métodos numéricos aplicados a la ingeniería · web viewque se a considerado que el determinante...
TRANSCRIPT

Métodos Numéricos Aplicados a la Ingeniería
II. AUTOVALORES Y AUTOVECTORES DE UNA
MATRIZ
2.1. Aspectos básicos.
2.2. Teorema de Schur y Gershgorin
2.3. Problemas propios de una matriz.
2.4. Factorizaciones Ortogonales y problemas de mínimos cuadrados
2.5. Método de QR de Francis para problemas de valores propios.
2.6. Método mixtos evaluación de la determinante Iteración en un subespacio
Autovalores y Autovectores de una Matriz Página 1

Métodos Numéricos Aplicados a la Ingeniería
II. AUTOVALORES Y AUTOVECTORES DE UNA MATRIZ
2.1. ASPECTOS BÁSICOS
Para ingresar a los estudios de los valores propios de una matriz debemos tener cierta familiaridad con matrices y determinantes los números complejos.
2.1.1. MATRICES, DEFINICIÓN, INTERPRETACIÓN
DEFINICIÓN: Llamaremos matriz a un arreglo rectangular de entes
(números, funciones, etc) ordenados en filas y columnas.
2.1.2. ORDEN DE UNA MATRIZ: Se llama así al producto de las filas y
columnas.
; ;
2.1.3. MATRIZ FILA Y MATRIZ COLUMNA
MATRIZ FILA: Llamaremos matriz fila o vector fila a aquella matriz que
posee sólo una fila y n columnas.
La representamos del siguiente modo:
MATRIZ COLUMNA: Llamaremos matriz columna o vector columna a
aquella matriz que posee sólo una columna y m filas.
Autovalores y Autovectores de una Matriz Página 2
Filas
Columnas

Métodos Numéricos Aplicados a la Ingeniería
La representamos del siguiente modo:
2.1.4. IGUALDAD DE MATRICES: Las matrices son
iguales si tienen el mismo orden; es decir el número de filas y columnas
de cada una deben de ser iguales y además cada elemento de una de
ellas tiene que ser igual al correspondiente de la otra.
Su representación matricial es:
El resultado quiere decir que los elementos de las matrices A y C son
diferentes excepto el elemento que está en la segunda fila y primera
columna
2.1.5. PRODUCTO DE UN ESCALAR POR UNA MATRIZ:
Ejemplo:
1.
2.
Esta matriz nos proporciona la cantidad de productos producidos por
una empresa en cuatro diferentes plantas cuando su producción
aumenta en diez veces.
Propiedades:
Autovalores y Autovectores de una Matriz Página 3

Métodos Numéricos Aplicados a la Ingeniería
1
2
SUMA DE MATRICES: Dadas las matrices ; la
suma de ambas es otra matriz en la que cada elemento
de es igual a la suma de los elementos correspondientes de .
Su representación matricial es:
Ejemplo:
1.
2. En una empresa
M1=
M2=
Esta matriz nos proporciona el costo para producir parte de cada uno de
los cuatro productos en cuatro plantas ubicadas en ciudades diferentes
se requiere saber el costo total de cada uno de los productos.
Matriz de costo total =
Propiedades:1.2.
Autovalores y Autovectores de una Matriz Página 4

Métodos Numéricos Aplicados a la Ingeniería
3.4.
2.1.6. PRODUCTO DE MATRICES
El producto de las matrices es una matriz
. El producto de las matrices estará definido correctamente si
; es decir si el número de columnas de la matriz
es igual al número de filas de la matriz .
Su representación matricial es:
Donde el elemento es el producto escalar de la fila de por la
columna de , es decir:
Ejemplo:
1. ; Entonces:
Propiedades:
1.2.
3.
4.5.
Autovalores y Autovectores de una Matriz Página 5

Métodos Numéricos Aplicados a la Ingeniería
2.1.7. TIPOS ESPECIALES DE MATRICES:
1. MATRIZ CUADRADA: Cuando ; se llama matriz cuadrada de
orden y se denota por .
: Matriz cuadrada de orden 2x2.
: Matriz cuadrada de orden 3x3.
: Matriz cuadrada de orden nxn.
Ejemplo:
1.
2.
2. MATRIZ TRIANGULAR SUPERIOR: Llamaremos matriz
triangular superior a aquella matriz cuyos elementos son ceros para
; y se representa como:
Autovalores y Autovectores de una Matriz Página 6

Métodos Numéricos Aplicados a la Ingeniería
3. MATRIZ TRIANGULAR INFERIOR: Llamaremos matriz triangular
inferior a aquella matriz cuyos elementos son ceros para ; y se
representa como:
4. MATRIZ DIAGONAL: Llamaremos matriz diagonal a aquella
matriz donde todos sus elementos son ceros para , y se
representa de la siguiente forma:
5. MATRIZ ESCALAR: Es aquella matriz diagonal donde todos los
elementos son igual a una constante ; y se representa de la siguiente
manera:
6. MATRIZ IDENTIDAD: Es una matriz escalar con ; y se
representa de la siguiente manera:
Autovalores y Autovectores de una Matriz Página 7

Métodos Numéricos Aplicados a la Ingeniería
7. MATRIZ TRANSPUESTA: Dada una matriz ;
llamaremos transpuesta de denotada por a la matriz
Ejemplo:
1.
Propiedades:
1.
2.
3.
4.
5.
8. MATRIZ SIMÉTRICA: Se dice que una matriz cuadrada es
simétrica si se cumple que los elementos ; es decir .
Ejemplo:
9. MATRIZ ANTISIMÉTRICA: Una matriz cuadrada se llama anti
simétrica si
Ejemplo:
1.
Autovalores y Autovectores de una Matriz Página 8

Métodos Numéricos Aplicados a la Ingeniería
2.
10. MATRIZ HERMITIANAS
Las matrices cuadradas cuyos elementos tienen simetría conjugada se
le llama matriz Hermitianas es decir: , en donde * indica la
conjugada compleja
Ejemplo:
, en donde
Observemos si todos los elementos de la matriz Hermitiana fueran
reales, entonces tenemos una matriz simétrica.
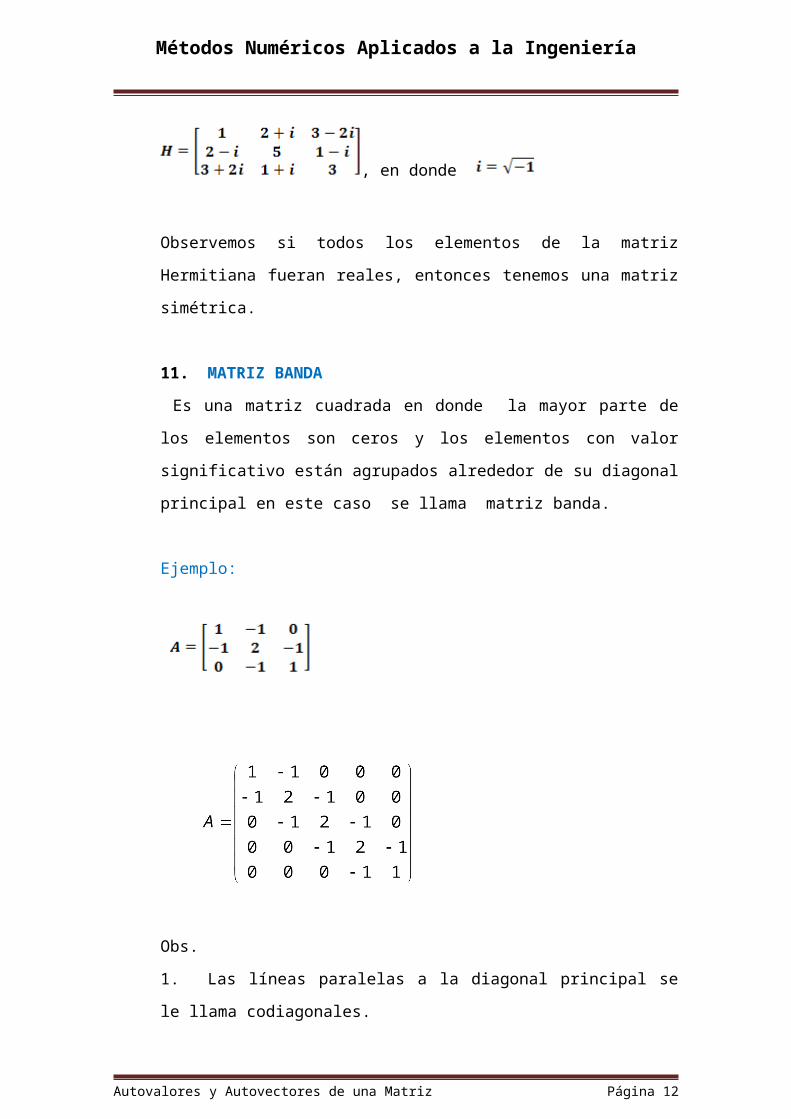
11. MATRIZ BANDA Es una matriz cuadrada en donde la mayor parte de los elementos son
ceros y los elementos con valor significativo están agrupados alrededor
de su diagonal principal en este caso se llama matriz banda.
Ejemplo:
Autovalores y Autovectores de una Matriz Página 9

Métodos Numéricos Aplicados a la Ingeniería
Obs.
1. Las líneas paralelas a la diagonal principal se le llama
codiagonales.
2. El número total de diagonal y codiagonales con elementos
significativos es el ancho de banda (3 en este ejemplo).
3. Para matrices simétricas puede también hablarse de un ancho de
semi – banda; que incluye a la diagonal principal (2 en el ejemplo
precedente).
4. Una matriz banda tiene baja densidad. Considerando densidad
como la razón entre el número de elementos con valor significativo y el
número total de elementos.
2.1.8 DETERMINANTE DE UNA MATRIZ
Definición: Determinante de una matriz denotada por .
Si ; entonces
Ejemplo:
1.
2.1.8.1. MENOR COMPLEMENTARIODefinición: Llamaremos menor complemento
de un elemento de una matriz de tercer orden al determinante de una
matriz cuadrada de segundo orden que se obtiene después de eliminar
la fila y la columna ; .
El menor complementario de se denota por .
Ejemplo: el menor complementario de:
es
Autovalores y Autovectores de una Matriz Página 10

Métodos Numéricos Aplicados a la Ingeniería
es
2.1.8.2. COFACTOR DE UN ELEMENTO
Sea un elemento de una matriz denotaremos cofactor y se
define como:
Sea entonces
Entonces
Ejemplo:
1.
» A=[1 0 0;1 2 3;0 0 5]
A =
1 0 0
1 2 3
0 0 5
» det(A)
ans =
10
2.
Por lo tanto
» B=[2 5 3;-2 3 4;0 -2 1]
B =
2 5 3
Autovalores y Autovectores de una Matriz Página 11
Métodos Numéricos Aplicados a la Ingeniería
-2 3 4
0 -2 1
» det(B)
ans =
44
2.1.8.3. Propiedades:
1. Si se intercambian una fila por una columna en su determinante
su valor no se altera.
Es decir:
2. Si todos sus elementos de una fila o columna son ceros el
determinante es cero.
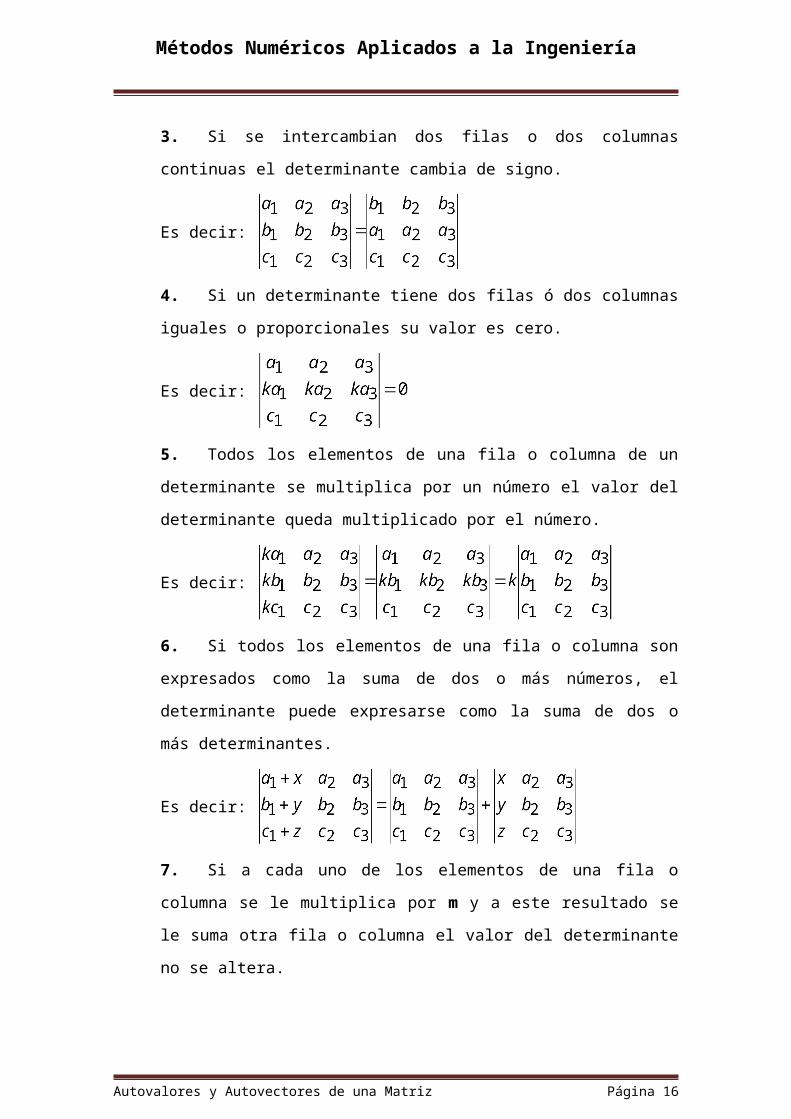
3. Si se intercambian dos filas o dos columnas continuas el
determinante cambia de signo.
Es decir:
4. Si un determinante tiene dos filas ó dos columnas iguales o
proporcionales su valor es cero.
Es decir:
5. Todos los elementos de una fila o columna de un determinante se
multiplica por un número el valor del determinante queda multiplicado
por el número.
Es decir:
6. Si todos los elementos de una fila o columna son expresados
como la suma de dos o más números, el determinante puede expresarse
como la suma de dos o más determinantes.
Autovalores y Autovectores de una Matriz Página 12

Métodos Numéricos Aplicados a la Ingeniería
Es decir:
7. Si a cada uno de los elementos de una fila o columna se le
multiplica por m y a este resultado se le suma otra fila o columna el valor
del determinante no se altera.
Es decir:
2.1.8.4. Observaciones La determinante de una matriz triangular es igual al producto de los
elementos de su diagonal principal.
, det(A) = (1)(5)(12)= 60
; det(A)= (1)(2)(10)(2)(20)=800
Para un producto matricial se cumple que: det(A.B.C)=det(A). det(B).
det(C)
2.1.8.5. MATRIZ DE COFACTORES
Sea la matriz entonces llamamos matriz de cofactores
de la matriz a la matriz ; donde
Autovalores y Autovectores de una Matriz Página 13

Métodos Numéricos Aplicados a la Ingeniería
Ejemplo:
2.1.8.6. MATRIZ ADJUNTA Se llama así a la matriz transpuesta de la matriz de cofactores y se
denota por ,
Ejemplo:
2.1.8.7. MATRIZ INVERSA.Supongamos la matriz cuadrada tiene , entonces la inversa
de la matriz denotada por es:
Ejemplo:
Verificando tenemos:
Una matriz cuadrada tiene inversa si y sólo si es una matriz no singular
en este caso se dice que es una matriz invertible.
Autovalores y Autovectores de una Matriz Página 14

Métodos Numéricos Aplicados a la Ingeniería
Propiedades:
1.
2.
3.
4. Donde es el orden de la matriz
5. La inversión de matrices permite efectuar la operación equivalente
a la división del álgebra común.
6. Una matriz A se llama ortogonal si AAT=I, en particular si A es una
matriz cuadrada se tiene que A-1 = AT
Ejemplo:
,
,
21.1.8.8. RANGO DE UNA MATRIZ:
Se llama rango de una matriz A de orden nxn, al orden de la matriz
cuadrada mas grande contenida en A cuyo determinante es diferente
de cero y se denota r(A) = rango de A.
Debemos resaltar que el r(A) ≤ min:{m,n} donde la matriz A en de orden
de mxn.
Para determinar el rango de una matriz se debe de tener en
consideración que al determinar las matrices cuadradas es suficiente
que una de ellas tenga su determinante diferente de cero.
Autovalores y Autovectores de una Matriz Página 15
Métodos Numéricos Aplicados a la Ingeniería
Ejemplo: Hallar el rango de la siguiente matriz:
Solución
Como la matriz es de orden 4x3, esto quiere decir que r(A) ≤ min{4,3} en
otras palabras r(A) ≤ 3
Determinamos las matrices de 3x3:
; ; ;
Como no existen más matrices de orden de 3x3 cuyos determinantes
sean ceros esto quiere decir que el orden de la matriz dada es 3.
Si en caso que sus determinantes fueran ceros entonces se prosigue a
determinar los determinantes de orden 2x2.
Aclaraciones:
- Toda matriz nula tiene como rango cero,
- Si una matriz A es de orden mxn no nula entonces su rango es
mayor que cero y menor igual que min (m,n)
- Si la matriz es de orden nxn su rango es mayor que cero y menor o
igual a n;
- Si la matriz es no nula de orden nxn , entonces existe su inversa si
solo si su determinante es diferente cero , en este caso se dice que la
matriz es no singular.
- De la afirmación anterior también se dice que una matriz cuadrada de
orden nxn tiene inversa si y solo si r(A) =n.
- Supongamos dos matrices A y B y que exista AB, entonces r(AB)≤
min{r(A), r(B)};
Autovalores y Autovectores de una Matriz Página 16

Métodos Numéricos Aplicados a la Ingeniería
- También es necesario resaltar que existe otra manera de calcular el
rango de una matriz y es usando operaciones elementales o
transformaciones elementales.
2.1.8.9. OPERACIONES O TRANSFORMACIONES ELEMENTALES Son operaciones con matrices que no alteran su orden ni su rango,
existiendo operaciones elementales por fila o por columnas.
1. La permutación de una fila por una columna se denota por Hij,
2. La permutación de columna por columna se denota por Kij;
3. El producto de todos los elementos de la fila i por un escalar “a”
distinto de cero se representa por Hi(a);
4. El producto de todos los elementos de una columna J por un
escalar “b” se denota por Kj(b);
5. La suma de los elementos de la fila I con los correspondientes
elementos de la fila j multiplicados por un escalar “k” es representado
por Hij(k);
6. La suma de los elementos de una columna i, con los
correspondientes elementos de una columna j multiplicado por un
escalar “p” se denota por Kij(p);
7. Debemos aclarar que a las operaciones de tipo H se les llama
operaciones de tipo fila y a las operaciones de tipo K se les llama
operaciones columna.
2.1.8.10. LONGITUD DE UN VECTOR Supongamos x un vector en R2, su longitud denotado por |x| es definido
como un número positivo o cero.
,
En términos de producto punto
,
Autovalores y Autovectores de una Matriz Página 17

Métodos Numéricos Aplicados a la Ingeniería
Ejemplo: sea determinar su norma
Solución
=7.0711
Debemos tener en consideración que el campo de los números reales R
tiene el defecto de que un polinomio de grado n con coeficientes reales
no necesariamente tiene n ceros reales.
Por ejemplo carece de ceros reales, este defecto se
supera extendiendo el campo de tal manera que contenga al elemento i,
elemento que se caracteriza por la ecuación , que es el campo
C de los números complejos en donde sus elementos tienen la forma:
x=a+bi , en donde a, b son reales.
Su conjugado, norma, o modulo, se le define:
; ,
,
Observe que:
1. ,
2. El campo de los complejos ya no tiene la anomalía de los reales,
es mas tenemos el teorema fundamental del algebra, que establece que
todo polinomio no constante con coeficientes complejos tiene al
menos un cero en el plano complejo.
Autovalores y Autovectores de una Matriz Página 18

Métodos Numéricos Aplicados a la Ingeniería
3. La afirmación anterior permite afirmar que todo polinomio de
grado n se puede descomponer como un producto de n factores
lineales.
ANGULO ENTRE VECTORES
El coseno entre dos vectores es dado por
,
Ejemplo
Sean los vectores y , entonces el
ángulo entre ellos es:
,
PERPENDICULARIDAD DE VECTORES Dos vectores son ortogonales si el coseno entre ellos es cero es decir si
solo si
,
Ejemplo
Sean los vectores x=(2,3,3,4), y =(4,-3,7,-5) son ortogonales pues:
X*y=2*4+3(-3)+3*7+4(-5)=0
2.1.9. ESPACIO VECTORIAL Cn El espacio vectorial Cn, esta compuesto de todos los vectores
en donde los , Si al vector
complejo x es multiplicado por también complejo el resultado es otro
vector complejo así:
Autovalores y Autovectores de una Matriz Página 19

Métodos Numéricos Aplicados a la Ingeniería
,
En consecuencia Cn, es un espacio vectorial sobre el campo de C. En
consecuencia en este espacio Cn. El producto interno se define:
,
2.1.10. NORMA DE VECTORES
La norma Euclidiana se define:
,
Podemos observar que,
1. ,
2. ,
3. ,
Consideremos A una matriz con elementos complejos, y A* denota su
conjugada transpuesta es decir en particular, si x es una
matriz de nx1 (o vector columna), entonces , es una matriz de
1xn o vector fila,
,
,
En general podemos definir norma de un vector x
,
Como casos particulares tenemos la norma Euclidiana cuando p=2
Autovalores y Autovectores de una Matriz Página 20

Métodos Numéricos Aplicados a la Ingeniería
,
Máximo valor absoluto
Propiedades
1. ,
2. ,
3. ,
Estas propiedades son familiares en relación a la norma Euclidiana o
“longitud” de un vector.
La norma de una matriz cuadrada, A , puede ser definida en forma
consistente con la definición de norma de un vector:
, (x ),
La norma de es donde es el máximo valor
característico de At.A. También
Estas normas definidas satisfacen ,
2.1.10. VALOR PROPIO DE UN MATRIZ A
Autovalores y Autovectores de una Matriz Página 21

Métodos Numéricos Aplicados a la Ingeniería
Ahora consideremos A una matriz de orden nxn cuyos elementos
pueden ser complejos y sea un escalar (numero complejo). Si la
ecuación
..................................................................................................(1)
Tiene una solución no trivial es decir entonces , es un valor
propio de A . Un vector x distinto de cero que satisface la ecuación (1) es
un vector propio de A correspondiente al valor propio .
Ejemplo: Consideremos la Ecuación siguiente
,
Esta ecuación nos afirma que -2 es un valor propio de matriz 3x3 y que
(1,3,-4)T, es un vector propio correspondiente.
Observemos que cualquier múltiplo distinto de cero de un vector propio
es también un vector propio correspondiente al mismo valor propio.
La condición de que la ecuación (1) tenga una solución no trivial es
equivalente a cada una de las siguientes afirmaciones:
1. , mapea algún vector distinto de cero en 0,......................(2).
2. , es singular,.............................................................(3)
Autovalores y Autovectores de una Matriz Página 22

Métodos Numéricos Aplicados a la Ingeniería
3. ),........................................................................(4)
2.1.11. ECUACIÓN CARACTERÍSTICA DE LA MATRIZ ADebemos decir que podemos resolver la relación (4) para las incógnitas
, y de esta manera determinamos los valores propios de A. Resaltando
que a esta relación se le conoce como ecuación característica de la matriz A . Nosotros podemos escribir esta ecuación mas detalladamente
así:
La función determinante se define como una suma de términos que son
productos de elementos de la matriz.
2.1.12. POLINOMIO CARACTERÍSTICO DE A,Podemos observar que la ecuación (4) tiene la forma de un polinomio de
grado n en la variable , a esto se le llama polinomio característico de
A, de lo cual podemos decir que una matriz de nxn tiene exactamente n
valores propios, siempre y cuando se cuenten con las multiplicidades
que tienen como raíces de la ecuación característica.
,
Si x es un autovector asociado con el autovalor en estas
circunstancias , es decir la matriz A transforma el vector x en
un múltiplo escalar de si mismo. Cuando , es un numero real mayor
Autovalores y Autovectores de una Matriz Página 23

Métodos Numéricos Aplicados a la Ingeniería
que uno, A tiene el efecto de alargar x en un factor de y cuando
, A disminuye a x en un factor de , cuando , los efectos
son similares pero en dirección contraria.
Ejemplo
Sea la matriz , calcular los autovalores de A
,
Los autovalores de A son ;
Un auto vector de A asociado con es una solución de
, así que , por lo tanto ,
esto quiere decir que cualquier valor no nulo de x1, produce un
autovector para el autovalor , por ejemplo x1=1 tenemos el
autovector
De manera análoga un auto vector de A asociado con es una
solución de , así que , por lo
tanto , esto quiere decir que cualquier valor no nulo de x1,
Autovalores y Autovectores de una Matriz Página 24
Ax
Axx x
, ,
Ax
xx
Ax
,,

Métodos Numéricos Aplicados a la Ingeniería
produce un autovector para el autovalor , por ejemplo x1=1
tenemos el autovector
Ejemplo
Dada la matriz A determinar,
1. Su ecuación característica y sus raíces
,
Siendo sus raíces , esto lustra el hecho de que
los valores propios de una matriz real no son necesariamente números
reales. Debemos decir que la metodología anterior es la directa y es la
mejor cuando se trata de matrices pequeñas.
2.1.13. RADIO ESPECTRAL DE UNA MATRIZ
Radio espectral de una matriz A se define así:
en donde es un autovalor de A
Ejemplo: Consideremos la matriz sus autovalores son,
, entonces
Autovalores y Autovectores de una Matriz Página 25

Métodos Numéricos Aplicados a la Ingeniería
El radio espectral se encuentra estrechamente vinculada con la norma
de una matriz.
Para la norma matricial
,
, para cualquier norma subordinada.
2.2. INDEPENDENCIA LINEAL
Diremos que los vectores no nulos son linealmente
independientes si el único conjunto de números reales tal
que , es , en caso contrario se dirá que los vectores son dependientes.
EjemploDados los vectores: , son linealmente
dependientes de pues existen (1) y (2) tal que:
Si es un conjunto Linealmente Independiente de n vectores en Rn, entonces para cada vector x en Rn, existe un único conjunto de número reales , tal que ,
, en este caso se dice que es una base de Rn.
Ejemplo: Sean los vectores .Si los
números son tales que
,
Autovalores y Autovectores de una Matriz Página 26

Métodos Numéricos Aplicados a la Ingeniería
Entonces
, de esta manera
tenemos que,
,
Pues la única solución al sistema es entonces el conjunto
, es Linealmente independiente en R3, y por lo tanto es una
base de R3. Entonces cualquier vector en R3, puede escribirse de la siguiente manera:
,.
2.2.2. INDEPENDENCIA LINEAL DE AUTOVECTORES
Si A es una matriz y son autovalores distintos de A con
autovectores correspondientes , entonces
, es linealmente independiente.
Un conjunto de vectores es ortogonal si
, Si, demás
entonces el conjunto es ortogonal.
Como , es un conjunto ortogonal de vectores
, es ortogonal si, solo si, , para cada
i=1,2,...,n.
2.2.3. INDEPENDENCIA LINEAL DE VECTORES ORTOGONALES Un conjunto ortogonal de vectores que no contenga el vector cero es linealmente independiente.
Ejemplo: El conjunto de vectores,
Autovalores y Autovectores de una Matriz Página 27

Métodos Numéricos Aplicados a la Ingeniería
, forman un
conjunto ortogonal, pues para estos vectores tenemos que:
,
,
.
Este conjunto forman un conjunto ortogonal por heredar la ortogonalidad
de , y además
,
Diremos que una matriz Q de dimensiones nxn es una matriz ortogonal si , debemos aclarar que esta terminología provienen del hecho de que las columnas de una matriz ortogonal forman un conjunto ortogonal.
Ejemplo. Considerando el ejemplo anterior la matriz ortogonal será:
,
Observemos que: Q*Qt=I
Autovalores y Autovectores de una Matriz Página 28

Métodos Numéricos Aplicados a la Ingeniería
*
Además se tiene que,
2.2.4. AUTOVALORES Y AUTOVECTORES DE MATRICES SEMEJANTES
Se dice que dos matrices A y B de dimensiones nxn son semejantes si existe una matriz P tal que A=P-1BP. Dos matrices semejantes tienen los mismos autovectores.
Supongamos que las matrices A y B son semejantes de orden nxn, y que es un autovalor de A con un autovector asociado x. En estas
condiciones diremos que es un autovalor de B y además si A=P -1BP.,
entonces Px es un autovector de B asociado a
Obsérvese que la determinación de los autovalores de una matriz triangular de orden nxn es relativamente sencilla, pues en este caso es la solución de la ecuación
, si solo si para algún i .
2.2.5. TEOREMA DE SCHUR Y GERSHGORIN Diremos que dos matrices A y B son semejantes entre si cuando existe
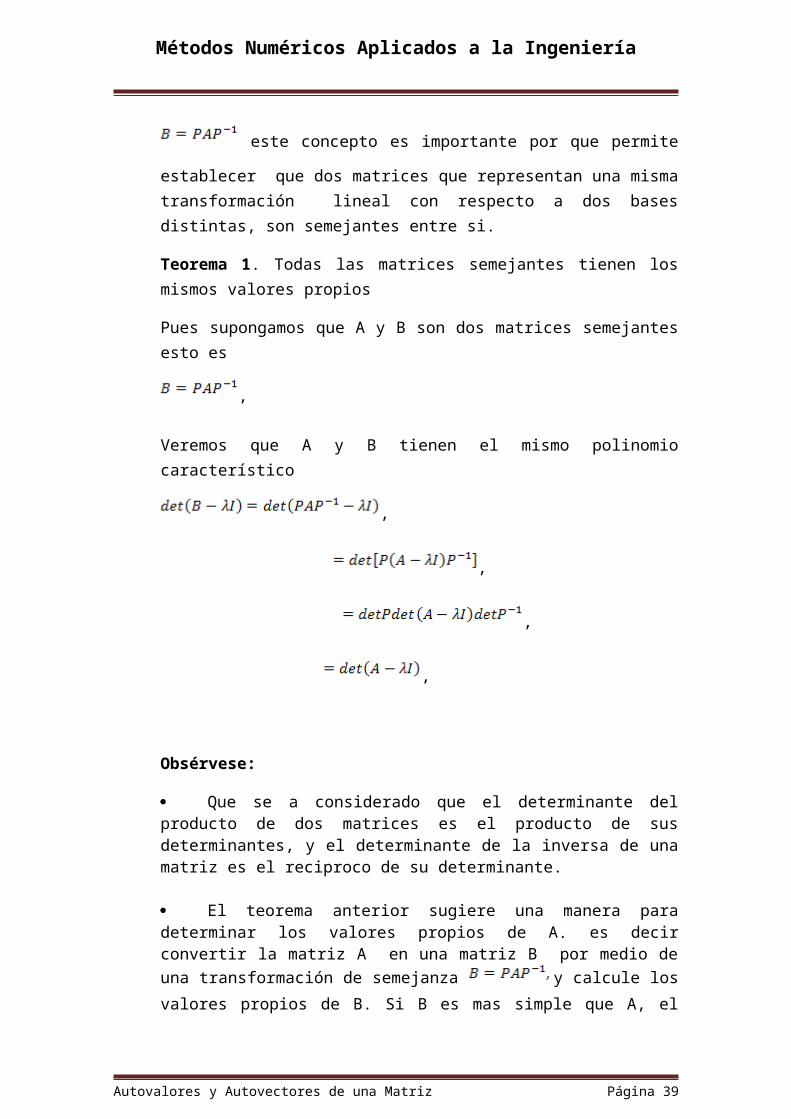
una matriz no singular P tal que este concepto es importante
por que permite establecer que dos matrices que representan una misma transformación lineal con respecto a dos bases distintas, son semejantes entre si.
Teorema 1. Todas las matrices semejantes tienen los mismos valores propios
Autovalores y Autovectores de una Matriz Página 29

Métodos Numéricos Aplicados a la Ingeniería
Pues supongamos que A y B son dos matrices semejantes esto es
,
Veremos que A y B tienen el mismo polinomio característico
,
,
,
,
Obsérvese:
Que se a considerado que el determinante del producto de dos matrices es el producto de sus determinantes, y el determinante de la inversa de una matriz es el reciproco de su determinante.
El teorema anterior sugiere una manera para determinar los valores propios de A. es decir convertir la matriz A en una matriz B por medio de una transformación de semejanza y calcule los valores propios de B. Si B es mas simple que A, el calculo de sus valores propios es mas fácil. En el caso de que B sea triangular los valores propios de B y de A son los elementos de la diagonal de B, es así como medito SCHUR , según el siempre será posible al menos teóricamente
Una matriz U será untaría si UU* =I, en donde U*, es la conjugada transpuesta de U es decir .
TEOREMA DE SCHUR.
Sea A una matriz de orden nxn cualquiera, entonces existe una matriz U ortogonal tal que T=U-1AU, donde T es triangular superior cuyos elementos diagonales son los autovalores de la matriz A.
Autovalores y Autovectores de una Matriz Página 30

Métodos Numéricos Aplicados a la Ingeniería
Debemos manifestar que el teorema de Schur garantiza que la matriz triangular existe, pero su prueba no proporciona la construcción de T.
En otras palabras SCHUR afirmo que toda matriz cuadrada es unitariamente semejante a una matriz triangular.
Corolario 1: toda matriz cuadrada es semejante una matriz triangular.
Corolario 2. Toda matriz Hermitiana es semejante unitariamente a una matriz diagonal.
Pues si A es Hermitiana, entonces A=A*, y sea U una matriz untaría tal que UAU*, es triangular superior. En este caso (UAU*)*, es triangular inferior, pero, (UAU*)*= U** A* U*= UAU*, De esta manera la matriz UAU*
es triangular superior e inferior en consecuencia se trata de una matriz diagonal.
Ejemplo
LOCALIZACIÓN DE LOS VALORES PROPIOS
TEOREMA DE GERSHGORIN
Sea A una matriz nxn y denotemos por R i, el círculo del plano complejo
con centro en aii y radio , es decir
En donde C denota el conjunto de los números complejos. Entonces los
autovalores de la matriz A están contenidos en , es más, si
Autovalores y Autovectores de una Matriz Página 31

Métodos Numéricos Aplicados a la Ingeniería
la unión de estos k círculos no se cortan con los demás n-k círculos entonces dicha unión contiene precisamente k autovalores contando las multiplicidades.
Ejemplo
Sea la matriz
Los círculos del teorema de Gershgorin son:
,
,
,
Como los R1 y R2 son disjuntos de R3, existen dos autovalores en
y uno con R3
Autovalores y Autovectores de una Matriz Página 32
1 2 3 4 5 6 7 8 9 10 11
Eje Imaginario
Eje Real

Métodos Numéricos Aplicados a la Ingeniería
2.3. FACTORIZACIONES ORTOGONALES Y PROBLEMAS DE MÍNIMOS CUADRADOS
En ítems anteriores ya se ya se conceptualizo un espacio complejo Cn,
En este espacio el producto nos permite definir el concepto de
ortogonalidad, es decir dos vectores x, y son ortogonales si , lo
que podemos generalizarlo considerando un conjunto en
Cn, diremos que los vectores vi y vj, son ortogonales si
Si , en este caso se dice que el conjunto de los vectores es
ortonormal
Ejemplo.
Determinar si los vectores son ortogonales x1 =[10,10] y . x2 =[-2,2]
Pues ,
Sin embargo si tenemos x1 =[10,10] y . x2 =[2,-2.0003], son casi ortogonales lo que induce al estudio de criterios de Ortagonalizacion.
2.3.1. MÉTODO DE ORTAGONALIZACION DE GRAM SCHMIDT
Consideremos dos vectores x1 , y x2 en el plano XY linealmente Independientes, a partir de estos vectores construyamos los vectores e1
y e2, ortogonales.
Supongamos x1= e1, y e1 como componente de e 2 perpendicular a x1,
en consecuencia , gráficamente es
Autovalores y Autovectores de una Matriz Página 33
e2X2
X1=e1
X2
E1

Métodos Numéricos Aplicados a la Ingeniería
En donde debemos de encontrar de tal manera que es
decir:
,
Consecuentemente se tiene que
,
De esta manera e2 se encuentra en función de x1 y x2, y sean ortogonalizado dichos vectores.
Ejemplo.
Ortogonalizar x1 =[4,6]t y . x2 =[8,0]t
Hacemos
Primero: consideramos el primer vector
,
Segundo: determinamos
Tercero: determinamos el segundo vector ortogonal.
Gráficamente
Autovalores y Autovectores de una Matriz Página 34
–
-1 –
-2 --
-3 -
-4 -
1 2 3 4 5 6
4 –
3 –
2 --
1 -

Métodos Numéricos Aplicados a la Ingeniería
Para un conjunto de n vectores Linealmente
Independientes de n componentes. A partir de ellos se puede construir
un conjunto de ortogonal de la siguiente manera.
Primero: consideramos el primer vector
,
Segundo:
,
Tercero:
,
Ejemplo. Ver Antonio Nieves y Federico Domínguez
Afirmación 1. Una sucesión de vectores ortogonales
genera una base ortogonal del espacio generado por
para .
Cuando el proceso de Ortagonalizacion de Gram-Schmidt, se aplica a las columnas de una matriz, se puede interpretar el resultado como una factorización matricial.
Pues los productos internos que aparecen en el calculo se guarda en una matriz que será uno de los factores.
Aplicamos el proceso a las columnas A1, A2, ...,An de una matriz A de mxn y finalmente se llega después de n pasos a una matriz B de mxn
Autovalores y Autovectores de una Matriz Página 35

Métodos Numéricos Aplicados a la Ingeniería
cuyas columnas forman un conjunto de ortogonal.
2.3.2. PROBLEMA DE LOS MÍNIMOS CUADRADOS
El problema de los mínimos cuadrados para sistemas de ecuaciones lineales es justamente una aplicación de las factorizaciones ortogonales. Consideremos un sistema de m ecuaciones con n incógnitas, es decir
Ax=b
En este sistema de ecuaciones A es una matriz de mxn, x es de nx1, y b es de mx1.
Vamos a considerar que el rango de A es n de donde .
Por lo general el sistema no tiene solución, como consecuencia de que b no pertenece al espacio Cm, de dimensión n. generado por las columnas de A .
En consecuencia generalmente se quiere encontrar una x que minimice la norma del vector residual b-Ax. La solución en mínimos cuadrados
del sistema planteado es el vector x que hace de , un mínimo
el cual x será único según el supuesto del rango de A.
LEMA: Si x es tal que A*(Ax-b)=0 entonces x es una solución del problema de mínimos cuadrados1.
Si suponemos que A se a factorizado de la forma A= BT, la solución en mínimos cuadrados del sistema Ax=b será la solución exacta del sistema nxn Tx=(B*B )-1 B*b. el cual se verifica usando el lema anterior
A*Ax=(BT)*BTx=T* B*BTx = T* B*B(B*B )-1 B*b=T*B*b=A*b
La matriz (B*B )-1es un matriz diagonal , esta diagonal
es calculado por el algoritmo modificado de Gram-Schmidt cuyo algoritmo evita el calculo de raíces cuadradas2.
Otra manera de abordar el problema de mínimos cuadrados asociado al sistema Ax=b es utilizar directamente el lema citado de esta manera
1 Ver demostracion en Analisis numeric de David Kincaid; Ward Cheney 2 Ver David Kincaid Ward Cheney pag. 254
Autovalores y Autovectores de una Matriz Página 36

Métodos Numéricos Aplicados a la Ingeniería
, será un mínimo si A* (Ax-b)=0.
Suponiendo que la matriz A de mxn es de rango n entonces A*A es una matriz de nxn no singular y solo existe una solución de mínimos cuadrados que se determina resolviendo un sistema no singular de nxn llamado sistema de ecuaciones normales.
A* Ax=A* b
En donde la matriz A* A es Hermitiana y definida positiva en consecuencia se utiliza la factorización de Cholesky para solucionar el sistema normal. Si A tiene rango menor que n el sistema será consistente pero puede tener muchas soluciones.
FACTORIZACIÓN QR DE HOUSEHOLDER
En uno de los métodos mas útiles para factorizar ortogonalmente. La idea es factorizar una matriz A de orden mxn como un producto
A=QR
En donde Q es una matriz unitaria de mxm y R una matriz triangular superior de mxn, vale destacar que el algoritmo de factorización produce Q*A=R
Construyéndose Q* paso a paso como un producto de matrices untaras que tiene la forma de,
Esto se le conoce con el nombre de transformaciones de Householder
Primero, determinamos el vector con la característica que l-vv*,
sea untaría de tal manera que (I-vv* )A inicie con tener la forma de R es decir una matriz triangular superior de orden mxm es decir su primera
columna debe de tener la forma , y denotamos la primera
columna de A con A1,
Queremos que , esto se realiza como sigue:
Primero, elegimos un número complejo , sea
Autovalores y Autovectores de una Matriz Página 37

Métodos Numéricos Aplicados a la Ingeniería
real.
Segundo, hacer ,
En donde ,
Obsérvese que aquí se admite dos valores para , en este caso
nosotros elegimos la que permita realizar menos cancelaciones al calcular el valor de v es decir,
,
Los siguientes pasos son similares al primero, pues después de k pasos se habría conseguido multiplicar por la izquierda por k matrices untarías, obteniendo de esta manera lo siguiente,
,
En donde
J : es una matriz triangular superior de KxK
0: es la matriz nula de (m-k)xk
H: es una matriz de kx(n-k)
W: es una matriz (m-k)x(n-k)
Se afirma que existe un vector tal que I-W*, es una matriz
unitaria de orden m-k con la característica de que (I-W *) tiene ceros por debajo del elemento en su primera columna, esto es, .
,
En esta relación
Autovalores y Autovectores de una Matriz Página 38
Métodos Numéricos Aplicados a la Ingeniería
, es una matriz unitaria y lo denotamos por Uk+1, y el proceso
termina cuando la columna (n-1) ésima de R queda en la forma apropiada y consecuentemente tenemos, Q* A = R, en donde Q* denota el producto de todas las matrices unitarias que se han usado como factores dado que Q es una matriz unitaria, A=QR .
Observemos que Q*= Qn-1Qn-2....Q1 en este caso ,
siendo
, se puede observar que Uk es Hermitiana
consecuentemente tenemos
,
Ejemplo.
Sea la matriz
Paso I
Primero: Calculamos , como , pues A1es real
,
Segundo, hacer ,
,
Autovalores y Autovectores de una Matriz Página 39

Métodos Numéricos Aplicados a la Ingeniería
,
En este caso el primero factor unitario
Tercero. Calculamos U1A
Paso II
Primero: Calculamos ,
,
Segundo, hacer ,
,
,
En este caso el primero factor unitario
Autovalores y Autovectores de una Matriz Página 40

Métodos Numéricos Aplicados a la Ingeniería
Tercero. Calculamos U2 U1A
Paso III
Primero: Calculamos ,
,
Segundo,
,
,
En este caso el primero factor unitario
En este caso la matriz triangular superior es
Autovalores y Autovectores de una Matriz Página 41

Métodos Numéricos Aplicados a la Ingeniería
Tercero. Calculamos Q* U3 U2 U1A
Luego A=QR
Encuentre la solución en minemos cuadrados del sistema
,
Encuentre la factorización QR de la matrz
,
2.3. DESCOMPOSICION DE LOS VALORES SINGULARES Y SEUDOINVERSAS
La descomposición en valores singulares es otra manera de factorizar matrices que tiene una diversidad de aplicaciones en el mundo real.
Se afirma que toda matriz compleja A de orden mxn se puede factorizar en la
Autovalores y Autovectores de una Matriz Página 42

Métodos Numéricos Aplicados a la Ingeniería
forma
A=PDQ
En donde
P= es una matriz de orden mxm
D= es una matriz de orden mxn
Q= es una matriz de orden nxn.
Ejemplo.
Se tiene que
De esta manera ,
Podemos considerar
, ,
Entonces A=PDQ
,
Autovalores y Autovectores de una Matriz Página 43