modelación computacional de problemas en -...
TRANSCRIPT

1
Modelación computacional de problemas enmecánica de �uidos
Tesis presentada
por
Ciro Filemón Flores Rivera
al
Departamento de Matemáticas
de la División de Ciencias Básicas e Ingeniería
para obtener el grado de
Doctor en Ciencias
Matemáticas
Universidad Autónoma Metropolitana
Iztapalapa
Asesor
Dr. L. Héctor Juárez Valencia
____________________________________
Noviembre 2008

c 2008 por Ciro Filemón Flores Rivera
Derechos reservados.
ii
Resumen
La modelación matemática y computacional de problemas en Ciencias e In-
geniería constituye un área muy importante de la matemática aplicada, que incide
en el desarrollo tecnológico. En el presente trabajo se abordan tres problemas de
aplicación dentro de la mecánica de �uidos, que se resuelven en forma numérica
con base en el método de elemento �nito.
1) Generación de campos vectoriales en modelos de masa consistente.
Dado un campo vectorial inicial de velocidad u0, donde sólo se conoce la com-
ponente horizontal, el problema consiste en recuperar la componente vertical del
campo a través de un modelo que satisface la condición de conservación de masa
r � u = 0. La modelación matemática del fenómeno físico conduce a un prob-
lema elíptico para cierto multiplicador �. Para resolver este problema se propone
un algoritmo llamado elíptico, que produce buenos resultados excepto en las fron-
teras verticales (arti�ciales) del dominio. Entonces se re-formula el problema como
uno de punto silla donde ya no es necesario imponer condiciones de frontera para
�. Para resolver este nuevo problema se introduce el algoritmo de gradiente con-
jugado, que da un muy buen ajuste incluso en las fronteras. Para optimizar este
algoritmo se le modi�ca obteniendo el algoritmo de gradiente conugado con pre-
condicionador, que reduce sustancialmente el número de iteraciones para alcanzar
la convergencia. Este análisis permite descubrir que las condiciones de frontera
originalmente impuestas, no son las mejores. Así que se les modi�ca para tomar
iii
Resumen iv
en cuenta más información contenida el campo inicial u0. Se adaptan los tres al-
goritmos mencionados a la nueva situación. Se concluye que el mejor método es
el algoritmo de gradiente conjugado con pre-condicionador con las nuevas condi-
ciones de frontera. Adicionalmente se incluye un ejemplo tri-dimensional.
2) Flujos electro-hidrodinámicos.
Se propone el modelo físico completo para una celda de combustible sin mem-
brana. Las leyes físicas invocadas son las de la dinámica de �uidos (ecuaciones de
Navier-Stokes) y las de la electro-química (ecuaciones de Poisson-Nernst-Plank).
El problema matemático consiste en un sistema acoplado de seis ecuaciones difer-
enciales parciales no lineales, donde las incógnitas son: velocidad del �uido u, pre-
sión p, potencial eléctrico �, densidad de carga eléctrica �q y conductividad eléctrica
�. Para enfrentar la complejidad del problema se adopta la estrategia de resolver
primero problemas más sencillos e incorporar gradualmente más variables hasta
llegar al modelo completo. Esto es posible al analizar las leyes físicas utilizadas.
Entonces se resuelven cuatro casos particulares. Los dos primeros consideran el
caso de electro-neutralidad (i. e. �q = 0) e incluyen �ujo estacionario (u = 0)
y �ujo en movimiento (u 6= 0). Mientras que en los dos segundos �q 6= 0 y de
nuevo se estudian tanto el �ujo estacionario como en movimiento. Los resultados
coinciden con las predicciones de la teoría de Gouy-Chapman-Stern.
3) Coe�cientes de permeabilidad efectiva en medios porosos.

Resumen v
Conocida la porosidad "� de un medio bi-fásico ��, se busca calcular el coe�-
ciente efectivo (o promedio) de permeabilidad K para dicho medio. La primer
parte del problema consiste en obtener las ecuaciones macroscópicas que mode-
lan al fenómeno de transporte. Esto se consigue aplicando el método del promedio
volumétrico a las ecuaciones puntuales (locales) que gobiernan al sistema, a saber:
la ecuación de continuidad y la ecuación de Stokes. Una hipótesis importante es
que se asume que el medio es isotrópico. El modelado conduce a un problema
de tipo Stokes que tiene que resolverse en una celda unitaria (que es un cuadrado
con un obstáculo también cuadrado en el centro). Para ello se desarrolla un ma-
llador ad hoc para la geometría y se aplica el resolvedor de Stokes implementado.
Los resultados numéricos obtenidos por este método analítico permiten con�rmar
la ecuación heurística de Carman-Kozeny, así como los resultados experimentales
reportados por otros autores.
Para poder plantear y resolver estos problemas fue necesario trabajar en forma
interdisciplinaria con investigadores de otras áreas de conocimiento diferentes a
la matemática: Dr. Marco A. Núñez del Departamento de Física de la UAM-I,
Dr. Eduardo Ramos del Centro de Investigación en Energía de la UNAM y Dr.
Francisco J. Valdés del Departamento de Ingeniería de Procesos e Hidráulica de

Resumen vi
la UAM-I. Además todos los problemas (excepto el tri-dimensional de campos de
viento) fueron resueltos con programas propios.

Agradecimientos
El presente trabajo no hubiera sido posible sin la participación, ayuda, colab-
oración y patrocinio de diversas entidades. Con todas ellas estoy en deuda y deseo
expresarles mi más sincero y profundo agradecimiento. Sin embargo, de manera
muy especial y signi�cativa quiero agradecer a:
� Dr. L. Héctor Juárez Valencia, por todo su apoyo y disposición incondicional para
asesorarme, pero sobre todo por su gran valor humano: mi reconocimiento.
� Dr. Marco Antonio Núñez Peralta, por su gran entusiasmo por la ciencia, que
contagia.
� Dr. Eduardo Ramos Mora, por su pasión por el conocimiento, que enriquece.
� Dr. Francisco J. Valdés Parada, por su gran entrega y por brindarme el honor de
su amistad.
� Dra. María Luisa Sandoval Solís, por su paciencia y perseverancia, que ilustran
� Dr. Guillermo Ovando Chacón, por compartirme su gran caudal de conocimien-
tos.
� Instituto Tecnológico y de Estudios Superiores de Monterrey en Hidalgo, por
darme una vez más la oportunidad de superarme.
� CONACYT, por permitirme contribuir al desarrollo de mi país: México.
� Roque Flores (y) y Consuelo Rivera, mis padres, por su gran ejemplo y dación.
vii
Agradecimientos viii
� Alejandro y Heriberto, mis hermanos, por su acompañamiento.
� Alberto y Armando Flores Moreno, mis hijos, por su apoyo, comprensión y cari-
ño, sea esta una herencia más para ellos.
� Elvia Moreno Durán, mi esposa, por su presencia, su compañía y su amor: la
razón de mi vida.
Por último, aunque en primer lugar, al que me ha dado la existencia y todo
cuanto soy; a Quien de donde vengo y a donde voy. Gracias Señor.

Índice
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1 Generación de campos vectoriales en modelos de masa consistente . . . 5
1.1 Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.1 Formulación matemática . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2 Problema elíptico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.1 Formulación del problema elíptico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.2 Método de elemento �nito para el problema elíptico . . . . . . . . . . . . . . . . . . . 17
1.2.3 Algoritmo elíptico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2.4 Ejemplo numérico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3 Problema de punto silla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.3.1 Formulación del problema de punto silla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.3.2 Algoritmo de gradiente conjugado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.3.3 Método mixto para resolver el problema de punto silla . . . . . . . . . . . . . . . . 29
1.3.4 Ejemplos numéricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.3.5 Algoritmo de gradiente conjugado con pre-condicionador . . . . . . . . . . . . . 35
1.3.6 Ejemplo numérico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
1.4 Estudio de nuevas condiciones de frontera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
ix

Índice x
1.4.1 Primer caso: nuevas condiciones sobre fronteras verticales . . . . . . . . . . . . . 44
1.4.2 Ejemplo numérico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
1.4.3 Segundo caso: se suprimen condiciones en tapa superior . . . . . . . . . . . . . . . 48
1.4.4 Ejemplo numérico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
1.4.5 Tercer caso: se suprimen condiciones en fronteras verticales y tapasuperior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
1.4.6 Ejemplo numérico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
1.5 Precondicionamiento mejorado para el algoritmo GC . . . . . . . . . . . . . . . . . . . . . . . . . 54
1.5.1 Descripción del método . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
1.5.2 Experimentos numéricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
1.6 Comentarios adicionales y conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2 Flujos electro-hidrodinámicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.1 Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
2.2 Modelo matemático del sistema físico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
2.2.1 Ecuaciones que gobiernan el sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
2.2.2 Condiciones de frontera en los electrodos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
2.3 Formulación adimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.3.1 Escalas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.3.2 Ecuaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
2.3.3 Condiciones de frontera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
2.4 Algunos casos particulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
2.4.1 Electroneutralidad y estacionalidad (�q = 0 y u = 0) . . . . . . . . . . . . . . . . . . 80
2.4.2 Electroneutralidad y �ujo variable (�q = 0 y u 6= 0) . . . . . . . . . . . . . . . . . . . 83
2.4.3 No hay electroneutralidad pero sí estacionalidad (�q 6= 0 y u = 0) . . . . . 87
Índice xi
2.4.4 No hay electroneutralidad y �ujo variable (�q 6= 0 y u 6= 0) . . . . . . . . . . . . 95
2.5 Metodología de solución para el modelo acoplado NS-PNP . . . . . . . . . . . . . . . . . . 102
2.5.1 Sistema acoplado de ecuaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
2.5.2 Formulación variacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
2.5.3 Aproximación por medio de elemento �nito. . . . . . . . . . . . . . . . . . . . . . . . . . 107
2.5.4 Integración en el tiempo por descomposición del operador . . . . . . . . . . . . 109
2.6 Conclusiones del problema de �ujos electro-hidrodinámicos . . . . . . . . . . . . . . . . . 113
3 Coe�cientes de permeabilidad efectiva en medios porosos . . . . . . . . . . 115
3.1 Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
3.2 Ecuaciones puntuales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
3.3 Suavizado espacial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
3.4 Problema de cerradura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
3.5 Cálculo de coe�cientes de permeabilidad efectiva . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
3.5.1 Formulación matemática . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
3.5.2 Mallador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
3.5.3 Algoritmo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
3.5.4 Resultados numéricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
3.6 Conclusiones del problema de coe�cientes de permeabilidad efectiva . . . . . . . . 142
Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Bibliografía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
Anexo 1 Descripción del resolvedor elíptico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Índice xii
Anexo 2 Descripción del resolvedor de Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Anexo 3 Descripción del resolvedor tipo onda . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Anexo 4 Descripción del resolvedor de Navier-Stokes . . . . . . . . . . . . . . . . . . . 162
Introducción
La matemática aplicada en general y la modelación y simulación computacional de
problemas físicos en particular, tienen un papel cada vez más importante para el desar-
rollo de la ciencia y la tecnología. En estos ámbitos surgen problemas y fenómenos que
demandan su estudio, algunos de los cuales constituyen un reto para el estado actual de
conocimientos. La mecánica de �uidos constituye una fuente muy amplia de problemas
teórico-prácticos tanto desde el punto de vista físico como el matemático. Por ejemplo, el
estudio de las ecuaciones de Navier-Stokes es un campo de investigación muy activo desde
hace más de un siglo. Durante las últimas cuatro décadas se han desarrollado una gran
cantidad de métodos para resolver numéricamente estas ecuaciones y, aunque se ha tenido
éxito en muchos casos, la investigación de nuevas metodologías sigue vigente.
Especialmente para el estudio de �ujos de �uidos complicados se necesitan modelos
matemáticos más elaborados y simulaciones computacionales con un grado de complejidad
cada vez mayor. Ejemplos de estos �ujos son: �ujos multifásicos, �ujos de frontera libre y
móvil, �ujos térmicos, �ujos electro y magneto hidrodinámicos y �ujos en medios porosos,
entre otros. De modo que la modelación matemática y la simulación computacional son
esenciales en el estudio de problemas centrales para el desarrollo de la ciencia y de la
tecnología. De acuerdo con esto es pertinente de�nir el objetivo del presente trabajo como
sigue.
Objetivo. El objetivo general de esta Tesis consiste en estudiar, modelar y simular numéri-
camente tres problemas de la mecánica de �uidos, mediante herramientas matemáticas de
1

Introducción 2
actualidad, para enfrentar situaciones cercanas a la realidad. Los tres problemas consider-
ados son:
1. Generación de campos de viento en modelos de masa consistente.
2. Flujos electro-hidrodinámicos con aplicaciones a celdas de combustible.
3. Cálculo de coe�cientes de permeabilidad efectiva en medios porosos.
El primer problema está basado en modelos de diagnóstico en meteorología en donde,
a partir de datos medidos del campo de viento en ciertos puntos de una región, se busca
generar el campo de vientos en la región completa. Normalmente estas mediciones con-
tienen sólo la componente horizontal del campo de viento, entonces el problema consiste
en recuperar la componente vertical del campo, satisfaciendo la condición de conservación
de masa. A estos modelos se les llama de masa consistente [Pielke, 2002], [Dudhia et al,
1999].
El conocimiento del campo completo de velocidad del viento tiene aplicaciones im-
portantes en meteorología, como por ejemplo: simulación del efecto del viento sobre es-
tructuras, transporte y difusión de contaminantes y predicción del clima entre otros. Pero
además tiene otras aplicaciones en diversas áreas de la Ingeniería experimental.
El segundo problema consiste en el estudio y diseño de una celda de combustible
sin membrana. Las micro celdas de combustible son dispositivos que pertenecen al grupo
de los llamados sistemas micro-electromecánicos (MEMS por sus iniciales en inglés), y
son capaces de generar electricidad por medio de reacciones químicas de óxido-reducción
Introducción 3
[Carrette, 2001]. Sus aplicaciones en la industria son muy numerosas y abarcan desde
laboratorios en miniatura hasta máquinas de pequeña escala.
En las celdas de combustible sin menbrana la separación de los �uidos reactantes se
hace únicamente por medio de �ujos laminares estables. Por lo tanto, es de fundamental
importancia para entender su correcto funcionamiento, determinar las condiciones bajo
las cuales los �ujos laminares pierden estabilidad. Un caso particular de las celdas de
combustible son las llamadas celdas electro-químicas en donde se asume que el �uido tiene
velocidad cero. La investigación sobre el comportamiento de este tipo de MEMS es muy
reciente y dista mucho de ser completa.
El tercer problema estudia el fenómeno de transporte en un medio poroso. Aunque se
sabe que las ecuaciones de continuidad y de Stokes son las que gobiernan estos fenómenos
a escala puntual, su estudio tiene que trasladarse a la escala macroscópica, debido a la
complejidad de la estructura del medio poroso. Una forma de lograr esto es mediante
la aplicación del método del promedio volumétrico [Whitaker, 1999], que a través de un
promediado espacial de las variables, permite obtener los problemas de valor a la frontera
que deben resolverse para poder calcular coe�cientes efectivos, como el de permeabilidad
del medio poroso que se busca en este problema.
La comprensión de este tipo de fenómenos tiene aplicación en el estudio de proble-
mas de transporte en medios multifásicos, como por ejemplo, en el ámbito de la geología
o bien en el metabolismo químico de contaminantes por medio de microbios.
Para poder modelar computacionalmente en forma adecuada los problemas arriba de-
scritos no basta con la perspectiva matemática, sino que se hace necesario trabajar en forma
Introducción 4
interdisciplinaria interactuando con especialistas de otras áreas del conocimiento. El pre-
sente trabajo es realizado en colaboración con invetigadores del Departamento de Física
de la UAM-I, del Centro de Investigación en Energía de la UNAM y del Departamento de
Ingeniería de Procesos e Hidráulica de la UAM-I. Esta labor conjunta requiere del involu-
cramiento de ambas partes en el área de conocimiento del otro, así como de una actitud de
cooperación mutua con mente abierta a una diversidad de puntos de vista.
El enfoque matemático adoptado para estudiar los tres problemas está basado en la
teoría y aplicación del método de elemento �nito, para obtener soluciones numéricas que
aproximen con su�ciente grado de precisión la solución buscada. Finalmente, para generar
software independiente que permita mantener el control sobre las variables utilizadas y
los métodos empleados, todos los problemas abordados en esta investigación, con excep-
ción de un ejemplo, son resueltos mediante programas propios desarrollados en lenguaje
FORTRAN 90.

Chapter 1Generación de campos vectoriales en modelos
de masa consistente
En el presente Capítulo se aborda el problema de generar campos vectoriales de
viento que satisfacen la ecuación de conservación de masa que, para densidad constante,
signi�ca que deben tener divergencia cero. Se dan dos formulaciones para este problema,
la primera de las cuales consiste en resolver un problema elíptico para cierto multipli-
cador asociado al campo de viento. Sin embargo, surgen ciertas di�cultades para de�nir las
condiciones de frontera que debe satisfacer dicho multiplicador. Esto da origen al primer
algoritmo que se propone llamado algoritmo elíptico (o algoritmo E).
Una formulación alternativa -que no necesita imponer condiciones de frontera sobre
el multiplicador-, consiste en plantear el problema pero re-formulándolo como un problema
de punto silla. Esta nueva formulación conduce a la solución del problema mediante un
método iterativo del tipo Uzawa, de donde surge el segundo algoritmo propuesto llamado
algoritmo de gradiente conjugado (o algoritmo GC).
Con la �nalidad de optimizar el algoritmo anterior minimizando el número de itera-
ciones requeridas para la convergencia, se introduce un pre-condicionador cuasi óptimo,
que resulta ser el problema elíptico ya referido. De este modo se da lugar al tercer al-
goritmo propuesto en este capítulo llamado algoritmo de gradiente conjugado con pre-
condicionador (o algoritmo GCP).
5

1 Generación de campos vectoriales en modelos de masa consistente 6
La experiencia ganada con estos algoritmos permitió determinar que las condiciones
de frontera que normalmente se manejan en la literatura no son las apropiadas, y adicional-
mente condujo al planteamiento de mejores condiciones de frontera para este problema,
mismas que se discuten hacia la parte �nal de este capítulo. Con estas nuevas condiciones
el campo vectorial generado se ajusta bastante bien a las restricciones de los modelos de
masa consistente (i. e., de divergencia cero).
De este modo, cinco aportaciones se presentan en este Capítulo, a saber:
1. Formulación rigurosa del problema elíptico en términos de espacios de Hilbert y de la
teoría de ortogonalidad de espacios de funciones. De aquí se obtiene el algoritmo E .
2. Re- formulación del problema elíptico como un problema de punto silla.
3. Solución del problema de punto silla visto como un problema de tipo Stokes aplicando
técnicas propias de la dinámica computacional de �uidos. De aquí resulta el algoritmo
GC.
4. Optimización del algoritmo precedente introduciendo un pre-condicionador cuasi
óptimo que minimiza el número de iteraciones, de donde se obtiene el algoritmo GCP .
5. Obtención de mejores condiciones de frontera para el problema de generación de
campos vectoriales de viento.
Por último, se presentan las conclusiones generales de este primer Capítulo.

1.1 Antecedentes 7
1.1 Antecedentes
En meteorología hay dos tipos de modelos para simular campos de viento sobre alguna
región de la super�cie terreste, a la que en general llamaremos topografía, y que son los
modelos de pronóstico y los de diagnóstico. Los primeros están basados en la solución de
ecuaciones hidrodinámicas dependientes del tiempo y se usan para predecir condiciones
meteorológicas [Ratto, 1996], pero la solución de las ecuaciones que aparecen es demasia-
do cara en términos computacionales. Por otro lado, los modelos de diagnóstico generan
campos de viento que satisfacen ciertas restricciones físicas. La ecuación de continuidad
es usada para asegurar la conservación de masa, y el modelo resultante se llama de masa
consistente [Ratto, 1996]. Este tipo de modelos fueron desarrollados también por Pielke
[Pielke, 2002] y por Dudhia y colaboradores [Dudhia et al, 1999].
Los modelos de diagnóstico son más atractivos que los de pronóstico debido a su
simplicidad y porque no requieren muchos datos de entrada, además de que son económicos
y fáciles de operar [Ratto, 1996]. Pennel [Pennel, 1983] y Burch y Ravenscroft [Burch y
Ravenscroft, 1992] aseguran que, en algunas aplicaciones, los modelos de masa consistente
tienen un mejor desempeño que los modelos dinámicos que son más caros y complicados.
En el presente trabajo consideramos los modelos de diagnóstico.
El método variacional presentado por Kitada et al [Kitada et al, 1983], originalmente
introducido por Sasaki [Sasaki, 1958], utiliza la ecuación de continuidad como restricción
y un multiplicador de Lagrange en una formulación variacional. En un modelo de masa
1.1 Antecedentes 8
consistente dicha restricción es expresada por medio de la siguiente ecuación
r � u = A (1.1)
donde u es el campo vectorial de velocidades del viento y A es la divergencia de este
campo, la cual vale cero si se trata de un campo conservativo de masa. El método varia-
cional que utiliza (1.1) como restricción, está basado en la minimización del funcional J
de�nido por
J =1
2
Z
��S(u� u0)
�� (u� u0) + � [r � u� A]
dV (1.2)
donde u0 es el campo inicial de viento observado, � es el multiplicador de Lagrange y S es
una matriz diagonal con parámetros de peso, llamados módulos de precisión Gaussianos,
relacionados con las escalas de las respectivas componentes del campo de velocidad, es
decir
S =
24 �21 0 00 �22 00 0 �23
35 : (1.3)
Frecuentemente la componente vertical del campo inicial u0 vale cero cuando no se tienen
datos observados. Sin embargo, es muy importante conocer la componente vertical del
campo de viento para predecir, por ejemplo, en forma con�able el movimiento de conta-
minantes del aire en la atmósfera [Kitada et al , 1983]. Las ecuaciones de Euler-Lagrange
obtenidas al hacer �J = 0, son
u = u0 + S�1r� (1.4)
��u � n = 0: (1.5)

1.1 Antecedentes 9
Al sustituir (1.4) en (1.1), y considerando que u sea un campo conservativo de masa, se
obtiene el problema elíptico para �
�r ��S�1r�
�= r � u0: (1.6)
Además, a partir de (1.5) pueden establecerse dos tipos de condiciones de frontera para
complementar esta ecuación:
1. Condición de frontera Dirichlet
� = 0; (1.7)
que es usada para obtener un campo ajustado u cuando la frontera es abierta o permite
un �ujo.
2. Condición de frontera Neumann
@�
@n= 0; (1.8)
que se usa para imponer la condición de que el �ujo a través de la frontera es cero.
Sin embargo, hay una controversia acerca de cuáles deben ser las condiciones de
frontera apropiadas que � debe satisfacer. Aún cuando varios autores ([Ratto, et al, 1996],
[Kitada, et al, 1983], [Kitada e Igarashi, 1986], [Sherman, 1978]) aseguran que la condición
de frontera Neumann es adecuada para una frontera cerrada como la topografía, en trabajos
recientes [Núñez, et al, 2004], [Núñez et al, 2006] se a�rma que esta interpretación es
incorrecta y que la condición (1.8) debe ser reemplazada por la condición más general
�S�1r� � n = u0 � n; (1.9)
1.1 Antecedentes 10
de la cual la ecuación previa es sólo un caso particular cuando �21 = �22 = �23 = 1 y
u0 � n = 0 sobre la topografía. Pero, en general, estos últimos valores no siempre son
empleados en meteorología.
En este capítulo se estudia, entre otros aspectos, cómo las condiciones de frontera
para el multiplicador � en el problema elíptico (1.6) pueden afectar la reconstrucción del
campo de viento en (1.4). Se considerarán dos enfoques para generar el campo ajustado de
viento u a partir de datos horizontales. El primero consiste en la solución, por un método
de elemento �nito, del problema elíptico para el multiplicador. El segundo está basado en
la formulación del problema de optimización como un problema de punto silla, para cuya
solución se aplica un método numérico derivado de una metodología exitosa que ya ha
sido empleada en problemas de la dinámica computacional de �uidos (CFD, por sus siglas
en inglés) [Glowinski, 2003]. Este segundo enfoque no requiere de imponer condiciones
de frontera para el multiplicador, produce mejores resultados que el primero y además
ayudó a establecer nuevas y "naturales" condiciones de frontera para el problema elíptico
tradicional (1.6). A conticunación se presenta el modelo matemático para este problema de
meteorología.
1.1.1 Formulación matemática
Sea una región abierta, simplemente conexa y acotada en Rd (d = 2 ó 3) con frontera
Lipschitz dada por @ = �N [ �D; donde �N es la parte de la frontera asociada con la
super�cie del terreno (topografía) y �D es el resto de la frontera (las paredes verticales
arti�ciales y la parte superior de la frontera), como se muestra en la Figura 1.1.

1.1 Antecedentes 11
Fig. 1.1. Dominio general
Dado un vector inicial u0 en (que puede ser obtenido por interpolación de datos atmos-
féricos, o por otro medio), el objetivo es encontrar (es decir, generar), un campo vectorial
u -llamado campo ajustado- tan cercano a u0 como sea posible en cierto sentido que se
de�nirá más adelante, tal que u � n = 0 sobre �N y r � u = 0.
Para concretar y siguiendo a Girault y Raviart [Girault y Raviart, 1986], se de�nen los
siguientes espacios de funciones vectoriales:
L2() = L2()d; con d = 2 ó 3;
H(div; ) = fv 2 L2() : r � v 2L2()g ;
Entonces el campo ajustado de viento u debe pertenecer al espacio
V = fv 2 H(div; ) : r � v = 0; v � n = 0 sobre �Ng; (1.10)
que está equipado con la norma k u kS; asociada al producto interior
hu;viS; �Z
(Su) � vdx; 8 u;v 2 V;

1.1 Antecedentes 12
donde v �w =dPi=1
viwi es el producto escalar usual en Rd y S = S(x) 2 Rd�d es una matriz
simétrica, de�nida positiva. Normalmente S es una matriz diagonal constante [Ratto, 1996]
y para el caso d = 2 se denotará como
S =
��21 00 �23
�:
De�niendo el funcional J : V! R como
J(v) =1
2k v � u0 k2S;=
1
2
Z
�S�v � u0
��� (v � u0)dx; (1.11)
el problema de generar el campo ajustado de viento u, puede formularse como sigue:
Problema 1 Dado u0 2 H(div; ); encontrar u 2 V tal que J(u) � J(v); 8v 2 V:
Puede verse que J es un funcional cuadrático convexo puesto que
J(u+ �v) = J(u) + �J (1)(u;v) +�2
2J (2)(u;v); 8� 2 R y u;v 2 V;
donde J (1) y J (2) denotan la primera y la segunda variación de J respectivamente y están
dadas por
J (1)(u;v) =
Z
�S�u� u0
��� v dx y
J (2)(u;v) =
Z
(Sv) � v dx:
Por lo tanto, una condición necesaria y su�ciente para que u 2 V sea solución del Problema
1, es que u satisfaga
0 = �J = lim"!0
J(u+ "v)� J(u)
"=
Z
�S�u� u0
��� vdx; 8v 2 V;
es decir, u 2 V satisface el problema variacionalZ
(Su) �vdx =Z
(Su0) � vdx; 8v 2 V: (1.12)
1.1 Antecedentes 13
Pero esta última ecuación, por el teorema de Lax Milgram [Girault y Raviart, 1986], tiene
una única solución, es decir, existe un único u 2 V que la satisface. Por lo tanto el
Problema 1 está bien de�nido y puede ser aproximado numéricamente por algún método
conocido. Aquí se usará el método del elemento �nito (FEM por sus iniciales en inglés)
para obtener una aproximación conveniente de la solución del Problema 1. La principal
di�cultad estriba en que el campo aproximado u debe satisfacer la condición de masa
consistente r � u = 0:
En esta Tesis se presentan dos formas diferentes de abordar el problema (1.12) a partir
de las cuales surgen dos algoritmos correspondientes para obtener la solución. Ambos
enfoques serán presentados más adelante en este mismo Capítulo.

1.2 Problema elíptico 14
1.2 Problema elíptico
En esta sección se presenta la formulación del problema elíptico a resolver así como el
método de elemento �nito empleado. De aquí se desprende el primero de los tres algoritmos
propuestos en este Capítulo, llamado algoritmo elíptico y se muestra un ejemplo numérico
que ilustra la situación.
1.2.1 Formulación del problema elíptico
El primer enfoque está basado en una descomposición del tipo Helmholtz del espacio de
Hilbert L2(), como se establece a continuación.
Proposición 1 El espacio de Hilbert L2() admite la siguiente descomposición
L2() = V �V?; dondeV es el espacio dado por
V = fv 2 H(div; ) : r � v = 0; v � n = 0 sobre �Ng
y
V? = frq : q 2 H1(); q = 0 sobre �Dg:
Demostración. Defínase el conjunto X como sigue:
X =�rq : q2H1(); q = 0 sobre �D
:
Este es un subespacio cerrado de L2()d: Si se prueba queX? = V; entonces se tiene que
V? = (X?)? = �X = X; y la proposición quedará demostrada. Así que se hará ver que

1.2 Problema elíptico 15
V � X? y que X? � V en dos pasos:
1) V � X? :
u2 V ) 0 =
Z
qr � udx = �Z
u � rqdx+Z�
u � nqd�
= �Z
u � rqdx; 8q2H1(); q = 0 sobre �D
= �hu;rqiL2()
) u 2X?:
2) X? � V :
u 2 X? \H(div; )) 0 = hu;rqiL2() =Z
u � rqdx;
8q 2 H1(); q = 0 sobre �D:
Si q2D() � X , entoncesZ
qr � udx+Z
u � rqdx =
Z�
u � nqd� = 0
)Z
qr � udx = 0 8q2D()
) r � u = 0 en (A)
)Z�
u � nqd� = 0 8q2H1(); q = 0 sobre �D
) u � n = 0 sobre �N : (B)
(A) y (B)) u 2 V �
De la ecuación (1.12) se sigue queZ
�S�u� u0
��� vdx=0; 8 v 2 V;

1.2 Problema elíptico 16
y por lo tanto
S�u� u0
�?V en L2();
así que
S�u� u0
�= r�
con � en el espacio de funciones
H1D() � fq 2 H1() : q = 0 sobre �Dg: (1.13)
Por lo que u y � deben satisfacer
Su�r� = Su0 en ; (1.14)
r � u = 0 en ; (1.15)
u � n = 0 sobre �N ; (1.16)
� = 0 sobre �D: (1.17)
Así que � satisface el siguiente problema elíptico
�r � (S�1r�) = r � u0 en ; (1.18)
� = 0 sobre �D; (1.19)
�S�1r� � n = u0 � n sobre �N : (1.20)
Una vez que � es conocido a partir de este problema, el campo ajustado u puede ser recu-
perado por (1.4).
Nótese que la ecuación (1.18) también ha sido formulada por Sasaki [Sasaki, 1958]
en la ecuación (1.6). En este sentido resolver el problema elíptico (1.18)-(1.20) corresponde
a la metodología usual. Sin embargo, Sasaki llegó a dicha ecuación siguiendo argumentos

1.2 Problema elíptico 17
diferentes, del tipo variacional, en donde no es claro cómo se establecen formalmente las
condiciones de frontera para �. Además, el espacio de funciones al cual � debe pertenecer
no está de�nido por Sasaki.
La contribución en este punto del presente trabajo es el argumento de la descomposi-
ción del tipo Helmholtz en espacios de Hilbert ortogonales V y V?, a partir de la cual la
condición de frontera para � emerge de manera natural.
1.2.2 Método de elemento �nito para el problema elíptico
La formulación variacional del problema elíptico (1.18)-(1.20) es
Z
S�1r� � rqdx =�Z
u0 � rqdx; 8q 2 H1D(); (1.21)
que tiene una única solución � y por lo tanto u queda univocamente determinado.
El presente trabajo se restrige sólo al caso bi-dimensional. Sea Th una triangulación
de elemento �nito de � R2 [Ciarlet, 2002], siendo h el paso de discretización del espacio.
Denótese por P1 el espacio de polinomios en dos variables de grado menor o igual que
uno. Entonces, para el problema elíptico, los espacios de funciones L2() y H1D() arriba
de�nidos se aproximarán por los siguientes espacios de dimensión �nita
Lh =�vh2C0(�)2 : vhjT2P1 � P1;8T2Th
; y (1.22)
H1Dh =
�q2C0(�) : qjT2P1;8T2Th; q = 0 sobre �D
; (1.23)
respectivamente.

1.2 Problema elíptico 18
1.2.3 Algoritmo elíptico
El primer algoritmo que se propone en este trabajo se concentra en resolver el problema
elíptico (1.18)-(1.20) cuya formulación variacional quedó establecida en la ecuación (1.21).
De acuerdo con los espacios de aproximación recién introducidos, este algoritmo, que
recibe el nombre de algoritmo elíptico, queda como sigue:
ALGORITMO ELÍPTICO
1. Dado u0h2 Lh, encontrar �h2H1Dh tal queZ
S�1r�h � rqdx = �Z
u0h � rqdx; 8q2H1Dh; (1.24)
donde u0h 2 Lh es el interpolante del campo inicial dado u0.
2. Calcular la aproximación numérica uh 2 Lh al campo ajustado u, con uh � n = 0
sobre �N , resolviendo la versión débil de (1.4) como sigueZ
(Suh) � vdx =Z
�Su0h
�� vdx�
Z
�hr � vdx; 8v 2 Lh: (1.25)
Es importante mencionar que en el paso 1, el sistema algebráico de ecuaciones lin-
eales que resulta puede resolverse por el método de gradiente conjugado -puesto que la
matriz del sistema es simétrica y de�nida positiva-, adaptado a matrices ralas [Teukolsky et
al, 1992]. Es posible también por supuesto emplear algún método directo como Choleski
o factorización LU [Golub and Van Loan, 1996], [Davis, 2006], pero siempre adaptándolo
al caso en que la matriz del sistema es rala. En este trabajo se decidió adoptar el método it-
erativo mencionado por la precisión que lo caracteriza y por su facilidad para adecuarlo al
caso de las matrices ralas. Este algoritmo será referido en esta Tesis como algoritmo E1 .

1.2 Problema elíptico 19
Fig. 1.2. Campo exacto u = (x;�z) en rojo, campo ajustado uh en azul; algoritmo E1 .
1.2.4 Ejemplo numérico
En el presente trabajo se mostrarán diversos ejemplos numéricos para ilustrar la efectividad
de cada método numérico, así como para hacer comparaciones y obtener conclusiones.
Ejemplo 1. Considérese el campo vectorial solenoidal bi-dimensional dado por u(x; z) =
(x;�z); de�nido en la región = (1; 2) � (0; 1); el cual satisface las condiciones (1.15)-
(1.16). Tomando como u0(x; z) = (x; 0) el campo de viento horizontal inicial, deseamos
saber qué tanto se puede recuperar de la componente vertical de u aplicando el algoritmo
E1 . Para este cálculo se dividió el dominio en una malla triangular regular de 80 � 80.
La Figura 1.2 muestra el campo exacto u en rojo y el campo ajustado uh en azul. Ambos
campos prácticamente coinciden dentro de la región , excepto en la fronteras arti�ciales
verticales x = 1 y x = 2. Para contar con una medida global de la diferencia entre estos
campos se consideró el error relativo dado por
er =jju� uhjj2jjujj2
: (1.26)

1.2 Problema elíptico 20
Para este ejemplo se obtuvo er = 1:9� 10�2. También se calculó un valor medio (media o
promedio) de la divergencia del campo ajustado uh, de�nido por
mdiv = mediaxi
f r � uh(xi) j xi es un vértice interior de la mallag; (1.27)
donde la divergencia puntual es calculada en el sentido débil
r � uh(xi) = �Z
uh � r�i dx : (1.28)
En (1.28) �i es la función base lineal por trozos asociada al nodo xi. Para este ejemplo se
obtuvomdiv = 4:1� 10�2.
Los módulos Gaussianos de precisión en (1.3) se tomaron como �1 = 1 y �3 = 0:001
en todos los ejemplos del Capítulo 1 de la Tesis. Estos valores fueron elegidos con base
en su desempeño numérico. La Tabla 1 muestra el comportamiento de er y mdiv para
diferentes valores de �3 cuando �1 se mantiene constante e igual a uno.
�3 er mdiv0:001 1:9� 10�2 4:1� 10�20:01 9:6� 10�2 �6:1� 10�20:1 1:4� 10�1 2:9� 10�11 5:2� 10�1 5:4� 10�1100 6:4� 10�1 7:8� 10�11000 9:8� 10�1 9:8� 10�1
Tabla 1. Desempeño numérico del algoritmo E1 para diferentes valores de �3.
Es claro que el mejor resultado se obtiene cuando �3 = 0:001. Una discusión adicional
acerca de la elección de estos parámetros puede consultarse en [Núñez, et. al., 2006] y en
[Núñez, et. al., 2007].

1.3 Problema de punto silla 21
1.3 Problema de punto silla
En esta sección se presenta la re-formulación del problema elíptico (1.18)-(1.20) como un
problema de punto silla. De aquí se desprenden los dos últimos algoritmos propuestos en
este capítulo, llamados algoritmo de gradiente conjugado y algoritmo de gradiente con-
jugado con pre-condicionador. Así mismo se muestra el método mixto como estrategia
numérica para resolver el problema de punto silla y se exponen algunos resultados numéri-
cos ilustrativos.
1.3.1 Formulación del problema de punto silla
El segundo enfoque para resolver el Problema 1, o de manera equivalente el problema
(1.12), está basado en la teoría de optimización de funcionales sujetos a restricciones. El
objetivo es relajar la condición de incompresibilidad
r � u = 0 (1.29)
que el campo ajustado u debe satisfacer, introduciendo una nueva incógnita: el multipli-
cador de Lagrange �. Para hacer esto se de�ne el siguiente espacio de funciones
VN = fv 2 H(div; ) : v � n = 0 sobre �Ng ; (1.30)
junto con el Lagrangiano L de�nido sobreVN � L2() como
L(v; q) � J(v)� hq;r � vi = 1
2
Z
�S(v � u0)
�� (v � u0)dx+
Z
qr � vdx:

1.3 Problema de punto silla 22
Así que (u; �) es un punto estacionario de L si
lim�!0
@
@�L (u+ �v;�) = 0; 8v 2 VN ; y
lim�!0
@
@�L (u;�+ �q) = 0; 8q 2 L2():
En otras palabras, la pareja (u; �) es un punto estacionario de L si resuelve el siguiente
problema de punto sillaZ
(Su) �vdx+Z
�r � vdx =Z
�Su0
��vdx; 8v 2 VN ; y (1.31)
Z
qr � udx = 0; 8q 2 L2(): (1.32)
La solución u es el minimizador de J que ahora es buscada en el espacio ampliado VN
que no requiere divergencia cero. En vez de ello la condición r � u = 0 es relajada por
la introducción del multiplicador de Lagrange � y entonces u debe satisfacer la condición
más débil (1.32), pero a cambio se ha introducido una nueva incógnita: la variable �.
El problema (1.31)-(1.32) es llamado de punto silla porque cualquier solución suya
(u; �), también satisface la siguiente relación [Larsson y Thomée, 2005], que establece que
� es un máximo mientras que u es un mínimo
L(u; q) � L(u; �) � L(v; �); 8(v; q)2 VN � L2():
Los primeros métodos para resolver este tipo de problemas se conocen como métodos tipo
Uzawa [Arrow et al, 1958]. En esta Tesis se presenta un método actualizado inspirado en
la propuesta de Glowinski para resolver problemas tipo Stokes en CFD [Glowinski, 1991],
[Glowinski, 2003]. Para ello primero se re-formula el problema (1.31)-(1.32) como sigue.

1.3 Problema de punto silla 23
Supóngase que (u; �) es solución del problema (1.31)-(1.32), entonces u puede ser
escrito como u = u0 + u�, donde u0 es el campo vectorial inicial dado y u� 2 VN es
solución de Z
(Su�) �vdx = �Z
�r�vdx; 8v 2 VN : (1.33)
Puesto que r � u = 0, se sigue que
r � u� = �r � u0: (1.34)
El problema (1.33)-(1.34) puede formularse como una ecuación funcional. Para ver esto se
de�ne el siguiente operador lineal sobre el espacio de multiplicadores,
A : L2()! L2();
Aq = r � uq; (1.35)
donde uq 2 VN es la solución (única por el teorema de Lax-Milgram) del problemaZ
(Suq) �vdx = �Z
qr�vdx; 8v 2 VN : (1.36)
Nótese que Z
qr�vdx = �Z
rq�vdx+Z�
qv � nd� =
= �Z
rq�vdx, si v 2 VN y q = 0 sobre �D;
por lo que
Z
(Suq) �vdx =Z
rq�vdx, si v 2 VN y q = 0 sobre �D;

1.3 Problema de punto silla 24
de modo que si q 2 H1D(), entonces uq y q están relacionados por medio de
Suq �rq = 0 en ; (1.37)
uq � n = 0 sobre �N ; (1.38)
q = 0 sobre �D: (1.39)
Algunas propiedades importantes del operador A se establecen en seguida.
Proposición 2 El operador A : L2() ! L2() de�nido en (1.35)-(1.36) tiene las si-
guientes propiedades
1. Es simétrico:R(Aq) q0dx =
R(Aq0) qdx; 8q; q02L2()
2. Es de�nido positivo:R(Aq) qdx � 0;8q2L2() y
R(Aq) qdx = 0, q = 0:
Demostración.
1. Por (1.36) y tomando v = uq0 resulta
Z
(Suq) �uq0dx = �Z
qr�uq0dx
y Z
(Suq0) �uqdx = �Z
q0r�uqdx;
entonces por (1.35):
Z
(Aq) q0dx = �Z
(r�uq) q0dx =Z
(Suq0) �uqdx = (1.40)
=
Z
Suq�uq0dx = �Z
qr�uq0dx =Z
(Aq0) qdx:
1.3 Problema de punto silla 25
2. Por (1.40) y tomando q0 = q resultaZ
(Aq) qdx =
Z
(Suq) �uqdx;
como S es positiva de�nida, entonces (Suq) �uq � 0; luegoZ
(Suq) �uqdx � 0;
de donde se tiene que A es positivo semi-de�nido. Además tomando en cuenta que
(Suq) �uq = 0, uq = 0 por ser S positiva de�nida, se concluye queZ
(Aq) qdx = 0) q = 0 �
Por la de�nición (1.35) y de acuerdo con (1.33)-(1.34) resulta que el multiplicador �
satisface la ecuación funcional
A� = �r � u0; (1.41)
siendo A un operador simétrico y de�nido positivo. Esto signi�ca que dado el campo vec-
torial inicial u0, el multiplicador � puede obtenerse a partir de la ecuación (1.41), que a su
vez -por las propiedades del operador A expresadas en la Proposición 2-, puede resolverse
mediante un algoritmo de gradiente conjugado en el espacio L2(). Además, el campo
ajustado u también puede calcularse como un paso intermedio en el algoritmo, como se
observa a continuación:
1.3.2 Algoritmo de gradiente conjugado
El segundo algoritmo que se propone en este trabajo resuelve el problema de punto silla
(1.31)-(1.32), a través de la solución para � del problema reformulado (1.41) mediante

1.3 Problema de punto silla 26
la técnica del gradiente conjugado. Aplicando los pasos de dicha técnica a este último
problema, se obtienen los siguientes pasos.
1. �0 2 L2() dado.
2. g0 = A�0 +r � u0:
3. d0 = g0:
Param � 0, suponiendo conocidos �m, gm y dm; calcular �m+1, gm+1 y dm+1 medi-
ante:
4. �m =Rjgmj2dx =
R(Adm)dmdx:
5. �m+1 = �m � �mdm:
6. gm+1 = gm � �mAdm:
SiRjgm+1j2dx =
Rjg0j2dx < "; tomar � = �m+1 y parar. En caso contrario calcular
7. �m =Rjgm+1j2dx =
Rjgmj2dx:
8. dm+1 = gm+1 + �mdm:
9. Hacerm = m+ 1 y regresar al paso 4:
En el algoritmo anterior es necesario evaluar A�0 en el paso 2, y Adm en los pasos 4 y 6.
Esto se logra utilizando las ecuaciones (1.35)-(1.36) que de�nen al operador A.

1.3 Problema de punto silla 27
En el paso 2, dado �0; se tiene que A�0 = r � u�0 ; donde u�02 VN resuelveZ
(Su�0) � vdx =Z
�0r � vdx; 8v 2 VN :
En los pasos 4 y 6 denotando por gm = Adm = r � um; donde um2 VN resuelveZ
(Sum) � vdx =Z
dmr � vdx; 8v 2 VN ;
se tiene que Z
(Adm)dmdx =
Z
dmr � umdx �Z
(Sum) � umdx:
Por otra parte, es posible obener um+1 del paso 5 mediante
A�m+1 = A�m � �mAdm;
es decir
r � um+1 = r � um � �mr � um;
de donde
um+1 = um � �mum:
Usando estos resultados obtenemos el segundo algoritmo propuesto en este capítulo, lla-
mado algoritmo de gradiente conjugado, el cual puede escribirse como sigue:
ALGORITMO DE GRADIENTE CONJUGADO GC
1. �0 2 L2() dado.
2. Resolver para u�02 VN :Z
(Su�0) � vdx =Z
�0r � vdx; 8v 2 VN :
3. g0 = r � (u0 + u�0):

1.3 Problema de punto silla 28
4. d0 = g0:
Para m � 0; suponiendo conocidos �m, gm, dm y um; calcular �m+1, gm+1, dm+1 y
um+1 mediante:
5. Resolver para _um2 VN :
Z
(S_um) � vdx =
Z
dmr � vdx; 8v 2 VN :
6. _gm = r � _um:
7. �m =Rjgmj2 dx =
R(_gm)Tdmdx:
8. �m+1 = �m � �mdm:
9. um+1 = um � �m_um:
10. gm+1 = gm � �m_gm:
SiRjgm+1j2dx =
Rjg0j2dx < "; tomar � = �m+1; u = um+1 y parar. En caso
contrario continuar con:
11. �m =Rjgm+1j2dx =
Rjgmj2dx:
12. dm+1 = gm+1 + �mdm:
13. Hacerm = m+ 1 y regresar al paso 5:
Nótese que al formular el problema de punto silla (1.31)-(1.32), no se impone ninguna
condición de frontera sobre el multiplicador �, como ocurrió al formular el problema elíp-
1.3 Problema de punto silla 29
tico (1.18)-(1.20). Esto tiene importantes efectos en la solución numérica como se verá en
los ejemplos posteriormente.
Debe señalarse que en este segundo enfoque no se calculan las ecuaciones de Euler-
Lagrange que condujeron al problema elíptico. En vez de ello se resuelve el Problema 1
mediante técnicas propias para los problemas de punto silla.
La contribución en esta parte del presente trabajo consiste en adaptar una metodología
usada para resolver problemas de tipo Stokes [Glowinski, 1991] en CFD, a la solución de
un problema en meteorología.
En esta Tesis se emplea la aproximación por elemento �nito para resolver la corres-
pondiente versión discreta de los trece pasos de este segundo algoritmo. Debe observarse
que ahora no se resuelve ningún problema elíptico, a diferencia del algoritmo E1 . Además
el campo ajustado u es calculado como un paso intermedio (paso 9). Este algoritmo será
referido en esta Tesis como algoritmo GC.
1.3.3 Método mixto para resolver el problema de punto silla
Para resolver en forma aproximada los problemas en los pasos 2 y 5 del algoritmo GC
recién descrito, se utiliza un método mixto. Este nombre se da a cierto tipo de métodos de
elemento �nito en los cuales se emplea más de un espacio de aproximación. Generalmente
uno de estos espacios está asociado a un multiplicador de Lagrange, cuyo papel es forzar
una restricción [Brenner y Scott, 1994]. Este es el caso de los problemas en los pasos 2 y
5, en los cuales dada una función �2L2() se calcula u 2 VN tal queZ
(Su) � vdx =Z
�r � vdx; 8v 2 VN :

1.3 Problema de punto silla 30
En este caso el multiplicador � se introdujo para forzar la condición de incompresibilidad.
Para aproximar las funciones en L2() y en VN se utilizará la aproximación de ele-
mento �nito del tipo Bercovier-Pironneau también llamada P1-iso-P2 [Bercovier y Piron-
neau, 1979]. En este método los elementos en L2() son aproximados por polinomios
lineales sobre una triangulación Th de , mientras que los elementos enVN son aproxima-
dos también por polinomios lineales pero sobre una triangulación doblemente �na Th=2 de
. La triangulación �na Th=2 es obtenida mediante una subdivisión regular de cada trián-
gulo T 2 Th, como se muestra en la Figura 1.3.Entonces los espacios de funciones VN y
Fig. 1.3. Elemento típico en Th: triángulo ABC . Elementos en Th=2: triángulos AQP, PRC,PQR y QBR
L2() serán aproximados por los siguientes espacios de dimensión �nita
VNh =�vh2C0(�)2 : vhjT2P1 � P1;8T2Th=2;vh � n =0 sobre �N
y
Lh =�qh2C0(�) : qhjT2P1;8T2Th
;
respectivamente.
La razón por la cual se utilizan métodos mixtos cuando se resuelven problemas de
punto silla es porque cuando la velocidad y la presión son aproximadas en el mismo tipo de
1.3 Problema de punto silla 31
elemento �nito (es decir, el mismo espacio discreto de funciones), aparecen oscilaciones
espúreas en el multiplicador y en la velocidad, haciendo inestable al método [Glowinski,
2003].
Además, los métodos mixtos producen soluciones aproximadas estables y conver-
gentes [Girault y Raviart, 1986], [Brezzi y Fortin, 1991], [Brenner y Scott, 1994] y [Temam,
1977], porque controlan los modos de alta frecuencia en � y en u, quienes son los causantes
de las oscilaciones. Aquí el método mixto es aplicado en particular en los pasos 2 y 5 del
algoritmo de gradiente conjugado.
Por otra parte, debe hacerse notar que si se usa la regla del trapecio para calcular
las integrales del lado izquierdo en los pasos 2 y 5, se obtiene un sistema de ecuaciones
algebráicas con matriz diagonal. El costo computacional de resolver este sistema es sólo el
de una multiplicación vectorial. Así pues, en el algoritmo GC en realidad no se resuelven
sistemas de ecuaciones algebraicas.
1.3.4 Ejemplos numéricos
A continuación se presentan varios ejemplos numéricos de aplicación del algoritmo GC.recientemente
descrito.
Ejemplo 2. Considérese nuevamente el problema del Ejemplo 1 donde el campo de viento
horizontal inicial es u = (x; 0). Se desea saber qué tanto se puede re-construir el campo
solenoidal exacto u = (x;�z) en el dominio = (1; 2) � (0; 1) empleando el algoritmo
GC. Para poder comparar los resultados numéricos con los obtenidos con el algoritmo E1 ,
se eligen h = 1=40 y h=2 = 1=80 como pasos de discretización para este caso. Para
1.3 Problema de punto silla 32
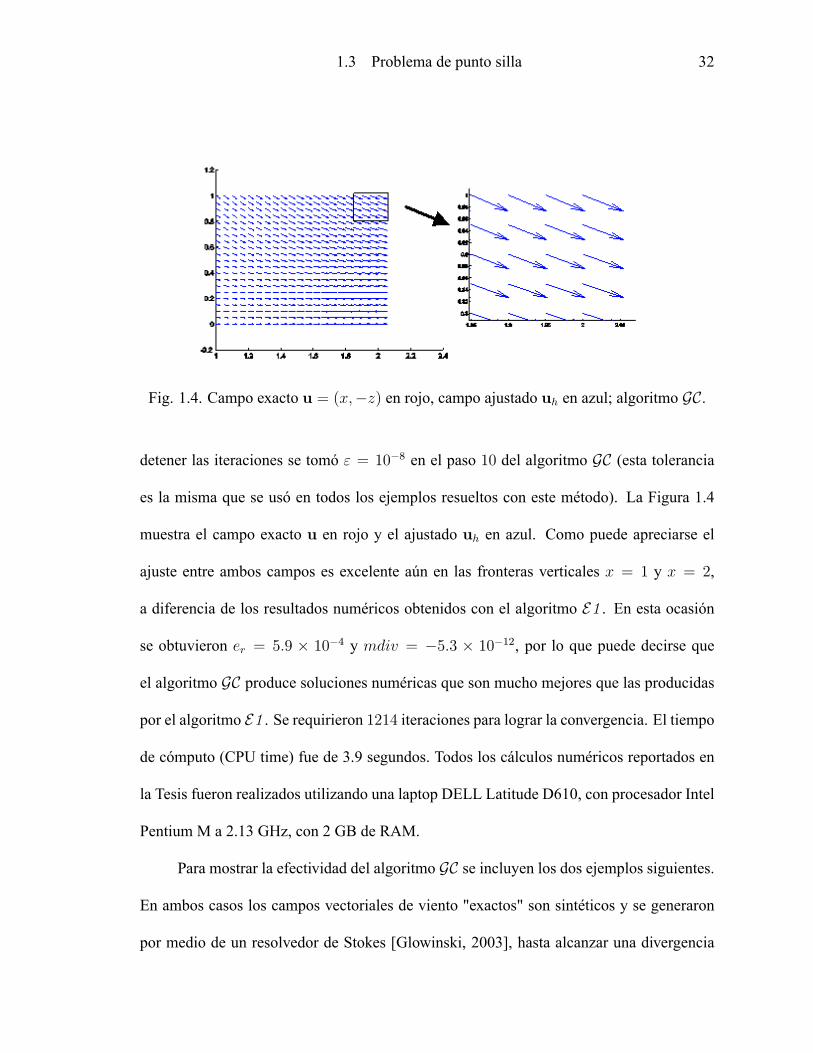
Fig. 1.4. Campo exacto u = (x;�z) en rojo, campo ajustado uh en azul; algoritmo GC.
detener las iteraciones se tomó " = 10�8 en el paso 10 del algoritmo GC (esta tolerancia
es la misma que se usó en todos los ejemplos resueltos con este método). La Figura 1.4
muestra el campo exacto u en rojo y el ajustado uh en azul. Como puede apreciarse el
ajuste entre ambos campos es excelente aún en las fronteras verticales x = 1 y x = 2,
a diferencia de los resultados numéricos obtenidos con el algoritmo E1 . En esta ocasión
se obtuvieron er = 5:9 � 10�4 y mdiv = �5:3 � 10�12, por lo que puede decirse que
el algoritmo GC produce soluciones numéricas que son mucho mejores que las producidas
por el algoritmo E1 . Se requirieron 1214 iteraciones para lograr la convergencia. El tiempo
de cómputo (CPU time) fue de 3.9 segundos. Todos los cálculos numéricos reportados en
la Tesis fueron realizados utilizando una laptop DELL Latitude D610, con procesador Intel
Pentium M a 2.13 GHz, con 2 GB de RAM.
Para mostrar la efectividad del algoritmo GC se incluyen los dos ejemplos siguientes.
En ambos casos los campos vectoriales de viento "exactos" son sintéticos y se generaron
por medio de un resolvedor de Stokes [Glowinski, 2003], hasta alcanzar una divergencia

1.3 Problema de punto silla 33
Fig. 1.5. Campo exacto u en rojo, campo ajustado uh en azul; algoritmo GC, topografíacoseno.
numérica débil del orden de 10�16 (es decir, son campos de divergencia cero en el orden
de precisión de la máquina). Luego, se hace cero la segunda componente (la vertical) de
los campos así generados para obtener los campos vectoriales correspondientes de viento
inicial horizontal u0. El objetivo es aplicar el mencionado algoritmo GC para ver qué tanto
se recupera dicha componente vertical.
Ejemplo 3. En este caso se de�ne el dominio como sigue
=
�(x; y) 2 R2 : 0 < x < 10;
1
2cos
3�x
10+1
2< y < 10
�:
El campo "exacto" satisface r � u = 1:2 � 10�16 y se resuelve el problema (1.31)-(1.32)
con el algoritmo GC, tomando h = 1=40 y h=2 = 1=80 como pasos de discretización en el
método de elemento �nito. La Figura 1.5 muestra tanto el campo exacto como el ajustado.
Como puede apreciarse el ajuste es muy bueno, pues no se distingue un campo de otro.
Ahora se obtuvieron los siguientes indicadores: er = 3:6 � 10�6 y mdiv = 9:8 � 10�9.

1.3 Problema de punto silla 34
Fig. 1.6. Campo exacto u en rojo, campo ajustado uh en azul; algoritmo GC, topografíareal.
En este caso se necesitaron 955 iteraciones para alcanzar la convergencia. El tiempo de
cómputo (CPU time) fue de 3.8 segundos.
Ejemplo 4. En este caso el dominio está dado por
=�(x; y) 2 R2 : 0 < x < 10; h(x) < y < 10
; (1.42)
donde h(x) es una función construida por medio de splines cúbicos que interpola datos
discretos sobre 10 km de topografía real de cierta región de México, que se encuentran en
una base de datos [GTOPO, 1997]. El campo exacto satisfacer�u = 6:1�10�16. Como se
mencionó más arriba, se elimina la componente vertical de este campo y se le toma como el
campo de viento horizontal inicial u0. Se desea ver qué tanto se puede recuperar de dicha
componente vertical al resolver el problema (1.31)-(1.32) aplicando el algoritmo GC. Los
pasos de discretización en el método de elemento �nito son los mismos que en el Ejemplo
3. La Figura 1.6 muestra los resultados obtenidos. El ajuste es muy bueno pues ambos
campos son prácticamente indistinguibles. Esto lo con�rman los indicadores cuantitativos,

1.3 Problema de punto silla 35
que ahora son: er = 4:1�10�6 ymdiv = 5:7�10�11. El número de iteraciones requeridas
para la convergencia fue de 1000. El tiempo de cómputo (CPU time) fue de 3.8 segundos.
La Tabla 2 resume los resultados obtenidos en los Ejemplos 2, 3 y 4 al utilizar el
algoritmo GC.
Ej. Campo exacto er mdiv no. iter. CPU time (s)2 u = (x;�z) 5:9� 10�4 �5:3� 10�12 1214 3:93 sobre top. coseno 3:6� 10�6 9:8� 10�9 955 3:84 sobre top. real 4:1� 10�6 5:7� 10�11 1000 3:8
Tabla 2. Resumen de resultados numéricos obtenidos con el algoritmo GC
Como puede verse, el algoritmo GC produce excelentes resultados en todos los ejemplos.
El problema que se aprecia es que el número de iteraciones requeridas para alcanzar la
convergencia es elevado y, por lo tanto, tarda más tiempo que el algoritmo tradicional E1 en
donde sólo se resuelve un problema elíptico (i. e. se hace una sola iteración). Esto justi�ca
la búsqueda de un pre-condicionador para el algoritmo GC que resuelva esta di�cultad de
manera óptima. En la siguiente Sección se aborda este aspecto.
1.3.5 Algoritmo de gradiente conjugado con pre-condicionador
En esta sección se presenta el tercer algoritmo propuesto en este capítulo. La idea central
es modi�car el algoritmo GC mediante un pre-condicionador cuasi-óptimo que reduzca al
mínimo posible el número de iteraciones necesarias para lograr la convergencia. Como
se verá más adelante, dicho pre-condicionador resulta ser un problema elíptico como el
abordado por el algoritmo E1 .
De acuerdo con las relaciones (1.37)-(1.39) que se obtuvieron al reformular el prob-
lema de punto silla, si q es su�cientemente suave, puede tomarse una restricción eA del

1.3 Problema de punto silla 36
operador A como sigue:
eAq = r � uq = �r � (S�1rq); para q en el dominio de eA; (1.43)
uq � n = 0 sobre �N ;
q = 0 sobre �D:
Es decir, para cada q en el dominio de eA podemos escribir formalmenteeAq = �r � (S�1rq):
El caso más sencillo es cuando S�1 = I , donde I es la matriz identidad. En este caso
obtenemos
eAq � ��q: (1.44)
Dado que se desea encontrar soluciones aproximadas del problema por medio del método
de elemento �nito, el análogo discreto de (1.44) sobre una malla regular con parámetro de
discretización h, es un sistema algebráico cuyo número de condición es de orden O(h�2).
Si además S�1 6= I , entonces este número de condición es mayor, y típicamente será su-
perior a 104. Por lo tanto, el número de iteraciones en el algoritmo de gradiente conjugado
para obtener una buena aproximación de u y � puede ser del orden de miles o más. Por
esta razón, es conveniente investigar si es posible obtener un precondicionador para el al-
goritmo de gradiente conjugado, con el objeto de reducir dramáticamente el número de
iteraciones.
En términos de operadores, el problema consiste en construir un operador lineal B tal que
ABq � q, que sea continuo, autoadjunto y positivo de�nido, de tal manera que B sea
invertible con inversa B�1 con las mismas propiedades de B. Si este operador existe,

1.3 Problema de punto silla 37
entonces B�1 tendrá las propiedades de precondicionamiento que se requieren, y por lo
tanto permitirá acelerar la convergencia del algoritmo de gradiente conjugado.
Para formalizar lo anterior defínase el siguiente operador lineal
A0 : C10 ()! L2();
tal que
A0q = r � uq; 8q 2 C10 ();
donde uq 2 VN es la solución de (1.36), es decir uq resuelveZ
(Suq) �vdx =Z
qr�vdx; 8v 2 VN :
Sea ahora B : L2() ! H1D() (re�érase a (1.13) para la de�nición de este espacio) el
operador compacto de�nido por
Bq = �q;
donde �q resuelve el problema
�r ��S�1r�q
�= q en (1.45)
�q = 0 sobre �D (1.46)
S�1r�q � n = 0 sobre �N ; 8q 2 L2(): (1.47)
Compárese con (1.18)-(1.20); es claro entonces que B implica resolver un problema elíp-
tico. La formulación variacional de (1.45)-(1.47) esZ
S�1r�q � r dx =Z
q dx; 8 2H1D(); (1.48)
con H1D() como en (1.13).
Las propiedades del operador B se establecen en seguida.
1.3 Problema de punto silla 38
Proposición 3 El operador B : L2()! H1D() recién de�nido es autoadjunto y positivo
de�nido.
Demostración. Para probar ambas propiedades se mostrará, por ejemplo, que la forma
bilineal b(�; �) de�nida por
b(q; q0) =
Z
(Bq)q0dx;
es simétrica y positiva de�nida.
De la de�nición de B, por (1.45) y por (1.48), se tiene que
b(q; q0) =
Z
�qq0dx
= �Z
�qr ��S�1r�q0
�dx
=
Z
S�1r�q0 � r�qdx:
Como S es una matriz diagonal constante cuyos elementos (módulos de precisión Gaus-
sianos) son positivos, esta relación muestra que la forma bilineal b(�; �) es simétrica y posi-
tiva semi-de�nida. Además por (1.45)-(1.47) resulta que
b(q; q) =
Z
�qqdx = 0 )Z
S�1r�q � r�qdx = 0 )
r�q = 0 ) �q es constante )
�q = 0 por (1.46)) q = 0;
es decir, b(�; �) es positiva de�nida �
Por lo tanto, si se de�ne a C como el operador inverso de B (C � B�1), resulta que
C es una extensión autoadjunta y positiva de�nida de A0, y satisface
CBq = q; 8q 2 L2():

1.3 Problema de punto silla 39
Entonces, siguiendo un razonamiento análogo al empleado para establecer (1.41), se ob-
tiene que el multiplicador � satisface la ecuación funcional
C� = �r � u0: (1.49)
Así que por las propiedades de C, el problema (1.49) puede resolverse mediante un al-
goritmo de gradiente conjugado pre-condicionado, siendo B un pre-condicionador cuasi-
óptimo para C. Introduciendo este pre-condicionador, dicho algoritmo queda como sigue.
1. �0 2 L2() dado.
2. g0 = A�0 +r � u0:
3. g0 = Bg0:
4. d0 = g0:
Para m � 0, suponiendo conocidos �m, gm, gm y dm; calcular �m+1, gm+1, gm+1 y
dm+1 como sigue:
5. �m =Rgmgmdx =
R(Adm)dmdx:
6. �m+1 = �m � �mdm:
7. gm+1 = gm � �mAdm:
8. gm+1 = gm � �mB(Adm):
SiRgm+1gm+1dx =
Rjg0j2dx < "; hacer � = �m+1 y parar. Si no, hacer
9. �m =Rgm+1gm+1dx =
Rgmgmdx:
1.3 Problema de punto silla 40
10. dm+1 = gm+1 + �mdm:
11. Hacerm = m+ 1 y regresar a 5.
Si se incorporan explícitamente las evaluaciones A�0 en 2, así como Adm en 5, 7 y 8,
así como las evaluaciones Bg0 en 3 y B(Adm) en 8, se obtiene el algoritmo explícito con
precondicionamiento. Las evaluaciones A�0 y Adm ya se realizaron en el algoritmo GC, y
basta agregar las evaluaciones de B. Esto se hace en seguida.
En 3, Bg0 = '0, donde '02H1D() resuelveZ
S�1r'0 � r dx =Z
g0 dx; 8 2H1D():
Por tanto g0 = '0:
En 8; B(Adm) = B�gm = 'm donde 'mH1D() resuelveZ
S�1r'm � r dx =Z
�gm dx; 8 2H1D():
Con los cálculos anteriores, el tercer y último algoritmo propuesto en este capítulo, llamado
algoritmo de gradiente conjugado con pre-condicionador, se puede escribir como sigue:
ALGORITMO DE GRADIENTE CONJUGADO CON PRE-CONDICIONADOR
1. �0 2 L2() dado.
2. Resolver para u�02 VN :
Z
(Su�0) � vdx =Z
�0r � vdx; 8v 2 VN :
3. g0 = r � (u0 + u�0) :

1.3 Problema de punto silla 41
4. Resolver para �02H1D() :
Z
S�1r�0 � r dx =Z
g0 dx; 8 2H1D():
5. g0 = �0:
6. d0 = g0:
Para m � 0; suponiendo conocidos �m, gm, dm y um; calcular �m+1, gm+1, dm+1 y
um+1 por medio de
7. Resolver para _um2 VN :
Z
(S�um) � vdx =Z
dmr � vdx; 8v 2 VN :
8. �gm = r � _um:
9. Resolver para �m2H1D() :
Z
S�1r�m � r dx =Z
�gm dx; 8 2H1D():
10. �m =Rgmgmdx =
R�gmdmdx:
11. �m+1 = �m � �mdm:
12. um+1 = um � �m_um:
13. gm+1 = gm � �m_gm:
1.3 Problema de punto silla 42
14. gm+1 = gm � �m�m:
SiRgm+1gm+1dx =
Rg0g0dx < "; hacer � = �m+1; u = um+1 y parar. Si no, hacer
15. �m =Rgm+1gm+1dx =
Rgmgmdx:
16. dm+1 = gm+1 + �mdm:
17. Hacerm = m+ 1 y regresar a 7:
Se espera que el precondicionamiento reduzca el número de iteraciones del orden de
miles al orden de decenas, en los problemas discretos asociados. Esto se ha veri�cado con
los experimentos numéricos realizados, como se muestra en los ejemplos. Este algoritmo
será referido en esta Tesis como algoritmo GCP .
1.3.6 Ejemplo numérico
En esta sección se ilustra con un ejemplo la aplicación del algoritmo GCP . Se trata de una
continuación de los Ejemplos 1 y 2, resueltos con los algoritmos E1 y GC respectivamente,
de modo que podrán establecerse comparaciones entre los tres algoritmos.
Ejemplo 5. Ahora considérese la misma situación que en el Ejemplo 2, con la única difer-
encia de que el algoritmo empleado es el GCP . La Figura 1.7 muestra, como antes, en
rojo el campo exacto u y en azul el ajustado uh. Ahora el ajuste es satisfactorio, aunque
no supera al obtenido en el Ejemplo 2. Los valores obtenidos para er = 3:6 � 10�2 y
mdiv = 4:6 � 10�2 lo con�rman. Sin embargo el ajuste en las fronteras verticales arti�-
ciales x = 1 y x = 2 permanece en un nivel adecuado. El número de iteraciones requeridas
para la convergencia fue de sólo 22. El tiempo de cómputo (CPU time) fue de 0.1 segundos.

1.3 Problema de punto silla 43
Fig. 1.7. Campo exacto u = (x;�z) en rojo, campo ajustado uh en azul; algoritmo GCP .
Nótese que el resultado obtenido con el algoritmo GCP no es mejor que el obtenido
con el algoritmo GC puesto que la condición de frontera tipo Dirichlet � = 0 es muy rígida
y produce gradientes de � muy grandes sobre �D degradando la solución u que se obtiene
de (1.4). Recuérdese que �D está formada por las paredes verticales arti�ciales y la parte
superior de la frontera. Esto conduce a la necesidad de estudiar más detenidamente las
condiciones de frontera. En la siguiente Sección se aborda con detalle esta situación.

1.4 Estudio de nuevas condiciones de frontera 44
1.4 Estudio de nuevas condiciones de frontera
Después de haber experimentado con los tres algoritmos antes referidos, a saber: algoritmo
E1 , algoritmo GC y algoritmo GCP , quedó claro que las condiciones de frontera que se
han utilizado para el problema elíptico (1.18)-(1.20) no son muy adecuadas o bien resultan
insu�cientes. A continuación se muestra el estudio que se realizó con nuevas condiciones
de frontera, las cuales condujeron a mejores resultados en la aproximación numérica. En la
presente sección se describen estas nuevas condiciones y se muestran con ejemplos numéri-
cos las ventajas obtenidas. Se consideran tres casos: condiciones Neumann sobre fronteras
verticales y Dirichlet en tapa superior; condiciones Neumann sobre fronteras verticales y
se suprime condición en tapa superior; se suprimen condiciones en fronteras verticales y
tapa superior.
1.4.1 Primer caso: nuevas condiciones sobre fronteras verticales
De acuerdo con las ecuaciones (1.31)-(1.32) donde se re-formula el problema elíptico como
un problema de punto silla y empleando integración por partes, se sigue que
Z
�Su�r�� Su0
��vdx =
Z�n�N
�v � nd�; 8v 2 VN : (1.50)Z
qr � udx = 0; 8q 2 L2(): (1.51)
Pero la integral del lado derecho en (1.50) se hace cero en dos casos, a saber: v � n = 0
ó � = 0 sobre �n�N . El primer caso no es posible dado que se cumple sólo sobre �N ,
mientras que el segundo caso no es una buena elección, según se ha visto en las secciones
precedentes (ver Ejemplo 1). Por lo tanto, si se desea que la integral de frontera en (1.50)

1.4 Estudio de nuevas condiciones de frontera 45
Fig. 1.8. Nuevas condiciones de frontera para el dominio .
se anule, una posibilidad es la siguiente: rede�nir la frontera �D como la parte superior de
la frontera del dominio e imponer � = 0 allí, y denotar por �V las fronteras verticales
(x = 1 y x = 2) donde aún es necesario de�nir condiciones de frontera adecuadas. La
Figura 1.8 ilustra las nuevas fronteras para el dominio . Dado que la única información
que se tiene en las paredes verticales es sobre u0, es razonable imponer la condición u � n =
u0 � n sobre �V . Así que, de acuerdo con estas consideraciones se arriba al problema de

1.4 Estudio de nuevas condiciones de frontera 46
punto silla
Su�r� = Su0 en ; (1.52)
r � u = 0 en ; (1.53)
� = 0 sobre �D; (1.54)
u � n = u0 � n sobre �V ; (1.55)
u � n = 0 sobre �N : (1.56)
Las ecuaciones (1.52) y (1.55) implican que �S�1r� � n = 0 sobre las paredes verticales;
y estas son las condiciones naturales para � si dichas paredes verticales son fronteras tipo
Neumann. En otras palabras, re-de�niendo las fronteras del dominio como aparece en la
Figura 1.8 y eliminando u de (1.52)-(1.56) se obtiene el siguiente problema elíptico para �
con nuevas condiciones de frontera
�r ��S�1r�
�= r � u0 en ; (1.57)
� = 0 sobre �D; , (1.58)
�S�1r� � n = 0 sobre �V ; (1.59)
�S�1r� � n = u0 � n sobre �N : (1.60)
El problema (1.57)-(1.60) será referido en adelante como el problema elíptico dos, o sim-
plemente como problema PE2 .
El algoritmo de elemento �nito para el problema PE2 es:

1.4 Estudio de nuevas condiciones de frontera 47
1. Dado u0 2 Lh, encontrar �h 2 H1Dh tal queZ
S�1r�h � rq dx = �Z
u0h � rq dx+Z�V
q u0h � n d�; (1.61)
8 q 2 H1Dh;
donde Lh y H1Dh se han de�nido en (1.22) y (1.23), respectivamente, pero �D
representa ahora sólo la parte superior de la frontera del dominio , como en la Figura
1.8.
2. Calcular uh 2 Vh, con uh � n = 0 sobre �N , resolviendoZ
(Suh) � vdx =Z
�Su0h
�� vdx�
Z
�hr � vdx; 8v 2 Vh;
donde v � n = 0 sobre �N :
Nótese que la ecuación (1.61) di�ere de la (1.24) sólo por la integral de línea sobre
�V y se espera que esta integral mejore el campo ajustado de viento uh sobre las fronteras
verticales x = 1 y x = 2, lo cual efectivamente sucede como se verá en los ejemplos
numéricos de varias de las secciones siguientes. Este algoritmo, que es una modi�cación
del algoritmo E1 , será referido en esta Tesis como algoritmo E2 .
1.4.2 Ejemplo numérico
En seguida se presenta un ejemplo de aplicación del algoritmo E2 , que constituye una
continuación del Ejemplo 1 a �n de poder hacer comparaciones.
Ejemplo 6. Considérese una vez más el Ejemplo 1 con u0 = (x; 0), y tómese h = 1=80
como paso de discretización para el método de elemento �nito. Se desea ver qué tanto se
1.4 Estudio de nuevas condiciones de frontera 48
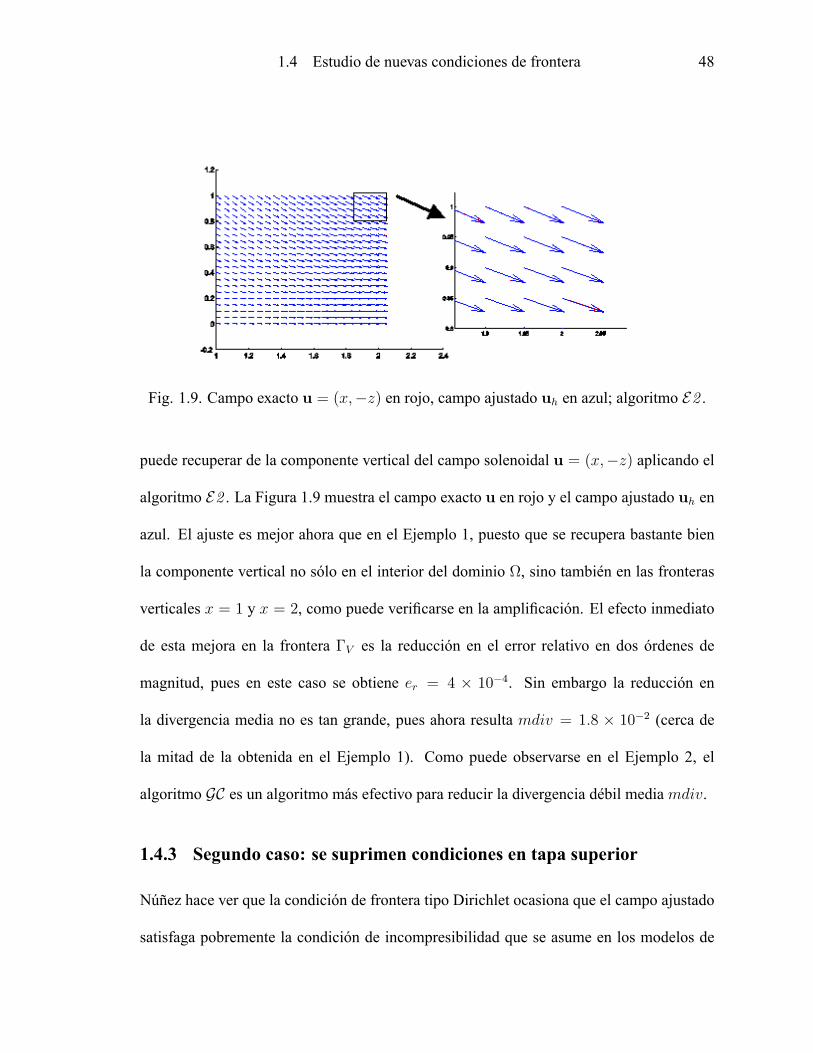
Fig. 1.9. Campo exacto u = (x;�z) en rojo, campo ajustado uh en azul; algoritmo E2 .
puede recuperar de la componente vertical del campo solenoidal u = (x;�z) aplicando el
algoritmo E2 . La Figura 1.9 muestra el campo exacto u en rojo y el campo ajustado uh en
azul. El ajuste es mejor ahora que en el Ejemplo 1, puesto que se recupera bastante bien
la componente vertical no sólo en el interior del dominio , sino también en las fronteras
verticales x = 1 y x = 2, como puede veri�carse en la ampli�cación. El efecto inmediato
de esta mejora en la frontera �V es la reducción en el error relativo en dos órdenes de
magnitud, pues en este caso se obtiene er = 4 � 10�4. Sin embargo la reducción en
la divergencia media no es tan grande, pues ahora resulta mdiv = 1:8 � 10�2 (cerca de
la mitad de la obtenida en el Ejemplo 1). Como puede observarse en el Ejemplo 2, el
algoritmo GC es un algoritmo más efectivo para reducir la divergencia débil mediamdiv.
1.4.3 Segundo caso: se suprimen condiciones en tapa superior
Núñez hace ver que la condición de frontera tipo Dirichlet ocasiona que el campo ajustado
satisfaga pobremente la condición de incompresibilidad que se asume en los modelos de
1.4 Estudio de nuevas condiciones de frontera 49
masa consistente [Núñez, 2008]. Apoyados en este trabajo se propone una modi�cación
para el dominio , de tal manera que no se imponga condición tipo Dirichlet sobre �. Lo
que se obtiene es un dominio como el mostrado en la Figura 1.8 donde la parte superior
�D se elimina como frontera y en su lugar se considera que los puntos de la malla que
le correspondían son ahora puntos interiores (pertenecen al interior de ), es decir, nodos
en los cuales � no se conoce y forman parte del sistema de ecuaciones que se resuelve.
Entonces, de forma precisa, el sistema que se resuelve en el dominio recién descrito es
�r ��S�1r�
�= r � u0 en ; (1.62)
�S�1r� � n = 0 sobre �V ; (1.63)
�S�1r� � n = u0 � n sobre �N : (1.64)
El problema (1.62)-(1.64) con el nuevo dominio será referido como problema elíptico
tres, o problema PE3 . El algoritmo para resolver este problema es exactamente igual a
E2 , descrito en la Sección 1.4.1, sólo que ahora �D = � y el espacio H1Dh de�nido en
(1.23) se modi�ca para quedar como sigue
H1Dh =
�q2C0(�) : qjT2P1;8T2Th
: (1.65)
Este algoritmo modi�cado será referido en esta Tesis como algoritmo E3 .
1.4.4 Ejemplo numérico
Ahora se presenta un ejemplo numérico de aplicación del algoritmo E3 , siguiendo con la
idea de continuar el Ejemplo 1 para �nes de comparación.
1.4 Estudio de nuevas condiciones de frontera 50
Ejemplo 7. Considérese de nuevo como en el Ejemplo 1 que u0 = (x; 0), y tómese
h = 1=80 como paso de discretización para el método de elemento �nito. Se desea ver
qué tanto se puede recuperar de la componente vertical del campo solenoidal u = (x;�z)
aplicando el algoritmo E3 . El ajuste numérico es muy bueno y los indicadores cuantita-
tivos lo con�rman, pues se obtiene er = 1:4�10�4 ymdiv = 1:8�10�12. Aunque el error
relativo es del mismo orden que en el Ejemplo 6, la divergencia ha disminuido en 10 ór-
denes de magnitud, de modo que puede considerarse prácticamente un campo solenoidal.
Entonces puede decirse que el algoritmo E3 es ampliamente superior, por los resultados
que produce, a los algoritmos E1 y E2 . En otras palabras, la modi�cación de las condi-
ciones de frontera en la forma propuesta por el algoritmo E3 conduce a resultados muy
satisfactorios. La Figura 1.10 muestra el campo exacto u en rojo y el campo ajustado uh
en azul; como puede apreciarse ambos campos son indistinguibles.
1.4.5 Tercer caso: se suprimen condiciones en fronteras verticales ytapa superior
Ahora se propone una nueva modi�cación al dominio , de manera que -como en el caso
anterior-, no se imponga condición tipo Dirichlet sobre �. Lo que resulta es un dominio
como el mostrado en la Figura 1.8 donde tanto la parte superior �D como las paredes
verticale �V se eliminan como frontera y en su lugar se considera que los puntos de la malla
que les correspondían son ahora puntos que pertenecen al interior de , es decir, nodos
en los cuales � no se conoce y forman parte del sistema de ecuaciones que se resuelve.
Entonces, de forma precisa, el sistema que se resuelve en el dominio modi�cado recién

1.4 Estudio de nuevas condiciones de frontera 51
Fig. 1.10. Campo exacto u = (x;�z) en rojo, campo ajustado uh en azul; algoritmos E3 ,E4 y GCPM.
1.4 Estudio de nuevas condiciones de frontera 52
descrito es
�r ��S�1r�
�= r � u0 en ; (1.66)
�S�1r� � n = u0 � n sobre �N : (1.67)
El problema (1.66)-(1.67) con el nuevo dominio será referido como problema elíptico
cuatro, o problema PE4 . El algoritmo para resolver este problema es exactamente igual
a E2 , descrito en la Sección 1.4.1, sólo que ahora, como en el caso anterior, �D = � y el
espacio H1Dh de�nido en (1.23) se modi�ca para quedar como se estableció en (1.65). Este
algoritmo modi�cado será referido en esta Tesis como algoritmo E4 .
1.4.6 Ejemplo numérico
En seguida se presenta un ejemplo numérico de aplicación del algoritmo E4 , continuando
con el Ejemplo 1 para poder hacer comparacicones.
Ejemplo 8. Considérese una vez más como en el Ejemplo 1 que u0 = (x; 0), y tómese
h = 1=80 como paso de discretización para el método de elemento �nito. Se desea ver
qué tanto se puede recuperar de la componente vertical del campo solenoidal u = (x;�z)
aplicando el algoritmo E4 . El ajuste numérico es tan bueno como en el caso anterior
y los indicadores cuantitativos lo con�rman, pues ahora se obtiene er = 1:1 � 10�4 y
mdiv = 1:7 � 10�12. Los resultados están en el mismo orden de magnitud que en el
caso anterior y son ligeramente mejores. Las grá�cas de los campos exacto y ajustado son
esencialmente las mismas que las que se obtuvieron en el caso anterior por lo que pueden
verse en la misma Figura 1.10, en la cual se aprecia que el ajuste es excelente pues ambos
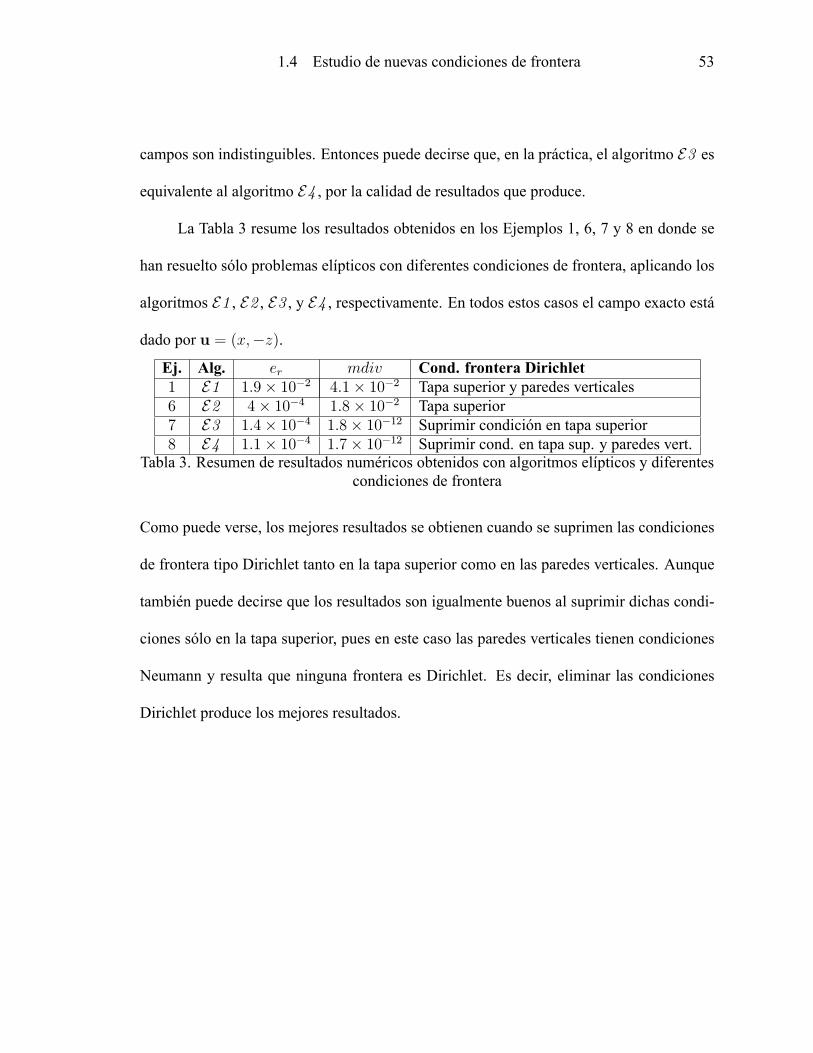
1.4 Estudio de nuevas condiciones de frontera 53
campos son indistinguibles. Entonces puede decirse que, en la práctica, el algoritmo E3 es
equivalente al algoritmo E4 , por la calidad de resultados que produce.
La Tabla 3 resume los resultados obtenidos en los Ejemplos 1, 6, 7 y 8 en donde se
han resuelto sólo problemas elípticos con diferentes condiciones de frontera, aplicando los
algoritmos E1 , E2 , E3 , y E4 , respectivamente. En todos estos casos el campo exacto está
dado por u = (x;�z).
Ej. Alg. er mdiv Cond. frontera Dirichlet1 E1 1:9� 10�2 4:1� 10�2 Tapa superior y paredes verticales6 E2 4� 10�4 1:8� 10�2 Tapa superior7 E3 1:4� 10�4 1:8� 10�12 Suprimir condición en tapa superior8 E4 1:1� 10�4 1:7� 10�12 Suprimir cond. en tapa sup. y paredes vert.
Tabla 3. Resumen de resultados numéricos obtenidos con algoritmos elípticos y diferentescondiciones de frontera
Como puede verse, los mejores resultados se obtienen cuando se suprimen las condiciones
de frontera tipo Dirichlet tanto en la tapa superior como en las paredes verticales. Aunque
también puede decirse que los resultados son igualmente buenos al suprimir dichas condi-
ciones sólo en la tapa superior, pues en este caso las paredes verticales tienen condiciones
Neumann y resulta que ninguna frontera es Dirichlet. Es decir, eliminar las condiciones
Dirichlet produce los mejores resultados.
1.5 Precondicionamiento mejorado para el algoritmo GC 54
1.5 Precondicionamiento mejorado para el algoritmo GC
Como quedó establecido en la Sección 1.3.5, el precondicionador para el algoritmo GC es
precisamente el problema elíptico. Y de acuerdo con los resultados de la Sección 1.4 resulta
que las mejores condiciones de frontera son aquellas en donde no se imponen condiciones
tipo Dirichlet (algoritmo E4 ). Por lo tanto se propone como pre-condicionador mejorado
para el algoritmo GC el problema elíptico PE4 . En esta sección se describe el nuevo
método y se ilustra su e�cacia con varios ejemplos numéricos.
1.5.1 Descripción del método
El método a seguir consiste en aplicar el mismo algoritmo de gradiente conjugado con pre-
condicionador descrito en la Sección 1.3.5, sólo que en la versión discreta de los Pasos 4 y
9 se debe cambiar la de�nición del espacio H1Dh para que quede como en (1.65). Es decir,
ahora el sub-problema elíptico que se resuelve en cada iteración está dado por las ecua-
ciones (1.66)-(1.67), considerando que �D = �. En otras palabras, se está aprovechando
tanto la minimización del número de iteraciones (pre-condicionador cuasi-óptimo elíptico),
como la máxima precisión en el ajuste (condiciones de fronteraPE4 ). A este nuevo método
se le referirá como algoritmo de gradiente conjugado con pre-condicionador mejorado
o símplemente algoritmo GCPM. En seguida se presentan algunos ejemplos numéricos
donde se aplica este algoritmo.
1.5 Precondicionamiento mejorado para el algoritmo GC 55
1.5.2 Experimentos numéricos
En esta Sección se presentan tres ejemplos numéricos de aplicación del algoritmo GCPM.
El primero es una continuación del Ejemplo 2 que con�rma la e�cacia del método y los
otros dos se corresponden a los Ejemplos 3 y 4 en donde se abordó una topografía coseno
y una real.
Ejemplo 9. Considérese como en el Ejemplo 2 que el campo exacto es u = (x;�z)
y que el campo inicial está dado por u0 = (x; 0). Se desea saber qué tanto se puede
recuperar la componente vertical aplicando el algoritmo GCPM. Se tomaron h = 1=40
y h=2 = 1=80 como pasos de discretización en el método de elemento �nito. El campo
numérico así obtenido da un ajuste excelente y cumple satisfactoriamente la condición de
incompresibilidad, pues resulta que er = 1:0 � 10�7 con mdiv = 4:3 � 10�12. Además
fueron necesarias sólo 30 iteraciones para alcanzar la convergencia. El tiempo de cómputo
(CPU time) fue de 0.1 segundos. Estos resultados comparados con los del Ejemplo 2,
en donde se aplicó el algoritmo GC han mejorado notablemente tanto en la reducción en
el número de iteraciones como en la disminución en tres órdenes de magnitud del error
relativo, manteniendo el mismo orden de magnitud en la divergencia. Además el tiempo
de cómputo es notablemente inferior. La grá�ca que se obtiene para el campo ajustado es
esencialmente la misma que la de los Ejemplo 7 y 8 por lo que puede apreciarse también
en la Figura 1.10.
Ejemplo 10. Ahora la topografía �N se de�ne como en el Ejemplo 3, se consideran los
mismos campos exacto sintético e inicial allí descritos y se resuelve el problema con el al-
goritmo GCPM, tomando los mismos pasos de discretización en el método de elemento

1.5 Precondicionamiento mejorado para el algoritmo GC 56
Fig. 1.11. Campo exacto u en rojo, campo ajustado uh en azul; algoritmo GCPMtopografía coseno.
�nito. El campo ajustado obtenido es excelente pues resulta que er = 3:9 � 10�7 y
mdiv = 6:7 � 10�12. Se necesitaron 33 iteraciones para la convergencia y el tiempo
de cómputo (CPU time) fue de 0.1 segundos. Comparados con el Ejemplo 3, se mejoran el
error relativo, la divergencia, el número de iteraciones y el tiempo de cómputo. La Figura
1.11 muestra en rojo el campo exacto y en azul el campo ajustado; una vez más se observa
que ambos campos ya no pueden distinguirse.
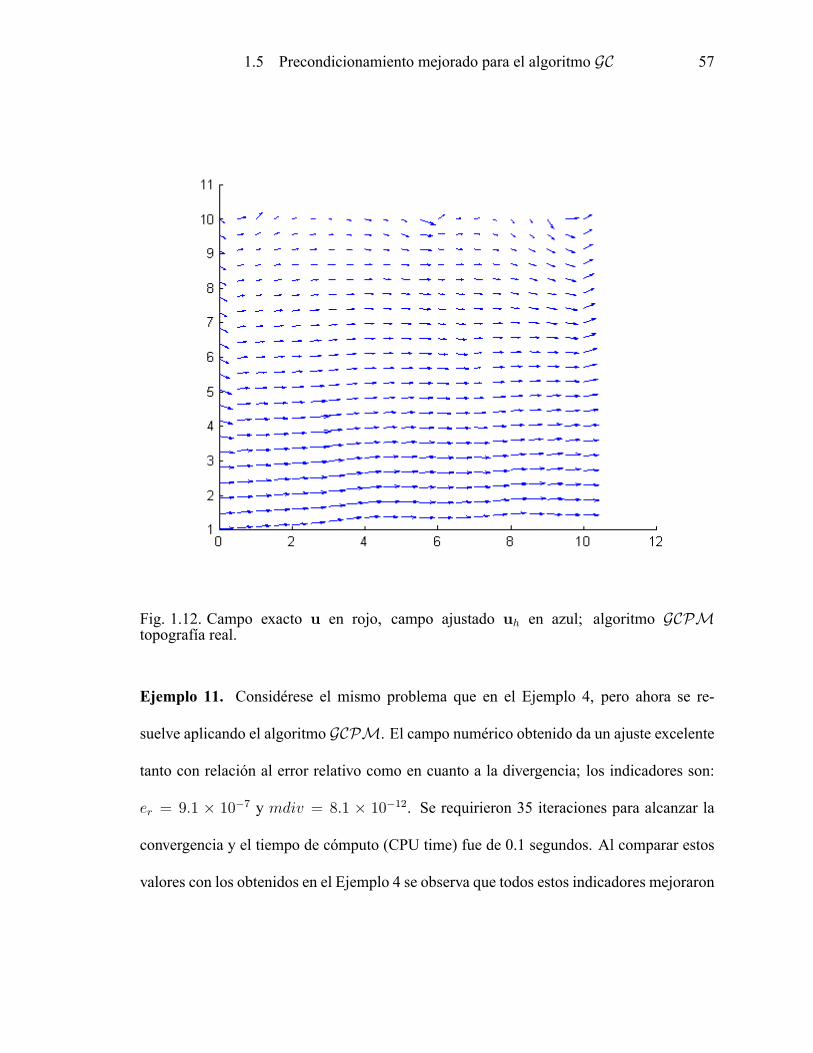
1.5 Precondicionamiento mejorado para el algoritmo GC 57
Fig. 1.12. Campo exacto u en rojo, campo ajustado uh en azul; algoritmo GCPMtopografía real.
Ejemplo 11. Considérese el mismo problema que en el Ejemplo 4, pero ahora se re-
suelve aplicando el algoritmo GCPM. El campo numérico obtenido da un ajuste excelente
tanto con relación al error relativo como en cuanto a la divergencia; los indicadores son:
er = 9:1 � 10�7 y mdiv = 8:1 � 10�12. Se requirieron 35 iteraciones para alcanzar la
convergencia y el tiempo de cómputo (CPU time) fue de 0.1 segundos. Al comparar estos
valores con los obtenidos en el Ejemplo 4 se observa que todos estos indicadores mejoraron

1.5 Precondicionamiento mejorado para el algoritmo GC 58
signi�cativamente. La Figura 1.12 muestra el campo u en rojo y el uh en azul, aunque no
pueden distinguirse.
1.6 Comentarios adicionales y conclusiones 59
1.6 Comentarios adicionales y conclusiones
MÓDULOS DE PRECISIÓN GAUSSIANOS
Como se mencionó en el Ejemplo 1 de la Sección 1.2.4 los módulos de precisión
Gaussianos utilizados en todos los ejemplos del Capítulo 1 de la Tesis son �1 = 1 y �3 =
0:001. Dichos parámetros fueron elegidos con base en su desempeño numérico como se
muestra en la Tabla 1. Además la elección de fronteras tipo Dirichlet o Neumann es crucial
en cuanto a la precisión del ajuste, como se muestra enseguida.
De acuerdo con las ecuaciones (1.4) y (1.6) resulta que con
u = u0 + S�1r�
se debe satisfacer la ecuación diferencial
�r ��S�1r�
�= r � u0;
donde u0 es el campo inicial dado. Pero
S�1r� =� @�
@x1�23
@�@z
�
por lo que, si las condiciones de frontera son sólo del tipo Neumann, entonces al variar el
valor del parámetro �3, las cantidades 1�23y @�@zse ajustan de modo que el producto 1
�23
@�@zsiga
siendo el mismo que satisface a la ecuación diferencial. Es decir, no hay una dependencia
de la solución con respecto de �3. Mientras que al imponer una condición de frontera
tipo Dirichlet sobre �, entonces el gradiente de� toma un valor determinado y el producto
1�23
@�@zcambia según sea el valor del módulo Gaussiano, y esto ocasiona que la solución sea

1.6 Comentarios adicionales y conclusiones 60
sensible a dicho parámetro. Es claro que entre mayor sea la frontera tipo Dirichlet que se
utilize, mayor dependencia habrá con relación al valor de �3.
A manera de ilustración la Tabla 4 proporciona el desempeño numérico del algoritmo E4
para diferentes valores de �3.
�3 er mdiv0:001 1:4� 10�4 1:8� 10�120:01 5:1� 10�4 1:9� 10�100:1 8:3� 10�4 1:8� 10�121 7:4� 10�4 1:1� 10�12100 8:6� 10�4 �1:9� 10�10
Tabla 4. Desempeño numérico del algoritmo E4 para diferentes valores de �3.
Como puede apreciarse, los resultados son prácticamente insensibles a las variaciones de
�3. Este es el caso en que se consiguen los mejores resultados para el campo ajustado y
ninguna de las fronteras tiene condición Dirichlet. Estos resultados pueden compararse con
los reportados en la Tabla 1 donde sí hay variaciones importantes debido a que tres de las
cuatro fronteras tienen condición tipo Dirichlet. Esto veri�ca la a�rmación previa.
EJEMPLO TRI-DIMENSIONAL
Siguiendo con las ideas presentadas en este Capítulo 1 de la Tesis y a manera de
extensión, se resolvió el siguiente problema tri-dimensional en donde no hay condición
Dirichlet sobre las fronteras
�r ��S�1r�
�= r � u0 en ;
�S�1r� � n =�u0 � vT
�� n sobre � = @;
donde
dominio: = [0; 1]� [0; 1]� [0; 1];

1.6 Comentarios adicionales y conclusiones 61
Fig. 1.13. Campo exacto vT en rojo, campo ajustado uh en azul, dominio tri-dimensional.
campo exacto: vT = (x; y;�2z);
campo inicial horizontal: u0 = (x; y; 0);
y el campo recuperado es
u = u0 + S�1r�:
Se utilizó una malla no estructurada de 17,035 elementos (tetraedros). La Figura 1.13
muestra el campo exacto vT en rojo y el campo ajustado uh (ajuste numérico de u en la úl-
tima ecuación) en azul. Como puede apreciarse el ajuste es muy bueno y los indicadores
cuantitativos lo con�rman pues se obtuvo: er = 9:5 � 10�3 y una estimación de la diver-
1.6 Comentarios adicionales y conclusiones 62
gencia O(10�7). El tiempo de cómputo (CPU time) fue 181.1 segundos. Este problema se
resolvió utilizando el software COMSOL/MATLAB c y puede utilizarse como problema
"benchmark" para desarrollar en el futuro un código propio.
CONCLUSIONES
De acuerdo con lo aquí presentado, las conclusiones generales del Capítulo 1 de esta
Tesis referentes al problema de generación de campos vectoriales en modelos de masa
consistente, pueden plantearse como sigue:
� Se generó un campo ajustado de viento bi-dimensional a patir de un campo inicial
horizontal, por medio de tres algoritmos numéricos que recuperan la componente
vertical (algoritmos E , GC y GCP).
� La metodología usual (problema elíptico PE1 , algoritmo E1 ) no produce resultados
satisfactorios cerca de las fronteras verticales debido a los elevados gradientes
introducidos por el término S�1r� en (1.4).
� Se re-formuló el problema elíptico como un problema de punto silla, en donde
no se resuelve ecuación diferencial alguna y por lo tanto no es necesario imponer
condiciones de frontera para el multiplicador �.
� En el problema de punto silla se satisface una ecuación funcional cuyo operador
es simétrico y positivo de�nido. Esto permitió resolver el problema mediante
algoritmos iterativos de tipo gradiente conjugado (algoritmos GC y GCP).
1.6 Comentarios adicionales y conclusiones 63
� El algoritmo GC produce un error relativo O(10�4) y un campo ajustado con
divergenciaO(10�12). Este algoritmo produce mejores resultados numéricos que los
algoritmos E1 y GCP , para las condiciones de frontera originales.
� Para mejorar los resultados obtenidos con estos algoritmos, se modi�caron las
condiciones de frontera con lo que se obtuvieron los algoritmos E2 , E3 y E4 , que
son adecuaciones del primero para tomar en cuenta las nuevas fronteras.
� El algoritmo que produce los mejores resultados numéricos, para el caso de las
condiciones de frontera modi�cadas, es el E4 , pues genera un campo ajustado
con error relativo O(10�4), mientras que la divergencia débil de dicho campo es
O(10�12), lo cual es muy útil en algunas aplicaciones prácticas.
� Modi�cando el algoritmo GCP de modo que su pre-condicionador utilice las
condiciones de frontera del problema PE4 se obtuvo el algoritmo GCPM, con el
cual los resultados obtenidos fueron excelentes pues el error relativo es O(10�7)
y el campo ajustado tiene divergencia débil O(10�12). Éste es el mejor algoritmo
propuesto, considerando todas las variantes en las condiciones de frontera.
� Los módulos de precisión Gaussianos utilizados (�1 = 1 y �3 = 0:001) son los
adecuados para este problema.
� Se desarrolló un ejemplo tri-dimensional con ayuda de un software comercial que
puede servir para generar más adelante un programa propio.

1.6 Comentarios adicionales y conclusiones 64
Finalmente, el trabajo futuro que se desprende de esta investigación tiene al menos
dos orientaciones: por un lado aplicar la metodología desarrollada al caso tri-dimensional,
que es más realista, mediante un programa propio. Por otro lado, extender las aplicaciones
a la dinámica de �uidos experimental, en donde un problema importante es, por ejemplo, la
re-construcción de campos vectoriales solenoidales de velocidad a partir de datos obtenidos
por la técnica PIV (Particle Image Velocimetry) [Markus et al, 1998].
Chapter 2Flujos electro-hidrodinámicos
En el presente capítulo se estudia un problema sobre �ujos electro-hidrodinámicos,
es decir, donde intervienen las leyes físicas tanto de la dinámica de �uidos (ecuaciones
de Navier-Stokes), como de la electroquímica (ecuaciones de Poisson-Nernst-Planck). La
aplicación de estas teorías se concreta en el estudio de las llamadas celdas de combustible.
Estas celdas son dispositivos que generan electricidad a partir de reacciones electroquími-
cas de óxido-reducción.
Se introduce el modelo matemático del sistema físico que representa a una celda de
combustible del tipo sin membrana. Para completar este modelo se dan las condiciones
de frontera que deben satisfacer las ecuaciones diferenciales parciales que lo forman. El
modelo resultante es complejo e incluye un sistema acoplado de siete ecuaciones diferen-
ciales parciales no lineales en el caso tri-dimensional y seis en el caso bi-dimensional. Las
variables relevantes del sistema son: la velocidad u y la presión p del �uido -que consti-
tuyen la parte hidrodinámica-, así como el potencial eléctrico �, la densidad de carga �q y
la conductividad eléctrica � -que forman la parte electroquímica-.
Con el objeto de estudiar y comprender las propiedades del modelo, así como diseñar
un algoritmo efectivo para encontrar soluciones, antes se consideran cuatro casos simpli�-
cados del mismo agrupados como sigue: primero se asume electroneutralidad (�q = 0) y
se analizan los casos estacionario (u = 0) y con �ujo variable (u 6= 0); a continuación se
relaja la condición de electroneutralidad (�q 6= 0) y de nueva cuenta se estudian los casos
65
2 Flujos electro-hidrodinámicos 66
estacionario y con �ujo variable. Para validar el código desarrollado, en el tercero de estos
casos (es decir: �q 6= 0 y u = 0), se extiende a dos dimensiones un caso uni-dimensional
reportado en la literatura. Los casos donde se supone u = 0 son llamados celdas electro-
químicas y se modelan por medio de las ecuaciones de Poisson y Nernst-Planck.
La experiencia ganada a través de la solución de dichos casos permite enfrentar mejor
el sistema completo. El último paso constituye la solución numérica de dicho sistema
complejo completo, utilizando la técnica de descomposición de operadores para integrar
en el tiempo. Entonces, se muestra la metodología propuesta para su solución numérica
mediante el método de elemento �nito.
Por lo tanto las aportaciones de este Capítulo son:
1. Se cuenta con un modelo físico completo para una celda de combustible sin membrana
en dos dimensiones, que facilmente se puede generalizar al caso tri-dimensional. No
se conoce un modelo similar en la literatura.
2. Por primera vez se presenta simulación numérica para el caso bi-dimensional.
3. Se introduce un esquema numérico, basado en el método de elemento �nito, para
resolver el modelo físico de una celda de combustible. Este esquema incluye tres tipos
de sub-problemas: de difusión, de advección y de Stokes.
4. Se extiende de manera con�able un resultado uni-dimensional para una celda
electro-química reportado en la literatura, al caso de dos dimensiones.
2 Flujos electro-hidrodinámicos 67
5. Todas las soluciones numéricas presentadas son obtenidas mediante programas
propios (elaborados en FORTRAN 90), en vez de sólo utilizar software comercial que
a veces no se adapta a las condiciones especí�cas del problema bajo estudio.
Por último, se presentan las conclusiones generales de este segundo Capítulo.

2.1 Antecedentes 68
Fig. 2.14. Celda de combustible con membrana
2.1 Antecedentes
El diseño y la construcción de sistemas micro-electro-mecánicos (MEMS por sus iniciales
en inglés) que involucran el �ujo de �uidos constituye actualmente una rama importante de
la Ingeniería, debido a su gran potencial de aplicaciones que abarcan incluso laboratorios
en miniatura. La dinámica de �uidos en estos dispositivos puede tener efectos físicos que
están prácticamente ausentes en sus contra-partes de escalas mayores. Las micro celdas
de combustible son un buen ejemplo de MEMS con gran número de aplicaciones, pero
donde los fundamentos físicos así como los procesos electro-químicos no se han entendido
completamente [Carrette, 2001]. El diseño más común de celdas de combutible considera
canales para el combustible y el oxidante separados por una membrana porosa que evita que
se mezclen los reactantes, pero que permite la transferenca de protones, como se muestra
en la Figura 2.14.

2.1 Antecedentes 69
Fig. 2.15. Celda de combustible sin membrana
El montaje de la membrana aumenta considerablemente el costo de la celda, y el de-
terioro de la misma provoca la necesidad de cambios o reemplazos frecuentes. Las celdas
de combustible sin membrana ofrecen una alternativa muy atractiva, por su simplicidad y
el ahorro considerable en el costo, además de que se evitan los problemas técnicos inhe-
rentes al diseño con membrana. En estos mecanismos sin membrana la separación de los
�uidos reactantes se hace únicamente por medio de �ujos laminares estables, es decir sólo
mediante consideraciones hidrodinámicas del combustible y el oxidante. Por lo tanto, es
de fundamental importancia para su correcto funcionamiento, determinar las condiciones
bajo las cuales los �ujos laminares pierden la estabilidad. La investigación sobre el com-
portamiento de estos dispositivos es muy reciente, y aunque se han construido este tipo de
celdas sin membrana todavía su e�ciencia es limitada [Choban et al, 2004]. En este Capí-
tulo se presenta un modelo simpli�cado para una celda de combustible sin membrana como
la que se ilustra en la Figura 2.15. La celda está formada por un pequeño canal donde el
combustible y el oxidante son alimentados por un extremo (izquierdo) a cierta velocidad

2.1 Antecedentes 70
característica, y luego abandonan el canal por el otro extremo (derecho). Los lados superior
e inferior del canal son electrodos (ánodo y cátodo respectivamente) usualmente hechos de
platino y conectados a un circuito externo. Entonces se genera una corriente eléctrica por
las reacciones de óxido-reducción que ocurren en los electrodos y los iones de Hidrógeno
se mueven del ánodo hacia el cátodo. Este arreglo permite el �ujo de una corriente eléc-
trica a través del circuito, generando eventualmente una diferencia de potencial entre los
electrodos, que puede ser utilizada como fuente de voltaje [Ferrigno et al, 2002].
El enfoque adoptado incorpora los fenómenos fundamentales que ocurren, por lo que,
para simpli�car la discusión, se considerará que las cargas aniónicas y catiódicas trans-
portadas en los dos �uidos son las mismas en el sentido de que ambos conducen el mismo
exceso de carga (z�), es decir
z+(combustible) = z+(oxidante) = �z�(combustible) = �z�(oxidante), (2.68)
y que tienen la misma difusividad y mobilidad. Estas suposiciones, si bien no son del
todo realistas como en el caso del metanol o del ácido fórmico, conducen a un modelo
razonablemente simple.

2.2 Modelo matemático del sistema físico 71
2.2 Modelo matemático del sistema físico
Se supondrá que los electrolitos (combustible y oxidante) son �uidos Newtonianos incom-
presibles, con la misma viscosidad � y la misma densidad de masa �. En la siguiente pre-
sentación y a lo largo de todo el Capítulo 2 se utilizará el sistema racionalizado de unidades
mks. Así, dadas las condiciones físicas arriba mencionadas, las ecuaciones generales go-
bernantes son la ecuación de Navier-Stokes para la dinámica del �uido y las ecuaciones
de Poisson-Nernst-Planck que describen la electro-química. Una formulación precisa en
términos matemáticos del modelo físico propuesto, se presenta a continuación.
2.2.1 Ecuaciones que gobiernan el sistema
Dinámica del �uido (ecuaciones de Navier-Stokes):
�
�@u
@t+ u � ru
�= �rp+ �r2u+ f ; (2.69)
r � u = 0; (2.70)
donde u denota al vector bi-dimensional de velocidad, p es la presión y f es la fuerza
electromagnética por unidad de volumen dada por
f = �qE;
siendo E el campo eléctrico y �q la densidad de carga. Se ha asumido que el parámetro
de electro-restricción es cero [Castellanos, 1998]. Las ecuaciones (2.69)-(2.70) describen
la conservación del momentum y de la masa del �uido, respectivamente. En ausencia de
campos magnéticos, suponiendo que los desplazamientos de corriente son pequeños y que

2.2 Modelo matemático del sistema físico 72
el campo eléctrico E es cuasi estático, las ecuaciones de Maxwell se pueden escribir como
r� E = 0, lo cual implica que E = �r�;
y además se cumple la ley de Gauss
r � E =�q�s;
siendo � el potencial eléctrico y �s la permitividad del electrolito. Entonces � debe satis-
facer la siguiente ecuación.
Ley de Gauss (ecuación de Poisson):
��Sr2� = �q: (2.71)
Distribución de carga (ecuaciones de Nernst-Planck):
@C+@t
+ u � rC+ = r � (D+rC+ + w+z+FC+r�) ; (2.72)
@C�@t
+ u � rC� = r � (D�rC� + w�z�FC�r�) : (2.73)
Estas ecuaciones describen la distribución de carga en un canal lleno con soluciones elec-
trolíticas diluidas en movimiento [Melcher, 1981]. Las constantes C� denotan las concen-
traciones molares de carga, D� son los coe�cientes de difusión, w� los coe�cientes de
movilidad, z� los números de valencia y F es la constante de Faraday.
El primer término de la derecha en las ecuaciones (2.72)-(2.73) representa el �ujo de iones
debido a la difusión (i.e., por gradientes de concentración), mientras que el segundo des-
cribe el �ujo de iones debido a la electromigración (i.e., por gradientes de voltaje). La
relación de Einstein
w� = D�=RT
2.2 Modelo matemático del sistema físico 73
permite relacionar la movilidad con los coe�cientes de difusión vía la temperatura absoluta
T y la constante universal de los gases R.
La conductividad eléctrica y la densidad de carga se de�nen como
� = F 2(w+ z2+C+ + w� z
2�C�) y �q = F (z+C+ � z�C�); (2.74)
respectivamente. Por lo tanto las concentraciones molares pueden escribirse como
C+ =w� z� F �q � �
F 2 z+ (w� z� � w+ z+); C� =
w+ z+ F �q � �
F 2 z� (w+ z+ � w� z�): (2.75)
2.2.2 Condiciones de frontera en los electrodos
En el "bulto", el cual abarca la mayor parte del electrolito, se espera que los �uidos sean
electroneutros (i.e. �q = 0). Pero esto no implica que la densidad de carga sea nula.
El signi�cado físico de esta aproximación puede establecerse diciendo que, en la escala
macroscópica, la densidad de carga �q es pequeña comparada con la concentración total de
carga [Newman, 1991]. Esto implica que
jC+ � C�j � C+ + C�: (2.76)
En la super�cie de los electrodos se acumula un exceso de carga, pero en el electrolito
(combustible u oxidante) el exceso de carga que balancea al del electrodo no se con-
centra exclusivamente en la región cercana a la interface, debido al efecto aleatorio del
movimiento térmico. En consecuencia, cerca de los electrodos se forma una capa con
carga eléctrica de espesor signi�cativo. Esta capa de electrolito con carga eléctrica neta es
conocida como la doble capa de Gouy-Chapman-Stern pues su estructura incluye una zona
interna, llamada la parte compacta, y una zona externa más grande llamada la parte difu-
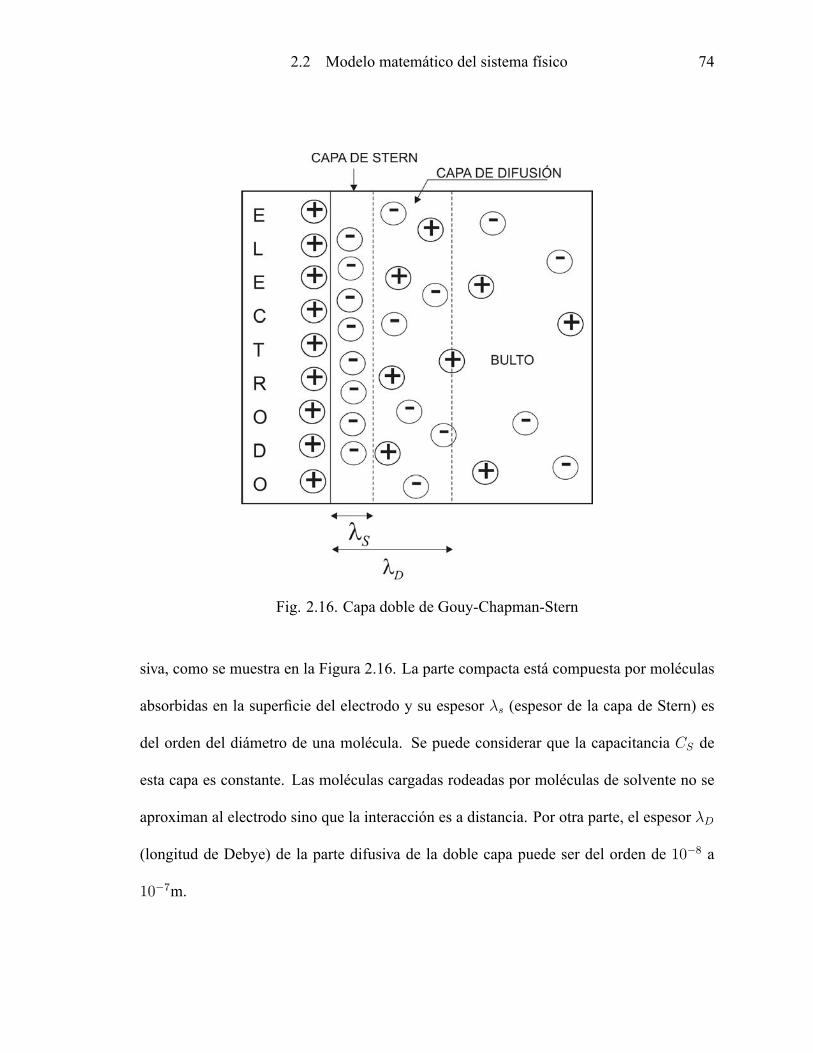
2.2 Modelo matemático del sistema físico 74
Fig. 2.16. Capa doble de Gouy-Chapman-Stern
siva, como se muestra en la Figura 2.16. La parte compacta está compuesta por moléculas
absorbidas en la super�cie del electrodo y su espesor �s (espesor de la capa de Stern) es
del orden del diámetro de una molécula. Se puede considerar que la capacitancia CS de
esta capa es constante. Las moléculas cargadas rodeadas por moléculas de solvente no se
aproximan al electrodo sino que la interacción es a distancia. Por otra parte, el espesor �D
(longitud de Debye) de la parte difusiva de la doble capa puede ser del orden de 10�8 a
10�7m.

2.2 Modelo matemático del sistema físico 75
Debido al exceso de carga en la doble capa se forma un potencial eléctrico �. La teoría de
Gouy-Chapman-Stern indica que r� es una constante negativa en la parte compacta de la
doble capa y que se aproxima a cero asintóticamente en la capa difusiva [Bard y Faulkner,
1980].
De acuerdo con esta discusión, es posible imponer las siguientes condiciones de frontera
en los electrodos:
Potencial eléctrico en los electrodos. Se asume una caída de potencial lineal a través de
la capa de Stern [Bazant et al, 2005]:
r� � n = ��=�S con � =
(�� V en el ánodo;� en el cátodo;
(2.77)
donde �S = �S=CS es el espesor de la capa de Stern, y � es el llamado potencial zeta. El
potencial de referencia se toma como cero en el cátodo y V es el potencial aplicado a la
celda en el ánodo.
Transferencia de iones en los electrodos. Siguiendo a Bazant [Bazant et al, 2005] se con-
sidera que no hay �ujo normal de aniones en los electrodos. Por otro lado, los cationes
siguen reacciones a una tasa R(C+; �), la cual se supone que depende sólo de la concen-
tración y de la caída de potencial. Así, las condiciones de frontera en los electrodos para
las concentraciones de carga positiva y negativa se convierten en
(D�rC� + w� z� F C�r�) � n = 0; (2.78)
(D+rC+ + w+ z+ F C+r�) � n = R(C+; �); (2.79)
donde la reacción R(C+; �) sigue una forma de Arrhenius
R(C+; �) = k+C+e��c� � k�e
�a� ; (2.80)
2.2 Modelo matemático del sistema físico 76
en donde los símbolos �a;c son los coe�cientes de transferencia aniónica y catiódica re-
spectivamente, y son característicos de las parejas particulares combustible/electrodo y ox-
idante/electrodo usados en el experimento. Las constantes k+ y k� son las formas adimen-
sionales de las tasas constantes K+ y K�:
k+ =hK+
D+
; k� =hK�CMD�Cref
;
donde CM es la densidad del electrodo metálico. La ecuación (2.80) es la ecuación de
Butler-Volmer [Newman, 1991], [Bard y Faulkner, 1980].
Velocidad del �uido en los electrodos. Se impondrá una condición de no resbalamiento
para la velocidad del �uido en los electrodos, es decir
u = 0: (2.81)
2.3 Formulación adimensional 77
2.3 Formulación adimensional
A continuación se adaptarán las ecuaciones generales recién descritas a la geometría sim-
pli�cada mostrada en la Figura 2.15. El ducto es bidimensional con paredes separadas una
distancia 2h y de longitud l. Ambos �uidos (combustible y oxidante) tienen la misma ve-
locidad uref , y atraviezan la celda de izquierda a derecha. Se asume que a la salida (frontera
2 de la �gura) el �ujo está desarrollado completamente. Cabe enfatizar que se ha supuesto
que los dos �uidos tienen la misma viscosidad � y la misma densidad de masa �. Por sim-
plicidad se supondrá que el electrolito es simétrico, es decir z+ = �z� = z, w+ = w� = w
y que los coe�cientes de difusión son los mismos, D+ = D� = D. Esta simpli�cación
se realiza con el objeto de reducir la complejidad del problema en un primer estudio del
mismo, y con el objeto de comprender algunos mecanismos fundamentales que nos per-
mitan abordar el problema completo en un estudio posterior. Bajo estas condiciones se
procede como sigue.
2.3.1 Escalas
Para facilitar el análisis y los cálculos necesarios se re-formula el modelo en su forma
adimensional. Las siguientes escalas naturales del problema quedan especi�cadas por la
geometría y las condiciones físicas recién descritas.
x� = x=h; t� = t uref=h; u� = u=uref ; p� = p=� u2ref ; (2.82)
C�� = C�=Cref ; �� =Fw
D� =
z F
RT�: (2.83)

2.3 Formulación adimensional 78
2.3.2 Ecuaciones
En términos de las variables adimensionales, las ecuaciones de Nernst-Planck son (por
simplicidad en la notación se ha omitido el superíndice � en las ecuaciones adimensionales):
@C+@t
+ u � rC+ =1
Per � (rC+ + C+r�) ; (2.84)
@C�@t
+ u � rC� =1
Per � (rC� � C�r�) : (2.85)
Estas ecuaciones pueden ser reformuladas en términos de la conductividad eléctrica adi-
mensional � = C+ + C� y de la densidad de carga también adimensional �q = C+ �
C�.Haciendo esto y juntándolas con las ecuaciones de Navier-Stokes y la ecuación de
Poisson, se obtiene el conjunto completo de ecuaciones adimensionales siguiente
@u
@t+ u � ru = �rp+ 1
Rer2u� 1
Rel�qr�; (2.86)
r � u = 0; (2.87)
��2r2� = �q; (2.88)
@�q@t
+ u � r�q =1
Per � (r�q + �r�); (2.89)
@�
@t+ u � r� =
1
Per �
�r� + �qr�
�; (2.90)
donde Re = � uref h=� es el número de Reynolds, Rel = � u2ref=RT Cref es el número de
Reynolds eléctrico, y Pe = huref=D es el número de Péclet que establece la relación entre
la velocidad del �uido y la difusividad. Finalmente, � = �D=h, donde
�D =q�S RT=z2 F 2Cref
es la longitud de Debye.

2.3 Formulación adimensional 79
2.3.3 Condiciones de frontera
En los electrodos las condiciones de frontera toman la forma
u = 0; (2.91)
�r� � n = �� donde � = �S=h; (2.92)
(r�q + �r�) � n = �R(�; �q; �); (2.93)
(r� + �qr�) � n = �R(�; �q; �): (2.94)
Por otra parte, en la entrada y en la salida del ducto, es posible imponer condiciones de
frontera ya sean Dirichlet y/o naturales, dependiendo del problema en particular que se
desee resolver. Por ejemplo, si el �ujo está desarrollado completamente en la entrada o
en la salida del ducto, es posible imponer condiciones de frontera naturales homogéneas,
dadas por
pn� 1
Reru � n = 0; (2.95)
r� � n = r� � n = r�q � n = 0: (2.96)
Más adelante, cuando se aborde la metodología para resolver el problema completo (2.86)-
(2.90) en la Sección 2.5, se retomará este punto relativo a las condiciones de frontera de un
problema especí�co.

2.4 Algunos casos particulares 80
2.4 Algunos casos particulares
En esta Sección se presentarán cuatro casos particulares que representan simpli�caciones
del problema completo (2.86)-(2.90). El análisis se hace suponiendo primero electroneu-
tralidad (i.e., �q = 0), lo cual permite desacoplar las ecuaciones de Navier-Stokes (2.86)-
(2.87) de las ecuaciones de Poisson-Nernst-Planck (2.88)-(2.90). Bajo este supuesto se
estudian los casos de un �uido estacionario (u = 0) y luego un �uido con velocidad dis-
tinta de cero.
El análisis se continúa ahora relajando la condición de electroneutralidad (i.e., ahora
�q 6= 0) y bajo esta suposición el tercer caso aborda un �uido estacionario (u = 0), mientras
que el último caso considera que u 6= 0: Cabe recordar que tanto el primero como el tercer
casos donde se considera que u = 0, corresponden a las llamadas celdas electro-químicas
(donde el electrolito no se mueve).
2.4.1 Electroneutralidad y estacionalidad (�q = 0 y u = 0)
En electro-química una de las aproximaciones más frecuentes es suponer que el bulto es
electroneutro. Esto signi�ca que para distancias macroscópicas la densidad de carga es
pequeña comparada con la concentración total, como se menciona en la desigualdad (2.76),
es decir���q�� � �. Considerando que �q � 0, el límite macroscópico corresponde a
� = �D=h! 0.
Ejemplo 12. Considérese que �q = 0 (en el bulto) y que u = 0. Entonces la solución
estable electroneutra satisface, en la región del bulto dada por
�1 + � � y � 1� �;
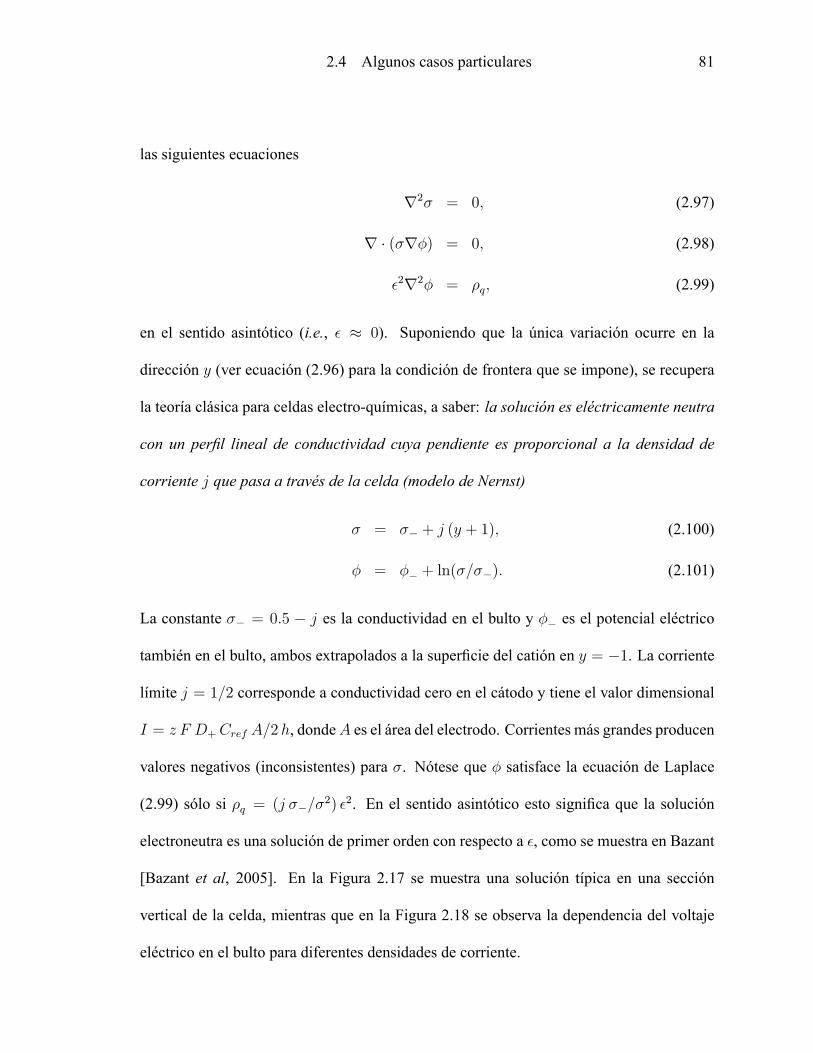
2.4 Algunos casos particulares 81
las siguientes ecuaciones
r2� = 0; (2.97)
r � (�r�) = 0; (2.98)
�2r2� = �q; (2.99)
en el sentido asintótico (i.e., � � 0). Suponiendo que la única variación ocurre en la
dirección y (ver ecuación (2.96) para la condición de frontera que se impone), se recupera
la teoría clásica para celdas electro-químicas, a saber: la solución es eléctricamente neutra
con un per�l lineal de conductividad cuya pendiente es proporcional a la densidad de
corriente j que pasa a través de la celda (modelo de Nernst)
� = �� + j (y + 1); (2.100)
� = �� + ln(�=��): (2.101)
La constante �� = 0:5 � j es la conductividad en el bulto y �� es el potencial eléctrico
también en el bulto, ambos extrapolados a la super�cie del catión en y = �1. La corriente
límite j = 1=2 corresponde a conductividad cero en el cátodo y tiene el valor dimensional
I = z F D+Cref A=2h, dondeA es el área del electrodo. Corrientes más grandes producen
valores negativos (inconsistentes) para �. Nótese que � satisface la ecuación de Laplace
(2.99) sólo si �q = (j ��=�2) �2. En el sentido asintótico esto signi�ca que la solución
electroneutra es una solución de primer orden con respecto a �, como se muestra en Bazant
[Bazant et al, 2005]. En la Figura 2.17 se muestra una solución típica en una sección
vertical de la celda, mientras que en la Figura 2.18 se observa la dependencia del voltaje
eléctrico en el bulto para diferentes densidades de corriente.

2.4 Algunos casos particulares 82
Fig. 2.17. Solución estacionaria electroneutra con � = 0:1, �� = 0:2, �� = 0:
Fig. 2.18. Potencial eléctrico � para diferentes valores de corriente.

2.4 Algunos casos particulares 83
2.4.2 Electroneutralidad y �ujo variable (�q = 0 y u 6= 0)
Ejemplo 13. Considérese ahora que u 6= 0 pero se mantiene la hipótesis de electroneu-
tralidad. Entonces las ecuaciones de Navier-Stokes están desacopladas de las ecuaciones
de Poisson-Nernst-Planck. Sin embargo, como la velocidad está presente en estas últimas
se genera una ecuación de convección-difusión para �. Suponiendo que u satisface las
ecuaciones de Navier-Stokes, entonces la solución estacionaria para � y � satisface
u � r� � 1
Per2� = 0; (2.102)
r � (�r�) = 0: (2.103)
Esta es una generalización del problema abordado en el Ejemplo 12. Pero, al contrario
de como se hizo en dicho Ejemplo, ahora no puede asumirse que exista una solución que
sólo varíe en la dirección vertical, debido a la presencia de la convección. No obstante,
es posible simpli�car este modelo considerando una solución estable para las ecuaciones
de Navier-Stokes, como puede ser por ejemplo un �ujo de Poiseuille. Otra posibilidad es
considerar una solución simple como u = (1; 0) a partir de la cual se obtiene el siguiente
problema
@�
@x� 1
Per2� = 0; (2.104)
r � (�r�) = 0: (2.105)
En el dominio = [0; 10]� [�1; 1] la frontera izquierda es �1, la derecha es �2, la inferior
es �3,y la superios es �4. Las condiciones de frontera para �, que escogemos con el objeto

2.4 Algunos casos particulares 84
de obtener una solución bi-dimensional, son las siguientes
�(x; 1) = �+; �(x;�1) = ��; �(0; y) =
(�+ si 0 � y < 1;
�� si � 1 < y < 0;
donde se asignan, por ilustración, �+ = 2 y �� = 1. En x = 10 (frontera �2) se impone
@�@x= 0 para modelar limx!1 �(x; y) = �1(y). Mientras que para � las condiciones de
frontera son
@�
@bn = 0; sobre �1 [ �2;
�+@�
@bn = 0; sobre �3;
�+@�
@bn = v; sobre �4;
donde v = 1 es el voltaje aplicado sobre el electrodo (ánodo). Nótese que la ecuación
(2.104) es independiente de la ecuación (2.105) y además su solución (analítica) está dada
por
�(x; y) = �1(y) +1Pn=1
Cne� 12(pPe2+n2�2�Pe)xsen
n�(y + 1)
2;
donde
Cn =
Z 1
�1[�(0; y)� �1(y)]sen
n�(y + 1)
2dy
=2
n�(�+ � ��) cos
n�
2:
Así, si la celda es su�cientemente larga o el número de Péclet es su�cientemente pequeño,
entonces en la derecha (frontera �2) se recupera la solución de Nernst obtenida en el Ejem-
plo 19. Las Figuras 2.19 y 2.20 muestran la solución � de las ecuaciones (2.104)-(2.105),
mientras que las Figuras 2.21 y 2.22 muestran la solución �, para el caso en que Pe = 100.
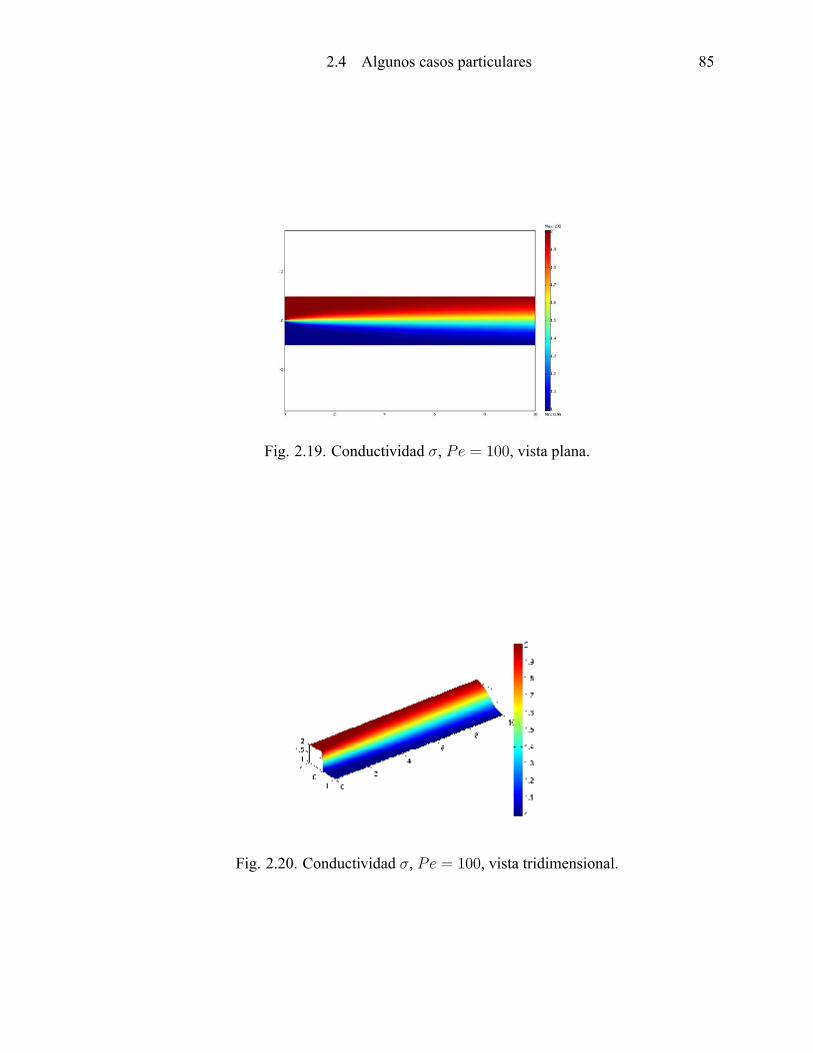
2.4 Algunos casos particulares 85
Fig. 2.19. Conductividad �, Pe = 100, vista plana.
Fig. 2.20. Conductividad �, Pe = 100, vista tridimensional.
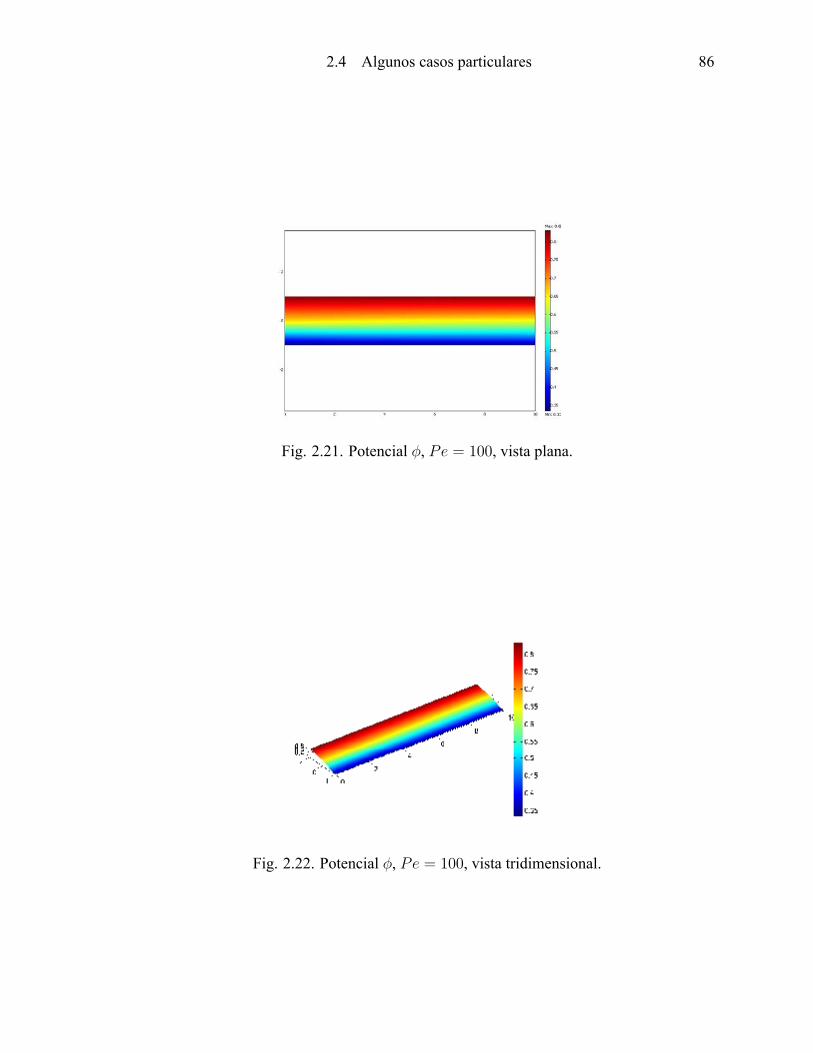
2.4 Algunos casos particulares 86
Fig. 2.21. Potencial �, Pe = 100, vista plana.
Fig. 2.22. Potencial �, Pe = 100, vista tridimensional.
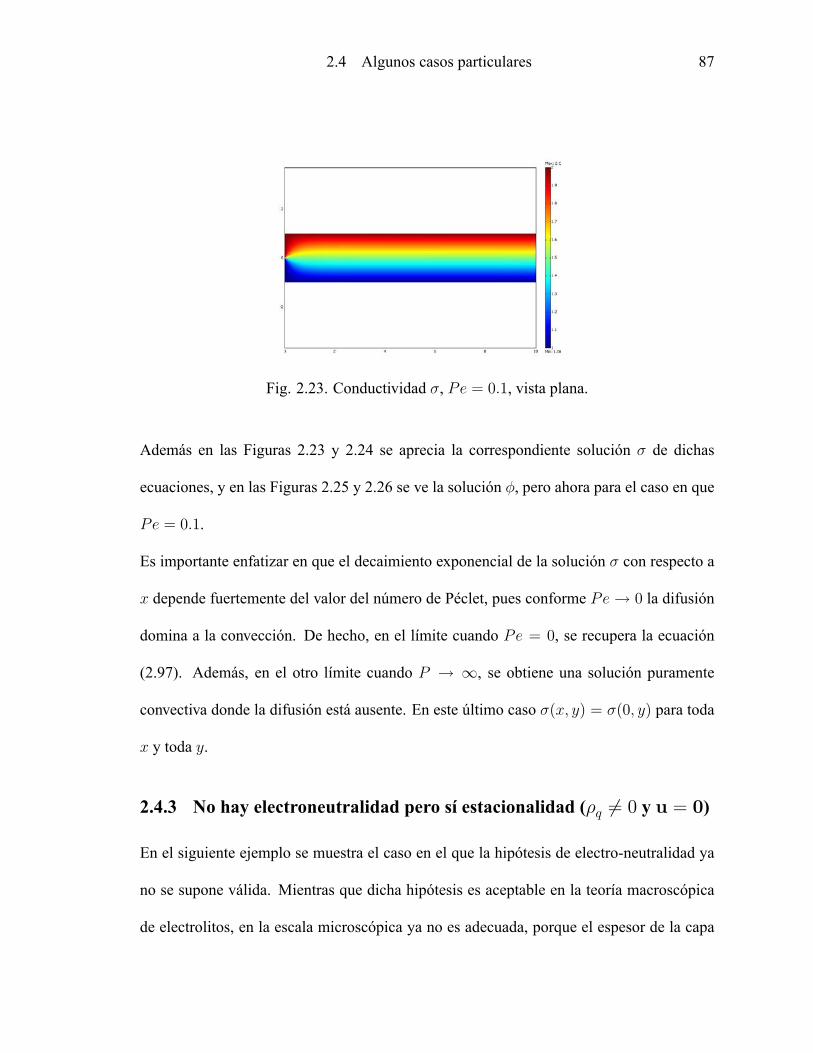
2.4 Algunos casos particulares 87
Fig. 2.23. Conductividad �, Pe = 0:1, vista plana.
Además en las Figuras 2.23 y 2.24 se aprecia la correspondiente solución � de dichas
ecuaciones, y en las Figuras 2.25 y 2.26 se ve la solución �, pero ahora para el caso en que
Pe = 0:1.
Es importante enfatizar en que el decaimiento exponencial de la solución � con respecto a
x depende fuertemente del valor del número de Péclet, pues conforme Pe! 0 la difusión
domina a la convección. De hecho, en el límite cuando Pe = 0, se recupera la ecuación
(2.97). Además, en el otro límite cuando P ! 1, se obtiene una solución puramente
convectiva donde la difusión está ausente. En este último caso �(x; y) = �(0; y) para toda
x y toda y.
2.4.3 No hay electroneutralidad pero sí estacionalidad (�q 6= 0 y u = 0)
En el siguiente ejemplo se muestra el caso en el que la hipótesis de electro-neutralidad ya
no se supone válida. Mientras que dicha hipótesis es aceptable en la teoría macroscópica
de electrolitos, en la escala microscópica ya no es adecuada, porque el espesor de la capa
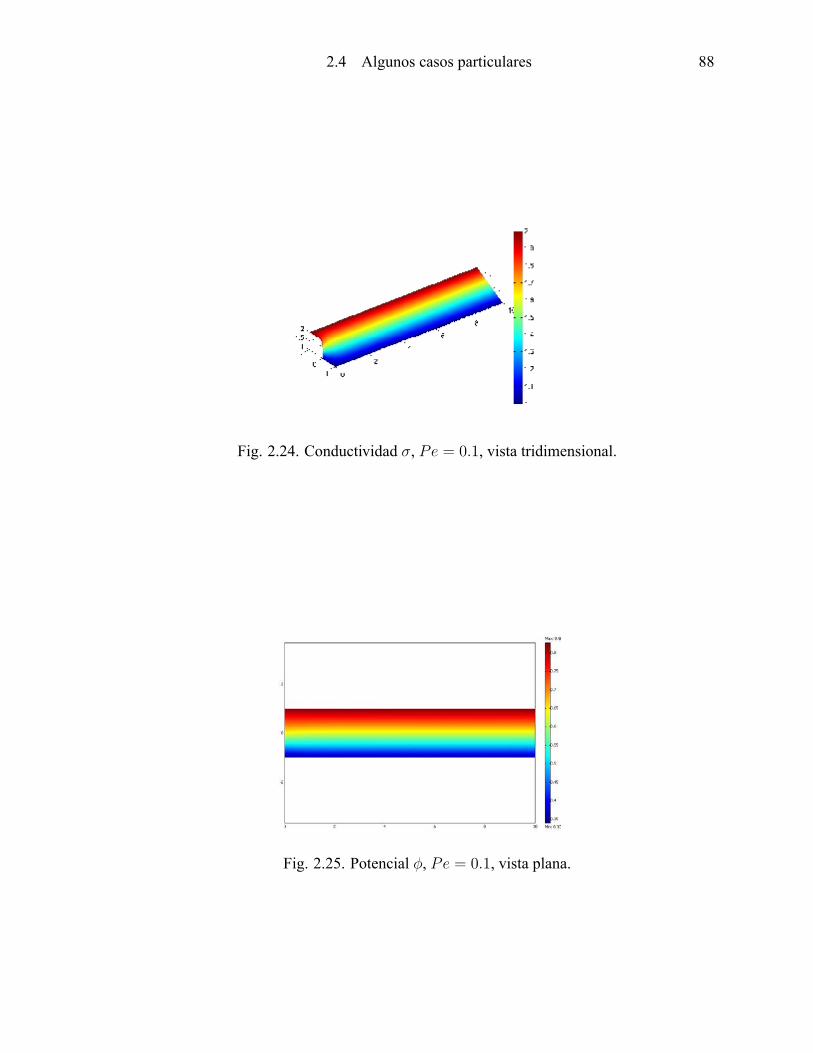
2.4 Algunos casos particulares 88
Fig. 2.24. Conductividad �, Pe = 0:1, vista tridimensional.
Fig. 2.25. Potencial �, Pe = 0:1, vista plana.

2.4 Algunos casos particulares 89
Fig. 2.26. Potencial �, Pe = 0:1, vista tridimensional.
compacta de Stern ya no es pequeño comparado con la distancia entre los electrodos. En-
tonces la dinámica de carga-difusiva se vuelve una característica muy importante en esta
escala. Una posible simpli�cación en este caso es considerar a la celda como una micro
batería donde el electrolito no se mueve, i.e. u = 0. Este modelo simpli�cado se describe
mediante las ecuaciones de Poisson-Nernst-Planck (2.88)-(2.90).
Puesto que ahora la velocidad del �uido o electrolito no está presente, una escala de tiempo
más conveniente es � c = �D h=D y entonces el parámetro que controla las soluciones es
� = �D=h, en vez del número de Péclet. Las ecuaciones a resolver son
@�
@t= �r � (r�+ �r�); (2.106)
@�
@t= �r � (r� + �r�); (2.107)
��2r2� = �: (2.108)

2.4 Algunos casos particulares 90
En vez de las condiciones de frontera (2.92)-(2.94) en los electrodos, se consideran las
siguientes condiciones más simples
(r�q + �r�) � n = (r� + �qr�) � n = 0; (2.109)
�+ � �r� � n =
(+v en el ánodo;�v en el cátodo;
(2.110)
donde � = �S=�D (i.e. � � = �S=h). Las dos primeras condiciones de frontera expre-
sadas por (2.109) corresponden a electrodos "completamente bloqueados" sin procesos
Faradaicos, lo que signi�ca que no hay �ujo de iones en los electrodos. Mientras que
las condiciones de frontera dadas por (2.110) corresponden a (2.92) e incluyen los poten-
ciales externos dados por +v y �v (v > 0 voltaje constante) en y = �1 y en y = 1,
respectivamente.
En el ejemplo siguiente se compara la solución de este modelo bi-dimensional con la solu-
ción del modelo en una dimensión reportada por Bazant [Bazant, 2004]. Para el modelo en
dos dimensiones es necesario aún proporcionar condiciones de frontera a la izquierda y a
la derecha de la celda. Una vez más se busca una solución que no varíe a lo largo de la di-
rección horizontal de la celda, y es su�ciente imponer las condiciones de frontera naturales
de�nidas por (2.96).
Las ecuaciones de Nernst-Planck son altamente no lineales y están fuertemente acopladas,
así que es necesario implementar una metodología numérica efectiva para integrarlas. Una
estrategia numérica robusta es la integración en el tiempo por técnicas de descomposición
del operador [Marchuk, 1990], [Yanenko, 1971], combinada con el método de elemento
�nito para integración en el espacio [Glowinski, 2003].

2.4 Algunos casos particulares 91
Se propone la siguiente estrategia: sea �t el paso de discretización en el tiempo y
considérese la notación
�n � �(x; n�t); �n � �(x; n�t) y �n � �(x; n�t):
Dados los valores iniciales �0, �0 y �0, encontrar la solución en tiempos sucesivos mediante
el siguiente algoritmo que se mueve en el tiempo:
Para n = 0; 1; 2; : : :, encontrar �n+1, �n+1, �n+1 resolviendo
�n+1 � �n
�t� �r2�n+1 = �r � (�nr�n); (2.111)
��2r2�n+1 = �n+1; (2.112)
�n+1 � �n
�t� �r2�n+1 = �r � (�n+1r�n+1): (2.113)
Este algoritmo se parece a la iteración de Gauss-Seidel para la solución de sistemas de
ecuaciones algebraicas lineales, y su costo computacional es la solución de tres ecuaciones
elípticas desacopladas en cada paso del tiempo. Estas ecuaciones elípticas (2.111)-(2.113)
se resuelven con el método de elemento �nito empleando elementos triangulares lineales.
Ejemplo 14. Considérese el problema dado por las ecuaciones (2.106)-(2.110), con los
siguientes parámetros
v = 1; � = 0:05; � = 0:1;
y las condiciones iniciales
�(x; y; 0) = 1; �(x; y; 0) = 0; �(x; y; 0) = v y;
como en Bazant [Bazant, 2004]. Se aplicará el algoritmo dado por las ecuaciones (2.111)-
(2.113) utilizando �t = 0:001 como parámetro de discretización en el tiempo y una malla
graduada de 100� 40 con división O(10�4) cerca de los electrodos. La solución converge

2.4 Algunos casos particulares 92
Fig. 2.27. Comparativo para �.
rápidamente al estado estable. Se toma una sección transversal vertical en la celda (en
x = 5) y se compara la solución ahí con la solución estacionaria reportada en Bazant
[Bazant, 2004]. Las Figuras 2.27, 2.28 y 2.29 muestran los comparativos para �, � y �,
respectivamente. Como se aprecia en dichas �guras, el ajuste es excelente para las tres
variables.
Las Figuras 2.30, 2.31 y 2.32 muestran las grá�cas de las super�cies de la solución en el
dominio completo.
La presencia de gradientes muy fuertes cerca de los electrodos en las soluciones para �, � y
� revela la formación de capas de frontera cerca de ellos. El voltaje externo simétrico apli-
cado genera una solución simétrica, mientras que en el bulto se observa electro-neutralidad
y conductividad constante, además de que el voltaje se incrementa linealmente. Todo lo
cual está de acuerdo con la teoría de Stern [Bard y Faulkner, 1980].
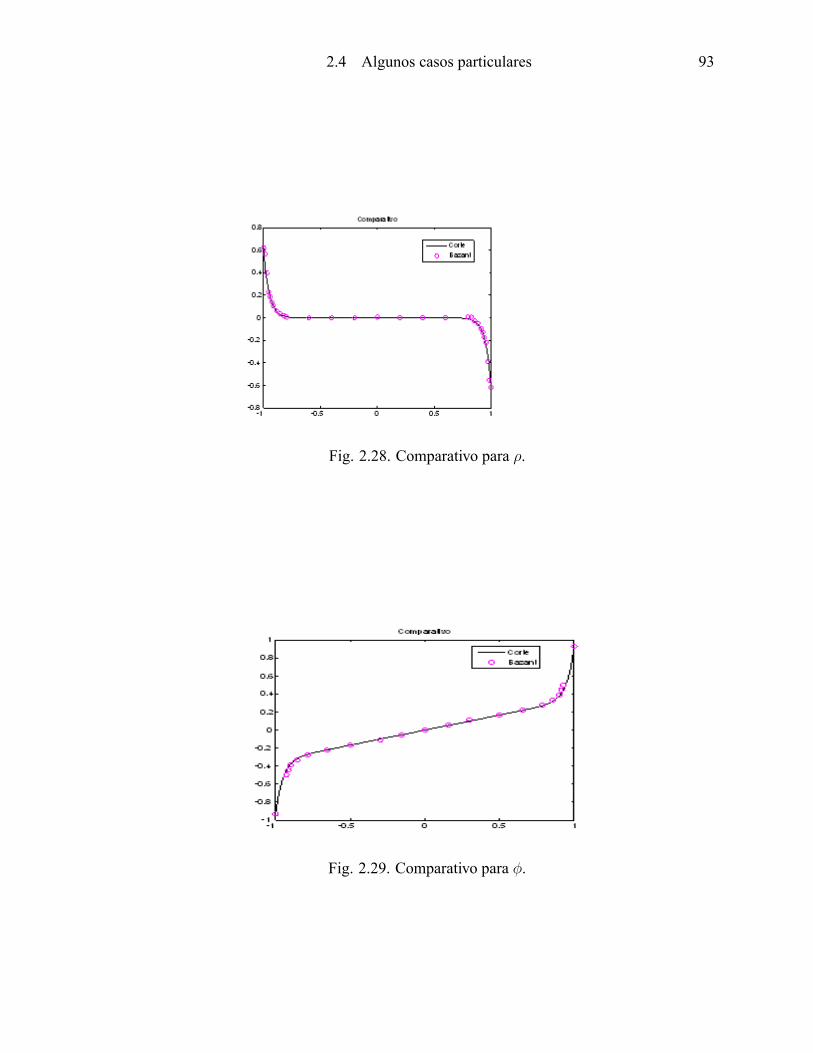
2.4 Algunos casos particulares 93
Fig. 2.28. Comparativo para �.
Fig. 2.29. Comparativo para �.
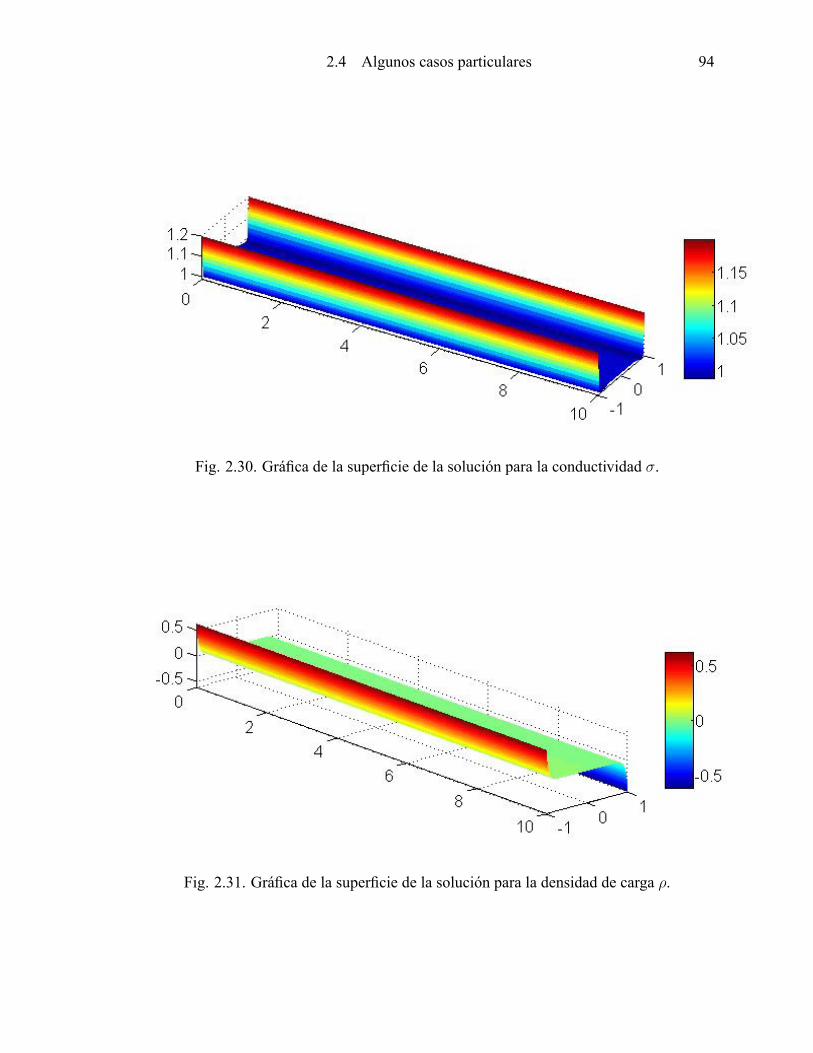
2.4 Algunos casos particulares 94
Fig. 2.30. Grá�ca de la super�cie de la solución para la conductividad �.
Fig. 2.31. Grá�ca de la super�cie de la solución para la densidad de carga �.

2.4 Algunos casos particulares 95
Fig. 2.32. Grá�ca de la super�cie de la solución para el potencial eléctrico �.
2.4.4 No hay electroneutralidad y �ujo variable (�q 6= 0 y u 6= 0)
La experiencia ganada con la resolución de los tres casos anteriores permite ahora bordar el
presente problema que es más complejo. En este caso el problema que se resuelve consta
de tres sub-problemas ligados en serie como sigue:
1) Poisson-Nernst-Planck sin velocidad
Las ecuaciones que se satisfacen en el dominio = [0; 10]� [�1; 1] son:
@�
@t= �r � (r�+ �r�);
@�
@t= �r � (r� + �r�);
��2r2� = �:
Condiciones iniciales:
�(x; y; 0) = �0; �(x; y; 0) = 0; �(x; y; 0) = vy

2.4 Algunos casos particulares 96
Condiciones de frontera: como antes y de acuerdo con la Figura 2.15, �1 es la frontera
izquierda (entrada del �uido), �2 es la frontera derecha (salida del �uido), �3 es la frontera
inferior (cátodo) y �4 es la frontera superior (ánodo). Entonces las condiciones de frontera
son:
@�
@bn =@�
@bn = @�
@bn = 0; sobre �1 [ �2;(r�+ �r�) � n = (r� + �r�) � n = 0; sobre �3 [ �4;
�+ � �r� � n =
(�v sobre �3;+v sobre �4;
2) Navier-Stokes
Para poder capturar tanto la difusión electro-química como la dinámica del �uido
conviene utilizar las siguientes escalas para obtener la formulación adimensional de las
ecuaciones de Navier-Stokes:
x� = x=h; t� = tD=�Dh; u� = u�D=D; p� = �2Dp=�D2;
C�� = C�=Cref ; �� =Fw
D� =
z F
RT�:
Con estas nuevas variables y omitiendo el símbolo � las ecuaciones que se satisfacen en el
dominio son:
@u
@t+ (u � r)u = �rp+ 1
Rer2u� 1
Rel�r�
r � u = 0;
donde � y � son las salidas (soluciones) del sub-problema 1 y
Re =�eurefh
�; Rel =
�eD2
RTCref�2D
:

2.4 Algunos casos particulares 97
Condiciones iniciales:
u = (u0; 0); p = p0:
Condiciones de frontera:
u =
��14
dp
dx(1� y2); 0
�; sobre �1;
1
Re
@u
@bn � pbn = 0 sobre �2u = 0; sobre �3 [ �4:
3) Poisson-Nernst-Planck con velocidad conocida
Las ecuaciones que se satisfacen en el dominio son:
@�2@t
+ u � r�2 = �r � (r�2 + �2r�2);
@�2@t
+ u � r�2 = �r � (r�2 + �2r�2);
��2r2�2 = �2;
donde u es la salida (solución) del sub-problema 2 y en estas ecuaciones se ha utilizado el
sub-índice 2 para distinguir a estas variables de aquellas que aparecen en el sub-problema
1.
Las condiciones iniciales y de frontera son las mismas que las del sub-problema 1.
A continuación se presenta un ejemplo de aplicación para el caso �q 6= 0 y u 6= 0
que se está considerando.
Ejemplo 15. Considérese el caso establecido por los tres sub-problemas recién descritos.
Para abordar una situación realista se toman como base los datos de la Tabla 5 que contiene
algunos de los parámetros experimentales reportados por Lin y colaboradores [Lin, H. et.
al., 2003]

2.4 Algunos casos particulares 98
Símbolo Descripción Valor� viscosidad absoluta 10�3 Kg=m � s�e densidad del electrolito 103 Kg=m3
D difusividad 2:0� 10�9 m2=s�Cref concentración molar incremental 3:7� 10�7 mol=m3
Cref concentración molar 3:3� 10�2 mol=m3
h semi ancho del canal 5:0� 10�4 mTabla 5. Parámetros experimentales reportados por Lin et. al..
Además Robinson y Stokes [Robinson, R. A. y Stokes, R. H., 2002] proponen como valor
típico para la longitud de Debye en electrolitos �D = 1�10�8 m. Entonces los parámetros
involucrados en los tres sub-problemas son:
� =�Dh= 2� 10�5; � = �Cref
Cref= 1:12� 10�5;
uref � D
�D= 0:2; Re = 110; Rel = 0:47;
además, con los valores experimentales reportados por Lin y colaboradores [Lin, H. et. al.,
2003] se toma
v = 2� 103 volts; y � es O(10�10)
por lo que las condiciones iniciales están dadas por
�0 = 1� 10�10; u0 = 0:22; p0 = 0:22;dp
dx= �0:22:
Con estos valores se resuelven los sub-problemas 1, 2 y 3 en forma ligada como se presentó
líneas arriba y se obtienen los siguientes resultados numéricos. El estado que se reporta es
t = 1 s y se tomó �t = 0:0001. Las Figuras 2.33, 2.34, y 2.35 muestran la solución del
sub-problema 1 para �, � y �, respectivamente.
Luego se resuelve el sub-problema 2 tomando la solución del sub-problema 1 como datos.
La Figura 2.36 muestra un corte del campo de velocidad obtenido en x = 5.

2.4 Algunos casos particulares 99
Fig. 2.33. Conductividad �, solución del sub-problema 1.
Fig. 2.34. Densidad de carga �, solución del sub-problema 1.
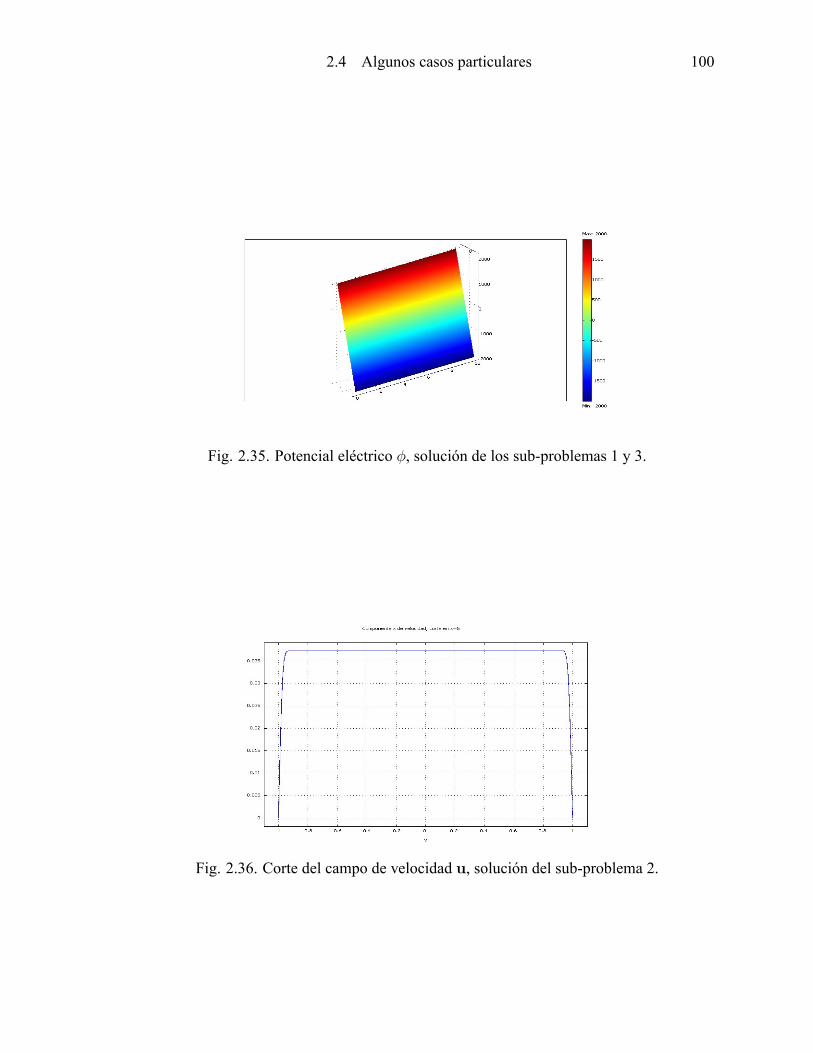
2.4 Algunos casos particulares 100
Fig. 2.35. Potencial eléctrico �, solución de los sub-problemas 1 y 3.
Fig. 2.36. Corte del campo de velocidad u, solución del sub-problema 2.

2.4 Algunos casos particulares 101
Fig. 2.37. Conductividad �2, solución del sub-problema 3.
Finalmente se toma esta solución u del sub-problema 2 como dato para resolver el sub-
problema 3. Las Figuras 2.37, y 2.38 muestran la solución del sub-problema 3 para �2, y
�2, respectivamente. La solución para �2 es prácticamente la misma que la correspondiente
del sub-problema 1 por lo que puede verse también en la Figura 2.35.
Como puede apreciarse tanto la conductividad eléctrica como la densidad de carga
mantienen el mismo comportamiento cualitativo con sólo una disminución de un orden de
magnitud en la escala; mientras que el potencial eléctrico es practicamente el mismo.

2.5 Metodología de solución para el modelo acoplado NS-PNP 102
Fig. 2.38. Densidad de carga �2, solución del sub-problema 3.
2.5 Metodología de solución para el modelo acoplado NS-PNP
Para describir la metodología de solución del problema acoplado NS-PNP en primer lugar
se resume la discusión de la Sección 2.3 de�niendo condiciones de frontera especí�cas.
Después se presenta la formulación variacional del problema, la aproximación empleada
en el método de elemento �nito y �nalmente la integración en el tiempo mediante la técnica
de descomposición del operador.

2.5 Metodología de solución para el modelo acoplado NS-PNP 103
2.5.1 Sistema acoplado de ecuaciones
Sea el dominio del problema y denótese por � = @ su frontera. De acuerdo con la
Figura 2.15 se empleará la siguiente notación
�1 la frontera de entrada (izquierda),
�2 la frontera de salida (derecha),
�3 la frontera del cátodo (abajo) y
�4 la frontera del ánodo (arriba).
Entonces, para cada instante t > 0, se satisfacen las ecuaciones (2.86)-(2.90) y se consid-
erarán las siguientes condiciones de frontera que constituyen un caso particular de aquellas
establecidas por (2.91)-(2.96).
Velocidad
u = go sobre �1 (entrada), donde g0(x; y) = (u(y); 0), (2.114)
1
Re
@u
@n+ pn = 0 sobre �2 (salida), (2.115)
u = 0 sobre �3 [ �4 (cátodo y ánodo). (2.116)
Potencial eléctrico
�@�
@n=
8<: 0 sobre �1 [ �2 (entrada y salida)�� sobre �3 (cátodo);V � � sobre �4 (ánodo).
(2.117)
Densidad de carga y conductividad
�q = 0 sobre �1 [ �2 (entrada y salida) (2.118)

2.5 Metodología de solución para el modelo acoplado NS-PNP 104
� = �D sobre �1 (entrada), con �D =�
�0; si � 1 < y < 0;�f ; si 0 < y < 1;
(2.119)
@�
@n= 0 sobre �2 (salida) (2.120)
�@�q@n
+ �@�
@n= �R(�; �q; &) sobre �3 [ �4 (cátodo y ánodo) (2.121)
@�
@n+ ��q
@�
@n= �R(�; �q; &) sobre �3 [ �4 (cátodo y ánodo) (2.122)
donde & =�
� sobre �3;�� V sobre �4:
2.5.2 Formulación variacional
Para obtener la formulación variacional del problema (2.86)-(2.90) con las condiciones de
frontera (2.114)-(2.122) para u; p; �; �q y �, se introducen como espacios de funciones de
prueba los siguientes:
V0 =�v 2 H1() : v = 0 sobre �1 [ �3 [ �4
(velocidad), (2.123)
P = L2() (2.124)
= H1(); (potencial eléctrico) (2.125)
R0 =�r2H1() : r=0 sobre �1 [ �2
; (densidad de carga) (2.126)

2.5 Metodología de solución para el modelo acoplado NS-PNP 105
S0 =�s2H1() : s=0 sobre �1
; (conductividad) (2.127)
además de los siguientes espacios generales
V = H1(); (2.128)
P0 =
�q2 P :
Z
qdx =0
�; (2.129)
R = S = H1(): (2.130)
Dado u 2 H1(), las siguientes fórmulas de Green se satisfacen para cada función de
prueba v 2 V0 Z
�u � vdx +Z
ru :rvdx =Z�2
@u
@n� vd�; (2.131)
Z
rp � vdx +Z
pr � vdx =Z�2
pn � vd�; (2.132)
En (2.131) se ha usado la notación
ru :rv =dXi=1
rui�rvi;@u
@n=
�@u1@n
; :::;@ud@n
�con u = (u1; :::; ud) ; v = (v1; :::; vd) y d = 2 ó 3 la dimensión del espacio de de�nición
de u y v.
Por otro lado, dada �2H1(), para cada 2 se satisfaceZ
�2�� dx +
Z
�2r� � r dx =Z�
�2@�
@n d�: (2.133)
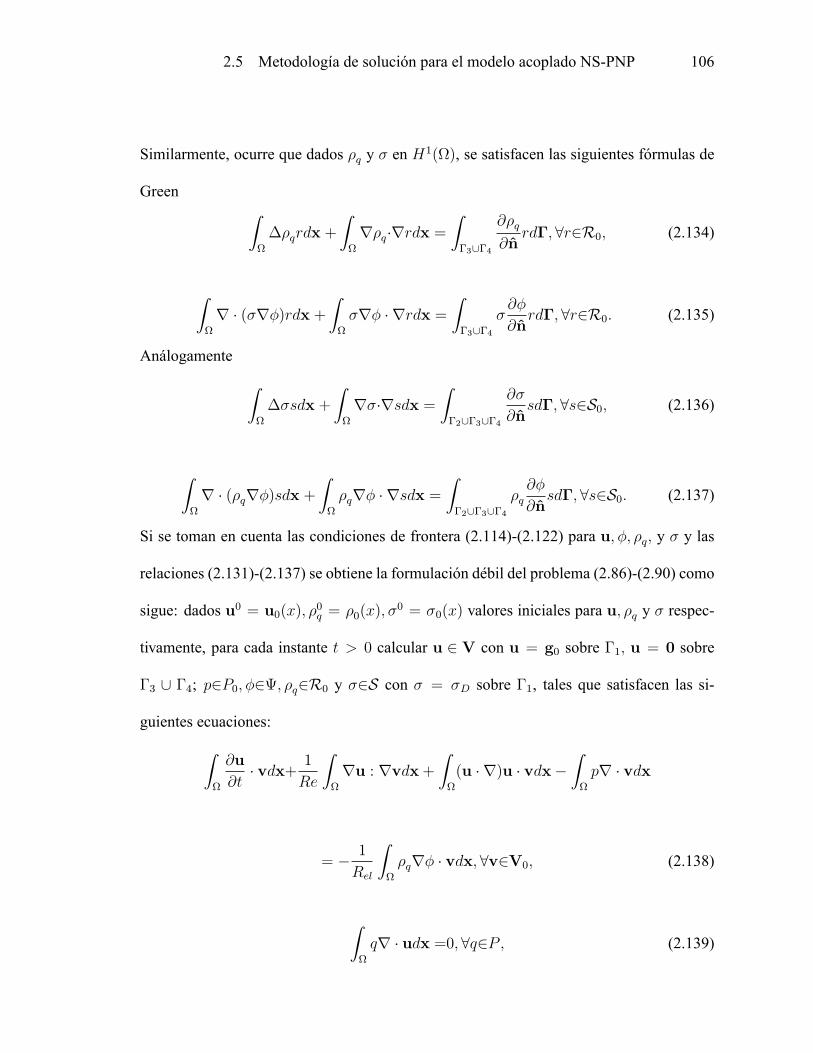
2.5 Metodología de solución para el modelo acoplado NS-PNP 106
Similarmente, ocurre que dados �q y � en H1(), se satisfacen las siguientes fórmulas de
Green Z
��qrdx +
Z
r�q�rrdx =Z�3[�4
@�q@n
rd�; 8r2R0; (2.134)
Z
r � (�r�)rdx +Z
�r� � rrdx =Z�3[�4
�@�
@nrd�; 8r2R0: (2.135)
Análogamente Z
��sdx +
Z
r��rsdx =Z�2[�3[�4
@�
@nsd�;8s2S0; (2.136)
Z
r � (�qr�)sdx +Z
�qr� � rsdx =Z�2[�3[�4
�q@�
@nsd�;8s2S0: (2.137)
Si se toman en cuenta las condiciones de frontera (2.114)-(2.122) para u; �; �q; y � y las
relaciones (2.131)-(2.137) se obtiene la formulación débil del problema (2.86)-(2.90) como
sigue: dados u0 = u0(x); �0q = �0(x); �0 = �0(x) valores iniciales para u; �q y � respec-
tivamente, para cada instante t > 0 calcular u 2 V con u = g0 sobre �1; u = 0 sobre
�3 [ �4; p2P0; �2; �q2R0 y �2S con � = �D sobre �1, tales que satisfacen las si-
guientes ecuaciones:Z
@u
@t� vdx+ 1
Re
Z
ru : rvdx+Z
(u � r)u � vdx�Z
pr � vdx
= � 1
Rel
Z
�qr� � vdx;8v2V0; (2.138)
Z
qr � udx =0;8q2P ; (2.139)
2.5 Metodología de solución para el modelo acoplado NS-PNP 107
Z
�2r� � r dx+1�
Z�3[�4
�2� d�=
Z
�q dx+1
�
Z�3
�2V d�;8 2; (2.140)
Z
@�q@t
rdx+1
Pe
Z
r�q � rrdx+Z
(u � r)�qrdx =
� 1
Pe
Z
�r� � rrdx� 1
Pe
Z�3[�4
Rrd�;8r 2 R0; (2.141)
Z
@�
@tsdx+
1
Pe
Z
r� � rsdx+Z
(u � r)�sdx =
� 1
Pe
Z
�qr� � rsdx�1
Pe
Z�2[�3[�4
Rsd�;8s 2 S0; (2.142)
La tarea de resolver el sistema de ecuaciones (2.138)-(2.142) es no trivial debido a la condi-
ción de incompresibilidad (2.139), el término no lineal en (2.138), el acoplamiento de las
distintas variables u; �; �q y � en las ecuaciones, y los términos de advección o transporte
en las ecuaciones (2.141) y (2.142). Además para resolver de manera aproximada este
problema es necesario aproximar las funciones tanto en sus variables espaciales x; y como
en la variable temporal t:
2.5.3 Aproximación por medio de elemento �nito
Para aproximar el problema (2.138)-(2.142) en las variables espaciales se puede utilizar un
método mixto como el empleado para resolver el problema de punto-silla (1.31)-(1.32) del
Capítulo 1. Todas las funciones se aproximan mediante funciones continuas, polinomiales
por tramos y de grado � 1: La presión p y sus funciones de prueba se aproximan mediante
polinomios lineales sobre cada elemento T de una triangulación Th, mientras que u; �; �q
y �; y sus funciones de prueba, se aproximan con polinomios lineales también, pero ahora
sobre cada elemento de la triangulación doblemente �na Th=2.Así pues los espacios de

2.5 Metodología de solución para el modelo acoplado NS-PNP 108
funciones en (2.123)-(2.130) se aproximan por medio de los espacios de dimensión �nita
siguientes
Vh =�v 2C0(�)2 : vjT2P1 � P1;8T2Th=2
V0h = fv 2 Vh : v = 0 sobre �1 [ �3 [ �4g ;
Ph =�q2C0(�) : qjT2P1;8T2Th
;
P0h =
�q2Ph :
Z
qdx =0
�;
h =� 2C0(�) : jT2P1;8T2Th=2
;
Rh = h;
R0h = fr2Rh : r=0 sobre �1 [ �2g ;
Sh = Rh;
S0h = fs2Sh : s=0 sobre �1g :
Entonces el problema semidiscreto asociado al problema débil (2.138)-(2.142) es: dados
u0h; �0h; �0h aproximaciones de las condiciones iniciales para u; �q y � respectivamente,
para cada instante t > 0, calcular uh2 Vh con uh = g0h sobre �1; uh = 0 sobre �3 [ �4;
ph2P0h; �h2h; �qh2Rh con �qh = 0 sobre �1 [ �2; y �h2Sh con �h = �Dh sobre �1,
tales queZ
@uh@t
� vdx+ 1
Re
Z
ruh:rvdx+Z
(uh � r)uh�vdx�Z
phr � vdx
= � 1
Rel
Z
�qhr�h � vdx;8v2V0h; (2.143)
Z
qr � uhdx =0;8q2Ph; (2.144)
2.5 Metodología de solución para el modelo acoplado NS-PNP 109
Z
�2r�h � r dx+1
�
Z�3[�4
�2�h d�=
Z
�qh dx+1
�
Z�3
�2Vh d�;8 2h; (2.145)
Z
@�qh@t
rdx+1
Pe
Z
r�qh � rrdx+Z
(uh � r)�qhrdx =
� 1
Pe
Z
�hr�h � rrdx�1
Pe
Z�3[�4
Rhrd�; 8r 2 R0h; (2.146)
Z
@�h@t
sdx+1
Pe
Z
r�h � rsdx+Z
(uh � r)�hsdx =
� 1
Pe
Z
�qhr�h � rsdx�1
Pe
Z�2[�3[�4
Rhsd�;8s 2 S0h; (2.147)
A este problema se le llama semidiscreto porque aún falta integrar en el tiempo para obtener
una discretización completa. El problema semidiscreto (2.143)-(2.147) es un sistema de
ecuaciones diferenciales ordinarias no lineales, acopladas, con términos de difusión y ad-
vección para uh; �qh y �h, además de la restricción de incompresibilidad (2.144). Con el ob-
jeto de desacoplar las di�cultades asociadas a este problema se propone una discretización
en el tiempo por medio de la técnica de partición o descomposición del operador.
2.5.4 Integración en el tiempo por descomposición del operador
Los métodos modernos para resolver problemas complicados como (2.143)-(2.147) están
basados en métodos de proyección [Chorin, 1967], [Chorin, 1973], para forzar la condición
de incompresibilidad, y partición del operador para desacoplar las di�cultades numéricas a
las cuales puede asociárseles un operador especí�co, por ejemplo: términos de advección,
términos de difusión y términos de reacción, entre otros. En este sentido, desde el punto
de vista abstracto el problema (2.143)-(2.147) es un caso particular de la siguiente clase de

2.5 Metodología de solución para el modelo acoplado NS-PNP 110
problemas de valores iniciales
d
dt+
7Xi=1
Ai(; t) = f; (0) = 0;
donde los operadores Ai pueden ser multivaluados. Para discretizar este problema se pro-
pone el siguiente esquema del tipo Marchuk-Yanenko [Marchuk, 1990], [Yanenko, 1971]:
Sea �t > 0 un paso de discretización en tiempo, dado 0 = 0, calcular n+1 de n por
medio de
n+i7 �n+ i�1
7
�t+ Ai
�n+
i7 ; tn+1
�= fn+1i ;
para i = 1; 2; 3; 4; 5; 6; 7 con tn = n�t y7Pi=1
fn+1i = fn+1:
Este esquema, muy simple, es de primer orden respecto a �t, pero este bajo orden se
compensa por sus buenas propiedades de estabilidad y robustez. De hecho, este esquema
ha sido aplicado con mucho éxito en una gran variedad de problemas muy complicados
[Glowinski, 2003].
Aplicando este esquema al problema (2.143)-(2.147), se obtiene la siguiente dis-
cretización (de entre de las muchas opciones), después de quitar los subíndices h para sim-
pli�car la notación: dados u0; �0; �0 y suponiendo que se conocen un; �n; �nq y �n calcular
un+1; �n+1; �n+1q y �n+1 con base en los siguientes pasos:
Paso 1. Proyección sobre el espacio de funciones solenoidales
Encontrar�un+
13 ; pn+1
�2 Vh�P0h, con un+
13 = g0h sobre �1 y un+
13 = 0 sobre �3 [�4
tales que Z
un+13 � un�t
� vdx�Z
pn+1r � vdx = 0;8v 2 V0h (2.148)
2.5 Metodología de solución para el modelo acoplado NS-PNP 111
Z
qr � un+ 13dx = 0;8q2 Ph (2.149)
Paso 2. Advección
A) Encontrar un+ 23 = u(tn+1)2 Vh, donde u(t) es la solución sobre (tn; tn+1) del siguiente
problema de advecciónZ
du(t)
dt� vdx+
Z
�un+
13 � r
�u � vdx =0;8v 2 V�
0h; (2.150)
con u(tn) = un+ 13 ;u(t) = g0h(t
n+1) sobre �n+1� � (tn; tn+1);
donde �n+1� =�x 2� : gn+10h � n(x) < 0
;
yV�0h =
�vjv 2 Vh;v = 0 sobre �n+1�
:
B) Encontrar �n+12
q = �q(tn+1)2Rh; donde �q(t) resuelve sobre (tn; tn+1)Z
d�q(t)
dtrdx+
Z
�un+
13 � r
��qrdx =0;8r2R0h; (2.151)
�q(tn) = �nq ; �q(t) = 0 sobre �
n+1� � (tn; tn+1):
C) Encontrar �n+ 12 = �(tn+1)2Sh; donde �(t) resuelve sobre (tn; tn+1)Z
d�(t)
dtsdx+
Z
�un+
13 � r
��sdx =0;8s2S0h; (2.152)
�(tn) = �n; �(t) = �D sobre �n+1� � (tn; tn+1):
Paso 3. Actualización del potencial eléctrico
Encontrar �n+12h tal queZ
�2r�n+1 � r dx+1�
Z�3[�4
�2�n+1 d� =Z
�n+ 1
2q dx+
1
�
Z�3
�2V n+1 d�;8 2 h; (2.153)
Paso 4. Difusión

2.5 Metodología de solución para el modelo acoplado NS-PNP 112
A) Encontrar �n+12Sh con �n+1 = �D sobre �1 tal queZ
�n+1 � �n+12
�tsdx+
1
Pe
Z
r�n+1 � rsdx =
� 1
Pe
Z
�n+ 1
2q r�n+1 � rsdx� 1
Pe
Z�2[�3[�4
Rn+1sd�;8s 2 S0h; (2.154)
B) Encontrar �n+1q 2Rh con �n+1q = 0 sobre �1 [ �2 tal queZ
�n+1q � �n+ 1
2q
�trdx+
1
Pe
Z
r�n+1q � rrdx =
� 1
Pe
Z
�n+1r�n+1 � rrdx� 1
Pe
Z�3[�4
Rn+1rd�; 8r 2 R0h; (2.155)
C) Encontrar un+12 Vh con un+1 = g0 sobre �1; un+1 = 0 sobre �3 [ �4 tal queZ
un+1 � un+ 23
�t� vdx+ 1
Re
Z
run+1 � rvdx =
� 1
Rel
Z
�n+1q r�n+1 � vdx;8v 2 V0h: (2.156)
Las ecuaciones (2.148)-(2.156) constituyen el problema discreto completo o total
asociado al problema (2.138)-(2.142). Obsérvese que en este problema discreto es nece-
sario resolver ocho subproblemas en cada paso del tiempo: un problema de punto-silla en
el Paso 1, tres problemas de advección en el Paso 2, un problema elíptico en el Paso 3 y
tres problemas elípticos en el Paso 4. La utilización de este esquema se reserva para un
trabajo futuro y no será abordado como parte de esta Tesis.
2.6 Conclusiones del problema de �ujos electro-hidrodinámicos 113
2.6 Conclusiones del problema de �ujoselectro-hidrodinámicos
Las principales conclusiones que se obtienen de este segundo Capítulo de la Tesis, relativo
a los �ujos electro-hidrodinámicos, son las siguientes:
� Se utilizó un modelo físico completo para una celda de combustible que incluye tanto
las ecuaciones de la hidrodinámica (ecs. de Navier-Stokes), como las ecuaciones de
la electro-química (ecs. de Poisson-Nernst-Planck), en forma acoplada.
� Tomando en cuenta el trabajo reciente de Bazant et. al. [Bazant et. al., 2005] se
plantearon las condiciones de frontera adecuadas sobre los electrodos de la micro
celda, siendo ésta una de las principales di�cultades desde el punto de vista de la
modelación matemática del problema físico que se pretende resolver.
� Se cuenta con un esquema numérico complejo para resolver el problema matemático
asociado al modelo físico, que incluye la solución de tres tipos de subproblemas: de
punto silla, de advección y elípticos.
� Para poder estudiar y comprender mejor el problema se adoptó una estrategia de
solución de problemas simpli�cados que gradualmente incorpora más elementos,
desde lo más sencillo hasta lo más complejo. Esto se logró analizando las leyes
físicas involucradas en el problema: por un lado las ecuaciones de Navier-Stokes y
por otro las ecuaciones de Poisson-Nernst-Plank.
2.6 Conclusiones del problema de �ujos electro-hidrodinámicos 114
� Como parte de esta estrategia de complejidad gradual se resolvieron cuatro casos
particulares: los dos primeros bajo el supuesto de electro-neutralidad, considerando
tanto estacionalidad como �ujo variable. Los dos últimos asumiendo �q 6= 0 y
también ambos casos, �ujo estacionario y variable.
� Se extendió al caso bi-dimensional un problema uni-dimensional reportado en la
literatura, lo cual permitió validar el código desarrollado para resolver las ecuaciones
de Poisson-Nernst-Planck.
� Se obtuvo la solución para un �ujo electro-hidrodinámico que se mueve con una
velocidad conocida constante.
El trabajo futuro que se desprende de esta parte de la investigación incluye la imple-
mentación computacional del modelo completo para la celda de combustible. Otra vertiente
la constituye la extensión al caso tri-dimensional de los resultados aquí mostrados para dos
dimensiones.
Chapter 3Coe�cientes de permeabilidad efectiva en
medios porosos
Una importante área de investigación para identi�car modelos adecuados que de-
scriban fenómenos de transporte en medios porosos, es la formulación de modelos macroscópi-
cos. El análisis directo de estos procesos, en términos de las ecuaciones de transporte que
son válidas dentro de los poros es esencialmente imposible, dada la complejidad de la es-
tructura del medio [Whitaker, 1999]. En vez de ello conviene obtener cantidades que,
promediadas en términos espaciales, modelen el comportamiento global bajo estudio. Una
forma de lograr esto es mediante el método del promedio volumétrico. Los modelos gener-
ados por este método conducen a problemas de valor en la frontera (PVF) y dependen de las
características puntuales del sistema multifásico de que se trate. Dichas características se
expresan por medio de coe�cientes llamados efectivos. Los procesos de transporte de can-
tidad de movimiento involucran un coe�ciente efectivo de permeabilidad, que es necesario
calcular.
En este Capítulo se presentan diversos PVF, comparando varias condiciones de fron-
tera que no han sido reportadas en la literatura especializada, para poder calcular el coe-
�ciente efectivo de permeabilidad de un medio poroso. Se presentan en primer lugar las
ecuaciones de conservación puntuales (locales) que modelan el fenómeno de transporte
y luego se hace el promediado espacial. En seguida se deduce el problema de cerradura
que es necesario resolver y se procede al cálculo del coe�ciente. Para ello fue necesario
115
3 Coe�cientes de permeabilidad efectiva en medios porosos 116
generar un mallador ad hoc para la geometría subyacente, mismo que se muestra más
adelante. Además el PVF que se obtiene resulta ser un problema de tipo Stokes, que se
resuelve aplicando un algoritmo iterativo de tipo Uzawa [Arrow et al, 1958], [Glowin-
ski, 2003]. Los resultados numéricos obtenidos con�rman las predicciones del modelo
heurístico de Carman-Kozeny, así como otros resultados experimentales reportados en la
literatura [Whitaker, 1999].
Así, las aportaciones principales de este Capítulo son:
1. Se calculan coe�cientes de permeabiliad efectiva aplicando el método del
promedio volumétrico, obteniendo resultados similares a los de otras metodologías
[Valdés-Parada et al, 2007].
2. Se desarrolla y se aplica un resolvedor de Stokes mediante un programa propio
(elaborado en FORTRAN 90), en vez de sólo usar software comercial. Esto permite
tener un control total sobre las variables y los procedimientos involucrados.
3. Se desarrolla y se utiliza un mallador ad hoc a la geometría del problema, cuyas
variables de entrada son sólo la porosidad del medio y el número de divisiones que se
desean tener.
4. Se determinan las condiciones de frontera adecuadas para el cálculo de la
permeabilidad en medios porosos.
Finalmente se presentan las conclusiones de este tercer Capítulo.
3.1 Antecedentes 117
3.1 Antecedentes
El estudio de fenómenos de transporte en sistemas multifásicos implica el desarrollo de
ecuaciones macroscópicas, que son el resultado de promediar espacialmente las correspon-
dientes ecuaciones válidas en la escala microscópica. El método del promedio volumétrico
fue utilizado anteriormente por Eidsath y colaboradores [Eidsath et al, 1983] para calcu-
lar el coe�ciente efectivo de permeabilidad de un medio poroso. En su estudio impusieron
condiciones de frontera simétricas en la dirección paralela al �ujo, sin embargo no pre-
sentaron las consecuencias de utilizar otro tipo de condiciones de frontera. Además, sus
resultados numéricos no han sido comparados con los que se obtienen con otros mode-
los. En el presente Capítulo de esta Tesis se presentan los resultados de investigar ambas
situaciones.
Por otra parte, un resultado heurístico muy importante que a menudo se utiliza como
referencia para comparar resultados experimentales, es la llamada ecuación de Carman-
Kozeny [Whitaker, 1999]
K =d2p"
3�
180(1� "�)2(3.157)
donde
K = coe�ciente de permeabilidad efectiva,
dp = diámetro medio de las partículas del medio poroso, y
"� = porosidad del medio.
En este Capítulo se obtiene la ecuación de Darcy-Brinkman -que se muestra más adelante-,
a partir de un problema tipo Stokes, por el método del promedio volumétrico, y su solución

3.1 Antecedentes 118
permite calcular K. Es decir, los resultados heurísticos dados por (3.157) se corroboran
mediante los resultados numéricos obtenidos por medio del métodos analítico citado. El
procedimiento se explica en las Secciones siguientes.

3.2 Ecuaciones puntuales 119
3.2 Ecuaciones puntuales
Considérese el �ujo de un �uido incompresible, en estado estacionario, a través de un
medio poroso rígido y homogéneo, como el que se muestra en la Figura 3.39. La fase �
se re�ere al sólido y la � al �uido. Las ecuaciones puntuales (locales) que gobiernan al
sistema en la fase correspondiente al �uido provienen de la mecánica de �uidos y son la
ecuación de continuidad así como la ecuación de Stokes
r � v� = 0; en la fase �; (3.158)
���r2v� +rp� = ��g; en la fase �; (3.159)
donde se ha asumido que los efectos inerciales respecto al transporte viscoso se consideran
despreciables. Y suponiendo que la fase � (la del sólido) es impermeable, la condición de
no-resbalamiento se satisface en la interface (frontera común)
v� = 0; sobre la interfase ��; (3.160)
(véase el Anexo 2 de esta Tesis). Como se ha mencionado previamente, el análisis di-
recto del problema por medio de las ecuaciones (3.158)-(3.160) no es posible debido a la
complejidad de la estructura del medio poroso. Por lo cual es necesario hacer primero
un promediado espacial, en una región como la que aparece en la Figura 3.39, para luego
obtener el problema de cerradura (PVF) que permitirá el cálculo del coe�ciente K.
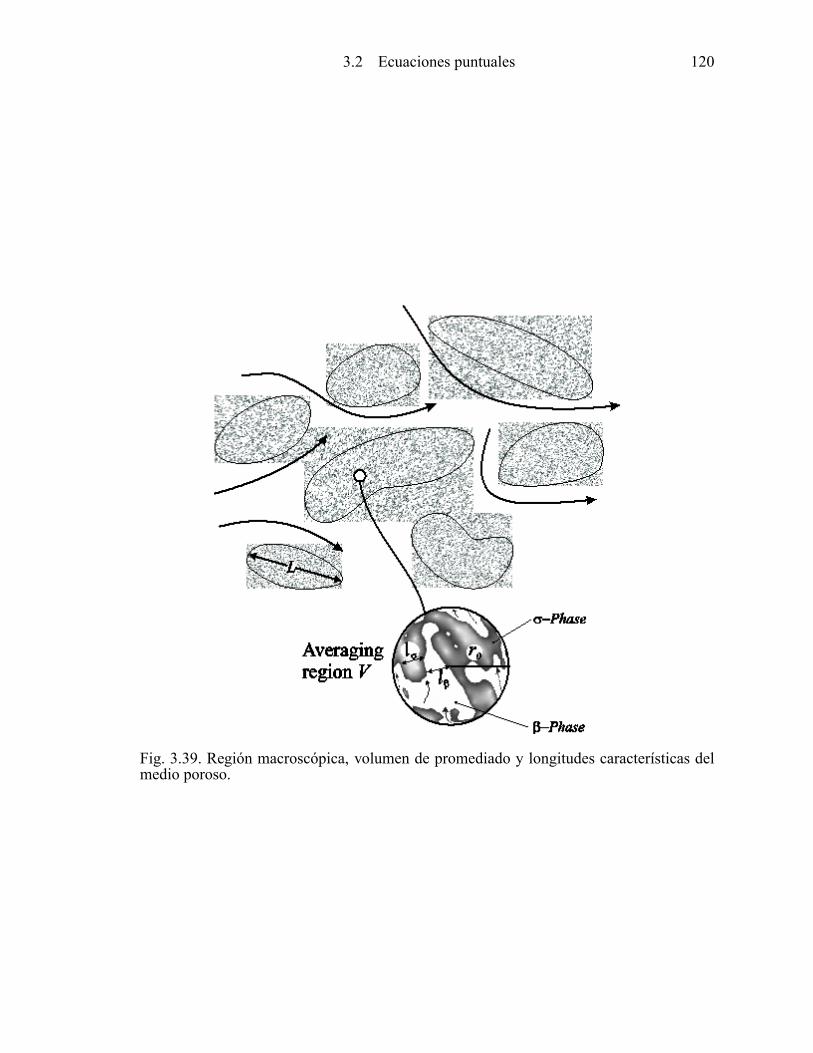
3.2 Ecuaciones puntuales 120
Fig. 3.39. Región macroscópica, volumen de promediado y longitudes características delmedio poroso.
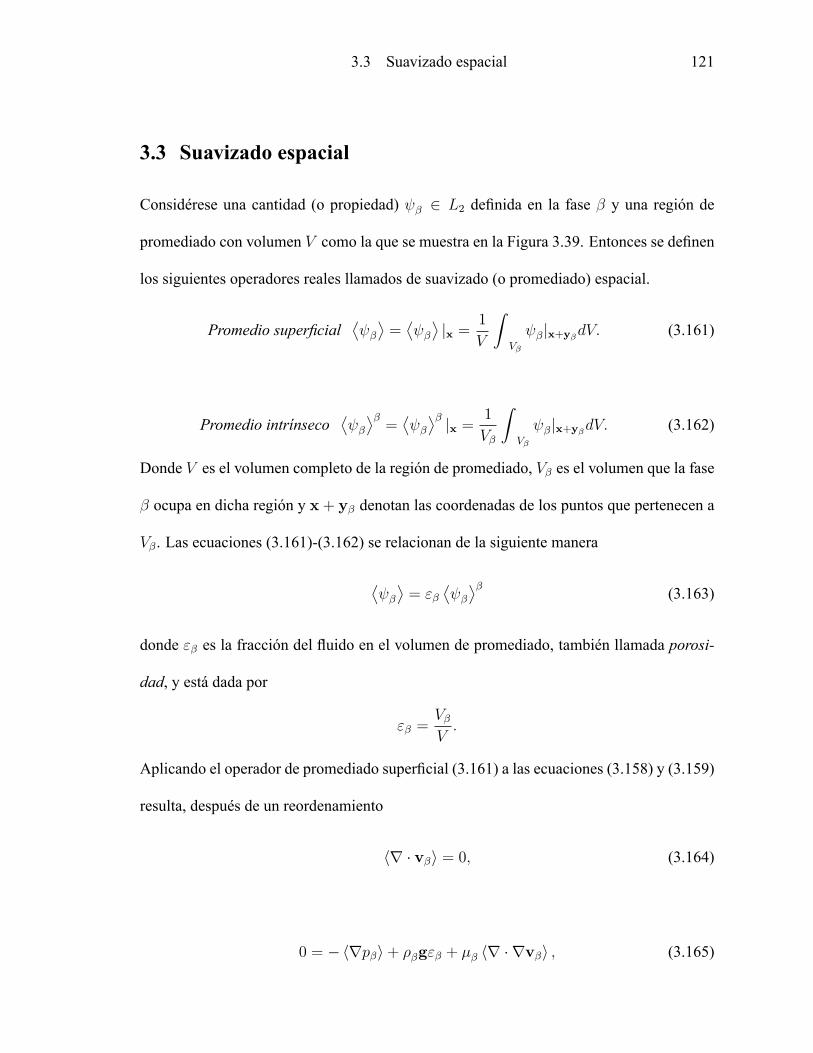
3.3 Suavizado espacial 121
3.3 Suavizado espacial
Considérese una cantidad (o propiedad) � 2 L2 de�nida en la fase � y una región de
promediado con volumen V como la que se muestra en la Figura 3.39. Entonces se de�nen
los siguientes operadores reales llamados de suavizado (o promediado) espacial.
Promedio super�cial ��= ��jx =
1
V
ZV�
�jx+y�dV: (3.161)
Promedio intrínseco ���= ��� jx = 1
V�
ZV�
�jx+y�dV: (3.162)
Donde V es el volumen completo de la región de promediado, V� es el volumen que la fase
� ocupa en dicha región y x+ y� denotan las coordenadas de los puntos que pertenecen a
V� . Las ecuaciones (3.161)-(3.162) se relacionan de la siguiente manera
��= "�
��� (3.163)
donde "� es la fracción del �uido en el volumen de promediado, también llamada porosi-
dad, y está dada por
"� =V�V:
Aplicando el operador de promediado super�cial (3.161) a las ecuaciones (3.158) y (3.159)
resulta, después de un reordenamiento
hr � v�i = 0; (3.164)
0 = �hrp�i+ ��g"� + �� hr � rv�i ; (3.165)
3.3 Suavizado espacial 122
donde se ha cambiado ligeramente la notación para hacer más claro el desarrollo subse-
cuente. Además en (3.165) se han despreciado los cambios espaciales de la viscosidad del
�uido �� dentro del volumen de promediado.
Para continuar con la discusión será necesario intercambiar las operaciones de diferen-
ciación e integración al aplicar los operadores (3.161)-(3.162), por lo que se acude al teo-
rema del promediado espacial [Howes y Whitaker, 1985] que establece lo siguiente
Forma escalarr �
�= r
��+1
V
ZA��
n�� �dA; (3.166)
Forma vectorial hra�i = r � ha�i+1
V
ZA��
n�� � a�dA; (3.167)
donde n�� es el vector unitario normal dirigido desde la fase � hacia la fase �.
Así, tomando en cuenta la condición de frontera (3.160) y aplicando el teorema del prome-
diado espacial a (3.164)-(3.165) se obtiene
r � hv�i = 0; (3.168)
0 = �rhp�i+ ��g"� + ��r2 hv�i+1
V
ZA��
n�� ���p�I+ ��rv�
�dA: (3.169)
Por otra parte, es conveniente expresar las propiedades puntuales (locales) en términos de
sus valores promedio y ciertas desviaciones espaciales
� = ��� jx+y� + e �; (3.170)
pero si el radio del volumen de promediado es su�cientemente pequeño y satisface restric-
ciones de escala adecuadas -asociadas con los cambios espaciales de las propiedades pun-
tuales, la porosidad y el gradiente de la velocidad promedio-, Whitaker [Whitaker,1999]

3.3 Suavizado espacial 123
demuestra que la ecuación (3.170) puede entonces escribirse como
� = ��� jx + e �: (3.171)
Utilizando (3.171) en la integral de (3.169) resulta
0 = �rhp�i+ ��g"� + ��r2 hv�i � r"� ���hp�i� I+ ��rhv�i
��
+1
V
ZA��
n����ep�I+ ��rev�� dA: (3.172)
donde
r"� � �1
V
ZA��
n��dA; (3.173)
que se obtiene de (3.166).
Además, empleando (3.163) en (3.168) y (3.172) se obtiene que
r � hv�i� = �"�1� r"� � hv�i� ; (3.174)
0 = �"�rhp�i� + ��g"� + ��
�"�r2 hv�i� + hv�i�r2"� �r"� � r hv�i�
�+1
V
ZA��
n����ep�I+ ��rev�� dA: (3.175)
Pero, si el medio poroso es homogéneo, generalmente se cumplen las siguientes desigual-
dades [Whitaker, 1999]:
r � hv�i� � "�1� r"� � hv�i� ;
"�r2 hv�i� � hv�i�r2"� y
"�r2 hv�i� � r"� � r hv�i� ;
por lo que las ecuaciones (3.174)-(3.175) pueden simpli�carse quedando así
r � hv�i� = 0 (3.176)
3.3 Suavizado espacial 124
0 = �rhp�i� + ��g + ��r2 hv�i� +1
V�
ZA��
n����ep�I+ ��rev�� dA: (3.177)
Nótese que las ecuaciones (3.176)-(3.177) -llamadas de medio efectivo-, dependen aún
de desviaciones espaciales de la presión y de la velocidad, por lo que para cerrarlas es
necesario expresar dichas desviaciones en términos de sus propiedades promedio. Al hacer
esto se conseguirá llegar al problema de cerradura que se presenta en la Sección siguiente.
3.4 Problema de cerradura 125
3.4 Problema de cerradura
Para que las ecuaciones de medio efectivo (3.176)-(3.177) queden expresadas sólo en tér-
minos de propiedades promedio, se resta la ecuación (3.176) de la (3.158), tomando en
cuenta (3.171), para obtener
r � ev� = 0 en la fase �: (3.178)
Análogamente, restando (3.177) de la ecuación (3.159) resulta
0 = �rep� + ��r2ev� � 1
V�
ZA��
n����ep�I+ ��rev�� dA en la fase �: (3.179)
La condición de frontera que satisface el campo de desviaciones en la interfase �� se
obtiene al sustituir (3.171) en (3.160), quedando
ev� = �hv�i� ; sobre la interfase ��: (3.180)
El lado derecho de (3.180) constituye la fuente de las desviaciones para el campo de ve-
locidad en la fase �.
Por otra parte, atendiendo a la teoría de fenómenos de transporte en medios porosos [Whitaker,
1999], el problema se debe resolver en una celda unitaria como la mostrada en la Figura
3.40. Además, dicha teoría supone que mediante la repetición en las direcciones horizon-
tal y vertical de la celda unitaria, se puede representar la microestructura del medio poroso,
razón por la cual se justi�ca imponer condiciones de frontera periódicas. Por último, si el
medio es espacialmente periódico entonces el promedio de las desviaciones espaciales se
anula. Por lo anterior se imponen las siguientes condiciones de frontera
Periodicidad ep�(r+ li) = ep�(r); ev�(r+ li) = ev�(r); i = 1; 2 y (3.181)
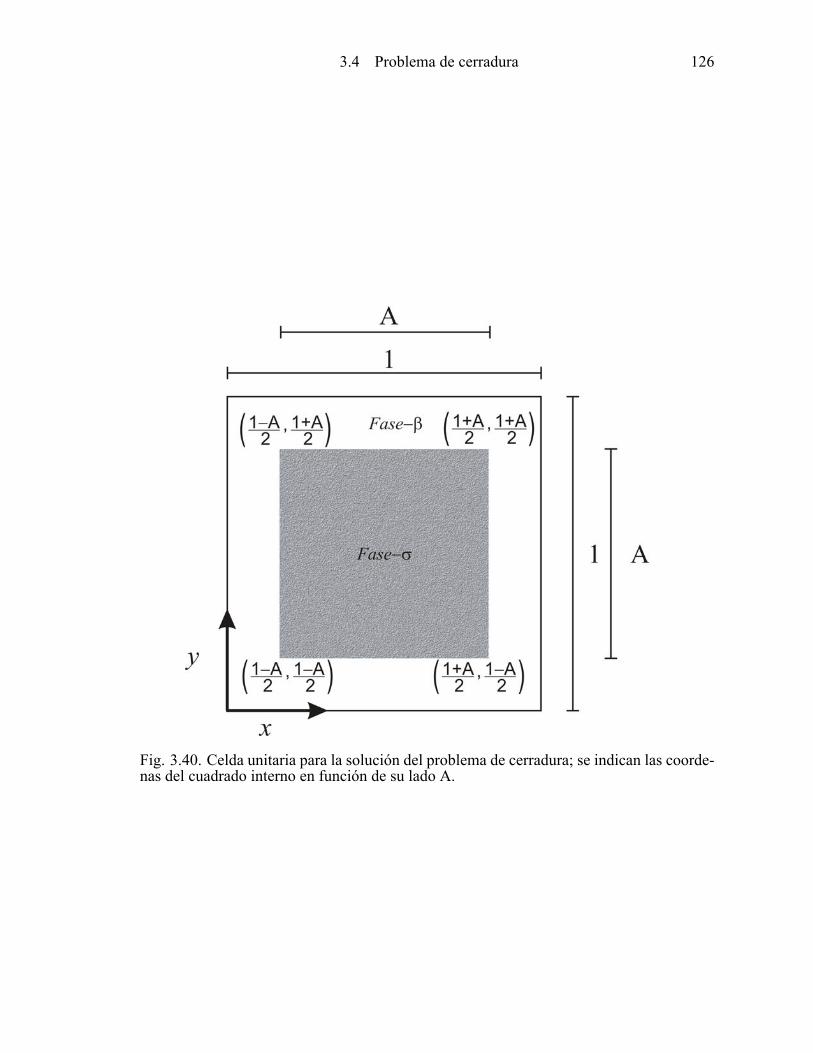
3.4 Problema de cerradura 126
Fig. 3.40. Celda unitaria para la solución del problema de cerradura; se indican las coorde-nas del cuadrado interno en función de su lado A.

3.4 Problema de cerradura 127
Promedio hev�i� = 0; (3.182)
quedando por de�nir en qué partes de la frontera (que no son de la interfase) se imponen
cada una de estas condiciones. Esto se discutirá en la Sección siguiente.
Para expresar el problema (3.178)-(3.182) en términos de variables macroscópicas se
introduce un cambio de variable a través de las llamadas varibles de cerradura B� y b� ,
que son dos tensores de�nidos por medio de
ev� = B� � hv�i� ; (3.183)
ep� = ��b� � hv�i� : (3.184)
Entonces al sustituir (3.183)-(3.184) en la integral de (3.177) se obtiene la forma cerrada
de la ecuación macroscópica también conocida como ecuación de Darcy-Brinkman, en la
cual -a diferencia de (3.177)-, ya sólo aparecen propiedades promedio
0 = �rhp�i� + ��g + ��r2 hv�i� � ��"�K�1� � hv�i� ; (3.185)
donde se ha introducido el tensor de permeabilidad efectiva K� que se de�ne por medio
de
"�K�1� = � 1
V�
ZA��
n����b�I+ ��rB�
�dA: (3.186)
Antes de continuar con la deducción del problema de cerradura, conviene hacer notar
que (3.185) puede re-escribirse como
hv�i = �K�
����rhp�i� � ��g
�+K� � r2 hv�i� ; (3.187)

3.4 Problema de cerradura 128
y si en (3.187) la corrección de Brinkman�r2 hv�i�
�es despreciable, se recupera la
conocida ley de Darcy
hv�i = �K�
����rhp�i� � ��g
�: (3.188)
Esto muestra que los resultados obtenidos son coherentes con la teoría clásica sobre dinámica
de �uidos en medios porosos.
Continuando con el desarrollo que interesa en esta Sección, al sustituir las variables
de cerradura (3.183)-(3.184) en las ecuaciones (3.178)-(3.182) se obtiene el problema de
cerradura siguiente, donde el dominio está formado por la fase � de la Figura 3.40
0 = �rb� +r2B� + "�K�1� ; en ; (3.189)
r �B� = 0; en ; (3.190)
B� = �I; sobre la interfase ��; (3.191)
además de las condiciones de
periodicidad: b�(r+ li) = b�(r); B�(r+ li) = B�(r); i = 1; 2 y (3.192)
promedio: hB�i� = 0: (3.193)
Para que el problema (3.189)-(3.193) satisfaga una condición de frontera homogénea en
(3.191), se introduce la translación siguiente
B0� = B� + I; (3.194)
3.4 Problema de cerradura 129
con lo que se obtiene
0 = �rb� +r2B0� + "�K�1� ; en ; (3.195)
r �B0� = 0; en ; (3.196)
B� = 0; sobre la interfase ��; (3.197)
y las condiciones de
periodicidad: b�(r+ li) = b�(r); B0�(r+ li) = B
0�(r); i = 1; 2 y (3.198)
promedio:B0���= 0: (3.199)
Debido a la de�nición (3.186) del tensor de permeabilidad efectiva, la ecuación (3.195)
resulta ser altamente no lineal, por lo que se propone el siguiente cambio de variables a �n
de eliminar este tensor de dicha ecuación
d� = "�1� b� �K�; D� = "�1� B0� �K�;
y entonces el problema de cerradura se puede escribir como sigue
0 = �rd� +r2D� + I; en ; (3.200)
r �D� = 0; en ; (3.201)
D� = 0; sobre la interfase ��; (3.202)
3.4 Problema de cerradura 130
con las condiciones de
periodicidad: d�(r+ li) = d�(r); D�(r+ li) = D�(r); i = 1; 2 y (3.203)
promedio: hD�i� = "�1� K�: (3.204)
Puesto que se desea obtener sólo la componente xx del tensor de permeabilidad efectiva
K� , entonces es necesario calcular el producto punto (dos veces) de ex con cada una de
las ecuaciones (3.200)-(3.204). De este modo se obtiene la versión escalar del problema de
cerradura, expresada por
0 = �ddxdx
+@2Dxx@x2
+@2Dxx@y2
+ 1; en ; (3.205)
0 = �ddxdy
+@2Dyx@x2
+@2Dyx@y2
; en ; (3.206)
@2Dxx@x
+@2Dyx@y
= 0; en ; (3.207)
Dxx = Dyy = 0; sobre la interfase ��; (3.208)
con las condiciones de
periodicidad: dx (r+ li) = dx (r); Dxx (r+ li) = Dxx (r); Dyx (r+ li) = Dyx (r) i = 1; 2 y
(3.209)
promedio: hDxx i� = "�1� K�: (3.210)

3.4 Problema de cerradura 131
Finalmente, si se representa con u = (u; v) a la velocidad del �uido en la fase � y con p a
la presión a la que está sometido, y se hace la identi�cación siguiente
p = dx ; u = Dxx ; v = Dyx ;
el problema bi-dimensional que tiene que resolverse es
0 = �rp+r2u+ F; en ; (3.211)
r � u = 0; en ; (3.212)
u = 0; sobre la interfase ��; (3.213)
donde F = (1; 0)t y se satisfacen las condiciones de
periodicidad: p(r+ li) = p(r); u(r+ li) = u(r); i = 1; 2 y (3.214)
promedio: hui� = "�1� K�: (3.215)
Claramente las ecuaciones (3.211)-(3.213) constituyen un problema de tipo Stokes (véase
el Anexo A2 y tómese � = 0), que puede resolverse por alguna técnica conocida. Además
falta por precisar cómo se satisface la condición (3.214) sobre las partes de @ que no son
de la interfase ��. Una vez hecho esto, la condición (3.215) permitirá calcular el coe�ciente
de permeabilidad efectiva K� . Todo esto se presenta en la Sección siguiente.
3.5 Cálculo de coe�cientes de permeabilidad efectiva 132
3.5 Cálculo de coe�cientes de permeabilidad efectiva
En esta Sección se estudian diferentes posibilidades para cumplir con la condición (3.214)
así como su efecto sobre el cálculo del coe�ciente K. Debido a la forma particular del do-
minio, que está dado por la región de la fase � de la Figura 3.40, fue necesario desarrollar
un mallador ad hoc para esta geometría, mismo que se muestra más adelante. Así mismo
se presenta el algoritmo numérico, basado en el método de elemento �nito, empleado para
resolver el problema de cerradura (3.211)-(3.215) y calcular el coe�ciente de permeabili-
dad efectiva K. Finalmente los resultados numéricos obtenidos se comparan con algunos
otros reportados en la literatura.
3.5.1 Formulación matemática
Para que el problema de cerradura establecido en la Sección anterior esté bien planteado
es necesario especi�car las condiciones de periodicidad. Esto condujo a la realización de
varias pruebas numéricas de las cuales en esta Tesis se presentan las tres más representati-
vas. Dichas pruebas serán referidas como problemas PC1 , PC2 y PC3 respectivamente,
mismas que se describen a continuación. De�niendo estas condiciones de periodicidad, la
formulación matemática del problema de cerradura queda completa.
Problema de cerradura PC1
Se imponen condiciones de frontera homogéneas tipo Dirichlet sobre las cuatro fronteras
externas de la celda unitaria. (Ver inciso a) de la Figura 3.41).
Problema de cerradura PC2

3.5 Cálculo de coe�cientes de permeabilidad efectiva 133
Fig. 3.41. Problemas de cerradura a) PC1 , b) PC2 y c) PC3 ; (���) condición Dirichlet,(� � �) condición Neumann, todas homogéneas.
Se imponen condiciones de frontera homogéneas tipo Dirichlet sólo sobre las fronteras
superior e inferior externas de la celda unitaria. Las fronteras izquierda y derecha externas
satisfacen condiciones homogéneas tipo Neumann. (Ver inciso b) de la Figura 3.41).
Problema de cerradura PC3
Se imponen condiciones de frontera homogéneas tipo Dirichlet sólo sobre las fronteras
derecha e izquierda externas de la celda unitaria. Las fronteras superior e inferior externas
satisfacen condiciones homogéneas tipo Neumann. (Ver inciso c) de la Figura 3.41).
Recuérdese que sobre las fronteras internas de la celda unitaria, donde coinciden las
fases � del �uido y � del sólido (interfase ��), siempre se satisface la condición de frontera
homogénea tipo Dirichlet establecida por (3.213). Adicionalmente debe mencionarse que
se asume que el �uido se mueve en la dirección horizontal de izquierda a derecha. Entonces
el problema PC3 es el único donde las condiciones de frontera Neumann coinciden con
la dirección del �ujo. Esta condición fue también utilizada por Eidsath y colaboradores
[Eidsat et al, 1983], aunque sin mencionar la justi�cación asociada.
3.5 Cálculo de coe�cientes de permeabilidad efectiva 134
3.5.2 Mallador
Puesto que el dominio , tal como se muestra en la Figura 3.40, está dado por la fase del
�uido �, se construyó un mallador que permite manejar diferentes porosidades (tamaño del
obstáculo) así como diveros re�namientos (número de subdivisiones de la malla). De este
modo, el mallador automatizado se programó en lenguaje FORTRAN 90 y acepta como
entradas las siguientes:
1. El valor de la porosidad "� , a partir del cual calcula las coordenas de las esquinas del
obstáculo, como se ilustra en la Figura 3.40, es decir, calcula el tamaño del obstáculo.
2. El número de subdivisiones en la fase �. Por la forma en que se diseñó, el mallador
va construyendo triángulos regulares siguiendo un camino espiral desde la esquina
inferior izquierda del cuadro exterior, hasta la esquina inferior izquierda del cuadro
interior, después de atravezar toda la fase del �uido en el sentido contrario al de las
manecillas del reloj. Por tal razón ha sido llamado mallador espiral.
La salida de este programa es una malla regular en el dominio . Las Figuras 3.42,
3.43, 3.44 y 3.45 muestran diversas mallas obtenidas para diferentes combinaciones de
porosidades (tamaños del obstáculo) y de número de espirales (tamaño del re�namiento de
la malla).
3.5.3 Algoritmo
Los problemas PC1 , PC2 y PC3 son problemas tipo Stokes y para resolverlos se sigue
la metodología propuesta por Glowinski [Glowinski, 1991] y que ha sido utilizada exitosa-
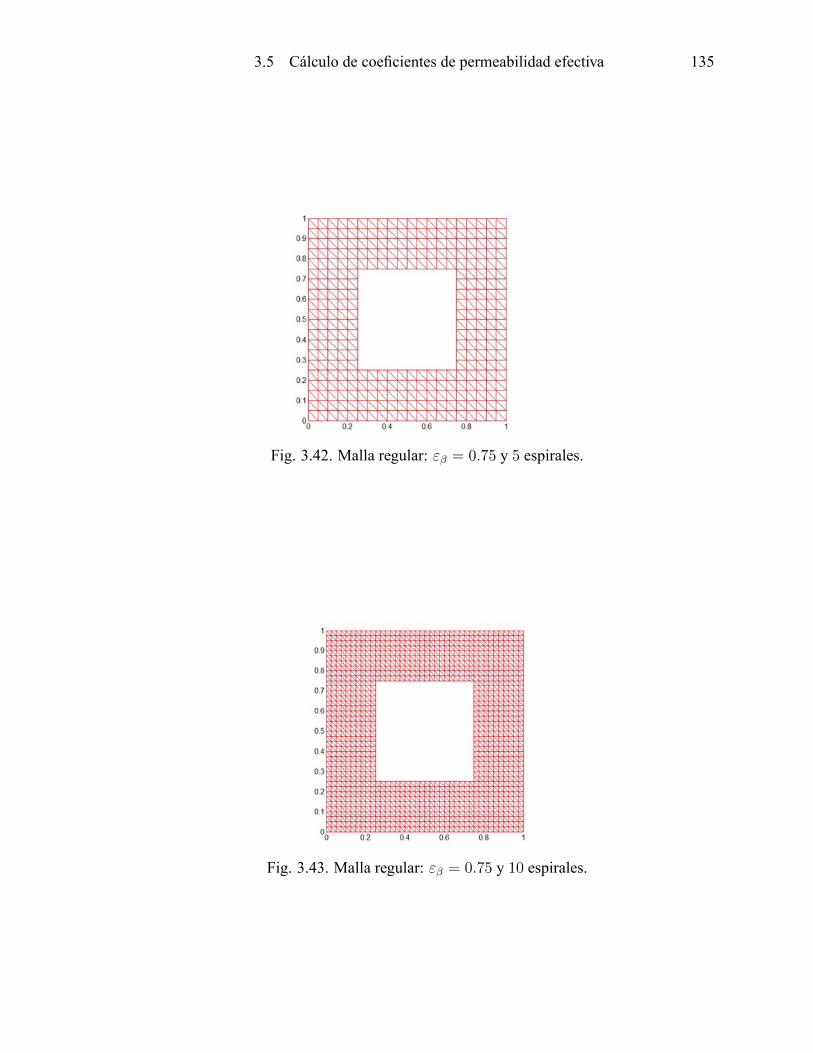
3.5 Cálculo de coe�cientes de permeabilidad efectiva 135
Fig. 3.42. Malla regular: "� = 0:75 y 5 espirales.
Fig. 3.43. Malla regular: "� = 0:75 y 10 espirales.

3.5 Cálculo de coe�cientes de permeabilidad efectiva 136
Fig. 3.44. Malla regular: "� = 0:19 y 3 espirales.
Fig. 3.45. Malla regular: "� = 0:96 y 20 espirales.

3.5 Cálculo de coe�cientes de permeabilidad efectiva 137
mente en problemas de dinámica computacional de �uidos. En la descripción que sigue
�0 representa la frontera Dirichlet, mientras que �1, la Neumann. Así que las ecuaciones
(3.211)-(3.214) se resuelven con el algoritmo de gradiente conjugado siguiente:
1. Dado p0; resolver para u0 el problema elíptico
�r2u0 = F�rp0; en �;
u0 = 0; sobre �0;
@u0
@bn = 0; sobre �1:
2. g0 = r � u0:
3. d0 = g0:
Para m = 0;suponiendo conocidos pm;um; gm y dm calcular pm+1;um+1; gm+1 y
dm+1 mediante
4. Resolver para um el problema elíptico
�r2um = �rdm en �;
um = 0 sobre �0;
@um
@n= ndm sobre �1:
5. gm = r � um:
6. �m =R g
mgmdxR d
mgmdx:
7. pm+1 = pm � �mdm:

3.5 Cálculo de coe�cientes de permeabilidad efectiva 138
8. um+1 = um � �mum:
9. gm+1 = gm � �mgm:
SiR g
m+1gm+1dxR g
0g0dx< " tomar como solución p = pm+1 y u = um+1. En caso contrario
hacer
10. �m =R g
m+1gm+1dxR g
mgmdx:
11. dm+1 = gm+1 + �mdm
12. Hacerm = m+ 1 y regresar al Paso 5:
Nótese que en los Pasos 2 y 6 se utiliza un método mixto como el que se explicó en la
Sección 1:3:3 del Capítulo 1. Véase también el Anexo 2 de esta Tesis.
3.5.4 Resultados numéricos
Una vez resuelto el problema de cerradura, la condición (3.215) permite calcular el coe�-
ciente de permeabilidad efectiva K� . La Figura 3.46 muestra los resultados numéricos de
resolver los problemas de cerradura PC1 , PC2 y PC3 , y compararlos con los obtenidos
por la ecuación heurística (3.157) de Carman-Kozeny, misma que -atendiendo a la Figura
3.40-, puede re-escribirse como
K�
A2=
"3�180(1� "�)2
:
Como se aprecia de las grá�cas, las condiciones de frontera para el problema PC3 son
las que arrojan mejores resultados. Esto permite con�rmar, mediante el método analítico
presentado en este Capítulo de la Tesis (método del promedio volumétrico), que el PVF
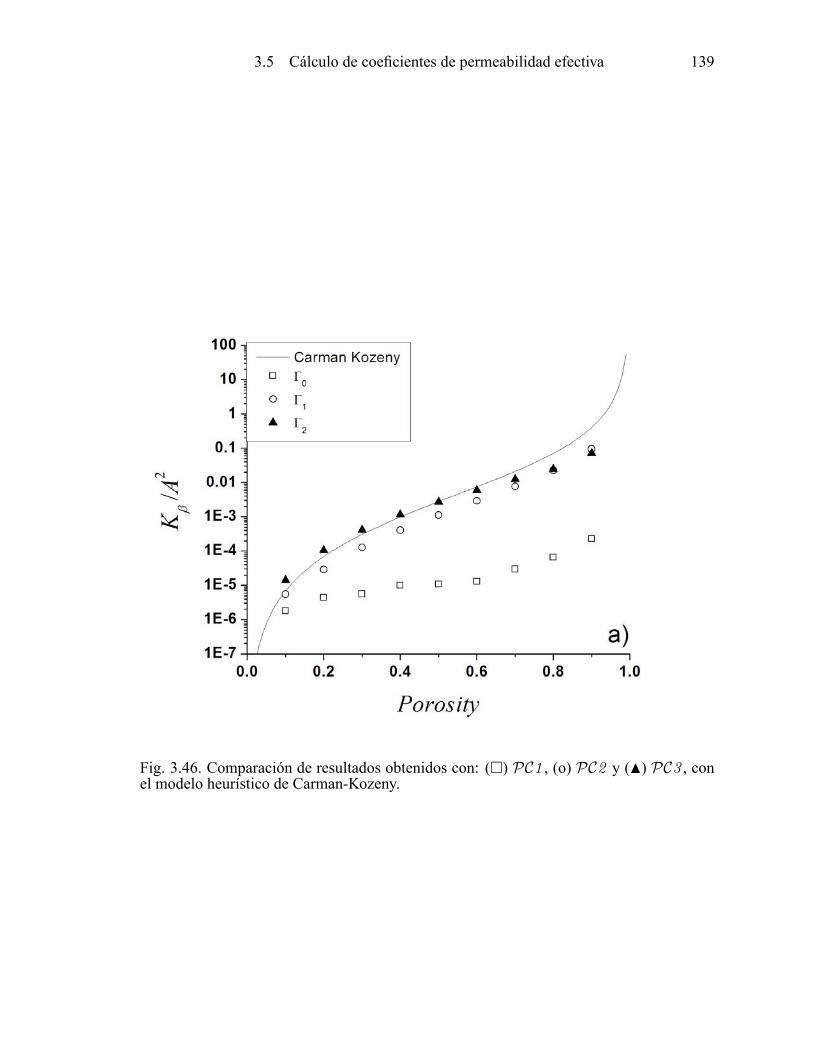
3.5 Cálculo de coe�cientes de permeabilidad efectiva 139
Fig. 3.46. Comparación de resultados obtenidos con: (�) PC1 , (o) PC2 y (N) PC3 , conel modelo heurístico de Carman-Kozeny.
3.5 Cálculo de coe�cientes de permeabilidad efectiva 140
que debe resolverse es el que mantiene condiciones de frontera homogéneas tipo Neumann
paralelas al �ujo del �uido.
Adicionalmente, una vez que se ha visto que el problema PC3 es el adecuado, se
comparan las soluciones obtenidas por este medio con las reportadas por otros autores:
Rumpf y Gupte con el método de la razón a la presión [Rumpf y Gupte, 1971], Larson
y Higdon con el método de colocación ortogonal [Larson y Higdon, 1989], y Sahraoui y
Kaviany con el método de discretización con corrección al campo de presión [Sahraoui y
Kaviany, 1992]. Una vez más se veri�ca que las soluciones obtenidas mediante PC3 son
acordes a los otros resultados. La Figura 3.47 muestra este otro comparativo. Puede decirse
que, en general, los métodos utilizados por estos autores promedian el campo de velocidad
para que al dividir entre el gradiente de presión obtengan la permeabilidad usando la ley de
Darcy, pero sin justi�car las condiciones de frontera empleadas. En cambio, la propuesta
presentada en este Capítulo de la Tesis, consiste en formular y resolver un problema de
cerradura y hacer un análisis de las condiciones de frontera del mismo, lo cual es original
[Valdés-Parada, 2007] y está dentro de una teoría bien fundamentada de escalamiento para
la obtención de ecuaciones macroscópicas [Whitaker, 1999].
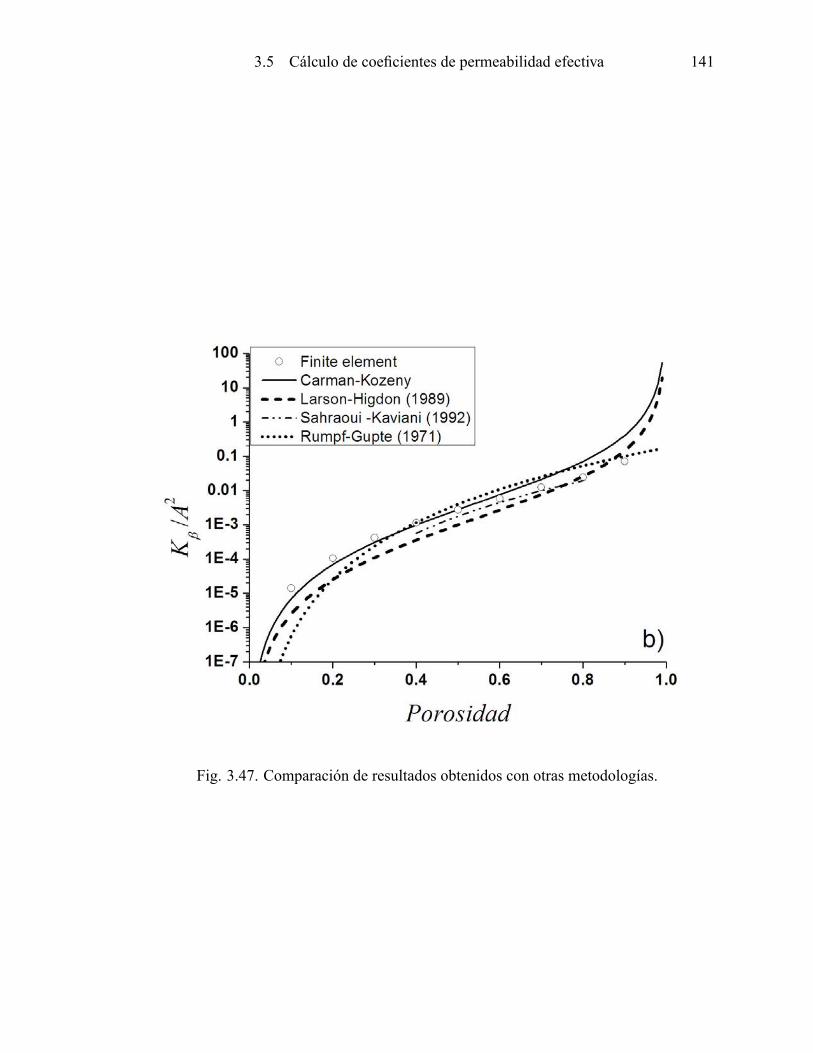
3.5 Cálculo de coe�cientes de permeabilidad efectiva 141
Fig. 3.47. Comparación de resultados obtenidos con otras metodologías.

3.6 Conclusiones del problema de coe�cientes de permeabilidad efectiva 142
3.6 Conclusiones del problema de coe�cientes depermeabilidad efectiva
Las conclusiones más importantes del Capítulo tres de esta Tesis, relativo al cálculo de
coe�cientes de permeabilidad efectiva en medios porosos son las siguientes:
� Se obtuvieron las ecuaciones puntuales (locales) que gobiernan el sistema a escala
microscópica. Puesto que el estudio a esta escala es prácticamente imposible, dada
la complejidad del medio poroso, se trasladó el análisis a la escala macroscópica.
� Se aplicó el método del promedio volumétrico para hacer un suavizado espacial de
las variables involucradas (presión y velocidad), por medio de la introducción de
los operadores de promedio super�cial y de promedio intrínseco. Esto condujo a la
formulación de ecuaciones en términos de promedios y de desviaciones espaciales
de las variables [Valdés-Parada, 2007].
� Se obtuvo el problema de cerradura estableciendo ecuaciones que sólo dependen de
cantidades promedio (ecuación de Darcy-Brinkman que implica la introducción del
tensor de permeabilidad efectiva).
� Se veri�có que los resultados obtenidos por el método del promedio volumétrico
coinciden con los esperados cuando se emplea la teoría clásica de la dinámica de
�uidos en medios porosos, pues la ley de Darcy resulta como caso particular -bajo
ciertas simpli�caciones-, de la ecuación de Darcy-Brinkman.

3.6 Conclusiones del problema de coe�cientes de permeabilidad efectiva 143
� Se realizaron diversos cambios de variables que permitieron expresar el problema
de cerradura como un problema de tipo Stokes y una condición de promedio, que
permite calcular el coe�ciente de permeabilidad efectiva del medio poroso. Esto
implica la introducción de las variables de cerradura [Valdés-Parada et al, 2007].
� Se desarrolló y aplicó un mallador ad hoc para la geometría del problema que sólo
depende de la porosidad del medio y del re�namiento que se desee que tenga la
malla. Esto fue hecho mediante un programa propio en vez de sólo emplear software
comercial.
� Se resolvió el problema de Stokes mediante un programa propio basado en elemento
�nito.
� Se calculó el coe�ciente de permeabilidad efectiva para distintas porosidades y se
comparó con los resultados heurísticos dados por la ecuación de Carman-Kozeny.
Ambos resultados coinciden con una precisión numérica aceptable.
� Se propusieron y compararon diferentes condiciones de frontera para el problema de
Stokes identi�cando la condición óptima.
� Se compararon los resultados obtenidos con los reportados por otros métodos en la
literatura. En general, las coincidencias son aceptables.
� Se puede decir que el método analítico (promedio volumétrico) con�rma los
resultados heurísticos (Carman-Kozeny).
3.6 Conclusiones del problema de coe�cientes de permeabilidad efectiva 144
El trabajo futuro que se desprende del estudio presentado en este Capítulo incluye
la aplicación a medios tri-fásicos o aún más complejos. Adicionalmente, queda aún por
desarrollar el estudio de medios no-isotrópicos, que implica resolver el problema de en-
contrar parámetros geométricos para lograr coincidencias aceptables con los resultados ex-
perimentales reportados [Whitaker, 1999]. Esto puede requerir posiblemente el desarrollo
de herramientas matemáticas más elaboradas.
Conclusiones
Las conclusiones generales obtenidas de la investigación desarrollada y reportada en
esta Tesis pueden establecerse de la siguiente manera:
� La modelación computacional de problemas en mecánica de �uidos constituye un
área muy importante para el desarrollo cientí�co y tecnológico. Por ello, contar
con metodologías que permitan obtener soluciones precisas para estos problemas se
vuelve relevante y pertinente, no sólo desde el punto de vista académico sino de las
aplicaciones en la Industria o en la Ingeniería. El presente trabajo aporta algunas de
estas metodologías.
� El trabajo interdisciplinario resulta imprescindible para formular y resolver
problemas con alcances reales. En esta investigación se interactuó con
investigadores de tres áreas diferentes: Meteorología, Energía e Ingeniería Química.
Es decir, no se desarrollan métodos matemáticos sólo para la matemática misma,
sino que se busca su aplicación en problemas de trascendencia real.
� La interacción con investigadores formados en otras disciplinas implica, por un lado,
una mentalidad abierta que no sólo imponga el punto de vista matemático sino que
acepte otras posturas más pragmáticas; y por otra parte, la necesidad de inmiscuirse
con los conceptos relevantes y la terminología de otras áreas. En este documento
se reporta el resultado de este tipo de interacciones de la matemática con otras
disciplinas.
145
Conclusiones 146
� Se desarrollaron y aplicaron métodos numéricos para resolver problemas en tres
disciplinas aplicadas: meteorología, al recuperar la componente vertical de un
campo de viento medido sólo en la dirección horizontal, satisfaciendo condiciones
de conservación de masa; electro-hidrodinámica, al resolver celdas electro-químicas
y �ujos con velocidad conocida; y fenómenos de transporte, al calcular coe�cientes
de permeabilidad efectiva en medios porosos.
� En el problema de meteorología se desarrollaron tres algoritmos: elíptico, de
gradiente conjugado y de gradiente conjugado con pre-condicionador. Los
experimentos numéricos mostraron que el algoritmo que produce mejores resultados
es el tercero. Además se encontró que las condiciones de frontera originalmente
propuestas -y que normalmente se emplean en la literatura-, no son las idóneas, y se
propusieron condiciones modi�cadas con las que se obtienen mejores resultados. La
di�cultad más grande en este problema radica en el dominio que incluye una frontera
irregular adaptada a la topografía de cierta región geográ�ca de México. Un ajuste
mediante splines cúbicos propuesto por el Dr. Marco A. Núñez permitió superarla.
� El problema de �ujos electro-hidrodinámicos consiste en resolver un sistema de
seis ecuaciones diferenciales parciales, no-lineales, acopladas. Para enfrentar esta
di�cultad se utilizó la estrategia de resolver primero problemas simpli�cados y
después agregar gradualmente más elementos hasta llegar al sistema completo. Esta
estrategia permitió resolver problemas parciales y extender resultados conocidos en
Conclusiones 147
una dimensión, al caso bi-dimensional. La técnica de descomposición del operador
es una herramienta muy útil para abordar este tipo de problemas complejos.
� En el problema de fenómenos de transporte se dedujo por medios analíticos -a través
del método del promedio volumétrico-, un problema de valores a la frontera que
resulta ser un problema tipo Stokes. La solución de este problema en un dominio
con un obstáculo central (celda unitaria), se logró desarrollando un resolvedor de
Stokes. Los resultados numéricos permitieron con�rmar la ecuación heurística de
Carman-Kozeny. Una de las di�cultades mayores implicó la construcción de un
mallador automatizado ad hoc para la celda unitaria.
� Para resolver cada uno de los tres problemas, se desarrollaron programas propios
escritos en FORTRAN 90, en vez de sólo emplear software comercial. Esto permite
tener el control de los métodos y variables involucradas, a la vez que desarrolla cierta
independencia de otros ambientes de cómputo, que a veces son más restringidos.
� En todos los casos, las soluciones obtenidas son aproximaciones numéricas basadas
en el método de elemento �nito. Se emplearon funciones base lineales debido a
su mayor sencillez y a que mantienen un nivel aceptablemente bajo en el error
(aproximaciones de primer y segundo orden).
De lo anterior se desprende que se han alcanzado satisfactoriamente los objetivos
planteados para este trabajo de Tesis.
Adicionalmente, las principales aportaciones de esta investigación son:

Conclusiones 148
� En el problema de meteorología: formular de manera rigurosa el problema
elíptico en términos de espacios de Hilbert y de la teoría de ortogonalidad de
espacios; re-formular el problema elíptico como un problema de punto silla; adaptar
metodologías exitosas en DCF a la generación de campos de viento; identi�car
condiciones de frontera óptimas para el problema elíptico; desarrollar tres algoritmos
para la solución de los problemas encontrados.
� En el problema de �ujos electro-hidrodinámicos: desarrollar un modelo físico
completo para una celda de combustible sin membrana; extender los resultados
uni-dimensionales reportados en la literatura para una celda electro-química, al
caso bidimensional; aplicar esquemas numéricos que permiten desacoplar sistemas
complejos de EDP.
� En el problema de fenómenos de transporte: calcular coe�cientes de permeabilidad
efectiva en medios porosos mediante el método del promedio volumétrico,
obteniendo resultados similares a los de otras metodologías; desarrollar un mallador
para una celda unitaria que tiene un obstáculo en su interior; determinar las
condiciones de frontera óptimas para el modelo macroscópico.
� Se enfrentaron y resolvieron problemas de aplicación real que tienen impacto en el
desarrollo tecnológico.
� Se ha contribuido a desarrollar el trabajo interdisciplinario entre la Matemática y la
Física, la Química y la Ingeniería.
Conclusiones 149
� Se han desarrollado resolvedores numéricos para problemas elípticos, de Stokes,
tipo onda y de Navier-Stokes, mediante la elaboración de programas propios.
Finalmente, el trabajo futuro que se vislumbra como continuación natural de la in-
vestigación presentada en esta Tesis tiene las siguientes orientaciones:
� Extender los resultados aquí presentados al caso tri-dimensional.
� Aplicar el modelo desarrollado para el problema de campos de viento a la dinámica
de �uidos experimental, donde pueden obtenerse datos reales -por ejemplo-, con la
técnica PIV.
� Implementar computacionalmente la solución del modelo físico completo para la
celda de combustible.
� Estudiar los fenómenos de transporte en medios multifásicos y extender la
investigación a los medios no isotrópicos.
� Desarrollar un resolvedor elíptico tri-dimensional programándolo en FORTRAN 90,
tomando como base algunas sub-rutinas que ya se tienen implementadas.
Bibliografía
Arrow, K. J., Hurwics, L. and Uzawa, H. (1958), Studies in Linear and Nonlinear Pro-gramming, Stanford University Press, Stanford CA.
Bard, A. J. and Faulkner, L. R., (1980), Electrochemical methods, fundamentals and appli-cations, John Wiley and sons, NY
Bazant, M., Thornton, K. y Ajdari, A., (2004), Diffuse-charge dynamics in electrochemicalsystems, Physical Review 70, 021506, pp 1-24
Bazant, M. Z., Chu, K. T. and Bayly, B. J., (2005), Current voltage relations for electro-chemical thin �lms, SIAM J. Appl. Maths. 65, 1463-1484.
Bercovier, M. and Pironneau, O., (1979), Error estimates for the �nite element methodsolution of the Stokes problem in the primitive variables, Numer. Math. 33, 211-224.
de Boor, C. A., (1978), A practical guide to splines, Springer, New York.
Brenner, S. C. and Scott, L. R., (1994), The Mathematical Theory of Finite Element Meth-ods, Springer-Verlag, New York, NY.
Brezzi, F. and Fortin, M., (1991), Mixed and Hybrid Finite Element Methods, Springer-Verlag, New York, NY.
Burch, S. F., and Ravenscroft, F., (1992), Computer modelling the UK Wind Energy Re-source: Final Overview Report. Technical Report ETSU WN 7055, AEA IndustrialTechnology Harwell Laboratory.
Carrette, L., Friedrich, K. A. y Stimming, U., (2001), Fuel Cells. Fundamentals and Appli-cations, Fuel Cells 1, 5-39.
Castellanos, A., (1998), Electrohydrodynamics, Springer, Wien, NY.
Ciarlet, P. G., (2002), The Finite Element Method for Elliptic Problems, North-HollandAmsterdam (1970), re-edited as Vol. 40, SIAM, Classics in Applied Mathematics,Philadelphia, PA.
Currie, I. G., (1993), Fundamental Mechanics of Fluids, 2nd edition, McGraw Hill.
150
Bibliografía 151
Choban, E. R., Markoski, P., Wiecjowisk, A. y Kenis, P. J. A., (2004), Micro�uidic �uidcell based on laminar �ow, J. Power Sources 128, 54-60.
Chorin, A. J., (1967), A numerical method for solving incompressible viscous �ow prob-lems, J. Comput. Phys. 2, 2-26.
Chorin, A. J., (1973), Numerical study of slightly viscous �ow, J. Fluid. Mech. 57, 785-796.
Davis, T. A., (2006), Direct methods for sparse linear systems, SIAM, USA.
Dudhia, J., Gill, D., Guo, Y. R., Hansen, D., Manning, K. & Wang, W., (1999) PSU/NCARMesoscale Modeling System Tutorial Class Notes and User's Guide (MM5 ModelingSystem Version 2 with an introduction to Version 3) http://www.mmm.ucar.edu/mm5.
Eidsath, A. B., Carbonell, R. G., Whitaker, S. and Herrmann, L. R., (1983), Dispersionin pulsed systems III: Comparison between theory and experiments for packed beds,Chemical Engineering Science, Vol. 38, 1803-1816.
Ferrigno, R., Stroock, A. D., Clark, T., Mayer, M. y Whitesides, G., (2002), J. Am. Chem.Soc., 124 pp 1230-1231.
Girault, V. and Raviart, P. A., (1986), Finite Element Methods for the Navier-Stokes Equa-tions: Theory and Algorithms, Springer-Verlag, Berlin.
Glowinski, R., (1991) Finite element methods for the numerical simulation of incompress-ible viscous �ow. Introduction to the control of the Navier-Stokes equations, in: C. R.Anderson and C. Greengard, eds. Vortex Dynamics and Vortex Methods, Lectures inAppl. Math. 28, American Mathematical Society, Providence, RI, 219-301.
Glowinski, R., (2003), Numerical Methods for Fluids (Part 3), Handbook of NumericalAnalysis, volume IX, North-Holland, Amsterdam.
Golub, G. H. and Van Loan, C. F., (1996), Matrix computations, John Hopkins, Studies inMathematical Sciences, 3rd Edition, USA.
GTOPO30 documentation, section 7, U. S. Geological Survey, (1997). http:// www.scd.ucar.edu/dss/datasests/ds758.0hmtl.
Howes, F. A. and Whitaker, S., (1985), The spatial averaging theorem revisited, ChemicalEngineering Science, Vol. 40, No. 8, 1387-1392.
Bibliografía 152
Kitada, T., Kaki, A., Ueda, H. and Peters,L. K., (1983), Estimation of the vertical air motionfrom limited horizontal wind data�A numerical experiment,.Atmos. Environ. 17, 2181-2192.
Kitada, T. and Igarashi, K., (1986), Numerical analysis of air pollution in a combined �eldof land/sea breeze and mountain/valley wind, Climate and Applied Met. 25, 767-784.
Larson, R. E. and Higdon, J. J. L., (1989), A periodic grain consolidation model of porousmedia, Physics of Fluids, Vol. A1, 38-46.
Larsson, S. and Thomée, V., (2005), Partial Differential Equations with Numericla Meth-ods, Springer, New York.
Lin, H., Storey, B. D., Oddy, M. H., Chuan-Hua, Ch. and Santiago, J. G., (2003), Instabilityof electrokinetic microchannel �ows with conductivity gradients, Submitted to Physicsof Fluids August 14th.
Marchuk, G. I., (1990), Splitting and alternate direction methods. Handbook of NumericalAnalysis, Vol 1, North-Holland, Amsterdam.
Markus, R., Willert, C. E. y Kompenhans, J., (1998), Particle Image Velocimetry: A Prac-tical Guide, Springer, Berlin.
Melcher, J. R., (1981), Continuum electromechanics, MIT Press, Cambridge, Mass.
Morton, K. W. y Mayers, D. F., (1994), Numerical Solution of Partial Differential Equa-tions, University Press, Cambridge, Mass.
Newman, J., (1991), Electrochemical systems, Prentice Hall, Englewood Cliffs, NJ.
Nuñez, M. A., Ramírez, G. and Hernández, H., (2004), Análisis de métodos de interpo-lación de datos de viento basados en la ecuación de conservación de la masa, Reportede investigación, Universidad Autónoma Metropolitana, División de Ciencias Básicase Ingeniería 1-65.
Núñez, M. A., Flores, C. y Juárez, H., (2006), A study of hydrodynamic mass-consistentmodels, Journal of Computational Methods in Science and Engineering, 6, 365-385.
Núñez, M.A., Flores, C. and Juárez, H., (2007), Interpolation of hydrodynamic velocitydata with the continuity equation, Journal of Computational Methods in Science andEngineering, 7 (1), 21-42.
Bibliografía 153
Núñez, M. A., (2007b), Calculation of the vertical velocity of geophysical �ows with MassConsistent Models, Proceedings of the XVI Congreso Mexicano de Meteorología, Ver-acruz, México.
Núñez, M. A., (2008), New scheme to compute mass-consistent models of geophysical�ows, Proceedings of the I Workshop on Asymptotics for Parabolic and HyperbolicSystems, Laboratóiro Nacional de Computaceao Cientí�ca, Petrópolis-R. J., Brasil.
Pennel, W. T., (1983), An evaluation of the role of numerical wind �eld models in windturbine siting. Technical Report PNL-SA-11129, Battelle Memorial Institute, Paci�cNorthwest Laboratory, Richland, Washington.
Pielke, R. A., (2002), Mesoscale Meteorological Modeling, Academic Press, New York2nd. ed.
Ratto, C. F., Festa, R., Romeo, C., Frumento, O. A. and Galluzzi, M., (1996), Environ.Software 9, 247-268. Mass-consistent models for wind �elds over complex terrain: Thesate of the art.
Robinson, R. A. and Stokes, R. H., (2002), Electrolyte solutions, Dover Publications, Mi-neola, NY.
Rumpf, H. and Gupte, A. R., (1971), Einfüse und korngrössenverteiung in widerstandsde-setz der porenströmung, Chemie-Ingenieur Technik, Vol. 43, 367-375.
Sahraoui, M. and Kaviany, M., (1992), Slip and non-slip velocity boundary conditions atthe interface of porous, plain media, International Journal of Heat and Mass Transfer,Vol. 35, 927-943.
Sasaki, Y., (1958) An objective analysis based on the variational method, Journal Met. Soc.Japan, 36:77-88.
Sherman, C. A., (1978), A mass-consistent model for wind �elds over complex terrain, J.Appl. Meteor. 17, 312-319.
Temam, R., (1977), Theory and Numerical Analysis of the Navier-Stokes Equations, North-Holland, Amsterdam.
Teukolsky, W. H., Vetterling, S. A., and Flannery, B. P., (1992), Numerical Recipies inFortran 77, Second Edition, The Art of Scienti�c Computing, Cambridge UniversityPress, USA.

Bibliografía 154
Valdés-Parada, F. J., Goyeau, B. and Ochoa-Tapia, J. A., (2007), Jump momentum bound-ary condition at a �uid�porous dividing surface: Derivation of the closure problem,Chemical Engineering Science, 62, 4025-4039.
Valdés-Parada, F. J. (2007), Condiciones de frontera para el transporte entre medios mul-tifásicos, Tesis Doctoral, UAM-I, México.
Whitaker, S. (1999), The method of volume averaging, Kluwer Academic Publishers, TheNetherlands.
Yanenko, N. N. (1971), The method of fractional steps, Springer-Verlag, Berlin.

Anexo 1 Descripción del resolvedor elíptico
Problema modelo:
�u� ��u = f en ;
u = g0 sobre �D;
�@u
@n= g1 sobre �N :
Aproximación por elemento �nito:
nPj=1
��
Z
�i�jdx+ �
Z
r�ir�jdx�uj
=
Z
f�idx+
Z�
g1�id����
Z
bg0�idx+ �
Z
rbg0r�idx� ; i = 1; ndonde
bg0(pj) = � 0; si j es nodo Dirichlet,g0(pj); si j no es nodo Dirichlet.
La Figura 3.48 muestra las sub-rutinas que componen al resolvedor elíptico y cómo inter-
actúan para obtener la solución numérica.
155
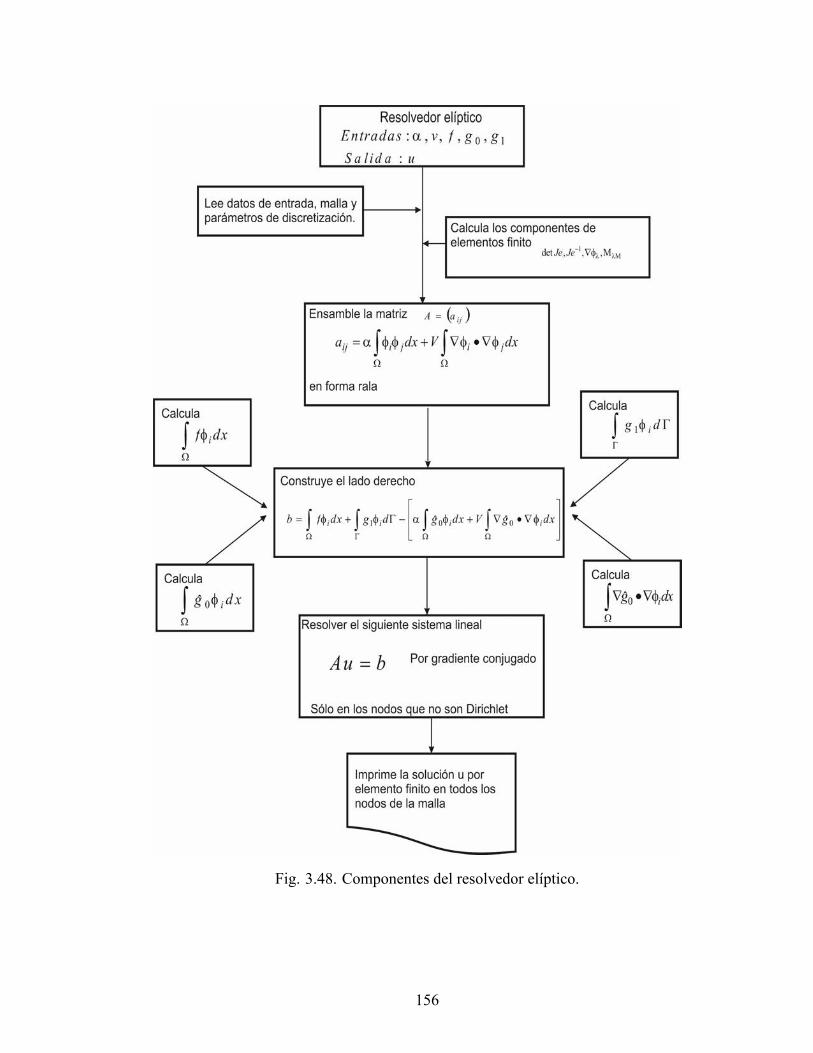
Fig. 3.48. Componentes del resolvedor elíptico.
156

Anexo 2 Descripción del resolvedor de Stokes
Problema modelo:
�u� ��u+rp = f en ;
r � u = 0 en ;
u = g0; sobre �D;
�@u
@n� np = g1 sobre �N :
La Figura 3.49 muestra el diagrama de �ujo que sigue este resolvedor [Glowinski, 1991]
para obtener la solución tanto en la velocidad u como en la presión p. Nótese que en varios
de sus pasos se utiliza al resolvedor elíptico del Anexo 1 como una subrutina.
157

Fig. 3.49. Componentes del resolvedor de Stokes.
158

Anexo 3 Descripción del resolvedor tipo onda
Problema modelo (problema puro de advección):
@u
@t+V � ru = 0 en n��;
u(t) = g(tn+1) sobre ��;
u(tn) = V;
que es equivalente, por componente, al problema hiperbólico
@2'
@t2�r � (VV � r') = 0 en � (0; T );
' = g sobre �� � (0; T );
V � n(@'@t+V � r') = 0 sobre �n�� � (0; T );
'(0) = '0;
@'
@t(0) = �V � r'0;
cuya formulación variacional [Glowinski, 2003] está dada por
Z
@2'
@t2vdx+
Z
(V � r')(V � rv)dx+
Z�n��
(V � n)'tvd� = 0;8v 2 W0;
' = g sobre �� (0; T );
'(0) = '0;
@'
@t(0) = �V � r'0:
159

Anexo 3 Descripción del resolvedor tipo onda 160
Entonces la Figura 3.50 muestra las subrutinas necesarias así como la forma en que deben
interactuar para obtener la solución a este problema.
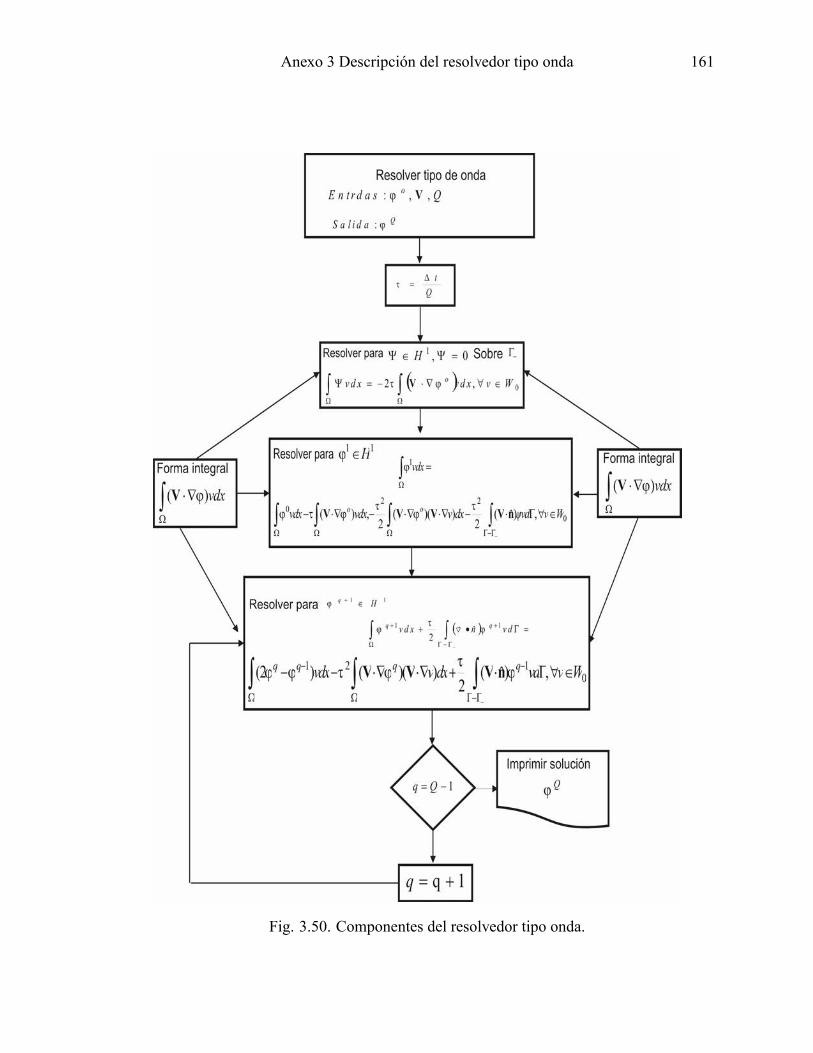
Anexo 3 Descripción del resolvedor tipo onda 161
Fig. 3.50. Componentes del resolvedor tipo onda.

Anexo 4 Descripción del resolvedor deNavier-Stokes
Problema modelo:
@u
@t� ��u+ (u � r)u+rp = 0 en � (0; T );
r � u = 0 en � (0; T );
c. i. u(0) = u0; con r � u0 = 0 en ;
c. f. u = g(t) sobre @� (0; T );
conZ
@�
g(t) � nd� = 0; sobre (0; T ):
La Figura 3.51 muestra las sub-rutinas necesarias para obtener la solución tanto en la pre-
sión p como en la velocidad u. Nótese que las tres principales sub-rutinas se toman de los
resolvedores expuestos en los Anexos 1, 2 y 3, respectivamente.
162
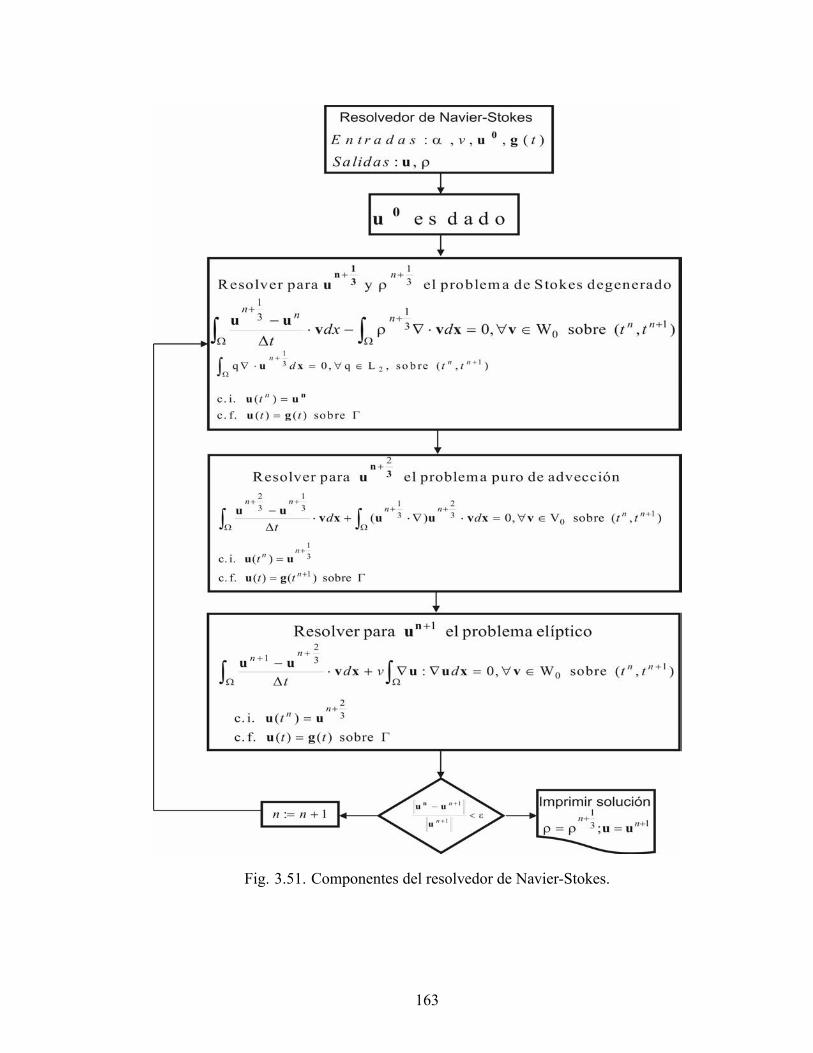
Fig. 3.51. Componentes del resolvedor de Navier-Stokes.
163