instituto tecnolÓgico superior de tantoyuca
TRANSCRIPT

INSTITUTO TECNOLÓGICO
SUPERIOR DE TANTOYUCA
DIVISIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
“EVALUACIÓN ERGONÓMICA EN TIEMPO REAL
PARA ESTACIONES DE TRABAJO EN UNA
INDUSTRIA TEXTIL UTILIZANDO LÓGICA DIFUSA
Y TECNOLOGÍA KINECT”.
TESIS QUE PRESENTA
ING. CELIA FRANCISCO MARTINEZ
PARA OBTENER EL GRADO DE
MAESTRA EN INGENIERÍA INDUSTRIAL
DIRECTOR DE TESIS
DR. HORACIO BAUTISTA SANTOS
TANTOYUCA, VERACRUZ JULIO 2018

II
“Evaluación ergonómica en
tiempo real
para estaciones de trabajo en
una industria textil utilizando
lógica difusa y tecnología
kinect”.

III
DEDICATORIAS
A mis hermanos, en espera de que algún día lleguen a ser grandes profesionistas.
Con cariño: Celia.

IV
AGRADECIMIENTOS
A Dios, por darme la vida y el gusto por el estudio.
Al Instituto Tecnológico Superior de Tantoyuca, por brindarme la oportunidad de superarme
personal y profesionalmente.
Al Dr. Horacio Bautista Santos, por guiarme en este camino como director de tesis, a la
M.I.I. Fabiola Sánchez Galván y al M.C. Rogelio García Rodríguez, por su valioso tiempo en la
revisión de este documento.
A la Academia de Posgrado e Investigación, especialmente a la M.C. Lidilia Cruz Rivero,
por la confianza depositada para la participación de trabajos académicos de los cuales obtuve
gratas experiencias.
A los Docentes y Doctores extranjeros que contribuyeron en mi formación como
profesionista, por sus conocimientos y experiencias trasmitidas.
Al M.C. Raúl Hernández Rivera, por la asesoría en el desarrollo de este proyecto.
Al Lic. José María Sarmiento Vargas, representante patronal de la empresa Líder Jeans S.A de
C.V., por el apoyo otorgado en la realización de la estadía técnica de este trabajo de tesis.
Al Consejo Nacional de Ciencia y Tecnología (CONACYT), por el financiamiento otorgado para
la realización de esta meta.
A mis compañeros y amigos, por el tiempo y experiencias compartidas.
Con cariño y admiración.
Ing. Celia Francisco Martínez

V
INDICE
ÍNDICE DE ILUSTRACIONES .................................................................................................................... VI
ÍNDICE DE TABLAS ................................................................................................................................. VIII
ÍNDICE DE GRÁFICOS .............................................................................................................................. IX
RESUMEN .................................................................................................................................................... X
ABSTRACT ................................................................................................................................................. XI
CARTA DE AUTORIZACIÓN DE IMPRESIÓN ......................................................................................... XII
DECLARACIÓN DE ORIGINALIDAD ...................................................................................................... XIII
CAPÍTULO I. GENERALIDADES ................................................................................................................. 1
1.1. Introducción. ......................................................................................................................... 1
1.2. Estado del arte. ...................................................................................................................... 3
1.3. Planteamiento del problema .................................................................................................. 7
1.4. Justificación .......................................................................................................................... 8
1.5. Objetivos ............................................................................................................................... 8
1.5.1. Objetivo General ............................................................................................................ 8
1.5.2. Objetivos Específicos .................................................................................................... 8
1.6. Alcances y limitaciones ......................................................................................................... 9
CAPITULO II. MARCO TEÓRICO .............................................................................................................. 10
2.1. Introducción ........................................................................................................................ 10
2.2. Ergonomía ........................................................................................................................... 10
2.3. Trastornos musculo-esqueléticos ........................................................................................ 12
2.3.1. Relación entre los trastornos musculoesqueléticos y los factores laborales ................ 12
2.4. Desorden de trauma acumulado .......................................................................................... 13
2.5. Criterios de referencia para las posturas de trabajo. ............................................................ 14
2.6. Métodos de evaluación de riesgo ergonómico. ................................................................... 16
2.7. Método REBA ..................................................................................................................... 16
2.8. Lógica difusa ....................................................................................................................... 17
2.9. Microsoft kinect .................................................................................................................. 18
2.10. Metodología de Sistemas Blandos de Peter Checkland. ................................................... 19
2.11. Diseño Centrado en Personas. ........................................................................................... 21
CAPÍTULOIII. MARCO METODOLÓGICO. ............................................................................................... 23
3.1. Introducción. ....................................................................................................................... 23
3.2. Metodología propuesta ........................................................................................................ 23
3.3. Delimitación de la investigación ......................................................................................... 24
3.4. Caso de estudio .................................................................................................................... 24

VI
CAPÍTULO IV. MARCO OPERATIVO ........................................................................................................ 27
4.1. Introducción. ....................................................................................................................... 27
4.2. Contextualización del problema mediante la metodología de Sistemas Blandos de Peter
Checkland. .................................................................................................................................. 27
4.3. Diseño del prototipo y diagnostico ergonómico a través de la metodología Diseño Centrado
en Personas. ................................................................................................................................ 30
4.4. Programación del sistema REBA- lógica difusa. ................................................................ 36
4.5. Ensamble del prototipo. ....................................................................................................... 40
4.6. Evaluación del riesgo ergonómico en las estaciones de trabajo del caso de estudio. ......... 41
4.7. Resultados ........................................................................................................................... 45
CAPÍTULO V. CONCLUSIONES Y RECOMENDACIONES ...................................................................... 47
5.1. Conclusiones ....................................................................................................................... 47
5.2. Recomendaciones ................................................................................................................ 48
ANEXOS...................................................................................................................................................... 49
Anexo 1: ENEIT-2018. .............................................................................................................. 49
Anexo 2: Ficha técnica de servicio. ........................................................................................... 51
Anexo 3: Método REBA ............................................................................................................ 52
Anexo 4: Etapas de la Metodología de Peter Checkland. .......................................................... 58
Anexo 5: Proceso de Diseño Centrado en Personas ................................................................... 59
Anexo 6: Carta de intención de colaboración. ........................................................................... 61
REFERENCIAS BIBLIOGRÁFICAS ........................................................................................................... 64
ÍNDICE DE ILUSTRACIONES
Figura 1. Microsoft kinect. ............................................................................................................. 18
Figura 2. Articulaciones detectadas por el kinect. ......................................................................... 19
Figura 3. Esquema de Peter Checkland Fuente: en aproximación a (Checkland, 1979). .............. 21
Figura 4. Soluciones deseables, factibles y viables. ....................................................................... 22
Figura 5. Procedimiento general. Fuente: Elaboración propia. ...................................................... 23
Figura 6. Estaciones de trabajo. Fuente: Elaboración propia. ........................................................ 25
Figura 7. Riesgo ergonómico en la planta de ensamble. ................................................................ 27
Figura 8. Situación actual del problema. Fuente: Elaboración propia. .......................................... 28

VII
Figura 9. Situación actual del problema (Entrada, proceso, salida). Fuente: Elaboración propia. 28
Figura 10. Modelo conceptual del riesgo ergonómico. Fuente: Elaboración propia. .................... 29
Figura 11. Planta líder Jeans. ......................................................................................................... 32
Figura 12. Condiciones ergonómicas de los asientos. .................................................................... 33
Figura 13. Área de planchado. Fuente: Elaboración propia. .......................................................... 33
Figura 14. Condiciones de trabajo. ................................................................................................. 34
Figura 15. Diagrama esquemático del prototipo de evaluación ergonómico. ................................ 35
Figura 16. Representación de la interfaz gráfica. Fuente: Elaboración propia. ............................. 35
Figura 17. Diagrama a bloques para la evaluación de riesgo con tecnología kinect y labview. .... 36
Figura 18. Conjunto difuso 1: Grupo A. Fuente: Elaboración propia. ........................................... 37
Figura 19. Conjunto difuso 2: Grupo B. Fuente: Elaboración propia. ........................................... 38
Figura 20. Conjunto difuso 3: Grupo AB y nivel de riesgo. Fuente: Elaboración propia.............. 38
Figura 21. Diagrama a bloques para la valoración de riesgo ergonómico. .................................... 39
Figura 22. Interfaz de Usuario (panel frontal). Fuente: Elaboración propia. ................................. 40
Figura 23. Prototipo de evaluación de riesgo ................................................................................. 40
Figura 24. Estación E028. .............................................................................................................. 41
Figura 25. Estación M4. ................................................................................................................. 41
Figura 26. Estación M5. ................................................................................................................. 41
Figura 27. Estación E011. .............................................................................................................. 42
Figura 28. Estación E012. ............................................................................................................. 42
Figura 29. Estación E013. .............................................................................................................. 42
Figura 30. Estación E014. .............................................................................................................. 42
Figura 31. Estación E015. .............................................................................................................. 42
Figura 32. Estación E016. .............................................................................................................. 42
Figura 33. Estación E017. .............................................................................................................. 42
Figura 34. Estación E023. .............................................................................................................. 43
Figura 35. Estación E021. .............................................................................................................. 43
Figura 36. Estación E010. .............................................................................................................. 43
Figura 37. Estación E007. .............................................................................................................. 43
Figura 38. Estación E009. .............................................................................................................. 43
Figura 39. Estación E037. .............................................................................................................. 43

VIII
Figura 40. Estación E018. .............................................................................................................. 43
Figura 41. Estación LK3-B430E. ................................................................................................... 44
Figura 42. Estación LK3-B430. ..................................................................................................... 44
Figura 43. Estación E029. .............................................................................................................. 44
Figura 44. Área de Planchado. ....................................................................................................... 44
Figura 45. Área de Revisión. ......................................................................................................... 44
Figura 46. Estación: Fusionadora. ................................................................................................. 45
Figura 47. Estación: Fusionadora. .................................................................................................. 45
ÍNDICE DE TABLAS
Tabla 1. Métodos de evaluación ergonómica. (Prevalia, 2017). .................................................... 17
Tabla 2. Especificaciones del sensor kinect en aproximación a (Casillas, 2012) ......................... 19
Tabla 3. Descripción de las estaciones de trabajo. Fuente: Elaboración propia. ........................... 26
Tabla 4. Aplicación de modelo CARWOE. Fuente: Elaboración propia ....................................... 29
Tabla 5. Comparación del sistema real vs modelo conceptual. Fuente: Elaboración propia. ........ 30
Tabla 6. Resultados de evaluación de actividades. Fuente: Elaboración propia. .......................... 46
Tabla 7. Puntuación del tronco. ...................................................................................................... 53
Tabla 8. Modificación de la puntuación del tronco. ....................................................................... 53
Tabla 9. Puntuación del cuello. ...................................................................................................... 53
Tabla 10. Modificación de la puntuación del cuello ...................................................................... 54
Tabla 11. Puntuación de las piernas. .............................................................................................. 54
Tabla 12. Incremento de la puntuación de las piernas ................................................................... 54
Tabla 13. Puntuación del brazo ...................................................................................................... 54
Tabla 14. Modificación de la puntuación del brazo. ...................................................................... 54
Tabla 15. Puntuación del antebrazo. .............................................................................................. 55
Tabla 16. Puntuación de la muñeca. ............................................................................................... 55
Tabla 17. Modificación de la puntuación de la muñeca. ................................................................ 55
Tabla 18. Puntuación del Grupo A ................................................................................................. 55
Tabla 19. Puntuación del Grupo B. ................................................................................................ 56

IX
Tabla 20. Incremento de puntuación del Grupo A ......................................................................... 56
Tabla 21. Incremento del Grupo A por cargas o fuerzas bruscas. ................................................. 56
Tabla 22. Incremento de puntuación del Grupo B por calidad del agarre. .................................... 56
Tabla 23. Puntuación C. ................................................................................................................. 57
Tabla 24. Incremento de la Puntuación C por tipo de actividad muscular. .................................... 57
Tabla 25. Niveles de actuación (Hignett & McAtamney, 2000) y. (Diego-Mas J. A., 2015). ....... 57
ÍNDICE DE GRÁFICOS
Gráfico 1. Nivel de riego ergonómico obtenido. Fuente: Elaboración propia .............................. 45
Gráfico 2. Nivel de riesgo ergonómico. Fuente: Elaboración propia. ........................................... 46

X
RESUMEN
La presente investigación consistió en el diseño de un prototipo para evaluar el riesgo ergonómico
en estaciones de trabajo en tiempo real. La importancia de dicha investigación radica en la
prevención a desarrollar desórdenes músculo-esqueléticos por trauma acumulado, realizando
evaluaciones ergonómicas, obtenido de manera automática los ángulos formados por el cuerpo del
trabajador con ayuda de la tecnología kinect y el uso de lógica difusa, así mismo determinar el
nivel de riesgo del operador sin interrumpir las actividades que esté ejerciendo.
Partiendo de la metodología de sistemas suaves de Peter Checkland, se desarrolla un esquema
representativo del sistema con la problemática real; en la última etapa del diseño se aplica la
metodología de diseño centrado en personas para el ensamble del prototipo. El riesgo ergonómico
se determinó a través del método REBA con lógica difusa; se desarrolló la interfaz gráfica de
usuario que evalúa el nivel de riesgo ergonómico, misma que se desarrolló con el software
Labview. La toma de datos angulares se lleva a cabo en tiempo real por medio de un dispositivo
de control de movimiento (kinect). Se realizaron evaluaciones ergonómicas en las estaciones de
trabajo de la empresa Líder Jeans S.A de C.V, y se establecen recomendaciones de rediseño de
estaciones de trabajo para mitigar el riesgo a desarrollar desórdenes por trauma acumulado.

XI
ABSTRACT
This research consisted of the design of a prototype toevaluate the ergonomic risk on workstation
s in real-time. The importance of this research lies in prevention to develop musculoskeletal
cumulative trauma disorders, doing ergonomic assessments, obtained automatically the angles
formed by the body of the worker with the kinect technology support and the use of fuzzy logic,
likewise determine the level of risk of the operator without interrupting activities who is exercising.
Starting from Peter Checkland's soft systems methodology, develops a schema representative
of the system with the actual problems; in the last stage of design applies the methodology of
Design Centered in People for the assembly of the prototype. The ergonomic risk was determined
through the REBA method with fuzzy-logic; the graphical user interface was developed that
evaluates the level of ergonomic risk, same that was developed with Labview software. Angular
data collection is carried out in real time by means of a motion control device (kinect). Ergonomic
evaluations were carried out in the work stations of the company leader Jeans S.A de C.V. and
establishing recommendations for redesigning work stations to mitigate risk to developing
cumulative trauma disorders.

XII
CARTA DE AUTORIZACIÓN DE IMPRESIÓN

XIII
DECLARACIÓN DE ORIGINALIDAD
Capítulo I. Generalidades
______________________________________________________________________________
1
CAPÍTULO I. GENERALIDADES
1.1. Introducción.
La posibilidad de que un trabajador sufra un determinado daño procedente del trabajo que
desempeña, se conoce como riesgo laboral y puede ser causado por un factor físico, químico,
biológico, mecánico o ergonómico (Collado, 2008; Escalante, 2009).
El riesgo ergonómico en el medio laboral, se refiere a exigencias físicas del trabajo,
levantamiento y transporte de cargas, dimensiones del puesto de trabajo, posturas, percepciones
sensoriales exigidas, así como el gasto energético (De Pablo, 2010). Diversos estudios (Aguayo
Vargas, 2004; Asensio-Cuesta et al., 2012; Calzavara et al., 2016; Cruz y Garnica, 2011; Nishanth
et al., 2015; Ramírez Ortíz, 2005) han reflejado “quejas/molestias” de trabajadores sobre
desórdenes musculo-esquelético (DME’s), tales como: dolores de espalda, brazos, vista, muñecas,
cuello, entre otros.
La ergonomía permite diseñar un ambiente de trabajo cómodo para desempeñarse diariamente,
ofrece técnicas que ayudan a minimizar el impacto físico incrementando la productividad
(Asensio-Cuesta et al., 2012). El objetivo global de la ergonomía es diseñar sistemas y esquemas
seguros, productivos y confortables para el trabajador (Maestre, 2007). También la evaluación
ergonómica de puestos de trabajo tiene por objeto detectar el nivel de presencia de factores de
riesgo de problemas de salud de tipo disergonómico (Asensio-Cuesta et al., 2012).
Los métodos de evaluación ergonómica permiten identificar y valorar los factores de riesgo
presentes en estaciones de trabajo, para plantear soluciones de rediseño que reduzcan el riesgo a
niveles aceptables para el trabajador (Asensio-Cuesta et al., 2012; Torres y Rodríguez, 2007);
existen varios métodos de evaluación ergonómica cuya selección depende de las características
específicas de la actividad a evaluar, entre ellos, podemos mencionar el método NIOSH (Instituto
Nacional de Seguridad y Salud Ocupacional, del inglés National Institute for Occupational Safety
and Health) para la evaluación manual de cargas, RULA (Evaluación rápida de la extremidad
superior, del inglés Rapid Upper Limb Assessment) análisis postural, JSI (Índice de tensión laboral,
del inglés Job Strain Index) para la evaluación de movimientos repetitivos y REBA (Valoración
Rápida del Cuerpo Completo, del inglés Rapid Entire Body Assessment), para evaluar la postura
de todo el cuerpo, entre otros (Asensio-Cuesta et al., 2012; GC, 2005; Zare et al., 2014). De éstos,
el método REBA permite evaluar la postura de todo el cuerpo; tanto los miembros superiores como

Capítulo I. Generalidades
______________________________________________________________________________
2
inferiores, siendo la postura, carga, tipo de agarre y actividad muscular desarrollada por el
trabajador, los factores considerados para la valoración. Asimismo, permite evaluar posturas
estáticas y dinámicas (Gasca et al., 2009; Hignett y McAtamney, 2000; Montiel et al., 2006).
Los procedimientos utilizados en las mediciones que se efectúan sobre las posturas adoptadas
por el trabajador son esencialmente angulares, es decir; los ángulos que forman los diferentes
miembros del cuerpo respecto a determinadas referencias, pueden realizarse directamente sobre el
trabajador mediante transportadores de ángulos, electrogoniómetros o cualquier dispositivo que
permita la toma de datos angulares. También es posible emplear fotografías adoptando la postura
estudiada para medir los ángulos sobre éstas, teniendo como datos de entrada un número suficiente
de tomas desde diferentes puntos de vista (alzado, perfil, vistas de detalle); en este caso es necesario
asegurarse de que los ángulos a medir se aprecien a escala real en las imágenes (el plano en el que
se encuentra el ángulo a medir es paralelo al plano de la cámara) (Mas y Antonio, 2015); otra
alternativa es utilizar sensores de control de movimiento de bajo costo (kinect) para obtener
información biomecánica del individuo, esta información es captada con una cámara de
profundidad infrarroja que tiene la capacidad de rastrear 20 puntos articulares sobre el cuerpo
humano. Con la información recabada es posible realizar cálculos matemáticos respecto a un
sistema de referencia de coordenadas X, Y, Z para obtener los ángulos reales, estos dispositivos
adquieren datos a una distancia promedio de tres metros (Villada y Muñoz, 2014). De los
procedimientos anteriormente descritos, el sensor kinect es el único que obtiene los datos angulares
en tiempo real, sin afectar las tareas del trabajador, lo que representa cual es una gran ventaja para
realizar la evaluación ergonómica.
Por otra parte la lógica difusa es una técnica de inteligencia artificial computacional que
permite trabajar con información de entrada ambigua, imprecisa, con ruido o incompleta, una de
las ventajas es la posibilidad de implementar sistemas basados tanto en Hardware como en
Software, admite valores intermedios para poder definir entre sí/no, verdadero/falso, cerca/lejos,
entre otros (Zadeh, 1965, 1996).
En el presente proyecto de investigación se desarrolla un prototipo para evaluar el riesgo
ergonómico en estaciones de trabajo, implementando el sensor Microsoft kinect para capturar los
datos angulares en tiempo real y la metodología REBA-Lógica difusa (Sánchez et al., 2015) para
evaluar el riesgo ergonómico.
Capítulo I. Generalidades
______________________________________________________________________________
3
1.2. Estado del arte.
En la actualidad existe un gran número de métodos de evaluación que tratan de asistir al ergónomo
en la tarea de identificación de los diferentes riesgos ergonómicos (Asensio-Cuesta et al., 2012).
Entre las herramientas más utilizadas se encuentran el método NIOSH (73.4%) para la evaluación
manual de cargas, el método RULA (51.6 %) para análisis postural, seguido por el método JSI para
la evaluación de movimientos repetitivos (39.3 %) y del método postural (21.4 %) (Dempsey et al.,
2005).
Respecto al método REBA este se basa en la solidez confirmada de los métodos RULA,
NIOSH y OWAS (Sistema de Análisis de Trabajo Ovako, del inglés Ovako Working Analysis
System), y supone la ampliación del método RULA al incluir en la evaluación los miembros
inferiores y otros factores determinantes del riesgo; por su parte, el método OCRA (Acción
Repetitiva Ocupacional, del inglés Occupational Repetitive Action), pese a su reciente creación, ha
sido incluido en la norma UNE-EN 1005-5 (UNE-EN1005-5, 2007); finalmente, el método Fanger
para la evaluación del ambiente térmico también queda avalado por su integración en la norma
UNE-EN ISO 8996 (ISO, 2006).
En Ríos et al. (2011), se aplica la metodología REBA paralelamente con la Termografía
Infrarroja en un puesto de trabajo de la zona de armado de neumáticos, las actividades evaluadas
presentan un riesgo, de nivel medio, a sufrir lesiones músculo esqueléticas, sin embargo, debe
realizarse un mayor número de pruebas para concluir estadísticamente sobre la factibilidad de la
Termografía Infrarroja como método para evaluaciones biomecánicas de puestos de trabajo.
También en Montiel et al. (2006) , se realiza un estudio de riesgos posturales a 18 trabajadores
de una industria metalmecánica utilizando el método REBA, las puntuaciones obtenidas revelaron
altos porcentajes de niveles de riesgo en la mayoría de los puestos, 8 trabajadores con edades entre
49 y 58 años presentaron valores muy altos y 2 trabajadores entre 59 y 68 años valores Medios; se
demostró que la adopción de posturas inadecuadas en el puesto de trabajo conlleva a un alto riesgo
de desórdenes musculoesqueléticos (DMEs).
Se evalúan las condiciones de trabajo del área de tapas de una empresa metalúrgica, debido a
la frecuencia de DMEs, se empleó el método del Laboratorio de Economía y Sociología del Trabajo
(LEST) para la caracterización del ambiente físico, los factores de riesgo psicosociales se
analizaron con el Cuestionario Psicosocial de Copenhague (CoPsoQ), con el método REBA se
Capítulo I. Generalidades
______________________________________________________________________________
4
estimó la demanda biomecánica, para ello se filmaron tres ciclos de operación en cada puesto de
trabajo teniendo como resultado un nivel de riesgo postural medio en las tareas de recolección y
embolsado, no obstante en el área de paletizado en las prensas se presenta un nivel de riesgo alto
debido a que se encuentran a nivel del piso, siendo los brazos, cuello y la zona lumbar las
estructuras más comprometidas del trabajador (Gasca et al., 2009).
En Perú, los autores Vigil et al. (2007), realizaron un estudio observacional a 105 trabajadores
de estiba de papa de los mercados mayoristas de Huancayo, se efectuó una valoración
antropométrica y se evaluaron las condiciones laborales por observación directa y ergonómicas
usando el método REBA y OWAS. Se realizó un examen clínico y traumatológico, del mismo
modo se evaluó la satisfacción laboral y los niveles de ansiedad y depresión con la escala de Zung,
encontrando así posturas inadecuadas como flexión de cuello mayor a 60°, flexión elevada de
brazos, flexión de tronco mayor a 60° y flexión de tronco con movimientos de rotación, valorando
dicha actividad de riesgo ergonómico muy alto. Presentado un 55% lumbalgia, 42% hipercifosis
dorsal, 62% indicaron estar satisfechos con su trabajo, el 77% no tenían síntomas depresivos y de
ansiedad 62%.
Los autores Maldonado Macias et al. (2007), realizaron un análisis ergonómico en la
operación de desensamble de bombas de combustible diésel, aplicaron el método REBA para
determinar el riesgo y el nivel de acción, así como también el método de la ecuación de NIOSH
(Instituto Nacional de Seguridad Ocupacional y Salud de Estados Unidos) para determinar el índice
de levantamiento y el peso límite recomendado para las condiciones de la actividad. Los resultados
arrojaron niveles de riesgo bajo y medio en los elementos de trabajo, el análisis se llevó a cabo
mediante la observación y toma de video de las actividades del trabajador durante 15 minutos, por
lo que se utilizó una cámara de video (Sony Digital Handycam), un cronómetro (Westward 6JG70),
equipo de cómputo, así como software comercial.
En una empresa maquiladora de Ciudad Juárez México, se detectaron accidentes de tipo
ergonómico, se utilizó el método REBA implementando el software Poser V.4 para evaluar y
simular las diferentes posturas adoptadas por las operadoras del área de preparación de fibra óptica,
la puntuación final fue 12, el cual indica un nivel de riesgo muy alto y se requiere una acción
inmediata, detectando así el problema en las piernas y brazos. Se propuso instalar un diseño
ajustable para la operadora y desmontable para la mesa de trabajo para que, al terminar el pegado

Capítulo I. Generalidades
______________________________________________________________________________
5
de la fibra, se continúe laborando en las siguientes operaciones sin que el diseño sea un problema
y así prevenir futuras lesiones (Rodarte Martínez et al., 2008).
Los autores E. Rodríguez y Medina (2007), realizaron un estudio ergonómico a grupo de
trabajadores en el sector automotriz venezolano, considerando variables biomecánicas y
fisiológicas; se estimó la capacidad física de los trabajadores mediante una prueba escalonada que
se relacionó con el consumo energético de la actividad laboral. También se estimó el compromiso
cardiovascular y se utilizó el método L.E.S.T. para caracterizar los factores ambientales y
psicosociales de los trabajadores seleccionados. Para la evaluación ergonómica se implementó el
método REBA y el Modelo simple para la evaluación integral del riesgo a lesiones
musculoesqueléticas (MODSI); la aplicación muestra altos niveles de riesgo a padecer de L.M.E.
(67% de la muestra) como consecuencia del uso repetido de herramientas vibratorias en posturas
muy exigentes y durante largos periodos de tiempo como es el caso de los operadores de la línea
de esmerilado. Las tareas de paletización realizadas en el área de moldeo también constituyen un
factor de riesgo a lesiones de músculos, huesos y articulaciones, debido principalmente a la elevada
repetitividad de actividades que involucran levantamientos de carga con flexión de tronco y
hombros alejados de la neutralidad.
Se presenta un estudio sobre las tecnologías y dispositivos existentes para la captación de las
dimensiones antropométricas, históricamente la antropometría ha sido unidimensional, con
registros manuales a través de instrumentos como: estadiómetro, antropómetro, compás
antropométrico, cinta métrica, silla antropométrica, entre otros; el desarrollo de las tecnologías ha
permitido la creación de sistemas de captación de las dimensiones antropométricas que no
requieren del contacto directo con la persona a medir. Afirman que del kinect es una herramienta
interactiva que se está utilizado para adquirir datos antropométricos a través de diversos drivers
instalados en una computadora entre ellos Kinect for Windows SDK, OpenNI, OpenKinect o
Libfreenect, el kinect no requiere que los puntos a medir sean marcados con anterioridad, esto
reduce el tiempo de adquisición de las mediciones, además de ser económico (Lescay et al., 2017).
Por otra parte, se han desarrollado plataformas que contribuyen al proceso de evaluación de
riesgo ergonómico en puestos de trabajo aplicando diferentes métodos (Diego-Mas, 2015).
Ergonautas-NUI, es un sistema de evaluación computarizado ergonómico, el cual emplea el
método OWAS y sensor kinectTM para la adquisición y procesamiento de datos, con el fin de

Capítulo I. Generalidades
______________________________________________________________________________
6
determinar el nivel de riesgo de cada una de las posturas grabadas (Asensio-Cuesta et al., 2012;
Diego-Mas y Alcaide-Marzal, 2014).
El Software de Evaluación y Recomendaciones de diseño asociado a los riesgos ergonómicos
y psicosociales del puesto de trabajo (Ergo/IBV), es la aplicación de referencia para técnicos de
prevención y salud laboral en países de habla hispana, contando con agentes comerciales y
especialistas en ergonomía que ofrecen apoyo a más de 1700 clientes (IBV, 2016).
El programa de Gestión de Prevención de Riesgos Laborales (PrevGes), permite identificar
riesgos a partir de una lista predeterminada y establecer la gravedad en función de la probabilidad
de ocurrencia del riesgo y las posibles consecuencias (PrevGes, 2016).
Ergo Kinect Visión, es un sistema para las áreas de antropometría y ergonomía que tiene el
objetivo de evaluar estaciones de trabajo en tiempo real (Záratea et al., 2015).
En Sánchez et al. (2016), se desarrolló un Software para determinar el nivel de riesgo
ergonómico en puestos de trabajo utilizando el método REBA y Lógica difusa, se probó en cuatro
casos de estudio con 16 posturas, permitió calcular de forma rápida el nivel de riesgo ergonómico
para cada postura específica del trabajador.
Se ha desarrollado un estudio ergonómico a trabajadores de la industria de la construcción
ferretera a través del método RULA con lógica difusa, el modelo propuesto se dividió en tres partes,
la primera de las extremidades, la segunda de las extremidades inferiores, y el ultimo conjunto
difuso una evaluación integral considerando la actividad muscular y la fuerza ejercida, obteniendo
así el nivel de riesgo (Rivero et al., 2015).
Por otra parte, se han realizado estudios sobre la aplicación de la metodología de sistemas
suaves de Peter Checkland (SSM), tal es el caso de (Huerta et al., 2016), en la que se expone el
diagnóstico de una prótesis tumoral de rodilla, como ejemplo de un sistema de bioingeniería, en
donde se aplica la metodología de Checkland con la finalidad de obtener información sobre las
posibles fallas del sistema y brindar una solución que considere aspectos emocionales, físicos,
sociales y económico del sistema.
En Martínez y Rios (2008), se aplica la metodología SSM y el lenguaje unificado de Modelado
(UML) para desarrollar un sistema de información gerencial para la Subcomisión de Trabajos de
Grado de Ingeniería de Sistemas del Núcleo de Anzoátegui de la Universidad de Oriente
Venezuela, lo que permitió realizar mejoras en el sistema de actividades humanas de la

Capítulo I. Generalidades
______________________________________________________________________________
7
subcomisión y el desarrollo de un sistema de información adaptado a los requerimientos de las
actividades.
1.3. Planteamiento del problema
De acuerdo al artículo 472 de la Ley Federal de Trabajo, se considera como riesgo laboral a
aquellos accidentes o enfermedades a la que están expuestos los trabajadores derivados de la
actividad que desempeñan. Actualmente, es indispensable conocer el nivel de riesgo a desarrollar
un desorden por trauma acumulado, no realizar evaluaciones ergonómicas involucra costos extras
en cuanto a tratamiento médico, incapacidad y de este modo pérdida de la productividad y
eficiencia en la empresa.
Según la Memoria Estadística del IMSS 2016, el estado de Coahuila presentó 2478 casos de
enfermedades de trabajo, indica la tasa más alta de empleados que reportan una enfermedad de
origen laboral con 35.5 por cada 10 mil trabajadores; seguido de Jalisco con 875 y Baja California
con 612 casos. Por otra parte, Jalisco presenta 2304 casos de dorsalgia en hombres y 964 en
mujeres, seguido de México (Zona Oriente) con 1148 casos en hombres y 767 en mujeres.
Del mismo modo, el Instituto Tecnológico Superior de Tantoyuca (ITSTa) cuenta con la Maestría
en Ingeniería Industrial perteneciente al Programa Nacional de Posgrados de Calidad (PNPC) de
CONACyT. Entre sus líneas de investigación, se plantean trabajos que estén orientados a evaluar
puestos y el desarrollo de prototipos para determinar el nivel de riesgo ergonómico, obteniendo
datos angulares en tiempo real a través de sensores de control de movimiento para reducir el tiempo
de análisis y evaluación, por lo tanto en la Empresa Líder Jeans es necesario realizar evaluaciones
ergonómicas en las estaciones de trabajo en tiempo real sin afectar las actividades de los
trabajadores ya que se dedican a confeccionar, producir y comercializar prendas de vestir de la más
alta calidad, capacitando y gestionando el talento humano, actuando con responsabilidad social,
brindando un rendimiento racional a los accionistas y bienestar a todos sus empleados.
Derivado del contexto de la problemática se plantea la siguiente pregunta de investigación:
¿Es posible medir en tiempo real el nivel de riesgo ergonómico en estaciones de trabajo?

Capítulo I. Generalidades
______________________________________________________________________________
8
1.4. Justificación
De acuerdo a la Organización Mundial de la Salud (OMS), algunos riesgos ocupacionales tales
como traumatismos, ruidos, agentes carcinogénicos, partículas transportadas por el aire y riesgos
ergonómicos representan una parte considerable de la morbilidad derivada de enfermedades
crónicas. El 37% corresponde a casos de dorsalgia, 16% pérdida de audición; 13% enfermedades
pulmonares, 11% asma, 8% traumatismos, 9% cáncer de pulmón, 2% leucemia y 8% depresión.
Además, anualmente, 12.2 millones de personas, de países en desarrollo, mueren en edad laboral a
causa de enfermedades no transmisibles. En la mayoría de los países, los problemas de salud
relacionados con el trabajo ocasionan pérdidas que van del 4 al 6% del Producto Interno Bruto
(PIB). Los servicios sanitarios básicos para prevenir enfermedades ocupacionales y relacionadas
con el trabajo, tienen costos promedio entre 18 y 60 dólares (paridad del poder adquisitivo) por
trabajador (OMS., 2016).
Por otra parte, dejar de considerar los principios de Ergonomía puede llegar a producir efectos
negativos reflejados principalmente en lesiones, enfermedades profesionales y deterioros en la
productividad y eficiencia: por tanto el desarrollo de un prototipo es una alternativa para evaluar el
nivel de riesgo ergonómico de los operadores en sus puestos de trabajo, mediante el método REBA
y lógica difusa utilizando el sensor Microsoft kinect, el cual tomará datos angulares en tiempo real
de acuerdo al método implementado y así obtener un mayor número de posturas evaluadas, con la
finalidad de realizar propuestas de re-diseño de las estaciones de trabajo y contribuir a la
prevención de riesgos laborales ergonómicos y el costo económico generado a las empresas, en
este caso la empresa Líder Jeans.
1.5. Objetivos
1.5.1. Objetivo General
Diseñar un prototipo que permita evaluar en tiempo real el nivel de riesgo ergonómico en
estaciones de trabajo.
1.5.2. Objetivos Específicos
- Contextualizar la problemática planteada aplicando la metodología de Sistemas Blandos
de Peter Checkland.

Capítulo I. Generalidades
______________________________________________________________________________
9
- Diseñar el prototipo y realizar el diagnóstico ergonómico utilizando Diseño Centrado en
Personas (DCP).
- Programar en el software labview la metodología REBA-lógica difusa para la valoración
ergonómica.
- Diseñar y ensamblar el prototipo de evaluación ergonómica.
- Evaluar el nivel de riesgo ergonómico en las estaciones de trabajo de un caso de estudio.
1.6. Alcances y limitaciones
Durante la ejecución del proyecto se logró obtener resultados favorables, dentro de los principales
alcances destacan:
Un prototipo portátil para la evaluación de riesgo ergonómico en puestos de trabajo en tiempo
real, se realizó la programación del software para la evaluación mediante el método REBA-lógica
difusa y la tecnología kinect. Se evaluaron a 24 operadores en sus respectivas estaciones de trabajo.
Se obtuvo el primer lugar en el Evento Nacional Estudiantil de Innovación Tecnológica 2018
en el que se participó en la categoría de Servicio denominado ERGOT (ver Anexo 1), demostrando
así el funcionamiento del software desarrollado en esta tesis, del mismo modo se realizó una ficha
técnica del servicio (ver Anexo 2).
Algunas limitaciones se presentan en la implementación de las mejoras ya que dependerá de
la empresa, se realizarán solamente las pruebas funcionales que la empresa autorice; así mismo, se
sugerirán modificaciones y/o adaptaciones a las estaciones de trabajo en las que se detecte riesgo
ergonómico alto a muy alto.

Capitulo II. Marco Teórico
______________________________________________________________________________
CAPITULO II. MARCO TEÓRICO
2.1. Introducción
Las condiciones de seguridad, higiene y confort en el trabajo han sido motivo de preocupación
desde principios de la revolución industrial, por lo que se han desarrollado varias disciplinas de
estudio, tal como la Ingeniería Industrial, Medicina Ocupacional y Ergonomía.
En este capítulo se describen conceptos fundamentales de ergonomía, trastornos musculo-
esqueléticos, definición de desorden por trauma acumulado, la descripción de la Norma Oficial
Mexicana PROY-NOM-036-1-STPS-2017, los principales métodos de evaluación ergonómica así
como las metodologías que sirvieron de base para el desarrollo del presente trabajo, tal es el caso
del método REBA, lógica difusa, la metodología de Sistemas Blandos de Peter Checkland, Diseño
Centrado en Personas, la tecnología implementada y sus características (kinect).
2.2. Ergonomía
La secretaria de Salud Laboral y Medio Ambiente señala que la ergonomía es una de las
especialidades de la prevención de riesgos laborales (junto a la Seguridad en el Trabajo, la Higiene
Industrial y la Medicina del Trabajo) que trata de adaptar las máquinas, las herramientas y puestos
de trabajo a las actitudes y las capacidades del trabajador (UGT, 2017).
En base a lo establecido por la Sociedad de Ergonomistas de México A.C, la palabra
ergonomía, se deriva del griego “ergon”, que significa trabajo, y “nomos” leyes; por lo tanto,
ergonomía significa “leyes del trabajo”. De este modo, se entiende que son normas que rigen tanto
las actividades de los trabajadores, así como el lugar donde se desempeñan laboralmente; con la
finalidad de adecuar el entorno (productos, sistemas, estaciones de trabajo) a las necesidades y
capacidades del usuario incrementado la productividad, mejorando su eficiencia, seguridad y
bienestar (SEMAC, 2017).
La ergonomía permite diseñar un ambiente de trabajo cómodo para desempeñarse diariamente,
ofrece técnicas que ayudan a minimizar el impacto físico incrementando la productividad (Asensio-
Cuesta et al., 2012).
El objetivo global de la ergonomía es diseñar sistemas y esquemas seguros, productivos y
confortables para el trabajador (Maestre, 2007).

Capitulo II. Marco Teórico
______________________________________________________________________________
11
El término ergonomía de acuerdo a pruebas documentales fue introducido a la literatura en el
año de 1857, por el científico Wojciech Jastrzebowski. Una definición oficial de la ergonomía no
existe; sin embargo, Murruel la definió como “El estudio científico de las relaciones del hombre y
su medio de trabajo”. Así mismo, se considera a la ergonomía una tecnología que utiliza ciencias
como la medicina del trabajo, fisiología y la antropometría.
Del mismo modo, la Asociación Internacional de Ergonomía (IEA), definió a la ergonomía,
como la disciplina científica concerniente con el estudio de las interacciones entre los humanos y
otros elementos de un sistema, así como la profesión que aplica la teoría, principios, datos y
métodos al diseño, para optimizar el bienestar humano y el desempeño general del sistema
(Association, 2000).
La ergonomía es una ciencia multidisciplinaria, considera aspectos físicos, cognitivos, social,
organizacional, ambiental, entre otros; cuyo objetivo es asegurar el bienestar de los trabajadores;
es decir, que no sufran lesiones, que laboren sin peligro alguno, en un ambiente cómodo y
confortable, con la finalidad de ser productivos.
La evolución histórica de la ergonomía radica desde los inicios del desarrollo de la especie
humana, a pesar de que se considere como una ciencia moderna, un claro ejemplo es en el orden
de sus herramientas para facilitar sus tareas, en este caso la selección de piedras y huesos.
El desarrollo de la civilización humana en el ámbito industrial, así como la selección de
herramientas y maquinaria para ejercer un trabajo se ha efectuado a través de un proceso continuo
con la finalidad de mejorar la eficiencia; es decir; el tiempo en realizar una tarea así como la
efectividad de la producción, sin embargo en ocasiones no se consideran las condiciones de trabajo,
seguridad y comodidad de los trabajadores por lo que varios autores han reflejado la preocupación
de dichas condiciones de trabajo y las consecuencias sobre la salud, tal es el caso de la publicación
de 1713 “La muerte en los trabajadores” de Bernardino Ramazinni, donde expresa desde un punto
medico la relación que observó entre el trabajo y los daños musculo-esqueléticos generados.
A principios del siglo XX el objetivo fue incrementar la eficiencia y calidad de procesos
productivos implementando herramientas científicas y administrativas, los pioneros en esta etapa
fueron Frederick W. Taylor, Frank y Lilian Gilbreth, entre otros; cuya aportación fue el análisis de
los puestos de trabajo y actividades (tiempos y movimientos). Durante la Segunda Guerra Mundial
la ergonomía no presentó grandes avances, el enfoque estaba centrado en la introducción de nueva
maquinaria y equipo complejo como radares, aviones y comunicaciones, lo que provocó problemas

Capitulo II. Marco Teórico
______________________________________________________________________________
12
de desempeño y de mantenimiento, una solución fue trabajar en conjunto con especialistas de otras
áreas, es por ello que Ingeniería Humana y Psico-ingeniería describen estos primeros esfuerzos.
El concepto de ergonomía cambió de enfoque militar a industrial después de la Segunda Guerra
Mundial. En 1950 se fundó la primera Sociedad Ergonómica de Investigación de Gran Bretaña y
en 1961 la primera reunión internacional de sociedades de ergonomía se llevó a cabo estableciendo
las bases para la Formación de la Asociación Internacional de Ergonomía, que actualmente agrupa
a más de 20 asociaciones nacionales de ergonomía alrededor del mundo (Oborne, 2015).
La actividad de los ergonomistas en los últimos años se ha enfocado en el análisis de problemas
y factores que influyen en el desempeño, satisfacción, confort y seguridad de los humanos al
efectuar sus actividades laborales, diseñando los espacios de trabajo, tareas, productos, entre otros;
con el objetivo de obtener mayor productividad y bajo riesgo para el trabajador.
Se define como puesto de trabajo al conjunto de actividades y responsabilidades que tiene un
trabajador dentro de su organización
Riesgo laboral es la posibilidad de que un trabajador sufra un determinado daño procedente
del trabajo que desempeña, puede ser causado por un factor físico, químico, biológico, mecánico o
ergonómico, (Collado, 2008; Escalante, 2009).
2.3. Trastornos musculo-esqueléticos
Los trastornos musculo-esqueléticos (TME) relacionados con el trabajo son motivo de
preocupación en la mayoría de los países, principalmente porque afectan a un gran número de
trabajadores, sin limitarse a un sector o actividad profesional en específico; en la industria de
montaje oficinas, en empresas y en los servicios se han encontrado TME. Aunque puede afectar a
cualquier parte del cuerpo, frecuentemente se encuentran en codo, hombro, mano, muñeca y en la
zona cervical, dorsal y lumbar (espalda) (Villar, 2015).
2.3.1. Relación entre los trastornos musculoesqueléticos y los factores laborales
De acuerdo a la Organización Mundial de la Salud (OMS) los TME o dicho de otra manera las
enfermedades ósteo-musculares, son multifactoriales, lo que indica que existe un gran número de
factores de riesgo que contribuyen a causarlas, por ejemplo; el entorno físico, la organización del
trabajo, psicosociales, individuales y socioculturales.
Capitulo II. Marco Teórico
______________________________________________________________________________
13
Los TME han sido definidos de diferentes maneras, así la OMS la definió de la siguiente
manera:
Por TME se entienden los problemas de salud del aparato locomotor, es decir, de músculos,
tendones, esqueleto óseo, cartílagos, ligamentos y nervios. Abarca todo tipo de dolencias, desde
las molestias leves y pasajeras hasta las lesiones irreversibles e incapacitantes (OMS., 2016).
La Agencia Europea para la Seguridad y la Salud en el Trabajo la define así: Los TME de
origen laboral son alteraciones que sufren estructuras corporales como los músculos,
articulaciones, tendones, ligamentos, nervios, huesos y el sistema circulatorio, causadas o
agravadas fundamentalmente por el trabajo y los efectos del entorno en el que éste se desarrolla
(OSHA-Europa, 2007).
2.4. Desorden de trauma acumulado
Los desórdenes musculo esqueléticos (DME) o desordenes por trauma acumulado (DTA), son una
de las principales causas de enfermedad relacionada con el trabajo (Bellorín et al., 2007; Dimate et
al., 2017). Se desarrollan con el tiempo y son generados por el trabajo o por el entorno en el que se
lleva a cabo (Dimate et al., 2017; Rodríguez y Dimate, 2015), por lo que no resultan de un solo
evento, sino de múltiples micro-traumas que van presentándose a través del tiempo, comenzando
a producir síntomas y/o deterioro (B. M. Fonseca, 2011). Por lo tanto, los DME o DTA son una
de las principales causas de ausentismo e incapacidad laboral en el mundo; debido a esto, se
encuentran catalogados entre los problemas más importantes de salud en el trabajo, afectando la
calidad de vida de la mayor parte de la población y repercutiendo en costos para las empresas.
Las afecciones pueden darse en los músculos, tendones, vainas tendinosas, alteraciones
articulares y generalmente afectan espalda, cuello, hombros y extremidades superiores e inferiores
(Dimate et al., 2017). Estudios epidemiológicos han reportado factores de riesgo que favorecen al
desarrollo de estos desordenes, entre ellos movimientos repetitivos, esfuerzos prolongados,
levantamientos frecuentes o pesados, empujar, jalar o trasladar objetos pesados, posturas
inadecuadas, vibraciones, el frio, carga estática, factores psicosociales, entre otros (Bellorín et al.,
2007; Pueyo, 2015).
Estos trastornos son considerados una epidemia de enfermedades crónicas en la actualidad, de
tipo multifactorial, por lo que se ha buscado el máximo confort de las personas con relación en su
puesto de trabajo, el equilibrio entre estos y el medio ambiente, además, se busca proteger y

Capitulo II. Marco Teórico
______________________________________________________________________________
14
promover la salud, seguridad y bienestar de los trabajadores por medio de estrategias dirigidas a
mejorar las condiciones laborales (Dimate et al., 2017).
Los autores Niebel, B. y A. Freivalds (2009), describen que son cuatro los principales factores
relacionados con el trabajo que generan el desarrollo de desorden de trauma acumulativo, 1) fuerza
excesiva, 2) movimientos no naturales o de los extremos de las articulaciones, 3) gran número de
repeticiones, 4) duración del trabajo. Asimismo, los datos del Consejo de Seguridad Nacional
(2003) sugieren que entre 15 y 20% de quienes trabajan en industrias clave (empacadoras de carne,
procesamiento de aves, ensamblado de automóviles y manufactura textil) corren el riesgo de sufrir
DTA y 61% de todas las lesiones ocupacionales están asociadas con movimientos repetitivos; la
industria más afectada es la manufacturera, mientras que el peor puesto ocupacional es el de
carnicero con 22 quejas de DTA por cada 100 000 trabajadores. Debido a estos índices elevados y
costos de servicio médico promedio de 30 000 dólares por caso, el NIOSH y la OSHA se han
enfocado en la tarea de reducir los índices de incidencia de las lesiones musculoesqueléticas
relacionadas con el trabajo.
2.5. Criterios de referencia para las posturas de trabajo.
Los estudios realizados se han basado en criterios de referencia para la posición de los segmentos
articulares. Estas normas son: la “ISO 11226: 2000. Ergonomics – Evaluation of static working
postures” y la “UNE-EN 1005-4:2005+A1:2009. Seguridad de las máquinas. Comportamiento
físico del ser humano. Evaluación de las posturas y movimientos de trabajo en relación con las
máquinas”. Ambas difieren poco entre sí; las dos diferencias más importantes son:
1º. El campo de aplicación: el de ISO es para todo tipo de puestos, mientras que la UNE-EN
es de aplicación a trabajos con máquinas.
2º. Mientras ISO solo evalúa la posición de los segmentos corporales y el tiempo de
mantenimiento de la postura, UNE-EN tiene en cuenta también el número de veces en que se
adopta, es decir, la repetición de la postura (Villar, 2015).
2.5.1. Proyecto de Norma Oficial Mexicana PROY-NOM-036-1-STPS-2017.
La secretaría de Trabajo y Prevención Social, en ejercicio de sus atribuciones de normalización,
elaboró el proyecto de Norma Oficial Mexicana PROY-NOM-036-1-STPS-2017, Factores de
riesgo ergonómico en el trabajo, Identificación, análisis, prevención y control.

Capitulo II. Marco Teórico
______________________________________________________________________________
15
Por otra parte, en el contexto internacional, la Organización Internacional del Trabajo (OIT),
en 2013 señaló que a pesar de que algunos de los riesgos de trabajo han disminuido, se registra un
aumento de nuevas enfermedades de trabajo sin que se apliquen medidas de prevención, protección
y control adecuadas; entre estos riesgos de trabajo se incluyen los factores de riesgo ergonómico.
Por lo tanto, los factores de riesgo ergonómico exigen un compromiso gubernamental para
fortalecer la seguridad y la salud en el trabajo que permita lograr un trabajo digno y decente, a
través de políticas, líneas estratégicas de acción y proyectos con un enfoque preventivo, para que
prevalezcan centros de trabajo en condiciones seguras y saludables.
En México, los factores de riesgo ergonómico son regulados de manera general por la Ley
Federal del Trabajo y el Reglamento Federal de Seguridad y Salud en el Trabajo. Es así como la
Ley Federal del Trabajo en su artículo 2 establece que las normas del trabajo tienden a conseguir
el equilibrio entre los factores de la producción y la justicia social, así como propiciar el trabajo
digno y decente en todas las relaciones laborales, se tiene acceso a la seguridad social y se percibe
un salario remunerador, se recibe capacitación continua para el incremento de la productividad con
beneficios compartidos y se cuenta con condiciones óptimas de seguridad e higiene para prevenir
riesgos de trabajo.
Del mismo modo, el Reglamento Federal de Seguridad, Higiene y Medio Ambiente de
Trabajo, que la ergonomía es la adecuación del lugar de trabajo, equipo, maquinaria y herramientas
al trabajador, de acuerdo a sus características físicas y psíquicas, con la finalidad de prevenir
enfermedades por la exposición a los factores ergonómicos.
Por otra parte, el Reglamento Federal de Seguridad y Salud en el Trabajo, publicado en el
Diario oficial de la Federación de 13 de noviembre de 2014, que derogó al Reglamento Federal de
Seguridad, Higiene y Medio Ambiente de Trabajo, señala: que los factores de riesgo ergonómico
son aquellos que manifiestan un sobresfuerzo físico, movimientos repetitivos o posturas forzadas
en el trabajo desarrollado, con la consecuente fatiga, errores, accidentes y enfermedades de trabajo,
derivado del diseño de las instalaciones, maquinaria, equipo, herramientas o puesto de trabajo.
También establece las obligaciones generales que los patrones deben observar para la atención de
los factores de riesgo ergonómico en los espacios de trabajo, en su artículo 42 señala que deberán:
- Contar con un análisis de los factores de riesgo ergonómico de los puestos de trabajo
expuestos a los mismos.
Capitulo II. Marco Teórico
______________________________________________________________________________
16
- Adoptar medidas preventivas para mitigar los factores de riesgo ergonómico en sus
instalaciones, maquinaria, equipo o herramientas del centro de trabajo;
- Practicar exámenes médicos al personal ocupacionalmente expuesto;
- Informar a los trabajadores sobre las posibles alteraciones a la salud por la exposición a los
factores de riesgo ergonómico;
- Capacitar al personal ocupacionalmente expuesto sobre las prácticas de trabajo seguras, y
- Llevar los registros sobre las medidas preventivas adoptadas y los exámenes médicos
practicados (STPS, 2017).
2.6. Métodos de evaluación de riesgo ergonómico.
Existen metodologías de evaluación de posturas forzadas, trabajos repetitivos, manipulación
manual de cargas y aplicación de posturas forzadas, tal y como se aprecia en el Tabla 1.
2.7. Método REBA
REBA (Valoración Rápida del Cuerpo Completo) del inglés “Rapid Entire Body Assessment”, es
uno de los métodos observacionales para la valoración de posturas más extenso, basado
principalmente en el método RULA, la diferencia radica en la inclusión de la evaluación de las
extremidades superiores, tiene como objetivo valorar el grado de exposición de los trabajadores al
riesgo por la adopción de posturas inadecuadas, es así como el resultado determina el nivel de
riesgo existente de padecer DTA´s estableciendo el nivel de acción requerido y la urgencia de la
intervención.
Este método fue propuesto por Sue Hignett y Lynn McAtamney en el año 2000, y para
desarrollar el método se contó con el apoyo de un grupo multidisciplinario compuesto de
ergónomos, fisioterapeutas, terapeutas ocupacionales y enfermeras, para ello valoraron alrededor
de 600 posturas de trabajo, se analizaron tareas simples con variaciones en la carga y los
movimientos para la definición de los segmentos corporales. El estudio se realizó aplicando varios
métodos previamente desarrollados como la ecuación de Niosh, la Escala de Percepción de
Esfuerzo, el método OWAS, la técnica BPD y el método RULA como ya se había mencionado
anteriormente. Es un método sensible a las tareas que conllevan cambios inesperados de postura a

Capitulo II. Marco Teórico
______________________________________________________________________________
17
consecuencia de la manipulación de cargas inestables o impredecibles; evalúa posturas individuales
por lo que es necesario seleccionar que posturas se van a analizar (ver Anexo 3).
Tabla 1. Métodos de evaluación ergonómica. (Prevalia, 2017).
MÉTODO POSTURAS FORZADAS
REBA
Permite estimar el riesgo de padecer desórdenes por trauma acumulado relacionados con el trabajo basándose el análisis de las posturas adoptadas por los miembros superiores del cuerpo (brazo, antebrazo, muñeca), del
tronco, cuello y piernas.
Además, define la carga o fuerza manejada, el tipo de agarre o el tipo de actividad muscular desarrollada por el trabajador.
Evalúa tanto posturas estáticas como dinámicas, e incorpora la posibilidad de señalar la existencia de cambios
bruscos de postura o posturas inestables. En el método valora si la postura de los miembros superiores del cuerpo es adoptada a favor o en contra de la
gravedad.
OCRA TRABAJOS REPETITIVOS
Se utiliza para la evaluación del riesgo asociado a movimientos repetitivos de los miembros superiores evalúa
las posturas forzadas de los hombros, codos, muñecas y manos adoptadas durante la realización del movimiento
y la presencia de otros factores de riesgo como el uso de guantes inadecuados al trabajo a desarrollar la actividad.
INSHT LEVANTAMIENTO DE CARGAS
Se valora el levantamiento manual de cargas mediante los parámetros de: masa efectiva levantada, calidad de
agarre, distancia inicial y final del desplazamiento de la carga, distancia horizontal y la asimetría o dislocación
angular del tronco. También valora el uso de una extremidad o dos, si se levanta por una o dos personas, la frecuencia y la duración del levantamiento
NORMA ISO 11228-2 EMPUJE Y ARRASTRE
Permite evaluar determinando las fuerzas límite mediante tablas que establecen altura del agarre, distancia a
recorrer y frecuencia de empuje o arrastre; realiza la estimación del nivel de riesgo a partir de las fuerzas
registradas y los límites establecidos en las tablas correspondientes.
NORMA ISO 11228-1 TRANSPORTE
Se determina el valor límite de masa acumulada que pueden ser transportados durante un determinado tiempo. Se determinan dos valores diferentes: un valor de la masa acumulada por día en el transporte de cargas y un
valor de masa acumulada relativo a la distancia.
2.8. Lógica difusa
Las bases teóricas de la lógica borrosa o difusa (fuzzy logic) fueron descritas en 1965 por Lotfi A.
Zadeh, profesor de la universidad de California en Berkeley, quién inconforme con la teoría de
conjuntos clásicos (crisp sets) que sólo permiten dos opciones, la pertenencia o no de un elemento
a dicho conjunto, presentó como una forma de procesar información permitiendo pertenencias
parciales a unos conjuntos a los denominó “Conjuntos difusos” (fuzzy sets).
La lógica difusa es una metodología, una técnica de la inteligencia computacional proporciona
una manera simple resultados en base a información con alto grado de imprecisión, (con ruido,
incompletos); una ventaja importante es la posibilidad de implementar sistemas basados tanto en

Capitulo II. Marco Teórico
______________________________________________________________________________
18
hardware como software, incluso combinar ambos. Es una lógica multivaluada ya que permite
valores intermedios para poder definir evaluaciones entre sí/no, verdadero/ falso, pequeño/grande,
entre otros; su frontera no está precisamente definida, y el grado de pertinencia entrega un valor
entre 0 y 1 (D´Negri y De Vito, 2006).
2.9. Microsoft kinect
El kinect es un dispositivo de control de movimiento (ver Figura 1), funciona bajo un esquema
maestro-esclavo, donde el maestro es la computadora y el esclavo es el kinect. El dispositivo genera
y mantiene en memoria los cuadros de imagen de profundidad y color a una velocidad de 30 cps
(cuadros por segundo). El acceso a estos datos se realiza a través de un puerto USB 2.0 especial.
El procesamiento del audio y el control de USB es realizado por un microprocesador Marvell
Technology que funciona independiente al procesamiento de imágenes (Fernández, 2012).
Figura 1. Microsoft kinect.
Fuente: (Fernández, 2012).
2.9.1. Skeletal Tracking
La NUI Skeleton API proporciona información de la localización (posición y orientación) del
cuerpo de un máximo de dos personas de pie enfrente del sensor kinect. Estos datos son
proporcionados al código como puntos, (joints), que forman el esqueleto mediante puntos
concretos, como se aprecia en la Figura 2. Concretamente, se dispone de 20 joints que corresponde
con las partes que definen nuestro cuerpo, así como con las articulaciones del mismo (cabeza,
hombros, codos, muñecas, manos, cadera, rodillas, tobillos y pies). Este esqueleto representa la
posición y postura actual del usuario.

Capitulo II. Marco Teórico
______________________________________________________________________________
19
Figura 2. Articulaciones detectadas por el kinect.
Fuente: (Casillas, 2012)
2.9.2. Especificaciones del sensor kinect.
A continuación, en la Tabla 2, se describen las especificaciones técnicas del kinect:
Tabla 2. Especificaciones del sensor kinect en aproximación a (Casillas, 2012)
Ángulo de visión
43º de campo de visión vertical
57º de campo de visión horizontal
Ángulo de movimiento del motor ±27º
Velocidad de frames 30 fps
Resolución (profundidad) VGA (640x480)
Resolución (cámara RGB) VGA (640x480)
Flujo de color y profundidad De 1.2 a 3.5 metros.
Seguimiento del esqueleto De 1.2 a 3.5 metros.
Formato de audio
16 KHz, 16 bit PCM
Características de entrada de audio
Array de cuatro micrófonos con un convertidor analógico a digital de 24 bits (ADC) y
procesamiento de señales de kinect con cancelación de eco y eliminación de ruido de fondo.
Consumo de energía 2,25 watts.
Memoria RAM 512 MB.
Acelerómetro Para estabilizar la imagen cuando se mueve.
Ventilador No se encuentra encendido continuamente para no interferir con los micrófonos.
2.10. Metodología de Sistemas Blandos de Peter Checkland.
La metodología de Sistemas blandos de Checkland (SSM) del inglés Soft System Methodology,
contribuye sistemáticamente la incorporación del entorno y el nivel cultural de los involucrados al
utilizar “weltanschauung” (“visión del mundo” forma particular de percibir y conceptualizar el
mundo que lo rodea) en la definición raíz y favorece a la determinación del sistema principal y de
los subsistemas al modelar el listado logrado de actividades mínimas necesarias, a partir de las
cuales se obtiene el proceso principal (Gurruchaga et al., 2006).

Capitulo II. Marco Teórico
______________________________________________________________________________
20
De acuerdo a J. M. C. Fonseca y Huacuja (2011) esta metodología emplea la construcción de
diagramas y esquemas conceptuales para definir la estructura y la lógica de una situación
problemática, por lo tanto, las reglas para construirlos son:
- Elegir un diagrama adecuado, es decir; definir las dependencias lógicas, los parámetros de
interacción del proceso y las influencias sociales.
- Decidir los símbolos que se usarán para cada clase de elementos.
- Proporcionar las claves para asegurar que diferentes lectores interpreten el diagrama de la
misma manera.
La metodología se basa, en identificar el tipo de sistema o actividad humana en donde se ubica
el problema y propone siete premisas, las cuales son:
- Aproximación al problema a partir de la experiencia u observación del mundo real.
- Expresión de la situación problemática.
- Identificación de la definición raíz en donde se hacen relevantes los propósitos, los
involucrados y las principales actividades del sistema.
- Elaboración de los modelos conceptuales, basados en la definición raíz.
- Comparación de los modelos diseñados con el mundo real.
- Análisis de los cambios deseables y culturalmente factibles.
- Implementación de las acciones para resolver la situación problemática.
Es así como, la metodología se describe como un proceso (ver Figura 3) de siete etapas de
análisis que emplean el concepto de un sistema de actividad humana como un medio de obtener
tanto investigar la situación como efectuar acciones para mejorarla (Wilson, 1993).

Capitulo II. Marco Teórico
______________________________________________________________________________
21
Figura 3. Esquema de Peter Checkland Fuente: en aproximación a (Checkland, 1979).
El esquema de la Figura 3 se divide en dos partes, integradas por las fases 1, 2, 5,6 y 7 las
cuales necesitan interacción con el mundo real, las personas y sus precepciones. Del mismo modo
las fases 3 y 4 se aplican para la elaboración de esquemas de actividad humana según el criterio
del analista para mejorar la situación problemática. La secuencia lógica ilustrada mediante esta
figura es una manera útil de describir la metodología, representa un patrón de actividades (Wilson,
1993), para más información consultar Anexo 4.
2.11. Diseño Centrado en Personas.
El Diseño centrado en las Personas, del inglés “Design Centered In People” (DCP) es un proceso
y un conjunto de técnicas utilizadas para crear soluciones nuevas en productos, servicios, espacios,
organizaciones y modos de iteración (ver Anexo 5). Asimismo, el proceso consiste en examinar las
necesidades, sueños y comportamientos de las personas que serán beneficiadas con las soluciones
resultantes; en tal sentido, se pretende escuchar y entender sus necesidades (dimensión de lo que
es deseable) que deben ser factibles y viables, tal y como se aprecia en la Figura 4 la intersección
de las tres lupas tiene que ser deseables, factibles y viables (Gates y 3.0, 2013).

Capitulo II. Marco Teórico
______________________________________________________________________________
22
Figura 4. Soluciones deseables, factibles y viables.
Fuente: Elaboración propia.
Deseabilidad
ViabilidadFactibilidad

Capítulo III. Marco Metodológico
______________________________________________________________________________
23
CAPÍTULOIII. MARCO METODOLÓGICO.
3.1. Introducción.
El presente capítulo hace referencia al tipo de investigación que se ha realizado, el caso de estudio
expuesto, así como la descripción de las estaciones de trabajo y las afectaciones detectadas en cada
trabajador.
3.2. Metodología propuesta
Para llevar a cabo el análisis ergonómico se aplica el método REBA y lógica difusa, una de las
razones por la que se ha elegido este método es que realiza una valoración completa del cuerpo
considerando las fuerzas y cargas ejercidas, además la lógica difusa permite medir ciertos grados
de membresía sobre el nivel del riesgo en las aposturas; en la Figura 5 se muestra el procedimiento
para la evaluación del nivel de riego ergonómico en tiempo real con la metodología kinect.
Figura 5. Procedimiento general. Fuente: Elaboración propia.

Capítulo III. Marco Metodológico
______________________________________________________________________________
24
3.3. Delimitación de la investigación
Los autores Sampieri et al. (2014), afirman que una investigación es un conjunto de procesos
sistemáticos, críticos y empíricos que se aplican al estudio de un fenómeno o un problema, además
este puede tener dos enfoques:
✓ Enfoque cuantitativo: Utiliza principalmente la recolección de datos para probar
hipótesis con base en la medición numérica, así como del análisis estadístico, con el fin de
establecer pautas de comportamiento y probar teorías.
✓ Enfoque cualitativo: Utiliza la recolección y análisis de los datos para afinar las
preguntas de la investigación o revelar nuevas interrogantes en el proceso de interpretación.
En base a lo expuesto anteriormente, la investigación realizada adopta un enfoque cuantitativo
debido a que se aplica la lógica deductiva pasando de un problema en general a uno en particular
en este caso en el diseño de un prototipo para evaluar riesgo ergonómico en puestos de trabajo;
además la recolección de datos se basa en instrumentos estandarizados, por medio de la
observación, medición y documentación de los resultados. Sin embargo, también tiene un enfoque
cualitativo al aplicar la metodología de Peter Checkland y generar modelos conceptuales.
3.4. Caso de estudio
El estudio se realizó en las instalaciones de la planta de ensamble Strongest Jeans ubicado en
Parque de Poblamiento de Huejutla de Reyes Hidalgo perteneciente a la empresa LÍDER JEANS
con ubicación en Calle Galeana No.5 Zona Federal Zacualtipán de Ángeles, Hidalgo, México. C.P.
43200, (ver Anexo 6).
En la sucursal de Líder Jeans se dedican a confeccionar piezas de pantalones de Mezclilla y
poliéster de las marcas WESTLER, SILVER y Cuidado con el Perro en su modelo básico (vaquero)
para caballero, desde la talla seis hasta la 48. Las actividades de confección, ensamble, corte y
demás comienzan a las 6:00 Am con un horario de comida de 11:00 a 11:30, la salida es a las 4:00
Pm. La producción promedio semanal es de 4300 piezas.
El proceso fue dividido en 8 celdas de trabajo conocidas como: Preparación, Costura delantero,
Costura trasero, Ensamble, Terminado, Planchado, Revisión y Fusionadora en las cuales para la
evaluación participaron 24 operarios del sexo masculino y femenino respectivamente.

Capítulo III. Marco Metodológico
______________________________________________________________________________
25
En la Figura 6 se muestra la distribución de las estaciones de trabajo de la planta de ensamble
y manufactura.
Figura 6. Estaciones de trabajo. Fuente: Elaboración propia.
3.4.1. Estaciones de trabajo y afectaciones.
El proceso de ensamble y confección es dividido en 8 celdas de trabajo conocidas como:
Preparación, Costura delantero, Costura trasero, Ensamble, Terminado, Planchado, Revisión y
Fusionadora en las cuales para la evaluación participaron 24 operarios del sexo masculino y
femenino respectivamente.
En el Tabla 3, se describen los principales DTA´s que presenta cada operador en su respectiva
estación de trabajo y la forma en que realiza su actividad.
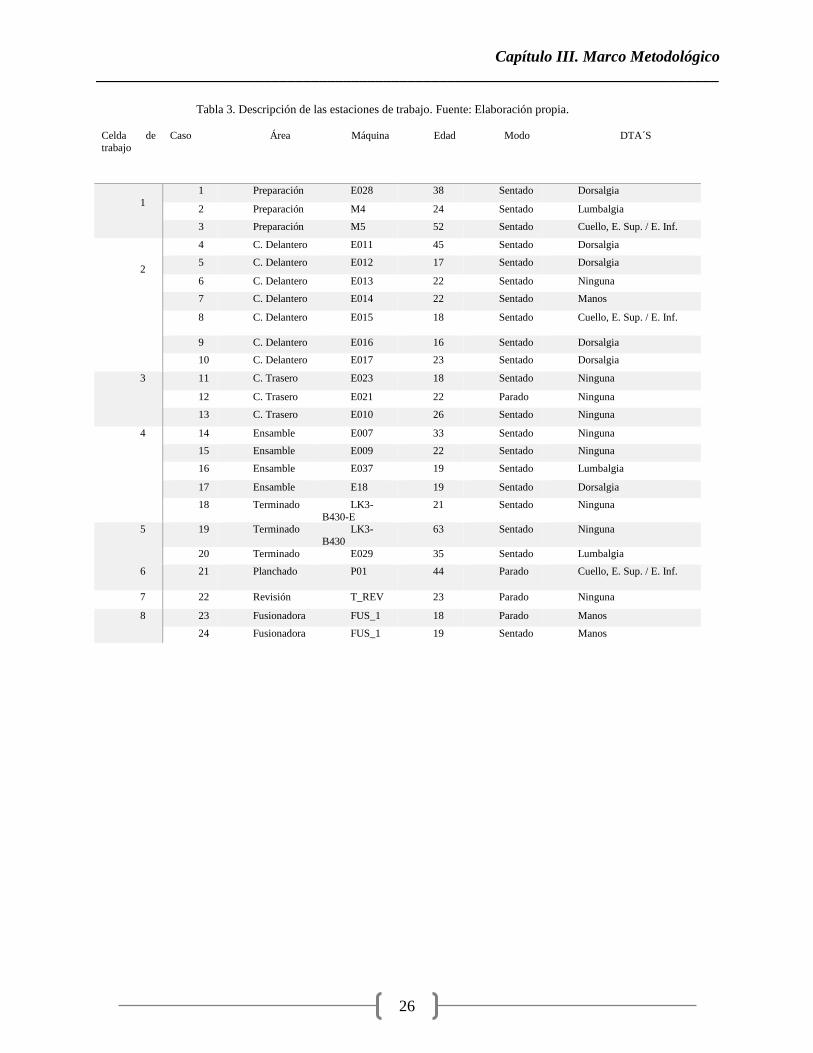
Capítulo III. Marco Metodológico
______________________________________________________________________________
26
Tabla 3. Descripción de las estaciones de trabajo. Fuente: Elaboración propia.
Celda de
trabajo
Caso Área Máquina Edad Modo DTA´S
1
1 Preparación E028 38 Sentado Dorsalgia
2 Preparación M4 24 Sentado Lumbalgia
3 Preparación M5 52 Sentado Cuello, E. Sup. / E. Inf.
2
4 C. Delantero E011 45 Sentado Dorsalgia
5 C. Delantero E012 17 Sentado Dorsalgia
6 C. Delantero E013 22 Sentado Ninguna
7 C. Delantero E014 22 Sentado Manos
8 C. Delantero E015 18 Sentado Cuello, E. Sup. / E. Inf.
9 C. Delantero E016 16 Sentado Dorsalgia
10 C. Delantero E017 23 Sentado Dorsalgia
3 11 C. Trasero E023 18 Sentado Ninguna
12 C. Trasero E021 22 Parado Ninguna
13 C. Trasero E010 26 Sentado Ninguna
4 14 Ensamble E007 33 Sentado Ninguna
15 Ensamble E009 22 Sentado Ninguna
16 Ensamble E037 19 Sentado Lumbalgia
17 Ensamble E18 19 Sentado Dorsalgia
18 Terminado LK3-
B430-E
21 Sentado Ninguna
5 19 Terminado LK3-
B430
63 Sentado Ninguna
20 Terminado E029 35 Sentado Lumbalgia
6 21 Planchado P01 44 Parado Cuello, E. Sup. / E. Inf.
7 22 Revisión T_REV 23 Parado Ninguna
8 23 Fusionadora FUS_1 18 Parado Manos
24 Fusionadora FUS_1 19 Sentado Manos
Capítulo IV. Marco Operativo
______________________________________________________________________________
CAPÍTULO IV. MARCO OPERATIVO
4.1. Introducción.
El desarrollo de este capítulo es referente a la aplicación de la metodología de Sistemas Blandos
de Peter Checkland, con la finalidad de determinar los factores de la problemática existente en la
empresa sujeta al caso de estudio. Posteriormente se realiza el diseño del prototipo y el diagnostico
ergonómico utilizando la metodología de Diseño Centrado en Personas. Se describe la
programación en el software labview de la metodología REBA-lógica difusa que permite la
valoración ergonómica. También el ensamble del prototipo y la evaluación del nivel de riesgo
ergonómico en estaciones de trabajo en tiempo real en la empresa.
4.2. Contextualización del problema mediante la metodología de Sistemas Blandos de Peter
Checkland.
1.- Situación problemática: Situación no estructurada sobre los riesgos ergonómicos (ver Figura
7) en la planta de ensamble de textiles ubicada en Huejutla de Reyes Hidalgo perteneciente a la
empresa LÍDER JEANS con ubicación en Calle Galeana No.5 Zona Federal Zacualtipán de
Ángeles, Hidalgo, México. C.P. 43200.
Los trabajadores se dedican al ensamble de pantalones de pantalones de Mezclilla y poliéster
de las marcas WESTLER, SILVER y Cuidado con el Perro en su modelo básico (vaquero) para
caballero, desde la talla seis hasta la 48. Las actividades de confección, ensamble, corte y demás
comienzan a las 6:00 Am con un horario de comida de 11:00 a 11:30, la salida es a las 4:00 Pm.
La producción promedio semanal es de 4300 piezas.
Figura 7. Riesgo ergonómico en la planta de ensamble.
Fuente: Elaboración propia.
Riesgo Ergonómico
Maquinaria
Estación de trabajo
Posturas/ actividades
Ambiente

Capítulo IV. Marco Operativo
______________________________________________________________________________
28
2.- Expresión de la situación problemática: Los trabajadores no cuentan con la vestimenta
adecuada para la realización de la actividad. En las estaciones de trabajo se aprecia que utilizan
sillas comunes, elaboradas de madera y palma, las cuales no reflejan ningún tipo de comodidad;
los trabajadores presentan molestias musculoesqueléticas, principalmente en la espalda, cuello,
extremidades inferior y superior (ver Figura 8). Por lo que surgen quejas por parte de los
trabajadores manifestando dichas dolencias y afectaciones en su salud.
Figura 8. Situación actual del problema. Fuente: Elaboración propia.
En la Figura 9, se describe la estructura organizativa, actividades e interrelación existente, las
variables de entrada proceso y salida de la situación actual del problema en el lugar de estudio.
Figura 9. Situación actual del problema (Entrada, proceso, salida). Fuente: Elaboración propia.

Capítulo IV. Marco Operativo
______________________________________________________________________________
29
3.- Construcción de la definición raíz: Se aplica un análisis CATWOE a la planta de
ensamble de la empresa LIDER JEANS por lo que se muestra en la Tabla 4.
Tabla 4. Aplicación de modelo CARWOE. Fuente: Elaboración propia
Análisis CATWOE
Elementos Descripción
C Clientes Empresa LIDER JEANS A Actores 37 empleados
T Transformación Confección y ensamble de jeans
W Weltanschauung Realizar evaluaciones ergonómicas a los trabajadores O Owners El gerente de LIDER JEANS
E Environment Iluminación / energía, ruido, residuos.
4.- Definición raíz: El modelo conceptual de la Figura 10, se obtiene mediante el análisis
CATWOE, en él se aprecia el suprasistema denominado como planta LIDER JEANS y la relación
entre los subsistemas (Empleados, Estación de trabajo, Factores ambientales, Riesgo ergonómico
y Métodos de evaluación).
Los empleados se encargan de la confección y ensamble de pantalones, dentro de su carga de
trabajo se realizan actividades repetitivas, manipulación de cargas, lo que conlleva estar en una
postura estática involucrando los miembros superior e inferior durante toda la jornada laboral, estas
actividades ocasionan un riesgo ergonómico que a su vez dependiendo del nivel de riesgo se
generan desordenes por trauma acumulado (DTA´s) los más comunes que se desarrollan son la
lumbalgia (zona de la espalda), fatiga muscular producida por contracciones permanentes que
posteriormente ocasionan dolor debido a que el trabajo es monótono y excesivamente repetitivo,
se genera estrés.
Figura 10. Modelo conceptual del riesgo ergonómico. Fuente: Elaboración propia.
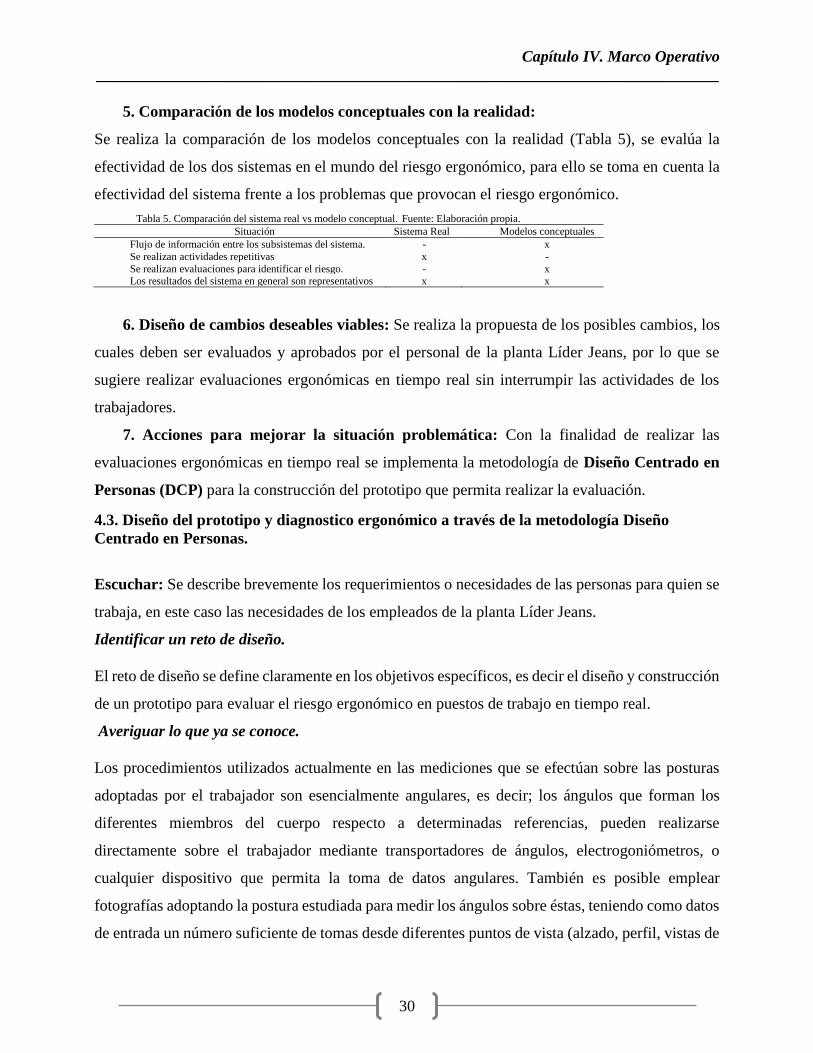
Capítulo IV. Marco Operativo
______________________________________________________________________________
30
5. Comparación de los modelos conceptuales con la realidad:
Se realiza la comparación de los modelos conceptuales con la realidad (Tabla 5), se evalúa la
efectividad de los dos sistemas en el mundo del riesgo ergonómico, para ello se toma en cuenta la
efectividad del sistema frente a los problemas que provocan el riesgo ergonómico.
Tabla 5. Comparación del sistema real vs modelo conceptual. Fuente: Elaboración propia.
Situación Sistema Real Modelos conceptuales
Flujo de información entre los subsistemas del sistema. - x
Se realizan actividades repetitivas x -
Se realizan evaluaciones para identificar el riesgo. - x Los resultados del sistema en general son representativos x x
6. Diseño de cambios deseables viables: Se realiza la propuesta de los posibles cambios, los
cuales deben ser evaluados y aprobados por el personal de la planta Líder Jeans, por lo que se
sugiere realizar evaluaciones ergonómicas en tiempo real sin interrumpir las actividades de los
trabajadores.
7. Acciones para mejorar la situación problemática: Con la finalidad de realizar las
evaluaciones ergonómicas en tiempo real se implementa la metodología de Diseño Centrado en
Personas (DCP) para la construcción del prototipo que permita realizar la evaluación.
4.3. Diseño del prototipo y diagnostico ergonómico a través de la metodología Diseño
Centrado en Personas.
Escuchar: Se describe brevemente los requerimientos o necesidades de las personas para quien se
trabaja, en este caso las necesidades de los empleados de la planta Líder Jeans.
Identificar un reto de diseño.
El reto de diseño se define claramente en los objetivos específicos, es decir el diseño y construcción
de un prototipo para evaluar el riesgo ergonómico en puestos de trabajo en tiempo real.
Averiguar lo que ya se conoce.
Los procedimientos utilizados actualmente en las mediciones que se efectúan sobre las posturas
adoptadas por el trabajador son esencialmente angulares, es decir; los ángulos que forman los
diferentes miembros del cuerpo respecto a determinadas referencias, pueden realizarse
directamente sobre el trabajador mediante transportadores de ángulos, electrogoniómetros, o
cualquier dispositivo que permita la toma de datos angulares. También es posible emplear
fotografías adoptando la postura estudiada para medir los ángulos sobre éstas, teniendo como datos
de entrada un número suficiente de tomas desde diferentes puntos de vista (alzado, perfil, vistas de

Capítulo IV. Marco Operativo
______________________________________________________________________________
31
detalle). En este caso es necesario asegurarse de que los ángulos a medir se aprecien a escala real
en las imágenes (el plano en el que se encuentra el ángulo a medir es paralelo al plano de la cámara)
(Mas y Antonio, 2015). Otra alternativa es utilizar sensores de control de movimiento de bajo costo
(kinect), para obtener información biomecánica del individuo. Esta información es captada con una
cámara de profundidad infrarroja que tiene la capacidad de rastrear 20 puntos articulares sobre el
cuerpo humano. Con la información recabada es posible realizar cálculos matemáticos respecto a
un sistema de referencia de coordenadas X, Y, Z para obtener los ángulos reales. Estos dispositivos
adquieren datos a una distancia promedio de tres metros (Villada y Muñoz, 2014). Por lo tanto, de
los procedimientos descritos el sensor kinect es el único que obtiene los datos angulares en tiempo
real, sin afectar las tareas del trabajador, lo cual es una gran ventaja para realizar la evaluación
ergonómica.
Identificar a las personas con quienes hablar.
La recolección de datos se realizó con los 37 empleados de la planta de Líder Jeans.
Elegir los métodos de investigación.
- Inmersión en el contexto
Existen varios métodos de evaluación ergonómica cuya selección depende de las
características específicas de la actividad a evaluar, entre ellos, podemos mencionar el método
NIOSH (Instituto Nacional de Seguridad y Salud Ocupacional, del inglés National Institute for
Occupational Safety and Health) para la evaluación manual de cargas, RULA (Evaluación rápida
de la extremidad superior, del inglés Rapid Upper Limb Assessment) análisis postural, JSI (Índice
de tensión laboral, del inglés Job Strain Index) para la evaluación de movimientos repetitivos y
REBA (Valoración Rápida del Cuerpo Completo, del inglés Rapid Entire Body Assessment), para
evaluar la postura de todo el cuerpo, entre otros (Asensio-Cuesta et al., 2012; GC, 2005; Zare et
al., 2014). De éstos, el método REBA permite evaluar la postura de todo el cuerpo; tanto los
miembros superiores como inferiores, siendo la postura, carga, tipo de agarre y actividad muscular
desarrollada por el trabajador, los factores considerados para la valoración. Asimismo permite
evaluar posturas estáticas y dinámicas (Gasca et al., 2009; Hignett y McAtamney, 2000; Montiel
et al., 2006).
Por otra parte, la lógica difusa es una técnica de inteligencia artificial computacional que
permite trabajar con información de entrada ambigua, imprecisa, con ruido o incompleta, una de

Capítulo IV. Marco Operativo
______________________________________________________________________________
32
las ventajas es la posibilidad de implementar sistemas basados tanto en Hardware como en
Software, admite valores intermedios para poder definir entre sí/no, verdadero/falso, cerca/lejos,
entre otros (Zadeh, 1965, 1996).
Desarrollo de paradigma (Diagnostico ergonómico).
Observar vs interpretar
Se observan las actividades y el entorno laboral de la empresa, con la finalidad de determinar las
condiciones ergonómicas en las que se encuentra la empresa.
Observación/Deducción 1: Los trabajadores realizan tareas repetitivas sin ciclos de descanso
durante la jornada laboral tal y como se aprecia en la Figura 11.
Interpretación: Las tareas repetitivas generan dolor de cuello, piernas, manos, así como fatiga
y estrés laboral.
Figura 11. Planta líder Jeans.
Fuente: Elaboración propia.
Observación/Deducción 2: Las condiciones ergonómicas no son favorables, como se puede
observar en la Figura 12 los asientos no son confortables, son de palma y carecen de un buen
respaldo y ajuste de asiento.
Interpretación: Los asientos provocan desordenes por trauma acumulado como lumbalgia
(dolores en la espalda y cintura).

Capítulo IV. Marco Operativo
______________________________________________________________________________
33
Figura 12. Condiciones ergonómicas de los asientos.
Fuente: Elaboración propia.
Observación/Deducción 3: Las encargadas de planchar las bolsas traseras de los pantalones
permanecen paradas y descalzas durante toda la jornada laboral (ver Figura 13).
Interpretación: Permanecer paradas durante mucho tiempo ocasiona dolor en las extremidades
inferiores, además de planchar continuamente genera molestias en las manos incluso quemaduras
por el vapor.
Figura 13. Área de planchado. Fuente: Elaboración propia.
Observación/Deducción 4: En la Figura 14 se aprecia que no se cuenta con un uniforme
establecido por la empresa, los trabajadores son libres de ir como gusten, por ejemplo, en short,
sandalias y además no todos los trabajadores usan cubrebocas.
Interpretación: No contar con un uniforme y equipo de seguridad genera un riesgo en la
integridad física del trabajador.

Capítulo IV. Marco Operativo
______________________________________________________________________________
34
Figura 14. Condiciones de trabajo.
Fuente: Elaboración propia.
Crear
En esta sección de la metodología DCP, se describe detalladamente el proceso para poder construir
el prototipo, las tecnologías implementadas, así como el diseño y funcionalidad.
Para ello se parte del pensamiento sistémico (ver Figura 15) en la que se denomina como supra-
sistema de evaluación ergonómica en tiempo real, que a su vez está compuesto de una entrada en
el subsistema 1 la cual se encarga de establecer la comunicación entre el usuario conocida como
interfaz Natural de Usuario (NUI) y la tecnología kinect. El proceso se lleva a cabo en el subsistema
2 y 3 en este caso el kinect se encarga de la adquisición de datos vectoriales los cuales son
implementados por el método REBA en el software labview finalmente se tiene un nivel de riesgo
ergonómico que es guardado en un archivo de texto, para un historial de resultados. En la parte de
control se realizan los cambios de acuerdo a los factores observados en el trabajador al momento
de realizar la evaluación.

Capítulo IV. Marco Operativo
______________________________________________________________________________
35
Figura 15. Diagrama esquemático del prototipo de evaluación ergonómico.
Fuente: Elaboración propia
.
En la Figura 16 se aprecia detalladamente el contenido de la interfaz gráfica, como se observa
el método REBA necesita de 6 ángulos corporales (tronco, cuello, pierna, brazo, antebrazo y
muñeca), la modificación de factores de los segmentos corporales, es decir, si existe inclinación de
troco, cuello, si el trabajador se encuentra con soporte unilateral o bilateral, si el brazo está
abducido/rotado, el tipo de actividad que se realiza, la fuerza ejercida, tipo de agarre entre otros.
Figura 16. Representación de la interfaz gráfica. Fuente: Elaboración propia.

Capítulo IV. Marco Operativo
______________________________________________________________________________
36
4.4. Programación del sistema REBA- lógica difusa.
La programación se ha realizado con el software labview mediante la tecnología kinect que permite
la detección de ángulos en tiempo real. La secuencia a seguir se aprecia en la Figura 17.
Figura 17. Diagrama a bloques para la evaluación de riesgo con tecnología kinect y labview.
Fuente: Elaboración propia.
1.- El software comienza con la inicialización del kinect y la activación del esqueleto en 3D.
2.- En la Interfaz Natural de Usuario (NUI), específicamente en el kinect-read se ejecuta la lectura
de profundidad y esqueleto de la persona, mismo que detecta los 20 puntos vectoriales que
representan las principales articulaciones de una persona.
3.- El siguiente bloque denominado “Medición de ángulos”, genera los ángulos de acuerdo al
método REBA, es decir, los ángulos del grupo A (tronco, cuello, pierna) y del grupo B (brazo,
antebrazo y muñeca); también el proceso se lleva a cabo con un retardo de 600 milisegundos para
la adquisición de datos angulares.
Para el cálculo de ángulos se utiliza la fórmula matemática (ecuación 1) del producto punto
que permite determinar el ángulo formado entre dos vectores dependiendo de la articulación a
analizar.
𝜃 = cos−1𝑣.𝑤
|𝑣|.|𝑤| ecuación (1)

Capítulo IV. Marco Operativo
______________________________________________________________________________
37
4.- Posteriormente en los parámetros de modificación, se selecciona el lado a evaluar (izquierdo o
derecho), también cada uno de los factores que interviene en cada segmento corporal, para el troco
y para el cuello si presentan inclinación, en el caso de las piernas si el operador se encuentra con
soporte unilateral o bilateral; del mismo modo, para el brazo, si presenta rotación, abducción, un
punto de apoyo a favor de la gravedad, entre otros aspectos, también si existe torsión o desviación
radial en la muñeca. Otros parámetros de modificación en la puntuación de cada grupo son: Fuerzas
ejercidas, fuerzas aplicadas bruscamente, calidad de agarre.
5.- En el bloque de evaluación ergonómica, se desarrolla una interfaz gráfica que contiene el
método REBA y lógica difusa para ello se desarrollan tres conjuntos difusos, el primero clasificado
como grupo A (tronco, cuello y piernas) y los parámetros de modificación de la puntuación tal y
como se aprecia en la Figura 18.
Figura 18. Conjunto difuso 1: Grupo A. Fuente: Elaboración propia.
El siguiente conjunto (ver Figura 19) corresponde al grupo B (brazo, antebrazo y muñeca) y
sus correspondientes parámetros de modificación.

Capítulo IV. Marco Operativo
______________________________________________________________________________
38
Figura 19. Conjunto difuso 2: Grupo B. Fuente: Elaboración propia.
El último nivel determina el nivel de riesgo en base al sistema difuso 1 y 2, es decir; en base a
la combinación del grupo A y B, así como se aprecia en la Figura 20.
Figura 20. Conjunto difuso 3: Grupo AB y nivel de riesgo. Fuente: Elaboración propia.
6.- El nivel de riesgo ergonómico obtenido se guarda en un archivo de texto, para tener un historial
de las evaluaciones realizadas.

Capítulo IV. Marco Operativo
______________________________________________________________________________
39
7.- Para finalizar, se cierra el bloque de reconocimiento de profundidad y esqueleto en 3D del
kinect.
En la Figura 21 se aprecia el diagrama a bloques desarrollado en labview del sistema de
evaluación ergonómica. Para el óptimo funcionamiento se requiere de iluminación moderada y la
persona a evaluar debe de encontrarse a 3 metros de distancia con respecto al sensor.
Figura 21. Diagrama a bloques para la valoración de riesgo ergonómico.
Fuente: Elaboración propia.
El dispositivo kinect detecta las 20 articulaciones principales de la persona, en el panel de
control se aprecia la imagen y esqueleto de la persona rastreada (ver Figura 22). A través de
algoritmos basados en los vectores X, Y y Z de las articulaciones involucradas en el método REBA
se calculó el ángulo de cada segmento corporal a evaluar; una vez que se evalúan los seis ángulos
involucrados en el método (tronco, cuello, piernas, brazo, antebrazo y muñeca), se generan las
puntuaciones correspondientes A,B y C, permitiendo al evaluador realizar las modificaciones en
los parámetros de cada segmento corporal, por ejemplo, elegir si hay inclinación lateral, fuerzas
ejercidas, tipo de actividad, entre otros establecidos por el método, con estos datos de entrada se
obtiene el nivel de riesgo del operador en su estación de trabajo; el proceso termina y los datos
generados se guardan en un archivo de texto (.txt), el cual sirve como referencia de un historial de
datos evaluados una vez finalizada la evaluación

Capítulo IV. Marco Operativo
______________________________________________________________________________
40
Figura 22. Interfaz de Usuario (panel frontal). Fuente: Elaboración propia.
4.5. Ensamble del prototipo.
Una vez que se tiene el sistema de evaluación se realiza el ensamble y las pruebas de
funcionamiento en tiempo real.
El prototipo está integrado por la tecnología kinect, una computadora portátil indispensable
para ejecutar el programa de evaluación de riesgo ergonómico, un No break y una base portátil, tal
y como se observa en la Figura 23.
Figura 23. Prototipo de evaluación de riesgo
ergonómico en tiempo real.
Fuente: Elaboración propia.

Capítulo IV. Marco Operativo
______________________________________________________________________________
41
4.6. Evaluación del riesgo ergonómico en las estaciones de trabajo del caso de estudio.
El estudio se realizó en las instalaciones de la planta de ensamble Strongest Jeans con dirección en
Parque de Poblamiento S/N, Huejutla de Reyes, Hidalgo perteneciente a la empresa LÍDER JEANS
con ubicación en Calle Galeana No.5 Zona Federal Zacualtipán de Ángeles, Hidalgo, México. C.P.
43200. El proceso fue dividido en 8 celdas de trabajo conocidas como: Preparación, Costura
delantero, Costura trasero, Ensamble, Terminado, Planchado, Revisión y Fusionadora; en las
cuales, para la evaluación participaron 24 operarios del sexo masculino y femenino
respectivamente.
4.5.1. Diagnóstico Integral.
Evaluación Celda 1. Proceso de Preparación
Preparación: La primera celda de trabajo evaluada consta de las máquinas E028, M4 y M5, (ver
Figura 24-26) en la que se realizan costuras de los cortes que posteriormente formaran el pantalón,
sobrehilar, confeccionar partes del cierre, vistas, pespunte de bolsa y traba son las actividades que
se llevan a cabo en este bloque de trabajo.
Evaluación celda 2: Proceso de Costura delantero.
Posteriormente los cortes pasan al área denominada delantero, en la que se confeccionan las cortes
de enfrente del pantalón como son fijar cierre/bolsas a los paneles, encuarte, J, pespunte de bolsa
y pegar falsos efectuadas en las maquinas E011, E012, E013, E014, E015, E016, E017.Se
realizaron la toma de datos angulares y detección de nivel de riesgo (ver Figura 27-33).
Figura 24. Estación E028.
Fuente: Elaboración propia.
Figura 25. Estación M4.
Fuente: Elaboración propia.
Figura 26. Estación M5.
Fuente: Elaboración propia.

Capítulo IV. Marco Operativo
______________________________________________________________________________
42
Evaluación Celda 3. Proceso de Costura Trasero.
En esta sección se realiza la primera y segunda costura de bolsas traseras, del mismo modo, se fijan
las etiquetas de las prendas. En la Figura 34-36 se muestran las puntuaciones obtenidas del riesgo
ergonómico en las estaciones de trabajo (E023, E021 Y E010).
Figura 27. Estación E011.
Fuente: Elaboración propia.
Figura 28. Estación E012.
Fuente: Elaboración propia.
Figura 29. Estación E013.
Fuente: Elaboración propia.
Figura 30. Estación E014.
Fuente: Elaboración propia.
Figura 31. Estación E015.
Fuente: Elaboración propia.
Figura 32. Estación E016.
Fuente: Elaboración propia.
Figura 33. Estación E017.
Fuente: Elaboración propia.

Capítulo IV. Marco Operativo
______________________________________________________________________________
43
Evaluación Celda 4: Proceso de Ensamble.
A continuación, en la celda de ensamble se realiza el pespunte y confeccionan los laterales, la parte
de entrepierna, pegar pretina, y ruedo con los equipos E007, E009, E037, E18, de los cuales se
muestran las evaluaciones (ver Figura 37-40).
Evaluación Celda 5: Proceso de Terminado.
En la Figura (41-43) se evaluaron las estaciones de trabajo en la que los trabadores ejercen las
siguientes actividades: sobrehilar ojal, pegar traba, presilla, así como colocar el botón.
Figura 34. Estación E023.
Fuente: Elaboración propia.
Figura 35. Estación E021.
Fuente: Elaboración propia.
Figura 36. Estación E010.
Fuente: Elaboración propia.
Figura 37. Estación E007.
Fuente: Elaboración propia.
Figura 38. Estación E009.
Fuente: Elaboración propia.
Figura 39. Estación E037.
Fuente: Elaboración propia.
Figura 40. Estación E018.
Fuente: Elaboración propia.

Capítulo IV. Marco Operativo
______________________________________________________________________________
44
Evaluación Celda 6 y 7: Proceso de Planchado y Revisión.
Una vez que se terminan las costuras delanteras un revisor vine por las prendas y se las lleva a su
área de trabajo para cortar y formar piezas del pantalón, así como marcar los puntos para fijar
bolsas traseras (T_Rev), las cuales previamente son planchadas para seguir las líneas a
confeccionar, los niveles de riesgo obtenidos en esta área se aprecian en la Figura 44 y 45.
Evaluación Celda 8: Fusionadora.
La máquina fusionadora la operan dos trabajadores cuando los modelos requieren llevar doble tela
en las bolsas (poliéster), en la Figura 46 y 47 se observan las puntuaciones obtenidas y el nivel de
riesgo existente.
Figura 41. Estación LK3-B430E.
Fuente: Elaboración propia.
Figura 42. Estación LK3-B430.
Fuente: Elaboración propia.
Figura 43. Estación E029.
Fuente: Elaboración propia.
Figura 44. Área de Planchado.
Fuente: Elaboración propia.
Figura 45. Área de Revisión.
Fuente: Elaboración propia.

Capítulo IV. Marco Operativo
______________________________________________________________________________
45
4.7. Resultados
De los 24 casos evaluados el 83 % de las actividades se desempeña sentado mientras que el 17 %
parado. Del mismo modo, el 38 % no presenta ninguna molestia musculoesquelética, el 25 %
asegura malestares de dorsalgia, 13 % de lumbalgia, 13 % en cuello, extremidades superiores e
inferiores así mismo un 13 % molestias en las manos.
En el gráfico 1, se aprecian las puntuaciones obtenidas de las 24 operaciones evaluadas, el
riesgo ergonómico a desarrollar lesiones musculo esquelitas comprenden de un riesgo medio a muy
alto.
Gráfico 1. Nivel de riego ergonómico obtenido. Fuente: Elaboración propia
De las actividades evaluadas el 75% de la población presenta un riesgo de nivel medio de
desarrollar desordenes musculoesqueléticos, el 21% un riesgo alto y el 4% representa un nivel muy
alto a sufrir lesiones músculo esqueléticas tal y como se aprecia en el Grafico 2.
0
5
10
15
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
Puntu
ació
n
Operación
5 9 14
Figura 46. Estación: Fusionadora.
Fuente: Elaboración propia.
Figura 47. Estación: Fusionadora.
Fuente: Elaboración propia.

Capítulo IV. Marco Operativo
______________________________________________________________________________
46
Gráfico 2. Nivel de riesgo ergonómico. Fuente: Elaboración propia.
En la Tabla 6, se describen las principales recomendaciones por cada celda de trabajo de
acuerdo al nivel de riesgo obtenido.
Tabla 6. Resultados de evaluación de actividades. Fuente: Elaboración propia. No. Celda de trabajo Análisis REBA
1: Preparación Nivel de actuación: 2
Riesgo: Medio Recomendaciones: Establecer intervalos de descanso ya que las actividades son repetitivas y los operadores
permanecen sentados por largas horas.
2. Costura delantero. Nivel de actuación: 2
Riesgo: Medio
Recomendaciones: Los asientos no son confortables, son de palma y carecen de un buen respaldo y ajuste de
asiento. Se sugiere cambiar los asientos ya que provocan desordenes por trauma acumulado como lumbalgia
(dolores en la espalda y cintura).
3. Costura Trasero Nivel de actuación: 2 y 3
Riesgo: Medio - Alto
Recomendaciones: En este caso el riesgo aumenta de medio a muy alto, ya se producen movimientos repetitivos y posturas estáticas al realizar la actividad, se sugiere alternar tiempos de descanso con el trabajo.
4. Ensamble. Nivel de actuación: 2 y 4
Riesgo: Medio a Muy alto
Recomendaciones: Se adoptan posturas inestables debido a que el trabajador tiene que levantar las prendas del piso por lo que se sugiere contar con un área adecuada a la altura del trabajador.
5: Terminado Nivel de actuación: 2 y 3
Riesgo: Medio - Alto
Recomendaciones: Para este caso, el riesgo evaluado comprende un riesgo medio a alto, en esta área es de suma
importancia que se cambien los asientos y de la misma manera que se establezcan tiempos de descanso.
6: Planchado Nivel de actuación: 2
Riesgo: Medio
Recomendaciones: Como se observa en la evaluación realizada para este caso, durante toda la jornada laboral el
trabajador se encuentra parado adoptando posturas estáticas en las extremidades inferiores mientras realiza la actividad. Es necesario asignar una estación exclusiva para esta celda de trabajo, así como también es importante
que utilicen calzado confortable y tapetes antifatiga.
7: Revisión Nivel de actuación: 4
Riesgo: Muy alto
Recomendaciones: Se propone establecer tiempos de descanso, así como también de utilizar calzado y ropa
apropiada para el trabajo que desempeña.
8: Fusionadora Nivel de actuación: 2 y 3
Riesgo: Medio - Alto
Recomendaciones: Colocar asientos confortables para esta área cambiarlas por las bancas.
0
5
10
15
20 Riesgo ergonómico
Inapreciable Bajo Medio Alto Muy alto

Capítulo V. Conclusiones y Recomendaciones
______________________________________________________________________________
CAPÍTULO V. CONCLUSIONES Y RECOMENDACIONES
5.1. Conclusiones
En esta tesis fue posible determinar el nivel de riesgo ergonómico en tiempo real con el uso de la
tecnología kinect a través de la metodología REBA – lógica difusa, lo que representa una
alternativa adecuada al realizar las valoraciones de riesgo al que están expuestos los trabajadores,
es preciso destacar que al momento de determinar la valoración no se afecta al trabajador ya que la
medición se realiza a una distancia de 2 metros.
También se obtuvo el modelo conceptual de las partes que integran el prototipo con ayuda de
la metodología de sistemas blandos de Peter Checkland, puesto que fue esencial para determinar la
situación real de la problemática en la planta Líder Jeans S.A de C.V y con ello saber las acciones
a tomar en base a lo observado e interpretado a lo largo de la metodología.
Ahora bien, el último paso de la metodología de sistemas blandos se auxilia de otra más, para
ello se aplicó la metodología de Diseño Centrado en Personas en este apartado se diseñó y se fabricó
un prototipo que permite la evaluación del nivel de riesgo ergonómico en estaciones de trabajo en
tiempo real, el cual es práctico de trasportar de un lugar a otro, está integrado por una computadora
portátil, un No break y el dispositivo kinect y una base portátil.
Se realizó la programación de la valoración de riesgo ergonómico mediante la metodología
REBA-lógica difusa en el software labview, que través de librerías como kinesthesia y el SDK for
Windows V.1.8 enlaza el dispositivo kinect a la computadora portátil y al software labview.
Se realizó la evaluación integral del riesgo ergonómico en tiempo real a 24 trabajadores, las
pruebas de funcionamiento se efectuaron en la planta Líder Jeans sin interrumpir las actividades de
los trabajadores.
Se observó, durante la aplicación de las evaluaciones, que en la mayoría de las actividades
existe un riesgo ergonómico, que oscila entre medio a muy alto, de generar DTA´s; por lo que es
necesario seguir las recomendaciones mencionadas en el Tabla 6. Así mismo, capacitar a los
trabajadores en materia preventiva, con la finalidad de concientizar al personal para disminuir el
índice de riesgos ergonómicos.
Además, se recomienda que el personal utilice vestimenta adecuada, zapatos de seguridad,
cubrebocas entre otros al desarrollar sus actividades con el objetivo de prevenir los riesgos de
trabajo. Del mismo modo, se recomienda disponer de sillas regulables en altura, establecer
Capítulo V. Conclusiones y Recomendaciones
______________________________________________________________________________
48
intervalos de descanso durante la jornada laboral. También es necesario considerar el espacio libre
entre cada estación de trabajo, para ello se debe de tomar en cuenta el diseño ergonómico en las
estaciones de trabajo de acuerdo a las características personales de cada trabajador.
Por lo tanto, en esta tesis se acepta la hipótesis planteada, ya que fue posible determinar el
nivel de riesgo ergonómico en tiempo real en las estaciones de trabajo sin interrumpir las
actividades del trabajador.
5.2. Recomendaciones
Para una óptima evaluación de riesgo ergonómico se recomienda colocar el sensor sobre una
superficie estable, (libre de vibración y ruido), a 2 metros de distancia entre el dispositivo y la
persona a evaluar. Es posible ajustar la ubicación del sensor kinect sólo moviendo la base, en los
siguientes puntos se menciona el orden en el que se debe de llevar a cabo la evaluación.
1. Conectar el dispositivo kinect a la computadora portátil.
2. Ejecutar el programa en Labview.
3. Modificar los parámetros de acuerdo a su criterio con respecto a lo observado.
4. Decidir el lado a evaluar (izquierdo o derecho) y modificar en el icono correspondiente.
5. Posteriormente presionar en evaluar.
6. Inmediatamente se apreciará el nivel de actuación y el nivel de riesgo, éste dato se guarda
automáticamente en un archivo de texto (.txt).
5.2.1. Recomendaciones técnicas al prototipo desarrollado
- Reemplazar la computadora portátil por una tarjeta de menor dimensión por ejemplo existe
la posibilidad de ejecutar el programa desarrollado en labview desde una Raspberry Pi.
- Otra opción es establecer comunicación entre el sistema desarrollado en labview con el
sistema experto para generar los reportes, o agregarlos desde labview.

Anexo 1: ENEIT-2018
______________________________________________________________________________
ANEXOS
Anexo 1: ENEIT-2018.

Anexo 1: ENEIT-2018
______________________________________________________________________________
50

Anexo 2: Ficha técnica
______________________________________________________________________________
Anexo 2: Ficha técnica de servicio.
FICHA TÉCNICA DE SERVICIO
Nombre del
servicio:
ERGOT
Categoría: Producto/
Servicio
Sector estratégico:
Tecnologías de la información
y comunicación y Electrónica
Dirección: Desv. Lindero Tametate, S/N, Col. La morita, Tantoyuca, Veracruz.
Teléfono: 7891207084
Email: [email protected]
Misión: Evaluar el nivel de riesgo ergonómico en puestos de trabajo en tiempo real.
Visión: Ser líderes en innovación y servicios de evaluación ergonómica de alta calidad.
Requerimientos:
1 Computadora portátil.
1 Kinect Xbox 360
Software de evaluación ergonómica
Nobreak
Valor que aporta y características esperadas del servicio que brinda:
Resultados ergonómicos al instante y propuestas de rediseño de estaciones de trabajo.
Objetivo del servicio:
Evaluar el nivel de riesgo ergonómico en puestos de trabajo
en tiempo real mediante el método REBA y Lógica difusa.
Política de Calidad: En ERGOT estamos
comprometidos a satisfacer las necesidades de
nuestros clientes a través de la constancia en la
calidad y confianza de nuestros servicios,
fomentando la gestión de calidad de vida en los
trabajadores. Ofertas de servicios: Servicios personalizados de rediseño
de estaciones de trabajo.
Requisitos (expectativas) del cliente y otras
partes interesadas:
Confiabilidad y alta calidad en las valoraciones
ergonómicas.
Competencias necesarias: Trabajo en equipo. Valores: Respeto, Honestidad, integridad,
mantener altos estándares éticos y morales.
Funcionamiento:
Para una óptima evaluación de riesgo ergonómico se recomienda colocar el kinect sobre una superficie estable,
(libre de vibración y ruido), a 2 metros de distancia entre el dispositivo y la persona a evaluar. Es posible ajustar
la ubicación del kinect sólo moviendo la base, en los siguientes puntos se menciona el orden en el que se debe de
llevar a cabo la evaluación.
1.- Conectar el dispositivo kinect a la computadora portátil.
2.- Ejecutar el programa.
3.- Modificar los parámetros de acuerdo a su criterio con respecto a lo observado.
4.- Decidir el lado a evaluar (izquierdo o derecho) y modificar en el icono correspondiente.
5.- Posteriormente presionar en evaluar.
6.- Inmediatamente se apreciará el nivel actuación y nivel de riesgo, éste dato se guarda automáticamente en un
archivo de texto (.txt).
7.- Establecer las propuestas de rediseño de la estación de trabajo de acuerdo a los resultados.
Indicadores: Satisfacción del cliente
Elaborado por: Ing. Celia Francisco Martínez
Fecha: junio de 2018

Anexo 3: Metodología REBA, (Hignett y McAtamney, 2000).
______________________________________________________________________________
Anexo 3: Método REBA
El primer paso consiste en la en la observación de las actividades que desempeña el trabajador, los
ciclos de trabajo y se determinarán las posturas que se evaluarán. En este caso se considera el
tiempo que pasa el trabajador en cada postura. REBA divide el cuerpo dos grupos, el Grupo A
(piernas, el tronco y el cuello) y el Grupo B, que incluye los miembros superiores (brazos,
antebrazos y muñecas). A través de tablas asociadas al método, se asigna una puntuación a cada
segmento corporal evaluado y en función de dichas puntuaciones, asignar valores globales a cada
uno de los grupos A y B. Posteriormente, las puntuaciones globales son modificadas en función
del tipo de actividad muscular desarrollada, el tipo y calidad del agarre de objetos con la mano, así
como también la fuerza aplicada durante la realización de la tarea. Por último, se obtiene la
puntuación final a partir de dichos valores globales modificados. El valor final proporcionado por
el método REBA es proporcional al riesgo que conlleva la realización de la tarea, de ahí que valores
altos indican un mayor riesgo de aparición de DTA´S (Hignett y McAtamney, 2000; Mas y
Antonio, 2015).
El procedimiento para llevar a cabo la aplicación del método es la siguiente.
1.- Determinar los ciclos de trabajo y observar al trabajador durante varios de estos ciclos. Si
el ciclo es muy prolongado o no existen ciclos, se pueden realizar evaluaciones a intervalos
regulares.
2.- Seleccionar las posturas que se evaluarán. Se seleccionarán aquellas que, representen una
mayor carga postural ya sea por su duración, frecuencia o porque presentan mayor desviación
respecto a la posición neutra.
3.- Determinar si se evaluará el lado izquierdo del cuerpo o el derecho. En caso de duda se
analizarán los dos lados.
4.- Tomar los datos angulares requeridos. Pueden tomarse fotografías desde los puntos de vista
adecuados para realizar las mediciones, así como también emplear RULER, la herramienta de
Ergonautas para medir ángulos sobre fotografías
5.- Determinar las puntuaciones para cada parte del cuerpo, empleando la tabla
correspondiente a cada miembro.
6.- Obtener las puntuaciones parciales y finales para determinar la existencia de riesgos y
establecer el Nivel de Actuación

Anexo 3: Metodología REBA, (Hignett y McAtamney, 2000).
______________________________________________________________________________
53
7.- Si se requieren, determinar qué tipo de medidas deben adoptarse. Revisar las puntuaciones
de las diferentes partes del cuerpo para determinar dónde es necesario aplicar correcciones.
8.- Rediseñar el puesto o introducir cambios para mejorar la postura si es necesario
9.- En caso de haber introducido cambios, evaluar de nuevo la postura con el método RULA
para comprobar la efectividad de la mejora (Diego-Mas, 2015), apud (McAtamney y Corlett,
1993).
Evaluación del Grupo A
La puntuación del tronco se determina mediante la Tabla 7, que depende básicamente del ángulo
de flexión del tronco medido por el ángulo entre el eje del tronco y la vertical.
Tabla 7. Puntuación del tronco.
De acuerdo a la Tabla 8, la puntuación obtenida aumentará en un punto si existe rotación o
inclinación lateral del tronco.
Tabla 8. Modificación de la puntuación del tronco.
Puntuación del cuello
Este dato se obtiene de la medición del ángulo formado por el eje de la cabeza y el eje del tronco,
así como lo indica la Tabla 9.
Tabla 9. Puntuación del cuello.
La puntuación obtenida, aumentará en un punto si existe rotación o inclinación lateral de la
cabeza (ver Tabla 10).
Posición Puntuación
Tronco erguido 1
Flexión o extensión entre 0° y 20° 2
Flexión >20° y ≤60° o extensión >20° 3
Flexión >60° 4
Posición Puntuación
Tronco con inclinación lateral o rotación +1
Posición Puntuación
Flexión entre 0° y 20° 1
Flexión >20° o extensión 2

Anexo 3: Metodología REBA, (Hignett y McAtamney, 2000).
______________________________________________________________________________
54
Tabla 10. Modificación de la puntuación del cuello
Puntuación de las piernas
La asignación de puntos dependerá de la distribución del peso entre piernas y los apoyos existentes,
se obtiene mediante la Tabla 11.
Tabla 11. Puntuación de las piernas.
La puntuación incrementará de acuerdo a los casos presentados en la Tabla 12.
Tabla 12. Incremento de la puntuación de las piernas
Evaluación del Grupo B
Se obtiene la puntuación a partir de los ángulos derivados del movimiento de flexión y extensión
del brazo y el eje del tronco (ver Tabla 13).
Tabla 13. Puntuación del brazo
La puntuación se verá afectada de acuerdo a la Tabla 14.
Tabla 14. Modificación de la puntuación del brazo.
Puntuación del antebrazo
Mediante la Tabla 15 se obtiene la puntuación del antebrazo esto a partir del ángulo formado por
el eje del antebrazo y el eje del brazo.
Posición Puntuación
Cabeza rotada o con inclinación lateral +1
Posición Puntuación
Sentado, andando o de pie con soporte bilateral simétrico 1
De pie con soporte unilateral, soporte ligero o postura inestable 2
Posición Puntuación
Flexión de una o ambas rodillas entre 30 y 60° +1
Flexión de una o ambas rodillas de más de 60° (salvo postura sedente) +2
Posición Puntuación
Desde 20° de extensión a 20° de flexión 1
Extensión >20° o flexión >20° y <45° 2
Flexión >45° y 90° 3
Flexión >90° 4
Posición Puntuación
Brazo abducido, brazo rotado u hombro elevado +1
Existe un punto de apoyo o la postura a favor de la gravedad -1

Anexo 3: Metodología REBA, (Hignett y McAtamney, 2000).
______________________________________________________________________________
55
Tabla 15. Puntuación del antebrazo.
Puntuación de la muñeca
En la Tabla 16 se describe la puntuación a asignar en base al ángulo de flexión/extensión medido
desde la posición neutral.
Tabla 16. Puntuación de la muñeca.
La puntuación obtenida de la muñeca se verá afectada siempre y cuando cumpla lo establecido
en la Tabla 17.
Tabla 17. Modificación de la puntuación de la muñeca.
Puntuación de los Grupos A y B
Una vez obtenidas las puntuaciones del grupo A y B respectivamente, se procede a calcular las
puntuaciones globales de cada grupo empleando la Tabla 18 (grupo A), así como la Tabla 19 para
el grupo B.
Tabla 18. Puntuación del Grupo A
Puntuaciones parciales
A continuación, se valorarán las fuerzas ejercidas durante su adopción para modificar la puntuación
del Grupo A, y el tipo de agarre de objetos para modificar la puntuación del Grupo B. En base a la
Tabla 20 se determina si existe un incremento de puntuación en el grupo A, mientras que con la
Posición Puntuación
Flexión entre 60° y 100° 1
Flexión <60° o >100° 2
Posición Puntuación
Posición neutra 1
Flexión o extensión > 0° y <15° 1
Flexión o extensión >15° 2
Posición Puntuación
Torsión o Desviación radial o cubital +1
Cuello
1 2 3
Piernas Piernas Piernas
Tronco 1 2 3 4 1 2 3 4 1 2 3 4
1 1 2 3 4 1 2 3 4 3 3 5 6
2 2 3 4 5 3 4 5 6 4 5 6 7
3 2 4 5 6 4 5 6 7 5 6 7 8
4 3 5 6 7 5 6 7 8 6 7 8 9
5 4 6 7 8 6 7 8 9 7 8 9 9

Anexo 3: Metodología REBA, (Hignett y McAtamney, 2000).
______________________________________________________________________________
56
Tabla 21 el incremento debido a cargas o fuerzas bruscas. La puntuación del Grupo A,
incrementada por la carga o fuerza, se denominará Puntuación A.
Tabla 19. Puntuación del Grupo B.
Tabla 20. Incremento de puntuación del Grupo A
Tabla 21. Incremento del Grupo A por cargas o fuerzas bruscas.
La puntuación del Grupo B, aumentará debido a la calidad del agarre de objetos con la mano
(ver Tabla 22). Considerando agarre bueno como, los que se realizan con contenedores con asas o
agarraderas, o de lo contrario que las manos estén bien cómodas alrededor del objeto. Agarre
regular: es llevado a cabo sobre contenedores con agarraderas no óptimas por ser de tamaño
inadecuado, o al flexionar los dedos a 90º. Agarre malo: el que es realizado sobre contenedores
mal diseñados, objetos voluminosos a granel, irregulares o con aristas, y los realizados sin flexionar
los dedos manteniendo el objeto presionando sobre sus laterales.
La puntuación del Grupo B modificada por la calidad del agarre se denominará Puntuación B.
Tabla 22. Incremento de puntuación del Grupo B por calidad del agarre.
Antebrazo
1 2
Muñeca Muñeca
Brazo 1 2 3 1 2 3
1 1 2 2 1 2 3
2 1 2 3 2 3 4
3 3 4 5 4 5 5
4 4 5 5 5 6 7
5 6 7 8 7 8 8
6 7 8 8 8 9 9
Carga o fuerza Puntuación
Carga o fuerza menor de 5 Kg. 0
Carga o fuerza entre 5 y 10 Kg. +1
Carga o fuerza mayor de 10 Kg. 3
Posición Puntuación
Existen fuerzas o cargas aplicadas bruscamente +1
Calidad de Agarre Descripción Puntuación
Bueno El agarre es bueno y la fuerza de agarre de rango medio 0
Regular El agarre es aceptable pero no ideal o el agarre es aceptable utilizando otras partes del cuerpo +1
Malo El agarre es posible pero no aceptable +2
Inaceptable El agarre es torpe e inseguro, no es posible el agarre manual o el agarre es inaceptable utilizando otras partes del cuerpo
+3

Anexo 3: Metodología REBA, (Hignett y McAtamney, 2000).
______________________________________________________________________________
57
Puntuación final
A partir de la puntuación A y B respectivamente, se evalúan nuevamente empleando la Tabla 23,
y así obtener a puntuación C.
Tabla 23. Puntuación C.
Por último, para obtener la Puntuación Final, la Puntuación C incrementará según el tipo de
actividad muscular desarrollada en la tarea (ver Tabla 24).
Tabla 24. Incremento de la Puntuación C por tipo de actividad muscular.
Nivel de Actuación
De acuerdo a la puntuación final se establecen los niveles de actuación, la puntuación será mayor
cuanto mayor sea el riesgo para el trabajador; el valor 1 indica un riesgo inapreciable mientras que
el valor máximo, 15, indica riesgo muy elevado por lo que se debería actuar de inmediato. La Tabla
19 muestra los Niveles de Actuación según la puntuación final.
Tabla 25. Niveles de actuación (Hignett & McAtamney, 2000) y. (Diego-Mas J. A., 2015).
Puntuación Nivel Riesgo Actuación
1 0 Inapreciable No es necesaria la actuación.
2 o 3 1 Bajo Puede ser necesaria la actuación.
4 a 7 2 Medio Es necesaria la actuación.
8 a10 3 Alto Es necesaria la actuación cuanto antes.
11 a 15 4 Muy alto Es necesaria la actuación de inmediato.
Puntuación B
Puntuación A 1 2 3 4 5 6 7 8 9 10 11 12
1 1 1 1 2 3 3 4 5 6 7 7 7
2 1 2 2 3 4 4 5 6 6 7 7 8
3 2 3 3 3 4 5 6 7 7 8 8 8
4 3 4 4 4 5 6 7 8 8 9 9 9
5 4 4 4 5 6 7 8 8 9 9 9 9
6 6 6 6 7 8 8 9 9 10 10 10 10
7 7 7 7 8 9 9 9 10 10 11 11 11
8 8 8 8 9 10 10 10 10 10 11 11 11
9 9 9 9 10 10 10 11 11 11 12 12 12
10 10 10 10 11 11 11 11 12 12 12 12 12
11 11 11 11 11 12 12 12 12 12 12 12 12
12 12 12 12 12 12 12 12 12 12 12 12 12
Tipo de actividad muscular Puntuación
Una o más partes del cuerpo permanecen estáticas, por ejemplo, soportadas durante más de 1 minuto +1
Se producen movimientos repetitivos, por ejemplo, repetidos más de 4 veces por minuto (excluyendo caminar) +1
Se producen cambios de postura importantes o se adoptan posturas inestables +1
Anexo 4: Etapas de la Metodología de Peter Checkland, (Azabache y Robles, 2012).
______________________________________________________________________________
Anexo 4: Etapas de la Metodología de Peter Checkland.
Las etapas de la metodología de Checkland se describen a continuación.
1.- Situación problemática (no estructurado): Se pretende describir la situación del objeto de
estudio, las relaciones entre el sistema, entorno y actividades, se realiza un modelo conceptual que
represente el sistema de actividades humanas realizadas en el objeto de estudio; se busca delimitar
el sistema y definir el entorno del mismo, sin hacer énfasis en el problema (Azabache y Robles,
2012; Martínez y Rios, 2008).
2.- Expresión de la situación problemática: Se describe la estructura organizativa, actividades e
interrelación existente, las variables de entrada y salida (Azabache y Robles, 2012).
3.- Construcción de la definición raíz: La estructuración de la definición raíz se basa en los
siguientes elementos:
C) Clientes o beneficiarios: ¿A quién beneficia o perjudica?
A) Actores: Personal específico que efectúa las actividades, por lo tanto, se debe aplicar
encuestas y entrevistas en sus áreas de trabajo.
T) Proceso de transformación: Involucra a las personas, procesos, documentos, tecnologías y
su interacción con el sistema existente ¿Qué hace el sistema?
W) Puntos de vista de clientes y actores: Se comparan los resultados de la organización en
general para aportar un cambio en el sistema, ¿Desde dónde se les esté considerando?
O) Propietario del sistema: Los directivos de la organización ¿Quién decide?
E) Medio ambiente y sus limitaciones: Elementos externos sobre los que el sistema no puede
influir, ¿Qué limitaciones existen? (J. M. C. Fonseca y Huacuja, 2011).
4.- Definición raíz: Se obtiene mediante el análisis CATWOE, se elaboran modelos conceptuales
para representar las actividades que se deban realizar en el sistema (lenguaje sistémico) (Azabache
y Robles, 2012).
5.- Comparación de los modelos conceptuales con la realidad: Se identifican las diferencias
existentes en lo descrito en los modelos conceptuales con lo que existe realmente en el sistema.
6. Diseño de cambios deseables viables: Se realiza la propuesta de los posibles cambios los cuales
deben ser evaluados y aprobados por el personal a cargo del sistema humano.
7. Acciones para mejorar la situación problemática: Aplicación de los cambios diseñados, sin
embargo, no representa el fin del método, sino que siempre se busca mejorar la situación; es un
ciclo continuo de conceptualización y habilitación de cambios (J. M. C. Fonseca y Huacuja, 2011).

Anexo 5: Proceso de Diseño Centrado en Personas, (Gates y 3.0, 2013).
______________________________________________________________________________
Anexo 5: Proceso de Diseño Centrado en Personas
El proceso de DCP según (Gates y 3.0, 2013), comienza con la identificación de un reto que se
quiere resolver por lo que se aplican tres fases: Escuchar, Crear y Entregar (ECE).
Escuchar: Paso 1: Identificar un reto de diseño. Este reto servirá de guía para las preguntas
que se realicen en la investigación de campo, para las oportunidades y soluciones que se desarrollen
en la siguiente etapa.
Paso 2: Averiguar lo que ya se conoce: ¿Qué se sabe?, actualizar el conocimiento que ya existe
en relación con el Reto de Diseño, en otras palabras, se refiere a lo que quieren o necesitan las
personas, que tecnologías pueden ayudar a resolverlo, las soluciones o ideas probadas en otras
áreas, de igual manera las futuras necesidades de los involucrados.
Paso 3: Identificar a las Personas con quienes hablar: Reclutar a los participantes apropiados
de acuerdo a la problemática (Reto de Diseño), es importante considerar y encontrar gente que
represente los extremos con el objeto de descubrir comportamientos, deseos y necesidades no
manifestados por el resto de la población.
Paso 4: Elegir los métodos de investigación: Los métodos son siete, desde la entrevista
individual, entrevista grupal, inmersión en el contexto, documentación propia, conocimiento
generado por la población, entrevistas con expertos hasta la búsqueda de información en otras
partes.
Paso 5: Desarrollar un paradigma manteniendo una mente abierta a través de tres maneras
posibles: mente de principiante, observar vs crear (Gates y 3.0, 2013).
Crear : En esta fase se transforma lo que se ha investigado en un conjunto de orientaciones
estratégicas y soluciones tangibles cuyos objetivos son dar sentido a los datos, identificar patrones,
definir oportunidades y crear soluciones en base a los siguientes pasos expuestos en (Gates y 3.0,
2013).
Paso 1: Desarrollar el enfoque: Consiste en desarrollar una comprensión profunda y generar
nuevas innovaciones.
Paso 2: Compartir historias: Son indispensables debido a que son acontecimientos específicos
que se pueden usar para inspirar ideas, oportunidades y soluciones.
Paso 3: Identificar patrones: La identificación de patrones y conexiones entre los datos
orientan a soluciones y es posible a través de los métodos de Detección de intuiciones críticas,

Anexo 5: Proceso de Diseño Centrado en Personas, (Gates y 3.0, 2013).
______________________________________________________________________________
60
encontrar temas (buscar categorías y grupos, relacionar las categorías) y Crear modelos
interpretativos (representación visual de un sistema).
Paso 4: Crear áreas de oportunidad: Implica salir de la situación actual para imaginar
posibilidades en el futuro dicho de otra manera es la reformulación de los problemas y las
necesidades para que sean productivas y orientadas al futuro.
Paso 5: Realizar una lluvia de ideas de soluciones nuevas: Permite pensar sin ninguna
limitación organizacional, operacional o tecnológica.
Paso 6: Concretar las ideas: Los prototipos permiten concretar ideas de forma rápida y
económica, de tal modo que otros los puedan probar y evaluar.
Entregar : En la fase de entrega se identifican las capacidades que se necesitan, del mismo
modo se crea un modelo de sostenibilidad financiera lo que implica el desarrollo de proyectos
innovadores y por último se realizan planes pilotos, así como evaluaciones del impacto (Gates y
3.0, 2013)

Anexo 6: Carta de intención de colaboración.
______________________________________________________________________________
Anexo 6: Carta de intención de colaboración.

Anexo 6: Carta de liberación de la empresa.
______________________________________________________________________________

Anexo 6: Oficio de informe técnico de la empresa.
______________________________________________________________________________

Referencias bibliográficas
______________________________________________________________________________
REFERENCIAS BIBLIOGRÁFICAS
Aguayo Vargas, Y. (2004). Factores de riesgo ergonómico y desórdenes musculoesqueléticos en
trabajadores de un complejo procesador de gas.
Asensio-Cuesta, S., Ceca, M. J. B., y Más, J. A. D. (2012). Evaluación ergonómica de puestos de
trabajo: Editorial Paraninfo.
Association, I. E. (2000). What is ergonomics. URL: http://www. iea. cc/whats/[accessed 2016-07-
28][WebCite Cache ID 6jL0wKZ8c].
Azabache, M. A. A., y Robles, B. G. A. (2012). Aplicación de la metodología de sistemas blandos,
para la mejora de la enseñanza del curso de Matemática, en una institución educativa. Lima,
Perú.
Bellorín, M., Sirit, Y., Rincón, C., y Amortegui, M. (2007). Síntomas músculo esqueléticos en
trabajadores de una empresa de construcción civil. Salud de los Trabajadores, 15(2), 89-98.
Calzavara, M., Glock, C. H., Grosse, E. H., Persona, A., y Sgarbossa, F. (2016). Models for an
ergonomic evaluation of order picking from different rack layouts. IFAC-PapersOnLine,
49(12), 1715-1720.
Collado, L. S. (2008). Prevención de riesgos laborales: principios y marco normativo. 91-117.
Cruz, A., y Garnica, A. (2011). Ergonomía aplicada: Ecoe Ediciones.
Checkland, P. B. (1979). Techniques in'soft'systems practice part 2: Building conceptual models.
Journal of Applied Systems Analysis, 6, 41-49.
D´Negri, C. E., y De Vito, E. L. (2006). Introducción al razonamiento aproximado: lógica difusa.
RAMR, 3, 126-136.
De Pablo, H. C. (2010). Manual de ergonomía: Incrementar la calidad de vida en el trabajo:
Formación Alcalá.
Dempsey, P. G., McGorry, R. W., y Maynard, W. S. (2005). A survey of tools and methods used
by certified professional ergonomists. Applied ergonomics, 36(4), 489-503.
Diego-Mas, J. A. (2015). Evaluación postural mediante el método RULA.
http://www.ergonautas.upv.es/metodos/rula/rula-ayuda.php
Diego-Mas, J. A., y Alcaide-Marzal, J. (2014). Using Kinect™ sensor in observational methods
for assessing postures at work. Applied ergonomics, 45(4), 976-985.
Dimate, A. E., Rodríguez, D. C., y Rocha, A. I. (2017). Percepción de desórdenes
musculoesqueléticos y aplicación del método RULA en diferentes sectores productivos:
una revisión sistemática de la literatura. Revista de la Universidad Industrial de Santander.
Salud, 49(1), 57-74.
Escalante, M. (2009). Evaluación ergonómica de puestos de trabajo. LACCEI Latin American and
Caribbean Conference for Engineering and Technology, 1-6.
Fernández, E. (2012). Control de software educativo mediante Kinect de Microsoft. Tesis
(Ingeniería en Sistemas Computacionales). Madrid, España. Universidad Carlos III de
Madrid, Escuela de Ingeniería.
Fonseca, B. M. (2011). Desórdenes del sistema musculoesquelético por trauma acumulativo en
estudiantes universitarios de computación e informática. Revista de Ciencia y Tecnología
Vol. 26 Núm. 1 y 2.
Fonseca, J. M. C., y Huacuja, C. O. (2011). La información documental para la implementación de
sistemas de gestión de calidad aplicando la metodología de sistemas blandos. Paper
presented at the Anales de documentación.
Referencias bibliográficas
______________________________________________________________________________
65
Gasca, M. A., Rengifo, M., y Rodríguez, E. (2009). Evaluación ergonómica de los puestos de
trabajo en el área de tapas de una empresa metalúrgica. Ingeniería Industrial. Actualidad y
Nuevas Tendencias(1), 31-42.
Gates, F. B. M., y 3.0, C. C. C. B. (Producer). (2013). DCP. Diseño Centrado en las personas, kit
de herramientas . Retrieved from https://hcd-connect-
production.s3.amazonaws.com/toolkit/en/spanish_download/ideo_hcd_toolkit_final_com
bined_lr.pdf
GC, D. (2005). Ergonomic methods for assessing exposure to risk factors for work-related
musculoskeletal disorders. Occupational medicine, 55(3), 190-199.
Gurruchaga, M. E., Flores, L. C., Muñoz, H., Díaz, C., y Rahme, M. E. (2006). Diseño de sistemas
de calidad utilizando la metodología de Checkland modificada (Vol. 3). Sistemas,
Cibernética e Informática.
Hignett, S., y McAtamney, L. (2000). Rapid entire body assessment (REBA). Applied ergonomics,
31(2), 201-205.
Huerta, L. A., Hernández, S. L. M., Domínguez, H. V. M., Araujo, M. V. M., y Rico, M. G. (2016).
Aplicación de la metodología de Checkland para el diagnóstico de una prótesis tumoral de
rodilla. Científica, 20(1), 13-19.
IBV. (2016). Evaluación de riesgos ergonómicos.
ISO, U. (2006). 7730: 2006, Ergonomía del ambiente térmico. Determinación analítica e
integración del bienestar térmico mediante el cálculo de los índices PMV y PPD y los
criterios de bienestar térmico local.
Lescay, R. N., Becerra, A. A., y González, A. H. (2017). Antropometría. análisis comparativo de
las tecnologías para la captación de las dimensiones antropométricas. Revista EIA, 13(26),
47-59.
Maestre, D. G. (2007). Ergonomía y psicosociología: FC Editorial.
Maldonado Macias, A. A., Rodríguez Orona, y M. Á., N. M., S. A. (2007). Diagnostico ergonómico
en operación de desensable de bombas de combustible diesel. Ergonomia Ocupacional.
Invetigaciones y aplicaciones, 9-16.
Martínez, M. A. Y., y Rios, R. F. R. (2008). Estudio de sistemas blandos para eldesarrollo de un
sistema de información gerencial, mediante una adaptación de la metodología para sistemas
blandos de Peter Checkland. Ciencia Ergo Sum, 15(1), 45-53.
Mas, D., y Antonio, J. (2015). Evaluación postural mediante el método REBA. Ergonautas,
Universidad Politécnica de Valencia.
McAtamney, L., y Corlett, E. N. (1993). RULA: a survey method for the investigation of work-
related upper limb disorders. Applied ergonomics, 24(2), 91-99.
Montiel, M., Romero, J., Lubo Palma, A., Quevedo, A. L., Rojas, L., Chacin, B., et al. (2006).
Valoración de la carga postural y riesgo musculoesqueletico en trabajadores de una empresa
metalmecanica. Salud de los Trabajadores, 14(1), 61-69.
Nishanth, R., Muthukumar, M., y Arivanantham, A. (2015). Ergonomic Workplace Evaluation for
Assessing Occupational Risks in Multistage Pump Assembly. International Journal of
Computer Applications, 113(9).
Oborne, D. J. (2015). Ergonomía en Acción: La Adaptación del Medio de Trabajo al Hombre. 2a
ed. Editorial: Trillas, México, DF.
OMS. (2016). Protección de la salud de los trabajadores

Referencias bibliográficas
______________________________________________________________________________
66
PrevGes. (2016). Programa de Gestión de Prevención de Riesgos Laborales. . Recuperado el 22 de
09 de 2016.
Pueyo, B. A. (2015). Trastornos musculo-esqueléticos y enfermedades profesionales en la
construcción. Universitad Politécnica de Catalunya.
Ramírez Ortíz, J. (2005). Desórdenes músculo esqueléticos en miembros torácicos y factores de
riesgo ergonómico en trabajadores con posturas forzadas.
Ríos, M. M., Chacón, E. M., Fernández, A. C., y Guillén, E. O. (2011). Termografía infrarroja y el
estudio de riesgos de lesiones músculo esqueléticas. Revista Ingeniería Industrial, 10(1),
55-67.
Rivero, L. C., Rodríguez, R. G., Pérez, M. D. R., Mar, C., y Juárez, Z. (2015). Fuzzy logic and
RULA method for assessing the risk of working. Procedia Manufacturing, 3, 4816-4822.
Rodarte Martínez, R., Maldonado Macias, A. A., y Noriega Morales, S. (2008). Implementación
de diseño ergonómico para el área de preparación de fibra óptica. Ergonomía Ocupacional
Investigaciones y Aplicaciones, 9-16.
Rodríguez, R. D. C., y Dimate, G. A. E. (2015). Evaluación de riesgo biomecánico y percepción
de desórdenes músculo esqueléticos en administrativos de una universidad Bogotá
(Colombia). Investigaciones Andina, 17(31), 1284-1299.
Sampieri, R. H., Collado, C. F., Lucio, P. B., y Pérez, M. d. l. L. C. (2014). Metodología de la
investigación (Vol. 1): 6 a ed. Mcgraw-hill México.
Sánchez, G. F., Bautista, S. H., y Aguilar, L. A. A. (2015). Diseño de software que evalua riesgo
ergonómico en puestos de trabajo.
Sánchez, G. F., Bautista, S. H., y Aguilar, L. A. A. (2016). Desarrollo de una aplicación en lenguaje
Java utilizando la metodología análisis estructurado moderno. Pistas Educativas, 112-122.
SEMAC. (2017). Ergonomía. Sociedad de Ergonomistas de México, A.C.
STPS. (2017). Factores de riesgo ergonómico en el trabajo-Identificación, análisis, prevención y
control. Parte 1- Menejo manual de cargas. In DOF (Ed.). México.
Torres, T., y Rodríguez, M. (2007). Evaluación ergonómica de puestos de trabajo de la industria
pesquera del Ecuador. Revista Tecnológica-ESPOL, 20(1), 139-142.
UGT. (2017). Por la mejora de la seguridad y la salud en el trabajo: Los Riesgos Ergonómicos en
el sector Educativo. Recuperado el 20 de Septiembre de 2017, de
www.prevencion.feteugt_sma.es.
UNE-EN1005-5. (2007). Seguridad de las máquinas. Comportamiento físico del ser humano. Parte
5: Evaluación de riesgo por manipulación repetitiva de alta frecuencia. .
Vigil, L., Gutiérrez, R., Cácere, W., Collantes, H., y Beas, J. (2007). Salud ocupacional del trabajo
de estiba: los trabajadores de mercados mayoristas de Huancayo, 2006. Revista Peruana de
Medicina Experimental y Salud Publica, 24(4), 336-342.
Villada, F., y Muñoz, J. (2014). Desarrollo de un software de análisis biomecánico a través de datos
de captura de movimiento usando el sensor KINECT para rehabilitación asistida con video
juegos. Entre Ciencia e Ingeniería(16), 72-77.
Villar, F. M. F. (2015). Posturas de trabajo: evaluación del riesgo. Instituto Nacional de Salud e
Higiene en el Trabajo (INSHT).
Wilson, B. (1993). Sistemas: conceptos, metodología y aplicaciones. México.
Zadeh, L. A. (1965). Information and control. Fuzzy sets, 8(3), 338-353.
Zadeh, L. A. (1996). Fuzzy sets Fuzzy Sets, Fuzzy Logic, And Fuzzy Systems: Selected Papers by
Lotfi A Zadeh (pp. 394-432): World Scientific.

Referencias bibliográficas
______________________________________________________________________________
67
Záratea, G. G. R., Herreraa, A. L. R., Jiménez, X. L., Bermúdeza, R. I. C. P., Eduardo, H. G. G. H.
J., Zacaríasa, V., et al. (2015). ERGO KINECT VISION. XII encuentro: Participación de
la mujer en la Ciencia.
Zare, M., Biau, S., Croq, M., y Roquelaure, Y. (2014). Development of a biomechanical method
for ergonomic evaluation: comparison with observational methods. J. Int. J. Soc. Behav.
Educ. Econ. Bus. Ind. Eng, 8(1), 218-220.