escuela de verano de...
TRANSCRIPT

Escuela de Verano de Potencia
Morelia, Mich., 24 de Agosto de 2011
Control Estático de Estabilidad Transitoria
A. Pizano Martínez
Departamento de Ingeniería Eléctrica
Universidad de Guanajuato

Contenido
INTRODUCCIÓNFLUJOS DE POTENCIA ÓPTIMOS (FPO)
Modelo explícito de FPOSolución del modelo OPF
ESTABILIDAD TRANSITORIA (ET)Modelo explícito de ETModelo clásico para el análisis de ETAnálisis en el domino del tiempoMétodo SIME

CONTROL ESTABILIDAD (CET)Modelo heurísticoModelo de Sensibilidades
CASOS DE ESTUDIOSistema de 3 generadores-9 nodosModelo reducido del sistema Mexicano
CONCLUSIONES
Contenido

INTRODUCCIÓNINTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
Los sistemas eléctricos modernos son sistemas grandes y complejoscuya operación debe ser segura y económica. Sin embargo, conciliar laseguridad y economía no es una tarea sencilla, ya que se contraponenentre si. Es decir, la operación económica tiende a degradar la seguridaddel sistema, mientras que la seguridad tiende a afectar la operacióneconómica.
Una componente fundamental de la seguridad de un sistema eléctrico esla estabilidad transitoria. Con el fin de incluir esta componente en laoperación económica de sistema eléctricos, se formula y resuelve unproblema de optimización no lineal restringido, denominado análisis decontrol estático de estabilidad transitoria.
El análisis proporciona un punto económico de operación de estadoestacionario en el que se garantiza la estabilidad transitoria del sistema.

INTRODUCCIÓNINTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
FLUJOS DE POTENCIA ÓPTIMOS (OPF)INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
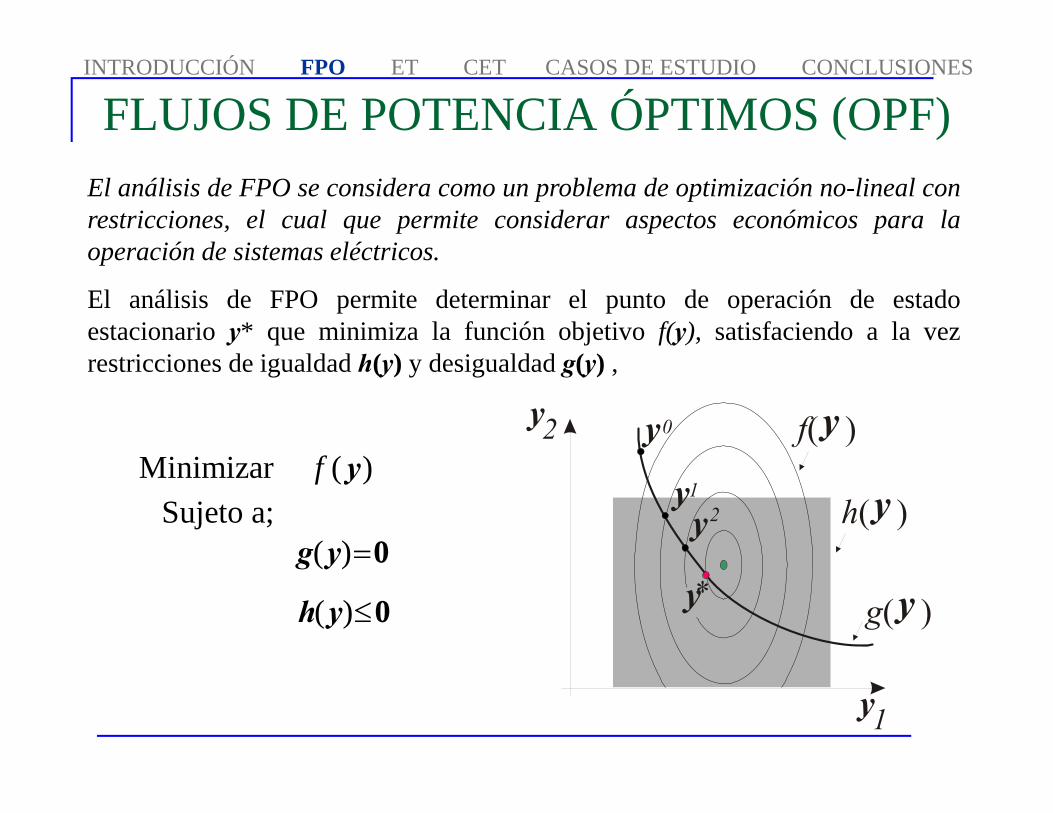
Minimizar ( )f ySujeto a;
( )≤0h y
( )=0 g y
El análisis de FPO se considera como un problema de optimización no-lineal conrestricciones, el cual que permite considerar aspectos económicos para laoperación de sistemas eléctricos.
El análisis de FPO permite determinar el punto de operación de estadoestacionario y* que minimiza la función objetivo f(y), satisfaciendo a la vezrestricciones de igualdad h(y) y desigualdad g(y) ,
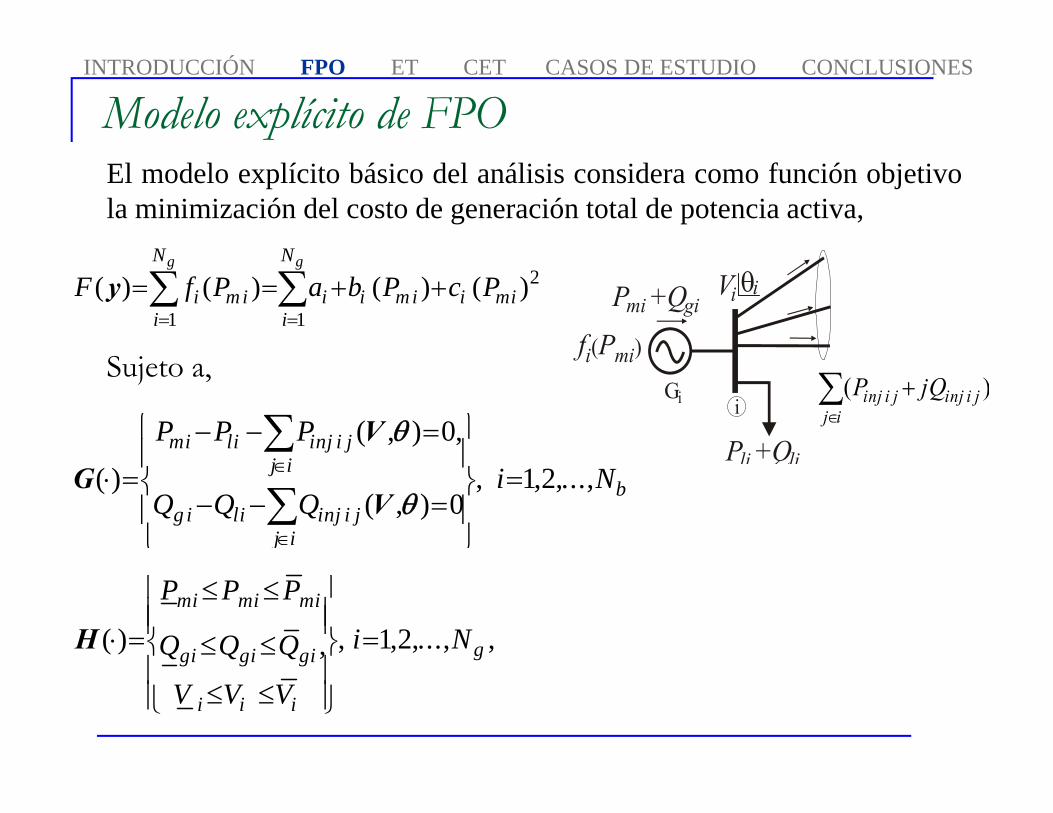
Modelo explícito de FPOEl modelo explícito básico del análisis considera como función objetivola minimización del costo de generación total de potencia activa,
Sujeto a,
2
1 1( ) ( ) ( ) ( )
g gN N
i m i i i m i i mii i
F f P a b P c P= =
= = + +∑ ∑y
( , ) 0,( ) , 1,2,...,
( , ) 0
mi li inj i jj i
bg i li inj i j
j i
P P Pi N
Q Q Q∈
∈
⎧ ⎫− − =⎪ ⎪
⋅ = =⎨ ⎬− − =⎪ ⎪
⎩ ⎭
∑
∑
VG
V
θ
θ
( ) , 1,2,..., ,,
mi mi mi
ggi gi gi
i i i
P P P
i NQ Q Q
V V V
⎧ ⎫≤ ≤⎪ ⎪⎪ ⎪⋅ = =⎨ ⎬≤ ≤⎪ ⎪
≤ ≤⎪ ⎪⎩ ⎭
H
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

Solución del modelo de FPOPara determinar el punto óptimo de operación y*, se requiere de laformulación de la función Lagrangiana,
( ) ( )( ) ( ) ( , )t tI Ef= + +y,λ y λG y λ H yL λ
El punto de operación de estado estacionario óptimo y* se obtiene alaplicar y resolver las condiciones de optimalizad de KKT,
*
*m⎡ ⎤
⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
Py V
θ
( ) 0sys∇ =* *y y ,L λ
( ) 0sys∇ =* *y ,Lλ λ* 0E≤λ
El punto y* no garantiza la estabilidad del sistema.
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
Pmi
Pmk

INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
ESTABILIDAD TRANSITORIA (ET)La estabilidad transitoria se define como la habilidad del sistemapar mantener la operación síncrona ante la ocurrencia de undisturbio severo. Esta característica debe ser evaluada paradeterminar la operación segura del sistema.
Para el análisis de estabilidad transitoria el sistema eléctrico esmodelado por medio de un sistema diferencial-algebraico,
( )( ) ( ), ( ), ,x t F x t y t u t T= ∀ ∈
( )( ), ( ), 0,G x t y t u t T= ∀ ∈
0 00 0( ) , ( )t tx t x y t y= =
donde T = (t0 , tcl ] ∪ (tcl , tend ].

La estabilidad del sistema se puede investigar a partir de laevolución en el tiempo de las variables que representan ladinámica de los generadores, lo cual se obtiene de la solución delmodelo diferencial-algebraico.
La solución del modelo se puede obtener por medio de,
( ) ( ) ( )( ), ( ), ( ), ( ), ( ), ( ), 0,t hx t y t u x t y t u x t t y t t u t Tϕ ϕ ϕ= − −Δ −Δ = ∈
( ) ( )( ), ( ), ( ) ( ), ( ),2ttx t y t u x t F x t y t uϕ Δ
= −
( ) ( )( ), ( ), ( ) ( ), ( ),2htx t t y t t u x t t F x t t y t t uϕ Δ
−Δ −Δ = −Δ + −Δ −Δ
( )ϕ ⋅donde representa un conjunto de ecuaciones de discretizadas y,
ESTABILIDAD TRANSITORIA (ET)INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

Modelo clásico para estudios de ET
,, ,, 1,2,..,2 ( , , ) ( )
tii s
t t t t gi imi Gi i i i i i s
s
dt Tdti nH d P P V D
dt
δ ω ω
ω θ δ ω ωω
⎧ ⎫= −⎪ ⎪ ∈⎪ ⎪⎨ ⎬⎛ ⎞ =⎪ ⎪= − − −⎜ ⎟⎪ ⎪⎝ ⎠⎩ ⎭
0,, 1,2,...,0
t t tei lG i inj i j
j it t t
bei lB i inj i jj i
P P Pt Ti NQ Q Q
∈
∈
⎧ ⎫− − =⎪ ⎪ ∈⎨ ⎬ =− − =⎪ ⎪⎩ ⎭
∑
∑
0
0
0
0
0
0 0( ) ; ( )
tt
tt
t
y t x t
⎡ ⎤⎡ ⎤⎢ ⎥
= = ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ ⎣ ⎦
⎣ ⎦
V
E
δθ
ω
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

Análisis en el dominio del tiempo( )
0
0
,2
, ,0 ( )( ) 1,2,..,02 ( )
t t t t t ti i i i
t t ttmi ei i i
t t t gi i t t t t ti mi ei i i
t
t TP P D i nt
M P P D
δ δ ω ω
ωϕω ω
ω
−Δ −Δ
−Δ
−Δ −Δ
Δ⎧ ⎫− − Δ +Δ⎪ ⎪⎪ ⎪ ∈⎪ ⎪⎡ ⎤ ⎛ ⎞⎡ ⎤− − Δ +⋅ = =⎨ ⎬⎢ ⎥ ⎢ ⎥⎜ ⎟ =⎣ ⎦Δ⎣ ⎦ ⎪ ⎪− − ⎜ ⎟⎪ ⎪⎡ ⎤⎜ ⎟− − Δ⎪ ⎪⎢ ⎥⎣ ⎦⎝ ⎠⎩ ⎭
0( ) , 1,2,..,0
t t tei lGi inj i j
j itt t t
bei lBi inj i jj i
P P Pt TG i nQ Q Q
∈
∈
⎧ ⎫− −⎪ ⎪ ∈⎡ ⎤⋅ = =⎨ ⎬⎢ ⎥ =− −⎣ ⎦ ⎪ ⎪⎩ ⎭
∑
∑
0
0
0
0
0
0 0( ) ; ( )
tt
tt
t
y t x t
⎡ ⎤⎡ ⎤⎢ ⎥
= = ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ ⎣ ⎦
⎣ ⎦
V
E
δθ
ω
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

Análisis en el dominio del tiempo
El en el dominio del tiempo proporciona una medida cualitativa de laestabilidad.
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
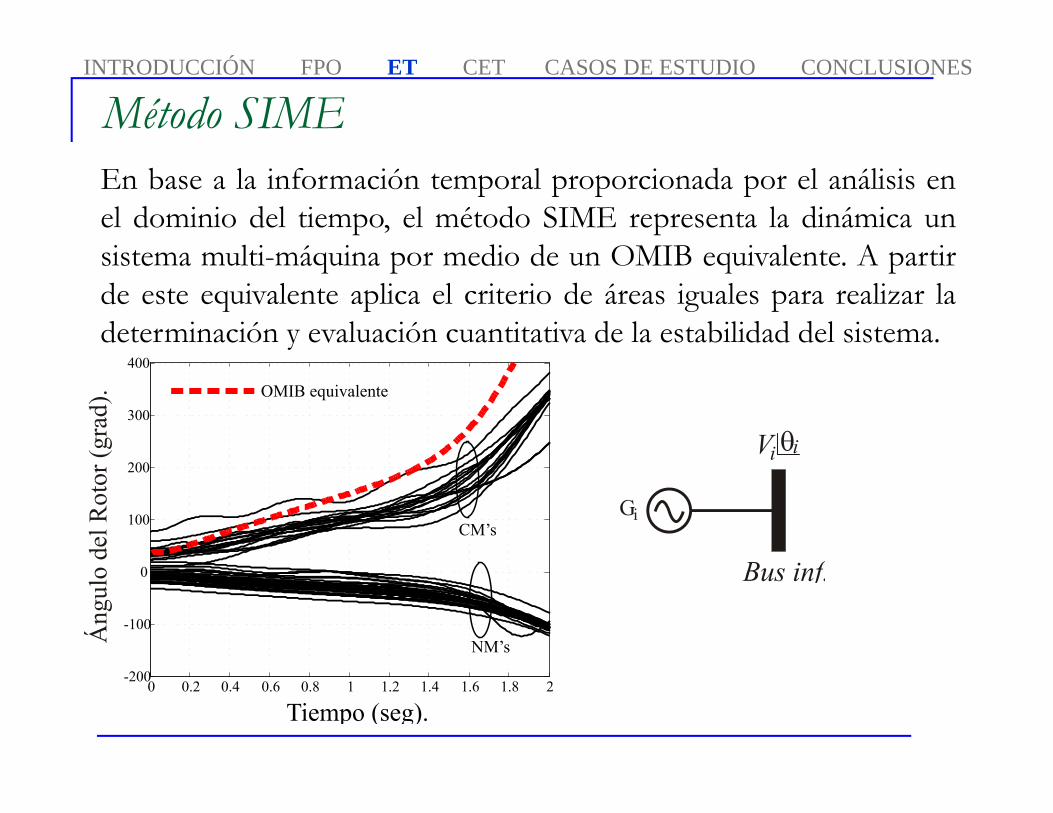
En base a la información temporal proporcionada por el análisis enel dominio del tiempo, el método SIME representa la dinámica unsistema multi-máquina por medio de un OMIB equivalente. A partirde este equivalente aplica el criterio de áreas iguales para realizar ladeterminación y evaluación cuantitativa de la estabilidad del sistema.
Método SIMEINTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

Método SIME
( ) ( ) ( )CM NMt t tδ δ δ= −
( ) ( ) ( )CM NMt t tω ω ω= −
1 1( ) ( ) ( )e CM ek NM ejk CM j NM
P t M M P t M P t− −
∈ ∈
⎡ ⎤= −⎢ ⎥
⎢ ⎥⎣ ⎦∑ ∑
1 1( ) ( ) ( )m CM mk NM mjk CM j NM
P t M M P t M P t− −
∈ ∈
⎡ ⎤= −⎢ ⎥
⎢ ⎥⎣ ⎦∑ ∑
El sistema OMIB equivalente es representado por,
1( ) ( ) ( )CM CM k kk CM
t M t Mδ δ−
∈= ∑
donde,
C N
C N
M MMM M
=+1( ) ( )CM CM k k
k CMt M t Mω ω−
∈
= ∑
CM kk CM
M M∈
= ∑
NM kk NM
M M∈
= ∑
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

Método SIMELa medición y determinación de la estabilidad se realiza en base alcriterio de aéreas iguales,
( ) ( ) ( ) 0a u m u e uP t P t P t= − =
( ) 0a uP t >
( )2( ) 2u uM tη ω= −
( ) ( ) ( ) 0a r m r e rP t P t P t= − <
( ) 0rtω =
( )( ) ( ) ( ) 2st a r u rP t t tη δ δ= −
Caso inestable Caso estable
Margen inestable (negativo) Margen estable (positivo)
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

Método SIMEAdicionalmente a la evaluación determinación cuantitativa de laestabilidad, el método SIME pude utilizarse para determinar loslímites de estabilidad del sistema multi-máquina.
22m k mP P
Sη
= −
2 1
2 1m m m
SP P Pη η ηΔ −
= =Δ −
22cl k clt t
Sη
= −
2 1
2 1cl cl cl
St t tη η ηΔ −
= =Δ −
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

CONTROL DE ESTABILIDAD (CET)Consiste en determinar un punto de estado estacionario quegarantice la estabilidad transitoria del sistema ante la ocurrencia deuna contingencia.
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

min ( )f y
( )0 0 , 0t tG =y u
( ) 0, ,( ), ( ), 0 [ ) ( ]cl cl endx t y t u t t t t tϕ = ∈ ∪( ) 0, ,( ), ( ), 0, [ ) ( ]cl cl endG t t t t t t t= ∈ ∪x y u
0, ,max
[ ) ( ]1( ) ( ) ( )1,..,
cl cl endi i i
gi
t t t t tH t M
i nMδ δ δ
∈ ∪⎧ ⎫⎪ ⎪= − ≤⎨ ⎬ =⎪ ⎪⎩ ⎭∑∑
i
( )0 0 0t tI =x
( )0 0 , 0t tH ≤y u
≤ ≤u u u
•Restricciones de estado estacionario
Sujeto a:
•Restricciones dinámicas
•Restricción de estabilidad
FPO
ET
Modelo HeurísticoINTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
ET
maxδ
maxδ
endt0t

Modelo de sensibilidadesINTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

Modelo de sensibilidades
0
2 10
( 2) 0 ( 1) 0
( )( ) ( )
k kk
t k k
S tt t
η ηηδ δ δ
− −
− −
−Δ= =Δ −
( )( 1) ( 1) 00 ( 1) 0
0
( )( ) ( )
( )k k
sh k kk
tt t
S tη δ
δ δ − −−= −
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
0 0 0 0 0( ( ), ( )) ( ( ) ( )) 0,sh n UT UT sh n hH t t abs t t T t tδ δ δ δ= − − ≤ =
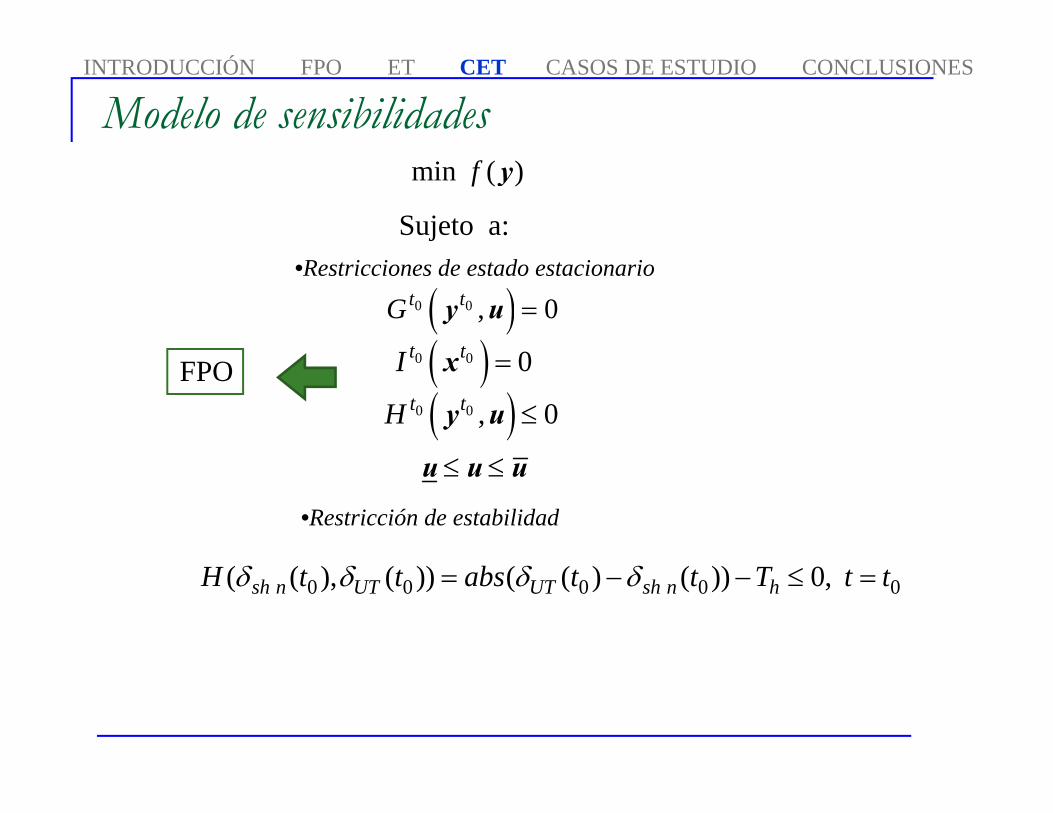
min ( )f y
( )0 0 , 0t tG =y u
( )0 0 0t tI =x
( )0 0 , 0t tH ≤y u
≤ ≤u u u
•Restricciones de estado estacionario
Sujeto a:
•Restricción de estabilidad
FPO
Modelo de sensibilidades
0 0 0 0 0( ( ), ( )) ( ( ) ( )) 0,sh n UT UT sh n hH t t abs t t T t tδ δ δ δ= − − ≤ =
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

CASO DE ESTUDIOINTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
A continuación se considera en un ejemplo numérico un modeloreducido del sistema Mexicano de 46 generadores-190 nodos.
Para realizar el control de estabilidad se utiliza el modelo desensibilidades.

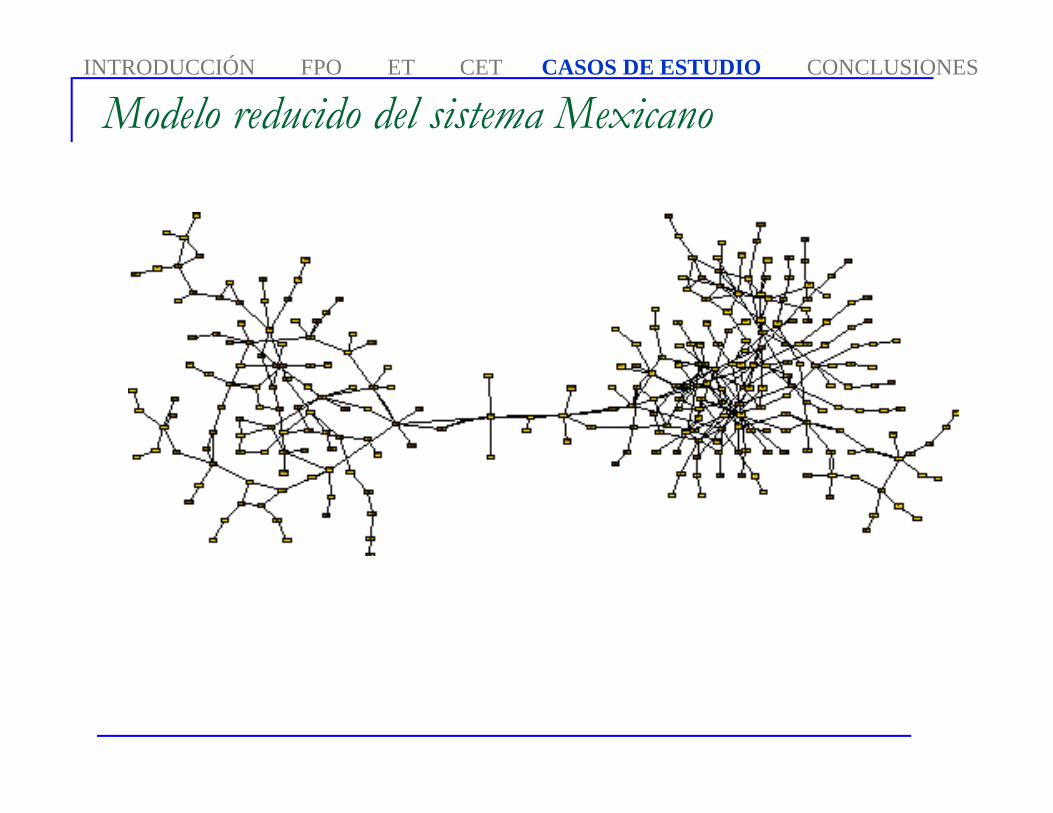
Modelo reducido del sistema Mexicano
Este sistema es representado por modelo reducido de 46 generadores, 190 nodos,265 elementos de transmisión, 91 cargas y 26 compensadores en derivación.
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
Modelo reducido del sistema MexicanoINTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
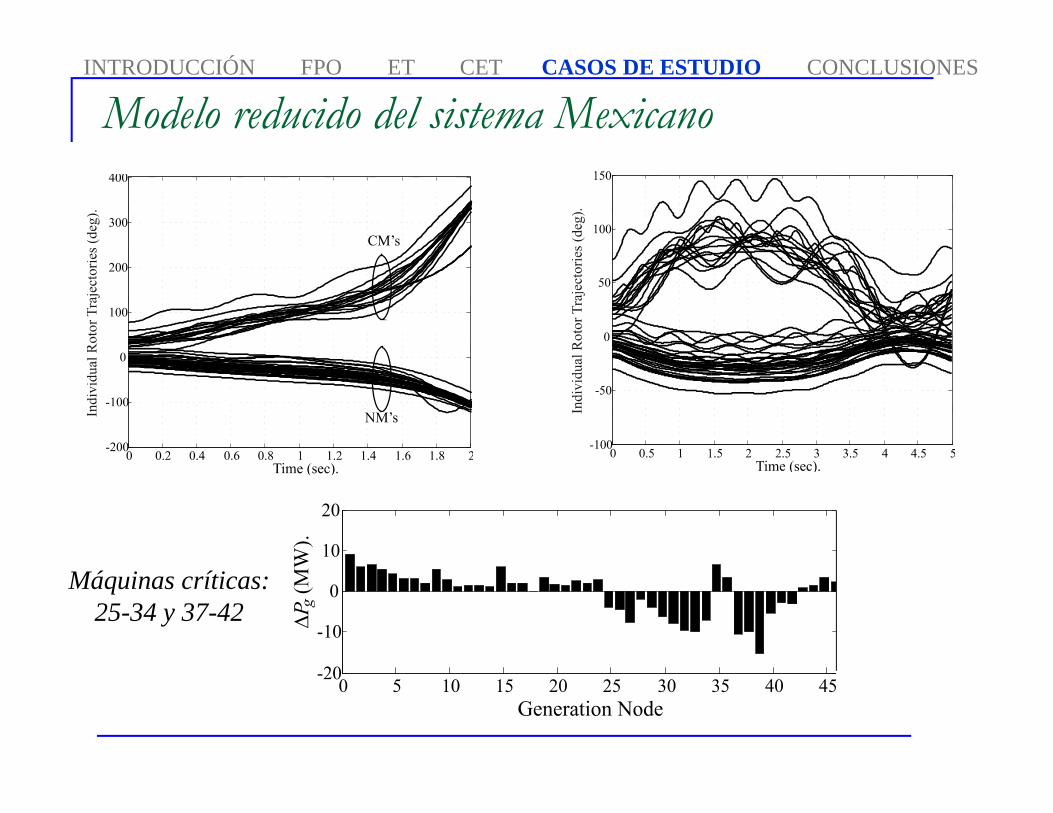
Modelo reducido del sistema Mexicano
Máquinas críticas: 25-34 y 37-42
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES

Modelo reducido del sistema Mexicano
El tiempo de computo requerido para determinar IP3 fue de 40seg.
INTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
CONCLUSIONESINTRODUCCIÓN FPO ET CET CASOS DE ESTUDIO CONCLUSIONES
El modelo de sensibilidades mejora la problemática común de lastécnicas para control estático de estabilidad transitoria; la baja eficienciacomputacional y la determinación heurística de la estabilidad.
La metodología presentada se basa en el método SIME, lo que permiteevitar introducir al modelo de optimización una gran cantidad derestricciones.
Es necesario realizar un esquema para análisis de múltiplescontingencias.
GRACIAS