electrónica inteligente con interfaz digital para sensores
TRANSCRIPT

20276000T92Z003K000
V1.00/ES/00726133/2019-10-09
JUMO digiLine CR/CiElectrónica inteligente con interfaz digital para
sensores de conductividad de JUMO
Descripción de interfaz Modbus

Contenido
Contenido1 Indicaciones de seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1 Signos de advertencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51.2 Signos de indicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
2 Descripción de protocolo Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.1 Principio de maestro-esclavo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72.2 Medios de transmisión para Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82.3 Construcción de un telegrama Modbus RTU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82.4 Códigos de función . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82.4.1 Lectura de n palabras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .92.4.2 Escritura de una palabra. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .102.4.3 Escritura de n palabras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .112.5 Tipos de datos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .112.6 Ejemplos para la transmisión de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .132.6.1 Valores integros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .132.6.2 Valores flotante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .132.6.3 Cadenas de caracteres (textos) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .152.7 Suma de comprobación (CRC16). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .162.8 Avisos de error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .172.8.1 Códigos Modbus de error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .172.8.2 Avisos de error con valores inválidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
3 Interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.1 Ocupación de interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .193.1.1 Resistencias de terminación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
4 Configuración de interfaces. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5 Modbus por interfaz de serie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235.1 Funcionamiento Modbus-esclavo por interfaz de serie RS485 . . . . . . . . . . . . . . . . . . . . . .23
6 Tablas de dirección Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256.1 Placa de modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .256.2 Info puntos de medición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .266.3 Configuración de Interfaz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .266.4 Datos de calibrado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .276.4.1 Apunte en libro bitácora de calibrado 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .276.4.2 Apunte en libro bitácora de calibrado 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .286.4.3 Apunte en libro bitácora de calibrado 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .306.4.4 Apunte en libro bitácora de calibrado 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .316.4.5 Apunte en libro bitácora de calibrado 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .326.4.6 Apunte en libro bitácora de calibrado 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .346.4.7 Apunte en libro bitácora de calibrado 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35

Contenido
6.4.8 Apunte en libro bitácora de calibrado 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .366.4.9 Apunte en libro bitácora de calibrado 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .386.4.10 Apunte en libro bitácora de calibrado 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .396.4.11 Constantes relativas de célula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .406.5 Configuración entrada conductividad CR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .416.6 Configuración entrada conductividad Ci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .436.7 Configuración entrada de temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .456.8 Configuración del temporizador de calibrado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .456.9 Configuración del estrés desensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .456.10 Configuración de monitorización de sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .456.11 Configuración Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .466.12 Valores de proceso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .486.12.1 Entradas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .486.12.2 Alarma de calibrado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .496.12.3 estrés de sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .496.12.4 Monitoreo de sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .496.12.5 Fecha y hora del sello horario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .506.12.6 Resumen de importantes valores de proceso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
1 Indicaciones de seguridad
1 Indicaciones de seguridad
1.1 Signos de advertenciaPELIGRO!Este símbolo indica que se puede provocar daño personal por descarga eléctrica si no se toman lasmedidas de seguridad necesarias.
ADVERTENCIA!Este símbolo, en combinación con la palabra de advertencia, indica que se puede provocar daño per-sonal si no se toman las medidas de seguridad necesarias.
ATENCIÓN!Este signo en combinación con la palabra de advertencia indica que puede ocurrir un daño material ouna pérdida de datos sino se observan las medidas de seguridad.
ATENCIÓN!Este símbolo indica que se pueden provocar daños en los componentes por descargas electrostáticas(ESD = Electro Static Discharge) si no se toman las medidas de seguridad necesarias.En caso de devolver unidades enchufables, módulos o componentes, utilice únicamente embalajesESD previstos para este fin.
1.2 Signos de indicación
¡NOTA!Este signo indica una información importante sobre el producto o su manipulación o un beneficio adicio-nal.
¡LEER DOCUMENTACIÓN!Este signo sobre el instrumento indica que se debe tener en cuenta la documentación adjunta. Esto es necesario para reconocer los diferentes peligros potenciales y tomar medidas para evitarlos.
¡REFERENCIA!Este símbolo indica que hay más información disponible en otros apartados, capítulos o manuales.
¡INFORMACIÓN ADICIONAL!Este signo se utiliza en las tablas e indica informaciones adicionales a continuación de la tabla.¡ELIMINACIÓN DE RESIDUOS!Una vez finalizado el ciclo de vida ni el instrumento o en su caso las baterías se deben tirar a la basura. Le rogamos que realice la eliminación de la manera adecuada y respetando el medio ambiente.
5

1 Indicaciones de seguridad
6
2 Descripción de protocolo Modbus
2 Descripción de protocolo Modbus
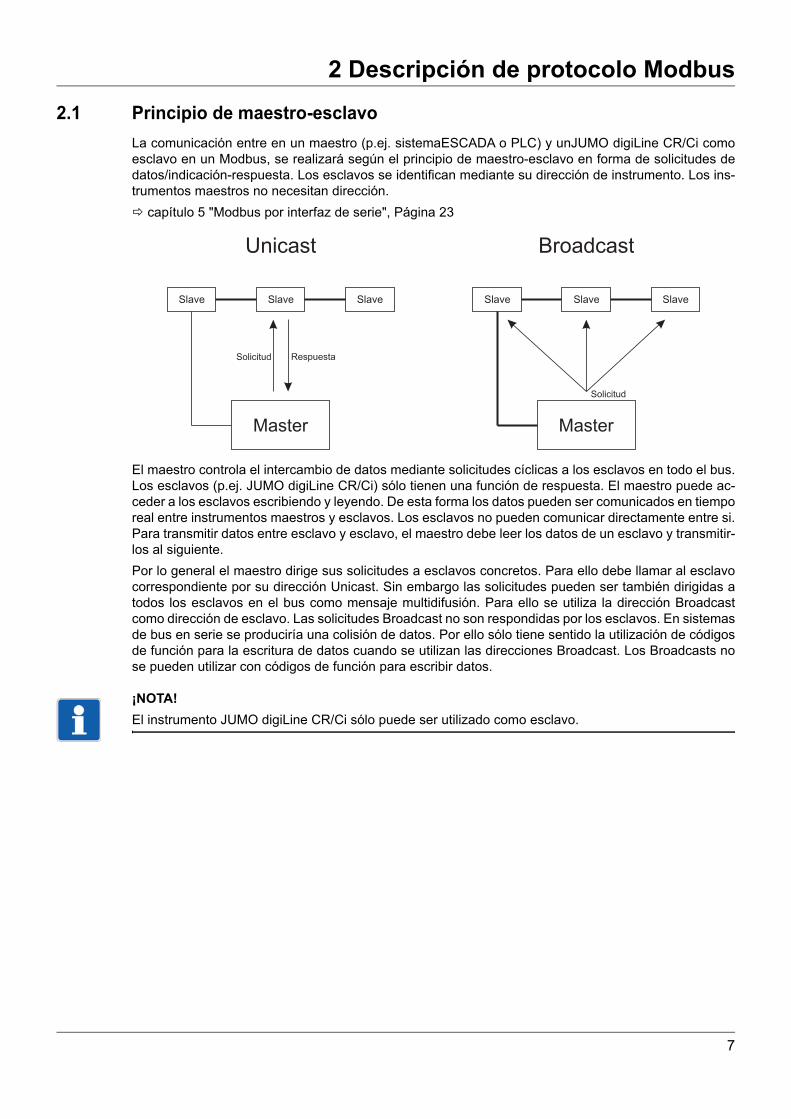
2.1 Principio de maestro-esclavoLa comunicación entre en un maestro (p.ej. sistemaESCADA o PLC) y unJUMO digiLine CR/Ci comoesclavo en un Modbus, se realizará según el principio de maestro-esclavo en forma de solicitudes dedatos/indicación-respuesta. Los esclavos se identifican mediante su dirección de instrumento. Los ins-trumentos maestros no necesitan dirección. capítulo 5 "Modbus por interfaz de serie", Página 23
El maestro controla el intercambio de datos mediante solicitudes cíclicas a los esclavos en todo el bus.Los esclavos (p.ej. JUMO digiLine CR/Ci) sólo tienen una función de respuesta. El maestro puede ac-ceder a los esclavos escribiendo y leyendo. De esta forma los datos pueden ser comunicados en tiemporeal entre instrumentos maestros y esclavos. Los esclavos no pueden comunicar directamente entre si.Para transmitir datos entre esclavo y esclavo, el maestro debe leer los datos de un esclavo y transmitir-los al siguiente.Por lo general el maestro dirige sus solicitudes a esclavos concretos. Para ello debe llamar al esclavocorrespondiente por su dirección Unicast. Sin embargo las solicitudes pueden ser también dirigidas atodos los esclavos en el bus como mensaje multidifusión. Para ello se utiliza la dirección Broadcastcomo dirección de esclavo. Las solicitudes Broadcast no son respondidas por los esclavos. En sistemasde bus en serie se produciría una colisión de datos. Por ello sólo tiene sentido la utilización de códigosde función para la escritura de datos cuando se utilizan las direcciones Broadcast. Los Broadcasts nose pueden utilizar con códigos de función para escribir datos.
¡NOTA!El instrumento JUMO digiLine CR/Ci sólo puede ser utilizado como esclavo.
Master
SlaveSlave Slave
Solicitud Respuesta
Master
SlaveSlave Slave
Solicitud
Unicast Broadcast
7
2 Descripción de protocolo Modbus
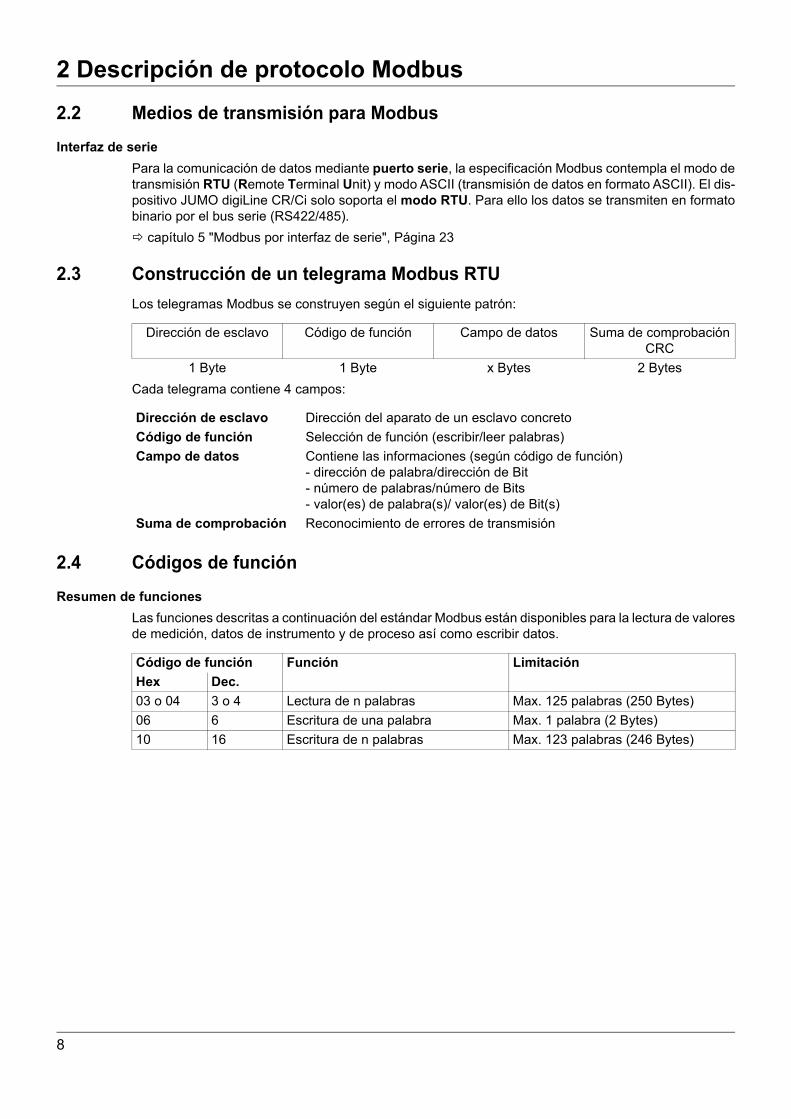
2.2 Medios de transmisión para ModbusInterfaz de seriePara la comunicación de datos mediante puerto serie, la especificación Modbus contempla el modo detransmisión RTU (Remote Terminal Unit) y modo ASCII (transmisión de datos en formato ASCII). El dis-positivo JUMO digiLine CR/Ci solo soporta el modo RTU. Para ello los datos se transmiten en formatobinario por el bus serie (RS422/485). capítulo 5 "Modbus por interfaz de serie", Página 23
2.3 Construcción de un telegrama Modbus RTULos telegramas Modbus se construyen según el siguiente patrón:
Cada telegrama contiene 4 campos:
2.4 Códigos de funciónResumen de funciones
Las funciones descritas a continuación del estándar Modbus están disponibles para la lectura de valoresde medición, datos de instrumento y de proceso así como escribir datos.
Dirección de esclavo Código de función Campo de datos Suma de comprobaciónCRC
1 Byte 1 Byte x Bytes 2 Bytes
Dirección de esclavo Dirección del aparato de un esclavo concretoCódigo de función Selección de función (escribir/leer palabras)Campo de datos Contiene las informaciones (según código de función)
- dirección de palabra/dirección de Bit- número de palabras/número de Bits- valor(es) de palabra(s)/ valor(es) de Bit(s)
Suma de comprobación Reconocimiento de errores de transmisión
Código de función Función LimitaciónHex Dec.03 o 04 3 o 4 Lectura de n palabras Max. 125 palabras (250 Bytes)06 6 Escritura de una palabra Max. 1 palabra (2 Bytes)10 16 Escritura de n palabras Max. 123 palabras (246 Bytes)
8

2 Descripción de protocolo Modbus
2.4.1 Lectura de n palabrasCon ayuda de esta función se pueden leer n palabras desde una dirección concreta.
Solicitud de datos
Respuesta
EjemploLectura del nombre de instrumento. En este ejemplo se trata del nombre del instrumento „dl CR“. Dadoque el nombre del instrumento tiene una longitud de hasta 10 signos (incluido el signo CERO como iden-tificador final) y se guardan 2 signos ASCII del nombre de instrumento por palabra, es aquí necesario,que se lean 5 palabras, esto son 10 Bytes. Estas y otras direcciones Modbus se pueden consultar encapítulo 6 "Tablas de dirección Modbus", Página 25.
Dirección de escla-vo
Función 0x03 o 0x04
Direcciónprimera palabra
Número de pala-bras x
Suma de compro-bación CRC
1 Byte 1 Byte 2 Bytes 2 Bytes 2 Bytes
Dirección de escla-vo
Función 0x03 o 0x04
Númerode Bytes leídos
Valor(es) de pala-bra(s)
Suma de compro-bación CRC
1 Byte 1 Byte 1 Byte 2 x Bytes 2 Bytes
Código Hex de la solicitud de datos:01 03 00 00 00 05 85 C9
Esclavo Función Dirección1ª palabra
Número de palabras
CRC
Código Hex de la respuesta (valores en formato Byte):01 03 0A 64 6C 20 43 52 00 00 00 00 00 E6 B1
Esclavo Función Bytesleídos
Texto en ASCII CRC
9

2 Descripción de protocolo Modbus
2.4.2 Escritura de una palabraEn la función Escribir Palabra los bloques de datos para la solicitud y la respuesta son idénticos
ATENCIÓN!
Operaciones de escritura en algunos parámetros R/W ocasionan una memorización en EEPROMo en una memoria Flash. Estos elementos de memoria sólo tienen un número limitado de ciclosde escritura (aprox. 100.000 o 10.000).Una escritura frecuente de las correspondientes variables puede producir por ese motivo que ocurra unerror de memoria. Por lo tanto, el número de operaciones de escritura debe mantenerse lo más pequeño posible.
Indicación
Respuesta
EjemploEn este ejemplo se trata de escribir un comando para el valor „Duración hasta reconocimiento CIP“ delinstrumento. La dirección esclavo del instrumento aquí es 1, la dirección de palabra es 0x5A42(capítulo 6.10 "Configuración de monitorización de sensor", Página 45) y el valor a escribir ha de ser„2700“ (2700 s corresponde a 45 min).
Dirección de escla-vo
Función0x06
Dirección de pala-bra
Valor de palabra Suma de compro-bación CRC
1 Byte 1 Byte 2 Bytes 2 Bytes 2 Bytes
Dirección de escla-vo
Función0x06
Dirección de pala-bra
Valor de palabra Suma de compro-baciónCRC
1 Byte 1 Byte 2 Bytes 2 Bytes 2 Bytes
Código Hex de la instrucción:01 06 5A 42 0A 8C 3C 03
Esclavo Función Dirección de palabra
Valor CRC
Código Hex de la respuesta:01 06 5A 42 0A 8C 3C 03
Esclavo Función Dirección de palabra
Valor CRC
10
2 Descripción de protocolo Modbus
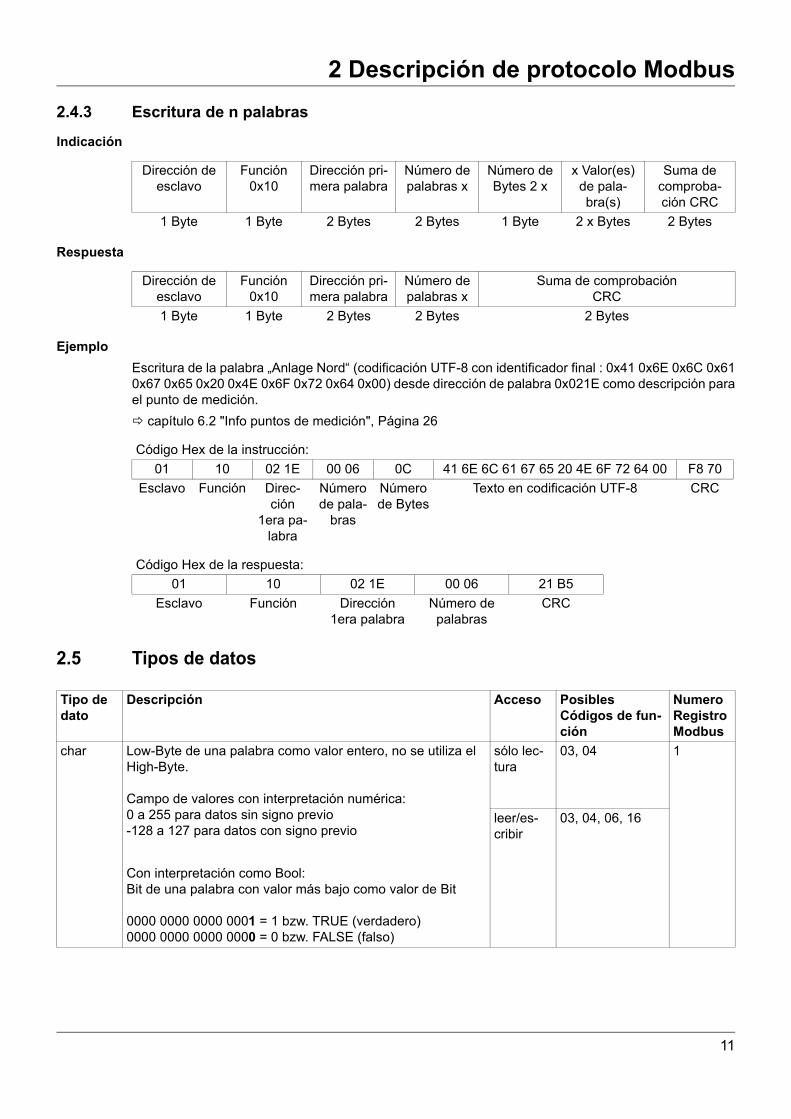
2.4.3 Escritura de n palabrasIndicación
Respuesta
EjemploEscritura de la palabra „Anlage Nord“ (codificación UTF-8 con identificador final : 0x41 0x6E 0x6C 0x610x67 0x65 0x20 0x4E 0x6F 0x72 0x64 0x00) desde dirección de palabra 0x021E como descripción parael punto de medición. capítulo 6.2 "Info puntos de medición", Página 26
2.5 Tipos de datos
Dirección de esclavo
Función0x10
Dirección pri-mera palabra
Número de palabras x
Número de Bytes 2 x
x Valor(es) de pala-bra(s)
Suma de comproba-ción CRC
1 Byte 1 Byte 2 Bytes 2 Bytes 1 Byte 2 x Bytes 2 Bytes
Dirección de esclavo
Función0x10
Dirección pri-mera palabra
Número de palabras x
Suma de comprobaciónCRC
1 Byte 1 Byte 2 Bytes 2 Bytes 2 Bytes
Código Hex de la instrucción:01 10 02 1E 00 06 0C 41 6E 6C 61 67 65 20 4E 6F 72 64 00 F8 70
Esclavo Función Direc-ción
1era pa-labra
Número de pala-
bras
Número de Bytes
Texto en codificación UTF-8 CRC
Código Hex de la respuesta:01 10 02 1E 00 06 21 B5
Esclavo Función Dirección1era palabra
Número de palabras
CRC
Tipo de dato
Descripción Acceso PosiblesCódigos de fun-ción
NumeroRegistro Modbus
char Low-Byte de una palabra como valor entero, no se utiliza el High-Byte.
Campo de valores con interpretación numérica:0 a 255 para datos sin signo previo-128 a 127 para datos con signo previo
Con interpretación como Bool:Bit de una palabra con valor más bajo como valor de Bit
0000 0000 0000 0001 = 1 bzw. TRUE (verdadero)0000 0000 0000 0000 = 0 bzw. FALSE (falso)
sólo lec-tura
03, 04 1
leer/es-cribir
03, 04, 06, 16
11

2 Descripción de protocolo Modbus
corto Palabra (16 Bit) como valor entero
Campos de valores:0 a 65535 para datos sin signo previo-32768 a 32767 para datos con signo previo
sólo lec-tura
03, 04 1
leer/es-cribir
03, 04, 06, 16
flotante 2 palabras como numero de decimal flotante de 32 Bit con co-dificación según IEEE 754, teniendo en cuenta que se debe observar el orden correcto de transferencia de los 4 bytes du-rante la transmisión. En la configuración del interfaz RS485 se puede seleccionar la codificación deseada en el ajuste "for-mato decimal deslizante". S = Bit de signo previoE = Exponente (complemento de 2)M = 23 Bit mantisa normalizada
sólo lec-tura
03, 04 2
leer/es-cribir
03, 04, 16
largo Palabra doble (32 Bit) como valor entero sin signo previo
Campo de valores: 0 a 4.294.967.295
sólo lec-tura
03, 04 2
leer/es-cribir
03, 04, 16
string[n] Cadena para una longitud de hasta n bytes. La codificación de caracteres de las variables individuales se puede encontrar en las tablas de direcciones Modbus en el último capítulo de este documento. Las codificaciones de juego de caracteres son codificación UTF-8, ISO 8859-1 o ASCII.Cada una de las n palabras del registro Modbus contiene 2 bytes consecutivos de la cadena de caracteres.Hay que tener en cuenta que la cadena de caracteres siempre debe contener como último signo un „\0“ (ASCII-Code 0x00) como identificador de final. Además, la longitud de la cadena debe tener un recuento de bytes pares en total. Para garanti-zar esto, se debe agregar un "/0" adicional si el número de bytes que incluye "/0" es impar.
sólo lec-tura
03, 04 n/2
leer/es-cribir
03, 04, 06, 16
Tipo de dato
Descripción Acceso PosiblesCódigos de fun-ción
NumeroRegistro Modbus
SE EEEEEE7 1 E M MMMMMM0 23 16 M MMMMMMM15 8 M MMMMMMM7 0
Byte 1 Byte 2 Byte 3 Byte 4
IEEE 754 Little Endian
IEEE 754 Big Endian
SE EEEEEE7 1E M MMMMMM0 23 16M MMMMMMM15 8M MMMMMMM7 0
Byte 1 Byte 2 Byte 3 Byte 4
Codificación Modbus estándar
Byte 4Byte 1
SE EEEEEE7 1 E M MMMMMM0 23 16M MMMMMMM15 8 M MMMMMMM7 0
Byte 2
1. Registro Modbus 2. Registro Modbus
Byte 3
12
2 Descripción de protocolo Modbus
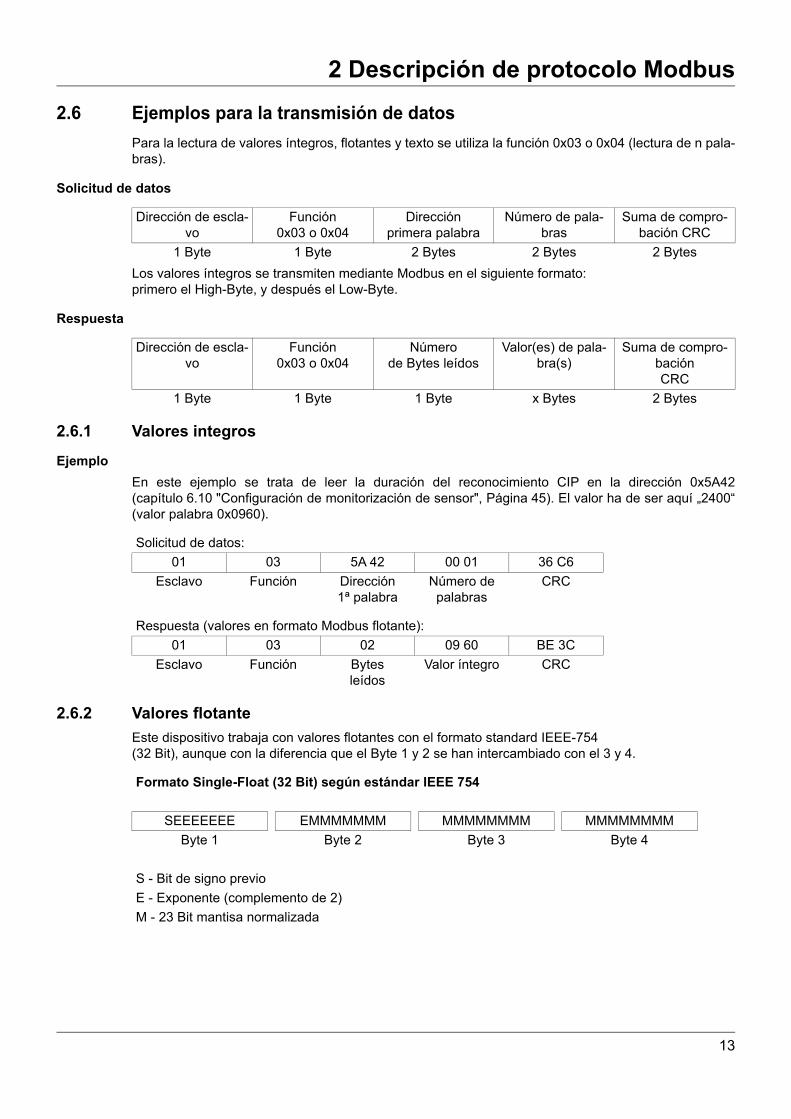
2.6 Ejemplos para la transmisión de datosPara la lectura de valores íntegros, flotantes y texto se utiliza la función 0x03 o 0x04 (lectura de n pala-bras).
Solicitud de datos
Los valores íntegros se transmiten mediante Modbus en el siguiente formato:primero el High-Byte, y después el Low-Byte.
Respuesta
2.6.1 Valores integros
EjemploEn este ejemplo se trata de leer la duración del reconocimiento CIP en la dirección 0x5A42(capítulo 6.10 "Configuración de monitorización de sensor", Página 45). El valor ha de ser aquí „2400“(valor palabra 0x0960).
2.6.2 Valores flotanteEste dispositivo trabaja con valores flotantes con el formato standard IEEE-754(32 Bit), aunque con la diferencia que el Byte 1 y 2 se han intercambiado con el 3 y 4.
Dirección de escla-vo
Función 0x03 o 0x04
Direcciónprimera palabra
Número de pala-bras
Suma de compro-bación CRC
1 Byte 1 Byte 2 Bytes 2 Bytes 2 Bytes
Dirección de escla-vo
Función 0x03 o 0x04
Númerode Bytes leídos
Valor(es) de pala-bra(s)
Suma de compro-baciónCRC
1 Byte 1 Byte 1 Byte x Bytes 2 Bytes
Solicitud de datos:01 03 5A 42 00 01 36 C6
Esclavo Función Dirección1ª palabra
Número de palabras
CRC
Respuesta (valores en formato Modbus flotante):01 03 02 09 60 BE 3C
Esclavo Función Bytesleídos
Valor íntegro CRC
Formato Single-Float (32 Bit) según estándar IEEE 754
SEEEEEEE EMMMMMMM MMMMMMMM MMMMMMMMByte 1 Byte 2 Byte 3 Byte 4
S - Bit de signo previoE - Exponente (complemento de 2)M - 23 Bit mantisa normalizada
13

2 Descripción de protocolo Modbus
EjemploEn este ejemplo se trata de leer el valor „valor de temperatura reconocimiento CIP“ en la dirección delinstrumento 0x5A40. El valor ha de ser aqui 70,25 (0x428C8000 en el formato IEEE-754).
Después de la transmisión desde el instrumento, los Bytes del valor flotante deben ser intercambiadosde forma correspondiente. Muchos compiladores (p.ej. Microsoft Visual C++) ordenar los valores flotan-tes de la siguiente forma :
¡NOTA!El orden de los Bytes depende de cómo se almacenaron los valores flotantes en la aplicación corres-pondiente. En caso dado se deben intercambiar los Bytes en el programa de interfaces de forma corres-pondiente .
Formato módulos flotante
Dirección Modbus x Dirección Modbus x+1MMMMMMMM MMMMMMMM SEEEEEEE EMMMMMMM
Byte 3 Byte 4 Byte 1 Byte 2
Solicitud de datos:01 03 5A 40 00 02 D7 07
Esclavo Función Dirección1ª palabra
Número de palabras
CRC
Respuesta (valores en formato Modbus flotante):01 03 04 80 00 42 8C E2 F6
Esclavo Función Bytesleídos
Valor flotante CRC
Valor flotante
Dirección x Dirección x+1 Dirección x+2 Dirección x+3MMMMMMMM MMMMMMMM EMMMMMMM SEEEEEEE
Byte 4 Byte 3 Byte 2 Byte 1
14

2 Descripción de protocolo Modbus
2.6.3 Cadenas de caracteres (textos)Las cadenas se transmiten en UTF8 codificado.
¡NOTA!Como último signo siempre se debe transmitir „\0“ (ASCII-Code 0x00) como identificador de final. Lossignos siguientes no tienen ningún significado.Dado que la transmisión de textos se realiza en forma de palabras (registro de 16 Bit), en caso de unnúmero impar de Bytes (incl. „\0“) se añade 0x00.Las longitudes máximas para cadenas de caracteres indicadas en las tablas de dirección contienen elfinal „\0“. Esto significa que con „String[60]“ el texto sólo debe tener una longitud máxima de 60 bytesincluido el „\0“.Con 19 signos Unicode con una longitud cada uno de 3 bytes, sólo quedan 2 bytes para el signo vigé-simo. Se necesita 1 byte para el identificador final.
EjemploConsulta del texto de la dirección 0x021E, bajo esta dirección se encuentra la cadena de signos para ladescripción del punto de medición „Anlage Nord“ (código ASCII: 0x41 0x6E 0x6C 0x61 0x67 0x65 0x200x4E 0x6F 0x72 0x64).
¡NOTA!Los valores (aquí: 00 AA) delante de la suma CRC (aquí: C5DF) no se tienen en cuenta dado que seencuentran después del identificador final „\0“.
Código Hex de la consulta:01 03 02 1E 00 07 65 B6
Esclavo Función Dirección1era palabra
Número de palabras
CRC
Código Hex de la respuesta:01 03 00 0E 41 6E 6C 61 67 65 20 4E 6F 72 64 00 00 AA C5 DF
Esclavo Función Bytes leí-dos
Valores de palabras (signos ASCII) CRC
15
2 Descripción de protocolo Modbus
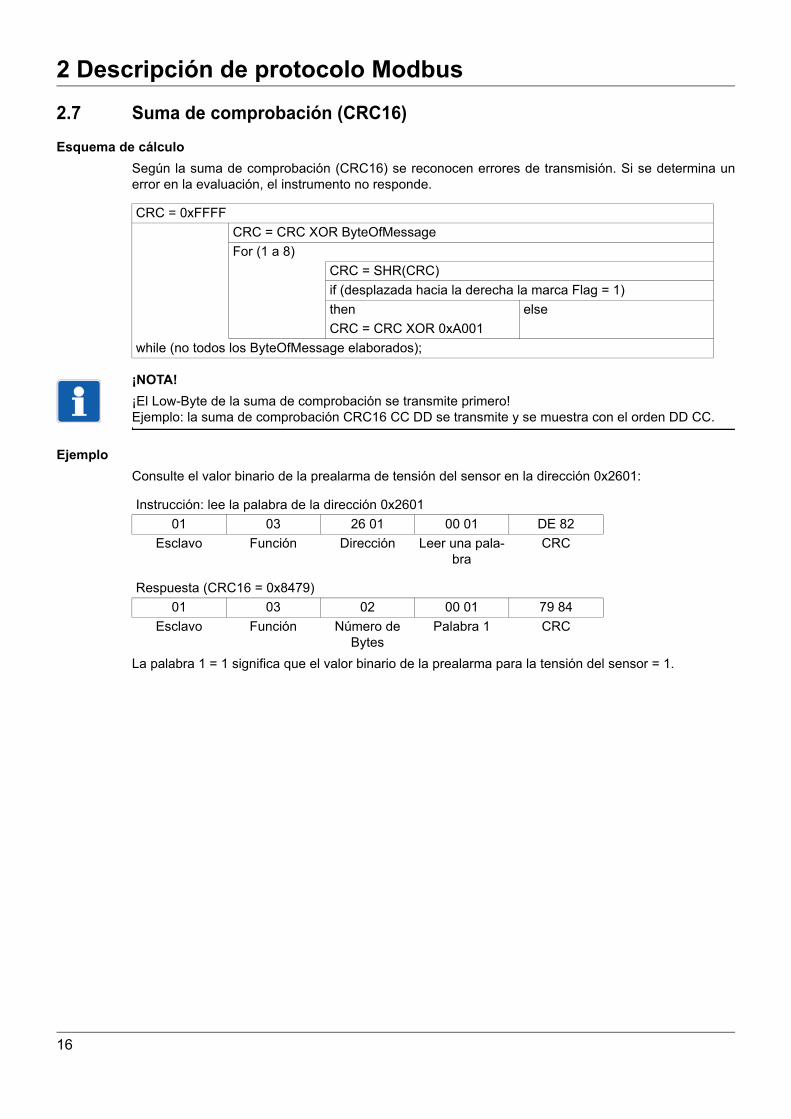
2.7 Suma de comprobación (CRC16)Esquema de cálculoSegún la suma de comprobación (CRC16) se reconocen errores de transmisión. Si se determina unerror en la evaluación, el instrumento no responde.
¡NOTA!¡El Low-Byte de la suma de comprobación se transmite primero!Ejemplo: la suma de comprobación CRC16 CC DD se transmite y se muestra con el orden DD CC.
EjemploConsulte el valor binario de la prealarma de tensión del sensor en la dirección 0x2601:
La palabra 1 = 1 significa que el valor binario de la prealarma para la tensión del sensor = 1.
CRC = 0xFFFFCRC = CRC XOR ByteOfMessageFor (1 a 8)
CRC = SHR(CRC)if (desplazada hacia la derecha la marca Flag = 1)then elseCRC = CRC XOR 0xA001
while (no todos los ByteOfMessage elaborados);
Instrucción: lee la palabra de la dirección 0x260101 03 26 01 00 01 DE 82
Esclavo Función Dirección Leer una pala-bra
CRC
Respuesta (CRC16 = 0x8479)01 03 02 00 01 79 84
Esclavo Función Número de Bytes
Palabra 1 CRC
16
2 Descripción de protocolo Modbus
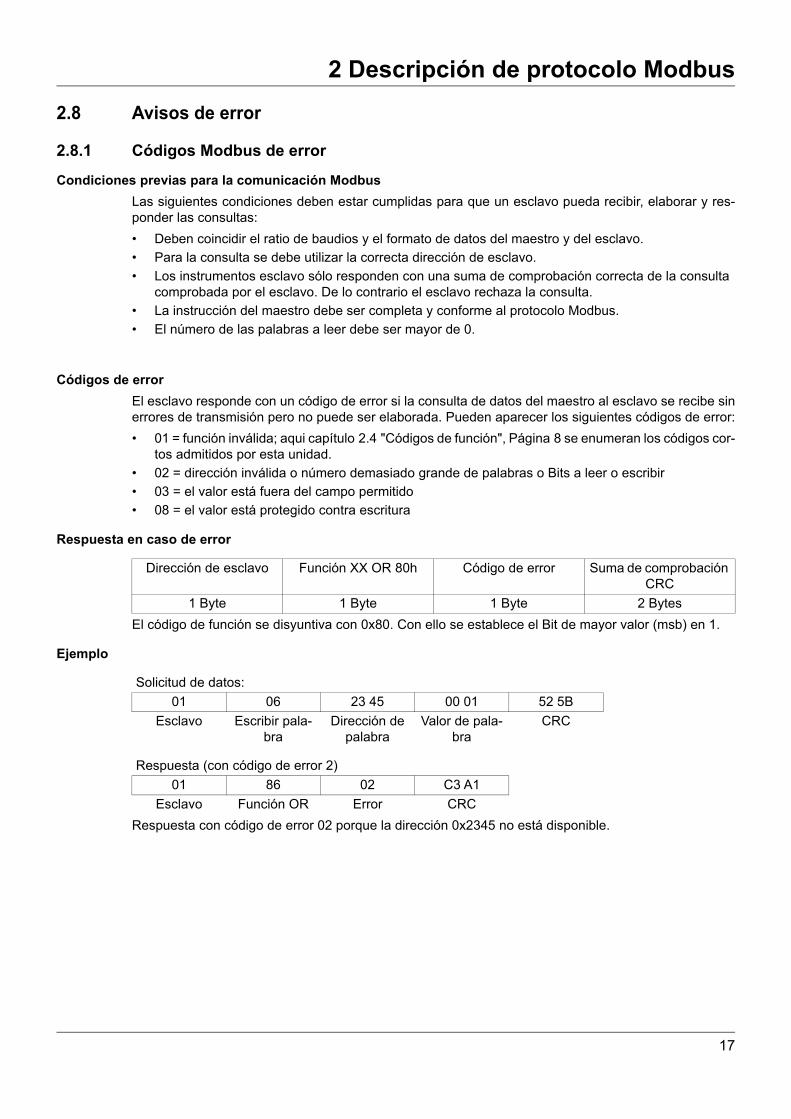
2.8 Avisos de error2.8.1 Códigos Modbus de error
Condiciones previas para la comunicación ModbusLas siguientes condiciones deben estar cumplidas para que un esclavo pueda recibir, elaborar y res-ponder las consultas:• Deben coincidir el ratio de baudios y el formato de datos del maestro y del esclavo.• Para la consulta se debe utilizar la correcta dirección de esclavo.• Los instrumentos esclavo sólo responden con una suma de comprobación correcta de la consulta
comprobada por el esclavo. De lo contrario el esclavo rechaza la consulta.• La instrucción del maestro debe ser completa y conforme al protocolo Modbus.• El número de las palabras a leer debe ser mayor de 0.
Códigos de errorEl esclavo responde con un código de error si la consulta de datos del maestro al esclavo se recibe sinerrores de transmisión pero no puede ser elaborada. Pueden aparecer los siguientes códigos de error:• 01 = función inválida; aqui capítulo 2.4 "Códigos de función", Página 8 se enumeran los códigos cor-
tos admitidos por esta unidad.• 02 = dirección inválida o número demasiado grande de palabras o Bits a leer o escribir• 03 = el valor está fuera del campo permitido• 08 = el valor está protegido contra escritura
Respuesta en caso de error
El código de función se disyuntiva con 0x80. Con ello se establece el Bit de mayor valor (msb) en 1.
Ejemplo
Respuesta con código de error 02 porque la dirección 0x2345 no está disponible.
Dirección de esclavo Función XX OR 80h Código de error Suma de comprobación CRC
1 Byte 1 Byte 1 Byte 2 Bytes
Solicitud de datos:01 06 23 45 00 01 52 5B
Esclavo Escribir pala-bra
Dirección de palabra
Valor de pala-bra
CRC
Respuesta (con código de error 2)01 86 02 C3 A1
Esclavo Función OR Error CRC
17

2 Descripción de protocolo Modbus
2.8.2 Avisos de error con valores inválidosEn valores de medición con formato flotante, el número de error se representa en el mismo valor, esdecir en vez del valor de medición contiene el número de error.
EjemploLectura del valor de medición de conductividad a dirección Modbus 0x8002:
El valor de medición 0x7D70BDC2 (=2,0 × 1037) entregado en la entrada analógica indica que se tratade un exceso del campo de medición.
Código de error enValores flotantes
Error
1,0 × 1037 Valor inferior al campo de medición2,0 × 1037 Exceso del campo de medición:3,0 × 1037 ningún valor de entrada válido4,0 × 1037 División entre cero5,0 × 1037 Error matemático6,0 × 1037 Temperatura de compensación inválida7,0 × 1037 Valor flotante inválido8,0 × 1037 Integrador o estadística corrupta
Solicitud de datos:08 03 80 02 00 02 4C 92
Esclavo Función Dirección de palabra
Número de palabras
CRC
Respuesta:08 03 04 BD C2 7D 70 C6 17
Esclavo Función Bytes leídos Código de error CRC
18
3 Interfaces
3 Interfaces
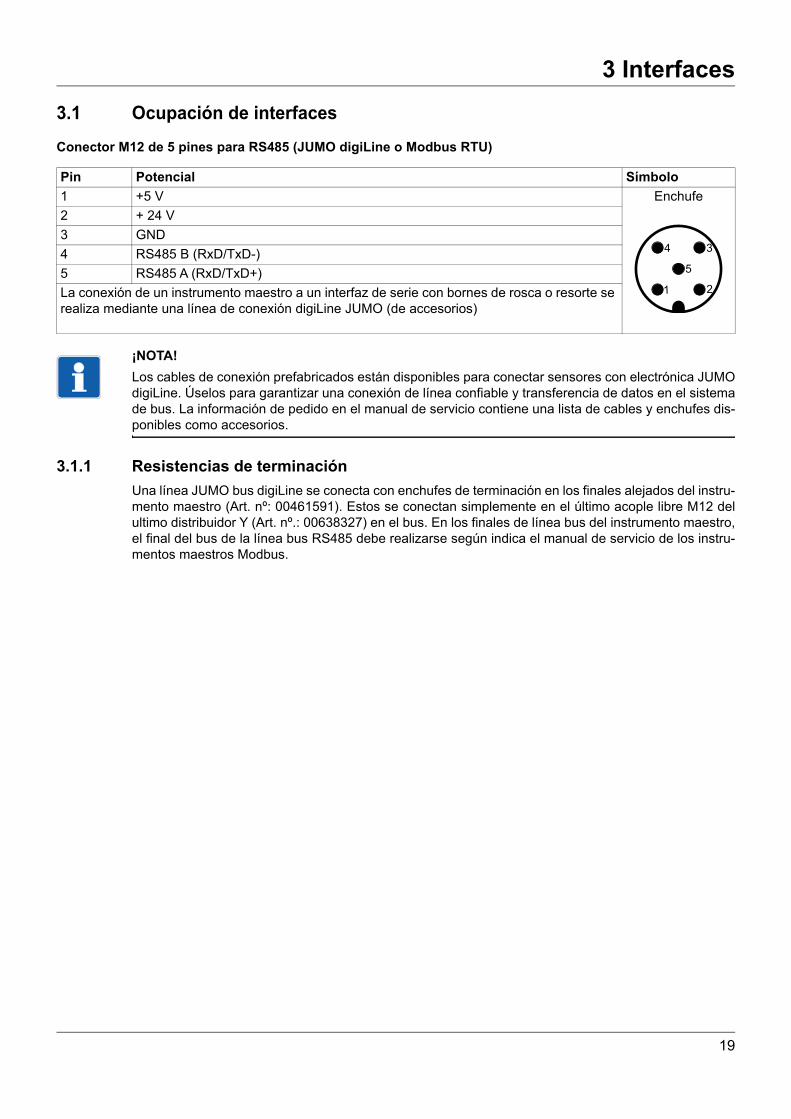
3.1 Ocupación de interfacesConector M12 de 5 pines para RS485 (JUMO digiLine o Modbus RTU)¡NOTA!Los cables de conexión prefabricados están disponibles para conectar sensores con electrónica JUMOdigiLine. Úselos para garantizar una conexión de línea confiable y transferencia de datos en el sistemade bus. La información de pedido en el manual de servicio contiene una lista de cables y enchufes dis-ponibles como accesorios.
3.1.1 Resistencias de terminaciónUna línea JUMO bus digiLine se conecta con enchufes de terminación en los finales alejados del instru-mento maestro (Art. nº: 00461591). Estos se conectan simplemente en el último acople libre M12 delultimo distribuidor Y (Art. nº.: 00638327) en el bus. En los finales de línea bus del instrumento maestro,el final del bus de la línea bus RS485 debe realizarse según indica el manual de servicio de los instru-mentos maestros Modbus.
Pin Potencial Símbolo1 +5 V Enchufe2 + 24 V3 GND4 RS485 B (RxD/TxD-)5 RS485 A (RxD/TxD+)La conexión de un instrumento maestro a un interfaz de serie con bornes de rosca o resorte se realiza mediante una línea de conexión digiLine JUMO (de accesorios)
21
34
5
19
3 Interfaces
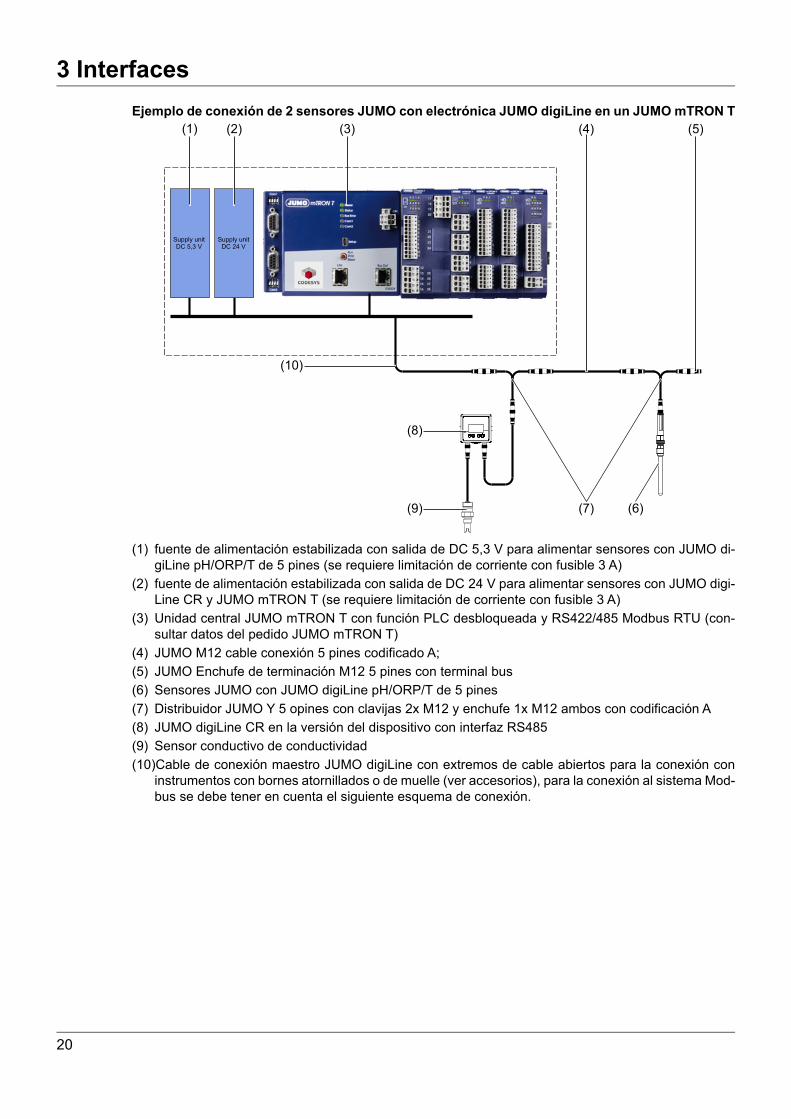
Ejemplo de conexión de 2 sensores JUMO con electrónica JUMO digiLine en un JUMO mTRON T(1) fuente de alimentación estabilizada con salida de DC 5,3 V para alimentar sensores con JUMO di-giLine pH/ORP/T de 5 pines (se requiere limitación de corriente con fusible 3 A)
(2) fuente de alimentación estabilizada con salida de DC 24 V para alimentar sensores con JUMO digi-Line CR y JUMO mTRON T (se requiere limitación de corriente con fusible 3 A)
(3) Unidad central JUMO mTRON T con función PLC desbloqueada y RS422/485 Modbus RTU (con-sultar datos del pedido JUMO mTRON T)
(4) JUMO M12 cable conexión 5 pines codificado A;(5) JUMO Enchufe de terminación M12 5 pines con terminal bus(6) Sensores JUMO con JUMO digiLine pH/ORP/T de 5 pines(7) Distribuidor JUMO Y 5 opines con clavijas 2x M12 y enchufe 1x M12 ambos con codificación A(8) JUMO digiLine CR en la versión del dispositivo con interfaz RS485(9) Sensor conductivo de conductividad(10)Cable de conexión maestro JUMO digiLine con extremos de cable abiertos para la conexión con
instrumentos con bornes atornillados o de muelle (ver accesorios), para la conexión al sistema Mod-bus se debe tener en cuenta el siguiente esquema de conexión.
Supply unitDC 24 V
Supply unitDC 5,3 V
(2)
(10)
(6)
(3) (4)(1) (5)
(8)
(7)(9)
20
4 Configuración de interfaces
4 Configuración de interfaces
IndicacionesATENCIÓN!
Se pueden producir estados de funcionamiento inesperados motivados por una instalación de-fectuosa o ajustes erróneos de recursos de producción.Esto puede ocasionar daños en los procesos o una limitación de las funciones correctas. Por ese motivo se deben prever elementos de seguridad independientes del instrumento y realizar
los ajustes sólo por personal especializado.
¡NOTA!Los cambios descritos en este capítulo sobre los ajustes de configuración de la electrónica JUMO digi-Line pueden ser realizados mediante el software JUMO DSM en PC.
En el manual de servicio del JUMO digiLine CR/Ci se detalla la operativa, la configuración y la parame-trización. Manual de servicio JUMO digiLine CR/Ci
21
4 Configuración de interfaces
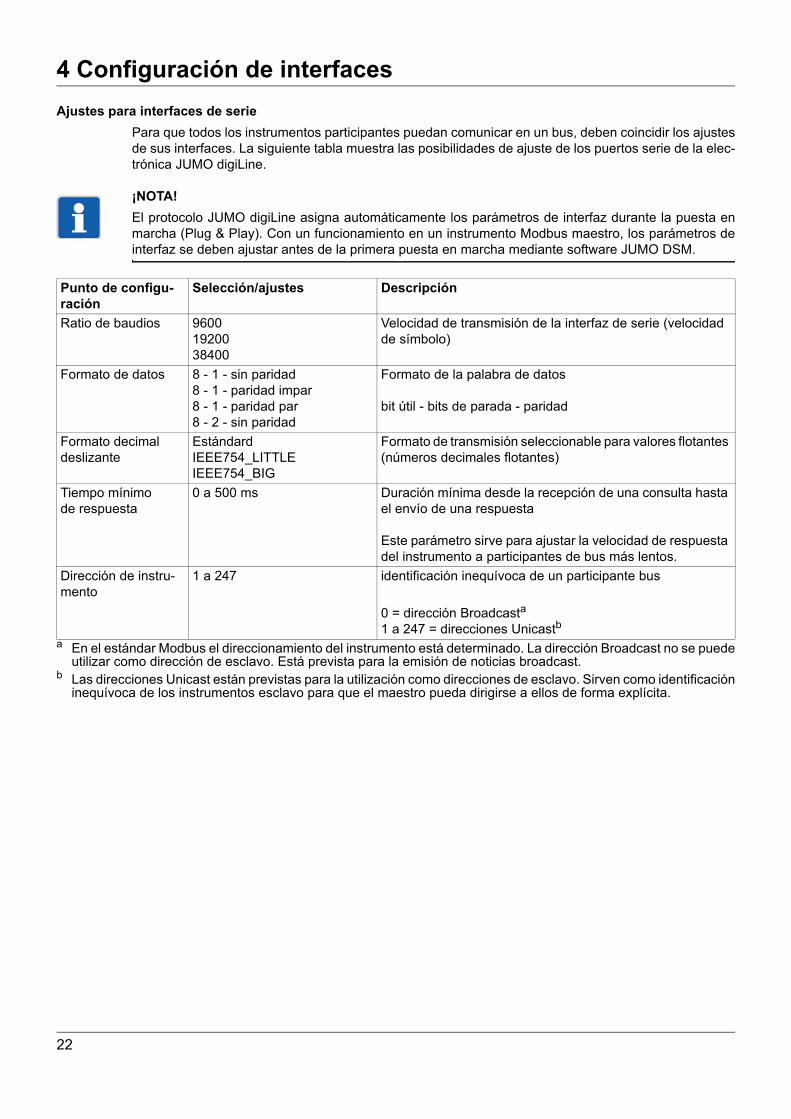
Ajustes para interfaces de seriePara que todos los instrumentos participantes puedan comunicar en un bus, deben coincidir los ajustesde sus interfaces. La siguiente tabla muestra las posibilidades de ajuste de los puertos serie de la elec-trónica JUMO digiLine.
¡NOTA!El protocolo JUMO digiLine asigna automáticamente los parámetros de interfaz durante la puesta enmarcha (Plug & Play). Con un funcionamiento en un instrumento Modbus maestro, los parámetros deinterfaz se deben ajustar antes de la primera puesta en marcha mediante software JUMO DSM.
Punto de configu-ración
Selección/ajustes Descripción
Ratio de baudios 96001920038400
Velocidad de transmisión de la interfaz de serie (velocidad de símbolo)
Formato de datos 8 - 1 - sin paridad8 - 1 - paridad impar8 - 1 - paridad par8 - 2 - sin paridad
Formato de la palabra de datos
bit útil - bits de parada - paridad
Formato decimal deslizante
EstándardIEEE754_LITTLEIEEE754_BIG
Formato de transmisión seleccionable para valores flotantes (números decimales flotantes)
Tiempo mínimode respuesta
0 a 500 ms Duración mínima desde la recepción de una consulta hasta el envío de una respuesta
Este parámetro sirve para ajustar la velocidad de respuesta del instrumento a participantes de bus más lentos.
Dirección de instru-mento
1 a 247 identificación inequívoca de un participante bus
0 = dirección Broadcasta1 a 247 = direcciones Unicastb
a En el estándar Modbus el direccionamiento del instrumento está determinado. La dirección Broadcast no se puedeutilizar como dirección de esclavo. Está prevista para la emisión de noticias broadcast.
b Las direcciones Unicast están previstas para la utilización como direcciones de esclavo. Sirven como identificacióninequívoca de los instrumentos esclavo para que el maestro pueda dirigirse a ellos de forma explícita.
22

5 Modbus por interfaz de serie
5 Modbus por interfaz de serie
5.1 Funcionamiento Modbus-esclavo por interfaz de serie RS485Secuencia temporal de la comunicaciónUn ciclo de consulta en el bus transcurre según el siguiente esquema temporal:
¡NOTA!El tiempo mínimo de respuesta se puede ajustar en la configuración.Este tiempo establecido es el que se cumple antes de enviar una respuesta (0 a 500 ms). Si el procesode una solicitud de maestro en el esclavo se ha finalizado antes del transcurso del tiempo mínimo derespuesta, la respuesta se envía una vez transcurrido el "tiempo mínimo de respuesta".
¡NOTA!El maestro no debe enviar nuevas solicitudes de datos dentro del espacio de t1 y t2 ni durante el tiempode respuesta del esclavo. Las solicitudes durante t1 y t2 son ignoradas por el esclavo. Las solicitudesdurante el tiempo de respuesta provoca que todos los datos que se encuentran en ese momento en elbus se conviertan en no válidos.
¡NOTA!El identificador final después de una solicitud o respuesta de datos tiene una longitud de 3,5 caracteres.La duración de estos 3,5 caracteres depende de la velocidad de transmisión (ratio de baudios).
Tiempo de transmisión de caracteresEl principio y el final de un bloque de datos se caracterizan por pausas de transmisión. El tiempo detransmisión de caracteres (tiempo de transmisión de un carácter) depende de la velocidad de transmi-sión.Con un formato de datos de 8 bits de datos,sin bit de paridad y 1 bit de parada, resulta:
Con otro formato de datos, resulta:
t1 Tiempo de espera interno del instrumento antes de la comprobación de la solicitud de datos y del plazo interno de elaboración:
min.: 3,5 tiempos Byte + tiempo de respuesta mínimotípico: 5 msmax: 25 ms + tiempo de respuesta mínimo
t2 Tiempo de espera que debe observar el maestro, antes de iniciar una nueva consulta de datos:3,5 signos o mínimo 2 ms
Master
Esclavo
Solicitud datos
Respuesta
Solicitud datos
t
t1 t2
Tiempo de transmisión de caracteres [ms] = 1000 × 10 Bit ÷ ratio de baudios
Tiempo de transmisión de caracteres [ms] = 1000 × 11 Bit / ratio de baudios
23

5 Modbus por interfaz de serie
EjemploIdentificador para solicitud de datos o el final de la respuesta Tiempo de espera = 3,5 caracteres * 1000 * 11 Bit/ratio de baudios
Ratio de baudios [Baud]
Formato de datos [Bit] Tiempo de transmisión de caracte-res [ms]
38400 11 0,28710 0,260
19200 11 0,57310 0,521
9600 11 1,14610 1,042
24

6 Tablas de dirección Modbus
6 Tablas de dirección Modbus
6.1 Placa de modeloDirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
0 0000 string[10] 5 r Nombre del equipo Codificación ASCII con "CE-RO" como identificador final
5 0005 string[12] 6 r Versión de software Codificación ASCII con "CE-RO" como identificador final
11 000B corto 1 r Numero de software12 000C char 1 r Versión mayor de sensor13 000D char 1 r Versión menor de sensor14 000E corto 1 r Versión de prueba15 000F char 1 r Versión mayor de hardware16 0010 char 1 r Versión menor de hardware17 0011 string[14] 7 r Versión VDN Codificación ASCII con "CE-
RO" como identificador final24 0018 corto 1 r Número VDN25 0019 corto 1 r Número de versión VDN64 0040 char 1 r Versión mayor protocolo
JUMO digiLine65 0041 char 1 r Versión menor protocolo
JUMO digiLine128 0080 corto 1 r Base del tipo de hardware129 0081 corto 1 r Número de software micro-
controlador de medición130 0082 char 1 r Versión mayor de software
de microcontrolador de me-dición
131 0083 char 1 r Versión menor de software de microcontrolador de me-dición
132 0084 char 1 r Versión de prueba micro controlador de medición
133 0085 char 1 r Índice de error micro con-trolador de medición
134 0086 corto 1 r Versión VDN micro contro-lador de medición
135 0087 corto 1 r Numero VDN micro contro-lador de medición
136 0088 char 1 r Tipo de hardware micro controlador de medición
137 0089 char 1 r Versión mayor de hardware micro controlador de medi-ción
138 008A char 1 r Versión menor de hardware micro controlador de medi-ción
25
6 Tablas de dirección Modbus
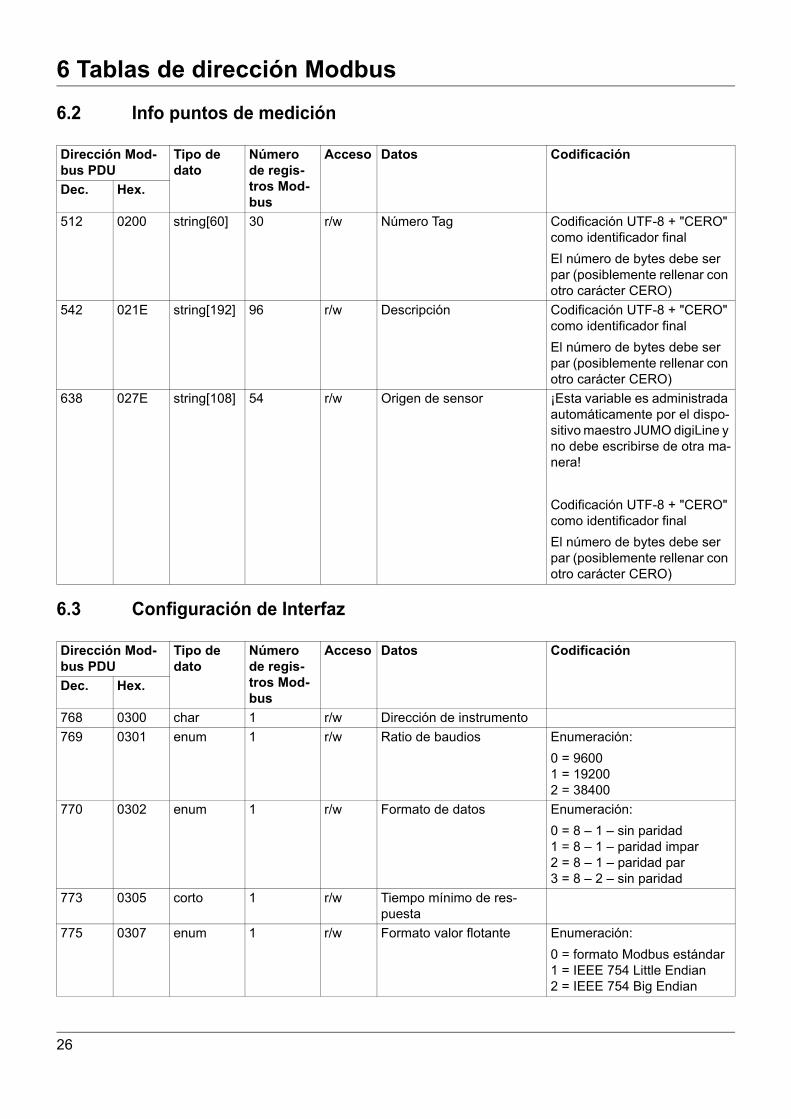
6.2 Info puntos de medición6.3 Configuración de Interfaz
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
512 0200 string[60] 30 r/w Número Tag Codificación UTF-8 + "CERO" como identificador finalEl número de bytes debe ser par (posiblemente rellenar con otro carácter CERO)
542 021E string[192] 96 r/w Descripción Codificación UTF-8 + "CERO" como identificador finalEl número de bytes debe ser par (posiblemente rellenar con otro carácter CERO)
638 027E string[108] 54 r/w Origen de sensor ¡Esta variable es administrada automáticamente por el dispo-sitivo maestro JUMO digiLine y no debe escribirse de otra ma-nera!
Codificación UTF-8 + "CERO" como identificador finalEl número de bytes debe ser par (posiblemente rellenar con otro carácter CERO)
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
768 0300 char 1 r/w Dirección de instrumento769 0301 enum 1 r/w Ratio de baudios Enumeración:
0 = 96001 = 192002 = 38400
770 0302 enum 1 r/w Formato de datos Enumeración:0 = 8 – 1 – sin paridad1 = 8 – 1 – paridad impar2 = 8 – 1 – paridad par3 = 8 – 2 – sin paridad
773 0305 corto 1 r/w Tiempo mínimo de res-puesta
775 0307 enum 1 r/w Formato valor flotante Enumeración:0 = formato Modbus estándar1 = IEEE 754 Little Endian2 = IEEE 754 Big Endian
26

6 Tablas de dirección Modbus
6.4 Datos de calibrado¡NOTA!La electrónica JUMO digiLine tiene 1 libro de registro de calibración con 10 registros de datos de entra-da. Las direcciones de los datos del libro de registro de calibración se proporcionan explícitamente enlas siguientes tablas. Como todos los libros de registro de calibración tienen áreas de memoria del mis-mo tamaño, las direcciones también se pueden calcular. El tamaño del área de dirección de un libro deregistro de calibración es 0x0031 en escala hexadecimal o 49 en números decimales. Con múltiplos deeste valor, se pueden calcular los saltos de un libro de registro de calibración a otro.Por ejemplo: 0x0600 + (n - 1) * 0x0031 devuelve la dirección Modbus del parámetro "Tipo de entrada"del enésimo libro de registro de calibración.
6.4.1 Apunte en libro bitácora de calibrado 1
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
1536 0600 enum 1 r Tipo de apunte Enumeración:0 = sin entrada1 = constante relativa de célula2 = coeficiente de temperatura
1537 0601 enum 1 r cambio manual Enumeración:0 = manual1 = calibración
1538 0602 enum 1 r Valoración de la calibración Enumeración:0 = sin valoración1 = OK2 = Aviso
1539 0603 largo 2 r lectura de contador de ho-ras de funcionamiento
Sello de fecha y hora
1541 0605 corto 1 r Año1542 0606 char 1 r Mes1543 0607 char 1 r Día1544 0608 char 1 r Hora1545 0609 char 1 r Minuto1546 060A char 1 r Segundos1547 060B corto 1 r Zona horaria1548 060C char 1 r Lectura del medidor cambio
de sensor
27

6 Tablas de dirección Modbus
6.4.2 Apunte en libro bitácora de calibrado 2
1549 060D float[6] 12 r Valores calibración Elementos de matriz con tipo de entrada "constante de celda relativa": [0] = campo[1] = de medición de constante de celda relativa
Elementos de matriz con tipo de entrada „Coeficiente de temperatura“:[0] = coeficiente de temperatu-ra[1] = Temperatura 1[2] = Temperatura 2[3] = Campo de medición
1561 0619 string[6][8] 24 r Unidades Unidades de los valores de ca-libración en el siguiente forma-to:Para cada unidad de los 6 va-lores de calibración están dis-ponibles 8 bytes para la cadena de signos de unidad, incluido el signo CERO como indicador final en la codifica-ción UTF-8. La cadena de sig-nos puede tener una longitud de 5 signos.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
1585 0631 enum 1 r Tipo de apunte Enumeración:0 = sin entrada1 = constante relativa de célula2 = coeficiente de temperatura
1586 0632 enum 1 r cambio manual Enumeración:0 = manual1 = calibración
1587 0633 enum 1 r Valoración de la calibración Enumeración:0 = sin valoración1 = OK2 = Aviso
28
6 Tablas de dirección Modbus
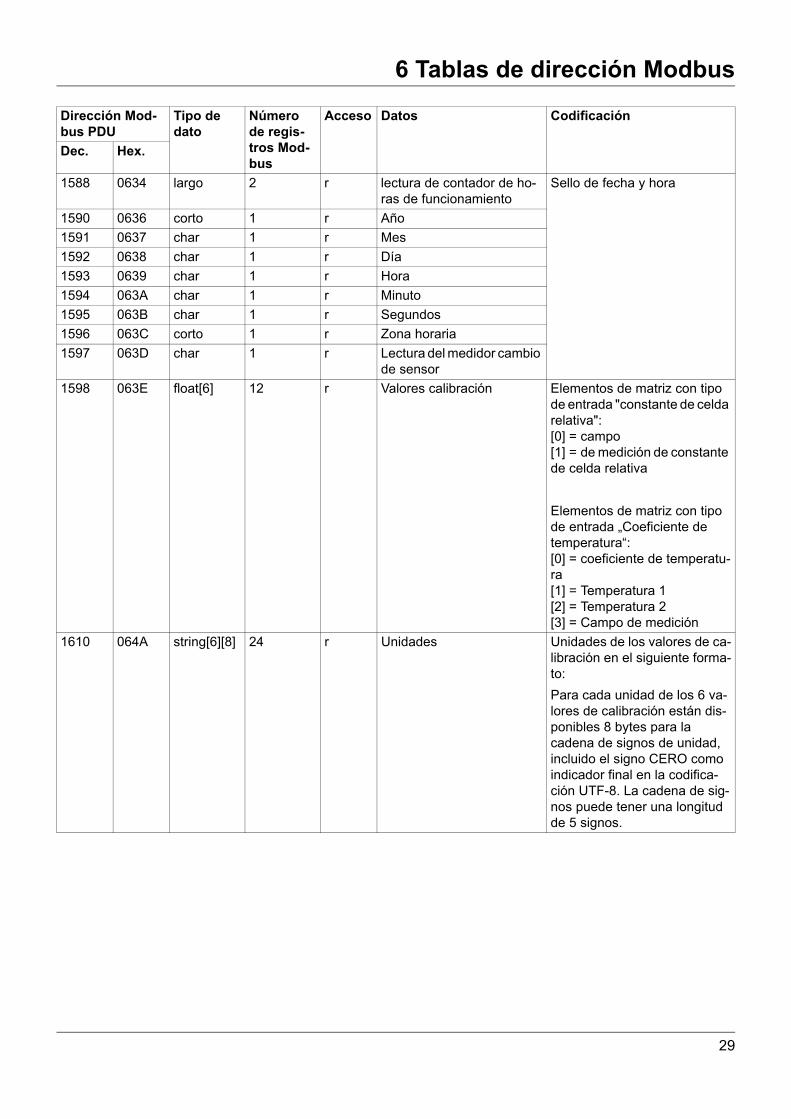
1588 0634 largo 2 r lectura de contador de ho-ras de funcionamiento
Sello de fecha y hora
1590 0636 corto 1 r Año1591 0637 char 1 r Mes1592 0638 char 1 r Día1593 0639 char 1 r Hora1594 063A char 1 r Minuto1595 063B char 1 r Segundos1596 063C corto 1 r Zona horaria1597 063D char 1 r Lectura del medidor cambio
de sensor1598 063E float[6] 12 r Valores calibración Elementos de matriz con tipo
de entrada "constante de celda relativa": [0] = campo[1] = de medición de constante de celda relativa
Elementos de matriz con tipo de entrada „Coeficiente de temperatura“:[0] = coeficiente de temperatu-ra[1] = Temperatura 1[2] = Temperatura 2[3] = Campo de medición
1610 064A string[6][8] 24 r Unidades Unidades de los valores de ca-libración en el siguiente forma-to:Para cada unidad de los 6 va-lores de calibración están dis-ponibles 8 bytes para la cadena de signos de unidad, incluido el signo CERO como indicador final en la codifica-ción UTF-8. La cadena de sig-nos puede tener una longitud de 5 signos.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
29

6 Tablas de dirección Modbus
6.4.3 Apunte en libro bitácora de calibrado 3Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
1634 0662 enum 1 r Tipo de apunte Enumeración:0 = sin entrada1 = constante relativa de célula2 = coeficiente de temperatura
1635 0663 enum 1 r cambio manual Enumeración:0 = manual1 = calibración
1636 0664 enum 1 r Valoración de la calibración Enumeración:0 = sin valoración1 = OK2 = Aviso
1637 0665 largo 2 r lectura de contador de ho-ras de funcionamiento
Sello de fecha y hora
1639 0667 corto 1 r Año1640 0668 char 1 r Mes1641 0669 char 1 r Día1642 066A char 1 r Hora1643 066B char 1 r Minuto1644 066C char 1 r Segundos1645 066D corto 1 r Zona horaria1646 066E char 1 r Lectura del medidor cambio
de sensor1647 066F float[6] 12 r Valores calibración Elementos de matriz con tipo
de entrada "constante de celda relativa": [0] = campo[1] = de medición de constante de celda relativa
Elementos de matriz con tipo de entrada „Coeficiente de temperatura“:[0] = coeficiente de temperatu-ra[1] = Temperatura 1[2] = Temperatura 2[3] = Campo de medición
30
6 Tablas de dirección Modbus
6.4.4 Apunte en libro bitácora de calibrado 4
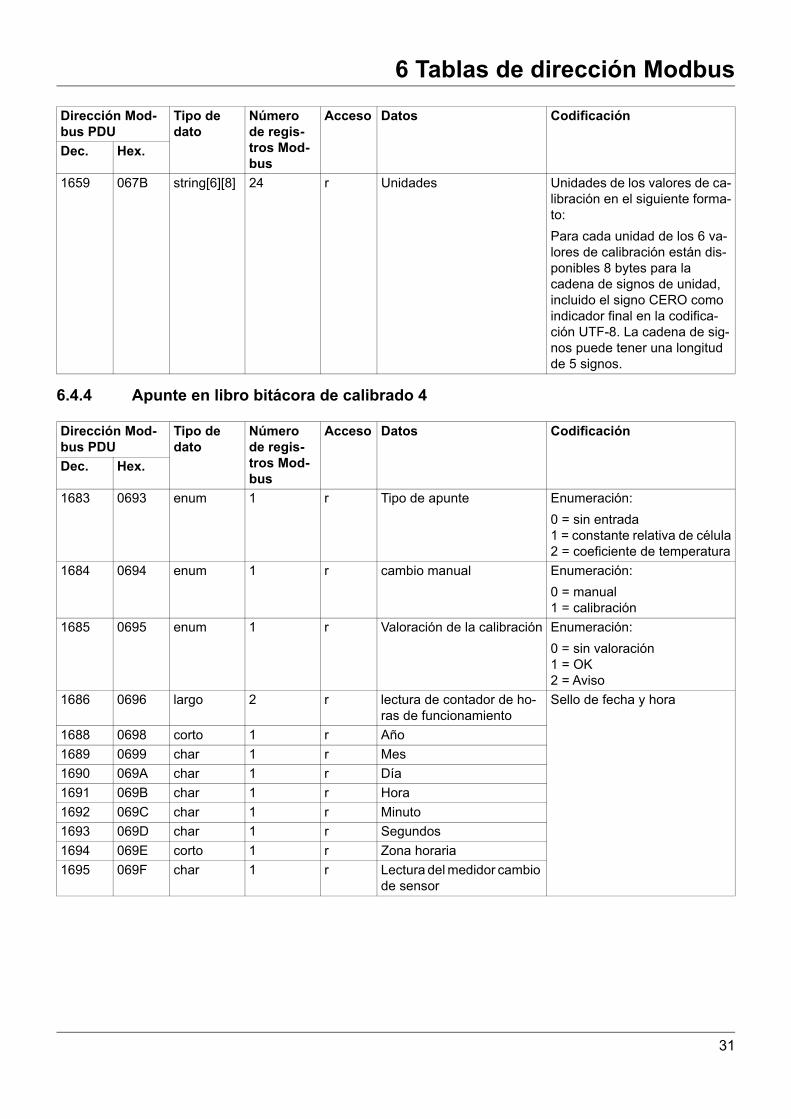
1659 067B string[6][8] 24 r Unidades Unidades de los valores de ca-libración en el siguiente forma-to:Para cada unidad de los 6 va-lores de calibración están dis-ponibles 8 bytes para la cadena de signos de unidad, incluido el signo CERO como indicador final en la codifica-ción UTF-8. La cadena de sig-nos puede tener una longitud de 5 signos.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
1683 0693 enum 1 r Tipo de apunte Enumeración:0 = sin entrada1 = constante relativa de célula2 = coeficiente de temperatura
1684 0694 enum 1 r cambio manual Enumeración:0 = manual1 = calibración
1685 0695 enum 1 r Valoración de la calibración Enumeración:0 = sin valoración1 = OK2 = Aviso
1686 0696 largo 2 r lectura de contador de ho-ras de funcionamiento
Sello de fecha y hora
1688 0698 corto 1 r Año1689 0699 char 1 r Mes1690 069A char 1 r Día1691 069B char 1 r Hora1692 069C char 1 r Minuto1693 069D char 1 r Segundos1694 069E corto 1 r Zona horaria1695 069F char 1 r Lectura del medidor cambio
de sensor
31

6 Tablas de dirección Modbus
6.4.5 Apunte en libro bitácora de calibrado 5
1696 06A0 float[6] 12 r Valores calibración Elementos de matriz con tipo de entrada "constante de celda relativa": [0] = campo[1] = de medición de constante de celda relativa
Elementos de matriz con tipo de entrada „Coeficiente de temperatura“:[0] = coeficiente de temperatu-ra[1] = Temperatura 1[2] = Temperatura 2[3] = Campo de medición
1708 06AC string[6][8] 24 r Unidades Unidades de los valores de ca-libración en el siguiente forma-to:Para cada unidad de los 6 va-lores de calibración están dis-ponibles 8 bytes para la cadena de signos de unidad, incluido el signo CERO como indicador final en la codifica-ción UTF-8. La cadena de sig-nos puede tener una longitud de 5 signos.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
1732 06C4 enum 1 r Tipo de apunte Enumeración:0 = sin entrada1 = constante relativa de célula2 = coeficiente de temperatura
1733 06C5 enum 1 r cambio manual Enumeración:0 = manual1 = calibración
1734 06C6 enum 1 r Valoración de la calibración Enumeración:0 = sin valoración1 = OK2 = Aviso
32
6 Tablas de dirección Modbus
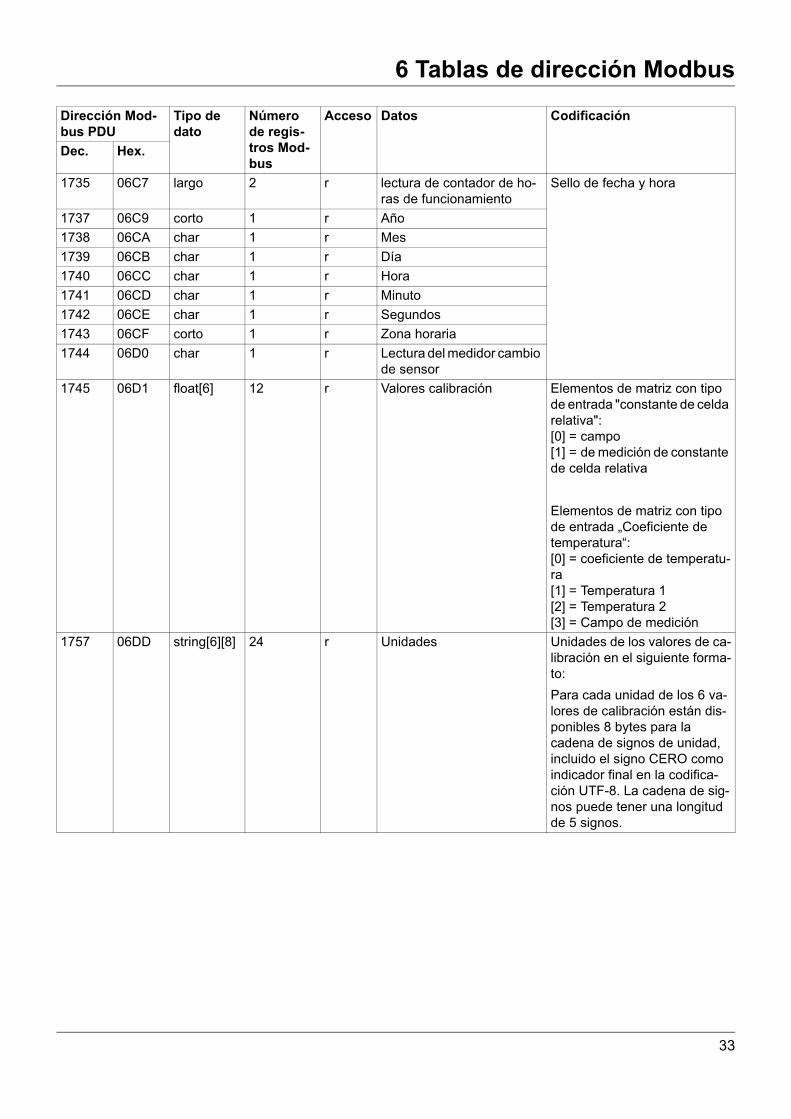
1735 06C7 largo 2 r lectura de contador de ho-ras de funcionamiento
Sello de fecha y hora
1737 06C9 corto 1 r Año1738 06CA char 1 r Mes1739 06CB char 1 r Día1740 06CC char 1 r Hora1741 06CD char 1 r Minuto1742 06CE char 1 r Segundos1743 06CF corto 1 r Zona horaria1744 06D0 char 1 r Lectura del medidor cambio
de sensor1745 06D1 float[6] 12 r Valores calibración Elementos de matriz con tipo
de entrada "constante de celda relativa": [0] = campo[1] = de medición de constante de celda relativa
Elementos de matriz con tipo de entrada „Coeficiente de temperatura“:[0] = coeficiente de temperatu-ra[1] = Temperatura 1[2] = Temperatura 2[3] = Campo de medición
1757 06DD string[6][8] 24 r Unidades Unidades de los valores de ca-libración en el siguiente forma-to:Para cada unidad de los 6 va-lores de calibración están dis-ponibles 8 bytes para la cadena de signos de unidad, incluido el signo CERO como indicador final en la codifica-ción UTF-8. La cadena de sig-nos puede tener una longitud de 5 signos.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
33
6 Tablas de dirección Modbus
6.4.6 Apunte en libro bitácora de calibrado 6Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
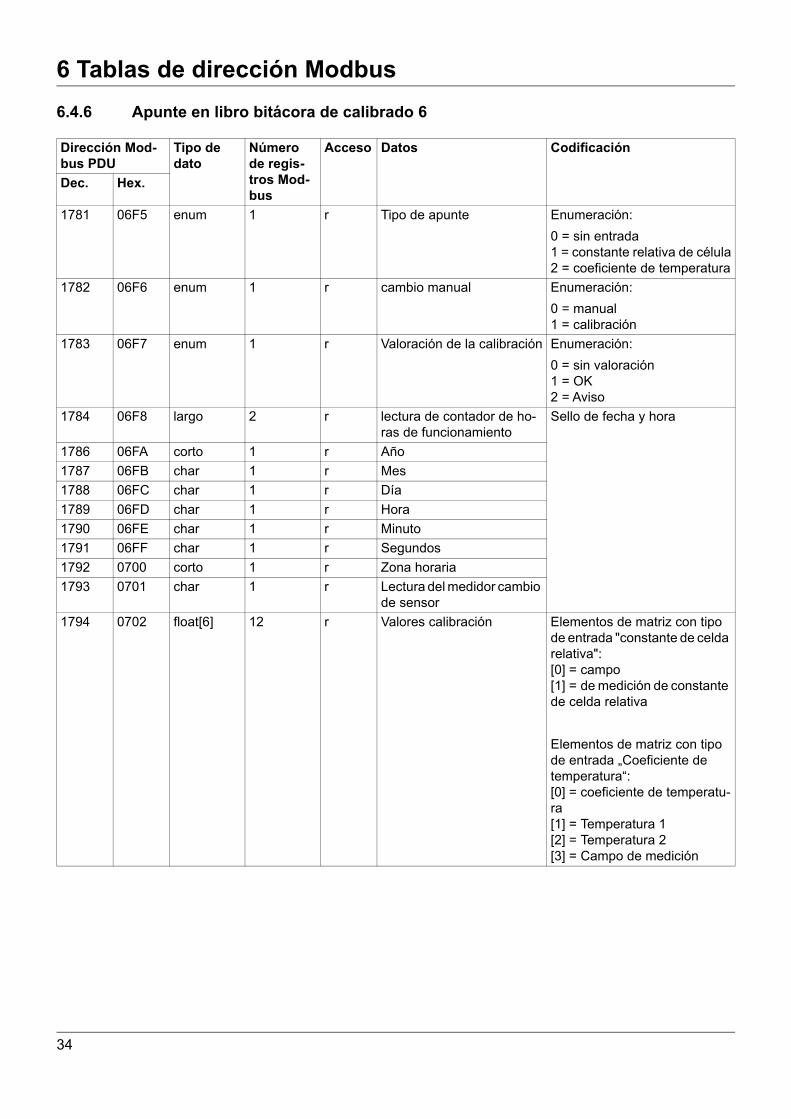
1781 06F5 enum 1 r Tipo de apunte Enumeración:0 = sin entrada1 = constante relativa de célula2 = coeficiente de temperatura
1782 06F6 enum 1 r cambio manual Enumeración:0 = manual1 = calibración
1783 06F7 enum 1 r Valoración de la calibración Enumeración:0 = sin valoración1 = OK2 = Aviso
1784 06F8 largo 2 r lectura de contador de ho-ras de funcionamiento
Sello de fecha y hora
1786 06FA corto 1 r Año1787 06FB char 1 r Mes1788 06FC char 1 r Día1789 06FD char 1 r Hora1790 06FE char 1 r Minuto1791 06FF char 1 r Segundos1792 0700 corto 1 r Zona horaria1793 0701 char 1 r Lectura del medidor cambio
de sensor1794 0702 float[6] 12 r Valores calibración Elementos de matriz con tipo
de entrada "constante de celda relativa": [0] = campo[1] = de medición de constante de celda relativa
Elementos de matriz con tipo de entrada „Coeficiente de temperatura“:[0] = coeficiente de temperatu-ra[1] = Temperatura 1[2] = Temperatura 2[3] = Campo de medición
34

6 Tablas de dirección Modbus
6.4.7 Apunte en libro bitácora de calibrado 7
1806 070E string[6][8] 24 r Unidades Unidades de los valores de ca-libración en el siguiente forma-to:Para cada unidad de los 6 va-lores de calibración están dis-ponibles 8 bytes para la cadena de signos de unidad, incluido el signo CERO como indicador final en la codifica-ción UTF-8. La cadena de sig-nos puede tener una longitud de 5 signos.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
1830 0726 enum 1 r Tipo de apunte Enumeración:0 = sin entrada1 = constante relativa de célula2 = coeficiente de temperatura
1831 0727 enum 1 r cambio manual Enumeración:0 = manual1 = calibración
1832 0728 enum 1 r Valoración de la calibración Enumeración:0 = sin valoración1 = OK2 = Aviso
1833 0729 largo 2 r lectura de contador de ho-ras de funcionamiento
Sello de fecha y hora
1835 072B corto 1 r Año1836 072C char 1 r Mes1837 072D char 1 r Día1838 072E char 1 r Hora1839 072F char 1 r Minuto1840 0730 char 1 r Segundos1841 0731 corto 1 r Zona horaria1842 0732 char 1 r Lectura del medidor cambio
de sensor
35

6 Tablas de dirección Modbus
6.4.8 Apunte en libro bitácora de calibrado 8
1843 0733 float[6] 12 r Valores calibración Elementos de matriz con tipo de entrada "constante de celda relativa": [0] = campo[1] = de medición de constante de celda relativa
Elementos de matriz con tipo de entrada „Coeficiente de temperatura“:[0] = coeficiente de temperatu-ra[1] = Temperatura 1[2] = Temperatura 2[3] = Campo de medición
1855 073F string[6][8] 24 r Unidades Unidades de los valores de ca-libración en el siguiente forma-to:Para cada unidad de los 6 va-lores de calibración están dis-ponibles 8 bytes para la cadena de signos de unidad, incluido el signo CERO como indicador final en la codifica-ción UTF-8. La cadena de sig-nos puede tener una longitud de 5 signos.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
1879 0757 enum 1 r Tipo de apunte Enumeración:0 = sin entrada1 = constante relativa de célula2 = coeficiente de temperatura
1880 0758 enum 1 r cambio manual Enumeración:0 = manual1 = calibración
1881 0759 enum 1 r Valoración de la calibración Enumeración:0 = sin valoración1 = OK2 = Aviso
36
6 Tablas de dirección Modbus
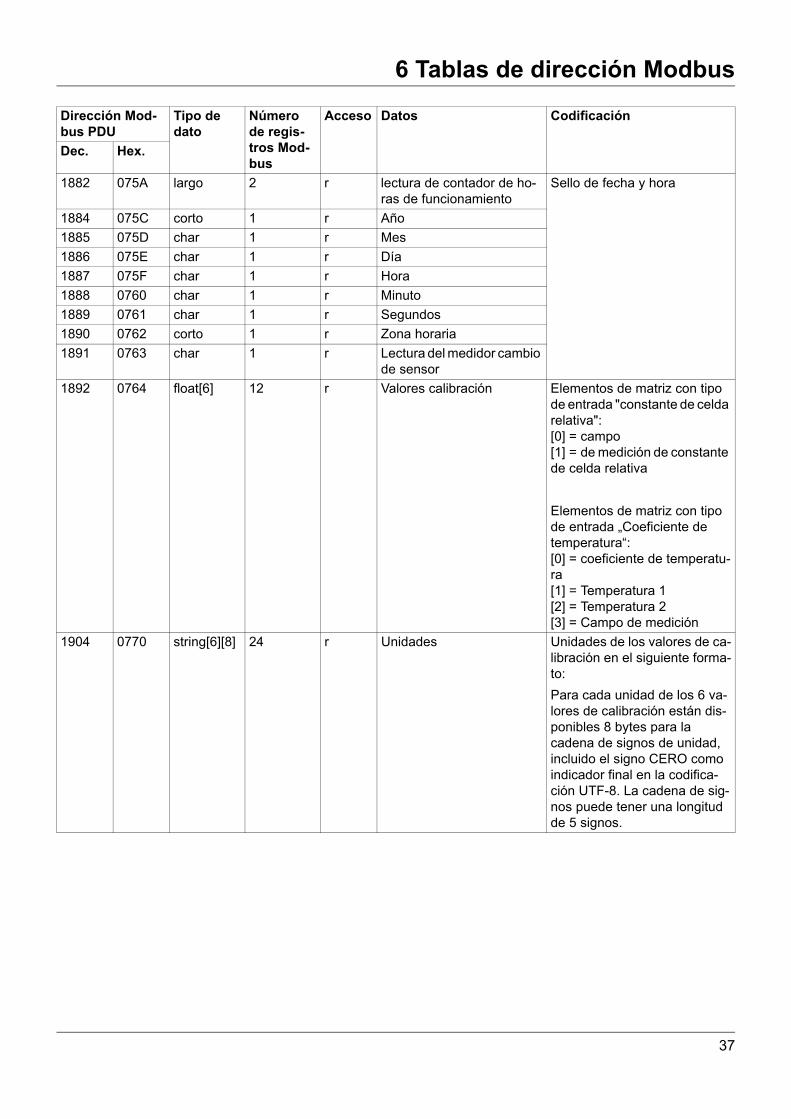
1882 075A largo 2 r lectura de contador de ho-ras de funcionamiento
Sello de fecha y hora
1884 075C corto 1 r Año1885 075D char 1 r Mes1886 075E char 1 r Día1887 075F char 1 r Hora1888 0760 char 1 r Minuto1889 0761 char 1 r Segundos1890 0762 corto 1 r Zona horaria1891 0763 char 1 r Lectura del medidor cambio
de sensor1892 0764 float[6] 12 r Valores calibración Elementos de matriz con tipo
de entrada "constante de celda relativa": [0] = campo[1] = de medición de constante de celda relativa
Elementos de matriz con tipo de entrada „Coeficiente de temperatura“:[0] = coeficiente de temperatu-ra[1] = Temperatura 1[2] = Temperatura 2[3] = Campo de medición
1904 0770 string[6][8] 24 r Unidades Unidades de los valores de ca-libración en el siguiente forma-to:Para cada unidad de los 6 va-lores de calibración están dis-ponibles 8 bytes para la cadena de signos de unidad, incluido el signo CERO como indicador final en la codifica-ción UTF-8. La cadena de sig-nos puede tener una longitud de 5 signos.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
37
6 Tablas de dirección Modbus
6.4.9 Apunte en libro bitácora de calibrado 9Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
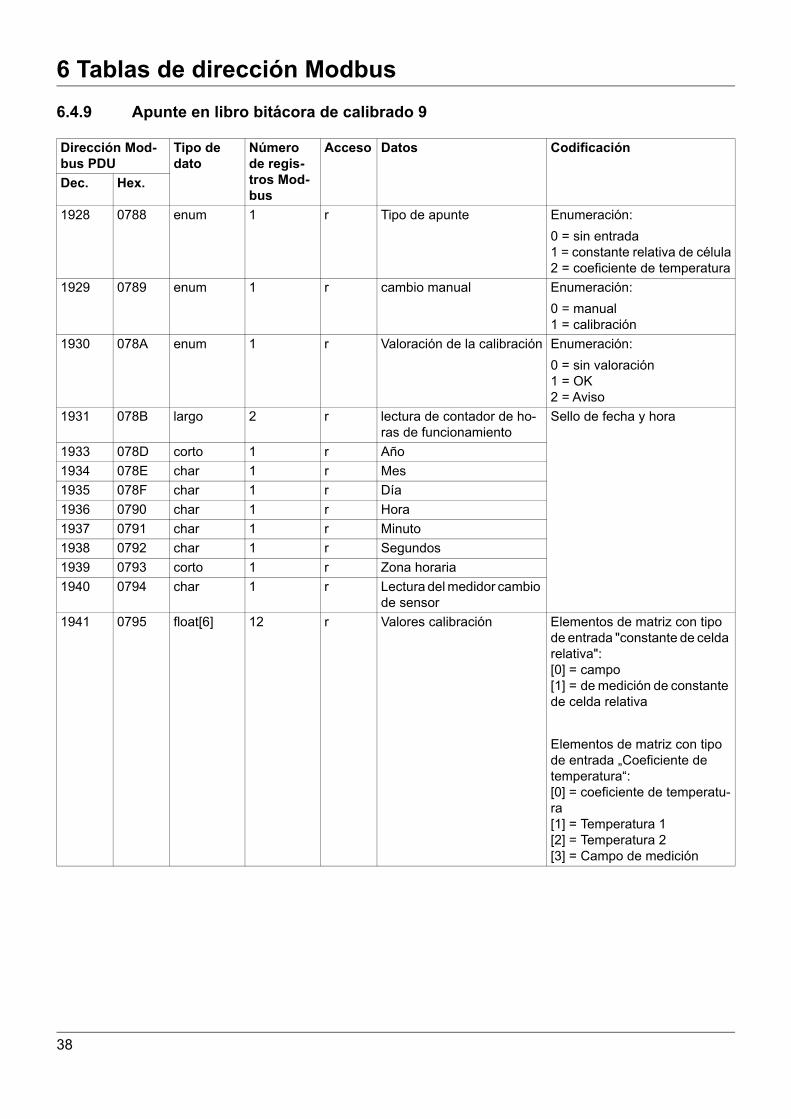
1928 0788 enum 1 r Tipo de apunte Enumeración:0 = sin entrada1 = constante relativa de célula2 = coeficiente de temperatura
1929 0789 enum 1 r cambio manual Enumeración:0 = manual1 = calibración
1930 078A enum 1 r Valoración de la calibración Enumeración:0 = sin valoración1 = OK2 = Aviso
1931 078B largo 2 r lectura de contador de ho-ras de funcionamiento
Sello de fecha y hora
1933 078D corto 1 r Año1934 078E char 1 r Mes1935 078F char 1 r Día1936 0790 char 1 r Hora1937 0791 char 1 r Minuto1938 0792 char 1 r Segundos1939 0793 corto 1 r Zona horaria1940 0794 char 1 r Lectura del medidor cambio
de sensor1941 0795 float[6] 12 r Valores calibración Elementos de matriz con tipo
de entrada "constante de celda relativa": [0] = campo[1] = de medición de constante de celda relativa
Elementos de matriz con tipo de entrada „Coeficiente de temperatura“:[0] = coeficiente de temperatu-ra[1] = Temperatura 1[2] = Temperatura 2[3] = Campo de medición
38
6 Tablas de dirección Modbus
6.4.10 Apunte en libro bitácora de calibrado 10
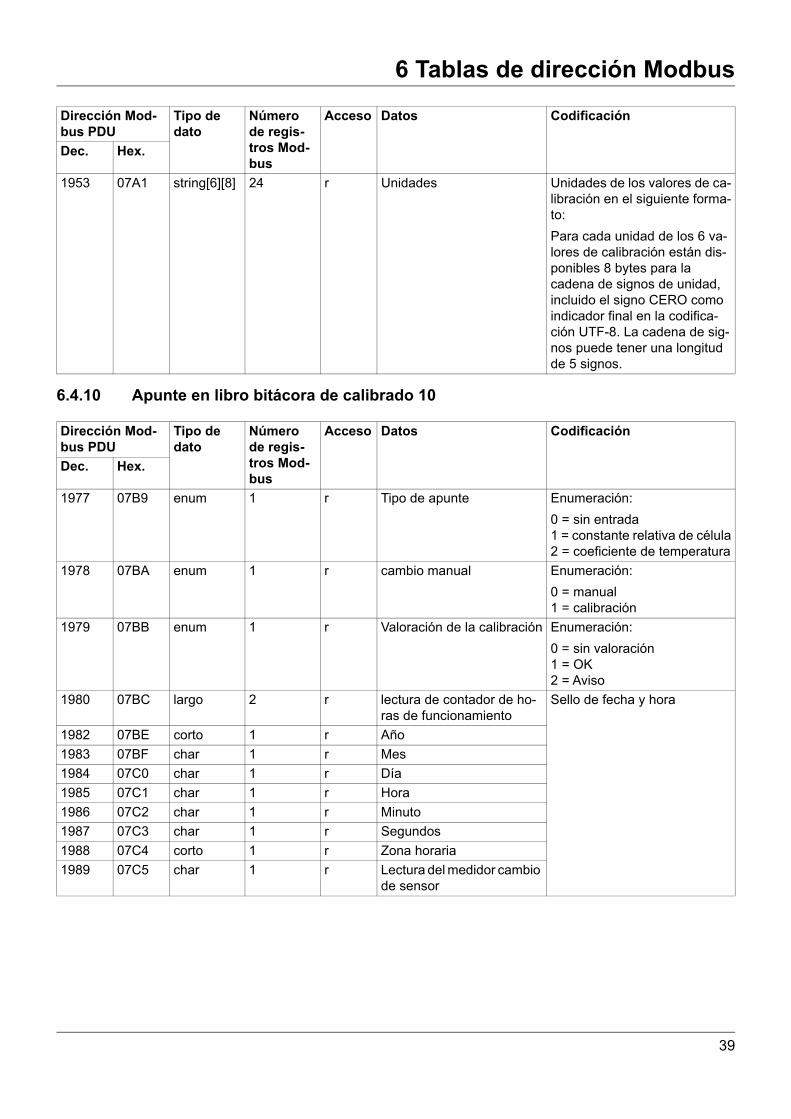
1953 07A1 string[6][8] 24 r Unidades Unidades de los valores de ca-libración en el siguiente forma-to:Para cada unidad de los 6 va-lores de calibración están dis-ponibles 8 bytes para la cadena de signos de unidad, incluido el signo CERO como indicador final en la codifica-ción UTF-8. La cadena de sig-nos puede tener una longitud de 5 signos.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
1977 07B9 enum 1 r Tipo de apunte Enumeración:0 = sin entrada1 = constante relativa de célula2 = coeficiente de temperatura
1978 07BA enum 1 r cambio manual Enumeración:0 = manual1 = calibración
1979 07BB enum 1 r Valoración de la calibración Enumeración:0 = sin valoración1 = OK2 = Aviso
1980 07BC largo 2 r lectura de contador de ho-ras de funcionamiento
Sello de fecha y hora
1982 07BE corto 1 r Año1983 07BF char 1 r Mes1984 07C0 char 1 r Día1985 07C1 char 1 r Hora1986 07C2 char 1 r Minuto1987 07C3 char 1 r Segundos1988 07C4 corto 1 r Zona horaria1989 07C5 char 1 r Lectura del medidor cambio
de sensor
39
6 Tablas de dirección Modbus
6.4.11 Constantes relativas de célula
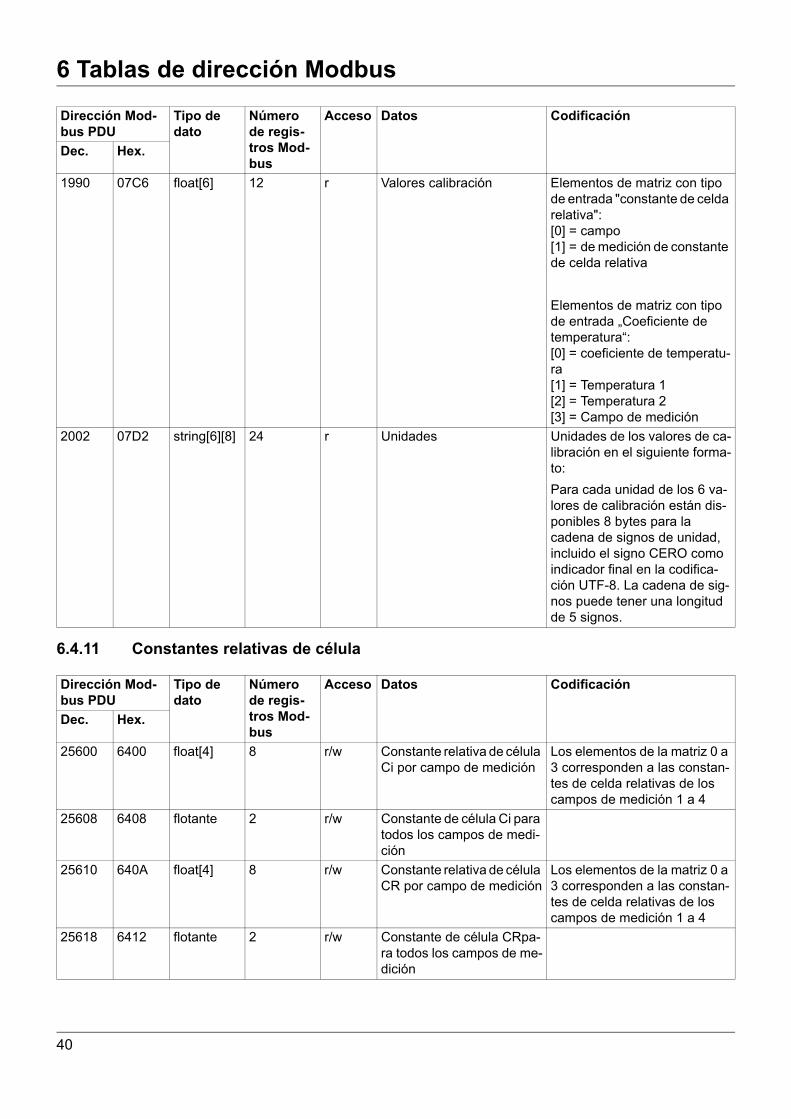
1990 07C6 float[6] 12 r Valores calibración Elementos de matriz con tipo de entrada "constante de celda relativa": [0] = campo[1] = de medición de constante de celda relativa
Elementos de matriz con tipo de entrada „Coeficiente de temperatura“:[0] = coeficiente de temperatu-ra[1] = Temperatura 1[2] = Temperatura 2[3] = Campo de medición
2002 07D2 string[6][8] 24 r Unidades Unidades de los valores de ca-libración en el siguiente forma-to:Para cada unidad de los 6 va-lores de calibración están dis-ponibles 8 bytes para la cadena de signos de unidad, incluido el signo CERO como indicador final en la codifica-ción UTF-8. La cadena de sig-nos puede tener una longitud de 5 signos.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
25600 6400 float[4] 8 r/w Constante relativa de célula Ci por campo de medición
Los elementos de la matriz 0 a 3 corresponden a las constan-tes de celda relativas de los campos de medición 1 a 4
25608 6408 flotante 2 r/w Constante de célula Ci para todos los campos de medi-ción
25610 640A float[4] 8 r/w Constante relativa de célula CR por campo de medición
Los elementos de la matriz 0 a 3 corresponden a las constan-tes de celda relativas de los campos de medición 1 a 4
25618 6412 flotante 2 r/w Constante de célula CRpa-ra todos los campos de me-dición
40

6 Tablas de dirección Modbus
6.5 Configuración entrada conductividad CR
25620 6414 flotante 2 r/w Constante relativa de célula CR junior
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
20738 5102 enum 1 r/w Fuente de compensación Enumeración:0 = temperatura manual1 = entrada temperatura2 = interfaz
20739 5103 enum 1 r/w Modo constante relativa de célula
Enumeración:
0 = Una constante de célula para todos los campos de medición
1 = Constante relativa de cé-lula CR separada por cada campo de medición
20741 5105 enum 1 r/w Detección rotura de capilar Enumeración:0 = Apagado1 = Encendido
20742 5106 flotante 2 r/w Temperatura manual20744 5108 flotante 2 r/w Temperatura de referencia
para TK lin./curva TK20746 510A flotante 2 r/w Tiempo de filtrado20748 510C flotante 2 r/w Constante nominal de célu-
la20750 510E enum[4] 4 r/w Activación tabla de lineali-
zaciónElementos de matriz [0] a [3] para los campos de medición 1 a 4Enumeración:0 = No1 = Si
20754 5112 enum[4] 4 r/w Unidad de cálculo Elementos de matriz [0] a [3] para los campos de medición 1 a 4Enumeración:0 = µS/cm1 = mS/cm2 = kΩ×cm3 = MΩ×cm
41

6 Tablas de dirección Modbus
20758 5116 T_KOMP_-CR[4]
4 r/w Compensación Los elementos de la matriz [0] a [3] corresponden a las enu-meraciones para los ajustes de compensación de los campos de medición 1 a 4.
Enumeración: :0 = Ninguno1 = TK lineal2 = Curva TK3 = Aguas naturales4 = Aguas naturales con
campo de temperatura ampliado
5 = TDS6 = ASTM neutral7 = ASTM ácido8 = ASTM alcalino
20762 511A float[4] 8 r/w TK Los elementos de la matriz [0] a [3] corresponden a los coefi-cientes de temperatura de los campos de medición 1 a 4
20770 5122 float[4] 8 r/w Offset Los elementos de la matriz [0] a [3] corresponden a los offsets de los campos de medición 1 a 4
20778 512A float[4] 8 r/w Factor TDS Los elementos de la matriz [0] a [3] corresponden a los facto-res TDS de los campos de me-dición 1 a 4
20786 5132 string[4][6] 12 r/w Texto de unidad para TDS y linealización específica del cliente con tablas de lineali-zación
Los elementos de la matriz [0][x] a [3][x] corresponden a los textos de la unidad TDS de los campos de medición 1 a 4 en la codificación ISO 8859-1 con hasta 6 caracteres que in-cluyen "CERO" como el identi-ficador final.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
42
6 Tablas de dirección Modbus
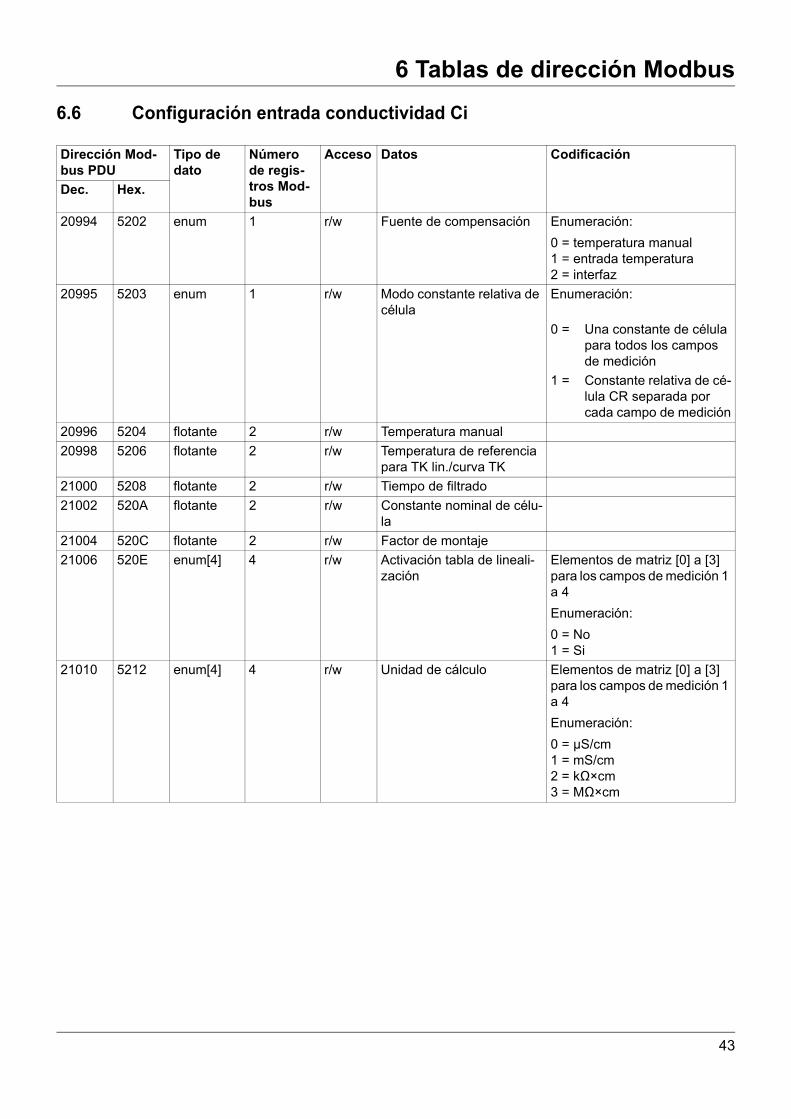
6.6 Configuración entrada conductividad CiDirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
20994 5202 enum 1 r/w Fuente de compensación Enumeración:0 = temperatura manual1 = entrada temperatura2 = interfaz
20995 5203 enum 1 r/w Modo constante relativa de célula
Enumeración:
0 = Una constante de célula para todos los campos de medición
1 = Constante relativa de cé-lula CR separada por cada campo de medición
20996 5204 flotante 2 r/w Temperatura manual20998 5206 flotante 2 r/w Temperatura de referencia
para TK lin./curva TK21000 5208 flotante 2 r/w Tiempo de filtrado21002 520A flotante 2 r/w Constante nominal de célu-
la21004 520C flotante 2 r/w Factor de montaje21006 520E enum[4] 4 r/w Activación tabla de lineali-
zaciónElementos de matriz [0] a [3] para los campos de medición 1 a 4Enumeración:0 = No1 = Si
21010 5212 enum[4] 4 r/w Unidad de cálculo Elementos de matriz [0] a [3] para los campos de medición 1 a 4Enumeración:0 = µS/cm1 = mS/cm2 = kΩ×cm3 = MΩ×cm
43
6 Tablas de dirección Modbus
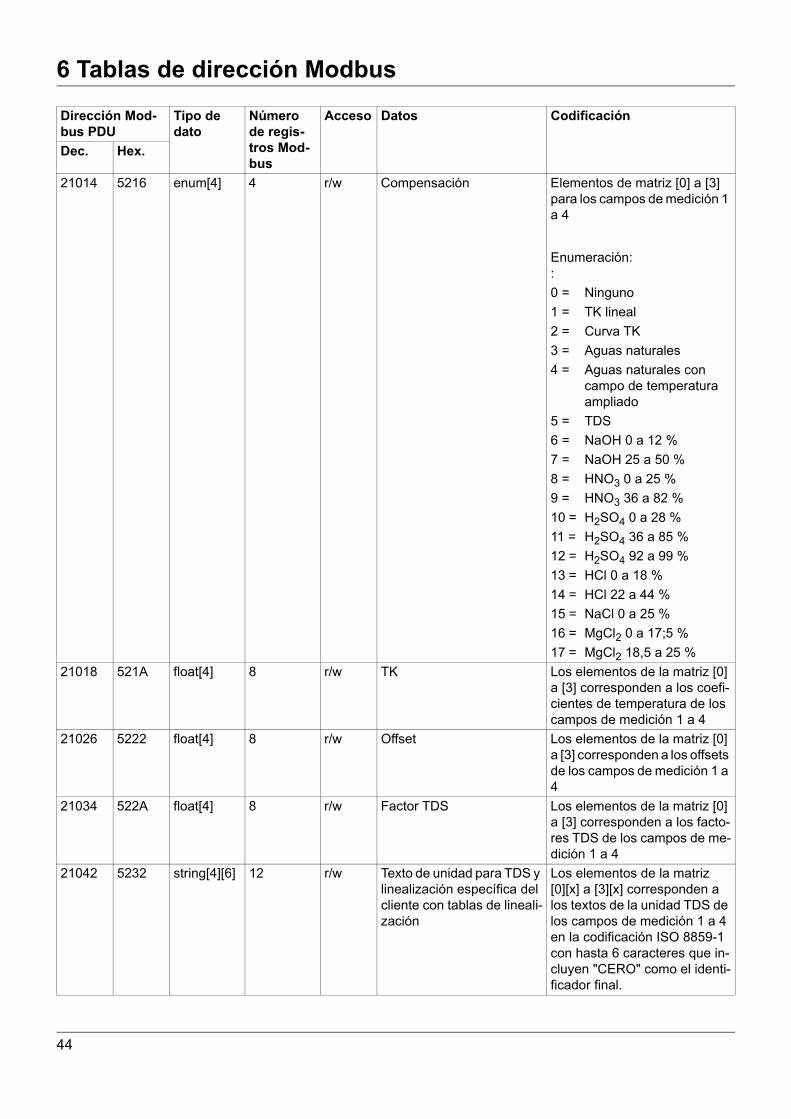
21014 5216 enum[4] 4 r/w Compensación Elementos de matriz [0] a [3] para los campos de medición 1 a 4
Enumeración: :0 = Ninguno1 = TK lineal2 = Curva TK3 = Aguas naturales4 = Aguas naturales con
campo de temperatura ampliado
5 = TDS6 = NaOH 0 a 12 %7 = NaOH 25 a 50 %8 = HNO3 0 a 25 %9 = HNO3 36 a 82 %10 = H2SO4 0 a 28 %11 = H2SO4 36 a 85 %12 = H2SO4 92 a 99 %13 = HCl 0 a 18 %14 = HCl 22 a 44 %15 = NaCl 0 a 25 %16 = MgCl2 0 a 17;5 %17 = MgCl2 18,5 a 25 %
21018 521A float[4] 8 r/w TK Los elementos de la matriz [0] a [3] corresponden a los coefi-cientes de temperatura de los campos de medición 1 a 4
21026 5222 float[4] 8 r/w Offset Los elementos de la matriz [0] a [3] corresponden a los offsets de los campos de medición 1 a 4
21034 522A float[4] 8 r/w Factor TDS Los elementos de la matriz [0] a [3] corresponden a los facto-res TDS de los campos de me-dición 1 a 4
21042 5232 string[4][6] 12 r/w Texto de unidad para TDS y linealización específica del cliente con tablas de lineali-zación
Los elementos de la matriz [0][x] a [3][x] corresponden a los textos de la unidad TDS de los campos de medición 1 a 4 en la codificación ISO 8859-1 con hasta 6 caracteres que in-cluyen "CERO" como el identi-ficador final.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
44
6 Tablas de dirección Modbus
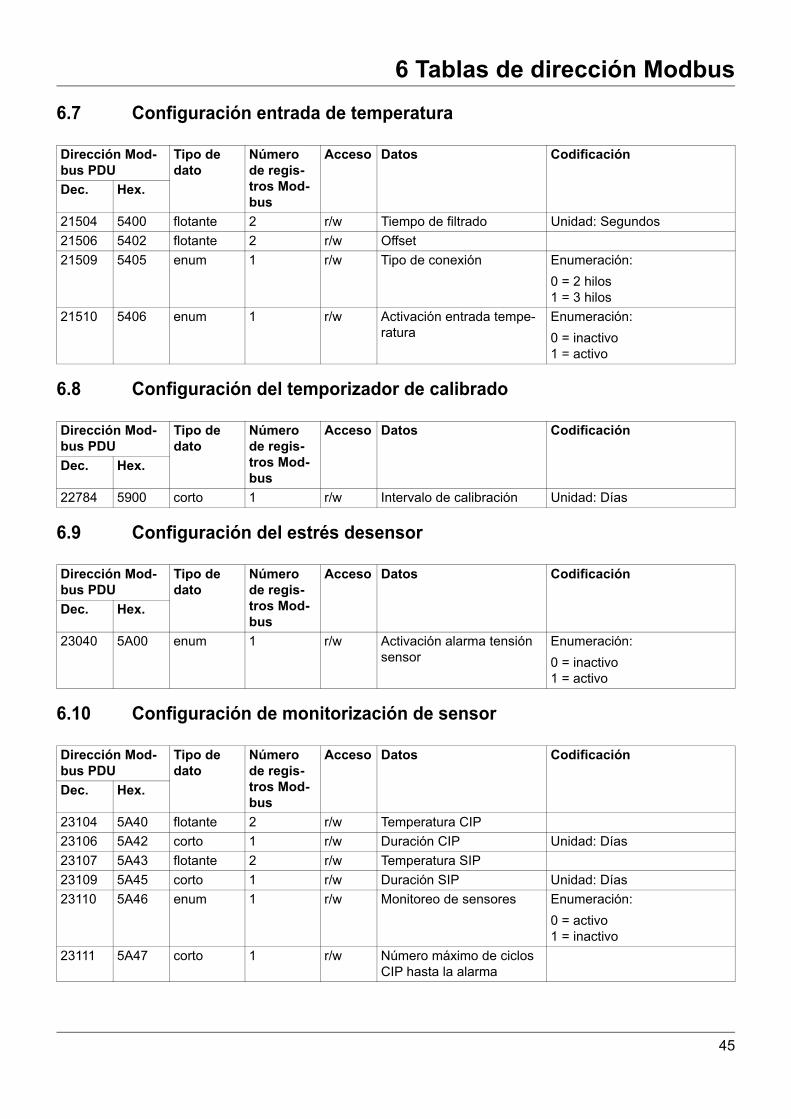
6.7 Configuración entrada de temperatura6.8 Configuración del temporizador de calibrado
6.9 Configuración del estrés desensor
6.10 Configuración de monitorización de sensor
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
21504 5400 flotante 2 r/w Tiempo de filtrado Unidad: Segundos21506 5402 flotante 2 r/w Offset21509 5405 enum 1 r/w Tipo de conexión Enumeración:
0 = 2 hilos1 = 3 hilos
21510 5406 enum 1 r/w Activación entrada tempe-ratura
Enumeración:0 = inactivo1 = activo
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
22784 5900 corto 1 r/w Intervalo de calibración Unidad: Días
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
23040 5A00 enum 1 r/w Activación alarma tensión sensor
Enumeración:0 = inactivo1 = activo
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
23104 5A40 flotante 2 r/w Temperatura CIP23106 5A42 corto 1 r/w Duración CIP Unidad: Días23107 5A43 flotante 2 r/w Temperatura SIP23109 5A45 corto 1 r/w Duración SIP Unidad: Días23110 5A46 enum 1 r/w Monitoreo de sensores Enumeración:
0 = activo1 = inactivo
23111 5A47 corto 1 r/w Número máximo de ciclos CIP hasta la alarma
45

6 Tablas de dirección Modbus
6.11 Configuración Display
23112 5A48 corto 1 r/w Número máximo de ciclos SIP hasta la alarma
23113 5A49 corto 1 r/w Número máximo de ciclos CIP hasta la prealarma
23114 5A4A corto 1 r/w Número máximo de ciclos SIP hasta la prealarma
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
23809 5D01 enum 1 r/w Idioma Enumeración:0 = Alemán1 = Inglés2 = Francés3 = Español
23810 5D02 corto 1 r/w Tiempo de cierre automáti-co de sesión
Unidad: Minutos0 = sin cierre automático de
sesión 23811 5D03 enum 1 r/w Tipo visualización Enumeración:
0 = pantalla estándar1 = pantalla grande2 = gráfico de barras
23812 5D04 enum 1 r/w Unidad temperatura Enumeración:0 = °C1 = °F
23813 5D05 float[4] 8 r/w Gráf. barras inicio Los elementos de la matriz [0] a [3] corresponden a los valo-res iniciales del gráfico de ba-rras de los campos de medición 1 a 4
23821 5D0D float[4] 8 r/w Gráf. barras final Los elementos de la matriz [0] a [3] corresponden a los valo-res finales del gráfico de ba-rras de los campos de medición 1 a 4
46
6 Tablas de dirección Modbus
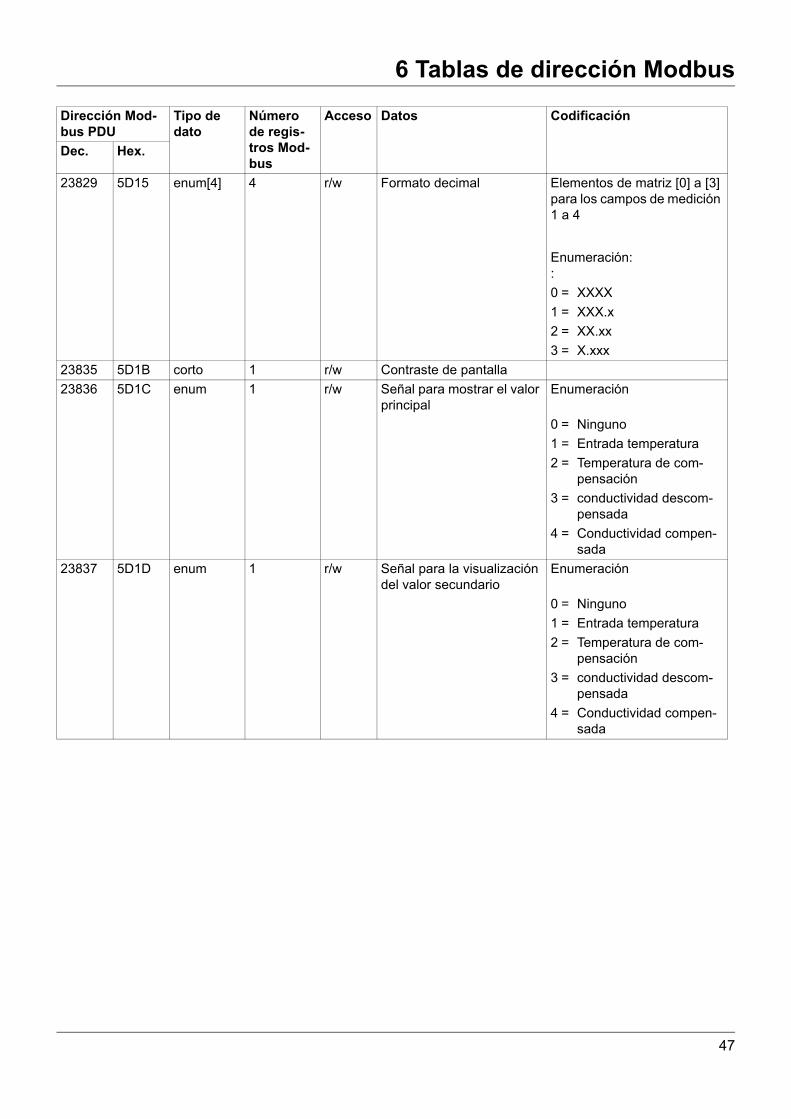
23829 5D15 enum[4] 4 r/w Formato decimal Elementos de matriz [0] a [3] para los campos de medición 1 a 4
Enumeración: :0 = XXXX1 = XXX.x2 = XX.xx3 = X.xxx
23835 5D1B corto 1 r/w Contraste de pantalla23836 5D1C enum 1 r/w Señal para mostrar el valor
principalEnumeración
0 = Ninguno1 = Entrada temperatura2 = Temperatura de com-
pensación3 = conductividad descom-
pensada4 = Conductividad compen-
sada23837 5D1D enum 1 r/w Señal para la visualización
del valor secundarioEnumeración
0 = Ninguno1 = Entrada temperatura2 = Temperatura de com-
pensación3 = conductividad descom-
pensada4 = Conductividad compen-
sada
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
47

6 Tablas de dirección Modbus
6.12 Valores de proceso6.12.1 Entradas
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
8192 2000 flotante 2 r valor medido de conductivi-dad no compensada en mi-cro-Siemens
8194 2002 flotante 2 r valor medido conductividad no compensada
8196 2004 flotante 2 r valor medido conductividad compensada
8198 2006 flotante 2 r valor de temperatura de compensación
8200 2008 corto 1 r campo de medición actual del valor medido de con-ductividad
8202 200A char 1 r Dejar área de compensa-ción
8203 200B char 1 r Conductividad no válida 0 = no hay errores1 = conductividad no válida
8204 200C string[6] 3 r Texto de unidad conductivi-dad no comp.
Codificación ASCII con hasta 6 caracteres incluido "CERO" como identificador final.El número de bytes debe ser par (posiblemente rellenar con otro carácter CERO)
8207 200F string[6] 3 r Texto de unidad conductivi-dad comp.
Codificación ASCII con hasta 6 caracteres incluido "CERO" como identificador final.El número de bytes debe ser par (posiblemente rellenar con otro carácter CERO)
8210 2012 corto 1 r/w campo de medición actual del valor medido de con-ductivida mediante interfaz
0 = Campo de medición 11 = Messbereich 22 = Messbereich 33 = Messbereich 4
8211 2013 flotante 2 r/w Temperatura de compensa-ción en interfaz
Temperatura de compensa-ción, que se transfiere del dis-positivo maestro JUMO digiLine al JUMO digiLine CR/Ci
8450 2102 flotante 2 r Valor medido entrada de temperatura en °C
Valor medido de temperatura del JUMO digiLine CR/Ci en °C
8452 2104 flotante 2 r Valor medido entrada de temperatura en °F
Valor medido de temperatura del JUMO digiLine CR/Ci en °F
8454 2106 char 1 r Alarma entrada de tempe-ratura
0 = no hay errores1 = alarma entrada de tempe-ratura
48

6 Tablas de dirección Modbus
6.12.2 Alarma de calibrado6.12.3 estrés de sensor
6.12.4 Monitoreo de sensores
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
9472 2500 char 1 r Alarma de calibración
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
9728 2600 char 1 r Estado de alarma tensión de sensor
El nivel de tensión del sensor representa la tensión térmica y química del sensor como un índice en función del valor me-dido de temperatura y conduc-tividad. Se puede encontrar más información en el manual de servicio de JUMO digiLine CR/Ci.
9729 2601 char 1 r Estado de prealarma ten-sión de sensor
9730 2602 corto 1 r Nivel actual de tensión del sensor
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
9792 2640 char 1 r Alarma CIP/SIP9793 2641 char 1 r Prealarma CIP/SIP
49

6 Tablas de dirección Modbus
6.12.5 Fecha y hora del sello horario6.12.6 Resumen de importantes valores de proceso
¡NOTA!Las variables de los valores de proceso resumidos se configuran como inválidas durante la fase dearranque para evitar que las mediciones inestables causen problemas a los dispositivos maestros queacceden a estas mediciones. Por el contrario, las variables originales siempre se muestran de maneratransparente (también oscilante).
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
10304 2840 corto 1 r/w Año10305 2841 char 1 r/w Mes10306 2842 char 1 r/w Día10307 2843 char 1 r/w Hora10308 2844 char 1 r/w Minuto10309 2845 char 1 r/w Segundo10310 2846 corto 1 r/w Zona horaria Offset a UTC en minutos
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
32768 8000 flotante 2 r valor medido conductividad no compensada
32770 8002 flotante 2 r valor medido conductividad compensada
32772 8004 flotante 2 r Temperatura en °C32774 8006 corto 1 r Juego de parámetros activo32775 8007 corto 1 r palabra de estado La palabra de estado es un
campo de bits que consta de 16 bits de estado. La estructura de la palabra de estado se muestra en la si-guiente tabla.
32776 8008 corto 1 r nivel de tensión del sensor El nivel de tensión del sensor representa la tensión térmica y química del sensor como un índice en función del valor me-dido de temperatura y conduc-tividad. Se puede encontrar más información en el manual de servicio de JUMO digiLine CR/Ci.
32777 8009 largo 2 r ciclos contador CIP32779 800B largo 2 r ciclos contador SIP
50
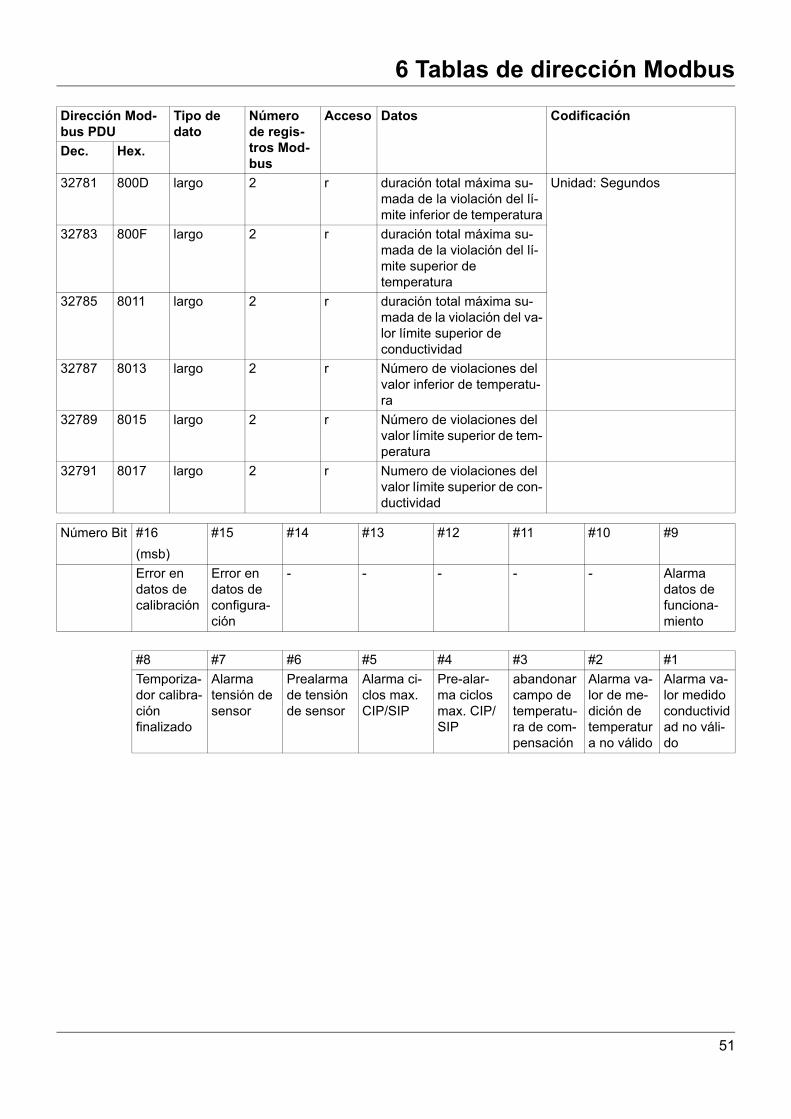
6 Tablas de dirección Modbus
32781 800D largo 2 r duración total máxima su-mada de la violación del lí-mite inferior de temperatura
Unidad: Segundos
32783 800F largo 2 r duración total máxima su-mada de la violación del lí-mite superior de temperatura
32785 8011 largo 2 r duración total máxima su-mada de la violación del va-lor límite superior de conductividad
32787 8013 largo 2 r Número de violaciones del valor inferior de temperatu-ra
32789 8015 largo 2 r Número de violaciones del valor límite superior de tem-peratura
32791 8017 largo 2 r Numero de violaciones del valor límite superior de con-ductividad
Dirección Mod-bus PDU
Tipo de dato
Número de regis-tros Mod-bus
Acceso Datos Codificación
Dec. Hex.
Número Bit #16(msb)
#15 #14 #13 #12 #11 #10 #9
Error en datos de calibración
Error en datos de configura-ción
- - - - - Alarma datos de funciona-miento
#8 #7 #6 #5 #4 #3 #2 #1Temporiza-dor calibra-ción finalizado
Alarma tensión de sensor
Prealarma de tensión de sensor
Alarma ci-clos max. CIP/SIP
Pre-alar-ma ciclos max. CIP/SIP
abandonar campo de temperatu-ra de com-pensación
Alarma va-lor de me-dición de temperatura no válido
Alarma va-lor medido conductividad no váli-do
51

6 Tablas de dirección Modbus
52

JUMO CONTROL S.A.Berlin, 1528813 Torres de la Alameda/MadridTeléfono:Telefax:E-Mail:Internet:
+34 91 886 31 53+34 91 830 87 [email protected]