
1
IN
ST
IT
UT
O T
EC
NO
LÓ
GIC
O D
E V
ER
AC
RU
Z
“A
NT
OR
CH
A Y
L
UZ
D
E F
UE
GO
P
ER
MA
NE
NT
E”
MECANISMOS
CRITERO DE GRÜBEL Y SUS EXCEPCIONES
CATEDRATICO: DR. JOSE GARRIDO ANTONIO NATAREN
ALUMNOS:
JAIRO ABEL VIERA MENDEZ E10020152
JULIO ARMANDO ORTEGA LICONA E11020300
SANTIAGO CONDE GOMEZ E10020119
PAHOLA ARACELI CORDERO REBOLLEDO E09021267
CARLOS ALBERTO HERMANN CROWSON E09020518
DAMIAN BARUCH LAGUNES SARMIENTO E12020633
ALEJANDRA VEGA ALBERTO E09021441
BRYAN MONOLA GUZMAN E11021005
INGENIERIA
MECATRONICA

2
INDICE
Portada …………………………………………1
Índice …………………………………………2
Resumen …………………………………………3
Criterio de Grübler …………………………………………4
Aplicación del criterio de Grübler …………………………………………7
Excepciones al criterio de Grübler. …………………………………………10
Bibliografía …………………………………………12

3
RESUMEN
Por grado de libertad se entiende el número de entradas independientes requeridas para determinar la posición de todos los eslabones del mecanismo respecto a tierra en cualquier instante.
En muchos casos resulta posible conocer la movilidad de un mecanismo a partir del número de eslabones y la cantidad y tipo de los pares que los enlazan. El criterio de grübler para mecanismos planos establece que la movilidad está dada por:
Siendo:
N = número de eslabones.
J1 = número de pares con un grado de libertad.
J2 = número de pares con dos grados de libertad.
Los gdl de un ensamble de eslabones predicen por completo su carácter. Hay varias posibilidades:
· M Positivo: se tendrá un mecanismo, y los eslabones tendrán movimiento relativo.
· M=1: El mecanismo puede ser impulsado con un solo movimiento de entrada.
· M = 0: se tendrá una estructura, y ningún movimiento es posible.
· M Negativo: se tendrá una estructura precargada, estáticamente indeterminada en la que hay exceso de ligaduras, por lo que ningún movimiento es posible y algunos esfuerzos pueden también estar presentes en el momento del ensamble.
El eslabonamiento de cuatro barras es el mecanismo articulado más simple posible para movimiento controlado de un grado de libertad.
4
Criterio de Grübler
Grados de Libertad de un Eslabonamiento
DEFINICION: Grados de libertad, o movilidad, de un eslabonamiento es el número
mínimo y suficiente de variables requeridas para determinar completamente la
posición del eslabonamiento.
Es decir conociendo esas variables debe ser posible conocer la posición de
cualquiera de los eslabones que forman parte del eslabonamiento.
EJEMPLO. A continuación se presentan dos ejemplos de eslabonamientos que
incluyen un conteo de sus grados de libertad o movilidad.
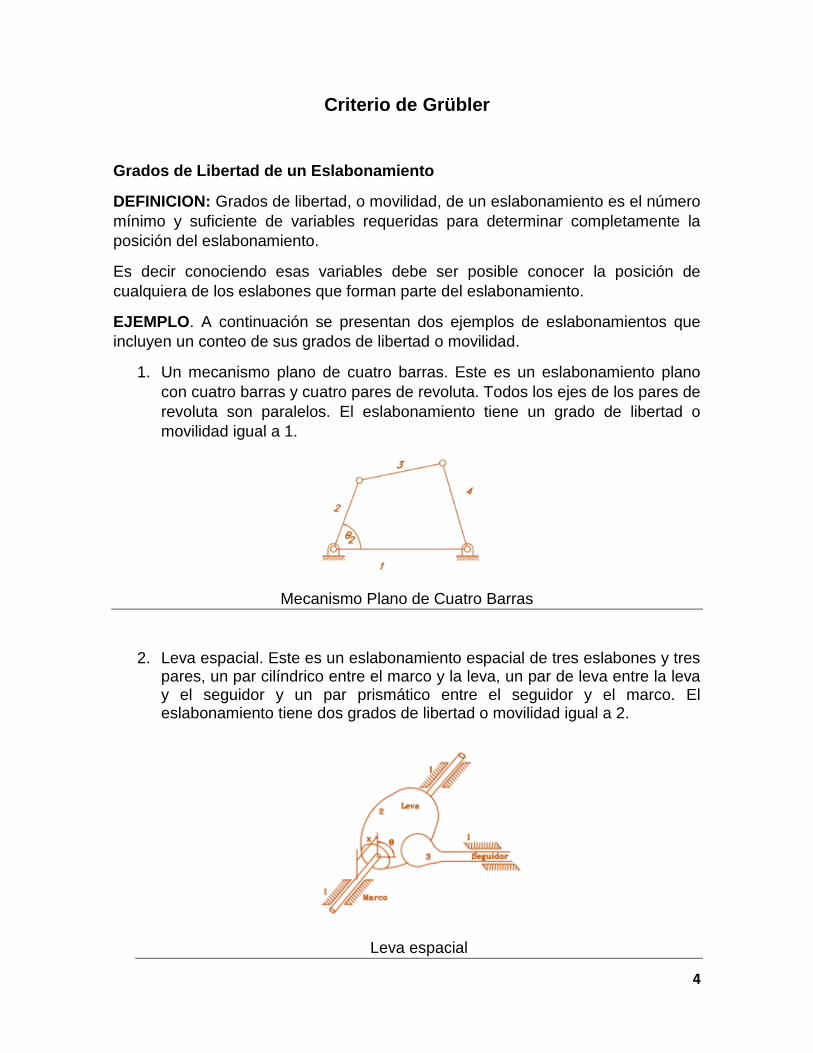
1. Un mecanismo plano de cuatro barras. Este es un eslabonamiento plano
con cuatro barras y cuatro pares de revoluta. Todos los ejes de los pares de
revoluta son paralelos. El eslabonamiento tiene un grado de libertad o
movilidad igual a 1.
Mecanismo Plano de Cuatro Barras
2. Leva espacial. Este es un eslabonamiento espacial de tres eslabones y tres pares, un par cilíndrico entre el marco y la leva, un par de leva entre la leva y el seguidor y un par prismático entre el seguidor y el marco. El eslabonamiento tiene dos grados de libertad o movilidad igual a 2.
Leva espacial

5
Una forma de determinar el número de grados de libertad de un eslabonamiento consiste en observar su movimiento, si lo hay y determinar empíricamente ese número mínimo y suficiente de variables.
Sin embargo frecuentemente es necesario determinar los grados de libertad de eslabonamientos que no han sido construidos para solucionar este problema, desde el siglo pasado se formularon diferentes criterios de movilidad, uno de los más sencillos es el criterio de Grübler.
A continuación se deducirá el criterio Grübler para eslabonamientos planos. Es decir, para aquellos eslabonamientos cuyos eslabones se mueven en planos paralelos. La secuencia del razonamiento es la siguiente.
1. Imagine la formación de un eslabonamiento constituido por N eslabones, como se muestra en la figura, originalmente el sistema tiene 3N grados de libertad, 3 grados de libertad por cada uno de los cuerpos que se conectaran para construir el eslabonamiento.
Cuerpos rígidos aislados que formaran un eslabonamiento
2. Para formar un eslabonamiento, se requiere que uno de los eslabones se
fije al sistema de referencia. Por lo tanto el conjunto tiene ahora 3(N-1)
grados de libertad.
Cuerpos rígidos aislados que formaran un eslabonamiento, con uno de ellos fijo.

6
3. Por ultimo a fin de transmitir movimiento, los eslabones deben unirse
mediante pares cinemáticos, puesto que los eslabones están originalmente
obligados a tener movimiento plano general, entonces un par de la clase I
prismático o de revoluta elimina 2 grados de libertad y un par de leva de la
clase II elimina un grado de libertad.
Eslabonamiento formado a partir de los cuerpos rígidos inicialmente aislados.
Así pues, con base a los anteriores razonamientos es posible formular la ecuación:
F = 3 (N – 1) – 2P₁ - P₂
Donde F es el número de grados de libertad del eslabonamiento, N es el número
de eslabones que forman el eslabonamiento, P₁ es el número de pares de la clase
I que forman parte del eslabonamiento y P₂ es el número de pares de la clase II
que forman parte del eslabonamiento. La ecuación anterior se conoce como el
criterio de Grübler.
Dependiendo del número de grados de libertad, un eslabonamiento se clasifica
en:
1. F < 0, grado de libertad o movimiento negativo. El eslabonamiento es una
estructura estáticamente indeterminada.
2. F = 0, grado de libertad o movilidad cero. El eslabonamiento es una
estructura estáticamente determinada.
3. F > 0, grado de libertad o movilidad positivo. El eslabonamiento es un
mecanismo de 1, 2, 3, etc. Grados de libertad, según sea el caso.

7
APLICACIÓN DEL CRITERIO DE GLÜBLER
En esta sección se determinaran los grados de libertad de diferentes
abonamientos aplicando el criterio de Grübler.
1. Considere el eslabonamiento mostrado en la figura siguiente , el
eslabonamiento contiene 5 eslabones y 6 pares cinemáticos, indicados en
itálica, todos estos pares, excepto el par 6, que es un par de leva, entre los
eslabones 2 y 5, son pares de la clase I, de manera que aplicando el criterio
de Grübler, se tiene que:
Eslabonamiento formado a partir de los cuerpos rígidos inicialmente aislados.
F = 3 (N - 1) – 2 P₁ – P₂ = 3 (5 – 1) – 2 (5) – 1 = 12 – 10 – 1 = 1
El eslabonamiento es un mecanismo de un grado de libertad.
2. Considere el eslabonamiento mostrado en la figura siguiente, el
eslabonamiento contiene 4 eslabones, y pares de revoluta, todos estos
pares pertenecen a la clase I, de manera que aplicando el criterio de
Grübler, se tiene que:

8
Eslabonamiento formado por cuatro eslabones y cuatro pares de revoluta. Mecanismo
plano de cuatro barras.
F = 3 (N - 1) – 2 P₁ – P₂ = 3 (4 – 1) – 2 (4) – 0 = 9 – 8 – 0 = 1
El eslabonamiento es un mecanismo de un grado de libertad, como era de
esperarse. Este mecanismo se le conoce como un mecanismo plano de cuatro
barras.
3. Considere el eslabonamiento de la siguiente figura, el eslabonamiento
contiene 3 eslabones, y 3 pares de revoluta, todos estos pares pertenecen
a la clase I, de manera que aplicando el criterio de Grübler, se tiene que:
Eslabonamiento formado por tres eslabones y tres pares de revoluta. Estructura
estáticamente determinada.
F = 3 (N - 1) – 2 P₁ – P₂ = 3 (3 – 1) – 2 (3) – 0 =6 – 6 – 0 = 0
El eslabonamiento de una estructura estáticamente determinada, como era de
esperarse pues, del estudio de la estatica, se sabe bien que un triangulo es la
celula básica de las estructuras.
4. Considere el eslabonamiento mostrado en la siguiente figura, el
eslabonamiento contiene 3 eslabones, y 3 pares cinemático, todos estos
pares, excepto el par 3 que es un par de leva, entre los eslabones 2 y 3,
son pares de clase I, pares de revoluta, de manera que aplicando el criterio
de Grübler, se tiene que:
9
Eslabonamiento formado por tres eslabones, dos pares de revoluta y un par de leva. Leva
de disco seguidor de cara plana.
F = 3 (N - 1) – 2 P₁ – P₂ = 3 (3 – 1) – 2 (2) – 1 =6 – 4 – 1 = 1
El eslabonamiento es un mecanismo de un grado de libertad. Este mecanismo se
conoce como un mecanismo de leva de disco con seguidor de cara plana.
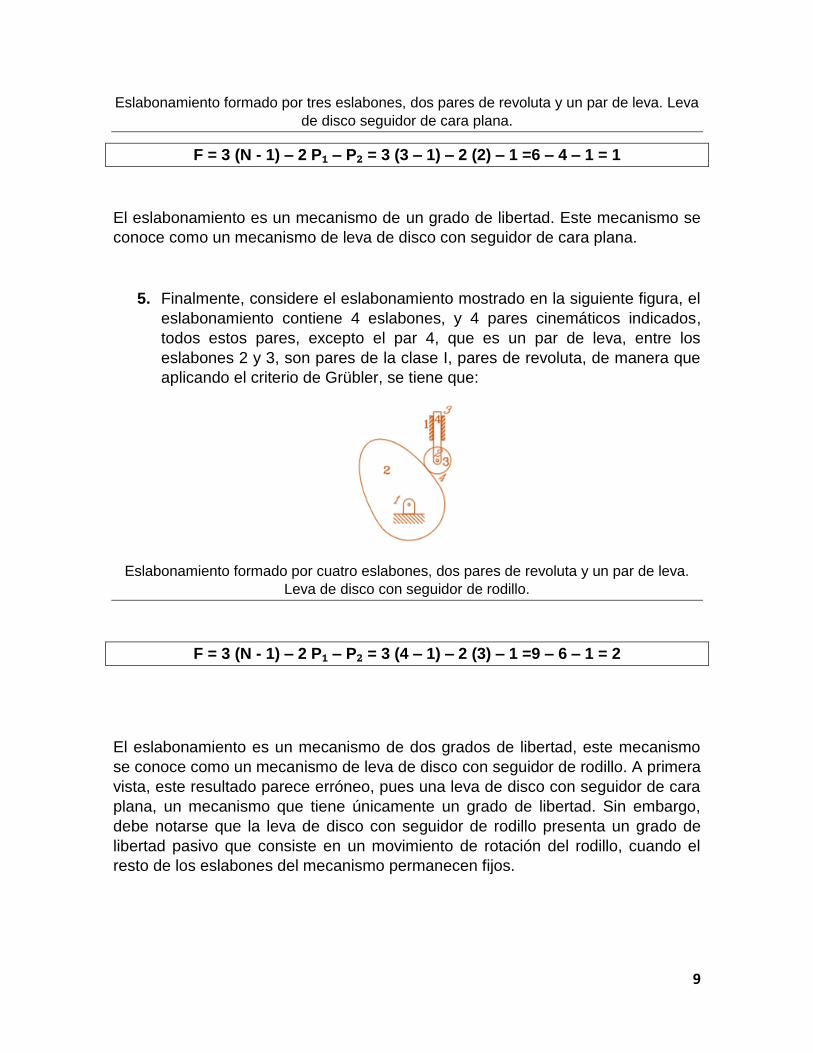
5. Finalmente, considere el eslabonamiento mostrado en la siguiente figura, el
eslabonamiento contiene 4 eslabones, y 4 pares cinemáticos indicados,
todos estos pares, excepto el par 4, que es un par de leva, entre los
eslabones 2 y 3, son pares de la clase I, pares de revoluta, de manera que
aplicando el criterio de Grübler, se tiene que:
Eslabonamiento formado por cuatro eslabones, dos pares de revoluta y un par de leva.
Leva de disco con seguidor de rodillo.
F = 3 (N - 1) – 2 P₁ – P₂ = 3 (4 – 1) – 2 (3) – 1 =9 – 6 – 1 = 2
El eslabonamiento es un mecanismo de dos grados de libertad, este mecanismo
se conoce como un mecanismo de leva de disco con seguidor de rodillo. A primera
vista, este resultado parece erróneo, pues una leva de disco con seguidor de cara
plana, un mecanismo que tiene únicamente un grado de libertad. Sin embargo,
debe notarse que la leva de disco con seguidor de rodillo presenta un grado de
libertad pasivo que consiste en un movimiento de rotación del rodillo, cuando el
resto de los eslabones del mecanismo permanecen fijos.

10
EXCEPCIONES AL CRITERIO DE GRÜBLER.
Un criterio de movilidad, como el de Grübler, basado exclusivamente en
consideraciones del número de eslabones y de pares necesariamente debe tener
excepciones; es decir eslabonamientos para los cuales el número de grados de
libertad determinado mediante el criterio de Grübler no es el correcto.
Algunas de ellos se muestran a continuación.
1. Considere un mecanismo de cuatro barras y cuatro pares de revoluta, tal
como el mostrado en la figura 31.
Figure 31: Mecanismo Plano de Cuatro Barras que Constituye una
Excepcion del Criterio de Gr¨ubler.
Aplicando el criterio de Gr¨ubler, se tiene que:
Sin embargo, si las longitudes de los eslabones del mecanismo plano de
cuatro barras son a1 = 4 u.l., a2 = 2 u.l., a3 = 7 u.l. y a4 = 1 u.l.. y se trata
de ensamblar el mecanismo.Consecuentemente, este “mecanismo plano de
cuatro barras” tiene 0 grados de libertad
y es en realidad una estructura.
2.Considere ahora el eslabonamiento mostrado en la figura:
Eslabonamiento de 5 barras y 6 pares cinemáticos que constituye una excepción del
criterio de Grübler.

11
Aplicando el criterio de Grübler, se tiene que:
F = 3 (5 – 1) – 2 (6) – 0 = 12 – 12 - 0 = 0
Sin embargo, es necesario reconocer que, en este caso, los eslabones 1, 3 y 4
son paralelos, además los eslabones 2 y 4 son, igualmente paralelos y permiten
que es eslabonamiento gire en el sentido indicado, por lo tanto F =1
3.Considere el eslabonamiento mostrado en la figura:
Eslabonamiento de dos lazos con pares prismáticos y de revoluta que constituye una
excepción del criterio de Grübler.
Aplicando el criterio de Grübler se tiene que:
F = 3 (5 – 1) – 2 (6) – 0 = 12 – 12 - 0 = 0
Este eslabonamiento es un ejemplo de mecanismos complejos, en los que un
lazo, aquel formado por los eslabones conectados por los pares prismáticos está
asociado a las traslacionales planas, mientras que cualquiera de los dos restantes
lazos está asociado al movimiento plano general. Puede probarse que el
eslabonamiento es movible y tiene un grado de libertad.
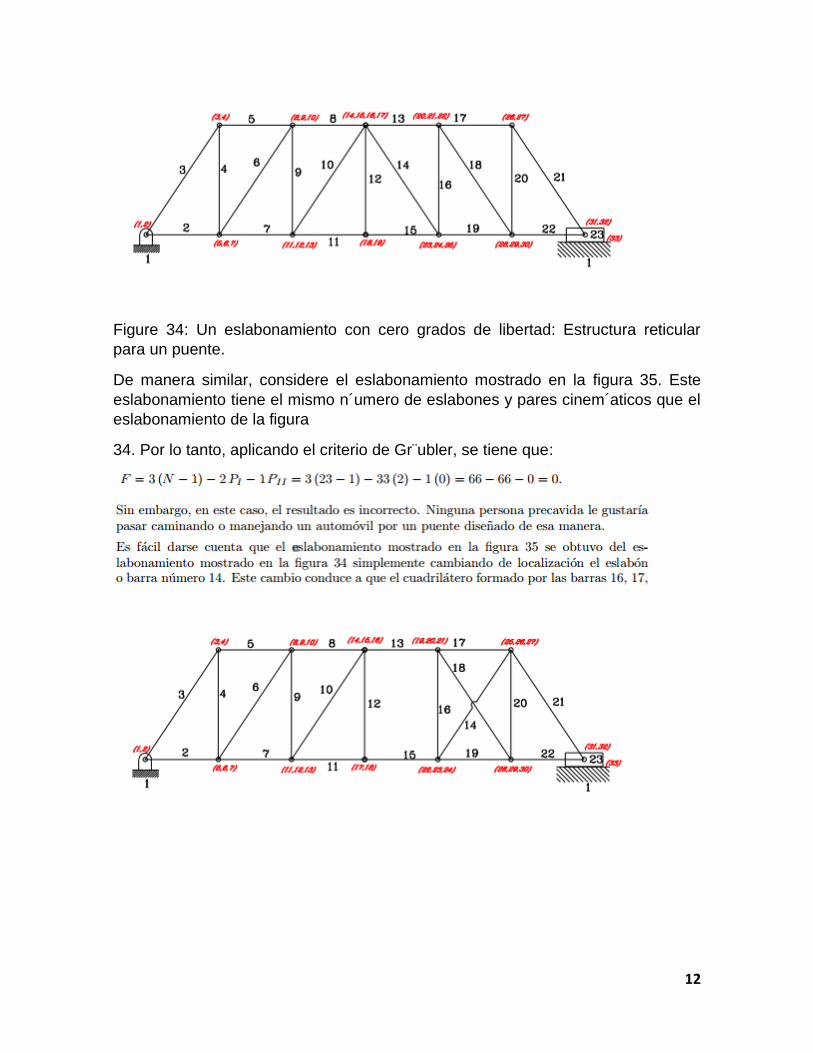
4. . Finalmente, considere el eslabonamiento mostrado en la figura 34. El
eslabonamiento tiene
23 eslabones, 33 pares cinemáticos de la clase I y no tiene pares cinemáticos de
la clase II.
Por lo tanto, aplicando el criterio de Gr¨ubler, se tiene que:
El resultado, correcto en este caso, indica que el eslabonamiento es un estructura.
Estas estructuras se emplean frecuentemente en techos y puentes.
12
Figure 34: Un eslabonamiento con cero grados de libertad: Estructura reticular
para un puente.
De manera similar, considere el eslabonamiento mostrado en la figura 35. Este
eslabonamiento tiene el mismo n´umero de eslabones y pares cinem´aticos que el
eslabonamiento de la figura
34. Por lo tanto, aplicando el criterio de Gr¨ubler, se tiene que:

13

14
BIBLIOGRAFIA
LIBROS:
Hamilton H. Mabie, Charles F. Reinholtz, Mecanismos Y Dinámica De
Maquinaria, 4 Edición.
Robert L. Norton, Diseño De Maquinaria, McGraw Hill
SITOS WEB:
http://www.unioviedo.es/DCIF/IMecanica/GestionCortizo/Metodolo~gia/
conceptos%20de%20mecanica/Glosario%20de%20t%E9rminos/Grados
%20de%20libertad%20y%20ecuaci%F3n%20de%20G.html
http://www.fimee.ugto.mx/profesores/chema/documentos/An%C3%A1li
sis%20y%20S%C3%ADntesis%20de%20Mecanismos/IntroduccionALo
sMecanismos.pdf
www.fimee.ugto.mx/profesores/.../IntroduccionALosMecanismos.pdf







