problemas resueltos de sistemas de control continuo primera parte rev0
TRANSCRIPT
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 1/63
Sistemas de Control Continuo
1
PROLOGO
La presente, esta dirigida al estudio de los sistemas de control de
tiempo continuo, mediante la resolución de problemas; donde cada uno
de los mismos fue cuidadosamente seleccionado de manera de poder
exponer con claridad los conceptos de sistemas de control.
Esta obra, dispone de un lenguaje claro y sencillo para explicar los
conceptos más importantes en los sistemas de control, esto permitirá al
lector introducirse con más herramientas al diseño de sistemas de
control para sistemas continuos.
Deseo expresar mi agradecimiento sincero al Ing. Mauricio Amestegui
y al Ing. Roberto Carranza (fallecido), docentes de la Carrera de
Ingeniería Electrónica, de la Facultad de Ingeniería de la Universidad
Mayor de San Andrés, quienes guiaron mi carrera y mi interés sobre los sistemas de control y automatización.
Esta obra esta dedicada a mis padres Roberto y María Asunta a
quienes les debo la vida, a Susana F. mi esposa, Abigail mi hija y
Matías quien no pudo ver la luz de la vida, por el cariño, paciencia,
apoyo y colaboración durante la elaboración de esta obra.
Raúl R. Roque Y.
La Paz Junio de 2009

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 2/63
Sistemas de Control Continuo
2
PARTE I
PROBLEMASRESUELTOS
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 3/63
Sistemas de Control Continuo
3
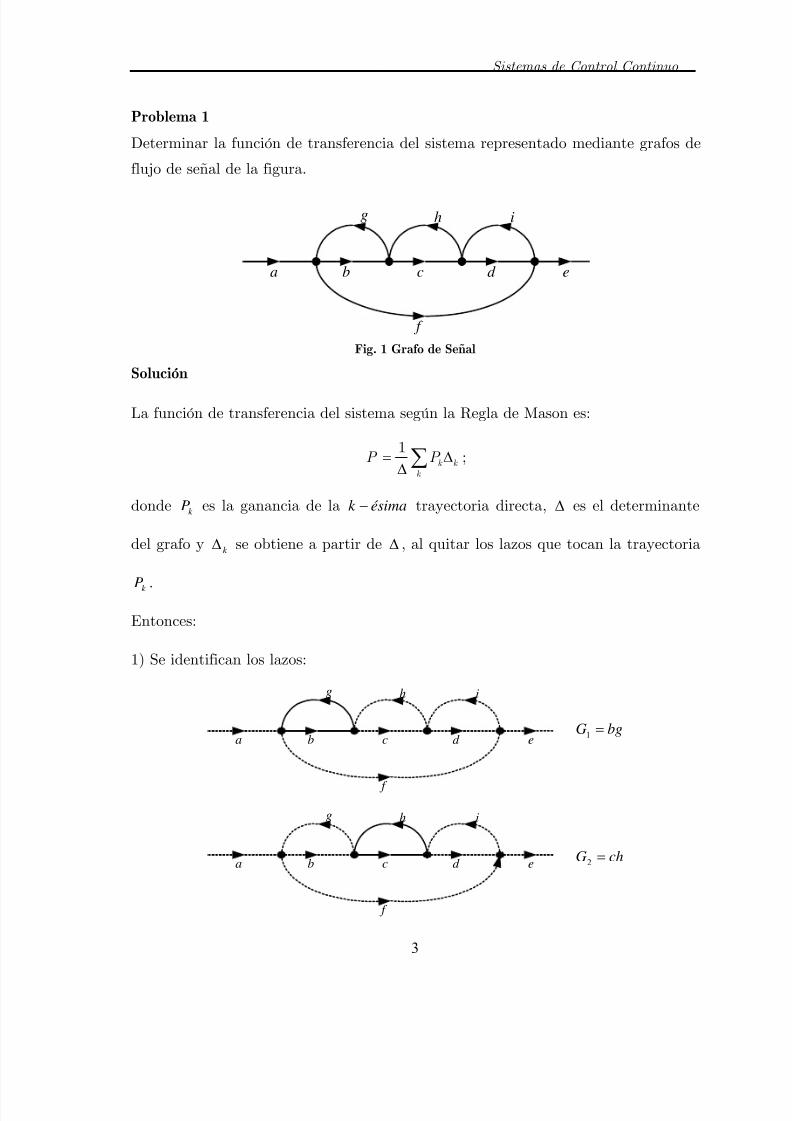
Problema 1
Determinar la función de transferencia del sistema representado mediante grafos de
flujo de señal de la figura.
a
ihg
f
ed cb
Fig. 1 Grafo de Señal
Solución
La función de transferencia del sistema según la Regla de Mason es:
= ΔΔ
∑1
k k k
P P ;
donde k P es la ganancia de la ésimak − trayectoria directa, Δ es el determinante
del grafo y k Δ se obtiene a partir de Δ , al quitar los lazos que tocan la trayectoria
k P .
Entonces:
1) Se identifican los lazos:
a
ihg
f
ed cbbgG =1
a
ihg
f
ed cbchG =2
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 4/63
Sistemas de Control Continuo
4
a
ihg
f
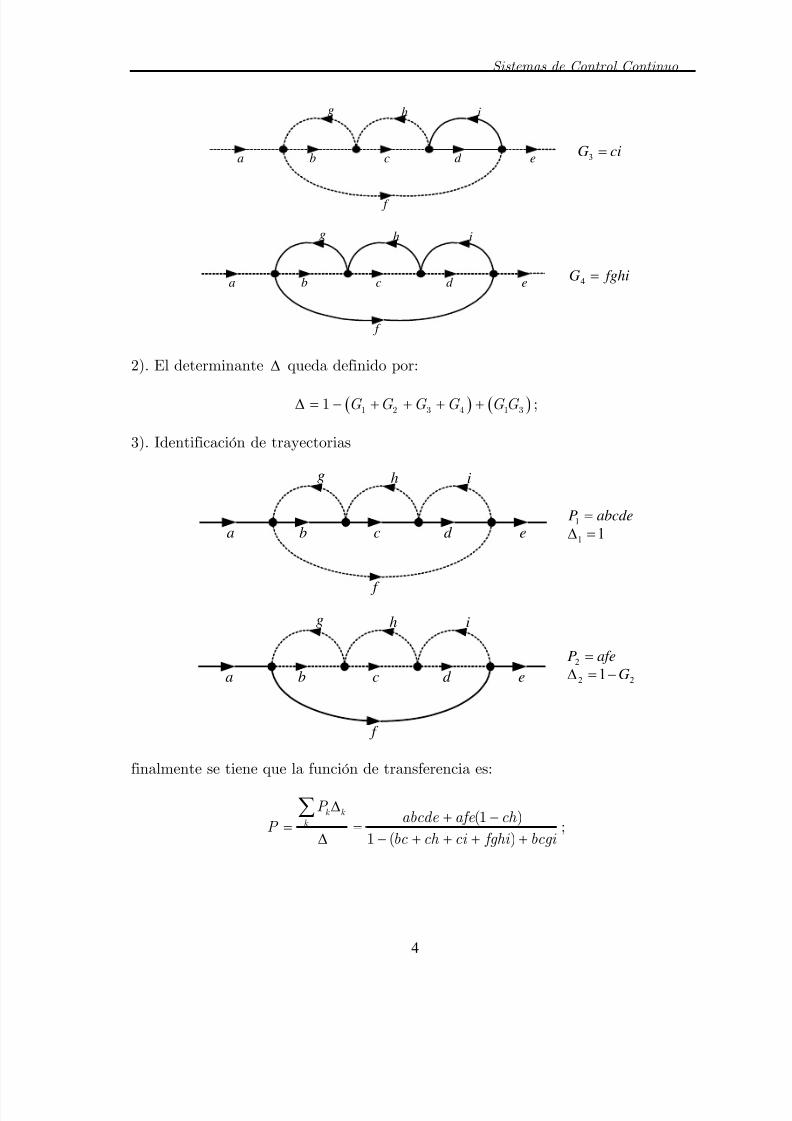
ed cbciG =3
a
ihg
f
ed cbfghiG =4
2). El determinante Δ queda definido por:
( ) ( )Δ = − + + + +1 2 3 4 1 31 G G G G GG ;
3). Identificación de trayectorias
a
ihg
f
ed cbabcdeP =1
11 =Δ
a
ihg
f
ed cb
afeP =2
22 1 G−=Δ
finalmente se tiene que la función de transferencia es:
Δ+ −
= =Δ − + + + +
∑ (1 )
1 ( )
k k k
P abcde afe ch
P bc ch ci fghi bcgi
;
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 5/63
Sistemas de Control Continuo
5
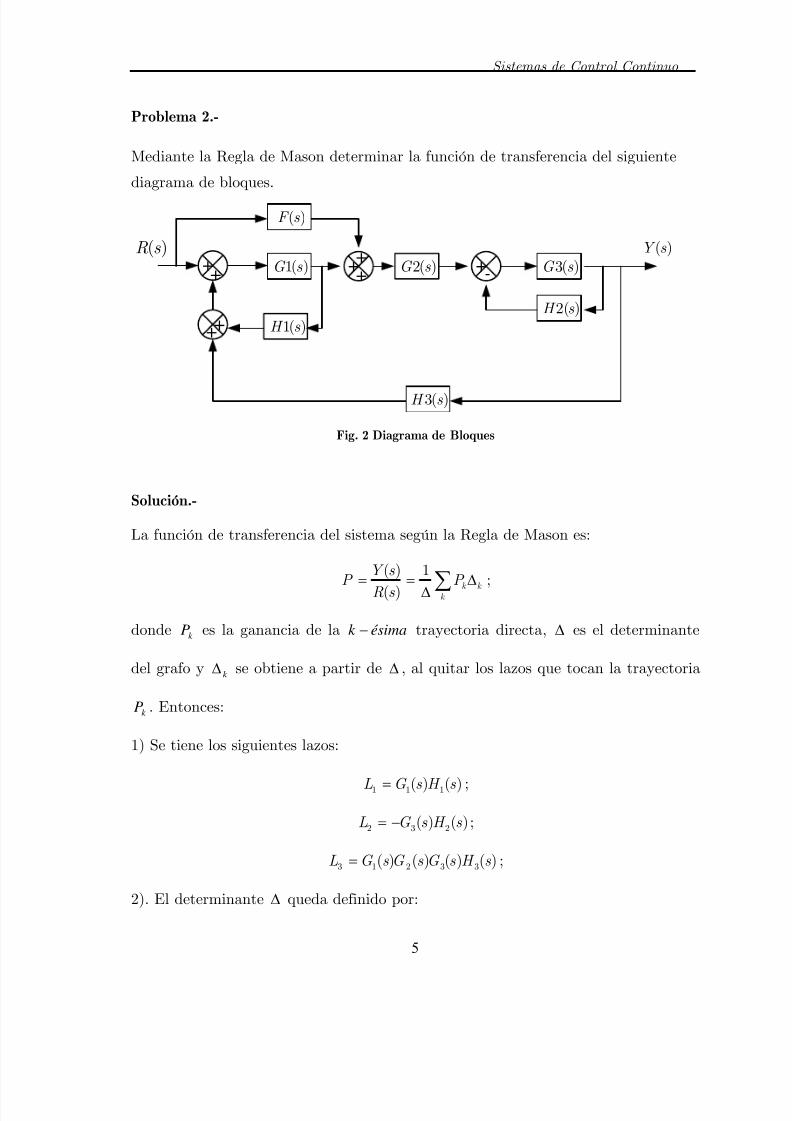
Problema 2.-
Mediante la Regla de Mason determinar la función de transferencia del siguiente
diagrama de bloques.
++
( )R s ( )Y s
+ +
1( )G s
( )F s
1( )H s
++
2( )G s +-
3( )G s
2( )H s
3( )H s
+
Fig. 2 Diagrama de Bloques
Solución.-
La función de transferencia del sistema según la Regla de Mason es:
( ) 1
( ) k k k
Y s P P
R s = = Δ
Δ ∑;
donde k P es la ganancia de la ésimak − trayectoria directa, Δ es el determinante
del grafo y k Δ se obtiene a partir de Δ , al quitar los lazos que tocan la trayectoria
k P . Entonces:
1) Se tiene los siguientes lazos:
1 1 1( ) ( )L G s H s = ;
2 3 2( ) ( )L G s H s = − ;
3 1 2 3 3( ) ( ) ( ) ( )L G s G s G s H s = ;
2). El determinante Δ queda definido por:

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 6/63
Sistemas de Control Continuo
6
( ) ( )1 2 3 1 31 L L L L LΔ = − + + + ;
3). Identificación de trayectorias
1 2 3( ) ( ) ( )P F s G s G s = ;
2 1 2 3( ) ( ) ( )P G s G s G s = ;
4) Los determinantes mínimos entonces están dados por:
1 1 1 11 1 ( ) ( )L G s H s Δ = − = − ;
2 1Δ = ;
esto debido a que la trayectoria 1P toca 2L y 3L pero no 1L ; mientras que la
trayectoria 2P toca 1L , 2L y 3L .
5.- Finalmente se tiene que la función de transferencia es:
1 1 2 2k k
k
P P P
P
ΔΔ + Δ
= =Δ Δ
∑;
[ ]2 3 1 1
1 1 3 2 1 2 3 3 1 1 3 2
( ) ( ) 1 ( ) ( )
1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
G s G s G s H s P
G s H s G s H s G s G s G s H s G s H s G s H s
−=
− − − −
;

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 7/63
Sistemas de Control Continuo
7
Problema 3.-
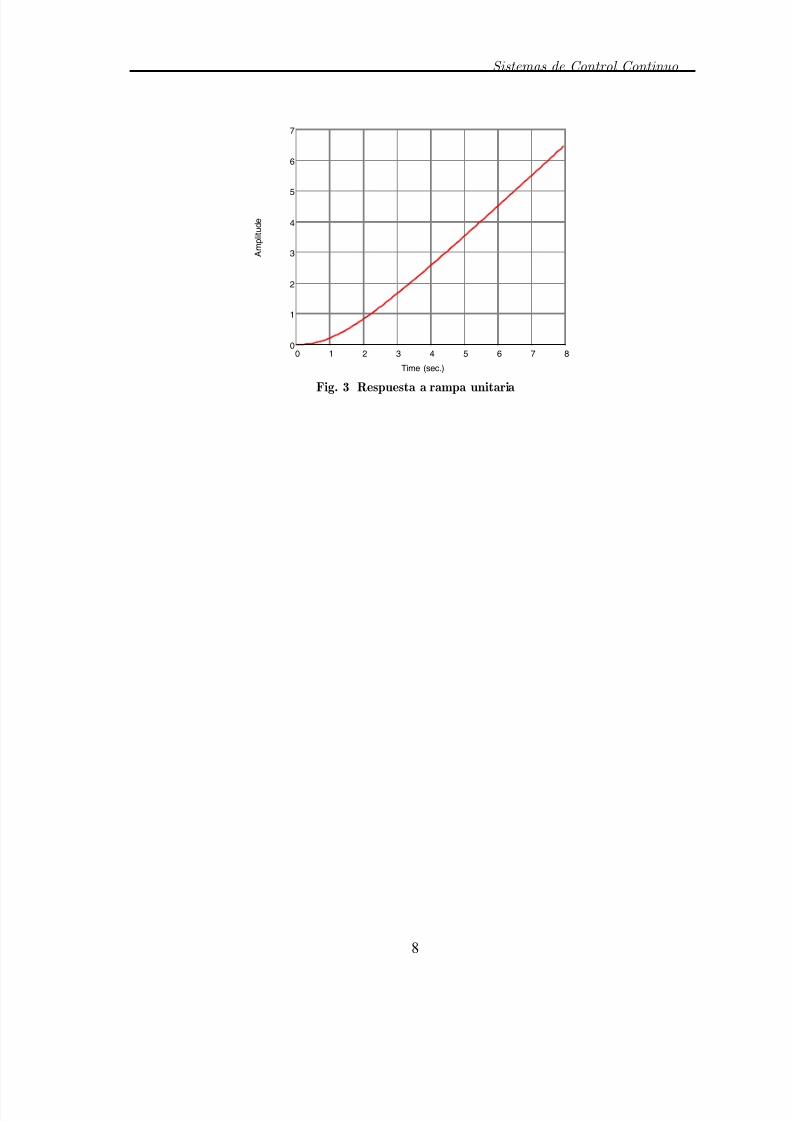
Obtenga la respuesta en el tiempo de un sistema con realimentación unitaria ante
una rampa unitaria, siendo la función de transferencia del sistema de lazo abierto:
=+
4( )
( 6)G s
s s
Solución.
La función de transferencia en lazo cerrado con realimentación unitaria es:
=+
( )( )
1 ( )
G s H s
G s
la función de transferencia será entonces:
+=
++
4( 6)
( )4
1( 6)
s s H s
s s
=+ +2
4( )
6 4H s
s s
Por otro lado, la entrada en términos de Laplace es una rampa: =2
1( )R s
s por lo
tanto:
2 2
4 1( ) 6 4Y s s s s = + +
Separando por fracciones parciales se tiene:
2
15 7 5 3 15 7 5120 2 20( )
(3 5) (3 5)Y s
s s s s
− + − +−
= − + + ++ + + −
mediante la transformada inversa de Laplace se obtiene la respuesta en el tiempo:
( )(3 5) (3 5)3 15 7 5( )
2 20t t y t t e e − − − +− +
= − + −
podemos ver gráficamente la respuesta del sistema en la siguiente figura:
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 8/63
Sistemas de Control Continuo
8
Time (sec.)
A m p l i t u d e
Step Response
0 1 2 3 4 5 6 7 80
1
2
3
4
5
6
7
Fig. 3 Respuesta a rampa unitaria

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 9/63
Sistemas de Control Continuo
9
Problema 4.-
Determine la respuesta al escalón unitario de un sistema de control de
realimentación unitaria cuya función de transferencia de lazo abierto es:
= +7( )
( 7)H s
s s
y obtenga el tiempo de crecimiento, el tiempo pico, el máximo sobrepaso y el
tiempo de establecimiento.
Solución.
De la forma general:
ω
ω ζ ω =
+ +
2
2 2( )
2n
n n
H s s s
por comparación tenemos:
ω = =7 2.646n
ξ = =7
1.3232
La solución general en el dominio del tiempo es:
1 2
21 2
( ) 12 1
s t s t n e e
y t s s
ω
ξ
− −⎛ ⎞= + −⎜ ⎟
− ⎝ ⎠
siendo:
ξ ξ ω = + −21 ( 1) n s ξ ξ ω = − −2
2 ( 1) n s
de la función de transferencia del sistema se obtiene los polos y están dados por:
1 5.79s = − 2 1.1s = −
Como vemos s2 es comparablemente mayor a s1, de modo que el efecto de s1 es
despreciable en la respuesta final del sistema; por lo tanto podemos despreciar el
efecto de este polos, quedando:
2
( ) 1
s t
y t e
−=
− Para mayor claridad podemos revisar el comportamiento de cada ambos sistemas
mediante la grafica de ambas funciones en el tiempo:

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 10/63
Sistemas de Control Continuo
10
Time (sec.)
A m p l i t u d e
Step Response
0 1 2 3 4 5 6 70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fig. 4 Respuesta al escalón unitario
Como podemos ver la consideración anteriormente hecha es aceptable, ya que la
diferencia es mínima. Lo que nos permite realizar simplificación en los cálculos :
Tiempo de levantamiento: como el sistema es sobreamortiguado el tiempo tr se
calculará con el tiempo del 10% al 90%.
= −(90%) (10%)r t t t ; ⎛ ⎞= − ⎜ ⎟⎝ ⎠2
1 0.1ln
0.9r t
s
tr = 1.83 s
Tiempo de retardo, el tiempo de retardo para un sistema sobreamortiguado es:−= − 20.5 1 d s t e
despejando td tenemos:
= −1
ln(0.5)d t s
reemplazando:
td = 0.58 s
Tiempo de establecimiento: Para un error en estado estacionario del 2%, tenemos:
−
= −20.02 1
s ts
e despejando ts tenemos:
= − =1
ln(0.02) 3.26s t seg s
En un sistema sobreamortiguado no existen los parámetros de tiempo pico y
máximo sobrepaso.

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 11/63
Sistemas de Control Continuo
11
Problema 5.-
Sea la función de transferencia de un sistema:
+ +=+ + + + +
2
24 5( )
( 8 20)( 1)( 3)( 5)s s G s
s s s s s ;
determinar el lugar de raíces de dicho sistema y realizar un análisis del mismo.
Solución.-
1.- Se determina los lugares geométricos de las raíces sobre el eje real, para ello se
utiliza la condición de ángulo.
Im
Re
2
1
-1
-2
-1-3-5
Fig. 5 Posible lugar de Raíces
2.- Se determina las asíntotas del Lugar Geométrico de las Raíces:
θ ° +
= ±−
180 (2 1)k
n m ; = 0,1,2,...k
con =n número de polos y =m número de ceros, entonces:
θ ° +
= ± = ° +180 (2 1) 60 (2 1)3k k ;
θ = °0 60 , θ = °1 180 , θ = °2 300
3.- Se determina la intersección de las asíntotas con el eje real.

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 12/63
Sistemas de Control Continuo
12
σ −
=−
∑ ∑polos ceros
n m ;
entonces:
σ + + + + − +
= = − = −−
(1 3 5 4 4) (2 2) 144.67
5 2 3
Hasta aquí se tiene la siguiente grafica
Im
Re
2
1
-1
-2
-1-3-5
Fig. 6 Puntos de Intersección y asíntotas del LGR
4.- Como se tiene 2 ramas unidas sobre el eje real (lugar de raíces entre –1 y -3),
ellos quiebran en su trayectoria a °90 , el punto de quiebre se determina utilizando:
=( )
0df s
ds , donde = +( ) 1 ( ) f s G s
reemplazando se tiene:
+ += +
+ + + + +
2
2
4 5( ) 1
( 8 20)( 1)( 3)( 5)
s s f s
s s s s s ;
finalmente:
= = + + + + + + =6 5 4 3 2( )( ) 3 50 344 1269 2661 3190 1700 0
df s P s s s s s s s
ds ;
cuyas raíces son:
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 13/63
Sistemas de Control Continuo
13
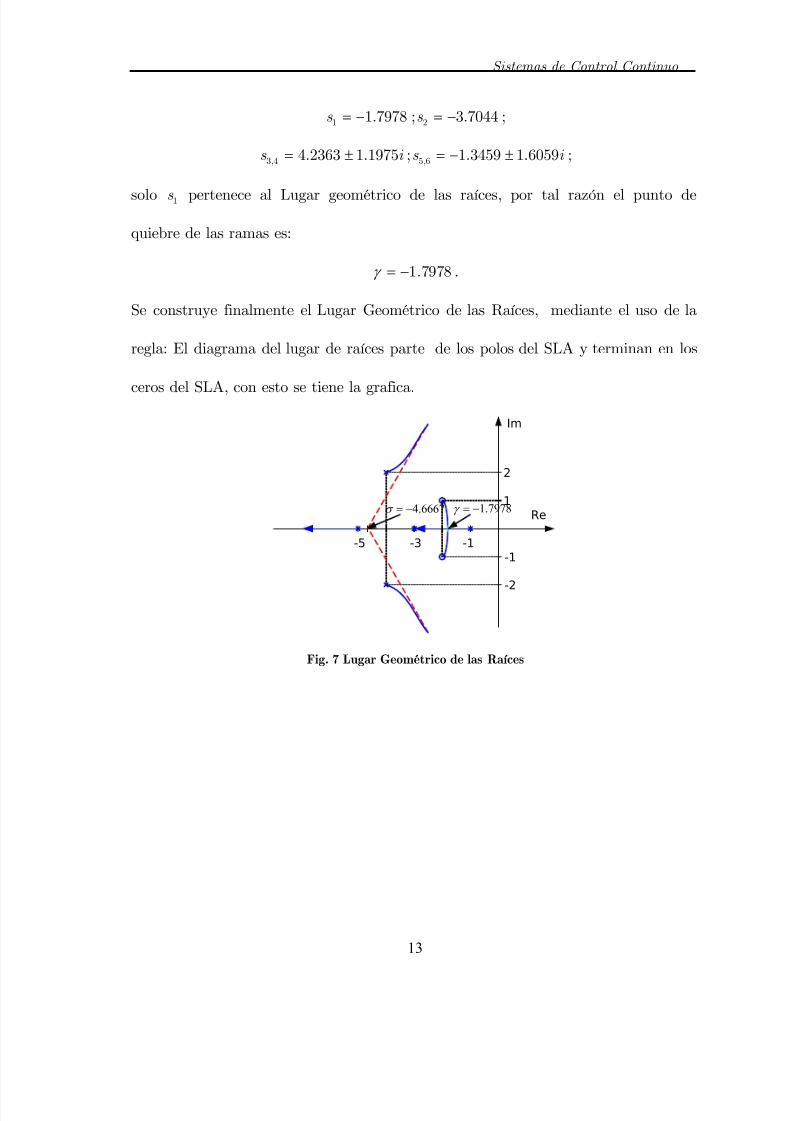
= −1 1.7978s ; = −2 3.7044s ;
= ±3,4 4.2363 1.1975s i ; = − ±5,6 1.3459 1.6059s i ;
solo 1s pertenece al Lugar geométrico de las raíces, por tal razón el punto de
quiebre de las ramas es:
γ = −1.7978 .
Se construye finalmente el Lugar Geométrico de las Raíces, mediante el uso de la
regla: El diagrama del lugar de raíces parte de los polos del SLA y terminan en los
ceros del SLA, con esto se tiene la grafica.
Im
Re
2
1
-1
-2
-1-3-5
7978.1−=γ 6667.4−=σ
Fig. 7 Lugar Geométrico de las Raíces
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 14/63
Sistemas de Control Continuo
14
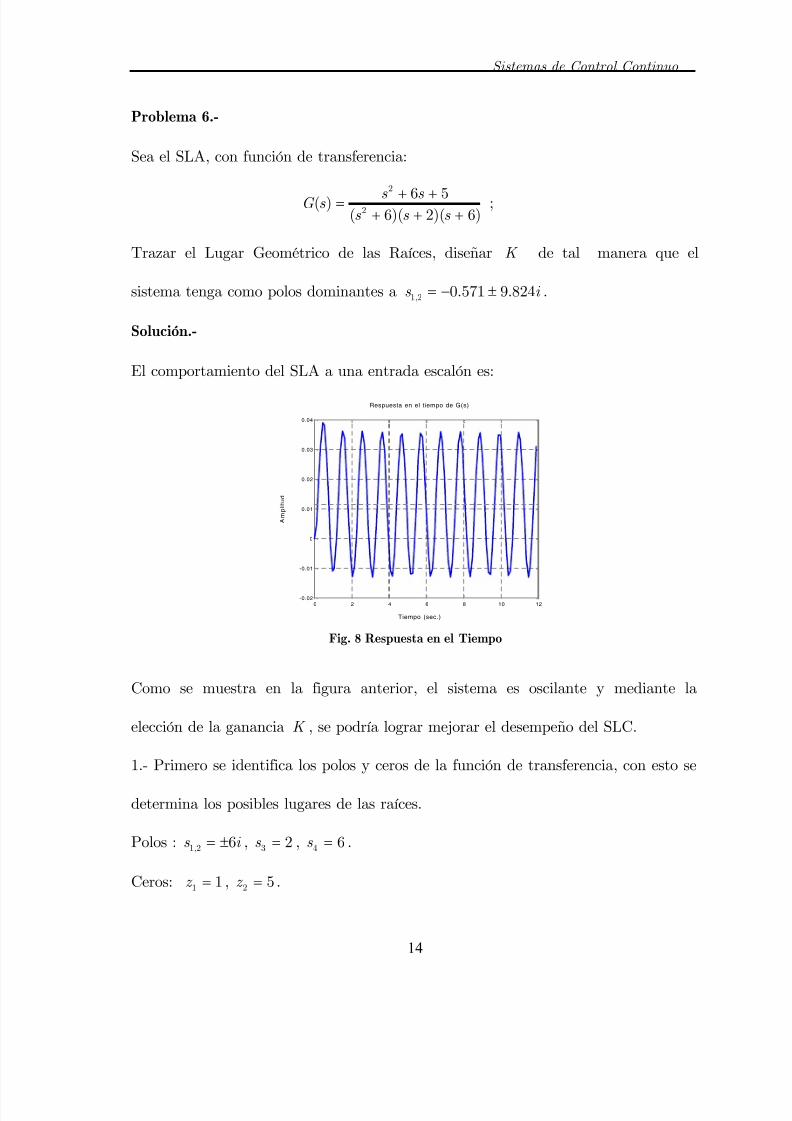
Problema 6.-
Sea el SLA, con función de transferencia:
+ +=+ + +
2
26 5( )
( 6)( 2)( 6)s s G s
s s s ;
Trazar el Lugar Geométrico de las Raíces, diseñar K de tal manera que el
sistema tenga como polos dominantes a = − ±1,2 0.571 9.824s i .
Solución.-
El comportamiento del SLA a una entrada escalón es:
Tiempo (sec.)
A m
p l i t u d
Respuesta en el tiempo de G(s)
0 2 4 6 8 10 12-0.02
-0.01
0
0.01
0.02
0.03
0.04
Fig. 8 Respuesta en el Tiempo
Como se muestra en la figura anterior, el sistema es oscilante y mediante la
elección de la ganancia K , se podría lograr mejorar el desempeño del SLC.
1.- Primero se identifica los polos y ceros de la función de transferencia, con esto se
determina los posibles lugares de las raíces.
Polos : = ±1,2 6s i , =3 2s , =4 6s .
Ceros: =1 1z , =2 5z .

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 15/63
Sistemas de Control Continuo
15
De esa manera se tiene la ubicación de los mismos en el plano complejo:
Im
Re
6
-6
-1-2-5-6
Fig. 9 Posible Lugar Geométricos de Raíces
2.- Determinación de las asíntotas de los lugares geométricos:θ ± ° +
=
−
180 (2 1)k
k
n m
;
θ ± +
= = ± ° +−
180(2 1)90 (2 1)
4 2k
k k ; (1)
Las asíntotas tiene ángulos :θ = °0 90 , θ = °1 270 ;
3.- Determinación del Punto de intersección de las asíntotas con el eje real.
σ −
=−
∑ ∑polos ceros
n m ;
σ + + − − +
=−
(2 6 6 6 ) (5 1)
4 2
i i ; (2)
El punto de intersección de las asíntotas y el eje real se produce en :
σ = 1 ;
4.- Determinación del puntos de quiebre de las ramas. Nótese que en este ejemplo
no se tiene la unión de dos ramas (polos).
= = =( ) ( )
( ) 0df s dG s
P s ds ds
; (3)
= + + − − =5 4 3( ) 2 26 116 384 1152 0P s s s s s ; (4)
cuyas raíces son:

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 16/63
Sistemas de Control Continuo
16
=1 2.012s ; = − ±2,3 5.27 2.101s i ; = − ±4,5 2.23 1.971s i ;
ninguno de estas soluciones pertenece al Lugar de Raíces, entonces quiere decir que
no hay puntos de quiebre.
5.- Determinación de los ángulos con que el lugar de raíces deja a los polos:
ω = ° + − ∠ + ∠∑ ∑180 (2 1)k k otros polos ceros ;
ω = ° − ° + ° + ° + ° + ° = °1 180 (27 57 90 ) (32 72 ) 110 ; (5)
como los polos son conjugados:
ω = − − ° − ° − ° + − ° − ° = ° = − °2 180 ( 27 57 90 ) ( 32 72 ) 250 110 . (6)
La mediciones se muestran en la figura siguiente.
6.- El valor de K se halla reemplazando el polo deseado (este polo debe estar en el
LGR), y cumple con:
1.6456
)128)(36(
)(
1
824.9571.0
2
22
=++
+++==
+−=is
ss
sss
sGK . (7)
Im
Re
6
-6
-1-2-5-6
2732
5772
Fig. 10 Medición de ángulos
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 17/63
Sistemas de Control Continuo
17
Im
Re
6
-6
-1-2-5-6
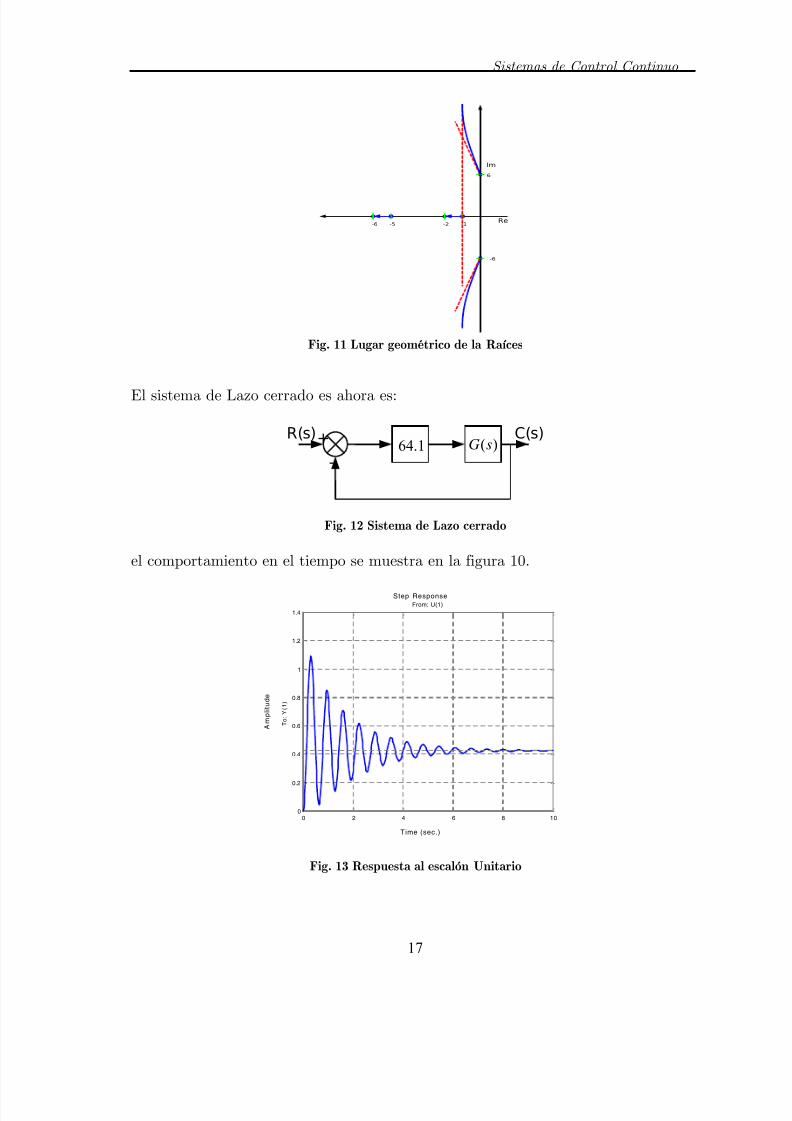
Fig. 11 Lugar geométrico de la Raíces
El sistema de Lazo cerrado es ahora es:
+
-)(sG1.64
R(s) C(s)
Fig. 12 Sistema de Lazo cerrado
el comportamiento en el tiempo se muestra en la figura 10.
Time (sec.)
A m p l i t u d e
Step Response
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
From: U(1)
T o : Y ( 1 )
Fig. 13 Respuesta al escalón Unitario

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 18/63
Sistemas de Control Continuo
18
Es importante aclarar que el sistema en lazo abierto era oscilatorio, en cambio con
el uso de método del Lugar Geométrico de las raíces se ha encontrado una ganancia
la misma que hace que el sistema de lazo cerrado tenga mayor desempeño, aunque
con un sobre paso bastante grande.
El diseño anterior puede ser resuelto utilizando algunas herramientas
computacionales. Ahora se presenta el desarrollo del diseño utilizando rutinas de
MATLAB.
El Lugar Geométrico de Raíces es trazado mediante la función rlocus , se utiliza
el siguiente script para generar tal grafica:
num=[ 1 6 5] ;den=[ 1 8 48 288 432] ;si sl a=t f ( num, den) ;rlocus(sisla);
Generando :
-7 -6 -5 -4 -3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
20
Real Axis
I m a g
A x i s
Fig. 14 Lugar de raíces
mediante la función rlocfind se busca los polos deseados:

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 19/63
Sistemas de Control Continuo
19
z=0. 057;wn=9. 84;sgr i d( z, wn) ;rlocfind(sisla);
-7 -6 -5 -4 -3 -2 -1 0 1 2 3-40
-30
-20
-10
0
10
20
30
40
Real Axis
I m a g A x i s
Fig. 15 Resultado del comando rlocfind
esta función determina la ganancia K para obtener los polos deseados, el resultado
fue el siguiente:
» rlocfind(sisla)
Select a point in the graphics window
selected_point =
-0.59447004608295 + 9.59064327485381i
ans =
59.81092426934112.

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 20/63
Sistemas de Control Continuo
20
Problema 7.-
Sea un proceso físico, el mismo que puede ser modelado mediante, la siguiente
función de transferencia:
= + +1.06( )
( 1)( 2)G s
s s s ;
A este proceso se le aplica realimentación unitaria, tal como se ve en la figura:
)2)(1(
06.1
++ sss+-
( )R s ( )Y s
Fig. 16 Proceso con realimentación unitaria.
a) Determine la función de transferencia del sistema de lazo cerrado.
b) Determine los polos dominantes del sistema.
c) Determine la constante de error de velocidad.
d) Determine el Lugar Geométrico de las Raíces.
e) Hallar el intervalo de la constante K de manera que el sistema sea estable.
f) Diseñar un compensador de retraso para que el error estático de velocidad
incremente hasta casi 5 [1/seg] , sin que los polos del sistema de lazo cerradocon 1=K , no cambien en forma notable.
Solución.-
a). La función de transferencia para un sistema con realimentación unitaria es:
1.06
( ) ( 1)( 2)1.06
( ) 1 ( 1)( 2)
Y s s s s
R s s s s
+ +=
+ + +
;
simplificando:
( ) 1.06
( ) ( 1)( 2) 1.06
Y s
R s s s s =
+ + +;
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 21/63
Sistemas de Control Continuo
21
b). Los polos dominantes se determinan con las raíces del denominador, esto es:
006.1)2)(1( =+++ sss ;
entonces:
= − ±1,2 0.33 0.58s j y = −3 2.33s ;los polos que están mas cerca del eje imaginario son los dominantes, entonces:
js 58.033.02,1 ±−= ;
de aquí se puede obtener el coeficiente de amortiguamiento y la frecuencia
natural no amortiguada de la siguiente manera:
Sabemos que:
ζω =0.33 n y ω ζ = − 20.58 1n ;
resolviendo ambas ecuaciones, se tiene que, el coeficiente de amortiguamiento
es:
5.0=ζ ;
y la frecuencia natural no amortiguada es:
ω = 0.66n ;
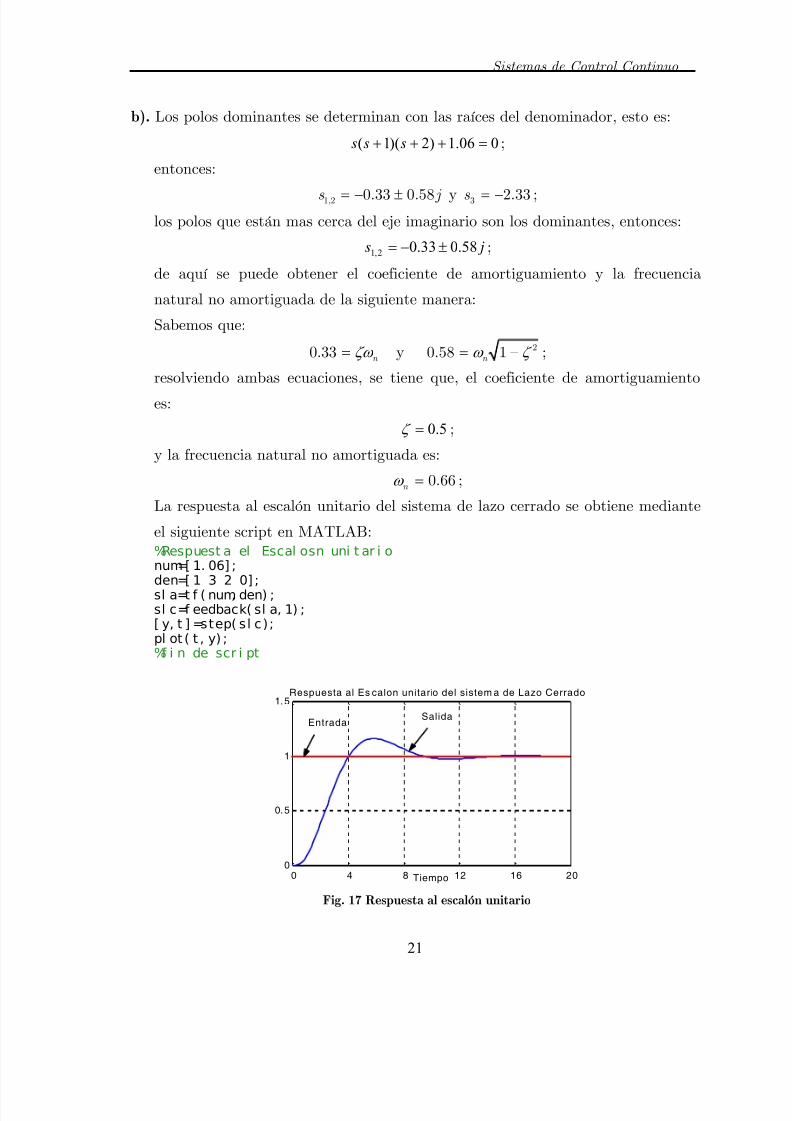
La respuesta al escalón unitario del sistema de lazo cerrado se obtiene mediante
el siguiente script en MATLAB:%Respuest a el Escal osn uni t ar i o num=[ 1. 06] ;den=[ 1 3 2 0] ;sl a=t f ( num, den) ;sl c=f eedback( sl a, 1) ;[ y, t ] =step( sl c);pl ot ( t , y) ;%f i n de scr i pt
0 4 8 12 16 200
0.5
1
1.5Respuesta al Es calon unitario del sistem a de Lazo Cerrado
Tiempo
SalidaEntrada
Fig. 17 Respuesta al escalón unitario

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 22/63
Sistemas de Control Continuo
22
c). La constante de error de velocidad es:
→=
0( )v
s K Lim sG s ;
reemplazando la función de transferencia y resolviendo el limite se tiene que:
= 0.53v K ;
por otro lado el error en estado estacionario para una entrada rampa es:
= = =1 1
1.88680.53
ss
v
e K
la respuesta a una entrada rampa unitaria se la obtiene incluyendo el siguiente
script%Respuest a a l a Rampa uni t ar i a r am=t f ( [ 1] , [ 1 0] ) ;sl cer =ser i es( r am, sl c) ;[ yr , t r ] =step( s l cer) ;
r =t r ;pl ot ( t r , r , t r , yr ) ;%f i n de scri pt
se observa el comportamiento en la siguiente figura:
0 2 4 6 8 10 120
2
4
6
8
10
12Respuesta a una Ram pa unitaria
Tiempo
Entrada
Salida
Fig. 18 Respuesta a la rampa unitaria
Se nota que el error en estado estacionario es bastante grande.
d). Para hallar el Lugar Geométrico de las Raíces se utiliza el siguiente script enMATLAB:num=[ 1. 06] ;den=[ 1 3 2 0] ;sl a=t f ( num, den) ;r l ocus(s l a) ;

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 23/63
Sistemas de Control Continuo
23
-2.5 -2 -1.5 -1 -0.5 0 0.5
-2
-1
0
1
2
Real Axis
I m
a g
A x i s
Lugar Geométrico de las Raíces para el sistema:
G(s)= 1.06 / s(s+1)(s+2)
Fig. 19 Gráfica del Lugar de Raices
e). Para hallar el intervalo en el cual la ganancia K hace que el sistema sea
estable, se utiliza el criterio de Rout-Hurwitz, entonces se analiza la ecuación
característica:
+ =1 ( ) 0KG s ;
reemplazando:
+ =+ +
1.061 0
( 1)( 2)K
s s s ;
operando se tiene:
+ + + + =3 23 2 1.06( 1) 0s s s K ;
Entonces el arreglo de Rout-Hurwitz es:
[ ]
+
− +
+
3
2
1
0
12
31.06( 1)
106 1.06( 1)
31.06( 1)
s
s K
K s
s K
para que el sistema sea estable, los elementos de la primera columna deben ser
positivos, de esta manera se obtienen las siguientes condiciones:
i). [ ]− + >1
6 1.06( 1) 03
k ;
ii). + >1.06( 1) 0K ;
resolviendo las inecuaciones, el intervalo resultante es:

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 24/63
Sistemas de Control Continuo
24
> >4.6604 0K ;
En el inciso d). se determinó que el error en estado estacionario era grande, si
desearíamos incluir la ganancia K , dentro la trayectoria directa modificará el erroren estado estacionario reduciéndolo, sin embargo como se ve el valor de la ganancia
K esta restringido en un pequeño intervalo, tal como se determino anteriormente.
f). El compensador de retraso tiene la forma:
T s
T s
K Ts
TsK sG ccc
β
β β
1
1
1
1)(
+
+=
+
+= ;
La localización del cero y el polo de este compensador deben estar alejados del los
polos dominantes deseado. La contribución angular de este compensador debe ser
bastante pequeña (menor que 7° [Ogata, 2da Edición]). Existen criterios de diseño
que indican que el valor del parámetro β debe ser β < <1 15 .
Con lo dicho anteriormente, la posición del cero será:
=1
0.08T
;
se elige β = 10 ;
entonces el compensador tiene la forma:
+=
+
0.08( )
0.008c c
s G s K
s ;
lo que queda determinar es la ganancia; antes de ello veamos la contribución
angular que da el compensador en la ubicación de los polos dominantes, es decir:
=− +∠ = ∠ + − ∠ +0.33 0.58( ) | 0.08 0.008c s j G s s s ;
=− +∠ = °0.33 0.58( ) | 5.72c s j G s ;
Esta contribución angular modifica el Lugar de Raíces, claro está que dicha
modificación es pequeña tal como se quería.
Ahora la función de transferencia de trayectoria directa, incluido el compensador
es:
+=
+ + +
0.08 1.06( ) ( ) *
0.008 ( 1)( 2)c c
s G s G s K
s s s s ;
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 25/63
Sistemas de Control Continuo
25
lo que es igual :
+=
+ + +
0.08( ) ( )
( 0.008)( 1)( 2)c
s G s G s K
s s s s ;
donde = 1.06 c K K ;
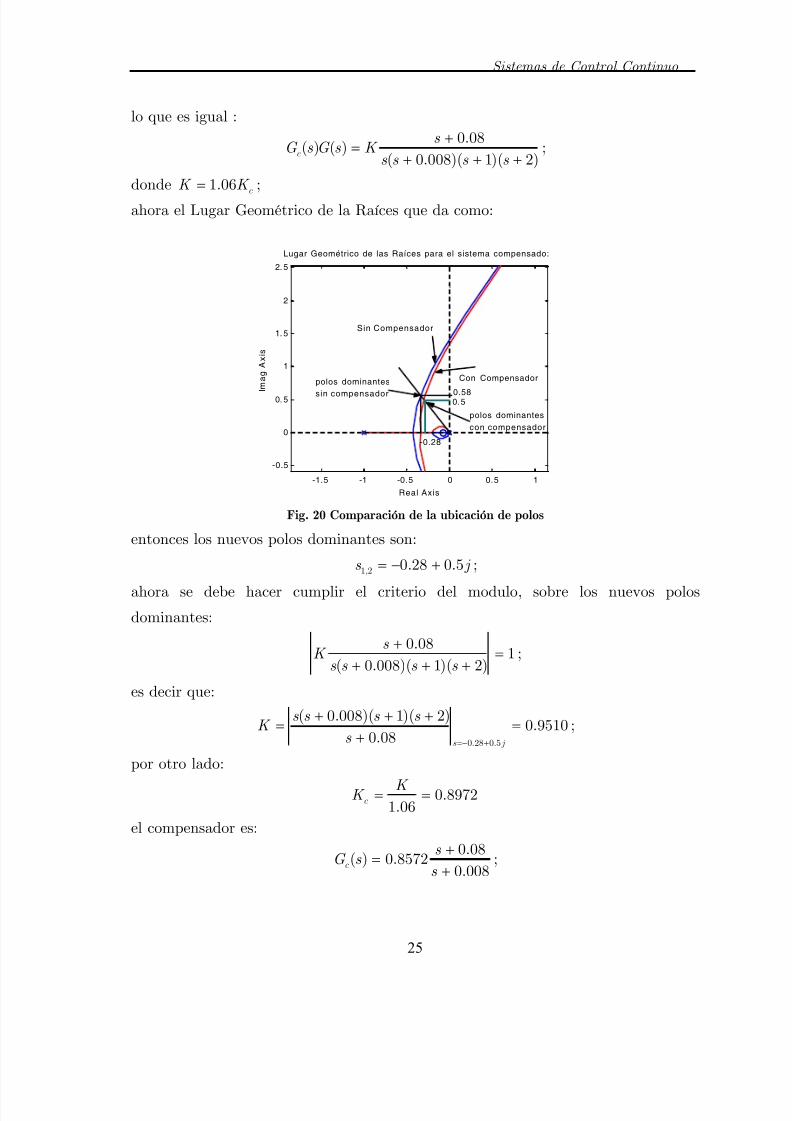
ahora el Lugar Geométrico de la Raíces que da como:
-1.5 -1 -0.5 0 0.5 1
-0.5
0
0. 5
1
1. 5
2
2. 5
Real Axis
I m a g
A x i s
Lugar Geométrico de las Raíces para el sistema compensado:
Sin Compensador
Con Compensadorpolos dominantes
sin compensador
polos dominantes
con compensador
0.580. 5
-0.28
Fig. 20 Comparación de la ubicación de polos
entonces los nuevos polos dominantes son:
= − +1,2 0.28 0.5s j ;
ahora se debe hacer cumplir el criterio del modulo, sobre los nuevos polos
dominantes:
+=
+ + +
0.081
( 0.008)( 1)( 2)
s K
s s s s ;
es decir que:
=− +
+ + += =
+ 0.28 0.5
( 0.008)( 1)( 2)0.9510
0.08 s j
s s s s K
s ;
por otro lado:
= = 0.89721.06
c K K
el compensador es:
+=
+
0.08( ) 0.8572
0.008c
s G s
s ;
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 26/63
Sistemas de Control Continuo
26
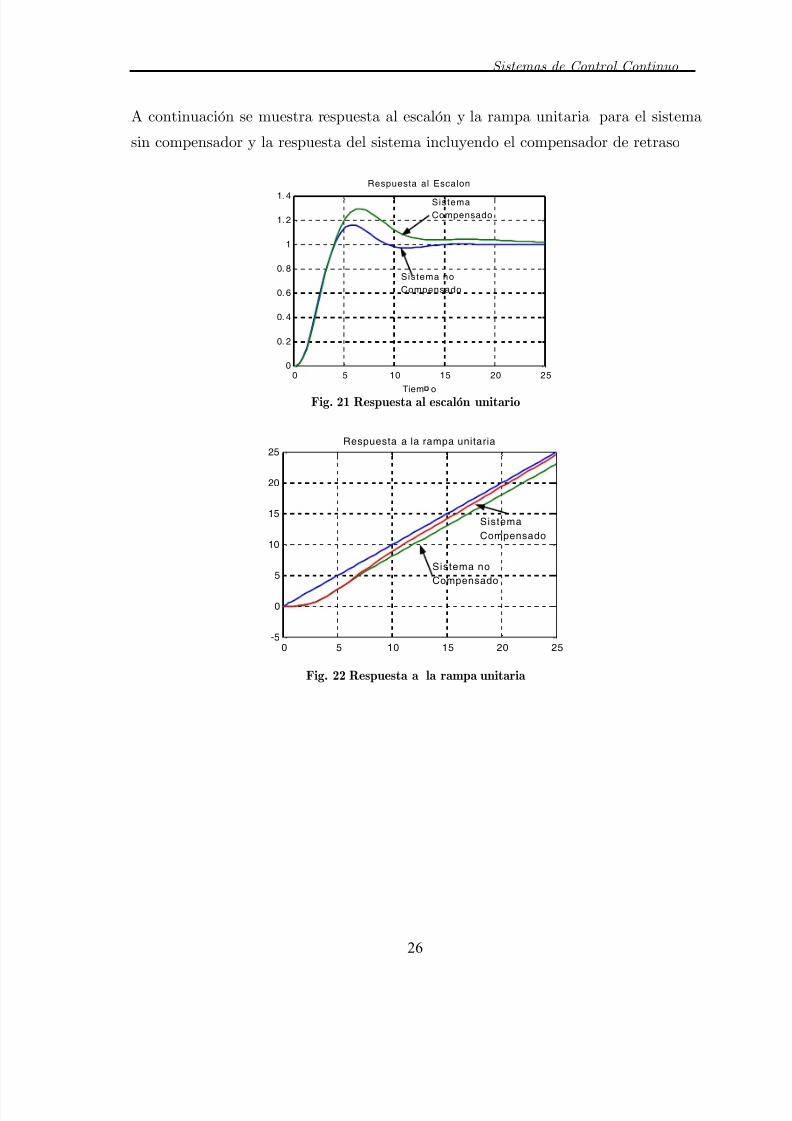
A continuación se muestra respuesta al escalón y la rampa unitaria para el sistema
sin compensador y la respuesta del sistema incluyendo el compensador de retraso
0 5 10 15 20 250
0. 2
0. 4
0. 6
0. 8
1
1. 2
1. 4
Tiem o
Respuesta al Escalon
Sistema
Compensado
Sistema no
Compensado
Fig. 21 Respuesta al escalón unitario
0 5 10 15 20 25-5
0
5
10
15
20
25Respuesta a la rampa unitaria
Sistema
Compensado
Sistema no
Compensado
Fig. 22 Respuesta a la rampa unitaria

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 27/63
Sistemas de Control Continuo
27
Problema 8
Sea el sistema de orientación de satélite de la figura, donde θ es la posición angular
deseada, l es la distancia del eje del propulsor al centro de masa del satélite, β es
el ángulo de efecto de control, la variación del ángulo β es proporcional a la señal
de control u , R es una constante que representa una cierta ganancia estática del
actuador que convierte el control u en velocidad de variación del ángulo β y J es
la inercia efectiva del satélite.
l
β
θ
CM
Orientación
de
ReferenciaOrientación
Deseada
F
Fig. 23 Sistema de orientación de Satélite
Determinar el modelo matemático del sistema, realizar el análisis del sistema lineal
y no lineal mediante simulación y determinar un controlador basado en
realimentación de estados de manera de ubicar e satélite en una posición deseada.
Solución
Las ecuaciones diferenciales que rigen el movimiento del sistema se obtienen de la
segunda ley de Newton:
θ β = = = Fuerza x brazo sin( ) *J Torque neto aplicado F l ;

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 28/63
Sistemas de Control Continuo
28
o en forma compacta:
θ β = sin( )J Fl ;
el ángulo β crece o decrece, de acuerdo al control aplicado mediante la ley de
variación:
β =
d Ru
dt ;
las variables d estado se escogen como:
θ =1x ; θ = 2x y β =3x ;
Entonces el sistema no lineal se describe de la siguiente manera en el espacio de
estados:
= +1 2 1 2( , ,..., ) ( , ,..., )i i i i x f x x x ug x x x ; = 1,2,...i n
es decir:
=1 2x x ;
=2 3sin( )Fl x x J
;
=3x Ru ;
El punto de equilibrio físicamente significativo del sistema, se obtiene igualando a
cero el miembro derecho de cada ecuación de estado. Este resulta ser:
=1x arbitrario ; =2 0x ; =3 0x y = 0u
La respuesta a un escalón unitario del sistema no lineal es:

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 29/63
Sistemas de Control Continuo
29
0 1 2 3 4 5 6 7 8 9 100
50
100
150
0 1 2 3 4 5 6 7 8 9 10
0
5
10
15
0 1 2 3 4 5 6 7 8 9 100
1
2
Respuesta del sistem a No lineal
x1
x2
x3
Fig. 24 Respuesta en Lazo abierto
Se tiene que la forma lineal general de un sistema SISO es:
= +x Ax Bu ;
donde:
== |i e x x A J ;
para linealizar el sistema alrededor de estos puntos se determina la matriz
Jacobiana del sistema, es decir:
⎡ ⎤∂ ∂ ∂⎢ ⎥ ⎡ ⎤ ⎡ ⎤∂ ∂ ∂⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥∂ ∂ ∂ ⎢ ⎥ ⎢ ⎥= = = =⎢ ⎥ ⎢ ⎥ ⎢ ⎥∂ ∂ ∂⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥∂ ∂ ∂ ⎣ ⎦ ⎣ ⎦⎢ ⎥∂ ∂ ∂⎣ ⎦
1 1 1
1 2 3
2 2 23
1 2 3
3 3 3
1 2 3
0 1 0 0 1 0
0 0 cos( ) 0 0
0 0 0 0 0 0
A
f f f
x x x
f f f Fl Fl A J x
x x x J J
f f f
x x x
;

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 30/63
Sistemas de Control Continuo
30
⎡ ⎤∂⎢ ⎥
∂ ⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥∂
= = = ⎢ ⎥⎢ ⎥∂ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥∂ ⎣ ⎦⎢ ⎥∂⎣ ⎦
1
1
2
1
3
1
0
0B
g
u
g B J
u
Rg
u
; ⎡ ⎤=⎣ ⎦1 0 0C ;
luego resolviendo, la representación lineal en el espacio de estados es:
⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥= + ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦ ⎣ ⎦⎣ ⎦
1 1
2 2
33
0 1 00
0 0 0
0 0 0
x x Fl
x x u J
x x R
;
⎡ ⎤⎢ ⎥
⎡ ⎤= ⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦
1
2
3
1 0 0
x
y x
x
;
El sistema linealizado es independiente del punto de equilibrio pues ningún
miembro de la matriz de transferencia tiene como parámetro algún punto de
equilibrio. También es fácil ver que el sistema es completamente controlable pues la
matriz de controlabilidad:
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
0 0
0 0
0 0
FLR
J FLR
C J
R
;
es de rango completo (rango 3), pues su determinante es distinta de cero, por lo
tanto es controlable y es puede llevar el sistema de lazo cerrado a un punto deseado
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 31/63
Sistemas de Control Continuo
31
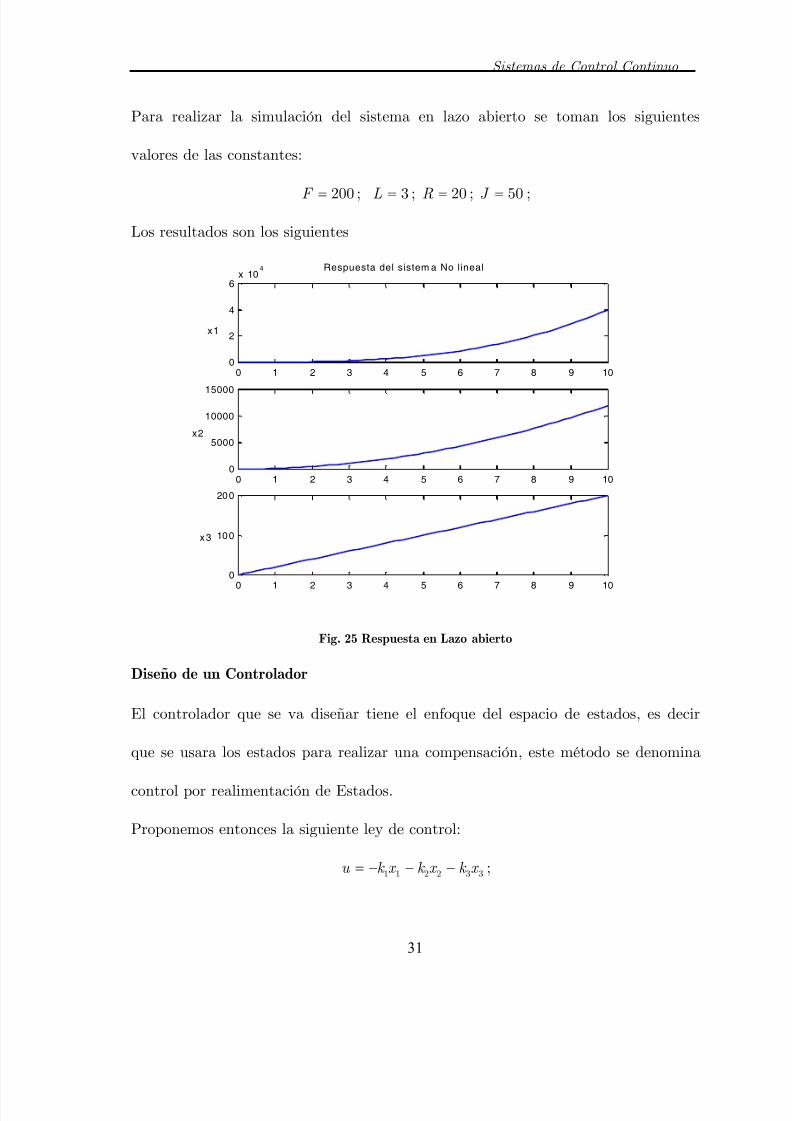
Para realizar la simulación del sistema en lazo abierto se toman los siguientes
valores de las constantes:
= 200F ; = 3L ; = 20R ; = 50J ;
Los resultados son los siguientes
0 1 2 3 4 5 6 7 8 9 10
0
100
200
0 1 2 3 4 5 6 7 8 9 100
2
4
6x 10
4
0 1 2 3 4 5 6 7 8 9 100
5000
10000
15000
Respuesta del sistem a No lineal
x1
x2
x3
Fig. 25 Respuesta en Lazo abierto
Diseño de un Controlador
El controlador que se va diseñar tiene el enfoque del espacio de estados, es decir
que se usara los estados para realizar una compensación, este método se denomina
control por realimentación de Estados.
Proponemos entonces la siguiente ley de control:
= − − −1 1 2 2 3 3u k x k x k x ;
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 32/63
Sistemas de Control Continuo
32
Esta ley de control conlleva, en consecuencia, la siguiente expresión para el sistema
de control en lazo cerrado.
⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥− − −⎢ ⎥ ⎣ ⎦⎣ ⎦ ⎣ ⎦
1 1
2 2
331 2 3
0 1 0
0 0
x x FL
x x J
x x Rk Rk Rk
;
puesto que el interés fundamental está en inducir una dinámica controlada para el
valor de las perturbaciones del estado de naturaleza asintóticamente estable a cero,
los valores de las ganancia 1k , 2k y 3k deben especificarse de tal manera que los
autovalores del sistema autónomo anterior(sistema de lazo cerrado) tengan parte
real negativa. Con el objetivo de hacer está especificación calculamos el polinomio
característico y lo igualamos a alguno del cual sabemos tiene sus raíces en el
semiplano izquierdo en valores preestablecidos.
El polinomio característico del sistema de lazo cerrado está dado por:
−⎡ ⎤⎢ ⎥⎢ ⎥− + = − = + + +⎢ ⎥⎢ ⎥+⎣ ⎦
3 2 2 13
1 2 3
1 0
det( ) det 0
s
FL FLRk FLRk sI A bk s s Rk s s
J J J Rk Rk s Rk
como puede apreciarse de la formación de este polinomio característico, los
parámetros de diseño intervienen independientemente en cada término del
polinomio. Este hecho permitirá obtener estos valores al igualar el polinomio
característico deseado, cuyos polos se encuentran en el semiplano izquierdo.
Supongamos que deseamos contar con una localización de polos como la que se
muestra en la figura:

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 33/63
Sistemas de Control Continuo
33
cj
-cj
ab
Fig. 26 Ubicación de Polos deseados
Es decir, deseamos que el polinomio característico en lazo cerrado por:
= + + − + + = + + + +2 2 2( ) ( )( )( ) ( )( 2 )d p s s a s b jc s b jc s a s bs b c ;
donde a, b y c, son conocidos y se escogen de tal manera que el sistema de lazo
cerrado tenga características deseables. Igualando, los coeficientes de las mismas
potencias de ambos polinomios obtenemos el siguiente conjunto de ecuaciones para
los parámetros de diseño:
+=
2 2
1
( )a b c k J
FLR;
+ +=
2 2
2
2b c abk J
FLR;
+=3
2b a k
R;
Para realizar la verificación del diseño del controlador, se utilizaron los siguientes
datos en le controlador: = 2a ; = 3.5b ; = 12.75c ;
las condiciones iniciales del sistema son:
=1 2x ; =1 0x ; =3 0x ;
el valor de referencia es: =1 2.5ref x ;
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 34/63
Sistemas de Control Continuo
34
0 1 2 3 4 5 6 7 8 9 10
-0.5
0
0 .5
1
0 1 2 3 4 5 6 7 8 9 102
2 .5
3
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
Res pu es t a de l s is t em a e Laz o c e r rado
x 1
x 2
x 3
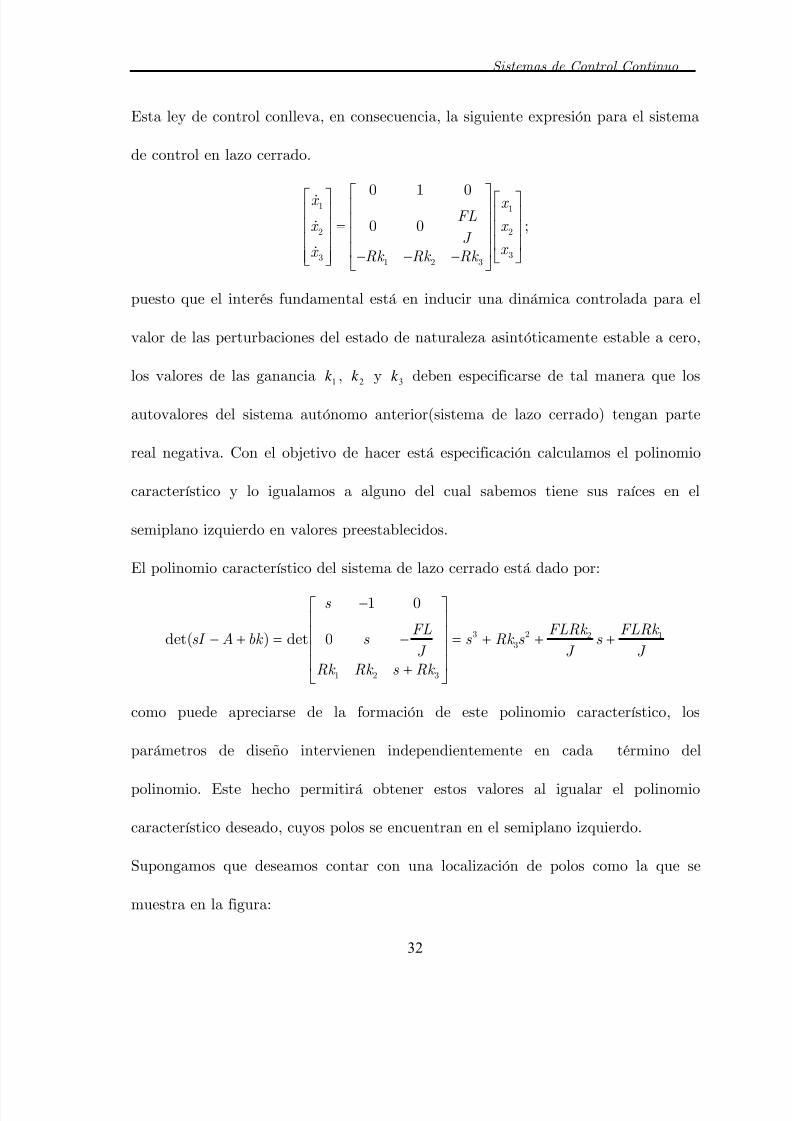
x 1 re f
Fig. 27 Respuesta a la referencia deseada 2.5mm
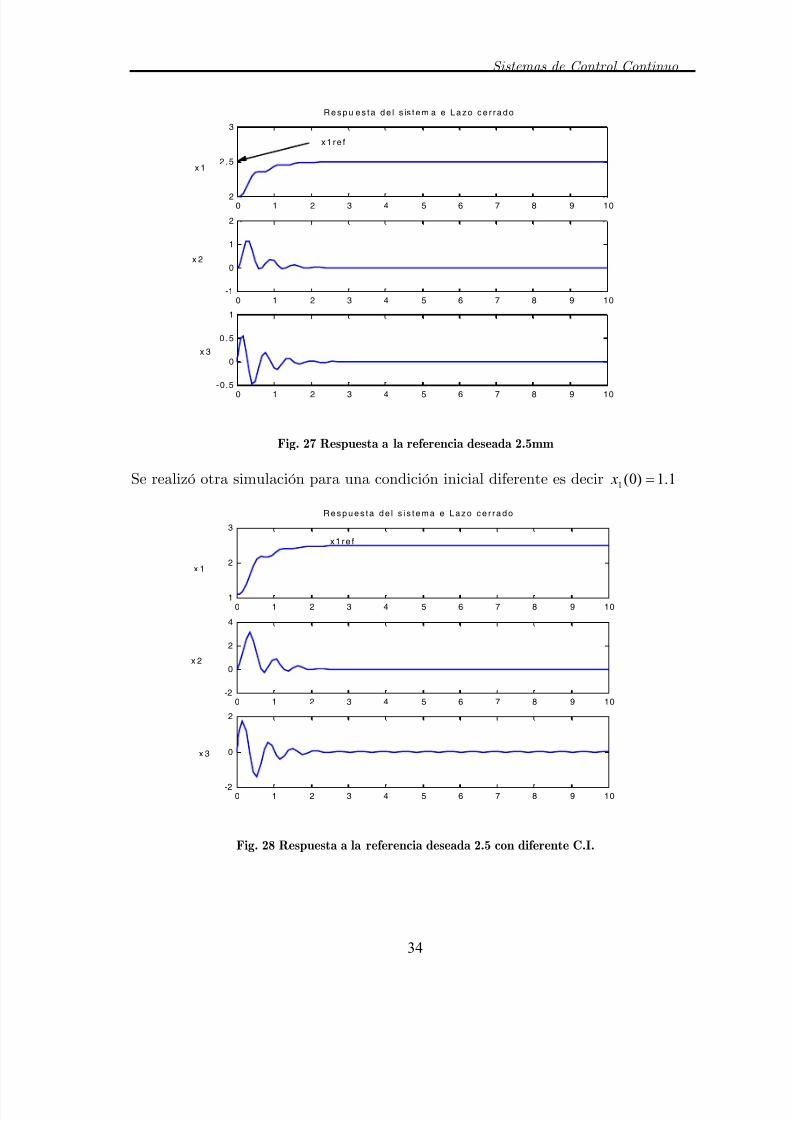
Se realizó otra simulación para una condición inicial diferente es decir 1.1)0(1 = x
0 1 2 3 4 5 6 7 8 9 10-2
0
2
0 1 2 3 4 5 6 7 8 9 101
2
3
0 1 2 3 4 5 6 7 8 9 10-2
0
2
4
Res pues t a de l s i s t em a e Laz o c e r rado
x 1
x 2
x 3
x 1 re f
Fig. 28 Respuesta a la referencia deseada 2.5 con diferente C.I.
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 35/63
Sistemas de Control Continuo
35
es claro notar que cuando la condición inicial del sistema está próxima a la
referencia, el controlador realiza óptimamente su trabajo.
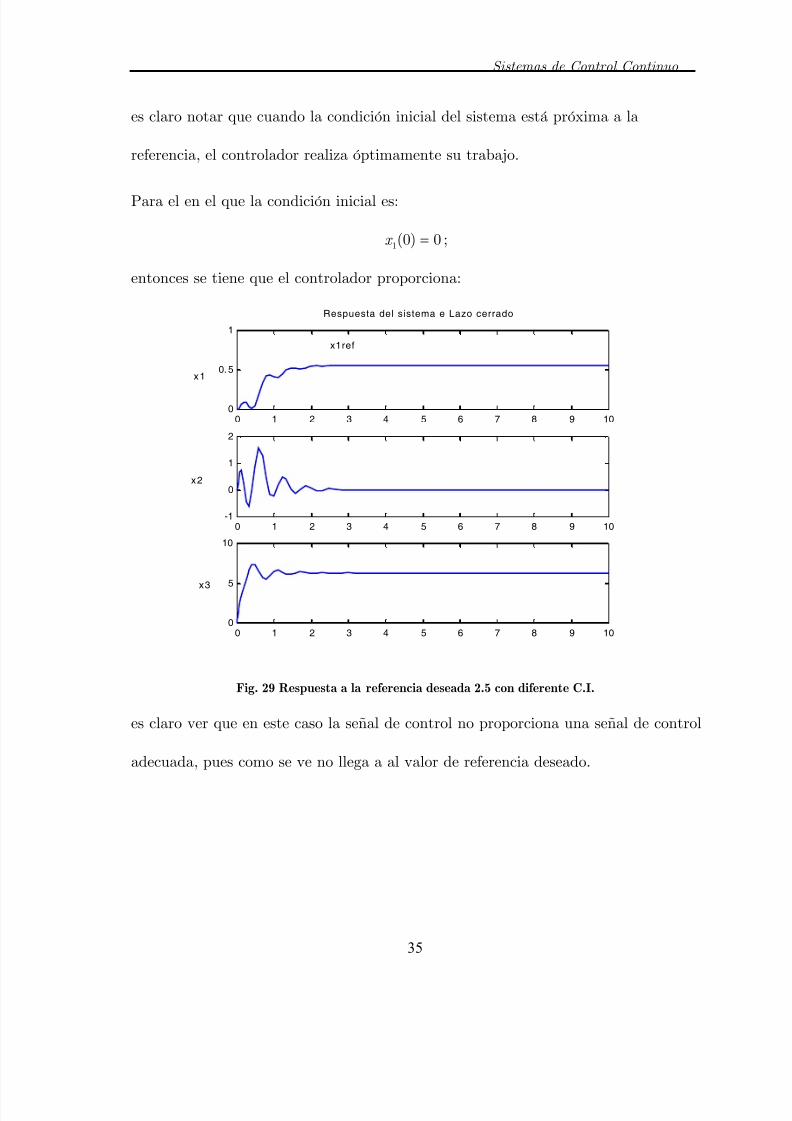
Para el en el que la condición inicial es:
=1(0) 0x ;
entonces se tiene que el controlador proporciona:
0 1 2 3 4 5 6 7 8 9 100
5
10
0 1 2 3 4 5 6 7 8 9 100
0. 5
1
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
Respuesta del sistema e Lazo cerrado
x1
x2
x3
x1ref
Fig. 29 Respuesta a la referencia deseada 2.5 con diferente C.I.
es claro ver que en este caso la señal de control no proporciona una señal de control
adecuada, pues como se ve no llega a al valor de referencia deseado.
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 36/63
Sistemas de Control Continuo
36
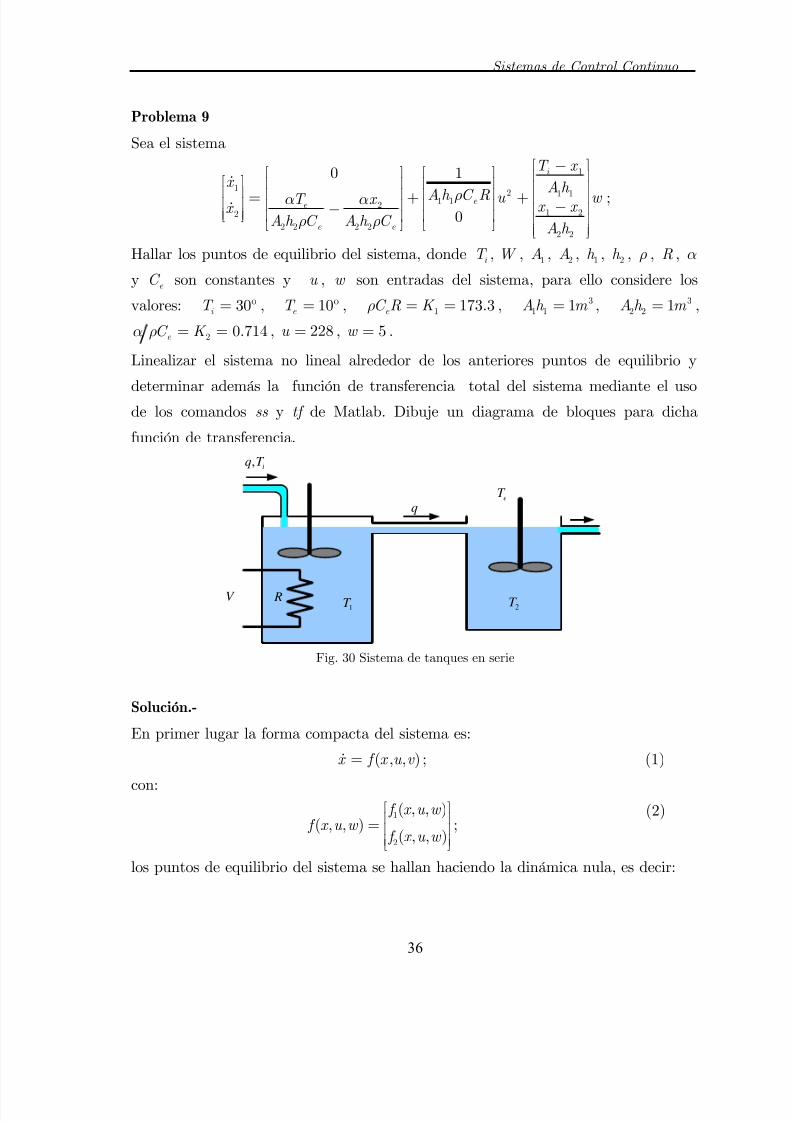
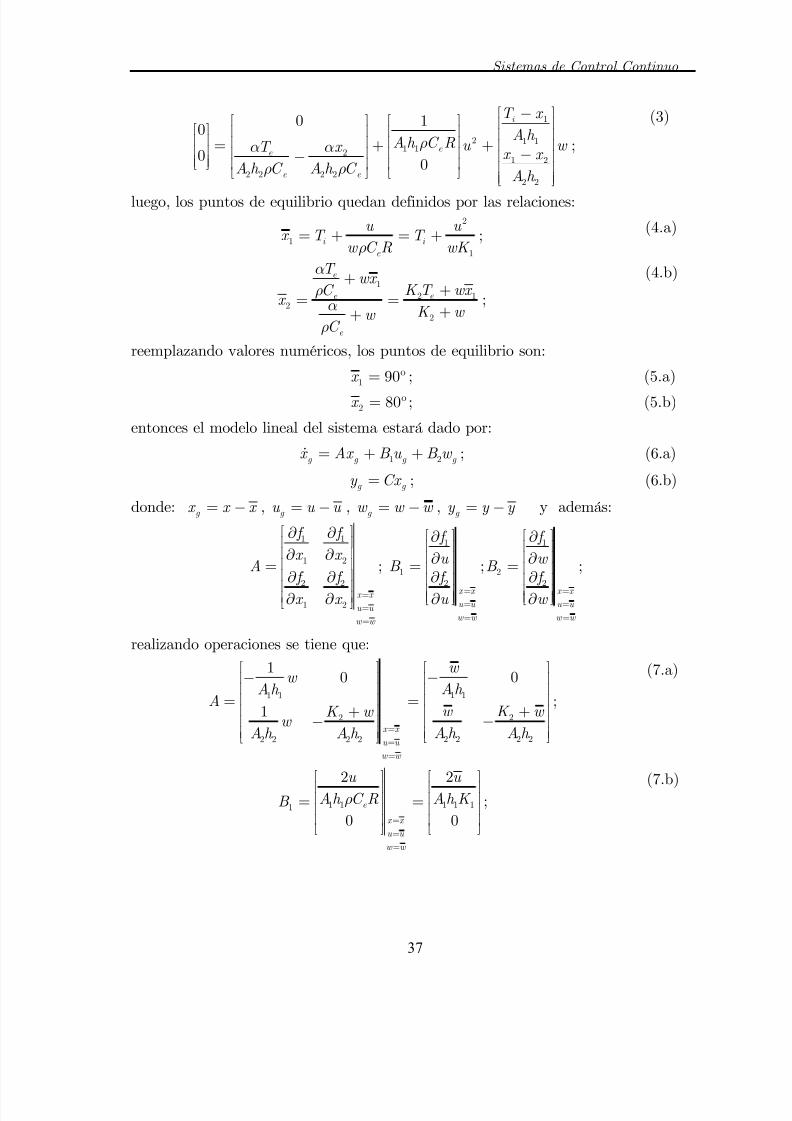
Problema 9
Sea el sistema
1
1
2 1 11 121 22
2 2 2 22 2
0 1
0
i
e e
e e
T x x Ah
Ah C R u w T x x x x A h C A h C A h
ρα α
ρ ρ
⎡ − ⎤⎡ ⎤ ⎡ ⎤ ⎢ ⎥⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥= + + ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ −− ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎢ ⎥⎣ ⎦
;
Hallar los puntos de equilibrio del sistema, donde i T , W , 1A , 2A , 1h , 2h , ρ , R , α
y e C son constantes y u , w son entradas del sistema, para ello considere los
valores: 30ºi T = , 10ºe T = , 1 173.3e C R K ρ = = , 31 1 1Ah m = , 3
2 2 1Ah m = ,
2 0.714e C K α ρ = = , 228u = , 5w = .
Linealizar el sistema no lineal alrededor de los anteriores puntos de equilibrio y
determinar además la función de transferencia total del sistema mediante el usode los comandos ss y tf de Matlab. Dibuje un diagrama de bloques para dicha
función de transferencia.
V R
eT q
2T
iT q,
1T
Fig. 30 Sistema de tanques en serie
Solución.-
En primer lugar la forma compacta del sistema es:
( , , )x f x u v = ; (1)
con:
1
2
( , , )( , , )
( , , )
f x u w f x u w
f x u w
⎡ ⎤⎢ ⎥
= ⎢ ⎥⎢ ⎥⎣ ⎦
;(2)
los puntos de equilibrio del sistema se hallan haciendo la dinámica nula, es decir:
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 37/63
Sistemas de Control Continuo
37
1
2 1 11 12
1 2
2 2 2 22 2
0 10
00
i
e e
e e
T x
Ah Ah C R u w T x x x A h C A h C A h
ρα α
ρ ρ
⎡ − ⎤⎡ ⎤ ⎡ ⎤ ⎢ ⎥⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥= + + ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ −− ⎢ ⎥⎢ ⎥⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎢ ⎥⎣ ⎦
;
(3)
luego, los puntos de equilibrio quedan definidos por las relaciones:2
1
1
i i
e
u u x T T
w C R wK ρ= + = + ;
(4.a)
1
2 12
2
e
e e
e
T wx
K T wx C x
K w w C
α
ρα
ρ
++
= =++
;
(4.b)
reemplazando valores numéricos, los puntos de equilibrio son:
1 90ºx = ; (5.a)
2 80ºx = ; (5.b)
entonces el modelo lineal del sistema estará dado por:
1 2g g g g x Ax B u B w = + + ; (6.a)
g g y Cx = ; (6.b)
donde: g x x x = − , g u u u = − , g w w w = − , g y y y = − y además:
1 1
1 2
2 2
1 2x x
u u
w w
f f
x x A
f f
x x =
=
=
⎡ ⎤∂ ∂⎢ ⎥⎢ ⎥∂ ∂⎢ ⎥=⎢ ⎥∂ ∂⎢ ⎥⎢ ⎥∂ ∂⎣ ⎦
;
1
12
x x u u
w w
f
u B f
u =
=
=
⎡ ⎤∂⎢ ⎥⎢ ⎥∂
= ⎢ ⎥∂⎢ ⎥
⎢ ⎥⎢ ⎥∂⎣ ⎦
;
1
22
x x u u
w w
f
w B f
w =
=
=
⎡ ⎤∂⎢ ⎥⎢ ⎥∂
= ⎢ ⎥∂⎢ ⎥
⎢ ⎥⎢ ⎥∂⎣ ⎦
;
realizando operaciones se tiene que:
1 11 1
22
2 2 2 22 2 2 2
100
1x x
u u
w w
w w
Ah Ah A
w K w K w w
Ah Ah Ah Ah =
=
=
⎡ ⎤ ⎡ ⎤−−⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ++ ⎢ ⎥
−−⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
;
(7.a)
1 1 1 1 11
2 2
0 0e
x x
u u
w w
u u
Ah C R Ah K B ρ
=
=
=
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
;(7.b)
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 38/63
Sistemas de Control Continuo
38
11
1 11 12
1 2 1 2
2 2 2 2
i i
x x
u u
w w
T x T x
Ah Ah B
x x x x
Ah Ah =
=
=
⎡ − ⎤⎡ − ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥= =⎢ ⎥
− −⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦
;
(7.c)
reemplazando valores numéricos respectivos el modelo lineal es:
5 0 602.63
5 5.714 0 10g g g g x x u w − ⎡− ⎤⎡ ⎤ ⎡ ⎤
⎢ ⎥⎢ ⎥ ⎢ ⎥= + + ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
;(8.a)
[ ] gg x y 10= ; (8.b)
el siguiente Script en Matlab determina la función de transferencia del sistema
[ ]( ) det( )G s C sI A B = − % Si st ema de Tanques Tér mi cos
% Li neal i zaci ón al r ededor de punt os de equi l i br i o% Tomando en cuent a l as dos ent r adas: Fl uj o y Vol t aj eA1 = 1;A2 = 1;h1 = 1;h2 = 1;
Ti = 30; Te = 10;x10 = 90;x20 = 80;u0 = 228;v0 = 5;k1 = 173. 28;k2 = 0. 714;
a11 = - v0/ ( A1*h1) ;a12 = 0;a21 = v0/ ( A2*h2) ;a22 = - v0/ ( A2*h2) - k2/ ( A2*h2) ;% Matr i z de estadoA = [ a11 a12; a21 a22] ;% Matr i z de ent r adab11 = 2*u0/ ( A1*h1*k1) ;b12 = ( Ti - x10) / ( A1*h1) ;b21 = 0;b22 = ( x10- x20) / ( A2*h2) ;B = [ b11 b12; b21 b22] ;% MAt r i ces de ent r ada por separado
B1 = [ b11; b21] ;B2 = [ b12; b22] ;% Mat r i z de sal i dac1 = 0;c2 = 1;C =[ c1 c2] ;% Matr i z de acopl ami ent oD = [ 0 0] ;% Funci ón de t r ansf er enci a
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 39/63
Sistemas de Control Continuo
39
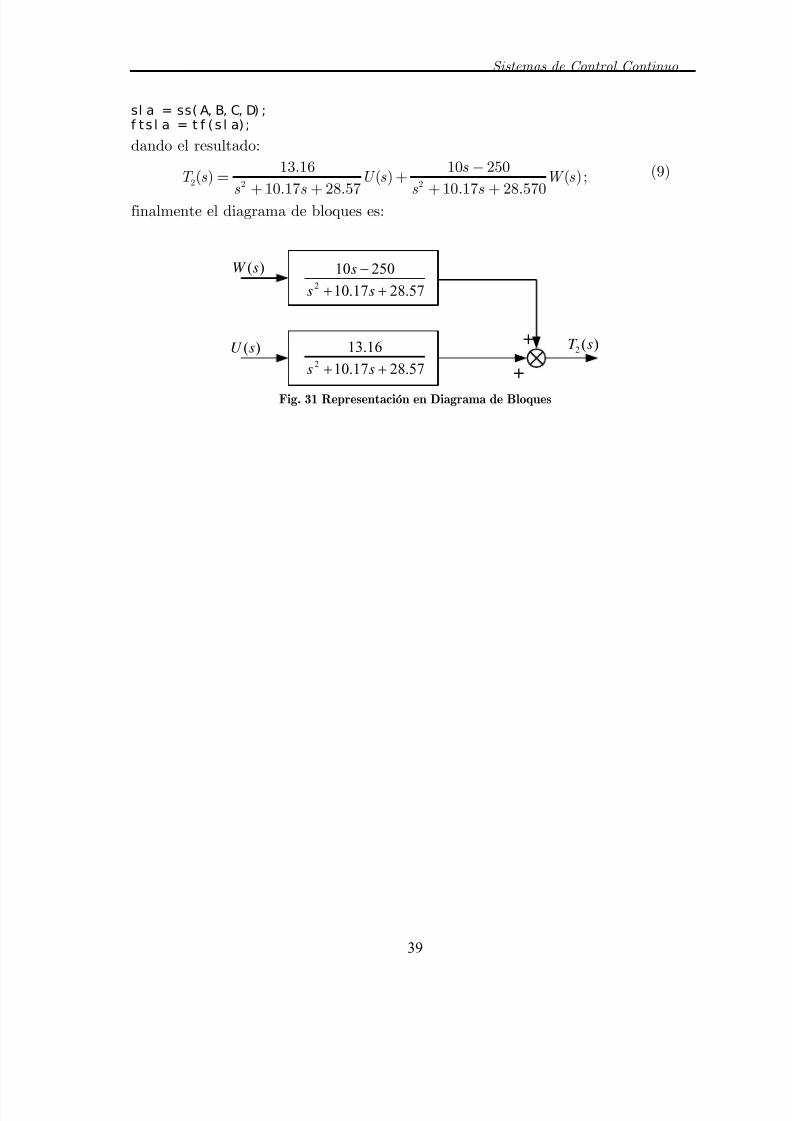
sl a = ss( A, B, C, D) ;f ts l a = t f (s l a) ;
dando el resultado:
2 2 2
13.16 10 250( ) ( ) ( )
10.17 28.57 10.17 28.570
s T s U s W s
s s s s
−= +
+ + + +; (9)
finalmente el diagrama de bloques es:
57.2817.10
16.132 ++ ss
57.2817.10
250102 ++
−
ss
s
+
+
)(sU
)(sW
)(2 sT
Fig. 31 Representación en Diagrama de Bloques
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 40/63
Sistemas de Control Continuo
40
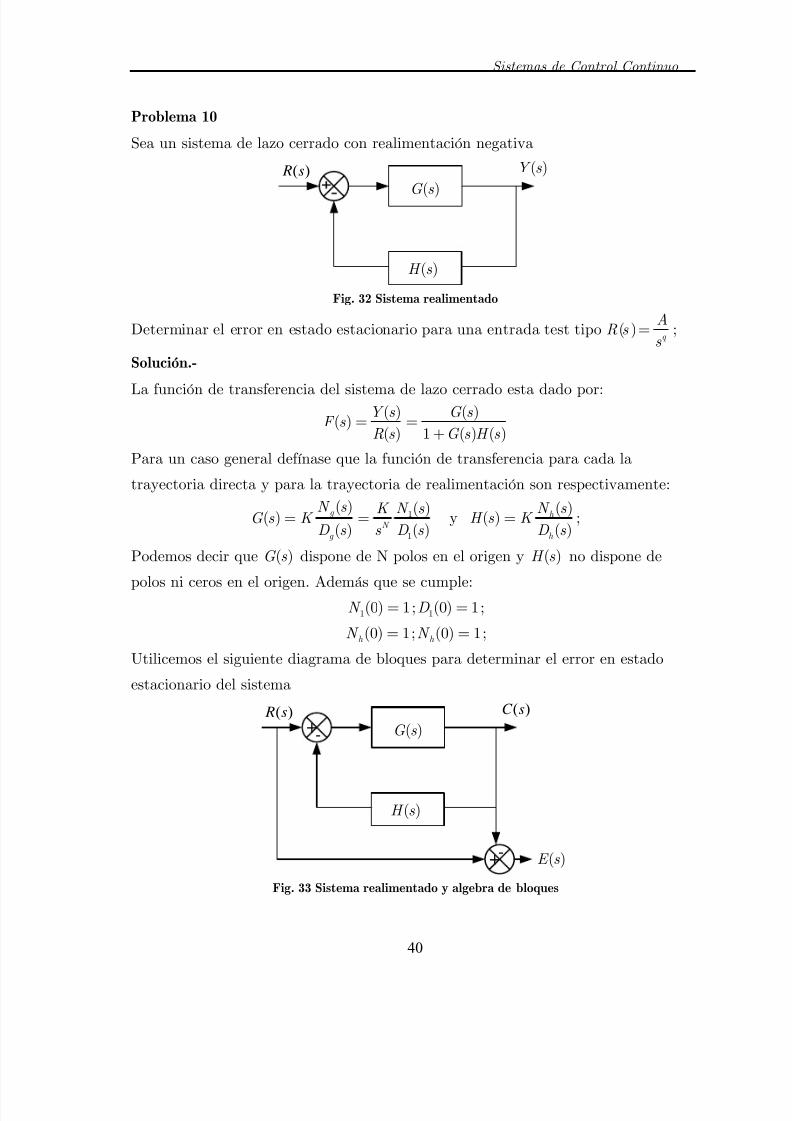
Problema 10
Sea un sistema de lazo cerrado con realimentación negativa
( )G s
)(s R ( )Y s
( )H s
Fig. 32 Sistema realimentado
Determinar el error en estado estacionario para una entrada test tipo ( )q
AR s
s = ;
Solución.-
La función de transferencia del sistema de lazo cerrado esta dado por:( ) ( )
( )( ) 1 ( ) ( )
Y s G s F s
R s G s H s = =
+
Para un caso general defínase que la función de transferencia para cada la
trayectoria directa y para la trayectoria de realimentación son respectivamente:
1
1
( ) ( )( )
( ) ( )
g
N g
N s K N s G s K
D s s D s = = y
( )( )
( )h
h
N s H s K
D s = ;
Podemos decir que ( )G s dispone de N polos en el origen y ( )H s no dispone de
polos ni ceros en el origen. Además que se cumple:1(0) 1N = ; 1(0) 1D = ;
(0) 1h N = ; (0) 1h N = ;
Utilicemos el siguiente diagrama de bloques para determinar el error en estado
estacionario del sistema
( )G s +-
)(s R )(sC
( )H s
+- ( )E s
Fig. 33 Sistema realimentado y algebra de bloques
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 41/63
Sistemas de Control Continuo
41
de manera que el error en estado estacionario es:
( ) ( ) ( )E s R s C s = − ;
reemplazando:( ) ( ) ( ) ( )E s R s R s F s = − ;
[ ]( )
( ) ( ) 1 ( ) ( ) 11 ( ) ( )
G s E s R s F s R s
H s G s
⎡ ⎤⎢ ⎥= − = −⎢ ⎥+⎣ ⎦
;
1 ( ) ( ) ( )( ) ( )
1 ( ) ( )
H s G s G s E s R s
H s G s
⎡ ⎤+ −⎢ ⎥=⎢ ⎥+⎣ ⎦
;
Asumiendo que el sistema de lazo cerrado es estable el error de estado estacionario
puede ser obtenido aplicando el teorema del valor final a ( )E s :
[ ] [ ]0( ) ( )ss t s e Lim e t Lim sE s →∞ →
= = ;
reemplazando en esta ultima e obtiene:
0
1 ( ) ( ) ( )( )
1 ( ) ( )ss
s
H s G s G s e Lim sR s
H s G s →
⎡ ⎤+ −⎢ ⎥=⎢ ⎥+⎣ ⎦
;
Para una señal de test:
1
0
1 ( ) ( ) ( )
1 ( ) ( )q
ss s
H s G s G s e ALim s
H s G s −
→
⎡ ⎤+ −⎢ ⎥=⎢ ⎥+⎣ ⎦
;
Utilizando la suposición inicial acerca la forma de las funciones de transferencia:
1 1
1 1 1
01
1
( ) ( ) ( )1
( ) ( ) ( )( ) ( )
1( ) ( )
h h N
q h ss
s h h N
h
k N s KN s KN s
D s s D s D s e ALim s
k N s KN s
D s s D s
−
→
⎡ ⎤+ −⎢ ⎥
⎢ ⎥= ⎢ ⎥
⎢ ⎥+⎢ ⎥
⎢ ⎥⎣ ⎦
;
1 1 1 1
01 1
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
N N q h h h h h
ss N s h h h
s D s D s k KN s N s k s D s N s e ALim s
s D s D s k KN s N s −
→
⎡ ⎤+ −⎢ ⎥=⎢ ⎥+⎣ ⎦
;
1 1 1 1
01 1
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
N N q h h h h h
ss N s h h h
s D s D s k KN s N s k s D s N s e ALim s
s D s D s k KN s N s −
→
⎡ ⎤+ −⎢ ⎥=⎢ ⎥+⎣ ⎦
;
reemplazando finalmente se tiene:1
0
N N q h h
ss N s h
s k K k s e ALim s
s k K −
→
⎡ ⎤+ −⎢ ⎥=⎢ ⎥+⎣ ⎦
;
Esta última es una relación general para sistemas con realimentación negativa no
unitaria.

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 42/63
Sistemas de Control Continuo
42
Problema 11.-
Un sistema de control con realimentación unitaria tiene como función de
transferencia de lazo abierto:
2( ) ( )( 5)
C K G s G s s s
=+
;
Determinar el rango de valores de K si existe de manera que todos los modos de
lazo cerrado sean más rápidos que t e − .
Solución.-
El requerimiento del problema es determinar los valores de K de manera que todos
los polos del sistemas de lazo cerrado tengan como parte real negativa valores
menores que -1. Por lo tanto se debe considerar la línea 1 0s + = como nuevolímite de estabilidad, entonces se hace una transformación 1s w = − y se
complementa con el uso del criterio de Routh-Hurwitz para hallar el valor de K .
El sistema de lazo cerrado se define como:
3 2
( ) ( ) ( )
( ) 1 ( ) ( ) 10 25c
c
Y s G s G s K
R s G s G s s s s K = =
+ + + +;
el polinomio característico esta dado por:3 2( ) 10 25P s s s s K = + + + ;
para el valor desplazado:3 2
1( ) ( 1) 10( 1) 25( 1)s w P s w w w K = − = − + − + − + ;
3 2( ) 7 8 16P w w w w K = + − + − ;
Se realiza el arreglo de Routh-Hutwitz para dicho polinomio:
[ ]
3
2
1
0
1 8
7 16
172
7
16
w
w K
w K
w K
−
− −
−
se obtiene:1
( 72) 07
K − − > y ( 16) 0K − >
por lo tanto si 16 72K < < , entonces todos los polos deberían tener parte real
menor que -1.

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 43/63
Sistemas de Control Continuo
43
% Si st ema de Pri mer orden f ( t ) = exp( - t )num = 1;den = [ 1 1] ;% Respuest a al escal on uni t ar i osl ades = t f ( num, den) ;[ x, t ] =st ep( sl ades, 10) ;
% Si st ema de Lazo Abi ert o% 1% F( s) =- - - - - - - - - - - - - - - - - -% s ( s + 5) ( s+5)K1 = 16. 5;num1 = K1;den1 = [ 1 10 25 K1] ;sl c1 = t f ( num1, den1) ;[ x1, t 1] =st ep( sl c1, 10) ;K2 = 71. 5;num2 = K2;den2 = [ 1 10 25 K2] ;sl c2 = t f ( num2, den2) ;
[ x2, t 2] =st ep( sl c2, 10) ;K3 = 72. 1;num3 = K3;den3 = [ 1 10 25 K3] ;sl c3 = t f ( num3, den3) ;[ x3, t 3] =st ep( sl c3, 10) ;pl ot ( t , x, ' y- ' , t 1, x1, ' b- ' , t 2, x2, ' g- ' , t 3, x3, ' r - ' ) ;p1 = r oot s( den1) ;p2 = r oot s( den3) ;p3 = r oot s( den3) ;
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4Respuesta al escalon Unitario
exp(-t)K=16.5
K=71.5
K=72.1
Fig. 34 Respuesta de diferentes valores de la ganancia K

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 44/63
Sistemas de Control Continuo
44
Problema 12.-
Sea el convertidor DC/DC reductor-elevador (Buck-boost converter) representado
en la figura. Determinar el modelo promedio de dicho sistema. Considere los
valores 10R = Ω , 12L mH = y 250C F μ= para realizar la simulación del sistemaconsiderando un esquema PWM con frecuencia de 500F Hz = y un ciclo de trabajo
0 0.5d = .
C RinV
Q
D
0v+
-
+
-
Li
Fig. 35 Convertidor DC/DC Reductor-elevador(Buck-boost converter)
Solución.-
Se considera que tomando en cuenta la base de un esquema de modulación de
ancho de pulso, la conmutación del switch Q cada periodo de tiempo T es ( )d t
(los valores numéricos de d satisfacen 0 ( ) 1d t ≤ ≤ ), de donde se puede extraer las
relaciones matemáticas de dicho modelo considerando el estado del switch Q .
Cuando el switch Q esta en el estado ON, es decir cumple 0 t dT ≤ < las
ecuaciones que rigen el sistema son:
0
10 o dv
C v dt R
= + ; (1)
Li
di V L
dt = ; (2)
y cuando el switch está en OFF lo que quiere decir que T t dT ≤< , las ecuaciones
del sistema son:
00
1L
dv i C v
dt R= + ; (3)
00 Ldi L v dt
= + ; (4)
se elige como estados a 1 Lx i = y 2 O x v = , a la entrada ( )u d t = y finalmente la
salida a
2O y v x = = , con lo que podemos representa las ecuaciones anteriores como:
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 45/63
Sistemas de Control Continuo
45
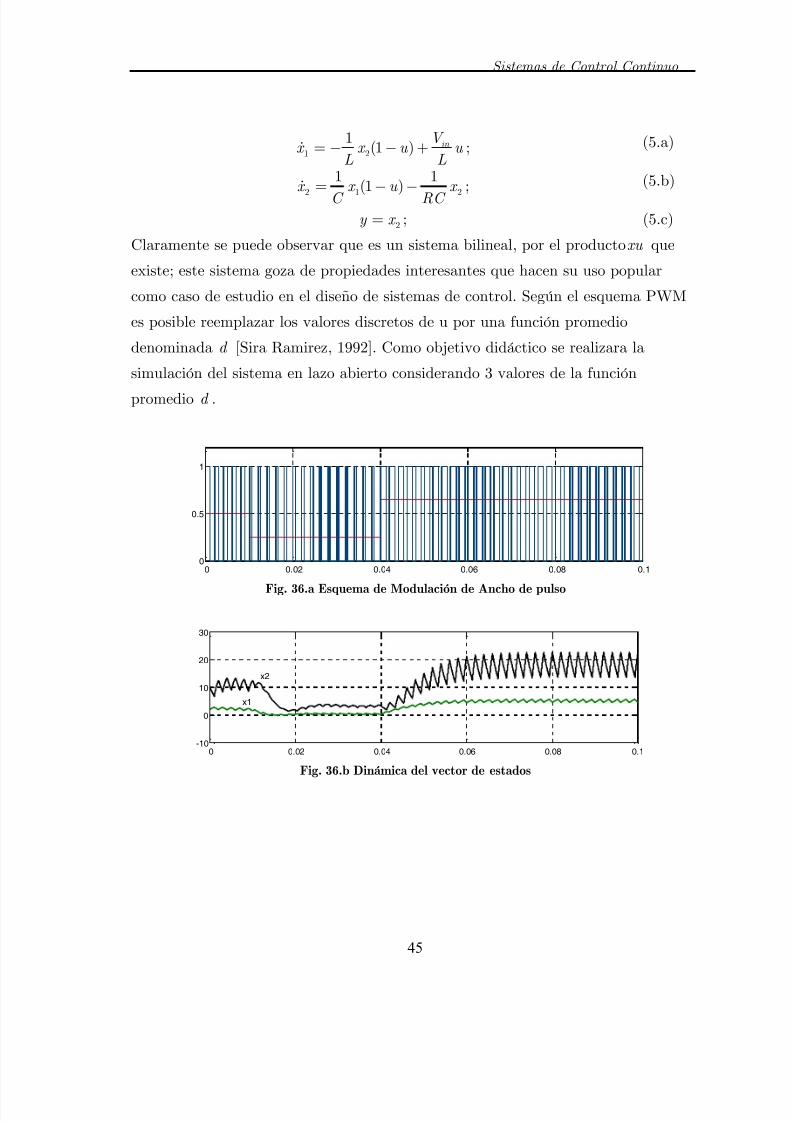
1 2
1(1 ) in V
x x u u L L
= − − + ; (5.a)
2 1 2
1 1(1 )x x u x
C RC = − − ; (5.b)
2y x = ; (5.c)
Claramente se puede observar que es un sistema bilineal, por el producto xu que
existe; este sistema goza de propiedades interesantes que hacen su uso popular
como caso de estudio en el diseño de sistemas de control. Según el esquema PWM
es posible reemplazar los valores discretos de u por una función promedio
denominada d [Sira Ramirez, 1992]. Como objetivo didáctico se realizara la
simulación del sistema en lazo abierto considerando 3 valores de la función
promedio d .
0 0.02 0.04 0.06 0.08 0.10
0.5
1
Fig. 36.a Esquema de Modulación de Ancho de pulso
0 0.02 0.04 0.06 0.08 0.1-10
0
10
20
30
x2
x1
Fig. 36.b Dinámica del vector de estados
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 46/63
Sistemas de Control Continuo
46
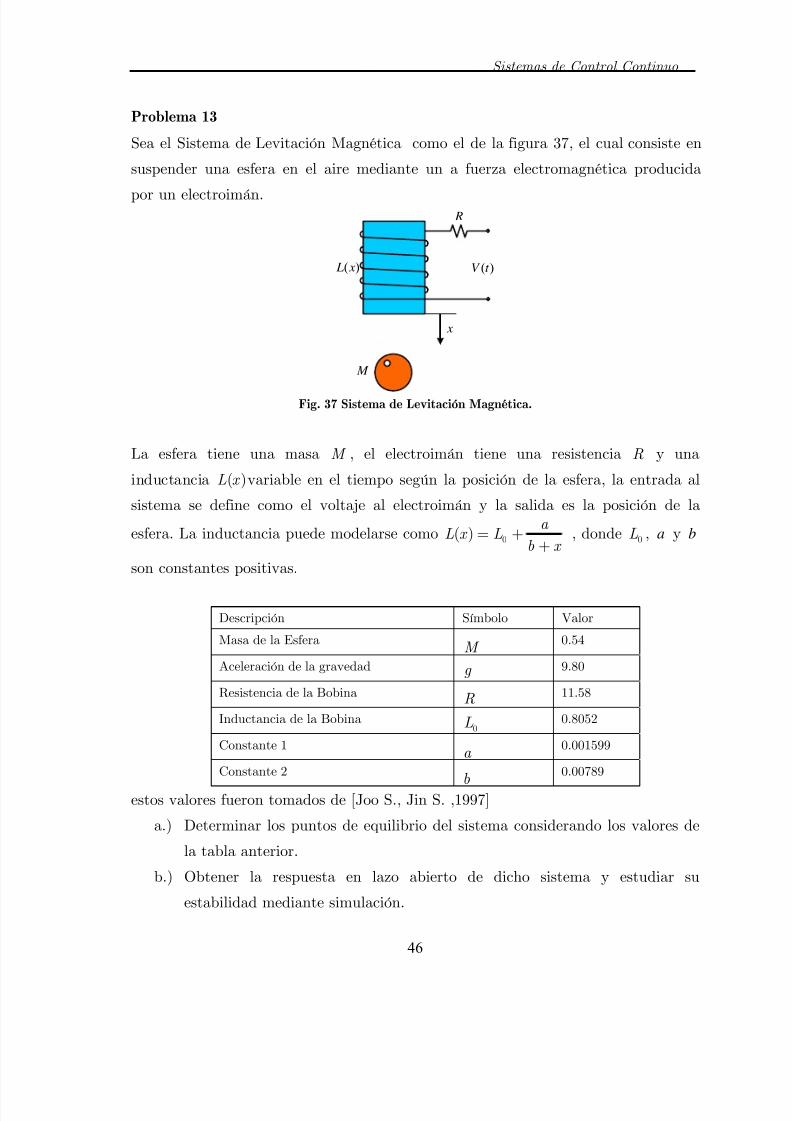
Problema 13
Sea el Sistema de Levitación Magnética como el de la figura 37, el cual consiste en
suspender una esfera en el aire mediante un a fuerza electromagnética producida
por un electroimán. R
)( x L )(t V
x
M
Fig. 37 Sistema de Levitación Magnética.
La esfera tiene una masa M , el electroimán tiene una resistencia R y una
inductancia ( )L x variable en el tiempo según la posición de la esfera, la entrada al
sistema se define como el voltaje al electroimán y la salida es la posición de la
esfera. La inductancia puede modelarse como 0( )a
L x Lb x
= ++
, donde 0L , a y b
son constantes positivas.
estos valores fueron tomados de [Joo S., Jin S. ,1997]
a.) Determinar los puntos de equilibrio del sistema considerando los valores de
la tabla anterior.
b.) Obtener la respuesta en lazo abierto de dicho sistema y estudiar su
estabilidad mediante simulación.
Descripción Símbolo Valor
Masa de la EsferaM
0.54
Aceleración de la gravedad g 9.80
Resistencia de la Bobina R 11.58
Inductancia de la Bobina0L 0.8052
Constante 1a
0.001599
Constante 2
b
0.00789
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 47/63
Sistemas de Control Continuo
47
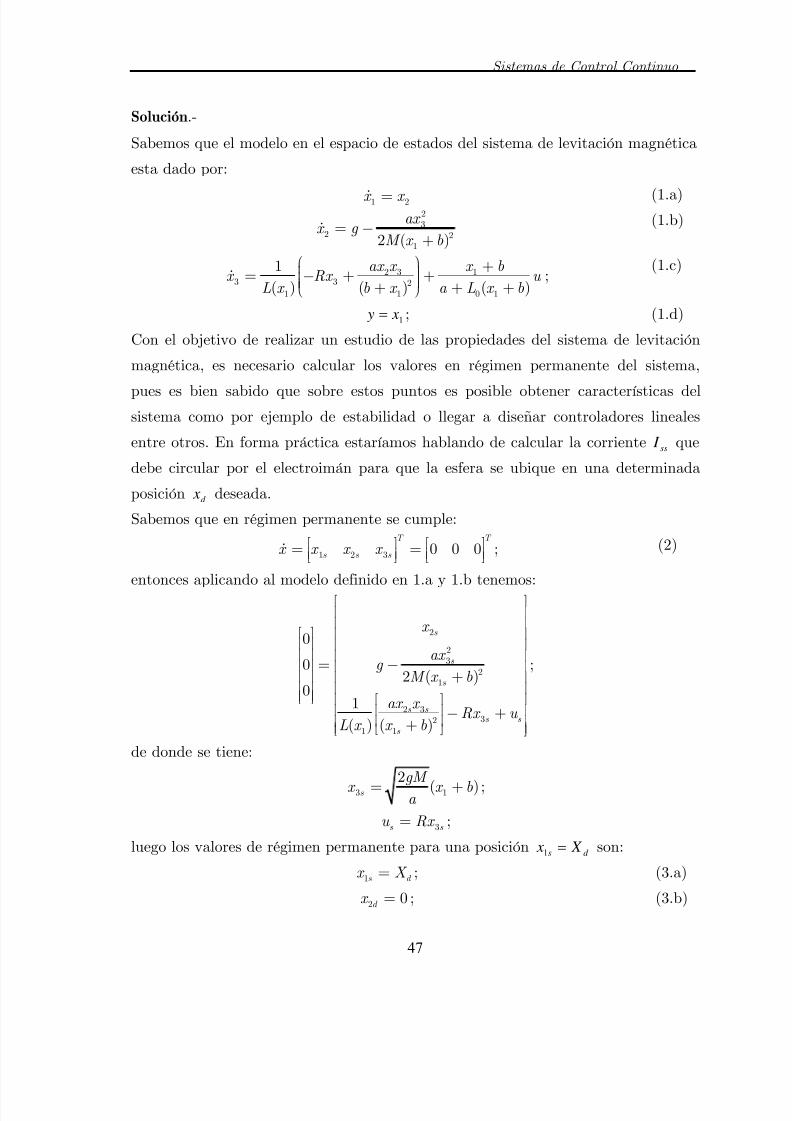
Solución.-
Sabemos que el modelo en el espacio de estados del sistema de levitación magnética
esta dado por:
1 2x x = (1.a)
23
2 212 ( )
ax x g
M x b= −
+
(1.b)
2 3 13 3 2
1 1 0 1
1
( ) ( ) ( )
ax x x bx Rx u
L x b x a L x b
⎛ ⎞ +⎟⎜ ⎟= − + +⎜ ⎟⎜ ⎟⎜ + + +⎝ ⎠ ;
(1.c)
1 x y = ; (1.d)
Con el objetivo de realizar un estudio de las propiedades del sistema de levitación
magnética, es necesario calcular los valores en régimen permanente del sistema,
pues es bien sabido que sobre estos puntos es posible obtener características delsistema como por ejemplo de estabilidad o llegar a diseñar controladores lineales
entre otros. En forma práctica estaríamos hablando de calcular la corriente ss I que
debe circular por el electroimán para que la esfera se ubique en una determinada
posición d x deseada.
Sabemos que en régimen permanente se cumple:
1 2 3 0 0 0T T
s s s x x x x ⎡ ⎤ ⎡ ⎤= =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
; (2)
entonces aplicando al modelo definido en 1.a y 1.b tenemos:
2
23
21
2 332
1 1
0
02 ( )
01
( ) ( )
s
s
s
s s s s
s
x
ax g
M x b
ax x Rx u
L x x b
⎡ ⎤⎢ ⎥⎢ ⎥
⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
= −⎢ ⎥ ⎢ ⎥+⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥− +⎢ ⎥⎢ ⎥+⎢ ⎥⎣ ⎦⎣ ⎦
;
de donde se tiene:
3 1
2( )s
gM x x ba
= + ;
3s s u Rx = ;
luego los valores de régimen permanente para una posición d s X x =1 son:
1s d x X = ; (3.a)
2 0d x = ; (3.b)
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 48/63
Sistemas de Control Continuo
48
3
2( )s d
gM x X b
a = + ;
(3.c)
2( )s d
gM u R X b
a = + ;
(3.d)
los valores obtenidos en (3.a) hasta (3.d) serán utilizados en el estudio de la
estabilidad local, lo cual nos proporciona ideas claras sobre las propiedades del
sistema ya en forma general o en todo el espacio de estados.
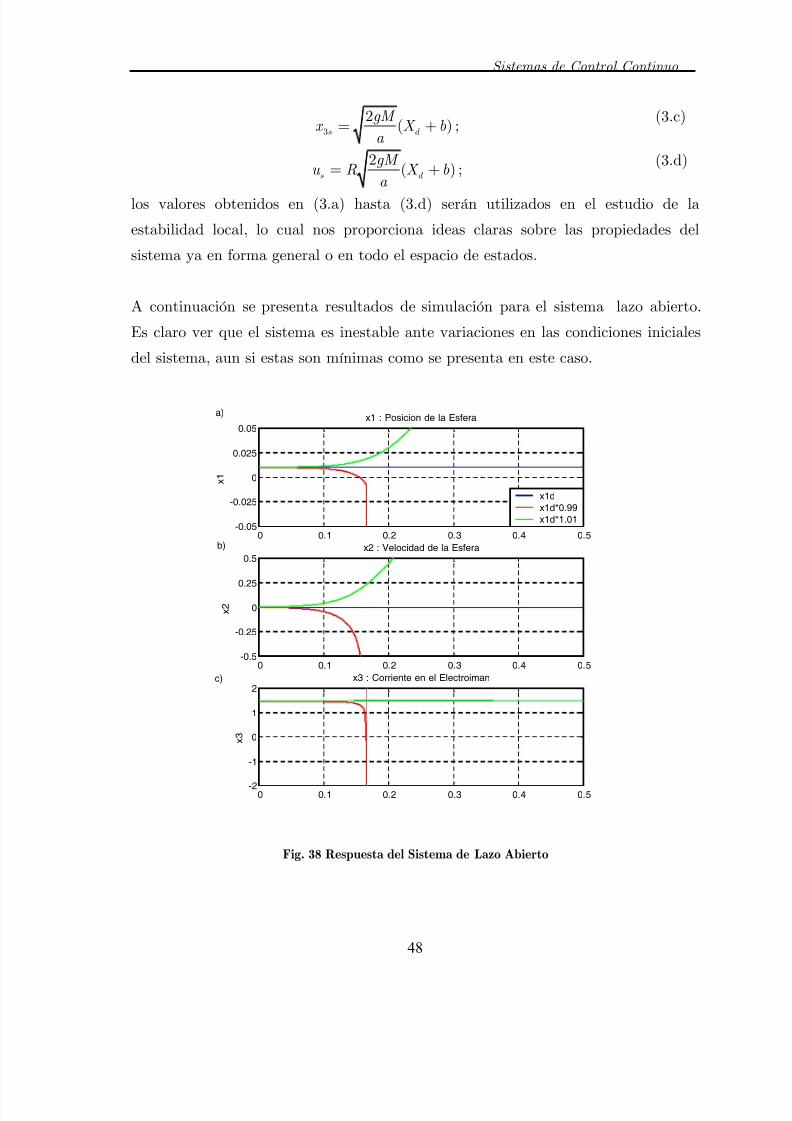
A continuación se presenta resultados de simulación para el sistema lazo abierto.
Es claro ver que el sistema es inestable ante variaciones en las condiciones iniciales
del sistema, aun si estas son mínimas como se presenta en este caso.
0 0.1 0.2 0.3 0.4 0.5-0.05
-0.025
0
0.025
0.05x1 : Posicion de la Esfera
x 1
x1d
x1d*0.99
x1d*1.01
0 0.1 0.2 0.3 0.4 0.5-0.5
-0.25
0
0.25
0.5
x 2
x2 : Velocidad de la Esfera
0 0.1 0.2 0.3 0.4 0.5-2
-1
0
1
2x3 : Corriente en el Electroiman
x 3
a)
b)
c)
Fig. 38 Respuesta del Sistema de Lazo Abierto

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 49/63
Sistemas de Control Continuo
49
Si se desea realizar el control de la esfera en una determinada posición es decir de
forma local alrededor de un punto de equilibrio, entonces se debe realizar la
linealización del sistema 1.a y 1.b en el punto de equilibrio definido en las
relaciones 3.a, 3.b, 3.c y 3.d..
b) Linealización del Sistema de Levitación Magnética en un Punto de Equilibrio
El sistema en su modelo no lineal, debe ser linealizado en el punto de operación que
se elija, entonces el modelo lineal queda definido por:
111 12 13
21 22 23 2
31 32 33 3
ba a a
x a a a x b u
a a a b
δ δ δ
⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
= + ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎢ ⎥⎣ ⎦
;
(4.a)
1y x δ δ = (4.b)
Donde cado de los elementos de las matrices y vectores quedan definidos por las
relaciones:
11 0a = ; (5.a)
12 1a = ; (5.b)
13 0a = ; (5.c)23
21 31( ) e
e
x x u u
ax a
M b x =
=
=+
;(5.d)
22 0a = ; (5.e)
23
23 21( ) e
e
x x u u
ax a
M b x =
=
=+
;(5.f)
[ ][ ]31 3 2 3 0 0 12
0 1
( 2 2 )( ) e
e
x x
u u
a a u Rx ax x a L b L x
a L b x =
=
= − − + +
+ +
;(5.g)
[ ]3 1
32
0 1
( )
( ) e
e
x x u u
ax b x a
a L b x =
=
+=
+ +;
(5.h)
[ ]1
31 2
0 1
( )
( ) e
e
x x u u
R b x a
a L b x =
=
+= −
+ +
;(5.i)

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 50/63
Sistemas de Control Continuo
50
1 0b = ; (5.j)
2 0b = ; (5.k)
13
0 1( ) e e x x u u
b x b
a L b x =
=
+=
+ +
;(5.l)
Entonces con las relaciones de las ecuaciones (3.a) hasta (3.d), (4.a) y (4.b)
obtenemos la linealización del sistema para la posición deseada [ ]5d
x mm= , a
continuación se presenta el script en MATLAB que realiza el calculo del modelo
linealizado del sistema de levitación magnética.%*************************** ***************************** **********% SI STEMA DE LEVI TACI ON MAGNETI CA %% UNI VERSI DAD MAYOR DE SAN ANDRES %% FACULTAD DE I NGENI ERI A %% CARRERA DE I NGENI ERI A ELECTRONI CA %
% Aut or: Raúl R. Roque Y. %%*************************** ***************************** *********%% Par ámet r os numeí cos del si st ema de Levi t aci on magnét i cag = 9. 81 ;a = 0. 001599 ;b = 0. 00789 ;L0 = 0. 8052 ;M = 0. 54 ;R = 11. 58 ;% Cal cul o de punt os de operaci on segun l os parámetr os ant eri ores% y l a posi ci on deseada xdxd = 0. 005 ;x1s = xd ;
x2s = 0 ;x3s = sqr t ( 2*g*M/ a) *( xd + b) ;us = R*sqr t ( 2*g*M/ a)*( xd + b) ;% Val or es del si st ema l i neal i zado baj o l os punt os de equi l i br i o% def i ni dos en l a secci on ant er i ora11 = 0;a12 = 1;a13 = 0;a21 = ( a*( x3s) 2) / ( M*( b+x1s) 3) ;a22 = 0;a23 = ( a*( x3s) ) / ( M*( b+x1s) 2) ;a31 = a*( ue- R*x3s- a*x2s*x3s* ( a+2*L0*( b+x1s) ) ) / ( a+L0*( b+x1s) ) 2;a32 = ( a*x3s*( b+x1s) ) / ( ( a+L0*( b+x1s) ) *( b+x1s) 2) ;a33 = - R*( b+x1s) / ( a+L0( b+x1s) ) ;
b1 = 0;b2 = 0;b3 = ( b+x1s) / ( a+L0( b+x1s) ) ;A = [ a11 a12 a13; a21 a22 a23; a31 a32 a33] ;B = [ b1 ; b2 ; b3] ;%*************************** ***************************** **********
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 51/63
Sistemas de Control Continuo
51
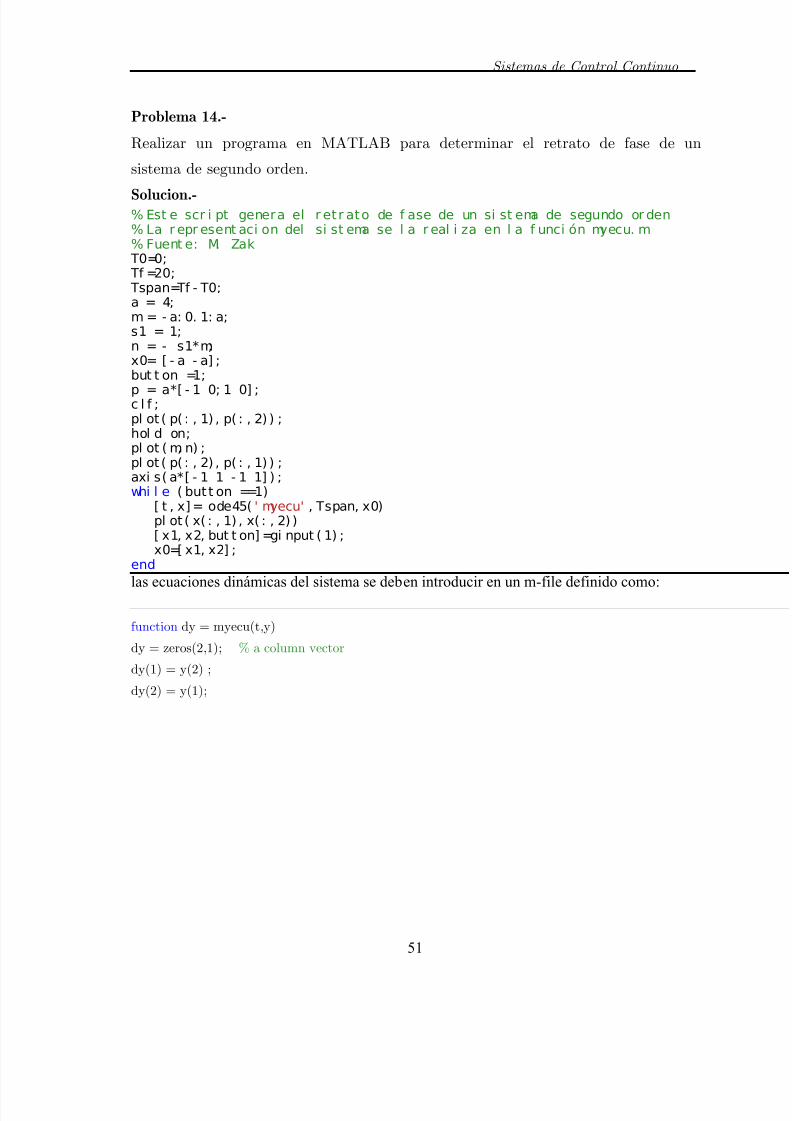
Problema 14.-
Realizar un programa en MATLAB para determinar el retrato de fase de un
sistema de segundo orden.
Solucion.-% Est e scr i pt genera el r et r ato de f ase de un si st ema de segundo or den% La r epr esent aci on del si st ema se l a r eal i za en l a f unci ón myecu. m% Fuent e: M. Zak
T0=0; Tf =20; Tspan=Tf - T0;a = 4;m = - a: 0. 1: a;s1 = 1;n = - s1*m;x0= [ - a - a] ;but t on =1;
p = a*[ - 1 0; 1 0] ;c l f ;pl ot ( p( : , 1) , p( : , 2) ) ;hol d on;pl ot ( m, n) ;pl ot ( p( : , 2) , p( : , 1) ) ;axi s( a*[ - 1 1 - 1 1] ) ;whi l e ( but t on ==1)
[ t , x] = ode45( ' myecu' , Tspan, x0)pl ot ( x( : , 1) , x( : , 2) )[ x1, x2, but t on] =gi nput ( 1) ;x0=[ x1, x2] ;
end
las ecuaciones dinámicas del sistema se deben introducir en un m-file definido como:
function dy = myecu(t,y)
dy = zeros(2,1); % a column vector
dy(1) = y(2) ;
dy(2) = y(1);
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 52/63
Sistemas de Control Continuo
52
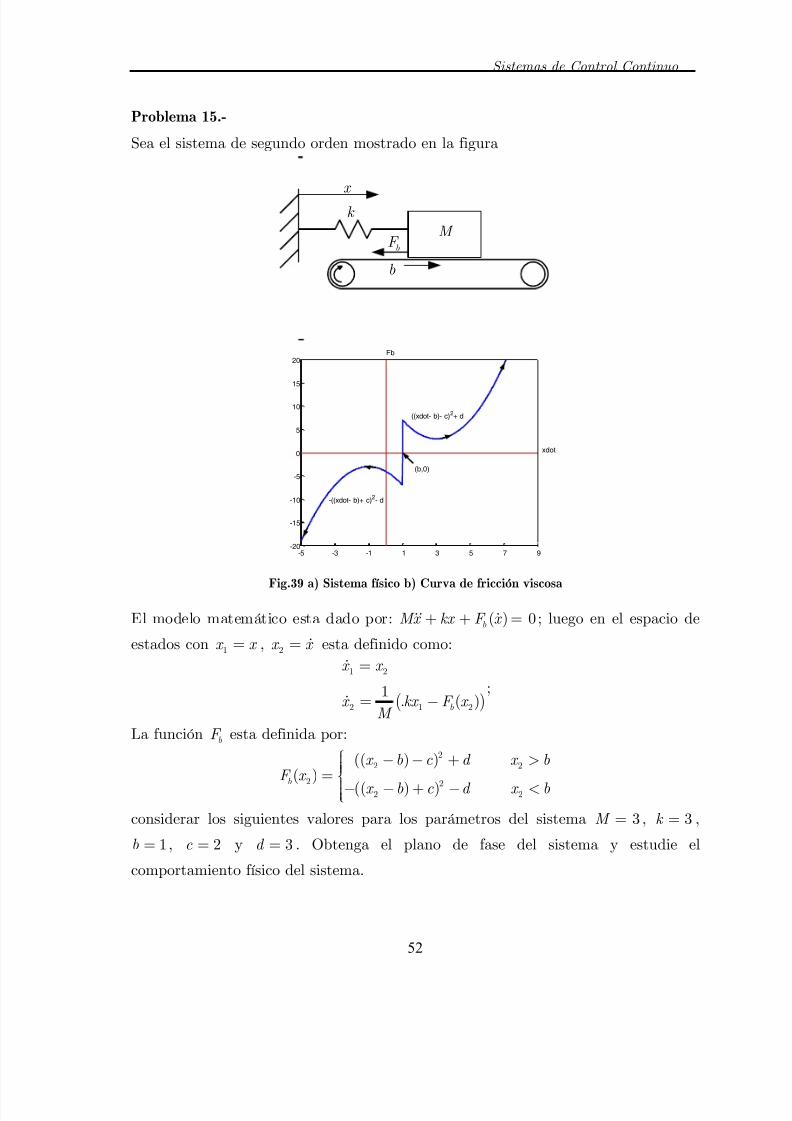
Problema 15.-
Sea el sistema de segundo orden mostrado en la figura
k
M
x
bF
b
-5 -3 -1 1 3 5 7 9-20
-15
-10
-5
0
5
10
15
20Fb
xdot
(b,0)
((xdot- b)- c)2+ d
-((xdot- b)+ c)2- d
Fig.39 a) Sistema físico b) Curva de fricción viscosa
El modelo matemático esta dado por: ( ) 0bMx kx F x + + = ; luego en el espacio de
estados con 1x x = , 2x x = esta definido como:
( )
1 2
2 1 2
1. ( )b
x x
x kx F x M
=
= −
;
La función bF esta definida por:2
2 2
2 22 2
(( ) )( )
(( ) )b
x b c d x bF x
x b c d x b
⎧ − − + >⎪⎪⎪=
⎨⎪− − + − <⎪⎪⎩
considerar los siguientes valores para los parámetros del sistema 3M = , 3k = ,
1b = , 2c = y 3d = . Obtenga el plano de fase del sistema y estudie el
comportamiento físico del sistema.
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 53/63
Sistemas de Control Continuo
53
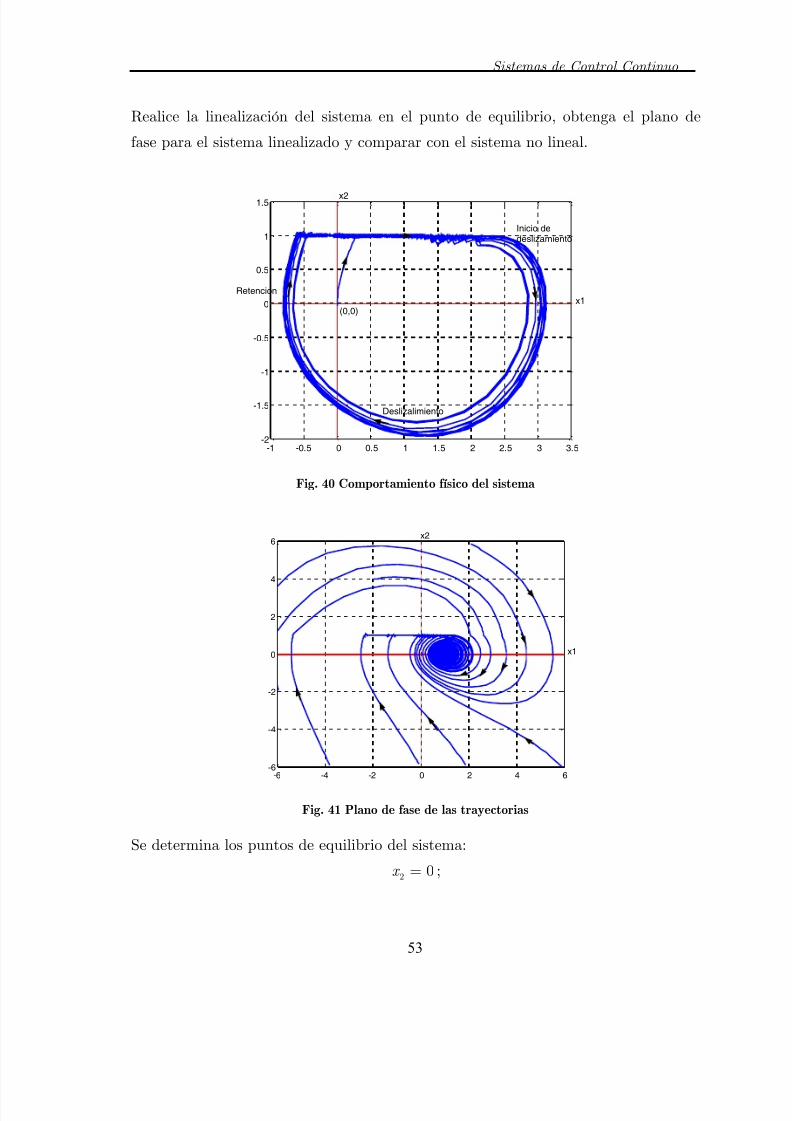
Realice la linealización del sistema en el punto de equilibrio, obtenga el plano de
fase para el sistema linealizado y comparar con el sistema no lineal.
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
(0,0)
Inicio dedeslizamiento
Deslizalimiento
Retencion
x2
x1
Fig. 40 Comportamiento físico del sistema
-6 -4 -2 0 2 4 6-6
-4
-2
0
2
4
6x2
x1
Fig. 41 Plano de fase de las trayectorias
Se determina los puntos de equilibrio del sistema:
2 0x = ;
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 54/63
Sistemas de Control Continuo
54
( )1 2
1( ) 0kx F x
M − = ;
resolviendo el sistema se obtiene el punto de equilibrio 0
4,0
3x
⎛ ⎞⎟⎜= ⎟⎜ ⎟⎜⎝ ⎠, entonces
0
1 1
1 2
22 2
21 2
0 1
1 ( )
x x
f f x x
A k F x f f
M M x x x
=
⎡ ⎤∂ ∂ ⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥∂ ∂⎢ ⎥⎢ ⎥= = ∂⎢ ⎥⎢ ⎥∂ ∂ − −⎢ ⎥⎢ ⎥ ∂⎢ ⎥⎣ ⎦⎢ ⎥∂ ∂⎣ ⎦
;
0 1 0 1
22( )1
3
A k b c
M M
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥= =−⎢ ⎥ ⎢ ⎥−− −⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
;
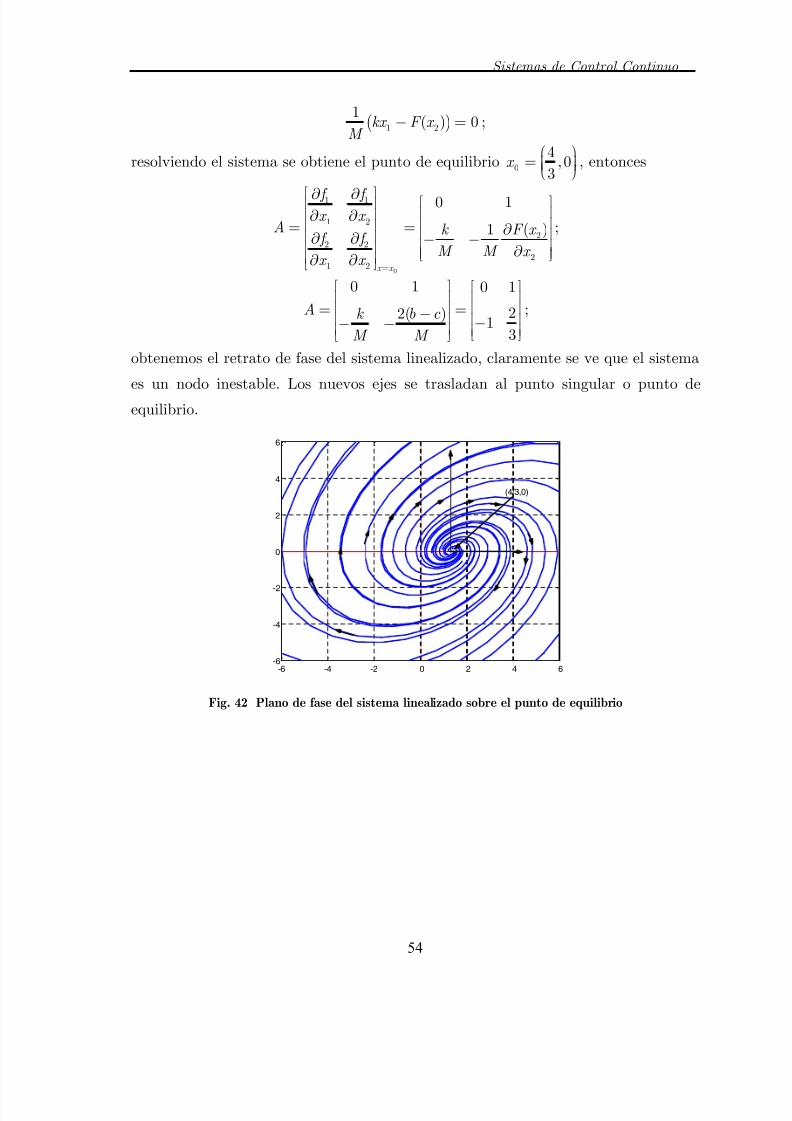
obtenemos el retrato de fase del sistema linealizado, claramente se ve que el sistema
es un nodo inestable. Los nuevos ejes se trasladan al punto singular o punto de
equilibrio.
-6 -4 -2 0 2 4 6-6
-4
-2
0
2
4
6
(4/3,0)
Fig. 42 Plano de fase del sistema linealizado sobre el punto de equilibrio

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 55/63
Sistemas de Control Continuo
55
Problema 16.-
Considere el modelo matemático del sistema de descarga de agua de un tanque
mediante gravedad:
21 2 12
p f
p
A g K x x x L Aρ
= − ;
( )(1 )2 max 1
1 u C
t
x F x A
α− −= − ;
2y x = ;
Donde 1x es la tasa de flujo volumétrico que sale del tanque a través de la cañería
y 2x es la altura del liquido en el tanque, maxC F es el flujo volumétrico máximo
del liquido que ingresa al tanque, g es la aceleración de la gravedad, L es la
longitud de la cañería por la cual se descarga el liquido, mientras que f K es unfactor debido a la fricción y ρ la densidad del liquido, pA es el área transversal de
la cañería y t A es el área transversal del tanque, α es un parámetro de propio de
la válvula y la entrada de control u es la posición de la válvula tomando valores
entre el intervalo [0,1]. El objetivo de control es mantener el tanque a un nivel
deseado.
a) Hallar los puntos de equilibrio del sistema. Considere los siguientes valores:3
max 2 /C F m s = ; 29.81 /g m s = ; 914L m = ; 2 34.41 / f K N s m = ;
3998 /kg m ρ = ; 20.653pA m = ; 210.5t A m = ; 10α = ;
b) realizar la linealización del sistema y determine la función de transferencia según
los puntos de equilibrio considerando que se desea mantener el nivel del tanque a
5m , c) realizar un programa en MATLAB de manera de obtener una comparación
entre el sistema original y el sistema linealizado, para los siguientes valores para la
entrada: ( ) 0.90u t = , ( ) 0.95u t = , ( ) 0.98u t = y ( ) 0.99u t = . d) determinar un
controlador para el sistema linealizado para mantener la altura en 5.4m.
Solución.-
a) Se define 1X y 2X como los puntos de equilibrio, de modo que se debe resolver
22 12
0 p f
p
A g K X X
L Aρ= − ;

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 56/63
Sistemas de Control Continuo
56
( )(1 )max 1
10 U
C
t
F X A
α− −= −
de forma inmediata se tiene que los puntos de equilibrio están dados por:
(1 )1 max
U C X F α− −
= ; 2 2(1 )2 max3
f U C
p
LK X F
g Aα
ρ
− −= ;
Observemos que los puntos de equilibrio depende de la entrada U , ahora como el
objetivo de control es el nivel del tanque es decir 2X , entonces se debe determinar
los valores de equilibro para 1X y U . De este modo se tiene:
31
1t d
f
X gA X K L
ρ= ;
2 d X X = ;3 2
maxlog( ) log( )1
2 log( )p d f C gA X K LF
U ρ
α
−= + ;
reemplazando tenemos:3
1 1.8360 /X m s = ; 2 5X m = ; 0.9627U = ;
b) Luego para la linealización consideramos la forma:
;x Ax Bu
y Cx
δ δ δ
δ δ
= +
=
que representa una aproximación al comportamiento de las perturbaciones queexhibe el sistema no lineal alrededor de los puntos de operación dados y tenemos:
1 1
1 2
2 2
1 2x x
u u
f f
x x A
f f
x x =
=
⎡ ⎤∂ ∂⎢ ⎥⎢ ⎥∂ ∂⎢ ⎥=⎢ ⎥∂ ∂⎢ ⎥⎢ ⎥∂ ∂⎣ ⎦
;
1
2x x
u u
g
u B g
u =
=
⎡ ⎤∂⎢ ⎥⎢ ⎥∂
= ⎢ ⎥∂⎢ ⎥
⎢ ⎥⎢ ⎥∂⎣ ⎦
;
finalmente
12
2
10
f p
p
t
K X A g
A LA
A
ρ
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥⎣ ⎦
; (1 )max
0
ln( ) U C
t
B F
Aα α− −
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
;
se define las siguientes relaciones para realizar la comparación de respuestas del
sistema no lineal y el sistema lineal

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 57/63
Sistemas de Control Continuo
57
( ) ( )x t X x t δ = + ; ( ) ( )u t U u t δ = + y ( ) ( )y t Y y t δ = +
O equivalentemente:
( ) ( )x t x t X δ = − ; ( ) ( )u t u t U δ = − y ( ) ( )y t y t Y δ = − ;
La función de transferencia del sistema linealizado es:
2
( ) 0.40326( 0.03811)( )
( ) 0.03811 0.0006675
U s s G s
Y s s s
+= =
+ +;
c) El siguiente programa en MATLAB nos permitirá obtener la respuesta del
sistema no lineal y linealizado respectivamente
% si mt anqueg. m% Progr ama para l a si mul aci on del model o del t anque% de descar ga por gravedad% Par amet r osgl obal g L Kf den Ap At a Fcmax Xd X1 X2 U uu
g = 9. 81; % gravedad
L = 914; % Longi t ud de l a cañer i a;Kf = 4. 41 ; % Fri cci on del aguaden = 998 ; % densi dad del aguaAp = 0. 653 ; % Ar ea t r ansver sal de l a cañeri a de descar gaAt = 10. 5 ; % Ar ea t r anver sal del t anquea = 10; % coef i c i enteFcmax = 2; % f l uj o maxi mo de ent r ada al t anque% Punt os de Equi l i br i oXd = 5; X1 = sqrt ( ( den*g*Ap 3*Xd) / ( Kf *L) ) ; X2 = Xd; U = ( 0. 5*l og( ( den*g*Ap 3*Xd) / ( Kf *L*Fcmax 2)) ) / l og( a)+1;% Condi ci ones I ni c i al esx0 = [ X1 X2] ;% Si st ema Li neal
a11 = - 2*Kf *X1/ ( den*Ap 2) ;a12 = Ap*g/ L;a21 = - 1/ At ;a22 = 0;b11 = 0;b12 = ( Fcmax/ At ) *( a ( U- 1) ) *l og( a);A = [ a11 a12; a21 a22];B = [ b11; b12] ;C = [ 0 1] ;D = 0;sl at a=ss( A, B, C, D) ;s l ata t f =t f (s l ata) ;% Ti empo de Si mul aci ónt i = 0; t f = 300;opt i ons = odeset ( ' Rel Tol ' , 1e- 2, ' AbsTol ' , [ 1e- 3 1e- 3] ) ;
t t = 0: 0. 05: t f ;% Si mul aci ón a uu = - 0. 0635;[ t , xa] = ode45( ' t anqueg' , [ t i t f ] , x0, opt i ons ) ;uua = - 0. 0635*ones( si ze( t t ) ) ;[ Ya, Xa] =l si m( sl at at f , uua, t t , [ 0 0] ) ; Ya = Ya + X2;% Si mul aci ón buu = - 0. 0135;[ t , xb] = ode45( ' t anqueg' , [ t i t f ] , x0, opt i ons ) ;

7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 58/63
Sistemas de Control Continuo
58
uub = - 0. 0135*ones( si ze( t t ) ) ;[ Yb, Xb] =l si m( sl at at f , uub, t t , [ 0 0] ) ; Yb = Yb + X2;% Si mul aci ón cuu = 0. 0165;[ t , xc] = ode45( ' t anqueg' , [ t i t f ] , x0, opt i ons ) ;uuc = 0. 0165*ones( si ze(t t ) ) ;[ Yc , Xc]=l s i m( s l at at f , uuc, tt , [ 0 0] ) ; Yc = Yc + X2;% Si mul aci ón duu = 0. 0265;[ t , xd] = ode45( ' t anqueg' , [ t i t f ] , x0, opt i ons ) ;uud = 0. 0265*ones( si ze(t t ) ) ;[ Yd, Xd] =l si m( sl at at f , uud, t t , [ 0 0] ) ; Yd = Yd + X2;% Gr af i cas de r espuest asubpl ot( 221) , pl ot ( t , xa( : , 2) , ' b' , t t , Y a , ' r - - ' )t i t l e( ' x2 vs t ( u = 0. 90) ' ) , gr i d;subpl ot( 222) , pl ot ( t , xb( : , 2) , ' b' , t t , Yb, ' r - - ' )t i t l e( ' x2 vs t ( u = 0. 95) ' ) , gr i d;subpl ot( 223) , pl ot ( t , xc( : , 2) , ' b' , t t , Y c , ' r - - ' )t i t l e( ' x2 vs t ( u = 0. 98) ' ) , gr i d;subpl ot( 224) , pl ot ( t , xd( : , 2) , ' b' , t t , Yd, ' r - - ' )t i t l e( ' x2 vs t ( u = 0. 99) ' ) , gr i d;
% t anqueg. m% Model o del t anque de descar ga por gravedadf uncti on xdot = t anqueg( t , x)gl obal g L Kf den Ap At a Fcmax Xd X1 X2 U uu% cal cul o de l a ent r ada al si st emau=U+uu;% def i ni ci ón de l as ecuaci ones di f er enci al esxdot1=( Ap*g/ L) *x( 2) - ( Kf / ( den*Ap 2) ) *x( 1) 2;xdot 2=( 1/ At ) *( Fcmax*a ( - ( 1- u) ) - x(1) ) ;xdot = [ xdot1; xdot2] ;% f i n de t anqueg. m
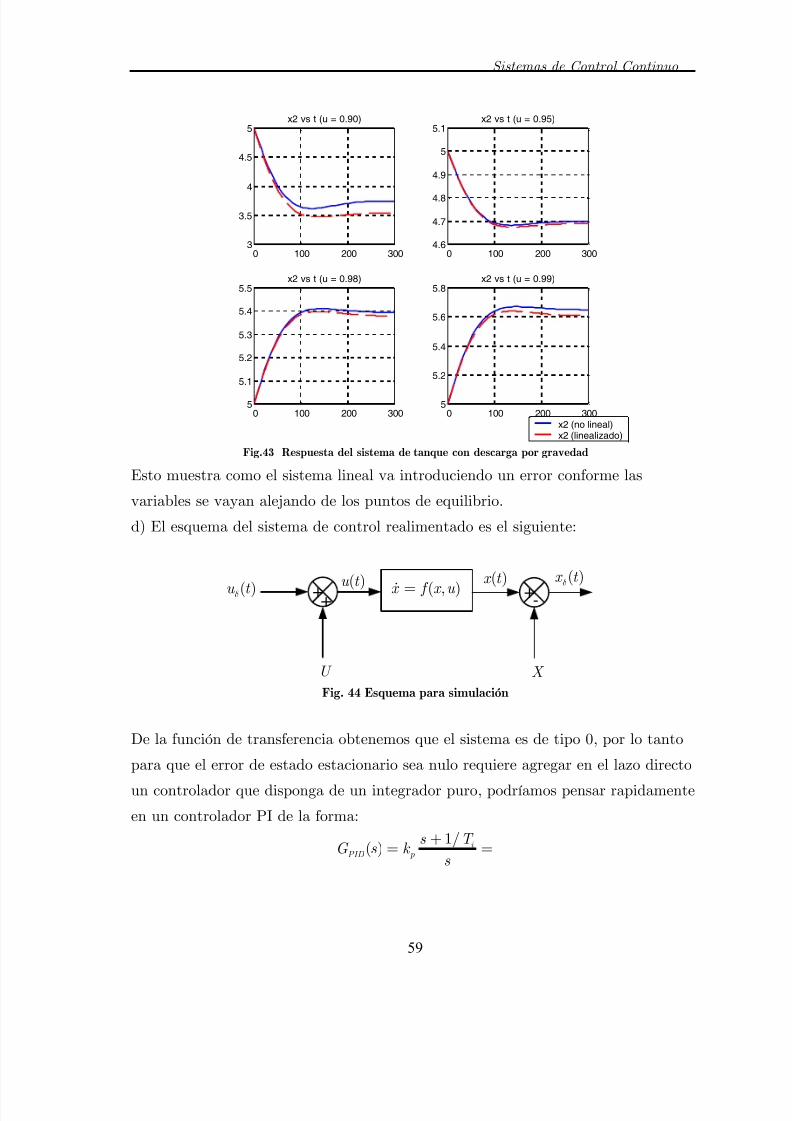
Como se puede ver en la figura, la respuesta del sistema lineal dada para la entrada( ) 0.90u t = y ( ) 0.99u t = definen un error bastante apreciable comparado con la
respuesta proporcionada con ( ) 0.95u t = y ( ) 0.98u t = .
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 59/63
Sistemas de Control Continuo
59
0 100 200 3003
3.5
4
4.5
5x2 vs t (u = 0.90)
0 100 200 3004.6
4.7
4.8
4.9
5
5.1x2 vs t (u = 0.95)
0 100 200 3005
5.1
5.2
5.3
5.4
5.5x2 vs t (u = 0.98)
x2 (no lineal)x2 (linealizado)
0 100 200 3005
5.2
5.4
5.6
5.8x2 vs t (u = 0.99)
Fig.43 Respuesta del sistema de tanque con descarga por gravedad
Esto muestra como el sistema lineal va introduciendo un error conforme las
variables se vayan alejando de los puntos de equilibrio.
d) El esquema del sistema de control realimentado es el siguiente:
( , )x f x u =
++( )u t δ
U
( )u t
+-
X
( )x t ( )x t δ
Fig. 44 Esquema para simulación
De la función de transferencia obtenemos que el sistema es de tipo 0, por lo tanto
para que el error de estado estacionario sea nulo requiere agregar en el lazo directo
un controlador que disponga de un integrador puro, podríamos pensar rapidamente
en un controlador PI de la forma:
1/( ) i
PID p
s T G s k
s
+= =
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 60/63
Sistemas de Control Continuo
60
donde el valor de pk y i T se podrían determinar de forma experimental o utilizando
por ejemplo el criterio de adición de polo y cero. Como el SLA tiene un cero en
0.03811z s = − , podemos elegir simplemente:
0.5pk = , 100i T = Con el objetivo completamente académico, se invita al lector a verificar la
implementación de un controlador PI en variables de estado.
2 2
1 1( ) ( ) ( ); (0) 0
( ) ( ) ( );
( ) ( );
i i
p
ref
z t z t u t z T T
u t z t k e t
e t X x t
+ = =
= +
= −
con esto podemos utilizar el script desarrollado mas arriba.
% si mt anquegPI . m% Progr ama para l a si mul aci on del model o del t anque% de descar ga por gr avedad y cont r ol PI% Par amet r osgl obal g L Kf den Ap At a Fcmax Xe X1 X2 X3 U uu Kp Xd Tig = 9. 81; % gr avedadL = 914; % Longi t ud de l a cañer i a;Kf = 4. 41 ; % Fri cci on del aguaden = 998 ; % densi dad del aguaAp = 0. 653 ; % Ar ea t r ansver sal de l a cañeri a de descar gaAt = 10. 5 ; % Ar ea t r anver sal del t anquea = 10; % coef i ci ent eFcmax = 2; % f l uj o maxi mo de ent r ada al t anque% ganaci as del cont r ol ador PI
Kp = 0. 5; % ganaci a pr oporci onal Ti = 100; % Ti empo i nt egr al% Punt os de Equi l i br i oXe = 5;X1 = sqr t ( ( den*g*Ap 3*Xe) / ( Kf *L) ) ;X2 = Xe;X3 = 0; % U = ( 0. 5*l og( ( den*g*Ap 3*Xe) / ( Kf *L*Fcmax 2) ) ) / l og( a)+1;% Condi ci ones I ni ci al esx0 = [ X1 X2 X3] ;% Ti empo de Si mul aci ónt i = 0; t f = 300;opt i ons = odeset ( ' Rel Tol ' , 1e- 4, ' AbsTol ' , [ 1e- 3 1e- 3 1e- 3] ) ;
t t = 0: 0. 01: t f ;% Si mul aci ón par a el cont r ol de ni vel al t ur a 5. 3 mXd = 4. 4;[ t a, xa] = ode45( ' t anquegPI ' , [ t i t f ] , x0, opt i ons ) ;% Si mul aci ón par a el cont r ol de ni vel al t ur a 5. 3 mXd = 4. 8;[ t b, xb] = ode45( ' t anquegPI ' , [ t i t f ] , x0, opt i ons ) ;% Si mul aci ón par a el cont r ol de ni vel al t ur a 5. 3 mXd = 5. 2;[ t c, xc] = ode45( ' t anquegPI ' , [ t i t f ] , x0, opt i ons ) ;
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 61/63
Sistemas de Control Continuo
61
% Si mul aci ón par a el cont r ol de ni vel al t ur a 5. 3 mXd = 5. 6;[ t d, xd] = ode45( ' t anquegPI ' , [ t i t f ] , x0, opt i ons ) ;% Respuest a de l a var i abl e a cont r ol ar : Ni vel f i gure;subpl ot ( 221) , pl ot ( t a, xa( : , 2) , ' b' ) ;
t i t l e( ' x2 vs t ( Xd = 4. 4m) ' ) , gr i d; subpl ot ( 222) , pl ot ( t b, xb( : , 2) , ' b' ) ; t i t l e( ' x2 vs t ( Xd = 4. 8m) ' ) , gr i d; subpl ot ( 223) , pl ot ( t c, xc(: , 2) , ' b' ) ; t i t l e( ' x2 vs t ( Xd = 5. 2m) ' ) , gr i d; subpl ot ( 224) , pl ot ( t d, xd( : , 2) , ' b' ) ; t i t l e( ' x2 vs t ( Xd = 5. 6m) ' ) , gr i d;% Gr af i cas de respuest as par a l a señal de cont r ol u( t ) f i gure;subpl ot ( 221) , pl ot ( t a, xa( : , 3) +Kp*( 4. 4- xa( : , 2) ) +U, ' b' ) ;t i t l e( ' u( t ) vs t ( Xd = 4. 4m) ' ) , gr i d;subpl ot ( 222) , pl ot ( t b, xb( : , 3) +Kp*( 4. 8- xb( : , 2) ) +U, ' b' ) ;t i t l e( ' u( t ) vs t ( Xd = 4. 8m) ' ) , gr i d;
subpl ot ( 223) , pl ot ( t c, xc(: , 3) +Kp*( 5. 2- xc(: , 2) ) +U, ' b' ) ;t i t l e( ' u( t ) vs t ( Xd = 5. 2m) ' ) , gr i d;subpl ot ( 224) , pl ot ( t d, xd( : , 3) +Kp*( 5. 6- xd( : , 2) ) +U, ' b' ) ;t i t l e( ' u( t ) vs t ( Xd = 5. 6m) ' ) , gr i d;% Gr af i cas de r espuest as del er r or : e( t ) = Xd - x2( t ) ; f i gure;subpl ot ( 221) , pl ot ( t a, 4. 4- xa( : , 2) , ' b' ) ;t i t l e( ' e( t ) vs t ( Xd = 4. 4m) ' ) , gr i d;subpl ot ( 222) , pl ot ( t b, 4. 8- xb( : , 2) , ' b' ) ;t i t l e( ' e( t ) vs t ( Xd = 4. 8m) ' ) , gr i d;subpl ot ( 223) , pl ot ( t c, 5. 2- xc(: , 2) , ' b' ) ;t i t l e( ' e( t ) vs t ( Xd = 5. 2m) ' ) , gr i d;subpl ot ( 224) , pl ot ( t d, 5. 6- xd( : , 2) , ' b' ) ;t i t l e( ' e( t ) vs t ( Xd = 5. 6m) ' ) , gr i d;
cl ear al l ;
y el archivo con el modelo no lineal del tanque y el control PI:% t anquegPI . m% Model o del t anque de descarga por gr avedad% con un cont r ol ador PI i mpl ement ado en espaci o de est ados% dz + 1/ Ti *z = 1/ Ti *u% u( t ) =z( t ) +kp*e( t )% e( t ) = SP - PV;% se agr ega en el espaci o de est ados del si st ema i ni ci al un estado% con X3( 0)= 0;f uncti on xdot = t anqueg( t , x)
gl obal g L Kf den Ap At a Fcmax Xd X1 X2 X3 U uu Ti Kp% cal cul o del cont r ol PIuu = x( 3) +Kp*( Xd- x( 2) ) ; u=U+uu;% Se pl ant ea un bl oque de sat uraci ón como en un si st ema r eal i f U+uu >=1
ut = 1;el se ut = u;end;
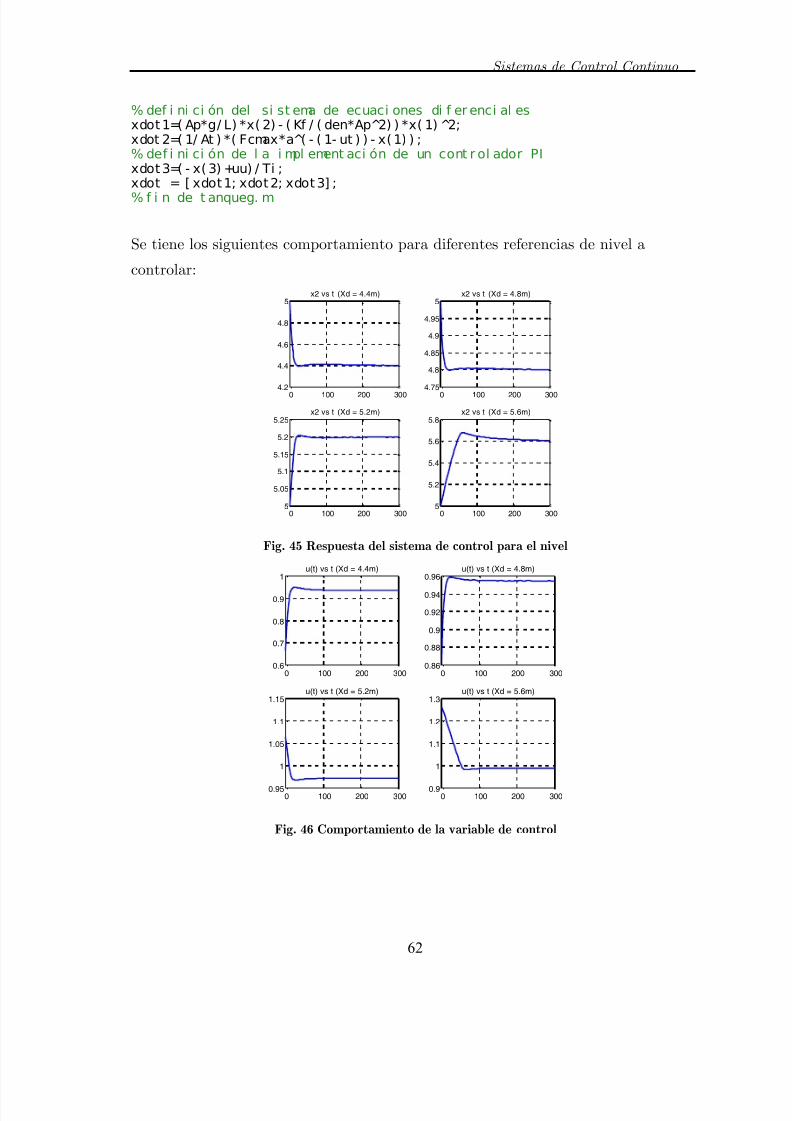
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 62/63
Sistemas de Control Continuo
62
% def i ni ci ón del si st ema de ecuaci ones di f er enci al esxdot1=( Ap*g/ L) *x( 2) - ( Kf / ( den*Ap 2) ) *x( 1) 2;xdot 2=( 1/ At ) *( Fcmax*a ( - ( 1- ut ) ) - x(1) ) ;% def i ni ci ón de l a i mpl ement aci ón de un cont r ol ador PI xdot3=( - x( 3) +uu) / Ti ;xdot = [ xdot1; xdot2; xdot3] ;
% f i n de t anqueg. m
Se tiene los siguientes comportamiento para diferentes referencias de nivel a
controlar:
0 100 200 3004.2
4.4
4.6
4.8
5x2 vs t (Xd = 4.4m)
0 100 200 3004.75
4.8
4.85
4.9
4.95
5x2 vs t (Xd = 4.8m)
0 100 200 3005
5.05
5.1
5.15
5.2
5.25x2 vs t (Xd = 5.2m)
0 100 200 3005
5.2
5.4
5.6
5.8x2 vs t (Xd = 5.6m)
Fig. 45 Respuesta del sistema de control para el nivel
0 100 200 3000.6
0.7
0.8
0.9
1u(t) vs t (Xd = 4.4m)
0 100 200 3000.86
0.88
0.9
0.92
0.94
0.96u(t) vs t (Xd = 4.8m)
0 100 200 3000.95
1
1.05
1.1
1.15u(t) vs t (Xd = 5.2m)
0 100 200 3000.9
1
1.1
1.2
1.3u(t) vs t (Xd = 5.6m)
Fig. 46 Comportamiento de la variable de control
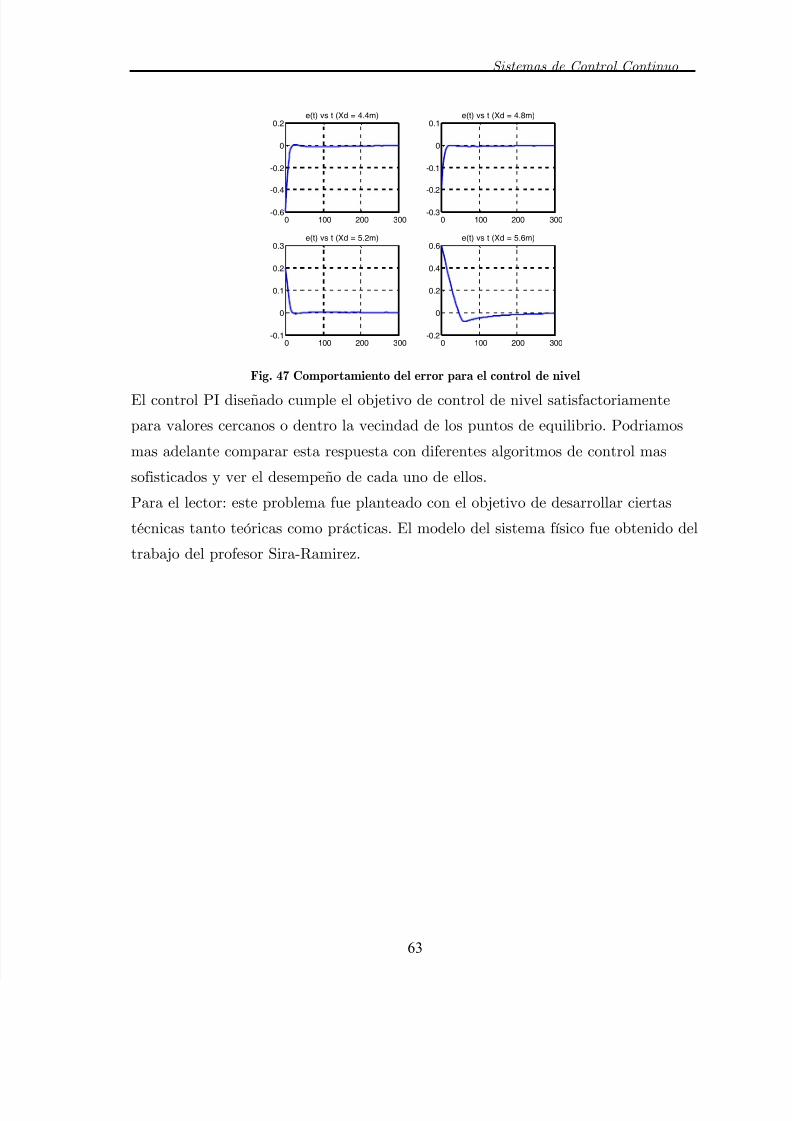
7/28/2019 Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0
http://slidepdf.com/reader/full/problemas-resueltos-de-sistemas-de-control-continuo-primera-parte-rev0 63/63
Sistemas de Control Continuo
0 100 200 300-0.6
-0.4
-0.2
0
0.2e(t) vs t (Xd = 4.4m)
0 100 200 300-0.3
-0.2
-0.1
0
0.1e(t) vs t (Xd = 4.8m)
0 100 200 300-0.1
0
0.1
0.2
0.3e(t) vs t (Xd = 5.2m)
0 100 200 300-0.2
0
0.2
0.4
0.6e(t) vs t (Xd = 5.6m)
Fig. 47 Comportamiento del error para el control de nivel
El control PI diseñado cumple el objetivo de control de nivel satisfactoriamente
para valores cercanos o dentro la vecindad de los puntos de equilibrio. Podriamos
mas adelante comparar esta respuesta con diferentes algoritmos de control mas
sofisticados y ver el desempeño de cada uno de ellos.
Para el lector: este problema fue planteado con el objetivo de desarrollar ciertas
técnicas tanto teóricas como prácticas. El modelo del sistema físico fue obtenido del
trabajo del profesor Sira-Ramirez.