osciladores de onda senoidal - adrosa.netadrosa.net/pdf/elec2/osc_v1.1.pdf · previamente a...
TRANSCRIPT

Osciladores de onda senoidal
1.1 Introducción
Los osciladores senoidales son la base fundamental de los sistemas que transmiten información radia-da mediante ondas electromagnéticas.
Estos circuitos son diseñados con el objeto de entregar una onda senoidal, en su salida, de frecuencia y potencia específicas.
1.2 Usos
Como mencionamos en el parágrafo anterior, los osciladores están presentes en todos los sistemas de telecomunicaciones, de manera que algunas de las funciones que cumplen son:
a) Determinan la frecuencia de la portadora en un transmisor. b) Se los aplica en los mezcladores que, como vimos sirven para modular o demodular una portado-
ra. c) Para generar señales de referencia o marcadoras. d) En instrumentos, como voltímetros electrónicos, analizadores de espectro, puentes de impedan-
cias, Q-metros, etc. 1.3 Clasificación
a) Se los puede fabricar con un dispositivo activo, tbj, fet, o circuito integrado, combinado con una red pasiva en una configuración retroalimentada. Esta última define la frecuencia de trabajo. También se usan cristales piezoeléctricos de cuarzo, que además de definir la frecuencia, también la estabiliza.
b) Dispositivos que presentan una resistencia negativa, como el diodo túnel o el diodo Gunn, funda-mentalmente usados en el campo de las microondas.
1.4 Condiciones de funcionamiento
Previamente a establecer las condiciones para que el oscilador funcione, es necesario conocer el tipo de sistema del que se trata, es decir el sistema retroalimentado, en términos generales. Analicemos el sig. diagrama de bloques:
Fig. 1.1
Si: Señal de entrada del sistema. So. Señal de salida del sistema. Sf: Señal retroalimentada. a: Ganancia de lazo abierto. f: Transferencia del retroalimentador.
a
Podemos establecer las relaciones siguientes: ; ; . Operando y despejando con las ecuaciones escritas, resulta:
1
Se trata de la ecuación en la que
es la que se conoce como ganancia a lazo cerrado y define el comportamiento total del sistema retroalimentado.
f
SoSiSf
Ing.
Adr
ián
Dar
ío R
osa
Observando la ecuación anterior, se aprecia que si se da la condición 1 , tenemos una ganancia de lazo ce-rrado que tiende a infinito, por lo tanto, podríamos tener señal de salida, sin tener señal de entrada, es decir que la misma salida del sistema está proveyendo la señal para su entrada, la cual es vuelta a amplificar y así sucesivamente, hasta que aparece algún límite físico, como la saturación del amplificador, por el límite impuesto por la tensión de alimentación. Para que esto ocurra, el retroalimentador (red pasiva), deberá presentar una diferencia de fase nula o múltiplo de 2π, para que la señal ingrese con igual fase que la de entrada. Además, en condiciones estables de opera-ción la ganancia de lazo cerrado deberá ser suficientemente elevada como para compensar las pérdidas. Como el re-troalimentador, se trata de una red pasiva con inductores y capacitores, tendrá una diferencia de fase y un módulo, que serán función de la frecuencia, de manera que para que el circuito comience a oscilar y permanezca en tal condición, deberá cumplir con las siguientes dos condiciones:
0
| | 1a) b) =2n con , entero
Expresiones conocidas como las condiciones de Barkhausen.
1.5 Ejemplo de aplicación
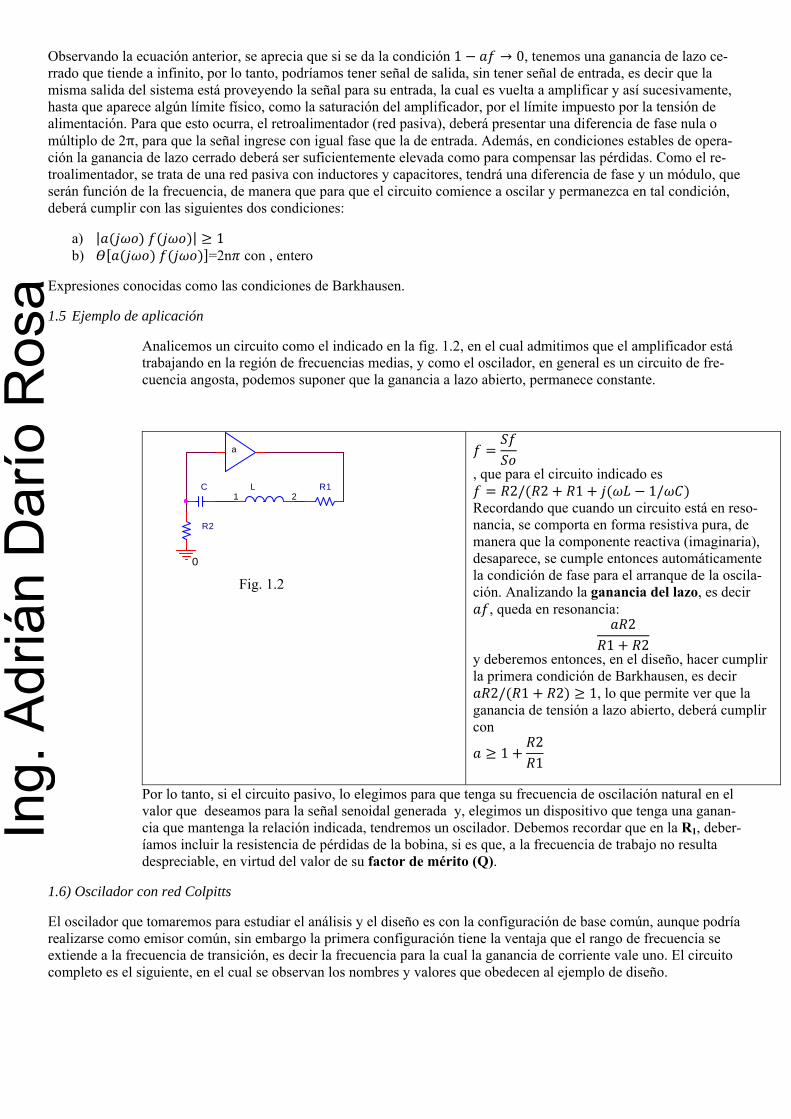
Analicemos un circuito como el indicado en la fig. 1.2, en el cual admitimos que el amplificador está trabajando en la región de frecuencias medias, y como el oscilador, en general es un circuito de fre-cuencia angosta, podemos suponer que la ganancia a lazo abierto, permanece constante.
, que para el circuito indicado es
Fig. 1.2
2/ 2 1 1/
21 2
Recordando que cuando un circuito está en reso-nancia, se comporta en forma resistiva pura, de manera que la componente reactiva (imaginaria), desaparece, se cumple entonces automáticamente la condición de fase para el arranque de la oscila-ción. Analizando la ganancia del lazo, es decir
, queda en resonancia:
2/ 1 2 1
121
y deberemos entonces, en el diseño, hacer cumplir la primera condición de Barkhausen, es decir
, lo que permite ver que la ganancia de tensión a lazo abierto, deberá cumplir con
a
C L1 2
R1
R2
0
Por lo tanto, si el circuito pasivo, lo elegimos para que tenga su frecuencia de oscilación natural en el valor que deseamos para la señal senoidal generada y, elegimos un dispositivo que tenga una ganan-cia que mantenga la relación indicada, tendremos un oscilador. Debemos recordar que en la R1, deber-íamos incluir la resistencia de pérdidas de la bobina, si es que, a la frecuencia de trabajo no resulta despreciable, en virtud del valor de su factor de mérito (Q).
1.6) Oscilador con red Colpitts
El oscilador que tomaremos para estudiar el análisis y el diseño es con la configuración de base común, aunque podría realizarse como emisor común, sin embargo la primera configuración tiene la ventaja que el rango de frecuencia se extiende a la frecuencia de transición, es decir la frecuencia para la cual la ganancia de corriente vale uno. El circuito completo es el siguiente, en el cual se observan los nombres y valores que obedecen al ejemplo de diseño.
Ing.
Adr
ián
Dar
ío R
osa

Fig. 1.3
Significado de cada componente: Lt: Inductancia del circuito tanque. Rp: Representa la resistencia paralelo equivalente de Lt Cc: Capacitancia de desacople de colector, que permite eliminar la componente continua sobre la carga. Cf: Capacitor variable para el ajuste fino de la frecuen-cia. Cb: Capacitor de desacople de base. C1 y C2: Capacitores que definen un divisor capacitivo que constituye el retroalimentador y, permite definir la relación de transformación del circuito con derivación en el capacitor. R1: Se usa para que haya una resistencia mayor que la dinámica de la juntura base emisor, de manera que la “R2” del circuito no dependa de los parámetros del TBJ. R5, R2 y R3, son las resistencias que permiten la polari-zación del TBJ. En la mayoría de los casos, el capacitor C2, puentea a la resistencia RE, de manera que no haría falta el choque de RF.
Q1
2N3866
L11.2uH
1
2
L2100uH
1
2
R144
R212k
R33.7k
R45371
R5700
C1
3.3nF
C2220pF
C32.7nF
C41n
C53.3nF
0
0
00
0
0
R611.3k
VCC
Lt Rp
RFC
RE
Re
RL
C2
C1
CcCb
Analicemos un poco más en detalle y teniendo en cuenta el comportamiento en alterna.
Fig. 1.4
RL, es la resistencia de carga. Rt, representa la resistencia reflejada (transformada) por el tanque con derivación capacitiva. RP, representa la resistencia equivalente paralelo de la inductancia Lt. Q1
2N3866Re
C1
C2
0
0
Lt
1
2
RL Rp Rt
0
0 0 0
Retroalimentador
Carga
Queda claro que la cantidad de retroalimentación, queda definida por el divisor capacitivo y también, que la resisten-cia en paralelo con C2 será Re+1/gm =Ri, donde gm es la transconductancia del TBJ. Usando valores de Re, de algunas decenas de Ohm, asegura que las condiciones de arranque, no dependan de los parámetros del TBJ, que en general, son variables.
1.7) Criterios de diseño
Se trata de dar algunas pautas prácticas para encarar el diseño de un oscilador Colpitts, pero teniendo claro, que se trata de pautas y no de un procedimiento exacto, es decir que siempre serán necesarias modificaciones, posteriores a la experimentación y simulación.
Si realizamos el equivalente de pequeña señal, considerando el circuito híbrido π, especialmente la salida, podemos hacer algunas consideraciones de diseño.
Fig. 1.5
Si observamos la salida, vemos que es resistiva pura, en virtud que la Lt está en resonancia con Ct, por tratarse del tanque que será diseñado con esas condiciones, por lo tanto, una idea es procurar que el circuito trabaje en el régimen de máxima transferencia de potencia, entonces la resistencia de salida del circuito, que es el paralelo entre Rp y Rt, deberá tener el valor de RL, de manera que Rp//Rt =RL Es así que la resistencia total colgada del colector deberá valer Ro = RL/2. Ec. 1.6.1
Ic Rp Rt RLL1
1
2
Ct
00
0
0 0 0
CargaSalida
Además, recordando que la condición más conveniente para la excursión de la tensión de salida es la máxima excur-sión simétrica, es decir cuando VCEQ = ICQ Ro. Es así, que la potencia entregada a la carga será
Ing.
Adr
ián
Dar
ío R
osa

2 4
Además, como la mitad de la poten-cia solamente, se disipa en la resis-tencia de carga, entonces la potencia disipada por RL, será finalmente:
8
a
Ec.1.6.2 Podemos determinar entonces la corriente de polarización. Obtenida lcorriente de polarización, podemos sacar también la tensión VCEQ = ICQ Ro
• Primero fijamos un factor de mérito por lo menos de 50 (valor mínimo aceptable) o mayor y podemos elegir un inductor Lt que tengamos en el laboratorio o elegir el valor de Ct . Si aceptamos Qt = 50, podemos obtener el valor de la capacitancia mínima y la inductancia máxima, es decir:
502
12
Ec.1.6.4
• Elegimos un transistor y el criterio a tener en cuenta es que como se trata de una eta-pa en clase A, su rendimiento máximo será del 25%, de manera que aceptamos que el TBJ, pueda disipar una po-tencia cuatro veces mayor que la que deseamos derivar a la carga, es decir Pd =4Po, por lo menos, además, debe-mos asegurar el cumplimien-to de las condiciones de Bar-khausen y ello, dependerá de la ganancia del lazo, que a su vez, es función de la ganancia del transistor.
Un criterio práctico para esta condición, es que la frecuencia de transición, frecuencia para la cual la ganancia vale 1, sea el doble de la frecuencia de trabajo, es decir: fT = 2fo
• Ri = Re + re , donde re = 1/gm Se elige Re de manera que sea bastan-te mayor que re, de manera que el funcionamiento del circuito, no de-penda de parámetros del transistor, que suelen ser variables.
• Vimos que para que se cum-pla la condición de máxima transferencia de potencia, debería ser Ro = RL/2, por lo que RL = Rp // Rt =Rp //n2 Ri, donde Ro es toda la resisten-cia colgada en el colector del transistor. Por lo tanto, todos son datos y entonces, pode-mos determinar el valor de la “relación de transformación”.
Recordamos que Rp = rc(1+Qt2 ),
donde rc es la resistencia serie de la bobina.
Despejando, se obtiene:
Ec. 1.6.3 Se observa que Rp >RL, de lo contrario el circuito no funcio-nará y también, que es conve-niente que la bobina sea de buena calidad para que tenga un Q ele-vado.
• Elegimos las capacitancias Ct =C0 + Cs + Cf , donde C0 es la capacitancia de salida del transistor, que puede obtenerse a partir de la hoja de datos, Cs no la conocemos y Cf la elegimos con un criterio ade-cuado, en virtud de tratarse de un capacitor variable, deberíamos adop-tarlo de modo que la capacitancia deseada, quede más o menos por la mitad del rango posible de variación. Por lo tanto despejando obtenemos el valor de Cs y usando las expresiones adecuadas de la tabla, correspondien-tes a este circuito, resulta
1
Y C2 = Cs n Ec. 1.6.5
Estas capacitancias, definen la trans-ferencia del retroalimentador e in-fluirán en el cumplimiento de las condiciones de arranque del oscila-dor. Debe quedar claro, que este método es aproximado ya que I) Varios parámetros del transistor son ignora-dos. II) Asumimos que las señales son senoidales y que le transistor está en funcionando en la zona lineal.
Ejemplo: Se desea diseñar un oscilador Col-pitts, que pueda entregar una potencia de 15 mW a una carga de 5370 Ω. Procedimiento:
a) Como vimos, el TBJ, debería ser capaz de disipar una po-tencia al menso, cuatro veces mayor a la deseada en la car-ga, es decir Pdmáx=60 mW
b) También está el requisito pa-ra la frecuencia de transiciónque debería ser al menos del doble, es decir fT= 20 MHz.
,
8
c) Podríamos elegir un TBJ que tengamos y que cumpla al menos con las especificacio-nes indicadas. Nosotros ele-gimos el 2N3866, del cual se reproduce la hoja de datos al final, también podría haberse usado el 2N2222 y muchos otros.
d) Según la ecuación 1.6.2, po-demos determinar el valor de la corriente de polarización, es decir
4.7
e
Por otra parte, de la Ec. 1.6.1, obtenemos la Ro =RL/2 =2686 Ω y, por lo tanto, la máxima excursión dsalida por corte es VCEmáx=ICQRo=12.7 V
Como todo diseño, deja libertad para elegir algunos parámetros y por una cuestión de conveniencia, es que se eligen algunos de ellos. Por ejemplo, podríamos disponer de algún inductor, armado y medido, supongamos disponer de un inductor de 1.2 µH con una resistencia equivalente paralelo de 11.3 kΩ. Por lo tanto Lt =1.2 µH.
Ing.
Adr
ián
Dar
ío R
osa

e) Para el valor de corriente encontrado, podemos obtener el valor de la resistencia dinámica re = 1/gm = 5.3 Ω, entonces, para independizarnos de los parámetros del TBJ, elegimos, arbitrariamente un resistencia RE = 44 Ω, de manera que la resistencia de entrada adquiere un valor: Ri = Re + re = 49.3 Ω, entonces de Ec. 1.6.3, ob-tenemos el valor N = 14.4, mientras que de la Ec. 1.6.4, podemos obtener, conocida la inductancia, la capaci-tancia del tanque Ct = 211.1 pF. Luego, mediante las expresiones Ec. 1.6.5, podemos encontrar las capacitancias faltantes, pre-via elección de laguno de los capacitores, por ejemplo si adoptamos C1 = 218 pF, obtenemos Cs = 203 pF y C2 = 2.923 nF, En general la capacitancia de colector es muy pequeña, fijémonos en la hoja de datos del 2N2222 y está alrededor de los 8 pF, en condiciones particulares, que no son las cuales usa nuestro diseño, por lo tanto, directamente, si ponemos un capacitor variable 2-20 pF, seguramente podremos lograr la compensa-ción correcta de la sintonía. Cs + Cf + Co
f) Finalmente, la tensión de alimentación la obtenemos, en virtud de las condiciones anteriores, como VCC = VCEQ + ICQ (Re+RE ) = 16.9 V. Por su parte, los valores de las resistencias de polarización de base, se obtienen del modo acostumbrado, a través del cálculo aproximado, dando R1 = 12 k, R2 = 3.7 k, mientras que los capacitores de desacople, y acople, deben ser de tal valor, que presenten una pequeña impedancia a la fre-cuencia de utilización, adoptamos Cb = Cc =3.3 nF, por supuesto del tipo cerámicos. Finalmente, pueda ser necesario la utilización de otro capacitor, si es que aparecen oscilaciones espurias, también cerámico, pero ello es estrictamente experimental.
g) A continuación simulamos el circuito diseñado, previo al armado del prototipo, con el 2N3866, donde apre-ciamos en el primer gráfico el régimen transitorio, previo al permanente, que permite mantener la oscilación deseada.
Time
23.00us 23.50us 24.00us 24.50us 25.00us 25.50us 26.00us 26.50us22.69usV(C4:2)
-10.0V
0V
10.0V
-13.9V
16.4V
Régimen transitorio de arranque
Fig. 1.6
Ing.
Adr
ián
Dar
ío R
osa

Time
387.8400us 387.8800us 387.9200us 387.9600us 388.0000us 388.0400us 388.0800us 388.1200us 388.1556usV(C4:2)
-20V
-10V
0V
10V
20V
(387.983u,-40.229m)(387.882u,48.669m)
Régimen permanente
Fig. 1.7
Observamos que la forma de onda, tiene un período de T = 387.983 µs – 387.882 µs = 101 µs , lo que equiva-le a una frecuencia f = 9.9 MHz, que es muy aproximada al valor deseado. Su variación es -9.9 %. Por otra parte, los valores máximo y mínimo dan 15.4 V y – 14.1 V, lo que indica cierta distorsión.
Time
387.8400us 387.8800us 387.9200us 387.9600us 388.0000us 388.0400us 388.0800us 388.1200us 388.1556usV(C4:2)
-20V
-10V
0V
10V
20V
(387.954u,-14.159)
(387.912u,15.420)
(387.983u,-40.229m)(387.882u,48.669m)
Régimen permanente con indicaciones de tensión
Fig. 1.8 Es muy interesante observar el análisis de Fourier, mediante la FFT, que realiza el PSPICE, de manera que es lo que se vería en un analizador de espectro. Vemos en el espectro de amplitud, que a salida tiene la mayor parte de la energía concentrada en la frecuencia de 9.9 MHz y es casi una función delta de Dirac, lo cual, también permite concluir que tiene muy pocos espurias y todas ellas, prácticamente concentradas en el entor-no de la frecuencia de la señal deseada, es decir no se aprecia distorsión armónica importante, lo cual puede verse en el último gráfico. Si hacemos los cálculos, lo cual es un buen ejercicio para usar el PSPICE, el nivel de armónicos está alrededor de los -34 dB.
Ing.
Adr
ián
Dar
ío R
osa

Frequency
9.7000MHz 9.7500MHz 9.8000MHz 9.8500MHz 9.9000MHz 9.9500MHz 10.0000MHz 10.0500MHz 10.0933MHzV(C4:2)
0V
5.00V
10.00V
12.24V
(9.889M,11.953)
Fig. 1.9
La potencia entregada a la carga, es de alrededor de 22 mW. Si usáramos un 2N2222, se puede verificar que obtendríamos resultados similares, pero, en este caso, con un menor costo.
Frequency
10.0MHz 15.0MHz 20.0MHz 25.0MHz 30.0MHz 35.0MHz 40.0MHz6.7MHzV(C4:2)
0V
4.0V
8.0V
11.7V
Observación de armónicos
Fig. 1.10
Ing.
Adr
ián
Dar
ío R
osa

1.8) Oscilador Clapp
Fig. 1.11
La característica es que presenta un circuito resonante serie, de manera que se puede sintonizar independientemente de la relación de capacitancias C1 y C2, con lo que se mantiene la retroalimentación sin modificaciones, aún cambiando la frecuencia, de manera que no se modifica la condición de arranque. Es decir que permitiría realizar osciladores de frecuencia variable. Por otra parte, el circuito es más estable, en virtud que si el factor de mérito es elevado la reactancia de la rama L-C, varía muy rápidamente, acomodándose fácilmente a los cambios.. Por otra parte, la sintonía, se logra cuando la reactancia de Lt, se iguala la de la combinación serie C1 , C2 y Ct. Además, si en vez de Ct, ponemos un diodo varactor, tendremos un OFV (oscilador de frecuencia variable), controlado electrónicamente.
L1100uH
1
2
L2100uH
1
2
R144
R212k
R33.7k
R5700
C1
3.3nF
C2220pF
C32.7nF
C54.7nF
0
0
0
0
VCC
Cc
RpLt
C2
C1
RE
Re
RLCfCb
RFC
Q2
Q2N2222
L32.2uH
1
2
0
C6120pF
R611k
R75371
0
Vemos el espectro del oscilador anterior, trabajando en una frecuencia muy cercana al MHz.
Frequency
1.00MHz 2.00MHz 3.00MHz 4.00MHz 5.00MHz0.44MHzV(C6:2)
0V
2.50V
5.00V
7.50V
9.48V
.Fig. 1.12
Fig. 1.13
Otra versión del oscilador clapp es que tiene el circuito resonan-te serie en la base, de manera que cuando se alcanza la frecuen-cia de resonancia, la configuración del TBJ, es la de base común. Tiene la particularidad que ningún terminal del TBJ está puesto a masa, con lo que se obtiene una más eficiente construcción y puede usarse en frecuencias muy elevadas, del orden de los 100 MHz o más. También, si en vez de usar un capacitor fijo, lo reemplazamos por un diodo varactor, entonces podemos construir un VFO (oscilador controlado por tensión) y si la tensión de control del varactor es la proveniente de una fuente de señal, permitirá construir un modulador de FM, sien-do uno de los circuitos más comúnmente usados para esa apli-cación
1.9) Oscilador Hartley También tomaremos la configuración de base común, la única diferencia es que la retroalimentación, se logra mediante un divisor in-ductivo, como se vio cuando se trató el tema de de los circuitos para adaptación de impedancias. En general, como se trata de un cir-cuito que hay que implementarlo con una bobina con derivación y esto trae más complicación que usar capacitores, entonces, en la ac-tualidad, se prefiere al Colpitts. Un circuito posible del oscilador Hartley en base común, puede ser el siguiente:
Q1
RFC
1
2
Lt1 2
Re
R2
R3
C1
C2
Ct
out
VCC
000
0Ing.
Adr
ián
Dar
ío R
osa

Fig. 1.14
La expresión de cálculo de la frecuencia de oscilación es la conocida del circuito oscilador paralelo.
1
2 √
10que para el caso común en que , . El proceso de diseño es semejante al anterior, usando las expre-siones correspondientes, dadas en la guía de fórmulas para circuitos de RF. Q1
R1
R2
R3
1
2
L1
1
2
L2
1
2
L3
C1
00 0
C2
0
VCC
0
C3
R4
0
1.10) Osciladores con JFET También podemos obtener un circuito Colpitts, pero usando un JFET, en vez de un TBJ. El esquema es el siguiente:
Fig. 1.15
La frecuencia de oscilación la obtenemos como
1
2 √
Donde
Representa la capacitancia de los dos capacitores conectado en serie.
1.11 Osciladores a cristal
El cuarzo y algunos otros cristales, presentan la propiedad llamado piezo electricidad, que es la propiedad recíproca entre la deformación mecá-nica a lo largo de uno de los ejes del cristal y la aparición de una diferencia de potencial a lo largo de otro eje. es decir que la deformación del cristal produce una diferencia de potencial mediante la separación de carga, inversamente, una ddp aplicada, produce una deformación. si la tensión aplicada es senoidal, con frecuencia variable, el cristal entra en oscilación mecánica, exhibiendo cierto número de frecuencias de reso-nancia. un cristal oscilando, tiene un comportamiento como el de un circuito l-c con un pico cerca de la frecuencia de resonancia, de q elevado. se los usa en virtud de la gran estabilidad en frecuencia que muestran y, fundamentalmente cuando las leyes vigentes son restrictivas en cuanto a variaciones de frecuencia El circuito equivalente es el siguiente: en él, se observa que tenemos dos capacitancias. cs, representa el equivalente mecánico de la elasticidad, es decir de la constante elástica del resorte. ls es la inductancia serie que representa la masa del cristal. rs es la resistencia serie, que tiene en cuenta a la resistencia viscosa del mate-rial. finalmente la capacitancia cp, es la verdadera capacitancia eléctrica del cristal, la cual surge por el hecho que entre dos placas metálicas, tenemos un material aislante, de manera de constituir un verdadero capacitor.
FIG. 1.16
analizando el circuito equivalente, puede observarse que podemos tener dos resonancias, una para lelo y otra serie . Si nos fijamos en la parte superior del circuito, vemos que la pulsación de resonancia la obtenemos en 1/ , la conocida expresión y además, si recorremos toda la malla (resonancia en paralelo), vemos que están en serie Cs y Cp , por lo tanto la otra expresión será: 1/
s,
1
Donde Ceq = CsCp/(Cs+Cp), de manera que la frecuencia de resonan-cia paralelo es un poco mayor que la serie, como fácilmente puede demostrarse, ya que la capacitancia equivalente, será menor que la Cllegándose a la expresión
1
1
J11
2VCC
Rs Cs
Rg
1
2
L
C1
C2
0
0
RFC
Cd
0
RL
0
Rs
15
1 2Ls
54.8mH
Cs
0.054pF
A B
Cp
29pF
Ing.
Adr
ián
Dar
ío R
osa

Finalmente resulta
1 /
2
en el gráfico siguiente, se aprecia el valor de la tensión en bornes del cristal para una corriente de excitación constante, puede verse en ella las resonancias serie y paralelo. puede apreciarse que: fs = 2,925 MHz y fp = 2,928 MHz, donde queda claro lo cerca que está una de la otra y además también puede observarse lo delgado de la curva, lo cual signifi-ca, como sabemos, que el factor de mérito es extremadamente elevado.
Fig. 1.17
Frequency
2.89MHz 2.90MHz 2.91MHz 2.92MHz 2.93MHz 2.94MHz 2.95MHz 2.96MHz 2.97MHz 2.98MHz 2.99MHz 3.00MHz 3.01MHzV(R1:1)
0V
400mV
800mV
(2.9284M,639.485m)
(2.9258M,813.024u)
Si hacemos los cálculos para el cristal, cuyo modelo está representado en la Fig. 1.16, veremos que el factor de mérito, es
67153
, extremadamente elevado, lo que nos indica su gran selectividad, ya que el ancho de banda de puntos de potencia mitad, será
2.92510
67153 45
1,5 10
∆∆
, lo cual nos indica que en términos relativos, el ancho de banda, está alrededor de %, extremadamente baja, lo cual nos va a permitir cumplir con la estabilidad prescriptas por las normas.
1.12) Estabilidad del cristal La frecuencia de oscilación del cristal, se ve influida por la temperatura fundamentalmente y también por el envejecimiento del cristal. El indicador de la variación de la frecuencia de operación con la temperatura se expresa mediante el coeficiente de temperatura:
Este coeficiente puede presarse en Hz/MHz °C, que equivale también a ppm por °C. Por ejemplo, un cristal que tenga un coeficiente de variación de temperatura de + 20 Hz/MHz 'C, es equivalente a 20 ppm/ 'C. Los coeficientes de temperatu-ra, pueden ser positivos o negativos, es decir que la frecuencia puede aumentar (+) o disminuir (-) al aumentar la temperatura. La va-riación de frecuencia, puede expresarse de la siguiente manera:
donde k es el coeficiente de temperatura, fn es la frecuencia natural del cristal. ∆T, es la variación de temperatura en 'C. Por lo tanto, tal frecuencia de oscilación (operación) de un cristal, podrá escribirse como f0 = fn ±∆f. Los valores de los coeficientes de temperatura están comprendidos entre-10 y-25 Hz/MHz°C según el corte X y entre -25 y + 100, para corte Y. También hay unos cris-tales realizados según el corte llamado GT, Cuyos coeficientes están entre-1 y 1 Hz/MHz°C , pero su aplicación no puede superar al-gunos centenares de kHz. También se los suele denominar RTXO (Room temperatura Crystal Oscillator), que se trata de osciladores a temperatura ambiente. También encontramos los TXCO (Temperatura compensated Crystal Oscillator). Son osciladores compensados en temperatura. Hay un tercer tipo de osciladores, que se utilizan cuando una alta estabilidad es requerida. Son
∆ ∆
10 10 10 1
los llamados Oven Cotrolled Cristal Oscillator) es decir, osciladores controlados mediante horno. Se coloca el cristal dentro de un hornillo, de manera que mantiene la temperatura constante Estos cristales tienen una estabilidad de 7 partes en 109 sobre un rango en-tre 0 y 50°C. Luego de un tiempo de estabilización de temperatura. Muchos de estos osciladores, encienden los hornillos, en el momento de la de la conexión a la red, aunque el oscilador no está en funcionamiento, para lograr el tiempo de Warm-up, También se suele especificar variación de la frecuencia en función de la variación de tensión de alimentación del circuito. Para un RTXO están el orden de una parte en 107 y para uno controlado por horno, están alrededor de 1 parte en 1010. Otros de los procesos que alteran la frecuencia es el envejecimiento, llamado Anging Rate. En general, se especifica por período de un mes o un año, para que no quede enmascarado por las variaciones de la temperatura. En los RTXO, la tasa de envejecimiento está en el orden de 0,3 ppm, mientras que para un oscilador controlado por horno, está en el orden de 0,015 ppm por mes. Todas estas va-riaciones son acumulativas Ej. Para un cristal de 10MHz, con un coeficiente K = + 10 Hz/M Hz °C, si la temperatura se incrementa 10 °C, entonces ∆ , de manera que f0 = fn + ∆f, f0 = 10. 001MHz. Estos parámetros mencionados se usan para calificar a un oscilador, pero también hay otros. Potencia en la carga: Debe medirse la potencia, pero también hay que ver la señal en un analizador de espectros, para observar si hay armónicos. Esto último, debe hacerse especialmente si el Q es reducido. Por ello se define: Nivel de armónico = Potencia armónicos/ Potencia fundamental Nivel de espurias = Potencia de espurias/ Potencia fundamental
Ing.
Adr
ián
Dar
ío R
osa

Como ambos valores se miden respecto de la potencia de la fundamental, es decir respecto de la portadora, se utiliza la unidad llamada dBc (dB, respecto de la portadora, carry). Expresaríamos entonces
10
Rendimiento Lo especificamos como la relación entre la potencia útil en la carga y la potencia tomada del generador de continua, es decir
Pulling
Mide la variación de frecuencia, debida a la modificación en la Impedancia de carga. Para especificar el pulling, es necesario dar la carga nominal Z0 y la variación de la impedancia de carga admitida. para una dada variación de frecuencia. Estos últimos valores, pue-den definirse a partir del coeficiente de reflexión (Г), respecto de la carga nominal, relación de ondas estacionarias SWR, o variación relativa de la Impedancia de carga. Mide la variación de la frecuencia debido Г /
1 Г1 Г
Para evitar la influencia en la frecuencia de ZL, se utilizan amplificadores separadores con muy alta impedancia de entrada, (buffering) Pushing Mide la variación de la frecuencia al variar la tensión de polarización del dispositivo. Se especifica en ppm de variación de frecuencia para un porcentaje de variación de la tensión de alimentación (ej. 5 ppm para ±10% de variación de tensión. Ruido de fase El propio oscilador, genera ruido interno, que da lugar a variaciones de fase de la señal que hace cambiar la frecuencia en un corto tiempo y por ello también se lo denomina estabilidad a corto plazo. Se especifica en función de la densidad espectral de ruido, por uni-dad de frecuencia, por ej. dB/hz El problema fundamental Es el ruido de fase, ya que el de amplitud puede eliminarse mediante limita-dores El ruido de fase, puede considerarse como una modulación de fase o frecuencia espuria. ∆ ∆ . El ruido de fase, puede modelarse mediante el modelo de Leeson L (fm), que relaciona la densidad espectral de la poten-cia de ruido en un ancho de banda de 1 Hz, Para una distancia en frecuencia fm , respecto de la frecuencia de oscilación, con la poten-cia del oscilador. La función en dB, viene expresada L(fm)= 10 log [Sn(f)/Po] = 10 log[ L (fm)] . Sn(f): Función de densidad espectral de ruido. Po: Potencia total de la señal, fm=f-fo Distancia a la frecuencia de oscilación (fm) se expresa en dBc/Hz, para indicar que se trata de valores respecto de la portadora y para un ancho de banda de 1Hz. Finalmente: ∆ ∆
Representan las desviaciones máximas de fase y frecuencia respectivamente.
Fig.1.18
Ing.
Adr
ián
Dar
ío R
osa
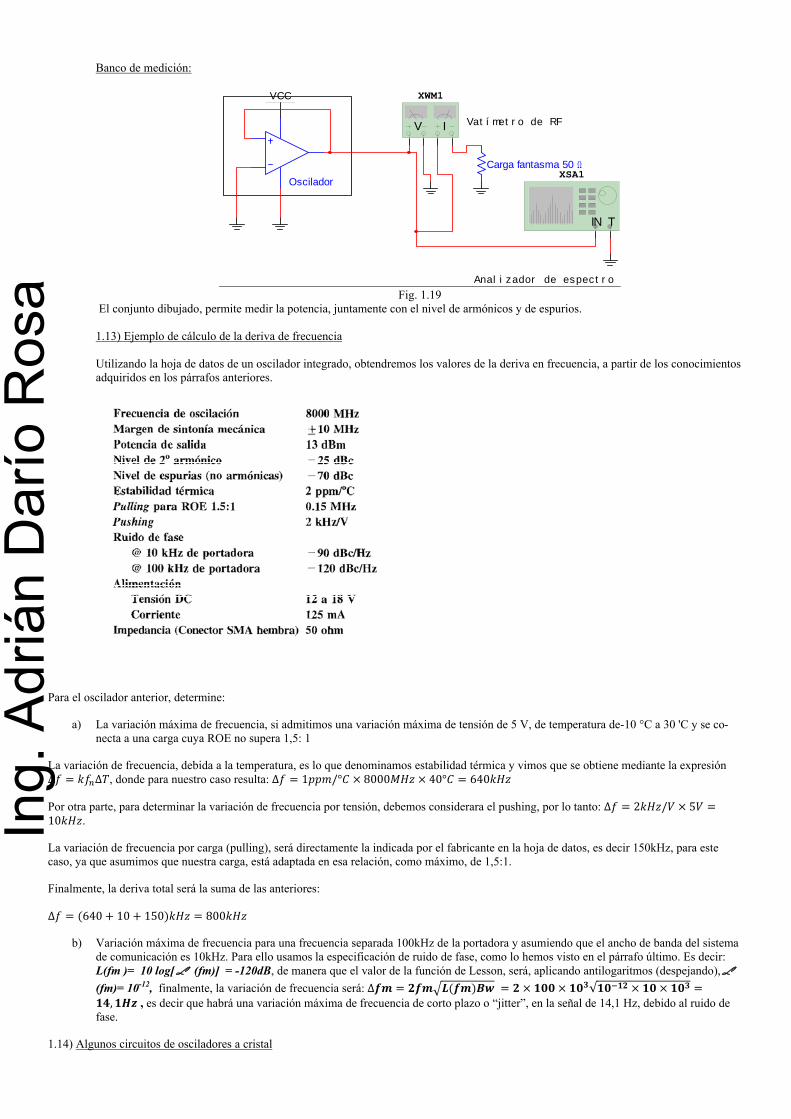
Banco de medición:
Fig. 1.19
El conjunto dibujado, permite medir la potencia, juntamente con el nivel de armónicos y de espurios. 1.13) Ejemplo de cálculo de la deriva de frecuencia Utilizando la hoja de datos de un oscilador integrado, obtendremos los valores de la deriva en frecuencia, a partir de los conocimientos adquiridos en los párrafos anteriores.
Para el oscilador anterior, determine:
a) La variación máxima de frecuencia, si admitimos una variación máxima de tensión de 5 V, de temperatura de-10 °C a 30 'C y se co-necta a una carga cuya ROE no supera 1,5: 1
La variación de frecuencia, debida a la temperatura, es lo que denominamos estabilidad térmica y vimos que se obtiene mediante la expresión , donde para nuestro caso resulta: ∆ ∆ ∆ 1 /° 8000 40° 640
2 / 510 .
∆ 640 10 150 800
Por otra parte, para determinar la variación de frecuencia por tensión, debemos considerara el pushing, por lo tanto: ∆
La variación de frecuencia por carga (pulling), será directamente la indicada por el fabricante en la hoja de datos, es decir 150kHz, para este caso, ya que asumimos que nuestra carga, está adaptada en esa relación, como máximo, de 1,5:1.
Finalmente, la deriva total será la suma de las anteriores:
b) Variación máxima de frecuencia para una frecuencia separada 100kHz de la portadora y asumiendo que el ancho de banda del sistema de comunicación es 10kHz. Para ello usamos la especificación de ruido de fase, como lo hemos visto en el párrafo último. Es decir: L(fm )= 10 log[ L (fm)] = -120dB, de manera que el valor de la función de Lesson, será, aplicando antilogaritmos (despejando), L (fm)= 10-12, finalmente, la variación de frecuencia será: ∆ √
, , es decir que habrá una variación máxima de frecuencia de corto plazo o “jitter”, en la señal de 14,1 Hz, debido al ruido de fase.
1.14) Algunos circuitos de osciladores a cristal
XSA1
TIN
XWM1
V I
Oscilador
Carga fantasma 50 Ω
Vatímetro de RF
Analizador de espectro
VCC
Ing.
Adr
ián
Dar
ío R
osa

En general, el cristal, cumple la función de circuito oscilante L-C, por ejemplo, hay varias versiones del oscilador Colpitts con cristal. A conti-nuación, veremos dos.
Collpitts con cristal en base. El funcionameitno es el del oscilador Colpitts, ya que la retroalimentación, la logra mediante un divisor capacitivo, mientras que el cristal puesto en la base, permite que cuando éste llega a la resonancia serie, entonces, pone la base a masa, convirtiéndolo entonces en un base común. En la figura de la derecha, vemos un ejemplo de este oscilador.
Fig. 1.20
Q1
Q2N2222
1
2
Lt
X1
R1
R2 R3
VCC
00
0
C1
C2
C3
RL
0
0
Otra versión del Colpitts, está construido, usando el cristal en la co-nexión entre el divisor capacitivo y el emisor, de manera que en la resonancia serie, el cristal se comporta como una pequeña resistencia en serie, de manera que el lazo de retroalimentación entre colector y emisor, se establece a la frecuencia de resonancia.
Fig. 1.21
Q1
Q2N2222
1
2
Lt
R1
R2 R3
VCC
00
C1
C2
C3
RL
0
0
X1C4
0
Oscilador de Pierce con JFET: Es uno de los osciladores a cristal más utilizados y se trata básicamente de un oscilador Colpitts en fuente común, con el cristal trabajando como reactancia inductiva y resonan-do con CG, CD y la capacitancia parásita del JFET. El circuito puede ser sintonizado, variando las capacitancias anteriores o poniendo un pequeño capacitor variable en paralelo con el cristal. Sólo pequeñas variaciones de frecuencias es posible, ya que las frecuencias de osci-lación serie y paralelo del cristal, están muy cerca, como vimos ante-riormente. El capacitor CB, de bloqueo estará diseñado, para que se comporte como un cable para la alterna. Una de las características es que la sintonía, puede cambiarse fácilmente mediante el reemplazo del cristal, con lo cual, con un circuito adecuado de conmutación, se pueden tener varias frecuencias fijas, de fácil sintonía, cambiando así, fácilmente de canal. Finalmente, podría ser necesario poner un choque en paralelo con la resistencia de carga, para evitar que al continua pase por ella. Observando el modelo equivalente, podemos entender mejor el principio de funcionamiento de este oscilador.
Fig. 1.22
J1
RD
RG
CDCG
VCC
CBX1
0
00
0
Finalmente mencionaremos otro oscilador a cristal con JFET, que suele usarse, que es el oscilador de Miller. Se trata de un oscilador doblemente sintonizado y la ventaja fundamental es que tiene un terminal del tanque y otro del cristal, puestos a tierra, en alterna. Además, un esquema similar puede realizarse con la utilización de circuitos integrados como los amplificadores operacionales o las compuertas inversoras trabajando en su zona lineal.
Fig. 1.23
J2
R2 C1
1
2
L1
VCC
RG
C2
X2
000
1.15) Osciladores de resistencia negativa
Ing.
Adr
ián
Dar
ío R
osa

Un dispositivo que convierte energía eléctrica en calor o en energía mecánica se puede representar en un circuito mediante una resistencia posi-tiva equivalente. Por otra parte, uno que convierte otras formas en energía eléctrica, se puede representar mediante una resistencia negativa. En un circuito elemental de c.c., que contenga una batería y un resistor de carga, por ejemplo, la resistencia que se calcularía si se aplicara la ley de Ohm al voltaje y corriente en las terminales de la batería (con el cuidado adecuado a las convenciones de signo) es negativa. Esto quiere decir que la batería es una fuente de energía eléctrica y no un sumidero. Los diodos túnel y Gunn, los transistores monojuntura, son capaces de absorber potencia de continua y convertir parte de ella en salida sinusoi-dal de frecuencia elevadas. Estos dispositivos exhiben así una resistencia negativa dentro de cierto ancho de banda finito. La figura 1.24 ilustra la característica de salida con resistencia negativa controlada a voltaje (estable en voltaje) para un diodo activo. La resistencia estática del disposi-tivo es V/I y siempre es positiva, por lo que el diodo siempre absorbe potencia de continua. Por otra parte, la resistencia incremental o de señal débil rn = dvldi, es positiva en las regiones o -a y b-c, pero negativa en la región a -b. Si el dispositivo se polariza en un punto Q, cualquier señal de c.a. aplicada al diodo vería una resistencia negativa y podrían generarse oscilaciones. Para hacer un oscilador, se conecta un circuito paralelo resonante con componentes L, C y Rt en paralelo con la resistencia negati-va, como en la figura 1.25. El ruido térmico hará que arranquen las oscilaciones. El punto de operación oscilará alrededor de Q y la resistencia incremental instantánea del diodo puede llegar a ser positiva en parte de cada ciclo, cuando la amplitud de la oscilación llegue a ser lo suficientemente grande, el diodo llegará a tener nuevamente resistencia positiva de manera que disipará energía de alterna, disminuyendo la amplitud de las oscilaciones y de este modo, se alcanza el equilibrio.
Fig. 1.24
Fig. 1.25
Ing.
Adr
ián
Dar
ío R
osa