos del
canal, en cambio todos los nodos compiten por el uso del
canal, es decir se les permite transmitir aleatoriamente en la
misma banda de frecuencia y al mismo tiempo, pero al hacerlo
deben seguir un protocolo para el control de acceso medio
(MAC) para asegurar que sus paquetes de información no
colisionen. Todos los tipos de acceso múltiple están siendo
considerados para los sistemas acústicos submarinos. Los
sistemas experimentales de hoy en día votan a favor de los
dos, TDMA, o acceso múltiple evitando la colisión (MACA)
basado en una interacción cuto procedimiento requiere un
intercambio de solicitudes y autorizaciones para enviar
(RTS/CTS). La prevención inteligente de colisiones es
necesaria en un canal submarino, donde el simple principio de
acceso múltiple por detección de portadora (CSMA) se ve
gravemente comprometida debido a la demora de
propagación- el hecho de que el canal se perciba como
inactivo en algún lugar, no garantiza que un paquete de datos
no está en la transmisión en una ubicación remota.
Uno de los mayores aspectos de la evolución de las redes
submarinas es el requerimiento para escalabilidad. Un método
para compartir canales es escalable si es igualmente aplicable
a cualquier número de nodos en una red de densidad dada. Por
ejemplo, un esquema TDMA puro no es escalable, ya que
rápidamente pierde eficiencia en un canal submarino debido al
aumento en el retardo de máxima propagación en el área de
cobertura. Con el fin de hacer este esquema de otro modo
escalable, es que puede ser utilizado a nivel local, y en
combinación con otra técnica para la reutilización espacial de
los recursos del canal. El esquema resultante es escalable y
eficiente, sin embargo, puede requerir una red dinámica con
gestión sofisticada. Por el contrario, el argumento basado en la
asignación de canal ofrece la simplicidad de implementación,
pero su eficiencia es limitada por la latencia en el canal. Por lo
tanto, ésta no es la única forma de despliegue de una red
submarina. En su lugar, la selección de algoritmos y
protocolos de comunicación de la red es controlado por los
requerimientos y rendimiento particular del sistema.
Hoy en día la investigación está activa en todos los temas de
las redes de comunicación submarinas: a partir de análisis de
la capacidad fundamental para el diseño de protocolos de red
práctica es todas las capas de la arquitectura de red (incluido el
acceso al medio y el control de enlace de datos, ruteo,
transporte control y en la capa de aplicación) así como la
optimización de redes en la capa cruzada.
Además de servir como sistemas independientes, las redes
acústicas submarinas tienen aplicación en situaciones más
complejas como sistemas heterogéneos para la observación en
el océano.

14
VI. FABRICACIÓN DE TECNOLOGÍA INALÁMBRICA BAJO EL MAR
A. Sonares
De las distintas formas de radiación conocidas, la que mejor
se propaga a través del mar es el sonido como se ha
mencionado anteriormente. La radiación electromagnética no
es eficaz para la transmisión de información submarina,
debido a las características de buen conductor eléctrico del
agua del mar lo que conlleva una elevada atenuación con la
distancia por la conversión de la energía del campo eléctrico
en calor. La propagación del sonido en el mar depende
fuertemente de las características del medio submarino. La
velocidad de propagación del sonido en el mar (en torno a
1500 m/s) es claramente superior a la velocidad en el aire (en
torno a 340 m/s) y se incrementa a medida que disminuye la
compresibilidad del medio, que depende principalmente de la
temperatura, la presión y la salinidad.
En general se trata de una propagación compleja en la que,
además del perfil de velocidad del sonido, influyen de forma
significativa las características del fondo y la superficie del
mar y la presencia de vida marina y partículas en suspensión
en el entorno marino.
La denominación SONAR (acrónimo de Sound Navigation
and Ranging) referencia en la actualidad todas las actividades
en las que el agua es el medio de propagación del sonido, se
puede considerar como el equivalente en el medio marino al
RADAR en el medio aéreo.
Una de las primeras referencias históricas a la propagación del
sonido en el mar y su detección se debe a Leonardo Da Vinci,
quien en 1590 escribía:
“Si detienes tu barco e introduces el extremo de un tubo largo
en el agua y aplicas tu oído al extremo exterior, oirás barcos
que se encuentran a una gran distancia de ti”.
Definición que contiene los principios básicos de un sistema
SONAR actual: producción de sonido por parte de una fuente
sonora, propagación del sonido a través del mar y detección
del sonido. Los sonares se clasifican genéricamente en activos,
que se basan en el análisis de los ecos producidos por la
reflexión en los objetos de la energía acústica emitida y en
pasivos que se limitan a recibir y analizar los sonidos
emitidos por las fuentes sonoras.
El sonido consiste en un movimiento regular de las
moléculas de un medio elástico, en nuestro caso el agua del
mar, que se transmite en forma de onda. Cuando la onda
alcanza un área determinada hace que se perturbe el equilibrio
de sus partículas moleculares. Esta perturbación se denomina
presión y es medible mediante un hidrófono sensible a la
presión.
En un sistema SONAR genérico, los niveles de presión
captados por los hidrófonos son convertidos a niveles de
tensión eléctrica y generalmente discretizados (convertidos de
niveles analógicos a valores digitales) para permitir su
tratamiento en procesadores digitales. Las siguientes etapas
son el procesado de la señal y la generación de los resultados
en forma de audio y de vídeo, específicamente diseñados para
permitir al operador distinguir la presencia de contactos de la
forma más sencilla posible.
La empresa cartagenera SAES está a la vanguardia del
desarrollo de sistemas SONAR en España, y dispone de una
tecnología que le permite competir en los mercados
internacionales con los sistemas procedentes de otros países.
Entre los sistemas SONAR ya desarrollados cabe resaltar el
SOLARSUB (Sonar remolcado de Largo alcance para
Submarinos), primer sonar remolcado desarrollado en España,
actualmente operativo en los submarinos de la Serie-70 (clase
Galerna), el SOCILSUB (Sonar Cilíndrico para Submarinos),
primer sonar de casco para submarinos desarrollado en
España, actualmente en fase de evaluación por la Armada
española- cuya interfaz de software se puede observar en la
figura N° 22- y el SONAR para la detección activa de
buceadores (DAB), del que se dispone de un primer prototipo,
validado con la detección de buceadores, y que también es el
primero de sus características desarrollado íntegramente en
España.
Fig. 22 Presentación de Software BA de SOCILSUB
B. Descripción empresa SAES
La Sociedad Anónima de Electrónica Submarina (SAES) es
la única empresa española especializada en acústica submarina
y electrónica. SAES tiene su sede social en Cartagena
(Murcia), donde la Marina española dispone de sus principales
centros y escuelas ligadas a la guerra submarina. SAES es
líder internacional del segmento ASW en los programas
españoles de construcción de nuevas fragatas y submarinos,
así como en la modernización de los aviones de patrulla
marítima.
La situación y evolución tecnológica de una empresa como
la Sociedad Anónima de Electrónica Submarina (SAES) le
permite ser considerada la única empresa de ingeniería de
electrónica submarina en España.
Todo ello se ha forjado gracias al esfuerzo y capacidad
técnica de su personal, del que más del 90% son titulados, con
una media de edad inferior a 35 años. Entre éstos hay un alto
porcentaje de técnicos superiores (telecomunicación,
informática e industriales) y licenciados (físicas y
matemáticas).

15
Aunque la máxima capacidad de la empresa está enfocada al
tratamiento de señales acústicas no sólo se limita a ello, sino
que además se trabaja en otros campos, novedosos para
cualquier técnico, como son la propagación submarina de
campos eléctrico y magnético, las ondas de presión y sísmicas.
En particular se ha desarrollado, en estrecha colaboración con
la Facultad de Ciencias Químicas de la Universidad de
Murcia, un sensor de campo eléctrico submarino (UEP) que se
ha exportado hasta la fecha a países como Australia, Francia y
Noruega.
Como anteriormente se ha comentado el desarrollo de
sistemas de procesamiento acústico ha sido el motivo de la
creación de la empresa en el año 1989. En este campo se han
diseñado, desarrollado y fabricado los siguientes sistemas:
Sistemas de Predicción de Prestaciones Sonar (SPPS
y PCS)
Simulación del entorno acústico y de los sonares
integrados en el Simulador Táctico de
Submarinos (SATS)
Sistema Interactivo de Clasificación (SICLA)
Sonar Remolcado para submarinos (SOLARSUB)
Procesador del Sonar Cilíndrico para submarinos
(SOCILSUB)
Familia de Procesadores Acústicos de Sonoboyas
(SPAS)
Simulador Sonar de los Cazaminas (SIMSON)
La variedad de los sistemas antes relacionados precisa de
diversas disciplinas de ingeniería dentro de la empresa, como
son la ingeniería de Sistemas, la ingeniería Electrónica, la
ingeniería Software y el tratamiento de Señal. Todas ellas,
disciplinas que se imparten en la UPCT.
La sociedad de electrónica submarina SAES expuso sus
productos en el stand de Navantia-SAES, Pabellón N-164,
durante la feria EXPONAVAL, que se llevó a cabo del 30 al 3
de Diciembre del 2010 en Valparaíso, Chile.
En aquella oportunidad SAES presentó en la feria, la Mina
de Ejercicio Avanzada Multi-Influencia MINEA, y una unidad
de Mina Lapa de combate (MILA), ambas de tamaño real, así
como otros novedosos desarrollos, entre los que destacan el
Sistema ACINT FTAS (Fast Time Analizar System) como
apoyo a las operaciones de los aviones ASW, y el Sonar
Remolcado Digital para submarinos DTAS SOLARSUB,
junto al sistema de despliegue y recogida TAHS
C. Procesamiento digital de ondas acústicas según
SAES
Los sistemas sonares se consideran activos o pasivos en
función de que exista una emisión de señal y se trate el eco
recibido, o se limite a recibir el ruido emitido por un contacto.
Para la emisión o adquisición se utilizan transductores
piezoeléctricos, magnetostrictivos y electrostrictivos que
transforman la energía eléctrica en acústica y viceversa.
Las bandas de frecuencias utilizadas son muy variadas;
mientras en los sonares pasivos no suelen exceder la gama de
frecuencias audibles, típicamente por debajo de los 20 KHz,
en los sonares activos se alcanzan frecuencias superiores a 1
MHz. El comportamiento con la frecuencia de las ondas
acústicas es semejante a la transmisión de campos
electromagnéticos en lo que se refiere a atenuación (mayor
atenuación a mayor frecuencia), reflexión, etc. Sin embargo
existe una gran diferencia en lo que se refiere a su propagación
a través del medio debido a la gran dependencia de las
inhomogeneidades del medio que afectan a su impedancia
característica y a la velocidad de propagación, ambas función
de la densidad y de la elasticidad. Estas características del
medio, determinantes entre otros fenómenos de la trayectoria
de la onda sonora, se ven afectadas por la profundidad, la
salinidad y la temperatura, lo que provoca la curvatura de los
rayos sonoros, variando este comportamiento con la estación
del año, la hora del día, la profundidad de la zona, existencia
de estuarios de ríos, etc.
Ciñéndonos a una cadena de recepción sonar sea ésta activa
o pasiva se dispondrá de una antena o arreglo de hidrófonos
físicamente alineados (lineal o circularmente) para favorecer
la recepción en una determinada dirección y en una banda de
frecuencia, obteniendo así una ventaja respecto al ruido
isotrópico de fondo. La señal detectada se aplica a un
preamplificador próximo al sensor, pudiendo este amplificador
estar controlado en ganancia para ajustar el margen dinámico.
En los sonares activos esta ganancia se varía incluso
temporalmente para contrarrestar las pérdidas de propagación,
a la entrada a la unidad de adquisición y digitalización. Una
vez digitalizadas, con una resolución de 16 bits, las señales
procedentes de cada uno de los hidrófonos o columnas que
componen la antena, se procede a la generación de vías
mediante una integración espacial y temporal de las señales
procedentes de diversas columnas mejorando así la resolución
angular y la relación señal ruido. Tras este proceso se realiza
un análisis espectral mediante FFT’s (transformadas rápidas
de Fourier) superiores a 1024 puntos, la normalización
frecuencial (banda estrecha, banda ancha) y su comparación
con un determinado umbral, este último asociado a unas
probabilidades de detección y de falsa alarma.
El procesamiento de sonoboyas direccionales es similar pero
requiere de una etapa adicional de demultiplexación en
frecuencia de las señales complejas recibidas. Las señales
procedentes de sonoboyas se reciben en la plataforma de
tratamiento (buque, avión o helicóptero) mediante un receptor
específico en la banda de VHF, que permite la recepción
simultánea de hasta 32 sonoboyas. Los procesadores de
sonoboyas por tanto requieren realizar el tratamiento
simultáneo de un elevado número de señales independientes y
la presentación de resultados del análisis al operador de forma
secuencial.
Dada la cantidad de procesos distintos (banda estrecha,
banda ancha, transitorios, interceptación) y la densidad de
información que cualquiera de estos sistemas proporciona, es
preciso facilitar una serie de ayudas al operador en lo relativo
a la detección (alertas automáticas de líneas espectrales
concretas), seguimientos automáticos, localización (DOPCPA,
Lloyds Mirror, TMA), clasificación (peines de harmónicos,
librerías de firmas acústicas).
La tecnología empleada en este tipo de proyectos está basada
generalmente en hardware de desarrollo interno para el
acondicionamiento de señal y de procesadores COTS basados

16
en PowerPC o Intel, usando buses VME 64, PCI y Ethernet;
sistemas operativos VxWorks, Lynx, Linux y Windows, con
lenguajes de programación C y C++. Es asimismo habitual el
empleo de otros interfaces más específicos como NTDS, 1553,
Arinc 429, etc.
Por último cabe indicar que como en cualquier proceso de
ingeniería la fase de diseño requiere de una permanente
participación del usuario final, típicamente la Armada o el
Ejército del Aire, que permite clarificar los objetivos
operativos de los sistemas. De igual manera el usuario final
será el responsable de realizar la evaluación operativa que
permita depurar la funcionalidad y con ello la calidad del
producto final.
D. Producto “MINEA” de SAES
MINEA es una moderna mina marina que utiliza varios tipos
de sensores de influencia.
El prototipo está equipado con sensores para la detección y
procesado de ondas magnéticas, eléctricas, la presión acústica,
y las influencias sísmicas. También incluye un Sonar detector.
Esta mina ha sido diseñada y fabricada por SAES.
SAES está trabajando en tres grandes líneas de productos: la
evolución de sonar, las minas y los sistemas de medición, y la
influencia de equipos a bordo. El diseño y el ensayo de las
diferentes versiones de MINEA se ha llevado a cabo en
estrecha cooperación con la Armada española, que ha
contribuido con su amplia experiencia en lo que se trata de
minas navales y los sistemas de medición bajo el agua.
El MINEA , mina de ejercicios avanzada, se ha desarrollado
como una mina con la máxima capacidad de detección y de
procesamiento de señales y con las instalaciones necesarias
para la formación que incluyen sistema de grabación,
recuperación del sistema y un enlace acústico para enviar
datos.
Hay tres tipos de minas se han desarrollado: la mina
cilíndrica, la mina de bajo perfil inferior y la mina amarrada.
La Figura N° 23 muestra los tres tipos de minas desarrolladas
por SAES.
Fig. 23 Tipos de minas MINEA Avanzada: la mina amarrada
(superior izquierda), la mía bajo perfil inferior (superior derecha) y la mina
cilíndrica (inferior).
VII. CONCLUSIONES
Del trabajo realizado se pueden obtener las siguientes
conclusiones:
A pesar del gran desarrollo en comunicaciones
inalámbricas en el medio aéreo a través de la radio
frecuencia, las comunicaciones inalámbricas
subacuáticas, esencialmente bajo el mar siguen
siendo complejas, esto se debe a lo complejo del
canal submarino, puesto que éste presenta como
obstáculo las peores características del canal aéreo, es
decir presenta características como alta atenuación,
perdidas por propagación, ancho de banda limitado,
propagación multicamino, lo que deriva en
intermitencias del canal que hacen que las
comunicaciones sean mucho más lentas y difíciles de
llevar a cabo.
Debido a la alta atenuación que presenta el medio
submarino a la propagación de las ondas
electromagnéticas es que se utiliza el canal acústico
para las trasmisiones, lo que implica que se ocupen
bajas frecuencias de la banda denominada ELF y SLF
(extremadamente bajas frecuencias y súper bajas
frecuencias) que oscilan entre los 3 y 30 Hz para el
primer caso y entre los 30 y 300 Hz para el segundo.
Utilizando el canal acústico, los submarinos pueden
comunicarse utilizando la banda de VLF (frecuencias
muy bajas) del orden de decenas de kHz para
profundidades de menos de 20 metros, pero a
profundidades mayores de 100 metros, necesitan
utilizar la banda SLF y ELF, puesto que son las
únicas frecuencias capaces de penetrar el mara a esas
profundidades. Luego el uso de estas frecuencias
hace que la comunicación a esas profundidades sea
lenta e intermitente.
Para generar ondas de frecuencia ELF y SLF se
utiliza la tierra como antena, puesto que es imposible
hasta el momento construir una antena que sea capaz
de generar señales con la longitud de onda necesaria
para dichas frecuencias (largo de 10 km). Los
ejemplos de generadores ELF y SLF más
representativos son los desarrollados en la guerra fría
por Estados Unidos con su generador de 76Hz y
Rusia con su generador ZEVS de 82Hz. La
transmisión de datos entre el generador y un
submarino se realiza mediante modulación MSK
(mínimo desplazamiento en frecuencia), lo que hace
que el sistema demodulador sea lo suficientemente
complejo para detectar estos cambios de frecuencia.
Cabe decir que por la distancia entre el generador y la
profundidad en la que se encuentre el submarino, la
comunicación es lenta, puntual y en un solo sentido,
es decir el submarino solo recibe órdenes en las
profundidades, y estas órdenes son simples. Por
ejemplo emerger a la superficie para establecer un
contacto más rápido vía radiofrecuencia.

17
Además de la comunicación entre submarinos es
posible el desarrollo de otras actividades de
comunicación inalámbrica bajo el mar, tales como las
redes de sensores submarinos, útiles en vigilancia e
investigaciones científicas ya sea para observar el
medio ambiente marino, como para predecir porque
no es un futuro los maremotos.
Las redes de sensores submarinos se presentan de tres
formas, configuración 2D, 3D y redes de sensores
con vehículos submarinos autónomos (AUVs).
Además las redes submarinas pueden agruparse en
topologías, ya sean centralizadas y no centralizadas
según el tipo de interacción que exista entre ellas. El
canal de comunicación dentro de estas topologías es
compartido, luego el canal debe ser regulado para
evitar las colisiones. Para lograr esto último se
utilizan métodos de programación o determinista de
acceso múltiple tales como FDMA, TDMA, CDMA,
así como una técnica más elaborada de acceso
múltiple por división de espacio (SDMA).
Con el fin de aumentar la velocidad de transmisión de
datos en redes submarinas es que se desarrollan
módems acústicos (el micromodem WHOI) por
ejemplo, que utilizan modulaciones del tipo FSK y
PSK. Con FSK se logran velocidades de transmisión
del orden de los 100 bps y con la modulación PSK se
alcanzan velocidades de hasta 5000 bps. Para lograr
eficiencia en el ancho de banda, es decir transmitir a
una velocidad mayor que el ancho de banda
disponible, se utiliza modulación PSK o QAM. Para
detectar la señal transmitida afectada por los
multicaminos que provocan interferencia
intersimbolica, es necesario utilizar en el receptor un
ecualizador multicanal adaptativo con decisión en la
retroalimentación DFE que soporta cualquier formato
de modulación lineal, ya sea M-ary PSK o M-ary
QAM.
Dentro de las empresas que llevan a cabo el
desarrollo de comunicación submarina, se destaca la
Sociedad Anónima de Electrónica Submarina
(SAES), empresa española que lleva a cabo el
desarrollo de sistemas para la armada Española y para
otras armadas Europeas entre las que se encuentran
Australia, Francia y Noruega. Además SAES expone
sus productos a lo largo del mundo, incluso en Chile
donde expusieron en la feria Exponaval de
Valparaíso en diciembre del 2010. Esta empresa lleva
acabo el desarrollo de sistemas acústicos como lo son
Sonares, Procesadores acústicos de Sonoboyas,
Sistemas MINEA y muchos otros más.
Cabe decir finalmente que si bien las comunicaciones
digitales submarinas son complicadas debido a la
complejidad del canal, el desarrollo tecnológico y la
adaptación de las tecnologías inalámbricas al medio
submarino nos permiten ver con buenos ojos el
desarrollo de las comunicaciones bajo el mar, no tan
solo en el ámbito militar, sino también en el ámbito
de la investigación científica donde la gran meta de
estas investigaciones es poder entender el entorno
submarino, y porque no poder predecir movimientos
sísmicos.
VIII. BIBLIOGRAFÍA
Milica Stojanovic, Underwater Wireless Communications:
Currents Achievements and Research Challenges, Massachusetts
Institute of Technology, disponible en: http://www.mit.edu/~millitsa/resources/pdfs/newsletter-oes.pdf
Ian F. Akyildiz, State of the Art in Protocol Research for
Underwater Acoustic Sensor Networks, Georgia Institute of
Technology, disponible en: http://www.ece.gatech.edu/research/labs/bwn/surveys/uw_2007.pdf
Comunicación con submarinos: la Tierra como antena, disponible
en: http://resistencianumantina.blogspot.com/2011/06/comunicacion-
con-submarinos-la-tierra.html
Lloyd Butler, Radio Comunicaciones bajo el agua, disponible en:
https://sites.google.com/site/proyectorovsubacuatico/home/sistema
-de-comunicaciones/comunicaciones-subacuaticas
Trond Jacobsen, ZEVS, The Russian 82 Hz ELF Transmitter,
ALFLAB Noruega, disponible en: http://www.vlf.it/zevs/zevs.htm
Antonio Molina, The Spanish Advanced Multi-Influence Naval
Mine MINEA, Sociedad Anónima de Electrónica Submarina (SAES), disponible en: http://www.electronica-
submarina.com/saes/index.php/es/articulos.html
Ficha Técnica Micro-modem Acústico WHOI, disponible en:
http://acomms.whoi.edu/umodem/
COMENTARIOS
Ante el requerimiento de precios del servicio, alcance,
número de usuarios por servicio y valores de los equipos, cabe
mencionar que no fue posible obtener estos datos, debido a
que el servicio de comunicación entre submarinos es de uso
militar y científico, y con la referencia a precios de equipos,
fue solicitada esta información a la empresa española SAES
vía correo electrónico no obteniendo una respuesta, y en el
caso del módem acústico WHOI corresponde a un módem
usado en investigaciones y para ser solicitado debía llenarse
un formulario en el cual se exigía cuenta corriente
internacional, además de pertenecer a alguna organización
dedicada a la investigación.