monitoreo y control de un estanque para producciÓn piscÍcola
TRANSCRIPT
MONITOREO Y CONTROL DE UN ESTANQUE PARA PRODUCCIÓN PISCÍCOLA
CRISTIAN HOYOS VELANDIA Cód.: 2140873
UNIVERSIDAD AUTÓNOMA DE OCCIDENTE FACULTAD DE INGENIERÍA
DEPARTAMENTO DE AUTOMÁTICA Y ELECTRÓNICA PROGRAMA INGENIERÍA MECATRÓNICA
SANTIAGO DE CALI 2019
MONITOREO Y CONTROL DE UN ESTANQUE PARA PRODUCCIÓN PISCÍCOLA
CRISTIAN HOYOS VELANDIA
Proyecto de grado Para optar al título de Ingeniero Mecatrónico
Director JUAN MANUEL NUÑEZ VELAZCO
Mágister en ingeniería
UNIVERSIDAD AUTÓNOMA DE OCCIDENTE FACULTAD DE INGENIERÍA
DEPARTAMENTO DE AUTOMÁTICA Y ELECTRÓNICA PROGRAMA INGENIERÍA MECATRÓNICA
SANTIAGO DE CALI 2019
3
Nota de aceptación:
Aprobado por el Comité de Grado en cumplimiento de los requisitos exigidos por la Universidad Autónoma de Occidente para optar al título de Ingeniero Mecatrónico Jimmy Tombe Andrade
Jurado
Jesús Alfonso López
Jurado
Santiago de Cali, 13 de Agosto de 2019

4
Siempre al final del camino o al alcanzar cualquier objetivo propuesto te detienes a pensar que lo que realmente importa es el recorrido, la gente que estuvo allí, que te apoyo e hizo lo que eres el día de hoy, por ello, dedico este trabajo a mis padres y hermano que son lo que me impulsan a lograr cada meta, a mi novia María del Mar Cadavid Libreros por estar presente y apoyarme de manera incondicional y más importante, a Dios por ser motor y guía en mi época de estudio.
Cristian Hoyos Velandia
5
AGRADECIMIENTOS
El presente trabajo de grado no pudo haber sido realizado sin el apoyo fundamental de un gran colectivo humano y por lo cual, el mismo se encuentra dedicado a estas personas; en primer lugar, familiares y seres queridos, mis padres: ANGEL NORLEY HOYOS, CLARA ELENA VELANDIA, ARACELLY HOYOS y MARCO HOYOS quienes a lo largo del proceso educativo fueron pilares, guías y apoyo para llegar a esta instancia, a ellos, infinitas gracias y agradezco al cielo por tenerlos.
A su vez, al director de este trabajo de grado Juan Manuel Núñez Velazco que siempre y desde el primer momento estuvo allí, no solo como educador y asesor, sino más bien, como un amigo presto a facilitar los lineamientos del proyecto y a guiar el mismo de una forma cordial y amena.
Al ingeniero Cesar Marino Rojas por su tiempo y asesoría en todo momento que facilitaron a gran medida el desarrollo del proyecto.
A la ingeniería Sandra Arce por ser la orientadora y maestra en este proceso educativo tan bonito como lo es la investigación, por orientarme durante todo el camino universitario y estar allí siempre.
Al grupo de investigación IMMANT por su colaboración en todo momento para la realización de este proyecto de investigación, en especial, al ingeniero FARUK FONTHAL RICO, por brindar los equipos e instrumentos necesarios para la operación del mismo.
Gracias a todos ustedes.
6
CONTENIDO
Pág.
RESUMEN 18
INTRODUCCIÓN 20
1. PLANTEAMIENTO DEL PROBLEMA 22
2. JUSTIFICACIÓN. 26
3. OBJETIVOS 27
3.1 OBJETIVO GENERAL 27
3.2 OBJETIVOS ESPECÍFICOS 27
4. ANTECEDENTES 28
5. MARCO TEÓRICO 32
5.1 CONCEPTOS DE AUTOMATIZACIÓN INDUSTRIAL 32
5.1.1 Automática y Automatización 32
5.1.2 Control 32
5.2 REDES 33
5.2.1 Arquitectura de Redes WSN Y WSAN 34
5.2.2 Protocolos de Comunicación Para WSN 35
5.2.3 Topología de los Nodos WSN Y WSAN 39
5.2.4 Algoritmos para Redes WSN Y WSAN. 40
5.3 CONCEPTOS BÁSICOS PISCICULTURA. 41

7
5.4 DEPARTAMENTOS CON CIFRAS SIGNIFICATIVAS EN COLOMBIA 43
5.4.1 Etapas del Cultivo de Peces 46
5.4.2 Alevinaje 46
5.4.3 Levante 46
5.4.4 Engorde 46
5.4.5 Parámetros del Cultivo de Peces 47
6. METODOLOGÍA 50
6.1 ETAPAS DEL PROYECTO 51
6.1.1 Etapa 1: Recolección de Información 52
6.1.2 Etapa 2: Reconocimiento Tecnológico 53
6.1.3 Etapa 3: Generación y Selección de Conceptos. 53
6.1.4 Etapa 4: Diseño a Nivel Sistema y detallado 53
6.1.5 Etapa 5: Validación de Diseño 54
7. LÓGICA SECUENCIAL DEL PROYECTO GRAFCET 55
7.1 MODO NORMAL DE OPERACIÓN (GRAFCET PRINCIPAL) 56
7.2 MODO DE FALLA 57
7.3 PROGRAMACIÓN DE PARÁMETROS 57
7.4 MODO MANUAL 60
8. RECONOCIMIENTO TECNOLÓGICO. 61
8.1 QFD 63
8.2 GENERACIÓN Y SELECCIÓN DE CONCEPTOS 64
8.2.1 Descripción del producto 64
8
8.2.2 Variantes de Diseño 64
8.3 SELECCIÓN DE ALTERNATIVAS DE SOLUCIÓN 71
8.4 DISEÑO DE ALTERNATIVA DE SOLUCIÓN 73
9. PROGRAMACIÓN DEL DISPOSITIVO. 74
9.1 DISEÑO NODO DE SENSADO. 74
9.1.1 Unidad de Proceso (CPU): 74
9.1.2 Memoria (MEM) 75
9.1.3 Sistema de Alimentación (Power Supply) 75
9.1.4 Sensores (Analog Sensor [transductor]) 77
9.1.5 Comunicación (Aerial) 95
9.1.6 Diseño Final WSN. 103
9.2 SISTEMA DE CONTROL. 108
9.2.1 Modelamiento matemático sistema. 110
10. ALGORITMOS. 120
10.1 ALGORITMO DE KRIGING. 120
10.2 TIPOS DE KRIGING. 121
10.3 KRIGING ORDINARIO. 122
10.4 IMPLEMENTACIÓN DE KRIGING. 124
11. ANÁLISIS ECONÓMICO. 130
11.1 COSTOS DE IMPLEMENTACIÓN. 130
11.2 VAN Y TIR. 133
12. CONCLUSIONES. 135
9
13. TRABAJO FUTURO 137
BIBLIOGRAFÍA 139
ANEXOS 147
10
LISTA DE TABLAS.
Tabla 1. Comparativa de producción acuícola de Colombia frente a otros países año 2014 23
Tabla 2. Variables a Considerar Etapas de la trucha en Colombia 24
Tabla 3. Comparación entre protocolos de Comunicación 38
Tabla 4. Departamentos con Cifras Significativas. 45
Tabla 5. Piscicultura en Colombia 45
Tabla 6. Parámetros físico peces 48
Tabla 7. Lista de necesidades 61
Tabla 8. Lista de Métricas 62
Tabla 9. QFD 63
Tabla 10. Alternativas de solución para número de nodos Sensado/Actuación 64
Tabla 11. Alternativas de solución para número de especies 66
Tabla 12. Alternativas de solución para Tiempo de trabajo continuo 67
Tabla 13. Alternativas de solución error máx. de medición 68
Tabla 14. Primer Concepto de Diseño 69
Tabla 15. Segundo Concepto de Diseño 70
Tabla 16. Tercer Concepto de Diseño 71
Tabla 17. Matriz de selección 71
Tabla 18. Matriz de Evaluación de Conceptos 72
Tabla 19. Parámetros ATMEGA328 75
Tabla 20. Parámetros DS18B20D 79
Tabla 21. Resolución DS18B20D 80
Tabla 22. Parámetros HSR04 82
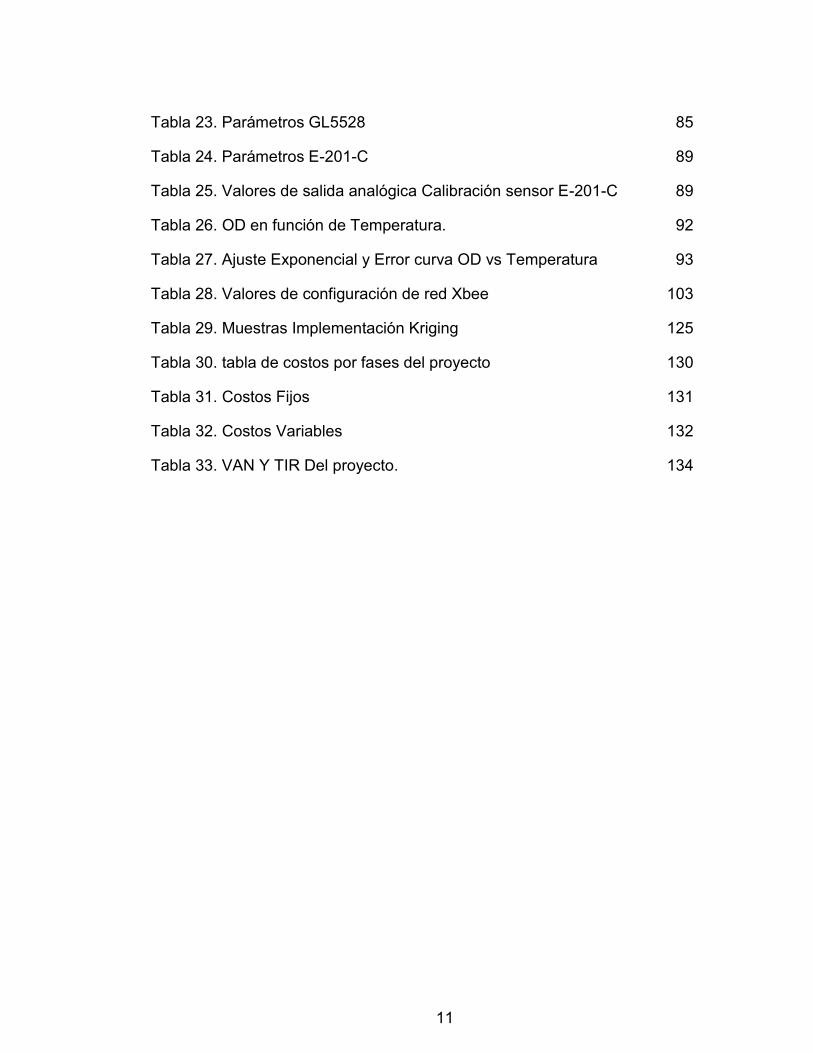
11
Tabla 23. Parámetros GL5528 85
Tabla 24. Parámetros E-201-C 89
Tabla 25. Valores de salida analógica Calibración sensor E-201-C 89
Tabla 26. OD en función de Temperatura. 92
Tabla 27. Ajuste Exponencial y Error curva OD vs Temperatura 93
Tabla 28. Valores de configuración de red Xbee 103
Tabla 29. Muestras Implementación Kriging 125
Tabla 30. tabla de costos por fases del proyecto 130
Tabla 31. Costos Fijos 131
Tabla 32. Costos Variables 132
Tabla 33. VAN Y TIR Del proyecto. 134
12
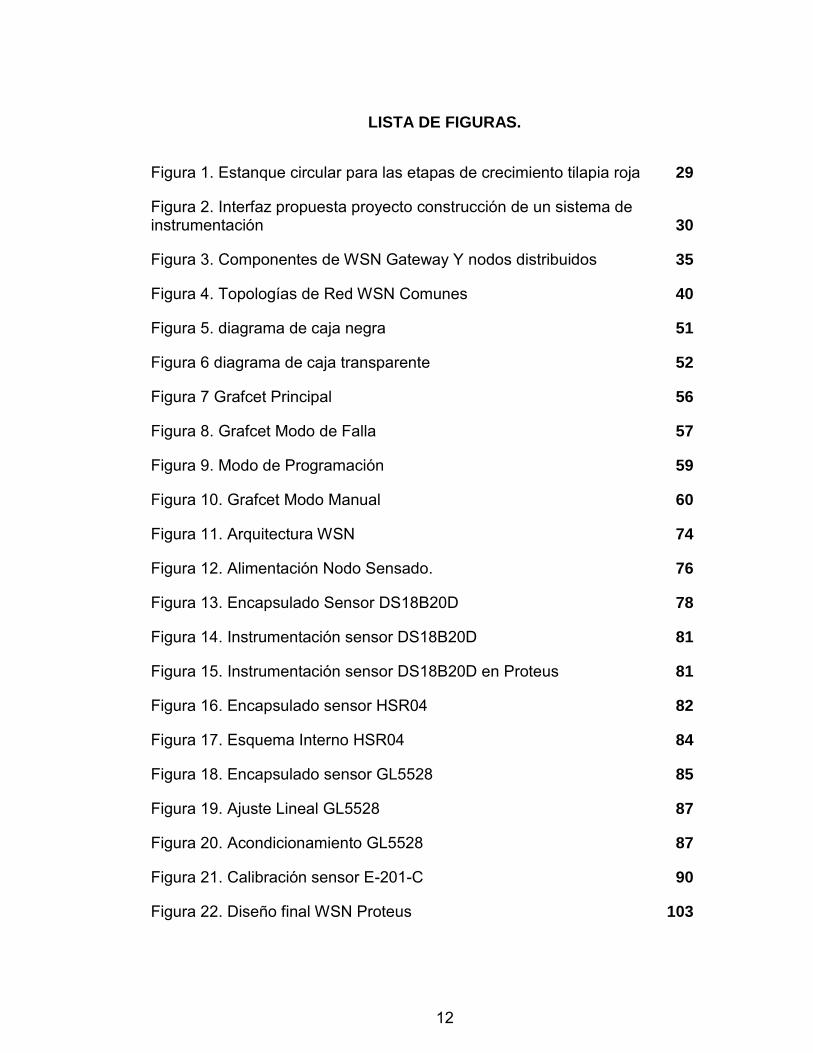
LISTA DE FIGURAS.
Figura 1. Estanque circular para las etapas de crecimiento tilapia roja 29
Figura 2. Interfaz propuesta proyecto construcción de un sistema de instrumentación 30
Figura 3. Componentes de WSN Gateway Y nodos distribuidos 35
Figura 4. Topologías de Red WSN Comunes 40
Figura 5. diagrama de caja negra 51
Figura 6 diagrama de caja transparente 52
Figura 7 Grafcet Principal 56
Figura 8. Grafcet Modo de Falla 57
Figura 9. Modo de Programación 59
Figura 10. Grafcet Modo Manual 60
Figura 11. Arquitectura WSN 74
Figura 12. Alimentación Nodo Sensado. 76
Figura 13. Encapsulado Sensor DS18B20D 78
Figura 14. Instrumentación sensor DS18B20D 81
Figura 15. Instrumentación sensor DS18B20D en Proteus 81
Figura 16. Encapsulado sensor HSR04 82
Figura 17. Esquema Interno HSR04 84
Figura 18. Encapsulado sensor GL5528 85
Figura 19. Ajuste Lineal GL5528 87
Figura 20. Acondicionamiento GL5528 87
Figura 21. Calibración sensor E-201-C 90
Figura 22. Diseño final WSN Proteus 103
13
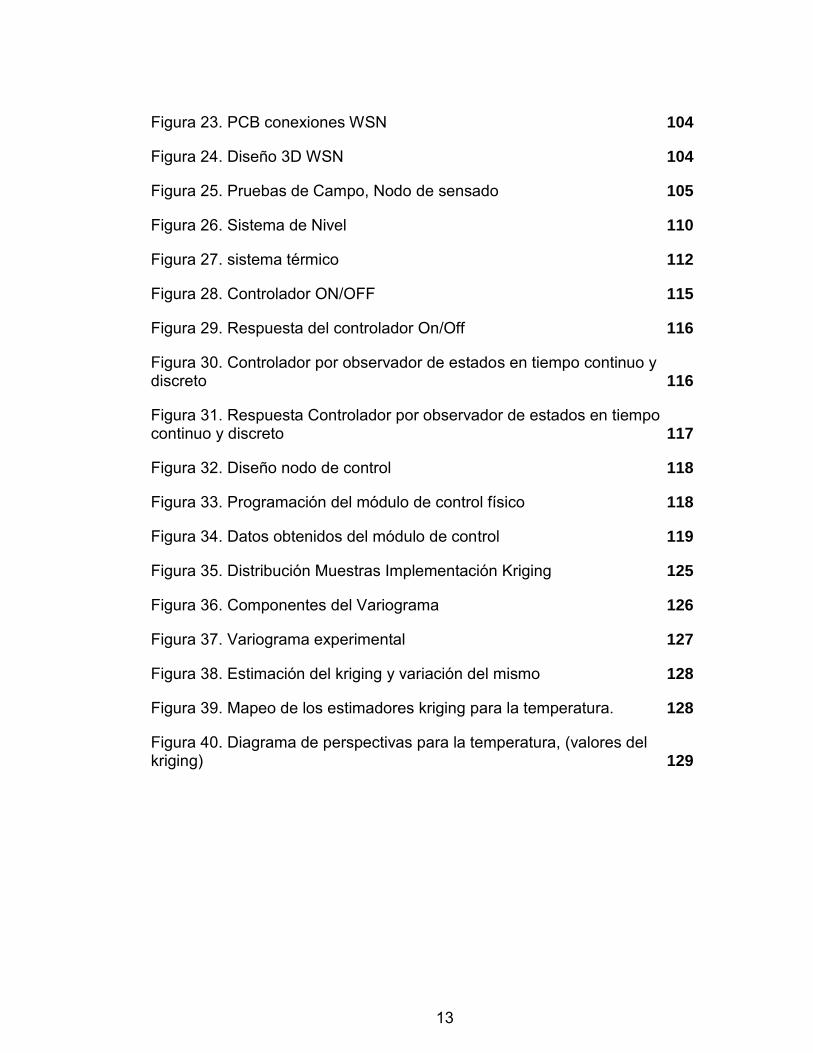
Figura 23. PCB conexiones WSN 104
Figura 24. Diseño 3D WSN 104
Figura 25. Pruebas de Campo, Nodo de sensado 105
Figura 26. Sistema de Nivel 110
Figura 27. sistema térmico 112
Figura 28. Controlador ON/OFF 115
Figura 29. Respuesta del controlador On/Off 116
Figura 30. Controlador por observador de estados en tiempo continuo y discreto 116
Figura 31. Respuesta Controlador por observador de estados en tiempo continuo y discreto 117
Figura 32. Diseño nodo de control 118
Figura 33. Programación del módulo de control físico 118
Figura 34. Datos obtenidos del módulo de control 119
Figura 35. Distribución Muestras Implementación Kriging 125
Figura 36. Componentes del Variograma 126
Figura 37. Variograma experimental 127
Figura 38. Estimación del kriging y variación del mismo 128
Figura 39. Mapeo de los estimadores kriging para la temperatura. 128
Figura 40. Diagrama de perspectivas para la temperatura, (valores del kriging) 129
14
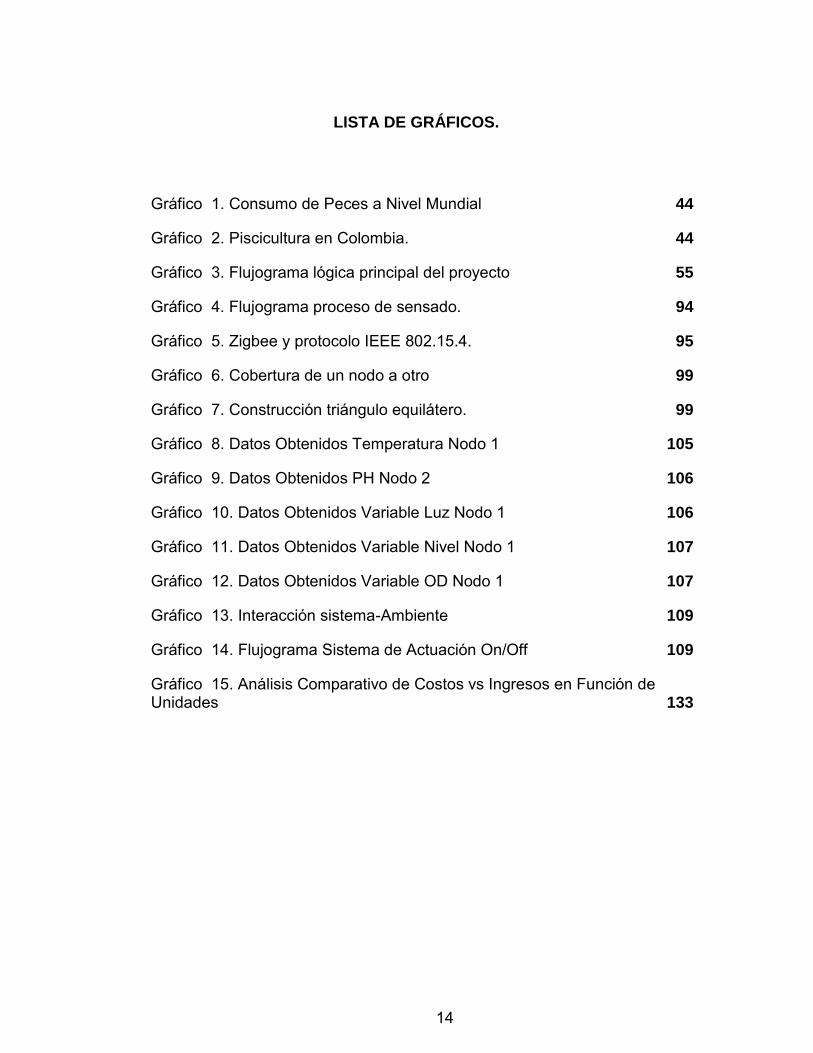
LISTA DE GRÁFICOS.
Gráfico 1. Consumo de Peces a Nivel Mundial 44
Gráfico 2. Piscicultura en Colombia. 44
Gráfico 3. Flujograma lógica principal del proyecto 55
Gráfico 4. Flujograma proceso de sensado. 94
Gráfico 5. Zigbee y protocolo IEEE 802.15.4. 95
Gráfico 6. Cobertura de un nodo a otro 99
Gráfico 7. Construcción triángulo equilátero. 99
Gráfico 8. Datos Obtenidos Temperatura Nodo 1 105
Gráfico 9. Datos Obtenidos PH Nodo 2 106
Gráfico 10. Datos Obtenidos Variable Luz Nodo 1 106
Gráfico 11. Datos Obtenidos Variable Nivel Nodo 1 107
Gráfico 12. Datos Obtenidos Variable OD Nodo 1 107
Gráfico 13. Interacción sistema-Ambiente 109
Gráfico 14. Flujograma Sistema de Actuación On/Off 109
Gráfico 15. Análisis Comparativo de Costos vs Ingresos en Función de Unidades 133
15
LISTA DE ANEXOS.
Anexo A. Datos Obtenidos por nodo de sensado no 1 147
Anexo B. Tapa superior Nodo de Control. 149
Anexo C. Parte Inferior Nodo de Control 150
Anexo D. Tapas Lateral Nodo de Control 151
16
GLOSARIO
EEPROM: son las siglas de Electrically Erasable Programmable Read-Only Memory (ROM programable y borrable eléctricamente). Es un tipo de memoria ROM que puede ser programada, borrada y reprogramada eléctricamente, a diferencia de la EPROM que ha de borrarse mediante un aparato que emite rayos ultravioletas.
Piscicultura: Técnica que se ocupa de dirigir y fomentar la reproducción y cría de peces y mariscos.
OD: El oxígeno disuelto (OD) es la cantidad de oxígeno gaseoso que esta disuelto en el agua. El oxígeno libre es fundamental para la vida de los peces, plantas, algas, y otros organismos; por eso, desde siempre, se ha considerado como un indicador de la capacidad de un río para mantener la vida acuática.
PH: El pH es una medida de acidez o alcalinidad de una disolución. El pH indica la concentración de iones de hidrógeno presentes en determinadas disoluciones. La sigla significa potencial de hidrógeno o potencial de hidrogeniones.
Red: es un conjunto de equipos, nodos y software conectados entre sí por medio de dispositivos físicos o inalámbricos que envían y reciben impulsos eléctricos, ondas electromagnéticas o cualquier otro medio para el transporte de datos, con la finalidad de compartir información, recursos y ofrecer servicios.
Wireless: (inalámbrico o sin cables) es un término usado para describir las telecomunicaciones en las cuales las ondas electromagnéticas (en vez de cables) llevan la señal sobre parte o toda la trayectoria de la comunicación.
WPAN: Wireless Personal Área Networks, (Red Inalámbrica de Área Personal), es una red para la comunicación entre distintos dispositivos (tanto computadoras, puntos de acceso a internet, teléfonos celulares, PDA, entre otros) cercanos al punto de acceso. Estas redes normalmente son de unos pocos metros y para uso personal.
WSN: Del inglés Wireless sensor Network (red inalámbrica de sensores).
17
Zigbee: Es el nombre de la especificación de un conjunto de protocolos de alto nivel de comunicación inalámbrica para su utilización con radiodifusión digital de bajo consumo, basada en el estándar IEEE 802.15.4 de redes inalámbricas de área personal (Wireless personal área Network, WPAN). Su objetivo son las aplicaciones que requieren comunicaciones seguras con baja tasa de envío de datos y maximización de la vida útil de sus baterías.
18
RESUMEN
El presente proyecto de grado tiene como objetivo dar seguimiento al proceso de Diseño Mecatrónico realizado para la implementación de un sistema automatizado de monitoreo y control de las condiciones físico-químicas necesarias que se deben de considerar en un estanque dedicado a la producción y cría de peces; en función de optimizar la producción piscícola en el Valle del Cauca, y, particularmente, en el municipio de Tuluá. A través de un sistema de redes inalámbricas constituido por nodos tales como el de: control, actuación y sensado se logra generar soluciones inteligentes a problemas en ramas del sector rural que antes no se contemplaban para el desarrollo de productos automatizados.
Para ello se hace uso de un sistema basado en microcontroladores de la familia ATMEL y XBEE, dada la conexión por radiofrecuencia y su programación por medio de Software Libre (como característica principal), junto a prestaciones como: bajo consumo energético, fácil adquisición y manipulación de variables, fácil despliegue y generación de entornos (para el desarrollo de espacios de trabajo constantes y en tiempo real) se logra como resultado final un sistema completo de sensado y actuación que logra cumplir con el monitoreo Online de un cultivo de peces en función de optimizar los tiempos de producción, desarrollo y cuidado de la actividad piscícola.
Palabras clave: automatización, piscicultura, control, ATMEL, XBEE, diseño mecatrónico.

19
ABSTRACT
The present degree project has the objective to follow up the Mechatronic Design process carried out for the implementation of an automated monitoring and control system of the necessary physical-chemical conditions that should be considered in a pond dedicated to the production and breeding of fish; in terms of optimizing fish production in the Valle del Cauca, and, particularly, in the municipality of Tuluá. Through a wireless network system constituted by nodes such as: control, acting and sensing, intelligent solutions are generated to problems in branches of the rural sector that were not previously contemplated for the development of automated products.
For this, a system based on microcontrollers of the ATMEL and XBEE family is used, given the connection by radiofrequency and its programming by Free Software (as main characteristic), together with features such as: low energy consumption, easy acquisition and manipulation of variables, easy deployment and generation of environments (for the development of constant workspaces and in real time) is achieved as a final result a complete system of sensing and performance that manages to comply with Online monitoring of a fish culture based on optimize the times of production, development and care of the fish farming activity.
Keywords: automation, fish farming, control, ATMEL, XBEE, mechatronic design.
20
INTRODUCCIÓN
La pesca y el desarrollo del sector piscícola aparecen en la actualidad como una industria con uno de los mayores crecimientos en las últimas décadas alrededor del mundo al lograr mantener su consumo per cápita de productos combinados del pescado en niveles de 15.8 kilos al año1. Durante los últimos años, sin embargo, también, es uno de los sectores más amenazados debido no solo, a que la sobrepesca está superando los límites de la sostenibilidad, es decir, que se realiza a un ritmo más rápido que el de la reposición, sino que, además, varias especies de peces se están agotando. La situación anteriormente mencionada, agregada a las alarmantes realidades de la sobrepoblación humana, de la desertización de los suelos, de la escasez de agua dulce y de la contaminación ambiental, son las consecuencias de la acelerada degradación del medio ambiente en todo el mundo, y por eso, el hombre está obligado a interponer soluciones para la protección de los ecosistemas.
En el sector acuícola se ve la piscicultura como la reproducción y cría controlada de algunas especies como trucha, cachama blanca, Mojarra roja, entre otros. A escala industrial, esta industrialización en el sector piscícola tiene como objeto la obtención de peces (proteína de calidad dietaría) para el consumo humano que la pesca libre no puede proporcionar en cantidad suficiente. En el contexto nacional, se presenta una participación creciente y preponderante de la piscicultura, por lo cual se le considera ahora como una industria promisoria, tanto para el abastecimiento interno, como también para la colonización y la apropiación de mercados internacionales Lo que ha llevado al sector acuícola y pesquero a contar con exportaciones a diferentes países, principalmente Estados Unidos con US$53,1 millones (38,2 % de participación), Ecuador con US$11,7 millones (8,5 %), Francia con US$8,2 millones (6,0 %) y España con US$7,1 millones (5,1 %)2. Sin embargo, esta se hace de manera tradicional, con ambientes poco controlados tecnológicamente y que, a partir de pruebas de ensayo y error, conducen a perdida de capitales, flojo retorno de la inversión y un proceso lento y a gran medida engorroso que no permita obtener los resultados esperados. por lo cual, este 1 PIERRE. Failler. Future prospects for fish and fishery products: medium-term projections to the years 2015. [en línea] En: FAO Fisheries Circular. Roma: Italia. No. 972/4, Part 1. 2014 [Consultado: 4 de abril 2018]. Disponible en internet: http://www.fao.org/3/a-ah947e.pdf. ISSN 0429-9329
2 PROCOLOMBIA, MIN COMERCIÓ. INDUSTRIA Y TURISMO. Los Productos Colombianos Del Sector Acuícola Y Pesquero [En línea] Bogotá procolombia [Consultado: 3 de abril 2018] Disponible en Internet: http://www.procolombia.co/compradores/es/explore-oportunidades/productos-pesqueros
21
trabajo de investigación se enfoca en cubrir esta problemática de manera automatizada por medio de en primera instancia, del estudio mismo del estanque artificial en donde se practica a manera industrial la cría y reproducción de los peces. En donde se consideran cuáles son las variables críticas para el control del proceso de desarrollo hasta la etapa de consumo. Esto por medio del diseño de un sistema automatizado que pueda mejorar la reproducción y cría de peces cubriendo las necesidades anteriormente planteadas y que ayude a posicionar este sector de una manera óptima en Colombia.
Con este proyecto de grado se pretende realizar un estudio del funcionamiento de los estanques industriales de piscicultura y propuesta de mecanismo de automatización de su operación para mejorar su producción; para esto se diseñará e implementar un sistema automatizado que permita controlar las condiciones físicas necesarias en un estanque artificial para el proceso de reproducción y cría de las especies de peces aptas para el consumo humano al analizar en tiempo real el ecosistema acuático en donde se encuentre el dispositivo y que a partir de unos parámetros fijos dados por el tipo de especie de pez a controlar, mantenga este hábitat en condiciones idóneas para su desarrollo y producción.

22
1. PLANTEAMIENTO DEL PROBLEMA
En el marco de la situación medio ambiental vista en los últimos años alrededor del mundo y el impacto negativo que ha propuesto el hombre para con la naturaleza en diversidad de ramas, tales como: la explotación de recursos, manejo de cultivos de fauna y flora, contaminación de cuencas hibridas, suelo, aire, el problema del cambio climático, entre otros. Se refleja a priori, el poco aprovechamiento de las tecnologías en la relación hombre-natura, y por ello, nacen propuestas de investigación y desarrollo de alternativas en pro de mejorar la sinergia de los mismos.
Uno de los campos en los cuales se ha visto poco avance tecnológico es la piscicultura industrial. La cual, es la técnica enfocada en el control y fomentación de la reproducción tanto sea de: peces como de mariscos, por medio de ambientes controlados, los cuales, deben tener las óptimas condiciones para las especies a reproducir y así aumentar su población. Y si bien, la misma es una técnica empleado a lo largo del territorio colombiano, se observa que sigue siendo practicada de una forma muy cultural y convencional con bajo nivel de infraestructura automatizada que presenta a su vez, un nivel bajo de eficiencia y productividad comparados a procesos automatizados a lo largo del mundo ((HOT), 2014)3, Proyectos de Sistemas robotizados en Guatemala. (MYONR., 2017)4, Smart Aquaponics, Holanda (MIDHUN., 2017),5 entre otros). Hablando estadísticamente (ver tabla No 1), La producción nacional acuícola para el año 2011 comparada con otros países fue (Bonilla, 2011) 6:
3 AQUA. Acuicultura: «Pecera» automatizada permite sustituir las redes: Criadero de huevos de atún sumergido en el océano [en línea]. Hawái: USA. 2014; [Consultado: 3 de abril 2018]. Disponible en internet: http://www.aqua.cl/2014/08/11/acuicultura-pecera-automatizada-permite-sustituir-las-redes/#
4 PINEDA MYONR. Proyectos de tilapia a gran escala: Sistemas robotizados para automatizar tareas como la alimentación y supervisión [en línea]. Guatemala, pisciculturaglobal 2017 [Consultado: 4 de abril 2018]. Disponible en internet: https://www.pisciculturaglobal.com/sistemas-robotizados-automatizan-tareas-importantes-alimentacion-proyectos-tilapia-gran-escala/
5 MENON MIDHUN. Smart Aquaponics: futuro de la piscicultura [en línea] Holanda, ripplesiot. 2017 [Consultado: 4 de abril 2018]. Disponible en internet: https://www.ripplesiot.com/es/smart-aquaponics/
6 BONILLA. Sandra P. Datos estadísticos de la acuicultura en Colombia (2000 – 2011). [en línea] Bogotá, Colombia 2011; [Consultado: 4 de abril 2018]. Disponible en internet: https://bit.ly/2KpKBbe
23
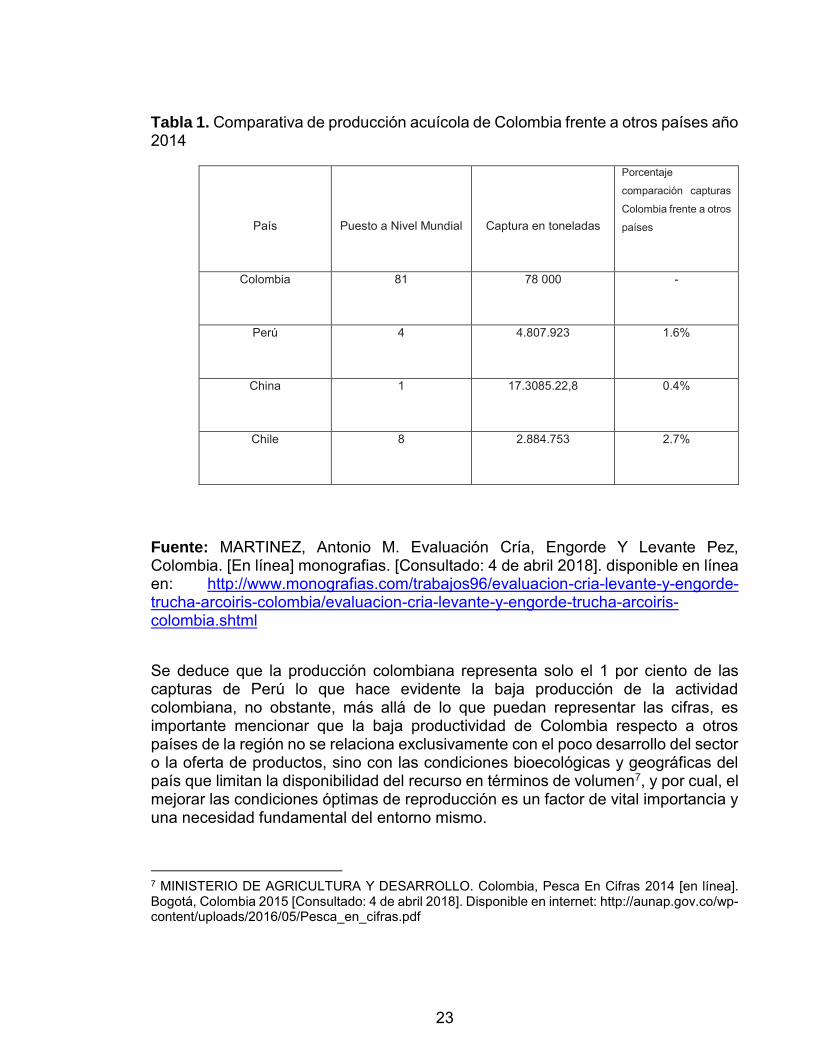
Tabla 1. Comparativa de producción acuícola de Colombia frente a otros países año 2014
País
Puesto a Nivel Mundial
Captura en toneladas
Porcentaje
comparación capturas
Colombia frente a otros
países
Colombia 81 78 000 -
Perú 4 4.807.923 1.6%
China 1 17.3085.22,8 0.4%
Chile 8 2.884.753 2.7%
Fuente: MARTINEZ, Antonio M. Evaluación Cría, Engorde Y Levante Pez, Colombia. [En línea] monografias. [Consultado: 4 de abril 2018]. disponible en línea en: http://www.monografias.com/trabajos96/evaluacion-cria-levante-y-engorde-trucha-arcoiris-colombia/evaluacion-cria-levante-y-engorde-trucha-arcoiris-colombia.shtml
Se deduce que la producción colombiana representa solo el 1 por ciento de las capturas de Perú lo que hace evidente la baja producción de la actividad colombiana, no obstante, más allá de lo que puedan representar las cifras, es importante mencionar que la baja productividad de Colombia respecto a otros países de la región no se relaciona exclusivamente con el poco desarrollo del sector o la oferta de productos, sino con las condiciones bioecológicas y geográficas del país que limitan la disponibilidad del recurso en términos de volumen7, y por cual, el mejorar las condiciones óptimas de reproducción es un factor de vital importancia y una necesidad fundamental del entorno mismo.
7 MINISTERIO DE AGRICULTURA Y DESARROLLO. Colombia, Pesca En Cifras 2014 [en línea]. Bogotá, Colombia 2015 [Consultado: 4 de abril 2018]. Disponible en internet: http://aunap.gov.co/wp-content/uploads/2016/05/Pesca_en_cifras.pdf
24
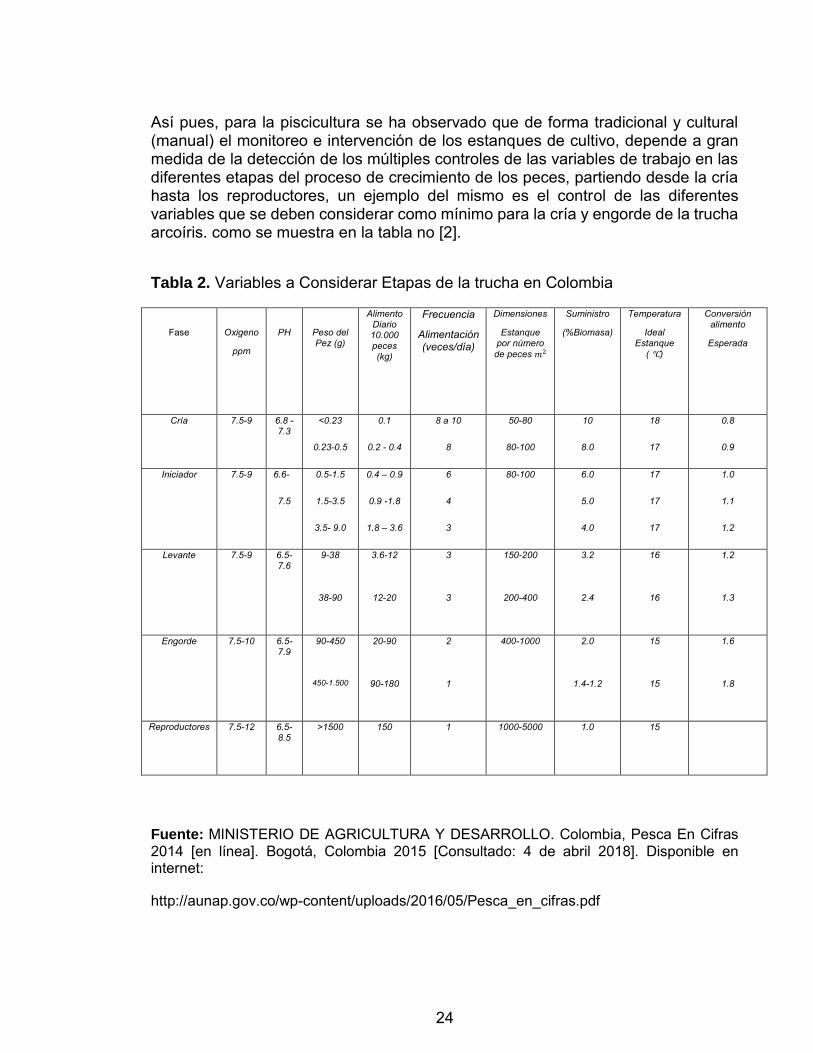
Así pues, para la piscicultura se ha observado que de forma tradicional y cultural (manual) el monitoreo e intervención de los estanques de cultivo, depende a gran medida de la detección de los múltiples controles de las variables de trabajo en las diferentes etapas del proceso de crecimiento de los peces, partiendo desde la cría hasta los reproductores, un ejemplo del mismo es el control de las diferentes variables que se deben considerar como mínimo para la cría y engorde de la trucha arcoíris. como se muestra en la tabla no [2].
Tabla 2. Variables a Considerar Etapas de la trucha en Colombia
Fase
Oxigeno
ppm
PH
Peso del Pez (g)
Alimento Diario 10.000 peces (kg)
Frecuencia
Alimentación (veces/día)
Dimensiones
Estanque por número de peces 𝑚2
Suministro
(%Biomasa)
Temperatura
Ideal Estanque
( )
Conversión alimento
Esperada
Cría 7.5-9 6.8 -7.3
<0.23
0.23-0.5
0.1
0.2 - 0.4
8 a 10
8
50-80
80-100
10
8.0
18
17
0.8
0.9
Iniciador 7.5-9 6.6-
7.5
0.5-1.5
1.5-3.5
3.5- 9.0
0.4 – 0.9
0.9 -1.8
1.8 – 3.6
6
4
3
80-100 6.0
5.0
4.0
17
17
17
1.0
1.1
1.2
Levante 7.5-9
6.5-7.6
9-38
38-90
3.6-12
12-20
3
3
150-200
200-400
3.2
2.4
16
16
1.2
1.3
Engorde 7.5-10 6.5- 7.9
90-450
450-1.500
20-90
90-180
2
1
400-1000
2.0
1.4-1.2
15
15
1.6
1.8
Reproductores 7.5-12 6.5-8.5
>1500 150 1 1000-5000 1.0 15
Fuente: MINISTERIO DE AGRICULTURA Y DESARROLLO. Colombia, Pesca En Cifras 2014 [en línea]. Bogotá, Colombia 2015 [Consultado: 4 de abril 2018]. Disponible en internet:
http://aunap.gov.co/wp-content/uploads/2016/05/Pesca_en_cifras.pdf

25
En la misma se ve que al generar medidas erróneas y un descuido mínimo de las variables, puede conllevar a la extinción del cultivo y pérdidas millonarias al sector acuícola, por lo cual, el control de manera automática y con algoritmos computaciones del estanque artificial y variables óptimas para la condición de vida de los peces tales como Luz, temperatura del agua, nivel del agua, dosificación, pH, entre otras. Genera mayor retorno de la inversión y una ayuda en el sector campesino, de esta manera, se genera pues la siguiente pregunta de investigación: ¿Cómo se puede realizar el control automático de variables del hábitat de peces que generen las condiciones necesarias de reproducción y cría de los mismos para una mayor producción de pescado en Colombia?
26
2. JUSTIFICACIÓN.
La automatización y el control son dos de los factores más radicales que han marcado el sector industrial en el siglo XX y posteriormente el siglo XIX, por una parte, tenemos la automatización el cual es el uso de sistemas o elementos computarizados y electromecánicos para controlar maquinarias o procesos industriales. En donde se integra la rama de control como el conjunto de dispositivos encargados de administrar, ordenar, dirigir o regular el comportamiento de otro sistema, con el fin de reducir las probabilidades de fallo y obtener los resultados teóricamente verdaderos siempre en pro de la optimización de recursos, de tiempos y principalmente, de la disminución de riesgos. El sector de la piscicultura no está excluido del control, este mismo se hace, pero de una manera tradicional en Colombia y al incorporar nuevas tecnologías se procederán a reevaluar este campo a nivel industrial. Teniendo en cuenta estos dos enfoques principales, se adaptará un sistema autónomo que permita el procesamiento de datos a tiempo real emitidos por los sensores que generan la información del hábitat de los peces; para después, tomar las decisiones necesarias si la variable de salida no se encuentra en el rango deseado.
Los sistemas automatizados de sensado y control, pretende inicialmente facilitar el proceso de la obtención de los datos de las variables a considerar en los estanques dedicados a la piscicultura industrial sin la necesidad de la intervención humana constante, en segunda instancia, minimiza el error del mismo al ser un proceso automatizado lo que logra que los cultivos de peces siempre estén en óptimas condiciones y por lo cual, se asegure la no extinción de los mismos en los malos manejos dados por el hombre. Y finalmente, promueven la eficiencia en la producción de peces a gran escala. Generando no solo una herramienta, sino también una alternativa de solución incluyente y participativa para este sector al generar datos del comportamiento y las condiciones en las que se encuentra el estanque.
Lo que conlleva finalmente a un proyecto transversal que incorpora las ciencias biológicas, específicamente las ciencias acuícolas con la ingeniería y promueve el desarrollo de productos que puede generar nuevo conocimiento y el mismo ser replicado en otras ramas como lo son: biología marina, ictiología, ecología y entendimiento de los ecosistemas.

27
3. OBJETIVOS
3.1 OBJETIVO GENERAL
Diseñar e implementar un sistema automatizado para monitoreo y control de las condiciones físicas necesarias en estanques artificiales definidos y sus características para obtener un cambio cualitativo y cuantitativo en el proceso de reproducción y cría de las especies de peces aptas para el consumo humano.
3.2 OBJETIVOS ESPECÍFICOS
Identificar las variables físicas ambientales necesarias que favorezcan la cría y reproducción de peces según el tipo de especie.
Diseñar y especificar el sistema de control para cada una de las variables y tipo de especies de peces a tratar delimitados por dimensiones del estanque, cantidad de peces en él, tiempo de vida.
Generar base de datos que permitan seguimiento, análisis, alertas de falla y ajuste flexible de variables del proceso.
Diseño interfaz gráfica para interacción usuario-sistema
Validar el funcionamiento del sistema en campo y el análisis de datos.

28
4. ANTECEDENTES
En Colombia se han presentado diversos proyectos que tratan de tecnificar el desarrollo de la piscicultura automatizada, algunos brindan el sensado de pocas variables por medio de alternativas de solución incluyente haciendo sistemas semiautomáticos, es decir dan el análisis y promueven el control de algunas variables de trabajo, sin embargo, necesitan de la intervención humana para operar al 100% de su capacidad, tal es el caso de Producción intensiva y automatizada de tilapia roja en estanques circulares8, realizado por John Fredy Sanabria Muñoz e Israel Garnica Bohórquez en el Sena. El cual tiene como objetivo facilitar el monitoreo, seguimiento, manejo y simulación de eventos relacionados con los procesos productivos para contribuir a la modernización y la competitividad de la empresa piscícola y los programas de formación técnica profesional en el departamento de Santander por medio de la medición y generación de aireación artificial.
8 SANABRIA, John. Producción Intensiva Y Automatizada De Tilapia Roja En Estanques Circulares. [en línea] En: Revista Integra - SENNOVA. Santander, Colombia: Sena, Julio- Diciembre de 2016 [Consultado: 4 de abril 2019]. Disponible en internet: http://revistas.sena.edu.co/index.php/int/article/view/457/487.
29
Figura 1. Estanque circular para las etapas de crecimiento tilapia roja
Fuente: SANABRIA, John. Producción Intensiva Y Automatizada De Tilapia Roja En Estanques Circulares. En: Revista Integra - SENNOVA [en línea]. Santander, Colombia: Sena, Julio- Diciembre de 2016 [Consultado: 4 de abril 2019]. Disponible en internet: http://revistas.sena.edu.co/index.php/int/article/view/457/487.
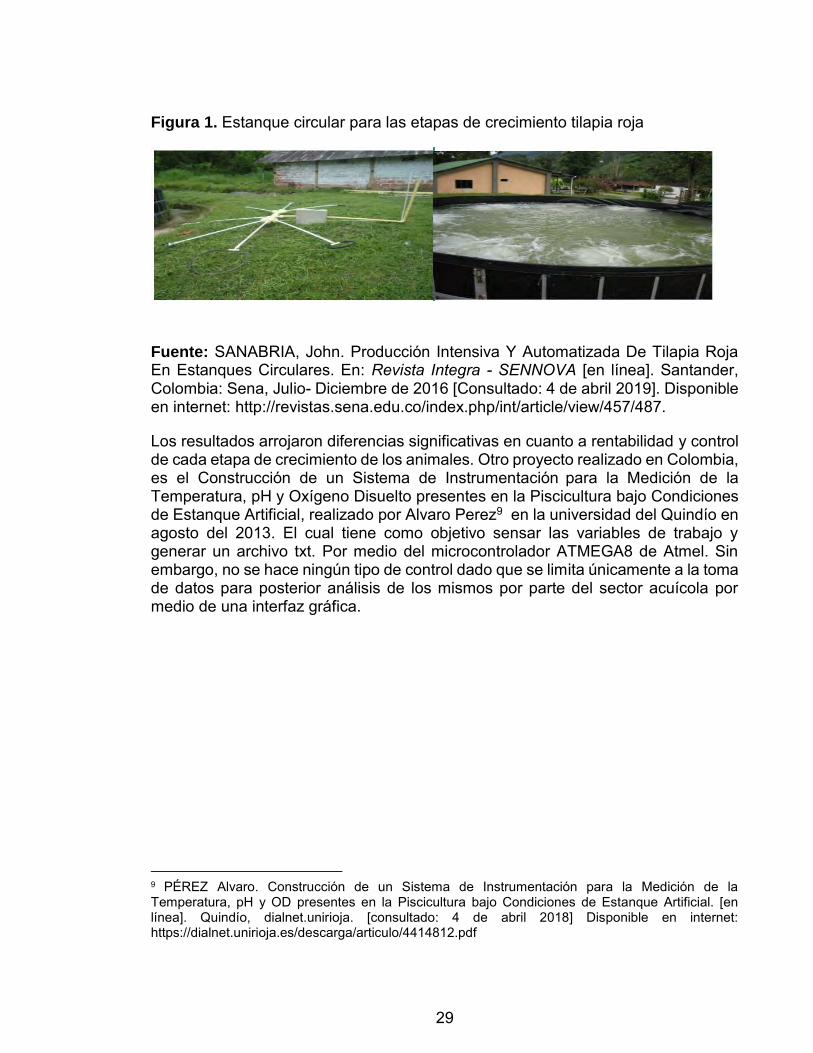
Los resultados arrojaron diferencias significativas en cuanto a rentabilidad y control de cada etapa de crecimiento de los animales. Otro proyecto realizado en Colombia, es el Construcción de un Sistema de Instrumentación para la Medición de la Temperatura, pH y Oxígeno Disuelto presentes en la Piscicultura bajo Condiciones de Estanque Artificial, realizado por Alvaro Perez9 en la universidad del Quindío en agosto del 2013. El cual tiene como objetivo sensar las variables de trabajo y generar un archivo txt. Por medio del microcontrolador ATMEGA8 de Atmel. Sin embargo, no se hace ningún tipo de control dado que se limita únicamente a la toma de datos para posterior análisis de los mismos por parte del sector acuícola por medio de una interfaz gráfica.
9 PÉREZ Alvaro. Construcción de un Sistema de Instrumentación para la Medición de la Temperatura, pH y OD presentes en la Piscicultura bajo Condiciones de Estanque Artificial. [en línea]. Quindío, dialnet.unirioja. [consultado: 4 de abril 2018] Disponible en internet: https://dialnet.unirioja.es/descarga/articulo/4414812.pdf
30
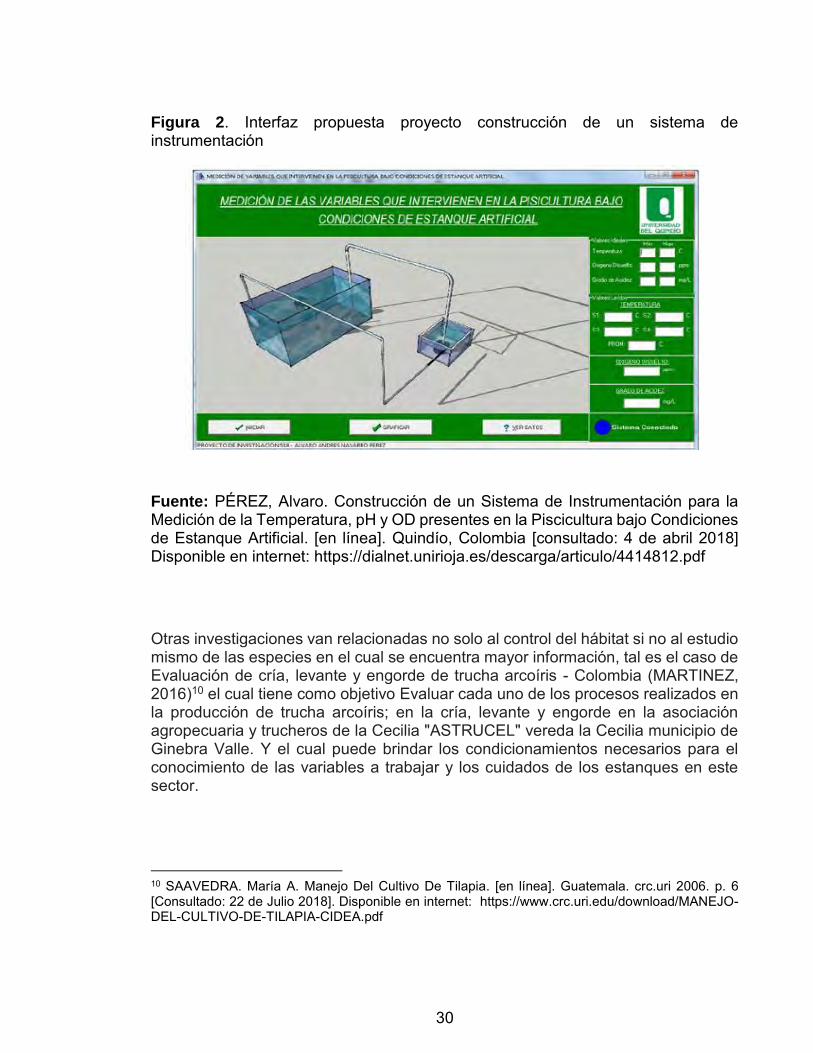
Figura 2. Interfaz propuesta proyecto construcción de un sistema de instrumentación
Fuente: PÉREZ, Alvaro. Construcción de un Sistema de Instrumentación para la Medición de la Temperatura, pH y OD presentes en la Piscicultura bajo Condiciones de Estanque Artificial. [en línea]. Quindío, Colombia [consultado: 4 de abril 2018] Disponible en internet: https://dialnet.unirioja.es/descarga/articulo/4414812.pdf
Otras investigaciones van relacionadas no solo al control del hábitat si no al estudio mismo de las especies en el cual se encuentra mayor información, tal es el caso de Evaluación de cría, levante y engorde de trucha arcoíris - Colombia (MARTINEZ, 2016)10 el cual tiene como objetivo Evaluar cada uno de los procesos realizados en la producción de trucha arcoíris; en la cría, levante y engorde en la asociación agropecuaria y trucheros de la Cecilia "ASTRUCEL" vereda la Cecilia municipio de Ginebra Valle. Y el cual puede brindar los condicionamientos necesarios para el conocimiento de las variables a trabajar y los cuidados de los estanques en este sector.
10 SAAVEDRA. María A. Manejo Del Cultivo De Tilapia. [en línea]. Guatemala. crc.uri 2006. p. 6 [Consultado: 22 de Julio 2018]. Disponible en internet: https://www.crc.uri.edu/download/MANEJO-DEL-CULTIVO-DE-TILAPIA-CIDEA.pdf

31
El articulo Trasmallo de arrastre Multipropósito escrito por el Dr. William Franco11, brinda también una idea general sobre los errores comunes realizados en la práctica de la piscicultura tradicional y por lo cual, se dan las condiciones óptimas en las cuales cada etapa del cultivo tiene un crecimiento mayor para estanques de agua - de 20 m x 40 m aprox. En él se habla de la importancia de controlar variables como la iluminación, oxigenación, temperatura y nivel de pH, ya que en ellas reposa el 70% del éxito en la piscicultura. Pues en el mismo, se considera que no es cierto que el suministro de alimento procesado sea el mayor responsable en el crecimiento y ganancia de peso y producción del cultivo de peces, es decir, que controlar únicamente la dosificación del cultivo no es factor suficiente para asegurar su crecimiento, a pesar de que la alimentación del mismo sea un 40% del costo de la inversión.
Este culmina con la reflexión de que, Si las condiciones ambientales son óptimas, no existe ningún riesgo en reducir, mermar los volúmenes de suministro de concentrado y por lo cual la producción de peces será exitosa y eficiente.
11 FRANCO WILLIAM. Trasmallo de Arrastre Multipropósito: Errores Comunes Al Practicar La Piscicultura Tradicional [en línea]. Medellín redes-para-pesca. [Consultado: 5 de abril 2018]. Disponible en internet: http://redes-para-pesca.co/trasmallo-arrastre-multiproposito/
32
5. MARCO TEÓRICO
A continuación, se procederán a definir algunos de los conceptos claves sobre lo que es la automatización, el control y variables a considerar para el buen manejo y práctica de la piscicultura industrial. Esto con el fin de entender cuáles son los componentes necesarios para cumplir con el objetivo general propuesto y como estos van a hacer empleados en cada etapa que presenta el cultivo de peces. Definiendo así, cuáles son los tipos de instrumentación necesaria o metodologías practicadas para la toma de datos en el sector acuícola.
5.1 CONCEPTOS DE AUTOMATIZACIÓN INDUSTRIAL
5.1.1 Automática y Automatización
Para La Real Academia de las Ciencias Físicas y Exactas se define a la automática como: “el conjunto de métodos y procedimientos para la substitución del operario en tareas físicas o mentales por dispositivos artificiales previamente programados” (RAE, )12. De esta definición original, se desprende la definición de la automatización como la aplicación de la automática al control de procesos industriales (UPC)13. A partir de ello, hablar de automática, es hablar de la ciencia que gobierna y controla cualquier proceso entendiendo proceso como la transformación de entradas o materiales en salidas como un producto de forma autónoma, siendo la misma, en la mayoría de casos frente a los procesos manuales; más confiable en función del número de repeticiones, presenta minimización de riesgos y mayor seguridad como a su vez también mejora el flujo de datos.
5.1.2 Control
Para Juan Martin (GARCÍA, 2017)14. Un sistema de control es un conjunto de dispositivos encargados de administrar, ordenar, dirigir o regular el comportamiento de otro sistema, con el fin de reducir las probabilidades de fallo y obtener los 12 RAE. Automática [en línea]. dle.rae.es [Consultado: 4 de febrero 2019]. Disponible en internet: https://dle.rae.es/?id=4TO3M08
13 UNIVERSIDAD POLITÉCNICA DE CATALUNYA. Diseño Y Automatización Industrial [en línea]. epsevg.upc [Consultado: 5 de abril 2018]. Disponible en internet: https://www.epsevg.upc.edu/hcd/material/lecturas/interfaz.pdf
14 MARTÍN GARCÍA, Juan. Teoría Y Ejercicios Prácticos De Dinámica De Sistemas. 4. Ed. Zaragoza. España. 2017 ISBN 9788460793045.
33
resultados teóricamente verdaderos. Es decir, son aquellos subsistemas que a partir de observar la salida y al comparar la misma con un valor deseado (Setpoint) toma decisiones para alcanzarlo. Esta toma de datos del valor de salida para posterior decisión se hace generalmente por medio de sensores o transductores, los cuales convierten una variable física en una señal eléctrica para ser procesada en un controlador. Sin embargo, se requiere que estos sensores sean previamente instrumentados (CREUS, 2011)15 para minimizar el error en la toma de datos, de allí se desprende un importante ítem como lo es las telecomunicaciones en las cuales en la mayoría de casos el nodo de sensado se encuentra en una posición diferente al de control, siendo importante que los datos sean recibidos con el mínimo error posible frente a la toma, esta taza es llamada BER.
5.2 REDES
Como bien se dijo con anterioridad, un ítem importante o estructura básica en la automatización y en los procesos de control son las telecomunicaciones; en esta sección se procederá a revisar y caracterizar las múltiples redes de transmisión y recepción de datos, protocolos de redes de comunicación inalámbrica, nodos de la red (arquitecturas) y algoritmos que pueden influenciar de manera positiva la comunicación a cierta distancia de un área local.
En primera instancia definimos una red de comunicaciones como: el conjunto de medios técnicos que permiten la comunicación a distancia entre equipos autónomos. Normalmente, se trata de transmitir datos, audio y vídeo por ondas electromagnéticas a través de diversos medios (aire, vacío, cable de cobre, fibra óptica, entre otros)16. Para ello existen diferentes tipos de arquitecturas, entre ellos se encuentran los WSN (Wireless Sensor Networks) y los WSAN (Wireless Sensor and Actuator Network) en las cuales se basa este trabajo de investigación.
15 CREUS Antonio. Instrumentación Industrial, 10.Ed. España: Marcombo 2011. ISBN: 9786077070429
16 GUIMI, Redes de comunicaciones [en línea]. monografias.2009; [Consultado: 11 de febrero 2019] Disponible en Internet: https://www.monografias.com/trabajos-pdf2/redes-comunicaciones/redes-comunicaciones.pdf

34
5.2.1 Arquitectura de Redes WSN Y WSAN
(NATIONAL INSTRUMENTS, 2009)17 define a la arquitectura de redes WSN como: una red inalámbrica que consiste de un conjunto de dispositivos autónomos espacialmente distribuidos que emplean sensores para monitorear condiciones físicas o ambientales. Un sistema WSN incorpora un Gateway que provee conectividad inalámbrica frente a los otros dispositivos al transmitir sus datos de forma cooperativa a través de la red a otras ubicaciones (ver Figura 3).
17 NATIONAL INSTRUMENTS. ¿Qué es una Red de Sensores Inalámbricos? [en línea]. 2009 [Consultado: 11 de febrero 2019]: Disponible en Internet: http://www.ni.com/white-paper/7142/es/
35
Figura 3. Componentes de WSN Gateway Y nodos distribuidos
Fuente: NATIONAL INSTRUMENTS, Componentes de WSN Gateway y Nodos Distribuidos [imagen]. [consultado: 11 de febrero de 2019]. Disponible en internet: http://www.ni.com/white-paper/7142/es/ Las redes más modernas son bidireccionales, que permiten el control de la actividad del sensor y que, a partir de la información de entrada, toman decisiones frente a las variables monitoreadas (actuación). El protocolo inalámbrico depende en los requerimientos de la aplicación. Algunos de los estándares más frecuentes incluyen radios de 2.4 GHz basados en los estándares IEEE 802.15.4 o IEEE 802.11 (Wi-Fi) o radios propietarios, los cuales son regularmente de 900 MHz.
Estas redes de sensores y actuadores inalámbricos se utilizan en muchos campos industriales y de consumo, como monitorización y control de procesos industriales, monitorización de la salud mediante máquinas, sistemas ciberfísicos, domótica, detección ambiental, etc.
5.2.2 Protocolos de Comunicación Para WSN
El protocolo, se define como las reglas para la transmisión de la información entre dos puntos. Un protocolo de red de comunicación de datos es un conjunto de reglas que gobierna el intercambio ordenado de datos dentro de la red18. Los protocolos más comunes oscilan en las bandas de 2.4 GHz y 5GHz; sus características principales se encuentran enfocadas principalmente en la inclusión de un menor 18 FLORES R, Jesús Alejandro. Protocolos de Comunicación. [en línea]. Tesis de Licenciatura para optar al título de Ing. Mec. Eléc. Universidad Nacional Autónoma de México. Dpt de Ingenieria. Pág. 56-70. [Consultado: 12 de febrero 2019] disponible en Internet: http://www.ptolomeo.unam.mx:8080/xmlui/bitstream/handle/132.248.52.100/734/A6.pdf
36
costo de almacenamiento de datos, soluciones de RF (radio frecuencia) de menor potencia y mayores niveles de accesibilidad de la red con posibilidad de escalonamiento en el número de nodos. Los estándares de comunicación más empleados a nivel de redes inteligentes al día de hoy son la familia IEEE 802.11 (Wifi), IEEE 802.15.4 (Bluetooth) y IEEE 802.15.5 (Zigbee)19.
Bluetooth IEEE 802.15.4.
Es un estándar que define el nivel físico y el control de acceso al medio de redes inalámbricas de área personal con tasas bajas de transmisión de datos (Low-rate Wireless PAN “personal área Network”, LR-WPAN). Este estándar posibilita la transmisión de voz y datos entre diferentes dispositivos mediante un enlace por radiofrecuencia en la banda ISM (Industrial, Scientific and Medical) de los 2.4 GHz. La especificación de Bluetooth define un canal de comunicación a un máximo 720 kbit/s con rango óptimo de 10 m. Además, incluye temporización para garantizar que los transmisores del dispositivo no se superpongan. El sistema es muy resistente al ruido y la interferencia.
Wifi o IEEE (802.11 a, 802.11 b, 802.11 g, 802.11 n)
La familia de estándares IEEE 802.11 es la solución de red inalámbrica TCP / IP más amplia para el consumidor y la empresa, es un estándar utilizado para identificar dispositivos de red de área local inalámbrica (WLAN)20 cubriendo las bandas de: 902-928 MHz, 2.400-2.4835 GHz, 5.725-5.850 GHz. El comité que administra este estándar tiene como objetivo crear el reemplazo de la red TCP/IP cableada por lo cual su funcionamiento está basado en Ethernet presentando diferencias en el CSMA/CA (Carrier Sense Multiple Access with Collision Avoidance). Su ancho de banda se encuentra entre 1 y 11 Mbps hasta 54Mbps a un precio reducido, sin embargo, es una solución muy robusta para redes de pocos nodos.
Zigbee IEE 802.15.4.
Zigbee es el nombre de la especificación de un conjunto de protocolos de alto nivel de comunicación inalámbrica para su utilización con radiodifusión digital de bajo
19 ARC MAP. Redes de Sensores Inalámbricos WSN [en línea]. informaticaredes2012.blogspot.2012 [Consultado: 11 de febrero 2019] Disponible en Internet: http://informaticaredes2012.blogspot.com/
20 NEGRO P. ¿WiFi, Bluetooth o Zigbee? : ¿Qué estándar inalámbrico se adapta a su aplicación industrial? [en línea]. processindustryinformer 2015 [Consultado: 12 de febrero 2018]. Disponible en internet: https://es.processindustryinformer.com/art%C3%ADculo-t%C3%A9cnico/wifi-bluetooth-zigbee-inal%C3%A1mbrica-est%C3%A1ndar-de-aplicaci%C3%B3n-industrial/

37
consumo, basada en el estándar IEEE 802.15.4 de redes WPAN. Su objetivo son las aplicaciones que requieren comunicaciones seguras con baja tasa de envío de datos y maximización de la vida útil de sus baterías al presentar un encendido y apagado rápido en su modo Sleep. Zigbee tiene un consumo de 30 mA transmitiendo y de 3 μA en reposo, frente a los 40 mA transmitiendo y 0,2 mA en reposo que tiene el Bluetooth. Presentando velocidades de 250 kbit/s21.
21 ORTEGA Carlos. Zigbee: El nuevo estándar global para la domótica [en línea]. Managua, Nicaragua. monografias. 2008 [Consultado: 12 de febrero 2018]. Disponible en internet: https://www.monografias.com/trabajos61/zigbee-estandar-domotico-inmotica/zigbee-estandar-domotico-inmotica.shtml
38
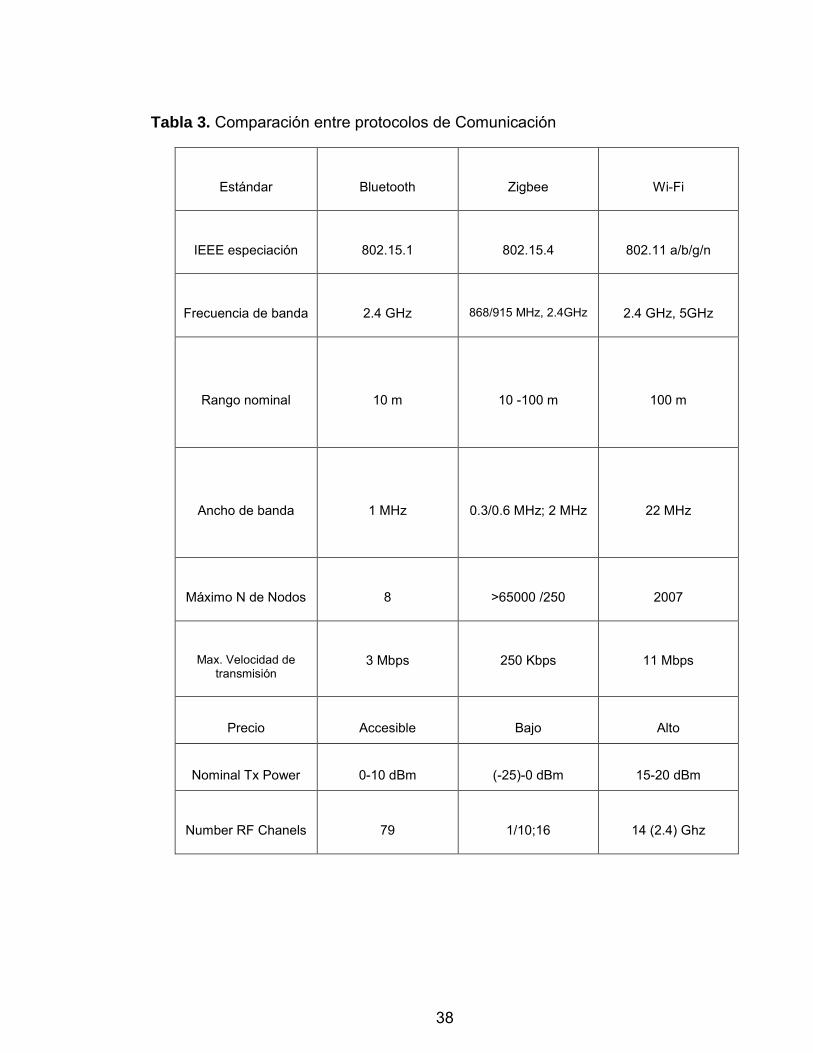
Tabla 3. Comparación entre protocolos de Comunicación
Estándar
Bluetooth
Zigbee
Wi-Fi
IEEE especiación
802.15.1
802.15.4
802.11 a/b/g/n
Frecuencia de banda
2.4 GHz
868/915 MHz, 2.4GHz
2.4 GHz, 5GHz
Rango nominal
10 m
10 -100 m
100 m
Ancho de banda
1 MHz
0.3/0.6 MHz; 2 MHz
22 MHz
Máximo N de Nodos
8
>65000 /250
2007
Max. Velocidad de transmisión
3 Mbps
250 Kbps
11 Mbps
Precio
Accesible
Bajo
Alto
Nominal Tx Power
0-10 dBm
(-25)-0 dBm
15-20 dBm
Number RF Chanels
79
1/10;16
14 (2.4) Ghz
39
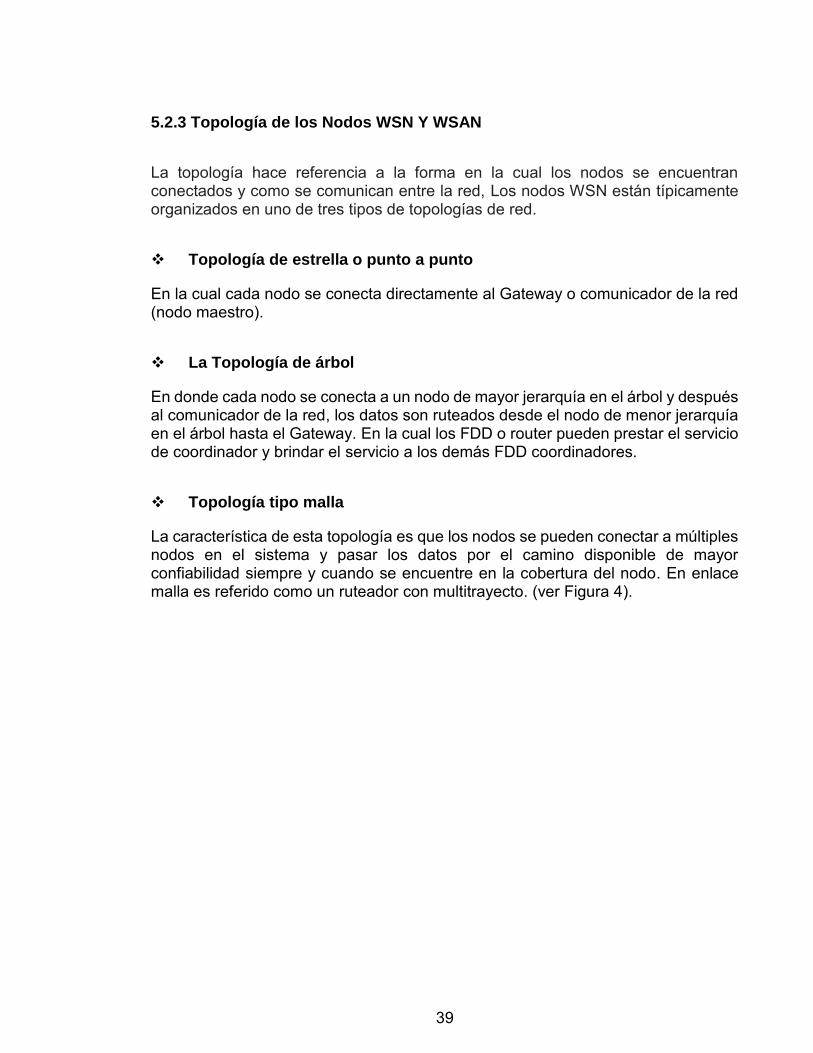
5.2.3 Topología de los Nodos WSN Y WSAN
La topología hace referencia a la forma en la cual los nodos se encuentran conectados y como se comunican entre la red, Los nodos WSN están típicamente organizados en uno de tres tipos de topologías de red.
Topología de estrella o punto a punto
En la cual cada nodo se conecta directamente al Gateway o comunicador de la red (nodo maestro).
La Topología de árbol
En donde cada nodo se conecta a un nodo de mayor jerarquía en el árbol y después al comunicador de la red, los datos son ruteados desde el nodo de menor jerarquía en el árbol hasta el Gateway. En la cual los FDD o router pueden prestar el servicio de coordinador y brindar el servicio a los demás FDD coordinadores.
Topología tipo malla
La característica de esta topología es que los nodos se pueden conectar a múltiples nodos en el sistema y pasar los datos por el camino disponible de mayor confiabilidad siempre y cuando se encuentre en la cobertura del nodo. En enlace malla es referido como un ruteador con multitrayecto. (ver Figura 4).
40
Figura 4. Topologías de Red WSN Comunes
Fuente: NATIONAL INSTRUMENTS, Componentes de WSN Gateway y Nodos
Distribuidos [imagen]. [consultado: 11 de febrero de 2019]. Disponible en internet:
http://www.ni.com/white-paper/7142/es/
5.2.4 Algoritmos para Redes WSN Y WSAN.
Algoritmo de Kriging.
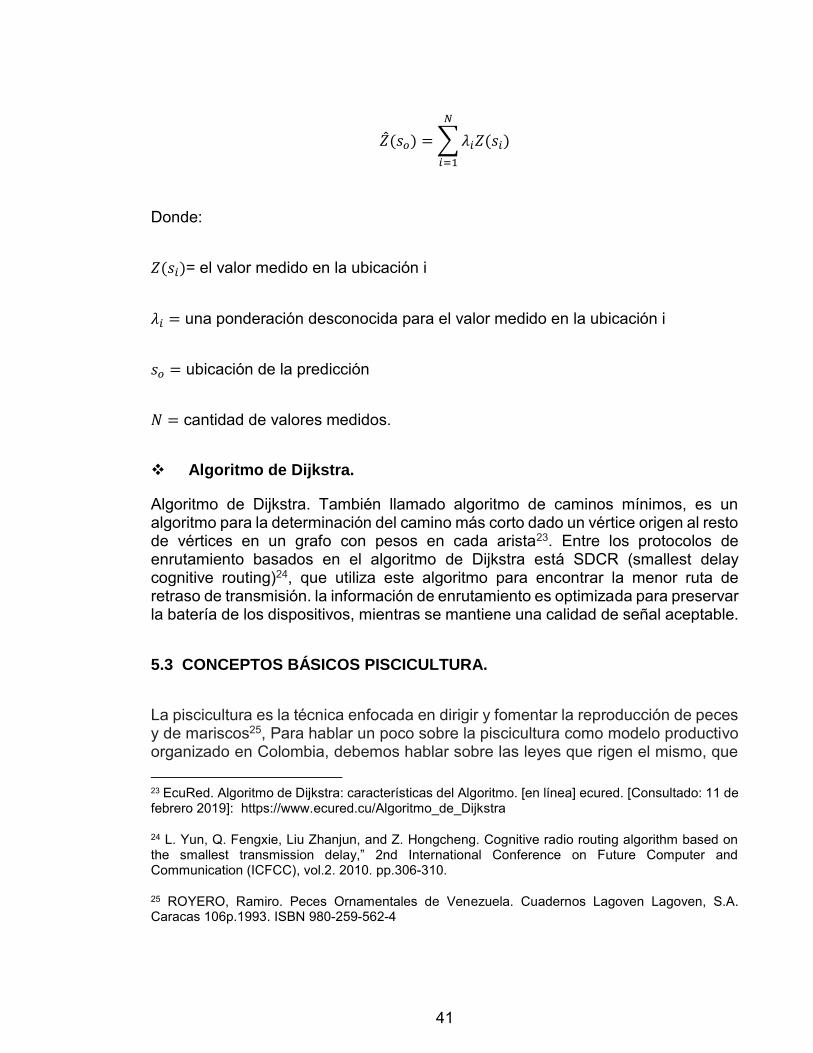
El algoritmo de Kriging también conocido como regresión en procesos Gaussianos, es un método geoestadístico de estimación de puntos. Utiliza un modelo que genera una superficie estimada a partir de un conjunto de puntos dispersados con valores z22. Esta técnica de interpolación se basa en la premisa de que la variación espacial continúa con el mismo patrón. Es decir, puntos próximos en el espacio tienden a tener valores más parecidos que los puntos más distantes.
El método Kriging es similar al de IDW (interpolación mediante distancia inversa) en que pondera los valores medidos circundantes para calcular una predicción de una ubicación sin mediciones. La fórmula general para ambos interpoladores se forma como una suma ponderada de los datos:
22 ARC MAP. ¿Cómo funciona Kriging? [en línea]. desktop.arcgis. [Consultado: 11 de febrero 2019] Disponible en Internet: http://desktop.arcgis.com/es/arcmap/10.3/tools/spatial-analyst-toolbox/how-kriging-works.htm
41
(𝑠𝑜) = ∑𝜆𝑖𝑍(𝑠𝑖)
𝑁
𝑖=1
Donde:
𝑍(𝑠𝑖)= el valor medido en la ubicación i
𝜆𝑖 = una ponderación desconocida para el valor medido en la ubicación i
𝑠𝑜 = ubicación de la predicción
𝑁 = cantidad de valores medidos.
Algoritmo de Dijkstra.
Algoritmo de Dijkstra. También llamado algoritmo de caminos mínimos, es un algoritmo para la determinación del camino más corto dado un vértice origen al resto de vértices en un grafo con pesos en cada arista23. Entre los protocolos de enrutamiento basados en el algoritmo de Dijkstra está SDCR (smallest delay cognitive routing)24, que utiliza este algoritmo para encontrar la menor ruta de retraso de transmisión. la información de enrutamiento es optimizada para preservar la batería de los dispositivos, mientras se mantiene una calidad de señal aceptable.
5.3 CONCEPTOS BÁSICOS PISCICULTURA.
La piscicultura es la técnica enfocada en dirigir y fomentar la reproducción de peces y de mariscos25, Para hablar un poco sobre la piscicultura como modelo productivo organizado en Colombia, debemos hablar sobre las leyes que rigen el mismo, que 23 EcuRed. Algoritmo de Dijkstra: características del Algoritmo. [en línea] ecured. [Consultado: 11 de febrero 2019]: https://www.ecured.cu/Algoritmo_de_Dijkstra
24 L. Yun, Q. Fengxie, Liu Zhanjun, and Z. Hongcheng. Cognitive radio routing algorithm based on the smallest transmission delay,” 2nd International Conference on Future Computer and Communication (ICFCC), vol.2. 2010. pp.306-310.
25 ROYERO, Ramiro. Peces Ornamentales de Venezuela. Cuadernos Lagoven Lagoven, S.A. Caracas 106p.1993. ISBN 980-259-562-4

42
departamentos manejan cifras significativas respecto al nivel de exportación, consumo y producción en Colombia, como a su vez, la proyección realizada por el gobierno para años venideros. Para ello, el primer ítem a evaluar son las normativas especiales que rigen estos sistemas, en ella existen leyes como:
5.3.1. Leyes y Normativa de la Piscicultura en Colombia (Marco Legal del Proyecto)
LEY 811 DE 2003
La cual es la encargada de modificar la ley 101 de 1993 y por medio de la misma, se reconoce y Crea las Organizaciones de Cadena en el Sector Agropecuario, Pesquero, Forestal y Acuícola y, crea las Sociedades Agrarias de Transformación – SAT constituidas a nivel nacional, a nivel zonal o regido productora mejorando la productividad y competitividad, desarrollo del mercado de bienes y factores de la cadena, entre otros26.
DECRETO 3800 DE 2006
Reglamenta parcialmente la Ley 811 de 2003, sobre Organizaciones de Cadena en el Sector Agropecuario, Pesquero, Forestal y Acuícola, se generan los principios de representatividad de los integrantes de las organizaciones de cadena, inscripción de las mismas, requisitos para la inscripción autorización de acuerdos comerciales, depósito de los acuerdos en materia comercial (como se compite y como se reglamenta esta competencia a nivel de instituciones)27.
26 COLOMBIA. SECRETARIA DEL SENADO. Ley 811 (2, julio, 2003). Por la cual se modifica la Ley 101 de 1993, [en línea]. Santa Fe de Bogotá, D.C.: Diario Oficial No. 45.236 [Consultado: 31 de Julio 2018]: Disponible en Internet: http://www.secretariasenado.gov.co/senado/basedoc/ley_0811_2003.html
27 COLOMBIA. MINISTERIO DE AGRICULTURA Y DESARROLLO RURAL. Decreto 3800 (31, Octubre, 2006). Reglamenta parcialmente la Ley 811 de 2003, sobre Organizaciones de Cadena en el Sector Agropecuario, Pesquero, Forestal y Acuícola [en línea]. Santa Fe de Bogotá, D.C.: El Ministerio [Consultado: 31 de Julio 2018]: Disponible en Internet: https://n9.cl/94c
43
RESOLUCIÓN 186 DE 2008
Establece los procedimientos para la inscripción, reconocimiento, seguimiento, verificación de acuerdo a la ley de los indicadores acordados y cancelación de las Organizaciones de Cadena en el Sector Agropecuario, Pesquero, Forestal y Acuícola28.
A su vez, podemos hablar de normas y estatutos que certifican la calidad en el sector acuícola, como lo es la Norma HACCP o APPCC la cual habla sobre El Análisis de Peligros y Puntos Críticos de Control siendo un proceso sistemático preventivo para garantizar la inocuidad alimentaria, de forma lógica y objetiva. En él se identifican, evalúan y previenen todos los riesgos de contaminación de los productos a nivel físico, químico y biológico a lo largo de todos los procesos de la cadena de suministro, estableciendo medidas preventivas y correctivas para su control tendientes a asegurar la inocuidad29.
5.4 DEPARTAMENTOS CON CIFRAS SIGNIFICATIVAS EN COLOMBIA
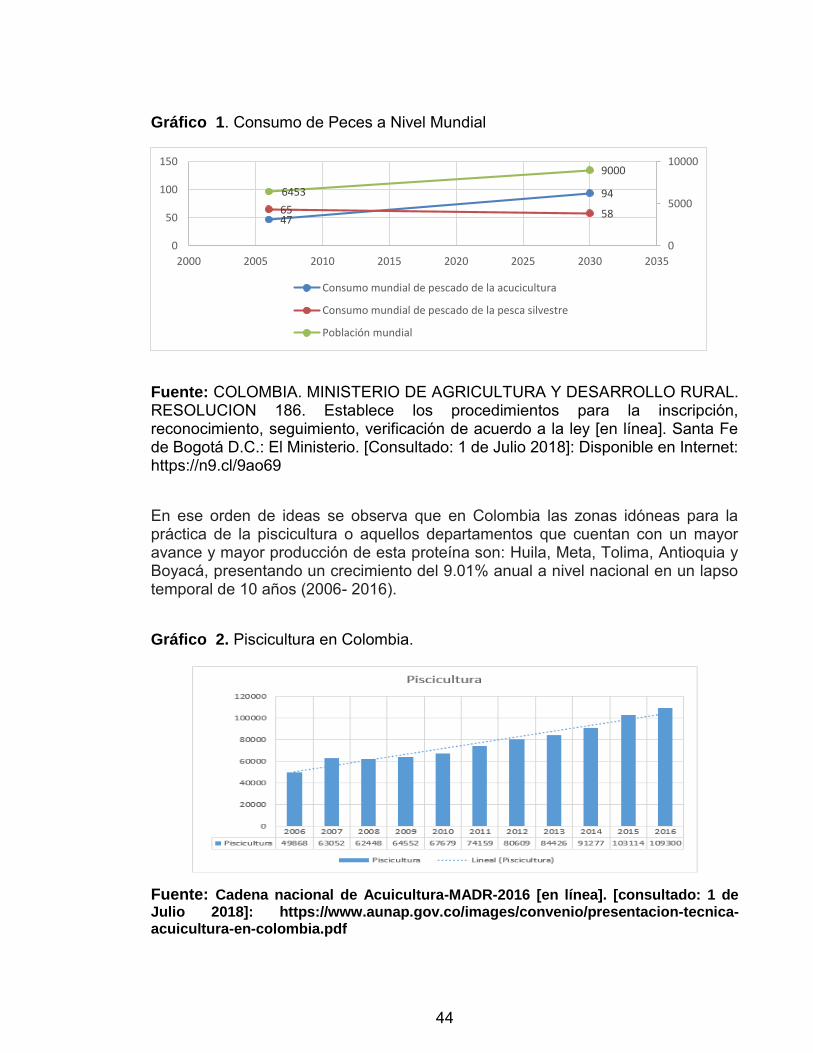
En estudios estadísticos del caso realizados a lo largo del mundo se espera que la mayoría del consumo per cápita de pescado provenga de la acuicultura, para el año 2030 se prevé que el consumo de pescado proveniente de ambientes controlados presente un crecimiento del 200% (94 millones de toneladas) al año frente a los 47 millones del 2006. Junto a su vez, la pesca silvestre baje de 65 millones de toneladas a 58 millones siendo optimistas durante ese mismo tiempo, la acuicultura tiene que llegar a una adición de 47 millones de para satisfacer las necesidades de proteína de cerca de 9.000 millones de habitantes30.
28 COLOMBIA. MINISTERIO DE AGRICULTURA Y DESARROLLO RURAL. RESOLUCION 186. Establece los procedimientos para la inscripción, reconocimiento, seguimiento, verificación de acuerdo a la ley [en línea]. Santa Fe de Bogotá D.C.: El Ministerio. [Consultado: 1 de Julio 2018]: Disponible en Internet: https://n9.cl/9ao69
29 MOTIMORE, Sara. HACCP Enfoque Práctico. Acriba. [en línea] FAO 2001. p. 448. [Consultado: 1 de Julio 2018]: Disponible en Internet: http://www.fao.org/docrep/005/Y1579S/y1579s03.htm
30 WORLD BANK. Fish To 2030: Prospects For Fisheries And Aquaculture. Reporte Numero: 83177-Glb [en línea] documents.worldbank.org 2014 [Consultado: 1 de Julio 2018]: Disponible en Internet: http://documents.worldbank.org/curated/en/2013/12/18882045/fish-2030-prospects-fisheries-aquaculture
44
Gráfico 1. Consumo de Peces a Nivel Mundial
Fuente: COLOMBIA. MINISTERIO DE AGRICULTURA Y DESARROLLO RURAL. RESOLUCION 186. Establece los procedimientos para la inscripción, reconocimiento, seguimiento, verificación de acuerdo a la ley [en línea]. Santa Fe de Bogotá D.C.: El Ministerio. [Consultado: 1 de Julio 2018]: Disponible en Internet: https://n9.cl/9ao69
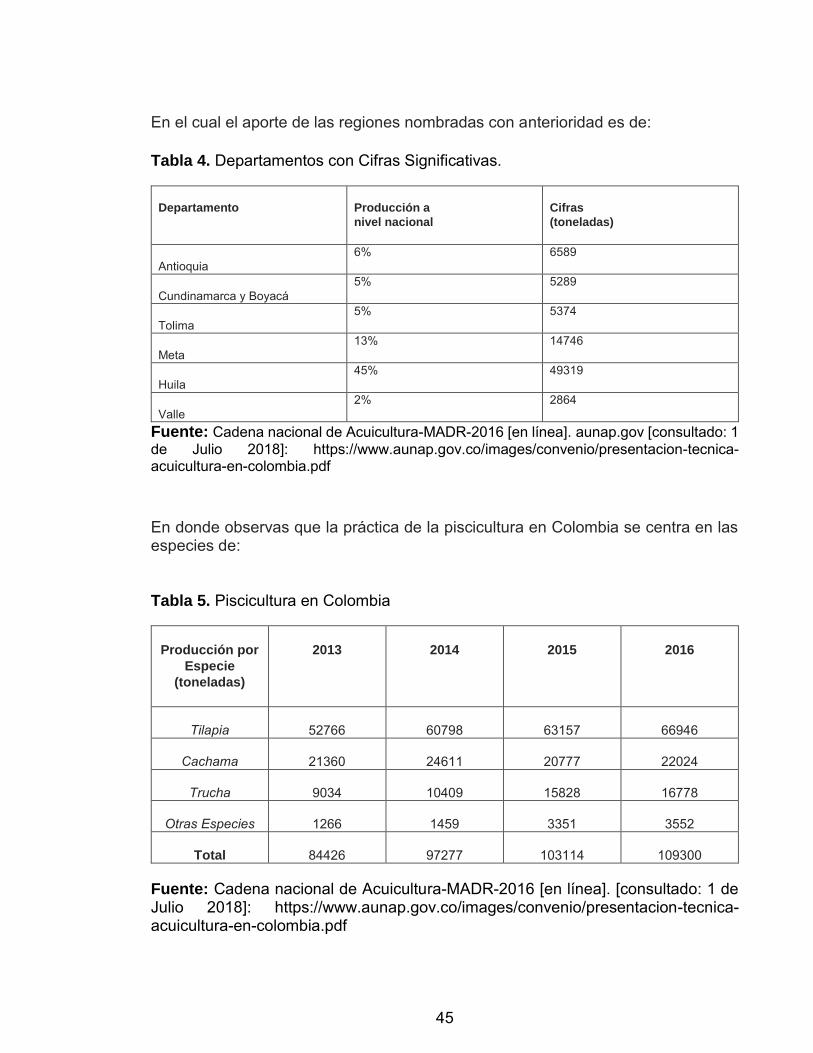
En ese orden de ideas se observa que en Colombia las zonas idóneas para la práctica de la piscicultura o aquellos departamentos que cuentan con un mayor avance y mayor producción de esta proteína son: Huila, Meta, Tolima, Antioquia y Boyacá, presentando un crecimiento del 9.01% anual a nivel nacional en un lapso temporal de 10 años (2006- 2016).
Gráfico 2. Piscicultura en Colombia.
Fuente: Cadena nacional de Acuicultura-MADR-2016 [en línea]. [consultado: 1 de Julio 2018]: https://www.aunap.gov.co/images/convenio/presentacion-tecnica-acuicultura-en-colombia.pdf
47
94
65 58
6453
9000
0
5000
10000
0
50
100
150
2000 2005 2010 2015 2020 2025 2030 2035
Consumo mundial de pescado de la acucicultura
Consumo mundial de pescado de la pesca silvestre
Población mundial
45
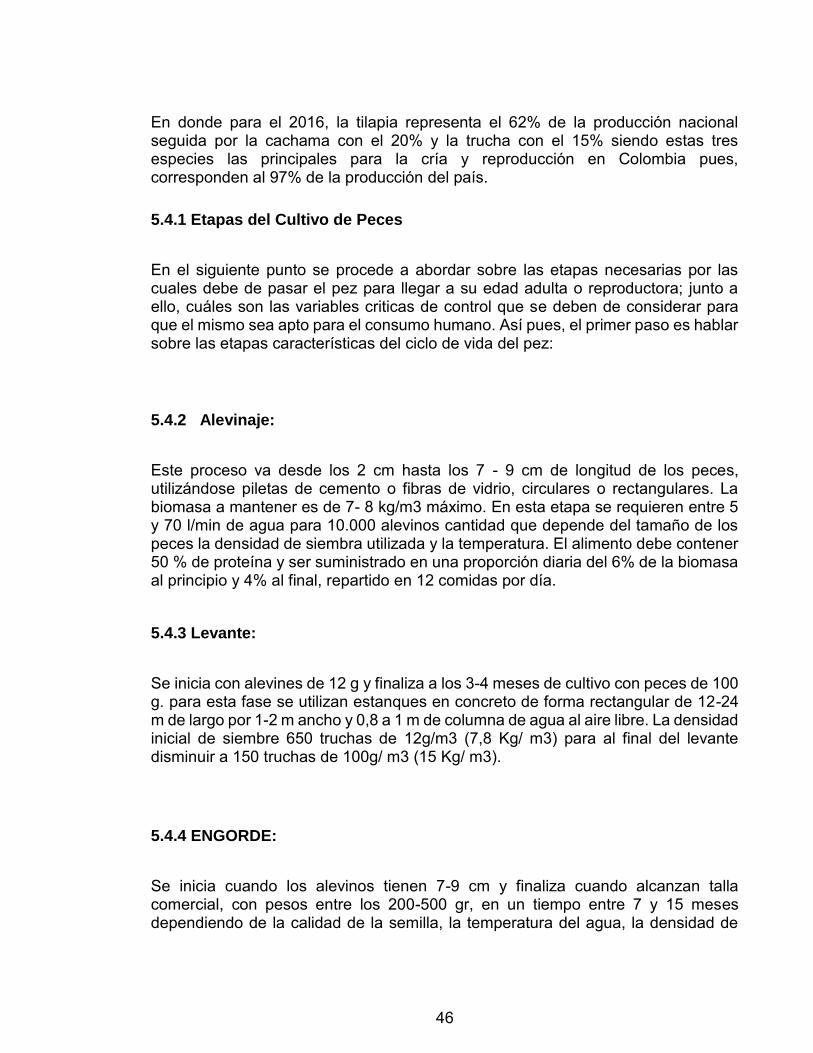
En el cual el aporte de las regiones nombradas con anterioridad es de: Tabla 4. Departamentos con Cifras Significativas.
Departamento
Producción a
nivel nacional
Cifras
(toneladas)
Antioquia
6% 6589
Cundinamarca y Boyacá
5% 5289
Tolima
5% 5374
Meta
13% 14746
Huila
45% 49319
Valle
2% 2864
Fuente: Cadena nacional de Acuicultura-MADR-2016 [en línea]. aunap.gov [consultado: 1 de Julio 2018]: https://www.aunap.gov.co/images/convenio/presentacion-tecnica-acuicultura-en-colombia.pdf
En donde observas que la práctica de la piscicultura en Colombia se centra en las especies de: Tabla 5. Piscicultura en Colombia
Producción por
Especie
(toneladas)
2013
2014
2015
2016
Tilapia
52766
60798
63157
66946
Cachama
21360
24611
20777
22024
Trucha
9034
10409
15828
16778
Otras Especies
1266
1459
3351
3552
Total
84426
97277
103114
109300
Fuente: Cadena nacional de Acuicultura-MADR-2016 [en línea]. [consultado: 1 de Julio 2018]: https://www.aunap.gov.co/images/convenio/presentacion-tecnica-acuicultura-en-colombia.pdf
46
En donde para el 2016, la tilapia representa el 62% de la producción nacional seguida por la cachama con el 20% y la trucha con el 15% siendo estas tres especies las principales para la cría y reproducción en Colombia pues, corresponden al 97% de la producción del país.
5.4.1 Etapas del Cultivo de Peces
En el siguiente punto se procede a abordar sobre las etapas necesarias por las cuales debe de pasar el pez para llegar a su edad adulta o reproductora; junto a ello, cuáles son las variables criticas de control que se deben de considerar para que el mismo sea apto para el consumo humano. Así pues, el primer paso es hablar sobre las etapas características del ciclo de vida del pez:
5.4.2 Alevinaje:
Este proceso va desde los 2 cm hasta los 7 - 9 cm de longitud de los peces, utilizándose piletas de cemento o fibras de vidrio, circulares o rectangulares. La biomasa a mantener es de 7- 8 kg/m3 máximo. En esta etapa se requieren entre 5 y 70 l/min de agua para 10.000 alevinos cantidad que depende del tamaño de los peces la densidad de siembra utilizada y la temperatura. El alimento debe contener 50 % de proteína y ser suministrado en una proporción diaria del 6% de la biomasa al principio y 4% al final, repartido en 12 comidas por día. 5.4.3 Levante:
Se inicia con alevines de 12 g y finaliza a los 3-4 meses de cultivo con peces de 100 g. para esta fase se utilizan estanques en concreto de forma rectangular de 12-24 m de largo por 1-2 m ancho y 0,8 a 1 m de columna de agua al aire libre. La densidad inicial de siembre 650 truchas de 12g/m3 (7,8 Kg/ m3) para al final del levante disminuir a 150 truchas de 100g/ m3 (15 Kg/ m3). 5.4.4 ENGORDE:
Se inicia cuando los alevinos tienen 7-9 cm y finaliza cuando alcanzan talla comercial, con pesos entre los 200-500 gr, en un tiempo entre 7 y 15 meses dependiendo de la calidad de la semilla, la temperatura del agua, la densidad de
47
siembra y la alimentación. principalmente se toman los parámetros de oxígeno disuelto, temperatura y pH, de tal manera que se mantenga en los rangos adecuados para garantizar el buen estado de los peces y un desarrolló optimo del cultivo. Para este proceso de cría y engorde del pez hasta llegar a su etapa de apto para el consumo humano, debemos considerar la infraestructura y variables a controlar que necesita un estanque a nivel industrial para llevar estas etapas a buen término, se consideran: 5.4.5 Parámetros del Cultivo de Peces
Alimentación. Dada por la BIOMASA del estanque que es calculada por medio del muestreo de aproximado el 10% al 15 % de los peces, se procede a tomar su peso promedio, multiplicándolo por el número total de animales del estanque, esto con el fin de ajustar la ración diaria según un porcentaje establecido para cada peso promedio y cada tipo de especie.
Temperatura óptima. Depende del tipo de pez y las condiciones del agua, generalmente para la mayoría de las especies el rango oscila entre los 20 a 26 ºC. Es necesario el control de la misma dado que si los peces permanecen fuera de las condiciones indicadas tienden a estresarse, reducir el consumo de alimento, se tornan susceptibles a enfermedades y mueren en poco tiempo.
PH. El rango se encuentra entre 5 - 9, siendo ideal 7.5. Valores fuera de este rango ocasionan aletargamiento, disminución en la reproducción y el crecimiento. Para mantener el pH en este rango, es necesario encalar (lo cual quiere decir que se preparan y tratan los estanques con diversos tipos de cal, sustancias químicas ricas en calcio (Ca), similares a las que se usan para luchar contra las plagas) cuando esté ácido o hacer recambios fuertes de agua y fertilizar cuando este se toma alcalino.
Oxígeno disuelto. Mayor de 4 ppm en el agua para el normal desarrollo del cultivo. Resisten concentraciones menores a 2 ppm, pero se afectan mucho los peces (disminuyen el consumo de alimento y se hacen más susceptibles a enfermedades).
Luz. La luz es un parámetro que controla de manera significa el crecimiento de la fauna acuática como algas (elementos importas del control de oxigeno de los estanques), y peces. En sistemas intensivos con poca profundidad, los rayos
48
solares pueden ocasionar quemaduras en el dorso del animal. Por lo cual, el estándar dice que 4 Lux, es suficiente para controlar el tema de madurez de los peces, sin embargo, a 10 Lux logra, además, el efecto de un mejor crecimiento.
Tiempo de Vida. Cuando los peces ya han alcanzado el tamaño comercial o un peso promedio de 1.5 kg. El estanque debe cosecharse y los peces tienen que venderse. Si no se hace esto se pierde tiempo, los peces pierden peso y el riesgo de sufrir pérdidas es cada vez mayor
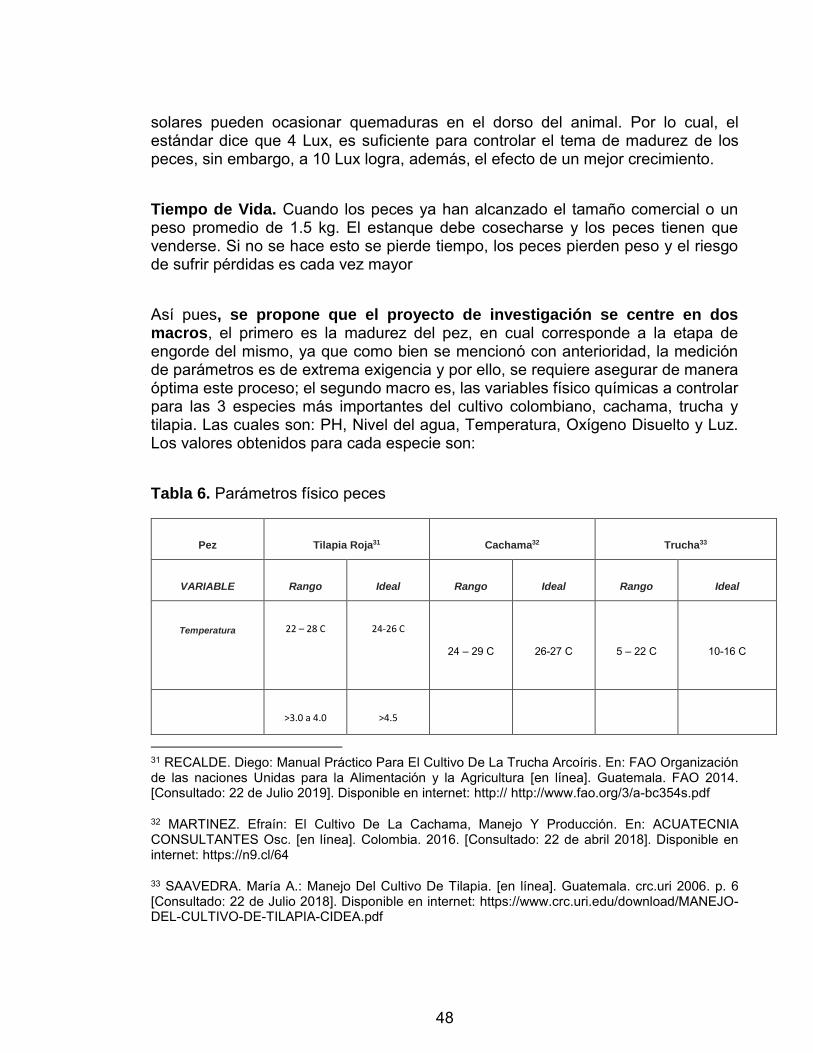
Así pues, se propone que el proyecto de investigación se centre en dos macros, el primero es la madurez del pez, en cual corresponde a la etapa de engorde del mismo, ya que como bien se mencionó con anterioridad, la medición de parámetros es de extrema exigencia y por ello, se requiere asegurar de manera óptima este proceso; el segundo macro es, las variables físico químicas a controlar para las 3 especies más importantes del cultivo colombiano, cachama, trucha y tilapia. Las cuales son: PH, Nivel del agua, Temperatura, Oxígeno Disuelto y Luz. Los valores obtenidos para cada especie son:
Tabla 6. Parámetros físico peces
Pez
Tilapia Roja31
Cachama32
Trucha33
VARIABLE
Rango
Ideal
Rango
Ideal
Rango
Ideal
Temperatura
22 – 28 C
24-26 C
24 – 29 C
26-27 C
5 – 22 C
10-16 C
>3.0 a 4.0
>4.5
31 RECALDE. Diego: Manual Práctico Para El Cultivo De La Trucha Arcoíris. En: FAO Organización de las naciones Unidas para la Alimentación y la Agricultura [en línea]. Guatemala. FAO 2014. [Consultado: 22 de Julio 2019]. Disponible en internet: http:// http://www.fao.org/3/a-bc354s.pdf
32 MARTINEZ. Efraín: El Cultivo De La Cachama, Manejo Y Producción. En: ACUATECNIA CONSULTANTES Osc. [en línea]. Colombia. 2016. [Consultado: 22 de abril 2018]. Disponible en internet: https://n9.cl/64
33 SAAVEDRA. María A.: Manejo Del Cultivo De Tilapia. [en línea]. Guatemala. crc.uri 2006. p. 6 [Consultado: 22 de Julio 2018]. Disponible en internet: https://www.crc.uri.edu/download/MANEJO-DEL-CULTIVO-DE-TILAPIA-CIDEA.pdf
49
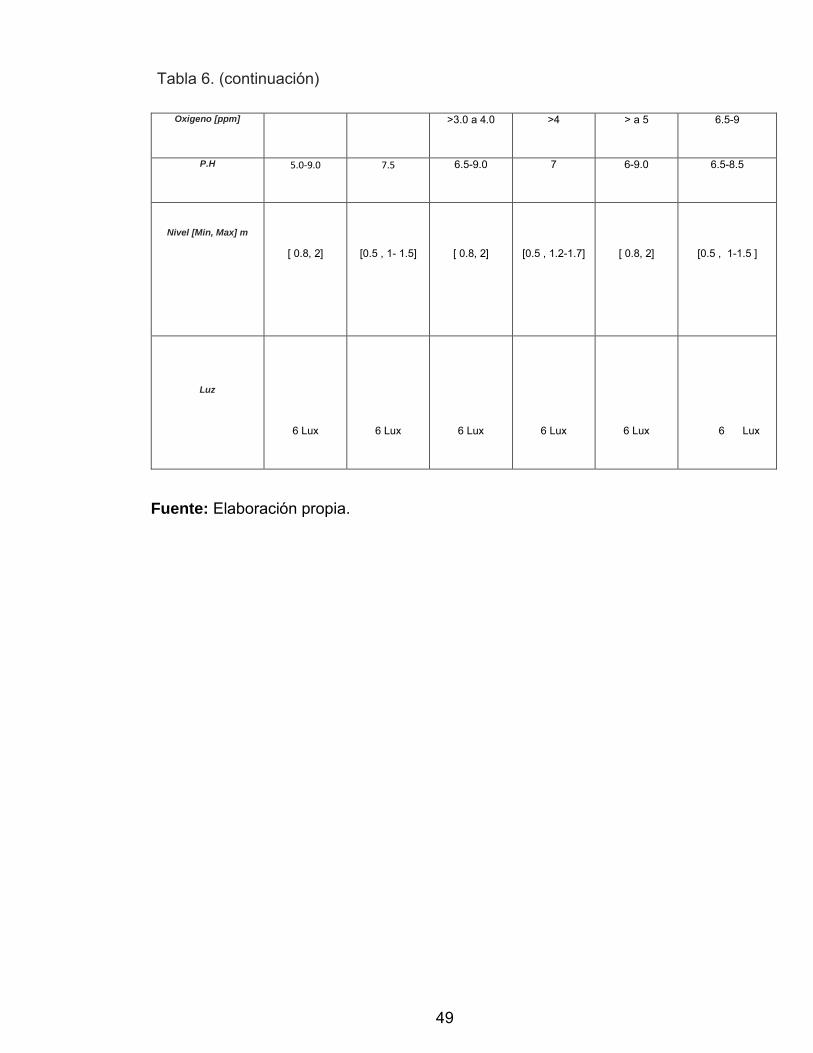
Oxigeno [ppm] >3.0 a 4.0 >4 > a 5 6.5-9
P.H 5.0-9.0 7.5 6.5-9.0 7 6-9.0 6.5-8.5
Nivel [Min, Max] m
[ 0.8, 2] [0.5 , 1- 1.5] [ 0.8, 2] [0.5 , 1.2-1.7] [ 0.8, 2] [0.5 , 1-1.5 ]
Luz
6 Lux 6 Lux 6 Lux 6 Lux 6 Lux 6 Lux
Fuente: Elaboración propia.
Tabla 6. (continuación)
50
6. METODOLOGÍA
Para el desarrollo metodológico del proyecto se implementará de acuerdo a la naturaleza de los datos una metodología del tipo cuantitativo, dado que, la investigación de las ciencias físico-naturales y sus instrumentos incluyen medición sistemática con un análisis estadístico como característica resultante, se decide identificar la problemática reuniendo el mayor número de información que permita configurar el estado del arte del mismo y entorno a eso, anexar información de cómo automatizar el proceso; para la manipulación de variables, se tiene la investigación del tipo experimental en donde se manipula una o varias variables independientes, ejerciendo el máximo control y regulando el setpoint de las mismas para mantener el estanque artificial de las especies de peces en condiciones óptimas de desarrollo.
La información que se dispone en los antecedentes y en el marco teórico sobre las variables a considerar para la reproducción y cría de peces en Colombia. Permite derivar como alternativa de solución, un análisis de tipo nodal en donde se necesitarán al menos tres nodos; un nodo de sensado, para la medición de las variables de: Temperatura, Nivel, pH, luz y Oxígeno Disuelto (OD). Un nodo de actuación y un nodo de control.
El número de nodos de sensado se determina por medio del algoritmo de Kriging (método geoestadístico de estimación de puntos). el nodo de actuación, será el encargado de operar en el entorno cuando las variables físico-químicas se encuentren fuera del rango deseado; este nodo será conducido por medio del nodo de control y opera sobre las variables de temperatura, nivel y luz. A su vez, el nodo de control es el encargado de la comunicación nodal entre los diferentes nodos de sensado y nodos de actuación, también, proporciona la información del estanque al usuario por medio de una interfaz HMI. De esta manera, se propone una metodología adaptada al diseño concurrente que permita alcanzar de manera sistemática y de forma gradual los objetivos inicialmente propuestos.
51
6.1 ETAPAS DEL PROYECTO
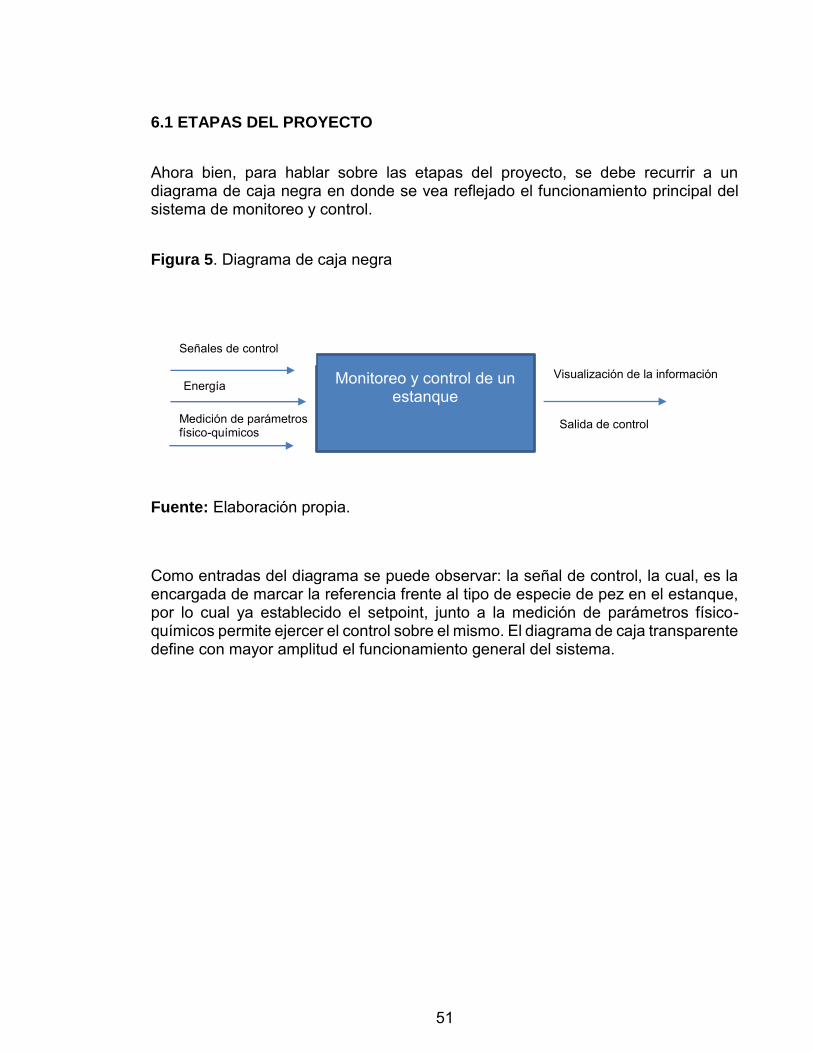
Ahora bien, para hablar sobre las etapas del proyecto, se debe recurrir a un diagrama de caja negra en donde se vea reflejado el funcionamiento principal del sistema de monitoreo y control.
Figura 5. Diagrama de caja negra
Fuente: Elaboración propia.
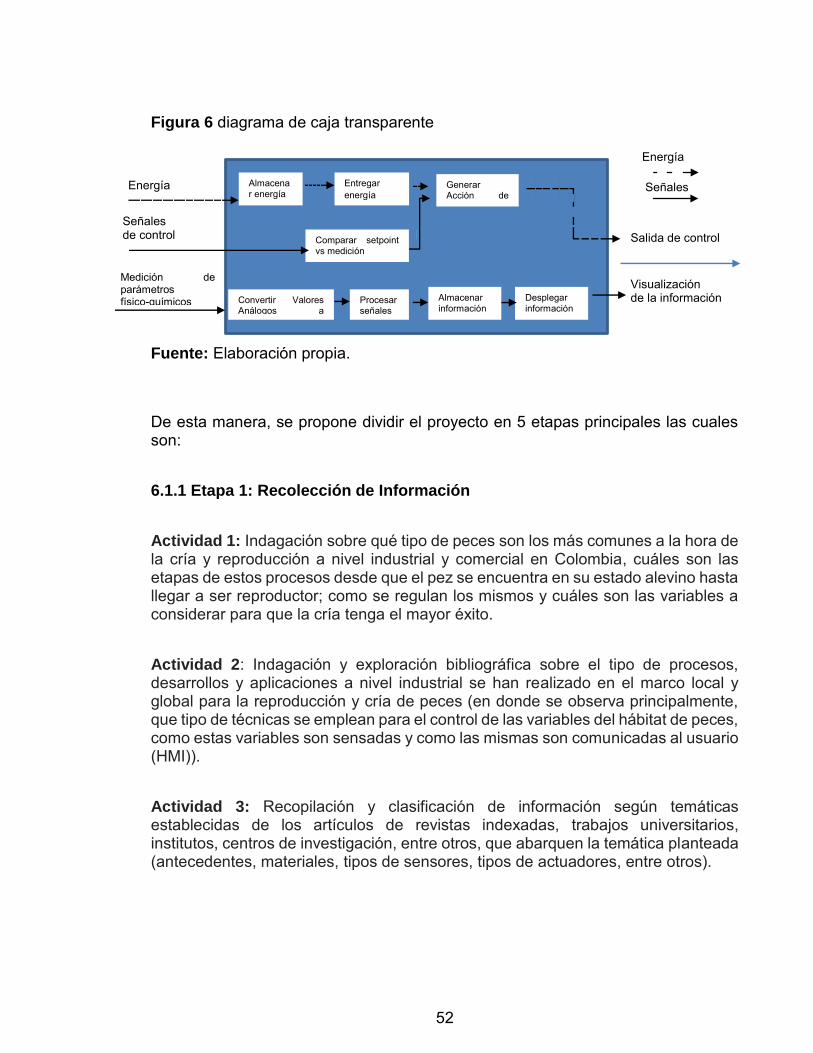
Como entradas del diagrama se puede observar: la señal de control, la cual, es la encargada de marcar la referencia frente al tipo de especie de pez en el estanque, por lo cual ya establecido el setpoint, junto a la medición de parámetros físico-químicos permite ejercer el control sobre el mismo. El diagrama de caja transparente define con mayor amplitud el funcionamiento general del sistema.
Monitoreo y control de un estanque
Señales de control
Energía
Medición de parámetros físico-químicos
Visualización de la información
Salida de control
52
Figura 6 diagrama de caja transparente
Fuente: Elaboración propia.
De esta manera, se propone dividir el proyecto en 5 etapas principales las cuales son:
6.1.1 Etapa 1: Recolección de Información
Actividad 1: Indagación sobre qué tipo de peces son los más comunes a la hora de la cría y reproducción a nivel industrial y comercial en Colombia, cuáles son las etapas de estos procesos desde que el pez se encuentra en su estado alevino hasta llegar a ser reproductor; como se regulan los mismos y cuáles son las variables a considerar para que la cría tenga el mayor éxito.
Actividad 2: Indagación y exploración bibliográfica sobre el tipo de procesos, desarrollos y aplicaciones a nivel industrial se han realizado en el marco local y global para la reproducción y cría de peces (en donde se observa principalmente, que tipo de técnicas se emplean para el control de las variables del hábitat de peces, como estas variables son sensadas y como las mismas son comunicadas al usuario (HMI)).
Actividad 3: Recopilación y clasificación de información según temáticas establecidas de los artículos de revistas indexadas, trabajos universitarios, institutos, centros de investigación, entre otros, que abarquen la temática planteada (antecedentes, materiales, tipos de sensores, tipos de actuadores, entre otros).
Señales de control
Energía
Medición de parámetros físico-químicos
Visualización de la información
Salida de control
Convertir Valores Análogos a Digitales.
Procesar señales
Comparar setpoint vs medición
Almacenar energía
Entregar energía
Generar Acción de control
Almacenar información
Desplegar información
Energía
Señales
53
6.1.2 Etapa 2: Reconocimiento Tecnológico
Actividad 1: Identificación de cada variable critica en el proceso de cría y reproducción de peces, como la misma va ser sensada e instrumentada junto a su vez, determinar el tipo de actuador a emplear en un espacio acuático y el funcionamiento del mismo para realizar un adecuado control.
Actividad 2: Identificación de los posibles fallos frente a la toma de datos en un estanque artificial, determinando número de sensores por unidad de área, funcionamiento de los mismos, gasto enérgico entre otros.
Actividad 3: Identificación de necesidades y requerimientos del sistema de actuación y delimitación sobre las fallas del mismo que puede comprometer el cultivo de peces.
6.1.3 Etapa 3: Generación y Selección de Conceptos.
Actividad 1: Generación y Selección de Conceptos para la realización del sistema de sensado, control y actuación del sistema.
Actividad 2: Generación y Selección de Conceptos para la realización de la interfaz HMI del sistema.
6.1.4 Etapa 4: Diseño a Nivel Sistema y detallado
Actividad 1: Diseño detallado del sistema de control (selección de entradas, referencia de acuerdo al tipo de pez (setpoint), tipo de algoritmos a emplear, actuación en salida junto a geometrías y espacio a ocupar en un estanque artificial).
Actividad 2: Diseño detallado del sistema de sensado, numero de sensores a emplear, numero de nodos por unidad de área, posicionamiento de los sensores, entre otros.

54
6.1.5 Etapa 5: Validación de Diseño
Actividad 1: Validación de Diseño mediante Evaluación Financiera y de Materiales del diseño seleccionado.
Actividad 2: Validación de diseño mediante simulación del sistema de control.
Actividad 3: Ajustes finales al diseño y validación del modelo.
55
7. LÓGICA SECUENCIAL DEL PROYECTO GRAFCET
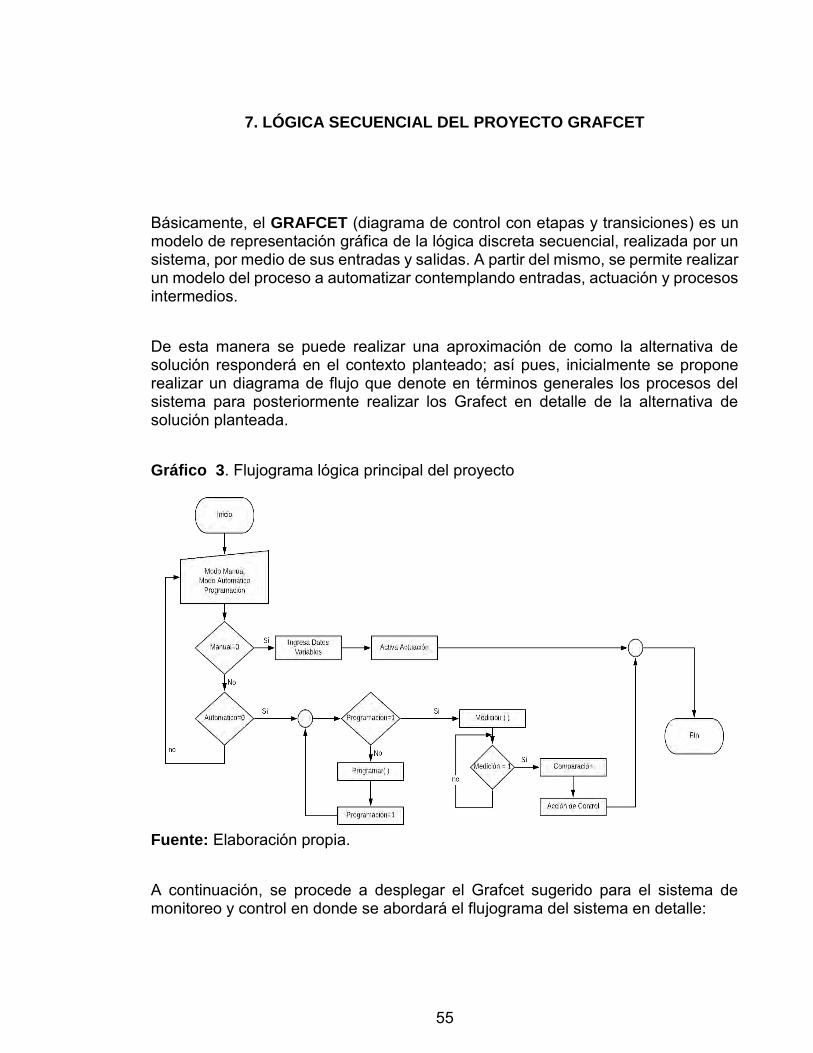
Básicamente, el GRAFCET (diagrama de control con etapas y transiciones) es un modelo de representación gráfica de la lógica discreta secuencial, realizada por un sistema, por medio de sus entradas y salidas. A partir del mismo, se permite realizar un modelo del proceso a automatizar contemplando entradas, actuación y procesos intermedios.
De esta manera se puede realizar una aproximación de como la alternativa de solución responderá en el contexto planteado; así pues, inicialmente se propone realizar un diagrama de flujo que denote en términos generales los procesos del sistema para posteriormente realizar los Grafect en detalle de la alternativa de solución planteada.
Gráfico 3. Flujograma lógica principal del proyecto
Fuente: Elaboración propia.
A continuación, se procede a desplegar el Grafcet sugerido para el sistema de monitoreo y control en donde se abordará el flujograma del sistema en detalle:
56
7.1 MODO NORMAL DE OPERACIÓN (GRAFCET PRINCIPAL)
Sistema de monitoreo y control:
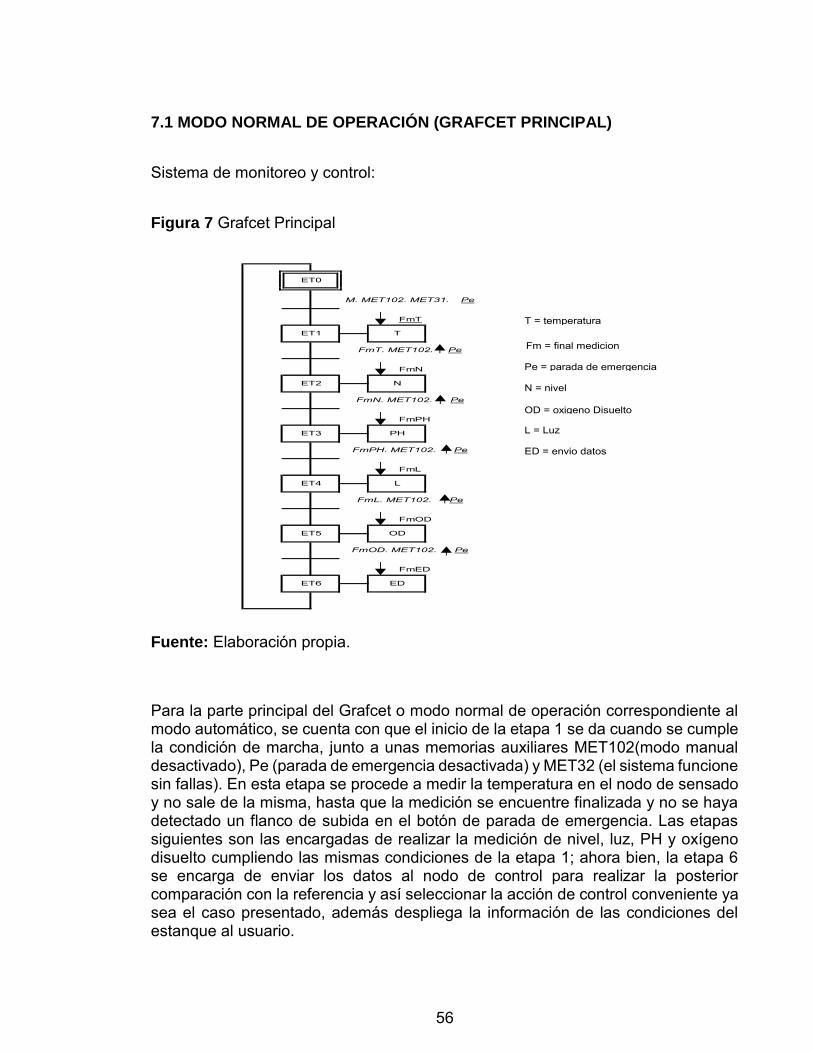
Figura 7 Grafcet Principal
Fuente: Elaboración propia.
Para la parte principal del Grafcet o modo normal de operación correspondiente al modo automático, se cuenta con que el inicio de la etapa 1 se da cuando se cumple la condición de marcha, junto a unas memorias auxiliares MET102(modo manual desactivado), Pe (parada de emergencia desactivada) y MET32 (el sistema funcione sin fallas). En esta etapa se procede a medir la temperatura en el nodo de sensado y no sale de la misma, hasta que la medición se encuentre finalizada y no se haya detectado un flanco de subida en el botón de parada de emergencia. Las etapas siguientes son las encargadas de realizar la medición de nivel, luz, PH y oxígeno disuelto cumpliendo las mismas condiciones de la etapa 1; ahora bien, la etapa 6 se encarga de enviar los datos al nodo de control para realizar la posterior comparación con la referencia y así seleccionar la acción de control conveniente ya sea el caso presentado, además despliega la información de las condiciones del estanque al usuario.
T = temperatura
Fm = final medicion
Pe = parada de emergencia
N = nivel
L = Luz
ED = envio datos
OD = oxigeno Disuelto
FmT
FmN
FmPH
FmL
FmOD
FmED
ET5 OD
ET6 ED
FmOD. MET102. Pe
FmL. MET102. Pe
ET3 PH
ET4 L
FmPH. MET102. Pe
FmN. MET102. Pe
ET2 N
FmT. MET102. Pe
ET0
ET1 T
M. MET102. MET31. Pe

57
7.2 MODO DE FALLA
Figura 8. Grafcet Modo de Falla
Fuente: Elaboración propia.
El modo de falla es el encargado de parar el sistema para evitar comprometer el cultivo o el instrumento mismo, el dispositivo ingresa a este modo cuando el botón asociado a la parada de emergencia (Son es la memoria activada cuando) es presionado y de la única manera que puede salir, es si el sistema es enviado a modo manual. La ET30 corresponde al inicio de esta interrupción en la cual se observa y compara si el botón ha sido presionado, de no ser así, el dispositivo genera la memoria de la etapa 31 y procede a operar de manera normal, si el dispositivo se encuentra en falla, el sistema envía el Grafcet a las etapas iniciales, esperando que el operario mande el sistema a modo manual y el sistema de alerta es activado, a su vez el nodo de actuación es enviado a condiciones iniciales, es decir, espera que todas las salidas del sistema se encuentren en bajo.
7.3 PROGRAMACIÓN DE PARÁMETROS
En el módulo de control se presenta la programación del dispositivo, este corresponde a la etapa 40 hasta la etapa 52, cuando se presenta un bajo de energía
F/G G(0):(0)
F/G G(100):(100)
M. Son M.Son
ET31 MET31 ET32
M.Son
ET30
M.Ma. Son
58
eléctrica en el sistema o el mismo es apagado a voluntad, en el reinicio se ingresa a este modo para asegurar que el dispositivo opere de forma correcta y continua, en él se tomara la decisión de observar si el sistema contaba con una programación anterior, de ser así, el mismo, ingresa a la etapa 41 que permite por un intervalo de tiempo decidir si se va a operar con esta programación o no, al acabarse el tiempo y si el usuario no ha digitado ningún valor el sistema asume un 1 lógico y trabaja con la programación anterior, si el usuario digita NO, el sistema procede a ingresar a la ET42, como ingresaría normalmente cuando el usuario digite el botón de programar.
Una vez allí, el usuario escoge el tipo de cultivo presente, en consideración se optó por brindar unas opciones pre programadas considerando el tipo de pez comúnmente cultivado en Colombia, así pues, el menú permite la selección de la trucha, cachama o tilapia. Y de caso de no querer ninguna de las anteriores, puede ingresar los datos por su cuenta de una nueva especie.
Una vez la programación del dispositivo sea concluida ya sea por la etapa 41 o la etapa 42, el dispositivo activa la etapa 52 lo que permite iniciar con su modo habitual de operación. El Grafcet de este proceso es detallado a continuación:
59
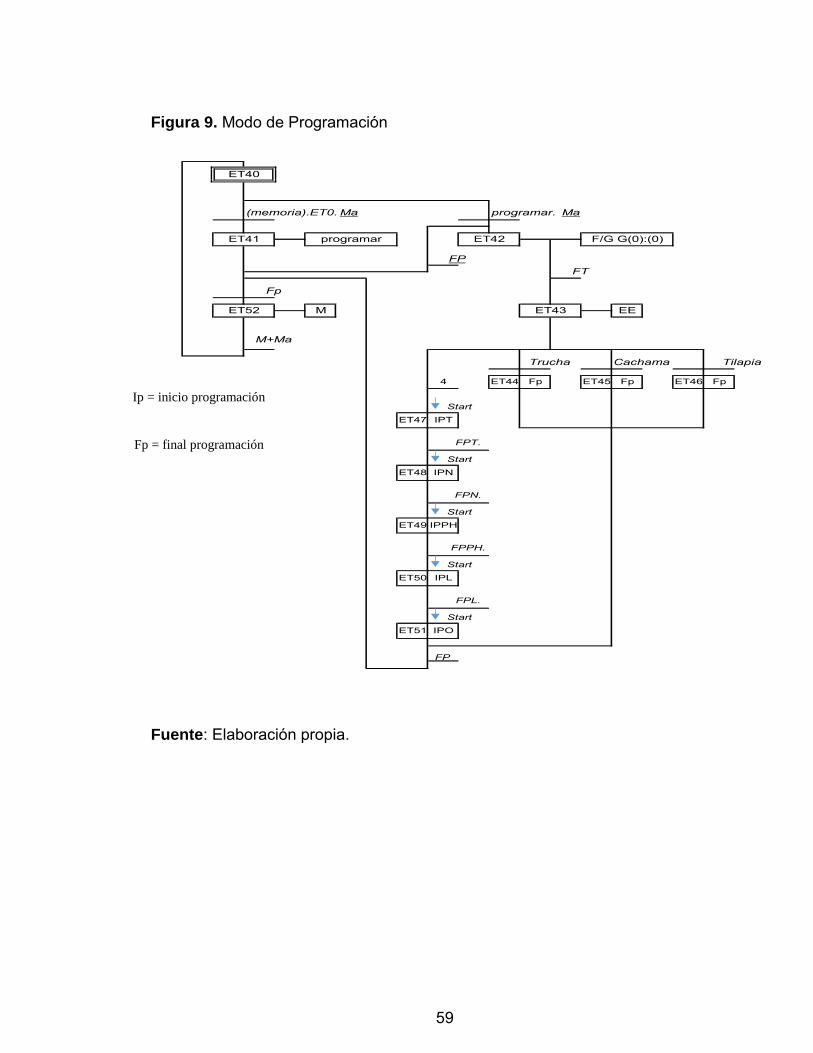
Figura 9. Modo de Programación
Fuente: Elaboración propia.
FP
programar. Ma
FPN.
FPPH.
FPL.
Start
Start
Start
ET52 M
ET40
ET41
M+Ma
(memoria).ET0. Ma
programar
Fp
ET46 Fp
ET42
ET43 EE
ET44 Fp ET45 Fp
Trucha Cachama Tilapia
FPFT
F/G G(0):(0)
ET47 IPT
ET48 IPN
4
FPT.
Start
ET49 IPPH
ET50 IPL
ET51 IPO Start
Ip = inicio programación
Fp = final programación
60
7.4 MODO MANUAL
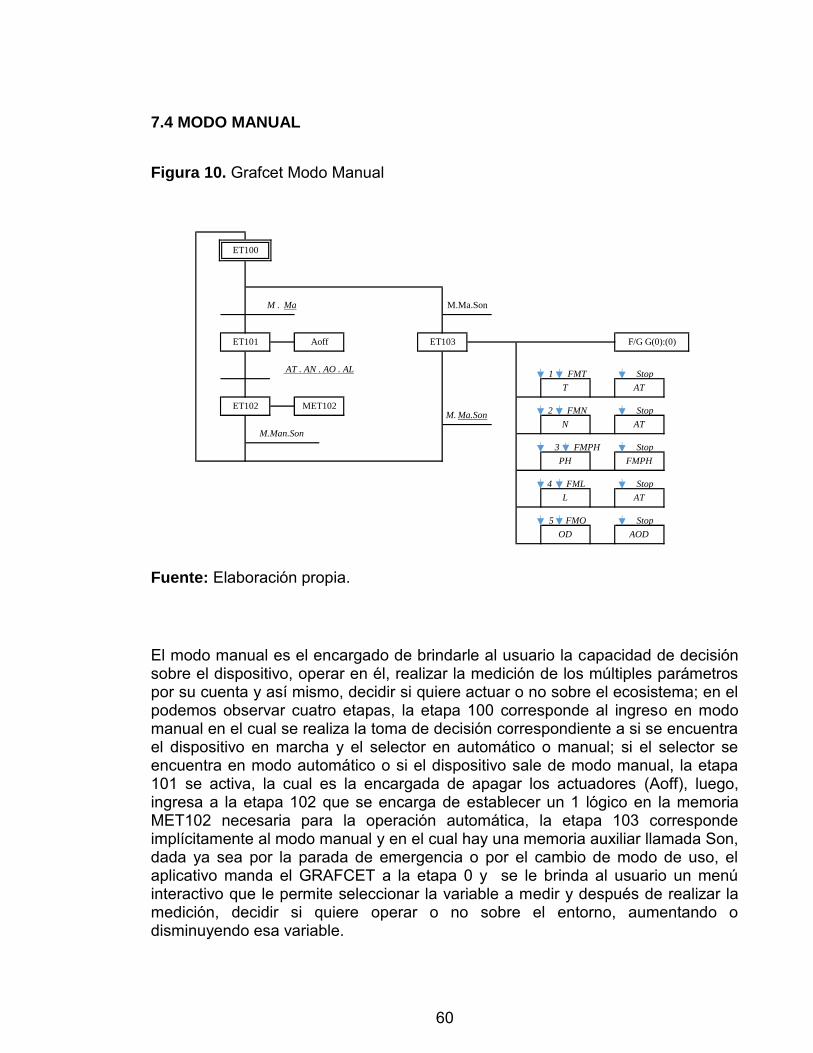
Figura 10. Grafcet Modo Manual
Fuente: Elaboración propia.
El modo manual es el encargado de brindarle al usuario la capacidad de decisión sobre el dispositivo, operar en él, realizar la medición de los múltiples parámetros por su cuenta y así mismo, decidir si quiere actuar o no sobre el ecosistema; en el podemos observar cuatro etapas, la etapa 100 corresponde al ingreso en modo manual en el cual se realiza la toma de decisión correspondiente a si se encuentra el dispositivo en marcha y el selector en automático o manual; si el selector se encuentra en modo automático o si el dispositivo sale de modo manual, la etapa 101 se activa, la cual es la encargada de apagar los actuadores (Aoff), luego, ingresa a la etapa 102 que se encarga de establecer un 1 lógico en la memoria MET102 necesaria para la operación automática, la etapa 103 corresponde implícitamente al modo manual y en el cual hay una memoria auxiliar llamada Son, dada ya sea por la parada de emergencia o por el cambio de modo de uso, el aplicativo manda el GRAFCET a la etapa 0 y se le brinda al usuario un menú interactivo que le permite seleccionar la variable a medir y después de realizar la medición, decidir si quiere operar o no sobre el entorno, aumentando o disminuyendo esa variable.
ET100
M . Ma
F/G G(0):(0)
M.Man.Son
M. Ma.Son
AT
ET101 Aoff ET103
M.Ma.Son
ET102 MET102
AT . AN . AO . AL
T
1 FMT
3 FMPH
L AT
Stop
2 FMN Stop
Stop
PH FMPH
N AT
5 FMO Stop
OD AOD
4 FML Stop

61
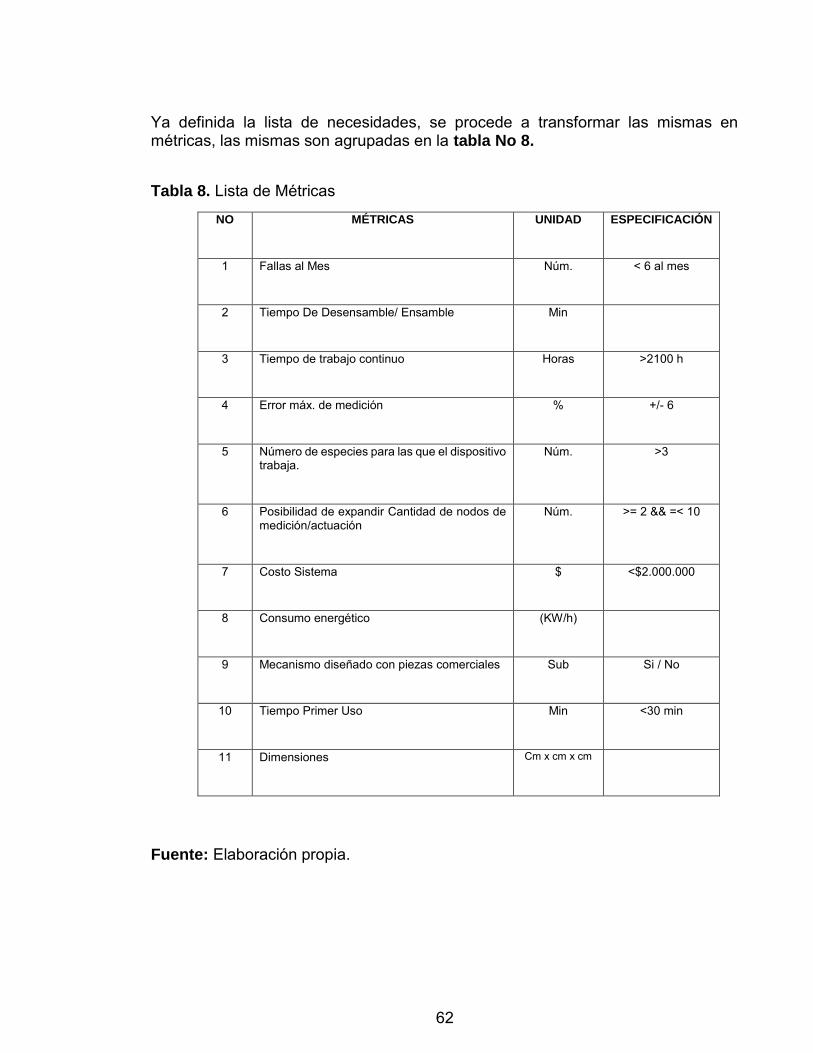
8. RECONOCIMIENTO TECNOLÓGICO.
Como primer paso del diseño mecatrónico, se procede a enumerar las múltiples necesidades que el sistema debe cumplir. Para ello, estas se listarán junto a su respectiva ponderación de importancia (siendo 9 el ítem de mayor importancia y 1 el de menor).
Tabla 7. Lista de necesidades
NO NECESIDADES IMPORTANCIA
1 SEGURIDAD
1.1 Resistente 1
1.2 Fácil Mantenimiento 3
1.3 Alto rendimiento 9
1.4 Confiable 9
2 REQUERIMIENTOS
2.1 Flexible 9
2.2 Modular – escalable 3
2.3 Vida útil 3
3 COSTO
3.1 Bajo costo 3
3.2 Bajo consumo energético 3
3.3 Piezas de fácil reemplazo 1
4 COMODIDAD
4.1 Ergonómico 1
4.2 No invasivo 3
4.3 Estético 1
4.4 Intuitivo 1
Fuente: Elaboración propia.
62
Ya definida la lista de necesidades, se procede a transformar las mismas en métricas, las mismas son agrupadas en la tabla No 8.
Tabla 8. Lista de Métricas
NO MÉTRICAS UNIDAD ESPECIFICACIÓN
1 Fallas al Mes Núm. < 6 al mes
2 Tiempo De Desensamble/ Ensamble Min
3 Tiempo de trabajo continuo Horas >2100 h
4 Error máx. de medición % +/- 6
5 Número de especies para las que el dispositivo trabaja.
Núm. >3
6 Posibilidad de expandir Cantidad de nodos de medición/actuación
Núm. >= 2 && =< 10
7 Costo Sistema $ <$2.000.000
8 Consumo energético (KW/h)
9 Mecanismo diseñado con piezas comerciales Sub Si / No
10 Tiempo Primer Uso Min <30 min
11 Dimensiones Cm x cm x cm
Fuente: Elaboración propia.
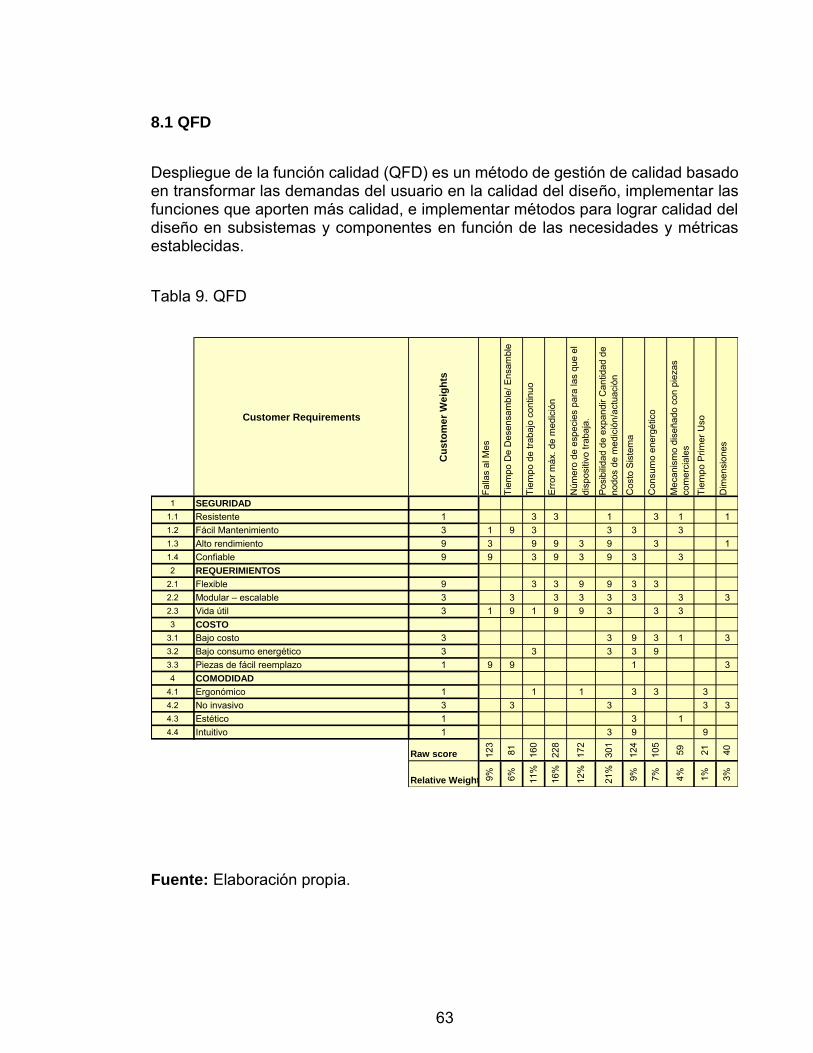
63
8.1 QFD
Despliegue de la función calidad (QFD) es un método de gestión de calidad basado en transformar las demandas del usuario en la calidad del diseño, implementar las funciones que aporten más calidad, e implementar métodos para lograr calidad del diseño en subsistemas y componentes en función de las necesidades y métricas establecidas.
Tabla 9. QFD
Fuente: Elaboración propia.
Customer Requirements
Cu
sto
me
r W
eig
hts
Falla
s al
Mes
Tiem
po D
e D
esen
sam
ble/
Ens
ambl
e
Tiem
po d
e tra
bajo
con
tinuo
Erro
r máx
. de
med
ició
n
Núm
ero
de e
spec
ies
para
las
que
el
disp
ositi
vo tr
abaj
a.
Posi
bilid
ad d
e ex
pand
ir C
antid
ad d
e no
dos
de m
edic
ión/
actu
ació
n C
osto
Sis
tem
a
Con
sum
o en
ergé
tico
Mec
anis
mo
dise
ñado
con
pie
zas
com
erci
ales
Ti
empo
Prim
er U
so
Dim
ensi
ones
1 SEGURIDAD
1.1 Resistente 1 3 3 1 3 1 11.2 Fácil Mantenimiento 3 1 9 3 3 3 31.3 Alto rendimiento 9 3 9 9 3 9 3 11.4 Confiable 9 9 3 9 3 9 3 32 REQUERIMIENTOS
2.1 Flexible 9 3 3 9 9 3 32.2 Modular – escalable 3 3 3 3 3 3 3 32.3 Vida útil 3 1 9 1 9 9 3 3 33 COSTO
3.1 Bajo costo 3 3 9 3 1 33.2 Bajo consumo energético 3 3 3 3 93.3 Piezas de fácil reemplazo 1 9 9 1 34 COMODIDAD
4.1 Ergonómico 1 1 1 3 3 34.2 No invasivo 3 3 3 3 34.3 Estético 1 3 14.4 Intuitivo 1 3 9 9
Raw score 123
81 160
228
172
301
124
105
59 21 40
Relative Weight 9% 6% 11%
16%
12%
21%
9% 7% 4% 1% 3%
64
Por medio del desarrollo de la QFD se obtiene como métricas principales: Error máx. de medición (16%) número de especies para las que trabaja el dispositivo (12%) número de nodos (21%) y tiempo de trabajo continuo (11%).
8.2 GENERACIÓN Y SELECCIÓN DE CONCEPTOS
8.2.1 Descripción del producto
Diseño de un sistema de monitoreo y control para estanques artificiales dedicados a la producción piscícola.
8.2.2 Variantes de Diseño
A continuación, se procede a presentar cada una de las alternativas de diseño que pueden responder a esta problemática. Cada una de ellas es evaluada por medio de la matriz de selección la cual permite conocer la alternativa con mayor ponderación.
Tabla 10. Alternativas de solución para número de nodos Sensado/Actuación
Alternativa 1
Bluetooth IEEE 802.15.4.
No máx. Nodos 8
Alternativa 2
65
Número de nodos
Sensado / Actuación
Sistema
Zigbee IEE 802.15.4.
No máx. Nodos >6500/250
Alternativa 3
Wifi o IEEE (802.11 a, 802.11 b)
No máx. Nodos 2007
Fuente: Elaboración propia.
Tabla 10. (continuación)
66
Tabla 11. Alternativas de solución para número de especies
Número de especies para las que trabaja el dispositivo.
Alternativa 1
Pic + Atmel
Alternativa 2
Pic
Alternativa 3
Atmel
Fuente: Elaboración propia.
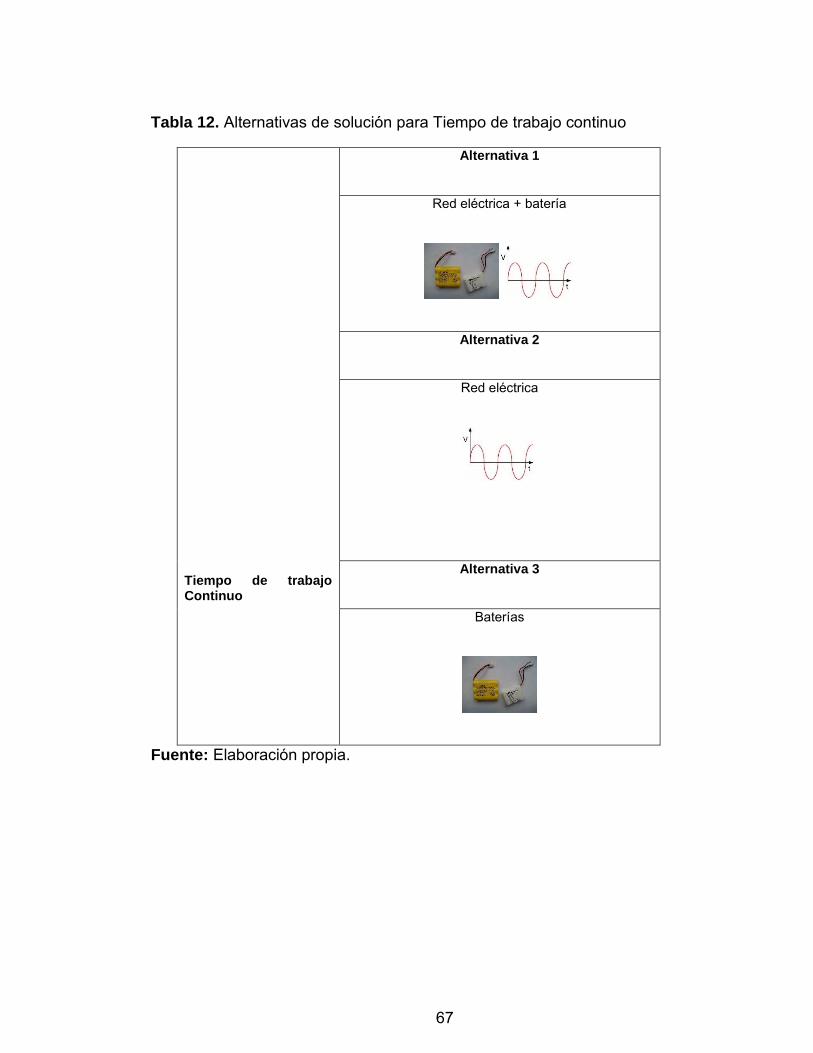
67
Tabla 12. Alternativas de solución para Tiempo de trabajo continuo
Tiempo de trabajo Continuo
Alternativa 1
Red eléctrica + batería
Alternativa 2
Red eléctrica
Alternativa 3
Baterías
Fuente: Elaboración propia.
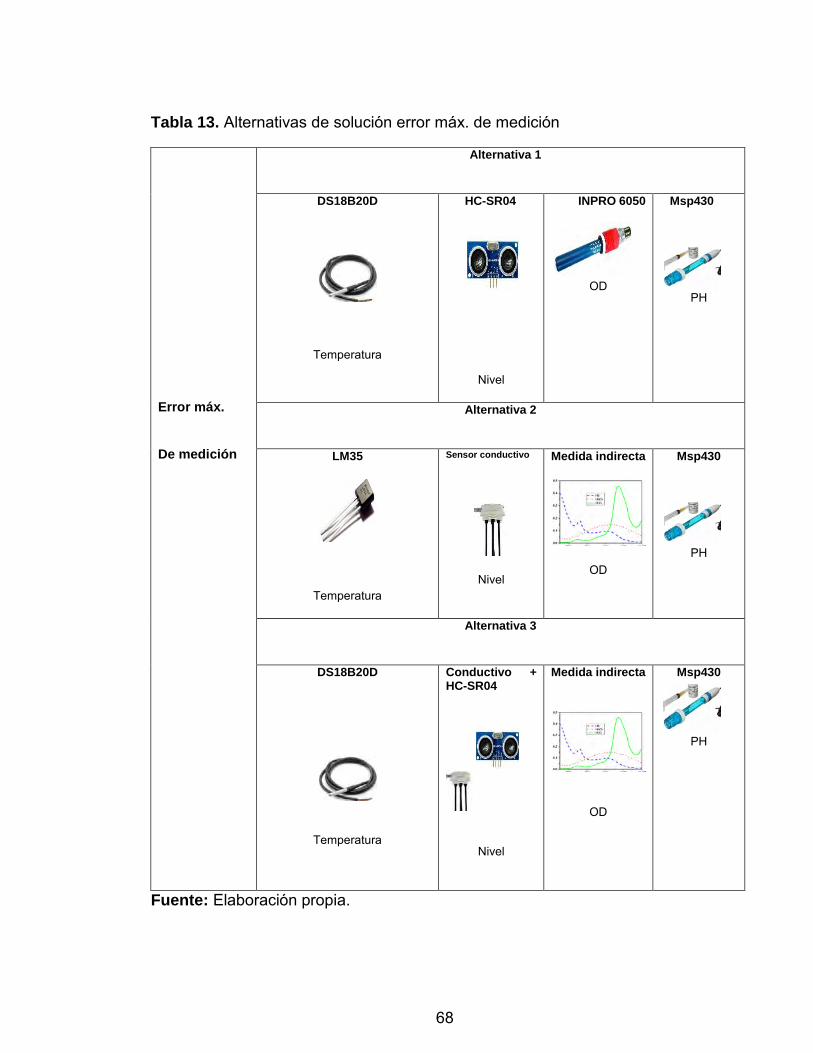
68
Tabla 13. Alternativas de solución error máx. de medición
Error máx.
De medición
Alternativa 1
DS18B20D
Temperatura
HC-SR04
Nivel
INPRO 6050
OD
Msp430
PH
Alternativa 2
LM35
Temperatura
Sensor conductivo
Nivel
Medida indirecta
OD
Msp430
PH
Alternativa 3
DS18B20D
Temperatura
Conductivo + HC-SR04
Nivel
Medida indirecta
OD
Msp430
PH
Fuente: Elaboración propia.
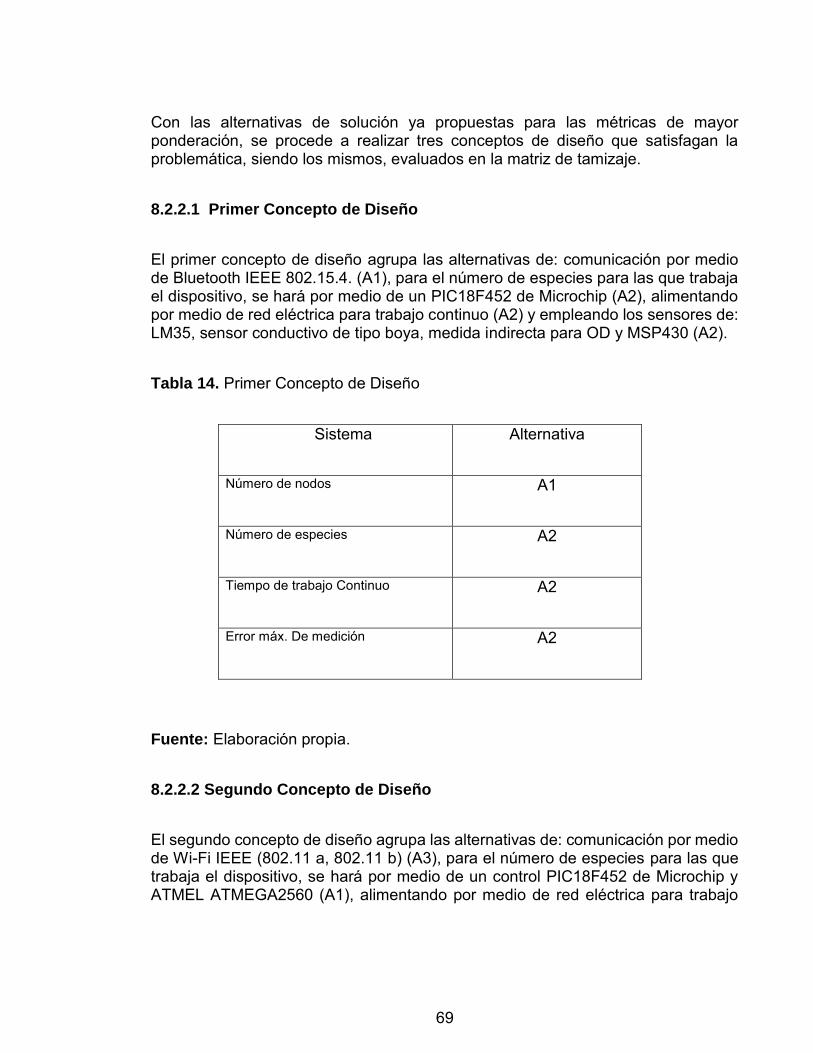
69
Con las alternativas de solución ya propuestas para las métricas de mayor ponderación, se procede a realizar tres conceptos de diseño que satisfagan la problemática, siendo los mismos, evaluados en la matriz de tamizaje.
8.2.2.1 Primer Concepto de Diseño
El primer concepto de diseño agrupa las alternativas de: comunicación por medio de Bluetooth IEEE 802.15.4. (A1), para el número de especies para las que trabaja el dispositivo, se hará por medio de un PIC18F452 de Microchip (A2), alimentando por medio de red eléctrica para trabajo continuo (A2) y empleando los sensores de: LM35, sensor conductivo de tipo boya, medida indirecta para OD y MSP430 (A2).
Tabla 14. Primer Concepto de Diseño
Sistema Alternativa
Número de nodos A1
Número de especies A2
Tiempo de trabajo Continuo A2
Error máx. De medición A2
Fuente: Elaboración propia.
8.2.2.2 Segundo Concepto de Diseño
El segundo concepto de diseño agrupa las alternativas de: comunicación por medio de Wi-Fi IEEE (802.11 a, 802.11 b) (A3), para el número de especies para las que trabaja el dispositivo, se hará por medio de un control PIC18F452 de Microchip y ATMEL ATMEGA2560 (A1), alimentando por medio de red eléctrica para trabajo
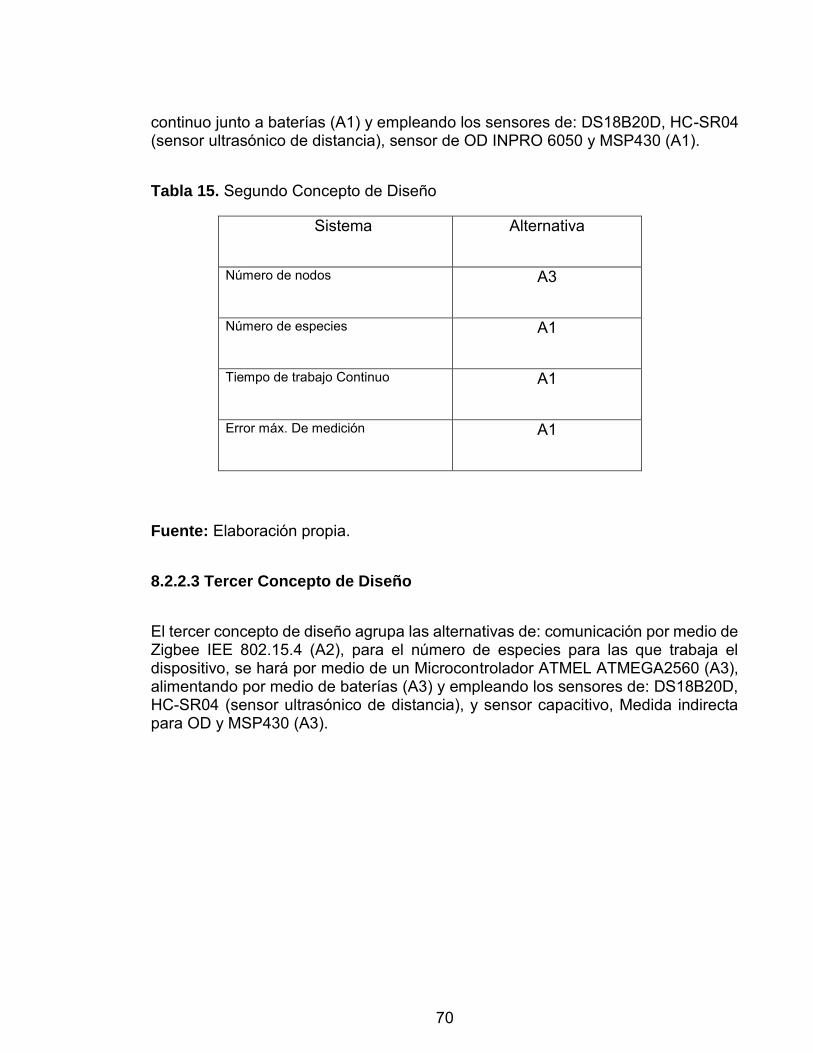
70
continuo junto a baterías (A1) y empleando los sensores de: DS18B20D, HC-SR04 (sensor ultrasónico de distancia), sensor de OD INPRO 6050 y MSP430 (A1).
Tabla 15. Segundo Concepto de Diseño
Sistema Alternativa
Número de nodos A3
Número de especies A1
Tiempo de trabajo Continuo A1
Error máx. De medición A1
Fuente: Elaboración propia.
8.2.2.3 Tercer Concepto de Diseño
El tercer concepto de diseño agrupa las alternativas de: comunicación por medio de Zigbee IEE 802.15.4 (A2), para el número de especies para las que trabaja el dispositivo, se hará por medio de un Microcontrolador ATMEL ATMEGA2560 (A3), alimentando por medio de baterías (A3) y empleando los sensores de: DS18B20D, HC-SR04 (sensor ultrasónico de distancia), y sensor capacitivo, Medida indirecta para OD y MSP430 (A3).

71
Tabla 16. Tercer Concepto de Diseño
Sistema Alternativa Número de nodos A2 Número de especies A3 Tiempo de trabajo Continuo A3 Error máx. De medición A3
Fuente: Elaboración propia.
8.3 SELECCIÓN DE ALTERNATIVAS DE SOLUCIÓN
Tabla 17. Matriz de selección
Conceptos de Diseño
Criterios de selección 1 2 3 Ref.
Resistente 0 0 0 0 Fácil Mantenimiento - 0 0 0 Alto rendimiento + + - 0 Confiable 0 + + 0 Flexible - 0 + 0 Modular – escalable 0 - + 0 Vida útil 0 + 0 0 Bajo costo 0 - + 0 Bajo consumo energético 0 0 + 0 Piezas de fácil reemplazo 0 0 0 0 No invasivo + 0 + 0 Intuitivo + + 0 0 Positivos 3 4 6 Iguales 7 6 5 Negativos 2 2 1 Total 1 2 5 Orden 3 2 1
Fuente: Elaboración propia.
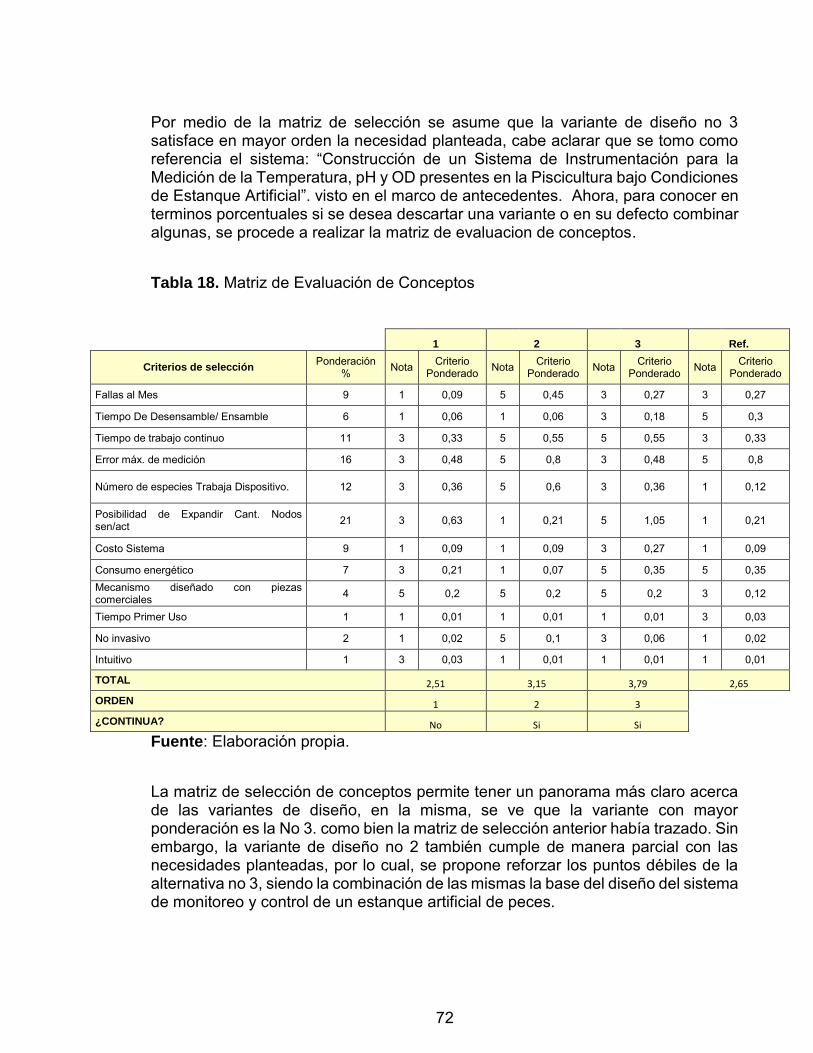
72
Por medio de la matriz de selección se asume que la variante de diseño no 3 satisface en mayor orden la necesidad planteada, cabe aclarar que se tomo como referencia el sistema: “Construcción de un Sistema de Instrumentación para la Medición de la Temperatura, pH y OD presentes en la Piscicultura bajo Condiciones de Estanque Artificial”. visto en el marco de antecedentes. Ahora, para conocer en terminos porcentuales si se desea descartar una variante o en su defecto combinar algunas, se procede a realizar la matriz de evaluacion de conceptos.
Tabla 18. Matriz de Evaluación de Conceptos
1 2 3 Ref.
Criterios de selección Ponderación
% Nota Criterio Ponderado Nota Criterio
Ponderado Nota Criterio Ponderado Nota Criterio
Ponderado
Fallas al Mes 9 1 0,09 5 0,45 3 0,27 3 0,27
Tiempo De Desensamble/ Ensamble 6 1 0,06 1 0,06 3 0,18 5 0,3
Tiempo de trabajo continuo 11 3 0,33 5 0,55 5 0,55 3 0,33
Error máx. de medición 16 3 0,48 5 0,8 3 0,48 5 0,8
Número de especies Trabaja Dispositivo. 12 3 0,36 5 0,6 3 0,36 1 0,12
Posibilidad de Expandir Cant. Nodos sen/act 21 3 0,63 1 0,21 5 1,05 1 0,21
Costo Sistema 9 1 0,09 1 0,09 3 0,27 1 0,09
Consumo energético 7 3 0,21 1 0,07 5 0,35 5 0,35 Mecanismo diseñado con piezas comerciales 4 5 0,2 5 0,2 5 0,2 3 0,12
Tiempo Primer Uso 1 1 0,01 1 0,01 1 0,01 3 0,03
No invasivo 2 1 0,02 5 0,1 3 0,06 1 0,02
Intuitivo 1 3 0,03 1 0,01 1 0,01 1 0,01
TOTAL 2,51 3,15 3,79 2,65
ORDEN 1 2 3
¿CONTINUA? No Si Si
Fuente: Elaboración propia.
La matriz de selección de conceptos permite tener un panorama más claro acerca de las variantes de diseño, en la misma, se ve que la variante con mayor ponderación es la No 3. como bien la matriz de selección anterior había trazado. Sin embargo, la variante de diseño no 2 también cumple de manera parcial con las necesidades planteadas, por lo cual, se propone reforzar los puntos débiles de la alternativa no 3, siendo la combinación de las mismas la base del diseño del sistema de monitoreo y control de un estanque artificial de peces.
73
En donde: la comunicación se hará por medio de Zigbee IEE 802.15.4 (A2), para el número de especies para las que trabaja el dispositivo, se hará por medio de un Microcontrolador ATMEL ATMEGA2560 (A3), alimentando por medio de red eléctrica para trabajo continuo junto a baterías (A1) y empleando los sensores de: DS18B20D, HC-SR04 (sensor ultrasónico de distancia), y sensor capacitivo, Medida indirecta para OD y MSP430 (A3).
8.4 DISEÑO DE ALTERNATIVA DE SOLUCIÓN
A partir de la selección de conceptos, se tiene como base de diseño para el sistema, que el controlador principal o coordinador de la red sea de la arquitectura ATMEL, específicamente, el ATMEGA2560, la comunicación entre nodos por la posibilidad de escalonamiento sea basado en el protocolo ZigBee, la alimentación de los nodos de sensado se realice por medio de baterías de 9v, sin embargo, la alimentación del nodo de actuación se realiza por medio de red eléctrica, esto se debe a las etapas de potencia las cuales el sistema contara, los sensores a emplear serán caracterizados en detalle, en capítulos posteriores.
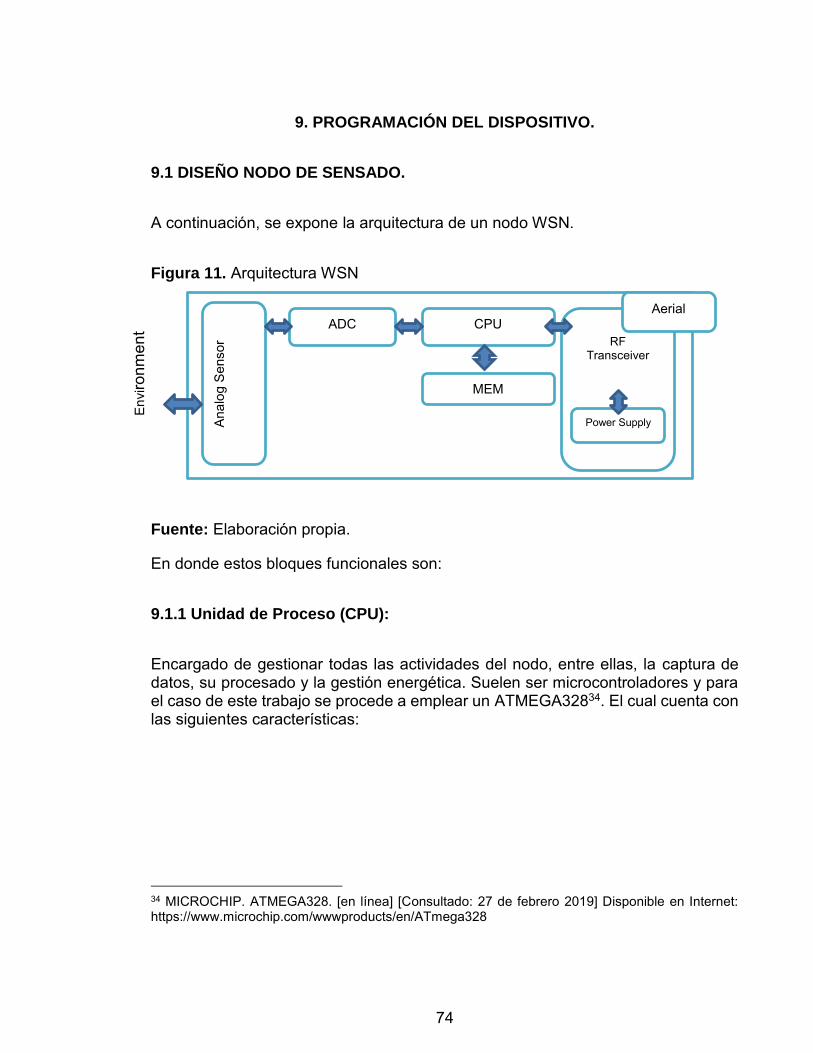
74
9. PROGRAMACIÓN DEL DISPOSITIVO.
9.1 DISEÑO NODO DE SENSADO.
A continuación, se expone la arquitectura de un nodo WSN.
Figura 11. Arquitectura WSN
Fuente: Elaboración propia.
En donde estos bloques funcionales son:
9.1.1 Unidad de Proceso (CPU):
Encargado de gestionar todas las actividades del nodo, entre ellas, la captura de datos, su procesado y la gestión energética. Suelen ser microcontroladores y para el caso de este trabajo se procede a emplear un ATMEGA32834. El cual cuenta con las siguientes características:
34 MICROCHIP. ATMEGA328. [en línea] [Consultado: 27 de febrero 2019] Disponible en Internet: https://www.microchip.com/wwwproducts/en/ATmega328
Anal
og S
enso
r ]
ADC CPU
MEM
RF Transceiver
Power Supply
Aerial
Envi
ronm
ent
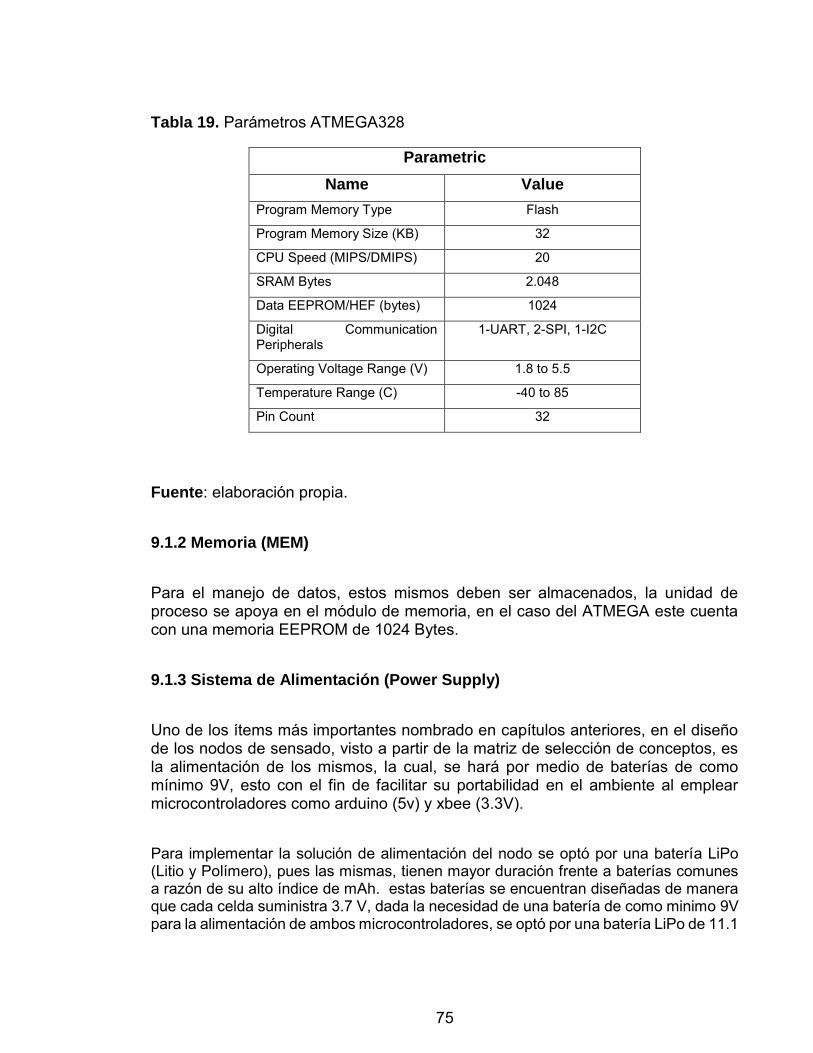
75
Tabla 19. Parámetros ATMEGA328
Parametric
Name Value
Program Memory Type Flash
Program Memory Size (KB) 32
CPU Speed (MIPS/DMIPS) 20
SRAM Bytes 2.048
Data EEPROM/HEF (bytes) 1024
Digital Communication Peripherals
1-UART, 2-SPI, 1-I2C
Operating Voltage Range (V) 1.8 to 5.5
Temperature Range (C) -40 to 85
Pin Count 32
Fuente: elaboración propia.
9.1.2 Memoria (MEM)
Para el manejo de datos, estos mismos deben ser almacenados, la unidad de proceso se apoya en el módulo de memoria, en el caso del ATMEGA este cuenta con una memoria EEPROM de 1024 Bytes.
9.1.3 Sistema de Alimentación (Power Supply)
Uno de los ítems más importantes nombrado en capítulos anteriores, en el diseño de los nodos de sensado, visto a partir de la matriz de selección de conceptos, es la alimentación de los mismos, la cual, se hará por medio de baterías de como mínimo 9V, esto con el fin de facilitar su portabilidad en el ambiente al emplear microcontroladores como arduino (5v) y xbee (3.3V).
Para implementar la solución de alimentación del nodo se optó por una batería LiPo (Litio y Polímero), pues las mismas, tienen mayor duración frente a baterías comunes a razón de su alto índice de mAh. estas baterías se encuentran diseñadas de manera que cada celda suministra 3.7 V, dada la necesidad de una batería de como minimo 9V para la alimentación de ambos microcontroladores, se optó por una batería LiPo de 11.1
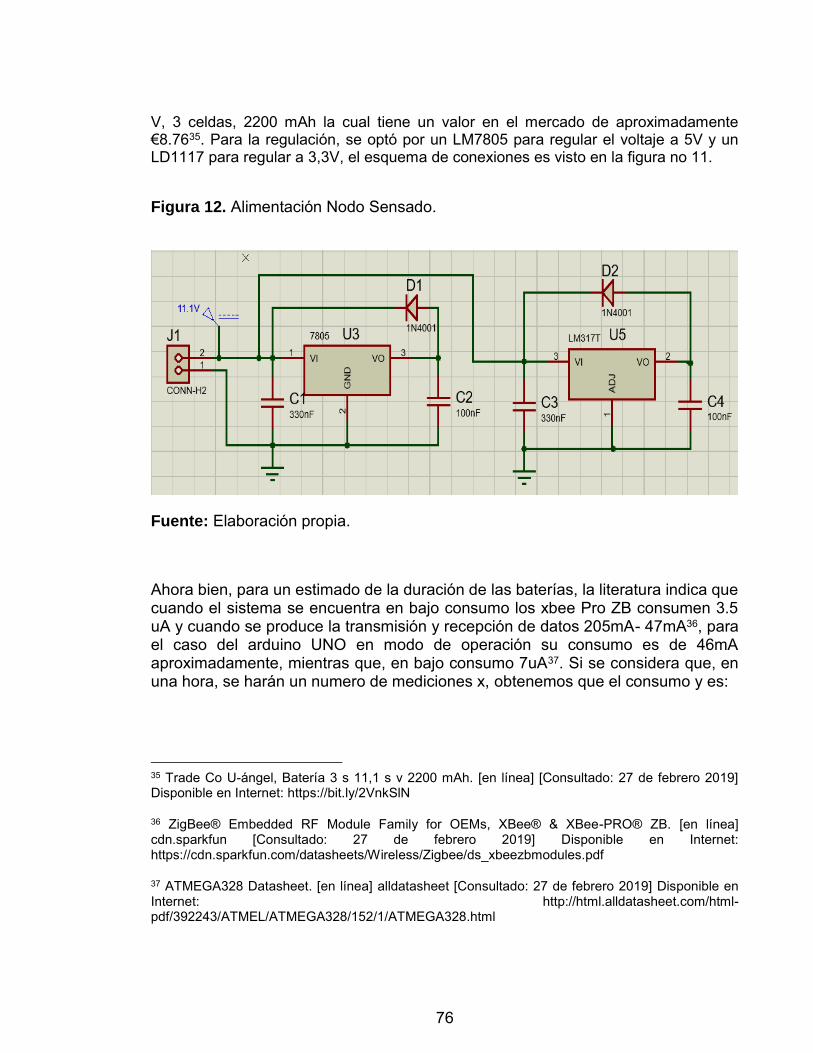
76
V, 3 celdas, 2200 mAh la cual tiene un valor en el mercado de aproximadamente €8.7635. Para la regulación, se optó por un LM7805 para regular el voltaje a 5V y un LD1117 para regular a 3,3V, el esquema de conexiones es visto en la figura no 11.
Figura 12. Alimentación Nodo Sensado.
Fuente: Elaboración propia.
Ahora bien, para un estimado de la duración de las baterías, la literatura indica que cuando el sistema se encuentra en bajo consumo los xbee Pro ZB consumen 3.5 uA y cuando se produce la transmisión y recepción de datos 205mA- 47mA36, para el caso del arduino UNO en modo de operación su consumo es de 46mA aproximadamente, mientras que, en bajo consumo 7uA37. Si se considera que, en una hora, se harán un numero de mediciones x, obtenemos que el consumo y es:
35 Trade Co U-ángel, Batería 3 s 11,1 s v 2200 mAh. [en línea] [Consultado: 27 de febrero 2019] Disponible en Internet: https://bit.ly/2VnkSlN
36 ZigBee® Embedded RF Module Family for OEMs, XBee® & XBee-PRO® ZB. [en línea] cdn.sparkfun [Consultado: 27 de febrero 2019] Disponible en Internet: https://cdn.sparkfun.com/datasheets/Wireless/Zigbee/ds_xbeezbmodules.pdf
37 ATMEGA328 Datasheet. [en línea] alldatasheet [Consultado: 27 de febrero 2019] Disponible en Internet: http://html.alldatasheet.com/html-pdf/392243/ATMEL/ATMEGA328/152/1/ATMEGA328.html
77
𝑦 (𝑥) = 10.5(60 − 𝑥)
60[𝑢𝐴] + (205 + 46)
𝑥
60[𝑚𝐴]
Siendo 6 mediciones el consumo promedio del nodo será:
𝑦 (6) = 10.5(60 − 𝑥)
60[𝑢𝐴] + (205 + 46)
𝑥
60[𝑚𝐴]
𝑦 (6) = 25.1 𝑚𝐴ℎ
Dando como capacidad de la batería:
𝐶 =2200
25.1= 87 ℎ = 3 𝑑𝑖𝑎𝑠 𝑦 15 ℎ𝑜𝑟𝑎𝑠
9.1.4 Sensores (Analog Sensor [transductor])
Por medio de la matriz de selección de conceptos, se definió en primera instancia los sensores a emplear en el dispositivo, a continuación, se procede a exhibir los mismos, junto a su respectiva instrumentación y hoja característica.
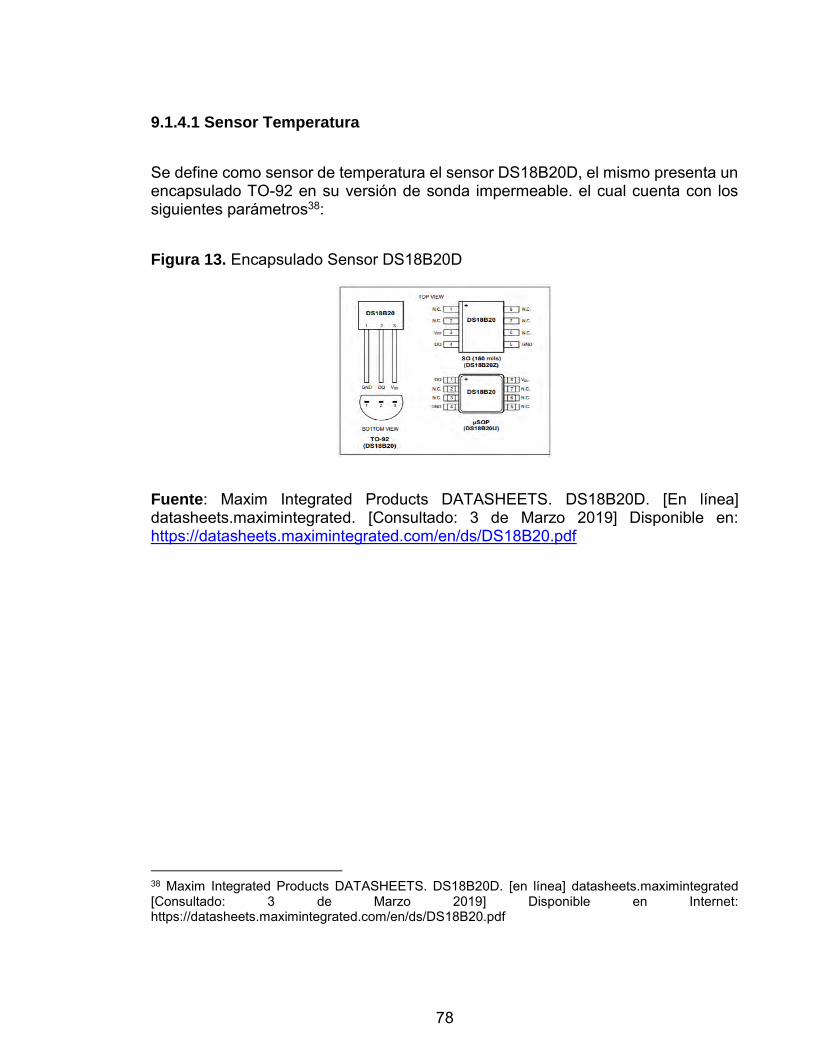
78
9.1.4.1 Sensor Temperatura
Se define como sensor de temperatura el sensor DS18B20D, el mismo presenta un encapsulado TO-92 en su versión de sonda impermeable. el cual cuenta con los siguientes parámetros38:
Figura 13. Encapsulado Sensor DS18B20D
Fuente: Maxim Integrated Products DATASHEETS. DS18B20D. [En línea] datasheets.maximintegrated. [Consultado: 3 de Marzo 2019] Disponible en: https://datasheets.maximintegrated.com/en/ds/DS18B20.pdf
38 Maxim Integrated Products DATASHEETS. DS18B20D. [en línea] datasheets.maximintegrated [Consultado: 3 de Marzo 2019] Disponible en Internet: https://datasheets.maximintegrated.com/en/ds/DS18B20.pdf
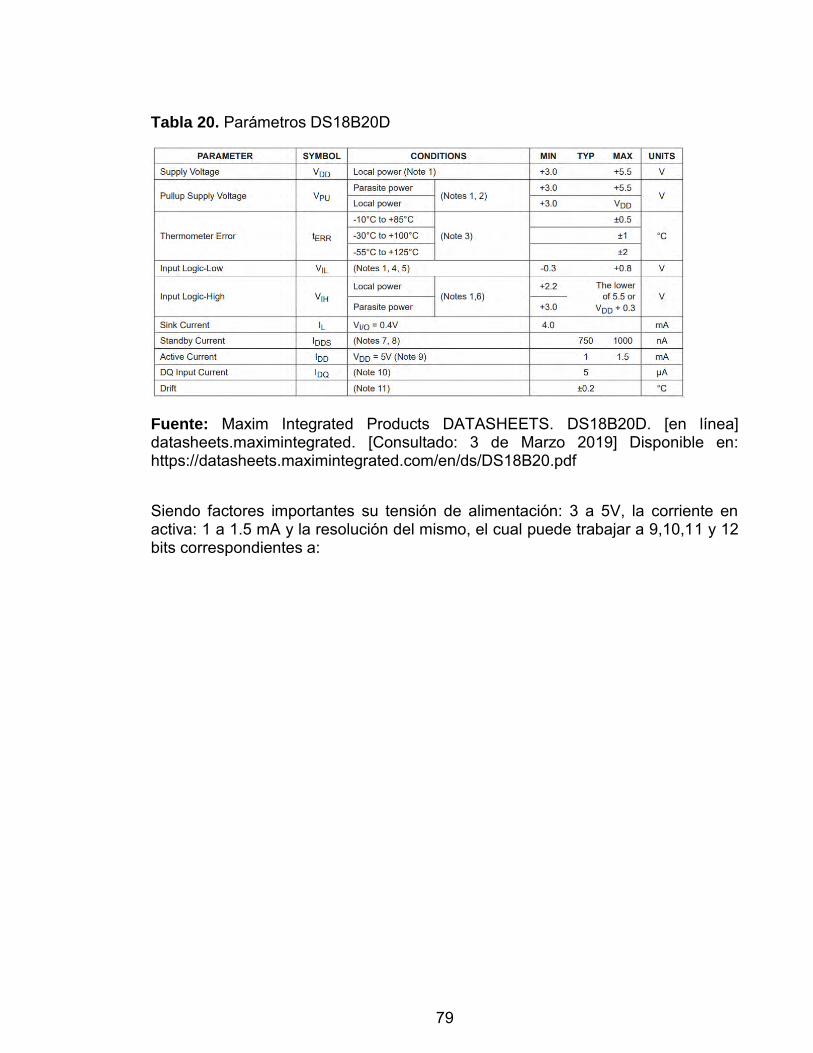
79
Tabla 20. Parámetros DS18B20D
Fuente: Maxim Integrated Products DATASHEETS. DS18B20D. [en línea] datasheets.maximintegrated. [Consultado: 3 de Marzo 2019] Disponible en: https://datasheets.maximintegrated.com/en/ds/DS18B20.pdf
Siendo factores importantes su tensión de alimentación: 3 a 5V, la corriente en activa: 1 a 1.5 mA y la resolución del mismo, el cual puede trabajar a 9,10,11 y 12 bits correspondientes a:
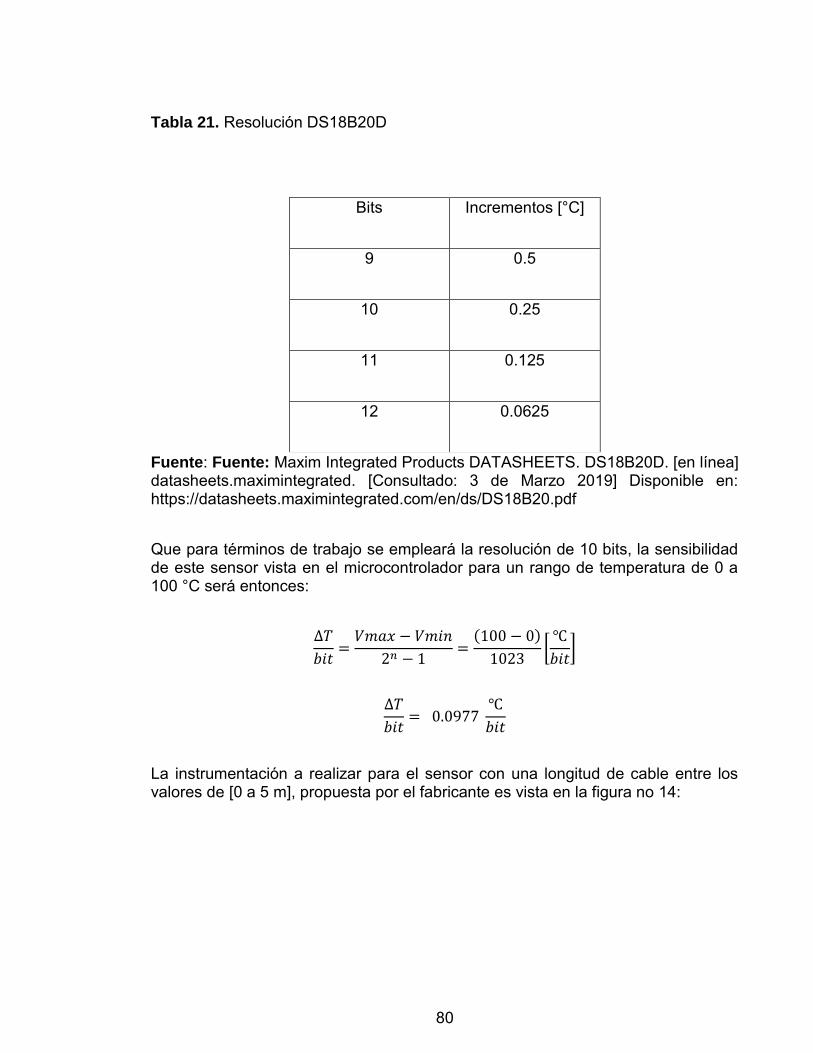
80
Tabla 21. Resolución DS18B20D
Bits Incrementos [°C]
9 0.5
10 0.25
11 0.125
12 0.0625
Fuente: Fuente: Maxim Integrated Products DATASHEETS. DS18B20D. [en línea] datasheets.maximintegrated. [Consultado: 3 de Marzo 2019] Disponible en: https://datasheets.maximintegrated.com/en/ds/DS18B20.pdf
Que para términos de trabajo se empleará la resolución de 10 bits, la sensibilidad de este sensor vista en el microcontrolador para un rango de temperatura de 0 a 100 °C será entonces:
∆𝑇
𝑏𝑖𝑡=
𝑉𝑚𝑎𝑥 − 𝑉𝑚𝑖𝑛
2𝑛 − 1=
(100 − 0)
1023[
𝑏𝑖𝑡]
∆𝑇
𝑏𝑖𝑡= 0.0977
𝑏𝑖𝑡
La instrumentación a realizar para el sensor con una longitud de cable entre los valores de [0 a 5 m], propuesta por el fabricante es vista en la figura no 14:
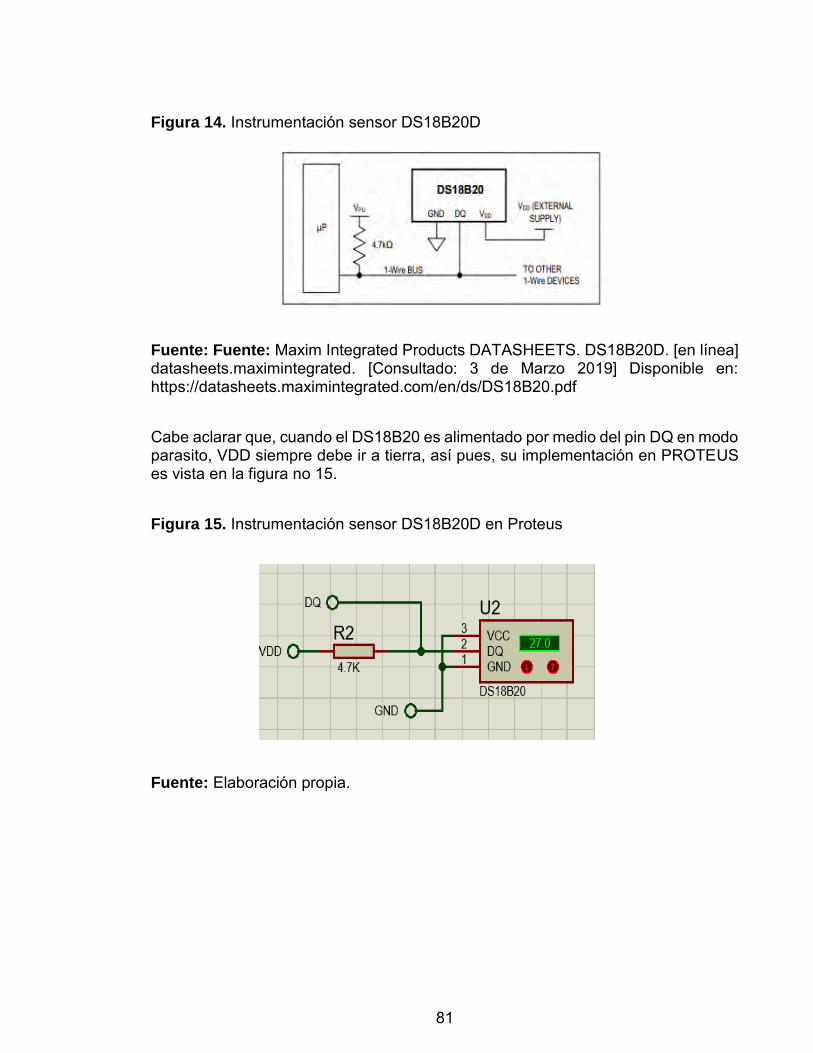
81
Figura 14. Instrumentación sensor DS18B20D
Fuente: Fuente: Maxim Integrated Products DATASHEETS. DS18B20D. [en línea] datasheets.maximintegrated. [Consultado: 3 de Marzo 2019] Disponible en: https://datasheets.maximintegrated.com/en/ds/DS18B20.pdf
Cabe aclarar que, cuando el DS18B20 es alimentado por medio del pin DQ en modo parasito, VDD siempre debe ir a tierra, así pues, su implementación en PROTEUS es vista en la figura no 15.
Figura 15. Instrumentación sensor DS18B20D en Proteus
Fuente: Elaboración propia.

82
9.1.4.2 Sensor Nivel
Ahora bien, continuando con la línea de sensores, para la medición de nivel se optó por implementar el sensor de ultrasonido HSR04. un sensor de ultrasonido, funcionan emitiendo y recibiendo ondas de sonido a altas frecuencias. La frecuencia generalmente es de 200 kHz, un valor muy superior al que puede ser oído por el ser humano. El encapsulado y los parámetros de este sensor son vistos a continuación39:
Figura 16. Encapsulado sensor HSR04
Fuente: Cytron Tecnologies DATASHEETS. HSR04. [en línea] datasheetspdf. [Consultado: 3 de Marzo 2019]: https://www.datasheetspdf.com/pdf/1291829/Cytron/HC-SR04/1
Tabla 22. Parámetros HSR04
Power Supply +5 V DC Quiescent Current <2 mA Working Current 15 mA Effectual Angle < 15𝑜 Ranging Distance 2cm – 400 cm Resolution 0.3 cm
Fuente: Cytron Tecnologies DATASHEETS. HSR04. [en línea] datasheetspdf. [Consultado: 3 de Marzo 2019]: https://www.datasheetspdf.com/pdf/1291829/Cytron/HC-SR04/1
39 Cytron Tecnologies DATASHEETS. HSR04. [en línea] datasheetspdf. [Consultado: 3 de Marzo 2019] Disponible en Internet: https://www.datasheetspdf.com/pdf/1291829/Cytron/HC-SR04/1
83
Ahora bien, para hablar un poco acerca de su funcionamiento. El HSR04 se basa en un principio físico muy sencillo. Para iniciar la medición, se debe generar una onda sónica de 8 ciclos a 40KHz por medio del pin Trig en alto (5V) durante al menos 10 us, inmediatamente después, esta onda al encontrarse con algún obstáculo rebotará, volviendo al sensor y siendo registrada por el receptor, traduciéndose esta en un pulso en la patilla "Echo". La ecuación que rige este principio es:
𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 = 𝑡𝑖𝑒𝑚𝑝𝑜 𝑥 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑
Siendo la velocidad igual a la velocidad del sonido:
𝑣 = 343𝑚
𝑠
𝑉 = .0343𝑐𝑚
𝑢𝑠
𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 = 𝑡𝑖𝑒𝑚𝑝𝑜 𝑒𝑛𝑡𝑟𝑒 𝑇𝑟𝑖𝑔 𝑦 𝐸𝑐ℎ𝑜 𝑥 0.0343𝑐𝑚
𝑢𝑠𝑢𝑠 = [𝑐𝑚]
Dado que la onda recorre el camino de ida y el camino de vuelta, esta distancia es dividida en dos, por lo cual:
D𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 = 𝑡𝑖𝑒𝑚𝑝𝑜 𝑥 0.01715 [𝑐𝑚]
La sensibilidad de este sensor vista en el microcontrolador para un rango de distancia de 2 a 250 cm será entonces:
∆𝑑
𝑏𝑖𝑡=
𝑉𝑚𝑎𝑥 − 𝑉𝑚𝑖𝑛
2𝑛 − 1=
(250 − 2)
1023[𝑐𝑚
𝑏𝑖𝑡] = 0.2424
𝑐𝑚
𝑏𝑖𝑡
∆𝑑
𝑏𝑖𝑡 = 0.2424
𝑐𝑚
𝑏𝑖𝑡
Dado la composición del sensor (esquema eléctrico, figura 17) el sensor no debe ser instrumentado externamente:

84
Figura 17. Esquema Interno HSR04
Fuente: FIGUEROA F. Arduino: SENSOR ULTRASÓNICO HC-SR04. [en línea] sensoricx. [Consultado: 3 de marzo 2019]: disponible en Internet: https://sensoricx.com/arduino/sensor-ultrasonico-para-arduino-hc-sr04/
9.1.4.3 Sensor Luz
Se define como sensor de Luz: la LDR, una LDR (Light Dependent Resistor), específicamente hablando son aquellas resistencias cuyo valor Óhmico es una función que depende de la iluminación recibida en su superficie. La dependencia entre resistencia e iluminación está dada por la siguiente ecuación40:
𝑅 = 𝐴. 𝐿−𝛼
En donde R es el valor de la resistencia en Ohm, L es el lux incidente en la resistencia en Lux y A, 𝛼 son constantes del tipo del material en la que está construida la fotorresistencia. Que al realizar un ajuste logarítmico se obtiene una relación lineal.
𝐿𝑜𝑔 𝑅 = 𝐿𝑜𝑔 (𝐴) − 𝛼 log ( 𝐿)
40 Calibrado de una LDR. [en línea] previa [Consultado: 3 de Marzo 2019] disponible en Internet: https://previa.uclm.es/profesoradO/ajbarbero/Practicas/Calibrado%20LDR%202003.pdf
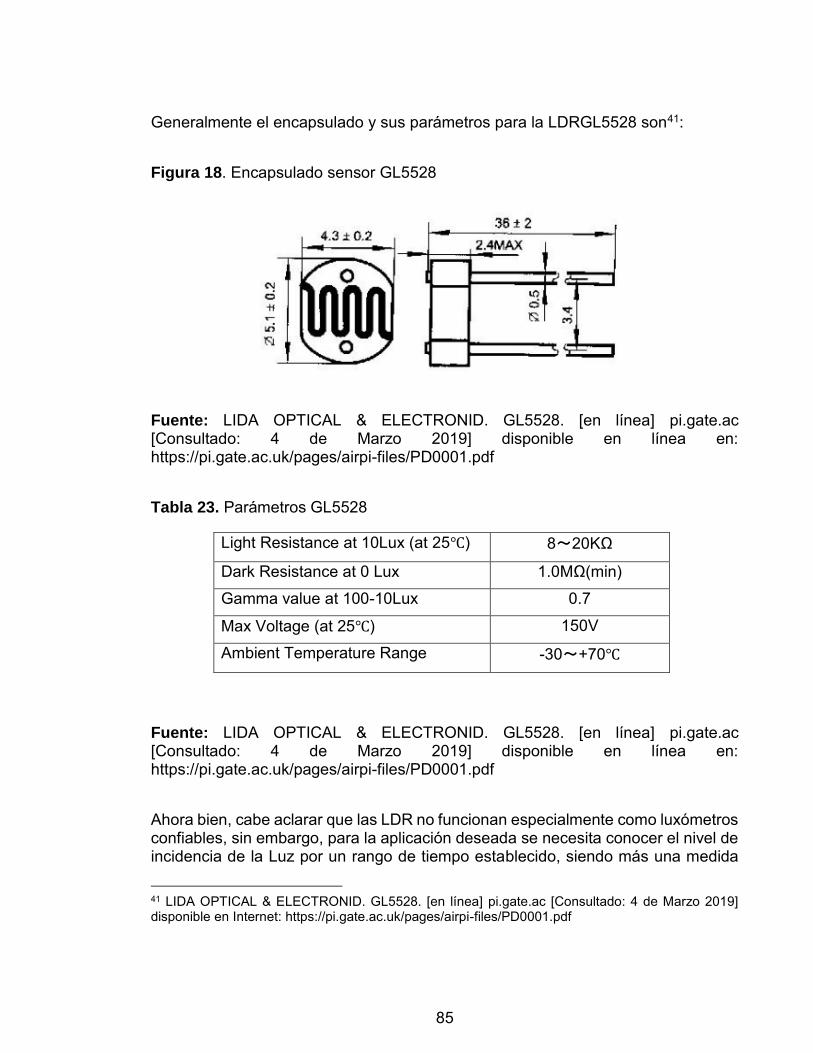
85
Generalmente el encapsulado y sus parámetros para la LDRGL5528 son41:
Figura 18. Encapsulado sensor GL5528
Fuente: LIDA OPTICAL & ELECTRONID. GL5528. [en línea] pi.gate.ac [Consultado: 4 de Marzo 2019] disponible en línea en: https://pi.gate.ac.uk/pages/airpi-files/PD0001.pdf
Tabla 23. Parámetros GL5528
Light Resistance at 10Lux (at 25) 8~20KΩ
Dark Resistance at 0 Lux 1.0MΩ(min) Gamma value at 100-10Lux 0.7
Max Voltage (at 25) 150V
Ambient Temperature Range -30~+70
Fuente: LIDA OPTICAL & ELECTRONID. GL5528. [en línea] pi.gate.ac [Consultado: 4 de Marzo 2019] disponible en línea en: https://pi.gate.ac.uk/pages/airpi-files/PD0001.pdf
Ahora bien, cabe aclarar que las LDR no funcionan especialmente como luxómetros confiables, sin embargo, para la aplicación deseada se necesita conocer el nivel de incidencia de la Luz por un rango de tiempo establecido, siendo más una medida
41 LIDA OPTICAL & ELECTRONID. GL5528. [en línea] pi.gate.ac [Consultado: 4 de Marzo 2019] disponible en Internet: https://pi.gate.ac.uk/pages/airpi-files/PD0001.pdf

86
cualitativa en el tiempo que cuantitativa. Ya que se desea realmente saber los fotoperiodos del cultivo, De tal manera, se puede configurar de manera aceptable la LDR por medio de la siguiente ecuación:
𝐿𝑜𝑔 𝑅 = −𝛼 log( 𝐿) + 𝑏
En donde, 𝛼 = 0.7 para el intervalo de (100,10) [Lux] y 𝑏 = log (𝐴), al conocer también que cuando L = 10 lux , R =20K. Podemos obtener el valor de b y la resistencia a 100 lux.
𝑅 = 20𝐾 , 𝐿 = 10
𝐿𝑜𝑔 20𝐾 = −0.7 log( 10) + 𝑏
4.30 = −0.7 + 𝑏
𝑏 = 5
Ahora para conocer la resistencia a L =100.
𝐿𝑜𝑔 𝑅 = −0.7 log( 100) + 5
log 𝑅 = 3.6
𝑅 = 103.6 = 3.98𝐾 ≅ 4 𝐾
Por lo cual, el ajuste lineal resultante es:
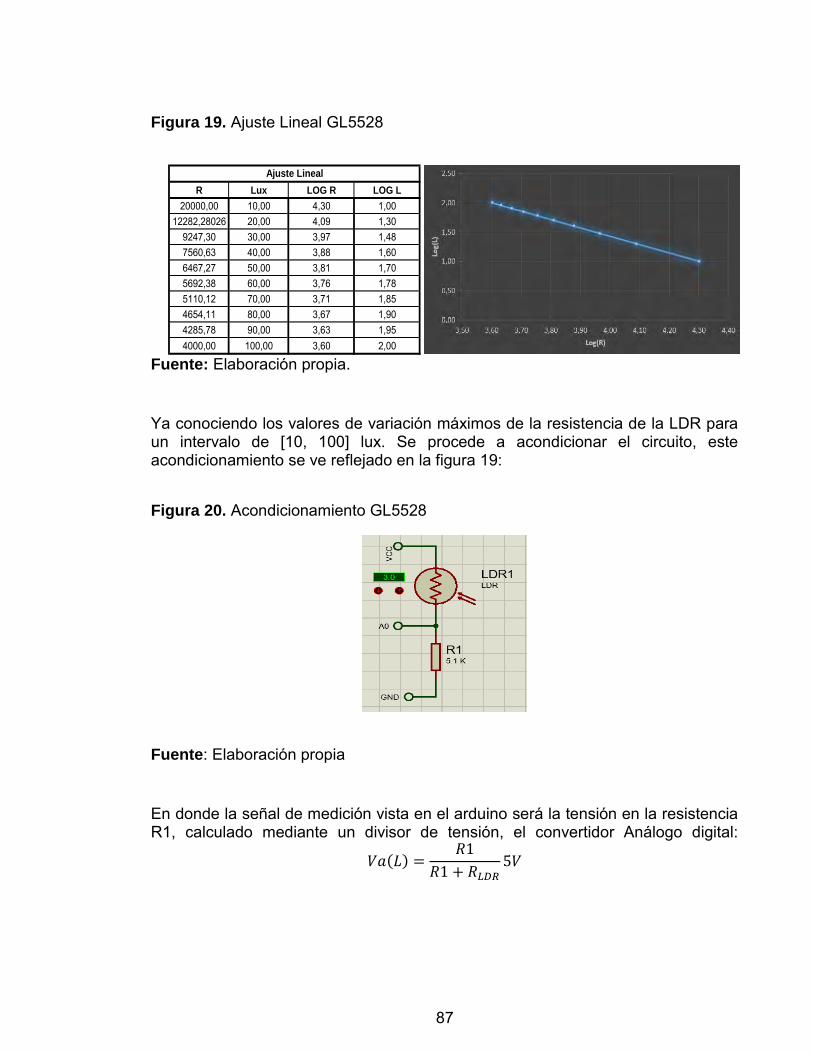
87
Figura 19. Ajuste Lineal GL5528
Fuente: Elaboración propia.
Ya conociendo los valores de variación máximos de la resistencia de la LDR para un intervalo de [10, 100] lux. Se procede a acondicionar el circuito, este acondicionamiento se ve reflejado en la figura 19:
Figura 20. Acondicionamiento GL5528
Fuente: Elaboración propia
En donde la señal de medición vista en el arduino será la tensión en la resistencia R1, calculado mediante un divisor de tensión, el convertidor Análogo digital:
𝑉𝑎(𝐿) =𝑅1
𝑅1 + 𝑅𝐿𝐷𝑅5𝑉
R Lux LOG R LOG L
20000,00 10,00 4,30 1,0012282,28026 20,00 4,09 1,30
9247,30 30,00 3,97 1,487560,63 40,00 3,88 1,606467,27 50,00 3,81 1,705692,38 60,00 3,76 1,785110,12 70,00 3,71 1,854654,11 80,00 3,67 1,904285,78 90,00 3,63 1,954000,00 100,00 3,60 2,00
Ajuste Lineal

88
𝑉𝑑𝑖𝑔 = 2𝑛 − 1𝑉𝑎𝑛𝑎𝑙𝑜𝑔𝑜
𝑉𝑟𝑒𝑓= 1023
𝑅1𝑅1 + 𝑅𝐿𝐷𝑅
5𝑉
5 𝑉= 1023
𝑅1
𝑅1 + 𝑅𝐿𝐷𝑅
Para términos de aumentar la sensibilidad vista en el controlador, se procedió a proporcionar un valor de resistencia R1 cercano a el valor de la resistencia de la LDR cuando esta tiene una incidencia de 100 Lux, el valor seleccionado es 5.1 K, la sensibilidad en el micro para el rango de 10 a 100 lux será entonces:
∆𝐿
∆𝑏𝑖𝑡=
100 − 10
573.32 − 207.86=
90
365.46[𝐿𝑢𝑥
𝑏𝑖𝑡] = 0.25 [
𝐿𝑢𝑥
𝑏𝑖𝑡]
9.1.4.4 Sensor PH
Continuando con la línea de sensores, una de las variables con mayor criticidad es el PH; pH es el acrónimo para potencial de hidrógeno, e indica el nivel de acidez o alcalinidad de una sustancia Su ecuación está dada por:
𝑝𝐻 = log (1
𝐻3𝑂+)
Donde 𝐻3𝑂+ indica la concentración del ion hidronio en moles/L. El término pH
expresa la intensidad de un ácido, dependiendo de su capacidad de disociación, así como de su concentración. En un cuerpo de agua es un parámetro a considerar cuando se quiere determinar la especie química y su solubilidad de varias substancias orgánicas e inorgánicas. Como sensor de PH se optó por un MSP430 E-201-C. sus especificaciones son:

89
Tabla 24. Parámetros E-201-C
Input supply Voltage 8~20KΩ
Working current 1.0MΩ(min)
Detection concentration range 0 – 14 PH
Detection range of temperature 0 – 80
Response Time <= 5 S
Fuente: e-Gizmo PH SENSOR E-201-C. [en línea] [consultado: 4 de Marzo 2019] disponible en Internet: https://bit.ly/30u7C1y
Este sensor cuenta con una respuesta lineal, sin embargo, el mismo debe ser calibrado por medio de la resistencia de precisión en el puerto BNC, los valores de salida del sensor oscilan entre el 0 y 5 V, la referencia dada por el fabricante para algunos valores de PH son:
Tabla 25. Valores de salida analógica Calibración sensor E-201-C
Valor de PH Salida
4 3.071
7 2.535
10 2.066
Fuente: e-Gizmo PH SENSOR E-201-C. [en línea] [consultado: 4 de Marzo 2019] disponible en Internet: https://bit.ly/30u7C1y
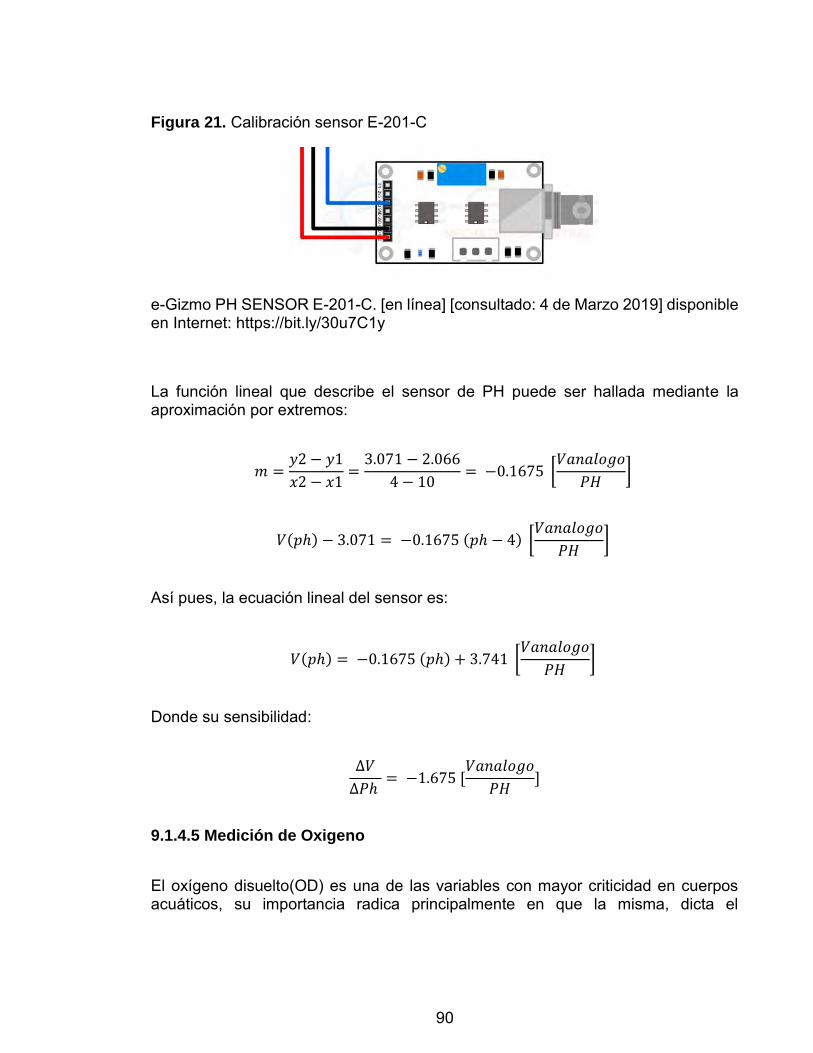
90
Figura 21. Calibración sensor E-201-C
e-Gizmo PH SENSOR E-201-C. [en línea] [consultado: 4 de Marzo 2019] disponible en Internet: https://bit.ly/30u7C1y
La función lineal que describe el sensor de PH puede ser hallada mediante la aproximación por extremos:
𝑚 =𝑦2 − 𝑦1
𝑥2 − 𝑥1=
3.071 − 2.066
4 − 10= −0.1675 [
𝑉𝑎𝑛𝑎𝑙𝑜𝑔𝑜
𝑃𝐻]
𝑉(𝑝ℎ) − 3.071 = −0.1675 (𝑝ℎ − 4) [𝑉𝑎𝑛𝑎𝑙𝑜𝑔𝑜
𝑃𝐻]
Así pues, la ecuación lineal del sensor es:
𝑉(𝑝ℎ) = −0.1675 (𝑝ℎ) + 3.741 [𝑉𝑎𝑛𝑎𝑙𝑜𝑔𝑜
𝑃𝐻]
Donde su sensibilidad:
∆𝑉
∆𝑃ℎ = −1.675 [
𝑉𝑎𝑛𝑎𝑙𝑜𝑔𝑜
𝑃𝐻]
9.1.4.5 Medición de Oxigeno
El oxígeno disuelto(OD) es una de las variables con mayor criticidad en cuerpos acuáticos, su importancia radica principalmente en que la misma, dicta el

91
crecimiento y supervivencia de los organismos en el medio. Normalmente la medición directa de esta variable se puede hacer a través de tres métodos:
Producción de color: el cual es un kit de análisis de OD para trabajo decampo para agua dulce.
Método de Wrinkler: válido para agua de mar y agua dulce, pero no paraaguas muy alcalinas.
Consiste en tomar muestras de agua en tubos de ensayo, inmediatamente después de que se haya tomado la muestra, se añade 2 𝑐𝑚3 de cloruro de manganeso al 50 por 100 en solución y 2 𝑐𝑚3 de reactivo Winkler (100 g de hidróxido potásico y 60 g de yoduro potásico en 200 𝑐𝑚3 de agua). Se debe dejar reposar el precipitado con la muestra al volver al laboratorio, y posteriormente, introducir cuidadosamente 2 𝑐𝑚3 de ácido sulfúrico concentrado, el hidróxido mangánico oxida el yoduro potásico en una cantidad equivalente a la de yodo libre. Lo que permite hacer una estimación aproximada a partir del color del yodo42.
Medidor de OD: conductividad eléctrica basada en una reacción química lacual puede cambiar a partir de la instrumentación realizada al transductor demedición.
Sin embargo, si se pretende realizar una medida indirecta, se debe conocer en esencia como varia la concentración de OD en el agua; esta variación puede darse en función de la Temperatura, Oxígeno disuelto de las fuentes (entradas), Oxígeno disuelto de las (salidas) u Otros factores. Dado que el diseño propuesto tiene como objeto de estudio la variable de temperatura, la misma servirá para brindar una aproximación del valor de OD cuando el cuerpo hibrido se encuentra al 100 % de saturación.
Es importante denotar que: al aumentar la temperatura, disminuye la cantidad de oxígeno disuelto en el agua. Cuando el agua contiene todo el oxígeno disuelto a una temperatura dada, se dice que está 100/100 saturada de oxígeno. El agua
42 Dr. VÍCTOR H. LALLANA. Métodos para medir OD. 2008. [en línea] [Consultado: 4 de Marzo 2019] Disponible en Internet: https://bit.ly/2wBiIF1
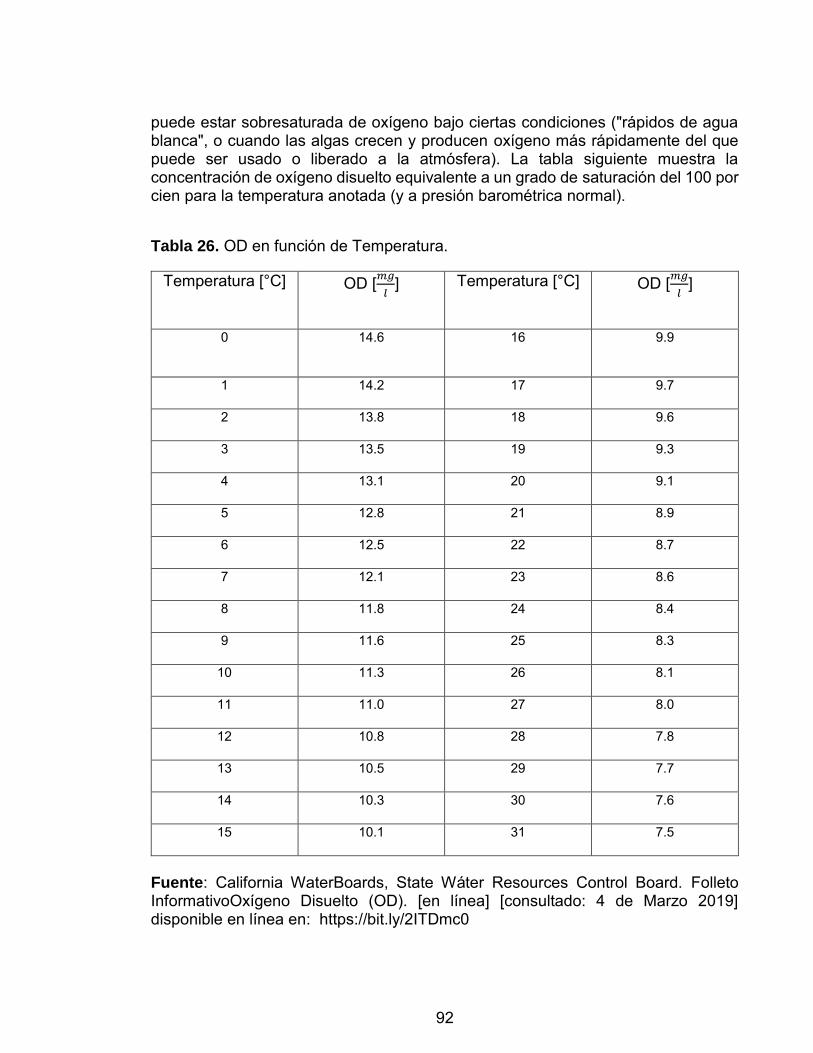
92
puede estar sobresaturada de oxígeno bajo ciertas condiciones ("rápidos de agua blanca", o cuando las algas crecen y producen oxígeno más rápidamente del que puede ser usado o liberado a la atmósfera). La tabla siguiente muestra la concentración de oxígeno disuelto equivalente a un grado de saturación del 100 por cien para la temperatura anotada (y a presión barométrica normal).
Tabla 26. OD en función de Temperatura.
Temperatura [°C] OD [𝑚𝑔
𝑙] Temperatura [°C] OD [𝑚𝑔
𝑙]
0 14.6 16 9.9
1 14.2 17 9.7
2 13.8 18 9.6
3 13.5 19 9.3
4 13.1 20 9.1
5 12.8 21 8.9
6 12.5 22 8.7
7 12.1 23 8.6
8 11.8 24 8.4
9 11.6 25 8.3
10 11.3 26 8.1
11 11.0 27 8.0
12 10.8 28 7.8
13 10.5 29 7.7
14 10.3 30 7.6
15 10.1 31 7.5
Fuente: California WaterBoards, State Wáter Resources Control Board. Folleto InformativoOxígeno Disuelto (OD). [en línea] [consultado: 4 de Marzo 2019] disponible en línea en: https://bit.ly/2ITDmc0
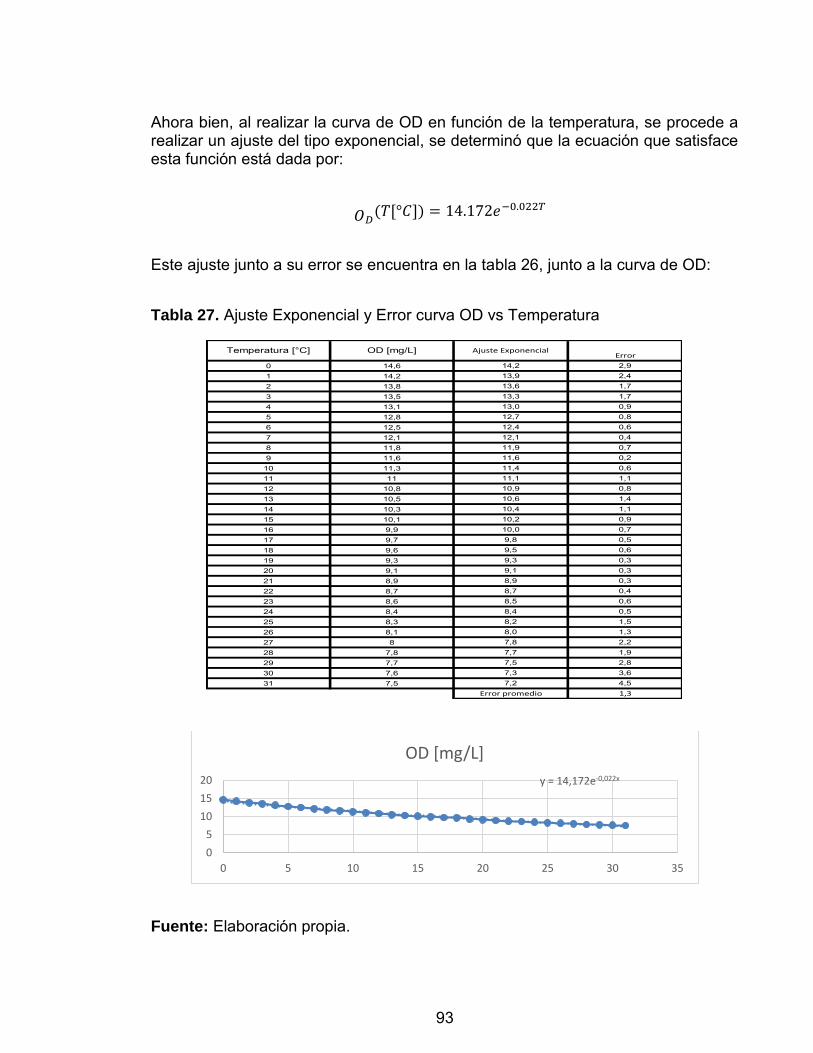
93
Ahora bien, al realizar la curva de OD en función de la temperatura, se procede a realizar un ajuste del tipo exponencial, se determinó que la ecuación que satisface esta función está dada por:
𝑂𝐷(𝑇[°𝐶]) = 14.172𝑒−0.022𝑇
Este ajuste junto a su error se encuentra en la tabla 26, junto a la curva de OD:
Tabla 27. Ajuste Exponencial y Error curva OD vs Temperatura
Fuente: Elaboración propia.
0 14,61 14,22 13,83 13,54 13,15 12,86 12,57 12,18 11,89 11,6
10 11,311 1112 10,813 10,514 10,315 10,116 9,917 9,718 9,619 9,320 9,121 8,922 8,723 8,624 8,425 8,326 8,127 828 7,829 7,730 7,631 7,5
1,92,83,64,51,3Error promedio
0,40,60,51,51,32,2
0,70,50,60,30,30,3
0,61,10,81,41,10,9
0,90,80,60,40,70,2
7,87,77,57,37,2
Error
2,92,41,71,7
8,98,78,58,48,28,0
10,210,09,89,59,39,1
11,611,411,110,910,610,4
13,313,012,712,412,111,9
Temperatura [°C] OD [mg/L] Ajuste Exponencial
14,213,913,6
y = 14,172e-0,022x
0
5
10
15
20
0 5 10 15 20 25 30 35
OD [mg/L]
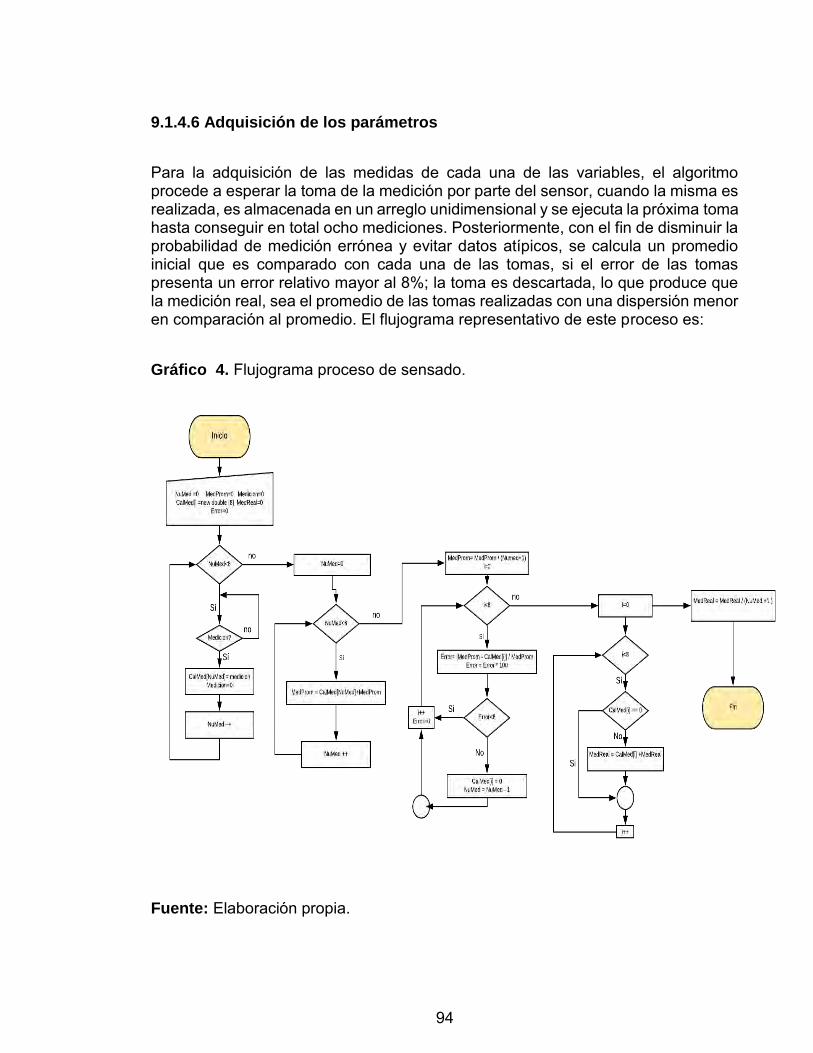
94
9.1.4.6 Adquisición de los parámetros
Para la adquisición de las medidas de cada una de las variables, el algoritmo procede a esperar la toma de la medición por parte del sensor, cuando la misma es realizada, es almacenada en un arreglo unidimensional y se ejecuta la próxima toma hasta conseguir en total ocho mediciones. Posteriormente, con el fin de disminuir la probabilidad de medición errónea y evitar datos atípicos, se calcula un promedio inicial que es comparado con cada una de las tomas, si el error de las tomas presenta un error relativo mayor al 8%; la toma es descartada, lo que produce que la medición real, sea el promedio de las tomas realizadas con una dispersión menor en comparación al promedio. El flujograma representativo de este proceso es:
Gráfico 4. Flujograma proceso de sensado.
Fuente: Elaboración propia.
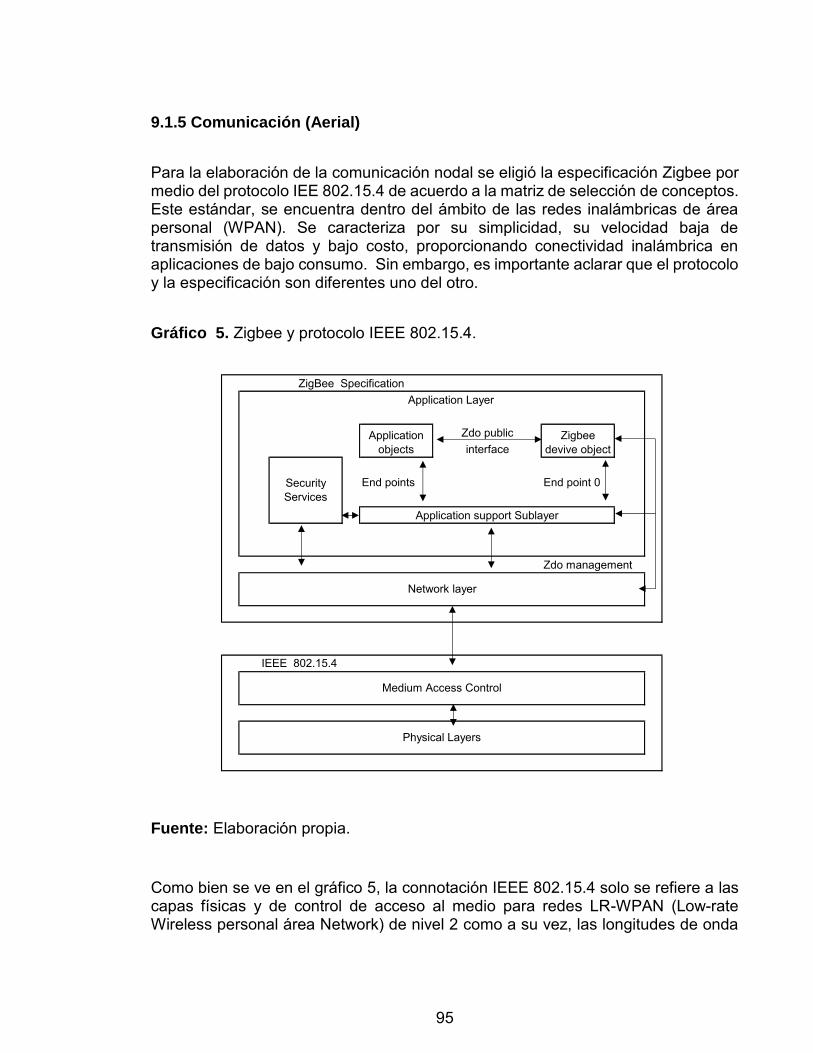
95
9.1.5 Comunicación (Aerial)
Para la elaboración de la comunicación nodal se eligió la especificación Zigbee por medio del protocolo IEE 802.15.4 de acuerdo a la matriz de selección de conceptos. Este estándar, se encuentra dentro del ámbito de las redes inalámbricas de área personal (WPAN). Se caracteriza por su simplicidad, su velocidad baja de transmisión de datos y bajo costo, proporcionando conectividad inalámbrica en aplicaciones de bajo consumo. Sin embargo, es importante aclarar que el protocolo y la especificación son diferentes uno del otro.
Gráfico 5. Zigbee y protocolo IEEE 802.15.4.
Fuente: Elaboración propia.
Como bien se ve en el gráfico 5, la connotación IEEE 802.15.4 solo se refiere a las capas físicas y de control de acceso al medio para redes LR-WPAN (Low-rate Wireless personal área Network) de nivel 2 como a su vez, las longitudes de onda
Zdo publicinterface
End points End point 0
Zdo management
Network layer
Medium Access Control
Physical Layers
IEEE 802.15.4
Application Layer
Application objects
Zigbee devive object
Application support Sublayer
Security Services
ZigBee Specification
96
empleadas. Mientras que, Zigbee, usa las capas PHY (Physical Layers) y MAC (Medium Access Control) del estándar 802.15.4 e implementa una solución propia para las capas de red, de aplicación y de seguridad. Como las capa NWK (Network Layer) que maneja la estructura de red, enrutamiento y seguridad. De esta manera, el protocolo Zigbee emplea la capa de aplicación como aquella que habilita la interoperabilidad y está compuesta por:
APS: ofrece un interfaz entre la red y la capa de aplicación, define los mensajes estandarizados que permite la comunicación entre dispositivos de diferentes fabricantes.
Application Framework: es el entorno donde se almacenan las aplicaciones en los dispositivos Zigbee.
ZDO (ZigBee Device Object): ofrece funcionalidades de descubrimiento de dispositivos y gestión avanzada de red.
Para la configuración de los módulos xbee, se debe conocer inicialmente, conceptos sobre el tipo de topología a emplear y las características de las mismas, los diferentes roles asumidos dentro de la red. Como a su vez, que parámetros son importantes en la programación dentro del software X-CTU (aplicación multi-plataforma compatible con Windows y MacOs).
9.1.5.1 Tipo de redes
Anteriormente se mencionó que la topología hace referencia a la forma en la cual los nodos se encuentran conectados y como se comunican entre la red, para la elaboración de este proyecto, contaremos en primera instancia, con una conexión punto a punto, esto con el fin de validar que la trama de datos sea transmitida y recibida de manera correcta (logrando paridad entre dispositivos). Una vez comprobado que el sistema cumple con el envío y recepción de datos, se procederá a emplear una topología de tipo Mesh, en la cual, los datos son transmitidos por el camino disponible con mayor confiabilidad, ya sea por trayecto o cobertura mínima del nodo.
97
9.1.5.2 Tipo de dispositivos
Una red XBee la forman básicamente 3 tipos de elementos. Un único dispositivo Coordinador, dispositivos Routers y dispositivos finales (end points). A continuación, se procede a presentar cada uno de los posibles roles para los Xbee serie 2:
Coordinador ZigBee (ZigBee coordinator, ZC):
Actúa como director de una red, así como, puede servir de enlace a otras redes. Existe exactamente un coordinador por cada red, que es el nodo que inicializa su operación. Además, almacena información sobre la misma y distribuye claves de cifrado. Router ZigBee (ZR):
Además de ofrecer un nivel de aplicación para la ejecución de código de usuario (medición de variables u otro tipo de aplicación), puede actuar como router enlazando dispositivos separados en la topología de la red.
Dispositivo final (ZigBee end device, ZED).
Posee la funcionalidad necesaria para comunicarse con su nodo padre (el coordinador o un router), pero no puede transmitir información a otros dispositivos. De esta forma, este tipo de nodo puede estar dormido (configuración del módulo en la cual se hace un ahorro significativo en el consumo energético) la mayor parte del tiempo, aumentando la vida media de sus baterías. Un ZED tiene requerimientos mínimos de memoria y su arquitectura, la mayoría de ocasiones, solo se compone de los sensores necesarios para la toma de datos.
9.1.5.3 Diseño de red
El proyecto tiene como macro el diseño de una red de control en un contexto local de estanque artificial, hablar precisamente de la elaboración de la red; constituye en primera instancia, conocer donde se va a elaborar esta alternativa y en ese orden de ideas, se procede a caracterizar este contexto.
Básicamente, el despliegue de la red se ve delimitado por dimensiones y densidad poblacional, comúnmente en Colombia, las dimensiones mínimas de estanques artificiales por lo general oscila en valores de 100 𝑚2 de superficie y a su vez, como máximo, a nivel macro no se recomienda exceder 1 hectárea (10.000 𝑚2 ) por la
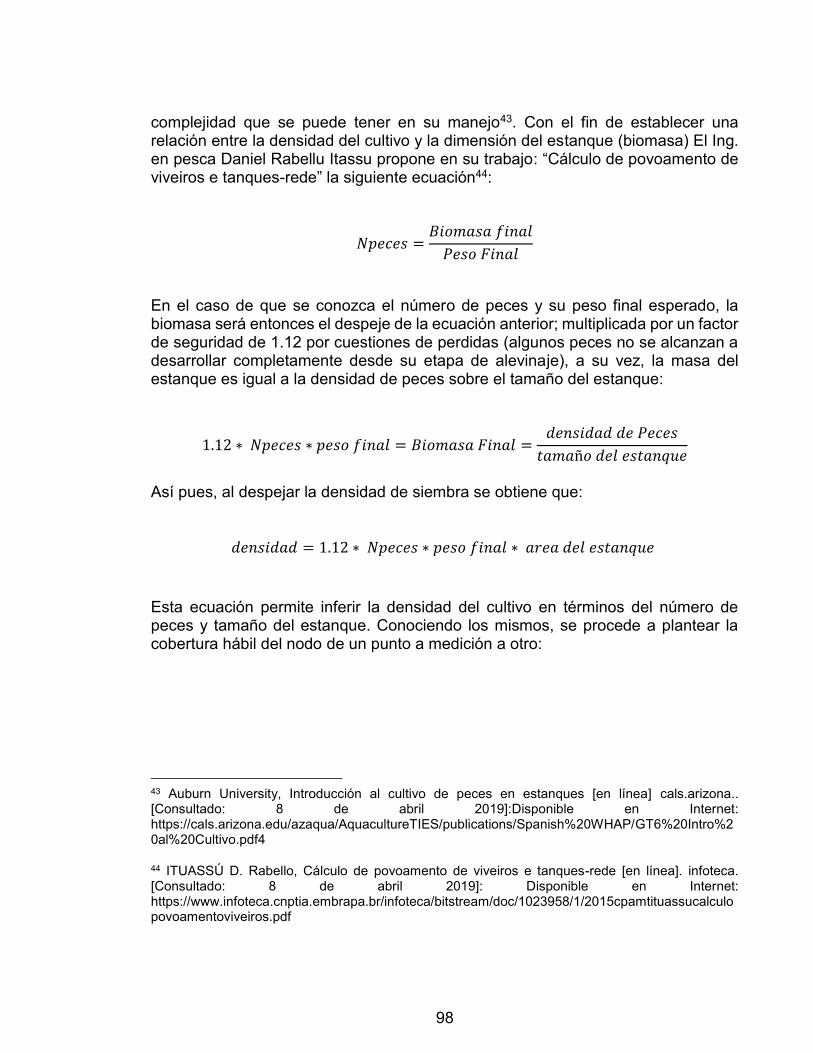
98
complejidad que se puede tener en su manejo43. Con el fin de establecer una relación entre la densidad del cultivo y la dimensión del estanque (biomasa) El Ing. en pesca Daniel Rabellu Itassu propone en su trabajo: “Cálculo de povoamento de viveiros e tanques-rede” la siguiente ecuación44:
𝑁𝑝𝑒𝑐𝑒𝑠 =𝐵𝑖𝑜𝑚𝑎𝑠𝑎 𝑓𝑖𝑛𝑎𝑙
𝑃𝑒𝑠𝑜 𝐹𝑖𝑛𝑎𝑙
En el caso de que se conozca el número de peces y su peso final esperado, la biomasa será entonces el despeje de la ecuación anterior; multiplicada por un factor de seguridad de 1.12 por cuestiones de perdidas (algunos peces no se alcanzan a desarrollar completamente desde su etapa de alevinaje), a su vez, la masa del estanque es igual a la densidad de peces sobre el tamaño del estanque:
1.12 ∗ 𝑁𝑝𝑒𝑐𝑒𝑠 ∗ 𝑝𝑒𝑠𝑜 𝑓𝑖𝑛𝑎𝑙 = 𝐵𝑖𝑜𝑚𝑎𝑠𝑎 𝐹𝑖𝑛𝑎𝑙 =𝑑𝑒𝑛𝑠𝑖𝑑𝑎𝑑 𝑑𝑒 𝑃𝑒𝑐𝑒𝑠
𝑡𝑎𝑚𝑎ñ𝑜 𝑑𝑒𝑙 𝑒𝑠𝑡𝑎𝑛𝑞𝑢𝑒
Así pues, al despejar la densidad de siembra se obtiene que:
𝑑𝑒𝑛𝑠𝑖𝑑𝑎𝑑 = 1.12 ∗ 𝑁𝑝𝑒𝑐𝑒𝑠 ∗ 𝑝𝑒𝑠𝑜 𝑓𝑖𝑛𝑎𝑙 ∗ 𝑎𝑟𝑒𝑎 𝑑𝑒𝑙 𝑒𝑠𝑡𝑎𝑛𝑞𝑢𝑒
Esta ecuación permite inferir la densidad del cultivo en términos del número de peces y tamaño del estanque. Conociendo los mismos, se procede a plantear la cobertura hábil del nodo de un punto a medición a otro:
43 Auburn University, Introducción al cultivo de peces en estanques [en línea] cals.arizona.. [Consultado: 8 de abril 2019]:Disponible en Internet: https://cals.arizona.edu/azaqua/AquacultureTIES/publications/Spanish%20WHAP/GT6%20Intro%20al%20Cultivo.pdf4
44 ITUASSÚ D. Rabello, Cálculo de povoamento de viveiros e tanques-rede [en línea]. infoteca. [Consultado: 8 de abril 2019]: Disponible en Internet: https://www.infoteca.cnptia.embrapa.br/infoteca/bitstream/doc/1023958/1/2015cpamtituassucalculopovoamentoviveiros.pdf
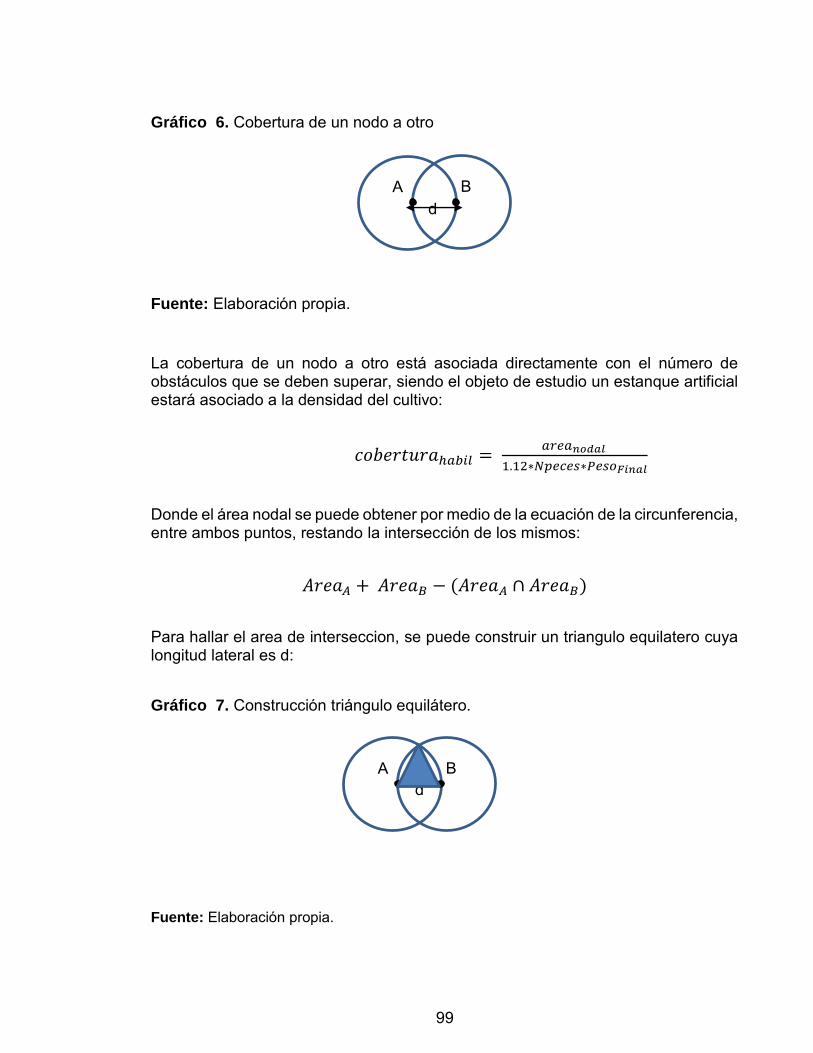
99
Gráfico 6. Cobertura de un nodo a otro
Fuente: Elaboración propia.
La cobertura de un nodo a otro está asociada directamente con el número de obstáculos que se deben superar, siendo el objeto de estudio un estanque artificial estará asociado a la densidad del cultivo:
𝑐𝑜𝑏𝑒𝑟𝑡𝑢𝑟𝑎ℎ𝑎𝑏𝑖𝑙 = 𝑎𝑟𝑒𝑎𝑛𝑜𝑑𝑎𝑙
1.12∗𝑁𝑝𝑒𝑐𝑒𝑠∗𝑃𝑒𝑠𝑜𝐹𝑖𝑛𝑎𝑙
Donde el área nodal se puede obtener por medio de la ecuación de la circunferencia, entre ambos puntos, restando la intersección de los mismos:
𝐴𝑟𝑒𝑎𝐴 + 𝐴𝑟𝑒𝑎𝐵 − (𝐴𝑟𝑒𝑎𝐴 ∩ 𝐴𝑟𝑒𝑎𝐵)
Para hallar el area de interseccion, se puede construir un triangulo equilatero cuya longitud lateral es d:
Gráfico 7. Construcción triángulo equilátero.
Fuente: Elaboración propia.
A B d
A B d

100
De esta manera, se conoce por geometría que, los puntos de intersección tienen como medida 3√𝑑 y que el ángulo entre ellos es 60∘, formando un rombo (uniendo otro triángulo equilátero en la parte inferior) se conoce que el ángulo de apertura en los centros es igual a 120∘.
Elementalmente el área de la intersección es el área de un segmento circular con un ángulo 𝜃 =
2𝜋
3 y radio de d, lo que da un área de:
(𝐴𝑟𝑒𝑎𝐴 ∩ 𝐴𝑟𝑒𝑎𝐵) = 𝑑2 (2𝜋
3−
√3
2 )
Remplazando de la ecuación inicial y resolviendo tenemos que:
𝐴𝐴 + 𝐴𝐵 − (𝐴𝐴 ∩ 𝐴𝐵) = 𝜋(𝑑2) + 𝜋(𝑑2) − 𝑑2 (2𝜋
3−
√3
2 )
𝐴𝐴 + 𝐴𝐵 − (𝐴𝐴 ∩ 𝐴𝐵) = (4𝜋
3+
√3
2)𝑑2
De esta manera:
𝑐𝑜𝑏𝑒𝑟𝑡𝑢𝑟𝑎ℎ𝑎𝑏𝑖𝑙 = (4𝜋
3+
√3
2)𝑑2
1.12 ∗ 𝑁𝑝𝑒𝑐𝑒𝑠 ∗ 𝑃𝑒𝑠𝑜𝐹𝑖𝑛𝑎𝑙
Así pues, para conocer el número de nodos se elabora la siguiente ecuación:
𝑁 𝑑𝑒 𝑁𝑜𝑑𝑜𝑠 = 𝑑𝑒𝑛𝑠𝑖𝑑𝑎𝑑 𝑒𝑠𝑡𝑎𝑛𝑞𝑢𝑒
𝑐𝑜𝑏𝑒𝑟𝑡𝑢𝑟𝑎ℎ𝑎𝑏𝑖𝑙
101
𝑁 𝑑𝑒 𝑁𝑜𝑑𝑜𝑠 =1.12 ∗ 𝑁𝑃𝑒𝑐𝑒𝑠 ∗ 𝑃𝑒𝑠𝑜𝐹𝑖𝑛𝑎𝑙 ∗ 𝐴𝑟𝑒𝑎 𝑒𝑠𝑡𝑎𝑛𝑞𝑢𝑒
(4𝜋3
+ √32 )𝑑
2
En donde inicialmente se procede a estimar un radio entre nodos de 30 m ; para un estanque extensivo pequeño de 120 𝑚2, con un numero de peces aproximado de 480 y un peso final esperado de 500 gr se obtiene:
𝑁 𝑑𝑒 𝑁𝑜𝑑𝑜𝑠 =1.12 ∗ 480 ∗ 0.5 𝑘𝑔 ∗ 120 𝑚2
(4𝜋3 + √3
2 )302 𝑚2
= 7 𝑛𝑜𝑑𝑜𝑠
Ahora para el cálculo del radio real entre nodos, se despeja la distancia de la ecuación original:
𝑑 =√
1.12 ∗ 𝑁𝑃𝑒𝑐𝑒𝑠 ∗ 𝑃𝑒𝑠𝑜𝐹𝑖𝑛𝑎𝑙 ∗ 𝐴𝑟𝑒𝑎 𝑒𝑠𝑡𝑎𝑛𝑞𝑢𝑒
(4𝜋
3+
√3
2) 𝑁 𝑑𝑒 𝑁𝑜𝑑𝑜𝑠
𝑑 = 30.19 𝑚
De esta manera, conociendo el número de nodos y la distancia entre ellos, se da inicio a la programación de la red tipo Mesh (malla), siendo este tipo de topología la más confiable. Dado que, los Routers y el coordinador pueden comunicarse por medio de varios caminos hacia el destinatario del mensaje a transmitir; si no hay cobertura para una comunicación directa, el mensaje es entregado al Router más cercano, quien a su vez transmite el mensaje por múltiples rutas hasta que el mismo llegue a destino. Ahora bien, los ZED (ZigBee end Device) solo entregan el mensaje a su coordinador o router más cercano y entran en modo de bajo consumo (Sleep) hasta que los mismos sean activados nuevamente.
102
9.1.5.4 Programación de la Red
Para la programación de los módulos xbee en el software X-CTU es importante conocer conceptos como: DH (Destination Address High), DL (Destination Addres Low), PAN ID (personal área Network identificator), MY 16-bit Network Address:
DH (Destination Addres High):
Para configurar la red se necesita, en primera instancia, establecer los parámetros de destino de la misma. Es decir, establecer a qué punto será dirigida o transmitida la trama de datos.
La dirección alta o DAH constituye los primeros 32 bits de la red; cada serie xbee tiene unos parámetros definidos, siendo por ejemplo para una red broadcast (datos recibidos hacia y por todos los nodos de la red): DH: 0x00000000 y para una red punto a multipunto (Mesh) con el DH común: 13A200.
DL (Destination Address Low):
Por otro lado, la dirección de destino inferior, hace referencia a los bits menos significativos de la transmisión y recepción de datos, es decir, el destinatario del mensaje, este valor puede ser obtenido del Serial Low del xbee (SL) y varia con cada modelo. Si se desea enviar los datos a todos los módulos de la red el valor del DL es: FFFF
PAN ID (personal área Network identificator):
Hace referencia únicamente al identificador de la red de 16 bits, el mismo es un número hexadecimal referido en el intervalo de 0 a 65535. Cada xbee de la red debe tener el mismo identificador.
MY 16-bit Network Address:
Es la dirección de origen del mensaje, estos valores deben ser únicos para cada XBee en una red. La dirección MY puede tener cualquier valor entre 0x0000 y 0xFFFF.
Un ejemplo de configuración de estos parámetros es:
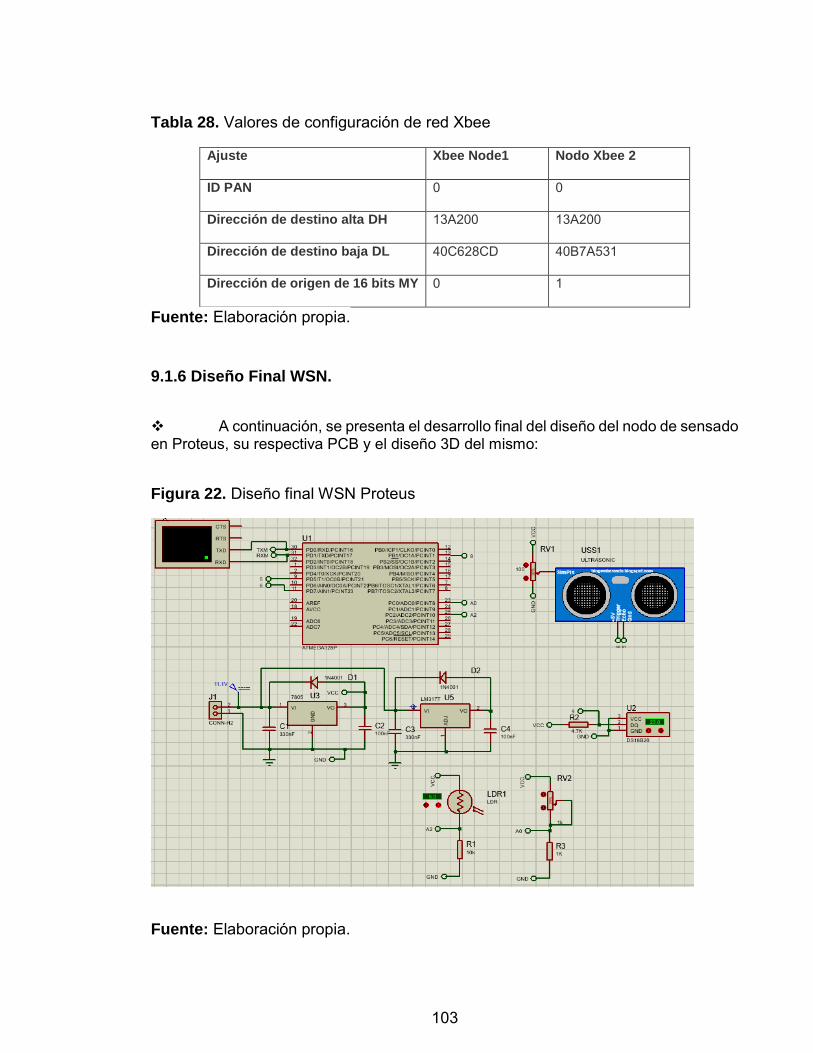
103
Tabla 28. Valores de configuración de red Xbee
Ajuste Xbee Node1 Nodo Xbee 2
ID PAN 0 0
Dirección de destino alta DH 13A200 13A200
Dirección de destino baja DL 40C628CD 40B7A531
Dirección de origen de 16 bits MY 0 1
Fuente: Elaboración propia.
9.1.6 Diseño Final WSN.
A continuación, se presenta el desarrollo final del diseño del nodo de sensadoen Proteus, su respectiva PCB y el diseño 3D del mismo:
Figura 22. Diseño final WSN Proteus
Fuente: Elaboración propia.
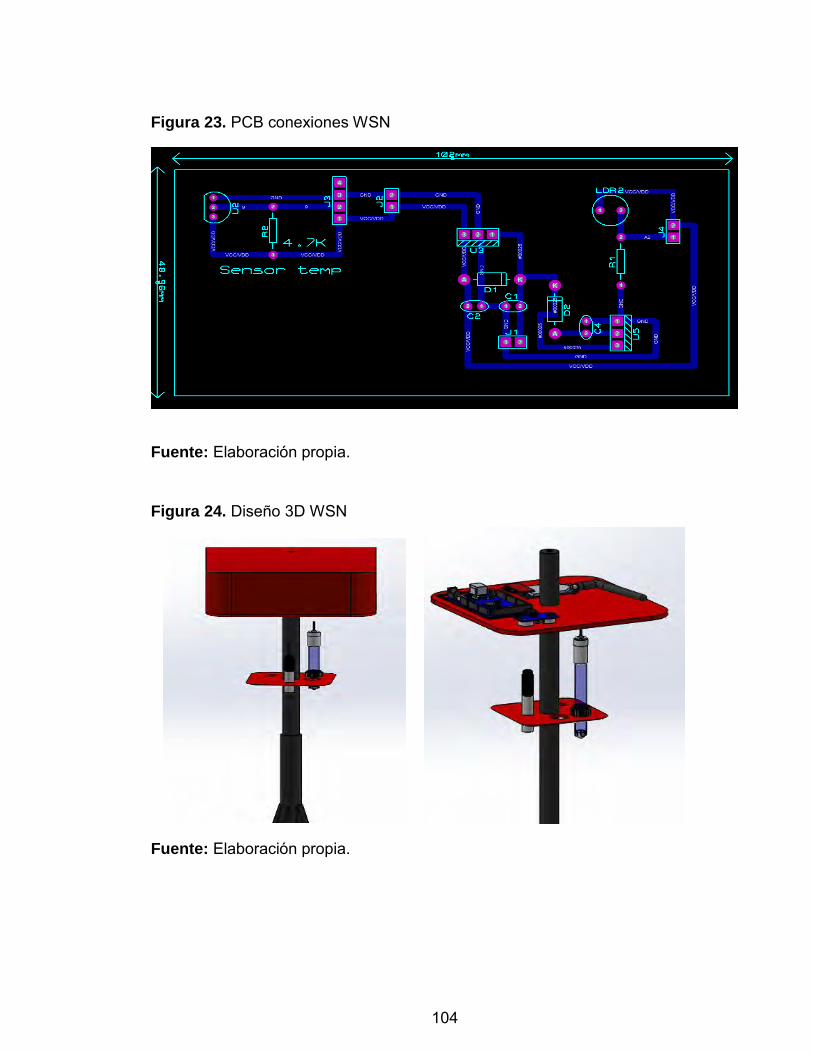
104
Figura 23. PCB conexiones WSN
Fuente: Elaboración propia.
Figura 24. Diseño 3D WSN
Fuente: Elaboración propia.
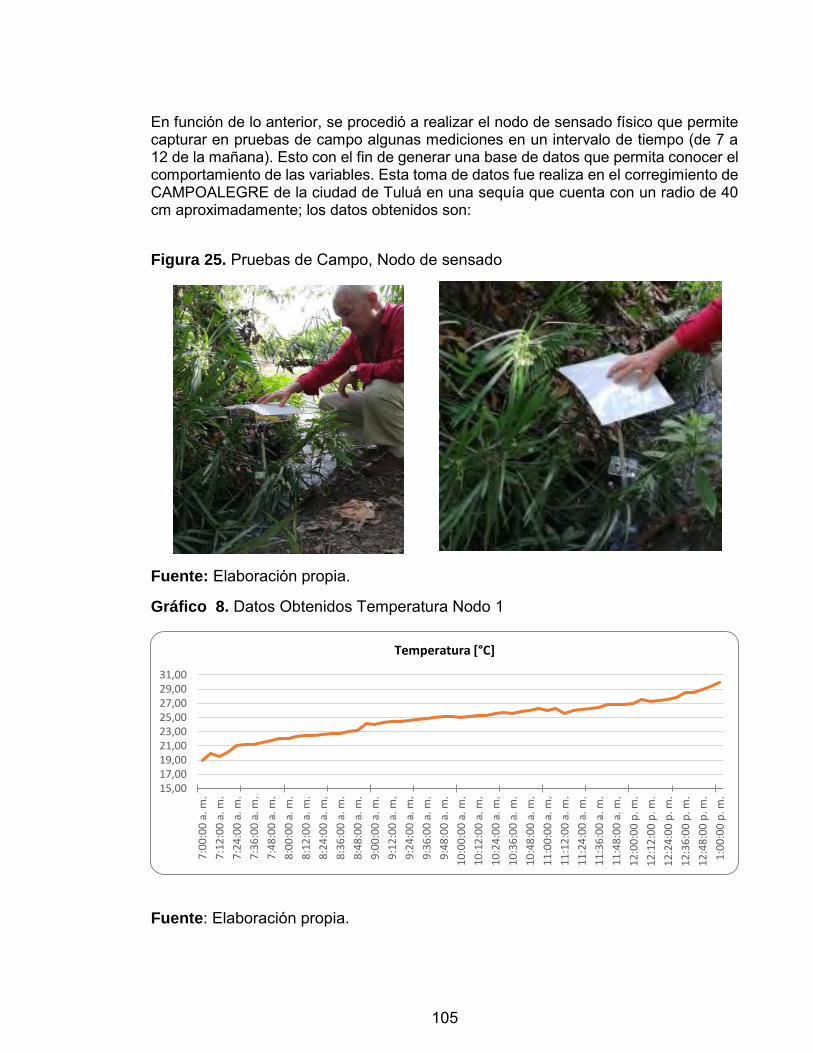
105
En función de lo anterior, se procedió a realizar el nodo de sensado físico que permite capturar en pruebas de campo algunas mediciones en un intervalo de tiempo (de 7 a 12 de la mañana). Esto con el fin de generar una base de datos que permita conocer el comportamiento de las variables. Esta toma de datos fue realiza en el corregimiento de CAMPOALEGRE de la ciudad de Tuluá en una sequía que cuenta con un radio de 40 cm aproximadamente; los datos obtenidos son:
Figura 25. Pruebas de Campo, Nodo de sensado
Fuente: Elaboración propia.
Gráfico 8. Datos Obtenidos Temperatura Nodo 1
Fuente: Elaboración propia.
15,0017,0019,0021,0023,0025,0027,0029,0031,00
7:0
0:0
0 a
. m.
7:1
2:0
0 a
. m.
7:2
4:0
0 a
. m.
7:3
6:0
0 a
. m.
7:4
8:0
0 a
. m.
8:0
0:0
0 a
. m.
8:1
2:0
0 a
. m.
8:2
4:0
0 a
. m.
8:3
6:0
0 a
. m.
8:4
8:0
0 a
. m.
9:0
0:0
0 a
. m.
9:1
2:0
0 a
. m.
9:2
4:0
0 a
. m.
9:3
6:0
0 a
. m.
9:4
8:0
0 a
. m.
10
:00
:00
a. m
.
10
:12
:00
a. m
.
10
:24
:00
a. m
.
10
:36
:00
a. m
.
10
:48
:00
a. m
.
11
:00
:00
a. m
.
11
:12
:00
a. m
.
11
:24
:00
a. m
.
11
:36
:00
a. m
.
11
:48
:00
a. m
.
12
:00
:00
p. m
.
12
:12
:00
p. m
.
12
:24
:00
p. m
.
12
:36
:00
p. m
.
12
:48
:00
p. m
.
1:0
0:0
0 p
. m.
Temperatura [°C]
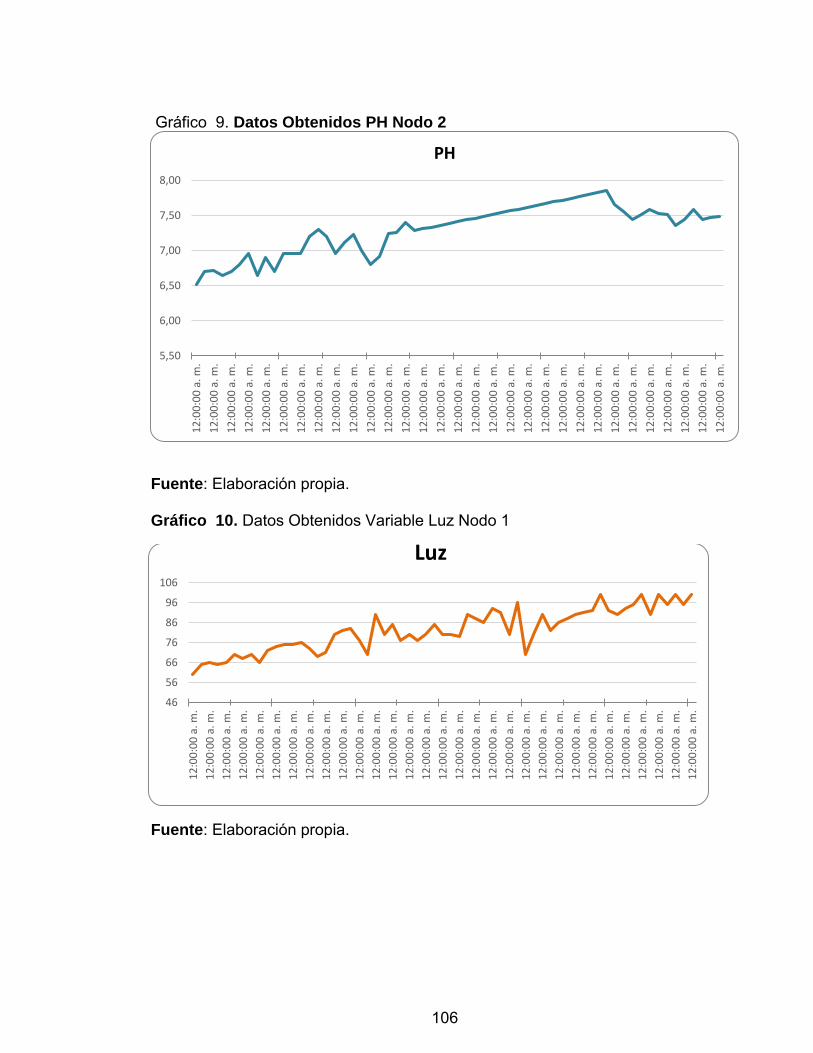
106
Gráfico 9. Datos Obtenidos PH Nodo 2
Fuente: Elaboración propia.
Gráfico 10. Datos Obtenidos Variable Luz Nodo 1
Fuente: Elaboración propia.
5,50
6,00
6,50
7,00
7,50
8,00
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
PH
46
56
66
76
86
96
106
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
Luz
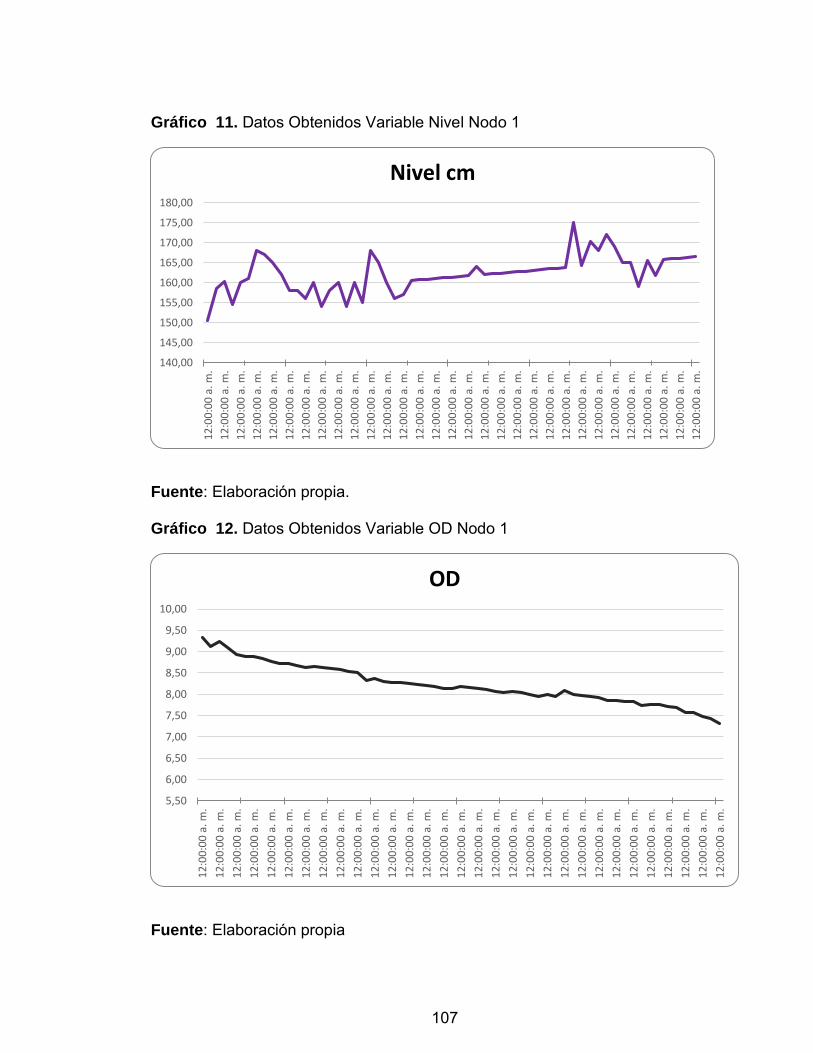
107
Gráfico 11. Datos Obtenidos Variable Nivel Nodo 1
Fuente: Elaboración propia.
Gráfico 12. Datos Obtenidos Variable OD Nodo 1
Fuente: Elaboración propia
140,00
145,00
150,00
155,00
160,00
165,00
170,00
175,00
180,001
2:0
0:0
0 a
. m.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
Nivel cm
5,50
6,00
6,50
7,00
7,50
8,00
8,50
9,00
9,50
10,00
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
12
:00
:00
a. m
.
OD
108
9.2 SISTEMA DE CONTROL.
Como bien se mencionó en capítulos anteriores, El nodo de control es el encargado de coordinar toda la red WSNA, para ello, este debe conocer el tipo de especie de pez que se encuentra en el estanque, como a su vez, los rangos de operación que debe tener cada variable físico-química. Al recibir las señales provenientes de los nodos de sensado, puede conocer en donde se debe realizar la acción de control. Específicamente hablando, en el sector acuícola o en los estanques de peces, la variación de los parámetros físicos, normalmente no sufre razones de cambio abruptas y el costo de implementación de la acción de control puede ser tedioso y elevado; por ello, se propone un sistema de control de lazo cerrado para algunas variables y para otras, únicamente el monitoreo. También, el sistema de control debe ser el punto central de toda la red de comunicación (nodo coordinador) pues debe conocer con exactitud cada una de las mediciones de los nodos de sensado y posteriormente, realizar un promedio general de las mediciones para la toma de decisiones, como a su vez, estimar el valor de las variables en los lugares donde no se encuentre un nodo (algoritmo de Kriging). De esta manera, se procede a emplear el control de lazo cerrado.
El lazo cerrado es aquel sistema en el que la acción de control está en función de la señal de salida. Es decir, que, por medio de una realimentación de la salida en la entrada y al ser comparada con la referencia, da como resultado final el ajuste de la acción de control, por ello. Este tipo de control solo se realizará en las variables de nivel y temperatura. Pues son parámetros de fácil manejo y que influyen de forma significativa en el cultivo. A continuación, se procede a definir la acción de control:
Para la red de sensores se definen dos acciones de control, para el modo automático, como acción de control se empleara un sistema del tipo ON/OFF con histéresis, el cual es un control simple de dos posiciones, en el, el sistema manda un 1 lógico cuando la variable de medición se encuentre por encima de un rango establecido al actuador y cuando el mismo llega a referencia, el sistema cambia a un 0 la salida de actuación, Conjuntamente, para el modo de operación manual el usuario puede optar por ingresar un valor de referencia (setpoint) al cual desee establecer la variable de interés. Proponiendo entonces un control por observador de estados. dado que, la implementación inicial de la red se hará de punto a punto entre el nodo coordinador o nodo de control y el nodo de sensado, el sistema de actuación será establecido en el nodo de control. Esto con el fin de disminuir la carga computacional de transmisión y recepción de datos. De esta manera se define:

109
Gráfico 13. Interacción sistema-Ambiente
Fuente: Elaboración propia.
Como lógica secuencial vista por medio del siguiente flujograma:
Gráfico 14. Flujograma Sistema de Actuación On/Off
Fuente: Elaboración propia.
Para la comprobación del correcto funcionamiento del control, inicialmente se procedió a realizar el modelamiento matemático del sistema, a su vez el sistema de actuación ha sido sustituido por un piloto, estas simulaciones han sido realizadas por medio del software MATLAB.
Ambiente
Control
Sensado Actuación
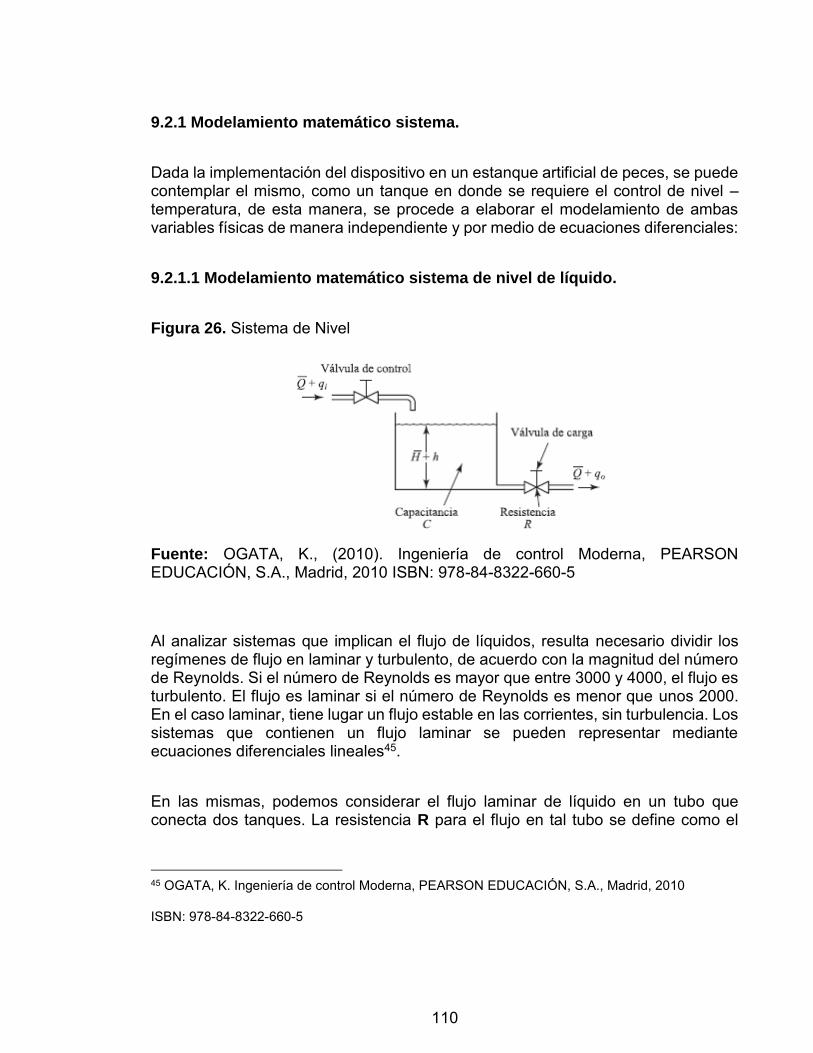
110
9.2.1 Modelamiento matemático sistema.
Dada la implementación del dispositivo en un estanque artificial de peces, se puede contemplar el mismo, como un tanque en donde se requiere el control de nivel – temperatura, de esta manera, se procede a elaborar el modelamiento de ambas variables físicas de manera independiente y por medio de ecuaciones diferenciales:
9.2.1.1 Modelamiento matemático sistema de nivel de líquido.
Figura 26. Sistema de Nivel
Fuente: OGATA, K., (2010). Ingeniería de control Moderna, PEARSON EDUCACIÓN, S.A., Madrid, 2010 ISBN: 978-84-8322-660-5
Al analizar sistemas que implican el flujo de líquidos, resulta necesario dividir los regímenes de flujo en laminar y turbulento, de acuerdo con la magnitud del número de Reynolds. Si el número de Reynolds es mayor que entre 3000 y 4000, el flujo es turbulento. El flujo es laminar si el número de Reynolds es menor que unos 2000. En el caso laminar, tiene lugar un flujo estable en las corrientes, sin turbulencia. Los sistemas que contienen un flujo laminar se pueden representar mediante ecuaciones diferenciales lineales45.
En las mismas, podemos considerar el flujo laminar de líquido en un tubo que conecta dos tanques. La resistencia R para el flujo en tal tubo se define como el
45 OGATA, K. Ingeniería de control Moderna, PEARSON EDUCACIÓN, S.A., Madrid, 2010
ISBN: 978-84-8322-660-5

111
cambio en la diferencia de nivel (la diferencia entre el nivel de líquido en los dos tanques) necesaria para producir un cambio de una unidad en el caudal; es decir:
𝑅 =𝑐𝑎𝑚𝑏𝑖𝑜 𝑒𝑛 𝑙𝑎 𝑑𝑖𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎 𝑑𝑒 𝑛𝑖𝑣𝑒𝑙
𝑐𝑎𝑚𝑏𝑖𝑜 𝑒𝑛 𝑙𝑎 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑑𝑒 𝑓𝑙𝑢𝑗𝑜 [𝑚]
[𝑚3
𝑠 ]=
𝑑𝐻
𝑑𝑄
Mientras que, la capacitancia C de un tanque se define como el cambio necesario en la cantidad de líquido almacenado, para producir un cambio de una unidad en el potencial (altura). (El potencial es la cantidad que indica el nivel de energía del sistema).
𝐶 =𝑐𝑎𝑚𝑏𝑖𝑜 𝑒𝑛 𝑒𝑙 𝑙í𝑞𝑢𝑖𝑑𝑜 𝑎𝑙𝑚𝑎𝑐𝑒𝑛𝑎𝑑𝑜
𝑐𝑎𝑚𝑏𝑖𝑜 𝑒𝑛 𝑙𝑎 𝑎𝑙𝑡𝑢𝑟𝑎 [𝑚3]
[𝑚]=
𝑑𝑉
𝑑𝐻
Consideramos las siguientes definiciones para un sistema como el observado en la figura no 25:
𝑄 = caudal en estado estable (antes de que haya ocurrido un cambio) [𝑚]
𝑞𝑖𝑛 = desviación pequeña del flujo de entrada [ 𝑚3
𝑠]
𝑞𝑜𝑢𝑡= desviación pequeña del flujo de salida [𝑚3
𝑠]
𝐻 = altura en estado estable (antes de que haya ocurrido un cambio) [𝑚]
ℎ = desviación pequeña de la altura [𝑚]
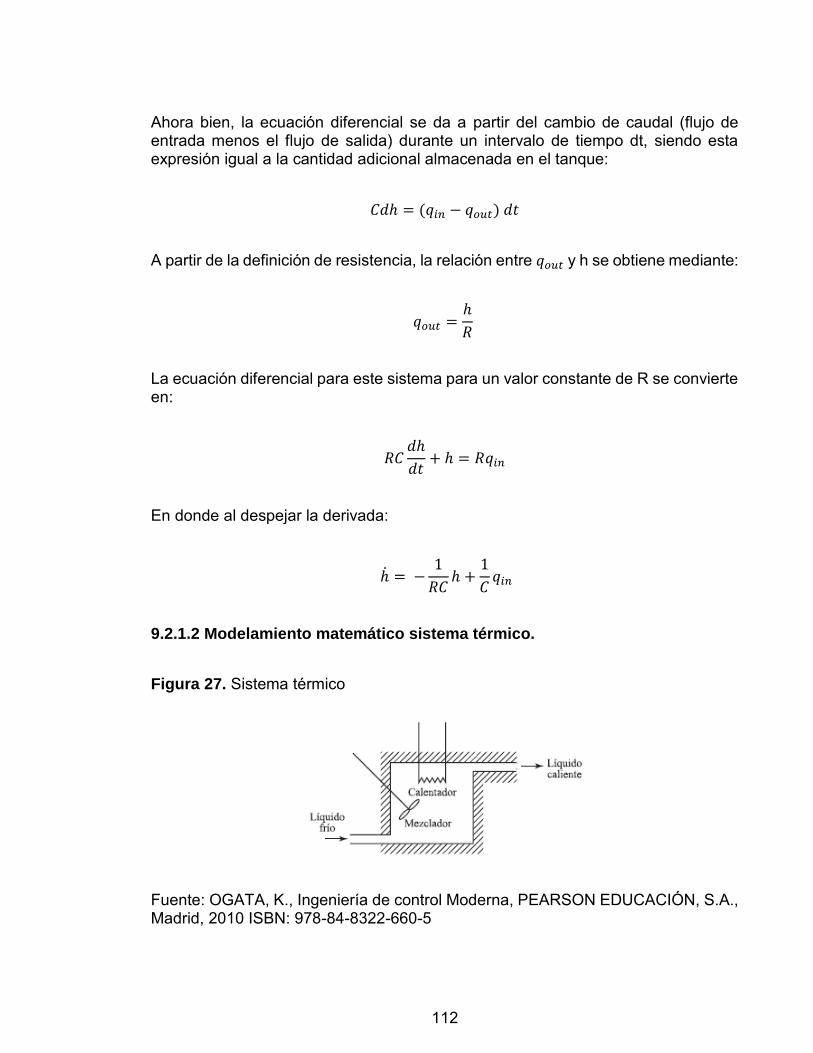
112
Ahora bien, la ecuación diferencial se da a partir del cambio de caudal (flujo de entrada menos el flujo de salida) durante un intervalo de tiempo dt, siendo esta expresión igual a la cantidad adicional almacenada en el tanque:
𝐶𝑑ℎ = (𝑞𝑖𝑛 − 𝑞𝑜𝑢𝑡) 𝑑𝑡
A partir de la definición de resistencia, la relación entre 𝑞𝑜𝑢𝑡 y h se obtiene mediante:
𝑞𝑜𝑢𝑡 =ℎ
𝑅
La ecuación diferencial para este sistema para un valor constante de R se convierte en:
𝑅𝐶𝑑ℎ
𝑑𝑡+ ℎ = 𝑅𝑞𝑖𝑛
En donde al despejar la derivada:
ℎ = −1
𝑅𝐶ℎ +
1
𝐶𝑞𝑖𝑛
9.2.1.2 Modelamiento matemático sistema térmico.
Figura 27. Sistema térmico
Fuente: OGATA, K., Ingeniería de control Moderna, PEARSON EDUCACIÓN, S.A., Madrid, 2010 ISBN: 978-84-8322-660-5
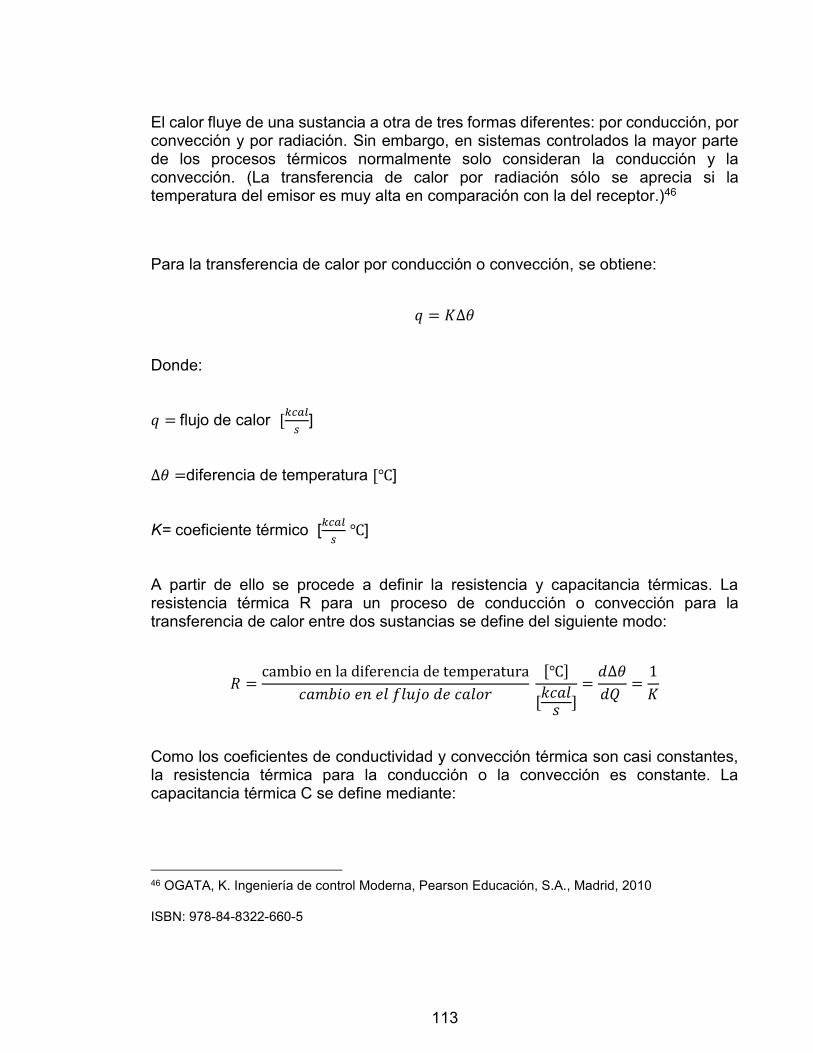
113
El calor fluye de una sustancia a otra de tres formas diferentes: por conducción, por convección y por radiación. Sin embargo, en sistemas controlados la mayor parte de los procesos térmicos normalmente solo consideran la conducción y la convección. (La transferencia de calor por radiación sólo se aprecia si la temperatura del emisor es muy alta en comparación con la del receptor.)46
Para la transferencia de calor por conducción o convección, se obtiene:
𝑞 = 𝐾∆𝜃
Donde:
𝑞 = flujo de calor [𝑘𝑐𝑎𝑙
𝑠]
∆𝜃 =diferencia de temperatura []
K= coeficiente térmico [𝑘𝑐𝑎𝑙
𝑠 ]
A partir de ello se procede a definir la resistencia y capacitancia térmicas. La resistencia térmica R para un proceso de conducción o convección para la transferencia de calor entre dos sustancias se define del siguiente modo:
𝑅 =cambio en la diferencia de temperatura
𝑐𝑎𝑚𝑏𝑖𝑜 𝑒𝑛 𝑒𝑙 𝑓𝑙𝑢𝑗𝑜 𝑑𝑒 𝑐𝑎𝑙𝑜𝑟
[]
[𝑘𝑐𝑎𝑙
𝑠 ]=
𝑑∆𝜃
𝑑𝑄 =
1
𝐾
Como los coeficientes de conductividad y convección térmica son casi constantes, la resistencia térmica para la conducción o la convección es constante. La capacitancia térmica C se define mediante:
46 OGATA, K. Ingeniería de control Moderna, Pearson Educación, S.A., Madrid, 2010
ISBN: 978-84-8322-660-5

114
𝐶 =cambio en el calor almacenado
cambio en la temperatura
[kcal]
[𝑚kcal]= 𝑚𝑐
Donde:
m = masa de la sustancia considerada [kg]
c = calor específico de la sustancia. [𝑘𝑐𝑎𝑙
𝑘𝑔 ]
Consideramos las siguientes definiciones para un sistema como el observado en la figura no 26:
𝐺 = velocidad de flujo en estado estable [𝑘𝑔
𝑠]
𝜃𝑖𝑛 = temperatura de entrada []
𝜃𝑜𝑢𝑡= temperatura de salida []
𝐻 = entrada del flujo de calor en estado estable [𝑘𝑐𝑎𝑙
𝑠]
De esta manera, para un flujo de calor de entrada constante se presenta una variación del flujo de calor de salida en función del tiempo, la ecuación diferencial de este sistema es:
𝐶𝑡𝑒𝑟𝑚𝑖𝑐𝑜𝑑𝜃 = (ℎ𝑖𝑛 − ℎ𝑜𝑢𝑡) 𝑑𝑡
Que puede reescribirse como:
𝑅𝐶𝑡𝑒𝑟𝑚𝑖𝑐𝑜
𝑑𝜃
𝑑𝑡+ 𝜃 = 𝑅ℎ𝑖𝑛
En donde al despejar la derivada:
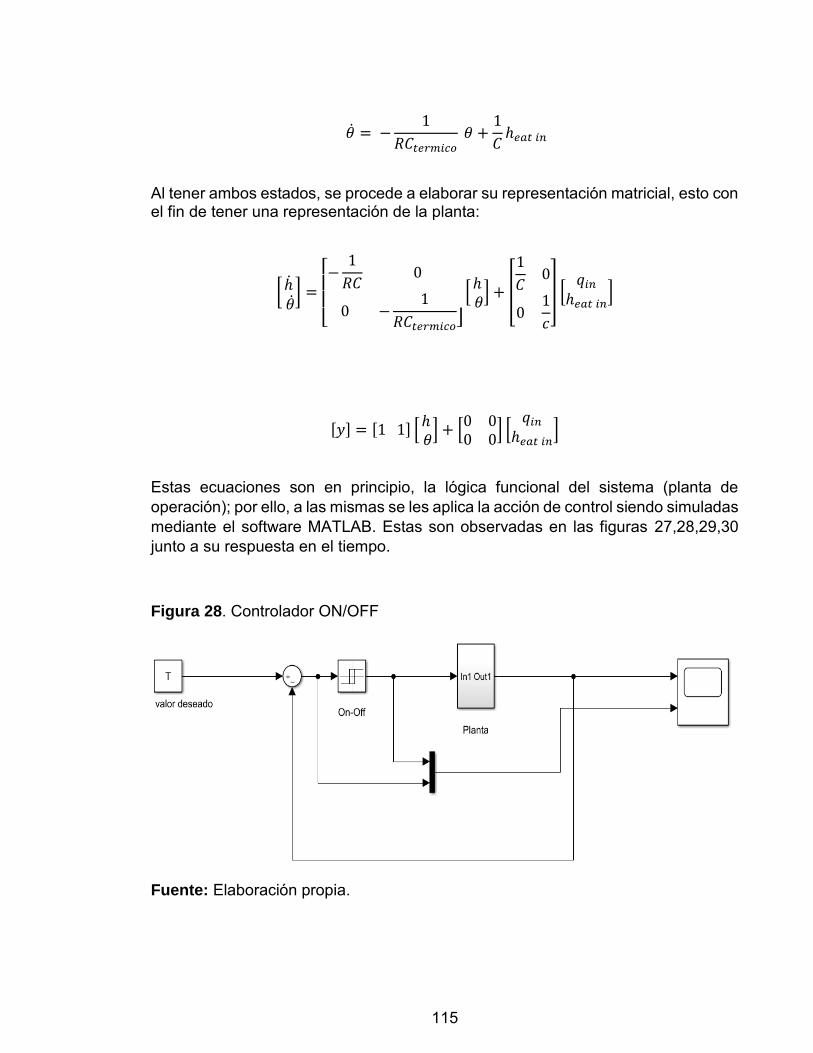
115
= −1
𝑅𝐶𝑡𝑒𝑟𝑚𝑖𝑐𝑜 𝜃 +
1
𝐶ℎ𝑒𝑎𝑡 𝑖𝑛
Al tener ambos estados, se procede a elaborar su representación matricial, esto con el fin de tener una representación de la planta:
[ ℎ
] =
[ −
1
𝑅𝐶0
0 −1
𝑅𝐶𝑡𝑒𝑟𝑚𝑖𝑐𝑜]
[ℎ 𝜃
] + [
1
𝐶0
01
𝑐
] [𝑞𝑖𝑛
ℎ𝑒𝑎𝑡 𝑖𝑛]
[𝑦] = [1 1] [ℎ 𝜃
] + [0 00 0
] [𝑞𝑖𝑛
ℎ𝑒𝑎𝑡 𝑖𝑛]
Estas ecuaciones son en principio, la lógica funcional del sistema (planta de operación); por ello, a las mismas se les aplica la acción de control siendo simuladas mediante el software MATLAB. Estas son observadas en las figuras 27,28,29,30 junto a su respuesta en el tiempo.
Figura 28. Controlador ON/OFF
Fuente: Elaboración propia.
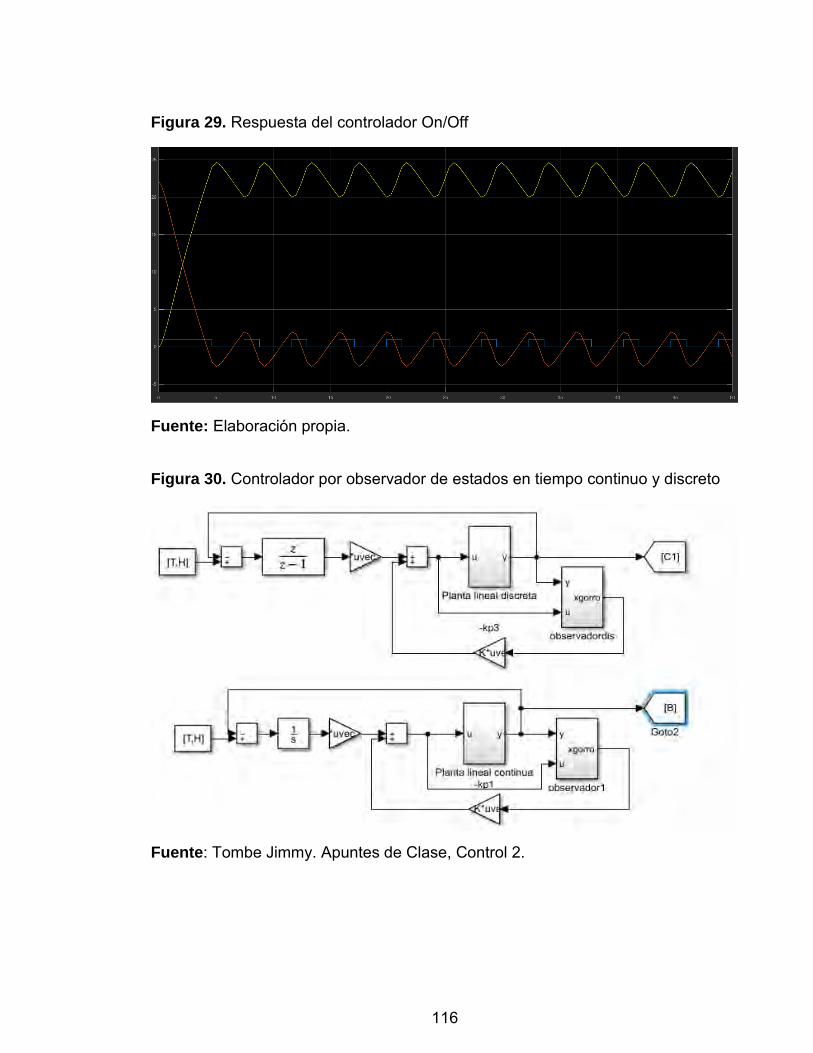
116
Figura 29. Respuesta del controlador On/Off
Fuente: Elaboración propia.
Figura 30. Controlador por observador de estados en tiempo continuo y discreto
Fuente: Tombe Jimmy. Apuntes de Clase, Control 2.
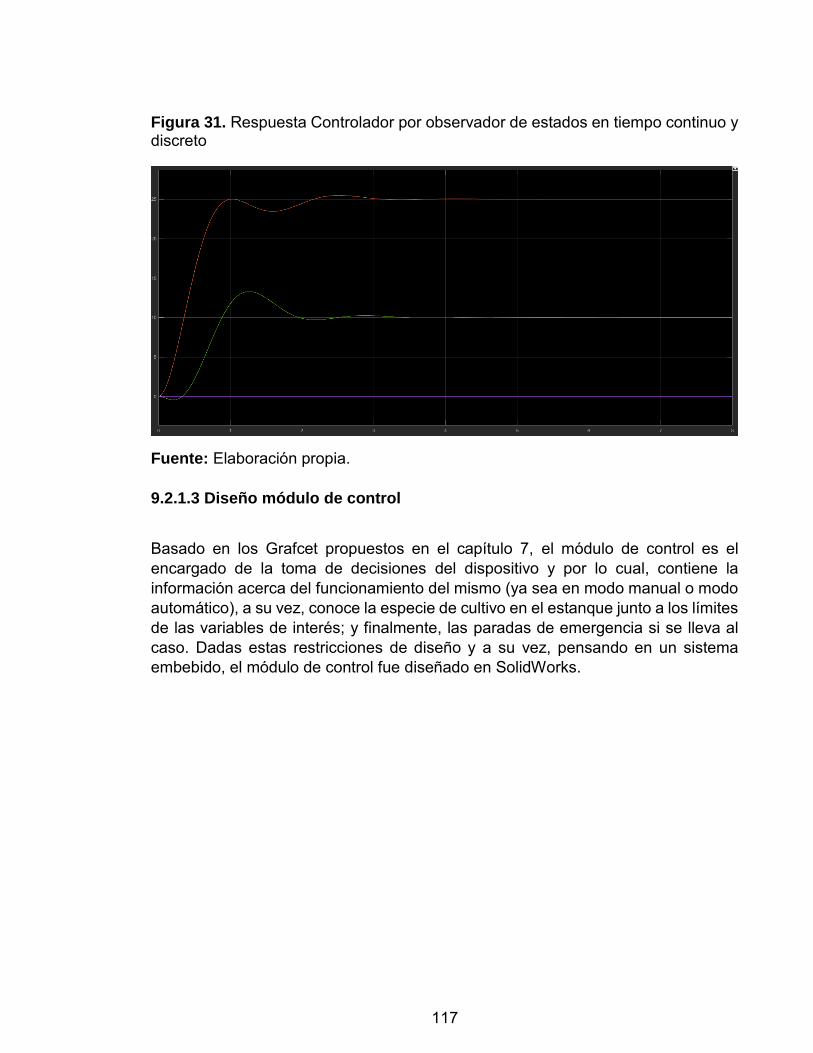
117
Figura 31. Respuesta Controlador por observador de estados en tiempo continuo y discreto
Fuente: Elaboración propia. 9.2.1.3 Diseño módulo de control
Basado en los Grafcet propuestos en el capítulo 7, el módulo de control es el encargado de la toma de decisiones del dispositivo y por lo cual, contiene la información acerca del funcionamiento del mismo (ya sea en modo manual o modo automático), a su vez, conoce la especie de cultivo en el estanque junto a los límites de las variables de interés; y finalmente, las paradas de emergencia si se lleva al caso. Dadas estas restricciones de diseño y a su vez, pensando en un sistema embebido, el módulo de control fue diseñado en SolidWorks.
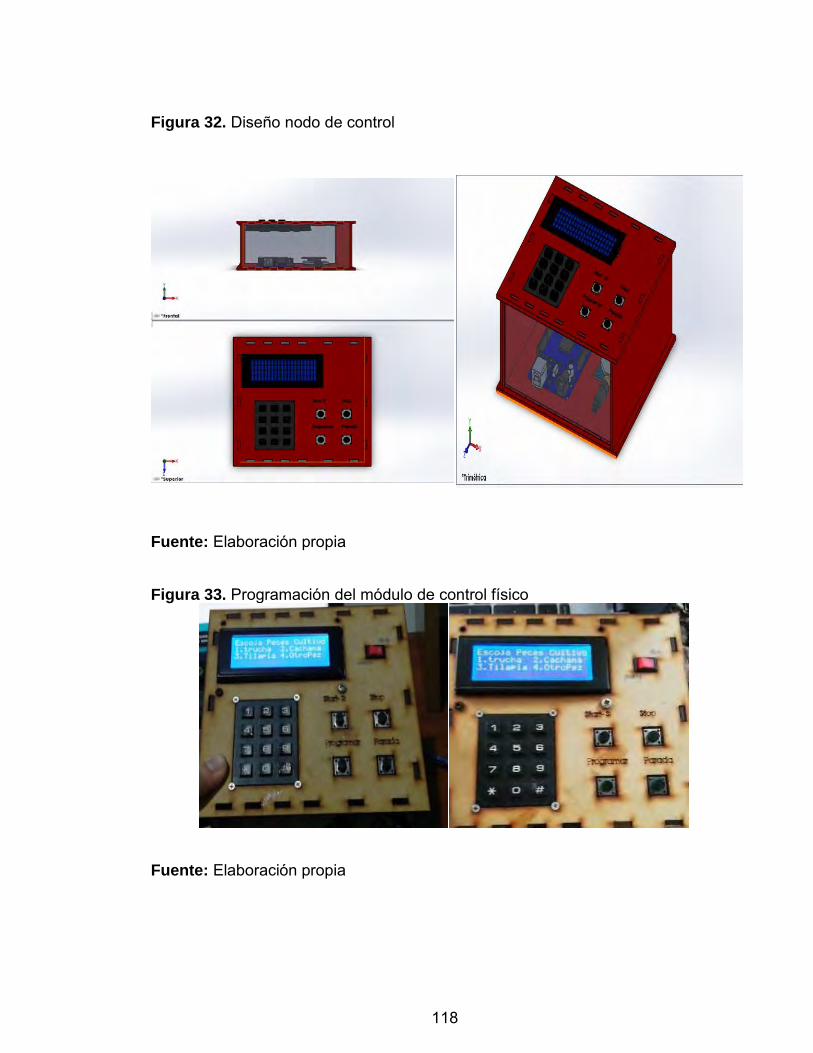
118
Figura 32. Diseño nodo de control
Fuente: Elaboración propia
Figura 33. Programación del módulo de control físico
Fuente: Elaboración propia

119
Figura 34. Datos obtenidos del módulo de control
Fuente: Elaboración propia

120
10. ALGORITMOS.
10.1 ALGORITMO DE KRIGING.
Kriging es una de las técnicas de interpolación por métodos gaussianos más utilizada para la estimación de datos en geoestadística. A diferencia de otros métodos de interpolación, para emplear Kriging de forma efectiva se debe conocer el comportamiento espacial del fenómeno representado por los valores z y a partir de ello seleccionar el semivariograma* (isotrópico o anisotropico) que mejor represente la superficie de salida. Lo que indica que la capacidad de predicción de un punto frente a otro está relacionada en esencia, con las reglas de dependencia o con su distancia de separación (puntos cercanos tienen mayor autocorrelación que puntos lejanos). Gracias a esto, las técnicas de estadística geográfica no sólo tienen la capacidad de producir una superficie de predicción (interpolación puntual o por bloques), sino que también proporcionan alguna medida de certeza o precisión de las predicciones.
El método Kriging es similar al de IDW (interpolación mediante distancia inversa) en que pondera los valores medidos circundantes para calcular una predicción de una ubicación sin mediciones. La fórmula general para ambos interpoladores se forma como una suma ponderada de los datos:
(𝑠𝑜) = ∑𝜆𝑖𝑍(𝑠𝑖)
𝑁
𝑖=1
Donde:
𝑍(𝑠𝑖)= el valor medido en la ubicación i
𝜆𝑖 = una ponderación desconocida para el valor medido en la ubicación i
* es una herramienta que permite analizar el comportamiento espacial de una variable sobre un área definida, obteniendo como resultado un diagrama de la variable experimental que refleja la distancia máxima y la forma en que un punto tiene influencia sobre otro punto a diferentes distancias.
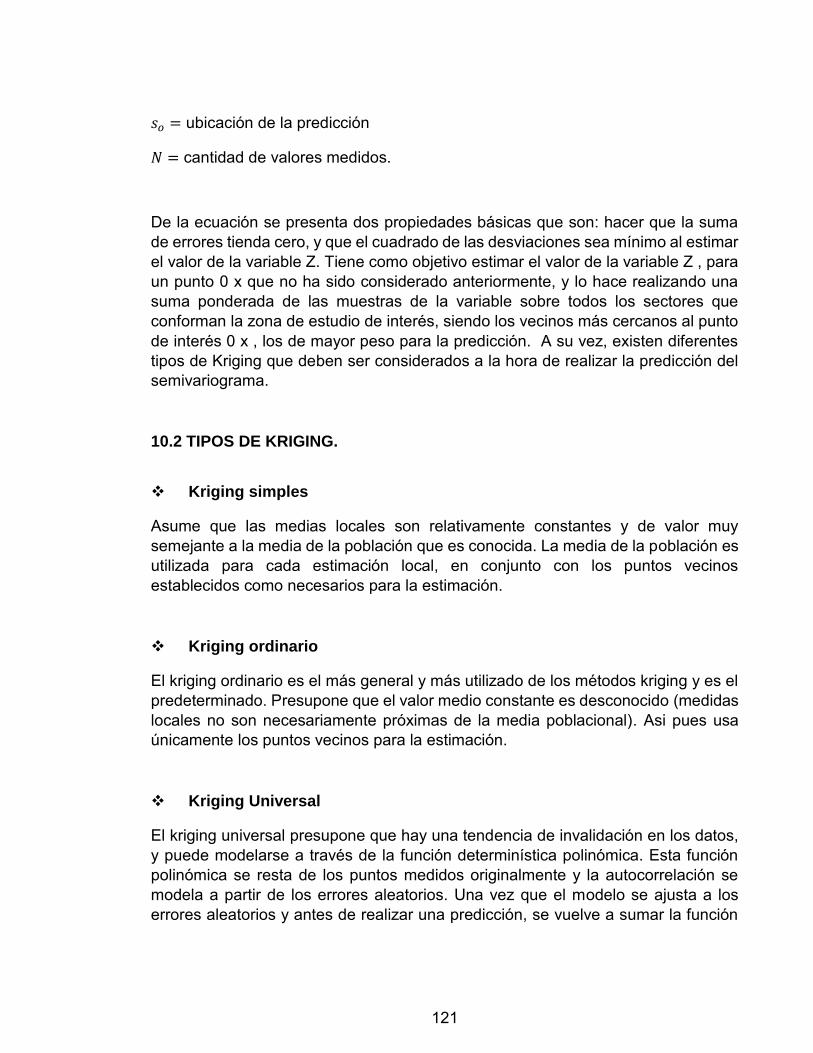
121
𝑠𝑜 = ubicación de la predicción
𝑁 = cantidad de valores medidos.
De la ecuación se presenta dos propiedades básicas que son: hacer que la suma de errores tienda cero, y que el cuadrado de las desviaciones sea mínimo al estimar el valor de la variable Z. Tiene como objetivo estimar el valor de la variable Z , para un punto 0 x que no ha sido considerado anteriormente, y lo hace realizando una suma ponderada de las muestras de la variable sobre todos los sectores que conforman la zona de estudio de interés, siendo los vecinos más cercanos al punto de interés 0 x , los de mayor peso para la predicción. A su vez, existen diferentes tipos de Kriging que deben ser considerados a la hora de realizar la predicción del semivariograma.
10.2 TIPOS DE KRIGING.
Kriging simples
Asume que las medias locales son relativamente constantes y de valor muy semejante a la media de la población que es conocida. La media de la población es utilizada para cada estimación local, en conjunto con los puntos vecinos establecidos como necesarios para la estimación.
Kriging ordinario
El kriging ordinario es el más general y más utilizado de los métodos kriging y es el predeterminado. Presupone que el valor medio constante es desconocido (medidas locales no son necesariamente próximas de la media poblacional). Asi pues usa únicamente los puntos vecinos para la estimación.
Kriging Universal
El kriging universal presupone que hay una tendencia de invalidación en los datos, y puede modelarse a través de la función determinística polinómica. Esta función polinómica se resta de los puntos medidos originalmente y la autocorrelación se modela a partir de los errores aleatorios. Una vez que el modelo se ajusta a los errores aleatorios y antes de realizar una predicción, se vuelve a sumar la función
122
polinómica a las predicciones para obtener resultados significativos. El kriging universal sólo se debe utilizar si se conoce una tendencia en los datos y se puede dar una justificación científica para describirla.47
Dado el análisis de cado uno de los tipos de Kriging, y en función a la problemática propuesta, se emplea el Kriging ordinario para la estimación de los puntos. A continuación:
10.3 KRIGING ORDINARIO.
El Kriging ordinario es un Kriging lineal con un valor esperado estacionario desconocido, para emplearse se parte del hecho de que el valor esperado Z de la función aleatoria tiende a ser constante para valores de 𝑥𝑖 𝑑𝑜𝑛𝑑𝑒 𝑖 = 1, 2 , … , 𝑛. de esta manera se obtiene la ecuación de insesgamiento:
𝑚(𝑥𝑖) = 𝐸[𝑍(𝑥𝑖)] = 𝑚 (𝑒𝑐𝑢𝑎𝑐𝑖𝑜𝑛 𝑑𝑒 𝑖𝑛𝑠𝑒𝑠𝑔𝑎𝑚𝑖𝑒𝑛𝑡𝑜)
Para predecir el valor de la variable en el punto 𝑥𝑜 (punto donde no hubo medición) se realiza la combinación lineal de las n variables, multiplicadas el peso o ponderación de los valores originales 𝜆𝑖 de la siguiente manera:
(𝑥𝑜) = ∑𝜆𝑖𝑍(𝑥𝑖)
𝑛
𝑖=1
(𝑥𝑜) = 𝜆1𝑍(𝑥1) + 𝜆2𝑍(𝑥2) + ⋯+𝜆𝑛𝑍(𝑥𝑛)
Cabe recalcar que la suma de los pesos 𝜆𝑖 debe ser igual a 1 para que la esperanza del predictor sea igual al valor de variable (requisito de insesgamiento). Empleando la ecuación de insesgamiento en el Kriging se obtiene:
47 ArcGIS Pro, how-kriging-works? [en línea]. pro.arcgis. [Consultado: 31 de Mayo 2019] Disponible en Internet: https://pro.arcgis.com/es/pro-app/tool-reference/3d-analyst/how-kriging-works.htm

123
𝑚(𝑥𝑜) = 𝐸[𝑍(𝑥𝑜)] = 𝑚
𝑚(𝑥𝑜) = 𝐸 [∑𝜆𝑖𝑍(𝑥𝑖)
𝑛
𝑖=1
] = 𝑚
Donde al ser Z(xi) igual a m constante, se extrae de la sumatoria, siendo el resultado igual a 1:
𝐸 [∑𝜆𝑖𝑚
𝑛
𝑖=1
] = 𝑚 𝑚𝐸 [∑𝜆𝑖
𝑛
𝑖=1
] = 𝑚
𝐸 [∑𝜆𝑖
𝑛
𝑖=1
] =𝑚
𝑚 𝐸 [∑𝜆𝑖
𝑛
𝑖=1
] = 1
Considerando que la varianza del error sea mínima (satisfaciendo la condición de insesgadez), la varianza de estimación se expresa de la siguiente manera48:
𝜎𝑒2 = 𝑉𝑎𝑟(𝑍𝑘 − 𝑍𝑘
∗) = 𝐸[(𝑍𝑘 − 𝑍𝑘∗)2]
Siendo su mínimo la siguiente función objetivo:
𝐹 = 𝜎𝑒2 − 2𝜇 [∑𝜆𝑖 − 1
𝑛
𝑖=1
]
Siendo 𝜇 = 𝑎𝑙 𝑚𝑢𝑙𝑡𝑖𝑝𝑙𝑖𝑐𝑎𝑑𝑜𝑟 𝑑𝑒 𝑙𝑎𝑔𝑟𝑎𝑛𝑔𝑒 , bien, de esta manera se procede a minimizar la función al realizar las derivadas parciales en función del multiplicador y los pesos 𝜆𝑖 e igualando a 0:
𝜕𝐹
𝜕𝜆𝑖= −2𝜎𝑘𝑖 + 2 [∑𝜆𝑗𝜎𝑖𝑗
𝑛
𝑗=1
] − 2𝜇 = 0
48 DIAZ, V. Martinez, Universidad Autónoma de México. Geoestadística aplicada [en línea]. mmc2.geofisica [Consultado: 31 de Mayo 2019] Disponible en Internet: http://mmc2.geofisica.unam.mx/cursos/geoest/Presentaciones/CG6_2009.pdf
124
𝜕𝐹
𝜕𝜇= [∑𝜆𝑖 − 1
𝑛
𝑖=1
] = 0
donde , 𝜎𝑖𝑗 = 𝐶(𝑥𝑖 , 𝑥𝑗) − 𝑐𝑜𝑣[𝑍(𝑥𝑖), 𝑍(𝑥𝑗)]
al sustituir , 𝜎𝑖𝑗 𝑦 𝜎𝑒2 en las derivadas, resulta un sistema de ecuaciones (𝑛 + 1) con
(𝑛 + 1) incógnitas:
𝑐𝑖𝑗 ∗ 𝜆 = 𝑐𝑖0
[ 𝑐11 . .. . .. . .
. 𝑐1𝑛 1
. . .
. . .. . .𝑐𝑛1 . .1 . .
. . .
. 𝑐𝑛𝑚 1
. 1 0]
[ 𝜆1
.
..𝜆𝑛
𝜇 ]
=
[ 𝑐10
.
..𝑐𝑛0
1 ]
Siendo entonces, los pesos que minimizan la red, la matriz inversa de Cij:
𝜆 = (𝑐𝑖𝑗 )−1
∗ 𝑐𝑖0
De esta manera la variación del Kriging ordinario es:
𝜎𝑘2 = 𝜎𝑒
2 − [∑𝜆𝑖𝑐𝑖0
𝑛
𝑖=1
] − 𝜇
10.4 IMPLEMENTACIÓN DE KRIGING.
Para la implementación del algoritmo de estimación de kriging, se procedió a emplear muestras tomadas de los nodos de medición, la distribución de las mismas y los valores obtenidos pueden ser observados en la Figura 32 y la tabla 27, siendo las mismas posteriormente procesadas en la herramienta estadística Stargraphics y el software matemático MATLAB empleando el toolbox MgStat.
125
Tabla 29. Muestras Implementación Kriging
Fuente: Elaboración propia.
Figura 35. Distribución Muestras Implementación Kriging
Fuente: Elaboración propia.
Ya con las distribuciones de las muestras se procede a realizar la construcción del variograma experimental, en este caso se empleó un modelo exponencial dado por:
x(m) y(m) T [°C]
3 3 19,00
3 27 18,10
20 3 17,80
20 15 18,60
20 27 18,40
37 3 19,30
37 27 18,20
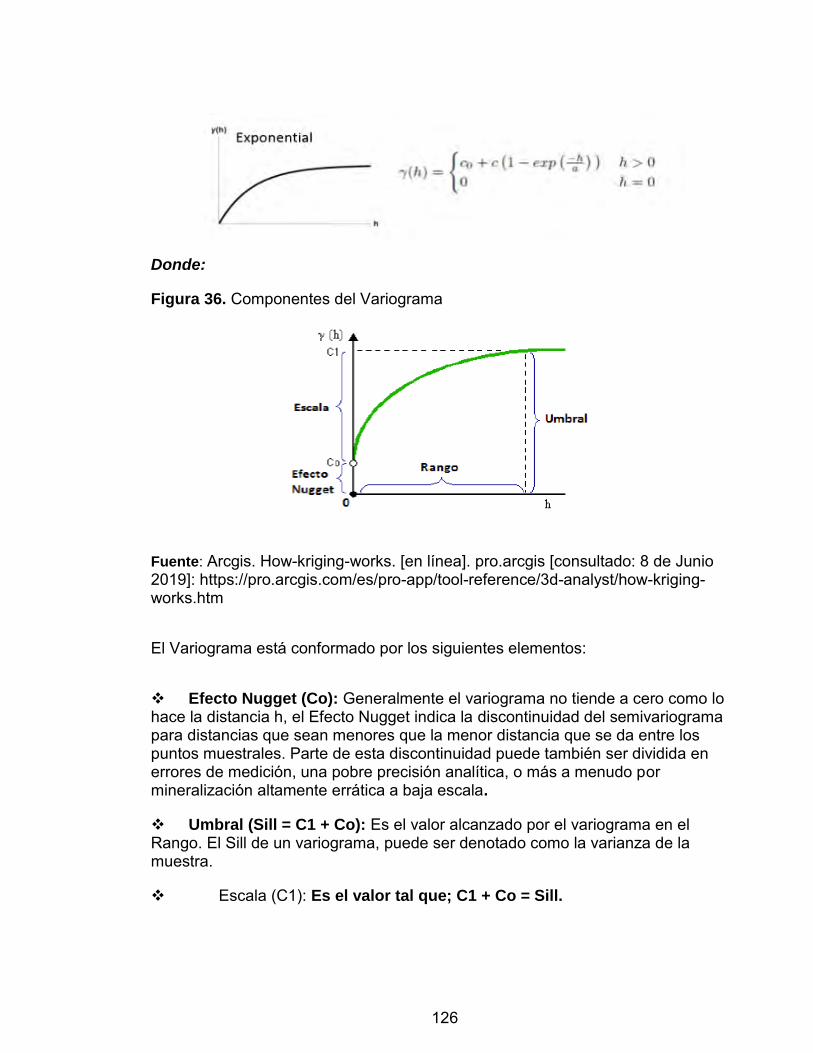
126
Donde:
Figura 36. Componentes del Variograma
Fuente: Arcgis. How-kriging-works. [en línea]. pro.arcgis [consultado: 8 de Junio 2019]: https://pro.arcgis.com/es/pro-app/tool-reference/3d-analyst/how-kriging-works.htm
El Variograma está conformado por los siguientes elementos:
Efecto Nugget (Co): Generalmente el variograma no tiende a cero como lo hace la distancia h, el Efecto Nugget indica la discontinuidad del semivariograma para distancias que sean menores que la menor distancia que se da entre los puntos muestrales. Parte de esta discontinuidad puede también ser dividida en errores de medición, una pobre precisión analítica, o más a menudo por mineralización altamente errática a baja escala.
Umbral (Sill = C1 + Co): Es el valor alcanzado por el variograma en el Rango. El Sill de un variograma, puede ser denotado como la varianza de la muestra.
Escala (C1): Es el valor tal que; C1 + Co = Sill.

127
Rango: Es la distancia dentro de la cual, las muestras están correlacionadasespacialmente.49
ya conociendo las caracteristiscas del variograma, el variograma obtenido es:
Figura 37. Variograma experimental
Fuente: Elaboración propia.
Dando como resultado, el siguiente mapeo kriging:
49 Arcgis. How-kriging-works. [en línea]. pro.arcgis [Consultado: 8 de Junio 2019] Disponible en Internet: https://pro.arcgis.com/es/pro-app/tool-reference/3d-analyst/how-kriging-works.htm
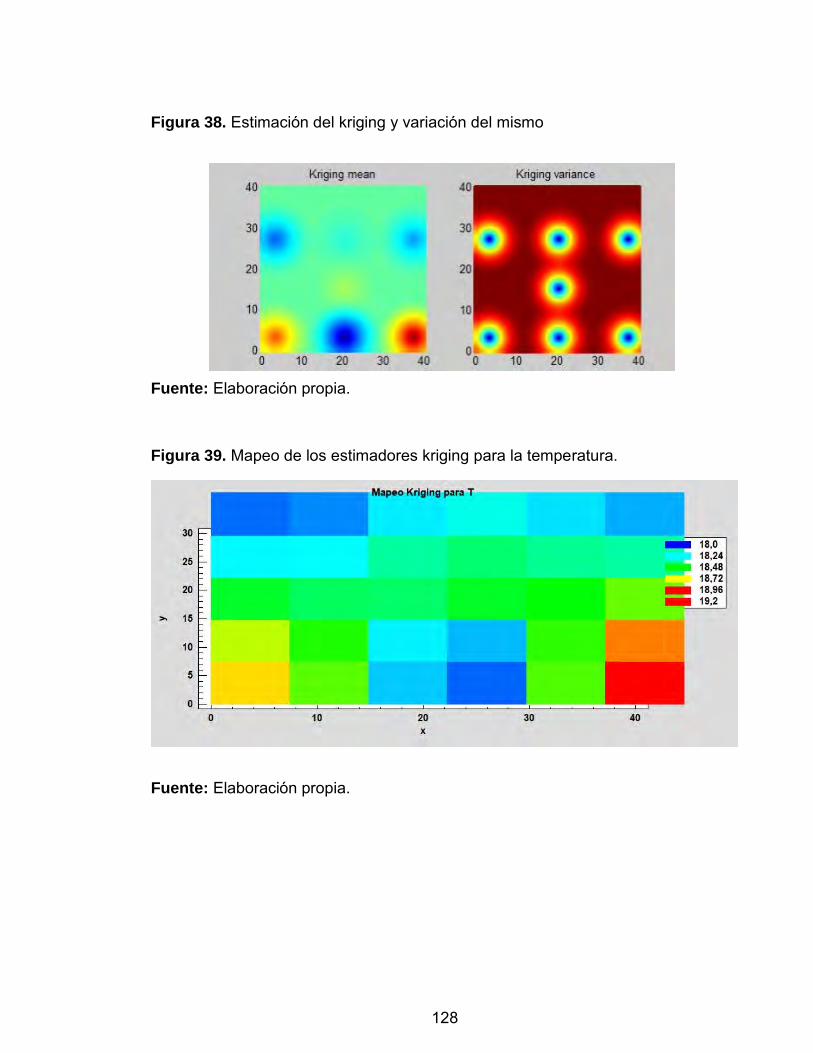
128
Figura 38. Estimación del kriging y variación del mismo
Fuente: Elaboración propia.
Figura 39. Mapeo de los estimadores kriging para la temperatura.
Fuente: Elaboración propia.
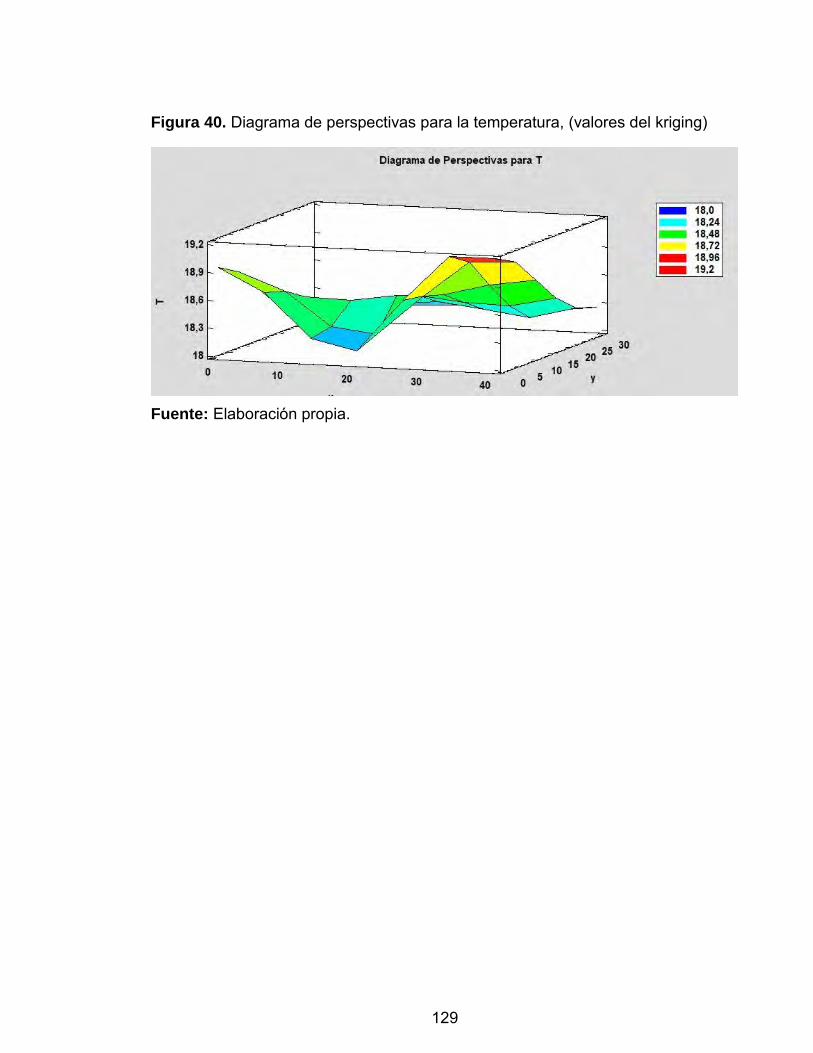
129
Figura 40. Diagrama de perspectivas para la temperatura, (valores del kriging)
Fuente: Elaboración propia.

130
11. ANÁLISIS ECONÓMICO.
En esta sección, se detallan los costos totales que tiene la implementación del proyecto (costos fijos y de igual manera costos variables), así como, un posible ingreso al ejecutar la alternativa de solución junto a su respectivo análisis del valor actual neto (VAN) y la tasa de retorno de inversión (TIR).
11.1 COSTOS DE IMPLEMENTACIÓN.
Tabla 30. Tabla de costos por fases del proyecto
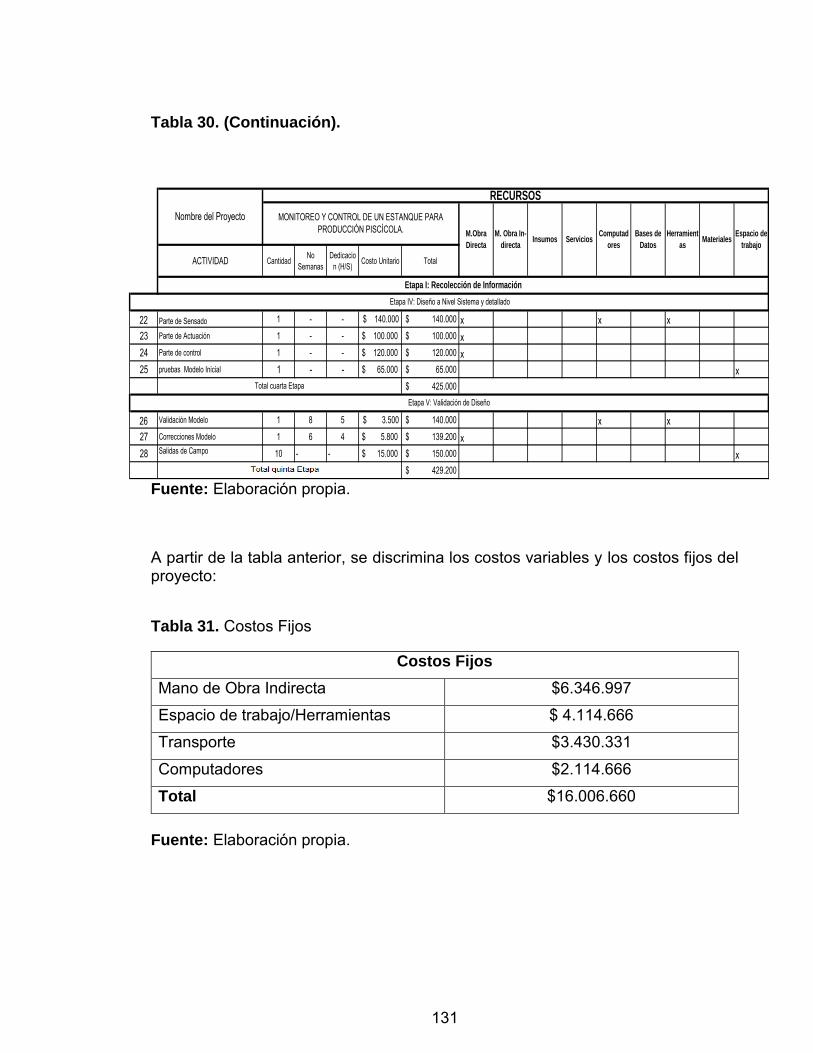
131
Tabla 30. (Continuación).
Fuente: Elaboración propia.
A partir de la tabla anterior, se discrimina los costos variables y los costos fijos del proyecto:
Tabla 31. Costos Fijos
Costos Fijos
Mano de Obra Indirecta $6.346.997 Espacio de trabajo/Herramientas $ 4.114.666 Transporte $3.430.331 Computadores $2.114.666 Total $16.006.660
Fuente: Elaboración propia.
ACTIVIDAD Cantidad No Semanas
Dedicacion (H/S) Costo Unitario Total
22 Parte de Sensado 1 - - $ 140.000 $ 140.000 x x x23 Parte de Actuación 1 - - $ 100.000 $ 100.000 x24 Parte de control 1 - - $ 120.000 $ 120.000 x25 pruebas Modelo Inicial 1 - - $ 65.000 $ 65.000 x
$ 425.000
26 Validación Modelo 1 8 5 $ 3.500 $ 140.000 x x27 Correcciones Modelo 1 6 4 $ 5.800 $ 139.200 x28 Salidas de Campo 10 - - $ 15.000 $ 150.000 x
$ 429.200
Etapa IV: Diseño a Nivel Sistema y detallado
Nombre del Proyecto
Etapa I: Recolección de Información
M.Obra
Directa
M. Obra In-
directaInsumos Servicios
Computad
ores
Bases de
Datos
Herramient
asMateriales
Espacio de
trabajo
MONITOREO Y CONTROL DE UN ESTANQUE PARA PRODUCCIÓN PISCÍCOLA.
RECURSOS
Total cuarta Etapa
Total tercera Etapa
Etapa V: Validación de Diseño
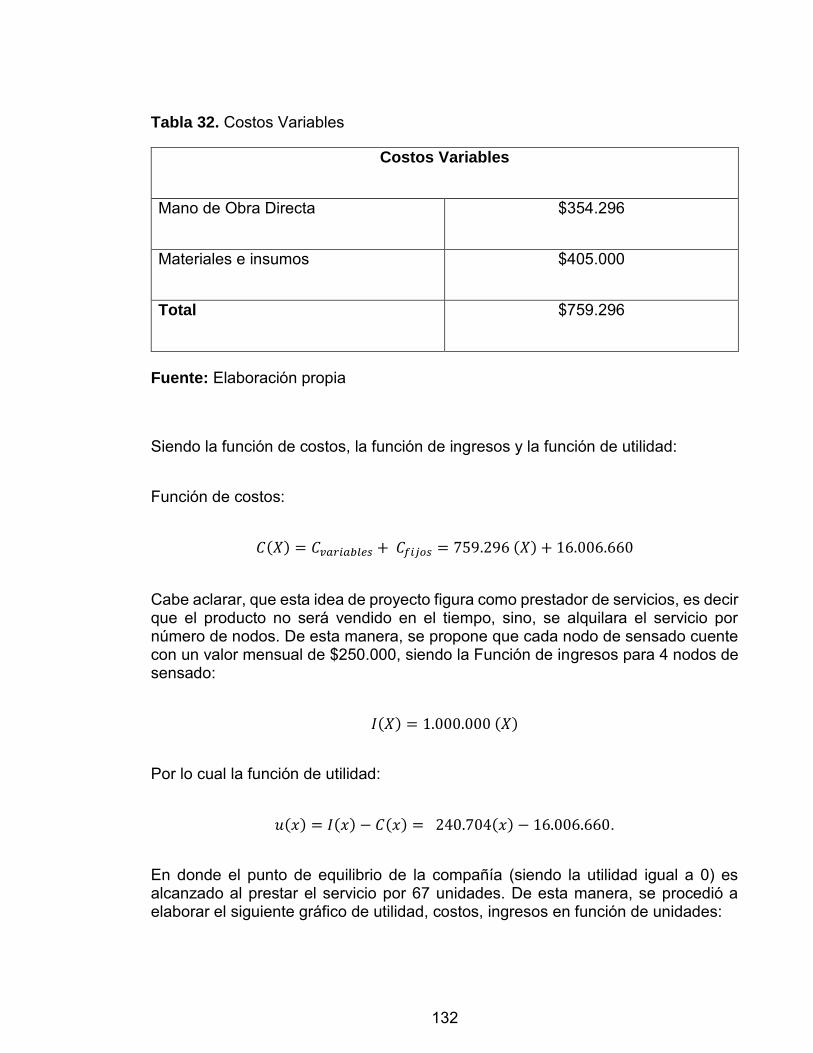
132
Tabla 32. Costos Variables
Costos Variables
Mano de Obra Directa $354.296
Materiales e insumos $405.000
Total $759.296
Fuente: Elaboración propia
Siendo la función de costos, la función de ingresos y la función de utilidad:
Función de costos:
𝐶(𝑋) = 𝐶𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒𝑠 + 𝐶𝑓𝑖𝑗𝑜𝑠 = 759.296 (𝑋) + 16.006.660
Cabe aclarar, que esta idea de proyecto figura como prestador de servicios, es decir que el producto no será vendido en el tiempo, sino, se alquilara el servicio por número de nodos. De esta manera, se propone que cada nodo de sensado cuente con un valor mensual de $250.000, siendo la Función de ingresos para 4 nodos de sensado:
𝐼(𝑋) = 1.000.000 (𝑋)
Por lo cual la función de utilidad:
𝑢(𝑥) = 𝐼(𝑥) − 𝐶(𝑥) = 240.704(𝑥) − 16.006.660.
En donde el punto de equilibrio de la compañía (siendo la utilidad igual a 0) es alcanzado al prestar el servicio por 67 unidades. De esta manera, se procedió a elaborar el siguiente gráfico de utilidad, costos, ingresos en función de unidades:
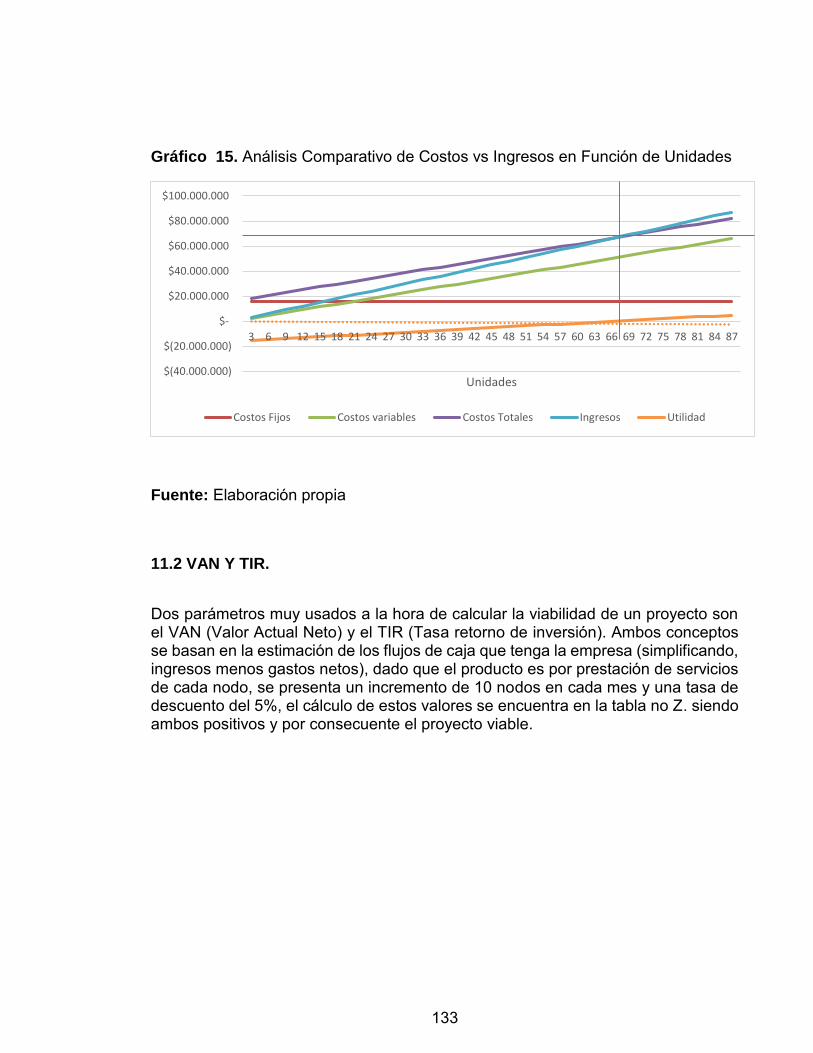
133
Gráfico 15. Análisis Comparativo de Costos vs Ingresos en Función de Unidades
Fuente: Elaboración propia
11.2 VAN Y TIR.
Dos parámetros muy usados a la hora de calcular la viabilidad de un proyecto son el VAN (Valor Actual Neto) y el TIR (Tasa retorno de inversión). Ambos conceptos se basan en la estimación de los flujos de caja que tenga la empresa (simplificando, ingresos menos gastos netos), dado que el producto es por prestación de servicios de cada nodo, se presenta un incremento de 10 nodos en cada mes y una tasa de descuento del 5%, el cálculo de estos valores se encuentra en la tabla no Z. siendo ambos positivos y por consecuente el proyecto viable.
$(40.000.000)
$(20.000.000)
$-
$20.000.000
$40.000.000
$60.000.000
$80.000.000
$100.000.000
3 6 9 12 15 18 21 24 27 30 33 36 39 42 45 48 51 54 57 60 63 66 69 72 75 78 81 84 87
Unidades
Costos Fijos Costos variables Costos Totales Ingresos Utilidad
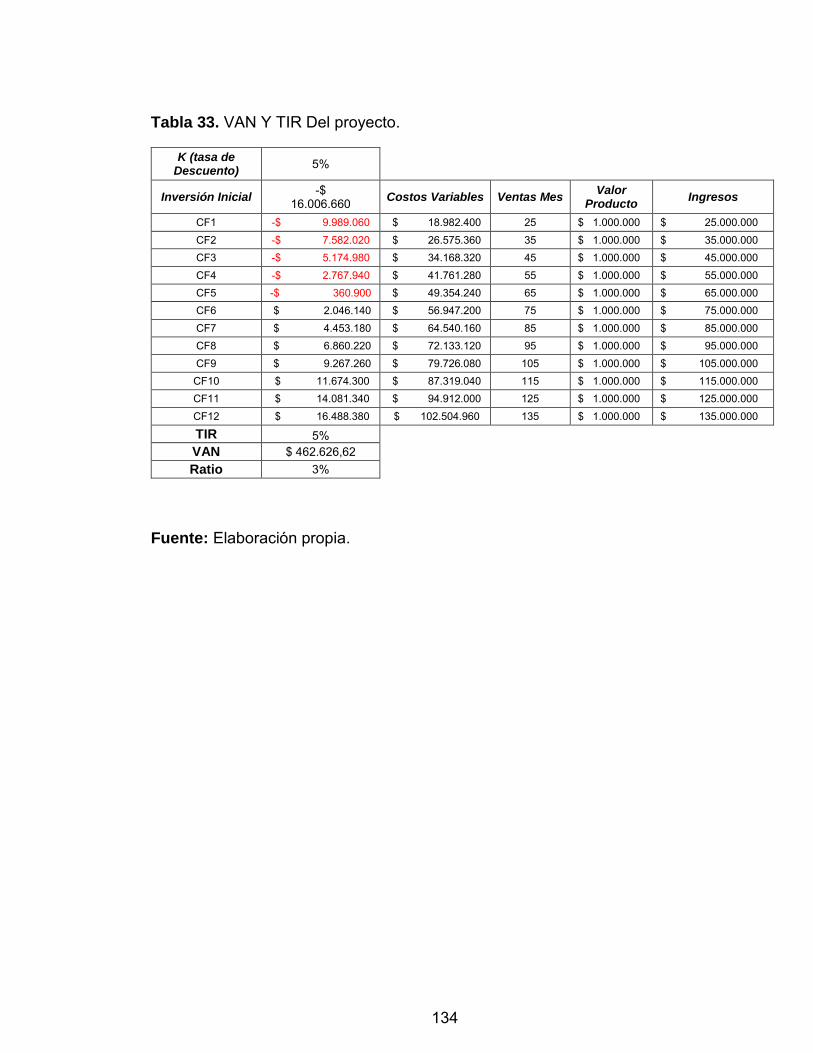
134
Tabla 33. VAN Y TIR Del proyecto.
K (tasa de Descuento)
5%
Inversión Inicial -$
16.006.660 Costos Variables Ventas Mes Valor
Producto Ingresos
CF1 -$ 9.989.060 $ 18.982.400 25 $ 1.000.000 $ 25.000.000 CF2 -$ 7.582.020 $ 26.575.360 35 $ 1.000.000 $ 35.000.000 CF3 -$ 5.174.980 $ 34.168.320 45 $ 1.000.000 $ 45.000.000 CF4 -$ 2.767.940 $ 41.761.280 55 $ 1.000.000 $ 55.000.000 CF5 -$ 360.900 $ 49.354.240 65 $ 1.000.000 $ 65.000.000 CF6 $ 2.046.140 $ 56.947.200 75 $ 1.000.000 $ 75.000.000 CF7 $ 4.453.180 $ 64.540.160 85 $ 1.000.000 $ 85.000.000 CF8 $ 6.860.220 $ 72.133.120 95 $ 1.000.000 $ 95.000.000 CF9 $ 9.267.260 $ 79.726.080 105 $ 1.000.000 $ 105.000.000 CF10 $ 11.674.300 $ 87.319.040 115 $ 1.000.000 $ 115.000.000 CF11 $ 14.081.340 $ 94.912.000 125 $ 1.000.000 $ 125.000.000 CF12 $ 16.488.380 $ 102.504.960 135 $ 1.000.000 $ 135.000.000
TIR 5%
VAN $ 462.626,62
Ratio 3%
Fuente: Elaboración propia.
135
12. CONCLUSIONES.
Este trabajo de grado presento el diseño e implementación de un sistema para monitoreo y control de algunas variables físico-químicas tales como: luz, temperatura, PH, nivel y oxígeno disuelto. Que intervienen de manera significativa en la producción y cría de peces bajo condiciones de estanque artificial. Para ello, inicialmente se procedió a estudiar el funcionamiento tradicional de este tipo de estanques y sus interacciones con el ambiente, de allí, surge el conocimiento necesario de cómo este tipo de sistemas operan, y a su vez, brindan las restricciones o necesidades que se desean satisfacer de manera óptima. En relación con los resultados obtenidos, se puede observar como el sistema propuesto a partir de mediciones realizadas por nodos de punto a punto (cada uno con un área de cobertura hábil) y con el desarrollo de una red WSAN (Wireless sensor and actuator Network) de tipo mesh por medio del estándar IEEE IEEE 802.15.4 y ZigBee, configura de manera óptima una estimación del comportamiento del cultivo, presentando un diferencial o error mínimo entre mediciones de ±5%.
En adición a ello, la arquitectura de la programación de los nodos está enfocada de manera significativa en la lógica secuencial Grafcet. en donde, se puede observar saltos o transiciones en el número de las etapas, estos saltos han sido realizados a propósito en función de mejorar la escalabilidad del dispositivo, pues si se necesita aumentar el número de nodos de sensado junto a las variables a sensar o el número de nodos de actuación como los dispositivos de actuación. Simplemente se ingresan las nuevas líneas de código sin comprometer el funcionamiento anterior.
Uno de los ítems más importantes al considerar a la hora de realizar cualquier tipo de análisis y toma de decisiones en un sistema microcontrolado, es elaborar de manera detenida y detallada el modelamiento del sistema al cual se le va a realizar la acción de control, al conocer textualmente cual es la respuesta en variable continua del mismo, junto a emplear un tiempo de muestreo adecuado, permite su transformación para posterior programación de la variable en tiempo discreto y de allí, emplear el control que se desee de una manera más óptima.
A su vez, elaborar un proceso de diseño riguroso ayuda a minimizar perdidas a la hora de construir un prototipo, pues asegura emplear cierto tipo de componentes y disminuye la cantidad de diseños alternativos.
Una de las herramientas más poderosas para el análisis del comportamiento de cualquier red WSN y con el fin de conocer el nivel de incidencia de una medición a otra en un área espacial, es el método de regresión en procesos Gaussianos Kriging, el empleo del mismo junto a un cálculo correcto de los pesos de cada punto

136
de referencia en la red junto al variograma más adecuado. Permite estimar de manera precisa en donde realizar la acción de control.

137
13. TRABAJO FUTURO
Partiendo de los resultados obtenidos durante el desarrollo de este proyecto, se puede contemplar como trabajos futuros la bifurcación en dos ramas principales, la primera, el diseño físico del nodo en donde:
Inicialmente se contempló el diseño estacionario del mismo dentro delestanque artificial, es decir que, cada nodo de sensado ocuparía un único puntofijo en el sistema y el mismo fuera el encargado de la medición en su radio decobertura, sin embargo, la concepción de punto fijo podría sustituirse fácilmentepor un nodo móvil, que por medio de la agitación propia del estanque o por mediode movimiento asistido, pueda recorrer y cubrir una mayor área de trabajo,haciendo que tanto precio como numero de nodos de sensado necesariosdisminuyan de manera significativa.
La idea de concebir el sistema de forma modular (nodos de actuación, nodosde sensado y nodo de control), permite en gran medida emplear el diseño demanera escalar. Ya que, dadas las condiciones o requerimientos del entorno osistema en donde el dispositivo va a ser instalado; su arquitectura puede aumentaro disminuir para adaptarse en cualquiera de los casos sin comprometer suprogramación; es decir que, por ejemplo, si se desea a futuro que los nodos demedición sensen un mayor número de variables, se pueden adaptar los mismossin realizar mayores cambios al diseño físico y ampliando en gran medida la basede datos para la toma de decisiones.
En función de mejorar el tiempo de operación de los nodos y pensando en lacantidad de puertos empleados en cada uno de ellos; los microcontroladoresATMEGA328 pueden ser sustituidos por ATmega328P que cuentan con un menornúmero de puertos, pero siguen siendo suficientes para la operación del mismo,no obstante, estos últimos logran disminuir moderadamente/considerablemente lapotencia consumida (siendo lo indicado por la literatura, 3 veces menos). A su vez,las baterías de los nodos pueden ser recargadas mediante paneles solareshaciendo que el tiempo de vida aumente.
En cuestión de la programación del dispositivo, se puede profundizar en las siguientes ramas:
138
Dada la idea de operación de manera online (es decir que el sistema opere localmente en tiempo real) se puede proveer o incluir en el nodo de control un punto de acceso a internet (IOT) en donde la información sea almacenada en un servidor y pueda ser consultada/visualizada en cualquier dispositivo.
La información de las variables medidas son guardadas en el nodo de control en una memoria micro SD, a partir de la generación de esta base de datos, se pueden emplear en investigación futuras correlaciones que permitan cruzar variables y generar nuevo conocimiento en la cría y reproducción de peces.
Inicialmente se contempló el diseño del nodo para un ambiente controlado como lo es un estanque artificial, sin embargo, esta propuesta de diseño puede migrar a otros entornos como ríos, lagos o mares, en donde, al emplear servicios Web, se pueda controlar y realizar informes del entorno en función de preservar el medio ambiente.
Por medio de la optimización de software y usando características adicionales de los nodos de sensado al emplear tecnologías Zigbee, específicamente su modo Sleep (consumo de 3.5 uA) junto al cambio del pin de alimentación de sensores en el ATMEL348 (alimentación por pin digital que pueda mantenerse en bajo (0 lógico) y el mismo cambie a alto cuando sea momento de realizar la medición) se puede lograr una eficiencia energética cercana al 30% logrando que la batería alcance una duración cercana de 4 días y 7 horas, a su vez, los nodos de medición pueden albergar un mayor intervalo de tiempo si las baterías del tipo LiPo son cargadas mediante el empleo de paneles solares.
139
BIBLIOGRAFÍA
AQUA. Acuicultura: «Pecera» automatizada permite sustituir las redes: Criadero de huevos de atún sumergido en el océano [en línea]. Hawái: USA. 2014; [Consultado: 3 de abril 2018]. Disponible en internet: http://www.aqua.cl/2014/08/11/acuicultura-pecera-automatizada-permite-sustituir-las-redes/#
ARC MAP. ¿Cómo funciona Kriging? [en línea]. desktop.arcgis [Consultado: 11 de febrero 2019] Disponible en Internet: http://desktop.arcgis.com/es/arcmap/10.3/tools/spatial-analyst-toolbox/how-kriging-works.htm
Arcgis. How-kriging-works. [En línea]. pro.arcgis. [Consultado: 8 de Junio 2019] Disponible en Internet: https://pro.arcgis.com/es/pro-app/tool-reference/3d-analyst/how-kriging-works.htm
ATMEGA328 Datasheet. [en línea] alldatasheet. [Consultado: 27 de febrero 2019] Disponible en Internet: http://html.alldatasheet.com/html-pdf/392243/ATMEL/ATMEGA328/152/1/ATMEGA328.html
Auburn University, Introducción al cultivo de peces en estanques [en línea]. cals.arizona [Consultado: 8 de abril 2019] Disponible en Internet: https://cals.arizona.edu/azaqua/AquacultureTIES/publications/Spanish%20WHAP/GT6%20Intro%20al%20Cultivo.pdf4
BONILLA. Sandra P. Datos estadísticos de la acuicultura en Colombia (2000 – 2011). [en línea] Bogotá, Colombia 2011; [Consultado: 4 de abril 2018]. Disponible en internet: https://bit.ly/2KpKBbe
Calibrado de una LDR. [en línea] previa.uclm [Consultado: 3 de Marzo 2019] disponible en Internet: https://previa.uclm.es/profesoradO/ajbarbero/Practicas/Calibrado%20LDR%202003.pdf
140
COLOMBIA. MINISTERIO DE AGRICULTURA Y DESARROLLO RURAL. Decreto 3800 (31, Octubre, 2006). Reglamenta parcialmente la Ley 811 de 2003, sobre Organizaciones de Cadena en el Sector Agropecuario, Pesquero, Forestal y Acuícola [en línea]. Santa Fe de Bogotá, D.C.: El Ministerio [Consultado: 31 de Julio 2018]: Disponible en Internet: https://n9.cl/94c
-------.-------. RESOLUCION 186. Establece los procedimientos para la inscripción, reconocimiento, seguimiento, verificación de acuerdo a la ley [en línea]. Santa Fe de Bogotá D.C.: El Ministerio. [Consultado: 1 de Julio 2018]: Disponible en Internet: https://n9.cl/9ao69
------. SECRETARIA DEL SENADO. Ley 811 (2, julio, 2003). Por la cual se modifica la Ley 101 de 1993, [en línea]. Santa Fe de Bogotá, D.C.: Diario Oficial No. 45.236 [Consultado: 31 de Julio 2018]: Disponible en Internet: http://www.secretariasenado.gov.co/senado/basedoc/ley_0811_2003.html
CREUS Antonio. Instrumentación Industrial, 10.Ed. España: Marcombo 2011. ISBN: 9786077070429
Cytron Tecnologies DATASHEETS. HSR04. [en línea] datasheetspdf. [Consultado: 3 de Marzo 2019] Disponible en Internet: https://www.datasheetspdf.com/pdf/1291829/Cytron/HC-SR04/1
DIAZ, V. Martinez, Universidad Autónoma de México. Geoestadística aplicada [en línea]. mmc2.geofisica [Consultado: 31 de Mayo 2019] Disponible en Internet: http://mmc2.geofisica.unam.mx/cursos/geoest/Presentaciones/CG6_2009.pdf
EcuRed. Algoritmo de Dijkstra: características del Algoritmo. [En línea]. ecured. [Consultado: 11 de febrero 2019]: https://www.ecured.cu/Algoritmo_de_Dijkstra
ELECTRONID., L. O. GL5528. [en línea] pi.gate.a [Consultado: 5 de Marzo de 2019] Disponible en Internet: https://pi.gate.ac.uk/pages/airpi-files/PD0001.pdf
FLORES R, Jesús Alejandro. Protocolos de Comunicación. [en línea]. Tesis de Licenciatura para optar al título de Ing. Mec. Eléc. Universidad Nacional Autónoma de México. Dpt de Ingenieria. P. 56-70. [Consultado: 12 de febrero 2019] disponible en Internet: http://www.ptolomeo.unam.mx:8080/xmlui/bitstream/handle/132.248.52.100/734/A6.pdf
141
FRANCO William. Trasmallo de Arrastre Multipropósito: Errores Comunes Al Practicar La Piscicultura Tradicional [en línea]. Medellín redes-para-pesca [Consultado: 5 de abril 2018]. Disponible en internet: http://redes-para-pesca.co/trasmallo-arrastre-multiproposito/
------ Errores comunes al practicar la piscicultura tradicional.[en línea] redes-para-pesc [Consultado: 31 de Julio 2018]: Disponible Disponible en Internet: http://redes-para-pesca.co/trasmallo-arrastre-multiproposito/
GAA. Global Aquaculture Alliance, why it Matters.[en linea] documents.worldbank. [Consultado: 31 de Julio 2018]: Disponible en Internet: http://documents.worldbank.org/curated/en/2013/12/18882045/fish-2030-prospects-fisheries-aquaculture
GARCÍA, J. M. Teoría y ejercicios prácticos de Dinámica de Sistemas. ISBN 9788460793045.
GUIMI, Redes de comunicaciones [en línea]. monografias 2009 [Consultado: 11 de febrero 2019] Disponible en Internet: https://www.monografias.com/trabajos-pdf2/redes-comunicaciones/redes-comunicaciones.pdf
H. O. AQUA. De Criadero de huevos de atún sumergido en el océano, instalado en Hawái [en línea] aqua [Consultado: 31 de Julio 2018]: Disponible en Internet: http://www.aqua.cl/2014/08/11/acuicultura-pecera-automatizada-permite-sustituir-las-redes/#.
ITUASSÚ, D. R. Cálculo de povamento de viveiros e tanques-rede[en línea] infoteca.cnptia.embrapa . [Consultado: 31 de Julio 2018]: Disponible en Internet: https://www.infoteca.cnptia.embrapa.br/infoteca/bitstream/doc/1023958/1/2015cpamtituassucalculopovoamentoviveiros.pdf
L. Yun, Q. Fengxie, Liu Zhanjun, and Z. Hongcheng. Cognitive radio routingalgorithm based on the smallest transmission delay,” 2nd International Conferenceon Future Computer and Communication (ICFCC), vol.2. 2010. p.306-310.
LALLANA. Víctor H. Métodos para medir OD. 2008. [en línea] [Consultado: 4 de Marzo 2019] Disponible en Internet: https://bit.ly/2wBiIF1
142
LIDA OPTICAL & ELECTRONID. GL5528. [En línea] pi.gate. [Consultado: 4 de Marzo 2019] disponible en Internet: https://pi.gate.ac.uk/pages/airpi-files/PD0001.pdf
MAP, A. ¿Cómo funciona Kriging? [en línea] desktop.arcgis. [Consultado: 12 de febrero 2019] disponible en Internet: http://desktop.arcgis.com/es/arcmap/10.3/tools/spatial-analyst-toolbox/how-kriging-works.htm
MAP., A. Redes de Sensores Inalámbricos WSN. [en línea] informaticaredes2012.blogspot [Consultado 11 de Febrero de 2019], Disponible en Internet http://informaticaredes2012.blogspot.com/
MARTÍN GARCÍA, Juan. Teoría Y Ejercicios Prácticos De Dinámica De Sistemas. 4. Ed. Zaragoza. España. 2017 ISBN 9788460793045.
MARTINEZ, A. Trucha arcoíris. Evaluación levante y engorde [en línea]. monografias [Consultado 11 de Febrero de 2019], Disponible en http://www.monografias.com/trabajos96/evaluacion-cria-levante-y-engorde-trucha-arcoiris-colombia/evaluacion-cria-levante-y-engorde-trucha-arcoiris-colombia.shtml#ixzz59SkaOFTv
MARTINEZ. Efraín: El Cultivo De La Cachama, Manejo Y Producción. En: Acuatecnia Consultantes Osc. [en línea]. Colombia. 2016. [Consultado: 22 de abril 2018]. Disponible en internet: https://n9.cl/64
Maxim Integrated Products DATASHEETS. DS18B20D. [en línea] /datasheets.maximintegrated [Consultado: 3 de Marzo 2019] Disponible en Internet: https://datasheets.maximintegrated.com/en/ds/DS18B20.pdf
MENON MIDHUN. Smart Aquaponics: futuro de la piscicultura [en línea] Holanda, 2017 ripplesiot. [Consultado: 4 de abril 2018]. Disponible en internet: https://www.ripplesiot.com/es/smart-aquaponics/
MICROCHIP. ATMEGA328. [en línea] microchip [Consultado: 27 de febrero 2019] Disponible en Internet: https://www.microchip.com/wwwproducts/en/ATmega328

143
MIDHUN., M. Smart Aquaponics: futuro de la piscicultura. Holanda. microchip: [en línea] ripplesiot [Consultado: 12 de febrero 2019] disponible en Internet: https://www.ripplesiot.com/es/smart-aquaponics/
MINISTERIO DE AGRICULTURA Y DESARROLLO RURAL. RESOLUCION 186 DE 2008. [en línea] sioc.minagricultura. [Consultado: 12 de febrero 2019] disponible en Internet: https://sioc.minagricultura.gov.co/Sabila/Documentos/004%20%20Documentos%20Competitividad%20Cadena/D.C.%202008%20Junio%20%20Resolucion%20que%20reglamenta%20Ley%20811%20de%202003.pdf
MINISTERIO DE AGRICULTURA Y DESARROLLO. Colombia, Pesca En Cifras 2014 [en línea]. Bogotá, aunap.gov.Colombia 2015 [Consultado: 4 de abril 2018]. Disponible en internet: http://aunap.gov.co/wp-content/uploads/2016/05/Pesca_en_cifras.pdf
MIP. Maxim Integrated Products DATASHEETS. DS18B20D.[en línea] datasheets.maximintegrated [Consultado: 4 de abril 2018]. Disponible en internet: https://datasheets.maximintegrated.com/en/ds/DS18B20.pdf
MOTIMORE, Sara. HACCP Enfoque Práctico. Acriba. [En línea] FAO 2001.pp. 448 págs. [Consultado: 1 de Julio 2018]: Disponible en Internet: http://www.fao.org/docrep/005/Y1579S/y1579s03.htm
MYONR., P. Proyectos de tilapia a gran escala: Sistemas robotizados para automatizar tareas como la. [En línea] pisciculturaglobal. [Consultado: 4 de Abril de 2018], de Guatemala: https://www.pisciculturaglobal.com/sistemas-robotizados-automatizan-tareas-importantes-alimentacion-
NATIONAL INSTRUMENTS. ¿Qué es una Red de Sensores Inalámbricos? [En línea]. .ni. 2009 [Consultado: 11 de febrero 2019]: Disponible en Internet: http://www.ni.com/white-paper/7142/es/
NEGRO P. ¿WiFi, Bluetooth o Zigbee? : ¿Qué estándar inalámbrico se adapta a su aplicación industrial? [En línea]. .processindustryinformer 2015 [Consultado: 12 de febrero 2018]. Disponible en internet: https://es.processindustryinformer.com/art%C3%ADculo-t%C3%A9cnico/wifi-bluetooth-zigbee-inal%C3%A1mbrica-est%C3%A1ndar-de-aplicaci%C3%B3n-industrial/
144
OGATA, K. Ingeniería de control Moderna. Madrid: Pearson Educación, S.A.
ORTEGA Carlos. Zigbee: El nuevo estándar global para la domótica [en línea]. Managua, Nicaragua. .monografias 2008 [Consultado: 12 de febrero 2018]. Disponible en internet: https://www.monografias.com/trabajos61/zigbee-estandar-domotico-inmotica/zigbee-estandar-domotico-inmotica.shtml
PÉREZ Alvaro. Construcción de un Sistema de Instrumentación para la Medición de la Temperatura, pH y OD presentes en la Piscicultura bajo Condiciones de Estanque Artificial. [En línea]. Quindío dialnet.unirioja [consultado: 4 de abril 2018] Disponible en internet: https://dialnet.unirioja.es/descarga/articulo/4414812.pdf
PIERRE. Failler. Future prospects for fish and fishery products: medium-term projections to the years 2015. [En línea] En: FAO Fisheries Circular. Roma: Italia. No. 972/4, Part 1. 2014 [Consultado: 4 de abril 2018]. Disponible en internet: http://www.fao.org/3/a-ah947e.pdf. ISSN 0429-9329
PINEDA MYONR. Proyectos de tilapia a gran escala: Sistemas robotizados para automatizar tareas como la alimentación y supervisión [en línea]. Guatemala, pisciculturaglobal. 2017 [Consultado: 4 de abril 2018]. Disponible en internet: https://www.pisciculturaglobal.com/sistemas-robotizados-automatizan-tareas-importantes-alimentacion-proyectos-tilapia-gran-escala/
PROCOLOMBIA, MIN COMERCIÓ. INDUSTRIA Y TURISMO. Los Productos Colombianos Del Sector Acuícola Y Pesquero [En línea] Bogotá procolombia. [Consultado: 3 de abril 2018] Disponible en Internet: http://www.procolombia.co/compradores/es/explore-oportunidades/productos-pesqueros
RAE. Automática. [En línea] dle.rae. [consultado 4 de Febrero de 2019], Disponible en Internet https://dle.rae.es/?id=4TO3M08
RECALDE. Diego: Manual Práctico Para El Cultivo De La Trucha Arcoíris. En: FAO Organización de las naciones Unidas para la Alimentación y la Agricultura [en línea]. Guatemala. FAO 2014. [Consultado: 22 de Julio 2019]. Disponible en internet: http:// http://www.fao.org/3/a-bc354s.pdf
ROYERO, Ramiro. Peces Ornamentales de Venezuela. Cuadernos Lagoven Lagoven, S.A. Caracas 106p.1993. ISBN 980-259-562-4
145
SAAVEDRA. María A.: Manejo Del Cultivo De Tilapia. [En línea]. Guatemala. crc.uri. 2006. p. 6 [Consultado: 22 de Julio 2018]. Disponible en internet: https://www.crc.uri.edu/download/MANEJO-DEL-CULTIVO-DE-TILAPIA-CIDEA.pdf
SANABRIA, John. Producción Intensiva Y Automatizada De Tilapia Roja En Estanques Circulares. [En línea] En: Revista Integra - SENNOVA. Santander, Colombia: Sena, Julio- Diciembre de 2016 [Consultado: 4 de abril 2019]. Disponible en internet: http://revistas.sena.edu.co/index.php/int/article/view/457/487.
SENADO., S. D. Leyes de Colombia. [en línea] secretariasenado.gov [consultado 31 de Julio de 2018] Disponible en Internet: http://www.secretariasenado.gov.co/senado/basedoc/ley_0811_2003.html
Trade Co U-ángel, Batería 3 s 11,1 s v 2200 mAh. [En línea] [Consultado: 27 de febrero 2019] Disponible en Internet: https://bit.ly/2VnkSlN
U-ángel, T. C. Batería 3 s 11,1 s v 2200 mAh. [En línea] [Consultado: 27 de febrero 2019] Disponible en Internet: de https://bit.ly/2VnkSlN
UCLM. Calibrado de una LDR. [En línea] previa. [Consultado: 27 de febrero 2019] Disponible en Internet::https://previa.uclm.es/profesoradO/ajbarbero/Practicas/Calibrado%20LDR%202003.pdf
UNIVERSIDAD POLITÉCNICA DE CATALUNYA. Diseño Y Automatización Industrial [en línea] epsevg.upc. [Consultado: 5 de abril 2018]. Disponible en internet: https://www.epsevg.upc.edu/hcd/material/lecturas/interfaz.pdf
UPC. Diseño y automazación industrial. [en línea] epsevg.upc [consultado 5 de Abril de 2018], Disponible en Internet https://www.epsevg.upc.edu/hcd/material/lecturas/interfaz.pdf
WORLD BANK. Fish To 2030: Prospects For Fisheries And Aquaculture. Reporte Numero: 83177-Glb [en línea] documents.worldbank.2014 [Consultado: 1 de Julio 2018]: Disponible en Internet: http://documents.worldbank.org/curated/en/2013/12/18882045/fish-2030-prospects-fisheries-aquaculture

146
ZigBee® Embedded RF Module Family for OEMs, XBee® & XBee-PRO® ZB. [en línea] cdn.sparkfun [Consultado: 27 de febrero 2019] Disponible en Internet: https://cdn.sparkfun.com/datasheets/Wireless/Zigbee/ds_xbeezbmodules.pdf
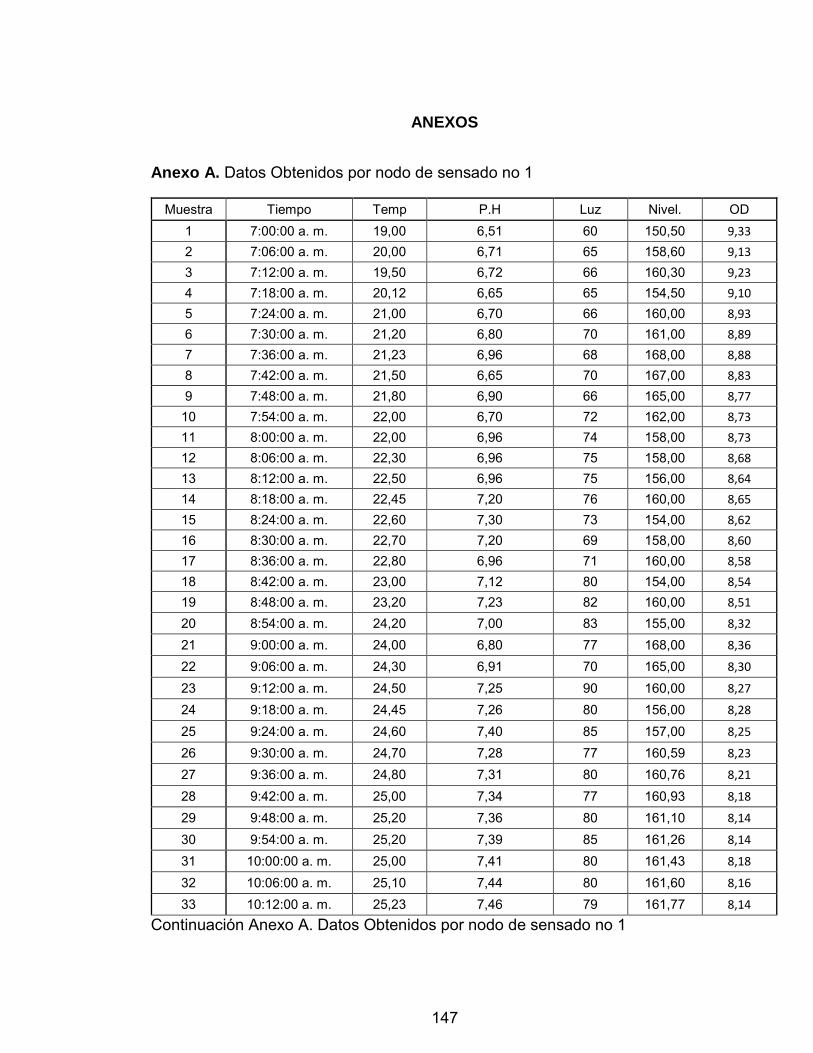
147
ANEXOS
Anexo A. Datos Obtenidos por nodo de sensado no 1
Muestra Tiempo Temp P.H Luz Nivel. OD 1 7:00:00 a. m. 19,00 6,51 60 150,50 9,33
2 7:06:00 a. m. 20,00 6,71 65 158,60 9,13
3 7:12:00 a. m. 19,50 6,72 66 160,30 9,23
4 7:18:00 a. m. 20,12 6,65 65 154,50 9,10
5 7:24:00 a. m. 21,00 6,70 66 160,00 8,93
6 7:30:00 a. m. 21,20 6,80 70 161,00 8,89
7 7:36:00 a. m. 21,23 6,96 68 168,00 8,88
8 7:42:00 a. m. 21,50 6,65 70 167,00 8,83
9 7:48:00 a. m. 21,80 6,90 66 165,00 8,77
10 7:54:00 a. m. 22,00 6,70 72 162,00 8,73
11 8:00:00 a. m. 22,00 6,96 74 158,00 8,73
12 8:06:00 a. m. 22,30 6,96 75 158,00 8,68
13 8:12:00 a. m. 22,50 6,96 75 156,00 8,64
14 8:18:00 a. m. 22,45 7,20 76 160,00 8,65
15 8:24:00 a. m. 22,60 7,30 73 154,00 8,62
16 8:30:00 a. m. 22,70 7,20 69 158,00 8,60
17 8:36:00 a. m. 22,80 6,96 71 160,00 8,58
18 8:42:00 a. m. 23,00 7,12 80 154,00 8,54
19 8:48:00 a. m. 23,20 7,23 82 160,00 8,51
20 8:54:00 a. m. 24,20 7,00 83 155,00 8,32
21 9:00:00 a. m. 24,00 6,80 77 168,00 8,36
22 9:06:00 a. m. 24,30 6,91 70 165,00 8,30
23 9:12:00 a. m. 24,50 7,25 90 160,00 8,27
24 9:18:00 a. m. 24,45 7,26 80 156,00 8,28
25 9:24:00 a. m. 24,60 7,40 85 157,00 8,25
26 9:30:00 a. m. 24,70 7,28 77 160,59 8,23
27 9:36:00 a. m. 24,80 7,31 80 160,76 8,21
28 9:42:00 a. m. 25,00 7,34 77 160,93 8,18
29 9:48:00 a. m. 25,20 7,36 80 161,10 8,14
30 9:54:00 a. m. 25,20 7,39 85 161,26 8,14
31 10:00:00 a. m. 25,00 7,41 80 161,43 8,18
32 10:06:00 a. m. 25,10 7,44 80 161,60 8,16
33 10:12:00 a. m. 25,23 7,46 79 161,77 8,14
Continuación Anexo A. Datos Obtenidos por nodo de sensado no 1
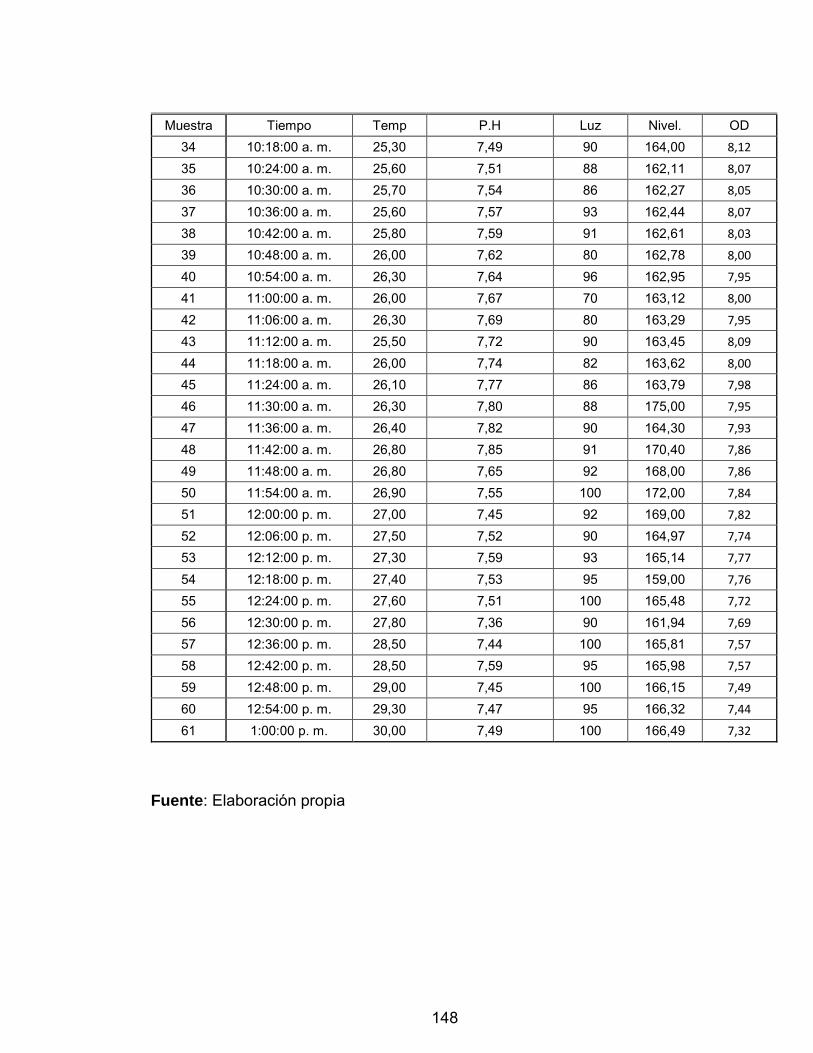
148
Muestra Tiempo Temp P.H Luz Nivel. OD 34 10:18:00 a. m. 25,30 7,49 90 164,00 8,12
35 10:24:00 a. m. 25,60 7,51 88 162,11 8,07
36 10:30:00 a. m. 25,70 7,54 86 162,27 8,05
37 10:36:00 a. m. 25,60 7,57 93 162,44 8,07
38 10:42:00 a. m. 25,80 7,59 91 162,61 8,03
39 10:48:00 a. m. 26,00 7,62 80 162,78 8,00
40 10:54:00 a. m. 26,30 7,64 96 162,95 7,95
41 11:00:00 a. m. 26,00 7,67 70 163,12 8,00
42 11:06:00 a. m. 26,30 7,69 80 163,29 7,95
43 11:12:00 a. m. 25,50 7,72 90 163,45 8,09
44 11:18:00 a. m. 26,00 7,74 82 163,62 8,00
45 11:24:00 a. m. 26,10 7,77 86 163,79 7,98
46 11:30:00 a. m. 26,30 7,80 88 175,00 7,95
47 11:36:00 a. m. 26,40 7,82 90 164,30 7,93
48 11:42:00 a. m. 26,80 7,85 91 170,40 7,86
49 11:48:00 a. m. 26,80 7,65 92 168,00 7,86
50 11:54:00 a. m. 26,90 7,55 100 172,00 7,84
51 12:00:00 p. m. 27,00 7,45 92 169,00 7,82
52 12:06:00 p. m. 27,50 7,52 90 164,97 7,74
53 12:12:00 p. m. 27,30 7,59 93 165,14 7,77
54 12:18:00 p. m. 27,40 7,53 95 159,00 7,76
55 12:24:00 p. m. 27,60 7,51 100 165,48 7,72
56 12:30:00 p. m. 27,80 7,36 90 161,94 7,69
57 12:36:00 p. m. 28,50 7,44 100 165,81 7,57
58 12:42:00 p. m. 28,50 7,59 95 165,98 7,57
59 12:48:00 p. m. 29,00 7,45 100 166,15 7,49
60 12:54:00 p. m. 29,30 7,47 95 166,32 7,44
61 1:00:00 p. m. 30,00 7,49 100 166,49 7,32
Fuente: Elaboración propia
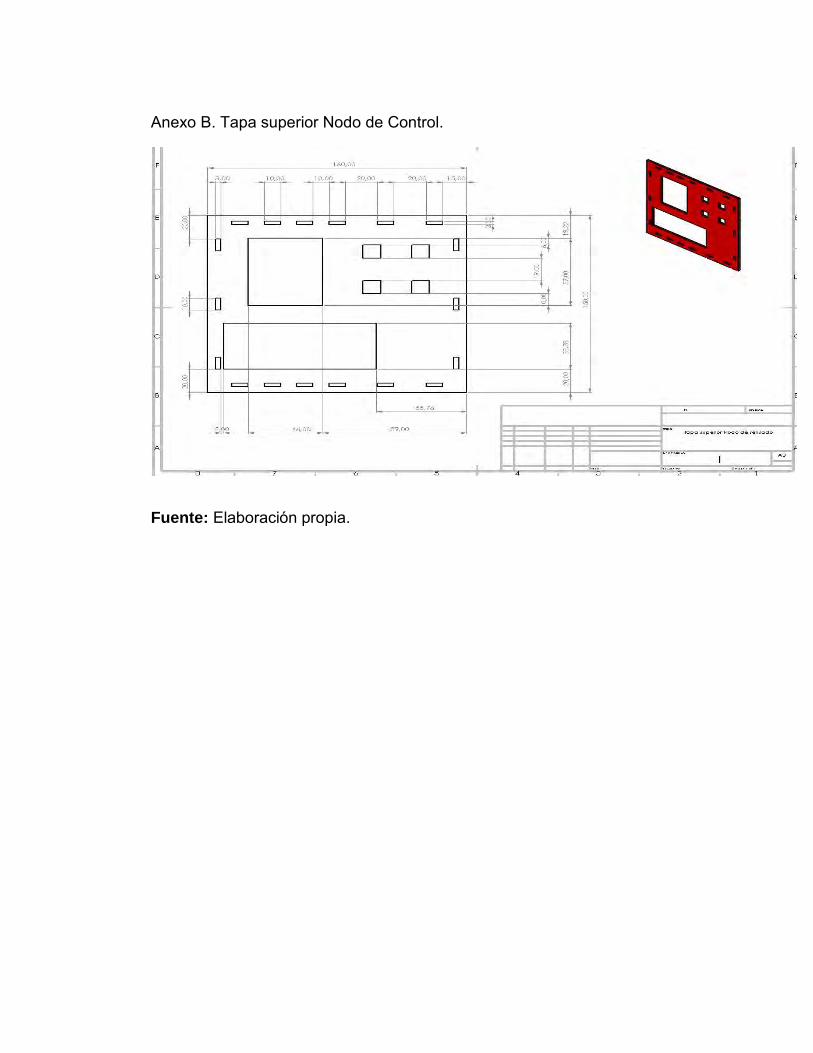
Anexo B. Tapa superior Nodo de Control.
Fuente: Elaboración propia.
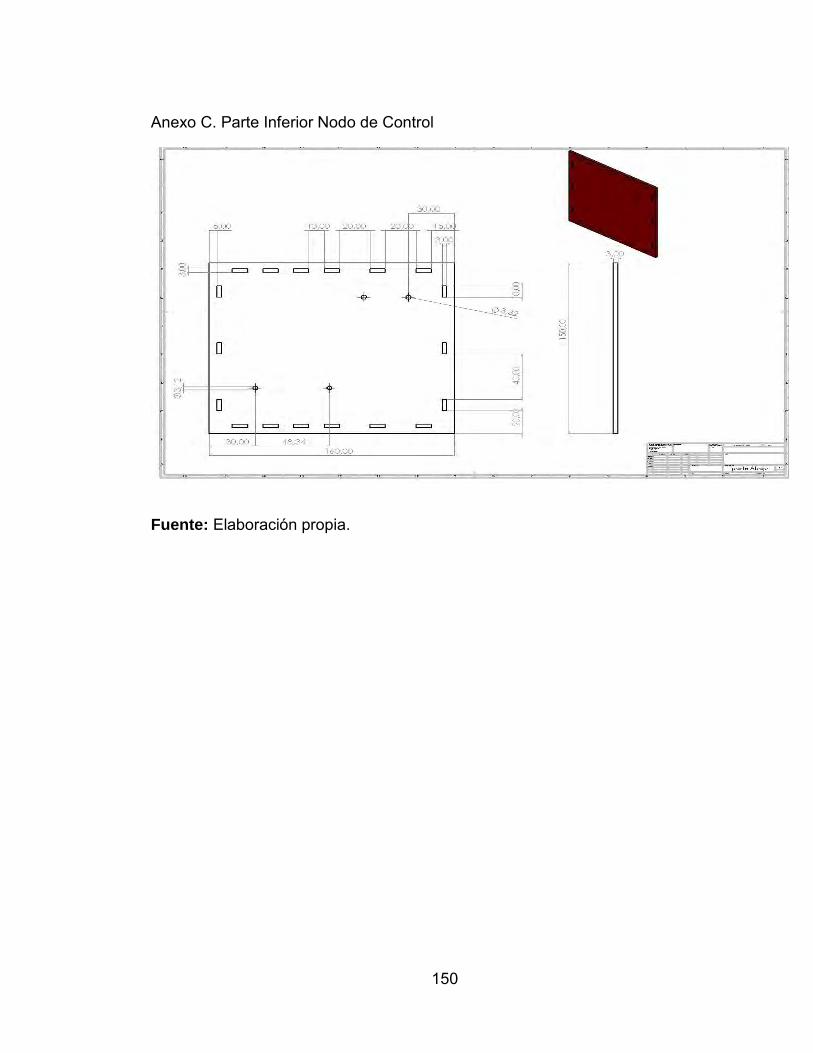
150
Anexo C. Parte Inferior Nodo de Control
Fuente: Elaboración propia.
151
Anexo D. Tapas Lateral Nodo de Control
Fuente: Elaboración propia.