mra1-sp actuadores rotativos serie pa
TRANSCRIPT

Soluciones para automatización industrial
ACTUADORES ROTATIVOS SERIE RA
®
MRA1-SP
Sistema de calidad certificadoPHD, Inc. Planta 1
CERTIFICADOISO-9002

2 COMO ORDENAR: ACTUADORES ROTATIVOS SERIE RA
INDICECóm
o ordenarPag. 2
VentajasPag. 3
Dimensiones
Pags. 4 y 5
Datos técnicosPags. 6 y 7
OpcionesPags. 8 a 11
SelecciónPags. 12 y 13
Ejemplos de
aplicacionesPags. 14 y 15
Lista de partes ejuegos de reparación
Pag. 16
PRODUCTOR - Actuador rotativo
TIPOS - 10 bar [150 psi] de aire max.
5SAR 20
PARA ORDENAR ESPECIFIQUE:Producto, serie, tipo, No. de diseño, diámetro deémbolo. ángulo de rotación y opciones.
DIAMETRODE EMBOLO
20 mm [0.78"]25 mm [1.0"]32 mm [1.25"]40 mm [1.5"]50 mm [2.0"]
E – Q10x –– –180 PB NB
SERIEA - Trabajo medio
ANGULO DE ROTACION45°, 90°, 135°, 180°, 225°, 270°
TABLA DE AMORTIGUADORES
REGULADORES DEVELOCIDAD
PB - Ambas direccionesPC - Sentido anti-horarioPW- Sentido horario
SENSORESE - Magneto para sensores de efecto Hall serie 5360I - Magneto para sensores magneto-resistivos serie 5360M - Magneto para sensores de Reed serie 5360Los sensores se ordenan por separado
TIPO DE FLECHAQ10 - Con adaptadorQ19 - Hueca con salida para adaptador(Disponible únicamente en unidades de 32 a 50 mm)Q22 - Con salida para adaptador
No. DE DISEÑO1 - Inglés5 - Métrico
AMORTIGUAMIENTO REGULABLEDB - Ambas direccionesDC - Sentido anti-horarioDW - Sentido horario
AMORTIGUADORESNB - Instalado en ambas direccionesNC - Instalado en sentido anti-horarioNW - Instalado en sentido horarioGS - Preparado en ambas direccionesGT - Preparado en sentido anti-horarioGU - Preparado en sentido horario
Para las opciones GS, GT y GU losamortiguadores se ordenan por separado.En las unidades de 225° y 270° la opciónGS es estándar.
No. DEPARTE PHD56722-0156722-0256722-0356722-0456722-05
DIAMETRODE EMBOLO
20 mm25 mm32 mm40 mm50 mm
© Copyright 1998, por PHD, Inc. Im
preso en EE.UU.

3
VENTAJAS: ACTUADORES ROTATIVOS SERIE RA
VENTAJAS■ Los actuadores rotativos serie RA están disponibles en cinco
tamaños y seis ángulos de rotación estándar con torques dehasta 17 Nm a 7 bar [150 lb-in a 100 psi] de presión paracubrir uma amplia gama de aplicaciones.
■ Todas las unidades tienen “cero juego” en ambos finales derotación para un posicionamiento preciso.
■ La cremallera en acero aleado de alta resistencia y la flecha/piñon de una sola pieza están diseñados y probados paratrabajar un mínimo de 10 millones de ciclos libres demantenimiento.
■ Embolos flotantes con sellos con compensación al desgaste ypresión que proporcionan una larga vida útil e baja fricciónpara trabajar con valores de presión tan bajos como 0.3 bar[5 psi].
■ Rodamientos con sellos reforzados nio endurecido y placa dealuminio anodizado con agujeros de montajge roscados y/o decaja para acoplar fácilmente la herramenta.
■ Ajustes de rotación integrados estándar, de +10° a -45° de larotación nominal, que facilitan el posicionamiento de la pieza, yproporcionan una rotación total de 0° a 280°.
■ Agujeros de montaje en tres caras.
■ Las unidades con ángulo de rotación menor o igual a 180°,tienen todos los controles y puertos en la parte superior,ahorrando espacio y facilitando el acceso.
■ Los amortiguadores hidráulicos integrados son opcionales ypermiten decelerar suavemente las cargas externas eincrementar la capacidad de paro de la unidad.
■ Los reguladores de velocidad integrados son opcionales.Ahorran espacio y permiten controlar de manera uniforme lavelocidad de rotación.
■ El amortiguamiento regulable integrado es opcional. Reducenel impacto al final de la rotación e incrementan la capacidad deparo de la unidad.
■ Flecha con adaptador opcional que proporciona una superficieplana con cuatro agujeros para facilitar el montaje de laherramienta y accesorios.
■ Sensores de proximidad Reed o de efecto Hall para enlazarlocom sistemas lógicos o PLC.
■ Los actuadores rotativos están disponibles en sistema inglés ymétrico, brindando mayor flexibilidad en diseño.
ESPECIFICACIONES 20 mm - 50 mmSELLOS DEL EMBOLO Cilindro neumático integradoEMBOLOS Flotantes, de acetalFLECHA/PIÑON Acero aleado de una sola piezaCREMALLERAS Acero aleadoTAPAS Aluminio anodizado color claroCUERPO Aluminio endurecidoRODAMIENTOS Dos rodamientos de bolas de aceroPUERTOS NPT o BSPPLUBRICACION Permanente para aire no lubricadoPRESION DE TRABAJO 10 bar [150 psi] de aire max.ANGULOS DE GIRO 45°, 90°, 135°, 180°, 225° y 270° ESTANDAROPCIONES Reguladores de velocidad,
amortiguamiento regulable, flecha conadaptador, amortiguadores hidráulicosy émbolos magnéticos para sensores

4
UNIDADES DE 45°, 90°, 135° O 180° DE ROTACION
DIMENSIONES: ACTUADORES ROTATIVOS SERIE RA
NOTAS:1) *LA DIMENSION G AUMENTA SI SE SOLICITA LA UNIDAD CON AMORTIGUAMIENTO. VER PAG. 82) EL CUÑERO SE MUESTRA A LA MITAD DE LA ROTACION TOTAL.3) LOS NUMEROS EN [ ] SON PARA UNIDADES EN SISTEMA INGLES O ESTAN EN PULGADAS
J
RR/2
T
S
F
G* AY
Y/24X AGUJERO DE CAJA Y PASADOPARA L TORNILLO ALLEN
2X X PUERTOBSP [NPT]
Q
2X AJUSTE DE ROTACION
EE/2
B
D MAX
MA – 4X AL FRENTEMB – 4X ATRAS
Ø NB ± 0.013 x NC PROF.[Ø NB ± 0.0005 x NC PROF.]
Q/2
Ø V
CUÑERO PARAW CUÑA
PA O
K
UZ
H C
RANURA PARASENSORES REED/HALLOPCIONALES
ASIENTO PARA CUÑAWOODRUFF #204
11.10[0.437]
UNICAMENTE UNIDADESRAS 120
A20.50.80725.00.98329.51.16138.51.51642.51.674
B46.51.83156.52.22468.52.69785.53.36699.53.918
C15.340.60418.390.72423.370.92024.820.97730.251.191
D40.01.57445.01.77255.02.16665.02.55875.02.952
E10.00.39410.00.39410.00.39412.00.47212.00.472
F43.51.71253.02.08765.02.55982.03.22894.53.720
H44.01.73249.01.92957.52.26478.03.07185.03.346
K
M5#10M5#10M61/4M85/16M103/8
L
23.00.9125.51.0130.01.1839.751.5744.251.74
J19.50.76819.50.76819.50.76824.00.94524.00.945
G
M5 x 0.8 x 710-24 x 0.281M5 x 0.8 x 7
10-24 x 0.285M6 x 1.0 x 7.51/4-20 x 0.250M8 x 1.25 x 125/16-18 x 0.437M10 x 1.5 x 103/8-16 x 0.375
MA55.02.16660.02.36275.02.95285.03.346100.03.936
R7.0
0.2767.5
0.2958.5
0.33510.00.39411.50.452
S30.01.18135.01.37845.01.77255.02.16460.02.362
Q25.01.00030.01.25040.01.50042.51.75055.02.000
PA52.02.04760.02.36272.02.83590.03.544101.03.976
O2.160.0852.030.0802.540.1002.920.1153.170.125
NC35.0141.378537.0131.457247.0131.850952.0122.047762.0122.4414
NBM5 x 0.8 x 12.510-24 x 0.375
M5 x 0.8 x 12.510-24 x 0.500M6 x 1.0 x 151/4-20 x 0.500M8 x 1.25 x 205/16-18 x 0.750M10 x 1.5 x 203/8-16 x 0.750
MB
20 mm
25 mm
32 mm
40 mm
50 mm
DIAMETRO
20 mm
25 mm
32 mm
40 mm
50 mm
DIAMETRO
38.01.49645.01.77255.02.16570.02.75678.03.071
T1.00.041.00.041.20.050.80.031.80.07
U10 (h8)
0.375/0.37412 (h8)
0.4727/0.471416 (h8)
0.625/0.62417 (h8)
0.750/0.74922 (h8)
0.875/0.874
V25.51.00428.51.12437.01.45840.61.59850.41.984
Y1.50.062.00.082.00.082.00.082.50.10
Z
20 mm
25 mm
32 mm
40 mm
50 mm
DIAMETRO3 mm CUADR. x 20 mm
VER ARRIBA4 mm CUADR. x 25 mm
1/8 CUADR. x 1.1255 mm CUADR. x 32 mm
3/16 CUADR. x 1.2505 mm CUADR. x 35 mm
3/16 CUADR. x 1.5006 mm CUADR. x 45 mm
3/16 CUADR. x 1.750
W CUÑA
45° o 90°135° o 180°45° o 90°
135° o 180°45° o 90°
135° o 180°45° o 90°
135° o 180°45° o 90°
135° o 180°
ROTACION NOMINAL
1/81/81/81/81/81/81/81/81/41/4
X BSP [NPT]
89.595.097.0
114.5117.0143.5133.5164.5160.0186.5
[3.524][3.760][3.819][4.508][4.606][5.650][5.256][6.476][6.300][7.343]
Los números en las areas sombreadasestán en mm o son para unidades métricas.
Todas las dimensiones son únicamente como referencia, a menos que se especifique la tolerancia.

5
DIMENSIONES: ACTUADORES ROTATIVOS SERIE RA
UNIDADES DE 225° O 270° DE ROTACION
A20.50.80725.00.98329.51.16138.51.51642.51.674
B46.51.83156.52.22468.52.69785.53.36699.53.918
C111.54.39128.55.06149.15.87169.16.66186.07.32
D40.01.57445.01.77255.02.16665.02.55875.02.952
E10.00.39410.00.39410.00.39412.00.47212.00.472
F43.51.71253.02.08765.02.55982.03.22894.53.720
H44.01.73249.01.92957.52.26478.03.07185.03.346
K
M5#10M5#10M61/4M85/16M103/8
L
23.00.9125.51.0130.01.1839.751.5744.251.74
J19.50.76819.50.76819.50.76824.00.94524.00.945
G
M5 x 0.8 x 710-24 x 0.281M5 x 0.8 x 7
10-24 x 0.285M6 x 1.0 x 7.51/4-20 x 0.250M8 x 1.25 x 125/16-18 x 0.437M10 x 1.5 x 103/8-16 x 0.375
MA55.02.16660.02.36275.02.95285.03.346100.03.936
R7.0
0.2767.5
0.2958.5
0.33510.00.39411.50.452
S30.01.18135.01.37845.01.77255.02.16460.02.362
Q25.01.00030.01.25040.01.50042.51.75055.02.000
PA52.02.04760.02.36272.02.83590.03.544101.03.976
O2.160.0852.030.0802.540.1002.920.1153.170.125
NC35.0141.378537.0131.457247.0131.850952.0122.047762.0122.4414
NBM5 x 0.8 x 12.510-24 x 0.375
M5 x 0.8 x 12.510-24 x 0.500M6 x 1.0 x 151/4-20 x 0.500M8 x 1.25 x 205/16-18 x 0.750M10 x 1.5 x 203/8-16 x 0.750
MB
20 mm
25 mm
32 mm
40 mm
50 mm
DIAMETRO
20 mm
25 mm
32 mm
40 mm
50 mm
DIAMETRO
38.01.49645.01.77255.02.16570.02.75678.03.071
T1.00.041.00.041.20.050.80.031.80.07
U10 (h8)
0.375/0.37412 (h8)
0.4727/0.471416 (h8)
0.625/0.62417 (h8)
0.750/0.74922 (h8)
0.875/0.874
V10.00.3912.00.4718.00.7123.00.9123.00.91
FF1.50.062.00.082.00.082.00.082.50.10
Z
20 mm
25 mm
32 mm
40 mm
50 mm
DIAMETRO3 mm CUADR. x 20 mm
VER ARRIBA4 mm CUADR. x 25 mm
1/8 CUADR. x 1.1255 mm CUADR. x 32 mm
3/16 CUADR. x 1.2505 mm CUADR. x 35 mm
3/16 CUADR. x 1.5006 mm CUADR. x 45 mm
3/16 CUADR. x 1.750
W CUÑA
225° o 270°
225° o 270°
225° o 270°
225° o 270°
225° o 270°
ROTACION NOMINAL
1/81/81/81/81/81/81/81/81/41/4
X BSP [NPT]
111.54.390134.55.295170.06.693196.57.736226.58.917
Los números en las areas sombreadasestán en mm o son para unidades métricas.
NOTAS:1) *LA DIMENSION G AUMENTA SI SE SOLICITA LA UNIDAD CON AMORTIGUAMIENTO. VER PAG. 82) EL CUÑERO SE MUESTRA A LA MITAD DE LA ROTACION TOTAL.3) LOS NUMEROS EN [ ] SON PARA UNIDADES EN SISTEMA INGLES O ESTAN EN PULGADAS
J
FF FLANCOS DEMONTAJE
R/2
R
2X X PUERTOBSP [NPT]
4X AGUJERO DE CAJA YPASADO PARA LTORNILLO ALLEN
A
F
T
S
G*
ASIENTO PARA CUÑAWOODRUFF #204
11.10[0.437]
UNICAMENTE UNIDADESRAS 120
Ø V
OK
U
H C
Z
PA
CUÑERO PARAW CUÑA
RANURA PARASENSORES REED/HALL
OPCIONALES
D MAX
B
E/2E
Q/2Q
2X AJUSTE DEROTACION MA – 4X AL FRENTE
MB – 4X ATRAS
Ø NB ± 0.013 x NC PROF.[Ø NB ± 0.0005 x NC PROF.]
Todas las dimensiones son únicamente como referencia, a menos que se especifique la tolerancia.

6
DATOS TECNICOS: ACTUADORES ROTATIVOS SERIE RA
RANGO DE PRESIONTodos los actuadores rotativos serie RA trabajan bajo valores
de presión que oscilen entre 0.3 a 10 bar [5 a 150 psi], y sonexclusivamente para uso neumático.
TEMPERATURASe recomienda que los actuadores rotativos serie RA trabajen
en ambientes que oscilen entre -28° a 82°C [-20° a 180°F]. Paraaplicaciones que excedan estos valores, consultar a PHD.
LUBRICACIONTodas las unidades están permanentemente lubricadas de
planta para trabajar con aire sin lubricar. La vida útil puedeaumentar lubricando periódicamente la cremallera y el piñonutilizando grasa de alto grado para cojinentes y aire lubricado.
JUEGOTodas las unidades tienen cero grados de juego en los
extremos de rotación.
ANGULO DE ROTACIONLos ángulos de rotación estándar son 45°, 90°, 135°, 180°,
225° y 270°. Consulte a PHD para otros requerimientos de rotación.Todas las unidades tienen ajustes de rotación estándar integrados,que trabajan en un rango de +10°, -45°.
TOLERANCIA ROTACIONALLa tolerancia de rotación total de los actuadores rotativos serie
RA es +10°, -0° del valor nominal especificado.
VELOCIDAD DE ROTACIONLa velocidad promedio de rotación para unidades sin carga es
180° en 0.05 segundos para unidades de 20 mm, 25 mm y 32 mm;180° en 0.06 segundos para unidades de 40 mm y 180° en 0.075segundos para unidades de 50 mm.
CONTROLESEl control de la velocidad de la flecha es de extrema
importancia, puesto que la inercia está en función de ella y ladistancia al centro de la flecha. Los reguladores de velocidad yamortiguamientos regulables integrados de PHD debenconsiderarse cuando se aplican cargas de inercia. Para informaciónsobre el control de los actuadores rotativos serie RA, ver pags. 8 a10. Para información sobre capacidad de paro de cargas, ver pags.12 a 14.
ESPECIFICACIONES RACREMALLERAS DIA. DEL EMBOLO AREA DEL EMBOLO DESPLAZAMIENTO
mm3/GRADO DE ROTACION32.7765.55114.71229.42442.45
in3/GRADO DE ROTACION0.0020.0040.0070.0140.027
DIAMETRO20 mm25 mm32 mm40 mm50 mm
mm2
314.19490.32804.191256.641963.48
in2
0.490.761.251.953.04
mm2025324050
in0.790.981.261.571.97
225°-270°22222
45°-180°11111
TABLA DE CAPACIDAD DECARGAEN LOS RODAMIENTOS
DISTANCIA ENTRERODAMIENTOS
CAPACIDAD DECARGA RADIAL
CAPACIDAD DECARGA AXIAL
DIAMETRO20 mm25 mm32 mm40 mm50 mm
34.040.949.365.073.6
mm1.341.611.942.562.90
in376453640746966
lb16722015284633184296
N97118182237325
lb43152480910541445
N
TABLA DE TORQUE TEORICODIAMETRO
20 mmPRESION DE
ENTRADA 25 mm 32 mm 40 mm 50 mmpsi405060708090100120130140150
bar2.73.44.14.85.56.26.88.28.99.610
in-lb3.94.95.86.87.88.89.711121314
Nm0.440.550.650.770.880.991.11.31.41.51.6
in-lb7.69.5111315171922242628
Nm0.851.01.21.51.71.92.12.52.73.03.2
in-lb1620242933374149545862
Nm1.82.32.83.23.74.24.65.66.16.57.0
3138465462707793101109116
in-lbNm3.54.45.26.17.07.98.810111213
in-lb607691106121136152182197213228
Nm6.88.6101213151720222425

7
AJUSTE DE ROTACION ESTANDARTodos los actuadores rotativos serie RA están fabricados con
ajustes de rotación estándar integrados. Estos topes positivospermiten que el ángulo nominal en un rango de +10° a -45° de suvalor nominal (ver tabla 1). (+5° a -22-1/2° de cada lado).
Los tornillos de ajuste de rotación en las unidades de 180° omenos, se localizan en la parte superior, los cuales limitan el giro deuna leva acoplada al piñon (ver fig. A). Los tornillos de ajuste derotación en las unidades de 225° y 270° se localizan en las tapaslaterales, los cuales detienen la cremallera auxiliar inferior (fig. B).Cuando las unidades de 225° y 270° se ordenan con amortiguado-res hidráulicos, estos también trabajan como ajustes de rotación.
La capacidad de ajuste del ángulo de rotación, elimina el usode unidades con ángulos de giro específicos. Para los actuadoresrotativos serie RA, el rango de rotación va de 0° a 280°, si seconsideran los ajustes de rotación.
DATOS TECNICOS: ACTUADORES ROTATIVOS SERIE RA
kg0.130.160.240.340.47
lb0.30.40.60.81.1
lb0.030.030.040.120.23
kg0.010.010.020.050.11
225° o 270°TIPO DE UNIDAD
ESTANDARCON AMORTIGUADOR OPCION -NB
ESTANDARCON AMORTIGUADOR OPCION -NB
ESTANDARCON AMORTIGUADOR OPCION -NB
ESTANDARCON AMORTIGUADOR OPCION -NB
ESTANDARCON AMORTIGUADOR OPCION -NB
TABLA DE PESO DE LOS ACTUADORES ROTATIVOSROTACION NOMINAL
DIAMETRO
20 mm
25 mm
32 mm
40 mm
50 mm
135° o 180°45° o 90°lb1.82.02.42.94.35.27.79.511.614.3
kg0.770.881.081.291.922.333.474.305.226.47
lb1.82.12.83.34.95.88.810.712.815.7
kg0.770.891.241.462.192.633.964.845.787.09
lb2.32.43.63.96.57.111.813.017.719.0
kg1.021.091.601.752.943.195.315.898.018.59
DIAMETRO20 mm25 mm32 mm40 mm50 mm
TABLA DE PESO CON ADAPTADOR Y AMORTIGUAMIENTOPESO ADICIONAL CON
AMORTIGUADOR OPCION -DBPESO ADICIONAL CON ADAPTADOR
OPCIONES -Q10 Y -Q19
RANGO DE AJUSTE ESTANDAR0° a 55°
45° a 100°90° a 145°135° a 190°180° a 280°
ROTACION NOMINAL45°90°135°180°
225° o 270°
TABLA 1
TORNILLO DE AJUSTEDE ROTACION
LEVA DE PARO
FIGURA AROTACION DE 0° A 180°
CREMALLERA SUPERIOR OMITIDA PARA MAYOR CLARIDAD
FIGURA BROTACION DE 181° A 270°
TORNILLO DE AJUSTE DE ROTACION
8
PB
OPCIONES: ACTUADORES ROTATIVOS SERIE RA
PC
PW
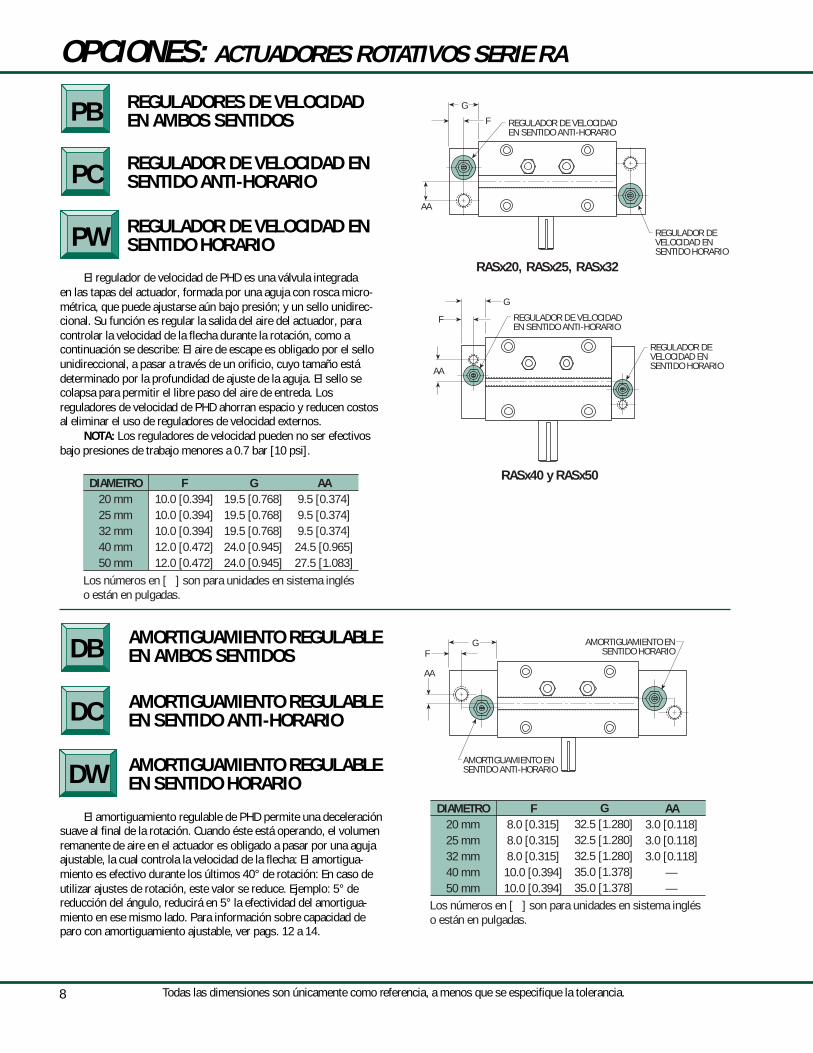
REGULADORES DE VELOCIDADEN AMBOS SENTIDOS
El regulador de velocidad de PHD es una válvula integradaen las tapas del actuador, formada por una aguja con rosca micro-métrica, que puede ajustarse aún bajo presión; y un sello unidirec-cional. Su función es regular la salida del aire del actuador, paracontrolar la velocidad de la flecha durante la rotación, como acontinuación se describe: El aire de escape es obligado por el sellounidireccional, a pasar a través de un orificio, cuyo tamaño estádeterminado por la profundidad de ajuste de la aguja. El sello secolapsa para permitir el libre paso del aire de entreda. Losreguladores de velocidad de PHD ahorran espacio y reducen costosal eliminar el uso de reguladores de velocidad externos.
NOTA: Los reguladores de velocidad pueden no ser efectivosbajo presiones de trabajo menores a 0.7 bar [10 psi].
DB AMORTIGUAMIENTO REGULABLEEN AMBOS SENTIDOS
DC AMORTIGUAMIENTO REGULABLEEN SENTIDO ANTI-HORARIO
AMORTIGUAMIENTO REGULABLEEN SENTIDO HORARIO
El amortiguamiento regulable de PHD permite una deceleraciónsuave al final de la rotación. Cuando éste está operando, el volumenremanente de aire en el actuador es obligado a pasar por una agujaajustable, la cual controla la velocidad de la flecha: El amortigua-miento es efectivo durante los últimos 40° de rotación: En caso deutilizar ajustes de rotación, este valor se reduce. Ejemplo: 5° dereducción del ángulo, reducirá en 5° la efectividad del amortigua-miento en ese mismo lado. Para información sobre capacidad deparo con amortiguamiento ajustable, ver pags. 12 a 14.
DW
REGULADOR DE VELOCIDAD ENSENTIDO ANTI-HORARIO
REGULADOR DE VELOCIDAD ENSENTIDO HORARIO
RASx40 y RASx50
AA
F
G
F
G
RASx20, RASx25, RASx32
REGULADOR DEVELOCIDAD ENSENTIDO HORARIO
AA
REGULADOR DE VELOCIDADEN SENTIDO ANTI-HORARIO
REGULADOR DE VELOCIDADEN SENTIDO ANTI-HORARIO
REGULADOR DEVELOCIDAD ENSENTIDO HORARIO
DIAMETRO20 mm25 mm32 mm40 mm50 mm
F10.0 [0.394]10.0 [0.394]10.0 [0.394]12.0 [0.472]12.0 [0.472]
G19.5 [0.768]19.5 [0.768]19.5 [0.768]24.0 [0.945]24.0 [0.945]
AA9.5 [0.374]9.5 [0.374]9.5 [0.374]24.5 [0.965]27.5 [1.083]
Los números en [ ] son para unidades en sistema ingléso están en pulgadas.
DIAMETRO20 mm25 mm32 mm40 mm50 mm
F8.0 [0.315]8.0 [0.315]8.0 [0.315]10.0 [0.394]10.0 [0.394]
G32.5 [1.280]32.5 [1.280]32.5 [1.280]35.0 [1.378]35.0 [1.378]
AA3.0 [0.118]3.0 [0.118]3.0 [0.118]
——
Los números en [ ] son para unidades en sistema ingléso están en pulgadas.
AA
AMORTIGUAMIENTO ENSENTIDO ANTI-HORARIO
AMORTIGUAMIENTO ENSENTIDO HORARIOF
G
Todas las dimensiones son únicamente como referencia, a menos que se especifique la tolerancia.

9
LOCALIZACION DE REGULADORES DE VELOCIDAD Y AMORTIGUAMIENTOS
E
MEMBOLO MAGNETICO PARASENSORES MINIATURA REEDDE PHD
El actuador rotativo viene magnetos en la cremallera, parautilizar sensores miniatura de efecto Hall serie 5360. Los sensoresse montan fácilmente, utilizando la ranura en “T” localizada en laparte superior del actuador.
I
Todas las dimensiones son únicamente como referencia, a menos que se especifique la tolerancia.
OPCIONES: ACTUADORES ROTATIVOS SERIE RA
F
G
REGULADOR DE VELOCIDADEN SENTIDO ANTI-HORARIO
RASx50
AA
F
G
AA
REGULADOR DE VELOCIDADEN SENTIDO HORARIO
RASx20, RASx25, RASx32, RASx40
AMORTIGUAMIENTO ENSENTIDO ANTI-HORARIO
AMORTIGUAMIENTOEN SENTIDO HORARIO
AMORTIGUAMIENTO ENSENTIDO ANTI-HORARIO
AMORTIGUAMIENTOEN SENTIDO HORARIO
REGULADOR DE VELOCIDADEN SENTIDO ANTI-HORARIO
REGULADOR DEVELOCIDAD ENSENTIDO HORARIO
DIAMETRO20 mm25 mm32 mm40 mm50 mm
F8.5 [0.335]8.5 [0.335]8.5 [0.335]10.0 [0.394]11.5 [0.453]
G32.5 [1.280]32.5 [1.280]32.5 [1.280]35.0 [1.378]35.0 [1.378]
AA9.5 [0.374]9.5 [0.374]9.5 [0.374]11.5 [0.453]27.5 [1.083]
Los números en [ ] son para unidades en sistema ingléso están en pulgadas.
El actuador rotativo viene magnetos en la cremallera, parautilizar sensores miniatura de efecto Hall serie 5360. Los sensoresse montan fácilmente, utilizando la ranura en “T” localizada en laparte superior del actuador.
EMBOLO MAGNETICO PARASENSORES MINIATURA DEEFECTO HALL DE PHD
No. DE PARTE53603-1-0253604-1-0253623-153624-1
COLORAmarilloRojoAmarilloRojo
DESCRIPCIONNPN (Sink) 4.5-24 VCD con cable de 2 m.PNP (Source) 4.5-24 VCD con cable de 2 m.NPN (Sink) 4.5-24 VCD conexión rápidaPNP (Source) 4.5-24 VCD conexión rápida
No. DE PARTE53602-2-0253609-2-02
53622-253629-2
COLORBlancoVerde
BlancoVerde
DESCRIPCIONNPN o PNP 4.5-24 VCD con cable de 2 m.110-120 VCA con límite de corriente, con cable de 2 m.NPN o PNP 4.5-24 VCD conexión rápida110-120 VCA con límite de corriente, conexión rápida
El actuador rotativo viene magnetos en la cremallera, parautilizar sensores magneto-resistivos de PHD. Los sensores semontan fácilmente, utilizando la ranura en “T” localizada en la partesuperior del actuador.
EMBOLO MAGNETICO PARASENSORES MINIATURAMAGNETO-RESISTIVOS DE PHD
8.0 [0.317]
LOS SENSORES DEBERANORIETARSE COMO SE MUESTRA,PARA UNA DETECCION OPTIMA
LOS FLANCOS DE LA TUERCA DE AJUSTE DE ROTACIONDEBERAN ORIENTARSE COMO SE MUESTRA
No. DE PARTE53605-1-0253606-1-0253625-153626-1
COLORNegroNaranjaNegroNaranja
DESCRIPCIONNPN (Sink) 6-24 VCD con cable de 2 m.PNP (Source) 6-24 VCD con cable de 2 m.NPN (Sink) 6-24 VCD conexión rápidaPNP (Source) 6-24 VCD conexión rápida
Los sensores miniatura de efecto Hall/Reed de PHD serie 5360están diseñados para enviar señales de entrada a diversos tipos decontroles programables o sistema lógicos. Para información sobrelos sensores miniatura serie 5360, ver la sección de sensores delcatálogo general.
NOTA: Al montar los sensores miniatura en unidades de 20 y25 mm, con rotaciones mayores a 180°, ver las figuras arriba. Larotación mínima en unidades de 20 mm con dos sensores, deberáser 45°.

10
NB AMORTIGUADORES INSTALADOSEN AMBOS SENTIDOS
NC AMORTIGUADOR INSTALADO ENSENTIDO ANTI-HORARIO
NW AMORTIGUADOR INSTALADO ENSENTIDO HORARIO
GS PREPARADO EN AMBASDIRECCIONES
GT PREPARADO EN SENTIDO ANTI-HORARIO
GU PREPARADO EN SENTIDOHORARIO
El uso de amortiguadores hidráulicos aumenta la capacidad deparo del actuador rotativo. Las opciones -NB, -NC y -NW vienen conel amortiguador instalado en el lugar adecuado. Para detalles sobrela capacidad de paro, ver pags. 12 a 14. Los amortiguadoreshidráulicos son efectivos a los 45° de rotación en cada dirección.
NOTA: El amortiguador hidráulico es dos veces más largo queel ajuste de rotación de las unidades con rotación mayor a 180°
Las opciones -GS, -GT y -GU deberán ser solicitadas si losamortiguadores son solicitados por separado. Con estas opciones,el actuador viene preparado para montar amortiguadoreshidráulicos. Para detalles sobre capacidad de paro conamortiguadores integrados, ver pags. 12 a 14.
NOTA: El amortiguador es dos veces más largos que el ajustede rotación de las unidades con rotación mayor a 180°. Losamortiguadores deberán instalarse previamente a la operación de launidad. La operación de las unidades preparadas para amortiguadorhidráulico sin éstos instalados puede daños, anulando la garantía.Unicamente deberán utilizarse los amortiguadores bajoespecificaciones de PHD. El uso de cualquier otra marca puedealterar el rendimiento o la vida útil.
Todas las dimensiones son únicamente como referencia, a menos que se especifique la tolerancia.
PHD,In c.
AMORTIGUADOR (SENTIDO HORARIO)
CONTRATUERCA DEL AMORTIGUADOR
AMORTIGUADOR (SENTIDO ANTI-HORARIO)
TAPA
PHD,In c.
TAPAS PREPARADASPARA AMORTIGUADOR
AGUJERO DE MONTAJE PARAAMORTIGUADOR (SENTIDO HORARIO)
AGUJERO DE MONTAJEPARA AMORTIGUADOR(SENTIDO ANTI-HORARIO)
B FLANCOS
A MAX
OPCIONES: ACTUADORES ROTATIVOS SERIE RA
ESPECIFICACIONES DE LOS AMORTIGUADORES HIDRAULICOS
DIAMETRODE EMBOLO
20 mm25 mm32 mm40 mm50 mm
No. DEPARTE PHD56722-0156722-0256722-0356722-0456722-05
TIPO DEROSCAM12 x 1
M14 x 1.5M20 x 1.5M25 x 1.5M25 x 1.5
lb0.090.120.340.570.57
kg0.040.540.150.260.26
in-lb1.13.15.015.029.5
Nm0.120.350.571.703.33
CARRERAin
0.130.190.250.310.31
mm3.304.836.357.877.87
in1.241.972.413.383.44
mm31.550.061.285.787.4
in—
0.470.710.910.91
mm—12182323
PESO DELAMORTIGUADOR
CARGA DE LAENERGIA CINETICA A MAX. B FLANCOS

11
Q10
Q19
OPCIONES: ACTUADORES ROTATIVOS SERIE RA
Esta opción ofrece un adaptador en la flecha en lugar de lasalida convencional. El adaptador tiene cuatro agujeros de cajapasados en una cara, y roscados en el lado opuesto, facilitando elmontaje de herramentales u otros actuadores que requieren un áreaplana. La flecha hueca permite colocar líneas de alimentaciónneumáticas o eléctricas desde la parte posterior del actuador.
El adaptador está fabricado en aluminio aleado y viene listopara ensamblarse en la flecha. El adaptador puede quitarse paramaquinarse de acuerdo a las necesidades del usuario, y re-orientarse a intervalos de 22.5°. Los valores de energía cinética sereducen en un 10% para esta opción.
NOTA: Disponible en unidades de 32 a 50 mm.
CON SALIDA PARA ADAPTADOR
Esta opción ofrece un adaptador en la flecha en lugar de lasalida convencional. El adaptador tiene cuatro agujeros de cajapasados en una cara, y roscados en el lado opuesto, facilitando elmontaje de herramentales u otros actuadores que requieren un áreaplana. El adaptador está fabricado en aluminio aleado y viene listopara ensamblarse en la flecha. El adaptador puede quitarse paramaquinarse de acuerdo a las necesidades del usuario, y re-orientarse a intervalos de 22.5°. Los adaptadores sueltos también sesuministran por separado, que incluyen el juego de montaje. Vertabla abajo.
HUECA CON SALIDA PARAADAPTADOR
C
B
PHD,In c.
TORNILLO DESUJECIÓN
ADAPTADOR
Ø A
D
E
F AGUJERO DE CAJA PASADOEN EL LADO OPUESTO PARA
G TORNILLO ALLEN
Ø H AGUJERO PASADO(UNICAMENTE OPCION -Q19)
Ø J AGUJERO PARA PERNO GUIA(UNICAMENTE OPCION -Q10)
A39.01.53545.01.77255.02.16569.02.71775.02.953
B9.5
0.3749.5
0.37412.50.49212.50.49219.00.748
C2.5
0.1002.5
0.1002.5
0.1002.5
0.1002.5
0.100
D20.00.78724.00.94528.01.10235.51.39840.01.575
E20.00.78724.00.94528.01.10235.51.39840.01.575
DIAMETRO
20 mm
25 mm
32 mm
40 mm
50 mm
FM4 x 0.7
8-32M5 x 0.8
10-32M6 x 1.01/4-28
M8 x 1.251/4-28
M10 x 1.57/16-20
GM3#4M4#6M4#10M6#10M83/8
J3.21 x 6.4 PROF.
0.1264 x 0.25 PROF.3.21 x 6.4 PROF.
0.1264 x 0.25 PROF.6.39 x 12.7 PROF.
0.2514 x 0.50 PROF.6.39 x 12.7 PROF.
0.2514 x 0.50 PROF.6.39 x 12.7 PROF.
0.2514 x 0.50 PROF.
H—
—
7.00.2768.0
0.3159.0
0.354
TABLA DE INERCIA DEL ADAPTADOR -Q10 Y -Q19
DIAMETRO20 mm25 mm32 mm40 mm50 mm
in-lb-sec2
0.0000438310.0000851460.0002253890.0007312120.001230561
El momento de inercia rotacional de la masa está basado en el adaptadormás los tornillos de montaje.
PESO DEL ADAPTADORlb
0.060.080.140.300.42
kg0.030.040.060.140.19
kg-m2
4.96 x 10-6
9.63 x 10-6
2.55 x 10-5
8.27 x 10-5
1.39 x 10-4
Jm TOTAL
JUEGO DE ADAPTADORES DE REEMPLAZO
DIAMETRO20 mm25 mm32 mm40 mm50 mm
No. DE PARTEINGLES
57651-2721-157652-2731-157653-2741-157654-2751-157655-2761-1
METRICO57658-2771-157659-2781-157660-2791-157661-2801-157662-2811-1
Todas las dimensiones son únicamente como referencia, a menos que se especifique la tolerancia.
12
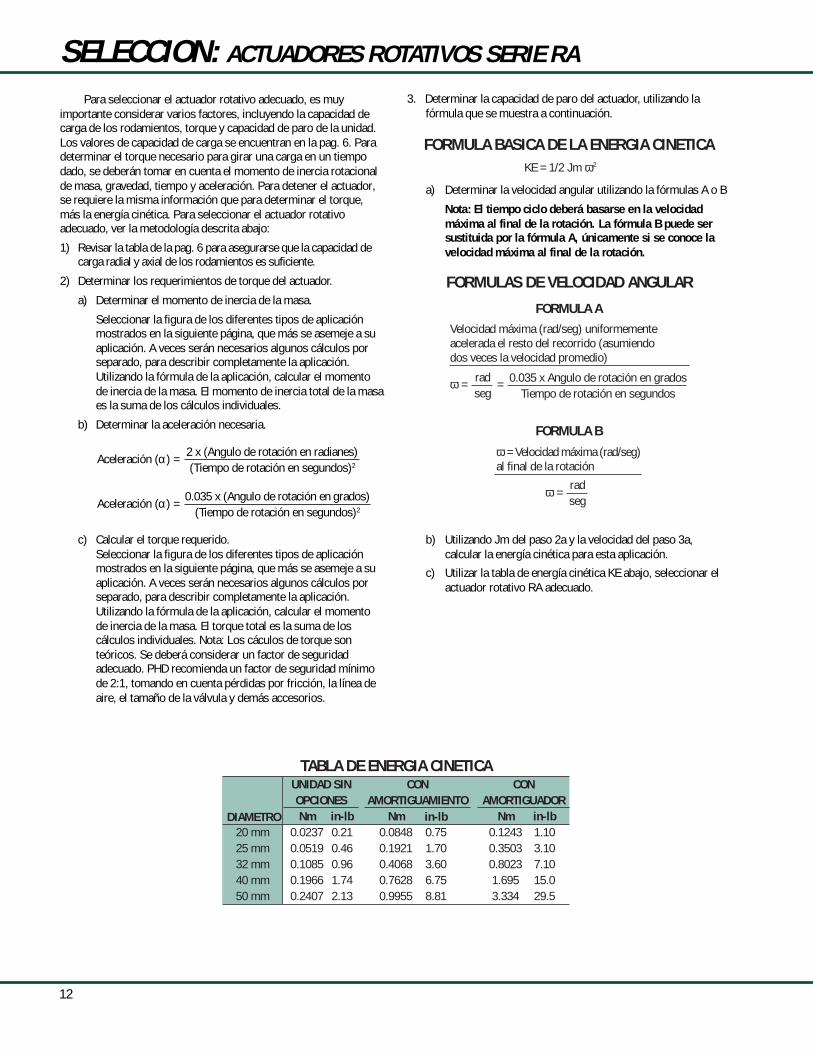
3. Determinar la capacidad de paro del actuador, utilizando lafórmula que se muestra a continuación.
a) Determinar la velocidad angular utilizando la fórmulas A o B
Nota: El tiempo ciclo deberá basarse en la velocidadmáxima al final de la rotación. La fórmula B puede sersustituida por la fórmula A, únicamente si se conoce lavelocidad máxima al final de la rotación.
b) Utilizando Jm del paso 2a y la velocidad del paso 3a,calcular la energía cinética para esta aplicación.
c) Utilizar la tabla de energía cinética KE abajo, seleccionar elactuador rotativo RA adecuado.
Para seleccionar el actuador rotativo adecuado, es muyimportante considerar varios factores, incluyendo la capacidad decarga de los rodamientos, torque y capacidad de paro de la unidad.Los valores de capacidad de carga se encuentran en la pag. 6. Paradeterminar el torque necesario para girar una carga en un tiempodado, se deberán tomar en cuenta el momento de inercia rotacionalde masa, gravedad, tiempo y aceleración. Para detener el actuador,se requiere la misma información que para determinar el torque,más la energía cinética. Para seleccionar el actuador rotativoadecuado, ver la metodología descrita abajo:
1) Revisar la tabla de la pag. 6 para asegurarse que la capacidad decarga radial y axial de los rodamientos es suficiente.
2) Determinar los requerimientos de torque del actuador.
a) Determinar el momento de inercia de la masa.
Seleccionar la figura de los diferentes tipos de aplicaciónmostrados en la siguiente página, que más se asemeje a suaplicación. A veces serán necesarios algunos cálculos porseparado, para describir completamente la aplicación.Utilizando la fórmula de la aplicación, calcular el momentode inercia de la masa. El momento de inercia total de la masaes la suma de los cálculos individuales.
b) Determinar la aceleración necesaria.
c) Calcular el torque requerido.Seleccionar la figura de los diferentes tipos de aplicaciónmostrados en la siguiente página, que más se asemeje a suaplicación. A veces serán necesarios algunos cálculos porseparado, para describir completamente la aplicación.Utilizando la fórmula de la aplicación, calcular el momentode inercia de la masa. El torque total es la suma de loscálculos individuales. Nota: Los cáculos de torque sonteóricos. Se deberá considerar un factor de seguridadadecuado. PHD recomienda un factor de seguridad mínimode 2:1, tomando en cuenta pérdidas por fricción, la línea deaire, el tamaño de la válvula y demás accesorios.
Aceleración (α) = 2 x (Angulo de rotación en radianes)(Tiempo de rotación en segundos)2
Aceleración (α) = 0.035 x (Angulo de rotación en grados)(Tiempo de rotación en segundos)2
0.035 x Angulo de rotación en gradosTiempo de rotación en segundos
FORMULAS DE VELOCIDAD ANGULAR
FORMULA BASICA DE LA ENERGIA CINETICAKE = 1/2 Jm ω2
Velocidad máxima (rad/seg) uniformementeacelerada el resto del recorrido (asumiendodos veces la velocidad promedio)
ω = =radseg
FORMULA A
FORMULA B
ω = Velocidad máxima (rad/seg)al final de la rotación
ω =radseg
TABLA DE ENERGIA CINETICA
DIAMETRO20 mm25 mm32 mm40 mm50 mm
CONAMORTIGUADOR
CONAMORTIGUAMIENTO
UNIDAD SINOPCIONES
0.210.460.961.742.13
in-lb0.02370.05190.10850.19660.2407
Nm0.751.703.606.758.81
in-lb0.08480.19210.40680.76280.9955
Nm0.12430.35030.80231.6953.334
Nm1.103.107.1015.029.5
in-lb
SELECCION: ACTUADORES ROTATIVOS SERIE RA

13
SELECCION: ACTUADORES ROTATIVOS SERIE RA
UNIDADES METRICASJm = Momento de inercia rotacional de la masa (N-m-sec2) (Depende del tamaño y peso del objeto)g = constante gravitacional 9.81 m/sec2 Fg = Peso de la carga (N) k = radio de giro (m)T = Torque requerido para girar la carga (N-m) α = Aceleración angular (rad/seg2) t = tiempo (seg)M = Masa = Fg/g (kg) SF = Factor de seguridad
UNIDADES INGLESASJm = Momento de inercia rotacional de la masa (in-lb-sec2) (Depende del tamaño y peso del objeto)g = constante gravitacional 386.4 in/sec2 Fg = Peso de la carga (lb) k = radio de giro (in)T = Torque requerido para girar la carga (in-lbs) α = Aceleración angular (rad/seg2) t = tiempo (seg)SF = Factor de seguridad
CARGAS BALANCEADAST = Jm x α x SF
Jm = x k2Fg
g
k dim es elradio de la
flecha
Jm = x12
Fg
ga2 + 3k2
( ) ( )Fg1
gJm = x (4a2 + 3k2)
12+ xFg2
g(4b2 + 3k2)
12
b-a2
Tg = [(Jm x α) + (Fg x k)] x SFT = Jm x α x SF
( )k2Jm = +L2
3Fg
gxx 1
4
k dim es elradio de la
flecha
Tg = [(Jm x α) + [(Fg2 - Fg1) x (a + ( ))]] x SF
kFg
k
c Fg2
a
Fg1b
a
L
kk
DiscoExtremo montado al centro
DiscoMontado al centro
Placa rectangularMontada al centro
Placa rectangularMontada excéntricamente
Esfera sólidaMontada al centro
FlechaMontada al centro
FlechaMontada excéntricamente
Jm = x 4a2 + c2
12+ x 4b2 + c2
12Fg1
gFg2
g
Jm = x x k225
Fg
g
Carga puntual
aFg1
Fg2
b
ORIENTACION DE LA CARGA
Tg = Giro vertical(con gravedad)
T = Giro horizontal(sin gravedad)
CARGAS DESBALANCEADAS
T = Jm x α x SF
CARGAS DESBALANCEADAS
Jm = x k2
2Fg
g
a2 + b2
12Jm = xFg
g
a
b

14
EJEMPLOS DE APLICACIONES: ACTUADORES ROTATIVOS SERIE RA
EJEMPLO A - Disco girando concéntricamente con la unidad
1) DatosMETRICO INGLES
ANGULO DE GIRO / TIEMPO 180°/0.10 seg. 180°/0.10 seg.CARGA Disco de aluminio Disco de aluminioPESO 1.05 N 0.236 lbMASA 0.107 kgPRESION 6 bar 87 psiFACTOR DE SEGURIDAD 2 2
2) Determinar el torque requerido
a) Calcular el momento de inercia rotacional de la masa (Jm)utilizando las fórmulas en la pag. 13.
b) Determinar la aceleración requerida
c) Calcular el torque requerido
Verificar la tabla de torque en la pag. 6 para 6 bar (87 psi), paradeterminar el tamaño mínimo de actuador que se debe utilizar
3) Determinar la capacidad de paro del actuador rotativo:
a) Determinar la velocidad angular máxima utilizando lafórmula A en la pag. 12.
α = 0.035 x = 630 rad/seg2
ángulo de rotación (deg.)[tiempo de rotación (sec)]2
α = 0.035 x
180°(0.1 sec)2
b) Utilizando Jm del paso 2a y la velocidad del paso 3a, deter-minar la KE del sistema, a partir de la fórmula básica de KE:
c) Utilizando la tabla de energía cinética KE en la pag. 12,seleccionar el actuador rotativo RA adecuado. Las siguientesunidades cumplen con los requerimientos. 25 mm sinopciones, 20 mm con amortiguamiento regulable o 20 mmcon amortiguadores
k25.4
[1.00]
44.45[1.75]
k
Los números en [ ] son para unidades en sistema inglés o están en pulgadas.
0.236 lb (0.875 in)2
386.4 2
Fg k2
g 2
Jm = 0.000234 in-lb-seg2
Jm = x
Jm = x
INGLES
1.05 N (0.0222m)2
9.81 2
Fg k2
g 2
Jm = 2.64 x 10-5 N-m-seg2
Jm = x
Jm = x
METRICO
ω = 0.035 x = 63 rad/seg180°0.1 sec
ángulo de rotación (deg.)tiempo de rotación (sec)
ω = rad/sec = 0.035 x
METRICO
T = Jm x α x 2
T = 2.64 x 10-5 x 630 x 2 = 0.03 N-m
INGLES
T = Jm x α x SF
T = 0.000234 x 630 x 2 = 0.29 in-lbs
INGLES
KE = 1/2 x Jm x ω 2
KE = 0.5 x 0.000234 x 632
KE = 0.464 in-lbs
METRICO
KE = 1/2 x Jm x ω 2
KE = 0.5 x 2.64 x 105 x 632
KE = 0.052 N-m
15
EJEMPLOS DE APLICACIONES: ACTUADORES ROTATIVOS SERIE RA
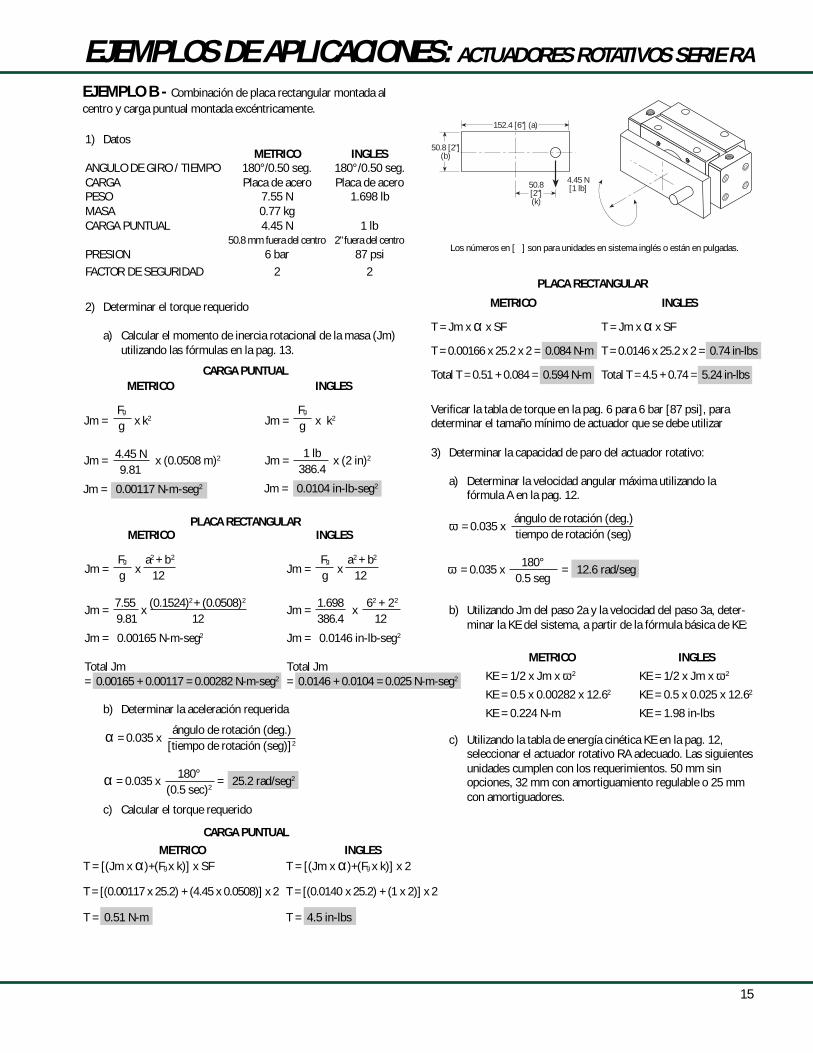
EJEMPLO B - Combinación de placa rectangular montada alcentro y carga puntual montada excéntricamente.
1) DatosMETRICO INGLES
ANGULO DE GIRO / TIEMPO 180°/0.50 seg. 180°/0.50 seg.CARGA Placa de acero Placa de aceroPESO 7.55 N 1.698 lbMASA 0.77 kgCARGA PUNTUAL 4.45 N 1 lb
50.8 mm fuera del centro 2" fuera del centroPRESION 6 bar 87 psiFACTOR DE SEGURIDAD 2 2
2) Determinar el torque requerido
a) Calcular el momento de inercia rotacional de la masa (Jm)utilizando las fórmulas en la pag. 13.
b) Determinar la aceleración requerida
c) Calcular el torque requerido
4.45 N9.81
Fg
g
Jm = 0.00117 N-m-seg2
Jm = x k2
Jm = x (0.0508 m)2
METRICO
1 lb386.4
Fg
g
Jm = 0.0104 in-lb-seg2
Jm = x k2
Jm = x (2 in)2
INGLESCARGA PUNTUAL
PLACA RECTANGULARINGLES
7.55 (0.1524)2 + (0.0508)2
9.81 12
Fg a2 + b2
g 12
Jm = 0.00165 N-m-seg2
Total Jm= 0.00165 + 0.00117 = 0.00282 N-m-seg2
Jm = x
Jm = x
METRICO
1.698 62 + 22
386.4 12
Fg a2 + b2
g 12
Jm = 0.0146 in-lb-seg2
Total Jm= 0.0146 + 0.0104 = 0.025 N-m-seg2
Jm = x
Jm = x
α = 0.035 x = 25.2 rad/seg2180°(0.5 sec)2
ángulo de rotación (deg.)[tiempo de rotación (seg)]2α = 0.035 x
METRICOT = [(Jm x α)+(Fg x k)] x SF
T = [(0.00117 x 25.2) + (4.45 x 0.0508)] x 2
T = 0.51 N-m
INGLEST = [(Jm x α)+(Fg x k)] x 2
T = [(0.0140 x 25.2) + (1 x 2)] x 2
T = 4.5 in-lbs
CARGA PUNTUAL
50.8[2"](k)
4.45 N[1 lb]
50.8 [2"](b)
152.4 [6"] (a)
Los números en [ ] son para unidades en sistema inglés o están en pulgadas.
METRICO
T = Jm x α x SF
T = 0.00166 x 25.2 x 2 = 0.084 N-m
Total T = 0.51 + 0.084 = 0.594 N-m
INGLES
T = Jm x α x SF
T = 0.0146 x 25.2 x 2 = 0.74 in-lbs
Total T = 4.5 + 0.74 = 5.24 in-lbs
PLACA RECTANGULAR
Verificar la tabla de torque en la pag. 6 para 6 bar [87 psi], paradeterminar el tamaño mínimo de actuador que se debe utilizar
3) Determinar la capacidad de paro del actuador rotativo:
a) Determinar la velocidad angular máxima utilizando lafórmula A en la pag. 12.
b) Utilizando Jm del paso 2a y la velocidad del paso 3a, deter-minar la KE del sistema, a partir de la fórmula básica de KE:
c) Utilizando la tabla de energía cinética KE en la pag. 12,seleccionar el actuador rotativo RA adecuado. Las siguientesunidades cumplen con los requerimientos. 50 mm sinopciones, 32 mm con amortiguamiento regulable o 25 mmcon amortiguadores.
ω = 0.035 x = 12.6 rad/seg180°0.5 seg
ángulo de rotación (deg.)tiempo de rotación (seg)
ω = 0.035 x
INGLES
KE = 1/2 x Jm x ω 2
KE = 0.5 x 0.025 x 12.62
KE = 1.98 in-lbs
METRICO
KE = 1/2 x Jm x ω 2
KE = 0.5 x 0.00282 x 12.62
KE = 0.224 N-m
16
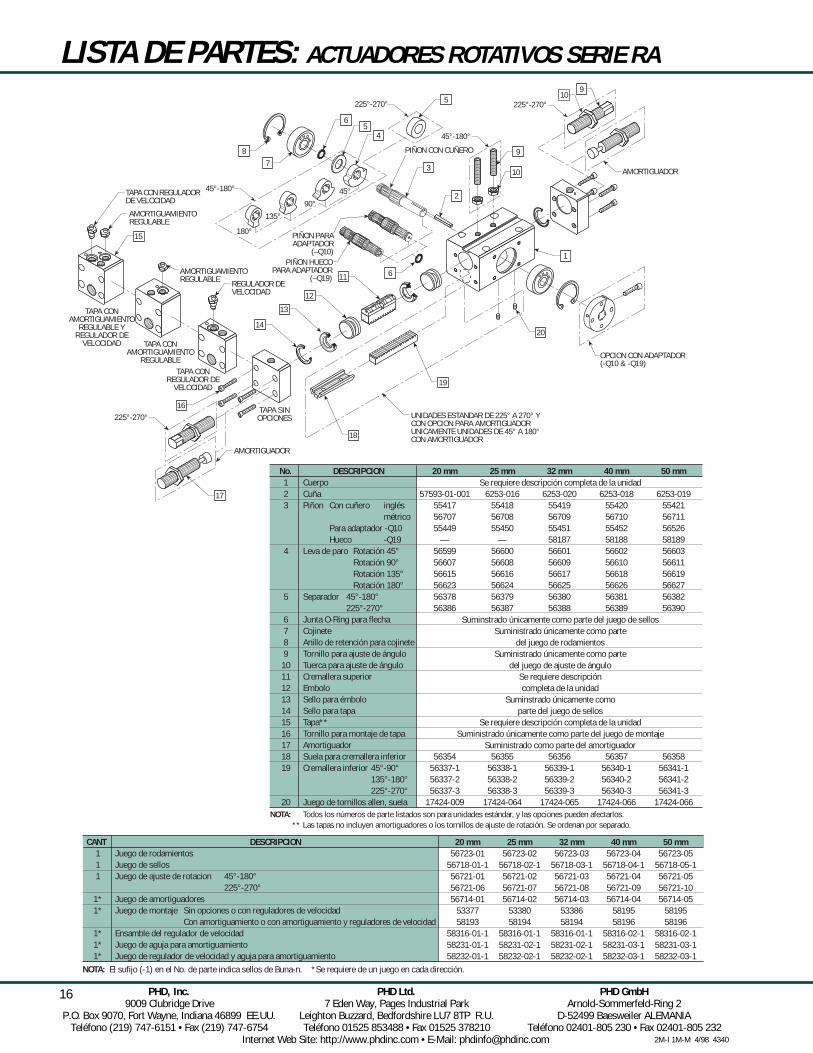
No. DESCRIPCION1 Cuerpo2 Cuña3 Piñon Con cuñero inglés
métricoPara adaptador -Q10Hueco -Q19
4 Leva de paro Rotación 45°Rotación 90°Rotación 135°Rotación 180°
5 Separador 45°-180°225°-270°
6 Junta O-Ring para flecha7 Cojinete8 Anillo de retención para cojinete9 Tornillo para ajuste de ángulo10 Tuerca para ajuste de ángulo11 Cremallera superior12 Embolo13 Sello para émbolo14 Sello para tapa15 Tapa**16 Tornillo para montaje de tapa17 Amortiguador18 Suela para cremallera inferior19 Cremallera inferior 45°-90°
135°-180°225°-270°
20 Juego de tornillos allen, suela
Se requiere descripción completa de la unidad
Suminstrado únicamente como parte del juego de sellosSuministrado únicamente como parte
del juego de rodamientosSuministrado únicamente como parte
del juego de ajuste de ánguloSe requiere descripcióncompleta de la unidad
Suminstrado únicamente comoparte del juego de sellos
Se requiere descripción completa de la unidadSuministrado únicamente como parte del juego de montaje
Suministrado como parte del amortiguador
20 mm
57593-01-001554175670755449
—565995660756615566235637856386
5635456337-156337-256337-3
17424-009
25 mm
6253-016554185670855450
—566005660856616566245637956387
5635556338-156338-256338-3
17424-064
32 mm
6253-02055419567095545158187566015660956617566255638056388
5635656339-156339-256339-3
17424-065
40 mm
6253-01855420567105545258188566025661056618566265638156389
5635756340-156340-256340-3
17424-066
50 mm
6253-01955421567115652658189566035661156619566275638256390
5635856341-156341-256341-3
17424-066NOTA: Todos los números de parte listados son para unidades estándar, y las opciones pueden afectarlos.
** Las tapas no incluyen amortiguadores o los tornillos de ajuste de rotación. Se ordenan por separado.
NOTA: El sufijo (-1) en el No. de parte indica sellos de Buna-n. *Se requiere de un juego en cada dirección.
CANT DESCRIPCION1 Juego de rodamientos1 Juego de sellos1 Juego de ajuste de rotacion 45°-180°
225°-270°1* Juego de amortiguadores1* Juego de montaje Sin opciones o con reguladores de velocidad
Con amortiguamiento o con amortiguamiento y reguladores de velocidad1* Ensamble del regulador de velocidad1* Juego de aguja para amortiguamiento1* Juego de regulador de velocidad y aguja para amortiguamiento
20 mm56723-01
56718-01-156721-0156721-0656714-01
5337758193
58316-01-158231-01-158232-01-1
25 mm56723-02
56718-02-156721-0256721-0756714-02
5338058194
58316-01-158231-02-158232-02-1
32 mm56723-03
56718-03-156721-0356721-0856714-03
5338658194
58316-01-158231-02-158232-02-1
40 mm56723-04
56718-04-156721-0456721-0956714-04
5819558196
58316-02-158231-03-158232-03-1
50 mm56723-05
56718-05-156721-0556721-1056714-05
5819558196
58316-02-158231-03-158232-03-1
PIÑON CON CUÑERO
PH D,INC.
PH D,INC.
TAPA CON REGULADORDE VELOCIDAD
AMORTIGUAMIENTOREGULABLE
15
REGULADOR DEVELOCIDAD
TAPA CONAMORTIGUAMIENTO
REGULABLE YREGULADOR DE
VELOCIDAD TAPA CONAMORTIGUAMIENTO
REGULABLETAPA CON
REGULADOR DEVELOCIDAD
TAPA SINOPCIONES
14
UNIDADES ESTANDAR DE 225° A 270° YCON OPCION PARA AMORTIGUADORUNICAMENTE UNIDADES DE 45° A 180°CON AMORTIGUADOR18
19
13
12
11
87 3
2
PIÑON PARAADAPTADOR
(–Q10)PIÑON HUECO
PARA ADAPTADOR(–Q19)
9
10
1
20
16
17
AMORTIGUADOR
5
225°-270°
45°-180°
6
180°
135°90°
45°
54
225°-270°
45°-180°
AMORTIGUADOR
9
225°-270°10
6
OPCION CON ADAPTADOR(-Q10 & -Q19)
AMORTIGUAMIENTOREGULABLE
Internet Web Site: http://www.phdinc.com • E-Mail: [email protected]
LISTA DE PARTES: ACTUADORES ROTATIVOS SERIE RA
2M-I 1M-M 4/98 4340
PHD, Inc. PHD Ltd. PHD GmbH9009 Clubridge Drive 7 Eden Way, Pages Industrial Park Arnold-Sommerfeld-Ring 2
P.O. Box 9070, Fort Wayne, Indiana 46899 EE.UU. Leighton Buzzard, Bedfordshire LU7 8TP R.U. D-52499 Baesweiler ALEMANIATeléfono (219) 747-6151 • Fax (219) 747-6754 Teléfono 01525 853488 • Fax 01525 378210 Teléfono 02401-805 230 • Fax 02401-805 232