dsp - sistemas de información y comunicacionesnunez/clases-micros-para-com/... · muchos tipos de...
TRANSCRIPT

DSP - ELECTRÓNICA ENAUTOMOCIÓN
Juan Ramón Suárez SantanaCurso 2008/2009

CONTENIDO
Introducción
Procesadores Digitales de Señales
La Electrónica en Automoción Factores que influyen en la elección de un procesador
Procesado Digital de Señales en automoción
Aplicaciones en Automoción ABS, TCS, ECS, EBD, Sistemas de Suspensión Adaptativa,
Sistemas de Presión de Neumáticos.
Noticias y Tendencias Futuras
Concusiones

INTRODUCCIÓN
Tendencia actual Automatizar Mejorar la calidad de vida Aumentar la seguridad Reducir costes
Incluimos sensores y actuadoresen nuestro entorno, que captanlas señales y las envían a otrosdispositivos para tratarlas ycontrolar el sistema
PROCESADORES DIGITALES DE SEÑALES(DSP)
Características Generales:
DSP sistema programable que permite implementar
muchos tipos de aplicaciones en función de losrequerimientos del sistema.
Diferencia entre DSP y GPP
DSP Diseñado para tareas de altas prestaciones.
GPP/Microcontroladores no están especializados paraninguna aplicación concreta.

Aplicaciones:
Filtros de compresión de voz y decodificación de
canales en telefonía móvil.
Electrónica de Consumo
Procesamiento de imágenes.
Control de motores.
Sistemas Radar.
4 grandes fabricantes:

Arquitectura:
Optimizada para realizar cálculos intensos en
sistemas de procesado de señal en tiempo real, mediante:
Implementación de operaciones por hardware.
Modos de direccionamiento especiales.
Arquitecturas de memoria que permiten un acceso múltiple.
Instrucciones poco comunes que ejecutan varias operaciones en un solo ciclo.
Flujo de programa diseñado para acelerar la ejecución de operaciones repetitivas.

Organización de la memoria:
Arquitectura Harvard (memoria de
datos/instrucciones separadas) Acelera la ejecución de instrucciones
Esto permite leer los datos de la instrucción n y decodificar la instrucción n+1 simultáneamente se
reduce el tiempo total de ejecución de cada instrucción.

Velocidad:
Parámetro de medida Tiempo de ciclo de instrucción
(tiempo necesario para ejecutar la instrucción más rápidadel procesador)
Consumo:
Dado el uso de los DSP en aplicaciones portátiles, los fabricantes ya implementan DSP que trabajan a bajas tensiones (3-3.3V) con prestaciones de gestión de energía:
Modos Sleep: inhiben la señal de reloj algunas partes del DSP.
Divisores de Reloj Programables: permite realizar tareas a velocidades inferiores.

Arquitecturas de Altas Prestaciones: VLIW (Very Long Instruction Word) Relacionadas con los procesadores superescalares ya que
ambos tratan de aumentar la velocidad de cómputomediante el paralelismo a nivel de instrucciones.
Adoptadas por los DSP de altas prestaciones.
Aprovechan el silicio utilizado para la planificación de
instrucciones para incorporar más unidades funcionalesy aumentar el paralelismo de ejecución .
Incrementan la velocidad de reloj y reducen el consumo.

ELECTRÓNICA EN AUTOMOCIÓN
Los automóviles actuales incorporan múltiplesprocesadores conectados a través de múltiples redesdigitales que controlan y optimizan la mayoría de lossistemas presentes en él.
Factores que influyen en la elección de un procesadorpara automoción: 1 Adecuados o no para automoción.
2 Grado de Integración.
3 Rendimiento.
4 Precio.
5 Consumo de Energía.
6 Criterios Software.

1 Adecuados o no para automoción: Existen sistemas (frenos, control del motor, airbag, etc.)
que influyen críticamente en la seguridad se necesitanprocesadores de gran fiabilidad y durabilidad.
Para otros sistemas (navegación, entretenimiento) no sonnecesarios procesadores específicos para automoción.
2 Grado de Integración (1): Es conveniente disponer de un procesador que tenga
integrados en el mismo chip: Memoria Interfaces de Entrada/Salida Periféricos necesarios
Se consigue mayor rendimiento. Se aumenta la fiabilidad. Se reduce el consumo de energía y el coste final.

2 Grado de Integración (2): Por ejemplo, un sistema de control del motor recibe una
docena de señales (velocidad del motor, temperatura, etc.), se digitalizan, filtran y analizan, y el controlador genera las salidas de inyección de carburante:

3 Rendimiento: Depende de la aplicación para la que se utilicen.
Para el control de sistemas críticos (frenos, motor, etc.) se necesitan chips capaces de trabajar en entornos más hostiles se puede conseguir con tecnologías de fabricación de 0.18-0.25 micras con una velocidad de procesado de 40-150 MHz.
Para los sistemas de entretenimiento recientes (DVD, sistema de navegación, GPS, etc.) se necesita más potencia de procesado
digital procesadores de 200-700 MHz
DSP
Procesadores de propósito general mejorados (DSP-enhanced GPP)
Híbridos entre los 2 anteriores.
4 Precio:Actualmente los fabricantes han sido capaces de crear
procesadores altamente especializados a preciosasequibles, aunque mayores que los de propósitogeneral.
5 Consumo de Energía:No plantea demasiados problemas, ya que casi todos los
sistemas se ponen en funcionamiento con el vehículo en marcha y la batería cargándose.
6 Criterios Software:El software para procesado digital de señales en
automoción puede estar desarrollado en:Lenguaje de alto nivel (facilidad y portabilidad del programa)Lenguaje ensamblador (eficiencia del programa prioritaria)

PROCESADORES EN AUTOMOCIÓN
1. Procesadores de Propósito General (GPP) (1): Basados en arquitecturas RISC.
Usan instrucciones simples, genéricas y de bajo nivel de paralelismo.
Gran eficiencia en algoritmos en los que la toma de decisiones y los cambios de control de flujo son importantes.
Arquitecturas más conocidas: MIPS, ARM, PowerPc.
Ejemplos: Familia TMS470 de Texas Instruments (núcleo ARM7)
MPC500 de Freescale (núcleo PowerPC)
Integran periféricos específicos para automoción con un procesador de 32 bits de propósito general.

1. Procesadores de Propósito General (GPP) (2): Freescale MPC566: destinado a control del motor y la
transmisión. Integra múltiples periféricos, (conversores A/D), memorias
flash e interfaces de E/S.
2. DSP, Híbridos y otros (1); Utilizados en:
Sistemas de entretenimiento
Sistemas de control que necesitan un alto nivel de procesado.
Cuentan con instrucciones específicas que aceleran muchísimo el rendimiento.
Problema al programar aplicaciones porque los
compiladores no están optimizados y no aprovechan del todo esas instrucciones específicas.

2. DSP, Híbridos y otros (2);
Híbridos DSP/GPP y GPP mejorados combinan:
Ventajas de DSP (Capacidad de procesado digital)
Ventajas de GPP (eficiencia en algoritmos basados en decisiones y código compilado)
Ejemplos:
Familia TMS320C2000 de Texas Instruments.
Familia MC56F83xx de Freescale
SH7760 de Renesas
ADSP-BF53x de Analog Devices.
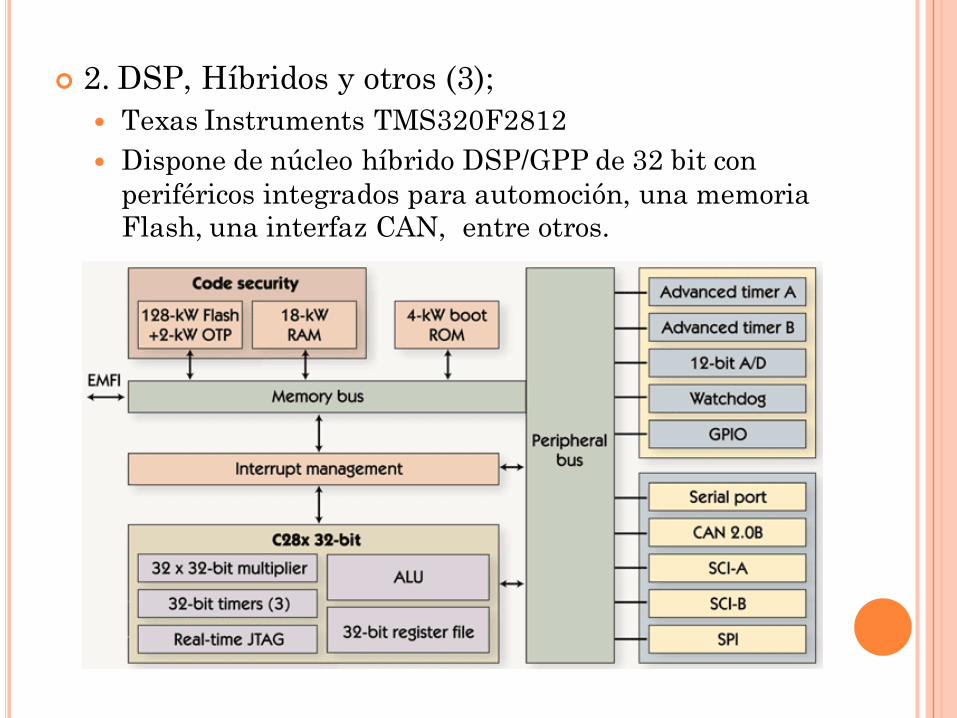
2. DSP, Híbridos y otros (3); Texas Instruments TMS320F2812 Dispone de núcleo híbrido DSP/GPP de 32 bit con
periféricos integrados para automoción, una memoria Flash, una interfaz CAN, entre otros.

APLICACIONES EN AUTOMOCIÓN
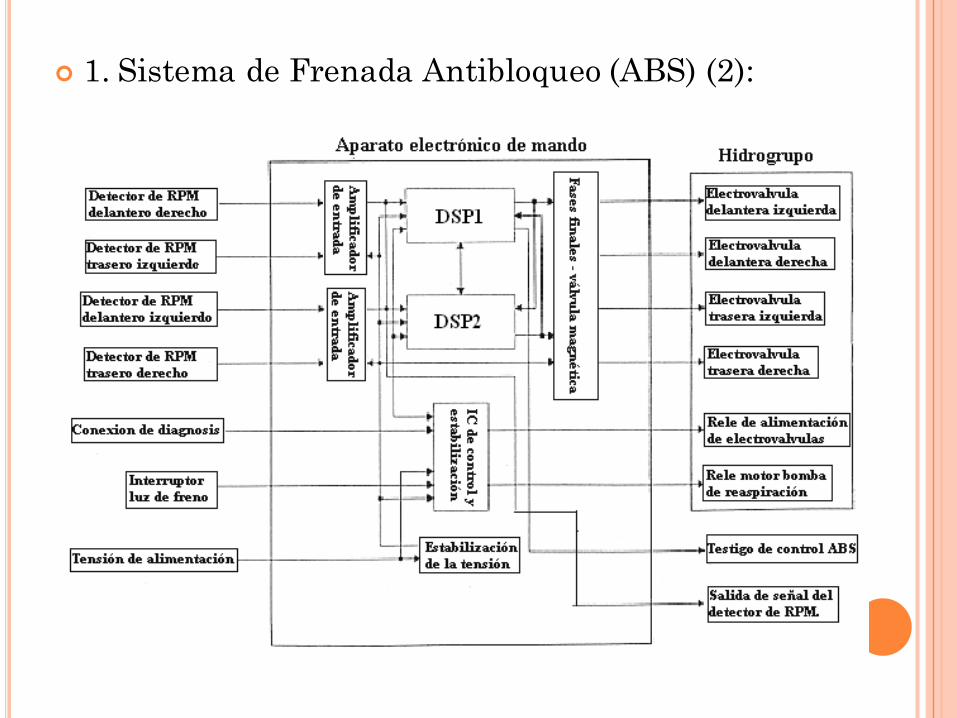
1. Sistema de Frenada Antibloqueo (ABS) (1):
Sistema que evita el bloqueo de las ruedas al frenar
aumentando la seguridad de los vehículos es unsistema crítico debe funcionar muy rápido conllevauna electrónica muy compleja
Elemento principal:
ECU (Centralita Electrónica de Mando): Formada por dos DSP diferentes en paralelo que reciben
las señales de sensores de revoluciones y se comunicande manera jerárquica.
1. Sistema de Frenada Antibloqueo (ABS) (2):

2. Sistema de Control de Tracción (TCS) Similar al ABS pero actúa en caso de excesiva aceleración
regulando el par motor. 3. Sistema de Control de Estabilidad (ESP)
Incluye los sistemas ABS y TCS y trata de mejorar las prestaciones del vehículo en cualquier combinación de estas tres situaciones: aceleración, frenado y curva.
4. Sistema de Distribución Automática de Frenado (EBD) Representa un perfeccionamiento del sistema ABS
regulando individual y electrónicamente la presión de frenado en cada una de las cuatro ruedas de manera independiente.
5. Sistema de Suspensión Activa Elimina el balanceo en las curvas
y el cabeceo en la frenada.

6. Sensor de Presión de Neumáticos.
Existen un sensor de presión en cada rueda, unaunidad de control y un display en el tablero. Cuandoel sistema detecta un nivel de presión anormal dauna señal de alerta en el display.

NOTICIAS Y TENDENCIAS FUTURAS (1)
Con el fin de mejorar estos sistemas se han creadodiferentes proyectos de investigación.
Proyecto MERASA Multi-Core Execution of Hard Real-Time Applications Supporting
Analysability
Pretende obtener un mejor rendimiento de losprocesadores para lograr coches y aviones más seguros yeconómicos.
Desarrollan procesadores específicos de núcleosmúltiples para aplicaciones en tiempo real (como lasvistas anteriormente)

CONCLUSIONES
DSP poseen arquitecturas específicas diseñadaspara acelerar cálculos matemáticos de sistemasen tiempo real.
Un DSP está muy ligado al tipo de aplicación. La tendencia que se sigue es crear arquitecturas
cada vez mejor adaptadas a las particularidadesde cada aplicación.
La aparición de compiladores potentes hanpropiciado la reaparición de las arquitecturasVLIW y con ellas, los DSP de altas prestaciones.
