descripciÓn del sistema - profesaulosuna.com · para calcular la distancia del recorrido del...
TRANSCRIPT

DESCRIPCIÓN DEL SISTEMA.
2.1 Funcionamiento del Sistema.
El sistema implementado para realizar las acciones de control involuca piezas
mecánicas, circuitos, microcontroladores, diversos medios de comunicación y
equipos de compúto.
Una descripción general del funcionamiento del sistema se presenta a
continuación: Un motor mueve una serie de engranes que a su vez mueven una
pieza dentada conectada directamente a un carro que está montado sobre un par
de rieles. El movimiento del carro desplaza el sintonizador de un potenciómetro
conectado en la parte inferior del éste.
La señal generada por el potenciómetro es proporcional a la posición del
carro (variable controlada). Esta señal se acondiciona y se filtra para disminuir el
riudo y pueda se utilizada en el microcontrolador 1 (M1). Posteriormente, en el
microcontrolador 1 (M1), la señal se convierte en forma digital, para que se
procesen las posición obtenida.

M1 envía por medio de comunicación en paralelo los datos que
representan la posicón del carro al microcontrolador 2 (M2). M2 se encarga de la
implementación de las acciones de control y genera las señales de PWM que
regulan al puente H. El sentido y la velocidad del motor dependen de la señal
proveniente del puente H, es decir, del ciclo del trabajo de las señales de PWM
generadas en M2.
Los interruptores, ubicados en los extremos del recorrido del carro, se
conectan a los microcontrolador para indicar que el carro no puede desplazarce
más y se deben detener las señales de PWM. Los microcontroladores generan los
voltajes de referencia para el convertidor A/D, con el fin de que el rango de
desplazamiento tenga los 10bits del convertidor A/D.
Por otra parte, M1 se comunica serialmente con la computadora
(servidor) quien envía todas las intrucciones de control al sistema, es decir, se
selecciona la acción de control, el inicio de la acción de control, detener la acción
de control, la posición deseada, el cambio de la velocidad de la comunicación
serial entre otras instrucciones. Asimismo, por este medio, M1 envía los datos que
representan la posición del carro al servidor.
Estos datos se envían de forma continua hasta que se reciba la instrucción
para detener la transmisión de datos. Por último el usuario envía los parámetros y
ordenes de control a través de una página de Internet (cliente).

2.2 Diagrama a Bloques.
Una vez descrito el funcionamiento del sistema se realiza un diagrama a
bloques para epresentarlo. A continuación se describe el diagrama para
comprender el desempeño y la función de cada bloque.
!"#
!"#
!$#
!$#
%%
Figura 2.1 Diagrama a Bloques del Sistema.
2.2.1 Planta.
Como se mencionó en el capítulo anterior la planta es el conjunto de partes que
funcionan juntas para ejecutar una operación en particular. La planta se diseño a
partir de la idea de un sistema sencillo para que el usuario lo comprenda
fácilmente. En este caso la idea surgió de un lector de discos compactos.
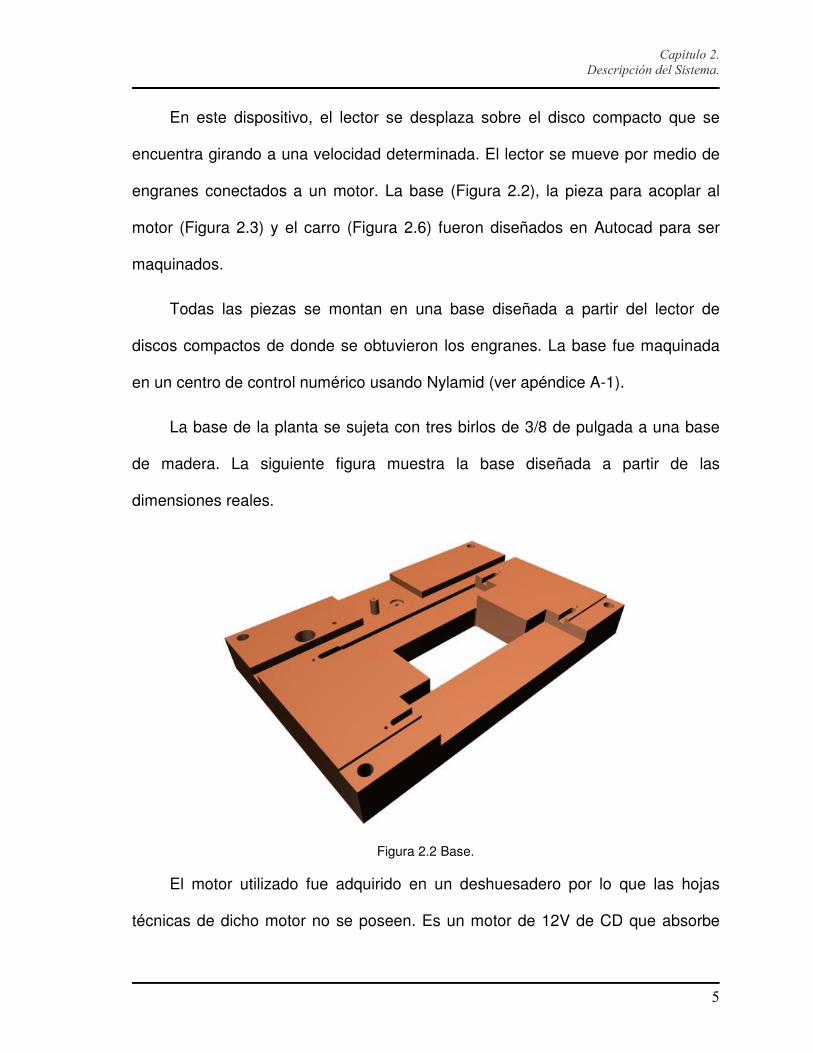
En este dispositivo, el lector se desplaza sobre el disco compacto que se
encuentra girando a una velocidad determinada. El lector se mueve por medio de
engranes conectados a un motor. La base (Figura 2.2), la pieza para acoplar al
motor (Figura 2.3) y el carro (Figura 2.6) fueron diseñados en Autocad para ser
maquinados.
Todas las piezas se montan en una base diseñada a partir del lector de
discos compactos de donde se obtuvieron los engranes. La base fue maquinada
en un centro de control numérico usando Nylamid (ver apéndice A-1).
La base de la planta se sujeta con tres birlos de 3/8 de pulgada a una base
de madera. La siguiente figura muestra la base diseñada a partir de las
dimensiones reales.
Figura 2.2 Base.
El motor utilizado fue adquirido en un deshuesadero por lo que las hojas
técnicas de dicho motor no se poseen. Es un motor de 12V de CD que absorbe
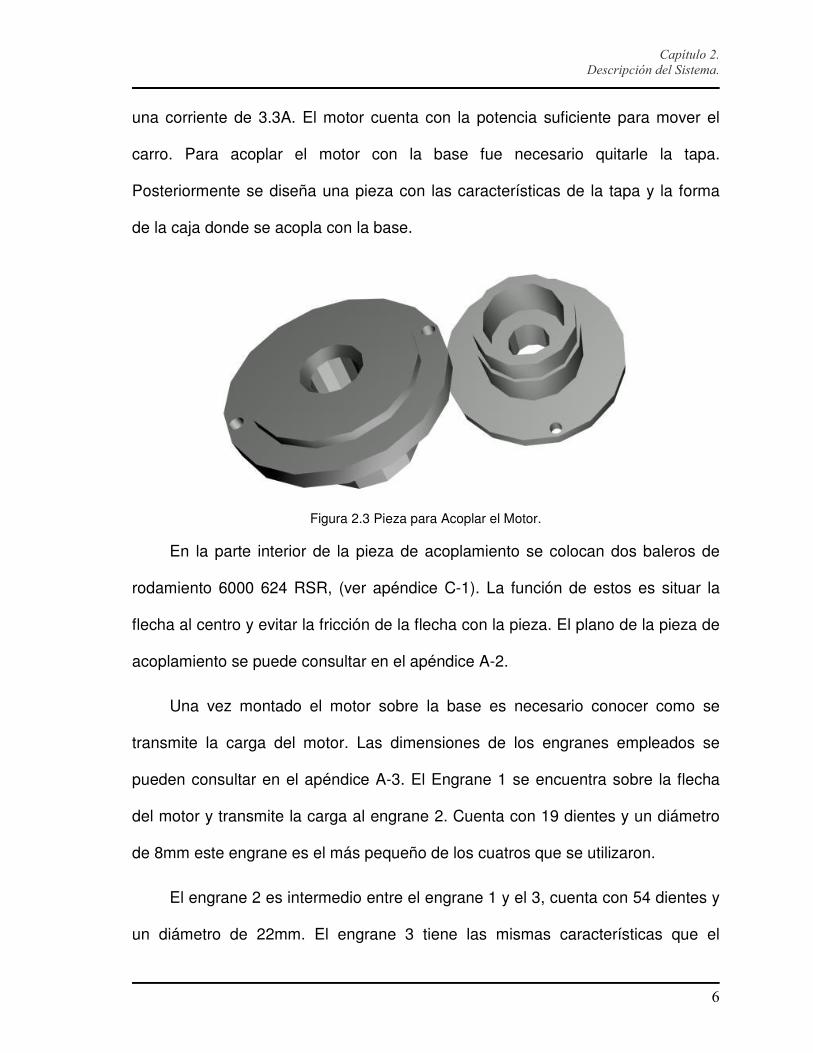
una corriente de 3.3A. El motor cuenta con la potencia suficiente para mover el
carro. Para acoplar el motor con la base fue necesario quitarle la tapa.
Posteriormente se diseña una pieza con las características de la tapa y la forma
de la caja donde se acopla con la base.
Figura 2.3 Pieza para Acoplar el Motor.
En la parte interior de la pieza de acoplamiento se colocan dos baleros de
rodamiento 6000 624 RSR, (ver apéndice C-1). La función de estos es situar la
flecha al centro y evitar la fricción de la flecha con la pieza. El plano de la pieza de
acoplamiento se puede consultar en el apéndice A-2.
Una vez montado el motor sobre la base es necesario conocer como se
transmite la carga del motor. Las dimensiones de los engranes empleados se
pueden consultar en el apéndice A-3. El Engrane 1 se encuentra sobre la flecha
del motor y transmite la carga al engrane 2. Cuenta con 19 dientes y un diámetro
de 8mm este engrane es el más pequeño de los cuatros que se utilizaron.
El engrane 2 es intermedio entre el engrane 1 y el 3, cuenta con 54 dientes y
un diámetro de 22mm. El engrane 3 tiene las mismas características que el
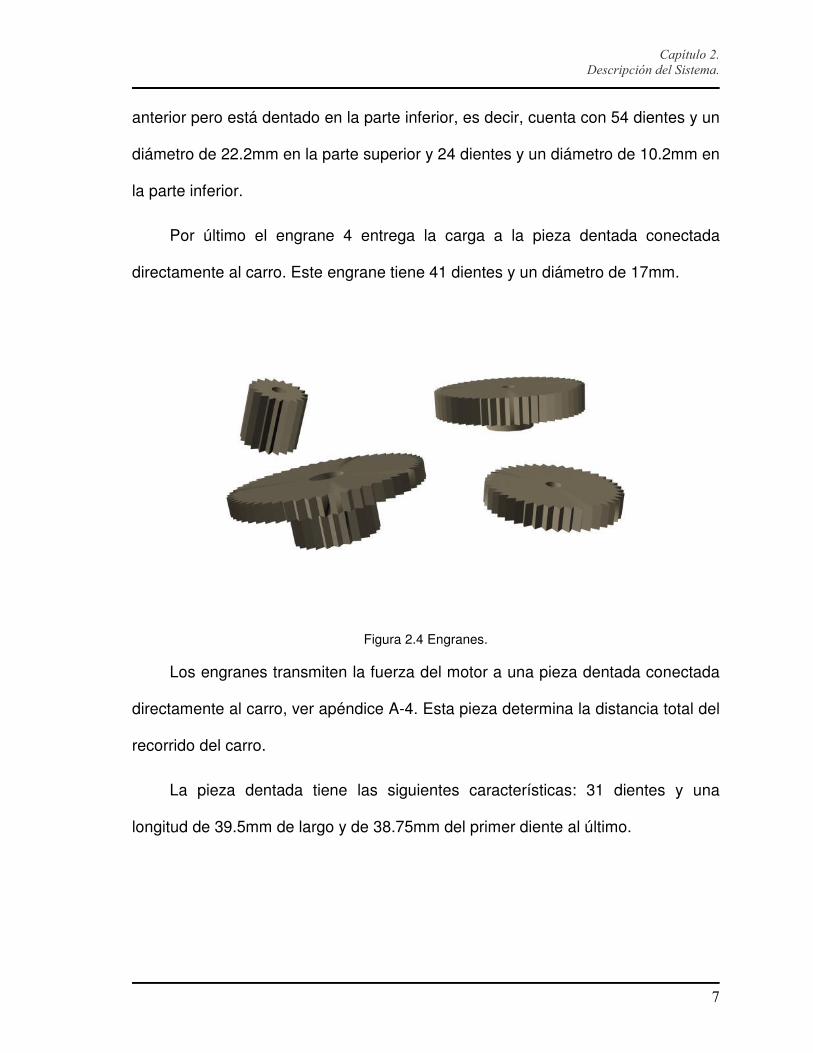
anterior pero está dentado en la parte inferior, es decir, cuenta con 54 dientes y un
diámetro de 22.2mm en la parte superior y 24 dientes y un diámetro de 10.2mm en
la parte inferior.
Por último el engrane 4 entrega la carga a la pieza dentada conectada
directamente al carro. Este engrane tiene 41 dientes y un diámetro de 17mm.
Figura 2.4 Engranes.
Los engranes transmiten la fuerza del motor a una pieza dentada conectada
directamente al carro, ver apéndice A-4. Esta pieza determina la distancia total del
recorrido del carro.
La pieza dentada tiene las siguientes características: 31 dientes y una
longitud de 39.5mm de largo y de 38.75mm del primer diente al último.

Figura 2.5 Pieza Dentada.
La pieza dentada se une permanentemente al carro con silicón y pegamento.
El carro que se desplaza también fue maquinado en un CNC (ver apéndice A-5).
Figura 2.6 Carro Deslizable.
Este carro cuenta con las siguientes características: En la parte superior
tiene una caja para que la pieza anterior se acople de forma permanente. También
tiene dos barrenos de 3mm de diámetro en la parte lateral en los cuales van los
rieles. Sobre estos rieles se desplaza el carro, por lo que la fricción entre el carro y
los rieles debe ser mínima. En la parte inferior, dentro de otro barreno se coloca el
sintonizador del potenciómetro. Para asegurar el sintonizador hay un barreno en la
parte lateral del carro, donde se coloca un prisionero.
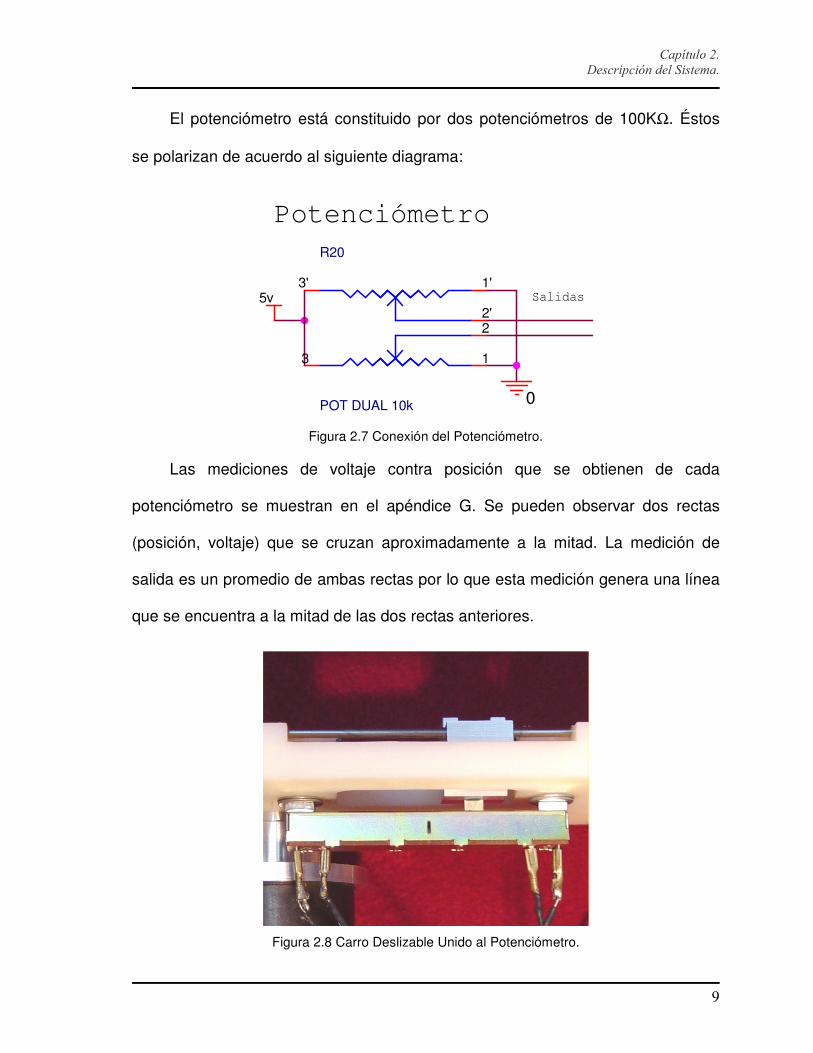
El potenciómetro está constituido por dos potenciómetros de 100KΩ. Éstos
se polarizan de acuerdo al siguiente diagrama:
5v Salidas
Potenciómetro
0
R20
POT DUAL 10k
3'
2
3 1
1'
2'
Figura 2.7 Conexión del Potenciómetro.
Las mediciones de voltaje contra posición que se obtienen de cada
potenciómetro se muestran en el apéndice G. Se pueden observar dos rectas
(posición, voltaje) que se cruzan aproximadamente a la mitad. La medición de
salida es un promedio de ambas rectas por lo que esta medición genera una línea
que se encuentra a la mitad de las dos rectas anteriores.
Figura 2.8 Carro Deslizable Unido al Potenciómetro.
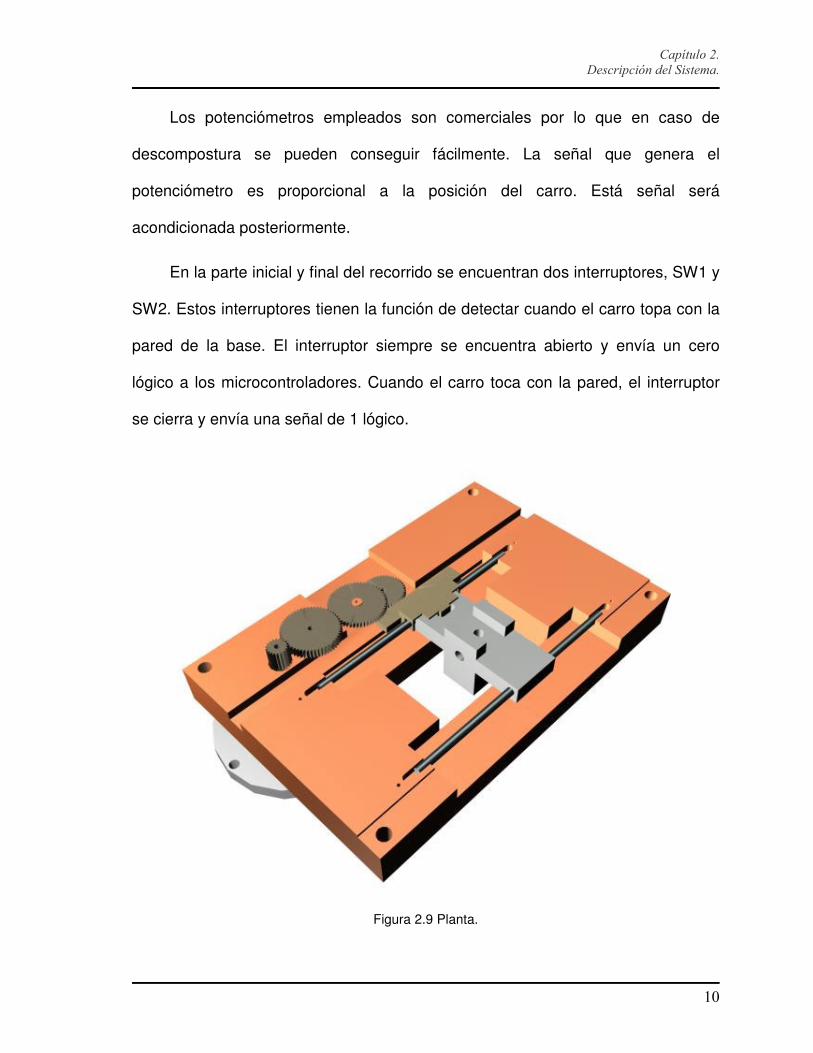
Los potenciómetros empleados son comerciales por lo que en caso de
descompostura se pueden conseguir fácilmente. La señal que genera el
potenciómetro es proporcional a la posición del carro. Está señal será
acondicionada posteriormente.
En la parte inicial y final del recorrido se encuentran dos interruptores, SW1 y
SW2. Estos interruptores tienen la función de detectar cuando el carro topa con la
pared de la base. El interruptor siempre se encuentra abierto y envía un cero
lógico a los microcontroladores. Cuando el carro toca con la pared, el interruptor
se cierra y envía una señal de 1 lógico.
Figura 2.9 Planta.
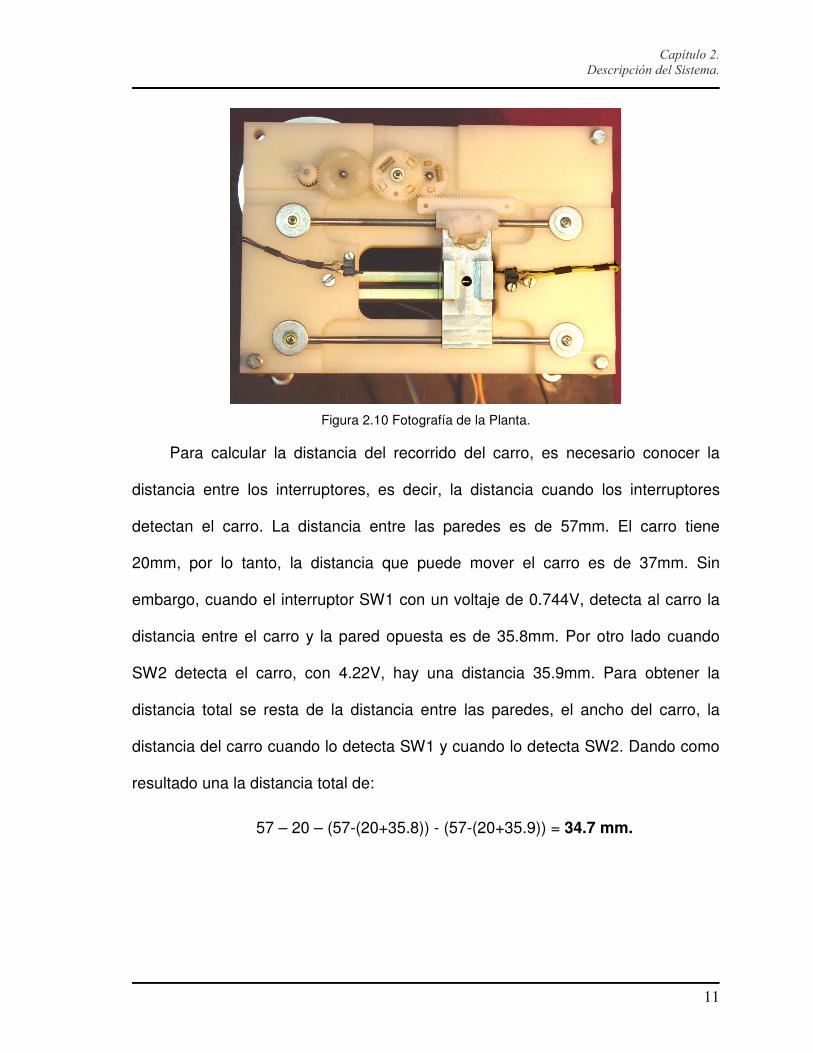
Figura 2.10 Fotografía de la Planta.
Para calcular la distancia del recorrido del carro, es necesario conocer la
distancia entre los interruptores, es decir, la distancia cuando los interruptores
detectan el carro. La distancia entre las paredes es de 57mm. El carro tiene
20mm, por lo tanto, la distancia que puede mover el carro es de 37mm. Sin
embargo, cuando el interruptor SW1 con un voltaje de 0.744V, detecta al carro la
distancia entre el carro y la pared opuesta es de 35.8mm. Por otro lado cuando
SW2 detecta el carro, con 4.22V, hay una distancia 35.9mm. Para obtener la
distancia total se resta de la distancia entre las paredes, el ancho del carro, la
distancia del carro cuando lo detecta SW1 y cuando lo detecta SW2. Dando como
resultado una la distancia total de:
57 – 20 – (57-(20+35.8)) - (57-(20+35.9)) = 34.7 mm.
2.2.2 Puente H.
La señal PWM generada por los microcontroladores es TTL, está señal no se
puede utilizar para controlar el motor, es necesario usar una señal de 12V con
3.3A. El puente H tiene la función de manejar al motor por medio de una señal
TTL, es decir, la señal TTL se convierte en una señal de 0V a 12V. El puente H se
alimenta con una fuente de 18V y 5A capaz de soportar al motor.
Asimismo, por medio de las dos señales de PWM se controla el giro del
motor. El ciclo de trabajo de la señal de PWM determina la velocidad del motor, si
el ciclo de trabajo es pequeño, la velocidad del motor es lenta y si el ciclo de
trabajo es grande, el motor se mueve rápido. La señal de PWM se genera en M2 y
la frecuencia se determina en el programa implementado en el M1. La frecuencia
de la señal generada en M1 es de 294 117.647Hz. Luego se divide entre 255,
dando como resultado una frecuencia de 1.153402KHz para las señales de PWM.
0
VCC
Q2Darlington
1
2
Q3Darlington
1
2
Q3Darlington
Q4Darlington
&'(
)*+,)*+-
,
-
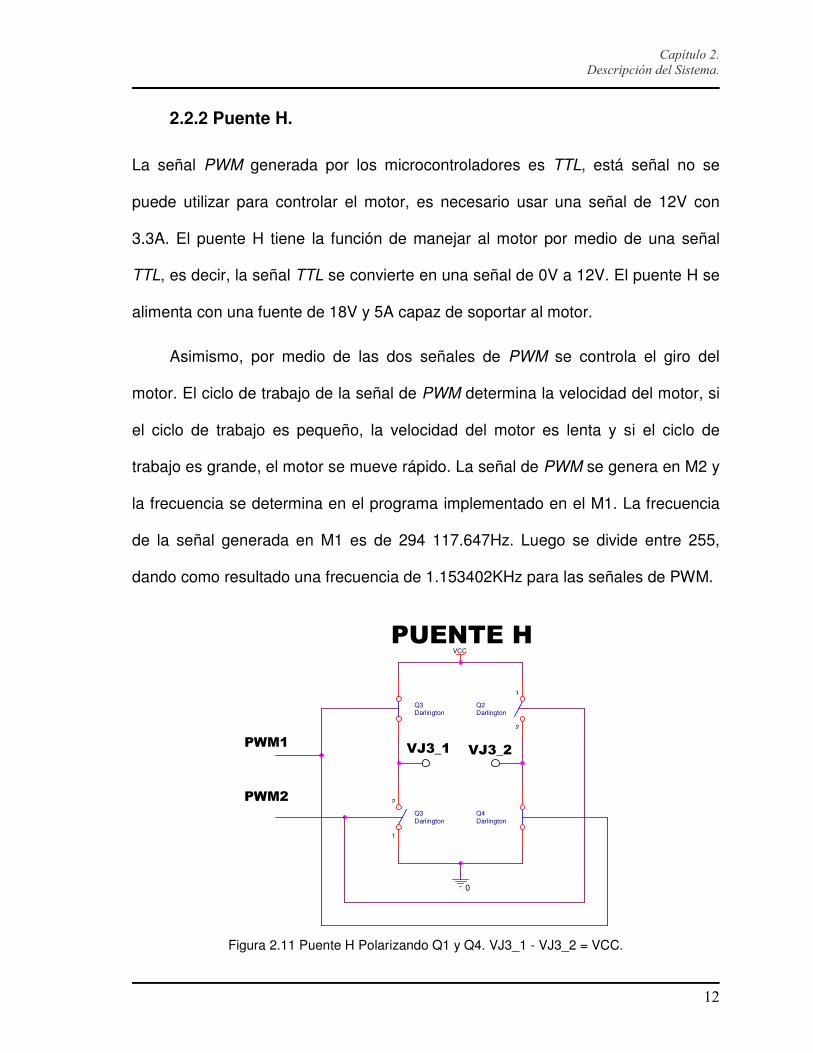
Figura 2.11 Puente H Polarizando Q1 y Q4. VJ3_1 - VJ3_2 = VCC.
PWM1 se define como la señal de PWM que se envía por el canal 1 y la
señal PWM que se envía por el canal 2 se define como PWM2.
En la figura anterior cuando existe un voltaje positivo en la señal de PWM1,
el VCE del transistor Q1 y Q4 es igual a 0V, mientras que el voltaje VCE de los
transistores Q2 y Q3, que están controlados al canal del PWM2, es diferente de
cero, por lo que el voltaje entre VJ3_1 y VJ3_2 es positivo igual a VCC.
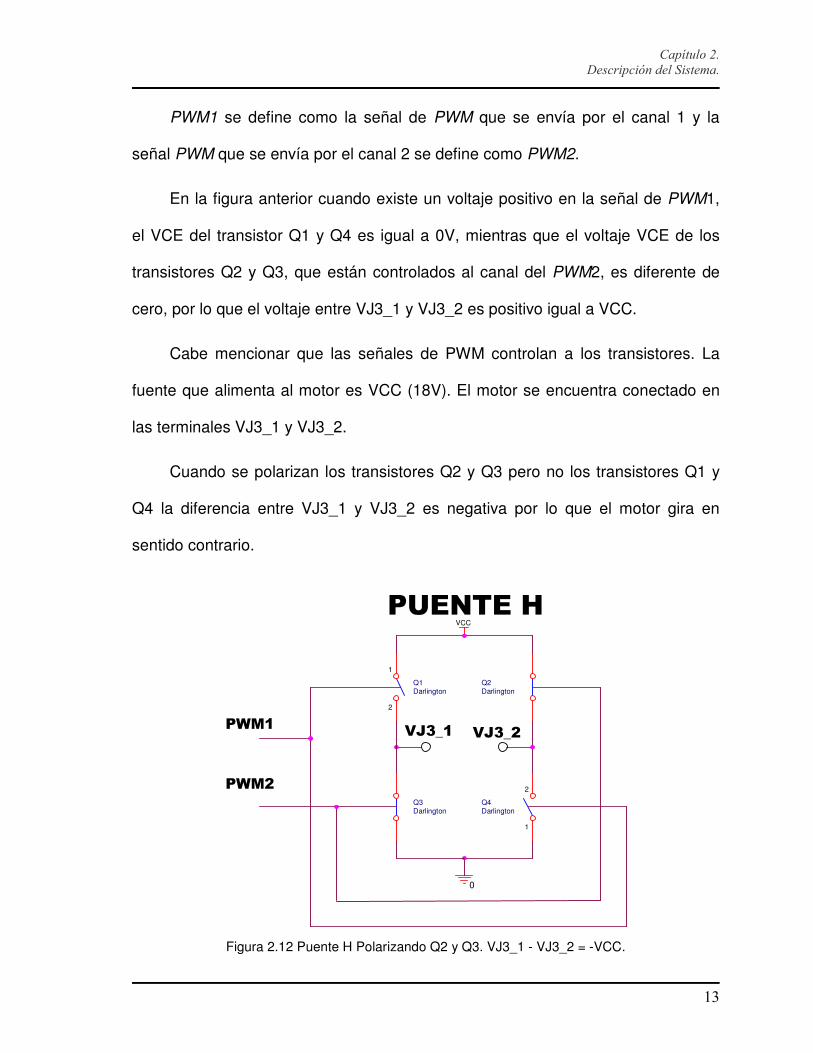
Cabe mencionar que las señales de PWM controlan a los transistores. La
fuente que alimenta al motor es VCC (18V). El motor se encuentra conectado en
las terminales VJ3_1 y VJ3_2.
Cuando se polarizan los transistores Q2 y Q3 pero no los transistores Q1 y
Q4 la diferencia entre VJ3_1 y VJ3_2 es negativa por lo que el motor gira en
sentido contrario.
VCC
0
Q1Darlington
1
2
Q4Darlington
1
2
Q3Darlington
Q2Darlington
)*+- )*+,
,
-
&'(
Figura 2.12 Puente H Polarizando Q2 y Q3. VJ3_1 - VJ3_2 = -VCC.
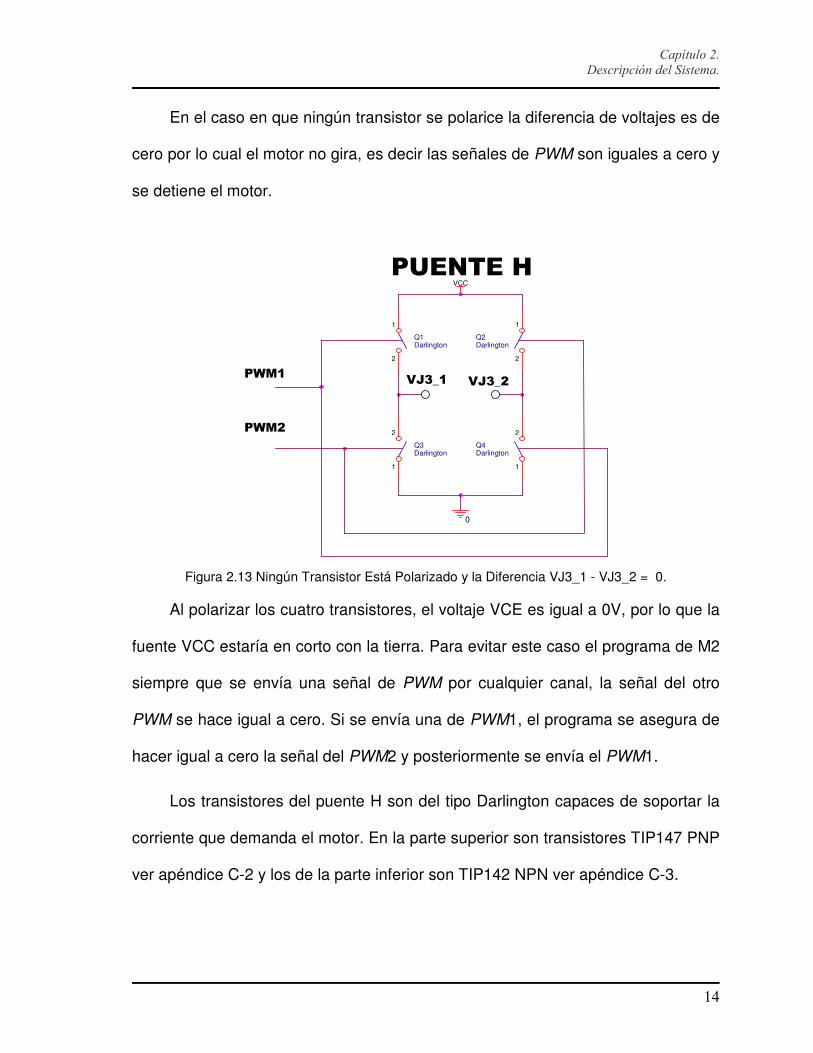
En el caso en que ningún transistor se polarice la diferencia de voltajes es de
cero por lo cual el motor no gira, es decir las señales de PWM son iguales a cero y
se detiene el motor.
VCC
0
Q1Darlington
1
2
Q3Darlington
1
2
Q2Darlington
1
2
Q4Darlington
1
2
-
,
)*+- )*+,
&'(
Figura 2.13 Ningún Transistor Está Polarizado y la Diferencia VJ3_1 - VJ3_2 = 0.
Al polarizar los cuatro transistores, el voltaje VCE es igual a 0V, por lo que la
fuente VCC estaría en corto con la tierra. Para evitar este caso el programa de M2
siempre que se envía una señal de PWM por cualquier canal, la señal del otro
PWM se hace igual a cero. Si se envía una de PWM1, el programa se asegura de
hacer igual a cero la señal del PWM2 y posteriormente se envía el PWM1.
Los transistores del puente H son del tipo Darlington capaces de soportar la
corriente que demanda el motor. En la parte superior son transistores TIP147 PNP
ver apéndice C-2 y los de la parte inferior son TIP142 NPN ver apéndice C-3.

El control de los transistores Darlington se realiza por medio de transistores
de pequeña señal empleando configuraciones de polarización por colector común
y emisor común. Se utilizan los transistores 2N2222 (ver apéndice C-4) y 2N2907
(ver apéndice C-5).
Los transistores Darlington PNP se polarizan como se muestra en el
siguiente diagrama:
Q4
TIP142
Q2
TIP147
0
Q1
TIP147
Q3
TIP142
R6a1k
PWMCanal 2
R61k
R8a1k
R81k
R110k
R210k
Q6Q2N2222
M1
MOTOR DC
1 2
R510k
PWMCanal 1
Q5Q2N2222
18 V
0
R710k
Figura 2.14 Circuito para Polarizar el Transistor TIP147 PNP.
Las señales de PWM enviadas por M2 son de tipo TTL, varían en rangos de
0V a 5V. Cuando hay 5V en la base del transistor 2N2222, el voltaje en el colector
es de 8.1946V. Este voltaje entra a la base del transistor TIP147 PNP y se satura
el transistor, el voltaje VCE es de - 3.82V. Cuando el voltaje en la base del
transistor 2N2222 es de 0V, el Voltaje de colector es 18V, por lo que el VBE del
transistor Darlington es 0V, es decir, no está polarizado. El voltaje del colector es
igual al voltaje del colector del transistor de la parte inferior del puente.
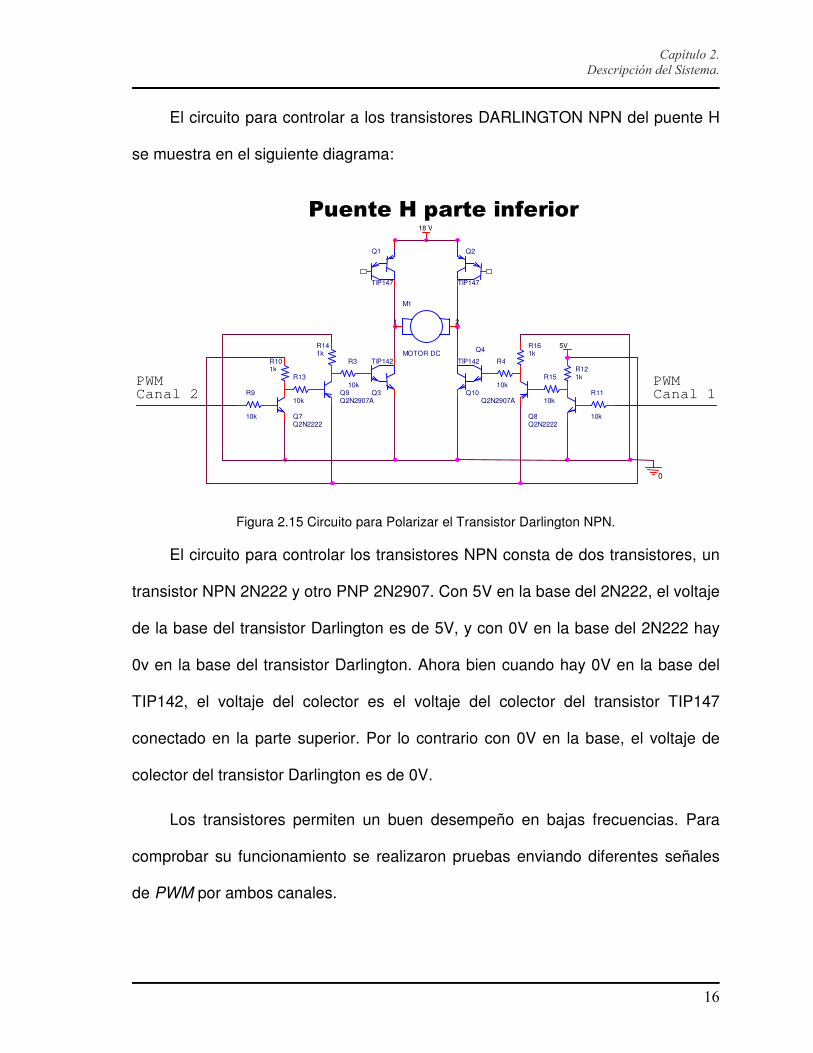
El circuito para controlar a los transistores DARLINGTON NPN del puente H
se muestra en el siguiente diagrama:
R101k
0
Q2
TIP147
R4
10k
R141k
18 V
R9
10k
Q10Q2N2907A
5V
PWMCanal 2
R13
10k
R121k
Q3
TIP142
M1
MOTOR DC
1 2
PWMCanal 1
Q1
TIP147
Q8Q2N2222
R161k
Q9Q2N2907A
Q4TIP142
Q7Q2N2222
R11
10k
R3
10kR15
10k
Figura 2.15 Circuito para Polarizar el Transistor Darlington NPN.
El circuito para controlar los transistores NPN consta de dos transistores, un
transistor NPN 2N222 y otro PNP 2N2907. Con 5V en la base del 2N222, el voltaje
de la base del transistor Darlington es de 5V, y con 0V en la base del 2N222 hay
0v en la base del transistor Darlington. Ahora bien cuando hay 0V en la base del
TIP142, el voltaje del colector es el voltaje del colector del transistor TIP147
conectado en la parte superior. Por lo contrario con 0V en la base, el voltaje de
colector del transistor Darlington es de 0V.
Los transistores permiten un buen desempeño en bajas frecuencias. Para
comprobar su funcionamiento se realizaron pruebas enviando diferentes señales
de PWM por ambos canales.

La grafica que se obtiene al enviar un PWM1 de frecuencia de 1.22kHz. y un
ciclo de trabajo del 94.6%.
Figura 2.16 Voltaje en las Terminales del Puente H Aplicando un PWM en el Canal 1.
En la imagen anterior se muestra el voltaje de las terminales del puente H
con una carga resistiva de prueba de 1KΩ. En la parte superior se muestra el
voltaje de la terminal VJ3_1, el voltaje cambia de 18V a 4V porque se polariza el
transistor Q1. En la parte inferior está el voltaje en VJ3_2 cuando se polariza el
transistor Q4 y el voltaje cambia de 0V a 4V aproximadamente.
La diferencia entre estos voltaje da como resultado una señal cuadrada con
una amplitud de 8V como se puede mostrar en la siguiente gráfica.
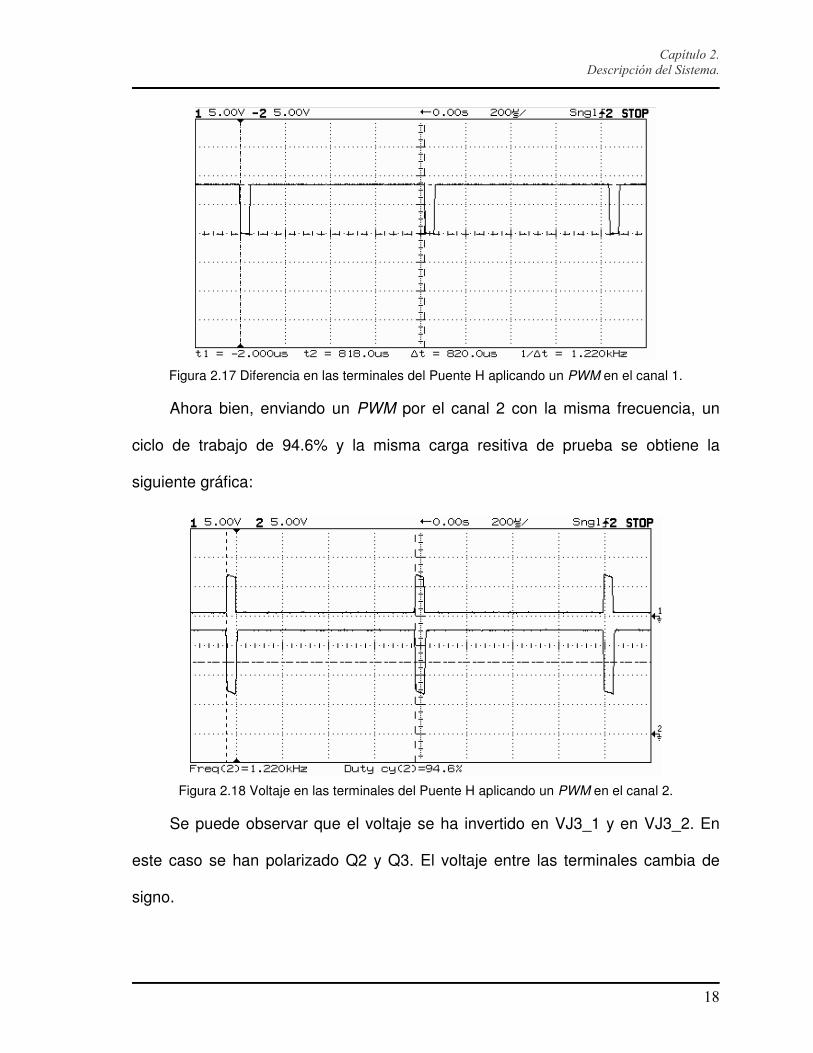
Figura 2.17 Diferencia en las terminales del Puente H aplicando un PWM en el canal 1.
Ahora bien, enviando un PWM por el canal 2 con la misma frecuencia, un
ciclo de trabajo de 94.6% y la misma carga resitiva de prueba se obtiene la
siguiente gráfica:
Figura 2.18 Voltaje en las terminales del Puente H aplicando un PWM en el canal 2.
Se puede observar que el voltaje se ha invertido en VJ3_1 y en VJ3_2. En
este caso se han polarizado Q2 y Q3. El voltaje entre las terminales cambia de
signo.

Restando VJ3_2 de VJ3_1 se obtiene una señal cuadrada con el mismo ciclo
de trabajo y una amplitud de –8V.
Figura 2.19 Diferencia en las terminales del Puente H aplicando un PWM en el canal 2.
Al conectar el motor, la señal se deforma ya que la impedancia del motor no
es puramente resistiva y se obtiene la siguiente gráfica:
Figura 2.20 Voltajes de Salida con el Motor como Carga Aplicando un PWM en el Canal 2.
Al obtener la diferencia en las terminales no se obtiene una señal
perfectamente cuadrada.

Los voltajes en las teminales cambian pero la frecuencia y el ciclo de trabajo
se mantienen.
Figura 2.21 Diferencia de los Voltajes de Salida con un PWM de 94.6% con el Motor.
Aplicando una señal de PWM en el canal 1 y restando los voltajes de las
terminales VJ3 se obtiene el inverso de la gráfica anterior.
Figura 2.22 Diferencia de los Voltajes de Salida con un PWM de 94.6% con el Motor.
Con estas gráficas se comprueba el buen funcionamiento del Puente H
cuando se aplica una señal por el canal 1 y cuando se aplica por el canal 2.

El voltaje cuando se aplica PWM1 es positivo, mientras que el voltaje es
negativo cuando se aplica PWM2.
El diagrama completo del Puente H se muestra a continuación:
Q4TIP142
Q2
TIP147
Q9Q2N2907A
R161k
Q1
TIP147
Q3
TIP142
R9
10k
R6a1k
R121k
R11
10k
R3
10k
PWMCanal 2
R141k
R4
10k
R61k
R8a1k
R81k
R110k
R210k
Q6Q2N2222
Q8Q2N2222
0
R101k
Q7Q2N2222
M1
MOTOR DC
1 2
R510k
PWMCanal 1
R15
10k
R13
10k
Q5Q2N2222
18 V
5V
Q10Q2N2907A
R710k
Figura 2.23 Diagrama Completo del Circuito del Puente H.
2.2.3 Acondicionamiento de la Señal.
En el apartado 2.2.1 la señal que genera el potenciómetro representa la posición
del carro. Esta señal tiene que convertirse en digital para ser procesada. Por lo
que es necesario una etapa de acondicionamiento de esta señal.
El voltaje generado de los dos potenciómetros se obtienen por medio de dos
amplificadores en configuración de seguidor. Posteriormente las señales se unen
para obtener una señal con un rango de 0V a –5V. Para realizar esta operación se
usa un amplificador sumador inversor.
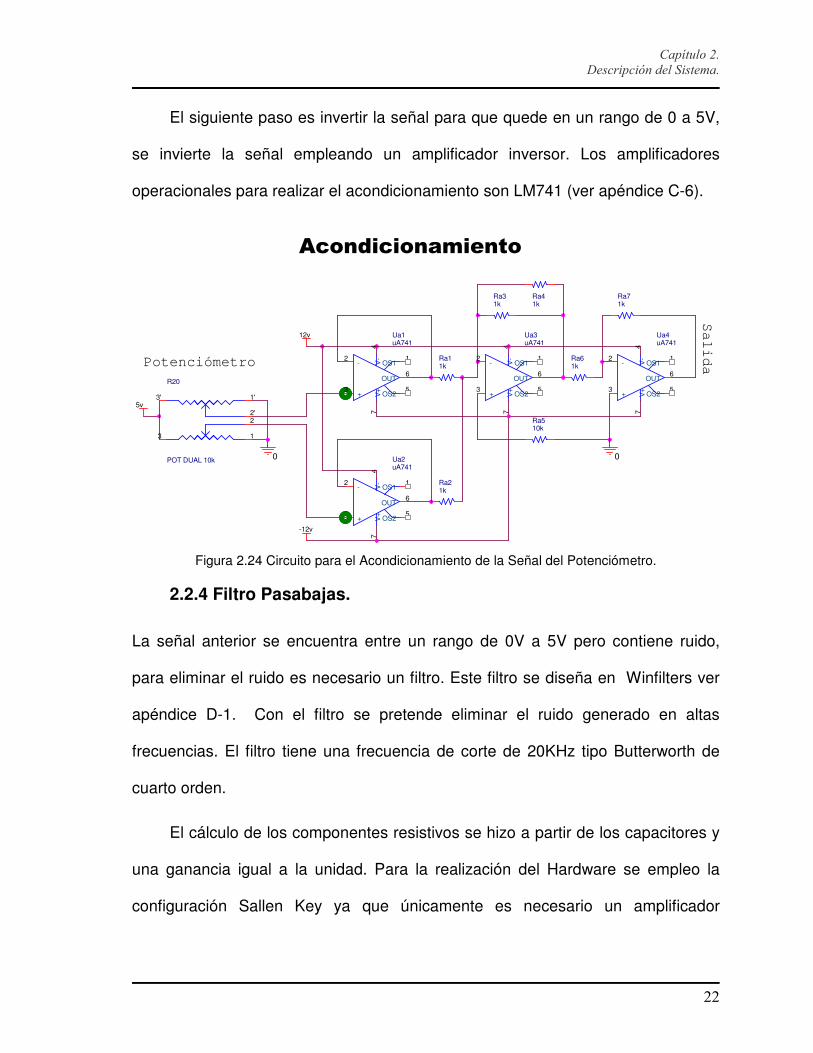
El siguiente paso es invertir la señal para que quede en un rango de 0 a 5V,
se invierte la señal empleando un amplificador inversor. Los amplificadores
operacionales para realizar el acondicionamiento son LM741 (ver apéndice C-6).
Potenciómetro
Ra510k
12v
-12v
Ra71k
Ua3uA741
3
2
74
6
1
5+
-
V+
V-
OUT
OS1
OS2
Ua2uA741
3
2
74
6
1
5+
-
V+
V-
OUT
OS1
OS2
Ra21k
%
Salida
Ua4uA741
3
2
74
6
1
5+
-
V+
V-
OUT
OS1
OS2
Ra31k
0
Ua1uA741
3
2
74
6
1
5+
-
V+
V-
OUT
OS1
OS2
5v
R20
POT DUAL 10k
3'
2
3 1
1'
2'
Ra61k
0
Ra11k
Ra41k
Figura 2.24 Circuito para el Acondicionamiento de la Señal del Potenciómetro.
2.2.4 Filtro Pasabajas.
La señal anterior se encuentra entre un rango de 0V a 5V pero contiene ruido,
para eliminar el ruido es necesario un filtro. Este filtro se diseña en Winfilters ver
apéndice D-1. Con el filtro se pretende eliminar el ruido generado en altas
frecuencias. El filtro tiene una frecuencia de corte de 20KHz tipo Butterworth de
cuarto orden.
El cálculo de los componentes resistivos se hizo a partir de los capacitores y
una ganancia igual a la unidad. Para la realización del Hardware se empleo la
configuración Sallen Key ya que únicamente es necesario un amplificador

operacional para cada etapa. A partir del valor de dos capacitores (C2 y C4) y un
resistor (R5) se calculan los otros componentes.
Las resistencias reales deben tener el mismo valor que las del filtro diseñado
para obtener la ganancia igual a la unidad. Este valor se obtiene limando las
resistencias. En la siguiente tabla se muestra la comparación entre los valores
deseados y los valores utilizados en la implementación del filtro.
Sallen - Key ETAPA 1
Componente Valor Teórico Valor real C2 0.9801n C4 1.005n Ho 1 R5 9.883k R3 7.59k 7.588k R6 11.97k 11.98k R11 18.708k 18.68k R12 13.856k 13.68k
Tabla 2.1 Valores de los Resistores y Capacitores Teóricos y Prácticos en la Etapa 1.
Sallen - Key ETAPA 2
Componente Valor Teórico Valor real C2 0.9828n C4 0.9790n Ho 1 R5 9.908k R3 9.585k 9.706k R6 2.062k 2.068k R11 8.286k 8.308k R12 55.641k 55.62k
Tabla 2.2 Valores de los Resistores y Capacitores Teóricos y Prácticos en la Etapa 2.
Con estos valores se implementa el circuito, los amplificadores operacionales
utilizados son JFET de bajo ruido TL071, ver apéndice C-7

0
Rm8
55.62k
Cm4.979n
Rm49.883k
Rm99.908k Rm10
2.068k
12v
Um1TL071
3
2
74
6
1
5+
-
V+
V-
OUT
OS1
OS2Salida
Cm1
.9801n
Rm313.68k
-12v
Rm511.98k
Rm68.308k
.
Rm79.706k
Entarda
Cm3
.9828n
Rm27.588k
Cm21.005n
Rm118.68k
Um2TL071
3
2
74
6
1
5+
-
V+
V-
OUT
OS1
OS2
Figura 2.25 Filtro Pasabajas Diseñado.
Una vez implementado el circuito, se realizan las pruebas correspondientes
para obtener las características del filtro. En la siguiente figura se observa la
ganancia del filtro con una señal de 1.289KHz. Se puede observar que dicha
ganancia es de la unidad y las señales son prácticamente idénticas.
Figura 2.26 Ganancia del Filtro con una Señal de 1.289KHz.
Una vez observada la ganancia unitaria se obtiene la gráfica de la frecuencia
de corte. El filtro diseñado tiene una frecuencia de corte de 20KHz y una
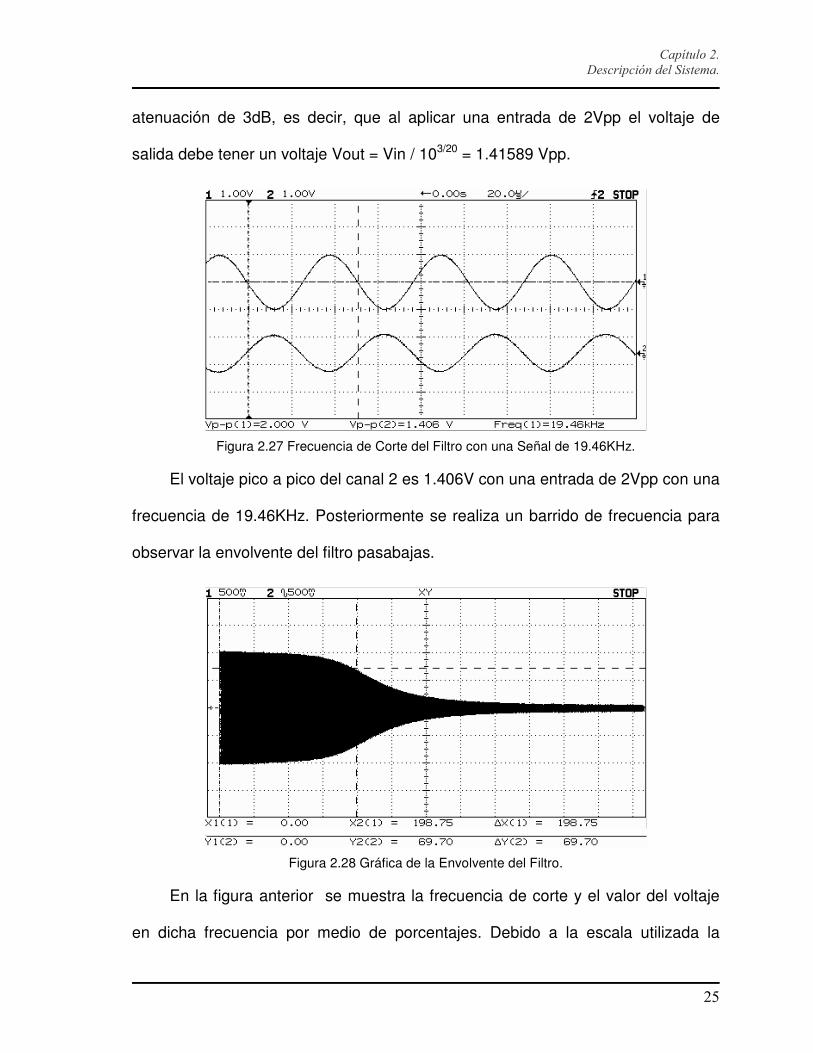
atenuación de 3dB, es decir, que al aplicar una entrada de 2Vpp el voltaje de
salida debe tener un voltaje Vout = Vin / 103/20 = 1.41589 Vpp.
Figura 2.27 Frecuencia de Corte del Filtro con una Señal de 19.46KHz.
El voltaje pico a pico del canal 2 es 1.406V con una entrada de 2Vpp con una
frecuencia de 19.46KHz. Posteriormente se realiza un barrido de frecuencia para
observar la envolvente del filtro pasabajas.
Figura 2.28 Gráfica de la Envolvente del Filtro.
En la figura anterior se muestra la frecuencia de corte y el valor del voltaje
en dicha frecuencia por medio de porcentajes. Debido a la escala utilizada la

frecuencia de corte es de 198.75/10 = 19.75 que corresponde aproximadamente al
valor de 20KHz. El valor del voltaje es de 69.7/100 = 0.697V, siendo este valor
aproximadamente igual a 0.70794V que equivale la mitad del voltaje pico a pico de
la gráfica de la figura 2.27. Al observar que la frecuencia de corte y la ganancia
son las esperadas se puede decir que el filtro funciona adecuadamente.
2.2.5 Voltajes de Referencia.
La señal que representa la posición ya está acondicionada y filtrada, es decir, lista
para realizar la conversión A/D en el M1. Sin embargo, con el fin de obtener un
rango de valores de 0 a 1023 para la posición inicial y final del recorrido del carro
(detección del SW1 y del SW2) se generan voltajes de referencia para la
conversión A/D. Con esto se logra que el valor cuando SW1 detecta al carro sea
igual a cero y cuando SW2 detecte el carro sea de 1023.
12v
0
-12v
5v
Voltaje deReferenciaPositivo
Rb14.7k
Rb3
4.7k
M2 Micro 2 Uc2
uA741
3
2
74
6
1
5+
-
V+
V-
OUT
OS1
OS2
Voltaje deReferenciaNegativo
Rc14.7k
Ub2uA741
3
2
74
6
1
5+
-
V+
V-
OUT
OS1
OS2
Rb2 4.7k
Uc1
DAC0800
121110
98765
133
4
1415
2
1
16
DB7DB6DB5DB4DB3DB2DB1DB0
VCCVSS
OUT+
VREF+VREF-
OUT-
GND
16
Rc2 4.7k
Rc3
4.7k
Ub1
DAC0800
121110
98765
133
4
1415
2
1
16
DB7DB6DB5DB4DB3DB2DB1DB0
VCCVSS
OUT+
VREF+VREF-
OUT-
GND
16
M1 Micro 1
Cc110n
Cb110n
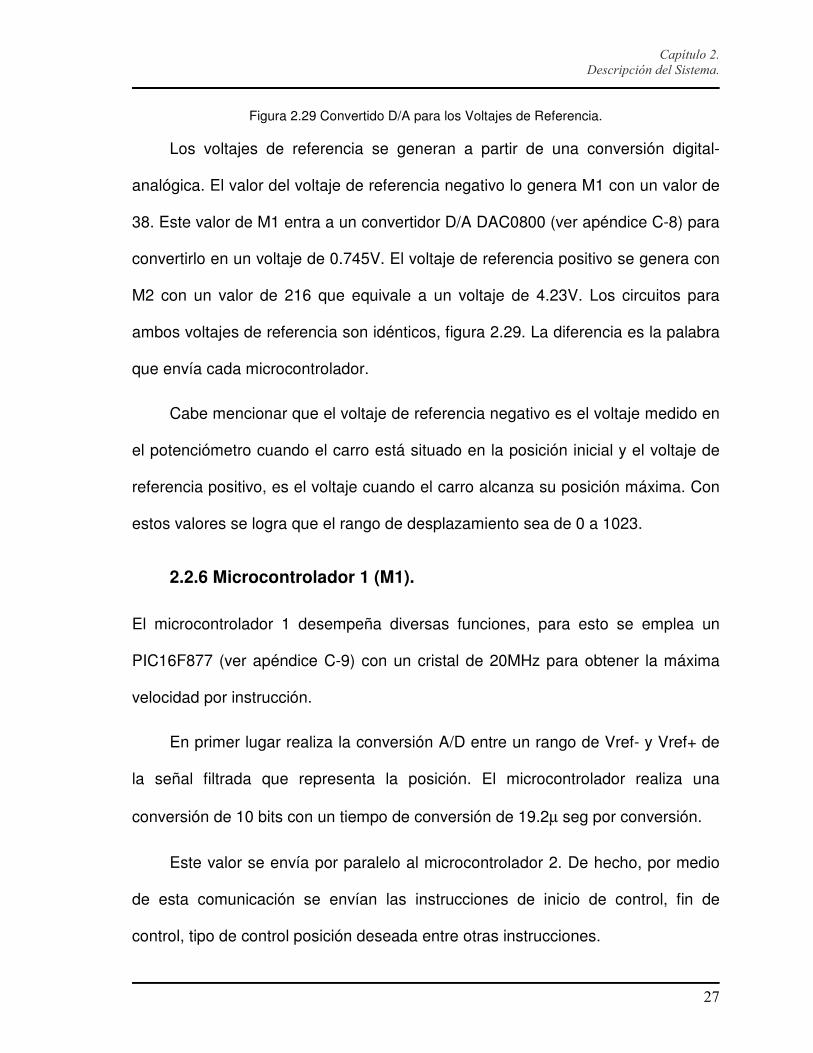
Figura 2.29 Convertido D/A para los Voltajes de Referencia.
Los voltajes de referencia se generan a partir de una conversión digital-
analógica. El valor del voltaje de referencia negativo lo genera M1 con un valor de
38. Este valor de M1 entra a un convertidor D/A DAC0800 (ver apéndice C-8) para
convertirlo en un voltaje de 0.745V. El voltaje de referencia positivo se genera con
M2 con un valor de 216 que equivale a un voltaje de 4.23V. Los circuitos para
ambos voltajes de referencia son idénticos, figura 2.29. La diferencia es la palabra
que envía cada microcontrolador.
Cabe mencionar que el voltaje de referencia negativo es el voltaje medido en
el potenciómetro cuando el carro está situado en la posición inicial y el voltaje de
referencia positivo, es el voltaje cuando el carro alcanza su posición máxima. Con
estos valores se logra que el rango de desplazamiento sea de 0 a 1023.
2.2.6 Microcontrolador 1 (M1).
El microcontrolador 1 desempeña diversas funciones, para esto se emplea un
PIC16F877 (ver apéndice C-9) con un cristal de 20MHz para obtener la máxima
velocidad por instrucción.
En primer lugar realiza la conversión A/D entre un rango de Vref- y Vref+ de
la señal filtrada que representa la posición. El microcontrolador realiza una
conversión de 10 bits con un tiempo de conversión de 19.2µ seg por conversión.
Este valor se envía por paralelo al microcontrolador 2. De hecho, por medio
de esta comunicación se envían las instrucciones de inicio de control, fin de
control, tipo de control posición deseada entre otras instrucciones.

Otra función que desempeña es la de generar una señal TTL con una
frecuencia de 294 117.647Hz, que equivale a 255 veces la frecuencia de las
señales de PWM. Esta señal TTL se envía a M2 por un puertos.
Asimismo, tiene la función de comunicarse por medio del puerto seria con el
servidor al cual se conecta al circuito. Este microcontrolador recibe las palabras
que controlan a ambos microcontroladores, el inicio y fin del control, selección de
tipo de control, inicio y fin del envío de datos a la computadora servidor, cambiar la
velocidad de la comunicación serial, ajuste de los voltajes de referencia y otras
opciones. Además envía los datos de la posición del carro al servidor y a M2.
Por otra parte, la señal de los interruptores se utilizan cuando se ejecuta la
rutina para ajustar los voltajes de referencia que se describiren en el siguiente
capítulo. Al cerrarse el interruptor SW1, el voltaje medido se convierte con el
convertidor A/D, con un rango de 0V a 5V. El valor convertido si es válido se
envía al convertidor D/A por uno de sus puertos y se utiliza como voltaje de
referencia negativo.
Al llegar al límite superior, es decir, cuando el interruptor SW2 se cierra, se
realiza otra conversión A/D. El valor convertido se envía a M2 por medio de la
comunicación en paralelo. La documentación del programa implementado en M1
se describe en el capítulo 3 Programa de Adquisición de Datos.
2.2.7 Microcontrolador 2 (M2).
Este microcontrolador, al igual que M1, desempeña varias funciones. La principal
es la de realizar las acciones de control. En primer lugar, M2 recibe de M1 las
instrucciones que indican el tipo de control, la posición deseada, inicio y fin de
control, entre otras. Por unos de sus puertos recibe la señal TTL con la cual se
genera las señales de PWM que se envían al puente H. Las señales de PWM
tienen una frecuencia de 1.153.402KHz. Estas señales de PWM son las que
determinan el giro (canal 1 o canal 2) del motor y la velocidad con la que este se
mueve (ciclo de trabajo).
Los interruptores se conectan a M2 con el fin de detectar los límites de la
posición y detener el motor haciendo cero las señales de PWM. El programa
también se encarga impedir que se envíen las dos señales de PWM al mismo
tiempo como se menciona en el apartado 2.2.2 y evitar un corto circuito.
Por otra parte, por medio de la comunicación en paralelo se recibe el valor
del voltaje de referencia positivo cuando se ejecuta la rutina de ajuste de voltajes
de referencia. Este valor se envía por un puerto al convertidor D/A y genera el
voltaje de referencia positivo.
Por último, M2 se encarga de realizar las acciones de control que tiene
programadas. Calcula el error a partir de la posición actual del carro que envía M1
y la posición deseada enviada desde el servidor. Dependiendo del control
seleccionado se calcula el valor del ciclo de trabajo del PWM y dependiendo del
signo del resultado se decide por que canal se envía la señal de PWM.
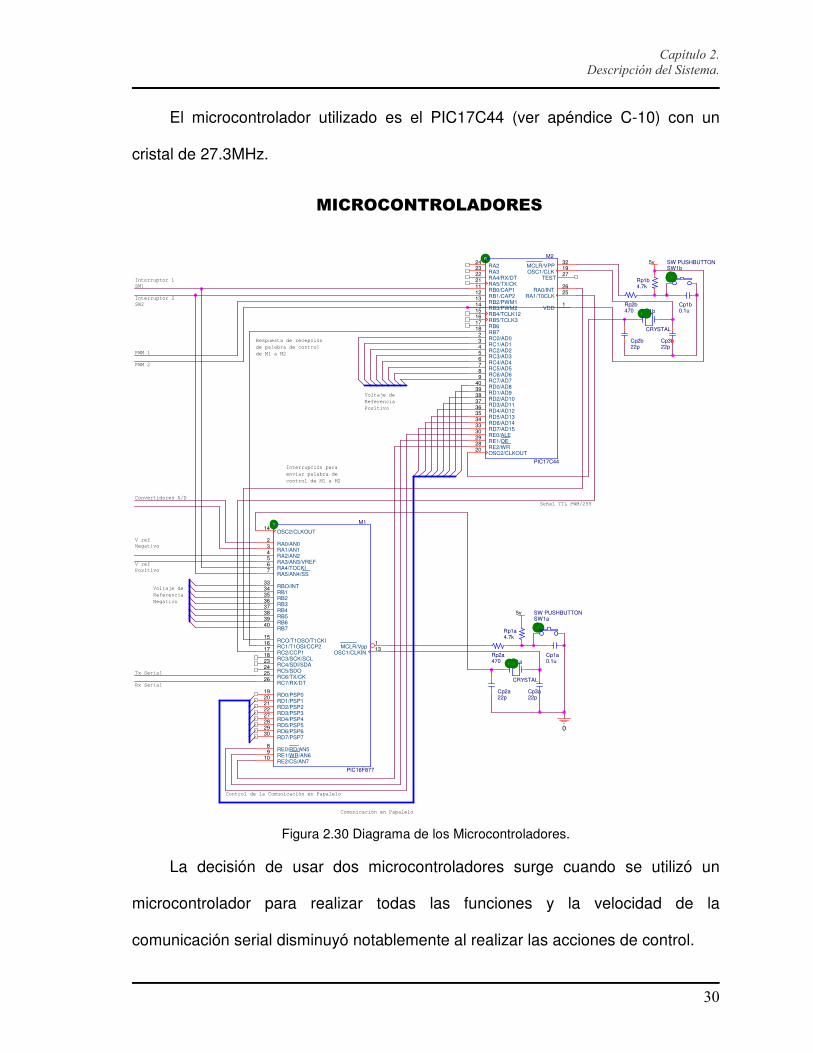
El microcontrolador utilizado es el PIC17C44 (ver apéndice C-10) con un
cristal de 27.3MHz.
Cp1a0.1u
Interruptor 1SW1
Señal TTL PWM/255
Rp1a4.7k
Convertidores A/D
Respuesta de recepciónde palabra de controlde M1 a M2
Rp2b470
Cp3b22p
Cp1b0.1u
Rp2a470
M1
PIC16F877
1
234567
89
10
13
14
15161718
19202122
23242526
27282930
3334353637383940
MCLR/Vpp
RA0/AN0RA1/AN1RA2/AN2RA3/AN3/VREFRA4/TOCKIRA5/AN4/SS
RE0/RD/AN5RE1/WR/AN6RE2/CS/AN7
OSC1/CLKIN
OSC2/CLKOUT
RCO/T1OSO/T1CKIRC1/T1OSI/CCP2RC2/CCP1RC3/SCK/SCL
RD0/PSP0RD1/PSP1RD2/PSP2RD3/PSP3
RC4/SDI/SDARC5/SDORC6/TX/CKRC7/RX/DT
RD4/PSP4RD5/PSP5RD6/PSP6RD7/PSP7
RBO/INTRB1RB2RB3RB4RB5RB6RB7
V refNegativo
0
V refPositivo
Rp1b4.7k
Y1b
CRYSTAL
Tx Serial
Y1a
CRYSTAL
Voltaje deReferenciaPositivo
M2
PIC17C44
2625
19
1
27
3224232221111213141516171823456789
403938373635343330292820
RA0/INTRA1/T0CLK
OSC1/CLK
VDD
TEST
MCLR/VPPRA2RA3RA4/RX/DTRA5/TX/CKRB0/CAP1RB1/CAP2RB2/PWM1RB3/PWM2RB4/TCLK12RB5/TCLK3RB6RB7RC0/AD0RC1/AD1RC2/AD2RC3/AD3RC4/AD4RC5/AD5RC6/AD6RC7/AD7RD0/AD8RD1/AD9RD2/AD10RD3/AD11RD4/AD12RD5/AD13RD6/AD14RD7/AD15RE0/ALERE1/OERE2/WROSC2/CLKOUT
Cp3a22p
SW1bSW PUSHBUTTON
PWM 1
Cp2a22p
Cp2b22p
PWM 2
5v
5vSW1aSW PUSHBUTTON
Interruptor 2SW2
//'(/0%1/
Rx Serial
Control de la Comunicaciòn en Papalelo
Comunicaciòn en Papalelo
Interrupción paraenviar palabra decontrol de M1 a M2
Voltaje deReferenciaNegativo
Figura 2.30 Diagrama de los Microcontroladores.
La decisión de usar dos microcontroladores surge cuando se utilizó un
microcontrolador para realizar todas las funciones y la velocidad de la
comunicación serial disminuyó notablemente al realizar las acciones de control.

Además, M2 realiza multiplicaciones con lo cual se ejecutan las acciones de
control más rápido ya que tiene una velocidad mayor por instrucción. M1 se dedica
a transformar, transmitir y recibir datos, mientras M2 se dedica a las acciones de
control.
2.2.8 Comunicación Serial Asíncrona.
Para realizar la comunicación entre la computadora servidor y el circuito se usa
transmisión y recepción asíncrona por medio de M1. El microcontrolador M1 recibe
las instrucciones y envía la posición del carro a la computadora servidor.
La señal enviada y recibida por el microcontrolador es TTL por lo que es
necesario convertirla al estándar RS232, para esto se usa el circuito integrado
MAX232 (ver apéndice C-11). El diagrama del circuito empleado para generar la
comunicación serial con el estándar RS232 se presenta a continuación:
0
Rx COMPPIN 2
Cs1 220p
Cs3 220p
Cs2 220p5v
Tx M1 Us1
MAX232
1381110
134526
129
147
R1INR2INT1INT2IN
C+C1-C2+C2-V+V-
R1OUTR2OUTT1OUTT2OUT
Rx M1
Tx COMPPIN 3
Cs4220p
Figura 2.31 Comunicación Serial Asíncrona.
2.2.9 Servidor.
El servidor tiene la función de enviar las instrucciones a M1 por medio de dos
programas, el programa Stand-Alone o por medio de una página de Internet
utilizando los Servlets ambos basados en Java.
El primero tiene el fin de ser utilizado por el administrador. Este programa
tiene acceso al circuito de forma directa e inmediata, además de contar con
opciones que no posee el programa que tiene acceso vía Internet. Este programa
se utilizó para realizar las pruebas y verificar el funcionamiento del circuito.
Por otra parte, el servidor al estar configurado como servidor web, puede
recibir y transmitir información por medio de Internet usando los Servlets. Los
datos del cliente son recibidos, se procesan y se envían al circuito.
Posteriormente, el servidor recibe los datos de M1, procesa la información y envía
una respuesta al cliente.
2.2.10 Cliente.
El cliente tiene acceso por medio de Internet a la página de las prácticas de
control. En esta se presentan las diferentes acciones de control y obtiene la
información sobre dichos controladores.
El usuario envía los parámetros de control para experimentar con el sistema.
De esta forma aplicar los conocimientos obtenidos en clase.

2.3 Circuito Implementado.
Las diferentes partes del circuito que se describieron anteriormente, sin
embargo también se diseñaron dos fuentes de voltaje regulado. Una que alimenta
al motor de 18V y 5A y otra de ±18V y 1A para alimentar a todo el circuito. El
circuito diseñado se puede consultar en el apéndice B-1. También si se desea se
pueden consultar los diferentes diagramas.
Asimismo se realizaron los circuitos impresos con el fin de evitar las
capacitancias parásitas del protoboard ver apéndice B-2. Sin embargo, estos son
varios circuitos impresos ya que el circuito sufrió modificaciones durante la
elaboración del proyecto de tesis.
Figura 2.32 Fuentes de Voltaje Reguladas.
