informe técnico de un sistema mecatrónico (robot gusano)
TRANSCRIPT

28 de septiembre de 2016
BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA
FACULTAD DE CIENCIAS DE LA ELECTRÓNICA
Ingeniería en Mecatrónica
Diseño de Sistemas Mecatrónicos
Profesor Pedro Santana Sánchez
OTOÑO 2016
PRÁCTICA 1 ROBOT GUSANO
Informe Técnico
Eduardo Miguel Ricárdez Karla Carballo Valderrábano

ROBOT GUSANO 28 de septiembre de 2016
1 | P á g i n a
ÍNDICE Resumen .......................................................................................................................................... 2
Abstract ........................................................................................................................................... 2
Palabras Clave ................................................................................................................................ 2
Introducción .................................................................................................................................... 2
Antecedentes ................................................................................................................................... 4
Objetivos del proyecto.................................................................................................................... 4
Objetivo General: ....................................................................................................................... 4
Objetivo Específico del equipo: ................................................................................................. 4
Metodología ..................................................................................................................................... 5
Materiales ........................................................................................................................................ 5
Sistemas del Robot.......................................................................................................................... 5
1) Sistema electrónico .......................................................................................................... 5
a) Comunicación Bluetooth ............................................................................................. 5
b) Detección de aplausos .................................................................................................. 6
c) Detección de sombra .................................................................................................... 6
d) Detección de choque ..................................................................................................... 7
e) Electrónica de potencia ................................................................................................ 7
2) Sistemas mecánicos .......................................................................................................... 8
a) Sistema Tornillo-Tuerca .............................................................................................. 8
b) Estructura (soporte del peso de componentes y soporte de esfuerzos) ........................ 8
3) Sistema de control ............................................................................................................ 8
a) Algoritmo de control .................................................................................................... 8
b) Aplicación en Android de Encendido/Apagado ...................................................... 10
Productos ....................................................................................................................................... 11
Conclusiones y recomendaciones ................................................................................................ 12
Bibliografía.................................................................................................................................... 12
ANEXOS ....................................................................................................................................... 14
Anexo 1 Código desarrollado para el Robot para un PIC18F4550 ..................................... 14
Anexo 2 Diseño Conceptual del Robot ................................................................................... 19
Anexo 3 Diseño y Simulación del Robot Gusano ................................................................... 22

ROBOT GUSANO 28 de septiembre de 2016
2 | P á g i n a
INFORME TÉCNICO
Título del proyecto: Robot Gusano
Nombre de los desarrolladores: Karla Carballo Valderrábano, Eduardo Miguel Ricárdez
Dirección y datos de contacto: Benemérita Universidad Autónoma de Puebla
Correos electrónicos: [email protected],
Fecha de entrega de informe: 28 de Septiembre de 2016
Tiempo de ejecución del proyecto: 6 semanas (12/Agosto – 21/Septiembre)
Resumen Este informe detalla las actividades realizadas correspondientes al desarrollo de un robot que
asemeje el movimiento de un gusano. Este sistema se desarrolló como primera práctica para la
materia de Diseño de Sistemas Mecatrónicos de la Licenciatura en Ingeniería en Mecatrónica de
la Benemérita Universidad Autónoma de Puebla durante el periodo de Otoño 2016. La finalidad
de este trabajo es tener un acercamiento con el desarrollo de sistemas mecatrónicos de una manera
más integral y formalizarlo a través de la documentación del mismo. El producto final es un robot
encendido vía Bluetooth por medio de una aplicación desarrollada para celulares con sistema
operativo Android, que reacciona ante choques y el aplauso del usuario cambiando el sentido de
su movimiento.
Abstract This report details the activities for the development of a robot that resembles the movement of a
worm. This system was developed as the first practice for the subject of Design of Mechatronic
Systems of the Bachelor of Engineering in Mechatronics at the Benemérita Universidad
Autónoma de Puebla during the 2016’s Autumn semester. The purpose of this work is to have an
approach to the development of mechatronic systems in a more comprehensive manner and
formalize it through documentation. The final product is a robot controlled via Bluetooth through
an application developed for phones with Android operating system, which also reacts to shocks
and user’s applause, changing the direction of its movement.
Palabras Clave Sistema Mecatrónico, Diseño, BUAP, Facultad de Electrónica, Robot Gusano, Sinergia, Biónica,
Movimiento Peristáltico.
Introducción Un sistema mecatrónico es un sistema integrador que recoge señales, las procesa y emite una
respuesta por medio de actuadores, generando movimientos o acciones sobre el mismo sistema.
Los elementos que lo componen son sensores, actuadores, sistemas de control, sistemas físicos y
sistemas de adquisición de datos. En la figura 1 se muestra un esquema de los principales
elementos de un sistema mecatrónico, incluyendo sus relaciones y los variables que se ven
involucradas en el mismo.

ROBOT GUSANO 28 de septiembre de 2016
3 | P á g i n a
Figura 1 Sistema Mecatrónico y sus componentes
Un robot es un sistema mecatrónico que responde a estímulos del ambiente mediante actuadores.
Se puede clasificar los distintos tipos de robots en 3 ramas: móviles, humanoides e industriales. El
robot desarrollado es del tipo móvil terrestre, pues su desplazamiento está pensado únicamente
para realizarse en tierra y no cumple con las características de figura humana para ser un
humanoide o de servir a un propósito industrial. La principal función y característica de un robot
móvil es el movimiento de la totalidad del robot respecto a un marco de referencia. Muchas veces
ésta locomoción es inspirada en los mecanismos ya existentes en la naturaleza, en este caso el
movimiento de un insecto, pues emula el desplazamiento de un gusano o lombriz tomando en
cuenta la recomendación de no usar servomotores y el requisito de originalidad en cuanto al
mecanismo de locomoción al no poseer patas, su movimiento peristáltico ha sido simplificado, de
manera de que no se requiere de una gran cantidad de actuadores o motores para poder recrearlo,
además la apariencia de un gusano es relativamente sencilla para su posterior fabricación y no
requerirá de una cantidad significativa de partes móviles que compliquen el diseño.
La locomoción en la mayoría de los animales artrópodos y vertebrados está basada en cambios de
los ángulos de sus articulaciones, en cambio, los organismos con cuerpos blandos, como la
lombriz de tierra (figura 2), se mueven en base a cambios coordinados en la forma y dimensiones
de los segmentos de su cuerpo; este movimiento ondulatorio es conocido como movimiento
peristáltico. En el ámbito de la Biología puede definirse como una serie sucesiva de contracciones
en torno al cuerpo del mismo y el desplazamiento de estas secciones contraídas respecto de las
dilatadas.
Figura 2 Lombriz de tierra

ROBOT GUSANO 28 de septiembre de 2016
4 | P á g i n a
Antecedentes Algunas compañías de equipo médico han comenzado a desarrollar robots de movimiento
peristáltico al ser una sencilla forma de moverse a través de los tractos digestivos del ser humano
o incluso de animales o también a través del torrente sanguíneo pues las venas y arterias, así como
los intestinos y tractos esofágico y laríngeo reducen la libertad de movimiento dentro de ellos a
prácticamente un solo grado de libertad que es paralelo a lo que podría considerarse como su eje.
Estos robots pueden aprovechar las mismas paredes de estos ductos para su movimiento o
simplemente seguir a través de los conductos, usándolos como vías de tránsito para llegar a su
destino. La importancia de esta clase de nuevos robots radica en la posibilidad de intervenir a un
paciente sin tener que realizar una cirugía que requiera de abrir el organismo, con todas las
desventajas que esto representa, (posibles infecciones, pérdida de sangre, necesidad de anestesia,
cicatrices de operación, etc.) esta nueva posibilidad de únicamente introducir un robot a través de
algún tracto está ganando terreno entre los cirujanos e incluso entre los mismos pacientes, pues se
sienten más seguros al no requerir de una cirugía abierta, además de la gran precisión con la que
puede contar el robot para realizar cortes, suturas, recolectar muestras, etc,. Si bien es un proceso
más sencillo introducir un pequeño robot a abrir las entrañas de una persona, este procedimiento
tiene algunos pequeños inconvenientes en la actualidad como dejar pequeñas lesiones en los
tractos donde pasa, los robots no son capaces de realizar tareas variadas y en su mayoría tienen
una única función, queda entonces una posibilidad de expansión y mejora de las capacidades de
esta clase de productos.
Objetivos del proyecto Objetivo General:
Diseñar e implementar un robot insecto autónomo de locomoción innovadora de dimensiones no
mayores a 20cm X 20cm el cual debe realizar las siguientes acciones:
Iniciar su funcionamiento de forma inalámbrica, encendido así como su apagado.
Desarrollar la locomoción del robot para avance y retroceso cuando se realice un aplauso,
cambiando su dirección de movimiento cada vez que se aplauda y cuando tenga un choque
frontal o trasero, para continuar su movimiento evadiendo el obstáculo.
Detener al robot inmediatamente en cuanto detecte la presencia de una mano en su parte
superior y continuar su avance en cuanto no detecte dicha sombra.
Considerar en el diseño:
Batería recargable.
Mecanismo de locomoción innovador.
Usar elementos de reciclaje, tanto mecánicos como electrónicos, en la medida de lo
posible.
No usar madera o plásticos, preferentemente utilizar sistemas de corte con CNC y/o
impresión 3D.
No usar protoboard, desarrollar los PCB y/o utilizar tarjetas comerciales.
Objetivo Específico del equipo:
Como ya se mencionó, existen aplicaciones específicas en el campo de la medicina y la cirugía
para este tipo de robots, sin embargo no se pretende crear un robot de proporciones suficientes
como para realizar una endoscopía, pero si el recrear de una manera más sencilla el movimiento
peristáltico, eliminando las dilataciones y contracciones de las secciones transversales del robot,
para dejar la tarea al desplazamiento independiente de secciones a fin de conseguir el mismo
movimiento.

ROBOT GUSANO 28 de septiembre de 2016
5 | P á g i n a
Metodología Para el desarrollo de este robot, primeramente se realizó el diseño conceptual, durante el cual se
decidió el tipo de insecto cuyo movimiento imitaría el robot, después de eso, se identificaron los
sistemas participantes en el mecanismo así como las partes que lo componen, dividiéndolo así en
principalmente en sistemas eléctricos, mecánicos y de control.
Posteriormente a ello, se diseñaron y simularon estos sistemas por separado, para que, una vez
que todos funcionaran en simulación (SolidWorks y Proteus), se implementaran físicamente, para
finalmente integrarlos y formar el robot insecto.
Materiales
1 PIC 18F4550
1 celular con sistema operativo Android
1 módulo Bluetooth HC05.
2 motores DC Pololu.
1 sensor CNY70
2 finales de carrera
1 micrófono
1 Compuerta OR 74LS32
1 puente H L293D
1 transistor 2n3904
1 capacitor de 100nF
5 resistencias de 10kΩ
1 resistencia de 1MΩ
1 resistencia de 330Ω
1 Cristal de 4MHz
Sistemas del Robot El robot se dividió para su funcionamiento en subsistemas, los cuales se detallan en los siguientes
párrafos.
1) Sistema electrónico
a) Comunicación Bluetooth
Con el fin de encender y apagar el robot de manera inalámbrica mediante una aplicación para
celular (sistema operativo ANDROID) usando además del Bluetooth del celular un módulo
Bluetooth HC-05 para recibir la orden de encender y apagar el robot, con una comunicación
serial, a través del protocolo SR232 a 9600 baudios.

ROBOT GUSANO 28 de septiembre de 2016
6 | P á g i n a
Figura 3 Sistema Electrónico para el encendido/apagado del Robot con comunicación Bluetooth
b) Detección de aplausos Para detectar un aplauso del usuario y así generar la orden de cambiar el sentido de
desplazamiento del robot, se utiliza un transistor NPN conectado a un circuito de carga y
descarga de un capacitor, el cual se ubica en la base del transistor para que a cada vez que
gracias al aplauso del usuario se cierre el circuito y genere una diferencia de potencial
entre los bornes del capacitor, esto provocará una corriente en la base que será amplificada
en el emisor, donde se tomará la señal de control.
Figura 4 Sistema Electrónico de Cambio de Movimiento por Detección de Aplauso
c) Detección de sombra Para pausar el movimiento del robot se tiene un circuito formado por un sensor de
refracción de luz ultravioleta, en el cual cada vez que el usuario acerque su mano, esta luz

ROBOT GUSANO 28 de septiembre de 2016
7 | P á g i n a
será refractada por él mismo hacia el receptor generando una corriente en su emisor que es
donde se recogerá la señal.
Figura 5 Circuito para pausar del movimiento de robot
d) Detección de choque El robot tiene como requisito que, al chocar con una pared, cambie de sentido, para ello se
desarrolló un simple switch realizado con un final de carrera, anclado a tierra mediante
una resistencia, para que una vez cerrado gracias al contacto físico debido a un obstáculo,
los bornes de la resistencia tengan una diferencia de potencial adecuada para ser detectada
por el microcontrolador.
Figura 6 Circuito de detección de choques
e) Electrónica de potencia Dos puentes H son utilizados para el control de la dirección de cada uno de los motores,
mandado por señales lógicas emitidas por el microcontrolador.
Figura 7 Circuito electrónico de Potencia para controlar el giro de los motores

ROBOT GUSANO 28 de septiembre de 2016
8 | P á g i n a
2) Sistemas mecánicos
a) Sistema Tornillo-Tuerca Para transformar el movimiento rotacional del motor, se optó por un sistema de tornillo-
tuerca, el cual transforma esa rotación en traslación lineal a lo largo del eje. Se escogió
este sistema dada su simplicidad para el acoplamiento con los motores y su costo
económico, pues ya existen los denominados motores lineales que realizan la misma
función, pero tienen un elevado costo.
Figura 8 Sistema Mecánico del Robot
b) Estructura (soporte del peso de componentes y soporte de esfuerzos)
La estructura original tuvo que ser re-diseñada con propósito de ser fabricada mediante
impresión 3D, pero su propósito es el mismo, brindar soporte a los componentes del
sistema y soportar el esfuerzo que se ejerce sobre el contorno de la tuerca en el momento
en que el tornillo entra o sale de la misma, así como soportar el motor y mantenerlo fijo en
los módulos extremo para transmitir el desplazamiento
Figura 9 Estructura del Robot Gusano
3) Sistema de control
El microcontrolador PIC18F4550 será quien funge como “cerebro del robot”, coordinando el
funcionamiento del mismo en conjunción con una aplicación desarrollada para celulares con
sistema operativo Android, por medio de comunicación Bluetooth.
En los próximos párrafos se detalla primeramente el algoritmo de control del robot, y
posteriormente la aplicación desarrollada en Appinventor.
En el Apéndice 1, se muestra el código desarrollado en el programa PICC CCS para este robot.
a) Algoritmo de control
ROBOT GUSANO 28 de septiembre de 2016
9 | P á g i n a
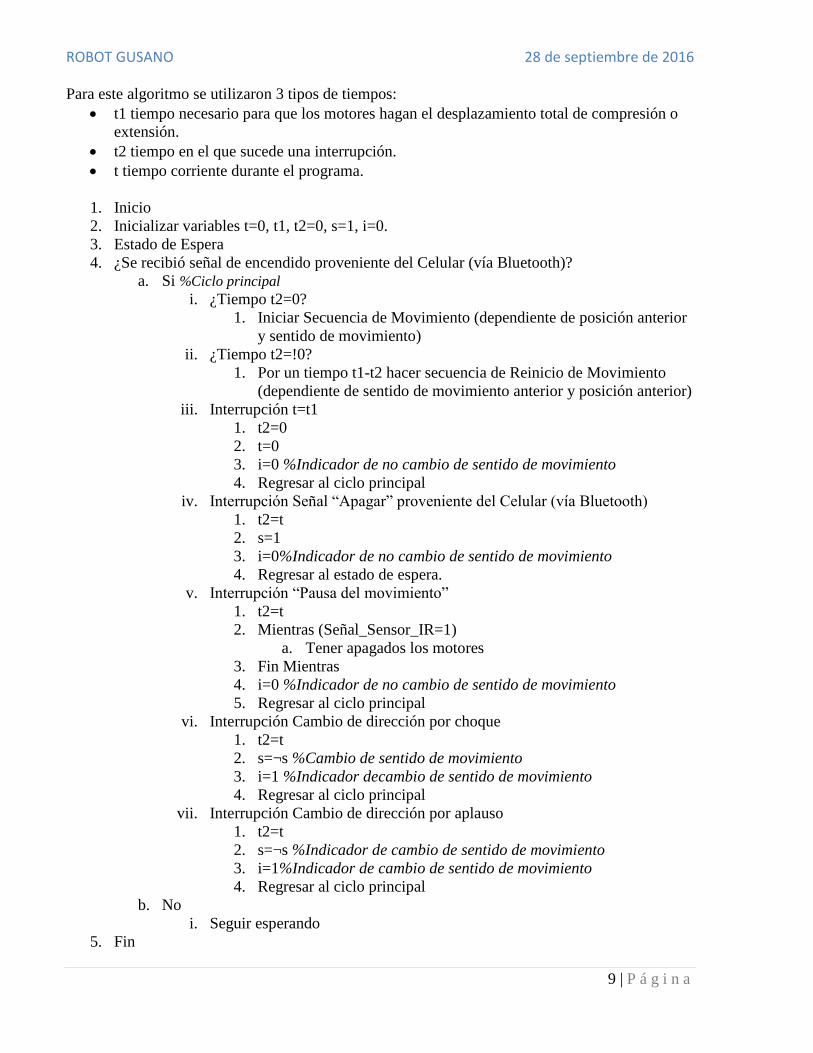
Para este algoritmo se utilizaron 3 tipos de tiempos:
t1 tiempo necesario para que los motores hagan el desplazamiento total de compresión o
extensión.
t2 tiempo en el que sucede una interrupción.
t tiempo corriente durante el programa.
1. Inicio
2. Inicializar variables t=0, t1, t2=0, s=1, i=0.
3. Estado de Espera
4. ¿Se recibió señal de encendido proveniente del Celular (vía Bluetooth)?
a. Si %Ciclo principal
i. ¿Tiempo t2=0?
1. Iniciar Secuencia de Movimiento (dependiente de posición anterior
y sentido de movimiento)
ii. ¿Tiempo t2=!0?
1. Por un tiempo t1-t2 hacer secuencia de Reinicio de Movimiento
(dependiente de sentido de movimiento anterior y posición anterior)
iii. Interrupción t=t1
1. t2=0
2. t=0
3. i=0 %Indicador de no cambio de sentido de movimiento
4. Regresar al ciclo principal
iv. Interrupción Señal “Apagar” proveniente del Celular (vía Bluetooth)
1. t2=t
2. s=1
3. i=0%Indicador de no cambio de sentido de movimiento
4. Regresar al estado de espera.
v. Interrupción “Pausa del movimiento”
1. t2=t
2. Mientras (Señal_Sensor_IR=1)
a. Tener apagados los motores
3. Fin Mientras
4. i=0 %Indicador de no cambio de sentido de movimiento
5. Regresar al ciclo principal
vi. Interrupción Cambio de dirección por choque
1. t2=t
2. s=¬s %Cambio de sentido de movimiento
3. i=1 %Indicador decambio de sentido de movimiento
4. Regresar al ciclo principal
vii. Interrupción Cambio de dirección por aplauso
1. t2=t
2. s=¬s %Indicador de cambio de sentido de movimiento
3. i=1%Indicador de cambio de sentido de movimiento
4. Regresar al ciclo principal
b. No
i. Seguir esperando
5. Fin

ROBOT GUSANO 28 de septiembre de 2016
10 | P á g i n a
b) Aplicación en Android de Encendido/Apagado
La aplicación para celular con la cual se enciende y apaga el robot fue desarrollada en App-
Inventor. En la figura 5 se tiene el diseño de la pantalla que ve el usuario, mientras que en la
figura 6 se tiene al editor de bloques.
Como se puede observar en las figuras, el programa tiene una opción de Conectar mediante el uso
de un botón, el cual mostrará los dispositivos Bluetooth disponibles para establecer una
comunicación con el celular. Una vez escogido el dispositivo se establece la comunicación al
presionar el botón “Conectar”. Se puede encender el robot enviando una indicación por medio del
Bluetooth al presionar el botón de ON/OFF; al volver a presionar el botón ON/OFF, el celular
enviará la indicación de apagar el robot.
Además se tiene la opción de salir de la aplicación, la cual termina la comunicación entre los
dispositivos y cerrará la aplicación.
Para finalizar, se tiene un recuadro en el cual se estará mostrando el estado del robot mientras la
comunicación esté establecida.

ROBOT GUSANO 28 de septiembre de 2016
11 | P á g i n a
Figura 10 Editor de bloques de la aplicación para celular
Productos
Producto Observaciones Desempeño
Sistema de
movimiento
Los postes roscados (espárragos) no son completamente
rectos, lo que genera ciertos esfuerzos en los soportes del
mismo. Los motores tienen el torque necesario para hacer
girar los espárragos, sin embargo el desplazamiento final,
debido a la velocidad de rotación del motor, es bastante
lento.
Adecuado
Sistema de detección
de aplauso
Requiere un aplauso fuerte, aunque trabaja bien aún con
ruido en el ambiente.
Bueno
Sistema de detección
de choque
Debido al resorte propio del sensor no detecta el
obstáculo hasta haber oprimido por completo el sensor
Bueno
Sistema de detección
de mano
El sensor tiene un rango de funcionamiento bastante
pequeño, se puede cambiar por un QRD1114
Adecuado
Sistema electrónico de
potencia
El puente H utilizado (L293D) para cada motor tiene un
consumo máximo de 3 A, en caso de una
implementación de motores más grandes se debe cambiar
el puente H por uno que soporte corrientes mayores
(L298)
Bueno
Sistema de control La tarjeta utilizada como soporte del PIC18f4550 es
demasiado grande para la cavidad destinada a su
emplazamiento en el robot pues originalmente se
pretendía realizar esta tarea con un PSoC
Bueno
Alimentación La batería LiPo con la que se realizaron las pruebas y Bueno
ROBOT GUSANO 28 de septiembre de 2016
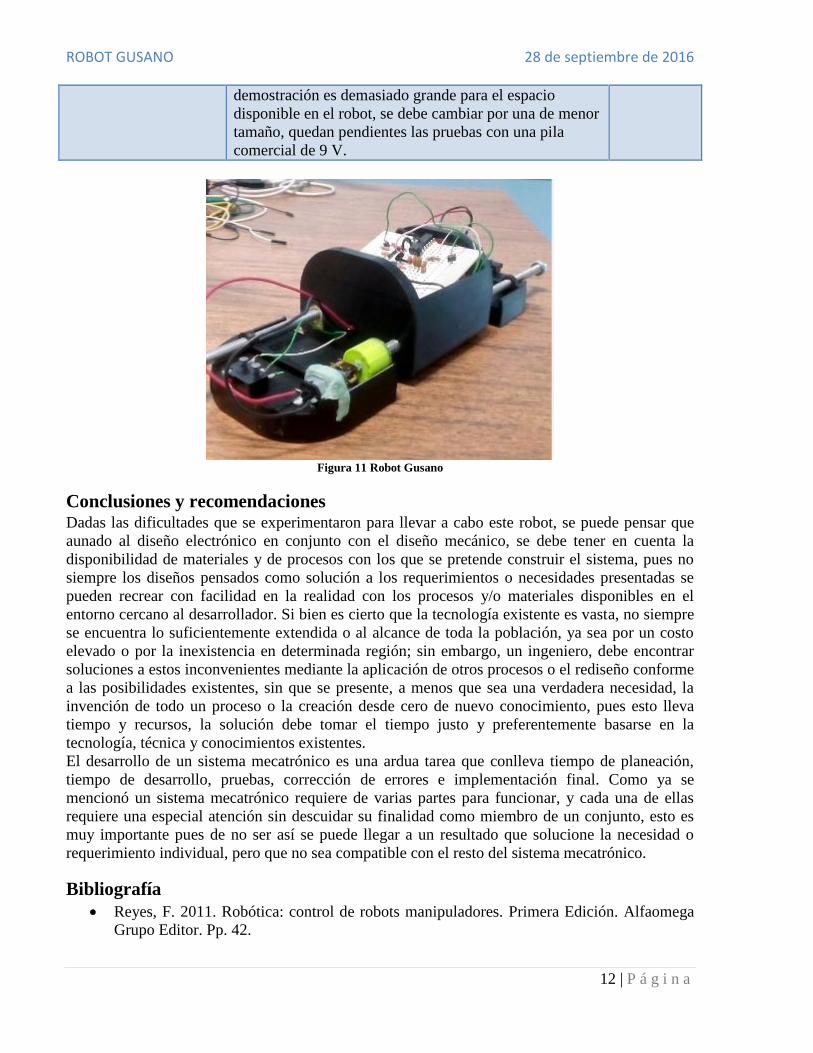
12 | P á g i n a
demostración es demasiado grande para el espacio
disponible en el robot, se debe cambiar por una de menor
tamaño, quedan pendientes las pruebas con una pila
comercial de 9 V.
Figura 11 Robot Gusano
Conclusiones y recomendaciones Dadas las dificultades que se experimentaron para llevar a cabo este robot, se puede pensar que
aunado al diseño electrónico en conjunto con el diseño mecánico, se debe tener en cuenta la
disponibilidad de materiales y de procesos con los que se pretende construir el sistema, pues no
siempre los diseños pensados como solución a los requerimientos o necesidades presentadas se
pueden recrear con facilidad en la realidad con los procesos y/o materiales disponibles en el
entorno cercano al desarrollador. Si bien es cierto que la tecnología existente es vasta, no siempre
se encuentra lo suficientemente extendida o al alcance de toda la población, ya sea por un costo
elevado o por la inexistencia en determinada región; sin embargo, un ingeniero, debe encontrar
soluciones a estos inconvenientes mediante la aplicación de otros procesos o el rediseño conforme
a las posibilidades existentes, sin que se presente, a menos que sea una verdadera necesidad, la
invención de todo un proceso o la creación desde cero de nuevo conocimiento, pues esto lleva
tiempo y recursos, la solución debe tomar el tiempo justo y preferentemente basarse en la
tecnología, técnica y conocimientos existentes.
El desarrollo de un sistema mecatrónico es una ardua tarea que conlleva tiempo de planeación,
tiempo de desarrollo, pruebas, corrección de errores e implementación final. Como ya se
mencionó un sistema mecatrónico requiere de varias partes para funcionar, y cada una de ellas
requiere una especial atención sin descuidar su finalidad como miembro de un conjunto, esto es
muy importante pues de no ser así se puede llegar a un resultado que solucione la necesidad o
requerimiento individual, pero que no sea compatible con el resto del sistema mecatrónico.
Bibliografía
Reyes, F. 2011. Robótica: control de robots manipuladores. Primera Edición. Alfaomega
Grupo Editor. Pp. 42.

ROBOT GUSANO 28 de septiembre de 2016
13 | P á g i n a
Castañeda, D. 2007. Movimiento Adaptativo en máquinas y animales (online). Disponible
en:
https://robotica2010.wikispaces.com/d+Movimiento+adaptativo+en+maquias+y+animales
(Obtenido el 20 de Septiembre de 2016)
Medtronic. 2010. Acerca de la cirugía de tiroides mínimamente invasiva (online).
Disponible en: http://www.medtronic.es/su-salud/tiroides/terapia/cmi/Que-es/index.htm
(Obtenido el 20 de Septiembre de 2016)
ROBOT GUSANO 28 de septiembre de 2016
14 | P á g i n a
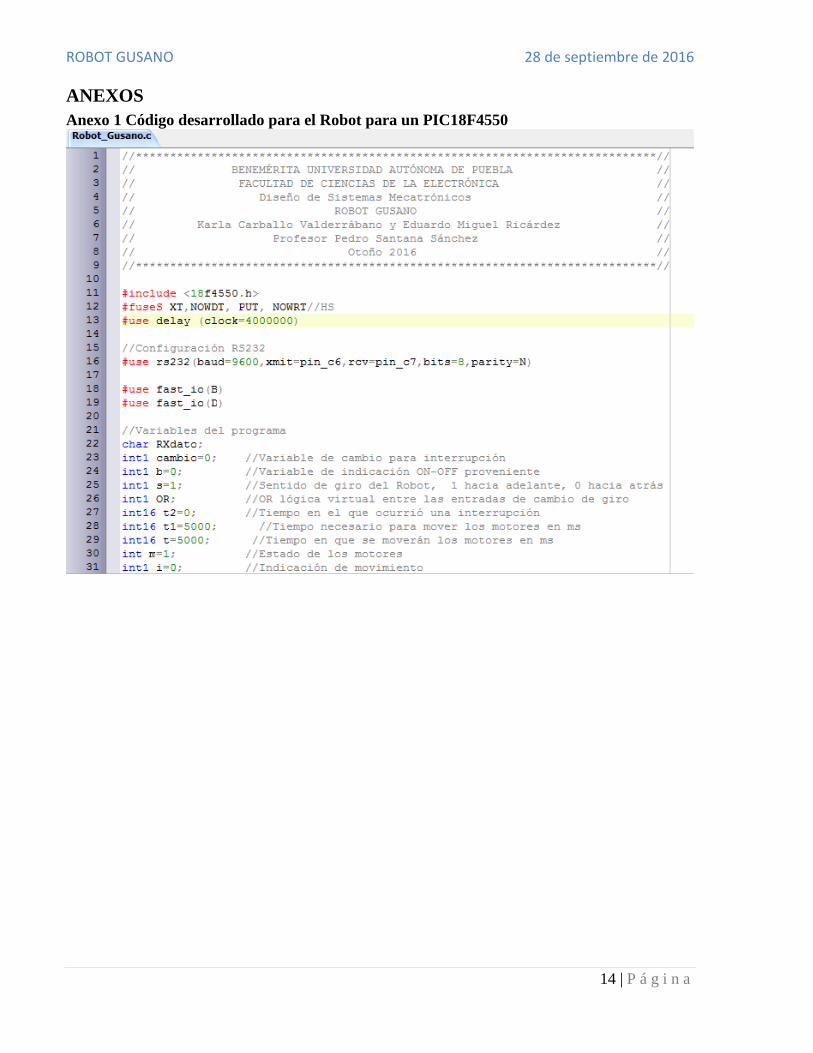
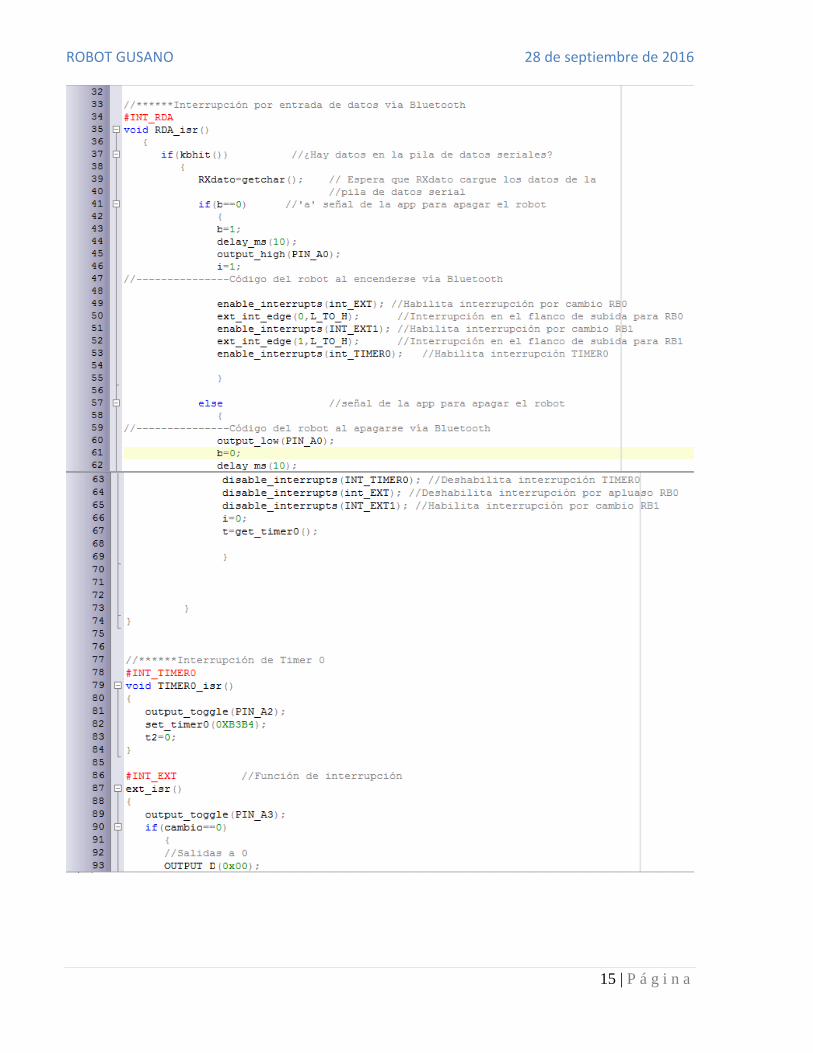
ANEXOS
Anexo 1 Código desarrollado para el Robot para un PIC18F4550
ROBOT GUSANO 28 de septiembre de 2016
15 | P á g i n a

ROBOT GUSANO 28 de septiembre de 2016
16 | P á g i n a

ROBOT GUSANO 28 de septiembre de 2016
17 | P á g i n a

ROBOT GUSANO 28 de septiembre de 2016
18 | P á g i n a

ROBOT GUSANO 28 de septiembre de 2016
19 | P á g i n a
Anexo 2 Diseño Conceptual del Robot
Robot Gusano La locomoción en la mayoría de los animales artrópodos y vertebrados está basada en cambios de
los ángulos de sus articulaciones. Los organismos con cuerpos blandos, como la lombriz de tierra,
se mueven en base a cambios coordinados en la forma y dimensiones de los segmentos de su
cuerpo; este movimiento ondulatorio es conocido como movimiento peristáltico.
Figura 12 Lombriz de tierra
Basados en este tipo de desplazamiento, se ha pensado diseñar un robot insecto que tratará de
emular el avance de un gusano mediante un movimiento peristáltico simple, es decir, el robot
constará de 3 segmentos en línea, conectados en secuencia (1 con 2 y 2 con 3), los cuales estarán
diseñados para ser desplazados uno en referencia a otro. Primeramente uno de los bloques
ubicados en los extremos (3) se hará avanzar respecto del resto del robot (1 y 2). Una vez
alcanzada su posición más lejana, se dejará en reposo para proceder a desplazar el bloque del
medio (2) hasta que este alcance su posición más lejana del único bloque que ha permanecido en
reposo (1), implicando con ello que también el bloque (3) sea desplazado aún más lejos del
bloque (1). Posteriormente se mantendrá en reposo el bloque (3) para acercar el bloque (2) y
finalmente se repetirá el acercamiento con el bloque que originalmente hizo el trabajo de “ancla”
(1).
Figura 13 Movimiento peristáltico simple del diseño propuesto

ROBOT GUSANO 28 de septiembre de 2016
20 | P á g i n a
Siendo este el sistema mecánico principal, los mismos módulos o bloques del robot servirían
como contenedores de la circuitería y los diferentes sensores necesarios para llevar a cabo las
tareas requeridas, al igual que para una tarjeta de desarrollo PSoC que será el “cerebro” del robot.
Se ha escogido esta herramienta debido a que el sistema tiene una gran versatilidad al permitir
ubicar cualquier función en cualquier terminal, gracias a la matriz configurable de funciones
analógicas y otra de funciones digitales, ambas necesarias para el uso de los diferentes sensores;
se ha tomado en cuenta también la facilidad de programar este microprocesador en lenguaje C, su
alta velocidad, pues puede trabajar inclusive hasta 48MHz, lo que se cree más que suficiente para
esta aplicación y, finalmente, su bajo costo.
Para realizar cada una de las tareas se dispondrán de los siguientes elementos:
Control remoto de encendido y apagado: modulo Bluetooth vinculado a un celular con una
aplicación sencilla
Detección de aplausos: micrófono
Detección de obstáculo: finales de carrera en ambos extremos del robot
Detección de señal de paro (mano sobre el robot): sensor óptico de detección infrarroja
Locomoción: motorreductores
Procesamiento: PSoC 4 CY8CKIT-049-42xx
El prototipo será fabricado en su mayoría mediante impresión 3D debido a la forma no tan
compleja de las piezas a fabricar y a la posibilidad de diseño hueco que ofrecen, aunado a esto se
tiene la posibilidad de utilizar un sistema de tornillo y tuerca, agrandados, y con un paso de
roscado amplio para el sistema de locomoción, para lo cual sería muy útil el poder imprimir en
3D el propio diseño de este sistema, en lugar de pistones que serían los usados comúnmente en
una aplicación de movimiento lineal como lo es el movimiento de cada bloque del robot, pero que
no tendrían cabida en este diseño principalmente por su alimentación hidráulica o neumática, sus
características físicas y su precio. La manera de utilizar estos tornillos y tuercas se plantean
siguiendo la línea de pensamiento que indica que al desatornillar, el tornillo tiene un
desplazamiento para salir de la tuerca y su contrario cuando se atornilla, esto lleva a pensar que si
se sitúa un tornillo en un bloque y una tuerca en otro y son accionados de esta manera, los
módulos se desplazaran uno con respecto al otro.

ROBOT GUSANO 28 de septiembre de 2016
21 | P á g i n a
Figura 14 Diseño Conceptual del Robot Gusano

ROBOT GUSANO 28 de septiembre de 2016
22 | P á g i n a
Anexo 3 Diseño y Simulación del Robot Gusano
Robot Gusano
Un sistema mecatrónico es un sistema integrador que recoge señales, las procesa y emite una
respuesta por medio de actuadores, generando movimientos o acciones sobre el sistema en el que
se va a actuar. Los elementos que lo componen son sensores, actuadores, sistemas de control,
sistemas físicos y sistemas de adquisición de datos. En la figura 15 se muestra un esquema de los
principales elementos de un sistema mecatrónico, incluyendo sus relaciones y los variables que se
ven involucradas en el mismo.
Figura 15 Sistema Mecatrónico y sus componentes
El robot insecto a desarrollar es un sistema mecatrónico, en el que serán usados los elementos
mencionados anteriormente. En el presente reporte se explicará el diseño y las simulaciones del
robot, dividido en 3 sistemas:
Sistema Mecánico
Sistema de Control.
Sistema Electrónico
Sistema Mecánico El robot insecto se compondrá de tres módulos alineados a lo largo del eje que los atraviesa,
formando una especie de línea que será el cuerpo del gusano. El movimiento se llevará a cabo
mediante una imitación sencilla del movimiento peristáltico, propiamente no es un movimiento
peristáltico pues este involucra contracciones y relajaciones radialmente simétricas, pero el
sistema mecánico de este robot asemejará el movimiento hasta cierto punto dada la forma de
desplazamiento que involucra desplazar los diferentes módulos respecto a los demás primero para
extender el gusano y posteriormente encogerlo en una posición adelantada a donde se inició el
movimiento.

ROBOT GUSANO 28 de septiembre de 2016
23 | P á g i n a
Figura 16 Desplazamiento del Robot Gusano
Al ser un espacio reducido el que encontramos en cada módulo, un sistema de engranes sería poco
factible, así mismo un sistema de pistones, por lo cual hemos optado por generar una pieza central
con dos perforaciones con cuerda en la cual se enroscará o desenroscará su respectivo tornillo
dependiendo del sentido de giro, ocasionando un aproximamiento entre los módulos en extremos
del tornillo o distanciamiento.
Figura 17 Estructura interna del Robot Gusano
Este sistema nos permite aprovechar el espacio ocupado por el mismo cuerpo del robot y genera
un mecanismo simple sin tener que realizar grandes adaptaciones o cambios en la estructura
visible al público, manteniendo cierta estética.

ROBOT GUSANO 28 de septiembre de 2016
24 | P á g i n a
El movimiento será generado por motores eléctricos de corriente directa, fijos a la pieza
correspondiente a alguno de los extremos del gusano, que se acoplarán a un tornillo destinado a
entrar y salir de la pieza central ocasionando de este modo pequeños desplazamientos que al
realizarse en secuencia propiciarán el movimiento del robot completo.
Figura 18 Extremos del Robot Gusano
Sistema de Control La tarjeta de desarrollo PSoC 4 CY8CKIT-049-42xx será la que funja como “cerebro del robot”,
coordinando el funcionamiento del mismo en conjunción con una aplicación desarrollada para
celulares con sistema operativo Android, por medio de comunicación Bluetooth.
En los próximos párrafos se detalla primeramente el algoritmo de control del robot, y
posteriormente la aplicación desarrollada en Appinventor.
Algoritmo de Control Para este algoritmo se utilizarán 3 tipos de tiempos:
t1 tiempo necesario para que los motores hagan el desplazamiento total de compresión o
extensión.
t2 tiempo en el que sucede una interrupción.
t tiempo corriente durante el programa.
6. Inicio
7. Inicializar variables t=0, t1, t2=0, s=1, i=0.
8. Estado de Espera
9. ¿Se recibió señal de encendido proveniente del Celular (vía Bluetooth)?
a. Si %Ciclo principal
i. ¿Tiempo t2=0?
1. Iniciar Secuencia de Movimiento (dependiente de posición anterior
y sentido de movimiento)
ii. ¿Tiempo t2=!0?
1. Por un tiempo t1-t2 hacer secuencia de Reinicio de Movimiento
(dependiente de sentido de movimiento anterior y posición anterior)
iii. Interrupción t=t1
1. t2=0
2. t=0
3. i=0 %Indicador de no cambio de sentido de movimiento
ROBOT GUSANO 28 de septiembre de 2016
25 | P á g i n a
4. Regresar al ciclo principal
iv. Interrupción Señal “Apagar” proveniente del Celular (vía Bluetooth)
1. t2=t
2. s=1
3. i=0%Indicador de no cambio de sentido de movimiento
4. Regresar al estado de espera.
v. Interrupción “Pausa del movimiento”
1. t2=t
2. Mientras (Señal_Sensor_IR=1)
a. Tener apagados los motores
3. Fin Mientras
4. i=0 %Indicador de no cambio de sentido de movimiento
5. Regresar al ciclo principal
vi. Interrupción Cambio de dirección por choque
1. t2=t
2. s=¬s %Cambio de sentido de movimiento
3. i=1 %Indicador decambio de sentido de movimiento
4. Regresar al ciclo principal
vii. Interrupción Cambio de dirección por aplauso
1. t2=t
2. s=¬s %Indicador de cambio de sentido de movimiento
3. i=1%Indicador de cambio de sentido de movimiento
4. Regresar al ciclo principal
b. No
i. Seguir esperando
10. Fin
Aplicación en Android de Encendido/Apagado La aplicación para celular con la cual se encenderá y apagará el robot fue desarrollada en App-
Inventor. En la figura 19 se tiene el diseño de la pantalla que verá el usuario, mientras que en la
figura 20 se tiene al editor de bloques.

ROBOT GUSANO 28 de septiembre de 2016
26 | P á g i n a
Figura 19 Pantalla de la aplicación para Celular
Como se puede observar en las figuras, el programa tiene una opción de Conectar mediante el uso
de un selector de lista, el cual mostrará los dispositivos Bluetooth disponibles para establecer una
comunicación con el celular. Una vez escogido el dispositivo y haberse establecido la
comunicación, el celular enviará la indicación de encender el robot.
Se tiene de igual manera un botón de desconectar, el cual terminará con la comunicación
Bluetooth, no sin antes enviar una indicación de apagar el robot.
Por otro lado se tiene la opción de salir de la aplicación, la cual incluye el apagar el robot y
terminar la comunicación entre los dispositivos.
Para finalizar, se tiene un recuadro en el cual se estará mostrando el estado del robot mientras la
comunicación esté establecida, este dato será enviado por el robot.

ROBOT GUSANO 28 de septiembre de 2016
27 | P á g i n a
Figura 20 Editor de Bloques de la aplicación para celular
Sistema Electrónico El Sistema Electrónico del robot puede ser dividido en los siguientes subsistemas.
Comunicación Bluetooth para Encender/Apagar el Robot
Control del Giro de Motores
Detección de choque
Detección de aplauso
Pausa del movimiento

ROBOT GUSANO 28 de septiembre de 2016
28 | P á g i n a
Figura 21 Subsistemas del Robot Gusano
En los siguientes apartados se describirá el diseño y la simulación en el software PROTEUS de
los mismos.
Comunicación Bluetooth para Encender/Apagar el Robot Para encender y apagar el robot se usará una señal enviada vía Bluetooth por la aplicación
descrita anteriormente; esta señal será recibida por un módulo Bluetooth del tipo HC06 en el
PSoC, la cual indicará que el robot debe empezar a ejecutar el algoritmo de control necesario para
el movimiento del mismo.
El diagrama de la simulación en Proteus se muestra en la figura 8, en ella se puede ver que se
utilizó un PIC16F877A, esto porque en la librería del mismo no se halla el PSoC y porque ambos
son programables con el lenguaje C. Además se utilizó una librería que incluye un módolo
Bluetooth HC06 para simular la comunicación entre el robot y la aplicación del celular, por ello
se agregaron 2 de estos dispositivos, y por medio de una terminal virtual se monitorea los datos
enviados y recibidos por ambos.

ROBOT GUSANO 28 de septiembre de 2016
29 | P á g i n a
Figura 22 Circuito de Comunicación Bluetooth para el Encendido y Apagado del Robot
Para este caso se realizó un programa en el software PIC C, mostrado en la figura 23. El programa
únicamente encenderá un led cuando reciba una letra ‘e’ y lo apagará al recibir una letra ‘a’; este
código fue compilado e implementado en Proteus con éxito como se ve en las figuras 24 y 25,
simulando ambos casos, el envío de una e y una a, respectivamente.
Figura 23 Código de prueba para la comunicación Bluetooth

ROBOT GUSANO 28 de septiembre de 2016
30 | P á g i n a
Figura 24 Simulación de la Comunicación Bluetooth para Encender el Robot
Figura 25 Simulación de la Comunicación Bluetooth para Apagar el Robot
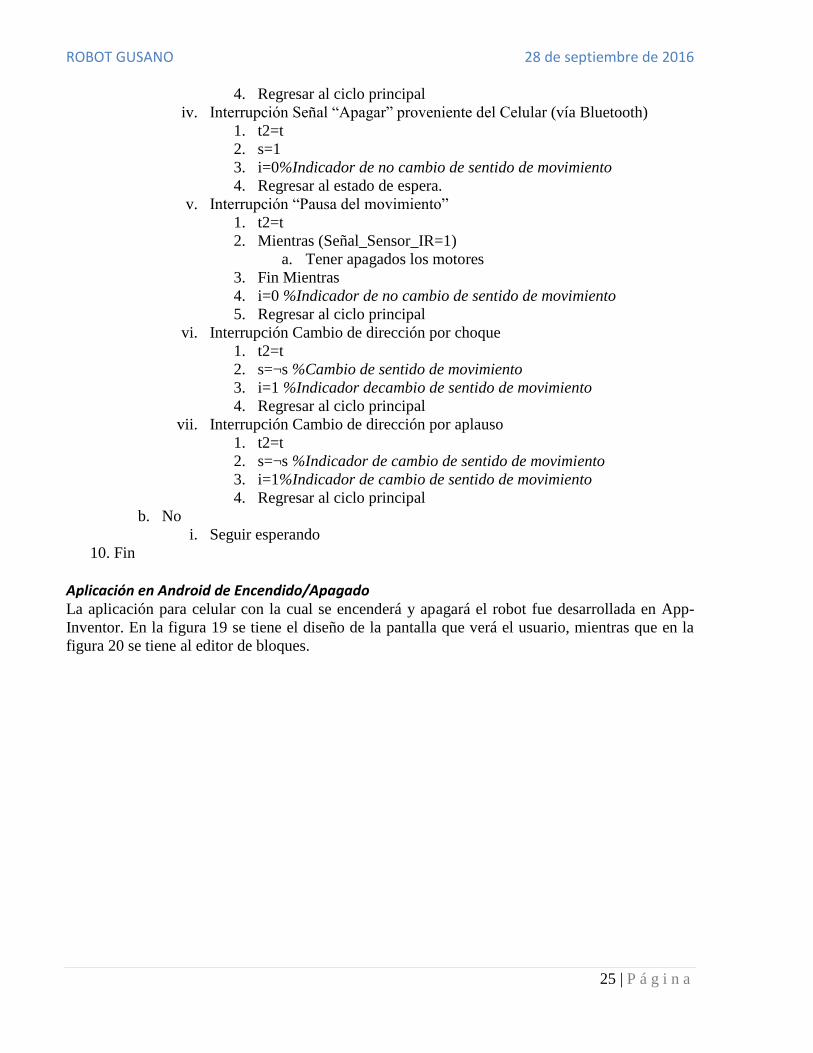
Control del Giro de Motores Para este subsistema se empleará el circuito integrado L293D, el cual es un puente H, con el que
se estará controlando la polaridad del giro de los motores de acuerdo a los valores de voltaje de
entrada en el mismo. En la figura 26 se muestra el diagrama de la simulación en Proteus del
subsistema, en este caso se utilizaron unos botones para controlar el sentido de giro de los
motores, dichas señales serán controladas posteriormente por el PSoC.
ROBOT GUSANO 28 de septiembre de 2016
31 | P á g i n a
Figura 26 Circuito de Control de Giro de los Motores del Robot
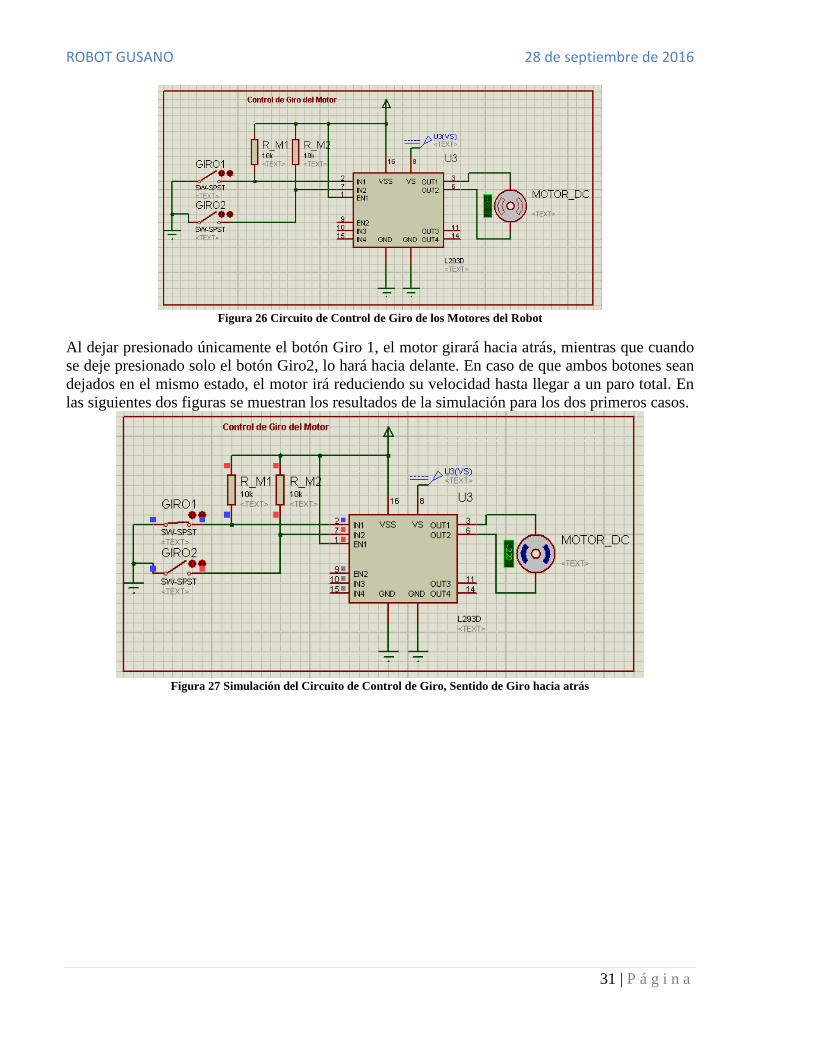
Al dejar presionado únicamente el botón Giro 1, el motor girará hacia atrás, mientras que cuando
se deje presionado solo el botón Giro2, lo hará hacia delante. En caso de que ambos botones sean
dejados en el mismo estado, el motor irá reduciendo su velocidad hasta llegar a un paro total. En
las siguientes dos figuras se muestran los resultados de la simulación para los dos primeros casos.
Figura 27 Simulación del Circuito de Control de Giro, Sentido de Giro hacia atrás

ROBOT GUSANO 28 de septiembre de 2016
32 | P á g i n a
Figura 28 Simulación del Circuito de Control de Giro, Sentido de Giro hacia adelante
Detección de choque Para crear el cambio de sentido de movimiento del robot por medio de la detección de choque con
una pared del mismo, se usará un final de carrera, el cual fue simulado en Proteus como un
Switch de enclavamiento, que se cierra al detectar otro cuerpo, generando una caída de voltaje en
la resistencia R_FC; por otro lado, cuando no detecta cuerpo alguno, el circuito está abierto, por
lo que el voltaje presente en la resistencia es de 0V. Los resultados de la simulación se pueden
observar en la figura 29.
Figura 29 Simulación del Circuito de Detección de Choque, al detectar un cuerpo y no detectar cuerpo alguno
Detección de aplauso Para detectar un aplauso y así cambiar el sentido del avance del robot se utilizará un micrófono
electret como transductor, que funciona con un capacitor, y un transistor que amplifica la señal de
voltaje de dicho capacitor.
Cuando se escucha un aplauso el transistor se satura y el voltaje en la base se cae repentinamente,
generando un pico en el colector con el cual se registrará un cambio de estado en el
microcontrolador.
Al igual que en los subsistemas anteriores, se optó por simular el circuito con un switch en lugar
del transductor.

ROBOT GUSANO 28 de septiembre de 2016
33 | P á g i n a
Figura 30 Simulación del Circuito de Detección de Aplauso del Robot
Los resultados de la simulación al pensar que se detecta un sonido son instantáneos y difíciles de
capturar, sin embargo, existen.
Pausa del movimiento Para hacer un paro momentáneo del robot, se usará un sensor óptico de detección infrarroja, el
cual indicará si hay una “mano” sobre el robot. Para el circuito se tiene pensado utilizar un sensor
CNY70, sin embargo, al no estar este componente en Proteus se hizo un sistema análogo, usando
de nuevo un switch y en este caso un optoacoplador. Como se ve en la figura 31, al detectar la
presencia de una mano, el circuito del diodo se cierra provocando que el del transistor también lo
haga y que en la resistencia de carga se presente una caída de voltaje, si no se detecta la presencia
de una mano, sucede lo contrario, provocando que en la resistencia de carga no exista una
diferencia de potencial
Figura 31 Simulación del circuito de paro del Robot al detectar y al no detectar la presencia de una mano