diseÑo y construcciÓn de una base mÓvil para …
TRANSCRIPT

DISEÑO Y CONSTRUCCIÓN DE UNA BASE MÓVIL PARA MICRÓFONOS
CONTROLADA A DISTANCIA
JUAN SEBASTIÁN GELVES GÓMEZ
UNIVERSIDAD DE SAN BUENAVENTURA FACULTAD DE INGENIERÍA
INGENIERÍA DE SONIDO BOGOTÁ D.C.
2011

DISEÑO Y CONSTRUCCIÓN DE UNA BASE MÓVIL PARA MICRÓFONOS CONTROLADA A DISTANCIA
JUAN SEBASTIÁN GELVES GÓMEZ
Proyecto de grado
Ing. Jorge Andrés Casas Acero
Ing. Oscar Esneider Acosta Agudelo
UNIVERSIDAD DE SAN BUENAVENTURA FACULTAD DE INGENIERÍA
INGENIERÍA DE SONIDO BOGOTÁ D.C.
2011

Nota de aceptación ___________________________________
Jorge Andrés Casas Acero
___________________________________ Oscar Esneider Acosta Agudelo
Bogotá, 25 de mayo de 2011
GLOSARIO
Algoritmo: Es un conjunto de instrucciones ordenadas y finitas que permite realizar una actividad mediante pasos sucesivos. Son ampliamente utilizados para ejemplificar el funcionamiento de códigos de programación mediante diagramas de flujo.
Campo magnético: Un campo magnético es un campo de fuerza creado como consecuencia del movimiento de cargas eléctricas (flujo de la electricidad).
Circuito integrado: Es un circuito electrónico utilizado para realizar una función electrónica específica. Están construidos a partir de elementos como diodos, transistores, resistencias y condensadores, interconectados y ubicados en una única pastilla de silicio.
Conector Jack: Es un conector de audio utilizado en numerosos dispositivos para la transmisión de audio en formato analógico. Existen conectores jack Balanceados (TRS) y no balanceados (TS).
Criterio NC: Es un criterio utilizado para calificar las emisiones de ruido en interiores. Bajo este criterio se definen los límites máximos permisibles de transmisión de ruido en un rango de 63 hasta 8000 Hz, que no se debe superar en determinados espacios.
Decibel: El decibel (dB) es una unidad logarítmica que indica la proporción de una magnitud física en relación con un nivel de referencia. Es la unidad de medida utilizada para el nivel de potencia y el nivel de intensidad del ruido
Decibel FS: Un decibel Full Scale o a escala completa (dBFS), mide los niveles de decibeles de amplitud en sistemas digitales, en una escala donde el valor máximo es asignado al máximo nivel digital posible, cero 0 dBFS,.
Impedancia: magnitud que establece la relación (cociente) entre la tensión y la intensidad de corriente.
Plug-In: (en software) es una aplicación que se relaciona con otra, para aportarle una función nueva y generalmente muy especifica.

RMS: La raíz media cuadrática, RMS (root mean square) es una medida estadística de la magnitud de una cantidad variable. El nombre deriva del hecho de que es la raíz cuadrada de la media aritmética de los cuadrados de los valores.
SPL: El nivel de presión sonora (sound presure level) determina la intensidad del sonido que genera una presión sonora en un momento dado. Se mide en decibeles y varía entre 0 dB umbral de audición y 140 dB umbral de dolor.
STC: La Sound transmition class, o clase de Transmisión de Sonido, es una clasificación que refleja a grandes rasgos la reducción del nivel de presión sonora en el ruido que atenúa una partición. Esta clase se fija mediante un único número entero que representa las características de la partición.
TL: La perdida por transmisión (Transmission loss) es la capacidad de una partición para reducir o atenuar el ruido. Éste valor se da en decibeles y se entiende que a mayor TL, la partición tendrá una mayor absorción.

3
DEDICATORIA
A mi padres, por su absoluto esfuerzo y dedicación; por darme todas las oportunidades de de construir mi vida tal y como la he imaginado. Por la fuerza constantemente para cumplir cada reto, por su ejemplar consejo, por su inquebrantable apoyo, y por permitirme crecer en un hogar lleno de música, amor y poesía.
A mis amigos, los que acompañan mis sonrisas y adivinan cada tristeza, los que comparten mis sueños y siempre encuentran formas de inventar las alegrías. A todos ellos, los que nunca faltan.
A mis colegas, que caminamos en un mundo de sonido y tecnología, y me acompañaron en la búsqueda académica, descubriendo los secretos de la naturaleza y de las vibraciones que nos rodean.
Para todos ustedes,

4
AGRADECIMIENTOS
Muchas personas fueron de gran ayuda para el desarrollo de este proyecto y sin ellas, hubiera sido muy difícil materializar cada una de mis ideas. Por ello agradezco su consejo y apoyo a todos los que hicieron parte de éste proyecto, especialmente a Nelson, Oscar Méndez Oyola, Freddy Figueredo, Santiago Manrique, y a los docentes Carlos Vargas y Miguel Pérez.

5
CONTENIDO
pág.
INTRODUCCIÓN ................................................................................................... 15
1. PLANTEAMIENTO DEL PROBLEMA ................................................................ 16
1.1 ANTECEDENTES ......................................................................................... 16
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA ................................. 21
1.3 JUSTIFICACIÓN ........................................................................................... 22
1.4 OBJETIVOS ................................................................................................. 23
1.4.1 Objetivo General .................................................................................... 23
1.4.2 Objetivos Específicos ............................................................................. 23
1.5 ALCANCES Y LIMITACIONES ..................................................................... 24
1.5.1 Alcances ................................................................................................. 24
1.5.2 limitaciones ............................................................................................. 24
2. MARCO DE REFERENCIA ............................................................................. 25
2.1 MARCO TEÓRICO-CONCEPTUAL ............................................................. 25
2.1.1 Mecánica ................................................................................................ 25
2.1.2 Electrónica .............................................................................................. 31
2.1.3 Acústica .................................................................................................. 40
2.1.4 Ciencias de la grabación ........................................................................ 50
3. METODOLOGÍA ................................................................................................ 60
3.1 ENFOQUE DE LA INVESTIGACIÓN ............................................................ 60
3.2 LÍNEA / SUBLINEA / CAMPO DE INVESTIGACIÓN .................................... 60
3.2.1 Línea ...................................................................................................... 60
3.2.2 Sub línea ................................................................................................ 60

6
3.2.3 Campo temático ..................................................................................... 60
3.3 HIPÓTESIS .................................................................................................. 61
4. DESARROLLO INGENIERIL ............................................................................. 62
4.1 DISEÑO MECÁNICO .................................................................................... 62
4.1.1Diseño ..................................................................................................... 64
4.1.3 Construcción .......................................................................................... 69
4.1.4 Ensamble ............................................................................................... 74
4.2 DISEÑO ELECTRÓNICO ............................................................................. 75
4.2.2 Micro controladores ................................................................................ 76
4.2.6 Montaje ................................................................................................... 84
4.3 CONTROL DE RUIDO Y VIBRACIONES ..................................................... 86
4.3.1 Mediciones de ruido y vibraciones preliminares ..................................... 86
4.3.2 Mediciones de ruido y vibraciones posteriores al tratamiento ................ 97
4.4 CAPTURAS Y PRUEBAS DE FUNCIONAMIENTO ................................... 103
4.4.1 captura del bombo ................................................................................ 103
4.4.2 Captura del redoblante ......................................................................... 105
4.4.4 Captura de la guitarra eléctrica ............................................................ 107
5. ANÁLISIS DE RESULTADOS .......................................................................... 110
6. CONCLUSIONES ............................................................................................ 113
7. RECOMENDACIONES .................................................................................... 115
BIBLIOGRAFÍA .................................................................................................... 116

7
LISTA DE ILUSTRACIONES
pág.
Figura 1. Diagrama básico de un sistema de engranajes cilíndricos ..................... 27 Figura 2. Partes principales de los dientes de engranajes ..................................... 28
Figura 3. Sistema cremallera piñón. y sistema sinfín corona ................................. 28
Figura 4. Estructura de un circuito puente H, demarcado en rojo. ......................... 32 Figura 5. Estados básicos de un Puente H ............................................................ 32
Figura 6. Diagrama de funcionamiento de un motor eléctrico, ............................... 35
Figura 7. Servomotor ............................................................................................. 36
Figura 8. Reductor de velocidad ............................................................................ 37
Figura 9. Micro controlador Microchip PIC16F877A .............................................. 38
Figura 10. Arquitectura de la memoria de un micro controlador ............................ 39
Figura 11. Diagrama esquemático de la transmisión del sonido de la fuente al oyente. ................................................................................................................... 41
Figura 12. Diagrama esquemático de la transmisión de vibraciones ..................... 43
Figura 13. Ilustración esquemática de algunos sistemas del control de la vibración en las vías de transmisión. .................................................................................... 46
Figura 14. Diferentes diseños de bases para micrófonos convencionales. (A)Straigth Stand.Soporte recto tradicional. (B) Mini Boom. Base para micrófonos estándar para el posicionamiento de microfonía a baja altura. (C)Soporte recto con un brazo boom. ...................................................................................................... 52

8
Figura 15. Localización de fuentes sonoras por diferencias de tiempos de arribo y de intensidad.......................................................................................................... 54
Figura 16. Diferentes recorridos de una señal hacia un micrófono. Relación entre el campo directo y el campo reverberante. ............................................................ 55
Figura 17. Captura acentuada ............................................................................... 56
Figura 18. Diagrama de funcionamiento de tecnicas cercanas coincidentes ......... 58
Figura 19. Par espaciado ....................................................................................... 59
Figura 20. Mini boom ............................................................................................. 62
Figura 21. Modelo esquemático del dispositivo ..................................................... 63
Figura 22. Modelo 3D del Riel................................................................................ 64
Figura 23. Modelo 3D del Motor 2 .......................................................................... 66
Figura 24. Modelo 3D del sistema sin fin corona ................................................... 67
Figura 25. Diseño del la corona y el sinfin ............................................................. 69
Figura 26. Riel ........................................................................................................ 70
Figura 27. Construcción de la cremallera .............................................................. 71
Figura 28. Montaje del sistema de engranajes cilindricos ...................................... 72
Figura 29. Construcción de la corona .................................................................... 72
Figura 30. Construcción del tornillo sin fin ............................................................. 73
Figura 31. Montaje del motor 1 en el sistema cremallera piñón ............................. 74

9
Figura 32. Montaje de los tres sistemas mecánicos en el dispositivo .................... 74
Figura 33. Estructura y funcionamiento del puente H integrado L293B ................. 75
Figura 34. Línea TRS. ............................................................................................ 77
Figura 35. Diagrama de flujo de la programación del control remoto ..................... 80
Figura 36. Diagrama de flujo del funcionamiento del sistema esclavo ................... 82
Figura 37. Diseño de los circuitos impresos .......................................................... 83
Figura 38. Circuitos impresos finalizados .............................................................. 84
Figura 39. Prototipo terminado sin aislamiento ...................................................... 85
Figura 40. Niveles de ruido emitidos por cada uno de los motores. ....................... 88
Figura 41. Vibraciones transmitidas por el motor 1. Aceleración contra tiempo .... 89
Figura 42. Vibraciones transmitidas por el motor 1. Frecuencia contra tiempo ..... 89
Figura 43. Vibraciones transmitidas por el motor dos. Aceleración contra tiempo. 90
Figura 44. Vibraciones transmitidas por el motor dos. Frecuencia contra tiempo. 90
Figura 45. Vibraciones transmitidas por el motor tres. Aceleración contra tiempo. 91
Figura 46. Vibraciones transmitidas por el motor tres. Frecuencia contra tiempo. 91
Figura 47. Diseño del cerramiento del sistema cremallera piñón........................... 92
Figura 48. TL de la partición. ................................................................................. 94
Figura 49. Grafica de la comparación entre el ruido proyectado y el criterio NC25 ............................................................................................................................... 95

10
Figura 50. Foto prototipo terminado con aislamiento ............................................. 95
Figura 51. Nivel emitido por el dispositivo después del cerramiento ...................... 98
Figura 52. Vibraciones transmitidas por el motor uno. Aceleración contra tiempo. 99
Figura 53. Vibraciones transmitidas por el motor uno. Frecuencia contra tiempo . 99
Figura 54. Vibraciones transmitidas por el motor 2. Aceleración contra tiempo .. 100
Figura 55. Vibraciones transmitidas por el motor 2. Frecuencia contra tiempo ... 101
Figura 56. Vibraciones transmitidas por el motor 3. Aceleración contra tiempo .. 102
Figura 57. Vibraciones transmitidas por el motor 3. Frecuencia contra tiempo ... 102
Figura 58. Comparación antes y después del cerramiento .................................. 110
Figura 59. Comparación entre las frecuencias de vibración en el motor 1 .......... 112
Figura 60. Comparación entre las frecuencias de vibración en el motor 2 .......... 112
Figura 61. Comparación entre las frecuencias de vibración en el motor 3 .......... 112
Figura 62. FFT Bombo. Punto 1 ........................................................................... 104
Figura 63 FFT Bombo. Punto 2............................................................................ 104
Figura 64. FFT Bombo. Punto 3 ........................................................................... 105
Figura 65. FFT Redoblante. Punto 1 .................................................................... 106
Figura 66. FFT Redoblante. Punto 2 .................................................................... 106
Figura 67. FFT Redoblante. Punto 3 .................................................................... 107
11
Figura 68. FFT Guitarra. Punto 1 ......................................................................... 108
Figura 69. FFT Guitarra. Punto 2 ......................................................................... 108
Figura 70. FFT Guitarra. Punto 3 ......................................................................... 109

12
LISTA DE TABLAS
pág.
Tabla 1. Funcionamiento lógico de un puente H .................................................... 33
Tabla 2. Características de los motores ................................................................. 34
Tabla 3. Principales fuentes de ruido en motores. ................................................. 47
Tabla 4. Listado de los materiales utilizados ......................................................... 69
Tabla 5. Funcionamiento lógico del puente H L293B ............................................. 76
Tabla 6. Configuración de los puertos de entrada y salida .................................... 78
Tabla 7. Codificación de la información ................................................................. 79
Tabla 8. Fines de carrera ....................................................................................... 81
Tabla 9. Funcionamiento del microcontrolador esclavo ........................................ 81
Tabla 10. Nivel de ruido de fondo .......................................................................... 86
Tabla 11. Niveles de ruido de los sistemas mecánicos .......................................... 87
Tabla 12. Nivel de ruido emitido por los motores 1, 2 y 3 ...................................... 87
Tabla 13. Vibraciones Motor 1 ............................................................................... 89
Tabla 14. Coeficiente de absorción de la lana de vidrio. ........................................ 93
Tabla 15. Comparación entre el nivel de ruido proyectado y el criterio NC 25 ...... 94
Tabla 16. Nivel de ruido emitido por el sistema cremallera piñón después del tratamiento. ............................................................................................................ 97

13
Tabla 17. Vibraciones motor 1 ............................................................................... 98
Tabla 18. Vibraciones motor 2 ............................................................................. 100
Tabla 19 Vibraciones motor 3 ............................................................................. 101

14
LISTA DE ECUACIONES
pág.
Ecuación 1. Diámetro primitivo de un engranaje.................................................... 29
Ecuación 2. Altura de dientes de engranajes ......................................................... 30
Ecuación 3. Número de dientes en engranajes ..................................................... 30
Ecuación 4. Distancia entre dientes ....................................................................... 30
Ecuación 5. Módulo de un engranaje ..................................................................... 31
Ecuación 6. Cálculo de soportes anti vibratorios ................................................... 43

15
INTRODUCCIÓN
Éste proyecto está enfocado al desarrollo de una herramienta que facilita todos los procesos de captura y posicionamiento de microfonía en el estudio de grabación profesional, para lo cual se diseñó y construyó el prototipo de una base móvil para micrófonos, implementando un sistema de control de ruido y vibraciones.
El sistema planteado permite encontrar fácilmente y con gran precisión la posición más adecuada para la grabación de cualquier proyecto musical o sonoro directamente en captura y en el menor tiempo posible, facilitando la experimentación con las diferencias en el comportamiento de los micrófonos respecto al recinto y a los instrumentos.
Se realizó de tal manera que desde una distancia determinada y en tiempo real se puedan desplazar los micrófonos a través del estudio, consiguiendo con esto que el ingeniero de sonido pueda encontrar fácilmente y con gran precisión la posición necesaria, pertinente y más adecuada para la grabación de cualquier proyecto musical o sonoro, e igualmente abrir un mundo nuevo de posibilidades de captura sonora en movimiento.
Lo anterior se consiguió al articular en varios grados de libertad a una base para micrófonos convencional, aportando con esto movimiento en ejes de proximidad, altura, y rotación; manteniendo al mínimo la transferencia de ruido y vibraciones.

16
1. PLANTEAMIENTO DEL PROBLEMA
1.1 ANTECEDENTES
En 1981 Bruce A. Bartlett realizó un estudio para la convención número 69 de la AES1, el cual buscó estudiar los efectos tonales del posicionamiento de microfonía cercana para distintos instrumentos musicales.
En él describe como un instrumento radia diferentes calidades tonales en diferentes direcciones, lo cual produce un espectro sonoro distinto para cada parte del instrumento. Dado que éste espectro varía con la distancia y el ángulo de radiación, la ubicación del micrófono relativa a la posición del instrumento afecta en gran medida la calidad del sonido registrado.
Éste trabajo parte de una notable comparación en la cual se entiende que la captura de un instrumento musical es similar a la captura de un altavoz con múltiples drivers. Es decir, si un micrófono se ubica a varios pies de un parlante, se conseguirá una señal bien balanceada de la fuente, pero si la captura se realiza, por ejemplo, cerca del cono, o del tweeter, la señal resultante se escuchara muy coloreada.
En este sentido, cuando se ubica un micrófono más cerca de un punto del instrumento, la señal radiada por éste predominará en contenido frente a las otras áreas y el timbre del sonido capturado será distinto. La publicación anterior como criterio para posicionamiento de microfonía está íntimamente ligada con el estudio de Don Davis, en su documento ‘Distancia acústica equivalente2’ en el cual describe como al alejarse de una fuente sonora en un recinto, el nivel de presión sonora decrece en función de la ley del inverso cuadrado; es decir, con una atenuación de seis decibeles al duplicar la distancia; Aún así, siempre, en un punto específico del recinto el nivel de la señal reflejada por las superficies igualará al nivel de la señal original de la fuente, y esta longitud se conoce como distancia crítica.
1 BARTLETT, A. Bruce. Tonal Effects of Close Microphone Placement. 69 AES Convention. 1981. 2 DAVIS, Don. Equivalent Acoustic Distance, AES Journal. Volume 21.1973.
17
Para efectos prácticos de producción musical se entiende que la posición de un micrófono respecto a la distancia crítica en un recinto permite obtener en captura una señal más pura y similar a la original, o una señal con mayor influencia del campo reverberante del recinto. En éste sentido, el punto de captura relativo a la posición, dentro o fuera de ésta distancia otorgará diferentes sonoridades con una relación ‘señal directa/señal reflejada’ distinta para cada posición.
En el artículo de Emil Nikolov Milanov y Elena Blagoeva Milanova para la convención AES numero 108 ‘Proximity Effect Frequency Characteristics of Directional Microphones3’, exponen los factores que definen el fenómeno conocido como el efecto de proximidad, el cual se manifiesta como una variación en frecuencia en relación con la distancia entre un micrófono y la fuente, y las características direccionales (patrón polar) de los micrófonos. En este estudio se describe como el efecto de proximidad produce un incremento en la sensibilidad de los micrófonos de gradiente de presión en las frecuencias mas graves si el micrófono se acerca hacia la fuente, y un detrimento si se aleja. Éste fenómeno es de gran utilidad en grabación pues permite obtener un sonido rico en bajas frecuencias, y obtener ecualización y acentuación espectral directamente en captura.
Entonces, sin importar que tan plana sea la respuesta de un micrófono, éste no siempre proveerá el sonido más natural de un instrumento, debido a que con solo la posición del micrófono se puede colorear el timbre. Con todo lo anterior se evidencia la importancia del posicionamiento de la microfonía para efectos de captura sonora y producción musical y puede surgir la pregunta de si existe o no una posición ideal para capturar diferentes instrumentos musicales. Muchos estudios se han llevado a cabo y han llegado a pautas apropiadas y diferentes parámetros de captura. El problema es que el criterio de si éstos parámetros son buenos o malos, o si el sonido es deseado o no dependerá del gusto personal. Por esto, se planteo el diseño de una base móvil para micrófonos que permita experimentar con cada factor acústico y electro acústico relacionados con la producción musical. 3 NIKOLOV MILANOV, Emil y BLAGOEVA MILANOVA, Elena. Proximity Effect Frequency Characteristics of Directional Microphones. 108 AES convention. 2000.

18
Las bases para micrófonos son elementos indispensables para el desarrollo de sistemas de refuerzo sonoro y el montaje de sistemas electro-acústicos. Sin embargo, estos dispositivos se han mantenido al margen del progreso durante mucho tiempo, tanto así, que los sistemas de montaje de microfonía que utilizamos hoy en día son prácticamente los mismos que se utilizaron a lo largo del siglo XX. Primeros dispositivos móviles
Los primeros dispositivos móviles reprogramables que se crearon tenían una función completamente industrial, diseñados para mover materiales o para la realización de una gran diversidad de tareas.
En 1948 R.C. Goertz del Argonne National Laboratory, desarrolló el primer tele manipulador, con el objetivo de manipular elementos radioactivos sin ocasionar ningún riesgo para el operador. El operador además de poder observar a través de un grueso cristal el resultado de sus acciones, sentía a través del dispositivo maestro, las fuerzas que el esclavo ejercía sobre el entorno. Ésta forma de trabajo distante y a través de un grueso vidrio que separa ambas cámaras se relaciona con la manera de interacción en un estudio de grabación entre el ingeniero y los músicos en una sesión.
Aún así, el primer sistema mecánico robotizado, que fue la cuna de los sistemas automatizados industriales, fue patentado y presentado por George Devol con el objetivo de diseñar una maquina adaptable al entorno y de fácil manejo.
La máquina tenía un peso de 1.800 kg, y su función era la de levantar y apilar grandes piezas de metal caliente. Fue diseñado bajo contrato para la General Motors en 1960. En 1978, el primer robot programable de Devol se transformaría en el robot PUMA (Programmable Universal Machine for Assembly). El PUMA era capaz de mover un objeto y colocarlo en cualquier orientación en un lugar deseado que estuviera a su alcance.
Estos primeros dispositivos se formaban por algunos elementos rígidos conectados en serie mediante articulaciones prismáticas o de revolución, que

19
generalmente se pueden mover con tres grados de libertad4. Estos tres movimientos se denominan a menudo elevación (pitch), desviación (yaw) y giro (roll)5. Por tanto para un robot con seis articulaciones, el brazo es el mecanismo de posicionamiento, mientras que la muñeca es el mecanismo de orientación.
Muchos robots industriales, que están disponibles comercialmente, se utilizan ampliamente en tareas de fabricación y de ensamblaje, tales como manejo de material, soldaduras por arco y de punto, montajes de piezas, pintura, carga y descarga de máquinas controladas numéricamente, exploraciones espaciales y submarinas, investigación de brazos protésicos y en el manejo de materiales peligrosos6.
En 1999 la empresa norteamericana Mark Roberts Motion Control, desarrolló el sistema Milo para realizar capturas visuales de alta calidad en un sistema portable. Éste sistema consiste en un gran brazo móvil de control computarizado que permite desplazar la cámara en múltiples ángulos de libertad y le brinda total control y precisión de las capturas al director.
Éste sistema ofrece cuatro grados de libertad: movimiento sobre un riel, rotación, elevación, extensión del brazo, y además permite la adaptación de brazos intercambiables de diferentes tamaños para situaciones de filmación que así lo requieran. Así mismo permite controlar a distancia parámetros de la cámara como el zoom, foco, iris, entre otros.
Este mecanismo es una muy importante evolución de la forma en la que se realizan capturas de video, ya que permite realizar planos que de otra manera no se podrían capturar. Él MILO fue galardonado con un premio de la academia por su desarrollo técnico y tecnológico.
En el ámbito nacional cabe resaltar que existen varias empresas dedicadas a solucionar problemas relacionados con el control de vibraciones, control de ruido, diseño acústico y silencioso de recintos, control industrial de ruido, e igualmente centros y universidades dedicadas a la investigación en mecánica, robótica y ciencias afines con la automatización de procesos.
4 ZHANG, Yi, FINGER, Susan y BEHRENS, Stephanie. Introduction to Mechanisms. Mc graw Hill. 1998. P. 93 5 IBID 6 Historia de la robotica. [fuente en linea], visto en www.arobot.net/tecno/cyr_01/robotica/intro.htm

20
En la Facultad de ingeniería de sonido de la Universidad de San Buenaventura se han realizado varios trabajos de control de ruido incluyendo el proyecto de grado de Oscar Andrés Gómez Ortiz, el cual se trató de una: “Medición y propuesta de control de ruido, generado por maquinaria para construcción”. (2006). Y se llevo a cabo el diseño y construcción de una mesa giratoria automática para llevar a cabo mediciones de patrón polar de parlantes y micrófonos; proyecto de grado por Shymmy Wilhermer García Bustos.

21
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA
El movimiento relativo de un micrófono respecto a una fuente cualquiera (instrumento musical, parlante, recinto, etc.), puede conducir a un sinfín de resultados sonoros distintos con parámetros subjetivos y objetivos de escucha igualmente diferentes.
Por tal causa, en muchos estudios de grabación profesional, la grabación de cualquier proyecto se puede extender demasiado, ya que por ser también un trabajo artístico, se requiere una gran precisión y minuciosidad en procesos de captura para llegar al sonido deseado y adecuado para una producción musical.
Entonces, teniendo en cuenta que en un estudio de grabación profesional el tiempo es un factor de vital importancia para el buen desarrollo de cualquier proyecto musical, y sabiendo que los procesos de microfonía pueden tomar un tiempo muy valioso para el estudio, surge la siguiente pregunta.
¿Cómo facilitar los procedimientos de captura y posicionamiento de microfonía en el estudio?

22
1.3 JUSTIFICACIÓN
Los libros y la teoría en general aportan muchas posiciones recomendadas para la captura y grabación de cada instrumento musical; pero hay que tener en cuenta que las variables de grabación en cada sesión de captura y en cada momento son siempre distintas, inclusive para quienes desarrollaron dicha teoría.
En las guías de texto generalmente se enuncian las distancias del micrófono respecto a la fuente y los respectivos ángulos de apertura. Pero, aunque estas posiciones funcionen como un punto de partida, el ingeniero de sonido debe encontrar la solución pertinente a su entorno de trabajo.
Con esta herramienta se podrían evadir una gran cantidad de inconvenientes en mezcla y postproducción, y así no tener que recurrir a múltiples procesos digitales o analógicos que de una u otra manera alteran la señal original de captura; igualmente permitirá al ingeniero de sonido y al productor determinar a distancia la mejor posición de captura para su proyecto según lo juzguen sus oídos.
Otra de las grandes ventajas de este sistema es que aumentaría la productividad de los estudios de grabación al disminuir el tiempo necesario para realizar el posicionamiento de la microfonía, ya que evitará dirigirse al estudio cada vez que se deseen reposicionar los micrófonos al buscar un sonido diferente.

23
1.4 OBJETIVOS
1.4.1 Objetivo General
Diseñar y construir un prototipo de base móvil para micrófonos controlada a distancia.
1.4.2 Objetivos Específicos
• Diseñar el conjunto de elementos mecánicos que permitirán el correcto desplazamiento de la base
• Construir en conjunto la base y los sistemas electro-mecánicos en función del diseño y realizar el montaje del elemento.
• Implementar un sistema de aislamiento y control de vibraciones a los
servomotores para impedir que el ruido propio del mecanismo intervenga en las capturas en movimiento.
• Realizar diferentes grabaciones en movimiento a instrumentos musicales y
analizar su comportamiento.
• Implementar el dispositivo en una producción musical, verificando su correcto funcionamiento.
24
1.5 ALCANCES Y LIMITACIONES
1.5.1 Alcances
• Crear nuevas técnicas de captura en movimiento.
• Incorporar un sistema de control externo de configuración de microfonía estéreo.
• Implementar el mecanismo para realizar mediciones de micrófonos.
• Automatizar movimientos de la base para conseguir diferentes sonoridades respecto a la posición del micrófono y el tiempo de captura.
• Implementar un sistema de almacenamiento de posiciones predeterminadas por el usuario
• Realizar un sistema de comunicación inalámbrica entre el control remoto y la base
• Patentar el diseño del soporte controlado a distancia.
• Comercializar la base como una herramienta profesional para estudios de grabación.
1.5.2 limitaciones • Difícil implementación en estudios pequeños
Si la sala de captura resulta ser muy demasiado pequeña, el espacio que ocupa el dispositivo puede molestar o interferir con la ubicación de los diferentes instrumentos y equipos necesarios para realizar las capturas.
• Dificultad para realizar grabaciones en bloque
Del mismo modo, si el espacio no es suficientemente amplio el movimiento del dispositivo puede incomodar e interrumpir a los músicos en una sesión.

25
2. MARCO DE REFERENCIA
2.1 MARCO TEÓRICO-CONCEPTUAL
A continuación se precisa la terminología y definiciones que se emplearán a lo largo del presente proyecto, los cuales son necesarios para su comprensión. Estos conceptos están organizados en cuatro categorías cómo se organiza a continuación: Mecánica, electrónica, acústica y ciencias de grabación.
2.1.1 Mecánica
2.1.1.1 Sistema mecánico:
Los sistemas mecánicos son aquellos sistemas constituidos fundamentalmente por componentes, dispositivos o elementos que tienen como función específica transformar o transmitir el movimiento desde las fuentes que lo generan al transformar distintos tipos de energía. Igualmente, están compuestos de elementos distribuidos de forma tal que exhiben características de masa, elasticidad y amortiguación.
2.1.1.2 Grados de libertad
El número de grados de libertad de un sistema mecánico es el número de posiciones coordenadas independientes requeridas para describir completamente el movimiento del sistema. Los principales sistemas mecánicos de control, implementan articulaciones que se pueden mover en tres grados de libertad7. Estos tres movimientos se denominan elevación (pitch), desviación (yaw) y giro (roll).
2.1.1.3 Engranajes Los engranajes son uno de los medios de movimiento más importante en las máquinas, y consisten en una rueda dentada cuyos dientes están dispuestos de modo que cuando se produce un encaje con los dientes de otra rueda dentada u objeto fijo se transmite un movimiento.8
7 ZHANG, Yi, FINGER, Susan y BEHRENS, Stephanie. Carnegie Mellon University. Introduction to Mechanisms. Mcgraw Hill. 1998. P. 93 8 HARRIS, M. Cyril. Manual de medidas acústicas y control del ruido. McGraw-Hill. 1995. P.36.1
26
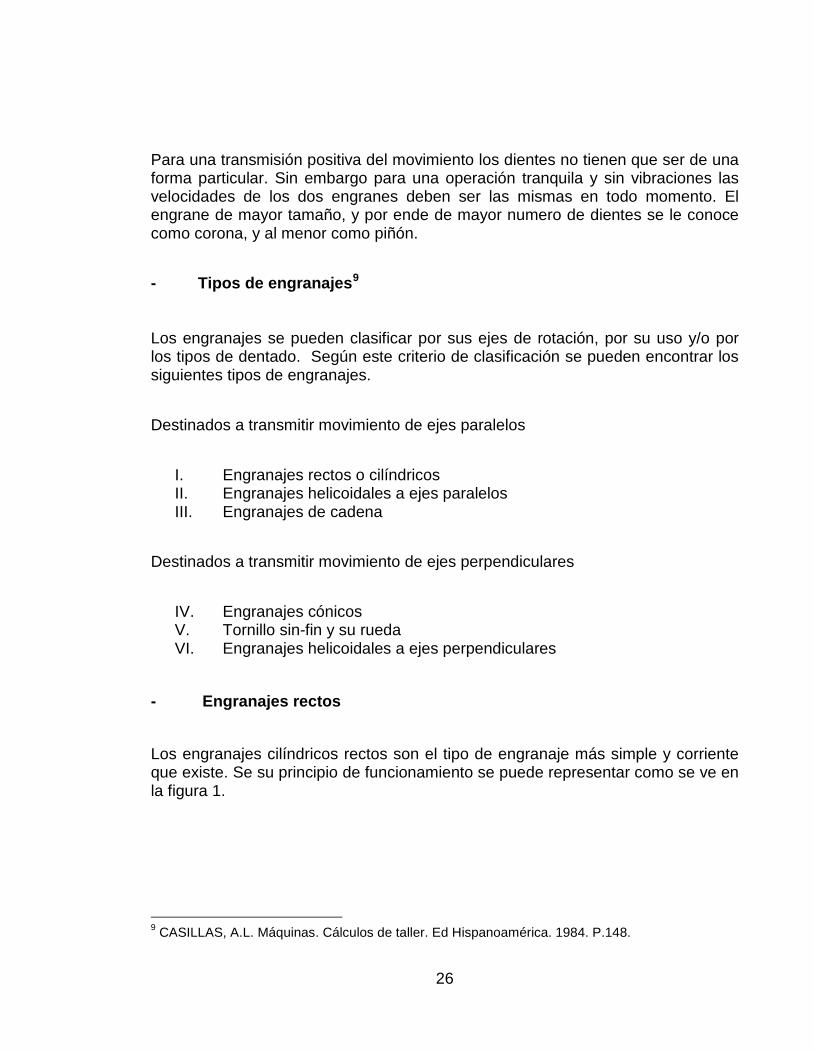
Para una transmisión positiva del movimiento los dientes no tienen que ser de una forma particular. Sin embargo para una operación tranquila y sin vibraciones las velocidades de los dos engranes deben ser las mismas en todo momento. El engrane de mayor tamaño, y por ende de mayor numero de dientes se le conoce como corona, y al menor como piñón.
- Tipos de engranajes9 Los engranajes se pueden clasificar por sus ejes de rotación, por su uso y/o por los tipos de dentado. Según este criterio de clasificación se pueden encontrar los siguientes tipos de engranajes.
Destinados a transmitir movimiento de ejes paralelos
I. Engranajes rectos o cilíndricos II. Engranajes helicoidales a ejes paralelos III. Engranajes de cadena
Destinados a transmitir movimiento de ejes perpendiculares
IV. Engranajes cónicos V. Tornillo sin-fin y su rueda VI. Engranajes helicoidales a ejes perpendiculares
- Engranajes rectos
Los engranajes cilíndricos rectos son el tipo de engranaje más simple y corriente que existe. Se su principio de funcionamiento se puede representar como se ve en la figura 1.
9 CASILLAS, A.L. Máquinas. Cálculos de taller. Ed Hispanoamérica. 1984. P.148.

27
Figura 1. Diagrama básico de un sistema de engranajes cilíndricos
Fuente: CASILLAS, A.L. Máquinas. Cálculos de taller. P.148
Para transmitir movimiento circular continuo de un eje a otro que este paralelo se puede imaginar el montaje de dos cilindros frotando uno sobre el otro. Si ambos están suficientemente adheridos la rotación de uno de ellos pondrá a circular al segundo en sentido inverso del primero. Para evitar esto las superficies en contacto se proveen de dientes engranando unos con otros.10
- Engranajes helicoidales y cónicos Los engranes helicoidales, cónicos y de tornillo sin fin son formas avanzadas de engranajes capaces de satisfacer requisitos especiales de geometría o resistencia que no pueden obtenerse con los engranajes cilíndricos.
Los engranes helicoidales tienen dientes que se encuentran en trayectorias helicoidales sobre los cilindros en lugar de dientes paralelos al eje del árbol. Los engranajes cónicos pueden utilizarse para conectar árboles que se interceptan. Un tornillo sin fin consiste en un tornillo acoplado con un engrane el cual puede utilizarse para obtener una gran reducción de velocidad.
Los engranajes con dientes helicoidales poseen ventajas inherentes puesto que más dientes están conectados simultáneamente y la carga se transmite gradual y uniformemente.
10 CASILLAS, A.L. Máquinas. Cálculos de taller. Ed Hispanoamérica. 1984. P.148.

28
Figura 2. Partes principales de los dientes de engranajes
Fuente [online]: http://www.b2b-powder-metallurgy.com/gear-parts-2B.jpg
- Cremallera Una cremallera puede ser considerada como un engrane de radio infinito. El mecanismo de cremallera aplicado a los engranajes lo constituyen una barra con dientes. Un engranaje de diente recto de menor diámetro, sirve para transformar un movimiento de rotación del piñón en un movimiento lineal de la cremallera.
Figura 3. Sistema cremallera piñón. y sistema sinfín corona
Fuente [online]: www.elektricidaz.blogspot.com/2010/05/engranajes.html

29
- Tornillo sin fin y corona
Es un mecanismo diseñado para transmitir grandes esfuerzos, y como reductores de velocidad aumentando la potencia de transmisión. Se construyen con el fin de convertir el punto de contacto de engranajes tradicionales en una línea de contacto y así distribuir mejor la fuerza a transmitir. Generalmente trabajan en ejes que se cruzan a 90º.
Diseño de un engranaje
Para construir un engranaje recto se parte de un elemento cilíndrico en el cual se deben diferenciar dos partes fundamentales, que son la corona y el cubo. La corona es la parte exterior donde están tallados los dientes y el cubo que es la parte central del engranaje, a través de la cual se fija al eje. - Circunferencia primitiva
El punto de partida para el cálculo de los engranajes se denomina círculo primitivo y es el diámetro de la circunferencia a partir de la cual se empiezan a deslizar los dientes entre engranajes. El diámetro primitivo (d) es el que corresponde a la circunferencia primitiva.
La fórmula para calcular el diámetro del círculo primitivo es:
Ecuación 1. Diámetro primitivo de un engranaje
- Diente de un engranaje
Son los que realizan el esfuerzo de empuje y transmiten la potencia desde los ejes motrices a los ejes conducidos. El perfil del diente, o sea la forma de sus flancos,

30
está constituido por dos curvas evolventes de círculo, simétricas respecto al eje que pasa por el centro del mismo. La altura de un diente se puede calcular así.
Ecuación 2. Altura de dientes de engranajes
- Número de dientes:
Es el número de dientes que tiene el engranaje. Se simboliza como (n). Es fundamental para calcular la relación de transmisión. El número de dientes de un engranaje no debe estar por debajo de 18 dientes cuando el ángulo de presión es 20º ni por debajo de 12 dientes cuando el ángulo de presión es de 25º.
Ecuación 3. Número de dientes en engranajes
- Paso
El paso (p) es el arco de circunferencia, sobre la circunferencia primitiva, entre los centros de los dientes consecutivos. Es la distancia entre un punto de un diente al punto correspondiente al siguiente diente. Éste se mide a partir del diámetro primitivo. Ecuación 4. Distancia entre dientes

31
- Módulo
El módulo de un engranaje es la relación que existe entre el diámetro primitivo y el número de dientes. Ésta magnitud se expresa en milímetros y su valor se fija en virtud de la potencia a transmitir y en función de la relación de transmisión que se establezca. Para que dos engranajes puedan encajar tienen que tener el mismo módulo. En la práctica esta normalizado según el siguiente criterio:
De 1 a 4 en incrementos de 0,25 mm De 4 a 7 en incrementos de 0,50 mm De 7 a 14 en incrementos de 1 mm De 14 a 20 en incrementos de 2 mm
Se calcula bajo la siguiente fórmula.
Ecuación 5. Módulo de un engranaje
Relación de transmisión:
La relación de transmisión es una relación entre las velocidades de rotación de dos engranajes conectados entre sí. Esta relación se debe a la diferencia de diámetros de las dos ruedas, que implica una diferencia entre las velocidades de rotación de ambos ejes, esto se puede verificar mediante el concepto de velocidad angular.
2.1.2 Electrónica
2.1.2.1 Puente H Un Puente H es un circuito electrónico que permite aplicar voltaje en una dirección específica permitiendo el movimiento en ambos sentidos de un motor de corriente continua, esto debido a que el sentido de giro de un motor DC depende del sentido relativo de las corrientes circulantes por los embobinados.
32
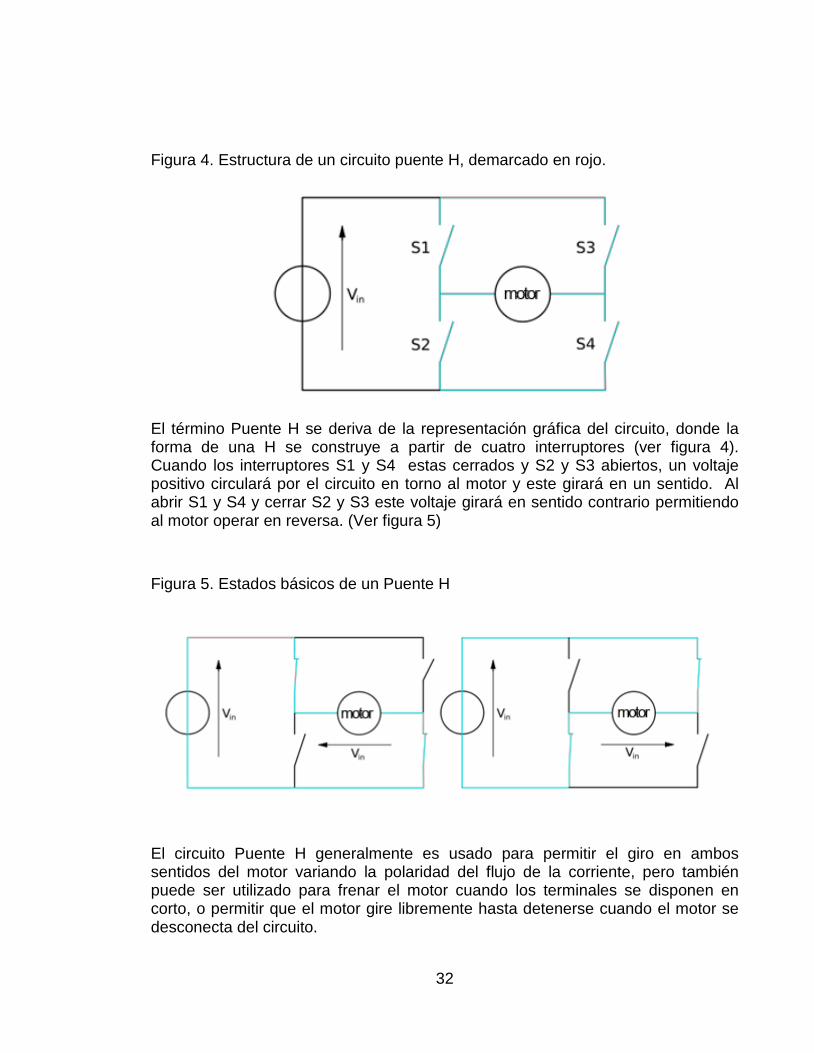
Figura 4. Estructura de un circuito puente H, demarcado en rojo.
El término Puente H se deriva de la representación gráfica del circuito, donde la forma de una H se construye a partir de cuatro interruptores (ver figura 4). Cuando los interruptores S1 y S4 estas cerrados y S2 y S3 abiertos, un voltaje positivo circulará por el circuito en torno al motor y este girará en un sentido. Al abrir S1 y S4 y cerrar S2 y S3 este voltaje girará en sentido contrario permitiendo al motor operar en reversa. (Ver figura 5)
Figura 5. Estados básicos de un Puente H
El circuito Puente H generalmente es usado para permitir el giro en ambos sentidos del motor variando la polaridad del flujo de la corriente, pero también puede ser utilizado para frenar el motor cuando los terminales se disponen en corto, o permitir que el motor gire libremente hasta detenerse cuando el motor se desconecta del circuito.

33
La tabla numero 1 resume el proceso de operación de un circuito Puente H convencional con los valores S1 a S4 como se muestra en la figura 4.
Tabla 1. Funcionamiento lógico de un puente H
S1 S2 S3 S4 Resultado
1 0 0 1 El motor Avanza
0 1 1 0 El motor Retrocede
0 0 0 0 El motor se detiene bajo su inercia
0 1 0 1 El motor se detiene
1 0 1 0 El motor se detiene
2.1.2.2 Motores Un motor es una máquina encargada de convertir energía en movimiento mecánico útil capaz de realizar un trabajo. Existen diferentes tipos de motores dependiendo de su funcionamiento, construcción y diseño.
- Clasificación Los tipos de motores más comunes son los siguientes:
• Motores térmicos: cuando el trabajo se obtiene a partir de energía calórica.
- Motores de combustión interna: Funcionan bajo la combustión del fluido del motor, transformando su energía química en energía mecánica a partir de algún tipo de combustible.

34
- Motores de combustión externa: Son motores térmicos en los cuales se produce una combustión en un fluido distinto al fluido motor.
• Motores eléctricos: cuando el trabajo se obtiene a partir de una corriente
eléctrica.
2.1.2.3 Características de los motores
Tabla 2. Características de los motores
Descripción Unidad de medida
POTENCIA
Es el trabajo que el motor es capaz de realizar en la unidad de tiempo a una determinada velocidad de giro. Se mide normalmente en caballos de vapor (CV), siendo 1 CV igual a 738 Watts.
CV
VELOCIDAD
Es la velocidad angular del cigüeñal, es decir, el número de gasolina por segundo (rad/s) a las que gira. Se representa por la letra N en RPM, de entrada y de salida.
rad/s
TORQUE
Es el momento de rotación que actúa sobre el eje del motor y determina su giro. Se mide en newtons - metro (Nm), siendo 1 kgm igual a 9,25 Nm.
KG/m.
RENDIMIENTO
Es el cociente entre la potencia útil que generan y la potencia absorbida. Habitualmente se representa con la letra griega η. índice que detalla la relación entre las RPM de entrada y salida.
η
2.1.2.4 Motores eléctricos Nos enfocaremos en los motores eléctricos, ya que estos son los más utilizados para las aplicaciones de robótica y automatización. Su funcionamiento esta dado por la interacción entre dos imanes o electroimanes.

35
“Cuando dos imanes (o electroimanes) se aproximan uno a otro, uno es atraído y el otro es repelido con respecto al otro (…), la energía eléctrica crea al menos uno de los campos magnéticos, entonces, las fuerzas entre los dos campos producen el movimiento”11.
Figura 6. Diagrama de funcionamiento de un motor eléctrico,
Fuente [online]: www.electronics.howstuffworks.com/motor1.htm
Para muchas aplicaciones presentan muchas ventajas respecto a los motores de combustión como un tamaño y peso mucho menores, y un rendimiento muy elevado. Poseen una gran fuerza y un torque elevado, que según el tipo de motor, es prácticamente constante, no emiten contaminantes y son de una muy baja emisión de ruido.
Existen diferentes tipos de motores eléctricos para aplicaciones de automatización, robótica y mecánica. A continuación se evaluaran las funciones y capacidades de los principales modelos.
- Servomotores
Un servomotor es un dispositivo actuador que tiene la capacidad de ubicarse en
11 El libro práctico de los generadores, transformadores y motores eléctricos. Gilberto Harper Enriquez Editorial Limusa, 2004, Pagina 1, Mexico DF.
36
cualquier posición dentro de su rango de operación, y de mantenerse estable en dicha posición12.
Figura 7. Servomotor
Fuente [online]: http://hombrepie.wordpress.com/2009/09/
Está formado por un motor de corriente continua, una caja reductora y un circuito de control, y su margen de funcionamiento generalmente es de menos de una vuelta completa13. Por estas cualidades de poder ubicarse en el espacio según la señal eléctrica emitida, es que son tan utilizados en procesos mecánicos y automatizaciones.
- Motores paso a paso
Los motores de giro escalonado o paso a paso (step motor) son utilizados para la el control de locomoción, movimiento y posicionamiento. Se caracterizan porque pueden ser controlados mediante circuitos digitales, y funcionan bajo una secuencia de pulsos eléctricos.
Este tipo de motores se puede encontrar fácilmente en las impresoras o en las unidades de disco. A diferencia de los motores comunes, que giran en forma continua al ser energizados, el motor de giro escalonado (paso a paso) se mueve en movimientos angulares fijos cada vez que se le excita.
Durante la construcción del motor se establece y determina el ángulo de paso o escalón. En los motores de este tipo disponibles, los ángulos de paso varían 12Whats a servo: A quick tutorial. [fuente en línea], visto en: seattlerobotics.org/guide/servos.html 13IBID

37
desde 0.72 grados (500 pasos por revolución) hasta 45 grados (ocho pasos por revolución.
- Moto reductores
Los reductores de velocidad o moto reductores son sistemas de engranajes que permiten que los motores eléctricos funcionen a diferentes velocidades para los que fueron diseñados.
Rara vez las máquinas funcionan de acuerdo con las velocidades que les ofrece el motor, por ejemplo, a 1.800, 1.600 o 3.600 revoluciones por minuto. La función de un moto reductor es disminuir esta velocidad a los motores (50, 60, 100 rpm) y permitir el eficiente funcionamiento de las máquinas, agregándole por otro lado potencia y fuerza.
Figura 8. Reductor de velocidad
Fuente [online]: www.sew-eurodrive.com.mx/productos_nuevos1.html
Debido que la mayoría de los motores de corriente directa aportan grandes revoluciones y bajo torque, cajas de reductoras de velocidad pueden ser añadidas para obtener menores revoluciones por minuto y mayor torque, lo cual es lo necesario para operaciones de robótica. Por esta razón, son apropiados para el

38
accionamiento de toda clase de máquinas y aparatos de uso industrial, que necesitan reducir su velocidad en una forma segura y eficiente. Al emplear moto reductores se obtiene una serie de beneficios sobre estas otras formas de reducción. Algunos de estos beneficios son:
• Una regularidad perfecta tanto en la velocidad como en la potencia transmitida.
• Una mayor eficiencia en la transmisión de la potencia suministrada por el motor.
• Mayor seguridad en la transmisión, reduciendo los costos en el mantenimiento.
• Menor espacio requerido y mayor rigidez en el montaje.
• Menor tiempo requerido para su instalación.
2.1.2.5 Micro controlador Un micro controlador es una pequeña computadora en un único circuito integrado. Se caracteriza por ser funcional con un mínimo de chips de soporte y por su bajo costo. Estos dispositivos contienen un procesador, memoria, entradas y salidas periféricas programables. Son utilizados para aplicaciones específicas por el contrario de los microprocesadores que se utilizan para aplicaciones de propósito general.
Estos dispositivos se utilizan para muchas tareas incluyendo el control monitoreo y procesamiento de sistemas, como teléfonos, hornos microondas, automóviles entre otros.
Figura 9. Micro controlador Microchip PIC16F877A

39
Fuente [online]: www.microchip.com/downloads/en/DeviceDoc/39582b.pdf
Estos dispositivos cuentan con una CPU (unidad central de procesamiento) que interpreta las señales programadas, una memoria PROM, es decir, programable de solo lectura; una memoria RAM utilizada para memorizar las variables utilizadas por el programa; Entradas y salidas para dispositivos externos y así recibir y enviar información; y una serie de dispositivos auxiliares para el funcionamiento.
• Micro controladores PIC
PIC es una familia de micro controladores creada por ‘Microchip Technology’ y su nombre se deriva por sus siglas en inglés: Programmable Interface Computer.
Existe una gran variedad con diferentes elementos periféricos y memorias programables que soportan líneas de código desde cien palabras hasta treinta y dos mil, y tienen la ventaja de ser reprogramables.
Figura 10. Arquitectura de la memoria de un micro controlador
Fuente: Programing pics P. 142
40
• Lógica y aritmética de micro controladores 14 Todos los micro controladores contienen instrucciones para llevar operaciones lógicas y aritméticas en números binarios u operadores decimales, estas instrucciones se pueden clasificar en 3 grupos: 1. Lógica boleana: AND, NOT, OR, and XOR. 2. Operaciones aritméticas: Suma resta multiplicación y división en binarios 3. Instrucciones auxiliares: Instrucciones para la manipulación de bits como cambiar y rotar su posición en una palabra, comparar operadores y probar, montar y resetear dígitos binarios individuales, entre otras funciones.
• Comunicación serial PIC-a-PIC Es la forma más básica de comunicación serial en la cual un PIC actúa como emisor o maestro y el segundo toma el papel de receptor o de esclavo. Esto es necesario cuando el número de entradas necesarias un montaje excede las entradas de un PIC, siendo necesario montar uno adicional. 15 Ésta comunicación se realiza mediante el puerto USART de trasmisión (Universal Synchronous Asynchronous Receiver Transmitter), permiten realizar comunicaciones entre dispositivos como computadores y otros PIC’s. Es mediante este puerto que se realiza la conexión vía protocolo MIDI con diferentes dispositivos musicales y permite también permite realizar envíos de información digital codificada a un computador.
2.1.3 Acústica
2.1.3.1 Técnicas de control de ruido 14 SANCHES, Julio. Microcontroller programming. CRC Press. 2007 P. 56 15 IBID. P. 339

41
Los padres de la acústica moderna como lo son Beranek, Harris, Sabine, entre muchos otros, han propuesto como técnicas de control de ruido diferentes procedimientos fundamentados en la teoría ondulatoria, en diferencias de impedancias y materiales absorbentes, superposición de campos y diferentes formas de amortiguación para generar pérdidas por transmisión y disipar energía acústica en calor.
Las principales técnicas de control de ruido se pueden organizar en tres categorías que se exponen a continuación: Control pasivo de ruido, Control activo de ruido y técnicas híbridas16. El método o combinación de ellos que se emplee dependerá de la cantidad de ruido que se requiera reducir, y de consideraciones económicas y operativas.
Control pasivo de ruido Estas técnicas se fundamentan en el principio de generar una alta impedancia en el medio de transmisión para generar pérdidas por absorción, difracción y cambios de impedancia. Son efectivas en frecuencias medias altas ya que para frecuencias bajas requerirían una gran envergadura y material para disminuir el nivel de presión sonora. Estas técnicas se pueden aplicar en la fuente, en el medio y en el receptor.
Figura 11. Diagrama esquemático de la transmisión del sonido de la fuente al oyente.
Fuente: Engineering Noise Control, David A. Bies and Collin H. Hansen
Aunque en la Figura 11 se presenta a la fuente, el medio y el receptor como elementos independientes en realidad estos interactúan de manera tal que no están separados, puesto que la transmisión del sonido puede depender del medio y su entorno, así como la reacción del receptor puede depender de las características del medio y la fuente.
16 BIES, A. David y HANSEN, H. Collin. Engineering Noise Control. Chapman and Hall. 1996
42
- Control de ruido en la fuente La primera y más costosa se aplica directamente sobre la fuente que genera el ruido molesto y consiste en el rediseño de la fuente para hacerla más silenciosa desde un principio. Por ejemplo aislando los componentes vibratorios mediante paneles que amortigüen la vibración. O alterando las frecuencias de resonancia de los mismos paneles. También es posible ubicar elementos de amortiguación que absorban y minimicen las vibraciones de las partes en movimiento, o asimismo encapsular la fuente para generar perdida de SPL por absorción.
- Control de ruido en el medio de transmisión Controlar el ruido por la vía de transmisión se puede lograr de varias formas:
(1) Emplazamiento: Aumentando la distancia entre la fuente de ruido y el receptor, dado que no todas las fuentes de ruido irradian uniformemente en todas las direcciones. (2) Cerramientos: realizar un cerramiento alrededor de la fuente o del receptor, o la forma más eficaz (3) Absorción: Mediante elementos absorbentes, la construcción de barreras acústicas en el medio de transmisión y la aplicación de elementos con diferentes coeficientes de absorción para generar pérdidas por transmisión en diferentes campos del espectro.
- Control de ruido en el receptor Por último sobre el receptor se pueden aplicar elementos de protección auditiva. Tampones auriculares y cascos constituyen una forma económica de proteger a las personas sujetas a un entorno de constante y alta presión sonora.
2.1.3.2 Técnicas de control de vibraciones Todos los sistemas mecánicos compuestos de masa, rigidez y amortiguación exhiben una respuesta vibratoria cuando son sujetos a perturbaciones que varían en el tiempo17. Así como en el control de ruido existen técnicas de control de 17 C.R. Fuller, J.S. Elliot, & P.A. Nelson.Active control of vibration. Academic press , 1996. P 1.1.
43
vibraciones pasivas, que funcionan sin agregar energía adicional al sistema, como técnicas activas, que funcionan bajo el principio se superposición.
El control de vibraciones es importante para mantener el equipo en buen estado y en buen funcionamiento, proteger las estructuras y cuidar al personal de las vibraciones excesivas.
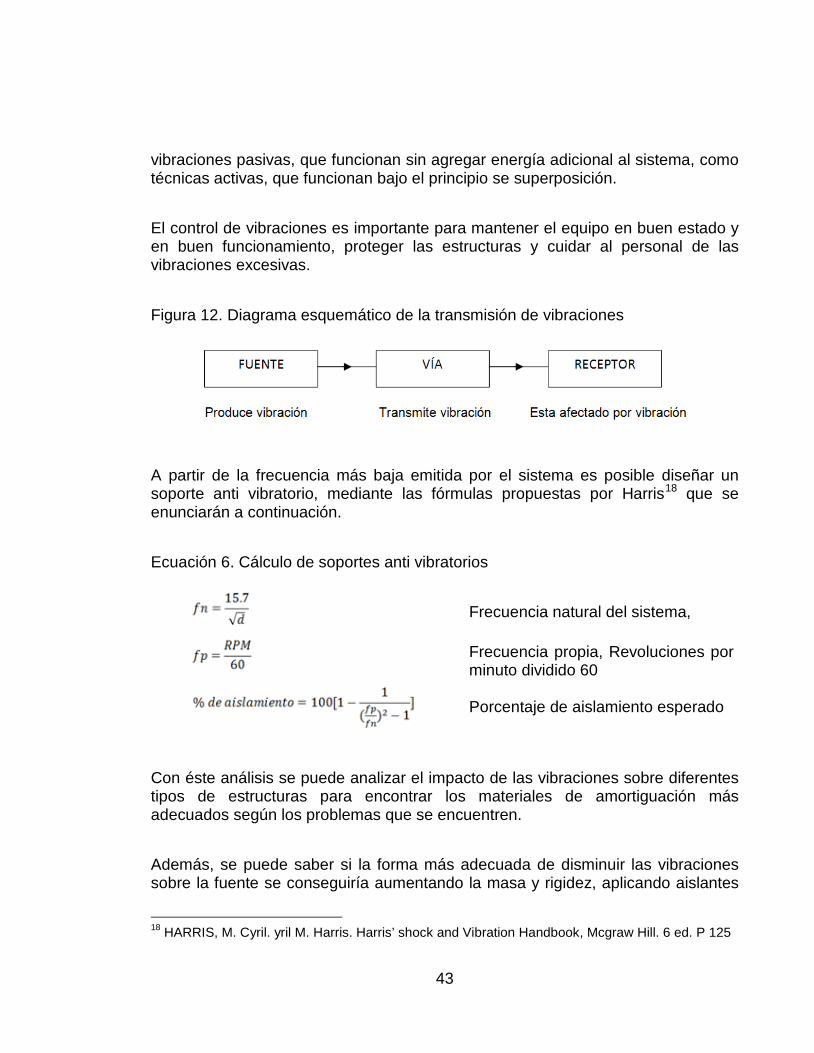
Figura 12. Diagrama esquemático de la transmisión de vibraciones
A partir de la frecuencia más baja emitida por el sistema es posible diseñar un soporte anti vibratorio, mediante las fórmulas propuestas por Harris18 que se enunciarán a continuación.
Ecuación 6. Cálculo de soportes anti vibratorios
Frecuencia natural del sistema, Frecuencia propia, Revoluciones por minuto dividido 60 Porcentaje de aislamiento esperado
Con éste análisis se puede analizar el impacto de las vibraciones sobre diferentes tipos de estructuras para encontrar los materiales de amortiguación más adecuados según los problemas que se encuentren.
Además, se puede saber si la forma más adecuada de disminuir las vibraciones sobre la fuente se conseguiría aumentando la masa y rigidez, aplicando aislantes
18 HARRIS, M. Cyril. yril M. Harris. Harris’ shock and Vibration Handbook, Mcgraw Hill. 6 ed. P 125

44
y gomas amortiguadoras o, reduciendo la amplitud de las vibraciones mediante amortiguación. Igualmente, con este análisis se podrán hallar también los puntos de apoyo del mecanismo sobre el material, y el espesor ideal del mismo.
Control de vibraciones en la fuente Es el método más eficaz en los problemas en que se pueda poner en práctica. La reducción de la vibración suele requerir (1) la modificación o reducción de las fuerzas intermitentes u oscilatorias que producen la vibración, o (2) la reducción del movimiento de los componentes sobre los cuales las fuerzas actúan.
Esto puede implicar:
a) Reemplazar un elemento por otro que vibre menos,
b) Cambiar la dirección, la magnitud, o la frecuencia de fuerzas y movimientos,
c) Mejorar el equilibrio dinámico de la fuente de vibración, o
d) Modificar los mecanismos internos de la máquina.19
Reducción de las fuerzas que producen la vibración
- Fuerzas de impacto
El ruido de impacto puede reducirse mediante componentes que sin limitar el funcionamiento de la maquina amortigüen la interacción de los elementos que se golpean entre sí.
- Fuerzas de desequilibrio: Las fuerzas que resultan del desequilibrio de los componentes rotativos pueden reducirse equilibrándolos o reemplazándolos por otros más equilibrados.
- Fuerzas de rozamiento: Las fuerzas de rozamiento inestables se suelen ocasionar por mala lubricación o por las combinaciones desfavorables de materiales deslizantes. Se pueden solucionar lubricando las superficies deslizantes, cambiando los materiales en contacto y/o las propiedades de los 19 HARRIS, M. Cyril. Manual de medidas acústicas y control del ruido. Mc Graw-Hill. 1995. P.28.1

45
componentes.
- Fuerzas electromagnéticas: Habitualmente estas fuerzas como las que se producen en los motores eléctricos no pueden cambiarse sin modificar drásticamente los aparatos. Sin embargo sus efectos pueden mitigarse con materiales no magnéticos y no conductores eléctricos cuando sea aceptable su uso.
- Fuerzas inestables de interacción mecánica: Estas fuerzas se producen en engranajes cruzados o rodamientos suelen reducirse mediante la sustitución de componentes o cambios en el diseño. La vibración y el ruido de engranajes puede reducirse con engranajes helicoidales o espirales, o con pasos más pequeños y dientes más cortos, y mejorando su lubricación.
- Reducción de las fuerzas transmitidas: Reducir las fuerzas transmitidas a la estructura a la que la maquina está conectada se puede lograr mediante las siguientes formas:
A) Añadiendo absorbentes dinámicos en el marco o apoyo,
B) Modificando el armazón
C) Mejorando el aislamiento entre los componentes internos, o
D) Mejorando el aislamiento entre el armazón y los puntos de apoyo de la máquina
- Reducción del movimiento del punto de conexión “Los movimientos de vibración que produce una fuente en una estructura a la que está unida pueden reducirse aumentando la resistencia al movimiento de la estructura de soporte”20. Esto puede lograrse aumentando la rigidez, la masa o el amortiguamiento dependiendo del parámetro que controla los movimientos en la estructura, el rango de frecuencias de interés o añadiendo absorbentes dinámicos.
20 HARRIS, M. Cyril. Manual de medidas acústicas y control del ruido. Mc Graw-Hill. 1995. P.28.6

46
Es importante notar que aumentar la rigidez será siempre favorable por debajo de la frecuencia de resonancia fundamental de la estructura, y los aumentos de masa serán útiles para las frecuencias altas.
Control de vibraciones en las vías de transmisión
- Discontinuidades en la vía de transmisión: La mejor forma de reducir las vibraciones emitidas del punto emisor al receptor, es interrumpir la vía de transmisión parcial o completamente mediante discontinuidades con uniones elásticas u otros elementos flexibles. La atenuación puede lograrse mediante dispositivos que impidan los movimientos estructurales a lo largo de la vía, como lo enseña la figura 13. “Si la transmisión de las vibraciones es un problema concreto en un rango de frecuencias determinado se debe considerar la de-sintonización de la vía; o sea, ajustar sus características de manera que transmita las vibraciones relativamente mal, en el rango de interés”21.
Figura 13. Ilustración esquemática de algunos sistemas del control de la vibración en las vías de transmisión.
Fuente: Manual de medidas acústicas y control del ruido. P. 28.6
- Dispersión y disipación de la energía
Dado que la energía vibratoria añadida a una estructura en un punto de entrada se extiende a lo largo de toda la estructura, es útil colocar el receptor tan lejos como sea posible de la fuente, de manera que sea alcanzado por menos energía.
21 IBID. P 28.7
47
- Control de la vibración en el receptor. El receptor se puede modificar haciéndolo más resistente a la fatiga, implementando distintos materiales, aumentando el amortiguamiento de la estructura y/o modificando los métodos de sujeción.
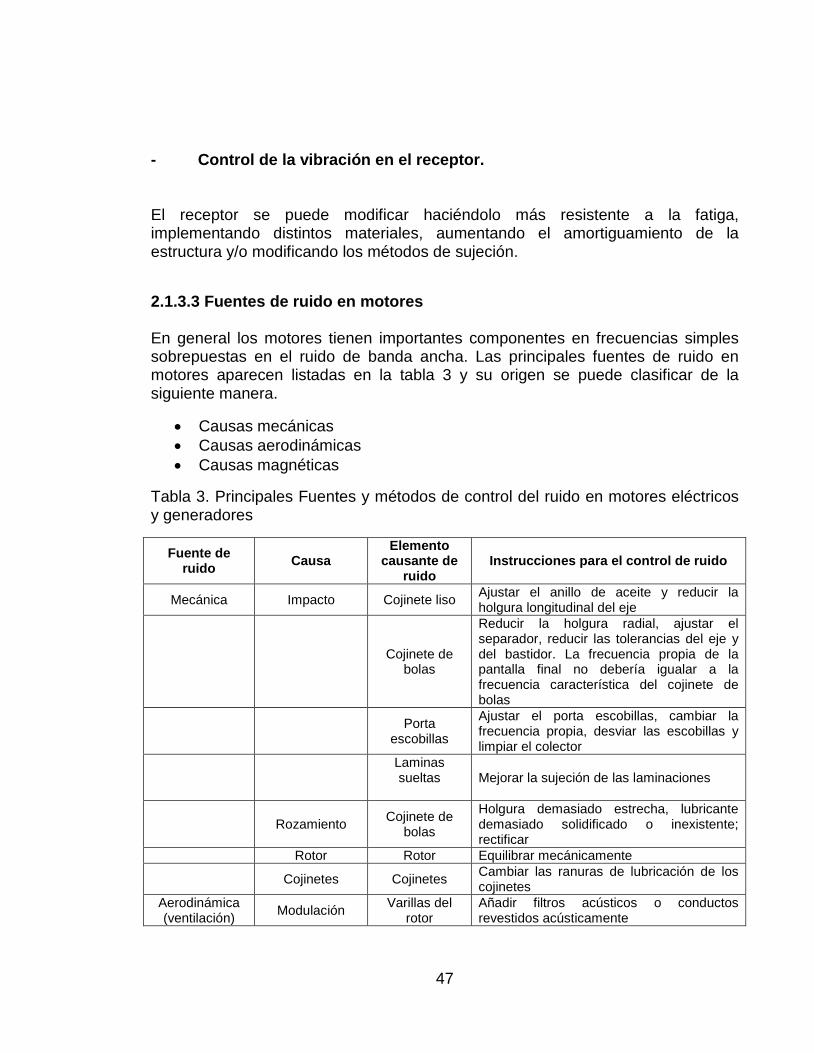
2.1.3.3 Fuentes de ruido en motores En general los motores tienen importantes componentes en frecuencias simples sobrepuestas en el ruido de banda ancha. Las principales fuentes de ruido en motores aparecen listadas en la tabla 3 y su origen se puede clasificar de la siguiente manera.
• Causas mecánicas • Causas aerodinámicas • Causas magnéticas
Tabla 3. Principales Fuentes y métodos de control del ruido en motores eléctricos y generadores
Fuente de ruido Causa
Elemento causante de
ruido Instrucciones para el control de ruido
Mecánica Impacto Cojinete liso Ajustar el anillo de aceite y reducir la holgura longitudinal del eje
Cojinete de bolas
Reducir la holgura radial, ajustar el separador, reducir las tolerancias del eje y del bastidor. La frecuencia propia de la pantalla final no debería igualar a la frecuencia característica del cojinete de bolas
Porta escobillas
Ajustar el porta escobillas, cambiar la frecuencia propia, desviar las escobillas y limpiar el colector
Laminas sueltas
Mejorar la sujeción de las laminaciones
Rozamiento Cojinete de bolas
Holgura demasiado estrecha, lubricante demasiado solidificado o inexistente; rectificar
Rotor Rotor Equilibrar mecánicamente
Cojinetes Cojinetes Cambiar las ranuras de lubricación de los cojinetes
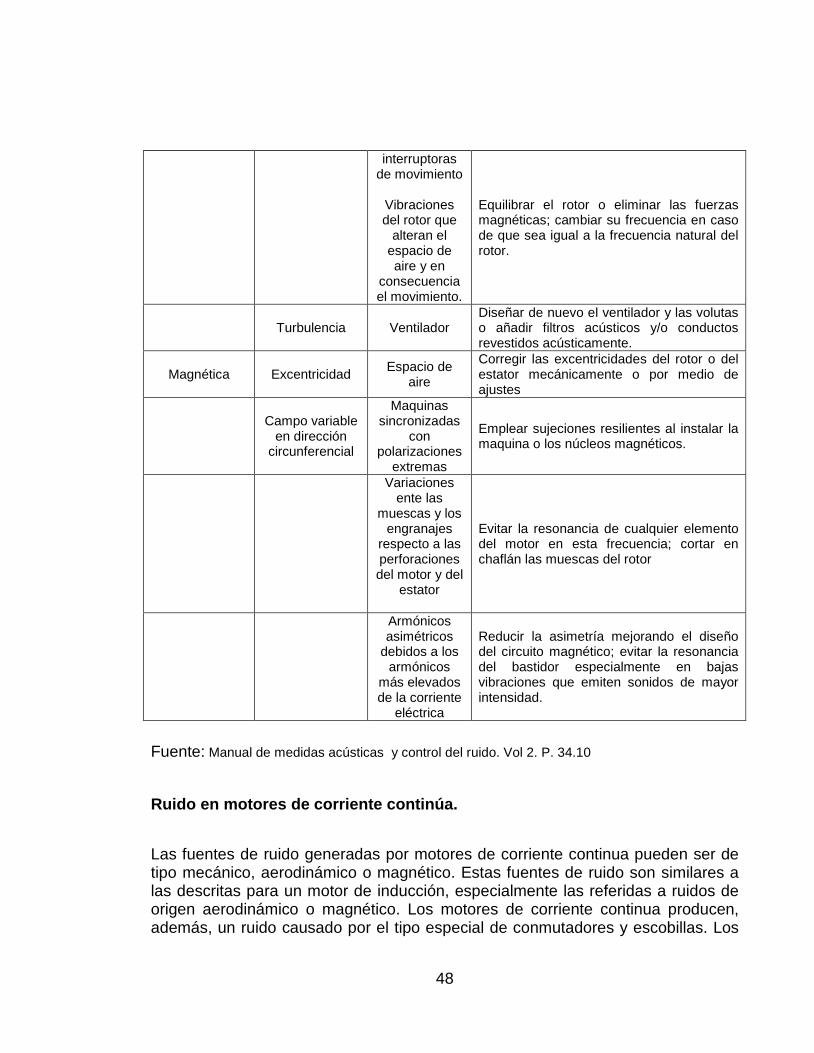
Aerodinámica (ventilación) Modulación Varillas del
rotor Añadir filtros acústicos o conductos revestidos acústicamente
48
interruptoras de movimiento
Vibraciones del rotor que
alteran el espacio de aire y en
consecuencia el movimiento.
Equilibrar el rotor o eliminar las fuerzas magnéticas; cambiar su frecuencia en caso de que sea igual a la frecuencia natural del rotor.
Turbulencia Ventilador Diseñar de nuevo el ventilador y las volutas o añadir filtros acústicos y/o conductos revestidos acústicamente.
Magnética Excentricidad Espacio de aire
Corregir las excentricidades del rotor o del estator mecánicamente o por medio de ajustes
Campo variable
en dirección circunferencial
Maquinas sincronizadas
con polarizaciones
extremas
Emplear sujeciones resilientes al instalar la maquina o los núcleos magnéticos.
Variaciones ente las
muescas y los engranajes
respecto a las perforaciones del motor y del
estator
Evitar la resonancia de cualquier elemento del motor en esta frecuencia; cortar en chaflán las muescas del rotor
Armónicos asimétricos
debidos a los armónicos
más elevados de la corriente
eléctrica
Reducir la asimetría mejorando el diseño del circuito magnético; evitar la resonancia del bastidor especialmente en bajas vibraciones que emiten sonidos de mayor intensidad.
Fuente: Manual de medidas acústicas y control del ruido. Vol 2. P. 34.10
Ruido en motores de corriente continúa.
Las fuentes de ruido generadas por motores de corriente continua pueden ser de tipo mecánico, aerodinámico o magnético. Estas fuentes de ruido son similares a las descritas para un motor de inducción, especialmente las referidas a ruidos de origen aerodinámico o magnético. Los motores de corriente continua producen, además, un ruido causado por el tipo especial de conmutadores y escobillas. Los

49
espectros de nivel de presión sonora de estos motores son similares para cargas diversas.22 El origen del ruido de motores de corriente continua a baja velocidad es, en orden de importancia, de tipo magnético, mecánico, de escobillas y aerodinámico.
Ruidos de origen mecánico.
Pueden existir ruidos de origen mecánico en los motores debido a errores de fabricación, asimetrías, deformaciones y desalineaciones. Las fuerzas asimétricas son las responsables de las componentes dominantes del espectro de ruido en algunos motores. La vibración intrínseca de los motores en funcionamiento puede ser transmitida por el sistema del motor hasta la estructura donde esta soportado.
Principales fuentes de ruido y vibraciones en engranajes Idealmente en un par de engranajes, la disposición de dientes transmite exactamente una cantidad de velocidad angular constante. Por tanto si cada diente del par en contacto posee dientes rígidos equidistantes perfectamente acoplados, la velocidad angular transmitida a través de sus ejes será exactamente constante por lo cual la vibración producida y el ruido resultante de dicho par de engranajes, serán mínimos. 23
Pero en la práctica los engranajes tienden a desgastarse y pueden tener errores de fabricación lo que impide el acople perfecto entre los dientes y es causa de ruidos y vibraciones indeseadas. A continuación se listan las principales causas de éste problema.
- Armónicos de engranaje entre dientes Las deformaciones y las desviaciones respecto a las superficies en las que se produce el movimiento son la principal causa de sonidos armónicos entre los dientes de un engranaje.
- Errores de fabricación La desviación respecto a la superficie de los dientes de una pieza puede ser 22 Cyril M. Harris. Manual de medidas acústicas y control del ruido. McGraw-Hill. Vol 2. P. 34.12
23 IBID P.36.16

50
distinta a la pieza deseada para el encaje. Por ejemplo el adelgazamiento de la punta hasta la base de o los extremos de los dientes.
- Defectos de alineación Cuando los ejes de los piñones no se encuentren perfectamente alineados estos no serán paralelos. Este desajuste será equivalente al error en el ángulo del piñón o el ángulo de desplazamiento de los dientes.
- Fricción
Las vibraciones provocadas por el rozamiento de los dientes deslizándose entre sí se supone menor a la generada por los armónicos del error estático de transmisión.
2.1.4 Ciencias de la grabación
2.1.4.1 Micrófono Según Beranek “Los micrófonos son transductores electro acústicos por convertir energía acústica en energía eléctrica”24. En realidad constan de dos transductores, uno cuya función es transformar las variaciones de presión en vibraciones mecánicas, y el segundo transforma las vibraciones mecánicas en una señal eléctrica. Para la conversión de las variaciones acústicas en las correspondientes variaciones eléctricas existen los siguientes tipos de transductores: de carbón, magnéticos, dinámicos (de bobina móvil y de cinta), electrostáticos (de condensador y electret), y piezoeléctricos (de cristal).25
• Micrófonos de carbón: consisten en una cavidad cilíndrica llena con gránulos de carbón, los cuales hacen contacto con un diafragma. El desplazamiento del diafragma crea cambios en la presión entre los granos de carbón, lo que resulta en una variación de la resistencia eléctrica entre los granos.
24 BERANEK, Leo L. “Acoustics”. Publicado por la sociedad Acústica de América. New York, Usa, 1996, p 110 25 HARRY F. OLSON Elements of Acoustical Engineering
51
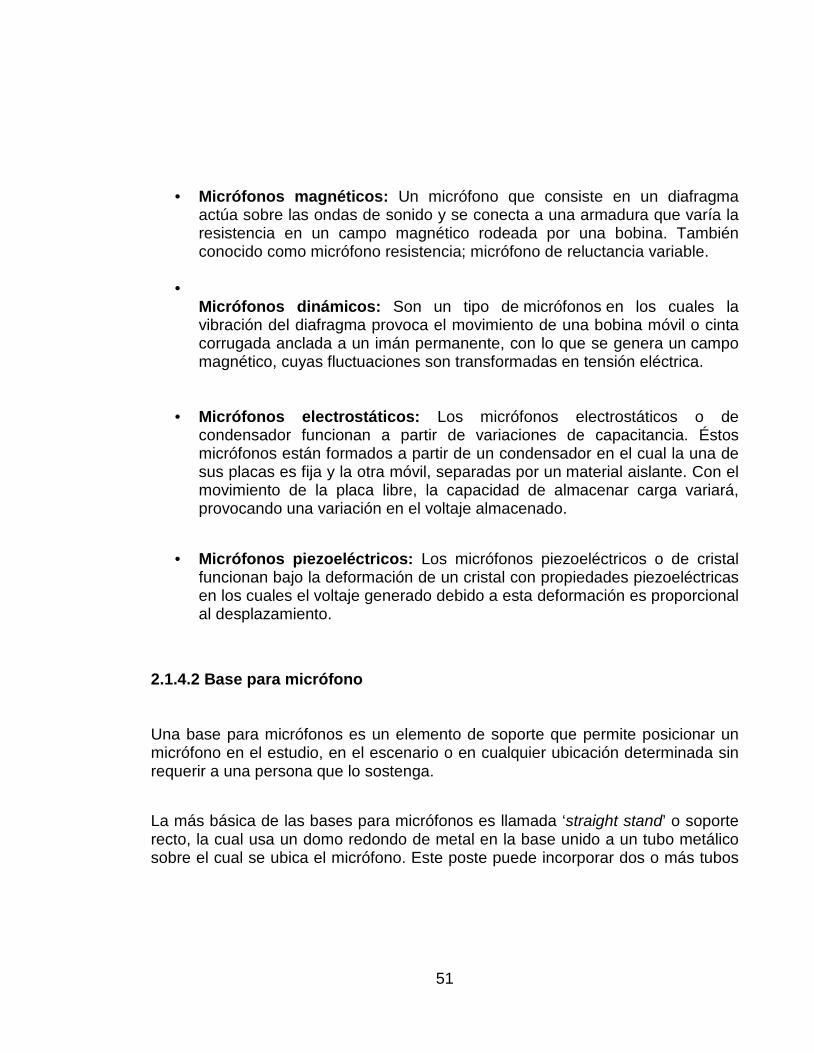
• Micrófonos magnéticos: Un micrófono que consiste en un diafragma actúa sobre las ondas de sonido y se conecta a una armadura que varía la resistencia en un campo magnético rodeada por una bobina. También conocido como micrófono resistencia; micrófono de reluctancia variable.
•
Micrófonos dinámicos: Son un tipo de micrófonos en los cuales la vibración del diafragma provoca el movimiento de una bobina móvil o cinta corrugada anclada a un imán permanente, con lo que se genera un campo magnético, cuyas fluctuaciones son transformadas en tensión eléctrica.
• Micrófonos electrostáticos: Los micrófonos electrostáticos o de condensador funcionan a partir de variaciones de capacitancia. Éstos micrófonos están formados a partir de un condensador en el cual la una de sus placas es fija y la otra móvil, separadas por un material aislante. Con el movimiento de la placa libre, la capacidad de almacenar carga variará, provocando una variación en el voltaje almacenado.
• Micrófonos piezoeléctricos: Los micrófonos piezoeléctricos o de cristal funcionan bajo la deformación de un cristal con propiedades piezoeléctricas en los cuales el voltaje generado debido a esta deformación es proporcional al desplazamiento.
2.1.4.2 Base para micrófono Una base para micrófonos es un elemento de soporte que permite posicionar un micrófono en el estudio, en el escenario o en cualquier ubicación determinada sin requerir a una persona que lo sostenga.
La más básica de las bases para micrófonos es llamada ‘straight stand’ o soporte recto, la cual usa un domo redondo de metal en la base unido a un tubo metálico sobre el cual se ubica el micrófono. Este poste puede incorporar dos o más tubos

52
telescópicos que encajan uno dentro del otro permitiendo realizar ajustes de la altura de la base.26
(A) (B) (C)
Fuente [online]: www.buymicstands.com/
Hay muchas versiones del soporte recto, dependiendo del uso, como sistemas pequeños para escritorio, o mucho más grandes y rígidos para levantar micrófonos más pesados a una mayor altura. Una versión mucho más popular y actualizada del soporte recto usa un trípode flexible en la base en lugar del domo de metal.
En estas bases, en la parte superior del soporte puede ser añadido un brazo ‘Boom’ para permitir desplazar el micrófono en el plano horizontal. El ángulo y longitud del Boom son ajustables. Esto es una gran ventaja en situaciones en las cuales el micrófono debe competir por el espacio con diferentes elementos, como las bases de los platos, o usarlo para separar aún más el micrófono del suelo con el fin de capturar, por ejemplo, una orquesta.27
26 BARLETT, Bruce.” Stereo Microphone Techniques “Focal press. 1991. P.11. 27 IBID. P. 12
Figura 14. Diferentes diseños de bases para micrófonos convencionales. (A) Straigth Stand. Soporte recto tradicional. (B) Mini Boom. Base para micrófonos estándar para el posicionamiento de microfonía a baja altura. (C) Soporte recto con un brazo boom.
53
2.1.4.3 Técnicas de captura y posicionamiento de microfonía La posición del micrófono, como primer elemento de la cadena de grabación, tiene un papel muy importante en la señal que será capturada. La calidad de esta señal depende de diversas variables externas como son su ubicación en la sala respecto al ambiente acústico y su ubicación respecto a la fuente, así como las mismas propiedades del tipo de micrófono que se esté utilizando. Estas interacciones afectan en conjunto la calidad de la señal que se registra. 28
Por ello, con el fin de poder trabajar en una gran variedad de situaciones que involucran diferentes tipos de música e instrumentos en distintos ambientes, se encuentran en el mercado una gran variedad de micrófonos con distintas características para igualmente distintas aplicaciones.
En el libro de técnicas modernas de grabación de David Huber y Robert Runstein se establece que para escoger la mejor ubicación de un micrófono es muy importante entender que las técnicas existentes para la ubicación de microfonia obedecen una muy simple regla:
No existen reglas, solamente guías: Aunque las posiciones recomendadas por la teoría pueden ser un gran punto de partida, no se debe dudar en experimentar diferentes posiciones y alternativas para encontrar un sonido que se acomode mejor a los intereses de la producción y al gusto personal del ingeniero.
Esto se debe a que ubicar los micrófonos para capturar voces e instrumentos musicales es una forma de arte y la mejor forma de conseguir buenos resultados es mediante el sentido común y confiar en tus instintos.
Percepción subjetiva de fuentes sonoras Para entender los principios teóricos de las técnicas de grabación y posicionamiento de microfonía es importante conocer la manera en que nuestro sistema auditivo reacciona frente a las perturbaciones sonoras para localizar las fuentes.
28 HUBER, David. Modern Recording Techniques.Focal press. 2001. P. 90.

54
- Localización de fuentes
El sistema auditivo humano utiliza las señales directas junto con las reflexiones tempranas para localizar fuentes sonoras en el espacio. Las señales directas y reflexiones que se encuentren en un rango de 2 milisegundos contribuirán a la ubicación de la fuente. 29
Reflexiones que se presenten entre 5 hasta 35 milisegundos afectarán la señal original sonido provocando un ensanchamiento aparente de la fuente y las señales con un retraso mayor de 50 milisegundos, no se fusionaran en el tiempo con la señal original pero contribuirán a enriquecer el espectro tonal percibido.
Figura 15. Localización de fuentes sonoras por diferencias de tiempos de arribo y de intensidad
Fuente: Stereo Microphone Techniques. Página 30. Figura 3-4 y figura 3-6
Cuando una onda sonora choca con un oyente se presentan diferentes espectros de amplitud y tiempo en cada oído. Estas diferencias inter-aurales son traducidas por el cerebro en una percepción de dirección de la fuente sonora.
También se puede ocasionar, por fenómeno de difracción, una sombra acústica que ocasione diferencias de fase que modifique el espectro en frecuencia que arriba a cada oído, en un rango aproximadamente entre 100 y 700 hertz.
29 BARLETT, Bruce. Stereo Microphone Techniques. 1991. P. 30.

55
Técnicas de captura en función de la distancia Éstas técnicas están directamente relacionadas con la posición de la fuente y el espacio en que son registradas.
• Distant microphone Placement (Captura lejana):
Con ésta técnica uno o más micrófonos son ubicados a una distancia de 3 pies o más de la fuente y permitirá obtener una gran proporción del instrumento o ensamble y permite que el ambiente acústico del recinto sea capturado naturalmente y mezclado con la señal directa. (ver figura 16)
Figura 16. Diferentes recorridos de una señal hacia un micrófono. Relación entre el campo directo y el campo reverberante.
Fuente: Modern Recording Techniques. P. 111.
• Close microphone placement (Captura cercana):
La gran presencia en la señal. Estas ubicaciones permiten disminuir significantemente la relación entre señal directa y el campo reverberante de la

56
sala. Como resultado solamente las señales directas sobre el eje del micrófono serán capturadas y las señales ajenas se evitaran.
Esto es una ventaja cuando la acústica del lugar en el cual se esté grabando no sea particularmente buena, ya que se evitaran problemas como malas reflexiones y cancelaciones que generan un sonido poco natural y poco definido.
• Accent microphone placement (Captura acentuada):
Para situaciones en las cuales se requiera acentuar un instrumento particular en una grabación se puede trabajar utilizando tanto las técnicas de captura lejanas como cercanas. Esto en muchas situaciones puede ser difícil ya que se puede perder el balance y la naturalidad de la mezcla cuando ambas señales se combinen.
En un ensamble de músicos o una orquesta, un micrófono ubicado cerca de una fuente en particular, pero no tan cerca como para obtener un sonido antinatural del conjunto se conoce como micrófono acentuado. (Ver figura 17)
Figura 17. Captura acentuada
Fuente: Modern Recording Techniques. P. 117.
• Ambient microphone placement (Captura Ambiente):
Un micrófono ambiente es aquel que es ubicado en una distancia en la cual el

57
campo reverberante del recinto es más prominente que la señal directa de un instrumento o un ensamble en particular.
Esta técnica puede ser utilizada para recuperar el ambiente que se pierde con las técnicas de captura cercana, para dar una sensación de naturalidad y espacio en el fondo de una grabación o para capturar aplausos y la reacción de la audiencia en un concierto.
Técnicas de captura estéreo
• Par coincidente
Las técnicas de grabación coincidentes utilizan a su favor el patrón polar de los micrófonos cardiodes para generar diferencias de amplitud entre los micrófonos en relación con la ubicación de la fuente en un espacio. Su principio de funcionamiento para representar la imagen estero se basa en el registro de diferencias de intensidad. 30
XY Dos micrófonos direccionales se montan con sus cápsulas juntas, casi tocándose y sus diafragmas son sobrepuestos y direccionados hacia los extremos del ensamble. Si una fuente esta mas direccionada hacia el eje de uno de los dos micrófonos, éste recibirá una señal de mayor nivel que el segundo, y que al ser reproducida estará fuera del centro aparente de los monitores.
MS El Mid - Side implementa un micrófono bidireccional para capturar la señal de los lados izquierdo y derecho junto con un micrófono cardiode viendo al centro. Esta técnica es mono compatible y permite manipular la señal en el campo estéreo
Blumlein Utiliza dos micrófonos bidireccionales en ubicados en un ángulo de 90° y apuntando a los extremos izquierdo y derecho del ensamblé o fuente sonora.
30 BARLETT, Bruce. Stereo Microphone Techniques. 1991. P. 19.
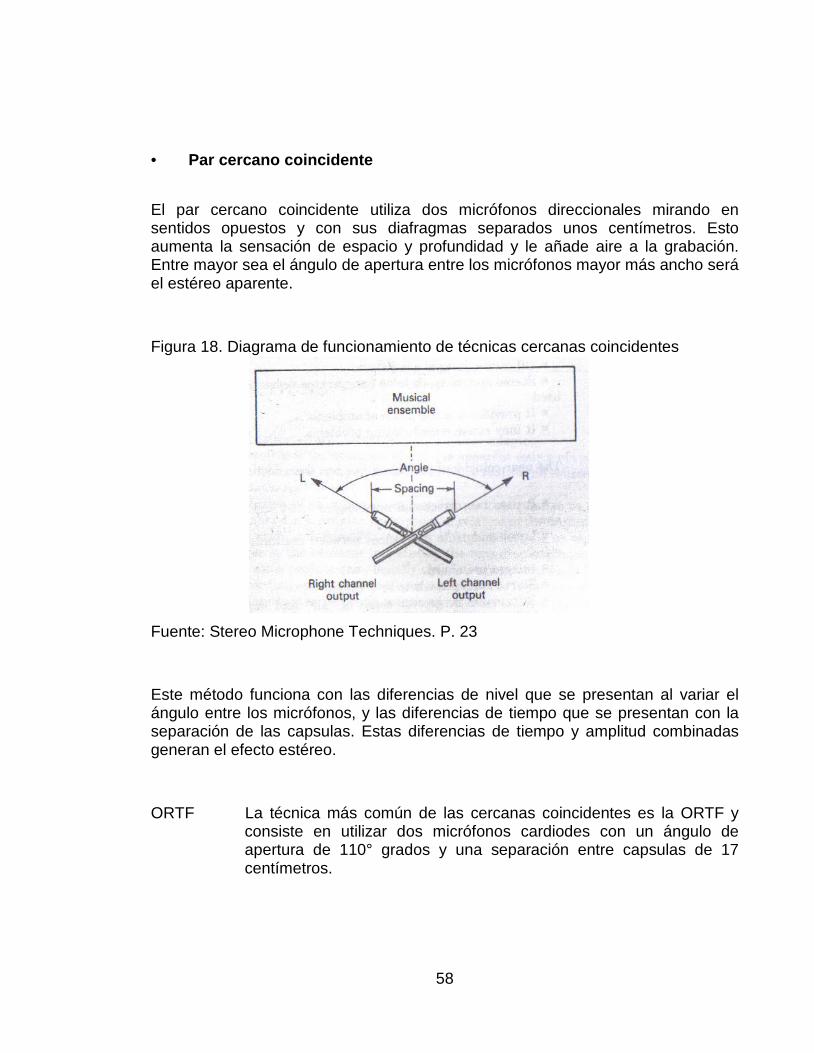
58
• Par cercano coincidente
El par cercano coincidente utiliza dos micrófonos direccionales mirando en sentidos opuestos y con sus diafragmas separados unos centímetros. Esto aumenta la sensación de espacio y profundidad y le añade aire a la grabación. Entre mayor sea el ángulo de apertura entre los micrófonos mayor más ancho será el estéreo aparente.
Figura 18. Diagrama de funcionamiento de técnicas cercanas coincidentes
Fuente: Stereo Microphone Techniques. P. 23
Este método funciona con las diferencias de nivel que se presentan al variar el ángulo entre los micrófonos, y las diferencias de tiempo que se presentan con la separación de las capsulas. Estas diferencias de tiempo y amplitud combinadas generan el efecto estéreo.
ORTF La técnica más común de las cercanas coincidentes es la ORTF y consiste en utilizar dos micrófonos cardiodes con un ángulo de apertura de 110° grados y una separación entre capsulas de 17 centímetros.

59
NOS Este sistema de microfonía está formado por dos micrófonos con 30 centímetros de separación entre sus capsulas y un ángulo de apertura de 90º grados.
OSS La OSS o de sus siglas en inglés ‘Optimal Stero Signal’, utiliza dos micrófonos omnidireccionales espaciados 16.5 centímetros y separados por un disco de 28 centímetros de diámetro cubierto con material absorbente para minimizar las reflexiones. Esta técnica pretende simular la forma binaural de escucha del ser humano.
• Par espaciado
Con la técnica del par espaciado (A - B), dos micrófonos idénticos son ubicados a una distancia considerable, apuntando hacia adelante, directamente hacia la fuente que se pretende grabar.
Estos micrófonos pueden ser de cualquier patrón polar pero los omnidireccionales son los más populares para este método por que añaden una gran espacialidad y difusión en el espacio estéreo. El par espaciado relaciona la posición de las fuentes mediante diferencias de tiempo de arribo.
Figura 19. Par espaciado
Fuente: Stereo Microphone Techniques. P. 66
60
3. METODOLOGÍA
3.1 ENFOQUE DE LA INVESTIGACIÓN
El enfoque escogido para llevar a cabo esta investigación es el empírico-analítico, debido a que es el que más se aproxima a la búsqueda técnica y tecnológica, y permitirá contrastar las aseveraciones teóricas con la verificación experimental.
3.2 LÍNEA / SUBLINEA / CAMPO DE INVESTIGACIÓN
3.2.1 Línea
Tecnologías actuales y sociedad
Se eligió esta línea ya que cobija los objetivos propuestos y los alcances de la investigación, dada la necesidad de conocimientos técnicos y científicos que ayuden a la solución de problemas, mejoren los sistemas actuales de posicionamiento de microfonía y faciliten a la sociedad el acceso a las nuevas tecnologías.
3.2.2 Sub línea
Instrumentación y control de procesos.
Esta sub línea es la indicada ya que vincula el proyecto vincula el manejo de herramientas teórico prácticas del diseño electrónico, mecánico y acústico para llevar a cabo el desarrollo de una herramienta innovadora para el campo de la producción musical.
3.2.3 Campo temático Diseño de sistemas de sonido
El proyecto se ubica en esta categoría por acogerse a los objetivos planteados, requiriendo la aplicación de conocimientos de ingeniería para su comprensión y manipulación hacia el desarrollo tecnológico.

61
3.3 HIPÓTESIS
Las bases para micrófono son los elementos fundamentales de soporte y posicionamiento de microfonía para diferentes aplicaciones. Con un sistema electromecánico aplicado y la implementación de un sistema de control de vibraciones es posible rediseñar esta simple herramienta para facilitar cada uno de los pasos en el posicionamiento de microfonía.
Una vez construida la herramienta móvil para posicionamiento de microfonía se podrá verificar la enorme facilidad y practicidad del implemento a la hora de realizar capturas a instrumentos musicales y buscar en tiempo real los distintos sonidos en un instrumento.

62
4. DESARROLLO INGENIERIL
La construcción del prototipo móvil para micrófonos requirió un trabajo interdisciplinar en mecánica, electrónica, acústica y en las ciencias de grabación; por ello éste proyecto fue desarrollado en cuatro etapas diferentes y en el orden en que se presentan a continuación.
4.1 DISEÑO MECÁNICO
El diseño partió de una base para micrófonos convencional conocida como el mini boom (figura 20), cuyo propósito es el montaje de microfonía a baja altura para capturar señales de instrumentos y fuentes sonoras cuyo contenido de frecuencias es más rico cerca al piso, como es el caso de un bombo, o el contrabajo.
Ésta base cuenta con todos los movimientos estándar en la mayoría de estructuras de soporte para micrófonos, que incluyen un soporte recto con un tubo telescópico para variar la rotación o la altura, y un brazo boom para el desplazamiento en el eje horizontal y la altura en un determinado ángulo de apertura respecto al soporte.
Figura 20. Mini boom

63
Con el objetivo de aportar la mayor libertad posible al sistema de posicionamiento de microfonía presentado en la figura 20, se planteó un diseñó mecánico que añadiría los movimientos de desviación y giro, para manipular la altura y los ángulos de apertura; y un tercer movimiento de proximidad que se llevó a cabo con un riel guía, buscando tener un factor de cercanía hacia las fuentes y a la vez un rango de movimiento entre los campos acústicos del recinto.
Con estos parámetros de funcionamiento se decidieron los grados de libertad que se le darían a la estructura y la forma en que estos movimientos afectarían la posición de la microfonía.
(1) Proximidad (2) Giro (3) Desviación
Figura 21. Modelo esquemático del dispositivo
En la figura 21 se muestra el diagrama esquemático sobre el cual se diseñó la base móvil. En rojo se detallan los grados de libertad, los cuales son movimientos convencionales en sistemas articulados mecánicos: Yaw, Pitch, y roll.
(3)
(2)
(1)

64
Para conseguir el movimiento rotacional y axial de cada articulación se aplicaron diferentes motores, que permitirán un control preciso y adecuado del punto de desplazamiento del dispositivo; y para el movimiento de proximidad, se construirá un riel de aproximadamente 1 metro; longitud adecuada para estar dentro y fuera de la distancia crítica del estudio A de la universidad, en donde se realizarán todas las pruebas y grabaciones con la base en funcionamiento.
4.1.1Diseño El diseño del prototipo se llevo a cabo en la Universidad de San Buenaventura en el programa SOLID EDGE ST2 (licencia académica). El cuerpo principal de la estructura se tomó de la base para micrófonos de referencia, la cual se rediseñó para acoplarla a los diferentes mecanismos. Por ello, el primer elemento que se planteó fue el riel sobre el cual se deslizaría la base para micrófonos. Éste riel tendría que permitirle a la base deslizarse libremente de izquierda a derecha sobre una superficie cerrada.
Figura 22. Modelo 3D del Riel
Para accionar este movimiento se determinó utilizar el mecanismo cremallera-piñón, que aporta gran estabilidad y gran transmisión de potencia. La cremallera sería construida y fijada a uno de los extremos laterales del riel, en un lugar apropiado para que pudiese encajar con el engranaje del motor 1, que a la vez estaría sujeto al soporte recto de la base.
65
El movimiento del motor (1) en cualquiera de los sentidos de giro permitiría a la base desplazarse en sentido izquierda o derechas y así permitir la ubicación de la base en su primer grado de libertad.
4.1.1.1 Sistema cremallera-piñón Para éste diseño se partió de un engranaje con las siguientes características.
Módulo 2
Número de dientes 14
Diámetro exterior 32mm
Diámetro interior 24mm
A partir de estos datos se calculó el paso entre los dientes para diseñar la cremallera que encajase perfectamente con el engrane, y posteriormente calcular el número de dientes necesario.
Paso
Número de dientes
Para cumplir con la longitud de desplazamiento propuesta (80cm), sería necesario construir un total de 127 dientes, con un módulo de 2 y una distancia entre dientes de 6.283 milímetros.
66
El segundo mecanismo, debería permitir el giro (roll) de la base. Para esto se planteó utilizar un par de engranajes cilíndricos convencionales de dientes rectos ubicados en el punto donde se proyecta el tubo telescópico de la base.
La corona estaría soportada sobre el tubo principal de la base para micrófonos y al mismo tiempo fijado al tubo telescópico; el piñón se encontraría sujeto al motor y ubicado a un costado de la estructura, de manera que encajara perfectamente con la corona para una óptima transmisión de movimiento.
Con lo anterior se conseguiría que al girar el motor (2), el tubo telescópico del soporte girase en función del sentido de revolución del motor.
Figura 23. Modelo 3D del Motor 2
4.1.1.2 Sistema de engranajes cilíndricos Para este mecanismo se consiguieron dos engranajes cilíndricos con las siguientes características.
Engranaje 1
Módulo 1
Número de dientes 32
Diámetro exterior 30 mm
Diámetro interior 26 mm
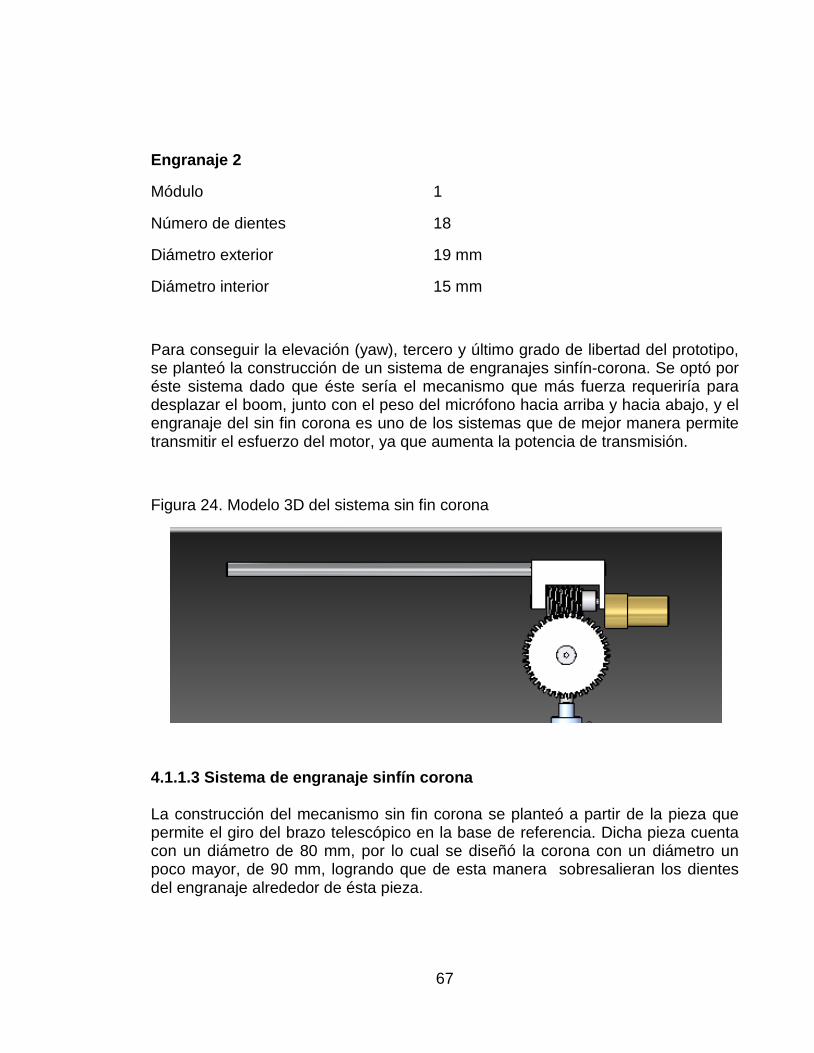
67
Engranaje 2
Módulo 1
Número de dientes 18
Diámetro exterior 19 mm
Diámetro interior 15 mm
Para conseguir la elevación (yaw), tercero y último grado de libertad del prototipo, se planteó la construcción de un sistema de engranajes sinfín-corona. Se optó por éste sistema dado que éste sería el mecanismo que más fuerza requeriría para desplazar el boom, junto con el peso del micrófono hacia arriba y hacia abajo, y el engranaje del sin fin corona es uno de los sistemas que de mejor manera permite transmitir el esfuerzo del motor, ya que aumenta la potencia de transmisión.
Figura 24. Modelo 3D del sistema sin fin corona
4.1.1.3 Sistema de engranaje sinfín corona La construcción del mecanismo sin fin corona se planteó a partir de la pieza que permite el giro del brazo telescópico en la base de referencia. Dicha pieza cuenta con un diámetro de 80 mm, por lo cual se diseñó la corona con un diámetro un poco mayor, de 90 mm, logrando que de esta manera sobresalieran los dientes del engranaje alrededor de ésta pieza.

68
De esta manera, se propuso crear la corona con módulo 2. Por principios de diseño, el tornillo sin fin estaría sujeto a los mismos criterios de construcción que la corona, con igual modulo, misma altura del dentado, y mismo paso.
Paso
Numero de dientes
Altura del diente
Diámetro primitivo
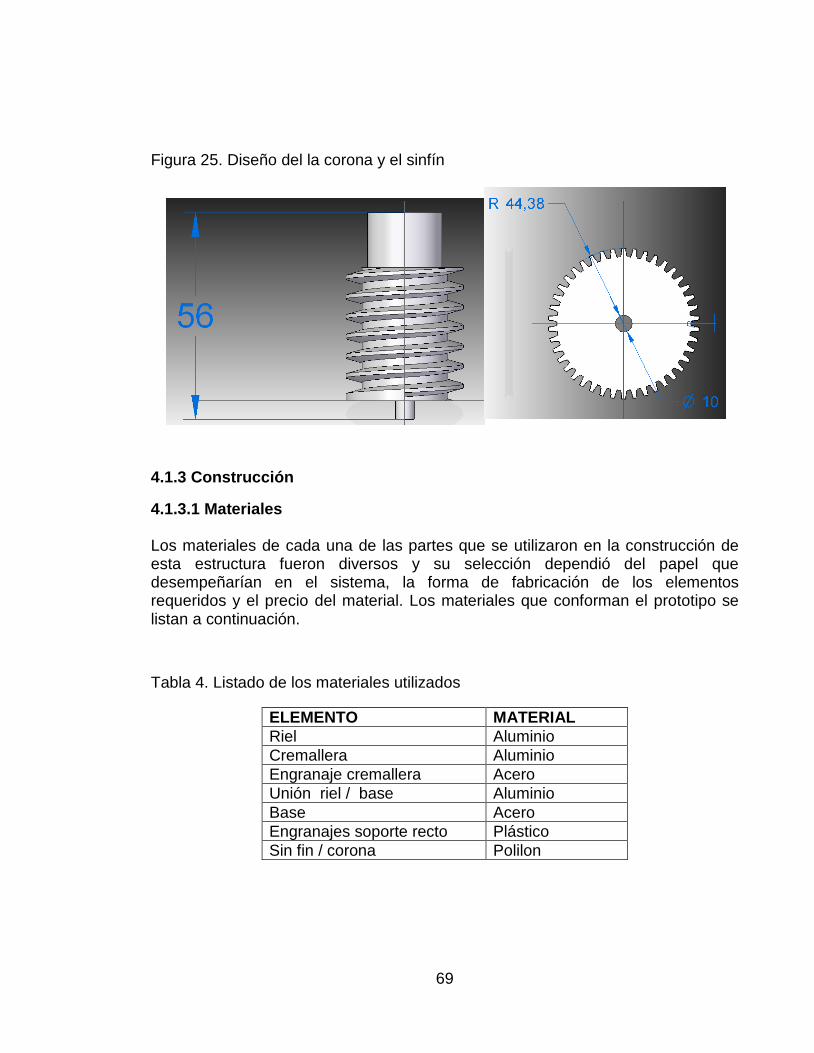
69
Figura 25. Diseño del la corona y el sinfín
4.1.3 Construcción
4.1.3.1 Materiales Los materiales de cada una de las partes que se utilizaron en la construcción de esta estructura fueron diversos y su selección dependió del papel que desempeñarían en el sistema, la forma de fabricación de los elementos requeridos y el precio del material. Los materiales que conforman el prototipo se listan a continuación.
Tabla 4. Listado de los materiales utilizados
ELEMENTO MATERIAL Riel Aluminio Cremallera Aluminio Engranaje cremallera Acero Unión riel / base Aluminio Base Acero Engranajes soporte recto Plástico Sin fin / corona Polilon

70
El Sistema se puede describir como una estructura rígida y pequeña hecha de metal. Para la construcción del riel y la cremallera que permitiría el movimiento de proximidad horizontal de toda la base utilizó aluminio
4.1.3.2 Construcción del sistema mecánico
Con los cálculos anteriores se procedió a adquirir cada uno de los materiales necesarios y a realizar la construcción de todos los elementos planteados.
• 4.1.3.2.1 riel
Para permitir el desplazamiento de la base se adquirió una pieza de aluminio de 80 centímetros como muestra la figura 27, ya que esta permitiría deslizar un pequeño vehículo en un solo sentido, y permitirá un fácil acople entre la estructura y el soporte recto.
Figura 26. Riel

71
• Cremallera
La cremallera se construyó en la maquina fresadora de la Universidad de San Buenaventura a partir de los cálculos previamente realizados: Módulo 2, 6.283 milímetros de paso entre dientes y 127 dientes en total para una distancia de 80 centímetros.
Se procedió a remover la viruta entre los dientes de una lámina de aluminio de 80 centímetros de largo por 1 cm de ancho y 1 cm de alto (ver figura 27). Fue necesario construirla en fragmentos de 10 centímetros pues la máquina no permitía realizar cortes más largos.
Al terminar los 8 fragmentos se procedió a unirlos con láminas de aluminio atornilladas entre cada pieza y posteriormente se sujetó a la estructura del riel mediante tornillos.
Figura 27. Construcción de la cremallera
• Engranajes cilíndricos para el giro
Para construir el arreglo de los engranajes cilíndricos que permitirán el giro del tubo telescópico, se construyó en el torno una pieza metálica con un diámetro de 24 mm la cual reposa libremente encima del soporte recto. Hecho esto se construyó en la fresadora la pieza sobre la cual descansaría el motor y el engranaje como se ve en la figura 28 y que permitirían darle movimiento.

72
Figura 28. Montaje del sistema de engranajes cilíndricos
• Corona
La corona se construyó a partir de una pieza de polylon 3, que es un material cuyas propiedades favorecen el mecanizado, y es resistente a las vibraciones.
Figura 29. Construcción de la corona

73
Primero se fijó el mecanismo divisor en la fresadora, que es un dispositivo que permite realizar operaciones espaciadas angularmente respecto a un eje y por ello es fundamental para la creación de engranajes. Luego se montó la fresa moduladora de las características establecidas y se procedió a hacer los cortes: Módulo 2, paso 6.283 mm, 43 dientes y altura del diente 4.334 mm.
• Tornillo sin fin
Para la construcción del sin fin se utilizó el torno, con las mismas especificaciones de módulo, y profundidad que los pautados para la corona. Luego se crearon los espacios para el encajara en la pieza el motor y del rodamiento.
Figura 30. Construcción del tornillo sin fin

74
4.1.4 Ensamble
Fue necesario construir una pieza 7 cm x 3cm x 2 cm en aluminio para realizar el acople entre la base de referencia y el vehículo. Hecho esto, con una delgada lamina de aluminio se construyó una abrazadera que sujetó el motor un lado del soporte y permitió el perfecto encaje entre engrane y la cremallera. (Ver figura 31)
Figura 31. Montaje del motor 1 en el sistema cremallera piñón
Figura 32. Montaje de los tres sistemas mecánicos en el dispositivo
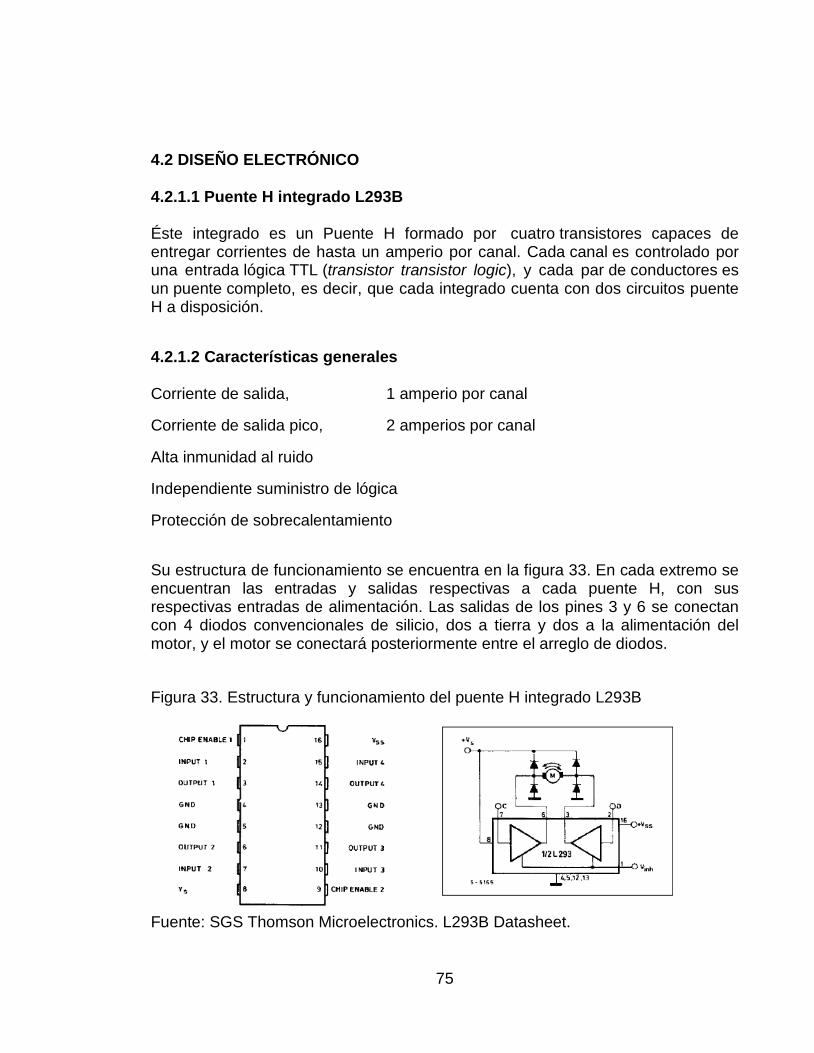
75
4.2 DISEÑO ELECTRÓNICO
4.2.1.1 Puente H integrado L293B Éste integrado es un Puente H formado por cuatro transistores capaces de entregar corrientes de hasta un amperio por canal. Cada canal es controlado por una entrada lógica TTL (transistor transistor logic), y cada par de conductores es un puente completo, es decir, que cada integrado cuenta con dos circuitos puente H a disposición.
4.2.1.2 Características generales Corriente de salida, 1 amperio por canal
Corriente de salida pico, 2 amperios por canal
Alta inmunidad al ruido
Independiente suministro de lógica
Protección de sobrecalentamiento
Su estructura de funcionamiento se encuentra en la figura 33. En cada extremo se encuentran las entradas y salidas respectivas a cada puente H, con sus respectivas entradas de alimentación. Las salidas de los pines 3 y 6 se conectan con 4 diodos convencionales de silicio, dos a tierra y dos a la alimentación del motor, y el motor se conectará posteriormente entre el arreglo de diodos.
Fuente: SGS Thomson Microelectronics. L293B Datasheet.
Figura 33. Estructura y funcionamiento del puente H integrado L293B

76
El sentido de giro será controlado con las entradas de los pines 2 y 7, o 10 y 15 para cada canal. Cuando existe una entrada de voltaje a uno de estos pines el motor girará en un sentido u otro respectivamente, y cuando las dos entradas están en tierra el motor se detendrá.
Tabla 5. Funcionamiento lógico del puente H L293B
Entradas Funciones
Vinh = H
C = H; D = L Giro hacia la derecha
C = L; D = H Giro hacia la izquierda
C = D El motor se detiene
Vinh = L C = X; D = X El motor se detiene por su inercia.
L = Low H = High X = dontcare
Se llevó a cabo el montaje indicado en la figura 33, la cual indica los puntos de conexión de voltaje, tierra, y las entradas y salidas para el control de los motores. Se utilizaron dos integrados L293 B para controlar los 3 motores.
4.2.2 Micro controladores El Micro controlador utilizado para el desarrollo de este proyecto fue el microchip 16f877A. Se determinó utilizar dos dispositivos micro controladores, uno como maestro y otro como esclavo para poder realizar el envío de información a distancia mediante un solo cable de comunicación TRS.
Otra ventaja de realizar éste montaje utilizando dos micro controladores conectados mediante el puerto de comunicación serial es que en cualquier momento se podría reemplazar la línea TRS por transmisores y receptores inalámbricos en los puertos de TX y RX de cada Micro controlador, y así poder manipular el prototipo de manera inalámbrica.

77
4.2.2.1 Esquema de funcionamiento
Micro controlador 1 Control remoto
Uno de los micro controladores sería el emisor o maestro, cuya función seria recibir, codificar y enviar la información que recibiría de tres interruptores, uno para controlar cada motor. Este control remoto seria alimentado mediante una batería cuadrada para que funcionara libremente si el prototipo se decide controlar vía inalámbrica.
Figura 34. Línea TRS.
Fuente [online]: http://en.wikipedia.org/wiki/File:Jack_plug.png
El ‘TIP’, o la punta de un cable TRS convencional se utilizaría para realizar el envío de la información entre los micro controladores en los pines TX del control remoto y RX del esclavo.
Los periféricos de entrada que se propusieron fueron interruptores. Estos permitirían dirigir el flujo de corriente del circuito hacia los pines de entrada deseados. Cada interruptor tendrían que ser de tres posiciones para que con uno solo se pudiera enviar una señal de entrada de voltaje a dos pines de entrada distintos del Micro controlador y además, se tuviera una posición de reposo en el control para mantener los motores sin movimiento.
Estos interruptores también tendrían que tener dos entradas y dos salidas para que al variar su posición se diera paso tanto al voltaje de entrada como a la tierra para que en la posición de apagado no existiese ninguna orden de entrada al Micro controlador.

78
Micro controlador 2 Esclavo
El PIC de recepción tendría la función de recibir e interpretar a información del pic maestro, y a su vez debería enviar señales de control a los puertos de entrada de cada uno de los circuitos integrados Puente H. Además, este micro controlador tendría la función de inhabilitar el funcionamiento de los motores cuando estos llegaran a los límites de la estructura.
• Fines de carrera.
Como el movimiento del sistema estaría limitado por una distancia específica, fue necesario implementar un sistema de control que inhabilitara el funcionamiento de los motores cuando estos llegaran a los límites de la estructura para no comprometer su integridad física.
Esto se elaboró implementando pulsadores: Cuando el movimiento del prototipo llegara a los extremos se encontraría a su paso con uno de estos pulsadores, que al entrar en contacto por la presión de la estructura en movimiento enviaría una señal que detendría inmediatamente el movimiento del motor en ese sentido.
4.2.2.2 Programación Para realizar la programación de los micro controladores se estableció lo siguiente:
Tabla 6. Configuración de los puertos de entrada y salida
MAESTRO ESCLAVO
Puertos de entrada Puerto A Puerto C
Puertos de salida Puerto B
Puertos de transmisión y recepción RC6 – TX RC7 - RX

79
Con el movimiento de los interruptores, al desplazar, por ejemplo, el interruptor del motor 1 hacia su primera posición, existe un flujo de corriente entrando al pin A0 del control remoto; cuando esto sucede, se envía una información codificada al micro esclavo, para que indicase al puente H del motor 1 el sentido de giro que debiera tomar.
Si la entrada de voltaje del control ingresa por el puerto A1, la orden enviada indicará que el giro del motor debe ser en sentido contrario; de esta manera se planteó el control de los demás motores del prototipo. Ver figura 35.
Debido a que el prototipo no se encuentra sujeto a ningún protocolo de comunicación serial, la codificación de la información para su envío a través del puerto serial podría ser cualquiera. Por ello se planteó el siguiente sistema:
Tabla 7. Codificación de la información
Entrada PIN Codificación Orden
A0 00 Motor 1 Giro hacia la derecha A1 01 Giro hacia la izquierda A2 02 Motor 2 Giro hacia la derecha A3 03 Giro hacia la izquierda A4 04 Motor 3 Giro hacia la derecha A5 05 Giro hacia la izquierda
Estas órdenes se programarían en el micro controlador maestro como se muestra a continuación.

80
Figura 35. Diagrama de flujo de la programación del control remoto
Lo primero que el micro controlador esclavo debería realizar sería recibir el valor codificado y guardarlo en una variable. Posteriormente debería verificar que ésta instrucción este no se encuentre inhabilitada por el fin de carrera correspondiente, y luego mediante una instrucción while se darían las ordenes de salida para los puente H, indicando el sentido de giro que debería tomar el motor.
Las variables utilizadas en esta programación serían las siguientes:

81
Tabla 8. Fines de carrera
Variable Entrada Pin Función
valor - Registra el valor de la codificación que recibe a través del puerto RX
fin1 C0 Inhabilita el movimiento hacia la izquierda del motor 1 fin2 C1 Inhabilita el movimiento hacia la derecha del motor 1 fin3 C2 Inhabilita el movimiento hacia la izquierda del motor 3 fin4 C3 Inhabilita el movimiento hacia la derecha del motor 3
Lo cual indica que mientras este presionado el pulsador del fin de carrera número uno, habrá una señal de entrada hacia el pin C0 que indicara a la variable fin1 tomar un valor igual a 1, de lo contrario fin1 será igual a cero. Esta programación permitiría que a través de los puertos de salida se enviaran las señales de activación y desactivación para manipular los circuitos integrados. El puerto de salida designado y su función se encuentran en la siguiente tabla.
Tabla 9. Funcionamiento del microcontrolador esclavo
Valor Salida PIN Función Orden
00 Motor 1
B7 B6
Output high Pin B7 Output low Pin B6 Giro hacia la derecha
01 B7 B6
Output high Pin B6 Output low Pin B7 Giro hacia la izquierda
02 Motor 2
B5 B4
Output high Pin B5 Output low Pin B4 Giro hacia la derecha
03 B5 B4
Output high Pin B4 Output low Pin B5 Giro hacia la izquierda
04 Motor 3
B3 B2
Output high Pin B3 Output low Pin B2 Giro hacia la derecha
05 B3 B2
Output high Pin B2 Output low Pin B3 Giro hacia la izquierda

82
Figura 36. Diagrama de flujo del funcionamiento del sistema esclavo
Para conocer la forma de manejo del prototipo revisar el manual para el usuario que se encuentra en el anexo 1.
4.2.2.2 Circuitos impresos El diseño de los circuitos impresos se realizó en el software EAGLE 2 bajo una licencia de prueba y se enseñan en la figura 37. Posteriormente se imprimieron y se soldaron los dispositivos para finalizar el control remoto y el sistema esclavo de control. Los circuitos impresos finalizados se encuentran en la figura 38.
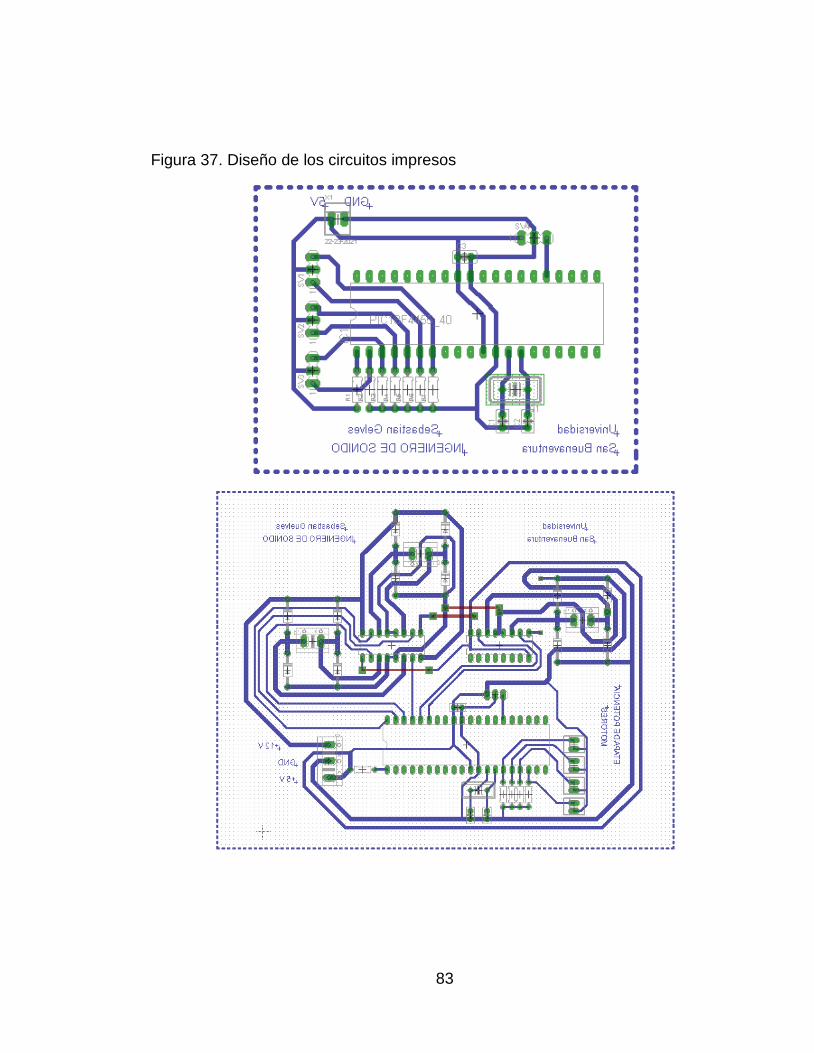
83
Figura 37. Diseño de los circuitos impresos

84
Figura 38. Circuitos impresos finalizados
4.2.6 Montaje Concluido el diseño de cada uno de los elementos mecánicos necesarios para el buen funcionamiento del prototipo, y se finalizó el diseño y la construcción de la parte electrónica para el control de los movimientos, se procedió a realizar el montaje final de ambos sistemas para que al acoplarlos se pudiese probar su funcionamiento (ver figura 39).
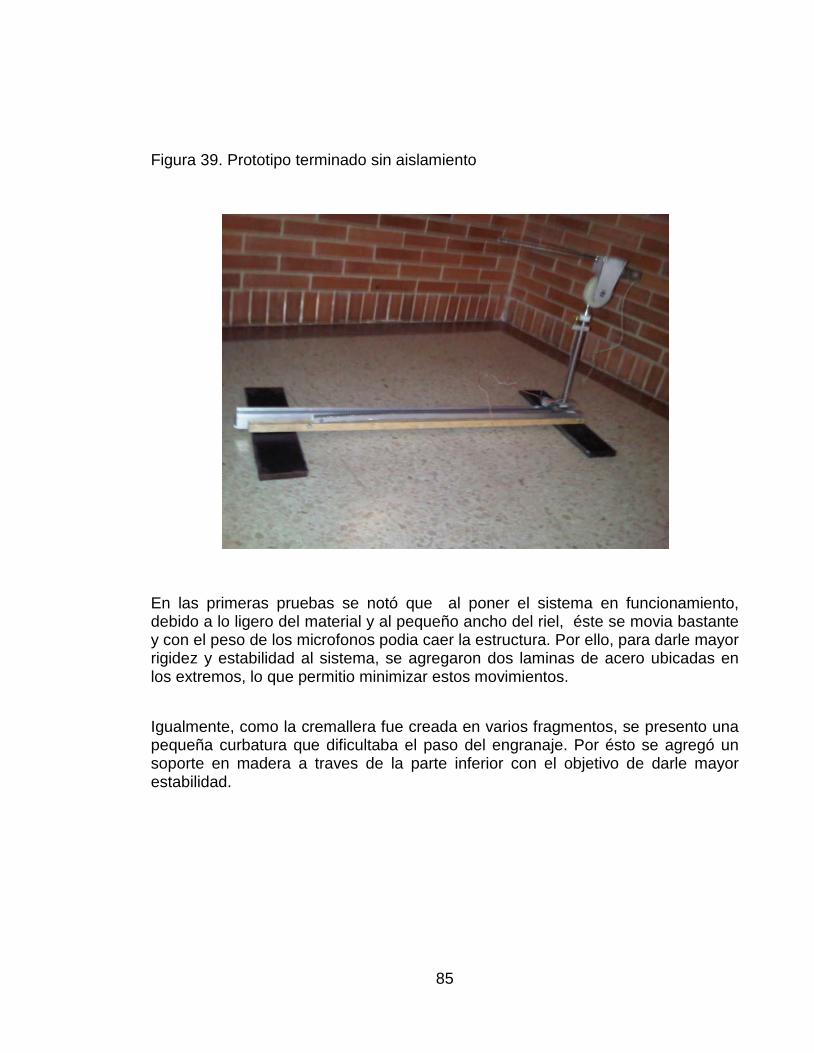
85
Figura 39. Prototipo terminado sin aislamiento
En las primeras pruebas se notó que al poner el sistema en funcionamiento, debido a lo ligero del material y al pequeño ancho del riel, éste se movia bastante y con el peso de los microfonos podia caer la estructura. Por ello, para darle mayor rigidez y estabilidad al sistema, se agregaron dos laminas de acero ubicadas en los extremos, lo que permitio minimizar estos movimientos.
Igualmente, como la cremallera fue creada en varios fragmentos, se presento una pequeña curbatura que dificultaba el paso del engranaje. Por ésto se agregó un soporte en madera a traves de la parte inferior con el objetivo de darle mayor estabilidad.

86
4.3 CONTROL DE RUIDO Y VIBRACIONES
Una vez construido el prototipo y verificado su correcto funcionamiento, se dio inició al tratamiento anti vibratorio para prevenir que la transmisión de vibraciones estructurares impidieran el registro adecuado de las señales acústicas que se pretendiera capturar.
Para ello fue necesario realizar mediciones de ruido y vibración con sonómetros y acelerómetros adecuados para dicha tarea, y en función de los resultados plantear el tratamiento de la estructura.
En un análisis previo a las mediciones, se determinó que en el presente proyecto se aplicarán únicamente técnicas pasivas de control de ruido debido a que el fin de ésta herramienta es para procedimientos de captura y grabación, y de ninguna manera debemos perturbar el campo sonoro al añadir energía adicional al sistema.
4.3.1 Mediciones de ruido y vibraciones preliminares
4.3.1.1 Mediciones de ruido
Las mediciones de ruido se llevaron a cabo en el estudio C de la Universidad de San Buenaventura, con el sonómetro Svantek SVAN 943, ubicado a un metro del dispositivo y a 1.2 metros de altura. Se realizó una medición independiente para cada uno de los movimientos del prototipo. Los resultados de la medición están organizados en las tablas 10, 11 y 12.
• Medición de ruido de fondo
Tabla 10. Nivel de ruido de fondo
Medición de ruido de fondo filtro Leq unidad Spl Lin 38.9 dB 38.6 A 34.9 dB 34.8 C 38.1 dB 37.7

87
• Niveles de ruido
Tabla 11. Niveles de ruido de los sistemas mecánicos
Mediciones de ruido Motor 1
Lin dB 39.7 51.6 A dB 35.8 51.7 C dB 38.7 51.0
Motor 2 Filter units Spl Leq
Lin dB 49.8 42.4 A dB 49.4 42.1 C dB 49.2 41.8
Motor 3 Lin dB 40.1 40.7 A dB 36.1 37.5 C dB 38.8 39.8
Tabla 12. Nivel de ruido emitido por los motores 1, 2 y 3
Motor 1 Motor 2 Motor 3 Motor 1 Motor 2 Motor 3 f[Hz] Lev[dB] f[Hz] Lev [dB]
25 14,9 14,9 14,9 800 35,6 27,1 25,9 31,5 14,9 16,9 17,5 1000 37,4 29,8 27 40 20,2 20,5 19,6 1250 43,4 32 29,6 50 14,9 14,9 14,9 1600 44 30,2 26,1 63 15,5 16,9 14,9 2000 41,5 33,1 25,6 80 20,5 20,8 20,5 2500 41,3 29,1 26,3
100 14,9 14,9 14,9 3150 42,5 32,4 28,3 125 16,2 16,9 16,2 4000 41 33,2 26,8 160 21,7 21,9 21,7 5000 41 30 26,8 200 20,5 17,5 16,9 6300 39,4 31,8 24,8 250 22,9 26,5 19,6 8000 38,2 30,4 25,5 315 25,7 23,6 22,9 10000 33,5 29,9 26 400 27,8 22,8 21,5 12500 27,4 28,1 22,3 500 32,5 25 24,8 16000 22,9 26 20,6 630 33,8 26,9 26,1 20000 25,5 24,8 24,5

88
Figura 40. Niveles de ruido emitidos por cada uno de los motores.
La Figura 40 presenta los niveles de ruido emitidos por los motores del prototipo. El resultado de la medición fue un nivel relativamente bajo para los 3 sistemas de movimiento, siendo el mecanismo de mayor intensidad el sistema cremallera piñón accionado por el motor 1. Éste presentó un ruido cuyo nivel de presión sonora se encuentra principalmente en el rango de frecuencias medias, en especial entre 1 KHz y 6 KHz
4.3.1.2 Mediciones de vibraciones
Las mediciones de vibraciones se llevaron a cabo en el laboratorio de sonido en vivo de la Universidad de San Buenaventura, utilizando el sistema de medición de vibraciones de 01dB dB4. El acelerómetro fue ubicado sobre el punto de ubicación de los micrófonos, y se realizó una medición para cada uno de los movimientos del prototipo. Los resultados de las mediciones se presentan a continuación.
10
15
20
25
30
35
40
45
50
20 200 2000 20000
Niv
el d
e pr
esió
n so
nora
[dB]
Frecuencia [Hz]
Motor 2 giro
Motor 3 brazo
Motor 1 riel

89
• Motor 1
Tabla 13. Vibraciones Motor 1
DURACIÓN VALOR
MÍNIMO VALOR
MÁXIMO PROMEDIO DESVIACIÓN ESTÁNDAR RMS
10,0007 s -99,0874 m/s² 106,8137 m/s² -0,0052 m/s² 14,4903 m/s² 14,4901 m/s²
Figura 41. Vibraciones transmitidas por el motor 1. Aceleración contra tiempo
Figura 42. Vibraciones transmitidas por el motor 1. Frecuencia contra tiempo
Envelop [ID=6] Ch. 1 - Recording - triax x s;m/s² 0 -0.081 9.98535 -0.331
-150
-100
-50
0
50
100
150
0 1 2 3 4 5 6 7 8 9
Envelop [ID=14] Ch. 1 - Recording - triax x s;dB(A) [1.000e-06 m/s²] 0 91.2 9.875 90.6
80
85
90
95
100
105
110
115
120
125
130
135
0 1 2 3 4 5 6 7 8 9 10

90
• Motor 2
DURACIÓN VALOR
MÍNIMO VALOR
MÁXIMO PROMEDIO DESVIACIÓN ESTÁNDAR RMS
9,9678 s -400,3739 m/s² 47,9416 m/s² -0,1888 m/s² 6,1714 m/s² 6,1734 m/s²
Figura 43. Vibraciones transmitidas por el motor dos. Aceleración contra tiempo.
Figura 44. Vibraciones transmitidas por el motor dos. Frecuencia contra tiempo.
Envelop [ID=3] Ch. 1 - Recording - x s;m/s² 0 -0.040 9.94629 -1.108
-400
-350
-300
-250
-200
-150
-100
-50
0
50
0 1 2 3 4 5 6 7 8 9
Envelop [ID=14] Ch. 1 - Recording - x s;dB(A) [1.000e-06 m/s²] 0 95.8 9.75 93.5
80
90
100
110
120
130
140
150
0 1 2 3 4 5 6 7 8 9

91
• Motor 3
DURACIÓN VALOR
MÍNIMO VALOR
MÁXIMO PROMEDIO DESVIACIÓN ESTÁNDAR RMS
39,9988 s -134,9716 m/s² 21,7929 m/s² -0,1051 m/s² 1,9863 m/s² 1,9891 m/s²
Figura 45. Vibraciones transmitidas por el motor tres. Aceleración contra tiempo.
Figura 46. Vibraciones transmitidas por el motor tres. Frecuencia contra tiempo.
Envelop [ID=3] Ch. 1 - Recording - x s;m/s² 0 0.027 39.9265 -0.297
-140
-120
-100
-80
-60
-40
-20
0
20
0 5 10 15 20 25 30 35
Envelop [ID=14] Ch. 1 - Recording - x s;dB(A) [1.000e-06 m/s²] 0 91.6 39.75 91.7
85
90
95
100
105
110
115
120
125
130
135
0 5 10 15 20 25 30 35

92
- Resultados
Con el análisis de vibración se llegó a las siguientes conclusiones:
• Que existe una transferencia de vibración estructural de baja frecuencia a través del prototipo, en un rango entre 110Hz y 130Hz.
• Que las vibraciones se encuentran en un valor promedio de 25m/s² y 35m/s² con picos aleatorios que llegan hasta 50m/s², lo que indica que el sistema no es lo suficientemente rígido y la vibración se transmite fácilmente.
4.3.1.5 Sistema de control de ruido
El tratamiento de control de ruido, fue planteado alrededor del sistema cremallera piñón, el cual presentó el mayor nivel de ruido en el prototipo. Por lo anterior se decidió realizar un encapsulamiento de todo el riel como se muestra en la figura 47.
Figura 47. Diseño del cerramiento del sistema cremallera piñón

93
En la ilustración 47 se ejemplifica el cerramiento propuesto. Éste sería construido en acrílico con las siguientes dimensiones: 112cm de largo, 9cm de alto y 15cm de ancho. Éstas medidas con el fin de abarcar a lo largo y ancho el prototipo, dejando el espacio necesario para ubicar el circuito impreso, y aplicar en todas las superficies interiores un material absorbente en las frecuencias requeridas.
Se optó por utilizar lana de vidrio ya que su coeficiente de absorción es funcional para las frecuencias de rango medio como se ve el en la tabla 14 y es funcional para la atenuación.
Tabla 14. Coeficiente de absorción de la lana de vidrio.
Fuente: Fiberglass Colombia S.A.
Para disminuir la transmisión de ruido se planteo construir el cerramiento como una partición de doble capa con las siguientes características
1. Acrílico 5 milímetros de espesor
2. Lana de vidrio de 1 pulgada de espesor
Los datos de diseño de la partición planteada se ingresaron en el software de predicción acústica INSUL bajo una licencia de prueba, para determinar el índice de pérdida por transmisión ‘TL’, y el STC equivalente (ver figura 48).
Posteriormente, con los valores de TL y el nivel de ruido emitido por el dispositivo se calculó el nivel de presión sonora proyectado (ver tabla 15), y luego estos valores se compararon con el criterio de ruido NC-25, utilizado como regulación para establecer los niveles máximos permisibles de transmisión de ruido en particiones para estudios de grabación. Ésta comparación se encuentra en la figura 49.

94
Figura 48. TL de la partición.
Tabla 15. Comparación entre el nivel de ruido proyectado y el criterio NC 25
Motor 1
banda de tercio de octava
f[Hz] Nivel
motor TL Ruido
proyectado NC 25
63 15,5 6,10 9,40 54 125 16,2 9,10 7,10 44 250 22,9 13,50 9,40 37 500 32,5 18,40 14,00 31
1000 37,4 23,40 14,00 27 2000 41,5 33,30 8,20 24 4000 41 35,90 5,10 22

95
Figura 49. Gráfica de la comparación entre el ruido proyectado y el criterio NC25
Con lo anterior se puede ver que el tratamiento planteado permite reducir en gran manera la transmisión de ruido del mecanismo cremallera piñón, y estaría muy por debajo del criterio NC25. Por lo tanto se procedió a realizar su construcción y montaje en el prototipo. (Ver figura 50).
Figura 50. Foto prototipo terminado con aislamiento
0
10
20
30
40
50
60
63 125 250 500 1000 2000 4000
SPL
(dB)
Frecuencia (Hz)
NC 25
NC 30
Ruido Proyectado

96
4.3.1.6 Medidas de control de vibraciones La principal fuente de vibraciones indeseadas que se presentaron en el prototipo se debe a errores de fabricación y de alineación. Durante la construcción manual de cada una de las piezas móviles, las distancias entre los dientes y la altura de los mismos varían de forma pequeña pero relevante, lo que ocasiona choques, saltos y discontinuidades en el movimiento.
Para corregir esto se debe realizar una importante modificación a los componentes del sistema, buscando que el maquinado sea perfecto, pero por inconvenientes de tiempo y presupuesto ésta solución no fue viable.
Por ello para reducir las fuerzas intermitentes u oscilatorias que producen la vibración, se tomaron las siguientes medidas:
• Se redujo el movimiento de los componentes sobre los cuales actúan las fuerzas haciendo más rígidos los soportes, las conexiones entre las partes y los ajustes a la estructura.
• Se introdujo una pieza de aluminio de seis milímetros de espesor al riel para que el vehículo que transporta el soporte recto se desplazara con mayor presión a sus extremos y los movimientos indeseados fueran minimizados. Así se limitó su libertad de movimiento y se aportó mayor peso y rigidez al riel.
• Se montó una pequeña lámina de neopreno de 4 milímetros de espesor alrededor del soporte recto con el fin de disminuir las vibraciones en las vías de transmisión
• Se redujeron las fuerzas de rozamiento en los engranajes, y el mecanismo cremallera – piñón mediante lubricación.
• Se obstaculizó la transmisión de vibraciones mediante un sistema de desacople en la vía de transmisión que interrumpió la continuidad entre la estructura y el micrófono. Esto se realizo con una pieza de neopreno y polilon de medidas 2.5 cm X 2.5 cm X 4cm.

97
4.3.2 Mediciones de ruido y vibraciones posteriores al tratamiento
4.3.2.1 Mediciones de ruido Se repitió la medición de ruido referente al motor número 1, para evaluar el funcionamiento del cerramiento construido. Los resultados fueron los siguientes.
Tabla 16. Nivel de ruido emitido por el sistema cremallera piñón después del tratamiento.
Motor 1 frec Lev dB frec Lev dB
25 14,9 800 24,6 31,5 16,9 1000 28,5 40 20,5 1250 26,4
50 14,9 1600 31,5 63 16,9 2000 29,1 80 19,8 2500 27,2
100 14,9 3150 25,5 125 16,9 4000 26,9 160 21,4 5000 24,7
200 17,5 6300 24,4 250 15,9 8000 22,8 315 14,7 10000 22
400 18,8 12500 16,4 500 21,5 16000 16,2 630 20,8 20000 14,9

98
Figura 51. Nivel emitido por el dispositivo después del cerramiento
4.3.1.2 Mediciones de vibraciones Las mediciones de vibraciones del prototipo finalizado dieron como resultado una notable disminución en la transmisión vibratoria hacia el punto de soporte del micrófono.
• Motor uno
Tabla 17. Vibraciones motor 1
DURACIÓN VALOR
MÍNIMO VALOR
MÁXIMO PROMEDIO DESVIACIÓN ESTÁNDAR RMS
11,9922 s -300,4556 m/s² 36,2605 m/s² -0,0846 m/s² 5,5148 m/s² 5,5154 m/s² •
10
15
20
25
30
35
20 200 2000 20000
Niv
el [
dB]
Frecuencia
nivel despues del tratamiento

99
Figura 52. Vibraciones transmitidas por el motor uno. Aceleración contra tiempo.
Figura 53. Vibraciones transmitidas por el motor uno. Frecuencia contra tiempo
Envelop [ID=3] Ch. 1 - Recording - triax x s;m/s² 0 0.050 11.9707 -0.801
-300
-250
-200
-150
-100
-50
0
50
0 1 2 3 4 5 6 7 8 9 10 11
Envelop [ID=11] Ch. 1 - Recording - triax x s;dB(A) [1.000e-06 m/s²] 0 94.4 11.75 93.7
80
90
100
110
120
130
140
150
0 1 2 3 4 5 6 7 8 9 10 11

100
• Motor 2.
Tabla 18. Vibraciones motor 2
DURACIÓN VALOR
MÍNIMO VALOR
MÁXIMO PROMEDIO DESVIACIÓN ESTÁNDAR RMS
10,9507 s -45,6551 m/s² 44,9935 m/s² -0,1879 m/s² 4,5052 m/s² 4,5090 m/s²
Figura 54. Vibraciones transmitidas por el motor 2. Aceleración contra tiempo
Envelop [ID=6] Ch. 1 - Recording - triax x s;m/s² 0 -0.061 10.9302 -0.306
-40
-30
-20
-10
0
10
20
30
40
0 1 2 3 4 5 6 7 8 9 10

101
Figura 55. Vibraciones transmitidas por el motor 2. Frecuencia contra tiempo
• Motor 3
Tabla 19 Vibraciones motor 3
DURACIÓN VALOR
MÍNIMO VALOR
MÁXIMO PROMEDIO DESVIACIÓN ESTÁNDAR RMS
32,0159 s -80,6190 m/s² 372,1071 m/s² -0,1737 m/s² 1,7004 m/s² 1,7012 m/s²
Envelop [ID=11] Ch. 1 - Recording - triax x s;dB(A) [1.000e-06 m/s²] 0 95.1 10.75 94.9
85
90
95
100
105
110
115
120
125
130
135
140
0 1 2 3 4 5 6 7 8 9 10

102
Figura 56. Vibraciones transmitidas por el motor 3. Aceleración contra tiempo
Figura 57. Vibraciones transmitidas por el motor 3. Frecuencia contra tiempo
Envelop [ID=1] Ch. 2 - Recording - triax y s;m/s² 0 -0.050 31.9446 -0.347
-100
-50
0
50
100
150
200
250
300
350
0 5 10 15 20 25 30
Envelop [ID=11] Ch. 2 - Recording - triax y s;dB(A) [1.000e-06 m/s²] 0 95.6 31.875 93.9
80
90
100
110
120
130
140
150
0 5 10 15 20 25 30
103
4.4 CAPTURAS Y PRUEBAS DE FUNCIONAMIENTO
Se realizó una producción musical involucrando el prototipo en la captura de una batería en el bombo, y el redoblante, y en una guitarra eléctrica. La captura se llevó a cabo en el estudio A de la Universidad de San Buenaventura. En la producción se utilizaron los siguientes micrófonos.
SHURE SM81 X 2 Ambientes
SHURE SM57 X 2 Redoblante y Guitarra
AKG D112 X 1 Bombo
De cada captura se tomaron tres puntos de referencia, a los cuales se realizó un análisis espectral FFT a través del dispositivo virtual Voxengo SPAN (versión libre) para visualizar las variaciones en frecuencia en función de la ubicación.
4.4.1 captura del bombo El prototipo se ubicó perpendicular al bombo y poco a poco se fue aproximando mediante el movimiento del motor uno hacia el parche. Los puntos de referencia fueron los siguientes:
Punto 1. Extremo derecho a 60 cm del parche
Punto 2. En el eje, a 30 cm
Punto 3. En el eje a 5 cm

104
Figura 58. FFT Bombo. Punto 1
Al iniciar la grabación el micrófono se encontraba fuera del eje, y por ello la señal registrada se encuentra principalmente en contenido de baja frecuencia, principalmente por las reflexiones de la sala. La señal fue de muy baja intensidad y con frecuencia fundamental en 70Hz (Ver figura 62) En esta posición el sonido resulto difuso y poco claro respecto de la señal original.
Figura 59 FFT Bombo. Punto 2
Al ubicar el micrófono en el eje del instrumento el timbre registrado cambió a la forma mostrada en la figura 63. La frecuencia fundamental aún se encontraba en 70Hz pero empezaron a aparecer armónicos y demás sonoridades propias del instrumento que antes no se encontraban en la captura y enriquecieron el sonido. Igualmente la intensidad aumento considerablemente al pasar de -63 dBFS a -57 dBFS.

105
Figura 60. FFT Bombo. Punto 3
Luego al aproximar la base móvil para micrófonos hacia el parche y mover el micrófono de arriba a abajo se encontró un sonido más característico del instrumento: Un timbre más fuerte, seco y con gran cantidad de contenido armónico entre 2 Khz y 4 Khz, que determina el carácter del parche y del golpe del pedal.
4.4.2 Captura del redoblante El redoblante fue registrado variando el ángulo de apertura del motor 3 y la proximidad frente al parche mediante el movimiento del motor 1. Se tomaron tres puntos de referencia para evaluar el comportamiento en frecuencia de las capturas y fueron los siguientes:
Punto uno. Fuera del eje a 20 cm del parche.
Punto dos. Sobre el eje a 10 cm del parche.
Punto tres. Sobre el eje a 2 cm del parche.

106
Figura 61. FFT Redoblante. Punto 1
El timbre del redoblante en el primer momento de ubicación se escucha difuso y sin presencia. El micrófono se encontraba fuera del parche lo que explica su bajo contenido en intensidad, y una débil señal en 200Hz (ver figura 65). Igualmente se presenta una cancelación completa en 1kHz.
Figura 62. FFT Redoblante. Punto 2
Para el segundo punto de referencia, con el motor número dos del prototipo, se realizó un giro para que el micrófono se encontrara bajo el parche, y se encontró que el timbre cambió completamente. El sonido se encontró con una mayor concentración en frecuencias medias altas. Igualmente en el orden de 200 Hz se vio un considerable aumento en la intensidad, lo que le dió mayor cuerpo al sonido capturado. (Ver figura 66.)

107
Figura 63. FFT Redoblante. Punto 3
Finalmente con el motor número tres del prototipo, se buscó elevar el micrófono hacia el parche para obtener una señal más pura del instrumento. Los armónicos del entorchado entre 3 kHz y 10 kHz, tienen una mayor intensidad que en las muestras anteriores y el sonido resultante fue más fuerte seco y brillante lo que le da más fuerza y carácter al sonido.
4.4.4 Captura de la guitarra eléctrica
Se realizó la captura de una guitarra eléctrica Fender Stratocaster y un amplificador Fender Frontman 202r. Para ésta captura la posición del prototipo fue paralela al amplificador, y se realizó un desplazamiento de izquierda a derecha a través del cono. Igualmente se vario el ángulo de apertura mediante el motor dos. Los puntos de referencia para este caso fueron los siguientes:
Punto 1. Extremo derecho y 5 cm fuera del cono sobre el eje
Punto 2. Centro del cono y 30º grados fuera de eje
Punto 3. Extremo izquierdo del cono, sobre el eje

108
Figura 64. FFT guitarra. Punto 1
En la primera posición de captura el micrófono SM57 se encontraba apuntando fuera del amplificador. Todo lo que se escucha en este punto son las reflexiones la guitarra lo que resulto en fuertes cancelaciones a lo largo del rango medio.
Figura 65. FFT guitarra. Punto 2
Poco a poco se fue variando la posición del micrófono a lo largo del amplificador. Primero se modificó el ángulo de apertura con el motor 2 para que el micrófono se encontrase en eje con el amplificador y después se fue desplazando de izquierda a derecha a través de él. El punto de referencia en la figura 69 es en el centro del amplificador. El cambio con respecto a la posición 1 fue evidente de inmediato. El contenido en el rango medio apareció con armónicos en 600 Hz, 1.2K Hz, 2.4 Khz.

109
Figura 66. FFT guitarra. Punto 3
Finalmente el último punto de referencia fue en el extremo derecho del amplificador con el micrófono inclinado 30º grados fuera del eje. Como se ve en la figura 61, en este punto prevaleció el contenido en frecuencias medias altas, especialmente ente 2 khz y 5 khz. El resultado fue un tono más brillante que en los demás puntos de referencia.

110
5. ANÁLISIS DE RESULTADOS
Con los datos obtenidos en las mediciones de ruido y vibraciones se logró apreciar el buen funcionamiento del encapsulamiento del sistema cremallera – piñón al ver una gran disminución en el nivel de presión sonora resultante.
Con el diseño planteado se esperaba que el nivel de presión sonora transmitida cumpliera con el criterio NC25, lo cual no se logró. A pesar de esto se obtuvo una disminución considerable como lo se puede observar en la figura 58. Por ejemplo en 2 KHz se consiguió una disminución de nivel de 18 dB.
Figura 67. Comparación antes y después del cerramiento sobre el riel y el motor 1
Del mismo modo, al comparar los gráficos de aceleración contra tiempo de las vibraciones transmitidas antes y después del tratamiento, se consiguió visualizar una favorable disminución en su valor.
En el motor 1 se puede observar que antes de realizar el tratamiento muchos de los picos máximos superan los 60 m/s², y luego del tratamiento ninguno supera los 47 m/s².
0
5
10
15
20
25
30
35
40
45
50
20 200 2000 20000
Niv
el [d
B]
Frecuencia [Hz]
Nivel Antes del tratamiento
Nivel después del tratamiento

111
Así mismo, las vibraciones del motor 2 que se hallaban en su mayoría entre 20 m/s² y 25 m/s², y picos que llegaban hasta 50 m/s², se lograron reducir hasta tal punto que los picos máximos aparecieran inferiores a 40 m/s² y la transferencia de vibraciones resultante se concentro entre 10 m/s² y 20 m/s².
Para el motor número tres, la transferencia fue en ambos casos inferior a la de los mecanismos restantes, y tras el tratamiento se logro reducir aproximadamente de 12 m/s² a 8 m/s² a lo largo de su funcionamiento.
Esta disminución en las vibraciones se verificó al comparar la media cuadrática RMS de cada mecanismo como se observa en la tabla 20. En ésta tabla se ve que la mayor reducción de vibraciones se presentó en el motor uno, seguida de los motores dos y tres respectivamente.
Tabla 20. Comparación de los valores RMS de cada uno de los motores
RMS Diferencia Antes Después
Motor 1 14,4901 5,5154 8,9747 Motor 2 6,1734 4,509 1,6644 Motor 3 1,9891 1,7012 0,2879
En cuanto a la frecuencia de las vibraciones, se observó una notable reducción en la frecuencia de transmisión debido al aumento de rigidez y masa en la estructura.
Para el motor uno se obtuvo una disminución de aproximadamente 8 Hz en comparación con las mediciones preliminares. Para el motor 2, cuya frecuencia varió desde 110 Hz y 135 Hz, el margen de oscilaciones se redujo a 115 Hz y 125 Hz como se puede ver en la figura 69. Finalmente, las vibraciones del motor numero 3, cuya influencia nunca fue tan crítica como en los motores anteriores, se logró estabilizar en 120 Hz. (Ver figuras 59, 60 y 61)

112
Figura 68. Comparación entre las frecuencias de vibración en el motor 1
Figura 69. Comparación entre las frecuencias de vibración en el motor 2
Figura 70. Comparación entre las frecuencias de vibración en el motor 3
90
100
110
120
130
140
0 2 4 6 8 10
Frec
uenc
ia (H
z)
Tiempo (s)
Antes
Despues
90
100
110
120
130
140
0 2 4 6 8 10
Frec
uenc
ia (H
z)
Tiempo (s)
Antes
Despues
90
100
110
120
130
140
0 2 4 6 8 10
Frec
uenc
ia (H
z)
Tiempo (s)
Antes
Despues

113
6. CONCLUSIONES
• La base móvil para micrófonos se probó como un prototipo funcional, práctico y eficiente para variar el posicionamiento de microfonía en producciones musicales. Los elementos mecánicos y el diseño planteado, permitieron un correcto funcionamiento de la base para que se desplazara alrededor de los instrumentos y diferentes fuentes sonoras.
• Con el diseño electrónico se logró controlar eficientemente el sistema, a pesar de que las limitaciones de transmisión serial de información, impidieron que la distancia entre el control remoto y el dispositivo superara una longitud mayor a dos metros.
• El encapsulamiento construido alrededor del riel, redujo efectivamente el nivel de presión sonora emitido por el dispositivo. Aunque se esperaba una atenuación mayor que cumpliera con el criterio NC25, no se consiguió llegar a ese nivel; en parte por la necesidad de dejar una apertura en la parte superior que permitiera el desplazamiento del soporte recto a través del cerramiento, y en parte por las diferencias en las características de los materiales utilizados en el cálculo y en la práctica. Aún así, se obtuvo una disminución considerable a lo largo del espectro audible y se minimizó la intervención de éste ruido en las capturas.
• La principal fuente de vibraciones que exhibió el prototipo tenía su origen en los errores de fabricación de los elementos mecánicos y móviles, lo cual dificultó el óptimo funcionamiento de la base. Por inconvenientes de tiempo y presupuesto no fue posible realizar un rediseño de estos elementos para que su maquinado fuera perfecto y se minimizaran al máximo las vibraciones. Pero al aumentar la rigidez y la masa, e interrumpir con materiales elásticos las vías de transmisión se consiguió reducir la propagación de vibraciones en la estructura.
114
• Mediante las señales registradas al variar la ubicación de los micrófonos, se consiguió ver un gran cambio tanto en intensidad como en el comportamiento espectral de cada instrumento. Las capturas procedieron sin interrumpir la interpretación de los músicos, y aunque al desplazar el prototipo mediante el motor número uno se alcanzó a filtrar el ruido propio de los mecanismos en la captura, éste no es relevante a la hora de registrar altos niveles de presión sonora.

115
7. RECOMENDACIONES
Para el desarrollo de una nueva base móvil para posicionamiento de microfonía a distancia, primero debo recomendar que la construcción de cada uno de los elementos mecánicos sea minuciosa, exigente y detallada para minimizar los errores de fabricación, e igualmente de ser posible utilizar materiales que reduzcan la fricción entre elementos móviles, pues esto permitiría disminuir el ruido emitido.
Para enriquecer este proyecto muchas ideas surgieron durante cada etapa de desarrollo. En materia de electrónica facilitaría mucho tener el control de velocidad y dirección de movimiento de los motores a través de potenciómetros en lugar de interruptores, y por supuesto, implementar un sistema que permita tener un control inalámbrico de la base. De misma forma, para permitir un posicionamiento mucho más puntual se podrían implementar servomotores en lugar de moto reductores para así, poder dar órdenes en función de distancias y ángulos específicos.
También, sería muy interesante aplicar al prototipo un sistema de visualización de la ubicación del micrófono y la variación del espectro en frecuencia directamente en el control, ya que en muchas ocasiones es complicado establecer a ciencia cierta la distancia que separa la capsula del micrófono de la fuente con tan solo una mirada.

116
BIBLIOGRAFÍA
BARTLETT, A. Bruce. Tonal Effects of Close Microphone Placement. 69 AES Convention. 1981.
BELL, H. Lewis y BELL. H. Douglas. Industrial Noise Control. 1993.
BERANEK, Leo. L. Noise and Vibration Control Engineering: Principles and Applications.
BIES, A. David y HANSEN, H. Colin. Engineering Noise Control. Spon press. 1996.
CARNEGIE MELLON UNIVERSITY. Introduction to Mechanisms. Mc graw Hill. 1998.
CASILLAS, A.L. Máquinas. Cálculos de taller. Ed Hispanoamérica. 1984.
C.R. Fuller, J.S. Elliot, y P.A. Nelson. Active control of vibration. Academic press, 1996. DAVIS, Don. Equivalent Acoustic Distance, AES Journal. Volume 21.1973.
HARPER, Enriquez Gilberto. El libro práctico de los generadores, transformadores y motores eléctricos. Editorial Limusa, 2004.
HARRIS, M.Cyril. Harris’ shock and Vibration Handbook, Mcgraw Hill. 6 ed. 2010.
-------. Manual de medidas acústicas y control del ruido. Mc Graw-Hill. 1995.
HUBER, David. Modern Recording Techniques.Focal press. 2001.

117
NIKOLOV MILANOV, Emil y BLAGOEVA MILANOVA, Elena. Proximity Effect Frequency Characteristics of Directional Microphones. 108 AES convention. 2000.
SANCHES, Julio. Microcontroller programming. CRC Press. 2007

3
ANEXO 1
BASE MOVIL PARA MICROFONOS CONTROLADA A DISTANCIA
MANUAL DEL USUARIO
Por: Juan Sebastián Gelves Gómez

4
CONTENIDO
I. Antes de empezar
II. Especificaciones
III. Instrucciones de instalación
IV. Modo de uso

5
I. ANTES DE EMPEZAR
La base móvil para micrófonos es un prototipo diseñado para manipular a distancia la ubicación y el posicionamiento de la microfonía en estudios de grabación profesionales. Para esto debe ser situado en un ambiente libre de obstáculos y con buena iluminación, siendo el objetivo obtener el mayor rendimiento posible de sus micrófonos, los instrumentos musicales que se hayan de capturar y los campos acústicos de su recinto.
Con ésta herramienta usted podrá desplazar en tiempo real la posición de sus micrófonos, lo que le permitirá encontrar con gran precisión, la posición más adecuada para la grabación de cualquier proyecto musical directamente en captura y en el menor tiempo posible, todo esto sin tener que desplazarse del control room.

6
II. ESPECIFICACIONES
Alimentación
El prototipo tiene dos entradas de voltaje que deben ser conectadas; la primera que circula y alimenta a los circuitos integrados, y la segunda que alimenta los motores. Estas tensiones son de 5 y 12 voltios respectivamente.
Circuito 1.
Alimentación: 5 V
Consumo de corriente 1.56 mA
Impedancia 3.2 MΩ
Circuito 2.
Alimentación: 12 V
Consumo de corriente 0.72 mA
Impedancia 16.6 MΩ
El dispositivo está compuesto por los siguientes elementos:
a) Una base para micrófonos en aluminio articulada con engranajes b) Tres moto reductores, cada uno acoplado a las partes móviles del prototipo c) Un control remoto d) Cerramiento: Acrílico negro, con una superficie de lana de vidrio al interior
para minimizar la transmisión de ruido al exterior.
La siguiente figura muestra cada una de estas partes:

7
FIGURA 1
(1) Movimiento de proximidad – (2) Movimiento de giro – (3) Movimiento de elevación

8
III. INSTRUCCIONES DE INSTALACIÓN
Se debe verificar que cada una de las partes del prototipo estén correctamente montadas y conectadas a la váquela de control como se indica en la siguiente figura continuación.
Antes de probar el prototipo verifique que los sistemas mecánicos estén debidamente lubricados, que no exista ningún mecanismo suelto o sin estar debidamente ajustado.
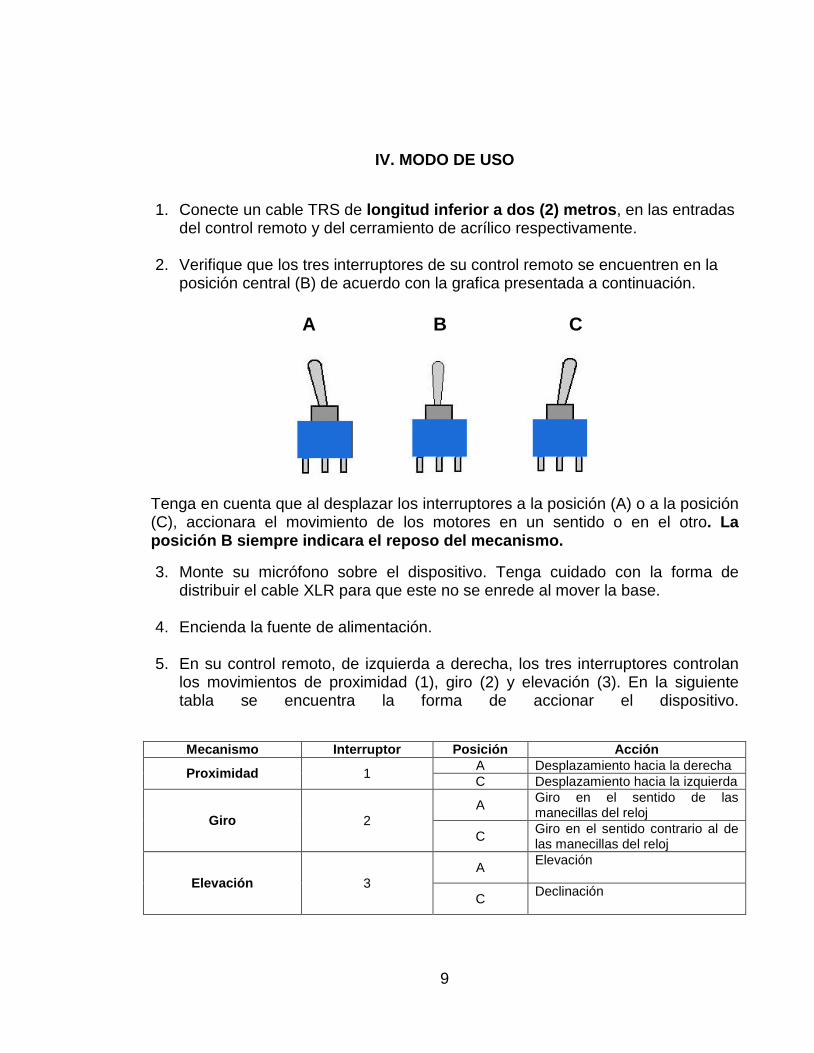
9
IV. MODO DE USO
1. Conecte un cable TRS de longitud inferior a dos (2) metros, en las entradas del control remoto y del cerramiento de acrílico respectivamente.
2. Verifique que los tres interruptores de su control remoto se encuentren en la posición central (B) de acuerdo con la grafica presentada a continuación.
A B C
Tenga en cuenta que al desplazar los interruptores a la posición (A) o a la posición (C), accionara el movimiento de los motores en un sentido o en el otro. La posición B siempre indicara el reposo del mecanismo.
3. Monte su micrófono sobre el dispositivo. Tenga cuidado con la forma de distribuir el cable XLR para que este no se enrede al mover la base.
4. Encienda la fuente de alimentación.
5. En su control remoto, de izquierda a derecha, los tres interruptores controlan los movimientos de proximidad (1), giro (2) y elevación (3). En la siguiente tabla se encuentra la forma de accionar el dispositivo.
Mecanismo Interruptor Posición Acción
Proximidad 1 A Desplazamiento hacia la derecha C Desplazamiento hacia la izquierda
Giro 2 A Giro en el sentido de las
manecillas del reloj
C Giro en el sentido contrario al de las manecillas del reloj
Elevación 3 A Elevación
C Declinación

10
6. Realice una variación de la posición de la base móvil para micrófonos mediante las instrucciones de la tabla anterior. Realice pequeños desplazamientos y siempre regrese a la posición central (B) para escuchar los cambios efectuados. Repita el procedimiento hasta encontrar el sonido deseado.