instituto politÉcnico nacional...figura 1.9 panel de instrumentos del bell 206 b jet ranger 27...
TRANSCRIPT

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL TICOMÁN
SEMINARIO EN: SISTEMAS DE AVIONICA
TESINA:
PROPUESTA DE DIGITALIZACIÓN DE LA T BÁSICA DE
INSTRUMENTOS DE VUELO PARA UN ULTRALIGERO
QUE PARA OBTENER EL TITULO DE INGENIERO EN AERONÁUTICA
PRESENTAN:
JORGE MIGUEL LOZADA VILLANUEVA
ALONSO IBRAEL MEJÍA PEREZ
ASESOR:
M. en I. RAYMUNDO HERNÁNDEZ BÁRCENAS
ENERO, 2013.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
2

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
3
AGRADECIMIENTOS
Jorge Miguel Lozada Villanueva
A mis padres:
Jorge Lozada Rivera
R. Gloria Villanueva Rivera
Por el cariño, la confianza, el apoyo y los consejos que me han brindado todo este tiempo,
gracias a ustedes he logrado culminar una etapa muy importante en vida académica.
A mi hermana:
Jazmín Lozada Villanueva
Por su apoyo y compañía.
A mi esposa:
Elizabeth Aguilar Roldán
Por su apoyo incondicional en este último paso de mi vida estudiantil, por estar a mi lado
en momentos difíciles y por alentarme a seguir con mi superación académica-profesional.
A mis hijas:
Por ser una fuente de inspiración y un motivo más para seguir adelante.
A mi familia, amigos, profesores, a todas aquellas personas que me han acompañado a lo
largo de este camino y principalmente a Dios, gracias.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
4
AGRADECIMIENTOS
Alonso Ibrael Mejia Perez
Quiero agradecer especialmente a dos mujeres que son importantes en mi vida:
A mi madre:
Nicolasa Perez Alanis
Por haberme apoyado en todo momento, por sus consejos, sus valores, por la motivación
constante que me ha permitido ser una persona de bien, pero más que nada, por su amor
por ser el pilar fundamental en todo lo que soy, en toda mi educación, tanto académica,
como de la vida, por ser incondicional.
A mi novia:
Diana Marcela Carrillo Ruiz
Quien estuvo en cada momento junto a mí y fue capaz de contenerme cuando todo iba
mal. Gracias por amarme como solo tú lo puedes hacer.
A mis familiares:
Todos aquellos que participaron directa o indirectamente en la elaboración de esta tesis.
Finalmente a los maestros, aquellos que marcaron cada etapa de nuestro camino
universitario, y que me ayudaron en asesorías y dudas presentadas en la elaboración
de este trabajo.
¡Gracias a ustedes!
Todo este trabajo ha sido posible gracias a ellos.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
5
RESUMEN
Este trabajo muestra una propuesta que consiste en una modificación aplicada a
los instrumentos básicos de vuelo de un avión ultraligero. La propuesta expone una forma
para digitalizar las señales de los instrumentos analógicos y como mostrarlas en una LCD.
Primeramente aquí están expuestos los conceptos básicos necesarios para entender la
propuesta, como la definición de un avión ultraligero, sus características y cuáles son los
instrumentos básicos de vuelo.
Posterior a los conceptos básicos, están indicados los 4 instrumentos que conforman a la
T básica, su definición, la función de cada uno de ellos, la composición interna y la forma
para interpretar los instrumentos, así como la ubicación en el panel de instrumentos.
Una vez que fueron expuestos los conceptos e información necesaria para entender la
propuesta, en seguida se anexan los códigos programados en C, en este trabajo esta
propuesto el uso del software PCW, la función de los códigos es simular los instrumentos
de vuelo.
Finalmente aquí se muestra la simulación de cada uno de los instrumentos de la T básica,
para la simulación fue propuesto el uso del software Proteus ISIS 7.6, este programa fue
diseñado para simular circuitos electrónicos.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
6
ABSTRACT
This paper shows a proposal that consists in a modification applied to the ultralight aircraft
basic flight instruments. The proposal exposes one way to digitizing the analog
instruments signals and how displays the signals in a LCD.
Firstly here are exposed the basic concepts necessary to understand the proposal, such
as the ultralight aircraft definition, the ultralight characteristics and which are the basic
flight instruments.
After to the basic concepts, are indicated the 4 instruments that conform the Basic T, their
definition, the function of each one of them, the internal composition and the way to
interpret the instruments. Also the location on the instruments panel.
Once that the necessary information and concepts to understand the proposal were
exposed, then here are added the codes programmed in C, in this paper is proposed the
use of PCW software, the codes function is to simulate the flight instruments.
Finally here shows the simulation of each one of the Basic T Instruments, for the
simulation was proposed the use of Proteus ISIS 7.6 software, this program was designed
to simulate electronics circuits.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
7
INDICE
Titulo Página
CARTA DE ACEPTACION 2
AGRADECIMIENTOS 3
RESUMEN 5
ABSTRACT 6
INDICE 7
LISTA DE FIGURAS 10
LISTA DE TABLAS 12
GLOSARIO DE ACRONIMOS 13
INTRODUCCIÓN 14
JUSTIFICACIÓN 15
OBJETIVO GENERAL 16
OBJETIVO ESPECIFICO 17
DESCRIPCION DE CAPITULOS 18
1 ANTECEDENTES 19
1.1.- ¿Qué es un ultraligero 20
1.2.- Instrumentos básicos en cabina de un ultraligero 21
1.2.1.- Sistema de pitot y estática 21
1.2.2.- Propiedades giroscópicas 23
1.3.- La T Básica de vuelo de un avión ultraligero 25
1.3.1.- Distribución de instrumentos 26
2 DESCRIPCIÓN DEL FUNCIONAMIENTO
DE LOS INTRUMENTOS BASICOS 30
2.1.- Horizonte artificial 31
2.1.1.- Construcción 31
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
8
2.1.2.- Lectura 32
2.1.3.- Resumen 33
2.2.- Altímetro 33
2.2.1.- Principios de operación 33
2.2.2.- Construcción 34
2.2.3.- Lectura 35
2.2.4.- Presiones referenciales 36
2.2.5.- Calibración del altímetro 37
2.2.6.- Tipos de altitud 37
2.2.7.- Resumen 39
2.3.- Anemómetro 40
2.3.1.- Principios de operación 41
2.3.2.- Construcción 41
2.3.3.- Lectura 42
2.3.4.- Nomenclatura de velocidades 42
2.3.5.- Códigos de colores 44
2.3.6.- Velocidades limitadas por razones estructurales 46
2.3.7.- Resumen 48
2.4.-Indicador de rumbo 49
2.4.1.- Construcción 50
2.4.2.- Lectura 51
2.4.3.- Resumen 51
3 SELECCION DEL SOFTWARE Y PROPUESTA DE DISEÑO DE LOS CODIGOS PARA LA SIMULACION DE LOS INSTRUMENTO 52
3.1.- Selección del software y
Diseño de los programas de los instrumentos propuestos 53
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
9
3.2.- Diseño del programa para simular el Horizonte artificial 56
3.3.- Diseño del programa para simular el Altímetro 59
3.4.- Diseño del programa para simular el Anemómetro 63
3.5.- Diseño del programa para simular el Indicador de rumbo 67
4 PROGRAMA PROTEUS Y CIRCUITOS ELECTRONICOS PROPUESTOS PARA LA SIMULACION
DE LOS INSTRUMENTOS 71
4.1.- Acerca del software Proteus ISIS 7.6 72
4.1.1.- Software ISIS 72
4.1.2.- El módulo VSM 72
4.2.-Diseño del circuito electrónico grafico en Proteus ISIS 7.6 73
4.3.- Presentación del funcionamiento de los circuitos electrónicos 74
4.3.1 Circuito y funcionamiento del Horizonte artificial 75
4.3.2 Circuito y funcionamiento del Altímetro 76
4.3.3 Circuito y funcionamiento del Anemómetro 77
4.3.4 Circuito y funcionamiento del Indicador de rumbo 78
CONCLUSIONES 79
REFERENCIAS 80
ANEXOS 81
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
10
LISTA DE FIGURAS
Titulo Página
Figura 1.1 Tipos de tubo pitot 22
Figura 1.2 Sistema de pitot y estática 23
Figura 1.3 Rigidez en el espacio 23
Figura 1.4 Precesión giroscópica 24
Figura 1.5 Giróscopo 24
Figura 1.6 Indicador de succión 25
Figura 1.7 Distribución de instrumentos en T básica 26
Figura 1.8 Panel de instrumentos del Cessna Skyline 182 S 27
Figura 1.9 Panel de instrumentos del Bell 206 B Jet Ranger 27
Figura 1.10 Panel de instrumentos del Learjet 45 28
Figura 1.11 Panel de instrumentos del Extra 300 S 28
Figura 1.12 Panel de instrumentos del Boeing 777-300 29
Figura 2.1 Horizonte artificial 31
Figura 2.2 Componentes del horizonte artificial 32
Figura 2.3 Interpretación del horizonte artificial 33
Figura 2.4 Altímetro 34
Figura 2.5 Construcción del altímetro 35
Figura 2.6 Lectura del altímetro de 2 agujas 36
Figura 2.7 Calibracion del altímetro 36
Figura 2.8 Ajuste del altímetro a los cambios QNH en distintas áreas 38
Figura 2.9 Indicador de velocidad aerodinámica 40
Figura 2.10 Construcción del indicador de velocidad aerodinámica 41
Figura 2.11 Código de colores del indicador de velocidad aerodinámica 45
Figura 2.12 Indicador de rumbo 49
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
11
Figura 2.13 Construcción del indicador de rumbo 50
Figura 2.14 Lectura del indicador de dirección 51
Figura 3.1 Tubo Pitot seccion transversal 63
Figura 4.1 Esquemático en Proteus 74
Figura 4.2 Esquema del horizonte artificial 75
Figura 4.3 esquema del altímetro 76
Figura 4.4 Esquema del anemómetro 77
Figura 4.5 esquema del indicador de rumbo 78

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
12
LISTA DE TABLAS
Titulo Página
Tabla 2.1 Conversión de IAS a CAS 43
Tabla2.2 Conversión de velocidad indicada a calibrada 43
Tabla 2.3 Codigos de colores 46
Tabla 2.4 limitaciones de velocidad 47

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
13
GLOSARIO DE ACRONIMOS
A/D Analógico/digital
CAS Calibrated Air Speed
FAA Federal Aviation Administration
GS GroundSpeed
IAS Indicated Air Speed
KIAS Calibrated Air Speed
LCD Liquid Crystal Display
MPH Millas Por Hora
Pe Presión Estatica
Pd Presión Dinámica
TAS True Air Speed

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
14
INTRODUCCIÓN
El presente trabajo aborda el tema Instrumentos básicos de una aeronave, en
especifico se trabajó la T básica de vuelo de instrumentos de un avión ultraligero, la cual
esta conformada por 4 instrumentos que más adelante se mencionan, primeramente se
ofrece una descripción general sobre cuales son, la función que desempeñan en un avión
y su evolución a través de los años.
Posteriormente se plantea una propuesta para digitalizar los instrumentos y así
poder presentarlos en una pantalla LCD. La propuesta esta basada en el uso del software
C, utilizando el compilador PCW en el cual se realizo el programa que controla y
convierte las señales analógicas a digitales.
Finalmente se presentan algunos comentarios o sugerencias para hacer más
eficiente la modificación a los instrumentos de navegación.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
15
JUSTIFICACIÓN
Este trabajo de investigación más allá de ser una aplicación de los conocimientos
adquiridos durante la carrera y el seminario de titulación, surgió de la inquietud por querer
conocer más sobre uno de los sistemas que conforman a una aeronave, las indicaciones
en cabina. Y así poder aportar una propuesta de modificación que puede ser adaptada a
los aviones ultraligeros.
En este trabajo se presenta el modelo teórico de la modificación en los
instrumentos básicos de un ultraligero que es la base para poder trasladarlo a un modelo
físico.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
16
OBJETIVO GENERAL
Realizar una propuesta de modificación de la T Básica de instrumentos de vuelo
de un avión ultraligero, la cual consiste en digitalizar las señales de los instrumentos
analógicos y presentarlas en una pantalla LCD, reduciendo así el espacio en el tablero de
instrumentos.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
17
OBJETIVOS ESPECIFICOS
1. Dar una introducción de los instrumentos que conforman la T Básica de vuelo, así
como su función y la evolución que han tenido.
2. Realizar los programas en el software PCW, con el que se convertirán las señales
analógicas a digitales.
3. Presentar el circuito electrónico gráfico en el software PROTEUS ISIS 7.6 que
controlara la conversión de las señales, sobre el cual se montara el programa.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
18
DESCRIPCION POR CAPÍTULOS.
Capítulo 1.
Para conformar este capítulo, primeramente se consultó la bibliografía que al final
del trabajo se presenta, se analizó y filtro la información para finalmente poder plasmar lo
relevante del tema.
Capítulo 2.
De igual forma se analizó la información de libros, páginas electrónicas y artículos,
en este capítulo se presenta información de manera más detallada sobre la T Básica de
vuelo de una aeronave.
Capítulo 3.
Se analizó la información técnica presente en manuales y circuitos similares, en
este capítulo se muestra el código en PCW que es el lenguaje escogido para el desarrollo
de los programas de los correspondientes instrumentos propuestos.
Capítulo 4.
Para el desarrollo de este capítulo y conforme a los programas propuestos en
PCW y teniendo conocimiento de los sensores y circuitos integrados a usar se monta un
circuito virtual para una simulación del prototipo propuesto al final se presentan los
resultados.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
19
CAPÍTULO I
ANTECEDENTES
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
20
1.- ANTECEDENTES
1.1.- ¿Qué es un ultraligero?
Hacia finales de los años 1970 y comienzos de los años 1980, mucha gente
trataba de ser capaz de volar económicamente. Como resultado, muchas autoridades de
aviación pusieron en marcha definiciones de ultraligeros, aviones de vuelo lento que
podían estar sujetos a una regulación mínima. Los aviones resultantes se conocen
comúnmente como ultraligeros, aunque el peso y los límites de velocidad son raramente
los mismos en dos países distintos.
La definición de ultraligero, de acuerdo con el documento de la Joint Aviation Authoritie,
es la de un avión que no tiene más de dos asientos, una velocidad de pérdida absoluta
(con motor y uso de dispositivos hipersustentadores de 65 km/h, y un peso máximo de
despegue de no más de:
300 kg para un avión terrestre, de un solo asiento (monoplaza).
450 kg para un avión terrestre, de dos asientos (biplaza).
330 kg para un avión anfibio (hidroavión) o un avión flotante, de un solo asiento.
495 kg para un avión anfibio o un avión flotante, de dos asientos. [1]
Las alas sustentadoras suelen del tipo delta; otras son planos rígidos muy delgados,
realizados casi siempre con materiales compuestos de alta resistencia (fibra de carbono,
fibra de vidrio, etc.).
Los ultraligeros solían tener unas marcas de seguridad pobres, principalmente debido al
insuficiente entrenamiento de sus pilotos. Este no es actualmente el caso, ya que la
mayoría de los países requieren hoy en día una Licencia / Certificado de Piloto de
Ultraligero, frecuentemente regulado por una o más organizaciones de pilotos en las que
se delega.
La calidad de construcción y buenas condiciones para el vuelo de los aviones ultraligeros
son iguales, en la actualidad, a los aviones ligeros certificados, y algunos tipos satisfacen
ambos tipos de requerimientos y están disponibles para registro tanto como ultraligeros
como certificados.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
21
Cuando se registran como ultraligero (o “Experimental-LSA” en EE.UU.) se permite
al piloto realizar más que simples tareas de mantenimiento, resultando en costes de
operación inferiores, aunque algunas veces con el coste de restricciones tales como evitar
el volar áreas pobladas, nubes o de noche. Muchos antiguos pilotos están dispuestos a
comerciar con estas restricciones operacionales para un desahogo durante su jubilación,
y como resultado muchos ultraligeros están dirigidos ahora por pilotos de aviación general
experimentados o por pilotos ex comerciales. Este efecto ha significado que el nivel de
experiencia del piloto medio de ultraligeros se ha elevado.
No se consideran ultraligeros los aerodinos no motorizados (planeadores), los aerostatos,
ni las aeronaves motorizadas o no, para cuyo despegue o aterrizaje sea necesario el
concurso directo del esfuerzo físico de cualquier ocupante, actuando éste en sustitución
de algún elemento estructural, tales como las alas delta, los paracaídas motorizados, los
aerostatos con barquillas motorizadas, así como cualquier otro ingenio que necesite de tal
esfuerzo para el despegue o el aterrizaje. [2]
1.2.- Instrumentos básicos en cabina de un ultraligero.
Los instrumentos básicos de vuelo son aquellos que nos informan de la altura y velocidad
del avión, su actitud con respecto al suelo sin necesidad de tomar referencias, si está en
ascenso, descenso o nivelado, y en qué dirección vuela.
Estos instrumentos básicos, salvo la brújula, se suelen dividir en dos grupos: los que
muestran información basándose en las propiedades del aire (anemómetro, altímetro, y
variómetro) y los que se basan en propiedades giroscópicas (indicador de actitud,
indicador de giro/viraje, e indicador de dirección).
1.2.1 Sistema de pitot y estática.
El sistema de pitot y estática es el que se encarga de proporcionar las presiones a medir,
y los instrumentos conectados a este sistema son: altímetro, variómetro y anemómetro.
Para su correcto funcionamiento, estos instrumentos necesitan que se les proporcione la
presión estática, la presión dinámica, o ambas. Estos dos tipos de presión definen los
componentes principales de este sistema: el dispositivo de recogida de presión de
impacto (pitot) y sus conducciones, y el dispositivo que recoge la presión estática con sus
respectivas conducciones.
En los aeroplanos antiguos, la recogida de ambas presiones se realizaba en un mismo
dispositivo (pitot), pero hoy en día lo habitual es que ambas fuentes estén separadas.
El tubo pitot Consiste en un tubo sencillo u otro dispositivo similar, de tamaño no muy
grande, que suele estar montado, enfrentado al viento relativo, en el borde de ataque o
debajo del ala, aunque en ciertos aeroplanos está colocado en el morro del avión o en el
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
22
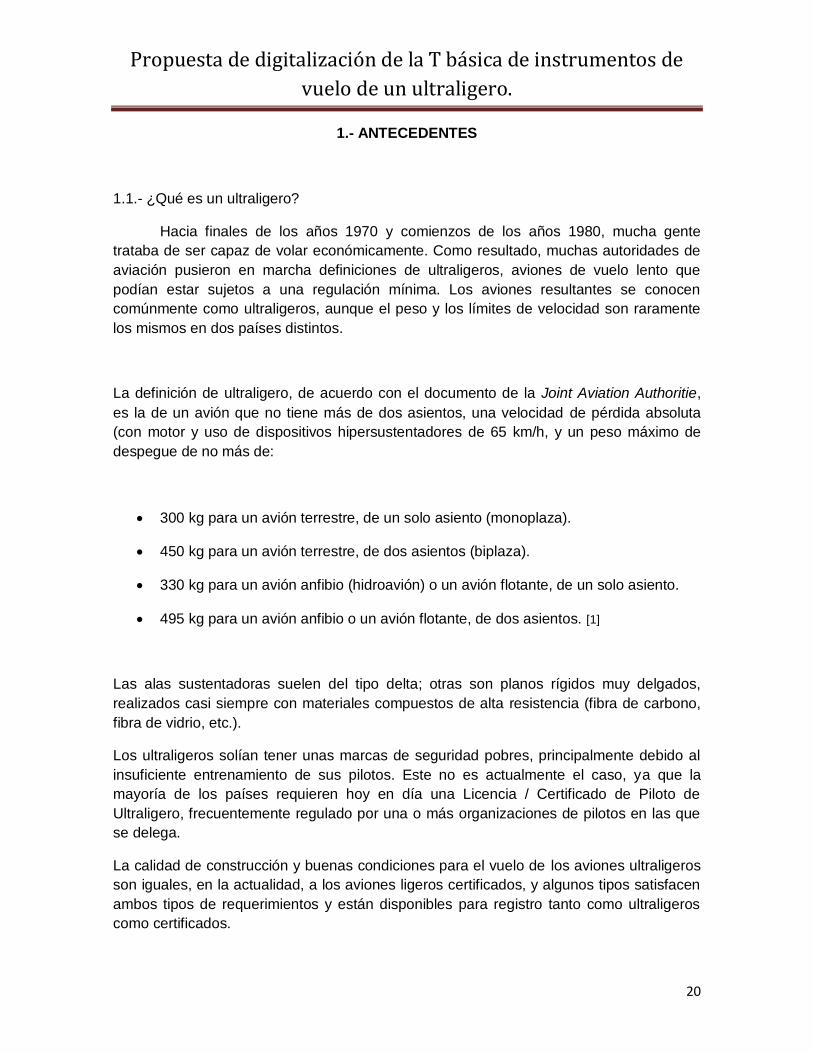
estabilizador vertical. Esta localización le pone a salvo de perturbaciones o turbulencias
causadas por el movimiento del avión en el aire. Este dispositivo, tiene un pequeño
agujero en la punta para recoger la presión de impacto, que debe permanecer siempre
libre de cualquier impureza (insectos, etc..) que lo obstruya. Suele tener un pequeño
orificio en la parte de abajo para facilitar su limpieza.
Figura 1.1 Tipos de tubo pitot.
No es recomendable soplar este tubo para limpiarlo, pues esto podría causar daño a los
instrumentos.
Cuenta también con una resistencia, accionable con un interruptor desde la cabina (pitot
heat), que al calentarse impide la creación de hielo cuando se vuela en condiciones
atmosféricas que propician su formación. Siempre que se vaya a entrar en condiciones de
humedad visible, es conveniente conectar la calefacción del pitot para prevenir la
formación de hielo, y una vez desaparecidas estas condiciones, desconectarla para evitar
desgastes y falsas indicaciones debido a la temperatura.
Las tomas estáticas del avión.
Como su propio nombre indica, toman la presión del aire libre en que se mueve el avión.
Son unos orificios, protegidos por alguna rejilla o similar, que normalmente están situados
en el fuselaje porque es donde sufren menos perturbaciones. Lo usual es que estas
tomas sean dobles, una a cada lado del fuselaje, y sus conducciones se conecten en
forma de Y en una sola para compensar posibles desviaciones, sobre todo en los virajes
ceñidos en que una toma recibe mayor presión estática que otra.
Esta toma, salvo en aviones capaces de volar en zonas de muy baja temperatura, no
necesitan de protección antihielo debido a su ubicación. Igual que el tubo pitot deben
mantenerse limpias de impurezas.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
23
Figura 1.2 Sistema de pitot y estática.
1.2.2 Propiedades giroscópicas.
Un giróscopo es un aparato en el cual una masa que gira velozmente alrededor de su eje
de simetría, permite mantener de forma constante su orientación respecto a un sistema de
ejes de referencia. Cualquier cuerpo sometido a un movimiento de rotación acusa
propiedades giroscópicas, por ejemplo una peonza. Las propiedades giroscópicas
fundamentales son: rigidez en el espacio y precesión.
La rigidez en el espacio se puede explicar por la 1ª Ley del Movimiento de Newton, que
dice: “Un cuerpo en reposo tiende a estar en reposo, y un cuerpo en movimiento tiende a
permanecer en movimiento en línea recta, salvo que se le aplique una fuerza externa”.
Siempre y cuando tenga suficiente velocidad, la fuerza de inercia que genera la peonza la
hace girar erguida incluso si inclinamos la superficie sobre la cual gira, ofreciendo una
gran resistencia a los intentos de volcarla o forzar su inclinación.
Figura 1.3 Rigidez en el espacio.
La segunda propiedad -precesión- es la respuesta del objeto cuando se le aplica una
fuerza deflectiva en algún borde. Volviendo a la peonza, es la reacción de esta cuando en
su rápido giro la tocamos en uno de sus bordes. El resultado de esta reacción es como si
el punto de aplicación de la fuerza estuviera desplazado 90º en el sentido de giro del
objeto. La precesión es inversamente proporcional a la velocidad de giro (a mayor
velocidad menor precesión) y directamente proporcional a la cantidad de fuerza de
deflexión aplicada.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
24
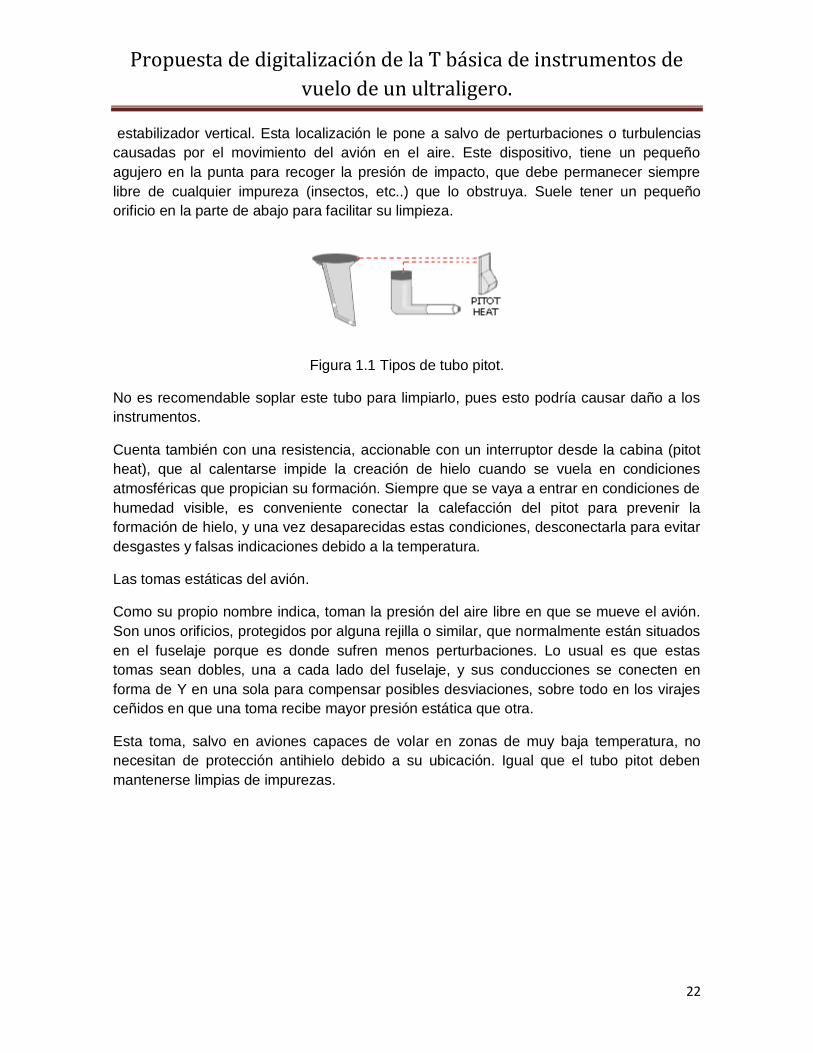
Figura 1.4 Precesión giroscópica.
A la hora de fabricar un giróscopo, se procura que el elemento giratorio este construido
con un material pesado o de muy alta densidad, con su masa repartida de forma uniforme
y que además rote a gran velocidad con el mínimo posible de resistencia por fricción.
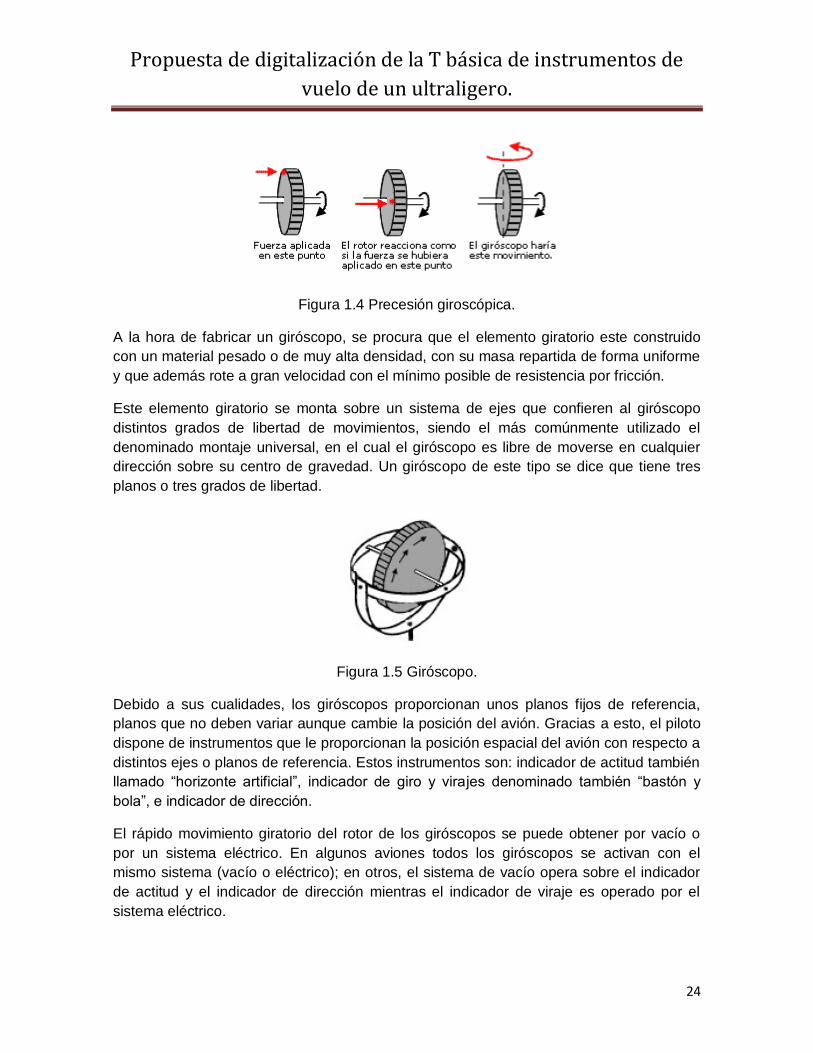
Este elemento giratorio se monta sobre un sistema de ejes que confieren al giróscopo
distintos grados de libertad de movimientos, siendo el más comúnmente utilizado el
denominado montaje universal, en el cual el giróscopo es libre de moverse en cualquier
dirección sobre su centro de gravedad. Un giróscopo de este tipo se dice que tiene tres
planos o tres grados de libertad.
Figura 1.5 Giróscopo.
Debido a sus cualidades, los giróscopos proporcionan unos planos fijos de referencia,
planos que no deben variar aunque cambie la posición del avión. Gracias a esto, el piloto
dispone de instrumentos que le proporcionan la posición espacial del avión con respecto a
distintos ejes o planos de referencia. Estos instrumentos son: indicador de actitud también
llamado “horizonte artificial”, indicador de giro y virajes denominado también “bastón y
bola”, e indicador de dirección.
El rápido movimiento giratorio del rotor de los giróscopos se puede obtener por vacío o
por un sistema eléctrico. En algunos aviones todos los giróscopos se activan con el
mismo sistema (vacío o eléctrico); en otros, el sistema de vacío opera sobre el indicador
de actitud y el indicador de dirección mientras el indicador de viraje es operado por el
sistema eléctrico.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
25
El sistema de vacío o succión se logra por medio de una bomba movida por el motor,
cuya capacidad y tamaño dependerá de la cantidad de giróscopos del avión. Mediante
este vacío se insufla una corriente de aire sobre los alabes del rotor que hace que este
gire velozmente como una turbina.
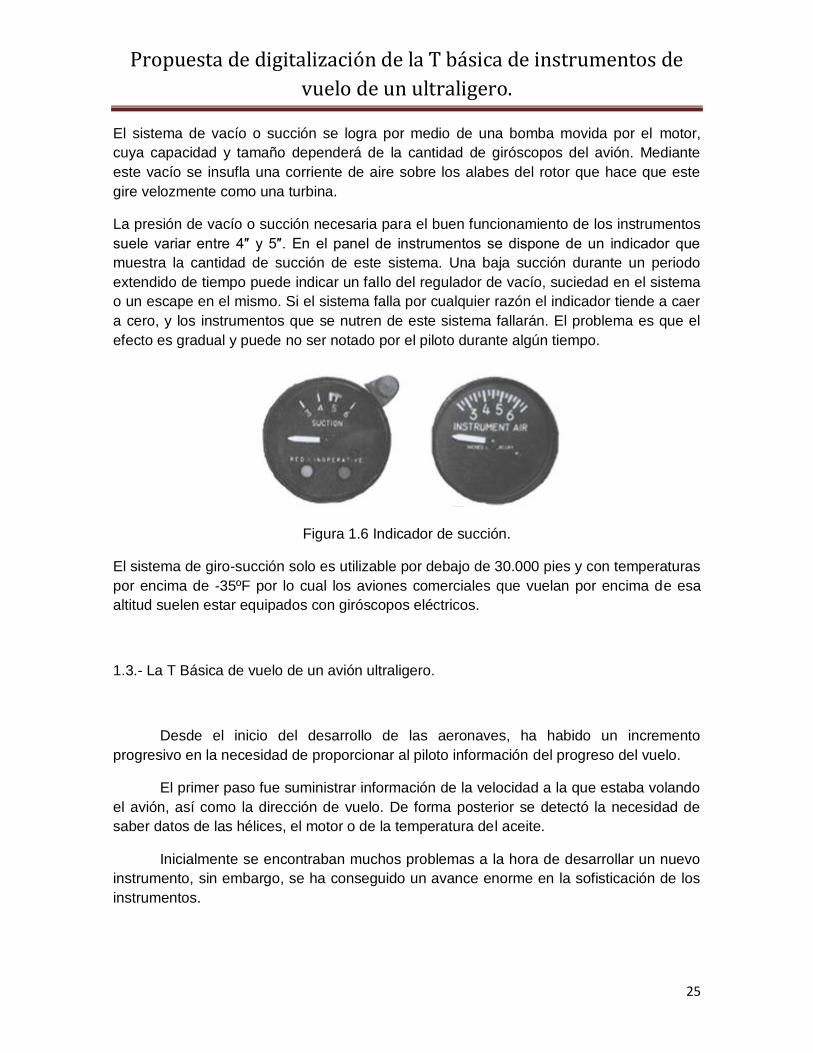
La presión de vacío o succión necesaria para el buen funcionamiento de los instrumentos
suele variar entre 4″ y 5″. En el panel de instrumentos se dispone de un indicador que
muestra la cantidad de succión de este sistema. Una baja succión durante un periodo
extendido de tiempo puede indicar un fallo del regulador de vacío, suciedad en el sistema
o un escape en el mismo. Si el sistema falla por cualquier razón el indicador tiende a caer
a cero, y los instrumentos que se nutren de este sistema fallarán. El problema es que el
efecto es gradual y puede no ser notado por el piloto durante algún tiempo.
Figura 1.6 Indicador de succión.
El sistema de giro-succión solo es utilizable por debajo de 30.000 pies y con temperaturas
por encima de -35ºF por lo cual los aviones comerciales que vuelan por encima de esa
altitud suelen estar equipados con giróscopos eléctricos.
1.3.- La T Básica de vuelo de un avión ultraligero.
Desde el inicio del desarrollo de las aeronaves, ha habido un incremento
progresivo en la necesidad de proporcionar al piloto información del progreso del vuelo.
El primer paso fue suministrar información de la velocidad a la que estaba volando
el avión, así como la dirección de vuelo. De forma posterior se detectó la necesidad de
saber datos de las hélices, el motor o de la temperatura del aceite.
Inicialmente se encontraban muchos problemas a la hora de desarrollar un nuevo
instrumento, sin embargo, se ha conseguido un avance enorme en la sofisticación de los
instrumentos.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
26
1.3.1 Distribución de los instrumentos.
Los avances en la aviación significaron un aumento significativo en la autonomía
de vuelo, aumentando la capacidad de vuelo de unos minutos a horas. Esto implica, por
ejemplo, la necesidad del piloto de saber localizar su posición entre las nubes cuando no
hay ninguna referencia visual del horizonte.
La cabina se empezó a llenar de indicadores y por ello fue necesario crear un
cierto orden dentro de este caos, de forma que se empezó a discernir entre qué
instrumentos tenía preferencia y como estandarizarlos.
Los instrumentos de vuelo (que cubrían el frontal de las cabinas) fueron
distribuidos en una única capa que se denominó los “Seis Básicos”. Los seis instrumentos
básicos, están formados por el indicador de velocidad o anemómetro, el horizonte
artificial, la velocidad vertical, el altímetro, el indicador de curso, y el indicador de giro y
desplazamiento lateral.
Una vez introducido el concepto “Basic Six”, se decidió crear el concepto “T
Básica”. La idea de este desarrollo es poder obtener la información indispensable en dos
movimientos de ojos, uno horizontal y otro vertical. De esta forma, se acumulan en la
horizontal superior (y por este orden) el anemómetro, el indicador/director de actitud y el
altímetro. En la vertical central (en su parte inferior) se localiza el indicador de situación
horizontal. De una manera menos importante, dicha T se acompaña de los dos
instrumentos restantes, el indicador de Mach y el indicador de rango de ascenso.
Figura 1.7 Distribución de instrumentos en T básica.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
27
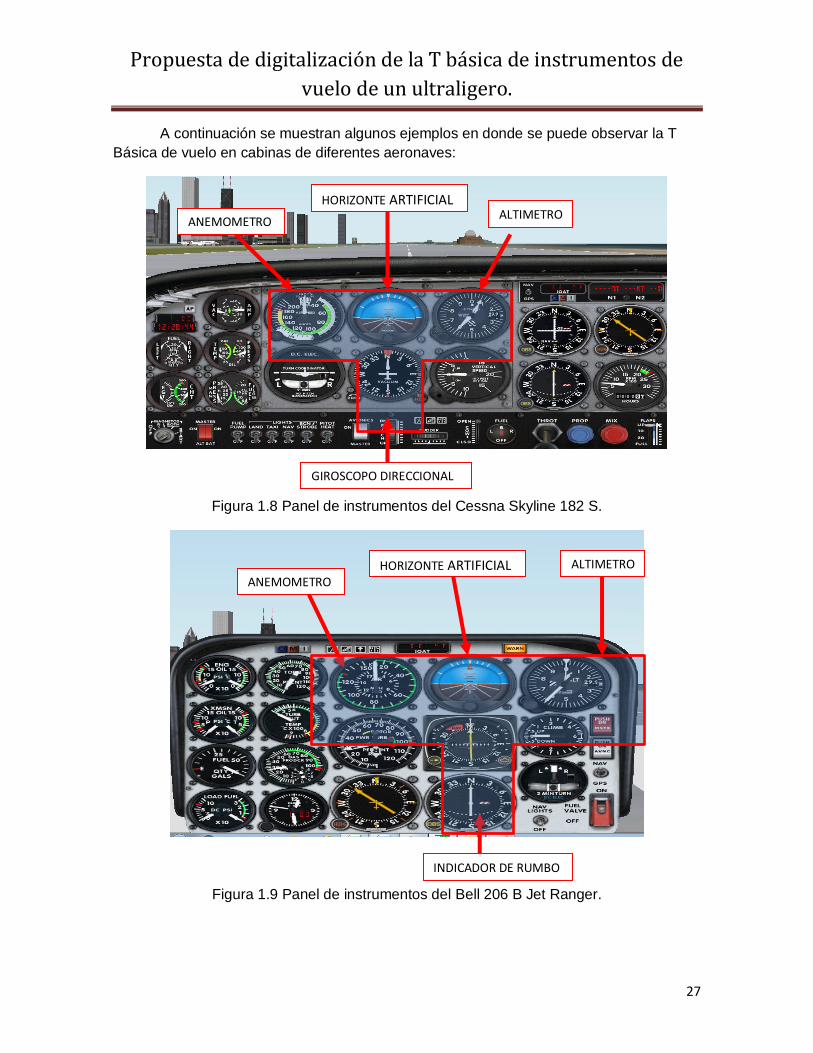
A continuación se muestran algunos ejemplos en donde se puede observar la T
Básica de vuelo en cabinas de diferentes aeronaves:
Figura 1.8 Panel de instrumentos del Cessna Skyline 182 S.
Figura 1.9 Panel de instrumentos del Bell 206 B Jet Ranger.
HORIZONTE ARTIFICIAL
GIROSCOPO DIRECCIONAL
ANEMOMETRO ALTIMETRO
HORIZONTE ARTIFICIAL ANEMOMETRO
ALTIMETRO
INDICADOR DE RUMBO

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
28
Figura 1.10 Panel de instrumentos del Learjet 45.
Figura 1.11 Panel de instrumentos del Extra 300 S.
HORIZONTE ARTIFICIAL
HORIZONTE ARTIFICIAL
ALTIMETRO
ALTIMETRO
ANEMOMETRO
ANEMOMETRO
INDICADOR DE RUMBO
GIROSCOPIO DIRECCIONAL
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
29
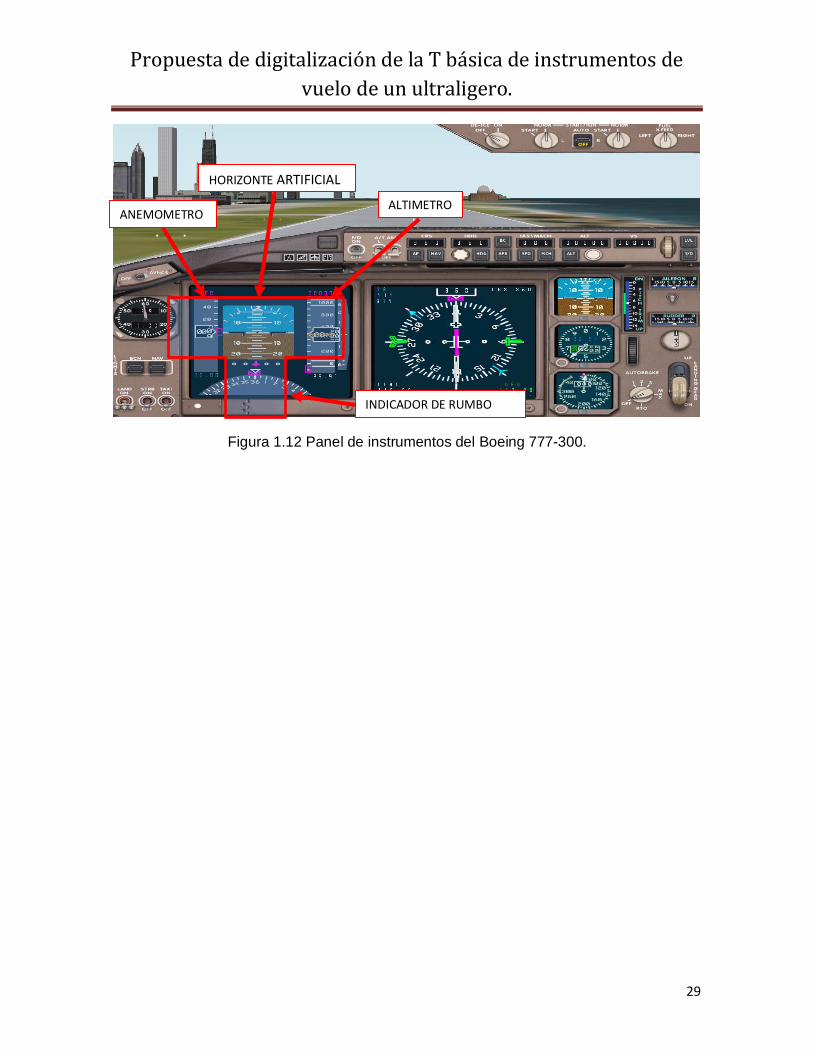
Figura 1.12 Panel de instrumentos del Boeing 777-300.
HORIZONTE ARTIFICIAL
ALTIMETRO ANEMOMETRO
INDICADOR DE RUMBO
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
30
CAÍTULO II
DESCRIPCIÓN DEL
FUNCIONAMIENTO DE
LOS INTRUMENTOS
BÁSICOS.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
31
2 DESCRIPCIÓN DEL FUNCIONAMIENTO DE LOS INTRUMENTOS BÁSICOS.
2.1.- Horizonte artificial.
El indicador de actitud, más conocido como horizonte artificial, es un instrumento que muestra la actitud del avión respecto al horizonte. Su función consiste en proporcionar al piloto de forma instantánea la posición del avión en alabeo y profundidad. La incorporación del horizonte artificial a los aviones ha sido fundamental para permitir el
vuelo en condiciones de visibilidad reducida o nula.
Este instrumento opera en base a una propiedad giroscópica, concretamente la de rigidez
en el espacio.
Figura 2.1 Horizonte artificial.
2.1.1 Construcción.
El horizonte artificial consta de un giróscopo de rotación horizontal montado sobre un
sistema de ejes que le confieren tres grados de libertad (montaje universal), dentro de una
caja hermética. Este giróscopo tiene fijada una esfera visible, con una barra horizontal de
referencia a la altura del eje de giro, por encima de la cual la esfera es de color azul (cielo)
y por debajo marrón (tierra).
Este aparato está conectado al sistema de succión, necesario para producir la corriente
de aire que incide sobre los alabes del rotor y hace girar este a unas 16.000 r.p.m.
aproximadamente.
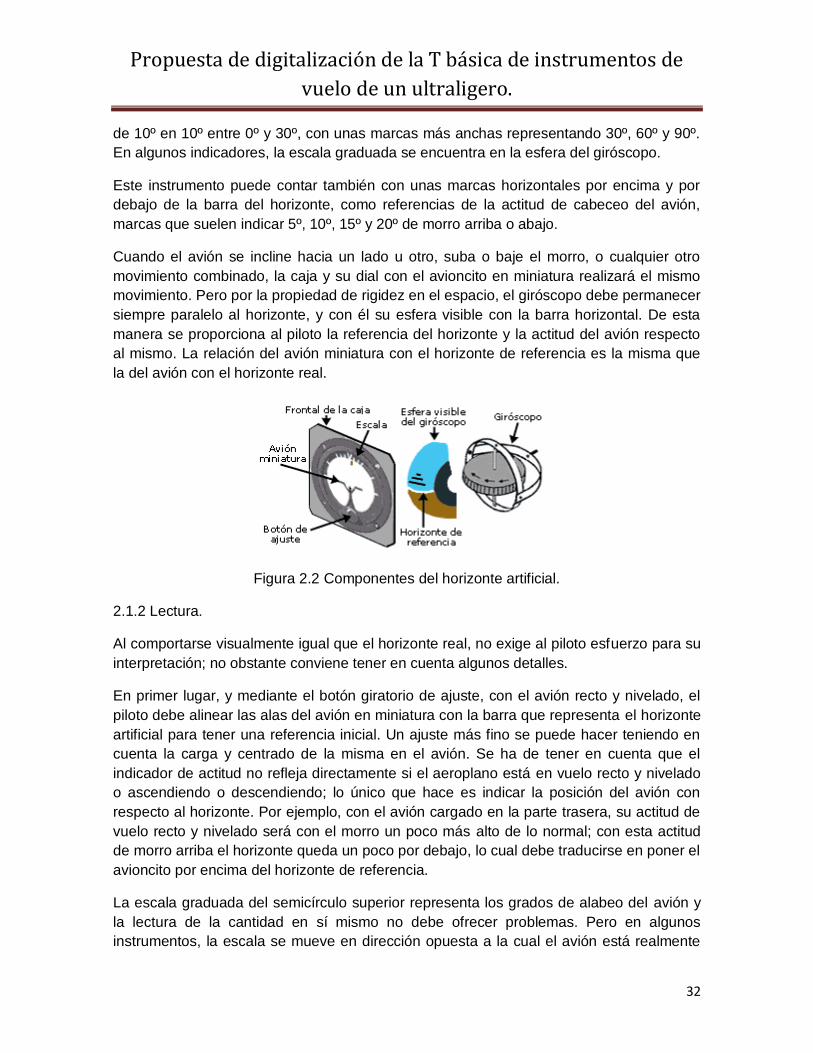
En el frontal de la caja, se fija un dial de presentación con un avioncito en miniatura y una
escala graduada en el semicírculo superior. Las marcas de esta escala están separadas
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
32
de 10º en 10º entre 0º y 30º, con unas marcas más anchas representando 30º, 60º y 90º.
En algunos indicadores, la escala graduada se encuentra en la esfera del giróscopo.
Este instrumento puede contar también con unas marcas horizontales por encima y por
debajo de la barra del horizonte, como referencias de la actitud de cabeceo del avión,
marcas que suelen indicar 5º, 10º, 15º y 20º de morro arriba o abajo.
Cuando el avión se incline hacia un lado u otro, suba o baje el morro, o cualquier otro
movimiento combinado, la caja y su dial con el avioncito en miniatura realizará el mismo
movimiento. Pero por la propiedad de rigidez en el espacio, el giróscopo debe permanecer
siempre paralelo al horizonte, y con él su esfera visible con la barra horizontal. De esta
manera se proporciona al piloto la referencia del horizonte y la actitud del avión respecto
al mismo. La relación del avión miniatura con el horizonte de referencia es la misma que
la del avión con el horizonte real.
Figura 2.2 Componentes del horizonte artificial.
2.1.2 Lectura.
Al comportarse visualmente igual que el horizonte real, no exige al piloto esfuerzo para su
interpretación; no obstante conviene tener en cuenta algunos detalles.
En primer lugar, y mediante el botón giratorio de ajuste, con el avión recto y nivelado, el
piloto debe alinear las alas del avión en miniatura con la barra que representa el horizonte
artificial para tener una referencia inicial. Un ajuste más fino se puede hacer teniendo en
cuenta la carga y centrado de la misma en el avión. Se ha de tener en cuenta que el
indicador de actitud no refleja directamente si el aeroplano está en vuelo recto y nivelado
o ascendiendo o descendiendo; lo único que hace es indicar la posición del avión con
respecto al horizonte. Por ejemplo, con el avión cargado en la parte trasera, su actitud de
vuelo recto y nivelado será con el morro un poco más alto de lo normal; con esta actitud
de morro arriba el horizonte queda un poco por debajo, lo cual debe traducirse en poner el
avioncito por encima del horizonte de referencia.
La escala graduada del semicírculo superior representa los grados de alabeo del avión y
la lectura de la cantidad en sí mismo no debe ofrecer problemas. Pero en algunos
instrumentos, la escala se mueve en dirección opuesta a la cual el avión está realmente
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
33
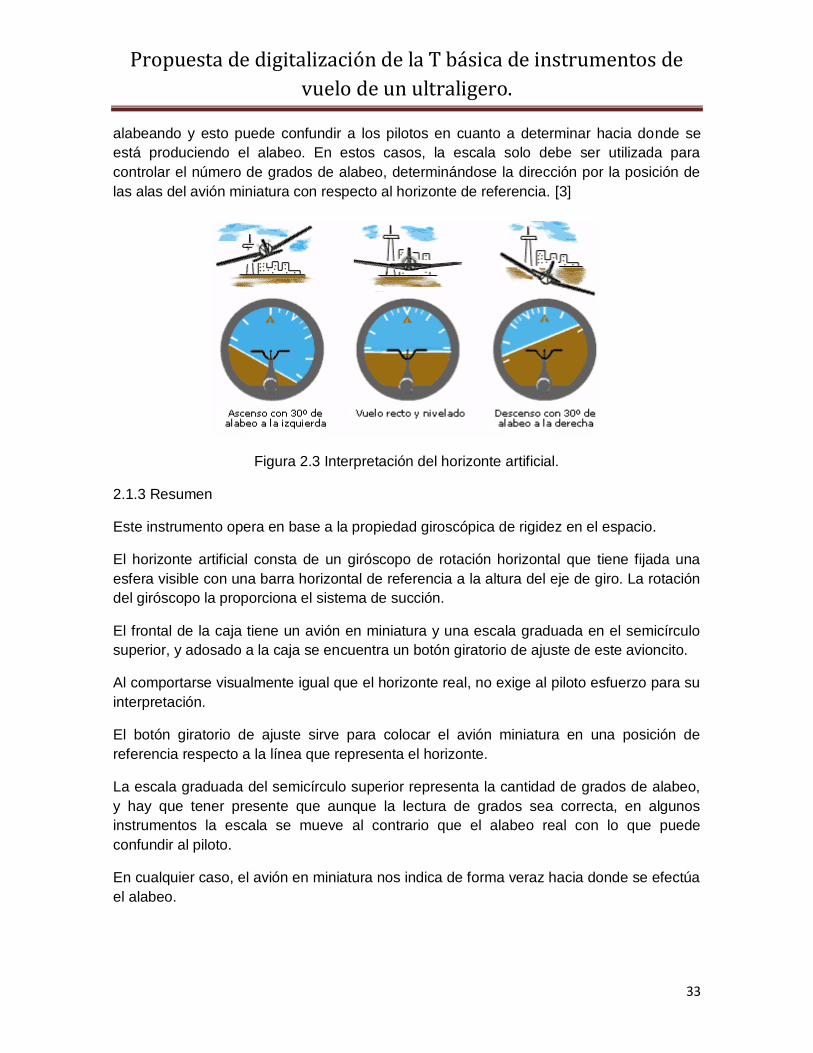
alabeando y esto puede confundir a los pilotos en cuanto a determinar hacia donde se
está produciendo el alabeo. En estos casos, la escala solo debe ser utilizada para
controlar el número de grados de alabeo, determinándose la dirección por la posición de
las alas del avión miniatura con respecto al horizonte de referencia. [3]
Figura 2.3 Interpretación del horizonte artificial.
2.1.3 Resumen
Este instrumento opera en base a la propiedad giroscópica de rigidez en el espacio.
El horizonte artificial consta de un giróscopo de rotación horizontal que tiene fijada una
esfera visible con una barra horizontal de referencia a la altura del eje de giro. La rotación
del giróscopo la proporciona el sistema de succión.
El frontal de la caja tiene un avión en miniatura y una escala graduada en el semicírculo
superior, y adosado a la caja se encuentra un botón giratorio de ajuste de este avioncito.
Al comportarse visualmente igual que el horizonte real, no exige al piloto esfuerzo para su
interpretación.
El botón giratorio de ajuste sirve para colocar el avión miniatura en una posición de
referencia respecto a la línea que representa el horizonte.
La escala graduada del semicírculo superior representa la cantidad de grados de alabeo,
y hay que tener presente que aunque la lectura de grados sea correcta, en algunos
instrumentos la escala se mueve al contrario que el alabeo real con lo que puede
confundir al piloto.
En cualquier caso, el avión en miniatura nos indica de forma veraz hacia donde se efectúa
el alabeo.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
34
2.2.- Altímetro.
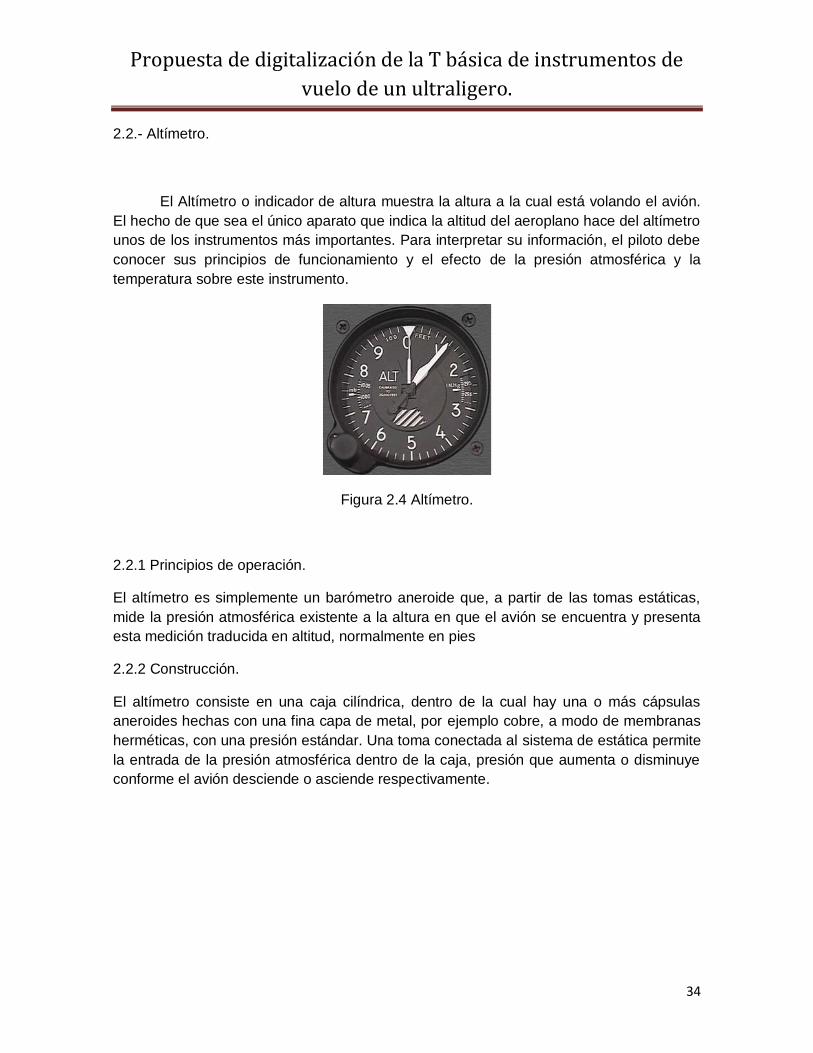
El Altímetro o indicador de altura muestra la altura a la cual está volando el avión.
El hecho de que sea el único aparato que indica la altitud del aeroplano hace del altímetro
unos de los instrumentos más importantes. Para interpretar su información, el piloto debe
conocer sus principios de funcionamiento y el efecto de la presión atmosférica y la
temperatura sobre este instrumento.
Figura 2.4 Altímetro.
2.2.1 Principios de operación.
El altímetro es simplemente un barómetro aneroide que, a partir de las tomas estáticas,
mide la presión atmosférica existente a la altura en que el avión se encuentra y presenta
esta medición traducida en altitud, normalmente en pies
2.2.2 Construcción.
El altímetro consiste en una caja cilíndrica, dentro de la cual hay una o más cápsulas
aneroides hechas con una fina capa de metal, por ejemplo cobre, a modo de membranas
herméticas, con una presión estándar. Una toma conectada al sistema de estática permite
la entrada de la presión atmosférica dentro de la caja, presión que aumenta o disminuye
conforme el avión desciende o asciende respectivamente.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
35
Figura 2.5 Construcción del altímetro.
Así pues, la diferencia de presión entre la caja y el interior de las cápsulas aneroides,
provoca que estas últimas se dilaten o contraigan, movimiento que, adecuadamente
calibrado, se transmite mecánicamente a un sistema de varillas y engranajes que hacen
moverse las agujas del altímetro.
El frontal visible del altímetro consta de una esfera con un dial numerado, unas agujas
indicadoras, y una ventanilla de calibración entre los números 2 y 3 (ventana de Kollsman)
que se ajusta con un botón giratorio situado en el lateral.
Este tipo de altímetro sencillo es el modelo habitual en los aeroplanos ligeros, pero hay
altímetros más precisos y sofisticados. Algunos presentan la información en forma digital;
otros tienen un dispositivo que mediante procedimientos electrónicos codifica la altitud y la
transmite a los radares de las estaciones en tierra (torres y centros de control); otros han
sustituido el sistema de varillas y engranajes por dispositivos electrónicos; etc.
2.2.3 Lectura del altímetro.
Generalmente, el dial está graduado con números que van de 0 a 9 en el sentido de las
agujas del reloj, con divisiones intermedias de 20 en 20 pies. Aunque su lectura no
debería presentar ninguna dificultad, se debe prestar atención a la forma en que se
muestra la altitud, debido a que puede hacerse mediante agujas (dos o tres), mediante
contadores, o de forma mixta.
Si el altímetro tiene dos agujas, que es lo habitual en aviones ligeros, la menor indica
miles de pies y la mayor centenas de pies; una indicación en forma de cuña es visible a
altitudes por debajo de 10000 pies e invisible por encima de esa altitud. Si tiene tres
agujas, la más pequeña indica decenas de miles, la intermedia miles y la mayor centenas
de pies. Si el altímetro presenta la altura solo mediante agujas indicadoras, se deben leer
estas de menor a mayor tamaño, como un reloj.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
36
Figura 2.6 Lectura del altímetro de 2 agujas.
2.2.4 Presiones referenciales.
El altímetro presenta en unidades de altitud los cambios de presión de la atmósfera real
respecto a la presión según la atmósfera tipo con que están calibradas las cápsulas
aneroides. Con esta premisa, este instrumento solo mostraría la altitud correcta si los
valores atmosféricos coincidieran con los de la atmósfera tipo. Pero como es bastante
improbable que las condiciones reales coincidan con las estándar, además de que estas
condiciones cambian continuamente y son distintas de un lugar a otro, el altímetro sería
poco fiable y el vuelo se haría arriesgado si no fuera por la posibilidad de ajustarlo y
compensarlo para situaciones no estándar.
Este ajuste se hace mediante el botón de reglaje, que permite seleccionar una presión de
referencia que se irá mostrando en la ventanilla de calibración a medida que se gira el
botón. La escala mostrada en esta ventana puede estar graduada en milibares, en
pulgadas de mercurio o ambas. Al seleccionar una presión de referencia, en realidad se
está ajustando la marcación de las agujas a la dilatación que en ese momento tienen las
cápsulas aneroides en condiciones de atmósfera real. Un simil: para que un reloj marque
la hora correcta, primero hay que ponerlo en hora, es decir ajustar las manillas con la
maquinaria que las mueve, en base a la hora real.
Figura 2.7 Calibración del altímetro.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
37
La mayoría de los aeródromos y todas las estaciones de seguimiento en tierra disponen
de aparatos que miden la presión atmosférica. Puesto que la altura de la estación es fija,
aplicando una sencilla regla (la presión decrece 1″ por cada 1000 pies o 110 milibares por
cada 1000 metros) “deducen” la presión al nivel del mar; cuando un piloto establece
contacto, se le comunica esta presión deducida.
Los distintos tipos de presión referencial que podemos colocar en la ventanilla del
altímetro son:
QNH. Presión al nivel del mar deducida de la existente en el aeródromo, considerando la
atmósfera con unas condiciones estándar, es decir sin tener en cuenta las desviaciones
de la temperatura real con respecto a la estándar. Esta presión de referencia es la más
utilizada por los pilotos y normalmente las torres de control y las estaciones de
seguimiento nos darán la presión QNH.
La utilidad de esta presión de referencia se debe a que en las cartas de navegación y de
aproximación a los aeródromos, las altitudes (de tráfico, de circuito con fallo de radio,
obstáculos, balizas, etc…) se indican respecto al nivel del mar. Con esta presión de
referencia, al despegar o aterrizar el altímetro debería indicar la altitud real del aeródromo.
QNE. Presión estándar al nivel del mar. Por encima de una determinada altitud
denominada de transición (normalmente 6000 pies) los reglamentos aéreos establecen
que todos los aviones vuelen con la misma presión de referencia. Esta presión, 29,92″ o
1013 milibares, es la correspondiente a la atmósfera tipo al nivel del mar. De esta manera,
cualquier cambio en las condiciones atmosféricas afectan por igual a todos los aviones,
garantizando la altura de seguridad que los separa.
QFE. Presión atmosférica en un punto de la corteza terrestre. Si calibramos el altímetro
con la presión QFE que nos dé un aeródromo, este marcará 0 al despegar o aterrizar en
el mismo.
QFF. Presión al nivel del mar, deducida de forma similar a la QNH pero teniendo en
cuenta los gradientes de presión y temperatura reales en vez de los de la atmósfera
estándar. Prácticamente no se utiliza.
2.2.5 Calibración del altímetro.
Una vez calado el altímetro con el QNH al despegar de un aeródromo, es razonable
pensar que las condiciones atmosféricas no cambiarán mucho en un determinado radio
de vuelo, pero esto no garantiza nada y mucho menos a medida que nos alejamos del
aeródromo. Por ello, es sensato mantener una altura suficiente que permita sortear los
obstáculos en nuestra ruta con seguridad.
Este hecho es más relevante todavía si volamos de una zona de altas presiones o
temperaturas a otra zona de bajas presiones o temperaturas. Se debe tener en cuenta
que:
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
38
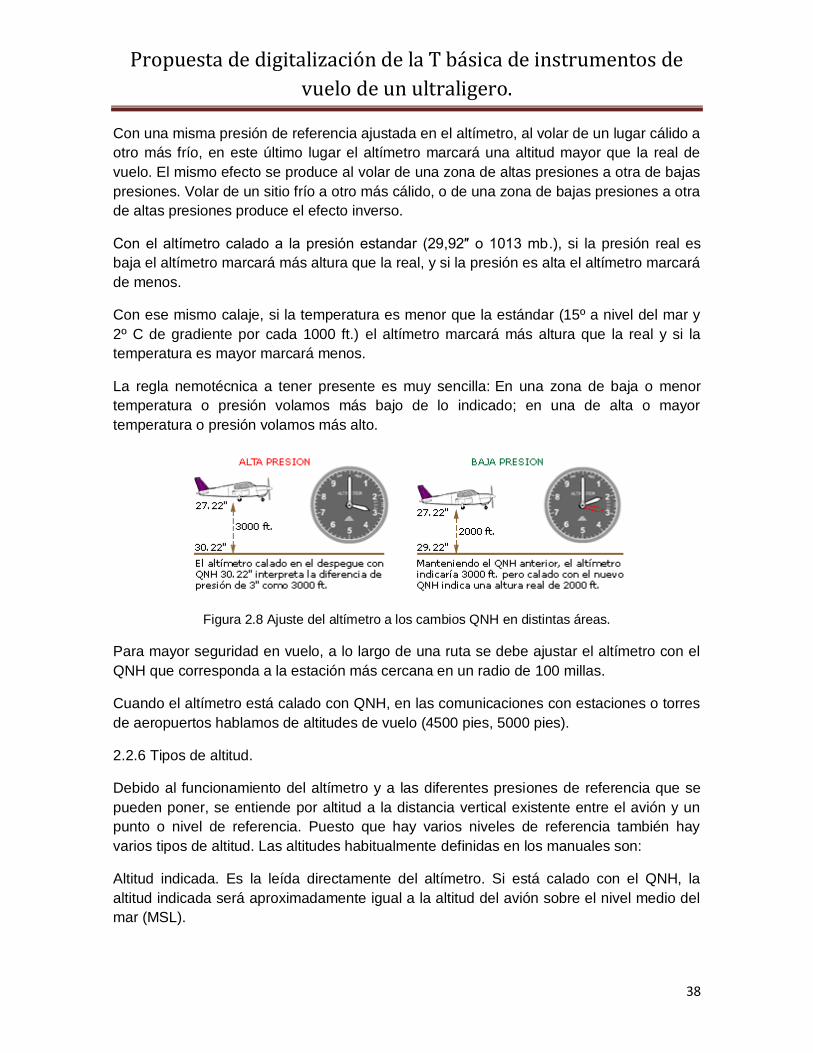
Con una misma presión de referencia ajustada en el altímetro, al volar de un lugar cálido a
otro más frío, en este último lugar el altímetro marcará una altitud mayor que la real de
vuelo. El mismo efecto se produce al volar de una zona de altas presiones a otra de bajas
presiones. Volar de un sitio frío a otro más cálido, o de una zona de bajas presiones a otra
de altas presiones produce el efecto inverso.
Con el altímetro calado a la presión estandar (29,92″ o 1013 mb.), si la presión real es
baja el altímetro marcará más altura que la real, y si la presión es alta el altímetro marcará
de menos.
Con ese mismo calaje, si la temperatura es menor que la estándar (15º a nivel del mar y
2º C de gradiente por cada 1000 ft.) el altímetro marcará más altura que la real y si la
temperatura es mayor marcará menos.
La regla nemotécnica a tener presente es muy sencilla: En una zona de baja o menor
temperatura o presión volamos más bajo de lo indicado; en una de alta o mayor
temperatura o presión volamos más alto.
Figura 2.8 Ajuste del altímetro a los cambios QNH en distintas áreas.
Para mayor seguridad en vuelo, a lo largo de una ruta se debe ajustar el altímetro con el
QNH que corresponda a la estación más cercana en un radio de 100 millas.
Cuando el altímetro está calado con QNH, en las comunicaciones con estaciones o torres
de aeropuertos hablamos de altitudes de vuelo (4500 pies, 5000 pies).
2.2.6 Tipos de altitud.
Debido al funcionamiento del altímetro y a las diferentes presiones de referencia que se
pueden poner, se entiende por altitud a la distancia vertical existente entre el avión y un
punto o nivel de referencia. Puesto que hay varios niveles de referencia también hay
varios tipos de altitud. Las altitudes habitualmente definidas en los manuales son:
Altitud indicada. Es la leída directamente del altímetro. Si está calado con el QNH, la
altitud indicada será aproximadamente igual a la altitud del avión sobre el nivel medio del
mar (MSL).

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
39
Altitud verdadera. O altitud real, es la altitud real sobre el nivel del mar. La altitud de
aeropuertos, montañas, obstáculos, etc.. en las cartas se dan en altitud verdadera.
Altitud absoluta. Distancia vertical real entre el avión y la tierra.
Altitud de presión. Altitud leída del altímetro calado con QNE.
Altitud de densidad. Altitud de presión corregida con la desviación de temperatura no
estándar. Conocer la altitud de densidad es necesario para determinar cuánta pista es
necesaria para despegar y aterrizar, así como la velocidad de ascenso, sobre todo en
días calurosos y húmedos en aeropuertos con una altitud considerable sobre el nivel
medio del mar.
Altitud determinada por radar. Los aviones comerciales están equipados con radio-altímetros que indican la altitud absoluta, la cual sirve a los pilotos para determinar la altitud de decisión en las fases finales de aproximación y aterrizaje, especialmente cuando el techo y la visibilidad son bajos. [3]
2.2.7. Resumen.
El altímetro es un barómetro que muestra los cambios de presión traducidos en altitud,
normalmente pies.
Su funcionamiento se basa en la propiedad de que la presión atmosférica es
inversamente proporcional a la altura: “a mayor altura menor presión y viceversa”
La presión recibida por el altímetro proviene de las tomas estáticas.
Las cápsulas aneroides del altímetro se expanden/contraen en función de los cambios de
presión, transmitiendo estos cambios a un sistema de varillas y engranajes que mueven
los indicadores de altitud.
La altitud se puede presentar de diversas maneras: agujas, digital, contadores, etc…
En la ventanilla de Kollsman se muestra la presión de referencia seleccionada con el
botón de ajuste, en pulgadas de mercurio, milibares, o ambas.
Las presiones referenciales más utilizadas son: QNH y QNE.
Hay varios tipos de altitud según la presión referencial utilizada: altitud indicada, altitud
verdadera, altitud absoluta, altitud de presión, altitud de densidad. Las usadas
normalmente son la altitud indicada y la altitud de presión.
Cuando se vuela de una zona de alta presión o temperatura a otra zona de baja presión o
temperatura, en esta última zona el avión vuela más bajo de lo que marca el altímetro.
Recordar “de alto a bajo mira debajo”.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
40
Por encima de la altitud de transición se ajusta el altímetro con QNE. Por debajo del nivel
de transición se ajusta con el QNH.
Con presión QNH en el altímetro se habla de altitudes de vuelo; con QNE se habla de
niveles de vuelo.
El calaje del altímetro no implica que este compense las irregularidades atmosféricas a
cualquier nivel de vuelo.
En las cercanías de los aeródromos, donde el tráfico se hace más intenso, el que todos
los aviones vuelen con alturas referenciadas a la misma calibración del altímetro
incrementa la seguridad aeronáutica.
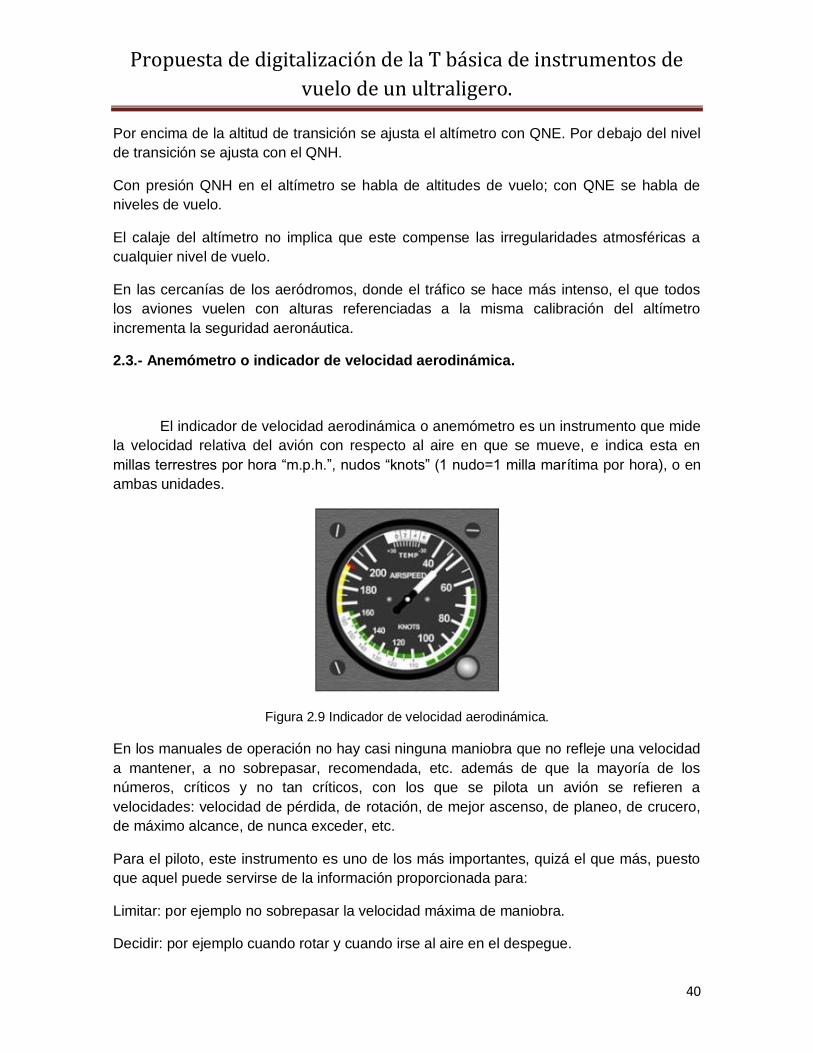
2.3.- Anemómetro o indicador de velocidad aerodinámica.
El indicador de velocidad aerodinámica o anemómetro es un instrumento que mide
la velocidad relativa del avión con respecto al aire en que se mueve, e indica esta en
millas terrestres por hora “m.p.h.”, nudos “knots” (1 nudo=1 milla marítima por hora), o en
ambas unidades.
Figura 2.9 Indicador de velocidad aerodinámica.
En los manuales de operación no hay casi ninguna maniobra que no refleje una velocidad
a mantener, a no sobrepasar, recomendada, etc. además de que la mayoría de los
números, críticos y no tan críticos, con los que se pilota un avión se refieren a
velocidades: velocidad de pérdida, de rotación, de mejor ascenso, de planeo, de crucero,
de máximo alcance, de nunca exceder, etc.
Para el piloto, este instrumento es uno de los más importantes, quizá el que más, puesto
que aquel puede servirse de la información proporcionada para:
Limitar: por ejemplo no sobrepasar la velocidad máxima de maniobra.
Decidir: por ejemplo cuando rotar y cuando irse al aire en el despegue.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
41
Corregir: por ejemplo una velocidad de aproximación incorrecta.
Deducir: por ejemplo que el ángulo de ataque que mantiene es muy elevado.
En resumen, el anemómetro puede ser un magnífico auxiliar durante todas aquellas
maniobras donde sea especialmente necesario el mejor control del ángulo de ataque,
porque tal como se dijo en un capítulo anterior, este instrumento proporciona al piloto la
mejor medida de dicho ángulo.
2.3.1 Principios de operación.
El indicador de velocidad es en realidad y básicamente un medidor de diferencias de
presión, que transforma esa presión diferencial en unidades de velocidad. La diferencia
entre la presión total proporcionada por el tubo de pitot (Pe+Pd) y la presión estática (Ps)
dada por las tomas estáticas, es la presión dinámica (Pe+Pd-Pe=Pd), que es proporcional
a 1/2dv² y que adecuadamente convertida a unidades de velocidad es la que muestra el
anemómetro.
El indicador de velocidad proporciona una medida de la presión aerodinámica (1/2dv²) de
una manera conceptual fácil de entender (en forma de velocidad) y además una primera
aproximación de la velocidad de desplazamiento del aeroplano sobre la superficie
(Ground Speed).
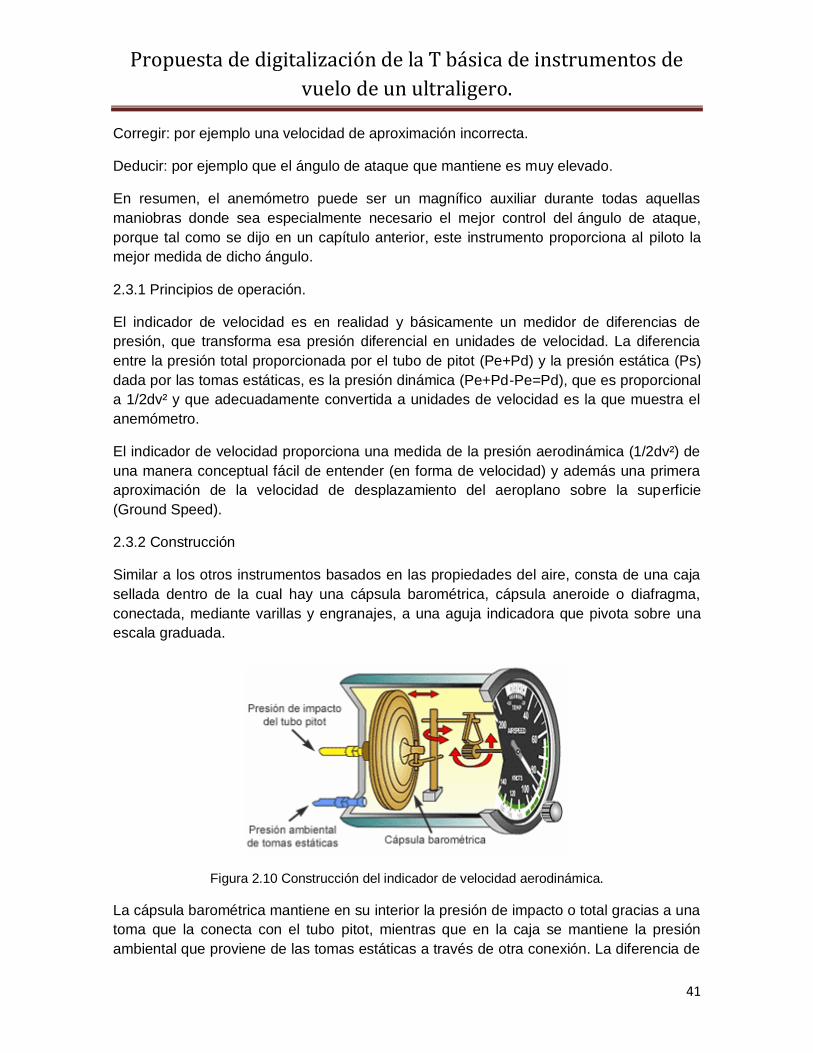
2.3.2 Construcción
Similar a los otros instrumentos basados en las propiedades del aire, consta de una caja
sellada dentro de la cual hay una cápsula barométrica, cápsula aneroide o diafragma,
conectada, mediante varillas y engranajes, a una aguja indicadora que pivota sobre una
escala graduada.
Figura 2.10 Construcción del indicador de velocidad aerodinámica.
La cápsula barométrica mantiene en su interior la presión de impacto o total gracias a una
toma que la conecta con el tubo pitot, mientras que en la caja se mantiene la presión
ambiental que proviene de las tomas estáticas a través de otra conexión. La diferencia de
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
42
presión entre el interior y el exterior de la cápsula aneroide hace que esta se dilate o
contraiga, movimiento que calibrado adecuadamente se transmite de forma mecánica a la
aguja indicadora por medio de varillas y engranajes.
En el suelo y con el avión parado, la presión de impacto y la estática son iguales y por lo
tanto este instrumento marcará cero. Pero con el avión en movimiento, la presión de
impacto será mayor que la presión en las tomas estáticas; esto hará que el diafragma se
expanda y mueva la aguja del indicador en proporción a esta diferencia. En la medida que
el avión acelere o decelere, el aumento o disminución de la presión diferencial hará que la
aguja indique el incremento o disminución de velocidad.
El frontal visible de este instrumento, consta básicamente de una esfera con una escala
numerada, una aguja indicadora, y alrededor de la escala numerada unas franjas de
colores. Algunos tienen además unas ventanillas graduadas y un botón giratorio de ajuste.
En este mismo capítulo, se explica el significado de esta escala de colores, y para que
sirve y como se maneja el botón de ajuste.
2.3.3 Lectura del indicador de velocidad.
La lectura de este instrumento es muy sencilla: una aguja marca directamente la
velocidad relativa del avión en la escala del dial. Algunos anemómetros tiene dos escalas,
una en m.p.h. y otra en nudos; se puede tomar como referencia una u otra, pero poniendo
cuidado para no confundirse de escala. Por ejemplo, si queremos planear a 70 nudos y
nos equivocamos de escala, planeamos realmente a 70 m.p.h., velocidad sensiblemente
inferior (un 15%) a la deseada.
Chequeo. Dada la importancia de este instrumento, durante la carrera de despegue se
debe comprobar que la aguja marca cada vez mayor velocidad, que el anemómetro está
“vivo”. Si observa que el avión cada vez se mueve mas rápido pero la aguja no se mueve
cancele el despegue. La causa más probable de esta disfunción es que se haya olvidado
de quitar la funda del tubo pitot.
2.3.4 Nomenclatura de velocidades.
La mayoría de los manuales de operación utilizan una nomenclatura de velocidades, que
derivan, como no, de las correspondientes siglas en ingles. En algunos casos estas siglas
están precedidas por la letra K “Knots – nudos” para significar que el valor
correspondiente esta expresado en dicha unidad, como por ejemplo KIAS para la
velocidad indicada, KCAS para velocidad calibrada, etc.
Velocidad Indicada del avión- IAS (Indicated Airspeed): Es la velocidad leída directamente
del anemómetro (sin correcciones) y en ella se basan los constructores para determinar
las performances del aeroplano: las velocidades de despegue, ascenso, aproximación y
aterrizaje son normalmente velocidades IAS.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
43
Velocidad Calibrada del avión- CAS (Calibrated Airspeed): Es la IAS corregida por
posibles errores del propio instrumento y su instalación. Aunque los fabricantes intentan
reducir estos errores al mínimo, como es imposible eliminarlos totalmente en todas las
escalas de velocidades optan por la mejor calibración en aquellas en las cuales vuela el
avión la mayor parte del tiempo: el rango de velocidades de crucero. En la tabla siguiente,
obtenida del manual de operación de un determinado aeroplano, se observa que en
velocidades cercanas al rango de crucero el error de medición es nulo o mínimo; máximo
a bajas velocidades e intermedio en velocidades superiores al régimen de crucero.
Tabla 2.1 Conversión de IAS a CAS.
Los manuales de operación suelen incluir unas tablas similares a la anterior o unos
gráficos que muestran la CAS que corresponde a cada IAS.
Tabla2.2 Conversión de velocidad indicada a calibrada.
Dependiendo del aeroplano y del año de su construcción, Vd. puede encontrarse con que
el manual del aeroplano menciona las velocidades en unidades “indicadas” (por ejemplo
Best Rate of Climb Speed=76 KIAS), unidades “calibradas” e “indicadas” (Design
Maneuvering Speed = 103 KIAS o 101 KCAS), en ninguna específica (Never Exceed
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
44
Speed = 171 Mph) y mencionar en algún párrafo que todas las velocidades del manual se
entienden “calibradas”, o cualquier combinación de todo esto.
Velocidad Verdadera del avión- TAS (True Airspeed): Es la CAS corregida por la altitud y
la temperatura no estándar. El sistema está construido teniendo en cuenta la densidad
estándar del aire al nivel del mar, pero con otra densidad la medición no es tan precisa.
Sabemos que la densidad del aire disminuye a medida que se incrementa la altitud, y
aunque este cambio afecta tanto a la presión estática como a la presión de impacto en el
tubo pitot, no lo hace en la misma proporción, de manera que para una misma velocidad
calibrada (CAS) la velocidad verdadera (TAS) va aumentando con el incremento de
altitud. Dicho de otra manera, a medida que aumenta la altitud un aeroplano tiene que
volar más rápido para “leer” la misma diferencia entre las presiones de impacto y estática.
Para una misma velocidad calibrada, la velocidad verdadera es mayor cuanto mayor sea
la altitud.
Se puede calcular la TAS a partir de un computador de vuelo, en el cual seleccionando la
CAS, la altitud de presión y la temperatura se obtiene calculada la TAS. También, algunos
anemómetros llevan incorporado un pequeño calculador mecánico que funciona de la
forma siguiente: en la parte superior del instrumento hay una ventanilla en la cual aparece
un dial movible sobre una pequeña escala de temperaturas; moviendo este dial con el
botón giratorio anexo al instrumento hasta que queden enfrentadas la altitud actual con la
temperatura exterior, se muestra la TAS en la ventanilla de la parte inferior del
instrumento
Velocidad respecto al suelo- GS (Ground Speed): Es la velocidad actual del aeroplano
respecto al suelo y su valor es igual a la velocidad verdadera (TAS) +/- la velocidad del
viento.
Con el viento en cara, el avión vuela en una masa de aire que se desplaza en sentido
contrario y eso hace GS=TAS-V (siendo V la velocidad del viento) y por tanto GS<TAS.
Con viento de cola, el avión y la masa de aire en que se mueve tienen el mismo sentido
por lo cual GS=TAS+V y de ahí GS>TAS. Por último, con el viento en calma GS=TAS. El
viento en cara disminuye la GS mientras que el viento en cola la aumenta.
Conviene insistir en que el anemómetro mide la velocidad relativa del avión respecto al
aire que lo rodea NO respecto al suelo; esta última velocidad depende además de la
dirección e intensidad del viento.
2.3.5 Códigos de colores.
Para recibir la certificación de la F.A.A. los aviones fabricados a partir de 1945 que tengan
un peso de hasta 12500 lbs. (5670 kg), deben contar con un anemómetro conforme con
un sistema de marcas de colores estándar (fig.2.5.7). Este sistema de marcas de colores

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
45
permite al piloto determinar a simple vista ciertas limitaciones de velocidad que son
importantes para manejar el avión con seguridad. Por ejemplo: si durante la ejecución de
una maniobra el piloto observa que la aguja está en el arco amarillo y se va acercando
con rapidez a la marca roja, la reacción inmediata debería ser reducir la velocidad. Las
marcas de colores y su traducción a velocidades IAS son las siguientes:
Figura 2.11 Código de colores del indicador de velocidad aerodinámica.
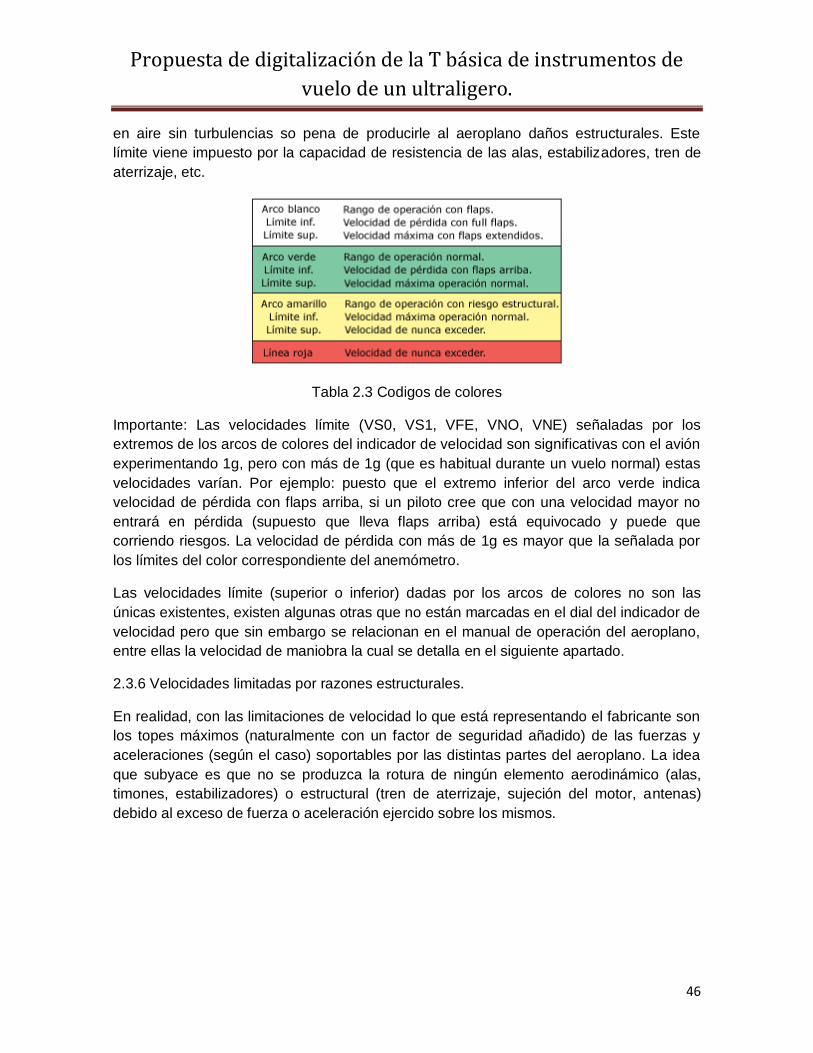
Arco blanco del anemómetro – Velocidades de operación con flaps extendidos, o
velocidades a las cuales se pueden extender los flaps sin sufrir daños estructurales. El
extremo inferior de este arco corresponde a la velocidad de pérdida con los flaps
totalmente extendidos, peso máximo, motor al ralentí y tren de aterrizaje abajo (VS0). El
extremo superior indica la velocidad límite de extensión de los flaps (VFE). Los flaps
deben deflectarse únicamente en el rango de velocidades del arco blanco. Las
velocidades de aproximación y aterrizaje suelen estar comprendidas en el rango del arco
blanco.
Arco verde del anemómetro – Velocidades de operación normal del avión, la mayoría del
tiempo de vuelo ocurre en este rango. El extremo inferior corresponde a la velocidad de
pérdida con el avión limpio (flaps arriba), peso máximo, motor al ralentí y tren de aterrizaje
abajo (VS1). El extremo superior marca el límite de la velocidad normal de operación
(VNO), límite que no debe ser excedido salvo en aire no turbulento, y en ese caso
además con mucha precaución. En este rango de velocidades el avión no tendrá
problemas estructurales en caso de turbulencias moderadas.
Arco amarillo del anemómetro – Margen de precaución. En este rango de velocidades
solo se puede volar en aire no turbulento y aún así no deben realizarse maniobras
bruscas que podrían dañar el avión.
Línea roja del anemómetro- Velocidad máxima de vuelo del avión (VNE) o velocidad de
nunca exceder (ne=never exceed). Esta velocidad no debe ser nunca rebasada ni siquiera
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
46
en aire sin turbulencias so pena de producirle al aeroplano daños estructurales. Este
límite viene impuesto por la capacidad de resistencia de las alas, estabilizadores, tren de
aterrizaje, etc.
Tabla 2.3 Codigos de colores
Importante: Las velocidades límite (VS0, VS1, VFE, VNO, VNE) señaladas por los
extremos de los arcos de colores del indicador de velocidad son significativas con el avión
experimentando 1g, pero con más de 1g (que es habitual durante un vuelo normal) estas
velocidades varían. Por ejemplo: puesto que el extremo inferior del arco verde indica
velocidad de pérdida con flaps arriba, si un piloto cree que con una velocidad mayor no
entrará en pérdida (supuesto que lleva flaps arriba) está equivocado y puede que
corriendo riesgos. La velocidad de pérdida con más de 1g es mayor que la señalada por
los límites del color correspondiente del anemómetro.
Las velocidades límite (superior o inferior) dadas por los arcos de colores no son las
únicas existentes, existen algunas otras que no están marcadas en el dial del indicador de
velocidad pero que sin embargo se relacionan en el manual de operación del aeroplano,
entre ellas la velocidad de maniobra la cual se detalla en el siguiente apartado.
2.3.6 Velocidades limitadas por razones estructurales.
En realidad, con las limitaciones de velocidad lo que está representando el fabricante son
los topes máximos (naturalmente con un factor de seguridad añadido) de las fuerzas y
aceleraciones (según el caso) soportables por las distintas partes del aeroplano. La idea
que subyace es que no se produzca la rotura de ningún elemento aerodinámico (alas,
timones, estabilizadores) o estructural (tren de aterrizaje, sujeción del motor, antenas)
debido al exceso de fuerza o aceleración ejercido sobre los mismos.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
47
Tabla 2.4 limitaciones de velocidad.
La limitación marcada por la velocidad VNO (Maximum Structural Cruising Speed)
señalada por el extremo superior del arco verde, se debe a la fuerza máxima de
sustentación que puede soportar el ala: hay un coeficiente máximo de sustentación y esta
fuerza depende de ese coeficiente por el cuadrado de la velocidad CAS. En régimen de
crucero, el ángulo de ataque es muy bajo y la velocidad es muy alta; si por cualquier
razón el ángulo de ataque varía bruscamente, la fuerza de sustentación puede sobrepasar
el límite soportable por las alas. Limitando la velocidad alejamos la fuerza producida por
las alas de su límite máximo y con ello el riesgo de rotura de las mismas. En régimen de
crucero no sobrepase esta velocidad salvo en aire no turbulento e incluso así con mucha
precaución.
En el límite VNE (Never-exceed speed) señalado por la línea roja intervienen además
otros factores, tales como la fuerza de resistencia creada a esa velocidad por algunos
componentes primarios (alas, timones, tren de aterrizaje)o secundarios (antenas, luces);
inestabilidad de la estructura y sistemas de control, etc… Las razones por las cuales no
debe sobrepasarse esta velocidad bajo ninguna circunstancia son obvias.
Esa misma fuerza de resistencia es la que impone el límite de velocidad con flaps
extendidos VFE (Maximum Flaps Extended Speed), marcado por el extremo superior del
arco blanco. Volar con flaps extendidos a velocidades superiores puede suponer
perderlos.
Por último, hay otra velocidad límite no señalada en el anemómetro pero que viene especificada en los manuales del constructor: se trata de la VA (Design Maneuvering Speed), que es la velocidad máxima a la cual la aplicación total de los controles aerodinámicos (alerones, timones, …) a pesar de someter al aeroplano a altos factores de carga (g) no provocan un exceso de estres sobre este; dicho de otra manera, si se encuentra volando con turbulencias moderadas o severas mantenga su velocidad por

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
48
debajo de este límite y evite además hacer movimientos bruscos sobre los controles aerodinámicos o aplicar estos al máximo. [3]
2.3.7 Resumen.
El anemómetro indica la velocidad relativa del avión con respecto al aire en que se
mueve, velocidad que puede mostrarse en nudos (knots), en millas por hora (mph), o en
ambas unidades.
Este instrumento es realmente un medidor que transforma la presión diferencial en
unidades de velocidad.
Para su medición necesita de la presión de impacto del tubo de pitot y de la presión
ambiental proporcionada por las tomas estáticas.
La diferencia entre ambas presiones hace que la cápsula aneroide del aparato se dilate o
contraiga, movimiento que se transmite por medio de varillas y engranajes a la aguja
indicadora.
El frontal visible consta de una esfera con una escala numerada, la aguja indicadora, y
alrededor de la escala numerada unas franjas de colores.
Algunos tienen además unas ventanillas graduadas y un botón giratorio de ajuste para
computar la TAS.
En anemómetros con dos escalas (knots y mph) hay que estar atento a no confundirse de
escala.
La velocidad indicada por el anemómetro se relaciona solo indirectamente con la
velocidad del avión respecto al suelo.
Velocidad indicada (IAS) es la leída directamente del instrumento; velocidad calibrada
(CAS) es la indicada corregida por el error de instalación o posición; la velocidad
verdadera (TAS) se obtiene corrigiendo la calibrada con la densidad real del aire; y por
último, la velocidad respecto al suelo (GS) se obtiene de la TAS +/- la velocidad del viento.
Las velocidades de operación normal del avión son las comprendidas en el arco verde.
El arco blanco es el rango de velocidades de operación con flaps.
El arco amarillo indica precaución; volar en este rango únicamente si no hay turbulencias
en el aire.
La velocidad del arco rojo no debe ser nunca rebasada por el avión so pena de producirle
daños estructurales.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
49
Limitando la velocidad se limita la fuerza máxima ejercida sobre las alas, o la fuerza de
resistencia ofrecida por los elementos estructurales, fuerzas que pueden llegar a romper
esos elementos (alas, timones, tren de aterrizaje, antenas, estabilizadores, etc…).
El límite de la velocidad de maniobra “garantiza” que el ala entre en pérdida an tes que un
excesivo factor de carga la rompa o rompa cualquier otra parte del aeroplano.
2.4.- Indicador de rumbo o dirección.
Este instrumento proporciona al piloto una referencia de la dirección del avión,
facilitándole el control y mantenimiento del rumbo.
Figura 2.12 Indicador de rumbo.
El desplazamiento de un lugar a otro en avión, se realiza a través de una ruta aérea
previamente elaborada, la cual se compone de uno o más tramos, en los cuales para
llegar de un punto al siguiente ha de seguirse una determinada dirección o rumbo, es
decir, el piloto debe “navegar” a través del aire para seguir esa ruta.
Antes de la aparición del indicador de dirección, los pilotos navegaban sirviéndose de la
brújula, y a la vista de las proezas narradas, con bastante eficiencia. Pero la brújula es un
instrumento que puede dar lugar a numerosos errores, exigiendo mucha atención y una
lectura adecuada, pues son muchos los efectos que alteran su funcionamiento y dan lugar
a interpretaciones erróneas. Por ejemplo, no es muy fácil realizar un giro con precisión en
base a la brújula, particularmente si el aire es turbulento.
Sin embargo, el indicador de dirección es inmune a las causas que hacen dificultosa la
lectura de la brújula, lo que le hace el instrumento adecuado para mantener el control

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
50
direccional del avión o su rumbo, pues sus indicaciones son más precisas y fiables que
las de la brújula. Este instrumento proporciona una indicación de dirección estable y
relativamente libre de errores.
Su funcionamiento se basa en la propiedad de rigidez en el espacio que tienen los
giróscopos.
2.4.1 Construcción.
Este instrumento consiste en un giróscopo cuyo eje de rotación es vertical, acoplado al
cual se encuentra una rosa de rumbos graduada de 0º a 359º. La caja del instrumento
tiene incrustado en su frontal visible un pequeño avión montado verticalmente cuyo morro
siempre apunta al rumbo del avión. Asimismo, dispone de un botón giratorio para ajustar
el rumbo.
Al efectuar un cambio de dirección, la caja del instrumento se mueve al unísono con el
avión, pero el giróscopo debido a su rigidez en el espacio continua manteniendo la
posición anterior. Este desplazamiento relativo de la caja respecto del eje vertical del rotor
se transmite a la rosa de rumbos, haciéndola girar de forma que muestre en todo
momento el rumbo, enfrentado al morro del avión de miniatura.
Figura 2.13 Construcción del indicador de rumbo.
Hay otro tipo de indicadores de dirección, que en lugar de la rosa de rumbos giratoria
disponen de una carta de rumbos circular, dispuesta en forma horizontal, que muestra en
una ventanilla el rumbo, de forma parecida a como se muestra en la brújula. Cuando el
aeroplano gira sobre su eje vertical, la carta de rumbos mantiene el eje marcando el
nuevo rumbo.
La rosa de rumbos está graduada en incrementos de 5 grados, con números cada 30
grados, y en algunos casos los puntos cardinales indicados por N(orte), S(ur), E(ste) y
W(est=Oeste).

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
51
2.4.2 Lectura.
La lectura de este instrumento es muy sencilla y no tiene dificultades; la dirección del
avión se muestra enfrentada a una marca frente al morro del pequeño avión, o en su caso
con una marca en la ventanilla.
No obstante, se ha de tener en cuenta lo siguiente: Este instrumento se desajusta, y
además no tiene cualidades magnéticas por lo que no detecta por si solo la posición del
norte magnético. Por ambas razones, el piloto debe chequearlo periódicamente con la
brújula y ajustarlo si es necesario mediante el botón giratorio, especialmente tras realizar
maniobras bruscas o giros prolongados. Este ajuste debe hacerse siempre con el avión
en vuelo recto y nivelado y con la brújula estable.
Figura 2.14 Lectura del indicador de dirección.
Algunos indicadores de dirección más avanzados tienen instalados unos sistemas de sincronización automática con la brújula, o con las líneas de flujo magnético terrestre, pero no suelen instalarse en aviones ligeros. [3]
2.4.3 Resumen.
El direccional proporciona al piloto una referencia constante de la dirección del avión.
Sus indicaciones son más precisas y fiables que las de la brújula.
Alineado con la brújula proporciona una indicación exacta y estable del rumbo magnético
del avión.
Su funcionamiento se basa en la propiedad de rigidez en el espacio de los giróscopos.
Está compuesto de un giróscopo de rotación vertical y una rosa de rumbos giratoria.
El rumbo se lee en la marca vertical enfrentada al morro del avión miniatura, y en algunos
giróscopos más antiguos en una ventanilla similar a la de la brújula.
Puesto que este instrumento se desajusta, debe ser ajustado de forma regular con la
lectura de la brújula.
El ajuste con la brújula debe realizarse siempre con el avión recto y nivelado.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
52
CAPÍTULO III
SELECCION DEL SOFTWARE Y
PROPUESTA DE DISEÑO DE LOS
CODIGOS PARA LA
SIMULACION DE LOS
INSTRUMENTOS
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
53
3 SELECCION DEL SOFTWARE Y PROPUESTA DE DISEÑO DE LOS CODIGOS PARA LA SIMULACION DE LOS INSTRUMENTOS
3.1.- Selección del software y Diseño de los programas de los instrumentos propuestos.
Existe una gran cantidad de lenguajes de programación entre los cuales esta c, c++.
Visual basic, java, etc. En el presente trabajo se selecciono un lenguaje que nos permita
programar microcontroladores para esto se selecciono el software PCW.
El software PCW CCS es un compilador de C para programar Microcontroladores PIC.
Algunas de esas características son:
-Al compilar genera un código máquina muy compacta y eficiente.
-Se integra perfectamente con MPLAB y otros simuladores/emuladores como PROTEUS
para el proceso de depuración.
-Incluye una biblioteca muy completa de funciones pre compiladas para el acceso al
hardware de los dispositivos (entrada/salida, temporizaciones, conversor A/D, transmisión
RS-232,bus I2C….,etc.
-Incorpora drivers para dispositivos externos, tales como pantallas LCD, teclados
numéricos, memorias EEPROM, conversores A/D, relojes en tiempo real, etc.(los drivers
son pequeños programas que sirven de interfaz entre los dispositivos hardware y nuestro
programa).
-Permite insertar partes de código directamente en Ensamblador, manteniendo otras
partes del programa en C.
Características del lenguaje C para este compilador
El lenguaje C estándar es independiente de cualquier plataforma. Sin embargo, para la programación de microcontroladores es necesario disponer de determinados comandos que se refieran a partes específicas de su hardware, como el acceso a memoria, temporizadores, etc. Por este motivo, además de los comandos, funciones y datos del lenguaje ANSI C, el compilador PCW incluye bibliotecas que incorporan determinados comandos que no son estándar, sino específicos para la familia de microcontroladores PIC. Éstos son básicamente de dos tipos: directivas del preprocesador y funciones precompiladas. [8] Directivas del preprocesador. El compilador PCW dispone de 7 tipos básicos de directivas: -Directivas derivadas del estándar de C, que permiten, entre otras funciones, un control básico del código y del flujo en el proceso de compilación:

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
54
#IF #IFDEF #INCLUDE #LIST #NOLIST #PRAGMA #UNDEF -Directivas asociadas a las bibliotecas precompiladas, que proporcionan al compilador información relacionada con estas bibliotecas: #USE DELAY #USE FAST_IO #USE FIXED_IO #USE I2C #USE RS232 #USE STANDARD_IO -Directivas relacionadas con la especificación del dispositivo, por un lado, para definir los mapas de memoria y el juego de instrucciones, y por otro, incluir información necesaria para la programación del dispositivo en los ficheros de salida de la compilación:
#DEVICE #ID #FUSES #TYPE -Directivas de cualificación de funciones, para identificar características especiales de una función: #INLINE #INT_DEFAULT #INT_GLOBAL #INT_xxxxx #SEPARATE -Directivas de control del compilador, para definir opciones referidas a la compilación del código del programa: #CASE #OPT #ORG #PRIORITY -Directivas de control de la memoria del microcontrolador, para gestionar y reservar el uso de determinadas zonas de memoria para variables: #ASM #BIT
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
55
#BYTE #ENDASM #LOCATE #RESERVE #ROM #ZERO_RAM [9] Funciones precompiladas. Se puede facilitar considerablemente la tarea de programación si no es necesario construir por nosotros mismos aquellas funciones que son de utilización más frecuente, como leer la entrada de un teclado o imprimir un determinado mensaje en una pantalla LCD conectada como salida. Existen funciones en C incluidas en el compilador PCW para manejar los diferentes recursos del microcontrolador, desde el bus I2C hasta el conversor A/D. Utilidades adicionales
El entorno PCW incluye, además del IDE y del compilador, una serie de utilidades adicionales con las que se amplían las posibilidades de éste, y que se encuentran en los menús View y Tools de la barra de menús, veamos algunas de ellas: -Monitor del puerto serie: Consiste en un terminal que monitoriza la entrada y la salida del puerto serie del computador. -Selección de dispositivos (Device Selection Tool): Esta utilidad consta de una base de datos con los dispositivos que puede programar el compilador, incluyendo todas sus características hardware, de manera que se puede emplear para buscar aquellos dispositivos que cumplan una serie de propiedades comunes. -Editor de dispositivos (Device Editor): Este programa también emplea la base de datos de dispositivos, y permite editar los componentes para modificar sus características hardware, así como añadir nuevos dispositivos o eliminar algunos de ellos. -Conversor numérico: Esta utilidad realiza conversiones entre los tipos de datos unsigned, signed, hex y float. -Extracción de datos de calibrado: Esta opción permite leer los datos de calibración existentes en la memoria de programa de un determinado dispositivo. Estos datos contienen información particular de cada microcontrolador a su salida de fábrica, y se refieren a posibles problemas especiales que pudieran haber tenido lugar durante el desarrollo y fabricación. Mediante esta opción es posible leer estos datos y grabarlos en un fichero .H o .C que incorporará una directiva #ROM para dicho dispositivo, con lo que cada vez que se programe el microcontrolador se incluirán estos datos de calibrado. -Desensamblador: Esta opción lee un fichero en Código máquina y lo traduce a su equivalente en Ensamblador, con lo que se podría insertar este código en un programa en C, mediante las directivas #ASM y #ENDASM.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
56
3.2.- Diseño del programa para simular el Horizonte artificial.
El indicador de actitud, más conocido como horizonte artificial, es un instrumento que muestra la actitud del avión respecto al horizonte. Su función consiste en proporcionar al piloto de forma instantánea la posición del avión en alabeo y profundidad. La incorporación del horizonte artificial a los aviones ha sido fundamental para permitir el
vuelo en condiciones de visibilidad reducida o nula.
Este instrumento opera en base a una propiedad giroscópica, concretamente la de rigidez
en el espacio.
Código del programa para simular el Horizonte artificial.
#include <18f4550.h> //librerias del compilador.
#device adc=10
#FUSES
#use delay(clock=4000000)
#include <HDM64GS12.c>
#include <graphics.c>
#use fast_io(b)
#use fast_io(c)
#include <math.h>
#include <stdio.h>
void main()
{
float p,presion_kpa,presion_psi,presion_atm,altitud_mts, altitud_ft;
int x1=0,y1=0,x2=0,y2=0,xc1=0,xc2=0,yc1=0,yc2=0;
float ANG=0,ANG2=0, XX1=0,YY1=0,XX2=0,YY2=0;
float ANGC=0,ANGC2=0,XXC1=0,XXC2=0,YYC1=0,YYC2=0;
char nombre[]="ESIME", escuela[]="IPN";
char tbasica[]="T BASICA",seminario[]="SEMINARIO AVIONICA";
char let_presion[]="PRESION",let_altitud[]="ALTITUD";
char kpa[]="kpa",psi[]="psi",atm[]="atm";
char ft[]="ft",mts[]="mts";
char val_presionkpa[10],val_presionpsi[10],val_presionatm[10];
char val_altitudft[10],val_altitudmts[10];
int16 q;
float tv,tr,temp,y,tf,error; //Variables ecuaciones
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
57
setup_adc_ports(AN0); //Canal 0 analógico
setup_adc(ADC_CLOCK_INTERNAL); //Fuente de reloj RC
glcd_init(on); //Inicializar LCD
glcd_text57(0,0,nombre,2,on);
delay_ms(2000);
glcd_text57(0,0,nombre,2,off);
glcd_text57(17,8,escuela,6,on);
delay_ms(2000);
glcd_text57(17,8,escuela,6,off);
glcd_text57(17,8,tbasica,2,on);
delay_ms(2000);
glcd_text57(17,8,tbasica,2,off);
while(TRUE)
{
glcd_circle(72,95,25,0,1); //limite del horizonte
delay_ms(200);
glcd_line(57,95,67,95,1); //Representacion del avión
delay_ms(200);
glcd_line(67,95,72,100,1);
delay_ms(200);
glcd_line(72,100,77,95,1);
delay_ms(200);
glcd_line(77,95,87,95,1);
delay_ms(200);
glcd_circle(72,95,25,0,0); //limite del horizonte
glcd_line(57,95,67,95,0); //Representacion del avion
glcd_line(67,95,72,100,0);
glcd_line(72,100,77,95,0);
glcd_line(77,95,87,95,0);
set_adc_channel(0); //Lectura del giroscopo alabeo
delay_us(20);
q = read_adc();
p = 5.0 * q / 1024.0;
ANG=(p*360)/5;
ANG=ANG*(2*3.141592)/360;

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
58
ANG2=ANG +180;
XX1=(24*cos(ANG))+72;
x1=XX1;
YY1=(24*sin(ANG))+95;
y1=YY1;
XX2=(24*cos(ANG2))+72;
x2=XX2;
YY2=(24*sin(ANG2))+95;
y2=YY2;
set_adc_channel(1); //Lectura del giroscopo cabeceo
delay_us(20);
q = read_adc();
p = 5.0 * q / 1024.0;
ANGC=(p*360)/5;
ANGC=ANGC*(2*3.141592)/360;
ANGC2=ANGC +180;
XXC1=(5*cos(ANGC))+65;
xc1=XC1;
YYC1=(5*sin(ANGC))+80;
yc1=YYC1;
XXC2=(5*cos(ANGC2))+65;
xc2=XXC2;
YYC2=(5*sin(ANGC2))+80;
yc2=YYC2;
glcd_line(72,95,x1,y1,1);
delay_ms(100);
glcd_line(72,95,x1,y1,0);
delay_ms(50);
glcd_line(72,95,x2,y2,1);
delay_ms(100);
glcd_line(72,95,x2,y2,0);
delay_ms(50);
glcd_line(65,80,xc1,yc1,1);
delay_ms(100);
glcd_line(65,80,xc1,yc1,0);
delay_ms(50);
glcd_line(65,80,xc2,yc2,1);

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
59
delay_ms(100);
glcd_line(65,80,xc2,yc2,0);
delay_ms(50);
}
}
3.3.- Diseño del programa para simular el Altímetro.
Para poder tener medidas precisas se incluye un dispositivo de medida de temperatura, para poder hacer las correcciones correspondientes considerando la temperatura, para esto el circuito integrado MPXHZ6115A de Freescale es un componente monolítico de silicio para medir la temperatura, con acondicionamiento de señal con un amplificador operacional interna y unas redes de resistencias de película delgada que proporcionan una señal de salida elevada y una compensación de temperatura desde -40°c a +125°c. Un gel de fluorosilicona aísla la superficie de la placa y los hilos del ambiente externo, al mismo tiempo que permite que la señal de presión sea transmitida al diafragma de silicona. Con un consumo típico de 6 mA a 5 V. es necesario mantener el sensor en un estado de apagado cuando no este en uso. El sensor requiere de unos 20 ms para su calentamiento, antes d e realizar cualquier medida. El componente proporciona la función de transferencia:
Donde P es la presión aplicada, Vs es la tensión de alimentación, PE es el error de presión y TF el factor de temperatura. La salida del sensor de presión se mide usando el conversor A/D interno del microcontrolador. Las alturas por debajo de 11.000 m (33.000 pies) pueden ser calculadas usando la fórmula barométrica:
Donde Pref es la presión en la base (por ejemplo, a MSL), y h la altitud en metros.
El modelo ISA está basado en la presión del aire a nivel del mar, con un valor de 101.325
kPa y una temperatura de +15 °c. la temperatura a 11000 m se toma un valor de -56,5 °c
por lo que la temperatura disminuye 6,5 °c cada 1000 m hasta llegar a unos 11000 m. la
temperatura de la atmósfera en cada momento puede desviarse considerablemente de
este modelo, por lo que es necesario aplicar una corrección a las lecturas de altitud. La
corrección de temperatura puede ser calculada con la ayuda de la ley de charles para los
gases ideales. Dicha ley establece que el volumen del gas es proporcional a la
temperatura absoluta.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
60
donde V = volumen del gas; T = temperatura absoluta y k = constante. Para una columna de aire con un área base A y una altura h, la fórmula puede describirse como:
Comparando la atmósfera estándar con las condiciones actuales, k sigue siendo
constante y para una columna de aire con la misma área base, A se hace también
constante, por lo que las únicas variaciones que nos quedan son en h y T. Usando el
índice s del modelo ISA y para el aire ambiente real, podemos escribir:
Tomando en consideración todas estas variables se procede a describir el cuerpo del programa.
Codigo del programa para simular el Altímetro.
#include <18f4550.h> //Librerias del compilador.
#device adc=10
#FUSES
#use delay(clock=4000000)
#include <HDM64GS12.c>
#include <graphics.c>
#use fast_io(b)
#use fast_io(c)
#include <math.h>
#include <stdio.h>
#define LBASE 0.065 // Temperatura K/m x 10
#define TBASE 2881.50 // (15.0 + 273.15) x 10
#define GMRL 5.255780029 // -gM/RLb
#define RLGM 0.19026674 // -RLb/gM
#define PE 69176888 // Correccion del error de presion por el sensor
void main(void)
{
char SET_QNH[] = "AJUSTAR QNH";
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
61
char let_presion[]="PRESION",let_altitud[]="ALTITUD";
char kpa[]="kpa",psi[]="psi";
char ft[]="ft",mts[]="mts";
char val_presionkpa[10],val_presionpsi[10],val_presionatm[10];
char val_altitudft[10],val_altitudmts[10];
int16 q;
float tv,tr,temp,y,tf,error;
float p,presion_kpa,presion_psi,presion_atm,altitud_mts, altitud_ft,Pressure_word1,
Pressure_word0;
int x1=0,y1=0;
float ANG=0, XX1=0,YY1=0;
setup_adc_ports(AN0); //Canal analógico
setup_adc(ADC_CLOCK_INTERNAL); //Fuente de reloj RC
glcd_init(on); //Inicializar LCD
glcd_text57(0,0,nombre,2,on);
delay_ms(2000);
glcd_text57(0,0,nombre,2,off);
glcd_text57(17,8,escuela,6,on);
delay_ms(2000);
glcd_text57(17,8,escuela,6,off);
while(true)
{
set_adc_channel(0); //Lectura presión en voltios
delay_us(20);
q = read_adc();
p = 5.0 * q / 1024.0;
presion_kpa= (0.475+p)/0.045; //Lectura presión en Kpa
set_adc_channel(1); //Lectura temperatura
delay_us(20);
q = read_adc();
tv = 5.0 * q / 1024.0;
tr = tv * 10000.0 / (5.0 - tv);
y = log(tr/20000.0);
y = (1.0/298.15) + (y *(1.0/4050.0));
temp=1.0/y;
temp = temp -273.15;
if (temp>=0 && temp<=85) TF=1.0;
else TF=3.0;
error = TF * 1.5; //Cálculo del error de presión con la temperatura

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
62
presion_kpa=presion_kpa-error; //Presión en Kpa
altitud_mts = -7990.652789*log(presion_kpa/101.304); //Altura
altitud_ft=altitud_mts*3.28; //altura en ft
delay_ms(100);
sprintf(val_presionkpa,"%f",presion_kpa);//
sprintf(val_altitudmts,"%4.1f",altitud_mts);
sprintf(val_altitudft,"%4.1f",altitud_ft);
glcd_text57(10,2,let_presion,1,on); //Escribir el texto que contiene la variable
mensaje
glcd_text57(75,2,let_altitud,1,on);
glcd_text57(2,12,kpa,1,on);
glcd_text57(61,12,ft,1,on);
glcd_text57(61,22,mts,1,on);
glcd_text57(25,12,val_presionkpa,1,on);
glcd_text57(80,12,val_altitudft,1,on);
glcd_text57(80,22,val_altitudmts,1,on);
delay_ms(2000);
glcd_text57(25,12,val_presionkpa,1,off);
glcd_text57(80,12,val_altitudft,1,off);
glcd_text57(80,22,val_altitudmts,1,off);
}
}
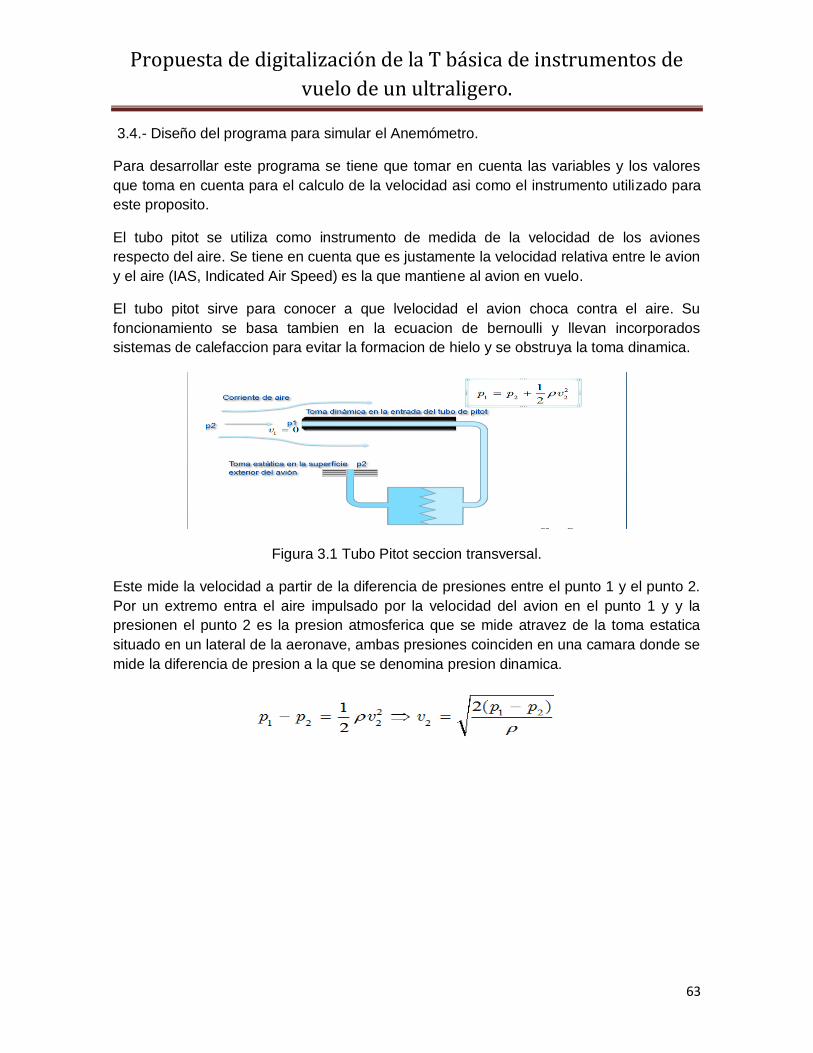
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
63
3.4.- Diseño del programa para simular el Anemómetro.
Para desarrollar este programa se tiene que tomar en cuenta las variables y los valores
que toma en cuenta para el calculo de la velocidad asi como el instrumento utilizado para
este proposito.
El tubo pitot se utiliza como instrumento de medida de la velocidad de los aviones
respecto del aire. Se tiene en cuenta que es justamente la velocidad relativa entre le avion
y el aire (IAS, Indicated Air Speed) es la que mantiene al avion en vuelo.
El tubo pitot sirve para conocer a que lvelocidad el avion choca contra el aire. Su
foncionamiento se basa tambien en la ecuacion de bernoulli y llevan incorporados
sistemas de calefaccion para evitar la formacion de hielo y se obstruya la toma dinamica.
Figura 3.1 Tubo Pitot seccion transversal.
Este mide la velocidad a partir de la diferencia de presiones entre el punto 1 y el punto 2.
Por un extremo entra el aire impulsado por la velocidad del avion en el punto 1 y y la
presionen el punto 2 es la presion atmosferica que se mide atravez de la toma estatica
situado en un lateral de la aeronave, ambas presiones coinciden en una camara donde se
mide la diferencia de presion a la que se denomina presion dinamica.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
64
Codigo del programa para simular el Anemómetro
#include <18f4550.h> #device adc=10 #FUSES #use delay(clock=4000000) #include <HDM64GS12.c> #include <graphics.c> #use fast_io(b) #use fast_io(c) #include <math.h> #include <stdio.h> void main() { float p,p1,p2,presiond_kpa,presione_kpa ,altitud_mts, altitud_ft,vel_ms,vel_kn,difpres; int x1=0,y1=0; float ANG=0, XX1=0,YY1=0; float den, presion_phg,knots; char nombre[]="ESIME", escuela[]="IPN",Tbasica[]="T BASICA"; char let_presion[]="PRESION",let_altitud[]="ALTITUD",let_velocidad[]="Indicated Air Speed"; char kpa[]="kpa",psi[]="psi",knot[]="Knot"; char ft[]="ft",mts[]="mt/s"; char val_presionekpa[10],val_difpres[10]; char val_altitudft[10],val_altitudmts[10]; char val_velknots[10],val_vel[10]; int16 q,q1,q2; float tv,tr,temp,y,tf,error,tempf; //Variables ecuaciones setup_adc_ports(AN0); setup_adc(ADC_CLOCK_INTERNAL); //Fuente de reloj RC glcd_init(on); //Inicializar LCD glcd_text57(0,0,nombre,2,on); delay_ms(2000); glcd_text57(0,0,nombre,2,off); glcd_text57(17,8,escuela,6,on); delay_ms(2000); glcd_text57(17,8,escuela,6,off); glcd_text57(15,25,Tbasica,2,on); delay_ms(2000); glcd_text57(15,25,Tbasica,2,off);
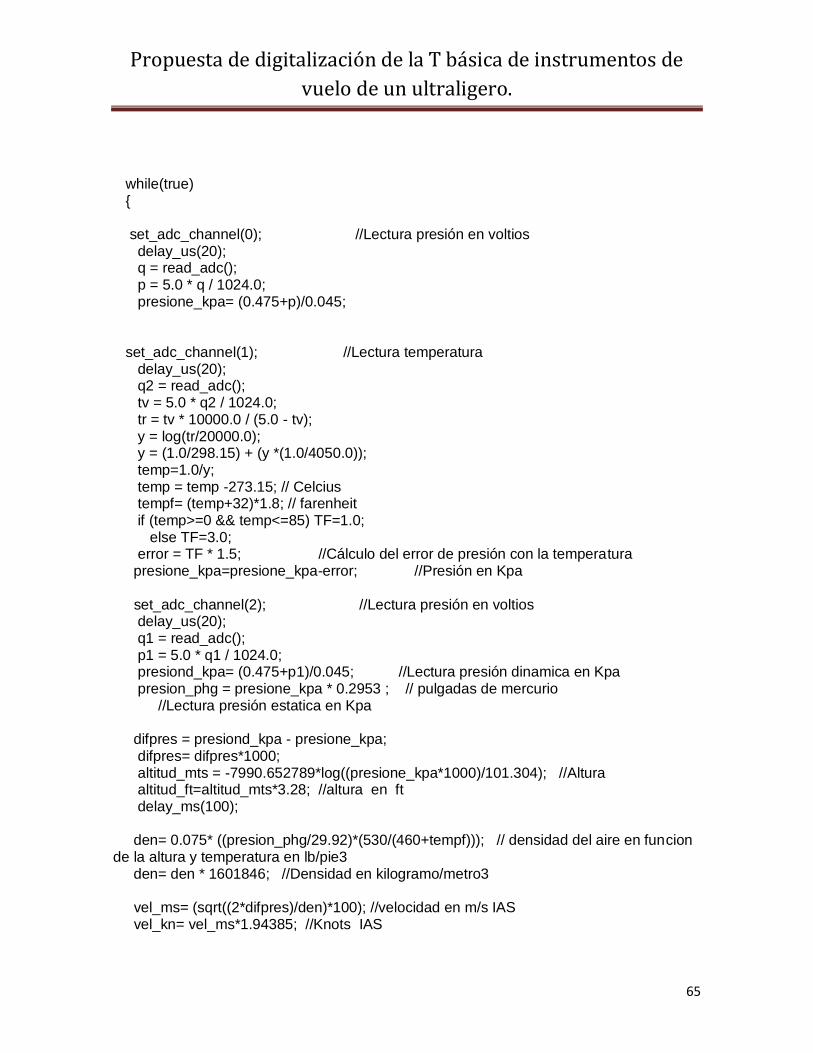
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
65
while(true) { set_adc_channel(0); //Lectura presión en voltios delay_us(20); q = read_adc(); p = 5.0 * q / 1024.0; presione_kpa= (0.475+p)/0.045; set_adc_channel(1); //Lectura temperatura delay_us(20); q2 = read_adc(); tv = 5.0 * q2 / 1024.0; tr = tv * 10000.0 / (5.0 - tv); y = log(tr/20000.0); y = (1.0/298.15) + (y *(1.0/4050.0)); temp=1.0/y; temp = temp -273.15; // Celcius tempf= (temp+32)*1.8; // farenheit if (temp>=0 && temp<=85) TF=1.0; else TF=3.0; error = TF * 1.5; //Cálculo del error de presión con la temperatura presione_kpa=presione_kpa-error; //Presión en Kpa set_adc_channel(2); //Lectura presión en voltios delay_us(20); q1 = read_adc(); p1 = 5.0 * q1 / 1024.0; presiond_kpa= (0.475+p1)/0.045; //Lectura presión dinamica en Kpa presion_phg = presione_kpa * 0.2953 ; // pulgadas de mercurio //Lectura presión estatica en Kpa difpres = presiond_kpa - presione_kpa; difpres= difpres*1000; altitud_mts = -7990.652789*log((presione_kpa*1000)/101.304); //Altura altitud_ft=altitud_mts*3.28; //altura en ft delay_ms(100); den= 0.075* ((presion_phg/29.92)*(530/(460+tempf))); // densidad del aire en funcion de la altura y temperatura en lb/pie3 den= den * 1601846; //Densidad en kilogramo/metro3 vel_ms= (sqrt((2*difpres)/den)*100); //velocidad en m/s IAS vel_kn= vel_ms*1.94385; //Knots IAS

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
66
sprintf(val_difpres,"%f",difpres);//En un bucle infinito, sprintf(val_velknots,"%f",vel_kn); sprintf(val_vel,"%f",vel_ms); //aqui empiezan las mediciones glcd_text57(10,2,let_velocidad,1,on);//Escribir el texto que contiene la variable mensaje glcd_text57(60,16,Knot,1,on); glcd_text57(60,30,mts,1,on); delay_ms(200); // borrar el texto que contiene la variable mensaje glcd_text57(20,16,val_velknots,1,on); //Escribir el texto que contiene la variable mensaje glcd_text57(20,30,val_vel,1,on); //Escribir el texto que contiene la variable mensaje2 //Escribir el texto que contiene la variable mensaje3 delay_ms(200); glcd_text57(20,16,val_velknots,1,off); glcd_text57(20,30,val_vel,1,off); } }

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
67
3.5.- Diseño del programa para simular el indicador de rumbo.
Para el diseño de el programa se tiene que considerar el sensor a utilizar y en este caso
existen una amplia gama de sensores proporcionados por distintos fabricantes entre los
cuales están : Honeywell Aerospace Plymouth, que es una empresa proveedora de
circuitos electrónicos a industrias en telecomunicaciones y aéreas, es también conocida
como fabricante de sensores de precisión magnético para una amplia variedad de
aplicaciones comerciales HMC1051/HMC1052L/HMC1053. Pueden ser usados en
ambientes de bajo y fuerte campo magnético possen 1,2 y hasta 3 ejes.
El modulo Hitachi HM55B es un sensor de campo magnético de 2 coordenadas (x ,y) ideal
para aplicaciones en donde se necesite visualizar o controlar la dirección, como por
ejemplo un robot que siga el punto cardinal que se le ha asignado como destino. Es capaz
de detectar variaciones bajo exposición de un campo magnético. Este producto fue
asignado por PARALLAX Inc. En un comodo empaquetado DIP con regulador de voltaje
compatible con 5 Vdc.
La brújula digital Hitachi HM55B tiene 2 coordenadas X e Y, cada coordenada X reporta (x
cos (θ)), y la coordenada Y reporta (y sen ((θ)),para hallar θ se usa la función ATAN (-y/x)
con la cual obtenemos fácilmente el punto cardinal hacia el cual nos dirigimos ,a través de
una escala de 0 a 360° donde el cero representa el norte geográfico.
Cuerpo del programa para simular el indicador de rumbo.
#include <18f4550.h>
#device adc=10
#FUSES
#use delay(clock=4000000)
#include <HDM64GS12.c>
#include <graphics.c>
#use fast_io(b)
#use fast_io(c)
#include <math.h>
#include <stdio.h>
void main()
{
float angulo,p,presion_kpa,presion_psi,presion_atm,altitud_mts, altitud_ft;
int x1=0,y1=0,x2=0,y2=0;
float x=0, ANG=0, XX1=0,YY1=0,angle2;
char nombre[]="ESIME", escuela[]="IPN";
char seminario[]="SEMINARIO AVIONICA";
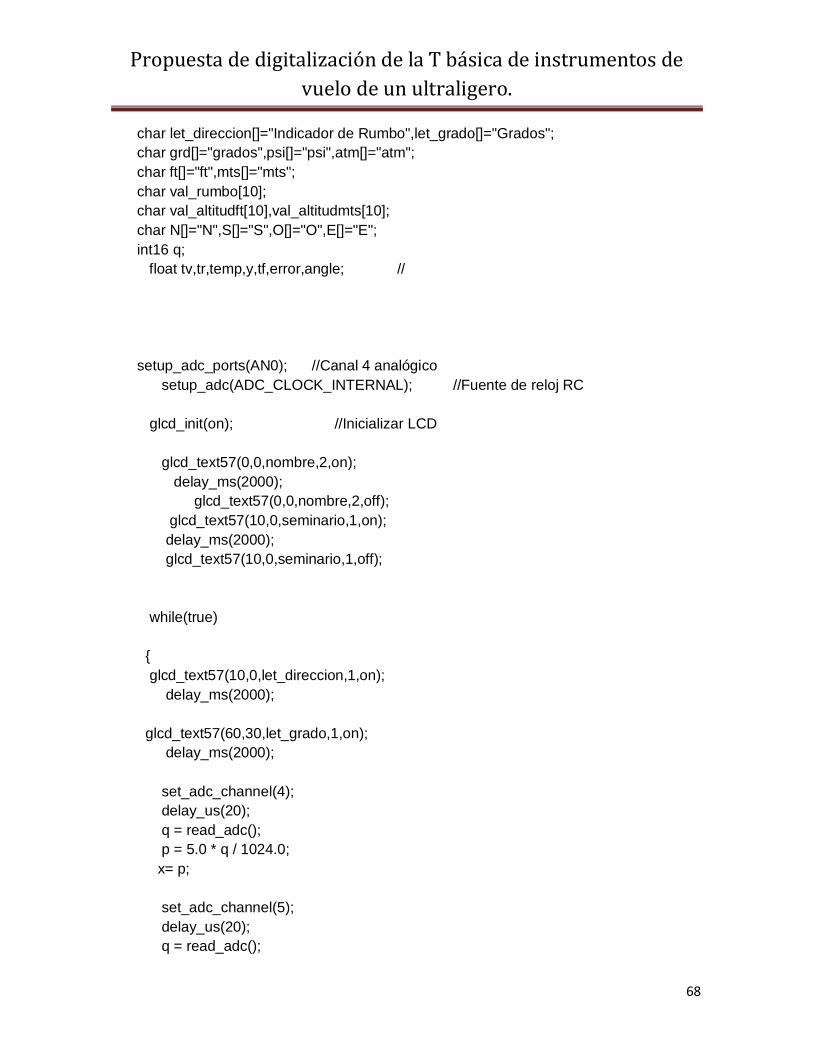
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
68
char let_direccion[]="Indicador de Rumbo",let_grado[]="Grados";
char grd[]="grados",psi[]="psi",atm[]="atm";
char ft[]="ft",mts[]="mts";
char val_rumbo[10];
char val_altitudft[10],val_altitudmts[10];
char N[]="N",S[]="S",O[]="O",E[]="E";
int16 q;
float tv,tr,temp,y,tf,error,angle; //
setup_adc_ports(AN0); //Canal 4 analógico
setup_adc(ADC_CLOCK_INTERNAL); //Fuente de reloj RC
glcd_init(on); //Inicializar LCD
glcd_text57(0,0,nombre,2,on);
delay_ms(2000);
glcd_text57(0,0,nombre,2,off);
glcd_text57(10,0,seminario,1,on);
delay_ms(2000);
glcd_text57(10,0,seminario,1,off);
while(true)
{
glcd_text57(10,0,let_direccion,1,on);
delay_ms(2000);
glcd_text57(60,30,let_grado,1,on);
delay_ms(2000);
set_adc_channel(4);
delay_us(20);
q = read_adc();
p = 5.0 * q / 1024.0;
x= p;
set_adc_channel(5);
delay_us(20);
q = read_adc();
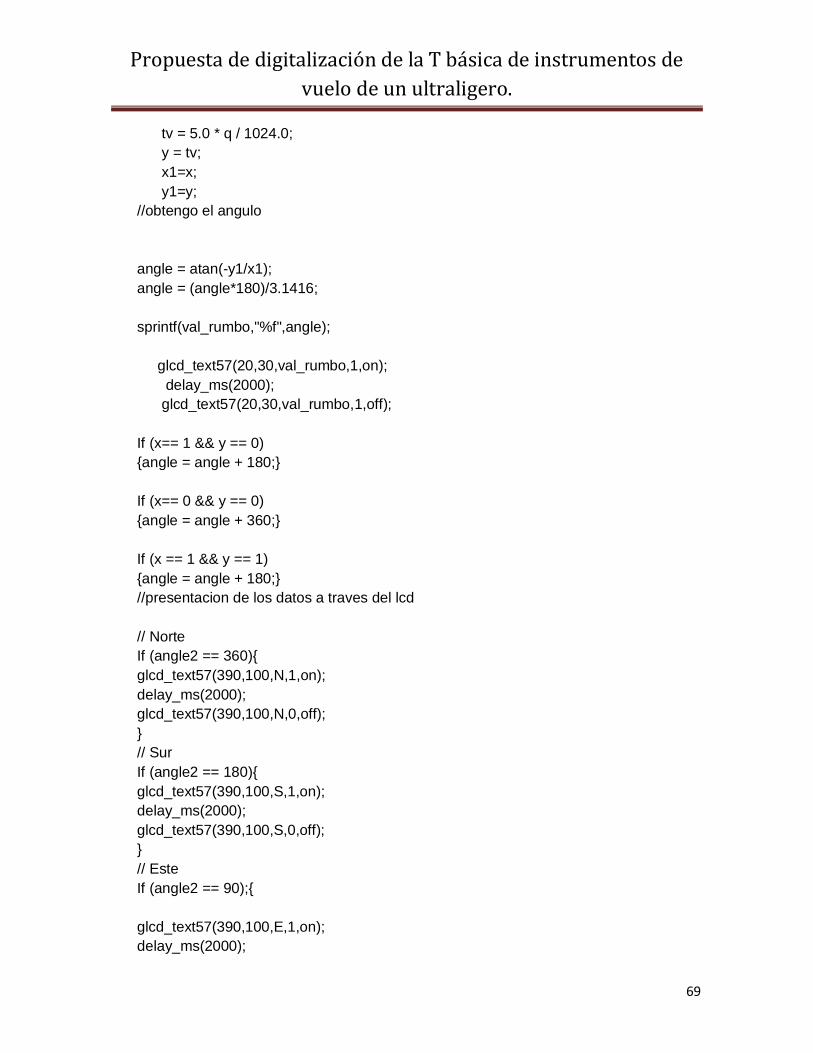
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
69
tv = 5.0 * q / 1024.0;
y = tv;
x1=x;
y1=y;
//obtengo el angulo
angle = atan(-y1/x1);
angle = (angle*180)/3.1416;
sprintf(val_rumbo,"%f",angle);
glcd_text57(20,30,val_rumbo,1,on);
delay_ms(2000);
glcd_text57(20,30,val_rumbo,1,off);
If (x== 1 && y == 0)
{angle = angle + 180;}
If (x== 0 && y == 0)
{angle = angle + 360;}
If (x == 1 && y == 1)
{angle = angle + 180;}
//presentacion de los datos a traves del lcd
// Norte
If (angle2 == 360){
glcd_text57(390,100,N,1,on);
delay_ms(2000);
glcd_text57(390,100,N,0,off);
}
// Sur
If (angle2 == 180){
glcd_text57(390,100,S,1,on);
delay_ms(2000);
glcd_text57(390,100,S,0,off);
}
// Este
If (angle2 == 90);{
glcd_text57(390,100,E,1,on);
delay_ms(2000);
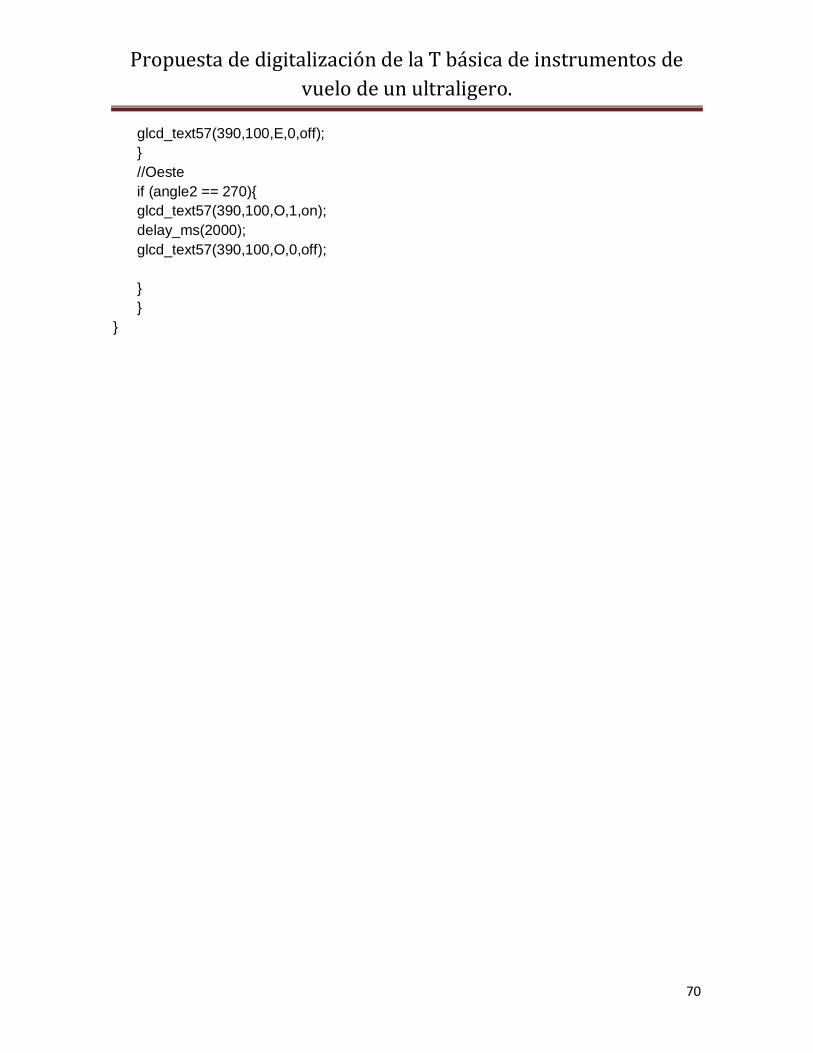
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
70
glcd_text57(390,100,E,0,off);
}
//Oeste
if (angle2 == 270){
glcd_text57(390,100,O,1,on);
delay_ms(2000);
glcd_text57(390,100,O,0,off);
}
}
}

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
71
CAPÍTULO IV
PROGRAMA PROTEUS Y CIRCUITOS
ELECTRONICOS PROPUESTOS PARA LA
SIMULACION DE LOS
INSTRUMENTOS
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
72
4 PROGRAMA PROTEUS Y CIRCUITOS ELECTRONICOS PROPUESTOS PARA LA SIMULACION DE LOS INSTRUMENTOS
4.1.- Acerca del software Proteus ISIS 7.6.
Proteus es una compilación de programas de diseño y simulación electrónica,
desarrollado por Labcenter Electronics que consta de los dos programas principales: Ares
e Isis, y los módulos VSM y Electra.
4.1.1 Software ISIS.
El Programa ISIS, Intelligent Schematic Input System (Sistema de Enrutado de
Esquemas Inteligente) permite diseñar el plano eléctrico del circuito que se desea realizar
con componentes muy variados, desde simples resistencias, hasta alguno que
otro microprocesador o microcontrolador, incluyendo fuentes de alimentación,
generadores de señales y muchos otros componentes con prestaciones diferentes. Los
diseños realizados en Isis pueden ser simulados en tiempo real, mediante el módulo VSM,
asociado directamente con ISIS.
4.1.2 El modulo VSM
Una de las prestaciones de Proteus, integrada con ISIS, es VSM, el Virtual System
Modeling (Sistema Virtual de Modelado), una extensión integrada con ISIS, con la cual se
puede simular, en tiempo real, con posibilidad de más rapidez; todas las características de
varias familias de microcontroladores, introduciendo nosotros mismos el programa que
controlará el microcontrolador y cada una de sus salidas, y a la vez, simulando las tareas
que queramos que lleve a cabo con el programa. Se pueden simular circuitos con
microcontroladores conectados a distintos dispositivos, como motores, lcd’s, teclados en
matriz, etc. Incluye, entre otras, las familias de PIC's PIC10, PIC12, PIC16, PIC18, PIC24
y dsPIC33. ISIS es el corazón del entorno integrado PROTEUS. Combina un entorno de
diseño de una potencia excepcional con una enorme capacidad de controlar la apariencia
final de los dibujos.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
73
4.2.- Diseño de los circuitos electrónicos en Proteus ISIS 7.6.
En este capitulo se muestra las pruebas y mediciones realizadas, incluyendo la
simulación en el sofware Proteus. El presente proyecto presenta como finalidad tomar
datos de los sensores de presión, giroscópicos y magnéticos a medida que se toman los
datos, estos podrán ser apreciados en el lcd conectado al microcontrolador.
Para esto se usa el sensor de presión MPX4115A, el sensor magnético Hitachi HM55B
Compass Module, pero dado las limitaciones del software Proteus se sustituye ciertos
componentes por potenciómetros que simulen las señales analógicas, sin mencionar que
el lcd grafico en Proteus es algo limitado por lo que se tuvo que adaptar los gráficos y
escalar los datos presentados en pantalla para un entendimiento del mismo.
El sensor dispuesto para obtener las mediciones es el Módulo Compás Hitachi HM55B.
Este dispositivo tiene como objetivo medir las variaciones magnéticas, reflejadas en dos
valores X e Y. Aparte de su alimentación (Vcc,Gnd) necesita tres entradas para su normal
funcionamiento: enable, din, clock y presenta una salida: dout.normal funcionamiento:
enable, din, clock y presenta una salida: dout. [7]
Se escogió el PIC 18f4550 como controlador, algunas de sus características son:
Fabricate: MICROCHIP.
Referencia: PIC18F4550-I/P
Memoria FLASH: 32K
Memoria RAM: 2K
Memoria EEPROM: 256 Bytes.
Pines de entrada/salida digitales: 35.
Canales ADC: 13 entradas conversoras análogo a digital de 10 bits de resolución.
Temporizadores: 4
Salida PWM: 1
Comunicación: USB V2.0, Serial USART, SPI, I2C.
Oscilador: Interno desde 32Khz hasta 8Mhz, Externo con cristal de hasta 48Mhz.
Voltaje de operación: 4.2V-5.5V. (ver anexo A datasheet PIC18F4550)

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
74
4.3.- Presentación del funcionamiento del circuito electrónico grafico.
Figura 4.1 Esquemático en Proteus.
Para la simulación de los sensor y debido a que algunos de estos no constan en el listado
de los componentes que tiene el programa Proteus se ha tenido que simularlos mediante
potenciómetros que hace la función del sensor, simula la obtención de los valores X e Y
adquiridos, utilizando una conversión analógica a digital de las variaciones de voltaje de
los potenciómetros, también simulan las señales entregadas por un sensor giroscópico en
2 ejes ajustando estos valores por medio de conversiones a las muestras obtenidas por
el sensor real y finalmente maneja el envío de datos al microcontrolador. Cabe resaltar
que esta simulación no comprende todas las características de los sensores, más bien
sirve para entender como funcionan los programas.
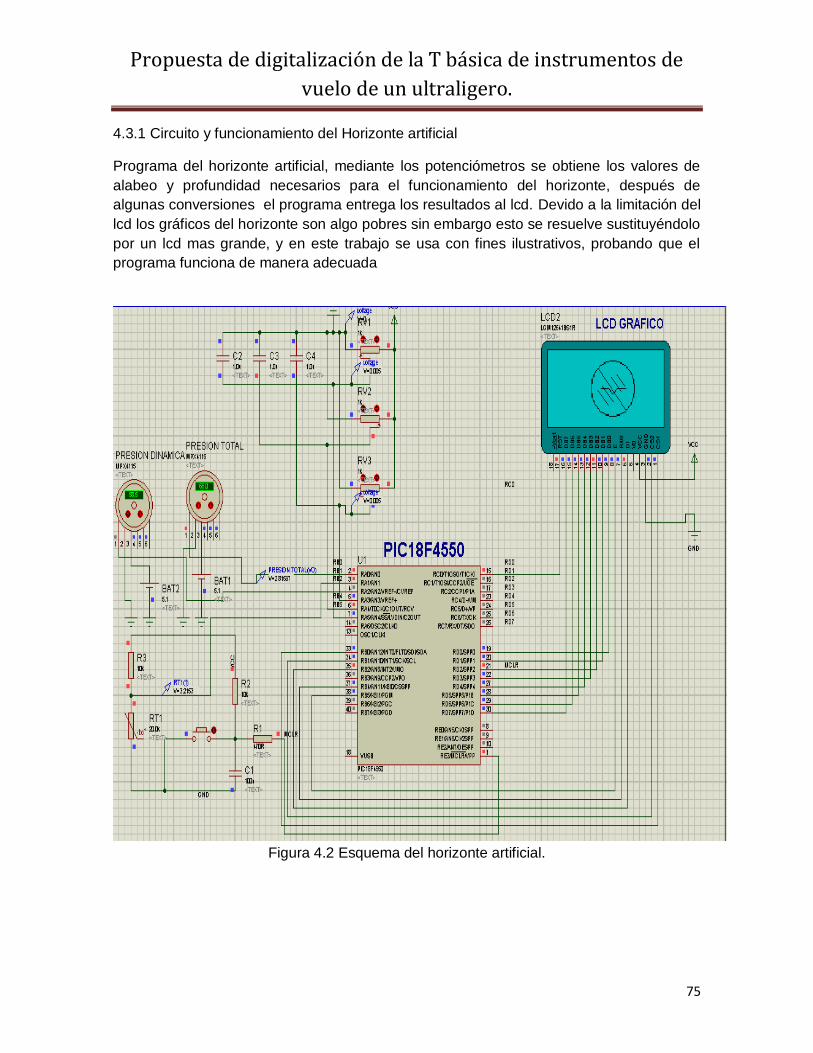
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
75
4.3.1 Circuito y funcionamiento del Horizonte artificial
Programa del horizonte artificial, mediante los potenciómetros se obtiene los valores de
alabeo y profundidad necesarios para el funcionamiento del horizonte, después de
algunas conversiones el programa entrega los resultados al lcd. Devido a la limitación del
lcd los gráficos del horizonte son algo pobres sin embargo esto se resuelve sustituyéndolo
por un lcd mas grande, y en este trabajo se usa con fines ilustrativos, probando que el
programa funciona de manera adecuada
Figura 4.2 Esquema del horizonte artificial.
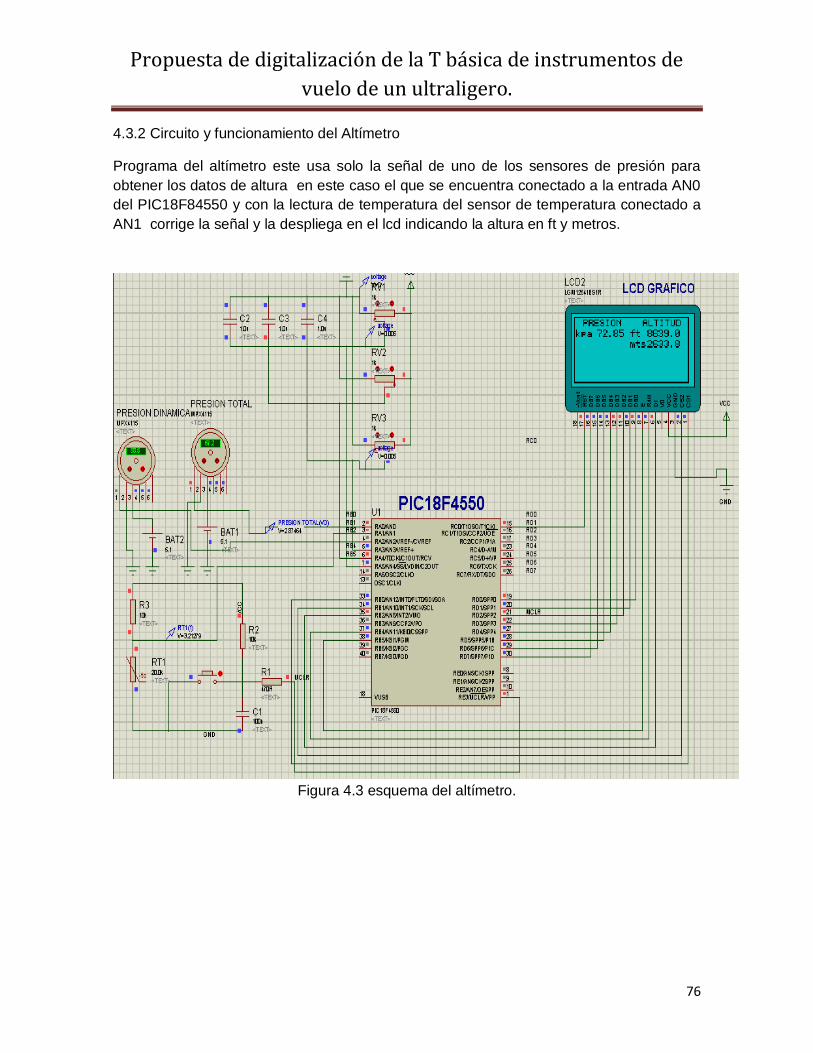
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
76
4.3.2 Circuito y funcionamiento del Altímetro
Programa del altímetro este usa solo la señal de uno de los sensores de presión para
obtener los datos de altura en este caso el que se encuentra conectado a la entrada AN0
del PIC18F84550 y con la lectura de temperatura del sensor de temperatura conectado a
AN1 corrige la señal y la despliega en el lcd indicando la altura en ft y metros.
Figura 4.3 esquema del altímetro.
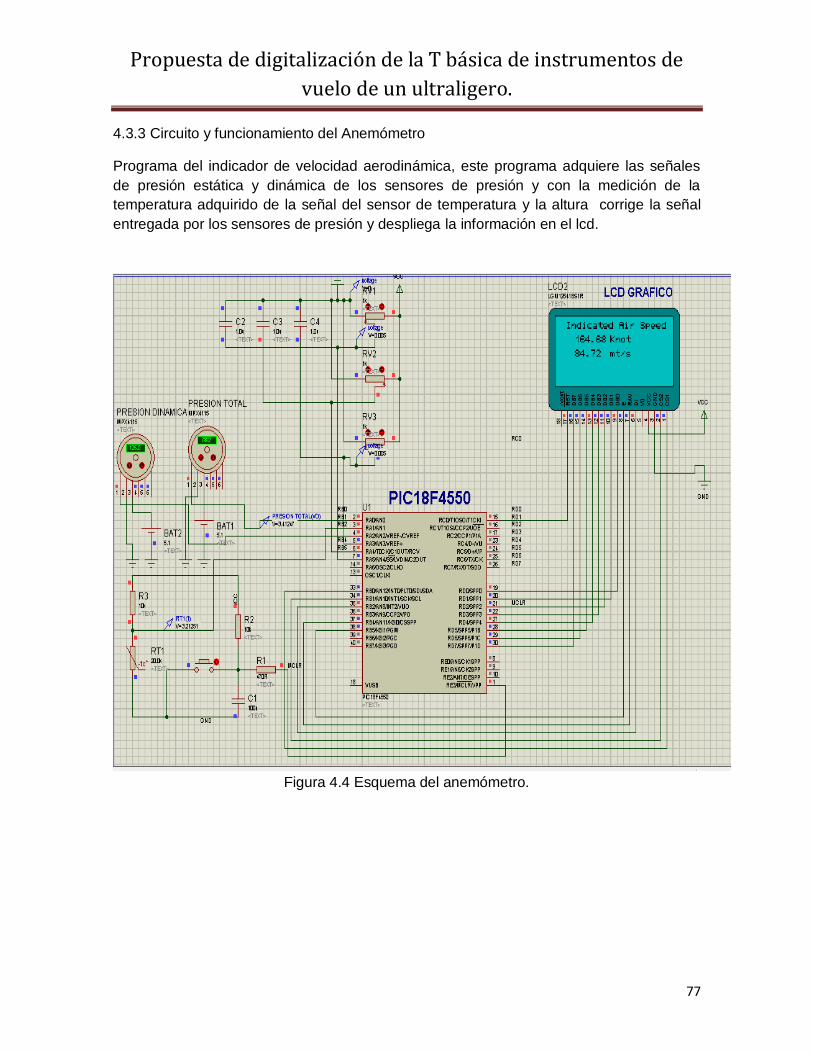
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
77
4.3.3 Circuito y funcionamiento del Anemómetro
Programa del indicador de velocidad aerodinámica, este programa adquiere las señales
de presión estática y dinámica de los sensores de presión y con la medición de la
temperatura adquirido de la señal del sensor de temperatura y la altura corrige la señal
entregada por los sensores de presión y despliega la información en el lcd.
Figura 4.4 Esquema del anemómetro.
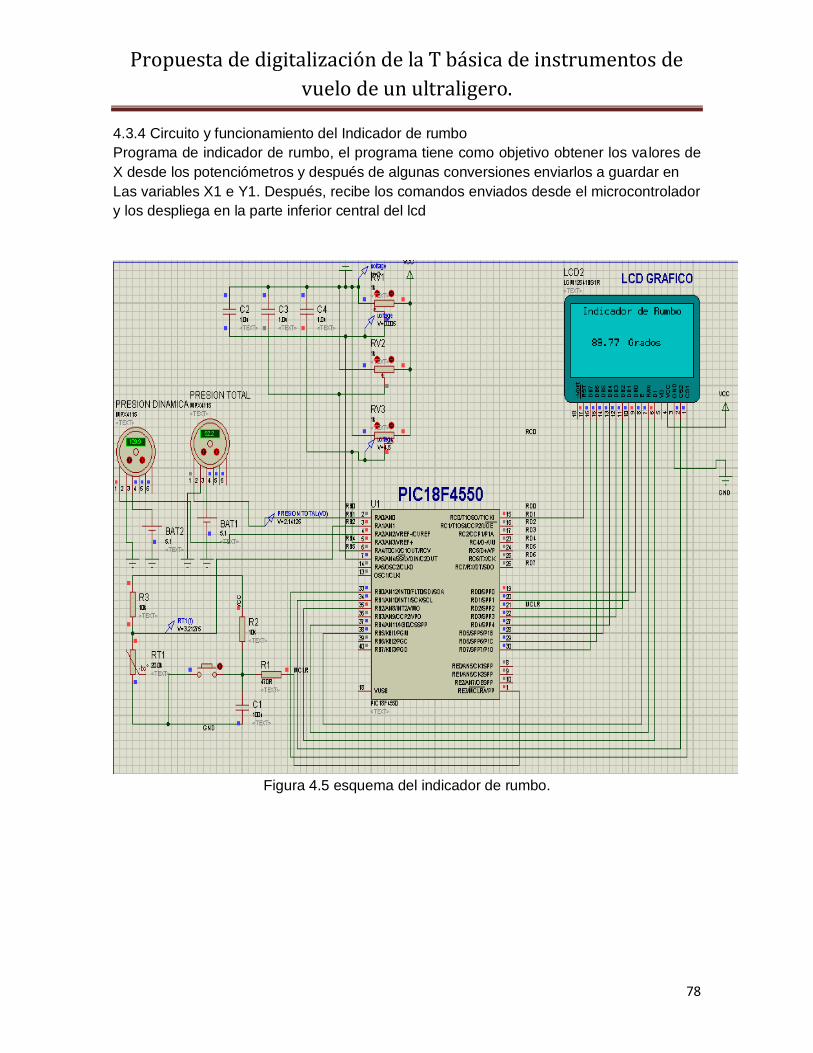
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
78
4.3.4 Circuito y funcionamiento del Indicador de rumbo
Programa de indicador de rumbo, el programa tiene como objetivo obtener los valores de
X desde los potenciómetros y después de algunas conversiones enviarlos a guardar en
Las variables X1 e Y1. Después, recibe los comandos enviados desde el microcontrolador
y los despliega en la parte inferior central del lcd
Figura 4.5 esquema del indicador de rumbo.

Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
79
CONCLUSIONES.
Se escogió el lenguaje de programación c mediante el compilador pcw, ya que este es la
base de muchos otros lenguajes y es uno de los mas difundidos, esto permitirá que en el
futuro se hagan correcciones, modificaciones, implementación de mejoras a los
programas descritos en este trabajo, así mismo se tuvieron algunos inconvenientes en la
implementación del circuito y la simulación de Proteus debido a las limitaciones del
software sin embargo se puede sustituir por otros componentes mas básicos que hagan
las veces de los componentes faltantes, este es un paso preliminar para la digitalización e
implementación de un método eficaz y de bajo costo que permita ahorrar peso y espacio
en aviones ultraligeros.
Para la simulación del proyecto en Proteus tuvo que implementarse un sensor a base de potenciómetros, porque el módulo compás así como los sensores giróscopos no se encuentra listado en las librerías del simulador Proteus, y era necesario comprobar el funcionamiento correcto del programa.
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
80
REFERENCIAS.
Libros.
1. Como Programar en C++
Harvey M. Deitel, Paul J. Deitel.
2. Sistemas Eléctricos y Electrónicos en las Aeronaves
Jesús Martinez
Internet.
3. Joint Aviation Autorities, documento oficial
http://www.jaa.nl/publications/jars/500969.pdf
4. Asociación Española de Pilotos de Aeronaves Ligeras, Titulo:¿Qué es un
ultraligero o ULM?
http://www.aepal.aero/faq#n4
5. Trabajo Final de Carrera, Titulo: Representación de instrumentos básicos
de vuelo,Autor: Néstor Peña Giménez, 2005
http://upcommons.upc.edu/pfc/bitstream/2099.1/3544/2/40625-2.pdf
6. Tutorial Proteus 7.6,
https://sites.google.com/site/proyectospic2010/PIC18F452/tutorial-proteus-
7-6
7. Hitachi HM55B Compass Module (#29123)
http://users.ece.utexas.edu/~valvano/Datasheets/HM55BModDocs.pdf
8. PCW C Compiler Reference Manual,2012
http://www.ccsinfo.com/downloads/ccs_c_manual.pdf
9. Manual de usuario del compilador PCW de CCS, Autor: Andrés Cánovas
López
http://www.bairesrobotics.com.ar/data/Manual_Compilador_CCS_PICC.pdf
Propuesta de digitalización de la T básica de instrumentos de
vuelo de un ultraligero.
81
ANEXOS.
Ver Disco compacto anexo, carpeta: hojas de datos
Contenido:
HM55BCompassModule.pdf
LCD128g0641.pdf
MPX41115A.pdf
PIC18F4550.pdf
TC77termal sensor.pdf
XC1000Gyroscop.pdf