lab control final lab1
DESCRIPTION
laboratorio de control para el analisis del lugar de las raices de un sistema de control de un servomotorTRANSCRIPT
ESCUELA DE INGENIERIA ELECTRICA Y ELECTRONICA
.
1
LABORATORIO DE ANALISIS Y COMPENSACION DE
SISTEMAS DE CONTROL LINEALES
PRACTICA #1: ESTABILIDAD Y LUGAR GEOMETRICO DE LAS
RAICES
Ian Mateo Rodríguez López 1224334
Héctor Camilo Rodríguez 1222911
Resumen — En un sistema de control de servo motor se busca
estudiar la técnica del lugar de las raíces, la cual consiste en el análisis
de los polos de red cerrada cuando se varia un parámetro k, este
análisis se logra por medio de la información de los polos y ceros de
red abierta, Este método es útil puesto que nos ayuda a ajustar de
manera correcta por medio de un controlador un sistema en
particular. Para el sistema de control del servomotor se busca
estudiar el comportamiento del sistema cuando se implementan polos
en la red abierta del controlador.
Palabras clave — lugar geométrico, raíces, polos, ceros,
controlador.
I. INTRODUCCION
Las características básicas de la respuesta transitoria de un sistema
realimentado las determinan los polos de lazo cerrado, por lo que
en el análisis de un sistema de control es importante poder ubicar
estos polos en lugares apropiados del plano S. Básicamente, el
diseño de sistemas de control lineal se puede enunciar como un
problema que consiste en arreglar la localización de los polos y
ceros de la función de transferencia del sistema, para que el
sistema se comporte de acuerdo a unas especificaciones prescritas.
Como los polos de lazo cerrado son las raíces de la ecuación
características resulta importante para el análisis conocer los
efectos de la ubicación de las raíces de lazo cerrado cuando
cambia un parámetro en la ecuación característica. En síntesis se
puede decir que el lugar geométrico de las raíces son las
trayectorias de la ecuación característica cuando un parámetro de
ella varía. [1]
II. OBJETIVOS
A. Objetivo general.
El objetivo general de la práctica de laboratorio es identificar y
conocer la importancia que tiene la técnica del lugar geométrico
de las raíces ante un sistema real que para este caso es un sistema
de servomotor.
B. Objetivos específicos.
♦ Identificar la zona lineal y operación del sistema, y con base
en lo anterior estipular un punto de operación.
♦ Obtener la ganancia crítica del sistema y ganancia con la que
el sistema se comporta como un segundo orden.
♦ Construir el lugar geométrico de las raíces con
MATLAB/SCILAB.
III. DESARROLLO DE LA PRÁCTICA Y ANALISIS
3.1 Identifique el sistema y seleccione un punto de operación.
Para identificar el sistema y seleccionar un punto de operación
se comienza con la revisión del sistema servo mecánico con el
fin de asegurar que estén bien sus conexiones para asegurar que
el sistema funcione óptimamente y tenga el menor ruido.
V.entrada(V) V.salida(V) 0,5 0
1 0
1,5 0
2 1,4
2,5 2,5
3 3,5
3,5 4,4
4 5,3
4,5 5,8
5 6,6
5,5 7,3
6 7,9
6,5 8,4
7 8,9
7,5 9,3
8 9,4
8,5 9,4
9 9,4
9,5 9,4
10 9,4
TABLA.1. Valores de voltaje de entrada y salida.

ESCUELA DE INGENIERIA ELECTRICA Y ELECTRONICA
.
2
A continuación se procede a utilizar el software labview como
sistema de control para la planta (servomotor). Para el punto de
operación se procede a aplicar diferentes valores de voltaje al
sistema de control en lazo abierto para determinar la zona lineal
del sistema. Los datos recolectados se presentan en la tabla1.
En la figura1, se observan los datos graficados Vin (eje x) vs Vout
(eje y), de esta forma se puede ver más claramente las zonas del
sistema (muerta, lineal y saturación).
Fig.1. Grafica de voltajes de salida vs entrada.
Según la figura 1 se puede determinar que la zona muerta ocurre
desde Vin (0-2V), la zona lineal se presenta desde Vin (2-8V) y la
zona de saturación para (>8V), según estos datos, se selecciona el
punto de operación en 4V el cual pertenece a la zona lineal y nos
permite tener un rango amplio para ver el funcionamiento del
sistema cuando se implemente un controlador o una cierta
dinámica.
FIG.2. Respuesta del sistema ante un escalón unitario.
Con el punto de operación escogido se procede a modelar la
planta, esto se lo hace por medio de la constante tao, la cual
corresponde a 1/4 del tiempo de establecimiento del sistema en
lazo abierto, la dinámica del sistema se lo aproxima mediante la
función de transferencia que se muestra en la ecuacion1.
𝐺𝑝(𝑠) =1
𝑇.𝑆+1 (1)
La ecuación (1) hace referencia a la función de transferencia
de la planta donde la constante T es el tao del sistema y tiene
un valor de 2,25 segundos (valor que se obtuvo a partir del
tiempo de establecimiento a partir de la figura.2).
3.2 Por software adicione una acción integral, un polo estable
y una ganancia en lazo directo.
Mediante el software labview se procede a cerrar el lazo del
sistema y a modificar su controlador para agregar un polo
estable y una acción integral. El controlador se va a
implementar con la variable compleja Z.
Siendo el controlador a implementar el que se muestra en la
ecuación 2 con el parámetro “a” constante positivo para que el
polo sea estable, se procede a encontrar su transformada en la
variable Z la cual se muestra en la ecuación 3.
𝐺𝑝(𝑠) =𝐾𝑝
𝑠. (𝑠 + 𝑎) ; 𝑎 > 0 (2)
𝐺𝑝(𝑧) =𝐾𝑝
𝑎[(
𝑧
𝑧 − 1) − (
𝑧
𝑧 − 𝑒−𝑎.𝑇)] (3)
Donde T en la ecuación 3, representa el tiempo de muestreo,
para el laboratorio se escogió un tiempo de muestro de 50ms.
En la figura 3 se muestra el diagrama de bloques implementado
en labview para llevar acabo la practica donde “a” corresponde
a un valor de 1,6.
FIG.3. Diagrama de bloques implementado en labview.
FIG.4. Controlador implementado en labview.
3.3 En lazo cerrado varié la ganancia de lazo directo y
determine la ganancia para la cual el sistema empieza a
-2
0
2
4
6
8
10
0 5 10 15
V.salida(V)
ESCUELA DE INGENIERIA ELECTRICA Y ELECTRONICA
.
3
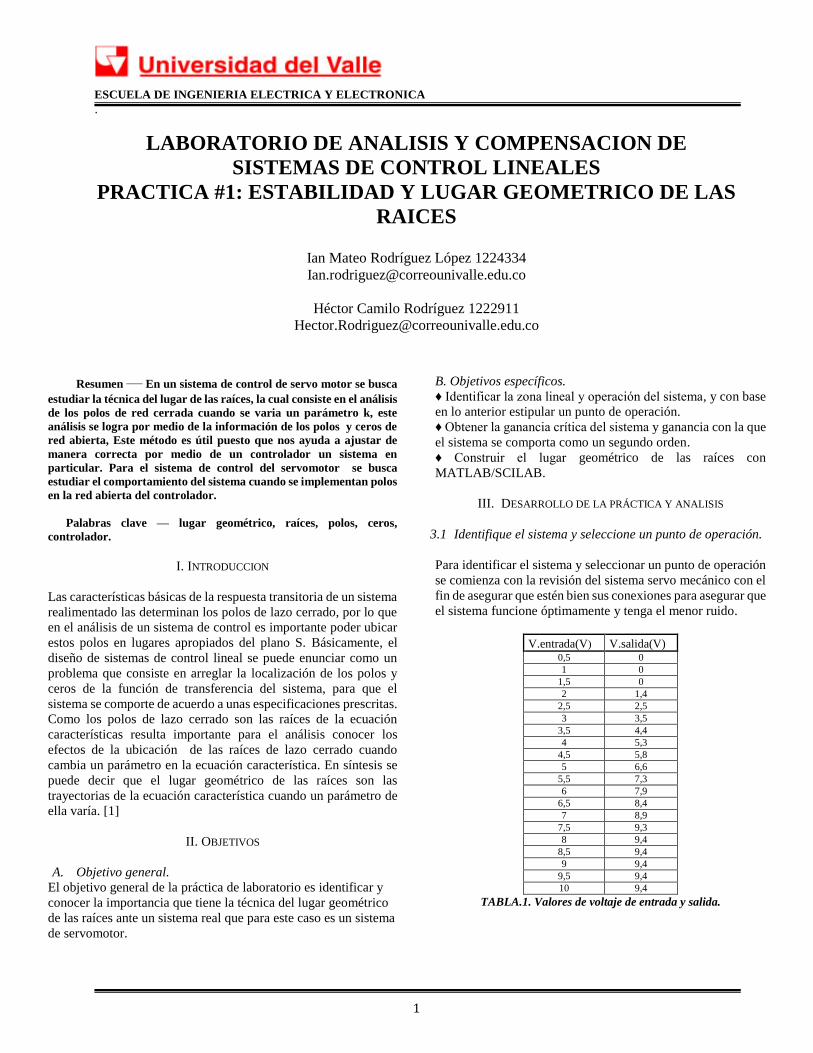
oscilar de manera sostenida y determine la frecuencia de
oscilación.
En lazo cerrado se comenzó a variar la ganancia de lazo directo y
se determinó que la ganancia para la cual el sistema empieza a
oscilar de manera sostenida es para un Kp=0,44, la cual
corresponde a la máxima ganancia que se aplica al sistema para
que el sistema continúe siendo estable, por encima de este valor el
sistema empieza a volverse inestable. Las oscilaciones obtenidas
en el sistema para este valor de Kp se observan en la figura 5.
FIG.5.Respuesta del sistema ante la ganancia critica.
La figura 6 muestra una ampliación de la figura 5, la cual
facilitara el cálculo de la frecuencia de oscilación.
FIG.6.Respuesta del sistema ante la ganancia critica.
Observe que el periodo de la onda es de aproximadamente 5,1
segundos por lo cual la frecuencia lo determina la ecuación (4).
𝑓(ℎ𝑧) =1
𝑇=
1
5,1= 0,196 𝐻𝑧 (4)
En frecuencia angular corresponde al valor de la ecuación (5).
𝑤 (𝑟𝑎𝑑
𝑠) = 2𝜋 ∗ 𝑓 = 2𝜋(0,196) = 1,23 𝑟𝑎𝑑/𝑠 (5)
3.4 Encuentre el valor más grande de la ganancia K para el cual
el sistema no presenta oscilaciones.
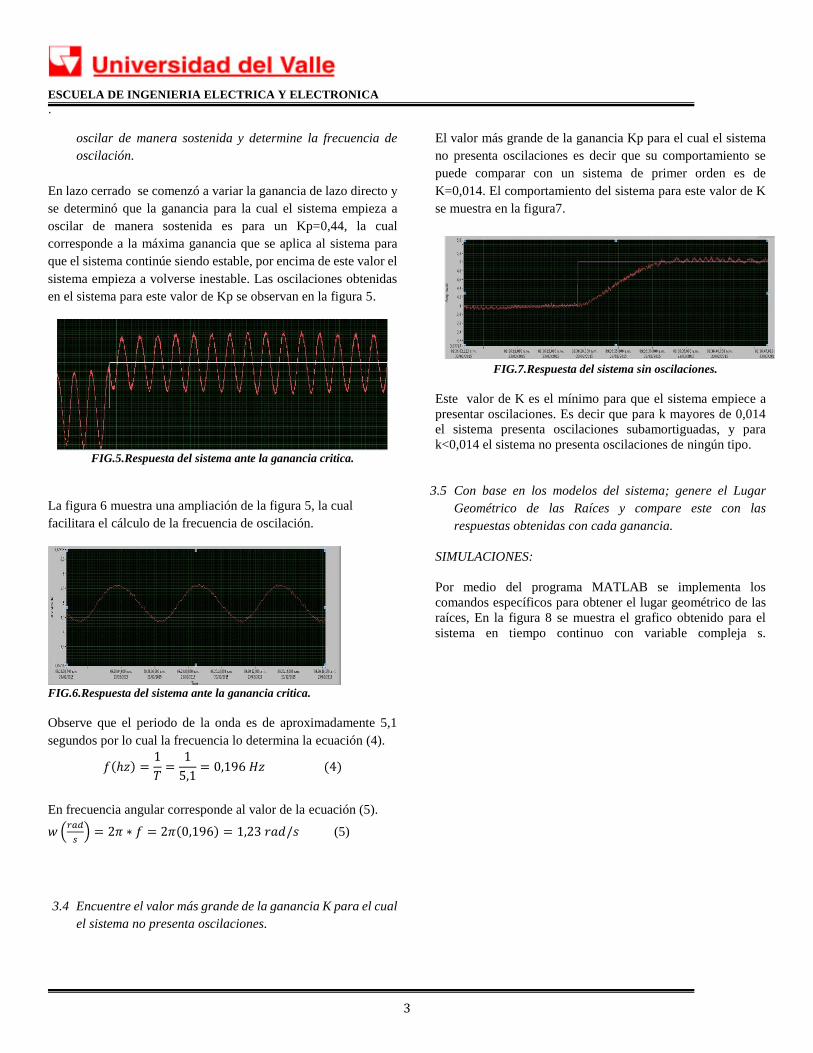
El valor más grande de la ganancia Kp para el cual el sistema
no presenta oscilaciones es decir que su comportamiento se
puede comparar con un sistema de primer orden es de
K=0,014. El comportamiento del sistema para este valor de K
se muestra en la figura7.
FIG.7.Respuesta del sistema sin oscilaciones.
Este valor de K es el mínimo para que el sistema empiece a
presentar oscilaciones. Es decir que para k mayores de 0,014
el sistema presenta oscilaciones subamortiguadas, y para
k<0,014 el sistema no presenta oscilaciones de ningún tipo.
3.5 Con base en los modelos del sistema; genere el Lugar
Geométrico de las Raíces y compare este con las
respuestas obtenidas con cada ganancia.
SIMULACIONES:
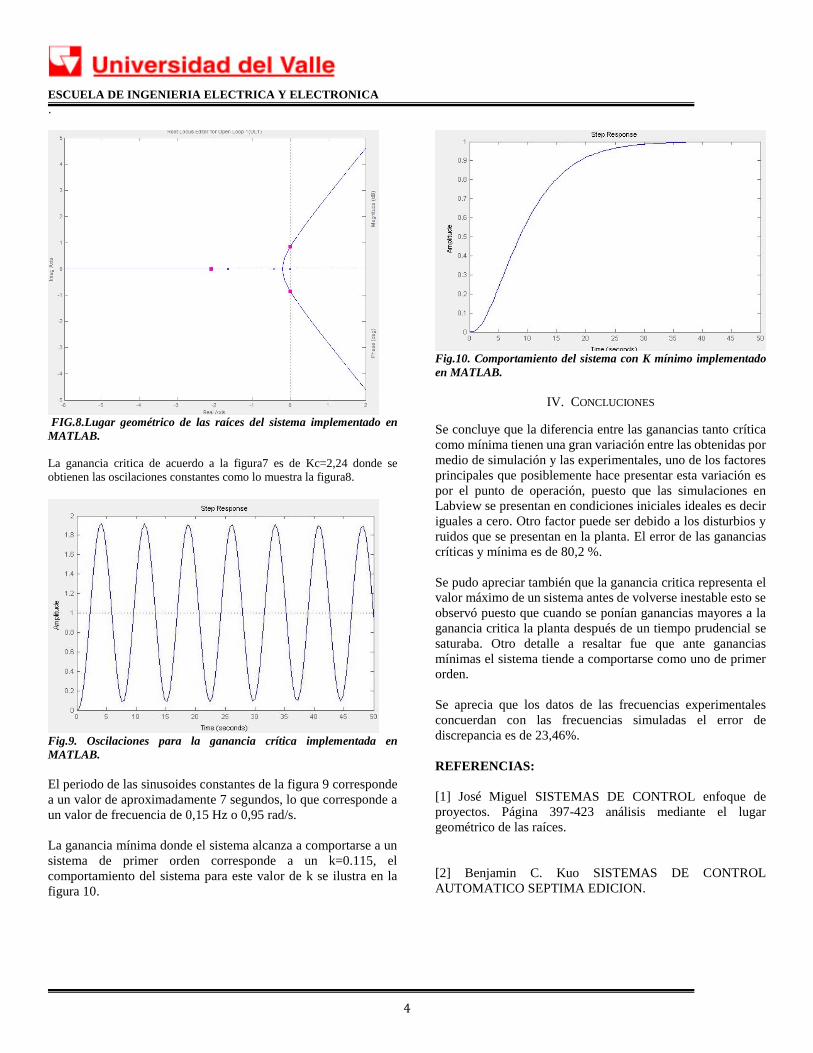
Por medio del programa MATLAB se implementa los
comandos específicos para obtener el lugar geométrico de las
raíces, En la figura 8 se muestra el grafico obtenido para el
sistema en tiempo continuo con variable compleja s.
ESCUELA DE INGENIERIA ELECTRICA Y ELECTRONICA
.
4
FIG.8.Lugar geométrico de las raíces del sistema implementado en
MATLAB.
La ganancia critica de acuerdo a la figura7 es de Kc=2,24 donde se
obtienen las oscilaciones constantes como lo muestra la figura8.
Fig.9. Oscilaciones para la ganancia crítica implementada en
MATLAB.
El periodo de las sinusoides constantes de la figura 9 corresponde
a un valor de aproximadamente 7 segundos, lo que corresponde a
un valor de frecuencia de 0,15 Hz o 0,95 rad/s.
La ganancia mínima donde el sistema alcanza a comportarse a un
sistema de primer orden corresponde a un k=0.115, el
comportamiento del sistema para este valor de k se ilustra en la
figura 10.
Fig.10. Comportamiento del sistema con K mínimo implementado
en MATLAB.
IV. CONCLUCIONES
Se concluye que la diferencia entre las ganancias tanto crítica
como mínima tienen una gran variación entre las obtenidas por
medio de simulación y las experimentales, uno de los factores
principales que posiblemente hace presentar esta variación es
por el punto de operación, puesto que las simulaciones en
Labview se presentan en condiciones iniciales ideales es decir
iguales a cero. Otro factor puede ser debido a los disturbios y
ruidos que se presentan en la planta. El error de las ganancias
críticas y mínima es de 80,2 %.
Se pudo apreciar también que la ganancia critica representa el
valor máximo de un sistema antes de volverse inestable esto se
observó puesto que cuando se ponían ganancias mayores a la
ganancia critica la planta después de un tiempo prudencial se
saturaba. Otro detalle a resaltar fue que ante ganancias
mínimas el sistema tiende a comportarse como uno de primer
orden.
Se aprecia que los datos de las frecuencias experimentales
concuerdan con las frecuencias simuladas el error de
discrepancia es de 23,46%.
REFERENCIAS:
[1] José Miguel SISTEMAS DE CONTROL enfoque de
proyectos. Página 397-423 análisis mediante el lugar
geométrico de las raíces.
[2] Benjamin C. Kuo SISTEMAS DE CONTROL
AUTOMATICO SEPTIMA EDICION.