Download - LA ROBÓTICA
LA ROBOTICA
Que es la Robótica
La robótica es la rama de la tecnología que se dedica al diseño, construcción, operación, disposición estructural, manufactura y aplicación de los robots.
La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial, la ingeniería de control y la física. Otras áreas importantes en robótica son el álgebra, los autómatas programables, laanimatrónica y las máquinas de estados
Tipos de Robots
Robótica Industrial
Entre los robots considerados de más utilidad en la actualidad se encuentran los robots industriales o manipuladores. Existen ciertas dificultades a la hora de establecer una definición formal de lo que es un robot industrial.
Estructura de los robots industriales
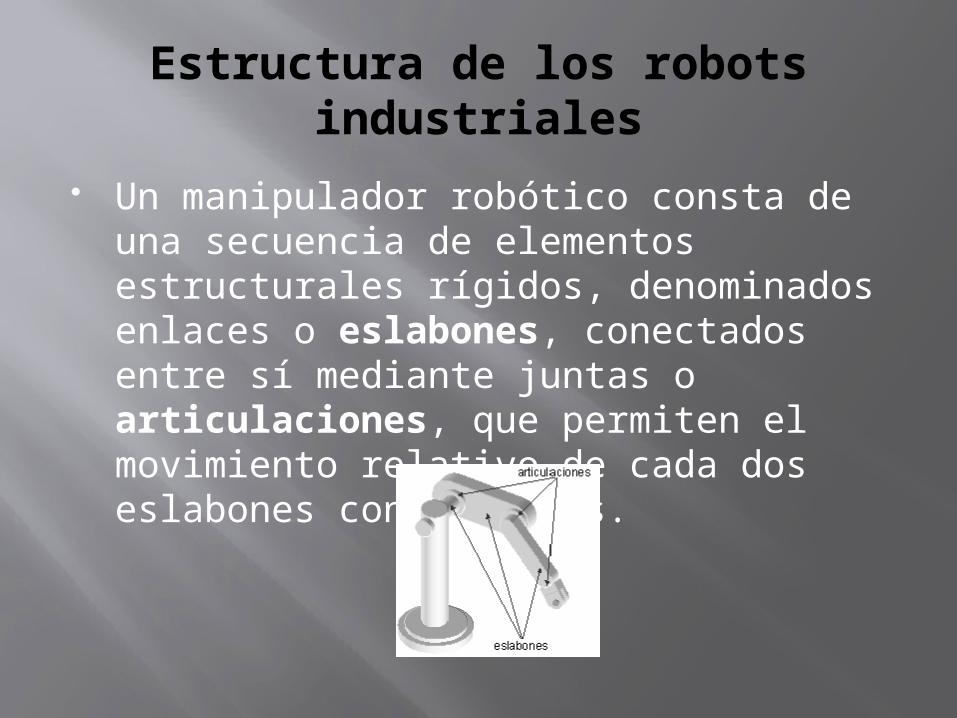
Un manipulador robótico consta de una secuencia de elementos estructurales rígidos, denominados enlaces o eslabones, conectados entre sí mediante juntas o articulaciones, que permiten el movimiento relativo de cada dos eslabones consecutivos.
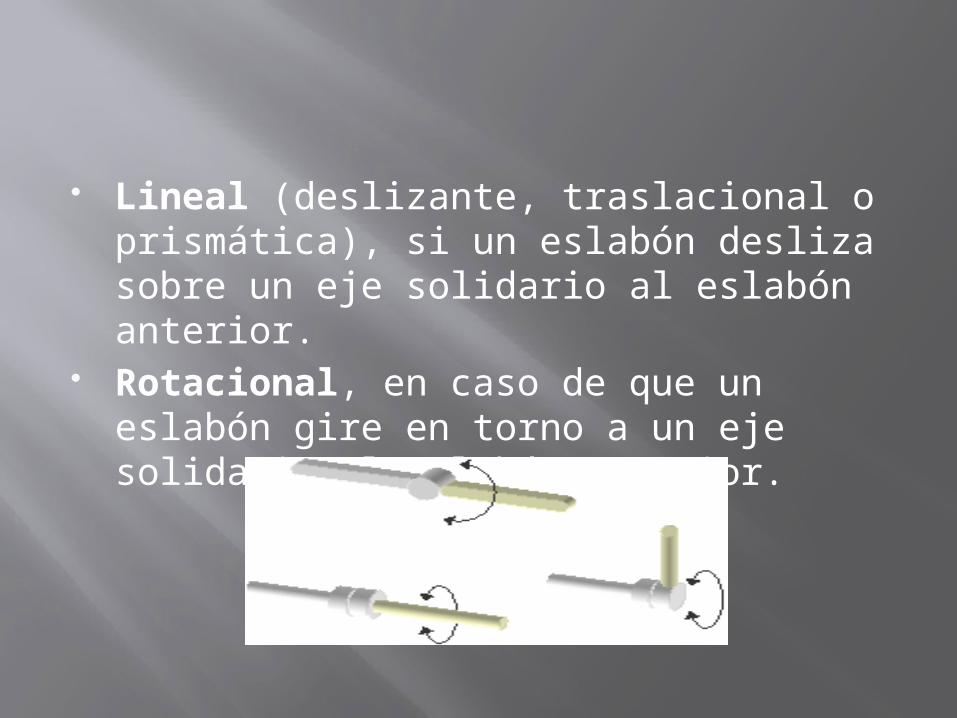
Lineal (deslizante, traslacional o prismática), si un eslabón desliza sobre un eje solidario al eslabón anterior.
Rotacional, en caso de que un eslabón gire en torno a un eje solidario al eslabón anterior.
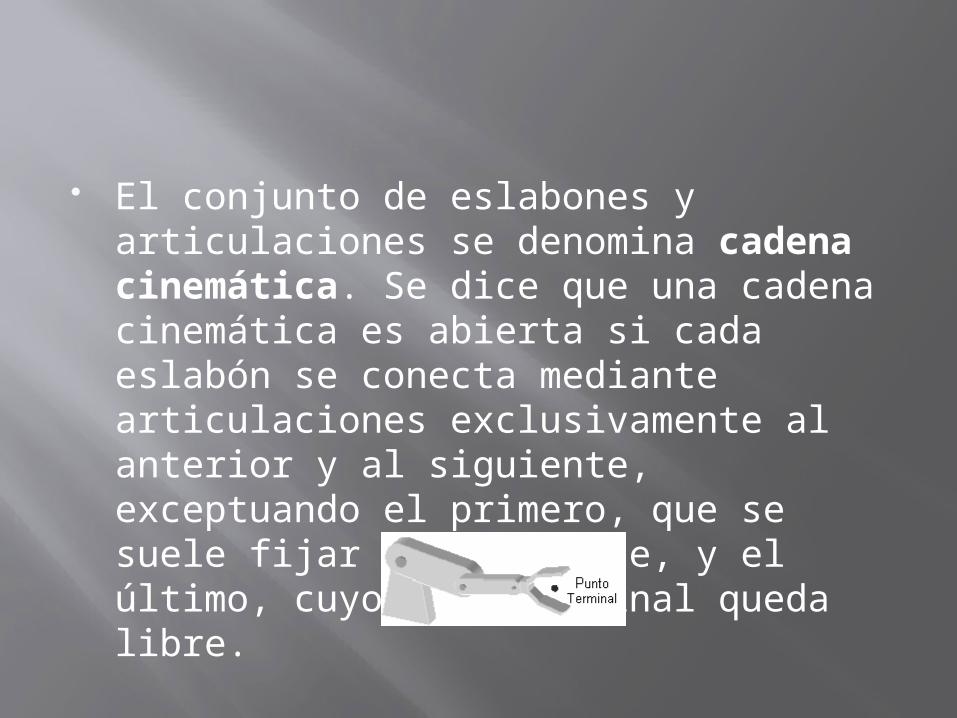
El conjunto de eslabones y articulaciones se denomina cadena cinemática. Se dice que una cadena cinemática es abierta si cada eslabón se conecta mediante articulaciones exclusivamente al anterior y al siguiente, exceptuando el primero, que se suele fijar a un soporte, y el último, cuyo extremo final queda libre.
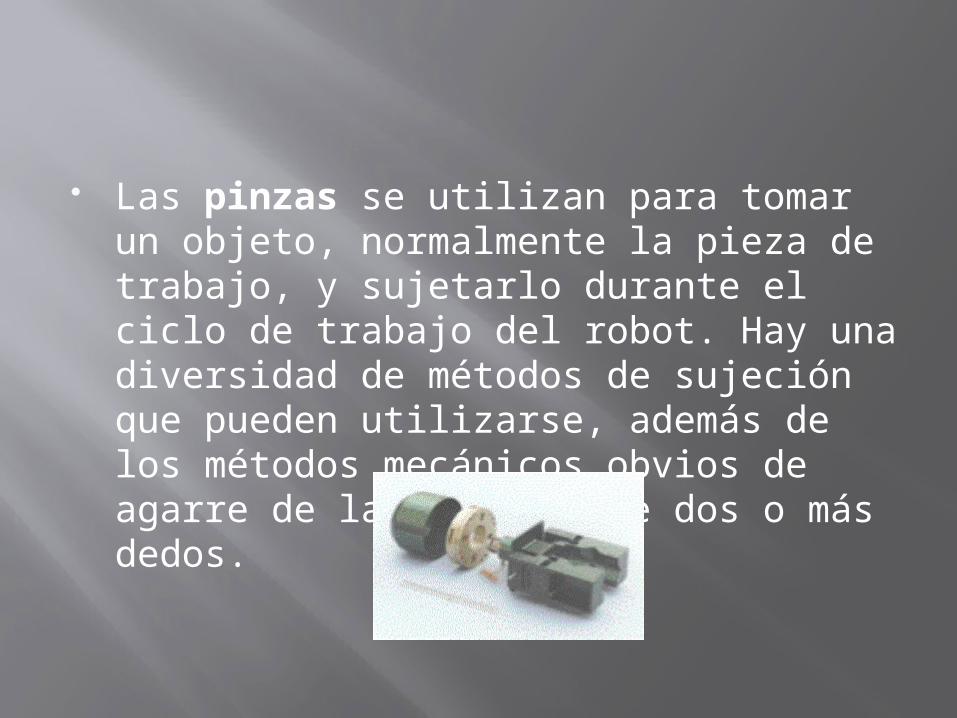
Las pinzas se utilizan para tomar un objeto, normalmente la pieza de trabajo, y sujetarlo durante el ciclo de trabajo del robot. Hay una diversidad de métodos de sujeción que pueden utilizarse, además de los métodos mecánicos obvios de agarre de la pieza entre dos o más dedos.
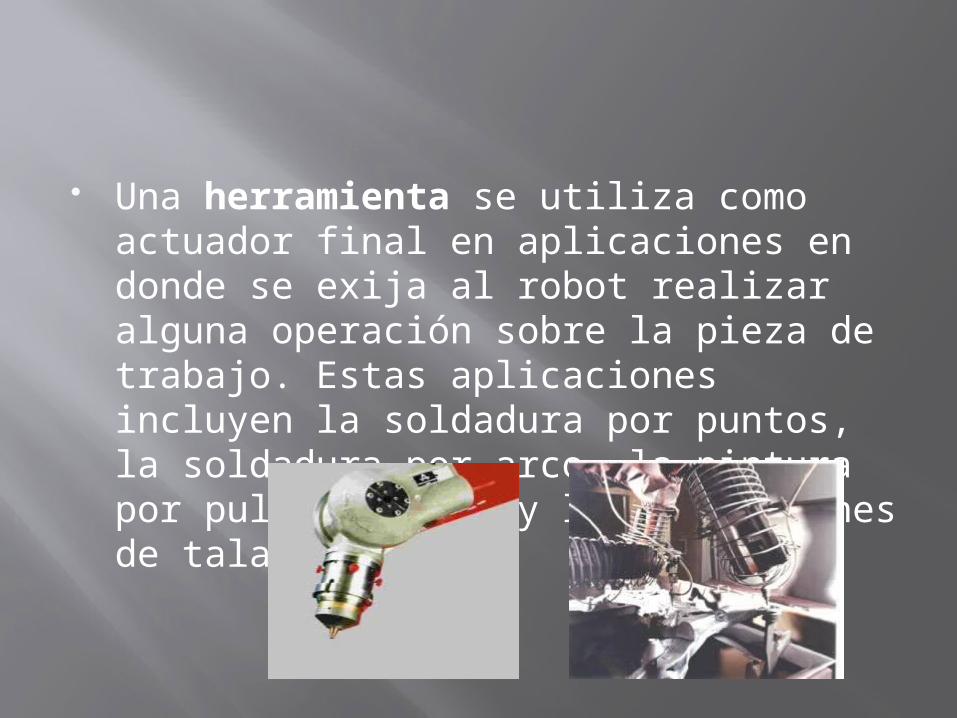
Una herramienta se utiliza como actuador final en aplicaciones en donde se exija al robot realizar alguna operación sobre la pieza de trabajo. Estas aplicaciones incluyen la soldadura por puntos, la soldadura por arco, la pintura por pulverización y las operaciones de taladro.
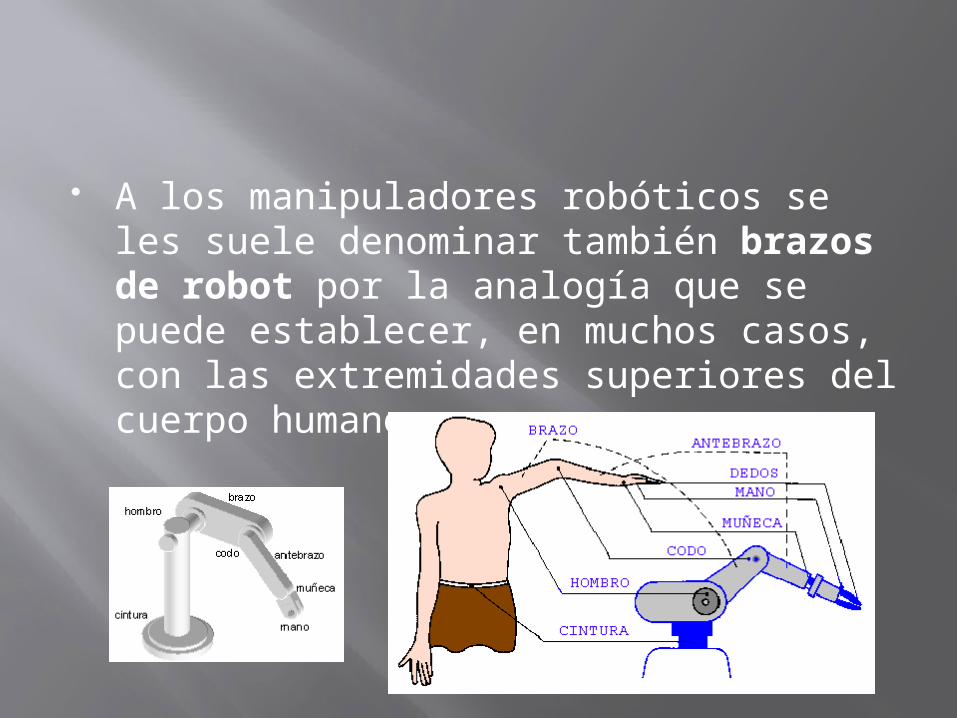
A los manipuladores robóticos se les suele denominar también brazos de robot por la analogía que se puede establecer, en muchos casos, con las extremidades superiores del cuerpo humano.
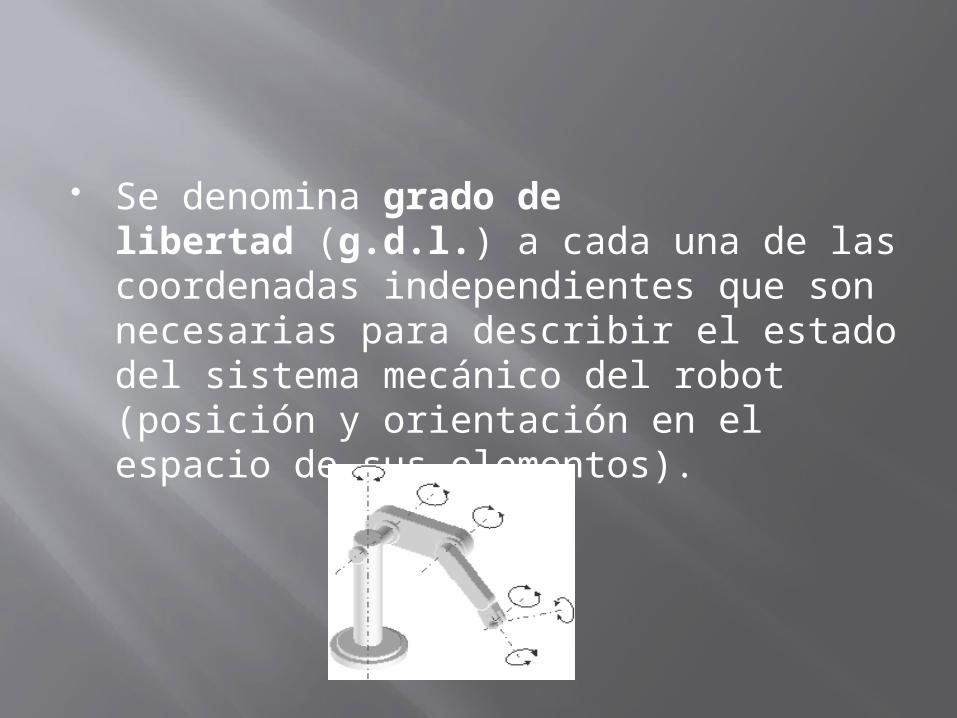
Se denomina grado de libertad (g.d.l.) a cada una de las coordenadas independientes que son necesarias para describir el estado del sistema mecánico del robot (posición y orientación en el espacio de sus elementos).
El análisis desde el punto de vista mecánico de un robot se puede efectuar atendiendo exclusivamente a sus movimientos (estudio cinemático) o atendiendo además a las fuerzas y momentos que actúan sobre sus partes (estudio dinámico) debidas a los elementos actuadores y a la carga transportada por el elemento terminal.
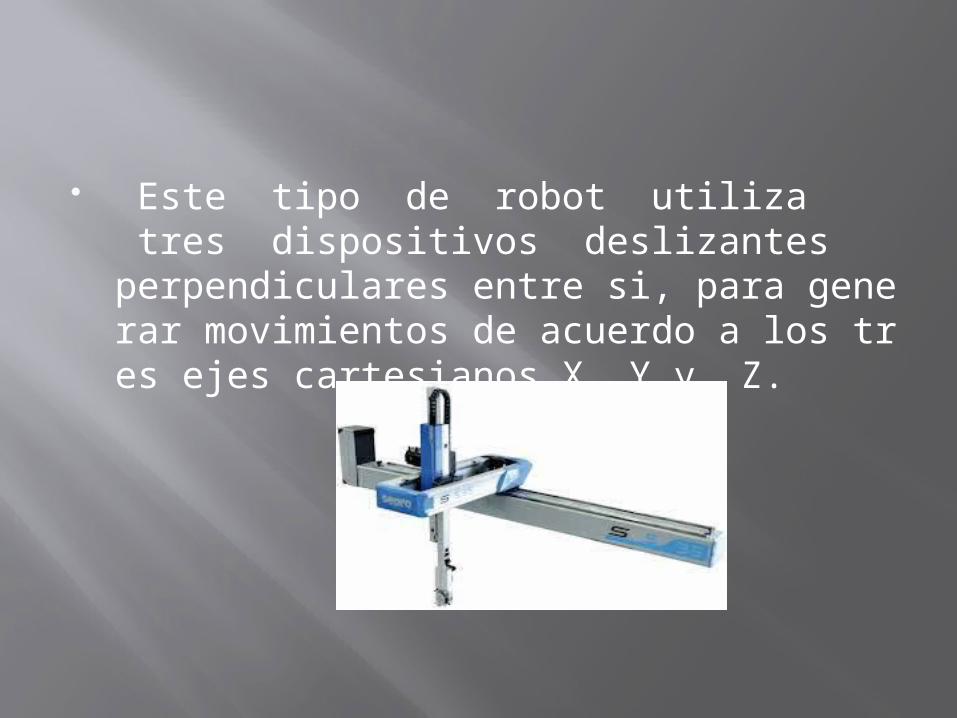
Este tipo de robot utiliza tres dispositivos deslizantes perpendiculares entre si, para generar movimientos de acuerdo a los tres ejes cartesianos X, Y y Z.
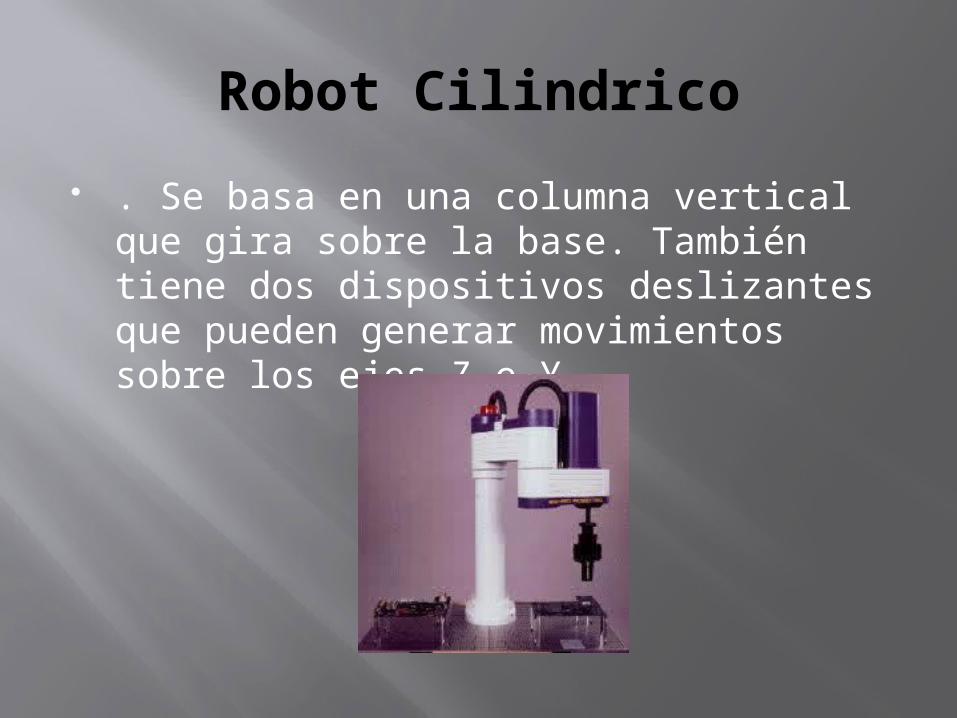
Robot Cilindrico
. Se basa en una columna vertical que gira sobre la base. También tiene dos dispositivos deslizantes que pueden generar movimientos sobre los ejes Z e Y.
Robot Esférico o Polar
Utiliza un brazo telescópico que puede bascular en torno a un eje horizontal. Este eje telescópico está montado sobre una base giratoria. Las articulaciones proporcionan al robot la capacidad de desplazar el brazo en una zona esférica.
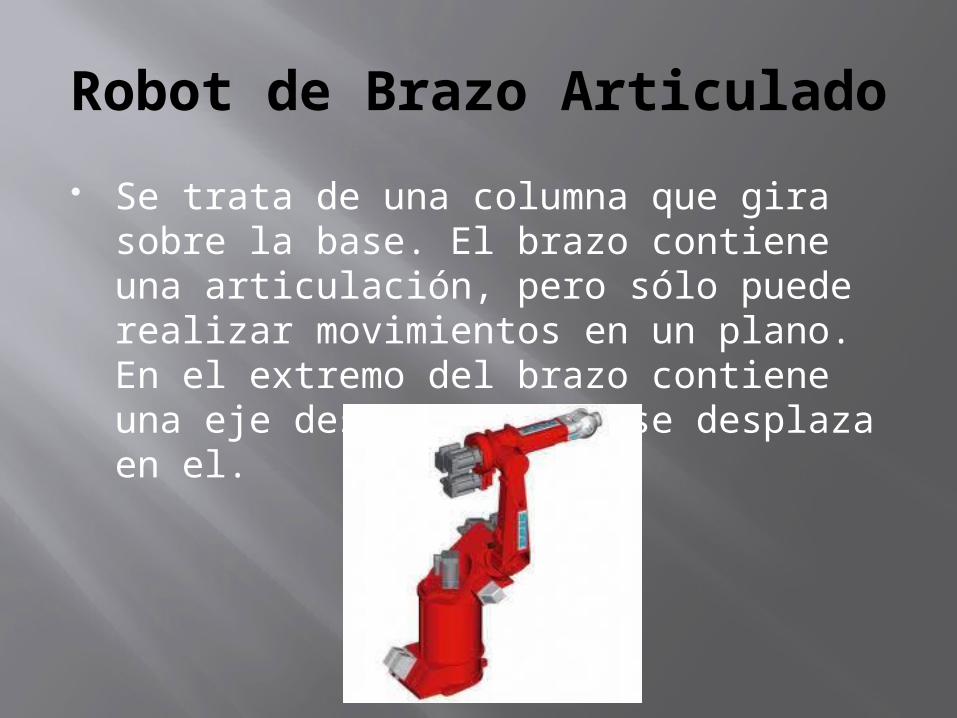
Robot de Brazo Articulado
Se trata de una columna que gira sobre la base. El brazo contiene una articulación, pero sólo puede realizar movimientos en un plano. En el extremo del brazo contiene una eje deslizante que se desplaza en el.
Está constituido por dos componentes rectos que simulan el brazo o antebrazo humano, sobre una columna giratoria. Estos antebrazos están conectados mediante articulaciones que se asemejan al hombro y al codo.
Poli articulados
Son robots sedentarios, o sea que no se pueden desplazar, están diseñados para mover sus brazos y herramientas en un determinado espacio de trabajo. En este grupo se encuentran los manipuladores y algunos robots industriales.
Móviles
Son robots con gran capacidad de desplazamiento, acoplados a carros o plataformas. Estos robots aseguran el transporte de un sitio a otro de piezas. Están dotados de un cierto grado de inteligencia, lo que les permite sortear obstáculos.
Nanorobots
Son pequeños robots capaces de cosas sorprendentes. Existen algunos que viajan por la sangre y son capaces de inyectar la cantidad precisa de droga en una célula. Se trata de robots experimentales.
Androides
Son robots que intentan reproducir la forma y los movimientos del ser humano. En la actualidad son poco evolucionados y con poca utilidad práctica.
Zoomórficos
Se caracterizan por imitar el sistema de locomoción de algunos seres vivos. Se encuentran el pleno desarrollo se utilizan para desplazarse sobre superficies accidentadas y con numerosos obstáculos.
La historia de la robótica ha estado unida a la construcción de “artefactos”, que trataban de materializar el deseo humano de crear seres semejantes a nosotros que nos descargasen del trabajo. El ingeniero español Leonardo Torres Quevedo (que construyó el primer mando a distancia para su torpedo automóvil mediante telegrafía sin hilodrecista automático, el primer transbordador aéreo y otros muchos ingénios) acuñó el término “automática” en relación con la teoría de la automatización de tareas tradicionalmente asociadas a los humanos.
Karel Capek, un escritor checo, acuño en 1921 el término Robot en su obra dramática “Rossum’s Universal Robots / R.U.R.”, a partir de la palabra checa Robbota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica.
Ningún robot puede hacer daño a un ser humano, o permitir que se le haga daño por no actuar.
Un robot debe obedecer las órdenes dadas por un ser humano, excepto si éstas órdenes entran en conflicto con la primera ley.
· Un robot debe proteger su propia existencia en la medida en que está protección no sea incompatible con las leyes anteriores.En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente aliviándonos de las labores caseras.La Robótica ha alcanzado un nivel de madurez bastante elevado en los últimos tiempos, y cuenta con un correcto aparato teórico.
Sin embargo, al intentar reproducir algunas tareas que para los humanos son muy sencillas, como andar, correr o coger un objeto sin romperlo, no se ha obtenido resultados satisfactorios, especialmente en el campo de la robótica autónoma. Sin embargo se espera que el continuo aumento de la potencia de los ordenadores y las investigaciones en inteligencia artificial, visión artificial, la robótica autónoma y otras ciencias paralelas nos permitan acercarnos un poco más cada vez a los milagros soñados por los primeros ingenieros y también a los peligros que nos adelanta la ciencia ficción.
Con certeza no se sabe cuántos tipos de robots existen pero se pueden clasificar en estos generaciones:
1ª Generación. Manipuladores. Son sistemas mecánicos multifuncionales con un sencillo sistema de control, bien manual, de secuencia fija o de secuencia variable.
2ª Generación. Robots de aprendizaje. Repiten una secuencia de movimientos de movimientos que ha sido ejecutada previamente por un operador humano. El modo de hacerlo es a través de un dispositivo mecánico. El operador realiza los movimientos requeridos mientras el robot le sigue y los memoriza.
3ª Generación. Robots con control sensorizado. El controlador es una computadora que ejecuta las órdenes de un programa y las envía al manipulador para que realice los movimientos necesarios.
4ª Generación. Robots inteligentes. Son similares a los anteriores, pero además poseen sensores que envían información a la computadora de control sobre el estado del proceso. Esto permite una toma inteligente de decisiones y el control del proceso en tiempo real.
FIN
Por : Heber López







