mecanismos 1
TRANSCRIPT

Unidad 1:Principios fundamentales. 1.1 Introducción al análisis de mecanismos.1.2 Conceptos básicos.1.3 Grados de libertad (movilidad).1.4 Inversión cinemática.
Unidad 2:Análisis cinemático de mecanismos planos articulados.
2.1 Análisis de posición en mecanismos decuatro barras articuladas.
2
2.2 Análisis de velocidad y aceleración relativa de los eslabones y articulaciones de mecanismos planos (mecanismo Biela – Manivela – Corredera centrado y de retorno rápido, además de mecanismos de cuatro, cinco o más barras articuladas, entre otros).
2.3 Análisis de velocidad y aceleración relativa de mecanismos con eslabones guía móviles (mecanismo Whitworth, Ginebra, leva y seguidor, entre otros).
2.4 Aplicación de Software en el modelado de mecanismos planos articulados.
2.5 Aplicación de mecanismos en sistemas mecatrónicos.
3

Unidad 3:Levas. 3.1 Nomenclatura, clasificación y aplicación de
levas y seguidores.3.2 Análisis de diagramas y curvas de
desplazamiento, velocidad y aceleración para el seguidor.
3.3 Diseño grafico y analítico del perfil de levas planas (con seguidor radial, descentrado y de movimiento oscilatorio).
3.4 Diseño de levas planas con la aplicaciónde Software.
4
Unidad 4:Engranes y trenes de engranajes.4.1 Nomenclatura, clasificación y aplicación de los
engranes (rectos, cónicos y helicoidales).4.2 Ley fundamental del engrane.4.3 Análisis cinemático de trenes de engranajes
(simples, compuestos y planetarios).
5

Unidad 5:Introducción a la síntesis de mecanismos. 5.1 Clasificación de problemas en la síntesis de
mecanismos. 5.2 Espaciamiento de los puntos de precisión
(exactitud) para la generación de funciones. 5.3 Diseño grafico y analítico de un mecanismos
de cuatro barras articuladas como un generador de funciones y para la guía de cuerpos.
5.4 Síntesis analítica empleando números complejos.
5.5 Consideraciones prácticas en la síntesis de mecanismos.
5.6 Aplicación de software en la síntesis de mecanismos.
6

1.1 Introducción al análisis de mecanismos.
Una máquina es una combinación de cuerpos rígidos, conectados por medio de articulaciones que les permiten un movimiento relativo definido y son capaces de transmitir o transformar energía. Una máquina siempre debe ser abastecida con energía de una fuente externa. Su utilidad consiste en su habilidad para alterar la energía suministrada y convertirla eficazmente para el cumplimiento de un servicio deseado.
7
Un mecanismo es una combinación de cuerpos rígidos, conectados por medio de articulaciones que les permiten un movimiento relativo definido, enfocado a la transformación del movimiento. En un mecanismo, aunque puede transmitir potencia de una fuerza, el concepto predominante que tiene presente el diseñador es logar un movimiento deseado. Es un dispositivo que producirá ciertos movimientos mecánicos, haciendo a un lado el problema de si esta capacitado para hacer el trabajo útil.
8

Una estructura es una combinación de cuerpos (rígidos) resistentes conectados por medio de articulaciones, cuyo propósito no es efectuar algún trabajo ni transformar el movimiento.
Analogía entre los términos.El termino “estructura” es a la Estática lo que el
termino “mecanismo” es a la Cinemática y el termino “máquina” es a la Cinética.
9

Los componentes de las máquinas.
Cualquier máquina se compone de un numero determinado de elementos (piezas) componentes, unos fijos y otros móviles, agrupados a veces para ejecutar tareas diferentes dentro de una misma maquina (formando diversos mecanismos).
10
1.2 Conceptos básicos.
El concepto topológico de mecanismos comprende el análisis de los elementos que lo componen en cuanto a: sus formas, el numero de elementos, las uniones entre ellos, los tipos de movimientos que estos pueden efectuar, las leyes por las que se rigen, etc. Engloba los aspectos relativos a su configuración geométrica y las consecuencias que de ella puedan derivarse.
11

PiezaCuando en un mecanismo se van separando cada
una de las partes que lo forman, se llega finalmente a una serie de partes indivisibles, generalmente rígidas (aunque no necesariamente) llamadas piezas.
Eslabón (miembro) Un conjunto de piezas unidas rígidamente entre
si, sin movimiento posible entre ellas.Un eslabón es un elemento de una maquina o
mecanismo que conecta a otros elementos y que tiene movimiento relativo a ellos.
12

Un eslabón o miembro puede servir de soporte, como guía de otros eslabones, para trasmitir movimientos o bien funcionar de las tres formas.
Piezas de una biela Eslabón de una biela
13

Clasificación de los eslabones: Eslabones rígidos. Están capacitados para
transmitir fuerza, para jalar o empujar. A esta clase pertenece la mayoría de las partes metálicas de las maquinas.
Eslabones flexibles. Son los que están constituidos para ofrecer resistencia en una sola forma (rigidez unilateral).◦ Eslabones que actúan a tensión. Cuerdas, bandas,
cadenas.◦ Eslabones que actúan a presión. Agua, aceite hidráulico,
conducen fuerzas de empuje.
14

Par cinemático.
Los eslabones pueden estar en contacto unos a otros de varias maneras. El contacto puede ocurrir sobre una superficie, a lo largo de una línea, o en un punto. Aquellas partes de dos eslabones que están en contacto con movimiento relativo entre ellos se les denomina pares.
15

Clasificación de los pares:1.Atendiendo la superficie de contacto entre los
dos miembros que constituyen el par: Pares superiores o de contacto lineal o puntual
(levas- varilla, cojinetes de bolas y engranes). Pares inferiores o de contacto superficial
(cilindro-embolo, perno- soporte), las superficies de los eslabones son geométricamente similares
16

Es posible remplazar pares superiores por pares inferiores cuando se requiere disminuir la presión de contacto y el rozamiento.
17

2. Atendiendo el movimiento relativo entre sus puntos:
De primer grado o lineal, cuando cualquier punto de uno de sus eslabones describe una línea en su movimiento relativo respecto del otro eslabón del par.
18

De segundo grado o superficial, cuando cualquier punto de uno de los miembros describe una superficie en su movimiento.
Par plano, Par cilíndrico y Par Esférico.
19

De tercer grado o espacial cuando un punto de los eslabones describe una curva alabada
20

3. Atendiendo al tipo de rozamiento entre los miembros, se clasifican en:
Par con deslizamiento. Cilindro-pistón. Par con rodadura. Rueda de tren sobre riel. Par con pivotamiento. Bisagra de una puerta.
4. Debido a los grados de libertad que posee el movimiento relativo de los miembros que forman el par se clasifican en I,II,III,IV,V grados de libertad.
21

Un cuerpo rígido en el espacio posee seis grados de libertad (seis movimientos independientes entre si). Que son 3 rotaciones paralelas a los ejes y 3 traslaciones.
22

ido en el espacio pos
23

Clasificación de pares dependiendo el numero de barras que conectan:
Binario (si conectan dos eslabones). Ternario (si conectan tres eslabones)
24
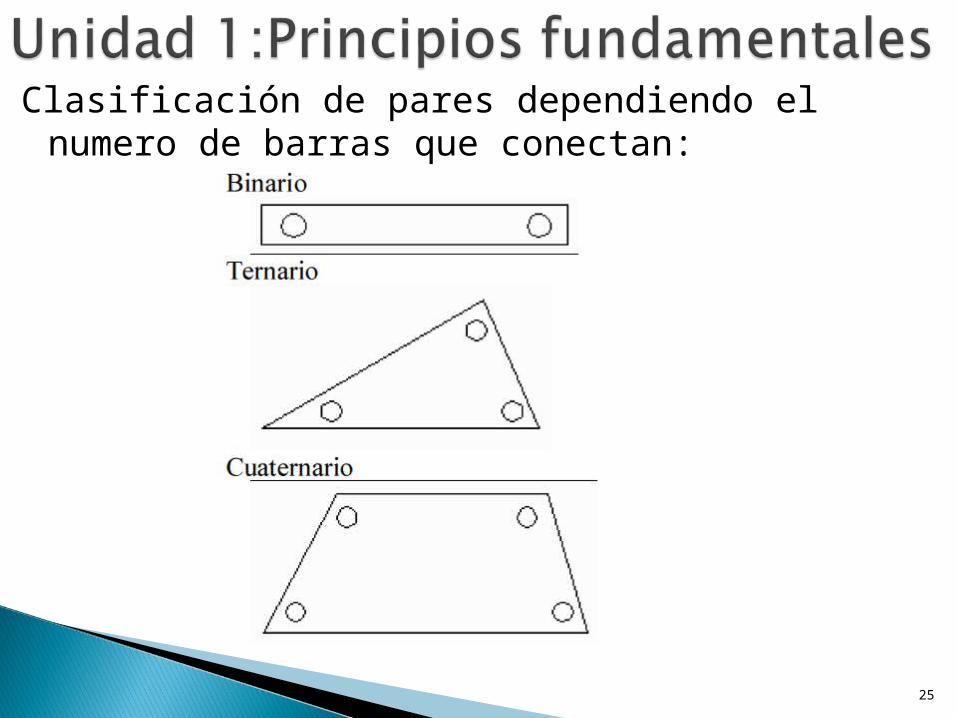
Clasificación de pares dependiendo el numero de barras que conectan:
25

Cadenas cinemáticas
Definición de las cadenas. Cuando un numero de eslabones están conectados unos a los otros por pares elementales, de tal forma que permitan que el movimiento se efectué en combinación, se denomina cadena cinemática. Una cadena cinemática no es necesariamente un mecanismo, se convierte en uno cuando se define el eslabón fijo.
26

Clasificación de las cadenas: Cadenas cerradas, cuando todos y cada uno de
los miembros se une a otros dos. Cadena abierta, cuando hay algún miembro no
unido a otros dos.
27

Clasificación de las cadenas: Simple: cada eslabón esta acoplado, por lo
menos a otros dos eslabones. Complejo: contiene eslabones acoplados a tres o
mas eslabones.
28

Grados de libertad (movilidad)
De un mecanismo es el numero de parámetros de entrada (casi siempre variables del par) que se deben controlar independiente mente, con el fin de llevar a dispositivo a una posición en particular.
También como el mínimo numero de coordenadas necesario para determinar la posición del mecanismo.
29

Grados de libertad (movilidad)Ecuación de Gruebler En mecanismos planos será:
GDL=3N -2 j – 3G N= numero de eslabones del mecanismos. j=numero de pares o juntas G =numero de eslabones fijos
30

Grados de libertad (movilidad)
En mecanismos planos será:m=3 (n-1) -2 j1 – j2
n= numero de eslabones del mecanismos. j1=numero de pares que permiten un grado de
libertad. j2 =numero de pares que permiten dos grados de
libertad (semijuntas). Conocida como criterio de kutzbach
31

Grados de libertad (movilidad)
En mecanismos espaciales la movilidad será:m=6 (n-1) -5 j1 – 4 j2 -3 j3 -2 j4 –j5
n= numero de eslabones del mecanismos. j1=numero de pares que permiten un grado de
libertad. j2 =numero de pares que permiten dos grados de libertad. j3=numero de pares que permiten tres grado de libertad. j4 =numero de pares que permiten cuatro grados de libertad. j5 =numero de pares que permiten cinco grado de libertad.
32

Grados de libertad (movilidad)
33

Grados de libertad (movilidad)
34

Grados de libertad (movilidad)
Pares cinemáticos de clase 1, un grado de libertad:
Pares cinemáticos de clase 2, dos grados de libertad:
35

Grados de libertad (movilidad)
Mecanismos y estructuras:GDL es positivo: Mecanismos; y eslabones tendrán
un movimiento relativo.GDL=0: Estructura; y no es posible ningún
movimiento.GDL es negativo: Estructura precargada; y no es
posible ningún movimiento.
36

Grados de libertad (movilidad)
Ejercicios.
37

Grados de libertad (movilidad)
Ejercicios.
38
Grados de libertad (movilidad)
Ejercicios.
39

Grados de libertad (movilidad)
Ejercicios.
40

Grados de libertad (movilidad)
Ejercicios.
41

Grados de libertad (movilidad)
Ejercicios.
42

Grados de libertad (movilidad)
Ejercicios.
43

Grados de libertad (movilidad)
Ejercicios.
44

Grados de libertad (movilidad)
Ejercicios.
45

Grados de libertad (movilidad)
Ejercicios.
46

Grados de libertad (movilidad)
Ejercicios.
47

Grados de libertad (movilidad)
Ejercicios.
48
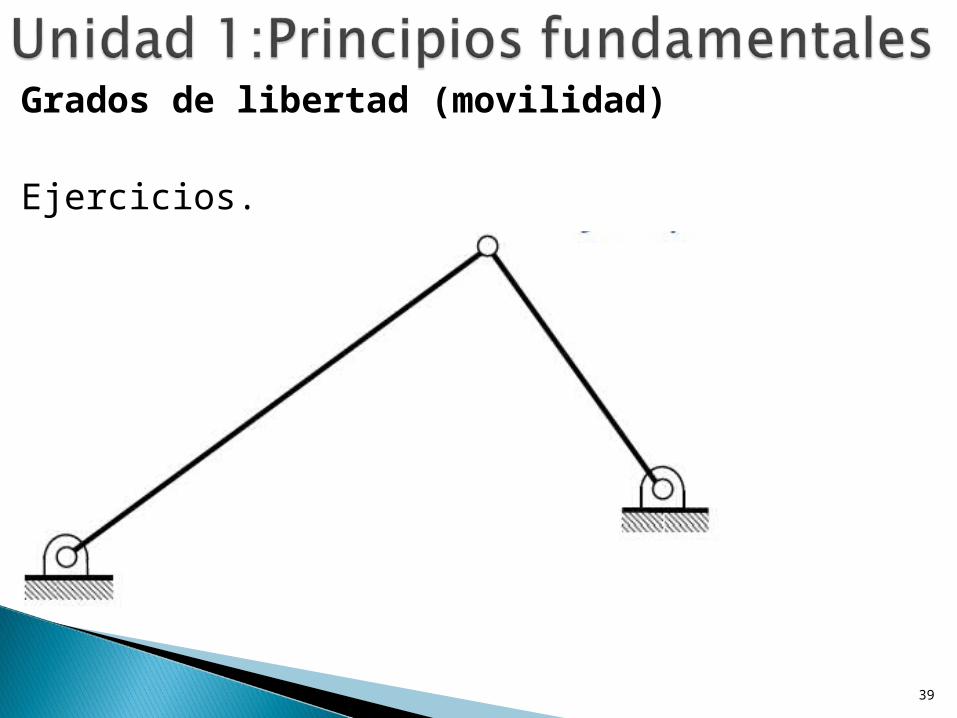
Grados de libertad (movilidad)
Ejercicios.
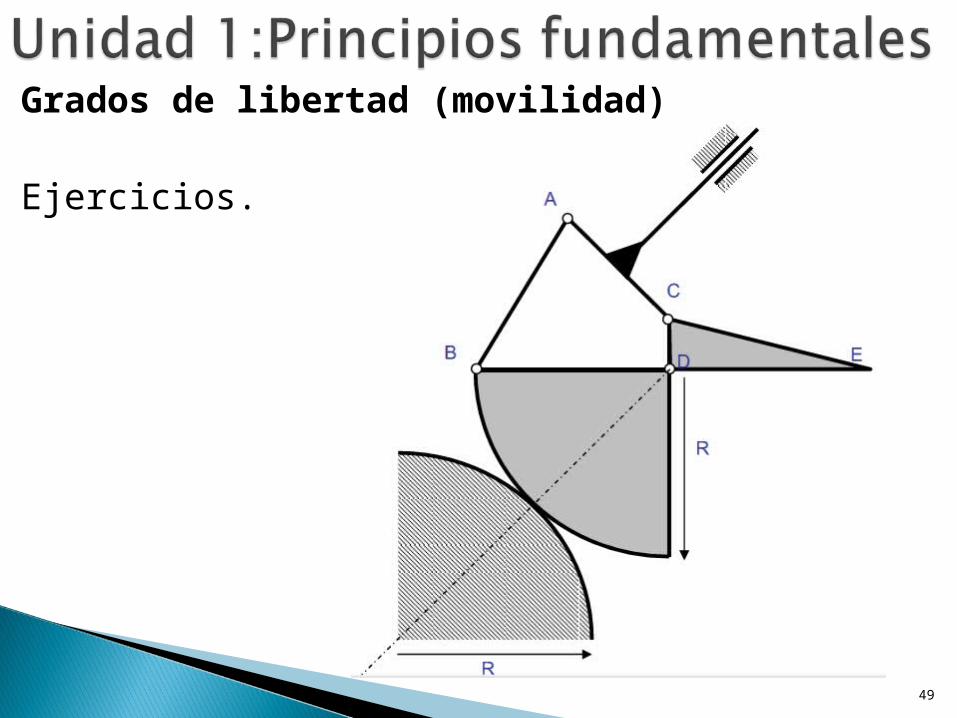
49

Grados de libertad (movilidad)
Ejercicios.
50

Grados de libertad (movilidad)
Ejercicios.
51

Grados de libertad (movilidad)
Ejercicios.
52
Grados de libertad (movilidad)
Ejercicios.
53

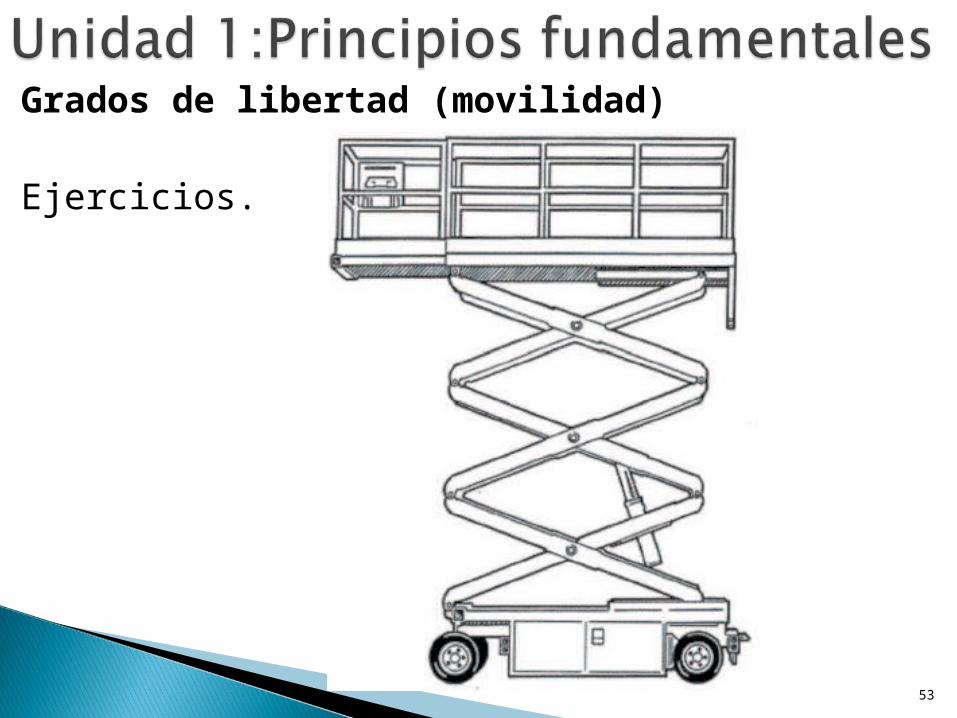
Grados de libertad (movilidad)
Ejercicios.
54

Grados de libertad (movilidad)
Ejercicios.
55
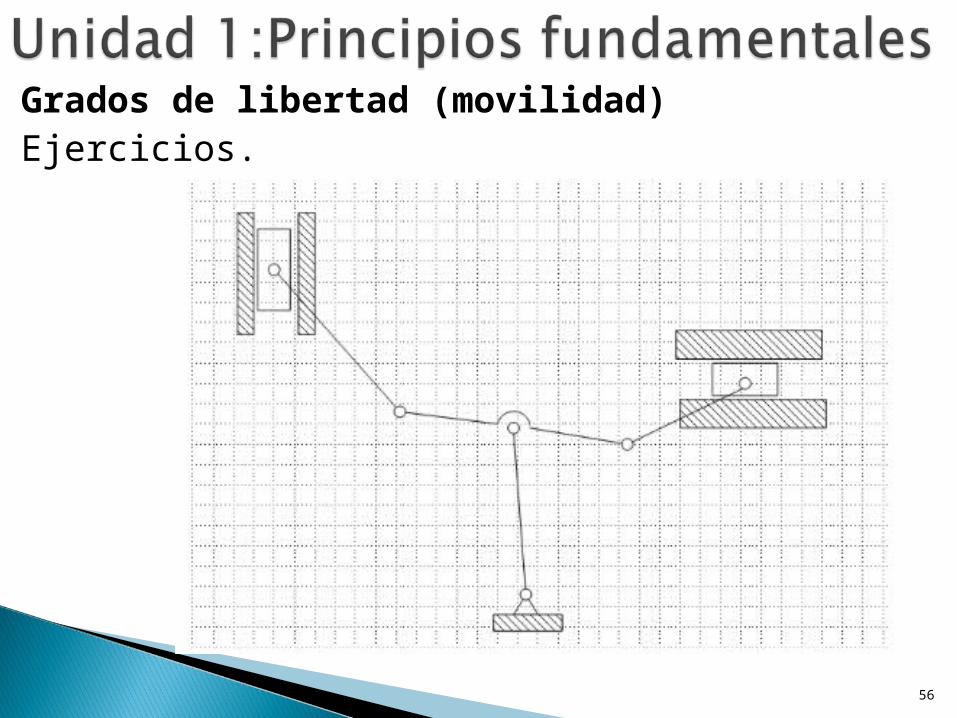
Grados de libertad (movilidad)Ejercicios.
56
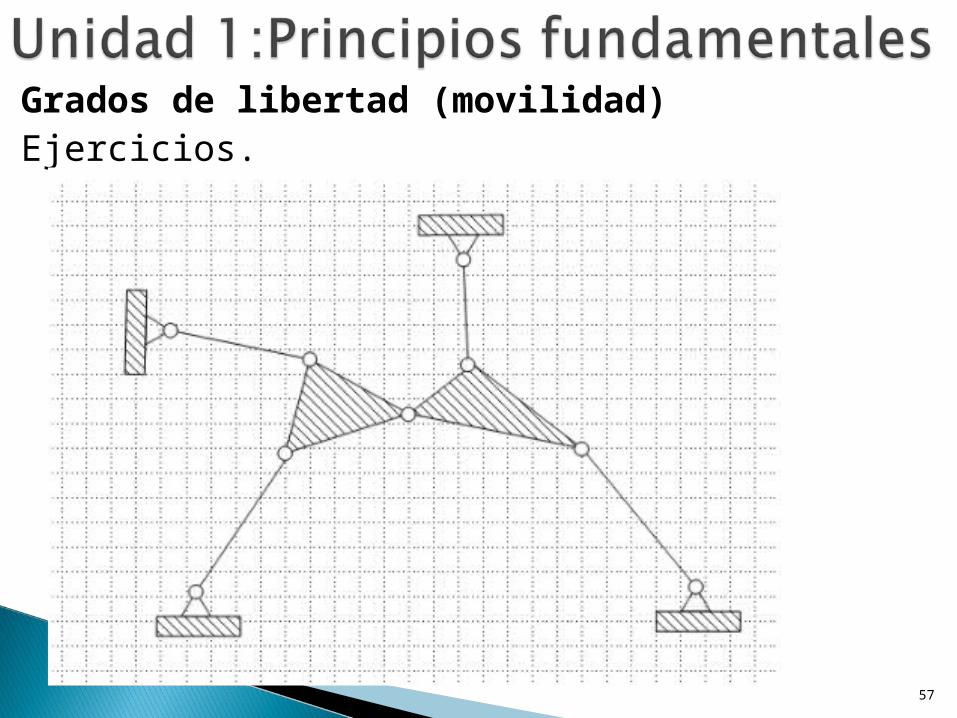
Grados de libertad (movilidad)Ejercicios.
57
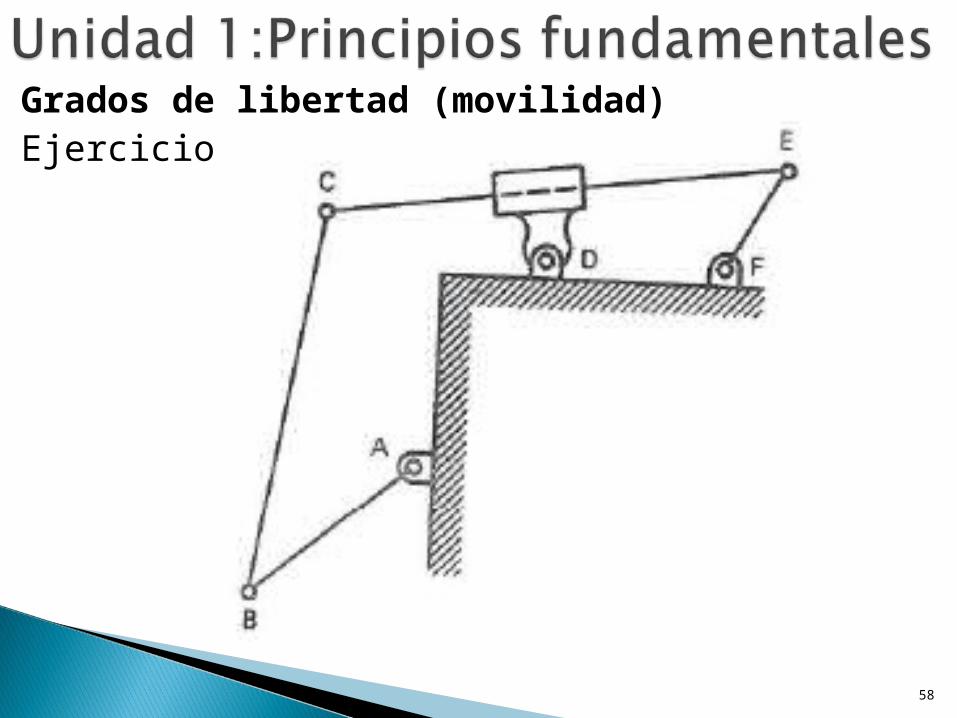
Grados de libertad (movilidad)Ejercicios.
58

Grados de libertad (movilidad)Ejercicios.
59

Grados de libertad (movilidad)Ejercicios.
60
Inversión Cinemática
Cuando se eligen diferentes eslabones como referencias para una cadena cinemática dada, los movimientos relativos entre los distinto eslabones no se alteran; pero sus movimientos absolutos (los que se miden con respecto a la referencia) pueden cambiar drásticamente. El proceso de elegir como referencia diferentes eslabones de una cadena recibe el nombre de inversión cinemática.
61

Un mecanismos con n eslabones cuenta con n-1 inversiones cinemáticas.
Mecanismo manivela-biela-corredera tiene 3 inversiones cinemáticas.
62

Primera inversión, el eslabón dos se hace fijo. Este mecanismo se utilizo como base del motor rotatorio de los primeros aviones.
63
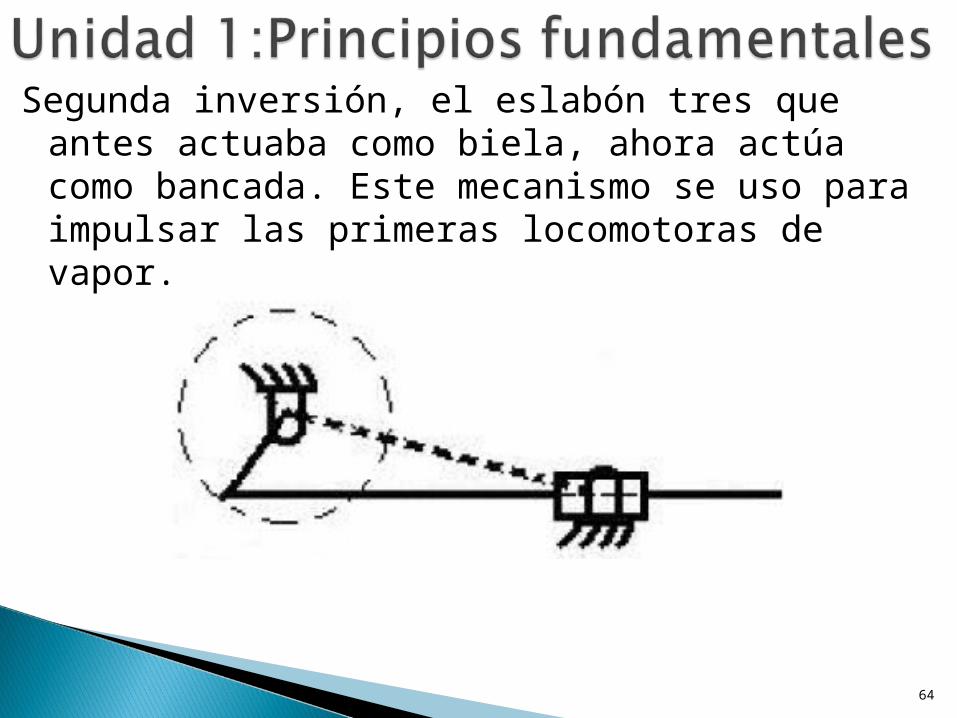
Segunda inversión, el eslabón tres que antes actuaba como biela, ahora actúa como bancada. Este mecanismo se uso para impulsar las primeras locomotoras de vapor.
64
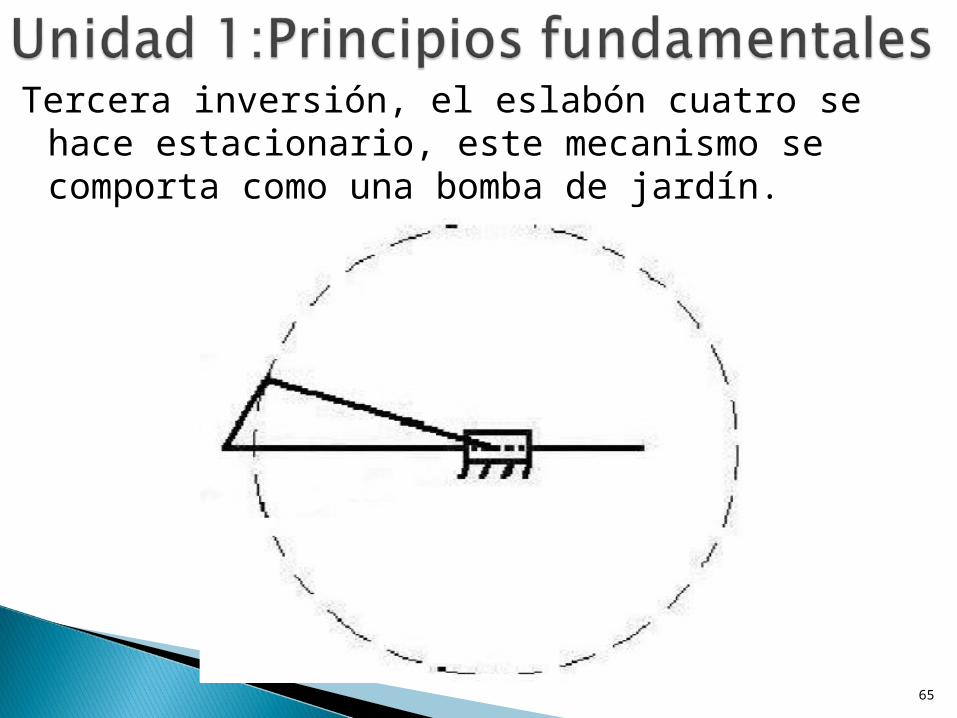
Tercera inversión, el eslabón cuatro se hace estacionario, este mecanismo se comporta como una bomba de jardín.
65

Tercera inversión, el eslabón cuatro se hace estacionario, este mecanismo se comporta como una bomba de jardín.
66
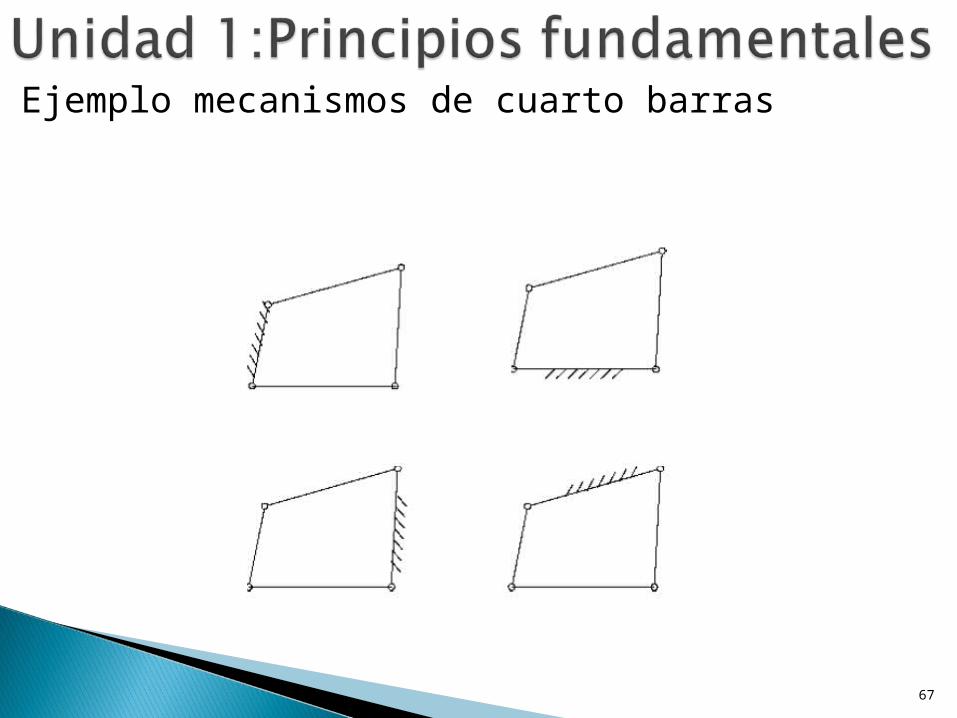
Ejemplo mecanismos de cuarto barras
67

Resultado del mecanismos de cuatro barras.
68

Mecanismo de cuatro barras articuladas.
El eslabón 1 es el marco o base, generalmente es el estacionario. El eslabón 2 es el motriz, el cual gira completamente o puede oscilar. En cualquiera de los dos casos el eslabón 4 oscila.
69

Mecanismo de cuatro barras articuladas.
Si el eslabón 2 dejara de girar completamente y solamente oscilara, pudiera haber puntos muertos en las posiciones extremas provocando que el mecanismo se detenga o se trabe. Estos puntos muertos ocurren cuando la línea de acción de la fuerza motriz se dirige a lo largo del eslabón 4.
70

Mecanismo de cuatro barras articuladas.
Otro aspecto importante de el mecanismo es el ángulo de transmisión (ɣ), que es el ángulo entre el eslabón conector 3(acoplador) y el eslabón de salida 4 (oscilador).
Ley de Grashof
Cuando se diseño un mecanismo que se impulsara con un motor, provocando que la manivela de una vuelta completa.
71

Para un eslabonamiento plano de cuatro barras, la suma de las longitudes mas larga y corta no puede ser mayor que la suma de las longitudes de los eslabones restantes, si se desea que exista una rotación relativa continua entre dos elementos.
72

Ecuación de cierre
73

Ecuación de cierre
L1=2, L2=3, L3=4, L4=4,
74

Ecuación de cierre
75

Ecuación de cierre
76
Ecuación de cierre
77
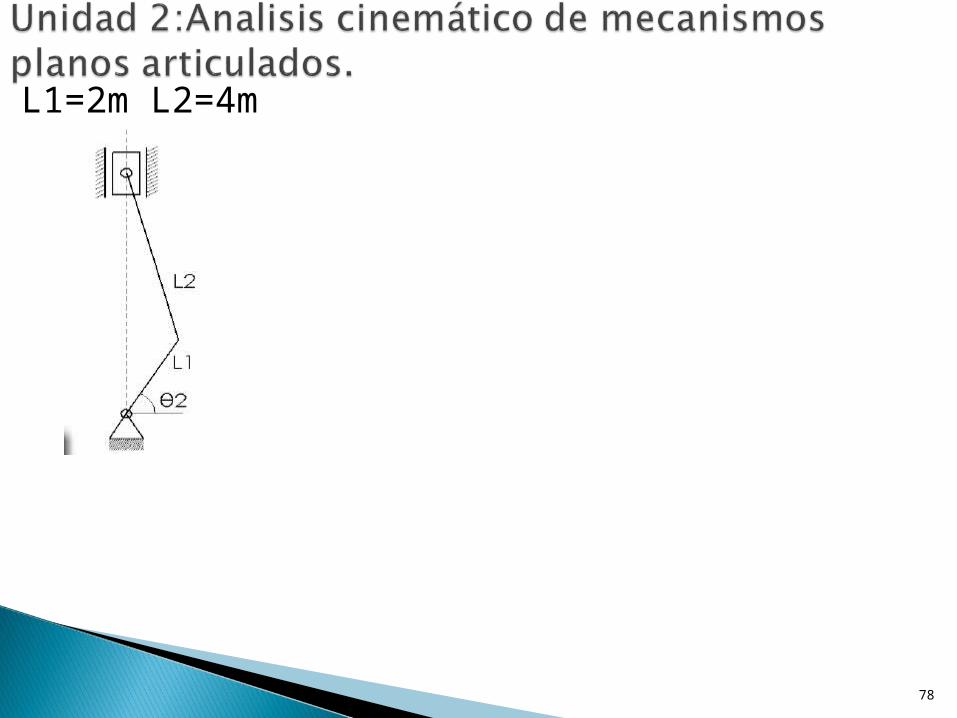
L1=2m L2=4m
78

Barra de entrada 2 mDistancia entre centros 4mBarra Salida 8m
79

R1=2, L1=5, R2=4, L2=4, O1A=2, L3=5
80
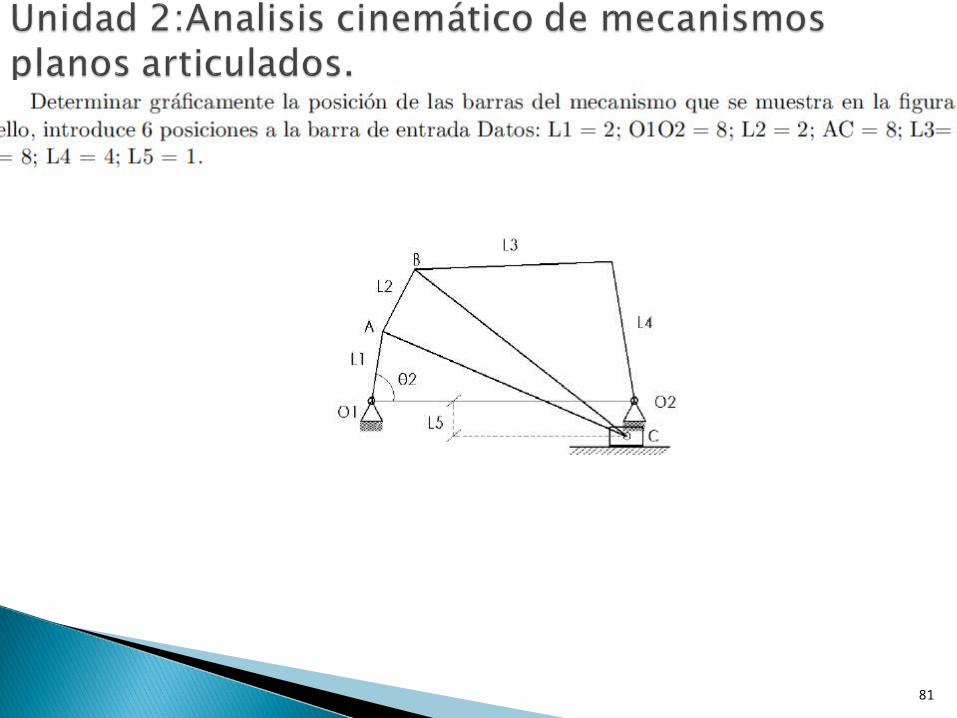
R1=2, L1=5, R2=4, L2=4, O1A=2, L3=5
81

Centros instantáneos. Es un punto, común a dos cuerpos en
movimiento plano, cuyo punto tiene la misma velocidad instantánea en cada cuerpo.
Algunas veces se denominan “centros o polos”. Como se requieren dos cuerpos o eslabones para
crear un centro instantáneo (CI), se puede predecir fácilmente la cantidad de centros instantáneos que se esperan de un conjunto de eslabones.
La fórmula de la combinación para “n” objetos tomados “r” en cada vez:
82
12
n nC

Centros instantáneos. De la ecuación anterior se puede concluir que un
eslabonamiento de 4 barras (n = 4) tiene 6 centros instantáneos, uno de 6 barras (n = 6) tiene 15, y uno de 8 barras (n = 8) tiene 28
83

Centros instantáneos. REGLA DE KENNEDY Cualesquiera tres cuerpos en movimiento plano tendrán exactamente tres centros instantáneos, y éstos se encontrarán en la misma línea recta.
84

Centros instantáneos. Una vez encontrados los CI, pueden ser
utilizados para hacer un muy rápido análisis gráfico de velocidad del eslabonamiento.
Según la posición particular del eslabonamiento que se analiza, algunos de los CI pueden estar muy distantes de los eslabones.
Por la definición de centro instantáneo, ambos eslabones que comparten el mismo centro instantáneo, tendrán una velocidad idéntica en su punto
85

Centros instantáneos. La relación de la velocidad angular VR se define como la velocidad angular de salida dividida entre la velocidad angular de entrada.
Para un mecanismo de cuatro barras esta se expresa como:
86
4
2
VR

Centros instantáneos. Dado el siguiente mecanismo, encuentre la velocidad en B y C. Considere ω2 = 1 rad/s en contra de las manecillas del reloj.
87

Centros instantáneos. PrimeroEncontramos los centros instantáneos
permanentes.O12, O23, O34, O14
88

Centros instantáneos. Luego. Encontramos los centros instantáneos
que faltan O13 y O24
89

Centros instantáneos. Ahora. Obtenemos VA de acuerdo con: VA = ω2
x r02-A
90
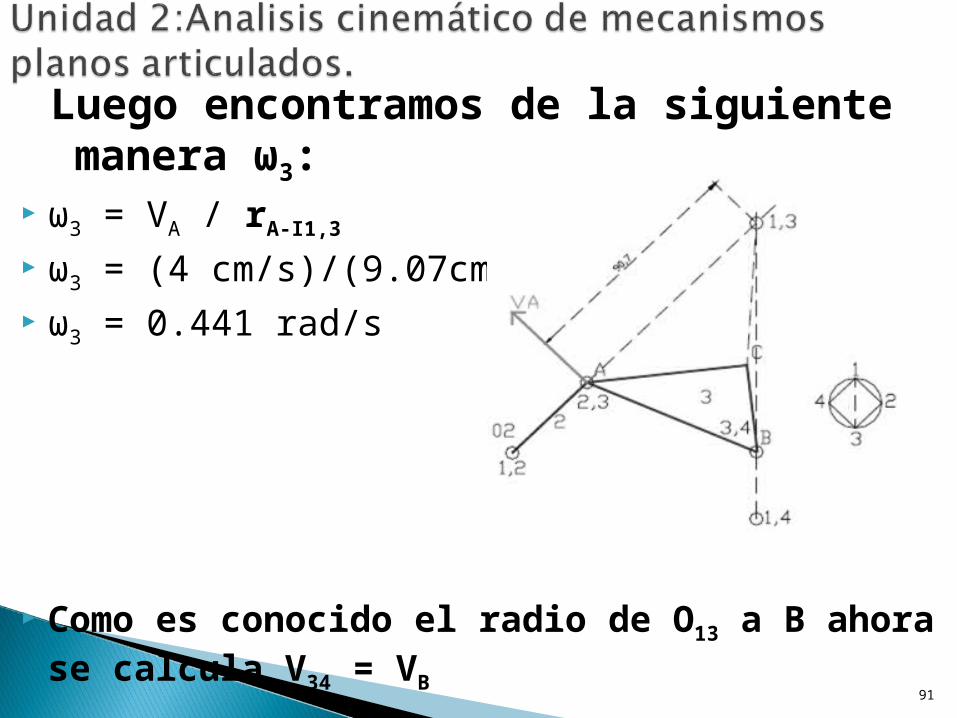
Luego encontramos de la siguiente manera ω3:
ω3 = VA / rA-I1,3 ω3 = (4 cm/s)/(9.07cm) ω3 = 0.441 rad/s
Como es conocido el radio de O13 a B ahora se calcula V34 = VB
91
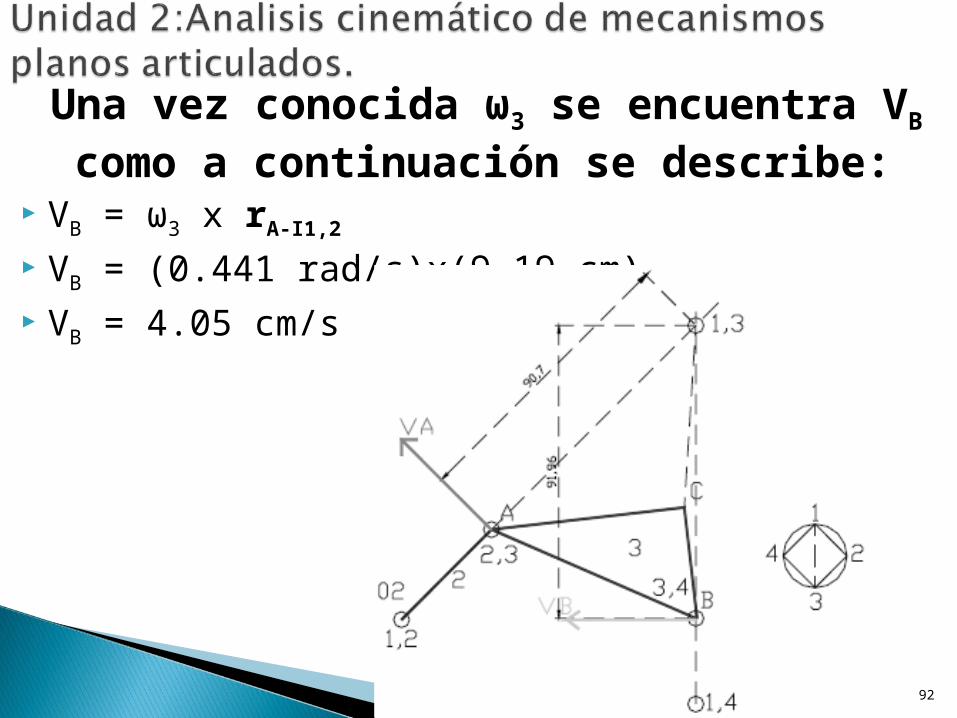
Una vez conocida ω3 se encuentra VB como a continuación se describe:
VB = ω3 x rA-I1,2
VB = (0.441 rad/s)x(9.19 cm) VB = 4.05 cm/s
92

Y Finalmente podemos determinar o cualquier punto en el acoplador como sigue:
VC = ω3 x rC-I1,3
VC = (0.441 rad/s)x(5.72 cm) VC = 2.52 cm/s
93

Obtener las velocidades en los puntos A, B Y C. Considere ω2 = 2 rad/s en sentido de las manecillas del reloj.
94