notas clase relatividad especial
DESCRIPTION
Fredy OchoaTRANSCRIPT

Principios de la Relatividad Especial:Fundamentos Fısicos, Geometricos y Algebraicos
FREDY A. OCHOA
Departamento de FısicaUniversidad Nacional de ColombiaSede Bogota
II

Indice general
Prefacio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VII
Introduccion 1
PARTE I: FUNDAMENTOS FISICOS
1. La relatividad clasica 51.1. Definiciones basicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2. Las transformaciones de Galileo . . . . . . . . . . . . . . . . . . . . . 61.3. La relatividad de las partıculas puntuales . . . . . . . . . . . . . . . . . 7
1.3.1. Teorema de adicion de velocidades . . . . . . . . . . . . . . . 71.3.2. Invariancia de la aceleracion . . . . . . . . . . . . . . . . . . . 81.3.3. La fuerza y masa inercial clasicos . . . . . . . . . . . . . . . . 8
1.4. La relatividad de las ondas mecanicas . . . . . . . . . . . . . . . . . . 91.4.1. Retraso longitudinal . . . . . . . . . . . . . . . . . . . . . . . 101.4.2. Retraso transversal . . . . . . . . . . . . . . . . . . . . . . . . 111.4.3. Efecto Doppler clasico . . . . . . . . . . . . . . . . . . . . . . 12
2. La relatividad especial 152.1. Experimento idealizado de Michelson-Morley . . . . . . . . . . . . . . 152.2. Postulados de la relatividad especial . . . . . . . . . . . . . . . . . . . 192.3. Transformaciones de Lorentz Simples . . . . . . . . . . . . . . . . . . 202.4. Aclaraciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3. Cinematica relativista 293.1. La relatividad del tiempo . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.1. Simultaneidad . . . . . . . . . . . . . . . . . . . . . . . . . . 30
III
IV INDICE GENERAL
3.1.2. Dilatacion temporal . . . . . . . . . . . . . . . . . . . . . . . . 323.2. La relatividad de la longitud . . . . . . . . . . . . . . . . . . . . . . . 333.3. La relatividad del movimiento . . . . . . . . . . . . . . . . . . . . . . 34
3.3.1. Teorema de adicion de velocidades . . . . . . . . . . . . . . . 353.3.2. Transformacion de la aceleracion . . . . . . . . . . . . . . . . 363.3.3. Efecto Doppler longitudinal . . . . . . . . . . . . . . . . . . . 37
3.4. Lımites a altas y bajas velocidades . . . . . . . . . . . . . . . . . . . . 393.4.1. El lımite clasico . . . . . . . . . . . . . . . . . . . . . . . . . 393.4.2. El lımite ultrarelativista . . . . . . . . . . . . . . . . . . . . . . 40
4. Dinamica relativista 434.1. El momento relativista . . . . . . . . . . . . . . . . . . . . . . . . . . 444.2. La energıa relativista . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.2.1. Energıa cinetica clasica . . . . . . . . . . . . . . . . . . . . . . 474.2.2. Energıa cinetica relativista . . . . . . . . . . . . . . . . . . . . 48
4.3. La masa en reposo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.3.1. La masa de los quarks . . . . . . . . . . . . . . . . . . . . . . 514.3.2. El mecanismo de Brout-Englert-Higgs . . . . . . . . . . . . . . 52
4.4. La relacion energıa y momento . . . . . . . . . . . . . . . . . . . . . . 534.4.1. El foton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.4.2. Decaimiento de partıculas . . . . . . . . . . . . . . . . . . . . 554.4.3. Fision Nuclear . . . . . . . . . . . . . . . . . . . . . . . . . . 56
PARTE II: FUNDAMENTOS GEOMETRICOS
5. Estructura de Espacio-Tiempo 615.1. La geometrıa Euclidiana del espacio . . . . . . . . . . . . . . . . . . . 615.2. Estructuras de espacio-tiempo . . . . . . . . . . . . . . . . . . . . . . 63
5.2.1. Espacio-tiempo clasico . . . . . . . . . . . . . . . . . . . . . . 655.2.2. Espacio-tiempo de Poincare . . . . . . . . . . . . . . . . . . . 665.2.3. Espacio-tiempo de Minkowski . . . . . . . . . . . . . . . . . . 67
5.3. La estructura de cono de luz . . . . . . . . . . . . . . . . . . . . . . . 695.3.1. El principio de causalidad . . . . . . . . . . . . . . . . . . . . 70
6. La Geometrıa de la Cinematica Relativista 736.1. Distorsion Angular . . . . . . . . . . . . . . . . . . . . . . . . . . . . 736.2. Cinematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
6.2.1. Relatividad de la simultaneidad . . . . . . . . . . . . . . . . . 746.2.2. Dilatacion temporal . . . . . . . . . . . . . . . . . . . . . . . . 756.2.3. Contraccion de Fitzgerald-Lorentz . . . . . . . . . . . . . . . . 75
6.3. Hiperbolas invariantes . . . . . . . . . . . . . . . . . . . . . . . . . . 76
INDICE GENERAL V
6.3.1. La paradoja de los gemelos . . . . . . . . . . . . . . . . . . . . 776.4. La rapidez hiperbolica . . . . . . . . . . . . . . . . . . . . . . . . . . 79
PARTE III: FUNDAMENTOS ALGEBRAICOS
7. El Grupo de Lorentz 857.1. Grupo Abstracto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 857.2. El grupo de Lorentz simple . . . . . . . . . . . . . . . . . . . . . . . . 877.3. El grupo de Lorentz en general . . . . . . . . . . . . . . . . . . . . . . 90
7.3.1. El tensor metrico . . . . . . . . . . . . . . . . . . . . . . . . . 907.3.2. El grupo de Lorentz restringido . . . . . . . . . . . . . . . . . 91
7.4. Transformaciones de Lorentz restringidas . . . . . . . . . . . . . . . . 937.5. Algebra del Grupo de Lorentz . . . . . . . . . . . . . . . . . . . . . . 99
7.5.1. Los generadores del grupo de Lorentz . . . . . . . . . . . . . . 997.5.2. Representaciones del Grupo de Lorentz . . . . . . . . . . . . . 1017.5.3. Representaciones tensoriales . . . . . . . . . . . . . . . . . . . 105
8. Algebra de Tensores 1078.1. Notacion de ındices de Einstein . . . . . . . . . . . . . . . . . . . . . . 1078.2. Operaciones tensoriales . . . . . . . . . . . . . . . . . . . . . . . . . . 1088.3. Tensores especiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
8.3.1. Boost de Lorentz . . . . . . . . . . . . . . . . . . . . . . . . . 1118.3.2. Tensores isotropicos . . . . . . . . . . . . . . . . . . . . . . . 1128.3.3. Tensores Dual . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
9. Formulacion Covariante: Mecanica 1159.1. Variables cinematicas . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
9.1.1. La cuadri-velocidad . . . . . . . . . . . . . . . . . . . . . . . 1169.1.2. La cuadri-aceleracion . . . . . . . . . . . . . . . . . . . . . . . 117
9.2. Variables dinamicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1199.2.1. El cuadri-momento . . . . . . . . . . . . . . . . . . . . . . . . 1199.2.2. La fuerza de Minkowski . . . . . . . . . . . . . . . . . . . . . 1209.2.3. La masa invariante . . . . . . . . . . . . . . . . . . . . . . . . 122
9.3. Colisiones de partıculas puntuales . . . . . . . . . . . . . . . . . . . . 1239.4. El cohete relativista . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
10. Formulacion Covariante: Electrodinamica 13310.1. Representacion vectorial . . . . . . . . . . . . . . . . . . . . . . . . . 13310.2. Representacion tensorial . . . . . . . . . . . . . . . . . . . . . . . . . 136
10.2.1. La cuadri-corriente . . . . . . . . . . . . . . . . . . . . . . . . 13810.2.2. El cuadri-potencial . . . . . . . . . . . . . . . . . . . . . . . . 13910.2.3. Tensor electromagnetico . . . . . . . . . . . . . . . . . . . . . 139

VI INDICE GENERAL
10.3. Ecuaciones de Maxwell covariantes . . . . . . . . . . . . . . . . . . . 14110.3.1. Ley de Gauss y de Ampere-Maxwell . . . . . . . . . . . . . . . 14110.3.2. Ley de Gauss magnetica y de Faraday . . . . . . . . . . . . . . 143
Apendices 145A. Ondas Armonicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145B. El experimento real de Michelson-Morley . . . . . . . . . . . . . . . . . . 146C. El electronvoltio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147D. Generadores del Grupo de Lie . . . . . . . . . . . . . . . . . . . . . . . . 148E. Operadores diferenciales del calculo vectorial . . . . . . . . . . . . . . . . 149F. Ecuaciones de Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
Prefacio
El presente texto es el resultado de las clases de relatividad especial que dicte paralos estudiantes de la carrera de fısica de la Universidad Nacional de Colombia duran-te los dos semestre del 2013. A pesar de la amplia y excelente oferta de textos sobreel tema, no encontre un texto que cubriera de forma integral y a un nivel basico tantolos aspectos fısicos, como los geometricos y algebraicos que surgen de los principiosde la relatividad. En los textos mas tradicionales, los autores generalmente hacen enfa-sis en el desarrollo historico y en las evidencias experimentales que motivaron las ideasde Einstein, complementados con amplias discusiones conceptuales y las tradicionalesconsecuencias en cinematica y dinamica, mientras que aspectos como las consecuenciasgeometricas quedan limitadas a algunos comentarios aislados o en alguna seccion dentrode un capıtulo. Ademas, el tratamiento moderno del calculo tensorial no se menciona,o se limita a una introducion basica de los cuadri-vectores. La mayorıa de textos queincluyen el lenguaje geometrico y tensorial, son textos mas especializados dirigidos ge-neralmente a estudiantes de niveles avanzados y enfocados hacia la relatividad general ya la teorıa cuantica de campos.
Debido a la activa investigacion en fısica teorica y a la gran variedad de experimen-tos destinados a la busqueda de nueva fısica, se ha vuelto primordial que los estudiantesdesde los cursos fundamentales, empiecen a familiarizarse con la notacion moderna y surelacion con los temas actuales de la investigacion. En el caso de la relatividad, si bien esuna teorıa que se construyo de forma completa desde hace mas de un siglo, su vigenciasigue siendo actual y es el eje central que soporta la investigacion de frontera en areascomo la fısica de partıculas y la cosmologıa. Ası, problemas actuales a nivel de partıcu-las elementales como el fenomeno de oscilacion de neutrinos, el reciente descubrimientodel boson de Higgs, la busqueda de la llamada supersimetrıa, etc, o a nivel cosmologi-co como la busqueda de las ondas gravitacionales, el problema de la cuantizacion de lagravedad, las evidencias de la llamada materia oscura y energıa oscura, etc, son temasde una investigacion intensa tanto teorico como experimental, y que ademas de cumplircon los postulados de la relatividad especial, se soportan en principios fundamentalesinspirados en la relatividad. Surge entonces la necesidad de que los estudiantes no sola-mente aprendan los conceptos basicos y generales, sino que ademas vean el alcance detales conceptos y su importancia en el contexto de problemas actuales.
El proposito principal de este texto es iniciar al estudiante en los principios de larelatividad especial cubriendo de forma integral y concisa tres enfoques. Primero, evi-tando largas discusiones conceptuales, se introducen los postulados de la relatividadespecial contrastado con la relatividad clasica, y sus consecuencias fenomenologicas ensituaciones fısicas concretas. Segundo, se replantea la cinematica relativista usando unlenguaje puramente geometrico en el contexto de los diagramas de espacio-tiempo, don-de se enfatiza la importancia de los principios de invariancia usando rotaciones de ejesespacio-temporales. Finalmente, y relacionado con los dos enfoques anteriores, se haceuna introduccion formal al lenguaje del algebra tensorial como una herramienta eficien-

te para introducir principios de invariancia y describir las variables fısicas, yendo masalla de los basicos cuadri-vectores. Como aplicacion, se replantea de nuevo la cinemati-ca y dinamica de la relatividad en el lenguaje tensorial, y se hace una introduccion a laformulacion covariante de la electrodinamica.
Como resultado de la propuesta, se espera que el estudiante, primero, adquiera unavision global e integral de la relatividad especial visto desde los tres enfoques. Segun-do, que el estudiante adquiera destresas no solamente en el planteamiento y solucionde problema relativistas usando algebra tradicional, si no que adicionalmente aprovecheherramientas como los diagramas de espacio-tiempo desde el punto de vista geometricoy del calculo tensorial desde un punto de vista algebraico para plantear, entender y resol-ver problemas, lo que le permita en el futuro tener las herramientas basicas para iniciarseen un trabajo de investigacion en las areas afines de forma mas rapida y fluida.
Introduccion
Uno de los propositos de la fısica es la de lograr describir la mayor cantidad defenomenos observados en la naturaleza con la mınima cantidad de suposiciones inicia-les, incluso aunque los fenomenos muchas veces parecen ser muy distintos. En la historiamoderna de la ciencias, hay muchos ejemplos de hechos diferentes que se han logradoentender bajo una unica vision, o al menos en relacion muy proxima. La caıda libre delos objetos en la superficie de la Tierra, el movimiento de los planetas alrededor delSol, la dinamica de las estrellas y galaxias en el Universo observable, etc, se descri-ben de forma aproximada con una unica ley: la ley gravitacional de Newton. Las reglasque obedecen los circuitos electricos, los fenomenos magneticos, la optica de la luz, laradiacion de partıculas cargadas, etc, se logran describir clasicamente con solamente 4ecuaciones fundamentales: las ecuaciones de Maxwell. Para citar un ejemplo mas actual,la interaccion de fotones muy energeticos con la materia y los procesos de decaimientoradioactivo de la materia como el decaimiento beta, se logran describir por un principiocomun de simetrıas: el modelo estandar electrodebil. En ese esfuerzo de encontrar unarelacion comun entre diferentes fenomenos, la fısica ha logrado identificar en los prin-cipios de relatividad, un conjunto de premisas fundamentales que deben ser obedecidaspor las teorıas fısicas, y que logro su maximo alcance con la fomulacion de la relatividadespecial.
Basicamente, un principio de relatividad es un principio de invariancia entre dife-rentes sistemas de referencias [inerciales] relacionado con algun parametro o alguna leyfısica. En particular, los postulados de la relatividad especial tienen un alcance tal quehasta donde sabemos, se cumple para todas las leyes de la fısica conocidas, y que tieneconsecuencias dramaticas en la concepcion clasica de los fenomenos. Con el propositode lograr un entendimiento integral, aunque introductorio de la relatividad especial, elpresente texto se divide en tres partes: primero, los fundamentos fısicos, donde se expo-nen las consecuencias fısicas de los principios de la relatividad a nivel de la mecanica.
1

Segundo, los fundamentos geometricos, en la cual se reinterpreta la concepcion del es-pacio y del tiempo bajo el contexto de los principios. Tercero, los fundamentos algebrai-cos, donde despues de una revision puramente matematica, se reformulan las leyes de lamecanica y la electrodinamica en el lenguaje formal y moderno de los tensores.

Parte IFundamentos Fısicos
3

CAPITULO 1
La relatividad clasica
Existen diferentes principios de relatividad planteados en el contexto de situacionesfısicas particulares. Incluso, la relatividad especial tuvo su origen puntual en los fenome-nos electromagneticos, particularmente en los problemas asociados a la propagacion dela luz. Sin embargo, fue Einstein quien por primera vez formulo un principio de rela-tividad que no solamente abarcaba los fenomenos electromagneticos, sino que ademascambiaba de forma dramatica nuestra concepcion del espacio, el tiempo y la energıa,afectando a todos los fenomenos fısicos conocidos, desde la mecanica hasta la fısicasubatomica.
En este capıtulo haremos primero una revision basica y discutiremos algunas conse-cuencias del principio de relatividad clasico asociados a las partıculas puntuales. Poste-riormente, describiremos la relatividad asociada a las ondas mecanicas, donde se enten-dera desde el punto de vista mecanico algunos resultados de los fenomenos ondulatorios,lo cual sera de importancia central para contextualizar las interpretaciones que los fısicosde finales del siglo XIX daban a algunos de los experimentos con luz.
1.1. Definiciones basicas
Antes de abordar el caso de la relatividad clasica, es fundamental establecer las de-finiciones mas basicas del lenguaje de la relatividad.
1. Evento: Intuitivamente, un evento es un hecho fısico que ocurre en cierta regionlimitada de espacio y que tiene una duracion en un intervalo de tiempo dado. Sinembargo, formalmente, lo vamos a definir como un punto matematico asociado auna posicion y un instante de tiempo especıficos, y que representa un hecho fısico
5
6 CAPITULO 1. LA RELATIVIDAD CLASICA
puntual. En la practica, los eventos se asemejan mas a nuestra idea intuitiva que ala formalmente definida. Sin embargo, la definicion formal es compatible con larealidad si asumimos que los fenomenos fısicos se pueden reproducir como unasucesion continua de eventos puntuales, que de ahora en adelante simplemente losvamos a llamar eventos. Ejemplos de eventos son: una partıcula ubicada en unaposicion r(t) en el instante de tiempo t, la colision de dos partıculas [puntuales]en un punto, el decaimiento de un nucleo en un instante t, etc.
2. Sistema Inercial: El principio de relatividad especial se plantea en sistemas de re-ferencia donde se cumple la ley de inercia de Galileo generalizada en la primeraley de Newton. Para que dicha ley se cumpla, el sistema inercial debe asociarse acuerpos en movimiento rectilıneo y uniforme. Ası, un sistema inercial lo definire-mos simplemente como un conjunto de cuerpos no acelerados.
3. Observador Inercial: El proceso de medicion en relatividad especial es una partefundamental en la concepcion misma del tiempo y el espacio. Para incorporarlode forma natural, es necesario ampliar el concepto de sistema inercial e incluirlos instrumentos de observacion. Ası, se define un observador inercial como unconjunto compuesto por un sistema de ejes coordenados inerciales, reglas y relojesque permiten registrar en “tiempo real” las posiciones y los tiempos de los eventos,es decir, en el lugar exacto donde ocurren y en el instante cuando ocurren. Para queesta definicion tenga sentido, es necesario garantizar siempre que haya una regla yun reloj en cada uno los puntos del sistema coordenado donde pueden ocurrir loseventos.
1.2. Las transformaciones de Galileo
La relatividad clasica de las partıculas puntuales fue establecida originalmente porGalileo, y soportadas en un conjunto de ecuaciones conocidas como las transformacionesde Galileo. Con el proposito de comparar las diferentes relatividades, vamos a clasificarlas transformaciones en los siguientes dos postulados:
1. Invariancia del intervalo de tiempo
Si ∆t representa el intervalo de tiempo entre dos eventos medido por un observadorinercial Σ, y ∆t ′ el medido por otro observador inercial Σ′ en movimiento relativorespecto a Σ, se cumple la relacion:
∆t = ∆t ′, (1.1)
es decir, los intervalos de tiempo entre eventos son los mismos para todo observa-dor inercial.
1.3. LA RELATIVIDAD DE LAS PARTICULAS PUNTUALES 7
2. Transformacion de la posicion
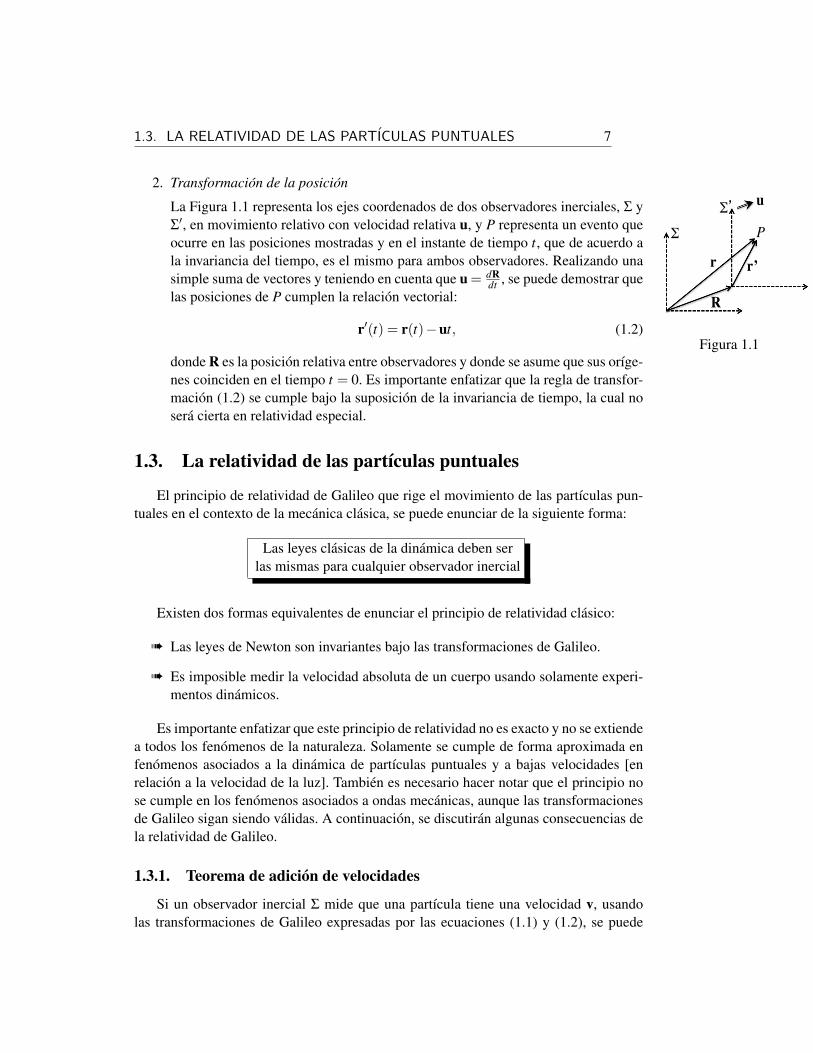
La Figura 1.1 representa los ejes coordenados de dos observadores inerciales, Σ yΣ′, en movimiento relativo con velocidad relativa u, y P representa un evento queocurre en las posiciones mostradas y en el instante de tiempo t, que de acuerdo ala invariancia del tiempo, es el mismo para ambos observadores. Realizando unasimple suma de vectores y teniendo en cuenta que u = dR
dt , se puede demostrar quelas posiciones de P cumplen la relacion vectorial:
P
r’ r
R
u Σ’
Σ
Figura 1.1r′(t) = r(t)−ut, (1.2)
donde R es la posicion relativa entre observadores y donde se asume que sus orıge-nes coinciden en el tiempo t = 0. Es importante enfatizar que la regla de transfor-macion (1.2) se cumple bajo la suposicion de la invariancia de tiempo, la cual nosera cierta en relatividad especial.
1.3. La relatividad de las partıculas puntuales
El principio de relatividad de Galileo que rige el movimiento de las partıculas pun-tuales en el contexto de la mecanica clasica, se puede enunciar de la siguiente forma:
Las leyes clasicas de la dinamica deben serlas mismas para cualquier observador inercial
Existen dos formas equivalentes de enunciar el principio de relatividad clasico:
à Las leyes de Newton son invariantes bajo las transformaciones de Galileo.
à Es imposible medir la velocidad absoluta de un cuerpo usando solamente experi-mentos dinamicos.
Es importante enfatizar que este principio de relatividad no es exacto y no se extiendea todos los fenomenos de la naturaleza. Solamente se cumple de forma aproximada enfenomenos asociados a la dinamica de partıculas puntuales y a bajas velocidades [enrelacion a la velocidad de la luz]. Tambien es necesario hacer notar que el principio nose cumple en los fenomenos asociados a ondas mecanicas, aunque las transformacionesde Galileo sigan siendo validas. A continuacion, se discutiran algunas consecuencias dela relatividad de Galileo.
1.3.1. Teorema de adicion de velocidades
Si un observador inercial Σ mide que una partıcula tiene una velocidad v, usandolas transformaciones de Galileo expresadas por las ecuaciones (1.1) y (1.2), se puede

8 CAPITULO 1. LA RELATIVIDAD CLASICA
calcular la velocidad de esa misma partıcula medida por otro observador Σ′ que se muevecon velocidad u relativa a Σ:
v′ =dr′(t ′)
dt ′=
dr′(t)dt
=ddt
(r(t)−ut) = v−u, (1.3)
que corresponde al teorema clasico de adicion de velocidades.
1.3.2. Invariancia de la aceleracion
Considerando los mismos observadores del caso anterior, si a es la aceleracion de lapartıcula medida por Σ, se puede demostrar con el mismo procedimiento anterior que laaceleracion en Σ′ es:
a′ = a. (1.4)
Ası, las aceleraciones al igual que el tiempo, son las mismas para todos los observadoresinerciales, o dicho de otra forma, la aceleracion es invariante bajo las transformacionesde Galileo.
1.3.3. La fuerza y masa inercial clasicos
En mecanica clasica, el concepto de fuerza es fundamental en la descripcion de ladinamica. La razon de ello es porque las leyes de Newton y el principio de relatividadde Galileo, permiten definir la fuerza con dos propiedades importantes: la fuerza es unacantidad invariante y absoluta. Para mostrar como se obtienen estas propiedades, parta-mos de la premisa que las leyes de la dinamica se rigen por las leyes de Newton, por loque deben cumplir con el principio de relatividad de Galileo.
1. Primera ley: Como consecuencia de la primera ley de Newton, si un observadorinercial Σ mide que una partıcula se mueve uniformemente (su velocidad es cons-tante), entonces la fuerza sobre la partıcula debe ser nula. Si otro observador iner-cial Σ′ en movimiento relativo mide la velocidad de esa misma partıcula aplicandoel teorema de adicion de velocidades segun la ecuacion (1.3), tambien medira quees constante, es decir, la fuerza seguira siendo nula. Ası, si una fuerza es cero paraun observador inercial, sera cero para todos los observadores inerciales. Decimosentonces que la fuerza es una cantidad absoluta.
2. Segunda ley: La segunda ley de Newton define matematicamente la fuerza comoel producto entre la masa inercial m y la aceleracion de una partıcula. Entonces,el observador Σ escribe la ecuacion en la forma F = ma. Por el principio de rela-tividad, el observador Σ′ debe escribir la misma ley para su propio sistema coor-denado inercial, es decir F′ = m′a′. Como la aceleracion es la misma para ambosobservadores, se encuentra la igualdad:
1.4. LA RELATIVIDAD DE LAS ONDAS MECANICAS 9
F′
m′=
Fm. (1.5)
Si definimos la masa inercial como una propiedad intrınseca de la materia inde-pendiente del sistema de referencia, de acuerdo a (1.5) se puede definir la fuerzacomo una cantidad invariante. Ası, si m′ = m entonces F′ = F. Tambien se pue-de ver en forma inversa: si la fuerza es invariante, entonces la masa tambien va aser invariante. De esta manera, del principio de relatividad y de la segunda ley deNewton se derivan dos propiedades importantes de la mecanica clasica: la fuerzasobre los cuerpos y la masa inercial de los cuerpos se definen clasicamente talque sean las mismas para todos los observadores inerciales, es decir, la fuerza y lamasa en mecanica clasica son cantidades invariantes.
1.4. La relatividad de las ondas mecanicas
Otra clase de fenomenos observados en la naturaleza son aquellos asociados a las on-das mecanicas, que exhiben una cinematica y una relatividad diferentes al de las partıcu-las. Primero, mientras que la propagacion de un objeto se describe como el movimientolocalizado de materia en el espacio, una onda mecanica describe la propagacion de unadeformacion local en un medio material, donde cada parte del medio sufre pequenoscorrimientos alrededor de un punto fijo en el espacio, pero no se desplaza junto a la de-formacion. Ası, lo que nos interesa es describir como esa deformacion se extiende a lolargo del medio. Segundo, la cinematica de las ondas esta determinada por un conjuntoadicional de parametros asociados a la deformacion, y que no aparecen en el movimien-to de las partıculas puntuales, como la amplitud, el periodo, la frecuencia, etc.. Para elproposito de la presente discusion, nos limitamos a las llamadas ondas armonicas, cuyaspropiedades se resumen en el Apendice A. Las propiedades relativistas de los movi-mientos ondulatorios vienen descritas por la ecuacion de onda, la cual cumple con elsiguiente principio de relatividad
La ecuacion de onda de una onda mecanica es la mismasin importar el movimiento de la fuente. Depende
del movimiento del observador inercial respecto al medio
Como un corolario del principio anterior, se tiene la siguiente propiedad:
à Las velocidad de una onda mecanica es independiente del movimiento de la fuen-ta que la produce. Depende de las propiedades del medio y del movimiento delobservador inercial respecto al medio.
Hay que enfatizar que aunque la naturaleza de los fenomenos ondulatorios y de partıcu-las puntuales son muy diferentes, la relacion de la posicion, tiempo y velocidad de la

10 CAPITULO 1. LA RELATIVIDAD CLASICA
onda entre distintos observadores inerciales sigue siendo gobernada por las transforma-ciones de Galileo. Para estudiar las consecuencias del principio de relatividad anterior,es necesario usar la relacion de dispersion descrita en el Apendice A en terminos de lalongitud de onda λ :
λ =cf= cT, (1.6)
donde c es la velocidad de la onda, f la frecuencia y T el periodo. Para enmarcar ladiscusion en un contexto fısico conocido, vamos a considerar ondas sonoras.
1.4.1. Retraso longitudinal
En la siguiente situacion, el sistema fısico coincide con el observador:
Un parlante emite un pulso de sonido hacia una pared rıgida ubicada a unadistancia L. El pulso se refleja en la pared y se devuelve en direccion opuestahacia el parlante, donde es detectada por un microfono. Calcular el tiempo totalentre la emision y la deteccion del pulso si a.) el sistema fısico se encuentra enreposo respecto al medio (la atmosfera) y b.) el sistema se mueve con velocidadu en direccion de emision del pulso.
En el caso a.), el sistema de referencia del observador coincide con el sistemaen reposo del medio ΣM, como se ilustra en la Figura 1.2. Es evidente de lafigura que el tiempo total de ida y regreso del pulso es:
t =2L|c|
. (1.7)
ΣM c -c
L0 Figura 1.2 En el caso b.), el observador Σ′ se encuentra en movimiento respecto al medio,
como se muestra en la Figura 1.3. Aunque el parlante (y la pared) se encuentraen movimiento, la velocidad del pulso respecto al medio sigue siendo c porel principio de relatividad para ondas. Ası, para el pulso de ida, de acuerdoal teorema de adicion de la ecuacion (1.3), si identificamos v′ = c′ como lavelocidad de la onda medida por Σ′, v = c la velocidad de la onda respecto almedio ΣM y u = u la velocidad de Σ′ respecto a ΣM, entonces se cumple quec′ = c−u. Para el pulso de vuelta, se cambia c′ por c′′ y c por −c, por lo queel observador mide c′′ =−c−u. Ası, asumiendo que la rapidez del sistema noes mayor a la del sonido, el tiempo total de viaje medido por Σ′ es:
ΣM Σ’
c -c u
Figura 1.3t ′ = t ′ida + t ′vuelta =
L|c′|
+L|c′′|
=L
c−u+
Lc+u
=2L
c(1−u2/c2). (1.8)
1.4. LA RELATIVIDAD DE LAS ONDAS MECANICAS 11
La cantidad u2/c2 aparece frecuentemente en relatividad, por lo que conviene escribirloen terminos del siguiente parametro adimensional:
β =uc, (1.9)
por lo que el tiempo total de un pulso que viaja con la misma orientacion de movimientodel sistema es:
t ′‖ =2L
c(1−β 2). (1.10)
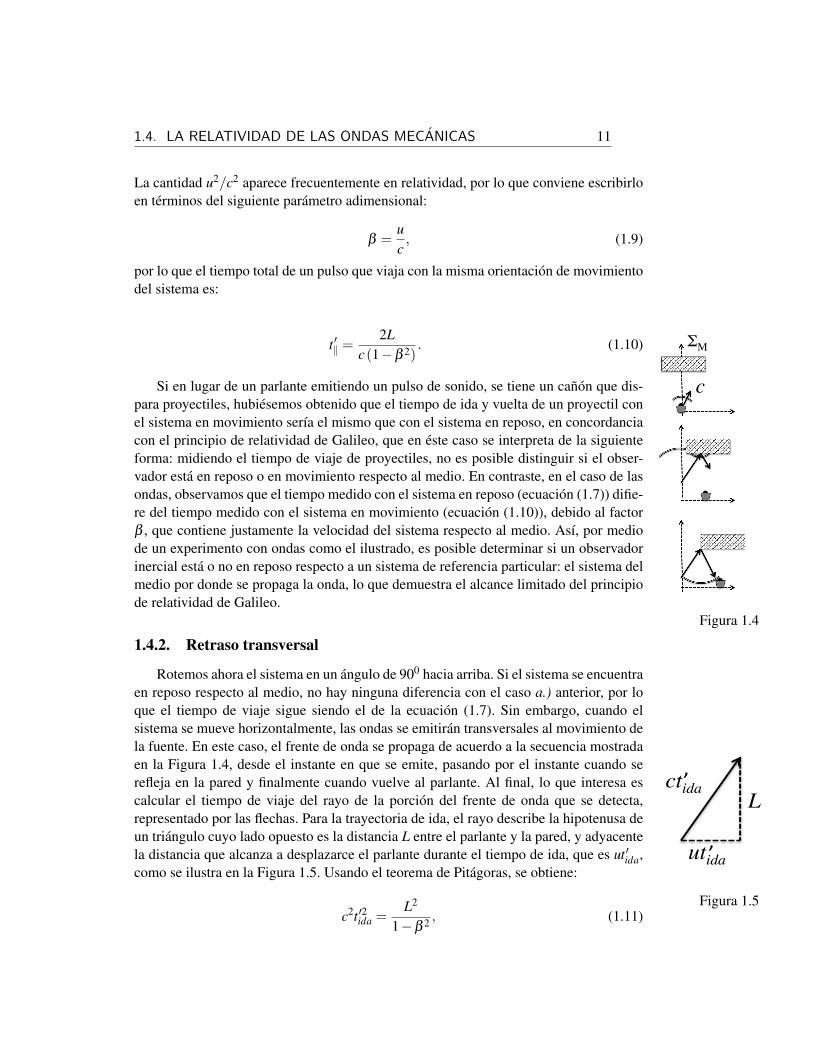
Si en lugar de un parlante emitiendo un pulso de sonido, se tiene un canon que dis-para proyectiles, hubiesemos obtenido que el tiempo de ida y vuelta de un proyectil conel sistema en movimiento serıa el mismo que con el sistema en reposo, en concordanciacon el principio de relatividad de Galileo, que en este caso se interpreta de la siguienteforma: midiendo el tiempo de viaje de proyectiles, no es posible distinguir si el obser-vador esta en reposo o en movimiento respecto al medio. En contraste, en el caso de lasondas, observamos que el tiempo medido con el sistema en reposo (ecuacion (1.7)) difie-re del tiempo medido con el sistema en movimiento (ecuacion (1.10)), debido al factorβ , que contiene justamente la velocidad del sistema respecto al medio. Ası, por mediode un experimento con ondas como el ilustrado, es posible determinar si un observadorinercial esta o no en reposo respecto a un sistema de referencia particular: el sistema delmedio por donde se propaga la onda, lo que demuestra el alcance limitado del principiode relatividad de Galileo.
ΣM
c
Figura 1.4
L
utida ’
ctida ’
Figura 1.5
1.4.2. Retraso transversal
Rotemos ahora el sistema en un angulo de 900 hacia arriba. Si el sistema se encuentraen reposo respecto al medio, no hay ninguna diferencia con el caso a.) anterior, por loque el tiempo de viaje sigue siendo el de la ecuacion (1.7). Sin embargo, cuando elsistema se mueve horizontalmente, las ondas se emitiran transversales al movimiento dela fuente. En este caso, el frente de onda se propaga de acuerdo a la secuencia mostradaen la Figura 1.4, desde el instante en que se emite, pasando por el instante cuando serefleja en la pared y finalmente cuando vuelve al parlante. Al final, lo que interesa escalcular el tiempo de viaje del rayo de la porcion del frente de onda que se detecta,representado por las flechas. Para la trayectoria de ida, el rayo describe la hipotenusa deun triangulo cuyo lado opuesto es la distancia L entre el parlante y la pared, y adyacentela distancia que alcanza a desplazarce el parlante durante el tiempo de ida, que es ut ′ida,como se ilustra en la Figura 1.5. Usando el teorema de Pitagoras, se obtiene:
c2t ′2ida =L2
1−β 2 , (1.11)

12 CAPITULO 1. LA RELATIVIDAD CLASICA
con β definido en la ecuacion (1.9). Como la distancia recorrida por el rayo de regreso esel mismo que el de ida, vamos a obtener el mismo resultado. Ası, despejando el tiempoen la ecuacion (1.11) y multiplicando por dos, obtenemos el tiempo total de viaje delpulso emitido transversal al movimiento del sistema:
t ′⊥ =2L
c√
1−β 2. (1.12)
Al comparar el resultado anterior con el tiempo del pulso emitido paralelo a la di-reccion del movimiento dado por la ecuacion (1.10), se comprueba que t ′‖ > t ′⊥. Ası, eneste experimento con ondas sonoras, no solamente podemos determinar si un observadorse encuentra en movimiento respecto al medio, sino que ademas, podemos determinarsu direccion de movimiento relativa a la direccion de propagacion de la onda. Como severa en el proximo capıtulo, este mismo experimento se puede realizar con luz, que esla esencia del famoso experimento de Michelson-Morley.
1.4.3. Efecto Doppler clasico
En la relatividad clasica de las ondas se pueden distinguir diferentes efectos Dop-pler segun el movimiento relativo entre la fuente y el observador. Ilustramos un caso endetalle, de acuerdo a la siguiente situacion fısica:
Un parlante emite un pulso de sonido a una frecuencia fF hacia un observadorque lo detecta. Calcular la frecuencia del pulso medida por el observador si a.)el observador se encuentra en reposo respecto al medio y el parlante se muevehacia el observador con rapidez u y b.) el parlante se encuentra en reposo y elobservador se mueve hacia el parlante con rapidez u.
A primera vista, pareciera que ambos casos son equivalentes. De hecho si el problemafuera con partıculas, no habrıa ninguna diferencia si la fuente se mueve hacia el obser-vador o si es el observador el que se mueve hacia la fuente, que es consecuencia delprincipio de relatividad de Galileo. Pero en este caso con ondas, se vera que las dos si-tuaciones llevan a diferentes soluciones, lo que muestra de nuevo las diferencias entrela relatividad de las partıculas puntuales y la de las ondas mecanicas. En el diagrama dela Figura 1.6 se muestra la situacion del caso a.) visto desde el sistema del observadoren reposo ΣO, donde ΣF es el sistema de la fuente en movimiento. De acuerdo a la rela-cion de dispersion de la ecuacion (1.6), la longitud de onda medida por el observador enreposo es:
ΣO ΣF
c
u
Figura 1.6λO =
cfO, (1.13)
donde fO es la frecuencia medida por el observador. Sin embargo, esta frecuencia no esla misma que la emitida por la fuente. La razon es que los pulsos van a salir mas cercanosuno a otro debido al desplazamiento continuo de la fuenta. Para ilustrar esto, la grafica

1.4. LA RELATIVIDAD DE LAS ONDAS MECANICAS 13
de la Figura 1.7 muestra la secuencia de emision de dos frentes de onda, 1 y 2, el primeroen el tiempo cero, y el segundo despues de un periodo TF , correspondiente al periodo deemision. Como se puede ver en la segunda grafica, el parlante se ha movido una distanciauTF , mientras que el primer pulso ha avanzado la distancia cTF . De la figura, se deduce
uTF
TF c
1
1 2
Figura 1.7
que la longitud de onda medida por el observador y que coincide con la distancia entrelos dos pulsos es:
λO = (c−u)TF =c−u
fF, (1.14)
donde en la segunda igualdad se uso la definicion T = 1/ f . Igualando las ecuaciones(1.14) y (1.13), se obtiene que la frecuencia medida por el observador es:
fO =fF
1−β, (1.15)
con β el factor definido en (1.9). Como la velocidad es hacia el observador, el factor β espositivo, lo que implica que la frecuencia detectada fO es mayor a la frecuencia emitidafF . Sin embargo, esa misma ecuacion se aplica tambien al caso en que la fuente se alejadel observador, con la diferencia de que el factor β se vuelve negativo, por lo que en esecaso la frecuencia detectada va a ser menor a la emitida.
El caso b.) se puede resolver de la misma forma. La diferencia fundamental radicaen que el observador, el cual ahora esta en movimiento, mide una velocidad del sonidodada por c′ = c+u, de acuerdo al teorema de adicion de velocidades. Ası, para este caso,las ecuaciones (1.13) y (1.14) se convierten en:
λO =c′
fO= (c′−u)TF =
c′−ufF
. (1.16)
Reemplazando la velocidad c′ = c+u en la ecuaciones anteriores y despejando en termi-nos de las frecuencias, se obtiene para el efecto Doppler con fuente en reposo que:
fO = fF(1+β ), (1.17)
la cual claramente difiere del resultado para el efecto Doppler con fuente en movimientodado por (1.15).
Problema 1: Demuestre que para el caso mas general en que tanto la fuente como elobservador se mueven con velocidades u y v en relacion al medio, respectivamente,la frecuencia medida por el observador es:
fO = fF
(1− v/c1−u/c
). (1.18)
14 CAPITULO 1. LA RELATIVIDAD CLASICA
CAPITULO 2
La relatividad especial
En el capıtulo anterior describimos los principios de relatividad para partıculas pun-tuales y ondas mecanicas. En este capıtulo extenderemos la descripcion a la relatividadde la propagacion de la luz, de la cual se desprendera de forma natural la necesidad dereformular los principios de relatividad clasicos a una nueva relatividad. En particular,la discusion se centra en el historico experimento de Michelson-Morley. Motivado porla evidencia experimental, formularemos los dos postulados de la relatividad. Finalmen-te, obtendremos las transformaciones de Lorentz simples asumiendo la validez de lospostulados y aplicados en situaciones fısicas particulares.
A continuacion haremos una descripcion simplificada del experimento de Michelson-Morley, que aunque irrealizable, destaca las ideas esenciales que nos permitira entenderla necesidad de formular una nueva relatividad. Una descripcion mas realista del experi-mento se muestra en el Apendice B.
2.1. Experimento idealizado de Michelson-Morley
Durante el siglo XIX, las numerosas evidencias experimentales recolectadas de losfenomenos electricos y magneticos condujeron a una formulacion matematica unificadadesarrollada por James C. Maxwell y sintetizadas en 4 ecuaciones fundamentales, co-nocidas hoy en dıa como las ecuaciones de Maxwell. En particular, dicha formulacionera compatible con la naturaleza ondulatoria de la luz. En electrodinamica clasica, laluz se describe como una onda de campos electricos y magneticos que se propaga en elespacio a una velocidad enorme pero finita de aproximadamente 3×108 m/s. Puesto quelos unicos fenomenos ondulatorios conocidos en la epoca eran las ondas mecanicas, losfısicos le dieron inicialmente una interpretacion de naturaleza mecanica a los procesos
15
16 CAPITULO 2. LA RELATIVIDAD ESPECIAL
de propagacion de la luz, lo que en particular presumıa las siguientes propiedades:
1. La luz debıa ser la propagacion de perturbaciones en un medio material. Puestoque los objetos astronomicos son visibles, dicho medio debıa llenar completa-mente el Universo y poseer propiedades extraordinarias para ser indetectable porotros medios diferentes a la de la luz. A dicho medio se le dio el nombre de eterluminıfero.
2. La velocidad de la luz es independiente del movimiento de la fuente. Solo dependedel movimiento del observador a traves del eter.
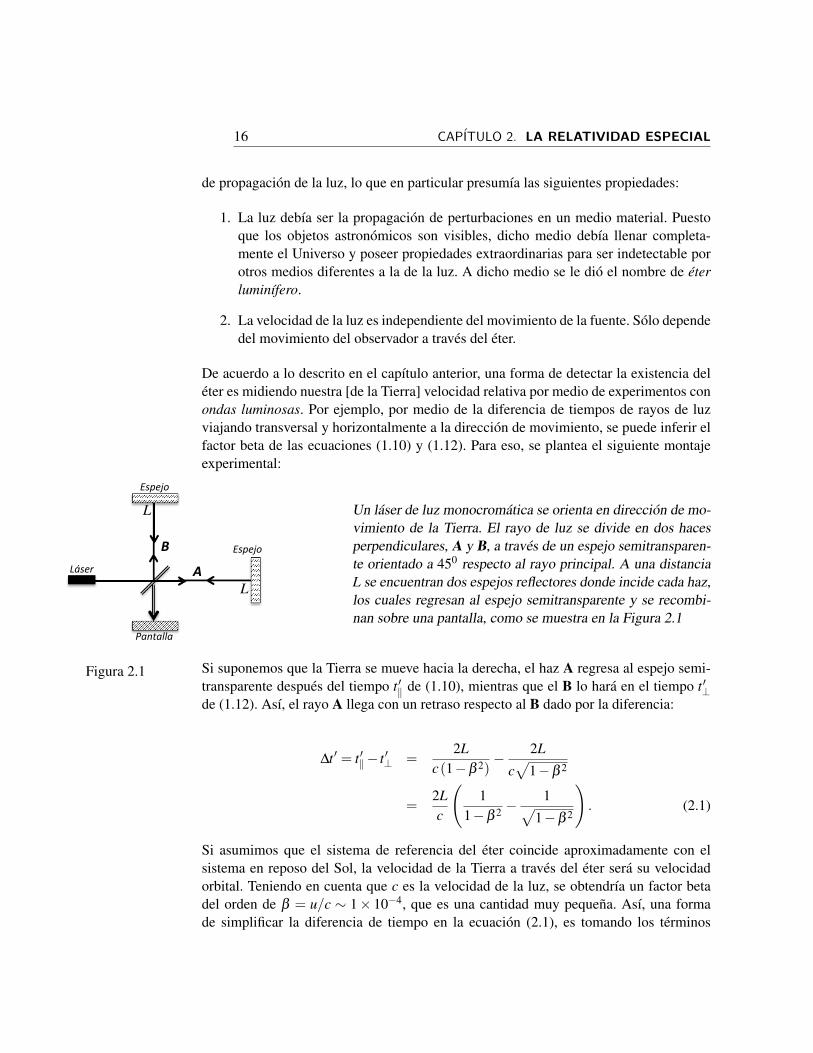
De acuerdo a lo descrito en el capıtulo anterior, una forma de detectar la existencia deleter es midiendo nuestra [de la Tierra] velocidad relativa por medio de experimentos conondas luminosas. Por ejemplo, por medio de la diferencia de tiempos de rayos de luzviajando transversal y horizontalmente a la direccion de movimiento, se puede inferir elfactor beta de las ecuaciones (1.10) y (1.12). Para eso, se plantea el siguiente montajeexperimental:
Láser A
B
L
L
Pantalla
Espejo
Espejo
Figura 2.1
Un laser de luz monocromatica se orienta en direccion de mo-vimiento de la Tierra. El rayo de luz se divide en dos hacesperpendiculares, A y B, a traves de un espejo semitransparen-te orientado a 450 respecto al rayo principal. A una distanciaL se encuentran dos espejos reflectores donde incide cada haz,los cuales regresan al espejo semitransparente y se recombi-nan sobre una pantalla, como se muestra en la Figura 2.1
Si suponemos que la Tierra se mueve hacia la derecha, el haz A regresa al espejo semi-transparente despues del tiempo t ′‖ de (1.10), mientras que el B lo hara en el tiempo t ′⊥de (1.12). Ası, el rayo A llega con un retraso respecto al B dado por la diferencia:
∆t ′ = t ′‖− t ′⊥ =2L
c(1−β 2)− 2L
c√
1−β 2
=2Lc
(1
1−β 2 −1√
1−β 2
). (2.1)
Si asumimos que el sistema de referencia del eter coincide aproximadamente con elsistema en reposo del Sol, la velocidad de la Tierra a traves del eter sera su velocidadorbital. Teniendo en cuenta que c es la velocidad de la luz, se obtendrıa un factor betadel orden de β = u/c ∼ 1× 10−4, que es una cantidad muy pequena. Ası, una formade simplificar la diferencia de tiempo en la ecuacion (2.1), es tomando los terminos

2.1. EXPERIMENTO IDEALIZADO DE MICHELSON-MORLEY 17
dominantes de hasta segundo orden en una expansion de Taylor en cada factor dentrodel parentesis:
(1−β
2)−1 ≈ 1+β2(
1−β2)−1/2 ≈ 1+
12
β2,
por lo que la diferencia de tiempo entre ambos rayos es aproximadamente:
∆t ′ ≈ Lc
β2. (2.2)
Si realizamos un estimativo numerico, para un montaje con L = 1 m y tomandoc≈ 3×108 m/s y β ≈ 1×10−4, obtenemos diferencias de tiempo del orden de 3×10−17
s, que es una cantidad muy pequena, por lo que medir directamente tiempos no resul-ta practico. Sin embargo, Michelson y Morley explotaron la propiedad de interferenciade las ondas para detectar de forma indirecta el efecto de la diferencia de los tiempos.Para entender el metodo usado en el experimento, vamos a asumir una situacion idealsuponiendo que 1.) los rayos de luz siguen un unico camino optico, 2.) el espejo se-mitransparente divide el haz en dos rayos perfectamente perpendiculares entre sı, y losespejos reflejan los rayos en direcciones exactamente opuestas y 3.) la unica fuente deretraso entre ambos rayos es debido al supuesto movimiento de la tierra a traves del eter.Bajo tales condiciones, se puede realizar un estimativo simple de la intensidad de la luzque incide sobre la pantalla utilizando el calculo complejo para describir las oscilacio-nes de campos. Si EA y EB describen las componentes de campo electrico de cada hazcuando inciden sobre la pantalla y asumimos que ambos rayos tienen la misma frecuen-cia angular ω , entonces los campos oscilan sobre la pantalla de acuerdo a las formasarmonicas:
EA = E0eiω(t ′+∆t ′), EB = E0eiωt ′ , (2.3)
donde se supone que ambos campos tienen la misma amplitud E0 y ∆t ′ es la diferenciade tiempo entre los rayos dada por la ecuacion (2.2). Si los rayos llegan en perfectaalineacion y sincronıa, sobre la pantalla se detecta un solo campo electrico dado por:
E = EA +EB = E0
(eiω(t ′+∆t ′)+ eiωt ′
)= E0eiωt ′
(1+ eiω∆t ′
). (2.4)
La intensidad observada es proporcional al cuadrado de la magnitud del campo electricototal, es decir:
18 CAPITULO 2. LA RELATIVIDAD ESPECIAL
I ∼ |E|2 = EE∗ = 2E20[1+ cos(ω∆t ′)
], (2.5)
donde hemos usado la ecuacion de Euler para expresar las exponenciales complejas enforma de funciones trigonometricas:
eiy = cos(y)+ isin(y). (2.6)
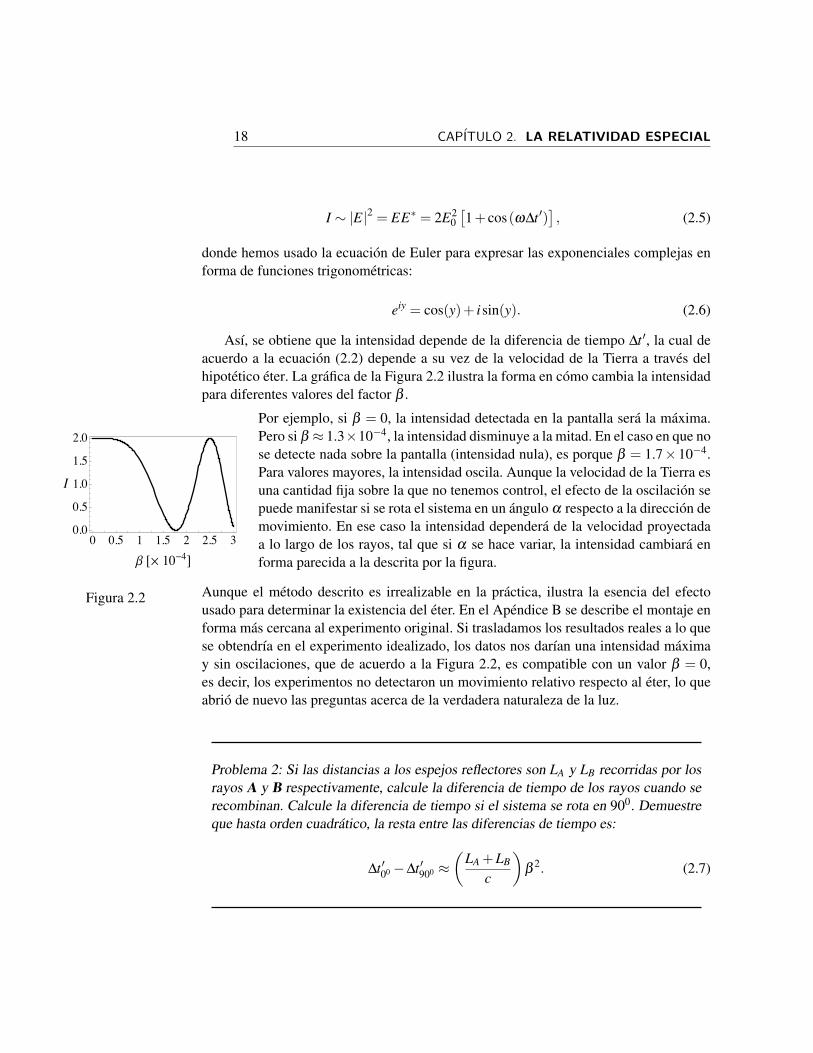
Ası, se obtiene que la intensidad depende de la diferencia de tiempo ∆t ′, la cual deacuerdo a la ecuacion (2.2) depende a su vez de la velocidad de la Tierra a traves delhipotetico eter. La grafica de la Figura 2.2 ilustra la forma en como cambia la intensidadpara diferentes valores del factor β .
Por ejemplo, si β = 0, la intensidad detectada en la pantalla sera la maxima.Pero si β ≈ 1.3×10−4, la intensidad disminuye a la mitad. En el caso en que nose detecte nada sobre la pantalla (intensidad nula), es porque β = 1.7×10−4.Para valores mayores, la intensidad oscila. Aunque la velocidad de la Tierra esuna cantidad fija sobre la que no tenemos control, el efecto de la oscilacion sepuede manifestar si se rota el sistema en un angulo α respecto a la direccion demovimiento. En ese caso la intensidad dependera de la velocidad proyectadaa lo largo de los rayos, tal que si α se hace variar, la intensidad cambiara enforma parecida a la descrita por la figura.
0 0.5 1 1.5 2 2.5 30.0
0.5
1.0
1.5
2.0
b @¥ 10-4D
I
Figura 2.2 Aunque el metodo descrito es irrealizable en la practica, ilustra la esencia del efectousado para determinar la existencia del eter. En el Apendice B se describe el montaje enforma mas cercana al experimento original. Si trasladamos los resultados reales a lo quese obtendrıa en el experimento idealizado, los datos nos darıan una intensidad maximay sin oscilaciones, que de acuerdo a la Figura 2.2, es compatible con un valor β = 0,es decir, los experimentos no detectaron un movimiento relativo respecto al eter, lo queabrio de nuevo las preguntas acerca de la verdadera naturaleza de la luz.
Problema 2: Si las distancias a los espejos reflectores son LA y LB recorridas por losrayos A y B respectivamente, calcule la diferencia de tiempo de los rayos cuando serecombinan. Calcule la diferencia de tiempo si el sistema se rota en 900. Demuestreque hasta orden cuadratico, la resta entre las diferencias de tiempo es:
∆t ′00−∆t ′900 ≈(
LA +LB
c
)β
2. (2.7)
2.2. POSTULADOS DE LA RELATIVIDAD ESPECIAL 19
2.2. Postulados de la relatividad especial
El resultado nulo de la deteccion del eter a traves del experimento de Michelson-Morley se sumo a una serie de otros indicios de que habıa algo mal en la teorıa. Inicial-mente, los fısicos asociaron dichos problemas a la misma teorıa de Maxwell, y otros tra-taron de explicar los resultados de las mediciones planteando efectos adicionales del eterque fueran compatibles con los resultados observados. Sin embargo, fue Albert Einsteinquien finalmente encontro el origen de la inconsistencia. El problema estaba, primero,en la interpretacion mecanica de la propagacion de la luz, y segundo, en la erronea con-cepcion del espacio y del tiempo de la mecanica clasica, problema que los principios derelatividad clasicos y las transformaciones de Galileo heredaban, ası como las leyes dela dinamica, en concreto, la segunda y tercera ley de Newton.
Para el primero de los problemas, Einstein evito el concepto del eter asociandole a laluz una nueva naturaleza diferente a las partıculas puntuales y a las ondas mecanicas. Ası,la luz no son partıculas [clasicas] puntuales ni deformaciones de un medio propagandoseen el espacio. La luz es una onda de variacion de campos electricos y magneticos quese pueden propagar independiente de la materia. Ası, el resultado nulo en experimentoscomo el de Michelson-Morley es consecuencia de la inexistencia de un medio por dondese propague la luz en el espacio exterior.
Para el segundo problema, Einstein planteo un principio de relatividad a partir de lossiguientes postulados :
I. Postulado de relatividad: Las leyes fısicas deben ser lasmismas para todos los observadores inerciales.
II. Postulado de la velocidad de la luz : La velocidad de la luzen el vacıo es la misma para todos los observadores inerciales,independiente de la direccion de propagacion y del movimientode la fuente.
El postulado I, a diferencia del principio de relatividad de Galileo, no se restringesolamente a las leyes dinamicas de las partıculas puntuales, sino que abarca la totalidadde los fenomenos fısicos, incluyendo partıculas puntuales y fenomenos electromagneti-cos (y hasta donde sabemos hoy en dıa, a cualquier fenomeno fısico). El postulado II,comparte con las ondas mecanicas la propiedad de que la velocidad es independiente delmovimiento de la fuente. Sin embargo, la luz ademas es independiente del movimientodel observador inercial, es decir, la velocidad de la luz es una constante universal quevale aproximadamente c = 3× 108 m/s sin importar que el observador se acerque o sealeje de la fuente. Como consecuencia, las transformaciones de Galileo expresadas porlas ecuaciones (1.1) y (1.2) resultan incompatibles con los postulados anteriores. Ası,

20 CAPITULO 2. LA RELATIVIDAD ESPECIAL
se debe plantear un nuevo conjunto de transformaciones entre observadores inercialesque adopte los postulados. Otra consecuencia, es que las nuevas transformaciones quereemplacen a las de Galileo no van a dejar invariante a la segunda ley de Newton, loque contradice al postulado I. Einstein asocio esta dificultad al hecho de que la segun-da ley de Newton no es la “verdadera” ley que describe la dinamica de los cuerpos.Ası, ademas de un nuevo conjunto de transformaciones de tiempo y de posiciones, larelatividad especial trae consigo un nuevo conjunto de leyes dinamicas.
2.3. Transformaciones de Lorentz Simples
Las transformaciones de Lorentz es el conjunto de relaciones de tiempo y posicionentre observadores inerciales compatibles con los postulados de la relatividad especial,las cuales van a reemplazar a las de Galileo. Para el proposito de la discusion de losproximos capıtulos, es suficiente restringirnos a las transformaciones de Lorentz simples(TLS)1, en la cual se adopta la siguiente configuracion estandar entre dos observadoresinerciales Σ y Σ′:
i.) Los ejes coordenados de ambos observadores son paralelos entre sı.
ii.) Solamente existe movimiento relativo entre los observadores en direccion de losejes x y x′.
iii.) Los relojes de los observadores se calibran tal que cuando los origenes de sus ejescoordenados coinciden, estos marcan el tiempo t = t ′ = 0.
Bajo la configuracion estandar, no existe movimiento relativo en las direcciones(y,z), por lo que dichas coordenadas no cambian entre observadores, es decir cumplenlas relaciones triviales y = y′ y z = z′. Ası, toda la discusion se reduce a la coordena-da x y al tiempo. Como punto de partida, se plantea una relacion lineal general entrecoordenadas y tiempos de la forma:
x′ = Ax+Bt,
t ′ = Dx+Et, (2.8)
donde los coeficientes A,B,D y E son constantes desconocidas. Por ejemplo, una posibi-lidad es A=E = 1, B=−u y D= 0, con u la velocidad de Σ′ respecto a Σ. Reemplazandoestos coeficientes en el sistema de ecuaciones (2.8), se reproducen las transformacionesde Galileo dadas por las ecuaciones (1.1) y (1.2) en la configuracion estandar. Ası, di-cha escogencia de los coeficientes da un conjunto de transformaciones compatible conel principio de relatividad de Galileo. Sin embargo, tal escogencia no es apropiada bajo
1La extension a las transformaciones de Lorentz generales no se abordara sino hasta el capıtulo 7

2.3. TRANSFORMACIONES DE LORENTZ SIMPLES 21
los postulados de la relatividad especial. Para deducir el nuevo conjunto de coeficientes,extraigamos las ideas esenciales de los dos postulados en tres principios fundamentalesasociados a dos observadores en movimiento relativo:
a.) Las leyes de la fısica son las mismas en Σ y Σ′.
b.) La velocidad de la luz es la misma en Σ y Σ′.
c.) La velocidad de la luz es la misma en todas direcciones en Σ y Σ′.
Partiendo de las transformaciones generales de la ecuacion (2.8), vamos a exigir cadauna de las condiciones anteriores en el contexto de situaciones fısicas especıficas.
a.) Las leyes de la fısica son las mismas en Σ y Σ′
Una ley fısica fundamental que se sigue cumpliendo en relatividad especial es la leyde inercia, que se enuncia de la siguiente forma:
Si sobre un cuerpo no se ejercen fuerzas, estedescribira un movimiento rectilıneo uniforme.
Para evaluar como deben ser las transformaciones entre observadores para que la leyde inercia se mantenga igual, se plantea la siguiente situacion fısica:
Dos particulas libres, 1 y 2, se mueven con velocidad relativa u.Sea Σ el observador donde la partıcula 1 se encuentra en reposo, yΣ′ donde la partıcula 2 esta en reposo. Determinar las ecuacionesde transformacion que deja invariante la ley de la inercia.
Se asume que la fuerza es nula (patıculas libres). La Figura 2.3 representa los coor-denadas de las partıculas vistas desde cada observador, donde la partıcula en reposo seubica en el orıgen del respectivo sistema. Si la ley de inercia es invariante, la acele-racion de las partıculas deben ser nulas para ambos observadores. Ası, las ecuacionescinematicas de posicion determinadas por cada observador son:
Desde Σ :
{x1(t1) = 0x2(t2) = ut2
Σ’
Σ
1 2
2 1
u
-u
x x2(t2)
x1(t1) ’ ’x’
Figura 2.3Desde Σ′ :
{x′1(t
′1) =−ut ′1
x′2(t′2) = 0,
(2.9)
donde x1(t1) y x′1(t′1) identifican la posicion en funcion del tiempo de la partıcula 1 medi-
dos por Σ y Σ′ respectivamente, mientras que x2(t2) y x′2(t′2) marca posiciones y tiempos

22 CAPITULO 2. LA RELATIVIDAD ESPECIAL
de la partıcula 2. Observe que la ausencia de la acelereacion en las ecuaciones anterio-res, es consecuencia de la suposicion de que la ley de la inercia se cumple para ambosobservadores. Las ecuaciones de transformacion en (2.8) aplicadas a cada partıcula seexpresan como:
Partıcula 1:
{x′1(t
′1) = Ax1(t1)+Bt1
t ′1 = Dx1(t1)+Et1
Partıcula 2:
{x′2(t
′2) = Ax2(t2)+Bt2
t ′2 = Dx2(t2)+Et2.(2.10)
Reemplazando las coordenadas espaciales dadas segun las ecuaciones (2.9) en las ecua-ciones (2.10), se obtiene el siguiente sistema de ecuaciones:
Partıcula 1:
{−ut ′1 = Bt1t ′1 = Et1
Partıcula 2:
{0 = Aut2 +Bt2t ′2 = Dut2 +Et2.
(2.11)
Despejando los coeficientes, se obtiene que B = −uA y E = A. Ası, las ecuaciones detransformacion general de (2.8) se reduce a las siguientes:
x′ = A(x−ut) ,
t ′ = Dx+At, (2.12)
lo que deja pendiente solamente dos coeficientes desconocidos: A y D. Para hallarlos sehace uso de los otros dos principios.
b.) La velocidad de la luz es la misma en Σ y Σ′
Consideremos la siguiente situacion:
Una fuente emite un pulso de luz en direccion x desde su sis-tema en reposo Σ. Otro observador Σ′ se mueve con velocidadu constante respecto a la fuente. Determinar las ecuaciones detransformacion que deja invariante la velocidad de la luz.
Σ
Σ’
x(t)
x’(t’)
c
c-u
Figura 2.4 La Figura 2.4 ilustra la propagacion del pulso visto desde ambos observadores. Clasi-camente, Σ′ medirıa una velocidad del pulso dada por c′ = c−u si se aplicara el teoremaclasico de adicion de velocidades. Sin embargo, dicho teorema es incompatible con elpostulado de invariancia de la velocidad de la luz, la cual exige que c′ = c, tal como

2.3. TRANSFORMACIONES DE LORENTZ SIMPLES 23
se escribe en la segunda figura. Ası, las ecuaciones cinematicas del pulso segun cadaobservador son:
Desde Σ :{
x(t) = ct
Desde Σ′ :
{x′(t ′) = ct ′. (2.13)
Si las coordenadas anteriores se reemplazan en las ecuaciones de transformacion (2.12),se obtiene:
ct ′ = A(ct−ut) ,
t ′ = Dct +At. (2.14)
Despejando los coeficientes, se obtiene que D = −Au/c2. Ası, las ecuaciones de trans-formacion compatibles con la invariancia de la velocidad de la luz son:
x′ = A(x−ut) ,
t ′ = A(−uc2 x+ t
), (2.15)
lo que reduce el sistema a una unica incognita: A. Para hallarla, se hace uso del principiode isotropıa de la luz.
Σ y(t) A
Figura 2.5
Σ’
A y’(t’)
x’(t’)
-u
r’(t’)
Figura 2.6
c.) La velocidad de la luz es la misma en todas direcciones en Σ y Σ′
Tomemos de nuevo la situacion fısica del problema anterior, pero estudiando la pro-pagacion de los pulsos en direccion y, esto es, perpendicular al movimiento relativo entrelos observadores. Como la propagacion del pulso es independiente del movimiento delobservador, el frente de onda se propaga igual sin importar que la fuente se vea o noen movimiento. Marquemos como A el punto del frente de onda que siempre viaja porencima de la fuente. La Figuras 2.5 muestra el progreso de A en el sistema Σ con lafuente en reposo, mientras que en la Figura 2.6 se muestre desde el sistema Σ′, dondese ve la fuente moverse con velocidad −u. Por el principio de isotropıa, en ambos siste-mas la velocidad con que se propaga el punto A es la misma velocidad c. La distanciar′(t ′) corresponde a la distancia diagonal recorrida por el punto visto desde Σ′, mientrasque (x′(t ′),y′(t ′)) marca sus coordenadas cartesianas. Ası, las ecuaciones cinematicasdel punto A son:

24 CAPITULO 2. LA RELATIVIDAD ESPECIAL
Desde Σ :
{x(t) = 0 (1)y(t) = ct (2)
Desde Σ′ :
{x′(t ′) =−ut ′ (3)r′(t ′) = ct ′ =
√x′(t ′)2 + y′(t ′)2 (4)
, (2.16)
donde en la ultima igualdad de (4) se uso el teorema de Pitagoras. Como no hay mo-vimiento relativo en direccion y entre los observadores, se cumple trivialmente quey(t) = y′(t ′). Teniendo en cuenta esto y las coordenadas de (2) y (3), la relacion (4)lleva a la siguiente igualdad:
ct ′ =√
u2t ′2 + c2t2, (2.17)
la cual al despejar, se obtiene la siguiente relacion de tiempos:
t ′2 =(
11−u2/c2
)t2 = γ
2t2. (2.18)
donde se definio el factor γ como:
γ =1√
1−β 2, (2.19)
con β = u/c. Ası, vemos de la ecuacion (2.18) que a diferencia de la relatividad clasica,en relatividad especial el tiempo no es un invariante bajo transformaciones entre obser-vadores inerciales. Si la coordenada dadas por (1) y (3) en las ecuaciones (2.16) y eltiempo dado por (2.18) se reemplazan en las ecuaciones de transformacion (2.15), seobtiene:
−uγt = A(0−ut) ,
γt = A(−uc2 (0)+ t
), (2.20)
de donde se deduce que A = γ . De esta forma, se determina la totalidad de coeficien-tes compatibles con los postulados de la relatividad especial, obteniendo finalmente lastransformaciones de Lorentz simples (TLS):
x′(t ′) = γ [x(t)−ut] ,
t ′ = γ
[t− u
c2 x(t)]. (2.21)
2.4. ACLARACIONES 25
Problema 3: Usando las TLS, demuestre las siguientes derivadas parciales:
∂x′
∂x= γ,
∂x′
∂ t=−γu,
∂ t ′
∂x=−γβ
c,
∂ t ′
∂ t= γ (2.22)
Problema 4: De acuerdo a la electrodinamica clasica, la componente de campoelectrico de un rayo de luz cumple con la siguiente ecuacion de onda:
∂ 2E(x, t)∂x2 =
1c2
∂ 2E(x, t)∂ t2 , (2.23)
donde el campo E(x, t) es una funcion de la coordenada y el tiempo medido por unobservador Σ. Calcular la forma de la ecuacion de onda segun otro observador Σ′ quese mueve con velocidad relativa u, usando a.) las TLS y b.) las transformaciones deGalileo. Demuestre que bajo las TLS, la ecuacion toma la misma forma que (2.23)cambiando las variables (x, t) por (x′, t ′), mientras que bajo las de Galileo, la ecuacioncambia a:
∂ 2E(x′, t ′)∂x′2
=1
c2−u2∂ 2E(x′, t ′)
∂ t ′2− 2u
c2−u2∂ 2E(x′, t ′)
∂x′∂ t ′, (2.24)
2.4. Aclaraciones
En relatividad especial es comun obtener resultados contradictorios, lo que causalas paradojas. Sin embargo, es importante aclarar que dichas paradojas no son resulta-dos de posibles inconsistencias internas de la formulacion, sino de una mala aplicacionde las transformaciones de Lorentz o incorrecta interpretacion de los postulados. Ası,reiteramos el significado de las TLS:
Sea un observador Σ que mide un evento en una posicion x(t) en el tiempot. Sea otro observador Σ′ que se mueve respecto a Σ a una velocidad u.Entonces, la posicion y el tiempo de ese mismo evento medido por Σ′ sepuede calcular a traves de las transformaciones de Lorentz:
x′(t ′) = γ [x(t)−ut] ,
t ′ = γ
[t− u
c2 x(t)].
26 CAPITULO 2. LA RELATIVIDAD ESPECIAL
donde el factor γ se calcula de acuerdo a la ecuacion (2.19), el cual asu vez contiene al factor β = u/c, con u la velocidad relativa entre losobservadores y c la velocidad de la luz.
Algunas aclaraciones adicionales:
1.) Si los eventos involucran el movimiento de partıculas, hay que ser cuidadosos deno confundir la velocidad relativa entre observadores con la velocidad misma de lapartıcula. La velocidad que aparece en las TLS es la relativa entre observadores,mientras que la velocidad de las partıculas se calcula derivando las coordenadas,esto es:
x =dx(t)
dt: velocidad de la partıcula medida por Σ
x′ =dx′(t ′)
dt ′: velocidad de la partıcula medida por Σ
′. (2.25)
2.) En las transformaciones se asume que el signo de la velocidad relativa es positi-va, es decir cuando Σ′ se mueve hacia “adelante” respecto a Σ. Sin embargo, lasecuaciones (2.21) tambien son validas si Σ′ se mueve en direccion opuesta, perosiendo cuidadosos de incluir el signo negativo de la velocidad relativa. Ası, en vezde tener dos terminos que se restan, se tendran terminos que suman.
3.) Las TLS expresan las coordenadas y el tiempo de un observador Σ′ en funcion delas de Σ. Sin embargo se puede requerir lo opuesto, expresar las coordenadas y eltiempo de Σ en funcion de las de Σ′. La diferencia es que si Σ′ se mueve en unadireccion respecto a Σ, entonces Σ se movera en direccion opuesta respecto a Σ′,por lo que el unico cambio es la del signo de la velocidad relativa. Tal transforma-cion se conoce como las transformaciones de Lorentz inversas, y se expresa de lassiguiente forma:
x(t) = γ[x′(t ′)+ut ′
],
t = γ
[t ′+
uc2 x′(t ′)
]. (2.26)
4.) Debido a la velocidad finita de la luz, en relatividad especial es necesario dife-renciar entre el acto fısico de ver los eventos al de observarlos. De acuerdo a lasdefiniciones descritas en la Seccion 1.1 del capıtulo anterior, observar los eventosse asocia al acto de medir las posiciones y los tiempos de los eventos en el lugardonde ocurren y en el instante cuando ocurren. Por otro lado, ver los eventos esel acto de mirarlos desde una posicion fija del espacio alejado del lugar donde
2.4. ACLARACIONES 27
ocurren y en instantes retrasados de cuando ocurren. El retraso surge debido a ladiferencia de tiempo que surge mientras la luz viaja desde el evento hasta el lugardonde se ubica la persona. Ası, en el proceso de interpretacion de un resultado,debemos ser cuidadosos de no confundir la medida de un evento con la imagengrafica de ver el evento, ya que ambos no se corresponden uno al otro.
28 CAPITULO 2. LA RELATIVIDAD ESPECIAL
CAPITULO 3
Cinematica relativista
En este capıtulo estudiaremos las consecuencias cinematicas de los postulados y lastransformaciones de Lorentz. Primero, discutiremos el concepto de tiempo en relatividadespecial incluyendo el problema de simultaneidad y el efecto de dilatacion temporal.Luego, extenderemos la discusion al problema de medicion de longitudes, donde apareceel efecto de contraccion de longitudes. Finalmente, plantearemos las nuevas propiedadesde las variables cinematicas que describen el movimiento junto con algunas aplicaciones.
3.1. La relatividad del tiempo
El problema central de la relatividad del tiempo no esta en como definirlo abstrac-tamente, sino en como lo medimos, lo que requiere adoptar una definicion precisa yfundamental de medicion de intervalos de tiempo independiente de la tecnica especıficaque se utilize para realizar tal medicion. Para eso, vamos a definir el reloj como el ins-trumento que permite medir tiempos asociados a eventos, sin importar que el reloj sea eltradicional reloj de manecillas, o digital, o un censor infrarojo capaz de arrancar y dete-nerse cuando ocurran los eventos, etc. Simplemente asumimos que los eventos ocurrenen instantes de tiempo determinados, los cuales en principio podemos medir. Con esto,vamos a definir de manera fundamental el tiempo como:
El intervalo de tiempo entre dos eventos medido por un observadorinercial, es la diferencia entre el tiempo marcado por un reloj en
reposo en la posicion donde ocurre el evento final y el tiempomarcado por otro reloj en reposo y sincronizado con el anterior
en la posicion donde ocurre el evento inicial.
29
30 CAPITULO 3. CINEMATICA RELATIVISTA
En la definicion anterior, se esta asumiendo dos condiciones esenciales:
i.) Si los eventos ocurren en distintas posiciones, los tiempos se miden con distintosrelojes. Ası, si en vez de eventos puntuales, se tiene una sucesion continua deeventos que ocurren en una region extendida del espacio, se entiende entoncesque el observador posee una sucesion continua de relojes en reposo que cubretodos los puntos del espacio.
ii.) Para que la medicion tenga sentido, es necesario garantizar siempre que para unmismo observador, todos sus relojes se encuentran sincronizados, es decir, arran-can en el mismo tiempo y marcan intervalos de tiempos exactamente iguales.
Teniendo una definicion precisa de [medicion de] tiempo, ya podemos estudiar lasconsecuencias temporales de los postulados de la relatividad.
3.1.1. Simultaneidad
Decimos que dos eventos son simultaneos si ocurren en el mismo instante de tiempomedido por un observador inercial, esto es, si el intervalo de tiempo entre los eventoses nulo. Es importante enfatizar en la definicion anterior el hecho de que se esta restrin-giendo a un observador, no a todos. La razon de eso es porque como consecuencia delos postulados, la simultaneidad puede ser relativa, es decir, si para un observador doseventos ocurren simultaneamente, para otro observador en movimiento relativo esos dosmismos eventos pueden ocurrir en tiempos diferentes, situacion que no se presenta en larelatividad clasica. Mas concretamente, en relatividad especial pueden ocurrir dos casos:
1.) Si dos eventos son simultaneos medido por un observador inercial, y adicional-mente ocurren en la misma posicion, esos mismos eventos tambien seran simultaneospara cualquier otro observador inercial. En este caso decimos que la simultaneidades absoluta.
2.) Si dos eventos son simultaneos medido por un observador inercial, pero ocurrenen diferentes posiciones, esos mismos eventos no seran simultaneos para otro ob-servador inercial. En este caso decimos que la simultaneidad es relativa.
En mecanica clasica, la simultaneidad es absoluta sin importar si ocurren en la mis-ma o en diferentes posiciones. Para ilustrar el efecto relativista de la simultaneidad,consideremos el siguiente ejemplo:
Dos partıculas, 1 y 2, viajan con velocidades de 2× 107 m/s y 4× 107 m/srespectivamente. La partıcula 1 colisiona con un detector fijo ubicado a unadistancia de 0.5 km del origen del observador inercial Σ, mientras que la 2 lohace con otro detector ubicado a una distancia de 1 km del mismo origen. Silas partıculas cruzan el origen simultaneamente en el instante t = 0, calcularel tiempo en que cada partıcula colisionara los detectores medido por a.) elobservador Σ y b.) el observador Σ′ donde la partıcula 1 esta en reposo.

3.1. LA RELATIVIDAD DEL TIEMPO 31
Mientras no se diga lo contrario, se asume en este y en los demas problemas que laconfiguracion de sistemas coordenados es la estandar, es decir, aquella donde se puedenaplicar las transformaciones de Lorentz simples. La Figura 3.1 muestra las coordenadasmedidas por Σ. Para movimiento constante, el tiempo que demora cada partıcula entre elorigen y los detectores son:
1
2
v1 v2
L1 L2
Σ
Figura 3.1
Partıcula 1: t1 =L1
v1=
0.5×103 m2×107 m/s
= 2.5×10−5 s
Partıcula 2: t2 =L2
v2=
1×103 m4×107 m/s
= 2.5×10−5 s. (3.1)
Ası, los eventos correspondientes a la deteccion de las partıculas, son eventos simultaneos.Para calcular los tiempos medidos por Σ′, se puede utilizar los datos medidos por Σ y lasTLS de las ecuaciones (2.21). Para eso, identificamos cada variable:
velocidad relativa: u = 2×107 m/s
tiempo medido por Σ : t1 = t2 = 2.5×10−5 s
posicion medida por Σ : x1(t1) = 0.5 km, x2(t2) = 1 km
factor beta: β = u/c = (2×107 m/s)/(3×108 m/s)≈ 6.6×10−2
factor gama: γ = 1/√
1−β 2 ≈ 1.002. (3.2)
Ası, usando la transformacion de tiempos, se obtiene para Σ′:
t ′1 = γ
[t1−
uc2 x1(t1)
]t ′2 = γ
[t2−
uc2 x2(t2)
]. (3.3)
El problema se reduce ahora a realizar los reemplazos numericos en las ecuaciones an-teriores para calcular t ′1 y t ′2. Sin embargo, es mas util obtener un resultado mas generalexpresado en una ecuacion simbolica. Teniendo en cuenta que Σ mide que t1 = t2, seobtiene para Σ′ la siguiente diferencia de tiempo :
∆t ′ = t ′1− t ′2 = γβ2t1. (3.4)
Numericamente, para este caso particular, se obtiene que ∆t ′ ≈ 1.1× 10−7 s. Ası, loseventos de colision contra los detectores ya no son simultaneos para el observador Σ′, elcual mide que la partıcula 2 llega primero, mientras que 1 llega 10−7s despues. Aunqueel valor numerico es muy pequeno, dicha diferencia aumenta si el factor β aumenta deacuerdo a la ecuacion (3.4), es decir, si las partıculas viajan mas cercanas a la de la luz,lo que evidencia que los efectos relativistas son apreciables a velocidades altas .
32 CAPITULO 3. CINEMATICA RELATIVISTA
3.1.2. Dilatacion temporal
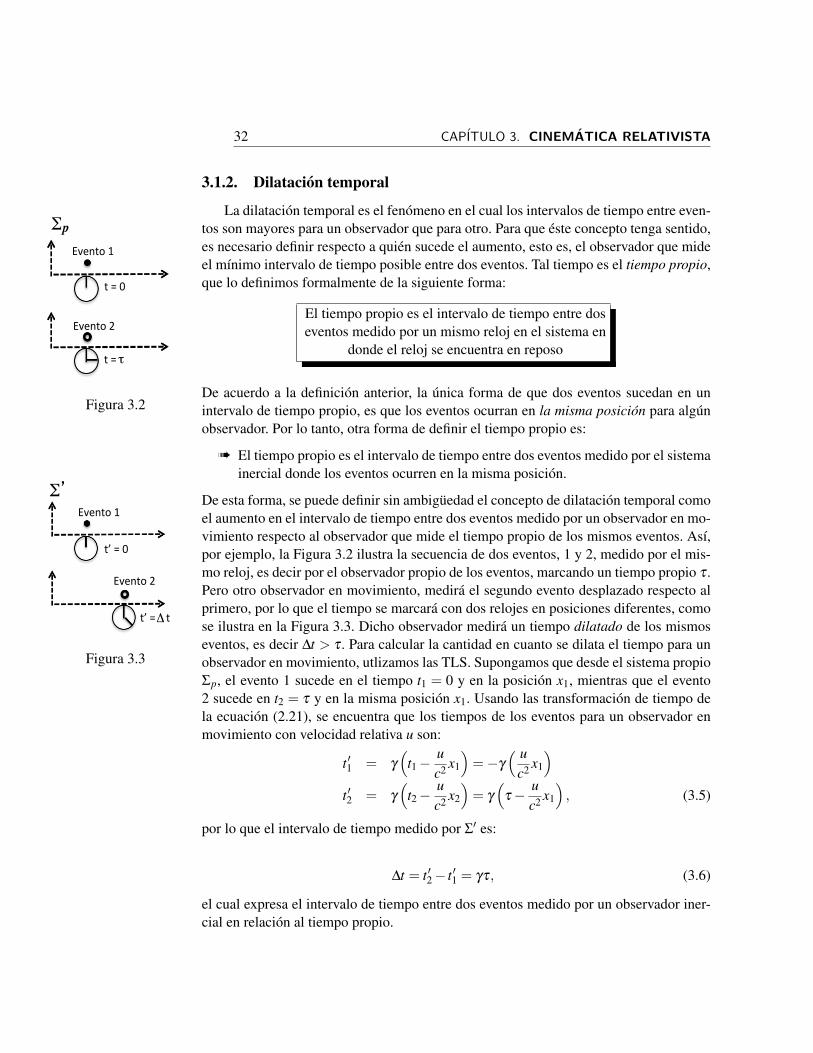
La dilatacion temporal es el fenomeno en el cual los intervalos de tiempo entre even-tos son mayores para un observador que para otro. Para que este concepto tenga sentido,es necesario definir respecto a quien sucede el aumento, esto es, el observador que mideel mınimo intervalo de tiempo posible entre dos eventos. Tal tiempo es el tiempo propio,que lo definimos formalmente de la siguiente forma:
El tiempo propio es el intervalo de tiempo entre doseventos medido por un mismo reloj en el sistema en
donde el reloj se encuentra en reposo
Σ p Evento 1
Evento 2
t = 0
t = τ
Figura 3.2De acuerdo a la definicion anterior, la unica forma de que dos eventos sucedan en unintervalo de tiempo propio, es que los eventos ocurran en la misma posicion para algunobservador. Por lo tanto, otra forma de definir el tiempo propio es:
Σ’ Evento 1
Evento 2
t’ = 0
t’ = t Δ
Figura 3.3
à El tiempo propio es el intervalo de tiempo entre dos eventos medido por el sistemainercial donde los eventos ocurren en la misma posicion.
De esta forma, se puede definir sin ambiguedad el concepto de dilatacion temporal comoel aumento en el intervalo de tiempo entre dos eventos medido por un observador en mo-vimiento respecto al observador que mide el tiempo propio de los mismos eventos. Ası,por ejemplo, la Figura 3.2 ilustra la secuencia de dos eventos, 1 y 2, medido por el mis-mo reloj, es decir por el observador propio de los eventos, marcando un tiempo propio τ .Pero otro observador en movimiento, medira el segundo evento desplazado respecto alprimero, por lo que el tiempo se marcara con dos relojes en posiciones diferentes, comose ilustra en la Figura 3.3. Dicho observador medira un tiempo dilatado de los mismoseventos, es decir ∆t > τ . Para calcular la cantidad en cuanto se dilata el tiempo para unobservador en movimiento, utlizamos las TLS. Supongamos que desde el sistema propioΣp, el evento 1 sucede en el tiempo t1 = 0 y en la posicion x1, mientras que el evento2 sucede en t2 = τ y en la misma posicion x1. Usando las transformacion de tiempo dela ecuacion (2.21), se encuentra que los tiempos de los eventos para un observador enmovimiento con velocidad relativa u son:
t ′1 = γ
(t1−
uc2 x1
)=−γ
( uc2 x1
)t ′2 = γ
(t2−
uc2 x2
)= γ
(τ− u
c2 x1
), (3.5)
por lo que el intervalo de tiempo medido por Σ′ es:
∆t = t ′2− t ′1 = γτ, (3.6)
el cual expresa el intervalo de tiempo entre dos eventos medido por un observador iner-cial en relacion al tiempo propio.
3.2. LA RELATIVIDAD DE LA LONGITUD 33
3.2. La relatividad de la longitud
Al igual que el tiempo, la longitud espacial de los objetos se define en base a sumedicion. Definimos entonces la longitud como:
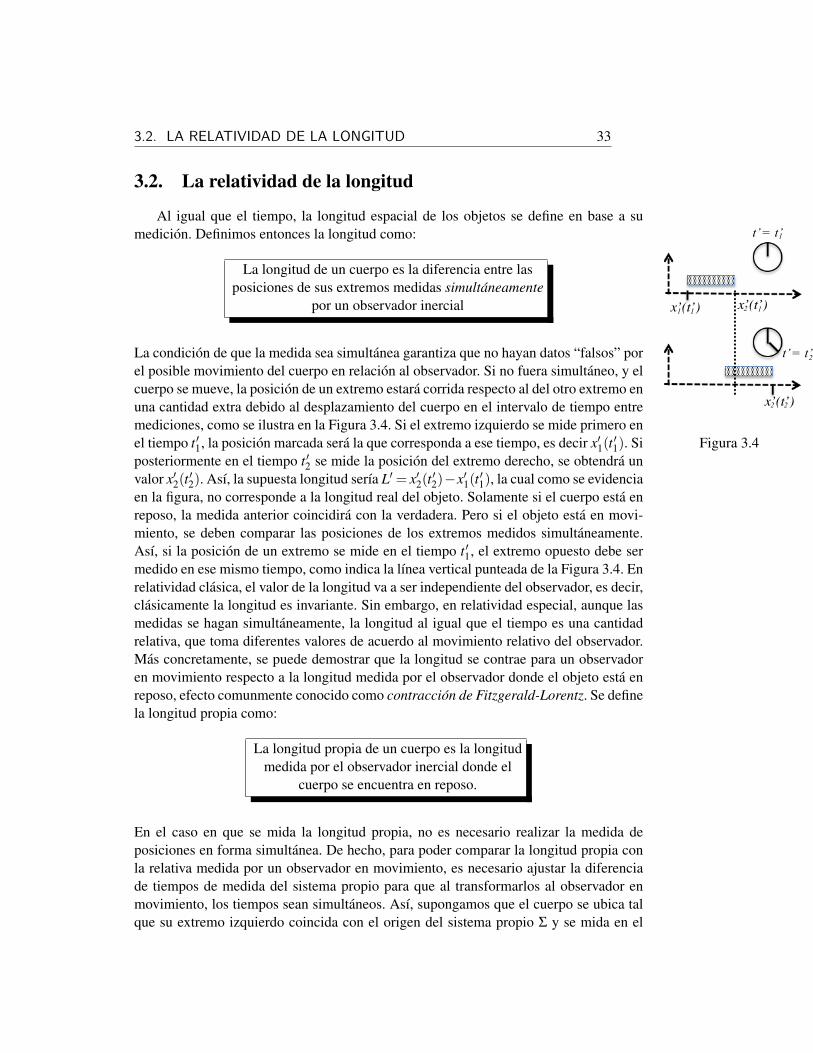
La longitud de un cuerpo es la diferencia entre lasposiciones de sus extremos medidas simultaneamente
por un observador inercial
La condicion de que la medida sea simultanea garantiza que no hayan datos “falsos” porel posible movimiento del cuerpo en relacion al observador. Si no fuera simultaneo, y elcuerpo se mueve, la posicion de un extremo estara corrida respecto al del otro extremo enuna cantidad extra debido al desplazamiento del cuerpo en el intervalo de tiempo entremediciones, como se ilustra en la Figura 3.4. Si el extremo izquierdo se mide primero en
t’ = t’
t’ = t’
x’(t’)
x’(t’)
1 1
1
2
2 2
x’(t’) 2 1
Figura 3.4el tiempo t ′1, la posicion marcada sera la que corresponda a ese tiempo, es decir x′1(t′1). Si
posteriormente en el tiempo t ′2 se mide la posicion del extremo derecho, se obtendra unvalor x′2(t
′2). Ası, la supuesta longitud serıa L′= x′2(t
′2)−x′1(t
′1), la cual como se evidencia
en la figura, no corresponde a la longitud real del objeto. Solamente si el cuerpo esta enreposo, la medida anterior coincidira con la verdadera. Pero si el objeto esta en movi-miento, se deben comparar las posiciones de los extremos medidos simultaneamente.Ası, si la posicion de un extremo se mide en el tiempo t ′1, el extremo opuesto debe sermedido en ese mismo tiempo, como indica la lınea vertical punteada de la Figura 3.4. Enrelatividad clasica, el valor de la longitud va a ser independiente del observador, es decir,clasicamente la longitud es invariante. Sin embargo, en relatividad especial, aunque lasmedidas se hagan simultaneamente, la longitud al igual que el tiempo es una cantidadrelativa, que toma diferentes valores de acuerdo al movimiento relativo del observador.Mas concretamente, se puede demostrar que la longitud se contrae para un observadoren movimiento respecto a la longitud medida por el observador donde el objeto esta enreposo, efecto comunmente conocido como contraccion de Fitzgerald-Lorentz. Se definela longitud propia como:
La longitud propia de un cuerpo es la longitudmedida por el observador inercial donde el
cuerpo se encuentra en reposo.
En el caso en que se mida la longitud propia, no es necesario realizar la medida deposiciones en forma simultanea. De hecho, para poder comparar la longitud propia conla relativa medida por un observador en movimiento, es necesario ajustar la diferenciade tiempos de medida del sistema propio para que al transformarlos al observador enmovimiento, los tiempos sean simultaneos. Ası, supongamos que el cuerpo se ubica talque su extremo izquierdo coincida con el origen del sistema propio Σ y se mida en el

34 CAPITULO 3. CINEMATICA RELATIVISTA
tiempo t1 = 0, mientras que el extremo opuesto se encuentra en la posicion x2(t2) = L0medido en un tiempo t2, tal que L0 correspondera a la longitud propia. Para calcular lasposiciones de los extremos en un observador Σ′ moviendose con velocidad relativa u, seusa la transformacion de coordenadas de acuerdo a (2.21):
Extremo izquierdo: x′1(t′1) = γ [x1(t1)−ut1] = 0,
Extremo derecho: x′2(t′2) = γ [x2(t2)−ut2] = γ [L0−ut2] , (3.7)
obteniendo la diferencia:
L′ = x′2(t′2)− x′1(t
′1) = γ [L0−ut2] . (3.8)
Para que la longitud L′ de la ecuacion anterior represente la verdadera longitud, se debeescoger el tiempo t2 tal que la medida en Σ′ sea simultanea, es decir, se debe exigir quet ′1 = t ′2. Ası, usando la transformacion de tiempo de las TLS (2.21), se obtiene:
t ′1 = γ
[t1−
uc2 x1(t1)
]= 0,
t ′2 = γ
[t2−
uc2 x2(t2)
]= γ
[t2−
uc2 L0
], (3.9)
que al igualarlas, se puede despejar el tiempo t2, obteniendo:
t2 =uc2 L0. (3.10)
Despues de reemplazar el tiempo t2 de la formula (3.10) en la ecuacion (3.8), se obtieneque la longitud medida por Σ′ es:
L′ =L0
γ, (3.11)
que corresponde a la longitud de un cuerpo en movimiento respecto a la longitud propia,donde el cuerpo se encuentra en reposo.
3.3. La relatividad del movimiento
Adicional a los efectos que causa la relatividad especial en conceptos tales como eltiempo y el tamano de los cuerpos, tambien se van a tener consecuencias importantes enla descripcion del movimiento de los cuerpos, algunas de las cuales se estudian en estaseccion.

3.3. LA RELATIVIDAD DEL MOVIMIENTO 35
3.3.1. Teorema de adicion de velocidades
En la seccion 1.3, se obtuvo el teorema de adicion de velocidades utilizando lastransformaciones de Galileo. Ahora se obtendra el teorema bajo el contexto de las TLS.Si un observador inercial Σ mide que una partıcula tiene una velocidad v en direccionx, usando las TLS, se puede calcular la velocidad de esa misma partıcula medida porotro observador Σ′ que se mueve con velocidad u relativa a Σ. Teniendo en cuenta quela velocidad se define de acuerdo a las ecuaciones (2.25), y usando las TLS para lacoordenada espacial de (2.21), se obtiene:
v′ =dx′(t ′)
dt ′=
ddt ′
γ [x(t)−ut]
= γ
[dx(t)dt ′−u
dtdt ′
]. (3.12)
Esn relatividad, es importante identificar cuales variables dependen de los tiempos t ycuales de los tiempos t ′. Ası, por ejemplo, en la primera derivada dentro del parentesisde la ecuacon (3.12), la posicion x esta en funcion de t, mientras que la derivacion esrespecto al otro tiempo t ′. Sin embargo, sabemos que por transformacion de tiempos,el tiempo t depende de t ′, es decir, la funcion x(t) es funcion implıcita del tiempo t ′.Aplicando la regla de la cadena se obtiene entonces:
dx(t)dt ′
=dx(t)
dtdtdt ′
= vdtdt ′
. (3.13)
Usando las TLS inversas dadas por la ecuacion (2.26), se puede derivar t respecto a t ′:
dtdt ′
=d
dt ′γ
[t ′+
uc2 x′(t ′)
]= γ
[1+
uc2
dx′(t ′)dt ′
]= γ
[1+
uv′
c2
]. (3.14)
Reemplazando la forma de la derivada (3.14) en (3.13), se obtiene:
dx(t)dt ′
= vγ
[1+
uv′
c2
]. (3.15)
Finalmente, reemplazando (3.15) y (3.14) en (3.12), se llega a la forma relativista delteorema de adicion de velocidades:
v′ =v−u1− uv
c2
. (3.16)

36 CAPITULO 3. CINEMATICA RELATIVISTA
Problema 5: Suponga que la partıcula se mueve en el plano de Σ a una velocidad concomponente vx en direccion x y vy en direccion y. Muestre que las componentes de lavelocidad medidas por el sistema Σ′ son:
v′x =vx−u1− uvx
c2
, v′y =vy
γ(1− uvx
c2
) . (3.17)
3.3.2. Transformacion de la aceleracion
Clasicamente, la aceleracion de una partıcula es invariante y absoluta entre obser-vadores inerciales. Bajo las transformaciones de Lorentz, la aceleracion se mantieneabsoluta, pero ya no sera invariante. Para mostrar eso, consideremos una partıcula conmovimiento acelerado en direccion x medido por un observador Σ. Aplicando el teoremade adicion de velocidades, se puede calcular la aceleracion medida por otro observadorΣ′ con velocidad relativa u. Derivando la ecuacion de la suma de velocidades (3.16), seobtiene para Σ′:
a′ =dv′(t ′)
dt ′=
ddt ′
(v(t)−u
1− uv(t)c2
), (3.18)
donde las velocidades se escriben en funcion de sus respectivos tiempos. Realizando lasdiferentes derivaciones, y teniendo en cuenta que la velocidad relativa u es constante, seobtiene:
a′ =
1
γ
(1− uv(t)
c2
)2
dv(t)dt ′
. (3.19)
Aplicando de nuevo la regla de la cadena y usando la derivada entre tiempos de la ecua-cion (3.14), se obtiene para la derivada de velocidad en (3.19):
dv(t)dt ′
=dv(t)
dtdtdt ′
= aγ
[1+
uv′
c2
], (3.20)
que reemplazando en (3.19), se obtiene:
a′ =a(
1+ uv′c2
)γ(1− uv
c2
)2 . (3.21)
La expresion anterior aun mezcla la velocidad instantanea v′ medida por Σ′ (en el nume-rador) con la velocidad v medida por Σ (en el denominador), por lo que aun no es una

3.3. LA RELATIVIDAD DEL MOVIMIENTO 37
ecuacion final. Para expresarlo en terminos de una unica velocidad, se hace de nuevo usodel teorema de adicion de velocidades. Por ejemplo, si se usa directamente la ecuacion(3.16), podemos obtener la relacion entre aceleraciones enteramente en funcion de lavelocidad v, obteniendo finalmente:
a′ =a
γ 3(
1− uvc2
)3 . (3.22)
Ası, si un cuerpo tiene una aceleracion a de acuerdo a un observador inercial, otro obser-vador inercial en movimiento relativo medira una aceleracion diferente, segun la ecua-cion (3.22). Por lo tanto la aceleracion, al igual que el tiempo, la longitud y la velocidad,es una cantidad relativa. Sin embargo se observa que si a = 0, entonces a′ = 0, esto es,la aceleracion sigue siendo absoluta. Esta ultima propiedad implica que la ley de la iner-cia sigue siendo invariante en relatividad especial, es decir, si un cuerpo se mueve conmovimiento rectilıneo uniforme (la aceleracion es nula) desde un sistema inercial, esteseguira moviendose uniformemente desde cualquier otro sistema inercial.
Problema 6: Suponga que la partıcula se mueve en el plano de Σ y tiene una acelera-cion con componente ax en direccion x y ay en direccion y. Muestre que las compo-nentes de la aceleracion desde el sistema Σ′ son:
a′x =ax
γ 3(1− uvx
c2
)3 ,
a′y =1
γ 2(1− uvx
c2
)3
[uvy
c2 ax +(
1− uvx
c2
)ay
]. (3.23)
3.3.3. Efecto Doppler longitudinal
En la subseccion 1.4.3 se obtuvo la frecuencia de una onda mecanica medida por unobservador en movimiento. La luz tambien va a exhibir un efecto parecido. Sin embargo,en relatividad especial la luz tiene una naturaleza diferente a las ondas mecanicas, porlo que el efecto se va a dar en una cantidad diferente. Consideremos el caso en que elobservador se mueve directamente hacia la fuente, el cual va a producir el llamado efectoDoppler longitudinal. Se plantea entonces la siguiente situacion:
Una fuente luminosa emite pulsos de luz a una frecuencia fF en su sistema enreposo Σ′ hacia un observador Σ que lo detecta. Calcular la frecuencia del pulsomedida por el observador Σ si este se mueve hacia la fuente con rapidez u.
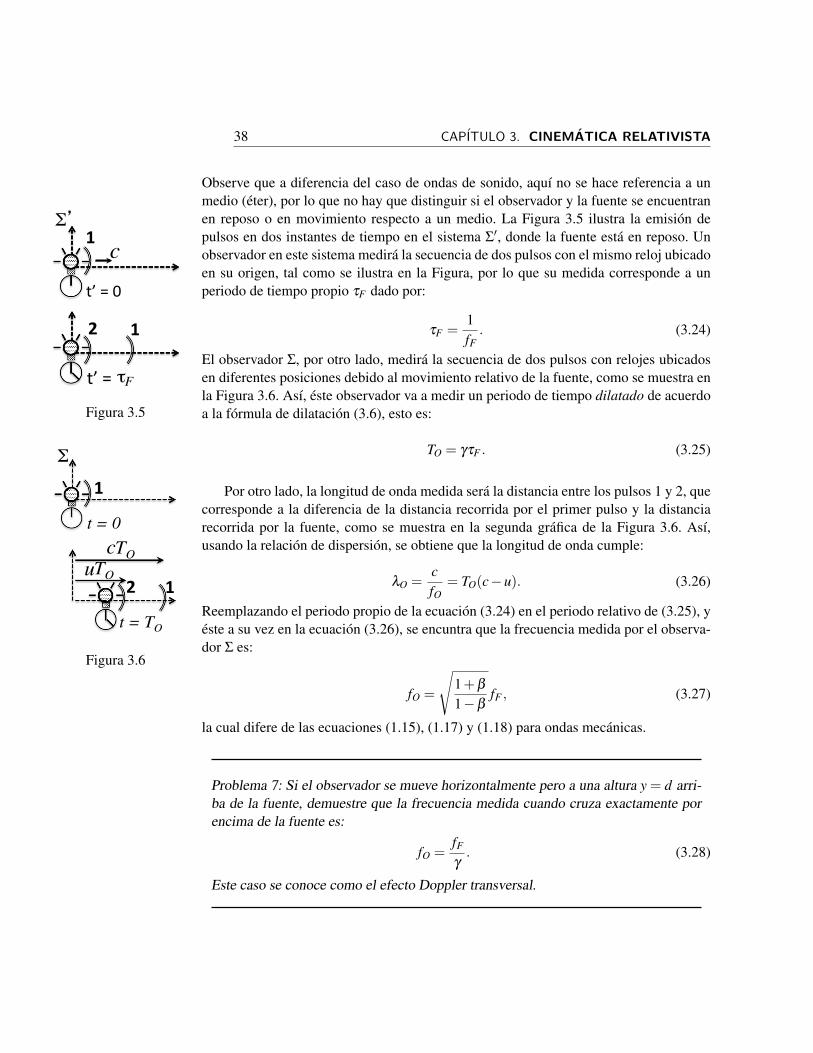
38 CAPITULO 3. CINEMATICA RELATIVISTA
Observe que a diferencia del caso de ondas de sonido, aquı no se hace referencia a unmedio (eter), por lo que no hay que distinguir si el observador y la fuente se encuentranen reposo o en movimiento respecto a un medio. La Figura 3.5 ilustra la emision depulsos en dos instantes de tiempo en el sistema Σ′, donde la fuente esta en reposo. Unobservador en este sistema medira la secuencia de dos pulsos con el mismo reloj ubicadoen su origen, tal como se ilustra en la Figura, por lo que su medida corresponde a unperiodo de tiempo propio τF dado por:
Σ’
c 1
1 2
t’ = 0
t’ = τ F
Figura 3.5
τF =1fF. (3.24)
El observador Σ, por otro lado, medira la secuencia de dos pulsos con relojes ubicadosen diferentes posiciones debido al movimiento relativo de la fuente, como se muestra enla Figura 3.6. Ası, este observador va a medir un periodo de tiempo dilatado de acuerdoa la formula de dilatacion (3.6), esto es:
TO = γτF . (3.25)Σ
1
1 2
t = 0
t = TO
TO cu TO
Figura 3.6
Por otro lado, la longitud de onda medida sera la distancia entre los pulsos 1 y 2, quecorresponde a la diferencia de la distancia recorrida por el primer pulso y la distanciarecorrida por la fuente, como se muestra en la segunda grafica de la Figura 3.6. Ası,usando la relacion de dispersion, se obtiene que la longitud de onda cumple:
λO =cfO
= TO(c−u). (3.26)
Reemplazando el periodo propio de la ecuacion (3.24) en el periodo relativo de (3.25), yeste a su vez en la ecuacion (3.26), se encuntra que la frecuencia medida por el observa-dor Σ es:
fO =
√1+β
1−βfF , (3.27)
la cual difere de las ecuaciones (1.15), (1.17) y (1.18) para ondas mecanicas.
Problema 7: Si el observador se mueve horizontalmente pero a una altura y = d arri-ba de la fuente, demuestre que la frecuencia medida cuando cruza exactamente porencima de la fuente es:
fO =fF
γ. (3.28)
Este caso se conoce como el efecto Doppler transversal.

3.4. LIMITES A ALTAS Y BAJAS VELOCIDADES 39
3.4. Lımites a altas y bajas velocidades
En los postulados de la relatividad especial, la velocidad c surge como una de lasconstantes fundamentales de la naturaleza. Sin embargo, es accidental que la luz se pro-page justo con esa velocidad. De hecho, cualquier tipo de ondas electromagnetica sepropaga en el vacıo a la velocidad c. Aun mas, se ha encontrado a nivel de la fısicasubatomica fenomenos asociados a objetos que se pueden propagar a esa misma velo-cidad, o al menos muy cercana, como los neutrinos y los gluones. La razon de que cse asocie a la velocidad de la luz es simplemente circunstancial: la luz es el objeto mascomun en el Universo que puede viajar a la velocidad c. Por tradicion, a la constante cla seguiremos llamando la velocidad de la luz. Por otro lado, la constante c marca doslımites extremos de la relatividad: el lımite ultrarelativista en el cual las velocidades delos cuerpos se obsevan cercanos a c, y el lımite clasico, en el cual las velocidades seobservan mucho mas pequenas que c.
3.4.1. El lımite clasico
De acuerdo a los resultados de la cinematica relativista estudiada a lo largo delcapıtulo, nos podemos dar cuenta que los nuevos parametros que modifican a la viejacinematica clasica son los factores γ y β . De hecho, el factor β determina al γ de acuerdoa la definicion en la ecuacion (2.19), la cual graficamos en la Figura 3.7. Como se puedever, γ varıa lentamente para pequenos valores de β , mientras que para valores cercanosa β = 1, el factor γ empieza a crecer asintoticamente. En particular, si las velocidadesrelativas entre observadores son mucho menores a las de la luz (β � 1), el factor γ sepuede aproximar a los primeros terminos de una expansion en series de Taylor. Como es-te factor puede aparecer multiplicando o dividiendo, es util tener expansiones separadaspara ambos casos. Hasta segundo orden, se tiene que:
0.0 0.2 0.4 0.6 0.8 1.0 1.21
2
3
4
5
b
g
Figura 3.7
γ =(1−β
2)−1/2 ≈ 1+12
β2,
1γ=(1−β
2)1/2 ≈ 1− 12
β2. (3.29)
Si adicionalmente, los observadores se mueven a velocidades relativas “ordinarias”muy por debajo de la velocidad de la luz1, obtenemos el lımite clasico, donde, primero,los terminos cuadraticos de las expansiones anteriores son indetectablemente pequenos,por lo que en la practica se puede hacer β 2 = 0 y por lo tanto γ = γ−1 = 1, y segundo,terminos de la forma uv/c2 tambien se pueden despreciar, como el que aparece en la ex-presion del teorema de adicion de velocidades. Las consecuencias de esta aproximacion
1Enfatizamos de nuevo, que los factores γ y β se relacionan con la velocidad relativa u entre observado-res, la cual podrıa o no coincidir con la velocidad v de los objetos
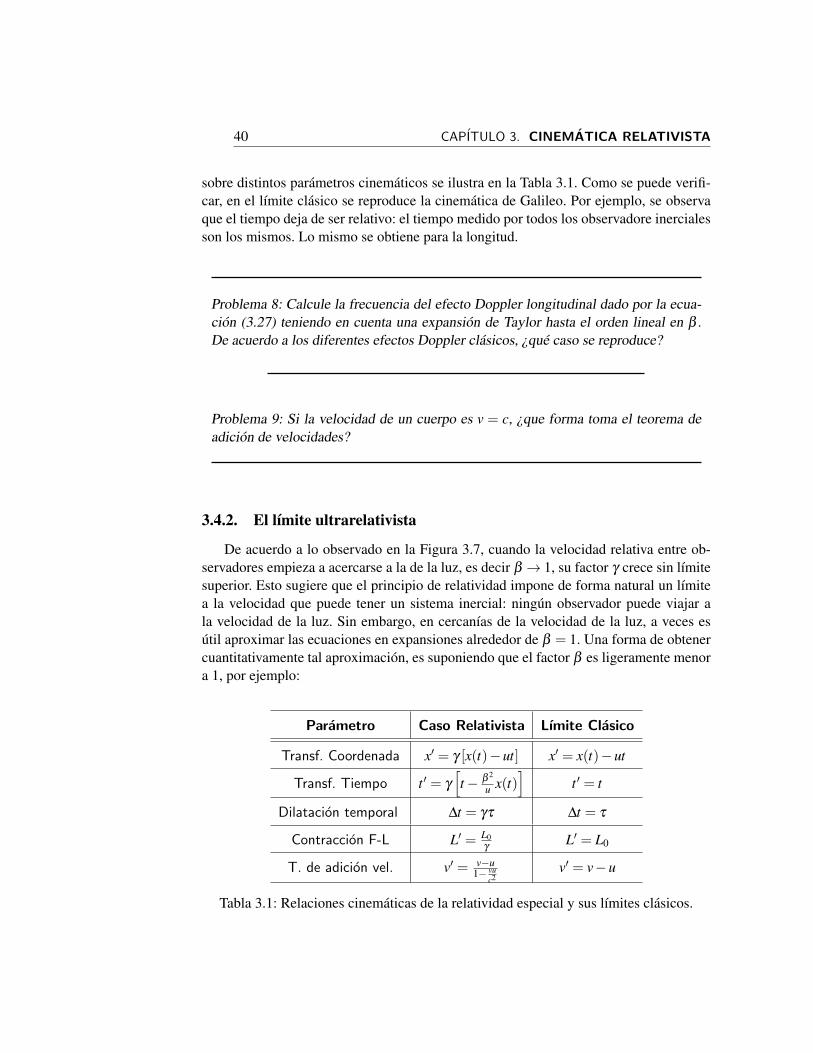
40 CAPITULO 3. CINEMATICA RELATIVISTA
sobre distintos parametros cinematicos se ilustra en la Tabla 3.1. Como se puede verifi-car, en el lımite clasico se reproduce la cinematica de Galileo. Por ejemplo, se observaque el tiempo deja de ser relativo: el tiempo medido por todos los observadore inercialesson los mismos. Lo mismo se obtiene para la longitud.
Problema 8: Calcule la frecuencia del efecto Doppler longitudinal dado por la ecua-cion (3.27) teniendo en cuenta una expansion de Taylor hasta el orden lineal en β .De acuerdo a los diferentes efectos Doppler clasicos, ¿que caso se reproduce?
Problema 9: Si la velocidad de un cuerpo es v = c, ¿que forma toma el teorema deadicion de velocidades?
3.4.2. El lımite ultrarelativista
De acuerdo a lo observado en la Figura 3.7, cuando la velocidad relativa entre ob-servadores empieza a acercarse a la de la luz, es decir β → 1, su factor γ crece sin lımitesuperior. Esto sugiere que el principio de relatividad impone de forma natural un lımitea la velocidad que puede tener un sistema inercial: ningun observador puede viajar ala velocidad de la luz. Sin embargo, en cercanıas de la velocidad de la luz, a veces esutil aproximar las ecuaciones en expansiones alrededor de β = 1. Una forma de obtenercuantitativamente tal aproximacion, es suponiendo que el factor β es ligeramente menora 1, por ejemplo:
Parametro Caso Relativista Lımite Clasico
Transf. Coordenada x′ = γ [x(t)−ut] x′ = x(t)−ut
Transf. Tiempo t ′ = γ
[t− β 2
u x(t)]
t ′ = t
Dilatacion temporal ∆t = γτ ∆t = τ
Contraccion F-L L′ = L0γ
L′ = L0
T. de adicion vel. v′ = v−u1− vu
c2v′ = v−u
Tabla 3.1: Relaciones cinematicas de la relatividad especial y sus lımites clasicos.

3.4. LIMITES A ALTAS Y BAJAS VELOCIDADES 41
β = 1− ε, (3.30)
donde ε es un numero muy pequeno, esto es ε � 1. Para obtener las ecuaciones ci-nematicas cercanas al lımite ultrarelativista, conviene reescribir el factor γ en funciondel parametro ε como:
γ =[1−β
2]−1/2=
[1− (1− ε)2]−1/2
=1√2ε
[1− ε
2
]−1/2. (3.31)
Como ε es menor que 1, se puede utilizar de nuevo la expansion de Taylor sobre lasegunda raız. Por ejemplo, manteniendo orden lineal en la expansion, se obtiene:
γ ≈ 1√2ε
[1+
14
ε
],
γ−1 ≈
√2ε
[1− 1
4ε
]. (3.32)
Un error comun en relatividad, es la de afirmar que ningun objeto puede [observarse]viajar mas rapido que la velocidad de la luz. Si bien la relatividad impone una velocidadlımite, no impide que existan partıculas superluminales, esto es, objetos que viajen porencima de la velocidad de la luz, comunmente conocidas como taquiones. En ese caso,la velocidad c ya no representarıa un lımite superior, sino un lımite inferior, y ninguntaquion puede desacelerarse por debajo de dicha velocidad. Concretamente, lo que larelativa especial prohıbe es que cualquier cuerpo, sea subluminal, o superluminal, puedacruzar el lımite de la velocidad c para cualquier observador inercial, mientras que aque-llos objetos que viajan a exactamente la velocidad c, quedan atrapados sin poder cambiarsu velocidad2. Aunque experimentalmente solo tenemos evidencia en nuestro Universode objetos que se mueven igual o por debajo de la velocidad de la luz, los taquiones sonuna posibilidad teorica y que actualmente se esta buscando en diferentes experimentos.
2Esto se cumple en relatividad especial. Sin embargo, si nos ubicamos en sistemas no inerciales, sepueden ver efectos de cambios de velocidad de la luz, como el curvamiento de su trayectoria. Dichosefectos son descritos en la relatividad general.
42 CAPITULO 3. CINEMATICA RELATIVISTA
CAPITULO 4
Dinamica relativista
De acuerdo al postulado de relatividad, las leyes de la fısica deben ser las mismaspara todos los observadores inerciales. Sin embargo, la segunda ley de Newton que des-cribe la dinamica de los cuerpos puntuales resulta incompatible con dicho postulado. Porejemplo, si un observador Σ′ asegura que una partıcula cumple con la ecuacion F = ma′
(asumiendo que la masa y la fuerza son cantidades invariantes), usando la transforma-cion de aceleracion dada por (3.22), se obtiene para otro observador Σ en movimientorelativo que:
F = maγ−3(
1− uvc2
)−3, (4.1)
que no reproduce la forma tıpica de la segunda ley de Newton. Einstein se dio cuen-ta que el problema radicaba en la suposicion de la invariancia de la masa y la fuerza.Ası, habıa que replantear las leyes dinamicas teniendo en cuenta que en realidad estascantidades son relativas y dependen del observador inercial. Esto implica en particular,que la fuerza deja de ser una variable apropiada para la descripcion de la dinamica, porlo que en relatividad especial como se vera de ahora en adelante, deja de jugar un pa-pel central en la fısica. Sin embargo, las leyes de conservacion siguen siendo validaspara todos los obervadores inerciales, por lo que la dinamica descrita en terminos deparametros que se conservan resultan mas apropiados. En este capıtulo se plantea lasconsecuencias dinamicas de los postulados de la relatividad en terminos del momentolineal y la energıa, lo que nos conducira a una de las concepciones mas revolucionariasde la relatividad: la equivalencia de masa y energıa.
43
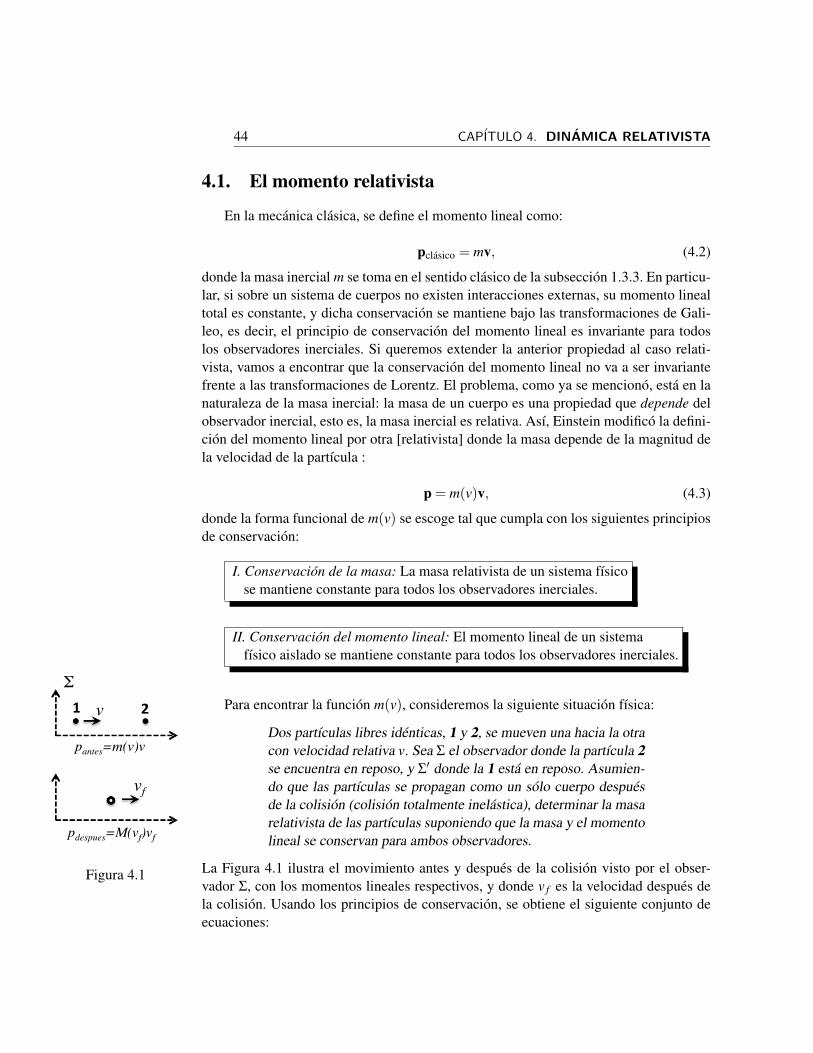
44 CAPITULO 4. DINAMICA RELATIVISTA
4.1. El momento relativista
En la mecanica clasica, se define el momento lineal como:
pclasico = mv, (4.2)
donde la masa inercial m se toma en el sentido clasico de la subseccion 1.3.3. En particu-lar, si sobre un sistema de cuerpos no existen interacciones externas, su momento linealtotal es constante, y dicha conservacion se mantiene bajo las transformaciones de Gali-leo, es decir, el principio de conservacion del momento lineal es invariante para todoslos observadores inerciales. Si queremos extender la anterior propiedad al caso relati-vista, vamos a encontrar que la conservacion del momento lineal no va a ser invariantefrente a las transformaciones de Lorentz. El problema, como ya se menciono, esta en lanaturaleza de la masa inercial: la masa de un cuerpo es una propiedad que depende delobservador inercial, esto es, la masa inercial es relativa. Ası, Einstein modifico la defini-cion del momento lineal por otra [relativista] donde la masa depende de la magnitud dela velocidad de la partıcula :
p = m(v)v, (4.3)
donde la forma funcional de m(v) se escoge tal que cumpla con los siguientes principiosde conservacion:
I. Conservacion de la masa: La masa relativista de un sistema fısicose mantiene constante para todos los observadores inerciales.
II. Conservacion del momento lineal: El momento lineal de un sistemafısico aislado se mantiene constante para todos los observadores inerciales.
Para encontrar la funcion m(v), consideremos la siguiente situacion fısica:
Dos partıculas libres identicas, 1 y 2, se mueven una hacia la otracon velocidad relativa v. Sea Σ el observador donde la partıcula 2se encuentra en reposo, y Σ′ donde la 1 esta en reposo. Asumien-do que las partıculas se propagan como un solo cuerpo despuesde la colision (colision totalmente inelastica), determinar la masarelativista de las partıculas suponiendo que la masa y el momentolineal se conservan para ambos observadores.
Σ
1 2 v
vf
pantes=m(v)v
pdespues=M(vf)vf
Figura 4.1 La Figura 4.1 ilustra el movimiento antes y despues de la colision visto por el obser-vador Σ, con los momentos lineales respectivos, y donde v f es la velocidad despues dela colision. Usando los principios de conservacion, se obtiene el siguiente conjunto deecuaciones:
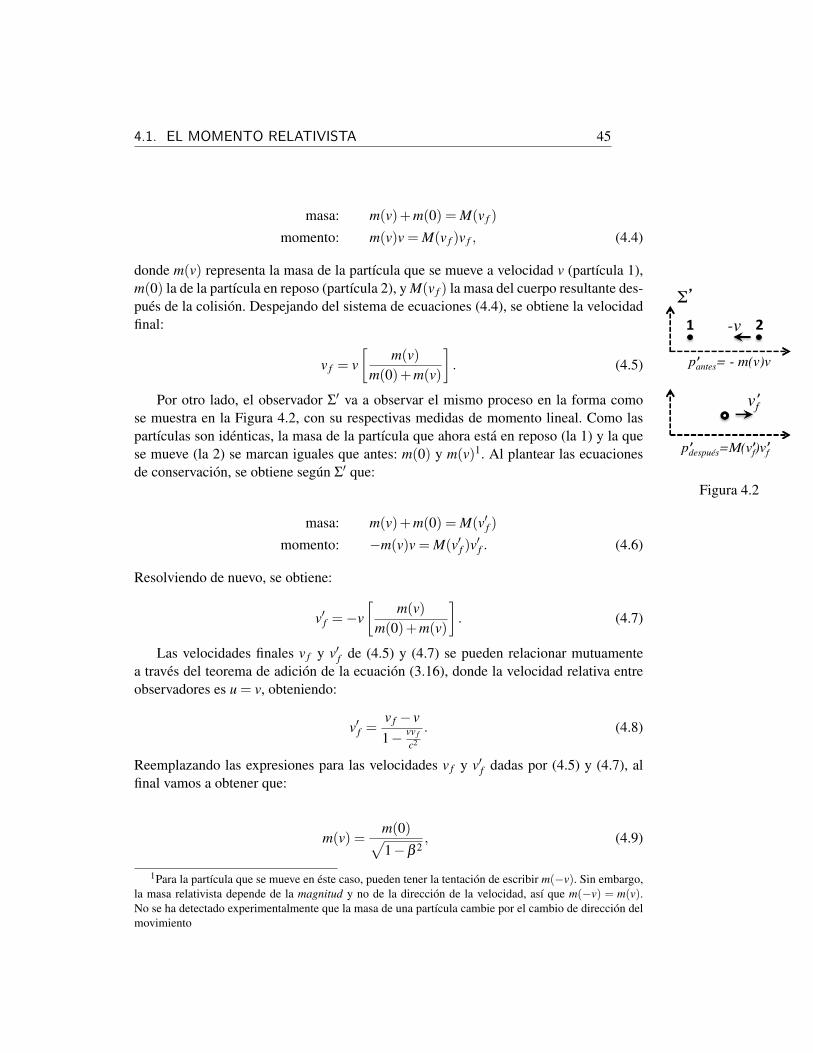
4.1. EL MOMENTO RELATIVISTA 45
masa: m(v)+m(0) = M(v f )
momento: m(v)v = M(v f )v f , (4.4)
donde m(v) representa la masa de la partıcula que se mueve a velocidad v (partıcula 1),m(0) la de la partıcula en reposo (partıcula 2), y M(v f ) la masa del cuerpo resultante des-pues de la colision. Despejando del sistema de ecuaciones (4.4), se obtiene la velocidadfinal:
v f = v[
m(v)m(0)+m(v)
]. (4.5)
Por otro lado, el observador Σ′ va a observar el mismo proceso en la forma comose muestra en la Figura 4.2, con su respectivas medidas de momento lineal. Como laspartıculas son identicas, la masa de la partıcula que ahora esta en reposo (la 1) y la quese mueve (la 2) se marcan iguales que antes: m(0) y m(v)1. Al plantear las ecuacionesde conservacion, se obtiene segun Σ′ que:
Σ’
1 2 -v
vf ’
pantes= - m(v)v
pdespués=M(vf)vf
’
’ ’ ’
Figura 4.2
masa: m(v)+m(0) = M(v′f )
momento: −m(v)v = M(v′f )v′f . (4.6)
Resolviendo de nuevo, se obtiene:
v′f =−v[
m(v)m(0)+m(v)
]. (4.7)
Las velocidades finales v f y v′f de (4.5) y (4.7) se pueden relacionar mutuamentea traves del teorema de adicion de la ecuacion (3.16), donde la velocidad relativa entreobservadores es u = v, obteniendo:
v′f =v f − v1− vv f
c2
. (4.8)
Reemplazando las expresiones para las velocidades v f y v′f dadas por (4.5) y (4.7), alfinal vamos a obtener que:
m(v) =m(0)√1−β 2
, (4.9)
1Para la partıcula que se mueve en este caso, pueden tener la tentacion de escribir m(−v). Sin embargo,la masa relativista depende de la magnitud y no de la direccion de la velocidad, ası que m(−v) = m(v).No se ha detectado experimentalmente que la masa de una partıcula cambie por el cambio de direccion delmovimiento

46 CAPITULO 4. DINAMICA RELATIVISTA
donde β = v/c. Tradicionalmente, la masa con velocidad nula m(0) se nota como m0,y se conoce como la masa en reposo del cuerpo. Ası, la masa relativista de un cuerpodepende de la rapidez del cuerpo respecto a un observador inercial y de su masa enreposo de acuerdo a
m(v) =m0√
1−β 2= γm0, (4.10)
mientras que el momento lineal relativista es:
p = m(v)v = γm0v (4.11)
Problema 10: Considere el mismo problema de colision anterior, pero asumiendo laversion clasica de la masa y del momento lineal. Suponiendo que el momento se con-serva para el observador Σ, muestre que bajo TLS, el observador Σ′ mide diferentesmomentos lineales antes y despues de la colision.
4.2. La energıa relativista
En mecanica clasica, la energıa total de cualquier sistema fısico, se puede separar entres contribuciones:
E = K +U +Q = K +E0, (4.12)
donde cada termino describe diferentes estados de un cuerpo de acuerdo con la Tabla 4.1.En particular, es conveniente separar la energıa de un cuerpo en contribuciones debido asolamente su movimiento global (energıa cinetica del centro de masa K) y aquellas quepueden existir independiente del movimiento (energıa en reposo E0), donde la energıaen reposo es la suma de la energıa potencial e interna del cuerpo. Ası, la ecuacion (4.12)se puede usar para definir la energıa cinetica como:
K = E−E0, (4.13)
esto es, la energıa cinetica es la energıa remanente de un cuerpo al restar de su energıatotal todas las energıas en reposo. La importancia de describir los estados de un cuerpoen funcion de sus energıas, es que estas se pueden definir tal que cumplan con el siguienteprincipio de conservacion:

4.2. LA ENERGIA RELATIVISTA 47
III. Conservacion de la energıa: La energıa total de un sistema fısicocerrado se mantiene constante para todos los observadores inerciales.
En relatividad especial, tambien podemos definir las energıas tal que el principio deconservacion anterior se mantenga. Sin embargo, al exigir invariancia de esa conserva-cion bajo las TLS, Einstein encontro cambios fundamentales en la forma de las energıas.Antes de entrar a discutir la version relativista de las energıas, estudiemos las formasclasicas para luego comparar las diferencias. Por simplicidad, nos limitamos a una soladimension.
4.2.1. Energıa cinetica clasica
Clasicamente, el cambio de energıa cinetica se define como el trabajo que realiza lafuerza sobre un cuerpo, donde la fuerza es la variacion del momento lineal [clasico]. Paracalcular dicho trabajo, primero debemos expresar la fuerza en terminos de la posicionusando la regla de la cadena:
F =d pclasico
dt=
d pclasico
dxdxdt
= mvdvdx
. (4.14)
El trabajo es la integral de la fuerza respecto al desplazamiento:
Wclasico =∫
Fdx = m∫
vdv =12
mv2 +C = K(v), (4.15)
con C una constante de integracion. Si el cuerpo se encuentra en reposo, entonces nohabra desplazamianto, por lo que el trabajo es nulo para v = 0. Aplicando esta condicionen (4.15), obtenemos que C = 0. Ası surge la tradicional definicion de la energıa cineticaen mecanica clasica:
Parametro Tipo de Energıa Origen Fısico
K CineticaDebido al movimiento del centro de masa.Depende de la rapidez
U PotencialDebido a interacciones externas
Depende de la posicion
Q InternaDebido a movimientos e interacciones internas
Depende de la estructura interna
Tabla 4.1: Estados de un cuerpo en terminos de energıas

48 CAPITULO 4. DINAMICA RELATIVISTA
K =12
mv2. (4.16)
Si lo comparamos con la definicion de la ecuacion (4.13), se obtiene que la energıa totalde un cuerpo es:
Eclasico =12
mv2 +E0. (4.17)
Por otro lado, la energıa en reposo contiene dos contribuciones: la energıa potencialU y la energıa interna Q. Estas energıas no contribuyen bajo las siguientes circunstan-cias:
1. La energıa potencial se puede calibrar en cero si no hay interacciones externas.Esto es, si el cuerpo es libre, entonces se puede hacer U = 0.
2. Clasicamente la energıa interna depende de la estructura interna del cuerpo. Pero siel cuerpo es una partıcula puntual, que por definicion carece de estructura interna,no existiran estados internos para describir, por lo que la podemos calibrar en cero.Ası, en mecanica clasica Q = 0 para partıculas puntuales
Ası, obtenemos la siguiente propiedad fundamental de la mecanica clasica: La energıatotal de una partıcula puntual libre es puramente cinetica, mientras que su energıa en re-poso es nula.
4.2.2. Energıa cinetica relativista
Para obtener el equivalente relativista de la energıa, definamos la fuerza relativistacomo la variacion del momento lineal relativista. Usando la definicion (4.11) y la reglade la cadena, se tiene:
Frelativista =d pdt
=d pdx
dxdt
= m0vdγvdx
. (4.18)
Ası, el trabajo relativista sera:
Wrelativista =∫
Frelativistadx = m0
∫vd(γv) = m0c2
∫βd(γβ ), (4.19)
donde se introdujo el factor β = v/c en la ultima igualdad. Para separar el diferencial deintegracion, se evalua:
d(γβ )
dβ=
ddβ
(β√
1−β 2
)
=1√
1−β 2+
β 2
(1−β 2)3/2 (4.20)

4.2. LA ENERGIA RELATIVISTA 49
de donde se obtiene el diferencial:
d(γβ ) =1√
1−β 2dβ +
β 2
(1−β 2)3/2 dβ . (4.21)
Reemplazando el diferencial anterior en la integral (4.19), se obtiene:
Wrelativista = m0c2
[∫β√
1−β 2dβ +
∫β 3
(1−β 2)3/2 dβ
]. (4.22)
Al realizar las integraciones [por partes], se encuentra al final que:
Wrelativista = m0c2
[1√
1−β 2+C
], (4.23)
donde C es una constante remanente de integracion. Si usamos, como en el caso clasico,la condicion de que el trabajo es nulo cuando la partıcula se encuentra en reposo (β = 0),se obtiene que C = −1. Ası, definiendo la energıa cinetica relativista como el trabajorelativista (teorema de trabajo-energıa relativista), se obtiene:
K =m0c2√1−β 2
−m0c2 = γm0c2−m0c2 = m(v)c2−m0c2, (4.24)
en donde se aplico la definicion de masa relativista de acuerdo a la ecuacion (4.10). Denuevo, comparando el resultado (4.24) con la definicion general de la ecuacion (4.13),se obtiene para las energıas total y en reposo que:
E−E0 = m(v)c2−m0c2. (4.25)
El primer termino despues de la igualdad lo podemos interpretar como la energıa medidapor un observador donde la partıcula tiene movimiento (depende de la masa relativistam(v)), mientras que el segundo termino es la energıa medida por el observador donde lapartıcula esta en reposo (depende de m0), que es justamente la energıa en reposo. Ası, sededuce de forma natural que la energıa total y la energıa en reposo de un cuerpo estandadas por:
Energıa total: E = m(v)c2 = γm0c2,
Energıa en reposo: E0 = m0c2. (4.26)
En particular, a diferencia de la mecanica clasica que no da una expresion especıficapara la energıa en reposo, en la relatividad especial se predice que sin importar cual sea elorigen de la energıa en reposo, estas siempre tienen que sumar la cantidad E0 =m0c2, que
50 CAPITULO 4. DINAMICA RELATIVISTA
es la celebre relacion de equivalencia de masa y energıa. La esencia de dicha relacionse manifiesta explıcitamente en el caso de partıculas puntuales libres. Mientras que en lamecanica clasica se predice que las partıculas puntuales aisladas tienen energıa en reposonula, en mecanica relativista aun tendran contribucion debido a su propiedad de masa enreposo, es decir, aunque la partıcula sea libre, no tenga estructura interna y se encuentreen reposo, aun existe una energıa remanente en forma de masa en reposo: la masa enreposo es una forma de energıa de un cuerpo, y como tal, puede transformarse en otrostipos de energıas como cinetica, calorıfica, electrica, etc. Si el cuerpo tiene estructurainterna, la masa en reposo puede tener contribuciones adicionales debido a energıas deinteraccion entre los constituyentes internos del cuerpo, o a movimientos termicos delos mismos. Ası, por ejemplo, un cuerpo caliente va a tener mas masa en reposo queel mismo cuerpo en estado frıo. Adicionalmente, como la velocidad de la luz es unaconstante universal, la expresion E = m(v)c2 implica que la conservacion de la masarelativista es equivalente a la conservacion de la energıa total.
Por otro lado, aunque la relatividad predice una ecuacion para la energıa en reposoen funcion de la masa en reposo, no da explicacion del origen de dicha masa, por loque su naturaleza es un tema de investigacion actual en la fısica, la cual se discute en lasiguiente seccion.
4.3. La masa en reposo
Uno de los problemas fundamentales de la fısica moderna es la de entender el origeny la naturaleza de la masa. En mecanica clasica, la segunda ley de Newton y sus pro-piedades relativistas [Galileanas] permiten definir de forma unica y matematica la masainercial de un cuerpo. Pero en el contexto de la relatividad especial, el concepto de masaya no se puede asociar exclusivamente a una propiedad intrınseca de la materia. Primero,la medida de masa depende del movimiento relativo del observador, en cuyo caso habla-mos de la masa relativista del cuerpo. Segundo, algo que se acerca mas a una propiedadintrınseca del cuerpo es su masa en reposo. Sin embargo, si el cuerpo se encuentra en unpotencial externo, o contiene grados de libertad internos, no es posible separar que par-te de su masa en reposo corresponde a energıas internas o externas extras, o que partecorresponde a energıa “autenticamente” intrınseca independiente de las interacciones ymovimientos internos. Ası, no es posible hablar de una unica masa asociado a un cuerpo,sino que va a depender de las condiciones dinamicas y cinematicas del cuerpo. Por otrolado, aunque se garantice que la partıcula sea puntual y este libre de interacciones ex-ternas, aun existen inconvenientes teoricos para explicar la fuente de su masa en reposo.Aunque la relatividad especial no pretende resolver el problema de la naturaleza de lamasa, es importante mencionar cual es el estado actual de las investigaciones sobre eltema. Para no hacer una discusion en abstracto, nos vamos a contextualizar en dos casosespecıficos en relacion a los dos problemas discutidos anteriormente.
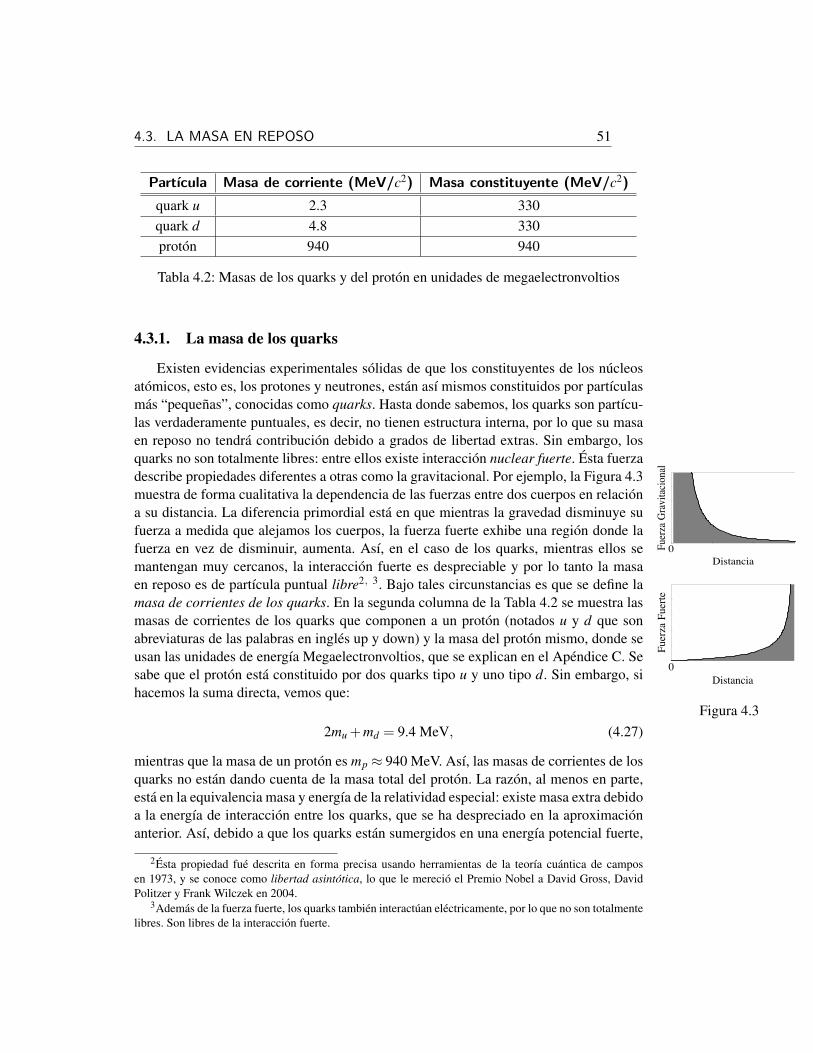
4.3. LA MASA EN REPOSO 51
Partıcula Masa de corriente (MeV/c2) Masa constituyente (MeV/c2)
quark u 2.3 330quark d 4.8 330proton 940 940
Tabla 4.2: Masas de los quarks y del proton en unidades de megaelectronvoltios
4.3.1. La masa de los quarks
Existen evidencias experimentales solidas de que los constituyentes de los nucleosatomicos, esto es, los protones y neutrones, estan ası mismos constituidos por partıculasmas “pequenas”, conocidas como quarks. Hasta donde sabemos, los quarks son partıcu-las verdaderamente puntuales, es decir, no tienen estructura interna, por lo que su masaen reposo no tendra contribucion debido a grados de libertad extras. Sin embargo, losquarks no son totalmente libres: entre ellos existe interaccion nuclear fuerte. Esta fuerzadescribe propiedades diferentes a otras como la gravitacional. Por ejemplo, la Figura 4.3muestra de forma cualitativa la dependencia de las fuerzas entre dos cuerpos en relaciona su distancia. La diferencia primordial esta en que mientras la gravedad disminuye sufuerza a medida que alejamos los cuerpos, la fuerza fuerte exhibe una region donde lafuerza en vez de disminuir, aumenta. Ası, en el caso de los quarks, mientras ellos semantengan muy cercanos, la interaccion fuerte es despreciable y por lo tanto la masaen reposo es de partıcula puntual libre2, 3. Bajo tales circunstancias es que se define lamasa de corrientes de los quarks. En la segunda columna de la Tabla 4.2 se muestra lasmasas de corrientes de los quarks que componen a un proton (notados u y d que sonabreviaturas de las palabras en ingles up y down) y la masa del proton mismo, donde seusan las unidades de energıa Megaelectronvoltios, que se explican en el Apendice C. Sesabe que el proton esta constituido por dos quarks tipo u y uno tipo d. Sin embargo, sihacemos la suma directa, vemos que:
0Distancia
FuerzaGravitacional
0Distancia
FuerzaFuerte
Figura 4.32mu +md = 9.4 MeV, (4.27)
mientras que la masa de un proton es mp ≈ 940 MeV. Ası, las masas de corrientes de losquarks no estan dando cuenta de la masa total del proton. La razon, al menos en parte,esta en la equivalencia masa y energıa de la relatividad especial: existe masa extra debidoa la energıa de interaccion entre los quarks, que se ha despreciado en la aproximacionanterior. Ası, debido a que los quarks estan sumergidos en una energıa potencial fuerte,
2Esta propiedad fue descrita en forma precisa usando herramientas de la teorıa cuantica de camposen 1973, y se conoce como libertad asintotica, lo que le merecio el Premio Nobel a David Gross, DavidPolitzer y Frank Wilczek en 2004.
3Ademas de la fuerza fuerte, los quarks tambien interactuan electricamente, por lo que no son totalmentelibres. Son libres de la interaccion fuerte.
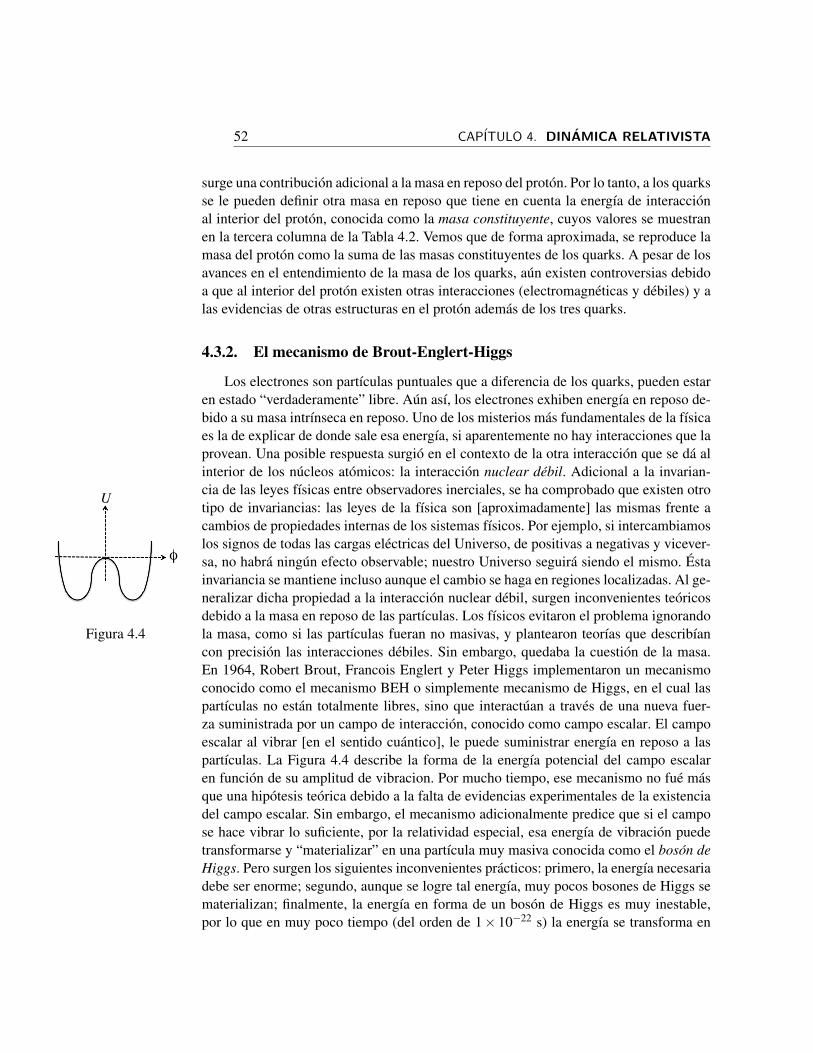
52 CAPITULO 4. DINAMICA RELATIVISTA
surge una contribucion adicional a la masa en reposo del proton. Por lo tanto, a los quarksse le pueden definir otra masa en reposo que tiene en cuenta la energıa de interaccional interior del proton, conocida como la masa constituyente, cuyos valores se muestranen la tercera columna de la Tabla 4.2. Vemos que de forma aproximada, se reproduce lamasa del proton como la suma de las masas constituyentes de los quarks. A pesar de losavances en el entendimiento de la masa de los quarks, aun existen controversias debidoa que al interior del proton existen otras interacciones (electromagneticas y debiles) y alas evidencias de otras estructuras en el proton ademas de los tres quarks.
4.3.2. El mecanismo de Brout-Englert-Higgs
Los electrones son partıculas puntuales que a diferencia de los quarks, pueden estaren estado “verdaderamente” libre. Aun ası, los electrones exhiben energıa en reposo de-bido a su masa intrınseca en reposo. Uno de los misterios mas fundamentales de la fısicaes la de explicar de donde sale esa energıa, si aparentemente no hay interacciones que laprovean. Una posible respuesta surgio en el contexto de la otra interaccion que se da alinterior de los nucleos atomicos: la interaccion nuclear debil. Adicional a la invarian-cia de las leyes fısicas entre observadores inerciales, se ha comprobado que existen otrotipo de invariancias: las leyes de la fısica son [aproximadamente] las mismas frente acambios de propiedades internas de los sistemas fısicos. Por ejemplo, si intercambiamoslos signos de todas las cargas electricas del Universo, de positivas a negativas y vicever-sa, no habra ningun efecto observable; nuestro Universo seguira siendo el mismo. Estainvariancia se mantiene incluso aunque el cambio se haga en regiones localizadas. Al ge-neralizar dicha propiedad a la interaccion nuclear debil, surgen inconvenientes teoricosdebido a la masa en reposo de las partıculas. Los fısicos evitaron el problema ignorando
U
φ
Figura 4.4 la masa, como si las partıculas fueran no masivas, y plantearon teorıas que describıancon precision las interacciones debiles. Sin embargo, quedaba la cuestion de la masa.En 1964, Robert Brout, Francois Englert y Peter Higgs implementaron un mecanismoconocido como el mecanismo BEH o simplemente mecanismo de Higgs, en el cual laspartıculas no estan totalmente libres, sino que interactuan a traves de una nueva fuer-za suministrada por un campo de interaccion, conocido como campo escalar. El campoescalar al vibrar [en el sentido cuantico], le puede suministrar energıa en reposo a laspartıculas. La Figura 4.4 describe la forma de la energıa potencial del campo escalaren funcion de su amplitud de vibracion. Por mucho tiempo, ese mecanismo no fue masque una hipotesis teorica debido a la falta de evidencias experimentales de la existenciadel campo escalar. Sin embargo, el mecanismo adicionalmente predice que si el campose hace vibrar lo suficiente, por la relatividad especial, esa energıa de vibracion puedetransformarse y “materializar” en una partıcula muy masiva conocida como el boson deHiggs. Pero surgen los siguientes inconvenientes practicos: primero, la energıa necesariadebe ser enorme; segundo, aunque se logre tal energıa, muy pocos bosones de Higgs sematerializan; finalmente, la energıa en forma de un boson de Higgs es muy inestable,por lo que en muy poco tiempo (del orden de 1× 10−22 s) la energıa se transforma en
4.4. LA RELACION ENERGIA Y MOMENTO 53
forma de energıa en reposo de otras partıculas y energıa cinetica. Por lo tanto resultaextremadamente difıcil detectar la presencia del Boson de Higgs. No fue sino hasta elano 2012 en que los experimentos llevados a cabo en el Gran Colisionador Hadronico(LHC por sus siglas en ingles), lograron suministrar la energıa necesaria para producirun numero de bosones de Higgs suficientes para ser detectados, descubrimiento que ledio el premio Nobel a Englert y a Higgs en el ano 2013. Aunque el mecanismo de Higgsda una explicacion natural a la existencia de la masa en reposo, aun hay detalles teori-cos y medidas experimentales que se mantiene sin una respuesta satisfactoria, lo que esmotivo de una intensa investigacion.
Problema 11: Un boson de Higgs con energıa en reposo E0 = 126 GeV, decae delreposo en dos quarks tipo b (bottom), que tienen energıa en reposo de 4 GeV cadauno. Calcular la energıa cinetica de los quarks usando conservacion de la energıa.
4.4. La relacion energıa y momento
Existe una relacion muy util entre el momento y la energıa relativista, que nos per-mitira complementar las ecuaciones de conservacion del momento lineal y de la energıapara la resolucion de problemas de colision. De acuerdo a lo obtenido en las seccionesanteriores, las variables dinamicas fundamentales son:
Momento relativista: p = γm0v, (A)
Energıa relativista: E = γm0c2 (B), (4.28)
donde el factor γ contiene la velocidad relativa entre el observador en reposo del cuerpoy el observador que mide el cuerpo moviendose a velocidad v. Ası, explicitamente laecuacion (A) de (4.28) es:
p =m0v√
1− v2/c2. (4.29)
Calculandole el modulo al cuadrado a la expresion anterior, se obtiene:
|p|2 = p2 =m2
0v2
1− v2/c2 . (4.30)
Despejando para la magnitud de la velocidad, se obtiene:
54 CAPITULO 4. DINAMICA RELATIVISTA
v =p√
m20 + p2/c2
. (4.31)
Por otro lado, si usamos el resultado anterior dentro de la energıa relativista (B) dela ecuacion (4.28), se obtiene:
E =m0c2√
1− v2/c2=
m0c2√1− p2/(m2
0c2 + p2)
= c√
m20c2 + p2. (4.32)
Ası, la energıa relativista y el momento lineal relativista se relacionan de acuerdo a:
E = c√
p2 +m20c2. (4.33)
En mecanica clasica, sabemos que si la masa de un cuerpo es nulo, entonces sumomento lineal sera nulo sin importar su energıa. Sin embargo, de acuerdo a la relacion(4.33), si el cuerpo tiene masa en reposo nulo, aun puede existir un momento lineal envirtud de su energıa. En la naturaleza existen objetos que no interactuan con el campoescalar de Higgs, por lo que no tienen masa en reposo. El mas comun es justamentelos cuantos de luz, esto es, los fotones. Aunque la relatividad sigue tratando a la luzcomo ondas de vibracion en el sentido de la electrodinamica clasica, es importante paraalgunos procesos relativistas considerar su naturaleza cuantica.
4.4.1. El foton
Los fotones son paquetes de energıa de campos electromagneticos, que exhiben uncomportamiento de partıcula con masa en reposo nula. De acuerdo a la relacion de ener-gia y momento de la ecuacion (4.33), un foton cumple con la siguiente relacion:
E = cp, (4.34)
donde c es la velocidad de propagacion del foton, que obviamente es la de la luz. Porotro lado, la mecanica cuantica postula (contribucion de Einstein independiente de la re-latividad) que la energıa contenida en un solo foton depende de su frecuencia de acuerdoa la siguiente relacion:
E = h f , (4.35)
donde h es, junto a la velocidad c, otra de las constantes fundamentales de la naturaleza,conocida como la constante de Planck, y cuyo valor en unidades internacionales y enelectronvoltios es:

4.4. LA RELACION ENERGIA Y MOMENTO 55
h = 6.63×10−34 J · s = 4.14×10−21 MeV · s. (4.36)
A las ecuaciones (4.34) y (4.35) las vamos a llamar las ecuaciones del foton.
4.4.2. Decaimiento de partıculas
Una de las consecuencias de la relacion de equivalencia de masa y energıa, es laposibilidad de que la masa en reposo de una partıcula se convierta en otras formas deenergıas, como por ejemplo otras partıculas mas livianas y energıa cinetica. Un ejemplode tales proceso es el decaimiento de un pion neutro, que es una partıcula compueta pordos quarks. Una de las posibilidades de transformacion de la masa del pion es produc-cion de energıa electromagnetica en forma de dos fotones. Consideremos la siguientesituacion:
Un pion neutro con masa en reposo de 135 MeV/c2 viaja con una energıade 426 MeV. Despues de un tiempo, el pion decae en dos fotones que sedispersan en direcciones opuestas y con la misma orientacion de propa-gacion del pion original. Calcular las frecuencias de cada foton
La Figura 4.5 ilustra el proceso antes y despues del decaimiento, con sus respectivasenergıas y momentos. Teniendo en cuenta las leyes de conservacion, la relacion entreenergıa y momento, y las ecuaciones del foton, se plantean las siguientes ecuaciones:
Ei , pi π M
E1 , p1 E2 , -p2
Figura 4.5
conservacion de energıa: Ei = E1 +E2 (A)
conservacion de momento: pi = p1− p2 (B)
relacion de energıa-momento pion: Ei = c√
p2i +M2
πc2 (C)
ecuacion de momento de fotones: p1 = E1/c, p2 = E2/c (D)
ecuacion de frecuencia de fotones: f1 = E1/h, f2 = E2/h (E) (4.37)
Sin importar el metodo que se use para combinar las ecuaciones anteriores y resolverla pregunta, siempre es importante identificar las variables conocidas y las que se puedencalcular directamente. En este caso, se conocen la masa en reposo del pion Mπ , y suenergıa total Ei, mientras que su momento se puede calcular directamente de la ecuacion(C), obteniendo:
pi =
√E2
ic2 −M2
πc2 = 404 MeV/c. (4.38)
De esta manera, se pueden combinar las 2 ecuaciones (A) y (B), y las 2 de (D) pararesolver las 4 incognitas E1, E2, p1 y p2. En particular, para las energıas, se obtiene:

56 CAPITULO 4. DINAMICA RELATIVISTA
E1 =12(Ei + cpi) = 415 MeV,
E2 =12(Ei− cpi) = 11 MeV, (4.39)
correspondientes a las energıas de cada foton. Finalmente, reemplazando lo anterior enlas ecuaciones (E), se obtienen las frecuencias buscadas (donde se usa el valor de laconstante de Planck en unidades MeV, dada en la ecuacion (4.36) ):
f1 = E1/h = 1×1023 s−1,
f1 = E2/h = 2.6×1021 s−1. (4.40)
4.4.3. Fision Nuclear
Otra consecuencia importante de la energıa relativista es el proceso de fision nuclear,que se da en los nucleos atomicos. A este nivel, conviene expresar la masa de los nucleosen unidades de masa atomica u.m.a, la cual se define como 1/12 veces la masa de unnucleo de Carbono 12:
1 u.m.a = 1.685×10−27 kg. (4.41)
Como los nucleos son cuerpos con estructura interna, parte de su masa en reposo pro-viene de la energıa potencial nuclear que mantiene unido a sus componentes (protonesy neutrones). Esa porcion de energıa en reposo puede ser transformada en otros nucleosmas livianos y energıa cinetica liberada que puede ser aprovechada en la generacion deenergıas alternas como la electrica. Una forma de lograr liberar la energıa acumulado enla masa en reposo, es haciendo chocar neutrones con nucleos de Uranio. Para ilustrar eltipo de reacciones que se dan, consideremos la siguiente situacion:
Un neutron y un nucleo de Uranio 235 sufre la siguiente reaccion:
n+23542 U −→ 92
38Sr+14054 Xe+4n, (4.42)
donde las masas en reposo de cada uno de los nucleos participantes son:
Estroncio: m(Sr) = mS = 91.937 u.m.a,
Xenon: m(Xe) = mX = 139.947 u.m.a,
Uranio: m(U) = mU = 235.175 u.m.a,
Neutron: m(n) = mn = 1.009 u.m.a. (4.43)

4.4. LA RELACION ENERGIA Y MOMENTO 57
Calcular a.) la energıa liberada en la reaccion y b.) la cantidad de Uranionecesario para generar la energıa electrica producida en Colombia enel ano 2012 de aproximadamente 5.7×1013 kilovatios-hora, asumiendouna eficiencia del 50%.
Para resolver el caso a.), el procedimiento metodologico es igual que en el caso dedecaimiento de partıculas, con la diferencia de que ahora tenemos dos cuerpos en elestado inicial, por lo que las energıas iniciales y finales son:
Ei = En +EU ,
E f = ES +EX +4En, (4.44)
donde los subındices se asignan a cada nucleo. En este caso nos piden la energıa cineticaentre los estados finales e iniciales, por lo que requeriremos usar la definicion general(4.13) con las formas relativistas de la ecuacion (4.26). Es importante distinguir que co-rresponde a energıa total y que a energıa en reposo. Las energıas en (4.44), que son lasque se conservan, corresponden a la energıa total (las energıas en reposo no se conser-van), mientras que las masas dadas por (4.43) determinan las energıas en reposo. Conesto, sera suficiente usar solamente el principio de conservacion de la energıa, por lo queel conjunto de ecuaciones es:
E0(n) = mnc2, E0(U) = mU c2, E0(S) = mSc2, E0(X) = mX c2,
Kn = En−E0(n), KU = EU −E0(U), KS = ES−E0(S), KX = EX −E0(X).
Ei = E f . (4.45)
Nuestras variables conocidas son todas las masas en reposo, por lo que sus energıasen reposo se pueden calcular directamente con la primera lınea de ecuaciones en (4.45).No conocemos las energıas totales iniciales ni finales, pero eso no interesa ya que debe-mos calcular la diferencia de energıas cineticas, por lo que al realizar la resta y en virtudde la conservacion de la energıa, las totales se van a cancelar. Ası, la unica contribucional cambio de energıa cinetica proviene del cambio de las energıas en reposo. Usando lasegunda lınea de ecuaciones en (4.45) se obtiene:
∆K = K f −Ki = Kn +KU −KS−KX −4Kn
= (mU −mS−mX −3mn)c2. (4.46)
Reemplazando los valores numericos de (4.43), se obtiene que ∆K = (0.264 u.m.a.)c2.Para convertirlo en Joules, se hace uso de la definicion (4.41) y se usa la velocidad de laluz a 3 cifras significativas, que es 2.998×108 m/s, por lo que:

58 CAPITULO 4. DINAMICA RELATIVISTA
∆K = (0.264 u.m.a.)c2 = (0.264 u.m.a.)1.685×10−27 kg
1 u.m.ac2
= 3.998×10−11 J, (4.47)
que corresponde a la energıa liberada para una unica reaccion. Si el proceso se multiplicapor muchas reacciones identicas, la energıa liberada aumentara en el mismo factor. Parael punto b.), se pide calcular cuantas reacciones son necesarias para producir una canti-dad dada de energıa liberada pero suponiendo que solamente el 50% de esa energıa seconvierte efectivamente en energıa electrica. Ası, definimos la eficiencia como la razonentre la energıa electrica convertida y la energıa total liberada por un numero N de reac-ciones:
η =Eelect
N∆K. (4.48)
En el problema planteado, se tiene que η = 0.5, Eelect = 5.7× 1013 kilovatios-hora y∆K = 3.998× 10−11 J. Ası, el problema numerico se reduce a realizar la conversionde kilovatios-hora a Joules y calcular el numero de reacciones necesarias, N. Para laconversion de unidades, recordemos que el vatio es la unidad de la razon de energıatransferida por unidad de tiempo, por lo que:
Eelect = 5.7×1013 kilovatios-hora = 5.7×1013 kiloJouless
3600 s1 h
= 2.052×1020 J. (4.49)
Reemplazando los valores, se obtiene que el numero de reacciones necesarias para ob-tener la energıa electrica de consumo en un ano en Colombia a un 50% de eficiencia esN = 1.026× 1031, que requerira el mismo numero de nucleos de Uranio, cada uno demasa 235.175 u.m.a, lo que correspondera a una masa total de:
MU = NmU = 235.175 u.m.a(1.026×1031)
= 235.175(
1.685×10−27 kg1 u.m.a
)(1.026×1031)
= 4066×106kg, (4.50)
que corresponde a cerca de 4000 toneladas de Uranio.

Parte IIFundamentos Geometricos
59


CAPITULO 5
Estructura Espacio Tiempo
En 1907, el fısico Hermann Minkowski introdujo el concepto de espacio-tiempoen el lenguaje de la relatividad especial como una alternativa de entender los efectoscinematicos de los postulados. Dicha formulacion permitio el desarrollo de dos ideasfundamentales de la fısica actual. Primero, aunque la formulacion fue originalmentepropuesta para observadores inerciales (relatividad especial), permitio la extension natu-ral a observadores acelerados (relatividad general). Segundo, el tratamiento geometricorevelo indirectamente la importancia de los principios de invariancia en fısica, los cua-les fueron fundamentales para la construccion de las teorıas que describen las demasinteracciones: la electromagnetica, la fuerte y la debil. En este capıtulo se introducen losconceptos basicos del tratamiento geometrico de la relatividad.
5.1. La geometrıa Euclidiana del espacio
El concepto mas basico que define la geometrıa de un espacio vectorial es la de dis-tancia entre puntos. En particular, definimos la distancia Euclidiana entre dos puntosmedido en un espacio vectorial de n dimensiones respecto a un sistema de ejes coorde-nados como:
d =√
∆x21 +∆x2
2 + ...+∆x2n, (5.1)
donde cada variable ∆xi representa la proyeccion de la distancia sobre cada uno de losejes coordenados. La geometrıa del espacio viene determinada por el siguiente principiode invariancia:
61

62 CAPITULO 5. ESTRUCTURA DE ESPACIO-TIEMPO
Un espacio de n dimensiones es de naturalezaEuclidiana si la distancia Euclidiana es la misma
entre sistemas coordenados rotados
x2 x
y y2
d α
Figura 5.1
x
x’ y’
y y2
y2 ’ x2 ’
x2 θ
Figura 5.2
Las posiciones espaciales de los objetos se pueden describir de forma completa enun espacio vectorial de 3 dimensiones, pero por simplicidad, nos limitamos a un subes-pacio de 2 dimensiones sobre el plano cartesiano (x,y). Para contextualizar la discusion,consideremos el caso de una partıcula que parte de la posicion (x,y) = (0,0) (evento1) y se desplaza en lınea recta hasta la posicion (x,y) = (x2,y2) (evento 2) medido des-de un sistema coordenado con su eje x horizontal, como se muestra en la Figura 5.1.La distancia [Euclidiana] recorrida por la partıcula se define en ese sistema coordenadocomo:
d =√
x22 + y2
2. (5.2)
Por otro lado, la Figura 5.2 representa la misma situacion superponiendo al ante-rior un sistema de ejes coordenados rotado en un angulo θ y sus correspondientes pro-yecciones, en donde el evento 1 tiene posicion (x′,y′) = (0,0) y el 2 tiene posicion(x′,y′) = (x′2,y
′2). La distancia Euclidiana medida en este sistema coordenado sera:
d′ =√
x′22 + y′22 . (5.3)
Si nuestro espacio es de naturaleza Euclidiana, entonces se debe cumplir que√
x22 + y2
2 =√x′22 + y′22 . Para demostrar que es ası, extraigamos de la Figura 5.2 los dos triangulos
cuya hipotenusa es la misma, la cual ilustramos en la Figura 5.3. Por simple geometrıa[Euclidiana], se obtienen las siguiente proyecciones:
Sistema no rotado: x2 = d cosα, y2 = d sinα,
Sistema rotado: x′2 = d cos(α−θ), y′2 = d sin(α−θ). (5.4)
En particular, usando identidades trigonometricas basicas, las coordenadas en el sistemarotado se pueden escribir como:
α-θ
α
x2
y2 d
d y2
x2
’
’
Figura 5.3x′2 = d cosα cosθ +d sinα sinθ ,
y′2 = d sinα cosθ −d cosα sinθ . (5.5)
Al comparar las coordenadas de la ecuacion (5.5) con las coordenadas del sistemano rotado en (5.4), obtenemos las siguientes ecuaciones de rotacion:
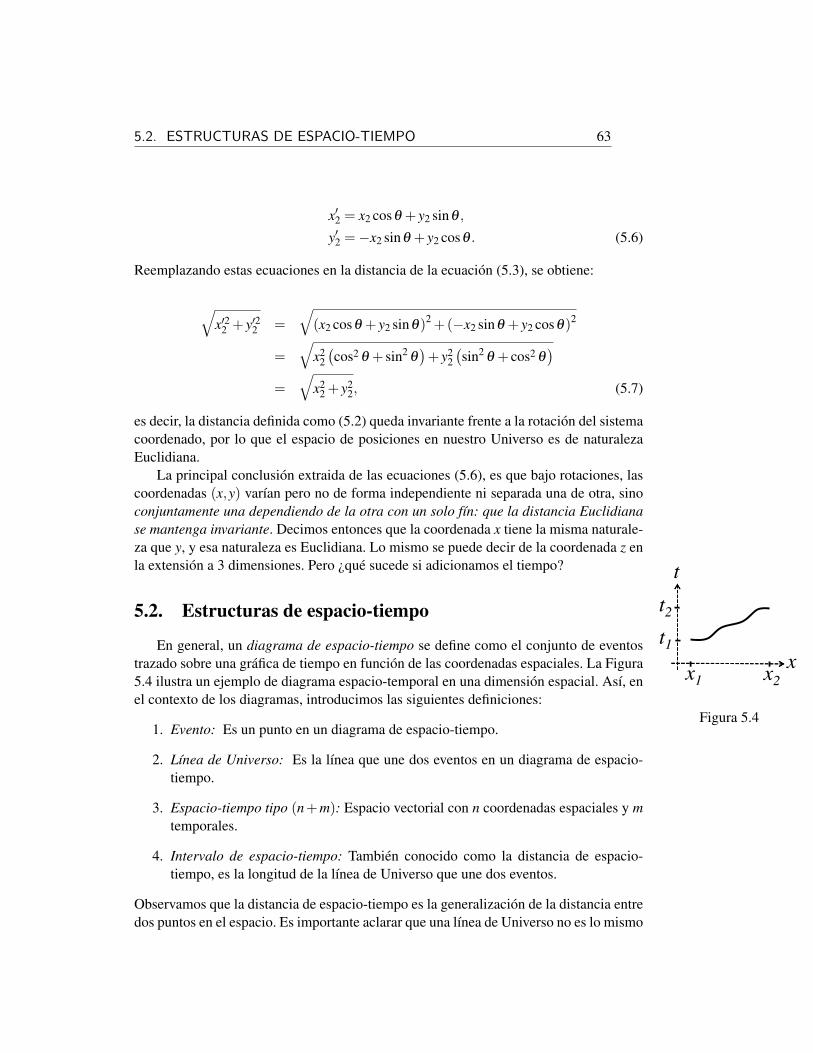
5.2. ESTRUCTURAS DE ESPACIO-TIEMPO 63
x′2 = x2 cosθ + y2 sinθ ,
y′2 =−x2 sinθ + y2 cosθ . (5.6)
Reemplazando estas ecuaciones en la distancia de la ecuacion (5.3), se obtiene:
√x′22 + y′22 =
√(x2 cosθ + y2 sinθ)2 +(−x2 sinθ + y2 cosθ)2
=√
x22
(cos2 θ + sin2
θ)+ y2
2
(sin2
θ + cos2 θ)
=√
x22 + y2
2, (5.7)
es decir, la distancia definida como (5.2) queda invariante frente a la rotacion del sistemacoordenado, por lo que el espacio de posiciones en nuestro Universo es de naturalezaEuclidiana.
La principal conclusion extraida de las ecuaciones (5.6), es que bajo rotaciones, lascoordenadas (x,y) varıan pero no de forma independiente ni separada una de otra, sinoconjuntamente una dependiendo de la otra con un solo fın: que la distancia Euclidianase mantenga invariante. Decimos entonces que la coordenada x tiene la misma naturale-za que y, y esa naturaleza es Euclidiana. Lo mismo se puede decir de la coordenada z enla extension a 3 dimensiones. Pero ¿que sucede si adicionamos el tiempo?
5.2. Estructuras de espacio-tiempo
En general, un diagrama de espacio-tiempo se define como el conjunto de eventostrazado sobre una grafica de tiempo en funcion de las coordenadas espaciales. La Figura5.4 ilustra un ejemplo de diagrama espacio-temporal en una dimension espacial. Ası, enel contexto de los diagramas, introducimos las siguientes definiciones:
x
t
t1 t2
x1 x2
Figura 5.41. Evento: Es un punto en un diagrama de espacio-tiempo.
2. Lınea de Universo: Es la lınea que une dos eventos en un diagrama de espacio-tiempo.
3. Espacio-tiempo tipo (n+m): Espacio vectorial con n coordenadas espaciales y mtemporales.
4. Intervalo de espacio-tiempo: Tambien conocido como la distancia de espacio-tiempo, es la longitud de la lınea de Universo que une dos eventos.
Observamos que la distancia de espacio-tiempo es la generalizacion de la distancia entredos puntos en el espacio. Es importante aclarar que una lınea de Universo no es lo mismo
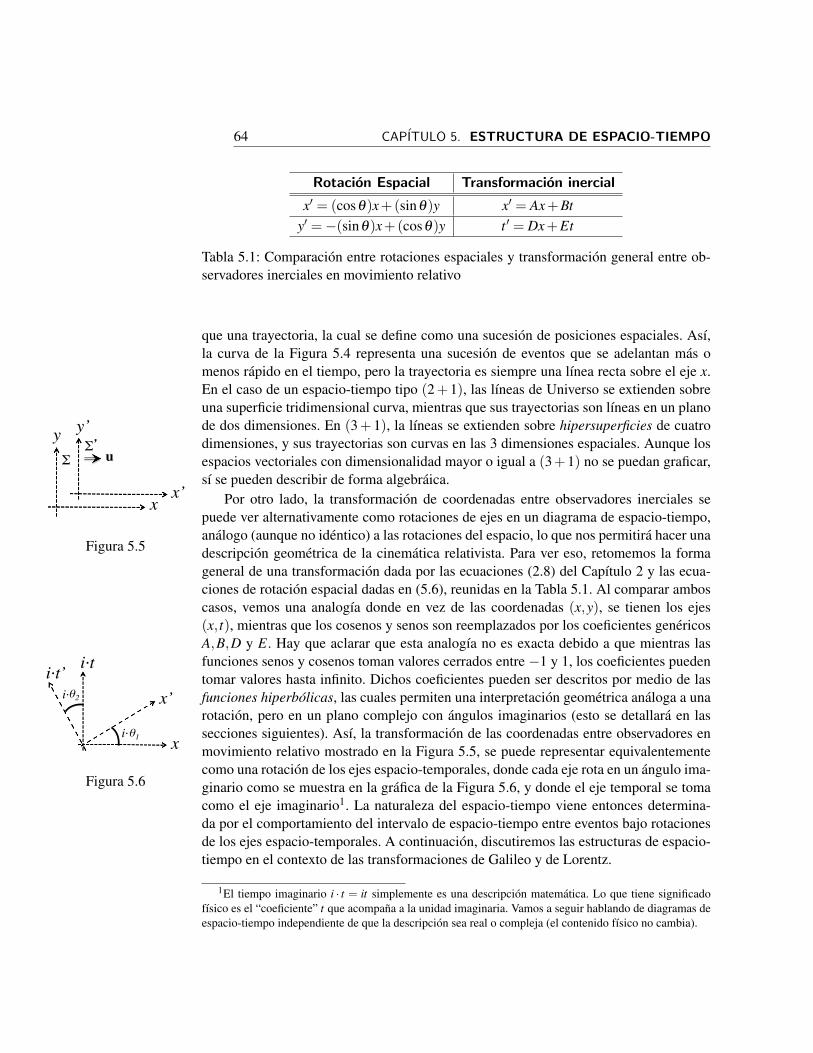
64 CAPITULO 5. ESTRUCTURA DE ESPACIO-TIEMPO
Rotacion Espacial Transformacion inercial
x′ = (cosθ)x+(sinθ)y x′ = Ax+Bty′ =−(sinθ)x+(cosθ)y t ′ = Dx+Et
Tabla 5.1: Comparacion entre rotaciones espaciales y transformacion general entre ob-servadores inerciales en movimiento relativo
que una trayectoria, la cual se define como una sucesion de posiciones espaciales. Ası,la curva de la Figura 5.4 representa una sucesion de eventos que se adelantan mas omenos rapido en el tiempo, pero la trayectoria es siempre una lınea recta sobre el eje x.En el caso de un espacio-tiempo tipo (2+1), las lıneas de Universo se extienden sobreuna superficie tridimensional curva, mientras que sus trayectorias son lıneas en un planode dos dimensiones. En (3+ 1), la lıneas se extienden sobre hipersuperficies de cuatrodimensiones, y sus trayectorias son curvas en las 3 dimensiones espaciales. Aunque losespacios vectoriales con dimensionalidad mayor o igual a (3+1) no se puedan graficar,sı se pueden describir de forma algebraica.
u Σ’
Σ
x
y y’
x’
Figura 5.5
x
x’
i·t i·t’
θ1 i·
θ2 i·
Figura 5.6
Por otro lado, la transformacion de coordenadas entre observadores inerciales sepuede ver alternativamente como rotaciones de ejes en un diagrama de espacio-tiempo,analogo (aunque no identico) a las rotaciones del espacio, lo que nos permitira hacer unadescripcion geometrica de la cinematica relativista. Para ver eso, retomemos la formageneral de una transformacion dada por las ecuaciones (2.8) del Capıtulo 2 y las ecua-ciones de rotacion espacial dadas en (5.6), reunidas en la Tabla 5.1. Al comparar amboscasos, vemos una analogıa donde en vez de las coordenadas (x,y), se tienen los ejes(x, t), mientras que los cosenos y senos son reemplazados por los coeficientes genericosA,B,D y E. Hay que aclarar que esta analogıa no es exacta debido a que mientras lasfunciones senos y cosenos toman valores cerrados entre −1 y 1, los coeficientes puedentomar valores hasta infinito. Dichos coeficientes pueden ser descritos por medio de lasfunciones hiperbolicas, las cuales permiten una interpretacion geometrica analoga a unarotacion, pero en un plano complejo con angulos imaginarios (esto se detallara en lassecciones siguientes). Ası, la transformacion de las coordenadas entre observadores enmovimiento relativo mostrado en la Figura 5.5, se puede representar equivalentementecomo una rotacion de los ejes espacio-temporales, donde cada eje rota en un angulo ima-ginario como se muestra en la grafica de la Figura 5.6, y donde el eje temporal se tomacomo el eje imaginario1. La naturaleza del espacio-tiempo viene entonces determina-da por el comportamiento del intervalo de espacio-tiempo entre eventos bajo rotacionesde los ejes espacio-temporales. A continuacion, discutiremos las estructuras de espacio-tiempo en el contexto de las transformaciones de Galileo y de Lorentz.
1El tiempo imaginario i · t = it simplemente es una descripcion matematica. Lo que tiene significadofısico es el “coeficiente” t que acompana a la unidad imaginaria. Vamos a seguir hablando de diagramas deespacio-tiempo independiente de que la descripcion sea real o compleja (el contenido fısico no cambia).

5.2. ESTRUCTURAS DE ESPACIO-TIEMPO 65
5.2.1. Espacio-tiempo clasico
x
i·t
θ2 i·
x2
i·t2
s
Figura 5.7
Las transformaciones de Galileo para una dimension espacial son:
s s’
x2
’
i·t2
x
i·t
φ i·
Figura 5.8
x′ = x−ut,
t ′ = t, (5.8)
que se pueden ver como una rotacion en un plano espacio-tiempo complejo, donde uni-camente el eje x rota. Consideremos el caso de un observador inercial Σ que mide unapartıcula moviendose sobre el eje x a velocidad constante v desde su origen. La lınea deUniverso de la partıcula en su diagrama de espacio-tiempo es entonces una lınea recta,como se muestra en la Figura 5.7, donde s indica la distancia de espacio-tiempo y (it2,x2)indican un tiempo [imaginario] y una posicion final de la partıcula. Si otro observador Σ′
en movimiento relativo describe la cinematica de la misma partıcula, obtendra una lıneade Universo con una pendiente (velocidad) diferente al anterior. La superposicion deldiagrama de espacio-tiempo del observador en movimiento Σ′ respecto al de Σ se puederepresentar como una rotacion, donde el eje x′ forma un angulo imaginario iφ , tal que(ver problema 13):
sin iφ ≈ iu, cos iφ ≈ 1, (5.9)
mientras que los ejes temporales coinciden, de acuerdo a las transformaciones de lasecuaciones (5.8). La Figura 5.8 representa las proyecciones2 de las distancias en el siste-ma rotado y no rotado simultaneamente. Se evidencia en la figura que si el eje temporalno rota y el tiempo es el mismo, entonces el intervalo de espacio-tiempo s′ medidopor el observador Σ′ no coincide con el medido por Σ, es decir, bajo transformacionesde Galileo no es posible definir un espacio-tiempo que deje invariante la distancia [deespacio-tiempo] entre eventos. Ası, en mecanica clasica el tiempo se describe como unparametro independiente y separado del espacio en el sentido de que no existe un prin-cipio geometrico de invariancia que relacione el tiempo y el espacio bajo rotacionesespacio-temporales. En este sentido es que decimos que el tiempo tiene una naturalezadiferente a la del espacio en mecanica clasica.
La importancia de los diagramas de espacio-tiempo en mecanica clasica radica enque son una herramienta util para la descripcion del movimiento de los cuerpos, pero nocontienen ningun principio fundamental de la fısica.
2Graficamente, las proyecciones se trazan como lıneas paralelas a cada eje.

66 CAPITULO 5. ESTRUCTURA DE ESPACIO-TIEMPO
5.2.2. Espacio-tiempo de Poincare
Escribamos las transformaciones de Lorentz simples dadas por la ecuacion (2.21)como:
x′ = γx− γuc
ct,
ct ′ = −uc
γx+ γct, (5.10)
donde los tiempos, por conveniencia, se multiplicaron por la velocidad de la luz, la cuales una constante universal independiente del movimiento del observador. A diferencia delas transformaciones de Galileo, vemos que la analogıa con las rotaciones espaciales esmas cercana en el sentido de que tanto el tiempo como la coordenada espacial cambian.Ası, considerando la representacion compleja, definimos los angulos de rotacion tal que:
cos iφ = γ,
sin iφ = iuc
γ = iβγ, (5.11)
por lo que las TLS expresadas en la forma de la ecuacion (5.10) se pueden escribir deforma equivalente en un plano complejo como:
x′ = xcos iφ + ict sin iφ ,
ict ′ = −xsin iφ + ict cos iφ . (5.12)
El significado fısico de los angulos imaginarios se aclara en la Seccion 6.4. Porel momento simplemente lo asimilamos como una rotacion de los ejes. Por otro lado,como el eje temporal se reparametrizo en terminos de un producto con una velocidad[de la luz], se asimila como una coordenada con unidades de longitud, semejante a unacoordenada espacial. Ası, se acostumbra en el caso mas general usar la siguiente notacionpara marcar las coordenadas espacio-temporales de eventos:
(x,y,z, ict)→ (x1,x2,x3,x4), (5.13)
que genera el espacio-tiempo en el esquema de tiempo imaginario (esquema de Poin-care). Ası, en el caso del plano (1+1), las TLS se escriben como:
x′1 = x1 cos iφ + x4 sin iφ ,
x′4 =−x1 sin iφ + x4 cos iφ , (5.14)
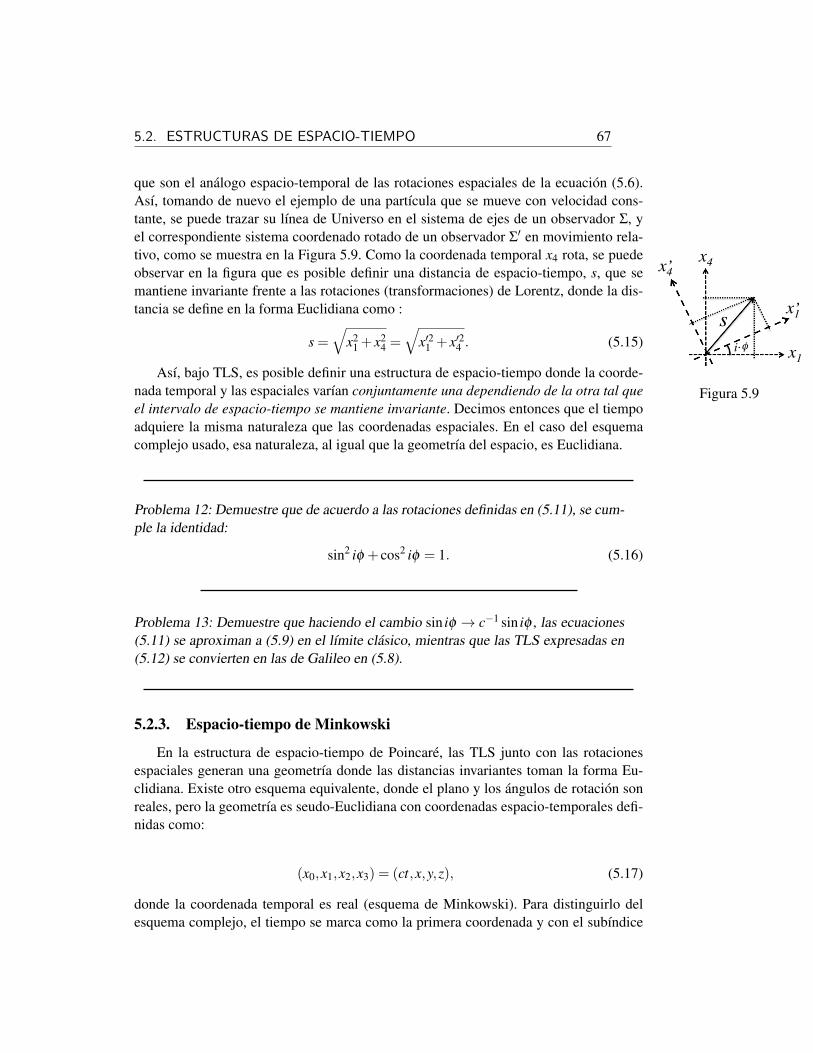
5.2. ESTRUCTURAS DE ESPACIO-TIEMPO 67
que son el analogo espacio-temporal de las rotaciones espaciales de la ecuacion (5.6).Ası, tomando de nuevo el ejemplo de una partıcula que se mueve con velocidad cons-tante, se puede trazar su lınea de Universo en el sistema de ejes de un observador Σ, yel correspondiente sistema coordenado rotado de un observador Σ′ en movimiento rela-tivo, como se muestra en la Figura 5.9. Como la coordenada temporal x4 rota, se puedeobservar en la figura que es posible definir una distancia de espacio-tiempo, s, que semantiene invariante frente a las rotaciones (transformaciones) de Lorentz, donde la dis-tancia se define en la forma Euclidiana como :
x1
x1 ’
x4 ’ x4
φ i·
s
Figura 5.9
s =√
x21 + x2
4 =√
x′21 + x′24 . (5.15)
Ası, bajo TLS, es posible definir una estructura de espacio-tiempo donde la coorde-nada temporal y las espaciales varıan conjuntamente una dependiendo de la otra tal queel intervalo de espacio-tiempo se mantiene invariante. Decimos entonces que el tiempoadquiere la misma naturaleza que las coordenadas espaciales. En el caso del esquemacomplejo usado, esa naturaleza, al igual que la geometrıa del espacio, es Euclidiana.
Problema 12: Demuestre que de acuerdo a las rotaciones definidas en (5.11), se cum-ple la identidad:
sin2 iφ + cos2 iφ = 1. (5.16)
Problema 13: Demuestre que haciendo el cambio sin iφ → c−1 sin iφ , las ecuaciones(5.11) se aproximan a (5.9) en el lımite clasico, mientras que las TLS expresadas en(5.12) se convierten en las de Galileo en (5.8).
5.2.3. Espacio-tiempo de Minkowski
En la estructura de espacio-tiempo de Poincare, las TLS junto con las rotacionesespaciales generan una geometrıa donde las distancias invariantes toman la forma Eu-clidiana. Existe otro esquema equivalente, donde el plano y los angulos de rotacion sonreales, pero la geometrıa es seudo-Euclidiana con coordenadas espacio-temporales defi-nidas como:
(x0,x1,x2,x3) = (ct,x,y,z), (5.17)
donde la coordenada temporal es real (esquema de Minkowski). Para distinguirlo delesquema complejo, el tiempo se marca como la primera coordenada y con el subındice

68 CAPITULO 5. ESTRUCTURA DE ESPACIO-TIEMPO
0. La relacion entre ambos esquemas se manifiesta al calcular el cuadrado de las coorde-nadas temporales:
x24 = (ict)2 =−(ct)2 =−x2
0. (5.18)
Ası, la distancia de espacio-tiempo definida en el plano complejo de acuerdo a la formaEuclidiana de (5.15) se convierte en un plano real en la distancia seudo-Euclidiana:
s =√
x21− x2
0. (5.19)
Las TLS definidas de acuerdo a la forma (5.10), se reescriben en el esquema real como:x1
x0
x1 ’ φ
Figura 5.10
x1
x0
x1 φ
’ φ
’ x0
Figura 5.11
s
x1 x1 ’
x0 x0 ’
Figura 5.12
x′1 = γ (x1−βx0) ,
x′0 = γ (x0−βx1) . (5.20)
Las transformaciones expresadas en la ecuacion (5.20) se pueden interpretar como rota-cion de ejes coordenados si encontramos la ecuacion de cada eje, x′0 y x′1, sobre un planoortogonal formado por los ejes x0 y x1. Por ejemplo, si en la segunda ecuacion de (5.20)hacemos x′0 = 0, encontraremos el conjunto de eventos en el plano (x0,x1) simultaneosen el tiempo t ′ = 0. Al despejar, se obtiene :
x0 = βx1, (5.21)
que representa una lınea recta en el plano (x0,x1) con pendiente
tanφ = β , (5.22)
como se muestra en la Figura 5.10. El conjunto de eventos ocurridos en el tiempo t ′ = 0no es mas que la definicion del eje x′1. De forma analoga, si tomamos el conjunto deeventos que ocurren en la posicion x′1 = 0, entonces de la primera ecuacion en (5.20)obtenemos la solucion:
x0 = (β )−1 x1, (5.23)
cuya pendiente es tambien β pero respecto al eje vertical, lo que nos define al eje x′0.La Figura 5.11 muestra la superposicion de ambas rectas. Ası, la TLS en el esquemareal de Minkowski se pueden interpretar como una rotacion, donde los ejes coordenadosespacio-temporales de observadores en movimiento relativo rotan en direccion opuesta,mientras que la distancia semi-Euclidiana definida en (5.19) se mantiene invariante fren-te a dichas rotaciones, como se ilustra en la Figura 5.12. Es importante resaltar de nuevoque las proyecciones se realizan trazando lıneas paralelas a los ejes de acuerdo a cadaobservador.

5.3. LA ESTRUCTURA DE CONO DE LUZ 69
5.3. La estructura de cono de luz
La distancia de espacio-tiempo de la ecuacion (5.19) se definio para el caso parti-cular de que el primer evento suceda en el origen de los ejes espacio-temporales y paradimensionalidad (1+1). En general, si los eventos ocurren con una separacion espacial∆x y en un intervalo de tiempo ∆t, el cuadrado del intervalo de espacio-tiempo es:
∆s2 = |∆x|2−∆x20, (5.24)
donde ∆x indica el vector de desplazamiento espacial, cuya magnitud mantiene la formaEuclidiana
|∆x|=√
∆x21 +∆x2
2 +∆x23, (5.25)
razon por la cual al intervalo en (5.24) se le llama seudo-Euclidiana (Euclidiano en elespacio, pero no Euclidiano en el tiempo). Se evidencia que el intervalo de espacio-tiempo puede ser positivo, nulo o negativo segun la relacion entre el desplazamiento y elintervalo de tiempo. Antes de discutir cada caso, tengamos en cuenta que:
|∆x| : Distancia espacial entre dos eventos∆t : Diferencia de tiempo entre dos eventosc∆t : Distancia recorrida por un rayo de luz
en el intervalo de tiempo de los eventos
(5.26)
Veamos los diferentes casos que genera el signo del intervalo.
i.) Intervalo tipo espacio: Corresponde al intervalo de espacio-tiempo entre eventoscuya separacion [espacial] es mayor que la distancia que recorrerıa un rayo de luzen el intervalo de tiempo en que ocurren esos mismos eventos:
|∆x|2 > (c∆t)2 ⇒ ∆s2 > 0. (5.27)
Ası, si se envıa un rayo de luz en el lugar y en el instante en que ocurre el primerevento, ese rayo de luz no alcanza a llegar al lugar donde y cuando ocurre elsegundo evento.
ii.) Intervalo tipo luz: Corresponde al intervalo de espacio-tiempo de eventos cuyaseparacion es igual a la distancia que recorrerıa un rayo de luz en el intervalo detiempo en que ocurren esos mismos eventos:
|∆x|2 = (c∆t)2 ⇒ ∆s2 = 0. (5.28)

70 CAPITULO 5. ESTRUCTURA DE ESPACIO-TIEMPO
Ası, si se envıa un rayo de luz en el lugar y en el instante en que ocurre el primerevento, ese rayo de luz justo alcanza a llegar al lugar donde y cuando ocurre elsegundo evento.
iii.) Intervalo tipo tiempo: Corresponde al intervalo de espacio-tiempo de eventos cuyaseparacion es menor que la distancia que recorrerıa un rayo de luz en el intervalode tiempo en que ocurren esos mismos eventos:
|∆x|2 < (c∆t)2 ⇒ ∆s2 < 0. (5.29)
Ası, si se envıa un rayo de luz en el lugar y en el instante en que ocurre el primerevento, ese rayo de luz llega a la posicion del segudo evento antes de que esteocurra.
x1
x0
x1
x0
(A)
(A) A
1 2
3 4
Figura 5.13
Δ s2<0 Δ s2=0
Δ s2>0
A
B
C
D
E
F
Figura 5.14
En particular, el intervalo tipo luz divide al espacio-tiempo en regiones separadas porlas lıneas de Universo de rayos de luz viajando hacia y desde un evento. Por ejemplo, laFigura 5.13 representa las lıneas de Universo de cuatro rayos de luz en un diagrama dedimension (1+1): dos rayos de luz se emiten desde el evento A en direcciones opuestas(lıneas 1 y 2), y simultaneamente otro dos rayos llegan al evento A de direcciones opues-tas (lıneas 3 y 4). Tal configuracion de lıneas de Universo se conoce como cono de luz.La Figura 5.14 ilustra los tres tipos de intervalos espacio-tiemporales en relacion a uncono de luz. Los eventos A y B estan separados por un intervalo tipo tiempo, los eventosC y D lo estan por un intervalo tipo luz, y los eventos E y F son eventos separados por unintervalo tipo espacio. Es importante enfatizar que el intervalo tipo luz, que es nulo, serepresenta como una lınea paralela al cono de luz, contrario a la distancia espacial nula,la cual se representa como un punto de longitud cero.
5.3.1. El principio de causalidad
La estructura de cono de luz del espacio-tiempo de Minkowski separa el espacio-tiempo en tres regiones de influencias en relacion a algun evento puntual A, representadocomo el vertice del cono. Primero, el interior del cono se define como el conjunto deeventos que se pueden unir con el A por intervalos tipo tiempo. Todos los eventos debajodel vertice son eventos que ocurren antes de A, por lo que los vamos a llamar el pasadode A, mientras que aquellos que estan por encima, seran eventos que ocurren despues,por lo que representan el futuro de A, como se indica en la Figura 5.15. Segundo, comoconsecuencia de la estructura del cono de luz, aparece una nueva region externa al cono,formada por todos aquellos eventos que no tienen ninguna relacion causal con A, esdecir, no forman ni el pasado, ni el futuro de A, por lo que simplemente lo vamos allamar el resto. Ası, cualquier evento futuro son eventos potencialmente posibles quepueden ser causados por A en el sentido de que cualquier objeto o informacion que viajepor debajo o igual a la velocidad de la luz puede influenciar eventos [futuros] despues
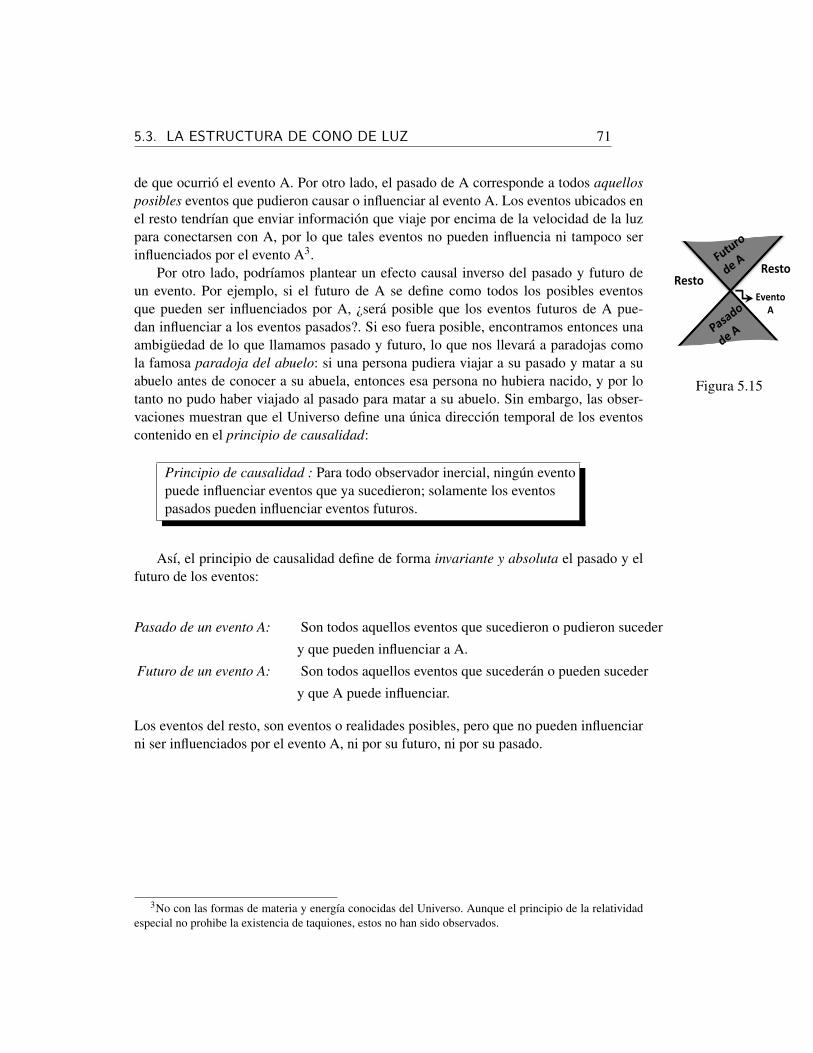
5.3. LA ESTRUCTURA DE CONO DE LUZ 71
de que ocurrio el evento A. Por otro lado, el pasado de A corresponde a todos aquellosposibles eventos que pudieron causar o influenciar al evento A. Los eventos ubicados enel resto tendrıan que enviar informacion que viaje por encima de la velocidad de la luzpara conectarsen con A, por lo que tales eventos no pueden influencia ni tampoco serinfluenciados por el evento A3.
Resto Resto
Evento A
Figura 5.15
Por otro lado, podrıamos plantear un efecto causal inverso del pasado y futuro deun evento. Por ejemplo, si el futuro de A se define como todos los posibles eventosque pueden ser influenciados por A, ¿sera posible que los eventos futuros de A pue-dan influenciar a los eventos pasados?. Si eso fuera posible, encontramos entonces unaambiguedad de lo que llamamos pasado y futuro, lo que nos llevara a paradojas comola famosa paradoja del abuelo: si una persona pudiera viajar a su pasado y matar a suabuelo antes de conocer a su abuela, entonces esa persona no hubiera nacido, y por lotanto no pudo haber viajado al pasado para matar a su abuelo. Sin embargo, las obser-vaciones muestran que el Universo define una unica direccion temporal de los eventoscontenido en el principio de causalidad:
Principio de causalidad : Para todo observador inercial, ningun eventopuede influenciar eventos que ya sucedieron; solamente los eventospasados pueden influenciar eventos futuros.
Ası, el principio de causalidad define de forma invariante y absoluta el pasado y elfuturo de los eventos:
Pasado de un evento A: Son todos aquellos eventos que sucedieron o pudieron suceder
y que pueden influenciar a A.
Futuro de un evento A: Son todos aquellos eventos que sucederan o pueden suceder
y que A puede influenciar.
Los eventos del resto, son eventos o realidades posibles, pero que no pueden influenciarni ser influenciados por el evento A, ni por su futuro, ni por su pasado.
3No con las formas de materia y energıa conocidas del Universo. Aunque el principio de la relatividadespecial no prohibe la existencia de taquiones, estos no han sido observados.

72 CAPITULO 5. ESTRUCTURA DE ESPACIO-TIEMPO
Problema 14: Una vara de longitud propia L0 se mueve horizontalmente con veloci-dad u hacia una pared fija. Asumiendo que la infomacion de los eventos de un extremoa otro se propaga a la velocidad lımite c, calcule la longitud final de la vara despuesde quedar enteremante en reposo respecto a la pared de acuerdo al observador queviaja a velocidad u. Pista: Resuelva el problema pintando las lıneas de universo delos extremos de acuerdo a como se describe abajo.
El observador que viaja junto con la vara cuando esta se encuentra en movimiento enel problema 14 observa que es la pared la que se mueve hacia un extremo con velocidad−u, mientras que la vara se encuentra inicialmente en reposo. Puesto que la informacionno puede viajar mas rapido que la velocidad c, la colision entera se prolonga entre doseventos que se pueden describir en un diagrama de espacio-tiempo: el primer eventosucede cuando la pared toca un extremo de la vara (evento A), el cual se empieza amover junto con la pared, y el segundo cuando la informacion de la colision llega alextremo opuesto (evento B), instante en que dicho extremo se pone en movimiento. Lalongitud final se puede obtener al pintar las lıneas de Universo de cada extremo entre losdos eventos, teniendo como referencia el cono de luz con vertice en el evento A.
El efecto descrito en el problema anterior se puede usar para resolver una de lasversiones de la paradoja del saltador con pertiga. La paradoja consiste en un saltadorS que lleva una pertiga horizontal con longitud propia L0 y corriendo a velocidad u. Elsaltador ingresa a un garaje cuya longitud propia coincide con la longitud de la pertiga enmovimiento medida por un portero P en reposo respecto al garaje. Tan pronto el porteroobserva que los extremos se encuentran al interior del garaje, activa un sistema que cierrainstantaneamente las puertas, dejando al saltador completamente encerrado. Por su lado,el saltador mide que la longitud del garaje en movimiento esta contraida respecto a suvara, tal que aparemente no puede quedar encerrado dentro del garaje cuando las puertasse cierran. Determine si el saltador queda o no encerrado.
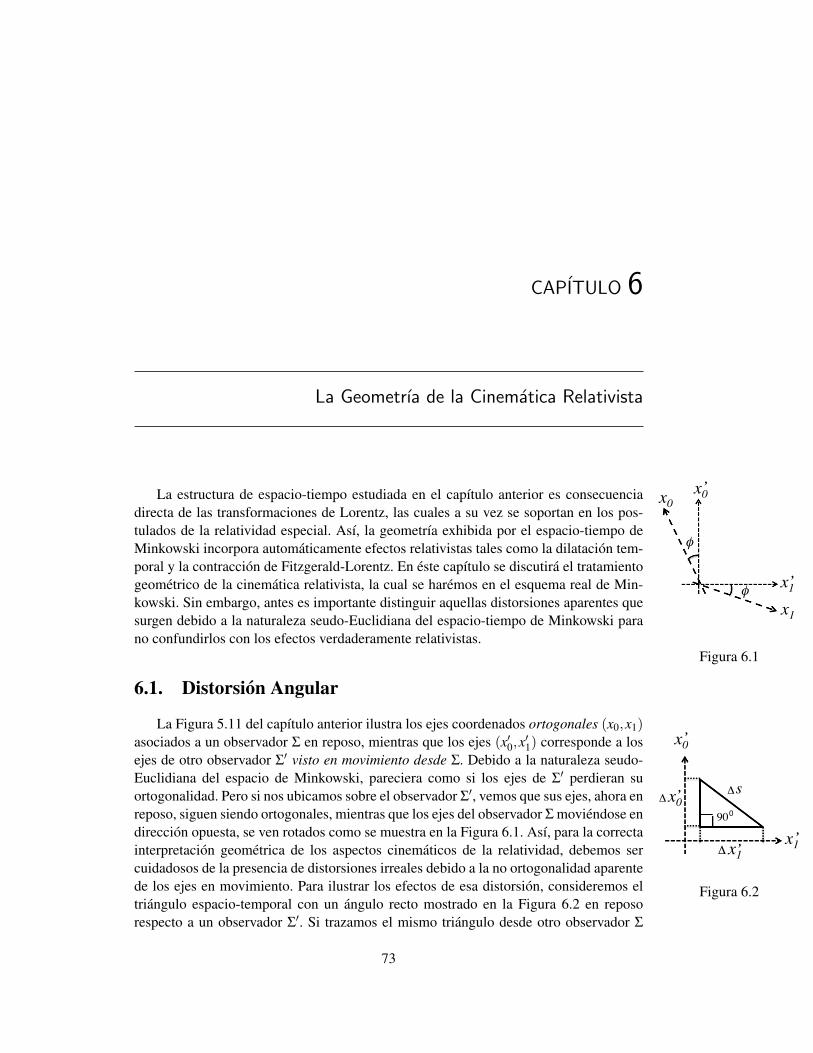
CAPITULO 6
La Geometrıa de la Cinematica Relativista
La estructura de espacio-tiempo estudiada en el capıtulo anterior es consecuenciadirecta de las transformaciones de Lorentz, las cuales a su vez se soportan en los pos-tulados de la relatividad especial. Ası, la geometrıa exhibida por el espacio-tiempo deMinkowski incorpora automaticamente efectos relativistas tales como la dilatacion tem-poral y la contraccion de Fitzgerald-Lorentz. En este capıtulo se discutira el tratamientogeometrico de la cinematica relativista, la cual se haremos en el esquema real de Min-kowski. Sin embargo, antes es importante distinguir aquellas distorsiones aparentes quesurgen debido a la naturaleza seudo-Euclidiana del espacio-tiempo de Minkowski parano confundirlos con los efectos verdaderamente relativistas.
x1
x0
’
φ
x0
x1
’
φ
Figura 6.1
x0
x1
’
’ Δ
Δ
x1 ’
x0 ’ 90 0
Δ s
Figura 6.2
6.1. Distorsion Angular
La Figura 5.11 del capıtulo anterior ilustra los ejes coordenados ortogonales (x0,x1)asociados a un observador Σ en reposo, mientras que los ejes (x′0,x
′1) corresponde a los
ejes de otro observador Σ′ visto en movimiento desde Σ. Debido a la naturaleza seudo-Euclidiana del espacio de Minkowski, pareciera como si los ejes de Σ′ perdieran suortogonalidad. Pero si nos ubicamos sobre el observador Σ′, vemos que sus ejes, ahora enreposo, siguen siendo ortogonales, mientras que los ejes del observador Σ moviendose endireccion opuesta, se ven rotados como se muestra en la Figura 6.1. Ası, para la correctainterpretacion geometrica de los aspectos cinematicos de la relatividad, debemos sercuidadosos de la presencia de distorsiones irreales debido a la no ortogonalidad aparentede los ejes en movimiento. Para ilustrar los efectos de esa distorsion, consideremos eltriangulo espacio-temporal con un angulo recto mostrado en la Figura 6.2 en reposorespecto a un observador Σ′. Si trazamos el mismo triangulo desde otro observador Σ
73

74 CAPITULO 6. LA GEOMETRIA DE LA CINEMATICA RELATIVISTA
que ve a Σ′ en movimiento relativo, se obtiene el triangulo distorsionado de la Figura6.3, donde el angulo sigue siendo recto aunque se vea deformado en un angulo agudo,efecto que llamaremos distorsion angular.
90 0
x0
x1
’
’
x0
x1
Δ s
Figura 6.3
A B
x1 A x1 B
x0
φ
Σ’ Σ
Figura 6.4
Δ x 0
s Δ
90 0φ
A B
Figura 6.5
6.2. Cinematica
Estudiaremos los efectos relativistas del tiempo y la longitud en el contexto de losdiagramas de espacio-tiempo en el esquema real de Minkowski.
6.2.1. Relatividad de la simultaneidad
Consideremos un observador inercial Σ, que mide dos eventos simultaneos A y Bque ocurren en el tiempo t y en las posiciones xA
1 y xB1 respectivamente. Usando rotacion
de diagramas espacio-temporales, podemos comprobar que esos mismos eventos ya noseran simultaneos desde otro observador Σ′ moviendose con velocidad relativa u. LaFigura 6.4 muestra los eventos y sus proyecciones sobre los ejes del observador en reposoΣ y los ejes del observador en movimiento Σ′ rotados en un angulo φ , de acuerdo a laecuacion (5.22). A simple vista, es evidente que los eventos medidos por Σ′ ocurren entiempos diferentes en un intervalo ∆x′0 = c∆t ′, y con una separacion espacial ∆x′1. LaFigura 6.5 muestra el triangulo espacio-temporal extraido del diagrama anterior, dondeal tener en cuenta la distorsion angular, se cumple1:
tanφ =∆x′0∆x′1
= β =uc, (6.1)
de donde se obtiene:
∆x′1 =∆x′0β
. (6.2)
Por otro lado, como el intervalo de espacio-tiempo es invariante, se cumple:
∆s2 = ∆x′21−∆x′20 = ∆x21. (6.3)
Reemplazando el intervalo espacial obtenido en (6.2) en la ecuacion (6.3), se obtiene:
∆x′20β 2 − ∆x′20 = ∆x2
1
⇒ ∆x′20 =(
β 2
1−β 2
)∆x2
1
⇒ ∆x′0 = γβ∆x1
⇒ ∆t ′ =γβ
c∆x1. (6.4)
1Para mayor claridad, pueden pintar ese mismo triangulo tomando a Σ′ como el sistema en reposo.
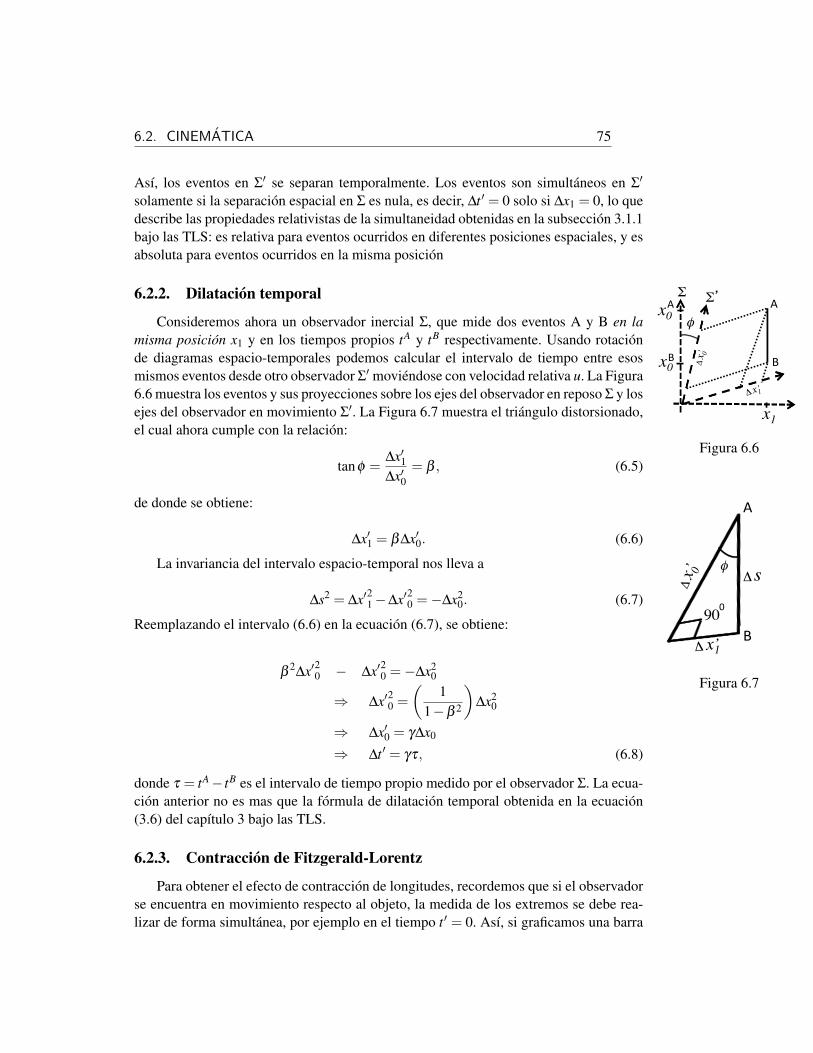
6.2. CINEMATICA 75
Ası, los eventos en Σ′ se separan temporalmente. Los eventos son simultaneos en Σ′
solamente si la separacion espacial en Σ es nula, es decir, ∆t ′ = 0 solo si ∆x1 = 0, lo quedescribe las propiedades relativistas de la simultaneidad obtenidas en la subseccion 3.1.1bajo las TLS: es relativa para eventos ocurridos en diferentes posiciones espaciales, y esabsoluta para eventos ocurridos en la misma posicion
6.2.2. Dilatacion temporal
Consideremos ahora un observador inercial Σ, que mide dos eventos A y B en lamisma posicion x1 y en los tiempos propios tA y tB respectivamente. Usando rotacionde diagramas espacio-temporales podemos calcular el intervalo de tiempo entre esosmismos eventos desde otro observador Σ′ moviendose con velocidad relativa u. La Figura6.6 muestra los eventos y sus proyecciones sobre los ejes del observador en reposo Σ y losejes del observador en movimiento Σ′. La Figura 6.7 muestra el triangulo distorsionado,el cual ahora cumple con la relacion:
A
B
φ
x 0
x0 A
x0 B
x1
Σ’ Σ
Figura 6.6
90 0
φ
Δ x1 ’
s Δ
A
B
Figura 6.7
tanφ =∆x′1∆x′0
= β , (6.5)
de donde se obtiene:
∆x′1 = β∆x′0. (6.6)
La invariancia del intervalo espacio-temporal nos lleva a
∆s2 = ∆x′21−∆x′20 =−∆x20. (6.7)
Reemplazando el intervalo (6.6) en la ecuacion (6.7), se obtiene:
β2∆x′20 − ∆x′20 =−∆x2
0
⇒ ∆x′20 =(
11−β 2
)∆x2
0
⇒ ∆x′0 = γ∆x0
⇒ ∆t ′ = γτ, (6.8)
donde τ = tA− tB es el intervalo de tiempo propio medido por el observador Σ. La ecua-cion anterior no es mas que la formula de dilatacion temporal obtenida en la ecuacion(3.6) del capıtulo 3 bajo las TLS.
6.2.3. Contraccion de Fitzgerald-Lorentz
Para obtener el efecto de contraccion de longitudes, recordemos que si el observadorse encuentra en movimiento respecto al objeto, la medida de los extremos se debe rea-lizar de forma simultanea, por ejemplo en el tiempo t ′ = 0. Ası, si graficamos una barra
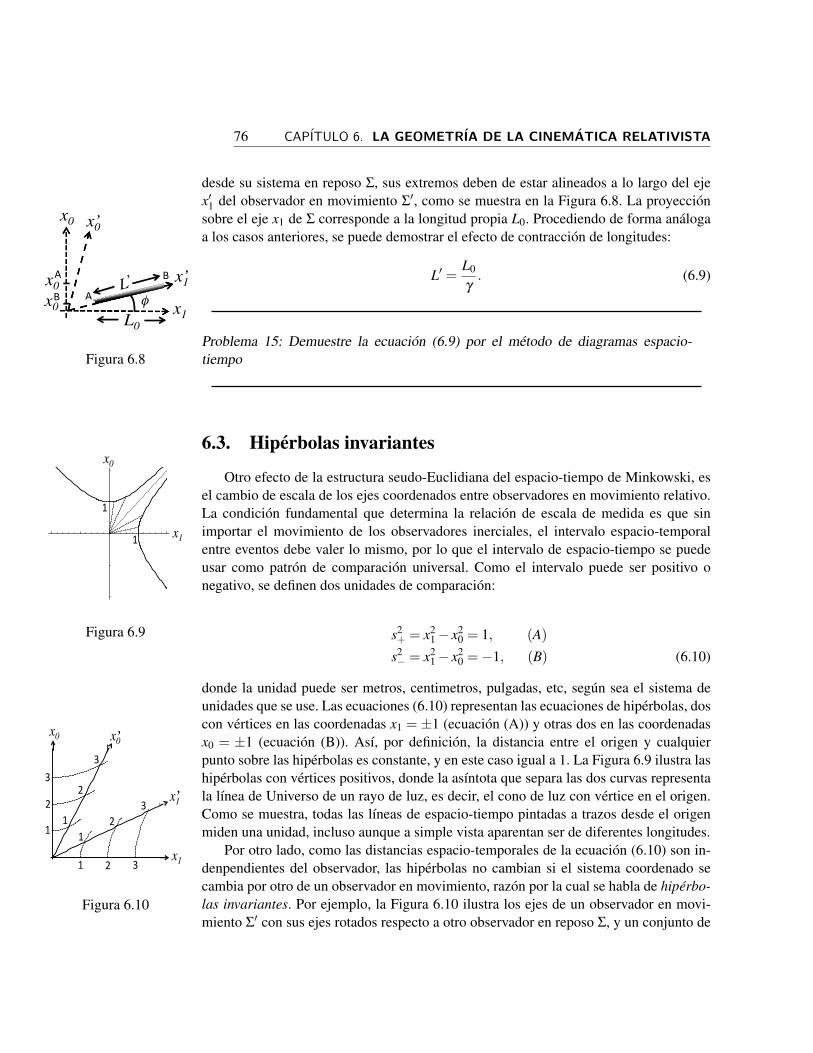
76 CAPITULO 6. LA GEOMETRIA DE LA CINEMATICA RELATIVISTA
desde su sistema en reposo Σ, sus extremos deben de estar alineados a lo largo del ejex′1 del observador en movimiento Σ′, como se muestra en la Figura 6.8. La proyeccionsobre el eje x1 de Σ corresponde a la longitud propia L0. Procediendo de forma analogaa los casos anteriores, se puede demostrar el efecto de contraccion de longitudes:
L′ =L0
γ. (6.9)
Problema 15: Demuestre la ecuacion (6.9) por el metodo de diagramas espacio-tiempo
A
B x0 A
x0 B L0 φ x1
x0 x0
x1
’
’
Figura 6.8
-2 -1 1 2
-2
-1
1
2x0
x1
1
1
Figura 6.9
x0
x1
x0
x1
’
’
1
2
3
3 2 1
1 1 2
2 3
3
Figura 6.10
6.3. Hiperbolas invariantes
Otro efecto de la estructura seudo-Euclidiana del espacio-tiempo de Minkowski, esel cambio de escala de los ejes coordenados entre observadores en movimiento relativo.La condicion fundamental que determina la relacion de escala de medida es que sinimportar el movimiento de los observadores inerciales, el intervalo espacio-temporalentre eventos debe valer lo mismo, por lo que el intervalo de espacio-tiempo se puedeusar como patron de comparacion universal. Como el intervalo puede ser positivo onegativo, se definen dos unidades de comparacion:
s2+ = x2
1− x20 = 1, (A)
s2− = x2
1− x20 =−1, (B) (6.10)
donde la unidad puede ser metros, centimetros, pulgadas, etc, segun sea el sistema deunidades que se use. Las ecuaciones (6.10) representan las ecuaciones de hiperbolas, doscon vertices en las coordenadas x1 = ±1 (ecuacion (A)) y otras dos en las coordenadasx0 = ±1 (ecuacion (B)). Ası, por definicion, la distancia entre el origen y cualquierpunto sobre las hiperbolas es constante, y en este caso igual a 1. La Figura 6.9 ilustra lashiperbolas con vertices positivos, donde la asıntota que separa las dos curvas representala lınea de Universo de un rayo de luz, es decir, el cono de luz con vertice en el origen.Como se muestra, todas las lıneas de espacio-tiempo pintadas a trazos desde el origenmiden una unidad, incluso aunque a simple vista aparentan ser de diferentes longitudes.
Por otro lado, como las distancias espacio-temporales de la ecuacion (6.10) son in-denpendientes del observador, las hiperbolas no cambian si el sistema coordenado secambia por otro de un observador en movimiento, razon por la cual se habla de hiperbo-las invariantes. Por ejemplo, la Figura 6.10 ilustra los ejes de un observador en movi-miento Σ′ con sus ejes rotados respecto a otro observador en reposo Σ, y un conjunto de
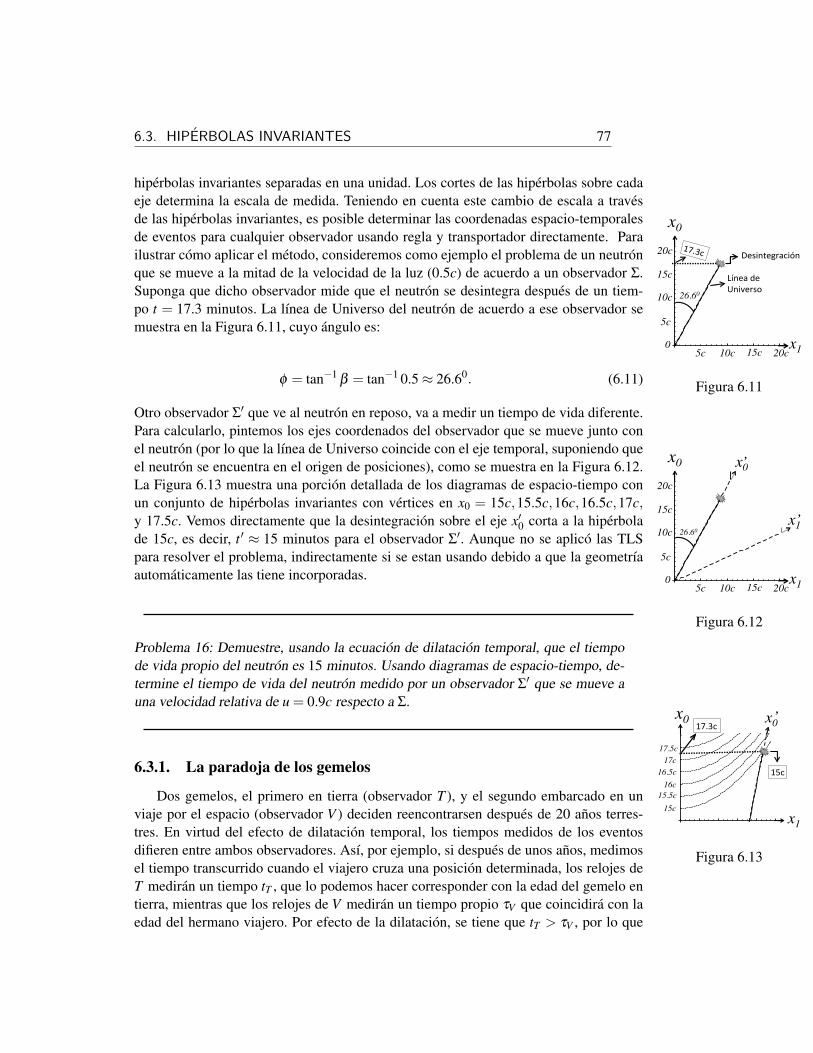
6.3. HIPERBOLAS INVARIANTES 77
hiperbolas invariantes separadas en una unidad. Los cortes de las hiperbolas sobre cadaeje determina la escala de medida. Teniendo en cuenta este cambio de escala a travesde las hiperbolas invariantes, es posible determinar las coordenadas espacio-temporalesde eventos para cualquier observador usando regla y transportador directamente. Para
5 10 15 20
5
10
15
20
0
5c
10c
15c
20c
5c 10c 15c 20c
x0
x1
26.60
Desintegración
Línea de Universo
Figura 6.11
5 10 15 20
5
10
15
20
0
5c
10c
15c
20c
5c 10c 15c 20c
x0
x1
x0 ’
’ x1 26.60
Figura 6.12
2 4 6 8 10
15.0
15.5
16.0
16.5
17.0
17.5
18.0
x0
x1
x0 ’ 17.3c
15c
15c 15.5c 16c
16.5c 17c 17.5c
Figura 6.13
ilustrar como aplicar el metodo, consideremos como ejemplo el problema de un neutronque se mueve a la mitad de la velocidad de la luz (0.5c) de acuerdo a un observador Σ.Suponga que dicho observador mide que el neutron se desintegra despues de un tiem-po t = 17.3 minutos. La lınea de Universo del neutron de acuerdo a ese observador semuestra en la Figura 6.11, cuyo angulo es:
φ = tan−1β = tan−1 0.5≈ 26.60. (6.11)
Otro observador Σ′ que ve al neutron en reposo, va a medir un tiempo de vida diferente.Para calcularlo, pintemos los ejes coordenados del observador que se mueve junto conel neutron (por lo que la lınea de Universo coincide con el eje temporal, suponiendo queel neutron se encuentra en el origen de posiciones), como se muestra en la Figura 6.12.La Figura 6.13 muestra una porcion detallada de los diagramas de espacio-tiempo conun conjunto de hiperbolas invariantes con vertices en x0 = 15c,15.5c,16c,16.5c,17c,y 17.5c. Vemos directamente que la desintegracion sobre el eje x′0 corta a la hiperbolade 15c, es decir, t ′ ≈ 15 minutos para el observador Σ′. Aunque no se aplico las TLSpara resolver el problema, indirectamente si se estan usando debido a que la geometrıaautomaticamente las tiene incorporadas.
Problema 16: Demuestre, usando la ecuacion de dilatacion temporal, que el tiempode vida propio del neutron es 15 minutos. Usando diagramas de espacio-tiempo, de-termine el tiempo de vida del neutron medido por un observador Σ′ que se mueve auna velocidad relativa de u = 0.9c respecto a Σ.
6.3.1. La paradoja de los gemelos
Dos gemelos, el primero en tierra (observador T ), y el segundo embarcado en unviaje por el espacio (observador V ) deciden reencontrarsen despues de 20 anos terres-tres. En virtud del efecto de dilatacion temporal, los tiempos medidos de los eventosdifieren entre ambos observadores. Ası, por ejemplo, si despues de unos anos, medimosel tiempo transcurrido cuando el viajero cruza una posicion determinada, los relojes deT mediran un tiempo tT , que lo podemos hacer corresponder con la edad del gemelo entierra, mientras que los relojes de V mediran un tiempo propio τV que coincidira con laedad del hermano viajero. Por efecto de la dilatacion, se tiene que tT > τV , por lo que
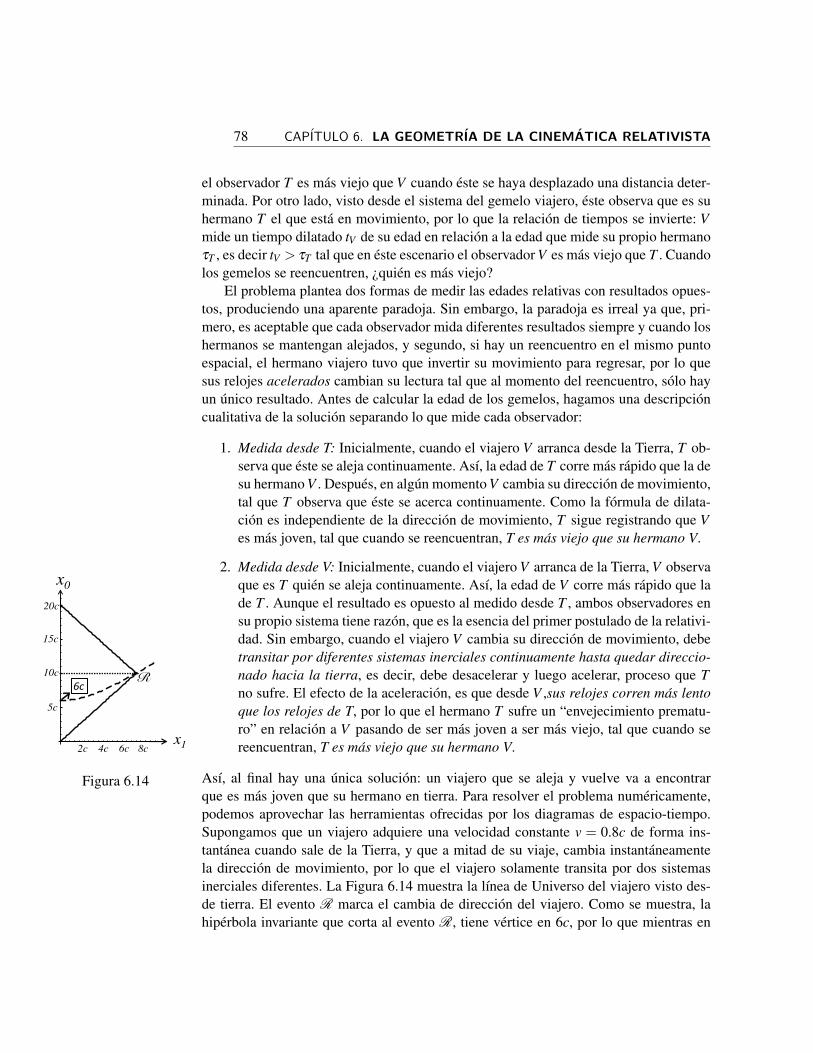
78 CAPITULO 6. LA GEOMETRIA DE LA CINEMATICA RELATIVISTA
el observador T es mas viejo que V cuando este se haya desplazado una distancia deter-minada. Por otro lado, visto desde el sistema del gemelo viajero, este observa que es suhermano T el que esta en movimiento, por lo que la relacion de tiempos se invierte: Vmide un tiempo dilatado tV de su edad en relacion a la edad que mide su propio hermanoτT , es decir tV > τT tal que en este escenario el observador V es mas viejo que T . Cuandolos gemelos se reencuentren, ¿quien es mas viejo?
El problema plantea dos formas de medir las edades relativas con resultados opues-tos, produciendo una aparente paradoja. Sin embargo, la paradoja es irreal ya que, pri-mero, es aceptable que cada observador mida diferentes resultados siempre y cuando loshermanos se mantengan alejados, y segundo, si hay un reencuentro en el mismo puntoespacial, el hermano viajero tuvo que invertir su movimiento para regresar, por lo quesus relojes acelerados cambian su lectura tal que al momento del reencuentro, solo hayun unico resultado. Antes de calcular la edad de los gemelos, hagamos una descripcioncualitativa de la solucion separando lo que mide cada observador:
1. Medida desde T: Inicialmente, cuando el viajero V arranca desde la Tierra, T ob-serva que este se aleja continuamente. Ası, la edad de T corre mas rapido que la desu hermano V . Despues, en algun momento V cambia su direccion de movimiento,tal que T observa que este se acerca continuamente. Como la formula de dilata-cion es independiente de la direccion de movimiento, T sigue registrando que Ves mas joven, tal que cuando se reencuentran, T es mas viejo que su hermano V.
2. Medida desde V: Inicialmente, cuando el viajero V arranca de la Tierra, V observaque es T quien se aleja continuamente. Ası, la edad de V corre mas rapido que lade T . Aunque el resultado es opuesto al medido desde T , ambos observadores ensu propio sistema tiene razon, que es la esencia del primer postulado de la relativi-dad. Sin embargo, cuando el viajero V cambia su direccion de movimiento, debetransitar por diferentes sistemas inerciales continuamente hasta quedar direccio-nado hacia la tierra, es decir, debe desacelerar y luego acelerar, proceso que Tno sufre. El efecto de la aceleracion, es que desde V ,sus relojes corren mas lentoque los relojes de T, por lo que el hermano T sufre un “envejecimiento prematu-ro” en relacion a V pasando de ser mas joven a ser mas viejo, tal que cuando sereencuentran, T es mas viejo que su hermano V.2 4 6 8 10
5
10
15
20
x0
x1
5c
10c
15c
20c
2c 4c 6c 8c
6c R
Figura 6.14 Ası, al final hay una unica solucion: un viajero que se aleja y vuelve va a encontrarque es mas joven que su hermano en tierra. Para resolver el problema numericamente,podemos aprovechar las herramientas ofrecidas por los diagramas de espacio-tiempo.Supongamos que un viajero adquiere una velocidad constante v = 0.8c de forma ins-tantanea cuando sale de la Tierra, y que a mitad de su viaje, cambia instantaneamentela direccion de movimiento, por lo que el viajero solamente transita por dos sistemasinerciales diferentes. La Figura 6.14 muestra la lınea de Universo del viajero visto des-de tierra. El evento R marca el cambia de direccion del viajero. Como se muestra, lahiperbola invariante que corta al evento R, tiene vertice en 6c, por lo que mientras en
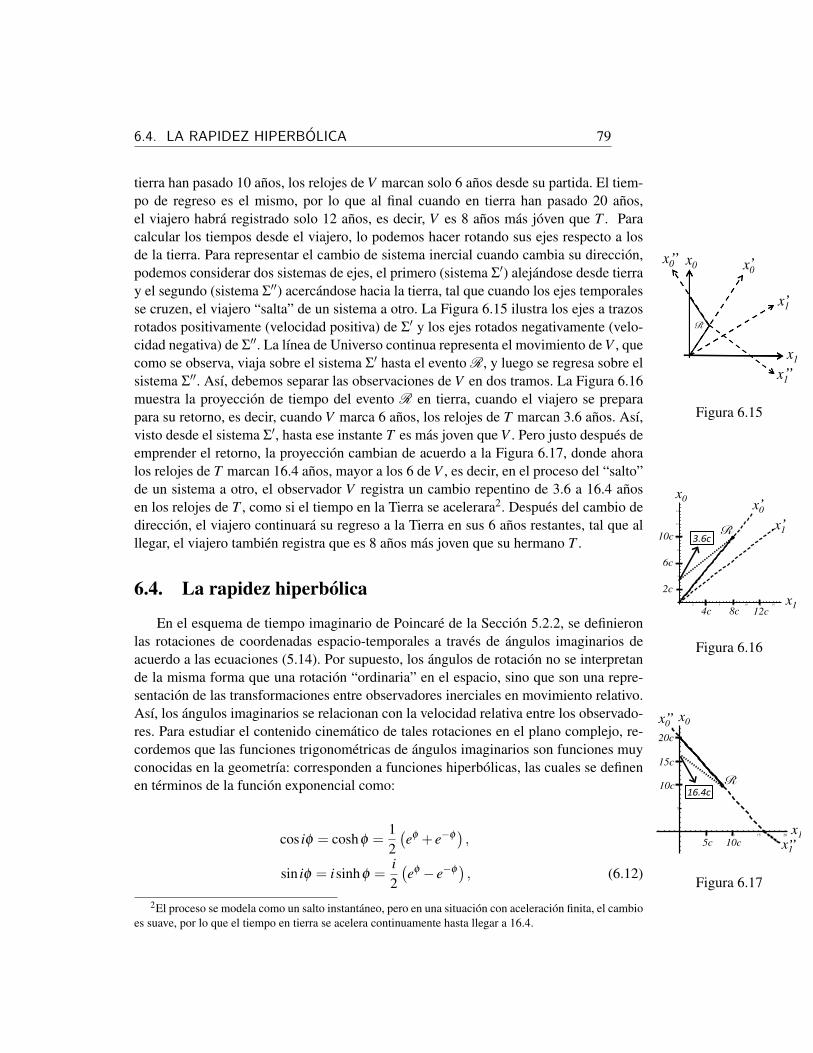
6.4. LA RAPIDEZ HIPERBOLICA 79
tierra han pasado 10 anos, los relojes de V marcan solo 6 anos desde su partida. El tiem-po de regreso es el mismo, por lo que al final cuando en tierra han pasado 20 anos,el viajero habra registrado solo 12 anos, es decir, V es 8 anos mas joven que T . Para
x0
x1
x0 ’
x1 ’
x1 ’’
x0 ’’
R
Figura 6.15
2 4 6 8 10 12 14
2
4
6
8
10
12
14
x0
x1
’ x0 x1 ’
6c
3.6c R
4c 8c 12c
10c
2c
Figura 6.16
5 10 15 20
5
10
15
20
x0
x1
’ x0 ’
’ x1 ’
10c
15c
20c
16.4c R
5c 10c
Figura 6.17
calcular los tiempos desde el viajero, lo podemos hacer rotando sus ejes respecto a losde la tierra. Para representar el cambio de sistema inercial cuando cambia su direccion,podemos considerar dos sistemas de ejes, el primero (sistema Σ′) alejandose desde tierray el segundo (sistema Σ′′) acercandose hacia la tierra, tal que cuando los ejes temporalesse cruzen, el viajero “salta” de un sistema a otro. La Figura 6.15 ilustra los ejes a trazosrotados positivamente (velocidad positiva) de Σ′ y los ejes rotados negativamente (velo-cidad negativa) de Σ′′. La lınea de Universo continua representa el movimiento de V , quecomo se observa, viaja sobre el sistema Σ′ hasta el evento R, y luego se regresa sobre elsistema Σ′′. Ası, debemos separar las observaciones de V en dos tramos. La Figura 6.16muestra la proyeccion de tiempo del evento R en tierra, cuando el viajero se preparapara su retorno, es decir, cuando V marca 6 anos, los relojes de T marcan 3.6 anos. Ası,visto desde el sistema Σ′, hasta ese instante T es mas joven que V . Pero justo despues deemprender el retorno, la proyeccion cambian de acuerdo a la Figura 6.17, donde ahoralos relojes de T marcan 16.4 anos, mayor a los 6 de V , es decir, en el proceso del “salto”de un sistema a otro, el observador V registra un cambio repentino de 3.6 a 16.4 anosen los relojes de T , como si el tiempo en la Tierra se acelerara2. Despues del cambio dedireccion, el viajero continuara su regreso a la Tierra en sus 6 anos restantes, tal que alllegar, el viajero tambien registra que es 8 anos mas joven que su hermano T .
6.4. La rapidez hiperbolica
En el esquema de tiempo imaginario de Poincare de la Seccion 5.2.2, se definieronlas rotaciones de coordenadas espacio-temporales a traves de angulos imaginarios deacuerdo a las ecuaciones (5.14). Por supuesto, los angulos de rotacion no se interpretande la misma forma que una rotacion “ordinaria” en el espacio, sino que son una repre-sentacion de las transformaciones entre observadores inerciales en movimiento relativo.Ası, los angulos imaginarios se relacionan con la velocidad relativa entre los observado-res. Para estudiar el contenido cinematico de tales rotaciones en el plano complejo, re-cordemos que las funciones trigonometricas de angulos imaginarios son funciones muyconocidas en la geometrıa: corresponden a funciones hiperbolicas, las cuales se definenen terminos de la funcion exponencial como:
cos iφ = coshφ =12(eφ + e−φ
),
sin iφ = isinhφ =i2(eφ − e−φ
), (6.12)
2El proceso se modela como un salto instantaneo, pero en una situacion con aceleracion finita, el cambioes suave, por lo que el tiempo en tierra se acelera continuamente hasta llegar a 16.4.

80 CAPITULO 6. LA GEOMETRIA DE LA CINEMATICA RELATIVISTA
donde φ es una variable real. Haciendo una inspeccion superficial, podemos ver que lafuncion coseno de un numero imaginario es una cantidad real, mientras que la funcionseno de un numero imaginario es otro numero imaginario. Por su parte, las funcionescoseno hiperbolico y seno hiperbolico son ambas funciones reales.
Por otro lado, las definiciones de la ecuacion (5.11) del capıtulo 5 se pueden escribiren terminos de las funciones hiperbolicas como:
coshφ = γ,
sinhφ = βγ, (6.13)
tal que la tangente hiperbolica es:
tanhφ =sinhφ
coshφ= β =
uc, (6.14)
por lo que la rotacion del plano complejo se relaciona con la velocidad relativa entreobservadores de acuerdo a la ecuacion (6.14). Debido a esa relacion, al parametro φ sele conoce como la rapidez hiperbolica3, y tradicionamente se nota con la letra y. Ası, larapidez hiperbolica entre observadores inerciales es:
y = tanh−1β . (6.15)
En procesos de colision es conveniente parametrizar el movimiento de las partıculasen terminos de la rapidez hiperbolica en lugar de la velocidad o el factor beta directa-mente. Por ejemplo, definiendo las razones βv′ = v′/c, βv = v/c y βu = u/c, el teoremade adicion de velocidades en la ecuacion (3.16) se puede expresar como:
βv′ =βv−βu
1−βvβu,
⇒ tanhyv′ =tanhyv− tanhyu
1− tanhyv tanhyu. (6.16)
Usando la identidad
tanh(x− y) =tanhx− tanhy
1− tanhx tanhy, (6.17)
la ecuacion (6.16) queda:
tanhyv′ = tanh(yv− yu), (6.18)
3La expresion en ingles es rapidity, la cual no tiene una traduccion directa al espanol, ya que rapidez serefiere a la magnitud de la velocidad. Para no confundir ambos terminos, lo llamo rapidez hiperbolica
6.4. LA RAPIDEZ HIPERBOLICA 81
la cual se cumple si sus argumentos son iguales, es decir, el teorema de suma de veloci-dades en terminos de la rapidez hiperbolica se expresa en la forma simple:
yv′ = yv− yu, (6.19)
que es mucho mas sencillo de manipular que la forma racional de la ecuacion (3.16).
Problema 17: Usando expansion en series de Taylor, demuestra que a bajas veloci-dades, la ecuacion (6.19) se convierte en la forma clasica v′ = v− u del teorema desuma de velocidades.
82 CAPITULO 6. LA GEOMETRIA DE LA CINEMATICA RELATIVISTA

Parte IIIFundamentos Algebraicos
83

CAPITULO 7
El Grupo de Lorentz
Actualmente, se han encontrado diversos tipos de invariancias en las leyes fısicas,donde el principio de la relatividad especial no es mas que una clase de invariancia.Ası, en la primera parte del texto, se plantearon las leyes de la mecanica clasica exi-giendo invariancia frente a las transformaciones de Lorentz simples. En la segunda par-te, dichas transformaciones se visualizaron geometricamente como rotaciones de ejesespacio-temporales, donde la distancia espacio-temporal se definio de tal que maneraque fuera invariante. Ahora, introduciremos un tercer enfoque mas formal usando lanotacion tensorial, la cual exhibe de manera explıcita las propiedades de transforma-cion e invariancia de los parametros fısicos frente al cambio de observadores inercialescompatible con los postulados. Para comenzar, en este capıtulo vamos a implementar elfundamento matematico que servira de soporte para entender la relacion entre al algebratensorial y el principio de relatividad especial.
7.1. Grupo Abstracto
Un conjunto de elementos G = {g1,g2, ...} forman un grupo si cumple con las si-guientes propiedades:
i.) El conjunto G es cerrado bajo el producto. En lenguaje de la teorıa de conjuntos,esto significa que:
(∃∗)(∀gi,g j ∈ G)(gi ∗g j = gk ∈ G), (7.1)
esto es, existe una operacion producto (∗) tal que para todo par de elementos gi yg j en G, su producto da como resultado otro elemento gk que tambien pertenece a
85
86 CAPITULO 7. EL GRUPO DE LORENTZ
G.
ii.) El conjunto G contiene un elemento identidad. Ası:
(∃I ∈ G)(∀gi ∈ G)(I ∗gi = gi ∗ I = gi), (7.2)
esto es, existe un elemento I en G, tal que para cualquier elemento gi de G, suproducto da el mismo elemento.
iii.) El conjunto G contiene los elementos inversos:
(∀gi ∈ G)(∃)(gi ∈ G)(gi ∗ gi = gi ∗gi = I), (7.3)
es decir, para cada elemento gi en G, existen elementos inversos gi en G tal que suproducto mutuo da la identidad.
iv.) El conjunto G es asociativo:
(∀gi, j.k ∈ G)(gi ∗ (g j ∗gk) = (gi ∗g j)∗gk) (7.4)
Las propiedades anteriores describen un grupo en general, donde los elementos delconjunto es abstracto sin ninguna interpretacion fısica concreta. Por otro lado, se puedendefinir propiedades adicionales a las descritas anteriormente que inducen diferentes tiposde grupos, de los cuales nos interesa los siguientes:
1. Grupo Abeliano: Grupo cuyos elementos conmutan entre sı, es decir:
(∀gi. j ∈ G)(gi ∗g j = g j ∗gi). (7.5)
2. Grupo Discreto: Grupo cuyos elementos son contables (o numerables), es decir,los elementos del grupo se pueden etiquetar con subındices de numeros naturales:
G = {g} ↔ {g1,g2,g3, ...} (7.6)
3. Grupo Continuo: Grupo no contable cuyos elementos son funciones de parametroscontinuos:
G = {g} ↔ {g(θθθ)}. (7.7)
La variable θθθ en general se define en un espacio vectorial de n dimensiones, esdecir, es un vector con componentes:
θθθ = {θ1,θ2, ...,θn}. (7.8)
donde cada componente θi puede tomar valores continuos reales o complejos.
7.2. EL GRUPO DE LORENTZ SIMPLE 87
7.2. El grupo de Lorentz simple
Desde el punto de vista algebraico, podemos describir las transformaciones de Lo-rentz como un conjunto de elementos que cumple con las condiciones de grupo. Paramostrar eso, vamos primero a considerar el caso de las transformaciones de Lorentz sim-ples en el esquema de tiempo real descrito por las ecuaciones (5.20), las cuales podemosexpresar en forma matricial como:
(x′0x′1
)=
(γ −γβ
−γβ γ
)(x0x1
). (7.9)
Si definimos las cantidades:
X′ =
(x′0x′1
),
X =
(x0x1
),
L =
(γ −γβ
−γβ γ
), (7.10)
entonces la ecuacion (7.9) se reduce a la forma compacta
X′ = LX. (7.11)
La ecuacion (7.11) representa la transformacion del vector X al vector X′ debido ala accion de la matrız L, la cual podemos expresar como:
L : X−→ X′. (7.12)
Ası, en el contexto del algebra matricial, podemos definir una transformacion de Lo-rentz como el conjunto de matrices L que transforma las coordenadas espacio-temporalesde acuerdo a la ecuacion (7.11) y que cumple con los postulados de la relatividad espe-cial.
Por otro lado, de acuerdo a las definiciones en (7.10), vemos que la TLS es unafuncion del parametro β , esto es L = L(β ), la cual puede tomar valores continuos en elintervalo semiabierto [0,1). Se puede entonces demostrar que el conjunto G = {L(β )}exhibe propiedades de un grupo continuo en el mismo sentido que lo definimos en laecuacion (7.7). Antes de describir las propiedades algebraicas del grupo de Lorentz sim-ple, es conveniente tener una definicion mas general de grupo de Lorentz independiente

88 CAPITULO 7. EL GRUPO DE LORENTZ
de la forma particular que tome la matrız L. Recordemos que la distancia de espacio-tiempo se define en la forma seudo-Euclidiana de la ecuacion (5.19), la cual podemosexpresar en forma matricial como
s2 = x21− x2
0 = (x0,x1)
(−1 00 1
)(x0x1
). (7.13)
Teniendo en cuenta las definiciones en (7.10) y definiendo la matrız
η =
(−1 00 1
), (7.14)
la distancia de espacio-tiempo se puede expresar de forma compacta como:
s2 = XTηX, (7.15)
donde el sımbolo T representa la transpuesta. Una de las caracterısticas de las TLS esque deja invariante la distancia de espacio-tiempo, propiedad que se puede expresar for-malmente en terminos de la matriz η de la siguiente forma:
Sean s2 = XT ηX y s′2 = X′T ηX′ las distancias de espacio-tiempo medidas por dosobservadores inerciales en movimiento relativo, tal que s2 = s′2. Teniendo en cuentaque las coordenadas se relacionan de acuerdo a la ecuacion (7.11), se obtiene:
XTηX = X′T ηX′
= (LX)Tη(LX)
= XT (LTηL)X. (7.16)
Al comparar el primer termino con el ultimo, se concluye entonces que la distanciade espacio-tiempo es invariante siempre y cuando se cumpla que:
η = LTηL. (7.17)
La condicion expresada por la ecuacion (7.17) es suficiente para garantizar que latransformacion L cumpla con los postulados de la relatividad especial. Ası, formalmentevamos a definir el grupo de Lorentz simple como:
Grupo de Lorentz simple : Es el conjunto de transformaciones L que actuansobre las coordenadas de espacio-tiempo y que cumplen con:
η = LTηL,
donde η es la matrız dada por (7.14)
7.2. EL GRUPO DE LORENTZ SIMPLE 89
A partir de la propiedad (7.17) y la matrız (7.10), podemos describir las propiedadesalgebraicas de las TLS. Primero, se puede mostrar que estas matrices cumplen con lascuatro propiedades que definen un grupo descritas en la seccion 7.1. Solamente a manerade ilustracion, vamos a demostrar la primera de esas propiedades:
i.) El conjunto G = {L(β )} es cerrado bajo el producto. Ası, si L1 = L(β1) yL2 = L(β2) son dos elementos del conjunto, entonces L3 = L1L2 tambien es un ele-mento del mismo grupo, es decir, L3 debe cumplir tambien la condicion (7.17). Efec-tivamente, asumiendo que L1 y L2 cumplen con (7.17), se obtiene:
LT3 ηL3 = (L1L2)
Tη(L1L2)
= LT2 (L
T1 ηL1)L2
= LT2 ηL2
= η . (7.18)
Problema 18: Demuestre que las TLS cumple con las demas propiedades (ii., iii. yiv.) que definen a un grupo.
Adicional a las condiciones de grupo que exhibe las TLS, existen otras propiedadesalgebraicas que se enumeran a continuacion:
1. El determinante es 1: Det[L] = 1.
2. Es simetrica. Esto es, los elementos matriciales no diagonales son iguales: L12 =L21 =−γβ .
3. El grupo es no compacto. Esto es, cada elemento se define por el parametro β quetoma valores continuos en el intervalo semiabierto [0,1) sin nunca llegar a ser 1.
4. El grupo es Abeliano. Esto es, dos elementos cualquiera conmutan entre sı: L1L2 =L2L1.
Ası, en conclusion, el grupo de Lorentz simple es un grupo continuo Abeliano y nocompacto.

90 CAPITULO 7. EL GRUPO DE LORENTZ
7.3. El grupo de Lorentz en general
A lo largo de los capıtulos anteriores, nos hemos limitado a observadores inercialesen la configuracion estandar que nos define las TLS, tal como se planteo en la Sec-cion 2.3. Ahora, con las herramientas algebraicas que nos ofrece el concepto de grupo,podemos hacer la extension a las transformaciones de Lorentz entre observadores conmovimiento relativo en direcciones arbitrarias y con ejes coordenados no paralelos entresı. Para eso, vamos a generalizar las definiciones de la seccion anterior que incluya lastres coordenadas espaciales.
7.3.1. El tensor metrico
En la seccion 5.3, definimos la forma general del intervalo de espacio-tiempo en laecuacion (5.24), la cual podemos expresar tambien en forma matricial como:
∆s2 = |∆x|2−∆x20 = (∆x0,∆x1,∆x2,∆x3)
−1 0 0 00 1 0 00 0 1 00 0 0 1
∆x0∆x1∆x2∆x3
= XT
ηX, (7.19)
con X definido en un espacio vectorial de 4 dimensiones, y η una matrız 4×4 definidacomo
η =
−1 0 0 00 1 0 00 0 1 00 0 0 1
. (7.20)
Esta definicion es la forma matricial del llamado tensor metrico que define la estructuraseudo-Euclidiana del espacio-tiempo de Minkowski, y que se caracteriza por la presenciade la cantidad negativa −1 en la primera componente en la diagonal. Ası, se acostumbrausar la notacion η = (−,+,+,+) para indicar que la matrız metrica es diagonal con −1en la componente temporal y +1 en las tres espaciales. Es importante aclarar que la for-ma definida por (7.20) no es unica en la relatividad especial. Existe la forma (+,−,−,−)que define el mismo intervalo de espacio-tiempo que (7.19) con una diferencia de sig-nos, es decir s2 = ∆x2
0−|∆x|2. En este caso, se acostumbra notar al tensor metrico conla letra g en vez de η . No hay ninguna diferencia fısica en usar una forma u otra, por loque vamos a escoger la que hemos venido usando con la estructura (−,+,+,+).
7.3. EL GRUPO DE LORENTZ EN GENERAL 91
7.3.2. El grupo de Lorentz restringido
Extrapolando la definicion del grupo de Lorentz simple de la seccion anterior, vamosa definir un grupo de Lorentz en general como:
Grupo de Lorentz: Es el conjunto de transformaciones lineales Λ(ωωω) que dejainvariante al tensor metrico:
GL = {Λ(ωωω) | η = ΛT
ηΛ}.
En la definicion anterior, se introduce un espacio de parametros ωωω que debe incluirla velocidad y las direcciones relativas entre los ejes coordenados de observadores, comose especificara mas adelante. Por ahora, podemos estudiar algunas propiedades globalesdel grupo de Lorentz sin necesidad de conocer la forma especıfica de la transformacionΛ:
1. Si el tensor metrico es invariante frente a las transformaciones de Lorentz, sudeterminante cumple:
Det[η ] = Det[ΛTηΛ]
= Det[ΛT ]Det[η ]Det[Λ]
= (Det[Λ])2Det[η ]. (7.21)
Al comparar el ultimo termino con el primero, se deduce que:
(Det[Λ])2 = 1, (7.22)
en donde se identifican dos clases de transformaciones con determinantes de dife-rentes signos:
Det[Λ] =
{+1, Transformaciones Propias−1, Transformaciones Impropias.
(7.23)
2. La transformacion de Lorentz se puede representar en el caso mas general comouna matrız 4×4 con componentes
Λ =
Λ0
0 Λ01 Λ0
2 Λ03
Λ10 Λ1
1 Λ12 Λ1
3Λ2
0 Λ21 Λ2
2 Λ23
Λ30 Λ3
1 Λ32 Λ3
3
, (7.24)
92 CAPITULO 7. EL GRUPO DE LORENTZ
donde se usa la notacion de indices de la forma Λµ
ν empezando por 0 para indicarcada una de las componentes. La forma matematica que tengan estas componentesdebe ser tal que deje invariante al tensor metrico, es decir, que cumplan con:
η =
−1 0 0 00 1 0 00 0 1 00 0 0 1
=
Λ0
0 Λ10 Λ2
0 Λ30
Λ01 ∗ ∗ ∗
Λ02 ∗ ∗ ∗
Λ03 ∗ ∗ ∗
−1 0 0 00 1 0 00 0 1 00 0 0 1
Λ00 Λ0
1 Λ02 Λ0
3Λ1
0 ∗ ∗ ∗Λ2
0 ∗ ∗ ∗Λ3
0 ∗ ∗ ∗
.
Para simplificar, se usan los sımbolos (∗) que marcan las posiciones de las demascomponentes. Al realizar los productos entre las tres matrıces, se obtiene unamatrız que debe igualarse con la primera. En general, dos matrices son igualessi cada una de sus componentes son iguales, por lo que la ecuacion anterior repre-senta realmente un conjunto de 16 ecuaciones: una que debe igualarse a −1, tresiguales a 1 y doce iguales a 0. En particular, la primera ecuacion es:
−1 = −(Λ00)
2 +(Λ11)
2 +(Λ21)
2 +(Λ31)
2
= −(Λ00)
2 +3
∑i=1
(Λi1)
2, (7.25)
donde se usa el ındice i para denotar las componentes espaciales {1,2,3}. Ası, segeneran dos tipos de soluciones para Λ0
0, que produce dos clases de transforma-ciones de Lorentz:
Λ0
0 =
+√
1+∑3i=1(Λ
i1)
2 > 1, Transformaciones Ortocronas
−√
1+∑3i=1(Λ
i1)
2 <−1, Transformaciones anti-Ortocronas.(7.26)
Ası, el grupo de Lorentz se puede separar en 4 tipos formados por diferentes combi-naciones de las propiedades anteriores: 1.) propias ortocronas, 2.) propias anti-ortocronas,3.) impropias ortocronas y 4.) impropias anti-ortocronas. Sin embargo, como veremosluego, las transformaciones propias ortocronas son la que pueden describir rotacionespuras y transformacion entre observadores en movimiento relativo, conocido como elgrupo de Lorentz restringido. Ası, definimos:

7.4. TRANSFORMACIONES DE LORENTZ RESTRINGIDAS 93
Grupo de Lorentz restringido: {Λ(ωωω) | η = ΛT ηΛ, Det[Λ] = 1, Λ00 > 1}.
Los otros 3 tipos de grupos de Lorentz describen transformaciones discretas. Por ejem-plo, la transformacion de paridad, en la cual las coordenadas espaciales cambian designo, son transformaciones de Lorentz impropias ortocronas. La inversion temporal sontransformaciones impropias anti-ortocronas, mientras que la combinacion simultanea deparidad e inversion temporal forman una transformacion propia anti-ortocrona.
7.4. Transformaciones de Lorentz restringidas
Despues de describir algunas propiedades generales del grupo de Lorentz, en estaseccion vamos a obtener la forma explıcita de la transformacion Λ(ωωω) para el grupo deLorentz restringido. La estrategia para obtenerlas, es partir de las TLS, y por medio de ro-taciones espaciales, llegar a la forma mas general de las transformaciones. Inicialmente,la obtendremos para un espacio-tiempo de dimension (2+1), y posteriormente haremosla extension a (3+ 1). Para simplificar el algebra, usaremos la siguiente notacion paralas funciones trigonometricas:
Σ
x1
x2
v
α θ
Figura 7.1
Σ
Σ’
X1
X2
X1 ’
’ X2 v
Figura 7.2
sinφ = Sφ , cosφ =Cφ . (7.27)
Consideremos dos observadores Σ y Σ′, donde Σ′ se mueve en el plano respecto aΣ con velocidad v = v1e1 + v2e2, donde e1,2 representan los vectores unitarios de losejes coordenados de Σ. Supongamos ademas que el eje x′1 forma un angulo α respecto ax1, como se muestra en la Figura 7.1, mientras que θ es el angulo del vector velocidadrespecto al eje x1. Las coordenadas transforman de acuerdo a las TLS si rotamos losejes coordenados de ambos observadores en la direccion de la velocidad relativa, comose muestra en la Figura 7.2, la cual podemos describir por ecuaciones de rotacion dela forma obtenidas anteriormente en la ecuacion (5.6). Ası, usando la notacion de lasFiguras. 7.1 y 7.2, los ejes originales y rotados se relacionen entre sı de acuerdo a:
Observador Σ :
{X1 = x1Cθ + x2Sθ ,
X2 =−x1Sθ + x2Cθ ,(7.28)
Observador Σ′ :
{X ′1 = x′1C(θ−α)+ x′2S(θ−α),
X ′2 =−x′1S(θ−α)+ x′2C(θ−α).(7.29)
Los ejes rotados cumplen con las condiciones de la configuracion estandar descritoen la seccion 2.3, por lo que se relacionan entre sı a traves de las TLS:
x′0 = γ (x0−|βββ |X1) .
X ′1 = γ (X1−|βββ |x0) ,
X ′2 = X2, (7.30)

94 CAPITULO 7. EL GRUPO DE LORENTZ
donde se define el vector βββ como:
βββ =vc, (7.31)
mientras que el factor γ se relaciona con la magnitud del vector anterior como:
γ =1√
1−|βββ |2=
1√1−β 2
. (7.32)
Si reemplazamos las ecuaciones de rotacion [espacial] dadas por (7.28) y (7.29)en las ecuaciones de transformacion (7.30), podemos obtener las transformaciones deLorentz en los sistemas coordenados originales. Este procedimiento se puede simplificarsi expresamos las ecuaciones de rotacion (7.28) y (7.29) en forma matricial como 1:
x0X1X2
=
1 0 00 Cθ Sθ
0 −Sθ Cθ
x0x1x2
= R(θ)
x0x1x2
(7.33)
x′0X ′1X ′2
=
1 0 00 C(θ−α) S(θ−α)
0 −S(θ−α) Cθ−α)
x′0x′1x′2
= R(θ −α)
x′0x′1x′2
, (7.34)
y las de transformacion en (7.30) como:
x′0X ′1X ′2
=
γ −γβ 0−γβ γ 0
0 0 1
x0X1X2
= L(β )
x0X1X2
, (7.35)
donde se definen las matrices de rotacion espacial R(θ) y R(θ−α), y la matrız de la TLSL(β ). Reemplazando las rotaciones (7.33) y (7.34) en las de transformacion en (7.35),obtenemos:
R(θ −α)
x′0x′1x′2
= L(β )R(θ)
x0x1x2
. (7.36)
Multiplicando a lado y lado de la ecuacion anterior por el inverso R−1(θ−α), se obtiene:
1Aunque las rotaciones espaciales en (7.33) y (7.34) se adiciona la componente temporal, observe queesta no rota de ninguna manera, obteniendo la relacion trivial x0 = x0 y x′0 = x′0.

7.4. TRANSFORMACIONES DE LORENTZ RESTRINGIDAS 95
x′0x′1x′2
= R−1(θ −α)L(β )R(θ)
x0x1x2
, (7.37)
que corresponde a la transformacion de Lorentz en el sistema de ejes coordenados origi-nales. Explıcitamente, la matrız inversa es:
R−1(θ −α) =
1 0 00 C(θ−α) −S(θ−α)
0 S(θ−α) Cθ−α)
. (7.38)
Problema 19: Demuestre que la matrız (7.38), es la inversa de R(θ −α).
Usando las identidades trigonometricas C(θ−α) =CθCα +Sθ Sα y S(θ−α) = SθCα −Cθ Sα , la matrız inversa (7.38) se puede separar en el producto de dos matrices como:
R−1(θ −α) =
1 0 00 C(θ−α) −S(θ−α)
0 S(θ−α) C(θ−α)
=
1 0 00 Cα Sα
0 −Sα Cα
1 0 00 Cθ −Sθ
0 Sθ Cθ
= R(α)R−1(θ). (7.39)
Problema 20: Demuestre la igualdad de la ecuacion (7.39).
Ası, el producto entre las tres matrices de (7.37) da la siguiente matrız de transfor-macion en el espacio-tiempo (2+1):
Λ2 = R−1(θ −α)L(β )R(θ) = R(α)R−1(θ)L(β )R(θ)
= R(α)L2(β ,θ), (7.40)

96 CAPITULO 7. EL GRUPO DE LORENTZ
donde R(α) representa una rotacion espacial pura alrededor del eje x3 en un angulo α ,y L2(β ,θ) contiene la transformacion pura entre observadores en movimiento relativo,conocidos comunmente como los Boost de Lorentz, como se ilustra en las Figurass 7.3y 7.4:
R(α) =
1 0 00 Cα Sα
0 −Sα Cα
L2(β ,θ) = R−1(θ)L(β )R(θ)
=
γ −γβCθ −γβSθ
−γβCθ γC2θ+S2
θ(γ−1)Cθ Sθ
−γβSθ (γ−1)SθCθ γS2θ+C2
θ
. (7.41)
En particular, para los boost de Lorentz, en vez del angulo θ y la magnitud β , la matrız
x1 x2
x3
x1
x2
’
’
α
Figura 7.3: Rotacion Pura
Σ’ Σ β
θ
Figura 7.4: Boost deLorentz
se acostumbra escribir en terminos de las componentes cartesianas del factor β , donde:
Cθ =β1
β, Sθ =
β2
β, (7.42)
con lo que se obtienen las siguientes relaciones asociadas a las componentes de los boost:
βCθ = β1,
βSθ = β2,
γC2θ +S2
θ = 1+(γ−1)C2θ
= 1+(γ−1)β 2
1β 2 ,
γS2θ +C2
θ = 1+(γ−1)S2θ
= 1+(γ−1)β 2
2β 2 ,
(γ−1)SθCθ = (γ−1)β1β2
β 2 . (7.43)
Para simplificar estas expresiones, podemos definir el siguiente parametro:
ai j = δi j +(γ−1)βiβ j
β 2 , (7.44)
donde δi j se conoce como el delta de Kronecker, que se define como:
7.4. TRANSFORMACIONES DE LORENTZ RESTRINGIDAS 97
δi j =
{1, si i = j0, si i 6= j
, (7.45)
y los ındices i y j toman valores de 1 o 2 segun sean las componentes cartesianas β1 yβ2 que participen en cada termino. Ası, las tres ultimas ecuaciones de (7.43) se reducena:
γC2θ +S2
θ = 1+(γ−1)(β1)
2
β 2 = a11
γS2θ +C2
θ = 1+(γ−1)(β2)
2
β 2 = a22
(γ−1)SθCθ = (γ−1)β1β2
β 2 = a12. (7.46)
Usando las identidades anteriores, los boost de Lorentz en (7.41) se expresan explıci-tamente en funcion de (β1,β2), obteniendo:
L2(β1,β2) =
γ −γβ1 −γβ2−γβ1 a11 a12−γβ2 a21 a22
. (7.47)
Ası, las transformaciones de Lorentz se construyen a traves del producto de rotacio-nes espaciales y boost de acuerdo a la ecuacion (7.40), que son funciones del espacio deparametros ωωω = {β1,β2,α}:
Λ2(β1,β2,α) = R(α)L2(β1,β2)
=
1 0 00 Cα Sα
0 −Sα Cα
γ −γβ1 −γβ2−γβ1 a11 a12−γβ2 a21 a22
. (7.48)
La extension al caso mas general de las tres dimensiones espaciales se puede hacerdirectamente a partir de los resultados anteriores. En este caso, el movimiento relativoentre dos observadores viene descrito por un vector beta de la forma βββ = β1e1 +β2e2 +β3e3, mientras sus ejes coordenados tienen diferentes orientaciones. En general, una ro-tacion en cualquier orientacion se puede describir como tres rotaciones alrededor de cadauno de los ejes coordenados. Ası, sea α1 el angulo de rotacion alrededor del eje x1, α2el angulo alrededor de x2 y α3 el angulo alrededor de x3. Para construir estas rotaciones,tomemos como referencia la matrız R(α) de la ecuacion (7.41), la cual representa la ro-tacion alrededor del eje x3. Pero en el caso del espacio-tiempo de dimension (3+1), esa
98 CAPITULO 7. EL GRUPO DE LORENTZ
matrız debe tener una columna y una fila adicional que represente posibles rotacionesdel eje x3. Para rotaciones alrededor del eje x3, los ejes x1 y x2 rotan, mientras que x3 semantiene fijo, tal como se mostro en la Figura 7.3. Ası, esta matrız de rotacion toma laforma:
R3(α3) =
1 0 0 00 Cα3 Sα3 00 −Sα3 Cα3 00 0 0 1
, (7.49)
donde la forma de la ultima fila y columna llena de ceros con un 1 en la diagonal indicaque la rotacion es alrededor de x3. Con esto, es directo obtener las demas rotaciones. Larotacion alrededor del eje x2 es:
R2(α2) =
1 0 0 00 Cα2 0 Sα2
0 0 1 00 −Sα2 0 Cα2
, (7.50)
donde la tercera fila y columna esta llena de ceros con un 1 en la diagonal, indicando larotacion alrededor de x2. Finalmente, alrededor del eje x1, se obtiene:
R1(α1) =
1 0 0 00 1 0 00 0 Cα1 Sα1
0 0 −Sα1 Cα1
. (7.51)
Ası, la rotacion completa se obtiene como el producto de las tres rotaciones anteriores:
R(α1,α2,α3) = R(α1)R(α2)R(α3). (7.52)
Por otro lado, la generalizacion de los Boost de Lorentz, tambien se obtienen a partirde la forma (2+1) de la matrız (7.47). Su extension a la forma (3+1) se logra adicio-nando una fila y una columna que contenga la componente β3, obteniendo:
L3(β1,β2,β3) =
γ −γβ1 −γβ2 −γβ3−γβ1 a11 a12 a13−γβ2 a21 a22 a23−γβ3 a31 a32 a33
, (7.53)
7.5. ALGEBRA DEL GRUPO DE LORENTZ 99
donde los coefiencientes ai j sigue tomando la misma forma definida en (7.44), con ladiferencia de que ahora los ındices i y j pueden tomar los tres valores 1,2 o 3. De estamanera, las transformaciones de Lorentz restringidas mas generales son:
Λ(βββ ,ααα) = R(α1,α2,α3)L3(β1,β2,β3), (7.54)
donde hemos usado la notacion βββ = (β1,β2,β3) y ααα = (α1,α2,α3).
Problema 21: Demuestre que la Transformacion de Lorentz de la ecuacion (7.54),cumple con las condiciones de un grupo de Lorentz restringido.
Finalmente, es importante aclarar que a diferencia de las TLS, la forma general delas transformaciones de Lorentz tienen propiedades de un grupo no abeliano.
7.5. Algebra del Grupo de Lorentz
Para construir las leyes de la fısica en el lenguaje de la relatividad especial, es necesa-rio tener las herramientas algebraicas apropiadas soportadas en la formulacion tensorial.En esta seccion se hace una introduccion formal a los tensores a partir de las propiedadesde grupo que exhibe las transformaciones de Lorentz.
7.5.1. Los generadores del grupo de Lorentz
Ademas de cumplir con propiedades de un grupo continuo, las transformaciones deLorentz exhibe propiedades de grupo de Lie. En general se define:
Sea un grupo continuo g(θθθ) funcion de un espacio de parametros θθθ = (θ1,θ2, ...,θn).Si para cualquier par de componentes θi y θ j se cumple:
g(θi,θ j) = g(θi,0)g(0,θ j), (7.55)
entonces el grupo es un grupo de Lie.
La condicion (7.55) la podemos interpretar como una transformacion simultanea endos direcciones de una funcion, que es equivalente a dos transformaciones consecutivasen cada direccion por separado. La consecuencia mas importante de que un grupo sea de
100 CAPITULO 7. EL GRUPO DE LORENTZ
Lie, es que su algebra se puede determinar a partir de sus generadores, que se definencomo las derivadas parciales
Tk = i∂g(θk)
∂θk
∣∣∣∣θk=0
, (7.56)
para cada componente k del espacio de parametros. En el apendice D, se demuestra quelos elementos de un grupo de Lie se pueden escribir como:
g(θθθ) = e−i∑k θkTk . (7.57)
Para el caso del grupo de Lorentz, es conveniente expresar las transformaciones deLorentz en terminos de la rapidez hiperbolica definida en la seccion 6.4, en vez de usar elfactor β . Para eso, generalicemos la definicion dada por la ecuacion (6.15), y definamosel vector rapidez hiperbolica como:
y = (tanh−1β )β , (7.58)
donde el vector unitario β indica la direccion de la velocidad relativa entre observado-res. Ası, las transformaciones de Lorentz en (7.54) se pueden escribir en funcion de lascomponentes de la rapidez hiperbolica:
Λ(y,ααα) = R(α1,α2,α3)L3(y1,y2,y3). (7.59)
Como las rotaciones espaciales y los boost de Lorentz forman independientemente ungrupo de Lie, podemos definir los siguientes generadores:
Momento Angular : Jk = i∂R(αk)
∂αk
∣∣∣∣αk=0
,
Boost : Kk = i∂L3(yk)
∂yk
∣∣∣∣yk=0
. (7.60)
Ası, las rotaciones y boost de Lorentz se pueden expresar como funciones exponencialesde sus generadores:
R(ααα) = e−i∑k αkJk ,
L3(y) = e−i∑k ykKk , (7.61)
por lo que las transformaciones de Lorentz tambien se acostumbran escribir en la forma:
Λ(y,ααα) = R(ααα)L3(y) = e−i∑k(αkJk+ykKk). (7.62)

7.5. ALGEBRA DEL GRUPO DE LORENTZ 101
7.5.2. Representaciones del Grupo de Lorentz
Extendiendo la definicion de la ecuacion (7.12), una transformacion de Lorentz sedefine como:
Λ : X−→ X′, (7.63)
tal que el operador Λ deja el tensor metrico invariante. Lo anterior se traduce en terminosfısicos como el cambio que sufren las coordenadas de espacio y de tiempo de un eventodebido al movimiento relativo entre dos observadores, el cual es generado por la acciondel operador Λ, y que son compatibles con los postulados de la relatividad especial. Porotro lado, ademas de sus coordenadas, los eventos pueden exhibir diversas propiedadesfısicas que tambien van a transformar bajo el cambio entre observadores inerciales. Laforma especıfica que tenga dicha transformacion depende de la naturaleza de la propie-dad fısica asociada al evento, la cual puede diferir de la transformacion de coordenadas.Para describir el efecto que producen las transformaciones de Lorentz sobre propiedadesfısicas diferentes a las coordenadas, vamos a definir una variable generica Φ que conten-ga la descripcion completa de la propiedad. Por ejemplo, Φ puede representar fuerzas,masas en reposo, energıa, campo electrico, funciones de onda cuanticas, etc. Al igualque sucede con las coordenadas, el cambio que sufra Φ debe respetar los postulados dela relatividad. El cumplimiento de los postulados se puede garantizar si exigimos que eloperador que genera la transformacion de esa propiedad es funcion de Λ, por lo que lomarcamos como M(Λ), y que bajo dos transformaciones sucesivas, se cumpla:
M(Λ1Λ2) = M(Λ1)M(Λ2), (7.64)
es decir, que M(Λ) sea un homomorfismo de Λ. Ası, la transformacion de coordenadasindicada por (7.63) esta acompanada por la transformacion de otras variables fısicas, quelo podemos indicar como:
Si Λ : X−→ X′ ⇒ M(Λ) : Φ−→Φ′, (7.65)
Una forma mas corta de expresar las relaciones en (7.65) es:
Φ′ = M(Λ)Φ, (7.66)
Debido a la condicion (7.64), las funciones M(Λ) heredan las mismas propiedades degrupo de las transformaciones de Lorentz, razon por la cual las llamamos representacio-nes del Grupo de Lorentz. Concretamente, se define:
102 CAPITULO 7. EL GRUPO DE LORENTZ
Representaciones del Grupo de Lorentz: Es el conjunto de transformacioneslineales M(Λ) que transforman una variable fısica Φ como
Φ′ = M(Λ)Φ,
tal que bajo dos transformaciones de Lorentz sucesivas se cumple:
M(Λ1)M(Λ2)Φ(x) = M(Λ1Λ2)Φ(x).
Especıficamente, lo anterior define una representacion finita del grupo de Lorentz, yaque la cantidad Φ genera un espacio vectorial de dimension finita2. Por otro lado, comose dijo anteriormente, la forma especıfica que tome el homomorfismo M(Λ) dependede la naturaleza de la propiedad Φ, es decir, conociendo la naturaleza de Φ, podemosdeterminar la forma de M(Λ). Pero esto tambien se puede ver de manera inversa: siconocemos como es M(Λ), podemos definir cual es la naturaleza de la propiedad Φ.Decimos entonces que Φ forma una base de las representaciones de Lorentz:
Base de una representaciones del Grupo de Lorentz: Es el conjunto de variablesΦ que transforman a traves de una representacion del Grupo de Lorentzbajo transformaciones de Lorentz.
Dicho de otra forma:
à Si Φ→Φ′=M(Λ)Φ cuando x→ x′=Λx, entonces Φ es base de la representacionde Lorentz M(Λ).
Es importante enfatizar que no cualquier variable Φ es base de una representacionde Lorentz. Por ejemplo, si F describe la fuerza sobre un cuerpo, sabemos que esta esdiferente entre dos observadores en movimiento relativo. Si F es la fuerza medida por Σ
y F ′ la medida por Σ′, en principio podremos relacionar ambas por medio de una funciong(u) (ver ecuacion (4.1)) que depende de la velocidad relativa entre ambos observadores:
F ′ = g(u)F. (7.67)
Sin embargo, al determinar la funcion g(u) vamos a encontrar que no es un homomor-fismo de las transformaciones de Lorentz. Esto sigue sucedieno incluso aunque la fuerzase extienda a sus tres componentes espaciales. Por lo tanto, la fuerza descrita en la formatradicional de un vector con tres componentes, no es una base de las representacionesdel grupo de Lorentz. Como veremos mas adelante, para poder describir la fuerza en unabase de Lorentz, es necesario definir una cantidad mas “grande” que un vector, en cuyocaso para distinguirlo de la fuerza clasica, lo llamaremos la cuadri-fuerza.
2Tambien existen representaciones infinitas, donde la cantidad Φ representan campos que dependen delas coordenadas espacio-temporales.

7.5. ALGEBRA DEL GRUPO DE LORENTZ 103
Por otro lado, a traves de los generadores del grupo de Lorentz, podemos clasificartodas las representaciones de Lorentz posibles, o equivalentemente, todas las bases derepresentaciones de Lorentz. Si las transformaciones de Lorentz se describen por mediode sus generadores de acuerdo a la forma exponencial de la ecuacion (7.62), entoncesuna representacion de Lorentz tambien se puede describir de la misma forma:
M(Λ) = e−i∑k(αkM(Jk)+ykM(Kk)), (7.68)
donde a los generadores tambien se le asocia una representacion:
Jk −→ M(Jk),
Kk −→ M(Kk). (7.69)
Sin entrar en detalles que van mas alla del nivel del texto, se puede mostrar que todas lasposibles representaciones de los generadores del grupo de Lorentz se pueden obtener apartir de la combinacion
J±k =Jk± iKk
2, (7.70)
cuyas representaciones se pueden parametrizar en funcion de dos ındices enteros o semi-enteros3:
J+k −→ M j+(J+k )
J−k −→ M j−(J−k ). (7.71)
tal que si
j = | j+± j−|=
{entero, M(Λ) es representacion tensorial,semi-entero, M(Λ) es representacion espinorial.
(7.72)
A la base de las representaciones anteriores se le conocen como tensores y espinores,respectivamente. Ası, se define:
1. Tensor: Base que transforma a traves de una representacion tensorial del grupo deLorentz ante el cambio entre observadores inerciales.
2. Espinor: Base que transforma a traves de una representacion espinorial del grupode Lorentz ante el cambio entre observadores inerciales.
3Una cantidad semi-entera es la razon entre dos enteros.
104 CAPITULO 7. EL GRUPO DE LORENTZ
Ası, cualquier representacion del grupo de Lorentz cae en alguna de dos categorıas:tensores o espinores. Para ilustrar algunas aplicaciones fısicas, consideremos los siguien-tes ejemplos:
- Espinores de Weyl: Cuando ( j+, j−) = (1/2,0) o (0,1/2), las bases forman un es-pinor de Weyl con espın j = 1/2. En el primer caso, se genera un espinor derechoψR, mientras que el segundo es un espinor izquierdo ψL. Estas representacionesdescriben fermiones de espın 1/2 que exhiben distintas propiedades bajo transfor-macion de paridad. A nivel nuclear, la fuerza de interaccion debil distingue si unfermion es derecho o izquierdo. Un caso extremo de dicha diferencia se observaen las partıculas llamadas neutrinos, las cuales solo se han detectado de tipo iz-quierdo. Un tema actual de la fısica de partıculas esta en entender porque no sehan observan neutrinos derechos.
- Espinor de Dirac: Si se combinan las representaciones de Weyl en una represen-tacion (1/2,0)⊕ (0,1/2), se genera una base con dos espinores de Weyl de laforma:
ψD =
(ψL
ψR
), (7.73)
correspondiente a un espinor de Dirac, los cuales tambien describen fermiones deespın j = 1/2 pero que son indistinguibles bajo paridad. Por ejemplo, la interac-cion electromagnetica entre electrones se describen por un espinor de Dirac, quees la base para la electrodinamica cuantica.
- Representacion fundamental: Cuando ( j+, j−) = (1/2,1/2) ( j = 0 y 1), las repre-sentaciones de los generadores son los mismos generadores, es decir, M(Jk) = Jky M(Kk) = Kk. Por lo tanto, la representacion del grupo de Lorentz coincide conla misma transformacion de Lorentz:
M(Λ) = Λ, (7.74)
que se conoce como la representacion fundamental. Como se definira mas adelan-tes, la base de esta representacion forma un tensor de rango uno, que tradicional-mente se conoce como un cuadri-vector. Hay muchos ejemplos fısicos de cuadri-vectores que vamos a describir en los dos ultimos capıtulos: el cuadri-momento,la cuadri-fuerza, la cuadri-corriente electrica, etc.
- Representacion escalar: Si ( j+, j−) = (0,0), obtenemos el caso trivial M(Jk) =M(Kk) = 0, por lo que la representacion del grupo de Lorentz es simplemente la

7.5. ALGEBRA DEL GRUPO DE LORENTZ 105
identidad. Ası, la base de esta representacion no cambia frente a las transforma-ciones de Lorentz, lo que se conoce como un escalar. Por ejemplo, la masa enreposo es una cantidad que no cambia frente a las transformaciones de Lorentz,por lo que tiene naturaleza escalar. En la fısica de partıculas, el recientemente des-cubierto Boson de Higgs exhibe propiedades de espın j = 0, por lo que cae en estarepresentacion. Decımos entonces que el boson de Higgs es una partıcula escalar.
7.5.3. Representaciones tensoriales
A nivel de la mecanica y la electrodinamica clasicas, las unicas representaciones queaparecen son las tensoriales. En la seccion anterior definimos un tensor de forma general.Sin embargo, dentro de los tensores, existen diferentes clasificaciones. Para eso, vamosa utilizar otra descripcion de una representacion tensorial diferente a la dada por (7.72).Si el espın j es un numero entero, se puede demostrar que la representacion del grupo deLorentz se genera como productos entre transformaciones de Lorentz y transformacionesinversas, que lo notamos de manera generica como:
M(Λ) j=entero = ∏n
Λn. (7.75)
Dependiendo de la cantidad de transformaciones directas e inversas, podemos clasi-ficar tres tipos de tensores:
1. Tensores de rango n contravariantes: Es el conjunto de variables T que trans-forman como n transformaciones de Lorentz ante el cambio entre observadoresinerciales:
T −→ T ′ = (Λ)nT. (7.76)
2. Tensores de rango n covariantes: Es el conjunto de funciones que transformancomo n transformaciones de Lorentz inversas
T −→ T ′ = (Λ−1)nT. (7.77)
3. Tensores mixtos de rango n: Es el conjunto de funciones que transforman como ptransformaciones de Lorentz y n− p transformaciones inversas
T −→ T ′ = (Λ)p(Λ−1)n−pT. (7.78)
106 CAPITULO 7. EL GRUPO DE LORENTZ
Con estas definiciones, podemos obtener las representaciones escalares, cuadri-vectoresy tensores de rango superior que describimos al final de la subseccion anterior. Lo queno estan incluidos son los espinores, ya que estos caen en otra categorıa diferente a lostensores:
- Escalares: Cuando la potencia es n = 0, se obtiene la representacion de rangocero:
M(Λ) = Λ0 = 1, (7.79)
cuya base T = φ forma un escalar:
φ −→ φ′ = φ . (7.80)
Ası, un escalar es una cantidad invariante bajo las transformaciones de Lorentz.
- Cuadri-vectores: Cuando la potencia es n = 1, se obtiene la representacion derango uno, que puede ser contravariante (V) o covariante (V ):
Si M(Λ) = Λ⇒V ′ = ΛV : c-vector contravariante
Si M(Λ) = Λ−1⇒ V ′ = Λ
−1V : c-vector covariante. (7.81)
Ası, por ejemplo, las coordenadas espacio-temporales (x0,x) forman un c-vectorque puede ser contra- o covariante.
Finalmente, existen otras representaciones tensoriales cuya transformacion dependedel determinante de la transformacion de Lorentz. La base de tales representaciones seconocen como seudo-tensores:
seudo-tensor: Conjunto de variables que transforman como un tensor y con elsigno del determinante de la transformacion de Lorentz:
T −→ T ′ = Det[Λ](Λ)nT. (7.82)
CAPITULO 8
Algebra de Tensores
Aunque el tratamiento matricial desarrollado en el capıtulo anterior permitio descri-bir de forma mas directa las propiedades algebraicas de las transformaciones de Lorentz,en la practica su manejo es ineficiente y complejo. En este capıtulo vamos a describiruna notacion mas apropiada para la manipulacion algebraica de los tensores.
8.1. Notacion de ındices de Einstein
En la ecuacion (7.24) definimos la representacion fundamental de las transformacio-nes de Lorentz como una matrız 4×4 formada por 9 componentes, cada una identificadapor dos ındices de la forma Λ
µ
ν . Generalizando la notacion, vamos a marcar con le-tras griegas minusculas cualquier componente espacio-temporal, es decir un ındice mar-cado con cualquiera de las letras {α,β ,γ,δ ,σ ,ω, ...}, indica una de las componentes{0,1,2,3}, donde 0 hace referencia a componentes temporales y (1,2,3) a componentesespaciales. En algunas circunstancias, vamos a encontrar parametros puramente espa-ciales, es decir, que solamente tiene componentes (1,2,3). Para distinguirlo del anterior,esos ındices se marcan con letras latinas minusculas, generalmente empezando desde i:{i, j,k, l,m,n, ...}.
Por otro lado, en el caso de las bases tensoriales, sabemos que existen tres tiposde representaciones: contravariantes, covariantes y mixtos. Para distinguir uno de otro,vamos a marcar a los tensores con ındices espacio-temporales con la siguienta regla deposicion:
107
108 CAPITULO 8. ALGEBRA DE TENSORES
ındices arriba → tensores contravariantes. Ejemplo: T µ ,T µν .
ındices abajo → tensores covariantes. Ejemplo: Tµ ,Tµν .
ındices arriba y abajo → tensores mixtos. Ejemplo: T µ
ν ,T α
βγ.
(8.1)
En esta notacion, la cantidad de ındices se relaciona con la representacion especıfica, lacual se obtiene de acuerdo al rango del tensor. Ası, por ejemplo, un escalar (rango cero)al ser invariante, no exhibe productos con Λ, por lo que no se necesitan ındices. Un c-vector (rango 1) transforma con una transformacion de Lorentz, por lo que se requiere deun ındice. Un tensor de rango 2 transforma con dos transformaciones Λ, lo que requierede dos ındices, y ası sucesivamente. Ası, se tiene:
Tensores sin ındices → rango 0 (escalares)Tensores con un ındice → rango 1 (cuadri-vectores)Tensores con n ındices → rango n .
(8.2)
De esta manera, la notacion de ındices exhibe explıcitamente la naturaleza tensorial delas variables: su forma de transformacion y su dimension (numero de componentes ne-cesarios para describirlo completamente).
8.2. Operaciones tensoriales
Al igual que sucede con las variables y funciones ordinarias, los tensores se puedencombinar para formar operaciones que den como resultado otros tensores de la misma odiferente naturaleza, algunas de las cuales vamos a describir a continuacion:
1. Producto interno (contraccion de ındices):
El producto interno define el producto entre tensores, donde dos o mas ındicessuman sobre todas las componentes espacio-temporales, y que da como resultadootro tensor del mismo o menor rango. Por ejemplo, sean dos tensores Aµ y Bµν .Un producto interno puede ser:
3
∑µ=0
AµBµν = A0B0ν +A1B1ν +A2B2ν +A3B3ν . (8.3)
Se observa que al realizar la suma, resulta una cantidad con componente ν abajo,es decir, el producto interno anterior da como resultado un c-vector covariante:
8.2. OPERACIONES TENSORIALES 109
3
∑µ=0
AµBµν =Cν . (8.4)
El ejemplo anterior exhibe dos reglas basicas del producto interno:
i.) Los ındices que suman deben aparecer en posiciones opuestas, esto es, elproducto interno se define con la suma entre un ındices covariante con unocontravariante. Por ejemplo, el producto ∑
3µ=0 AµBµ no existe.
ii.) La suma es diagonal en los ındices, esto es, los ındices que suman, corrensimultaneamente sobre las componentes de espacio-tiempo. Esto se indicanotando con la misma letra a los ındices que suman. Por ejemplo, el producto∑
3µ=0 ∑
3ν=0 AµBν no es un producto interno.
Las reglas anteriores permite interpretar el producto interno como una contraccionde ındices, donde la presencia de ındices repetidos arriba y abajo automaticamenteindica que existe una suma sobre todos los valores (0,1,2,3) sin necesidad deponer el sımbolo de sumatoria, y que el resultado es un nuevo tensor del rango delos ındices no repetidos, como si los que suman se aniquilaran entre sı (esto se leconoce como contraccion). Ası, por ejemplo, el producto interno
AµBµν = Aµ///Bµ///ν =Cν , (8.5)
representa la operacion extendida descrita en las ecuaciones (8.3) y (8.4)
2. Producto escalar:
El producto escalar es un producto interno donde se contraen completamente losındices, que da como resultado una cantidad escalar. Por ejemplo:
Aµ
νBνµ =C. (8.6)
La importancia del producto escalar es que permite construir cantidades invarian-tes bajo transformaciones de Lorentz.
3. Producto externo:
En contraste al producto interno donde hay ındices que suman sobre todas lascomponentes, el producto externo define una cantidad de mayor rango y por com-ponentes. Por ejemplo, si Aµ representa la componente µ de un c-vector, y Bν lacomponente ν de otro c-vector, entonces el producto externo:

110 CAPITULO 8. ALGEBRA DE TENSORES
AµBν =Cµν , (8.7)
representa la componente µν de un tensor de rango 2.
4. Adicion:
La adicion o suma se define solamente entre tensores del mismo rango y de com-ponente a componente, que da como resultado un tensor del mismo rango y mismacomponente. Por ejemplo,
Aµ
ν +Bµ
ν =Cµ
ν , (8.8)
para un valor particular de µ y ν . En cambio, sumas como por ejemplo Aµ
ν +Bµ ,Aµ +Bν o Aµ +Bµ no existen.
5. Producto por un escalar :
Es el producto entre un tensor y un escalar, que da como resultado otro tensor delmismo rango y naturaleza. Por ejemplo, si λ es un escalar, se cumple:
λAµ
ν =Cµ
ν . (8.9)
Antes de estudiar algunos tensores fundamentales, es importante enunciar una re-gla que se puede usar para determinar si un tensor es realmente una representacion deLorentz:
Regla del Cociente: Sea X una cantidad arbitraria y V un tensor de la represen-tacion del grupo de Lorentz. Sea el producto (interno o externo) XV = T . Si T esun tensor de la representacion de Lorentz, entonces la cantidad X tambien es untensor de la representacion de Lorentz.
8.3. Tensores especiales
Antes de definir las bases de representaciones del grupo de Lorentz asociadas a va-riables fısicas, vamos a definir un conjunto de tensores fundamentales para el calculoalgebraico.
8.3. TENSORES ESPECIALES 111
8.3.1. Boost de Lorentz
En la ecuacion (7.54), expresamos la transformacion de Lorentz como la combi-nacion de rotaciones espaciales y transformaciones entre observadores en movimientorelativo. Como siempre podremos reorientar los ejes de los observadores tal que quedenalineados, vamos a asumir que R(α1,α2,α3) = R(0,0,0) = 1, por lo que solamente va-mos a trabajar con los Boost de Lorentz. En particular, la representacion fundamentalde los Boost del grupo de Lorentz restringido viene dada por la matrız de la ecuacion(7.53). Usando la notacion de ındices, cada componente de los Boost lo vamos a notarcomo Lµ
ν , los cuales de acuerdo a las forma de la matrız (7.53) y la definicion en (7.44),podemos escribir como:
Lµ
ν =
L0
0 = γ,
L0i = Li
0 =−γβi,
Lij = δ i
j +(γ−1) β iβ jβ 2 .
(8.10)
Para entender como actuan los boost sobre los tensores, tomemos por ejemplo lascoordenadas espacio-temporales. Como estas transforman con una transformacion deLorentz, en la notacion tensorial se representan como un cuadri-vector que puede sercontra- o covariante, y que tiene la siguiente forma vectorial:
xµ .=
(x0,x1,x2,x3)= (x0,x
),
xµ
.= (x0,x1,x2,x3) = (x0,x) , (8.11)
donde el sımbolo .= indica que xµ o xµ es una de las cuatro componentes de espacio-
tiempo. Observese que en la definicion anterior, se escoge la notacion tradicional x paraindicar vectores espaciales sin importar que sea covariante o contravariante1. Bajo elcambio de observador inercial, sabemos que las coordenadas transforman de acuerdo a(7.11), que de forma explıcita es:
x′0
x′1
x′2
x′3
=
L0
0 L01 L0
2 L03
L10 ∗ ∗ ∗
L20 ∗ ∗ ∗
L30 ∗ ∗ ∗
x0
x1
x2
x3
=
L0
νxν
L1νxν
L2νxν
L3νxν
, (8.12)
1Esta indistinguibilidad de la parte espacial es consecuencia de la estructura (−,+,+,+) que exhibe eltensor metrico, como se muestra en la ecuacion (8.20). Es importante aclarar que si usamos la estructura(+,−,−,−), la representacion covariante serıa xµ
.= (x0,−x).

112 CAPITULO 8. ALGEBRA DE TENSORES
donde se aplico la notacion de suma del producto interno en el ultimo termino. Al com-parar este termino con el primero, obtenemos el siguiente conjunto de ecuaciones:
x′0 = L0νxν
x′1 = L1νxν
x′2 = L2νxν
x′3 = L3νxν , (8.13)
o en forma mas corta:
x′µ = Lµ
νxν , (8.14)
para cualquier componente µ = 0,1,2 o 3. De la misma forma, se obtiene la transforma-cion de Lorentz para las componentes covariantes:
x′µ = (L−1)νµxν . (8.15)
8.3.2. Tensores isotropicos
Un tensor isotropico es una cantidad cuyas componentes no cambian de valor bajotransformaciones de Lorentz. A diferencia de los escalares, un tensor isotropico estaformado por varias componentes de acuerdo a su rango. Algunos de estos tensores son:
1. Tensor de Kronecker:
Por definicion, la transformacion inversa seguida por la transformacion directa dala identidad, lo que en terminos tensoriales se expresa como el producto interno:
Lµ
α(L−1)αν =
{1 si µ = ν
0 si µ 6= ν= δ
µ
ν , (8.16)
que corresponde a la extension cuadri-dimensional del delta de Kronecker de laecuacion (7.45).
2. Tensor metrico:
La matrız de la ecuacion (7.20) define el tensor metrico que determina la geometrıaseudo-Euclidiana del intervalo de espacio-tiempo. En notacion tensorial toma laforma:
ηµν = ηµν =
−1 si µ = ν = 01 si µ = ν = 1,2,30 si µ 6= ν
, (8.17)
8.3. TENSORES ESPECIALES 113
tal que la distancia de espacio-tiempo queda expresada como un producto escalarde la forma:
s2 = xµηµνxν . (8.18)
Como los ındices se contraen completamente, es evidente que la cantidad s2 es unescalar, por lo que es invariante frente a las transformaciones de Lorentz. Adicio-nalmente, el tensor metrico sirve de puente entre tensores contravariantes y cova-riantes. Por ejemplo, la cuadri-posicion contravariante xµ la podemos convertir encovariante a traves del producto interno:
ηµνxν = xµ . (8.19)
Problema 22: Muestre que las componentes temporales entre la representacion con-travariante y covariante se diferencian por un signo, mientras que las espaciales tienenel mismo signo:
x0 =−x0, xi = xi. (8.20)
3. Tensor de Levi-Civita:
Consideremos el siguiente tensor de rango 4:
εαβγδ =
1 si (αβγδ ) = permutaciones par de (0123)−1 si (αβγδ ) = permutaciones impar de (0123)0 si hay ındices repetidos
. (8.21)
El numero de permutaciones es el numero de intercambios consecutivos para ob-tener otro ordenamiento del conjunto (0123). Por ejemplo, la componente con(αβγδ ) = (3120) vale −1 ya que hay que realizar 5 permutaciones entre ındicespara ir de (0123) a (3120):
(0123)→ (1023)→ (1203)→ (1230)→ (1320)→ (3120). (8.22)

114 CAPITULO 8. ALGEBRA DE TENSORES
Los tensores que cambian de signo bajo permutaciones impar se conocen comotensores antisimetricos. Por otro lado, para obtener la forma covariante, es necesa-rio bajar los 4 ındices, lo que requiere el producto interno con 4 tensores metricos.Se puede demostrar que el resultado es un tensor igual a la forma contravariantepero con signo opuesto:
εαβγδ = ηαµηβνηγσ ηδωεµνσω
=
−1 si (αβγδ ) = permutaciones par de (0123)1 si (αβγδ ) = permutaciones impar de (0123)0 si hay ındices repetidos
(8.23)
Problema 23: Demuestre la ecuacion (8.23).
8.3.3. Tensores Dual
El tensor metrico se puede interpretar como una operacion que convierte un tensorcontravariante en uno covariante, o viceversa. Por ejemplo, para tensores de rango 2, sepuede definir:
η : V µν −→Vαβ , (8.24)
donde:
Vαβ = ηαµηβνV µν . (8.25)
De manera analoga, el tensor de Levi-Civita se puede usar como un operador queconvierte un tensor de rango 2 en otro diferente llamado su forma dual:
ε : V µν −→ Vαβ , (8.26)
que es un tensor de naturaleza covariante, y que se obtiene como:
(V µν)D=
12
εαβ µνV µν = Vαβ . (8.27)
El factor 1/2 surge para corregir dobles sumas que aparecen en el producto interno.
CAPITULO 9
Formulacion Covariante de la Mecanica
En el contexto del algebra tensorial, una variable covariante es un tipo de represen-tacion del grupo de Lorentz que transforma como el inverso de las transformacionesde Lorentz bajo el cambio entre observadores inerciales. Sin embargo, en el contexto deuna teorıa fısica, se usa tambien la palabra covariante al conjunto de leyes que ademas decumplir con el principio de relatividad especial, estas se escriben en terminos de repre-sentaciones del grupo de Lorentz, es decir, en terminos de tensores y espinores, inclusoaunque un tensor puede aparecer en su forma contravariante. En la primera parte del tex-to, planteamos las leyes de la mecanica que respetaban los postulados de la relatividad,pero donde las variables no son representaciones del grupo de Lorentz. En este capıtulo,se revisara de nuevo las leyes de la mecanica pero en el lenguaje formal de los tensores,es decir, en la formulacion covariante.
9.1. Variables cinematicas
En la notacion tradicional, las variables cinematicas se representan en terminos deescalares y vectores, como el tiempo, el desplazamiento, la velocidad, etc. Sin embar-go, estas variables no transforman como representaciones del grupo de Lorentz. Parareconstruir la cinematica con una fomulacion covariante, empezemos por las dos va-riables basicas que ya tenemos en forma de representaciones del grupo de Lorentz: lacuadri-posicion y el intervalo de espacio-tiempo. Primero, en la ecuacion (8.11) se defi-nio las componentes de las coordenadas de espacio-tiempo, que lo llamaremos como lacuadri-posicion, o en forma corta, la c-posicion. Por tradicion, la componente temporalla definimos en su forma contravariante como x0 = ct. Sin embargo, debido a la formadel tensor metrico y de acuerdo al resultado de la ecuacion (8.20), su forma covariante
115

116 CAPITULO 9. FORMULACION COVARIANTE: MECANICA
tiene signo opuesto x0 =−ct. Ası, la c-posicion se define:
xµ .=
(x0,x
)= (ct,x) ,
xµ
.=
(−x0,x
)= (−ct,x) . (9.1)
Por otro lado, de acuerdo a la definicion (5.24), el intervalo de espacio-tiempo sedefine igual que la distancia de espacio-tiempo pero entre dos eventos que ocurren enposiciones y tiempos arbitrarios. En el lımite al continuo, si los eventos ocurren en tiem-pos y posiciones infinitesimalmente cercanos, se define el elemento de espacio-tiempocomo:
ds2 =−(dx0)2 + |dx|2 =−c2dt2 + |dx|2 . (9.2)
En particular, cuando los eventos ocurren en la misma posicion, el termino espacialse anula |dx| = 0 y de acuerdo a la definicion en la subseccion 3.1.2, el observadormedira elementos de tiempo propio dτ . Ası, se obtiene que ds2 =−c2dτ2, o despejandopara el tiempo propio:
dτ =
√−ds2
c2 . (9.3)
Usando la regla del cociente, puesto que la distancia de espacio-tiempo y la veloci-dad de la luz son escalares, entonces el tiempo propio tambien es un escalar, por lo queel tiempo propio de los eventos es unico independiente del observador inercial. Aunquelos eventos no ocurran en la misma posicion para un observador arbitrario, es posiblerelacionar los tiempos relativos con el escalar tiempo propio a traves de la formula dedilatacion de la ecuacion (3.6). Ası, aunque el observador no sea el de los tiempos pro-pios de los eventos, es posible expresar la cinematica en terminos de tiempos propios enlugar de tiempos relativos, esto es, en terminos de una representacion escalar del grupode Lorentz. De la formula de dilatacion, es directo comprobar las siguientes relacionesque seran de uso frecuente en los desarrollos algebraicos:
dtdτ
= γ,
dτ
dt= γ
−1,
dt = γdτ. (9.4)
9.1.1. La cuadri-velocidad
La cuadri-velocidad se define como la variacion de la c-posicion respecto al tiempopropio:

9.1. VARIABLES CINEMATICAS 117
U µ =dxµ
dτ. (9.5)
De nuevo, por la regla del cociente, como dxµ es un c-vector y dτ es un escalar, entoncesU µ es un c-vector. Es importante enfatizar que la cantidad
vµ =dxµ
dt, (9.6)
donde dt es el tiempo relativo, el cual no es un escalar del grupo de Lorentz (no esinvariante frente a transformaciones de Lorentz), no es un c-vector aunque exhiba cuatrocomponentes. A partir de (9.1) y la definicion (9.6), podemos calcular las componentesde la c-velocidad:
ddτ
xµ .=
ddτ
(ct,x)
=
(c
dtdτ
,dxdτ
). (9.7)
Usando las relaciones (9.4), se concluye:
U µ .= γ (c,v) ,
Uµ
.= γ (−c,v) , (9.8)
donde se define el vector velocidad en la forma tradicional:
v =dxdt
. (9.9)
9.1.2. La cuadri-aceleracion
Continuando con la construccion, definimos la cuadri-aceleracion como la variacionde la c-velocidad respecto al tiempo propio:
aµ =dU µ
dτ, (9.10)
que evidentemente tambien es un cuadri-vector. Usando las componentes (9.8), se obtie-ne:

118 CAPITULO 9. FORMULACION COVARIANTE: MECANICA
ddτ
U µ .=
ddτ
γ (c,v)
= γ
(0,
dvdτ
)+(c,v)
dγ
dτ, (9.11)
donde cada derivada es:
dvdτ
= γdvdt
= γA
dγ
dτ= γ
dγ
dt. (9.12)
Problema 24: Demuestre que:
γ =dγ
dt= γ
3βββ · βββ . (9.13)
Usando las ecuaciones (9.12) y (9.13), y teniendo en cuenta que βββ = v/c, la c-aceleracion tiene las siguientes componentes:
aµ .=
(a0,a
):
a0 = γ4
c v ·A,
a = γ2[A+ γ2
c2 (v ·a)v],
(9.14)
donde el vector A representa la aceleracion clasica. La expresion anterior no es de usofrecuente debido a su forma complicada. Para simplificar las expresiones cinematicas,se acostumbra usar la aceleracion del sistema co-movil, que se define como:
Sistema co-movil: conjunto de observadores inerciales que instantaneamente seencuentran en reposo respecto a un cuerpo acelerado.
Ası, desde un sistema co-movil, el cuerpo se encuentra en reposo intantaneo, por lo quela velocidad instantanea es v = 0. La c-aceleracion en un sistema co-movil es entonces:
aµc
.= (0,A) . (9.15)

9.2. VARIABLES DINAMICAS 119
9.2. Variables dinamicas
A partir de las variables cinematicas, se pueden construir las representaciones deLorentz que describira la dinamica de las partıculas puntuales.
9.2.1. El cuadri-momento
El momento lineal definido como el producto de la masa y la velocidad no formauna representacion del grupo de Lorentz. Para eso, se define el cuadri-momento como:
pµ = m0U µ , (9.16)
donde m0 es la masa en reposo y U µ la c-velocidad. Como sucede con el tiempo propio,se utiliza la masa en reposo en vez de la masa relativista, ya que el primero es un escalarinvariante frente a las transformaciones de Lorentz. Explıcitamente, las componentes delc-momento son:
pµ = m0U µ .= m0 (γc,γv) . (9.17)
Usando las definiciones de momento y energıa relativistas dadas por las ecuaciones (4.3)y (4.26 ), las componentes del c-momento se pueden expresar como:
m0γc = m(v)c =m(v)c2
c=
Ec
m0γv = m(v)v = p, (9.18)
por lo que:
pµ .=
(Ec,p). (9.19)
La forma del c-momento exhibe una de las consecuencias mas importantes de laformulacion covariante de la relatividad, y tiene que ver con la unificacion de concep-tos diferentes en un mismo esquema. Esto ya lo habiamos obtenido anteriormente enel tratamiento geometrico, donde describimos el tiempo y el espacio como variables dela misma naturaleza en un solo objeto, que identificamos como la c-posicion. De for-ma analoga, vemos que la energıa y el momento lineal se pueden describir de formaunificada como componentes de un unico concepto fısico: el c-momento.
120 CAPITULO 9. FORMULACION COVARIANTE: MECANICA
9.2.2. La fuerza de Minkowski
Podemos plantear el analogo relativista de la segunda Ley de Newton, conocida co-mo la ecuacion de Minkowski. Si la fuerza es la variacion del momento lineal respectoal tiempo, vamos a definir la cuadri-fuerza, o la fuerza de Minkowski sobre una partıculapuntual como:
Fµ =d pµ
dτ. (9.20)
Como el c-momento contiene la energıa y momento lineal total de la partıcula, la fuerzade Minkowski representa variaciones de dichas componentes, es decir, la fuerza de Min-kowski describe procesos de intercambio de energıa y de momento lineal entre sistemasfısicos. Solamente si Fµ se anula, obtendremos las leyes de conservacion de la energıay del momento lineal, como explicaremos en la siguiente seccion.
Otro aspecto importante de mencionar en relacion a la ecuacion (9.20) es que aunquela c-fuerza y el c-momento cambian frente a las transformaciones de Lorentz, la forma dela ecuacion no cambia, tal como lo exige el primer postulado de la relatividad especial.Para ilustrar el manejo del algebra tensorial descrito en el capıtulo anterior, vamos ademostrar la invariancia de la ecuacion de Minkowski. Sea un observador inercial Σ quemide una c-fuerza que respeta la ecuacion (9.20). Sea otro observador Σ′ moviendosecon velocidad u respecto a Σ. Queremos calcular la c-fuerza medida por Σ′ en relacion alc-momento que mide ese mismo observador. Como la c-fuerza es un cuadri-vector, estatransforma con una transformacion de Lorentz directa:
F ′µ = Lµ
νFν . (9.21)
Aplicando la ecuacion de Minkowski para Fν , se obtiene:
F ′µ = Lµ
ν
d pν
dτ. (9.22)
Para relacionar F ′µ con el c-momento en Σ′, invirtamos la transformacion del c-momento:
p′µ = Lµ
ν pν ⇒ pν = (L−1)νµ p′µ . (9.23)
Reemplazando (9.23) en (9.22), y teniendo en cuenta que el tiempo propio es escalar(τ = τ ′) obtenemos:
F ′µ = Lµ
ν(L−1)ν
µ
d p′µ
dτ ′, (9.24)

9.2. VARIABLES DINAMICAS 121
donde de acuerdo a la definicion del tensor de Kronecker en (8.16) se cumple para unacomponente µ particular que:
Lµ
ν(L−1)ν
µ = δµ
µ = 1, (9.25)
por lo que la ecuacion de Minkowski en Σ′ toma la misma forma que en Σ:
F ′µ =d p′µ
dτ ′. (9.26)
Para estudiar como la fuerza de Minkowski se relaciona con procesos de intercambiode energıa y momento lineal, calculemos explıcitamente sus componentes. Teniendo encuenta (9.19), se obtiene:
Fµ =d
dτ
(Ec,p)
= γddt
(Ec,p)
= γ
(Pc,K), (9.27)
donde se define:
P =dEdt
K =dpdt
. (9.28)
Podemos ver que P no es mas que la potencia absorbida o dispersada por la partıcula yK es el equivalente relativista de la fuerza, esto es, la variacion de momento lineal relati-vista respecto al tiempo. Observamos que esta fuerza no es exactamente la componenteespacial de la c-fuerza. De acuerdo a (9.27), las componentes de la c-fuerza son:
F0 = γPc
F = γK. (9.29)
Por otro lado, podemos mostrar que existe una ligadura que relaciona los cambios deenergıa con los cambios de momento lineal. En particular, para partıculas estables conmasa en reposo constante, la c-velocidad y la c-fuerza son ortogonales entre sı, es decir,su producto escalar es nulo:
FµUµ = 0, (9.30)
relacion que se puede demostrar usando la ecuacion general (9.31).

122 CAPITULO 9. FORMULACION COVARIANTE: MECANICA
Problema 25: Usando la descomposicion de la c-velocidad de la ecuacion (9.8), de-muestre el siguiente producto escalar:
U µdUµ
dτ= 0, (9.31)
Ası, se cumple que:
F0U0 +F ·U = 0
⇒ F0 =−F ·U
U0
= γK ·v
c. (9.32)
Definiendo βββ = v/c y teniendo en cuenta que F0 = γP/c, se encuentra la relacion:
P = cK ·βββ , (9.33)
por lo que las componentes de la c-fuerza para partıculas puntuales estables se puedeescribir como:
Fµ = γ (K ·βββ ,K) . (9.34)
9.2.3. La masa invariante
Como se menciono en el capıtulo anterior, el producto escalar es una herramienta utilque nos permite construir nuevas cantidades invariantes frente a las transformaciones deLorentz. Por ejemplo, el producto escalar entre las c-posiciones dada por la ecuacion(8.18) define la distancia de espacio-tiempo. De forma analoga, podemos definir el pro-ducto escalar entre los c-momentos:
pµ pµ = m20U µUµ
= m20(U0U0 +U iUi
)= m2
0γ2(−c2 + |v|2
)= −m2
0c2γ
2 (1−β2) . (9.35)

9.3. COLISIONES DE PARTICULAS PUNTUALES 123
Teniendo en cuenta que el termino dentro del parentesis no es mas que γ−2, se obtiene:
pµ pµ =−m20c2, (9.36)
es decir, el producto escalar de los c-momentos se relacionan con la masa en reposo delcuerpo, la cual como ya habıamos conjeturado, es invariante. Por tal razon, a la cantidadm0c se le conoce como la masa invariante del cuerpo, aunque su producto por c haceque no sea exactamente una masa.
Adicionalmente, el producto escalar entre c-momentos nos permite obtener de formacasi inmediata la relacion de energıa-momento dada por la ecuacion (4.33). Explıcita-mente, con la descomposicion del c-momento de la ecuacion (9.19), se obtiene:
pµ pµ = p0 p0 + pi pi
= −E2
c2 + |p|2 . (9.37)
Al igualar el resultado de (9.37) con (9.36), se puede demostrar la relacion de energıa-momento:
E = c√
p2 +m20c2, (9.38)
donde p2 = |p|2.
9.3. Colisiones de partıculas puntuales
Vamos ahora a estudiar sistemas de muchas partıculas puntuales que pueden interac-tuar. En particular, trataremos solamente partıculas que interactuan por colision directa1.A diferencia del caso clasico, donde el numero de partıculas se puede fijar, en relatividadla materia y la energıa pueden intercambiarsen, por lo que el numero de partıculas no esuna cantidad fija en el tiempo, incluso aunque el sistema sea cerrado. Sin embargo, en
!.!.!.!
!.!.!.!
n!m!
1!2!3!4!5!
1!2!3!
Figura 9.1el caso de colisiones de contacto, podrıamos separar subconjuntos de objetos que coli-sionan en el mismo punto espacial y comparar el c-momento de las partıculas antes ydespues de la colision, tal que mientras no suceda la interaccion, el numero de partıculases fijo. Ası, consideremos un sistema de n partıculas libres que se convierte en otro dem partıculas despues de la colision, como se muestra en la Figura 9.1. Si pµ
i represen-ta el c-momento de la i−esima partıcula en cada instante, definimos el c-momento delsistema de partıculas antes y despues de la colision como:
1Se puede hacer un tratamiento mas general con partıculas que interactuan a distancia a traves de cam-pos. Sin embargo, dicho tratamiento requiere de herramientas mas sofisticadas provenientes de la teorıacuantica de campos, por lo que no lo trataremos aquı.
124 CAPITULO 9. FORMULACION COVARIANTE: MECANICA
Pµ(antes) =n
∑i=1
pµ(antes)i ,
Pµ(despues) =m
∑i=1
pµ(despues)i . (9.39)
El cambio del c-momento debido a la colision es:
∆Pµ = Pµ(despues)−Pµ(antes). (9.40)
Si las interacciones al interior del conjunto se da solamente por contacto directoentre las partıculas, la tercera ley de Newton sigue siendo valida sin violar el principio decausalidad. Entonces, tal como sucede en la mecanica clasica, la transferencia de energıay momento entre solamente las partıculas que colisionan, no produce ningun incrementoni disipacion global de estas cantidades, por lo que ∆Pµ = 0. Se cumple entonces que losc-momentos totales definidos de acuerdo a la ecuacion (9.39) se conservan sin importarel cambio en el numero de partıculas. Para que esto ocurra, se tiene que conservar cadauna de sus componentes, es decir, la energıa y el momento lineal relativistas del sistemaantes y despues de la colision son los mismos:
Pµ(despues) = Pµ(antes)⇒
{∑
mi=1 E(despues)
i = ∑ni=1 E (antes)
i ,
∑mi=1 p(despues)
i = ∑ni=1 p(antes)
i .(9.41)
Por otro lado, como ocurre con el caso clasico, las colisiones las podemos clasificarde dos tipos de acuerdo a si la energıa cinetica se conserva o no: elasticas o inelasticas.Sin embargo, a diferencia de la mecanica clasica, donde las partıculas puntuales siempreexhiben colisiones elasticas, en el caso relativista estas podrıan ser inelasticas debidoa posibles transformaciones de masa en reposo en energıa cinetica durante la colision.Especıficamente, usando la definicion (4.24) y teniendo en cuenta que la energıa total seconserva en sistemas aislados, la condicion que determina si una colision es o no elasticaes:
K = E−M0c2 = const.⇒M0 = const., (9.42)
con M0 la suma de las masas en reposo de las partıculas del sistema. Ası, en relatividadespecial las colisiones se clasifican de acuerdo a:
Colisiones:
{Elasticas, si M0 se conserva,Inelasticas, si M0 no se conserva.
(9.43)

9.3. COLISIONES DE PARTICULAS PUNTUALES 125
Para ilustrar el manejo algebraico de los c-vectores, estudiemos el efecto Comptonque se puede tratar como una colision elastica. Un foton de longitud de onda λ0 colisionacon un electron libre originalmente en reposo. Queremos calcular la nueva longitud deonda del foton dispersado en funcion de su angulo de dispersion. La Figura 9.2 muestrael proceso antes y despues de la dispersion. Los c-momentos antes de la colision de cadapartıcula son:
k µ p µ
k µ ’
p ’ µ θ
φ
Figura 9.2
kµ =
(E f
c,kf
)=
(E f
c,E f
c,0,0
)pµ =
(Ee
c,pf
)= (mc,0,0,0) , (9.44)
donde se hızo uso de la relacion de energıa-momento de la ecuacion (9.38) y se tuvoen cuenta que el electron esta en reposo. Las componentes de c-momento despues de lacolision son:
k′µ =
(E ′fc,k′f
)=
(E ′fc,E ′fc
cosθ ,E ′fc
sinθ ,0
)
p′µ =
(E ′ec,p′f
)=
(E ′ec, p′f cosφ , p′f sinφ ,0
). (9.45)
Si definimos el c-momento total inicial como Pµ = kµ + pµ y el final como P′µ = k′µ +p′µ , la conservacin del c-momento nos dice que kµ + pµ = k′µ + p′µ . Despejando parael electron, obtenemos:
p′µ = kµ + pµ − k′µ . (9.46)
Por otro lado, obtengamos el producto escalar entre el c-momento inicial:
PµPµ = kµkµ + pµ pµ +2kµ pµ
= −m2c2 +2kµ pµ , (9.47)
donde se uso el resultado de la ecuacion (9.36). Para el c-momento final, se obtiene:
P′µP′µ = k′µk′µ + p′µ p′µ +2k′µ p′µ= −m2c2 +2k′µ p′µ= −m2c2 +2k′µ
(kµ + pµ − k′µ
), (9.48)

126 CAPITULO 9. FORMULACION COVARIANTE: MECANICA
donde se uso la ecuacion (9.46) en la ultima igualdad. Como los c-momentos totales seconservan, tambien se conservara sus productos escalares:
PµPµ = P′µP′µ⇒ −m2c2 +2kµ pµ =−m2c2 +2k′µ
(kµ + pµ − k′µ
)⇒ kµ pµ = k′µ
(kµ + pµ − k′µ
). (9.49)
Para calcular la ultima igualdad, debemos obtener los productos escalares individua-les teniendo en cuenta las componentes de las ecuaciones (9.44) y (9.45). Explıcitamen-te, se obtiene:
kµ pµ = −mE f ,
k′µkµ = −E f E ′f
c2 +E f E ′f
c2 cosθ ,
k′µ pµ = −mE ′fk′µk′µ = 0. (9.50)
Reemplazando cada producto escalar obtenido en (9.50) en la ecuacion (9.49), obtene-mos:
−mE f =−E f E ′f
c2 (1− cosθ)−mE ′f . (9.51)
Si en la ecuacion anterior despejamos la energıa del foton despues de la dispersion,obtenemos:
E ′f =E f
1+(
E fmc2
)(1− cosθ)
. (9.52)
Teniendo en cuenta que la energıa del foton se relaciona con su frecuencia de acuer-do a la ecuacion (4.35) y la frecuencia a la longitud de onda como f = c/λ con c lavelocidad de la luz, la ecuacion (9.52) se puede escribir en terminos de la longitud deonda como:
λ′ = λ0 +
hmc
(1− cosθ) . (9.53)
La ecuacion (9.53) nos dice que la longitud de onda del foton cambia de acuerdoal angulo de dispersion, resultado que no solamente es compatible con el tratamientorelativista, sino que confirma la naturaleza cuantica de la luz, ya que la electrodinamicaclasica predice una longitud de onda independiente del angulo, contrario a las observa-ciones experimentales.

9.4. EL COHETE RELATIVISTA 127
9.4. El cohete relativista
En la mecanica clasica, un sistema puede disminuir su masa expulsando materia. Enel caso relativista, sin embargo, debido a que la masa y la energıa pueden intercambiar-sen, existen otras fuentes que producen variacion de la masa en reposo del sistema. Ası,la masa en reposo de la materia emitida da cuenta de solo una parte de la masa totalperdida por el sistema; el resto se distribuye entre energıa cinetica y energıa de radiaciondependiendo del tipo de reacciones que se den al interior del sistema. Por lo tanto, esmejor hablar en terminos de emision de c-momento. En particular, el sistema se definecomo un cohete si el c-momento expulsado se logra colimar en una misma direccion,funcionando como un mecanismo de propulsion.
Supongamos un cohete que en cierto instante de tiempo propio tiene masa en reposoM(τ) y c-velocidad U µ(τ) medidos por algun observador inercial. Despues de un inter-valo de tiempo propio ∆τ , el cohete expulsa una porcion de c-momento ∆qµ en forma demateria y energıa, tal que en el tiempo τ +∆τ , el cohete tiene una nueva masa en reposoM(τ +∆τ) y c-velocidad U µ(τ +∆τ). En general, el sistema puede estar sometido a in-teracciones externas descritas por una c-fuerza Fµ
ext . La Figura 9.3 ilustra la situacion enambos instantes de tiempo. El c-momento del sistema completo encerrado por las lıneasa trazos en cada tiempo es:
Δ
F µ ext
U µ (τ)
U µ (τ+Δτ) q µ
M (τ)
M (τ+Δτ)
Figura 9.3
Pµ(τ) = M(τ)U µ(τ),
Pµ(τ +∆τ) = M(τ +∆τ)U µ(τ +∆τ)+∆qµ , (9.54)
de manera que el cambio del c-momento debido a las interacciones externas es:
∆Pµ = Pµ(τ +∆τ)−Pµ(τ) = M(τ +∆τ)U µ(τ +∆τ)−M(τ)U µ(τ)+∆qµ . (9.55)
Si consideramos pequenos intervalos de tiempo, y asumiendo que el cambio de lamasa en reposo del cohete se puede describir como una funcion continua y suave, pode-mos realizar la siguiente expansion en series de Taylor:
M(τ +∆τ) =∞
∑n=0
1n!
d(n)M(τ)
dτ(n)∆τ
n
= M(τ)+dM(τ)
dτ∆τ +
∞
∑n=2
1n!
d(n)M(τ)
dτ(n)∆τ
n, (9.56)
donde hemos separado los dos primeros terminos de la suma ya que son las unicas contri-buciones que nos interesaran. Reemplazando la expansion anterior en la ecuacion (9.55)y dividiendo por el intervalo ∆τ , obtenemos:

128 CAPITULO 9. FORMULACION COVARIANTE: MECANICA
∆Pµ
∆τ= M(τ)
[U µ(τ +∆τ)−U µ(τ)
∆τ
]+U µ(τ +∆τ)
dMdτ
+∆qµ
∆τ
+∞
∑n=2
1n!
d(n)M(τ)
dτ(n)∆τ
n−1. (9.57)
Tomando el lımite ∆τ→ 0, las razones se convierten en derivadas, mientras que la sumaen el ultimo termino se cancela para n≥ 2, por lo que obtenemos:
dPµ
dτ= M(τ)
dU µ
dτ+U µ(τ)
dMdτ
+dqµ
dτ. (9.58)
La ecuacion anterior se puede simplificar si definimos:
Fµ
ext =dPµ
dτ
MU µ = pµc
λµ =
dqµ
dτ. (9.59)
La primera ecuacion es la definicion de c-fuerza que es la variacion del c-momento total.La segunda es el c-momento del cohete que va perdiendo masa. Finalmente, la terceraecuacion describe la razon de emision de c-momento. Con lo anterior, la ecuacion (9.58)se puede escribir como:
d pµc
dτ= Fµ
ext −λµ , (9.60)
la cual indica que la variacion del c-momento del cohete tiene dos contribuciones: pri-mero, debido a intercambios de energıa y momento con otros sistemas externos descritopor Fµ
ext , y segundo, por emision de c-momento en forma de masa en reposo y energıadefinido por λ µ .
Para ilustrar una aplicacion de la ecuacion dinamica (9.60), vamos a calcular la ve-locidad adquirida por el cohete en un caso ideal sin interacciones externas y con unaeficiencia de propulsion del 100%, donde cualquier variacion de la masa en reposo delcohete se transforma en c-momento emitido en forma perfectamente colimada en una so-la direccion, por ejemplo, a lo largo de la coordenada x1. Por simplicidad, consideremossolo emision de materia, en cuyo caso el c-momento de la porcion de masa expulsadaen el intervalo ∆τ es ∆qµ = ∆mW µ , con ∆m su masa en reposo y W µ su c-velocidadrespecto a algun observador inercial. En el lımite infinitesimal se obtiene para la razonde emision:

9.4. EL COHETE RELATIVISTA 129
λµ = lım
∆τ→0
∆qµ
∆τ= lım
∆τ→0
∆m∆τ
W µ = W µ dmdτ
= W µλ0, (9.61)
donde λ0 es la razon de emision de masa en reposo. La ecuacion dinamica (9.60) sinc-fuerza externa se convierte en:
d pµc
dτ= −W µ
λ0, (9.62)
Por otro lado, es de esperar que la razon de masa en reposo emitida dependa de larazon a la que el cohete pierda masa. Sin embargo, debido a la relacion masa-energıa, di-cha dependencia no es la relacion clasica λ0 =−dM/dτ obtenida de la conservacin de lamasa [clasica]. Para calcularla, podemos usar la relacion de ortogonalidad de la ecuacion(9.31). Multiplicando por la c-velocidad del cohete, la ecuacion (9.62) se transforma en:
Uµ
d pµc
dτ= −UµW µ
λ0. (9.63)
El primer termino se puede descomponer como:
Uµ
d pµc
dτ=Uµ
dMU µ
dτ= MUµ
dU µ
dτ+UµU µ dM
dτ
= −c2 dMdτ
, (9.64)
donde se uso el producto escalar Uµ(dU µ/dτ) = 0 y UµU µ = −c2. Usando lo anterioren (9.63), se obtiene:
λ0 =
(c2
UµW µ
)dMdτ
, (9.65)
por lo que la ecuacion del cohete (9.62) con propulsion de materia se escribe como2:
d pµc
dτ=
(−c2
UνW ν
)dMdτ
W µ . (9.66)
Para resolver la ecuacion diferencial (9.66), sigamos la siguiente estrategia:
2Aunque en la ecuacion (9.65), el produto escalar se nota con el ındice µ , es conveniente cambiarlo porν para no confundirlo con la componente µ de (9.62).

130 CAPITULO 9. FORMULACION COVARIANTE: MECANICA
i.) Primero, expresemos la ecuacion dinamica (9.66) por medio de su producto esca-lar por la c-velocidad Wµ :
Wµ
d pµc
dτ=
(−c2
UνW ν
)dMdτ
WµW µ . (9.67)
El primer termino se puede descomponer como:
Wµ
d pµc
dτ=Wµ
dMU µ
dτ= MWµU µ +WµU µM, (9.68)
donde usamos la notacion punto para indicar las derivadas temporales. Para elsegundo termino, se cumple WµW µ = −c2. Ası, la ecuacion (9.67) se desdoblacomo:
MWµU µ +WµU µM =
(c4
UνW ν
)M, (9.69)
que al reunir los dos terminos con M, se convierte en:
MWµU µ =
(c4
UνW ν−WµU µ
)M. (9.70)
ii.) Conviene expresar las c-velocidades en terminos de la rapidez hiperbolica. Comoel movimiento ocurre enteramente en una sola direccion (a lo largo del eje x1), essuficiente utilizar la definicion (6.15).
Problema 26: Usando la ecuacion (6.15), demuestre que el factor γ , la c-velocidad yla c-aceleracion para movimiento unidimensional se pueden escribir en terminos dela rapidez hiperbolica como:
γ = coshy,
U µ .= c(coshy,sinhy,0,0)
U µ .= cy(sinhy,coshy,0,0) (9.71)

9.4. EL COHETE RELATIVISTA 131
Llamando yU y yW las rapideces hiperbolicas del cohete y de la materia expulsadarespectivamente, y usando las componentes de acuerdo a la ecuacion (9.71), seobtienen los siguientes productos escalares:
UνW ν = −c2 (coshyU coshyW − sinhyU sinhyW )
= −c2 cosh(yU − yW )
= −c2 coshyr, (9.72)
UνW ν = −c2yU (sinhyU coshyW − coshyU sinhyW )
= −c2yU sinh(yU − yW )
= −c2yU sinhyr, (9.73)
donde yr = yU − yW es la rapidez relativa entre el cohete y la materia emitida.Utilizando el resultado de estos dos productos escalares en la ecuacion (9.70), seobtiene:
−Mc2yU sinhyr =
(− c2
coshyr+ c2 coshyr
)M
= c2(
cosh2 yr−1coshyr
)M
= c2(
sinh2 yr
coshyr
)M. (9.74)
Reorganizando terminos y conviertendo las derivadas en diferenciales, se obtiene:
dyU =− tanhyrdMM
. (9.75)
Ası, el problema se reduce en integrar la ecuacion diferencial anterior. Pero antes,observemos que la tangente hiperbolica remanente se relaciona con la velocidad relativaentre el cohete y la materia expulsada. Usando identidades hiperbolicas, se tiene:
tanhyr = tanh(yU − yW ) =tanh(yU)− tanh(yW )
1− tanh(yU) tanh(yW )
=βU −βW
1−βU βW, (9.76)

132 CAPITULO 9. FORMULACION COVARIANTE: MECANICA
donde se definen los factores betas βU =U/c y βW =W/c, con U y W las velocidades delcohete y la materia emitida respecto al observador inercial. Si comparamos el resultadofinal de la ecuacion anterior con el teorema de adicion de velocidades en la ecuacion(3.16), vemos que (9.76) no es mas que la velocidad relativa escrita en terminos de losfactores beta:
tanhyr = βr =vr
c. (9.77)
Aplicando lo anterior en (9.75), y tomando el tiempo inicial en cero, obtenemos lassiguientes integrales:
yU (τ)∫yU (0)
dyU =−βr
M(τ)∫M(0)
dMM
, (9.78)
donde supusimos que βr es constante. Al realizar las integrales, obtenemos:
yU(τ) = yU(0)−βr ln(
M(τ)
M(0)
), (9.79)
que nos describe la rapidez hiperbolica del cohete en cualquier instante τ en funcion dela masa instantanea M(τ). Para obtener la solucion en terminos de la velocidad, usamosla siguiente propiedad de las funciones hiperbolicas:
yU(τ) = tanh−1βU =−1
2ln(
1−βU
1+βU
). (9.80)
Si adicionalmente suponemos que el cohete parte del reposo (lo cual implica que yU(0)=0), la ecuacion (9.79) se reescribe para la velocidad como:
U(τ) =
(1− (M(τ)/M0)
2βr
1+(M(τ)/M0)2βr
)c. (9.81)
Problema 27: Obtenga la ecuacion que describe la velocidad del cohete fotonico,donde en vez de materia se expulsan fotones. Tenga en cuenta que la porcion de c-momento expulsado en el intervalo ∆τ se puede calcular como ∆qµ = ∆NQµ , donde∆N es la cantidad de fotones emitidos en el intervalo de tiempo, y Qµ es el c-momentode un solo foton cuyas componentes cumplen con las ecuacion (4.34).
CAPITULO 10
Formulacion Covariante de la Electrodinamica
Aunque la teorıa de Maxwell de los campos electromagneticos fue el escenario ori-ginal en que se formulo la relatividad especial, su forma matematica soportada en elcalculo vectorial no manifiesta de forma trivial su naturaleza relativista. Sin embargo, esposible definir las variables electromagneticas en el lenguaje formal de las representa-ciones del grupo de Lorentz, lo que nos permitira plantear las leyes en forma manifies-tamente invariantes frente a las transformaciones de Lorentz. En este capıtulo, primero,haremos una descripcion de las variables basicas de la electrodinamica en terminos dela formulacion vectorial y tensorial, y posteriormente se mostrara la forma covariante delas ecuaciones de Maxwell partiendo de su forma vectorial.
10.1. Representacion vectorial
Antes de describir la electrodinamica en terminos de representaciones del grupo deLorentz, vamos a repasar algunos conceptos basicos en el tradicional lenguaje vectorialdel calculo diferencial. En el apendice E definimos los operadores diferenciales basicos.Una alternativa de construir una teorıa de las interacciones electromagneticas, es par-tir de las ecuaciones de Maxwell como axiomas fundamentales, clasificadas en cuatroecuaciones de naturaleza vectorial:
Ley de Gauss: ∇ ·E = 4πρ
Ley de Ampere-Maxwell: ∇×B = 4π
c J+ 1c ∂tE
Ley de Faraday: ∇×E =−1c ∂tB
Ley de Gauss magnetica: ∇ ·B = 0
(10.1)
133

134 CAPITULO 10. FORMULACION COVARIANTE: ELECTRODINAMICA
En lo anterior, se introduce la densidad de carga electrica ρ , y la densidad de corrienteJ, las cuales se definen como:
ρ =dqdV
,
J = ρv, (10.2)
donde dq/dV representa la carga electrica por unidad de volumen y v es la velocidad delas fuentes que contienen carga electrica. Aunque la discusion se centra en el formalis-mo matematico, es importante aclarar al menos el significado fısico de las ecuacionesanteriores, las cuales resumimos a continuacion:
1. Los campos electricos se originan en fuentes puntuales de cargas electricas.
2. Los campos magneticos rodea a las corrientes electricas.
3. No existen cargas magneticas puntuales (monopolos magneticos).
4. En ausencia de materia, es posible inducir campos magneticos debido a camposelectricos variables. Tambien se puede inducir campos electricos debido a varia-ciones de campos magneticos.
Por otro lado, la forma de las ecuaciones de Maxwell contiene varias propiedadesmatematicas, algunas de las cuales vamos a describir brevemente. Primero, la ley deGauss magnetica en (10.1) describe al campo magnetico como un campo de divergencianula, es decir, un campo solenoidal. Como la divergencia de un rotacional es siemprenula (ecuacion (69) en el apendice E), un campo solenoidal se puede expresar como elrotor de otro campo vectorial:
∇ ·B = 0 ⇒ B = ∇×A. (10.3)
El vector A se conoce como el potencial vector. Ası, si expresamos el campo magneticoen terminos del potencial vector, la ley de Faraday en (10.1) se puede reescribir de lasiguiente forma:
∇×E =−1c
∂t∇×A =−∇×(
1c
∂tA). (10.4)
Agrupando la expresion en un solo rotacional, se obtiene la siguiente forma alternativade la ley de Faraday:
∇×(
E+1c
∂tA)= 0, (10.5)

10.1. REPRESENTACION VECTORIAL 135
es decir, la funcion vectorial E = E+ 1c ∂tA describe un campo irrotacional. Como el
rotacional de un gradiente es siempre nulo (ecuacion (70) en el apendice E), un campoirrotacional se puede expresar como el gradiente de un campo escalar:
∇× E = 0 ⇒ E =−∇φ . (10.6)
La funcion φ es el potencial escalar1. Teniendo en cuenta que E = E+ 1c ∂tA, el campo
electrico original se puede describir en terminos de los potenciales escalar y vectorialcomo:
E =−∇φ − 1c
∂tA. (10.7)
Otra consecuencia de la forma de las ecuaciones de Maxwell, es la conservacion dela carga electrica manifestada en la ecuacion de continuidad. Como se demuestra en elapendice F, las fuentes de campos electricos y magneticos cumplen con la ecuacion:
∇ ·J =−∂tρ. (10.8)
Dicha ecuacion afirma fundamentalmente que la carga electrica en una region localizadadel espacio puede variar solamente si fluye de forma continua hacia otra region. Es decir,la carga no puede desaparecer y aparecer de forma discontinua en otra parte del espacio.
Por otro lado, una de las propiedades mas interesantes de las ecuaciones de Maxwelles su invariancia frente a un tipo de transformaciones de los potenciales electromagneti-cos conocidas como transformaciones de gauge. Tal como se demuestra en el apendiceF, los campos electromagneticos (y por lo tanto las ecuaciones de Maxwell) no cambiansi los potenciales transforman como:
φ → φ′ = φ − 1
c∂tψ,
A → A′ = A+∇ψ, (10.9)
donde ψ es una funcion escalar arbitraria. Ası, la electrodinamica clasica es una teorıainvariante de gauge.
En la definicion de los potenciales vector y escalar usamos dos de las ecuaciones deMaxwell: la ley de Gauss magnetica y la ley de Faraday. Ası, las ecuaciones (10.3) y(10.7) heredan las propiedades fısicas contenidas en esas dos ecuaciones de Maxwell. Siexpresamos los campos electricos y magneticos en terminos de los potenciales, las dosecuaciones de Maxwell remanentes, la ley de Gauss y la ley de Ampere-Maxwell, laspodemos cambiar por otras dos que contenga solamente a los potenciales.
1El signo negativo en la definicion del gradiente en (10.6) es una asignacion arbitraria que permiteasociar a φ directamente con el potencial electrico

136 CAPITULO 10. FORMULACION COVARIANTE: ELECTRODINAMICA
Problema 28: Usando la propiedad de la ecuacion (71) del apendice E y las defi-niciones de las ecuaciones (10.3) y (10.7), demuestre que las leyes de Gauss y deAmpere-Maxwell se transforman en:
∇2φ +
1c
∂t (∇ ·A) = −4πρ,
∇2A−∇
(∇ ·A+
1c
∂tφ
)− 1
c2 ∂2t A = −4π
cJ. (10.10)
Las ecuaciones (10.10) es un conjunto de ecuaciones diferenciales de segundo or-den acopladas. Para resolverlas (es decir, encontrar como los potenciales dependen deltiempo y el espacio tal que cumpla con ambas ecuaciones diferenciales), es convenientedesacoplar ambas ecuaciones, lo cual podemos lograr usando la propiedad de invarian-cia de gauge. Como los potenciales φ y A pueden cambiarsen por otros de acuerdo a latransformacion de gauge de la ecuacion (10.9), podemos escoger por una transformacionadecuada, un conjunto de potenciales que cumplan con la siguiente relacion:
∇ ·A =−1c
∂tφ . (10.11)
Si reemplazamos la divergencia del potencial vector por la derivada temporal del poten-cial escalar de acuerdo a la ecuacion anterior, las ecuaciones (10.10) se reducen a dosecuaciones diferenciales descopladas, una para φ y otra para A:
∇2φ − 1
c2 ∂2t φ = −4πρ,
∇2A− 1
c2 ∂2t A = −4π
cJ. (10.12)
La exigencia de una relacion que restringa la forma de los potenciales se conocecomo asignacion del gauge. La relacion (10.11) es la asignacion en el gauge de Lorentz,que como se vera en la proxima seccion, nos permitira expresar los potenciales en unarepresentacion del grupo de Lorentz.
10.2. Representacion tensorial
Las variables basicas de la electrodinamica descritas en la seccion anterior, se pue-den describir de manera formal en terminos de representaciones del grupo de Lorentz,

10.2. REPRESENTACION TENSORIAL 137
lo que nos conducira a una formulacion covariante. Antes de definir las variables elec-trodinamicas, definamos la extension c-vectorial del operador gradiente. Anteriormente,definimos el gradiente como un vector compuesto por las derivadas parciales respecto acada componente espacial, la cual vamos a notar en el lenguaje de ındices como:
∇ =
(∂
∂x1 ,∂
∂x2 ,∂
∂x3
)= (∂1,∂2,∂3) , (10.13)
mientras que la derivada temporal la definimos con el producto por la velocidad de la luzcomo:
∂
∂ct=
∂
∂x0 = ∂0. (10.14)
En las definiciones anteriores, observamos que aunque las derivadas se definieron ini-cialmente respecto a componentes espacio-temporales contravariantes (ındices arriba),la derivada completa se define con ındices covariante (ındices abajo). Lo mismo sucedea la inversa. Ası, definimos la cuadri-derivada en representaciones co- y contra-variantescomo:
∂µ
.=
(−∂
0,∇)=
(− ∂
∂x0,
∂
∂x1 ,∂
∂x2 ,∂
∂x3
),
∂µ .
=(∂
0,∇)=
(∂
∂x0,
∂
∂x1,
∂
∂x2,
∂
∂x3
), (10.15)
donde la parte temporal la escribimos en su representacion contravariante en ambos ca-sos.
Problema 29: Demuestre que la c-derivada ∂ µ definida en la forma de la ecuacion(10.15), transforma como un c-vector contravariante.
Tambien podemos definir el producto escalar entre c-derivadas, que da como resulta-do un escalar de Lorentz. Dicho producto corresponde a la extension cuadri-dimensionaldel laplaciano, conocido como el D’Alambertiano, que lo simbolizamos como un cua-drado �2 para indicar que es la generalizacion cuadri-dimensional del operador tri-dimensional del laplaciano ∇2:
�2 = ∂µ
∂µ = ∇2 +∂
0∂0 = ∇
2− 1c2 ∂
2t . (10.16)

138 CAPITULO 10. FORMULACION COVARIANTE: ELECTRODINAMICA
10.2.1. La cuadri-corriente
Extendiendo la definicion vectorial de la densidad de corriente en la ecuacion (10.2),definimos la c-corriente como:
Jµ = ρ0U µ , (10.17)
donde ρ0 es la densidad de carga propia medida por el observador donde la distribucionde carga se encuentra en reposo, y U µ es la c-velocidad de las fuentes de cargas electricasmedida por un observador arbitrario. Para entender el contenido fısica de la c-corriente,obtengamos sus componentes usando las de la c-velocidad de la ecuacion (9.8):
Jµ .= ρ0γ (c,v) = (ρc,ρv) , (10.18)
donde hemos defiido la densidad relativa como ρ = ρ0γ , correspondiente a la densidadde carga medida por un obervador en movimiento respecto a la distribucion de carga.Comparando las componentes de la c-corriente con la ecuacion (10.2), es evidente quela primera componente depende de la densidad de carga y las demas coinciden con ladensidad de corriente:
Jµ .= (ρc,J) . (10.19)
Ası, la c-corriente describe de forma simultanea y unificada las fuentes que producen loscampos electricos y magneticos, esto es, las cargas electricas y las corrientes.
Con las definiciones de la c-derivada y la c-corriente, podemos expresar la ecuacionde continuidad en forma tensorial. Para eso, escribamos la ecuacion (10.8) como:
∇ ·J+∂tρ = 0. (10.20)
Si expresamos la derivada temporal como ∂t = c∂ct = c∂0, y teniendo en cuenta que lacomponente temporal de la c-corriente es J0 = ρc, la ecuacion anterior se puede escribircomo:
∇ ·J+∂0J0 =
∂iJi +∂0J0 =
∂µJµ = 0. (10.21)
Por lo tanto la ecuacion de continuidad que expresa la conservacion de la carga electricatoma la forma simple ∂µJµ = 0. Como la ecuacion es un producto escalar, por definicion,es invariante frente a las transformaciones de Lorentz, por lo que la carga se conservapara todos los observadores inerciales.
10.2. REPRESENTACION TENSORIAL 139
10.2.2. El cuadri-potencial
Si aplicamos las definiciones de c-corriente y del D′Alambertiano, las ecuaciones deonda de los potenciales en (10.12) se pueden escribir como:
�2φ = −4π
cJ0,
�2A = −4π
cJ. (10.22)
Si definimos el c-potencial como:
Aµ .= (φ ,A) , (10.23)
entonces las dos ecuaciones en (10.22) se pueden escribir en forma compacta como:
�2Aµ = −4π
cJµ . (10.24)
Utilizando la regla del cociente de la seccion 8.2, puesto que �2 y c son escalares,mientras que Jµ es un c-vector, entonces Aµ es un c-vector.
10.2.3. Tensor electromagnetico
A partir de los c-potenciales, podemos obtener los campos electrico y magnetico enuna representacion del grupo de Lorentz. Para eso, recordemos que los campos, salvouna transformacion de gauge, estan determinados a traves de las definiciones (10.3) y(10.7). Para el rotacional, si utilizamos la definicon de la ecuacion (67) del apendice Een el lenguaje de ındices, el campo magnetico se puede escribir explıcitamente como:
B = ∇×A =
∣∣∣∣∣∣i j k
∂ 1 ∂ 2 ∂ 3
A1 A2 A3
∣∣∣∣∣∣=
(∂
2A3−∂3A2) i+
(∂
3A1−∂1A3) j+
(∂
1A2−∂2A1)k,(10.25)
mientras que para el gradiente y la derivada temporal, el campo electrico es:
E = −∇φ − 1c
∂tA
= −(i∂ 1 + j∂ 2 +k∂
3)A0 +∂0 (A1i+A2j+A3k
), (10.26)

140 CAPITULO 10. FORMULACION COVARIANTE: ELECTRODINAMICA
donde usamos la relacion ∂t = c∂ct = c∂0 = −c∂ 0 y la definicion φ = A0. Teniendoen cuenta que los coeficentes de los vectores unitarios (i, j,k) corresponde a las com-ponentes 1,2 y 3 de los campos, en las ecuaciones (10.25) y (10.26) identificamos lassiguientes relaciones:
B1 = ∂2A3−∂
3A2 = F23,
B2 = −(∂
1A3−∂3A1)=−F13,
B3 = ∂1A2−∂
2A1 = F12,
E1 = ∂0A1−∂
1A0 = F01,
E2 = ∂0A2−∂
2A0 = F02,
E3 = ∂0A3−∂
3A0 = F03, (10.27)
donde hemos definido la cantidad:
Fµν = ∂µAν −∂
νAµ , (10.28)
para simplificar la resta entre derivadas. Evidentemente Fµν es una cantidad antisimetri-ca que contiene a los campos electricos y magneticos, y que se puede representar deforma matricial como:
Fµν .=
0 E1 E2 E3
−E1 0 B3 −B2
−E2 −B3 0 B1
−E3 B2 −B1 0
. (10.29)
De esta forma, las relaciones (10.3) y (10.7) se unifican en una unica ecuacion dadapor (10.28), mientras que los campos electricos y magneticos dejan de aparecer comodos campos separados e independientes, y se identifican como distintas componentesde un solo campo: el campo electromagnetico Fµν . Como las cantidades ∂ µ y Aµ sonc-vectores, el producto externo expresado por (10.28) es una representacion tensorial derango 2.
Por otro lado, recordando las definiciones de la seccion 8.3, el tensor electromagneti-co puede tambien representarse en su forma dual como:
(Fµν)D= Fµν =
12
εµναβ Fαβ
.=
0 B1 B2 B3−B1 0 E3 −E2−B2 −E3 0 E1−B3 E2 −E1 0
. (10.30)

10.3. ECUACIONES DE MAXWELL COVARIANTES 141
10.3. Ecuaciones de Maxwell covariantes
En esta seccion obtendremos las ecuaciones de Maxwell en el lenguaje tensorial.
10.3.1. Ley de Gauss y de Ampere-Maxwell
Teniendo en cuenta la definicion de divergencia, la ley de Gauss de la ecuacion (10.1)se escribe en notacion de ındices como:
∂iE i = 4πρ, (10.31)
mientras que con la forma del rotacional, la ley de Ampere-Maxwell desplegada en suscomponentes se separa en tres ecuaciones como
∂2B3−∂3B2 =4π
cJ1 +∂0E1,
∂3B1−∂1B3 =4π
cJ2 +∂0E2,
∂1B2−∂2B1 =4π
cJ3 +∂0E3. (10.32)
Teniendo en cuenta que la densidad de carga y de corriente, y los campos electricos ymagneticos son componentes de los tensores Jµ y Fµν respectivamente, las ecuacionesen (10.31) y (10.32) se puede escribir equivalentemente como:
∂1F10 +∂2F20 +∂3F30 = −4π
cJ0,
∂0F01 +∂2F21 +∂3F31 = −4π
cJ1,
∂0F02 +∂1F12 +∂3F32 = −4π
cJ2,
∂0F03 +∂1F13 +∂2F23 = −4π
cJ3. (10.33)
El conjunto de las 4 ecuaciones anteriores se puede escribir de forma abreviada paracada componente ν como:
∂µFµν = −4π
cJν , (10.34)
donde se debe tener en cuenta que Fµν es antisimetrica, lo que en particular implica quese anula cuando µ = ν . De esta manera, dos de las ecuaciones de Maxwell se pueden

142 CAPITULO 10. FORMULACION COVARIANTE: ELECTRODINAMICA
reducir a una unica ecuacion dada por (10.34) en representaciones del grupo de Lorentz.A manera de ejercicio, vamos a demostrar que dicha ecuacion cumple con el primerpostulado de la relatividad, esto es, tiene la misma forma para otro observador inercialΣ′ en movimiento relativo. Recordemos que cada uno de los tensores que componen a laecuacion transforma de la siguiente forma bajo transformaciones de Lorentz2:
∂′α =
(L−1)µ
α∂µ ,
F ′αβ = LαµLβ
νFµν ,
J′β = Lβ
νJν . (10.35)
Para obtener las variables medidas en Σ comparadas con las de Σ′, debemos invertir lasecuaciones de (10.35). Esto se puede lograr si a ambos lados de la igualdad realizamos elproducto interno por las correspondientes transformaciones inversas. Por ejemplo, parauna componente µ particular, la primera variable se invierte como:
∂′α =
(L−1)µ
α∂µ → Lα
µ∂′α = Lα
µ
(L−1)µ
α∂µ
= δµ
µ∂µ
= ∂µ , (10.36)
donde aplicamos la definicion del tensor de Kronecker de la ecuacion (8.16) para unacomponente ν = µ particular. Si aplicamos el mismo procedimiento a las demas varia-bles, obtenemos:
∂µ = Lαµ∂′α ,
Fµν =(L−1)µ
α
(L−1)ν
βF ′αβ ,
Jν =(L−1)ν
βJ′β . (10.37)
Si en la ecuacion (10.34) reemplazamos las variables originales por las primadas deacuerdo a las relaciones en (10.37), obtenemos:
Lαµ
(L−1)µ
α
(L−1)ν
β∂′αF ′αβ = −4π
c
(L−1)ν
βJ′β . (10.38)
Como Lαµ
(L−1)µ
α= 1, la ecuacion se reduce a:
(L−1)ν
β∂′αF ′αβ = −4π
c
(L−1)ν
βJ′β . (10.39)
2Por simplicidad, nos limitamos a los boost de Lorentz. Las conclusiones no se modifican si se incluyenrotaciones

10.3. ECUACIONES DE MAXWELL COVARIANTES 143
Es evidente que las transformaciones de Lorentz a ambos lados de la igualdad son lasmismas, por lo que se simplifican. Ası, visto desde el otro observador Σ′, obtenemos lamisma forma de la ecuacion (10.34):
∂′αF ′αβ = −4π
cJ′β . (10.40)
10.3.2. Ley de Gauss magnetica y de Faraday
La ley de Gauss magnetica en notacion de ındices es:
∂iBi = 0. (10.41)
Esta ecuacion se expresa de forma simple a traves de la version dual del tensor electro-magnetico definido de acuerdo a la ecuacion (10.30), obteniendo:
∂iFi0 = 0. (10.42)
La ley de Faraday se despliega en las siguientes componentes:
∂2E3−∂
3E2−∂0B1 = 0,
∂3E1−∂
1E3−∂0B2 = 0,
∂1E2−∂
2E1−∂0B3 = 0. (10.43)
De nuevo, usando el tensor dual, las tres ecuaciones anteriores se expresan como:
∂iFi1 +∂
0F01 = 0,
∂iFi2 +∂
0F02 = 0,
∂iFi3 +∂
0F03 = 0. (10.44)
Las 4 ecuaciones en (10.42) y (10.44) se pueden escribir para cada componente ν
como:
∂µFµν = 0. (10.45)
En conclusion, las electrodinamica clasica se puede construir en el lenguaje tensoriala partir del conjunto de ecuaciones (10.34) y (10.45).
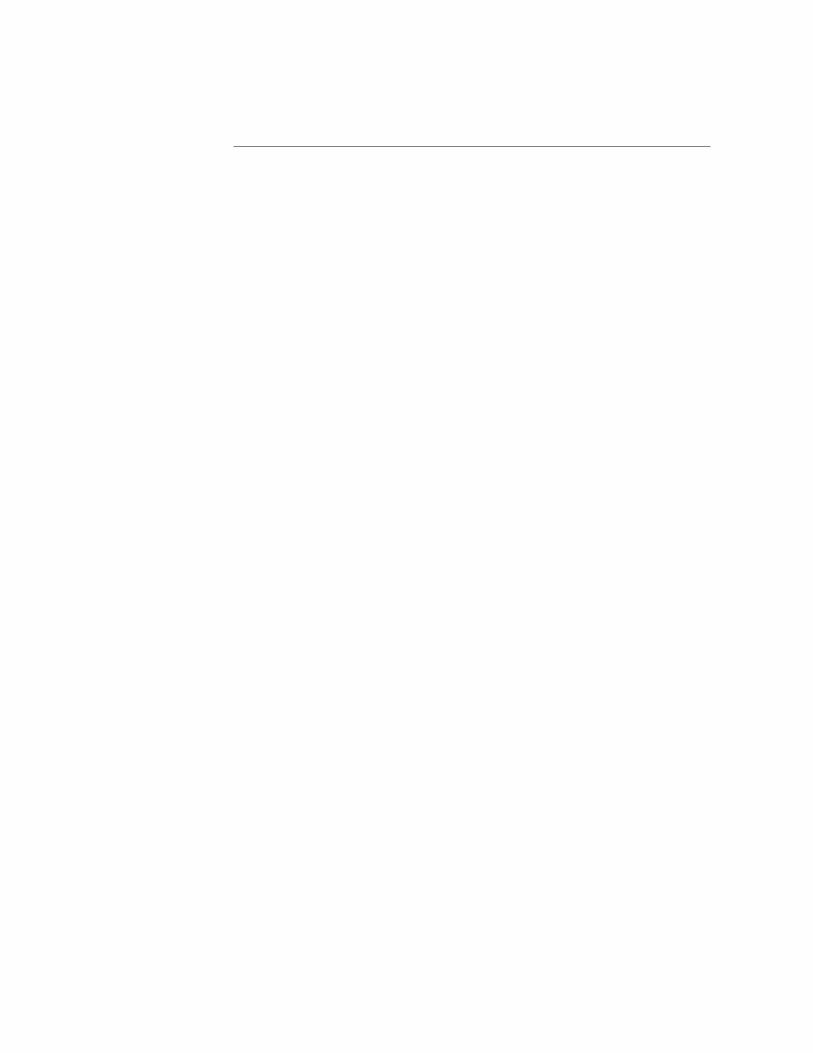

APENDICES
A. Ondas Armonicas
En una dimension, una onda arbitraria cumple la siguiente ecuacion diferencial (ecua-cion de onda):
∂ 2 f (x, t)∂x2 =
1c2
∂ 2 f (x, t)∂ t2 . (46)
La solucion de la ecuacion de onda es la forma de la funcion f (x, t) que cumple con laigualdad anterior. En el caso de una onda armonica, esa solucion tiene la forma generica:
f (x, t) = f0 sin(ωt + kx+φ) , (47)
donde f0 representa la amplitud de la onda, y φ la fase que determina el corrimiento dela onda en el punto x = 0 y el tiempo t = 0. Los parametros cinematicos basicos quedescriben una onda armonica son:
1. Amplitud A: Valor maximo de la oscilacion
2. Periodo T : Tiempo de duracion de una oscilacion completa.
3. Frecuencia f : Razon entre el numero de oscilaciones y el intervalo de tiempo.
4. Frecuencia angular ω: Frecuencia medida en radianes/segundo.
5. Longitud de onda λ : Distancia a la cual la oscilacion vuelve a comenzar.
6. Numero de onda k: Razon entre el numero de oscilaciones y el intervalo de dis-tancia
7. velocidad de fase c: Velocidad a la cual se propaga la oscilacion en el espacio
145
Existen las siguientes relaciones algebraicas entre los distintios parametros cinemati-cos:
relacion periodo-frecuencia: T =1f, (48)
relacion frecuencia-frecuencia angular: ω = 2π f (49)
relacion longitud de onda-numero de onda: λ =2π
k(50)
relacion de dispersion: ω = kc. (51)
En particular, si se combinan las relaciones de periodos, frecuencias y longitudes deonda, la relacion de dispersion se puede escribir equivalentemente como:
λ =cf= cT. (52)
B. El experimento real de Michelson-MorleyEn la seccion 2.1 se realizo un analisis simplificado del experimento deMichelson-Morley para detectar el movimiento de la tierra a traves del eter. Sinembargo, se hicieron consideraciones que en el experimento real no podıa llevarsea cabo. Primero, el rayo de luz del laser no sigue un unico camino optico en unalınea matematica bien definida. El haz son rayos que se distribuyen transversal-mente en el espacio de forma continua. El efecto de esa distribucion es que enla recombinacion sobre la pantalla, la interferencia no es de solamente dos rayos,sino de muchos rayos simultaneamente. Segundo, no es posible garantizar conprecision absoluta que el haz A y B se dividen en rayos perfectamente perpen-diculares entre sı. Esto hace que cada haz describa caminos opticos con desvia-ciones, tal que sobre la pantalla van a llegar rayos en distintas posiciones, por loque en vez de un solo punto, se ve una distribucion de franjas de interferencia.Tercero, no es posible tampoco garantizar que los haces A y B sigan trayectoriascon exactamente la misma longitud, por lo que hay efectos de interferencia prove-niente de retrasos de rayos debido a que recorren mayor distancia que otro, y quees independiente del hipotetico movimiento a traves del eter. Ası, la situacion reales mas parecida a como se observa en la Figura B-1 que lo descrito en la Figura 8del capıtulo 2.
Láser
A
B
Pantalla
Espejo
Espejo
Interferencia
Figura B-1 Se observa entonces un patron de interferencia de bandas de intensidades maximasque se degradan hasta intensidades nulas y ası sucesivamente como se observa en la fi-gura, la cual aparece incluso aunque no haya movimiento respecto al eter. Si el sistemase rota en 900 cuidadosamente sın modificar ninguna parte del montaje, el patron defranjas se tiene que mantener exactamente igual en ausencia de eter. Pero si el eter exis-tiera y hay movimiento relativo, surge un retraso adicional en los tiempos de llegada de

cada uno de los rayos al rotar el sistema, en una cantidad dada por la ecuacion (2.7) delproblema numero 2 en el capıtulo 2, por lo que una franja brillante disminuye su inten-sidad, mientras que las zonas oscuras la aumenta. Este efecto serıa equivalente a comosi el patron de interferencia se desplazara una fraccion de distancia n correspondiente ala razon entre la distancia desplazada d y la distancia entre franjas D, como se muestraen la Figura B-2. Esta fraccion es igual a la fraccion de diferencias de tiempos entre elsistema sin rotar y el sistema rotado respecto al periodo de oscilacion de la luz, el cualde acuerdo a la ecuacion (2.7) es:
n =dD
=∆t ′00−∆t ′900
T≈(
L1 +L2
c
)β
2 1T. (53)
Teniendo encuenta la relacion de dispersion (1.6), el periodo se puede expresar en fun-cion de la longitud de onda del laser, obteniendo:
n≈(
L1 +L2
λ
)β
2. (54)00
900
D
d
Figura B-2Ası, para un laser de longitud de onda λ = 6×10−7 m, una velocidad de la tierra dev = 30,000 m/s y para longitudes L1 = L2 = 0,6 m, se obtendrıa:
n≈ 0,04, (55)
es decir, el patron se correrıa en un 4% del tamano de la franja cuando el sistema serota, valor suficente para ser observado en el experimento original, que era capaz deregistrar un corrimiento de hasta 1%. Sin embargo, el resultado dentro del error experi-mental dio nulo, compatible con el valor β = 0. Experimentos mas sofisticados capacesde registrar velocidades de hasta 1 cm/s, siguen siendo compatibles con un factor betanulo.
C. El electronvoltio
En fenomenos donde los efectos relativistas son relevantes, las masas de las partıcu-las convienen expresarlas en unidades de energıa atraves de la relacion de equivalenciade masa y energıa E0 = m0c2. En el sistema internacional, la unidad basica de energıaes el Joule. Sin embargo, dicha escala de medida no es adecuada cuando se trata conobjetos microsopicos. Una unidad mas adecuada en ese caso es el electron-voltio, oelectronvoltio, el cual se deifine de la siguiente forma:
1 electronvoltio (1 eV) es la diferencia de energıa potencial de un electron (car-ga electrica q =−1,6×10−19 Coulombs) cuando se acelera en una diferenciade potencial de 1 Voltio.

Teniendo en cuenta que la diferencia de potencial ∆V se define tal que ∆U = q∆V ,se obtiene para 1 eV de energıa que:
1 eV = 1,6×10−19 Joules. (56)
Se obtienen las siguientes unidades derivadas en potencias de 10:
1 electronvoltio = 1 eV = 1,6×10−19 J,
1 kiloelectronvoltio = 1 KeV = 1×103 eV = 1,6×10−16 J,
1 megaelectronvoltio = 1 MeV = 1×106 eV = 1,6×10−13 J,
1 gigaelectronvoltio = 1 GeV = 1×109 eV = 1,6×10−10 J,
1 teraelectronvoltio = 1 TeV = 1×1012 eV = 1,6×10−7 J. (57)
Actualmente, el gran colisionador hadronico LHC del CERN logra acelerar protonesa una energıa de hasta 8 TeV, y se proyecta que en unos anos alcanzara los 14 TeV.
D. Grupo de Lie
Un grupo de Lie es un grupo continuo que cumple con la propiedad de la ecuacion(7.55). Primero, al ser continuo con derivadas parciales continuas, los elementos delgrupo los podemos representar como una serie de potencias alrededor de un punto de suespacio de parametros. Por ejemplo, la expansion de Taylor de g(θθθ) alrededor de θθθ = 0es:
g(θθθ) = g(0)+n
∑k=1
∂g(θk)
∂θk
∣∣∣∣θk=0
θk +12!
n
∑k,l=1
∂ 2g(θk,θl)
∂θk∂θl
∣∣∣∣θk,l=0
θkθl + ... (58)
Segundo, debido a la propiedad (7.55), las derivadas parciales de orden superior se pue-den escribir como el producto de derivadas de primer orden. Por ejemplo, a segundoorden, se tiene:
∂ 2g(θk,θl)
∂θk∂θl=
∂ 2
∂θk∂θlg(θk,0)g(0,θl) =
∂g(θk,0)∂θk
∂g(0,θl)
∂θl, (59)
propiedad que se puede generalizar a cualquier orden m:
∂mg(θ1,θ2, ...θm) = ∂1g(θ1,0,0, ...)∂2g(0,θ2,0, ...)...∂mg(0,0, ...θm)
=m
∏p=1
∂pg(0, ...,θp, ...,0), (60)

donde se usa la siguiente notacion:
∂m =
∂ m
∂θ1∂θ2, ...,∂θm,
∂p =∂
∂θp. (61)
Aplicando la propiedad anterior, la expansion en (58) se puede escribir como:
g(θθθ) = g(0)+n
∑k=1
∂kg|θk=0 θk +
12!
n
∑k,l=1
∂kg∂lg|θk,l=0 θkθl + ... (62)
Recordando que los generadores del grupo se definen de acuerdo a la ecuacion (7.56), ydefiniendo g(0) como la identidad 1, la expansion toma la forma mas corta:
g(θθθ) = 1−n
∑k=1
iTkθk +12!
n
∑k,l=1
iTkiTlθkθl + ...
= 1+
(−i
n
∑k=1
Tkθk
)+
12!
(−i
n
∑k=1
Tkθk
)2
+ ..., (63)
que es una serie que converge a una funcion exponencial:
g(θθθ) = e−i∑nk=1 Tkθk . (64)
Ası, en un grupo de Lie, sus elementos se pueden generar a traves de los generadoresde acuerdo a la ecuacion (64).
E. Operadores diferenciales del calculo vectorial
La formulacion vectorial de la electrodinamica se soporta en el calculo diferencialen varias variables. Los operadores diferenciales en coordenadas cartesianas se definencomo:
- Gradiente: Si ϕ es una funcion escalar continua y con derivadas parciales conti-nuas, su gradiente es:
∇ϕ = (i∂x + j∂y +k∂z)ϕ. (65)

- Divergencia: Si V es una funcion vectorial continua y con derivadas parcialescontinuas, su divergencia es:
∇ ·V = ∂xVx +∂yVy +∂zVz. (66)
- Rotacional: El rotacional de una funcion vectorial es:
∇×V =
∣∣∣∣∣∣i j k
∂x ∂y ∂z
Vx Vy Vz
∣∣∣∣∣∣ (67)
- Laplaciano: El laplaciano es el producto punto entre dos operadores gradientes:
∇2 = ∇ ·∇ = ∂
2xx +∂
2yy +∂
2zz (68)
Existen tres propiedades importantes que cumplen estos operadores:
∇ · (∇×V) = 0 (69)
∇× (∇ϕ) = 0 (70)
∇× (∇×V) = ∇(∇ ·V)−∇2V (71)
F. Ecuaciones de Maxwell
Las ecuaciones de Maxwell es el conjunto de 4 ecuaciones compuesto por las dosleyes de Gauss, la ley de Faraday y la ley de Ampere-Maxwell descritos en la ecuacion(10.1). En la seccion 10.1 describimos algunas propiedades matematicas de la formavectorial de las ecuaciones de Maxwell. En este apendice demostraremos algunos de losresultados mostrados.
Primero, para demostrar la ecuacion de continuidad de la ecuacion (10.8), calcule-mos la divergencia a ambos lados de la ley de Ampere-Maxwell dada en la ecuacion(10.1):
∇ · (∇×B) =4π
c∇ ·J+ 1
c∂t∇ ·E. (72)
Usando la propiedad (69) y la ley de Gauss, se obtiene:

0 =4π
c∇ ·J+ 4π
c∂tρ. (73)
Despejando, se obtiene la ecuacion de continuidad de la ecuacion (10.8).Por otro lado, el campo magnetico se puede definir como el rotacional de un poten-
cial vector, de acuerdo a la ecuacion (10.3). Sin embargo, debido a la propiedad (70), elpotencial vector no esta definido de forma unica. Si al potencial se le suma la divergenciade alguna funcion escalar arbitraria como
A → A′ = A+∇ψ, (74)
entonces la definicion (10.3) nos da el mismo campo magnetico:
B → B′ = ∇× (A+∇ψ)
= ∇×A= B, (75)
por lo que B es invariante frente a la transformacion del potencial vector. Para extenderesta propiedad al campo electrico definido como en la ecuacion (10.7), el potencial es-calar debe transformar tal que E′ = E. Para encontrar la forma de dicha transformacion,supongamos un campo electrico definido por un potencial escalar y vectorial de acuerdoa la forma:
E =−∇φ − 1c
∂tA. (76)
Si posteriormente cambiamos el potencial vector por otro A′ definido en la ecuacion(74), y el potencial escalar por otro aun desconocido φ ′, entonces el campo electricotransformado sera:
E′ =−∇φ′− 1
c∂tA′ = −∇φ
′− 1c
∂t (A+∇ψ)
= −∇
(φ′+
1c
∂tψ
)− 1
c∂tA. (77)
Exigiendo la invariancia del campo electrico, E = E′, de las ecuaciones (76) y (77)obtenemos que el potencial escalar debe transforma como:
φ′ = φ − 1
c∂tψ, (78)
tal como se tiene en la ecuacion (10.9).

Bibliografıa
[1] Relatividad Especial, A.P. French, Ed. Reverte (1984).
[2] Introducin a la teora especial de la relatividad, R. Resnick, Ed. Limusa (1981).
[3] Sobre la teora especial de la relatividad, J. M. Tejeiro, Ed. Universidad Nacional-Observatorio Astronmico Nacional (2005).
[4] A first course in general relativity, B.F. Schutz, Ed. Cambridge University Press(2000).
[5] Introducing Einsteins Relativity, R. DInverno, Ed. Oxford University Press (1998).
[6] Tensors, Relativity and Cosmology, M. Dalarsson and N. Dalarsson, Ed. ElsevierAcademic Press (2005).
[7] An introduction to mechanics, D. Kleppner and R.J. Kolenkow, Ed. McGrawHill(1986).
[8] The Feynman Lectures on Physics Vol. 1 y 2, R. Feynman, R.B. Leighton and M.Sands, Ed. Addison Wesley (1998).
[9] Classical Electrodynamics, J.D. Jackson, John Wiley and Sons (1975).
[10] Classical Mechanics: Point particles and Relativity, W. Greiner, Ed. Springer(1989).
153

Indice alfabetico
absolutaaceleracion, 34fuerza, 8simultaneidad, 73
aceleracionabsoluta, 34de relojes, 76invariancia clasica, 8relativa, 35transformacion de la, 34, 41
adicionde velocidad, teorema clasico de, 8de velocidad, teorema relativista de, 33,
78rapidez hiperbolica, teorema de, 79
angulardistorsion, 71
angulode rotacion, 60imaginario, 62, 64, 77
armonica, onda, 9asintotica, libertad, 49atomico, nucleo, 49
betadecaimiento, 1factor, 11, 37, 38, 78
Boson de Higgs, 50, 51
campo
electrico, 1, 15, 17, 24electromagnetico, 52escalar de Higgs, 50magnetico, 1, 15
carga electrica, 50causalidad, principio de, 68clasica
energıa cinetica, 45clasico
efecto Doppler, 12, 13, 38espacio-tiempo, 63lımite, 37masa inercial, 42momento lineal, 42trabajo, 45
Colisonador LHC, 51configuracion estandar, 20, 29cono de luz, 67, 68
futuro, 68pasado, 68resto, 69
conservacionde la energıa, 44de la masa relativista, 42del momento lineal relativista, 42
constantede Planck, 52
contraccion de Fitzgerald-Lorentz, 31, 32,73
154
conversiona energıa electrica, 56eficiencia de, 56
coordenadastransformacion de, 24, 25, 32
corrientemasa quarks, 49
decaimientobeta, 1de partıculas, 53de pion neutro, 53del neutron, 75
desplazamientovector espacial, 67
diagramade espacio-tiempo, 61, 62, 72, 76de espacio-tiempo complejo, 62, 63tipo (2+1), 62
dilatacion temporal, 30, 36, 73, 75dispersion
relacion de, 10, 12, 36distancia
Euclidiana, 59, 65seudo-Euclidiana, 66
distancia de espacio-tiempo, 61–63, 67distorsion angular, 71Doppler, efecto
clasico, 12, 13, 38longitudinal, 35, 38transversal, 36
ecuacionde onda, 9, 24
ecuacionescinematicas, 21de hiperbolas, 74de Maxwell, 1de rotacion, 60, 62del foton, 52
Efecto Dopplerclasico, 12, 13, 38
longitudinal, 35, 38transversal, 36
eficienciade conversion, 56
electricacarga, 50conversion a energıa, 56energıa, 54, 56fuerza, 49
electron, 50electromagnetico
campo, 52electronvoltio, 52
mega-, 49energıa
-momento, relacion, 52cinetica, 44cinetica clasica, 45cinetica relativista, 46clasica, 46conservacion de la, 44electrica, 54, 56electrica, conversion, 56en reposo, 44, 46, 47, 54interna, 44, 46, 48liberada en reacciones nucleares, 56nuclear, 48, 54potencial, 44, 46relativista, 44, 47, 51y masa, equivalencia, 48, 49y trabajo, teorema relativista, 47
equivalenciade masa y energıa, 48, 49
escalarcampo de Higgs, 50
espaciode Minkowski, 71Euclidiano, 59intervalo tipo, 67seudo-Euclidiano, 71vectorial, 59
espacio-tiempo
clasico, 63de Minkowski, 65de Poincare, 64, 77diagrama de, 61, 62, 72, 76distancia de, 61–63, 67esquema complejo, 62, 63estructura de, 61intervalo de, 61–63, 67, 72, 74invariancia del intervalo, 65, 73, 74tipo (3+1), 62tipo (n+m), 61
estandarconfiguracion, 20, 29modelo, 1
estructurade espacio-tiempo, 61
eter, 16–18, 35Euclidiana
distancia, 59, 65Euclidiano
espacio, 59evento, 5, 27, 61eventos
simultaneos, 28, 29sucesion de, 62
factorbeta, 11, 16, 18, 24, 25, 37, 38, 78gama, 23, 25, 37
fision nuclear, 54Fitzgerald-Lorentz, contraccion de, 31, 32,
73foton, 1, 52
ecuaciones del, 52frecuencia, 52
fotonesdecaimiento de pion en, 53
fuerzaabsoluta, 8clasica, 8electrica, 49gravitacional, 49
invariancia clasica de la, 8, 9nuclear debil, 50nuclear fuerte, 49relativista, 46
funcioneshiperbolicas, 62, 77
futuro de cono de luz, 68
Galileoprincipio de relatividad de, 7relatividad de, 11, 12transformaciones de, 6, 10, 63
gamafactor, 37
gravedadfuerza de la, 49
hadronico, gran colisionador LHC, 51Higgs
Boson de, 50, 51mecanismo de, 50, 51
hiperbolasecuaciones de, 74invariantes, 74–76
hiperbolicarapidez, 77, 78tangente, 78
hiperbolicas, funciones, 62, 77hiperbolico
coseno y seno, 78hipersuperficie, 62
inerciaLey de, 21, 35
inercialmasa, clasico, 8, 9, 42masa, relativista, 42, 43observador, 6, 9, 10, 19, 20, 28, 41sistema, 6
intensidad de la luz, 17, 18intervalo
de espacio-tiempo, 61–63, 67, 72, 74tipo espacio, 67
tipo luz, 67tipo tiempo, 68
invarianciaclasica de la aceleracion, 8clasica de la fuerza, 8, 9clasica de la longitud, 31clasica de la masa, 9clasica del tiempo, 6, 7de intervalo espacio-tiempo, 65, 73, 74de la conservacion del momento lineal,
42de Leyes fısicas, 50principios de, 59
invariantehiperbolas, 74–76
lımiteclasico, 37ultrarelativista, 37, 38
lınea de Universo, 61, 63, 64Ley
de inercia, 21, 35Gravitacional de Newton, 1segunda, de Newton, 9, 41
Leyesde Newton, 19, 20
LHC, Gran colisonador hadronico, 51libertad asintotica, 49longitud
de onda, 10, 12, 36invariancia clasica de la, 31propia, 31, 32, 74relativa, 31relatividad de la, 31
longitudinalefecto Doppler, 35, 38retraso para ondas mecanicas, 10–12
Lorentztransformaciones de, 20transformaciones inversas de, 26, 33transformaciones simples de, 20, 25,
29, 62
luzcono de, 67, 68fotones, 52intervalo tipo, 67
masaconstituyente de los quarks, 50de corrientes de quarks, 49de los quarks, 49de nucleo Carbono 12, 54de pion neutro, 53en reposo, 44, 48, 51, 54en reposo del proton, 49inercial clasico, 8, 9, 42inercial relativista, 42, 43invariancia clasica de la, 9relativista, conservacion de la, 42y energıa, equivalencia, 48, 49
Maxwellecuaciones de, 1, 15James C., 15teorıa de, 18
mecanismo de Brout-Englert-Higgs, 50, 51Michelson-Morley, experimento de, 12, 15,
17, 18Minkowski
espacio-tiempo de, 65, 71Hermann, 59
momento-energıa, relacion, 52lineal clasico, 42lineal relativista, 42, 51lineal relativista, conservacion del, 42lineal, conservacion del, 42
nucleode Carbono 12, masa, 54de Uranio, 54
nucleo atomico, 49neutron, 49, 75
desintegracion de, 75tiempo de vida, 75
neutrones, 54Newton
Ley Gravitacional de, 1Leyes de, 19, 20segunda Ley de, 9, 41
nuclearenergıa, 48, 54energıa liberada, 56fision, 54fuerza debil, 50fuerza fuerte, 49
observadorinercial, 6, 9, 10, 19, 20, 28, 41propio, 30, 31
ondaarmonica, 9, 17ecuacion de, 9, 24electromagnetica, 15, 19, 37frecuencia, 12frecuencia angular, 17intensidad, 17, 18interferencia, 17longitud de, 10, 12, 36luminosa, 15, 16, 19mecanica, 7, 9, 15, 35relatividad para, 9retraso longitudinal, 10–12, 16retraso transversal, 11, 12, 16sonora, 10, 35velocidad de, 9, 10
paradojade los gemelos, 75del abuelo, 69del saltador con pertiga, 70
paradojasen relatividad especial, 25
partıculadecaimiento de, 53libre, 48, 50puntual, 46, 48
pasado de cono de luz, 68pion
decaimiento en fotones, 53neutro, 53neutro, masa en reposo de, 53
Planck, constante de, 52Poincare
espacio-tiempo de, 64, 77posicion
transformacion clasica de la, 6postulado
de la velocidad de la luz, 19de relatividad, 19, 76
postulados de la relatividad especial, 18, 19principio
de conservacion de la energıa, 44de causalidad, 68de conservacion de la masa relativista,
42de conservacion del momento lineal,
42de invariancia, 59de relatividad especial, 41
propialongitud, 31, 32, 74
propioobservador, 30, 31tiempo, 30, 36, 73, 75
proton, 49masa en reposo del, 49
quarkdown, 49up, 49
quarksfuerza fuerte de los, 49masa, 49masa constituyente, 50masa de corrientes, 49piones, 53
rapidez hiperbolica, 77, 78
teorema de adicion, 79regla de la cadena, 33, 34, 45, 46relatividad
de Galileo, 11, 12, 19, 20de Galileo, principio de, 7de la aceleracion, 35de la longitud, 31de la simultaneidad, 28del movimiento, 32del tiempo, 27especial, 18, 59general, 59para ondas mecanicas, 9, 10, 12postulado de, 19, 76postulados de la, 18, 19principio de, 1, 41
relativistaconservacion de la masa, 42conservacion del momento lineal, 42energıa, 44, 47, 51energıa cinetica, 46fuerza, 46masa inercial, 42, 43momento lineal, 42, 51teorema trabajo y energıa, 47trabajo, 46
reloj, 27relojes
acelerados, 76sincronizados, 28
resto de cono de luz, 69
seudo-Euclidiano, distancia, 66Euclidiano, espacio, 65, 71
simultaneidadabsoluta, 28, 73de eventos, 28, 29relativa, 28, 72
subluminal, 39superluminal, 39
taquiones, 39, 69
Taylor, expansion en series de, 16, 37teorema
clasico de adicion de velocidad, 8de adicion de la rapidez hiperbolica,
79relativista de adicion de velocidad, 33,
35, 78trabajo y energıa relativista, 47
tiempodilatacion de, 30, 36, 73, 75imaginario, 62, 64, 77intervalo tipo, 68invariancia clasica del, 6, 7propio, 30, 36, 73, 75transformacion del, 24, 25, 29, 30, 32
trabajo, 45clasico, 45relativista, 46y energıa, teorema relativista, 47
transformaciondel tiempo, 29clasica de la posicion, 6, 7de coordenadas, 24, 25, 32de la aceleracion, 34, 41del tiempo, 24, 25, 30, 32
transformacionesde Galileo, 6, 10, 19, 63de Lorentz, 20de Lorentz inversas, 26, 33de Lorentz simples, 20, 24, 25, 29, 62,
64transversal
efecto Doppler, 36retraso para ondas mecanicas, 11, 12
trayectoria, 62
ultrarelativista, lımite, 37, 38unidad de masa atomica, u.m.a, 54Universo
lınea de, 61, 63, 64Uranio, 54
vatio, 56
velocidadde la luz, 15, 19, 25, 37–39de la luz, postulado de la, 19de una onda mecanica, 9, 10orbital, 16, 18relativa, 25, 77relativista, 29teorema de adicion relativista de, 33,
35