grado en ingeniería topografía -...
TRANSCRIPT
Grado en IngenieríaGrado en Ingeniería GeomáticaGeomática y Topografíay TopografíaGrado en Ingeniería Grado en Ingeniería GeomáticaGeomática y Topografíay Topografía
Escuela Técnica Superior de Ingenierosen Topografía, Geodesia y Cartografía
Universidad Politécnica de Madrid
ÍÍPROGRAMA DE TEORÍAPROGRAMA DE TEORÍA‐‐PROBLEMAS DE LA ASIGNATURA:PROBLEMAS DE LA ASIGNATURA:
REDES FOTOGRAMÉTRICASREDES FOTOGRAMÉTRICASREDES FOTOGRAMÉTRICASREDES FOTOGRAMÉTRICAS
Profesora: Isaura Alonso Profesora: Isaura Alonso MartinezMartinez
Profesor: Francisco García CepedaProfesor: Francisco García Cepeda
Profesor: Pedro Profesor: Pedro MiguelsanzMiguelsanz MuñozMuñoz
Septiembre 2015Septiembre 2015
1
Asignatura de Asignatura de Redes FotogramétricasRedes Fotogramétricas: : BIBLIOGRAFÍA BIBLIOGRAFÍA
José L. Lerma García: Fotogrametría Moderna: Analítica y Digital,, (2002)
Edward Mikhail, James Bethel, Chris McGlone: Introduction to Modern
Paul R. Wolf, Bon A. Dewitt : Elements of Photogrammetry (2000)
, ,Photogrammetry, (2001)
Karl Kraus: Photogrammetry: Geometry from images and Laser Scans,(2007)(2007)
Toni Schenk : Fotogrametría digital , (2002)
Rainer Sandau: Digital Airborne Camera, (2010)
2

Teoría. Unidad Didáctica 2:Teoría. Unidad Didáctica 2:Redes FotogramétricasRedes Fotogramétricas
Tema 6. –Triangulación aérea con datos INS/GNSS.
6.1. ‐Introducción.
6.2.‐ Descripción de los elementos de un sistema INS/GNSS.6.2. Descripción de los elementos de un sistema INS/GNSS.
6.3. ‐Problemas específicos en la determinación de los parámetros de OE.
6.3.1. ‐Excentricidad sensor‐antena GNSS y sensor‐IMU (offset).
6 3 2 F l d i i ió d l i ( i ff )6.3.2. ‐Falta de sincronización de los registros (antena time offset).
6.3.3. ‐Interrupción de la señal GNSS (signal interruption).
6.3.4. ‐Sistemas de referencia de coordenadas utilizados (datum problem).
6.4. ‐Integración de los datos del INS y del GNSS.
6.5. ‐Modelo matemático de orientación directa.
6.6. ‐Modelo matemático para aerotriangulación con parámetros variacionales.p g p
6.7. ‐Precisión de los parámetros de OE en una aerotriangulación.
6.8. ‐Evolución del diseño del apoyo de campo.
3

Teoría. Unidad Didáctica 2:Teoría. Unidad Didáctica 2:Objetivos específicosObjetivos específicos
• Definir y calcular los parámetros que determinan la geometría de un vuelo con finesfotogramétricos .g
• Asociar los sistemas de coordenadas de una imagen/es con los procesos de orientación interna yexterna.
• Definir y calcular un trabajo de triangulación aérea clásica .y j g
• Identificar y explicar los resultados de triangulación aérea clásica .
• Conocer y calcular, si se dispone de datos adicionales INS/GNSS, las ventajas/inconvenientes enun trabajo de triangulación aérea.j g
• Definir y calcular un trabajo de triangulación aérea automática.
• Conocer y aplicar las estrategias de búsqueda automática de puntos homólogos sobre imágenesadyacentes .y
• Conocer y aplicar los procedimientos automáticos de orientación externa indirecta.
• Conocer los procedimientos de cálculo de la orientación externa directa.
4

Tema 6. Tema 6. Triangulación aérea con datos Triangulación aérea con datos INS/GNSSINS/GNSS..Introducción.Introducción.
• Esta tecnología permite la obtención directa de los parámetros de OE (, , , X0, Y0, Z0) mediante Sistemas de
Navegación Inercial asistido con técnicas GNSS para todo tipo de sensores de Observación de la Tierra.
• Aerotransportados.
• Satelitales.
Existen sensores que obligatoriamente requieren del conocimiento de los
parámetros de OE y hay otros sensores en los que dichos parámetros
complementan el sistema de ecuaciones en la fase de aerotriangulación. 5

Tema 6. Tema 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Introducción.Introducción.
• El registro de las líneas imagen depende de la orientación del avión en el instante de adquisición.
La obtención de los datos de OE mediante INS/GNSS es de obligada utilización en sensores de barrido lineal.
A li ió d l á l tifi l i t ió d l lí• Aplicación de los ángulos para rectificar la orientación de las líneas.
La obtención de los datos de OE mediante INS/GNSS es de obligada utilización enLa obtención de los datos de OE mediante INS/GNSS es de obligada utilización en sensores lidar.
• La emisión de pulsos y registro de retornos depende de la orientación delavión en el instante de emisión y de recepción.
• Aplicación de los ángulos para rectificar la orientación de la nube depuntos.
6
Tema 6. Tema 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Introducción.Introducción.
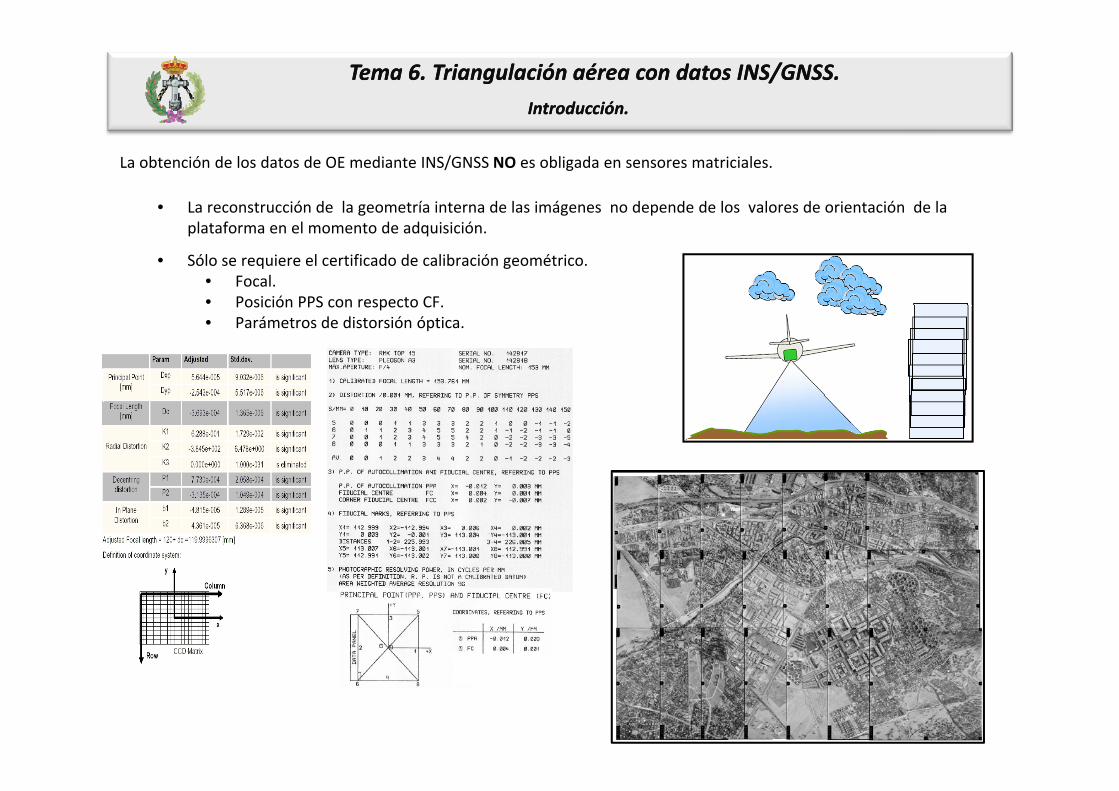
• La reconstrucción de la geometría interna de las imágenes no depende de los valores de orientación de la
La obtención de los datos de OE mediante INS/GNSS NO es obligada en sensores matriciales.
plataforma en el momento de adquisición.
• Sólo se requiere el certificado de calibración geométrico.• Focal.• Posición PPS con respecto CF.Posición PPS con respecto CF.• Parámetros de distorsión óptica.
7
Tema 6. Tema 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Descripción de los elementos de un sistema INS/GNSS.Descripción de los elementos de un sistema INS/GNSS.
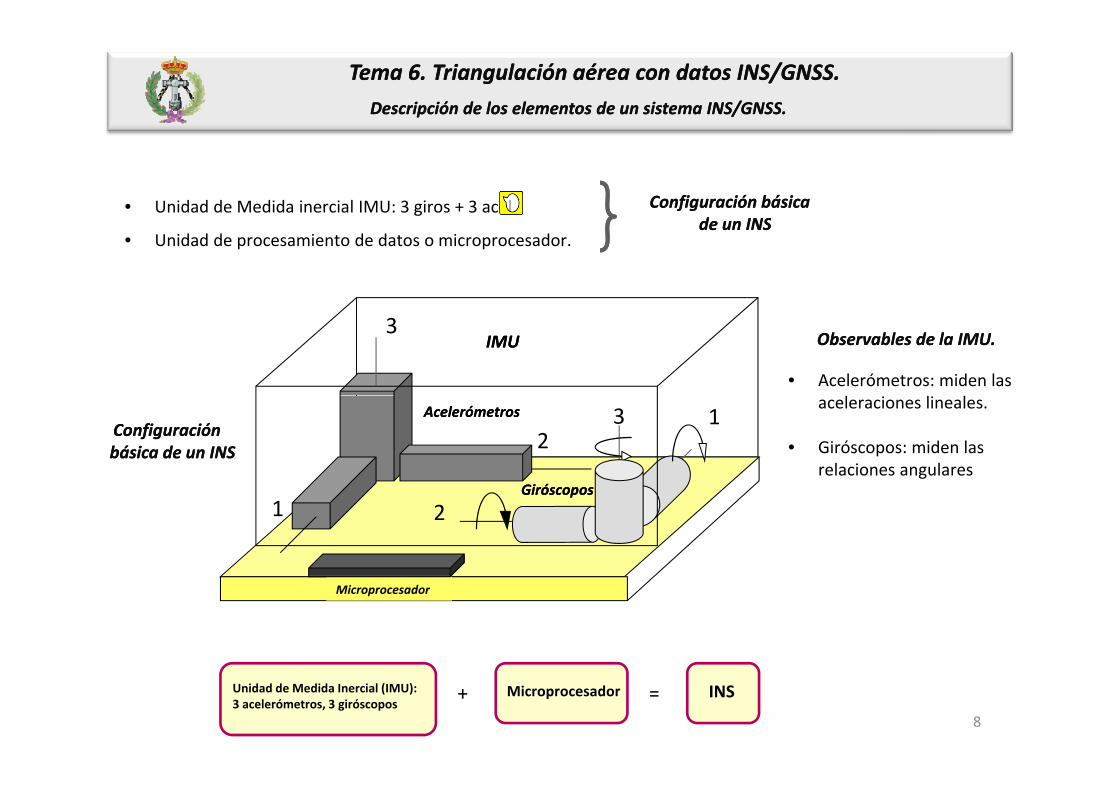
• Unidad de Medida inercial IMU: 3 giros + 3 acel. Configuración básica Configuración básica
• Unidad de procesamiento de datos o microprocesador.de un INSde un INS
3IMUIMU Observables de la IMU.Observables de la IMU.
• Acelerómetros: miden las
23 1AcelerómetrosAcelerómetros
Gi óGi ó
Configuración Configuración básica de un INSbásica de un INS
aceleraciones lineales.
• Giróscopos: miden las relaciones angulares
1 2GiróscoposGiróscopos
Microprocesador
Unidad de Medida Inercial (IMU):3 acelerómetros, 3 giróscopos
+ Microprocesador = INS
8
Tema 6. Tema 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Descripción de los elementos de un sistema INS/GNSS.Descripción de los elementos de un sistema INS/GNSS.
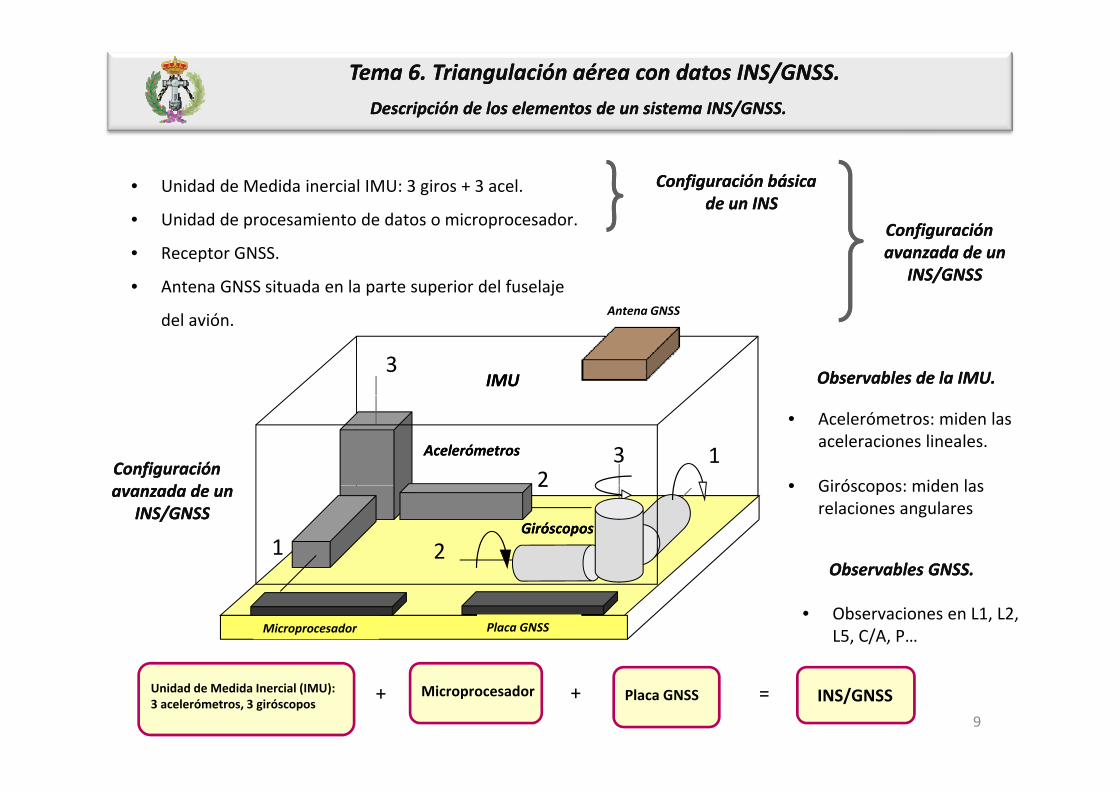
• Unidad de Medida inercial IMU: 3 giros + 3 acel.
U id d d i t d d t i d
Configuración básica Configuración básica de un INSde un INS
• Unidad de procesamiento de datos o microprocesador.
• Receptor GNSS.
• Antena GNSS situada en la parte superior del fuselaje
Configuración Configuración avanzada de un avanzada de un
INS/GNSSINS/GNSS
3
del avión.
IMUIMU Observables de la IMU.Observables de la IMU.
Antena GNSS
23 1AcelerómetrosAcelerómetros
Configuración Configuración d dd d
• Acelerómetros: miden las aceleraciones lineales.
• Giróscopos: miden las2
1 2GiróscoposGiróscopos
avanzada de un avanzada de un INS/GNSSINS/GNSS
Observables GNSS.Observables GNSS.
• Giróscopos: miden las relaciones angulares
Microprocesador
Observables GNSS.Observables GNSS.
• Observaciones en L1, L2, L5, C/A, P…Placa GNSS
Unidad de Medida Inercial (IMU):3 acelerómetros, 3 giróscopos
+ Microprocesador = INS/GNSS9
Placa GNSS+

Tema 6. Tema 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Descripción de los elementos de un sistema INS/GNSS.Descripción de los elementos de un sistema INS/GNSS.
• Tres acelerómetros
Unidad de Medida Inercial (IMU).
• Tres acelerómetros.• Tres giróscopos.• Componentes electrónicos.• Registro de observaciones hasta cada 400 Hz.
Unidad de Proceso de Datos (UPD).
• Receptor GNSS.
• Microprocesador de datos de altorendimiento para proceso en tiemporeal.
• Unidad de almacenamiento de datos Antena GNSS• Unidad de almacenamiento de datos. • Disco duro interno.• Adaptadores y conexiones USB externas.
• Características compatibles con las del receptor.• Se puede situar sobre la cola o sobre la vertical del sensor
• Sobre la cola, mejora la recepción de satélites.
Antena GNSS.
• Sobre la vertical, facilita el cálculo del offset.
10

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Problemas específicos en la determinación de los parámetros de OE.Problemas específicos en la determinación de los parámetros de OE.
i. Excentricidad sensor‐antena GNSS y sensor‐IMU (offset)i. Excentricidad sensor antena GNSS y sensor IMU (offset)
ii. Falta de sincronización de los registros (antenna time offset)
iii. Interrupciones de señal GNSS (signal interruption)
iv. Sistemas de coordenadas de referencia utilizados (datum problem)
i y ii afectan a la determinación absoluta de los parámetros de OE.
iii sigue siendo frecuente pero la IMU evita el problema métrico en gran medida.
iv pasa por una solución puramente analítica de transformaciones espaciales con sus respectivas consideraciones
en el campo de la geodesia. Transformación 3D de semejanza. 11

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Problemas específicos en la determinación de Problemas específicos en la determinación de los parámetros de OE.los parámetros de OE.
Antena GNSS (XGNSS, YGNSS, ZGNSS)
i. Excentricidad sensor‐antena GNSS y sensor‐IMU (offset).
• El desplazamiento entre el centro de proyección y el centro de fase de la antena debe conocerse con
Descripción.
z
• El desplazamiento entre el centro de proyección y el centro de fase de la antena debe conocerse conprecisión.
• Este desplazamiento debe estar referido al sistema de coordenadas imagen. dLa‐cp
yPlano focal imagen dza‐cpdLimu‐cp
y
x
dzimu‐cp
CM
Distancia focal calibrada
dya cp
dxa‐cp
imu‐cp
dximu‐cp
x
dya‐cp
Centro de proyección del Sensor (Xo, Yo, Zo)
dyimu‐cp
x
dLa‐cp = (dxa‐cp, dya‐cp, dza‐cp) dLimu‐cp = (dximu‐cp, dyimu‐cp, dzimu‐cp) 12

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Problemas específicos en la determinación de Problemas específicos en la determinación de los parámetros de OE.los parámetros de OE.
i. Excentricidad sensor‐antena GNSS y sensor‐IMU (offset).
Determinación de las excentricidades en tierra.
• Métodos topográficos convencionales.
• Referenciado de los elementos que van a
intervenir en la medición mediante marcas de
puntería.
• Definición de un sistema de referencia local.
• Procedimientos de aerotriangulación con autocalibración.
• Requiere software específico de AT y de cálculo de trayectorias. 13

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.
Problemas específicos en la determinación de Problemas específicos en la determinación de los parámetros de OE.los parámetros de OE.
Localización de la antena GNSS en el avión:
i. Excentricidad sensor‐antena GNSS y sensor‐IMU (offset).
• En el fuselaje del avión sobre la cámara.
• En el estabilizador vertical.
• Cuanto más cerca de la vertical de la cámara se encuentre la antena GNSS, menor será el efecto de
desplazamiento debido a los giros del avión.
• El sistema INS/GNSS envía información de orientación del• El sistema INS/GNSS envía información de orientación del
avión a la plataforma giroestabilizada para calcular el efecto
de los giros sobre el offset sensor‐antena.
• Al offset existente entre antena GNSS y el plano focal de lacámara o sensor, se debe sumar la focal y la distanciainternodal. 14
Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Problemas Problemas específicos en la determinación de específicos en la determinación de los parámetros de OE.los parámetros de OE.
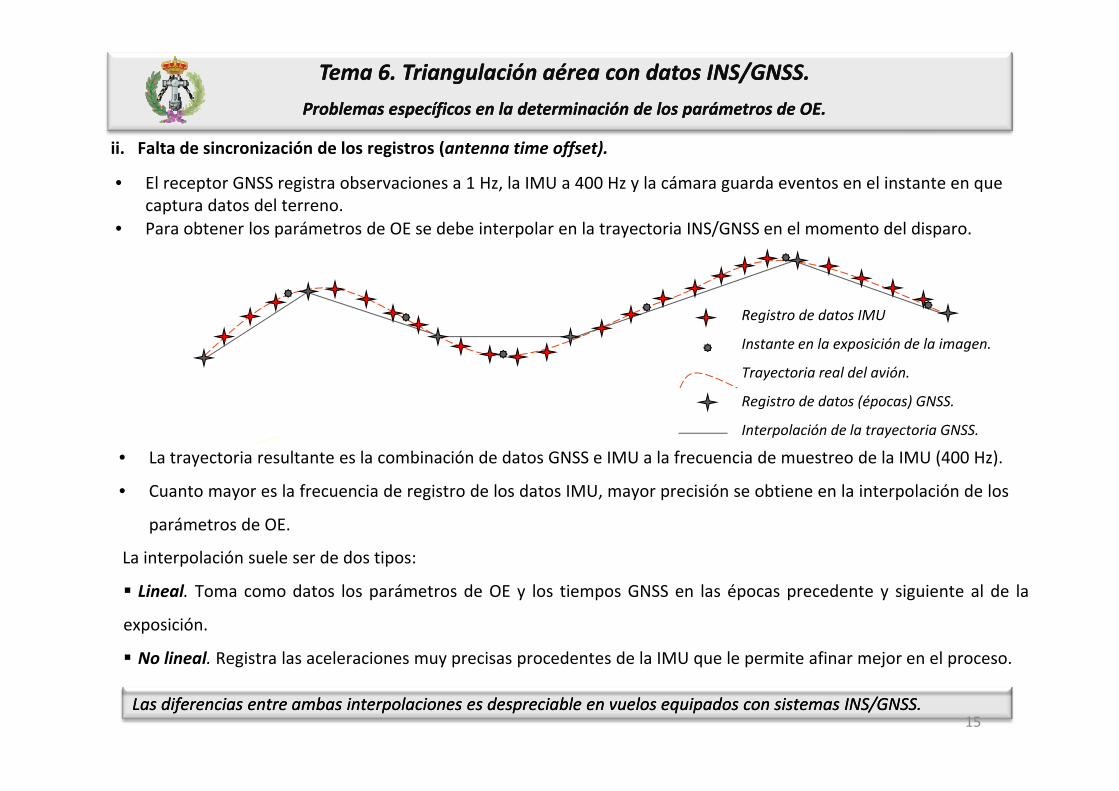
ii. Falta de sincronización de los registros (antenna time offset).
• El receptor GNSS registra observaciones a 1 Hz, la IMU a 400 Hz y la cámara guarda eventos en el instante en quecaptura datos del terreno.
• Para obtener los parámetros de OE se debe interpolar en la trayectoria INS/GNSS en el momento del disparo.
Registro de datos IMU
Instante en la exposición de la imagen.
Trayectoria real del avión.
d d (é )Registro de datos (épocas) GNSS.
Interpolación de la trayectoria GNSS.
• La trayectoria resultante es la combinación de datos GNSS e IMU a la frecuencia de muestreo de la IMU (400 Hz).
C l f i d i d l d IMU i ió b i l i l ió d l
La interpolación suele ser de dos tipos:
• Cuanto mayor es la frecuencia de registro de los datos IMU, mayor precisión se obtiene en la interpolación de los
parámetros de OE.
Lineal. Toma como datos los parámetros de OE y los tiempos GNSS en las épocas precedente y siguiente al de la
exposición.
No lineal. Registra las aceleraciones muy precisas procedentes de la IMU que le permite afinar mejor en el proceso.g y p p q p j p
LasLas diferenciasdiferencias entreentre ambasambas interpolacionesinterpolaciones eses despreciabledespreciable enen vuelosvuelos equipadosequipados concon sistemassistemas INS/GNSSINS/GNSS..15

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.
Problemas específicos en la determinación de los parámetros de OE.Problemas específicos en la determinación de los parámetros de OE.
Las interrupciones o pérdidas de señal se pueden producir por tres causas principalmente:
iii. Interrupciones de señal GNSS (signal interruption).
• Giros bruscos del avión durante la misión de vuelo. Generalmente al realizar el cambio de pasada.
• Efectos ionosféricos y troposféricos puedenprovocar pérdidas de señal incluso cuandoel avión circula en línea recta.
• Un mal funcionamiento en la electrónica dereceptores y antenas puede provocar lapérdida de señal.
La consecuencia directa de tener pérdidas deseñal de los satélites es que no se puedad i N bi ü d d d fdeterminar N, ambigüedad de fase.
Métodos de reparación de pérdidas de ciclo.
• Existen técnicas para la reparación de pérdidas de ciclo o señales seguidas a los satélites. Son más eficientes lasque funcionan en postproceso, aunque también hay subrutinas implantadas en los receptores para mitigar estesuceso.suceso.
• Para su determinación y reparación en post proceso se utilizan observaciones adicionales como pueden ser losdatos doppler registrados sobre las portadoras y sobre todo combinación de datos GNSS e IMU mediante filtrosde Kalman.
16

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.
Problemas Problemas específicos en la determinación de los parámetros de OE.específicos en la determinación de los parámetros de OE.
Métodos de resolución de ambigüedades en cinemático.Técnicas OTF (on‐the‐fly).
• Se obtiene la máxima precisión en la determinación de N.
• Se obtiene la máxima precisión absoluta en los CP.
• Requiere la máxima precisión en la medición del offset cámara‐
antena GNSS.
• Distancia entre “Master” y “Rover” < 50 ‐ 70 km.
• Las condiciones de vuelo son muy rigurosas (giros suaves)• Las condiciones de vuelo son muy rigurosas (giros suaves).
Acoplamiento fuerte en un sistema INS/GNSS utilizando filtros Kalman.
• Las observaciones realizadas por los receptores GNSS máster y rover se combinan con las observaciones de
giróscopos y acelerómetros de la IMU en un filtro de Kalman para determinar la N óptima.
• Combinando observaciones de la IMU y observaciones GNSS se puede hacer un rastreo muy eficiente de las
pérdidas de señal a los satélites cuando se produce el giro del avión para el cambio de pasada y reparar los
arcos de fase perdidos.
• Se obtiene la máxima precisión en la determinación de la ambigüedad de fase NSe obtiene la máxima precisión en la determinación de la ambigüedad de fase N.
• La precisión de la trayectoria calculada será óptima, lo mismo que la precisión de los parámetros completos de
OE (Xₒ, Yₒ, Zₒ, . 17
Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.
Problemas Problemas específicos en la determinación de los parámetros de OE.específicos en la determinación de los parámetros de OE.
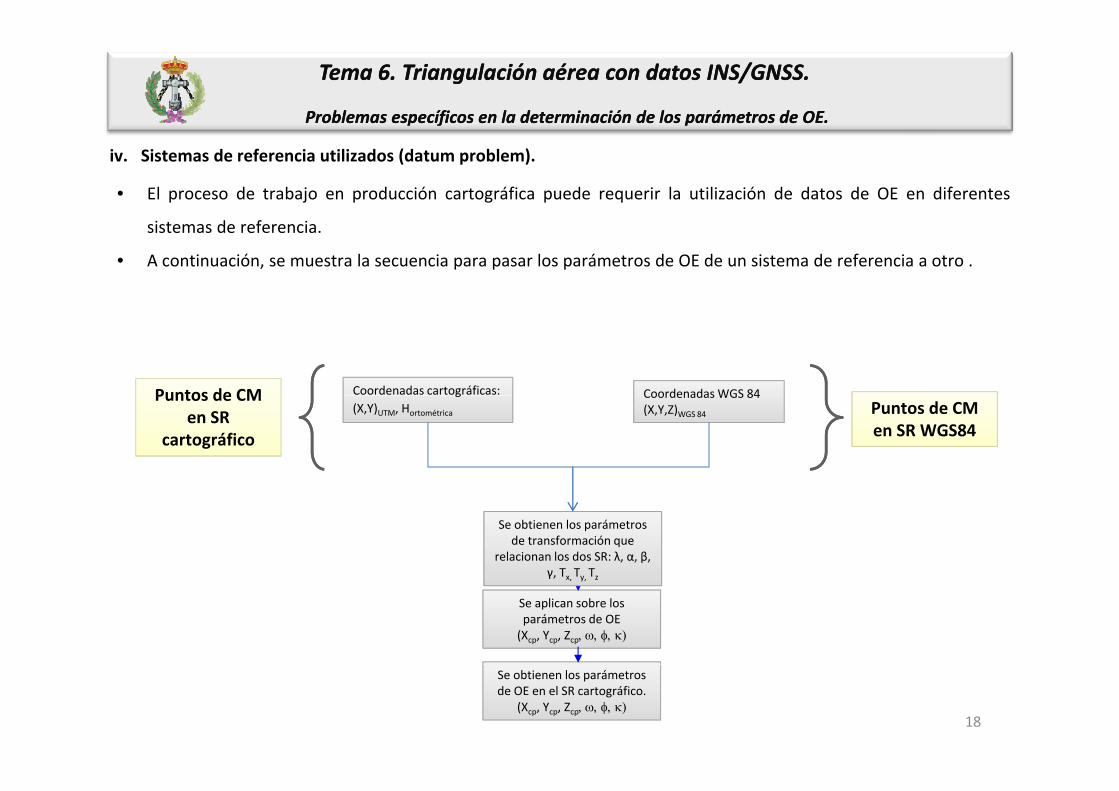
iv. Sistemas de referencia utilizados (datum problem).
• El proceso de trabajo en producción cartográfica puede requerir la utilización de datos de OE en diferentes
sistemas de referencia.
• A continuación, se muestra la secuencia para pasar los parámetros de OE de un sistema de referencia a otro .
Coordenadas cartográficas: CoordenadasWGS 84Puntos de CM g(X,Y)UTM, Hortométrica
Coordenadas WGS 84 (X,Y,Z)WGS 84
Puntos de CMen SR
cartográfico
Puntos de CM en SR WGS84
Se obtienen los parámetrosde transformación que
relacionan los dos SR: λ, α, β, γ, T T T
Se aplican sobre los parámetros de OE (Xcp, Ycp, Zcp
γ, Tx, Ty, Tz
Se obtienen los parámetros de OE en el SR cartográfico.
(Xcp, Ycp, Zcp18
Tema Tema 6. 6. Orientación externa directa por integración INS/GNSS.Orientación externa directa por integración INS/GNSS.Integración de los datos del INS y del GNSS.Integración de los datos del INS y del GNSS.
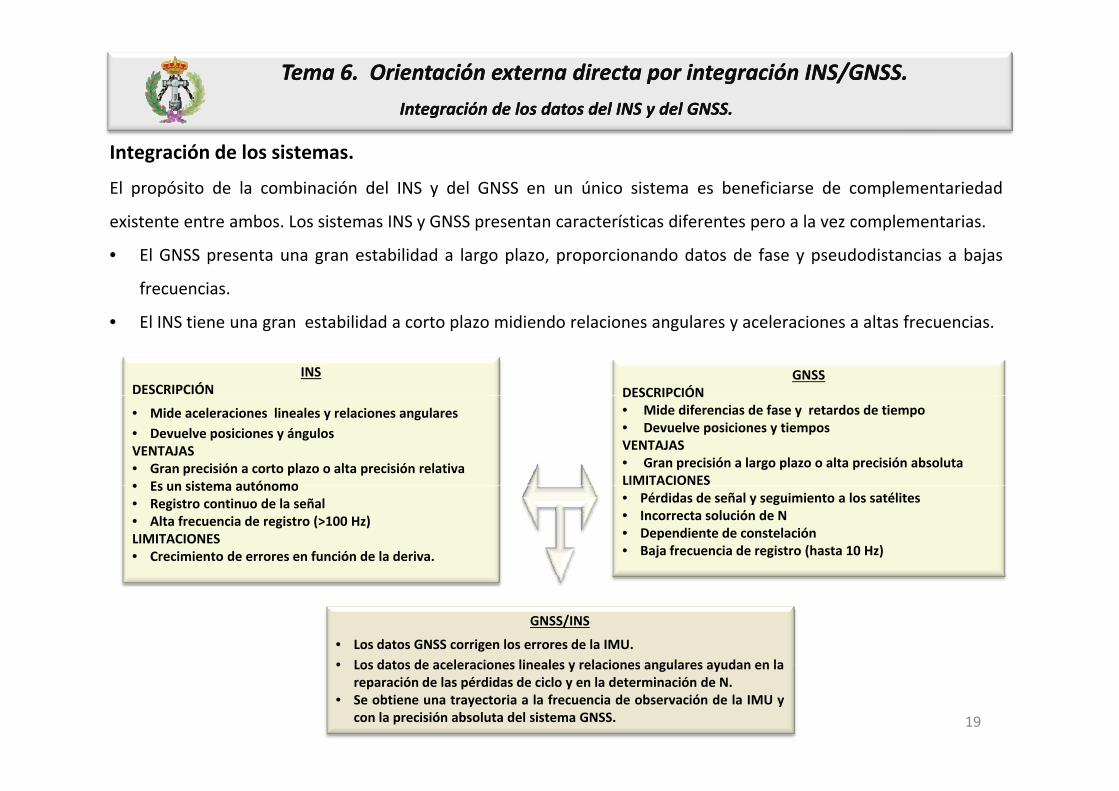
Integración de los sistemas.
El propósito de la combinación del INS y del GNSS en un único sistema es beneficiarse de complementariedad
i b L i INS GNSS í i dif l l iexistente entre ambos. Los sistemas INS y GNSS presentan características diferentes pero a la vez complementarias.
• El GNSS presenta una gran estabilidad a largo plazo, proporcionando datos de fase y pseudodistancias a bajas
frecuencias.
• El INS tiene una gran estabilidad a corto plazo midiendo relaciones angulares y aceleraciones a altas frecuencias.
INSDESCRIPCIÓN
GNSSDESCRIPCIÓN
• Mide aceleraciones lineales y relaciones angulares• Devuelve posiciones y ángulosVENTAJAS• Gran precisión a corto plazo o alta precisión relativa• Es un sistema autónomo
DESCRIPCIÓN• Mide diferencias de fase y retardos de tiempo• Devuelve posiciones y tiemposVENTAJAS• Gran precisión a largo plazo o alta precisión absolutaLIMITACIONES• Es un sistema autónomo
• Registro continuo de la señal• Alta frecuencia de registro (>100 Hz)LIMITACIONES• Crecimiento de errores en función de la deriva.
• Pérdidas de señal y seguimiento a los satélites• Incorrecta solución de N• Dependiente de constelación• Baja frecuencia de registro (hasta 10 Hz)
GNSS/INS
• Los datos GNSS corrigen los errores de la IMU.• Los datos de aceleraciones lineales y relaciones angulares ayudan en la• Los datos de aceleraciones lineales y relaciones angulares ayudan en la
reparación de las pérdidas de ciclo y en la determinación de N.• Se obtiene una trayectoria a la frecuencia de observación de la IMU y
con la precisión absoluta del sistema GNSS. 19
Tema Tema 6. 6. Orientación externa directa por integración INS/GNSS.Orientación externa directa por integración INS/GNSS.Integración de los datos del INS y del GNSS.Integración de los datos del INS y del GNSS.
Filtro Kalman
l l f ó “ ” l “ l” d á d b l• Consiste en utilizar la información “anterior” para conocer la “actual” en un sistema dinámico que describe latrayectoria de un objeto en movimiento, por ejemplo.
• Al mismo tiempo permite integrar información procedente de diferentes fuentes.
• Se compone de un grupo de ecuaciones diferenciales linealizadas y discretizadas que definen unamatriz de transiciónde estados y unamatriz de ruido del proceso.
• Matriz de transición de estados: suele estar definida por 15 parámetros. Definen la trayectoria y modelan los erroresde acelerómetros y giróscopos.
• 3 para la posición.• 3 para la velocidad.• 3 para la orientación.• 3 errores sistemáticos de los giróscopos.
• Matriz de ruido del proceso: matriz de varianzas ‐ covarianzas procedente de la estimación de la matriz de transiciónde estados en instantes anteriores.
• 3 errores sistemáticos de los acelerómetros.
20
Tema Tema 6. 6. Orientación externa directa por integración INS/GNSS.Orientación externa directa por integración INS/GNSS.Integración de los datos del INS y del GNSS.Integración de los datos del INS y del GNSS.
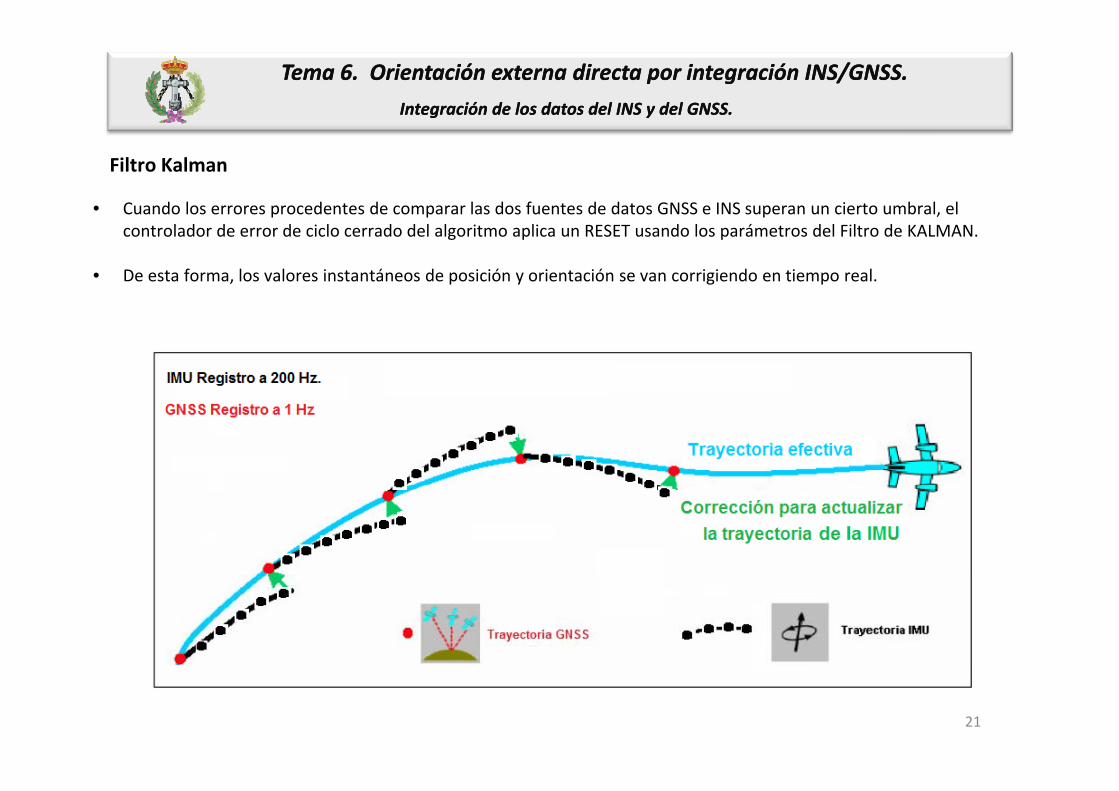
Filtro Kalman
• Cuando los errores procedentes de comparar las dos fuentes de datos GNSS e INS superan un cierto umbral, el p p p ,controlador de error de ciclo cerrado del algoritmo aplica un RESET usando los parámetros del Filtro de KALMAN.
• De esta forma, los valores instantáneos de posición y orientación se van corrigiendo en tiempo real.
21

Tema Tema 6. 6. Orientación externa directa por integración INS/GNSS.Orientación externa directa por integración INS/GNSS.Integración de los datos del INS y del GNSS.Integración de los datos del INS y del GNSS.
Integración de datos INS y GNSS.
Actualmente, existen dos modos de integración de los datos registrados por el INS y el GNSS, y aunque existe algún
• Modo loosely coupled.
otro modo más, se considera una particularización de uno de ellos.
• Contiene dos filtros de Kalman, uno en la depuración de las observaciones GNSS determinando posición,, p p ,velocidad y tiempo. Y otro para integrar los datos GNSS y los datos del INS, determinando posición, velocidad,orientación y estados de error de acelerómetros y giróscopos de la IMU.
• Es decir, se determina una trayectoria definida por posición, velocidad y tiempo, PVT, mediante las observaciones, y p p , y p , ,GNSS a la frecuencia de observación de los receptores GNSS y posteriormente se integran los datos de esatrayectoria con las observaciones del INS para obtener una trayectoria dada por posición, velocidad, orientación ytiempo, PVAT, a la frecuencia de observación de la IMU.
• Modo tightly coupled.
• Contiene un único filtro de Kalman que integra los datos GNSS y los datos del INS, determinando posición,velocidad, orientación , tiempo ,PVAT, a los que se le añaden los estados de error de acelerómetros y giróscopos, , p , , q y g pde la IMU.
• En situación de pérdidas de ciclo, débiles geometrías de constelación o registro de observaciones a menos de 4satélites, los datos de la IMU procedentes de posición y velocidad permitirán la reparación de esas pérdidas de, p p y p p pseñal y la correcta determinación de la ambigüedad de la fase N.
22

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Modelo matemático de orientación directa.Modelo matemático de orientación directa.
Modelo matemático de orientación directa.
Las coordenadas de un punto objeto rc (x y f) medidas en el SR (c)
Georreferenciación directa
Antena GNSS gLas coordenadas de un punto objeto rci (xi, yi, ‐f) medidas en el SR (c)
del sensor formador de imágenes están relacionadas con las
coordenadas rmi (XI, YI, ZI) del SR (m) terreno mediante los siguientesz
sensor cz
IMU b
rbgrg
c
vectores:
ϕw
kθ
y
y
x
ZRmb
rmb
dRbc
rbC
rmgrm
i Vector de posición de un punto i en el SR (m).
x Z
X
b
rmi
rci
Punto i
rmc
rmc
rci
Vector de posición del sensor c en el SR (m).
Vector de posición de un punto i en el SR (c).
Siendo:
Sistema terreno m
SR (m): Sistema de Referencia Terreno.
SR (c): Sistema de Referencia del sensor imagen.
Siendo:
Y
g
SR (b): Sistema de Referencia de la IMU.
b V l CP d l l CM d l IMUrbc
rgc
Vector que une el CP del sensor y el CM de la IMU.
Vector que une el CP del sensor y la antena GNSS.Offsets y excéntricas obtenidas por técnicas demetrología o autocalibración en procesos de AT.
23

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Modelo matemático de orientación directa.Modelo matemático de orientación directa.
Modelo matemático de orientación directa.
Por tanto la relación entre el vector rc (x y f) medido en el SR
Georreferenciación directa
Por tanto, la relación entre el vector rci (xi, yi, ‐f) medido en el SR
imagen y los vectores rmi (XI, YI, ZI) y rmc (Xₒ, Yₒ, Zₒ) medidos en el SR
terreno, vendrá dada por el triángulo de la figura:
rmi= rmc + rci (1)
El vector imagen rci se relaciona con su vector homólogo en el
terreno mediante un factor de escala λ, matriz de rotación entre la
IMU y el sensor imagen dRb y otra matriz de rotación entre el SRIMU y el sensor imagen dRbc y otra matriz de rotación entre el SR
(c) y el SR (m) Rmb.
(2)cbmb
mm rdRRrr ( )
dRbc : Matriz de desalineamiento entre IMU y sensor.
Boresight matrix.
icbci rdRRrr
Rmb : Matriz de giros fotogramétricos (
24

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Modelo matemático de orientación directa.Modelo matemático de orientación directa.
Modelo matemático de orientación directa.Por tanto, el vector rmc indica la posición del centro de proyección del
l S ( )sensor en el SR (m).Y relacionando los dos triángulos que se muestran en la figura se obtendrála siguiente expresión.
rm = rmb + rb (3) Triángulo gmbr g r b + r g
Despejando rmb :
rmb = rmg ‐ rbg
(3)
(4)
Triángulo gmb
Además:
rmc= rmb + rbc
b g g
(5) Triángulo cbm
Sustituyendo (4) en (5) y componiéndolo con sus correspondientes matrices de giro, quedará:
Los vectores rb y rb deben ser referidos al SR (m) mediante la matriz de giro que relaciona el SR (b) y el SR (m).
bc
bg
mg
mc rrrr
(6)
Los vectores r g y r c deben ser referidos al SR (m) mediante la matriz de giro que relaciona el SR (b) y el SR (m).
25b
cmb
bg
mb
mg
mc rRrRrr

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Modelo matemático de orientación directa.Modelo matemático de orientación directa.
Modelo matemático de orientación directa.
bmb
bmb
mm rRrRrr (6)
Sacando factor común a Rmb :
(7)Triángulo gcb
)( bbmb
mm rrRrr
cbgbgc ( )
El triángulo gcb relaciona el SR (c), SR (b) y el SR (g). Y de dicha relación
(7))( gcbgc rrRrr
se obtendrá la expresión definitiva para rmc
(8)b
gc
mb
mg
mc rRrr )(
: Será el vector existente entre el Centro de Proyección de la cámara y la antena GNSS con respecto al SR (b).
bg
cr )(
Sustituyendo (8) en (2), se obtendrá la expresión definitiva de rmi
cbmmm rdRRrr (2)
26c
ibc
mbb
gc
mb
mg
mi rdRRrRrr )(
icbci rdRRrr (2)
Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Modelo matemático de orientación directa.Modelo matemático de orientación directa.
Modelo matemático de orientación directa.
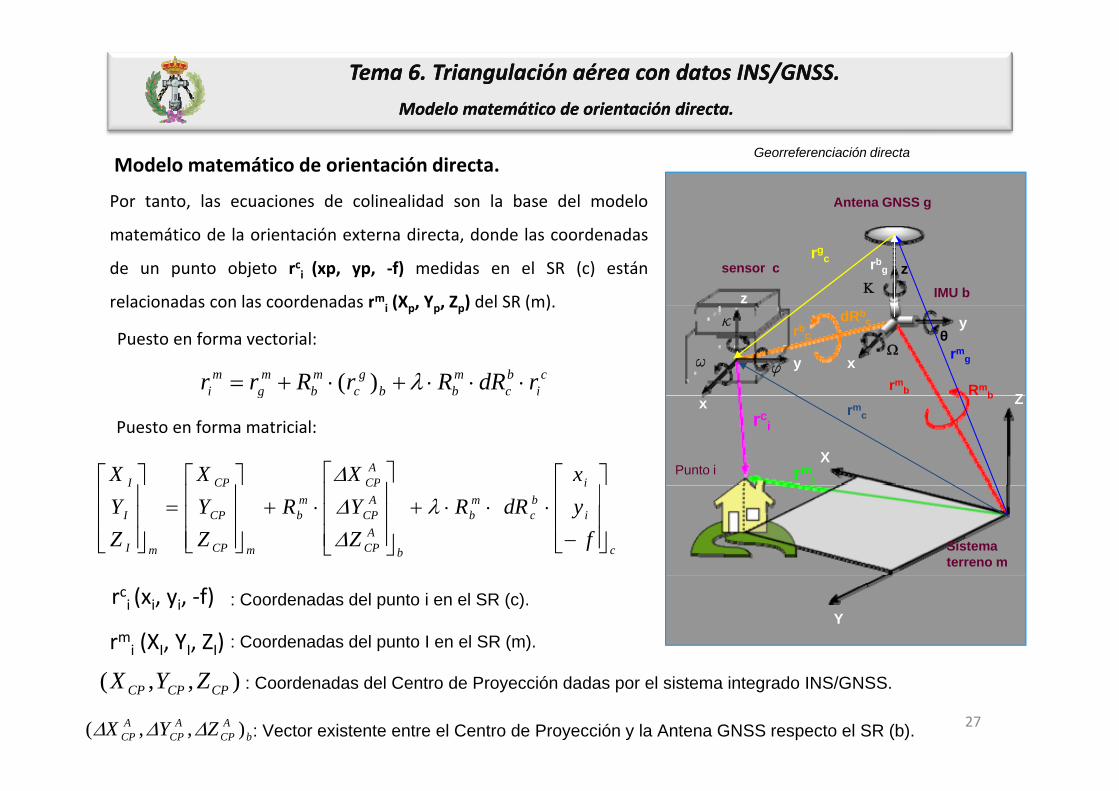
Por tanto, las ecuaciones de colinealidad son la base del modelo
Georreferenciación directa
Antena GNSS g
matemático de la orientación externa directa, donde las coordenadas
de un punto objeto rci (xp, yp, ‐f) medidas en el SR (c) están
relacionadas con las coordenadas rmi (X , Y , Z ) del SR (m).
zsensor c
z IMU b
rbg
rgc
relacionadas con las coordenadas r i (Xp, Yp, Zp) del SR (m).
ϕw
kθ
y
y
x
ZRmb
rmb
dRbc
rbC
rmg
Puesto en forma vectorial:
ci
bc
mbb
gc
mb
mg
mi rdRRrRrr )(
x Z
X
b
rmi
rci
Punto i
rmc
Puesto en forma matricial:
iA
CPCPI xXXX
g
Sistema terreno m
c
i
ibc
mb
b
ACP
ACP
CPmb
mCP
CP
CP
mI
I
I
fydRR
ZYR
ZY
ZY
Yrci (xi, yi, ‐f)
rmi (XI, YI, ZI)
: Coordenadas del punto i en el SR (c).
: Coordenadas del punto I en el SR (m).
: Coordenadas del Centro de Proyección dadas por el sistema integrado INS/GNSS.),,( CPCPCP ZYX
bACP
ACP
ACP ZYX ),,( : Vector existente entre el Centro de Proyección y la Antena GNSS respecto el SR (b). 27

Tema 6. Tema 6. Triangulación aérea con datos INS/GNSS. Triangulación aérea con datos INS/GNSS. Modelo Modelo matemático de orientación directa.matemático de orientación directa.
Identificación de vectores, offsets y excéntricas en el modelo matemático de Orientación Directa.
iA
CPCPI xXXX
Representación de un punto I del SR (m), siendo i
offsetsc
ibc
mb
b
ACP
ACP
mb
mCP
CP
mI
I
fydRR
ZYR
ZY
ZY
ep ese tac ó de u pu to de S ( ), s e dosu representación en el SR (c).
Calibración CalibraciónCalibración de la cámara
Calibración IMU
C lib ióCalibración Boresight
En este caso no hay Rabg matriz de rotación existente entre el SRtopográfico y SR imagen o rotación existente entre la posición dela cámara con respecto al eje de vuelo del avión, puesto que alcolocarse la IMU solidaria con la cámara, ambos experimentarán
28
colocarse la IMU solidaria con la cámara, ambos experimentaránel mismo giro que quedará registrado por el sistema INS/GNSS.
Tema 6. Tema 6. Triangulación aérea con datos INS/GNSS. Triangulación aérea con datos INS/GNSS. Modelo matemático Modelo matemático de orientación directa.de orientación directa.
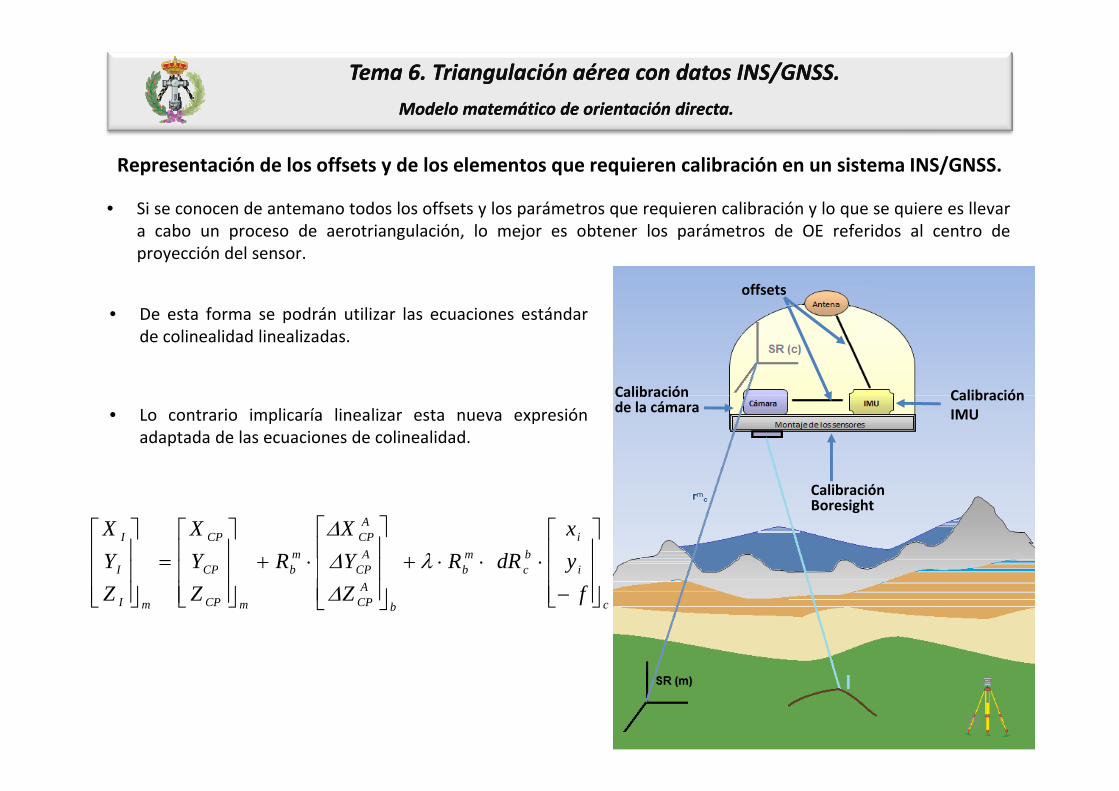
• Si se conocen de antemano todos los offsets y los parámetros que requieren calibración y lo que se quiere es llevar
Representación de los offsets y de los elementos que requieren calibración en un sistema INS/GNSS.
offsets
y p q q y q qa cabo un proceso de aerotriangulación, lo mejor es obtener los parámetros de OE referidos al centro deproyección del sensor.
Calibración Calibración
• De esta forma se podrán utilizar las ecuaciones estándarde colinealidad linealizadas.
Calibración de la cámara
Calibración IMU
C lib ió
• Lo contrario implicaría linealizar esta nueva expresiónadaptada de las ecuaciones de colinealidad.
Calibración Boresight
i
ibc
mb
ACP
ACP
mbCP
CP
I
I
yx
dRRYX
RYX
YX
cb
ACPmCPmI fZZZ
29

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Modelo Modelo matemático matemático para para aerotriangulaciónaerotriangulación con con parámetros parámetros variacionalesvariacionales..
• Expresión estándar de las ecuaciones de colinealidad linealizadas.
SeparandoVx = B14 + B15 + B16 ‐ B11 X0 ‐ B12 Y0 ‐ B13 Z0 + (Fx )0 pincógnitas de OE ycoordenadas terrenode los PCm
Vx = B11 X + B12 Y + B13 Z + (Fx )0
Vy = B24 + B25 + B26 ‐ B21 X0 ‐ B22 Y0 ‐ B23 Z0 + (Fy )0
Vy = B21 X + B22 Y + B23 Z + (Fy )0
A esta expresión, se le añaden dos más que son las ecuaciones de los parámetros variacionales, una para los centrosde proyección y otra más para los valores angularesde proyección y otra más para los valores angulares.
in
y
x
y
x
CP
CP
tbb
aa
YX
in
y
x
y
x
tvv
uu
i
z
y
z
y
CP
CP
baZ
0 i
z
y
z
y
vu
0
Tienen el mismo propósito que las ecuaciones anteriores, es decir eliminar errores sistemáticos de difícilp p qmodelización en el proceso de obtención de los parámetros de OE.
La expresión simplificada de la ecuación de colinealidad incluyendo parámetros variacionales quedaba de lasiguiente forma.g
30V = B1 X1 + B2 X2 + B3 X3 ‐L

Tema 6. Tema 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Modelo matemático para Modelo matemático para aerotriangulaciónaerotriangulación con parámetros con parámetros variacionalesvariacionales..
• Ecuaciones de observación para los parámetros de OE dados por el sistema INS/GNSS: Centros de Proyección.
XXv ' CPCP YYv ' CPCP ZZv '
Las ecuaciones de observación relacionan los valores reales con los calculados:
CPCPX XXv CPCPy YYv CPCPz ZZv
Además, se tienen las expresiones que relacionan los valores iniciales y los corregidos:
, ,
CPCPX XX 0 CPCPZ YY 0 CPCPZ ZZ 0
Relacionando ambas quedará:
, ,
Relacionando ambas, quedará:
XCPCP vXX ' XXX CPCP 0
YYY 0CPCPX XXXv '0
0Ecuaciones de los
YCPCP vYY ' YYY CPCP 0
ZCPCP vZZ ' ZZZ CPCP 0
,CPCPY YYYv '0
CPCPZ ZZZv '0 Centros de Proyección.
31

Tema 6. Tema 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Modelo matemático para Modelo matemático para aerotriangulaciónaerotriangulación con parámetros con parámetros variacionalesvariacionales..
• Ecuaciones de observación para los parámetros de OE dados por el sistema INS/GNSS: valores angulares.
' v ' v ' v
Las ecuaciones de observación relacionan los valores reales con los calculados:
v v v
Además, se tienen las expresiones que relacionan los valores iniciales y los corregidos:
, ,
0 0 0
Relacionando ambas quedará:
, ,
Relacionando ambas, quedará:
v ' 0
' 0
'0 v0 Ecuaciones de los
v ' 0
v ' 0
, '0 v'0 kkkvk
Ecuaciones de losvalores angulares.
32
Tema 6. Tema 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Modelo matemático para Modelo matemático para aerotriangulaciónaerotriangulación con parámetros con parámetros variacionalesvariacionales..
Ecuaciones de observación de los PCM planteadas por las coordenadas terreno de los PCM.
• Las ecuaciones de observación relacionan los valores reales con los calculados:
'XXvX 'YYvy 'ZZvz
• Las expresiones que relacionan los valores iniciales y los corregidos:Las expresiones que relacionan los valores iniciales y los corregidos:
0XXX 0YYZ 0ZZZ
• Relacionando ambas expresiones:
XX ' XXX 0 '0 XXXv XvXX ' XXX 0
YvYY ' YYY 0
ZvZZ ' ZZZ 0
,XXXvX '0 YYYvY '0 ZZZvZ
Ecuaciones de los
PCM.
33

Tema Tema 6. 6. Triangulación aérea con datos INS/GNSS.Triangulación aérea con datos INS/GNSS.Precisión de los parámetros de OE en una Precisión de los parámetros de OE en una aerotriangulaciónaerotriangulación
• Precisión de los puntos de Control Mayor en una aerotriangulación.
• La precisión dependerá de la escala del bloque y de la varianza de referencia a priori que se considere σₒ.
• Precisión de los CP en una AT asistida con datos INS/GNSS.
• La precisión en las coordenadas de los centros de proyección que se debe introducir en un proceso de AT
dependerá de la escala del bloque y de la varianza de referencia a priori que consideremos σₒ. En este caso
dicha precisión será la mitad del producto del denominador de la escala y la varianza de referencia a priori.
• Precisión de los valores angulares en una AT asistida con datos INS/GNSS.Precisión de los valores angulares en una AT asistida con datos INS/GNSS.
• La precisión de los valores angulares que se debe introducir en un proceso de aerotriangulación debe ser la
correspondiente a la precisión de los giróscopos que monta la IMU del sistema INS/GNSS. Viene indicado
por el fabricante de los equipos.
34

Tema 6. Triangulación aérea con datos INS/GNSS.Tema 6. Triangulación aérea con datos INS/GNSS.Ventajas y desventajas de la integración GNSS/INS
Las ventajas de la integración son diversas e importantes ya que ambos sistemas tienen
defectos si se usan independientemente pero se pueden disminuir al integrarlos.
La unidad de medidas inerciales es un sistema autónomo que registra con una frecuencia
de 200 Hz los ángulos y velocidades, lo que proporciona posiciones de gran exactitud
en cortos periodos de tiempo.Sin embargo también presentan desviaciones sustanciales a lo largo del tiempo.
Por lo tanto, con las medidas inerciales no se pueden determinar unas posiciones precisas.
Por otro lado, las observaciones DGNSS son más estables y uniformes en el tiempo, aunque
se registren a frecuencias en este tipo de levantamiento entre 0.1 y 1 Hz. En el DGNSS los
saltos de ciclos son los que producen mayores errores.
La clave del sistema integrado es conseguir la unión de un sistema con muy buena precisión
a corto plazo y mala estabilidad a largo plazo (INS) y un sistema con una precisión menor
pero con alta estabilidad a largo plazo (GNSS).

Tema 6. Triangulación aérea con datos INS/GNSS.Tema 6. Triangulación aérea con datos INS/GNSS.Ventajas y desventajas de la integración GNSS/INS
Ventajas
‐ Posiciones y velocidades de gran exactitud
‐ Calibración del Sistema InercialCalibración del Sistema Inercial
‐Mejora de la adquisición y readquisición de observaciones GNSS
‐ Integridad del sistema
‐Mejora de la resistencia frente a las interferencias
‐Mejor seguimiento de los satélites
‐ Uso del GPS durante periodos de pobre cobertura de satélites
‐ Limitación de la desviación a largo plazo

Tema 6. Triangulación aérea con datos INS/GNSS.Tema 6. Triangulación aérea con datos INS/GNSS.Ventajas y desventajas de la integración GNSS/INS
Desventajas
En la orientación directa los parámetros obtenidos no tienen redundancia por
lo que desaparece la posibilidad de evaluar la fiabilidad de los parámetros de
orientación y de los puntos del terreno.y p
Desaparece la posibilidad de aplicar las técnicas de Autocalibración en el
ajuste del bloque y de esta forma poder corregir sistematismos en los
fotogramas, o evaluar la calibración de la cámara métrica para refinar la
información de su orientación internainformación de su orientación interna.
Tema Tema 6. 6. Triangulación aérea con datos Triangulación aérea con datos INS/GNSSINS/GNSSEvolución del diseño del apoyo Evolución del diseño del apoyo de de campocampo
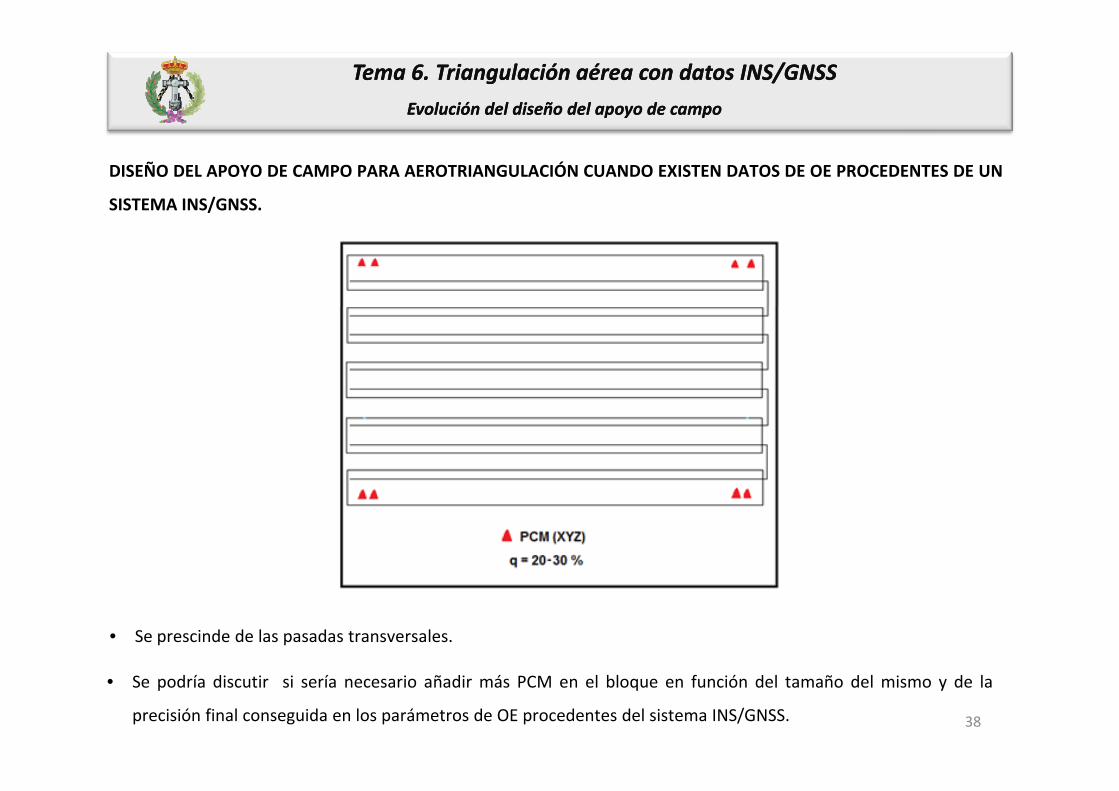
DISEÑO DEL APOYO DE CAMPO PARA AEROTRIANGULACIÓN CUANDO EXISTEN DATOS DE OE PROCEDENTES DE UN
SISTEMA INS/GNSS.
• Se prescinde de las pasadas transversales.
• Se podría discutir si sería necesario añadir más PCM en el bloque en función del tamaño del mismo y de la
precisión final conseguida en los parámetros de OE procedentes del sistema INS/GNSS. 38