guiones_practicas
TRANSCRIPT

!"# $%"&' (% )*( +,-% %,. ) )/ )%%* ")01
!
"#$%%&


Agradecimientos
Este texto no hubiera sido posible sin el apoyo de otros compañeros del Departamento y
sin el empeño de su Director, el profesor D. Sebastián Dormido, por garantizar una
buena dotación de equipos. Los autores agradecen esta colaboración desinteresada, así
como el trabajo de los que les precedieron en estas tareas de combinar la práctica con la
teoría de control desde la asignatura de Automática I. Con especial mención a dos
profesores, D. Jesús Manuel De la Cruz y D. Heliodoro Ruipérez, que acompañaban a
D. Fernando Morilla cuando este laboratorio de Automática I dió sus primeros pasos en
el año 1983.
Agradecemos también la atención y los comentarios que durante estos años nos han
hecho llegar las distintas generaciones de alumnos, y los profesores y becarios que les
tutorizaron en el laboratorio.

Contenido
La modalidad de prácticas en la Sede Central de la UNED presenta una restricción temporal muy importante. El alumno abandona su lugar habitual de residencia y se desplaza durante una semana a Madrid. Esta limitación se ha venido paliando desde el Departamento de Informática y Automática de la UNED con un tipo de sesiones prácticas muy guiadas. Y haciendo entrega a los alumnos de unos guiones como éstos, muy elaborados y contrastados por profesores y becarios del Departamento, para que sean, en la medida de lo posible, autosuficientes. De esta forma se evita que el alumno se tenga que enfrentar a la documentación que acompaña a los propios equipos didácticos o herramientas informáticas, y pueda centrar su atención en los aspectos prácticos de la asignatura. Pero el concepto de práctica también está cambiando gracias a los grandes avances de las Tecnologías de la Información. El Dpto. de Informática y Automática de la UNED está desarrollando un paradigma de laboratorio virtual y remoto de Automática que permitirá al alumno de Automática I, que así lo desee, realizar sus sesiones prácticas desde cualquier lugar (su propio domicilio, su Centro Asociado, etc...) sin tener que desplazarse a Madrid. Sólo necesitará disponer de un computador personal con conexión a Internet y un navegador web estándar. La práctica de “Análisis y diseño de sistemas de control” ya está diseñada con esa filosofía. En este texto se incluyen los guiones de siete prácticas, un documento de introducción al “Control System Toolbox” y otro a “SIMULINK”, que han sido elaborados bajo la coordinación del profesor D. Fernando Morilla. Todos los guiones mantienen en general el siguiente esquema:
Material necesario Objetivos de la práctica Presentación teórica de los problemas que se van a abordar Descripción de equipos y programas de computador Propuesta de experimentos

Presentación - 1
Presentación
Las prácticas de Automática I, que tienen carácter obligatorio para aprobar la asignatura, contemplan la asistencia y participación del alumno en cinco tipo de sesiones que se describen a continuación. Todas las sesiones tienen lugar en los laboratorios del Departamento de Informática y Automática de la UNED durante una semana, en horario de tarde o de mañana, y una duración máxima de 4 horas. Por tanto estamos hablando de sesiones prácticas presenciales, muy guiadas, que además van a estar tutorizadas por profesores y becarios en el laboratorio. Algunas sesiones comienzan con una breve introducción a la herramienta “software” de cierta complejidad que el alumno va a utilizar en la práctica de ese día, a cargo del equipo docente.
1ª Sesión Modelado y simulación a partir de leyes físicas
(Péndulo simple) El objetivo de esta sesión es probar mediante simulación distintos modelos de un péndulo simple. Todos los modelos tienen como punto de partida el péndulo simple sin rozamiento y suponen una simplificación de éste, mediante linealización, o una ampliación, al considerar fricción dinámica, o la combinación con un elemento actuador, al considerar un motor eléctrico acoplado en su extremo. En el transcurso de la sesión el alumno ensayará técnicas de modelado y de simulación en el entorno de SIMULINK. Al mismo tiempo podrá comprobar bajo qué condiciones las aproximaciones lineales pueden explicar el comportamiento de un sistema tan bien

Presentación - 2
conocido y tan sencillo, como es el péndulo simple, pero inherentemente no lineal. Para que el alumno no tenga que partir de cero, se le ofrece el modelo del péndulo simple sin rozamiento, previamente programado, y acompañado de visualización gráfica y de una animación. En el resto de experimentos se le ofrecen algunos bloques que facilitan mucho el desarrollo de la práctica.
2ª Sesión Estimación de parámetros
El objetivo de esta práctica es estimar los parámetros de varios sistemas analógicos, por tanto continuos, de una entrada una salida a partir de sus características de respuesta temporal y de su respuesta en frecuencia. Todos los sistemas a estudiar tienen una estructura simple, de primer o de segundo orden, conocida. Concretamente se conoce su función de transferencia, que describe muy bien su comportamiento lineal, pero se desconoce el valor de sus parámetros. La determinación de éstos se puede realizar experimentalmente mediante el análisis de su respuesta temporal o de su respuesta en frecuencia y debería dar, salvo aproximaciones, los mismos resultados. Pero incluso aunque la estimación paramétrica proporcione los mismos resultados con ambos métodos, puede ocurrir que realmente se esté reflejando sólo parte de la realidad. Se recomienda al alumno que contraste el diagrama de Bode teórico y el experimental en un rango de frecuencias adecuado al sistema bajo estudio. En esta tarea se puede auxiliar de un instrumento (Bodímetro) para medición automática de respuesta en frecuencia desarrollado por nuestro Departamento.
Una sesión práctica se completa con varios experimentos sobre uno de los módulos analógicos activos (primer o segundo orden) y sobre otro pasivo (red de adelanto o de retardo). Actualmente hay disponibles cinco módulos:
Módulo de primer orden realimentado Módulo de segundo orden y ganancia unitaria. Módulo de segundo orden y controles independientes. Redes pasivas de adelanto y de retardo.

Presentación - 3
3ª Sesión
Análisis y diseño de sistemas de control El objetivo de esta sesión es: la aplicación del computador en el análisis, y diseño clásico de sistemas de control lineales, descritos por funciones de transferencia o mediante variables de estado. La sesión práctica consta de tres ejercicios, que el alumno debe resolver utilizando la aplicación cliente-servidor SISTEMAS. El primer ejercicio corresponde a un sistema continuo, el segundo a un sistema discreto y el tercero a un sistema muestreado.
4ª Sesión Control de una planta piloto
(Depósito con Lab View) (Motores de corriente continua)
(Control de caudal)
Los objetivos generales de esta sesión son que el alumno conozca una de las plantas pilotos del laboratorio, analice sus características dinámicas, y experimente sobre ella distintas estrategias de control haciendo uso de los medios que ésta tenga disponibles, que puede ser una instrumentación industrial o un computador. Las siguientes cuatro plantas están disponibles actualmente en el laboratorio del Departamento, y sobre cada una ellas se propone una sesión práctica con unos objetivos particulares.
Depósito con Lab View: Equipo didáctico CE5 "Coupled Tanks" de Tecquipment y aplicación específica de simulación y control.
La sesión práctica consta de cuatro experimentos: pruebas de entrada y de salida, estudio de las características del proceso, simulación y control de nivel. El computador en este caso asume todas las tareas de simulación, de control y de supervisión, y permite que los alumnos interactúen con el proceso. Pero como el proceso real tiene una dinámica muy lenta, se ha elegido una frecuencia de muestreo adecuada (a la que el alumno no tiene acceso) para que el planteamiento de la práctica se haga en el dominio continuo.

Presentación - 4
Motor de corriente continua:
Equipo didáctico CE9 "Ball and Hoop" de Tecquipment y aplicación específica de control.
La sesión práctica consta de cuatro experimentos: pruebas de entrada y de salida, estudio de las características del proceso, control de velocidad y control de posición. Aunque el proceso tiene una dinámica relativamente rápida, todo el planteamiento de la práctica se hace como si el sistema fuera continuo, fijando una frecuencia de muestreo suficientemente grande a la que el alumno tiene acceso, y sólo al final se analizará el efecto cualitativo de elegir otros periodos de muestreo. El computador en esta planta asume las tareas de control y de supervisión, y permite que los alumnos interactúen con el proceso.
Motor de corriente continua: Equipo didáctico SFT154 "Analogue Servo Fundamentals Trainer" de Feedback y aplicación específica de control.
De cara al alumno, la práctica que se realiza con este equipo es muy similar a la que realiza con el “Ball and Hoop”, tiene los mismos objetivos y se utiliza la misma aplicación informática.
Control de caudal: Planta piloto compuesta de un caudalímetro magnético, un regulador industrial, una válvula con su circuito de control y una bomba sumergible.
Esta planta se ha montado utilizando expresamente una serie de componentes habituales en muchos lazos de control industriales. Por tanto, a diferencia de los experimentos propuestos para las otras plantas, se primará la toma de contacto y familiarización del alumno con instrumentación industrial. La sesión práctica consta de ocho experimentos: identificar los componentes de la planta y sus conexiones, estudiar el posicionamiento del vástago de la válvula, obtener la característica entre la señal de control y el caudal, obtener un modelo de primer orden para la planta, calcular los parámetros de control, obtener la respuesta del sistema a una entrada escalón, estudiar el comportamiento del sistema frente a perturbaciones y estudiar el comportamiento del sistema para cambios en los parámetros de control.

Presentación - 5
5ª Sesión Control de un sistema mecánico mediante
realimentación por variables de estado (Péndulo invertido)
El objetivo de esta sesión es controlar mediante simulación un sistema electro-mecánico relativamente complejo como es el péndulo invertido montado sobre un carro. El sistema de control que se va a emplear combina una realimentación de estados para estabilizar el péndulo y un controlador de la posición del carro. La bondad del diseño vendrá condicionada porque todos los movimientos que el carro necesita para posicionarse se realicen en un tiempo razonable y sin que el péndulo se desvíe de su posición vertical más de un cierto ángulo. La sesión práctica consta de tres experimentos: análisis de estabilidad, estabilización del péndulo mediante realimentación por variables de estados, y control de posición del carro. En el transcurso de la práctica el alumno aprenderá por un lado a usar funciones de MATLAB y del Control System Toolbox, todas ellas con fines de análisis y diseño, y por otro lado a utilizar el entorno de simulación SIMULINK, principalmente con fines de control puesto que el modelo del péndulo invertido ya se le ofrece previamente programado, acompañado de unos registros gráficos y de una animación, que facilitan mucho el desarrollo de la práctica.

Presentación - 6

PÉNDULO SIMPLE
θ
F
m g
motor

Péndulo simple - 2
PRÁCTICA: PÉNDULO SIMPLE
Presentación ............................................................................................................... 3
1. Péndulo simple sin rozamiento ............................................................................. 4
2. Experimentos......................................................................................................... 7
2.1 Modelo lineal para el péndulo simple sin rozamiento ................................... 8
2.2 Péndulo simple con fricción dinámica ........................................................... 9
2.3 Péndulo simple controlado por un motor eléctrico ........................................ 10

Péndulo simple - 3
PRÁCTICA : PÉNDULO SIMPLE
Material :Computador personal.Programas MATLAB y SIMULINK.Programas y funciones específicas en el entorno MATLAB-SIMULINK.
El objetivo de esta práctica es probar mediante simulación distintos modelos de unpéndulo simple. Todos los modelos tienen como punto de partida el péndulo simple sinrozamiento y suponen una simplificación de éste, mediante linealización, o unaampliación, al considerar fricción dinámica, o la combinación con un elementoactuador, al considerar un motor eléctrico acoplado en su extremo.
En el primer apartado se presenta un modelo del péndulo simple sin rozamientoprogramado en SIMULINK. Este modelo va acompañado de una ventana de animacióny de una ventana gráfica para que el alumno pueda observar, mediante simulación, lainfluencia que tiene en el comportamiento del péndulo la variación de su longitud y desu posición angular de partida.
En el segundo apartado se incluyen los tres experimentos a realizar; en primer lugar sepropone linealizar el modelo anterior en torno al punto de equilibrio, y utilizar dichomodelo para encontrar explicación matemática al comportamiento del péndulo simplesin rozamiento. El segundo experimento se dedica a estudiar el péndulo simple confricción dinámica, con este objetivo se facilita la nueva ecuación dinámica del sistema yse pide ampliar el modelo del primer apartado y encontrar explicación, con ayuda de lalinealización, a la influencia de los parámetros del modelo en su comportamiento.
El control de la posición del péndulo con un motor eléctrico acoplado al eje de giro secontempla en el tercer experimento, con este objetivo se facilitan todas las ecuacionesdinámicas que describen al sistema y se pide desarrollar un modelo en SIMULINK quepermita realizar determinadas experiencias.
En el transcurso de la práctica el alumno ensayará técnicas de modelado y de simulaciónen el entorno de SIMULINK. Al mismo tiempo podrá comprobar bajo qué condicioneslas aproximaciones lineales pueden explicar el comportamiento de un sistema tan bienconocido y tan sencillo, como es el péndulo simple, pero inherentemente no lineal. Paraque el alumno no tenga que partir de cero, se le ofrece el modelo del péndulo simple sin

Péndulo simple - 4
rozamiento, previamente programado, y acompañado de visualización gráfica y de unaanimación. En el resto de experimentos se le ofrecen algunos bloques que facilitanmucho el desarrollo de la práctica.
1.-Péndulo simple sin rozamiento.
Sea el péndulo simple de la figura 1. Se trata de modelar el sistema para,posteriormente, simularlo mediante SIMULINK. Por modelar nos referimos a obteneruna representación del sistema; generalmente, una representación matemática. Elmodelo debe reflejar las características del sistema, además de ser sencillo. Eso planteaun compromiso entre sencillez y exactitud. Hay que tener en cuenta, además, que elmodelo será adecuado, o no, a un experimento en particular. Por simular entendemos elrealizar un experimento sobre un modelo (definición de Granino Korn). Es una técnicapara imitar el comportamiento de un sistema ante determinados cambios o estímulos.
Fig. 1 Péndulo simple.
Hipótesis. Las hipótesis de partida son:
• Ausencia de perturbaciones.• Fricción nula (el péndulo gira libremente alrededor del punto de pivote).• La varilla tiene masa despreciable.• La varilla tiene una longitud l (m).• No hay fuerza externa aplicada (ya sea fuerza controlada, ya sea una
perturbación).• La bola tiene una masa m (kg).
θ

Péndulo simple - 5
Aplicación de las leyes físicas. Si se tienen en cuenta las leyes de la Mecánica clásica sellega a la siguiente ecuación diferencial
d dt
2
2
gl
sen θ θ= − (1)
(comprobar el resultado), que describe el movimiento del péndulo simple sinrozamiento en función de un único parámetro, su longitud.
Modelo con bloques de SIMULINK. La figura 2 muestra un modelo, mediante bloquesde SIMULINK. En este modelo además de los bloques que resuelven la ecuacióndiferencial (1), se incorporan un bloque de animación y un bloque gráfico que sonreutilizables en otras simulaciones.
La ecuación (1) se resuelve con:
- Dos bloque integradores. El primer integrador recibe la aceleración angular ygenera la velocidad angular, mientras que el segundo genera la posición angular.En el último integrador se pone la condición inicial de la simulación, que será laposición angular de partida del péndulo.
- Un bloque “Matlab function” que recibe la posición angular y genera la señal “gsen θ(t)”.
- Un bloque del tipo constante “longitud” para introducir el parámetro “l”.
- Un bloque “Producto” para realizar el producto entre el inverso de la longitud y laseñal “g sen θ(t)”.
- Un bloque “Sumador” de dos entradas. La entrada “-” recibe la señal “g/l senθ(t)”. Mientras que la entrada “+”, que en este caso recibe un valor constante nulo,puede tener como finalidad en otras simulaciones el poder simular unaperturbación sobre la aceleración angular. En definitiva, a la salida de este bloquesumador se tiene el segundo término de la ecuación (1).
Péndulo simple - 6
salida (rad)
4
longitud
1/s
integrador1
f(u)
g*sen(teta)
0
constanteanimacio
animacion
Suma
Producto
1/s
Integrador2
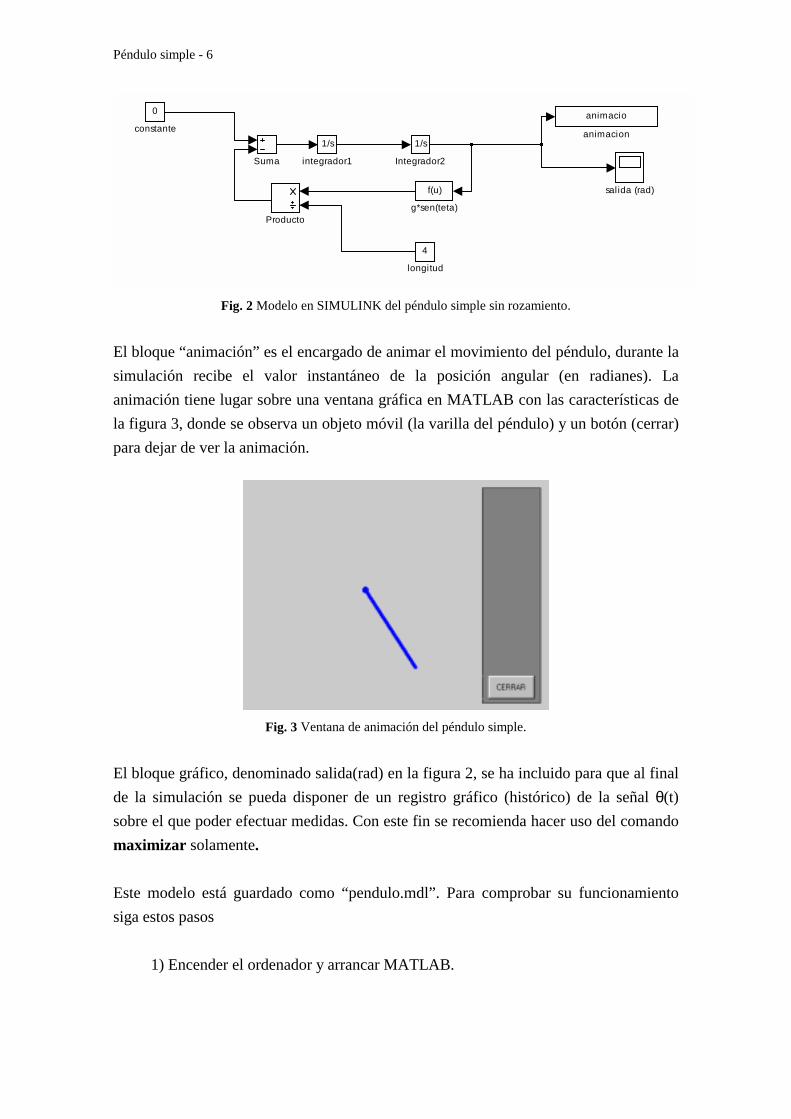
Fig. 2 Modelo en SIMULINK del péndulo simple sin rozamiento.
El bloque “animación” es el encargado de animar el movimiento del péndulo, durante lasimulación recibe el valor instantáneo de la posición angular (en radianes). Laanimación tiene lugar sobre una ventana gráfica en MATLAB con las características dela figura 3, donde se observa un objeto móvil (la varilla del péndulo) y un botón (cerrar)para dejar de ver la animación.
Fig. 3 Ventana de animación del péndulo simple.
El bloque gráfico, denominado salida(rad) en la figura 2, se ha incluido para que al finalde la simulación se pueda disponer de un registro gráfico (histórico) de la señal θ(t)sobre el que poder efectuar medidas. Con este fin se recomienda hacer uso del comandomaximizar solamente.
Este modelo está guardado como “pendulo.mdl”. Para comprobar su funcionamientosiga estos pasos
1) Encender el ordenador y arrancar MATLAB.

Péndulo simple - 7
2) Una vez en la ventana de comandos de MATLAB, cambiar al directorio detrabajo “pendsimp” y teclear
pendulo
3) Arrancar la simulación.
Para comprobar la influencia que tiene en el comportamiento del péndulo la variaciónde su longitud y de su posición angular de partida, realice alguna de las accionessiguientes, vuelva a arrancar la simulación y observe los resultados.
Para cambiar la longitud del péndulo. Hacer doble clic sobre el bloque llamado“longitud” para acceder al cuadro de diálogo de la figura 4. El parámetro acambiar es la longitud, expresada en metros. La coma decimal serepresenta por el punto. La figura 4 muestra un caso en el que la longitud delpéndulo son 4 metros. El cambio también se puede hacer en el transcurso de lasimulación.
Fig. 4 Cuadro de diálogo para cambiar la longitud del péndulo.
Para cambiar el ángulo que forma inicialmente el péndulo con la vertical.Proceder de forma similar sobre el bloque llamado “integrador2”. No tiene sentidohacer este cambio en el transcurso de la simulación.
2.- Experimentos.
A continuación se proponen una serie de experimentos, algunos encaminados acomparar dos modelos (el no lineal y el linealizado) del péndulo simple, y otros aconseguir un modelo más completo del péndulo simple que incluya fricción dinámica yun motor eléctrico como elemento actuador, capaz de mantener al péndulo en unaposición de equilibrio distinta de la vertical. Todos los experimentos se realizan en el

Péndulo simple - 8
entorno de SIMULINK donde el alumno encontrará algunos bloques específicamentediseñados para facilitar el desarrollo de los experimentos.
2.1.- Modelo lineal para el péndulo simple sin rozamiento.
El modelo péndulo simple descrito por la ecuación (1) se puede linealizar en torno alpunto de equilibrio dado por θ=0 (rad.). Para ello basta con aproximar la función sen θpor el valor de ángulo, esta aproximación se basa en utilizar el primer término deldesarrollo en serie de la función. Aunque el modelo obtenido sólo tendrá validez si losdesplazamientos angulares que sufre la varilla son pequeños, sin embargo nos permitiráencontrar explicación analítica al comportamiento del péndulo simple y a la influenciade sus parámetros en este comportamiento.
Obtener solución analítica a la ecuación (1) con la aproximación lineal y con θ(0) =θo. Se recomienda aplicar transformadas de Laplace.
Comparar, mediante simulación, los resultados obtenidos con los modelos (lineal yno lineal) del péndulo simple sin rozamiento. Como recomendación, los pasos aseguir son:
1) Ejecutar “pendulo” para acceder al sistema SIMULINK de la figura 2 yguardarlo con otro nombre.
2) Modificar y ampliar el sistema para disponer de ambos modelos a la vez.
3) Sustituir el bloque de “animación” por el bloque “ani_2_pe” que encontrará siabre el sistema “bloques” desde SIMULINK o lo ejecuta desde la ventana decomandos de MATLAB. Este bloque se ha desarrollado para que pueda ver unaanimación similar a la de la figura 3 con dos péndulos simultáneamente.
4) Efectuar diversas simulaciones, para distintas longitudes del péndulo y paradistintos ángulos de partida, y comparar los resultados.
¿La solución analítica explica los resultados anteriores?

Péndulo simple - 9
2.2.- Péndulo simple con fricción dinámica.
Este experimento tiene como objetivo modelar y simular un péndulo simple con unafricción dinámica directamente proporcional a la velocidad.
En primer lugar se debe formular la nueva ecuación del movimiento. La únicahipótesis que cambia respecto al apartado 1 es la “ausencia de fricción”. En el presentecaso se considera una fricción dinámica proporcional a la velocidad tangencial, que seopone al movimiento y que está provocada por el movimiento de la masa (no hayfricción en el punto de pivote ni en la varilla):
F b vf = − (2)
siendo b el coeficiente de fricción (en kg s-1).
Añadiendo esta nueva fuerza, la ecuación del movimiento queda como:
θα sen g m l l vb I −−= (3)
siendo I el momento de inercia del péndulo, l la longitud del mismo y b el coeficiente defricción dinámica. Pero para este péndulo (con masa en el extremo y varilla de pesodespreciable) es I = m l2 y según el movimiento circular v = l ω = l !θ , sustituyendo en(3) se llega a la siguiente ecuación de movimiento del péndulo simple con friccióndinámica:
dt d
mb sen
lg -
dt d2
2 θθθ −= (4)
Resolver, mediante simulación en SIMULINK, la ecuación diferencial (no lineal)del péndulo con fricción dinámica. Como recomendación, los pasos a seguir son:
1) Ejecutar “pendulo” para acceder al sistema SIMULINK de la figura 2 yguardarlo con otro nombre.
2) Modificar y ampliar el sistema para incluir el término de la fricción dinámica.Tomar como datos los siguientes: θo=π/4; g=9.8 m s-2; l=1 m; m=0.1 kg; b= 0.02kg s-1.

Péndulo simple - 10
3) Efectuar diversas simulaciones, para distintas longitudes del péndulo y paradistintos coeficientes de fricción. Se recomienda 0.5≤ l ≤ 2 y 0.05≤ b ≤ 0.5.
Aplicar transformada de Laplace a la ecuación (4) con la aproximación lineal y conθ(0) = θo. ¿Explica la expresión θθθθ(s) obtenida los resultados de la simulación?
2.3.- Péndulo simple controlado por un motor eléctrico.
Este experimento tiene como objetivo modelar y simular un péndulo simple con friccióndinámica y con un motor eléctrico acoplado a su eje de giro, como el de la figura 5. Conel motor, que ejerce un par sobre el punto de pivote del péndulo, se pretende compensarel giro del péndulo, y, ante perturbaciones (tales como la aplicación de un impulso sobrela bola, o la aparición de una ráfaga de viento) que éste mantenga una posición angulardeseada. Para modelar las perturbaciones se incluye la fuerza F en la direcciónhorizontal.
Fig. 5 Péndulo simple con motor eléctrico.
En primer lugar se deben formular todas las ecuaciones que describen al sistema.Que con un motor de corriente continua controlado por inducido resultan ser lassiguientes:
θ
Fm g
motor

Péndulo simple - 11
dt
(t) d l b - (t) cos l F(t) - (t)sen l g m =(t)T
(t)T + dt
(t)d f + dt
(t)d I = (t)T
(t)e = (t)e + (t)i R + dt
(t)diL
dt(t)d K = (t)e
(t)i K = (t)T
2L
L2
2
m
abaaa
a
bb
a1m
θθθ
θθ
θ
(5)
en las que intervienen como nuevas variables
ea(t) = tensión (V) aplicada al inducidoeb(t) = fuerza contraelectromotriz (V)ia(t) = corriente (A) en el inducidoTm(t) = par (N m) desarrollado por el motorTL(t) = par (N m) de carga aplicado al eje del motorF(t) = fuerza (N) externa aplicada en la dirección horizontalRa = resistencia del inducido (Ω)La = inductancia del inducido (H)K1 = constante de proporcionalidad del par motor(N m A-1)Kb = constante de proporcionalidad de la f.e.m. (V s rad -1)f = coeficiente de fricción viscosa del motor (kg m2 s-1 rad -1)I = momento de inercia del eje del motor (kg m2 rad -1)
En estas ecuaciones se observa que el motor desarrolla un par mecánico, directamenteproporcional a la corriente de inducido, que se emplea en vencer la inercia de su eje, elrozamiento entre sus elementos mecánicos y en vencer el par de carga. En el par decarga se recoge la componente debido al peso de la bola, la componente debido a lafuerza externa y la componente debida a la fricción dinámica del péndulo con el aire.
Resolver, mediante simulación en SIMULINK, el sistema de ecuaciones (5). Comorecomendación, los pasos a seguir son:
1) Modelar el sistema como un conjunto de subsistemas interconectados,tratando de mantener cierta separación entre las leyes físicas que rigen cada unosus componentes, principalmente entre la parte eléctrica y la parte mecánica. Estossubsistemas pueden ser los siguientes:

Péndulo simple - 12
- Para la función de transferencia entre la corriente de inducido y la diferenciade tensiones. Caracterizado por los parámetros Ra y La.
- Para el par de carga, caracterizado por los parámetros m, l y b.
- Para la aceleración angular, caracterizado por los parámetros I y f.

Péndulo simple - 13
2) Diseñar el actuador. Suponiendo g=9.8 m s-2 y que el péndulo tiene las mismas características físicas que en el experimento anterior, es decir, l=1 m, m=0.1 kg, b= 0.02 kg s-1. El motor debe tener unas características tal que se puedan cumplir unos objetivos de funcionamiento en régimen estacionario y en régimen transitorio del conjunto (motor+péndulo).
a) Los parámetros del motor que afectan al régimen estacionario son Ra y K1. Esto se demuestra al analizar el estado estacionario del sistema de ecuaciones (5), que se obtiene al hacer F(t)=0 y al anular todas las primeras y segundas derivadas. Que está definido por la relación
e = RK
m g l sen aa
1θ (6)
b) Mientras que en el régimen transitorio afectan todos los parámetros del motor (Ra, La, K1, Kb, I y f). Esto se demuestra al analizar el sistema linealizado en torno a la posición de equilibrio vertical, que se obtiene de (5) al hacer sen θ(t) ≅ θ(t), F(t)=0 y aplicar transformada de Laplace. Cuya ecuación característica resulta ser
( ) ( )( )L s + R I s + f + b l s + m g l + K K s = 0 a a
2 21 b (7)
Si la linealización se efectúa sobre otra posición de equilibrio la ecuación característica a la que se llega es ligeramente diferente a (7). No obstante, al imponer condiciones de estabilidad y de comportamiento dinámico en (7) podemos pensar que lo estamos imponiendo en todo el rango de funcionamiento del sistema. Comprobar, utilizando la ecuación (6), que si se eligen Ra=100 Ω y K1=7.5 N se tiene control de la posición angular entre -50 y 50 grados para valores de la tensión de inducido comprendida entre -10 y 10 V. Comprobar, utilizando la ecuación (7), que si además
La=10 H; Kb=0.001 V s rad-1; I=2 kg m2 rad-1; f=1 kg m2 s-1 rad-1 el sistema (motor+péndulo) es estable porque las tres raíces de la ecuación característica están en el semiplano-s izquierdo, y tiene un comportamiento

Péndulo simple - 14
oscilatorio porque dos de las raíces son complejas conjugadas y ademásdominantes. Si desea hacer esta comprobación en MATLAB, teclee en laventana de comandos
l=1 ; m=0.1 ; b=0.02 ; g=9.8 ;ra=100 ; k1=7.5 ; la=10 ; kb=0.001 ; i=2 ; f=1 ;roots(conv([la ra],[i f+b*l^2 m*g*l])+k1*kb*[0 0 1 0])
3) Crear el modelo en SIMULINK. Ejecutar “pendulo” para acceder al sistemade la figura 2, guardarlo con otro nombre, modificarlo y ampliarlo con los nuevosbloques. Si abre el sistema “bloques” desde SIMULINK o lo ejecuta desde laventana de comandos de MATLAB encontrará los subsistemas comentadosanteriormente. Incorporar además como entradas de excitación para la tensión deinducido y para la fuerza externa los bloques “Generador de tensión” y “fuerzaexterna”, respectivamente, que también se facilitan en el sistema “bloques”.
4) Validar el modelo. Asignar a cada uno de los parámetros físicos, del motor ydel péndulo, los valores recomendados anteriormente, excepto al valor inicial dela posición angular que ahora debe ser de 0 grados, y proceder a la validación delmodelo con varios experimentos. Un tiempo de simulación aconsejable paravalidar el modelo es 150 segundos.
1º) En ausencia de fuerza perturbadora en la dirección horizontal, comprobarque para valores constantes de la tensión de inducido de –10 y 10 V, elpéndulo se mantiene en una posición angular que verifica la ecuación (5).
2º) Para un valor fijo de tensión de inducido, por ejemplo de 5 V, y un trende pulsos de 50 segundos de período, 1 segundo de duración y una amplitudde 1 como fuerza perturbadora, comprobar que el péndulo recupera laposición de equilibrio tras un transitorio oscilatorio.
3º) En ausencia de fuerza perturbadora, utilizar como tensión de inducidopara comprobar el comportamiento simétrico del péndulo, tanto en estadoestacionario como en el transitorio, una onda cuadrada de frecuencia 0.01Hz entre +10 y -10 V,
5) Cambio de parámetro. Efectuar diversas simulaciones, para distintos valoresdel coeficiente de fricción viscosa del motor. Se recomienda el margen 0≤ f≤ 1.

ESTIMACIÓN DE PARÁMETROS
+V
-V
Departamento de Informáti ca y Automáti ca - UNED
Entrada SALI da
K
K=1 K=10
11+ ts

Estimación de parámetros - 2
PRÁCTICA: ESTIMACIÓN DE PARÁMETROS
1. Introducción........................................................................................................... 3
2. Experimentos......................................................................................................... 4
2.1 Sistema de primer orden ................................................................................ 4
a) Lazo abierto ............................................................................................... 4
b) Lazo cerrado .............................................................................................. 4
2.2 Sistema de segundo orden .............................................................................. 5
2.3 Red de compensación..................................................................................... 7
3. Características de la respuesta temporal................................................................ 8
3.1 Sistema de primer orden................................................................................. 8
3.2 Sistema de segundo orden .............................................................................. 9
3.3 Redes de adelanto y retardo de fase ............................................................... 12
4. Características de la respuesta en frecuencia......................................................... 14
4.1 Sistema de primer orden................................................................................. 14
4.2 Sistema de segundo orden .............................................................................. 16
4.3 Redes de adelanto y retardo de fase ............................................................... 18
5. Determinación experimental de diagramas de Bode ............................................. 20
6. Errores en estado estacionario ............................................................................... 21
Anexo 1. Descripción de los módulos analógicos...................................................... 24
A.1.1 Módulo de primer orden realimentado......................................................... 24
A.1.2 Módulo de segundo orden y ganancia unitaria ............................................ 27
A.1.3 Módulo de segundo orden y controles independientes ................................ 28
A.1.4 Módulos de redes de compensación............................................................. 29
Anexo 2. Bodímetro .................................................................................................. 31
A.2.1 Funcionamiento del "Bodímetro" ................................................................ 31
A.2.2 Descripción General del "Bodímetro" ......................................................... 35

Estimación de parámetros - 3
PRÁCTICA : ESTIMACIÓN DE PARÁMETROS
Material:
Generador de señal cuadrada y sinusoidal.
Osciloscopio.
Sistema analógico (Primer orden y/o segundo orden, red pasiva).
1. INTRODUCCIÓN
El objetivo de esta práctica es estimar los parámetros de varios sistemas analógicos,
por tanto continuos, de una entrada y una salida a partir de sus características de respuesta
temporal y de respuesta en frecuencia. Todos los sistemas a estudiar en esta práctica tienen
una estructura simple y por ello es inmediato identificar el orden del sistema.
Concretamente se conoce su función de transferencia, que describe muy bien su
comportamiento lineal, pero se desconoce el valor de sus parámetros. La determinación de
éstos se puede realizar experimentalmente utilizando dos métodos: el análisis de su
respuesta temporal y mediante su respuesta en frecuencia. Ambos deberían dar, salvo
aproximaciones, los mismos resultados.
Pero incluso aunque la estimación paramétrica proporcione los mismos resultados
con ambos métodos, puede ocurrir que realmente se esté reflejando sólo parte de la
realidad. Para comprobar que no se trata de una simplificación del proceso real sino que el
sistema tiene la misma estructura que el modelo, se propone contrastar el diagrama de Bode
teórico y el experimental en un rango de frecuencias adecuado para el sistema bajo estudio.
Todos los sistemas que se van a utilizar son electrónicos y están descritos en el anexo
1. Sus funciones de transferencia son funciones típicas de primer o segundo orden. Sus
características temporales y frecuenciales se recuerdan brevemente en las secciones 3 y 4,
donde están además descritos los procedimientos experimentales para la estimación
paramétrica de este tipo de funciones de transferencia. La obtención experimental de
diagramas de Bode se describe en la sección 5.
Para completar una sesión práctica se recomienda realizar al menos un experimento
con uno de los módulos analógicos activos (primer o segundo orden) y otro con una de las
redes de compensación (adelanto o retardo).

Estimación de parámetros - 4
2. EXPERIMENTOS
En esta sección se describen los experimentos a realizar con cada uno de los sistemas.
2.1 Sistema de primer orden
Material adicional: Módulo analógico del anexo 1.1
Fuentes de alimentación de +15 y -15 Vcc
Bodímetro
a) Lazo abierto
Para utilizar el módulo analógico de primer orden (véase anexo 1, apartado A.1.1) en
la configuración de lazo abierto debe: conectar alimentación y tierra al módulo, introducir
entrada y observar salida en el osciloscopio. Debe comenzar con el conmutador de ganancia
a la izquierda y el conmutador de lazo en la posición de lazo abierto. Los experimentos a
realizar son los siguientes:
Determinación de los parámetros a partir de la respuesta temporal. Para determinar
experimentalmente los parámetros del sistema, k y t , a partir de la respuesta a un escalón
siga el procedimiento explicado en la sección 3, apartado 3.1.
Determinación de los parámetros a partir de la respuesta en frecuencia. Para
determinar experimentalmente los parámetros del sistema, k y t , a partir de su respuesta en
frecuencia siga el procedimiento explicado en la sección 4, apartado 4.1. ¿Ha obtenido los
mismos valores que en el paso anterior?
Cambio de parámetro. ¿Qué cambio observa en la respuesta del sistema cuando sitúa a la
derecha el conmutador de ganancia del módulo analógico de primer orden? Cuantifique
este cambio razonadamente.
Comprobación de la estructura del modelo (Opcional) Para comprobar que este modelo
representa fielmente al sistema, elija un rango de frecuencia adecuado, obtenga el diagrama
de Bode experimentalmente utilizando el Bodímetro (Anexo 2), y compare con el diagrama
de Bode teórico.
b) Lazo cerrado
Para utilizar el módulo analógico de primer orden (véase anexo 1, apartado A.1.1) en
la configuración de lazo cerrado debe realizar las conexiones como en lazo abierto salvo el
conmutador de lazo que debe situarse en la posición de lazo cerrado. Los experimentos a
realizar son los siguientes:

Estimación de parámetros - 5
Comprobar experimentalmente que el sistema en lazo cerrado tiene un
comportamiento de primer orden. Si no es así, compruebe que las conexiones están bien
hechas.
Determinación de los parámetros a partir de la respuesta temporal. Para determinar
experimentalmente los parámetros del sistema, k' y ¢t , a partir de la respuesta a un escalón
siga el procedimiento explicado en la sección 3, apartado 3.1.
Determinación de los parámetros a partir de la respuesta en frecuencia. Para
determinar experimentalmente los parámetros del sistema, k' y ¢t , a partir de su respuesta
en frecuencia siga el procedimiento explicado en la sección 4, apartado 4.1. ¿Ha obtenido
los mismos valores que en el paso anterior? Compruebe que los parámetros en lazoabierto y cerrado cumplen las ecuaciones ( )kkk +=¢ 1 y ( )k+=¢ 1tt .
Error en estado estacionario. ¿Presenta este sistema error de posición en estado
estacionario?. Determinarlo experimentalmente de acuerdo con el procedimiento descrito
en la sección 6 y compararlo con el que debería tener teóricamente.
Cambio en los parámetros. ¿Qué cambio observa en la respuesta del sistema cuando
cambia a la derecha el conmutador de ganancia del módulo? Cuantifique este cambio
razonadamente.
Comprobación de la estructura del modelo (Opcional). Para comprobar que este
modelo representa fielmente al sistema, elija un rango de frecuencia adecuado, obtenga el
diagrama de Bode experimentalmente utilizando el Bodímetro (Anexo 2), y compare con el
diagrama de Bode teórico.
2.2 Sistema de segundo orden
Material adicional: Módulo analógico del anexo 1.2
Fuentes de alimentación de +15 y -15 Vcc
Bodímetro
Comprobar experimentalmente que el módulo tiene un comportamiento de segundo
orden subamortiguado.
a) Módulo de segundo orden y ganancia unitaria (anexo A.1.2)

Estimación de parámetros - 6
El potenciómetro de este módulo analógico (véase anexo A.1.2) permite modificar, de
forma no aislada, los valores de d y wn de su función de transferencia. Para comprobar la
influencia de este potenciómetro en la respuesta temporal del sistema proceder como sigue:
conectar alimentación al módulo, introducir una onda cuadrada a la entrada del sistema,
observar la salida en el osciloscopio para distintas posiciones del potenciómetro,
comprobando la influencia de ambos parámetros. Se recomienda elegir la amplitud y la
frecuencia de la onda cuadrada tal que se observe nítidamente la forma subamortiguada de
la señal de salida.
b) Módulo de segundo orden y controles independientes (anexo A.1.3)
Los potenciómetros de este módulo analógico (véase anexo A.1.3) permiten modificar, de
forma aislada, los valores de d y wn de su función de transferencia. Para comprobar la
influencia de estos potenciómetros en la respuesta temporal del sistema proceder como
sigue: conectar alimentación al módulo, introducir una onda cuadrada a la entrada del
sistema, observar la salida en el osciloscopio para distintas posiciones de ambos
potenciómetros, comprobando la influencia de ambos parámetros. Se recomienda elegir la
amplitud y la frecuencia de la onda cuadrada tal que se observe nítidamente la forma
subamortiguada de la señal de salida.
Determinación de los parámetros a partir de la respuesta temporal.
Para determinar experimentalmente los parámetros del sistema (k, d y wn ) a partir de la
respuesta a un escalón sitúe el o los potenciómetros, según el módulo tenga un único
potenciómetro o dos, en una posición determinada (se recomienda que sea tal que se
observe nítidamente la forma subamortiguada de la señal de salida) y siga el procedimiento
explicado en la sección 3, apartado 3.1.
Determinación de los parámetros a partir de la respuesta en frecuencia. Para
determinar experimentalmente los parámetros del sistema (k, d y wn ) a partir de su
respuesta en frecuencia mantenga el o los potenciómetros, según el módulo tenga un único
potenciómetro o dos, en la misma posición y siga el procedimiento explicado en la sección
4, apartado 4.2. ¿Ha obtenido los mismos valores que en el paso anterior?
Cambio de parámetros. ¿Qué cambio observa en la respuesta del sistema cuando sitúa el
o los potenciómetros, según el módulo tenga un único potenciómetro o dos, en posiciones
diferentes? ¿A qué parámetro (k, d y wn ) es achacable ese cambio? Cuantifíquelo de forma

Estimación de parámetros - 7
razonada.
Comprobación de la estructura del modelo (Opcional). Para comprobar que este modelo
representa fielmente al sistema, elija un rango de frecuencia adecuado, obtenga el diagrama
de Bode experimentalmente utilizando el Bodímetro (Anexo 2), y compare con el diagrama
de Bode teórico.
2.3 Red de compensación.
Material adicional: Módulo analógico del anexo 1.4.
Bodímetro
Comprobar experimentalmente si el módulo corresponde a una red de adelanto o de
retardo. Por tratarse de módulos analógicos pasivos, no necesitan fuente de alimentación.
Conectar la entrada y observar la salida. Las características de respuesta de estas redes
están descritas en los apartados 3.3 y 4.3.
Determinación de los parámetros a partir de la respuesta temporal. Para determinarexperimentalmente los parámetros del sistema (k, tso, tsp) de la red a partir de la respuesta
a un escalón siga el procedimiento explicado en el apartado 3.3.
Determinación de los parámetros a partir de la respuesta en frecuencia. Paradeterminar experimentalmente los parámetros del sistema (k, tso, tsp) de la red a partir de
su respuesta en frecuencia siga el procedimiento explicado en el apartado 4.3. ¿Ha
obtenido los mismos valores que en el paso anterior?
Comprobación de la estructura del modelo. Para comprobar que este modelo representa
fielmente al sistema, compare el diagrama de Bode experimental obtenido mediante el
método descrito en la sección 5 y con el diagrama de Bode teórico.

Estimación de parámetros - 8
3. CARACTERÍSTICAS DE LA RESPUESTA TEMPORAL
3.1 Sistema de primer orden
a) Características
Si un sistema de primer orden como el de la Figura 3.1 se excita con una entrada
escalón de la forma ( )îíì
£
>=
0 , 0
0 ,
t
tmtx el sistema responde con una salida
( )ïî
ïíì
£
>÷øöç
èæ -=
-
0 0
0 1
t
temkty
t
,
,t
La Figura 3.2 representa la respuesta de un sistema de primer orden (k=1 y t = 1) a
una entrada escalón de amplitud m = 1:
0 1 2 3 4 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t
m kk
st + 1
x(t) y(t)
Figura 3.1: Sistema de Primer Orden Figura 3.2: Respuesta de Primer Orden a entrada escalón
El valor estacionario de la salida ( ( )tylimt ¥®
) es k m. La constante de tiempo t es el
tiempo que tarda el sistema en alcanzar el 63,2% del valor final.
b) Procedimiento para la determinación de k y t partir de la respuesta temporal.
1) Registrar la respuesta del proceso a una entrada escalón, de amplitud y de instante
de cambio conocidos. Para que el registro sea válido, la salida debe haber
alcanzado el estacionario. Como la entrada escalón se genera a partir de una onda

Estimación de parámetros - 9
cuadrada, es conveniente elegir el periodo P de la misma mucho mayor que la
constante de tiempo t del sistema.
2) Obtener la ganancia k del modelo como el cociente entre el cambio observado en la
salida del proceso y la amplitud del escalón de entrada.
3) Obtener la constante de tiempo t como el tiempo transcurrido hasta que se alcanza
el 63.2% del valor estacionario de la salida.
3.2 Sistema de segundo orden
a) Características
Si un sistema de segundo orden subamortiguado (0 < d < 1) como el de la Figura 3.3
se excita con una entrada escalón de amplitud m, tiene la siguiente respuesta
( ) ( )÷÷ø
öççè
æ+
--=
-
fwd
dw
te
kmtytn
sen1
12
, donde ÷÷
ø
ö
çç
è
æ -=
d
df
21arctg
siendo k = ganancia en estado estacionario
d = coeficiente de amortiguamiento
wn= frecuencia natural y w w d= -n 1 2 = frecuencia forzada
Un cambio en d afecta al carácter oscilatorio amortiguado de la respuesta. Cuando
d =1 (amortiguamiento crítico) la respuesta deja de tener el carácter anterior (oscilatorio
amortiguado) y la salida tiende exponencialmente a la entrada. El cambio en wn afecta
únicamente a la frecuencia forzada y en definitiva a la velocidad de respuesta (tiempo de
asentamiento, tiempo de subida,...).
La Figura 3.4 representa la respuesta del sistema de segundo orden con gananciaunidad a un escalón unitario, cuyos máximos relativos en se presentan en los instantes tn,
e entn n= -dw , t
nnn
n
=-
=p
w d113 5
2; , , ,...

Estimación de parámetros - 10
0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
1.4
t (s)tp
ts
to
e2
e1e3
0.05
w
dw w
n
n ns s
2
2 22+ +
x(t) y(t)k
Figura 3.3: Sistema de segundo orden Figura 3.4: Respuesta del sistema de segundo orden con k=1
a un escalón unitario
0 10 20 30 40 50 60 70 80 900
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9en función de
(%)
d
d
Mp
Mp
Figura 3.5: Curva que relaciona M p con d
b) Determinación experimental de k, d y wn a partir de la respuesta temporal
La ganancia k se determina del cociente entre la salida del proceso en el estacionario

Estimación de parámetros - 11
y la amplitud del escalón de entrada. Los parámetros d y wn del sistema se puedendeterminar a partir de la respuesta temporal, midiendo la máxima sobreelongación M p
(valor del primer máximo e1) y el instante t tp = 1 en que se produce. El procedimiento es el
siguiente:
1) Aplicar una entrada de onda cuadrada.
2) Obtener la ganancia k del modelo como el cociente entre la amplitud de salida del
proceso en el estacionario y la amplitud del escalón de entrada.
3) Medir M p y t p. (Recuérdese que los máximos de sobrelongación se miden
respecto el valor de la salida en el estacionario)
4) A partir de la curva que relaciona M p con d (véase Figura 3.5), o bien
analíticamente utilizando la expresión
( )
( )( )22 01.0ln
01.0ln
p
p
M
M
+=
pd , M p porcentual,
obtener el coeficiente de amortiguamiento d .
5) Calcular wn a partir de la siguiente expresión: wp
dn
pt=
-1 2

Estimación de parámetros - 12
3.3 Redes de adelanto y retardo de fase
a) Características
Dada una función de transferencia de la forma
( )1
1
+
+=
s
sksG
sp
so
t
t
si t tso sp> es una red de adelanto
si t tso sp< es una red de retardo
Si se le excita con una entrada escalón de amplitud m, tiene la siguiente respuesta:
úû
ùêë
éD+=
-
spt
emktyt
1)( siendo D =-t t
tso sp
sp
que contiene un término constante más una respuesta análoga a la respuesta de un sistemade primer orden a una entrada escalón con t t= sp.
En las Figuras 3.6 y 3.7 se observan las respuestas de una red de adelanto con k = 0 1. ,1.0 ==tt sp y tso = 1 y de una red de retardo con k = 10, 1 ==tt sp y tso = 0 1. ,
respectivamente, a una entrada escalón unitario.
m k (1 + D )
0.5
1
t (s)0 0.1 0.2 0.3 0.4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t
m k
Figura 3.6: Respuesta de la red de adelanto a una entrada escalón

Estimación de parámetros - 13
0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
t (s)t
m k
m k (1 + D )
Figura 3.7: Respuesta de la red de retardo a una entrada escalón
Obsérvese en la expresión úû
ùêë
éD+=
-
sp1)(tt
emkty como para t = 0 la salida toma el
valor ( )D+1mk , en el estacionario (t®¥) toma el valor mk, y como para t > 0 evoluciona
de forma exponencial. La exponencial es decreciente en una red de adelanto ya que( )D+1mk es mayor que mk al ser D > 0. Y es creciente en una red de retardo ya que
( )D+1mk es menor que mk al ser 0<D .
b) Determinación experimental de k, tsp y tso a partir de la respuesta temporal
1) Registrar la respuesta de la red a una entrada escalón, de amplitud y de instante de
cambio conocidos.
2) Obtener a partir de la respuesta en el estacionario el valor de k.
3) Obtener a partir de la respuesta en t = 0 y de k el valor de D .
4) Obtener el valor de ( )ty para t sp= t mediante la expresión ( ) ( )11 -
=
D+= emktyspt t
.
Determinar el valor spt como el t en el que se alcanza este valor.
5) Utilizar la expresión ) (1 D+= spso tt para determinar tso.

Estimación de parámetros - 14
4. CARACTERÍSTICAS DE LA RESPUESTA EN FRECUENCIA
4.1 Sistema de primer orden
a) Características
Para un sistema de primer orden
( )wt
wj
kjG
+=
1
se tiene que
20 20 20 1log log logG k j= - + wt
10-1
100
101
-30
-20
-10
0
10-1
100
101
-30
-60
-90
0
20 log k-3 dB
Amplitud (dB)
Fase (grados)
Frecuencia (rad/s)
1/t
-45º
Figura 4.1: Diagrama de Bode de un sistema de primer orden

Estimación de parámetros - 15
b) Determinación experimental de k y t a partir de la respuesta en frecuencia
Los parámetros k y t del sistema se pueden determinar a partir de la respuesta enfrecuencia, conocida la frecuencia de corte wc.
Se define la wc como la frecuencia a la que ( )wjG ha disminuido en 3dB con
relación a su valor en w = 0. Es decir:
( )
( )3
0log20 -=÷
÷ø
öççè
æ
jG
jG cw
Para determinar k y t seguir los siguientes pasos:
1) Aplicar una entrada sinusoidal y observar la salida.
2) Obtener la ganancia k a partir de la siguiente relación ( )0jGk = .
3) Efectuar un barrido en frecuencia para localizar wc. La frecuencia de corte será
aquella para la que ( )
( )71.0
0»
jG
jG cw. Anotar el valor de la frecuencia de la señal
sinusoidal, fc (dada por el generador de señal en Hz), y calcular w pc cf= 2 .
4) Calcular t:
Como para un sistema de primer orden, la caída en 3dB se producirá cuando
( )
( )( ) 31log101log20
0log20 22 -=+-=+-=÷
÷ø
öççè
ætwtw
wcc
c jjG
jG
entonces 1 10 22 2 310+ = =w tc Þ @ Þ @w t w tc c1 1
También se puede realizar la determinación de w tc @ 1 sobre el diagrama de fase:
( )( ) ( ) ( )º== 1arctgarctgarg tww ccjG frecuencia para la cual la fase es igual a 45 grados.

Estimación de parámetros - 16
4.2 Sistema de segundo orden
a) Características
En la Figura 4.2 se representa el diagrama de Bode de amplitud de un sistema de
segundo orden de ganancia unidad, cuyo valor máximo Mr se obtiene a la frecuencia w r ,
Mr =-
1
2 1 2d d, w w dr n= -1 2 2
101
102
103
-40
-20
0
20
101
102
103
-90
-180
0
Amplitud (dB)
Fase (grados)
Frecuencia (rad/s)
wn
-90º
wr
Mr
Figura 4.2: Diagrama de Bode de un sistema de segundo orden
La fase del sistema de segundo orden está dada por: ïþ
ïýü
ïî
ïíì
úúû
ù
êêë
é÷÷ø
öççè
æ-- -
2
1 12
nn
tanw
w
w
dw para
distintos valores de d. A partir de esta expresión se deduce que para w w= n la fase toma el
valor de -90º.
NOTA : Si el sistema de segundo orden tiene ganancia k distinta a la unidad, como ocurre
en el caso del módulo con dos potenciómetros, su diagrama de fase es el mismo que el de lafigura 4.2, pero no así el de amplitud. Este último sufrirá un desplazamiento 20klog .

Estimación de parámetros - 17
b) Determinación experimental de k, d y wn a partir de la respuesta en
frecuencia
Los parámetros d y wn del sistema se pueden determinar a partir de la respuesta en
frecuencia, midiendo el pico de resonancia Mr y la frecuencia de resonancia w r .
Para determinar k, d y wn deben seguirse los siguientes pasos:
1) Aplicar una entrada sinusoidal. Determinar ( )0jGk = .
2) Efectuar un barrido en frecuencia para localizar la frecuencia w r (a la que se produce
la máxima amplificación, es decir la máxima amplitud de salida) y anotar el valor de
fr (dada por el generador de señal en Hz). Entonces w pr rf= 2 .
3) Determinar Mr como la razón entre amplitud de salida para ganancia unidad (es
decir, la amplitud de salida dividida por k), y la amplitud de entrada.
4) A partir de la curva que relaciona Mr con d (véase Figura 4.3), o bien analíticamente
utilizando la expresión Mr =-
1
2 1 2d d, obtener el coeficiente de amortiguamiento
d .
5) Calcular wn a partir de la siguiente expresión:
ww
dn
r=-1 2 2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5Mr en función de delta
Figura 4.3: Curva que relaciona Mr con d

Estimación de parámetros - 18
4.3 Redes de adelanto y retardo de fase
Las redes de compensación más utilizadas son la red de adelanto y la red de retardo.
Ambas redes se pueden describir (salvo que vayan acompañadas de una ganancia en estado
estacionario) por la función de transferencia.
( )1
1
+
+
=
p
o
s
s
s
s
ksG
w
w
Red de Retardo de Fase: Se trata básicamente de un filtro paso baja. El nombre de
red de retardo proviene del hecho de que para una señal de entrada sinusoidal, la señal de
salida de la red es también sinusoidal, con la misma frecuencia que la entrada, pero
retrasada en fase respecto a ésta en un ángulo que es función de la frecuencia de la señal de
entrada. Se caracteriza porque la frecuencia del cero es posterior a la frecuencia del polow ws so p
> y presenta un diagrama de Bode como el de la figura 4.4.
sp so
fm
20 log wso
wsp
wm
Figura 4.4 : Diagrama de Bode de la red de retardo, con wsp= 0 01. , w so
= 0 1. y k=1.
Red de Adelanto de Fase: Se trata básicamente de un filtro paso altas. El nombre de red de
adelanto proviene del hecho de que para una señal de entrada sinusoidal, la señal de salida
de la red es también sinusoidal, con la misma frecuencia que la entrada, pero adelantada en
fase respecto a esta en un ángulo que es función de la frecuencia de la señal de entrada. Secaracteriza porque la frecuencia del cero es anterior a la frecuencia del polo w ws so p
< y
presenta un diagrama de Bode como el de la figura 4.5.

Estimación de parámetros - 19
so sp
20 log wso
wsp
fm
wm
Figura 4.5: Diagrama de Bode de una red de adelanto, con wsp= 0 1. , w so
= 0 01. y k=1
NOTA : Si la red de compensación tiene k distinta a la unidad, como ocurre en el caso del
módulo con dos potenciómetros, su diagrama de fase es el mismo que el de las figuras 4.4 y4.5, pero no así el de amplitud. Este último sufrirá un desplazamiento 20log k .
a) Características
La respuesta en frecuencia de la red de compensación se caracteriza por presentar un
máximo (red de adelanto) o un mínimo (red de retardo) fm a la frecuencia wm, que es la
media geométrica de las frecuencias del cero y del polo, relacionándose mediante las
siguientes expresiones
w w wm so sp= y÷÷
ø
ö
çç
è
æ-=
sp
so
so
sp
mw
w
w
wf
2
1tg
b) Determinación experimental de k, wso y wsp a partir de la respuesta en
frecuencia
1) Aplicar una entrada sinusoidal. Determinar ( )0jGk = .
2) Efectuar un barrido en frecuencia para localizar wm (a la que se produce la máxima o
la mínima fase). La frecuencia wm viene dada por w pm mf= 2 , donde fm es la
frecuencia dada por el generador de señal en Hz . Anotar el valor del desfase fm y el
de wm. (Se recomienda realizar el diagrama de Bode experimental mediante el
método descrito en la sección 5 para determinar fm y wm)
3) Determinar la frecuencia del polo y del cero a partir de las expresiones
( )mmmsp ffww2tg1tg ++= y w
wwso
m
sp
=2

Estimación de parámetros - 20
5. DETERMINACION EXPERIMENTAL DE DIAGRAMAS DE BODE
Para obtener experimentalmente el diagrama de Bode (amplitud y fase) de un sistema
monovariable se aplica a su entrada una señal sinusoidal de la forma:( ) tAtx wsen=
con diferentes frecuencias. A cada una de ellas le corresponde una salida en estado
estacionario de la forma( ) ( ) ( )( )( )www jGtjGAty argsen -=
donde ( )sG es la función de transferencia del sistema.
Si se compone x con y en un plano de fases (se puede utilizar un osciloscopio para
visualizar esta composición) se observa la Figura 5.1.
y
x2B2b
2A
Figura 5.1: Composición de entrada senoidal y salida en estado estacionario de un sistema monovariable
Para cada w se obtienen las siguientes relaciones:
G jB
A( )w =
2
2 arg ( ( )) sen ( )G j arc
b
Bw f w= æ
èçöø÷
=22
Los diagramas de amplitud y fase son las representaciones de( )( )ww ,jG y de ( ( ), )f w w
respectivamente. En la práctica no se representa ( )wjG , sino ( )( )wjGlog20 .
NOTA : En los osciloscopios HM203-6 y HM205-2 el canal 2 es el eje x en la composición.
Por tanto, de acuerdo con la figura 5.1, la entrada debe observarse por el canal 2 y la salida
por el canal 1 (si el osciloscopio del que dispone es diferente compruebe qué canal es el eje
x).

Estimación de parámetros - 21
6. ERRORES EN ESTADO ESTACIONARIO
a) Descripción genérica
El comportamiento en estado estacionario de un sistema de control se juzga por el
error estacionario a determinadas entradas (escalón, rampa, aceleración, etc...). Se habla
entonces de error estacionario de posición, de velocidad, de aceleración, etc.. Un mismo
sistema puede no tener error estacionario de posición pero si de velocidad, ello depende del
tipo de función de transferencia del proceso y del controlador.
En el caso del sistema continuo de la Figura 6.1
r(t)
CONTROLADOR PROCESO
G (s) G (s)y(t)u(t)+
-
e(t)
c p
Figura 6.1: Sistema continuo
las expresiones de errores en estado estacionario de posición y de velocidad son:
error de posición:( ) ( )sGsGlim
epc
s
ssp
01
1
®
+=
error de velocidad:( ) ( )sGsGslim
epc
s
ssv
0
1
®
=
Según estas expresiones, el error en estado estacionario es función del límite de la
función de transferencia en lazo abierto cuando s tiende a 0. Esto permite hacer una
clasificación de los sistemas de control, se dice que un sistema de control es de tipo n
cuando su función de transferencia en lazo abierto tiene un polo en el origen de
multiplicidad n. De tal manera que:
· El error de posición es finito para sistemas de control de tipo 0 y nulo para sistemas
de tipo superior a 0.
· El error de velocidad es infinito para sistemas de control de tipo 0, es finito para
sistemas de tipo 1 y nulo para sistemas de tipo superior.

Estimación de parámetros - 22
El valor finito de un determinado error depende únicamente de la ganancia en estado
estacionario de la función de transferencia del sistema en lazo abierto, una vez eliminados
los polos en el origen. Esta ganancia es la que se conoce como coeficiente de error.
Asícoeficiente de error de posición: ( ) ( )sGsGlimk pc
sp
0®
=
coeficiente de error de velocidad: ( ) ( )sGsGslimk pcs
v0®
=
tal que
ekssp
p
=+1
1 , e
kssvv
=1
b) Determinación experimental
Error de posición:
El procedimiento para la determinación de error de posición en estado estacionario de
un sistema lineal consta de los siguientes pasos:
1) Aplicar una entrada escalón. En la práctica se utiliza una onda cuadrada de periodo
P>> t.
2) Registrar la respuesta del proceso a dicha entrada. Para que el registro sea válido,
la salida debe haber alcanzado el estacionario (como se observa en la Figura 6.2, la
salida debe tener una forma cercana a la onda cuadrada).
3) Obtener el error de posición como la diferencia de la amplitud de entrada y el
valor en estado estacionario de la salida.
SI
NO
ess
Figura 6.2: Error de posición en estado estacionario

Estimación de parámetros - 23
Error de velocidad:
El procedimiento para la determinación de error de velocidad en estado estacionario
de un sistema lineal consta de los siguientes pasos:
1) Aplicar una rampa a la entrada. En la práctica se utiliza una onda triangular de
periodo P >> t.
2) Registrar la respuesta del proceso a dicha entrada. Para que el registro sea válido,
la salida debe haber alcanzado el estacionario en cada uno de los flancos. Esto se
pone de manifiesto cuando la salida también tiene una forma cercana a la
triangular. Véase la Figura 6.3.
3) Obtener el error de velocidad como la diferencia entre la entrada y el valor en
estado estacionario de la salida.
SI
NO
essv
Figura 6.3: Error de velocidad en estado estacionario

Estimación de parámetros - 24
ANEXO 1
DESCRIPCIÓN DE LOS MÓDULOS ANALÓGICOS
Hay dos tipos de módulos, unos son pasivos y los otros activos. Todos los módulos
activos contienen amplificadores operacionales que deben ser alimentados de forma
simétrica con ayuda de una fuente externa. En todos los casos, esta alimentación se
suministra a través de los bornes laterales de la izquierda. En este lateral izquierdo aparecen
tres bornes de conexión: el borne central de color gris es la tierra del sistema. El superior de
color rojo es la alimentación positiva, y el inferior la alimentación negativa. Si tomamos el
0 de tensión en el borne gris (tierra), la tensión positiva, deberá estar alrededor de los +12
voltios y la negativa en -12 voltios. Estos valores pueden variar ligeramente, siempre que su
valor absoluto sea el mismo y en ningún caso sobrepase los 15 voltios respecto de tierra.
Los módulos pasivos (redes de compensación de adelanto y atraso) no requieren
alimentación externa.
A.1.1 Módulo de primer orden realimentado
En la figura A.1.1 se muestra es aspecto externo del módulo, donde se pone de
manifiesto su estructura interna a nivel de diagramas de bloque.
+V
-V
Departamento de Informáti ca y Automáti ca - UNED
Entrada SALI da
K
K=1 K=10
11+ ts
Figura A.1.1. Aspecto externo del módulo de primer orden realimentado,
donde se observa su estructura de bloques

Estimación de parámetros - 25
En la parte más cercana a la entrada aparece un restador que entrega a la salida la
diferencia entre la señal que se introduce por el borne verde de ENTRADA y la señal que
viene de la salida (señal realimentada). Esto nos proporciona la señal de error. A
continuación aparece un bloque multiplicador por una constante K. Esta constante se puede
variar entre dos valores: K=1 y K=10 con ayuda del conmutador de la parte superior, justo
encima del bloque multiplicador. A la salida de este bloque de ganancia K, hay un borne de
salida para visualizar la señal de entrada o de error, multiplicada por K. Esta conexión es
únicamente de salida, y en ningún caso podrá utilizarse como entrada para el bloque que
aparece a continuación. El introducir una señal por el borne central (amarillo), podría dañar
la etapa amplificadora previa.
Una vez que la señal de entrada o de error ha sido multiplicada por la constante K (1 ó 10)
en el mencionado bloque de ganancia K, se introduce en el bloque principal del módulo que
encierra un sistema de primer orden con contante de tiempo t. La salida de este segundo
bloque de primer orden, constituye la salida del módulo (borne azul). Esta salida puede
realimentarse a la entrada, lo que nos permite cerrar el lazo y considerar un sistema de
primer orden realimentado. Existe la posibilidad de trabajar tanto en lazo abierto (sin
realimentación) como en lazo cerrado (realimentando la salida). Podemos seleccionar
cualquiera de las dos configuraciones con ayuda del conmutador de la parte inferior. En la
posición inferior, la salida esta desconectada del restador de entrada y el módulo representa
un sistema de primer orden con ganancia K y constante de tiempo t trabajando en lazo
abierto (sin realimentación). En la posición superior, el conmutador conecta la salida con el
restador de la entrada, con lo que se cierra el lazo y tendremos por tanto un sistema de
primer orden realimentado.
La figura A.1.2 muestra el esquema eléctrico empleado para conseguir las dos
posibilidades con el sistema de primer orden. Para su implementación se han empleado
cuatro operacionales. El primero de ellos está configurado como sumador inversor con
ganancia unitaria. Para convertirlo en restador hay que proporcionar en una de sus entradas
la señal invertida. De las dos señales que le llegan es mucho más intuitivo invertir
internamente la señal que viene de la salida y de esta forma la señal de entrada, es
directamente la que llega por el borne externo. Más adelante se explica como se consigue
esta inversión de la señal de salida.
A continuación, aparece un segundo operacional que tiene dos resistencias de
realimentación entre las que se puede elegir con ayuda del conmutador superior como ya se
explicó. También está en configuración inversora, con lo que se cancela la inversión

Estimación de parámetros - 26
introducida por el primer operacional. Es de la salida de este segundo operacional donde se
conecta la toma intermedia de salida (borne amarillo).
El tercer operacional incorpora un elemento reactivo en la realimentación, con lo
que se comportará como un sistema de primer orden, siempre y cuando estemos en la zona
lineal del amplificador operacional y dentro de su ancho de banda. Como este operacional
también está en configuración inversora, se hace necesario un cuarto operacional que
cancele esta inversión. Esta función la realiza el cuarto y último operacional que constituye
a su vez la etapa de salida.
Como ya se comentó al principio de esta descripción, debemos invertir la señal de
salida para realimentarla a la entrada del primer operacional (sumador-inversor). Esto lo
podemos hacer haciendo pasar la salida total a través de un operacional en configuración
inversora y de ganancia unitaria. No obstante como el último operacional ya realiza esta
función debido a que la salida del tercer operacional (sistema de primer orden) ya estaba
invertida, podemos tomar esta señal ya invertida para realimentarla a la entrada con lo que
evitamos dos cosas: por una parte un operacional, y por otra los retardos, ruidos, y demás
efectos secundarios que puede introducir una cadena muy larga.
R1
R1
R1
R2R2
10xR2
R3
C
R3
R4
R4
Lazo cerrado
Lazoabierto
AO1
AO1
AO1
AO1
K=10
K=1
Entrada
Salida
Tomaintermedia
Figura A.1.2 Esquema eléctrico del sistema de primer orden con/sin realimentación.

Estimación de parámetros - 27
A.1.2 Módulo de segundo orden y ganancia unitaria.
La figura A.1.3 muestra el aspecto externo y el diagrama de bloques funcional del
módulo que contiene al sistema de segundo orden y ganancia unitaria.
El diagrama de bloques de este sistema es muy simple y se reduce a un único bloque
que representa a un sistema de segundo orden en lazo abierto donde K=1. Su diseño interno
se ha elegido para que trabaje en la zona subamortiguada, con lo que presentará
sobreelongación, cuando en la entrada introduzcamos una señal escalón. El
amortiguamiento y la frecuencia natural se pueden variar dentro de la zona subamortiguada
con ayuda del potenciómetro que incorpora el módulo. La señal se introduce por el borne
verde de la izquierda y la respuesta del sistema puede observarse en el borne azul de salida.
Hay que tener en cuenta, que las señales tanto de entrada como de salida deben
referenciarse a tierra.
+V
-V
Departamento de Informáti ca y Automáti ca - UNED
Entrada SALI daw
dw w
n
n ns s
2
2 22+ +
w dn
Figura A.1.3 Aspecto externo del módulo de segundo orden y ganancia unitaria con su diagrama de bloques
La figura A.1.4 muestra el esquema eléctrico interno del módulo. Consta de dos
operacionales, el primero de los cuales actúa únicamente como adaptador de impedancias,
para lo que se ha conectado como seguidor de tensión. El segundo operacional, con dos
elementos reactivos tiene una configuración de tipo Sallen-Key muy utilizada para la
realización de filtros activos de todo tipo (P. Bajo, P. Alto, P. Banda, E. Banda). De hecho,
podemos considerar este módulo como un filtro de segundo orden en el que podemos variar
tanto la frecuencia natural como el amortiguamiento.

Estimación de parámetros - 28
R1 R2
C1
P1
C2
Entrada SalidaAO1
AO1
Figura A.1.4 Esquema eléctrico del módulo de segundo orden y ganancia unitaria.
A.1.3 Módulo de segundo orden y controles independientes.
En el módulo descrito en el apartado anterior, sólo disponíamos de un mando de
control, de tal forma que al actuar sobre él resultaban modificadas tanto la frecuencia
natural como el amortiguamiento. Si introducimos una pequeña modificación podemos
aislar estos dos parámetros y variarlos con ayuda de controles independientes. Como se
trata de un sistema de segundo orden, de los tres elementos característicos, (ganancia,
frecuencia natural y amortiguamiento) podemos elegir dos y el tercero viene impuesto por
la naturaleza del sistema. En este módulo se ha elegido como parámetros independientes la
frecuencia natural y el amortiguamiento. De esta forma, la ganancia quedará fijada y
dependerá de los valores elegidos para los otros dos parámetros. Al igual que en el modulo
anterior, se dispone de un borne de entrada (verde) y otro de salida (azul). En este caso
tenemos dos potenciómetros: con el potenciómetro de la izquierda variamos la frecuencia
natural del sistema. Con el de la derecha podemos modificar el factor de amortiguamiento.
Este podría ajustarse en un margen muy amplio pero en el módulo se ha restringido para
que permanezca siempre en la zona de subamortiguamiento.
La configuración elegida para este módulo es básicamente la misma que la del
apartado anterior, puesto que se centra nuevamente en una estructura de tipo Sallen-Key.
La figura A.1.6 muestra el esquema eléctrico correspondiente. Al igual que en el módulo
del apartado anterior, en la entrada aparece un adaptador de impedancias, con un seguidor
de tensión. La frecuencia natural depende de las resistencias R1+P1 y de los condensadores
C. Los dos condensadores deben tener el mismo valor al igual que las dos resistencias en
serie R1+P1. Para conseguir esto último, se hace necesario el empleo de un potenciómetro
doble de tal forma que las dos resistencias P1 tengan aproximadamente el mismo valor en
cualquier instante. El amortiguamiento depende únicamente de la relación entre R2+P2 y
R3. La función de las resistencias R1 es evitar que la frecuencia natural crezca

Estimación de parámetros - 29
desmesuradamente cuando P1 está en su valor mínimo »0W. La función de R2 es la de
mantener el sistema en la zona subamortiguada.
+V
-V
Departamento de Informáti ca y Automáti ca - UNED
Entrada SALI dak
s sn
n n
w
dw w
2
2 22+ +
wn d
Figura A.1.5 Aspecto externo y diagrama de bloques del sistema de segundo orden con controles
independientes.
R1 R1
R2
R3
C
P1 P1
P2
C
Entrada
SalidaPotenciómetro
doble
AO1
AO1
Figura A.1.6 Sistema de segundo orden con controles
independientes para la frecuencia natural y el amortiguamiento.
A.1.4 Redes Pasivas de adelanto y de retardo.
Estas dos redes, por el hecho de ser pasivas no precisan alimentación externa. El
esquema de la red de compensación de adelanto se muestra en la figura A.1.7a. y el
correspondiente a la red de retardo en la figura A.1.7b.

Estimación de parámetros - 30
Una descripción detallada del comportamiento de estos dos tipos de compensadores puede
encontrarse en el libro de Ogata: "Ingeniería de control moderna".
R1
R2
C
R1
R2
C
a) b)
Figura A.1.7 Esquemas eléctricos de las redes de adelanto (a) y de retardo (b).

Estimación de parámetros - 31
ANEXO 2
BODÍMETRO
Material:
Computador personal con tarjeta de adquisición de datos.
Bodímetro.
Sistema a estudiar (módulo analógico).
Osciloscopio (opcional)
La respuesta en frecuencia es uno de los métodos básicos de medida y caracterización
de sistemas. La obtención experimental de diagramas de Bode descrita en la sección 5 de la
práctica, es una labor costosa en tiempo, monótona y repetitiva. Para facilitar la
determinación de la respuesta en frecuencia de un sistema lineal, los profesores D. Juan
Carlos Lázaro, D. Fernando Morilla y D. Roberto Hernández han desarrollado la
herramienta "Bodímetro".
Los módulos analógicos que se van a utilizar son los sistemas descritos en el Anexo
1. El osciloscopio se va a emplear únicamente como sistema de visualización de señales y
no es imprescindible. A continuación se describe el funcionamiento del "Bodímetro".
Seguidamente, se presenta el esquema general del dispositivo.
A.2.1.- Funcionamiento del "Bodímetro"
El aspecto exterior del "Bodímetro" es el que se muestra en la Figura A.2.1.
Figura A.2.1: "Bodímetro"

Estimación de parámetros - 32
Un esquema del "Bodímetro" y su conexión a la planta a estudiar se muestra en la
Figura A.2.2.
TEST REF. SALIDA
PLANTA
OFFSET FRECUENCIA RANGO AMPLITUDManual Manual
Nulo ControlExt
1 6 0 10(-) (+)Al canal 1 del osciloscopio
Al canal 2 del osciloscopio
Figura A.2.2: Esquema del "Bodímetro" y conexión con el sistema
˝
El "Bodímetro" dispone de los cuatro mandos siguientes:
1) Offset: Lleva asociado un interruptor que puede estar en dos posiciones, Manual y
Nulo. Este interruptor deberá estar en Nulo.
2) Frecuencia: Sirve para cambiar la frecuencia de la señal de excitación (entrada al
sistema). Lleva asociado un interruptor que puede estar en dos posiciones, Manual y
ControlExt. Antes de comenzar una medida nueva deberá ponerse en posición
ControlExt para que el ordenador pueda realizar el barrido en frecuencia. Si se quiere
cambiar manualmente la frecuencia de la señal de excitación se colocará el interruptor
en la posición Manual.
3) Rango: Sirve para visualizar rapidamente los puntos de interés del sistema con ayuda
de un osciloscopio. El "Bodímetro" permite la obtención de la respuesta en frecuencia
de cualquier sistema en un margen de casi cuatro décadas, que se pueden desplazar
sobre el eje de frecuencias en el rango entre 1.4x10-3 y 3.2x105 Hz. Con las seis
posiciones distintas de las que dispone este mando se fija el rango de frecuencias en el
que se va a dibujar el Bode. De esta forma una vez determinadas las frecuencias de
interés se elige la posición conveniente. Para facilitar la elección de dicha posición, en
la Tabla A.2.1 se muestran los extremos del barrido en frecuencia que se realiza en cada
una. La frecuencia inferior se denota por fmin y la superior con fmax. Todas las
posiciones abarcarán casi cuatro décadas, suficiente para la mayor parte de sistemas
desplazadas entre si 1 década, excepto la última (rango6) que sólo desplaza 1/3 de
década.

Estimación de parámetros - 33
4) Amplitud : Sirve para variar la amplitud de la señal de excitación. Se puede variar
desde una posición 0 a una posición 10. Para obtener un mejor aprovechamiento de la
tarjeta conversora la tendremos fija en 10 (posición máxima). Si el sistema presenta
sobreelongación fijaremos la amplitud a un valor menor.
fmin fmax
1 1.4 10-3 1.2 101
2 1.4 10-2 1.2 102
3 1.4 10-1 1.2 103
4 1.4 100 1.2 104
5 1.4 101 1.2 105
6 4.3 101 3.2 105
Tabla A.2.1:Rangos de frecuencias para cada posición
Utilizando el "Bodímetro" el procedimiento para obtener el Bode de un sistema es
el siguiente:
1. Conecte el sistema al "Bodímetro" tal y como se indica en la Figura A.2.2.
2. Si dispone de un osciloscopio puede observar en él la señal de excitación y la salida
del sistema conectando ambas a los canales del osciloscopio.
3. Encienda el PC, el "Bodímetro" y el osciloscopio. El osciloscopio puede estar en
modo dual con los trazos independientes o en modo de composición X-Y en el que
se visualizará una elipse.
4. Ejecute el programa Bodímetro.
5. Le aparecerá en su pantalla la ventana de la Figura A.2.3.
Figura A.2.3: Ventana de diálogo del "Bodímetro"

Estimación de parámetros - 34
Esta pantalla está formada por un conjunto de campos editables activos,
determinadas opciones, y botones que son los siguientes:
a) F. inicial y F. Final: son las frecuencias en las que comienza y termina la
medida.
b) Rango: debe coincidir con el rango seleccionado en el mando Rango del
"Bodímetro".
c) Número de puntos: Es el número de puntos que se desea en cada diagrama. El
valor por defecto es de 50. Este valor es lo suficientemente alto como para que
la precisión obtenida sea aceptable y lo suficientemente bajo como para que el
tiempo necesario para la obtención del Bode no sea excesivo.
d) El programa crea un fichero (diabode.dat) con formato Matlab. Al importar este
fichero en Matlab se introducen 3 variables: fbode, gan y fase con formato de
vector fila. Si se selecciona vector columna, las variables se importarán como
vector columna en lugar de como vector fila.
e) Barrer rango completo: Si esta opción está seleccionada, el intervalo de medida
es el máximo disponible dentro del rango seleccionado. En este caso, las
frecuencias F. inicial y F. Final no tienen ninguna influencia en la obtención del
Bode.
f) Medir: Si se presiona este botón comienza el proceso de captura de las señales
que proporciona el "Bodímetro" para generar el diagrama de Bode completo.
g) Ganancia: Dibuja la ganancia del diagrama de Bode del sistema.
h) Fase: Dibuja la fase del diagrama de Bode del sistema.
6. En el campo Rango poner el número de la posición del mando Rango seleccionada
en el "Bodímetro".
7. Dejar seleccionada la opción de Barrer rango completo y la de Generar Matlab. En
el número de puntos 50.
8. Presionar el botón de medir.
9. Presionar el botón Ganancia.
10. Presionar el botón Fase.

Estimación de parámetros - 35
A.2.2.- Descripción General del "Bodímetro"
El "Bodímetro" se encarga de generar la señal de excitación, y de determinar tanto las
amplitudes de las señales de entrada y de salida como la diferencia de fase entre ambas. El
ordenador controla la frecuencia de la señal de excitación y captura las tensiones que
proporciona el "Bodímetro" para generar el diagrama de Bode completo (Magnitud y Fase).
El "Bodímetro" se ha construido de forma que fuera capaz de cubrir un amplio
margen de frecuencias (1.4mHz - 320kHz) con el empleo de un equipamiento
convencional, de bajo coste. Este objetivo se ha cubierto con el diseño de un circuito que
realiza tres funciones básicas:
1ª. Generación de la señal de forma analógica con la ayuda de un VCO
2ª. Determinación de la amplitud de las señales
3ª. Determinación de la diferencia de fase de dos señales
Con la primera función se consigue una señal sinusoidal con un nivel de distorsión
total armónica muy bajo (THD = 0.5% según los datos del fabricante del VCO). La
segunda y la tercera, van a proporcinar unas señales de continua proporcionales a las
amplitudes de las señales de entrada y salida a la planta y la diferencia de fase entre ambas.
El esquema general del "Bodímetro" se puede ver en la Figura A.2.4, donde se muestra su
diagrama de bloques y las conexiones con el sistema y ordenador.
VCO Sistema
D. Pico
D. Pico
D. Fase
Tarjeta PC-LABD/A A/D
cont
rol d
e fr
ecue
ncia Reset
Ent. Sal.
Amplitud de la entrada
Amplitudde la
salida
Diferenciade fase
PC de control, adquisición y presentación
Bodímetro
Figura A.2.4: Esquema general del "Bodímetro"
En el esquema de la Figura A.2.4 se puede observar que la frecuencia de oscilación
del VCO, se controla mediante una de las dos salidas analógicas de que dispone la tarjeta

Estimación de parámetros - 36
de adquisición de datos. La otra salida analógica se emplea para reinicializar los circuitos
de detección de pico. Por último, al conversor de entradas analógicas se le proporcionan
tres señales: las dos amplitudes y la diferencia de fase.
Las ventajas de este circuito son las siguientes:
a) Permite obtener directamente las características necesarias para dibujar el
diagrama de Bode.
b) Una vez alcanzado el estacionario por parte del sistema, tanto las amplitudes
como la diferencia de fase serán constantes, por lo que basta cualquier tarjeta de
adquisición de datos para introducir estos valores en el ordenador.
c) El coste completo del circuito es reducido.

ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL

Análisis y diseño de sistemas de control - 2
PRÁCTICA: ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL
Presentación .......................................................................................................... 3
1. Características de SISTEMAS ......................................................................... 3
1.1 Página de entrada ...................................................................................... 4
1.2 Estación de trabajo ................................................................................... 5
1.2.1 Configuración .................................................................................... 6
1.2.2 Análisis ............................................................................................... 7
1.2.3 Diseño ................................................................................................ 8
1.2.4 Informe ............................................................................................... 10
2. Ejercicios con SISTEMAS............................................................................... 12
2.1 Ejercicio I ................................................................................................. 12
2.2 Ejercicio II ................................................................................................ 13
2.3 Ejercicio III ............................................................................................... 15

Análisis y diseño de sistemas de control - 3
PRÁCTICA: ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL Material :
Computador personal. Conexión a Internet. Navegador WEB estándar con actualización de página cada vez que se visita.
El objetivo de esta práctica es: la aplicación del computador en el análisis, y diseño
clásico de sistemas de control lineales, descritos por funciones de transferencia. Con este fin, los profesores D. Fernando Morilla y D. Arnoldo Fernández han desarrollado la versión para web de la herramienta SISTEMAS. Se trata de una aplicación informática cliente-servidor diseñada para su integración en el paradigma de laboratorio virtual y remoto de Automática que el Dpto. de Informática y Automática de la UNED está desarrollando.
El laboratorio virtual y remoto permitirá al alumno de Automática I poder realizar la
práctica de “Análisis y diseño de sistemas de control” y otras sesiones prácticas desde cualquier lugar (su propio domicilio, su Centro Asociado, etc...) sin tener que desplazarse al laboratorio del Dpto. de Informática y Automática, siempre que disponga de un computador personal con conexión a Internet y un navegador web estándar.
En el primer apartado se presenta SISTEMAS. En el segundo apartado se proponen
tres ejercicios, que el alumno debe resolver utilizando dicha herramienta.
1.- Características de SISTEMAS SISTEMAS está creada para el diseño y ajuste de controladores. Con ella, el alumno
puede: introducir fácilmente las distintas funciones de transferencia que describen al sistema (configurar el sistema), simularlo, analizarlo y diseñar el controlador. Permite elegir entre tres tipos de sistemas de control: sistema continuo, sistema discreto o sistema muestreado, incluidos por ese orden en la imagen de la portada, en los que la realimentación es siempre unitaria.
El interfaz de SISTEMAS son un conjunto de páginas HTML dinámicas. El alumno
va a poder navegar cómodamente por todas ellas haciendo uso de los botones y de los enlaces creados al efecto, sin necesidad de utilizar los botones pertenecientes al navegador. Además es importante que se haga así para que la aplicación funcione

Análisis y diseño de sistemas de control - 4
correctamente. Durante el uso de la herramienta el alumno tendrá que elegir diferentes opciones mediante radio botones o menús múltiples y deberá introducir datos mediante campos editables. Por ello es también importante que en el navegador esté seleccionada la opción de actualizar las páginas HTML cada vez que se visitan durante todo el tiempo que dure la sesión práctica.
IMPORTANTE: Todo alumno o grupo de alumnos que quiera acceder a
SISTEMAS debe solicitar al equipo docente de Automática I la dirección HTTP donde se encuentra la aplicación y la contraseña.
A continuación se presentan las páginas más importantes, sin entrar en excesivo
detalles, pues la aplicación dispone de una ayuda en HTML muy completa. Tampoco se describen en este documento los fundamentos teóricos de la aplicación, pues el alumno de Automática I se ha tenido que formar en ellos a lo largo del curso y los puede localizar en la bibliografía de la asignatura y en la colección de problemas del profesor Morilla. No obstante la ayuda de la aplicación incluye un breve resumen sobre dichos fundamentos.
1.1- Página de entrada
Cuando el usuario accede a la página HTML de entrada a la aplicación, véase la
figura 1, tiene la opción de comenzar una sesión o de recuperar una sesión que tuvo que interrumpir por algún motivo. Todo esto es posible porque a ese usuario se le asignó en algún momento un código de acceso y tuvo la oportunidad de guardar la sesión. También existe una opción para elegir el idioma “inglés” con el fin de que alumnos o profesores de otras universidades extranjeras puedan hacer uso de la aplicación.
Fig. 1 Página de entrada a SISTEMAS.

Análisis y diseño de sistemas de control - 5
1.2- Estación de trabajo Una de las páginas HTML más representativas de la aplicación es la denominada
Estación de trabajo, véase la figura 2, que muestra el esquema del tipo de sistema (continuo, discreto o muestreado) seleccionado en ese momento y presenta las siguientes seis opciones al usuario:
Tipo de sistema: para que el usuario acceda a una página HTML, donde tras observar el sistema seleccionado actualmente tiene la opción de cambiarlo. Configuración: para que el usuario acceda a la página HTML que le permitirá ver y modificar las funciones de transferencia del proceso y del controlador, y el período de muestreo en caso de que el sistema sea discreto o muestreado. Véase una descripción más detallada en el apartado 1.2.1. Análisis: para desencadenar el estudio y presentación de las características del sistema (estabilidad, errores en estado estacionario, margen de fase y margen de ganancia), y poner a disposición del usuario las técnicas de análisis (respuesta temporal, respuesta en frecuencia y lugar de las raíces) descritas en el apartado 1.2.2. Diseño: para presentar información sobre los errores de posición y de velocidad, así como los márgenes de ganancia y de fase del sistema sin compensar y del sistema actual, permitiendo al usuario que solicite un nuevo diseño (con las especificaciones actuales o con otras distintas), tal como se describe en el apartado 1.2.3. Informe: para que el usuario, si está convencido de que el diseño actual es el más adecuado a los objetivos de la sesión práctica, genere el correspondiente informe. En el apartado 1.2.4 se ofrecen algunos detalles sobre el contenido del informe. Salir: para que el usuario pueda salir de la aplicación y anotar el código de acceso por si decide en algún momento recuperar la sesión.

Análisis y diseño de sistemas de control - 6
Fig. 2 Estación de trabajo de SISTEMAS.
1.2.1 Configuración
Esta opción le permitirá ver y modificar las funciones de transferencia del proceso y
del controlador, y el período de muestreo en caso de que el sistema sea discreto o muestreado. Véase como ejemplo la figura 3. Es importante señalar que tanto los polinomios numerador y denominador de la función de transferencia se introducen utilizando la sintaxis de MATLAB; un polinomio se representa por sus coeficientes en orden de potencias decrecientes, separados por blancos y entre corchetes, si una potencia no existe se introducirá un cero en su lugar.
Fig. 3 Página de configuración del sistema continuo.
Pulsando el botón Guardar Datos se guarda la configuración completa del sistema
de control y se vuelve a la estación de trabajo. Presionando Cancelar se vuelve también a la estación de trabajo, pero sin considerar la última configuración introducida.

Análisis y diseño de sistemas de control - 7
1.2.2- Análisis Al seleccionar esta opción la aplicación le informará, a través de una ventana similar
a la de la figura 4, sobre la estabilidad del sistema, los errores de posición y velocidad en estado estacionario, el margen de ganancia y el margen de fase y las frecuencias a la que se consiguen dichos márgenes. Hay también dos campos: tiempo e intervalo de simulación o periodo de muestreo (en segundos). El primero de ellos activo, modificable por el usuario, el segundo elegido automáticamente por la aplicación.
Y le presentará las siguientes seis opciones de análisis gráfico con vistas al futuro
diseño o para comprobar los resultados del último diseño: Respuesta temporal del proceso; presenta la respuesta temporal del proceso en lazo abierto a una entrada escalón unidad, con la duración e intervalo de simulación o período de muestreo indicados. Respuesta temporal del sistema; presenta la respuesta temporal del sistema en lazo cerrado (formado por el proceso y el controlador en ese momento) a una entrada escalón unidad, con la duración e intervalo de simulación o período de muestreo indicados. Diagrama de Bode; presenta el diagrama de Bode (Amplitud y Fase) del sistema en lazo abierto existente en ese momento. Previamente habrá aplicado la transformada bilineal si el sistema es discreto o muestreado. Diagrama de Nyquist; traza el diagrama de Nyquist del sistema en lazo abierto. Previamente habrá aplicado la transformada bilineal si es necesario. Lugar de las raíces; traza el lugar de las raíces en el plano-s, si el sistema es continuo o en el plano-z, si el sistema es discreto o muestreado. Análisis total; presenta en la misma ventana gráfica la respuesta temporal del sistema en lazo cerrado, el diagrama de Bode y el lugar de las raíces.

Análisis y diseño de sistemas de control - 8
Fig. 3 Página de análisis de un sistema continuo.
1.2.3 Diseño
Esta opción presenta información sobre los errores estacionarios de posición y
velocidad, así como de los márgenes de ganancia y fase del sistema sin compensar y del sistema actual. Se ofrecen también cuatro campos activos donde se pueden introducir los valores (especificaciones) que se quieren obtener en el diseño. Observación: Si quiere introducir una especificación de valor infinito debe escribir Inf en el campo correspondiente.
Fig. 4 Página de especificaciones de diseño.

Análisis y diseño de sistemas de control - 9
Se pueden seleccionar tres formas de diseño: Diseño Manual: La aplicación determina los tipos de controladores (Red de adelanto, Red de retardo y control PD) o (control PI y control PID) que satisfacen las especificaciones de diseño y se los presenta al usuario para que elija el que considere oportuno. Seguidamente, dependiendo de la naturaleza del diseño, la herramienta determina el rango continuo (o los valores discretos) de frecuencias en el que (para los que) existe solución al problema de diseño. El usuario deberá elegir una frecuencia de diseño dentro del rango de valores o igual a uno de los valores posibles. Aún queda un grado de libertad para el usuario cuando el controlador es PID, que ejercerá cuando la aplicación le solicite la ganancia proporcional, integral o derivativa del controlador. Diseño Asistido: La aplicación selecciona automáticamente el controlador más adecuado y determina el rango de frecuencias en el que existe solución al problema de diseño. El usuario deberá elegir una frecuencia de diseño dentro del rango de valores o igual a uno de los valores posibles, y la ganancia proporcional, integral o derivativa del controlador si la aplicación ha decidido que éste debe ser PID. Diseño Automático: En este caso el diseño se va a realizar sin ninguna intervención del usuario, puesto que la aplicación selecciona automáticamente el controlador más adecuado, la frecuencia de diseño y la ganancia proporcional, integral o derivativa del controlador si ha decidido que éste debe ser PID. Cuando se ha terminado todo el proceso de diseño del controlador, aparece una
ventana que recoge toda la información sobre el controlador diseñado: tipo, polinomios numerador y denominador de su función de transferencia y sus parámetros. La ganancia proporcional, el cero y polo si se trata de una red de compensación. La ganancia proporcional, la constante de tiempo integral y la constante de tiempo derivativa en el caso de controladores PID. También presenta una justificación de cómo se ha llegado a la solución, en el área de texto a tal fin. Vea como ejemplo la figura 5.
Otra opción interesante que presenta la herramienta es un análisis comparativo del sistema sin compensar y del sistema compensado. Para realizar dicho análisis debe pulsar el botón Análisis de la Compensación. La comparación se efectúa sobre la respuesta temporal a escalón unitario en lazo cerrado, la respuesta temporal a rampa unitaria y el diagrama de Bode (amplitud y fase) de los dos sistemas (sistema sin

Análisis y diseño de sistemas de control - 10
compensar en azul y el compensado en rojo). Este paso es obligado si el alumno desea tener un informe completo del diseño realizado.
Fig. 5 Ejemplo de controlador diseñado.
1.2.4 Informe
Cuando el usuario está convencido de que el diseño actual es el más adecuado a los
objetivos de la sesión práctica debe generar el correspondiente informe. Vea como ejemplo la figura 6. Este informe automático es una página HTML con información textual, numérica y gráfica relativa a la sesión práctica y a los autores del diseño, pero incluye también un apartado de comentarios donde el alumno puede incluir toda la información textual que desee hasta un máximo de 255 caracteres.
A la vista del informe, el alumno tendrá la posibilidad de imprimirlo y de guardar en
su computador un archivo con los datos que han servido para generarlo y un gráfico con el análisis comparativo de la compensación. Pero si además se preocupa de guardar la sesión en el servidor del laboratorio, el equipo docente tendrá acceso al diseño realizado y podrá evaluar la práctica del alumno sin que éste tenga que enviarle nada. No obstante el alumno siempre tiene la opción de ir elaborando un informe más completo mientras realiza el diseño y enviarlo por otros medios (correo electrónico o correo postal) al equipo docente.

Análisis y diseño de sistemas de control - 11
Fig. 6 Ejemplo de informe generado automáticamente por SISTEMAS.

Análisis y diseño de sistemas de control - 12
2.- Ejercicios con SISTEMAS A continuación se incluyen tres ejercicios que el alumno debe resolver utilizando
SISTEMAS. El primer ejercicio corresponde a un sistema continuo, el segundo a un sistema discreto y el tercero a un sistema muestreado. Cada ejercicio incluye un enunciado con un objetivo claro de diseño y una serie de cuestiones o pasos intermedios para guiar al alumno hacia el objetivo final.
Se recomienda al alumno que afronte cada ejercicio como una sesión práctica
diferente en la aplicación, que vaya anotando las respuestas a las cuestiones que se les plantean, y que las incluya en el campo de comentarios para que el informe y los archivos generados por la aplicación pueda servir como memoria de la práctica realizada.
También se le recuerda que debe guardar todas y cada una de las sesiones, por si acaso es necesario recuperarlas para corregir algún fallo, y para que en el servidor del laboratorio quede constancia de que ha realizado los ejercicios. 2.1- Ejercicio I.
Sea un proceso descrito por la siguiente función de transferencia:
G ss s s
( ) =+ +
23 3 2 2
Se sabe que este proceso forma parte de un sistema continuo con realimentación
unitaria. Se pide: 1) Averiguar si el sistema en lazo abierto sin compensar (es decir, con control
proporcional igual a la unidad) es estable o no. ¿Qué parte de la aplicación ha utilizado para averiguarlo? ¿Es lógico este resultado?
2) Averiguar si el sistema en lazo cerrado sin compensar es estable o no Determinar
los valores aproximados de tp (tiempo del primer pico) y Mp (máxima sobreelongación) que presenta la respuesta temporal de este sistema.
3) ¿Qué errores estacionarios de posición y de velocidad presenta el sistema en lazo
cerrado sin compensar? ¿Son lógicos estos valores? Compruébelos analíticamente.

Análisis y diseño de sistemas de control - 13
4) Anotar sus márgenes de ganancia y de fase y comprobarlos sobre el diagrama de
Nyquist. 5) Observar el lugar de las raíces del sistema sin compensar. ¿Puede sacar alguna
conclusión de este diagrama? 6) Determinar la función de transferencia de una red de adelanto, de manera que el
margen de fase del sistema compensado sea de 50º y presente errores de posición y de velocidad en estado estacionario de 0 y 1 respectivamente. Aproveche la opción de diseño MANUAL para probar distintos valores de la frecuencia de diseño ωc y explique cómo varían el margen de ganancia y la respuesta del sistema en función de dicha frecuencia.
7) Seleccione uno de los casos analizados en la cuestión anterior. Anote sus valores
de MG, MF, ωcg, ωcf, y determine las características (tp y Mp) aproximadas de su respuesta temporal. Comparar dichos valores con los obtenidos anteriormente para el sistema sin compensar. ¿Qué se puede deducir con respecto a un aumento o disminución del MF?
8) ¿Cómo se ha modificado el lugar de las raíces del sistema al incorporar el
controlador? 9) Realizar un diseño AUTOMÁTICO exigiendo las mismas especificaciones de la
cuestión (6). Comentar las diferencias entre este diseño y el que seleccionó en la cuestión (7).
Por último debería guardar la sesión con la red de adelanto que considere más oportuna de todas las diseñadas durante el ejercicio, incluyendo comentarios a las cuestiones planteadas y una breve justificación de por qué se ha quedado con ella. 2.2- Ejercicio II.
Sea un proceso descrito por la siguiente función de transferencia:
G z z zz z
( ) = + +− −
4 8 43 2 1
2
2

Análisis y diseño de sistemas de control - 14
Se sabe que este proceso forma parte de un sistema discreto, con periodo de muestreo T = 2 sg. Se pide:
1) Averiguar si el sistema en lazo cerrado sin compensar es estable o no
Comprobarlo simulando la respuesta temporal de este sistema a un escalón unitario durante un tiempo igual o superior a 30 sg.
2) ¿Qué errores estacionarios de posición y de velocidad presenta el sistema en lazo
cerrado sin compensar? ¿Son lógicos estos valores? Compruébelos analíticamente. 3) Anotar sus márgenes de ganancia y de fase y comprobarlos sobre el diagrama de
Nyquist. 4) Observar el lugar de las raíces del sistema sin compensar. ¿Puede sacar alguna
conclusión de este diagrama? 5) Aproveche la opción de diseño MANUAL para explorar los posibles
controladores y las posibles frecuencias de diseño ωc tal que el sistema compensado presente error de velocidad en estado estacionario de 0.1 y margen de fase igual a 60º.
6) Diseñe una red de adelanto con las especificaciones de la cuestión anterior. Y
observe las características de la respuesta temporal del sistema compensado. Compárela con la del sistema sin compensar para apreciar el efecto de “ringing” introducido por la red.
7) Observe como se ha modificado el lugar de las raíces del sistema al incorporar la
red de adelanto controlador y trate de explicar por qué la respuesta temporal presenta “ringing”.
8) Diseñar un controlador PI que anule el error de velocidad del sistema sin
compensar consiguiendo un margen de fase de 60º a la frecuencia 0.5 rad/sg. Comentar las diferencias entre este diseño y el que realizó en la cuestión (6).
Por último debería guardar la sesión con el controlador que considere más oportuno de todos los diseñados durante el ejercicio, incluyendo comentarios a las cuestiones planteadas y una breve justificación de por qué lo ha elegido.

Análisis y diseño de sistemas de control - 15
2.3- Ejercicio III. Sea un proceso descrito por la siguiente función de transferencia:
1651)( 2 ++
=ss
sG
Se sabe que este proceso forma parte de un sistema muestreado, con período de muestreo T = 0.2 sg. Se pide:
1) Comprobar que el período de muestreo es adecuado para la respuesta temporal del
proceso en lazo abierto, pero que aún se podría haber elegido mayor (por ejemplo igual a 1 sg.) sin que el comportamiento del sistema sin compensar sufriera un deterioro apreciable. ¿Qué ha ocurrido con el margen de ganancia del sistema al aumentar el período de muestreo? ¿Lo considera lógico? El diagrama de Nyquist le puede ayudar a explicar lo que está ocurriendo.
2) Recupere el período de muestreo T = 0.2 sg para comprobar que variando la
ganancia del controlador se puede conseguir que la respuesta del sistema en lazo cerrado deje de ser sobreamortiguada y pase a ser subamortiguada. Observe el lugar de las raíces del sistema sin compensar y encontrará la justificación.
3) ¿Qué errores estacionarios de posición y de velocidad presenta el sistema en lazo
cerrado sin compensar (es decir, con control proporcional igual a la unidad)? ¿Son lógicos estos valores? Compruébelos analíticamente, observación: para que la comprobación le sea más fácil puede suponer que el sistema es continuo.
4) Determinar la función de transferencia de un controlador PI, de manera que el
margen de fase del sistema compensado sea igual a 45º y presente error velocidad finito, igual a 1. Como en el ejercicio I, aproveche la opción de diseño MANUAL para explorar los posibles valores de la frecuencia de diseño ωc y explique cómo varían el margen de ganancia y la respuesta del sistema en función de dicha frecuencia.
5) Seleccione uno de los casos analizados en la cuestión anterior. Anote sus valores
de MG, MF, ωcg, ωcf y determine las características (tp y Mp) aproximadas de su respuesta temporal. Comparar dichos valores y características con los que tenía el sistema sin compensar. El análisis comparativo de los diagramas de Bode o de

Análisis y diseño de sistemas de control - 16
Nyquist también ayudarán a comprender el efecto que ha tenido la introducción del controlador PI en el lazo de control.
6) Realizar un diseño AUTOMÁTICO exigiendo las mismas especificaciones de la
cuestión (4). Comentar si está de acuerdo o no con la selección del controlador y de la frecuencia de diseño que hizo la aplicación.
7) Aprovechar la opción de diseño AUTOMÁTICO para comprobar que si exige
un error de velocidad mucho menor (por ejemplo de 0.1) el diseño dejará de tener solución, salvo que también reduzca considerablemente la especificación del margen de fase. ¿Qué peligro tiene en ese caso?
Por último debería guardar la sesión con el controlador PI que ha considerado más oportuno, incluyendo comentarios a las cuestiones planteadas y una breve justificación de por qué lo eligió.

DEPÓSITO CON Lab View

Depósito con Lab View - 2
PRÁCTICA: DEPÓSITO CON Lab View
Presentación ............................................................................................................... 3 1. Modelo dinámico de un depósito .......................................................................... 3 2. Control de nivel .................................................................................................... 5 3. Descripción del equipo “Depósitos acoplados” .................................................... 7 4. Descripción de la aplicación “TANQUE”............................................................. 8 4.1 Opciones de simulación ................................................................................. 11 4.2 Modos de operación ....................................................................................... 12 4.3 ¿Cómo usar la aplicación? ............................................................................. 13 5. Descripción de la aplicación “ANÁLISIS DE DATOS” ...................................... 13 6. Experimentos ........................................................................................................ 16 Pruebas de entrada y salida .................................................................................. 16 Estudio de características del proceso .................................................................. 17 Simulación ............................................................................................................ 18 Control de nivel .................................................................................................... 19

Depósito con Lab View - 3
PRÁCTICA : DEPÓSITO CON Lab View.
Material :
Equipo CE5 “Coupled Tanks” de Tecquipment. Aplicación de simulación y de control en LabView: TANQUE. Aplicación de análisis de datos en LabView: ANALISIS DE DATOS. Computador personal. Tarjeta de adquisición de datos Advantech PCL-812PG y conector. Voltímetro (opcional).
Los objetivos de esta práctica son: el estudio de características dinámicas de un depósito de líquido, y el estudio de un sistema típico de control de nivel. Para ello se dispone en el laboratorio del equipo didáctico CE5 y de un programa específico de simulación y control para este equipo. En el primer apartado se describe un modelo dinámico del depósito, que recoge todas las aproximaciones habituales para el estudio teórico. En el segundo apartado se describe el sistema típico de control de nivel, que se montará en la práctica. En el tercer, cuarto y quinto apartado se describen el equipo y los programas de computador que se van a utilizar. Y en el sexto apartado se incluyen los cuatro experimentos a realizar:
- Prueba de entradas y salida. - Estudio de características del proceso. - Simulación. - Control de nivel.
1.- Modelo dinámico de un depósito.
Fig.1 Déposito con grifo.
El caudal de salida Qo(t ) en el depósito de la figura 1 viene dado por
Qi(t)
Q0(t)
H(t)

Depósito con Lab View - 4
Qo(t) = Kg H(t) (1) siendo H el nivel de liquido y Kg una constante, directamente proporcional a la abertura del grifo. Este es un claro ejemplo de sistema no lineal, pero que puede ser linealizado sin más que suponer que las variables Qo(t ) y H(t ) se desvían poco de su valor de equilibrio Qo y H. Si se definen las variables qo(t) = Qo(t) - Qo y h(t) = H(t ) - H , se obtiene la siguiente aproximación lineal de la expresión (1)
qo(t ) = Kn h(t ) (2) siendo Kn una constante.
Kn = Kg
2 H
Aplicando el teorema de conservación de masas, la variación de volumen de líquido en el depósito es igual al caudal de entrada menos el caudal de salida, se obtiene la ecuación:
A H(t) = Qi(t ) - Qo(t ) (3)
siendo A el área de la sección del depósito (supuesto que es un depósito uniforme). Sustituyendo los valores instantáneos de las variables, por su valor estacionario más la desviación respecto a este valor, y teniendo en cuenta que el estacionario se consigue con Qi = Qo. La ecuación (3) se puede expresar como:
A h(t) = qi(t ) - qo(t ) (4)
Sin más que sustituir qo por (2), se obtiene la siguiente diferencial lineal que describe la dinámica del depósito, es decir, la relación entre las pequeñas variaciones en el nivel de líquido y las pequeñas variaciones , en el caudal de entrada.
A h(t) = qi(t ) - Kn h(t ) (5)
Si se aplica la transformada de Laplace a la ecuación (5), se obtiene la función de transferencia, que relaciona las pequeñas variaciones en el nivel del liquido en el depósito con las pequeñas variaciones en el caudal de entrada.

Depósito con Lab View - 5
H(s)Qi(s)
= Khτ s + 1 (6)
siendo Kh = 1 / Kn la ganancia, y τ = A / Kn la constante de tiempo. 2.- Control de nivel. En determinados procesos químicos es necesario mantener constante el caudal de un líquido, una forma de conseguirlo es mediante el control de nivel del líquido en un depósito. Ya que una pequeño orificio en un depósito producirá un caudal de salida constante si el nivel de líquido se mantiene constante. La ventaja de hacerlo así es que dimensionando adecuadamente el depósito, el caudal de salida será prácticamente insensible a pequeñas variaciones de nivel. La figura 2 muestra un depósito de líquido con un orificio de salida variable, de forma manual, según la posición del grifo. Una tubería que suministra un caudal de líquido variable, mediante una moto bomba, desde un depósito de alimentación. Un depósito de recogida que hace a la vez de depósito de alimentación, de manera que se cierre el ciclo y no haya pérdida de liquido. Dada una posición del grifo de salida se desea tener control del nivel de líquido. Una posibilidad de conseguir este objetivo consiste en : medir el nivel, compararlo con el nivel de referencia y tomar acción de control sobre el caudal de entrada, variando la velocidad de la motobomba. Se tiene así el sistema de control de nivel de la figura 2.
Qi(t)
Q0(t)
Controlador
Depósito de recogida de agua y alimentación
Motobomba
Vc (t) e(t) Vr (t)
Vh (t)
Sensor deNivel
-
+
H(t)
Fig.2 Sistema típico de control de nivel.

Depósito con Lab View - 6
Suponiendo que existe una relación lineal entre la tensión de entrada a la motobomba y el caudal de salida
Qi(t ) = Kb Vc(t ) (7) y la siguiente relación entre el nivel del depósito y la medida del sensor de nivel
Vh(t ) = Ks H(t ) + Vo (8) si se definen las variables vc(t ) = Vc(t ) - Vc y vh(t ) = Vh(t) - Vh , siendo Vc la tensión necesaria en la bomba para conseguir el caudal de equilibrio Qi y Vh la tensión
correspondiente al nivel de equilibrio H. Se tienen las ecuaciones
qi(t ) = Kb vc(t ) (9)
vh(t ) = Ks h(t ) (10) que combinadas con las del modelo matemático del depósito, nos dan la siguiente función de transferencia, que relaciona las variaciones en la tensión de entrada a la bomba con las variaciones en la tensión del sensor de nivel
Vh(s)Vc(s)
= Kb Kh Ksτ s + 1
= Kτ s + 1 (11)
siendo K = Kb Kh Ks la ganancia del conjunto ( bomba + depósito + sensor de nivel) y
τ la constante de tiempo del depósito. Si además se supone que el controlador es de tipo PI, el sistema de control de nivel se puede representar mediante el siguiente diagrama de bloques.
+
s T1 1KI
P 1+s τKE(s) Vr (s) Vc(s) +
-
Vh(s)
Fig. 3 Control PI de nivel.
cuya ecuación característica es:
( ) 0 KK s KK 1 T s τT PPI
2I =+++ (12)

Depósito con Lab View - 7
3.- Descripción del equipo "Depósitos acoplados". Esta práctica se realiza con el equipo CE5 "Coupled Tanks" ( Depósitos acoplados), diseñado por TecQuipment, pero se limita a estudiar el comportamiento dinámico de uno de los depósitos, de la bomba y del sensor de nivel correspondiente. El equipo consta de, véase figura 4 :
- Dos depósitos rectangulares que están comunicados por varios orificios, tapando alguno de estos orificios se selecciona el tamaño del orificio de intercomunicación. En esta práctica, como sólo se trabaja con el segundo depósito, todos los orificios estarán tapados.
- Una bomba de velocidad variable, controlada por un motor de corriente continua, que impulsa líquido al depósito desde un recipiente, que actúa a su vez como depósito de recogida y depósito de alimentación.
- Dos sensores de nivel de tipo resistivo, uno en cada depósito. - Un grifo para controlar, manualmente, la salida de agua del segundo depósito. No
obstante el grifo está actualmente inutilizado, con el fin de facilitar la realización de la práctica en el rango útil del depósito.
El equipo facilita también toda la electrónica necesaria para realizar control de nivel, véase figura 4. En concreto, se dispone de :
- Un interruptor general de tensión - Una entrada al amplificador que excita el motor de la bomba. Esta entrada debe
estar comprendida entre 0 y 10 V. - Dos señales de salida, correspondientes a los niveles de líquido en el primer y
segundo depósito. Cada señal, variable entre 0 V y 10 V, es salida de un amplificador con ganancia ajustable y puede ser filtrada o no. Se recomienda mantener fija (al mínimo valor) la ganancia del amplificador durante toda la experiencia e incluir filtro en la señal.
- Un potenciómetro, para control manual de la bomba o para sumar una tensión a la señal de control externa.

Depósito con Lab View - 8
Fig. 4 Equipo CE5 “Coupled Tanks” de Tecquipment.
4.- Descripción de la aplicación “TANQUE”.
TANQUE, que ha sido desarrollada por el becario Miguel Ángel Rubio González bajo la supervisión del profesor Fernando Morilla García, es una aplicación ejecutable para Windows desarrollada en LabVIEW 6.1. Permite, haciendo uso de una tarjeta de adquisición de datos Advantech PCL-812PG, realizar control de nivel. Pero también permite trabajar en simulación; sobre un modelo fijo de primer orden que simula el comportamiento lineal del proceso en un punto de operación, o sobre un modelo de primer orden con ganancia variable (en función del punto de operación) para reproducir las mismas características estáticas no lineales del proceso real.

Depósito con Lab View - 9
Fig. 5 Interfaz de la aplicación TANQUE.
El programa presenta como interfaz una única ventana a la que se accede haciendo doble click sobre el icono “TANQUE” que encontrará en el escritorio de Windows. La ventana tiene inicialmente la apariencia de la figura 5, donde se distinguen los siguientes cinco grupos de elementos, de fácil interpretación y acceso mediante el ratón:
Grupo superior izquierdo: con un led indicador (en verde) para indicar que la aplicación está ejecutándose, un botón de STOP para parar la aplicación, un
conmutador con la posición (PLANT. REAL) para seleccionar que la aplicación interaccione con la planta real
(CE5) y la posición (SIMULACIÓN) para seleccionar que la aplicación interaccione con un modelo del proceso, el conjunto formado por un texto editable y una deslizadera para que el usuario pueda modificar la tensión aplicada a la bomba cuando el equipo o el modelo está bajo control manual.
Grupo central izquierdo: con un gráfico en el que participan los cuatro objetos importantes del equipo (bomba, depósito, grifo, bandeja de recogida de líquido) y la conducción de líquido entra la bandeja y el depósito. De estos objetos sólo la

Depósito con Lab View - 10
cantidad de líquido presente en el depósito está animada (en color azul) de forma continua, mientras que la conducción de líquido lo está de forma discreta (en azul cuando existe trasvase de líquido entre la bandeja y el depósito). El gráfico se acompaña también de un texto parpadeante de “¡PELIGRO!” y un mensaje sonoro cuando el nivel del depósito supera
los 25 cm con el fin de avisar que se puede producir un rebose de líquido.
Grupo superior derecho: con dos ventanas gráficas escaladas horizontalmente en números de muestras, que muestran la evolución instantánea de las tres señales representativas del lazo de control. En la gráfica superior se presenta el punto de consigna en trazo amarillo y el nivel de líquido en trazo azul. La gráfica inferior presenta siempre la señal de control en trazo azul, es decir, la tensión aplicada a la bomba. Las gráficas se acompañan de tres indicadores numéricos con los valores instantáneos de las señales. El nivel y su punto de consigna en centímetros, escalados entre 3 y 28, para que la visualización del nivel real coincida con la regla graduada adherida a la pared del depósito. la tensión aplicada a la bomba en voltios, escalada entre 0 y 10. El escalado vertical de estas gráficas se puede cambiar en ejecución, basta pulsar sobre la escala y cambiar el límite superior o inferior. Mientras que el escalado horizontal es fijo, en segundos. Advertencia: Todas las gráficas tienen una duración aproximada de 2 minutos. Para registros más largos es preciso hacer uso de la grabación de datos.
Grupo inferior izquierdo: con el conjunto formado por un texto editable y una deslizadera para que el usuario pueda modificar el punto de consigna de nivel, un texto editable para cada uno de los tres parámetros (ganancia
proporcional KP, constante de tiempo integral TI y constante de tiempo derivativa TD) del controlador PID. Las dos constantes de tiempo vendrán siempre expresadas en minutos, y la ganancia proporcional en V/cm.
Grupo central derecho: con texto editable para indicar el intervalo de tiempo (en segundos) con el que se grabarán las señales si el usuario lo solicita. Icono para indicar el directorio y el nombre del archivo *.txt donde el

Depósito con Lab View - 11
usuario desea grabar las tres señales representativas (vector de tiempo, medida de nivel y señal de control) de las experiencias realizadas. Un botón Grabar para ordenar el comienzo de la grabación.
4.1- Opciones de simulación.
Cuando en lugar de trabajar sobre la planta real se desea trabajar con un modelo del proceso, basta conmutar a simulación y seleccionar el tipo de modelo LINEAL o NO LINEAL en el conmutador etiquetado con la palabra MODELO que aparece junto al depósito, véase figura 6. En la opción LINEAL se emplea un modelo de primer orden sobre un punto de operación y se distingue un primer paso (pero sólo la primera vez que se entra en SIMULACIÓN) en el que la simulación está parada y esperando a que el usuario introduzca los parámetros del modelo. Los parámetros que necesita la aplicación son:
- uo : La tensión a la bomba en el punto de operación - no: El nivel del depósito en el punto de operación - K: La ganancia en estado estacionario del modelo - τ : La constante de tiempo (en minutos) del modelo
Después de introducir los parámetros, la simulación arranca en el punto de operación elegido por el usuario y desaparecen los campos editables, por lo que el modelo tendrá los mismos parámetros durante todo el tiempo que dure la simulación. Si el usuario desea cambiarlos lo puede hacer, pulsando el botón etiquetado con el texto “Introduce parámetros”, pero la simulación permanecerá parada hasta que el cambio de parámetros se haga efectivo. El mismo botón se puede utilizar para detener la simulación y volver a cambiar los parámetros del modelo. La opción NO LINEAL se caracteriza por emplear un modelo de primer orden con una ganancia variable, tratando de reproducir las características estáticas no lineales del proceso real en todo el rango de operación, y una constante de tiempo fija, la misma en todo el rango de operación. La aplicación sólo necesita que el usuario introduzca este último parámetro en minutos, y además lo puede cambiar en el transcurso de la simulación. Con independencia del modelo elegido para la simulación, el usuario tiene la posibilidad de incorporar ruido blanco en la medida de nivel. En ese caso debe fijar una amplitud de ruido y conmutar de OFF a ON el botón etiquetado con el texto “Ruido”. Los cambios sobre la señal de ruido también están permitidos en el transcurso de la simulación.

Depósito con Lab View - 12
Fig. 6 Parámetros del modelo LINEAL (izquierda) y del modelo NO LINEAL (derecha).
4.2- Modos de operación.
La aplicación TANQUE, independientemente de que esté interaccionando con la planta real o con el modelo, permite trabajar en dos modos de operación: Control Manual y Control Automático. En el modo Manual es el usuario quien se responsabiliza de actuar sobre la bomba, enviando la tensión que considere oportuna en cada momento. Mientras que en el modo Automático es la aplicación, a través del bloque controlador PID, quien se responsabiliza de actuar sobre la bomba con el fin de que el nivel de líquido en el depósito sea el deseado. A continuación se dan más detalles sobre las distintas posibilidades de estos modos de operación con vistas a la sesión práctica.
Control Manual: El usuario tiene la posibilidad de enviar una tensión al amplificador que excita a la bomba, y leer los valores del nivel de líquido en el depósito (en centímetros, generados por el potenciómetro y la correspondiente conversión en la aplicación). Al mismo tiempo puede observar la evolución de estas variables en las ventanas gráficas y en los indicadores anteriormente comentados, y puede solicitar que dicha evolución se grabe en un archivo de texto para un análisis posterior.
La primera utilidad de esta opción radica en poder ejecutar pruebas de la tarjeta de adquisición de datos, del conector y de los equipos, antes de proceder al control del motor. Pero la principal utilidad consiste en poder realizar experiencias en lazo abierto del sistema, encaminadas al estudio del sistema que se va a controlar y de sus características dinámicas. Paso obligado en todo sistema de control si queremos determinar correctamente los parámetros de control.
Control Automático: En este modo de funcionamiento, es el controlador PID quién determina la tensión que debe enviar cada periodo de muestreo al motor para conseguir que la variable controlada siga a una señal de referencia, si el punto de consigna es variable, o permanezca en el punto de consigna, si éste es fijo. El usuario

Depósito con Lab View - 13
tiene la posibilidad de poner los parámetros de control que considere más adecuados para conseguir los objetivos fijados.
Internamente el algoritmo de control PID es de tipo digital, pero con un periodo de muestreo (aproximadamente de 30 milisegundos) tan pequeño respecto a la dinámica del proceso que se puede considerar que el sistema se va a comportar como el sistema continuo de la figura 3.
4.3- ¿Cómo usar la aplicación?
Anteriormente se ha comentado que TANQUE es una aplicación LabVIEW a la que se accede haciendo doble click sobre el icono “TANQUE” que encontrará en el escritorio de Windows. Como tal aplicación Windows consume una serie de recursos que sólo se liberan si se sale correctamente de ella.
Para salir de la aplicación liberando los recursos utilice siempre el botón de STOP, de esta forma accederá a una ventana de LabVIEW muy parecida a la de la figura 5. En ese momento y no antes sí que puede cerrar la aplicación pulsando sobre la esquina superior derecha de la ventana. Aunque también puede volver a arrancar la aplicación pulsando sobre la flecha botón “Run” .
Tanto si se solicita parar la aplicación como si se solicita arrancar una SIMULACIÓN, la aplicación envía una tensión nula a la bomba para que ésta permanezca parada todo el tiempo que se esté interaccionando con un modelo del proceso o no se esté utilizando la aplicación. No obstante se recomienda apagar el equipo “Depósito Acoplados” cuando no se vaya a trabajar sobre él.
La aplicación incorpora también una parada de emergencia de la bomba si el nivel del depósito iguala o supera los 27.8 cm, devolviendo el control cuando desaparece tal situación.
5.- Descripción de la aplicación “ANÁLISIS DE DATOS”.
La aplicación ANÁLISIS DE DATOS, desarrollada por el becario Miguel Ángel Rubio González bajo la supervisión del profesor Fernando Morilla García, es una aplicación ejecutable para Windows desarrollada en LabVIEW 6.1, que complementa al programa TANQUE con el fin de analizar los datos registrados durante las experiencias con el depósito.

Depósito con Lab View - 14
Fig. 7 Interfaz de la aplicación ANÁLISIS DE DATOS. El programa presenta como interfaz una única ventana, véase figura 7, a la que se accede haciendo doble click sobre el icono “ANÁLISIS DE DATOS ” que encontrará en el escritorio de Windows. Advertencia: la aplicación arranca siempre preguntando el archivo que contiene los datos que se van a analizar. En la ventana se distinguen los siguientes cinco grupos de elementos, de fácil interpretación y acceso mediante el ratón:
Parte superior: con un botón de STOP para parar la aplicación y tres iconos, el situado a la izquierda para seleccionar el modo cursor en la ventana gráfica, el central para realizar algún tipo de zoom sobre la ventana gráfica y el de la derecha para permitir el movimiento de arrastre por la ventana gráfica.
Zona Gráfica: que muestra en todo momento el correspondiente grupo de señales, en las condiciones de zoom seleccionadas y los correspondientes cursores cuando está seleccionado el modo cursor.
Grupo inferior izquierda: con un botón de Nuevo Archivo para elegir el archivo que contiene el registro de datos, con texto que muestra el nombre del archivo elegido, un menú de Selección desplegable con dos opciones para

Depósito con Lab View - 15
elegir el grupo de señales que se desea visualizar:
Setpoint – Nivel
Señal de control – Nivel
Grupo inferior central: con textos que muestran los valores de las señales en la posición que se encuentra actualmente el cursor, y tres iconos, el primero de estado,
para permitir el movimiento del cursor sobre la correspondiente señal, el segundo para cambiar el color, el tamaño y la forma
del cursor, el tercero para bloquear el correspondiente cursor.
Grupo inferior derecha: con el objeto para navegar muestra a muestra (izquierda, derecha, arriba, abajo) con el cursor a través de las señales.
Grupo inferior: con datos (relativos a la fecha, hora e intervalo de grabación) leídos del archivo.

Depósito con Lab View - 16
6.- Experimentos. Todos los experimentos que se incluyen a continuación se pueden realizar desde el programa TANQUE, así que encienda el computador y siga atentamente las instrucciones. Asegúrese que el equipo “Depósitos Acoplados” está conectado al terminal de conexiones, que el terminal está conectado a la red y que el mazo de cuatro cables está conectado a la tarjeta de adquisición de datos. Realice a continuación el siguiente conexionado con el equipo:
- Cable de color rosa, que corresponde a un canal D/A de la tarjeta de adquisición de datos, a la entrada excitadora de la bomba (texto “Pump drive input” en el terminal de conexiones).
- Cable de color rojo, que corresponde a la tierra de la tarjeta de adquisición de datos, a cualquiera de las tierras del terminal de conexiones.
- Cable de color azul, que corresponde a un canal A/D de la tarjeta de adquisición de datos, a la medida de nivel en el depósito 2 (texto “Output 2” en el terminal de conexiones).
1er Experimento. Pruebas de entrada y salida. En este primer experimento se pretende comprobar que la tarjeta Advantech PCL-812PG puede enviar tensiones a la bomba en el rango de 0V a +10V, provocando un trasvase de líquido desde la bandeja al depósito, con los correspondientes cambios en el nivel del depósito.
1) Arrancar la aplicación TANQUE, asegurándose que está seleccionada la PLANTA REAL y el control MANUAL.
2) Encender el equipo “Depósitos acoplados", pero asegurándose que el
potenciómetro manual está en “off”, que el filtro en la medida de nivel está conectado (posición “IN”) y que su ganancia está al valor mínimo (totalmente girado a la izquierda).
3) Utilice la aplicación TANQUE para enviar distintas tensiones a la bomba,
comprobando que la medida y visualización del nivel en el gráfico animado coincide con la del depósito real.

Depósito con Lab View - 17
Si las pruebas han sido satisfactorias quiere decir que la comunicación entre el programa de control y el proceso funciona adecuadamente y se puede pasar a los siguientes experimentos. Si las pruebas no han sido satisfactorias puede ser que efectivamente la comunicación no funcione correctamente y no tiene sentido continuar los experimentos, pero también puede ocurrir que no haya hecho bien las conexiones o que no haya seguido correctamente todos los pasos, por tanto, antes de tomar esa decisión, vuelva a repetir el experimento. 2º Experimento. Estudio de características del proceso. Se pretende en este experimento comprobar que el proceso como conjunto ( actuador + bomba + depósito + sensor de nivel) se puede modelar como un sistema de primer orden con una ganancia K y una constante de tiempo τ, cuando se trabaja en zonas próximas a un estacionario. Se pone en conocimiento que la constante de tiempo real va a tener un valor superior a los 60 sg lo que habla de la lentitud del proceso, por lo que se recomienda mucha paciencia en las próximas experiencias.
1) Fije un valor de tensión para la bomba igual a 5 V y espere el tiempo suficiente (varios minutos) hasta que el nivel del depósito alcance el estado estacionario.
2) Preparar la aplicación para grabar datos en un archivo con un intervalo de
grabación igual o superior a 1 sg, arranque la grabación y provoque un cambio en la tensión de 5 a 6 V. Observe que el nivel evoluciona a un nuevo estado estacionario siguiendo la forma típica de la respuesta de un sistema de primer orden a una entrada escalón. Pare la grabación cuando esté totalmente seguro de que el nivel ha alcanzado el nuevo estado estacionario. Advertencia: es conveniente que cree un subdirectorio en el directorio C:\Automatica\Practicas\ y que esta grabación y las grabaciones posteriores las haga siempre en ese subdirectorio.
3) Preparar la aplicación para grabar datos en un archivo distinto al anterior, con el
mismo intervalo de grabación, arranque la grabación y provoque un cambio en la tensión de 6 a 5 V. Y pare la grabación cuando esté totalmente seguro de que el nivel ha alcanzado el nuevo estado estacionario.
4) Arranque la aplicación ANÁLISIS DE DATOS y proceda, como en la práctica de
primer orden, a medir la ganancia y la constante de tiempo del proceso utilizando las grabaciones realizadas en los pasos (2) y (3).

Depósito con Lab View - 18
5) ¿En función de los resultados anteriores se puede afirmar que el proceso que se va a controlar es lineal? ¿En los registros analizados observa la presencia de algún tipo de ruido en la medida de nivel?
3er Experimento. Simulación. Con este tercer experimento se pretende que el alumno pueda probar, en simulación, el controlador que posteriormente aplicará al proceso real. Este paso se considera totalmente necesario en el caso del equipo “Depósitos acoplados”, pues la dinámica del equipo es tan lenta que las pruebas de control en tiempo real requerirían demasiado tiempo.
1) Conmute a simulación, seleccione modelo LINEAL, elija un punto de operación e introduzca los parámetros del modelo que considere más representativo del proceso real en ese punto de operación. Recomendación: para acelerar la simulación puede considerar como constante del tiempo del modelo un submúltiplo de la obtenida experimentalmente o valores comprendidos entre 0.5 minutos (30 sg) y 0.1 minutos (6 sg).
2) Aprovechar la interactividad de la aplicación TANQUE para provocar varios
cambios de tensiones sobre el modelo, similares a las que tuvo que realizar sobre el proceso real en el experimento anterior. Observar y comparar los registros gráficos del nivel con vistas a una validación cualitativa del modelo.
3) Comprobar que el modelo lineal reproduce situaciones irreales al hacer alguna
incursión cercana a los extremos del rango de operación, que corresponden a voltajes manuales de 0 y 10 V respectivamente.
4) Conmutar a modelo NO LINEAL, manteniendo la misma constante de tiempo del
modelo, para comprobar que: el modelo no lineal sí reproduce situaciones reales en todo el rango de operación.
5) Vuelva a la opción LINEAL y ponga los siguientes parámetros de control, en
función de los parámetros del modelo que esté utilizando en ese momento:
0 T ; 4τ T ;
K1 K DIP ===

Depósito con Lab View - 19
Conmute a Modo Automático y efectúe varios cambios en el punto de consigna para observar la respuesta del sistema en lazo cerrado. Utilizar la expresión (12) para justificar el tipo de respuesta que se ha observado.
6) Repita el paso anterior para otros parámetros de control, justificando su elección. Recuerde también que puede grabar registros de datos y hacer un análisis de características con la aplicación ANÁLISIS DE DATOS.
7) Probar los diferentes juegos de parámetros de control con el modelo NO LINEAL.
Y aprovechar los resultados para quedarse con un juego de parámetros definitivo, aquellos valores de KP y TI que empleará en la planta real.
4º Experimento. Control de nivel. Se pretende en este cuarto experimento efectuar control de nivel sobre el equipo “Depósitos Acoplados”, como se indica en el diagrama de la figura 2, y comprobar el efecto que sobre la respuesta del sistema tienen los parámetros de control.
1) Elección de los parámetros de control. Como puede observar por los parámetros de control recomendados en la simulación, el único parámetro de control que se ve afectado por la constante de tiempo del modelo es la constante de tiempo integral. Por tanto, si durante la simulación ha utilizado una constante de tiempo del modelo más pequeña que le permitía acelerar las experiencias, con la planta real podrá utilizar los siguientes parámetros de control: la misma ganancia proporcional y una constante de tiempo integral escalada a la dinámica de la planta real.
2) Colocar los parámetros de control y el punto de consigna que considere oportunos
y conmute a PLANTA REAL. Utilice el Modo Manual para llevar el nivel a un valor próximo al punto de consigna.
3) Conmute a Modo Automático y efectúe varios cambios en el punto de consigna
para observar la respuesta del sistema en lazo cerrado. Importante: Recuerde que para evaluar adecuadamente las experiencias de control con la planta real requerirá registros con una duración entre 10 y 15 minutos, que los cambios no pueden ser tan frecuentes y que debería grabar las experiencias. Se recomienda utilizar un intervalo de grabación de 5 sg para que no se generen archivos excesivamente grandes que pudieran relentizar su procesamiento en la aplicación de ANÁLISIS DE DATOS.

Depósito con Lab View - 20
4) ¿Observa alguna similitud entre los resultados con la planta real y los que obtuvo en simulación con el modelo NO LINEAL? Justificar la respuesta.
5) Prueba de reacciones del sistema frente a perturbaciones. El proceso real se puede
someter a dos tipos de perturbaciones, una sobre la señal de control a la bomba y otra sobre la salida del proceso (nivel en el depósito 2). En ambos casos, si las perturbaciones no son excesivas , el sistema debe reaccionar adecuadamente.
Con la planta en Modo Automático, utilice el potenciómetro de control
manual etiquetado con el texto “Pump drive input” en el terminal de conexiones, para añadir durante un cierto tiempo una señal de control adicional, observar la evolución del sistema e interpretar resultados.
Recuperar la situación normal, de potenciómetro manual en “off”, y utilizar
una botella para añadir una cantidad de agua determinada al depósito 2 de forma brusca, observar la evolución de las acciones de control y de las variables. Interpretar resultados.

MOTORES DE CORRIENTE CONTINUA

Motores de corriente continua - 2
PRÁCTICA: MOTORES DE CORRIENTE CONTINUA
Presentación ............................................................................................................... 3 1. Modelo dinámico del motor de corriente continua .............................................. 3 2. Control de velocidad ............................................................................................ 7 3. Control de posición .............................................................................................. 8 4. Descripción de los equipos ................................................................................... 10 4.1 Descripción del equipo “Bola y Aro”.............................................................. 10 4.2 Descripción del “Servo de Feedback”............................................................. 11 5. Descripción de la aplicación “MOTORES”.......................................................... 14 5.1 Modos de operación ....................................................................................... 16 5.1 ¿Cómo usar la aplicación? ............................................................................. 17 6. Descripción de la aplicación “ANÁLISIS DE DATOS” ...................................... 18 7. Experimentos con el “Bola y Aro”........................................................................ 20 Pruebas de entrada y salida .................................................................................. 20 Estudio de características del proceso .................................................................. 21 Control de velocidad ............................................................................................ 23 Control de posición .............................................................................................. 24 8. Experimentos con el “Servo de Feedback” ........................................................... 26 Pruebas de entrada y salida .................................................................................. 26 Estudio de características del proceso .................................................................. 27 Control de velocidad ............................................................................................ 28 Control de posición .............................................................................................. 29

Motores de corriente continua - 3
PRACTICA : MOTORES DE CORRIENTE CONTINUA
Material : Equipo CE9 “BALL and HOOP” de Tecquipment o Unidad mecánica (33-100) “Analogue Servo Fundamentals Trainer” de FEEDBACK y fuente de alimentación. Aplicación de control en LabView: MOTORES. Aplicación de análisis de datos en LabView: ANALISIS. Computador personal. Tarjeta de adquisición de datos Advantech PCL-812PG y conector. Voltímetro (opcional).
Los objetivos de esta práctica son: el estudio de características de un motor de corriente continua controlado por inducido, y el estudio de dos sistemas típicos de control para el motor, control PI de velocidad y control PI de posición con realimentación de velocidad. Para ello se dispone en el laboratorio del equipo didáctico CE9 y de un programa específico de control para este equipo. En el primer apartado se describe un modelo dinámico del motor, que recoge todas las aproximaciones habituales para el estudio teórico. En el segundo y tercer apartado se describen los sistemas típicos de control de velocidad y de posición, que se montarán en la práctica. En el cuarto y quinto apartado se describen el equipo y el programa de computador que se van a utilizar. Y en el sexto apartado se incluyen los cuatro experimentos a realizar:
- Prueba de entrada y salida. - Estudio de características del proceso. - Control de velocidad. - Control de posición.
1.- Modelo dinámico del motor de corriente continua. El motor de corriente continua más utilizado es aquel motor que tiene campos excitados por separado, por un lado " el inducido" ( llamado "armadura" por algunos autores) y por otro lado "la excitación" ( llamado "campo" por otros autores), véase Fig. 1(a). La Fig. 1(b) muestra el esquema electromecánico de un motor de este tipo.

Motores de corriente continua - 4
Fig.1 (a) Esquema de un motor de corriente continua con dos campos excitados por separado. (b) Modelo electromécanico
El inducido se ha modelado como un circuito eléctrico con una resistencia Ra en serie con una inductancia La, y una fuente de tensión eb que representa la fuerza contraelectromotriz generada en el inducido por el giro del rotor. La excitación se ha representado como una resistencia Rf en serie con una inductancia Lf. A continuación se da una lista de variables y constantes que se van a utilizar.
ea(t ) = tensión aplicada al inducido ef(t ) = tensión aplicada a la excitación eb(t ) = fuerza contraelectromotriz Ra = resistencia del inducido Rf = resistencia de la excitación La = inductancia del inducido Lf = inductancia de la excitación
ef
if
ia
ea
+
+
-
-
(a)
Mea
ia La
eb +
- -
-
++
ef if
Ra Rf
Lf
JM
Bm
(b)
Tm TLθ

Motores de corriente continua - 5
ia(t ) = corriente en el inducido if(t ) = corriente en la excitación φ(t ) = flujo magnético Tm(t ) = par desarrollado por el motor Kf, Km, Kb = constantes θ(t ) = desplazamiento angular del eje del motor TL(t ) = par de carga Bm = coeficientes de fricción viscosa Jm = momento de inercia del motor
De acuerdo con el esquema existen dos posibilidades para el control del motor.Control por inducido con la tensión ea y control por excitación, con la tensión ef. Suponiendo que:
a)El flujo magnético en el interior del motor es proporcional a la corriente en la excitación.
φ( t ) = Kf if(t) (1) b) El par desarrollado por el motor es proporcional al flujo magnético y a la corriente en el inducido
Tm(t ) = Km φ(t ) ia(t ) (2)
En el control por inducido, ea es variable y ef se mantiene a un valor constante, por tanto if es constante, φ es constante y de (1) y (2) se tiene que
Tm(t ) = K1 ia(t ) (3) siendo K1 = Km Kf, e if una constante. Para un flujo φ constante , la tensión inducida en la armadura es directamente proporcional a la velocidad angular. Así,
eb(t ) = Kb dt
(t) dθ (4)
Para el circuito de inducido, se verifica la siguiente ecuación diferencial
La dt
(t) d ai + Ra ia(t ) + eb(t ) = ea(t ) (5)

Motores de corriente continua - 6
Por lo que respecta a la conversión en energía mecánica. Una parte del par desarrollado por el eje del motor Tm se emplea en vencer : a) un cierto par de carga TL y b) una cierta fricción entre los elementos mecánicos. La otra parte se transmite al eje como un par útill , producto del momento de inercia del motor Jm por la aceleración angular. Tal como se indica la expresión siguiente
Jm dt
(t) d2
2θ + Bm dt
(t) dθ + TL (t ) = Tm(t ) (6)
Sustituyendo (4) y (3) en (5) y (6) respectivamente se obtiene el siguiente sistema de ecuaciones, que constituye un modelo lineal del motor de corriente continua controlado por inducido.
La dt
(t) d ai + Kb dt
(t) dθ = - Ra ia(t ) + ea(t ) (7)
Jm dt
(t) d2
2θ + Bm dt
(t) dθ = K1 ia(t ) - TL (t ) (8)
Si se aplica la Transformada de Laplace a las ecuaciones (7) y (8) y se suponen condiciones iniciales nulas y que no existe par de carga TL(t). Se obtienen las ecuaciones siguientes :
La s Ia(s) + Kb s θ(s) = - Ra Ia (s) + Ea(s) (9)
Jm s2 θ(s) + Bm s θ(s) = K1 Ia(s) (10) Si se despeja Ia(s) en la expresión (10) y se sustituye en (9), se determina la siguiente función de transferencia, donde se ha considerado Ea(s) como la entrada y θ(s) como la salida del sistema.
θ(s)Ea(s)
= K1s La Jm s2 + La Bm + Ra Jm s + Ra Bm + K1 Kb (11)
La inductancia La de la armadura es, generalmente, pequeña y se puede despreciar. En ese caso la función de transferencia se reduce a :
θ(s)Ea(s)
= Kms (τ s + 1) (12)
siendo Km = K1 / (Ra Bm + K1 Kb) y τ = Ra Jm / (Ra Bm + K1 Kb)

Motores de corriente continua - 7
2. Control de velocidad. El motor de corriente continua es bastante utilizado en procesos donde se requiere fijar una velocidad angular, por ejemplo en procesos de laminación. La fig.2 muestra el esquema de un sistema típico de control de velocidad, donde la salida del tacómetro vt
es una tensión proporcional a la velocidad angular, y donde el amplificador de potencia recibe una tensión continua vc para excitar al inducido.
Fig.2. - Sistema típico de control de velocidad. Suponiendo que existe una relación lineal enttre la tensión de entrada al amplificador de potencia y la tensión de entrada al inducido.
ea(t) = Ka vc(t) (13) y entre la velocidad angular ω(t ) y la tensión del tacómetro.
vt (t ) = Kt ω(t ) (14)
La función de transferencia que relaciona a la tensión de entrada al amplificador con la salida del tacómetro viene dada por
Vt(s)Vc(s)
= Ka Km Ktτ s + 1
= Kτ s + 1 (15)
siendo K = Ka Km Kt la ganancia del conjunto ( amplificador + motor + tacómetro) y
τ la constante de tiempo del motor. Si además se supone que el controlador es de tipo PI,
Controlador Amplificador de Potencia M Carga
T
ω
Tacómetro
e vr vc
Motor dc
vt
+
+
-
-

Motores de corriente continua - 8
el sistema de control de velocidad se puede representar mediante el siguiente diagrama de bloques
Fig. 3 Control PI de velocidad. siendo vr ( t ) una tensión proporcional a la velocidad angular que se desea conseguir, KP la ganancia proporcional y KI la ganancia integral. Como es sabido, si la elección de parámetros es adecuada, el sistema es estable y no existe error en el estacionario, vt(t) seguirá a la tensión vr (t) con una dinámica función de los parámetros KP y KI.
Concretamente las raices de la ecuación característica del sistema
s2 τ + (1 + K KP) s + K KI = 0 (16) son las responsables del carácter más ó menos oscilatorio de la salida del tacómetro como respuesta a escalones en la tensión de referencia. 3. Control de posición.
Fig. 4 Sistema típico de control de posición. El motor de corriente continua se utiliza también cuando se requiere fijar una posición angular. Por ejemplo, en una máquina de escribir o en una impresora con
-
KKsP
I+K
s + 1τE(s) Vr (s) Vc(s)+
-
Vt(s)
Controlador Amplificador de Potencia M Carga
T
ω
Tacómetro
evr vc
Motor dc
vt
+
-
Sensor de posición
θ
vs

Motores de corriente continua - 9
cabezal de tipo margarita, un motor es el encargado de posicionar el carácter correspondiente de la margarita antes de proceder a la impresión sobre el papel. La Fig. 4 muestra el esquema de un sistema típico de control de posición con realimentación interna de velocidad, donde la salida del sensor de posición vs es una tensión proporcional a la posición angular del eje del motor , vt y vc idénticas a la Fig. 2.
Suponiendo que además de las relaciones ( 13 y 14), existe una relación lineal entre la posición angular θ(t ) y la tensión del sensor de posición.
vs(t) = Ks θ(t) (17) la función de transferencia que relaciona a la tensión de entrada al amplificador con la salida del sensor de posición es
Vs(s)Vc(s)
= Ka Km Kss (τ s + 1) (18)
Si el controlador es de tipo PI , el sistema de control de posición con realimentación interna de velocidad se puede representar mediante el siguiente diagrama de bloques
Fig. 5 Control PI de posición con realimentación en velocidad. siendo vr(t) una tensión proporcional a la posición angular que se desea conseguir, KP la ganancia proporcional, KI la ganancia integral y Kv la ganancia de realimentación en
velocidad. La inclusión del lazo interno de realimentación en velocidad tiene un efecto establizador, como se verá a continuación, en el control de posición. Analizando el diagrama de bloques ;
E(s) = Vr(s) - Vs(s) (19)
KKsP
I+K K s + 1
a m
τ
E(s)Vr (s) Vc(s)+
-
VS(s) +
-
KV Kt
Ks
S
Vt (s)

Motores de corriente continua - 10
Vc(s) = KP + KI
s E(s) - Kt Kv Ω(s) (20)
Ω(s) = Ka Kmτ s + 1
Vc(s) (21)
Vs(s) = Ks
s Ω(s) (22)
se llega a la función de transferencia
Vs(s) Vr(s)
= Ka Km Ks (s KP + KI)s2 (τ s + 1) + Ka Km Ks (s KP + KI) + s2 Ka Km Kt Kv (23)
y a la ecuación característica.
s3 τ + (1 + Ka Km Kt Kv) s2 + Ka Km Ks KP s + Ka Km Ks KI = 0 (24) Una elección adecuada de KP , KI y Kv hará que el sistema sea estable y que la salida del sensor de posición vs(t) siga a la tensión de referencia vr (t ) con una dinámica
determinada. 4.- Descripción de los equipos. Esta práctica se puede realizar con el equipo CE9 “BALL & HOOP” ( bola y aro), diseñado por TecQuipment, pero se limita a estudiar el comportamiento dinámico, en velocidad y posición, del aro. O con la unidad mecánica (33-100) “Analogue Servo Fundamentals Trainer” de FEEDBACK. 4.1- Descripción del equipo “Bola y Aro”. El equipo “BALL & HOOP” consta, véase Fig. 6, de un motor de corriente continua controlado por inducido, un tacómetro para medida de la velocidad angular del motor (incorporado en el propio motor), un transductor de la posición angular ( montado sobre el eje del motor) y un aro (fijado al eje del motor) que constituye a su vez una carga inercial .

Motores de corriente continua - 11
Fig. 6 Equipo CE9 “BALL & HOOP” de Tecquipment. El equipo facilita también toda la electrónica necesaria para interacción con el motor, véase Fig. 6. En concreto, se dispone de :
-Un interruptor general. -Una entrada al amplificador que gobierna la tensión de inducido en el motor. Esta entrada es en tensión y debe estar comprendida entre -10 y 10 V. -Una señal de salida, medida de la velocidad del aro y del sentido de giro, proporcional a la velocidad del motor. Obtenida a través del tacómetro y un amplificador, y variable entre -10 y 10 V. -Otra señal de salida, medida de la posición angular del aro, que genera el sensor de posición a través de un amplificador. Esta señal varía entre 0V. para 0º y 10 V. para 300 º. -Un potenciómetro para control manual del motor o para sumar una tensión a la señal de control externa.
4.2- Descripción del “Servo de FEEDBACK”. La unidad mecánica (33-100) “Analogue Servo Fundamentals Trainer” de FEEDBACK consta, véase Fig. 7, de un motor de corriente continua controlado por inducido, al que acompañan otros componentes mecánicos y toda la electrónica necesaria para excitar al motor y a los distintos sensores. Todos estos componentes se

Motores de corriente continua - 12
detallan en la Fig. 8, pero como algunos no se utilizaran en la práctica, sólo se comentan los siguientes:
1. Eje motor. Fijado al eje del motor se encuentran: un tacómetro para medida analógica de la velocidad angular del motor y un disco metálico con codificación óptica para medida digital de la velocidad. ¿El tacómetro proporciona una tensión en el rango de ± 10 V?.
2. Freno magnético. El freno magnético se aplica al disco metálico, incorporado en el eje del motor, por medio de la palanca de proyección a la izquierda. Se proporciona una escala para la palanca con el fin de poder repetir las colocaciones.
3. Conmutador de prueba del motor. Proporciona una tensión positiva o negativa al motor, que puede servir como comprobación inicial del funcionamiento de la unidad mecánica y de la fuente de alimentación.
4. Eje de salida. Fijado al eje de salida se encuentran: un potenciómetro para medida analógica de la posición angular del eje y un disco metálico con codificación óptica para medida digital de la posición. ¿El potenciómetro proporciona una tensión en el rango de ± 10 V?. ¿Y la velocidad cómo se mide?
5. Sistema de transmisión. El motor mueve el eje de salida por medio de una correa de transmisión y un engranaje con reducción 32:1.
6. Indicador de la velocidad de salida. Proporciona una lectura directa de la velocidad del eje de salida en r.p.m., en el rango de 0 a 99 r.p.m. obtenida a partir del tacómetro y de la reducción 32:1.
7. Conmutador DVM/RPM. Permite elegir la visualización de la velocidad del eje de salida en r.p.m. o en función de la tensión proporcionada por el tacómetro.
Fig. 7 Unidad mecánica “Analogue Servo Fundamentals Trainer” de Feedback.

Motores de corriente continua - 13
Fig. 8 Descripción de la unidad mecánica de Feedback.

Motores de corriente continua - 14
5.- Descripción de la aplicación “MOTORES”.
MOTORES, que ha sido desarrollada por el becario Luis Torres Ferrero bajo la supervisión del profesor Fernando Morilla García, es una aplicación ejecutable para Windows desarrollada en LabVIEW 6.0.2. Permite, haciendo uso de una tarjeta de adquisición de datos Advantech PCL-812PG, realizar control digital de velocidad o de posición de un motor de corriente continua.
Fig. 9 Interfaz de la aplicación MOTORES.
El programa presenta como interfaz una única ventana, véase figura 9, a la que se accede haciendo doble click sobre el icono “MOTORES” que encontrará en el escritorio de Windows. En la ventana se distinguen los siguientes cinco grupos de elementos, de fácil interpretación y acceso mediante el ratón:
Grupo superior izquierdo: con un botón de STOP para parar la aplicación, un conmutador con la posición (0FF) para parar el motor (enviando una tensión de 0V a su entrada) y la posición (ON) para permitir que la tensión elegida por el usuario o calculada por el controlador llegue
al motor, un segundo conmutador para poner al equipo en control Manual o

Motores de corriente continua - 15
Automático, dos indicadores numéricos del valor de la posición (en grados) y de la velocidad (en voltios) angulares, el conjunto formado por un texto editable y una deslizadera para que el usuario pueda modificar la tensión aplicada al motor cuando el equipo está bajo control manual, un texto editable para que el usuario pueda modificar el periodo de muestreo (en milisegundos) con el que se realizará la adquisición de datos y el control. Advertencia: la aplicación arranca siempre con el menor periodo de muestreo posible de 10 milisegundos, suficiente para tener control de este tipo de motores.
Grupo central izquierdo: con texto editable para indicar el intervalo de tiempo (en milisegundos) con el que se van a actualizar todas las señales de este interfaz, el mismo con el que se grabarán las señales si el usuario lo solicita. Este intervalo de tiempo debe ser superior al periodo de muestreo, y se recomienda usar el menor
intervalo posible de 40 milisegundos, con el que arranca la aplicación. Icono para indicar el
directorio y el nombre del archivo *.txt donde el usuario desea grabar las cuatro señales representativas (vector de tiempo, medida de velocidad, medida de posición y señal de control) de las experiencias realizadas. Un botón Grabar para ordenar el comienzo o el fin de la grabación y un indicador luminoso con texto asociado. El indicador estará en verde cuando esté listo para grabar y el texto pondrá “preparado”. Al pulsar el botón “Grabar”, el texto cambiará a “grabando” y el indicador luce en rojo.
Grupo superior derecho: con dos ventanas gráficas escaladas horizontalmente en números de muestras, que muestran la evolución instantánea de las tres señales representativas del lazo de control. En la gráfica superior se presenta el punto de consigna en trazo amarillo y la variable controlada (velocidad o posición, según se haya seleccionado control de velocidad o control de posición) en trazo azul. La gráfica inferior presenta siempre la señal de control en trazo azul, es decir, la tensión aplicada al motor. Las gráficas se acompañan de tres indicadores numéricos con los valores instantáneos de las señales. El escalado vertical de estas gráficas se puede cambiar en ejecución, basta pulsar sobre la escala y cambiar el límite superior o inferior.
Grupo inferior izquierdo: con un conmutador, para seleccionar control de Posición o de Velocidad, el conjunto formado por un texto editable y una

Motores de corriente continua - 16
deslizadera para que el usuario pueda modificar el punto de consigna del lazo de control, su valor corresponderá a una velocidad o a una posición según esté el conmutador, un texto editable para cada uno de los tres parámetros (ganancia proporcional KP, constante de tiempo integral TI y constante de tiempo derivativa TD) del controlador PID. Las dos constantes de tiempo vendrán siempre expresadas en minutos, mientras que las unidades de la ganancia proporcional depende del tipo de control que se esté realizando. Advertencia: la aplicación arranca la primera vez en control de velocidad y con unos parámetros de control por defecto.
Grupo inferior derecho: compuesto de dos indicadores de aguja para la posición (en grados) y para el valor absoluto de la velocidad (en voltios). Advertencia: El indicador de posición permanecerá inactivo en las experiencias de control de velocidad para evitar el efecto de distracción que produciría un cambio muy
rápido y continuo de la posición angular.
5.1- Modos de operación.
La aplicación MOTORES permite trabajar en dos modos de operación: Control Manual y Control Automático. En el modo Manual es el usuario quien se responsabiliza de actuar sobre el motor, enviando la tensión que considere oportuna en cada momento. Mientras que en el modo Automático es la aplicación, a través del bloque controlador PID, quien se responsabiliza de actuar sobre el motor con el fin de que su velocidad o su posición sea la deseada. A continuación se dan más detalles sobre las distintas posibilidades de estos modos de operación con vistas a la sesión práctica.
Control Manual: El usuario tiene la posibilidad de enviar una tensión al amplificador que excita el inducido del motor, y leer los valores de la velocidad angular (en voltios, generados por el tacómetro) y de la posición angular (en grados, generados por el potenciómetro y la correspondiente conversión en la aplicación). Al mismo tiempo puede observar la evolución de estas variables en las ventanas gráficas y en los indicadores anteriormente comentados, sin más que seleccionar el correspondiente control de velocidad o de posición, y puede solicitar que dicha evolución se grabe en un archivo de texto para un análisis posterior.
La primera utilidad de esta opción radica en poder ejecutar pruebas de la tarjeta de adquisición de datos, del conector y de los equipos, antes de proceder al control del motor. Pero la principal utilidad consiste en poder realizar experiencias en lazo abierto

Motores de corriente continua - 17
del sistema, encaminadas al estudio del sistema que se va a control y de sus características dinámicas. Paso obligado en todo sistema de control si queremos determinar correctamente los parámetros de control.
Control Automático: En este modo de funcionamiento, es el controlador PID quién determina la tensión que debe enviar cada periodo de muestreo al motor para conseguir que la variable controlada siga a una señal de referencia, si el punto de consigna es variable, o permanezca en el punto de consigna, si éste es fijo. El usuario tiene la posibilidad de: elegir la variable controlada (velocidad o posición), poner los parámetros de control que considere más adecuados y seleccionar el período de muestreo que permita conseguir los objetivos fijados. Control de velocidad: Internamente el algoritmo de control PID es de tipo digital, pero con la elección que se hace inicialmente (10 milisegundos) del periodo de muestreo, con TD=0 y seleccionando control de velocidad se puede considerar que el sistema se va a comportar como el sistema continuo de la Fig. 3 con ganancia proporcional KP y ganancia integral KI = KP/TI. Control de posición: Con una buena elección del periodo de muestreo y seleccionando control de posición se puede considerar que el sistema se va a comportar como el sistema continuo de la Fig. 5 con ganancia proporcional KP, ganancia integral KI = KP/TI y ganancia de realimentación en velocidad Kv = KP TD.
5.2- ¿Cómo usar la aplicación?
En el apartado anterior se ha comentado que MOTORES es una aplicación LabVIEW a la que se accede haciendo doble click sobre el icono “MOTORES” que encontrará en el escritorio de Windows. Como tal aplicación Windows consume una serie de recursos que sólo se liberan si se sale correctamente de ella.
Para salir de la aplicación liberando los recursos utilice el siguiente procedimiento:
Conmute al modo de control manual.
Pare el motor, conmutando a la posición OFF.
Pulse el botón de STOP.
De esta forma accederá a una ventana de LabVIEW con menús desplegables. En ese momento y no antes sí que puede cerrar la aplicación pulsando sobre la esquina superior derecha de la ventana. Aunque también puede volver a arrancar la aplicación pulsando sobre la opción Operate→Run del menú.

Motores de corriente continua - 18
6.- Descripción de la aplicación “ANÁLISIS DE DATOS”.
La aplicación ANÁLISIS DE DATOS, desarrollada por el becario Luis Torres Ferrero bajo la supervisión del profesor Fernando Morilla García es una aplicación ejecutable para Windows desarrollada en LabVIEW 6.0.2, que complementa al programa MOTORES con el fin de analizar los datos registrados durante las experiencias con el motor de corriente continua.
Fig. 10 Interfaz de la aplicación ANÁLISIS DE DATOS. El programa presenta como interfaz una única ventana, véase figura 10, a la que se accede haciendo doble click sobre el icono “ANALISIS” que encontrará en el escritorio de Windows. Advertencia: la aplicación arranca siempre preguntando el archivo que contiene los datos que se van a analizar. En la ventana se distinguen los siguientes cinco grupos de elementos, de fácil interpretación y acceso mediante el ratón:
Grupo superior: con un botón de STOP para parar la aplicación, un botón de Nuevo Archivo para elegir el archivo que contiene el registro de datos y el siguiente menú desplegable con cinco

Motores de corriente continua - 19
opciones para elegir el grupo de señales que se desea visualizar.
Zona Gráfica: que muestra en todo momento el correspondiente grupo de señales, en las condiciones de zoom seleccionadas y los correspondientes cursores cuando está seleccionado el modo cursor.
Grupo inferior izquierdo: con texto que muestra el nombre del archivo elegido, y tres iconos, el situado a la izquierda para seleccionar el modo cursor en la ventana gráfica, el central para realizar algún tipo de zoom sobre la ventana gráfica y el de la derecha para permitir el movimiento de arrastre por la ventana gráfica.
Grupo inferior central: con textos que muestran los valores de las señales en la posición que se encuentra actualmente el cursor, y tres iconos, el primero de estado, para permitir el movimiento del cursor sobre la
correspondiente señal, el segundo para cambiar el color, el tamaño y la forma del cursor, el tercero para bloquear el correspondiente cursor.
Grupo inferior derecha: con el objeto para navegar muestra a muestra (izquierda, derecha, arriba, abajo) con el cursor a través de las señales.
Grupo inferior: con datos (relativos a la fecha, hora e intervalo de grabación) leídos del archivo.

Motores de corriente continua - 20
7.- Experimentos con el equipo “Bola y Aro”. Todos los experimentos que se incluyen a continuación se pueden realizar desde el programa MOTORES, así que encienda el computador y siga atentamente todas las instrucciones. Asegúrese que el equipo “Bola y Aro” está conectado al terminal de conexiones, que el terminal está conectado a la red y que el mazo de cuatro cables está conectado a la tarjeta de adquisición de datos. Realice a continuación el siguiente conexionado con el equipo:
- Cable de color rosa, que corresponde a un canal D/A de la tarjeta de adquisición de datos, a la entrada excitadora del motor (texto “Motor drive input” en el terminal de conexiones).
- Cable de color rojo, que corresponde a la tierra de la tarjeta de adquisición de datos, a cualquiera de las tierras del terminal de conexiones.
- Cable de color azul, que corresponde a un canal A/D de la tarjeta de adquisición de datos, a la medida de posición (texto “Hoop angle output” en el terminal de conexiones).
- Cable de color amarillo, que corresponde a otro canal A/D de la tarjeta de adquisición de datos, a la medida de velocidad (texto “Hoop velocity output” en el terminal de conexiones).
1er Experimento. Pruebas de entrada y salida. a) La tarjeta Advantech PCL-812PG sólo puede enviar tensiones al motor en el rango de 0V a +10V, sin embargo para poder realizar control es necesario poderle enviar tensiones negativas. Es por esto que el potenciómetro que incorpora el equipo “Bola y Aro” con el texto “Motor input preset”, se utiliza para sumar una tensión de -5V a la señal de control que envía la tarjeta. Antes de efectuar control automático es preciso asegurarse que el potenciómetro está posicionado correctamente: encienda el equipo, arranque la aplicación MOTORES y mueva el potenciómetro hasta que el motor se quede parado. Si ya la tenía arrancada puede conseguir el mismo efecto en modo de Control Manual con la posición OFF del conmutador situado en la parte superior izquierda de la aplicación o enviando una tensión nula al motor. b) Con el motor parado, seleccione Control Manual Posición, observe que el exterior del aro está graduado en grados y muévalo ligeramente con la mano, comprobando que

Motores de corriente continua - 21
el indicador de posición de la aplicación marca correctamente la posición angular del aro. c) Seleccione Control Manual de Velocidad, envíe una tensión de 2 voltios al motor y compruebe que el motor gira en el sentido de las agujas del reloj al mismo tiempo que el indicador de velocidad de la aplicación marca un cierto valor. Repita la experiencia enviando una tensión de –2 voltios, en ese caso el motor debe girar en el sentido contrario a las agujas de reloj pero el indicador de velocidad de la aplicación marcará un valor similar al caso anterior. d) Repita alternativamente los envíos de tensiones +2 y –2 voltios al motor y utilice el potenciómetro “Motor input preset”, hasta conseguir que las medidas de velocidad sean simétricas respecto al cero. Si las pruebas han sido satisfactorias quiere decir que la comunicación entre el programa de control y el proceso funciona adecuadamente y se puede pasar a los siguientes experimentos. Si las pruebas no han sido satisfactorias puede ser que efectivamente la comunicación no funcione correctamente y no tiene sentido continuar los experimentos, pero también puede ocurrir que no haya hecho bien las conexiones o que no haya seguido correctamente todos los pasos, por tanto, antes de tomar esa decisión, vuelva a repetir el experimento. 2º Experimento. Estudio de características del proceso Se pretende con este segundo experimento conocer el proceso como conjunto, con sus características estáticas y dinámicas así como sus componentes.
a) Determinación de la ganancia K del conjunto ( amplificador + motor + tacómetro). Envíe una tensión de -5 V al motor y anote la medida de velocidad del tacómetro. Proceda de esa forma con incrementos de 0.5 V en la tensión del amplificador hasta que el motor no se mueva. La pendiente de la recta que mejor ajuste esos puntos es la ganancia
K = Ka Km Kt
b) Repetir el apartado (a) con valores de tensiones positivas e incrementos de 0.5 V, hasta 5 V, el valor de K obtenido debe ser el mismo o muy próximo.

Motores de corriente continua - 22
c) Comprobación y determinación de la zona muerta. En el estudio del motor se ha supuesto que el sistema es totalmente lineal, en realidad no lo es, una prueba de no linealidad es la existencia de una zona muerta, es decir, de valores de la tensión en el amplificador para los que el eje del motor, partiendo del reposo, no se mueve. Determinar experimentalmente el ancho en voltios de esta zona muerta, entorno a la tensión de parada (0 V). Advertencia: Se recomienda volver a ajustar el potenciómetro “Motor input preset” del equipo si la zona muerta no resulta simétrica respecto al cero. d) Determinación de la ganancia del conjunto ( amplificador + motor + sensor de posición). En este caso no se puede proceder como en el apartado (a) puesto que el sistema en posición es inestable y para un valor de tensión en el amplificador la posición angular crecería indefinidamente. No obstante se puede proceder como sigue:
- Enviar una tensión constante al motor, por ejemplo de 0.6 V. - Observar en la gráfica que la salida del sensor de posición es un diente de sierra. - Cada tramo lineal del diente de sierra corresponde a la integral en el tiempo de la velocidad. - La ganancia se obtiene como
Ka Km Ks = pendiente de un tramo lineal del diente de sierrtensión del amplificador
- Con el motor parado, seleccione grabación de datos con el mínimo intervalo de tiempo posible y vuelva a enviar la tensión constante de 0.6 V. Utilice la aplicación ANÁLISIS DE DATOS para medir esa ganancia a partir del registro de datos. Advertencia: es conveniente que cree un subdirectorio en el directorio C:\Automatica\Practicas\ y que esta grabación y las grabaciones posteriores las haga siempre en ese subdirectorio.
e) Determinación de la constante de tiempo τ del motor. Se ha supuesto que la dinámica más lenta está asociada al motor y que se puede modelar como una simple constante de tiempo. Para medirla se puede proceder como sigue:
- Seleccionar modo Control de Velocidad. - Enviar una tensión constante al motor, por ejemplo de 2V y esperar a que alcance el estacionario. - Preparar la aplicación para grabar datos en un archivo. - Cambiar la tensión de 2 a 4 V.

Motores de corriente continua - 23
- La respuesta en velocidad, registrada en el archivo, tendrá la forma típica de respuesta de un sistema de primer orden a una entrada escalón. Utilice la aplicación ANÁLISIS DE DATOS y proceda como en la práctica de primer orden para medir la constante de tiempo. - Repetir la experiencia para un cambio de -2 a -4 V.
3er Experimento. Control de velocidad. Se pretende en este tercer experimento efectuar control PI de velocidad, como se indica en el diagrama de la figura 3, y comprobar el efecto que sobre la respuesta del sistema tienen los parámetros de control.
a) Parar el motor, elegir CONTROL DE VELOCIDAD, poner KP = 0.5 , TI = 0.004 min. y TD = 0, y conmutar al modo Automático.
b) Cambiar varias veces el punto de consigna, en el rango de -5 a 5 V observando si el controlador es capaz de conseguir que la velocidad del motor siga a la consigna. c) Grabar una experiencia con la respuesta del sistema a un cambio brusco en la consigna de velocidad y utilizar la aplicación ANÁLISIS DE DATOS para discutir si la respuesta real, que se ha registrado, está de acuerdo con las raíces de la ecuación característica (16) para los parámetros del proceso K y τ determinados en el 2º experimento y los parámetros de control KP y KI en ese momento.
d) Repetir el paso anterior para distintos valores de KP y TI. e) Observar en alguna de las experiencias anteriores que el error estacionario es cero, es decir que el valor de referencia y el valor de velocidad coinciden transcurrido el transitorio. f) Observar si en alguna de las experiencias anteriores se produce saturación de la señal de control. Se recomienda no llegar nunca a esta situación pues el sistema deja de ser lineal. g) A la vista de las experiencias anteriores proponer, de forma justificada, unos parámetros de control adecuados para el control de velocidad.

Motores de corriente continua - 24
h) Repetir el caso (g) con otros valores del periodo de muestreo, superiores al recomendado por la aplicación (10 milisegundos). ¿Observa algún deterioro en el sistema de control?
4º Experimento. Control de posición Se pretende en este cuarto experimento efectuar control PI de posición con realimentación de velocidad, como se indica en el diagrama de la figura 5, y comprobar el efecto que sobre la respuesta del sistema tienen los parámetros de control.
a) Parar el motor, elegir CONTROL DE POSICIÓN, poner KP = 0.015 , TI = 0.04 min. y TD = 0.0002 min., situar al motor en una posición angular cercana a
180º, fijar la consigna de posición a ese mismo valor y conmutar al modo Automático. b) Comprobar en la gráfica si la posición del motor permanece en los 180o. Efectuar con la mano un ligero desplazamiento del aro y observar que el sistema de control recupera la posición de consigna. Repetir con un desplazamiento en sentido contrario. c) Cambiar varias veces el punto de consigna, en el rango de 90º a 270º grados, con variaciones nunca superiores a ±45º, observando si el controlador es capaz de conseguir que el eje del motor se posicione en la consigna deseada. d) Grabar una experiencia con la respuesta del sistema a un cambio brusco en la consigna de posición y utilizar la aplicación ANÁLISIS DE DATOS para discutir si la respuesta real, que se ha registrado, está de acuerdo con las raíces de la ecuación característica (24) para los parámetros del proceso Ka Km , Kt , Ks y τ determinados en el 2º experimento y los parámetros de control KP , KI y Kv en
ese momento. e) Repetir el paso anterior para distintos valores de KP, TI y TD. f) Observar en alguna de las experiencias anteriores que, a pesar de incluir término integral en el controlador, el error estacionario no es cero, es decir que el valor de referencia y el valor de velocidad no coinciden transcurrido el transitorio, produciéndose un ciclo límite entorno a la posición de referencia. Este fenómeno es debido a la zona muerta del motor.

Motores de corriente continua - 25
g) Observar si en alguna de las experiencias anteriores se produce excesiva oscilación en la señal de control y no se alcanza la posición deseada. Se recomienda no llegar nunca a esta situación pues debido al sensor de posición el sistema deja de ser lineal. h) A la vista de las experiencias anteriores proponer, de forma justificada, unos parámetros de control adecuados para el control de posición. i) Repetir el caso (h) con otros valores del periodo de muestreo, superiores al recomendado por la aplicación (10 milisegundos). ¿Observa algún deterioro en el sistema de control?

Motores de corriente continua - 26
8.- Experimentos con el “Servo de Feedback”. Todos los experimentos que se incluyen a continuación se pueden realizar desde el programa MOTORES, así que encienda el computador y siga atentamente todas las instrucciones. No necesita hacer ningún conexionado, pero asegúrese que el mazo de cuatro cables está conectado a la tarjeta de adquisición de datos y a la unidad mecánica de Feedback mediante un cable plano, que la fuente de alimentación está conectada a la unidad mecánica y también está conectada la red. 1er Experimento. Pruebas de entrada y salida.
a) La tarjeta Advantech PCL-812PG sólo puede enviar tensiones al motor en el rango de 0V a +10V, sin embargo para poder realizar control es necesario poderle enviar tensiones negativas. Es por esto que se ha incorporado una cierta electrónica entre la tarjeta de adquisición de datos y la unidad mecánica, encargada de sumar una tensión de -5V y multiplicar por dos a la señal de control que envía la tarjeta. Arranque la aplicación MOTORES, encienda la fuente de alimentación, compruebe si el motor se queda parado. Si ya la tenía arrancada puede conseguir el mismo efecto en modo de Control Manual con la posición OFF del conmutador situado en la parte superior izquierda de la aplicación o enviando una tensión nula al motor. Antes de continuar asegúrese de quitar el freno de la unidad mecánica. b) Con el motor parado, seleccione Control Manual Posición, observe que el frontal del eje de salida de la unidad mecánica está graduado en grados, utilice el conmutador de prueba del motor etiquetado “V+ y V- Motor check” moverlo ligeramente en el sentido horario o antihorario, comprobando que el indicador de posición de la aplicación marca correctamente la posición angular del aro. c) Seleccione Control Manual de Velocidad, envíe una tensión de 2 voltios al motor y compruebe que el motor gira en el sentido de las agujas del reloj al mismo tiempo que el indicador de velocidad de la aplicación marca un cierto valor. Repita la experiencia enviando una tensión de –2 voltios, en ese caso el motor debe girar en el sentido contrario a las agujas de reloj pero el indicador de velocidad de la aplicación marcará un valor similar al caso anterior.

Motores de corriente continua - 27
Si las pruebas han sido satisfactorias quiere decir que la comunicación entre el programa de control y el proceso funciona adecuadamente y se puede pasar a los siguientes experimentos. Si las pruebas no han sido satisfactorias puede ser que efectivamente la comunicación no funcione correctamente y no tiene sentido continuar los experimentos, pero también puede ocurrir que no algún conector esté suelto o que no haya seguido correctamente todos los pasos, por tanto, antes de tomar esa decisión, vuelva a repetir el experimento. 2º Experimento. Estudio de características del proceso Se pretende con este segundo experimento conocer el proceso como conjunto, con sus características estáticas y dinámicas así como sus componentes.
a) Determinación de la ganancia K del conjunto ( amplificador + motor + tacómetro). Envíe una tensión de -5 V al motor y anote la medida de velocidad del tacómetro. Proceda de esa forma con incrementos de 0.5 V en la tensión del amplificador hasta que el motor no se mueva. La pendiente de la recta que mejor ajuste esos puntos es la ganancia
K = Ka Km Kt
b) Repetir el apartado (a) con valores de tensiones positivas e incrementos de 0.5 V, hasta 5 V, el valor de K obtenido debe ser el mismo o muy próximo. c) Comprobación y determinación de la zona muerta. En el estudio del motor se ha supuesto que el sistema es totalmente lineal, en realidad no lo es, una prueba de no linealidad es la existencia de una zona muerta, es decir, de valores de la tensión en el amplificador para los que el eje del motor, partiendo del reposo, no se mueve. Determinar experimentalmente el ancho en voltios de esta zona muerta, entorno a la tensión de parada (0 V). d) Determinación de la ganancia del conjunto ( amplificador + motor + sensor de posición). En este caso no se puede proceder como en el apartado (a) puesto que el sistema en posición es inestable y para un valor de tensión en el amplificador la posición angular crecería indefinidamente. No obstante se puede proceder como sigue:
- Enviar una tensión constante al motor, por ejemplo de 0.4 V. - Observar en la gráfica que la salida del sensor de posición es un diente de sierra.

Motores de corriente continua - 28
- Cada tramo lineal del diente de sierra corresponde a la integral en el tiempo de la velocidad. - La ganancia se obtiene como
Ka Km Ks = pendiente de un tramo lineal del diente de sierrtensión del amplificador
- Con el motor parado, seleccione grabación de datos con el mínimo intervalo de tiempo posible y vuelva a enviar la tensión constante de 0.4 V. Utilice la aplicación ANÁLISIS DE DATOS para medir esa ganancia a partir del registro de datos. Advertencia: es conveniente que cree un subdirectorio en el directorio C:\Automatica\Practicas\ y que esta grabación y las grabaciones posteriores las haga siempre en ese subdirectorio.
e) Determinación de la constante de tiempo τ del motor. Se ha supuesto que la dinámica más lenta está asociada al motor y que se puede modelar como una simple constante de tiempo. Para medirla se puede proceder como sigue:
- Seleccionar modo Control de Velocidad. - Enviar una tensión constante al motor, por ejemplo de 2V y esperar a que alcance el estacionario. - Preparar la aplicación para grabar datos en un archivo. - Cambiar la tensión de 2 a 4 V. - La respuesta en velocidad, registrada en el archivo, tendrá la forma típica de respuesta de un sistema de primer orden a una entrada escalón. Utilice la aplicación ANÁLISIS DE DATOS y proceda como en la práctica de primer orden para medir la constante de tiempo. - Repetir la experiencia para un cambio de -2 a -4 V.
3er Experimento. Control de velocidad. Se pretende en este tercer experimento efectuar control PI de velocidad, como se indica en el diagrama de la figura 3, y comprobar el efecto que sobre la respuesta del sistema tienen los parámetros de control.
a) Parar el motor, elegir CONTROL DE VELOCIDAD, poner KP = 0.25 , TI = 0.004 min. y TD = 0, y conmutar al modo Automático.

Motores de corriente continua - 29
b) Cambiar varias veces el punto de consigna, en el rango de -4 a 4 V observando si el controlador es capaz de conseguir que la velocidad del motor siga a la consigna. c) Grabar una experiencia con la respuesta del sistema a un cambio brusco en la consigna de velocidad y utilizar la aplicación ANÁLISIS DE DATOS para discutir si la respuesta real, que se ha registrado, está de acuerdo con las raíces de la ecuación característica (16) para los parámetros del proceso K y τ determinados en el 2º experimento y los parámetros de control KP y KI en ese momento.
d) Repetir el paso anterior para distintos valores de KP y TI. e) Observar en alguna de las experiencias anteriores que el error estacionario es cero, es decir que el valor de referencia y el valor de velocidad coinciden transcurrido el transitorio. f) Observar si en alguna de las experiencias anteriores se produce saturación de la señal de control. Se recomienda no llegar nunca a esta situación pues el sistema deja de ser lineal. g) A la vista de las experiencias anteriores proponer, de forma justificada, unos parámetros de control adecuados para el control de velocidad. h) Repetir el caso (g) con otros valores del periodo de muestreo, superiores al recomendado por la aplicación (10 milisegundos). ¿Observa algún deterioro en el sistema de control? i) Repetir con los parámetros seleccionados en el apartado (g) alguna experiencia de rechazo a perturbaciones, por ejemplo fijando una consigna de velocidad y utilizando distintas posiciones del freno magnético. ¿Observa algún efecto en la señal de control?
4º Experimento. Control de posición Se pretende en este cuarto experimento efectuar control PI de posición con realimentación de velocidad, como se indica en el diagrama de la figura 5, y comprobar el efecto que sobre la respuesta del sistema tienen los parámetros de control.

Motores de corriente continua - 30
a) Parar el motor, elegir CONTROL DE POSICIÓN, poner KP = -0.008 (es
preciso utilizar una ganancia negativa porque el sensor de posición del equipo incorpora una inversión de signo) , TI = 0.04 min. y TD = 0.0002 min., situar al
motor en una posición angular cercana a 90º, fijar la consigna de posición a ese mismo valor y conmutar al modo Automático. b) Comprobar en la gráfica si la posición del motor permanece en los 90o. c) Cambiar varias veces el punto de consigna, en el rango de 90º a 270º grados, con variaciones nunca superiores a ±45º, observando si el controlador es capaz de conseguir que el eje del motor se posicione en la consigna deseada. d) Grabar una experiencia con la respuesta del sistema a un cambio brusco en la consigna de posición y utilizar la aplicación ANÁLISIS DE DATOS para discutir si la respuesta real, que se ha registrado, está de acuerdo con las raíces de la ecuación característica (24) para los parámetros del proceso Ka Km , Kt , Ks y τ determinados en el 2º experimento y los parámetros de control KP , KI y Kv en
ese momento. e) Repetir el paso anterior para distintos valores de KP, TI y TD. f) Observar si en alguna de las experiencias anteriores que, a pesar de incluir término integral en el controlador, el error estacionario no es cero, es decir que el valor de referencia y el valor de velocidad no coinciden transcurrido el transitorio, produciéndose un ciclo límite entorno a la posición de referencia. Este fenómeno es debido a la zona muerta del motor. g) Observar si en alguna de las experiencias anteriores se produce excesiva oscilación en la señal de control y no se alcanza la posición deseada. Se recomienda no llegar nunca a esta situación pues debido al sensor de posición el sistema deja de ser lineal. h) A la vista de las experiencias anteriores proponer, de forma justificada, unos parámetros de control adecuados para el control de posición. i) Repetir el caso (h) con otros valores del periodo de muestreo, superiores al recomendado por la aplicación (10 milisegundos). ¿Observa algún deterioro en el sistema de control?

CONTROL DE CAUDAL

Control de caudal - 2
PRÁCTICA: CONTROL DE CAUDAL
Presentación ............................................................................................................... 3
1. Descripción de la planta ....................................................................................... 4
Depósito ................................................................................................................ 4
Bomba ................................................................................................................. 5
Válvula y circuito electrónico ............................................................................... 5
Tubo de medida y transmisor (caudalímetro) ....................................................... 6
Regulador ............................................................................................................. 8
2. Experiencias ......................................................................................................... 10
2.1 Identificar los componentes de la planta y sus conexiones ............................ 10
2.2 Estudiar el posicionamiento del vástago de la válvula ................................... 11
2.3 Obtener la característica entre la señal de control y el caudal ........................ 12
2.4 Obtener un modelo de primer orden para la planta ........................................ 13
2.5 Calcular los parámetros de control ................................................................. 14
2.6 Obtener la respuesta del sistema a una entrada escalón .................................. 14
2.7 Estudiar el comportamiento del sistema frente a perturbaciones .................... 15
2.8 Estudiar el comportamiento del sistema para cambios
en los parámetros de control ............................................................................. 16

Control de caudal - 3
PRÁCTICA: CONTROL DE CAUDAL
NOTA IMPORTANTE: No tocar ni conectar nada hasta que no se haya leído y
comprendido el guión de la práctica. En caso de duda consultar al profesor.
Material:
Válvula Siemens tipo M 59 P y circuito de control.
Caudalímetro magnético Rosemount. Tubo de medida modelo 8711 y
transmisor modelo 8712C.
Regulador industrial SattControl ECA400.
Bomba sumergible Sicce modelo IDRA.
Depósito de líquido.
Fuente de alimentación doble.
Osciloscopio con memoria.
Multímetro digital.
El objetivo de esta práctica es la toma de contacto y familiarización del alumno con una
serie de componentes habituales en muchos lazos de control industriales. Para ello se ha
preparado una sencilla experiencia de control en la que se hace uso de estos elementos:
un caudalímetro magnético, un regulador industrial, una válvula con su circuito de
control y una bomba sumergible. Se busca, por tanto, alejarse de la típica práctica de
simulación y acercarse más a lo que es una experiencia de control de un sistema real y a
los componentes que la forman.
Caudal dereferencia
Actuadorválvula
control CaudalControlador
Sensorcaudalímetro
Medida delcaudal
Fig. 1 Diagrama de bloques del sistema de control

Control de caudal - 4
En la figura 1 se muestra el diagrama de bloques del sistema de control. La variable a
controlar es el caudal de líquido a la salida del actuador (válvula). Esta variable es
medida por el sensor (caudalímetro) y la señal de medida es enviada al controlador,
quien la compara con el caudal de referencia y aplica el algoritmo de control generando
la señal de control. Esta última señal se envía al actuador para posicionarlo de tal forma
que el caudal a su salida siga al de referencia.
En el apartado 1 de este guión se describe la planta junto con el sistema de control y en
el apartado 2 se indican las experiencias prácticas a realizar.
1.- Descripción de la planta.
En la figura 2 se representan los distintos componentes de la planta y sus conexiones.
VálvulaBombaDepósito Tubo demedida
Circuitoelectrónico
Transmisor
Regulador
Grifo
Fig. 2 Diagrama de bloques de la planta
Componentes:
· Depósito. Se trata de un depósito de líquido (agua) que actúa como depósito de
recogida y depósito de alimentación, lo que permite mantener cerrado el circuito por
el que circula el líquido. El agua se extra del depósito mediante una bomba y a el
llegan las salidas de líquido de la planta, que proceden de la salida de la bomba y del
tubo de medida.

Control de caudal - 5
· Bomba. La bomba sumergible, de la marca Sicce modelo IDRA, tiene como misión
extraer el líquido del depósito y llevarlo a la entrada de la válvula para hacerlo
circular por el circuito. A la salida de la bomba se han colocado dos tubos, uno
conectado a la válvula y otro que devuelve el agua directamente al depósito y que
dispone de un grifo. La misión de este segundo tubo es evitar que la presión sobre los
conductos sea elevada y, mediante el grifo, poder ajustar el caudal máximo que
circula por el circuito y poder introducir perturbaciones.
· Válvula y circuito electrónico. La válvula de control, de la marca Siemens tipo M
50 P, permite controlar la sección de paso de líquido y el circuito electrónico está
diseñado para conseguir situar el vástago de la válvula en la posición deseada.
La válvula tiene un orificio de entrada de líquido (que se encuentra conectado
mediante un tubo flexible al depósito) y otro orificio para la salida de éste (que está
conectado mediante un tubo flexible a la entrada del tubo de medida). La sección de
paso del líquido se modifica mediante dos motores, alimentados con corriente alterna
de 220 voltios y 50 Hz, que permiten aumentar o disminuir dicha sección. Para poner
en marcha los motores, éstos se conectan al circuito electrónico en su parte posterio,
mediante un cable que procede de la válvula y que posee un terminal con tres bornes.
Para conocer la posición del vástago de la válvula, ésta dispone de un potenciómetro
interno conectado a tres cables, dos a sus terminales fijos y el tercero al terminal
variable. Si los cables procedentes de los terminales fijos se conectan de forma
adecuada a una fuente de alimentación, el cable conectado al terminal variable
proporciona una tensión negativa que permite conocer la posición del vástago de la
válvula.
El control de la posición del vástago de la válvula se realiza mediante un circuito
electrónico que a partir de la referencia, proporcionada por el cable conectado al
terminal variable del potenciómetro, y de la señal de control, permite aumentar o
disminuir la sección de paso de líquido según convenga. Si la tensión de referencia
en valor absoluto es mayor que la señal de control, el circuito arranca el motor de
cierre, y en caso contrario arranca el motor de apertura. Cuando ambas tensiones son
iguales, el circuito desconecta los dos motores al haberse alcanzado la posición
indicada por la señal de control.

Control de caudal - 6
Para conectar el circuito de control con la señal de referencia de la válvula, la señal
de control y tierra, la caja que lo contiene dispone de tres conectores en su parte
frontal. En el central se conecta la tierra y en los otros dos las señales de referencia y
control indistintamente.
· Tubo de medida y transmisor (caudalímetro). El caudalímetro magnético de la
marca Rosemount está formado por un tubo de medida (figura 3) y un transmisor
(figura 4) separados y conectados mediante un cable. El tubo de medida permite
conocer el flujo de un líquido conductor que pasa a través de un campo magnético
detectando su velocidad.
El tubo de medida está coloca en línea con las tuberías del sistema (su entrada con la
salida de la válvula y su salida con el depósito). La posición ideal para la colocación
del tubo es la vertical, de manera que las impurezas sólidas del líquido sean lo más
homogéneas posibles y se minimice la cantidad de éstas que se depositen en el
interior del tubo cuando no exista flujo. Unas bobinas localizadas en extremos
opuestos del tubo crean el campo magnético necesario. Al paso del líquido a través
del campo magnético se crea un voltaje que es detectado por medio de dos
electrodos.
Fig. 3 Diversos modelos de tubos de medida

Control de caudal - 7
Fig. 4 Transmisor
El transmisor, que está basado en microprocesadores, controla las bobinas para
generar el campo magnético y acondiciona electrónicamente el voltaje detectado por
los electrodos. Produce una salida, tanto analógica (corriente de 4-20 mA) como en
frecuencia, que es linealmente proporcional a la velocidad del líquido.
El transmisor, además de medir caudales instantáneos, permite el cómputo total de
líquido que atraviesa la tubería desde un instante determinado de tiempo. También es
posible el filtrado de la salida con un filtro de primer orden con constante de tiempo
programable (para esta práctica se ha elegido una constante de tiempo de 0.5
segundos). La principal ventaja de los caudalímetros magnéticos radica en que no
perturban el flujo del fluido, lo que es especialmente útil cuando se trabaja con
caudales pequeños. El caudalímetro ha sido previamente configurado de manera
adecuada para la práctica, por lo que no necesita ningún tipo de ajuste ni
modificación de sus parámetros. La dinámica del caudalímetro es lo suficientemente
rápida como para poder ser despreciada.

Control de caudal - 8
Fig. 5 Panel frontal del regulador ECA400
· Regulador. Se trata del regulador industrial ECA400 de SattControl Instruments
(figura 5). Es un controlador PID muestreado de un único lazo, con funciones
adaptativas y que se puede configurar para realizar virtualmente cualquier proceso de
control. Este controlador también puede realizar procesamiento lógico y aritmético
de las señales, gestionar alarmas en función del valor medido de la salida de la planta
y generar internamente puntos de consigna en forma de rampa.
La manera de gestionar las señales de entrada y de salida se determina mediante los
parámetros de configuración. Todos los parámetros de configuración, ajustes,
controles e indicaciones están accesibles desde el panel frontal (ver la figura 3).
El periodo de muestreo es fijo, de 200 ms. Se pueden conseguir tres tipos de
estrategias de control diferentes: a) Control PID con parámetros fijos (convencional).

Control de caudal - 9
b) Control PID adaptativo. c) Control PID con ganancia programada, con o sin
adaptación.
El controlador muestra su información al operario a través de tres gráficos de barras y
de una pantalla digital. Las barras grandes de la izquierda son PV (valor del proceso)
y SP (punto de consigna o set point); la barra pequeña de la derecha muestra la señal
de salida del regulador (señal de control). En condiciones normales la pantalla digital
muestra el valor de la salida del proceso, aunque cuando se cambie el punto de
consigna mostrará el valor de éste durante unos 5 segundos. Hay que tener presente
que las barras muestran sus valores en % con respecto a su valor máximo, mientras
que la pantalla digital muestra el valor real en unidades de litros/minuto.
El punto de consigna se fija pulsando las flechas verdes de la izquierda: la barra SP
mostrará su valor en % con respecto al valor máximo, y la pantalla digital mostrará
también su valor (valor real, no %) durante unos 5 segundos (mientras que el
indicador SP junto a la pantalla permanezca encendido). Para poder fijar
manualmente el punto de consigna el botón R/L (Remote/Local set point) deberá
estar apagado, pues encendido indica que el punto de consigna viene determinado
mediante una entrada externa.
En modo manual (botón M pulsado e iluminado) el valor de la señal de control se
modifica con las flechas amarillas de la derecha. Para pasar a modo automático se
pulsará nuevamente el botón M , apagándose éste (en este caso, el valor de la señal de
control viene determinado por la salida del controlador PID).
La configuración del regulador se realiza mediante unos parámetros de configuración
que son introducidos desde su panel frontal. El regulador es muy versátil, por lo que
existen más de 150 parámetros. Por este motivo ya ha sido configurado previamente
para los objetivos de esta práctica, control PID con parámetros fijos, por lo que
únicamente habrá que modificar los parámetros que definen al controlador PID.
BAJO NINGÚN CONCEPTO SE DEBERÁ MODIFICAR CUALQUIER
PARÁMETRO NO INDICADO .
Al pulsar el botón PROG éste se encenderá y aparecerá en la pantalla la palabra
Program. Pulsando las flechas verdes (flechas de la izquierda) van pasando por
pantalla los códigos FCODE que identifican a los parámetros de configuración. Estos
códigos son de la forma FC n, donde n representa el número del código. Para
seleccionar un parámetro determinado, una vez que su código haya aparecido en

Control de caudal - 10
pantalla, se pulsará el botón SET, que estará parpadeando. La pantalla mostrará
ahora el valor que tiene dicho parámetro, que puede ser modificado pulsando las
flechas verdes. Para almacenar el nuevo valor del parámetro se pulsará el botón
STORE, parpadeante, apareciendo en pantalla el código del siguiente parámetro.
Finalizada la configuración del regulador se volverá al modo normal de operación
pulsando nuevamente el botón PROG.
El caudalímetro se encuentran conectado al regulador en la entrada AI1, y para
conectar el regulador al circuito electrónico de control de la válvula se dispone de dos
cables que parten de la salida AO1 y que están etiquetados como AO1+ (señal de
control) y AO1- (tierra).
2.- Experiencias.
2.1.- Identificar los componentes de la planta y sus conexiones.
· Depósito de agua. Comprobar que el nivel de líquido alcanza una altura superior a
un 25% de la altura total del depósito.
· Bomba. Identificar su alimentación y comprobar que se encuentra sumergida en el
depósito, así como que su salida de líquido se encuentra conectada a la entrada de la
válvula y al grifo que devuelve el líquido al depósito.
· Válvula. Comprobar que su salida de líquido se encuentra conectada a la entrada del
tubo de medida del caudalímetro. Identificar su alimentación (conector con tres
bornes) y los tres cables que permiten conocer la situación del vástago.
· Circuito de control de la válvula. Verificar que su alimentación no se encuentra
conectada a la red. Identificar el conector de alimentación de la válvula, que está
situado en la parte posterior de la caja que contiene el circuito, y los tres conectores
situadas en la parte frontal de la misma.
· Tubo de medida. Comprobar que su salida de líquido se encuentra conectada al
depósito de agua y que el conducto no está sumergido. Identificar el cable que lo
conecta al transmisor del caudalímetro.

Control de caudal - 11
· Transmisor del caudalímetro. Identificar su alimentación y comprobar que los
cables azul y marrón, que proceden de él, se encuentran conectados a los terminales 1
y 2 de entrada analógica del regulador, respectivamente, y entre ellos existe un
ponenciómetro.
· Regulador. Identificar su alimentación y con el regulador desconectado, reconocer
los distintos elementos que aparecen en su panel frontal (sin pulsar ningún botón)
siguiendo la figura 5.
2.2.- Estudiar el posicionamiento del vástago de la válvula
Cuando a la válvula se le aplica una señal de control, su vástago se sitúa en la posición
indicada por ésta tras un transitorio. El objetivo es conocer la forma del transitorio y
cuanto tarda en posicionarse el vástago de la válvula cuando la señal de control pasa de
un valor a otro. Para ello se realizarán los siguientes pasos:
· Conectar la doble fuente de alimentación a la red, comprobando previamente que no
se ésta alimentando con ella a ningún componente.
· Situar en 10 voltios las dos fuentes. Una vez realizada esta operación apagar la fuente
de alimentación.
· Con el circuito de control de la válvula desconectado de la red, encajar la
alimentación de la válvula (terminal de tres bornes) en su parte posterior y realizar las
siguientes conexiones con los tres cables que provienen del potenciómetro interno de
la válvula y que permiten conocer la posición de su vástago: 1. Cable azul al polo
positivo de la primera fuente (tierra), cable rojo al polo negativo de la misma y cable
amarillo (referencia) a la entrada izquierda de la parte frontal del circuito de control.
2. Conectar el polo positivo de la segunda fuente a la entrada derecha de la parte
frontal del circuito de control (control). 3. Conectar el polo positivo de la primera
fuente a la entrada central de la parte frontal del circuito de control y al polo negativo
de la segunda fuente (tierras). 4. Conectar el osciloscopio a la referencia y a tierra.
Con ello se consigue que la señal de referencia tome un valor entre 0 y -10 voltios,
que indica la posición del vástago, y que la válvula se sitúe en el valor indicado por la
señal de control.

Control de caudal - 12
· Conectar a la red el circuito de control, la fuente de alimentación y el osciloscopio.
Esperar a que la válvula se posicione en su abertura máxima y bajar la tensión de la
segunda fuente a 0 voltios con la finalidad de cerrar completamente la válvula. En el
osciloscopio se irá registrando el valor de la referencia en cada instante de tiempo lo
que permite conocer el comportamiento de la válvula cuando se pasa de un valor de
la señal de control a otro.
· Observar como al pasar la señal de control de 10 a 0 voltios, la válvula se va
cerrando de forma lineal y que el tiempo que tarda en variar 1 voltio la señal de
referencia es de 10 segundos.
· Una vez terminada la experiencia, desconectar la segunda fuente del circuito de
control y del polo positivo de la primera fuente, así como el osciloscopio. Comprobar
que la primera fuente sigue en 10 voltios y que su polo positivo se encuentra
conectado a la tierra del circuito de control (conector central).
2.3.- Obtener la característica entre la señal de control y el caudal
El objetivo es trazar una gráfica en la que se represente el caudal que corresponde a cada
valor de la señal de control. Para ello se realizarán los siguientes pasos:
· Conectar la salida analógica del regulador etiquetada como AO1- a tierra (polo
positivo de la fuente) y la AO1+ al circuito de control de la válvula (conector
derecho).
· Conectar a la red el circuito de control de la válvula, la fuente de alimentación, el
caudalímetro, regulador y la bomba.
· Poner el regulador en modo manual (botón M encendido) y llevar la señal de control
al 100% (botón con flecha arriba situado debajo del indicador de la señal de control).
· Comprobar que en el circuito de líquido no existe aire. En caso contrario cerrar
completamente el grifo situado en el depósito. Una vez que el agua circule por el
circuito, ajustar la posición del grifo de tal forma que en el visualizador del regulador
el caudal sea próximo e inferior a 3 litros por minuto, estando la válvula en su
máxima abertura.

Control de caudal - 13
· Reducir la señal de control a intervalos de 5% hasta llegar al 0% y anotar el valor del
caudal en litros/minutos, que aparece en el visualizar del regulador, para cada valor
de la señal de control.
· Trazar una gráfica en la que aparezcan los valores de la señal de control en abscisas y
los valores del caudal en ordenadas.
2.4.- Obtener un modelo de primer orden para la planta
El objetivo es determinar la ganancia Kp y la constante de tiempo t, de un sistema de
primer orden, a partir del registro en el osciloscopio del valor del caudal en cada instante
de tiempo cuando se pasa de un estado estacionario a otro. Este modelo de primer orden
es una aproximación, ya que como se habrá comprobado al caracterizar la válvula esta
presenta una fuerte no linealidad. Sin embargo, será un buen punto de partida a la hora
de sintonizar el regulador.
Para identificar este modelo se realizarán los siguientes pasos:
· A partir de la gráfica obtenida en la experiencia anterior, considerar dos valores de la
señal de control donde la característica sea aproximadamente lineal y que estén
distantes un 20%.
· Conectar el osciloscopio al cable rojo del potenciómetro de la salida analógica del
regulador y su tierra al cable amarillo de dicho potenciómetro (terminales 1 y 2).
· Con el regulador en modo manual, situar la señal de control en el menor valor
seleccionado y esperar a que se alcance el estacionario. Una vez alcanzado, aumentar
rápidamente la señal de control en un 20% y esperar a que se alcance de nuevo el
estacionario. Conseguido este último, detener en el osciloscopio el registro y medir la
ganancia Kp y la constante de tiempo t. La ganancia se obtiene dividiendo por 0.2 el
la diferencia entre estacionarios, y la constante de tiempo como el tiempo
transcurrido entre el instante en el que se produce el cambio en la señal de control
hasta el instante en que se alcanza el 63.2% del estacionario final menos el
estacionario inicial.
· Repetir el punto anterior para un escalón decreciente y considerar como valores de
Kp y t la media de los valores obtenidos para los dos escalones.

Control de caudal - 14
2.5.- Calcular los parámetros de control
Si para controlar el caudal se utiliza un controlador PI
u(t) = K e(t)1
Te(t)dtc
it
t
0
+æ
èç
ö
ø÷ò , G (s) = K
s T + 1
s Tc ci
i
y si se considera que el proceso se comporta como un sistema de primer orden
G (s) =K
s + 1p
p
t
la ecuación característica del sistema en lazo cerrado es
s + 1 + K K
s + K K
= s 2 s + = 02 p c p c
i
2n n
2
t t Tdw w+
de donde se obtienen las fórmulas que permiten ajustar los parámetros de control Kc y Ti
a partir de los parámetros del modelo del proceso Kp y t y de las especificaciones d y wn.
KK
T c
n
pi
n
n2= =
2 2dw t -1 dw t -1
w t, con w
d tn > 1
2
A partir de las fórmulas de ajuste y de los valores de Kp y t, obtenidos en la experiencia
anterio, calcular Kc y Ti para d=1 y wn=1/dt.
2.6.- Obtener la respuesta del sistema a una entrada escalón
El objetivo es estudiar el comportamiento del sistema en lazo cerrado cuando se
aplican al regulador los parámetros de control calculados en la experiencia anterior.
Para ello se realizarán los siguientes pasos:
· Conectar el osciloscopio al cable rojo del potenciómetro de la salida analógica del
regulador y su tierra al cable amarillo de dicho potenciómetro (terminales 1 y 2).
· Ajustar en el regulador los parámetros de control y pasar éste a modo automático.
Para introducir en el regulador los parámetros de control realizar los siguientes pasos:

Control de caudal - 15
1. Pulsar el botón PROG. 2. Pulsar las flechas verdes (flechas de la izquierda), para
ir pasando por la pantalla los códigos que identifican a los parámetros de
configuración FC n (donde n representa el número del código), hasta llegar al código
48 (ganancia del controlador Kc). 3. Una vez que el código 48 haya aparecido en
pantalla, pulsar el botón SET. 4. La pantalla mostrará ahora el valor del parámetro
Kc, que puede ser modificado pulsando las flechas verdes. 5. Para almacenar el
nuevo valor del parámetro se pulsará el botón STORE, apareciendo en pantalla el
código del siguiente parámetro. 6. El código 49 permite introducir la constante de
tiempo integral Ti en segundos, pulsar SET e introducir el valor del parámetro. 7.
Pulsar STORE para pasar al código 49 (constante de tiempo derivativa Td). 8. Pulsar
SET, poner su valor a cero y pulsar STORE. 9. Para finalizada la configuración del
regulador pulsar PROG. No modificar ningún parámetro distinto al 48, 49 y 50.
Si por error se ha modificado otro parámetro indicarlo al profesor.
· Provocar un escalón en la zona de funcionamiento y observar en el osciloscopio el
comportamiento del caudal.
· Provocar escalones fuera de dicha zona y observar en el osciloscopio las variaciones
que se producen en la respuesta del sistema en relación con la experiencia anterior.
2.7.- Estudiar el comportamiento del sistema frente a perturbaciones
El objetivo es observar el comportamiento del sistema en lazo cerrado cuando se
aumenta o disminuye el caudal de forma manual, actuando sobre el grifo situado en el
depósito. Para ello se realizarán los siguientes pasos:
· Con el sistema en la misma situación que en la experiencia anterior, llevarlo a un
estacionario que este dentro de la zona de funcionamiento.
· Aumentar el caudal cerrando el grifo y observar la evolución de la salida del sistema
hasta que de nuevo alcance el estacionario.
· Disminuir el caudal abriendo el grifo y observar la evolución de la salida del sistema
hasta que de nuevo alcance el estacionario.

Control de caudal - 16
2.8.- Estudiar el comportamiento del sistema para cambios en los parámetros de
control
El objetivo es estudiar el comportamiento de la salida del sistema cuando se modifican
los parámetros de control. Para ello se modificarán estos en el regulador (como se indicó
en el apartado 2.6) y se observarán las variaciones que se producen en la respuesta del
sistema en relación con experiencias previas.

PÉNDULO INVERTIDO
θmL
M
y
F
r
x
zy

Péndulo invertido - 2
PRÁCTICA: PÉNDULO INVERTIDO
Presentación ............................................................................................................... 3
1. Sistema “péndulo invertido” ................................................................................. 4
2. Modelo físico del péndulo invertido sobre un carro ............................................ 6
3. Modelos en SIMULINK y en MATLAB del péndulo invertido .......................... 9
3.1 Modelo lineal simple...................................................................................... 11
3.2 Animación del péndulo invertido................................................................... 16
4. Experimentos ........................................................................................................ 17
4.1 Análisis de estabilidad ................................................................................... 17
4.2 Realimentación por variables de estado ........................................................ 19
4.3 Control de posición del carro ........................................................................ 24

Péndulo invertido - 3
PRÁCTICA : PÉNDULO INVERTIDO
Material :Computador personal.Programas MATLAB, Control System Toolbox y SIMULINK.Programas y funciones específicas en el entorno MATLAB-SIMULINK.
El objetivo de esta práctica es controlar mediante simulación un sistema electro-mecánico relativamente complejo como es el péndulo invertido montado sobre un carro.El sistema de control que se va a emplear combina una realimentación de estados paraestabilizar el péndulo y un controlador de la posición del carro. La bondad del diseñovendrá condicionada porque todos los movimientos que el carro necesita paraposicionarse se realicen en un tiempo razonable y sin que el péndulo se desvíe de suposición vertical más de un cierto ángulo.
En el primer apartado se presentan las características del sistema a controlar, junto consus parámetros y el conjunto de señales de entrada y de salida. En el segundo apartadose detallan todas las ecuaciones que describen el modelo físico. En el tercer apartado sepresentan los modelos programados en SIMULINK y en MATLAB a partir de esasecuaciones y la animación que los acompaña; en primer lugar el modelo físicocompleto, con sus no linealidades, y en segundo lugar un modelo más simple,linealizado y con ciertas aproximaciones.
En el cuarto apartado se incluyen los tres experimentos a realizar; en primer lugar sepropone utilizar el modelo simple para hacer un análisis de estabilidad del pénduloinvertido y comprobar experimentalmente la necesidad de una realimentación de estadosque estabilice al sistema. El siguiente experimento se dedica a la realimentación deestados, donde por una parte se aborda del diseño y comprobación sobre el modelolineal y por otra parte se prueba experimentalmente con el modelo completo. El controlde la posición del carro se contempla como el tercer experimento, con una primeradiscusión sobre el lugar de las raíces del modelo lineal y posteriormente con lacomprobación de resultados sobre el modelo completo.
En el transcurso de la práctica el alumno aprenderá por un lado a usar funciones deMATLAB y del Control System Toolbox, todas ellas con fines de análisis y diseño, y

Péndulo invertido - 4
por otro lado a utilizar el entorno de simulación SIMULINK, principalmente con finesde control puesto que el modelo del péndulo invertido ya se le ofrece previamenteprogramado, acompañado de unos registros gráficos y de una animación que facilitanmucho el desarrollo de la práctica.
1.- Sistema “péndulo invertido”.
Se dispone de un modelo en SIMULINK del péndulo invertido montado sobre un carro,representado esquemáticamente en la figura 1, con las siguientes características:
θm
L
M
y
F
r
x
zy
Fig. 1 Esquema del péndulo invertido sobre un carro.
• El péndulo está constituido por una varilla homogénea, de masa m (kg) y longitudL (m), que gira libremente sin rozamiento en el plano YZ, paralelo al movimientodel carro, respecto al extremo que tiene ligado al centro del carro.
• El desplazamiento angular θ (grados) de la varilla, que se mide respecto al ejevertical Z, está limitado entre -90º y 90º por la superficie del carro. Se considerandesplazamientos angulares positivos los que colocan la varilla a la derecha del ejeZ y negativos los contrarios.
• El carro, equipado con cuatro ruedas de radio r (m), se mueve con rozamientodespreciable sobre unos rieles que limitan su movimiento en el eje horizontal Y.En todas las simulaciones se tomará como origen de los movimientos el centro delos rieles, de manera que el carro ocupará posiciones positivas cuando se situé a laderecha y negativas en caso contrario.

Péndulo invertido - 5
• Uno de los ejes del carro lleva acoplado un motor eléctrico de corriente continuacontrolado por inducido que permite mover al carro (a izquierda y a derecha) conel objetivo de mantener al péndulo en la posición de equilibrio vertical o derecuperar dicha posición. Las características de este motor son tales que sudinámica es mucho más rápida que el sistema (carro+péndulo) sobre el que actúa.
• El carro va equipado con sensores para medida de posiciones y velocidadeslineales y angulares, del carro y de la varilla respectivamente, con dinámicasmucho más rápidas que el sistema (carro+péndulo).
• Como parte de la fuerza F (N) en la dirección horizontal se considera una fuerzaFp(N), que representa cualquier empujón lateral intencionado sobre el carro, y portanto actúa como entrada perturbadora.
En resumen, el modelo está definido por los siguientes parámetros:
M (kg) = Masa total del conjunto carro+motor+sensores.r (m) = Radio de las ruedas del carro.m (kg) = Masa de la varilla.L (m) = Longitud de la varilla.Ra = Resistencia del inducido del motorLa = Inductancia del inducido (H)K1 = Constante de proporcionalidad del par motor (N m A-1)Kb = Constante de proporcionalidad de la f.e.m. (V s grados -1)
y por las siguientes señales:
señal de control (entrada manipulada)
u(t) = ea(t) = tensión (V) aplicada al inducido
perturbación (entrada perturbadora)
p(t) = Fp(t) = fuerza perturbadora (N)
señales de salida (variables medidas):

Péndulo invertido - 6
y(t) = posición lineal (m) del carro
v(t) = d y(t)
dt velocidad lineal (m s-1) del carro
θ(t) = posición angular (grados) de la varilla
ω(t) = d (t)
dtθ
= velocidad angular (grados s-1) de la varilla
2.- Modelo físico del péndulo invertido sobre un carro.
Para obtener el modelo físico de este sistema se han tenido en cuenta las ecuaciones quedescriben: el movimiento en la dirección horizontal, el giro de la varilla, el motor, laconversión de par motor a fuerza motriz y la relación entre la velocidad angular yvelocidad lineal del carro.
1º) Suma de las fuerzas en la dirección horizontal (del movimiento del carro). LlamandoF(t) a la fuerza en la dirección del movimiento del carro, se tiene que
F(t) = Fm(t) + Fp(t) = M d y(t)
dt
2
2 + m d y (t)
dt
2c2
donde Fm(t) representa la fuerza motriz, que transmite el motor electrico a través de lasruedas, Fp(t) representa la fuerza producida por un empujón lateral, y(t) es la posicióndel carro e yc(t) es la posición del centro de masas de la varilla.
Pero como
yc(t) = y(t) + L2
sen θ(t)
derivando dos veces se llega a la ecuación
d y (t)dt
2c2 =
d y(t)dt
2
2 + L2
d (t)
dt
2
2
θ cos θ(t) -
L2
d (t)
dtθ
2
sen θ(t)
que expresa la aceleración lineal del centro de masas de la varilla en función de laaceleración lineal del carro, la aceleración, velocidad y posición angular de la varilla. Yque podemos sustituir en la ecuación inicial, dando lugar a esta otra,

Péndulo invertido - 7
Fm(t) + Fp(t) = (M+m) d y(t)
dt
2
2 + m L2
d (t)
dt
2
2
θ cos θ(t) - m
L2
d (t)
dtθ
2
sen θ(t)
(1)
que resume el movimiento del carro y del centro de masas de la varilla en la direcciónhorizontal.
2º) Suma de pares de fuerza, responsables del giro de la varilla respecto al punto deapoyo en el carro, véase figura 2.
m L3
2
d (t)
dt
2
2
θ = m g
L2
sen θ(t) - m d y(t)
dt
2
2 L2
cos θ(t) (2)
donde el término m L3
2
representa el momento de inercia de la varilla respecto a un eje
perpendicular a la misma y que pasa por uno de sus extremos.
θ
m g
m ÿ
Fig. 2 Composición de pares en el centro de masas de la varilla.
3º) Ecuaciones dinámicas del motor de corriente continua controlado por inducido. Lasecuaciones
T (t) = K i (t)
e (t) = K d (t)
dt
Ldi (t)
dt + R i (t) + e (t) = e (t)
m 1 a
b b
aa
a a b a
ϕ(3)
siendoea(t) = tensión (V) aplicada al inducidoeb(t) = fuerza contraelectromotriz (V)

Péndulo invertido - 8
ia(t) = corriente (A) en el inducidoTm(t) = par (N m) desarrollado por el motorϕ(t) = posición angular (grados) del eje del motorRa = resistencia del inducido (Ω)La = inductancia del inducido (H)K1 = constante de proporcionalidad del par motor(N m A-1)Kb = constante de proporcionalidad de la f.e.m. (V s grados -1)
constituyen un modelo simplificado del “Modelo dinámico del motor de corrientecontinua”. Donde se ha supuesto que el motor tiene un momento de inercia despreciabley que no existe fricción entre sus elementos mecánicos, por lo que todo el par quedesarrolla el motor es par efectivo que se transmite a la rueda.
4º) Conversión del par desarrollado por el motor a fuerza motriz. El par motor Tm(t)aplicado a la rueda se transmite como fuerza motriz al conjunto del sistema(carro+péndulo) de la siguiente forma
Tm(t) = r Fm(t) (4)
5º) Relación entre la velocidad angular de la rueda y la velocidad lineal del carro.
d y(t)dt
= r d (t)
dtϕ
(5)
Operando con las ecuaciones (1) a (5) se puede llegar a las tres ecuaciones diferencialessiguientes, dos de ellas no lineales, que definen el modelo físico del sistema pénduloinvertido (motor+carro+varilla).
d y(t)dt
= -
34
m g sen (t) cos (t) + m L2
d (t)
dt sen (t) + F (t) + F (t)
M + m - 34
m cos (t)
2
2
2
m p
2
θ θθ
θ
θ
(7)
d (t)dt
= 3
2 L (M + m) g sen (t) - m
L2
d (t)
dt sen (t) cos (t) - F (t) - F (t) cos (t)
M + m - 34
m cos (t)
2
2
2
m p
2
θ θθ
θ θ θ
θ
(8)

Péndulo invertido - 9
r LK
d F (t)
dt +
r RK
F (t) + Kr
d y(t)
dt = e (t)a
1
m a
1m
ba (9)
3.- Modelos en SIMULINK y en MATLAB del péndulo invertido.
El modelo en SIMULINK correspondiente al sistema péndulo invertido se ha planteadocomo la conexión de dos bloques funcionales, véase figura 3:
La parte mecánica, representada por las ecuaciones no lineales (7) y (8) en elbloque péndulo invertido con dos entradas (Fp(t) y Fm(t)), cuatro salidas (y(t), v(t) ,θ(t) y ω(t)) y cuatro parámetros (M, r, m, y L).
La parte electromotriz, representada por la ecuación lineal (9) en el bloque ejemotor con dos entradas (ea(t), v(t)), una salida (Fm(t)) y cinco parámetros (Ra, La,K1, Kb, r).
M
Motor DC y eje Carro y péndulo
Fig. 3 Modelo en SIMULINK del sistema péndulo invertido.
Los parámetros de este modelo se fijan a través de los cuadros de diálogo de la figura 4.Donde, como caso particular, La se ha tomado igual a Ra/100 para que la dinámica delmotor sea despreciable frente a la dinámica del carro y del péndulo. Este aspecto seaborda en el apartado 3.1.

Péndulo invertido - 10
(a) Bloque mecánico
(a) Bloque electromecánico
Fig. 4 Cuadros de diálogo para el modelo en SIMULINK del sistema péndulo invertido.

Péndulo invertido - 11
3.1.- Modelo lineal simple.
En el modelo SIMULINK descrito en el apartado anterior hay dos bloques claramentediferenciados, la parte mecánica que es no lineal y la parte electromotriz que es lineal.En este apartado se presenta una simplificación del modelo físico que da lugar a unmodelo lineal con dos entradas y cuatro salidas.
La simplificación se basa por una parte en la linealización de las ecuaciones quedescriben la parte mecánica y por otra parte en considerar la dinámica del motor muchomás rápida que la dinámica de la parte mecánica. La linealización se hace sobre laposición vertical de la varilla suponiendo que los desplazamientos angulares que ésta vaa sufrir son pequeños, por lo que
sen θ(t) ≅ θ(t) ; cos θ(t) ≅ 1 ; d (t)
dtθ
2
≅ 0
y las ecuaciones (1) y (2) que describen la parte mecánica pasan a ser lineales
Fm(t) + Fp(t) = (M+m) d y(t)
dt
2
2 + m L2
d (t)
dt
2
2
θ
m L3
2
d (t)
dt
2
2
θ = m g
L2
θ(t) - m d y(t)
dt
2
2 L2
La dinámica del motor está representada por una función de transferencia que relacionala diferencia entre la tensión de inducido y la fuerza contraelectromotriz con la corrientede inducido. En esta función de transferencia de primer orden, que se obtiene de latercera ecuación de (3), aparece como constante de tiempo el cociente τa=La/Ra.Considerar la dinámica del motor mucho más rápida que la dinámica de la partemecánica equivale a considerar que la constante de tiempo τa es muy pequeña, resultadode un valor pequeño de La respecto a Ra. Y en definitiva que la corriente de inducido esdirectamente proporcional a la diferencia entre la tensión de inducido y la fuerzacontraelectromotriz
( ) ( ) ( )I (s) = 1
s L + R E (s) - E (s) =
1R
s + 1 E (s) - E (s)
1R
E (s) - E (s)aa a
a ba
aa b
aa bτ
≅

Péndulo invertido - 12
por lo que las ecuaciones que describen la parte electromotriz se pueden resumir en unasola ecuación dinámica
Fm(t) = 1r
Tm(t) = 1r
K11
R a (ea(t) - Kb
1r
d y(t)
dt) =
KR r
1
a ea(t) -
K KR r
1 b
a2
d y(t)dt
que se puede incorporar en la ecuaciones correspondientes a la parte mecánica, yoperando con ellas se llega al siguiente modelo dinámico lineal de dos ecuacionesdiferenciales de segundo orden,
d y(t)dt
= 1
M + m4
- K KR r
d y(t)
dt -
34
m g (t) + K
R r e (t) + F (t)
2
21 b
a2
1
aa pθ
(10)
d (t)dt
= 3
M + m4
L
K KR r
d y(t)
dt + (M + m) g (t) -
KR r
e (t) - F (t)2
21 b
a2
1
aa p
θθ
2
(11)
que también se podían haber obtenido de (7), (8) y (9) con las aproximacionesanteriormente indicadas.
Este modelo admite la siguiente descomposición: un primer bloque con dos entradas (latensión de inducido y la fuerza perturbadora) y tres salidas (la velocidad del carro, laposición de la varilla y su velocidad angular) y un segundo bloque (integrador puro) quetiene como entrada la velocidad del carro y como salida la posición.
En ausencia de entrada perturbadora Fp(t)=0, las ecuaciones de entrada y de salida, esdecir su representación en variables de estado, que definen el primer bloque son:
xxx
=
K K
M +m4
R r
m g M + m
3 K K
M +m4
L R r
(M + m) g
M +m4
L
xxx
+
K
M +m4
R r1
2
3
1 b
a2
1 b
a2
1
2
3
1
a!
!
!
−
−
34
0
0 0 1
2
3
20
0- 3 K
M +m4
L R r
e (t)1
a
a
2
(12)

Péndulo invertido - 13
v
= 1 0 00
1800
0 0180
xxx
1
2
3
θω
π
π
(13)
donde se han elegido como variables de estado la velocidad del carro, la posición de lavarilla y su velocidad angular. Que son a su vez las tres salidas del bloque, con lasalvedad de que se ha incluido el cambio de radianes a grados tanto en la medida deposición como de velocidad angular, multiplicando por 180/π. De esta forma se puedeconstruir el modelo lineal simple de la figura 5, cuyos parámetros son las matrices a, b, cy d.
x' = Ax+Bu y = Cx+Du
State-Space
Demux
Demux
1/sIntegrator
Fig. 5 Modelo lineal simple en SIMULINK del sistema péndulo invertido.
El siguiente conjunto de sentencias en MATLAB nos permite una representación delbloque en variables de estado de este modelo lineal del péndulo invertido y transmitirunos valores concretos para los parámetros a los bloques de los modelos en SIMULINK(el modelo lineal de la figura 5 y el no lineal de la figura 3).
% ParámetrosM=1;r=0.05;m=0.1;l=0.5;g=9.8;ra=100;k1=5;kb=1;
% Forma matrices del sistema lineala11=-k1*kb/((M+m/4)*ra*r^2);a12=-3*m*g/(4*M+m);a31=3*k1*kb/(2*(M+m/4)*l*ra*r^2);a32=3*(M+m)*g/(2*(M+m/4)*l);
a=[a11 a12 0;0 0 1;a31 a32 0];

Péndulo invertido - 14
b1=k1/((M+m/4)*ra*r);b3=-3*k1/(2*(M+m/4)*l*ra*r);b=[b1 0 b3]';
c=[1 0 0;0 180/pi 0;0 0 180/pi];
d=[0 0 0]';
disp('Representación en v.e. del sistema en lazo abierto')printsys(a,b,c,d)
con el siguiente resultado
Representación en v.e. del sistema en lazo abierto
a = x1 x2 x3 x1 -19.51220 -0.71707 0 x2 0 0 1.00000 x3 58.53659 31.55122 0
b = u1 x1 0.97561 x2 0 x3 -2.92683
c = x1 x2 x3 y1 1.00000 0 0 y2 0 57.29578 0 y3 0 0 57.29578
d = u1 y1 0 y2 0 y3 0

Péndulo invertido - 15
Conocida la representación en variables de estado , otro conjunto de sentencias enMATLAB nos permite solicitar el vector con las tres funciones de transferencia delsistema
[num,den]=ss2tf(a,b,c,d);disp('Función de transferencia del sistema en lazo abierto')printsys(num,den,'s')
con el siguiente resultado
Función de transferencia del sistema en lazo abierto
num(1)/den =
0.9756 s^2 + 4.263e-014 s - 28.68 --------------------------------- s^3 + 19.51 s^2 - 31.55 s - 573.7
num(2)/den =
2.132e-014 s^2 - 167.7 s + 7.958e-013 ------------------------------------- s^3 + 19.51 s^2 - 31.55 s - 573.7
num(3)/den =
-167.7 s^2 - 9.663e-013 s + 1.137e-013 -------------------------------------- s^3 + 19.51 s^2 - 31.55 s - 573.7

Péndulo invertido - 16
3.2.- Animación del péndulo invertido.
Los movimientos del carro y de la varilla, que se pueden simular en el entorno deMATLAB y SIMULINK mediante los modelos anteriormente comentados, también sepueden animar mediante un bloque expresamente diseñado para ello. Este bloque, véasefigura 6, recibe un vector de cuatro entradas; la primera componente es la referencia(posición que debe ocupar el carro en el escenario, este valor debe estar comprendidoentre -10 y 10), la segunda es la posición (en metros) que ocupa realmente, la tercera esel ángulo (en grados) que forma la varilla con el eje vertical y la cuarta es el valor de lafuerza motriz transmitida al carro en la dirección horizontal con el sentido hacia laderecha (en Newtons).
Animación
Fig. 6 Bloque para animación del péndulo invertido.
La animación tiene lugar sobre una ventana gráfica en MATLAB con las característicasde la figura 7, donde se observa: información numérica, continuamente actualizada delas cuatro variables de entrada y del tiempo transcurrido en la simulación, tres objetosmóviles (el carro y sus ruedas en color rojo, la varilla en color amarillo, un triánguloverde cuyo vértice indica la posición de referencia), un objeto fijo (una línea azul querepresenta la vista de los rieles) y un botón (cerrar) para dejar de ver la animación.
Fig. 7 Ventana de animación del péndulo invertido.

Péndulo invertido - 17
4.- Experimentos.
A continuación se proponen una serie de experimentos encaminados a conseguir uncontrol de posición del carro y del péndulo. Todos estos experimentos se realizan en elentorno de MATLAB y SIMULINK, aprovechando una serie de funciones y programasespecíficamente diseñados para ello y las funciones del Control System Toolbox.
4.1.- Análisis de estabilidad.
El análisis de estabilidad del sistema péndulo invertido se puede realizar sobre el bloqueen variables de estado del modelo lineal simplificado, mediante la determinación de lasraíces de su ecuación característica
s I - A = s - a - a 0
0 s -1- a - a s
= s - a s - a s + a a - a a = 011 12
31 32
311
232 11 32 12 31
o aplicando el criterio de Routh al polinomio resultante. Siendo
a11 = - K K
M +m4
R r
1 b
a2
; a12 = - m g
M + m3
4
a31 = 3 K K
M +m4
L R r
1 b
a22
; a32 = 3
2
(M + m) g
M +m4
L
En MATLAB, una vez que se dispone de la representación en el espacio de estados, ladeterminación de raíces de la ecuación característica se efectúa con la siguientesentencia
roots(poly(a))
que para la representación concreta anterior da el siguiente resultado
ans = -19.6308 -5.3468 5.4654

Péndulo invertido - 18
que tiene la siguiente interpretación: el sistema es inestable en lazo abierto debido a lapresencia de un polo en el semiplano derecho.
Comprobar analíticamente que independientemente del valor, siempre positivo, de losparámetros (M, r, m, L, Ra, K1, Kb), el sistema es inestable en lazo abierto. Por tantocualquier valor de tensión de inducido o de fuerza perturbadora, distinto de cero,aplicado al péndulo invertido hará que la varilla caiga y que el carro abandone elescenario.
Hacer una comprobación experimental de esta inestabilidad para los valoresconcretos de M=1, r=0.05, L=0.5, Ra=100, La=0.01 Ra, K1=5 y Kb=1. Comorecomendación, los pasos a seguir son:
1) Encender el ordenador y arrancar MATLAB.
2) Una vez en la ventana de comandos de MATLAB, cambiar al directorio detrabajo “pendinv” y teclear
M=1;r=0.05;m=0.1;l=0.5;ra=100;k1=5;kb=1;
3) Ejecutar “pendi_la” para acceder al sistema SIMULINK de la figura 8. En estesistema especialmente diseñado para la experiencia en lazo abierto se hanutilizado, además de los bloques anteriormente comentados (“Motor DC y eje”,“Carro y péndulo” y “Animación”), una serie de bloques auxiliares:
- El bloque “Mux” para facilitar el conexiado entre bloques.- El bloque “Referencia” para generar un valor nulo de tensión de inducido.- El bloque “Clock” junto con el bloque “To Workspace” para enviar el valor de
t (tiempo) a la ventana de animación a través de una variable del espacio detrabajo.
- Los bloques “Posición del carro”, “Velocidad del carro”, “Posición de lavarilla”, “Velocidad de la varilla”, “Fuerza perturbadora”, “Fuerza motriz” y“Control” para tener representación gráfica de las variables más importantesdel sistema.
- El bloque “Generador de pulsos” para excitar al sistema con un tren de pulsosen la fuerza perturbadora.

Péndulo invertido - 19
Fig. 8 Sistema SIMULINK para experiencia en lazo abierto.
4) Elegir como fuerza perturbadora un tren de pulsos de 20 segundos de período,una duración del 25% del período, una amplitud de 5 y como instante de iniciot=10 segundos. A continuación, arrancar la simulación e interpretar los resultados.
4.2.- Realimentación por variables de estado.
El sistema péndulo invertido se puede estabilizar mediante una realimentación de lasvariables de estado, si los componentes del vector de ganancias K se eligen tal que lanueva ecuación característica
s I - A + K b = s - a b k - a + b k b k
0 s - 1- a b k - a + b k s + b k
= 011 1 1 12 1 2 1 3
31 3 1 32 3 2 3 3
+
+
tenga sus tres raíces en el semiplano izquierdo.
En el Control System Toolbox de MATLAB existe una función, “acker”, paradeterminar el vector de ganancias que, conocidas las matrices A y b de la representaciónen variables de estado, sitúa las raíces (polos del sistema en lazo cerrado) en unasposiciones concretas. De manera que el siguiente conjunto de sentencias en MATLAB

Péndulo invertido - 20
k=acker(a,b,[-20 -5+i -5-i]');disp('Vector de ganancias')k
genera, para los valores concretos del apartado 3.1, el siguiente resultado
Vector de ganancias
k = -38.1293 -87.9967 -16.2931
Es decir que mediante la realimentación de estados [-38.1293 -87.9967 -16.2931] lospolos del sistema realimentado se sitúan en -20, -5+j y - 5-j. La comprobación teórica deque esto es así se puede realizar fácilmente en MATLAB, teniendo en cuenta que lanueva matriz característica del sistema es A - b K, con las instrucciones
ar=a-b*k;disp('Polos del sistema con realimentación de v.e.')roots(poly(ar))
que tienen el siguiente resultado
Polos del sistema con realimentación de v.e.
ans = -20.0000 -5.0000 + 1.0000i -5.0000 - 1.0000i
La interpretación de este resultado es que se consigue realmente el principal objetivo deestabilizar el sistema, porque los tres nuevos polos están todos en el semiplanoizquierdo, y que el sistema tendrá un comportamiento dinámico en el transitoriofuertemente dependiente de la posición de estos polos. Concretamente el polo en -20está lo suficientemente alejado de los dos polos complejos conjugados para que seanéstos los que dominen en el comportamiento dinámico del sistema con realimentaciónpor variables de estado.

Péndulo invertido - 21
El siguiente conjunto de sentencias en MATLAB nos permite además obtener unarepresentación gráfica, similar a la de la figura 9, con la evolución de las tres salidas delsistema (velocidad del carro, posición angular y velocidad angular) frente a una entradaescalón unitario en la entrada (tensión de inducido).
% Respuesta del sistema en lazo abierto[y,x,t]=step(ar,b,c,d,1);
subplot(3,1,1)plot(t,y(:,1))title('Respuesta escalón con realimentación de v.e.')xlabel('t(s)')ylabel('v(m/s)')
subplot(3,1,2)plot(t,y(:,2))xlabel('t(s)')ylabel('q(grados)')
subplot(3,1,3)plot(t,y(:,3))xlabel('t(s)')ylabel('w(grados/s)')
0 0.5 1 1.5 2-0.1
0
0.1Respuesta escalón con realimentación de v.e.
t(s)
v(m/s)
0 0.5 1 1.5 2-1
-0.5
0
t(s)
θ(grados)
0 0.5 1 1.5 2-5
0
5
t(s)
ω(grados/s)
Fig. 9 Respuesta del modelo lineal del péndulo invertido con realimentación por variables de estado.

Péndulo invertido - 22
El análisis de estas gráficas nos permite afirmar que un cambio unitario en la tensión deinducido del motor provoca en el sistema con realimentación por variables de estado:
- Un transitorio de aproximadamente 1.5 s durante el cuál; la velocidad lineal es alprincipio positiva y posteriormente negativa, la posición angular es en todomomento negativa, y la velocidad angular es al principio negativa yposteriormente positiva.
- Un estacionario, observable desde 1.5 s en adelante, definido por una velocidadlineal constante negativa, una posición angular de equilibrio nula y una velocidadangular nula.
Por tanto, incorporando la realimentación por variables de estado anterior en el modelodel sistema del péndulo invertido podemos esperar que frente a cambios en la tensión deinducido o en la fuerza horizontal de perturbación, la varilla tras un estacionario brevevolverá a su situación de equilibrio, no así el carro que permanecerá sometido a unmovimiento uniforme (velocidad constante) en un sentido (izquierda o derecha) quedepende del signo del cambio en la tensión de inducido o del sentido de la fuerzaperturbadora. La velocidad del carro dependerá de la amplitud del cambio en la tensiónde inducido o en la fuerza perturbadora.
Hacer una comprobación experimental de que la realimentación por variables deestado, diseñada a partir del modelo lineal simple, da resultados similares, portanto buenos, con el modelo no lineal. Como recomendación, los pasos a seguir son:
1) Ejecutar “pendi_la” para acceder al sistema SIMULINK de la figura 8.Modificarlo y ampliarlo para componer el sistema SIMULINK de la figura 10, enel que se incluye la realimentación por variables de estado con un vector deganancias k, de tres componentes k(1), k(2) y k(3) y dos bloques para conversiónde grados a radianes. Recomendacones: 1ª) abrir la librería “Math” deSIMULINK, en la que encontrará todos los elementos necesarios para completareste paso, 2ª) utilice los mismos parámetros de simulación y la misma fuerzaperturbadora que en “pendi_la”.

Péndulo invertido - 23
Fig. 10 Sistema SIMULINK para experiencia de realimentación por variables de estado.
2) Situarse en la ventana de comandos de MATLAB y ejecutar “pendi_ml”, quetiene el siguiente contenido
% ParámetrosM=1;r=0.05;m=0.1;l=0.5;g=9.8;ra=100;k1=5;kb=1;
% Forma matrices del sistema lineala11=-k1*kb/((M+m/4)*ra*r^2);a12=-3*m*g/(4*M+m);a31=3*k1*kb/(2*(M+m/4)*l*ra*r^2);a32=3*(M+m)*g/(2*(M+m/4)*l);
a=[a11 a12 0;0 0 1;a31 a32 0];
b1=k1/((M+m/4)*ra*r);b3=-3*k1/(2*(M+m/4)*l*ra*r);b=[b1 0 b3]';

Péndulo invertido - 24
c=[1 0 0;0 180/pi 0;0 0 180/pi];
d=[0 0 0]';
y por tanto forma las matrices del modelo lineal del péndulo invertido.
3) Teclear
k=acker(a,b,[-20 -5+i -5-i]')
Observación: Si el vector de ganancias que resulta no coincide con el del ejemploanterior será necesario comprobar que no ha habido ningún error y que lasmatrices “a” y “b” de la representación de estados son las correctas.
4) Arrancar la simulación e interpretar los resultados con ayuda de las ventanasgráficas. Como parte de la interpretación de resultados se pide contestar de formarazonada a las siguientes preguntas: ¿por qué la experiencia efectuada con elsistema de la figura 10 para cambios en la fuerza perturbadora tiene los mismosresultados que si el cambio fuera en la tensión de inducido?, ¿qué ocurre con laposición del carro, lo que se observa en la animación está de acuerdo con losresultados de la figura 9?
5) Se propone repetir el diseño y la validación (pasos 3 y 4) para distintasposiciones de los polos del sistema realimentado.
4.3.- Control de posición del carro.
Por los resultados del apartado anterior habrá observado que mientras la realimentaciónde estados garantiza el equilibrio del péndulo, la posición del carro está incontrolada. Sepretende en este apartado añadir al sistema de la figura 10 un lazo clásico de controlrealimentado que permita recuperar o mantener al carro en la posición inicial o seguirunas consignas de posición sin que el péndulo se caiga. El controlador de este nuevolazo debe generar una señal de control ea(t) (tensión de inducido) proporcional al errorentre la posición del carro y la posición deseada yr(t).
Como en el apartado anterior, el diseño de este controlador se debe realizar a partir delmodelo lineal y por tanto en el entorno de MATLAB, se recomienda seguir este orden:

Péndulo invertido - 25
1) Obtener la función de transferencia que relaciona a la tensión de inducidodel motor con la posición del carro. Con este propósito teclear
ar=a-b*k;[numr,denr]=ss2tf(ar,b,c,d);nump=numr(1,:);denp=[denr 0];disp('F.T. Y(s)/Ea(s) del sistema con realimentación de estados')printsys(nump,denp,'s')
2) Analizar el lugar de las raíces para encontrar un tipo de controlador capazde resolver el problema. El lugar de las raíces se presenta en una ventana gráficade MATLAB al teclear
sysp=tf(nump,denp)rlocus(sysp)
En este lugar de las raíces, tanto con el diseño original
k=[-38.1293 -87.9967 -16.2931]
véase figura 11, como con cualquiera de los diseños realizados por ustedobservará la presencia de un cero en el eje real positivo y un polo en el origen,luego si utilizáramos un controlador proporcional siempre existiría una raíz en eleje real positivo y el sistema en lazo cerrado sería inestable. Recomendación:utilice las capacidades del zoom de la ventana gráfica de MATLAB para analizarel lugar de las raíces.

Péndulo invertido - 26
-20 -15 -10 -5 0 5 10-25
-20
-15
-10
-5
0
5
10
15
20
25
Real Axis
Imag
Axi
s
Lugar de las raíces con controlador proporcional
Fig. 11 Lugar de las raíces para control proporcional de posición.
Se pide efectuar un razonamiento cualitativo similar sobre porqué también sondescartables los controladores PI, PD, PID, red de adelanto y red de retardo en estasituación.
Comprobar mediante el lugar de las raíces que una posible solución, quizás la mássimple, es utilizar un controlador cuya función de transferencia tenga un polo en eleje real negativo y un cero en el eje real positivo, de manera que el tramo entre elpolo en el origen (de la planta) y el primer cero en el eje real positivo (de la plantao del controlador) no pertenezca al lugar de las raíces. Como ejemplo, utilizar elcontrolador descrito por la siguiente función de transferencia,
G (s) = E (s)
Y (s) - Y(s) = K
s - 10s + 4
= K 1 - 14
s + 4 c
a
rc c
y justificar de forma cualitativa que para un rango de valores del parámetro Kc, elsistema en lazo cerrado es estable. Recomendación: si quiere hacer lajustificación con ayuda de MATLAB, utilice el siguiente conjunto de sentencias
numc=[1 -10];denc=[1 4];

Péndulo invertido - 27
numftla=conv(numc,nump);denftla=conv(denc,denp);sysftla=tf(numftla,denftla);rlocus(sysftla)
3) Elegir razonadamente un valor de Kc para el controlador propuesto.Sentencias como las siguientes en MATLAB le pueden ser de gran ayuda
[kc,polos]=rlocfind(sysftla)syss=feedback(kc*sysftla,1);step(syss)
4) Modificar y ampliar el sistema SIMULINK de la figura 10 para componerel sistema de la figura 12. Este sistema le servirá para validar los resultados conel modelo no lineal del péndulo invertido. En el proceso de validación serecomienda excitar al sistema con cambios escalones unitarios en la posición,utilizando para ello un generador de señal en el cual se genere una onda cuadradade amplitud 0.5 y frecuencia 0.05 Hz, deseada para el carro y con un tren depulsos unitarios en la fuerza perturbadora, de iguales características a la empleadaen los esquemas anteriores. Y observar que las desviaciones del péndulo respectoa su posición de equilibrio sean inferiores a 5º en valor absoluto.
Fig. 12 Sistema SIMULINK para experiencia control de posición del carro.

Péndulo invertido - 28
5) En el sistema del apartado anterior, aumentar el valor del parámetro Kc
hasta provocar una situación cercana a la inestabilidad. ¿Esta situación estájustificada con los resultados del apartado 2?
6) Se propone repetir el experimento (pasos 1, 2, 3 y 4) para cualquier otro de losdiseños realizados en el apartado 4.2.
7) Proponga un controlador alternativo, con estructura diferente a la del paso 2,elija sus parámetros de forma razonada y modifique adecuadamente el sistema dela figura 12 para comprobar los resultados.
Nota importante: En todos los experimentos que se le han planteado, los parámetroscaracterísticos del sistema péndulo invertido se han mantenido a unos valores concretosde M=1, r=0.05, L=0.5, Ra=100, La=0.01 Ra, K1=5 y Kb=1. Por supuesto que, si lodesea, puede realizar cualquiera de los experimentos con otros valores.

INTRODUCCIÓN AL
“CONTROL SYSTEM TOOLBOX”
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-1.5
-1
-0.5
0
0.5
1
1.5
Real Axis
Imag
Axi
s

Introducción al “Control System Toolbox” - 2
INTRODUCCIÓN AL “CONTROL SYSTEM TOOLBOX”
Introducción...................................................................................................... 3
Tipo de aplicaciones ......................................................................................... 4
Representación de sistemas .......................................................................... 4
Análisis de sistemas de control ..................................................................... 8
Diseño de sistemas de control ...................................................................... 9
Ejemplos de utilización ..................................................................................... 10
Ejemplo 1 : Sistema de control continuo ...................................................... 10
Ejemplo 2 : Sistema de control muestreado .................................................. 12
Ejemplo 3 : Realimentación de estados ......................................................... 15
Guía de comandos ............................................................................................ 18

Introducción al “Control System Toolbox” - 3
INTRODUCCIÓN AL “CONTROL SYSTEM TOOLBOX”
INTRODUCCIÓN
El Control System Toolbox es una herramienta de ayuda a la representación, análisis y
diseño de sistemas lineales de control. Esta constituida por un conjunto de funciones que
reproducen las técnicas de modelado, análisis y diseño más comunes en la bibliografía de
control.
La herramienta permite el estudio de sistemas lineales multivariables e invariantes en
el tiempo. Los sistemas pueden recibir un tratamiento continuo o discreto, según su
naturaleza, pero también se incluyen funciones para la discretización de sistemas
continuos o a la inversa, con lo que se facilita el tratamiento de sistemas muestreados.
Los bloques que constituyen el sistema se pueden describir en el espacio de estado
(representación interna) o por su función de transferencia (representación externa). En
este sentido la herramienta facilita funciones para efectuar cambios de representación y
para el conexionado de bloques.
El análisis que se puede efectuar del sistema pasa por el estudio de su respuesta
temporal para entradas escalón, impulso o arbitraria, por el estudio de su respuesta en
frecuencia mediante los diagramas de Bode, de Nyquist y la carta de Nichols, por el
estudio de su estabilidad a partir del lugar de las raíces y por el estudio de sus
características como son la ganancia en estado estacionario, la frecuencia natural, el
coeficiente de amortiguamiento, la controlabilidad y la observabilidad. Todo ello
acompañado de la gran potencia gráfica de MATLAB y de utilidades propias de Control
como el marcado de polos y ceros, el trazado de curvas de amortiguamiento, de
frecuencia natural, de magnitud y de fase constantes, y la determinación de ganancias
sobre el lugar de las raíces.
El diseño de un sistema de control se refiere a la determinación del controlador o sus
parámetros, a partir de las especificaciones. En Control existen funciones de diseño para
controladores con realimentación de variables de estado, con o sin estimación de estados,
mediante asignación de polos o minimización de una función de coste, y para el diseño
de filtros de Kalman (control lineal cuadrático gaussiano LQG). Para facilitar estos
diseños se incluyen funciones para la estimación de estados, para la obtención de
modelos reducidos de la planta y para la reconstrucción del sistema en lazo cerrado.

Introducción al “Control System Toolbox” - 4
TIPO DE APLICACIONES
A continuación se indican las aplicaciones de Control System Toolbox clasificadas en
tres grupos: representación de sistemas, análisis de sistemas de control y diseño de
sistemas de control.
Representación de sistemas
Control permite el estudio de sistemas de control descritos por un modelo lineal e
invariante en el tiempo. El sistema puede tener varias entradas y varias salidas (MIMO),
una entrada y varias salidas (SIMO) o una entrada y una salida (SISO). La potencia de
Control radica en el tratamiento matricial adaptado al caso MIMO.
Representación interna. La representación interna de un sistema lineal, continuo o
discreto e invariante en el tiempo la constituyen las cuatro matrices, referidas con las
letras a, b, c y d, que intervienen en la ecuación de estados (sistema lineal de ecuaciones
diferenciales en el caso continuo, sistema lineal de ecuaciones en diferencias en el caso
discreto) y en la ecuación de salidas (sistema lineal de ecuaciones). Si nx es el número de
estados, nu el número de entradas y ny el número de salidas, a es una matriz de nx filas y
nx columnas, b es una matriz de nx filas y nu columnas, c es una matriz de ny filas y nx
columnas, y d es una matriz de ny filas y nu columnas.
Sistema Ecuación de estados Ecuación de salidas
Continuo dx(t)/dt = a x(t) + b u(t) y(t) = c x(t) + d u(t)
Discreto x(k+1) = a x(k) + b u(k) y(k) = c x(k) + d u(k)
Ejemplo 1. El sistema MIMO
x t x t u t( ) ( ) ( )=− − −
+ −
22 51 70
1 0 0
0 1 0
1 1
0 1
0 1
y t x t( ) ( ) =
0
0
10
0
50
1

Introducción al “Control System Toolbox” - 5
se representa en MATLAB por:
a = [-22 -51 -70; 1 0 0; 0 1 0];
b = [1 1; 0 -1; 0 1];
c = [0 10 50; 0 0 1];
d= [0 0; 0 0];
sys=ss(a,b,c,d);
Representación externa. La representación externa de un sistema lineal, continuo o
discreto e invariante en el tiempo, se puede realizar de dos formas, sin factorizar y
factorizada, con polinomios en s (caso continuo) o en z (caso discreto). La forma sin
factorizar utiliza la siguiente notación para el caso SISO o SIMO:
H snum s
den s
num s num s num nn
den s den s den nd( )
( )
( )
( ) ( ) ... ( )
( ) ( ) ... ( )
nn nn
nd nd= = + + + +
+ + + +
−
−
1 2 1
1 2 1
1
1
donde num es una matriz con los coeficientes de los polinomios numeradores, de ny filas
y nn+1 columnas, siendo ny el número de salidas y nn el mayor grado de los polinomios
numeradores, y den un vector fila con los coeficientes del polinomio denominador con
nd+1 componentes.
Ejemplo 2. El sistema SIMO
H s
s
s s
s s s( ) =
++ +
+ + +
3 2
2 5
3 5 2 1
3
3 2
se representa en MATLAB por:
num = [0 0 3 2]; [1 0 2 5];
den= [3 5 2 1];
sys=tf(num,den);

Introducción al “Control System Toolbox” - 6
La forma factorizada utiliza la siguiente notación para el caso SISO o SIMO:
H snum s
den sk
s z s z s z nn
s p s p s p nd( )
( )
( )
( ( ))( ( ))... ( ( ))
( ( ))( ( ))... ( ( ))= = − − + −
− − + −1 2
1 2
donde k es un vector columna de ny filas, formado por las ganancias asociadas a cada
salida del sistema, z es una matriz de nn filas y ny columnas, formado por los ceros
finitos (raíces reales y complejas de los polinomios numeradores) y los infinitos (que
deben rellenar la ausencia de ceros finitos hasta completar el mayor orden de los
polinomios numeradores) y p es un vector columna de nd filas, formado por los polos
finitos (raíces reales y complejas del polinomio denominador).
Ejemplo 3. El sistema SIMO
H s
s
s s
s s s( )
( )
( )( )
( )( )( )=
++ +
+ + +
3 12
4 1 2
3 4 5
se representa en MATLAB por:
z = [-12]; [-1 -2];
p = [-3 -4 -5]; [-3 -4 -5];
k = [3; 4];
sys=zpk(z,p,k);
Cambios de representación. Hasta ahora se ha tratado la representación de sistemas
usando las funciones ss, tf y zpk. Al utilizar estas funciones, se crea un objetro que
representa al sistema y que se puede manipular utilizando la variable sys a la que ha sido
asignado. Estas mismas funciones permiten cambiar de representación. Para una misma
representación externa existen distintas representaciones internas. Es necesario advertir
que Control utiliza para el cambio de representación externa a representación interna la
forma canónica controlable.

Introducción al “Control System Toolbox” - 7
Funciones ltiprops, get y set. Los objetos creados con las funciones ss, tf y zpk, tienen
una serie de propiedades que se describen al ejecutar la función ltiprops. Para conocer
los valores de las propiedades de un objeto se utiliza la función get y para modificarlos se
usa la función set.
Cambios de modelos. Para facilitar el estudio de sistemas de control muestreados o
sistemas híbridos en general, en el que se combinan bloques continuos con bloques
discretos, Control pone a disposición del usuario unas funciones que permiten el paso de
modelo continuo a discreto y viceversa.
Conexionado de bloques. El conexionado de bloques es una forma de generación de
sistemas de control a partir de bloques más elementales. Control incluye un número
suficiente de funciones con el fin de facilitar los conexionados habituales (en paralelo, en
serie y en lazo cerrado) y el conexionado de bloques en general. La figura 1 muestra
gráficamente los tipos de conexionados que se pueden realizar con estas funciones.
Fig. 1 Tipos de conexionado simple de bloques.

Introducción al “Control System Toolbox” - 8
Generación de modelos. Las capacidades de Control en la representación de sistemas
se completan con funciones para la generación de modelos de segundo orden a partir de
su frecuencia natural y de su coeficiente de amortiguamiento, para la generación de un
modelo continuo del retardo puro, y para la generación aleatoria de un modelo previa
elección su orden.
Análisis de sistemas de control
Control incluye una serie de funciones para el análisis de sistemas lineales continuos o
discretos a partir de su representación interna (a,b,c,d) o de su representación externa
(num,den). Estas funciones son comunes para sistemas continuos y discretos. También
incluye dos interfaces ltiview y lrtools útiles para el análisis. A continuación se describen
las aplicaciones de las principales funciones de análisis, agrupadas por respuesta
temporal, respuesta en frecuencia y lugar de las raíces.
Respuesta temporal. Control incluye funciones específicas para obtener valores
instantáneos de la respuesta del sistema de control, continuo o discreto, a una entrada
específica que puede ser impulso, escalón o arbitraria. Al mismo tiempo es posible
conocer la evolución de las variables de estado. Las mismas funciones sirven para
obtener los registros gráficos de las entradas y de las salidas del sistema. En el caso
continuo, la información temporal asociada a la respuesta está recogida en el vector t,
que genera la función automáticamente o que se le facilita. Como la simulación se realiza
de forma discreta, es imprescindible que el vector t tenga sus valores regularmente
repartidos. En el caso discreto, la información temporal va asociada a instantes de
muestreo, y los registros gráficos son del tipo escalera. También es posible elegir
condiciones iniciales en las variables de estado y se dispone de funciones que permiten
perturbar las variables de estado del sistema y observar su evolución.
Respuesta en frecuencia. Control incluye funciones específicas para obtener los
valores parte real, parte imaginaria, magnitud y fase de la respuesta en frecuencia del
sistema de control continuo o discreto. Las mismas funciones sirven para trazar los tres
diagramas típicos de la respuesta en frecuencia, diagramas de Bode, de Nyquist y de
Nichols, a través de los cuales es posible obtener información sobre la estabilidad del
sistema en lazo cerrado. En el caso continuo la respuesta en frecuencia se obtiene
sustituyendo s por jω, y en el caso discreto z por ejωT. Los valores de ω asociados a la
respuesta en frecuencia, son los del vector w, que generan las funciones automáticamente
o que se les facilita. La función margin, que en el caso continuo además de para el

Introducción al “Control System Toolbox” - 9
cálculo analítico se puede emplear para ilustrar gráficamente los conceptos de margen de
ganancia y margen de fase, debe ir precedida de una llamada a dbode en el caso discreto.
Lugar de las raíces. La técnica en el plano complejo más empleada en el análisis de
sistemas de control es el lugar de las raíces. A partir de él se puede estudiar la influencia
que un parámetro concreto tiene en la respuesta del sistema en lazo cerrado y también se
puede obtener información sobre la estabilidad. El trazado del lugar de las raíces es
idéntico en el plano s y en el plano z, es decir para sistemas continuos y para sistemas
discretos, la única diferencia radica en la interpretación de resultados. Control incluye
una función específica rlocus para el trazado o determinación analítica de las raíces de la
ecuación característica del sistema en lazo cerrado, y otras funciones auxiliares para
facilitar el análisis.
Características de los sistemas lineales. Parte del análisis de un sistema de control,
sobre todo con vistas al posterior diseño, consiste en la determinación de ciertas
características del proceso a controlar. Control incluye funciones específicas para este fin
que permiten entre otras características determinar la ganancia en estado estacionario, la
frecuencia natural, el coeficiente de amortiguamiento, la controlabilidad y la
observabilidad.
Diseño de sistemas de control
El diseño de un sistema de control se refiere a la determinación del controlador o de
sus parámetros, conocido el resto del sistema (planta=proceso+sensores+actuadores),
para que el sistema en lazo cerrado cumpla unas determinadas especificaciones. Control
es una herramienta muy potente dentro del entorno Matlab para el análisis de sistemas,
pero incorpora pocas técnicas para el diseño de controladores. No obstante la
combinación de técnicas de análisis y de conexionado de bloques permite probar distintas
estrategias de control con distintos parámetros y obtener resultados de respuesta
temporal, respuesta en frecuencia o lugar de las raíces sobre los que decidir si el
controlador elegido es el adecuado. Las funciones de diseño que incorpora Control están
orientadas al diseño de sistemas MIMO y por lo tanto se encuentran basadas en la
representación interna del sistema. Dentro de ellas destacan las técnicas de
realimentación de estados mediante asignación de polos o mediante minimización de una
función de coste, con todos los estados disponibles o con estimación de estados, y las
técnicas de control cuadrático lineal y gaussiano.

Introducción al “Control System Toolbox” - 10
EJEMPLOS DE UTILIZACIÓN
En este apartado se incluyen tres ejemplos en los que se utilizan algunas de lasfunciones de Control, el primer ejemplo se refiere a un sistema de control continuo, elsegundo a un sistema de control muestreado y el tercero a un problema derealimentación de estados mediante asignación de polos.
Ejemplo 1. En la figura se muestra el diagrama de bloques de un sistema de controlcontinuo con realimentación unidad, en donde
Gc s( ) = 1 y Gp ss s s
( )( )( )
=+ +
2
1 2
R(s)
CONTROLADOR PROCESO
Gc(s) Gp(s)
Y(s)+
-
E(s) U(s)
1. Sistema que representa a Gp(s) en forma no factorizada.
z=[];
p=[0 -1 -2];
k=2;
sys=zpk(z,p,k)
sys=tf(sys)
2. Función de transferencia del sistema en lazo cerrado en forma no factorizada.
sysc=feedback(sys,1,1,-1)
3. Trazado de la respuesta del sistema a una entrada escalón unidad, con condicionesiniciales nulas, desde t=0sg hasta t=20sg a intervalos de 0.25sg y del escalón provocado.

Introducción al “Control System Toolbox” - 11
t=0:0.25:20;
step(sysc,t);
4. Trazado de la respuesta del sistema a una entrada rampa r(t)=t, con condicionesiniciales nulas, desde t=0sg hasta t=20sg a intervalos de 0.25sg y de la rampa provocada.
t=0:0.25:20;
r=t;
y=lsim(sysc,r,t);
plot(t,y,t,r)
5. Gráfica con el lugar de las raíces del sistema para el caso en que Gc(s)=Kc,utilizando Kc como parámetro con 0<Kc≤5 a intervalos de 0.05, en la que aparecen lospolos y ceros de lazo abierto y los lugares δ=cte para 0≤δ≤1 a intervalos de 0.1 y ωn=ctepara 0≤ωn≤3.5 a intervalos de 0.5.
[p,z]=pzmap(sys);
Kc=[0:0.05:5];
LR=rlocus(sys,Kc);
Wn=0:0.5:3.5;
Z=0:.1:1;
plot(LR,’.’)
hold on
plot(real(p),imag(p),'x')
plot(real(z),imag(z),'o')
sgrid(Z,Wn)
6. Gráfica con el diagrama de Bode del sistema en lazo abierto, para frecuenciascomprendidas entre 0.1≤ω≤10 a intervalos de 0.1, representando la amplitud en db y lafase en grados, frente a ω en escala logarítmica, en la que aparecen la recta de 0db en eldiagrama de amplitud y la de recta de -180° en el diagrama de fase, y cálculo de formaanalítica de los márgenes de ganancia y de fase.

Introducción al “Control System Toolbox” - 12
W=[0.1:0.1:10];
[MAG,PHASE,W]=bode(sys,W);
MAG_db=20*log10(MAG(:));
subplot(211)
semilogx(W,MAG_db,W,zeros(1,length(W)));
grid
subplot(212)
semilogx(W,PHASE(:),W,ones(1,length(W))*(-
180));
grid
[MG,MF,Wcg,Wcp]=margin(MAG,PHASE,W)
MG_db=20*log10(MG)
7. Diagrama de Nyquist del sistema, para frecuencias comprendidas entre 0.1≤<ω≤10y entre -0.1≤<ω≤-10 a intervalos de 0.1.
nyquist(sys,W);
Ejemplo 2. En la figura se muestra el diagrama de bloques de un sistema de controlmuestreado con realimentación unidad, en donde
Gc s KcTi T z Ti
Ti z( )
( )
( )= + −
−1 y Gp s
s s( )
( )( )=
+ +4
5 1
R(KT)
CONTROLADOR
D-A
PROCESO
Gc(z) Go(s) Gp(s)
T
A-D
Y(t)u(t)u(kT)+
-
e(kT)
ZOH

Introducción al “Control System Toolbox” - 13
1. Función de transferencia discreta del proceso, en forma no factorizada, cuando elperíodo de muestreo es de 0.2sg.
z=[];
p=[-5 -1];
k=4;
sys=zpk(z,p,k);
T=0.2;
sysd=c2d(sys,T,'zoh')
2. Trazado de la respuesta del proceso a una entrada escalón unidad, con condicionesiniciales nulas, para las 50 primeras muestras y del escalón provocado.
yp=step(sysd,49*T);
t=0:T:49*T;
r=ones(1,50);
stairs(t,yp)
axis([0 49*T 0 1.5])
hold on
plot(t,r,'r')
3. Función de transferencia discreta del sistema en forma no factorizada para Kc=3,Ti=1 y T=0.2.
Kc=3;
Ti=1;
numdc=[Kc*(Ti+T) -Kc*Ti];
dendc=[Ti -Ti];
sysc=tf(numdc,dendc,T);
sysdcp=series(sysc,sysd);
sysdlc=feedback(sysdcp,1,-1)

Introducción al “Control System Toolbox” - 14
4. Trazado de la respuesta del sistema a una entrada escalón unidad, con condicionesiniciales nulas, para las 50 primeras muestras y del escalón provocado.
y=step(sysdlc,49*T);
t=0:T:49*T;
r=ones(1,50);
stairs(t,y)
axis([0 49*T 0 max(y)+0.1])
hold on
plot(t,r,'r')
5. Gráfica con el lugar de las raíces del sistema utilizando Kc como parámetro cuando0<Kc≤400 a intervalos de 1, en la que aparecen los polos y ceros de lazo abierto y loslugares δ=cte para 0≤δ≤1 a intervalos de 0.1 y los lugares ωn=cte para 0≤ωn≤3 aintervalos de 0.25.
[p,z]=pzmap(sysdcp)
Kc=[0:1:400]/3;
LR=rlocus(sysdcp,Kc);
Wn=0:0.25:3;
Z=0:.1:1;
axis('square')
axis([-3 1 -2 2])
plot(LR)
hold on
plot(real(p),imag(p),'x')
plot(real(z),imag(z),'o')
grid
zgrid(Z,Wn)

Introducción al “Control System Toolbox” - 15
Ejemplo 3. Para el sistema de función de transferencia,
G ss s
( )( )
=+1
1
1. Representación del sistema continuo en variables de estado.
num=1;
den=[1 1 0];
sys=tf(num,den);
sys=ss(sys)
2. Si el sistema se encuentra precedido de un retenedor de orden cero, obtener larepresentación discreta en variables de estado para T=0.1sg.
T=0.1;
sysd=c2d(sys,T,'zoh')
3. Estudio de la controlabilidad y la observabilidad para el sistema discreto.
co=ctrb(sysd)
rco=rank(co)
ob=obsv(sysd)
rob=rank(ob)
4. Vector de realimentación de estados que sitúa los polos del sistema discreto en lazocerrado en z=0.888±0.173j.
l1=0.888+0.173*i;
l2=0.888-0.173*i;
ad=get(sysd,'a');
bd=get(sysd,'b');
K=acker(ad,bd,[l1 l2])

Introducción al “Control System Toolbox” - 16
5. Matriz de estados del sistema discreto en lazo cerrado, con el vector derealimentación obtenido, y estudio de la estabilidad del sistema a partir de ella.
adc=ad-bd*K
av=eig(adc);
mav=abs(av)
6. Diseño de un observador completo que tiene todos sus polos en z=0.819.
lo=0.819;
aco=conv([1 -lo],[1 -lo]);
I=eye(2);
aco=ad^2+aco(2)*ad+aco(3)*I;
G=aco*inv(ob)*[0 1]'
7. Evolución temporal de las variables de estado del sistema discreto en lazo abiertocuando el estado inicial es Xo=[1 1]'.
xo=[1 1]';
[y,t,x]=initial(sysd,xo,49*T);
plot(t,x(:,1),t,x(:,2))
8. Evolución temporal de las variables de estado del sistema discreto en lazo cerrado,con controlador y estimador, cuando el estado inicial del sistema y del estimador sonXo=Xeo=[1 1]'.
x(1,1:2)=[1 1];
xe(1,1:2)=[1 1];
bb=bd*K;
c=get(sysd,'c');
d=get(sysd,'d');
y(1)=c*x(1,:)';

Introducción al “Control System Toolbox” - 17
aa=ad-G*c-bb;
for k=2:51
x(k,1:2)=(aa*x(k-1,:)'+G*y(k-1))';
xe(k,1:2)=(ad*x(k-1,:)'-bb*xe(k-1,:)')';
y(k)=c*x(k,:)';
end
t=0:T:T*50;
plot(t,x(:,1),'o',t,x(:,2),'o',t,xe(:,1),...
'x',t,xe(:,2),'x')

Introducción al “Control System Toolbox” - 18
GUÍA DE COMANDOS. CONTROL SYSTEM TOOLBOX. VERSION 4.2
Creation of LTI models:
tf - Create a transfer function model. zpk - Create a zero/pole/gain model. ss - Create a state-space model. dss - Create a descriptor state-space model. frd - Create a frequency response data model. filt - Specify a digital filter. set - Set/modify properties of LTI models. ltimodels - Detailed help on various types of LTI models. ltiprops - Detailed help on available LTI properties.
Data extraction:
tfdata - Extract numerator(s) and denominator(s). zpkdata - Extract zero/pole/gain data. ssdata - Extract state-space matrices. dssdata - Descriptor version of SSDATA. frdata - Extract frequency response data. get - Access values of LTI model properties.
Model dimensions and characteristics:
class - Model type ('tf', 'zpk', 'ss', or 'frd'). isa - Test if LTI model is of given type. size - Model sizes and order. ndims - Number of dimensions. isempty - True for empty LTI models. isct - True for continuous-time models. isdt - True for discrete-time models. isproper - True for proper LTI models. issiso - True for single-input/single-output models. reshape - Reshape array of LTI models.
Conversions:
tf - Conversion to transfer function. zpk - Conversion to zero/pole/gain. ss - Conversion to state space. frd - Conversion to frequency data. chgunits - Change units of FRD model frequency points. c2d - Continuous to discrete conversion. d2c - Discrete to continuous conversion. d2d - Resample discrete-time model.
Overloaded arithmetic operations:
+ and - - Add and subtract LTI systems (parallel connection). * - Multiply LTI systems (series connection). \ - Left divide -- sys1\sys2 means inv(sys1)*sys2. / - Right divide -- sys1/sys2 means sys1*inv(sys2). ^ - LTI model powers. ' - Pertransposition. .' - Transposition of input/output map. [..] - Concatenate LTI models along inputs or outputs.

Introducción al “Control System Toolbox” - 19
stack - Stack LTI models/arrays along some array dimension. inv - Inverse of an LTI system.
Model dynamics:
pole, eig - System poles. zero - System (transmission) zeros. pzmap - Pole-zero map. dcgain - D.C. (low frequency) gain. norm - Norms of LTI systems. covar - Covariance of response to white noise. damp - Natural frequency and damping of system poles. esort - Sort continuous poles by real part. dsort - Sort discrete poles by magnitude.
Time delays:
hasdelay - True for models with time delays. totaldelay - Total delay between each input/output pair. delay2z - Replace delays by poles at z=0 or FRD phase shift. pade - Pade approximation of time delays.
State-space models:
rss,drss - Random stable state-space models. ss2ss - State coordinate transformation. canon - State-space canonical forms. ctrb, obsv - Controllability and observability matrices. gram - Controllability and observability gramians. ssbal - Diagonal balancing of state-space realizations. balreal - Gramian-based input/output balancing. modred - Model state reduction. minreal - Minimal realization and pole/zero cancellation. sminreal - Structurally minimal realization.
Time response:
ltiview - Response analysis GUI (LTI Viewer). step - Step response. impulse - Impulse response. initial - Response of state-space system with given initial state. lsim - Response to arbitrary inputs. gensig - Generate input signal for LSIM. stepfun - Generate unit-step input.
Frequency response:
ltiview - Response analysis GUI (LTI Viewer). bode - Bode plot of the frequency response. sigma - Singular value frequency plot. nyquist - Nyquist plot. nichols - Nichols chart. margin - Gain and phase margins. freqresp - Frequency response over a frequency grid. evalfr - Evaluate frequency response at given frequency.

Introducción al “Control System Toolbox” - 20
System interconnections:
append - Group LTI systems by appending inputs and outputs. parallel - Generalized parallel connection (see also overloaded +). series - Generalized series connection (see also overloaded *). feedback - Feedback connection of two systems. lft - Generalized feedback interconnection (Redheffer star product). connect - Derive state-space model from block diagram description.
Classical design tools:
rltool - Root locus design GUI rlocus - Evans root locus. rlocfind - Interactive root locus gain determination. acker - SISO pole placement. place - MIMO pole placement. estim - Form estimator given estimator gain. reg - Form regulator given state-feedback and estimator gains.
LQG design tools:
lqr,dlqr - Linear-quadratic (LQ) state-feedback regulator. lqry - LQ regulator with output weighting. lqrd - Discrete LQ regulator for continuous plant. kalman - Kalman estimator. kalmd - Discrete Kalman estimator for continuous plant. lqgreg - Form LQG regulator given LQ gain and Kalman estimator. augstate - Augment output by appending states.
Matrix equation solvers:
lyap - Solve continuous Lyapunov equations. dlyap - Solve discrete Lyapunov equations. care - Solve continuous algebraic Riccati equations. dare - Solve discrete algebraic Riccati equations.
Demonstrations:
ctrldemo - Introduction to the Control System Toolbox. jetdemo - Classical design of jet transport yaw damper. diskdemo - Digital design of hard-disk-drive controller. milldemo - SISO and MIMO LQG control of steel rolling mill. kalmdemo - Kalman filter design and simulation.

INTRODUCCIÓN A “SIMULINK”

Introducción a “Simulink” - 2
INTRODUCCIÓN A “SIMULINK”
Introducción .......................................................................................................... 3
Tipo de aplicaciones .............................................................................................. 3
Ejemplo de utilización ........................................................................................... 4
Guía de bloques .................................................................................................... 9

Introducción a “Simulink” - 3
INTRODUCCIÓN A “SIMULINK”
INTRODUCCIÓN
El programa de MathWorks para simulación (modelización y análisis) de sistemas
dinámicos no lineales fué presentado en 1990, con el nombre de SIMULAB para
computadores personales y con el nombre de SIMULINK para estaciones de trabajo.
Su aparición estuvo unida a la primera versión de MATLAB para Windows. Desde
mayo de 1994, que está disponible la versión 1.3, SIMULINK tiene un tratamiento
similar a los otros "Toolboxes" de MATLAB, en el sentido que se instala de forma
separada, pero sigue siendo la mejor herramienta para aprovechar toda la potencia de
MATLAB y de los otros "Toolboxes".
La principal diferencia respecto a los otros "Toolboxes" es que SIMULINK ofrece
un entorno gráfico de ventanas, en el que los sistemas se definen mediante su
diagrama de bloques, se construyen y se modifican haciendo uso del ratón, y en el
que el usuario dispone de unas capacidades gráficas ilimitadas. De esta forma, se
reduce considerablemente el tiempo empleado en la construcción y prueba de un
modelo del sistema y se dispone de una forma más natural e intuitiva para
describirlo.
Con SIMULINK, el usuario puede crear sus modelos a partir de una librería de
componentes básicos, copiándolos de una ventana a otra, estableciendo las
conexiones oportunas y dando valores a sus parámetros. Su utilización sólo requiere
del usuario un ligero conocimiento sobre la características básicas de MATLAB
(programa que facilita el uso de variables escalares, vectoriales y matriciales) y sobre
su sintaxis. No obstante el máximo rendimiento de SIMULINK lo obtendrá si
aprende a crear sus propios bloques, sabe programar en MATLAB y dispone de otros
"Toolboxes".
TIPO DE APLICACIONES
SIMULINK está especialmente pensado para el análisis y diseño de sistemas de
control, aunque es totalmente útil en el estudio de cualquier sistema dinámico: lineal,
no lineal, continuo, discreto, o híbrido.
El análisis del sistema, mediante simulación, se puede efectuar desde el menú de
simulación asociado a todo modelo en SIMULINK, desde la línea de comandos en

Introducción a “Simulink” - 4
MATLAB o desde cualquier programa en MATLAB. Para la simulación se puede
elegir entre diversos algoritmos de integración de paso fijo o paso variable, entre los
que se encuentran: ODE 45 (Dormand-Prince), ODE 23 (Bogacki-Shampine), ODE
113 (Adams), ODE 15S (Stiff/NDF), ODE 23S (Stiff/Modified Rosenbrock) y
discreto. Durante la simulación no es posible modificar los parámetros generales,
pero si es posible efectuar cambios en los parámetros específicos de cada bloque, e
inhibir o dar entrada a determinadas funcionalidades del sistema, lo que hace de
SIMULINK un entorno interactivo muy útil para la realización de pruebas.
Adicionalmente a la simulación es posible: obtener un modelo lineal del sistema
frente a determinadas perturbaciones, obtener las condiciones de equilibrio del
sistema a partir de distintas condiciones iniciales y utilizar toda la potencia de
MATLAB para el análisis de datos o para el análisis y diseño del modelo lineal.
EJEMPLO DE UTILIZACIÓN
Cada ventana en SIMULINK, que estará asociada a un sistema, ofrece un menú con las
siguientes cinco opciones, véase la figura 1: véase la figura 1: File (para manejo de
ficheros asociados a sistemas SIMULINK), Edit (para manejo de los objetos), View
(para hacer visible o no la barra de herramientas y/o la barra de estado), Simulation
(para ejecutar e interactuar con la simulación o modificar sus parámetros), Format
(para modificar aspectos relacionados con la visualización de los bloques o del sistema
en su conjunto), Tools (para tener acceso a otras utilidades de Matlab, como por
ejemplo el análisis a partir de un modelo linealizado del sistema, y al Real Time
WorkShop). Cada una de ellas despliega a su vez un submenú que da paso a acciones
concretas o a una ventana de diálogo con el usuario.
Un sistema en SIMULINK se construye a partir de tres tipos de objetos, los bloques
propiamente dichos, las líneas de conexión y los campos de texto. Por ejemplo, el
sistema de la figura 1 está constituido por 14 bloques, diversos campos de texto y las
líneas de conexión. Constituye un modelo para simulación del sistema de calefacción
por aire en una casa, en la que se pretende mantener una temperatura interior de 20oC frente a cambios en la temperatura exterior entorno a 10 oC, y para ello se cuenta
con un calefactor por aire con control todo-nada. Además en el modelo se quiere
evaluar el coste en pesetas asociado a este sistema de calefacción.
La mayoría de los bloques tienen asociado una ventana de diálogo con el usuario a la
que se accede abriendo el bloque con una doble pulsación del botón izquierdo del
ratón, véase como ejemplo la figura 2 que corresponde a la ventana de diálogo del
bloque Casa de la figura 1. En esta ventana hay una serie de campos y de botones,
con los siguientes significados:

Introducción a “Simulink” - 5
• Un texto con información funcional específica del bloque.
• Varios campos para modificar el valor de los parámetros del bloque. En estos
campos se pueden introducir constantes, variables del espacio de trabajo de Matlab
o expresiones con el formato de Matlab en las que intervienen constantes y
variables.
• El botón Apply para hacer efectivo los cambios de los parámetros en la
simulación.
• El botón Revert para recuperar los parámetros que tenía inicialmente el bloque.
• El botón Help para acceder a la información sobre el funcionamiento del bloque y
sus parámetros.
• El botón Close para cerrar la ventana, ya que ésta puede permanecer abierta
durante la simulación.
Fig. 1 Ejemplo de sistema en el entorno SIMULINK.
Fig. 2 Ejemplo de ventana de diálogo en SIMULINK.

Introducción a “Simulink” - 6
La mayoría de los bloques tienen asociados un icono principal con forma rectangular,
iconos de puertas con la marca > en cada entrada y en cada salida, y un campo de texto.
En algunos casos el tamaño del bloque se acomoda al número de entradas y número de
salidas definidas por el usuario, el bloque Sum de la figura 1 es un ejemplo de ello. En el
interior del bloque se puede incluir diferente tipo de información, textual o gráfica, el
bloque Casa de la figura 1 es un ejemplo de bloque con información gráfica en su
interior.
Para generar nuevos bloques con todas las características comentadas anteriormente
(ventana de diálogo con el usuario e icono) o modificar los suministrados por
SIMULINK, se suministra al usuario un entorno gráfico para definición de máscaras.
Las máscaras se pueden asociar a bloques simples o a subsistemas, véase como
ejemplo la figura 3. De ahí que el bloque Casa tenga 2 entradas (potencia
calefactora, temperatura exterior) y una salida (temperatura interior), las relaciones
entre ellas constituyen un modelo termodinámico simplificado de una casa, con tres
parámetros modificables por el usuario (la masa de aire en su interior, la resistencia
térmica y la temperatura inicial en su interior), como queda recogido en la figura 2.
Fig. 3 Estructura interna del bloque Casa de la figura 1.
Con el bloque seleccionado se accede a la definición de máscara a través de la opción
Look Under Mask en el menú de Edit . La definición tiene lugar mediante un editor
gráfico con tres ventanas Icon , Initialization y Documentation con los
siguientes campos y selecciones para el usuario:
• Mask type : campo textual para asignar un tipo de las máscaras ya existentes o
nueva al bloque.

Introducción a “Simulink” - 7
• Drawing commands : este campo se puede rellenar con el texto que se desea
incluir dentro del bloque o con comandos específicos que generen cierta información
gráfica.
Por ejemplo, en el bloque Casa, el campo Drawing commands contiene la
expresión:
plot(0,0,100,100,[20,80,80,20,20],[20,20,70,70,20],[15,50,85,15],[70,90,70,70],[42,42,29,29],[20,4
4,44,20],[52,68,68,52,52],[55,55,44,44,55])
que genera el dibujo del bloque Casa que se puede ver en la figura 1.
• Selección de las propiedades del icono: Icon frame (Invisible, Visible), Icon
transparency (Transparen, Opaque), Icon rotation (Fixed, Rotates) y
Drawing coordinates (Pixel, Autoscale, Normalized).
• Nombre (Prompt ), tipo (Control type ) y variable (Variable ) asociados
cada uno de los campos de parámetros que definen al bloque. Por ejemplo, en el
bloque Casa la máscara contiene tres parámetros, generados con la información de
la figura 4 y que explica el contenido de la ventana de diálogo de la figura 2.
Fig. 4 Ventana de edición de la máscara del bloque Casa de la figura 1.

Introducción a “Simulink” - 8
• Initialization commands : este campo se puede rellenar con un conjunto de
expresiones en el formato Matlab, con el fin de efectuar inicializaciones de variables
locales cada vez que el bloque sea utilizado en un sistema. Las expresiones pueden
incluir cálculos con los parámetros que definen al bloque, accediendo a ellos con los
nombres @1, @2, .. sucesivamente, con constantes y con variables locales asignadas
al bloque.
Por ejemplo, en el bloque Casa, el campo Initialization commands contiene la expresión:
c=1005.4; . Donde se asigna el valor 1005.4 al parámetro c como el calor específico del aire a 0 oC.
• Block description : para incluir el mensaje que se desea presentar al usuario
cuando acceda a la ventana de diálogo del bloque.
• Block Help : para incluir el mensaje que se desea presentar al usuario cuando
pulse el botón de ayuda sobre el funcionamiento y parámetros del bloque.
Por ejemplo, en el bloque Casa, el campo Block Help contiene el siguiente texto:
El modelo está descrito por la siguiente ecuación: Pc(t) = 1/Req ( Tint(t) - Text(t) ) + M c
dTint(t)/dt. Siendo Pc(t) la potencia calefactora suministrada, Text(t) la temperatura en el
exterior y Tint(t) la temperatura en el interior.
En la figura 5 se muestran los resultados de la simulación en las tres ventanas
gráficas del sistema de la figura 1, en las siguientes condiciones:
- Casa con masa de aire de 1200 kg, resistencia térmica de 0.0015 oC/W,
temperatura interior inicial de 10oC.
- Temperatura exterior con variación sinusoidal, de periodo 1 h y amplitud 5 oC,
entorno a 10 oC.
- Potencia calefactora máxima de 30000 kW
- Termostato con histéresis de 2 oC.
- Precio del kwh 15.5 pts.
- Simulación de 1h.

Introducción a “Simulink” - 9
Fig. 5 Resultados de una simulación con el sistema de la figura 1.
GUÍA DE BLOQUES
El gran número de bloques que ofrece actualmente SIMULINK lo convierten en una
herramienta muy potente para simulación de cualquier tipo de sistema dinámico.
Estos bloques están clasificados en ocho librerías principales: fuentes (Sources ) ,
sumideros (Sinks ) , continuos (Continuous ), discretos (Discrete ),
matemática (Math ), funciones y tablas (Functions & Tables ), no lineales
(Nonlinear ), señales y sistemas (Signals & Systems ), como se muestra en
la ventana de la figura 6. A las que se unen otras tantas en “Simulink Extras ”,
“Simulink Demos ” y unas librerías especiales dependiendo de los toolboxes que
se hayan instalado.
Todas estas librerías están disponibles en una ventana similar a la figura 6, a la que
se accede pulsando el icono SIMULINK de la ventana de MATLAB. La ventana
presenta una estructura de explorador, que facilita el acceso a las librerías y a los
bloques individuales. El acceso también es posible a través del botón derecho del

Introducción a “Simulink” - 10
ratón con las opciones Open o Get help . Concretamente, a la ventana de la figura
7, que muestra las ocho librerías principales, se accede con la opción Open the
Simulink Library .
Fig. 6 Navegador para acceso a las librerías y bloques de SIMULINK.
Fig. 7 Librerías de SIMULINK.
Los bloques fuentes, véase la figura 8, son un tipo de bloques que sólo tienen salida,
escalar o vectorial, con el fin de generar datos que:
- sirvan de señales excitadoras al sistema

Introducción a “Simulink” - 11
- modifiquen el valor de los parámetros del sistema durante la simulación
Uniform RandomNumber
Step
Sine Wave
SignalGenerator
RepeatingSequence
RandomNumber
Ramp
PulseGenerator
untitled.mat
From Fi le
[T,U]
FromWorkspace
Discrete PulseGenerator
12:34
Digital Clock
1
Constant
Clock
Chirp Signal
Band-LimitedWhite Noise
Fig. 8 Librería de bloques fuentes.
Los bloques sumideros, véase la figura 9, son un tipo de bloques que sólo tienen
entrada, escalar o vectorial, con el fin de:
- almacenar o visualizar datos generados en determinados puntos del sistema.
- parar la simulación
XY Graph
simout
To Workspace
untitled.mat
To File
STOP
Stop Simulation
Scope
0
Display
Fig. 9 Librería de bloques sumideros.

Introducción a “Simulink” - 12
Los bloques continuos. Dentro de esta categoría SIMULINK ofrece los dos bloques
elementales de un sistema analógico como son el integrador y el derivador, más los
bloques continuos genéricos descritos en el espacio de estados o por su función de
transferencia, véase la figura 10, y tres elementos característicamente no lineales como
son el bloque memoria y dos bloques retardos.
(s-1)
s(s+1)
Zero-Pole
VariableTransport Delay
TransportDelay
1
s+1
Transfer Fcn
x' = Ax+Bu y = Cx+Du
State-Space
Memory
s
1
Integrator
du/dt
Derivative
Fig. 10 Librería de bloques continuos.
Los bloques discretos, véase la figura 11, de SIMULINK tienen incorporado un
muestreador en sus entradas y un retenedor de orden cero en sus salidas. Tal que
cuando se combinan con bloques continuos, sus salidas se mantienen constante todo
el período de muestreo y sus entradas se actualizan cada instante de muestreo. Todo
bloque discreto tiene asociado un período de muestreo que puede ser diferente al de
otro bloque del mismo sistema.
Zero-OrderHold
z
1
Unit Delay
First-OrderHold
T
z-1
Discrete-TimeIntegrator
y(n)=Cx(n)+Du(n)x(n+1)=Ax(n)+Bu(n)
Discrete State-Space
1
1+0.5z -1
Discrete Fil ter
(z-1)
z(z-0.5)
DiscreteZero-Pole
1
z+0.5
DiscreteTransfer Fcn
Fig. 11 Librería de bloques discretos.

Introducción a “Simulink” - 13
Los bloques matemáticos. Dentro de esta categoría SIMULINK ofrece los bloques
elementales de cálculo como son el sumador, el multiplicador, el amplificador, más
bloques que realizan funciones lógicas y otros bloques de cálculo numérico
relativamente complejo, véase la figura 12.
sin
TrigonometricFunction
Sum
1
SliderGain
Sign
floor
RoundingFunction
<=
RelationalOperator
Re
Im
Real-Imag toComplex
Product
min
MinMax
K
MatrixGain
eu
MathFunction
|.|
Magni tude-Angleto Complex
AND
LogicalOperator
1
Gain
Dot Product
Re(u)
Im(u)
Complex toReal-Imag
|u|u
Complex toMagni tude-Angle
Combinatorial Logic
f (z) zSolve
f(z) = 0
Algebraic Constraint
|u|
Abs
Fig. 12 Librería de bloques matemáticos.
Los bloques de funciones y tablas. Dentro de esta categoría SIMULINK ofrece dos
tipos de tablas y tres tipos de funciones, véase la figura 13.

Introducción a “Simulink” - 14
system
S-Function
MATLABFunction
MATLAB Fcn
Look-UpTable (2-D)
Look-UpTable
f(u)
Fcn
Fig. 13 Librería de funciones y tablas.
Los bloques no lineales constituyen, junto con el entorno gráfico, la mayor
aportación de SIMULINK al entorno de trabajo de MATLAB y sus "Toolboxes".
Actualmente están repartidos por otras librerías y aparecen agrupados sólo aquellos
bloques directamente relacionados con características mecánicas no lineales, véase la
figura 14.
Switch
Saturation
Relay
Rate Limiter Quantizer
MultiportSwitch
Manual Switch
Dead Zone
Coulomb &Viscous Friction
Backlash
Fig. 14 Librería de bloques no lineales.
Los bloques de señales y sistemas. Dentro de este tipo de bloques, véase figura 15,
se encuentran todos aquellos que SIMULINK pone a disposición del usuario para:
- preparar al sistema para el conexionado exterior (en la recepción o la generación
de señales) entre los distintos subsistemas que pueden integrar un sistema
- agrupar o separar señales que faciliten el conexionado entre bloques dentro del
sistema

Introducción a “Simulink” - 15
- facilitar el intercambio de información entre los distintos subsistemas que pueden
integrar un sistema
- favorecer el uso de bloques y subsistemas con múltiples funciones, que se inhiben
o habilitan en función de cómo evolucione la simulación
1
Out1
0
Width
Terminator
SubSystem
Selector
W:0, Ts:[0 0], C:0
Probe
Mux
Model Info
Merge
Merge
[1]
ICHit Crossing
Ground
A
Goto TagVisibil ity
[A]
Goto
f()
Function-Cal lGenerator
[A]
From
m
Demux
(double)
Data Type Conversion
A
Data StoreWrite
A
Data StoreRead
A
Data StoreMemory
ConfigurableSubsystem
BusSelector
TriggerEnable
1
In1
Fig. 15 Librería de bloques para señales y sistemas.