ej2-a coord cartesianas
DESCRIPTION
Mecanica GeneralTRANSCRIPT
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-1
CINEMATICA DE LA PARTICULA MOVIMIENTO EN COORDENADAS RECTANGULARES
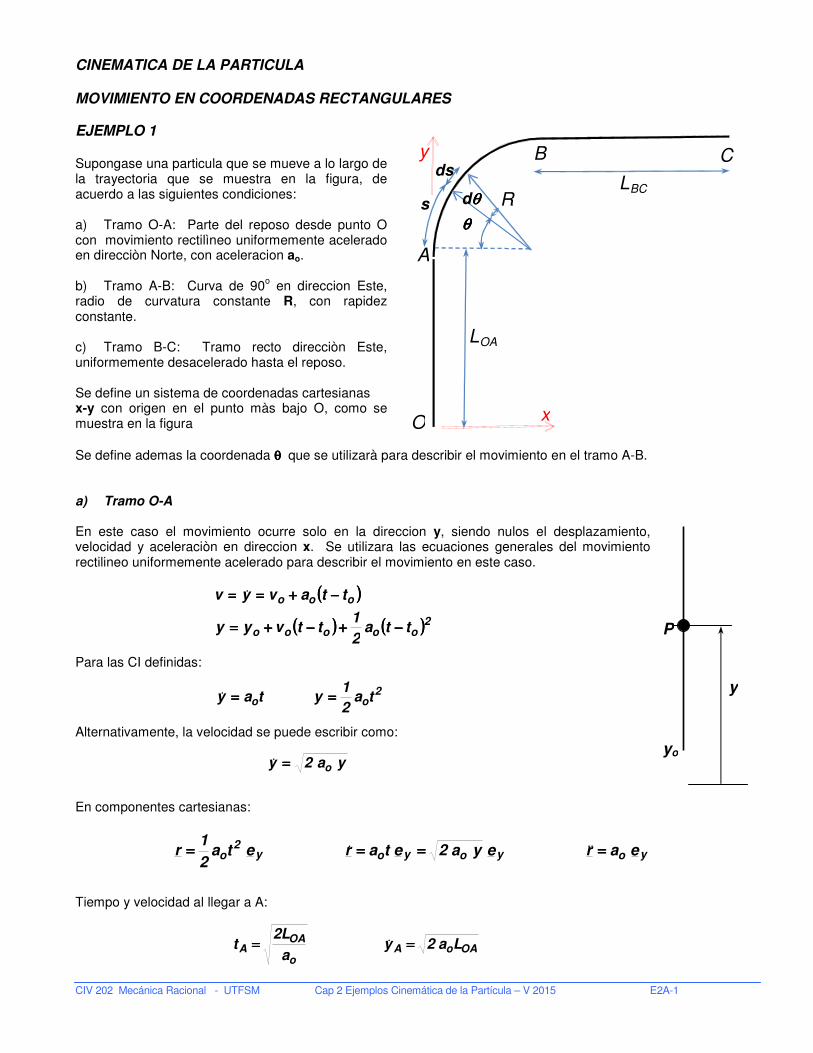
EJEMPLO 1 Supongase una particula que se mueve a lo largo de la trayectoria que se muestra en la figura, de acuerdo a las siguientes condiciones: a) Tramo O-A: Parte del reposo desde punto O con movimiento rectilìneo uniformemente acelerado en direcciòn Norte, con aceleracion ao. b) Tramo A-B: Curva de 90
o en direccion Este,
radio de curvatura constante R, con rapidez constante. c) Tramo B-C: Tramo recto direcciòn Este, uniformemente desacelerado hasta el reposo. Se define un sistema de coordenadas cartesianas x-y con origen en el punto màs bajo O, como se muestra en la figura
Se define ademas la coordenada θ θ θ θ que se utilizarà para describir el movimiento en el tramo A-B. a) Tramo O-A En este caso el movimiento ocurre solo en la direccion y, siendo nulos el desplazamiento, velocidad y aceleraciòn en direccion x. Se utilizara las ecuaciones generales del movimiento rectilineo uniformemente acelerado para describir el movimiento en este caso.
Para las CI definidas:
Alternativamente, la velocidad se puede escribir como:
En componentes cartesianas:
Tiempo y velocidad al llegar a A:
ya2y o====&
(((( ))))
(((( )))) (((( ))))2ooooo
ooo
tta2
1ttvyy
ttavyv
−−−−++++−−−−++++====
−−−−++++======== &
2oo ta
2
1ytay ========&
yoyoyoy2
o eareya2etareta2
1r ================ &&&
y
yo
P
OAoAo
OAA La2y
a
L2t ======== &
A
B C
R
O x
y
θθθθ
dθθθθ
ds
LOA
s
LBC

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-2
b) Tramo A-B Se trata de un movimiento circular con rapidez constante, con las CI correspondientes a la posicion y velocidad evaluadas en A en el punto anterior. Rapidez constante:
Rapidez y posición angular de R:
Vector posicion:
Velocidad:
Aceleracion: dada la condicion de rapidez constante, se tiene solo aceleracion centripeta, dirigida hacia el centro de curvatura:
Tiempo al alcanzar B:
c) Tramo B-C Se trata de un movimiento rectilineo, uniformemente desacelerado, en direccion x. La magnitud a1 de la aceleracion se determina haciendo la velocidad en c vC nula en la siguiente ecuacion:
La rapidez en B es:
Reemplazando se tiene:
OAoA La2ys ======== &&
yOAo
xOAo
ycxc
OAo2c
esinR
La2ecos
R
La2esinaecosaa
R
La2Ra
θθθθ−−−−θθθθ====θθθθ−−−−θθθθ====
====θθθθ==== &
yOAoxOAoyx ecosLa2esinLa2ecossesinsv θθθθ++++θθθθ====θθθθ++++θθθθ==== &&
(((( ))))AOAoOAo
ttR
La2
R
La2
R
s−−−−====θθθθ⇒⇒⇒⇒========θθθθ
&&
(((( )))) (((( )))) yOAxyx esinRLecos1Reyexr θθθθ++++++++θθθθ−−−−====++++====
(((( )))) 0La2vv BC12
BC ====++++====
OAoAB La2yv ======== &
BC
OAo1BC1OAo
L
Laa0La2La2 −−−−====⇒⇒⇒⇒====++++
(((( ))))
OAo
2
o
OA
OAoo
OA
o
OAABAB
La8
R
a
L2
La22
R
a
L2
s2
R
a
L2ttt
ππππ++++====
ππππ++++====
ππππ++++====++++====
&

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-3
La posicion es:
La velocidad es:
La aceleracion es:
(((( )))) (((( )))) (((( ))))
(((( )))) (((( )))) (((( )))) yOAx2
BBC
OAoBOAo
yOAx2
B1BB
eRLettL
La
2
1ttLa2R
eRLetta2
1ttvRr
++++++++
−−−−−−−−−−−−++++
====++++++++
−−−−++++−−−−++++====
(((( )))) xBBC
OAoOAo ett
L
LaLa2v
−−−−−−−−====
xBC
OAo1x1 e
L
Laaeaa −−−−============

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-4
EJEMPLO 2 Dos partículas comienzan simultáneamente sus movimientos en el punto A, con rapidez vo. La partícula 1 se desplaza con movimiento uniformemente retardado con aceleración -ao a lo largo del diámetro AB de la circunferencia de radio R contenida en el plano horizontal. La partícula 2 se desplaza a lo largo de la semi-circunferencia AB con aceleración tangencial constante ao. Estudiar el movimiento del sistema suponiendo que ambas partículas alcanzan simultáneamente el punto B.
CINPAR15 Cert. 1 -05-1
SOLUCION Considérese un sistema cartesiano x-y con origen coincidente con el centro de la circunferencia. Sea t1 el tiempo que demoran las partículas en llegar al punto B. Partícula 1: Movimiento rectilíneo uniformemente retardado a lo largo del eje x. Dadas las condiciones iniciales, las ecuaciones del movimiento son:
Particula 2: Movimiento circular de radio R, uniformemente acelerado. Si s es la longitud medida a lo largo de la
trayectoria, se tiene:
El movimiento de P2 se puede expresar en términos del ángulo θθθθ definido en la figura:
Nótese el signo menos, que se origina por la definición de las coordenadas: un aumento en la magnitud de θθθθ implica una disminución de s, y v/v.
La aceleración de P2 tiene las componentes tangencial y centrípeta. La tangencial es el valor dado ao:
Las componentes cartesianas de la trayectoria, velocidad y aceleración de P2 se pueden expresar en términos del
ángulo θθθθ:
(((( ))))R
tav
R
sRRaaa
2oo
22
c2ot2++++
====
−−−−====θθθθ========
&&
A R
x
y
B θθθθ
R
O
P2
P1
θθθθ−−−−====⇒⇒⇒⇒θθθθ−−−−==== &&&&&& RsRs
2o2
1ooo tatvstavs ++++====⇒⇒⇒⇒++++====&
(((( )))) (((( ))))
(((( ))))
(((( ))))θθθθ
++++−−−−θθθθ−−−−====θθθθ−−−−θθθθ−−−−====
θθθθ++++
−−−−θθθθ====θθθθ−−−−θθθθ====
θθθθ++++−−−−====θθθθ−−−−====θθθθ++++====θθθθ====
θθθθ====θθθθ====
sinR
tavcosasinacosay
cosR
tavsinacosasinax
costavcossysintavsinsx
sinRycosRx
2oo
oc2t22
2oo
oc2t22
oo2oo2
22
&&
&&
&&&&
2o2
1o1oo1o1 tatvRxtavxax −−−−++++−−−−====⇒⇒⇒⇒−−−−====⇒⇒⇒⇒−−−−==== &&&

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-5
Tiempo de llegada a B: Haciendo x1 = R y s =ππππR para t=tB, se tiene:
Sumando ambas ecuaciones:
El valor de ao para que se cumpla la condición de llegada simultánea a B se obtiene reemplazando tB en cualquiera de las ecuaciones anteriores:
La magnitud de la aceleración de P2 en B se determina a partir de sus componentes:
(((( ))))(((( ))))2
2o
2B1
Boo
2
2
R
v4
t
R2tv2a
++++ππππ
−−−−ππππ====
−−−−====
(((( ))))2
2
v
Rttv2RR2
oBBo
++++ππππ====⇒⇒⇒⇒====ππππ++++
2Bo2
1Bo
2Bo2
1Bo
tatvR
tatvRR
++++====ππππ
−−−−++++−−−−====
(((( ))))
(((( ))))(((( ))))
(((( )))) (((( ))))(((( ))))
(((( ))))(((( ))))
(((( ))))(((( ))))
42
2
2o
2
22o
c2o
B2
2o
o
2c2
2t22
2Boo
c2ot2
2
221
2
24
R
va
2
221
R
va
2
2
v
Rt
2
2
R
v4apero
aaaR
tavaaa
++++ππππ
−−−−ππππ++++++++
++++ππππ
−−−−ππππ
====⇒⇒⇒⇒
++++ππππ
−−−−ππππ++++====⇒⇒⇒⇒
++++ππππ====
++++ππππ
−−−−ππππ====
++++====++++
========

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-6
EJEMPLO 3 Una partícula describe una trayectoria en forma de una elipse de semiejes a y b en el plano x-y. Determine las expresiones de la velocidad y aceleración absolutas de la partícula, suponiendo que el movimiento se inicia en el punto (0,b), con velocidad vo, y que la aceleración tiene sólo componente y en todo instante.
C1-10-2 SOLUCION La ecuación de la elipse de la trayectoria de la partícula es:
De los datos se tiene:
• El movimiento se inicia en (0,b), es decir, en el punto más alto de la elipse. En dicho instante la velocidad de la partícula tiene sólo componente x igual a vo.
• La aceleración tiene sólo componente y en todo instante. Esto quiere decir que la componente x de la velocidad es constante igual al valor inicial vo:
• La expresión para la componente y de la velocidad se puede obtener derivando la Ec. (1):
Reemplazando según Ec. (2):
La velocidad es:
)3(Ec0dt
xd
)2(Ecvdt
dx
2
2
o
====⇒⇒⇒⇒
====
)1(Ec1b
y
a
x2
2
2
2
====++++
)4(Ecdt
dx
y
x
a
b
dt
dy0
dt
dy
b
y2
dt
dx
a
x22
22
−−−−====⇒⇒⇒⇒====++++
)5(Ecvy
x
a
bv o
2
y
−−−−====
)6(Ecevy
x
a
bevv yo
2
xo
−−−−====
x
b
x
y
a
y
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-7
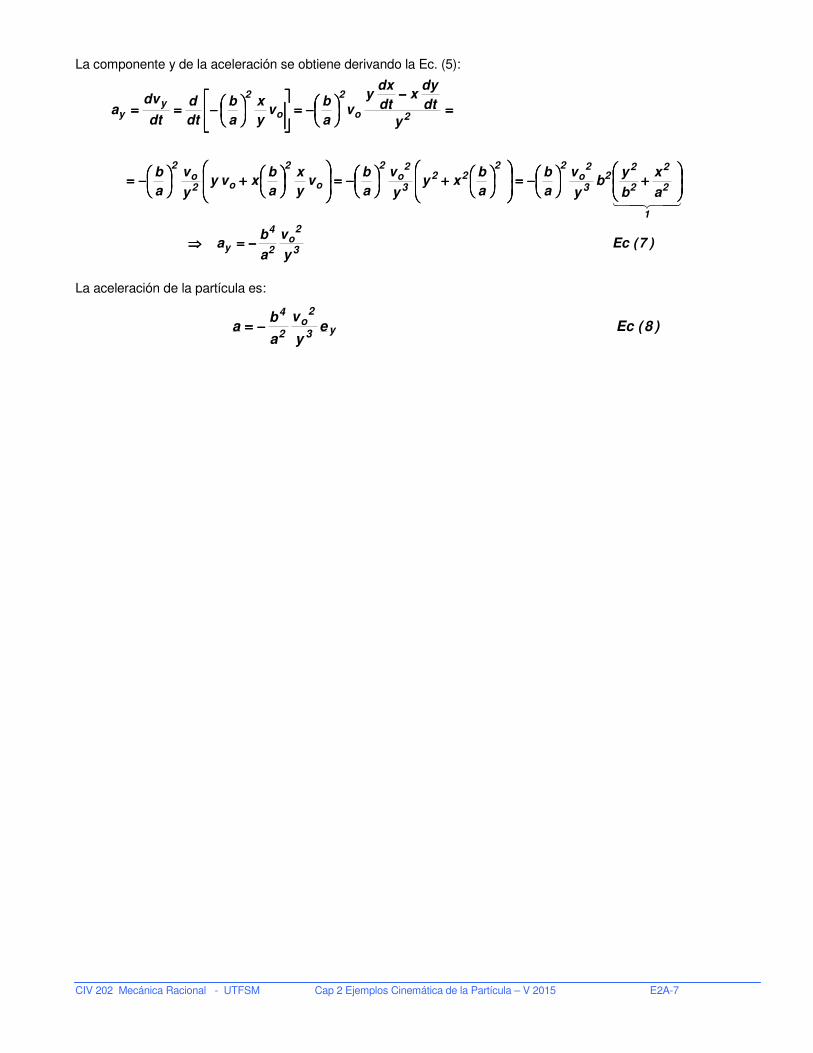
La componente y de la aceleración se obtiene derivando la Ec. (5):
La aceleración de la partícula es:
)7(Ecy
v
a
ba
a
x
b
yb
y
v
a
b
a
bxy
y
v
a
bv
y
x
a
bxvy
y
v
a
b
y
dt
dyx
dt
dxy
va
bv
y
x
a
b
dt
d
dt
dva
3
2o
2
4
y
1
2
2
2
22
3
2o
2222
3
2o
2
o
2
o2o
2
2o
2
o
2y
y
−−−−====⇒⇒⇒⇒
++++
−−−−====
++++
−−−−====
++++
−−−−====
====−−−−
−−−−====
−−−−========
4434421
)8(Ecey
v
a
ba y3
2o
2
4
−−−−====

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-8
SOLUCION de Fco. Díaz Lebel (2011).
x
b
x
y
a θθθθ
y
0dt
xdv
dt
dx2
2
o ====⇒⇒⇒⇒====
θθθθ====θθθθ==== sinbycosax
θθθθ
θθθθ−−−−====θθθθ
θθθθ−−−−====θθθθ⇒⇒⇒⇒
====θθθθθθθθ−−−−====
22
2oo
o
sin
cos
a
v
sina
v
vsinax
&&&
&&
(((( ))))θθθθ
−−−−====θθθθθθθθ−−−−θθθθθθθθ====
θθθθ
θθθθ−−−−====θθθθθθθθ====
32
2o2
o
sin
1
a
bvsincosby
sin
cos
a
bvcosby
&&&&&
&&
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-9
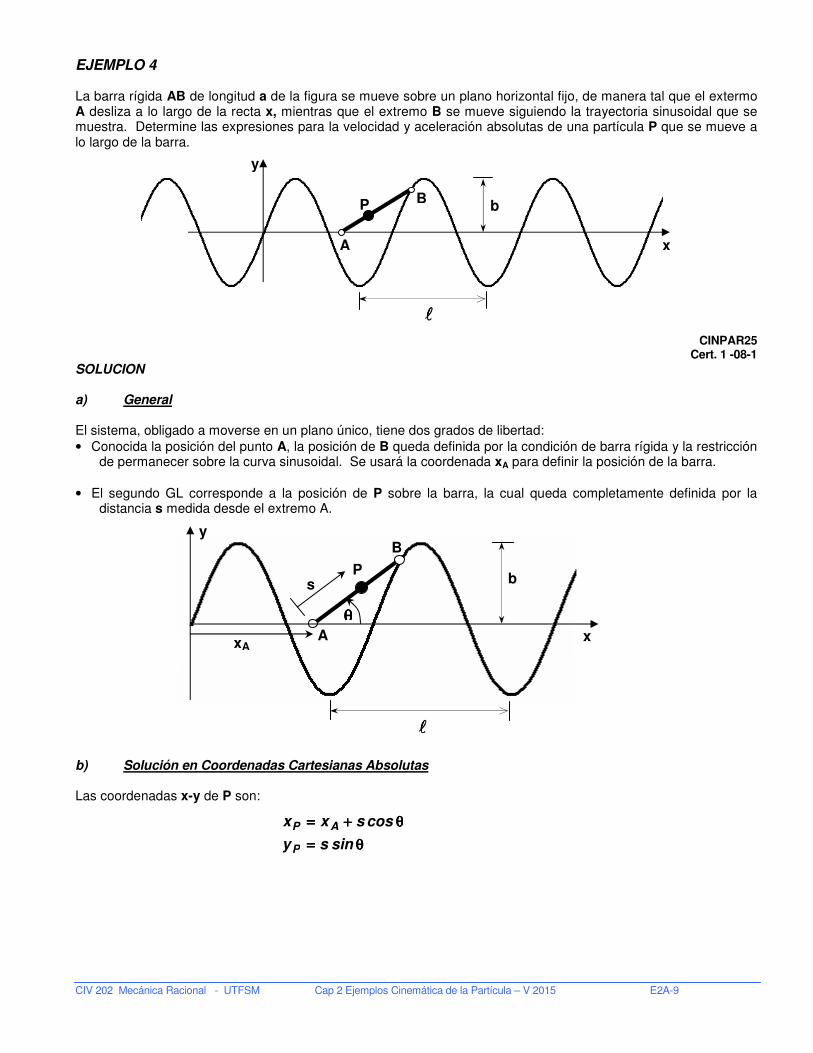
EJEMPLO 4 La barra rígida AB de longitud a de la figura se mueve sobre un plano horizontal fijo, de manera tal que el extermo A desliza a lo largo de la recta x, mientras que el extremo B se mueve siguiendo la trayectoria sinusoidal que se muestra. Determine las expresiones para la velocidad y aceleración absolutas de una partícula P que se mueve a lo largo de la barra.
CINPAR25 Cert. 1 -08-1
SOLUCION a) General El sistema, obligado a moverse en un plano único, tiene dos grados de libertad:
• Conocida la posición del punto A, la posición de B queda definida por la condición de barra rígida y la restricción de permanecer sobre la curva sinusoidal. Se usará la coordenada xA para definir la posición de la barra.
• El segundo GL corresponde a la posición de P sobre la barra, la cual queda completamente definida por la distancia s medida desde el extremo A.
b) Solución en Coordenadas Cartesianas Absolutas Las coordenadas x-y de P son:
b
y
x
P
A
B
xA
θθθθ
llll
s
x
y
llll
P b
A
B
θθθθ====
θθθθ++++====
sinsy
cossxx
P
AP

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-10
La velocidad y aceleración se obtienen derivando estas expresiones:
θθθθ y sus derivadas se obtienen de las condiciones geométricas del sistema. La ecuación de la trayectoria del punto B es:
El ángulo θθθθ se puede obtener de (ver figura):
La condición de longitud a constante de la barra permite obtener la ecuación para xB en función de xA:
Combinando las dos últimas ecuaciones se obtiene θθθθ y sus derivadas para reemplazar en las ecuaciones de la velocidad y aceleración de P.
(((( )))) (((( ))))
(((( )))) (((( )))) θθθθθθθθ++++θθθθ++++θθθθθθθθ−−−−====θθθθθθθθ−−−−θθθθθθθθ++++θθθθθθθθ++++θθθθθθθθ++++θθθθ====
θθθθθθθθ++++θθθθ====
θθθθθθθθ++++θθθθ−−−−θθθθθθθθ−−−−++++====θθθθθθθθ−−−−θθθθθθθθ−−−−θθθθθθθθ−−−−θθθθθθθθ−−−−θθθθ++++====
θθθθθθθθ−−−−θθθθ++++====
cosss2sinsssinscosscosscosssinsy
cosssinsy
sinss2cosssxcosssinssinssinscossxx
sinscossxx
22P
P
2A
2AP
AP
&&&&&&&&&&&&&&&&&&
&&&
&&&&&&&&&&&&&&&&&&&&&&
&&&&
ππππ====
l
BB
x2sinby
ππππ========θθθθ
l
BB x2sin
a
b
a
ysin
(((( )))) (((( ))))
ππππ++++−−−−====++++−−−−====
l
B222AB
2B
2AB
2 x2sinbxxyxxa
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-11
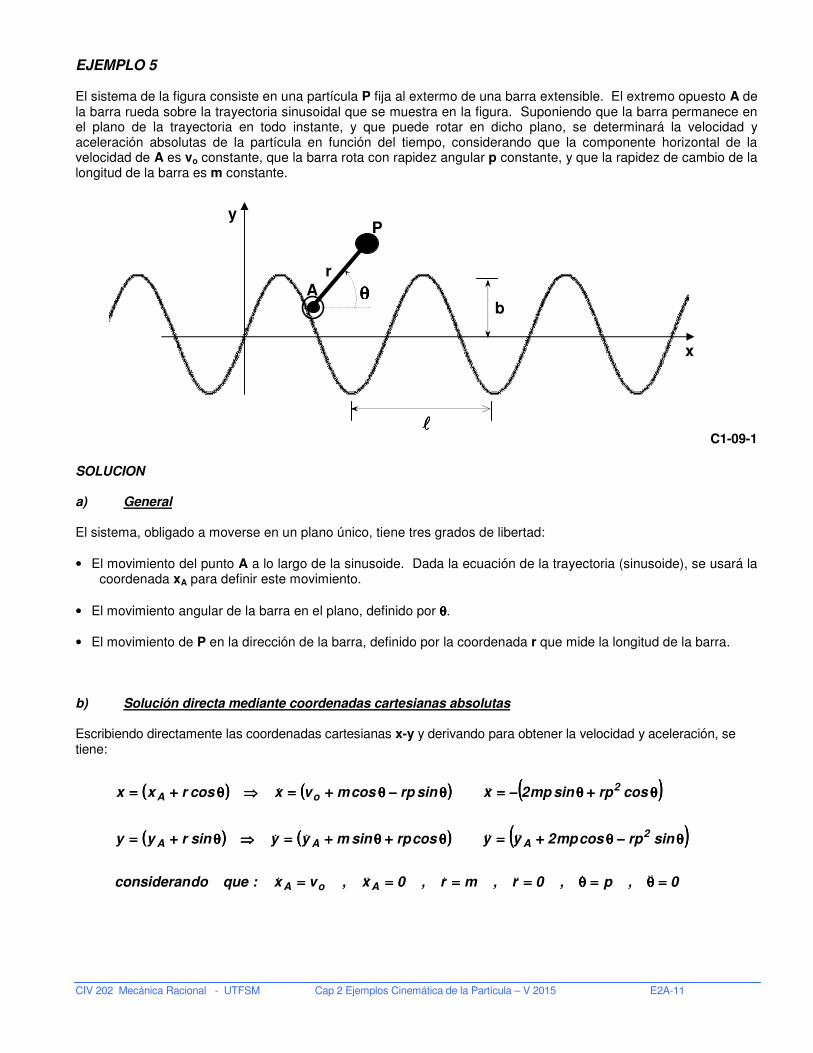
EJEMPLO 5 El sistema de la figura consiste en una partícula P fija al extermo de una barra extensible. El extremo opuesto A de la barra rueda sobre la trayectoria sinusoidal que se muestra en la figura. Suponiendo que la barra permanece en el plano de la trayectoria en todo instante, y que puede rotar en dicho plano, se determinará la velocidad y aceleración absolutas de la partícula en función del tiempo, considerando que la componente horizontal de la velocidad de A es vo constante, que la barra rota con rapidez angular p constante, y que la rapidez de cambio de la longitud de la barra es m constante.
C1-09-1
SOLUCION a) General El sistema, obligado a moverse en un plano único, tiene tres grados de libertad:
• El movimiento del punto A a lo largo de la sinusoide. Dada la ecuación de la trayectoria (sinusoide), se usará la coordenada xA para definir este movimiento.
• El movimiento angular de la barra en el plano, definido por θθθθ.
• El movimiento de P en la dirección de la barra, definido por la coordenada r que mide la longitud de la barra. b) Solución directa mediante coordenadas cartesianas absolutas Escribiendo directamente las coordenadas cartesianas x-y y derivando para obtener la velocidad y aceleración, se tiene:
x
y
llll
b
P
A θθθθ r
(((( )))) (((( )))) (((( ))))
(((( )))) (((( )))) (((( ))))
0,p,0r,mr,0x,vx:quedoconsideran
sinrpcosmp2yycosrpsinmyysinryy
cosrpsinmp2xsinrpcosmvxcosrxx
AoA
2AAA
2oA
====θθθθ====θθθθ================
θθθθ−−−−θθθθ++++====θθθθ++++θθθθ++++====⇒⇒⇒⇒θθθθ++++====
θθθθ++++θθθθ−−−−====θθθθ−−−−θθθθ++++====⇒⇒⇒⇒θθθθ++++====
&&&&&&&&&
&&&&&&
&&&
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-12
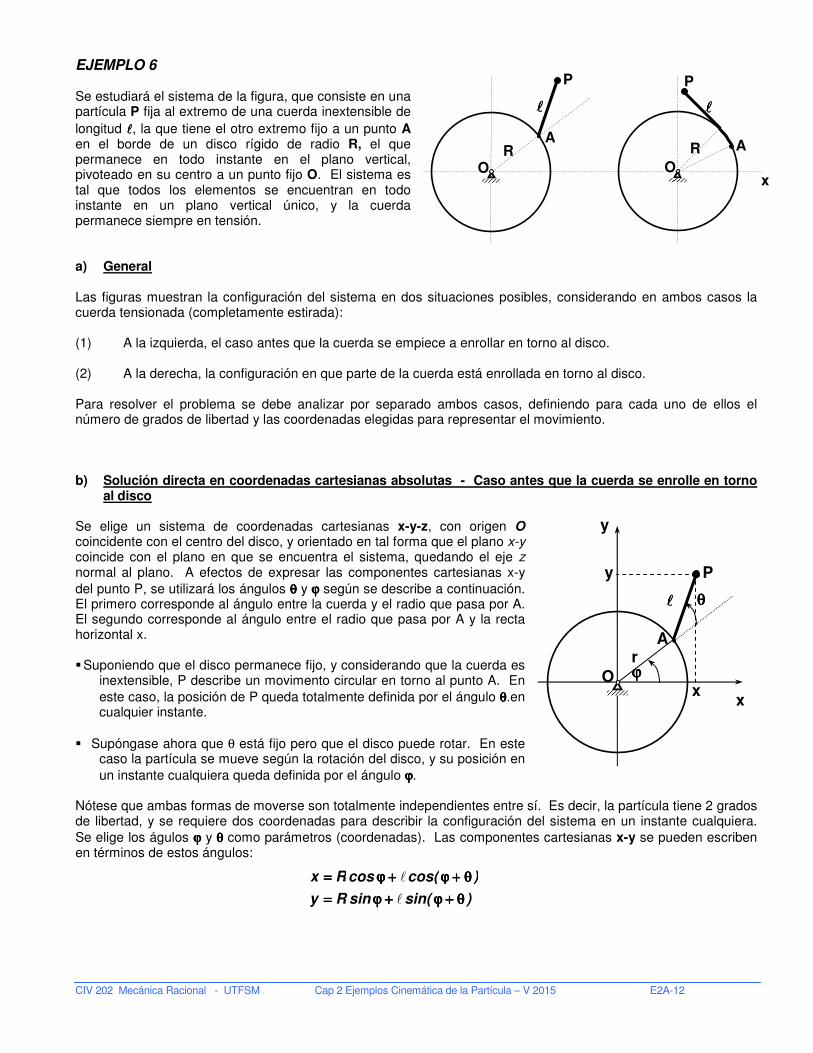
EJEMPLO 6 Se estudiará el sistema de la figura, que consiste en una partícula P fija al extremo de una cuerda inextensible de
longitud llll, la que tiene el otro extremo fijo a un punto A en el borde de un disco rígido de radio R, el que permanece en todo instante en el plano vertical, pivoteado en su centro a un punto fijo O. El sistema es tal que todos los elementos se encuentran en todo instante en un plano vertical único, y la cuerda permanece siempre en tensión. a) General Las figuras muestran la configuración del sistema en dos situaciones posibles, considerando en ambos casos la cuerda tensionada (completamente estirada): (1) A la izquierda, el caso antes que la cuerda se empiece a enrollar en torno al disco. (2) A la derecha, la configuración en que parte de la cuerda está enrollada en torno al disco. Para resolver el problema se debe analizar por separado ambos casos, definiendo para cada uno de ellos el número de grados de libertad y las coordenadas elegidas para representar el movimiento. b) Solución directa en coordenadas cartesianas absolutas - Caso antes que la cuerda se enrolle en torno
al disco Se elige un sistema de coordenadas cartesianas x-y-z, con origen O coincidente con el centro del disco, y orientado en tal forma que el plano x-y coincide con el plano en que se encuentra el sistema, quedando el eje z normal al plano. A efectos de expresar las componentes cartesianas x-y
del punto P, se utilizará los ángulos θθθθ y ϕϕϕϕ según se describe a continuación. El primero corresponde al ángulo entre la cuerda y el radio que pasa por A. El segundo corresponde al ángulo entre el radio que pasa por A y la recta horizontal x. Suponiendo que el disco permanece fijo, y considerando que la cuerda es
inextensible, P describe un movimento circular en torno al punto A. En
este caso, la posición de P queda totalmente definida por el ángulo θθθθ.en cualquier instante.
Supóngase ahora que θ está fijo pero que el disco puede rotar. En este caso la partícula se mueve según la rotación del disco, y su posición en
un instante cualquiera queda definida por el ángulo ϕϕϕϕ. Nótese que ambas formas de moverse son totalmente independientes entre sí. Es decir, la partícula tiene 2 grados de libertad, y se requiere dos coordenadas para describir la configuración del sistema en un instante cualquiera.
Se elige los águlos ϕϕϕϕ y θθθθ como parámetros (coordenadas). Las componentes cartesianas x-y se pueden escriben en términos de estos ángulos:
O R
A
P
llll
O
R
x
A
P
llll
O
r
x
y
ϕϕϕϕ
A
P
llll
x
θθθθ
y
)sin(sinRy
)cos(cosRx
θθθθ++++ϕϕϕϕ++++ϕϕϕϕ====
θθθθ++++ϕϕϕϕ++++ϕϕϕϕ====
l
l
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-13
Las componentes de la velocidad y aceleración se determinan derivando las expresiones de la posición:
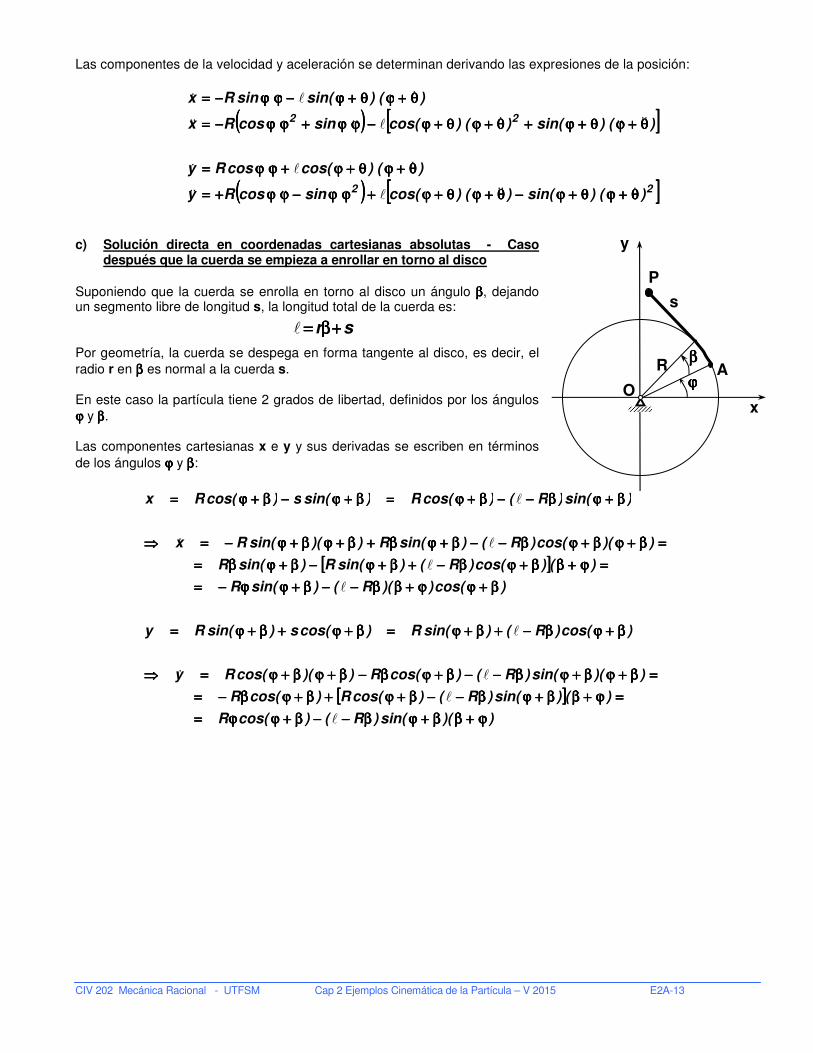
c) Solución directa en coordenadas cartesianas absolutas - Caso después que la cuerda se empieza a enrollar en torno al disco
Suponiendo que la cuerda se enrolla en torno al disco un ángulo ββββ, dejando un segmento libre de longitud s, la longitud total de la cuerda es:
Por geometría, la cuerda se despega en forma tangente al disco, es decir, el
radio r en ββββ es normal a la cuerda s. En este caso la partícula tiene 2 grados de libertad, definidos por los ángulos
ϕϕϕϕ y ββββ. Las componentes cartesianas x e y y sus derivadas se escriben en términos
de los ángulos ϕϕϕϕ y ββββ:
(((( )))) [[[[ ]]]]
(((( )))) [[[[ ]]]]22
22
)()sin()()cos(sincosRy
)()cos(cosRy
)()sin()()cos(sincosRx
)()sin(sinRx
θθθθ++++ϕϕϕϕθθθθ++++ϕϕϕϕ−−−−θθθθ++++ϕϕϕϕθθθθ++++ϕϕϕϕ++++ϕϕϕϕϕϕϕϕ−−−−ϕϕϕϕϕϕϕϕ++++====
θθθθ++++ϕϕϕϕθθθθ++++ϕϕϕϕ++++ϕϕϕϕϕϕϕϕ====
θθθθ++++ϕϕϕϕθθθθ++++ϕϕϕϕ++++θθθθ++++ϕϕϕϕθθθθ++++ϕϕϕϕ−−−−ϕϕϕϕϕϕϕϕ++++ϕϕϕϕϕϕϕϕ−−−−====
θθθθ++++ϕϕϕϕθθθθ++++ϕϕϕϕ−−−−ϕϕϕϕϕϕϕϕ−−−−====
&&&&&&l&&&&&
&&l&&
&&&&&&l&&&&&
&&l&&
sr ++++ββββ====l
[[[[ ]]]]
[[[[ ]]]]))(sin()R()cos(R
)()sin()R()cos(R)cos(R
))(sin()R()cos(R))(cos(Ry
)cos()R()sin(R)cos(s)sin(Ry
)cos())(R()sin(R
)()cos()R()sin(R)sin(R
))(cos()R()sin(R))(sin(Rx
)sin()R()cos(R)sin(s)cos(Rx
ϕϕϕϕ++++ββββββββ++++ϕϕϕϕββββ−−−−−−−−ββββ++++ϕϕϕϕϕϕϕϕ====
====ϕϕϕϕ++++ββββββββ++++ϕϕϕϕββββ−−−−−−−−ββββ++++ϕϕϕϕ++++ββββ++++ϕϕϕϕββββ−−−−====
====ββββ++++ϕϕϕϕββββ++++ϕϕϕϕββββ−−−−−−−−ββββ++++ϕϕϕϕββββ−−−−ββββ++++ϕϕϕϕββββ++++ϕϕϕϕ====⇒⇒⇒⇒
ββββ++++ϕϕϕϕββββ−−−−++++ββββ++++ϕϕϕϕ====ββββ++++ϕϕϕϕ++++ββββ++++ϕϕϕϕ====
ββββ++++ϕϕϕϕϕϕϕϕ++++ββββββββ−−−−−−−−ββββ++++ϕϕϕϕϕϕϕϕ−−−−====
====ϕϕϕϕ++++ββββββββ++++ϕϕϕϕββββ−−−−++++ββββ++++ϕϕϕϕ−−−−ββββ++++ϕϕϕϕββββ====
====ββββ++++ϕϕϕϕββββ++++ϕϕϕϕββββ−−−−−−−−ββββ++++ϕϕϕϕββββ++++ββββ++++ϕϕϕϕββββ++++ϕϕϕϕ−−−−====⇒⇒⇒⇒
ββββ++++ϕϕϕϕββββ−−−−−−−−ββββ++++ϕϕϕϕ====ββββ++++ϕϕϕϕ−−−−ββββ++++ϕϕϕϕ====
&&l&
&&l&
&&l&&&&
l
&&l&
&&l&
&&l&&&&
l
O
R
x
y
ϕϕϕϕ A
P
ββββ
s

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-14
EJEMPLO 7 Estudiar el movimiento de una partícula P que desliza con rapidez constante vo hacia abajo a lo largo de una espiral cilíndrica de eje vertical, radio R y paso h.
CINPAR14 Cert. 2 -05-1
SOLUCION En la figura se muestra la partícula y la trayectoria. Se define un sistema cartesiano de referencia x-y-z absoluto, tal que z coincide con el eje vertical de
la espiral. Se define además el ángulo φφφφ entre la proyección horizontal del radio y el eje x. Nótese que se trata de un sistema de un grado de libertad, bastando una coordenada para especificar la posición de la partícula. Esta coordenada podría
ser el ángulo φφφφ, la distancia s a lo largo del espiral, o la coordenada z. Nótese que x o y por si solas no sirven: dada una de ellas, existen múltiples posibilidades de ubicación de la partícula a lo largo de la espiral. La pendiente a lo largo de la espiral está dada por la siguiente condición: una
rotación completa en torno al eje implica un cambio de altura igual al paso h. El ángulo αααα está dado por:
La velocidad es tangente a la trayectoria y tiene magnitud constante vo. Conocida la inclinación de la espiral, las componentes horizontal y vertical de la velocidad son:
Dado que la partícula está descendiendo, la componente en z es negativa y constante. De igual forma, al descender,
se produce una componente horizontal que tiene la dirección positiva de φφφφ, que es constante en magnitud, pero cambia de dirección, generándose entonces una aceleración centrípeta de valor:
En componentes cartesianas, la velocidad y aceleración son:
z R
z
y
R φφφφ
x
h
αααα
(((( )))) (((( ))))2222 R2h
R2cos
R2h
hsin
R2
htan
ππππ++++
ππππ====αααα
ππππ++++====αααα⇒⇒⇒⇒
ππππ====αααα
αααα−−−−====αααα====φφφφ sinvvcosvv ozo
(((( )))) (((( ))))(((( ))))22
2o
2o
cR2h
Rv2
R
cosva
ππππ++++
ππππ====
αααα====
(((( )))) (((( ))))0asin
R
cosvsinaacos
R
cosvcosaa
sinvvcoscosvcosvvsincosvsinvv
z
2o
cy
2o
cx
ozoyox
====φφφφαααα
−−−−====φφφφ−−−−====φφφφαααα
−−−−====φφφφ−−−−====
αααα−−−−====φφφφαααα====φφφφ====φφφφαααα−−−−====φφφφ−−−−==== φφφφφφφφ
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-15
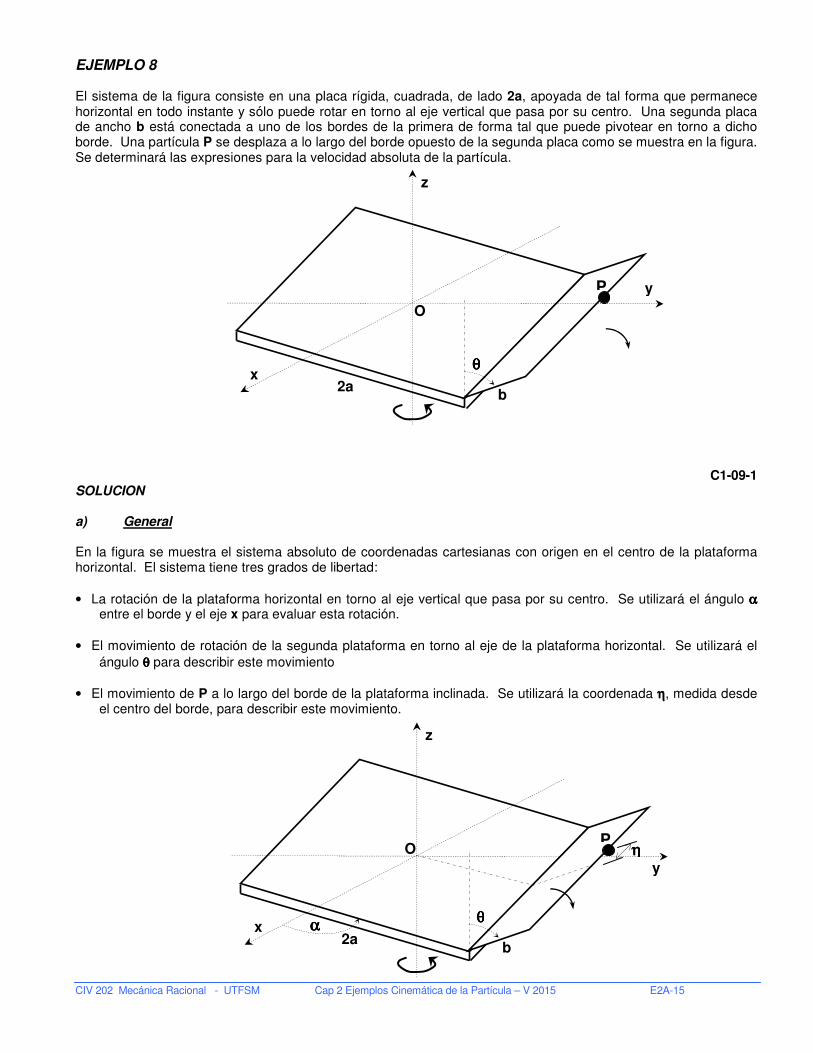
EJEMPLO 8 El sistema de la figura consiste en una placa rígida, cuadrada, de lado 2a, apoyada de tal forma que permanece horizontal en todo instante y sólo puede rotar en torno al eje vertical que pasa por su centro. Una segunda placa de ancho b está conectada a uno de los bordes de la primera de forma tal que puede pivotear en torno a dicho borde. Una partícula P se desplaza a lo largo del borde opuesto de la segunda placa como se muestra en la figura. Se determinará las expresiones para la velocidad absoluta de la partícula.
C1-09-1 SOLUCION a) General En la figura se muestra el sistema absoluto de coordenadas cartesianas con origen en el centro de la plataforma horizontal. El sistema tiene tres grados de libertad:
• La rotación de la plataforma horizontal en torno al eje vertical que pasa por su centro. Se utilizará el ángulo αααα entre el borde y el eje x para evaluar esta rotación.
• El movimiento de rotación de la segunda plataforma en torno al eje de la plataforma horizontal. Se utilizará el
ángulo θθθθ para describir este movimiento
• El movimiento de P a lo largo del borde de la plataforma inclinada. Se utilizará la coordenada ηηηη, medida desde el centro del borde, para describir este movimiento.
x 2a
b
O
y
z
θθθθ
P
αααα
ηηηη
x 2a
b
P
O
y
z
θθθθ
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-16
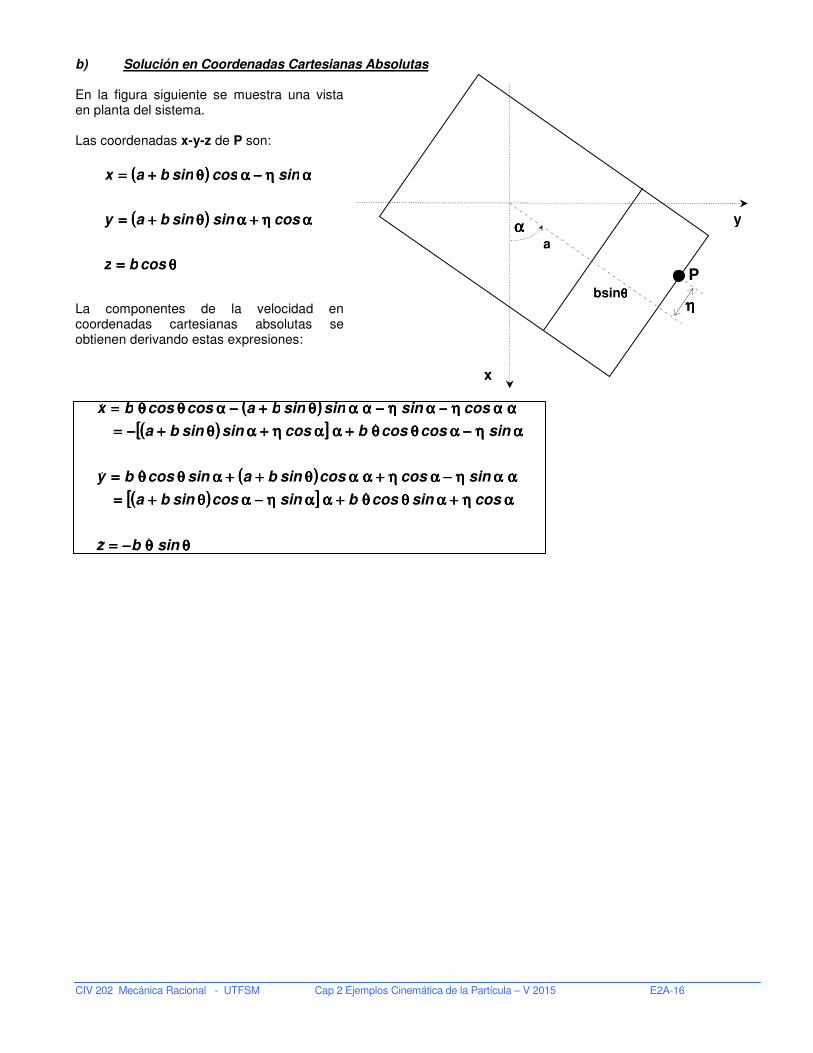
b) Solución en Coordenadas Cartesianas Absolutas En la figura siguiente se muestra una vista en planta del sistema. Las coordenadas x-y-z de P son:
La componentes de la velocidad en coordenadas cartesianas absolutas se obtienen derivando estas expresiones:
(((( ))))
(((( ))))
θθθθ====
ααααηηηη++++ααααθθθθ++++====
ααααηηηη−−−−ααααθθθθ++++====
cosbz
cossinsinbay
sincossinbax
x
y
P
αααα
ηηηη
a
bsinθθθθ
(((( ))))(((( ))))[[[[ ]]]]
(((( ))))(((( ))))[[[[ ]]]]
θθθθθθθθ−−−−====
ααααηηηη++++ααααθθθθθθθθ++++ααααααααηηηη−−−−ααααθθθθ++++====
ααααααααηηηη−−−−ααααηηηη++++ααααααααθθθθ++++++++ααααθθθθθθθθ====
ααααηηηη−−−−ααααθθθθθθθθ++++ααααααααηηηη++++ααααθθθθ++++−−−−====
ααααααααηηηη−−−−ααααηηηη−−−−ααααααααθθθθ++++−−−−ααααθθθθθθθθ====
sinbz
cossincosbsincossinba
sincoscossinbasincosby
sincoscosbcossinsinba
cossinsinsinbacoscosbx
&&
&&&
&&&&&
&&&
&&&&&
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-17
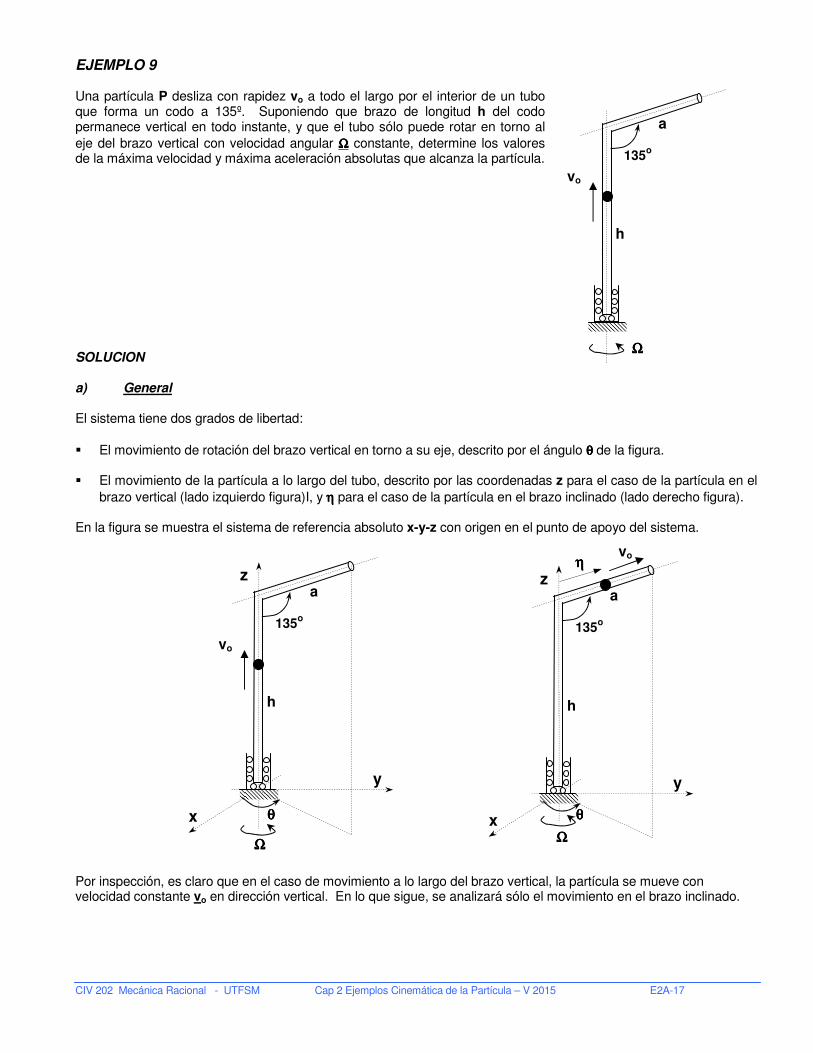
EJEMPLO 9 Una partícula P desliza con rapidez vo a todo el largo por el interior de un tubo que forma un codo a 135º. Suponiendo que brazo de longitud h del codo permanece vertical en todo instante, y que el tubo sólo puede rotar en torno al
eje del brazo vertical con velocidad angular ΩΩΩΩ constante, determine los valores de la máxima velocidad y máxima aceleración absolutas que alcanza la partícula. SOLUCION a) General El sistema tiene dos grados de libertad:
El movimiento de rotación del brazo vertical en torno a su eje, descrito por el ángulo θθθθ de la figura.
El movimiento de la partícula a lo largo del tubo, descrito por las coordenadas z para el caso de la partícula en el
brazo vertical (lado izquierdo figura)I, y ηηηη para el caso de la partícula en el brazo inclinado (lado derecho figura). En la figura se muestra el sistema de referencia absoluto x-y-z con origen en el punto de apoyo del sistema.
Por inspección, es claro que en el caso de movimiento a lo largo del brazo vertical, la partícula se mueve con velocidad constante vo en dirección vertical. En lo que sigue, se analizará sólo el movimiento en el brazo inclinado.
vo
h
ΩΩΩΩh
a
135o
x
y
z
vo
h
ΩΩΩΩh
a
135o
x
y
z
vo
h
ΩΩΩΩh
a
135o
ηηηηh
θθθθ θθθθ

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-18
b) Solución en coordenadas cartesianas
Las coordenadas x-y-z de P, en términos de θθθθ y ηηηη son:
b.1) Velocidad
Derivando estas expresiones se obtiene las componentes de la velocidad:
Pero:
Reemplazando:
El módulo de la velocidad es entonces:
La velocidad máxima ocurre para ηηηη=a:
o
o
o
45sinhz
sin45cosy
cos45cosx
ηηηη++++====
θθθθηηηη====
θθθθηηηη====
(((( ))))
(((( ))))o
o
o
45sinz
45coscossiny
45cossincosx
ηηηη====
θθθθθθθθηηηη++++θθθθηηηη====
θθθθθθθθηηηη−−−−θθθθηηηη====
&&
&&&
&&&
0
0vo
====θθθθΩΩΩΩ====θθθθ
====ηηηη====ηηηη
&&&
&&&
(((( ))))
(((( ))))o
o
oo
oo
45sinvz
45coscossinvy
45cossincosvx
====
θθθθΩΩΩΩηηηη++++θθθθ====
θθθθΩΩΩΩηηηη−−−−θθθθ====
&
&
&
(((( )))) (((( )))) (((( ))))
(((( )))) (((( )))) (((( ))))(((( )))) (((( )))) (((( )))) (((( ))))(((( ))))[[[[ ]]]](((( ))))
(((( ))))22
o
2oo
o2o
22oo
22o
2oo
o22o
o22o
2v
45sinv
45coscossinv2cossinvsincosv2sincosv
45sinv45coscossinv45cossincosvv
ΩΩΩΩηηηη++++====
====++++
θθθθΩΩΩΩηηηηθθθθ++++θθθθΩΩΩΩηηηη++++θθθθ++++θθθθΩΩΩΩηηηηθθθθ−−−−θθθθΩΩΩΩηηηη++++θθθθ====
====++++θθθθΩΩΩΩηηηη++++θθθθ++++θθθθΩΩΩΩηηηη−−−−θθθθ====
(((( ))))22
omax2
avv
ΩΩΩΩ++++====

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-19
b.2) Aceleración
Derivando las expresiones de las componentes de la velocidad se obtiene la aceleración:
El módulo de la aceleración es entonces:
La aceleración máxima ocurre para ηηηη=a:
0z
45cossin45coscosv2
45cossin45coscos45coscosvy
45coscos45cossinv2
45coscos45cossin45cossinvx
o2oo
oooo
o2oo
oooo
====
θθθθΩΩΩΩηηηη−−−−θθθθΩΩΩΩ====
θθθθθθθθΩΩΩΩηηηη−−−−θθθθΩΩΩΩηηηη++++θθθθθθθθ====
θθθθΩΩΩΩηηηη−−−−θθθθΩΩΩΩ−−−−====
θθθθθθθθΩΩΩΩηηηη−−−−θθθθΩΩΩΩηηηη−−−−θθθθθθθθ−−−−====
&&
&&&&&
&&&&&
(((( )))) (((( ))))
(((( )))) (((( )))) (((( ))))(((( ))))(((( )))) (((( )))) (((( ))))(((( ))))
(((( )))) (((( ))))
4222o
2o22oo
o2oo
2o22oo
o2oo
2o22oo
2o2oo
2o2oo
2
1v2
45cos45cosv2
45cossin45coscosv2245cossin45coscosv2
45coscos45cossinv2245coscos45cossinv2
45cossin45coscosv245coscos45cossinv2a
ΩΩΩΩηηηη++++ΩΩΩΩ====
ΩΩΩΩηηηη++++ΩΩΩΩ====
====
θθθθΩΩΩΩηηηηθθθθΩΩΩΩ−−−−θθθθΩΩΩΩηηηη++++θθθθΩΩΩΩ++++
++++θθθθΩΩΩΩηηηηθθθθΩΩΩΩ++++θθθθΩΩΩΩηηηη++++θθθθΩΩΩΩ====
θθθθΩΩΩΩηηηη−−−−θθθθΩΩΩΩ++++θθθθΩΩΩΩηηηη−−−−θθθθΩΩΩΩ−−−−====
222omax a
2
1v2a ΩΩΩΩ++++ΩΩΩΩ========
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-20
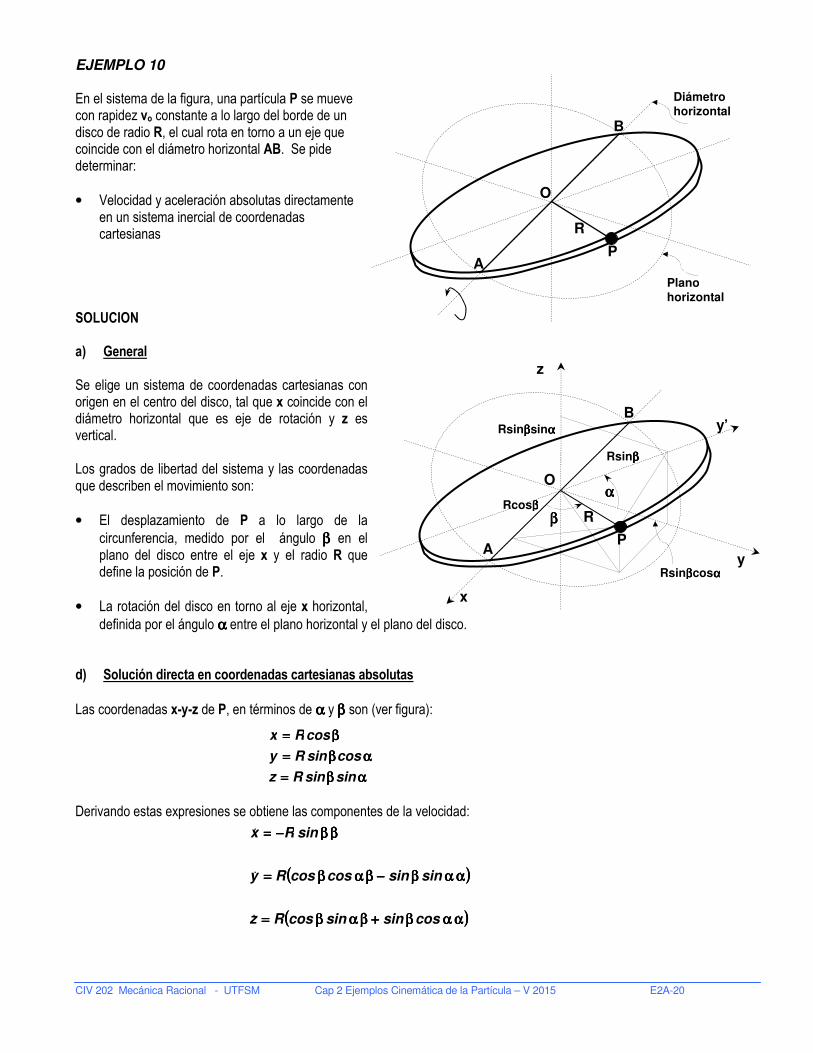
EJEMPLO 10 En el sistema de la figura, una partícula P se mueve con rapidez vo constante a lo largo del borde de un disco de radio R, el cual rota en torno a un eje que coincide con el diámetro horizontal AB. Se pide determinar:
• Velocidad y aceleración absolutas directamente en un sistema inercial de coordenadas cartesianas
SOLUCION a) General Se elige un sistema de coordenadas cartesianas con origen en el centro del disco, tal que x coincide con el diámetro horizontal que es eje de rotación y z es vertical. Los grados de libertad del sistema y las coordenadas que describen el movimiento son:
• El desplazamiento de P a lo largo de la
circunferencia, medido por el ángulo ββββ en el plano del disco entre el eje x y el radio R que define la posición de P.
• La rotación del disco en torno al eje x horizontal,
definida por el ángulo αααα entre el plano horizontal y el plano del disco. d) Solución directa en coordenadas cartesianas absolutas
Las coordenadas x-y-z de P, en términos de αααα y ββββ son (ver figura):
Derivando estas expresiones se obtiene las componentes de la velocidad:
ααααββββ====
ααααββββ====
ββββ====
sinsinRz
cossinRy
cosRx
(((( ))))
(((( ))))ααααααααββββ++++ββββααααββββ====
ααααααααββββ−−−−ββββααααββββ====
ββββββββ−−−−====
&&&
&&&
&&
cossinsincosRz
sinsincoscosRy
sinRx
R
P
O
B
A
Diámetro horizontal
Plano horizontal
x
y
z
ββββ R
P
y’
αααα Rcosββββ
Rsinββββ
Rsinββββcosαααα
Rsinββββsinαααα
O
A
B

CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-21
Pero:
Reemplazando se tiene:
Derivando estas expresiones se obtiene las componentes cartesianas de la aceleración:
0R
vo ====ββββ====ββββ &&&
(((( )))) (((( ))))
(((( )))) (((( ))))
ααααββββαααα++++ααααββββαααα++++ααααββββ
αααα++++−−−−====
ααααααααββββ−−−−ββββααααββββαααα++++ααααββββαααα++++ααααααααββββ++++ββββααααββββ−−−−====
ααααββββαααα++++ααααββββαααα++++ααααββββ
αααα++++−−−−====
====ααααββββαααα++++ααααββββββββαααα++++ααααββββαααα−−−−ααααααααββββ−−−−ββββααααββββ−−−−====
ββββ−−−−====ββββββββ−−−−====
cossinRcoscosv2sinsinRR
v
sinsincoscoscossinRcoscossinsinvz
sinsinRsincosv2cossinRR
v
cossinsincossinsinRsincoscossinvy
cosR
vcosvx
o2
2o
2o
o2
2o
2o
2o
o
&&&&
&&&&&&&&
&&&&
&&&&&&&&&
&&&
ααααββββαααα++++ααααββββ====
ααααββββαααα−−−−ααααββββ====
ββββ−−−−====
cossinRsincosvz
sinsinRcoscosvy
sinvx
o
o
o
&&
&&
&
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-22
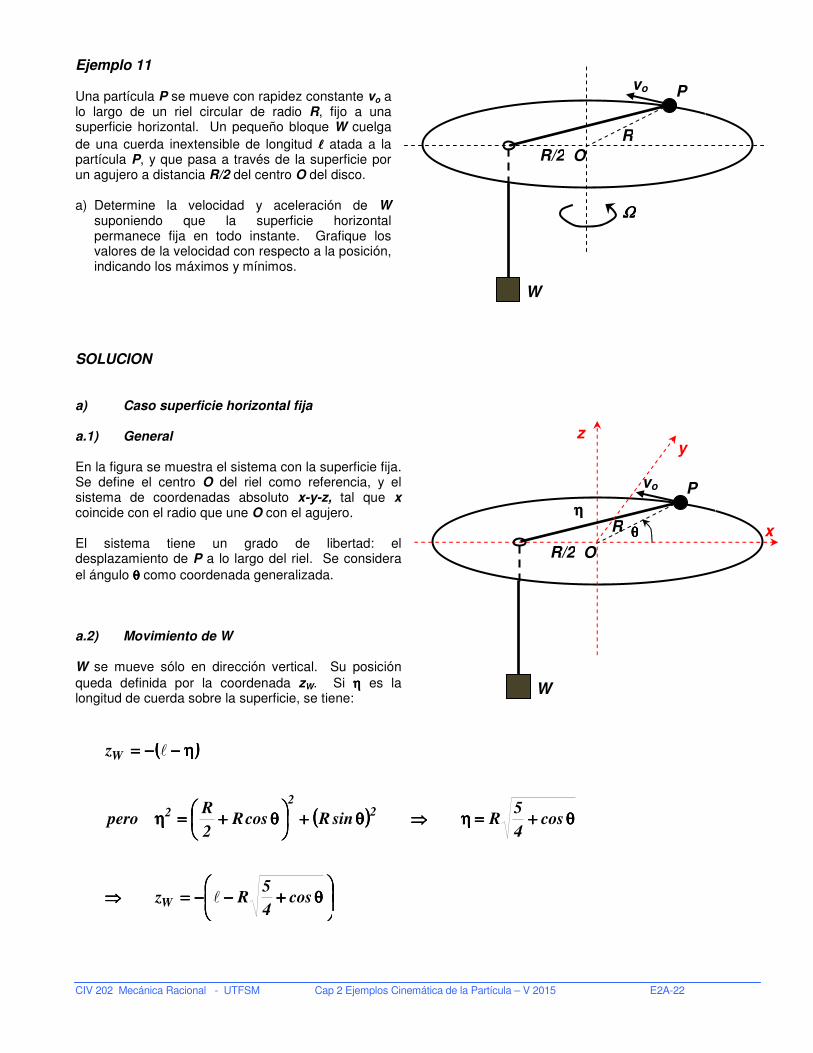
Ejemplo 11 Una partícula P se mueve con rapidez constante vo a lo largo de un riel circular de radio R, fijo a una superficie horizontal. Un pequeño bloque W cuelga
de una cuerda inextensible de longitud llll atada a la partícula P, y que pasa a través de la superficie por un agujero a distancia R/2 del centro O del disco. a) Determine la velocidad y aceleración de W
suponiendo que la superficie horizontal permanece fija en todo instante. Grafique los valores de la velocidad con respecto a la posición, indicando los máximos y mínimos.
SOLUCION a) Caso superficie horizontal fija a.1) General En la figura se muestra el sistema con la superficie fija. Se define el centro O del riel como referencia, y el sistema de coordenadas absoluto x-y-z, tal que x coincide con el radio que une O con el agujero. El sistema tiene un grado de libertad: el desplazamiento de P a lo largo del riel. Se considera
el ángulo θθθθ como coordenada generalizada. a.2) Movimiento de W W se mueve sólo en dirección vertical. Su posición
queda definida por la coordenada zW. Si ηηηη es la longitud de cuerda sobre la superficie, se tiene:
ΩΩΩΩ
O
R
P
R/2
W
vo
O
R
P
R/2
W
y z
x θθθθ
ηηηη
vo
(((( ))))
(((( ))))
θθθθ++++−−−−−−−−====⇒⇒⇒⇒
θθθθ++++====ηηηη⇒⇒⇒⇒θθθθ++++
θθθθ++++====ηηηη
ηηηη−−−−−−−−====
cos4
5Rz
cos4
5RsinRcosR
2
Rpero
z
W
22
2
W
l
l
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-23
Velocidad:
Aceleración:
(((( ))))
θθθθ++++
θθθθ−−−−====⇒⇒⇒⇒
====θθθθ
θθθθ++++
θθθθθθθθ−−−−====ηηηη====
cos4
5
sin
2
vz
R
vpero
cos4
52
sinRz
oW
o
W
&
&
&&&
(((( ))))
θθθθ++++
θθθθ++++θθθθ
θθθθ++++
−−−−====
====
θθθθ++++
θθθθ++++
θθθθθθθθ−−−−θθθθ−−−−θθθθ++++θθθθθθθθ
−−−−====⇒⇒⇒⇒
23
2
2o
oW
cos4
5
2
sincoscos
4
5
R2
v
cos4
5
cos4
52
sinsincos
4
5cos
2
vz
&&
&&
CIV 202 Mecánica Racional - UTFSM Cap 2 Ejemplos Cinemática de la Partícula – V 2015 E2A-24
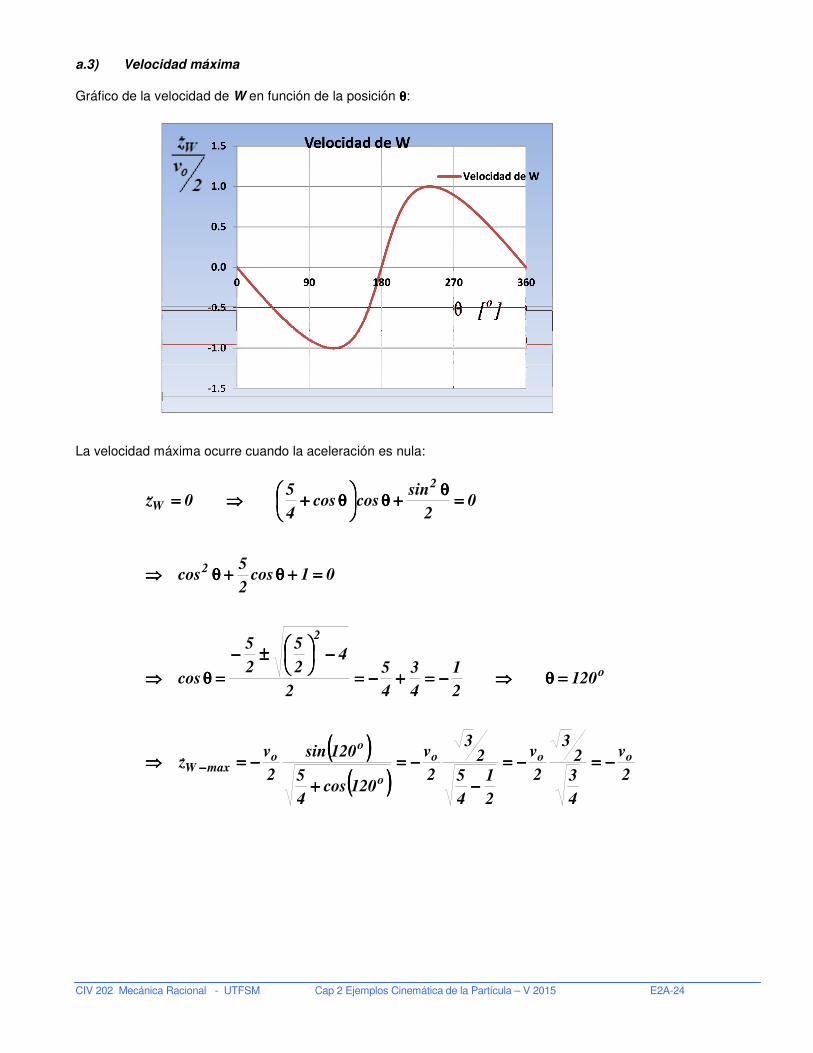
a.3) Velocidad máxima
Gráfico de la velocidad de W en función de la posición θθθθ:
La velocidad máxima ocurre cuando la aceleración es nula:
(((( ))))(((( )))) 2
v
4
3
23
2
v
2
1
4
5
23
2
v
120cos4
5
120sin
2
vz
1202
1
4
3
4
5
2
42
5
2
5
cos
01cos2
5cos
02
sincoscos
4
50z
ooo
o
oo
maxW
o
2
2
2
W
−−−−====−−−−====
−−−−
−−−−====
++++
−−−−====⇒⇒⇒⇒
====θθθθ⇒⇒⇒⇒−−−−====++++−−−−====
−−−−
±±±±−−−−
====θθθθ⇒⇒⇒⇒
====++++θθθθ++++θθθθ⇒⇒⇒⇒
====θθθθ
++++θθθθ
θθθθ++++⇒⇒⇒⇒====
−−−−&
&&